say sal kontrol - hava harp okulu -...
TRANSCRIPT
Sayısal Kontrol - HAVA HARP OKULUBölüm 3 Örneklenmiş Veri Sistemleri
İbrahim Beklan Küçükdemiral
Yıldız Teknik Üniversitesi
2015
1 / 40
Bu bölümde aşağıdaki konular incelenecektir:� Darbe Modülasyonu Şeklinde Örnekleme İşlemi� Örneklenmiş İşaretlerin Frekans Spektrumu� Aliasing Olayı� Örneklenmiş İşaretlerden Orjinal İşaretin İnşası� Blok Diyagram Analizi
2 / 40
Darbe Modülayonu Şeklinde Örnekleme, Giriş
� Önceki bölümlerde saf ayrık sistemlerle ilgilendik ve bu sistemlerinfark denklemlerini elde etmeye, gerçeklemeye çalıştık.
� Bir geri beslemeli kontrol sisteminde saf ayrık sistemler sadecekontrolör bloklarında bulunur.
� Oysa ki kontrol sistemleri bir bütün olarak ele alındığında sürekizaman sistemleri ile birlikte çalışır. Endüstride ele alınan sistemlerintamamına yakını sürekli zaman sistemlerdir.
� Bu durumda sürekli zaman işaretlerinin bilgisayar tarafından elealınmadan önce ayrıklaştırılması gerekir.
3 / 40
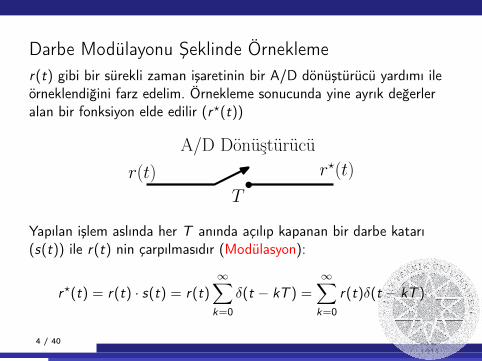
Darbe Modülayonu Şeklinde Örneklemer(t) gibi bir sürekli zaman işaretinin bir A/D dönüştürücü yardımı ileörneklendiğini farz edelim. Örnekleme sonucunda yine ayrık değerleralan bir fonksiyon elde edilir (r?(t))
r(t) r?(t)
A/D Donusturucu
T
Yapılan işlem aslında her T anında açılıp kapanan bir darbe katarı(s(t)) ile r(t) nin çarpılmasıdır (Modülasyon):
r?(t) = r(t) · s(t) = r(t)∞∑
k=0
δ(t − kT ) =∞∑
k=0
r(t)δ(t − kT )
4 / 40

Örnekleme İşlemi
r(t)
0T2T · · · t
r?(t) = r(t)s(t)
t
s(t)=∑∞
k=0 δ(t− kT )
0T2T · · ·
s(t)
t
5 / 40
Örneklemenin Matematiksel Modeli
r?(t) = r(t) · s(t) = r(t)∞∑
k=0
δ(t − kT ) =∞∑
k=0
r(t)δ(t − kT )
s(t) sadece kT anlarında sıfırdan farklı olduğundan
r?(t) =∞∑
k=0
r(kT )δ(t − kT )
Amacımız r?(t) ifadesinin frekans özelliklerini incelemek. Bunun içinr?(t) ifadesinin Fourier dönüşümüne ulaşmamız gerekmektedir. BizFourier dönüşümüne Laplace Dönüşümü üzerinden ulaşacağız.
6 / 40
Örneklemenin Matematiksel Modeli
r?(t) =∞∑
k=0
r(kT )δ(t − kT )
Laplace Dönüşümünün lineer bir dönüşüm olması sebebi ile:
R?(s) =∞∑
k=0
r(kT )
∫ ∞
0δ(t − kT )e−stdt
Hatırlatma(Ayıklama Özelliği) (Sifting Property)∫ ∞
0f (t)δ(t − a)dt = f (a)
7 / 40
Örnekleyici Çıkışında Elde Edilen İşaretin LaplaceDönüşümü
R?(s) =∞∑
k=0
r(kT )
∫ ∞
0δ(t − kT )e−stdt =
∞∑
k=0
r(kT )e−kTs
R?(s) =∞∑
k=0
r(kT )(eTs)−k
Gözlem ve Yorumr(kT ) = r(k) = rk bir dizidir. Bu durumda
R?(s) = R(z)|z=eTs
8 / 40
9 / 40
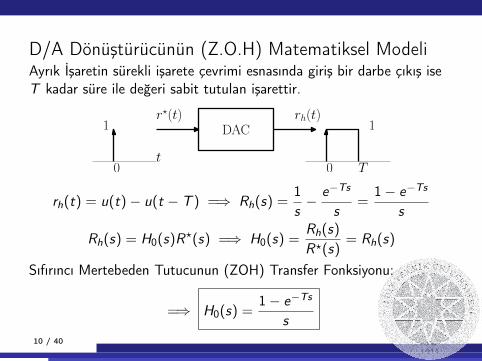
D/A Dönüştürücünün (Z.O.H) Matematiksel ModeliAyrık İşaretin sürekli işarete çevrimi esnasında giriş bir darbe çıkış iseT kadar süre ile değeri sabit tutulan işarettir.
DACr?(t) rh(t)
0t
0 T
1 1
rh(t) = u(t)− u(t − T ) =⇒ Rh(s) =1s− e−Ts
s=
1− e−Ts
s
Rh(s) = H0(s)R?(s) =⇒ H0(s) =Rh(s)
R?(s)= Rh(s)
Sıfırıncı Mertebeden Tutucunun (ZOH) Transfer Fonksiyonu:
=⇒ H0(s) =1− e−Ts
s
10 / 40
Fourier Dönüşümü ve Fourier Serilerif (t) fonksiyonu genel bir fonksiyon olsun. Bu fonksiyonun FourierDönüşümü (FT):
F (jω) =
∫ ∞
−∞f (t)e−jωtdt
şeklinde tanımlanır. Şayet f (t) işareti T periyodik ise bu işaret,birbirlerinden 2π
T frekans büyüklüğü kadar farklı sonsuz tane sinüsoidcinsinden ifade edilebilir:
f (t) =∞∑
n=−∞Cne
j(2πn/T )t
Burada Cn katsayıları
Cn =1T
∫ T2
−T2
f (t)e−j(2πn/T )tdt
şeklinde hesaplanır.11 / 40
Örnekleme İşleminin Frekans ÖzellikleriÖrnekleme işlemini hatırlayalım:
r?(t) = r(t) · s(t) = r(t)∞∑
k=0
δ(t − kT ) =∞∑
k=0
r(t)δ(t − kT )
Darbe katarı T periyodik olduğundan, bu katarını sonsuz adet farklıfrekansta salınan sünüsoidler cinsinden ifade etmeye çalışalım. Yani:
s(t) =∞∑
k=0
δ(t − kT ) =∞∑
k=−∞δ(t − kT ) =
∞∑
n=−∞Cne
j(2πn/T )t
Burada
Cn =1T
∫ T2
−T2
∞∑
k=0
δ(t − kT )e−j(2πn/T )tdt
12 / 40
Örnekleme İşleminin Frekans Özellikleri
Cn =1T
∫ T2
−T2
∞∑
k=0
δ(t − kT )e−j(2πn/T )tdt
ifadesinde sonsuz toplamın bir önemi yoktur. Zira entegrasyon −T2 ile
T2 aralığında alınmaktadır ve bu aralıkta tek bir k mevcuttur, k = 0
Cn =1T
∫ T2
−T2
δ(t)e−j(2πn/T )tdt
Cn =1T
s(t) =∞∑
k=0
δ(t − kT ) =∞∑
n=−∞
1Te j(2πn/T )t =
1T
∞∑
n=−∞e j(2πn/T )t
13 / 40
Örnekleme İşleminin Frekans ÖzellikleriÖrnekleme frekansı
ωs =2πT
=⇒ s(t) =1T
∞∑
n=−∞e jnωs t
r?(t) = r(t)× s(t) =1T
{r(t)
∞∑
n=−∞e jnωs t
}
L[r?(t)] =
∫ ∞
−∞
1T
{r(t)
∞∑
n=−∞e jnωs t
}e−stdt
=1T
∞∑
n=−∞
∫ ∞
−∞r(t)e jnωs te−stdt
=1T
∞∑
n=−∞
∫ ∞
−∞r(t)e−(s−jnωs)tdt =
1T
∞∑
n=−∞R(s − jnωs)
14 / 40
Örnekleme İşleminin Frekans Özellikleri...
=⇒ L[r?(t)] = R?(s) =1T
∞∑
n=−∞R(s − jnωs)
Teoremf (t) fonksiyonunun Laplace Dönüşümü F (s) olsun. Bu durumda f (t)fonksiyonunun Fourier Dönüşümü F (jω) ile ifade edilir ve
F (jω) = F (s)|s=jω
=⇒ R?(jω) =1T
∞∑
n=−∞R(jω − jnωs)
15 / 40
Örnekleme İşleminin Frekans Özellikleri...
=⇒ R?(jω) =1T
∞∑
n=−∞R(jω − jnωs)
Bu ifade bize 2 önemli şey söyler:1. Örneklenmiş işaretin frekans spektrumunun genliği, örneklenmemiş
işaretin frekans spektrumunun (R(jω)), 1/T katı kadardır.2. Sonsuz adet toplama
∑∞n=−∞, örneklenmiş verinin frekans
spektrumunun, örneklenmemiş verinin frekans spektrumunun sonsuzadet kopyasından oluştuğunu gösterir. Bu kopyalar frekansekseninde birbirlerinden ωs = 2π
T kadar uzaktadırlar.
16 / 40
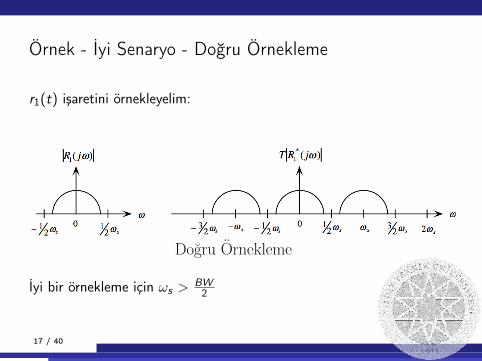
Örnek - İyi Senaryo - Doğru Örnekleme
r1(t) işaretini örnekleyelim:
Dogru Ornekleme
İyi bir örnekleme için ωs >BW2
17 / 40
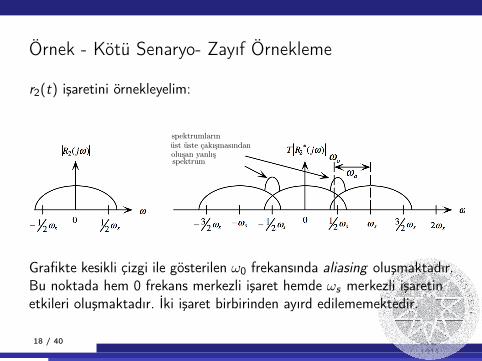
Örnek - Kötü Senaryo- Zayıf Örnekleme
r2(t) işaretini örnekleyelim:
spektrumlarınust uste cakısmasındanolusan yanlısspektrum
Grafikte kesikli çizgi ile gösterilen ω0 frekansında aliasing oluşmaktadır.Bu noktada hem 0 frekans merkezli işaret hemde ωs merkezli işaretinetkileri oluşmaktadır. İki işaret birbirinden ayırd edilememektedir.
18 / 40
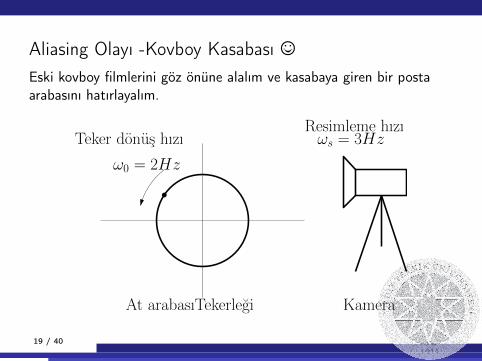
Aliasing Olayı -Kovboy Kasabası ©Eski kovboy filmlerini göz önüne alalım ve kasabaya giren bir postaarabasını hatırlayalım.
ω0 = 2Hz
ωs = 3Hz
At arabasıTekerlegi Kamera
Resimleme hızıTeker donus hızı
19 / 40
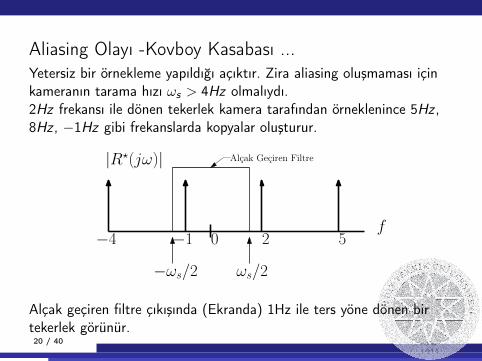
Aliasing Olayı -Kovboy Kasabası ...Yetersiz bir örnekleme yapıldığı açıktır. Zira aliasing oluşmaması içinkameranın tarama hızı ωs > 4Hz olmalıydı.2Hz frekansı ile dönen tekerlek kamera tarafından örneklenince 5Hz ,8Hz , −1Hz gibi frekanslarda kopyalar oluşturur.
0f
2
|R?(jω)|
5−1−4ωs/2−ωs/2
Alcak Geciren Filtre
Alçak geçiren filtre çıkışında (Ekranda) 1Hz ile ters yöne dönen birtekerlek görünür.20 / 40
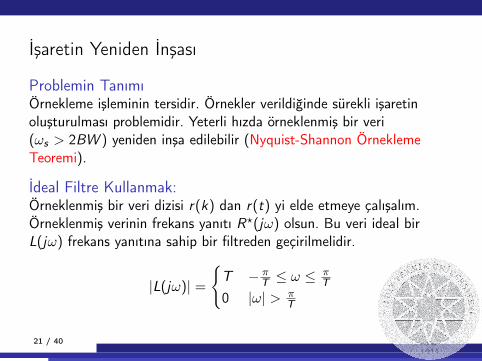
İşaretin Yeniden İnşası
Problemin TanımıÖrnekleme işleminin tersidir. Örnekler verildiğinde sürekli işaretinoluşturulması problemidir. Yeterli hızda örneklenmiş bir veri(ωs > 2BW ) yeniden inşa edilebilir (Nyquist-Shannon ÖrneklemeTeoremi).
İdeal Filtre Kullanmak:Örneklenmiş bir veri dizisi r(k) dan r(t) yi elde etmeye çalışalım.Örneklenmiş verinin frekans yanıtı R?(jω) olsun. Bu veri ideal birL(jω) frekans yanıtına sahip bir filtreden geçirilmelidir.
|L(jω)| =
{T − π
T ≤ ω ≤ πT
0 |ω| > πT
21 / 40
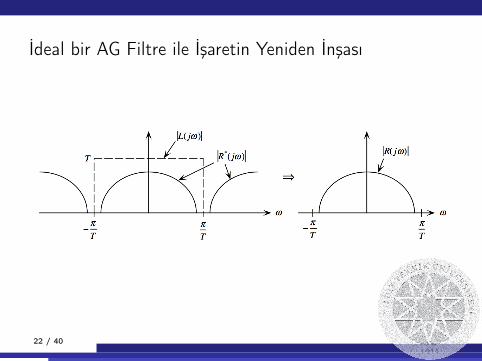
İdeal bir AG Filtre ile İşaretin Yeniden İnşası
22 / 40
İdeal bir AG Filtre ile İşaretin Yeniden İnşası
İdeal Filtre Gerçeklenebilir mi?Açıktır ki
R(jω) = L(jω)R?(jω)
L(jω) nın ters Fourier Dönüşümü alınırsa filtrenin darbe yanıtı l(t)elde edilir.
HatırlatmaBir F (jω) ifadesinin ters Fourier Dönüşümü
f (t) =12π
∫ ∞
−∞F (jω)e jωtdω
şeklinde tanımlanır.
23 / 40
İdeal bir AG Filtre ile İşaretin Yeniden İnşası
l(t) =12π
∫ πT
− πT
Te jωtdω
=T
2πe jωt
jt
∣∣∣∣π/T
−π/T
=T
j2πt
(e jπt/T−e
−jπt/T)
=1
πt/Tsin
πt
T
= sincπt
T
24 / 40
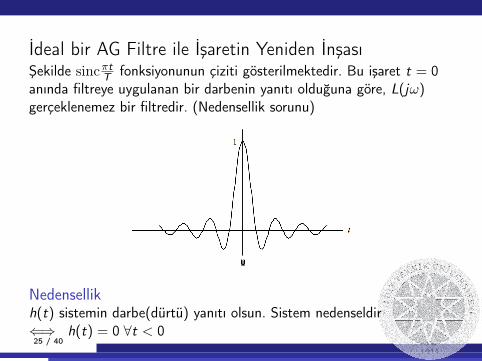
İdeal bir AG Filtre ile İşaretin Yeniden İnşasıŞekilde sincπtT fonksiyonunun çiziti gösterilmektedir. Bu işaret t = 0anında filtreye uygulanan bir darbenin yanıtı olduğuna göre, L(jω)gerçeklenemez bir filtredir. (Nedensellik sorunu)
Nedensellikh(t) sistemin darbe(dürtü) yanıtı olsun. Sistem nedenseldir⇐⇒ h(t) = 0 ∀t < 025 / 40
ZOH’ın Aliasing Filtresi Olarak Kullanılması
İdeal birleştirici filtrenin (desampling filter) gerçeklenemez olduğunugördük. Yani bu türden bir filtre asla gerçek zamanlı bir sistemdekullanılamaz. Onun yerine ZOH filtresini kullanmaya çalışacağız.
İddia:ZOH filtesi birleştirici filtre olarak kullanılabilir.
26 / 40
ZOH’ın Aliasing Filtresi Olarak KullanılmasıSıfırıncı Mertebeden Tutucu (Z.O.H) filtresinin transfer fonksiyonu
H0(s) =1− e−sT
s
Filtrenin frekans yanıtı ise
H0(jω) =1− e−jωT
jω
Bu ifadenin payını ve paydasını e jωT/2 ile çarpalım ve genliğinebakalım:
|H0(jω)| =
∣∣∣∣∣e jωT/2 − e−jωT/2
jωe jωT/2
∣∣∣∣∣ = T
∣∣∣∣sinωT/2ωT/2
∣∣∣∣ = T
∣∣∣∣sincωT
2
∣∣∣∣
27 / 40
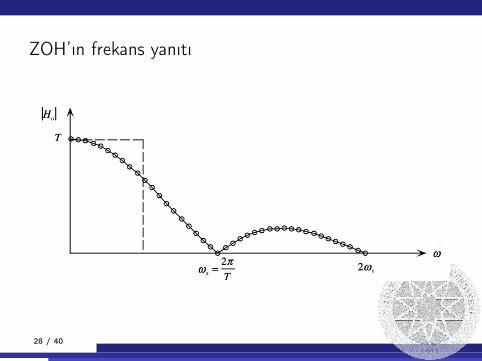
ZOH’ın frekans yanıtı
28 / 40
Blok Diyagram Analizi
Örneklenmiş veri sistemlerinin blok diyagramlarını ve blokdiyagramlardan yararlanarak transfer fonksiyonlarını inceleyeceğiz.Sürekli Zaman Sistemlerden farklı olarak örneklenmiş veri sistemleriHibrit Sistemlerdir. Bu sistemlere ait blok diyagramlarda 2 olasılıklakarşılaşılır:1. İki sürekli blok ve aralarında bir örnekleyici bulunması durumu2. Aralarında örnekleyici olmayan iki sürekli zaman bloğunun seri
bağlantısıHer iki durumu da ayrı ayrı inceleyeceğiz.
29 / 40
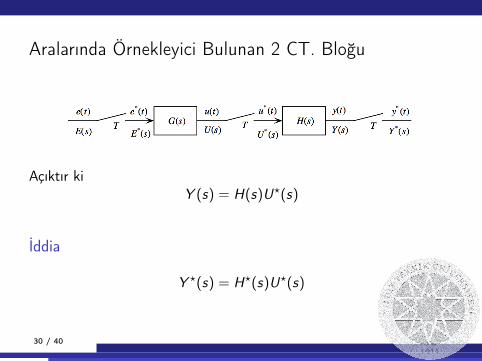
Aralarında Örnekleyici Bulunan 2 CT. Bloğu
Açıktır kiY (s) = H(s)U?(s)
İddia
Y ?(s) = H?(s)U?(s)
30 / 40
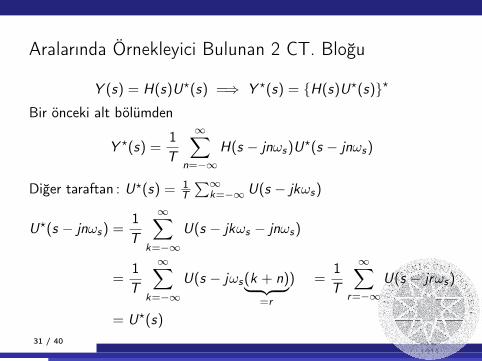
Aralarında Örnekleyici Bulunan 2 CT. Bloğu
Y (s) = H(s)U?(s) =⇒ Y ?(s) = {H(s)U?(s)}?
Bir önceki alt bölümden
Y ?(s) =1T
∞∑
n=−∞H(s − jnωs)U?(s − jnωs)
Diğer taraftan : U?(s) = 1T
∑∞k=−∞ U(s − jkωs)
U?(s − jnωs) =1T
∞∑
k=−∞U(s − jkωs − jnωs)
=1T
∞∑
k=−∞U(s − jωs(k + n)︸ ︷︷ ︸
=r
) =1T
∞∑
r=−∞U(s − jrωs)
= U?(s)
31 / 40
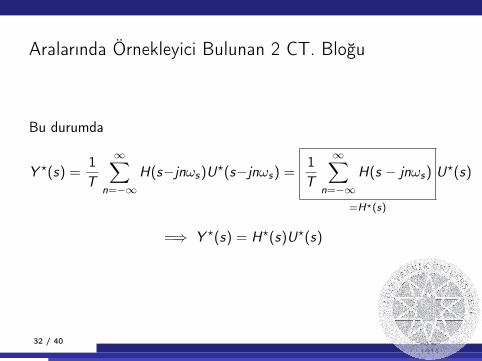
Aralarında Örnekleyici Bulunan 2 CT. Bloğu
Bu durumda
Y ?(s) =1T
∞∑
n=−∞H(s−jnωs)U?(s−jnωs) =
1T
∞∑
n=−∞H(s − jnωs)
=H?(s)
U?(s)
=⇒ Y ?(s) = H?(s)U?(s)
32 / 40
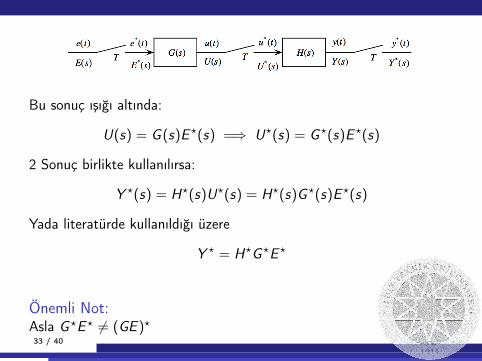
Bu sonuç ışığı altında:
U(s) = G (s)E ?(s) =⇒ U?(s) = G ?(s)E ?(s)
2 Sonuç birlikte kullanılırsa:
Y ?(s) = H?(s)U?(s) = H?(s)G ?(s)E ?(s)
Yada literatürde kullanıldığı üzere
Y ? = H?G ?E ?
Önemli Not:Asla G ?E ? 6= (GE )?33 / 40
Önemli Not
Hatırlamak gerekirse bir ayrık dizinin z dönüşümü verildiğinde
R?(s) = R(z)|z=eTs
şeklinde hesaplanır (Bunu görmüştük!!!). R?(s) verildiğinde R(z)ifadesini bulmak için
R(z) = R?(s)|s= 1Tln z
L−1 [U?(s)] =⇒ yoğunluğu u(kT ) olan darbeler dizisi
Z−1 [U(z)] =⇒ uk dizisi
34 / 40
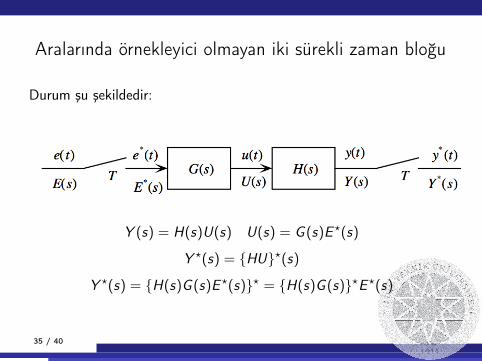
Aralarında örnekleyici olmayan iki sürekli zaman bloğu
Durum şu şekildedir:
Y (s) = H(s)U(s) U(s) = G (s)E ?(s)
Y ?(s) = {HU}?(s)
Y ?(s) = {H(s)G (s)E ?(s)}? = {H(s)G (s)}?E ?(s)
35 / 40
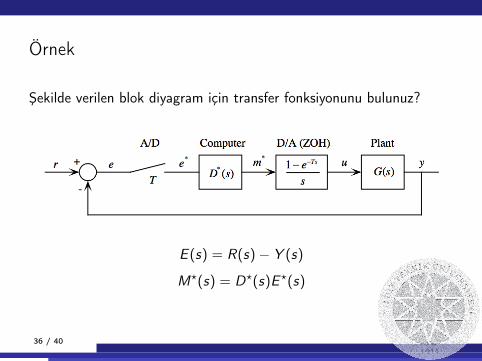
Örnek
Şekilde verilen blok diyagram için transfer fonksiyonunu bulunuz?
E (s) = R(s)− Y (s)
M?(s) = D?(s)E ?(s)
36 / 40
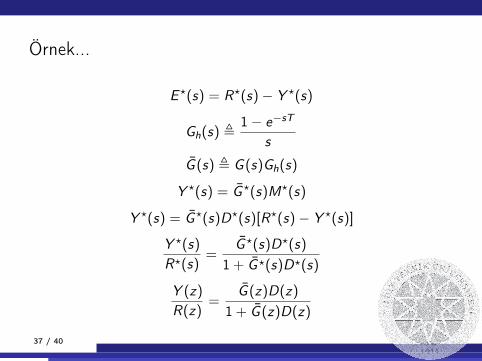
Örnek...
E ?(s) = R?(s)− Y ?(s)
Gh(s) ,1− e−sT
s
G (s) , G (s)Gh(s)
Y ?(s) = G ?(s)M?(s)
Y ?(s) = G ?(s)D?(s)[R?(s)− Y ?(s)]
Y ?(s)
R?(s)=
G ?(s)D?(s)
1 + G ?(s)D?(s)
Y (z)
R(z)=
G (z)D(z)
1 + G (z)D(z)
37 / 40
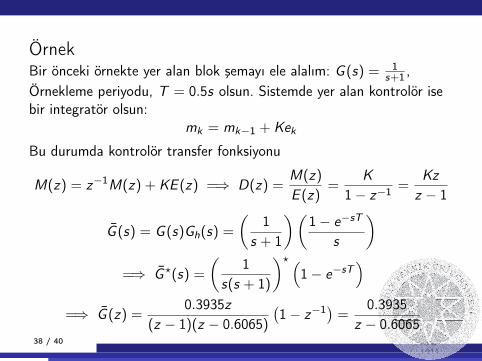
ÖrnekBir önceki örnekte yer alan blok şemayı ele alalım: G (s) = 1
s+1 ,Örnekleme periyodu, T = 0.5s olsun. Sistemde yer alan kontrolör isebir integratör olsun:
mk = mk−1 + Kek
Bu durumda kontrolör transfer fonksiyonu
M(z) = z−1M(z) + KE (z) =⇒ D(z) =M(z)
E (z)=
K
1− z−1=
Kz
z − 1
G (s) = G (s)Gh(s) =
(1
s + 1
)(1− e−sT
s
)
=⇒ G ?(s) =
(1
s(s + 1)
)? (1− e−sT
)
=⇒ G (z) =0.3935z
(z − 1)(z − 0.6065)
(1− z−1
)=
0.3935z − 0.6065
38 / 40
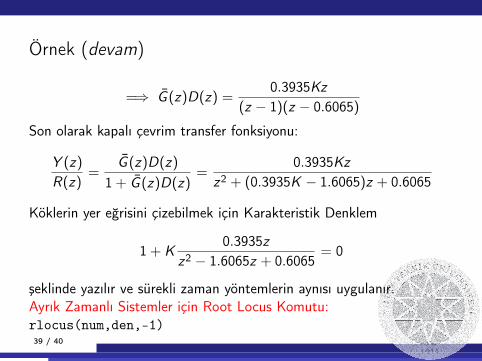
Örnek (devam)
=⇒ G (z)D(z) =0.3935Kz
(z − 1)(z − 0.6065)
Son olarak kapalı çevrim transfer fonksiyonu:
Y (z)
R(z)=
G (z)D(z)
1 + G (z)D(z)=
0.3935Kzz2 + (0.3935K − 1.6065)z + 0.6065
Köklerin yer eğrisini çizebilmek için Karakteristik Denklem
1 + K0.3935z
z2 − 1.6065z + 0.6065= 0
şeklinde yazılır ve sürekli zaman yöntemlerin aynısı uygulanır.Ayrık Zamanlı Sistemler için Root Locus Komutu:rlocus(num,den,-1)39 / 40

K nın Değişimine Göre Kapalı Çevrim Kutupların YerEğrisi
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
0.1π/T
0.2π/T
0.3π/T
0.4π/T
0.5π/T
0.6π/T
0.7π/T
0.8π/T
0.9π/T
1π/T
0.1π/T
0.2π/T
0.3π/T
0.4π/T
0.5π/T
0.6π/T
0.7π/T
0.8π/T
0.9π/T
1π/T
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Root Locus
Real Axis
Imagin
ary
Axis
40 / 40