session 38 magnus andersson
TRANSCRIPT

Beläggningskvalitet
Transportforum, 2013Magnus Andersson

Bakgrund
Idag

Imorgon
Bakgrund

Bakgrund
• IRI, International Roughness Index (mm/m)• Spårdjup (mm)• MPD, Makrotextur (mm)

Belagd väg Fordonsflotta Användargränssnitt
Överblick

Hårdvara
• Accelerometer• Gyro• GPS• Kommunikation (3G/GPRS)• Datalagring (SD-kort)• Batteri
• Inga externa sensorer• Samtliga komponenter finns tillgängliga
i dagens moderna fordon
Mjukvara
• Möjlighet till rådataloggningo Rå sensordata för vidareutveckling av modeller i kontorsmiljö.
• Simuleringsmiljöo Simulerar en körning med hjälp av insamlad rådata.
• Matlab/Simulinko Samtliga algoritmer är utvecklade och modellerade i Simulink.
• Avancerad grusdetektering

Validering
• Validering mot Trafikverkets vägytemätningar (laserbil).• Över 1.800 km
• E6, Göteborg-Halmstad, 3x282 km• V41, Varberg-Borås, 3x178 km• V190, Göteborg-Nossebro, 3x140 km
• IRI – God korrelation.• Inget bevis på korrelation med Spårdjup
och MPD.

ValideringFiltrerad över 100 m
Beläggningskvalitet – Blå, IRI - Röd

ValideringFiltrerad över 400 m
Beläggningskvalitet – Blå, IRI - Röd

ValideringFiltrerad över 1000 m
Beläggningskvalitet – Blå, IRI - Röd

Repeterbarhet
100 m 1000 m400 m
Validering

Korrelation
70 / 2000-4000 (km/h / fordon/dag)
Färgkod Kvalitetsvärde IRI (mm/m)
≤ 1 ≤ 2.2
2 ≤ 3.3
3 ≤ 3.4
4 ≤ 3.6
5 ≤ 3.9
6 ≤ 4.1
≥ 7 > 4.1
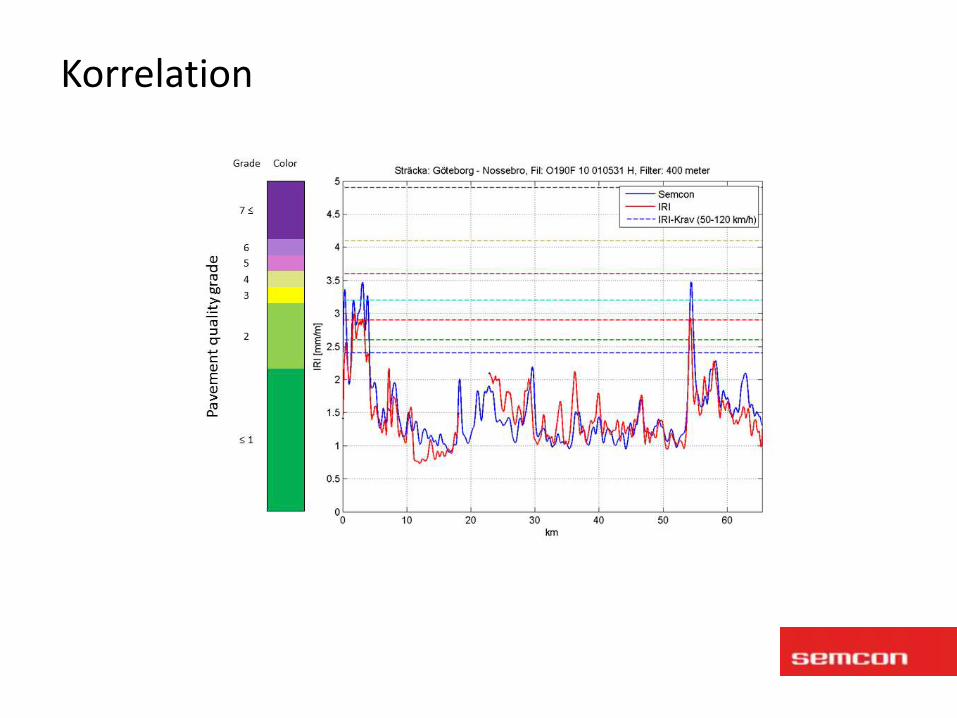
Korrelation

Användargränssnitt

Användargränssnitt

Användargränssnitt

Användargränssnitt

Användargränssnitt

Användargränssnitt
