sistemas embebidos
DESCRIPTION
Desarrollo de la Interfaz en LabView para robot.TRANSCRIPT
UNIVERSIDAD DE GUANAJUATO
DIVISIÓN DE INGENIERÍAS CAMPUS IRAPUATO – SALAMANCA
SISTEMAS EMBEBIDOS
PRÁCTICA 1. Configuración Del Equipo Starter KIT
2.0 de LabView Robotics
INTEGRANTES:
ERICK ANGEL RAYA
FRANCISCO RAMIRO
MICHEL MUJICA LANDEROS
OMAR ULISES CARRERA SALDÍVAR
MARICARMEN OROZCO MUÑIZ
Objetivo.- Realizar la configuración del equipo Starter Kit 2.0 con la PC. Efectuar mediciones de distancia con el PING))) y verificar que el servomotor donde está montado el sensor ultrasónico trabaje correctamente. Analizar que los motores de DC operen de forma óptima.
Material y Equipo
• Starter Kit 2.0 • Plataforma LabVIEW Robotics 2011 • Cable cruzado Ethernet • Computadora
1. PROCEDIMIENTO Y RESULTADOS
1.1 IDENTIFICACIÓN DE LAS PARTES COMPONENTES DEL
STARTER KIT 2.0
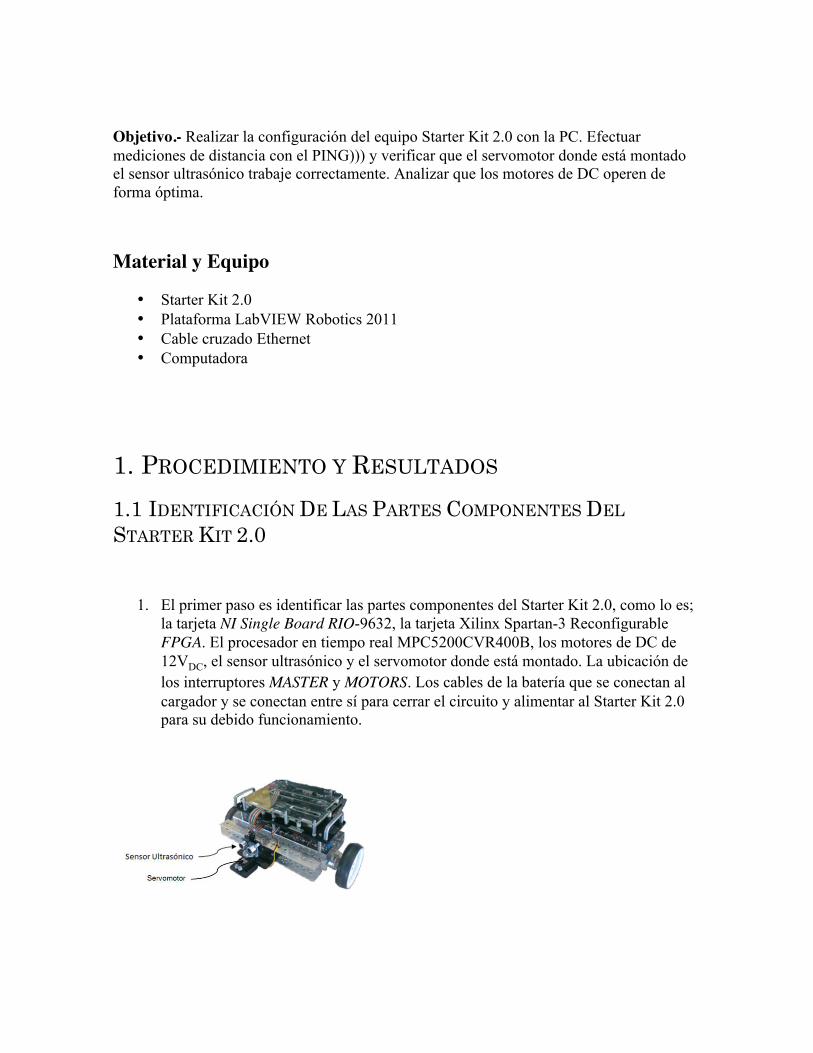
1. El primer paso es identificar las partes componentes del Starter Kit 2.0, como lo es; la tarjeta NI Single Board RIO-9632, la tarjeta Xilinx Spartan-3 Reconfigurable FPGA. El procesador en tiempo real MPC5200CVR400B, los motores de DC de 12VDC, el sensor ultrasónico y el servomotor donde está montado. La ubicación de los interruptores MASTER y MOTORS. Los cables de la batería que se conectan al cargador y se conectan entre sí para cerrar el circuito y alimentar al Starter Kit 2.0 para su debido funcionamiento.

FUNCIONES DE LOS INTERRUPTORES DEL DIP SWITCH
i. El pin 1, Safe Mode: si está en la posición ON en el inicio, la sbRIO lanza solamente los servicios requeridos para actualizar ésta configuración e instalar el software, el LabVIEW Real-Time no arranca. Si el switch está en la posición OFF, el LabVIEW Real-Time arranca. Manteniendo éste switch en la posición OFF opera de forma normal. El switch Safe Mode debe estar en la posición ON para reformatear el driver sobre el dispositivo. Poner el switch Safe Mode y el IP Reset en ON y pulsar el botón Reset, precisamente borrará la dirección IP. El led Status parpadeará 3 veces continuas indicando que la sbRIO se encuentra en modo seguro.
ii. El pin 2, Console Out con un programa de terminal de puerto serie, se puede utilizar dicho puerto para leer la dirección IP y la versión del firmware del dispositivo NI sbRIO. Usar un cable null-modem para conectar el puerto serie del dispositivo a un ordenador. Empujar el interruptor Console Out en la posición ON asegura que el programa de terminal de puerto serie está configurado para los siguientes ajustes:
· Los 9600 bits por segundo
· Ocho bits de datos
· Sin paridad
· Un bit de parada
· No hay control de flujo Mantener éste interruptor en la posición OFF durante la operación normal. Si se habilita la opción Console Out el LabVIEW Real Time no puede comunicarse con el puerto serie.
iii. El pin 3, IP Reset cuando se posiciona en ON reinicia el dispositivo sbRIO NI para restablecer la dirección IP y poner ceros, esto indica que desde MAX se observará IP (0.0.0.0) y por lo tanto se pude configurar una nueva dirección IP.
El pin 4, No APP en la posición ON evita que LabVIEW Real-Time al inicio de la aplicación se ejecute en el arranque. Si se desea desactivar de forma permanente una aplicación de LabVIEW Real-Time que se ejecute desde el arranque, debe desactivarse en LabVIEW. Para ejecutar una aplicación en el inicio, el interruptor No APP debe cambiar a la posición OFF, se debe crear una aplicación utilizando el LabVIEW Application Builder, y configurar la aplicación en LabVIEW para lanzarla en el inicio. Para obtener mayor información acerca del lanzamiento automático de VIs en el inicio y desactivación del lanzamiento de VIs en el arranque, se hace referencia a la ejecución de un Stand-Alone aplicación en tiempo real (RT Module) tema de ayuda de LabVIEW.
El pin 5, User1 se puede definir para la aplicación deseada. Para determinar el propósito de éste switch en la aplicación embebida usar el RT (Real-Time) Read Switch VI en LabVIEW RT embebido VI. Para más información acerca del RT Switch LabVIEW VI referirse en la ayuda de LabVIEW.
El pin 6, No FPGA en la posición ON evita que la aplicación LabVIEW FPGA arranque en el inicio. El interruptor anula las opciones que se describen en Boot Options Sections. Después del arranque puede cargar archivos de un bit en la memoria flash de un proyecto de LabVIEW con independencia de cambiar de posición. Si ya se tiene una aplicación configurada para ponerse en marcha y se presiona el interruptor NO FPGA de ON a OFF el inicio de la aplicación se empieza automáticamente.
Con anterioridad a la configuración del Starter Kit 2.0 con la PC se debe verificar que el switch MASTER y el switch MOTORS estén en OFF.

1.2 CONEXIÓN ENTRE LA PC Y EL STARTER KIT 2.0
1. Se conecta el cable ETHERNET en la PC y en el Starter Kit 2.0.
2. Se consulta la dirección IP de la computadora para crear la dirección IP estática del robot. Por tanto se accede a Panel de Control>>Redes e Internet>>Conexiones de Red, se da doble clic, y después se selecciona la opción Propiedades donde aparece la ventana Propiedades de conexión de área local se elige la opción Protocolo de Internet versión 4(TCP/IPv4).
Posteriormente se da doble clic en Protocolo de Internet versión 4 (TCP/IPv4) y se selecciona Configuración alternativa, donde es posible observar la dirección IP que tiene la máquina para proceder a crear la dirección IP estática del Robot DaNI.
1.3 CREACIÓN DE LA DIRECCIÓN IP ESTÁTICA
Ahora se procede a crear la dirección IP estática para el Starter Kit 2.0, en este caso la terminación de la dirección IP de la PC es 48, para lo cual se asignará al Starter Kit 2.0 la terminación 51. Esto es: 148.214.113.51.
3. Se accede al programa Measurement & Automation (MAX) de National Instruments para revisar la conexión con Single-Board RIO. Se abre el programa MAX, se da clic en Remote Systems, allí se selecciona el controlador de la Single Board RIO. Aparece el nombre de la tarjeta NI-sbRIO-9632-163FC23, se da un clic y después se elige la opción Network settigns donde es posible crear la dirección IP estática. Se escribe la misma subred de la

computadora y sólo se cambia el último número de la IP, como se mencionó anteriormente la dirección IP estática es: 148.214.113.51.
4. El siguiente paso es instalar el software para tener acceso al Real-Time y a la FPGA, se puede realizar dando doble clic en Software en NI- sbRIO-9632- 163FC23, o desde LabVIEW Robotics.
1.4 INSTALACIÓN DEL SOFTWARE PARA EL ACCESO AL REAL TIME
Y A LA FPGA DESDE LABVIEW
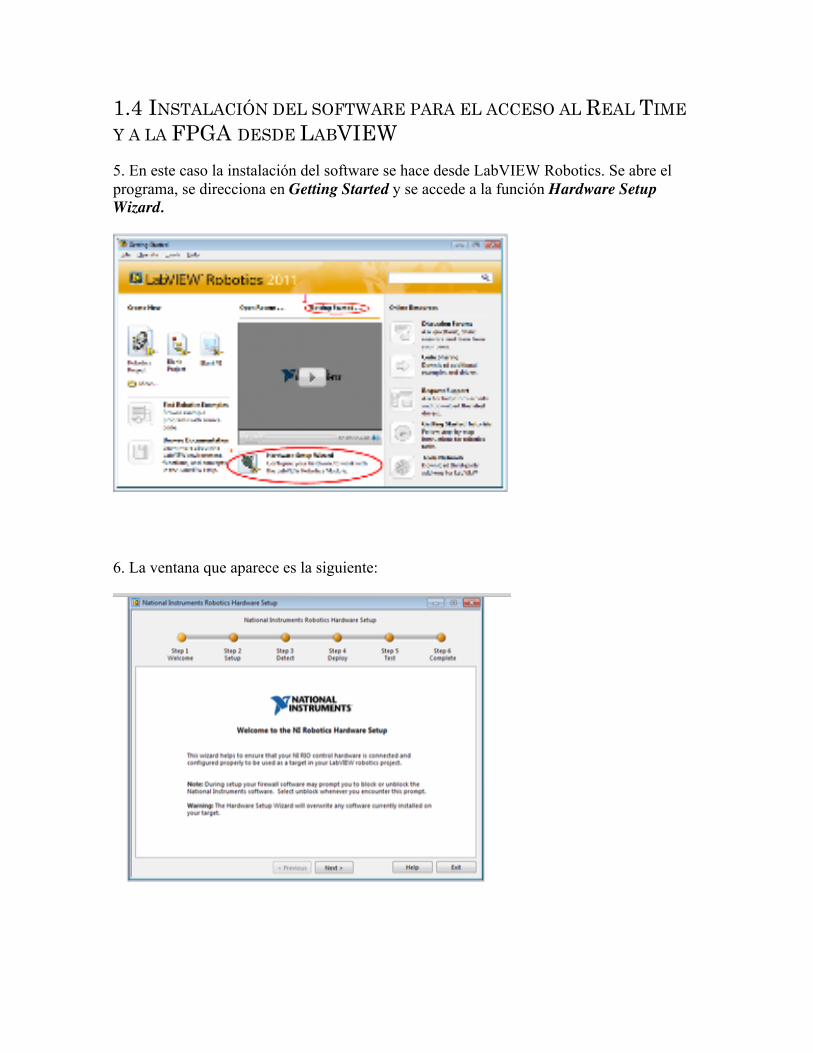
5. En este caso la instalación del software se hace desde LabVIEW Robotics. Se abre el programa, se direcciona en Getting Started y se accede a la función Hardware Setup Wizard.
6. La ventana que aparece es la siguiente:
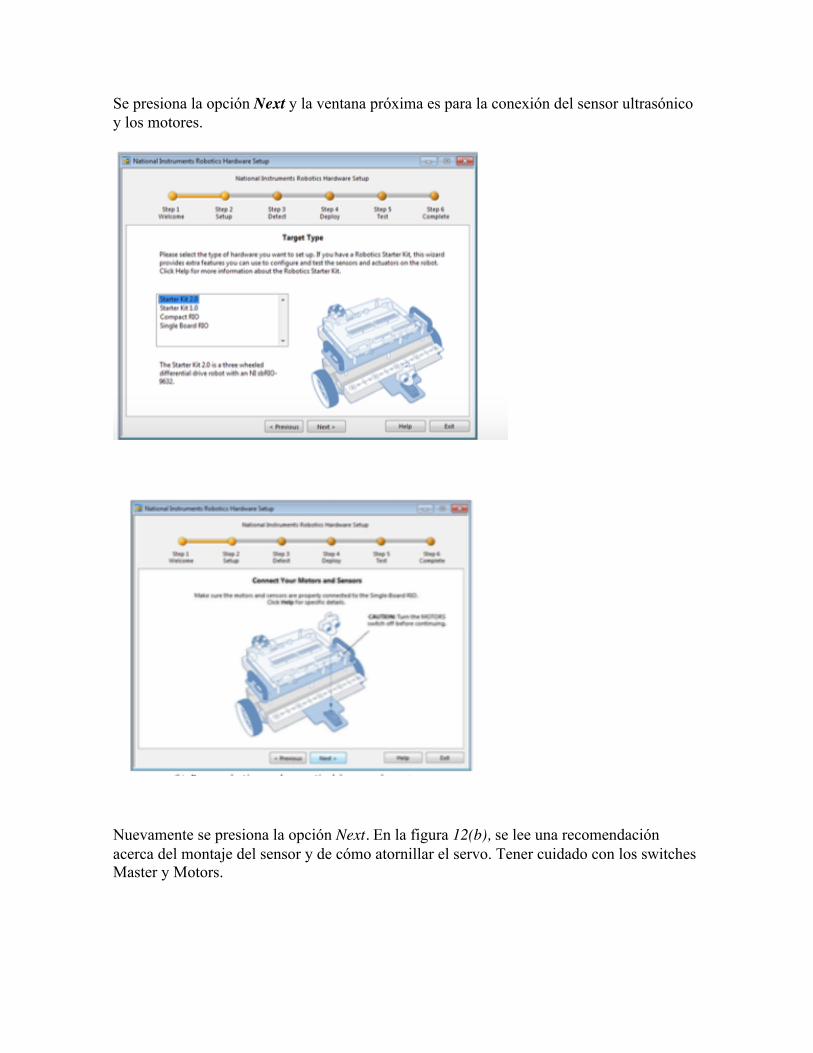
Se presiona la opción Next y la ventana próxima es para la conexión del sensor ultrasónico y los motores.
Nuevamente se presiona la opción Next. En la figura 12(b), se lee una recomendación acerca del montaje del sensor y de cómo atornillar el servo. Tener cuidado con los switches Master y Motors.
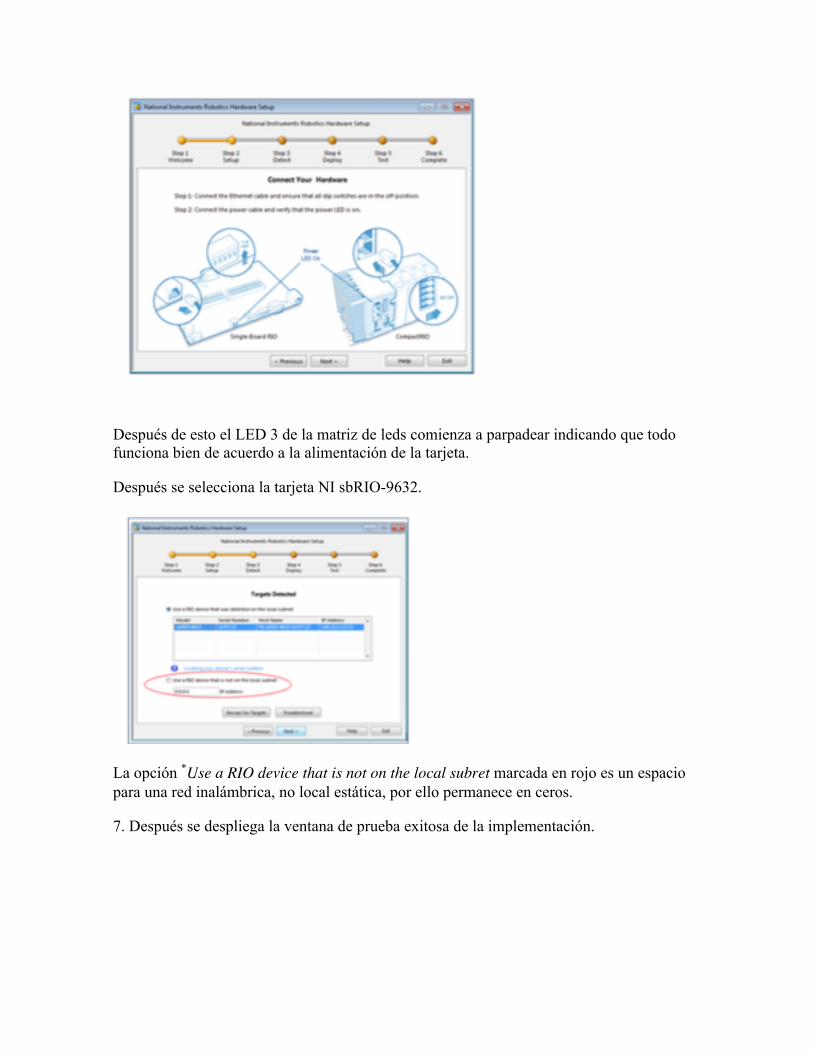
Después de esto el LED 3 de la matriz de leds comienza a parpadear indicando que todo funciona bien de acuerdo a la alimentación de la tarjeta.
Después se selecciona la tarjeta NI sbRIO-9632.
La opción *Use a RIO device that is not on the local subret marcada en rojo es un espacio para una red inalámbrica, no local estática, por ello permanece en ceros.
7. Después se despliega la ventana de prueba exitosa de la implementación.
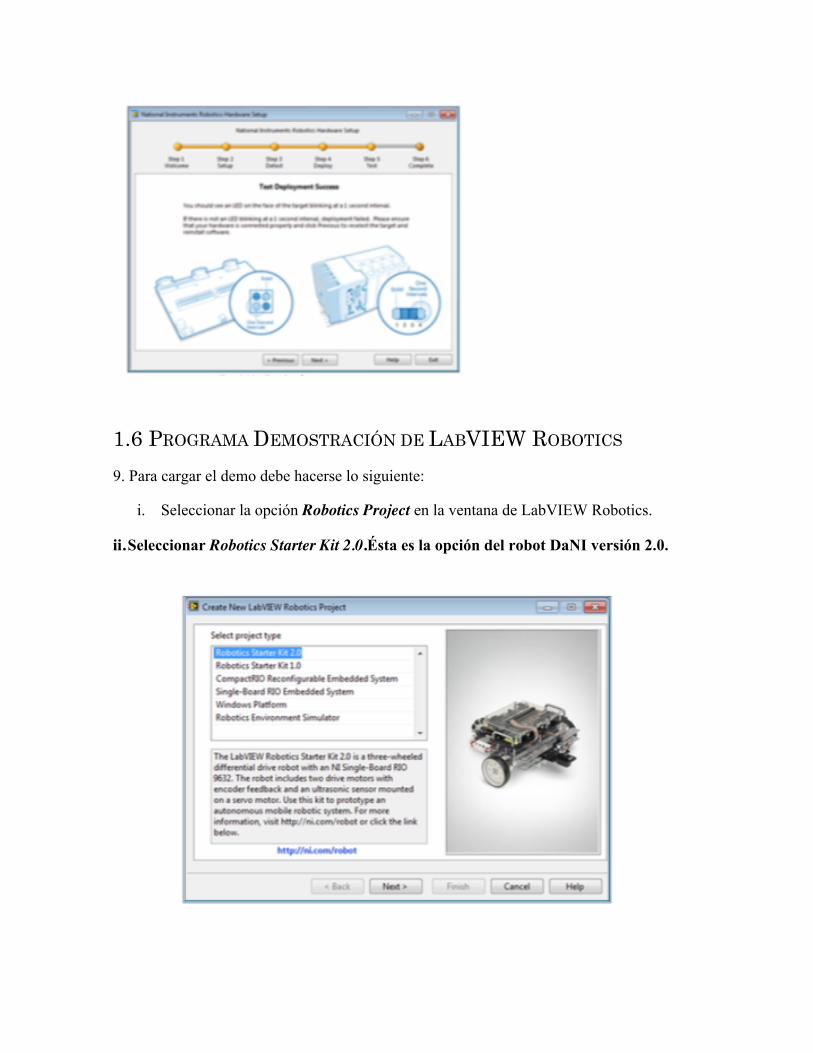
1.6 PROGRAMA DEMOSTRACIÓN DE LABVIEW ROBOTICS
9. Para cargar el demo debe hacerse lo siguiente:
i. Seleccionar la opción Robotics Project en la ventana de LabVIEW Robotics.
ii. Seleccionar Robotics Starter Kit 2.0.���Ésta es la opción del robot DaNI versión 2.0. ���
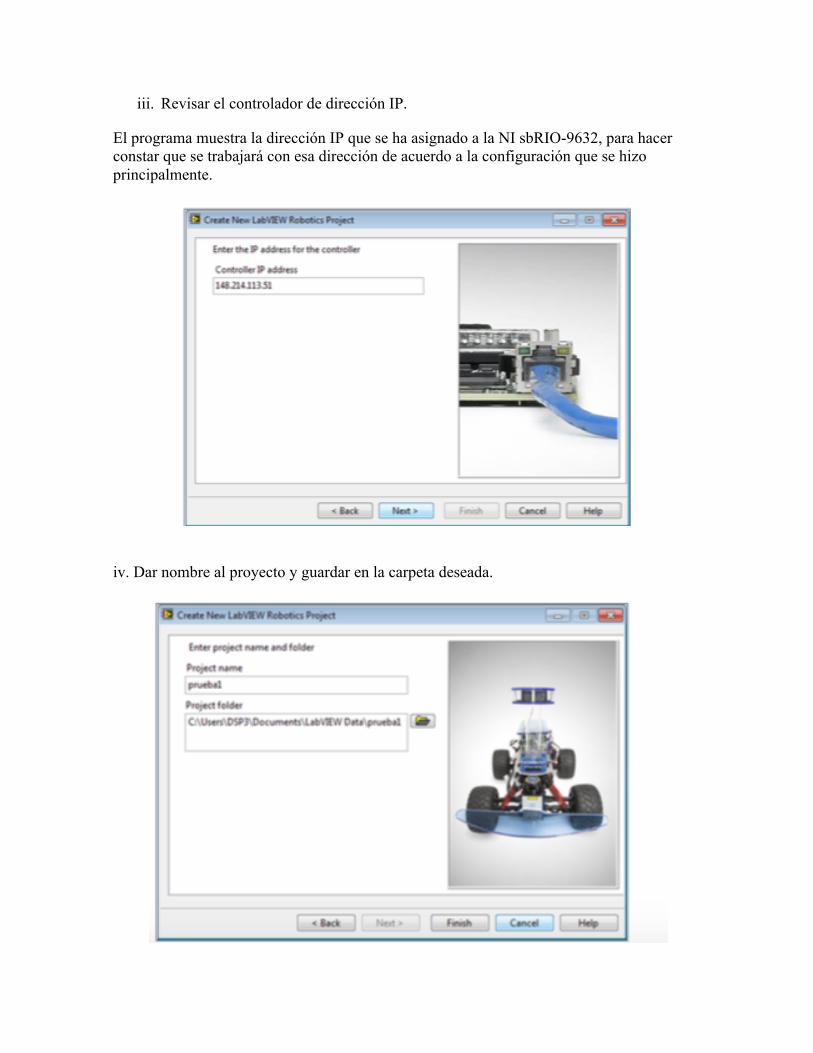
iii. Revisar el controlador de dirección IP.
El programa muestra la dirección IP que se ha asignado a la NI sbRIO-9632, para hacer constar que se trabajará con esa dirección de acuerdo a la configuración que se hizo principalmente.
iv. Dar nombre al proyecto y guardar en la carpeta deseada.
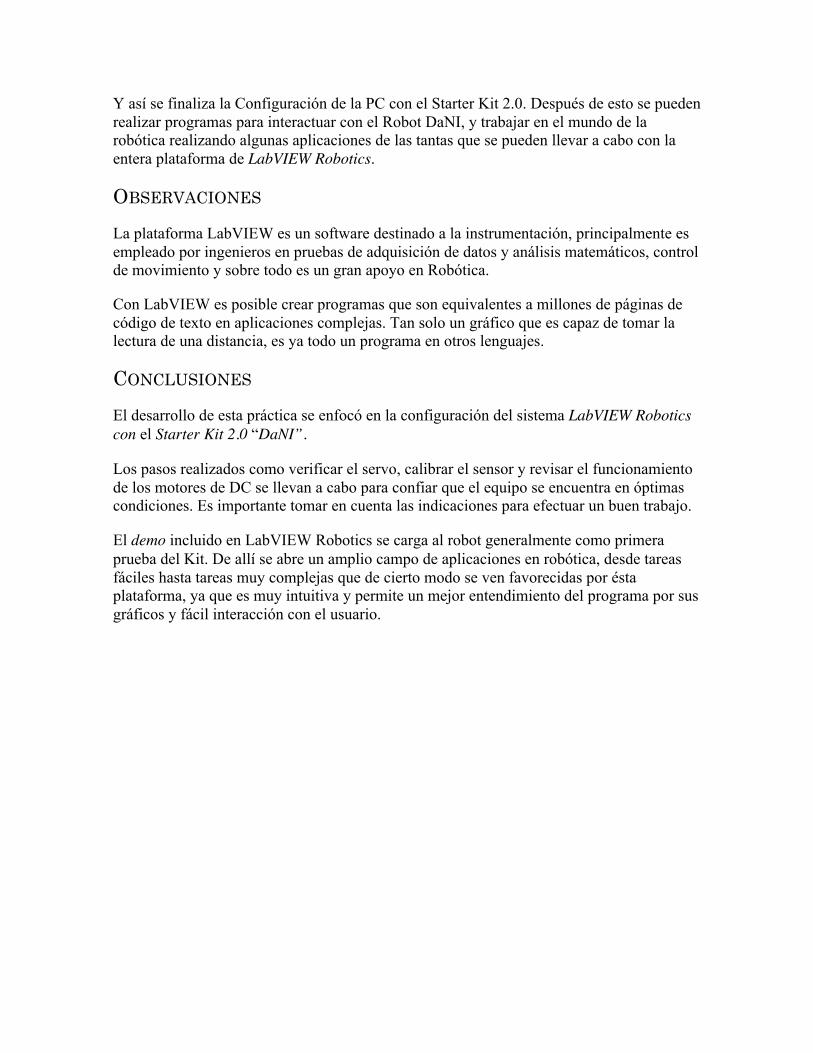
Una pequeña explicación del programa se enumera a continuación:
1. Se inicializa el Starter Kit 2.0.
2. Se crea un objeto de marco para la dirección del robot.
3. Se inicializan los datos escaneados, son los datos analizados por el sensor ultrasónico de acuerdo a los obstáculos que ha detectado.
4. Se calcula el ángulo de exploración del sensor ultrasónico.
5. Se escribe el ángulo de exploración para el servomotor.

6. Lee la distancia desde el sensor ultrasónico.
7. Se agrega al sensor de distancia la lectura de los datos escaneados de los obstáculos.
8. Se calcula la dirección del robot para moverse, basado en los datos digitalizados de los obstáculos.
9. Se aplica la velocidad del robot (x_dot, y_dot, theta_dot) a la estructura de dirección para el cálculo de las velocidades correspondientes del motor.
10. Se adaptan las consignas de velocidad del motor para el robot.
11. Cierre del robot kit de inicio.
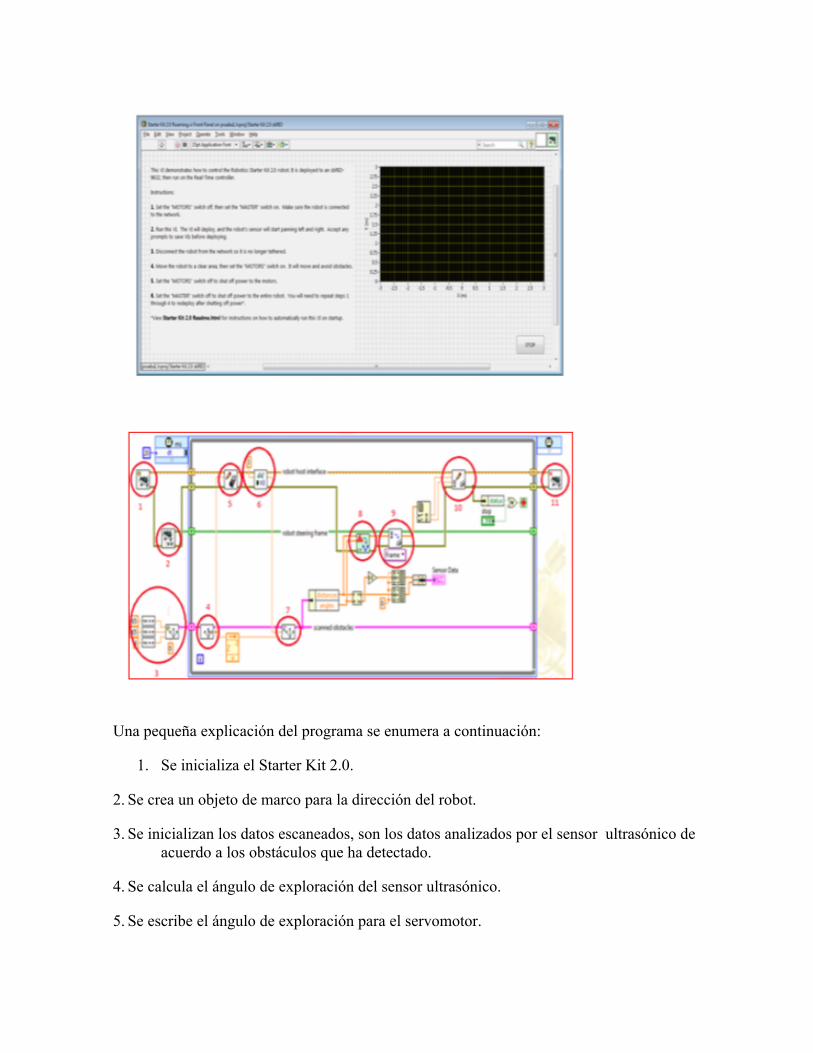
Se corre el programa directamente del panel frontal.
Y así se finaliza la Configuración de la PC con el Starter Kit 2.0. Después de esto se pueden realizar programas para interactuar con el Robot DaNI, y trabajar en el mundo de la robótica realizando algunas aplicaciones de las tantas que se pueden llevar a cabo con la entera plataforma de LabVIEW Robotics.
OBSERVACIONES
La plataforma LabVIEW es un software destinado a la instrumentación, principalmente es empleado por ingenieros en pruebas de adquisición de datos y análisis matemáticos, control de movimiento y sobre todo es un gran apoyo en Robótica.
Con LabVIEW es posible crear programas que son equivalentes a millones de páginas de código de texto en aplicaciones complejas. Tan solo un gráfico que es capaz de tomar la lectura de una distancia, es ya todo un programa en otros lenguajes.
CONCLUSIONES
El desarrollo de esta práctica se enfocó en la configuración del sistema LabVIEW Robotics con el Starter Kit 2.0 “DaNI”.
Los pasos realizados como verificar el servo, calibrar el sensor y revisar el funcionamiento de los motores de DC se llevan a cabo para confiar que el equipo se encuentra en óptimas condiciones. Es importante tomar en cuenta las indicaciones para efectuar un buen trabajo.
El demo incluido en LabVIEW Robotics se carga al robot generalmente como primera prueba del Kit. De allí se abre un amplio campo de aplicaciones en robótica, desde tareas fáciles hasta tareas muy complejas que de cierto modo se ven favorecidas por ésta plataforma, ya que es muy intuitiva y permite un mejor entendimiento del programa por sus gráficos y fácil interacción con el usuario.