skript elastizitaetstheorie
DESCRIPTION
Skript ElastizitaetstheorieTRANSCRIPT

Numerische Methoden und InformationsverarbeitungProf. Dr.-Ing. habil. Franz-Joseph Barthold
Universität DortmundFakultät Bauwesen
Das nachfolgende Manuskript ist ein unveränderter, elektronischer Nachdruck der
Unterlagen zur Vorlesung
Elastizitätstheorie
von
Erwin Stein und Franz-Joseph Barthold,
erstellt am Institut für Baumechanik und Numerische Mechanik der Universität Hannover.
Dieser Aufsatz wurde als Beitrag zum vergriffenen Handbuch der Bauingenieureim Verlag W. Ernst & Sohn veröffentlicht.
Ein Bezug auf diese Arbeit sollte unter Verweis auf die veröffentlichte Fassung erfolgen.
Stein, E. ; Barthold, F.-J.: Elastizitätstheorie.In: MEHLHORN, G. (Hrsg.): Der Ingenieurbau, Grundwissen: Werkstoffe, Elastizitätstheorie.
Ernst & Sohn, Berlin, 1996.ISBN 3–433–01570–8, S. 165–428
Die aktuellen Adressen der Autoren lauten:
em. Prof. Dr.-Ing. habil. Dr.-Ing. E.h. Dr. h.c. mult. Erwin SteinInstitut für Baumechanik und Numerische Mechanik
Universität HannoverAppelstraße 9A, D-30167 Hannover
Prof. Dr.-Ing. habil. Franz-Joseph BartholdFach Numerische Methoden und Informationsverarbeitung
Fakultät Bauwesen, Universität DortmundAugust-Schmidt-Straße 6, D-44227 Dortmund
Elastizitätstheorie – 15. Januar 2004
BI M
N
UNIVERSITAT HANNOVER
Institut fur Baumechanik und Numerische Mechanik
Unterlagen zur Vorlesung
ELASTIZITATSTHEORIE
von
Prof DrIng Erwin Stein
und
DrIng FranzJoseph Barthold
WS
Herausgeber:
Prof. Dr.-Ing. Dr.-Ing. E. h. Dr. h. c. mult. Erwin Stein
Organisation und Verwaltung:
Dr.-Ing. Franz-Joseph Barthold, M.Sc.Institut fur Baumechanik und Numerische MechanikUniversitat HannoverAppelstr. 9AD-30167 HannoverTel.: 0511 / 762 - 4297Fax.: 0511 / 762 - 5496E-Mail: [email protected]
c© 1992, 1994, 1995Prof. Dr.-Ing. Dr.-Ing. E. h. Dr. h. c. mult. Erwin SteinDr.-Ing. Franz-Joseph Barthold, M.Sc.Institut fur Baumechanik und Numerische MechanikAppelstraße 9 AD-30167 Hannover
Alle Rechte, insbesondere das der Ubersetzung in fremde Sprachen, vorbe-halten. Ohne Genehmigung der Autoren ist es nicht gestattet, dieses Heftganz oder teilweise auf fotomechanischem Wege (Fotokopie, Mikrokopie) zuvervielfaltigen oder in elektronische Medien zu speichern.
Vorwort
Das vorliegende Skript wurde in den Jahren 1988 bis 1992 auf der Grundlageder Vorlesungsunterlagen des erstgenannten Autors und Mitschriften derStudenten vom zweiten Autor in vollstandig uberarbeiteter und erweiterterForm neu erstellt.
Hierbei arbeiteten die Studenten cand. ing. S. Reese, M. Speth, J. Zurborgund M. Klaus mit vielen Beitragen und großem Engagement mit. Insbe-sondere ist ihre Ausdauer und ihr Geschick bei der Umsetzung des Ma-nuskriptes mit dem Textverarbeitungssystem LATEX zu erwahnen. Hierfurmochten wir Ihnen herzlich danken. Unser Dank gilt ebenfalls den Studen-tinnen cand. ing. K. Kordt und stud. ing. M. Tieke fur die zugige undsaubere Anfertigung der Zeichnungen.
Weiterhin danken wir Herrn Prof. D. Braess fur die aufmerksame Durchsichtdes gesamten Manuskriptes und vielen Mitarbeitern des Instituts sowie denStudierenden fur die zahlreichen Hinweise und Verbesserungsvorschlage.
Das Skript ist in seinem Umfang stark angewachsen, so daß es weder be-absichtigt noch moglich ist, den vollstandigen Inhalt in einer zweistundigenVorlesung vorzutragen und als Prufungsstoff vorauszusetzen. Vielmehr stelltdas Skript in einer beschrankten Anzahl ausgewahlter Abschnitte das Ske-lett der Vorlesung dar, ohne jedoch ein Ersatz fur die Vorlesung zu sein.
Dem interessierten Studenten soll es durch die ausfuhrlichere und uber denUmfang der Vorlesung hinausgehende Darstellung den Einstieg in die wei-terfuhrende und zumeist englischsprachige Literatur uber Elastizitatstheorieund Kontinuumsmechanik erleichtern.
Hannover im Oktober 1997 E. Stein, F.-J. Barthold

Inhaltsverzeichnis
1 Einleitung 1
1.1 Ubersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Historische Entwicklung . . . . . . . . . . . . . . . . . . . . . 3
1.3 Grundlagen der Kontinuumsmechanik . . . . . . . . . . . . . 6
1.3.1 Der materielle Korper und seine Eigenschaften . . . . 6
1.3.2 Die Beschreibung der Lage und Bewegung des mate-riellen Korpers . . . . . . . . . . . . . . . . . . . . . . 8
1.3.3 Die Bilanz- und Erhaltungssatze der Mechanik . . . . 9
1.3.4 Die konstitutiven Gleichungen . . . . . . . . . . . . . . 10
1.3.5 Das Aufgabengebiet der Elastizitatstheorie . . . . . . 10
1.3.6 Die mathematische Behandlung der Elastizitatstheorie 11
1.3.7 Einfuhrung in die Finite-Elemente–Methode . . . . . . 12
2 Lage und Bewegung 13
2.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1 Die deterministische Theorie . . . . . . . . . . . . . . 13
2.1.2 Die mathematische Beschreibung der physikalischenEreignisse . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Lage der materiellen Punkte . . . . . . . . . . . . . . . . . . . 18
I
II INHALTSVERZEICHNIS
2.3 Mathematische Forderungen . . . . . . . . . . . . . . . . . . . 21
2.3.1 Injektivitat, Surjektivitat und Bijektivitat der Abbil-dung χt : B → IR3 . . . . . . . . . . . . . . . . . . . . 21
2.3.2 Stetigkeit der Abbildung χt : B → IR3 . . . . . . . . . 25
2.3.3 Stetigkeit der Abbildung χM : IR → IR3 . . . . . . . . 26
2.4 Einfuhrung der Referenzkonfiguration B . . . . . . . . . . . . 27
2.5 Betrachtungsweisen der Bewegung . . . . . . . . . . . . . . . 32
2.5.1 Darstellung der Bewegung in Abhangigkeit der mate-riellen Punkte M . . . . . . . . . . . . . . . . . . . . . 32
2.5.2 Die materielle oder Lagrangesche Betrachtungsweise . 32
2.5.3 Die raumliche oder Eulersche Betrachtungsweise . . . 34
2.5.4 Die relative Beschreibung der Bewegung . . . . . . . . 35
2.6 Wechsel des Beobachters . . . . . . . . . . . . . . . . . . . . . 37
2.7 Wechsel der Referenzkonfiguration . . . . . . . . . . . . . . . 39
2.8 Wechsel des Koordinatensystems . . . . . . . . . . . . . . . . 42
3 Deformationen und Verzerrungen 45
3.1 Grundlagen und Vereinbarungen . . . . . . . . . . . . . . . . 45
3.2 Der materielle Deformationsgradient F . . . . . . . . . . . . . 49
3.3 Polare Zerlegung . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.4 Der Greensche Verzerrungstensor E . . . . . . . . . . . . . . . 56
3.4.1 Anschauliche Einfuhrung des Greenschen Verzerrungs-tensors E . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.4.2 Herleitung des Greenschen Verzerrungstensors E mitHilfe der Differenz der Quadrate der Linienelementeim verformten und unverformten Zustand . . . . . . . 59
3.4.3 Darstellung des Greenschen Verzerrungstensors E inkonvektiven Koordinaten durch die Differenz der Me-triktensoren in der Momentan- und der Referenzkon-figuration . . . . . . . . . . . . . . . . . . . . . . . . . 61
INHALTSVERZEICHNIS III
3.4.4 Darstellung des Greenschen Verzerrungstensors E mitHilfe des materiellen Verschiebungsgradienten H . . . 64
3.4.5 Vergleich des Greenschen Verzerrungstensors E mitden Ingenieurverzerrungen γ . . . . . . . . . . . . . . 66
3.5 Der Almansische Verzerrungstensor E(A) . . . . . . . . . . . . 69
3.6 Hauptachsentransformation . . . . . . . . . . . . . . . . . . . 71
3.6.1 Hauptachsentransformation des Rechts-Streck-TensorsU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.6.2 Hauptachsentransformation des Links-Streck-TensorsV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.6.3 Spektraldarstellung der Verzerrungstensoren . . . . . . 74
3.6.4 Einfuhrung weiterer Verzerrungstensoren . . . . . . . 75
3.6.5 Das Cauchysche Dehnungsellipsoid . . . . . . . . . . . 76
3.7 Volumetrische und isochore Deformationen . . . . . . . . . . 79
3.8 Kugeltensor und Deviator . . . . . . . . . . . . . . . . . . . . 81
3.9 Kompatibilitatsbedingungen . . . . . . . . . . . . . . . . . . . 83
3.10 Transformation geometrischer Großen . . . . . . . . . . . . . 86
3.10.1 Pull-Back und Push-Forward-Operationen . . . . . . . 86
3.10.2 Transformation der Linienelemente . . . . . . . . . . . 88
3.10.3 Transformation der Volumenelemente . . . . . . . . . 88
3.10.4 Transformation der Flachenelemente . . . . . . . . . . 90
4 Zeitliche Ableitungen 91
4.1 Skalarwertige Vektorfunktionen . . . . . . . . . . . . . . . . . 91
4.1.1 Materielle Darstellung der materiellen Zeitableitungskalarwertiger Vektorfunktionen . . . . . . . . . . . . . 92
4.1.2 Raumliche Darstellung der materiellen Zeitableitungskalarwertiger Vektorfunktionen . . . . . . . . . . . . . 92
4.2 Vektorwertige Vektorfunktionen . . . . . . . . . . . . . . . . . 93
IV INHALTSVERZEICHNIS
4.2.1 Materielle Darstellung der materiellen Zeitableitungvektorwertiger Vektorfunktionen . . . . . . . . . . . . 93
4.2.2 Raumliche Darstellung der materiellen Zeitableitungvektorwertiger Vektorfunktionen . . . . . . . . . . . . 93
4.2.3 Beispiel fur die materielle Zeitableitung vektorwerti-ger Vektorfunktionen . . . . . . . . . . . . . . . . . . . 94
4.3 Materielle Zeitableitungen . . . . . . . . . . . . . . . . . . . . 96
4.3.1 Die materielle Zeitableitung des Linienelementes dx . 97
4.3.2 Die materielle Zeitableitung der Jacobi-DeterminantedetF . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
4.3.3 Die zeitliche Ableitung des Volumenelementes dv . . . 99
4.3.4 Die zeitliche Ableitung des Oberflachenelementes da . 99
4.4 Transformationsbeziehungen . . . . . . . . . . . . . . . . . . . 100
4.5 Beobachterinvarianz . . . . . . . . . . . . . . . . . . . . . . . 104
4.5.1 Untersuchung der Objektivitat der Geschwindigkeit . 104
4.5.2 Untersuchung der Objektivitat der Beschleunigung . . 105
5 Bilanzsatze 107
5.1 Satz von der Erhaltung der Masse . . . . . . . . . . . . . . . 108
5.2 Satz von der Erhaltung der Bewegungsgroße . . . . . . . . . . 111
5.2.1 Raumliche Darstellung . . . . . . . . . . . . . . . . . . 111
5.2.2 Materielle Darstellung . . . . . . . . . . . . . . . . . . 114
5.3 Mechanische Spannungen . . . . . . . . . . . . . . . . . . . . 116
5.3.1 Einfuhrung des Spannungsvektors t und des Cauchy-schen Spannungstensors T in der Momentankonfigu-ration Bt . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.3.2 Darstellung der dynamischen Feldgleichungen in derMomentankonfiguration . . . . . . . . . . . . . . . . . 126
5.3.3 Materielle Darstellung des Spannungsvektors t unddes Cauchyschen Spannungstensors T in der Refe-renzkonfiguration B . . . . . . . . . . . . . . . . . . . 129
INHALTSVERZEICHNIS V
5.3.4 Darstellung der dynamischen Feldgleichungen in derReferenzkonfiguration . . . . . . . . . . . . . . . . . . 133
5.4 Der Satz von der Erhaltung des Drehimpulses . . . . . . . . . 135
5.4.1 Raumliche Darstellung . . . . . . . . . . . . . . . . . . 135
5.4.2 Materielle Betrachtungsweise . . . . . . . . . . . . . . 139
5.5 Der Bilanzsatz der kinetischen Energie . . . . . . . . . . . . . 141
5.5.1 Herleitung des Bilanzsatzes der kinetischenEnergie . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.5.2 Einfuhrung der Elementarleistung und arbeitskonfor-mer Paarungen von Spannungs- und Verzerrungsten-soren . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.6 Der Energieerhaltungssatz . . . . . . . . . . . . . . . . . . . . 149
5.6.1 Der Erhaltungssatz der gesamten mechanischen undthermischen Energie . . . . . . . . . . . . . . . . . . . 150
5.6.2 Die lokale Formulierung des Energieerhaltungssatzes . 151
5.7 Der 1. Hauptsatz der Thermodynamik . . . . . . . . . . . . . 152
5.8 Der 2. Hauptsatz der Thermodynamik . . . . . . . . . . . . . 154
6 Die stoffunabhangigen Gleichungen 161
6.1 Die stoffunabhangigen Gleichungen . . . . . . . . . . . . . . . 162
6.2 Mathematische Grundlagen der Linearisierung . . . . . . . . 164
6.2.1 Linearisierung reellwertiger Funktionen einerVeranderlichen . . . . . . . . . . . . . . . . . . . . . . 164
6.2.2 Linearisierung skalarwertiger Funktionen mehrerer Ver-anderlicher . . . . . . . . . . . . . . . . . . . . . . . . 166
6.2.3 Linearisierung vektor- und tensorwertiger Funktionen 167
6.3 Linearisierung stoffunabhangiger Großen . . . . . . . . . . . . 168
6.3.1 Linearisierung der kinematischen Beziehungen . . . . . 168
6.3.2 Linearisierung der Spannungstensoren . . . . . . . . . 175
6.3.3 Linearisierung der Feldgleichungen . . . . . . . . . . . 177
VI INHALTSVERZEICHNIS
7 Konstitutive Gleichungen 179
7.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
7.2 Allgemeingultige Prinzipien . . . . . . . . . . . . . . . . . . . 181
7.3 Die Definition des elastischen Materials . . . . . . . . . . . . 189
7.3.1 Der Ubergang von der allgemeinen Materialtheoriezum elastischen Material . . . . . . . . . . . . . . . . . 189
7.3.2 Das Hookesche Werkstoffgesetz . . . . . . . . . . . . . 191
7.4 Potential der Formanderungsenergie . . . . . . . . . . . . . . 194
7.4.1 Zusammenstellung der bisherigen Ergebnisse . . . . . 194
7.4.2 Darstellung der Spannungstensoren aus derFormanderungsenergiefunktion . . . . . . . . . . . . . 196
7.4.3 Herleitung der Materialtensoren . . . . . . . . . . . . 197
7.4.4 Folgerungen fur den Materialtensor aus dem Poten-tialcharakter der Formanderungsenergie . . . . . . . . 198
7.5 Prinzip der materiellen Objektivitat . . . . . . . . . . . . . . 200
7.6 Isotrope elastische Materialien . . . . . . . . . . . . . . . . . . 205
7.6.1 Der Einflußder Referenzkonfiguration auf den Defor-mationsgradienten . . . . . . . . . . . . . . . . . . . . 205
7.6.2 Das Prinzip der materiellen Symmetrie . . . . . . . . . 206
7.6.3 Das Materialgesetz homogener, isotroper, elastischerMaterialien . . . . . . . . . . . . . . . . . . . . . . . . 208
7.6.4 Die Formanderungsenergiefunktion eines homogenen,isotropen, hyperelastischen Materials . . . . . . . . . . 210
7.7 Die Umgebung der Referenzkonfiguration . . . . . . . . . . . 212
7.8 St. Venant-Kirchhoff-Material . . . . . . . . . . . . . . . . . . 215
7.9 Das Hookesche Werkstoffgesetz . . . . . . . . . . . . . . . . . 218
7.9.1 Herleitung des Hookeschen Werkstoffgesetzes . . . . . 218
7.9.2 Bestimmung der Lame-Parameter λ und µ . . . . . . . 221
INHALTSVERZEICHNIS VII
7.9.3 Das Hookesche Werkstoffgesetz inMatrizenschreibweise . . . . . . . . . . . . . . . . . . . 229
7.9.4 Das Hookesche Werkstoffgesetz fur den ebenen Span-nungszustand . . . . . . . . . . . . . . . . . . . . . . . 231
7.9.5 Das Hookesche Werkstoffgesetz fur den ebenen Ver-zerrungszustand . . . . . . . . . . . . . . . . . . . . . 233
7.9.6 Das Hookesche Werkstoffgesetz fur den geraden Stab . 234
7.10 Nichtlinear-elastische Materialien . . . . . . . . . . . . . . . . 235
7.10.1 AllgemeingultigeDarstellung der Formanderungsener-gie fur homogene, isotrope, hyperelastische Materialien 235
7.10.2 Das Ogden-Material . . . . . . . . . . . . . . . . . . . 236
7.10.3 Das Neo-Hooke-Material . . . . . . . . . . . . . . . . . 237
7.10.4 Das Mooney-Rivlin-Material . . . . . . . . . . . . . . 237
7.10.5 Ein Vergleich verschiedener Materialmodelle . . . . . . 238
7.11 Hauptachsentransformation . . . . . . . . . . . . . . . . . . . 240
7.11.1 Hauptachsenproblem des Cauchyschen Spannungsten-sors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
7.11.2 Das Hauptachsenproblem des ebenen Spannungszu-standes . . . . . . . . . . . . . . . . . . . . . . . . . . 241
7.11.3 Kugeltensor und Deviator . . . . . . . . . . . . . . . . 242
8 Die Grundgleichungen 245
8.1 Zusammenstellung der Grundgleichungen . . . . . . . . . . . 245
8.1.1 Die geometrischen Beziehungen . . . . . . . . . . . . . 245
8.1.2 Die dynamischen und statischen Feldgleichungen . . . 246
8.1.3 Die geometrischen und statischen Randbedingungen . 247
8.1.4 Das Werkstoffgesetz eines homogenen, isotropen, ela-stischen Materials . . . . . . . . . . . . . . . . . . . . 248
8.1.5 Das Randwertproblem der Elastizitatstheorie . . . . . 248
8.2 Linearisierung der Grundgleichungen . . . . . . . . . . . . . . 249
VIII INHALTSVERZEICHNIS
8.2.1 Die Grundgleichungen der klassischen Elastizitatstheo-rie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
8.2.2 Das Superpositionsprinzip der Losungen derklassischen Elastizitatstheorie . . . . . . . . . . . . . . 251
8.3 Lame-Naviersche Differentialgleichungen . . . . . . . . . . . . 252
8.3.1 Herleitung der Lame-Navierschen Verschiebungsdiffe-rentialgleichungen . . . . . . . . . . . . . . . . . . . . 252
8.3.2 Darstellung der Lame-Navierschen Verschiebungsdif-ferentialgleichungen in den Koeffizienten verschiede-ner Basissysteme . . . . . . . . . . . . . . . . . . . . . 254
8.3.3 Darstellung der Lame-Navierschen Verschiebungsdif-ferentialgleichungen in Matrixform . . . . . . . . . . . 258
8.4 Thermoelastische Probleme . . . . . . . . . . . . . . . . . . . 262
8.5 Biharmonische DGL fur Verschiebungen . . . . . . . . . . . . 264
8.6 Biharmonische DGL fur die Spannungen . . . . . . . . . . . . 266
8.7 Die Maxwellschen Spannungsfunktionen . . . . . . . . . . . . 269
8.7.1 Einfuhrung der Spannungsfunktionen zurErfullung der homogenen Gleichgewichtsbedingungen 269
8.7.2 Herleitung der Differentialgleichungen fur die Span-nungsfunktion . . . . . . . . . . . . . . . . . . . . . . . 271
8.7.3 Darstellung der Maxwellschen Spannungsfunktion furdie Scheibe . . . . . . . . . . . . . . . . . . . . . . . . 272
8.8 Eigenschaften der Differentialgleichungen . . . . . . . . . . . 275
8.8.1 Ein kleiner Exkurs in die Theorie der Differentialglei-chungen . . . . . . . . . . . . . . . . . . . . . . . . . . 275
8.8.2 Die Poissonsche Differentialgleichung . . . . . . . . . . 277
8.8.3 Die Differentialgleichung der schwingenden Saite . . . 278
8.8.4 Die Elliptizitat der Grundgleichungen der Elastizitats-theorie . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
8.8.5 Die Elliptizitat der Differentialgleichungen der Mem-branschale . . . . . . . . . . . . . . . . . . . . . . . . . 284
8.8.6 Das Prinzip von St. Venant . . . . . . . . . . . . . . . 284
8.9 Das TONTI-Schema . . . . . . . . . . . . . . . . . . . . . . . 290

INHALTSVERZEICHNIS IX
9 Losungen der Grundgleichungen 295
9.1 Drei-Funktionen-Ansatz . . . . . . . . . . . . . . . . . . . . . 296
9.1.1 Herleitung des Drei-Funktionen-Ansatzes . . . . . . . 296
9.1.2 Die Spannungsfunktion des Drei-Funktionen-Ansatzesfur den ebenen Verzerrungszustand . . . . . . . . . . . 299
9.1.3 Die Spannungsfunktion des Drei-Funktionen-Ansatzesfur den ebenen Spannungszustand . . . . . . . . . . . 302
9.2 Die Scheibentheorie . . . . . . . . . . . . . . . . . . . . . . . . 304
9.3 Losungen der Bipotentialgleichung . . . . . . . . . . . . . . . 306
9.3.1 Bipotentialgleichungen in Zylinderkoordinatenfur achsensymmetrische Probleme . . . . . . . . . . . 306
9.3.2 Ebener Spannungszustand in Polarkoordinaten . . . . 308
9.3.3 Ebener Spannungszustand in kartesischen Koordinaten309
9.4 Elastische Halbebene unter Einzellast . . . . . . . . . . . . . 311
9.5 Elastischer Halbraum unter Einzellast . . . . . . . . . . . . . 316
9.6 Scheibe mit Loch . . . . . . . . . . . . . . . . . . . . . . . . . 324
10 Arbeits- und Extremalprinzipien 331
10.1 Das Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . 331
10.2 Das Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . 335
10.3 Das Prinzip der virtuellen Erganzungsarbeit . . . . . . . . . . 338
10.4 Ein kleiner Exkurs in die Variationsrechnung . . . . . . . . . 342
10.5 Das Minimum der potentiellen Energie . . . . . . . . . . . . . 349
10.5.1 Einfuhrung eines Stoffgesetzes mit Potentialeigenschaft349
10.5.2 Einfuhrung von außeren Kraften mit Potentialcharakter351
10.5.3 Herleitung des Prinzips der stationaren potentiellenEnergie . . . . . . . . . . . . . . . . . . . . . . . . . . 353
10.5.4 Das Prinzip vom Minimum der potentiellen Energiefur die klassische lineare Elastizitatstheorie . . . . . . 355
X INHALTSVERZEICHNIS
10.5.5 Das Dirichletsche Prinzip in Matrizenform . . . . . . . 359
10.6 Folgerungen aus den Energieprinzipien . . . . . . . . . . . . . 360
10.6.1 Der Satz von Clapeyron . . . . . . . . . . . . . . . . . 360
10.6.2 Der Kirchhoffsche Eindeutigkeitssatz . . . . . . . . . . 361
10.6.3 Die Satze von Betti und Maxwell . . . . . . . . . . . . 363
10.6.4 Zusammenstellung der Satze von Castigliano, Enges-ser und Menabrea aus der Festigkeitslehre . . . . . . . 365
10.6.5 Uber die Gultigkeit der Satze von Castigliano, Enges-ser und Menabrea fur verschiedene elastische Strukturen372
10.7 Die Herleitung der DGL der Platte . . . . . . . . . . . . . . . 377
10.7.1 Die Herleitung des elastischen Potentials derPlatte . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
10.7.2 Die Behandlung des Variationsproblems . . . . . . . . 380
11 Mathematische Elastizitatstheorie 383
11.1 Klassische Elastizitatstheorie . . . . . . . . . . . . . . . . . . 384
11.1.1 Das Randwertproblem der klassischen linearisiertenElastizitatstheorie . . . . . . . . . . . . . . . . . . . . 384
11.1.2 Das Energieprinzip der klassischen linearisierten Ela-stizitatstheorie . . . . . . . . . . . . . . . . . . . . . . 385
11.1.3 Existenz- und Eindeutigkeit in der klassischen linea-risierten Elastizitatstheorie . . . . . . . . . . . . . . . 386
11.2 Die schwache Form des Gleichgewichts . . . . . . . . . . . . . 388
11.3 Variationsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . 392
11.3.1 Existenz- und Eindeutigkeit der Losung von Variati-onsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . 392
11.3.2 Beziehung der schwachen Form zu Minimalproblemen 394
11.3.3 Die Regularitat der Losung . . . . . . . . . . . . . . . 395
11.4 Losung der schwachen Form . . . . . . . . . . . . . . . . . . . 397
11.4.1 Die Wahl des geeigneten Hilbertraumes V . . . . . . . 397
11.4.2 Die V -Elliptizitat der Bilinearform . . . . . . . . . . . 399
INHALTSVERZEICHNIS XI
12 Einfuhrung in die FEM 403
12.1 Vorbemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . 403
12.2 Ingenieurmaßige Darstellung der linearen FEM . . . . . . . . 406
12.2.1 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . 406
12.2.2 Potentialeigenschaften der inneren und außeren Krafte 408
12.2.3 Direkte Darstellung des Dirichletprinzips . . . . . . . 409
12.2.4 Einfuhrung von Finite-Element Ansatzen furzweidimensionale Gebiete . . . . . . . . . . . . . . . . 410
12.2.5 Darstellung der Element-Steifigkeitsmatrizen . . . . . 411
12.2.6 Einfuhrung globaler Knotenverschiebungsvektoren . . 412
A Bezeichnungen 415
XII INHALTSVERZEICHNIS
Abbildungsverzeichnis
1.1 Themengebiete der Mechanik . . . . . . . . . . . . . . . . . . 2
1.2 Schritte zur Erstellung eines mechanisch-mathematischen Mo-dells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Modellierung des materiellen Korpers als Punktkontinuum . . 7
2.1 Abbildung χt der materiellen PunkteM auf die RaumpunkteP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Veranschaulichung der injektiven Abbildung . . . . . . . . . 22
2.3 Veranschaulichung der surjektiven Abbildung . . . . . . . . . 23
2.4 Veranschaulichung der bijektiven Abbildung . . . . . . . . . . 24
2.5 Referenzkonfiguration B . . . . . . . . . . . . . . . . . . . . 27
2.6 Abbildung Φ zwischen Referenz- und Momentankonfiguration 31
2.7 Relative Beschreibung der Bewegung . . . . . . . . . . . . . . 36
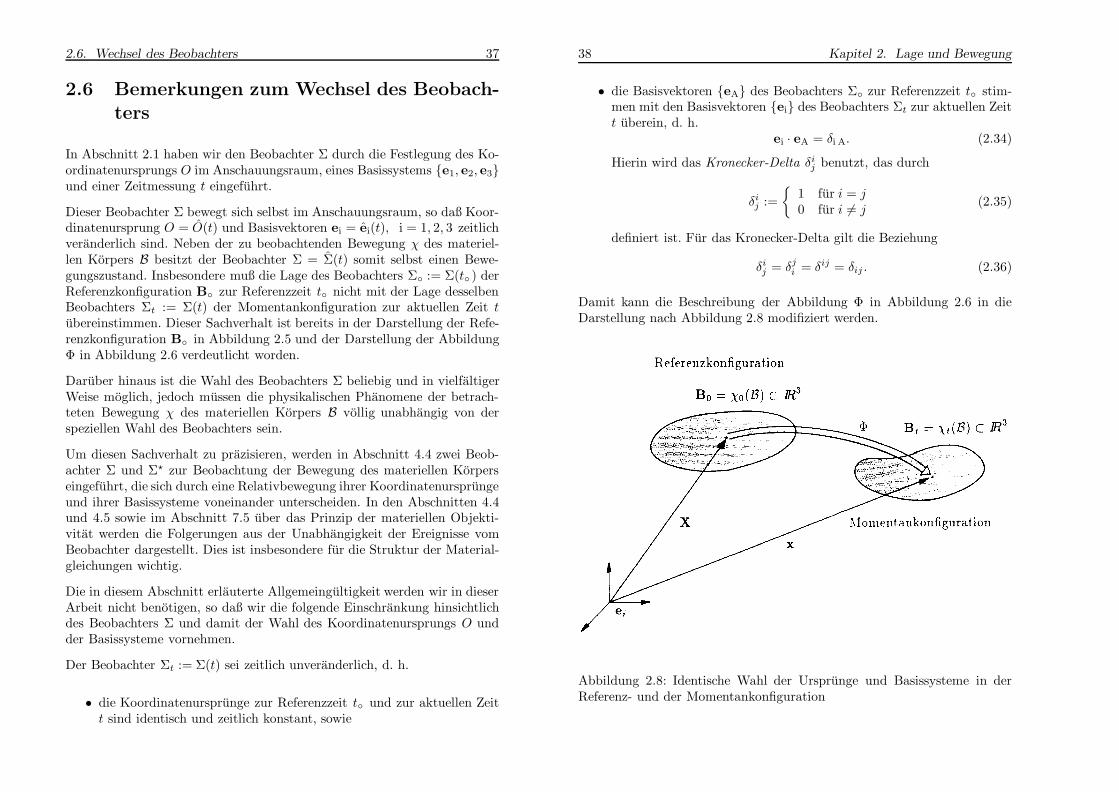
2.8 Identische Wahl der Ursprunge und Basissysteme in der Referenz-und der Momentankonfiguration . . . . . . . . . . . . . . . . 38
2.9 Einaxiale Belastung eines Wurfels . . . . . . . . . . . . . . . 39
2.10 Wechsel der Referenzkonfiguration . . . . . . . . . . . . . . . 40
2.11 Wahl beliebiger Koordinatensysteme . . . . . . . . . . . . . . 42
3.1 Abbildung Φ bei Vernachlassigung der Zeit t als expliziterParameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
XIII
XIV ABBILDUNGSVERZEICHNIS
3.2 Deformation eines infinitesimalen Linienelementes dX . . . . 49
3.3 Polare Zerlegung des materiellen Deformationsgradienten F . 55
3.4 Richtungsabhangigkeit von F . . . . . . . . . . . . . . . . . . 57
3.5 Konvektive Koordinatensysteme . . . . . . . . . . . . . . . . 61
3.6 Definition des Verschiebungsvektors u . . . . . . . . . . . . . 64
3.7 Beispiel fur eine lineare Drehung . . . . . . . . . . . . . . . . 68
3.8 Das Cauchysche Dehnungsellipsoid . . . . . . . . . . . . . . . 78
3.9 Pull-Back- und Push-Forward-Operationen . . . . . . . . . . 87
4.1 Materielle Zeitableitung . . . . . . . . . . . . . . . . . . . . . 94
5.1 Massenerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.2 Definition der mechanischen Spannungen . . . . . . . . . . . . 117
5.3 Das Cauchy-Postulat . . . . . . . . . . . . . . . . . . . . . . . 118
5.4 Gleichgewichtsbedingungen am infinitesimalen Tetraederele-ment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.5 Darstellung der Spannungskomponenten . . . . . . . . . . . . 124
5.6 Gleichgewicht am Teilkorper B⋆ . . . . . . . . . . . . . . . . . 127
5.7 Der Drehimpulserhaltungssatz . . . . . . . . . . . . . . . . . . 138
5.8 Warmequelle im materiellen Punkt . . . . . . . . . . . . . . . 149
6.1 Darstellung der linearen Approximation Lin [G]x . . . . . . . 165
7.1 Versuch 1: Einfache Scherung eines rechteckigen Blockes . . . 222
7.2 Versuch 2: Konstanter Druck auf eine Kugel . . . . . . . . . . 223
7.3 Versuch 3: Einaxialer Zug eines kreisformigen Stabes . . . . . 224
7.4 Vergleich verschiedener nichtlinearer elastischer Materialmodelle239
8.1 Vorgespannte Saite . . . . . . . . . . . . . . . . . . . . . . . . 279
ABBILDUNGSVERZEICHNIS XV
8.2 Gleichgewicht am Saitenelement . . . . . . . . . . . . . . . . 279
8.3 Kraftegruppen an einer Kreisscheibe . . . . . . . . . . . . . . 286
8.4 Wolbkraftgruppe auf Vollzylinder bzw. Kreiszylinderschale . . 287
8.5 Torsionsbeanspruchung eines eingespannten Stabes . . . . . . 288
8.6 Einfluß der Querschnittsform auf das Abklingverhalten derWolbnormalspannungen . . . . . . . . . . . . . . . . . . . . . 289
8.7 Lastabtragung eines Fachwerksystems . . . . . . . . . . . . . 290
8.8 Beispiel zum Einfluß der Querschnittsformen auf die Anwend-barkeit des Prinzips von St. Venant . . . . . . . . . . . . . . . 290
8.9 Das Tonti-Schema fur die lineare Elastizitatstheorie ohne Vo-lumenkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
9.1 Zylinderkoordinaten . . . . . . . . . . . . . . . . . . . . . . . 307
9.2 Rand einer Scheibe mit Belastung . . . . . . . . . . . . . . . 311
9.3 Verlauf der Spannungskomponenten . . . . . . . . . . . . . . 313
9.4 Einfuhrung von Polarkoordinaten . . . . . . . . . . . . . . . . 314
9.5 Linien der Hauptnormalspannungen . . . . . . . . . . . . . . 315
9.6 Verteilung der Radialspannungen . . . . . . . . . . . . . . . . 315
9.7 Der elastische Halbraum mit Einzellast . . . . . . . . . . . . . 316
9.8 Verteilung der Spannungskomponente σz . . . . . . . . . . . . 321
9.9 Spannungsverteilung im elastischen Halbraum . . . . . . . . . 323
9.10 Gelochte Scheibe unter einachsigem Zug . . . . . . . . . . . . 324
9.11 Spannungsverlaufe in der gelochten Scheibe . . . . . . . . . . 329
10.1 Funktionen v(x) und u(x) . . . . . . . . . . . . . . . . . . . . 343
10.2 Belastung einer linear-elastischen Feder . . . . . . . . . . . . 357
10.3 Last-Verformungsverhalten einer linear-elastischen Feder . . . 357
10.4 Inneres, außeres und Gesamtpotential einer statisch belaste-ten Feder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
XVI ABBILDUNGSVERZEICHNIS
10.5 Außere Arbeit und außere Erganzungsarbeit fur ein elasti-sches Material . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
10.6 Außere Arbeit und außere Erganzungsarbeit fur ein linear-elastisches Material . . . . . . . . . . . . . . . . . . . . . . . . 369
10.7 Auflagerreaktionen und unbekannte Krafte am statisch un-bestimmten System . . . . . . . . . . . . . . . . . . . . . . . . 370
10.8 Darstellung der Singularitaten fur einen beidseitig gelagertenBalken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
10.9 Die Kinematik der Kirchhoffschen Plattentheorie . . . . . . . 378
Tabellenverzeichnis
6.1 Bilanz der stoffunabhangigen Gleichungen . . . . . . . . . . . 163
7.1 Beziehungen unter den Materialparametern . . . . . . . . . . 228
XVII
XVIII TABELLENVERZEICHNIS

Kapitel 1
Einleitung
1.1 Ubersicht
Die vorliegende Darstellung der Elastizitatstheorie befaßt sich mit der Statikund Dynamik elastisch deformierbarer, homogener, fester Korper.
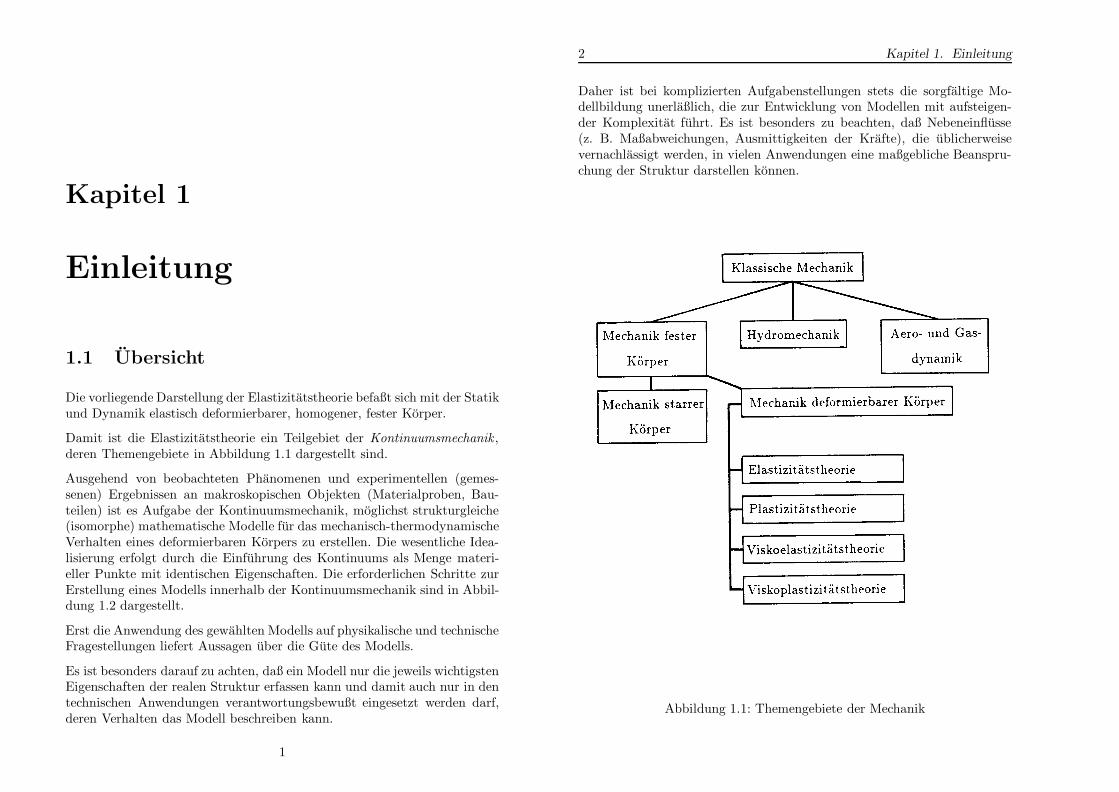
Damit ist die Elastizitatstheorie ein Teilgebiet der Kontinuumsmechanik ,deren Themengebiete in Abbildung 1.1 dargestellt sind.
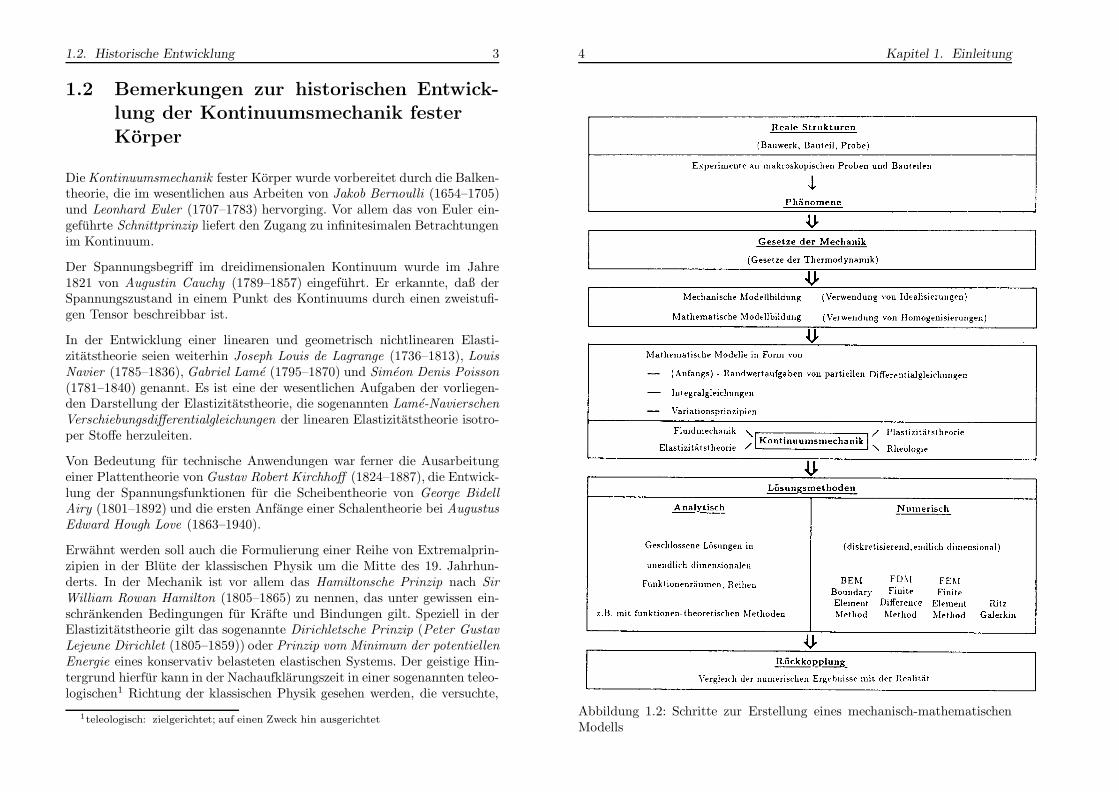
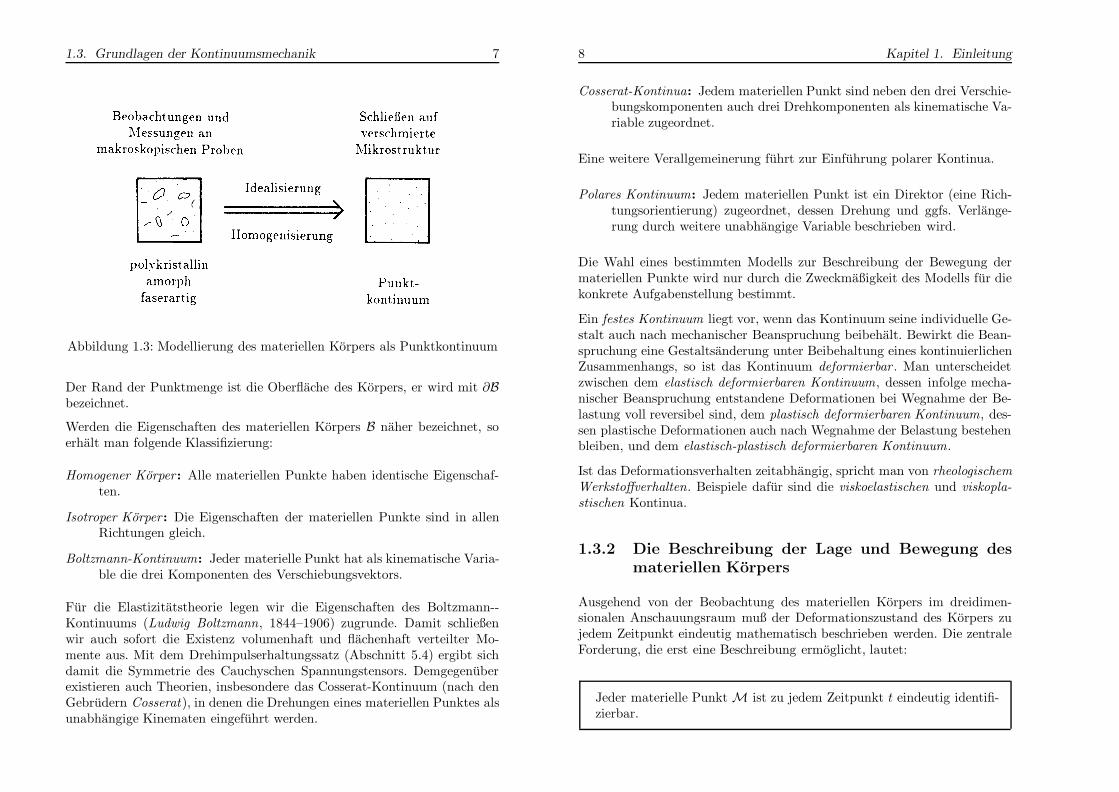
Ausgehend von beobachteten Phanomenen und experimentellen (gemes-senen) Ergebnissen an makroskopischen Objekten (Materialproben, Bau-teilen) ist es Aufgabe der Kontinuumsmechanik, moglichst strukturgleiche(isomorphe) mathematische Modelle fur das mechanisch-thermodynamischeVerhalten eines deformierbaren Korpers zu erstellen. Die wesentliche Idea-lisierung erfolgt durch die Einfuhrung des Kontinuums als Menge materi-eller Punkte mit identischen Eigenschaften. Die erforderlichen Schritte zurErstellung eines Modells innerhalb der Kontinuumsmechanik sind in Abbil-dung 1.2 dargestellt.
Erst die Anwendung des gewahlten Modells auf physikalische und technischeFragestellungen liefert Aussagen uber die Gute des Modells.
Es ist besonders darauf zu achten, daß ein Modell nur die jeweils wichtigstenEigenschaften der realen Struktur erfassen kann und damit auch nur in dentechnischen Anwendungen verantwortungsbewußt eingesetzt werden darf,deren Verhalten das Modell beschreiben kann.
1
2 Kapitel 1. Einleitung
Daher ist bei komplizierten Aufgabenstellungen stets die sorgfaltige Mo-dellbildung unerlaßlich, die zur Entwicklung von Modellen mit aufsteigen-der Komplexitat fuhrt. Es ist besonders zu beachten, daß Nebeneinflusse(z. B. Maßabweichungen, Ausmittigkeiten der Krafte), die ublicherweisevernachlassigt werden, in vielen Anwendungen eine maßgebliche Beanspru-chung der Struktur darstellen konnen.
Abbildung 1.1: Themengebiete der Mechanik
1.2. Historische Entwicklung 3
1.2 Bemerkungen zur historischen Entwick-lung der Kontinuumsmechanik fester
Korper
Die Kontinuumsmechanik fester Korper wurde vorbereitet durch die Balken-theorie, die im wesentlichen aus Arbeiten von Jakob Bernoulli (1654–1705)und Leonhard Euler (1707–1783) hervorging. Vor allem das von Euler ein-gefuhrte Schnittprinzip liefert den Zugang zu infinitesimalen Betrachtungenim Kontinuum.
Der Spannungsbegriff im dreidimensionalen Kontinuum wurde im Jahre1821 von Augustin Cauchy (1789–1857) eingefuhrt. Er erkannte, daß derSpannungszustand in einem Punkt des Kontinuums durch einen zweistufi-gen Tensor beschreibbar ist.
In der Entwicklung einer linearen und geometrisch nichtlinearen Elasti-zitatstheorie seien weiterhin Joseph Louis de Lagrange (1736–1813), LouisNavier (1785–1836), Gabriel Lame (1795–1870) und Simeon Denis Poisson(1781–1840) genannt. Es ist eine der wesentlichen Aufgaben der vorliegen-den Darstellung der Elastizitatstheorie, die sogenannten Lame-NavierschenVerschiebungsdifferentialgleichungen der linearen Elastizitatstheorie isotro-per Stoffe herzuleiten.
Von Bedeutung fur technische Anwendungen war ferner die Ausarbeitungeiner Plattentheorie von Gustav Robert Kirchhoff (1824–1887), die Entwick-lung der Spannungsfunktionen fur die Scheibentheorie von George BidellAiry (1801–1892) und die ersten Anfange einer Schalentheorie bei AugustusEdward Hough Love (1863–1940).
Erwahnt werden soll auch die Formulierung einer Reihe von Extremalprin-zipien in der Blute der klassischen Physik um die Mitte des 19. Jahrhun-derts. In der Mechanik ist vor allem das Hamiltonsche Prinzip nach SirWilliam Rowan Hamilton (1805–1865) zu nennen, das unter gewissen ein-schrankenden Bedingungen fur Krafte und Bindungen gilt. Speziell in derElastizitatstheorie gilt das sogenannte Dirichletsche Prinzip (Peter GustavLejeune Dirichlet (1805–1859)) oder Prinzip vom Minimum der potentiellenEnergie eines konservativ belasteten elastischen Systems. Der geistige Hin-tergrund hierfur kann in der Nachaufklarungszeit in einer sogenannten teleo-logischen1 Richtung der klassischen Physik gesehen werden, die versuchte,
1teleologisch: zielgerichtet; auf einen Zweck hin ausgerichtet
4 Kapitel 1. Einleitung
Abbildung 1.2: Schritte zur Erstellung eines mechanisch-mathematischenModells
1.2. Historische Entwicklung 5
die physikalischen Vorgange unter Verwendung von Extremalaussagen zuformulieren und damit eine Zielrichtung der Naturvorgange darzustellen.Aus dieser Betrachtungsweise formulierte bereits Gottfried Wilhelm Leibniz(1646–1716) zu Beginn des 18. Jahrhunderts das Postulat
”der besten aller
denkbaren Welten“. Als Beispiel sei auch das Prinzip des kleinsten Zwangesvon Karl Friedrich Gauß (1777–1855) genannt.
Seit der Jahrhundertwende hat sich mit der Umwalzung der klassischenPhysik des 19. Jahrhunderts eine Trennung in der Weiterentwicklung derMechanik vollzogen. Die sogenannte Festkorperphysik entwickelte sich inRichtung der Quantenmechanik und der statistischen Mechanik, vor allembeeinflußt durch Max Planck (1858–1947) und Erwin Schrodinger (1887–1961). Die Weiterentwicklung der deterministischen1 Kontinuumsmechaniknach Art der klassischen Physik fand vor allem an den in der Zwischenzeitgegrundeten Mechanik-Lehrstuhlen der Technischen Hochschulen statt.
Erwahnt werden soll hier besonders die Weiterentwicklung der nichtlinearenElastizitatstheorie und die Formulierung zugehoriger Variationsprinzipien(E. Trefftz, R. Kappus) und der Aufbau der Plastizitatstheorie, in der diegrundlegenden Gesetze des plastisch deformierbaren Kontinuums erarbeitetwurden. In diesem Zusammenhang seien nur die folgenden Namen erwahnt:von Mises, Huber, Hencky, Prager, Hill und Drucker .
In der ersten Halfte des 20ten Jahrhunderts wurden weiterhin grundlegen-de analytische Losungen der linearen Elastizitatstheorie erarbeitet. Hierzudienten z. B. Ansatze mit komplexen Funktionen und vor allem die Span-nungsfunktionsansatze nach Papkovitsch und Neuber . In dem Buch
”Kerb-
spannungslehre“ von Neuber aus dem Jahre 1937 wurden viele technischwichtige Probleme behandelt [52], [53].
Sehr wichtig war dann die tensoranalytische Darstellung der Elastizitatsthe-orie, z. B. durch A.E. Green und W. Zerna zu Beginn der funfziger Jahredieses Jahrhunderts. In diesen Jahren begann die moderne Entwicklung derKontinuumsmechanik, die sogenannte Rationale Mechanik , die eng mit denNamen Truesdell, Noll, Gurtin, Rivlin, Gunther, Green und Naghdi ver-bunden ist. Es wurden jetzt allgemeinere Werkstoffe mit nichtreversiblen,zeitabhangigen (viskoelastischen, viskoplastischen) Eigenschaften einbezo-gen. Ausgehend von den Hauptsatzen der Thermodynamik wurden dissipa-tive Eigenschaften, d. h. thermo-mechanische Kopplungen berucksichtigt.
1deterministisch: von Determinismus (Lehre von der kausalen [Vor-]bestimmtheit desGeschehens)
6 Kapitel 1. Einleitung
Die moderne Kontinuumsmechanik wird in ihren theoretischen Arbeitensehr vom Einfluß der Funktionalanalysis gepragt, mit deren Hilfe Fragender Existenz und Eindeutigkeit von Losungen untersucht werden.
Mit der Entwicklung der elektronischen Datenverarbeitung in den letztenJahrzehnten erfahrt auch die numerische Bearbeitung der erzielten theore-tischen Ergebnisse eine besondere Beachtung. An dieser Stelle sei besondersdie Entwicklung der Finite-Elemente-Methode genannt, mit der beachtens-werte Ergebnisse bei der numerischen Berechnung kontinuumsmechanischerProbleme erzielt werden. Die Erforschung und Weiterentwicklung der Finite-Elemente-Methode ist heutzutage ein Forschungsschwerpunkt innerhalb derNumerischen Mechanik und bedient sich ebenfalls in zunehmendem Maßeder Funktionalanalysis und der Numerischen Analysis bei der Entwicklungleistungsfahiger Algorithmen.
Dem an der historischen Entwicklung der Mechanik interessierten Leserkann die
”Geschichte der mechanischen Prinzipien“ von Istvan Szabo [74]
besonders empfohlen werden.
1.3 Grundlagen der Kontinuumsmechanik
fester Korper
1.3.1 Der materielle Korper und seine Eigenschaften
Grundlegend fur die Kontinuumsmechanik fester Korper ist die Idealisierungder real vorkommenden Strukturen als materielles Punktkontinuum.
Diese Idealisierung wird aus der Abbildung 1.3 deutlich.
Grundsatzlich kommt man bei dieser Idealisierung ohne Ruckgriff auf ei-ne mikroskopische –z. B. kristalline, molekulare oder atomare– Strukturaus. Jedoch kann die Kenntnis dieser Struktur Hinweise fur die physikalischzweckmaßige Wahl des kontinuumsmechanischen Modells geben.
Somit bildet der Begriff des materiellen Korpers B oder des Kontinuumsden Ausgangspunkt der Untersuchungen. Eine genauere Definition lautet:
Der materielle Korper B der Kontinuumsmechanik (Kontinuum) isteine zusammenhangende Menge materieller Punkte M.
1.3. Grundlagen der Kontinuumsmechanik 7
Abbildung 1.3: Modellierung des materiellen Korpers als Punktkontinuum
Der Rand der Punktmenge ist die Oberflache des Korpers, er wird mit ∂Bbezeichnet.
Werden die Eigenschaften des materiellen Korpers B naher bezeichnet, soerhalt man folgende Klassifizierung:
Homogener Korper : Alle materiellen Punkte haben identische Eigenschaf-ten.
Isotroper Korper : Die Eigenschaften der materiellen Punkte sind in allenRichtungen gleich.
Boltzmann-Kontinuum: Jeder materielle Punkt hat als kinematische Varia-ble die drei Komponenten des Verschiebungsvektors.
Fur die Elastizitatstheorie legen wir die Eigenschaften des Boltzmann--Kontinuums (Ludwig Boltzmann, 1844–1906) zugrunde. Damit schließenwir auch sofort die Existenz volumenhaft und flachenhaft verteilter Mo-mente aus. Mit dem Drehimpulserhaltungssatz (Abschnitt 5.4) ergibt sichdamit die Symmetrie des Cauchyschen Spannungstensors. Demgegenuberexistieren auch Theorien, insbesondere das Cosserat-Kontinuum (nach denGebrudern Cosserat), in denen die Drehungen eines materiellen Punktes alsunabhangige Kinematen eingefuhrt werden.
8 Kapitel 1. Einleitung
Cosserat-Kontinua: Jedem materiellen Punkt sind neben den drei Verschie-bungskomponenten auch drei Drehkomponenten als kinematische Va-riable zugeordnet.
Eine weitere Verallgemeinerung fuhrt zur Einfuhrung polarer Kontinua.
Polares Kontinuum: Jedem materiellen Punkt ist ein Direktor (eine Rich-tungsorientierung) zugeordnet, dessen Drehung und ggfs. Verlange-rung durch weitere unabhangige Variable beschrieben wird.
Die Wahl eines bestimmten Modells zur Beschreibung der Bewegung dermateriellen Punkte wird nur durch die Zweckmaßigkeit des Modells fur diekonkrete Aufgabenstellung bestimmt.
Ein festes Kontinuum liegt vor, wenn das Kontinuum seine individuelle Ge-stalt auch nach mechanischer Beanspruchung beibehalt. Bewirkt die Bean-spruchung eine Gestaltsanderung unter Beibehaltung eines kontinuierlichenZusammenhangs, so ist das Kontinuum deformierbar . Man unterscheidetzwischen dem elastisch deformierbaren Kontinuum, dessen infolge mecha-nischer Beanspruchung entstandene Deformationen bei Wegnahme der Be-lastung voll reversibel sind, dem plastisch deformierbaren Kontinuum, des-sen plastische Deformationen auch nach Wegnahme der Belastung bestehenbleiben, und dem elastisch-plastisch deformierbaren Kontinuum.
Ist das Deformationsverhalten zeitabhangig, spricht man von rheologischemWerkstoffverhalten. Beispiele dafur sind die viskoelastischen und viskopla-stischen Kontinua.
1.3.2 Die Beschreibung der Lage und Bewegung desmateriellen Korpers
Ausgehend von der Beobachtung des materiellen Korpers im dreidimen-sionalen Anschauungsraum muß der Deformationszustand des Korpers zujedem Zeitpunkt eindeutig mathematisch beschrieben werden. Die zentraleForderung, die erst eine Beschreibung ermoglicht, lautet:
Jeder materielle PunktM ist zu jedem Zeitpunkt t eindeutig identifi-zierbar.
1.3. Grundlagen der Kontinuumsmechanik 9
Grundlage der Kontinuumsmechanik ist somit die deterministische Theorie,nach der die Bewegung des materiellen Punktes M jederzeit beobachtbarist, und somit als stets vorhandene unabhangige Variable zur Verfugungsteht. Die Identifikation materieller Punkte kann man am Beispiel einerFlussigkeit durch die Einfarbung eines kleinen Flussigkeitsvolumens dar-stellen. Dieses eingefarbte Volumen, das in diesem Fall einen materiellenPunkt der Flussigkeit approximiert, laßt sich auf seiner Bahn durch denRaum verfolgen.
Weiterhin ist die Forderung nach einem kontinuierlichen Zusammenhang derdeformierten Struktur im Rahmen unserer Betrachtungen sinnvoll, d. h. wirpostulieren ein Kontinuitatsprinzip:
Bei der Deformation des materiellen Korpers wird der kontinuierlicheZusammenhang der materiellen Punkte beibehalten.
Die Uberlegungen, die zu einer mathematisch sinnvollen Beschreibung derLage und Bewegung des materiellen Korpers fuhren, werden im Kapitel 2dargestellt. Im Kapitel 3 wird diese Darstellung dazu benutzt, Aussagenuber die Art und Große der Deformation des materiellen Korpers herzulei-ten.
1.3.3 Die Bilanz- und Erhaltungssatze der Mechanik
In den Grundvorlesungen der Mechanik wurde die klassische NewtonscheMechanik des Massenpunktes und des starren Korpers dargelegt, die im fol-genden auf deformierbare Korper verallgemeinert werden soll. Die zentralenAussagen stellen dabei die Bilanz- und Erhaltungssatze der Mechanik dar.Wir unterscheiden dabei Satze uber
• Masse
• Impuls
• Drehimpuls
• Energie (1. Hauptsatz der Thermodynamik)
und den
10 Kapitel 1. Einleitung
• Entropiesatz (2. Hauptsatz der Thermodynamik).
Die exakte Formulierung dieser Aussagen wird in Kapitel 5 vorgenommen.
Die Aussagen des Impulserhaltungssatzes, der die Gleichgewichtsbedingun-gen liefert, lassen sich in unterschiedlichen Formulierungen (teilweise unterzusatzlichen Voraussetzungen) in Form des
• Prinzips der virtuellen Arbeit und als
• Prinzip vom Minimum der gesamten potentiellen Energie
formulieren. Diese Aussagen werden in Kapitel 10 hergeleitet.
1.3.4 Die konstitutiven Gleichungen
Zur vollstandigen Beschreibung der Materie fehlen nach den stoffunabhangi-gen Gleichungen uber die Kinematik und das Gleichgewicht noch Aussagenuber das spezifische Verhalten des vorliegenden Materials. Es ist die Auf-gabe der Materialgleichungen (Stoffgleichungen, konstitutive Beziehungen),die vorliegenden Gleichungen zu erganzen, d. h. die Spannungen und Verzer-rungen zu verknupfen. Die konstitutiven Beziehungen konnen jedoch nichtbeliebig gewahlt werden, sondern mussen bestimmten Kriterien wie z. B.dem
• Prinzip der materiellen Objektivitat und dem
• Prinzip der materiellen Symmetrie
genugen.
Eine Darstellung dieser Prinzipien und die Ableitung der Folgerungen wirdin Kapitel 7 vorgenommen.
1.3.5 Das Aufgabengebiet der Elastizitatstheorie
Die Elastizitatstheorie stellt ein Teilgebiet der Kontinuumsmechanik dar,das durch die Beschrankung auf elastische, d. h. reversibel deformierbareMaterialien entsteht.
1.3. Grundlagen der Kontinuumsmechanik 11
Innerhalb der Elastizitatstheorie erlaubt die Einschrankung auf wichtigeTeilgebiete eine weitere Unterteilung in Elastostatik, Elastokinetik, Ther-moelastizitat und Viskoelastizitat .
Die Elastostatik entsteht aus der Kontinuumsmechanik durch eine Be-schrankung auf zeitunabhangige Deformationen temperatur- und zeitun-abhangiger elastischer Materialien. Ihre Aufgabe ist die Formulierung undLosung von Randwertaufgaben, das heißt die Ermittlung der Verschiebun-gen, der Deformationen und der Beanspruchungen in allen Punkten einesbetrachteten Kontinuums, sowie die Bestimmung der Bindungskrafte (La-gerreaktionen).
In der Elastokinetik werden die dynamischen Effekte, die durch zeitabhan-gige Verschiebungen entstehen, mitberucksichtigt. Die Grundgleichungenfuhren in diesem Fall zu Anfangs-Randwertaufgaben.
Die oben genannten Gebiete Elastostatik und Elastokinetik legen ein elasti-sches Materialgesetz zugrunde, das nur den Einfluß der Deformation bein-haltet. Eine Erweiterung des Materialgesetzes um den Einfluß der Tempera-tur fuhrt zur Thermoelastizitat , wahrend die Formulierung eines zeitabhangi-gen elastischen Materials in das Gebiet der Viskoelastizitat fuhrt.
Im Kapitel 8 werden die Grundgleichungen der klassischen Elastizitatstheo-rie aus den Verzerrungs-Verschiebungsbeziehungen (Kapitel 3), den Gleich-gewichtsaussagen (Kapitel 5) und dem Materialgesetz (Kapitel 7) hergelei-tet.
Dabei wird zunachst in Kapitel 6 die Linearisierung der allgemeinen geome-trisch und physikalisch nichtlinearen Beziehungen bezuglich der spannungs-freien Referenzkonfiguration vorgenommen.
Die Lame-Navierschen Verschiebungsdifferentialgleichungen bilden somitden Ausgangspunkt fur die Herleitung weiterer Grundgleichungen, so et-wa den Gleichungen von Beltrami und Michell sowie den biharmonischenDifferentialgleichungen fur die Verschiebungskomponenten bzw. die Span-nungskomponenten. Im Kapitel 9 werden diese Grundgleichungen dazu be-nutzt, die Losungen in ausgewahlten klassischen Beispielen herzuleiten.
1.3.6 Die mathematische Behandlung der Elastizitats-theorie
Die Betrachtung der Elemente der Elastizitatstheorie bis einschließlich Ka-pitel 10 geht stillschweigend von der Existenz und Eindeutigkeit einer hin-
12 Kapitel 1. Einleitung
reichend glatten Losung unserer Aufgabenstellung, insbesondere der Rand-wertaufgabe der Elastizitatstheorie (siehe Kapitel 8) aus. WeitreichendeEinsichten in die Struktur der Gleichungen und die Eigenschaften der Lo-sung, soweit sie existiert, konnen mit den Hilfsmitteln der Funktionalanaly-sis gewonnen werden. In Kapitel 11 fuhren wir deshalb die mathematischeUntersuchung des linearisierten Randwertproblems der Elastizitatstheoriedurch. Hierbei werden die Fragen nach der Existenz und Eindeutigkeit derLosung unserer Randwertaufgabe in einem geeigneten Hilbertraum mit demLemma von Lax-Milgram beantwortet. Weiterhin gibt der wichtige Einbet-tungssatz von Sobolev die Beziehung der Losung der Randwertaufgabe imHilbertraum zur klassischen, hinreichend glatten Losung an.
1.3.7 Einfuhrung in die Finite-Elemente–Methode
In Kapitel 12 wird mit der Finite–Elemente–Methode (FEM) ein wichtigesNaherungsverfahren der Mechanik vorgestellt. Dem Leser sollen die Grund-ideen dieser numerischen Methode erlautert und ihm dabei der Ubergangzur Literatur erleichtert werden.
Kapitel 2
Lage und Bewegung desmateriellen Korpers
In diesem Kapitel wird die mathematische Formulierung der Lage und Be-wegung materieller Korper eingefuhrt. Diese theoretische Grundlegung derBegriffe und Bezeichnungen ist fur eine exakte Beschreibung und Analyseder physikalischen Beobachtungen unerlaßlich.
2.1 Grundlagen
In Abschnitt 1.3.1 wurde das Konzept des materiellen Korpers B eingefuhrt,wonach der materielle Korper B sich als zusammenhangende Menge mate-rieller Punkte M auffassen laßt.
2.1.1 Die deterministische Theorie
Neben diesen Uberlegungen bildet die sogenannte deterministische Theoriedie Grundlage der Kontinuumsmechanik fester und flussiger Korper.
Nach dieser Theorie wird angenommen, daß jeder materielle Punkt M zujedem Zeitpunkt t eindeutig identifizierbar ist. Damit kann der Zustand desSystems in Abhangigkeit der Bewegung der materiellen Punkte dargestellt
13
14 Kapitel 2. Lage und Bewegung
werden, d. h. die materiellen Punkte werden als stets vorhandene, eindeu-tig definierte und unabhangige Variablen eingefuhrt (siehe auch Abschnitt1.3.2).
Im Unterschied hierzu wird zur Behandlung von Gasen eine statistischeTheorie verwandt, die es nicht erlaubt, einzelne Teile (Gasatome) zu identi-fizieren und ihren Weg durch den Raum zu beschreiben. Mit dieser Theoriekonnen nur mittelbare Folgerungen aus der Bewegung der Gasatome, z. B.der Druck, erfaßt werden.
2.1.2 Die mathematische Beschreibung der physikali-schen Ereignisse
In einer weiteren Voruberlegung mussen wir die mathematische Beschrei-bung des uns umgebenden Anschauungsraumes und der in ihr zu verschie-denen Zeitpunkten stattfindenen Ereignisse einfuhren.
In der klassischen Mechanik ist die Ereignis-Welt E durch den Anschau-ungsraum Et zu allen Zeiten t, d. h. durch
E =⋃
t ∈ TEt (2.1)
gegeben. Dabei stellt Et den Anschauungsraum zur Zeit t dar, und T be-zeichnet den Raum der betrachteten Zeitpunkte t.
2.1.2.1 Die Beschreibung des Anschauungsraumes Et
Der Anschauungsraum Et ist naturgemaß frei von jeder mathematischenStruktur. Wir konnen ihn jedoch als dreidimensionalen Euklidischen Punkt-raum, bestehend aus allen Punkten des Anschauungsraumes, begreifen. DerBegriff des Euklidischen Punktraumes Et erlaubt es jedoch noch nicht, Lageund Bewegung materieller Korper zu beschreiben.
Hierzu wird fur jeden Zeitpunkt t ∈ T fur den Anschauuungsraum Et dieStruktur des Euklidischen Vektorraumes IE3 benotigt.
Durch die Einfuhrung eines raumfesten Bezugspunktes O ∈ Et kann derEuklidische Punktraum Et zum Zeitpunkt t in den Euklidischen VektorraumIE3 uberfuhrt werden, denn mit der Wahl des Bezugspunktes (Ursprung)
2.1. Grundlagen 15
O ∈ Et wird jedem Punkt P ∈ Et eindeutig ein Vektor ~x des EuklidischenVektorraumes IE3 zugeordnet, d. h. es gilt
~x :=−−→OP ∈ IE3. (2.2)
Die Aussagen der Mechanik sind mittels dieser Vektorschreibweise formu-lierbar; eine numerische Behandlung ist jedoch erst nach Wahl eines Basissy-stems moglich. Betrachten wir ein kartesisches Koordinatensystem ~e1, ~e2, ~e3,so kann der Vektor ~x auch unter Benutzung der Einsteinschen Summen-konvention1 in der Form
~x =
3∑
i=1
xi~ei = xi~ei (2.3)
dargestellt werden. Die Koeffizienten des Vektors ~x konnen zur (3 × 1)-Matrix
x =
x1
x2
x3
∈ IR3 (2.4)
der Koeffizienten des Vektors ~x bezuglich der kartesischen Basis ~e1, ~e2, ~e3zusammengefaßt werden. Diese Spaltenmatrix ist ein Element des Vektor-raumes der Zahlentripel IR3.
Durch die Einfuhrung eines Bezugspunktes O ∈ Et und eines raumfestenKoordinatensystems ist es uns somit gelungen, zu jedem festgewahlten Zeit-punkt t ∈ T jedem Punkt P des Anschauungsraumes einen Vektor ~x =
−−→OP
des Euklidischen Vektorraumes IE3 und ein Zahlentripel x ∈ IR3 der Koef-fizienten von ~x bezuglich der raumfesten Basis ~e1, ~e2, ~e3 zuzuordnen. Dadie Zuordnungen umkehrbar eindeutig sind, werden diese Elemente im fol-genden nicht mehr unterschieden, d. h. wir identifizieren den Punkt P ∈ Etmit dem Vektor ~x =
−−→OP des Euklidischen Vektorraumes IE3 und mit dem
Zahlentripel x ∈ IR3 der Koeffizienten von ~x bezuglich einer raumfestenBasis. Hierfur fuhren wir die Notation x ein. Das Basissystem ~e1, ~e2, ~e3wird analog mit e1, e2, e3 bezeichnet.
Zur Vereinfachung der Notation vereinbaren wir, das eingefuhrte Basis-system e1, e2, e3 auch kurz durch ei darzustellen, wobei der Index i
1Einsteinsche Summenkonvention: Es wird uber wiederholt auftretende gegenstandigeIndizes summiert, wobei die Summation, wenn nichts anderes angegeben ist, von 1 bis 3lauft. Der Summationsindex (stummer Index) darf im Verlauf der Berechnung beliebigumbenannt werden. Soll ausnahmsweise nicht summiert werden, so sind die betreffendenIndizes eingeklammert.
16 Kapitel 2. Lage und Bewegung
die Werte 1, 2, 3 durchlauft. Damit erhalten wir die Darstellung
x = xiei (2.5)
fur die betrachteten Raumpunkte unseres Anschauungsraumes. Weiterhinwollen wir nicht mehr streng zwischem dem Euklidischen Vektorraum IE3
und dem Vektorraum der Zahlentripel IR3 unterscheiden.
2.1.2.2 Die Beschreibung des Raumes T der betrachteten Zeit-
punkte
Ebenfalls ist es sinnvoll, den Raum T der betrachteten Zeitpunkte t zu einemeindimensionalen Euklidischen Vektorraum IE zu machen. Hierzu verfahrenwir mit dem Raum T der betrachteten Zeitpunkte t in analoger Weise,d.h wir wahlen einen Bezugszeitpunkt t ∈ T und einen Basisvektor ~e4 zurBeschreibung der positiven Zeitrichtung aus. Die gleichen Uberlegungen wieoben fuhren zu der Notation e4 fur den Basisvektor des Raumes T derbetrachteten Zeitpunkte.
2.1.2.3 Die Einfuhrung des Beobachters Σ
Mit den obigen Uberlegungen wird die Ereigniswelt E auf den vierdimen-sionalen Vektorraum IR4 durch die Wahl eines Beobachters Σ abgebildet,d. h.
Σ : E → IR4. (2.6)
Eine genauere Definition des Beobachters lautet:
Ein Beobachter (frame of reference) Σ in der Ereignis-Welt E istein kartesisches Koordinatensystem e4 auf T mit Koordinaten x4(.)und ein kartesisches Koordinatensystem e1, e2, e3 mit Koordinatenxi(., t), i = 1, 2, 3 auf Et fur jeden Zeitpunkt t ∈ T , so daß das Qua-drupel (xα, α = 1, 2, 3, 4) ein globales Koordinatensystem der Ereignis-Welt E ist.
Entsprechend der Wahl der Koordinatenursprunge und der kartesischen Ko-ordinatensysteme gibt es unendlich viele Beobachter Σ der Ereignisse derphysikalischen Ereignis-Welt.
2.1. Grundlagen 17
Fur die Materialtheorie sind insbesondere die Transformationseigenschaf-ten beim Wechsel des Beobachters Σ wichtig. Wir gehen hierauf in denAbschnitten 2.6, 4.4 und 4.5 sowie 7.5 naher ein.
2.1.2.4 Vereinbarungen und Bezeichnungen
Im Rahmen dieser Arbeit vereinbaren wir, daß der Beobachter Σ sich ineinem festen Raumpunkt befindet und sich somit wahrend der betrachte-ten Bewegung des materiellen Korpers B nicht bewegt. Weiterhin sei dasgewahlte kartesische Koordinatensystem e1, e2, e3 zeitlich konstant. Da-mit sind die physikalischen Ereignisse durch die Angabe der Koeffizientenx1, x2, x3 ∈ IR3 bezuglich des den Beobachter Σ definierenden kartesischenKoordinatensystems e1, e2, e3 eindeutig beschreibbar.
Daruberhinaus ist die Verwendung weiterer beliebiger, krummliniger Koor-dinatensysteme, die wir mit G1,G2,G3 oder mit g1, g2, g3 bezeichnen,moglich.
In Kapitel 1 ist der materielle Korper B eingefuhrt worden. Fur den Randdes Korpers B schreiben wir in Zukunft ∂B und bezeichnen den Bereich desRandes, auf dem die Verschiebungen vorgegeben sind, mit ∂Bu, sowie denBereich mit vorgegebenen Spannungen mit ∂Bσ . Fur die Randbereiche gilt
∂Bu ∪ ∂Bσ = ∂B und ∂Bu ∩ ∂Bσ = ∅. (2.7)
Es ist zu beachten, das wir bei der Behandlung der Bilanz- und Erhaltungs-satze der Mechanik in Kapitel 5 fur jeden beliebigen materiellen Korper Bund jeden Teilkorper P ⊂ B die Spannungen auf dem gesamten Rand ∂Bbzw. ∂P als bekannt und vorgegeben ansehen. Damit tritt die obige Auf-teilung des Randes in Bereiche mit vorgegebenen Spannungen auf ∂Bσ undvorgegebenen Verschiebungen auf ∂Bu erst bei der Behandlung der Rand-wertaufgaben der Elastizitatstheorie in Kapitel 8 und den nachfolgendenKapiteln uber die Variationsprinzipien auf.
18 Kapitel 2. Lage und Bewegung
2.2 Beschreibung der Lage des materiellen KorpersB in Abhangigkeit der materiellen Punkte
MIn den Abschnitten 1.3 und 2.1 sind die Grundlagen der Kontinuumsmecha-nik fester Korper, d. h.
• der Begriff des materiellen Korpers B und
• die deterministische Theorie
erlautert worden. Zudem wurde der Beobachter Σ und damit die mathe-matische Struktur zur Beschreibung von Ereignissen im Anschauungsraumeingefuhrt. Diese Elemente werden nun dazu benutzt, um die Lage des ma-teriellen Korpers im Anschauungsraum zu jeder Zeit t zu definieren. Dafurgelte:
Es existiere zu jedem Zeitpunkt t eine bijektive und in beiden Rich-tungen stetige Zuordnung (Abbildung) χt der materiellen Punkte Mdes materiellen Korpers B zu den Raumpunkten P des EuklidischenPunktraumes Et .
In der Mathematik nennt man eine bijektive Abbildung f , fur die f und f−1
stetig sind, einen Homoomorphismus bzw. eine topologische Abbildung .
Die Bedeutung der Begriffe”Bijektivitat“ und
”Stetigkeit“ fur die Beschrei-
bung der Lage der materiellen Punkte wird in Abschnitt 2.3 veranschaulicht.
Nach den Ausfuhrungen in Abschnitt 2.1 kann der Raumpunkt P auchdurch die Ortsvektoren ~x ∈ IE3 bzw. durch das Zahlentripel x ∈ IR3 derKoeffizienten bezuglich einer beliebigen raumfesten Basis beschrieben wer-den. Hierfur haben wir die Schreibweise x = xiei vereinbart.
Dann kann formal eine Abbildung χ : B × IR → IR3 mit χ(M, t) = x
definiert werden, die jedem Paar (M, t) ∈ B× IR, d. h. jedem PunktM desmateriellen Korpers B zu jeder Zeit t ∈ IR, ein Element x ∈ IR3, d. h. einenOrt P im Anschauungsraum, zuordnet. Hierfur schreibt man kurz
χ :
B × IR → IR3
(M, t) 7→ x = χ(M, t).(2.8)
2.2. Lage der materiellen Punkte 19
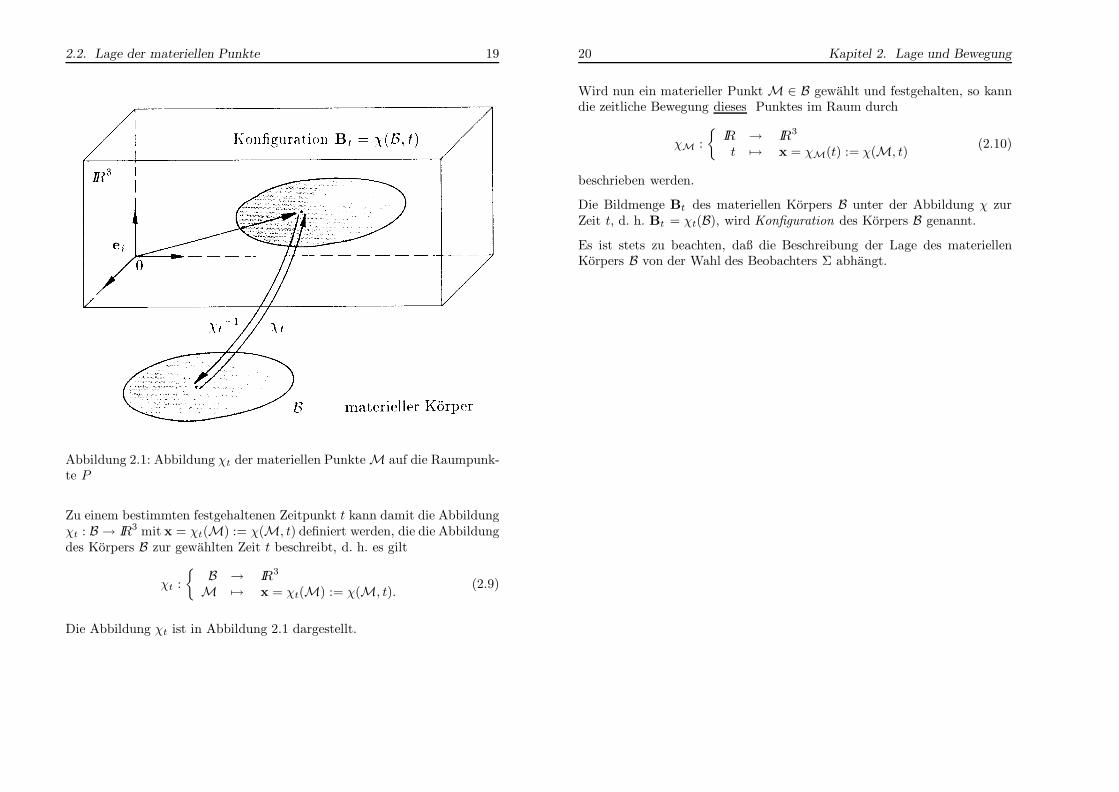
Abbildung 2.1: Abbildung χt der materiellen PunkteM auf die Raumpunk-te P
Zu einem bestimmten festgehaltenen Zeitpunkt t kann damit die Abbildungχt : B → IR3 mit x = χt(M) := χ(M, t) definiert werden, die die Abbildungdes Korpers B zur gewahlten Zeit t beschreibt, d. h. es gilt
χt :
B → IR3
M 7→ x = χt(M) := χ(M, t).(2.9)
Die Abbildung χt ist in Abbildung 2.1 dargestellt.
20 Kapitel 2. Lage und Bewegung
Wird nun ein materieller Punkt M ∈ B gewahlt und festgehalten, so kanndie zeitliche Bewegung dieses Punktes im Raum durch
χM :
IR → IR3
t 7→ x = χM(t) := χ(M, t)(2.10)
beschrieben werden.
Die Bildmenge Bt des materiellen Korpers B unter der Abbildung χ zurZeit t, d. h. Bt = χt(B), wird Konfiguration des Korpers B genannt.
Es ist stets zu beachten, daß die Beschreibung der Lage des materiellenKorpers B von der Wahl des Beobachters Σ abhangt.
2.3. Mathematische Forderungen 21
2.3 Veranschaulichung der mathematischen For-derungen
In diesem Abschnitt sollen die Forderungen an χ, d. h. χt : B → IR3 istbijektiv, χt und χt
−1 sind stetig fur jede Zeit t und χM : IR → IR3 iststetig, veranschaulicht werden.
2.3.1 Injektivitat, Surjektivitat und Bijektivitat derAbbildung χt : B → IR3
Zunachst wird der Begriff der injektiven Abbildung erlautert. Dazu betrach-ten wir eine Abbildung f : A → B, die einem Element x der Menge A(x ∈ A) genau ein Element y der Menge B (y ∈ B) zuordnet, d. h. y = f(x).Dieser Zusammenhang wird ublicherweise in der mathematischen Literaturin der Form
f :
A → Bx 7→ y = f(x)
(2.11)
geschrieben. Die Menge A wird Definitionsmenge oder Urbildmenge derAbbildung f genannt. Die Menge B heißt Zielmenge der Abbildung f undf(A) definiert durch f(A) := y ∈ B | es existiert ein x ∈ A mit y = f(x)wird als Bildmenge der Menge A unter der Abbildung f bezeichnet.
a) Injektivitat:
Definition: Eine Abbildung f : A → B heißt injektiv , genau dannwenn (g.d.w.)
f(x1) = f(x2) =⇒ x1 = x2 fur alle x1, x2 ∈ A. (2.12)
Eine injektive Abbildung f : A→ B wird auch als umkehrbar eindeu-tige (eineindeutige) Abbildung bezeichnet.1
1In der mathematischen Literatur wird fur den Ausdruck”fur alle“ das Symbol
”∀ “
verwendet. Gleichung (2.12) kann dann in der Form
f(x1) = f(x2) =⇒ x1 = x2 ∀ x1, x2 ∈ A.
geschrieben werden.
22 Kapitel 2. Lage und Bewegung
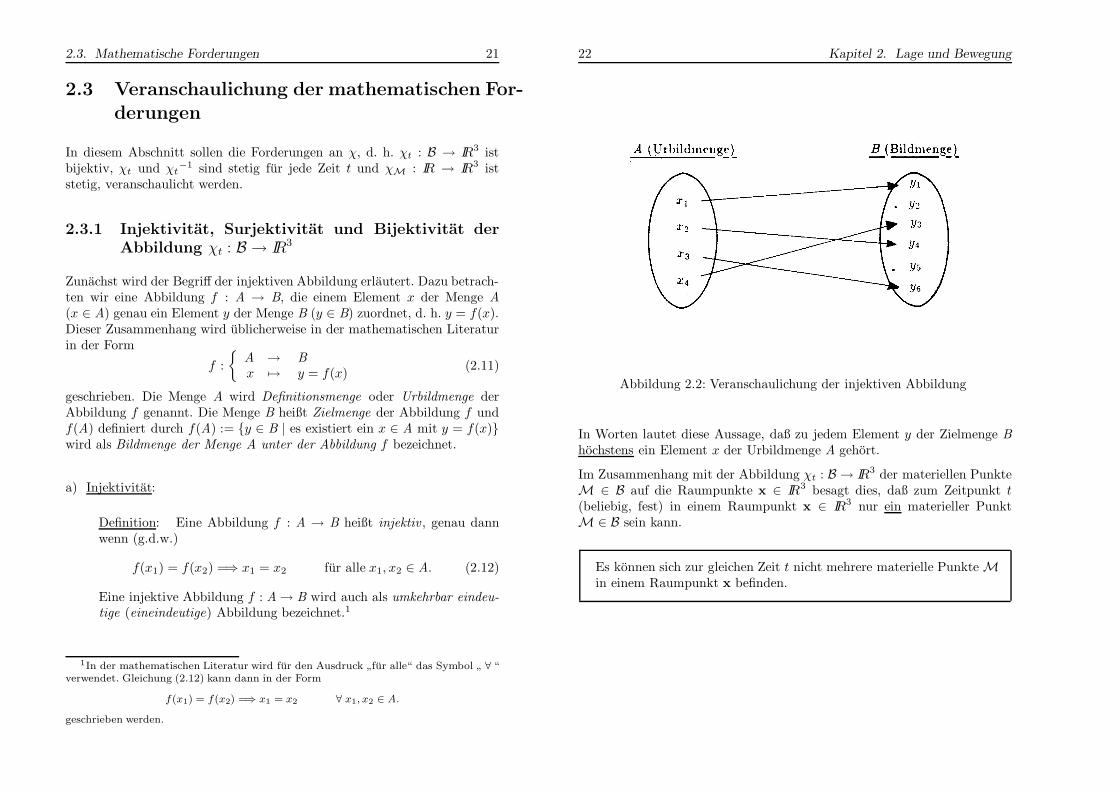
Abbildung 2.2: Veranschaulichung der injektiven Abbildung
In Worten lautet diese Aussage, daß zu jedem Element y der Zielmenge Bhochstens ein Element x der Urbildmenge A gehort.
Im Zusammenhang mit der Abbildung χt : B → IR3 der materiellen PunkteM ∈ B auf die Raumpunkte x ∈ IR3 besagt dies, daß zum Zeitpunkt t(beliebig, fest) in einem Raumpunkt x ∈ IR3 nur ein materieller PunktM ∈ B sein kann.
Es konnen sich zur gleichen Zeit t nicht mehrere materielle PunkteMin einem Raumpunkt x befinden.
2.3. Mathematische Forderungen 23
b) Surjektivitat:
Definition: Eine Abbildung f : A→ B heißt surjektiv , g.d.w.
f(A) = B, (2.13)
d. h. zu jedem y ∈ B existiert mindestens ein x ∈ A, so daß f(x) = y.Eine surjektive Abbildung f : A → B wird auch als Abbildung f derMenge A auf die Menge B bezeichnet.
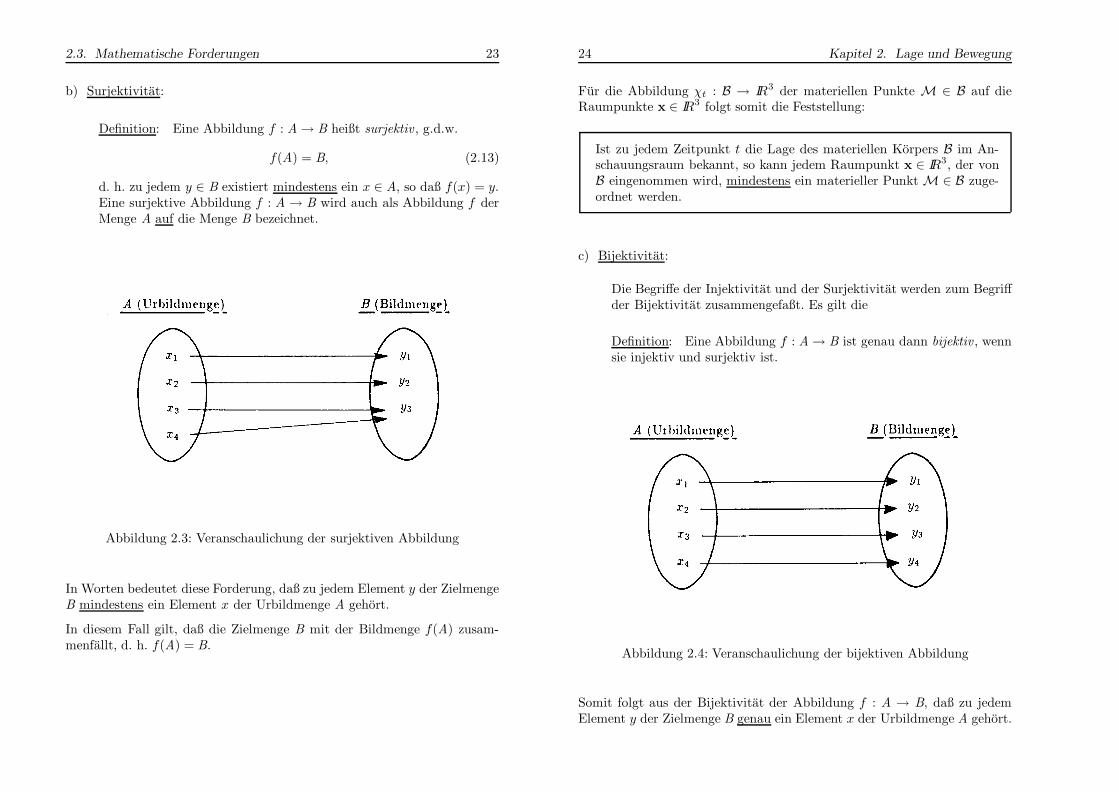
Abbildung 2.3: Veranschaulichung der surjektiven Abbildung
In Worten bedeutet diese Forderung, daß zu jedem Element y der ZielmengeB mindestens ein Element x der Urbildmenge A gehort.
In diesem Fall gilt, daß die Zielmenge B mit der Bildmenge f(A) zusam-menfallt, d. h. f(A) = B.
24 Kapitel 2. Lage und Bewegung
Fur die Abbildung χt : B → IR3 der materiellen Punkte M ∈ B auf dieRaumpunkte x ∈ IR3 folgt somit die Feststellung:
Ist zu jedem Zeitpunkt t die Lage des materiellen Korpers B im An-schauungsraum bekannt, so kann jedem Raumpunkt x ∈ IR3, der vonB eingenommen wird, mindestens ein materieller PunktM ∈ B zuge-ordnet werden.
c) Bijektivitat:
Die Begriffe der Injektivitat und der Surjektivitat werden zum Begriffder Bijektivitat zusammengefaßt. Es gilt die
Definition: Eine Abbildung f : A→ B ist genau dann bijektiv , wennsie injektiv und surjektiv ist.
Abbildung 2.4: Veranschaulichung der bijektiven Abbildung
Somit folgt aus der Bijektivitat der Abbildung f : A → B, daß zu jedemElement y der Zielmenge B genau ein Element x der Urbildmenge A gehort.
2.3. Mathematische Forderungen 25
Fur endliche Mengen A und B folgt hieraus, daß A und B eine gleiche Anzahlvon Elementen haben.
Fur die Abbildung χt : B → IR3 der materiellen Punkte M zu den Raum-punkten x ∈ IR3 gilt damit:
Zu jedem Zeitpunkt t kann jedem materiellen Punkt M genau einRaumpunkt x zugewiesen werden, andererseits ist jedem Raumpunktx der vom Korper B eingenommen wird, genau ein materieller PunktM zugeordnet.
Damit ist die Abbildung (2.9) χt : B → Bt ⊂ IR3 invertierbar, d. h.
χt−1 : Bt → B (2.14)
existiert, und es gilt
M = χt−1(x) ∀ x ∈ Bt . (2.15)
Damit haben wir die inverse Abbildung der Raumpunkte x der Konfigu-ration Bt des Korpers B auf die materiellen Punkte M ∈ B eingefuhrt,d. h.
χt−1 :
Bt → Bx 7→ M = χt
−1(x).(2.16)
2.3.2 Stetigkeit der Abbildung χt : B → IR3
Fur die Abbildung χt : B → IR3 wird weiterhin gefordert, daß χt und χt−1,
d. h. die Umkehrabbildung χt−1 : Bt → B, stetig sind.
Zur Definition der Stetigkeit einer Abbildung benotigen wir den Begriff desmetrischen Raumes. Der metrische Raum zeichnet sich durch die Eigen-schaften der Metrik als ein geometrisch sinnvoller Abstandsbegriff aus. Da-mit ist es in diesen Raumen moglich, die Abstande (im Sinne der gewahltenMetrik) zwischen jeweils zwei Elementen anzugeben. Fur eine genaue Defi-nition und weitere Motivation der Begriffe sei auf die Literatur verwiesen,z. B. Heuser [32], [33].
26 Kapitel 2. Lage und Bewegung
Anschaulich bedeutet die Stetigkeit von χt : B → IR3:
Materielle PunkteM, die im materiellen Korper B”nahe“ zusammen-
liegen, werden auch auf Raumpunkte x abgebildet, die im Anschau-ungsraum
”nahe“ zusammenliegen.
Somit kann durch die Abbildung χt z. B. kein Auseinanderreißen der Materiebeschrieben werden. Diesen Sachverhalt haben wir bereits in Abschnitt 1.3.2mit dem dort formulierten Kontinuitatsprinzip beschrieben.
2.3.3 Stetigkeit der Abbildung χM : IR→ IR3
Die Abbildung χ : B × IR → IR3 ordnet jedem Paar (M, t), d. h. demmateriellen PunktM zur Zeit t, einen Raumpunkt x zu.
Fur einen beliebig gewahlten und dann festgehaltenen materiellen PunktM ∈ B wird nach (2.10) die zeitliche Bewegung dieses Punktes im Raumbeschrieben. Fur den materiellen Korper B erhalten wir analog fur jede Zeitt die Konfiguration Bt . Die zeitliche Abfolge von Konfigurationen Bt wirdals Bewegung des materiellen Korpers angesehen, falls (2.10), d. h.
χM :
IR → IR3
t 7→ x = χM(t) = χ(M, t),
fur jeden materiellen PunktM ∈ B stetig ist.
Die Stetigkeit der Bewegung eines materiellen Punktes M bedeutet an-schaulich:
Fur”zeitlich nahe“ aufeinander folgende Zeitpunkte t und t′ nimmt
der materielle Punkt M im IR3
”raumlich nahe“ zusammenliegende
Orte x und x′ ein.
Diese Forderung ist anschaulich sofort verstandlich.
2.4.Einfuhrung der Referenzkonfiguration B 27
2.4 Einfuhrung der Referenzkonfiguration B
Die Lage und Bewegung des materiellen Korpers B wird durch die Ab-bildung χ : B × IR → IR3 mit x = χ(M, t) beschrieben. Damit sind diemateriellen PunkteM ∈ B und die Zeit t ∈ IR die unabhangigen Variablen.
Fur theoretische Uberlegungen ist diese Darstellung ausreichend; eine nu-merische Berechnung der Bewegung ist jedoch nicht moglich, da wir nochkeine praktikable Beschreibung der einzelnen materiellen Punkte M ange-geben haben.
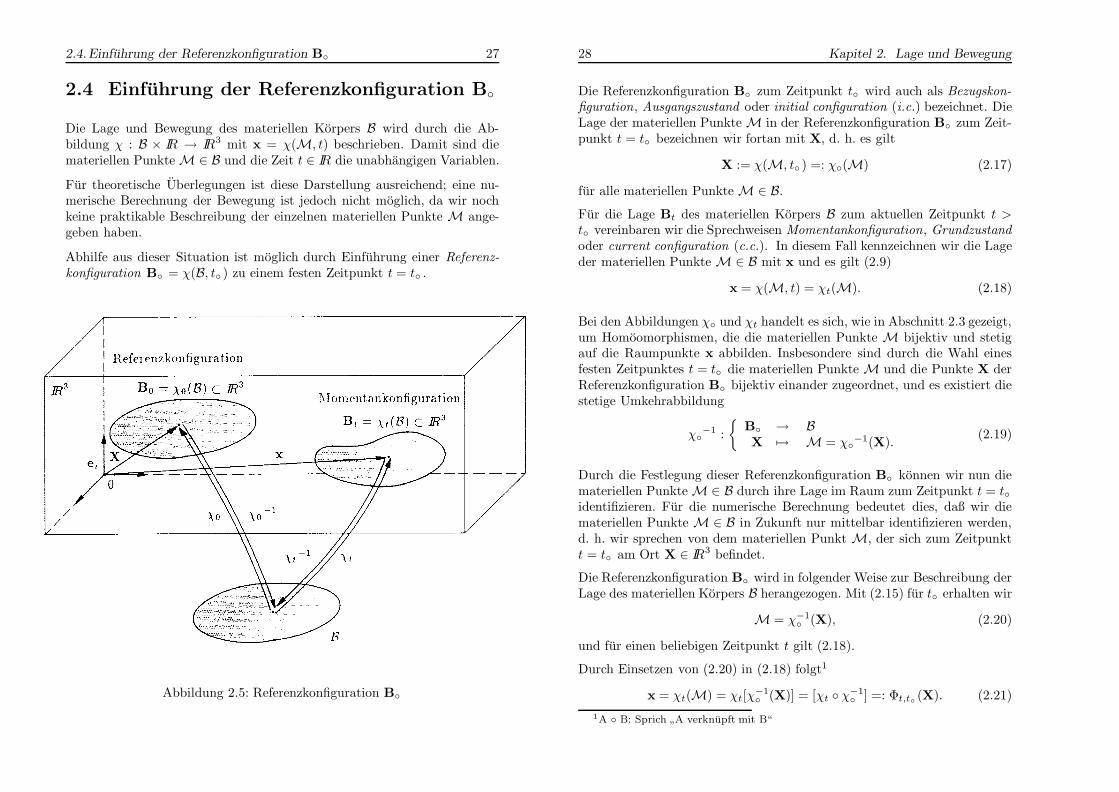
Abhilfe aus dieser Situation ist moglich durch Einfuhrung einer Referenz-konfiguration B = χ(B, t ) zu einem festen Zeitpunkt t = t .
Abbildung 2.5: Referenzkonfiguration B
28 Kapitel 2. Lage und Bewegung
Die Referenzkonfiguration B zum Zeitpunkt t wird auch als Bezugskon-figuration, Ausgangszustand oder initial configuration (i.c.) bezeichnet. DieLage der materiellen PunkteM in der Referenzkonfiguration B zum Zeit-punkt t = t bezeichnen wir fortan mit X, d. h. es gilt
X := χ(M, t ) =: χ(M) (2.17)
fur alle materiellen PunkteM ∈ B.
Fur die Lage Bt des materiellen Korpers B zum aktuellen Zeitpunkt t >t vereinbaren wir die Sprechweisen Momentankonfiguration, Grundzustandoder current configuration (c.c.). In diesem Fall kennzeichnen wir die Lageder materiellen Punkte M ∈ B mit x und es gilt (2.9)
x = χ(M, t) = χt(M). (2.18)
Bei den Abbildungen χ und χt handelt es sich, wie in Abschnitt 2.3 gezeigt,um Homoomorphismen, die die materiellen Punkte M bijektiv und stetigauf die Raumpunkte x abbilden. Insbesondere sind durch die Wahl einesfesten Zeitpunktes t = t die materiellen Punkte M und die Punkte X derReferenzkonfiguration B bijektiv einander zugeordnet, und es existiert diestetige Umkehrabbildung
χ−1 :
B → BX 7→ M = χ
−1(X).(2.19)
Durch die Festlegung dieser Referenzkonfiguration B konnen wir nun diemateriellen PunkteM∈ B durch ihre Lage im Raum zum Zeitpunkt t = tidentifizieren. Fur die numerische Berechnung bedeutet dies, daß wir diemateriellen Punkte M ∈ B in Zukunft nur mittelbar identifizieren werden,d. h. wir sprechen von dem materiellen Punkt M, der sich zum Zeitpunktt = t am Ort X ∈ IR3 befindet.
Die Referenzkonfiguration B wird in folgender Weise zur Beschreibung derLage des materiellen Korpers B herangezogen. Mit (2.15) fur t erhalten wir
M = χ−1 (X), (2.20)
und fur einen beliebigen Zeitpunkt t gilt (2.18).
Durch Einsetzen von (2.20) in (2.18) folgt1
x = χt(M) = χt[χ−1 (X)] = [χt χ−1
] =: Φt,t (X). (2.21)
1A B: Sprich”A verknupft mit B“
2.4.Einfuhrung der Referenzkonfiguration B 29
Bei fester Wahl der Referenzzeit t und bei Vorgabe der betrachteten Zeitt ist damit die Abbildung
Φt,t :
B → Bt
X 7→ x = Φt,t (X) = [χt χ−1 ](X)
(2.22)
definiert. Die Abbildung Φt,t entsteht durch Komposition (Hintereinan-derschaltung) der Abbildungen χ−1
und χt. Auf Grund der Eigenschaftenvon χ−1
und χt ist Φt,t eine stetige und bijektive Abbildung. Anschaulichbedeutet dies:
Der materielle Punkt M, der sich zur Referenzzeit t am Ort X be-findet, nimmt zur Zeit t > t den Ort x ein.
Um die zeitliche Bewegung des materiellen Korpers beschreiben zu konnenund die Abhangigkeit der Beschreibung von der gewahlten Referenzzeit tzu beachten, definieren wir die Abbildung
Φ :
IR3 × IR × IR → IR3
(X, t, t ) 7→ x = Φ(X, t, t ) := Φt,t (X),(2.23)
die somit von den Koordinaten der materiellen Punkte X zur Referenzzeitt , der Zeit t und der Referenzzeit t abhangt. Auf Grund der Eigenschaftender Abbildung χM ist Φ fur jede feste Wahl von X und t stetig in t.
Die Wahl der Referenzzeit t (t < t) und damit der ReferenzkonfigurationB ist beliebig. Eine Verallgemeinerung der Idee einer Referenzkonfigura-tion ergibt sich, wenn die Referenzkonfiguration vom materiellen Korper Bim Verlaufe der Bewegung χ nicht eingenommen wird. Dann sind Referenz-konfiguration und die Ausgangskonfiguration, d. h. die Lage des materiellenKorpers B zu Beginn der Beobachtung, nicht mehr identisch. Im Rahmendieser Abhandlung vereinbaren wir, daß der materielle Korper B zum Zeit-punkt t die Konfiguration χ(B) einnimmt. Damit sind der Ausgangszu-stand und der Referenzzustand identisch. Die Wahl der Referenzkonfigura-tion B und die Folgen des Wechsels der Referenzkonfiguration werden imAbschnitt 2.7 naher erlautert.
Fur den spateren Gebrauch bei der Behandlung der Randwertaufgaben undder Variationsprinzipien stellen wir einige Bezeichnungen bereit. In Ab-schnitt 2.1 ist der Rand des materiellen Korpers B mit ∂B eingefuhrt wordenund fur die Randbereiche ∂Bu und ∂Bσ gilt die Beziehung (2.7). Durch die
30 Kapitel 2. Lage und Bewegung
Einfuhrung der Referenz- und Momentankonfiguration ubertragt sich die-ser Sachverhalt in der folgenden Form. Die Lage des materiellen KorpersB zur Referenzzeit t wird Referenzkonfiguration B bzw. zur aktuellenZeit t > t Momentankonfiguration Bt genannt. Die Oberflache der Re-ferenzkonfiguration B wird mit ∂B bzw. die Oberflache der Momentan-konfiguration Bt mit ∂Bt bezeichnet. ∂Bu bzw. ∂Btu steht fur den Teilder Oberflache von ∂B bzw. ∂Bt auf dem die Verschiebungen u (sieheAbschnitt 3.1) vorgegeben sind und ∂Bσ bzw. ∂Btσ beschreiben den Teilder Oberflache auf dem die Belastung vorgegeben ist. Analog zur Gleichung(2.7) gilt dann fur die Referenzkonfiguration
∂Bu ∪ ∂Bσ = ∂B und ∂Bu ∩ ∂Bσ = ∅, (2.24)
und fur die Momentankonfiguration erhalten wir
∂Btu ∪ ∂Btσ = ∂Bt und ∂Btu ∩ ∂Btσ = ∅. (2.25)
Fur die Betrachtung der Bilanz- und Erhaltungssatze der Mechanik in Ka-pitel 5 sind jedoch die Spannungen auf dem gesamten Rand ∂B bzw. ∂Bt
als bekannt und vorgegeben anzusehen.
2.4.Einfuhrung der Referenzkonfiguration B 31
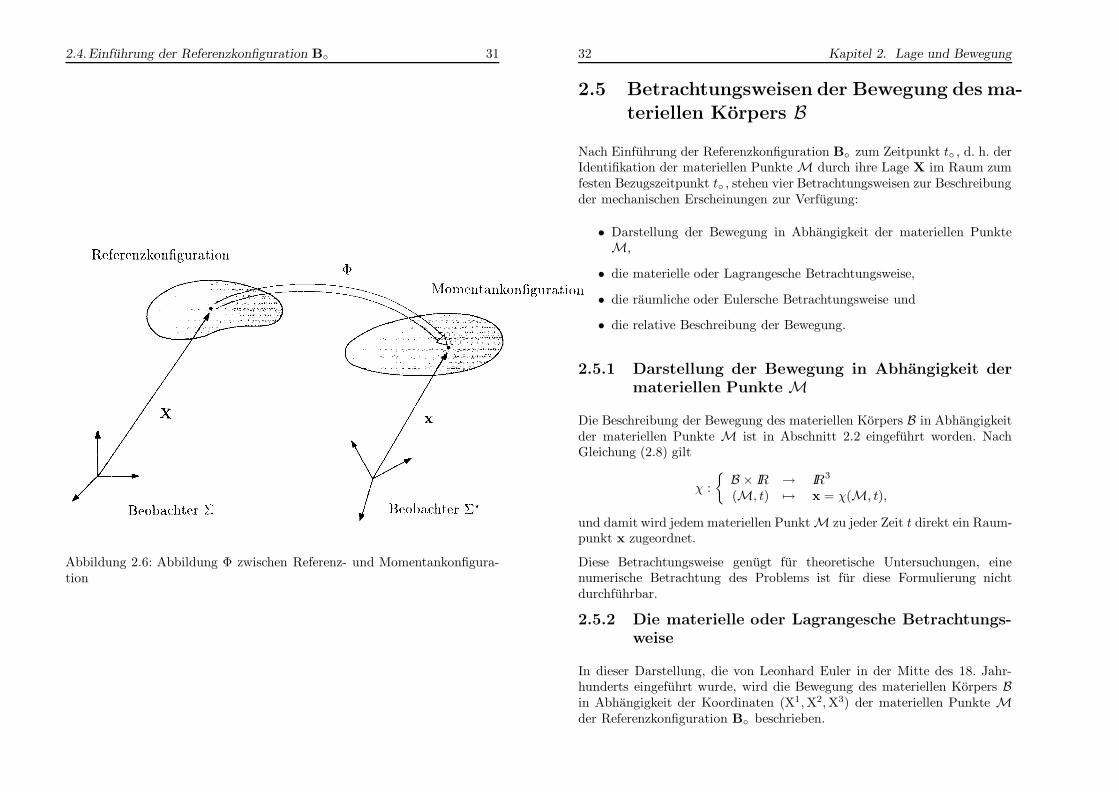
Abbildung 2.6: Abbildung Φ zwischen Referenz- und Momentankonfigura-tion
32 Kapitel 2. Lage und Bewegung
2.5 Betrachtungsweisen der Bewegung des ma-teriellen Korpers B
Nach Einfuhrung der Referenzkonfiguration B zum Zeitpunkt t , d. h. derIdentifikation der materiellen Punkte M durch ihre Lage X im Raum zumfesten Bezugszeitpunkt t , stehen vier Betrachtungsweisen zur Beschreibungder mechanischen Erscheinungen zur Verfugung:
• Darstellung der Bewegung in Abhangigkeit der materiellen PunkteM,
• die materielle oder Lagrangesche Betrachtungsweise,
• die raumliche oder Eulersche Betrachtungsweise und
• die relative Beschreibung der Bewegung.
2.5.1 Darstellung der Bewegung in Abhangigkeit dermateriellen Punkte M
Die Beschreibung der Bewegung des materiellen Korpers B in Abhangigkeitder materiellen Punkte M ist in Abschnitt 2.2 eingefuhrt worden. NachGleichung (2.8) gilt
χ :
B × IR → IR3
(M, t) 7→ x = χ(M, t),
und damit wird jedem materiellen PunktM zu jeder Zeit t direkt ein Raum-punkt x zugeordnet.
Diese Betrachtungsweise genugt fur theoretische Untersuchungen, einenumerische Betrachtung des Problems ist fur diese Formulierung nichtdurchfuhrbar.
2.5.2 Die materielle oder Lagrangesche Betrachtungs-weise
In dieser Darstellung, die von Leonhard Euler in der Mitte des 18. Jahr-hunderts eingefuhrt wurde, wird die Bewegung des materiellen Korpers Bin Abhangigkeit der Koordinaten (X1,X2,X3) der materiellen Punkte Mder Referenzkonfiguration B beschrieben.
2.5. Betrachtungsweisen der Bewegung 33
Die Koordinaten XA sind selbstverstandlich von der Wahl des BeobachtersΣ(t ) der Referenzkonfiguration, d. h. vom Koordinatenursprung O und derWahl und Orientierung der kartesischen Basisvektoren eA abhangig. DieBeschreibung ist auch bezuglich eines zusatzlich eingefuhrten krummlinigenBasissystems GA in der Referenzkonfiguration moglich, d. h. es gilt mitder Einsteinschen Summenkonvention
X = XAeA = XAGA. (2.26)
Mit der Wahl eines Beobachters Σ(t) der Momentankonfiguration, d. h.des Ursprungs und der Basis eines kartesischen Koordinatensystems zumZeitpunkt t (z. B. ei kartesisch bzw. gi krummlinig), folgt nach (2.22)und (2.23)
x = Φ(X, t, t ) = Φt,t (X).
Die Beschreibung der Bewegung kann auch bezuglich eines beliebigen, zu-satzlich definierten, krummlinigen Koordinatensystems gi vorgenommenwerden. Damit erhalten wir
x = xiei = xigi (2.27)
und somit fur die Koordinaten der gewahlten Basissysteme die funktionaleBeziehung
xi = xi(X1,X2,X3, t, t ) fur i = 1, 2, 3. (2.28)
Die Wahl der Koordinatensysteme eA und ei (bzw. GA und gi)in der Referenzkonfiguration und der Momentankonfiguration ist beliebig.Im Rahmen dieser Arbeit vereinbaren wir, daß der Ursprung der Koordi-natensysteme eA und ei (bzw. GA und gi) ubereinstimmt. Fernerseien die kartesischen Koordinatensysteme eA der Referenzkonfigurationund ei der Momentankonfiguration identisch.
Zum Einfluß der Wahl des Beobachters und dem Wechsel zwischen denKoordinatensystemen siehe auch Abschnitt 2.6 und 2.8.
Anschaulich gilt fur diese Betrachtungsweise:
Der Beobachter verfolgt jeden einzelnen materiellen Punkt auf seinerBahn durch den Raum (Der Beobachter sitzt im Rucksack des mate-riellen Punktes).
34 Kapitel 2. Lage und Bewegung
Der Name”materielle“ Betrachtungsweise weist eher auf die in Abschnitt
2.2 dargestellte Abhangigkeit von den materiellen Punkten M als auf dieAbhangigkeit von den Koordinaten XA der Referenzkonfiguration hin. Da-her erscheint der Name
”Bezugsbeschreibung“ treffender fur das Vorgehen
der von Euler eingefuhrten”Lagrangeschen“ Betrachtungsweise. Die Be-
zeichnung”materielle Betrachtungsweise“ fur die obige Vorgehensweise ist
jedoch so weit verbreitet, daß wir sie trotz der ungenauen und verwirrendenNamensgebung fast ausschließlich benutzen werden.
Diese”materielle“ oder
”Lagrangesche“ Beschreibung ist die ubliche Dar-
stellungsweise in der Festkorpermechanik. Fur die Berechnung von Pro-blemen mit endlichen Deformationen erscheint es ofters zweckmaßig, dieraumliche oder Eulersche Betrachtungsweise vorzuziehen.
2.5.3 Die raumliche oder Eulersche Betrachtungsweise
Diese nach Leonhard Euler benannte Betrachtungsweise geht nun wiederumauf Daniel Bernoulli und d’Alembert zuruck.
In ihr sind bei einer Wahl von Koordinatenursprung und Basis in der Refe-renzkonfiguration B und der aktuell betrachteten MomentankonfigurationBt die Koordinaten xi, i = 1, 2, 3 der Raumpunkte der Momentankonfigu-ration fur die Beschreibung der Bewegung ausgewahlt. Fur jede feste Wahlvon t und t gilt mit der Bijektivitat der Abbildung Φt,t nach (2.22)
X = Φ−1t,t
(x) (2.29)
undXA = XA(x1, x2, x3) fur A = 1, 2, 3. (2.30)
Damit sind die raumlichen Koordinaten xi die unabhangigen Variablen.Anschaulich gilt also:
Der Beobachter beobachtet die Raumpunkte (z. B. die Gitterpunkteeines kartesischen Koordinatensystems) und mißt die Eigenschaftender materiellen Punkte, die im Verlauf der Zeit diesen Ort einnehmen.
Dies ist die geeignete Darstellung in der Stromungsmechanik und in derUmformtechnik (plastisches Fließen). Bei endlichen Deformationen ist esebenfalls oft sinnvoll die raumliche Betrachtungsweise zu wahlen, da mit ihrdie physikalischen Eigenschaften der aktuellen Lage des materiellen Korpers(Momentankonfiguration) anschaulicher beschrieben werden konnen.
2.5. Betrachtungsweisen der Bewegung 35
2.5.4 Die relative Beschreibung der Bewegung
In der Darstellung der Lagrangeschen Betrachtungsweise wird eine fest ge-wahlte Referenzkonfiguration B zu einem Referenzzeitpunkt t als Grund-lage der Beschreibung der Bewegung des materiellen Korpers gewahlt.
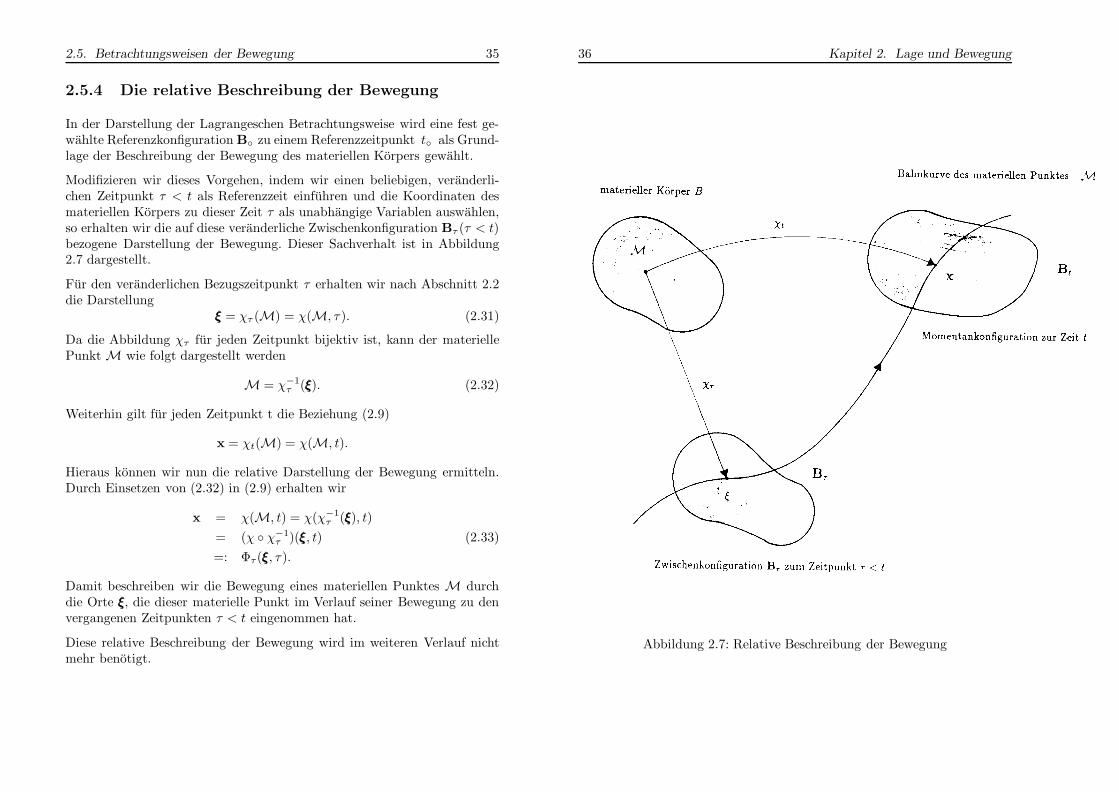
Modifizieren wir dieses Vorgehen, indem wir einen beliebigen, veranderli-chen Zeitpunkt τ < t als Referenzzeit einfuhren und die Koordinaten desmateriellen Korpers zu dieser Zeit τ als unabhangige Variablen auswahlen,so erhalten wir die auf diese veranderliche Zwischenkonfiguration Bτ (τ < t)bezogene Darstellung der Bewegung. Dieser Sachverhalt ist in Abbildung2.7 dargestellt.
Fur den veranderlichen Bezugszeitpunkt τ erhalten wir nach Abschnitt 2.2die Darstellung
ξξξ = χτ (M) = χ(M, τ ). (2.31)
Da die Abbildung χτ fur jeden Zeitpunkt bijektiv ist, kann der materiellePunktM wie folgt dargestellt werden
M = χ−1τ (ξξξ). (2.32)
Weiterhin gilt fur jeden Zeitpunkt t die Beziehung (2.9)
x = χt(M) = χ(M, t).
Hieraus konnen wir nun die relative Darstellung der Bewegung ermitteln.Durch Einsetzen von (2.32) in (2.9) erhalten wir
x = χ(M, t) = χ(χ−1τ (ξξξ), t)
= (χ χ−1τ )(ξξξ, t) (2.33)
=: Φτ(ξξξ, τ ).
Damit beschreiben wir die Bewegung eines materiellen Punktes M durchdie Orte ξξξ, die dieser materielle Punkt im Verlauf seiner Bewegung zu denvergangenen Zeitpunkten τ < t eingenommen hat.
Diese relative Beschreibung der Bewegung wird im weiteren Verlauf nichtmehr benotigt.
36 Kapitel 2. Lage und Bewegung
Abbildung 2.7: Relative Beschreibung der Bewegung
2.6. Wechsel des Beobachters 37
2.6 Bemerkungen zum Wechsel des Beobach-ters
In Abschnitt 2.1 haben wir den Beobachter Σ durch die Festlegung des Ko-ordinatenursprungs O im Anschauungsraum, eines Basissystems e1, e2, e3und einer Zeitmessung t eingefuhrt.
Dieser Beobachter Σ bewegt sich selbst im Anschauungsraum, so daß Koor-dinatenursprung O = O(t) und Basisvektoren ei = ei(t), i = 1, 2, 3 zeitlichveranderlich sind. Neben der zu beobachtenden Bewegung χ des materiel-len Korpers B besitzt der Beobachter Σ = Σ(t) somit selbst einen Bewe-gungszustand. Insbesondere muß die Lage des Beobachters Σ := Σ(t ) derReferenzkonfiguration B zur Referenzzeit t nicht mit der Lage desselbenBeobachters Σt := Σ(t) der Momentankonfiguration zur aktuellen Zeit tubereinstimmen. Dieser Sachverhalt ist bereits in der Darstellung der Refe-renzkonfiguration B in Abbildung 2.5 und der Darstellung der AbbildungΦ in Abbildung 2.6 verdeutlicht worden.
Daruber hinaus ist die Wahl des Beobachters Σ beliebig und in vielfaltigerWeise moglich, jedoch mussen die physikalischen Phanomene der betrach-teten Bewegung χ des materiellen Korpers B vollig unabhangig von derspeziellen Wahl des Beobachters sein.
Um diesen Sachverhalt zu prazisieren, werden in Abschnitt 4.4 zwei Beob-achter Σ und Σ⋆ zur Beobachtung der Bewegung des materiellen Korperseingefuhrt, die sich durch eine Relativbewegung ihrer Koordinatenursprungeund ihrer Basissysteme voneinander unterscheiden. In den Abschnitten 4.4und 4.5 sowie im Abschnitt 7.5 uber das Prinzip der materiellen Objekti-vitat werden die Folgerungen aus der Unabhangigkeit der Ereignisse vomBeobachter dargestellt. Dies ist insbesondere fur die Struktur der Material-gleichungen wichtig.
Die in diesem Abschnitt erlauterte Allgemeingultigkeit werden wir in dieserArbeit nicht benotigen, so daß wir die folgende Einschrankung hinsichtlichdes Beobachters Σ und damit der Wahl des Koordinatenursprungs O undder Basissysteme vornehmen.
Der Beobachter Σt := Σ(t) sei zeitlich unveranderlich, d. h.
• die Koordinatenursprunge zur Referenzzeit t und zur aktuellen Zeitt sind identisch und zeitlich konstant, sowie
38 Kapitel 2. Lage und Bewegung
• die Basisvektoren eA des Beobachters Σ zur Referenzzeit t stim-men mit den Basisvektoren ei des Beobachters Σt zur aktuellen Zeitt uberein, d. h.
ei · eA = δi A. (2.34)
Hierin wird das Kronecker-Delta δij benutzt, das durch
δij :=
1 fur i = j0 fur i 6= j
(2.35)
definiert ist. Fur das Kronecker-Delta gilt die Beziehung
δij = δj
i = δij = δij . (2.36)
Damit kann die Beschreibung der Abbildung Φ in Abbildung 2.6 in dieDarstellung nach Abbildung 2.8 modifiziert werden.
Abbildung 2.8: Identische Wahl der Ursprunge und Basissysteme in derReferenz- und der Momentankonfiguration
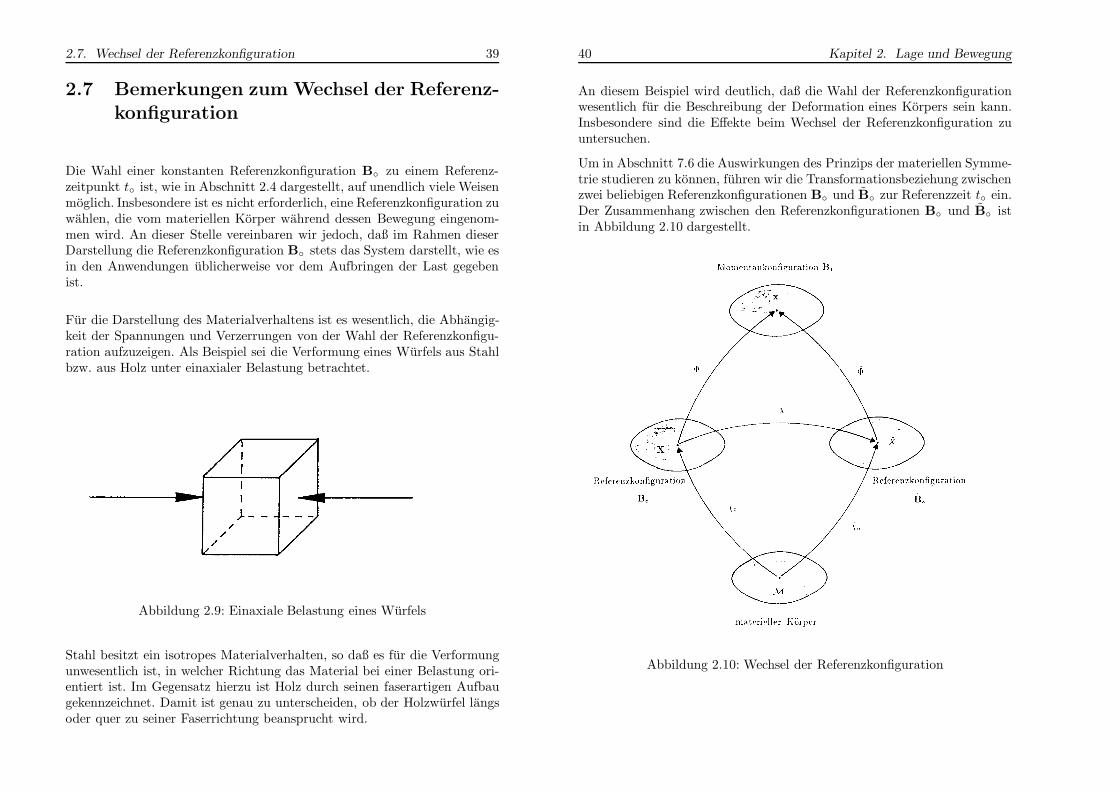
2.7. Wechsel der Referenzkonfiguration 39
2.7 Bemerkungen zum Wechsel der Referenz-konfiguration
Die Wahl einer konstanten Referenzkonfiguration B zu einem Referenz-zeitpunkt t ist, wie in Abschnitt 2.4 dargestellt, auf unendlich viele Weisenmoglich. Insbesondere ist es nicht erforderlich, eine Referenzkonfiguration zuwahlen, die vom materiellen Korper wahrend dessen Bewegung eingenom-men wird. An dieser Stelle vereinbaren wir jedoch, daß im Rahmen dieserDarstellung die Referenzkonfiguration B stets das System darstellt, wie esin den Anwendungen ublicherweise vor dem Aufbringen der Last gegebenist.
Fur die Darstellung des Materialverhaltens ist es wesentlich, die Abhangig-keit der Spannungen und Verzerrungen von der Wahl der Referenzkonfigu-ration aufzuzeigen. Als Beispiel sei die Verformung eines Wurfels aus Stahlbzw. aus Holz unter einaxialer Belastung betrachtet.
Abbildung 2.9: Einaxiale Belastung eines Wurfels
Stahl besitzt ein isotropes Materialverhalten, so daß es fur die Verformungunwesentlich ist, in welcher Richtung das Material bei einer Belastung ori-entiert ist. Im Gegensatz hierzu ist Holz durch seinen faserartigen Aufbaugekennzeichnet. Damit ist genau zu unterscheiden, ob der Holzwurfel langsoder quer zu seiner Faserrichtung beansprucht wird.
40 Kapitel 2. Lage und Bewegung
An diesem Beispiel wird deutlich, daß die Wahl der Referenzkonfigurationwesentlich fur die Beschreibung der Deformation eines Korpers sein kann.Insbesondere sind die Effekte beim Wechsel der Referenzkonfiguration zuuntersuchen.
Um in Abschnitt 7.6 die Auswirkungen des Prinzips der materiellen Symme-trie studieren zu konnen, fuhren wir die Transformationsbeziehung zwischenzwei beliebigen Referenzkonfigurationen B und B zur Referenzzeit t ein.Der Zusammenhang zwischen den Referenzkonfigurationen B und B istin Abbildung 2.10 dargestellt.
Abbildung 2.10: Wechsel der Referenzkonfiguration
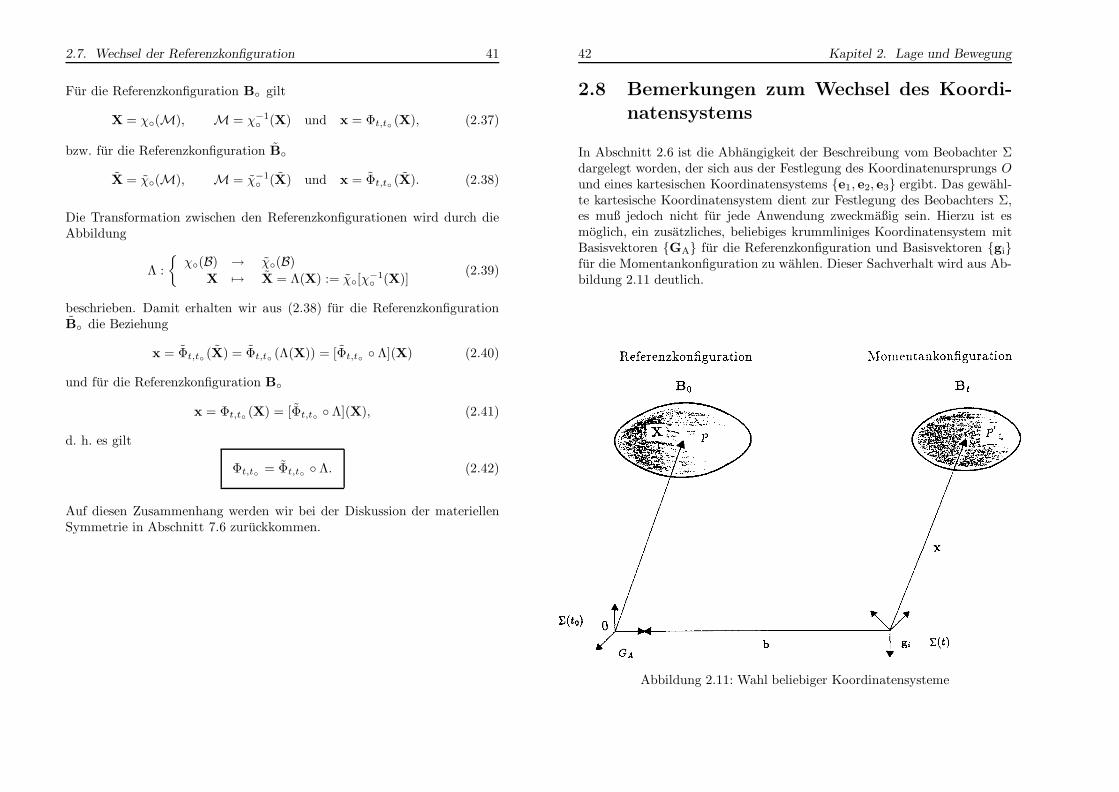
2.7. Wechsel der Referenzkonfiguration 41
Fur die Referenzkonfiguration B gilt
X = χ(M), M = χ−1 (X) und x = Φt,t (X), (2.37)
bzw. fur die Referenzkonfiguration B
X = χ(M), M = χ−1 (X) und x = Φt,t (X). (2.38)
Die Transformation zwischen den Referenzkonfigurationen wird durch dieAbbildung
Λ :
χ(B) → χ(B)
X 7→ X = Λ(X) := χ[χ−1 (X)]
(2.39)
beschrieben. Damit erhalten wir aus (2.38) fur die ReferenzkonfigurationB die Beziehung
x = Φt,t (X) = Φt,t (Λ(X)) = [Φt,t Λ](X) (2.40)
und fur die Referenzkonfiguration B
x = Φt,t (X) = [Φt,t Λ](X), (2.41)
d. h. es gilt
Φt,t = Φt,t Λ. (2.42)
Auf diesen Zusammenhang werden wir bei der Diskussion der materiellenSymmetrie in Abschnitt 7.6 zuruckkommen.
42 Kapitel 2. Lage und Bewegung
2.8 Bemerkungen zum Wechsel des Koordi-natensystems
In Abschnitt 2.6 ist die Abhangigkeit der Beschreibung vom Beobachter Σdargelegt worden, der sich aus der Festlegung des Koordinatenursprungs Ound eines kartesischen Koordinatensystems e1, e2, e3 ergibt. Das gewahl-te kartesische Koordinatensystem dient zur Festlegung des Beobachters Σ,es muß jedoch nicht fur jede Anwendung zweckmaßig sein. Hierzu ist esmoglich, ein zusatzliches, beliebiges krummliniges Koordinatensystem mitBasisvektoren GA fur die Referenzkonfiguration und Basisvektoren gifur die Momentankonfiguration zu wahlen. Dieser Sachverhalt wird aus Ab-bildung 2.11 deutlich.
Abbildung 2.11: Wahl beliebiger Koordinatensysteme
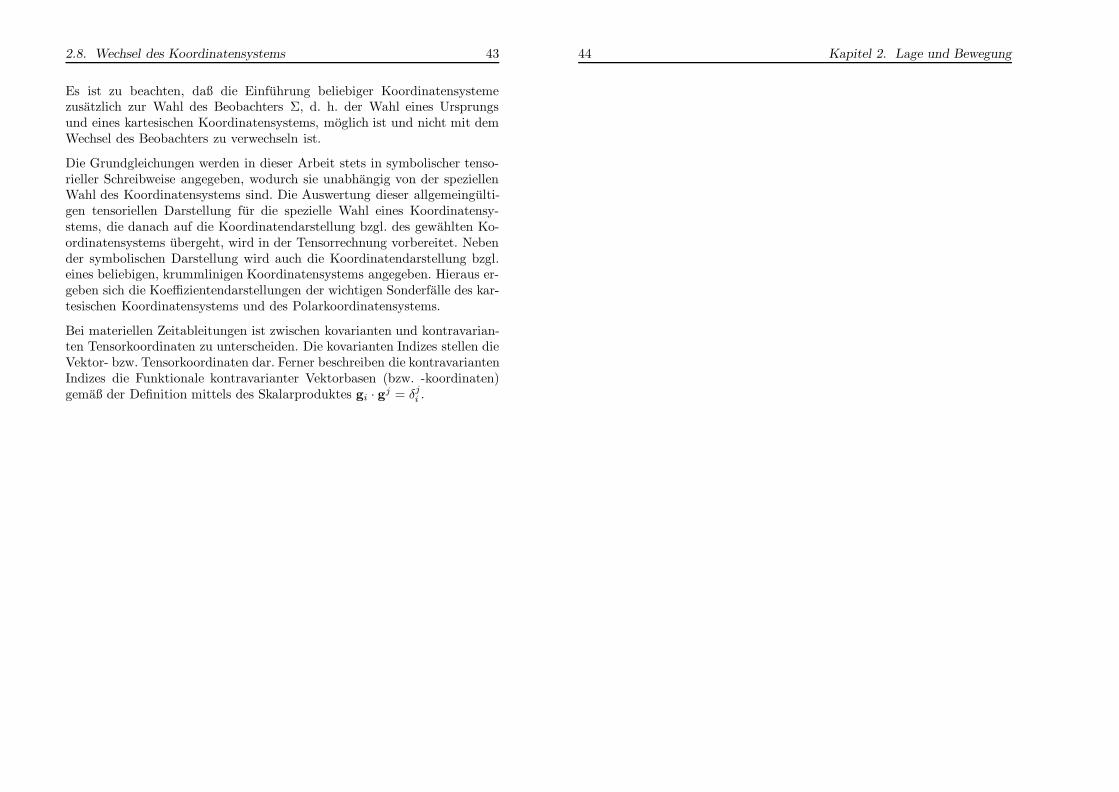
2.8. Wechsel des Koordinatensystems 43
Es ist zu beachten, daß die Einfuhrung beliebiger Koordinatensystemezusatzlich zur Wahl des Beobachters Σ, d. h. der Wahl eines Ursprungsund eines kartesischen Koordinatensystems, moglich ist und nicht mit demWechsel des Beobachters zu verwechseln ist.
Die Grundgleichungen werden in dieser Arbeit stets in symbolischer tenso-rieller Schreibweise angegeben, wodurch sie unabhangig von der speziellenWahl des Koordinatensystems sind. Die Auswertung dieser allgemeingulti-gen tensoriellen Darstellung fur die spezielle Wahl eines Koordinatensy-stems, die danach auf die Koordinatendarstellung bzgl. des gewahlten Ko-ordinatensystems ubergeht, wird in der Tensorrechnung vorbereitet. Nebender symbolischen Darstellung wird auch die Koordinatendarstellung bzgl.eines beliebigen, krummlinigen Koordinatensystems angegeben. Hieraus er-geben sich die Koeffizientendarstellungen der wichtigen Sonderfalle des kar-tesischen Koordinatensystems und des Polarkoordinatensystems.
Bei materiellen Zeitableitungen ist zwischen kovarianten und kontravarian-ten Tensorkoordinaten zu unterscheiden. Die kovarianten Indizes stellen dieVektor- bzw. Tensorkoordinaten dar. Ferner beschreiben die kontravariantenIndizes die Funktionale kontravarianter Vektorbasen (bzw. -koordinaten)gemaß der Definition mittels des Skalarproduktes gi · gj = δj
i .
44 Kapitel 2. Lage und Bewegung
Kapitel 3
Deformationen undVerzerrungen
In diesem Kapitel wird die in Kapitel 2 eingefuhrte mathematische Beschrei-bung der Bewegung materieller Korper dazu benutzt, um die Deformationenund Verzerrungen der Korper darzustellen.
Es wird besonders darauf hingewiesen, daß es sich hierbei um eine reingeometrische Beschreibung handelt; Aussagen uber die Krafte, die solcheDeformationen hervorrufen, und die besonderen materiellen Eigenschaftender Korper werden hier nicht gemacht.
3.1 Grundlagen und Vereinbarungen
Zunachst seien die Grundlagen der Beschreibung der Lage und Bewegungdes materiellen Korpers, dargelegt in den Kapiteln 1 und 2, zusammenge-stellt.
In Abschnitt 2.4 wurde die Abbildung Φ nach Gleichung (2.23)
Φ :
IR3 × IR × IR → IR3
(X, t, t ) 7→ x = Φ(X, t, t ) = Φt,t (X),
als bijektiv und stetig fur Φt,t und Φ−1t,t
, d. h. fur eine feste Wahl deraktuellen Zeit t und der Referenzzeit t , vereinbart. Die sich hieraus erge-
45
46 Kapitel 3. Deformationen und Verzerrungen
benden Folgerungen sind dort ebenfalls dargelegt worden und sind Voraus-setzung fur die Beschreibung der Bewegung eines materiellen Korpers. Furdie Darstellungen im Rahmen dieser Arbeit werden die Anforderungen andie Abbildung Φ : IR3 × IR × IR → IR3 verscharft; d. h. wir fordern, daßΦ bezuglich X und t zweimal stetig differenzierbar ist. Hierdurch werdenzum einen physikalisch unerwunschte Bewegungen ausgeschlossen, zum an-deren ist es mit dieser Vereinbarung nicht moglich, unstetige Verlaufe derGeschwindigkeit und Beschleunigung, wie sie etwa bei Schockwellen entste-hen, zu beschreiben. Dieses stellt jedoch keine Einschrankung der Thematikder vorliegenden Arbeit dar.
Die fur die Behandlung elastischer Materialien sinnvolle und weitestver-breitete Darstellung der Bewegung des materiellen Korpers stellt die La-grangesche Betrachtungsweise dar (siehe Abschnitt 2.5.2). Daher nimmt dieErlauterung dieser Darstellungsweise den breitesten Raum ein. Daruber hin-aus wird aber auch die Eulersche Betrachtungsweise angegeben, die insbe-sondere bei großen Deformationen sinnvoll eingesetzt werden kann (sieheAbschnitt 2.5.3).
Bei der materiellen (substantiellen, Lagrangeschen) Betrachtungsweise istder Beobachter fest mit einem materiellen Punkt M des Koorpers verbun-den und verfolgt so die Bewegung des Punktes. Zur Zeit t = t wird demmateriellen Punkt der Raumpunkt P mit den Koordinaten XA, A = 1, 2, 3bezuglich der kartesischen Basis eA zugeordnet. Nimmt ein materiellerPunkt im Laufe des Deformationsvorganges andere Raumpunkte P ′ ein, diedurch die Koordinaten xi, i = 1, 2, 3 beschrieben werden, so mussen dieseEulerschen oder raumlichen Koordinaten xi von den Lagrangeschen odermateriellen Koordinaten XA und von den Zeitpunkten t und t nach (2.28)in der Form
xi = xi(X1, X2, X3, t, t ) (3.1)
abhangig sein. Fur die Abbildung Φ : IR3 × IR × IR → IR3 gilt somit dieDarstellung (2.23), d. h.
x = Φ(X, t, t ). (3.2)
Bei der raumlichen Betrachtungsweise ist der Beobachter fest mit einemRaumpunkt P , beschrieben durch den Vektor x mit den raumlichen Koor-dinaten xi, i = 1, 2, 3, verbunden. Der Beobachter sieht die Bewegung des
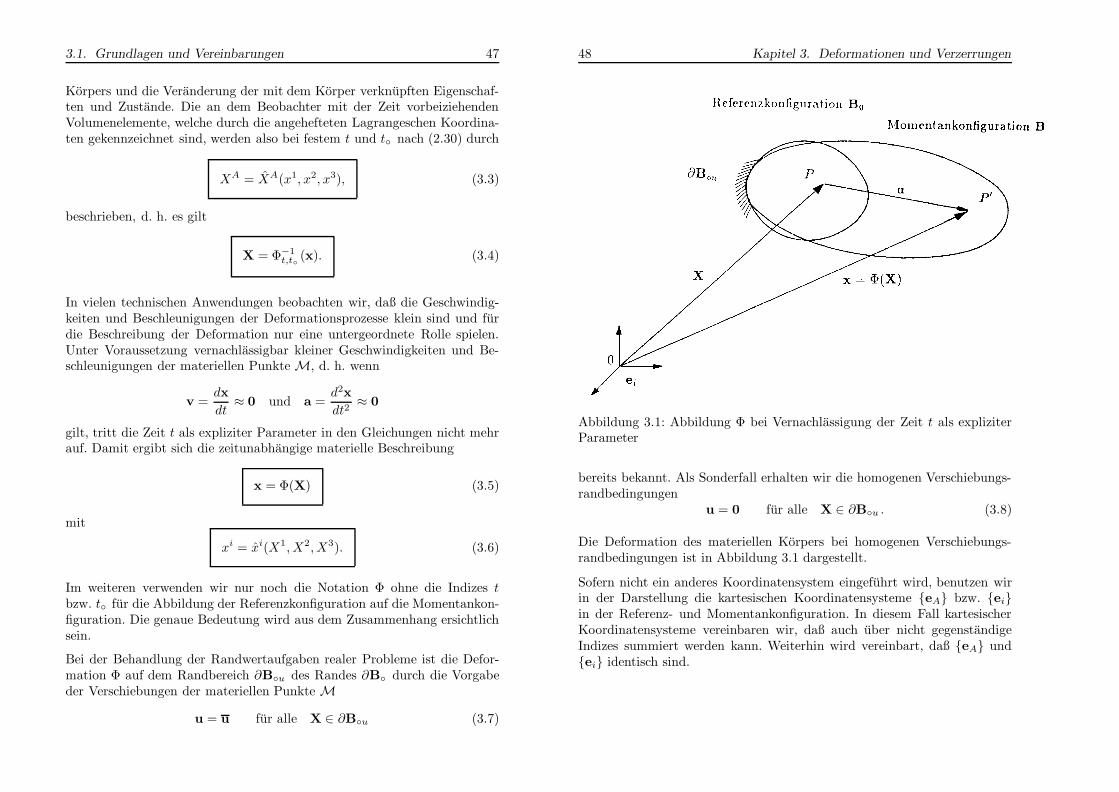
3.1. Grundlagen und Vereinbarungen 47
Korpers und die Veranderung der mit dem Korper verknupften Eigenschaf-ten und Zustande. Die an dem Beobachter mit der Zeit vorbeiziehendenVolumenelemente, welche durch die angehefteten Lagrangeschen Koordina-ten gekennzeichnet sind, werden also bei festem t und t nach (2.30) durch
XA = XA(x1, x2, x3), (3.3)
beschrieben, d. h. es gilt
X = Φ−1t,t
(x). (3.4)
In vielen technischen Anwendungen beobachten wir, daß die Geschwindig-keiten und Beschleunigungen der Deformationsprozesse klein sind und furdie Beschreibung der Deformation nur eine untergeordnete Rolle spielen.Unter Voraussetzung vernachlassigbar kleiner Geschwindigkeiten und Be-schleunigungen der materiellen PunkteM, d. h. wenn
v =dx
dt≈ 0 und a =
d2x
dt2≈ 0
gilt, tritt die Zeit t als expliziter Parameter in den Gleichungen nicht mehrauf. Damit ergibt sich die zeitunabhangige materielle Beschreibung
x = Φ(X) (3.5)
mit
xi = xi(X1, X2, X3). (3.6)
Im weiteren verwenden wir nur noch die Notation Φ ohne die Indizes tbzw. t fur die Abbildung der Referenzkonfiguration auf die Momentankon-figuration. Die genaue Bedeutung wird aus dem Zusammenhang ersichtlichsein.
Bei der Behandlung der Randwertaufgaben realer Probleme ist die Defor-mation Φ auf dem Randbereich ∂Bu des Randes ∂B durch die Vorgabeder Verschiebungen der materiellen Punkte M
u = u fur alle X ∈ ∂Bu (3.7)
48 Kapitel 3. Deformationen und Verzerrungen
Abbildung 3.1: Abbildung Φ bei Vernachlassigung der Zeit t als expliziterParameter
bereits bekannt. Als Sonderfall erhalten wir die homogenen Verschiebungs-randbedingungen
u = 0 fur alle X ∈ ∂Bu . (3.8)
Die Deformation des materiellen Korpers bei homogenen Verschiebungs-randbedingungen ist in Abbildung 3.1 dargestellt.
Sofern nicht ein anderes Koordinatensystem eingefuhrt wird, benutzen wirin der Darstellung die kartesischen Koordinatensysteme eA bzw. eiin der Referenz- und Momentankonfiguration. In diesem Fall kartesischerKoordinatensysteme vereinbaren wir, daß auch uber nicht gegenstandigeIndizes summiert werden kann. Weiterhin wird vereinbart, daß eA undei identisch sind.
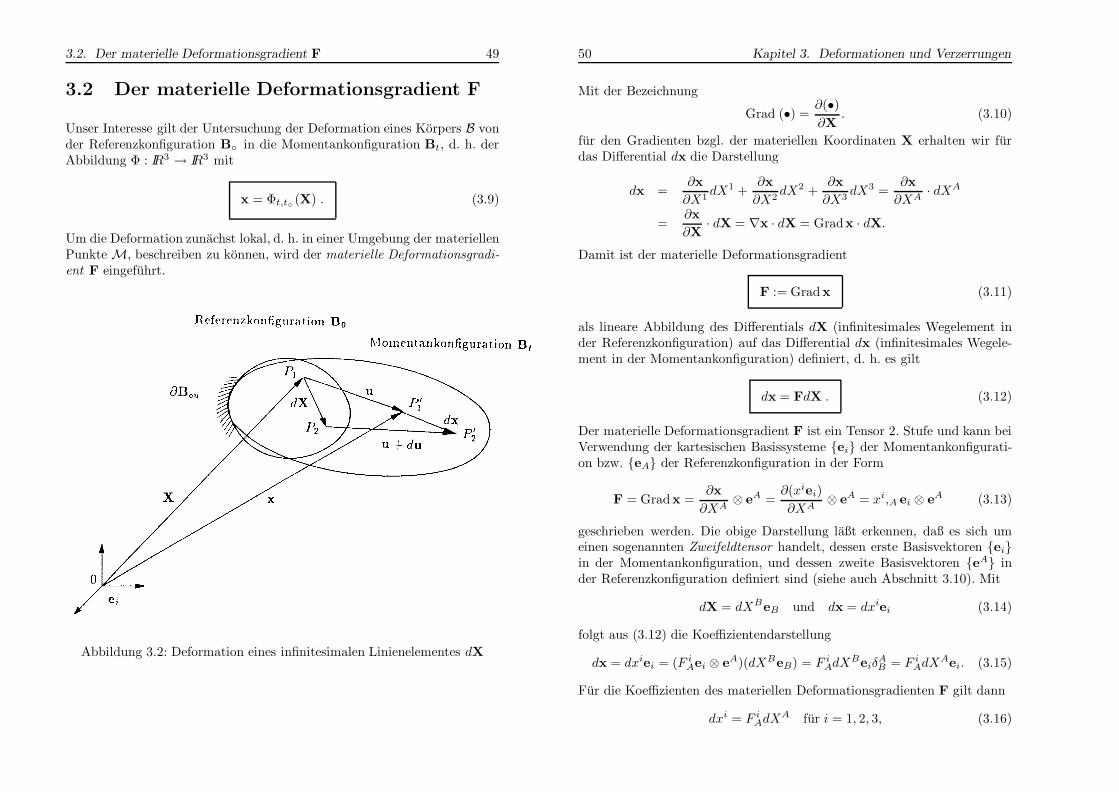
3.2. Der materielle Deformationsgradient F 49
3.2 Der materielle Deformationsgradient F
Unser Interesse gilt der Untersuchung der Deformation eines Korpers B vonder Referenzkonfiguration B in die Momentankonfiguration Bt, d. h. derAbbildung Φ : IR3 → IR3 mit
x = Φt,t (X) . (3.9)
Um die Deformation zunachst lokal, d. h. in einer Umgebung der materiellenPunkteM, beschreiben zu konnen, wird der materielle Deformationsgradi-ent F eingefuhrt.
Abbildung 3.2: Deformation eines infinitesimalen Linienelementes dX
50 Kapitel 3. Deformationen und Verzerrungen
Mit der Bezeichnung
Grad (•) =∂(•)∂X
. (3.10)
fur den Gradienten bzgl. der materiellen Koordinaten X erhalten wir furdas Differential dx die Darstellung
dx =∂x
∂X1dX1 +
∂x
∂X2dX2 +
∂x
∂X3dX3 =
∂x
∂XA· dXA
=∂x
∂X· dX = ∇x · dX = Gradx · dX.
Damit ist der materielle Deformationsgradient
F := Gradx (3.11)
als lineare Abbildung des Differentials dX (infinitesimales Wegelement inder Referenzkonfiguration) auf das Differential dx (infinitesimales Wegele-ment in der Momentankonfiguration) definiert, d. h. es gilt
dx = FdX . (3.12)
Der materielle Deformationsgradient F ist ein Tensor 2. Stufe und kann beiVerwendung der kartesischen Basissysteme ei der Momentankonfigurati-on bzw. eA der Referenzkonfiguration in der Form
F = Gradx =∂x
∂XA⊗ eA =
∂(xiei)
∂XA⊗ eA = xi,A ei ⊗ eA (3.13)
geschrieben werden. Die obige Darstellung laßt erkennen, daß es sich umeinen sogenannten Zweifeldtensor handelt, dessen erste Basisvektoren eiin der Momentankonfiguration, und dessen zweite Basisvektoren eA inder Referenzkonfiguration definiert sind (siehe auch Abschnitt 3.10). Mit
dX = dXBeB und dx = dxiei (3.14)
folgt aus (3.12) die Koeffizientendarstellung
dx = dxiei = (F iAei ⊗ eA)(dXBeB) = F i
AdXBeiδ
AB = F i
AdXAei. (3.15)
Fur die Koeffizienten des materiellen Deformationsgradienten F gilt dann
dxi = F iAdX
A fur i = 1, 2, 3, (3.16)

3.2. Der materielle Deformationsgradient F 51
die in Matrizenschreibweise in den Formen
dx1
dx2
dx3
=
F 11 F 1
2 F 13
F 21 F 2
2 F 23
F 31 F 3
2 F 33
dX1
dX2
dX3
, (3.17)
d. h.(dxi) = (F i
A)(dXA) bzw. dx = F dX (3.18)
dargestellt werden kann. Es ist zu beachten, daß der materielle Deformati-onsgradient F im allgemeinen nicht symmetrisch ist, d. h. es gilt
F 6= FT . (3.19)
Um einen kontinuierlichen, luckenlosen Zusammenhang der materiellenPunkte zu garantieren, muß auch die Umkehrabbildung Φ−1
t,teindeutig mog-
lich sein. Dies bedeutet, daß zu (3.11) mit
dx = FdX und F = Gradx =∂x
∂X
auch die inverse Abbildung F−1 mit
dX = F−1dx (3.20)
und damit
F−1 = gradX =∂X
∂x(3.21)
existieren muß. Den Gradienten bzgl. der raumlichen Koordinaten x be-zeichnen wir im weiteren mit grad (•), d. h. es sei
grad (•) =∂(•)∂x
. (3.22)
Die notwendige und hinreichende Bedingung fur die Existenz des inversenTensors F−1 ist, daß die Jacobische Funktionaldeterminante J des materi-ellen Deformationsgradienten F ungleich Null ist, d. h.
J := det F = det∂x
∂X6= 0 . (3.23)
52 Kapitel 3. Deformationen und Verzerrungen
Diese Forderung an J soll durch die Wahl der Abbildung Φ erfullt sein.Eine weitere wichtige Beziehung fur die Jacobische FunktionaldeterminanteJ erhalten wir durch die Betrachtung der Deformation fur t = t , d. h.
x = X = Φ(x, t , t ) (3.24)
und somit
J =
∣∣∣∣∂x
∂X
∣∣∣∣ =
∣∣∣∣∂X
∂X
∣∣∣∣ = |1| = 1 . (3.25)
Aus der geforderten Stetigkeit der Abbildung Φ folgt somit
J = det F > 0 (3.26)
fur alle Bewegungen des materiellen Korpers. Eine physikalische Interpre-tation dieser Forderung geben wir in Abschnitt 3.3 an.
Bezuglich der ko- und kontravarianten Basisvektoren der Referenz- und derMomentankonfiguration erhalten wir folgende Darstellungen fur den mate-riellen Deformationsgradienten F:
F = gi ⊗Gi, FT = Gi ⊗ gi,
F−1 = Gi ⊗ gi, F−T = gi ⊗Gi.
(3.27)
Fur eine Beschreibung in den raumlichen oder Eulerschen Koordinaten istdie Einfuhrung des raumlichen Deformationsgradienten F erforderlich. ZurErlauterung des Konzeptes der Beschreibung mittels der raumlichen Koor-dinaten xi siehe auch die Abschnitte 2.5.3 und 3.1. Der raumliche Deforma-tionsgradient F ergibt sich aus den partiellen Ableitungen der Koordinatenin der Referenzkonfiguration nach den Koordinaten in der Momentankonfi-guration, d. h. es gilt
dX =∂X
∂x· dx = grad X · dx = F · dx. (3.28)
Aus der Bijektivitat der Abbildung Φ erhalten wir mit (3.12) auch die Be-ziehung
dX = F−1 · dx. (3.29)
Damit gilt fur den raumlichen Deformationsgradienten F
F = grad X = F−1, (3.30)
d. h. im wesentlichen existiert nur der materielle Deformationsgradient F.

3.3. Polare Zerlegung 53
3.3 Multiplikative oder polare Zerlegung desmateriellen Deformationsgradienten F
Jede Deformation eines Korpers setzt sich aus Starrkorpertranslation, Starr-korperrotation und der Deformation im eigentlichen Sinne zusammen, wiesich anschaulich leicht verifizieren laßt. Damit sind diese qualitativ unter-schiedlichen Bewegungsanteile auch lokal, d. h. fur jeden materiellen PunktM, im materiellen Deformationsgradienten enthalten. Eine qualitative Aus-sage ist mit dem folgenden Satz moglich:
Jeder nichtsingulare Tensor 2. Stufe und damit auch F kann eindeutigin die Form
F = RU (3.31)
oderF = VR (3.32)
zerlegt werden, wobei U und V positiv definite, symmetrische Tenso-ren 2. Stufe sind und R einen orthogonalen Tensor 2. Stufe darstellt.
Zum Beweis verweisen wir auf die Literatur zur Tensorrechnung, z. B. dasBuch von de Boer [7].
In der Kontinuumsmechanik werden die Tensoren 2. Stufe des obigen Satzeswie folgt bezeichnet:
R: Drehtensor ,
U: materieller Rechts-Streck-Tensor ,
V: raumlicher Links-Streck-Tensor .
Der Tensor U (bzw. V) heißt symmetrisch, wenn die Beziehung
U = UT (3.33)
gilt und ist positiv definit , wenn fur beliebige Vektoren y mit y 6= 0 gilt
y · (U y) > 0. (3.34)
54 Kapitel 3. Deformationen und Verzerrungen
Dann gilt insbesondere (siehe z. B. de Boer [7])
detU > 0 und det V > 0 (3.35)
und wir erhalten mit der Forderung (3.26) die Beziehungen
J = det F = det(RU) = det R detU > 0 (3.36)
bzw.J = det F = det(VR) = det V det R > 0 . (3.37)
Damit folgt fur den orthogonalen Tensor R, d. h. RTR = RRT = 1 unddet R = ±1, aus (3.36) und (3.37) zusatzlich
det R = +1 . (3.38)
Man spricht in diesem Fall von einem eigentlich orthogonalen Tensor. Furdie Bewegung des materiellen Korpers B folgt somit, daß Spiegelungen aus-geschlossen sind.
Eine anschauliche Interpretation der polaren Zerlegung als Hintereinander-schaltung verschiedener Abbildungen ist in Abbildung 3.3 gegeben.
In der Kontinuumsmechanik wird haufig mit den symmetrischen, positivdefiniten Tensoren
C : materieller Rechts-Cauchy-Green-Tensor
C := FT F = (RU)T RU = UTRTRU = UTU = U2 (3.39)
und
b : raumlicher Links-Cauchy-Green-Tensor
b := FFT = VR(VR)T = VRRTVT = VVT = V2 (3.40)
gearbeitet. Man erkennt, daß in diesen Tensoren die Rotationsanteile R desmateriellen Deformationsgradienten F eliminiert worden sind. Dadurch sindsie zur Beschreibung der Verzerrung eines Korpers verwendbar. Die sinnvolleEinfuhrung eines Verzerrungsmaßes erfolgt im nachsten Abschnitt.
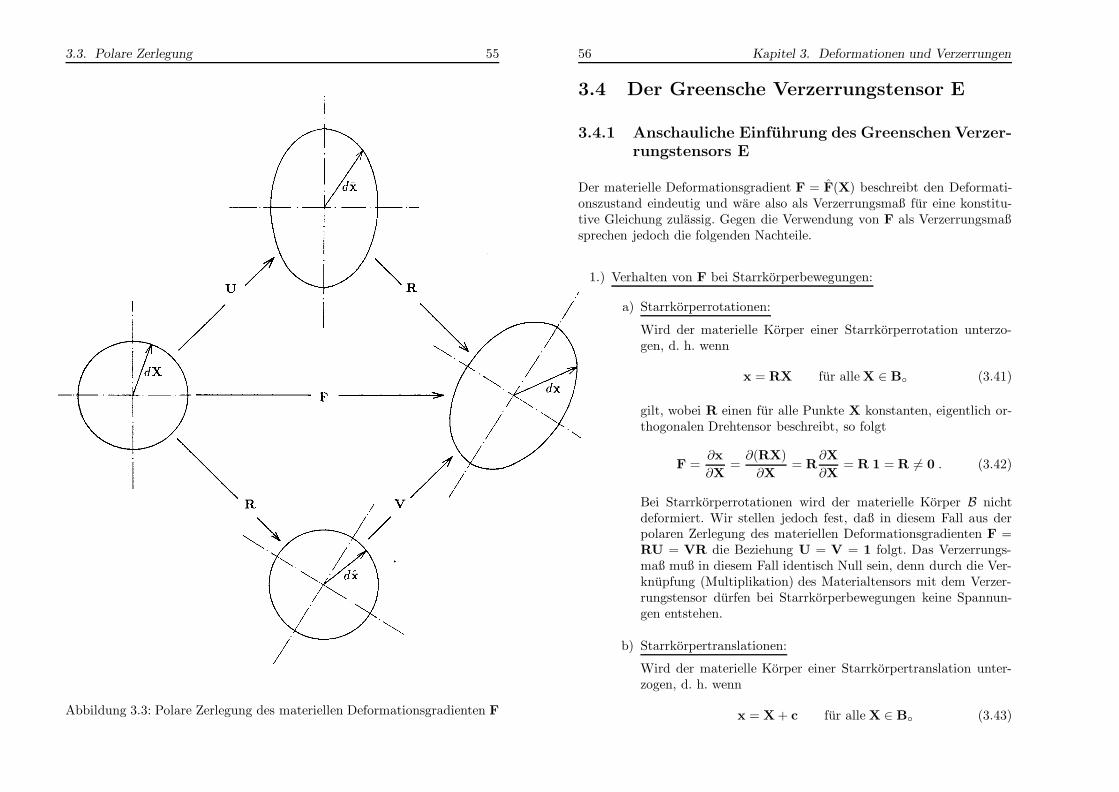
3.3. Polare Zerlegung 55
Abbildung 3.3: Polare Zerlegung des materiellen Deformationsgradienten F
56 Kapitel 3. Deformationen und Verzerrungen
3.4 Der Greensche Verzerrungstensor E
3.4.1 Anschauliche Einfuhrung des Greenschen Verzer-rungstensors E
Der materielle Deformationsgradient F = F(X) beschreibt den Deformati-onszustand eindeutig und ware also als Verzerrungsmaß fur eine konstitu-tive Gleichung zulassig. Gegen die Verwendung von F als Verzerrungsmaßsprechen jedoch die folgenden Nachteile.
1.) Verhalten von F bei Starrkorperbewegungen:
a) Starrkorperrotationen:
Wird der materielle Korper einer Starrkorperrotation unterzo-gen, d. h. wenn
x = RX fur alle X ∈ B (3.41)
gilt, wobei R einen fur alle Punkte X konstanten, eigentlich or-thogonalen Drehtensor beschreibt, so folgt
F =∂x
∂X=∂(RX)
∂X= R
∂X
∂X= R 1 = R 6= 0 . (3.42)
Bei Starrkorperrotationen wird der materielle Korper B nichtdeformiert. Wir stellen jedoch fest, daß in diesem Fall aus derpolaren Zerlegung des materiellen Deformationsgradienten F =RU = VR die Beziehung U = V = 1 folgt. Das Verzerrungs-maß muß in diesem Fall identisch Null sein, denn durch die Ver-knupfung (Multiplikation) des Materialtensors mit dem Verzer-rungstensor durfen bei Starrkorperbewegungen keine Spannun-gen entstehen.
b) Starrkorpertranslationen:
Wird der materielle Korper einer Starrkorpertranslation unter-zogen, d. h. wenn
x = X + c fur alle X ∈ B (3.43)
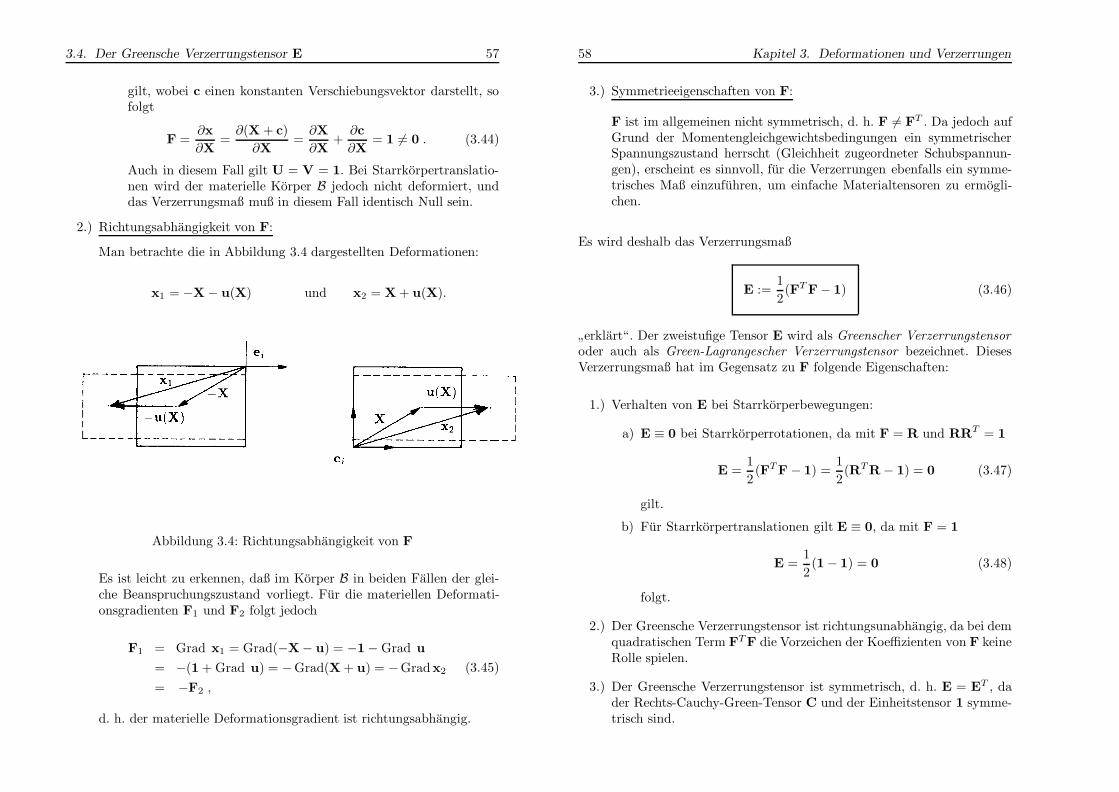
3.4. Der Greensche Verzerrungstensor E 57
gilt, wobei c einen konstanten Verschiebungsvektor darstellt, sofolgt
F =∂x
∂X=∂(X + c)
∂X=∂X
∂X+∂c
∂X= 1 6= 0 . (3.44)
Auch in diesem Fall gilt U = V = 1. Bei Starrkorpertranslatio-nen wird der materielle Korper B jedoch nicht deformiert, unddas Verzerrungsmaß muß in diesem Fall identisch Null sein.
2.) Richtungsabhangigkeit von F:
Man betrachte die in Abbildung 3.4 dargestellten Deformationen:
x1 = −X − u(X) und x2 = X + u(X).
Abbildung 3.4: Richtungsabhangigkeit von F
Es ist leicht zu erkennen, daß im Korper B in beiden Fallen der glei-che Beanspruchungszustand vorliegt. Fur die materiellen Deformati-onsgradienten F1 und F2 folgt jedoch
F1 = Grad x1 = Grad(−X− u) = −1−Grad u
= −(1 + Grad u) = −Grad(X + u) = −Gradx2
= −F2 ,
(3.45)
d. h. der materielle Deformationsgradient ist richtungsabhangig.
58 Kapitel 3. Deformationen und Verzerrungen
3.) Symmetrieeigenschaften von F:
F ist im allgemeinen nicht symmetrisch, d. h. F 6= FT . Da jedoch aufGrund der Momentengleichgewichtsbedingungen ein symmetrischerSpannungszustand herrscht (Gleichheit zugeordneter Schubspannun-gen), erscheint es sinnvoll, fur die Verzerrungen ebenfalls ein symme-trisches Maß einzufuhren, um einfache Materialtensoren zu ermogli-chen.
Es wird deshalb das Verzerrungsmaß
E :=1
2(FT F− 1) (3.46)
”erklart“. Der zweistufige Tensor E wird als Greenscher Verzerrungstensor
oder auch als Green-Lagrangescher Verzerrungstensor bezeichnet. DiesesVerzerrungsmaß hat im Gegensatz zu F folgende Eigenschaften:
1.) Verhalten von E bei Starrkorperbewegungen:
a) E ≡ 0 bei Starrkorperrotationen, da mit F = R und RRT = 1
E =1
2(FTF − 1) =
1
2(RTR− 1) = 0 (3.47)
gilt.
b) Fur Starrkorpertranslationen gilt E ≡ 0, da mit F = 1
E =1
2(1− 1) = 0 (3.48)
folgt.
2.) Der Greensche Verzerrungstensor ist richtungsunabhangig, da bei demquadratischen Term FTF die Vorzeichen der Koeffizienten von F keineRolle spielen.
3.) Der Greensche Verzerrungstensor ist symmetrisch, d. h. E = ET , dader Rechts-Cauchy-Green-Tensor C und der Einheitstensor 1 symme-trisch sind.

3.4. Der Greensche Verzerrungstensor E 59
Man beachte, daß im Korper B genau dann keine Verzerrungen auftre-ten, wenn es sich bei der Bewegung um eine Starrkorperbewegung handelt.Hierfur gilt jedoch, wie die obige Diskussion gezeigt hat, die BeziehungU = V = 1.
In diesem Abschnitt wurde der Greensche Verzerrungstensor E aus der Be-trachtung der Eigenschaften des materiellen Deformationsgradienten F undder Erwartung an ein sinnvolles Verzerrungsmaß heraus konstruiert. EineHerleitung des Greenschen Verzerrungstensors direkt aus dem Deformati-onsverhalten des Korpers wird im folgenden Abschnitt gegeben.
3.4.2 Herleitung des Greenschen Verzerrungstensors Emit Hilfe der Differenz der Quadrate der Linien-elemente im verformten und unverformten Zu-stand
Als sinnvoller Ausgangspunkt fur die Definition eines Verzerrungsmaßes solldie Differenz der Quadrate der Linienelemente zwischen den Punkten P ′
1 undP ′
2 in der Momentankonfiguration Bt und den Punkten P1 und P2 in derReferenzkonfiguration B betrachtet werden (siehe auch Abbildung 3.2).Damit ist sofort die Richtungsunabhangigkeit und die Invarianz gegenuberStarrkorperdrehungen gesichert.
Das Quadrat des unverformten Linienelementes dS in der Referenzkonfigu-ration lautet
(dS)2 = dX · dX = dX · 1dX = ‖dX‖2, (3.49)
und fur das Quadrat des verformten Linienelementes ds in der Momentan-konfiguration gilt
(ds)2 = dx · dx = FdX · FdX = ‖dx‖2. (3.50)
Somit folgt fur die Linienelemente in der Referenzkonfiguration B
dS = ‖dX‖
bzw. fur die Linienelemente in der Momentankonfiguration Bt
ds = ‖dx‖.
Hierin bezeichnet ‖ • ‖ die Euklidische Norm im IR3.
60 Kapitel 3. Deformationen und Verzerrungen
Mit der Rechenregelu ·Tv = v ·TTu (3.51)
ergibt sich aus (3.50) die Darstellung
(ds)2 = dX ·FT FdX . (3.52)
Als Ausgangspunkt fur die Definition einer Reihe von Verzerrungsmaßenbetrachten wir die als absolutes Verzerrungsmaß δ postulierte Differenz derQuadrate materieller Linienelemente der Momentankonfiguration dx ∈ Bt
und der Referenzkonfiguration dX ∈ B
δ := (ds)2 − (dS)2 . (3.53)
Hieraus folgt
δ = (ds)2 − (dS)2 = dX · FTFdX− dX · 1dX= dX · (FTF− 1)dX
= dX · 2 E dX
(3.54)
und wir erhalten die Beziehung(3.46) fur den Greenschen Verzerrungstensor.Die Komponentendarstellung lautet
δ = (ds)2 − (dS)2
= (dXAeA)[(F i
CeC ⊗ ei)(FjDej ⊗ eD)− (δCDeC ⊗ eD)
](dXBeB)
= (dXAeA)[F i
C δij FjD − δCD
](eC ⊗ eD)dXBeB
= dXA(F iC δij F
jD − δCD) dXB δC
A δDB
= (F iA δij F
jB − δAB) dXAdXB
= (xi,A δij xj,B − δAB) dXAdXB
= (xi,A xi,B − δAB) dXAdXB
= (CAB − δAB) dXAdXB
= 2EABdXAdXB
und damit gilt fur die Koeffizienten des Greenschen Verzerrungstensorsbezuglich des kartesischen Koordinatensystems eA die Darstellung
EAB =1
2(xi,A xi,B −δAB). (3.55)
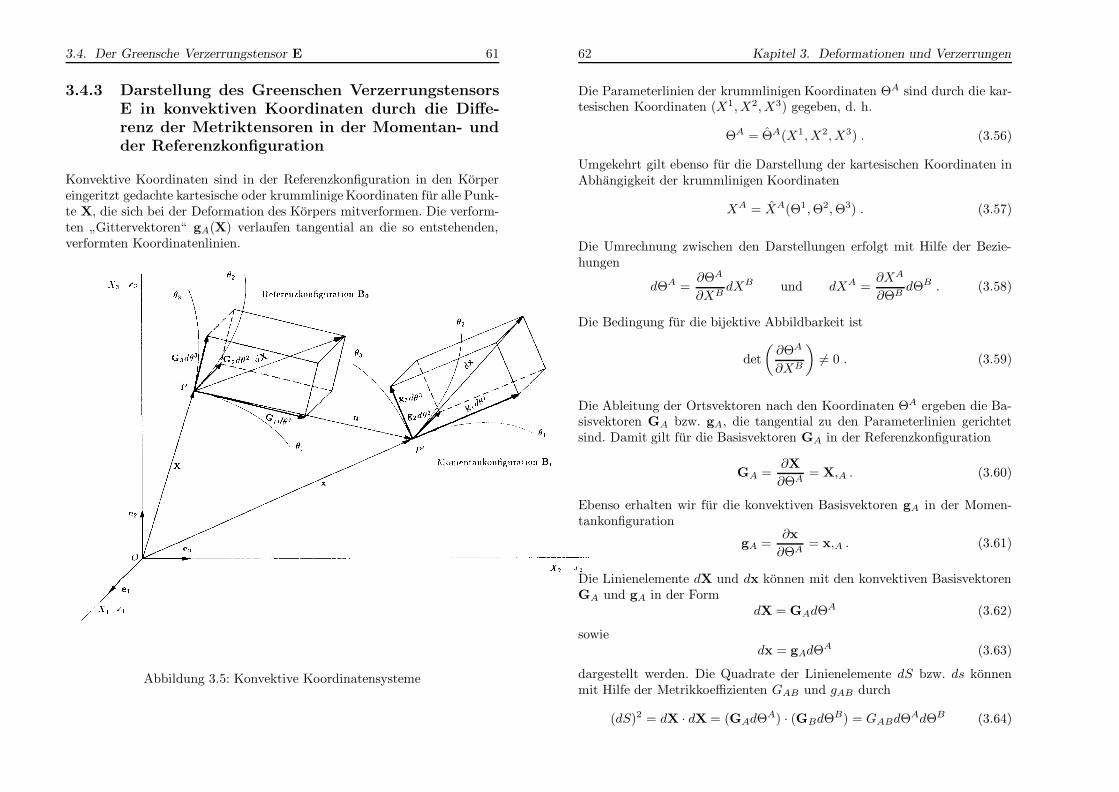
3.4. Der Greensche Verzerrungstensor E 61
3.4.3 Darstellung des Greenschen VerzerrungstensorsE in konvektiven Koordinaten durch die Diffe-renz der Metriktensoren in der Momentan- undder Referenzkonfiguration
Konvektive Koordinaten sind in der Referenzkonfiguration in den Korpereingeritzt gedachte kartesische oder krummlinige Koordinaten fur alle Punk-te X, die sich bei der Deformation des Korpers mitverformen. Die verform-ten
”Gittervektoren“ gA(X) verlaufen tangential an die so entstehenden,
verformten Koordinatenlinien.
Abbildung 3.5: Konvektive Koordinatensysteme
62 Kapitel 3. Deformationen und Verzerrungen
Die Parameterlinien der krummlinigen Koordinaten ΘA sind durch die kar-tesischen Koordinaten (X1, X2, X3) gegeben, d. h.
ΘA = ΘA(X1, X2, X3) . (3.56)
Umgekehrt gilt ebenso fur die Darstellung der kartesischen Koordinaten inAbhangigkeit der krummlinigen Koordinaten
XA = XA(Θ1,Θ2,Θ3) . (3.57)
Die Umrechnung zwischen den Darstellungen erfolgt mit Hilfe der Bezie-hungen
dΘA =∂ΘA
∂XBdXB und dXA =
∂XA
∂ΘBdΘB . (3.58)
Die Bedingung fur die bijektive Abbildbarkeit ist
det
(∂ΘA
∂XB
)6= 0 . (3.59)
Die Ableitung der Ortsvektoren nach den Koordinaten ΘA ergeben die Ba-sisvektoren GA bzw. gA, die tangential zu den Parameterlinien gerichtetsind. Damit gilt fur die Basisvektoren GA in der Referenzkonfiguration
GA =∂X
∂ΘA= X,A . (3.60)
Ebenso erhalten wir fur die konvektiven Basisvektoren gA in der Momen-tankonfiguration
gA =∂x
∂ΘA= x,A . (3.61)
Die Linienelemente dX und dx konnen mit den konvektiven BasisvektorenGA und gA in der Form
dX = GAdΘA (3.62)
sowiedx = gAdΘ
A (3.63)
dargestellt werden. Die Quadrate der Linienelemente dS bzw. ds konnenmit Hilfe der Metrikkoeffizienten GAB und gAB durch
(dS)2 = dX · dX = (GAdΘA) · (GBdΘ
B) = GABdΘAdΘB (3.64)
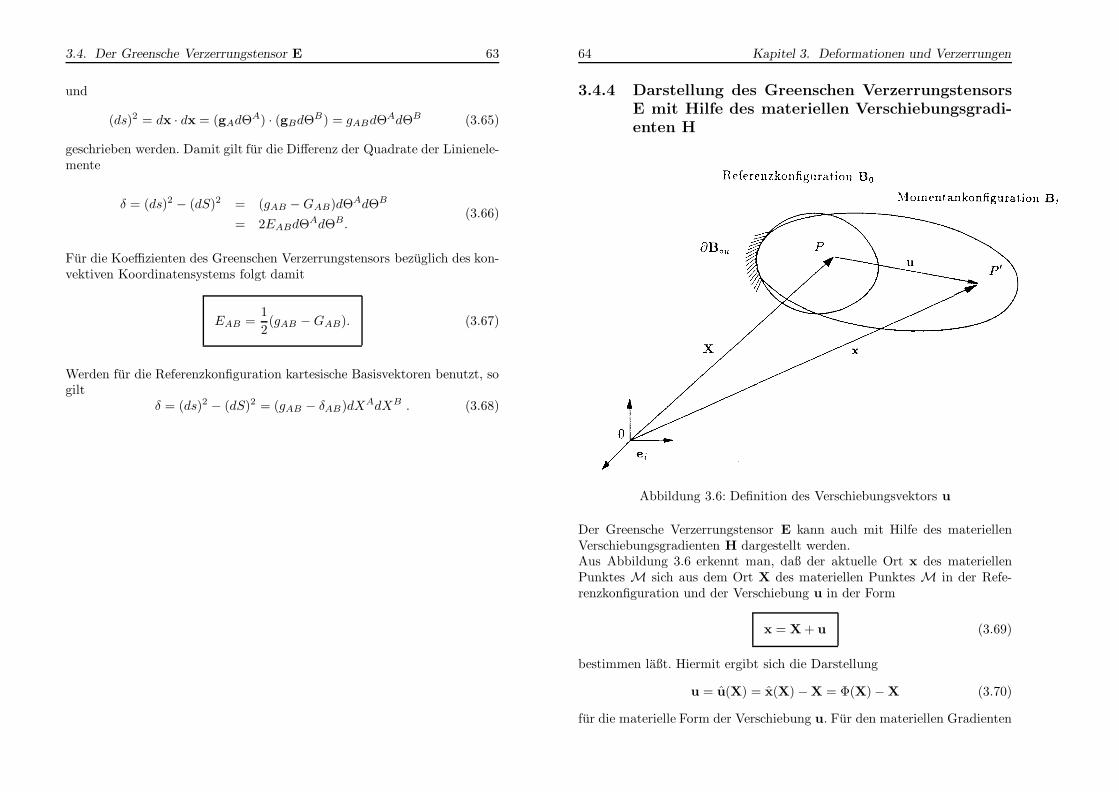
3.4. Der Greensche Verzerrungstensor E 63
und
(ds)2 = dx · dx = (gAdΘA) · (gBdΘ
B) = gABdΘAdΘB (3.65)
geschrieben werden. Damit gilt fur die Differenz der Quadrate der Linienele-mente
δ = (ds)2 − (dS)2 = (gAB −GAB)dΘAdΘB
= 2EABdΘAdΘB.
(3.66)
Fur die Koeffizienten des Greenschen Verzerrungstensors bezuglich des kon-vektiven Koordinatensystems folgt damit
EAB =1
2(gAB −GAB). (3.67)
Werden fur die Referenzkonfiguration kartesische Basisvektoren benutzt, sogilt
δ = (ds)2 − (dS)2 = (gAB − δAB)dXAdXB . (3.68)
64 Kapitel 3. Deformationen und Verzerrungen
3.4.4 Darstellung des Greenschen VerzerrungstensorsE mit Hilfe des materiellen Verschiebungsgradi-enten H
Abbildung 3.6: Definition des Verschiebungsvektors u
Der Greensche Verzerrungstensor E kann auch mit Hilfe des materiellenVerschiebungsgradienten H dargestellt werden.Aus Abbildung 3.6 erkennt man, daß der aktuelle Ort x des materiellenPunktes M sich aus dem Ort X des materiellen Punktes M in der Refe-renzkonfiguration und der Verschiebung u in der Form
x = X + u (3.69)
bestimmen laßt. Hiermit ergibt sich die Darstellung
u = u(X) = x(X) −X = Φ(X)−X (3.70)
fur die materielle Form der Verschiebung u. Fur den materiellen Gradienten
3.4. Der Greensche Verzerrungstensor E 65
des Vektors X der Referenzkonfiguration gilt
Grad X =∂XA
∂XBeA ⊗ eB = δA
BeA ⊗ eB = 1 . (3.71)
Mit der Linearitat des Gradientenoperators
F = Grad x = Grad (X + u) = Grad X + Grad u (3.72)
und mit (3.71) ergibt sich der Zusammenhang
F = 1 + Grad u. (3.73)
Fur den materiellen Verschiebungsgradienten H erhalten wir somit
H := Grad u =∂u
∂XB
⊗ eB = uA,B eA ⊗ eB , (3.74)
und aus (3.73) folgt die Beziehung
F = 1 + H (3.75)
zwischen dem materiellen Deformationsgradienten F und dem materiellenVerschiebungsgradienten H.
Bei krummlinigen Koordinaten ist der Gradient mit Hilfe der kovariantenAbleitung in der Form
H = uA |B (GA ⊗GB) = uA |B (GA ⊗GB). (3.76)
zu bilden. Der Greensche Verzerrungstensor
E =1
2(FTF− 1)
laßt sich mit Gleichung (3.75) umformen in
E =1
2((1 + H)T (1 + H)− 1)
=1
2(1 + H + H
T + HT H− 1)(3.77)
und damit erhalten wir
E =1
2(H + HT + HT H). (3.78)
66 Kapitel 3. Deformationen und Verzerrungen
Die Komponentenschreibweise lautet in kartesischen Koordinaten
E =1
2(uA,B +uB,A +uC ,A uC ,B )eA ⊗ eB (3.79)
und in krummlinigen Koordinaten
E =1
2(uA |B +uB |A +uC |A uC |B)GA ⊗GB. (3.80)
3.4.5 Vergleich des Greenschen Verzerrungstensors Emit den Ingenieurverzerrungen γ
Der Greensche Verzerrungstensor E kann additiv in einen linearen und einennichtlinearen Anteil der Verschiebungen u in der Form
E = Elin + Enlin (3.81)
aufgespalten werden. Dabei gilt fur Elin und Enlin
Elin :=1
2(H + HT ) = ET
lin (3.82)
und
Enlin :=1
2(HT H) = ET
nlin . (3.83)
Fur die Koeffizienten von E kann die Zerlegung folgendermaßen dargestelltwerden. Nach (3.79) gilt
EAB =1
2(uA,B +uB ,A +uC ,A uC ,B ) (3.84)
und somit
(Elin)AB =1
2(uA,B +uB ,A ) (3.85)
und
(Enlin)AB =1
2(uC ,A uC ,B ) . (3.86)
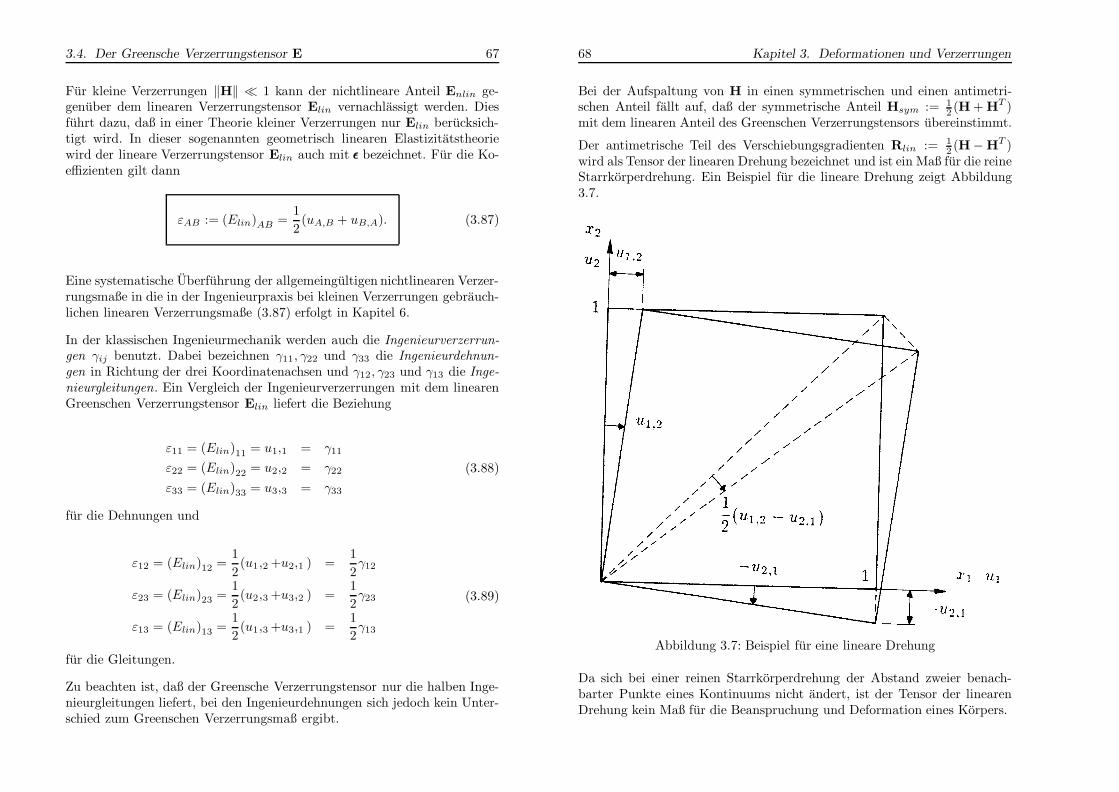
3.4. Der Greensche Verzerrungstensor E 67
Fur kleine Verzerrungen ‖H‖ ≪ 1 kann der nichtlineare Anteil Enlin ge-genuber dem linearen Verzerrungstensor Elin vernachlassigt werden. Diesfuhrt dazu, daß in einer Theorie kleiner Verzerrungen nur Elin berucksich-tigt wird. In dieser sogenannten geometrisch linearen Elastizitatstheoriewird der lineare Verzerrungstensor Elin auch mit ǫǫǫ bezeichnet. Fur die Ko-effizienten gilt dann
εAB := (Elin)AB =1
2(uA,B + uB,A). (3.87)
Eine systematische Uberfuhrung der allgemeingultigen nichtlinearen Verzer-rungsmaße in die in der Ingenieurpraxis bei kleinen Verzerrungen gebrauch-lichen linearen Verzerrungsmaße (3.87) erfolgt in Kapitel 6.
In der klassischen Ingenieurmechanik werden auch die Ingenieurverzerrun-gen γij benutzt. Dabei bezeichnen γ11, γ22 und γ33 die Ingenieurdehnun-gen in Richtung der drei Koordinatenachsen und γ12, γ23 und γ13 die Inge-nieurgleitungen. Ein Vergleich der Ingenieurverzerrungen mit dem linearenGreenschen Verzerrungstensor Elin liefert die Beziehung
ε11 = (Elin)11 = u1,1 = γ11
ε22 = (Elin)22 = u2,2 = γ22
ε33 = (Elin)33 = u3,3 = γ33
(3.88)
fur die Dehnungen und
ε12 = (Elin)12 =1
2(u1,2 +u2,1 ) =
1
2γ12
ε23 = (Elin)23 =1
2(u2,3 +u3,2 ) =
1
2γ23
ε13 = (Elin)13 =1
2(u1,3 +u3,1 ) =
1
2γ13
(3.89)
fur die Gleitungen.
Zu beachten ist, daß der Greensche Verzerrungstensor nur die halben Inge-nieurgleitungen liefert, bei den Ingenieurdehnungen sich jedoch kein Unter-schied zum Greenschen Verzerrungsmaß ergibt.
68 Kapitel 3. Deformationen und Verzerrungen
Bei der Aufspaltung von H in einen symmetrischen und einen antimetri-schen Anteil fallt auf, daß der symmetrische Anteil Hsym := 1
2(H + HT )
mit dem linearen Anteil des Greenschen Verzerrungstensors ubereinstimmt.
Der antimetrische Teil des Verschiebungsgradienten Rlin := 12 (H−HT )
wird als Tensor der linearen Drehung bezeichnet und ist ein Maß fur die reineStarrkorperdrehung. Ein Beispiel fur die lineare Drehung zeigt Abbildung3.7.
Abbildung 3.7: Beispiel fur eine lineare Drehung
Da sich bei einer reinen Starrkorperdrehung der Abstand zweier benach-barter Punkte eines Kontinuums nicht andert, ist der Tensor der linearenDrehung kein Maß fur die Beanspruchung und Deformation eines Korpers.
3.5. Der Almansische Verzerrungstensor E(A) 69
3.5 Der Almansische Verzerrungstensor E(A)
Bei der Eulerschen Beschreibung der Bewegung sind die raumlichen Koor-dinaten x1, x2 und x3 die unabhangigen Variablen. In Abschnitt 3.2 wurdemit Gleichung (3.30) der raumliche Deformationsgradient ermittelt, der sichgerade zur Inversen des materiellen Deformationsgradienten ergab, d. h. esgilt
F = grad X = F−1.
Uber die raumlicher Darstellung des Verschiebungsvektors
u = u(x) = x − X(x) = x− Φ−1(X) (3.90)
ergibt sich der raumliche Verschiebungsgradient H zu
H = grad u = grad (x −X) = 1− grad X = 1− F , (3.91)
d. h. es gilt
H = 1−F = 1−F−1 . (3.92)
Fur die Differenz der Quadrate der Linienelemente folgt daraus
δ = (ds)2 − (dS)2 = dx · dx− dX · dX= dx · dx− Fdx ·Fdx= dx · dx− dx ·FT
F dx
= dx · (1− FTF) dx
= dx · (1− F−TF−1) dx .
Damit ist der Almansische Verzerrungstensor E(A) durch
E(A) :=1
2(1−F−TF−1) (3.93)
definiert. Mit F = 1−H folgt
E(A) =1
2
[1−
(1−H
)T(1−H)
],
70 Kapitel 3. Deformationen und Verzerrungen
und hieraus erhalten wir
E(A) =1
2(H + H
T −HTH), (3.94)
bzw. fur die Komponenten des Almansischen Verzerrungstensors gilt
E(A)ik =
1
2(ui,k + uk,i − ul
,kul,i). (3.95)
Analog zur additiven Zerlegung des Greenschen Verzerrungstensors E ineinen linearen und einen nichtlinearen Anteil der Verschiebumgen u nach(3.81), (3.82) und (3.83) kann der Almansische Verzerrungstensors in derForm
E(A) = E(A)lin + E
(A)nlin (3.96)
aufgespalten werden. Dabei gilt fur E(A)lin und E
(A)nlin
E(A)lin :=
1
2(H + H
T) (3.97)
und
E(A)nlin :=
1
2(−H
TH) . (3.98)

3.6. Hauptachsentransformation 71
3.6 Hauptachsentransformation der Verzerrungs-tensoren
In Abschnitt 3.3 wurden die symmetrischen, positiv definiten Tensoren
C = FTF = U2 (3.99)
mit dem Rechts-Cauchy-Green-Tensor C und dem Rechts-Streck-Tensor U,sowie
b = F FT = V2 (3.100)
mit dem Links-Cauchy-Green-Tensor b und dem Links-Streck-Tensor V ein-gefuhrt. Wie (3.99) und (3.100) zeigen, sind in C bzw. b keine Starrkorper-rotationen enthalten. Zur weiteren Verdeutlichung der geometrischen Zu-sammenhange im deformierten Korper fuhren wir eine Hauptachsentrans-formation der Strecktensoren U bzw. V durch.
3.6.1 Hauptachsentransformation des Rechts-Streck--Tensors U
Dazu betrachten wir den folgenden Satz:
Jeder symmetrische und reellwertige Tensor 2. Stufe im dreidimen-sionalen Raum hat drei orthogonale Hauptachsenrichtungen und dreireelle Eigenwerte. Damit ist der Tensor diagonalahnlich und seine Spek-tralzerlegung existiert eindeutig.
Zum Beweis verweisen wir auf die Literatur zur Tensorrechnung, siehe z. B.de Boer [7].
Im weiteren fuhren wir die Betrachtung fur die materiellen Tensoren U undC durch und geben anschließend die analogen Ergebnisse fur V und b an.Der positiv definite Rechts-Streck-Tensor U ist durch die polare Zerlegungin Abschnitt 3.3 eindeutig gegeben. Dann konnen die drei reellen Eigenwerteλ1, λ2, λ3 und die drei orthogonalen und normierten HauptachsenrichtungenN1,N2,N3 des Rechts-Streck-Tensors U aus dem Eigenwertproblem
det(U− λ 1) = 0 (3.101)
72 Kapitel 3. Deformationen und Verzerrungen
bestimmt werden. Das zugehorige charakteristische Polynom ergibt sich aus(3.101) zu
λ3 − IUλ2 + IIUλ − IIIU = 0 (3.102)
mit den Invarianten
IU = trU = UAA = λ1 + λ2 + λ3 ,
IIU =1
2
[(trU)2 − trU2
]
=1
2[UAA UBB − UAB UAB ]
= λ1 λ2 + λ2 λ3 + λ3 λ1
und IIIU = detU = eABC UA1UB2UC3 = λ1 λ2 λ3 .
(3.103)
Die Eigenwerte λ1, λ2 und λ3 mussen die charakteristische Gleichung (3.102)erfullen, die normierten Hauptachsenrichtungen Ni , i = 1, 2, 3 sind dieLosungen des homogenen Gleichungssystems
(U− λi 1) Ni = 0. (3.104)
Die Hauptachsenrichtungen bilden eine orthogonale und normalisierte Basis,d. h. ein Orthonormalsystem N1,N2,N3.
Da der Rechts-Streck-Tensor diagonalahnlich ist, existiert die Spektralzer-legung
U =
3∑
i=1
λiNi ⊗Ni. (3.105)
Mit der Spektraldarstellung (3.105) erhalten wir sofort eine Darstellung desCauchy-Green-Tensors C durch
3.6. Hauptachsentransformation 73
C = FTF = U2 =
(3∑
i=1
λiNi ⊗Ni
)
3∑
j=1
λjNj ⊗Nj
=
3∑
i=1
3∑
j=1
λiλj(Ni ·Nj)Ni ⊗Nj
=
3∑
i=1
3∑
j=1
λiλjδijNi ⊗Nj
=
3∑
i=1
λ2i Ni ⊗Ni .
(3.106)
Damit gilt die Spektralzerlegung
C =
3∑
i=1
λ2i Ni ⊗Ni. (3.107)
Bemerkungen:
1. Die Eigenwerte λ2i des Cauchy-Green-Tensors C konnen alternativ
auch direkt aus der Losung des Eigenwertproblems
det(C− λ2 1) = 0 (3.108)
ermittelt werden.
2. Man beachte, daß die Hauptachsenrichtungen Ni von C koaxial zuden Hauptachsenrichtungen von U sind.
3. Wahrend die polare Zerlegung F = RU = VR die Existenz undEindeutigkeit der positiv definiten Tensoren U und V liefert, ist esuns erst mit der Darstellung (3.105) und (3.107) moglich den Rechts-Streck-Tensor U explizit zu berechnen. Hierzu wird zunachst das Ei-genwertproblem (3.108) gelost, die Eigenwerte von U durch die Be-rechnung der Wurzel der Eigenwerte λ2
i von C (λ2i > 0) sowie die
Eigenvektoren von C und U ermittelt. U ergibt sich dann gemaß(3.105).
74 Kapitel 3. Deformationen und Verzerrungen
3.6.2 Hauptachsentransformation des Links-Streck--Tensors V
Fur den Links-Cauchy-Green-Tensor b erhalten wir auf analoge Weise dieSpektralzerlegung
V =
3∑
i=1
λini ⊗ ni (3.109)
sowie fur den Links-Cauchy-Green-Tensor b die Form
b =
3∑
i=1
λ2i ni ⊗ ni. (3.110)
Hierin stellen λ1, λ2, λ3 die Eigenwerte und n1,n2,n3 die orthonormalenHauptachsenrichtungen des Links-Cauchy-Green-Tensors dar. Aus der Be-rechnung der Invarianten von C = FT F und b = F FT erkennen wir, daßdiese identisch sind, d. h. C und b besitzen gleiche Invarianten und damitgleiche Eigenwerte jedoch unterschiedliche Hauptachsenrichtungen.
3.6.3 Spektraldarstellung der Verzerrungstensoren
Mit den Spektraldarstellungen (3.105) und (3.109) lassen sich folgende Dar-stellungen herleiten:
• Fur den eigentlich orthogonalen Drehtensor R der polaren Zerlegungerhalten wir
R =
3∑
i=1
ni ⊗Ni (3.111)
3.6. Hauptachsentransformation 75
• und damit gilt fur den materiellen Deformationsgradienten F
F =
3∑
i=1
λini ⊗Ni. (3.112)
3.6.4 Einfuhrung weiterer Verzerrungstensoren
Aus der Spektraldarstellung (3.105) und (3.109) der Tensoren U und V
konnen weitere Verzerrungstensoren definiert werden. Dies ist insbesonderedeshalb moglich, da fur U = V = 1 keine Verzerrung vorliegt. Hierausergeben sich die materiellen Verzerrungstensoren
F(U) :=
1m
(Um − 1) fur m 6= 0ln U fur m = 0
(3.113)
fur beliebige ganzzahlige (positive oder negative) Werte m. Diese Verzer-rungstensoren sind koaxial zu U und besitzen die Eigenwerte
F (λi) :=
1m
(λmi − 1) fur m 6= 0
ln λi fur m = 0,(3.114)
wobei λ1, λ2, λ3 die Eigenwerte von U sind.
Analog folgt fur die raumlichen Verzerrungstensoren
F(V) :=
1m
(Vm − 1) fur m 6= 0ln V fur m = 0
(3.115)
mit Eigenwerten gegeben durch (3.114).
Die Definitionen (3.113) und (3.115) konnen auch auf beliebige reelle Ex-ponenten m erweitert werden, siehe hierzu Ogden [59]. Weiterhin ist esmoglich, Verzerrungstensoren zu definieren, die nicht koaxial zu den Streck-tensoren U bzw. V sind. Hierauf gehen wir jedoch nicht naher ein. AlsBeispiele gebrauchlicher Verzerrungstensoren betrachten wir (3.113) und er-halten
• den Greenschen Verzerrungstensor E = 12(U2 − 1) fur m = 2,
76 Kapitel 3. Deformationen und Verzerrungen
• den Henckyschen Verzerrungstensor lnU fur m = 0 und
• den Biotschen Verzerrungstensor U− 1 fur m = 1.
Weiterhin erhalten wir aus (3.115)
• den Almansischen Verzerrungstensor E(A) = 12(1−V−2) furm = −2.
3.6.5 Das Cauchysche Dehnungsellipsoid
In Abschnitt 3.4.2 wurden die unverformten und verformten LinienelementedS und ds berechnet. Nach den Gleichungen (3.49) und (3.50) gilt
(dS)2 = dX · dX = dX · 1dX (3.116)
und
(ds)2 = dx · dx = F dX · F dX = dX · FTF dX = dX ·C dX . (3.117)
In Abschnitt 3.4.2 wurden die Eigenwerte λ2i und die zugehorigen Eigenvek-
toren NA von C bestimmt. Wahlen wir zur Beschreibung der LinienelementedX anstelle des Basissystems eA die Eigenvektoren NA als Basisvektoren,so ist
dX = dXAeA = dXANA . (3.118)
Ebenso konnen wir C auf das hierzu duale Basissystem NA beziehen
C = CAB eA ⊗ eB = CAB NA ⊗NB . (3.119)
Die hier vorgenommene Koordinatentransformation der Koordinaten dXA
bezuglich der Basis eA in die Koordinaten dXA bezuglich der orthonor-malen Basis NA bzw. dXA bezuglich NA und ihre Eigenschaften wer-den ausfuhrlich in der Literatur zur Tensorrechnung behandelt, siehe z. B.de Boer [7].
Bei der in (3.119) vorgenommenen Hauptachsentransformation von C istdie Koeffizientenmatrix von C in Diagonalform ubergegangen
C =
C11 C12 C13
C21 C22 C23
C31 C32 C33
︸ ︷︷ ︸=(CAB)
eA ⊗ eB =
C1 0 0
0 C2 0
0 0 C3
︸ ︷︷ ︸=(CAB)
NA ⊗NB .
(3.120)
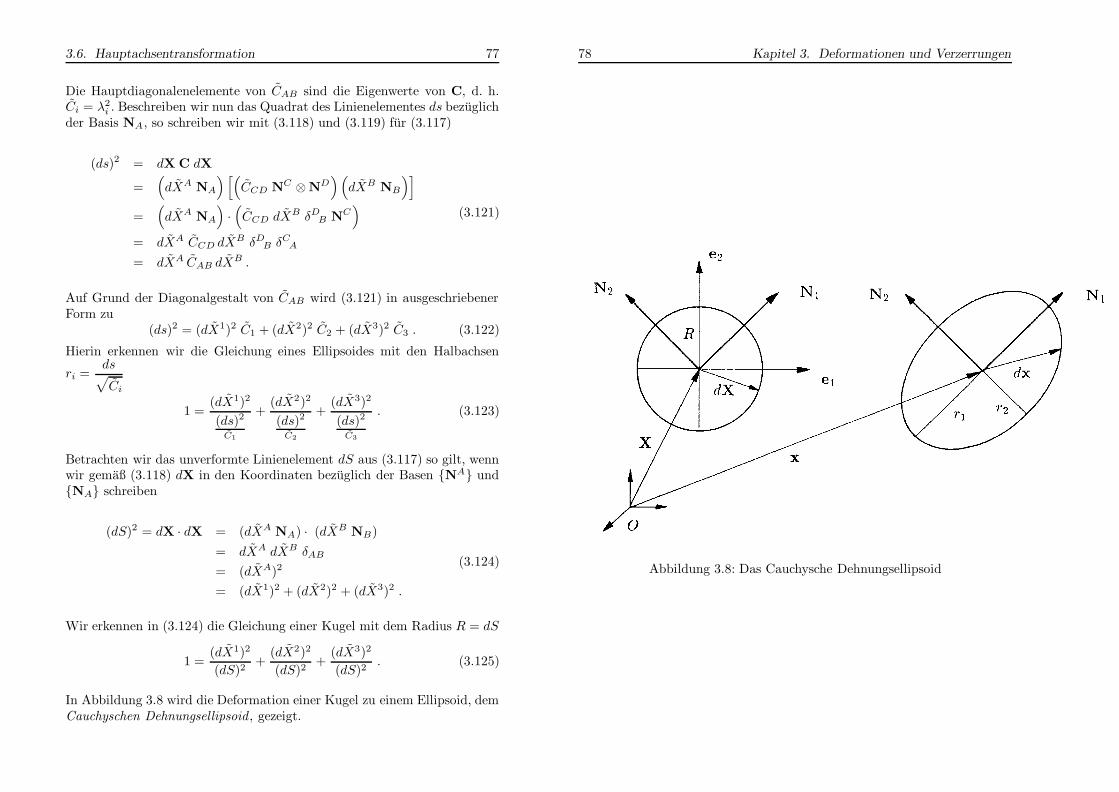
3.6. Hauptachsentransformation 77
Die Hauptdiagonalenelemente von CAB sind die Eigenwerte von C, d. h.Ci = λ2
i . Beschreiben wir nun das Quadrat des Linienelementes ds bezuglichder Basis NA, so schreiben wir mit (3.118) und (3.119) fur (3.117)
(ds)2 = dX C dX
=(dXA NA
) [(CCD NC ⊗ND
)(dXB NB
)]
=(dXA NA
)·(CCD dXB δD
B NC)
= dXA CCD dXB δD
B δCA
= dXA CAB dXB .
(3.121)
Auf Grund der Diagonalgestalt von CAB wird (3.121) in ausgeschriebenerForm zu
(ds)2 = (dX1)2 C1 + (dX2)2 C2 + (dX3)2 C3 . (3.122)
Hierin erkennen wir die Gleichung eines Ellipsoides mit den Halbachsen
ri =ds√Ci
1 =(dX1)2
(ds)2
C1
+(dX2)2
(ds)2
C2
+(dX3)2
(ds)2
C3
. (3.123)
Betrachten wir das unverformte Linienelement dS aus (3.117) so gilt, wennwir gemaß (3.118) dX in den Koordinaten bezuglich der Basen NA undNA schreiben
(dS)2 = dX · dX = (dXA NA) · (dXB NB)
= dXA dXB δAB
= (dXA)2
= (dX1)2 + (dX2)2 + (dX3)2 .
(3.124)
Wir erkennen in (3.124) die Gleichung einer Kugel mit dem Radius R = dS
1 =(dX1)2
(dS)2+
(dX2)2
(dS)2+
(dX3)2
(dS)2. (3.125)
In Abbildung 3.8 wird die Deformation einer Kugel zu einem Ellipsoid, demCauchyschen Dehnungsellipsoid , gezeigt.
78 Kapitel 3. Deformationen und Verzerrungen
Abbildung 3.8: Das Cauchysche Dehnungsellipsoid

3.7. Volumetrische und isochore Deformationen 79
3.7 Multiplikative Zerlegung des materiellenDeformationsgradienten in volumetrische
und isochore Anteile
Aus der polaren Zerlegung F = RU = VR erkennen wir, daß sich die allge-meine Deformation aus einer reinen Streckung U und einer Starrkorperro-tation R zusammensetzt. Eine weitere wichtige Zerlegung ist mit der multi-plikativen Aufspaltung des materiellen Deformationsgradienten F in einenvolumetrischen und einen isochoren Faktor gegeben. Diese speziellen Defor-mationen sind wie folgt definiert.
Eine Deformation wird isochore Deformation genannt, falls das Volumen
Vt =
∫
B⋆t
dv
eines beliebigen Teilkorpers B⋆ von B zeitlich konstant bleibt. Eine Defor-mation wird volumetrische Deformation genannt, falls ihr Deformationsgra-dient die Form α1 mit α ∈ IR besitzt.
Im Vorgriff auf die Herleitung der Transformation von Volumenelementenzwischen der Referenz- und Momentankonfiguration in Abschnitt 3.10 undder Diskussion der Massenbilanz in Abschnitt 5.1 geben wir die folgendenaquivalenten, notwendigen und hinreichenden Bedingungen fur eine isochoreDeformation an:
Eine Deformation ist isochor :⇐⇒ das Volumen jedes Teilkorpers ist
konstant
⇐⇒ J = 1
⇐⇒ ρ = ρ
⇐⇒ div x = 0.
Zur Durchfuhrung der oben beschriebenen Faktorisierung definieren wir mitJ = detF einen modifizierten materiellen Deformationsgradienten
F⋆ := J− 13 F, (3.126)
so daßdetF⋆ = det
J− 1
3 F
= 1. (3.127)
80 Kapitel 3. Deformationen und Verzerrungen
Damit laßt sich F in der Form
F = J13 F⋆ = (J
13 1) F⋆ (3.128)
darstellen. Hierin ist
• F⋆ = J− 13 F der materielle Deformationsgradient einer isochoren De-
formation und
• J 13 1 stellt eine reine Volumendehnung dar.
Betrachten wir die zu F⋆ zugehorige polare Zerlegung
F⋆ = R⋆ U⋆, (3.129)
so gilt fur die Eigenwerte λ⋆i mit i = 1, 2, 3 die Beziehung
λ⋆i = J− 1
3 λi, (3.130)
wobei λi (i = 1, 2, 3) die nach Abschnitt 3.6.1 berechneten Eigenwerte vonU sind. Damit erhalten wir die Inkompressibilitatsbeziehung
λ⋆1 · λ⋆
2 · λ⋆3 = 1. (3.131)
Fur weitere Folgerungen fur homogene und inhomogene isochore Deforma-tionen sei auf Ogden [59] verwiesen. Die in (3.128) angegebene Zerlegungwurde zunachst von Flory [20] angegeben und stellt insbesondere fur dienumerische Berechnung inkompressibler elastischer Materialien, z. B. gum-miartige Materialien, ein wichtiges Hilfsmittel dar (siehe hierzu Simo, Taylor[67] und die hierin angegebene weiterfuhrende Literatur).
3.8. Kugeltensor und Deviator 81
3.8 Additive Aufspaltung des GreenschenVerzerrungstensors E in Kugeltensor EK
und Deviator ED
Der Greensche Verzerrungstensor E kann additiv in einen Kugeltensor EK
und einen Deviator ED in der Form
E = EK + ED (3.132)
aufgespalten werden. Der Kugeltensor EK ist definiert durch
EK :=1
3(tr E) 1 =
1
3(E11 +E22 + E33) 1 (3.133)
und beschreibt eine reine Volumendehnung, da er nur Elemente in derHauptdiagonalen besitzt. Es gilt
EKAB =
13 trE 0 0
0 13 tr E 0
0 0 13 trE
=
1
3(E11 + E22 +E33)
1 0 00 1 00 0 1
.
Die jeweiligen Dehnungen oder Stauchungen in den drei Koordinatenrich-tungen sind gleich. Der Kugeltensor EK kann nach Abschnitt 3.4 als eineDeformation verstanden werden, die eine unverformte Kugel in der Refe-renzkonfiguration in eine Kugel in der Momentankonfiguration abbildet.Die dabei auftretende Deformation besteht nur aus einer Vergroßerung oderVerkleinerung des Radius der Kugel. Eine Gestaltsanderung tritt nicht auf.
Der Deviatoranteil ED des Greenschen Verzerrungstensors ergibt sich aus(3.132) und (3.133) zu
ED := E− EK = E− 1
3(tr E) 1 (3.134)
und beschreibt die reine Gestaltsanderung.
Die Invarianten zur Aufstellung von Eigenwertproblemen ergeben sich leichtaus der Definition von ED und EK und werden hier ohne Herleitung ange-geben:
82 Kapitel 3. Deformationen und Verzerrungen
a) Invarianten des Kugeltensors EK
IEK = IE = trE = EAA = E11 +E22 + E33,
IIEK =1
2
((trEK )2 − tr (EK)2
)=
1
3(E11 + E22 +E33)
2,
IIIEK = det EK =1
27(E11 + E22 +E33)
3,
b) Invarianten des Deviators ED
IED = 0,
IIED = −1
2tr (ED)2,
IIIED = det ED .
3.9. Kompatibilitatsbedingungen 83
3.9 Vertraglichkeitsbedingungenfur die linearen Verzerrungs-
Verschiebungsbeziehungen
Die linearen Verzerrungs-Verschiebungsbeziehungen (siehe Abschnitt 3.4.5)nach (3.87)
εij = (Elin)ij =1
2(ui,j + uj,i) (3.135)
ergeben ein System von sechs gekoppelten partiellen Differentialgleichungenzur Bestimmung der drei unabhangigen Verschiebungen ui in einem Punkt.Um eine eindeutige Zuordnung zwischen den sechs Verzerrungen und dendrei Verschiebungen in jedem Punkt zu erreichen, mussen 6 − 3 = 3Vertraglichkeitsbedingungen (Integrabilitatsbedingungen, Kompatibilitatsbe-dingungen) von den Verzerrungen erfullt werden.
Die Vertraglichkeitsbedingungen fur die sechs linearen Verzerrungs-Ver-schiebungsbeziehungen werden durch Elimination der Verschiebungsablei-tungen aus Gleichung (3.135) gewonnen.
Hierzu betrachten wir die Gleichung (3.135) und bilden die partielle Ablei-tung nach Xk
εij,k =1
2(ui,jk + uj,ik) (3.136)
sowie die durch die Permutation der Indizes entstehenden Gleichungen
εik,j =1
2(ui,kj + uk,ij) , (3.137)
εjk,i =1
2(uj,ki + uk,ji) . (3.138)
Durch geeignete Addition und Subtraktion der Gleichungen (3.136), (3.137)und (3.138) erhalten wir ein Differentialgleichungssystem fur die unbekann-ten Verschiebungen ui
εij,k + εjk,i − εik,j =1
2(ui,jk + uj,ik + uj,ki + uk,ji− ui,kj − uk,ij)
=1
2(uj,ik + uj,ki).
Da die Reihenfolge der partiellen Ableitungen vertauschbar ist, gilt
εij,k + εjk,i − εik,j = uj,ik. (3.139)
84 Kapitel 3. Deformationen und Verzerrungen
Aus der Integrabilitatsforderung
(uj,ik),l = (uj,lk),i (3.140)
ergibt sich fur das Differentialgleichungssystem (3.139) die Bedingung
(εij,k + εjk,i − εik,j),l = (εij,l + εjl,i − εil,j),k , (3.141)
die sich in die Darstellung
εil,jk + εjk,li − εik,jl− εjl,ik = 0 (3.142)
umformen laßt. Die Gleichung (3.142) stellt 81 Gleichungen der St. Ven-antschen Kompabilitatsbedingungen dar, von denen wegen der Symmetrie-eigenschaften jedoch nur die folgenden 6 Gleichungen wesentlich sind:
2 ε12,12 = ε11,22 + ε22,11 (3.143)
2 ε23,23 = ε22,33 + ε33,22 (3.144)
2 ε31,31 = ε33,11 + ε11,33 (3.145)
ε11,23 = (ε12,3 + ε31,2 − ε23,1),1 (3.146)
ε22,31 = (ε23,1 + ε12,3 − ε31,2),2 (3.147)
ε33,12 = (ε31,2 + ε23,1 − ε12,3),3 . (3.148)
Es soll jetzt gezeigt werden, daß nur noch drei der sechs Bedingungen un-abhangig sind. Hierzu leiten wir (3.146) nochmals partiell nach X2 ab underhalten
ε11,232 = ε12,312 + ε31,212 − ε23,112 . (3.149)
Ebenso ergibt sich aus der Ableitung von (3.147) nach X1
ε22,311 = ε23,121 + ε12,321 − ε31,221 . (3.150)
Durch Einsetzen von (3.150) in (3.149) und Vertauschen der Reihenfolgeder partiellen Ableitungen folgt
2ε12,123 = ε11,223 + ε22,113 (3.151)
und damit(2ε12,12),3 = (ε11,22 + ε22,11),3 , (3.152)

3.9. Kompatibilitatsbedingungen 85
d. h. die partielle Ableitung der Gleichung (3.143) nach X3. Damit sind dieGleichungen (3.146) und (3.147) von Gleichung (3.143) abhangig. Analogkann mit den ubrigen Gleichungen verfahren werden.
Hieraus erkennt man, daß nur drei Vertraglichkeitsbedingungen –z. B. dieGleichungen (3.143), (3.144) und (3.145)– unabhangig und hinreichend sind.
Abschließend sei noch darauf hingewiesen, daß der Einhaltung der Vertrag-lichkeitsbedingungen nur dann Aufmerksamkeit zu schenken ist, wenn voneinem gegebenen Verzerrungsfeld ǫǫǫ = Elin = Elin(X) auf das (unbekannte)Verschiebungsfeld u = u(X) geschlossen wird. Umgekehrt ist eine eindeu-tige Beschreibung des Verzerrungszustandes aus einem gegebenen Verschie-bungszustand mit (3.135) selbstverstandlich ohne weiteres moglich. EineMatrizendarstellung dieser Vertraglichkeitsbedingungen wird in Abschnitt8.6 angegeben.
86 Kapitel 3. Deformationen und Verzerrungen
3.10 Transformation geometrischer Großenvon der Referenzkonfiguration in die
Momentankonfiguration
Vektor- und tensorwertige physikalische Großen lassen sich grundsatzlichentweder auf die Basis der Referenz- bzw. auf die Basis der Momentan-konfiguration beziehen. Man erhalt somit duale materielle oder raumlicheFormulierungen. Daneben gibt es auch gemischte Großen, sogenannte Zwei-feldtensoren, wie beispielsweise den materiellen Deformationsgradienten F
nach (3.11). Die Grundideen der Transformation zwischen den dualen ma-teriellen Großen sollen zunachst angegeben werden.
3.10.1 Pull-Back und Push-Forward-Operationen
Die Pull-Back- und Push-Forward-Operationen sind von Marsden, Hughesin [44] auf der Basis einer differentialgeometrischen Beschreibung des ma-teriellen Korpers B als differenzierbare Mannigfaltigkeit eingefuhrt worden.Die exakte Darstellung dieses Vorgehens ist in dieser Arbeit nicht ange-bracht, so daß wir hier ohne strenge mathematische Argumentation nureinige Grundideen angeben werden. Der interessierte Leser sei auf [44] unddie darin angegebene Literatur verwiesen.
Die Bezeichnung”Pull-Back“ meint das
”Zuruckziehen“ des Bezugs von
Vektor- oder Tensorkomponenten von Basen der MomentankonfigurationBt auf Basen der Referenzkonfiguration B . Dem entgegen wirkt der
”Push-
Forward“, der das”Vorschieben“ des Komponentenbezugs von Basen der
Referenzkonfiguration auf Basen der Momentankonfiguration bedeutet. DerZusammenhang ist in Abbildung 3.9 bzgl. beliebiger krummliniger Basissy-steme GA in der Referenzkonfiguration und gi in der Momentankonfigura-tion dargestellt.
Der Pull-Back-Operator ( )∗, angewandt auf eine raumliche Feldgroße •,
liefert einen Basiswechsel von der kovarianten Basis g1, g2, g3 der Mo-mentabkonfiguration zur kovarianten Basis G1,G2,G3 der Referenzkon-figuration, d. h.
gi −→ Gi,
bzw. von der kontravarinaten Basis g1, g2, g3 zur kontravarianten BasisG1,G2,G3, d. h.
gi −→ Gi.
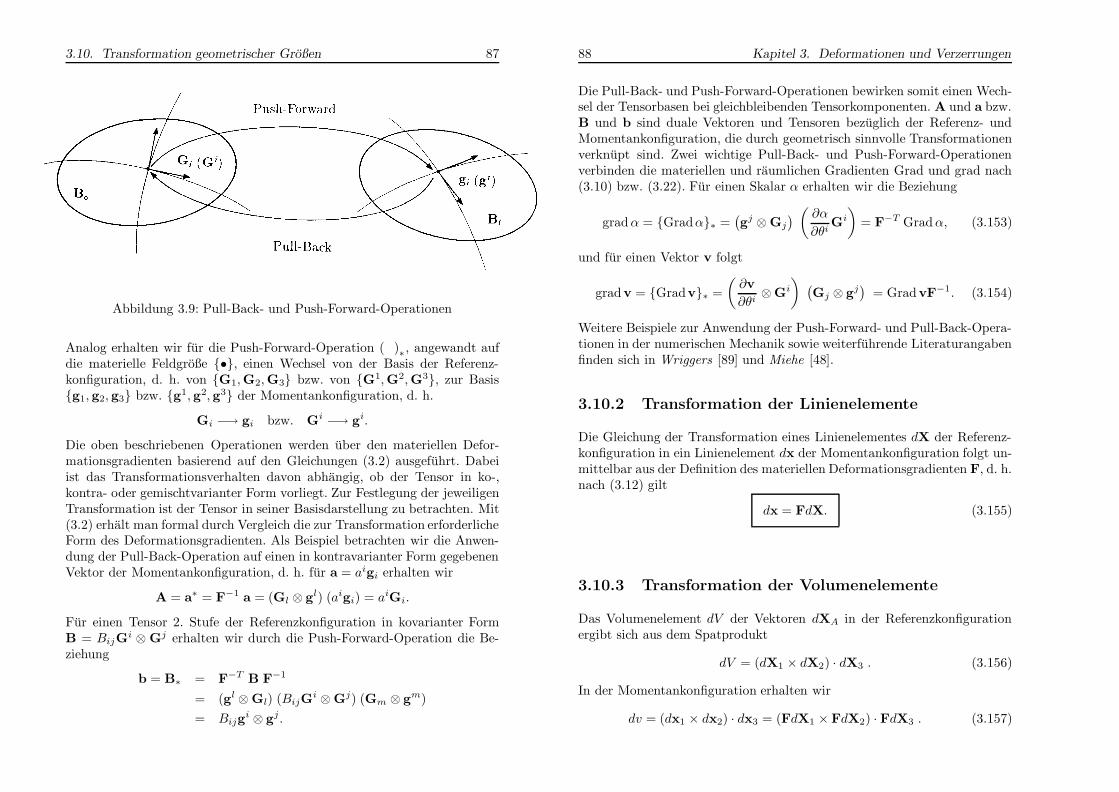
3.10. Transformation geometrischer Großen 87
Abbildung 3.9: Pull-Back- und Push-Forward-Operationen
Analog erhalten wir fur die Push-Forward-Operation ( )∗, angewandt aufdie materielle Feldgroße •, einen Wechsel von der Basis der Referenz-konfiguration, d. h. von G1,G2,G3 bzw. von G1,G2,G3, zur Basisg1, g2, g3 bzw. g1, g2, g3 der Momentankonfiguration, d. h.
Gi −→ gi bzw. Gi −→ gi.
Die oben beschriebenen Operationen werden uber den materiellen Defor-mationsgradienten basierend auf den Gleichungen (3.2) ausgefuhrt. Dabeiist das Transformationsverhalten davon abhangig, ob der Tensor in ko-,kontra- oder gemischtvarianter Form vorliegt. Zur Festlegung der jeweiligenTransformation ist der Tensor in seiner Basisdarstellung zu betrachten. Mit(3.2) erhalt man formal durch Vergleich die zur Transformation erforderlicheForm des Deformationsgradienten. Als Beispiel betrachten wir die Anwen-dung der Pull-Back-Operation auf einen in kontravarianter Form gegebenenVektor der Momentankonfiguration, d. h. fur a = aigi erhalten wir
A = a∗ = F−1 a = (Gl ⊗ gl) (aigi) = aiGi.
Fur einen Tensor 2. Stufe der Referenzkonfiguration in kovarianter FormB = BijG
i ⊗Gj erhalten wir durch die Push-Forward-Operation die Be-ziehung
b = B∗ = F−T B F−1
= (gl ⊗Gl) (BijGi ⊗Gj) (Gm ⊗ gm)
= Bijgi ⊗ gj.
88 Kapitel 3. Deformationen und Verzerrungen
Die Pull-Back- und Push-Forward-Operationen bewirken somit einen Wech-sel der Tensorbasen bei gleichbleibenden Tensorkomponenten. A und a bzw.B und b sind duale Vektoren und Tensoren bezuglich der Referenz- undMomentankonfiguration, die durch geometrisch sinnvolle Transformationenverknupt sind. Zwei wichtige Pull-Back- und Push-Forward-Operationenverbinden die materiellen und raumlichen Gradienten Grad und grad nach(3.10) bzw. (3.22). Fur einen Skalar α erhalten wir die Beziehung
gradα = Gradα∗ =(gj ⊗Gj
) ( ∂α∂θi
Gi
)= F−T Gradα, (3.153)
und fur einen Vektor v folgt
gradv = Gradv∗ =
(∂v
∂θi⊗Gi
) (Gj ⊗ gj
)= GradvF−1. (3.154)
Weitere Beispiele zur Anwendung der Push-Forward- und Pull-Back-Opera-tionen in der numerischen Mechanik sowie weiterfuhrende Literaturangabenfinden sich in Wriggers [89] und Miehe [48].
3.10.2 Transformation der Linienelemente
Die Gleichung der Transformation eines Linienelementes dX der Referenz-konfiguration in ein Linienelement dx der Momentankonfiguration folgt un-mittelbar aus der Definition des materiellen Deformationsgradienten F, d. h.nach (3.12) gilt
dx = FdX. (3.155)
3.10.3 Transformation der Volumenelemente
Das Volumenelement dV der Vektoren dXA in der Referenzkonfigurationergibt sich aus dem Spatprodukt
dV = (dX1 × dX2) · dX3 . (3.156)
In der Momentankonfiguration erhalten wir
dv = (dx1 × dx2) · dx3 = (FdX1 ×FdX2) · FdX3 . (3.157)
3.10. Transformation geometrischer Großen 89
Der Quotient der Volumina von Momentan- und Referenzkonfiguration istdamit durch
dv
dV=
(FdX1 × FdX2) · FdX3
(dX1 × dX2) · dX3(3.158)
gegeben. Unter Verwendung einer kartesischen Basis e1, e2, e3 konnen dieLinienelemente dXA in Richtung dieser Basisvektoren eA der kartesischenBasis der Referenzkonfiguration gewahlt werden, d. h. gilt
dX(A) = dX(A)e(A) fur A = 1, 2, 3. (3.159)
Mit der Beziehung(e1 × e2) · e3 = 1 (3.160)
folgt fur den Nenner
dV = (dX1 × dX2) · dX3 = dX1 dX2 dX3 . (3.161)
Die Anwendung des materiellen Deformationsgradienten F
F = F iBei ⊗ eB (3.162)
auf die Linienelemente dXA ergibt mit (3.159)
FdXA = (F iBei ⊗ eB)(dX(A)e(A)) = F i
BdX(A)δB(A)ei = F i
(A)dX(A)ei .(3.163)
Fur das Volumenelement dv gilt somit
dv = (FdX1 ×FdX2) · FdX3
= dX1dX2dX3(Fe1 ×Fe2) · Fe3
= dX1dX2dX3(Fi1ei × F j
2ej) · F k3ek
= dX1dX2dX3Fi1F
j2F
k3 (ei × ej) · ek︸ ︷︷ ︸
eijk
= dX1dX2dX3Fi1F
j2F
k3eijk ,
(3.164)
d. h.
dv = dX1dX2dX3 det(F iA) . (3.165)
Da wir kartesische Basissysteme ei bzw. eA gewahlt haben, gilt auch(siehe z. B. de Boer [7])
det(F iA) = det F . (3.166)
90 Kapitel 3. Deformationen und Verzerrungen
Damit errechnet sich das Volumenverhaltnis aus
dv
dV=dX1dX2dX3 det F
dX1dX2dX3= det F .
Fur die Transformation des Volumenelementes dV der Referenzkonfigurati-on in das Volumenelement dv der Momentankonfiguration gilt damit
dv = det FdV. (3.167)
In der Gleichung (3.166) ist mit dem Hinweis auf eine kartesische Basis derUbergang von der Determinante der Koeffizientenmatrix det(F i
A) des Ten-sors auf die Determinante det F vorgenommen worden. Betrachten wir be-liebige krummlinige Kooordinatensysteme, so gilt Gleichung (3.166) nicht.In dem Fall ist jedoch die Herleitung von Gleichung (3.167) umfangreicher.Hierauf haben wir an dieser Stelle verzichtet.
3.10.4 Transformation der Flachenelemente
Ein vektorielles Flachenelement da bzw. dA wird durch das Kreuzproduktzweier Vektoren beschrieben, d. h. es gilt
dA = dX1 × dX2 und da = dx1 × dx2 . (3.168)
Mit Gleichung (3.167) gilt
det F =dv
dV=
(dx1 × dx2) · dx3
(dX1 × dX2) · dX3
=(dx1 × dx2) · FdX3
(dX1 × dX2) · dX3
=da · FdX3
dA · dX3.
Hieraus erhalt man
(det F)dA · dX3 = da ·FdX3 = FTda · dX3
fur jedes beliebige Linienelement dX3. Fur das Flachenelement da der Mo-mentankonfiguration gilt also
da = det F(FT )−1dA. (3.169)
Diese Gleichung wird in der englischsprachigen Literatur als Nanson’s for-mula bezeichnet.

Kapitel 4
Zeitliche Ableitungen
4.1 Materielle Zeitableitung skalarwertigerVektorfunktionen
Wir betrachten eine stetig differenzierbare Funktion Ψ, die eine physikali-sche Eigenschaft eines beliebigen materiellen Punktes M in Abhangigkeitder Zeit t skalar beschreibt. Als Beispiel fur die Funktion Ψ betrachte mandie zeitliche Anderung eines Temperaturfeldes. Gemaß Kapitel 3 muß sie,da nach (3.23) detF > 0 ist, sowohl in raumlichen als auch in materiellenKoordinaten darstellbar sein, namlich in der Form
Ψ = Ψ(X, t, t ) fur die materielle Darstellung bzw. als
Ψ = Ψ⋆(x, t) fur die raumliche Darstellung.
Man beachte, daß in der materiellen Darstellung stets t als Parameterauftritt; dies ist die Referenzzeit, zu der X definiert worden ist. Die materi-
elle ZeitableitungD(•)Dt
beschreibt die zeitliche Anderung der physikalischen
Große Ψ eines beliebigen, dann aber festgehaltenen, materiellen PunktesMfur den X konstant ist.
Je nachdem, ob Ψ in raumlichen oder materiellen Koordinaten gegebenist, haben wir bei der Bildung der materiellen Zeitableitung wie folgt zuunterscheiden.
91
92 Kapitel 4. Zeitliche Ableitungen
4.1.1 Materielle Darstellung der materiellen Zeitablei-tung skalarwertiger Vektorfunktionen
Ψ = Ψ(X, t, t ) sei in materiellen Koordinaten gegeben. Die materielle zeit-liche Ableitung lautet dann
DΨ
Dt= lim
∆t→0
Ψ(X, t+ ∆t, t )− Ψ(X, t, t )
∆t=∂Ψ(X, t, t )
∂t= ΨX(t).
(4.1)Da X = konst. ist, andert sich im Differenzenquotient nur t, und die Ablei-
tungDΨ
Dtentspricht der partiellen Ableitung von Ψ nach t .
4.1.2 Raumliche Darstellung der materiellen Zeitablei-tung skalarwertiger Vektorfunktionen
Ψ = Ψ⋆(x, t) sei in raumlichen Koordinaten gegeben. DaM sich moglicher-weise mit der Geschwindigkeit v im Anschauungsraum fortbewegt, erscheintsein raumlicher Ortsvektor x = x(t) als Funktion der Zeit, und man schreibtgenauer Ψ = Ψ⋆(x(t), t). Wahrend des Zeitraumes ∆t andert sich also nichtnur Ψ, sondern auch der Ort x des betrachteten Teilchens. Auf Grund dieserzweifachen Abhangigkeit von Ψ uber t ergibt sich die materielle AbleitungDΨ
Dtin der Form
DΨ
Dt= lim
∆t→0
Ψ⋆(x(t + ∆t), t+ ∆t)− Ψ⋆(x(t), t)
∆t
=∂Ψ⋆(x(t), t)
∂x(t)
∂x(t)
∂t+∂Ψ⋆(x(t), t)
∂t.
Im ersten Glied wurde nach der Kettenregel differenziert. Mit
∂x(t)
∂t= v und
∂Ψ⋆(x(t), t)
∂x(t)= grad Ψ
schreiben wir kurz
DΨ
Dt= v · grad Ψ +
∂Ψ
∂t. (4.2)
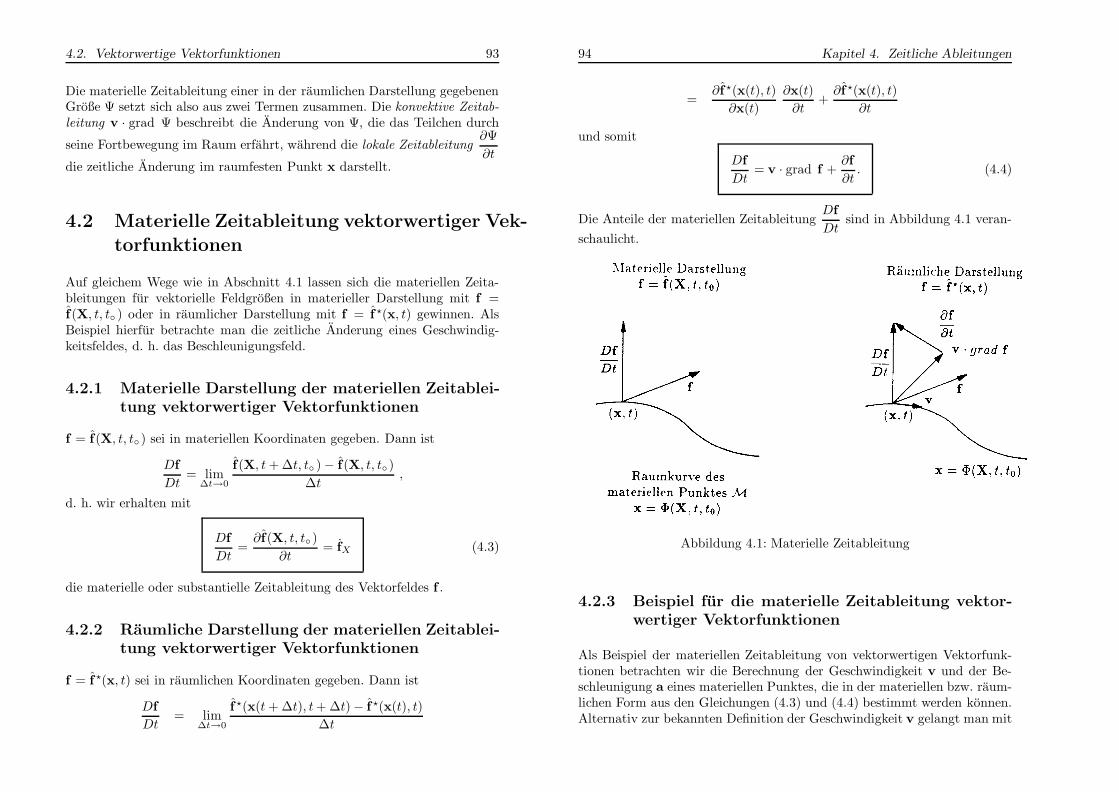
4.2. Vektorwertige Vektorfunktionen 93
Die materielle Zeitableitung einer in der raumlichen Darstellung gegebenenGroße Ψ setzt sich also aus zwei Termen zusammen. Die konvektive Zeitab-leitung v · grad Ψ beschreibt die Anderung von Ψ, die das Teilchen durch
seine Fortbewegung im Raum erfahrt, wahrend die lokale Zeitableitung∂Ψ
∂tdie zeitliche Anderung im raumfesten Punkt x darstellt.
4.2 Materielle Zeitableitung vektorwertiger Vek-
torfunktionen
Auf gleichem Wege wie in Abschnitt 4.1 lassen sich die materiellen Zeita-bleitungen fur vektorielle Feldgroßen in materieller Darstellung mit f =f(X, t, t ) oder in raumlicher Darstellung mit f = f ⋆(x, t) gewinnen. AlsBeispiel hierfur betrachte man die zeitliche Anderung eines Geschwindig-keitsfeldes, d. h. das Beschleunigungsfeld.
4.2.1 Materielle Darstellung der materiellen Zeitablei-tung vektorwertiger Vektorfunktionen
f = f(X, t, t ) sei in materiellen Koordinaten gegeben. Dann ist
Df
Dt= lim
∆t→0
f(X, t+ ∆t, t )− f(X, t, t )
∆t,
d. h. wir erhalten mit
Df
Dt=∂f(X, t, t )
∂t= fX (4.3)
die materielle oder substantielle Zeitableitung des Vektorfeldes f .
4.2.2 Raumliche Darstellung der materiellen Zeitablei-tung vektorwertiger Vektorfunktionen
f = f ⋆(x, t) sei in raumlichen Koordinaten gegeben. Dann ist
Df
Dt= lim
∆t→0
f ⋆(x(t+ ∆t), t+ ∆t)− f ⋆(x(t), t)
∆t
94 Kapitel 4. Zeitliche Ableitungen
=∂f ⋆(x(t), t)
∂x(t)
∂x(t)
∂t+∂f ⋆(x(t), t)
∂t
und somit
Df
Dt= v · grad f +
∂f
∂t. (4.4)
Die Anteile der materiellen ZeitableitungDf
Dtsind in Abbildung 4.1 veran-
schaulicht.
Abbildung 4.1: Materielle Zeitableitung
4.2.3 Beispiel fur die materielle Zeitableitung vektor-wertiger Vektorfunktionen
Als Beispiel der materiellen Zeitableitung von vektorwertigen Vektorfunk-tionen betrachten wir die Berechnung der Geschwindigkeit v und der Be-schleunigung a eines materiellen Punktes, die in der materiellen bzw. raum-lichen Form aus den Gleichungen (4.3) und (4.4) bestimmt werden konnen.Alternativ zur bekannten Definition der Geschwindigkeit v gelangt man mit
4.2. Vektorwertige Vektorfunktionen 95
x = u + X zu
v =Dx
Dt=D(u + X)
Dt=Du
Dt+DX
Dt=Du
Dt. (4.5)
Der Verschiebungsvektor u laßt sich (vgl. Kapitel 3) sowohl raumlich alsauch materiell darstellen, namlich
u = u(X, t, t ) und u = u⋆(x, t). (4.6)
Damit kann die materielle Geschwindigkeit v je nach Bezugssystem von u
wie folgt angegeben werden.
a) Fur die materielle Darstellung u = u(X, t, t ) gilt
v =Du
Dt=Du(X, t, t )
Dt=∂u(X, t, t )
∂t=∂u
∂t(4.7)
b) und fur die raumliche Darstellung u = u⋆(x, t) folgt
v =Du
Dt=Du⋆(x, t)
Dt= v · grad u⋆ +
∂u⋆
∂t. (4.8)
Die materielle Zeitableitung der Geschwindigkeit v ist die Beschleunigung
a =Dv
Dt. Je nach Bezugssystem der Feldgroße v unterscheiden wir die ma-
terielle und raumliche Darstellung und erhalten
a) fur die materielle Darstellung v = v(X, t, t )
a =Dv
Dt=Dv(X, t, t )
Dt=∂v(X, t, t )
∂t(4.9)
b) bzw. fur die raumliche Darstellung v = v⋆(x, t)
a =Dv
Dt=Dv⋆(x, t)
Dt= v · grad v⋆ +
∂v⋆
∂t. (4.10)
96 Kapitel 4. Zeitliche Ableitungen
4.3 Materielle Zeitableitung geometrischerGroßen
An dieser Stelle werden die zeitlichen Ableitungen der in Abschnitt 3.10 ein-gefuhrten Linien-, Flachen- und Volumenelemente sowie der Jacobi-Deter-minante angegeben. Hierbei fuhren wir die Bezeichnungen
l := grad x (4.11)
fur den raumlichen Geschwindigkeitsgradienten und
d :=1
2(l + lT ) (4.12)
fur den raumlichen Verzerrungsgeschwindigkeitstensor ein. Damit ergebensich die zeitlichen Ableitungen zu (siehe folgende Abschnitte):
a) Zeitliche Ableitung des Linienelementes dx
D(dx)
Dt=
˙(dx) = grad x dx = l dx. (4.13)
b) Zeitliche Ableitung des Flachenelementes da
D(da)
Dt=
˙(da) = ((tr d) 1− lT ) da. (4.14)
c) Zeitliche Ableitung des Volumenelementes dv
D(dv)
Dt=
˙(dv) = div x dv. (4.15)
Diese Gleichung ist in der Literatur als Transporttheorem bekannt.
d) Zeitliche Ableitung der Jacobi-Determinate det F
˙(detF) = div x (det F). (4.16)

4.3. Materielle Zeitableitungen 97
Zur Vereinfachung der Schreibweise in den Beweisen fuhren wir die Bezeich-nung
T−T = (TT )−1
ein. Im weiteren beweisen wir die Formeln uber die materiellen Zeitableitun-gen von Linien-, Flachen- und Volumenelementen sowie der Jacobi-Determinante.
4.3.1 Die materielle Zeitableitung des Linienelementesdx
Mit Hilfe des materiellen Deformationsgradienten F und der Beziehungdx = FdX zwischen den Linienelementen folgt
D(dx)
Dt=
D
Dt(FdX) = FdX = F F−1 F dX = F F−1 dx.
Mit der Beziehung (4.11) und
l = grad x =dx
dx=dx
dX· dXdx
= FF−1 (4.17)
erhalten wir die gewunschte Gleichung (4.13)
D(dx)
Dt= grad x dx = l dx.
4.3.2 Die materielle Zeitableitung der Jacobi-Determi-nante detF
Mit der Bezeichnung J = det F wie in (3.23) folgt fur die materielleAbleitung der Jacobi-Determinate
DJ
Dt= J = ˙detF =
∂
∂F(det F) : F. (4.18)
Zum Beweis der Formel (4.16) betrachten wir zuerst die Ableitung der De-
terminante, d. h. den Ausdruck∂
∂F(det F). Sei f(F) = det F . Dann gilt
fur die Richtungsableitung von f in Richtung A
df(F,A) = f ′(F) : A = ∂f(F,A) =d
dsf(F + sA)|s=0.
98 Kapitel 4. Zeitliche Ableitungen
Mit der Darstellung
f(F + sA) = det (F + sA) = det
[sF
(1
s1 + F−1 A
)]
= s3 detF det
[1
s1 + F−1 A
]
und mit Hilfe der charakteristischen Gleichung des Eigenwertproblems
det (B− λ 1) = −λ3 + λ2 IB − λ IIB + IIIB,
wobei B = F−1 A und λ = −1s
eingefuhrt wurden, erhalten wir die Glei-chung
f(F + sA) = s3 detF
(1
s3+
1
s2IF−1A +
1
sIIF−1A + IIIF−1A
).
Die Ableitung nach s an der Stelle s = 0 liefert
d
dsf (F + sA)|s=0 = detF IF−1A = detF tr(F−1A)
= detF A : F−T = det F F−T : A.
Damit gilt fur alle Tensoren A
f ′ (F) : A = detF F−T : A
und somitf ′ (F) = det F F−T ,
d. h. wir erhalten fur die Ableitung der Determinante eines Tensors nachdiesem Tensor die Darstellung
f ′ (F) =∂
∂Fdet F = det F F−T . (4.19)
Mit diesem Teilergebnis (4.19) folgt aus (4.18)
J = ˙det F =∂
∂F(det F) : F = det F F−T : F
und unter Verwendung von (4.17) gilt
J = J F−T : F = J tr (F F−1) = J tr l = J divv ,
d. h. wir erhalten die gewunschte Darstellung (4.16)
J = J div v.
4.3. Materielle Zeitableitungen 99
4.3.3 Die zeitliche Ableitung des Volumenelementes dv
Fur die zeitliche Ableitung des Volumenelementes dv erhalten wir mit deroben bewiesenen Ableitung der Jacobi-Determinate
dv = ˙J dV = J dV = J divv dV = divv dv
und damit die Formel (4.15)
dv = div v dv.
4.3.4 Die zeitliche Ableitung des Oberflachenelementesda
Aus der Transformationsformel da = J F−T dA nach (3.169) erhalten wirgemaß der Produktregel
D(da)
Dt=
D
Dt(J F−T dA)
= J F−T dA + J F−T dA
= J F−T : F F−TdA + J F−T dA
= F−T : F (J F−TdA) + F−T FT (J F−T dA)
= F−T : F da + F−T FT da
Mit der Beziehung
˙FT F−T = FT F−T + FT F−T = 1 = 0
folgtF−T = −F−T FT F−T .
Aus diesen Gleichungen erhalt man
da = F−T : F da− F−T FT da
= (tr(F F−1) 1− F−T FT ) da = (tr l 1− lT ) da.
Mit der Beziehung tr l = tr d gilt also die Gleichung (4.14)
da = ((trd) 1− lT ) da.
100 Kapitel 4. Zeitliche Ableitungen
4.4 Transformationsbeziehungen beimWechsel des Beobachters – Beobachterin-
varianz physikalischer Großen
Die Beschreibung der Bewegung eines materiellen Korpers ist unmittelbarmit der Wahl des Koordinatenursprungs und der Basisvektoren, d. h. mitder Wahl des Beobachters verbunden. Je zwei Beobachter Σ und Σ⋆ befin-den sich an verschiedenen Orten und besitzen selbst unterschiedliche Bewe-gungszustande, d. h. sie befinden sich in Ruhe oder bewegen sich relativ zumanderen Beobachter und auch relativ zur betrachteten Bewegung des mate-riellen Korpers. Aus den unterschiedlichen Bewegungszustanden der Beob-achter resultiert auch eine unterschiedliche Beschreibung der Bewegung desKorpers. Als Beispiel sei folgende Situation beschrieben.
Der Beobachter Σ fahrt mit dem Zug und laßt einen Stein aus dem fah-renden Zug auf den Bahndamm fallen. Der Beobachter Σ⋆ steht auf demBahndamm und beobachtet diesen Vorgang. Wahrend fur den mitbeweg-ten Beobachter Σ der Stein senkrecht auf den Bahndamm fallt, mißt derBeobachter Σ⋆ eine Parabel als Bewegung des Steins.
In diesem Kapitel wird die mathematische Beschreibung der Transformationder gemessenen Ereignisse zwischen zwei beliebig bewegten Beobachtern Σund Σ⋆ eingefuhrt und die sich daraus ergebenen Folgerungen dargestellt.
Weiterhin wird das Prinzip der materiellen Objektivitat, welches in derMaterialtheorie (siehe Kapitel 7) eine wichtige Rolle spielt, vorbereitet.
Um eine formelmaßige Beschreibung der Transformationsbeziehung zu er-halten, fuhren wir die folgende Definition fur die Beobachter Σ und Σ⋆ ein:
• Zum Beobachter Σ gehort der Ursprung O und die Basise1, e2, e3 eines kartesischen Koordinatensystems sowie die Zeit t.
• Zum Beobachter Σ⋆ gehort der Ursprung O⋆ und die Basise⋆
1, e⋆2, e
⋆3 eines kartesischen Koordinatensystems sowie die Zeit t⋆.
Die Bewegungen der Beobachter Σ und Σ⋆ unterscheiden sich durch einezeitlich veranderliche Starrkorperbewegung, die sich aus der gegenseitigenTranslation der Koordinatenursprunge O undO⋆, dargestellt durch den zeit-lich veranderlichen Vektor c(t), und der gegenseitigen Rotation der Basissy-steme e1, e2, e3 und e⋆
1, e⋆2, e
⋆3, dargestellt durch den zeitlich verander-
4.4. Transformationsbeziehungen 101
lichen orthogonalen Tensor Q(t), zusammensetzt. Weiterhin ist eine Zeit-verschiebung t⋆ = t − a, mit a ∈ IR, zwischen den Beobachtern Σ und Σ⋆
moglich.
Der Ubergang zwischen den Beobachtern Σ und Σ⋆ kann damit durch eineRotation, eine Translation und eine Zeitverschiebung dargestellt werden. Esgilt damit:
c(t) =−−→O⋆O, ei(t) = Q(t) e⋆
i und t⋆ = t− a.
Mit diesen Vereinbarungen ergibt sich fur die Beschreibung der Bewegungdes Korpers B durch Σ bzw. Σ⋆ der Zusammenhang
x⋆ = Q(t) x + c(t) und t⋆ = t − a.
Die Transformationsbeziehung zwischen den Beobachtern Σ und Σ⋆ wird alsEuklidische Transformation bezeichnet. Fur eine feste Wahl des orthogona-len Tensors Q(t) = Q(t) = konst. und des Verschiebungsvektors c = c(t)mit c = 0 geht die Euklidische Transformation in die Galilei-Transformationuber. Diese lautet somit
x⋆ = Q x + c(t) mit Q(t) = 0 und c = 0 ∀t.
Gilt weiterhin c(t) = c(t) = konst., d. h. ist c(t) = 0, so wird die zeitun-abhangige Transformation
x⋆ = Q x + c (4.20)
als starre Transformation bezeichnet.
Die Euklidische bzw. die Galilei-Transformation sowie die starre Transfor-mation zwischen den Beobachtern Σ und Σ⋆ kann auch als Starrkorper-bewegung des betrachteten materiellen Korpers B interpretiert werden. Beider Starrkorperbewegung treten keine Winkel- und Langenanderungen auf.
In der Kontinuumsmechanik ist es wichtig, Kriterien aufzustellen, nach de-nen sich physikalische Großen bei einem Wechsel des Beobachters Σ und Σ⋆
andern. Dabei gilt die wichtige Definition:
Objektive physikalische Großen sind unabhangig vom Beobachter.
102 Kapitel 4. Zeitliche Ableitungen
Fur skalar-, vektor- und tensorwertige objektive physikalische Großen seiendie fogenden Transformationseigenschaften gegeben.
a) Skalare
Eine skalarwertige physikalische Große ist objektiv , wenn der von Σbeobachtete Wert derselbe ist wie der Wert, der vom Beobachter Σ⋆
gemessen wird
α⋆(x⋆) = α(x).
b) Vektoren
Eine vektorielle physikalische Große ist objektiv , wenn der von Σ be-obachtete Vektor v fur Σ⋆ das Erscheinungsbild Qv hat
v⋆(x⋆) = Q(t)v(x).
c) Tensoren
Fur objektive Tensoren gilt die Beziehung:
Objektive Tensoren transformieren objektive Vektoren in objektiveVektoren. Fur den Vektor v gelte Tv = w. Hier sind v und w objek-tive Vektoren, d. h. es gilt
v⋆ = Qv und w⋆ = Qw.
Dann gilt
w⋆ = Qw = Q(Tv) = QTv = QTQTv⋆
und mit der Beziehung
(Tv)⋆ = T⋆v⋆ = QTQTv⋆
folgt fur den objektiven Tensor T die Transformationsbeziehung
T⋆(x⋆) = Q(t)T(x)QT (t).

4.4. Transformationsbeziehungen 103
Im weiteren seien einige geometrische Großen auf ihre Objektivitat unter-sucht.
a) Materieller Deformationsgradient F
Fur die Bewegung gilt die Transformationsvorschrift x⋆ = Q x + c.Hieraus ergibt sich fur den materiellen Deformationsgradienten
F⋆ = Grad x⋆ = Grad(Q x + c) = Q Grad x = Q F.
Dies bedeutet, daß der materielle Deformationsgradient F nicht ob-jektiv ist. Die Transformationsgleichung fur den materiellen Deforma-tionsgradienten F beim Wechsel des Beobachters lautet
F⋆ = Q F 6= Q F QT .
b) Determinante des materiellen Deformationsgradienten
Fur J = det F erhalten wir mit der Transformationseigenschaft F⋆ =QF des materiellen Deformationsgradienten die Beziehung
J⋆ = detF⋆ = det (Q F) = detQ det F = 1 · det F = J.
Damit ist die Determinante des materiellen Deformationsgradientenobjektiv, d. h. es gilt
J⋆ = det F⋆ = detF = J.
c) Aus den oben angegebenen Grundbeziehungen kann fur weitereaus dem materiellen Deformationsgradienten abgeleitete Großen dasTransformationsverhalten beim Wechsel des Beobachters bestimmtwerden. Man erhalt somit (ohne Beweis):
– Rechts-Cauchy-Green-Tensor: C⋆ = C.
– Greenscher Verzerrungstensor: E⋆ = E.
– Drehtensor R der polaren Zerlegung: R⋆ = Q R.
– Rechts-Strecktensor U: U⋆ = U.
104 Kapitel 4. Zeitliche Ableitungen
4.5 Untersuchung der Beobachterinvarianzzeitlicher Ableitungen
In diesem Abschnitt wird das Verhalten des Geschwindigkeits- und Be-schleunigungsfeldes einer Bewegung beim Wechsel des Beobachters unter-sucht. Weiterhin werden die Transformationsbeziehungen der hieraus abge-leiteten Großen angefuhrt.
Aus Abschnitt 4.4 erhalten wir die Transformationsbeziehung
x⋆(t) = Q(t) x + c(t)
fur die Bewegung eines materiellen Korpers beim Wechsel des Beobachters.Im weiteren sollen hieraus einige Folgerungen hergeleitet werden.
4.5.1 Untersuchung der Objektivitat der Geschwindig-keit v(x, t)
Aus der Transformationsbeziehung
x⋆ = Q(t) x + c(t)
folgt fur die Geschwindigkeiten des materiellen Korpers B
v = x bezogen auf den Beobachter Σ, bzw.
v⋆ = x⋆ bezogen auf den Beobachter Σ⋆
die Beziehung
v⋆ = x⋆ =˙
Q(t) x + c(t)
= Q x + c + Q x
= Q x + c + Q (QT (x⋆ − c))
= Q x + c + Q QT (x⋆ − c).
Mit der Betrachtung von
1 =˙
QQT = QQT + QQT = 0
erhalten wirA := Q QT = −QQT = −AT

4.5. Beobachterinvarianz 105
und damitv⋆ = x⋆ = Q v + c + A (x⋆ − c).
Da sich jedem schiefsymmetrischen Tensor A = −AT ein axialer VektorωωωA zuordnen laßt (siehe z. B. de Boer [7]), folgt daraus
A(x⋆ − c) = ωωωA × (x⋆ − c)
und damitv⋆ = Q v︸︷︷︸
=:vr
+ c + ωωωA × (x⋆ − c)︸ ︷︷ ︸=:vf
= vr + vf
mit der Fuhrungsgeschwindigkeit vf := c +ωωωA × (x⋆ − c) und der Rela-tivgeschwindigkeit vr := Q v.
Aus der obigen Darstellung erkennen wir, daß die Geschwindigkeit v fureine beliebige Euklidische Transformation x⋆ = Q(t) x + c(t) zwischenzwei Beobachtern Σ und Σ⋆ keine objektive Große ist.
Beschranken wir uns auf starre Transformationen zwischen Σ und Σ⋆, so giltQ = konst. und c = konst., d. h. insbesondere verschwindet die Fuhrungs-geschwindigkeit
vf = c + QQT (x⋆ − c) = 0.
Damit erhalten wir die Transformationsbeziehung
v⋆ = Q v
fur eine starre Bewegung.
4.5.2 Untersuchung der Objektivitat der Beschleuni-gung a(x, t)
Aus der Transformationsbeziehung
x⋆ = Q(t) x + c(t)
folgt fur die Beschleunigung des materiellen Korpers B
a = x bezogen auf den Beobachter Σ, bzw.
a⋆ = x⋆ bezogen auf den Beobachter Σ⋆
106 Kapitel 4. Zeitliche Ableitungen
die Beziehung
x⋆ =D
Dt[Q x + c + A(x⋆ − c)]
= Q x + Q x + c + A(x⋆ − c) + A(x⋆ − c).
Somit gilt
x⋆ = c + A(x⋆ − c) −A2(x⋆ − c)︸ ︷︷ ︸=:af
+2 A(x⋆ − c)︸ ︷︷ ︸=:ac
+ Q x︸︷︷︸=:ar
(4.21)
und mit der Einfuhrung des axialen Vektors ωωωAgilt weiterhin
x⋆ = c + ωωωA × (x⋆ − c) −ωωωA × (ωωωA × (x⋆ − c))︸ ︷︷ ︸=af
+ 2 ωωωA × (x⋆ − c)︸ ︷︷ ︸=ac
+ Q x︸︷︷︸=ar
.
Hierin stellt af die Fuhrungsbeschleunigung , ac die Coriolisbeschleunigungund ar die Relativbeschleunigung dar.
Damit ist die Beschleunigung a(x, t) fur eine beliebige Euklidische Trans-formation keine objektive Große.
Fur die Galilei-Transformation gilt wieder mit Q = konst. und c = konst.,d. h. mit ωωωA = 0 und c = 0, die Gleichung
a⋆ = x⋆ = Q x = Q a,
d. h. die Beschleunigung transformiert sich objektiv bzgl. einer Galilei-Transformation der Beobachter Σ und Σ⋆ .
Kapitel 5
Die Bilanz- undErhaltungssatze derMechanik
In diesem Kapitel werden die Bilanz- und Erhaltungssatze der Mechanikin integraler und differentieller Form angegeben, die fur jeden beliebigenmateriellen Korper B und jeden Teilkorper P ⊂ B erfullt sein mussen.
Um den Leser nicht durch die Einfuhrung zusatzlicher Bezeichnungsweisenzu verwirren, sprechen wir von dem materiellen Korper in der Referenz- undMomentankonfiguration B bzw. Bt mit der Oberflache ∂B bzw. ∂Bt undmeinen dabei stets auch jeden Teilkorper von B.
Weiterhin ist zu beachten, daß die von außen auf den Korper (oder Teil-korper) einwirkenden Krafte (siehe Abschnitt 5.2) als bekannt und vorgege-ben angesehen werden. Insbesondere seien die flachenhaft verteilten Ober-flachenkrafte auf dem gesamten Rand ∂B bzw. ∂Bt vorgegeben.
Die in Abschnitt 2.1 angegebene Aufteilung des Randes ∂B in Bereiche mitvorgegebenen Oberflachenspannungen und vorgegebenen Verschiebungen istdamit in diesem Kapitel nicht relevant, sondern wird erst bei der Behand-lung der Randwertaufgaben in Kapitel 8 und der Variationsprinzipien inKapitel 10 bedeutsam.
107
108 Kapitel 5. Bilanzsatze
5.1 Satz von der Erhaltung der Masse
Zur Berechnung der Masse m des betrachteten Korpers B in der Momen-tankonfiguration Bt setzen wir die Existenz einer Massendichte ρ = ρ(x)voraus. Die Dichte ρ im Punkt x ist durch den endlichen Grenzwert
ρ := lim∆v→0
∆m
∆v=dm
dv(5.1)
definiert. Damit gilt die Beziehung
dm = ρ dv (5.2)
fur den Wechsel der Integrationsvariablen. Die Gesamtmasse des materiellenKorpers B in der Momentankonfiguration Bt ergibt sich somit zu
m =
∫
Bt
dm =
∫
Bt
ρ dv . (5.3)
Im Rahmen unserer theoretischen Uberlegungen sei der materielle KorperB ein abgeschlossenes System, dessen Gesamtmasse sich wahrend des De-formationsprozesses weder durch Massenzufuhr uber die Oberflache ∂B desKorpers B noch durch Zufuhr im Innern von B verandert. Damit schlie-ßen wir z. B. die Berechnung von Raketen aus, die wahrend des FlugesMasse durch die Verbrennung ihres Treibstoffes verlieren. Im Rahmen derklassischen Mechanik wird weiterhin vorausgesetzt, daß wahrend des Defor-mationsprozesses im Korper B keine Masse produziert wird. Damit ist dieMasse m des Korpers B eine Erhaltungsgroße.
Diese Beobachtungen werden zum Satz von der Erhaltung der Masse zu-sammengefaßt. Es gilt:
Die Masse m des materiellen Korpers B verandert sich wahrend desDeformationsprozesses nicht.
Dies bedeutet, daß die Masse m des materiellen Korpers B, d. h. fur jedeKonfiguration Bt von B gleich ist, d. h. fur (5.3) gilt
m =
∫
Bt
dm =
∫
Bt
ρ dv = konst. fur alle Zeiten t. (5.4)
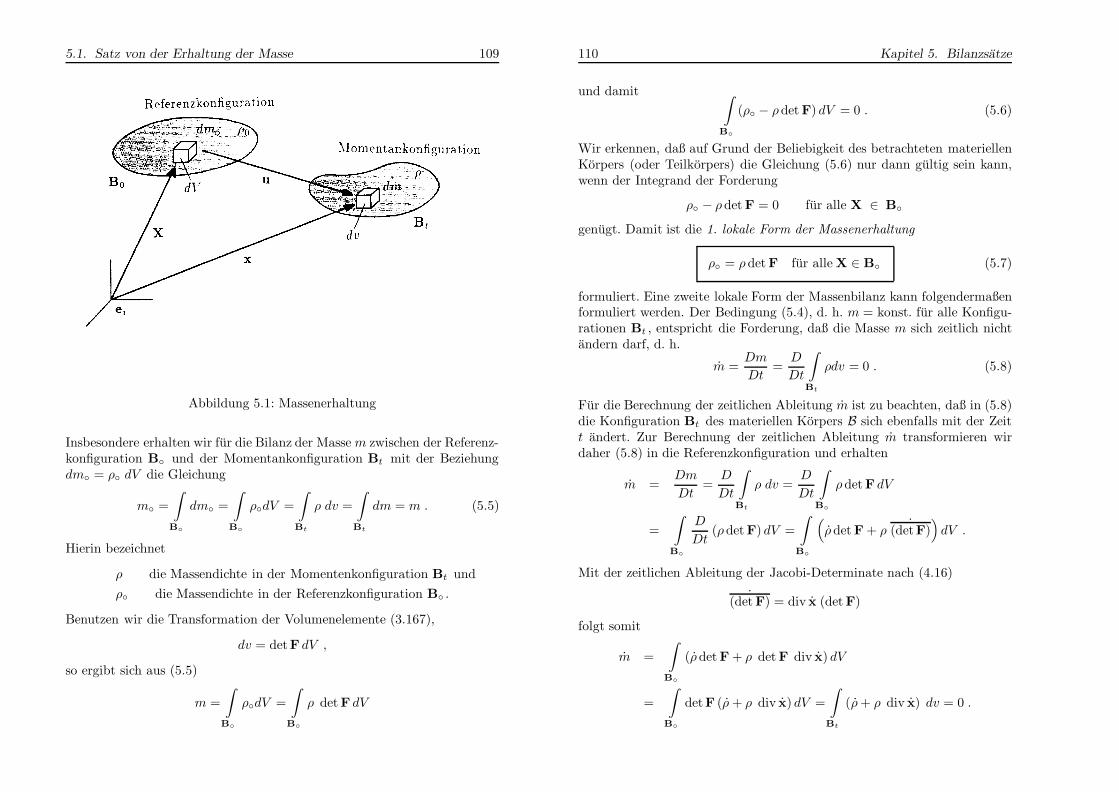
5.1. Satz von der Erhaltung der Masse 109
Abbildung 5.1: Massenerhaltung
Insbesondere erhalten wir fur die Bilanz der Masse m zwischen der Referenz-konfiguration B und der Momentankonfiguration Bt mit der Beziehungdm = ρ dV die Gleichung
m =
∫
B
dm =
∫
B
ρdV =
∫
Bt
ρ dv =
∫
Bt
dm = m . (5.5)
Hierin bezeichnet
ρ die Massendichte in der Momentenkonfiguration Bt und
ρ die Massendichte in der Referenzkonfiguration B .
Benutzen wir die Transformation der Volumenelemente (3.167),
dv = detF dV ,
so ergibt sich aus (5.5)
m =
∫
B
ρdV =
∫
B
ρ det F dV
110 Kapitel 5. Bilanzsatze
und damit ∫
B
(ρ − ρdet F) dV = 0 . (5.6)
Wir erkennen, daß auf Grund der Beliebigkeit des betrachteten materiellenKorpers (oder Teilkorpers) die Gleichung (5.6) nur dann gultig sein kann,wenn der Integrand der Forderung
ρ − ρdet F = 0 fur alle X ∈ B
genugt. Damit ist die 1. lokale Form der Massenerhaltung
ρ = ρdet F fur alle X ∈ B (5.7)
formuliert. Eine zweite lokale Form der Massenbilanz kann folgendermaßenformuliert werden. Der Bedingung (5.4), d. h. m = konst. fur alle Konfigu-rationen Bt , entspricht die Forderung, daß die Masse m sich zeitlich nichtandern darf, d. h.
m =Dm
Dt=
D
Dt
∫
Bt
ρdv = 0 . (5.8)
Fur die Berechnung der zeitlichen Ableitung m ist zu beachten, daß in (5.8)die Konfiguration Bt des materiellen Korpers B sich ebenfalls mit der Zeitt andert. Zur Berechnung der zeitlichen Ableitung m transformieren wirdaher (5.8) in die Referenzkonfiguration und erhalten
m =Dm
Dt=
D
Dt
∫
Bt
ρ dv =D
Dt
∫
B
ρdet F dV
=
∫
B
D
Dt(ρdet F) dV =
∫
B
(ρdet F + ρ
˙(detF)
)dV .
Mit der zeitlichen Ableitung der Jacobi-Determinate nach (4.16)
˙(det F) = div x (det F)
folgt somit
m =
∫
B
(ρdet F + ρ det F div x) dV
=
∫
B
detF (ρ+ ρ div x) dV =
∫
Bt
(ρ+ ρ div x) dv = 0 .
5.2. Satz von der Erhaltung der Bewegungsgroße 111
Hieraus konnen wir sofort die 2. lokale Form der Massenerhaltung nachEuler und d’Alembert, auch Kontinuitatsbedingung genannt, folgern
ρ+ ρ div x = 0 ∀ x ∈ Bt . (5.9)
Diese Kontinuitatsbedingung kann auch direkt durch die zeitliche Ableitungder 1. lokalen Form der Massenerhaltung nach Gleichung (5.7) gewonnenwerden. Die lokalen Formen (5.7) und (5.8) der Massenerhaltung werdenhaufig benutzt, um einfachere Darstellungen anderer Bilanzaussagen, z. B.des Impulserhaltungssatzes in Abschnitt 5.2, zu erhalten.
5.2 Satz von der Erhaltung der Bewegungs-
große
5.2.1 Raumliche Darstellung
Die Bewegungsgroße I eines materiellen Korpers B, der sich mit der Ge-schwindigkeit x bewegt, ist durch die Definition
I :=
∫
Bt
ρ x dv (5.10)
gegeben. In der englischsprachigen Literatur wird I als”momentum“ oder
auch als”linear momentum“ bezeichnet.
In den Abschnitten 2.6, 4.4 und 4.5 haben wir uns mit der Problematik derWahl eines Beobachters Σ und den Folgen des Wechsels des Beobachtersauseinandergesetzt. Eine besondere Klasse von Beobachtern ist dadurch aus-gezeichnet, daß in ihnen der Massenmittelpunkt eines kraftefreien Korpersin gleichformiger Bewegung verharrt. Das Bezugssystem dieser Klasse vonBeobachtern wird als Inertialsystem bezeichnet.
Bezogen auf ein oben beschriebenes Inertialsystem gilt der Satz von derErhaltung der Bewegungsgroße:
112 Kapitel 5. Bilanzsatze
Die Bewegungsgroße I des materiellen Korpers B ist eine Erhaltungs-große.Die zeitliche Anderung der Bewegungsgroße I ist gleich der Resultie-renden der von außen auf den Korper einwirkenden (physikalischen)Krafte.
Der Satz von der Erhaltung der Bewegungsgroße kann formelmaßig in derForm
I =DI
Dt= F
t+ F
b(5.11)
geschrieben werden. Hierin bezeichnet Ft
die resultierende Oberflachen-kraft, die durch die auf der gesamten Oberflache ∂Bt wirkenden eingeprag-
ten Spannungen t = t(x), z. B. Windlast, Wasserdruck, Kontaktkraft, all-gemeine Belastung, entsteht. Eventuell auftretende Reaktionskrafte in denAuflagerbereichen des Korpers werden ebenfalls als bekannt und vorgegebenangesehen. Fur die Resultierende F
tgilt damit
Ft
=
∫
∂Bt
t da . (5.12)
Weiterhin bezeichnet Fb
die resultierende Volumenkraft, die sich aus der
massenbezogenen Beschleunigung b = b(x), z. B. der Erdbeschleunigung,Zentrifugalbeschleunigung, durch Fernwirkung ergibt. Fur F
bgilt
Fb
=
∫
Bt
b dm =
∫
Bt
ρ b dv . (5.13)
Mit den Beziehungen (5.10), (5.12) und (5.13) kann der Satz von der Erhal-tung der Bewegungsgroße (5.11) in der Form
D
Dt
∫
Bt
ρ x dv =
∫
Bt
ρ b dv +
∫
∂Bt
t da (5.14)
geschrieben werden, die mit Hilfe der Kontinuitatsgleichung (5.9) weitervereinfacht werden kann. Fur die zeitliche Ableitung der Bewegungsgroße
5.2. Satz von der Erhaltung der Bewegungsgroße 113
gilt mit (4.16)
I =D
Dt
∫
Bt
ρ xdv =D
Dt
∫
B
ρ x detF dV
=
∫
B
D
Dt(ρ xdet F) dV
=
∫
B
(ρ xdet F + ρ x
˙(det F) + ρ xdet F
)dV
=
∫
B
(ρ xdetF + ρ x div x det F + ρ xdetF) dV
=
∫
B
detF (ρ+ ρ div x) x + ρx dV . (5.15)
Nach der Kontinuitatsbedingung (5.9) gilt ρ+ ρ div x = 0 und damit folgtaus (5.15)
I =
∫
B
detF ρ x dV =
∫
Bt
ρ x dv .
Der Satz von der Erhaltung der Bewegungsgroße erhalt somit die Form
∫
Bt
ρ x dv =
∫
Bt
ρ b dv +
∫
∂Bt
t da. (5.16)
Wir sprechen auch vom dynamischen Kraftegleichgewicht in raumlicherDarstellung .
Werden die Beschleunigungen x der materiellen Punkte des Korpers B ver-nachlassigt, so ist x ≈ 0, und es folgt das statische Kraftegleichgewicht inraumlicher Darstellung
0 =
∫
Bt
ρ b dv +
∫
∂Bt
t da. (5.17)
114 Kapitel 5. Bilanzsatze
Zur Erinnerung sei nochmals erwahnt, daß wir in diesem Abschnitt die er-haltenen Ergebnisse stets fur den gesamten materiellen Korper B formulierthaben. Der Satz von der Erhaltung der Bewegungsgroße muß jedoch auchfur jeden beliebigen Teilkorper P ⊂ B erfullt sein.
5.2.2 Materielle Darstellung
Im folgenden wird der Satz von der Erhaltung der Bewegungsgroße (5.11) inAbhangigkeit der materiellen Koordinaten X ∈ B der materiellen PunkteM formuliert. Hierzu betrachten wir die folgenden Transformationen.
a) Die Transformation der Bewegungsgroße I unter Verwendung der 1. lo-kalen Form der Massenerhaltung (5.7) liefert
I =
∫
Bt
ρ x dv =
∫
B
ρ x detF dV =
∫
B
ρ x dV . (5.18)
Damit gilt fur die zeitliche Ableitung der Bewegungsgroße
I =D
Dt
∫
B
ρ x dV =
∫
B
D
Dt(ρ x) dV =
∫
B
ρ x dV . (5.19)
b) Aus der Transformation der eingepragten Oberflachenkraft Ft
in diematerielle Form folgt
Ft
=
∫
∂Bt
t da =
∫
∂B
t dA . (5.20)
Auf die Beziehung zwischen den eingepragten Oberflachenspannungent in der Momentankonfiguration und t in der Referenzkonfigurationwird nach Einfuhrung des Cauchyschen Spannungstensors T in Ab-schnitt 5.3 eingegangen.
c) Die Transformation der eingepragten Volumenkraft Fb
in die materi-elle Form liefert
Fb
=
∫
Bt
ρ b dv =
∫
B
ρb dV . (5.21)
Auf die Transformationsbeziehung der eingepragten Volumenkraft Fb
wird in Abschnitt 5.3.3.1 nochmals ausfuhrlich eingegangen.
5.2. Satz von der Erhaltung der Bewegungsgroße 115
Damit kann die Bilanz der Bewegungsgroße, in (5.16) dargestellt durch dieGroßen der Momentankonfiguration, in der materiellen Form
∫
B
ρx dV =
∫
B
ρb dV +
∫
∂B
t dA (5.22)
geschrieben werden. Dies ist die dynamische Kraftegleichgewichtsbedingungin materieller Darstellung . Vernachlassigen wir die Tragheitskrafte und set-zen x ≈ 0, so lautet die statische Kraftegleichgewichtsbedingung in materi-eller Darstellung
0 =
∫
B
ρb dV +
∫
∂B
t dA. (5.23)
116 Kapitel 5. Bilanzsatze
5.3 Einfuhrung mechanischer Spannungen
Im Abschnitt 5.2 wurde die globale Formulierung der dynamischen Krafte-gleichgewichtsbedingung hergeleitet. Um fur diese Gleichgewichtsbedingungeine lokale Formulierung herleiten zu konnen, mussen wir die Spannung alslokale mechanische Beanspruchung definieren.
Den Zugang zu den inneren Kraften im mechanisch beanspruchten kontinu-ierlich festen Korper erhalten wir mit dem Eulerschen Schnittprinzip durchgedachte Schnitte durch den materiellen Korper B. Hieraus wird die lokalemechanische Beanspruchung eines Punktes x des materiellen Korpers B inder Form des von Cauchy eingefuhrten Spannungstensors T hergeleitet.
5.3.1 Einfuhrung des Spannungsvektors t und des Cau-chyschen Spannungstensors T in der Momentan-konfiguration Bt
5.3.1.1 Einfuhrung des Spannungsvektors t
Wir betrachten einen materiellen Korper B in der MomentankonfigurationBt und fuhren einen gedachten Schnitt S durch den Korper B durch. Da-durch wird B in zwei Teilkorper B1 und B2 mit den Oberflachen ∂B1 ∪ S−
und ∂B2 ∪ S+ zerteilt, d. h. fur die Oberflache des Korpers B gilt
∂B = ∂B1 ∪ ∂B2 und ∂B1 ∩ ∂B2 = ∅ .
Durch diesen (gedachten) Schnitt S werden die im Korper B wirkendeninneren Krafte der Betrachtung zuganglich. Zunachst wird der Begriff derSpannung (bzw. der Schnittkraftdichte) t in einem Punkt x der Schnittflacheeingefuhrt. Dazu betrachten wir ein Flachenelement ∆a der SchnittflacheS, an dem die Kraft ∆f angreift. Die Spannung t in einem Punkt x wirdals der endliche Grenzwert
t := lim∆a→0
∆f
∆a=df
da(5.24)
eingefuhrt. Es wird dabei vorausgesetzt, daß die Belastung f genugend glattist.
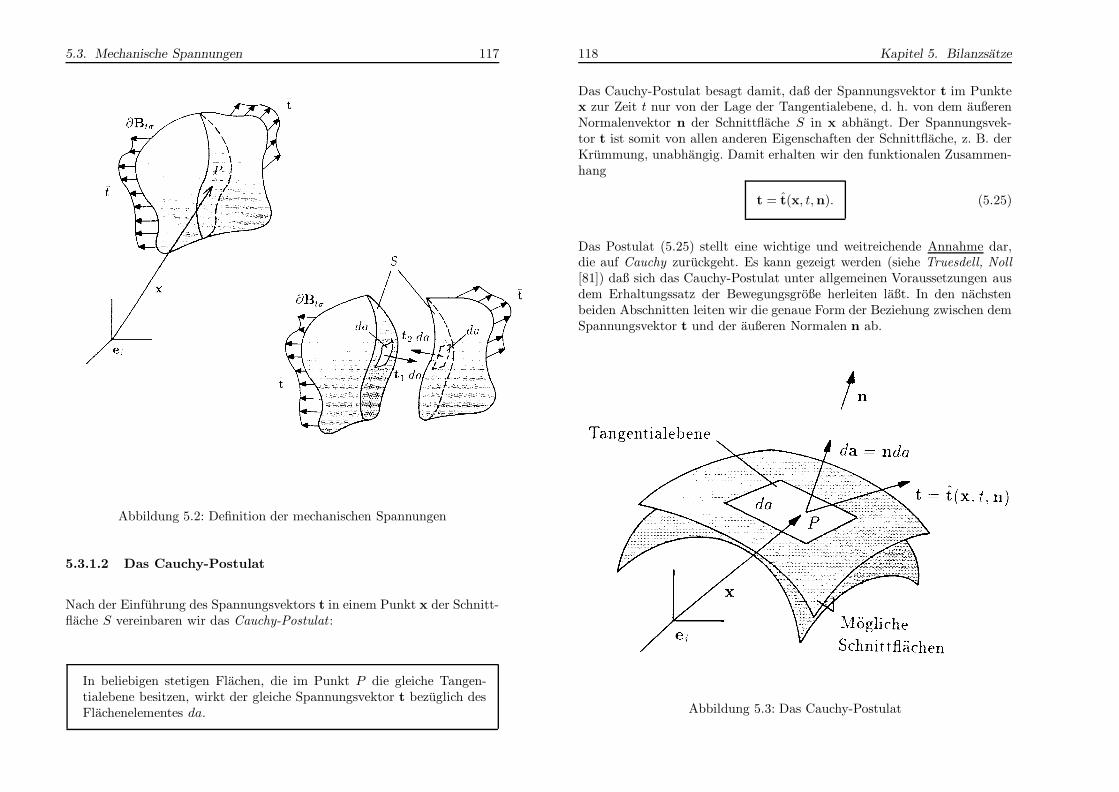
5.3. Mechanische Spannungen 117
Abbildung 5.2: Definition der mechanischen Spannungen
5.3.1.2 Das Cauchy-Postulat
Nach der Einfuhrung des Spannungsvektors t in einem Punkt x der Schnitt-flache S vereinbaren wir das Cauchy-Postulat :
In beliebigen stetigen Flachen, die im Punkt P die gleiche Tangen-tialebene besitzen, wirkt der gleiche Spannungsvektor t bezuglich desFlachenelementes da.
118 Kapitel 5. Bilanzsatze
Das Cauchy-Postulat besagt damit, daß der Spannungsvektor t im Punktex zur Zeit t nur von der Lage der Tangentialebene, d. h. von dem außerenNormalenvektor n der Schnittflache S in x abhangt. Der Spannungsvek-tor t ist somit von allen anderen Eigenschaften der Schnittflache, z. B. derKrummung, unabhangig. Damit erhalten wir den funktionalen Zusammen-hang
t = t(x, t,n). (5.25)
Das Postulat (5.25) stellt eine wichtige und weitreichende Annahme dar,die auf Cauchy zuruckgeht. Es kann gezeigt werden (siehe Truesdell, Noll[81]) daß sich das Cauchy-Postulat unter allgemeinen Voraussetzungen ausdem Erhaltungssatz der Bewegungsgroße herleiten laßt. In den nachstenbeiden Abschnitten leiten wir die genaue Form der Beziehung zwischen demSpannungsvektor t und der außeren Normalen n ab.
Abbildung 5.3: Das Cauchy-Postulat
5.3. Mechanische Spannungen 119
5.3.1.3 Das Cauchy-Fundamentallemma
Wir betrachten die durch den Schnitt S entstandenen Teilkorper B1 undB2. Die entlang der Schnittflache S auftretenden Spannungsvektoren t =t(x, t,n) werden nun fur die Teilkorper B1 und B2 als eingepragte außereKrafte aufgefaßt. Damit ergeben sich aus dem Satz uber die Erhaltung derBewegungsgroße die Gleichgewichtsbedingungen fur den
Korper B: ∫
Bt
ρ (b− x) dv +
∫
∂Bt
t da = 0 , (5.26)
Teilkorper B1:∫
B1t
ρ (b− x) dv +
∫
∂B1t
tda+
∫
S−
t1(x, t,n1) da = 0 , (5.27)
Teilkorper B2:∫
B2t
ρ (b − x) dv +
∫
∂B2t
t da+
∫
S+
t2(x, t,n2) da = 0 . (5.28)
Die Beziehung zwischen den Spannungsvektoren t1(x, t,n1) in der Schnitt-flache S− des Teilkorpers B1 und t2(x, t,n2) in der Schnittflache S+ desTeilkorpers B2 ergibt sich aus den folgenden Uberlegungen. Die Oberflache∂B des Korpers B ergibt sich zu ∂B = ∂B1 ∪ ∂B2 und die Oberflachen derTeilkorper B1 und B2 setzen sich aus der Vereinigung von ∂B1 bzw. ∂B2 mitder Schnittflache S zusammen. Aus der Subtraktion der Gleichungen (5.27)und (5.28) von Gleichung (5.26) folgt
∫
Bt
ρ (b − x) dv −∫
B1t
ρ (b − x) dv −∫
B2t
ρ (b− x) dv
+
∫
∂Bt
tda−∫
∂B1t
t da−∫
∂B2t
tda
−∫
S−
t1(x, t,n1) da−∫
S+
t2(x, t,n2) da = 0 .
Damit gilt ∫
S
t1(x, t,n1) + t2(x, t,n2) da = 0 . (5.29)
120 Kapitel 5. Bilanzsatze
Fur die außeren Normalenvektoren n1,n2 der Teilkorper B1 und B2 zurSchnittflache S gelten die Beziehungen
n1 = n und n2 = −n .
Mit der Annahme, daß t stetig ist, und der Tatsache, daß die SchnittflacheS beliebig gewahlt ist, folgt hieraus
t(x, t,n) = −t(x, t,−n). (5.30)
Dies ist das Fundamentallemma von Cauchy :
Die Spannungsvektoren t(x, t,n), die auf den entgegengesetzten Seitender materiellen Flache S in einem materiellen Punkt M wirken, sindbetragsmaßig gleich aber entgegengesetzt in der Richtung.
5.3.1.4 Das Cauchy-Theorem
Uber die funktionale Abhangigkeit des Spannungsvektors t = t(x, t,n) vonder außeren Normalen n wurde bisher noch keine Aussage gemacht. Mit demCauchy-Theorem wird nun bewiesen, daß der Spannungsvektor t linear vomNormalenvektor n abhangt.
Zum Beweis betrachten wir ein infinitesimales Tetraederelement, dargestelltin Abbildung 5.4, und untersuchen die statischen Gleichgewichtsbedingun-gen ohne Einfluß der Volumenkrafte. (Der Beweis verlauft fur die dynami-schen Gleichgewichtsbedingungen sowie fur die Berucksichtigung der Volu-menkrafte analog, erfordert jedoch mehr Schreibaufwand.)
Die statische Gleichgewichtsbedingung lautet (siehe Abbildung 5.4)
t(x, t,n1) da1 + t(x, t,n2) da2 + t(x, t,n3) da3 + t(x, t,n) dan = 0 . (5.31)
Als Hilfsmittel fuhren wir den Flachensatz fur die vektoriellen Oberflachen-elemente des infinitesimalen Tetraeders
dan + da1 + da2 + da3 = 0 (5.32)
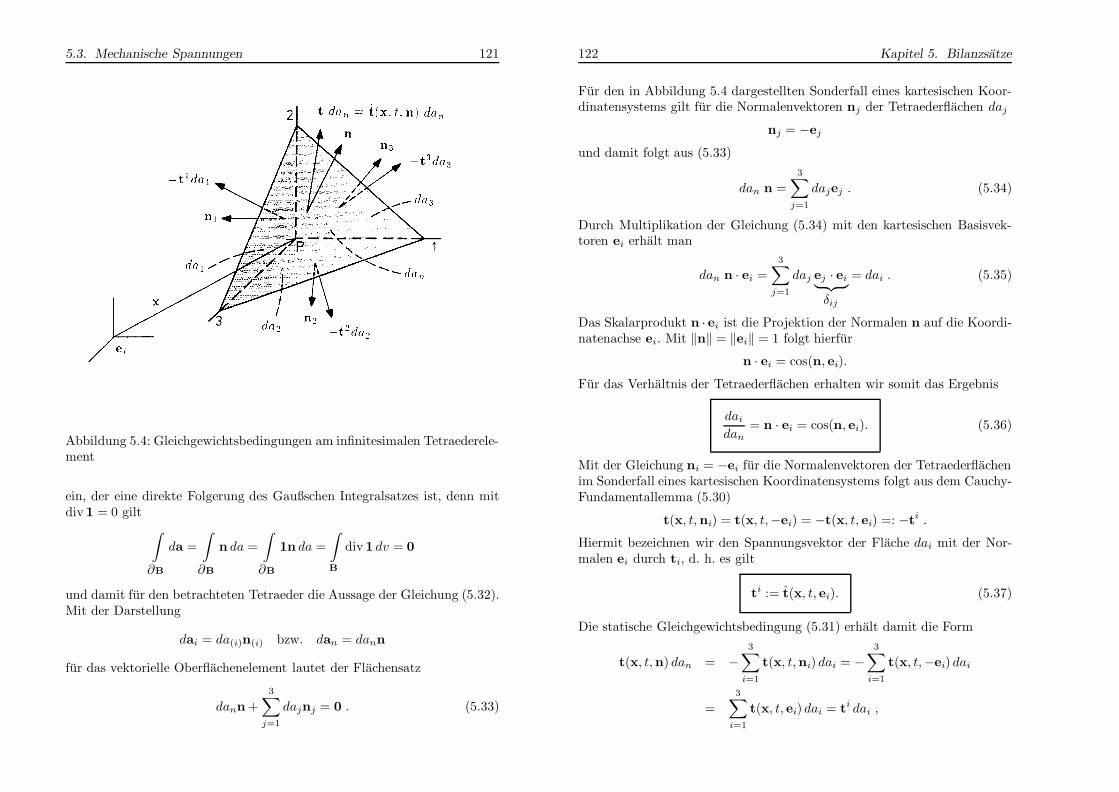
5.3. Mechanische Spannungen 121
Abbildung 5.4: Gleichgewichtsbedingungen am infinitesimalen Tetraederele-ment
ein, der eine direkte Folgerung des Gaußschen Integralsatzes ist, denn mitdiv1 = 0 gilt
∫
∂B
da =
∫
∂B
n da =
∫
∂B
1n da =
∫
B
div1 dv = 0
und damit fur den betrachteten Tetraeder die Aussage der Gleichung (5.32).Mit der Darstellung
dai = da(i)n(i) bzw. dan = dann
fur das vektorielle Oberflachenelement lautet der Flachensatz
dann +
3∑
j=1
dajnj = 0 . (5.33)
122 Kapitel 5. Bilanzsatze
Fur den in Abbildung 5.4 dargestellten Sonderfall eines kartesischen Koor-dinatensystems gilt fur die Normalenvektoren nj der Tetraederflachen daj
nj = −ej
und damit folgt aus (5.33)
dan n =
3∑
j=1
dajej . (5.34)
Durch Multiplikation der Gleichung (5.34) mit den kartesischen Basisvek-toren ei erhalt man
dan n · ei =3∑
j=1
daj ej · ei︸ ︷︷ ︸δij
= dai . (5.35)
Das Skalarprodukt n · ei ist die Projektion der Normalen n auf die Koordi-natenachse ei. Mit ‖n‖ = ‖ei‖ = 1 folgt hierfur
n · ei = cos(n, ei).
Fur das Verhaltnis der Tetraederflachen erhalten wir somit das Ergebnis
dai
dan
= n · ei = cos(n, ei). (5.36)
Mit der Gleichung ni = −ei fur die Normalenvektoren der Tetraederflachenim Sonderfall eines kartesischen Koordinatensystems folgt aus dem Cauchy-Fundamentallemma (5.30)
t(x, t,ni) = t(x, t,−ei) = −t(x, t, ei) =: −ti .
Hiermit bezeichnen wir den Spannungsvektor der Flache dai mit der Nor-malen ei durch ti, d. h. es gilt
ti := t(x, t, ei). (5.37)
Die statische Gleichgewichtsbedingung (5.31) erhalt damit die Form
t(x, t,n) dan = −3∑
i=1
t(x, t,ni) dai = −3∑
i=1
t(x, t,−ei) dai
=
3∑
i=1
t(x, t, ei) dai = ti dai ,
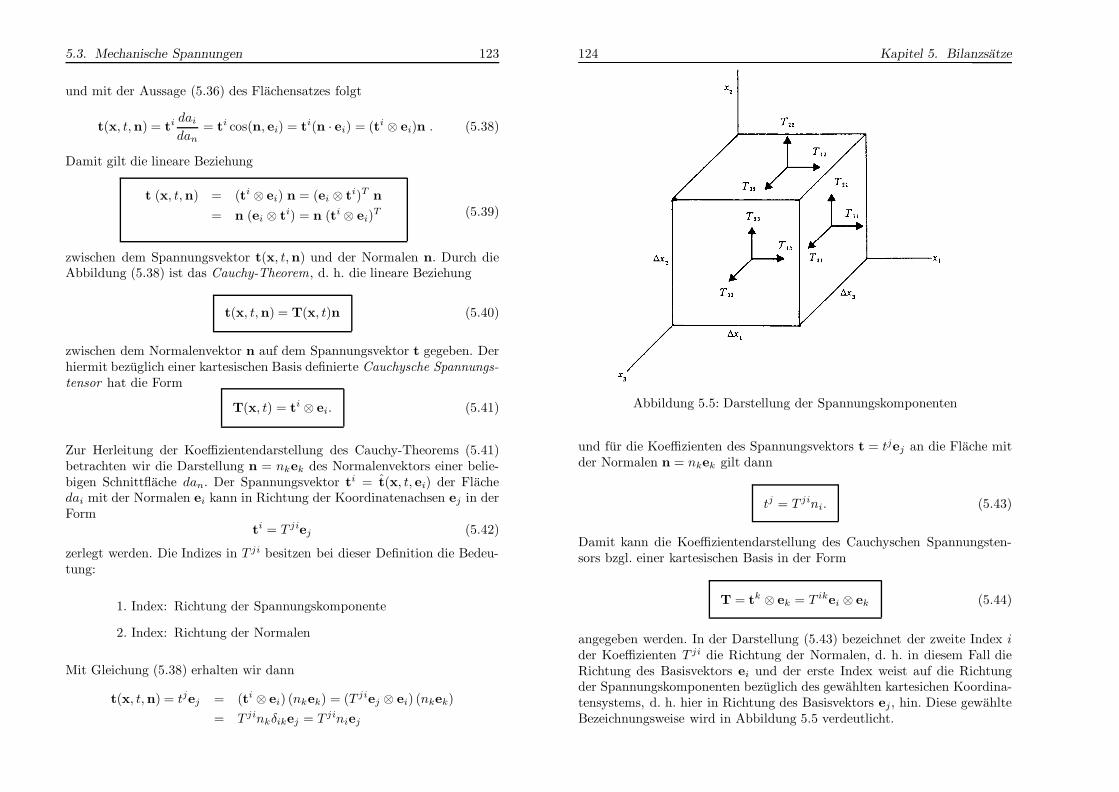
5.3. Mechanische Spannungen 123
und mit der Aussage (5.36) des Flachensatzes folgt
t(x, t,n) = ti dai
dan
= ti cos(n, ei) = ti(n · ei) = (ti ⊗ ei)n . (5.38)
Damit gilt die lineare Beziehung
t (x, t,n) = (ti ⊗ ei) n = (ei ⊗ ti)T n
= n (ei ⊗ ti) = n (ti ⊗ ei)T (5.39)
zwischen dem Spannungsvektor t(x, t,n) und der Normalen n. Durch dieAbbildung (5.38) ist das Cauchy-Theorem, d. h. die lineare Beziehung
t(x, t,n) = T(x, t)n (5.40)
zwischen dem Normalenvektor n auf dem Spannungsvektor t gegeben. Derhiermit bezuglich einer kartesischen Basis definierte Cauchysche Spannungs-tensor hat die Form
T(x, t) = ti ⊗ ei. (5.41)
Zur Herleitung der Koeffizientendarstellung des Cauchy-Theorems (5.41)betrachten wir die Darstellung n = nkek des Normalenvektors einer belie-bigen Schnittflache dan. Der Spannungsvektor ti = t(x, t, ei) der Flachedai mit der Normalen ei kann in Richtung der Koordinatenachsen ej in derForm
ti = T jiej (5.42)
zerlegt werden. Die Indizes in T ji besitzen bei dieser Definition die Bedeu-tung:
1. Index: Richtung der Spannungskomponente
2. Index: Richtung der Normalen
Mit Gleichung (5.38) erhalten wir dann
t(x, t,n) = tjej = (ti ⊗ ei) (nkek) = (T jiej ⊗ ei) (nkek)
= T jinkδikej = T jiniej
124 Kapitel 5. Bilanzsatze
Abbildung 5.5: Darstellung der Spannungskomponenten
und fur die Koeffizienten des Spannungsvektors t = tjej an die Flache mitder Normalen n = nkek gilt dann
tj = T jini. (5.43)
Damit kann die Koeffizientendarstellung des Cauchyschen Spannungsten-sors bzgl. einer kartesischen Basis in der Form
T = tk ⊗ ek = T ikei ⊗ ek (5.44)
angegeben werden. In der Darstellung (5.43) bezeichnet der zweite Index ider Koeffizienten T ji die Richtung der Normalen, d. h. in diesem Fall dieRichtung des Basisvektors ei und der erste Index weist auf die Richtungder Spannungskomponenten bezuglich des gewahlten kartesichen Koordina-tensystems, d. h. hier in Richtung des Basisvektors ej, hin. Diese gewahlteBezeichnungsweise wird in Abbildung 5.5 verdeutlicht.
5.3. Mechanische Spannungen 125
Die Wahl der Komponentendarstellung (5.42) ist nicht eindeutig und ins-besondere wird in der Ingenieurliteratur haufig der erste Index zur Bezeich-nung der Normale und der zweite Index zur Bezeichnung der Richtung her-angezogen, d. h. es gilt dann im Gegensatz zu (5.43) die Gleichung
tj = T ij ni, (5.45)
wobei fur T ij gilt :
1. Index: Richtung der Normalen
2. Index: Richtung der Spannungskomponente.
Bei der Arbeit mit mehreren Literaturstellen sollte der Leser sich den Um-stand der unterschiedlichen Bezeichnungen standig vor Augen halten.
In dieser Arbeit benutzen wir die Definition durch die Gleichung (5.42),verwenden jedoch in den Kapiteln 8 und 9 auch die gebrauchliche Inge-nieurnotation.
126 Kapitel 5. Bilanzsatze
5.3.2 Darstellung der dynamischen Feldgleichungen inder Momentankonfiguration
Mit Hilfe des in Abschnitt 5.3.1 eingefuhrten Cauchyschen Spannungsten-sors in der Form der Gleichung (5.44)
T = tk ⊗ ek = T ikei ⊗ ek
in einem Punkt x der Momentankonfiguration Bt ist es nun moglich, ausdem Satz von der Erhaltung der Bewegungsgroße eine lokale Formulierungder Gleichgewichtsbedingung herzuleiten.
5.3.2.1 Herleitung der dynamischen Feldgleichungen
Wir betrachten einen aus dem materiellen Korper B herausgeschnittenenTeilkorper B⋆ in der Momentankonfiguration. Fur diesen beliebig gewahltenTeilkorper B⋆ gilt die dynamische Kraftegleichgewichtsbedingung (5.16) inder Form ∫
B⋆
t
ρ x dv =
∫
B⋆
t
ρ b dv +
∫
∂B⋆
t
t da . (5.46)
Fur den Teilkorper B⋆ stellt t die auf ∂B⋆t wirkende, vorgegebene außere
Oberflachenspannung dar. Durch das Schnittprinzip sind die inneren Span-nungen t = t(x, t,n) im Punt x der Oberflache ∂B⋆
t ein Maß fur die dortwirkende lokale mechanische Beanspruchung und stellen fur den TeilkorperB⋆ die vorgegebene Spannung t dar, d. h. es gilt mit Hilfe des Cauchy-Theorems (5.40)
t = t = T n ∀ x ∈ ∂B⋆t .
Damit erhalten wir aus der Gleichung (5.46) die Darstellung∫
B⋆
t
ρ x dv =
∫
B⋆
t
ρ b dv +
∫
∂B⋆
t
Tn da . (5.47)
Das Oberflachenintegral uber die Oberflache ∂B⋆t des Teilkorpers B⋆ in der
Momentankonfiguration kann mit Hilfe des Gaußschen Integralsatzes in einIntegral uber das Volumen B⋆
t des Teilkorpers B⋆ umgewandelt werden. Furhinreichend glatte Spannungstensoren T gilt dann (siehe z. B. de Boer [7])
∫
∂B⋆
t
Tn da =
∫
B⋆
t
divT dv . (5.48)
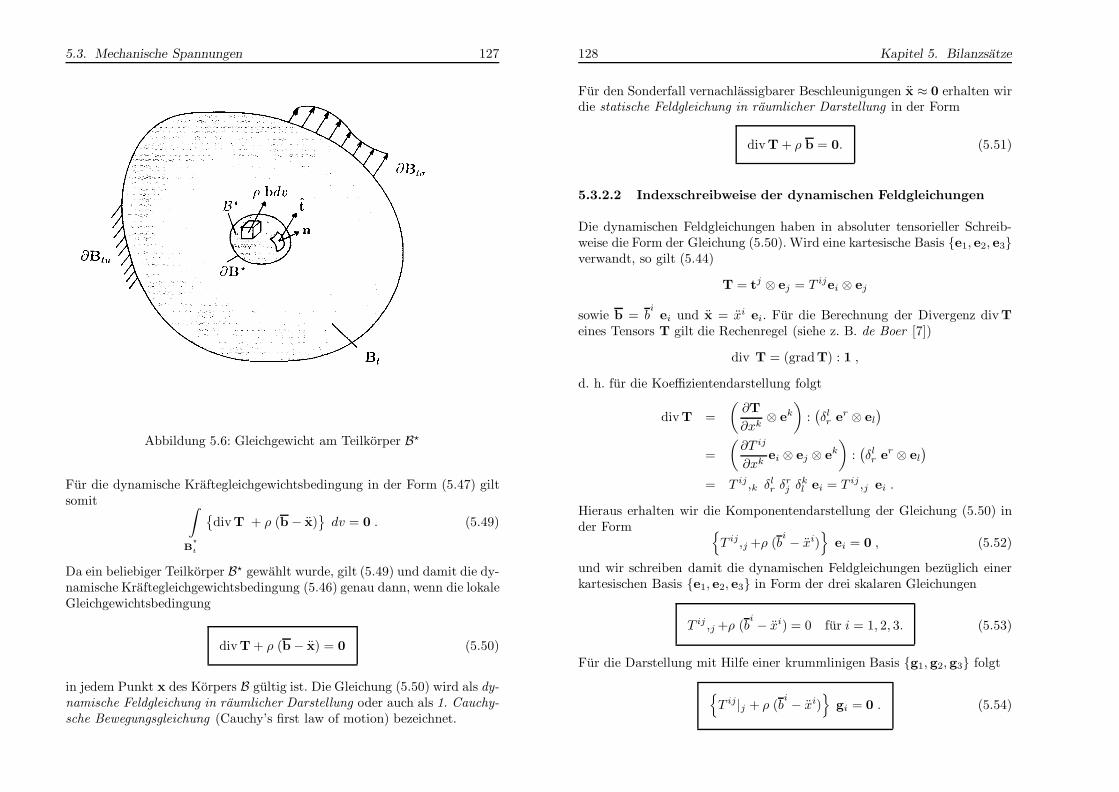
5.3. Mechanische Spannungen 127
Abbildung 5.6: Gleichgewicht am Teilkorper B⋆
Fur die dynamische Kraftegleichgewichtsbedingung in der Form (5.47) giltsomit ∫
B⋆
t
divT + ρ (b− x)
dv = 0 . (5.49)
Da ein beliebiger Teilkorper B⋆ gewahlt wurde, gilt (5.49) und damit die dy-namische Kraftegleichgewichtsbedingung (5.46) genau dann, wenn die lokaleGleichgewichtsbedingung
divT + ρ (b− x) = 0 (5.50)
in jedem Punkt x des Korpers B gultig ist. Die Gleichung (5.50) wird als dy-namische Feldgleichung in raumlicher Darstellung oder auch als 1. Cauchy-sche Bewegungsgleichung (Cauchy’s first law of motion) bezeichnet.
128 Kapitel 5. Bilanzsatze
Fur den Sonderfall vernachlassigbarer Beschleunigungen x ≈ 0 erhalten wirdie statische Feldgleichung in raumlicher Darstellung in der Form
divT + ρ b = 0. (5.51)
5.3.2.2 Indexschreibweise der dynamischen Feldgleichungen
Die dynamischen Feldgleichungen haben in absoluter tensorieller Schreib-weise die Form der Gleichung (5.50). Wird eine kartesische Basis e1, e2, e3verwandt, so gilt (5.44)
T = tj ⊗ ej = T ijei ⊗ ej
sowie b = biei und x = xi ei. Fur die Berechnung der Divergenz divT
eines Tensors T gilt die Rechenregel (siehe z. B. de Boer [7])
div T = (gradT) : 1 ,
d. h. fur die Koeffizientendarstellung folgt
divT =
(∂T
∂xk⊗ ek
):(δlr er ⊗ el
)
=
(∂T ij
∂xkei ⊗ ej ⊗ ek
):(δlr er ⊗ el
)
= T ij,k δlr δ
rj δ
kl ei = T ij,j ei .
Hieraus erhalten wir die Komponentendarstellung der Gleichung (5.50) inder Form
T ij,j +ρ (bi − xi)
ei = 0 , (5.52)
und wir schreiben damit die dynamischen Feldgleichungen bezuglich einerkartesischen Basis e1, e2, e3 in Form der drei skalaren Gleichungen
T ij ,j +ρ (bi − xi) = 0 fur i = 1, 2, 3. (5.53)
Fur die Darstellung mit Hilfe einer krummlinigen Basis g1, g2, g3 folgt
T ij|j + ρ (b
i − xi)
gi = 0 . (5.54)
5.3. Mechanische Spannungen 129
An dieser Stelle machen wir nochmals auf die unterschiedliche Definiti-onsmoglichkeit (5.43) bzw. (5.45) der Komponenten des SpannungstensorsT aufmerksam.
Die Gleichungen (5.53) bzw. (5.54) legen die Definition der Koeffizienten desSpannungstensors nach (5.43) zugrunde, d. h. der erste Index bezeichnet dieRichtung der Spannungskomponente wahrend der zweite Index die Richtungder Normalen ergibt.
Verwenden wir hingegen die klassische Ingenieurnotation, d. h. der ersteIndex bezeichnet die Normalenrichtung und der zweite Index die Richtungder Spannungskomponente, so verandern sich die obigen Gleichungen, d.hanstatt (5.53) erhalten wir
T ji,j +ρ (bi − xi) = 0 (5.55)
bzw. anstatt (5.54) folgt
T ji|j + ρ (bi − xi) = 0. (5.56)
In der absoluten Tensorschreibweise ist dann der Cauchysche Spannungs-tensor T durch den entsprechenden transponierten Tensor zu ersetzen.
In vielen Fallen, aber nicht immer, kann mit dem Ergebnis des Drehimpul-serhaltungsatzes (siehe Abschnitt 5.4), d. h. der Symmetrie des CauchyschenSpannungstensors T = TT , dieser Bedeutungsunterschied vernachlassigtwerden.
5.3.3 Materielle Darstellung des Spannungsvektors tund des Cauchyschen Spannungstensors T in derReferenzkonfiguration B
Mit Gleichung (5.24) wurde der Spannungsvektor t = t(x, t,n) und mit
Gleichung (5.40) der Cauchysche Spannungstensor T = T(x, t) im Punktx der verformten Konfiguration Bt in Abhangigkeit der raumlichen Ko-ordinaten x und des Normalenvektors n an die verformte Oberflache ∂Bt
eingefuhrt. Da diese verformte Konfiguration zunachst noch unbekannt ist,ist es erforderlich, die auftretenden Großen auf die bekannte Referenzkon-figuration B zu beziehen. Fur die globale Kraftegleichgewichstbedingungist dies mit der Formulierung des Erhaltungssatzes der Bewegungsgroße inmaterieller Betrachtungsweise in Abschnitt 5.2.2 geschehen. Die Transfor-mation der lokalen Großen b, t bzw. t und T soll im folgenden vorgenommenwerden.
130 Kapitel 5. Bilanzsatze
5.3.3.1 Transformation der eingepragten Volumenkraftdichte b
Die resultierende eingepragte Volumenkraft auf einen Korper B in der Mo-mentankonfiguration Bt ergibt sich aus (5.13) zu
Fb
=
∫
Bt
ρ(x) b(x) dv .
Durch Transformation des Integrationsbereiches auf die feste Referenzkon-figuration B folgt hieraus
Fb
=
∫
Bt
ρ(x) b(x) dv =
∫
B
ρ(Φ(X)) b(Φ(X)) det F(X) dV .
Mit der 1. lokalen Formulierung der Massenerhaltung nach (5.7)
detF(X) ρ(Φ(X)) = ρ(X)
ergibt sich weiterhin die Beziehung
Fb
=
∫
B
ρ(X) b(Φ(X)) dV =
∫
B
ρ(X) b(X) dV .
Damit ist die Beziehung
b(X) := b(Φ(X)) (5.57)
zwischen der raumlichen Darstellung b der eingepragten Volumenkrafte undder materiellen Darstellung b gefunden.
5.3.3.2 Transformation der eingepragten Oberflachenkraftdichte
t(x, t,n)
Aus der eingepragten Oberflachenspannung t der Oberflache ∂Bt des mate-riellen Korpers B in der Momentankonfiguration ergibt sich die resultierendeKontaktkraft F
tnach (5.26) zu
Ft
=
∫
∂Bt
t(x, t,n) da =
∫
∂B
t(X, t,N) dA . (5.58)
5.3. Mechanische Spannungen 131
Hierin bezeichnet
• t(x, t,n) die in raumlicher Darstellungsweise gegebene, eingepragteOberflachenspannung und
• t(X, t,N) die entsprechende Transformation von t(x, t,n) auf diematerielle Darstellung in Abhangigkeit der materiellen KoordinatenX und der Normalen N des Randes ∂B der unverformten Konfigura-tion B . t(X, t,N) stellt somit die auf die Ausgangsmetrik bezogeneeingepragte Oberflachenspannung dar.
In jedem Punkt x der Oberflache ∂Bt der verformten Konfiguration Bt
muß die eingepragte Oberflachenspannung t(x, t,n) der dort auftretendenSchnittspannung t(x, t,n) = T(x, t) n entsprechen, d. h. es gilt
t(x, t,n) = t(x, t,n) = T(x, t)n. (5.59)
5.3.3.3 Transformation des Spannungsvektors t(x, t,n) und Ein-
fuhrung der Piola-Kirchhoff-Spannungstensoren
Wir betrachten den in Abbildung 5.6 eingefuhrten Teilkorper B⋆t und be-
rechnen die auf der Oberflache ∂B⋆t wirkende resultierende Schnittkraft
Ft =
∫
∂B⋆
t
t(x, t,n) da =
∫
∂B⋆
t
T(x, t)n da . (5.60)
Mit der Transformationsregel (3.169) der vektoriellen Oberflachenelementeda = n da der Momentankonfiguration und dA = N dA der Referenzkonfi-guration
da = det F(FT )−1 dA
folgt fur die resultierende Schnittkraft
Ft =
∫
∂B⋆
t
Tn da =
∫
∂B⋆
Tdet FF−TN dA
=
∫
∂B⋆
(det F T F−T )︸ ︷︷ ︸=:P
N dA .
132 Kapitel 5. Bilanzsatze
Damit ist gezeigt, daß in der materiellen Darstellung der NormalenvektorN im Punkt X der unverformten Konfiguration auf die Transformation
P := detF T F−T (5.61)
des Cauchyschen Spannungstensors T angewandt wird. Der somit eingefuhr-te Spannungstensor P wird als 1. Piola-Kirchhoff-Spannungstensor (1. P.K.)bezeichnet, und es gilt
t(X, t,N) = P(X, t)N . (5.62)
Fur die Transformation des Spannungsvektors t der Momentankonfigurationin den Spannungsvektor t der Referenzkonfiguration gilt damit
Ft =
∫
∂B⋆
t
t(x, t,n) da =
∫
∂B⋆
t
T(x, t)n da
=
∫
∂B⋆
P(X, t)N dA =
∫
∂B⋆
t(X, t,N) dA .
Im Vorgriff auf das Ergebnis des Drehimpulserhaltungssatzes in Abschnitt5.4 notieren wir, daß der Cauchysche Spannungstensor T symmetrisch ist.Fuur den 1. Piola-Kirchhoff-Spannungstensor bleibt diese Symmetrie nichterhalten, d. h. es gilt im allgemeinen
PT = detF(TF−T )T = det F F−1 T 6= det F TF−T = P,
und damit erhalten wir die Gleichung (5.80)
P 6= PT .
Um diesen Nachteil zu beheben und auch fuur die materielle Darstel-lung einen symmetrischen Spannungstensor zu erhalten, wird der 1. Piola-Kirchhoff-Spannungstensor durch eine Kongruenztransformation symmetri-siert. Man definiert den 2. Piola-Kirchhoff-Spannungstensor (2. P.K.) S
durch
5.3. Mechanische Spannungen 133
S := F−1P = det F F−1 TF−T . (5.63)
Fuur den 2. Piola-Kirchhoff-Spannungstensor gilt offensichtlich
S = ST . (5.64)
Der 2. Piola-Kirchhoff-Spannungstensor stellt eine reine Rechengroße dar,deren Komponenten physikalisch nicht zu interpretieren sind.
Als weiterer Spannungstensor wird der Biotscher Spannungstensor (Jau-mannscher Spannungstensor)
TB := RTP = detFRTTF−T (5.65)
eingefuhrt. Hierin bezeichnet R den aus der polaren Zerlegung des mate-riellen Deformationsgradienten F = RU = VR bekannten orthogonalenDrehtensor. Es gilt wiederum
TB 6= TTB . (5.66)
An dieser Stelle weisen wir ausdrucklich darauf hin, daß der Unterschiedin der Notation der Indizes, d. h. der erste Index bezeichnet die Richtungder Spanunngskomponente und der zweite Index kennzeichnet die Norma-lenrichtung oder umgekehrt, bei den unsymmetrischen SpannungstensorenP und TB beachtet werden muß.
5.3.4 Darstellung der dynamischen Feldgleichungen inder Referenzkonfiguration
Die materielle Darstellung der dynamischen Kraftegleichgewichtsbedingunglautet nach (5.22)
∫
∂B
t(X, t,N) dA+
∫
B
ρ(X, t)(b(X, t)− x(X, t)
)dV = 0 .
134 Kapitel 5. Bilanzsatze
Mit der Darstellung der auf die Referenzkonfiguration bezogenen Spannungt durch die Anwendung des 1. Piola-Kirchhoff-Spannungstensors P auf dieFlachennormale N
t = t = PN
folgt ∫
∂B
PN dA+
∫
B
ρ(b − x) dV = 0 .
Das Oberflachenintegral uber die Oberflache der Referenzkonfiguration wirdmit Hilfe des Gaußschen Integralsatzes in ein Volumenintegral verwandelt,und wir erhalten die Gleichung
∫
B
DivP + ρ(b − x)
dV = 0 . (5.67)
Die obige Gleichung kann fur beliebige Korper B bzw. Teilkorper B⋆ nur
erfullt sein, wenn der Integrand identisch Null wird. Damit ist die dynami-sche Feldgleichung in materieller Form (lokale Gleichgewichtsbedingung inmaterieller Form)
DivP + ρ(b − x) = 0 (5.68)
hergeleitet. Wird die Beziehung
P = FS (5.69)
zwischen dem 1. Piola-Kirchhoff-Spannungstensor P und dem 2. Piola-Kirchhoff-Spannungstensor S verwandt, so erhalten wir
Div(FS) + ρ(b − x) = 0 . (5.70)
5.4. Der Satz von der Erhaltung des Drehimpulses 135
5.4 Der Satz von der Erhaltung des Drehim-pulses
In diesem Abschnitt wird der Drehimpulserhaltungssatz formuliert. Mit derBeschrankung auf die Betrachtung von Boltzmann-Kontinua (siehe auchAbschnitt 1.3.1), d. h. es treten keine flachen- bzw. volumenhaft verteiltenMomente auf, erhalten wir hieraus die Symmetrie des Cauchyschen Span-nungstensors.
5.4.1 Raumliche Darstellung
Der Drehimpuls L eines mit der Geschwindigkeit x bewegten materiellenKorpers B bezuglich eines raumfesten Punktes x ist gegeben durch
L :=
∫
Bt
(x− x)× ρ x dv. (5.71)
In der englischsprachigen Literatur wird L als”moment of momentum“ oder
auch als”angular momentum“ bezeichnet. Bezogen auf ein Inertialsystem
gilt der Satz von der Erhaltung des Drehimpulses:
Der Drehimpuls L eines materiellen Korpers Bt ist eine Erhaltungs-große.Die zeitliche Anderung des Drehimpulses L ist gleich der vektoriellenSumme der Momente aller auf den Korper einwirkenden Krafte.
Formelmaßig gilt
L =DL
Dt= M
t+ M
b. (5.72)
Hierin bezeichnet Mt
das resultierende Moment der auf ∂Bt wirkendeneingepragten Krafte t bezuglich des Punktes x, d. h.
Mt
=
∫
∂Bt
(x − x)× t da . (5.73)
136 Kapitel 5. Bilanzsatze
Weiterhin bezeichnet Mb
das resultierende Moment der in Bt wirkendeneingepragten Volumenkraft, d. h.
Mb
=
∫
Bt
((x − x)× ρb
)dv . (5.74)
Damit laßt sich der Drehimpulserhaltungssatz in der Form
DL
Dt=
D
Dt
∫
Bt
ρ (x− x)× x dv
=
∫
Bt
(x− x)× ρb dv +
∫
∂Bt
(x − x) × t da
schreiben. Fur die zeitliche Anderung des DrehimpulsesD
DtL folgt unter
Verwendung der Massenerhaltung
D
DtL =
D
Dt
∫
Bt
ρ (x − x) × x dv
=D
Dt
∫
B
detF ρ (x− x)× x dV
=
∫
B
D
Dtρ det F (x − x)× x dV
=
∫
B
(ρ+ ρ div x)︸ ︷︷ ︸=0
(x− x)× x det F dV
+
∫
B
ρ (x− x)× x + ρ x× x︸ ︷︷ ︸=0
detF dV
=
∫
Bt
ρ (x − x) × x dv
und mit der Darstellung des Spannungsvektors t = t durch den Cauchy-schen Spannungstensor T in der Form t = Tn folgt die Gleichung∫
Bt
ρ (x−x)× x dv =
∫
Bt
(x−x)×ρb dv+
∫
∂Bt
(x−x)×(Tn) da . (5.75)
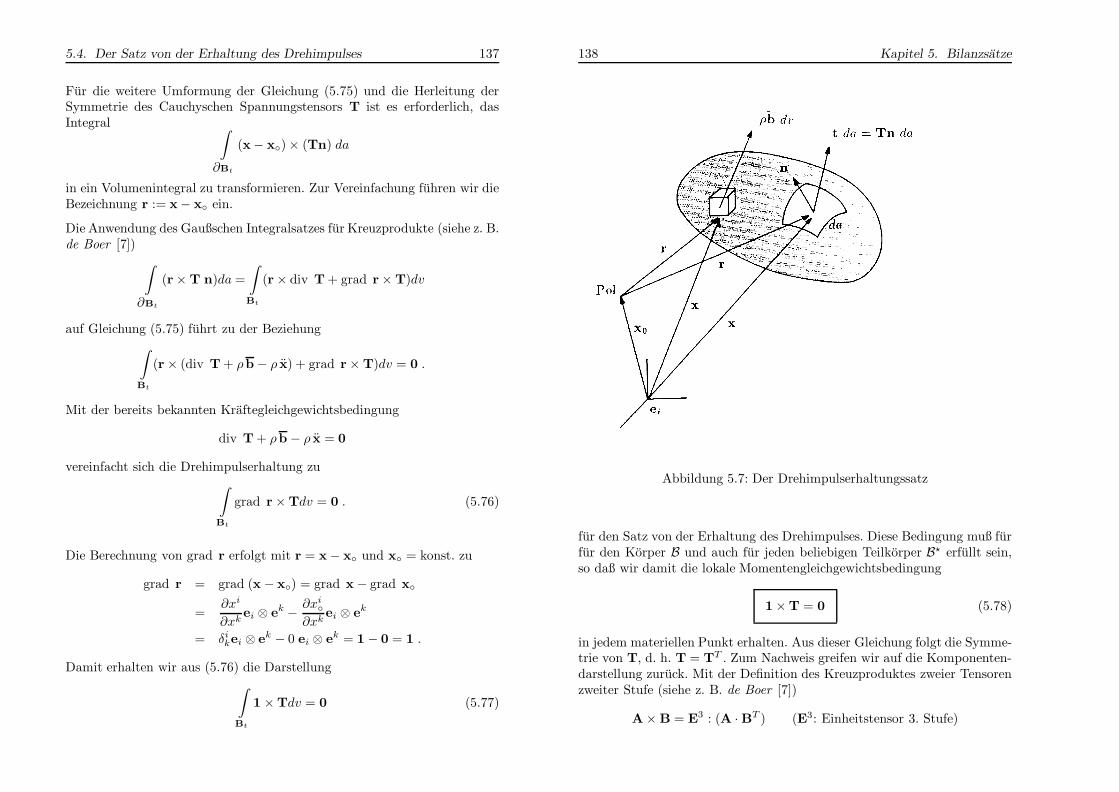
5.4. Der Satz von der Erhaltung des Drehimpulses 137
Fur die weitere Umformung der Gleichung (5.75) und die Herleitung derSymmetrie des Cauchyschen Spannungstensors T ist es erforderlich, dasIntegral ∫
∂Bt
(x− x)× (Tn) da
in ein Volumenintegral zu transformieren. Zur Vereinfachung fuhren wir dieBezeichnung r := x− x ein.
Die Anwendung des Gaußschen Integralsatzes fur Kreuzprodukte (siehe z. B.de Boer [7])
∫
∂Bt
(r×T n)da =
∫
Bt
(r× div T + grad r×T)dv
auf Gleichung (5.75) fuhrt zu der Beziehung
∫
Bt
(r× (div T + ρb− ρ x) + grad r×T)dv = 0 .
Mit der bereits bekannten Kraftegleichgewichtsbedingung
div T + ρb− ρ x = 0
vereinfacht sich die Drehimpulserhaltung zu
∫
Bt
grad r×Tdv = 0 . (5.76)
Die Berechnung von grad r erfolgt mit r = x− x und x = konst. zu
grad r = grad (x − x) = grad x − grad x
=∂xi
∂xkei ⊗ ek − ∂xi
∂xkei ⊗ ek
= δikei ⊗ ek − 0 ei ⊗ ek = 1 − 0 = 1 .
Damit erhalten wir aus (5.76) die Darstellung
∫
Bt
1 ×Tdv = 0 (5.77)
138 Kapitel 5. Bilanzsatze
Abbildung 5.7: Der Drehimpulserhaltungssatz
fur den Satz von der Erhaltung des Drehimpulses. Diese Bedingung muß furfur den Korper B und auch fur jeden beliebigen Teilkorper B⋆ erfullt sein,so daß wir damit die lokale Momentengleichgewichtsbedingung
1×T = 0 (5.78)
in jedem materiellen Punkt erhalten. Aus dieser Gleichung folgt die Symme-trie von T, d. h. T = TT . Zum Nachweis greifen wir auf die Komponenten-darstellung zuruck. Mit der Definition des Kreuzproduktes zweier Tensorenzweiter Stufe (siehe z. B. de Boer [7])
A×B = E3 : (A ·BT ) (E3: Einheitstensor 3. Stufe)

5.4. Der Satz von der Erhaltung des Drehimpulses 139
und ihrer Anwendung auf Gleichung (5.78) folgt
1×T = Tkjeijkgi .
Hierbei wird das Permutationssymbol eijk mit der Definition
eijk :=
+1 : i, j, k in gerader Permutation−1 : i, j, k in ungerader Permutation
0 : sonst
benutzt. Als Beispiel wird eine Auswertung fur i = 1 vorgenommen und wirerhalten
0 = e111T11 + e112T21 + e113T31
+ e121T12 + e122T22 + e123T32
+ e131T13 + e132T23 + e133T33
= T32 − T23
und somit T32 = T23. Entsprechend erhalt man aus der Auswertung von(5.78) fur i = 2 bzw. i = 3 die Ergebnisse T13 = T31 bzw. T12 = T21. Inabsoluter Schreibweise konnen diese Ergebnisse zur Symmetrie des Cauchy-schen Spannungstensors zusammengefaßt werden, d. h. es gilt
T = TT . (5.79)
5.4.2 Materielle Betrachtungsweise
In der materiellen Betrachtungsweise wurden die Piola-Kirchhoff-Span-nungstensoren P und S definiert. Zur Uberprufung ihrer Symmetrieeigen-schaften greifen wir auf ihre Definitionsgleichungen und die bereits nachge-wiesene Symmetrie des Spannungstensors T zuruck.
5.4.2.1 Betrachtung des 1. Piola-Kirchhoff-Spannungstensors P
Mit der Definition des 1. Piola-Kirchhoff-Spannungstensors (5.61)
P = detF TF−T
140 Kapitel 5. Bilanzsatze
und der Symmetrie des Cauchyschen Spannungstensors T folgt unter Be-achtung der Rechenregel (siehe z. B. de Boer [7])
(AB)T = BT AT
die Gleichung
PT = (det F T F−T )T = det F F−1 T 6= det F T F−T = P.
Damit ist gezeigt, daß der 1. Piola-Kirchhoff-Spannungstensor im allgemei-nen nicht symmetrisch ist, d. h. es gilt
P 6= PT . (5.80)
5.4.2.2 Symmetrie des 2. Piola-Kirchhoff-Spannungstensors S
Der 2. Piola-Kirchhoff-Spannungstensor S ist durch die Kongruenztransfor-mation nach (5.63), d. h. S = detF F−1TF−T , aus dem symmetrischenCauchyschen Spannungstensor T hergeleitet worden. Die Kongruenztrans-formation F−1TF−T bewahrt die Symmetrie des Spannungstensors T, unddamit gilt
S = ST . (5.81)
5.5. Der Bilanzsatz der kinetischen Energie 141
5.5 Der Bilanzsatz der kinetischen Energie
Der Erhaltungssatz der Bewegungsgroße eines mechanischen Systems, d. h.die globale Kraftegleichgewichtsbedingung (5.14)
D
Dt
∫
Bt
ρ x dv =
∫
Bt
ρ b dv +
∫
∂Bt
t da
ist in Abschnitt 5.2 formuliert worden. Durch Einfuhrung des CauchyschenSpannungstensors T nach (5.40) folgt hieraus die dynamische Feldgleichung(5.50)
divT + ρ (b− x) = 0
als lokale Gleichgewichtsbedingung fur alle materiellen Punkte x ∈ Bt .
Eine zum Erhaltungssatz der Bewegungsgroße aquivalente globale Gleich-gewichtsbedingung erhalten wir mit dem Bilanzsatz der kinetischen Energieeines mechanischen Systems, der auch als der Bilanzsatz der mechanischenEnergie oder als der Arbeitssatz der Mechanik bezeichnet wird.
5.5.1 Herleitung des Bilanzsatzes der kinetischenEnergie
Zur Herleitung betrachten wir die 1. Cauchysche Bewegungsgleichung (5.50)
divT + ρ (b− x) = 0 ∀ x ∈ Bt .
Durch Multiplikation mit dem Geschwindigkeitsvektor x des aktuellen Be-wegungszustandes und durch Integration uber das aktuelle Volumen Bt desmateriellen Korpers B in der Momentenkonfiguration erhalten wir die Aus-sage ∫
Bt
divT + ρ (b− x)
· x dv = 0 ,
bzw. ∫
Bt
ρ x · x dv =
∫
Bt
ρ b · x dv +
∫
Bt
(divT) · x dv. (5.82)
Mit der Beziehung
(divT) · x = div (TT x) − T : grad x
142 Kapitel 5. Bilanzsatze
und dem Gaußschen Integralsatz kann das dritte Integral in (5.82) in dieForm
∫
Bt
(divT) · x dv =
∫
Bt
div (TT x) dv −∫
Bt
T : grad x dv
=
∫
∂Bt
(TT x) · n da−∫
Bt
T : grad x dv
=
∫
∂Bt
x · (Tn) da−∫
Bt
T : grad x dv
umgewandelt werden. Mit dieser Beziehung, der Definition des CauchyschenSpannungstensors T, d. h. t = Tn, und der Randbedingung t = t auf ∂Bt
folgt fur Gleichung (5.82) die Darstellung
∫
Bt
ρ x · x dv =
∫
Bt
ρ b · x dv +
∫
∂Bt
t · x da−∫
Bt
T : grad x dv. (5.83)
Mit der Definition der kinetischen Energie eines mechanischen Systemsdurch
K :=
∫
Bt
1
2ρ x · x dv (5.84)
sowie der zeitlichen Anderung der kinetischen Energie in der Form
D
DtK = K =
D
Dt
∫
Bt
1
2ρ x · x dv =
∫
Bt
ρ x · x dv (5.85)
erhalten wir die Aussage des Bilanzsatzes der kinetischen Energie eines me-chanischen Systems
D
Dt
∫
Bt
1
2ρ x · x dv =
∫
∂Bt
t · x da+
∫
Bt
ρ b · x dv −∫
Bt
T : grad x dv.
(5.86)
5.5. Der Bilanzsatz der kinetischen Energie 143
Neben der Definition der gesamten kinetischen Energie K eines mechani-schen Systems nach (5.84) benutzen wir die Bezeichnung
A:=
∫
∂Bt
t · x da+
∫
Bt
ρ b · x dv (5.87)
fur die Leistung der eingepragten Oberflachen- und Volumenkrafte und
W :=
∫
Bt
T : grad x dv (5.88)
fur die innere Spannungsleistung . Damit kann der Bilanzsatz der kinetischenEnergie eines mechanischen Systems in der Form
DK
Dt= K =
A −
W (5.89)
geschrieben werden. In Worten gilt somit:
Die zeitliche Anderung der kinetischen Energie K eines mechanischenSystems entspricht der Leistung der eingepragten Oberflachen- und
Volumenkrafte
A vermindert um die innere Spannungsleistung
W .
Bemerkungen:
1. Der Bilanzsatz der kinetischen Energie ist in der obigen Form nur furInertialsysteme gultig.
2. Es ist besonders darauf zu achten, daß
W und
A keine Ableitungender Großen W und A darstellen, sondern nur Bezeichnungen sind. Esgilt mit (5.87)
A=
∫
Bt
ρ b · x dv +
∫
∂Bt
t · x da 6= DA
Dt,
144 Kapitel 5. Bilanzsatze
d. h. es ist nicht gesichert, ob eine skalare Große A (ein Potential)
existiert, so daß sich
A als zeitliche Ableitung von A nach t darstellenlaßt.
3. Benutzen wir die differentielle Schreibweise, so wird mit der Notationd–W bzw. d–A verdeutlicht, daß keine vollstandigen Differentiale derFormanderungsenergie und der außeren Arbeit existieren. Die Großend–A und d–W sind dabei sogenannten Diminutive.
Im Vorgriff auf die Ergebnisse des 1. und 2. Hauptsatzes der Thermodyna-mik betrachten wir reversible, isotherme Prozesse (siehe Kapitel 5.8), beidenen ein vollstandiges Differential dW der Formanderungsenergie existiert.Weiterhin beschranken wir uns auf außere, eingepragte Krafte mit Potenti-al, z. B. Totlasten (siehe Abschnitt 10.5), so daß wir mit dem vollstandigenDifferential dA der außeren Arbeit aus der Gleichung (5.89) die Darstellung
dK = dA− dW
folgern. Fur quasi-statische Prozesse mit x ≈ 0 tritt keine kinetische EnergieK auf, und wir erhalten damit durch Integration
0 =
E∫
A
dA−E∫
A
dW
uber den Deformationsweg vom unverformten Zustand A der Referenzkon-figuration zum deformierten Zustand E der Momentankonfiguration mitden Potentialeigenschaften der Formanderungsenergie und der außere Ar-beit den Arbeitssatz der Mechanik in der Form
W = A. (5.90)
In Worten besagt der Arbeitssatz der Mechanik fur reversible und isothermeProzesse:
Bei quasi-statischen Formanderunsgvorgangen ist die Arbeit aller ein-gepragten Krafte A gleich der Formanderungsenergie W .

5.5. Der Bilanzsatz der kinetischen Energie 145
5.5.2 Einfuhrung der Elementarleistung und arbeits-konformer Paarungen von Spannungs- und Ver-zerrungstensoren
Der Term (5.88)
W=
∫
Bt
Ws dv =
∫
Bt
T : grad x dv
in der Bilanzaussage der kinetischen Energie stellt die Leistung der inne-ren Spannungen auf dem aktuellen Geschwindigkeitsfeld dar. Der Integrand
Ws := T : grad x der inneren Spannungsleistung wird auch als Elementarlei-stung oder stress power bezogen auf die Momentankonfiguration bezeichnet.Das Skalarprokukt aus T und grad x beschreibt die tatsachliche physikali-sche Leistung und wird aus diesem Grunde als arbeitskonforme Paarungeines Spannungstensors mit einem Verzerrungsgeschwindigkeitstensor ein-gefuhrt.
Das Ziel dieses Abschnittes ist es, weitere arbeitskonforme Paarungen, ins-besondere fur Großen der Referenzkonfiguration, herzuleiten.
Als Vorbetrachtung bemerken wir, daß wir auf Grund der Symmetrie desCauchyschen Spannungstensors T = TT die Aussage
T : grad x = T : d
erhalten. Hierin stellt d den raumlichen Deformationsgeschwindigkeitsten-sor, das ist der symmetrische Anteil des raumlichen Geschwindigkeitsgradi-enten l = grad x
d :=1
2(l + lT ) =
1
2(grad x + grad xT ) , (5.91)
dar. Zur Herleitung weiterer arbeitskonformer Paarungen betrachten wir dieTransformation der inneren Spannungsleistung in die Referenzkonfiguration
W=
∫
Bt
T : d dv =
∫
Bt
T : grad x dv =
∫
B
det F T : grad x dV. (5.92)
Fur die Elementarleistung
Ws, bezogen auf die Referenzkonfiguration B ,erhalten wir die Gleichung
Ws := detF T : grad x = detF tr (T (grad x)T ). (5.93)
146 Kapitel 5. Bilanzsatze
Die Darstellung des Skalarproduktes A : B zweier 2-stufiger Tensoren uberden Spur-Operator tr in der Form
A : B = tr (ABT ) = tr (BTA) = tr (BAT ) = tr (AT B)
ist der Ausgangspunkt unserer weiteren Betrachtungen. Es gilt
Ws = detF T : grad x = detF tr (T (grad x)T )
= detF tr (TF−TFT
︸ ︷︷ ︸=1
(grad x)T )
= detF tr (TF−T (grad x F)T )
= (detF TF−T )︸ ︷︷ ︸=P
: (grad x F)︸ ︷︷ ︸=Grad x
,
und somit erhalten wir die Darstellung der Elementarleistung
Ws uberden 1. Piola-Kirchhoff-Spannungstensor P und den materiellen Geschwin-digkeitsgradienten F = Grad x
Ws = detF T : grad x = P : Grad x = P : F. (5.94)
Bei der obigen Umformung wurde die Beziehung
F = Grad x = grad x Gradx = grad x F
angewandt, die sich durch Anwendung der Kettenregel beweisen laßt
F = Grad x =∂
∂Xx(X) =
∂
∂Xx (x(X)) =
∂x(x)
∂x· ∂x∂X
= grad x Gradx = grad x F .
Es gilt damit
W=
∫
Bt
T : d dv =
∫
B
P : F dV , (5.95)
d. h. der 1. Piola-Kirchhoff-Spannungstensor P und die zeitliche Ableitungdes materiellen Deformationsgradienten F bilden eine arbeitskonforme Paa-rung.

5.5. Der Bilanzsatz der kinetischen Energie 147
Weitere Paarungen lassen sich folgendermaßen herleiten:
Ws = P : F = tr (PFT ) = tr (FF−1︸ ︷︷ ︸
=1
PFT )
= tr (F−1PFTF) = tr(F−1P(FT F)
T)
= (F−1P) : (FT F) = S : (FT F).
Wieder bietet es sich auf Grund der Symmetrie von S = ST an, im Ska-larprodukt nur den symmetrischen Anteil von FTF anzuschreiben. Dabeifindet man aus der zeitlichen Ableitung des Greenschen Verzerrungstensor
E =˙1
2(FTF− 1) =
1
2(FT F + FTF) =
1
2
(FT F + (FT F)T
)
leicht zu
Ws = S : (FT F) = S : E. (5.96)
Damit haben wir S und E als arbeitskonforme Großen bezuglich der Refe-renzkonfiguration identifiziert.
Fur den Biotschen Spannungstensor TB = RTP folgt die Beziehung
Ws = P : F = tr (PFT ) = tr (PT F)
= tr (PT RU) = tr (PT RU + PTRU)
= tr (PT RU) + tr (PTRU)
= tr (PT RRTF) + tr((RTP)T U
)
= tr (FPT RRT ) + tr((RTP)T U
)
= tr((
PFT)T
RRT)
+ tr((
RTP)T
U)
=(PFT
): RRT + (RTP) : U
= (detF T) : (RRT ) + TB : U.
Fur den Tensor RRT gilt
1 =˙
(RRT ) = RRT + RRT = 0
und damitRRT = −RRT = − (RRT )T ,
148 Kapitel 5. Bilanzsatze
d. h. er ist schiefsymmetrisch. Damit folgt aus der Symmterie des Cauchy-schen Spannungstensors die Beziehung
(detF T) : (RRT ) = 0
und wir erhalten die arbeitskonforme Paarung des Biotschen Spannungs-tensors TB mit der materiellen Zeitableitung des Rechts-Streck-Tensors U
Ws = TB : U. (5.97)
Somit haben wir die folgenden Beziehungen hergeleitet:
Darstellung der inneren Spannungsleistung uber arbeitskonforme Paa-rungen der Spannungstensoren mit geeigneten materiellen Zeitablei-tungen von Verzerrungstensoren:
W=
∫
Bt
Ws dv =
∫
Bt
T : grad x dv =
∫
Bt
T : d dv
=
∫
B
Ws dV =
∫
B
P : F dV =
∫
B
S : E dV
=
∫
B
TB : U dV.
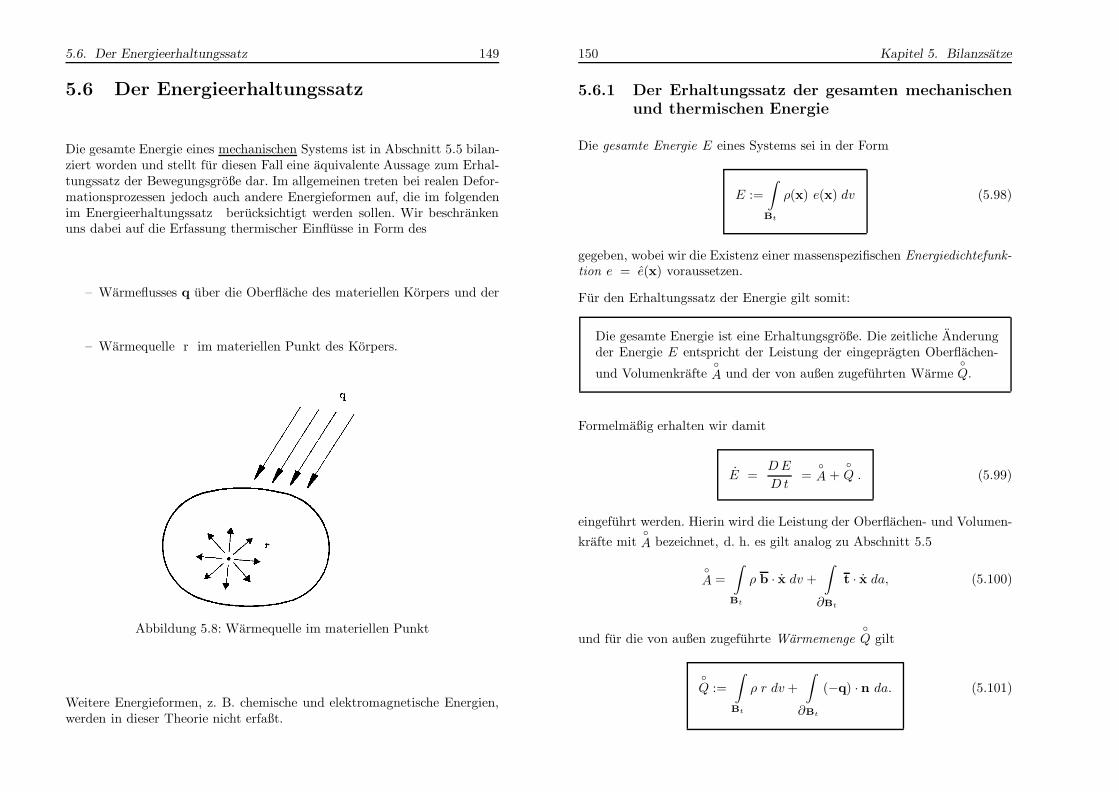
5.6. Der Energieerhaltungssatz 149
5.6 Der Energieerhaltungssatz
Die gesamte Energie eines mechanischen Systems ist in Abschnitt 5.5 bilan-ziert worden und stellt fur diesen Fall eine aquivalente Aussage zum Erhal-tungssatz der Bewegungsgroße dar. Im allgemeinen treten bei realen Defor-mationsprozessen jedoch auch andere Energieformen auf, die im folgendenim Energieerhaltungssatz berucksichtigt werden sollen. Wir beschrankenuns dabei auf die Erfassung thermischer Einflusse in Form des
– Warmeflusses q uber die Oberflache des materiellen Korpers und der
– Warmequelle r im materiellen Punkt des Korpers.
Abbildung 5.8: Warmequelle im materiellen Punkt
Weitere Energieformen, z. B. chemische und elektromagnetische Energien,werden in dieser Theorie nicht erfaßt.
150 Kapitel 5. Bilanzsatze
5.6.1 Der Erhaltungssatz der gesamten mechanischenund thermischen Energie
Die gesamte Energie E eines Systems sei in der Form
E :=
∫
Bt
ρ(x) e(x) dv (5.98)
gegeben, wobei wir die Existenz einer massenspezifischen Energiedichtefunk-tion e = e(x) voraussetzen.
Fur den Erhaltungssatz der Energie gilt somit:
Die gesamte Energie ist eine Erhaltungsgroße. Die zeitliche Anderungder Energie E entspricht der Leistung der eingepragten Oberflachen-
und Volumenkrafte
A und der von außen zugefuhrten Warme
Q.
Formelmaßig erhalten wir damit
E =DE
D t=
A +
Q . (5.99)
eingefuhrt werden. Hierin wird die Leistung der Oberflachen- und Volumen-
krafte mit
A bezeichnet, d. h. es gilt analog zu Abschnitt 5.5
A =
∫
Bt
ρ b · x dv +
∫
∂Bt
t · x da, (5.100)
und fur die von außen zugefuhrte Warmemenge
Q gilt
Q :=
∫
Bt
ρ r dv +
∫
∂Bt
(−q) · n da. (5.101)
5.6. Der Energieerhaltungssatz 151
Damit kann der Energieerhaltungssatz in der Form
D
Dt
∫
Bt
ρ e dv =
∫
Bt
ρ b · x dv +
∫
∂Bt
t · x da
+
∫
Bt
ρ r dv −∫
∂Bt
q · n da (5.102)
geschrieben werden. Schreiben wir Gleichung (5.99) als totales Differentialder auftretenden Großen, so gilt
dE = d–A+ d–Q, (5.103)
wobei die Notation d–A bzw. d–Q darauf hindeutet, daß A und Q keinevollstandigen Differentiale besitzen. Die Großen d–A und d–Q werden als Di-minutive bezeichnet.
5.6.2 Die lokale Formulierung des Energieerhaltungs-satzes
Lokale Formulierungen des Energieerhaltungssatzes konnen in der folgen-den Form hergeleitet werden. Betrachtet wird die Darstellung (5.102) desEnergieerhaltungssatzes. Mit Benutzung des Reynoldschen Transporttheo-rems und des Gaußschen Integralsatzes erhalten wir die Umformungen
D
Dt
∫
Bt
ρ e dv −∫
Bt
(ρ b · x + ρ r) dv +
∫
∂Bt
(q · n− t · x) da = 0
∫
Bt
ρ e dv −∫
Bt
ρ (b · x + r) dv +
∫
∂Bt
(q · n− (Tn) · x) da = 0
∫
Bt
ρ e− r − b · x dv +
∫
Bt
div q dv −∫
∂Bt
(TT x) · n da = 0
∫
Bt
ρ e− r − b · x +1
ρdiv q dv −
∫
Bt
div (TT x) dv = 0
∫
Bt
ρ
e− r − b · x +
1
ρdiv q − 1
ρdiv (TT x)
dv = 0.
152 Kapitel 5. Bilanzsatze
Hieraus folgt die Gultigkeit der Gleichung
e− r − b · x +1
ρdiv q− 1
ρdiv (TT x) = 0 ∀ x ∈ Bt
und damit die lokale Form des Energieerhaltungssatzes
e =1
ρ
−div q + div(TT x)
+ r + b · x. (5.104)
Hierin bezeichnetq:= r − 1
ρdivq (5.105)
die von außen zugefuhrte Warme pro Masseneinheit (spezifische Warmezu-fuhr) und es gelte
Q=
∫
Bt
ρq dv. (5.106)
5.7 Der 1. Hauptsatz der Thermodynamik
In Abschnitt 5.6 ist der Energieerhaltungssatz fur Systeme mit mechani-schen und thermischen Energien angegeben worden.
Die gesamte Energie E nach (5.98)
E =
∫
Bt
ρ(x) e(x) dv
kann additiv in den Anteil der kinetischen Energie K nach (5.84)
K =
∫
Bt
1
2ρ(x) x · x dv
und den Anteil der inneren Energie U , definiert durch
U :=
∫
Bt
ρ(x) u(x) dv, (5.107)
5.7. Der 1. Hauptsatz der Thermodynamik 153
aufgespalten werden. Hierbei setzen wir wieder die Existenz einer innerenEnergiedichtefunktion u = u(x) voraus. Fur die innere Energie U gilt damitdie Beziehung
U = E −K, (5.108)
d. h.
∫
Bt
ρ(x) u(x) dv =
∫
Bt
ρ(x) e(x) dv −∫
Bt
1
2ρ(x)x · x dv. (5.109)
Die Bilanz der inneren Energie kann somit sofort aus dieser Gleichung undden Ergebnissen der Abschnitte 5.5 und 5.6 hergeleitet werden. Es gilt damit
U =D
DtU =
D
Dt(E −K) = E − K = (
A +
Q) − (
A −
W ),
d. h.
U =
W +
Q . (5.110)
Benutzen wir wieder die Darstellung in Form der totalen Differentiale, soerhalten wir mit (5.103)
dU = (d–A+ d–Q)− (d–A− d–W ) = d–Q+ d–W. (5.111)
In Worten besagt der Bilanzsatz der inneren Energie, der auch als 1. Haupt-satz der Thermodynamik bezeichnet wird:
Die zeitliche Anderung der inneren Energie U entspricht der Summe
der inneren Spannungsleistung
W und der zugefuhrten Warme
Q.
Es gilt somit die Formel
D
DtU =
D
Dt
∫
Bt
ρ(x) u(x) dv =
∫
Bt
T : grad x dv +
∫
Bt
ρ r dv −∫
∂Bt
q · n da.
154 Kapitel 5. Bilanzsatze
Eine lokale Formulierung des 1. Hauptsatzes kann folgendermaßen hergelei-tet werden. Man betrachte die Darstellung
D
Dt
∫
Bt
ρ(x) u(x) dv =
∫
Bt
ρ(x) u(x) dv
=
∫
Bt
T : grad x dv +
∫
Bt
ρ r dv −∫
∂Bt
q · n da.
Mit dem Gaußschen Integralsatz gilt
∫
Bt
ρ u dv −∫
Bt
T : grad x dv −∫
Bt
ρ r dv +
∫
Bt
div q dv = 0
und somit ∫
Bt
ρ u− ρ r −T : grad x + div q dv = 0. (5.112)
Hieraus folgt unter Ausnutzung der Symmetrie des Cauchyschen Span-nungstensors T die lokale Form des 1. Hauptsatzes der Thermodynamik
u = r − 1
ρdiv q +
1
ρT : d. (5.113)
Mit der Definition (5.105)
q = r − 1
ρdivq
fur die spezifische Warmezufuhr gilt damit
u =q +
1
ρT : d. (5.114)
5.8 Der 2. Hauptsatz der Thermodynamik
Der 2. Hauptsatz der Thermodynamik sagt aus, daß fur die thermomecha-nischen Vorgange eine Prozeßrichtung naturlich gegeben ist. Als Beispiel sei
5.8. Der 2. Hauptsatz der Thermodynamik 155
die Beobachtung angegeben, nach der die Warme nicht von selbst aus ei-nem Korper niedriger Temperatur T1 zu einem Korper hoherer TemperaturT2 > T1 ubergehen kann.
Zur mathematischen Beschreibung dieser Beobachtung wird die EntropieS als massenspezifisch verteilte Feldgroße eingefuhrt, d. h. es existiere einemassenspezifische Entropiedichte s = s(x). Daraus ergibt sich die Entropiedes Korpers B zu
S :=
∫
Bt
ρ(x) s(x) dv. (5.115)
Zu Beginn des Prozesses sei der Wert der Entropie bekannt, d. h. o. B. d. A.sei S = 0.
Der 2. Hauptsatz der Thermodynamik besagt nun, in welcher Form sichdie Entropie, d. h. das eingefuhrte Maß fur die Prozeßrichtung, andert. Der2. Hauptsatz der Thermodynamik lautet:
Die Anderung der Entropie S entspricht der Summe der Entropiezu-fuhr durch Warmeproduktion im Innern und durch den Warmefluß-vektor uber die Oberflache sowie der Entropieproduktion im Innern.
In Formeln bedeutet dies
D
DtS =
D
Dt
∫
Bt
ρ s dv =
∫
Bt
r
θρ dv −
∫
∂Bt
1
θq · n da+
∫
Bt
ρ σ dv. (5.116)
Hierin bezeichnet
∫
Bt
ρr
θdv
die Entropiezufuhr durch Warmeproduktionim Innern,
−∫
∂Bt
1
θq · n da
die Entropiezufuhr durch den Warmeflußvektoruber die Oberflache,
∫
Bt
ρ σ dv die Entropieproduktion im Innern,
156 Kapitel 5. Bilanzsatze
wobei θ die absolute Temperatur ist.
Aus dieser globalen Bedingung kann die Darstellung des 2. Hauptsatzes inlokaler Form hergeleitet werden. Es folgt hieraus die Gleichung
s = σ +r
θ− 1
ρdiv(q
θ
)(5.117)
fur die Anderung der spezifischen Entropie S.
Wichtig sind nun die folgenden Uberlegungen. Aus der physikalischen Be-obachtung erkennen wir, daß die Entropie niemals vermindert werden kann.Dies bedeutet, daß die Entropieproduktion σ = σ(x) im Innern des KorpersB niemals negativ sein kann, d. h. es gilt
Entropieproduktion σ ≥ 0
fur alle moglichen Prozesse.
Aus dieser Beobachtung ergeben sich zwei Moglichkeiten:
(i) reversible ProzesseBetrachten wir reversible Prozesse, die in der Natur nur als Grenzfallauftreten, so geben wir keine bestimmte Prozeßrichtung vor, sondernerlauben auch die Umkehrung der Vorgange. Fur diesen Fall gilt
σ = 0.
(ii) irreversible ProzesseIn der Natur tritt bei jedem Vorgang auch eine Entropieproduktionσ > 0 auf, die es uns nicht ermoglicht den Vorgang, ohne weitereEnergiezufuhr von außen, umzukehren. Als anschauliches Beispiel seidie in jedem Prozeß auftretende dissipative Energie, z. B. infolge Rei-bung oder plastischer Formanderung, genannt, die eine Umkehrungdes Vorganges nicht erlaubt. In jedem wirklich auftretenden Prozeß inder Natur gilt daher
σ > 0.
Mit der Forderung σ ≥ 0 kann der 2. Hauptsatz der Thermodynamik auchals Ungleichung geschrieben werden. Wir erhalten dann die Darstellung
∫
Bt
ρ s dv ≥∫
Bt
ρ1
θr dv −
∫
∂Bt
1
θq · n da, (5.118)
5.8. Der 2. Hauptsatz der Thermodynamik 157
bzw. die sogenannte Clausius-Duhem-Ungleichung (CDU) als lokale Formdes zweiten Hauptsatzes
s ≥ r
θ− 1
ρdiv
q
θ, bzw. (5.119)
s ≥ r
θ− 1
ρ θdivq +
1
ρ θ2q · grad θ. (5.120)
In den Gleichungen (5.119) und (5.120) gilt das Gleichheitszeichen fur denFall eines reversiblen Prozesses, d. h. mit σ = 0 folgt
s =r
θ− 1
ρdiv(q
θ
), bzw. (5.121)
s =r
θ− 1
ρ θdivq +
1
ρ θ2q · grad θ. (5.122)
Fur die weitere Betrachtung fuhren wir die folgenden Bezeichnungen ein:
1. Ein thermomechanischer Prozeß heißt adiabatisch, wenn zwischen denmateriellen Punkten kein Warmeaustausch geschieht und auch keineWarme produziert wird. Es gilt dann r = 0 und q = 0 fur alle mate-riellen Punkte des materiellen Korpers B. Aus der lokalen Form des2. Hauptsatzes erhalten wir dann nach Gleichung (5.117) s = σ ≥ 0,bzw. s = 0 fur reversible Prozesse. Fur die von außen zugefuhr-
te Warmemenge
Q nach Gleichung (5.101) gilt dann
Q= 0 fur allex ∈ Bt . Dieses Ergebniss kann mit der in Abschnitt 5.6 angegebenenNotation in der Form
d–Q = 0 (5.123)
geschrieben werden.
2. Ein thermodynamischer Prozeß heißt isentrop, wenn
S = konst., d. h. S = 0
gilt. Mit Gleichung (5.121) folgt dann die Beziehung
r
θ− 1
ρdiv(q
θ
)= 0. (5.124)
Dann ist der Zuwachs der inneren Energie gleich dem Zuwachs derFormanderungsenergie, d. h.
dU = d–W = dW. (5.125)
158 Kapitel 5. Bilanzsatze
Die Formanderungsenergie besitzt also immer ein vollstandiges Dif-ferential, wenn der Deformationsprozeß ohne Warmeproduktion oderWarmeverlust vor sich geht. Dieser Grenzfall gilt naherungsweise furquasi-statische Vorgange, in denen die Deformationen
”langsam“ ein-
treten. Hieraus folgen die Beziehungen (5.123) und (5.125).
3. Ein thermomechanischer Prozeß heißt isotherm, wenn die Prozeßtem-peratur θ konstant bleibt, d. h. θ = 0, bzw. dθ = 0. Aus Gleichung(5.122) erhalten wir somit
θ s ≥ r − 1
ρdivq. (5.126)
Abschließend wollen wir die Folgerungen aus der thermodynamischen Be-trachtung fur die elastischen Materialien in Abschnitt 7.4 vorbereiten. Dazusetzen wir einen reversiblen, isothermen Prozeß voraus. Im Fall reversiblerProzesse kann die Gleichung (5.126) auch in der Form
θ dS = d–Q (5.127)
dargestellt werden. Dabei ist θ die thermodynamische Temperatur und dSdas vollstandige Differential der Entropie. Die Legendre-Transformation von(5.127) ergibt
θ dS = d(θ S) − dθ S.und damit folgt aus der Darstellung (5.111) des 1. Hauptsatzes
d–W = dU − d–Q = dU − d(θ S) + dθ S.
Hieraus erhalt man schließlich fur den Zuwachs an Formanderungsenergieden Ausdruck
d–W = d(U − θ S) + dθ S. (5.128)
Fur isotherme Prozesse mit dθ = 0 erhalten wir
d–W = d(U − θ S)
und damit besitzt in diesem Fall die freie oder Helmholtzsche Energie
W = WH := (U − θ S) (5.129)
ein vollstandiges Differential und ist eine Zustandsgroße, die vom Deforma-tionsvorgang unabhangig ist. Fuhren wir eine massenspezifische Funktion
5.8. Der 2. Hauptsatz der Thermodynamik 159
Ψ = Ψ(x) in der Momentankonfiguration und Ψ = Ψ(X) in der Refe-renzkonfiguration mit der Beziehung Ψ = Ψ Φ fur die HelmholtzscheEnergie ein, so kann fur isotherme Prozesse die folgende Beziehung zurFormanderungsenergie W mit der spezifischen Formanderungsdichte Ws
in der Referenzkonfiguration und Ws in der Momentankonfiguration herge-leitet werden:
Fur isotherme Prozesse, d. h. fur Prozesse ohne Temperaturanderungdθ = 0, erhalten wir die Darstellung
W =
∫
B
Ws dV =
∫
B
ρΨ dV =
∫
Bt
ρΨ dv =
∫
Bt
Ws dv (5.130)
fur die Formanderungsenergie.
160 Kapitel 5. Bilanzsatze
Kapitel 6
Zusammenstellung undLinearisierung derstoffunabhangigenGleichungen
In den Kapiteln 3, 4 und 5 wurden die stoffunabhangigen Gleichungen derKontinuumsmechanik hergeleitet. In Abschnitt 6.1 werden diese Gleichun-gen im Uberblick zusammengefaßt und die Bilanz zwischen den vorhande-nen Gleichungen und den Unbekannten gezogen. An dieser Stelle wird dieNotwendigkeit weiterer Gleichungen, namlich der konstitutiven Beziehungenzwischen den Spannungen und Verzerrungen, zur eindeutigen Losbarkeit desRandwertproblems der Elastizitatstheorie (siehe Kapitel 8) ersichtlich.
Die eingefuhrten Verzerrungsmaße sowie die mechanischen Bilanzaussagenuber die Erhaltung der Masse, der Bewegungsgroße und des Drehimpulsessind in absoluter tensorieller Schreibweise formuliert worden und somit furjede Wahl eines beliebigen, krummlinigen Koordinatensystems auszuwerten.
Die Herleitung der Verzerrungsmaße und der Bilanzaussagen ist fur eineallgemeine Deformation Φ : IR3 × IR × IR → IR3 eines materiellen KorpersB aus der Referenzkonfiguration B , zur Zeit t = t in die Momentankon-figuration Bt , zur Zeit t > t vorgenommen worden.
161
162 Kapitel 6. Die stoffunabhangigen Gleichungen
Hierfur sind neben einer hinreichenden Regularitat der Abbildung Φ keineweiteren einschrankenden Voraussetzungen gemacht worden.
In der Mechanik deformierbarer Korper kann in vielen Anwendungen eineBeschrankung der Deformation auf kleine Verschiebungen, kleine Verdre-hungen und kleine Verzerrungen festgestellt werden. Fur diese Problemelassen sich aussagekraftige Ergebnisse bereits mit einer linearisierten Theo-rie gewinnen.
Der Ubergang von der in den letzten Kapiteln aufgestellten allgemeingulti-gen Theorie großer Verschiebungen und großer Verzerrungen zur linearisier-ten Theorie kleiner Verschiebungen und kleiner Verzerrungen soll in diesemKapitel vorgenommen werden.
6.1 Zusammenstellung der stoffunabhangigenGleichungen
Die zunachst noch unbekannte Bewegung des materiellen Korpers B ist nach(2.23) durch die Abbildung Φ : IR3×IR×IR → IR3 der ReferenzkonfigurationB in die Momentankonfiguration Bt gegeben. Nach den Ausfuhrungen inKapitel 3 wird mit der Definition des materiellen Deformationsgradienten
F = GradΦ (X)
in (3.11) durch die Einfuhrung des Greenschen Verzerrungstensors E
E =1
2(FTF− 1)
ein geeignetes Verzerrungsmaß bereitgestellt.
Die mechanischen Bilanzaussagen uber die Erhaltung der Masse, der Be-wegungsgroße und des Drehimpulses sind in Kapitel 5 hergeleitet wordenund bilden das in Tabelle 6.1 dargestellte System von Gleichungen bzw.Differentialgleichungen.
Wird die Symmetrie des Cauchyschen Spannungstensors T = TT bereitsin die Differentialgleichungen eingearbeitet, so bleiben die vier Differential-gleichungen der Massenbilanz nach (5.9)
ρ+ ρ div x = 0
6.1. Die stoffunabhangigen Gleichungen 163
und der dynamischen Feldgleichungen nach (5.50)
divT + ρ (b− x) = 0
zur Bestimmung der zehn Unbekannten
Φ Bewegung des materiellen Korpers B, d. h. x = Φ (X, t, t)
ρ Massendichte ρ = ρ(x) und
T Cauchyscher Spannungstensor T = TT .
Es fehlen somit 6 Gleichungen, um die Unbekannten eindeutig bestimmenzu konnen. Zudem treten in dem System der Differentialgleichungen dieden mechanischen Vorgang beschreibenden Feldgroßen, d. h. die Bewegungx = Φ(X) und der Cauchysche Spannungstensor T, ohne Verknupfungauf.
Die restlichen 6 Gleichungen sind durch die Materialgleichungen (konsti-tutive Gleichungen), d. h. durch die Verknupfung von Verzerrungs- undSpannungstensor, gegeben. Die Beschreibung der Materialgesetze wird inKapitel 7 geschehen.
Erhaltungssatz Gleichungen Anzahl Unbekannte
Masse ρ+ ρ div x = 0 1 x 3
ρ 1
Impuls divT + ρ (b− x) = 0 3 T 9
b bekannt
Drehimpuls T = TT 3 - -
7 13
Tabelle 6.1: Bilanz der stoffunabhangigen Gleichungen
164 Kapitel 6. Die stoffunabhangigen Gleichungen
6.2 Mathematische Grundlagen der Lineari-sierung
Die Grundidee der linearen Approximation einer nichtlinearen Funktionkann an einem Beispiel aus der reellen Analysis erlautert werden, siehe z. B.Heuser [32], Blatter [6].
6.2.1 Linearisierung reellwertiger Funktionen einerVeranderlichen
Fur eine reellwertige, stetig differenzierbare Funktion G : IR → IR, d. h. furG ∈ C1(IR), gilt mit der Taylorreihenentwicklung in einem Punkt x ∈ IRder Zusammenhang
G(x+ u) = G+ DG · u+R. (6.1)
Hierin bezeichnet
G = G(x) den Funktionswert von G an der Stelle x,
DG = G′(x) die erste Ableitung der Funktion G an der Stelle x und
R = R(u) das Restglied der Taylorreihenentwicklung mit der Eigenschaft
lim|u|→0
R(u)
| u | = 0. (6.2)
Als Linearisierung Lin [G]x der Funktion G an der Stelle x wird nun derlineare Anteil der Funktion G
Lin [G]x := G+ DG · u (6.3)
bezeichnet. Die geometrische Interpretation wird aus Abbildung 6.1 deut-lich.
Fur den spateren Gebrauch werden die Landauschen O-Symbole eingefuhrt(siehe z. B. Blatter [6]). Dazu betrachten wir zwei Funktionen f und g, diein einer Umgebung von x ∈ IR definiert seien. Gilt fur die Funktionen f undg die Beziehung
limx→x
|f(x)||g(x)| = 0 ,

6.2. Mathematische Grundlagen der Linearisierung 165
so schreiben wir
f(x) = o(g(x)) fur x→ x.
Gilt andererseits fur eine Konstante c > 0 die Bedingung
|f(x)| ≤ c |g(x)|
fur alle x in einer geeigneten Umgebung von x, so schreiben wir hierfur
f(x) = O(g(x)) fur x→ x.
Damit kann (6.1) in der Form
G(x+ u) = G+ DG · u+ o(u) (6.4)
geschrieben werden.
Abbildung 6.1: Darstellung der linearen Approximation Lin [G]x
166 Kapitel 6. Die stoffunabhangigen Gleichungen
6.2.2 Linearisierung skalarwertiger Funktionen mehre-rer Veranderlicher
Die Ergebnisse, die fur die skalarwertige Funktion G : IR → IR erlautertwurden, lassen sich sofort auf stetig differenzierbare, skalarwertige Vektor-funktionen G : IR3 → IR verallgemeinern. Es gilt wiederum die Taylorrei-henentwicklung
G(x + u) = G+ DG · u +R , (6.5)
wobei nun x = (x1, x2, x3)T einen Punkt x im IR3 und u = (u1, u2, u3)
T
einen Verschiebungsvektor des IR3 ausgehend von x beschreibt.
Fur die Ableitung DG erhalten wir in diesem Fall den Gradientenvektor
DG ≡ DG(x) =∂G(x)
∂x=
(∂G(x)
∂x1,∂G(x)
∂x2,∂G(x)
∂x3
)T(6.6)
und fur das Restglied gilt mit | u |2= u · u
lim|u|→0
R(u)
| u | = 0.
Fur die weitere Betrachtung definieren wir den Begriff der Richtungsablei-tung oder auch Gateaux-Ableitung der Vektorfunktion G im Punkt x inRichtung von u durch
d
dε[G(x + εu)] ε=0 . (6.7)
Hierin bezeichnet ε ∈ IR den skalaren Parameter der durch die Gleichung
y(ε) = x + εu
definierten Gerade im IR3. Somit gibt Gleichung (6.7) die Anderung derFunktion G an der Stelle x in Richtung von u an. Aus der Kettenregel folgtdie Beziehung
d
dε[G(x + εu)] ε=0 =
[∂G(x + εu)
∂x· ∂(x + εu)
∂ε
]
ε=0
=∂G(x)
∂x· u.
(6.8)
6.2. Mathematische Grundlagen der Linearisierung 167
Durch den Vergleich der Formeln (6.6) und (6.8) erkennen wir den Zusam-menhang
DG · u =d
dε[G(x + εu)]ε=0 . (6.9)
Somit kann die Ableitung DG ·u aus der Definition der Richtungsableitungbestimmt werden.
6.2.3 Linearisierung vektor- und tensorwertiger Funk-tionen
Das Konzept der Linearisierung kann auf allgemeine Funktionenraume ska-lar-, vektor- oder tensorwertiger Großen ausgedehnt werden (siehe Hughes,Pister [36]). Die Rechenvorschriften ergeben sich hierbei analog zu den obenhergeleiteten Formeln.
Betrachten wir vektor- oder tensorwertige Großen A, so gilt fur die Linea-risierung von A an der Stelle x in Richtung des Vektors u die Beziehung
Lin [A]x,u = A + DA · u = A +
d
dε[A(x + εu)] ε=0 . (6.10)
168 Kapitel 6. Die stoffunabhangigen Gleichungen
6.3 Linearisierung der stoffunabhangigenGleichungen
Die hergeleiteten Verzerrungsmaße sowie die eingefuhrten Spannungstenso-ren sind im allgemeinen nichtlineare Funktionen des unbekannten Verschie-bungsfeldes u = u(X, t) des Korpers B von der Referenzkonfiguration B
in die Momentankofiguration Bt , d. h. mit (3.69) gilt
x = Φ(X) = X + u(X).
Bei einer Beschrankung auf kleine Verschiebungen u kann der Deformations-und Spannungszustand in der Umgebung der unverformten und spannungs-freien Referenzkonfiguration B durch eine lineare Approximation hinrei-chend genau beschrieben werden.
Es werden in diesem Abschnitt nur Linearisierungen an der Stelle x = X
der unverformten Referenzkonfiguration berechnet, so daß wir im weiterenauf die Angabe des Ortes X ∈ B verzichten werden und nach (6.10) dieLinearisierung einer vektor- oder tensorwertigen Große A kurz mit Lin [A]
u
bezeichnen.
6.3.1 Linearisierung der kinematischen Beziehungen
Die Großen an der Stelle X der Referenzkonfiguration werden mit einemubergesetzten Querstrich bezeichnet. Insbesondere gilt dann
F = F−1
= 1, J = 1 und E = 0.
6.3.1.1 Linearisierung des materiellen Deformationsgradienten
F = Gradx
Der Deformationsgradient F ergibt sich nach (3.10) zu
F = Gradx =∂x
∂X
und mit dem Konzept der Richtungsableitung folgt
DF · u =d
dε
[∂(X + ε u)
∂X
]
ε=0
=d
dε
[1 + ε
∂u
∂X
]
ε=0
=∂u
∂X= Gradu = H.
6.3. Linearisierung stoffunabhangiger Großen 169
Damit gilt fur die Linearisierung des materiellen Deformationsgradienten F
Lin [F]u
= F + DF · u = 1 + Gradu = 1 + H = F,
also
Lin [F]u
= 1 + H = F. (6.11)
Hieraus ist erkennbar, daß Lin [F]u
dem materiellen DeformationsgradientenF entspricht. Dies ist sofort einsichtig, da der materielle Deformationsgra-dient eine lineare Funktion der Verschiebung u ist.
6.3.1.2 Linearisierung des raumlichen Deformationsgradienten
F−1 = 1− gradu
Fur die Linearisierung des raumlichen Deformationsgradienten F−1 erhaltman mit der Beziehung F F−1 = 1 und der Produktregel die Gleichung
D[F F−1] · u = F(DF−1 · u) + (DF · u)F−1
= 0.
Hieraus folgt mit F = F−1
= 1 fur X ∈ B
DF−1 · u = −F−1
(DF · u)F−1
= −1 (Gradu) 1 = −Gradu.
Damit gilt fur die Linearisierung des raumlichen DeformationsgradientenF−1 im Punkt X ∈ B der Referenzkonfiguration
Lin[F−1
]u
= 1−Gradu. (6.12)
Man beachte, daß die Linearisierung des raumlichen Deformationsgradien-ten F−1 nicht F−1 entspricht, denn nach Gleichung (3.30) gilt
F−1 = 1− gradu 6= 1−Gradu = Lin[F−1
]u.
170 Kapitel 6. Die stoffunabhangigen Gleichungen
6.3.1.3 Linearisierung des Greenschen Verzerrungstensors E
Der Greensche Verzerrungstensor E ist durch die Beziehung
E =1
2(FT F − 1) =
1
2(H + HT + HT H).
gegeben. Fur die Linearisierung von E im Punkt X der Referenzkonfigura-tion gilt
DE · u =1
2
[d
dε
[∂(X + ε u)
∂X
]T [∂(X + ε u)
∂X
]− 1
]
ε=0
=1
2
[d
dε
[1 + ε H]
T[1 + ε H]− 1
]
ε=0
=1
2
[d
dε
ε H + εHT + ε2HTH
]
ε=0
=1
2
(H + HT
)=
1
2
(Gradu + (Gradu)T
).
Mit E = 0 gilt damit die bereits in Abschnitt 3.4.5 dargestellte Beziehung
ǫǫǫ := Lin [E]u
= E + DE · u =1
2(H + HT ) = Elin . (6.13)
Hiermit ist die Verwendung des linearisierten Greenschen Verzerrungsten-sors ǫǫǫ = Elin fur kleine Verschiebungen u aus der Referenzkonfiguration B
gerechtfertigt.
6.3.1.4 Linearisierung des Almansischen VerzerrungstensorsE(A)
Fur den Almansischen Verzerrungstensor E(A) gilt die Gleichung (3.93)
E(A) =1
2(1− F−T F−1).
Fur die Linearisierung erhalten wir die Beziehung
D[F−T F−1] · u = (DF−T · u)F−1
+ F−T
(DF−1 · u)
= (−Gradu)T1 + 1(−Gradu)
= −Gradu− (Gradu)T

6.3. Linearisierung stoffunabhangiger Großen 171
und fur die Linearisierung Lin[E(A)
]u
des raumlichen Verzerrungstensors
(Almansischer Verzerrungstensor) E(A) folgt somit
Lin[E(A)
]u
=1
2
(Gradu + (Gradu)T
)= Elin (6.14)
und im Vergleich mit der Linearisierung des Greenschen Verzerrungstensorsfolgt
ǫǫǫ = Lin [E]u
= Lin[E(A)
]u
=1
2
(Gradu + (Gradu)T
). (6.15)
Damit erhalten wir das wichtige Resultat:
Die Linearisierung des Almansischen Verzerrungstensors an der StelleX der Referenzkonfiguration B entspricht dem linearen GreenschenVerzerrungstensor ǫǫǫ = Elin und damit der Linearisierung des Green-schen Verzerrungstensors E = 1
2 (FTF − 1).
Hiermit ist die wichtige Tatsache gezeigt, daß bei einer Beschrankung aufeine Theorie kleiner Verschiebungen (ausgehend von der Referenzkonfigura-tion B ) die Unterschiede der Darstellungsweisen verschwinden.
Weiterhin gilt mit Gleichung (3.97)
Lin[E(A)
]u
=1
2(Gradu + (Gradu)T ) = Elin
6= 1
2(gradu + (gradu)T ) = E
(A)lin .
6.3.1.5 Linearisierung der Determinante det F des materiellen
Deformationsgradienten
Fur die Determinante J = detF des materiellen Deformationsgradientenfolgt mit der Beziehung F = 1 + H und der charakteristischen Gleichungdes speziellen Eigenwertproblems (fur λ = −1) die Darstellung
det F = det (1 + H) = 1 + IH + IIH + IIIH
172 Kapitel 6. Die stoffunabhangigen Gleichungen
mit den Invarianten
IH = tr H,
IIH =1
2
[(tr H)2 − trH2
]und
IIIH = det H.
Fur die Linearisierung erhalten wir mit dem Konzept der Richtungsablei-tung die Darstellung
DJ · u =d
dε[det F(X + ε u)]ε=0 =
d
dε[det (1 + ε H)]ε=0
=d
dε
[1 + εIH + ε2IIH + ε3IIIH
]ε=0
= IH = tr H = tr (Gradu)
= 1 : Gradu = Divu.
Damit ergibt sich die Linearisierung der Determinante J = detF des mate-riellen Deformationsgradienten F zu
Lin [J ]u
= detF + D(detF) · u = 1 + Divu. (6.16)
6.3.1.6 Linearisierung der polaren Zerlegung
Im Abschnitt 3.3 wurde mit der polaren Zerlegung die multiplikative Auf-spaltung des materiellen Deformationsgradienten F in den Rechts-Streck-Tensor U bzw. den Links-Streck-Tensor V und den Tensor der orthogonalenDrehung R vorgenommen, d. h. es gilt
F = RU = VR.
An dieser Stelle soll nun die Linearisierung der multiplikativen Zerlegungfur einen Punkt X ∈ B der Referenzkonfiguration vorgenommen werden.Dabei gelte fur die Großen der Referenzkonfiguration B
F = U = V = R = 1
Fur die Linearisierung des materiellen Deformationsgradienten F gilt mit(6.11) die Beziehung
Lin [F]u
= 1 + H = F
6.3. Linearisierung stoffunabhangiger Großen 173
sowie nach (6.13) folgt
ǫǫǫ = Lin [E]u
=1
2(H + HT ) = Elin
fur die Linearisierung des Greenschen Verzerrungstensors. Mit der Bezie-hung E = 1
2(C− 1) erhalten wir somit
DE · u =d
dε[E(X + εu)]ε=0 =
d
dε
[1
2(C(X + εu)− 1)
]
ε=0
=1
2
d
dε[C(X + εu)]ε=0 =
1
2DC · u.
Weiterhin gilt mit der Beziehung C = U2 und U = 1
DC · u =d
dε[C(X + εu)]ε=0 =
d
dε[U2(X + εu)]ε=0
=d
dε[U(X + εu) ·U(X + εu)]ε=0
=d
dε[U(X + εu)]ε=0 ·U + U
d
dε[U(X + εu)]ε=0
= (DU · u) 1 + 1 (Du · u) = 2 DU · u,
und damit folgt
DU · u =1
2DC · u = DE · u =
1
2(H + HT ).
Damit gilt fur die Linearisierung Lin [U]u
des Rechts-Streck-Tensors U
Lin [U]u
= U + DU · u = 1 +1
2DC · u = 1 + DE · u ,
d. h. es gilt
Lin [U]u
= 1 +1
2(H + HT ). (6.17)
Betrachten wir den orthogonalen Drehtensor R, so gilt nun mit Hilfe derpolaren Zerlegung F = RU die Beziehung
R = F−TU.
174 Kapitel 6. Die stoffunabhangigen Gleichungen
Hieraus ergeben sich durch die Herleitung
DR · u =d
dε[F−T (X + εu) ·U(X + εu)]ε=0
= F−T · d
dε[U(X + εu)]ε=0 +
d
dε[F−T (X + εu)]ε=0 U
= 1d
dε[U(X + εu)]ε=0 +
d
dε[F−T (X + εu)]ε=0 1
=d
dε[U(X + εu)]ε=0 +
[d
dε[F−1(X + εu)]ε=0
]T
=1
2(H + HT ) + (−H)T =
1
2(H−HT )
die Richtungsableitung des Drehtensors R und somit folgt fur die Lineari-sierung des Drehtensors R
Lin [R]u
= R + DR · u = 1 +1
2(H−HT ). (6.18)
Fur die Anderung der polaren Zerlegung aus der Referenzkonfiguration B
gilt mit F = RU die Gleichung
DF · u = D(RU) · u =d
dε[R(X + εu) ·U(X + εu)]ε=0
= Rd
dε[U(X + εu)]ε=0 +
d
dε[R(X + εu)]ε=0 U
= 1
1
2(H + HT )
+
1
2(H−HT )
1 = H.
Die Linearisierung der polaren Zerlegung setzt sich somit aus einem lineari-sierten Dehnungsanteil Hsym = 1
2(H+HT ) = Elin und einem Drehungsan-
teil Hasym = 12(H−HT ) = Rlin in Form eines schiefsymmetrischen Tensors
Rlin zusammen (siehe auch Abschnitt 3.4.5). Damit gilt fur die Linearisie-rung der polaren Zerlegung F = RU die Aussage
Lin [F]u
= 1 + H
= 1 + Hsym + Hasym
= 1 +1
2(H + HT ) +
1
2(H−HT )
= 1 + Elin + Rlin
= 1 + DU · u + DR · u.
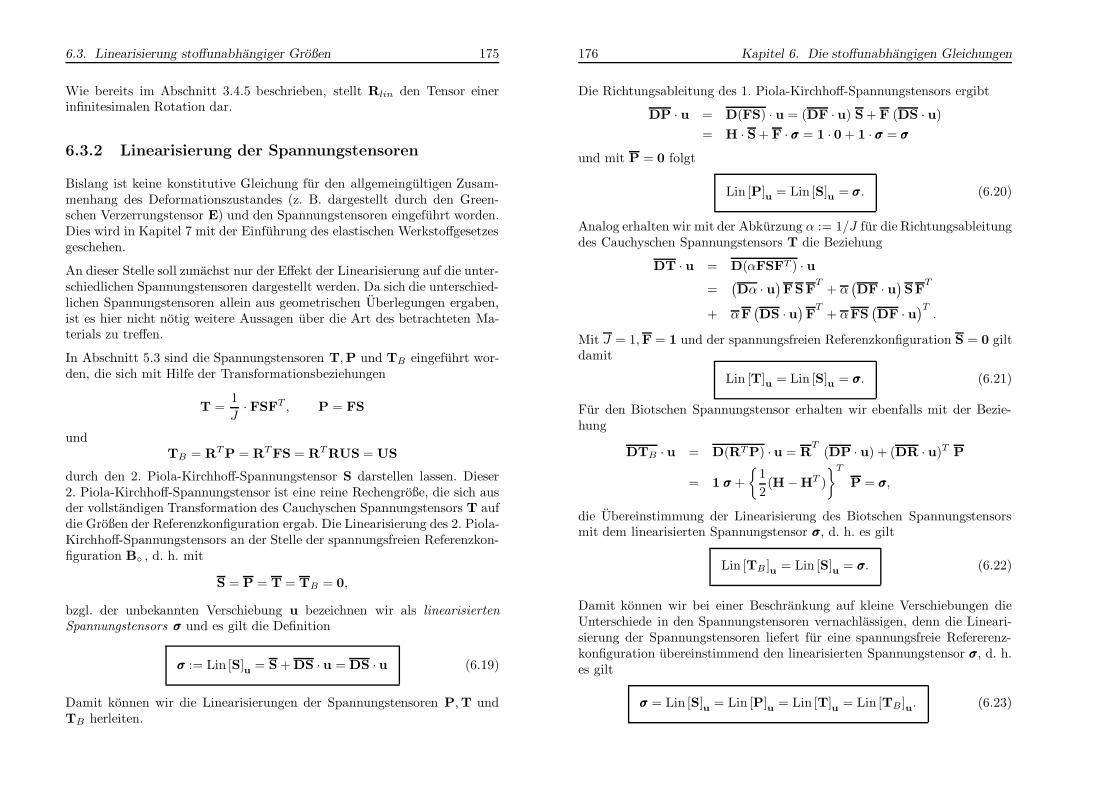
6.3. Linearisierung stoffunabhangiger Großen 175
Wie bereits im Abschnitt 3.4.5 beschrieben, stellt Rlin den Tensor einerinfinitesimalen Rotation dar.
6.3.2 Linearisierung der Spannungstensoren
Bislang ist keine konstitutive Gleichung fur den allgemeingultigen Zusam-menhang des Deformationszustandes (z. B. dargestellt durch den Green-schen Verzerrungstensor E) und den Spannungstensoren eingefuhrt worden.Dies wird in Kapitel 7 mit der Einfuhrung des elastischen Werkstoffgesetzesgeschehen.
An dieser Stelle soll zunachst nur der Effekt der Linearisierung auf die unter-schiedlichen Spannungstensoren dargestellt werden. Da sich die unterschied-lichen Spannungstensoren allein aus geometrischen Uberlegungen ergaben,ist es hier nicht notig weitere Aussagen uber die Art des betrachteten Ma-terials zu treffen.
In Abschnitt 5.3 sind die Spannungstensoren T,P und TB eingefuhrt wor-den, die sich mit Hilfe der Transformationsbeziehungen
T =1
J· FSFT , P = FS
undTB = RTP = RTFS = RTRUS = US
durch den 2. Piola-Kirchhoff-Spannungstensor S darstellen lassen. Dieser2. Piola-Kirchhoff-Spannungstensor ist eine reine Rechengroße, die sich ausder vollstandigen Transformation des Cauchyschen Spannungstensors T aufdie Großen der Referenzkonfiguration ergab. Die Linearisierung des 2. Piola-Kirchhoff-Spannungstensors an der Stelle der spannungsfreien Referenzkon-figuration B , d. h. mit
S = P = T = TB = 0,
bzgl. der unbekannten Verschiebung u bezeichnen wir als linearisiertenSpannungstensors σσσ und es gilt die Definition
σσσ := Lin [S]u
= S + DS · u = DS · u (6.19)
Damit konnen wir die Linearisierungen der Spannungstensoren P,T undTB herleiten.
176 Kapitel 6. Die stoffunabhangigen Gleichungen
Die Richtungsableitung des 1. Piola-Kirchhoff-Spannungstensors ergibt
DP · u = D(FS) · u = (DF · u) S + F (DS · u)
= H · S + F · σσσ = 1 · 0 + 1 · σσσ = σσσ
und mit P = 0 folgt
Lin [P]u
= Lin [S]u
= σσσ. (6.20)
Analog erhalten wir mit der Abkurzung α := 1/J fur die Richtungsableitungdes Cauchyschen Spannungstensors T die Beziehung
DT · u = D(αFSFT ) · u=
(Dα · u
)FSF
T+ α
(DF · u
)SF
T
+ αF(DS · u
)F
T+ αFS
(DF · u
)T.
Mit J = 1,F = 1 und der spannungsfreien Referenzkonfiguration S = 0 giltdamit
Lin [T]u
= Lin [S]u
= σσσ. (6.21)
Fur den Biotschen Spannungstensor erhalten wir ebenfalls mit der Bezie-hung
DTB · u = D(RTP) · u = RT
(DP · u) + (DR · u)T P
= 1 σσσ +
1
2(H−HT )
T
P = σσσ,
die Ubereinstimmung der Linearisierung des Biotschen Spannungstensorsmit dem linearisierten Spannungstensor σσσ, d. h. es gilt
Lin [TB ]u
= Lin [S]u
= σσσ. (6.22)
Damit konnen wir bei einer Beschrankung auf kleine Verschiebungen dieUnterschiede in den Spannungstensoren vernachlassigen, denn die Lineari-sierung der Spannungstensoren liefert fur eine spannungsfreie Refererenz-konfiguration ubereinstimmend den linearisierten Spannungstensor σσσ, d. h.es gilt
σσσ = Lin [S]u
= Lin [P]u
= Lin [T]u
= Lin [TB]u. (6.23)

6.3. Linearisierung stoffunabhangiger Großen 177
6.3.3 Linearisierung der Feldgleichungen
Die statischen Feldgleichungen unter Vernachlassigung der Volumenlastenb bzw. b lauten in der raumlichen Formulierung
divT = 0 und T = TT
bzw. in der materiellen Formulierung
DivP = 0 und F−1 P = (F−1 P)T .
Hieraus ergibt sich infolge der Linearisierung in einem Punkt X der Refe-renzkonfiguration die linearisierten statischen Feldgleichungen
Lin [divT]u
= Lin [DivP]u
= Divσσσ = 0 (6.24)
sowie
σσσ = σσσT . (6.25)
Mit der Beziehung (6.23) konnen nun die Beweise fur die Gleichung (6.24)und (6.25) gefuhrt werden.
Zunachst beweisen wir die Beziehung Lin [DivP]u
= Divσσσ fur die materielleForm der lokalen Gleichgewichtsbedingung.
Der Divergenzoperator Div ist ein linearer Operator und so gilt
D[DivP] · u = D[1 : GradP] · u = 1 :D[GradP] · u
= 1 : GradDP · u = 1 : Gradσσσ = Divσσσ
und die Linearisierung der statischen Feldgleichungen in einem Punkt X derReferenzkonfiguration ergibt die Beziehung
DivLin [P]u = 0. (6.26)
Mit der Bezeichnung (6.20) Lin [P]u
= σσσ gilt also
Divσσσ = 0. (6.27)
178 Kapitel 6. Die stoffunabhangigen Gleichungen
Im nachsten Schritt wird die Beziehung Lin [divT]u
= Divσσσ fur die raum-liche Formulierung der lokalen Gleichgewichtsbedingung gezeigt.
Mit der Beziehung
divT = 1 : gradT = 1 :∂T
∂x= 1 :
(∂T
∂X
∂X
∂x
)
= 1 : (GradT F−1).
erhalten wir fur die Linearisierung der lokalen Gleichgewichtsbedingung, daD[•] · u ein linearer Operator ist, die Darstellung
D[divT] · u = D[1 : (GradT F−1)] · u= 1 :
D(GradT F−1) · u
= 1 :Grad (DT · u) F
−1+ GradTDF−1 · u
.
Mit F−1
= 1 und der Annahme der spannungsfreien Referenzkonfiguration,d. h. T = 0, folgt
D[divT] · u = 1 :Grad (DT · u) 1 + 0 −Gradu
= 1 : Grad (DT · u)= Div (DT · u).
Mit der Linearisierung des Cauchyschen Spannungstensors T nach (6.21)gilt
Lin [T]u
= DT · u = σσσ
und damit folgt fur die Richtungsableitung der statischen Feldgleichung dieBeziehung
D[divT] · u = Div Lin [T]u = Divσσσ.
Damit erhalten wir fur die statische Feldgleichung divT = 0 die Linearisie-rung
Lin [divT]u
= Divσσσ = 0. (6.28)
Abschließend erhalten wir aus der lokalen Form des Drehimpulserhaltungs-satzes (2. Cauchysche Bewegungsgleichung) T = TT durch Linearisierungdirekt die Beziehung (6.25) σσσ = σσσT fur den linearisierten Spannungstensor.

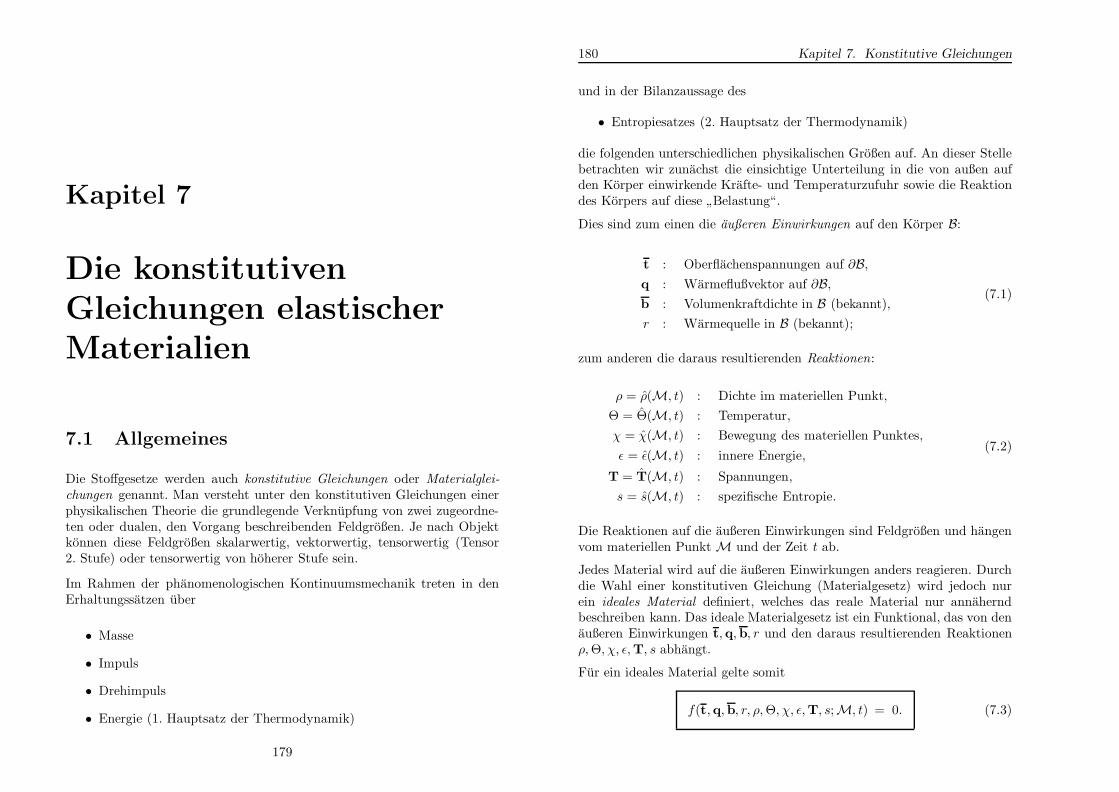
Kapitel 7
Die konstitutivenGleichungen elastischerMaterialien
7.1 Allgemeines
Die Stoffgesetze werden auch konstitutive Gleichungen oder Materialglei-chungen genannt. Man versteht unter den konstitutiven Gleichungen einerphysikalischen Theorie die grundlegende Verknupfung von zwei zugeordne-ten oder dualen, den Vorgang beschreibenden Feldgroßen. Je nach Objektkonnen diese Feldgroßen skalarwertig, vektorwertig, tensorwertig (Tensor2. Stufe) oder tensorwertig von hoherer Stufe sein.
Im Rahmen der phanomenologischen Kontinuumsmechanik treten in denErhaltungssatzen uber
• Masse
• Impuls
• Drehimpuls
• Energie (1. Hauptsatz der Thermodynamik)
179
180 Kapitel 7. Konstitutive Gleichungen
und in der Bilanzaussage des
• Entropiesatzes (2. Hauptsatz der Thermodynamik)
die folgenden unterschiedlichen physikalischen Großen auf. An dieser Stellebetrachten wir zunachst die einsichtige Unterteilung in die von außen aufden Korper einwirkende Krafte- und Temperaturzufuhr sowie die Reaktiondes Korpers auf diese
”Belastung“.
Dies sind zum einen die außeren Einwirkungen auf den Korper B:
t : Oberflachenspannungen auf ∂B,q : Warmeflußvektor auf ∂B,b : Volumenkraftdichte in B (bekannt),
r : Warmequelle in B (bekannt);
(7.1)
zum anderen die daraus resultierenden Reaktionen:
ρ = ρ(M, t) : Dichte im materiellen Punkt,
Θ = Θ(M, t) : Temperatur,
χ = χ(M, t) : Bewegung des materiellen Punktes,
ǫ = ǫ(M, t) : innere Energie,
T = T(M, t) : Spannungen,
s = s(M, t) : spezifische Entropie.
(7.2)
Die Reaktionen auf die außeren Einwirkungen sind Feldgroßen und hangenvom materiellen PunktM und der Zeit t ab.
Jedes Material wird auf die außeren Einwirkungen anders reagieren. Durchdie Wahl einer konstitutiven Gleichung (Materialgesetz) wird jedoch nurein ideales Material definiert, welches das reale Material nur annaherndbeschreiben kann. Das ideale Materialgesetz ist ein Funktional, das von denaußeren Einwirkungen t,q,b, r und den daraus resultierenden Reaktionenρ,Θ, χ, ǫ,T, s abhangt.
Fur ein ideales Material gelte somit
f(t,q,b, r, ρ,Θ, χ, ǫ,T, s;M, t) = 0. (7.3)
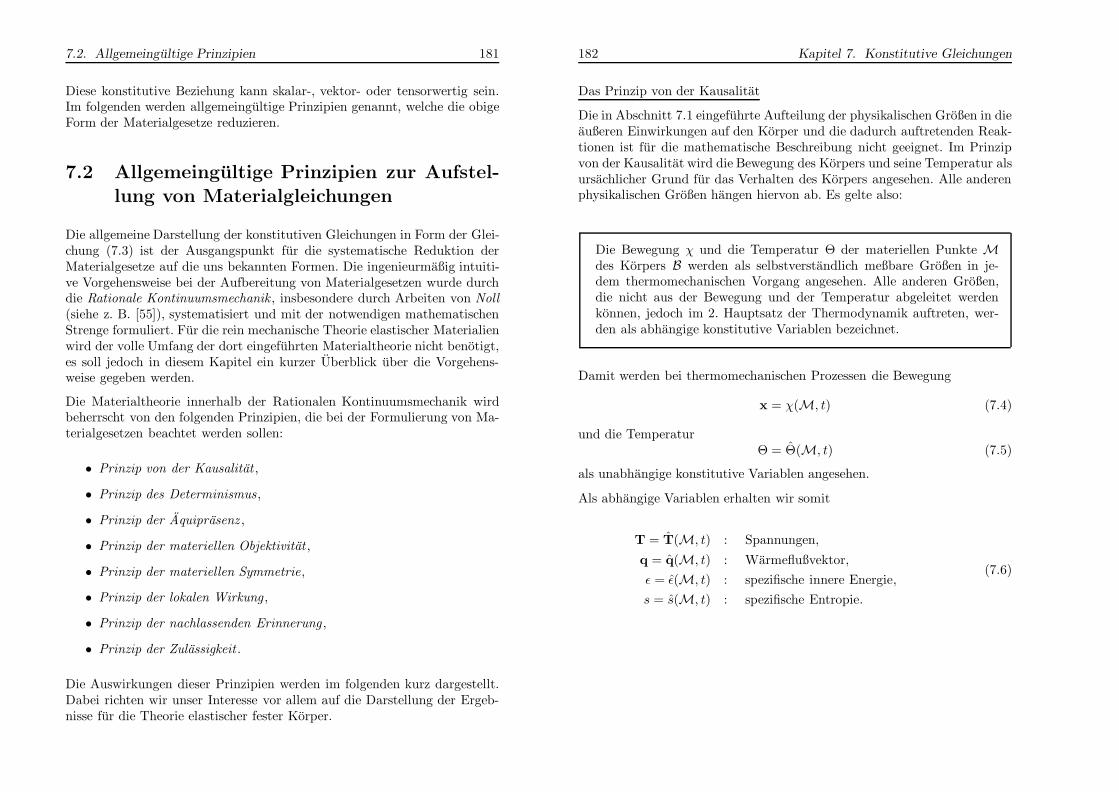
7.2. Allgemeingultige Prinzipien 181
Diese konstitutive Beziehung kann skalar-, vektor- oder tensorwertig sein.Im folgenden werden allgemeingultige Prinzipien genannt, welche die obigeForm der Materialgesetze reduzieren.
7.2 Allgemeingultige Prinzipien zur Aufstel-
lung von Materialgleichungen
Die allgemeine Darstellung der konstitutiven Gleichungen in Form der Glei-chung (7.3) ist der Ausgangspunkt fur die systematische Reduktion derMaterialgesetze auf die uns bekannten Formen. Die ingenieurmaßig intuiti-ve Vorgehensweise bei der Aufbereitung von Materialgesetzen wurde durchdie Rationale Kontinuumsmechanik , insbesondere durch Arbeiten von Noll(siehe z. B. [55]), systematisiert und mit der notwendigen mathematischenStrenge formuliert. Fur die rein mechanische Theorie elastischer Materialienwird der volle Umfang der dort eingefuhrten Materialtheorie nicht benotigt,es soll jedoch in diesem Kapitel ein kurzer Uberblick uber die Vorgehens-weise gegeben werden.
Die Materialtheorie innerhalb der Rationalen Kontinuumsmechanik wirdbeherrscht von den folgenden Prinzipien, die bei der Formulierung von Ma-terialgesetzen beachtet werden sollen:
• Prinzip von der Kausalitat ,
• Prinzip des Determinismus,
• Prinzip der Aquiprasenz ,
• Prinzip der materiellen Objektivitat ,
• Prinzip der materiellen Symmetrie,
• Prinzip der lokalen Wirkung ,
• Prinzip der nachlassenden Erinnerung ,
• Prinzip der Zulassigkeit .
Die Auswirkungen dieser Prinzipien werden im folgenden kurz dargestellt.Dabei richten wir unser Interesse vor allem auf die Darstellung der Ergeb-nisse fur die Theorie elastischer fester Korper.
182 Kapitel 7. Konstitutive Gleichungen
Das Prinzip von der Kausalitat
Die in Abschnitt 7.1 eingefuhrte Aufteilung der physikalischen Großen in dieaußeren Einwirkungen auf den Korper und die dadurch auftretenden Reak-tionen ist fur die mathematische Beschreibung nicht geeignet. Im Prinzipvon der Kausalitat wird die Bewegung des Korpers und seine Temperatur alsursachlicher Grund fur das Verhalten des Korpers angesehen. Alle anderenphysikalischen Großen hangen hiervon ab. Es gelte also:
Die Bewegung χ und die Temperatur Θ der materiellen Punkte Mdes Korpers B werden als selbstverstandlich meßbare Großen in je-dem thermomechanischen Vorgang angesehen. Alle anderen Großen,die nicht aus der Bewegung und der Temperatur abgeleitet werdenkonnen, jedoch im 2. Hauptsatz der Thermodynamik auftreten, wer-den als abhangige konstitutive Variablen bezeichnet.
Damit werden bei thermomechanischen Prozessen die Bewegung
x = χ(M, t) (7.4)
und die TemperaturΘ = Θ(M, t) (7.5)
als unabhangige konstitutive Variablen angesehen.
Als abhangige Variablen erhalten wir somit
T = T(M, t) : Spannungen,
q = q(M, t) : Warmeflußvektor,
ǫ = ǫ(M, t) : spezifische innere Energie,
s = s(M, t) : spezifische Entropie.
(7.6)
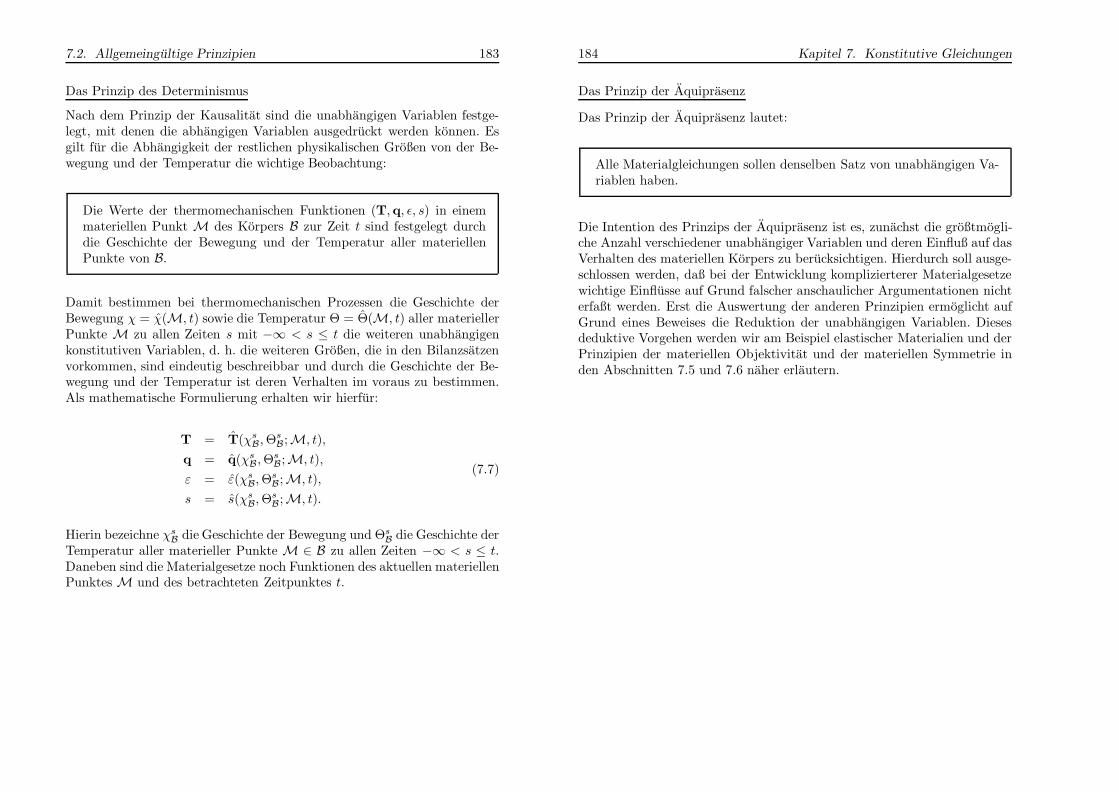
7.2. Allgemeingultige Prinzipien 183
Das Prinzip des Determinismus
Nach dem Prinzip der Kausalitat sind die unabhangigen Variablen festge-legt, mit denen die abhangigen Variablen ausgedruckt werden konnen. Esgilt fur die Abhangigkeit der restlichen physikalischen Großen von der Be-wegung und der Temperatur die wichtige Beobachtung:
Die Werte der thermomechanischen Funktionen (T,q, ǫ, s) in einemmateriellen Punkt M des Korpers B zur Zeit t sind festgelegt durchdie Geschichte der Bewegung und der Temperatur aller materiellenPunkte von B.
Damit bestimmen bei thermomechanischen Prozessen die Geschichte derBewegung χ = χ(M, t) sowie die Temperatur Θ = Θ(M, t) aller materiellerPunkte M zu allen Zeiten s mit −∞ < s ≤ t die weiteren unabhangigenkonstitutiven Variablen, d. h. die weiteren Großen, die in den Bilanzsatzenvorkommen, sind eindeutig beschreibbar und durch die Geschichte der Be-wegung und der Temperatur ist deren Verhalten im voraus zu bestimmen.Als mathematische Formulierung erhalten wir hierfur:
T = T(χsB,Θ
sB;M, t),
q = q(χsB,Θ
sB;M, t),
ε = ε(χsB,Θ
sB;M, t),
s = s(χsB,Θ
sB;M, t).
(7.7)
Hierin bezeichne χsB die Geschichte der Bewegung und Θs
B die Geschichte derTemperatur aller materieller Punkte M ∈ B zu allen Zeiten −∞ < s ≤ t.Daneben sind die Materialgesetze noch Funktionen des aktuellen materiellenPunktes M und des betrachteten Zeitpunktes t.
184 Kapitel 7. Konstitutive Gleichungen
Das Prinzip der Aquiprasenz
Das Prinzip der Aquiprasenz lautet:
Alle Materialgleichungen sollen denselben Satz von unabhangigen Va-riablen haben.
Die Intention des Prinzips der Aquiprasenz ist es, zunachst die großtmogli-che Anzahl verschiedener unabhangiger Variablen und deren Einfluß auf dasVerhalten des materiellen Korpers zu berucksichtigen. Hierdurch soll ausge-schlossen werden, daß bei der Entwicklung komplizierterer Materialgesetzewichtige Einflusse auf Grund falscher anschaulicher Argumentationen nichterfaßt werden. Erst die Auswertung der anderen Prinzipien ermoglicht aufGrund eines Beweises die Reduktion der unabhangigen Variablen. Diesesdeduktive Vorgehen werden wir am Beispiel elastischer Materialien und derPrinzipien der materiellen Objektivitat und der materiellen Symmetrie inden Abschnitten 7.5 und 7.6 naher erlautern.
7.2. Allgemeingultige Prinzipien 185
Das Prinzip der materiellen Objektivitat
In Kapitel 4.4 wurden die Transformationseigenschaften der kinematischenGroßen beim Wechsel des Beobachters eingefuhrt. Fur jeden Beobachter giltdie folgende physikalische Grundforderung an die Materialgesetze:
Die konstitutiven Gleichungen mussen unabhangig vom Bewegungszu-stand des Beobachters sein.
An dieser Stelle kann nur allgemein auf die Auswirkungen des Prinzips dermateriellen Objektivitat eingegangen werden. Der Ausgangspunkt unsererBetrachtungen ist Gleichung (7.7) fur ein allgemeines thermomechanischesMaterial. Fuhren wir unsere gewohnte Betrachtungsweise in Bezug auf einegewahlte Referenzkonfiguration B ein, so erhalten wir hieraus die Bezie-hungen:
T = T(xsB,Θs
B; X, t),
q = q(xsB
,ΘsB
; X, t),
ǫ = ǫ(xsB,Θs
B; X, t),
s = s(xsB,Θs
B; X, t).
(7.8)
Hierin bezeichnet x in gewohnter Form den Ortsvektor des aktuell betrach-teten materiellen Punktes M in der Momentankonfiguration Bt , sowie X
den Ortsvektor des materiellen Punktes in der Referenzkonfiguration B .
Die Geschichte der Bewegung eines materiellen Punktes wird durch xs unddie Geschichte der Bewegung aller materiellen Punkte X′ ∈ B mit xs
B
bezeichnet, d. h. es gilt
xsB
= x (X′, s) | X′ ∈ B , s ≤ t. (7.9)
Fur elastische Materialien beschreiben wir die Folgerungen aus diesem Prin-zip in Abschnitt 7.5 genauer.
186 Kapitel 7. Konstitutive Gleichungen
Das Prinzip der materiellen Symmetrie
Zur Beschreibung der Bewegung wird aus praktischen Uberlegungen standigeine Referenzkonfiguration B eingefuhrt. Damit sind samtliche Großennaturlich auch abhangig von der speziellen Wahl dieser Referenzkonfigu-ration, insbesondere die Gleichung (7.8). Das Prinzip von der materiellenSymmetrie erlautert den Einfluß einer Anderung der Referenzkonfiguration,d. h. der Veranderung der materiellen Koordinaten durch eine Transforma-tion Λ nach 2.7, fur die konstitutive Gleichung:
Die konstitutiven Gleichungen sind unabhangig in bezug auf die Trans-formationen Λ der materiellen Koordinaten aus der SymmetriegruppeS des betrachteten Materials.
Die Symmetriegruppe S wird hier nicht als universell angesehen, sondern istfur jedes Material jeweils zu spezifizieren. Die Auswirkungen des Prinzipsder materiellen Symmetrie werden fur elastische Materialien in Abschnitt7.6 naher beschrieben.
Das Prinzip der lokalen Wirkung
Im Prinzip des Determinismus wird der Einfluß der Geschichte der Bewe-gung aller materiellen Punkte des Korpers auf die aktuellen Werte einesmateriellen Punktes M postuliert. Eine wichtige Einschrankung, die alleklassischen Materialien (elastischer Festkorper, elastische Flussigkeit, vis-kose Flussigkeit, etc.) genugen, ergibt sich durch das Prinzip der lokalenWirkung:
Die Werte der unabhangigen konstitutiven Variablen von materiellenPunkten in weiterer Entfernung von M beeinflussen die Werte derabhangigen konstitutiven Variablen inM nicht wesentlich.
Durch diese Feststellung kann die Form der Materialgesetze weiter redu-ziert werden. Die Einschrankung des Einflusses der unabhangigen Variablenauf eine lokale Umgebung des aktuell betrachteten materiellen Punktes Merlaubt den Ersatz der Geschichte der Bewegung χs
B und der Geschichteder Temperatur Θs
B aller materieller Punkte M ∈ B in Gleichung (7.7)
7.2. Allgemeingultige Prinzipien 187
durch die Geschichte der Bewegung χs(M) und die Geschichte der Tem-peratur Θs(M) des betrachteten materiellen Punktes M sowie durch dieentsprechenden Gradienten ∇χs(M) bzw. grad Θ(χs(M)) fur alle Zeiten−∞ < s ≤ t. Die so entstehenden Materialien wurden von Noll als simplebodies bezeichnet.
Fuhren wir unsere gewohnte Bezeichnungsweise in bezug auf eine gewahl-te Referenzkonfiguration B ein, so erhalten wir aus (7.8) die folgendenGleichungen:
T = T(xs,Fs,Θs, gs; X, t),
q = q(xs,Fs,Θs; gs; X, t),
ε = ε(xs,Fs,Θs, gs; X, t),
s = s(xs,Fs,Θs, gs; X, t).
(7.10)
Berucksichtigen wir die Ergebnisse des Prinzips der materiellen Objektivitat(siehe Abschschnitt 7.5), so gilt mit der Einfuhrung des Temperaturgradi-enten g := Grad Θ
T = T(Fs,Θs, gs; X),
q = q(Fs,Θs, gs; X),
ε = ε(Fs,Θs, gs; X),
s = s(Fs,Θs, gs; X).
(7.11)
Das Prinzip der nachlassenden Erinnerung
Neben der Beschrankung auf einen lokalen Einflußbereich der unabhangigenVariablen ist eine Einschrankung der Materialgesetze in bezug auf die Ge-schichte der Bewegung und der Temperatur der materiellen Punkte moglich.Hierdurch unterscheiden sich nun unterschiedliche Materialien wesentlich.Das Prinzip von der nachlassenden Erinnerung lautet:
Die Werte der konstitutiven Variablen in großerer zeitlicher Entfernungbeeinflussen die Momentanwerte der konstitutiven Funktionen nichtwesentlich.
188 Kapitel 7. Konstitutive Gleichungen
In unserem Zusammenhang elastischer Materialien soll das Materialgesetzkeinen Einfluß vergangener Bewegungen oder Temperaturen ihrer materiel-len Punkte enthalten. Dies steht z. B. im Gegensatz zu der Theorie plasti-scher Werkstoffe, die geschichtsabhangige Merkmale enthalten.
Wir beschranken uns also insbesondere auf den Spezialfall eines thermo-elastischen Festkorpers, fur den nur noch Abhangigkeiten von den aktuellenWerten bestehen sollen. Damit gilt fur das Materialgesetz eines einfachenthermo-elastischen Festkorpers:
T = T(F,Θ, g; X),
q = q(F,Θ; g; X),
ε = ε(F,Θ, g; X),
s = s(F,Θ, g; X).
(7.12)
Das Prinzip der Zulassigkeit
Die Materialgesetze durfen selbstverstandlich den Bilanz- und Erhaltungs-satzen sowie dem 2. Hauptsatz der Thermodynamik nicht widersprechen.Dieses fordert das Prinzip der Zulassigkeit:
Alle konstitutiven Gleichungen mussen konsistent, d. h. vertraglich mitden grundlegenden Aussagen der Kontinuumsmechanik sein. Diesessind:
• Massenerhaltung,
• Erhaltungssatz der Bewegungsgroße,
• Drehimpulserhaltung,
• Energieerhaltungssatz (1. Hauptsatz der Thermodynamik),
• Entropiesatz (2. Hauptsatz der Thermodynamik).
Die Konsequenzen fur thermo-elastische Materialien bei einer geeignetenWahl des thermodynamischen Prozesses werden in Kapitel 7.4 erlautert.
7.3. Die Definition des elastischen Materials 189
7.3 Die Definition des elastischen Materials
7.3.1 Der Ubergang von der allgemeinen Materialtheo-rie zum elastischen Material
Im Rahmen der Elastizitatstheorie sollen die im letzten Abschnitt genann-ten Ansatze zur Materialbeschreibung nicht in der dort angegebenen All-gemeingultigkeit benutzt werden. Vielmehr ergibt sich der Ubergang zurElastizitatstheorie durch die folgenden Annahmen. In der Darstellung sindbereits die grundsatzlichen Ergebnisse des Prinzips der materiellen Objek-tivitat berucksichtigt (siehe Abschnitt 7.5).
1. Der Spannungstensor T(X, t) sei nicht von der Geschichte der Defor-mation des Korpers B und der Geschichte der Temperatur Θ abhangig,sondern nur von dessen aktueller Deformation x = Φ (X, t, t ) undder aktuellen Temperatur Θ. Damit gilt fur den Cauchyschen Span-nungstensor (siehe auch Gleichung (7.12))
T(X, t) = T(x (X′, t)− x (X, t),Θ(X′, t)−Θ(X, t); X). (7.13)
Diese Reduktion ergibt sich infolge des Prinzips von der nachlassendenErinnerung.
2. Die Differenz der Bewegung aller materiellen Punkte X′ ∈ B zumaktuell betrachteten Punkt X ∈ B kann in der naheren Umgebungdes materiellen Punktes X durch den materiellen Deformationsgradi-enten F = Grad x angenahert werden. Ebenso wird der Einfluß derTemperatur aller materieller Punkte durch die aktuelle TemperaturΘ und den Temperaturgradienten g = Grad Θ hinreichend genaubeschrieben. Das Prinzip der lokalen Wirkung rechtfertigt diese Ap-proximationen. Mit den Naherungen
x (X′, t)− x (X, t) ≈ Grad x = F (7.14)
und
Θ(X′, t)− Θ(X, t); X) ≈ grad Θ = g (7.15)
folgt somit fur das Funktional T die Darstellung
T(X, t) = T(F,Θ, g; X). (7.16)
190 Kapitel 7. Konstitutive Gleichungen
3. Der Einfluß der Temperatur Θ der materiellen Punkte M auf dasMaterialverhalten soll nicht berucksichtigt werden. Mit dieser Annah-me erfolgt der Ubergang vom thermo-elastischen Festkorper, dessenkonstitutiven Gleichungen in der Form (7.16) gegeben sind, zum ela-stischen Materialgesetz innerhalb der rein mechanischen Betrachtun-gen. Hierdurch reduzieren sich die vier konstitutiven Beziehungen furT,q, ε und s in Gleichung (7.12) auf eine konstitutive Beziehung furden Cauchyschen Spannungstensor T. Die Konsequenzen, die sich ausder thermodynamischen Behandlung eines temperaturunabhangigenMaterialgesetzes ergeben, werden in Abschnitt 7.4 diskutiert.
Fur elastische Materialien gilt somit die Definition:
Ein materieller Punkt eines Korpers wird elastisch genannt, wenn derCauchysche Spannungstensor T zu einem beliebigen Zeitpunkt t al-lein eine Funktion des Deformationsgradienten F in dem betrachtetenmateriellen Punkt X ∈ B zu dieser Zeit t ist, d. h. es gilt
T = T(X,F). (7.17)
Sind in einem materiellen Korper alle materiellen Punkte elastischePunkte, so spricht man von einem elastischen Korper .
Die elastischen Materialien, die der Gleichung (7.17) genugen, werden auchals Cauchy-elastische Materialien bezeichnet.
In dieser Arbeit werden ausschließlich homogene elastische Materialien be-trachtet, deren Eigenschaften fur alle materiellen Punkte gleich sind. Somithangt die Materialgleichung nicht explizit vom materiellen Punkt X ab. Esgilt damit
T = T(F). (7.18)
Fur die elastischen Materialien laßt sich der Cauchysche SpannungstensorT allein aus dem aktuellen Deformationszustand herleiten. Insbesondereist er damit nicht von der Verformungsgeschichte des Korpers abhangig.Im Gegensatz hierzu ist die von der Spannung geleistete Arbeit jedoch imallgemeinen vom Deformationsvorgang abhangig, d. h. wegabhangig. Einespezielle Gruppe elastischer Materialien besitzt auch die Eigenschaft, daß
7.3. Die Definition des elastischen Materials 191
die von der Spannung geleistete Arbeit wegunabhangig ist. Diese elastischenMaterialien werden als hyperelastische Materialien oder auch als Green-elastische Materialien bezeichnet.
Hierzu betrachten wir die in Abschnitt 5.5 definierte spezifische innere Span-
nungsleistung
Ws = P · F nach (5.94) und fordern, daß die Arbeit
t∫
t
P · F dt =
F∫
F
P · dF =
F∫
F
dW = W (F) −W (F)
nur vom Anfangs- und Endwert der Deformation abhangt. Damit fordernwir die Existenz einer spezifischen Formanderungsenergiefunktion der FormWs = Ws (X,F), die eine Potentialfunktion fur den 1. Piola-Kirchhoff--Spannungstensor P darstellt, d. h. es sei
P(X,F) =∂Ws
∂F(X,F) ∀ X, ∀ F. (7.19)
In der weiteren Darstellung betrachten wir nur noch homogene, hyperela-stische Materialien.
7.3.2 Das Hookesche Werkstoffgesetz
Im vorigen Abschnitt haben wir die Definition eines homogenen, hyperela-stischen Materials angegeben. In der historischen Entwicklung und in dentechnischen Anwendungen steht mit dem Hookeschen Werkstoffgesetz einSpezialfall elastischer Materialien an bedeutender Stelle.
Ein Ziel dieser Darstellung elastischer Materialien ist die vollstandige Anga-be aller Voraussetzungen, die zur Herleitung des Hookeschen Gesetzes ausder Theorie elastischer Materialien benotigt werden. Diese Reduktion wirdausfuhrlich in den restlichen Abschnitten des Kapitels 7 vorgenommen. ZurMotivation des Lesers sei unser Vorgehen und das Ziel unserer Bemuhungenkurz angeben.
In Kapitel 6.2.3 wurde die Linearisierung der Spannungstensoren in der un-belasteten Referenzkonfiguration untersucht. Als Ergebnis erhielten wir dieGleichheit der Linearisierung des Cauchyschen Spannungstensors T mit den
192 Kapitel 7. Konstitutive Gleichungen
entsprechenden linearisierten 1. bzw. 2. Piola-Kirchhoff-Spannungstensoren.Die Linearisierung des 2. Piola-Kirchhoff-Spannungstensor S wurde in (6.19)als linearisierter Spannungstensors σσσ definiert. Damit gilt der Zusammen-hang (6.23)
σσσ = Lin [T]u
= Lin [P]u
= Lin [S]u.
Weiterhin erhalten wir fur die Linearisierung des Greenschen Verzerrungs-tensors E die Beziehung (6.13)
ǫǫǫ = Lin [E]u
=1
2(H + HT ) = Elin.
Aus der Definition (7.17) eines elastischen Materials kann auch durch denBezug auf die Großen der Referenzkonfiguration B die materielle Darstel-lung
S = S(X,E) (7.20)
fur die funktionale Abhangigkeit des 2. Piola-Kirchhoff-Spannungstensor S
vom Greenschen Verzerrungstensor E hergeleitet werden (siehe Abschnitt7.6). Dieser Zusammenhang ist im allgemeinen nichtlinear.
Die Linearisierung dieser Beziehung fuhrt nach den Ausfuhrungen in Kapitel7.7 auf die Darstellung
σσσ =C ǫǫǫ. (7.21)
Hierin stellt C den vierstufigen Elastizitatstensor dar. Gleichung (7.21) istdie lineare Approximation des Spannungsfunktionals T (Tensor 2. Stufe) inder Nahe der spannungsfreien Referenzkonfiguration.
Die Komponentendarstellung der Gleichung (7.21) bzgl. einer kartesischenBasis lautet
σij = Cijkl εkl. (7.22)
Die Approximation aller elastischer Materialien in der Umgebung der Re-ferenzkonfiguration ergibt stets die in Gleichung (7.21) dargestellte Form.Hieraus konnen durch die Ergebnisse der nachfolgenden Kapitel speziel-le reduzierte Formen hergeleitet werden. Insbesondere kann die Form derKonstanten Cijkl bestimmt werden.
7.3. Die Definition des elastischen Materials 193
1. Eine erste Einschrankung der moglichen 34 = 81 Konstanten Cijkl
ergibt sich durch die folgende Betrachtung.
Durch die Symmetrie des 2. Piola-Kirchhoff-Spannungstensors unddes Cauchyschen Spannungstensors, die sich auf die entsprechendenLinearisierungen σσσ = σσσT ubertragt, sowie durch die Symmetrie derLinearisierung ǫǫǫ = ǫǫǫT des Greenschen Verzerrungstensors, konnen inGleichung (7.22) die Indizes i ↔ j und k ↔ l vertauscht werden. Furdie Koeffizienten des Spannungstensors σσσ und des Verzerrungstensorsǫǫǫ folgt damit σij = σji und εkl = εlk. Fur die Koeffizienten Cijkl desElastizitatstensors C ergibt dies die Gleichung
Cijkl = Cjikl = Cijlk = Cjilk (7.23)
und damit die Reduktion auf 36 unterschiedliche Koeffizienten.
2. Die zweite Reduktion der Anzahl der unabhangigen Stoffkonstantenlaßt sich aus dem Potentialcharakter der spezifischen Formanderungs-energiefunktion Ws folgern. Es gilt demnach die Beziehung
Cijkl =∂σij
∂εkl
=∂Ws
∂εij ∂εkl
=∂Ws
∂εkl ∂εij
=∂σkl
∂εij
= Cklij, (7.24)
d. h. die Vertauschbarkeit der Indexpaare ij ↔ kl. Hierduch redu-ziert sich die Anzahl der unabhangigen Stoffkonstanten weiter von 36auf 21 unabhangige Stoffkonstanten fur ein allgemeines anisotropes,homogenes, linear-elastisches Materialgesetz. Die Bedeutung der Po-tentialeigenschaft der Formanderungsenergiefunktion W wird in Ab-schnitt 7.4 naher beschrieben.
3. Die dritte Reduktion, von 21 Stoffkonstanten auf die zwei Lame-Konstanten(λ und µ), ergibt sich aus der Beschrankung auf isotrope, linear-elastische Materialien, die in Abschnitt 7.6 naher dargestellt ist. Mitdieser Reduktion erhalten wir die Darstellung
Cijkl = λ δij δkl + µ (δikδjl + δil δjk). (7.25)
An dieser Stelle mochten wir einige Hinweise zum Hookeschen Werkstoff-gesetz geben. Entgegen der Namensgebung ist das Hookesche Werkstoff-gesetz kein Werkstoffgesetz, das mit den in Abschnitt 7.2 beschriebenen
194 Kapitel 7. Konstitutive Gleichungen
Prinzipien, insbesondere dem Prinzip der materiellen Objektivitat, im Ein-klang steht. Die Bedeutung des Hookeschen Werkstoffgesetzes und auchder gesamten
”linearen Elastizitatstheorie“ besteht in ihrer einfachen ma-
thematischen Struktur, die sich aus der allgemeinen, nichtlinearen Elasti-zitatstheorie einzig aus der Linearisierung der Gleichungen an der Stelleder spannungsfreien Referenzkonfiguration ergibt. Dieses Vorgehen ist nichtmit mechanischen Argumenten zu begrunden, sondern nur mit dem mathe-matischen Argument der Linearisierung und der Fehlerbetrachtung dieserLinearisierung in der Nahe der Referenzkonfiguration. Aus diesem Grundwerden wir die Bezeichnung
”lineare Elastizitatstheorie“ vermeiden und nur
von der”linearisierten Elastizitatstheorie“ sprechen.
7.4 Folgerungen aus dem Potentialcharakter
der Formanderungsenergie
7.4.1 Zusammenstellung der bisherigen Ergebnisse
In den Abschnitten 5.7 und 5.8 haben wir den 1. und 2. Hauptsatz der Ther-modynamik behandelt und erhielten fur reversible, isotherme Prozesse mitGleichung (5.129) ein vollstandiges Potential der Formanderungsenergie W ,d. h. nach Einfuhrung der volumenspezifischen Formanderungsenergiefunk-tion Ws bzw. Ws und der massenspezifischen Helmholtzschen Energie Ψbzw. Ψ gilt Gleichung (5.130)
W =
∫
B
Ws dV =
∫
B
ρΨ dV =
∫
Bt
ρΨ dv =
∫
Bt
Ws dv.
Fur homogene, elastische Materialien gilt nach (7.19) fur die spezifischeFormanderungsenergie Ws der funktionale Zusammenhang Ws = Ws(F)und die Herleitung des 1. Piola-Kirchhoff-Spannungstensors P aus der spe-zifischen Formanderungsenergie in der Form
P(X,F) =∂Ws
∂F(X,F) ∀ X, ∀ F.
Damit ist der materielle Deformationsgradient F die einzige unabhangigeVariable in der Beschreibung hyperelastischer Materialien.
7.4. Potential der Formanderungsenergie 195
Bevor wir einige Folgerungen aus dem Potentialcharakter der Formande-rungsenergie herleiten werden, sollen zunachst einige aquivalente mathe-matische Charakterisierungen fur die Existenz eines Potentials angegebenwerden, siehe z. B. Heuser [32]. Ein vollstandiges Potential der Formande-rungsenergie W existiert genau dann, wenn die im folgenden angegebenenaquivalenten Kriterien erfullt sind:
• Die spezifische Formanderungsenergiefunktion Ws ist ein wegunab-hangiges Kurvenintegral
Ws =
F∫
F
dWs = Ws(F)−Ws(F) (7.26)
und hangt damit nur von der Differenz zwischen Anfangs- und End-deformationszustand ab.
• Die spezifische Formanderungsenergiefunktion Ws verschwindet aufjedem gechlossenen Kreisintegral
∮dWs = 0, (7.27)
d. h. auf beliebigen geschlossenen Deformationspfaden wird keine Ener-gie dissipiert.
• Die spezifische Formanderungsenergiefunktion, dargestellt in der funk-tionalen Abhangigkeit Ws = Ws(E) vom Greenschen Verzerrungs-tensor E (siehe Abschnitt 7.5), besitzt ein vollstandiges Differential
dWs =∂Ws
∂Eij
dEij. (7.28)
Hierin stellen Eij die Koeffizienten des Greenschen Verzerrungstensorsbzgl. der kartesischen Basis dar.
• Fur die zweiten partiellen Ableitungen der spezifischen Formande-rungsenergie gilt die Beziehung
∂2Ws
∂Eij∂Ekl
=∂2Ws
∂Ekl∂Eij
, (7.29)
d. h. die zweiten partiellen Ableitungen der spezifischen Formande-rungsenergiefunktion nach den Koeffizienten des Greenschen Verzer-rungstensors E sind vertauschbar.
196 Kapitel 7. Konstitutive Gleichungen
7.4.2 Darstellung der Spannungstensoren aus derFormanderungsenergiefunktion
In Abschnitt 5.5.2 haben wir die spezifische innere Spannungsleistung
Ws
bzw.
Ws uber die arbeitskonforme Paarung von Spannungstensoren undzeitlichen Ableitungen von Deformationstensoren hergeleitet. Dies fuhrtezu den Darstellungen
W =
∫
Bt
Ws dv =
∫
Bt
T : grad x dv =
∫
Bt
T : d dv
=
∫
B
Ws dV =
∫
B
P : F dV =
∫
B
S : E dV
=
∫
B
TB : U dV.
Nachdem uber die thermodynamischen Betrachtungen die Existenz einerFormanderungsenergiefunktion
W =
∫
B
Ws dV =
∫
Bt
Ws dv
bewiesen wurde, erhalten wir die innere Spannungsleistung
W uber die zeit-liche Ableitung der Formanderungsenergie W . Damit lassen sich die Span-nungstensoren als Ableitung der Formanderungsenergie nach geeigneten De-formationstensoren darstellen. Als Beispiel betrachten wir die Form
W=
∫
B
Ws dV =
∫
B
P : F dV
der inneren Spannungsleistung nach (5.95), die sich aus der Formanderungs-energie W =
∫B
Ws dV fur isotherme Prozesse uber die Ableitung der
spezifischen Formanderungsenergie Ws = ρΨ nach der Zeit herleiten laßt,d. h. es gilt
Ws =∂Ws
∂F: F =
∂ρΨ
∂F: F = ρ
∂Ψ
∂F: F
7.4. Potential der Formanderungsenergie 197
Die obige Formel vergleichen wir mit der Darstellung der spezifischen in-
neren SpannungsleistungWs = P : F und stellen damit fur isotherme
Prozesse den Zusammenhang
P = ρ∂Ψ
∂F(7.30)
fest.
In entsprechender Form erhalten wir im Vergleich der inneren Spannungs-
leistungW aus Abschnitt 5.5.2 mit der zeitlichen Ableitung der Formande-
rungsenergiefunktion W fur isotherme Prozesse die folgenden Darstellungender Spannungstensoren
T = ρ∂Ψ
∂FFT = 2ρ
∂Ψ
∂g= 2ρb
∂Ψ
∂b= ρ
∂Ψ
∂E(A),
P = ρ∂Ψ
∂F,
S = ρ∂Ψ
∂E= 2ρ
∂Ψ
∂C.
Der Beweis verlauft analog zum oben gegebenen Beispiel und kann mit Hilfeder ausfuhrlichen Herleitung der inneren Spannungsleistung in Abschnitt5.5.2 vom Leser selbst durchgefuhrt werden.
7.4.3 Herleitung der Materialtensoren
In Abschnitt 6.3 haben wir uns mit der Linearisierung der stoffunabhangigenGleichungen beschaftigt und die Ubereinstimmung der Linearisierung derSpannungstensoren fur kleine Verschiebungen u aus der spannungsfreien Re-ferenzkonfiguration heraus hergeleitet. An dieser Stelle soll im weiteren dieLinearisierung bzgl. des im Materialgesetz benutzten Deformationstensorseingefuhrt werden, die uns den vierstufige Materialtensor liefert. Hierzu be-trachten wir die obige Darstellung des 2. Piola-Kirchhoff-SpannungstensorsS als Ableitung der spezifischen Formanderungsenergiefunktion und fuhreneine Linearisierung bzgl. des Greenschen Verzerrungstensors an einer belie-bigen Stelle x = X + u durch, d. h. mit der Bezeichnungsform des Kapitels6 gilt
Lin [S]E
= S(E) + DS · E = S(E) +∂S
∂E(E) : E. (7.31)
198 Kapitel 7. Konstitutive Gleichungen
Hierin werden die bekannten Werte an der betrachteten Stelle wieder miteinem Querstrich gekennzeichnet. Der lineare Anteil DS · E kennzeichnetdabei die Richtungsableitung des Spannungstensors fur eine Veranderungdes Greenschen Verzerrungstensors. Der vierstufige Materialtensor C wirddamit durch die Frechet-Ableitung der Spannung nach dem Greenschen Ver-zerrungstensor gebildet und wir erhalten fur isotherme Prozesse
C =∂S
∂E= ρ
∂2Ψ
∂E ∂E= 4ρ
∂2Ψ
∂C ∂C(7.32)
Der MaterialtensorC besitzt bezuglich des kartesischen Koordinatensystemse1, e2, e3 die Darstellung
C = Cijkl ei ⊗ ej ⊗ ek ⊗ el, (7.33)
wobei die Koeffizienten Cijkl des Materialtensors durch die Beziehung
Cijkl = ρ∂2Ψ
∂Eij ∂Ekl
=∂2Ws
∂Eij ∂Ekl
(7.34)
berechnet werden. Durch die Transformation auf die Momentankonfigurati-on folgt der Materialtensor c
c = 4ρ∂2Ψ
∂g ∂g= 4ρb
∂2Ψ
∂b ∂bbT . (7.35)
Der Materialtensor c besitzt bezuglich des kartesischen Koordinatensystemse1, e2, e3 die Darstellung
c = cijkl ei ⊗ ej ⊗ ek ⊗ el. (7.36)
7.4.4 Folgerungen fur den Materialtensor aus dem Po-tentialcharakter der Formanderungsenergie
Im weiteren sollen die Folgerungen fur die Struktur des elastischen Materi-algesetzes aus der Potentialeigenschaft der Formanderungsenergiefunktionerlautert werden. Hierzu betrachten wir die Charakterisierung (7.29)
∂2Ws
∂Eij∂Ekl
=∂2Ws
∂Ekl∂Eij
7.4. Potential der Formanderungsenergie 199
fur den Potentialcharakter der Formanderungsenergie und erhalten mit Glei-chung (7.34) die Darstellung
Cijkl = Cklij
und damit die Vertauschbarkeit der Indexpaare ij und kl. Zusam-men mit der Symmetrie des 2. Piola-Kirchhoff-Spannungstensors S und desGreenschen Verzerrungstensors E sind damit von den 34 = 81 Konstan-ten Cijkl des Materialtensors C nur 21 Konstanten bei einem allgemeinenanisotropen elastischen Werkstoff unabhangig.
Die Linearisierung nach (7.31) kann fur jede beliebige Deformation x =X + u durchgefuhrt werden und liefert einen Materialtensor C der weiter-hin nichtlinear vom Greenschen Verzerrungstensor dieser betrachteten StelleE = E(X + u) abhangt. Insbesondere folgt daraus, daß sich der Material-tensor C stets andert und nicht konstant ist. Ebenfalls ist zwischen demMaterialtensor C bezogen auf die Referenzkonfiguration und dem Material-tensor c der Momentankonfiguration zu unterscheiden.
Eine besonderen Materialtensor erhalten wir, wenn wir die Linearisierungan der Stelle der unverformten, spannungsfreien Referenzkonfiguration be-trachten. Mit der Definition nach Gleichung (7.32) erhalten wir den Mate-rialtensor fur die Stelle E = 0 der unverformten Referenzkonfiguration
C =∂S
∂E(0) (7.37)
den wir im weiteren als Elastizitatstensor bezeichnen wollen.
Dieser Elastizitatstensor wird in Abschnitt 7.9 fur die Matrizendarstel-lung des Hookeschen Werkstoffgesetzes in die Elastizitatsmatrix E uber-gehen. Die Symmetrieeigenschaft Cijkl = Cklij ubertragt sich auf die Ela-stizitatsmatrix, so daß die 36 Elastizitatskonstanten des allgemein anisotro-pen, linear-elastischen, festen Werkstoffes sich auf maximal 21 unabhangigeElastzitatskonstanten reduzieren.
200 Kapitel 7. Konstitutive Gleichungen
7.5 Das Prinzip der materiellen Objektivitatund die Auswirkungen auf die Darstel-
lungsformen der konstitutiven Gleichun-
gen elastischer Materialien
Am Beispiel des Cauchyschen Spannungstensor T sollen die allgemeinenForderungen des Prinzips der materiellen Objektivitat an die Struktur derMaterialgleichungen erlautert werden.
Fur den Spannungsvektor t und den Normalenvektor n erhalten wir beieinem Beobachterwechsel von Σ zu Σ⋆ die Beziehungen (siehe Abschnitt4.4)
t⋆ = Q t und n⋆ = Q n.
Fur den Cauchyschen Spannungstensor T bzw. T⋆ gilt
t⋆ = T⋆ n⋆ bzw. t = T n.
Somit folgtT⋆ n⋆ = t⋆ = Q t = Q T n = Q T QT n⋆.
Damit erhalten wir die Transformationsbeziehung
T⋆(X, t) = Q(t) T(X, t) QT (t), (7.38)
d. h. der Cauchysche Spannungstensor T ist objektiv.
Betrachten wir nun die konstitutive Beziehung in der Form der Gleichung(7.8), so gilt fur den Beobachter Σ das Materialgesetz
T(X, t) = T(xsB,Θs
B; X, t).
Analog muß fur den Beobachter Σ⋆ nach dem Prinzip der materiellen Ob-jektivitat die Darstellung
T⋆(X, t) = T(x⋆sB,Θ⋆s
B; X, t⋆) (7.39)
gelten. Aus dem Transformationsverhalten objektiver Tensoren folgt mitGleichung (7.38) die folgende Aussage fur die funktionalen Abhangigkeiten
T(x⋆sB
,Θ⋆sB
; X; t⋆) = Q(t) T(xsB
,ΘsB
; X, t) QT (t). (7.40)
7.5. Prinzip der materiellen Objektivitat 201
Die anderen konstitutiven Beziehungen der Gleichung (7.8) konnen nachdem Prinzip der materiellen Objektivitat in ahnlicher Form transformiertwerden.
Im weiteren werden spezielle Transformationen des Beobachters Σ unter-sucht.
a) Reine Translation des Beobachters
Fur die Wahl Q(s) = 1, a = 0, c(s) = −x(X, s) wird erreicht, daß dermaterielle Punkt X zu jeder Zeit s = s⋆ mit s ≤ t (bzw. s⋆ ≤ t⋆) anseinem Ort bleibt (relativ zu seinem Beobachter). Damit gilt fur allePunkte X′ ∈ B und alle Zeiten s
x⋆(X′, s⋆) = Q(s) x(X′, s)− c(s) = x (X′, s)− x (X, s) (7.41)
und fur den Cauchyschen Spannungsvektor folgt
T(X, t) = T(x (X′, s) − x (X, s),ΘsB
; X, t). (7.42)
Damit hangen die konstitutiven Gleichungen nicht von der Bewegungaller materiellen Punkte X′ zu allen Zeiten s ≤ t ab, sondern nur vonder Differenz aller materiellen Punkte X′ zum betrachteten Punkt X
zu allen Zeiten s ≤ t.
b) Zeitverschiebung zwischen den Beobachtern
Fur die Wahl Q(s) = 1, c(s) = 0 und a = t ergibt sich mit s⋆ = s− tdie Beziehung
x⋆(X′, s) = Q(s) x(X′, s) + c(s) = x (X′, s) (7.43)
und aus dem Prinzip der materiellen Objektivitat folgt nach Gleichung(7.40)
T(X, t) = T(x (X′, s⋆ + t),ΘsB
; X, 0). (7.44)
Damit ist gezeigt, daß die konstitutiven Beziehungen explizit zeitun-abhangig sind.
202 Kapitel 7. Konstitutive Gleichungen
c) Starre Rotation des Beobachters
Fur c(t) = 0, a = 0 und einer beliebigen Wahl eines orthogonalenTensors Q(t) folgt die Beziehung
T⋆(X, t) = Q(t) T(X, t) QT (t). (7.45)
Zusammenfassend erhalten wir damit das folgende Ergebnis.
Der Cauchysche Spannungstensor wird durch ein Geschichtsfunktional derBewegung des Korpers B fur den Beobachter Σ in der Form
T(X, t) = T(x (X′, s)− x (X, s),ΘsB
; X) (7.46)
und fur den Beobachter Σ⋆ in der Form
T⋆(X, t) = T(Q(s)x (X′, s)− x (X, s),ΘsB
; X) (7.47)
fur alle materiellen Punkte X′ und alle Zeiten s ≤ t beschrieben. Mit diesenfunktionalen Abhangigkeiten und der Bedingung
T⋆(X, t) = Q(t) T(X, t) QT (t) (7.48)
an das Geschichtsfunktional T aus der Darstellung des Prinzips der mate-riellen Objetivitat nach (7.40) erhalten wir die Darstellung
Q(t) T [x (X′, s)− x (X, s),ΘsB
; X] QT (t) =
T [Q(s)x (X′, s)− x (X, s),ΘsB
; X] (7.49)
fur das Funktional T. Dies ist die allgemeinste Darstellung der konstitutivenGleichung fur die Spannungen.
Unser zentrales Anliegen besteht darin, die elastischen Materialien syste-matisch aus der allgemeinen Theorie herzuleiten. Fur das Prinzip der ma-teriellen Objektivitat sollen daher die Folgerungen fur die spezielle Gestaltdes elastischen Materialgesetzes im folgenden hergeleitet werden. Fur dashomogene elastische Materialgesetz gilt mit (3.11)
F = Grad x
die funktionale Beziehung (7.18)
T = T(F)
7.5. Prinzip der materiellen Objektivitat 203
fur die konstitutive Gleichung elastischer Materialien. Aus dem Prinzip dermateriellen Objektivitat (7.49) erhalten wir fur die spezielle Wahl des ho-mogenen, elastischen Materials (7.18) die Bedingung
Q T(F) QT = T(Q F). (7.50)
Hierin stellt Q(t) einen beliebigen eigentlich orthogonalen Tensor dar.
Wird nun speziell Q = RT gewahlt, wobei R den Drehtensor der polarenZerlegung F = R U bezeichne, so kann man die reduzierte Form
RT T(F) R = T(RT F)
ablesen. Mit der Umformung RT F = U gilt der Zusammenhang
T(F) = R T(U) RT , (7.51)
und damit folgt fur den Cauchyschen Spannungstensor
T = R T(U) RT . (7.52)
Weitere reduzierte Formen ergeben sich durch Ersetzen des Rechts-Streck-Tensors U durch anderer Verzerrungsmaße, z. B. durch den Rechts-Cauchy-Green-Tensor C nach (3.39)
C = FT F = (RU)T RU = UTU = U2
oder den Greenschen Verzerrungstensor E mit
E =1
2(FTF− 1) =
1
2(C− 1) =
1
2(U2 − 1)
Damit erhalten wir die folgenden Darstellungen fur den Cauchyschen Span-nungstensor T(X, t)
T(X, t) = R T(U) RT
= RˆT(C) RT
= RˆT(E) RT .
(7.53)
204 Kapitel 7. Konstitutive Gleichungen
Hierbei wird T als Funktion von U,C und E sowie des nicht objektivenTensors R dargestellt. Die obigen Formen (7.53) erfullen jedoch das Prinzipder materiellen Objektivitat automatisch, da z. B.
T⋆ = R⋆ ˆT(C⋆) R⋆T
= Q RˆT(C)(Q R)T
= Q R T(U) RT QT = Q T QT
gilt. Fur den 1. Piola-Kirchhoff-Spannungstensor P konnen ebenfalls redu-zierte Formen angegeben werden. Es ergibt sich die Beziehung
P = (det F) T F−T
= (det F) R T(U) RT F−T
= (det R)︸ ︷︷ ︸=1
(det U) R T(U) RT R︸ ︷︷ ︸=1
UT−1
= R ((det U) T(U) UT−1)︸ ︷︷ ︸=: G(U)
= R G(U)
Durch Ersetzen des Strecktensors U durch andere Verzerrungsmaße erhaltenwir
P = R G(U) = R G(C) = RˆG(E). (7.54)
Fur den 2. Piola-Kirchhoff-Spanungstensor S gilt
S = (det F) F−1 TF−T
= (det R) (det U) (R U)−1 R T(U) RT (R U)−T
= (det U) U−1 R−1 R︸ ︷︷ ︸1
T(U) RT R−T UT−1
= (det U) U−1 T(U) UT−1 =: W(U).
Damit erhalten wir fur den 2. Piola-Kirchhoff-Spannungstensor S den fol-genden funktionalen Zusammenhang
S = W(U) = W(C) =ˆW(E). (7.55)
7.6. Isotrope elastische Materialien 205
7.6 Die Materialgleichungen isotroper elasti-scher Materialien
7.6.1 Der Einfluß der Referenzkonfiguration auf denDeformationsgradienten
In Abschnitt 2.7 wurde verdeutlicht, daß die Lagrangesche Darstellungs-form der Bewegung χ des materiellen Korpers B entscheidend von der Wahlder Referenzkonfiguration B abhangt. In Abbildung 2.10 ist der Wech-sel veranschaulicht worden. Zunachst sollen die Unterschiede in den Ver-zerrungsmaßen bezogen auf die unterschiedlichen Referenzkonfigurationenhergeleitet werden.
Mit den Formeln (2.37) und (2.38) erhalten wir den materiellen Deformati-onsgradienten bezogen auf die Referenzkonfigurationen B bzw. B
F =∂x
∂X= Grad x = Grad Φ(X, t)
F =∂x
∂X= Grad x = Grad Φ(X, t)
und fur die Abbildung Λ zwischen den Referenzkonfigurationen nach (2.39)
Λ :
B → B
X 7→ X = Λ(X)
ergibt sich der Gradient zu
Z :=∂Λ
∂X= Grad Λ(X). (7.56)
Fur die Abbildungskomposition Φ = Φ Λ erhalten wir
F = Grad Φ =∂(Φ Λ)
∂X=∂Φ
∂X
∂Λ
∂X= Grad Φ Grad Λ = F Z,
d. h. es gilt fur die Deformationsgradienten F und F zweier Referenzkonfi-gurationen B und B die Beziehung
F = F Z. (7.57)
206 Kapitel 7. Konstitutive Gleichungen
7.6.2 Das Prinzip der materiellen Symmetrie
Fur jeden materiellen Punkt M konnen die Referenzkonfigurationen B
und B lokal durch eine Abbildung Λ ineinander uberfuhrt werden. DieAussage des Prinzips der materiellen Symmetrie, siehe auch Abschnitt 2.7und 7.2, besagt:
Die konstitutiven Gleichungen sind unabhangig in bezug auf die Trans-formationen Λ der materiellen Koordinaten aus der SymmetriegruppeS des betrachteten Materials.
Dies bedeutet, daß die Materialien grundsatzlich in unterschiedlichen Rich-tungen unterschiedliche Eigenschaften aufweisen konnen. Das spezielle Ma-terial kann jedoch Symmetrieeigenschaften bzgl. einer Menge von Transfor-mationen Λ aus der speziellen Symmetriegruppe S besitzen. Verdeutlichtist dies am Beispiel von Stahl und Holz. Weitere klassische Beispiele tretenbei der Betrachtung von speziellen Kristallen auf.
Die Symmetriegruppe S wird hier nicht als universell aufgefaßt, sondern istjeweils vorher zu spezifizieren. Analog dem Prinzip der materiellen Objek-tivitat muß fur jedes Material die Angabe der Symmetriegruppe die Formder konstitutiven Gleichungen beeinflussen.
An dieser Stelle werden wir die Auswirkungen untersuchen, die die großteSymmetriegruppe, d. h. die Gruppe aller eigentlich orthogonalen TensorenQ (d. h. aller Drehungen), auf die Gestalt der Materialgleichungen besitzt.Dabei sei Q der eigentlich orthogonale Tensor einer Rotation der Referenz-konfiguration B , d. h. es gilt die Beziehung
X = Λ(X) = QT X (7.58)
zwischen der Darstellung der materiellen Punkte X und X.
Ist das Materialverhalten in allen Richtungen identisch, d. h. kann die Re-ferenzkonfiguration beliebig gewahlt werden, so spricht man von einem iso-tropen Materialverhalten oder von Isotropie.
Bei einem isotropen Materialverhalten kann somit jede beliebige Rotationunternommen werden, d. h. mit
Λ(X) = QT X und Z = QT
7.6. Isotrope elastische Materialien 207
giltF = F QT und F = F Q,
ohne das sich das Materialgesetz andert.
Fur den Cauchyschen Spannungstensor T erhalten wir mit dieser Forderungfur die Darstellung (7.17) die Bedingung
T(X, F) = T(X,FQ) = T(X,F) ∀ Q (7.59)
und fur ein homogenes Materialgesetz gilt insbesondere
T(F Q) = T(F). (7.60)
In analoger Form wird die Isotropiebedingung fur den 1. und 2. Piola-Kirchhoff-Spannungstensor dargestellt, d. h. mit der Beziehung F = F Q
zwischen den Deformationsgradienten nach (7.57), den Transformationsbe-ziehungen zwischen den Spannungstensoren T, P und S nach (5.61) und(5.63), d. h.
T =1
JP FT und T =
1
JF S FT ,
konnen aus der Bedingung (7.60) aquivalente Aussagen fur die Piola-Kirchhoff-Spannungstensoren hergeleitet werden.
Fur den 1. Piola-Kirchhoff-Spannungstensor erhalten wir aus dieser Bedin-gung die Beziehung
1
det FP(F) FT =
1
det FP(F) FT .
Mit det Q = 1 und damit
det F = det (FQ) = det F det Q = det F
folgt die Beziehung
P(F) FT = P(F) FT = P(FQ) (FQ)T
= P(FQ)QT FT = (P(FQ) QT ) FT
und somit gilt
P(FQ) = P(F) Q. (7.61)
208 Kapitel 7. Konstitutive Gleichungen
Fur den 2. Piola-Kirchhoff-Spannungstensor gilt ebenso
1
det FF S(F) FT =
1
det FF S(F) FT
und mit den entsprechenden Vorgehen erhalten wir schließlich
S(FQ) = QT S(F) Q. (7.62)
7.6.3 Das Materialgesetz homogener, isotroper, elasti-scher Materialien
Aus dem Prinzip der materiellen Objektivitat erhalten wir die aquivalentenBedingungen
T(QF) = Q T(F) QT ,
P(QF) = Q P(F),
S(QF) = S(F).(7.63)
fur alle Rotationen Q des Beobachters Σ und alle DeformationsgradientenF. Daneben fordert das Prinzip der materiellen Symmetrie im Falle einesisotropen Werkstoffes die Unabhangigkeit der konstitutiven Gleichung furalle Deformationsgradienten F von der beliebigen Drehung Q der Referenz-konfiguration, d. h. es gelten die aquivalenten Aussagen
T(FQ) = T(F),
P(FQ) = P(F) Q,
S(FQ) = QT S(F) Q.(7.64)
Kombinieren wir die Forderungen aus dem Prinzip der materiellen Objek-tivitat und der Isotropie, so erhalten wir die weitreichende Folgerung desDarstellungssatzes von Rivlin-Ericksen [65].
7.6. Isotrope elastische Materialien 209
Die konstitutive Gleichung fur den Cauchyschen Spannungstensor ei-nes isotropen, elastischen Materials genugt dem Prinzip der materiellenObjektivitat, d. h. es gilt
T(QF) = Q T(F) QT und T(FQ) = T(F) ∀ F, ∀ Q,
dann und nur dann, wenn die konstitutive Beziehung fur den Cauchy-schen Spannungstensor die Form
T(F) = T(FFT ) ∀ F (7.65)
mitT(b) = η(ib)1 + η1(ib)b + η2(ib)b2 (7.66)
besitzt.Hierin stellen ib die Invarianten Ib, IIb, IIIb des Links-Cauchy-Green-Tensor b = FFT dar und η, η1, η2 seien stetige Funktionen der Inva-rianten.
Diese Aussage kann ebenfalls fur den 2. Piola-Kirchhoff-Spannungstensorformuliert werden, d. h. es gilt:
Die konstitutive Gleichung fur den 2. Piola-Kirchhoff-Spannungstensoreines isotropen, elastischen Materials genugt dem Prinzip der materiel-len Objektivitat dann und nur dann, wenn die konstitutive Beziehungfur den 2. Piola-Kirchhoff-Spannungstensor die Form
S(F) = S(FTF) = S(C) (7.67)
mitS(C) = γ(iC)1 + γ1(iC) C + γ2(iC)C2 (7.68)
besitzt.
Bemerkungen:
1. Diese Aussage besitzt eine zentrale Bedeutung fur die Behandlungelastischer Materialien. Sie wurde von Rivlin und Erickson 1955 be-wiesen, siehe [65] und z. B. auch Wang, Truesdell [87].
210 Kapitel 7. Konstitutive Gleichungen
2. Die Funktionen η(ib), η1(ib), η2(ib) sind drei reellwertige Funktionender Invarianten des Links-Cauchy-Green-Tensors. Damit ist gezeigt,daß es fur ein isotropes Material im allgemeinen nur drei Parameterzur Beschreibung der Spannungen gibt, die jedoch von der aktuellenDeformation abhangig sind.
3. Die drei Parameter (γ(iC), γ1(iC), γ2(iC)) der Beschreibung des 2. Piola-Kirchhoff-Spannungstensors nach (7.68) sind ebenfalls Funktionen derInvarianten. Trotz der Gleichheit der Invarianten des Links-Cauchy-Green-Tensors b und des Rechts-Cauchy-Green-Tensors C unterschei-den sich die skalaren Funktionen γ, γ1, γ2 jedoch von den Funktionenη, η1, η2 der konstitutiven Gleichung fur den Cauchyschen Spannungs-tensor.
7.6.4 Die Formanderungsenergiefunktion eines homo-genen, isotropen, hyperelastischen Materials
Die Uberlegungen der letzten Abschnitte zur Darstellung der Spannungsten-soren eines homogenen, isotropen, hyperelastischen Materials konnen auf dieFormanderungsenergiefunktion W = W (F) ubertragen werden. An dieserStelle geben wir die Ergebnisse kurz an und verweisen fur eine ausfuhrlicheDarstellung z. B. auf Ciarlet [9].
Bezeichnen wir den Satz der Invarianten des Rechts-Cauchy-Green-TensorsC = FT F mit iC bzw. des Links-Cauchy-Green-Tensors b = FFT mit ib,so konnen wir den folgenden Satz formulieren:
Die Formanderungsenergiefunktion W = W (F) eines isotropen, hyper-elastischen Materials genugt dem Prinzip der materiellen Objektivitatgenau dann, wenn eine Funktion W (iC) = W (ib) der Invarianten exi-stiert, so daß
W = W (F) = W (iC) = W (ib) fur alle F (7.69)
gilt.
Der Zusammenhang zwischen der Formanderungsenergiefunktion W undden Spannungstensoren P und S kann mit den Ergebnissen des Abschnittes
7.6. Isotrope elastische Materialien 211
7.4.2, d. h. mit den Beziehungen
P =∂Ws
∂Fund S =
∂Ws
∂E= 2
∂Ws
∂C,
in dem folgenden Satz zusammengefaßt werden:
Aus der differenzierbaren Formanderungsenergiefunktion W = W (iC)erhalten wir den 1. und 2. Piola-Kichhoff-Spannungstensor zu
1
2P =
∂Ws
∂ICF +
∂Ws
∂IIC
(IC1− FFT
)F +
∂Ws
∂IIICIIICF−T ,
1
2S =
∂Ws
∂IC1 +
∂Ws
∂IIC(IC1−C) +
∂Ws
∂IIICIIICC−1
=
∂Ws
∂IC+∂Ws
∂IICIC +
∂Ws
∂IIICIIC
1
−∂Ws
∂IIC+∂Ws
∂IIICIC
C +
∂Ws
∂IIICC2.
Fur den Beweis verweisen wir z. B. auf Ciarlet [9, Theorem 4.4-2].
212 Kapitel 7. Konstitutive Gleichungen
7.7 Das Verhalten der konstitutiven Glei-chungen in der Umgebung der Referenz-
konfiguration
Betrachten wir das Verhalten des deformierten Korpers in der Nahe derReferenzkonfiguration, so ist die Lagrangesche Betrachtungsweise mit denGroßen der Referenzkonfiguration am besten geeignet.
Fur die Beschreibung der Verzerrungen wurde in Abschnitt 3.4 der Green-sche Verzerrungstensor E eingefuhrt, der fur jede Starrkorperbewegung unddamit auch fur die identische Abbildung verschwindet, d. h. mit
E =1
2(FT F− 1) =
1
2(C− 1) bzw. C = 1 + 2E
gilt fur Starrkorperbewegungen mit C = 1 die Aussage E = 0.
Der Unterschied zwischen dem 2. Piola-Kirchhoff-Spannungstensor der ver-formten Konfiguration und dem 2. Piola-Kirchhoff-Spannungstensor der Re-ferenzkonfiguration, d. h. die Differenz
S(X, 1 + 2E) − S(X, 1)
kann in der Nahe der Referenzkonfiguration durch die Linearisierung gut be-stimmt werden. Mit Hilfe der in Kapitel 6 dargestellten Gateaux-Ableitungfolgt fur die Linearisierung des Materialgesetzes des 2. Piola-Kirchhoff-Spannungstensors S(1 + 2E) bzgl. des Greenschen Verzerrungstensors E
an der Stelle C = 1 die Beziehung
Lin [S]E
= S(1) + DS ·E = S(1) + 2∂S
∂C(1) : E. (7.70)
Da wir stets die Linearisierung an der Stelle X der unverformten Referenz-konfiguration bilden werden, verzichten wir auf die vollstandige Bezeichnungnach (6.10) und schreiben kurz Lin [S]
E. Im Unterschied zur Betrachtung der
Linearisierung bzgl. des unbekannten Verschiebungsvektors u in Abschnitt6.3 fuhren wir hier die Linearisierung bzgl. des Greenschen Verzerrungsten-sors durch, wobei fur die Approximation von S die Fehlerabschatzung
S = Lin [S]E
+ o(‖E‖) (7.71)
gilt. Damit stimmt die Linearisierung Lin [S]E
mit der Spannung S = S(E)in der Umgebung der Referenzkonfiguration bis auf einen Fehler der Große

7.7. Die Umgebung der Referenzkonfiguration 213
o(‖E‖) (siehe Abschnitt 6.2) uberein, wobei ‖E‖ ein geeignetes Maß (Norm)zur Bestimmung der Große von E darstellt.
Die in den Verzerrungen E lineare Approximation (7.70) des Materialver-haltens besitzt in dem vierstufigen Tensor
C := 2∂S
∂C(1) (7.72)
des linearen Terms∂S
∂C(1) : E im allgemeinen 34 = 81 Konstanten. Be-
zuglich des kartesischen Koordinatensystems e1, e2, e3 erhalten wir dieKoeffizientendarstellung
C = Cijkl ei ⊗ ej ⊗ ek ⊗ el.
Durch die Symmetrie des Spannungstensors S = ST , mit der Koeffizien-tendarstellung S = Sij ei ⊗ ej und damit der Beziehung Sij = Sji, undder Symmetrie des Greenschen Spannungstensors E = ET , mit der Koef-fizientendarstellung E = Ekl ek ⊗ el und damit Ekl = Elk, folgt fur dieKoeffizienten Cijkl von C
Cijkl = Cjikl = Cjilk = Cijlk.
Damit reduzieren sich die unanhangigen Konstanten auf 36 Konstanten.
Setzen wir nun weiterhin isotropes Materialverhalten voraus, so kann ausdem Darstellungssatz von Rivlin-Ericksen in der materiellen Formulierungnach (7.68) eine weitere Reduktion hergeleitet werden. Hierzu betrachtenwir die Invarianten IC, IIC, IIIC des Rechts-Cauchy-Green-Tensors C (sieheauch Abschnitt 3.6) und erhalten fur die Linearisierung der Invarianten ander Stelle C = 1 mit der Beziehung tr1 = 3 die Darstellungen
Lin [I]E
= Lin [trC]E
= tr 1 + 2 trE = 3 + 2 trE (7.73)
Lin [II]E
= Lin
[1
2
(tr C)2 − trC2
]
E
=1
2
(tr 1)2 − tr12
+ 4 trE = 3 + 4 trE (7.74)
Lin [III]E
= Lin
[1
6
(tr C)3 − 3 trC trC2 + 2 trC3
]
E
=1
6
(tr 1)3 − 3(tr1)(tr 12) + 2(tr13)
+ 2 trE
= 1 + 2 trE. (7.75)
214 Kapitel 7. Konstitutive Gleichungen
Die Linearisierung des isotropen, materiell objektiven Werkstoffgesetzes des2. Piola-Kirchhoff-Spannungstensors kann nun mit Hilfe der Linearisierungder Invarianten durchgefuhrt werden.
Dazu betrachten wir zunachst die Linearisierung der Koeffizientenfunktionγ, γ1, γ2 an der Stelle C = 1 mit iC = i1 = (I1, II1, III1) = (3, 3, 1), d. h.
γ(iC) = γ(i1) + Dγ · E + o(‖E‖).
Fur die Gateaux-Ableitung Dγ ·E der Koeffizienten γ an der Stelle iC = i1erhalten wir mit der Produktregel und der Linearisierung der Invariantennach (7.73) bis (7.75)
Dγ(i1) ·E =∂γ
∂I(i1) DI · E +
∂γ
∂II(i1) DII · E +
∂γ
∂III(i1) DIII · E
= 2∂γ
∂I(i1) trE + 4
∂γ
∂II(i1) trE + 2
∂γ
∂III(i1) trE
= γ(i1) trE
mit der Definition
γ(i1) := 2∂γ
∂I(i1) + 4
∂γ
∂II(i1) + 2
∂γ
∂III(i1).
Damit folgt aus (7.68) und der Beziehung C2 = 1 + 4E + o(‖E‖) die Dar-stellung
S(C) = S(1 + 2E) = γ(i1) + γ1(i1) + γ2(i1)1+ γ(i1) + γ1(i1) + γ2(i1)(trE) 1
+ 2γ1(i1) + 4γ2(i1)E+ o(‖E‖). (7.76)
Definieren wir die Konstanten
π(x) = −γ(i1) + γ1(i1) + γ2(i1),λ(x) = γ(i1) + γ1(i1) + γ2(i1) und (7.77)
µ(x) = 2γ1(i1) + 4γ2(i1),
so erhalten wir fur den 2. Piola-Kirchhoff-Spannungstensor S fur alle C =1 + 2E die Darstellung
S(x,C) = −π(x) 1 + λ(x) (tr E) 1 + 2µ(x) E + o(‖E‖). (7.78)
7.8. St. Venant-Kirchhoff-Material 215
Setzen wir weiterhin voraus, daß das betrachtete Material homogen und dieReferenzkonfiguration spannungsfrei sei, so erhalten wir aus der Gleichung(7.78) die Aussage
S(F) = S(C) = S(E) = λ(trE) 1 + 2µE + o(‖E‖). (7.79)
In diesem Fall werden die Konstanten λ, µ als die Lame-Konstanten bezeich-net.
Damit haben wir den folgenden bedeutsamen Sachverhalt bewiesen:
Jedes homogene, isotrope elastische Material genugt in der Umgebungder spannungsfreien Referenzkonfiguration der Abschatzung:
S = λ(tr E) 1 + 2µE + o(‖E‖).
7.8 Das St. Venant-Kirchhoff-Material als
Beispiel einer linearen elastischen
Materialgleichung
In Abschnitt 7.7 wurde die konstitutive Gleichung eines homogenen, isotro-pen Materials in der Umgebung der spannungsfreien Refernzkonfigurationangegeben. Vernachlassigen wir die Terme hoherer Ordnung, so erhalten wirdie konstitutive Gleichung des St. Venant-Kirchhoff-Materials in der Form
S(E) = S(1 + 2E) = λ(trE) 1 + 2µ E (7.80)
wobei λ und µ die Lame-Konstanten sind.
Bemerkungen:
1. Durch direktes Nachrechnen laßt sich erkennen, daß dieses Materialhomogen und isotrop ist. Dabei ist die Referenzkonfiguration span-nungsfrei, d. h. fur E = 0 folgt S = 0.
2. Weiterhin genugt diese konstitutive Beziehung der materiellen Objek-tivitat.
216 Kapitel 7. Konstitutive Gleichungen
3. Das St. Venant-Kirchhoff-Material ist eine lineare Beziehung zwischendem Greenschen Verzerrungstensor E und dem 2. Piola-Kirchhoff-Spannungstensor.
4. Ersetzen wir den Greenschen Verzerrungstensor E durch seine Defini-tion mittels der Verschiebung u, so gilt mit H = Gradu
S(E(u)) = λ(tr H) 1 + µ(HT + H)
+λ
2(tr(HT H)) 1 + µ(HT H),
(7.81)
d. h. der 2. Piola-Kirchhoff-Spannungstensor S ist nichtlinear von denunbekannten Verschiebungen u abhangig.
Die Anwendbarkeit beschrankt sich, wie es aus der Herleitung deutlichwurde, auf den Bereich kleiner Verzerrungen E.
Auf Grund der vollstandig nichtlinearen Beziehung zwischen dem Green-schen Verzerrungstensor E und den Verschiebungen u konnen jedochauch große Verschiebungen auftreten. Daher wird dieses Material auchals Modell fur
”große Verschiebung — kleine Verzerrungen“
bezeichnet.
5. Beschreiben wir das St. Venant-Kirchhoff-Material durch die aquiva-lenten Formulierungen mittels des 1. Piola-Kirchhoff-Spannungstensorund des Cauchyschen Spannungstensors, so gilt mit den Transforma-tionsbeziehungen
P = F S = F(λ(tr(E) 1 + 2µ E)
= λ(tr E) F + 2µ F E
bzw.
T = J F S FT = J F(λ(tr E) 1 + 2µ E) FT
= J(λ(trE) F FT + 2µ FEFT )
Hieran erkennen wir, daß trotz der linearen konstitutiven Beziehun-gen (7.80) zwischen der Verzerrung E und dem 2. Piola-Kirchhoff-Spannungstensor die vollstandig geometrische Nichtlinearitat bewahrtist.
7.8. St. Venant-Kirchhoff-Material 217
6. Die Formanderungsenergiefunktion W = W (E(u)) des St. Venant-Kirchhoff-Materials lautet
W = W (E) =λ
2(trE)
2+ µ trE2
und fur den Elastizitatstensor C erhalten wir die Darstellung
C = λ1⊗ 1 + 2µ I.
Damit kann die Formanderungsenergiefunktion W auch in der Form
W = W (E) =1
2E : (CE)
dargestellt werden.
218 Kapitel 7. Konstitutive Gleichungen
7.9 Das Hookesche Werkstoffgesetz
7.9.1 Herleitung des Hookeschen Werkstoffgesetzes
Im Abschnitt 7.8 wurde mit dem St. Venant-Kirchhoff-Material die konsti-tutive Gleichung des einfachsten Modells homogener, isotroper, elastischerMaterialien genannt, das dem Prinzip der materiellen Objektivitat genugt.Obwohl dieses Material die lineare konstitutive Beziehung (7.80) besitzt, istes, wie die Gleichung (7.81) zeigt, nichtlinear in den unbekannten Verschie-bungen u.
Eine weitere Vereinfachung ist durch die Beschrankung auf kleine Verschie-bungen u moglich, die sich beim Ubergang vom Greenschen Verzerrungs-tensor E = 1
2 (H + HT + HTH) auf den linearisierten Verzerrungstensorǫǫǫ = 1
2(H + HT ) ergibt.
Bevor wir den Ubergang zum Hookeschen Gesetz, dem klassischen linear-elastischen Werkstoffgesetz, naher beschreiben, sei die folgende wichtigeWarnung ausgesprochen.
Samtliche Herleitungen basieren auf der Berucksichtigung aller geo-metrisch nichtlinearen Großen, die zu einer genauen Beschreibung derphysikalischen Großen der Verzerrung, der Spannung und des Gleich-gewichts fuhren.Beim Ubergang zu der linearisierten Theorie fuhren wir Naherungenein, die den Anwendungsbereich des Modells auf die Betrachtung klei-ner Verschiebungen, kleiner Verdrehungen und kleiner Verzerrungenbeschranken.
Der Ausgangspunkt unserer Reduktion ist die in den Gleichungen (7.80)dargestellte konstitutive Gleichung des St. Venant-Kirchhoff-Materials, diejedes homogene, isotrope, elastische Material in der Umgebung der span-nungsfreien Referenzkonfiguration bis auf die Fehler der Großenordnungo(‖E‖) annahert.
Im Kapitel 6 wurde bereits gezeigt, daß die Linearisierung samtlicher Span-nungstensoren in der Nahe der spannungsfreien Referenzkonfiguration B
bzgl. der unbekannten Verschiebung u der Linearisierung σσσ = Lin [S]u
des2. Piola-Kirchhoff-Spannungstensors entspricht, d. h. es gilt nach (6.23)
σσσ = Lin [S]u
= Lin [P]u
= Lin [T]u
= Lin [TB]u.
7.9. Das Hookesche Werkstoffgesetz 219
Nachdem wir nun mit dem St. Venant-Kirchhoff-Material bereits den Ef-fekt einer Linearisierung in den Verzerrungen E dargestellt haben, verbleibtnach der Kettenregel nur noch die Linearisierung des St. Venant-Kirchhoff-Materials bezuglich der unbekannten Verschiebungen u.
Aus der Materialgleichung des St. Venant-Kirchhoff-Materials (7.80)
S(E(u)) = S(1 + 2E(u)) = λ(trE(u)) 1 + 2µE(u),
und der Linearisierung des Greenschen Verzerrungstensors ǫǫǫ = Lin [E]u
er-halten wir sofort
σσσ = Lin[S(E(u))
]u
= Lin [λ(tr E(u)1 + 2µE(u)]u
= λ(trLin [E]u)1 + 2µ(Lin [E]
u)
= λ(tr ǫǫǫ)1 + 2µǫǫǫ.
(7.82)
Damit ist das Hookesche Werkstoffgesetz
σσσ = λ(tr ǫǫǫ) 1 + 2µǫǫǫ (7.83)
aus der Theorie elastischer Materialien hergeleitet worden.
Im folgenden soll die Darstellung des Hookeschen Werkstoffgesetzes in dergewohnten Indexschreibweise bzgl. eines kartesischen Koordinatensystemshergeleitet werden. Dazu betrachten wir die Gleichung (7.83) und stellendie dort auftretenden Tensoren in der Koeffizientendarstellung dar, d. h. esgilt
σσσ = σij ei ⊗ ej, ǫǫǫ = εkl ek ⊗ el, und 1 = δij ei ⊗ ej.
Mit der Beziehung
tr ǫǫǫ = ǫǫǫ : 1 = (εij ei ⊗ ej) : (δkl ek ⊗ el) = εij δkl δik δjl = εkk
folgt
σσσ = σij ei ⊗ ej = λεkk δij ei ⊗ ej + 2µ εij ei ⊗ ej
und damit fur die Koeffizienten bzgl. der Basis ei ⊗ ej
σij = λεkk δij + 2µεij . (7.84)
220 Kapitel 7. Konstitutive Gleichungen
Aus dieser Koeffizientendarstellung konnen wir nun auch leicht die Inversiondes Hookeschen Gesetzes, d. h. die Darstellung der linearisierten Verzerrungǫǫǫ als Funktion der linearisierten Spannung σσσ, angeben. Dazu betrachten wir(7.84) in der Form
εij =1
2µσij −
λ
2µεkk δij , (7.85)
fuhren durch Multiplikation mit dem Kronecker-Delta δij
εij δij =1
2µσij δij −
λ
2µεkk δij δij
eine Verjungung durch und erhalten mit δii = 3 durch Umbenennung derstummen Indizes
εii =1
2µσii −
3λ
2µεii,
d. h. es gilt
εkk =σkk
3λ+ 2µ. (7.86)
Damit kann aus (7.85) und (7.86) die inverse Beziehung
εij =1
2µσij −
λ
2µ(3λ+ 2µ)σkkδij (7.87)
hergeleitet werden, die in absoluter tensorieller Notation als
ǫǫǫ =1
2µσσσ − λ
2µ(3λ + 2µ)trσσσ 1 (7.88)
geschrieben werden kann.
Stellen wir das Hookesche Werkstoffgesetz (7.83) in der Form
σσσ =C ǫǫǫ (7.89)
dar, so gilt fur den vierstufigen Materialtensor C die Gleichung
C = λ 1⊗ 1 + 2µI, (7.90)
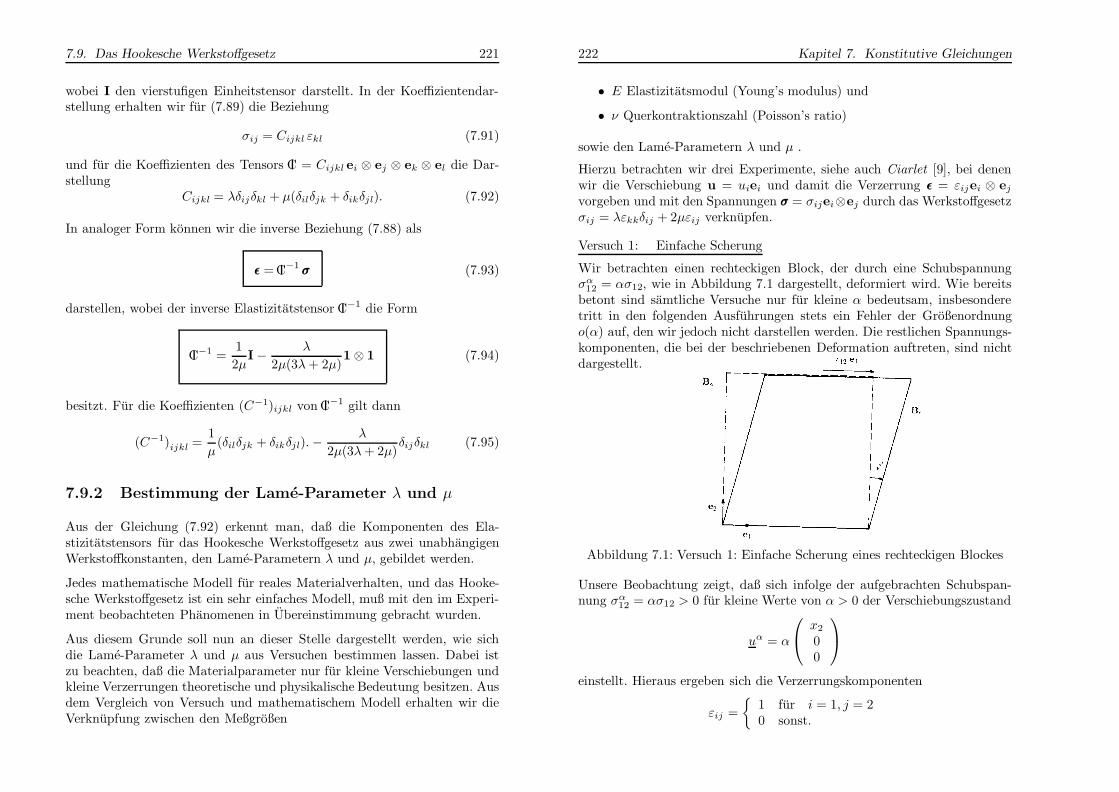
7.9. Das Hookesche Werkstoffgesetz 221
wobei I den vierstufigen Einheitstensor darstellt. In der Koeffizientendar-stellung erhalten wir fur (7.89) die Beziehung
σij = Cijkl εkl (7.91)
und fur die Koeffizienten des Tensors C = Cijkl ei ⊗ ej ⊗ ek ⊗ el die Dar-stellung
Cijkl = λδijδkl + µ(δilδjk + δikδjl). (7.92)
In analoger Form konnen wir die inverse Beziehung (7.88) als
ǫǫǫ =C−1 σσσ (7.93)
darstellen, wobei der inverse Elastizitatstensor C−1 die Form
C−1 =1
2µI − λ
2µ(3λ+ 2µ)1⊗ 1 (7.94)
besitzt. Fur die Koeffizienten (C−1)ijkl von C−1 gilt dann
(C−1)ijkl =1
µ(δilδjk + δikδjl).−
λ
2µ(3λ+ 2µ)δijδkl (7.95)
7.9.2 Bestimmung der Lame-Parameter λ und µ
Aus der Gleichung (7.92) erkennt man, daß die Komponenten des Ela-stizitatstensors fur das Hookesche Werkstoffgesetz aus zwei unabhangigenWerkstoffkonstanten, den Lame-Parametern λ und µ, gebildet werden.
Jedes mathematische Modell fur reales Materialverhalten, und das Hooke-sche Werkstoffgesetz ist ein sehr einfaches Modell, muß mit den im Experi-ment beobachteten Phanomenen in Ubereinstimmung gebracht wurden.
Aus diesem Grunde soll nun an dieser Stelle dargestellt werden, wie sichdie Lame-Parameter λ und µ aus Versuchen bestimmen lassen. Dabei istzu beachten, daß die Materialparameter nur fur kleine Verschiebungen undkleine Verzerrungen theoretische und physikalische Bedeutung besitzen. Ausdem Vergleich von Versuch und mathematischem Modell erhalten wir dieVerknupfung zwischen den Meßgroßen
222 Kapitel 7. Konstitutive Gleichungen
• E Elastizitatsmodul (Young’s modulus) und
• ν Querkontraktionszahl (Poisson’s ratio)
sowie den Lame-Parametern λ und µ .
Hierzu betrachten wir drei Experimente, siehe auch Ciarlet [9], bei denenwir die Verschiebung u = uiei und damit die Verzerrung ǫǫǫ = εijei ⊗ ej
vorgeben und mit den Spannungen σσσ = σijei⊗ej durch das Werkstoffgesetzσij = λεkkδij + 2µεij verknupfen.
Versuch 1: Einfache Scherung
Wir betrachten einen rechteckigen Block, der durch eine Schubspannungσα
12 = ασ12, wie in Abbildung 7.1 dargestellt, deformiert wird. Wie bereitsbetont sind samtliche Versuche nur fur kleine α bedeutsam, insbesonderetritt in den folgenden Ausfuhrungen stets ein Fehler der Großenordnungo(α) auf, den wir jedoch nicht darstellen werden. Die restlichen Spannungs-komponenten, die bei der beschriebenen Deformation auftreten, sind nichtdargestellt.
Abbildung 7.1: Versuch 1: Einfache Scherung eines rechteckigen Blockes
Unsere Beobachtung zeigt, daß sich infolge der aufgebrachten Schubspan-nung σα
12 = ασ12 > 0 fur kleine Werte von α > 0 der Verschiebungszustand
uα = α
x2
00
einstellt. Hieraus ergeben sich die Verzerrungskomponenten
εij =
1 fur i = 1, j = 20 sonst.
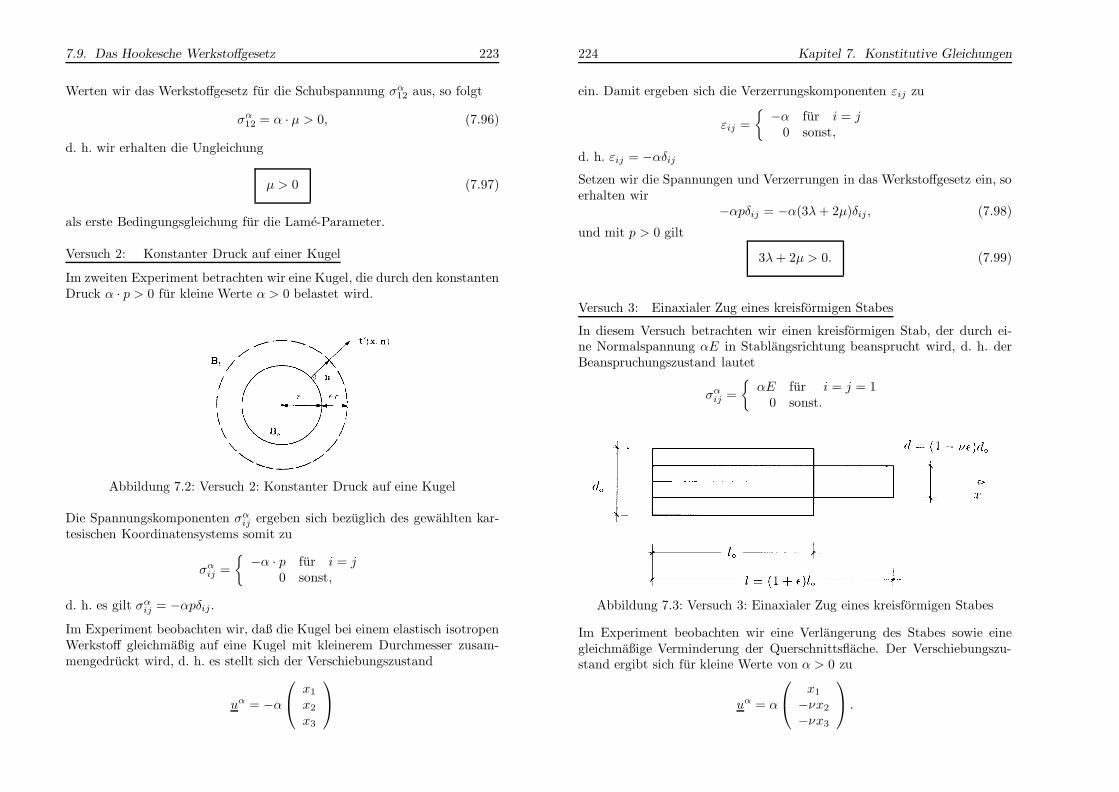
7.9. Das Hookesche Werkstoffgesetz 223
Werten wir das Werkstoffgesetz fur die Schubspannung σα12 aus, so folgt
σα12 = α · µ > 0, (7.96)
d. h. wir erhalten die Ungleichung
µ > 0 (7.97)
als erste Bedingungsgleichung fur die Lame-Parameter.
Versuch 2: Konstanter Druck auf einer Kugel
Im zweiten Experiment betrachten wir eine Kugel, die durch den konstantenDruck α · p > 0 fur kleine Werte α > 0 belastet wird.
Abbildung 7.2: Versuch 2: Konstanter Druck auf eine Kugel
Die Spannungskomponenten σαij ergeben sich bezuglich des gewahlten kar-
tesischen Koordinatensystems somit zu
σαij =
−α · p fur i = j
0 sonst,
d. h. es gilt σαij = −αpδij.
Im Experiment beobachten wir, daß die Kugel bei einem elastisch isotropenWerkstoff gleichmaßig auf eine Kugel mit kleinerem Durchmesser zusam-mengedruckt wird, d. h. es stellt sich der Verschiebungszustand
uα = −α
x1
x2
x3
224 Kapitel 7. Konstitutive Gleichungen
ein. Damit ergeben sich die Verzerrungskomponenten εij zu
εij =
−α fur i = j
0 sonst,
d. h. εij = −αδijSetzen wir die Spannungen und Verzerrungen in das Werkstoffgesetz ein, soerhalten wir
−αpδij = −α(3λ+ 2µ)δij, (7.98)
und mit p > 0 gilt
3λ+ 2µ > 0. (7.99)
Versuch 3: Einaxialer Zug eines kreisformigen Stabes
In diesem Versuch betrachten wir einen kreisformigen Stab, der durch ei-ne Normalspannung αE in Stablangsrichtung beansprucht wird, d. h. derBeanspruchungszustand lautet
σαij =
αE fur i = j = 1
0 sonst.
Abbildung 7.3: Versuch 3: Einaxialer Zug eines kreisformigen Stabes
Im Experiment beobachten wir eine Verlangerung des Stabes sowie einegleichmaßige Verminderung der Querschnittsflache. Der Verschiebungszu-stand ergibt sich fur kleine Werte von α > 0 zu
uα = α
x1
−νx2
−νx3
.
7.9. Das Hookesche Werkstoffgesetz 225
Damit ergeben sich die Verzerrungskomponenten zu
εij =
−να fur i, j = 2 oder i, j = 3
α fur i, j = 10 sonst.
Setzen wir die Spannungen und Verzerrungen in das Hookesche Werkstoff-gesetz ein, so erhalten wir
σαij = α(λ(1 − 2ν)− 2νµ) = 0 fur i, j = 2 oder i, j = 3 (7.100)
σαij = 0 fur i 6= j (7.101)
σαij = α(λ(1− 2ν) + 2µ) = αE fur i, j = 1 (7.102)
Damit erhalten wir aus (7.100) die Beziehung
λ(1− 2ν)− 2νµ = 0
und daraus, da λ+ µ > 0 nach (7.97) und (7.99),
ν =λ
2(λ + µ). (7.103)
Mit der naturlichen Annahme ν > 0 folgt sofort
λ > 0. (7.104)
Mit der Bezeichnung (7.103) erhalten wir aus der Gleichung (7.102) fur dieSpannungskomponente σ11
σα11 = α · E = α
(λ
(1− 2λ
2(λ + µ)
)+ 2µ
)
und damit die Beziehnug
E =µ(3λ + 2µ)
λ+ µ. (7.105)
Aus den Experimenten lassen sich anschauliche Deutungen fur die aus denLame-Parametern hergeleiteten Konstanten gewinnen.
226 Kapitel 7. Konstitutive Gleichungen
1. Die Konstante ν nach (7.103), d. h.
ν =λ
2(λ+ µ)
mißt im dritten Versuch fur kleine Verzerrungen das Verhaltnis zwi-schen der relativen Abnahme des Querschnittsdurchmessers zu derrelativen Verlangerung des Stabes, d. h. es gilt
ν =
d − dd(
l− ll
) .
Die Konstante ν wird daher als Querkontraktionszahl oder in der eng-lischsprachigen Literatur als Poisson’ s ratio bezeichnet.
2. Die Konstante E des dritten Versuches mißt fur kleine Verzerrungendas Verhaltnis der Zugspannung σα
11 zu der relativen Langenanderung
α =l− ll
.
des Stabes und ist damit ein Maß fur die”Elastizitat“ des Materials.
Daher wird E mit
E =µ(3λ+ 2µ)
λ + µ
als Elastizitatsmodul oder als Young’s modulus bezeichnet.
3. Im ersten Versuch wird durch den Lame-Parameter µ die Schubspan-nung σα
12 mit der Winkelanderung α = tanϕ nach Gleichung (7.96)verknupft, d. h. es gilt
µ =σα
12
α.
Aus dieser Beobachtung fuhren wir mit
G := µ
den Schubmodul ein.
4. Betrachten wir das zweite Experiment, so wird der Wert 3λ + 2µ in(7.98) in Beziehung zur Druckbelastung p der Kugel gesetzt und stellt
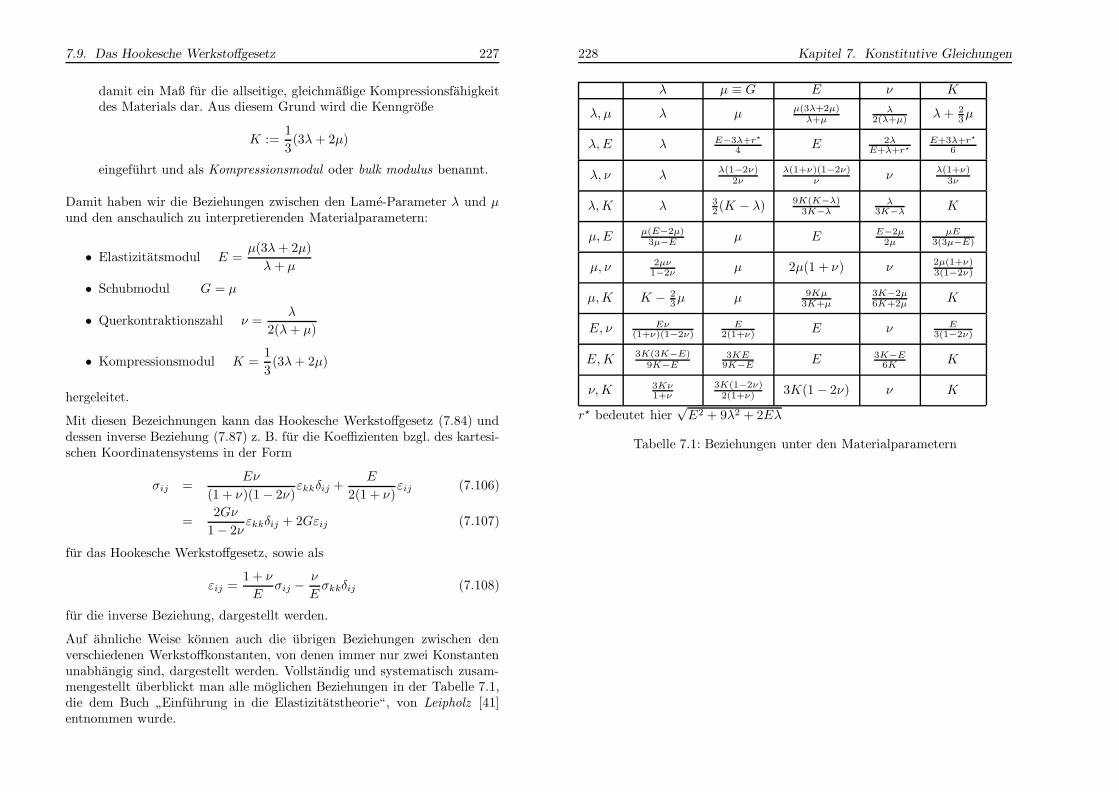
7.9. Das Hookesche Werkstoffgesetz 227
damit ein Maß fur die allseitige, gleichmaßige Kompressionsfahigkeitdes Materials dar. Aus diesem Grund wird die Kenngroße
K :=1
3(3λ + 2µ)
eingefuhrt und als Kompressionsmodul oder bulk modulus benannt.
Damit haben wir die Beziehungen zwischen den Lame-Parameter λ und µund den anschaulich zu interpretierenden Materialparametern:
• Elastizitatsmodul E =µ(3λ+ 2µ)
λ + µ
• Schubmodul G = µ
• Querkontraktionszahl ν =λ
2(λ+ µ)
• Kompressionsmodul K =1
3(3λ+ 2µ)
hergeleitet.
Mit diesen Bezeichnungen kann das Hookesche Werkstoffgesetz (7.84) unddessen inverse Beziehung (7.87) z. B. fur die Koeffizienten bzgl. des kartesi-schen Koordinatensystems in der Form
σij =Eν
(1 + ν)(1− 2ν)εkkδij +
E
2(1 + ν)εij (7.106)
=2Gν
1− 2νεkkδij + 2Gεij (7.107)
fur das Hookesche Werkstoffgesetz, sowie als
εij =1 + ν
Eσij −
ν
Eσkkδij (7.108)
fur die inverse Beziehung, dargestellt werden.
Auf ahnliche Weise konnen auch die ubrigen Beziehungen zwischen denverschiedenen Werkstoffkonstanten, von denen immer nur zwei Konstantenunabhangig sind, dargestellt werden. Vollstandig und systematisch zusam-mengestellt uberblickt man alle moglichen Beziehungen in der Tabelle 7.1,die dem Buch
”Einfuhrung in die Elastizitatstheorie“, von Leipholz [41]
entnommen wurde.
228 Kapitel 7. Konstitutive Gleichungen
λ µ ≡ G E ν K
λ, µ λ µ µ(3λ+2µ)λ+µ
λ2(λ+µ)
λ + 23µ
λ, E λ E−3λ+r⋆
4E 2λ
E+λ+r⋆E+3λ+r⋆
6
λ, ν λλ(1−2ν)
2ν
λ(1+ν)(1−2ν)ν
νλ(1+ν)
3ν
λ,K λ 32(K − λ) 9K(K−λ)
3K−λλ
3K−λK
µ,E µ(E−2µ)3µ−E
µ E E−2µ2µ
µE3(3µ−E)
µ, ν 2µν1−2ν
µ 2µ(1 + ν) ν 2µ(1+ν)3(1−2ν)
µ,K K − 23µ µ 9Kµ
3K+µ3K−2µ6K+2µ
K
E, ν Eν(1+ν)(1−2ν)
E2(1+ν)
E ν E3(1−2ν)
E,K3K(3K−E)
9K−E3KE
9K−EE 3K−E
6KK
ν,K 3Kν1+ν
3K(1−2ν)2(1+ν) 3K(1− 2ν) ν K
r⋆ bedeutet hier√E2 + 9λ2 + 2Eλ
Tabelle 7.1: Beziehungen unter den Materialparametern
7.9. Das Hookesche Werkstoffgesetz 229
7.9.3 Das Hookesche Werkstoffgesetz inMatrizenschreibweise
Eine weitere Darstellungsform des Hookeschen Gesetzes ist mit der Ma-trizenschreibweise fur die Koeffizienten der Tensoren bzgl. des kartesischenKoordinatensystems gegeben. Hierzu definieren wir die Spaltenmatrix σ derSpannungen und die Spaltenmatrix ε der Verzerrungen
σ =
σ11
σ22
σ33
σ12
σ23
σ13
bzw. ε =
ε11
ε22
ε33
2ε12
2ε23
2ε13
. (7.109)
Hierbei haben wir bereits die Symmetrie des Spannungstensors σσσ = σσσT
und des Verzerrungstensors ǫǫǫ = ǫǫǫT ausgenutzt, indem wir in den entspre-chenden Spaltenmatrizen nur die jeweils 6 unterschiedlichen Koeffizientenaufnehmen. Man beachte, daß bei der Definition der Spaltenmatrix ε derVerzerrungen die doppelten tensoriellen Schubverzerrungen, d. h. die Inge-nieurgleitungen auftreten.
Das Hookesche Werkstoffgesetz nach Gleichung (7.89) soll nun in Matrizen-schreibweise in der Form
σ = E ε (7.110)
mit der Elastizitatsmatrix E dargestellt werden. Die Elastizitatsmatrix be-sitzt auf Grund der Wahl der Spannungs- und Verzerrungsmatrizen 6 ∗ 6 =36 unterschiedliche Konstanten. Auf Grund des Potentialcharakters derFormanderungsenergie (siehe auch Kapitel 7.4) erhalten wir die Symmetriedes Elastizitatstensors C und somit die Symmetrie der Elastizitatsmatrix,d. h. mit
E =
E11 E12 E13 E14 E15 E16
E21 E22 E23 E24 E25 E26
E31 E32 E33 E34 E35 E36
E41 E42 E43 E44 E45 E46
E51 E52 E53 E54 E55 E56
E61 E62 E63 E64 E65 E66
(7.111)
230 Kapitel 7. Konstitutive Gleichungen
gilt E = ET bzw. fur die Elemente der Elastizitatsmatrix gilt Eij = Eji.Aus dieser Darstellung soll im weiteren fur das Hookesche Gesetz die genaueForm der Elastizitatsmatrix E hergeleitet werden. Aus dem Zusammenhangσij = Cijklεkl nach (7.91) folgt mit den eingefuhrten Matrizen σ, ε und Eund der Berucksichtigung der Symmetrie εkl = εlk sowie Cijkl = Cijlk dieDarstellung
σ11
σ22
σ33
σ12
σ23
σ13
=
C1111 C1122 C1133 C1112 C1123 C1113
C2211 C2222 C2233 C2212 C2223 C2213
C3311 C3322 C3333 C3312 C3323 C3313
C1211 C1222 C1233 C1212 C1223 C1213
C2311 C2322 C2333 C2312 C2323 C2313
C1311 C1322 C1233 C1312 C1323 C1313
ε11
ε22
ε33
2ε12
2ε23
2ε13
=
E11 E12 E13 E14 E15 E16
E21 E22 E23 E24 E25 E26
E31 E32 E33 E34 E35 E36
E41 E42 E43 E44 E45 E46
E51 E52 E53 E54 E55 E56
E61 E62 E63 E64 E65 E66
ε11
ε22
ε33
2ε12
2ε23
2ε13
.
Aus dem Vergleich der Darstellungsformen und der Form der KoeffizientenCijkl nach (7.92) ergibt sich die Elastizitatsmatrix E zu
E =
E11 E12 E13 E14 E15 E16
E21 E22 E23 E24 E25 E26
E31 E32 E33 E34 E35 E36
E41 E42 E43 E44 E45 E46
E51 E52 E53 E54 E55 E56
E61 E62 E63 E64 E65 E66
(7.112)
=E
(1 + ν)(1− 2ν)
1− ν ν ν 0 0 0ν 1− ν ν 0 0 0ν ν 1− ν 0 0 00 0 0 1−2ν
2 0 00 0 0 0 1−2ν
2 00 0 0 0 0 1−2ν
2
.
Damit kann das Hookesche Werkstoffgesetz fur den allgemeinen dreidimen-
7.9. Das Hookesche Werkstoffgesetz 231
sionalen Fall nach (7.110) in der Form
σ = E ε,
d. h. durch
σ11
σ22
σ33
σ12
σ23
σ13
=E
(1+ν)(1−2ν)
1−ν ν ν 0 0 0ν 1−ν ν 0 0 0ν ν 1−ν 0 0 00 0 0 1−2ν
20 0
0 0 0 0 1−2ν2
00 0 0 0 0 1−2ν
2
ε11
ε22
ε33
2ε12
2ε23
2ε13
formuliert werden.
Aus der oben angegebenen Form konnen nun durch eine Matrizeninversiondie Verzerrungen durch die Spannungen ausgedruckt werden. Die Inversionder Elastizitatsmatrix E ist moglich, da diese positiv definit ist, d. h. es giltuT E u > 0 furu 6= 0. Dieses Ergebnis erhalt man auch durch die analogeUmsetzung der inversen Beziehung (7.93) mit dem inversen Elastizitatsten-sor C−1 nach (7.94). Das inverse Elastizitatsgesetz in Matrizenschreibweiseerhalt somit die Form
ε = E−1 σ, (7.113)
und es gilt die Darstellung
ε11
ε22
ε33
2ε12
2ε23
2ε13
=1
E
1 −ν −ν 0 0 0−ν 1 −ν 0 0 0−ν −ν 1 0 0 00 0 0 2(1+ν) 0 00 0 0 0 2(1+ν) 00 0 0 0 0 2(1+ν)
σ11
σ22
σ33
σ12
σ23
σ13
Aus dieser Form des Hookeschen Werkstoffgesetzes konnen die Sonderfalledes ebenen Verzerrungszustandes, des ebenen Spannungszustandes und desgeraden Stabes hergeleitet werden.
7.9.4 Das Hookesche Werkstoffgesetz fur den ebenenSpannungszustand
Der ebene Spannungzustand wird dadurch charakterisiert, daß die Span-nungskomponenten in der dritten Richtung verschwinden, d. h. es gilt
σ13 = σ23 = σ33 = 0. (7.114)
232 Kapitel 7. Konstitutive Gleichungen
Hieraus ergeben sich fur den ebenen Spannungszustand reduzierte Span-nungs- und Verzerrungsmatrizen
σESZ = σ11 σ22 σ12T und εESZ = ε11 ε22 2ε12T
sowie die Beziehung zwischen den Verzerrungen und den Spannungen
εESZ = E−1ESZ σESZ (7.115)
mit der inversen Elastizitatsmatrix
E−1ESZ =
1
E
1 −ν 0−ν 1 00 0 2(1 + ν)
. (7.116)
Weiterhin gilt fur die Verzerrungen
ε13 = ε23 = 0 (7.117)
undε33 = − ν
E(σ11 + σ22). (7.118)
Durch Inversion der Beziehung (7.115) erhalt man die Darstellung der Span-nungen durch die Verzerrungen fur den ebenen Spannungszustand
σESZ = EESZ εESZ . (7.119)
Dabei besitzt die Elastizitatsmatrix die folgende Gestalt
EESZ =E
1− ν2
1 ν 0ν 1 00 0 1−ν
2
. (7.120)
Daraus folgt
σ11 + σ22 =E
1− ν2(1 + ν)ε11 + (1 + ν)ε22
σ11 + σ22 =E
1− ν (ε11 + ε22).
Durch Einsetzen in (7.118) erhalt man die Darstellung
ε33 = − ν
1− ν (ε11 + ε22). (7.121)
Beim ebenen Spannungszustand sind die Verzerrungen ε11, ε22 und ε33 alsonicht mehr voneinander unabhangig.
7.9. Das Hookesche Werkstoffgesetz 233
7.9.5 Das Hookesche Werkstoffgesetz fur den ebenenVerzerrungszustand
Beim ebenen Verzerrungszustand wird vorausgesetzt, daß die Verzerrungs-komponenten in der dritten Richtung verschwinden, d. h. es gilt
ε13 = ε23 = ε33 = 0. (7.122)
Berucksichtigt man dieses in (7.109), so ergibt sich mit den fur den ebenenVerzerrungszustand reduzierten Spannungs- und Verzerrungsmatrizen
σEV Z = σ11, σ22, σ12T und εEV Z = ε11, ε22 2ε12T
fur die Beziehungen zwischen den Spannungen und den Verzerrungen
σEV Z = EEV ZεEV Z. (7.123)
Die Elastizitatsmatrix hat die Gestalt
EEV Z =E
(1 + ν)(1− 2ν)
1− ν ν 0ν 1− ν 00 0 1−2ν
2
. (7.124)
Weiterhin gilt fur die Spannungen
σ13 = σ23 = 0 (7.125)
und
σ33 =Eν
(1 + ν)(1− 2ν)(ε11 + ε22). (7.126)
Die Inversion von (7.123) liefert wiederum die Darstellung der Verzerrungendurch die Spannungen
εEV Z = E−1EV ZσEV Z (7.127)
mit der inversen Elastizitatsmatrix des ebenen Verzerrungszustandes
E−1EV Z =
1 + ν
E
1− ν −ν 0−ν 1− ν 00 0 2
. (7.128)
Aus (7.127) folgt
ε11 + ε22 =1 + ν
E(1− 2ν)σ11 + (1− 2ν)σ22
ε11 + ε22 =(1 + ν)(1− 2ν)
E(σ11 + σ22)
234 Kapitel 7. Konstitutive Gleichungen
Durch Einsetzen in (7.126) erkennt man, daß beim ebenen Verzerrungszu-stand die Spannungen σ11, σ22 und σ33 voneinander abhangig sind, d. h. esgilt
σ33 = ν(σ11 + σ22). (7.129)
7.9.6 Das Hookesche Werkstoffgesetz fur den geradenStab
In der Stabtheorie wird fur die Spannungen vorausgesetzt
σ22 = σ33 = σ23 = 0. (7.130)
Damit ergibt sich aus (7.84) mit der Benutung der Tabelle 7.1
σ11 = Eε11 (7.131)
σ12 = 2Gε12 = Gγ12 (7.132)
σ13 = 2Gε13 = Gγ13. (7.133)
Die hierzu inversen Beziehungen lauten
ε11 =1
Eσ11 (7.134)
ε12 =1 + ν
Eσ12 =
1
2Gσ12 (7.135)
ε13 =1 + ν
Eσ13 =
1
2Gσ13. (7.136)
Weiterhin gilt
ε22 = − νEσ11 (7.137)
ε33 = − νEσ11. (7.138)
Durch einen Vergleich von (7.134),(7.135) und (7.136) erkennt man, daß dieVerzerrungen ε22 und ε33 von ε11 abhangig sind, d. h. es gilt
ε22 = ε33 = −νε11. (7.139)

7.10. Nichtlinear-elastische Materialien 235
7.10 Beispiele nichtlinear-elastischer Materia-lien
7.10.1 Allgemeingultige Darstellung der Formanderungs-energie fur homogene, isotrope, hyperelastischeMaterialien
In Abschnitt 7.6.4 wurde die Darstellung eines homogenen, isotropen, hype-relastischen Materials, das dem Prinzip der materiellen Objektivitat genugt,in der Form
W (F) = W (Ib, IIb, IIIb) = W (IC, IIC, IIIC)
angegeben. Die Invarianten des Rechts-Cauchy-Green-Tensors C = FTF
und des Links-Cauchy-Green-Tensors b = FFT stimmen uberein, d. h.Ib = IC, IIb = IIC und IIIb = IIIC, so daß wir im weiteren den Unterschiedzwischen der Darstellung der Formanderungsenergie in der Referenz- undder Momentankonfiguration vernachlassigen und somit nur noch
W (F) = W (I, II, III)
schreiben wollen.
Unter der Voraussetzung einer beliebig oft stetig differenzierbaren Formande-rungsenergiefunktion erhalten wir durch eine Potenzreihenentwicklung dieDarstellung
W (F) = W(I, II, III) =∞∑
p,q,r=0
cpqr (I − 3)p (II− 3)q (III − 1)r, (7.140)
wobei die Koeffizienten cpqr unabhangig von der Deformation sind, siehez. B. Ogden [59]. Hiermit ist die exakte Darstellung aller isotropen, materiellobjektiven, hyperelastischen Formanderungsfunktionen gegeben.
Eine weitere wichtige Darstellungsform der Formanderungsenergie ergibtsich aus den Beziehungen (3.6.1)
IC = tr C = CAA = λ21 + λ2
2 + λ23 ,
IIC =1
2
[(tr C)2 − trC2
]
=1
2[CAACBB − CAB CAB]
= λ21 λ
22 + λ2
2 λ23 + λ2
3 λ21
und IIIC = det C = eABC CA1CB2CC3 = λ21 λ
22 λ
23
236 Kapitel 7. Konstitutive Gleichungen
der Invarianten von C bzw. b zu den Eigenwerten λ1, λ2, λ3 des Rechts-bzw. Links-Streck-Tensors U bzw. V. Hiermit erhalten wir die Darstellung
W = ˇW (λ1, λ2, λ3)
=
∞∑
p,q,r
apqr [λp1 (λq
2 + λq3) + λp
2 (λq3 + λq
1)+
λp3 (λq
1 + λq2)] (λ1λ2λ3)
r − 6 (7.141)
Es ist zu beachten, daß die Darstellungen (7.140) und (7.141) aquivalent undvollstandig allgemeingultig fur isotrope, hyperelastische Materialien ohne in-nere Zwangsbedigungen, z. B. Inkompressibilitat sind. Fur eine vollstandigeDartsellung und die Erweiterung auf inkompressible, elastische Materiali-en verweisen wir auf Ogden [59] und die darin angegebene weiterfuhrendeLiteratur.
Fur die praktische Berechnung z. B. gummiartiger Materialien sind wichti-ge Spezialfalle der angegebenen Formanderungsenergiefunktion ausreichend,die wir im weiteren kurz darstellen wollen.
7.10.2 Das Ogden-Material
Von Ogden wurde fur kompressible, elastische Materialien die Formande-rungsenergiefunktion
W = ˇW (λ1, λ2, λ3) =
∞∑
p=1
2ap00 (λp1 + λq
2 + λq3 − 3) + g(J) (7.142)
vorgeschlagen, wobei g(J) eine skalare Funktion der Determinante J desmateriellen Deformationsgradienten F ist.
Fur inkompressible Materialien mit der Nebenbedingung λ1λ2λ3 = 1 erhal-ten wir daraus die Form des Ogden-Materials
W (λ1, λ2, λ3) =
N∑
p=1
µp
(λ
αp
1 + λαq
2 + λαq
3 − 3)/αp, (7.143)
wobei die Exponenten αp fur p = 1, 2, · · · , N beliebige reelle Werte anneh-men konnen. Aus dem Vergleich mit der linearen Theorie erhalten wir fur

7.10. Nichtlinear-elastische Materialien 237
inkompressible Ogden-Materialien die Konsistenzbedingung
N∑
p=1
µpαp = 2µ, (7.144)
wobei µ = G den Schubmodul der linearen Theorie darstellt, siehe Abschnitt7.9.
7.10.3 Das Neo-Hooke-Material
Als weiteres praktisch bedeutsames Materialmodell erhalten wir das inkom-pressible Neo-Hooke-Material fur eine Darstellung in den Invarianten in derForm
W =1
2µ (I− 3) (7.145)
bzw. als Sonderfall des Ogden-Materials mit N = 1 und α1 = 2, d. h.
W =1
2µ1(λ
21 + λ2
2 + λ23 − 3) (7.146)
mit µ1 = µ.
7.10.4 Das Mooney-Rivlin-Material
Weiterhin wird z. B. bei der numerischen Berechnung gummiartiger Ma-terialien das inkompressible Mooney-Rivlin-Material in der Invariantendar-stellung
W = C1µ(I− 3) +C2(II− 3) (7.147)
bzw. als Sonderfall des Ogden-Materials mit N = 2 und α1 = 2, α2 = −2 inder Form
W =1
2µ1(λ
21 + λ2
2 + λ23 − 3)− 1
2µ2(λ
−21 + λ−2
2 + λ−23 − 3) (7.148)
mit µ1 − µ2 = µ benutzt.
238 Kapitel 7. Konstitutive Gleichungen
7.10.5 Ein Vergleich verschiedener Materialmodelle
Das Verhalten der unterschiedlichen Materialmodelle fur inkompressible ela-stische Materialien soll am Beispiel eines vulkanisierten Gummis im ein-axialen Zugversuch (siehe Treloar [78]) verdeutlicht werden. Fur Hinweise zuden physikalischen Eigenschaften der gummiartigen Materialien siehe Tre-loar [79]. Hinweise zur numerischen Umsetzung finden sich in Simo, Taylor[67].
Mit dem Wert G = µ = 0.4225kN/cm2 fur den Schubmodul eines vulkani-sierten Gummis wurde das Neo-Hooke-Material nach (7.146), das Mooney-Rivlin-Material nach (7.148) und das Ogden-Material nach (7.143) mit N =3 und
α1 = 1.3, α2 = 5.0, α3 = −2.0 sowie µ1 = 0.63, µ2 = 0.00127, µ3 = −0.01
berechnet und in Abbildung 7.4 dargestellt.
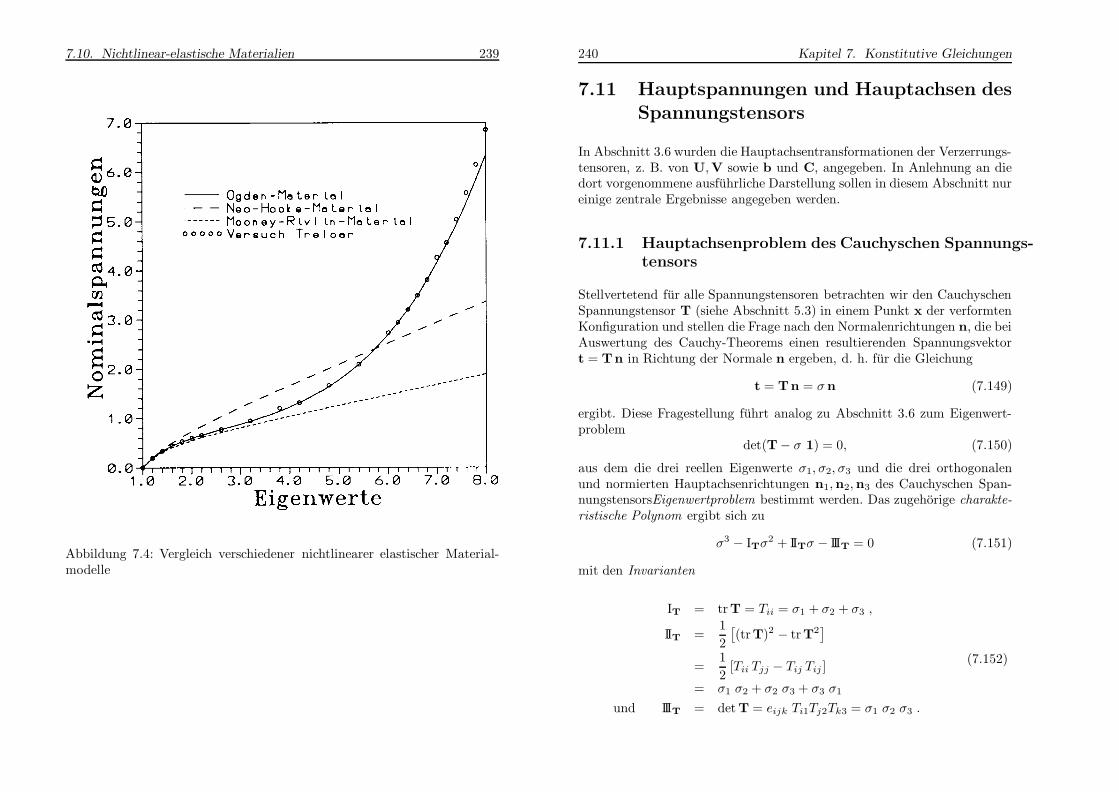
7.10. Nichtlinear-elastische Materialien 239
Abbildung 7.4: Vergleich verschiedener nichtlinearer elastischer Material-modelle
240 Kapitel 7. Konstitutive Gleichungen
7.11 Hauptspannungen und Hauptachsen desSpannungstensors
In Abschnitt 3.6 wurden die Hauptachsentransformationen der Verzerrungs-tensoren, z. B. von U,V sowie b und C, angegeben. In Anlehnung an diedort vorgenommene ausfuhrliche Darstellung sollen in diesem Abschnitt nureinige zentrale Ergebnisse angegeben werden.
7.11.1 Hauptachsenproblem des Cauchyschen Spannungs-tensors
Stellvertetend fur alle Spannungstensoren betrachten wir den CauchyschenSpannungstensor T (siehe Abschnitt 5.3) in einem Punkt x der verformtenKonfiguration und stellen die Frage nach den Normalenrichtungen n, die beiAuswertung des Cauchy-Theorems einen resultierenden Spannungsvektort = Tn in Richtung der Normale n ergeben, d. h. fur die Gleichung
t = Tn = σ n (7.149)
ergibt. Diese Fragestellung fuhrt analog zu Abschnitt 3.6 zum Eigenwert-problem
det(T− σ 1) = 0, (7.150)
aus dem die drei reellen Eigenwerte σ1, σ2, σ3 und die drei orthogonalenund normierten Hauptachsenrichtungen n1,n2,n3 des Cauchyschen Span-nungstensorsEigenwertproblem bestimmt werden. Das zugehorige charakte-ristische Polynom ergibt sich zu
σ3 − ITσ2 + IITσ − IIIT = 0 (7.151)
mit den Invarianten
IT = trT = Tii = σ1 + σ2 + σ3 ,
IIT =1
2
[(trT)2 − trT2
]
=1
2[Tii Tjj − Tij Tij ]
= σ1 σ2 + σ2 σ3 + σ3 σ1
und IIIT = det T = eijk Ti1Tj2Tk3 = σ1 σ2 σ3 .
(7.152)
7.11. Hauptachsentransformation 241
Die Eigenwerte σ1, σ2 und σ3 mussen die charakteristische Gleichung (7.151)erfullen, die normierten Hauptachsenrichtungen ni , i = 1, 2, 3 sind dieLosungen des homogenen Gleichungssystems
(T − σi 1) ni = 0. (7.153)
Die Hauptachsenrichtungen bilden eine orthogonale und normalisierte Basis,d. h. ein Orthonormalsystem n1,n2,n3.Bemerkungen:
1. Die Eigenwerte σi fur i = 1, 2, 3 des Cauchyschen SpannungstensorsT werden auch Hauptspannungen genannt und mit σI , σII sowie σIII
bezeichnet. Dabei ist σI die Hauptzugspannung und σIII die Haupt-druckspannung.
2. Man beachte, daß auf Grund der Isotropieeigenschaft des zugrundelie-genden elastischen Materials die Hauptachsenrichtungen ni der raum-lichen Verzerrungstensoren b,V (siehe Abschnitt 3.6 koaxial zu denHauptachsenrichtungen des Cauchyschen Spannungstensors T sind.Entsprechend gilt dies fur die Hauptachsenrichtungen Ni der mate-riellen Verzerrungstensoren U und C sowie des 2. Piola-Kirchhoff-Spannungstensors.
3. Die Zusammenhange fur den Spannungstensor T konnen analog zuAbschnitt 3.6.5 mit Hilfe des Spannungsellipsoides veranschaulichtwerden, siehe z. B. Leipholz [41].
4. Eine gelungene Darstellung des Spannungszustandes ist weiterhin mitdem Mohrschen Spannungskreis gegeben, der aus der Darstellung desSpannungstensors T bezuglich der Hauptachsen ni hergeleitet werdenkann.
7.11.2 Das Hauptachsenproblem des ebenen Spannungs-zustandes
Betrachten wir die Situation des ebenen Spannungszustandes, z. B. fur ei-ne Scheibe, so ist die Hauptspannung σ3 und die zugehorige Hauptachsen-richtung n3 in Richtung der Scheibennormalen durch die Problemstellungbereits vorgegeben. Somit reduziert sich das allgemeine dreidimensionale
242 Kapitel 7. Konstitutive Gleichungen
Hauptspannungsproblem auf ein zweidimensionales, ebenes Problem zur Be-stimmung von σ1, σ2 sowie n1 und n2, die in der Scheibenebene liegen unddamit orthogonal zu n3 sind. Im Fall des ebenen Spannungszustandes be-sitzt der Cauchysche Spannungstensor T die Gestalt
T = T ijei ⊗ ej =
2∑
ξ=1
2∑
η=1
T ξηeξ ⊗ eη =: Te, (7.154)
da die Komponenten T 13 = T 31, T 23 = T 32 und T 33 nach VoraussetzungNull sind. Hieraus ergibt sich das charakteristische Problem zur Bestimmungder Hauptspannungen σ1 und σ2 des ebenen Spannungstensors Te zu
det(Te − σ 1) = 0. (7.155)
Das zugehorige charakteristische Polynom lautet
σ2 − Ieσ + IIe = 0 (7.156)
mit den Invarianten
Ie := tr Te = Tαα = T11 + T22 = σ1 + σ2 ,
IIe := det Te = T11 T22 − T 212 = σ1 σ2 .
(7.157)
7.11.3 Additive Aufspaltung des Spannungstensors inKugeltensor und Deviator
Der Cauchysche Spannungstensor T und naturlich auch jeder andere Span-nungstensor kann additiv in einen Kugeltensor TK und einen Deviator TD
in der FormT = TK + TD (7.158)
aufgespalten werden. Der Kugeltensor TK ist definiert durch
TK :=1
3(trT) 1 =
1
3(T11 + T22 + T33) 1 (7.159)
und beschreibt einen hydrostatischen Spannungszustand, da er nur Elemen-te in der Hauptdiagonalen besitzt. Es gilt
7.11. Hauptachsentransformation 243
TKij =
13
trT 0 00 1
3trT 0
0 0 13
trT
=
1
3(T11 + T22 + T33)
1 0 00 1 00 0 1
.
Die jeweiligen Spannungen in den drei Koordinatenrichtungen sind gleich.Der Kugeltensor TK kann nach Abschnitt 3.4 als eine Deformation verstan-den werden, die eine unverformte Kugel in der Referenzkonfiguration in eineKugel in der Momentankonfiguration abbildet. Die dabei auftretende Defor-mation besteht nur aus einer Vergroßerung oder Verkleinerung des Radiusder Kugel. Eine Gestaltsanderung tritt nicht auf.
Der Deviatoranteil TD des Cauchyschen Spannungstensors ergibt sich aus(7.158) und (7.159) zu
TD := T−TK = T − 1
3(trT) 1 (7.160)
und beschreibt die reine Gestaltsanderung.
Die Invarianten zur Aufstellung von Eigenwertproblemen ergeben sich leichtaus der Definition von TD und TK und werden hier ohne Herleitung ange-geben:
a) Invarianten des Kugeltensors TK
IT K = IT = tr T = TAA = T11 + T22 + T33,
IIT K =1
2
((trTK)2 − tr (TK)2
)=
1
3(T11 + T22 + T33)
2,
IIIT K = det TK =1
27(T11 + T22 + T33)
3,
b) Invarianten des Deviators TD
IT D = 0,
IIT D = −1
2tr (TD)2,
IIIT D = detTD.
244 Kapitel 7. Konstitutive Gleichungen

Kapitel 8
Die Grundgleichungen derElastizitatstheorie
8.1 Zusammenstellung der Grundgleichun-gen der Elastizitatstheorie
In diesem Abschnitt sollen die vollstandigen nichtlinearen Gleichungen derElastizitatstheorie zusammengefaßt dargestellt werden. Sie bilden den Aus-gangspunkt der analytischen und numerischen Behandlung mechanischerProbleme unter Verwendung elastischer Materialien. Die hierbei auftreten-den nichtlinearen Effekte sind in Abschnitt 8.1.5 zusammengefaßt.
8.1.1 Die geometrischen Beziehungen
Ausgehend von der Lagrangeschen Betrachtungsweise der Deformation inKapitel 3 und der Darstellung (3.69) der Verschiebung u = u(X) einesPunktes X ∈ B der Referenzkonfiguration in den Punkt x ∈ Bt der Mo-mentankonfiguration, d. h. x = X + u, ergibt sich fur den materiellen De-formationsgradienten F = Gradx nach (3.11) die Beziehung
F = Grad x = Grad (X + u) = Grad X + Grad u = 1 + Grad u. (8.1)
245
246 Kapitel 8. Die Grundgleichungen
Aus dem materiellen Deformationsgradienten F und dem materiellen Ver-schiebungsgradienten H = Grad u = F−1 wird der Greensche Verzerrungs-tensor E (siehe Abschnitt 3.4) in der folgenden Form hergeleitet
E =1
2(FTF− 1) =
1
2(H + HT + HT H) (8.2)
und stellt ein geeignetes Maß zur Beschreibung der lokalen Beanspruchungdes materiellen Korpers dar. Der Greensche Verzerrungstensor E ist somiteine nichtlineare Funktion der unbekannten Verschiebung u, d. h. mit u =u(X) gilt
E = E(u(X)). (8.3)
Weiterhin gilt mit der Beziehung x = X + u zwischen der Lage des materi-ellen Punktes in der Referenzkonfiguration B und der Momentankonfigu-ration Bt die Gleichung
x =D2
Dt2(X + u(X)) =
D2
Dt2(X) +
D2
Dt2(u(X)) =
D2
Dt2u(X) = u. (8.4)
Damit kann bei einer materiellen Darstellung die Beschleunigung des ma-teriellen Punktes x durch die zweite Ableitung des Verschiebungsvektors u
ersetzt werden.
8.1.2 Die dynamischen und statischen Feldgleichungen
Die Aussagen der Massenbilanz sowie der Impuls- und Drehimpulserhal-tungssatze in Kapitel 5 liefern uns nach Einfuhrung des Cauchyschen Span-nungstensors T in Abschnitt 5.3.1 die lokalen dynamischen Feldgleichungen(5.50) und (5.79)
divT + ρ (b− x) = 0 ∀ x ∈ Bt , (8.5)
T = TT ∀ x ∈ Bt . (8.6)
Diese Feldgleichungen stellen die dynamischen Gleichgewichtsbedingungenin der zunachst noch unbekannten verformten Momentankonfiguration Bt
dar. Diese Momentankonfiguration ist somit selbst eine nichtlineare Funk-tion der gesuchten Deformation Φ bzw. der Verschiebung u .
Das Problem der Berechnung der unbekannten, von der Losung u abhangi-gen Momentankonfiguration Bt kann durch die Transformation der Feld-gleichungen auf die Referenzkonfiguration B umgangen werden. Mit der

8.1. Zusammenstellung der Grundgleichungen 247
Definition des 1. Piola-Kirchhoff-Spannungstensor P = det F T F−T nach(5.61) ergibt sich (siehe auch (5.68))
DivP + ρ(b − u) = 0 ∀ X ∈ B , (8.7)
PFT =(PFT
)T ∀ X ∈ B . (8.8)
Betrachten wir den 2. Piola-Kirchhoff-Spannungstensor S nach (5.63), sofolgt (siehe auch (5.70) und (5.81))
Div(FS) + ρ(b − u) = 0 ∀ X ∈ B , (8.9)
S = ST ∀ X ∈ B . (8.10)
Beschranken wir uns im weiteren auf die Betrachtung statischer Probleme,so erhalten wir durch die Vernachlassigung der dynamischen Krafte in (8.7)und (8.9) die statischen Feldgleichungen
DivP + ρb = 0 ∀ X ∈ B bzw. (8.11)
Div(FS) + ρb = 0 ∀ X ∈ B. (8.12)
Mit der Definition k := ρb fur die eingepragten außeren Volumenkraftekonnen wir die statische Feldgleichung abschließend in der Form
DivP + k = 0 ∀ X ∈ B bzw. (8.13)
Div(FS) + k = 0 ∀ X ∈ B (8.14)
darstellen.
8.1.3 Die geometrischen und statischen Randbedin-gungen
Die geometrischen Randbedingungen sind durch
u(x) = u ∀ x ∈ ∂Btu (8.15)
in der Eulerschen Betrachtungsweise gegeben. Analog gilt fur die auf dieReferenzkonfiguration bezogene Lagrangesche Betrachtungsweise
u(Φ(X)) = u ∀ X ∈ ∂Bu . (8.16)
Fur die statischen Randbedingungen erhalten wir mit (5.40) die Beziehung
t = Tn = t ∀ x ∈ ∂Btσ (8.17)
248 Kapitel 8. Die Grundgleichungen
bzw. fur die Darstellung in der Referenzkonfiguration B
t = PN = t ∀ X ∈ ∂Bσ . (8.18)
Die geometrischen und statischen Randbedingungen sind ebenfalls nichtli-neare Funktionen der Deformation, die sich in einigen Spezialfallen (z. B.Totlasten) auf lineare Funktionen der gesuchten Deformation reduzierenlassen.
8.1.4 Das Werkstoffgesetz eines homogenen, isotropen,elastischen Materials
Die konstitutive Beziehung eines homogenen, isotropen, elastischen Mate-rials stellt ebenfalls eine nichtlineare Beziehung zwischen dem GreenschenVerzerrungstensor und dem 2. Piola-Kirchhoff-Spannungstensor dar. Es giltmit (7.55) der Zusammenhang
S = S(E(u)). (8.19)
Nur im Sonderfall eines St. Venant-Kirchhoff-Materials nach (7.80) stehtan dieser Stelle eine lineare Beziehung, welche jedoch, wie im Abschnitt 7.7dargestellt, nur fur kleine Verzerrungen gultig ist.
8.1.5 Das Randwertproblem der Elastizitatstheorie
Aus den oben zusammengestellten Beziehungen soll im folgenden das Rand-wertproblem der Elastizitatstheorie hergeleitet werden. Hierzu betrachtenwir die Beschreibung bzgl. der Referenzkonfiguration B und setzen in diedynamischen Feldgleichungen (8.7) die Definition des materiellen Deforma-tionsgradienten F nach (8.1) und die Beziehung (8.19) fur das nichtlineareWerkstoffverhalten ein. Damit erhalten wir fur alle X ∈ B die Bedingung
Div(1 + Gradu) S(E(u))+ ρb = 0. (8.20)
Damit haben wir fur die Beschreibung in der Referenzkonfiguration B
die dynamische Feldgleichung als nichtlineare Funktion des unbekanntenVerschiebungszustandes u beschrieben. Hieraus ergibt sich die Anfangs-Randwertaufgabe der Elastizitatstheorie.
Fur eine Beschrankung auf statische Probleme folgt daraus
Div(1 + Gradu) S(E(u))+ ρb = 0 ∀ X ∈ B . (8.21)

8.2. Linearisierung der Grundgleichungen 249
Damit konnen wir das Randwertproblem der Elastizitatstheorie wie folgtbeschreiben:
Gegeben seien die Verschiebung u auf dem Randbereich ∂Bu sowiedie volumenhaft verteilten außeren Krafte b in B und die auf demRandbereich ∂Bσ angreifenden flachenhaft verteilten Oberflachen-spannungen t. Der gesuchte Verschiebungszustand u fur alle X ∈ B
ist durch die Losung der folgenden Gleichungen gegeben:
Div(1 + Gradu) S(E(u))+ ρb = 0 ∀ X ∈ B , (8.22)
u = u ∀ X ∈ ∂Bu , (8.23)
(1 + Gradu) S(E(u)) N = t ∀ X ∈ ∂Bσ . (8.24)
8.2 Linearisierung der Grundgleichungen
der Elastizitatstheorie
Das Randwertproblem der Elastizitatstheorie ist ein in den unbekanntenVerschiebungen u hochgradig nichtlineares Problem. Aus den Erfahrungenin den Anwendungsgebieten der Elastizitatstheorie laßt sich jedoch oftmalseine Beschrankung der Deformation auf kleine Verschiebungen und kleineVerzerrungen aus einem unbelasteten, spannungsfreien, im Gleichgewichtbefindlichen Ausgangszustand feststellen. Die Deformationen und die auf-tretenden Spannungen sind reversibel, d. h. bei Wegnahme der Belastungstellt sich der unbelastete, spannungsfreie Ausgangszustand wieder ein. Ausdiesem Grund kann das nichtlineare Randwertproblem der Elastizitatstheo-rie fur ein homogenes, isotropes, elastisches Material in der Nahe eines span-nungsfreien Ausgangszustands (Referenzkonfiguration) durch eine Lineari-sierung bzgl. der unbekannten Verschiebungen u hinreichend gut approxi-miert werden.
8.2.1 Die Grundgleichungen der klassischen Elastizi-tatstheorie
Die Linearisierung des Greenschen Verzerrungstensors, der dynamischenFeldgleichungen und der Spannungstensoren ist in Kapitel 6 vorgenommen
250 Kapitel 8. Die Grundgleichungen
worden. Hieraus ergeben sich die Gleichungen
ǫǫǫ = L[E]X = E︸︷︷︸=0
+DE · u =1
2(H + HT ) = Elin, (8.25)
σσσ = L[T]X = L[P]X = L[S]X, (8.26)
Lin [div T]u
+ ρ(b − u) = Div σσσ + ρ(b − u) = 0. (8.27)
Die Linearisierung des Materialgesetzes fur die unbekannten Verschiebungenerfolgt nach Abschnitt 7.9 und liefert das Hookesche Gesetz
σσσ = σσσ (u) = λ (tr ǫǫǫ (u)) 1 + 2µ ǫǫǫ (u). (8.28)
Hieraus ergibt sich dann das Randwertproblem der linearisierten Elasti-zitatstheorie in Abhangigkeit der unbekannten Verschiebungen u, indemdie linearisierte konstitutive Beziehung (8.28) in die linearisierten Gleichge-wichtsbedingungen (8.27) eingesetzt wird. Das Randwertproblem der linea-risierten Elastizitatstheorie lautet damit:
Gegeben seien die Verschiebung u auf dem Randbereich ∂Bu sowiedie volumenhaft verteilten außeren Krafte b in B und die auf demRandbereich ∂Bσ angreifenden flachenhaft verteilten Oberflachen-spannungen t. Der gesuchte Verschiebungszustand u fur alle X ∈ B
ist durch die Losung der folgenden Gleichungen gegeben:
Divλ (tr ǫǫǫ (u)) 1 + 2µǫǫǫ (u)+ ρb = 0 ∀ X ∈ B , (8.29)
u = u ∀ X ∈ ∂Bu , (8.30)
λ (tr ǫǫǫ (u)) 1 + 2µǫǫǫ (u) N = t ∀ X ∈ ∂Bσ . (8.31)
In diesem Fall ist zu beachten, daß in den Gleichungen (8.29) bis (8.31)nur eine lineare Abhangigkeit von den unbekannten Verschiebungen u be-steht. Das obige Randwertproblem soll im weiteren als das klassische Rand-wertproblem der Elastizitatstheorie bezeichnet werden. Das klassische Rand-wertproblem der Elastizitatstheorie wird in der mathematischen Literatureingehend behandelt. Um dem Leser den Zugang zu der mathematischenBetrachtungsweise, die sich dem Existenz- und Eindeutigkeitsproblem derLosung widmet, zu ermoglichen, wird in Kapitel 11 die in der mathema-tischen Literatur ubliche Darstellungs- und Bezeichnungsweise angegeben.Weiterhin werden dort die Grundideen der mehr mathematisch orientiertenFragen nach der Existenz und Eindeutigkeit der Losung dargelegt.

8.2. Linearisierung der Grundgleichungen 251
8.2.2 Das Superpositionsprinzip der Losungen derklassischen Elastizitatstheorie
Wir betrachten nur vorgeschriebene Belastungen t auf ∂Bσ und b inB , die unabhangig vom Verschiebungszustand sind. Unter diesen Voraus-setzungen erhalten wir dann aus der Linearisierung des Randwertproblems(8.22) bis (8.24) das in den unbekannten Verschiebungen u lineare Rand-wertproblem (8.29) bis (8.31) der klassischen Elastizitatstheorie.
In diesem Fall gilt das wichtige Superpositionsgesetz , das es erlaubt, die Ge-samtlosung eines Problems durch die Superposition (Addition) der Losun-gen geeigneter Teilprobleme herzuleiten. Dieses Verfahren wird zum Beispielbei der Aufteilung in die homogenen und partikularen Losungsanteile derlinearen Differentialgleichungen benutzt.
Es ist entscheidend, daß sich dieses Superpositionsprinzip im allgemeinennicht auf nichtlineare Probleme anwenden laßt.
Damit erweist sich die Struktur des Randwertproblems (8.29) bis (8.31)als sehr einfach im Gegensatz zu dem Randwertproblem (8.22) bis (8.24),wodurch sich auch die Vielzahl der Losungen und Anwendungsbeispiele zurklassischen Elastizitatstheorie erklaren laßt.
252 Kapitel 8. Die Grundgleichungen
8.3 Die Herleitung der Lame-NavierschenVerschiebungsdifferentialgleichungen
der klassischen linearen Elastizitatstheo-
rie
Das Randwertproblem der linearen Elastizitatstheorie ist nach Abschnitt8.2 in der folgenden Form gegeben
Div λ (tr ǫǫǫ (u)) 1 + 2 µ ǫǫǫ (u) + ρ(b − u) = 0, (8.32)
u = u, (8.33)
λ (tr ǫǫǫ (u)) 1 + 2 µ ǫǫǫ (u) N = t. (8.34)
Dabei gilt fur den linearisierten Greenschen Verzerrungstensor ǫǫǫ
ǫǫǫ =1
2(H + HT ) =
1
2(Gradu + (Gradu)T ). (8.35)
Die Lame-Navierschen Verschiebungsdifferentialgleichungen konnen nunaus den oben angegebenen Gleichungen hergeleitet werden. Diese Differen-tialgleichungen sind der Ausgangspunkt der analytischen Losungsverfahrenin der linearen Elastizitatstheorie. Um den unterschiedlichen Anwendungengerecht zu werden, sollen die Lame-Navierschen Verschiebungsdifferential-gleichungen auf unterschiedlichen Wegen hergeleitet werden.
8.3.1 Herleitung der Lame-Navierschen Verschie-bungsdifferentialgleichungen
Zunachst werden wir die Lame-Navierschen Verschiebungsdifferentialglei-chungen in absoluter vektoranalytischer Schreibweise aus dem oben ange-gebenen Randwertproblem herleiten.
In die linearisierte Differentialgleichung (8.32) setzen wir die Definition deslinearisierten Greenschen Verzerrungstensors (8.35) ein und erhalten somitdie Darstellung
Div
λ
(tr
1
2(Gradu + (Gradu)T )
)1
+2 µ1
2(Gradu + (Gradu)T )
+ ρb = ρu.
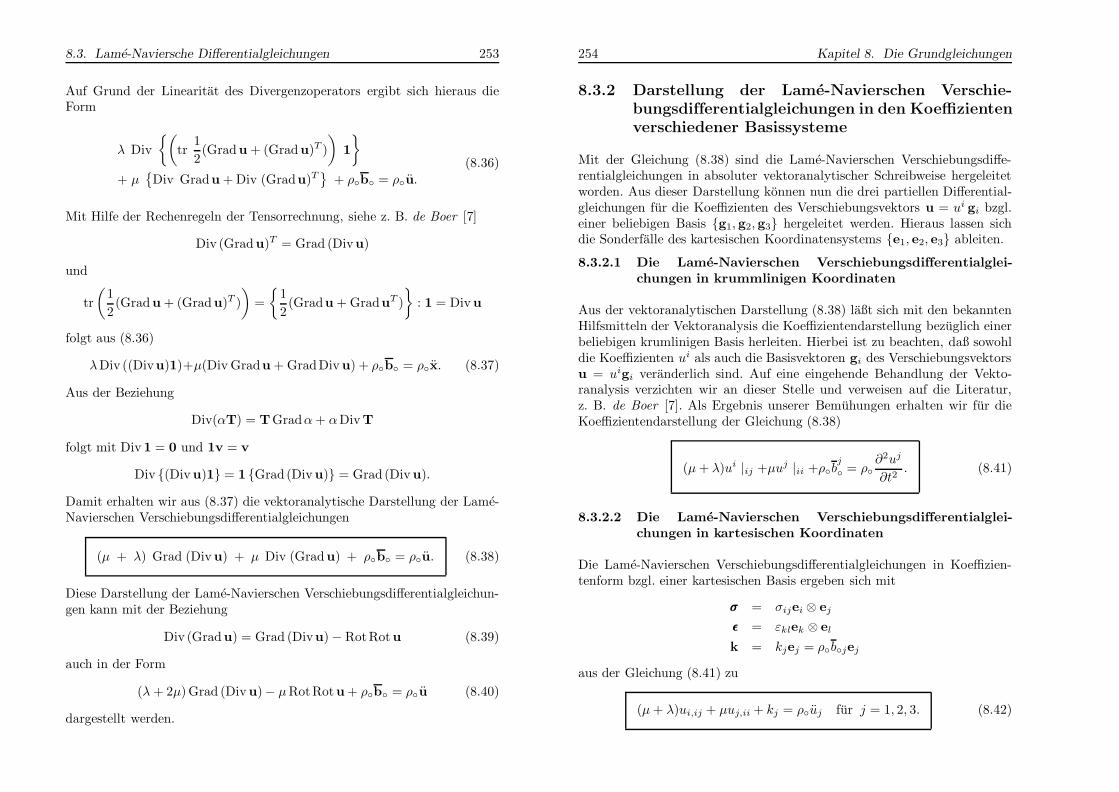
8.3. Lame-Naviersche Differentialgleichungen 253
Auf Grund der Linearitat des Divergenzoperators ergibt sich hieraus dieForm
λ Div
(tr
1
2(Gradu + (Gradu)T )
)1
+ µDiv Gradu + Div (Gradu)T
+ ρb = ρu.
(8.36)
Mit Hilfe der Rechenregeln der Tensorrechnung, siehe z. B. de Boer [7]
Div (Gradu)T = Grad (Divu)
und
tr
(1
2(Gradu + (Gradu)T )
)=
1
2(Gradu + GraduT )
: 1 = Divu
folgt aus (8.36)
λDiv ((Divu)1)+µ(Div Gradu + GradDivu) + ρb = ρx. (8.37)
Aus der Beziehung
Div(αT) = TGradα+ αDivT
folgt mit Div1 = 0 und 1v = v
Div (Divu)1 = 1 Grad (Divu) = Grad (Divu).
Damit erhalten wir aus (8.37) die vektoranalytische Darstellung der Lame-Navierschen Verschiebungsdifferentialgleichungen
(µ + λ) Grad (Divu) + µ Div (Gradu) + ρb = ρu. (8.38)
Diese Darstellung der Lame-Navierschen Verschiebungsdifferentialgleichun-gen kann mit der Beziehung
Div (Gradu) = Grad (Divu)− RotRotu (8.39)
auch in der Form
(λ + 2µ)Grad (Divu)− µRotRotu + ρb = ρu (8.40)
dargestellt werden.
254 Kapitel 8. Die Grundgleichungen
8.3.2 Darstellung der Lame-Navierschen Verschie-bungsdifferentialgleichungen in den Koeffizientenverschiedener Basissysteme
Mit der Gleichung (8.38) sind die Lame-Navierschen Verschiebungsdiffe-rentialgleichungen in absoluter vektoranalytischer Schreibweise hergeleitetworden. Aus dieser Darstellung konnen nun die drei partiellen Differential-gleichungen fur die Koeffizienten des Verschiebungsvektors u = ui gi bzgl.einer beliebigen Basis g1, g2, g3 hergeleitet werden. Hieraus lassen sichdie Sonderfalle des kartesischen Koordinatensystems e1, e2, e3 ableiten.
8.3.2.1 Die Lame-Navierschen Verschiebungsdifferentialglei-
chungen in krummlinigen Koordinaten
Aus der vektoranalytischen Darstellung (8.38) laßt sich mit den bekanntenHilfsmitteln der Vektoranalysis die Koeffizientendarstellung bezuglich einerbeliebigen krumlinigen Basis herleiten. Hierbei ist zu beachten, daß sowohldie Koeffizienten ui als auch die Basisvektoren gi des Verschiebungsvektorsu = uigi veranderlich sind. Auf eine eingehende Behandlung der Vekto-ranalysis verzichten wir an dieser Stelle und verweisen auf die Literatur,z. B. de Boer [7]. Als Ergebnis unserer Bemuhungen erhalten wir fur dieKoeffizientendarstellung der Gleichung (8.38)
(µ+ λ)ui |ij +µuj |ii +ρbj
= ρ∂2uj
∂t2. (8.41)
8.3.2.2 Die Lame-Navierschen Verschiebungsdifferentialglei-
chungen in kartesischen Koordinaten
Die Lame-Navierschen Verschiebungsdifferentialgleichungen in Koeffizien-tenform bzgl. einer kartesischen Basis ergeben sich mit
σσσ = σijei ⊗ ej
ǫǫǫ = εklek ⊗ el
k = kjej = ρbjej
aus der Gleichung (8.41) zu
(µ+ λ)ui,ij + µuj,ii + kj = ρuj fur j = 1, 2, 3. (8.42)
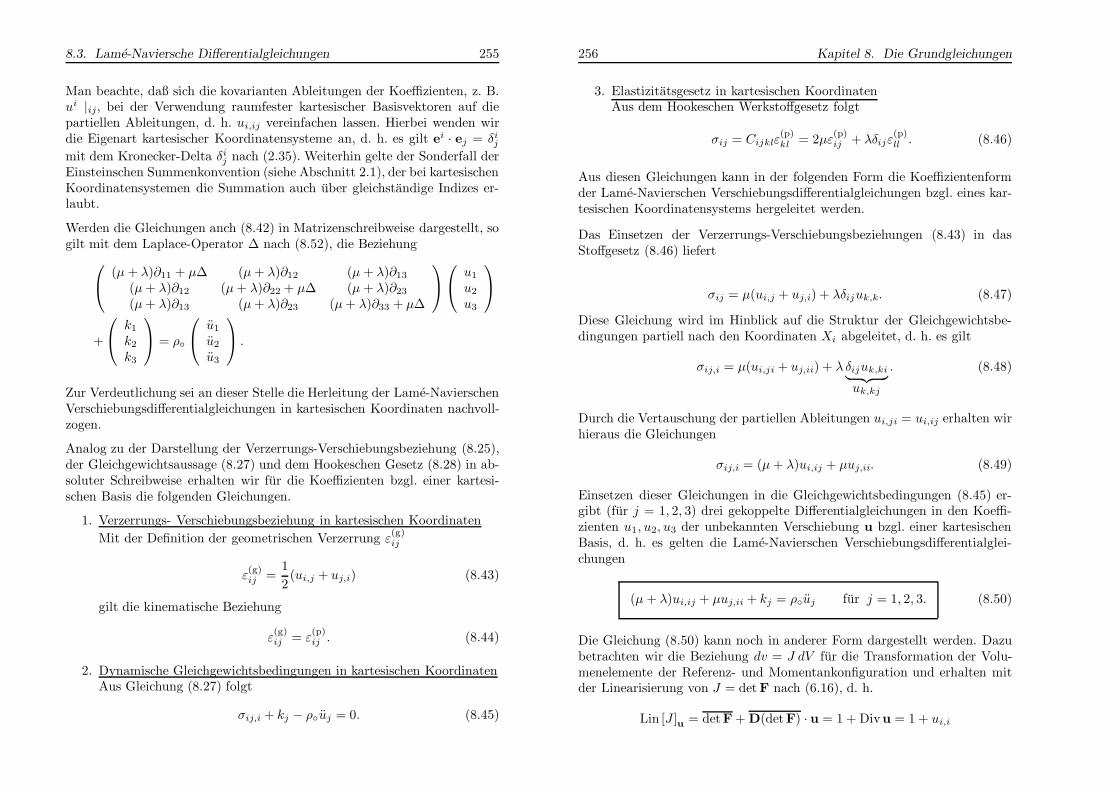
8.3. Lame-Naviersche Differentialgleichungen 255
Man beachte, daß sich die kovarianten Ableitungen der Koeffizienten, z. B.ui |ij, bei der Verwendung raumfester kartesischer Basisvektoren auf diepartiellen Ableitungen, d. h. ui,ij vereinfachen lassen. Hierbei wenden wirdie Eigenart kartesischer Koordinatensysteme an, d. h. es gilt ei · ej = δi
j
mit dem Kronecker-Delta δij nach (2.35). Weiterhin gelte der Sonderfall der
Einsteinschen Summenkonvention (siehe Abschnitt 2.1), der bei kartesischenKoordinatensystemen die Summation auch uber gleichstandige Indizes er-laubt.
Werden die Gleichungen anch (8.42) in Matrizenschreibweise dargestellt, sogilt mit dem Laplace-Operator ∆ nach (8.52), die Beziehung
(µ + λ)∂11 + µ∆ (µ+ λ)∂12 (µ + λ)∂13
(µ+ λ)∂12 (µ+ λ)∂22 + µ∆ (µ + λ)∂23
(µ+ λ)∂13 (µ+ λ)∂23 (µ+ λ)∂33 + µ∆
u1
u2
u3
+
k1
k2
k3
= ρ
u1
u2
u3
.
Zur Verdeutlichung sei an dieser Stelle die Herleitung der Lame-NavierschenVerschiebungsdifferentialgleichungen in kartesischen Koordinaten nachvoll-zogen.
Analog zu der Darstellung der Verzerrungs-Verschiebungsbeziehung (8.25),der Gleichgewichtsaussage (8.27) und dem Hookeschen Gesetz (8.28) in ab-soluter Schreibweise erhalten wir fur die Koeffizienten bzgl. einer kartesi-schen Basis die folgenden Gleichungen.
1. Verzerrungs- Verschiebungsbeziehung in kartesischen Koordinaten
Mit der Definition der geometrischen Verzerrung ε(g)ij
ε(g)ij =
1
2(ui,j + uj,i) (8.43)
gilt die kinematische Beziehung
ε(g)ij = ε
(p)ij . (8.44)
2. Dynamische Gleichgewichtsbedingungen in kartesischen KoordinatenAus Gleichung (8.27) folgt
σij,i + kj − ρuj = 0. (8.45)
256 Kapitel 8. Die Grundgleichungen
3. Elastizitatsgesetz in kartesischen KoordinatenAus dem Hookeschen Werkstoffgesetz folgt
σij = Cijklε(p)kl = 2µε
(p)ij + λδijε
(p)ll . (8.46)
Aus diesen Gleichungen kann in der folgenden Form die Koeffizientenformder Lame-Navierschen Verschiebungsdifferentialgleichungen bzgl. eines kar-tesischen Koordinatensystems hergeleitet werden.
Das Einsetzen der Verzerrungs-Verschiebungsbeziehungen (8.43) in dasStoffgesetz (8.46) liefert
σij = µ(ui,j + uj,i) + λδijuk,k. (8.47)
Diese Gleichung wird im Hinblick auf die Struktur der Gleichgewichtsbe-dingungen partiell nach den Koordinaten Xi abgeleitet, d. h. es gilt
σij,i = µ(ui,ji + uj,ii) + λ δijuk,ki︸ ︷︷ ︸uk,kj
. (8.48)
Durch die Vertauschung der partiellen Ableitungen ui,ji = ui,ij erhalten wirhieraus die Gleichungen
σij,i = (µ+ λ)ui,ij + µuj,ii. (8.49)
Einsetzen dieser Gleichungen in die Gleichgewichtsbedingungen (8.45) er-gibt (fur j = 1, 2, 3) drei gekoppelte Differentialgleichungen in den Koeffi-zienten u1, u2, u3 der unbekannten Verschiebung u bzgl. einer kartesischenBasis, d. h. es gelten die Lame-Navierschen Verschiebungsdifferentialglei-chungen
(µ + λ)ui,ij + µuj,ii + kj = ρuj fur j = 1, 2, 3. (8.50)
Die Gleichung (8.50) kann noch in anderer Form dargestellt werden. Dazubetrachten wir die Beziehung dv = J dV fur die Transformation der Volu-menelemente der Referenz- und Momentankonfiguration und erhalten mitder Linearisierung von J = det F nach (6.16), d. h.
Lin [J ]u
= detF + D(detF) · u = 1 + Divu = 1 + ui,i
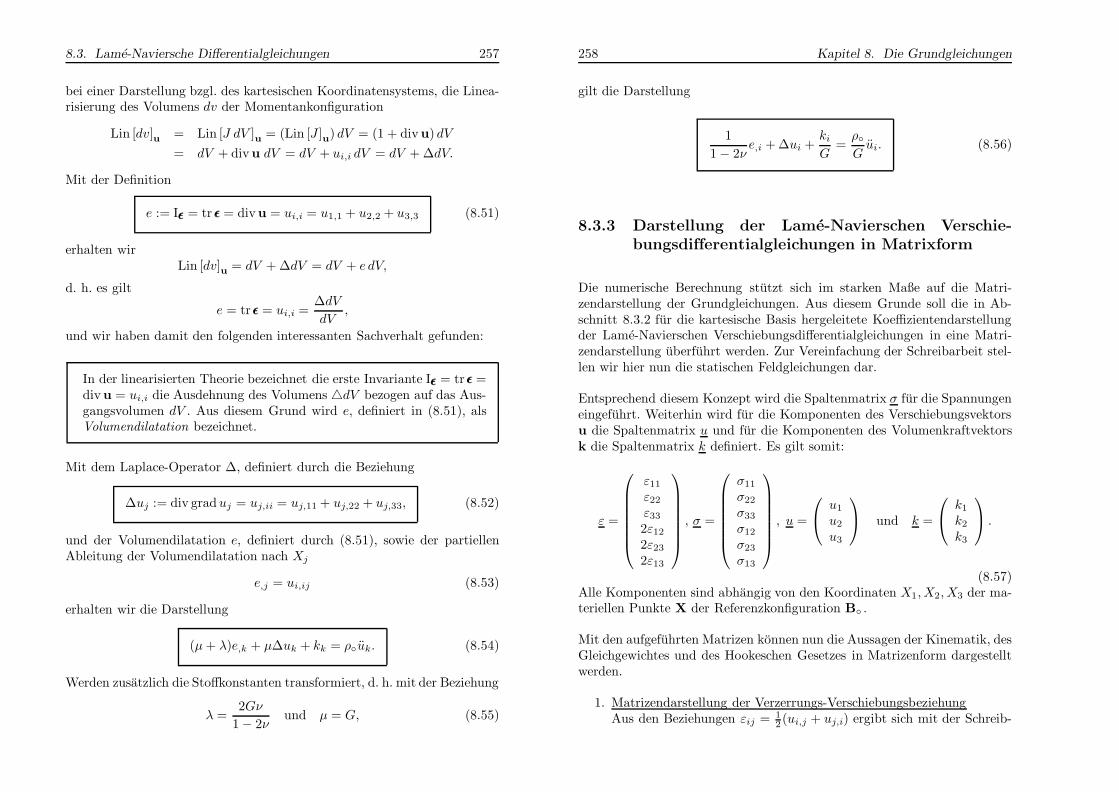
8.3. Lame-Naviersche Differentialgleichungen 257
bei einer Darstellung bzgl. des kartesischen Koordinatensystems, die Linea-risierung des Volumens dv der Momentankonfiguration
Lin [dv]u
= Lin [J dV ]u
= (Lin [J ]u) dV = (1 + divu) dV
= dV + divu dV = dV + ui,i dV = dV + ∆dV.
Mit der Definition
e := Iǫǫǫ = tr ǫǫǫ = divu = ui,i = u1,1 + u2,2 + u3,3 (8.51)
erhalten wirLin [dv]
u= dV + ∆dV = dV + e dV,
d. h. es gilt
e = tr ǫǫǫ = ui,i =∆dV
dV,
und wir haben damit den folgenden interessanten Sachverhalt gefunden:
In der linearisierten Theorie bezeichnet die erste Invariante Iǫǫǫ = tr ǫǫǫ =divu = ui,i die Ausdehnung des Volumens dV bezogen auf das Aus-gangsvolumen dV . Aus diesem Grund wird e, definiert in (8.51), alsVolumendilatation bezeichnet.
Mit dem Laplace-Operator ∆, definiert durch die Beziehung
∆uj := div graduj = uj,ii = uj,11 + uj,22 + uj,33, (8.52)
und der Volumendilatation e, definiert durch (8.51), sowie der partiellenAbleitung der Volumendilatation nach Xj
e,j = ui,ij (8.53)
erhalten wir die Darstellung
(µ+ λ)e,k + µ∆uk + kk = ρuk. (8.54)
Werden zusatzlich die Stoffkonstanten transformiert, d. h. mit der Beziehung
λ =2Gν
1− 2νund µ = G, (8.55)
258 Kapitel 8. Die Grundgleichungen
gilt die Darstellung
1
1− 2νe,i + ∆ui +
ki
G=ρGui. (8.56)
8.3.3 Darstellung der Lame-Navierschen Verschie-bungsdifferentialgleichungen in Matrixform
Die numerische Berechnung stutzt sich im starken Maße auf die Matri-zendarstellung der Grundgleichungen. Aus diesem Grunde soll die in Ab-schnitt 8.3.2 fur die kartesische Basis hergeleitete Koeffizientendarstellungder Lame-Navierschen Verschiebungsdifferentialgleichungen in eine Matri-zendarstellung uberfuhrt werden. Zur Vereinfachung der Schreibarbeit stel-len wir hier nun die statischen Feldgleichungen dar.
Entsprechend diesem Konzept wird die Spaltenmatrix σ fur die Spannungeneingefuhrt. Weiterhin wird fur die Komponenten des Verschiebungsvektorsu die Spaltenmatrix u und fur die Komponenten des Volumenkraftvektorsk die Spaltenmatrix k definiert. Es gilt somit:
ε =
ε11
ε22
ε33
2ε12
2ε23
2ε13
, σ =
σ11
σ22
σ33
σ12
σ23
σ13
, u =
u1
u2
u3
und k =
k1
k2
k3
.
(8.57)Alle Komponenten sind abhangig von den Koordinaten X1, X2, X3 der ma-teriellen Punkte X der Referenzkonfiguration B .
Mit den aufgefuhrten Matrizen konnen nun die Aussagen der Kinematik, desGleichgewichtes und des Hookeschen Gesetzes in Matrizenform dargestelltwerden.
1. Matrizendarstellung der Verzerrungs-VerschiebungsbeziehungAus den Beziehungen εij = 1
2(ui,j + uj,i) ergibt sich mit der Schreib-
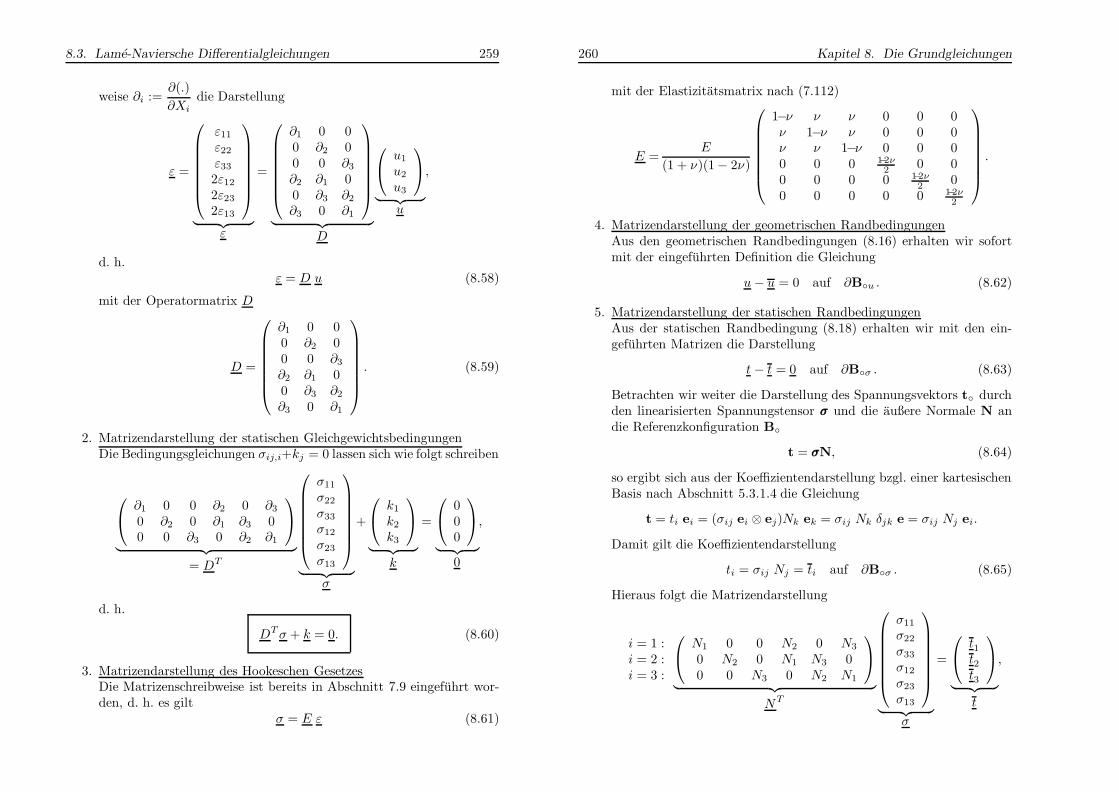
8.3. Lame-Naviersche Differentialgleichungen 259
weise ∂i :=∂(.)
∂Xi
die Darstellung
ε =
ε11
ε22
ε33
2ε12
2ε23
2ε13
︸ ︷︷ ︸ε
=
∂1 0 00 ∂2 00 0 ∂3
∂2 ∂1 00 ∂3 ∂2
∂3 0 ∂1
︸ ︷︷ ︸D
u1
u2
u3
︸ ︷︷ ︸u
,
d. h.ε = D u (8.58)
mit der Operatormatrix D
D =
∂1 0 00 ∂2 00 0 ∂3
∂2 ∂1 00 ∂3 ∂2
∂3 0 ∂1
. (8.59)
2. Matrizendarstellung der statischen GleichgewichtsbedingungenDie Bedingungsgleichungen σij,i+kj = 0 lassen sich wie folgt schreiben
∂1 0 0 ∂2 0 ∂3
0 ∂2 0 ∂1 ∂3 00 0 ∂3 0 ∂2 ∂1
︸ ︷︷ ︸= DT
σ11
σ22
σ33
σ12
σ23
σ13
︸ ︷︷ ︸σ
+
k1
k2
k3
︸ ︷︷ ︸k
=
000
︸ ︷︷ ︸0
,
d. h.
DTσ + k = 0. (8.60)
3. Matrizendarstellung des Hookeschen GesetzesDie Matrizenschreibweise ist bereits in Abschnitt 7.9 eingefuhrt wor-den, d. h. es gilt
σ = E ε (8.61)
260 Kapitel 8. Die Grundgleichungen
mit der Elastizitatsmatrix nach (7.112)
E =E
(1 + ν)(1− 2ν)
1−ν ν ν 0 0 0ν 1−ν ν 0 0 0ν ν 1−ν 0 0 00 0 0 1−2ν
20 0
0 0 0 0 1−2ν2
00 0 0 0 0 1−2ν
2
.
4. Matrizendarstellung der geometrischen RandbedingungenAus den geometrischen Randbedingungen (8.16) erhalten wir sofortmit der eingefuhrten Definition die Gleichung
u− u = 0 auf ∂Bu . (8.62)
5. Matrizendarstellung der statischen RandbedingungenAus der statischen Randbedingung (8.18) erhalten wir mit den ein-gefuhrten Matrizen die Darstellung
t − t = 0 auf ∂Bσ . (8.63)
Betrachten wir weiter die Darstellung des Spannungsvektors t durchden linearisierten Spannungstensor σσσ und die außere Normale N andie Referenzkonfiguration B
t = σσσN, (8.64)
so ergibt sich aus der Koeffizientendarstellung bzgl. einer kartesischenBasis nach Abschnitt 5.3.1.4 die Gleichung
t = ti ei = (σij ei ⊗ ej)Nk ek = σij Nk δjk e = σij Nj ei.
Damit gilt die Koeffizientendarstellung
ti = σij Nj = ti auf ∂Bσ . (8.65)
Hieraus folgt die Matrizendarstellung
i = 1 :i = 2 :i = 3 :
N1 0 0 N2 0 N3
0 N2 0 N1 N3 00 0 N3 0 N2 N1
︸ ︷︷ ︸NT
σ11
σ22
σ33
σ12
σ23
σ13
︸ ︷︷ ︸σ
=
t1t2t3
︸ ︷︷ ︸t
,
8.3. Lame-Naviersche Differentialgleichungen 261
d. h.
NTσ = t auf ∂Bσ . (8.66)
Man beachte, daß die Matrix N mit dem Richtungskosinus Ni desNormaleneinheitsvektors die gleiche Besetzung und Indizierung wiedie Differentialoperatormatrix D hat.
Aus den Matrizendarstellungen fur die Verzerrungs-Verschiebungsbeziehung(8.58), das Gleichgewicht (8.60) und das Hookesche Gesetz (8.61) kann inder folgenden Form die Matrizendarstellung der Lame-Navierschen Verschie-bungsdifferentialgleichungen hergeleitet werden. Setzen wir die Verzerrungs-Verschiebungsbeziehung (8.58) in das Hookesche Gesetz (8.61) ein, so gilt
σ = E(D u). (8.67)
Durch Einsetzen dieser Gleichung in das Gleichgewicht (8.60) erhalten wirdie Matrizendarstellung der Lame-Navierschen Verschiebungsdifferential-gleichungen
DTE D u+ k = 0 in B . (8.68)
Fur dynamische Probleme gilt damit sofort
DTE D u+ k = ρu in B . (8.69)
Hierin ist u die Spaltenmatrix der zweiten Zeitableitung der Komponentendes Verschiebungsvektors.
In Gleichung (8.68) ist die Operatormatrix
L := DTE D (8.70)
der Matrizendarstellung der Lame-Navierschen Verschiebungsdifferential-gleichungen hergeleitet worden. Mit der Symmetrie der ElastizitatsmatrixE = ET erhalten wir die Symmetrie der Operatormatrix L = LT .
262 Kapitel 8. Die Grundgleichungen
8.4 Erweiterung der Lame-NavierschenVerschiebungsdifferentialgleichungen
fur stationare thermoelastische
Probleme
Die Gultigkeit unserer Darstellung beschrankt sich auf thermisch und ela-stisch homogene und isotrope Korper bei einer zeitlich stationaren Tempe-raturverteilung. Als Ausgangspunkt betrachten wir die bekannte Form derWarmedehnung eines Stabes
εϑ11 = αT (T1 − T) = αTϑ (8.71)
wobei ϑ := T1−T die Differenz der Temperatur des Stabes in der Referenz-konfiguration T und der Momentankonfiguration T beschreibt, wahrend αT
den Temperaturausdehnungskoeffizienten darstellt.
Wir fuhren die Herleitung der Temperaturerweiterung der Lame-Navier-schen Verschiebungsdifferentialgleichungen exemplarisch fur die Koeffizien-tendarstellung bzgl. des kartesischen Koordinatensystems durch.
Der zentrale Schritt zur Berucksichtigung von Verzerrungen infolge Tempe-raturanderungen ist die Erweiterung des inversen Elastizitatsgesetzes nach(7.87) um den Term
εϑik = αTϑ δik.
Diese Erweiterung fuhrt auf die Duhamel-Neumann-Formel
εik =1
2G(σik −
ν
1 + νσllδik) + αTϑ δik (8.72)
fur ein thermisch und elastisch homogenes und isotropes Material.
Aus dieser Gleichung erhalt man die Volumendilatation e = εii zu
e =1
2G(σii −
ν
1 + νσllδii) + αTϑ δii,
d. h. mit δii = 3 gilt
e = εii =1
2G
1− 2ν
1 + 2νσii + 3αTϑ. (8.73)
8.4. Thermoelastische Probleme 263
Aus der Inversion der Duhamel-Neumann-Formel erhalten wir die zu (8.74)gehorige Erweiterung des Elastizitatsgesetzes um die Temperaturverzerrungin der Form
σik = 2G
[εik +
ν
1− 2νeδik −
1 + ν
1− 2ναTϑ δik
]. (8.74)
Analog zur Herleitung der Lame-Navierschen Verschiebungsdifferentialglei-chungen wird die Gleichung (8.74) in die statischen Gleichgewichtsbedin-gungen
σik,i + kk = 0
eingesetzt und wir erhalten mit der linearisierten Verzerrungs-Verschie-bungsbeziehung
εik =1
2(ui,k + uk,i)
und den daraus folgenden Ableitungen
εik,i =1
2(ui,ki + uk,ii) und e,i = εkk,i = uk,ki
die Darstellung
0 = εik,i +ν
1− 2νe,iδik −
1 + ν
1− 2ναTϑ,i δik +
1
2Gkk
=1
2(ui,ki︸︷︷︸
= ui,ik = e,k
+uk,ii) +ν
1− 2νe,k −
1 + ν
1− 2ναTϑ,k +
1
2Gkk
=1
2
[uk,ii +
(1 +
2ν
1− 2ν
)e,k −
2 + 2ν
1− 2ναTϑ,k +
1
Gkk
].
Mit dem Laplace-Operator ∆, d. h. mit der Schreibweise uk,ii = ∆uk, er-halten wir die Erweiterung der Lame-Navierschen Verschiebungsdifferential-gleichungen (k = 1, 2, 3) auf thermoelastische Probleme in der Form
(1− 2ν)∆uk + e,k − 2(1 + ν)αTϑ,k +1− 2ν
Gkk = 0. (8.75)
264 Kapitel 8. Die Grundgleichungen
Beschranken wir uns auf Probleme ohne Volumenkrafte, d. h. fur kk = 0,so erhalten wir fur die Ableitung von (8.75) nach Xk nach einigen Umfor-mungen die Beziehung
(1− 2ν)∆e+ ∆e− 2(1 + ν)αT∆ϑ = 0
und hieraus die Differentialgleichung
∆e =1 + ν
1− ν αT ∆ϑ (8.76)
fur die Volumendilatation e. Setzt man weiterhin stationare Temperaturfel-der ohne Warmequellen voraus, d. h. h = 0, so ergibt sich aus der Warme-leitungsgleichung
∆ϑ = −h · ρcv
= 0.
Damit folgt aus der Gleichung (8.76) die Laplace-Gleichung
∆e = 0. (8.77)
Die Laplace-Gleichung ist eine Potentialgleichung, deren Losung als Poten-tialfunktionen bezeichnet werden.
8.5 Biharmonische Differentialgleichungen
fur die Verschiebungskomponenten
Entfallen in den Lame-Navierschen Verschiebungsdifferentialgleichungen(8.42) die Volumenkrafte und die Beschleunigungsterme, so erhalt man
(µ + λ) ui,ij + µ uj,ii = 0. (8.78)
Durch nochmalige Differentation nachXj und Summieren ergibt sich hieraus
(λ+ µ) ui,ijj + µ uj,iij = 0
und da die Reihenfolge der partiellen Ableitungen beliebig ist, folgt
(λ + µ) ui,ijj + µuj,jii = 0.
8.5. Biharmonische DGL fur Verschiebungen 265
Tauscht man nun noch die Summationsindizes i und j im zweiten Term aus(dies ist moglich, da i und j stumme Indizes sind), konnen beide Terme inder Form
(λ + 2µ) ui,ijj = 0
zusammengefaßt werden. Diese Gleichung ist erfullt, wenn
(ui,i),jj = 0 (8.79)
ist. Mit der Einfuhrung des Laplace-Operators nach (8.52) laßt sich hierfurschreiben
∆ (ui,i) = 0. (8.80)
Eine weitere Umformung ist mit der Volumendilatation nach (8.51) in derForm
∆ (ui,i) = ∆ εii = ∆e (8.81)
moglich. Durch zweimaliges Ableiten der Lame-Navierschen Verschiebungs-differentialgleichung in der Form (8.78) nach Xm und Summieren erhaltman
(µ + λ) ui,ijmm + µ uj,iimm = 0.
Da die Reihenfolge der partiellen Differentationen vertauschbar ist, kannman hierfur auch
(µ + λ)[(ui,i),mm],j + µ uj,iimm = 0
schreiben. Nun ist aber nach (8.79) der Ausdruck in der eckigen Klammergerade gleich Null, so daß man als Ergebnis schließlich die biharmonischenDifferentialgleichungen fur die Verschiebungskomponenten erhalt, d. h. furj = 1, 2, 3 gilt
uj,iimm = 0, (8.82)
oder mit Hilfe des Laplace-Operators ausgedruckt
∆ ∆ uj = 0. (8.83)
In absoluter vektoranalytischer Schreibweise erhalten wir hierfur die Dar-stellung (siehe z. B. de Boer [7])
(Div Grad (Div Grad u)) = 0. (8.84)
Hieraus lassen sich somit die Darstellungen bzgl. beliebiger Koordinatensy-steme herleiten.
266 Kapitel 8. Die Grundgleichungen
8.6 Biharmonische Differentialgleichung fur dieSpannungskomponenten
Ausgangspunkt der Betrachtung sind wiederum die geometrischen Bezie-hungen, die sich aus der Definition des linearisierten Greenschen Verzer-rungstensors in der Form
εik =1
2(ui,k + uk,i)
ergeben. Die sechs Komponenten εik des symmetrischen Verzerrungstensorswerden aus den partiellen Ableitungen der drei Verschiebungskomponentenui gebildet. Fur einen kontinuierlichen Verschiebungszustand konnen daherdie sechs Verzerrungskomponenten nicht unabhangig voneinander sein. Esexistieren deshalb drei sogenannte Vertraglichkeitsbedingungen oder auchKompatibilitatsbedingungen zwischen den Verzerrungen. Diese sind bereitsin Abschnitt 3.9 hergeleitet worden. Nach Gleichung (3.142) erhalten wirsomit die Vertraglichkeitsbedingungen
εil,mk + εmk,li − εik,lm − εlm,ik = 0.
In diese Vertraglichkeitsbedingungen wird jetzt zur Herleitung der biharmo-nischen Differentialgleichungen fur die Spannungen das Hookesche Gesetzin der Form der Gleichung (7.108)
εik =1 + ν
Eσik −
ν
Eδikσll
eingesetzt. Dies ergibt
σil,mk + σmk,li − σik,lm − σlm,ik =ν
1 + ν(δilσrr,mk + δmkσrr,li − δikσrr,lm − δlmσrr,ki).
(8.85)
Durch Multiplikation beider Seiten mit dem Kronecker-Delta δmk ergibtsich
σil,mm + σmm,li − σim,lm − σlm,mi =ν
1 + ν(δilσrr,mm + 3σrr,li − σrr,li − σrr,li).

8.6. Biharmonische DGL fur die Spannungen 267
Nach Einfuhrung des Laplace-Operators ∆ und nach Umbenennung derstummen Indizes laßt sich schreiben
∆σil + σkk,li − σik,lk − σlk,ki =ν
1 + ν(δil∆σkk + σkk,li). (8.86)
Die linearisierte statische Kraftegleichgewichtsbedingung lautet dann nach(8.45)
σki,k + ki = 0
und mit der Symmetrie des Spannungstensors, d. h. mit σik = σki, erhaltenwir hieraus
σik,k + ki = 0.
Durch partielle Differentation dieser Bedingungen nach Xl erhalt man
σik,kl = −ki,l, (8.87)
und (8.86) laßt sich damit zu
∆σil +1
1 + νσkk,li −
ν
1 + νδil∆σkk = −(ki,l + kl,i) (8.88)
umformen. Nun werden die Ausgangsgleichungen (8.85) zweimal mit denKronecker-Deltas δki und δml multipliziert. Das ergibt die Gleichungen
σil,li + σli,li − σii,ll − σll,ii =ν
1 + ν(−4σkk,ii).
Nach Einfuhrung des Laplace-Operators und nach Umbenennung der Sum-mationsindizes kann man hierfur
2σil,li − 2∆σkk = − 4ν
1 + ν∆σkk
und weiterhin
σil,li =1− ν1 + ν
∆σkk (8.89)
schreiben. Mit den differenzierten Gleichgewichtsbedingungen (8.87) wirddaraus
∆σkk = −1 + ν
1− ν ki,i (8.90)
oder bei fehlenden oder konstanten Volumenkraften
∆σkk = 0. (8.91)
268 Kapitel 8. Die Grundgleichungen
Setzt man (8.90) in (8.88) ein, so erhalt man die Gleichungen von Michell
∆σil +1
1 + νσkk,li = − ν
1− ν δilkk,k − (ki,l + kl,i), (8.92)
die zusammen mit den Randbedingungen fur die Spannungen die Berech-nung der Spannungen gestatten.
Fur fehlende oder konstante Volumenkrafte ki gehen die Gleichungen vonMichell in die Gleichungen von Beltrami uber
∆σil +1
1 + νσkk,li = 0. (8.93)
Die Darstellung der Beltrami-Gleichungen in absoluter vektoranalytischerSchreibweise lautet
DivGrad σσσ +1
1 + ν(Grad Grad(trσσσ)) = 0. (8.94)
Auf diese Gleichungen wendet man nochmals den Laplace-Operator ∆ an
∆∆σil +1
1 + ν(∆σkk),li = 0,
und erhalt daraus mit (8.91) die biharmonischen Differentialgleichungenfur die Spannungskomponenten σil bei fehlenden oder konstanten Volumen-kraften
∆∆σil = 0. (8.95)
In absoluter vektoranalytischer Schreibweise erhalten wir hierfur die Dar-stellung (siehe z. B. de Boer [7])
(DivGrad (DivGradσσσ)) = 0. (8.96)
Hieraus lassen sich wie ublich die Darstellungen bzgl. beliebiger Koordina-tensysteme herleiten.
8.7. Die Maxwellschen Spannungsfunktionen 269
8.7 Die Maxwellschen Spannungsfunktionen
In der Herleitung der biharmonischen Differentialgleichung fur die Span-nungskomponenten ist mit Gleichung (8.45) die statische Gleichgewichts-bedingung benutzt worden. Fur den Fall verschwindender Volumenkrafteρ b = 0 gilt damit
Divσσσ = 0 (8.97)
bzw. in den Koeffizienten bzgl. der kartesischen Basis
σij,i = 0 fur i = 1, 2, 3. (8.98)
Verwenden wir die Matrizenschreibweise, so erhalten wir weiterhin
DT σ = 0. (8.99)
Um den Aufwand in der Berechnung nach Gleichung (8.95) reduzieren zukonnen, ist es sinnvoll, nur solche Losungen σij zur Konkurrenz zuzulas-sen, die a priori die homogenen statischen Gleichgewichtsbedingungen (8.98)bzw. (8.99) erfullen. Diese Vorgehensweise, die von Maxwell eingefuhrt wur-de, soll im weiteren dargestellt werden. Zur Vereinfachung der Schreibarbeitund zur Verbesserung der Ubersichtlichkeit wahlen wir hierzu die Matrizen-darstellung.
8.7.1 Einfuhrung der Spannungsfunktionen zurErfullung der homogenen Gleichgewichtsbedin-gungen
Die Maxwellschen Spannungsfunktionen φi(x1, x2, x3) fur i = 1, 2, 3 sol-len die homogenen Gleichgewichtsbedingungen σij,i = 0 oder DTσ = 0erfullen. Nach Maxwell definiert man:
σ11 := φ2,33 + φ3,22,
σ22 := φ3,11 + φ1,33,
σ33 := φ1,22 + φ2,11,
σ12 := −φ3,12,
σ23 := −φ1,23,
σ31 := −φ2,31.
(8.100)
270 Kapitel 8. Die Grundgleichungen
Mit der Schreibweise
∂ik =∂(·)
∂xi∂xk
und der Definition der Differentialoperatormatrix D⋆ durch
D⋆(6,3) :=
0 ∂33 ∂22
∂33 0 ∂11
∂22 ∂11 00 0 −∂12
−∂23 0 00 −∂31 0
(8.101)
folgt aus (8.100)
σ11
σ22
σ33
σ12
σ23
σ31
︸ ︷︷ ︸σ
=
0 ∂33 ∂22
∂33 0 ∂11
∂22 ∂11 00 0 −∂12
−∂23 0 00 −∂31 0
︸ ︷︷ ︸D⋆
(6,3)
φ1
φ2
φ3
︸ ︷︷ ︸φ
(8.102)
und somit gilt in Matrizenschreibweise
σ = D⋆ φ. (8.103)
Im Unterschied zur Differentialoperatormatrix D nach (8.59) sind in D⋆
zweite Ableitungen enthalten. Auch ist die Besetzung der Differentialopera-tormatrizen D und D⋆ unterschiedlich, und zwar istD⋆ gerade auf den Leer-stellen von D besetzt. Mit der Definition der Maxwellschen Spannungsfunk-tionen φi nach (8.100) werden die homogenen statischen Gleichgewichtsbe-dingungen DT σ = 0 erfullt; denn es gilt
DTD⋆ =
0 ∂133 − ∂331 ∂122 − ∂212
∂233 − ∂323 0 ∂211 − ∂112
∂322 − ∂222 ∂311 − ∂313 0
= 0(3,3). (8.104)
8.7. Die Maxwellschen Spannungsfunktionen 271
8.7.2 Herleitung der Differentialgleichungen fur dieSpannungsfunktion
Nachdem mit Gleichung (8.100) die Maxwellschen Spannungsfunktionen be-reitstehen, sind die Vertraglichkeitsbeziehungen fur die Verzerrungen unddas Elastizitatsgesetz in den Spannungsfunktionen φi auszudrucken.
Zuerst betrachten wir die Vertraglichkeitsbedingungen (3.142) fur die Ver-schiebungen. Die 6 Verzerrungen εij = εji mussen 3 Vertraglichkeits- oderIntegrabilitatsbedingungen genugen, damit sich ein stetiges Verschiebungs-feld u = uiei aus den Verzerrungen integrieren laßt (siehe Abschnitt 3.9).Aus der Beziehung ε = D u muß es durch Ableitungskombination gelingen,die Verschiebungen zu eliminieren. Wie aus (8.104) hervorgeht, ist dies abergerade mit der Matrix D⋆T moglich und zwar ist
D⋆T ε = D⋆TD u = 0 u = 0,
d. h. es gilt
D⋆T ε = 0. (8.105)
Dies sind die drei Vertraglichkeitsbedingungen fur die Verzerrungen.
Mit der inversen Beziehung des Elastizitatsgesetzes nach (7.113)
ε = E−1σ (8.106)
folgt durch Einsetzen von (8.105) in (8.106)
D⋆TE−1σ = 0, (8.107)
und damit erhalten wir aus (8.103) die drei gesuchten Differentialgleichun-gen 4. Ordnung
(D⋆TE−1D⋆)φ = 0. (8.108)
Betrachten wir den durch (8.108) definierten Operator L⋆
L⋆ := D⋆TE−1D⋆, (8.109)
so stellen wir die Symmetrie von L⋆ fest, d. h.
L⋆ = L⋆T
. (8.110)
272 Kapitel 8. Die Grundgleichungen
Durch systematisches Probieren erkennt man den Zusammenhang
D⋆ = B D (8.111)
zwischen D⋆ und D, wobei B in der Form
B :=
0 −∂3 −∂2 0 ∂2 + ∂3 0−∂3 0 −∂1 0 0 ∂3 + ∂1
−∂2 −∂1 0 ∂1 + ∂2 0 00 0 0 1
2∂3 −1
2∂1 −1
2∂2
0 0 0 −12∂3
12∂1 −1
2∂2
0 0 0 −12∂3 −1
2∂1
12∂2
. (8.112)
gegeben ist. Damit laßt sich (8.108) wie folgt darstellen
(DTBTE−1B D) φ = 0. (8.113)
8.7.3 Darstellung der Maxwellschen Spannungsfunkti-on fur die Scheibe
Betrachten wir die beim ebenen Spannungszustand der Scheibe auftretendenSpannungen (siehe auch Abschnitt 7.9.4), so gilt
σ23 = σ13 = σ33 = 0.
Mit der Definition (8.100) der Maxwellschen Spannungsfunktionen erhaltenwir somit
φ1 = 0, φ2 = 0 und φ3 = φ.
Die verbleibende Spannungsfunktion φ3 = φ wird in diesem Fall als AiryscheSpannungsfunktion F bezeichnet und es gilt
σ11 = φ,22, σ22 = φ,11 und σ12 = −φ,12.
Damit sind die homogenen Gleichgewichtsbedingungen σαη,α = 0 mit α, η =1, 2 erfullt. In Matrizenschreibweise erhalten wir
σ11
σ22
σ12
︸ ︷︷ ︸σESZ
=
∂22
∂11
−∂12
︸ ︷︷ ︸D⋆
ESZ
φ, (8.114)
8.7. Die Maxwellschen Spannungsfunktionen 273
und damit die Darstellung
σESZ = D⋆ESZ φ. (8.115)
Die Vertraglichkeitsbedingungen fur die Verzerrungen sind in (8.105) mittelsder Operatormatrix D⋆ dargestellt worden und fur den ebenen Verzerrungs-zustand folgt daraus
ε11,22 + ε22,11 − 2ε12,12 = 0. (8.116)
In Matrizenschreibweise lautet dies
[∂22 ∂11 −∂12
]︸ ︷︷ ︸
D⋆TESZ
ε11
ε22
2ε12
︸ ︷︷ ︸εESZ
= 0 (8.117)
und wir erhalten analog zu (8.114) die Darstellung
D⋆TESZ εESZ = 0 (8.118)
fur den ebenen Spannungszustand. Mit dem inversen Elastizitatsgesetz furden ebenen Spannungszustand nach (7.115) und der Definition der Max-wellschen Spannungsfunktion (8.100) ergibt sich
(D⋆TESZE
−1ESZD
⋆ESZ)φ = 0. (8.119)
Schreiben wir diese Beziehung ausfuhrlich, so folgt
(D⋆TESZE
−1ESZD
⋆ESZ)φ =
[∂22 ∂11 −∂12
] 1
E
1 −ν 0−ν 1 00 0 2(1 + ν)
∂22
∂11
−∂12
φ =
1
E
[∂22 ∂11 −∂12
]
∂22 − ν∂11
∂11 − ν∂22
−2(1 + ν)∂12
φ =
1
E∂22(∂22 − ν∂11) + ∂11(∂11 − ν∂22) + 2(1 + ν)∂12∂12) φ = 0.
274 Kapitel 8. Die Grundgleichungen
Nach Auswertung der partiellen Ableitungen und unter Beachtung ihrerVertauschbarkeit folgt
(D⋆TESZE
−1ESZD
⋆ESZ)φ =
1
E∂1111 + 2∂1212 + ∂2222 φ = 0. (8.120)
Mit dem Laplace-Operator fur zweidimensionale Problem in der Form ∆ =∂11 + ∂22 folgt daraus
∆∆φ = 0, (8.121)
d. h. es ergibt sich fur den ebenen Spannungszustand eine homogene Bipo-tentialgleichung fur die Airysche Spannungsfunktion φ.
Bemerkungen:
1. Die Airysche Spannungsfunktion φ wird in den Lehrbuchern der Statikauch mit F bezeichnet, d. h. es gilt mit (8.121)
∆∆F = 0.
2. Die Airysche Spannungsfunktion ist unabhangig von den Stoffkonstan-ten des betrachteten elastischen Werkstoffes. Das Materialverhaltenund somit die Abhangigkeit der Verschiebung u von den Stoffkon-stanten wird erst durch die Erfullung der Randbedingungen beruck-sichtigt.
3. Die Scheibentheorie wird in Abschnitt 9.2 ohne Ruckgriff auf die all-gemeingultige Darstellung der Gleichung (8.113) in der ublichen Inge-nieurnotation hergeleitet.

8.8. Eigenschaften der Differentialgleichungen 275
8.8 Die Eigenschaften der Differentialglei-chungen der Elastizitatstheorie
Die in diesem Kapitel hergeleiteten Differentialgleichungen der klassischenElastizitatstheorie, d. h.
• die Lame-Navierschen Verschiebungsdifferentialgleichungen z. B. nach(8.68) und
• die Gleichungen von Beltrami und Michell nach (8.93) bzw. (8.92),
sind partielle Differentialgleichungen 2. Ordnung vom elliptischen Typ.
Um die fundamentale Bedeutung der Elliptizitat einer Differentialgleichungauf das Verhalten der Losung zu erkennen, fuhren wir einen kleinen Exkursin die Theorie der linearen, partiellen Differentialgleichungen 2. Ordnungdurch.
8.8.1 Ein kleiner Exkurs in die Theorie der Differenti-algleichungen
Die allgemeinste Form einer linearen, partiellen Differentialgleichung 2. Ord-nung lautet
A∂2u
∂x2+ 2B
∂2u
∂x ∂y+C
∂2u
∂y2+ a
∂u
∂x+ b
∂u
∂y+ cu = f. (8.122)
Hierbei sind die Koeffizienten A,B, C, a, b und c sowie f Funktionen desOrtsvektors x = (x, y) jedoch unabhangig von den gesuchten Verschiebun-gen u = u(x, y). Aus dieser allgemeinen Darstellung kann eine Klassifizie-rung der Differentialgleichung und damit der Losung vorgenommen werden.
Hierzu betrachten wir den Anteil der zweiten partiellen Ableitung in derallgemeinen Form und schreiben fur die Gleichung (8.122)
A∂2u
∂x2+ 2B
∂2u
∂x∂y+ C
∂2u
∂y2= e. (8.123)
Mit den Definitionen
p :=∂u
∂x, q :=
∂u
∂y, r :=
∂2u
∂x2, s :=
∂2u
∂x∂yund w :=
∂2u
∂y2(8.124)
276 Kapitel 8. Die Grundgleichungen
folgt aus (8.123)Ar + 2Bs+ Cw = e. (8.125)
Nehmen wir an, daß die Losung u und die partiellen Ableitungen p =∂u
∂x
und q =∂u
∂yfur alle Punkte (x,y) auf einer glatten Kurve bekannt seien,
dann muß fur die totalen Ableitungen von u,∂u
∂xund
∂u
∂ygelten
du =∂u
∂xdx+
∂u
∂ydy = pdx+ qdy, (8.126)
dp =∂p
∂xdx+
∂p
∂ydy = rdx+ sdy, (8.127)
dq =∂q
∂xdx+
∂q
∂ydy = sdx+wdy. (8.128)
Die Gleichungen (8.125), (8.127) und (8.128) bilden ein System von dreiGleichungen in r, s und w, das keine eindeutige Losung in jedem Punkt(x, y) besitzt, wenn ∣∣∣∣∣∣
A 2B Cdx dy 00 dx dy
∣∣∣∣∣∣= 0 (8.129)
gilt, d. h. furA(dy)2 − 2Bdxdy+ C(dx)2 = 0
und somit fur
A
(dy
dx
)2
− 2B
(dy
dx
)+C = 0. (8.130)
Diese quadratische Gleichung in der unbekannten Steigungdy
dxbesitzt zwei,
eine oder auch keine reelle Nullstelle furdy
dx. Die Existenz von Losungen
hangt von dem Vorzeichen der Diskriminante
4δ := 4B2 − 4AC (8.131)
ab. Betrachten wir δ = B2−AC, so erhalten wir die folgende Bezeichnungenfur den Typ einer linearen, partiellen Differentialgleichung 2. Ordnung:
δ > 0 : Hyperbolische Differentialgleichung,
δ < 0 : Elliptische Differentialgleichung,
δ = 0 : Parabolische Differentialgleichung.
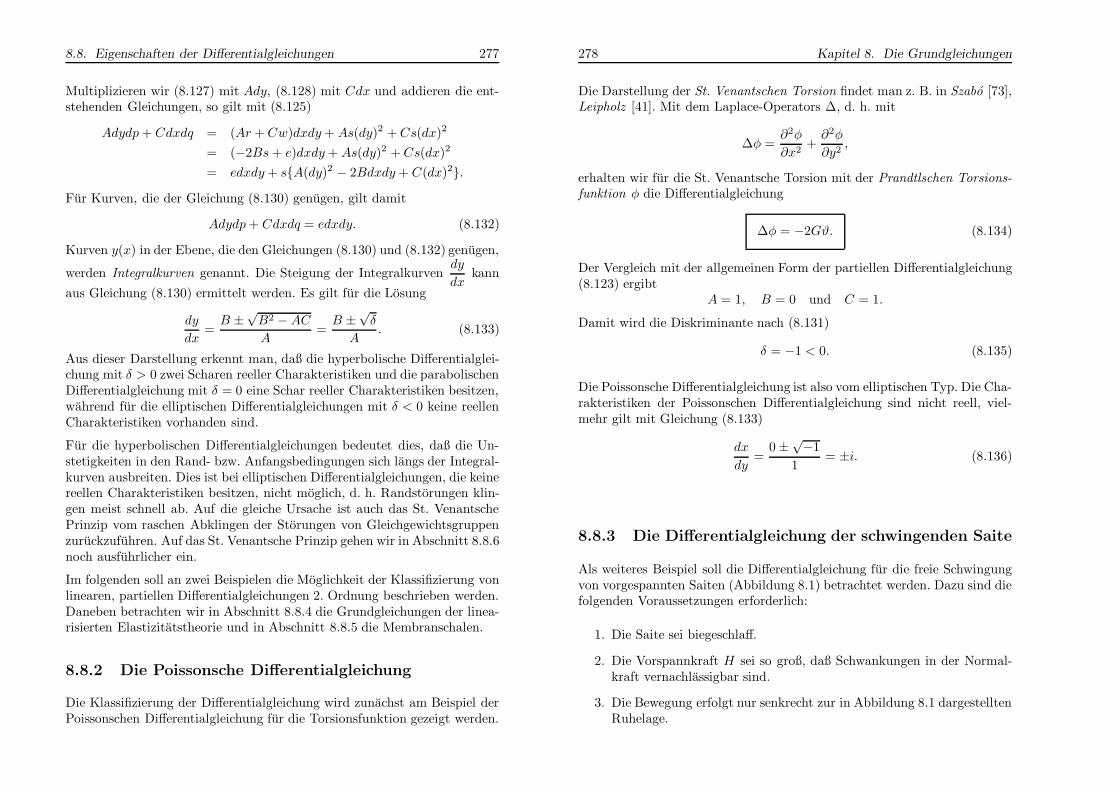
8.8. Eigenschaften der Differentialgleichungen 277
Multiplizieren wir (8.127) mit Ady, (8.128) mit Cdx und addieren die ent-stehenden Gleichungen, so gilt mit (8.125)
Adydp+ Cdxdq = (Ar +Cw)dxdy+ As(dy)2 +Cs(dx)2
= (−2Bs+ e)dxdy+ As(dy)2 +Cs(dx)2
= edxdy+ sA(dy)2 − 2Bdxdy+ C(dx)2.
Fur Kurven, die der Gleichung (8.130) genugen, gilt damit
Adydp+ Cdxdq = edxdy. (8.132)
Kurven y(x) in der Ebene, die den Gleichungen (8.130) und (8.132) genugen,
werden Integralkurven genannt. Die Steigung der Integralkurvendy
dxkann
aus Gleichung (8.130) ermittelt werden. Es gilt fur die Losung
dy
dx=B ±
√B2 − ACA
=B ±
√δ
A. (8.133)
Aus dieser Darstellung erkennt man, daß die hyperbolische Differentialglei-chung mit δ > 0 zwei Scharen reeller Charakteristiken und die parabolischenDifferentialgleichung mit δ = 0 eine Schar reeller Charakteristiken besitzen,wahrend fur die elliptischen Differentialgleichungen mit δ < 0 keine reellenCharakteristiken vorhanden sind.
Fur die hyperbolischen Differentialgleichungen bedeutet dies, daß die Un-stetigkeiten in den Rand- bzw. Anfangsbedingungen sich langs der Integral-kurven ausbreiten. Dies ist bei elliptischen Differentialgleichungen, die keinereellen Charakteristiken besitzen, nicht moglich, d. h. Randstorungen klin-gen meist schnell ab. Auf die gleiche Ursache ist auch das St. VenantschePrinzip vom raschen Abklingen der Storungen von Gleichgewichtsgruppenzuruckzufuhren. Auf das St. Venantsche Prinzip gehen wir in Abschnitt 8.8.6noch ausfuhrlicher ein.
Im folgenden soll an zwei Beispielen die Moglichkeit der Klassifizierung vonlinearen, partiellen Differentialgleichungen 2. Ordnung beschrieben werden.Daneben betrachten wir in Abschnitt 8.8.4 die Grundgleichungen der linea-risierten Elastizitatstheorie und in Abschnitt 8.8.5 die Membranschalen.
8.8.2 Die Poissonsche Differentialgleichung
Die Klassifizierung der Differentialgleichung wird zunachst am Beispiel derPoissonschen Differentialgleichung fur die Torsionsfunktion gezeigt werden.
278 Kapitel 8. Die Grundgleichungen
Die Darstellung der St. Venantschen Torsion findet man z. B. in Szabo [73],Leipholz [41]. Mit dem Laplace-Operators ∆, d. h. mit
∆φ =∂2φ
∂x2+∂2φ
∂y2,
erhalten wir fur die St. Venantsche Torsion mit der Prandtlschen Torsions-funktion φ die Differentialgleichung
∆φ = −2Gϑ. (8.134)
Der Vergleich mit der allgemeinen Form der partiellen Differentialgleichung(8.123) ergibt
A = 1, B = 0 und C = 1.
Damit wird die Diskriminante nach (8.131)
δ = −1 < 0. (8.135)
Die Poissonsche Differentialgleichung ist also vom elliptischen Typ. Die Cha-rakteristiken der Poissonschen Differentialgleichung sind nicht reell, viel-mehr gilt mit Gleichung (8.133)
dx
dy=
0±√−1
1= ±i. (8.136)
8.8.3 Die Differentialgleichung der schwingenden Saite
Als weiteres Beispiel soll die Differentialgleichung fur die freie Schwingungvon vorgespannten Saiten (Abbildung 8.1) betrachtet werden. Dazu sind diefolgenden Voraussetzungen erforderlich:
1. Die Saite sei biegeschlaff.
2. Die Vorspannkraft H sei so groß, daß Schwankungen in der Normal-kraft vernachlassigbar sind.
3. Die Bewegung erfolgt nur senkrecht zur in Abbildung 8.1 dargestelltenRuhelage.
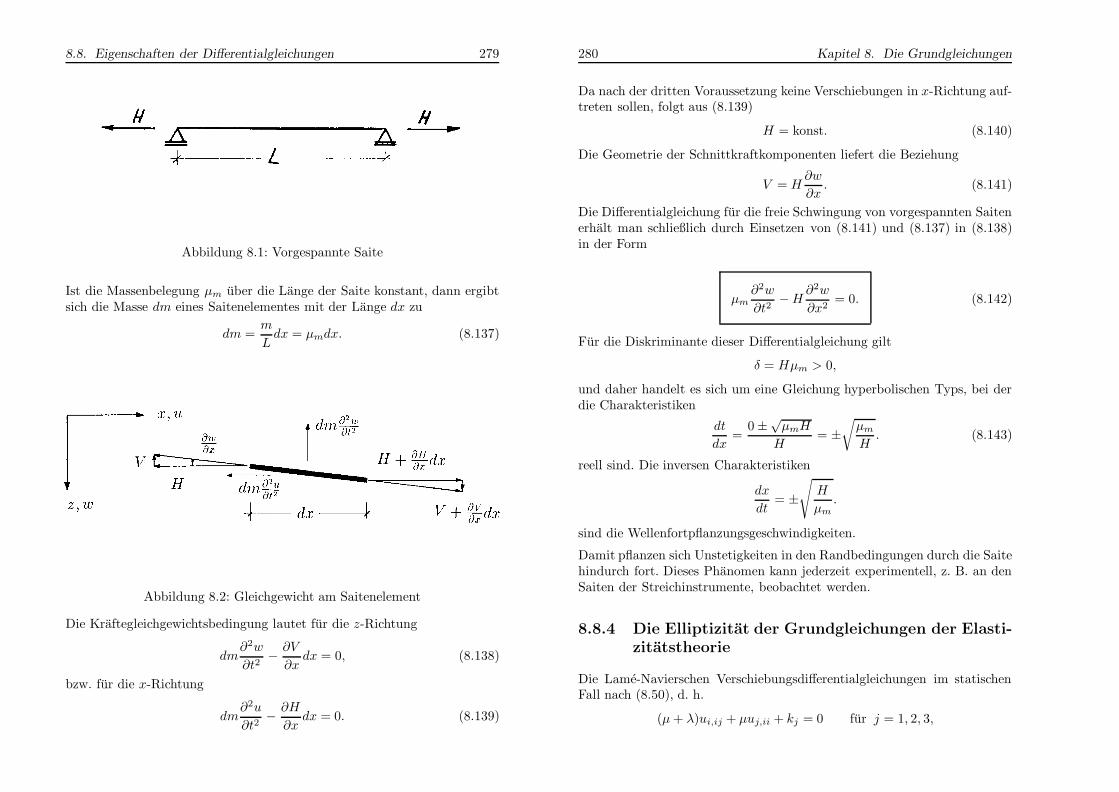
8.8. Eigenschaften der Differentialgleichungen 279
Abbildung 8.1: Vorgespannte Saite
Ist die Massenbelegung µm uber die Lange der Saite konstant, dann ergibtsich die Masse dm eines Saitenelementes mit der Lange dx zu
dm =m
Ldx = µmdx. (8.137)
Abbildung 8.2: Gleichgewicht am Saitenelement
Die Kraftegleichgewichtsbedingung lautet fur die z-Richtung
dm∂2w
∂t2− ∂V
∂xdx = 0, (8.138)
bzw. fur die x-Richtung
dm∂2u
∂t2− ∂H
∂xdx = 0. (8.139)
280 Kapitel 8. Die Grundgleichungen
Da nach der dritten Voraussetzung keine Verschiebungen in x-Richtung auf-treten sollen, folgt aus (8.139)
H = konst. (8.140)
Die Geometrie der Schnittkraftkomponenten liefert die Beziehung
V = H∂w
∂x. (8.141)
Die Differentialgleichung fur die freie Schwingung von vorgespannten Saitenerhalt man schließlich durch Einsetzen von (8.141) und (8.137) in (8.138)in der Form
µm
∂2w
∂t2−H ∂2w
∂x2= 0. (8.142)
Fur die Diskriminante dieser Differentialgleichung gilt
δ = Hµm > 0,
und daher handelt es sich um eine Gleichung hyperbolischen Typs, bei derdie Charakteristiken
dt
dx=
0±√µmH
H= ±
õm
H. (8.143)
reell sind. Die inversen Charakteristiken
dx
dt= ±
√H
µm
.
sind die Wellenfortpflanzungsgeschwindigkeiten.
Damit pflanzen sich Unstetigkeiten in den Randbedingungen durch die Saitehindurch fort. Dieses Phanomen kann jederzeit experimentell, z. B. an denSaiten der Streichinstrumente, beobachtet werden.
8.8.4 Die Elliptizitat der Grundgleichungen der Elasti-zitatstheorie
Die Lame-Navierschen Verschiebungsdifferentialgleichungen im statischenFall nach (8.50), d. h.
(µ+ λ)ui,ij + µuj,ii + kj = 0 fur j = 1, 2, 3,

8.8. Eigenschaften der Differentialgleichungen 281
und die Gleichungen von Michell nach (8.92), d. h.
∆σil +1
1 + νσkk,li = − ν
1− ν δilkk,k − (ki,l + kl,i),
stellen jeweils ein gekoppeltes System partieller linearer Differentialgleichun-gen 2. Ordnung mit konstanten Koeffizienten fur die Verschiebungskompo-nenten ui bzw. die Spannungskomponenten σil dar.
Fur die folgende Darstellung der Methode von I.G. Petrowski zum Testendes Typs der Differentialgleichungen wahlen wir die Matrizenschreibweiseder Lame-Gleichungen
µ L u(x) = k mit L := ∆u+1
1− 2νgrad divu, (8.144)
wobei uT = [u1(x), u2(x), u3(x)], kT = [ρk1, ρk2, ρk3] sowie
∆u = div gradu = ∂iiu mit ∂ij =∂2
∂xi ∂xj
und α :=1
1− 2νgilt.
Ausgeschrieben erhalten wir
µ
∆ + α ∂11 α ∂12 α ∂13
α∂21 ∆ + α ∂22 α ∂23
α∂31 α ∂32 ∆ + α∂33
︸ ︷︷ ︸L
u1
u2
u3
︸ ︷︷ ︸u
= −
k1
k2
k3
︸ ︷︷ ︸k
.
(8.145)
Es wird nun untersucht, ob ein hyperbolischer Typ vorliegt, d.h. ob reellwer-tige planare Wellen auftreten, die die homogenen Gleichungen Lu(x) = 0losen. Es ist im ubrigen nur erforderlich, den sogenannten Hauptteil , d.h.die 2. Ableitungen, der allgemein gekoppelten drei Differentialgleichungen2. Ordnung zu untersuchen. In den Lame-Gleichungen gehoren alle Termedem Hauptteil an.
Ein ebene Welle hat die Form
u(x) = U(ξ · x) (8.146)
mit dem Wellenvektor ξ ∈ IR3, ξT = [ξ1, ξ2, ξ3], der Normierung ‖ξ‖ =√ξ21 + ξ22 + ξ23 = 1 und dem Skalarprodukt ξ · x = η ∈ IR.
Fur die Ableitungen in (8.145) ergibt sich mit (8.146) nach der Kettenregel
∂2u
∂xj ∂xl
=d2U
d2η
∂η
∂xj
∂η
∂xl
= U ′′ ξj ξl. (8.147)
282 Kapitel 8. Die Grundgleichungen
Aus den Ableitungen nach xj , xl entstehen also Polynome ξj ξl in den Wel-lenkoordinaten ξ1, ξ2, ξ3. Damit ergibt sich der Lame-Operator L zu
Lu(x) = A(ξ) U ′′(η) mit η = ξ · x und U ′′ =d2U
dη2, (8.148)
mit der Matrix A ∈ IR3×IR3 , in der die Ableitungen nach den Koordinatenin L durch entsprechende Potenzen der Wellenkoordinaten zu ersetzen sind.Man erhalt mit γ := 1 + α
A(ξ) = µ
γ ξ21 + ξ22 + ξ23 α ξ1ξ2 α ξ1ξ3α ξ2ξ1 ξ21 + γ ξ22 + ξ23 α ξ2ξ3α ξ3ξ1 α ξ3ξ2 ξ21 + ξ22 + γ ξ23
. (8.149)
Das Kriterium fur die Existenz reellwertiger Wellenvektoren ist
detA(ξ) ∈ 0,∞ ∀ξ ∈ IR3 mit ‖ξ‖ = 1. (8.150)
Umgekehrt ergibt sich die Bedingung fur Elliptizitat, d.h. das Fehlen pla-narer Wellen und damit das Nichtvorhandensein von sich ausbreitendenStorungen, zu
0 < detA <∞ ⇐⇒ L elliptisch ∀ξ ∈ IR3 mit ‖ξ‖ = 1. (8.151)
Die Berechnung der Determinante von A gemaß (8.149) ergibt
detA(ξ) = µ (1 + α) ‖ξ‖2·3. (8.152)
Damit ist L nicht elliptisch fur detA = 0, d.h. fur µ = 0 bei beliebigem α
sowie im Fall µ 6= 0 fur α = −1, also wegen α =1
1− 2 νfur ν = 1. L ist
ebenfalls nicht elliptisch fur detA =∞, d.h. fur µ 6= 0 und fur α =∞, also
fur ν =1
2. Zusammengefaßt bedeutet dies fur die punktweise Elliptizitat
des Operators L
0 < µ <∞ und ν 6= 1
2bzw. ν 6= 1 ⇐⇒ L elliptisch (8.153)
oder auch
0 < µ <∞ und 0 < λ+ 2µ = 2µ1− ν1− 2ν
<∞.
8.8. Eigenschaften der Differentialgleichungen 283
Punktweise starke Elliptizitat von L liegt genau dann vor, wenn gilt
0 < detA <∞, d.h. detA ist positiv definit.
Dies gilt fur µ > 0 und 1+α > 0, d.h. ν <1
2oder ν > 1 oder gleichbedeutend
fur µ > 0 und λ+ 2µ > 0.
Mit der positiv definiten isotropen Elastizitatsmatrix E, siehe auch Ab-schnitt 7.9, erhalt man die Beziehung fur punktweise Stabilitat, d.h. furpunktweise positiv definite spezifische Formanderungsenergie
Ws =1
2εT E ε > 0 ∀ε 6= 0
fur isotropes linear elastisches Material.
Hieraus folgen nach einigen Umformungen die Bedingungen µ > 0 fur denSchubmodul und 3K = 3λ + 2µ > 0 fur den Kompressionsmodul K, d.h.
fur µ > 0 sowie ν > −1 und ν <1
2, d.h. fur −1 < ν < 1/2.
Man erkennt, daß die punktweise Stabilitat eine starkere Forderung als star-ke Elliptizitat beinhaltet und zu dem zusatzlichen Grenzwert ν > −1 fuhrt.
Fur die starke Elliptizitat des Randwertproblems sind naturlich auch dieRandbedingungen und die Belastung maßgebend. Die Randbedingungenmussen assoziiert sein und die Lasten im Gebiet quadratisch integrierbar.Diese Bedingung der starken Elliptizitat des Randwertproblems wird durchdie Kornsche Ungleichung beschrieben, siehe Kapitel 11, Gleichung (11.59).
Die Elliptizitat der Grundgleichungen der dreidimensionalen Elastizitats-theorie konnen wir fur den Sonderfall verschwindender Volumenkrafte ki =0 auch an den biharmonischen Differentialgleichungen fur die Verschiebungs-komponenten nach (8.83)
∆ ∆ uj = 0.
und an den biharmonischen Differentialgleichungen fur die Spannungskom-ponenten nach (8.95)
∆∆σil = 0
erkennen. Die Differentialgleichungen sind in diesem Fall entkoppelt, so daßeine Klassifizierung mit Hilfe der Theorie partieller Differentialgleichungenhoherer Ordnung, siehe z. B. Courant, Hilbert [12], vorgenommen werdenkann. Entsprechend der Ergebnisse der Theorie partieller Differentialglei-chungen 2. Ordnung, in der sich die Laplacesche Differentialgleichung
∆ u = 0
284 Kapitel 8. Die Grundgleichungen
als Prototyp einer elliptischen Differentialgleichung 2. Ordnung erweist,stellt die Bipotentialgleichung
∆ ∆ u = 0
eine elliptische Differentialgleichung 4. Ordnung dar. Damit sind die obenangegebenen biharmonischen Differentialgleichungen fur die Verschiebungs-bzw. Spannungskomponenten vom elliptischen Typ.
In diesem Zusammenhang verweisen wir auch auf die in Kapitel 11 ein-gefuhrte V -Elliptizitat der Bilinearform a(., .) der linearisierten Elastizitats-theorie.
8.8.5 Die Elliptizitat der Differentialgleichungen derMembranschale
Die Differentialgleichung der Membranschale kann mit den oben dargestell-ten Kriterien ebenfalls in die Typen elliptisch, parabolisch und hyperbolischeingeteilt werden. Diese Einteilung wird im wesentlichen von der GaußschenKrummung der Schale bestimmt. Ist die Krummung positiv, so handelt essich um Gleichungen elliptischen Typs, bei der Krummung Null um denparabolischen Typ, und bei negativer Gaußscher Krummung ist die Diffe-rentialgleichung hyperbolischen Typs.
Damit ist der Effekt des St. Venantschen Prinzips, d. h. das rasche Abklin-gen von Randstorungen bei assoziierten Randbedingungen (siehe Abschnitt8.8.6), fur Membranschalen elliptischen Typs zu beobachten, wahrend beiMembranschalen hyperbolischen Typs bestimmte Randstorungen abhangigvon den Randstorungen nicht abklingen, sondern sich uber das gesamteSchalentragwerk fortpflanzen.
Fur eine ausfuhrliche Darstellung dieser Effekte siehe z. B. Novozhilov [58].
8.8.6 Das Prinzip von St. Venant
Das”Prinzip von der aquivalenten Wirkung statisch gleichwertiger Kraftesy-
steme“ wurde zuerst im Jahre 1855 von Barre de Saint-Venant (1797–1886)aufgestellt. Hiernach kann die Wirkung von Kraftesystemen mit verschwin-dender resultierender Kraft und verschwindendem resultierendem Moment,
8.8. Eigenschaften der Differentialgleichungen 285
die auf einem kleinen Gebiet der Oberflache des Korpers angreifen, in ei-ner hinreichend weiten Entfernung vom Angriffsbereich der Krafte ver-nachlassigt werden. Dieses Prinzip wird in der Ingenieurpraxis haufig, be-wußt oder unbewußt, angewendet, insbesondere dort, wo bei der Modellie-rung physikalischer Probleme Idealisierungen, z. B. der Randbedingungenoder der Krafteeinleitung, auftreten. Die Beschaftigung mit dem Phano-men des Prinzips von St. Venant, welches wesentlich auf die Elliptizitatder zugrunde liegenden Differentialgleichungen zuruckzufuhren ist, zeigtedurch einfache Gegenbeispiele, daß die Voraussetzungen fur die Gultigkeitdes Prinzips verscharft werden mussen. Hierbei sind zwei unterschiedlicheZugange zum Beweis des Prinzips moglich.
1. Von Zanaboni wurde im Jahre 1937 am Beispiel des kreisformigen Zy-linders das Abklingen der Formanderungsenergie (siehe Kapitel 10)mit der Entfernung vom Lasteinleitungsbereich als Maß fur den Ein-fluß der Belastung auf Punkte in großer Entfernung von der Belastunggewertet. Dieser Zugang wurde weiterhin von Toupin, Knowles undanderen teilweise an besonderen Bauteilen untersucht. Hierauf werdenwir nicht weiter eingehen und verweisen auf die Literatur, siehe z. B.Fung [22], Villagio [86].
2. Daneben stellte von Mises im Jahre 1945 eine strengere mathema-tische Formulierung des ursprunglichen Prinzips von St. Venant auf,welche 1954 von Sternberg bewiesen wurde. Dieses Vorgehen soll imweiteren kurz dargestellt werden; fur eine ausfuhrliche Abhandlungund weiterreichende Literaturangaben verweisen wir z. B. auf Fung[22], Villagio [86].
Als Gegenbeispiel zur ursprunglichen Form des Prinzips von St. Venant be-trachten wir eine Kreisscheibe, die wie in Abbildung 8.3 dargestellt belastetist. In der dargestellten Lage der Krafte F und −F ist das Krafte- und Mo-mentengleichgewicht erfullt. Dreht man jedoch die Krafte um den Winkel α,so tritt der Hebelarm ǫ · sinα zwischen F und −F auf, so daß nunmehr keinMomentengleichgewicht herrscht. Die Behandlung dieses Beispiels mit denanalytischen Losungsverfahren der linearisierten Elastizitatstheorie durchvon Mises zeigte, daß auch in großer Entfernung von der Lasteinleitungnoch signifikante Spannungen auftreten und somit das Prinzip von St. Ven-ant fur diesen Fall nicht mehr gultig ist.
Fur die notwendige Erweiterung fuhren wir den Begriff des astatischenGleichgewichts ein, der die Gultigkeit der Gleichgewichtsbedingungen auch
286 Kapitel 8. Die Grundgleichungen
Abbildung 8.3: Kraftegruppen an einer Kreisscheibe
fur eine beliebige Drehung der Krafte bedeutet. Damit konnen wir nun dievon Mises Formulierung des Prinzips von St. Venant angeben.
Gegeben sei ein elastischer Korper B mit charaktersictischer Abmes-sung 1. Der Korper sei auf mehreren Gebieten mit maximalem Durch-messer ǫ durch endliche Oberflachenspannungen belastet. Betrachtetwird ein Punkt X ∈ B , dessen Abstand zu jedem Belastungsbe-reich großer der charakteristischen Abmessung ist. Betrachten wir denGrenzubergang ǫ −→ 0, so erhalten wir fur die Verzerrungskomponen-ten die Beziehung
ǫǫǫ (X, ǫ) = 0(ǫp),
wobei die Große p wie folgt festgelegt ist.
1. Besitzen die Oberflachenspannungen in mindestens einem Gebieteine nichtverschwindende Resultierende, so gilt im allgemeinenp ≥ 2.
2. Verschwinden die Resultierenden der Spannungen in jedem Teil-gebiet, so gilt p ≥ 3.
3. Verschwinden zusatzlich die resultierenden Momente in jedemGebiet, so erhalten wir weiterhin nur p ≥ 3.
4. Befinden sich die Spannungen in jedem Gebiet im astatischenGleichgewicht, so erhalten wir p ≥ 4.
Diese Formulierung geht von endlichen Oberflachenspannungen auf ei-nem gegen Null strebenden Gebiet (ǫ −→ 0) aus. Betrachten wir dage-gen Krafte, die auch fur ǫ −→ 0 endlich bleiben, so ist der Exponent pin den obigen Fallen durch 0, 1 bzw. 2 (statt 2, 3 bzw. 4) zu ersetzen.
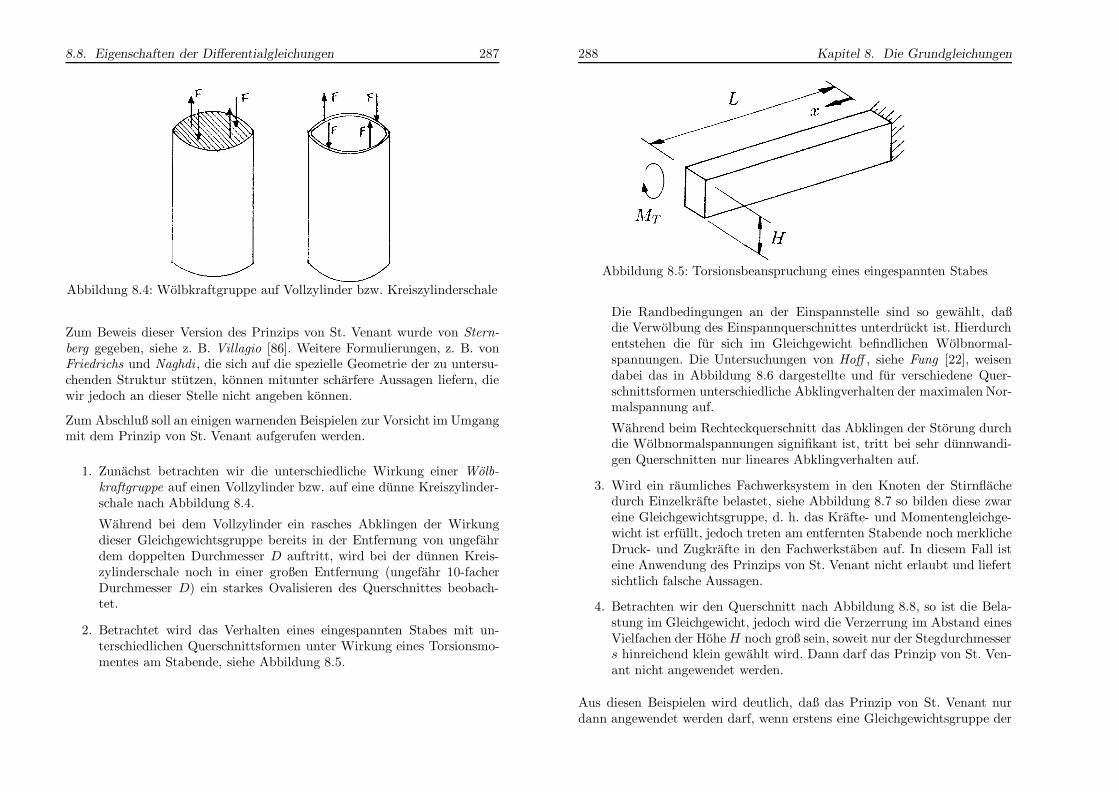
8.8. Eigenschaften der Differentialgleichungen 287
Abbildung 8.4: Wolbkraftgruppe auf Vollzylinder bzw. Kreiszylinderschale
Zum Beweis dieser Version des Prinzips von St. Venant wurde von Stern-berg gegeben, siehe z. B. Villagio [86]. Weitere Formulierungen, z. B. vonFriedrichs und Naghdi , die sich auf die spezielle Geometrie der zu untersu-chenden Struktur stutzen, konnen mitunter scharfere Aussagen liefern, diewir jedoch an dieser Stelle nicht angeben konnen.
Zum Abschluß soll an einigen warnenden Beispielen zur Vorsicht im Umgangmit dem Prinzip von St. Venant aufgerufen werden.
1. Zunachst betrachten wir die unterschiedliche Wirkung einer Wolb-kraftgruppe auf einen Vollzylinder bzw. auf eine dunne Kreiszylinder-schale nach Abbildung 8.4.
Wahrend bei dem Vollzylinder ein rasches Abklingen der Wirkungdieser Gleichgewichtsgruppe bereits in der Entfernung von ungefahrdem doppelten Durchmesser D auftritt, wird bei der dunnen Kreis-zylinderschale noch in einer großen Entfernung (ungefahr 10-facherDurchmesser D) ein starkes Ovalisieren des Querschnittes beobach-tet.
2. Betrachtet wird das Verhalten eines eingespannten Stabes mit un-terschiedlichen Querschnittsformen unter Wirkung eines Torsionsmo-mentes am Stabende, siehe Abbildung 8.5.
288 Kapitel 8. Die Grundgleichungen
Abbildung 8.5: Torsionsbeanspruchung eines eingespannten Stabes
Die Randbedingungen an der Einspannstelle sind so gewahlt, daßdie Verwolbung des Einspannquerschnittes unterdruckt ist. Hierdurchentstehen die fur sich im Gleichgewicht befindlichen Wolbnormal-spannungen. Die Untersuchungen von Hoff , siehe Fung [22], weisendabei das in Abbildung 8.6 dargestellte und fur verschiedene Quer-schnittsformen unterschiedliche Abklingverhalten der maximalen Nor-malspannung auf.
Wahrend beim Rechteckquerschnitt das Abklingen der Storung durchdie Wolbnormalspannungen signifikant ist, tritt bei sehr dunnwandi-gen Querschnitten nur lineares Abklingverhalten auf.
3. Wird ein raumliches Fachwerksystem in den Knoten der Stirnflachedurch Einzelkrafte belastet, siehe Abbildung 8.7 so bilden diese zwareine Gleichgewichtsgruppe, d. h. das Krafte- und Momentengleichge-wicht ist erfullt, jedoch treten am entfernten Stabende noch merklicheDruck- und Zugkrafte in den Fachwerkstaben auf. In diesem Fall isteine Anwendung des Prinzips von St. Venant nicht erlaubt und liefertsichtlich falsche Aussagen.
4. Betrachten wir den Querschnitt nach Abbildung 8.8, so ist die Bela-stung im Gleichgewicht, jedoch wird die Verzerrung im Abstand einesVielfachen der HoheH noch groß sein, soweit nur der Stegdurchmessers hinreichend klein gewahlt wird. Dann darf das Prinzip von St. Ven-ant nicht angewendet werden.
Aus diesen Beispielen wird deutlich, daß das Prinzip von St. Venant nurdann angewendet werden darf, wenn erstens eine Gleichgewichtsgruppe der
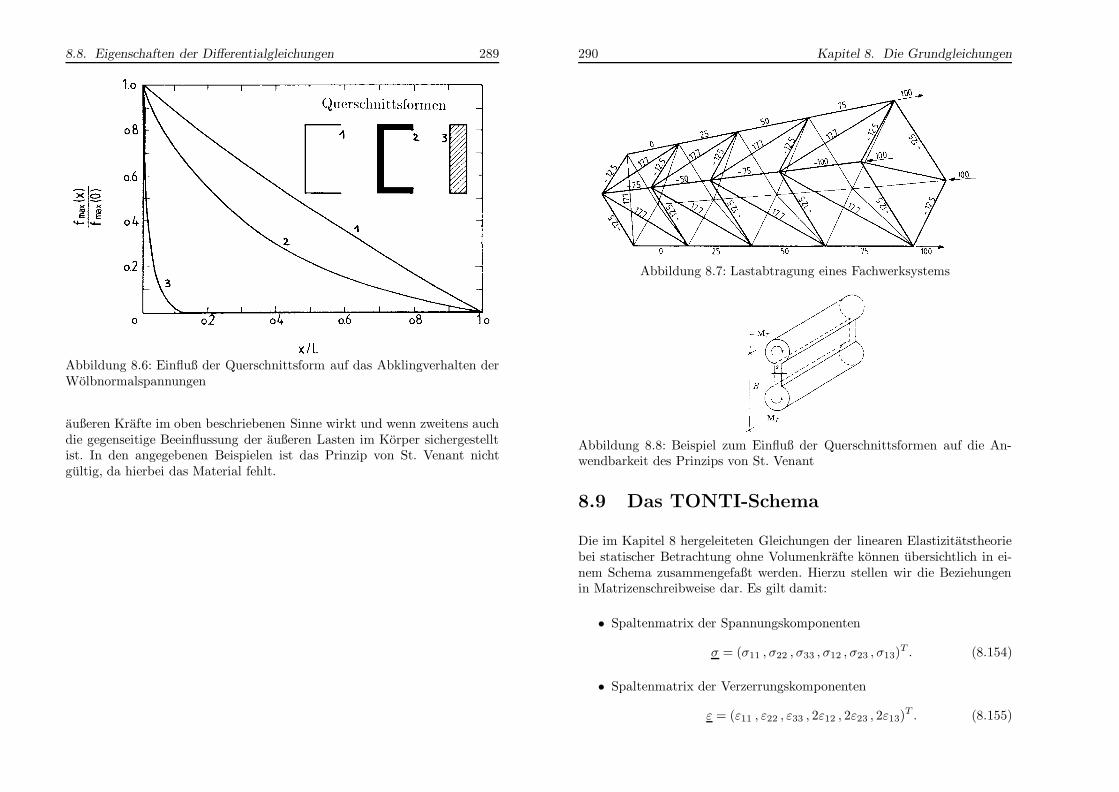
8.8. Eigenschaften der Differentialgleichungen 289
Abbildung 8.6: Einfluß der Querschnittsform auf das Abklingverhalten derWolbnormalspannungen
außeren Krafte im oben beschriebenen Sinne wirkt und wenn zweitens auchdie gegenseitige Beeinflussung der außeren Lasten im Korper sichergestelltist. In den angegebenen Beispielen ist das Prinzip von St. Venant nichtgultig, da hierbei das Material fehlt.
290 Kapitel 8. Die Grundgleichungen
Abbildung 8.7: Lastabtragung eines Fachwerksystems
Abbildung 8.8: Beispiel zum Einfluß der Querschnittsformen auf die An-wendbarkeit des Prinzips von St. Venant
8.9 Das TONTI-Schema
Die im Kapitel 8 hergeleiteten Gleichungen der linearen Elastizitatstheoriebei statischer Betrachtung ohne Volumenkrafte konnen ubersichtlich in ei-nem Schema zusammengefaßt werden. Hierzu stellen wir die Beziehungenin Matrizenschreibweise dar. Es gilt damit:
• Spaltenmatrix der Spannungskomponenten
σ = (σ11 , σ22 , σ33 , σ12 , σ23 , σ13)T . (8.154)
• Spaltenmatrix der Verzerrungskomponenten
ε = (ε11 , ε22 , ε33 , 2ε12 , 2ε23 , 2ε13)T . (8.155)
8.9. Das TONTI-Schema 291
• Vektor der Verschiebungskomponenten
u = (u1 , u2 , u3)T . (8.156)
• Konstitutive Beziehung zwischen Spannungen und Verzerrungen mitder Elastizitatsmatrix nach Abschnitt 7.9.3
σ = E ε(p). (8.157)
Hieraus erhalten wir die inverse konstitutive Gleichung
ε(p) = E−1σ (8.158)
mit der inversen Elastizitatsmatrix E−1 nach Abschnitt 7.9.3.
• Geometrische Beziehungen
Die im Werkstoffgesetz definierten physikalischen Verzerrungen ε(p)
mussen mit den geometrischen Verzerrungen ε(g) ubereinstimmen,d. h. es muß gelten
ε(p) = ε(g). (8.159)
• Definition der geometrischen Verzerrungen
ε(g) := Du (8.160)
mit der Differentialoperatormatrix D nach (8.59).
• Geometrische Vertraglichkeitsbedingungen
D⋆T ε(g) = 0 (8.161)
mit der Differentialoperatormatrix D⋆T nach (8.101).
• Statische Gleichgewichtsbedingungen
DTσ + k = 0. (8.162)
Fur verschwindende Volumenkrafte gilt
DTσ = 0. (8.163)
292 Kapitel 8. Die Grundgleichungen
• Definition der Maxwellschen Spannungsfunktionen
φ = (φ1, φ2, φ3)T (8.164)
durch die Gleichungσ = D⋆ φ. (8.165)
Mit den angegebenen Bezeichnungen kann die Herleitung der Lame-Navier-schen Verschiebungsdifferentialgleichungen und der biharmonischen Diffe-rentialgleichungen fur die Verschiebungskomponenten u und die Spannungs-funktionen φ in der Abbildung 8.9 dargestellt werden.
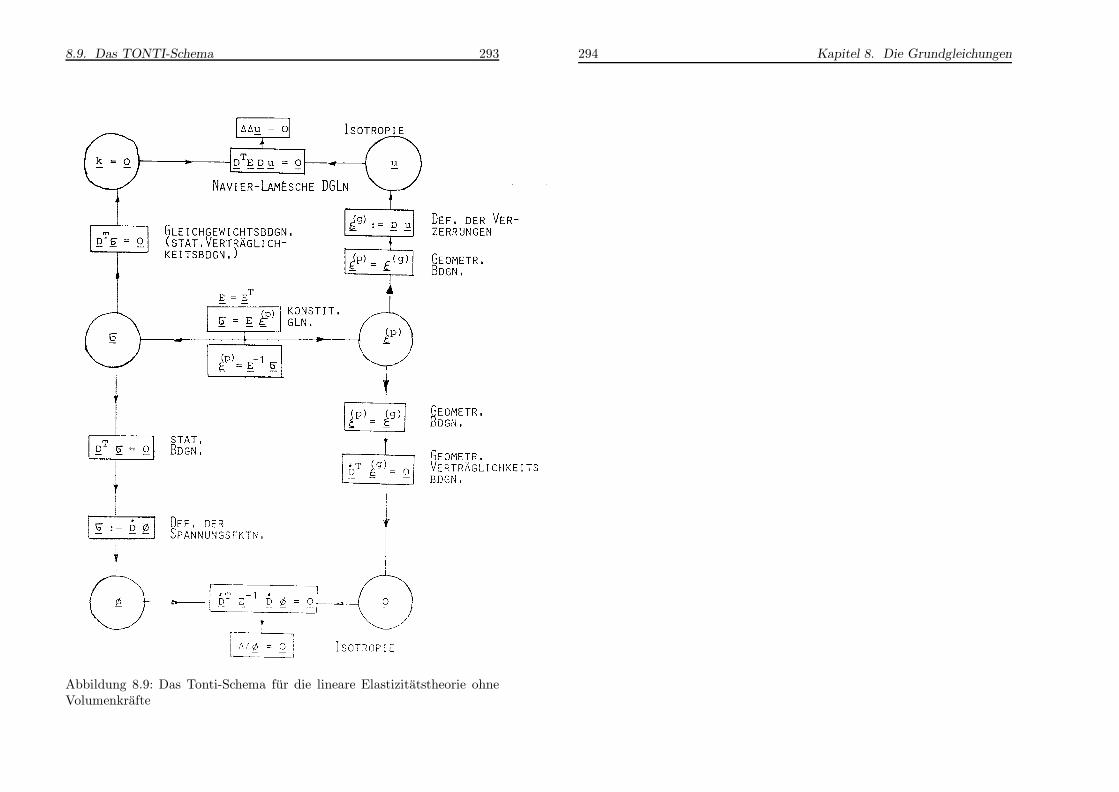
8.9. Das TONTI-Schema 293
Abbildung 8.9: Das Tonti-Schema fur die lineare Elastizitatstheorie ohneVolumenkrafte
294 Kapitel 8. Die Grundgleichungen

Kapitel 9
Losungen derGrundgleichungen derklassischen linearenElastizitatstheorie
Die Aufgaben der Elastizitatstheorie sind meist so kompliziert, daß manim allgemeinen keine geschlossenen Losungen angeben kann. Es sind daherauch nur wenige klassische Losungen fur die Lame-Navierschen Verschie-bungsdifferentialgleichungen bekannt, z. B.
• die Torsion nicht wolbbehinderter prismatischer Stabe nach St. Venant,
• die elastische Halbebene (siehe Abschnitt 9.4)
• der elastische Halbraum (siehe Abschnitt 9.5),
• die dicke Kugel,
• der dickwandige Zylinder und
• die unendlich ausgedehnte Scheibe mit Loch (siehe Abschnitt 9.6).
295
296 Kapitel 9. Losungen der Grundgleichungen
9.1 Der Drei-Funktionen-Ansatz nachPapkovitsch-Neuber
Erst in den dreißiger Jahren dieses Jahrhunderts ist es Papkovitsch [60], [61]und Neuber [51] gelungen, allgemeine Losungen fur die homogenen Grund-gleichungen (kk = 0) im statischen Fall (siehe auch Gleichung (8.56))
1
1− 2νe,k + ∆ uk = 0 (9.1)
zu finden.
9.1.1 Herleitung des Drei-Funktionen-Ansatzes
9.1.1.1 Definition des Drei-Funktionen-Ansatzes
Zur Losung der homogenen Grundgleichungen (9.1) macht man einen An-satz mit einer raumlichen Spannungsfunktion F (X1, X2, X3) und drei har-monischen Funktionen φi(X1, X2, X3), die der Bedingung
φi,kk = 0 (9.2)
genugen. Der Drei-Funktionen-Ansatz nach Papkovitsch-Neuber fur die un-bekannten Verschiebungen lautet damit
2Gui = −F,i + 2αφi . (9.3)
Dabei ist α eine Konstante, die im folgenden bestimmt werden soll.
9.1.1.2 Bestimmung der Ansatzkonstanten α
Wird (9.3) in (9.1) eingesetzt, so erhalt man mit (9.2)
−∆F,i + 2G1
1− 2νe,i = 0
oder
(2G1
1− 2νe−∆F ),i = 0.

9.1. Drei-Funktionen-Ansatz 297
Diese Bedingungen werden erfullt, wenn der Klammerausdruck konstant,bzw. im speziellen Fall Null ist. Dann gilt
2Ge = (1− 2ν)∆F. (9.4)
Die Volumendilatation e nach (8.51) laßt sich auch mit dem Ansatz (9.3) inder Form
2Ge = 2Gui,i = −F,ii + 2αφi,i
oder
2Ge = −∆F + 2αφi,i (9.5)
ausdrucken. Durch Gleichsetzen von (9.4) und (9.5) erhalt man
(2− 2ν)∆F = 2αφi,i. (9.6)
Als Ansatz fur die raumliche Spannungsfunktion F wird
F = φ +Xi φi (9.7)
gewahlt, wobei auch fur die Ansatzfunktion φ analog zu (9.2) die Bedin-gung
φ,kk = 0 (9.8)
erfullt sein soll. Die Anwendung des Laplace-Operators ∆ auf (9.7) ergibt
∆F = φ,ii + 2φi,i +Xi φi,ii
oder mit (9.2) und (9.8)
∆F = 2φi,i. (9.9)
Setzt man (9.9) in (9.6) ein, so erhalt man fur die Ansatzkonstante α
α = 2(1− ν). (9.10)
Hieraus ergibt sich mit (9.3) der Drei-Funktionen-Ansatz
2Gui = −F,i + 4(1− ν)φi . (9.11)
298 Kapitel 9. Losungen der Grundgleichungen
9.1.1.3 Bestimmung der Spannungen aus dem Drei-Funktionen-
Ansatz
Mit (9.11) lassen sich die Spannungen aus der raumlichen Spannungsfunk-tion F und den harmonischen Funktionen φ1, φ2, φ3 bestimmen. Mit demElastizitatsgesetz in der Form der Gleichung (7.107) folgt
σik = 2G εik + 2Gν
1− 2νδikεll , (9.12)
und speziell fur die Normalspannungen gilt
σ(ii) = 2Gu(i,i) + 2Gν
1− 2νe. (9.13)
Mit (9.11) und (9.4) ergeben sich die Normalspannungen dann zu
σ(ii) = −F,(ii) + 4(1− ν)φ(i,i) + ν∆F
und mit (9.9) folgt
σ(ii) = −F,(ii) + 4φ(i,i) − 4νφ(i,i) + 2νφj,j. (9.14)
Addiert und subtrahiert man auf der rechten Seite dieser Gleichung dieAusdrucke von (9.9), so erhalt man schließlich die Losungen fur die Nor-malspannungen
σ(ii) = F,jj − F,(ii) + 4(1− ν)φ(i,i)− 2(1− ν)φj,j
und damit
σ(ii) = F,jj − F,(ii) + 2(1− ν)(2φ(i,i) − φj,j). (9.15)
Ausgeschrieben lauten diese Gleichungen fur i = 1, 2 und 3:
σ11 = F,22 + F,33 + 2(1− ν)(φ1,1− φ2,2 − φ3,3), (9.16)
σ22 = F,33 + F,11 + 2(1− ν)(φ2,2− φ3,3 − φ1,1), (9.17)
σ33 = F,11 + F,22 + 2(1− ν)(φ3,3− φ1,1 − φ2,2). (9.18)
Fur die Schubspannungen ergibt sich aus dem Elastizitatsgesetz (9.12) furi 6= k
σik = G(ui,k + uk,i). (9.19)
9.1. Drei-Funktionen-Ansatz 299
Mit dem Drei-Funktionen-Ansatz (9.11) erhalt man unmittelbar
σik = −1
2(F,ik + F,ki) + 2(1− ν)(φi,k + φk,i).
Da die Reihenfolge der partiellen Ableitungen vertauschbar ist, erhalten wirhieraus fur die Schubspannungen
σik = −F,ik + 2(1− ν)(φi,k + φk,i) fur i 6= k. (9.20)
Ausgeschrieben lauten die Schubspannungen:
σ12 = −F,12 + 2(1− ν)(φ1,2 + φ2,1), (9.21)
σ23 = −F,23 + 2(1− ν)(φ2,3 + φ3,2), (9.22)
σ31 = −F,31 + 2(1− ν)(φ3,1 + φ1,3). (9.23)
Es werden also nur drei harmonische Funktionen φ1, φ2, φ3 zur Bestimmungder Spannungen benotigt. Dieser grundlegende theoretische Einblick in dieStruktur elastischer Spannungszustande kann auch folgendermaßen formu-liert werden:
Die Mannigfaltigkeit des allgemeinen elastischen Zustandes ist gleichder dreifachen Mannigfaltigkeit der harmonischen Funktionen.
Bedeutung in der Anwendung erlangten die Drei-Funktionen-Ansatze un-ter anderem bei der Berechnung von Spannungsspitzen an einspringendenEcken (Kerben), Offnungen und Bohrungen. Eine große Zahl dieser furebene und raumliche Spannungszustande berechneten Kerbprobleme fin-det man in dem Buch
”Kerbspannungslehre“ von Neuber [53]. Von großer
Wichtigkeit sind diese Uberlegungen besonders zum Nachweis der Dauerfe-stigkeit bei metallischen Werkstoffen.
9.1.2 Die Spannungsfunktion des Drei-Funktionen-An-satzes fur den ebenen Verzerrungszustand
Der ebene Verzerrungszustand wird durch die Annahme charakterisiert, daßdie Verschiebung u3 verschwindet und daß die ubrigen Verschiebungen vonX3 unabhangig sind, d. h. es gilt nach Abschnitt 7.9.5
u1 = u1 (X1 , X2), u2 = u2 (X1, X2) und u3 = 0. (9.24)
300 Kapitel 9. Losungen der Grundgleichungen
Auf Grund der linearen Verzerrungs-Verschiebungsbeziehungen (3.87) folgtdaraus fur die Verzerrungen ε33 = ε13 = ε23 = 0, und die ubrigen Verzerrun-gen sind wie die Verschiebungskomponenten u1 und u2 nur Funktionen vonX1 und X2. Beim Spannungstensor verschwinden nach (7.125) die Kompo-nenten σ13 = σ23 = 0 , und die verbleibenden Komponenten sind wiederumFunktionen der materiellen Koordinaten X1 und X2, d. h.
σ11 = σ11(X1, X2), (9.25)
σ22 = σ22(X1, X2), (9.26)
σ33 = σ33(X1, X2), (9.27)
σ12 = σ12(X1, X2). (9.28)
In den Gleichungen (9.25)–(9.28) tritt im Gegensatz zur allgemeinen raum-lichen Spannungsfunktion nach (9.7) keine Abhangigkeit von der raumli-chen Koordinate X3 auf. Aus diesem Grund muß die Spannungsfunktionφ3 Null sein. Weiterhin sind nach (9.24) nur noch die Verschiebungen u1
und u2 zu bestimmen, so daß ein Ansatz nach (9.7) mit zwei unbekann-ten Spannungsfunktionen zur Bestimmung der Verschiebungskomponentenu1, u2 ausreicht. Deshalb wird die harmonische Funktion φ2 zu Null gesetztund es verbleiben die harmonischen Funktionen
φ = φ(X1, X2) und φ1 = φ1(X1, X2). (9.29)
Als Ansatz fur die Spannungsfunktion F erhalt man nach (9.7)
F = φ +X1φ1 = F (X1 , X2). (9.30)
Mit (9.3) ergeben sich die Verschiebungen zu
2Gu1 = − ∂F
∂X1+ 2αφ1, (9.31)
2Gu2 = − ∂F
∂X2, (9.32)
wobei die Ansatzkonstante α in (9.10) angeben ist. Um fur die Spannun-gen moglichst einfache Ausdrucke zu erhalten, werden die neuen ebenen,harmonischen Funktionen φ
′
und φ′
1 in der Form
φ1 =∂φ
′
1
∂X1und φ = αφ
′
1 + φ′
(9.33)
9.1. Drei-Funktionen-Ansatz 301
eingefuhrt. Diese neuen Funktionen werden in (9.30) eingesetzt und somitfolgt
F = φ′
+ αφ′
1 +X1∂φ
′
1
∂X1. (9.34)
Mit der Abkurzung
F′
:= φ′
+X1∂φ
′
1
∂X1(9.35)
laßt sich (9.34) in die Darstellung
F = F′
+ αφ′
1 (9.36)
vereinfachen, und die Verschiebungen (9.31) und (9.32) konnen dann durchF
′
und φ′
1 als
2Gu1 = − ∂
∂X1(F
′ − αφ′
1), (9.37)
2Gu2 = − ∂
∂X2(F
′
+ αφ′
1) (9.38)
angegeben werden, wobei α = 2(1 − ν) nach (9.10) gilt. Die Normalspan-nungen werden unter Beachtung von ∆φ
′
1 = 0 aus den Gleichungen (9.15)und (9.36) berechnet, d. h. es ist
σ11 =∂2F
′
(∂X2)2= F
′
,22, (9.39)
σ22 =∂2F
′
(∂X1)2= F
′
,11, (9.40)
σ33 =∂2F
′
(∂X1)2+
∂2F′
(∂X2)2− α ∂2φ
′
1
(∂X1)2= ∆F
′ − α ∂2φ′
1
(∂X1)2. (9.41)
Entsprechend ergeben sich aus den Gleichungen (9.20) und (9.36) die Schub-spannungen
σ12 = − ∂2F′
∂X1∂X2= −F ′
,12 und σ23 = σ13 = 0. (9.42)
Mit der Bedingung
∆F = ∆F′
= 2∂2φ
′
1
(∂X1)2(9.43)
und (9.41) erhalt man die Normalspannung σ33 zu
σ33 = (1− α
2)∆F
′
= ν∆F′
= ν(σ11 + σ22). (9.44)
302 Kapitel 9. Losungen der Grundgleichungen
9.1.3 Die Spannungsfunktion des Drei-Funktionen-An-satzes fur den ebenen Spannungszustand
Der ebene Spannungszustand ist durch die folgenden Voraussetzungen cha-rakterisiert (siehe auch Abschnitt 7.9.4):
σ11 = σ11(X1, X2), (9.45)
σ22 = σ22(X1, X2), (9.46)
σ12 = σ12(X1, X2), (9.47)
σ33 = σ23 = σ31 = 0. (9.48)
Es werden wieder die harmonischen Funktionen φ′
und φ′
1 entsprechendihrer Definition in (9.33) benutzt. Der Ansatz lautet damit
φ =4− 4α+ α2
α(4− α)
(X3)
2 ∂2φ′
1
(∂X1)2−X1
∂φ′
1
∂X1
+2 − α4 − α
h2
12
∂2φ′
1
(∂X1)2+
4
4− αφ′
1 + φ′
, (9.49)
φ1 =4
α(4− α)
∂φ′
1
∂X1, (9.50)
φ2 = 0, (9.51)
φ3 =−4 + 2α
α(4− α)X3
∂2φ′
1
(∂X1)2. (9.52)
Die Funktionen φ, φ1 und φ3 sind raumliche, harmonische Funktionen, wieman leicht nachweisen kann. Realisiert wird der ebene Spannungszustandan einer Scheibe der Dicke h. Die Ordinate X3 = 0 kennzeichnet die Schei-benmittelflache. Fur die Spannungsfunktion F ergibt sich mit dem obigenAnsatz
F =−2 + α
4− α
(X3)
2 − h2
12
∂2φ
′
1
(∂X1)2+
4
4− αφ′
1 + φ′
+X1∂φ
′
1
∂X1. (9.53)
Mit der Abkurzung (9.35) und der Bedingung (9.43) kann man schreiben
F = F′
+2− α
2(4− α)
h2
12− (X3)
2
∆F
′
+4
4− αφ′
1. (9.54)
Mit der Ansatzkonstanten α nach (9.10) und dem Drei-Funktionen-Ansatznach (9.3) lauten die Verschiebungen
2Gu1 = − ∂
∂X1
F
′
+2− α
2(4− α)
[h2
12− (X3)
2
]∆F
′ − 4
4− αφ′
1
, (9.55)

9.1. Drei-Funktionen-Ansatz 303
2Gu2 = − ∂
∂X2
F
′
+2− α
2(4− α)
[h2
12− (X3)
2
]∆F
′ − 4
4− αφ′
1
, (9.56)
2Gu3 = −2− α4− α∆F
′
X3. (9.57)
Die Spannungen erhalt man wieder aus der Bedingungen (9.15) und (9.20):
σ11 =∂2
(∂X2)2
F
′
+2− α
2(4− α)
[h2
12− (X3)
2
]∆F
′
, (9.58)
σ22 =∂2
(∂X1)2
F
′
+2− α
2(4− α)
[h2
12− (X3)
2
]∆F
′
, (9.59)
σ12 =∂2
∂X1∂X2
F
′
+2− α
2(4− α)
[h2
12− (X3)
2
]∆F
′
. (9.60)
Diese Gleichungen vereinfachen sich erheblich, wenn man die Spannungenan sehr dunnen Scheiben aus der Spannungsfunktion ermittelt, da danndie Terme mit h2 und (X3)
2 vernachlassigbar klein sind. In diesem Fallvereinfachen sich die Gleichungen (9.58) bis (9.60) zu:
σ11 = F′
,22, σ22 = F′
,11 und σ12 = −F ′
,12.
Bei dicken Scheiben ermittelt man die Mittelwerte der Spannungen durchIntegration uber die Scheibendicke, z. B. in der Form
σ11 =1
h
∫ h2
−h2
σ11dX3.
Da jedoch die Integrale uber die Ausdrucke
∫ h2
−h2
(h2
12− (X3)
2
)dX3 = 0
verschwinden, erhalt man fur die mittleren Spannungen σ11, σ22 und σ12
die gleichen Ausdrucke wie bei der dunnen Scheibe, d. h. es gilt
σ11 = F′
,22, σ22 = F′
,11 und σ12 = −F ′
,12.
304 Kapitel 9. Losungen der Grundgleichungen
9.2 Die direkte Herleitung der Scheibentheo-rie
In den Abschnitten dieses Kapitels soll zur Vereinfachung der Darstellungauf eine weithin gebrauchliche Bezeichnungsweise ubergegangen werden:
• Die materiellen Koordinaten X1, X2 und X3 werden durch x, y und zersetzt;
• Die Spannungen σik werden dargestellt durch:
σ11 = σx , σ22 = σy , σ33 = σz
σ12 = τxy , σ23 = τyz , σ31 = τzx; (9.61)
• Anstelle des linearisierten Greenschen Verzerrungstensors mit den Ko-effizienten εik werden die Ingenieurdehnmaße und die Ingenieurglei-tungen verwendet:
ε11 = εx , ε22 = εy , ε33 = εz ,2ε12 = γxy , 2ε23 = γyz , 2ε31 = γzx.
(9.62)
• Die Kraftegleichgewichtsbedingungen in x− bzw. y−Richtung fur ver-schwindene Volumenkrafte lauten damit:
∂σx
∂x+∂τxy
∂y= 0, (9.63)
∂τxy
∂x+∂σy
∂y= 0. (9.64)
Nun wird die Airysche Spannungsfunktion F so eingefuhrt, daß die aus ihrabgeleiteten Spannungen die homogenen Gleichgewichtsbedingungen (9.63)und (9.64) identisch erfullen, d. h. F genugt den Bedingungen
σx =∂2F
∂y2, σy =
∂2F
∂x2und τxy = − ∂2F
∂x∂y. (9.65)
In diesem Fall entspricht die Airysche Spannungsfunktion F der FunktionF
′
fur den ebenen Spannungszustand nach Abschnitt 9.1.3. Fur das verall-gemeinerte Hookesche Gesetz gilt nach Abschnitt 7.9.4
εx =1
E(σx − νσy), (9.66)
9.2. Die Scheibentheorie 305
εy =1
E(σy − νσx), (9.67)
γxy =1
Gτxy =
2(1 + ν)
Eτxy. (9.68)
Die Ingenieurdehnmaße ergeben sich aus den partiellen Ableitungen derVerschiebungskomponenten
εx =∂ux
∂x, εy =
∂uy
∂yund γxy =
∂ux
∂y+∂uy
∂x. (9.69)
Außerdem mussen die so definierten Dehnmaße die Kompatibilitatsbedin-gungen (3.143)
∂2εx
∂y2+∂2εy
∂x2− ∂γxy
∂x∂y= 0 (9.70)
erfullen. Durch Einsetzen der Beziehungen (9.65) fur die Spannungen in dasElastizitatsgesetz erhalt man
εx =1
E
(∂2F
∂y2− ν ∂
2F
∂x2
), (9.71)
εy =1
E
(∂2F
∂x2− ν ∂
2F
∂y2
), (9.72)
γxy = −2(1 + ν)
E
∂2F
∂x∂y. (9.73)
Setzt man diese Beziehungen in die Kompatibilitatsbedingungen (9.70) ein,so erhalt man die Gleichung
1
E
[∂4F
∂y4− ν ∂4F
∂x2∂y2+∂4F
∂x4− ν ∂4F
∂x2∂y2+ 2(1 + ν)
∂4F
∂x2∂y2
]= 0 (9.74)
fur die Airysche Spannungsfunktion. Die Terme mit dem Faktor ν heben sichheraus, und man erhalt die bekannte Differentialgleichung fur die Scheibe
∂4F
∂x4+ 2
∂4F
∂x2∂y2+∂4F
∂y4=
(∂2
∂x2+
∂2
∂y2
)(∂2F
∂x2+∂2F
∂y2
)= 0, (9.75)
d. h.
∆∆ F = 0. (9.76)
Die Scheibengleichung ist also eine harmonische Bipotentialgleichung. Dasbedeutet, daß die Belastungen uber die Randbedingungen eingearbeitet wer-den mussen. Bemerkenswert ist, daß die Scheibengleichung keine Werkstoff-konstanten enthalt. Dadurch werden auch die Losungen stoffunabhangig,
306 Kapitel 9. Losungen der Grundgleichungen
wenn an den Randern nur Krafterandbedingungen gegeben sind, die unmit-telbar mit der Spannungsfunktion verknupfbar sind. Demgegenuber ergibtsich bei Verschiebungsrandbedingungen eine Abhangigkeit vom Werkstoff.Im Falle mehrfach zusammenhangender Bereiche ergeben sich Schwierigkei-ten bei der Integration der Verschiebungen. Dann ist es empfehlenswert, vonden Differentialgleichungen fur die Verschiebungen auszugehen.
Es sei noch darauf hingewiesen, daß der Laplace-Operator ∆ koordinate-ninvariant ist. Daher ist ein Ubergang z. B. zu Polarkoordinaten durch eineeinfache Koordinatentransformation moglich. Man erhalt dann
∆ =∂2
∂x2+
∂2
∂y2=
∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂ϕ2. (9.77)
9.3 Losungsfunktionen der Bipotentialglei-
chungen
In Kapitel 8 traten in den Grundgleichungen wiederholt Bipotentialglei-chungen auf, zu denen wir an dieser Stelle fur ausgewahlte Formulierungeneinige Losungsfunktionen angeben wollen.
9.3.1 Bipotentialgleichungen in Zylinderkoordinatenfur achsensymmetrische Probleme
Die biharmonische Differentialgleichung fur eine Verschiebungskomponenteui nach (8.83), eine Spannungskomponente σil nach (8.95) bzw. eine Span-nungsfunktion φ nach (8.121)
∆∆ui = 0, ∆∆σil = 0 und ∆∆φ = 0, (9.78)
mit dem Laplace-Operator ∆ in Zylinderkoordinaten (r, ϕ, z)
∆ =∂2
∂z2+∂2
r2+
1
r
∂
∂r(9.79)
hat u. a. folgende Losungen, die Bipotentialfunktionen genannt werden:
φ = r2
φ = ln r
φ = z
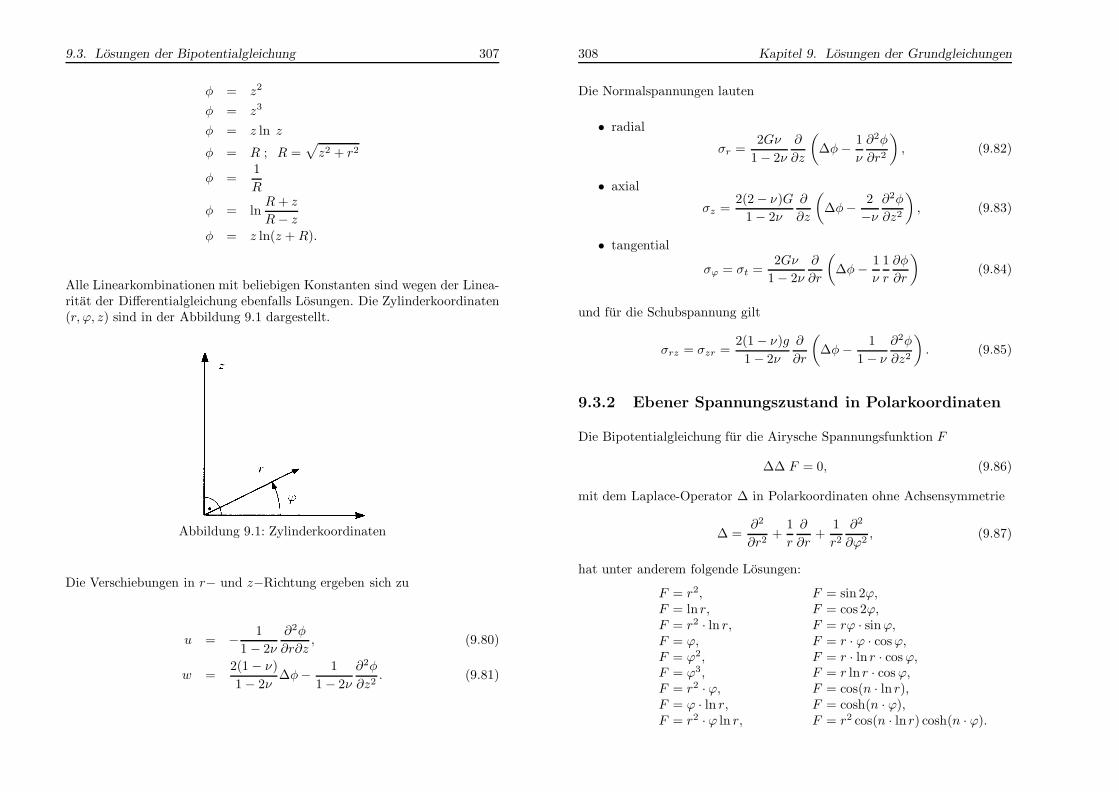
9.3. Losungen der Bipotentialgleichung 307
φ = z2
φ = z3
φ = z ln z
φ = R ; R =√z2 + r2
φ =1
R
φ = lnR+ z
R− zφ = z ln(z + R).
Alle Linearkombinationen mit beliebigen Konstanten sind wegen der Linea-ritat der Differentialgleichung ebenfalls Losungen. Die Zylinderkoordinaten(r, ϕ, z) sind in der Abbildung 9.1 dargestellt.
Abbildung 9.1: Zylinderkoordinaten
Die Verschiebungen in r− und z−Richtung ergeben sich zu
u = − 1
1 − 2ν
∂2φ
∂r∂z, (9.80)
w =2(1− ν)1− 2ν
∆φ− 1
1− 2ν
∂2φ
∂z2. (9.81)
308 Kapitel 9. Losungen der Grundgleichungen
Die Normalspannungen lauten
• radial
σr =2Gν
1− 2ν
∂
∂z
(∆φ− 1
ν
∂2φ
∂r2
), (9.82)
• axial
σz =2(2− ν)G
1− 2ν
∂
∂z
(∆φ− 2
−ν∂2φ
∂z2
), (9.83)
• tangential
σϕ = σt =2Gν
1− 2ν
∂
∂r
(∆φ− 1
ν
1
r
∂φ
∂r
)(9.84)
und fur die Schubspannung gilt
σrz = σzr =2(1− ν)g1− 2ν
∂
∂r
(∆φ− 1
1− ν∂2φ
∂z2
). (9.85)
9.3.2 Ebener Spannungszustand in Polarkoordinaten
Die Bipotentialgleichung fur die Airysche Spannungsfunktion F
∆∆ F = 0, (9.86)
mit dem Laplace-Operator ∆ in Polarkoordinaten ohne Achsensymmetrie
∆ =∂2
∂r2+
1
r
∂
∂r+
1
r2∂2
∂ϕ2, (9.87)
hat unter anderem folgende Losungen:
F = r2, F = sin 2ϕ,F = ln r, F = cos 2ϕ,F = r2 · ln r, F = rϕ · sinϕ,F = ϕ, F = r · ϕ · cosϕ,F = ϕ2, F = r · ln r · cosϕ,F = ϕ3, F = r ln r · cosϕ,F = r2 · ϕ, F = cos(n · ln r),F = ϕ · ln r, F = cosh(n · ϕ),F = r2 · ϕ ln r, F = r2 cos(n · ln r) cosh(n · ϕ).

9.3. Losungen der Bipotentialgleichung 309
Weiterhin gilt fur harmonische Funktionen φ1 und φ2 mit ∆φ1 = 0 bzw.∆φ2 = 0, daß F = φ1 +r2φ2 eine biharmonische Funktion ist. Eine wichtigeharmonische Funktion in Polarkoordinaten ist z. B.
φ = rn[C1 cos(nϕ) + C2 sin(nϕ)]. (9.88)
Die Spannungen des ebenen Spannungszustandes, dargestellt in Polarkoor-dinaten, ergeben sich zu
σr =1
r
∂F
∂r+
1
r2∂2F
∂ϕ2, (9.89)
σϕ =∂2F
∂r2, (9.90)
σrϕ = σϕr = − ∂
∂r
(1
r
∂F
∂ϕ
). (9.91)
9.3.3 Ebener Spannungszustand in kartesischen Koor-dinaten
Die Bipotentialgleichung fur die Airysche Spannungsfunktion F
∆∆F = 0, (9.92)
mit dem Laplace-Operator ∆ in kartesischen Koordinaten
∆ =∂2
∂x2+
∂2
∂y2, (9.93)
hat unter anderem folgende Losungen:
F = x ; x2 ; x3
F = y ; y2 ; y3
F = xy
F = x2y ; yx2
F = x3y ; yx3.
Weiterhin sind die biharmonischen Polynome
P40 = x4 − 3x2y2 ; P41 = x4y − x2y3
P50 = x5 − 5x3y2 ; P51 = x5y − 5
3x3y3
P60 = x6 − 10x4y2 + 5x2y4 ; P61 = x6y − 10
3x4y3 + x2y5
310 Kapitel 9. Losungen der Grundgleichungen
usw. Losungsfunktionen. Fur harmonische Funktionen φ mit ∆φ = 0 gilt,daß folgende Funktionen F biharmonische Funktionen sind:
F = (ax+ by) φ(x, y),
F = (x2 + y2) φ(x, y).
Weiterhin sind folgende logarithmische Funktionen Bipotentialfunktionen:
F = ln(x2 + y2),
F = (x2 + y2) ln(x2 + y2),
F = (ax+ by) ln(x2 + y2),
F = ln[(x+ c)2 + y2
],
F = (x+ c) ln[(x+ c)2 + y2
].
Ebenso die folgenden Produkte von Exponentialfunktionen und trigonome-trischen Funktionen
F = eαy sin(αx), F = e−αy sin(αx),
F = y eαy sin(αx), F = y e−αy sin(αx)
sowie die Funktionen mit vertauschten Koordinaten und die folgenden Pro-dukte von Exponentialfunktionen und hyperbolischen Funktionen
F = sinh(αy) · sin(αx),
F = y · sinh(αy) · sin(αx),
F = x · sinh(αy) · sin(αx)
und ebenso die Funktionen mit vertauschten Koordinaten.
Die Spannungen des ebenen Spannungszustandes dargestellt in kartesischenKoordinaten ergeben sich zu
σx =∂2F
∂y2, (9.94)
σy =∂2F
∂x2, (9.95)
σxy = − ∂2F
∂x∂y. (9.96)
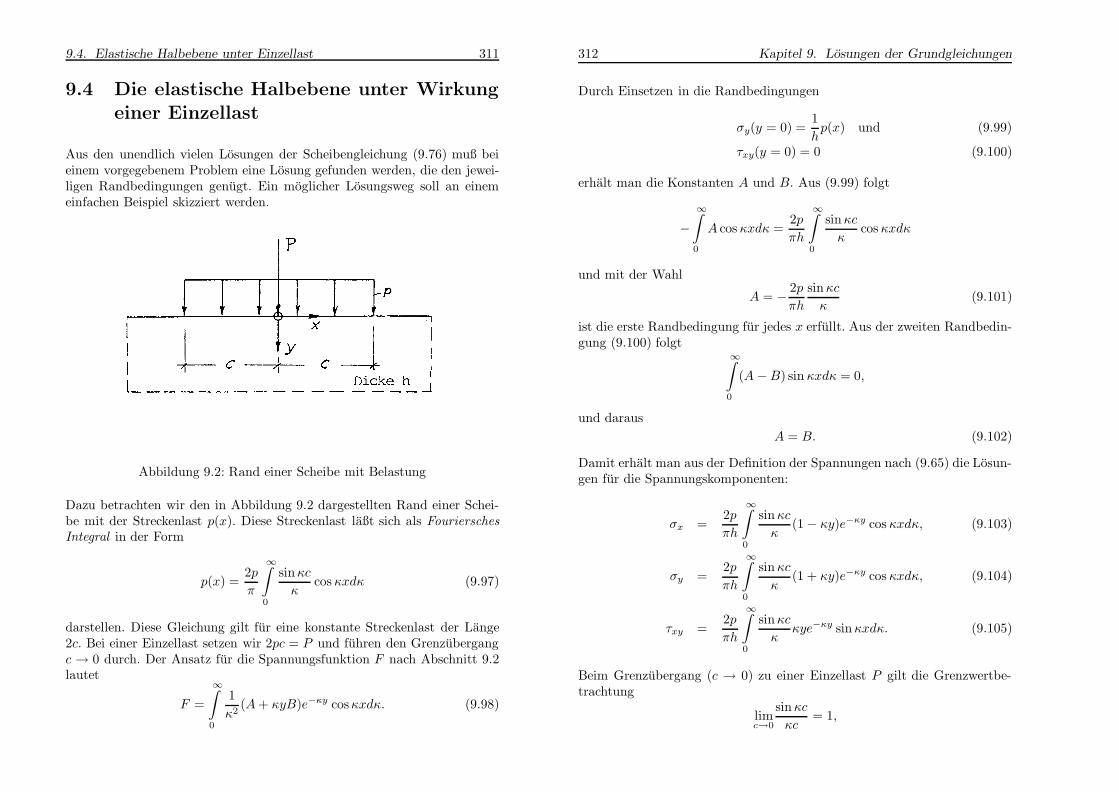
9.4. Elastische Halbebene unter Einzellast 311
9.4 Die elastische Halbebene unter Wirkungeiner Einzellast
Aus den unendlich vielen Losungen der Scheibengleichung (9.76) muß beieinem vorgegebenem Problem eine Losung gefunden werden, die den jewei-ligen Randbedingungen genugt. Ein moglicher Losungsweg soll an einemeinfachen Beispiel skizziert werden.
Abbildung 9.2: Rand einer Scheibe mit Belastung
Dazu betrachten wir den in Abbildung 9.2 dargestellten Rand einer Schei-be mit der Streckenlast p(x). Diese Streckenlast laßt sich als FourierschesIntegral in der Form
p(x) =2p
π
∞∫
0
sinκc
κcos κxdκ (9.97)
darstellen. Diese Gleichung gilt fur eine konstante Streckenlast der Lange2c. Bei einer Einzellast setzen wir 2pc = P und fuhren den Grenzubergangc → 0 durch. Der Ansatz fur die Spannungsfunktion F nach Abschnitt 9.2lautet
F =
∞∫
0
1
κ2(A+ κyB)e−κy cosκxdκ. (9.98)
312 Kapitel 9. Losungen der Grundgleichungen
Durch Einsetzen in die Randbedingungen
σy(y = 0) =1
hp(x) und (9.99)
τxy(y = 0) = 0 (9.100)
erhalt man die Konstanten A und B. Aus (9.99) folgt
−∞∫
0
A cos κxdκ =2p
πh
∞∫
0
sinκc
κcos κxdκ
und mit der Wahl
A = − 2p
πh
sinκc
κ(9.101)
ist die erste Randbedingung fur jedes x erfullt. Aus der zweiten Randbedin-gung (9.100) folgt
∞∫
0
(A −B) sin κxdκ = 0,
und daraus
A = B. (9.102)
Damit erhalt man aus der Definition der Spannungen nach (9.65) die Losun-gen fur die Spannungskomponenten:
σx =2p
πh
∞∫
0
sinκc
κ(1− κy)e−κy cos κxdκ, (9.103)
σy =2p
πh
∞∫
0
sinκc
κ(1 + κy)e−κy cos κxdκ, (9.104)
τxy =2p
πh
∞∫
0
sinκc
κκye−κy sinκxdκ. (9.105)
Beim Grenzubergang (c → 0) zu einer Einzellast P gilt die Grenzwertbe-trachtung
limc→0
sinκc
κc= 1,
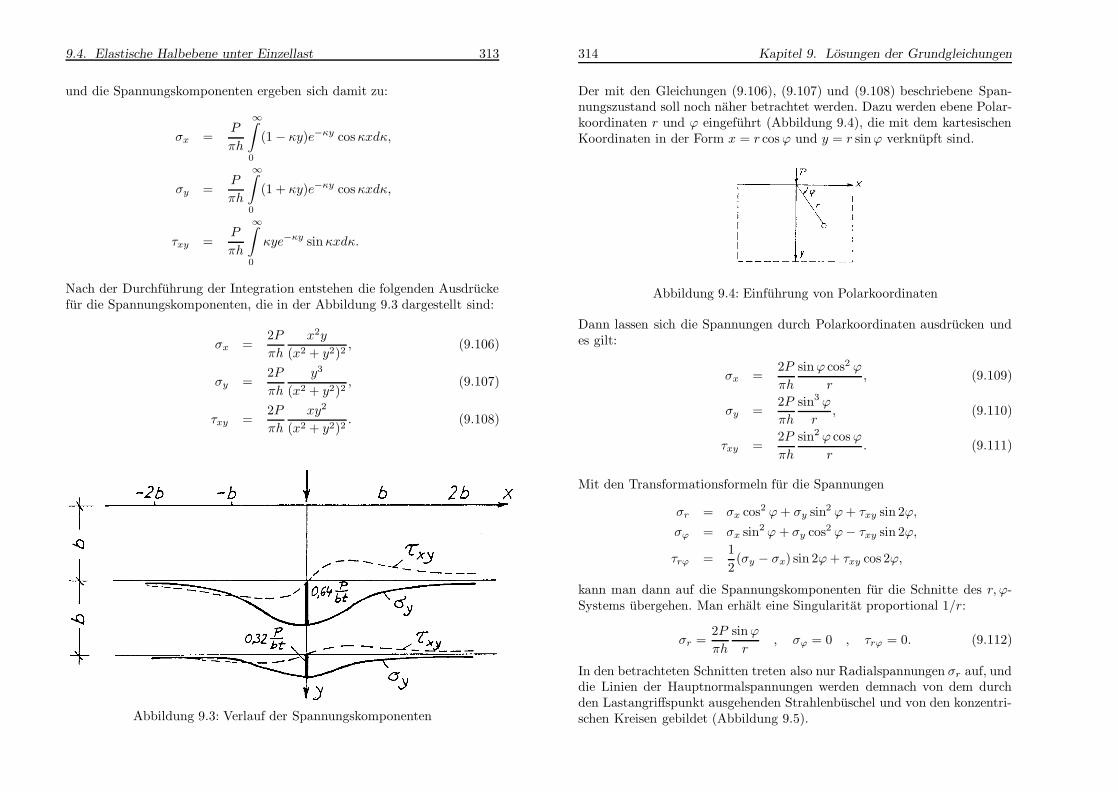
9.4. Elastische Halbebene unter Einzellast 313
und die Spannungskomponenten ergeben sich damit zu:
σx =P
πh
∞∫
0
(1− κy)e−κy cosκxdκ,
σy =P
πh
∞∫
0
(1 + κy)e−κy cosκxdκ,
τxy =P
πh
∞∫
0
κye−κy sinκxdκ.
Nach der Durchfuhrung der Integration entstehen die folgenden Ausdruckefur die Spannungskomponenten, die in der Abbildung 9.3 dargestellt sind:
σx =2P
πh
x2y
(x2 + y2)2, (9.106)
σy =2P
πh
y3
(x2 + y2)2, (9.107)
τxy =2P
πh
xy2
(x2 + y2)2. (9.108)
Abbildung 9.3: Verlauf der Spannungskomponenten
314 Kapitel 9. Losungen der Grundgleichungen
Der mit den Gleichungen (9.106), (9.107) und (9.108) beschriebene Span-nungszustand soll noch naher betrachtet werden. Dazu werden ebene Polar-koordinaten r und ϕ eingefuhrt (Abbildung 9.4), die mit dem kartesischenKoordinaten in der Form x = r cosϕ und y = r sinϕ verknupft sind.
Abbildung 9.4: Einfuhrung von Polarkoordinaten
Dann lassen sich die Spannungen durch Polarkoordinaten ausdrucken undes gilt:
σx =2P
πh
sinϕ cos2 ϕ
r, (9.109)
σy =2P
πh
sin3 ϕ
r, (9.110)
τxy =2P
πh
sin2 ϕ cosϕ
r. (9.111)
Mit den Transformationsformeln fur die Spannungen
σr = σx cos2 ϕ+ σy sin2 ϕ+ τxy sin 2ϕ,
σϕ = σx sin2 ϕ + σy cos2 ϕ− τxy sin 2ϕ,
τrϕ =1
2(σy − σx) sin 2ϕ+ τxy cos 2ϕ,
kann man dann auf die Spannungskomponenten fur die Schnitte des r, ϕ-Systems ubergehen. Man erhalt eine Singularitat proportional 1/r:
σr =2P
πh
sinϕ
r, σϕ = 0 , τrϕ = 0. (9.112)
In den betrachteten Schnitten treten also nur Radialspannungen σr auf, unddie Linien der Hauptnormalspannungen werden demnach von dem durchden Lastangriffspunkt ausgehenden Strahlenbuschel und von den konzentri-schen Kreisen gebildet (Abbildung 9.5).
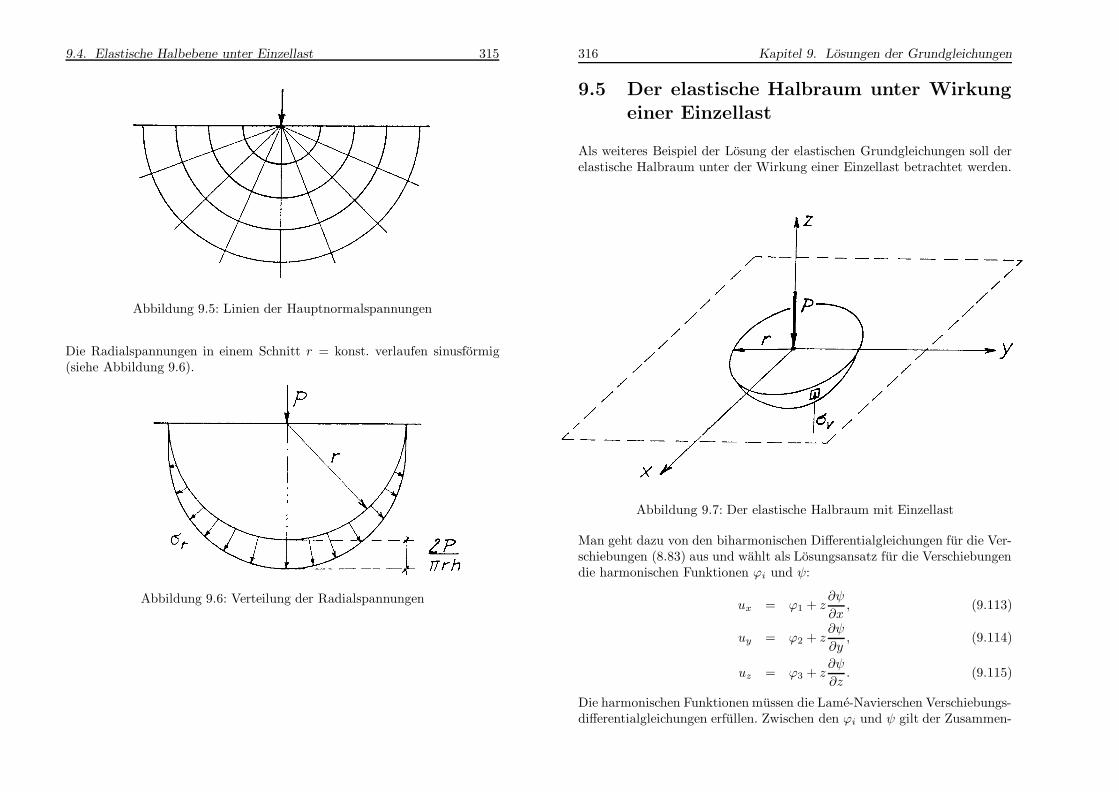
9.4. Elastische Halbebene unter Einzellast 315
Abbildung 9.5: Linien der Hauptnormalspannungen
Die Radialspannungen in einem Schnitt r = konst. verlaufen sinusformig(siehe Abbildung 9.6).
Abbildung 9.6: Verteilung der Radialspannungen
316 Kapitel 9. Losungen der Grundgleichungen
9.5 Der elastische Halbraum unter Wirkungeiner Einzellast
Als weiteres Beispiel der Losung der elastischen Grundgleichungen soll derelastische Halbraum unter der Wirkung einer Einzellast betrachtet werden.
Abbildung 9.7: Der elastische Halbraum mit Einzellast
Man geht dazu von den biharmonischen Differentialgleichungen fur die Ver-schiebungen (8.83) aus und wahlt als Losungsansatz fur die Verschiebungendie harmonischen Funktionen ϕi und ψ:
ux = ϕ1 + z∂ψ
∂x, (9.113)
uy = ϕ2 + z∂ψ
∂y, (9.114)
uz = ϕ3 + z∂ψ
∂z. (9.115)
Die harmonischen Funktionen mussen die Lame-Navierschen Verschiebungs-differentialgleichungen erfullen. Zwischen den ϕi und ψ gilt der Zusammen-

9.5. Elastischer Halbraum unter Einzellast 317
hang∂ψ
∂z= − 1
3− 4ν
(∂ϕ1
∂x+∂ϕ2
∂y+∂ϕ3
∂z
). (9.116)
Die Spannungen am Rand z = 0 sollen als Funktion von x und y in derForm
σz = φ1(x, y) , τzx = φ2(x, y) , τzy = φ(x, y). (9.117)
vorgegeben sein. Diese Spannungen am Rand z = 0 konnen in den Verschie-bungen ausgedruckt werden, was durch die Anwendung des Elastizitatsge-setzes und des linearisierten Greenschen Verzerrungstensors in der Form
φ1 =E
1 + ν
∂uz
∂z+
ν
1− 2ν
(∂ϕ1
∂x+∂ϕ2
∂y+∂ϕ3
∂z+∂ψ
∂z
),(9.118)
φ2 =E
2(1 + ν)
(∂ux
∂z+∂uz
∂x
), (9.119)
φ3 =E
2(1 + ν)
(∂uz
∂y+∂uy
∂z
)(9.120)
geschieht. Weiterhin nimmt man an, daß zu dem Problem drei harmonischeFunktionen ω1, ω2 und ω3 existieren, fur die die Beziehungen
E
2(1 + ν)ω1(x, y, 0) = φ1(x, y) (9.121)
E
2(1 + ν)ω2(x, y, 0) = φ2(x, y) (9.122)
E
2(1 + ν)ω3(x, y, 0) = φ3(x, y) (9.123)
fur den Rand z = 0 gultig sind. Setzt man (9.118) bis (9.120) in dieseGleichungen ein, so erhalt man:
ω1 = 2∂ϕ3
∂z+ 2z
∂2ψ
∂z2+ 2
∂ψ
∂z
+2ν
1− 2ν
(∂ϕ1
∂x+∂ϕ2
∂y+∂ϕ3
∂z+∂ψ
∂z
), (9.124)
ω2 =∂ϕ3
∂y+ 2z
∂2ψ
∂z∂x+∂ψ
∂x+∂ϕ3
∂x, (9.125)
ω3 =∂ϕ3
∂y+ 2z
∂2ψ
∂z∂y+∂ϕ2
∂z+∂ψ
∂y. (9.126)
318 Kapitel 9. Losungen der Grundgleichungen
Durch Umformen von (9.116)
∂ϕ1
∂x+∂ϕ2
∂y+∂ϕ3
∂z+∂ψ
∂z= −2(1− 2ν)
∂ψ
∂z(9.127)
und Einsetzen in die harmonischen Funktionen (9.124) bis (9.126) ergebensich die Gleichungen
ω1 = 2∂ϕ3
∂z+ 2(1− ν)∂ψ
∂z, (9.128)
ω2 =∂ϕ1
∂z+∂ϕ3
∂x+∂ψ
∂x, (9.129)
ω3 =∂ϕ2
∂z+∂ϕ3
∂y+
ψ
∂y. (9.130)
In diesen Gleichungen bestehen die rechten und die linken Seiten aus har-monischen Funktionen. Nun gilt, daß zwei harmonische Funktionen im Ge-samtgebiet identisch sind, wenn sie an den Randern dieses Gebietes uber-einstimmen. Daher konnen die Funktionen ϕ1, ϕ2 und ϕ3 eliminiert werden,und ψ kann allein in ω1, ω2 und ω3 ausgedruckt werden. Nach einer Zwi-schenrechnung folgt
∂2ψ
∂z= −1
2
(∂ω1
∂z+∂ω2
∂x+∂ω3
∂y
)
und nach zweimaliger Integration
ψ = −1
2
z∫
−∞
z∫
−∞
(∂ω1
∂z+∂ω2
∂x+∂ω3
∂y
)dzdz. (9.131)
Von Boussinesq [8] stammt die Losung dieser Gleichungen fur eine auf demelastischen Halbraum wirkende Einzellast (Abbildung 9.7). Aus den Rand-bedingungen
τzx = φ2 = 0; τzy = φ3 = 0 (9.132)
ergeben sich die harmonischen Funktionen
ω2 = 0 ; und ω3 = 0. (9.133)
Es bleibt noch die Funktion ω1(x, y, z) zu bestimmen. Schneidet man ausdem Halbraum wie in Abbildung 9.7 skizziert eine Halbkugel mit dem Ra-dius r, so erhalt man aus dem Gleichgewicht der Kraftkomponenten in z-Richtung ∫
O
σvdA = P.
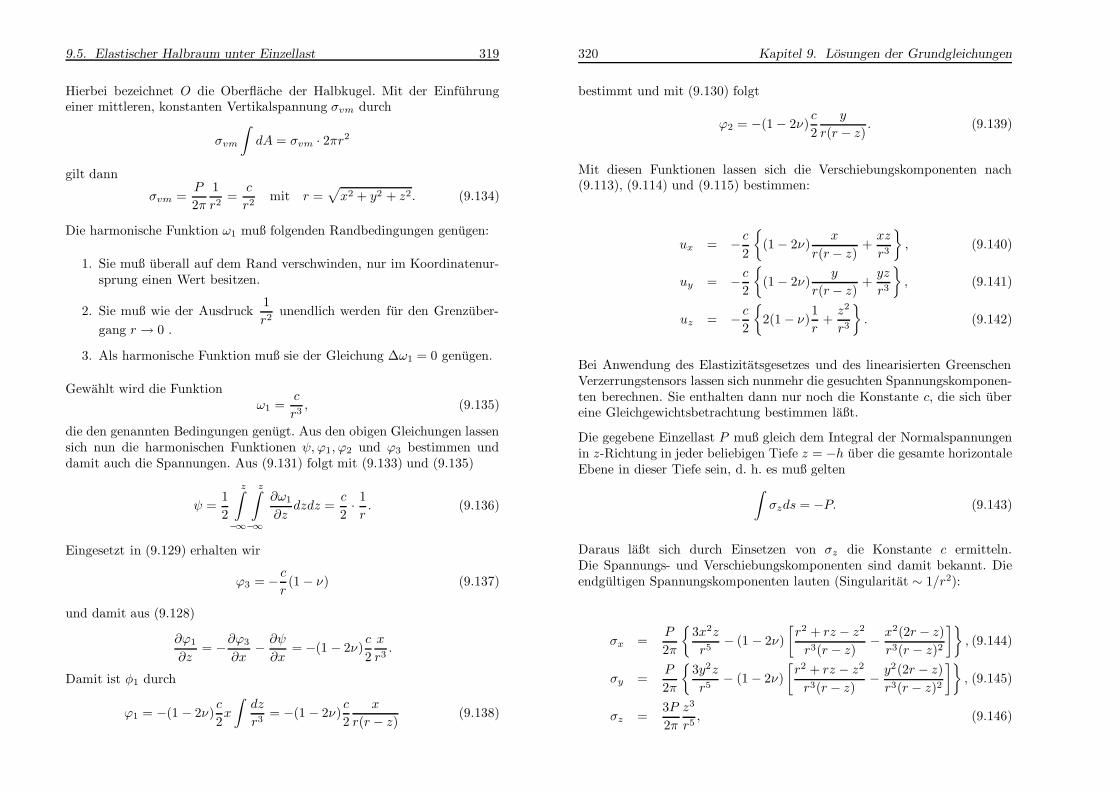
9.5. Elastischer Halbraum unter Einzellast 319
Hierbei bezeichnet O die Oberflache der Halbkugel. Mit der Einfuhrungeiner mittleren, konstanten Vertikalspannung σvm durch
σvm
∫dA = σvm · 2πr2
gilt dann
σvm =P
2π
1
r2=
c
r2mit r =
√x2 + y2 + z2. (9.134)
Die harmonische Funktion ω1 muß folgenden Randbedingungen genugen:
1. Sie muß uberall auf dem Rand verschwinden, nur im Koordinatenur-sprung einen Wert besitzen.
2. Sie muß wie der Ausdruck1
r2unendlich werden fur den Grenzuber-
gang r → 0 .
3. Als harmonische Funktion muß sie der Gleichung ∆ω1 = 0 genugen.
Gewahlt wird die Funktionω1 =
c
r3, (9.135)
die den genannten Bedingungen genugt. Aus den obigen Gleichungen lassensich nun die harmonischen Funktionen ψ, ϕ1, ϕ2 und ϕ3 bestimmen unddamit auch die Spannungen. Aus (9.131) folgt mit (9.133) und (9.135)
ψ =1
2
z∫
−∞
z∫
−∞
∂ω1
∂zdzdz =
c
2· 1r. (9.136)
Eingesetzt in (9.129) erhalten wir
ϕ3 = − cr(1− ν) (9.137)
und damit aus (9.128)
∂ϕ1
∂z= −∂ϕ3
∂x− ∂ψ
∂x= −(1 − 2ν)
c
2
x
r3.
Damit ist φ1 durch
ϕ1 = −(1 − 2ν)c
2x
∫dz
r3= −(1 − 2ν)
c
2
x
r(r − z) (9.138)
320 Kapitel 9. Losungen der Grundgleichungen
bestimmt und mit (9.130) folgt
ϕ2 = −(1− 2ν)c
2
y
r(r − z) . (9.139)
Mit diesen Funktionen lassen sich die Verschiebungskomponenten nach(9.113), (9.114) und (9.115) bestimmen:
ux = − c2
(1− 2ν)
x
r(r− z) +xz
r3
, (9.140)
uy = − c2
(1− 2ν)
y
r(r− z) +yz
r3
, (9.141)
uz = − c2
2(1− ν)1
r+z2
r3
. (9.142)
Bei Anwendung des Elastizitatsgesetzes und des linearisierten GreenschenVerzerrungstensors lassen sich nunmehr die gesuchten Spannungskomponen-ten berechnen. Sie enthalten dann nur noch die Konstante c, die sich ubereine Gleichgewichtsbetrachtung bestimmen laßt.
Die gegebene Einzellast P muß gleich dem Integral der Normalspannungenin z-Richtung in jeder beliebigen Tiefe z = −h uber die gesamte horizontaleEbene in dieser Tiefe sein, d. h. es muß gelten
∫σzds = −P. (9.143)
Daraus laßt sich durch Einsetzen von σz die Konstante c ermitteln.Die Spannungs- und Verschiebungskomponenten sind damit bekannt. Dieendgultigen Spannungskomponenten lauten (Singularitat ∼ 1/r2):
σx =P
2π
3x2z
r5− (1 − 2ν)
[r2 + rz − z2
r3(r − z) − x2(2r − z)r3(r − z)2
], (9.144)
σy =P
2π
3y2z
r5− (1− 2ν)
[r2 + rz − z2
r3(r − z) − y2(2r − z)r3(r − z)2
], (9.145)
σz =3P
2π
z3
r5, (9.146)
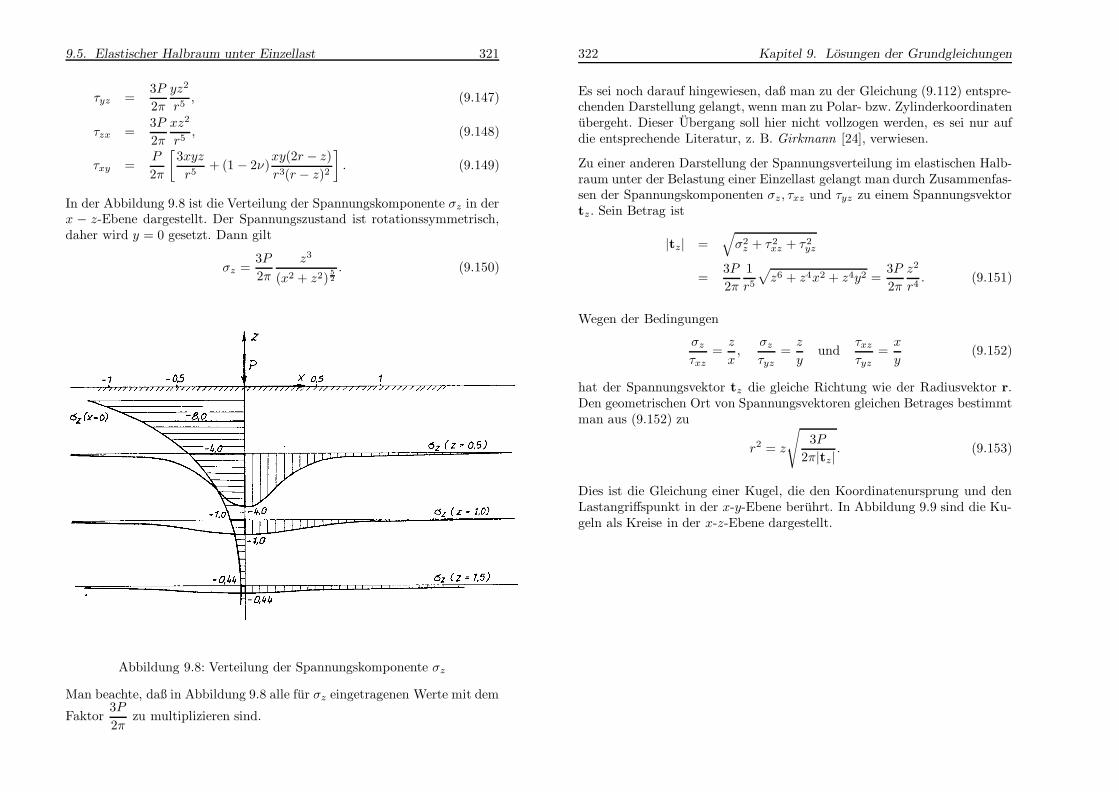
9.5. Elastischer Halbraum unter Einzellast 321
τyz =3P
2π
yz2
r5, (9.147)
τzx =3P
2π
xz2
r5, (9.148)
τxy =P
2π
[3xyz
r5+ (1 − 2ν)
xy(2r − z)r3(r − z)2
]. (9.149)
In der Abbildung 9.8 ist die Verteilung der Spannungskomponente σz in derx − z-Ebene dargestellt. Der Spannungszustand ist rotationssymmetrisch,daher wird y = 0 gesetzt. Dann gilt
σz =3P
2π
z3
(x2 + z2)52
. (9.150)
Abbildung 9.8: Verteilung der Spannungskomponente σz
Man beachte, daß in Abbildung 9.8 alle fur σz eingetragenen Werte mit dem
Faktor3P
2πzu multiplizieren sind.
322 Kapitel 9. Losungen der Grundgleichungen
Es sei noch darauf hingewiesen, daß man zu der Gleichung (9.112) entspre-chenden Darstellung gelangt, wenn man zu Polar- bzw. Zylinderkoordinatenubergeht. Dieser Ubergang soll hier nicht vollzogen werden, es sei nur aufdie entsprechende Literatur, z. B. Girkmann [24], verwiesen.
Zu einer anderen Darstellung der Spannungsverteilung im elastischen Halb-raum unter der Belastung einer Einzellast gelangt man durch Zusammenfas-sen der Spannungskomponenten σz, τxz und τyz zu einem Spannungsvektortz. Sein Betrag ist
|tz| =√σ2
z + τ2xz + τ2
yz
=3P
2π
1
r5
√z6 + z4x2 + z4y2 =
3P
2π
z2
r4. (9.151)
Wegen der Bedingungen
σz
τxz
=z
x,
σz
τyz
=z
yund
τxz
τyz
=x
y(9.152)
hat der Spannungsvektor tz die gleiche Richtung wie der Radiusvektor r.Den geometrischen Ort von Spannungsvektoren gleichen Betrages bestimmtman aus (9.152) zu
r2 = z
√3P
2π|tz|. (9.153)
Dies ist die Gleichung einer Kugel, die den Koordinatenursprung und denLastangriffspunkt in der x-y-Ebene beruhrt. In Abbildung 9.9 sind die Ku-geln als Kreise in der x-z-Ebene dargestellt.
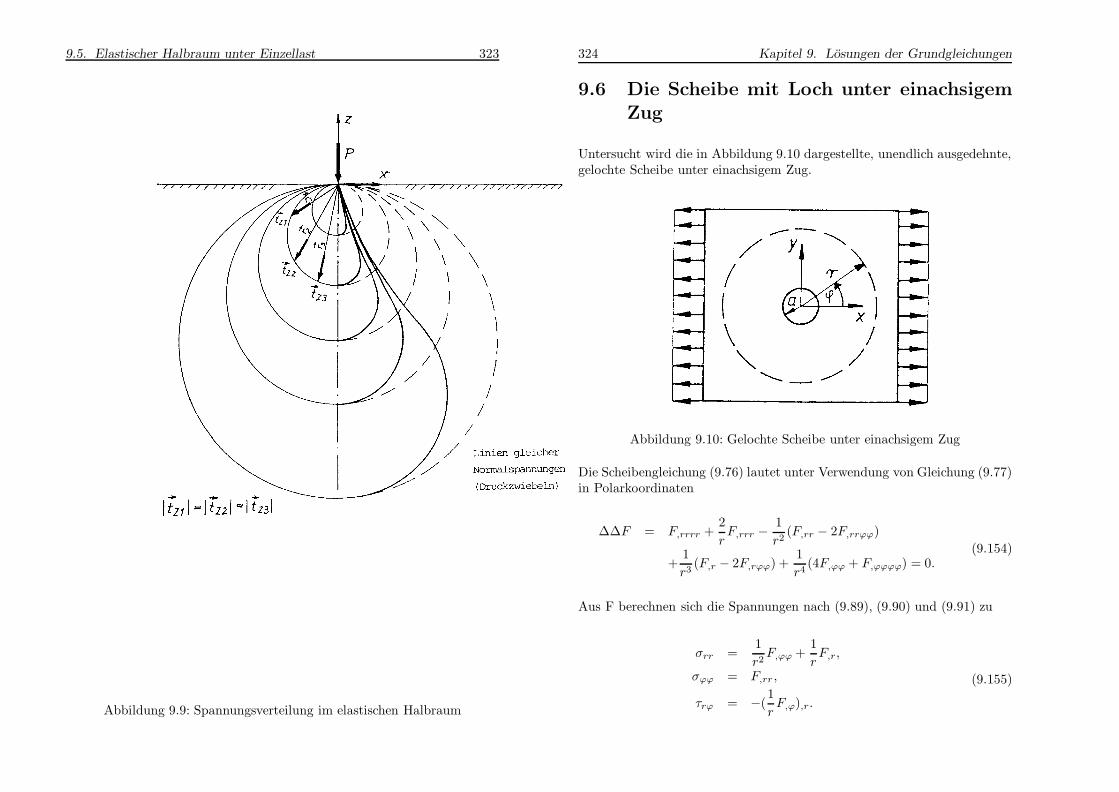
9.5. Elastischer Halbraum unter Einzellast 323
Abbildung 9.9: Spannungsverteilung im elastischen Halbraum
324 Kapitel 9. Losungen der Grundgleichungen
9.6 Die Scheibe mit Loch unter einachsigemZug
Untersucht wird die in Abbildung 9.10 dargestellte, unendlich ausgedehnte,gelochte Scheibe unter einachsigem Zug.
Abbildung 9.10: Gelochte Scheibe unter einachsigem Zug
Die Scheibengleichung (9.76) lautet unter Verwendung von Gleichung (9.77)in Polarkoordinaten
∆∆F = F,rrrr +2
rF,rrr −
1
r2(F,rr − 2F,rrϕϕ)
+1
r3(F,r − 2F,rϕϕ) +
1
r4(4F,ϕϕ + F,ϕϕϕϕ) = 0.
(9.154)
Aus F berechnen sich die Spannungen nach (9.89), (9.90) und (9.91) zu
σrr =1
r2F,ϕϕ +
1
rF,r,
σϕϕ = F,rr ,
τrϕ = −(1
rF,ϕ),r.
(9.155)

9.6. Scheibe mit Loch 325
Die Losung des in Abbildung 9.10 skizzierten Spannungsproblems setzt sichadditiv aus
• einem ungestorten Anteil des rotationssymmetrischen, homogenerSpannungszustandes der ungelochten Scheibe und
• einem Storanteil infolge des Loches, der achsensymmetrisch zur x−und y-Achse ist,
zusammen. Im folgenden werden zunachst Ansatzfunktionen fur den rota-tionssymmetrischen und achsensymmetrischen Anteil bereitgestellt:
• Rotationsymmetrischer Ansatz F1(r):
Mit∂
∂ϕ(•) ≡ 0 bei Rotationsymmetrie vereinfacht sich die Scheiben-
gleichung (9.154) zu
∆∆F1 = F1,rrrr +2
rF1,rrr −
1
r2F1,rr +
1
r3F1,r = 0. (9.156)
Dies ist eine gewohnliche Differentialgleichung vom Eulertyp, die sichmit dem Potenzansatz
F = Crn (9.157)
losen laßt. Es entsteht die charakteristische Gleichung
n(n− 1)(n− 2)(n − 3) + 2n(n− 1)(n− 2)− n(n− 1) + n = 0,
d. h. n2(n − 2)2 = 0 mit den Wurzeln: n1,2 = 0; n3,4 = 2. Wegender Doppelwurzeln lautet die vollstandige Losung fur den rotations-symmetrischen Anteil
F1(r) = C1 +C2r2 + C3 ln r +C4r
2 ln r. (9.158)
• Achsensymmetrischer Ansatz F2(r, ϕ):
Man macht folgenden sowohl zur x- als auch zur y-Achse symmetri-schen Ansatz
F2 = f(r) cos 2ϕ. (9.159)
326 Kapitel 9. Losungen der Grundgleichungen
Damit ergibt sich die Scheibengleichung (9.154) zu
∆∆F2 = (f,rrrr +2
rf,rrr −
9
r2f,rr +
9
r3f,r) cos 2ϕ = 0. (9.160)
Es entsteht eine gewohnliche Differentialgleichung vom Eulertyp furf , die wiederum mit dem Produktansatz (9.157) gelost werden kann.Die charakteristische Gleichung lautet
n(n− 1)(n− 2)(n − 3) + 2n(n− 1)(n− 2)− 9n(n− 1) + 9n = 0
mit den Wurzeln: n1 = 0, n2 = 2, n3 = 4, n4 = −2. Also lautetdie vollstandige Losung fur den achsensymmetrischen Anteil
F2(r, ϕ) = (C5 +C6r2 + C7r
4 +C81
r2) cos 2ϕ. (9.161)
Die Gesamtfunktion F fur die gelochte Scheibe erhalt man durch Additiondes rotationsymmetrischen Anteils F1 und des achsensymmetrischen AnteilsF2
F (r, ϕ) = F1(r) + F2(r, ϕ)
= C1 +C2r2 + C3 ln r +C4r
2 ln r
+(C5 + C6r2 +C7r
4 + C81
r2) cos 2ϕ.
(9.162)
Mit der Hilfe der Gleichungen (9.155) lassen sich hieraus die Spannungenberechnen
σrr = 2C2 +C3
r2+ C4 (2 ln r + 1)
︸ ︷︷ ︸Rotationsymmetrischer
Anteil
−(
4C5
r2+ 2C6 + 6
C8
r4
)cos 2ϕ,
︸ ︷︷ ︸Achsensymmetrischer
Anteil
(9.163)
σϕϕ = 2C2 −C3
r2+ C4 (2 ln r + 3)
︸ ︷︷ ︸Rotationsymmetrischer
Anteil

9.6. Scheibe mit Loch 327
+
(2C6 + 12C7 + 6
C8
r4
)cos 2ϕ,
︸ ︷︷ ︸Achsensymmetrischer
Anteil
(9.164)
τrϕ =
(−2
C5
r2+ 2C6 + 6C7r
2 − 6C8
r4
)sin 2ϕ.
︸ ︷︷ ︸Achsensymmetrischer
Anteil
(9.165)
Zur Ermittlung der vollstandigen Losung sind die Ansatzkonstanten C1 bisC8 aus den Randbedingungen zu bestimmen. Hierzu fuhren wir zunachstdie folgenden Voruberlegungen durch:
1. C1 ist fur die Spannungen ohne Bedeutung.
2. Die Spannungen bleiben fur die gesamte unendlich ausgedehnte Schei-be beschrankt, d. h. mit den Bedingungen
σrr(r →∞, ϕ) 6=∞ und σϕϕ(r→∞, ϕ) 6=∞ (9.166)
folgt sofort
C4 = C7 = 0. (9.167)
3. Der Lochrand ist unbelastet, d. h. fur r = a gilt mit (9.163) fur jedenbeliebigen Winkel ϕ
σrr(r = a, ϕ) = 0. (9.168)
Daraus erhalten wir die Bedingungsgleichungen
2C2 +C3
a2= 0 und 2
C5
a2+C6 + 3
C8
a4= 0. (9.169)
4. Ebenso gilt fur die Schubspannungen am Innenrand
τrϕ(r = a, ϕ) = 0 (9.170)
und damit erhalten wir die Bedingung
C5
a2− C6 + 3
C8
a4= 0. (9.171)
328 Kapitel 9. Losungen der Grundgleichungen
5. Fur den belasteten Rand r → ∞ muß die Spannung der außerenBelastung entsprechen, d. h.
σxx = σ und σyy = τxy = 0. (9.172)
Mit den Drehtransformationsbeziehungen gilt:
σrr = σ cos 2ϕ =σ2
(1 + cos 2ϕ), (9.173)
σϕϕ = σ sin 2ϕ =σ2
(1− cos 2ϕ), (9.174)
σrϕ = −σ2
sin 2ϕ. (9.175)
Aus den Gleichungen (9.163) bis (9.165) erhalt man so fur r → ∞ beiVergleich mit den Gleichungen (9.173) bis (9.175) die Koeffizienten
C2 =σ4
und C6 = −σ4. (9.176)
Die Gleichungen (9.169) und (9.171) liefern die Koeffizienten
C3 = −σ2a2; C5 =
σ2a2 und C8 = −σ
4a4. (9.177)
Damit erhalt man fur die Spannungen:
σrr =σ2
[(1− 1
( ra)2
)+
(1− 4
( ra)2
+3
( ra)4
)cos 2ϕ
], (9.178)
σϕϕ =σ2
[(1 +
1
( ra)2
)−(
1 +3
( ra)4
)cos 2ϕ
], (9.179)
τrϕ = −σ2
[1 +
2
( ra)2− 3
( ra)4
]sin 2ϕ. (9.180)
Im Vergleich mit den Formeln (9.163) bis (9.165) konnen die rotationssym-metrischen bzw. achsensymmetrischen Anteile der Spannungen identifiziertwerden. Die Spannungen sind qualitativ in Abbildung 9.11 dargestellt. Diemaximale Normalspannung tritt am Lochrand fur ϕ = π
2=90 auf. Somit
ergibt sich die maximale Normalspannung zu
σϕϕ(ϕ =π
2, r = a) = 3σ. (9.181)
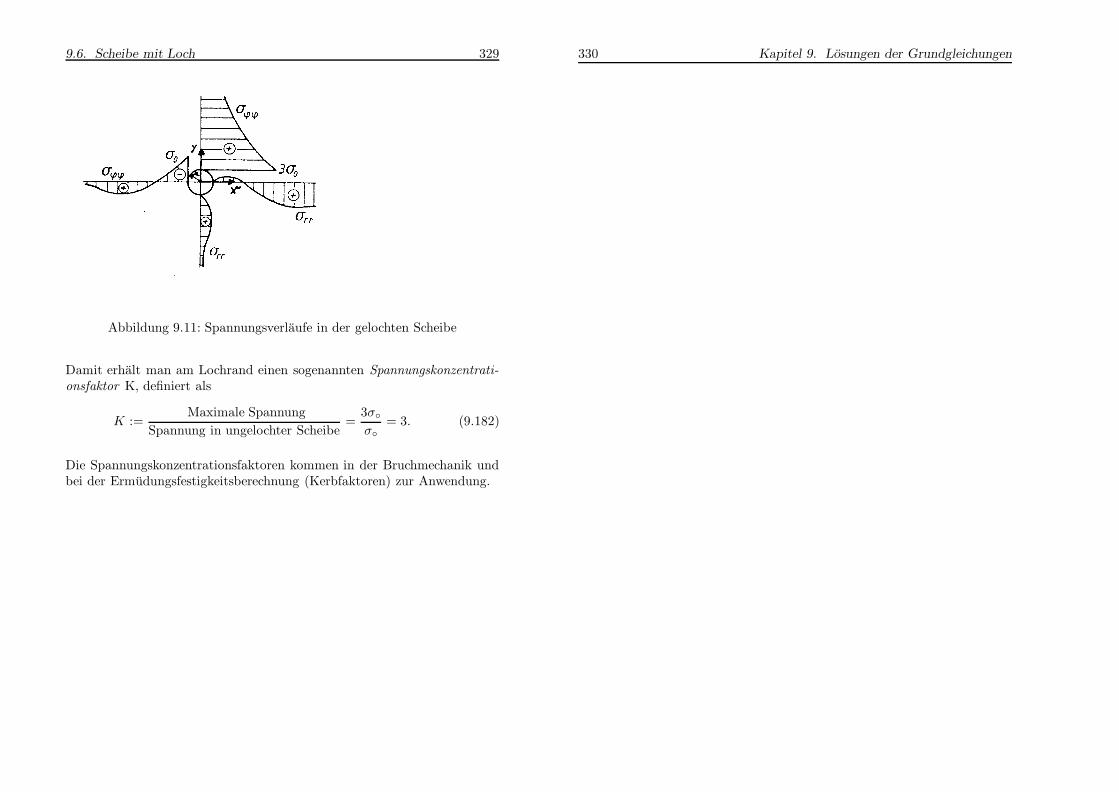
9.6. Scheibe mit Loch 329
Abbildung 9.11: Spannungsverlaufe in der gelochten Scheibe
Damit erhalt man am Lochrand einen sogenannten Spannungskonzentrati-onsfaktor K, definiert als
K :=Maximale Spannung
Spannung in ungelochter Scheibe=
3σσ
= 3. (9.182)
Die Spannungskonzentrationsfaktoren kommen in der Bruchmechanik undbei der Ermudungsfestigkeitsberechnung (Kerbfaktoren) zur Anwendung.
330 Kapitel 9. Losungen der Grundgleichungen
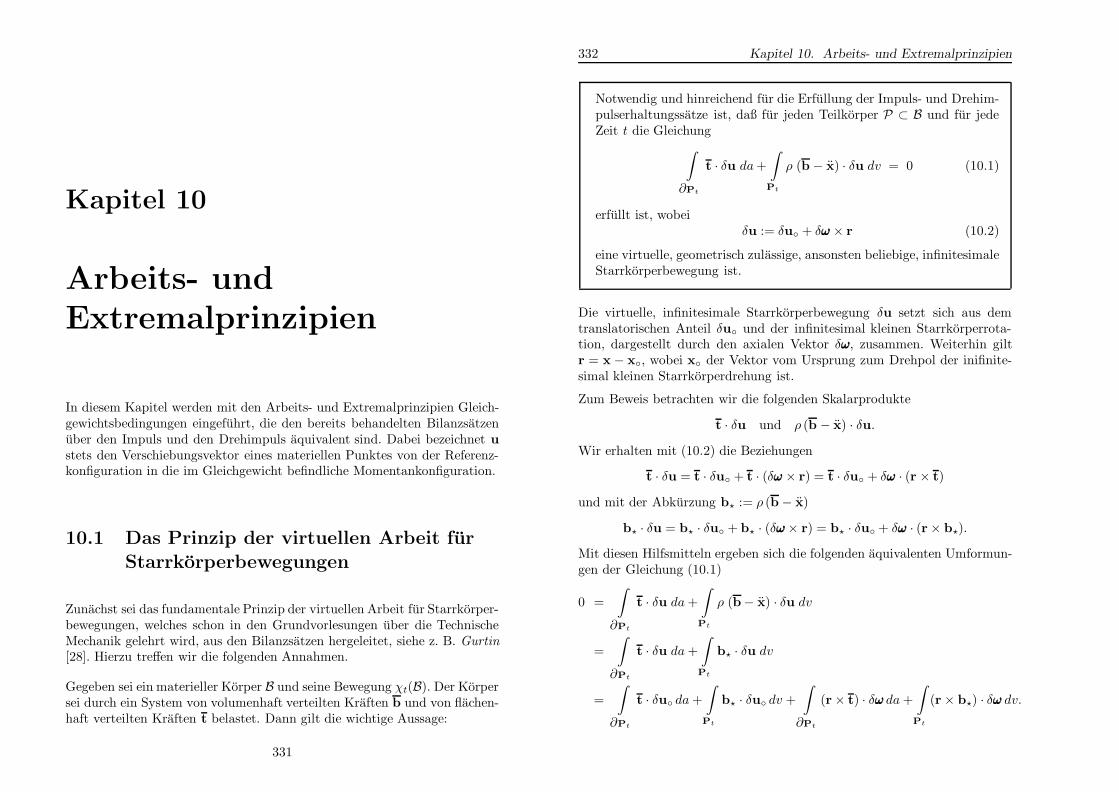
Kapitel 10
Arbeits- undExtremalprinzipien
In diesem Kapitel werden mit den Arbeits- und Extremalprinzipien Gleich-gewichtsbedingungen eingefuhrt, die den bereits behandelten Bilanzsatzenuber den Impuls und den Drehimpuls aquivalent sind. Dabei bezeichnet u
stets den Verschiebungsvektor eines materiellen Punktes von der Referenz-konfiguration in die im Gleichgewicht befindliche Momentankonfiguration.
10.1 Das Prinzip der virtuellen Arbeit fur
Starrkorperbewegungen
Zunachst sei das fundamentale Prinzip der virtuellen Arbeit fur Starrkorper-bewegungen, welches schon in den Grundvorlesungen uber die TechnischeMechanik gelehrt wird, aus den Bilanzsatzen hergeleitet, siehe z. B. Gurtin[28]. Hierzu treffen wir die folgenden Annahmen.
Gegeben sei ein materieller Korper B und seine Bewegung χt(B). Der Korpersei durch ein System von volumenhaft verteilten Kraften b und von flachen-haft verteilten Kraften t belastet. Dann gilt die wichtige Aussage:
331
332 Kapitel 10. Arbeits- und Extremalprinzipien
Notwendig und hinreichend fur die Erfullung der Impuls- und Drehim-pulserhaltungssatze ist, daß fur jeden Teilkorper P ⊂ B und fur jedeZeit t die Gleichung
∫
∂Pt
t · δu da+
∫
Pt
ρ (b− x) · δu dv = 0 (10.1)
erfullt ist, wobeiδu := δu + δωωω × r (10.2)
eine virtuelle, geometrisch zulassige, ansonsten beliebige, infinitesimaleStarrkorperbewegung ist.
Die virtuelle, infinitesimale Starrkorperbewegung δu setzt sich aus demtranslatorischen Anteil δu und der infinitesimal kleinen Starrkorperrota-tion, dargestellt durch den axialen Vektor δωωω, zusammen. Weiterhin giltr = x − x, wobei x der Vektor vom Ursprung zum Drehpol der inifinite-simal kleinen Starrkorperdrehung ist.
Zum Beweis betrachten wir die folgenden Skalarprodukte
t · δu und ρ (b − x) · δu.
Wir erhalten mit (10.2) die Beziehungen
t · δu = t · δu + t · (δωωω × r) = t · δu + δωωω · (r × t)
und mit der Abkurzung b⋆ := ρ (b− x)
b⋆ · δu = b⋆ · δu + b⋆ · (δωωω × r) = b⋆ · δu + δωωω · (r× b⋆).
Mit diesen Hilfsmitteln ergeben sich die folgenden aquivalenten Umformun-gen der Gleichung (10.1)
0 =
∫
∂Pt
t · δu da+
∫
Pt
ρ (b− x) · δu dv
=
∫
∂Pt
t · δu da+
∫
Pt
b⋆ · δu dv
=
∫
∂Pt
t · δu da+
∫
Pt
b⋆ · δu dv +
∫
∂Pt
(r× t) · δωωω da+
∫
Pt
(r× b⋆) · δωωω dv.
10.1. Das Prinzip der virtuellen Arbeit 333
Da es sich bei δu und δωωω um die translatorischen und rotatorischen Anteileeiner virtuellen Starrkorperbewegung handelt, die damit fur alle materiellenPunkte gleich sind, konnen Integration und Skalarmultiplikation mit δu
und δωωω vertauscht werden. Somit erhalten wir
0 =
∫
∂Pt
t da+
∫
Pt
b⋆ dv
· δu +
∫
∂Pt
r× t da+
∫
Pt
r× b⋆ dv
· δωωω
=
∫
∂Pt
t da+
∫
Pt
ρ (b− x) dv
· δu
+
∫
∂Pt
r× t da+
∫
Pt
ρ r× (b− x) dv
· δωωω
=
∫
∂Pt
t da+
∫
Pt
ρ b dv −∫
Pt
ρ x dv
· δu
+
∫
∂Pt
r× t da+
∫
Pt
ρ r× b dv −∫
Pt
ρ r × x dv
· δωωω. (10.3)
Die Gleichung (10.3) ist genau dann erfulllt, wenn bei einer beliebigen Starr-korperbewegung die Gleichungen
∫
∂Pt
t da+
∫
Pt
ρb dv −∫
Pt
ρ x dv = 0 (10.4)
und ∫
∂Pt
r× t da+
∫
Pt
ρ r× b dv −∫
Pt
ρ r× x dv = 0 (10.5)
erfullt sind. Hieraus erkennen wir mit Hilfe der Gleichungen (5.16) und(5.75) die Aquivalenz des Prinzips der virtuellen Arbeit und der Impuls-und Drehimpulserhaltungssatze und damit die Gultigkeit der Behauptung.
334 Kapitel 10. Arbeits- und Extremalprinzipien
Bemerkungen:
1. Die Aussage des Prinzips der virtuellen Arbeit in der Form (10.1) istfur geeignete Starrkorperbewegungen gultig. Insbesondere ist es je-doch nicht erforderlich, daß diese Bewegungen tatsachlich vorgenom-men werden. Hieraus ergeben sich die folgenden Charakterisierungeneiner zulassigen Bewegung:
(a) die Bewegung ist virtuell, d. h. gedacht;
(b) die Bewegung ist eine infinitesimal kleine Starrkorperbewegung;
(c) die Bewegung ist geometrisch zulassig;
(d) ansonsten ist die Bewegung beliebig.
2. Das Prinzip der virtuellen Arbeit wird in der obigen Form auch alsPrinzip der virtuellen Verruckungen bezeichnet.
3. In der Literatur uber die Technische Mechanik hat sich die folgen-de Symbolik eingeburgert. Die virtuelle Verruckung wird durch dasVorstellen eines kleinen griechischen Deltas gekennzeichnet, d. h. manschreibt δu fur eine virtuelle Verruckung (siehe hierzu auch die Be-merkungen zu (10.56) in Abschnitt 10.4).
4. Betrachten wir einen materiellen Korper im statischen Gleichgewicht,so erhalten wir die folgende Form des Prinzips der virtuellen Arbeit:
Ein materieller Korper B ist im statischen Gleichgewicht,wenn er sich in Ruhe befindet, d. h. wenn mit x = x = 0
fur jeden Teilkorper P ⊂ B das Prinzip der virtuellen Kraftein der Form
∫
∂Pt
t · δu da+
∫
Pt
ρ b · δu dv = 0 (10.6)
gilt. Dabei ist δu eine geometrisch zulassige, ansonsten belie-bige, infinitesimal kleine, virtuelle Starrkorperbewegung.
5. Das oben angegebene Prinzip ist vollstandig aquivalent zu den Bi-lanzsatzen uber den Impuls und den Drehimpuls. Insbesondere ist inder obigen Form keinerlei Einschrankung uber die auftretenden auße-ren Krafte gemacht worden.
10.2. Das Prinzip der virtuellen Arbeit 335
10.2 Das Prinzip der virtuellen Arbeit
In der obigen Form des Prinzips der virtuellen Arbeit ist die betrachteteBewegung des materiellen Korpers auf eine geometrisch zulassige, anson-sten beliebige, infinitesimal kleine, virtuelle Verruckung δu, die eine Starr-korperbewegung darstellt, beschrankt. In diesem Abschnitt wird eine andereForm des Prinzips der virtuellen Arbeit hergeleitet, die sich von der Ein-schrankung auf Starrkorperbewegungen befreit.
Um jedoch die Beschrankung auf Starrkorperbewegungen aufheben zu kon-nen, sind weitere Anforderungen an die virtuellen Verruckungen zu stellen.Wir fordern, daß die Bewegung den folgenden Bedingungen genugen moge:
• Die Bewegung ist virtuell, d. h. gedacht.
• Die Bewegung ist zulassig, d. h. sie genugt den homogenen geome-trischen Feld- und Randbedingungen, d. h. es gilt (siehe Abschnitt3.5)
δH(p)
= δH(g)
= grad δu ∀ x ∈ Bt , (10.7)
δu = 0 ∀ x ∈ ∂Btu . (10.8)
• Die Bewegung ist infinitesimal klein.
• Ansonsten ist die Bewegung beliebig.
Hierzu betrachten wir wieder eine zulassige, virtuelle (gedachte) Bewegungδu des materiellen Korpers B. Die lokale Gleichgewichtsbedingung (5.50)lautet
divT + ρ (b− x) = 0 ∀ x ∈ Bt . (10.9)
Weiterhin gelten die Krafterandbedingungen (8.17)
t = t ∀ x ∈ ∂Btσ . (10.10)
Um die Aquivalenz zwischen den dynamischen Feld- und Randbedingun-gen und dem Prinzip der virtuellen Arbeit zu zeigen, betrachten wir diefolgenden aquivalenten Umformungen. Die dynamischen Feld- und Randbe-dingungen sind genau dann erfullt, wenn fur die Multiplikation von (10.9)und (10.10) mit einer virtuellen Verruckung δu die Gleichungen
(divT + ρ (b− x)) · δu = 0 ∀ x ∈ Bt und
(t− t) · δu = 0 ∀ x ∈ ∂Bt
336 Kapitel 10. Arbeits- und Extremalprinzipien
gelten. Dies gilt genau dann, wenn fur die Integration uber das zur Zeit tvom materiellen Korper B eingenommene Volumen Bt die Bedingung
∫
Bt
(divT + ρ (b− x)) · δu dv +
∫
∂Bt
(t− t) · δu da = 0. (10.11)
gilt. Eine Anwendung des Gaußschen Integralsatzes (siehe auch Abschnitt5.5.1) liefert mit
(divT) · δu = div(TT δu)−T : grad δu (10.12)
die Beziehung
0 =
∫
Bt
(divT + ρ (b− x)) · δu dv +
∫
∂Bt
(t− t) · δu da
=
∫
Bt
(div(TT δu)−T : grad δu) dv +
∫
Bt
ρ (b− x) · δu dv
+
∫
∂Bt
(t− t) · δu da
=
∫
∂Bt
(TT δu) · n da−∫
Bt
T : grad δu dv +
∫
Bt
ρ (b− x) · δu dv
+
∫
∂Bt
(t− t) · δu da
=
∫
∂Bt
(Tn) · δu da−∫
Bt
T : grad δudv +
∫
Bt
ρ (b − x) · δu dv
+
∫
∂Bt
(t− t) · δu da.
Mit dem Cauchy-Theorem t = Tn nach Gleichung (5.40) erhalten wir ab-schließend die Aussage des Prinzips der virtuellen Arbeit :
∫
Bt
T : grad δu dv =
∫
Bt
ρ (b − x) · δu dv +
∫
∂Bt
t · δu da. (10.13)
10.2. Das Prinzip der virtuellen Arbeit 337
Damit ist gezeigt, daß die dynamischen Feld- und Randbedingungen (10.9)und (10.10) genau dann erfullt sind, wenn das Prinzip der virtuellen Arbeitin der Form (10.13) erfullt ist. Betrachten wir nur materielle Korper imstatischen Gleichgewicht, d. h. gilt x = x = 0, so erhalten wir aus (10.13)die Form
∫
Bt
T : grad δu dv =
∫
Bt
ρ b · δu dv +
∫
∂Bt
t · δu da. (10.14)
Hierin wird die innere virtuelle Arbeit mit
δW :=
∫
Bt
T : grad δu dv (10.15)
und die außere virtuelle Arbeit mit
δA :=
∫
Bt
ρ b · δu dv +
∫
∂Bt
t · δu da (10.16)
bezeichnet. Damit kann das Prinzip der virtuellen Arbeit in der Kurzform
δW = δA (10.17)
dargestellt werden und bedeutet anschaulich, daß die innere virtuelle Ar-beit δW , die die tatsachlich auftretenden inneren Spannungen T auf demWeg virtueller (physikalischer) Verzerrungen grad δu leisten, der außerenvirtuellen Arbeit δA, die die tatsachlich auftretenden flachenhaft bzw. vo-lumenhaft verteilten außeren Spannungen t bzw. b auf dem Weg virtuellerVerschiebungen δu des Randes leisten, entspricht.
Die Ausdrucke fur die virtuelle innere Arbeit δW nach (10.15) und dievirtuelle außere Arbeit δA nach (10.16) konnen mit den berechneten Ergeb-nissen des Kapitels 5.5.2 uber arbeitskonforme Paarungen von Spannungs-und Verzerrungstensoren auch auf die Referenzkonfiguration B transfor-miert werden. Man beachte, daß die Variation der Referenzkonfigurationverschwindet, d. h. δX = 0.
338 Kapitel 10. Arbeits- und Extremalprinzipien
Damit erhalten wir fur die innere virtuelle Arbeit δW
δW =
∫
Bt
T : grad δu dv =
∫
B
P : Grad δu dV =
∫
B
S : δE dV (10.18)
und fur die virtuelle außere Arbeit δA folgt
δA =
∫
Bt
ρb·δu dv+
∫
∂Bt
t·δu da =
∫
B
ρb ·δu dV +
∫
∂B
t·δu dA. (10.19)
Damit gilt das Prinzip der virtuellen Arbeit auch in den folgenden Formen
∫
B
P : Grad δu dV =
∫
B
ρb · δu dV +
∫
∂B
t · δu dA (10.20)
und
∫
B
S : δE dV =
∫
B
ρb · δu dV +
∫
∂B
t · δu dA. (10.21)
Beschranken wir uns auf die bezuglich der unbekannten Verschiebungen u
linearisierte Theorie, so gilt fur die Umgebung der Referenzkonfigurationdurch den bereits bekannten Linearisierungsvorgang (siehe auch Kapitel 6)
∫
B
σσσ : δǫǫǫ dV =
∫
B
ρb · δu dV +
∫
∂B
t · δu dA. (10.22)
Aus dieser Formulierung laßt sich die bekannte Komponentendarstellungbezuglich einer kartesischen Basis in der Form
∫
B
σij δǫij dV =
∫
B
ρ bi δui dV +
∫
∂B
ti δui dA (10.23)
herleiten.
10.3. Das Prinzip der virtuellen Erganzungsarbeit 339
10.3 Das Prinzip der virtuellen Erganzungs-arbeit
Neben dem Prinzip der virtuellen Arbeit (auch Prinzip der virtuellen Ver-ruckungen) kann in analoger Weise ein Prinzip der virtuellen Erganzungsar-beit (Prinzip der konjugierten virtuellen Arbeit oder Prinzip der virtuellenKrafte) formuliert werden.
Der Ausgangspunkt dieser Uberlegungen sind die geometrischen Bedingun-gen an die im Gleichgewicht befindliche aktuelle Deformation χt(B). Dar-gestellt in den Verschiebungen u lauten die geometrischen Feld- und Rand-bedingungen
H(p)
= H(g)
:= gradu ∀ x ∈ Bt und (10.24)
u = u ∀ x ∈ ∂Btu . (10.25)
Im Gegensatz zum Prinzip der virtuellen Arbeit werden beim Prinzip derkonjugierten virtuellen Arbeit virtuelle Spannungen vorgegeben, die denfolgenden Bedingungen genugen:
• Die Spannungen sind virtuell, d. h. gedacht.
• Die virtuellen Spannungen genugen den homogenen statischen Feld-und Randbedingungen, d. h. es gilt
div δT = 0 ∀ x ∈ Bt und (10.26)
δt = 0 ∀ x ∈ ∂Btσ . (10.27)
• Die virtuellen Spannungen sind infinitesimal klein.
• Ansonsten sind die virtuellen Spannungen beliebig.
Wir zeigen nun die Aquivalenz der geometrischen Feld- und Randbedingun-gen mit dem Prinzip der konjugierten virtuellen Arbeit. Hierzu betrachtenwir die Gleichungen (10.24) und (10.25) und bemerken, daß sie genau dannerfullt sind, wenn gilt
∫
Bt
(H(p) − gradu) : δT dv +
∫
∂Bt
(u− u) · δt da = 0. (10.28)
340 Kapitel 10. Arbeits- und Extremalprinzipien
Diese Gleichung konnen wir mit Hilfe der Beziehung
δT : gradu = div(δTT u)− (div δT) · u (10.29)
und der Voraussetzung (10.26) an die virtuelle Spannung zu der Beziehung
∫
Bt
H(p)
: δT dv−∫
∂Bt
u·δt da =
∫
∂Bt
(δTn)︸ ︷︷ ︸δt
·u da−∫
∂Bt
u·δt da = 0 (10.30)
umformen. Damit ist die Aquivalenz zwischen den geometrischen Feld- undRandbedingungen und dem Prinzip der konjugierten virtuellen Arbeit
∫
Bt
H(p)
: δT dv =
∫
∂Bt
u · δt da (10.31)
gezeigt. Hierin wird der Ausdruck
δW ⋆ :=
∫
Bt
grad u : δT dv (10.32)
als innere konjugierte virtuelle Arbeit und der Ausdruck
δA⋆ :=
∫
∂Bt
u · δt da (10.33)
als außere konjugierte virtuelle Arbeit bezeichnet. Damit kann das Prinzipder virtuellen Erganzungsarbeit in der Kurzform
δW ⋆ = δA⋆ (10.34)
dargestellt werden und bedeutet in Worten, daß die außere virtuelle kon-jugierte Arbeit δA⋆ der virtuellen Krafte entlang der tatsachlichen Ver-schiebungswege der inneren virtuellen konjugierten Arbeit δW ⋆ der vir-tuellen Spannungen entlang der wirklichen (physikalischen) Verzerrungenentspricht.
10.3. Das Prinzip der virtuellen Erganzungsarbeit 341
Analog zu den Umformungen des Prinzips der virtuellen Arbeit erhalten wirfur die Darstellung des Prinzips der konjugierten virtuellen Arbeit in denGroßen der Referenzkonfiguration
∫
B
Gradu : δP dV =
∫
∂B
u · δt dA (10.35)
bzw. ∫
B
F : δS dV =
∫
∂B
u · δt dA. (10.36)
Fur den Ubergang zu der in den unbekannten Verschiebungen u lineari-sierten Theorie, die wir wiederum mit Hilfe des Linearisierungskonzeptsherleiten konnen, folgt
∫
B
ǫǫǫ : δσσσ dV =
∫
∂B
u · δt dA, (10.37)
und in der Koeffizientenform bzgl. einer kartesischen Basis ergibt sich
∫
B
ǫij δσij dV =
∫
∂B
ui δti dA. (10.38)
342 Kapitel 10. Arbeits- und Extremalprinzipien
10.4 Ein kleiner Exkurs in die Variationsrech-nung
Die Variationsrechnung beschaftigt sich mit der Minimierung von Funktio-nalen. Wir betrachten die Funktion v(x) der Veranderlichen x, die auf demIntervall (a, b) definiert ist, und weisen der Funktion v : (a, b) → IR denWert I mittels der Vorschrift
I :=
b∫
a
[v(x)]2 dx (10.39)
zu. Man erkennt, daß der Wert von I naturgemaß von der Funktion v(x)abhangt, kennzeichnet dies durch I[v(x)] und bezeichnet I als ein Funktionalvon v(x). Allgemeiner wird jede Vorschrift I, die Funktionen v(x) auf diereellen Zahlen abbildet, als Funktional bezeichnet.
Als physikalische Beispiele seien die totale kinetische Energie K eines Ge-schwindigkeitsfeldes (siehe Abschnitt 5.5) und die Formanderungsenergieeines elastischen Korpers (siehe Abschnitt 10.5) genannt.
Das Grundproblem der Variationsrechnung laßt sich am folgenden Beispielerklaren. Dazu betrachten wir eine Funktion F (x, v(x), v′(x)), die fur dasIntervall [a, b] und alle zweimal stetig differenzierbaren Funktionen v(x) imIntervall [a, b] definiert ist. Diese Funktion F (x, v, v′) sei bezuglich der par-tiellen Ableitungen nach x, v und v′ zweimal stetig differenzierbar. Mittelsder Vorschrift
J [v] :=
b∫
a
F (x, v, v′) dx (10.40)
wird das Funktional J [v] definiert.
Zunachst betrachten wir alle in [a, b] stetigen Funktionen v(x), die denRandbedingungen
v(0) = u und v(b) = u1, (10.41)
mit vorgegebenen u, u1 ∈ IR genugen.
Unter allen Funktionen v(x), die diesen Stetigkeitsanforderungen und Rand-bedingungen genugen, versuchen wir die Funktion v(x) = u(x) zu finden,die fur das Funktional J [v] in einer hinreichend kleinen h-Umgebung vonu(x) den minimalen Wert liefert.
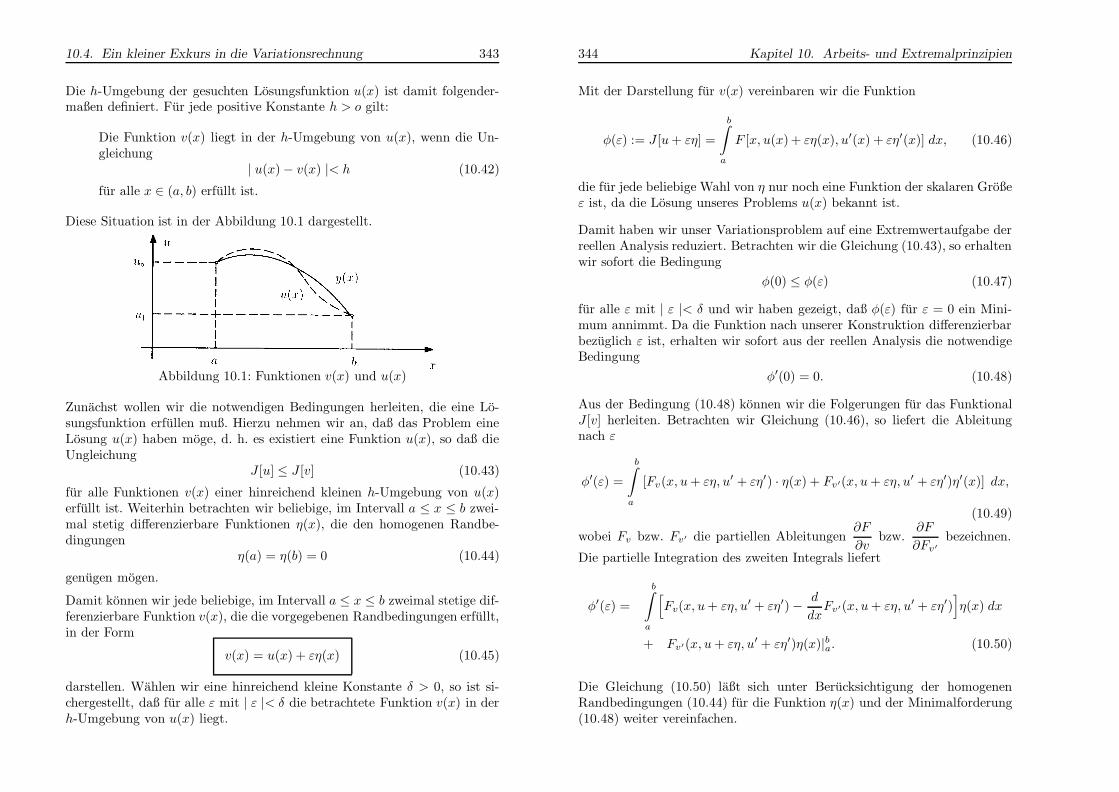
10.4. Ein kleiner Exkurs in die Variationsrechnung 343
Die h-Umgebung der gesuchten Losungsfunktion u(x) ist damit folgender-maßen definiert. Fur jede positive Konstante h > o gilt:
Die Funktion v(x) liegt in der h-Umgebung von u(x), wenn die Un-gleichung
| u(x)− v(x) |< h (10.42)
fur alle x ∈ (a, b) erfullt ist.
Diese Situation ist in der Abbildung 10.1 dargestellt.
Abbildung 10.1: Funktionen v(x) und u(x)
Zunachst wollen wir die notwendigen Bedingungen herleiten, die eine Lo-sungsfunktion erfullen muß. Hierzu nehmen wir an, daß das Problem eineLosung u(x) haben moge, d. h. es existiert eine Funktion u(x), so daß dieUngleichung
J [u] ≤ J [v] (10.43)
fur alle Funktionen v(x) einer hinreichend kleinen h-Umgebung von u(x)erfullt ist. Weiterhin betrachten wir beliebige, im Intervall a ≤ x ≤ b zwei-mal stetig differenzierbare Funktionen η(x), die den homogenen Randbe-dingungen
η(a) = η(b) = 0 (10.44)
genugen mogen.
Damit konnen wir jede beliebige, im Intervall a ≤ x ≤ b zweimal stetige dif-ferenzierbare Funktion v(x), die die vorgegebenen Randbedingungen erfullt,in der Form
v(x) = u(x) + εη(x) (10.45)
darstellen. Wahlen wir eine hinreichend kleine Konstante δ > 0, so ist si-chergestellt, daß fur alle ε mit | ε |< δ die betrachtete Funktion v(x) in derh-Umgebung von u(x) liegt.
344 Kapitel 10. Arbeits- und Extremalprinzipien
Mit der Darstellung fur v(x) vereinbaren wir die Funktion
φ(ε) := J [u+ εη] =
b∫
a
F [x, u(x)+ εη(x), u′(x) + εη′(x)] dx, (10.46)
die fur jede beliebige Wahl von η nur noch eine Funktion der skalaren Großeε ist, da die Losung unseres Problems u(x) bekannt ist.
Damit haben wir unser Variationsproblem auf eine Extremwertaufgabe derreellen Analysis reduziert. Betrachten wir die Gleichung (10.43), so erhaltenwir sofort die Bedingung
φ(0) ≤ φ(ε) (10.47)
fur alle ε mit | ε |< δ und wir haben gezeigt, daß φ(ε) fur ε = 0 ein Mini-mum annimmt. Da die Funktion nach unserer Konstruktion differenzierbarbezuglich ε ist, erhalten wir sofort aus der reellen Analysis die notwendigeBedingung
φ′(0) = 0. (10.48)
Aus der Bedingung (10.48) konnen wir die Folgerungen fur das FunktionalJ [v] herleiten. Betrachten wir Gleichung (10.46), so liefert die Ableitungnach ε
φ′(ε) =
b∫
a
[Fv(x, u+ εη, u′ + εη′) · η(x) + Fv′(x, u+ εη, u′ + εη′)η′(x)] dx,
(10.49)
wobei Fv bzw. Fv′ die partiellen Ableitungen∂F
∂vbzw.
∂F
∂Fv′
bezeichnen.
Die partielle Integration des zweiten Integrals liefert
φ′(ε) =
b∫
a
[Fv(x, u+ εη, u′ + εη′)− d
dxFv′(x, u+ εη, u′ + εη′)
]η(x) dx
+ Fv′(x, u+ εη, u′ + εη′)η(x)|ba. (10.50)
Die Gleichung (10.50) laßt sich unter Berucksichtigung der homogenenRandbedingungen (10.44) fur die Funktion η(x) und der Minimalforderung(10.48) weiter vereinfachen.
10.4. Ein kleiner Exkurs in die Variationsrechnung 345
Fur ε = 0, d. h. fur v(x) = u(x), muß die Funktion φ′(ε) Null werden, unddamit gilt fur jede beliebige Funktion η(x)
0 = φ′(0) =
b∫
a
[Fu(x, u, u′)− d
dxFu′(x, u, u′)
]η(x) dx. (10.51)
Aus der Gleichung (10.51) erhalten wir sofort die Eulerschen Differential-gleichungen, indem wir das folgende Fundamentallemma der Variationsrech-nung anwenden:
Sei ψ(x) eine stetige Funktion im Intervall [a, b]. Sei η(x) beliebig undzweimal stetig differenzierbar in [a, b] mit n ∈ IN und genuge denhomogenen Randbedingungen
η(a) = η(b) = 0.
Wird die Gleichungb∫
a
ψ(x)η(x) dx = 0 (10.52)
fur alle η(x) erfullt, so gilt ψ(x) ≡ 0.
Zum Beweis nehmen wir an, daß die Behauptung des Fundamentallemmasder Variationsrechnung nicht erfullt sei. Dann gibt es eine Stelle ξ ∈ (a, b),so daß ψ(x) verschieden von Null ist, z. B. sei o. B. d. A. ψ(ξ) > 0.
Da ψ(x) nach Annahme stetig ist, existiert ein Intervall a < ξ − δ ≤ x ≤ξ + δ < b, mit δ > 0, in welchem ψ(x) positiv ist. Da die Wahl von η(x)beliebig ist, betrachten wir (fur n ∈ IN) beispielsweise die Funktion
η(x) =
(x− ξ + δ)4n · (x− ξ − δ)4n fur ξ − δ ≤ x ≤ ξ + δ
0 sonst.(10.53)
Diese Wahl der Funktion η ergibt jedoch im Gegensatz zur Voraussetzung(10.52)
b∫
a
ψ(x)η(x) > 0.
346 Kapitel 10. Arbeits- und Extremalprinzipien
Damit ist ein Widerspruch aufgezeigt, und es gilt ψ(x) ≡ 0 fur a < x < b.Auf Grund der Stetigkeit von ψ(x) erhalten wir sofort ψ(x) ≡ 0 fur allex ∈ [a, b] und der Beweis ist erbracht.
Mit der Hilfe des gerade bewiesenen Fundamentallemmas der Variations-rechnung ergibt sich aus der Gleichung (10.51) fur beliebige η(x) die Euler-sche Differentialgleichung als Bedingungsgleichung fur die Losungsfunktionu(x)
Fu(x, u, u′) − d
dxFu′(x, u, u′) = 0 ∀x ∈ [a, b]. (10.54)
Schreiben wir die Gleichung (10.54) ausfuhrlich, so gilt
d2y
dx2
∂2F
∂u′∂u′(x, u, u′) +
dy
dx
∂2F
∂u′∂u(x, u, u′)
+∂2F
∂u′∂x(x, u, u′)− ∂F
∂u(x, u, u′) = 0.(10.55)
Andern wir das Ausgangsproblem um die notwendige Bedingung fur einMaximum von J [v] in einer hinreichend kleinen h-Umgebung von u(x) zufinden, so ergibt sich wieder die Gleichung (10.54). Damit erhalten wir dasErgebnis:
Die Erfullung der Eulerschen Differentialgleichung (10.54) ist eine not-wendige Bedingung an die Funktion v(x), damit diese in einer hinrei-chend kleinen Umgebung von u(x) einen Extremwert des FunktionalsJ [v] ergibt.
Dies bedeutet insbesondere, daß die Eulersche Differentialgleichung nur einenotwendige, jedoch keine hinreichende Bedingung darstellt. Die Frage nachhinreichenden Bedingungen kann an dieser Stelle nicht beantwortet werdenund der Leser sei auf die weiterfuhrende Literatur, z. B. Courant, Hilbert[12], verwiesen. Jede Behandlung hinreichender Bedingungen erfordert dasKonzept der 2. Variation des Funktionals J [v] und der Untersuchung ihrerpositiven oder negativen Definitheit. Es sind hierzu einige Bedingungen be-kannt, die vergleichbar zu den Bedingungen der reellen Analysis sind. Dadie Variationsrechnung sehr komplex ist, ist es kaum moglich hinreichende
10.4. Ein kleiner Exkurs in die Variationsrechnung 347
Bedingungen fur allgemeine Variationsprobleme mit großem Gultigkeitsbe-reich anzugeben. Fur das Prinzip vom Minimum der potentiellen Energiewird in Abschnitt 10.5 konkret auf dieses Problem eingegangen.
Abschließend sei die ublicherweise benutzte Notation eingefuhrt. Wir be-zeichnen mit εη(x) die Variation von u(x) und schreiben
δu(x) := εη(x). (10.56)
Damit definieren wir die 1. Variation des Funktionals J [v] als
δJ := εφ′(ε). (10.57)
Multiplizieren wir beide Seiten der Gleichung (10.50) mit ε, so folgt sofort
δJ =
b∫
a
[Fv(x, v, v
′)− d
dxFv′(x, v, v′)
]δu(x) dx+ Fv′(x, v, v′)δu(x)|ba.
(10.58)Diese Bezeichnung ist vergleichbar mit der Bezeichnung in der reellen Ana-lysis, wo der Ausdruck df = εf ′(x) fur beliebige, kleine Werte fur ε als
”Differential der Funktion f“ bezeichnet wird.
Es ist leicht ersichtlich, daß die 1. Variation δJ von der Funktion u(x) undihrer Variation δu(x) abhangt. Damit erhalten wir als notwendige Bedin-gung fur einen Extremalwert des Funktionals J [v] fur v(x) = u(x) das Ver-schwinden der 1. Variation δJ fur alle beliebigen Variationen δu(x), die denhomogenen Randbedingungen δu(a) = δu(b) = 0 genugen.
Zum Abschluß unserer Uberlegungen zur Variationsrechnung wollen wir dasProblem naturlicher Randbedingungen betrachten. Hierzu benutzen wir,daß bisher nur solche Funktionen v(x) mit den Randbedingungen (10.41)betrachtet werden.
An dieser Stelle wollen wir unsere Problemstellung soweit verandern, daßweiterhin das Funktional (10.40) minimiert werden soll, auf dem Rand je-doch keine Randbedingungen vorgegeben sind. Fuhren wir die Berechnungfur diesen Fall fort, so erhalten wir wieder die Bedingung (10.50), d. h.
0 =
b∫
a
Fu −
d
dxFu′
η(x) dx+ Fu′ · η(x)|ba. (10.59)
348 Kapitel 10. Arbeits- und Extremalprinzipien
Diese Gleichung muß fur alle Funktionen η(x) erfullt sein, insbesondereauch fur beliebige η(x) mit η(a) = η(b) = 0. Damit erhalten wir sofort dieEulersche Differentialgleichung (10.54)
Fu(x, u, u′)− d
dxFu′(x, u, u′) = 0 ∀ x ∈ [a, b]. (10.60)
Im Gegensatz zur bisherigen Betrachtung verschwindet der Term Fu′η(x)|bader Gleichung (10.59) nicht bei jeder Wahl einer zulassigen Funktion η(x).Betrachten wir die Gleichungen (10.59) und (10.60), so erhalten wir alsBedingung an jede beliebige Funktion η(x)
(Fu′ · η)x=b − (Fu′ · η)x=a = 0. (10.61)
Da die Funktion η(x) und damit ihre Werte auf dem Rand des Intervalls[a, b] beliebig sind, betrachten wir zwei spezielle Funktionen η1(x) bzw. η2(x)mit den Randbedingungen
η1(a) = 1, η1(b) = 0, η2(a) = 0, η2(b) = 1 (10.62)
und werten fur diese Funktionen die Bedingung (10.61) aus. Somit erhaltenwir die naturlichen Randbedingungen unseres Variationsproblems in derForm
Fu′[a, u(a), u′(a)] = 0, Fu′[b, u(b), u′(b)] = 0. (10.63)
Diese Randbedingungen mussen von der Losungsfunktion u(x) unseres Va-riationsproblems erfullt werden, wenn die Randwerte u(a) und u(b) voll-kommen beliebig sind und das Funktional J [v] im Punkt v(x) = u(x) einenExtremwert annehmen soll.
Damit haben wir gezeigt, daß, falls die 1. Variation des Funktionals J [v]in v(x) = u(x) verschwindet und die Randwerte der zulassigen Funktionenv(x) fur x = a und x = b vollkommen beliebig sind, die Losungsfunkti-on u(x) sowohl die Eulersche Differentialgleichung als auch die naturlichenRandbedingungen erfullt.
Fur die praktische Anwendung der Variationsrechnung sind noch Erweite-rungen der hier dargestellten Uberlegungen erforderlich, d. h. die Erweite-rung auf Funktionale, die von hoheren Ableitungen der zulassigen Funktio-nen v(x) abhangen, die Betrachtung mehrerer Funktionen v1(x), v2(x), . . . ,vn(x), die Zulassung mehrerer unabhangiger Variablen x1, x2, . . . , xm unddie Betrachtung von Nebenbedingungen fur unser Funktional J [v]. DiesePunkte konnen hier nicht vertieft werden und der Leser sei auf die Litera-tur, z. B. Courant, Hilbert [12], verwiesen. Eine schone Zusammenstellungder Variationsrechnung findet man in Fung [22], dem auch Teile dieses Ab-schnittes entnommen wurden.
10.5. Das Minimum der potentiellen Energie 349
10.5 Das Prinzip vom Minimum der potenti-ellen Energie
In den ersten Abschnitten dieses Kapitels wurde die Aquivalenz der Arbeits-prinzipien (Prinzip der virtuellen Arbeit, Prinzip der virtuellen Erganzungs-arbeit) mit den dynamischen Feld- und Randbedingungen bzw. mit dengeometrischen Feld- und Randbedingungen gezeigt.
Man beachte, daß in diesen Formulierungen keine Aussagen uber das Ma-terial benutzt wurden. Vielmehr wurden nur die auftretenden Spannungenbetrachtet, ohne nach der Verknupfung mit den Verzerrungen zu fragen.Damit sind die Ergebnisse der Arbeitsprinzipien allgemeingultig und auchauf inelastische Materialien anzuwenden.
Im weiteren wollen wir jedoch Einschrankungen im Materialverhalten vor-nehmen und uns nur mit elastischen Stoffgesetzen befassen, die Potentialei-genschaften besitzen, d. h. fur die gilt (siehe auch Abschnitt 7.3)
P =∂Ws
∂F. (10.64)
Hierin bezeichnet P den 1. Piola-Kirchhoff-Spannungstensor, F den materi-ellen Deformationsgradienten und Ws die spezifische Formanderungsener-giefunktion. Diese Materialien wurden in Abschnitt 7.1 als hyperelastischeMaterialien bezeichnet.
10.5.1 Einfuhrung eines Stoffgesetzes mit Potentialei-genschaft
In der Beschreibung der virtuellen inneren Arbeit nach Gleichung (10.18)
δW =
∫
Bt
T : grad δu dv =
∫
B
P : Grad δu dV =
∫
B
S : δE dV
stellt der Integrand die spezifische virtuelle Formanderungsenergie dar, dieaus arbeitskonformen Paarungen von Spannungen und Verzerrungen ge-bildet wird. Im Abschnitt 5.5 finden sich entsprechende Paarungen aus
Spannungs- und Verzerrungstensoren, mit denen die Elementarleistung
Wdefiniert wurde.
350 Kapitel 10. Arbeits- und Extremalprinzipien
Wie bereits dort dargelegt wurde, existiert in der Regel keine SkalarfunktionWs(F) des Deformationsgradienten F, so daß sich die Spannungsleistung
Ws = P : F (10.65)
als Ableitung von Ws(F) ergibt. Damit ist im allgemeinen nicht gesichert,
daß sich
Ws als vollstandiges Differential einer SkalarfunktionWs(F) dar-stellen laßt. An dieser Stelle vereinbaren wir jedoch, beispielhaft fur elasti-sche Materialen, die Existenz einer PotentialfunktionWs, d. h. es gelte dasPostulat:
Es existiere ein vollstandiges Differential dWs fur die spezifischeFormanderungsenergie Ws
dWs = S : dE = P : dF. (10.66)
Wie in den Abschnitten 5.7 und 5.8 gezeigt wurde, ist dies fur adiabatische,isotherme bzw. isentrope Prozesse erfullt. In Abschnitt 7.4 haben wir dieFolgerungen fur das elastische Material infolge des Potentialcharakters dar-gelegt. Insbesondere erhalten wir dann das Potential fur die Spannungen inden Verzerrungen, d. h. fur den 2. Piola-Kirchhoff-Spannungstensor gilt
S =∂Ws
∂E. (10.67)
Damit ist Ws eine Potentialfunktion fur die Spannungen und das Differen-tial der gesamten Formanderungsenergie W lautet
dW = d
∫
B
Ws dV
=
∫
B
dWs dV, (10.68)
und die Formanderungsenergie W
W =
∫
B
Ws dV = WE −WA (10.69)
ist ebenfalls ein Potential. Sie wird auch das inneres Potential oder die innerepotentielle Energie Π(i) genannt und mit
Π(i)(v) := W (v) =
∫
B
Ws(v) dV (10.70)
10.5. Das Minimum der potentiellen Energie 351
bezeichnet. Hierin haben wir die funktionale Abhangigkeit vom Verschie-bungsfeld v explizit angegeben. Mit den oben durchgefuhrten Uberlegun-gen und dem Abriß der Variationsrechnung in Abschnitt 10.5 konnen wirnun die 1. Variation der Formanderungsenergie W vornehmen. Analog zuGleichung (10.68) erhalten wir dann
δW = δ
∫
B
Ws dV
=
∫
B
δWs dV, (10.71)
und fur die Variation der spezifischen inneren Formanderungsenergie Ws
gilt
δWs = S : δE = P : δF (10.72)
und wir haben den Ubergang von der virtuellen inneren Arbeit zur Variationder inneren Formanderungsenergie vollzogen.
Fur die lineare Elastizitatstheorie ergibt sich damit die Darstellung
Π(i)(v) = W (v) =1
2
∫
B
σσσ(v) : ǫǫǫ(v) dV (10.73)
fur die Formanderungsenergie. In kartesischen Koordinaten gilt
Π(i) = W =1
2
∫
B
σij εij dV =1
2
∫
B
Cijkl εij εkl dV, (10.74)
wobei die Koeffizienten εij und σij wiederum vom Verschiebungszustand v
abhangen.
10.5.2 Einfuhrung von außeren Kraften mit Potential-charakter
Fur die außeren, volumenhaft wirkenden Spannungen b und die außeren,flachenhaft wirkenden Spannungen t wird vorausgesetzt, daß sie konservativseien, d. h. es existieren die Potentiale Πs1 fur die volumenhaft verteilten
352 Kapitel 10. Arbeits- und Extremalprinzipien
Spannungen b und Πs2 fur die flachenhaft verteilten Spannungen t. Damitgilt fur einen beliebigen Verschiebungszustand v
ρb = −∂Πs1
∂vmit Πs1 = −ρb · v und (10.75)
t = −∂Πs2
∂vmit Πs2 = −t · v. (10.76)
Fur den Korper Bt folgt somit
Π(a)1 :=
∫
Bt
Πs1 dv = −∫
Bt
ρb · v dv (10.77)
Π(a)2 :=
∫
∂Bt
Πs2 da = −∫
∂Bt
t · v da. (10.78)
Solche Krafte werden in der Baustatik auch oft als konservative Kraftebezeichnet, obwohl dieser Ausdruck eigentlich in der Dynamik ublich ist.Unter Vorwegnahme der weiteren Darstellung ist festzustellen, daß außereKrafte b in Bt und t auf ∂Btσ immer dann ein Potential besitzen, wennsie wahrend der Verschiebungen des Korpers nach Große und Richtung kon-stant sind (richtungstreue Krafte). Die oben eingefuhrten Potentiale Π(a)1
und Π(a)2 konnen zum Potential der außeren Krafte Π(a) in der Form
Π(a) := Π(a)1 + Π(a)2 = −∫
Bt
ρb · v dv −∫
∂Bt
t · v da (10.79)
zusammengefaßt werden. Die Variation des Potentials der außeren Kraftekann entsprechend der Betrachtung des Potentials der inneren Krafte Π(i)
durchgefuhrt werden. Wir erhalten hieraus mit Gleichung (10.16) die Dar-stellung
−δΠ(a) = −(δΠ(a)1 + δΠ(a)2) = δ
∫
Bt
ρb · v dv +
∫
∂Bt
t · v da
=
∫
Bt
ρb · δu dv +
∫
∂Bt
t · δu da = δA.
(10.80)
10.5. Das Minimum der potentiellen Energie 353
10.5.3 Herleitung des Prinzips der stationaren poten-tiellen Energie
In den letzten Abschnitten haben wir die Existenz von Potentialen fur denCauchyschen Spannungstensor T als auch fur die flachen- und volumenhaftverteilten außeren Spannungen t und b gefordert. Damit kann die inne-re bzw. außere potentielle Energie des Systems in Form der Gleichungen(10.70) bzw. (10.79) dargestellt werden. Damit erhalten wir die gesamte po-tentielle Energie Π des Systems aus der Addition der Anteile Π(i) und Π(a),d. h. mit der Definition
Π := Π(i) + Π(a), (10.81)
in der Form
Π(v) =
∫
B
Ws(v) dV −∫
Bt
ρb · v dv −∫
∂Bt
t · v da. (10.82)
Π ist die gesamte potentielle Energie, die –wie im folgenden gezeigt wird–,im Gleichgewichtszustand fur den wirklichen Verschiebungszustand u unterallen zulassigen Vergleichsfunktionen v mit
v = u + εηηη
einen stationaren Wert und fur die lineare Elastizitatstheorie sogar ein Mi-nimum annimmt. Der Raum der zulassigen Funktionen V ist dabei durch
V :=v ∈
(H1(B )
)3 | v = 0 auf ∂Bu
gegeben, wobei wir homogene Verschiebungsrandbedingungen u = u =0 auf dem Rand ∂Bu voraussetzen. Die Funktionen v im Hilbertraum(H1(B )
)3sind dadurch gekennzeichnet, daß die Koordinatenfunktionen
vi und deren erste Ableitungen quadratisch integrierbar sind.
Hieraus kann mit Blick auf die in Abschnitt 10.4 hergeleiteten Beziehungender Zusammenhang der gesamten potentiellen Energie Π des Korpers mitdem Prinzip der virtuellen Arbeit (10.17)
δW = δA (10.83)
354 Kapitel 10. Arbeits- und Extremalprinzipien
fur den wirklichen Verschiebungszustand u aufgezeigt werden.
Hierzu betrachten wir die gesamte potentiellen Energie Π einer zulassigenVergleichsfunktion v und erhalten mit dem Einbettungsansatz v = u + εηηηdie Darstellung
Π(v) = Π(u + εηηη) = Π(ηηη). (10.84)
Durch Bildung der ersten Ableitung von Π nach ε an der Stelle ε = 0erhalten wir die Stationaritatsbedingung
Π′ =∂Π(ε)
∂ε|ε=0= 0 (10.85)
fur die gesamte potentielle Energie, die nach Multiplikation mit ε in dieForm
δΠ := εΠ′ = 0 (10.86)
ubergeht. Im Vergleich mit Gleichung (10.83) gilt auch die Darstellung
δΠ = δ(Π(i) + Π(a)) = δΠ(i) + δΠ(a)
= δΠ(i) − (−δΠ(a)) = δW − δA = 0. (10.87)
Die 1. Variation der gesamten potentiellen Energie Π fur den Gleichge-wichtszustand u, in dem das Prinzip der virtuellen Arbeit erfullt ist, istgleich Null, d. h. es gilt
δΠ(u) = 0. (10.88)
Wie in Abschnitt 10.4 gezeigt, ist das Verschwinden der 1. Variation desFunktionals Π eine notwendige und hinreichende Bedingung fur einen sta-tionaren Punkt von Π und wir konnen die obigen Ergebnisse in der Formu-lierung des Prinzips vom stationaren Wert der potentiellen Energie zusam-menfassen:
Unter allen zur Konkurrenz zugelassenen, d. h. die inneren und auße-ren geometrischen Bedingungen erfullenden Deformationszustanden,fuhrt derjenige, der die inneren und außeren Gleichgewichtsbedingun-gen erfullt, zu einem stationaren Wert der gesamten potentiellen Ener-gie, d. h.
Π→ stat. im Gleichgewichtszustand fur v → u.
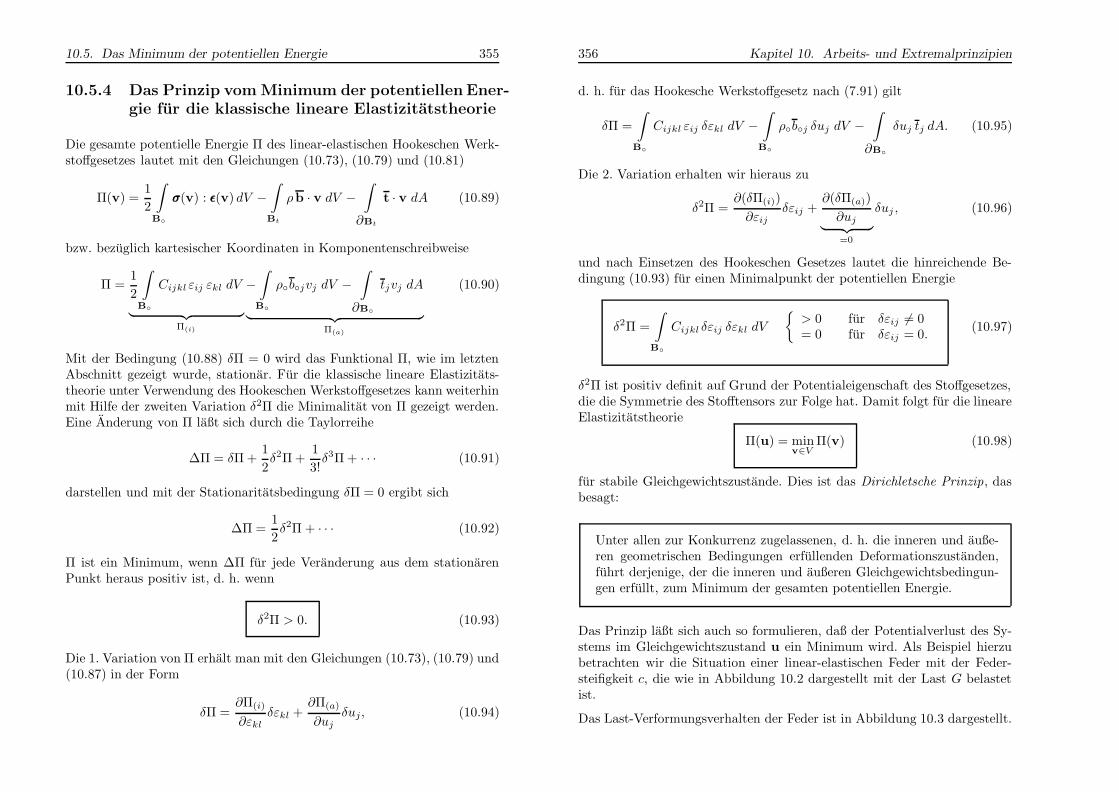
10.5. Das Minimum der potentiellen Energie 355
10.5.4 Das Prinzip vom Minimum der potentiellen Ener-gie fur die klassische lineare Elastizitatstheorie
Die gesamte potentielle Energie Π des linear-elastischen Hookeschen Werk-stoffgesetzes lautet mit den Gleichungen (10.73), (10.79) und (10.81)
Π(v) =1
2
∫
B
σσσ(v) : ǫǫǫ(v) dV −∫
Bt
ρb · v dV −∫
∂Bt
t · v dA (10.89)
bzw. bezuglich kartesischer Koordinaten in Komponentenschreibweise
Π =1
2
∫
B
Cijkl εij εkl dV
︸ ︷︷ ︸Π(i)
−∫
B
ρbjvj dV −∫
∂B
tjvj dA
︸ ︷︷ ︸Π(a)
(10.90)
Mit der Bedingung (10.88) δΠ = 0 wird das Funktional Π, wie im letztenAbschnitt gezeigt wurde, stationar. Fur die klassische lineare Elastizitats-theorie unter Verwendung des Hookeschen Werkstoffgesetzes kann weiterhinmit Hilfe der zweiten Variation δ2Π die Minimalitat von Π gezeigt werden.Eine Anderung von Π laßt sich durch die Taylorreihe
∆Π = δΠ +1
2δ2Π +
1
3!δ3Π + · · · (10.91)
darstellen und mit der Stationaritatsbedingung δΠ = 0 ergibt sich
∆Π =1
2δ2Π + · · · (10.92)
Π ist ein Minimum, wenn ∆Π fur jede Veranderung aus dem stationarenPunkt heraus positiv ist, d. h. wenn
δ2Π > 0. (10.93)
Die 1. Variation von Π erhalt man mit den Gleichungen (10.73), (10.79) und(10.87) in der Form
δΠ =∂Π(i)
∂εkl
δεkl +∂Π(a)
∂uj
δuj, (10.94)
356 Kapitel 10. Arbeits- und Extremalprinzipien
d. h. fur das Hookesche Werkstoffgesetz nach (7.91) gilt
δΠ =
∫
B
Cijkl εij δεkl dV −∫
B
ρbj δuj dV −∫
∂B
δuj tj dA. (10.95)
Die 2. Variation erhalten wir hieraus zu
δ2Π =∂(δΠ(i))
∂εij
δεij +∂(δΠ(a))
∂uj︸ ︷︷ ︸=0
δuj , (10.96)
und nach Einsetzen des Hookeschen Gesetzes lautet die hinreichende Be-dingung (10.93) fur einen Minimalpunkt der potentiellen Energie
δ2Π =
∫
B
Cijkl δεij δεkl dV
> 0 fur δεij 6= 0= 0 fur δεij = 0.
(10.97)
δ2Π ist positiv definit auf Grund der Potentialeigenschaft des Stoffgesetzes,die die Symmetrie des Stofftensors zur Folge hat. Damit folgt fur die lineareElastizitatstheorie
Π(u) = minv∈V
Π(v) (10.98)
fur stabile Gleichgewichtszustande. Dies ist das Dirichletsche Prinzip, dasbesagt:
Unter allen zur Konkurrenz zugelassenen, d. h. die inneren und auße-ren geometrischen Bedingungen erfullenden Deformationszustanden,fuhrt derjenige, der die inneren und außeren Gleichgewichtsbedingun-gen erfullt, zum Minimum der gesamten potentiellen Energie.
Das Prinzip laßt sich auch so formulieren, daß der Potentialverlust des Sy-stems im Gleichgewichtszustand u ein Minimum wird. Als Beispiel hierzubetrachten wir die Situation einer linear-elastischen Feder mit der Feder-steifigkeit c, die wie in Abbildung 10.2 dargestellt mit der Last G belastetist.
Das Last-Verformungsverhalten der Feder ist in Abbildung 10.3 dargestellt.
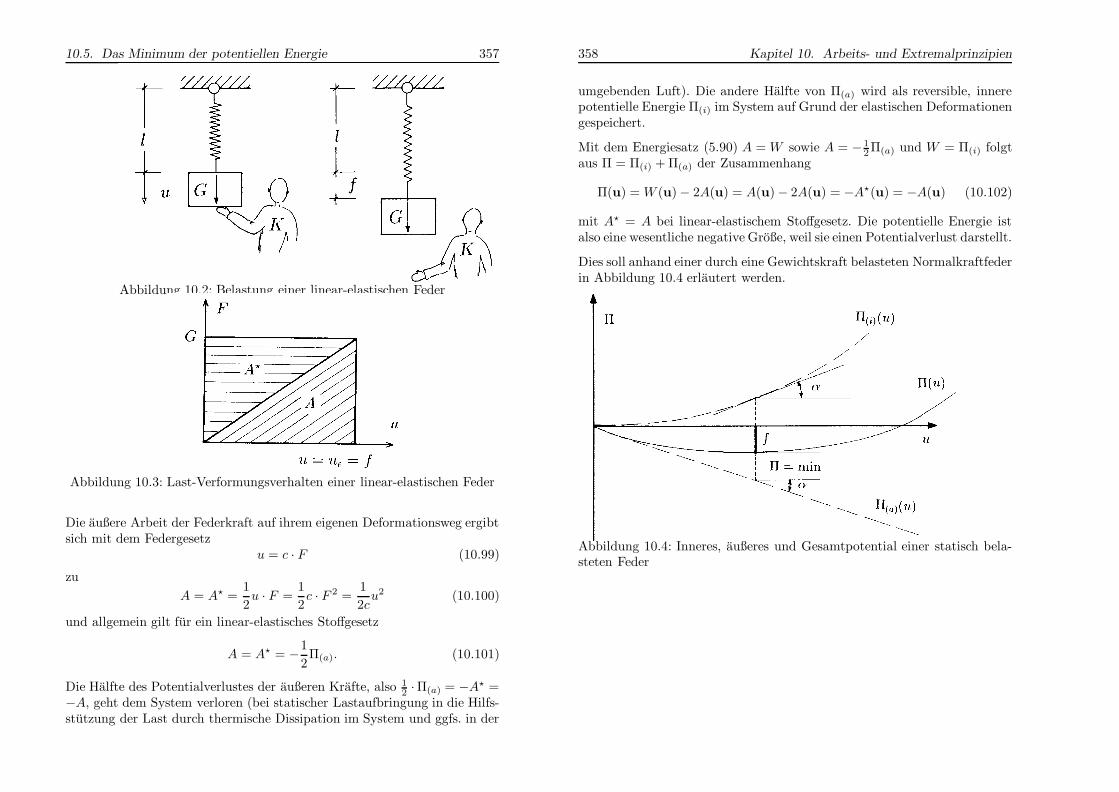
10.5. Das Minimum der potentiellen Energie 357
Abbildung 10.2: Belastung einer linear-elastischen Feder
Abbildung 10.3: Last-Verformungsverhalten einer linear-elastischen Feder
Die außere Arbeit der Federkraft auf ihrem eigenen Deformationsweg ergibtsich mit dem Federgesetz
u = c · F (10.99)
zu
A = A⋆ =1
2u · F =
1
2c · F 2 =
1
2cu2 (10.100)
und allgemein gilt fur ein linear-elastisches Stoffgesetz
A = A⋆ = −1
2Π(a). (10.101)
Die Halfte des Potentialverlustes der außeren Krafte, also 12·Π(a) = −A⋆ =
−A, geht dem System verloren (bei statischer Lastaufbringung in die Hilfs-stutzung der Last durch thermische Dissipation im System und ggfs. in der
358 Kapitel 10. Arbeits- und Extremalprinzipien
umgebenden Luft). Die andere Halfte von Π(a) wird als reversible, innerepotentielle Energie Π(i) im System auf Grund der elastischen Deformationengespeichert.
Mit dem Energiesatz (5.90) A = W sowie A = −12Π(a) und W = Π(i) folgt
aus Π = Π(i) + Π(a) der Zusammenhang
Π(u) = W (u)− 2A(u) = A(u)− 2A(u) = −A⋆(u) = −A(u) (10.102)
mit A⋆ = A bei linear-elastischem Stoffgesetz. Die potentielle Energie istalso eine wesentliche negative Große, weil sie einen Potentialverlust darstellt.
Dies soll anhand einer durch eine Gewichtskraft belasteten Normalkraftfederin Abbildung 10.4 erlautert werden.
Abbildung 10.4: Inneres, außeres und Gesamtpotential einer statisch bela-steten Feder
10.5. Das Minimum der potentiellen Energie 359
10.5.5 Das Dirichletsche Prinzip in Matrizenform
Die gesamte potentielle Energie fur die geometrisch lineare Theorie unddas Hookesche Werkstoffgesetz gemaß Gleichung (10.89) kann in Matrizen-schreibweise in der Form
Π(v) =1
2
∫
B
(D v)T
︸ ︷︷ ︸εT
E (Dv)︸ ︷︷ ︸ε
dV
︸ ︷︷ ︸Π(i)
−∫
B
vT k dV −∫
∂B
vT t dA
︸ ︷︷ ︸Π(a)
(10.103)
dargestellt werden. Die 1. Variation ist mit Gleichung (10.95) gegeben undlautet in Matrizenschreibweise
δΠ =
∫
B
(δuTDT )E(Du) dV −∫
B
δuT k dV −∫
∂B
δuT t dA. (10.104)
Aus der Stationaritatsbedingung δΠ = 0 erhalten wir die statischen Feld-gleichungen und die statischen Randbedingungen in Matrizenschreibweisein der Form
DTσ + k = 0 in B und (10.105)
NTσ − t = 0 auf ∂Bσ . (10.106)
Die 2. Variation ergibt sich aus Gleichung (10.94) zu
δ2Π =
∫
B
(δuTDT )︸ ︷︷ ︸= δεT
E Dδu︸ ︷︷ ︸= δε
dV =
∫
B
δεT E δε dV ≥ 0. (10.107)
In der Matrizenform erkennt man sehr schon die positive Definitheit von δ2Πwegen der Symmetrie der Matrix E, die auf Grund der Potentialeigenschaftder inneren Formanderungsenergie gegeben ist.
360 Kapitel 10. Arbeits- und Extremalprinzipien
10.6 Folgerungen aus den Arbeits- undEnergieprinzipien
10.6.1 Der Satz von Clapeyron
Gegeben sei ein materieller Korper mit linear-elastischem Werkstoffgesetzim statischen Gleichgewicht. Als Ausgangspunkt betrachten wir die Arbeitder außeren Krafte t und b des Gleichgewichtszustandes auf dem Wegder Verschiebungen u von dem spannungslosen Ausgangszustand in denGleichgewichtszustand. Dabei ist zu beachten, daß die Spannungen stets involler Große wirken, d. h. es gilt
A :=
∫
B
ρb · u dV +
∫
∂Bσ
t · u dA. (10.108)
Mit der statischen Randbedingung t = t auf ∂Bσ , dem Cauchy-Theoremin der linearisierten Form t = σσσN und der Rechenregel (σσσN) ·u = (σσσTu) ·Nfolgt
A =
∫
B
ρb · u dV +
∫
∂Bσ
(σσσTu) ·N dA. (10.109)
Hierauf wenden wir den Gaußschen Integralsatz an, benutzen die Regel
Div(σσσTu) = u ·Divσσσ + σσσ : Gradu
und erhalten
A =
∫
B
(σσσ : Gradu + Divσσσ + ρb) · u dV. (10.110)
Mit der statischen Feldgleichung Divσσσ + ρb = 0 und der bekannten Be-ziehung σσσ : Gradu = σσσ : ǫǫǫ, auf Grund der Symmetrie des Spannungstensorsσσσ, folgt
A =
∫
B
σσσ : ǫǫǫ dV. (10.111)
Mit der Gleichung (10.73)
W =1
2
∫
B
σσσ : ǫǫǫ dV
10.6. Folgerungen aus den Energieprinzipien 361
fur die Formanderungsenergie des linear-elastischen Werkstoffgesetzes giltsomit
A = 2W, d. h.
W =1
2
∫
B
σσσ : ǫǫǫ dV =1
2
∫
∂Bσ
t · u dA+
∫
B
ρb · u dV
. (10.112)
Mit Gleichung (10.112) ist die Aussage des Clapeyronschen Satzes gefunden,der in Worten lautet:
Ist ein linear-elastischer Korper unter einem System von Volumen-und Flachenkraften b bzw. t im Gleichgewicht, so ist die Formande-rungsenergie W halb so groß wie die von den außeren Kraften desGleichgewichtszustandes bei der Verschiebung u geleisteten Arbeit A.Die Verschiebung u fuhrt dabei vom spannungslosen Ausgangszustandin den Gleichgewichtszustand.
10.6.2 Der Kirchhoffsche Eindeutigkeitssatz
Im Verlaufe unseres Exkurses durch die Elastizitatstheorie sind uns etlicheBestimmungsgleichungen fur die Losungen der jeweils gestellten Aufgabe be-gegnet. Bisher ist jedoch stillschweigend davon ausgegangen worden, daß diegestellte Aufgabe auch sinnvoll ist und damit stets eine eindeutig bestimm-te Losung besitzt. Dies muß jedoch gerade bei Problemen der nichtlinearenElastizitatstheorie nicht der Fall sein.
An dieser Stelle beschranken wir uns zunachst wieder auf die klassischelinerarisierte Elastizitatstheorie bei der sich die Spannungen σσσ aus der spe-zifischen Formanderungsenergie Ws in der Form
σσσ =∂Ws
∂ǫǫǫ
ergeben. Die spezifische Formanderungsenergie Ws sei hierbei positiv de-finit. Weiterhin seien auf dem Rand ∂Bu die geometrischen Randbedin-gungen u = u und auf den Rand ∂Bσ die statischen Randbedingungent = t vorgegeben. Dann nehmen wir an, daß eine Losung unseres Problemsexistieren moge, die der statischen Feldgleichung
Divσσσ + ρb = 0 ∀ X ∈ B
362 Kapitel 10. Arbeits- und Extremalprinzipien
genugen moge. Unter diesen Voraussetzungen konnen wir die Eindeutigkeitder Losung aus dem Kirchhoffschen Eindeutigkeitssatz (1859) schließen:
Die Grundgleichungen der linearen Elastizitatstheorie haben, wenn sieuberhaupt Losungen besitzen, genau eine Losung.
Zum Beweis nehmen wir an, daß zwei Losungen (σσσ(1),u(1)) und (σσσ(2),u(2))existieren, die die Gleichungen
Divσσσ + ρb = 0 (10.113)
ǫǫǫ =1
2
(Gradu + GradTu
)(10.114)
σσσ =∂Ws
∂ǫǫǫ(10.115)
u = u (10.116)
t = t (10.117)
fur alle X in B bzw. auf dem betreffenden Teil des Randes ∂B erfullen.Dann folgt aus der Gultigkeit der statischen Feldgleichung (10.113) fur beideLosungen auf Grund der Linearitat des Divergenz-Operators Div fur alleX ∈ B
Divσσσ(1) = Divσσσ(2) und σσσ(1)N = σσσ(2)N. (10.118)
Wegen der Linearitat der Gleichungen erfullt auch die Differenz der Losun-gen
σσσ := σσσ(2) − σσσ(1) (10.119)
u := u(2) − u(1) (10.120)
die homogenen statischen Feldgleichungen, d. h. fur b = 0. Weiterhin giltfur die außeren Lasten
t = σσσN = σσσ(2)N− σσσ(1)N = 0. (10.121)
Betrachten wir die Aussage des Satzes von Clapeyron, so gilt fur das System(σσσ, u) mit b = 0 und t = 0 die Gleichung
2W = A =
∫
∂B
t · u dA+
∫
B
ρb · u dV = 0. (10.122)
10.6. Folgerungen aus den Energieprinzipien 363
Damit verschwindet die Formanderungsenergie W fur die Differenzlosung(σσσ, u), d. h.
2W =
∫
B
σσσ : ǫǫǫ dV = 0. (10.123)
Da die Formanderungsenergie voraussetzungsgemaß positiv definit ist, kanndies jedoch nur gelten, wenn fur jeden Punkt X ∈ B aus Ws = 0 die Be-dingung ǫǫǫ = 0 und damit u = 0 folgt. Dann gilt u = u(1) − u(2) = 0, d. h.u(1) = u(2). Da sich die Spannungen nach (10.115) aus der Formanderungs-energie berechnen lassen, diese jedoch eindeutig von u(1) = u(2) bestimmtist, folgt sofort σσσ(1) = σσσ(2) und wir haben die Eindeutigkeit der Losung(σσσ,u) bewiesen.
10.6.3 Die Satze von Betti und Maxwell
In diesem Abschnitt betrachten wir fur einen linear-elastischen Korper zweiunterschiedliche Gleichgewichtszustande infolge verschiedener außerer Be-lastungen, d. h. es seien bzgl. eines kartesischen Koordinatensystems dieKoeffizienten der Belastungen t und k = ρb sowie der Verschiebungenu und Spannungen σσσ der Gleichgewichtszustande in der Form
• Gleichgewichtszustand 1: k1i , t
1i , σ
1ij, u
1i
• Gleichgewichtszustand 2: k2i , t
2i , σ
2ij, u
2i
gegeben. Die Verknupfung dieser verschiedenen Gleichgewichtszustande istdurch den Vergleich der Arbeiten des einen Kraftsystems auf den Wegendes anderen Gleichgewichtszustandes moglich.
Die Arbeit der Krafte des 1. Gleichgewichtszustandes auf den Wegen des2. Gleichgewichtszustandes ist durch
∫
∂B
t1i u2i dA+
∫
B
k1i u
2i dV =
∫
B
σ1ij ε
2ij dV. (10.124)
gegeben. Nach dem Einsetzen des Hookeschen Werkstoffgesetzes erhaltenwir hieraus die Aussage
∫
∂B
t1i u2i dA+
∫
B
k1i u
2i dV =
∫
B
Cijkl ε1kl ε
2ij dV (10.125)
364 Kapitel 10. Arbeits- und Extremalprinzipien
In analoger Weise folgt fur die Arbeit der Krafte des 2. Gleichgewichtszu-standes auf den Wegen des 1. Gleichgewichtszustandes die Beziehung
∫
∂B
t2i u1i dA+
∫
B
k2i u
1i dV =
∫
B
Cijkl ε2kl ε
1ij dV. (10.126)
Da der ElastizitatstensorC symmetrisch ist, erhalten wir mit der Vertausch-barkeit der Koeffizienten Cijkl = Cklij die Gleichheit
∫
B
Cijkl ε1kl ε
2ij dV =
∫
B
Cijkl ε2kl ε
1ij dV (10.127)
der rechten Seiten von (10.125) und (10.126). Damit stimmen auch die linkenSeiten der Gleichungen (10.125) und (10.126) uberein und wir erhalten
∫
∂B
t1i u2i dA+
∫
B
k1i u
2i dV =
∫
∂B
t2i u1i dA+
∫
B
k2i u
1i dV. (10.128)
Dies ist die Aussage des Reziprozitatssatzes von Betti der in Worten lautet:
Fur einen linear-elastischen Korper ist die Arbeit des außeren Kraft-systems 1 an den Verschiebungen des Systems 2 gleich der Arbeit desaußeren Kraftesystems 2 an den Verschiebungen des Systems 1.
Einen wichtigen Sonderfall des Satzes von Betti erhalten wir mit der Be-schrankung auf den Fall verschwindender Volumenkrafte, d. h. fur k1
i =k2
i = 0. In diesem Fall folgt direkt aus (10.128) die Aussage des Satzes vonMaxwell in der Form
∫
∂B
t1i u2i dA =
∫
∂B
t2i u1i dA, (10.129)
der in Worten lautet:
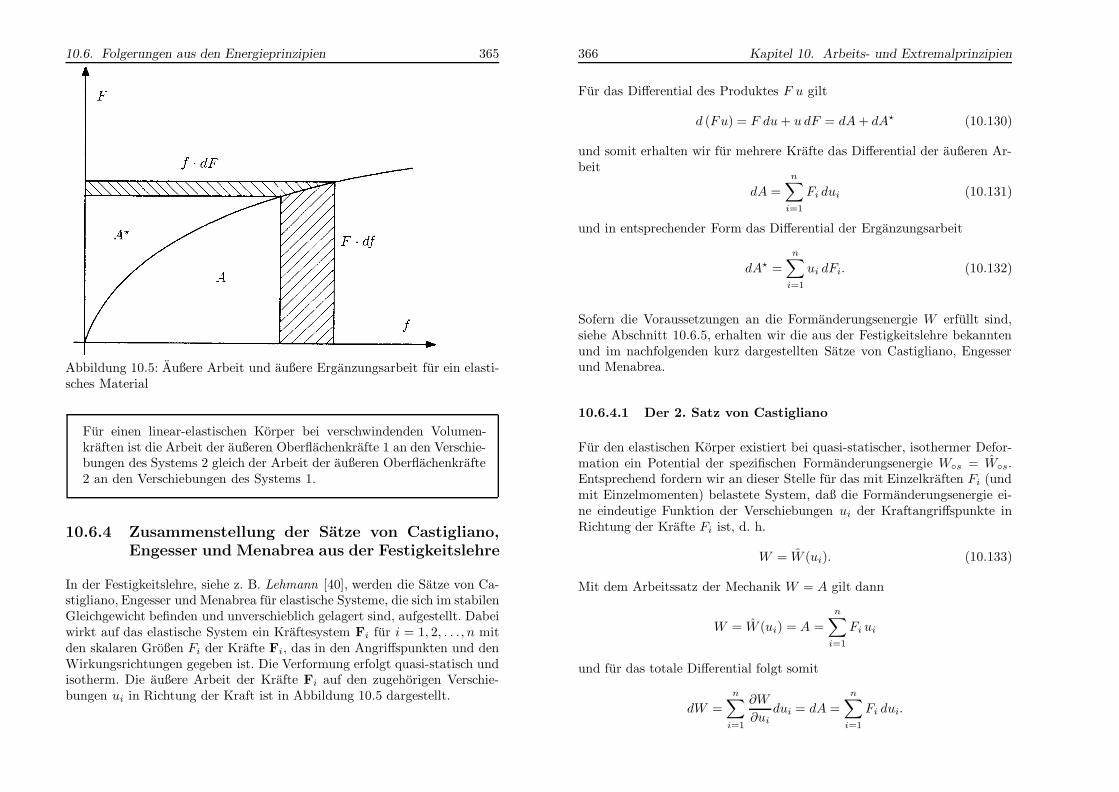
10.6. Folgerungen aus den Energieprinzipien 365
Abbildung 10.5: Außere Arbeit und außere Erganzungsarbeit fur ein elasti-sches Material
Fur einen linear-elastischen Korper bei verschwindenden Volumen-kraften ist die Arbeit der außeren Oberflachenkrafte 1 an den Verschie-bungen des Systems 2 gleich der Arbeit der außeren Oberflachenkrafte2 an den Verschiebungen des Systems 1.
10.6.4 Zusammenstellung der Satze von Castigliano,Engesser und Menabrea aus der Festigkeitslehre
In der Festigkeitslehre, siehe z. B. Lehmann [40], werden die Satze von Ca-stigliano, Engesser und Menabrea fur elastische Systeme, die sich im stabilenGleichgewicht befinden und unverschieblich gelagert sind, aufgestellt. Dabeiwirkt auf das elastische System ein Kraftesystem Fi fur i = 1, 2, . . . , n mitden skalaren Großen Fi der Krafte Fi, das in den Angriffspunkten und denWirkungsrichtungen gegeben ist. Die Verformung erfolgt quasi-statisch undisotherm. Die außere Arbeit der Krafte Fi auf den zugehorigen Verschie-bungen ui in Richtung der Kraft ist in Abbildung 10.5 dargestellt.
366 Kapitel 10. Arbeits- und Extremalprinzipien
Fur das Differential des Produktes F u gilt
d (Fu) = F du+ u dF = dA+ dA⋆ (10.130)
und somit erhalten wir fur mehrere Krafte das Differential der außeren Ar-beit
dA =
n∑
i=1
Fi dui (10.131)
und in entsprechender Form das Differential der Erganzungsarbeit
dA⋆ =
n∑
i=1
ui dFi. (10.132)
Sofern die Voraussetzungen an die Formanderungsenergie W erfullt sind,siehe Abschnitt 10.6.5, erhalten wir die aus der Festigkeitslehre bekanntenund im nachfolgenden kurz dargestellten Satze von Castigliano, Engesserund Menabrea.
10.6.4.1 Der 2. Satz von Castigliano
Fur den elastischen Korper existiert bei quasi-statischer, isothermer Defor-mation ein Potential der spezifischen Formanderungsenergie Ws = Ws.Entsprechend fordern wir an dieser Stelle fur das mit Einzelkraften Fi (undmit Einzelmomenten) belastete System, daß die Formanderungsenergie ei-ne eindeutige Funktion der Verschiebungen ui der Kraftangriffspunkte inRichtung der Krafte Fi ist, d. h.
W = W (ui). (10.133)
Mit dem Arbeitssatz der Mechanik W = A gilt dann
W = W (ui) = A =
n∑
i=1
Fi ui
und fur das totale Differential folgt somit
dW =
n∑
i=1
∂W
∂ui
dui = dA =
n∑
i=1
Fi dui.

10.6. Folgerungen aus den Energieprinzipien 367
Aus dem Vergleich erhalten wir hieraus
∂W
∂ui
= Fi
und wir konnen den 2. Satz von Castigliano formulieren, siehe Lehmann[40, Satz 6.7]:
Sind bei einem elastischen System die Angriffspunkte und die Wir-kungslinien aller Krafte gegeben und ist bei quasi-statischer, isother-mer Belastung die Formanderungsenergie W eine eindeutige Funktionder Verschiebungen ui der Kraftangriffspunkte in Richtung der KrafteFi, so ergibt die partielle Ableitung der Formanderungsenergie nach ei-ner der Verschiebungen ui die skalare Große Fi der betreffenden Kraft:
∂W
∂ui
= Fi. (10.134)
Bemerkungen:
1. Der 2. Satz von Castigliano wurde zuerst von Alberto Castigliano,(1847–1884) im Jahre 1873 formuliert. In der englischsprachigen Lite-ratur wird er als
”Castigliano’s first theorem“ oder auch als
”Castiglia-
no’s theorem, part I“ bezeichnet. Man beachte die Vertauschung derNumerierung der Castiglianoschen Satze von der deutschsprachigenzur englischsprachigen Literatur.
2. Betrachten wir die Annahmen des 2. Satzes von Castigliano, so istder Satz auch fur nichtlineare Kraft-Verschiebungsbeziehungen, z. B.nach Abbildung 10.5 gultig. Damit sind auch geometrisch nichtlinea-re Verzerrungs-Verschiebungsbeziehungen und nichtlineare elastischeMaterialien erlaubt.
10.6.4.2 Der 1. Satz von Engesser
Die Grundlage des 1. Satzes von Engesser bildet die Annahme der Existenzeiner konjugierten Formanderungsenergie W ⋆, die eine eindeutige Funktionder Große Fi der Krafte Fi ist, d. h.
W ⋆ = W ⋆(Fi). (10.135)
368 Kapitel 10. Arbeits- und Extremalprinzipien
Analog zum obigen Vorgehen erhalten wir das Differential der konjugiertenFormanderungsenergie zu
dW ⋆ =
n∑
i=1
ui dFi. (10.136)
Andererseits gilt fur das totale Differential von W ⋆ mit der Abhangigkeit(10.135)
dW ⋆ =
n∑
i=1
∂W ⋆
∂Fi
dFi. (10.137)
und wir erhalten aus dem Vergleich von (10.136) und (10.137)
∂W ⋆
∂Fi
= ui
und damit die Aussage des 1. Satzes von Engesser , siehe Lehmann [40,Satz 6.8]:
Sind bei einem elastischen System die Angriffspunkte und Wirkungs-linien aller Krafte Fi gegeben und ist bei quasi-statischer, isothermerBelastung die konjugierte Formanderungsenergie W ⋆ eine eindeutigeFunktion der skalaren Großen Fi, so ergibt die partielle Ableitung vonW ⋆ nach einer der Großen Fi die Verschiebung ui des Angriffspunktesdieser Kraft in Richtung der Kraft:
∂W ⋆
∂Fi
= ui. (10.138)
Bemerkungen:
1. Der 1. Satz von Engesser wurde zuerst von Friedrich Engesser, (1848-1931) im Jahre 1889 formuliert und wird auch als Erweiterung des imfolgenden dargestellten 1. Satzes von Castigliano bezeichnet.
2. Entsprechend dem 2. Satz von Castigliano ist der 1. Satz von En-gesser auch fur eine geometrisch nichtlineare Formulierung und furnichtlinear elastische Systeme gultig.
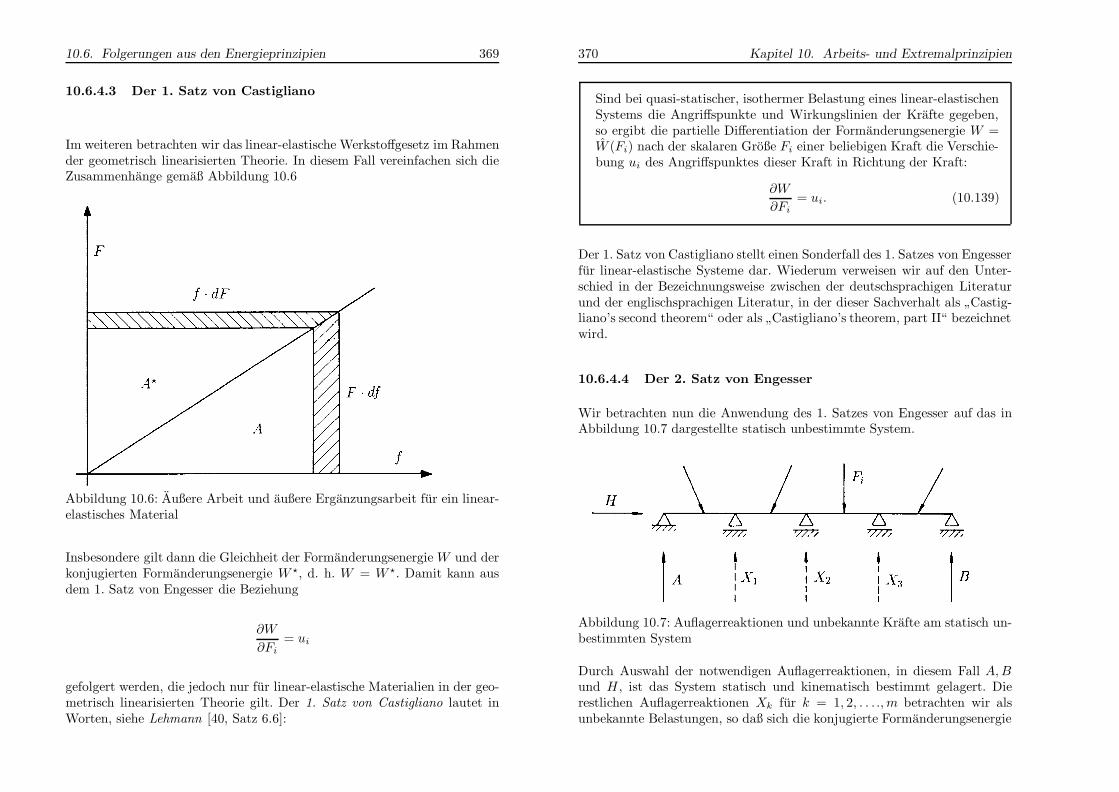
10.6. Folgerungen aus den Energieprinzipien 369
10.6.4.3 Der 1. Satz von Castigliano
Im weiteren betrachten wir das linear-elastische Werkstoffgesetz im Rahmender geometrisch linearisierten Theorie. In diesem Fall vereinfachen sich dieZusammenhange gemaß Abbildung 10.6
Abbildung 10.6: Außere Arbeit und außere Erganzungsarbeit fur ein linear-elastisches Material
Insbesondere gilt dann die Gleichheit der Formanderungsenergie W und derkonjugierten Formanderungsenergie W ⋆, d. h. W = W ⋆. Damit kann ausdem 1. Satz von Engesser die Beziehung
∂W
∂Fi
= ui
gefolgert werden, die jedoch nur fur linear-elastische Materialien in der geo-metrisch linearisierten Theorie gilt. Der 1. Satz von Castigliano lautet inWorten, siehe Lehmann [40, Satz 6.6]:
370 Kapitel 10. Arbeits- und Extremalprinzipien
Sind bei quasi-statischer, isothermer Belastung eines linear-elastischenSystems die Angriffspunkte und Wirkungslinien der Krafte gegeben,so ergibt die partielle Differentiation der Formanderungsenergie W =W (Fi) nach der skalaren Große Fi einer beliebigen Kraft die Verschie-bung ui des Angriffspunktes dieser Kraft in Richtung der Kraft:
∂W
∂Fi
= ui. (10.139)
Der 1. Satz von Castigliano stellt einen Sonderfall des 1. Satzes von Engesserfur linear-elastische Systeme dar. Wiederum verweisen wir auf den Unter-schied in der Bezeichnungsweise zwischen der deutschsprachigen Literaturund der englischsprachigen Literatur, in der dieser Sachverhalt als
”Castig-
liano’s second theorem“ oder als”Castigliano’s theorem, part II“ bezeichnet
wird.
10.6.4.4 Der 2. Satz von Engesser
Wir betrachten nun die Anwendung des 1. Satzes von Engesser auf das inAbbildung 10.7 dargestellte statisch unbestimmte System.
Abbildung 10.7: Auflagerreaktionen und unbekannte Krafte am statisch un-bestimmten System
Durch Auswahl der notwendigen Auflagerreaktionen, in diesem Fall A,Bund H , ist das System statisch und kinematisch bestimmt gelagert. Dierestlichen Auflagerreaktionen Xk fur k = 1, 2, . . . ., m betrachten wir alsunbekannte Belastungen, so daß sich die konjugierte Formanderungsenergie
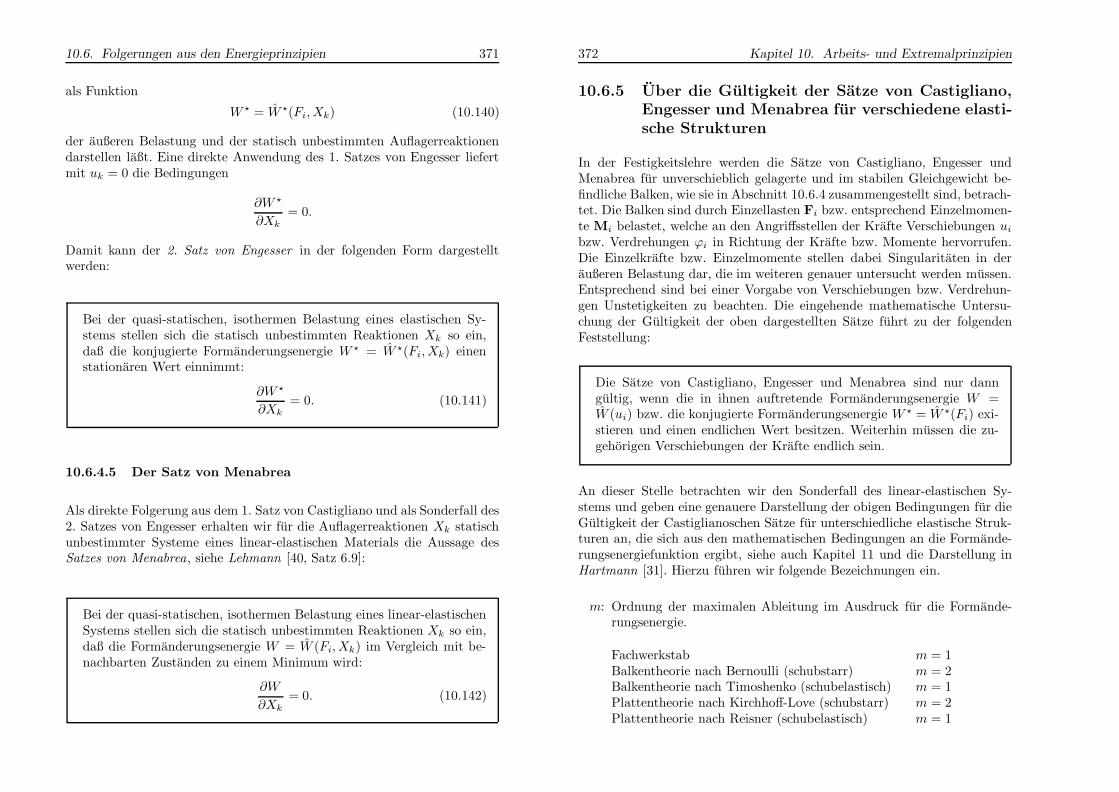
10.6. Folgerungen aus den Energieprinzipien 371
als Funktion
W ⋆ = W ⋆(Fi, Xk) (10.140)
der außeren Belastung und der statisch unbestimmten Auflagerreaktionendarstellen laßt. Eine direkte Anwendung des 1. Satzes von Engesser liefertmit uk = 0 die Bedingungen
∂W ⋆
∂Xk
= 0.
Damit kann der 2. Satz von Engesser in der folgenden Form dargestelltwerden:
Bei der quasi-statischen, isothermen Belastung eines elastischen Sy-stems stellen sich die statisch unbestimmten Reaktionen Xk so ein,daß die konjugierte Formanderungsenergie W ⋆ = W ⋆(Fi, Xk) einenstationaren Wert einnimmt:
∂W ⋆
∂Xk
= 0. (10.141)
10.6.4.5 Der Satz von Menabrea
Als direkte Folgerung aus dem 1. Satz von Castigliano und als Sonderfall des2. Satzes von Engesser erhalten wir fur die Auflagerreaktionen Xk statischunbestimmter Systeme eines linear-elastischen Materials die Aussage desSatzes von Menabrea, siehe Lehmann [40, Satz 6.9]:
Bei der quasi-statischen, isothermen Belastung eines linear-elastischenSystems stellen sich die statisch unbestimmten Reaktionen Xk so ein,daß die Formanderungsenergie W = W (Fi, Xk) im Vergleich mit be-nachbarten Zustanden zu einem Minimum wird:
∂W
∂Xk
= 0. (10.142)
372 Kapitel 10. Arbeits- und Extremalprinzipien
10.6.5 Uber die Gultigkeit der Satze von Castigliano,Engesser und Menabrea fur verschiedene elasti-sche Strukturen
In der Festigkeitslehre werden die Satze von Castigliano, Engesser undMenabrea fur unverschieblich gelagerte und im stabilen Gleichgewicht be-findliche Balken, wie sie in Abschnitt 10.6.4 zusammengestellt sind, betrach-tet. Die Balken sind durch Einzellasten Fi bzw. entsprechend Einzelmomen-te Mi belastet, welche an den Angriffsstellen der Krafte Verschiebungen ui
bzw. Verdrehungen ϕi in Richtung der Krafte bzw. Momente hervorrufen.Die Einzelkrafte bzw. Einzelmomente stellen dabei Singularitaten in deraußeren Belastung dar, die im weiteren genauer untersucht werden mussen.Entsprechend sind bei einer Vorgabe von Verschiebungen bzw. Verdrehun-gen Unstetigkeiten zu beachten. Die eingehende mathematische Untersu-chung der Gultigkeit der oben dargestellten Satze fuhrt zu der folgendenFeststellung:
Die Satze von Castigliano, Engesser und Menabrea sind nur danngultig, wenn die in ihnen auftretende Formanderungsenergie W =W (ui) bzw. die konjugierte Formanderungsenergie W ⋆ = W ⋆(Fi) exi-stieren und einen endlichen Wert besitzen. Weiterhin mussen die zu-gehorigen Verschiebungen der Krafte endlich sein.
An dieser Stelle betrachten wir den Sonderfall des linear-elastischen Sy-stems und geben eine genauere Darstellung der obigen Bedingungen fur dieGultigkeit der Castiglianoschen Satze fur unterschiedliche elastische Struk-turen an, die sich aus den mathematischen Bedingungen an die Formande-rungsenergiefunktion ergibt, siehe auch Kapitel 11 und die Darstellung inHartmann [31]. Hierzu fuhren wir folgende Bezeichnungen ein.
m: Ordnung der maximalen Ableitung im Ausdruck fur die Formande-rungsenergie.
Fachwerkstab m = 1Balkentheorie nach Bernoulli (schubstarr) m = 2Balkentheorie nach Timoshenko (schubelastisch) m = 1Plattentheorie nach Kirchhoff-Love (schubstarr) m = 2Plattentheorie nach Reisner (schubelastisch) m = 1
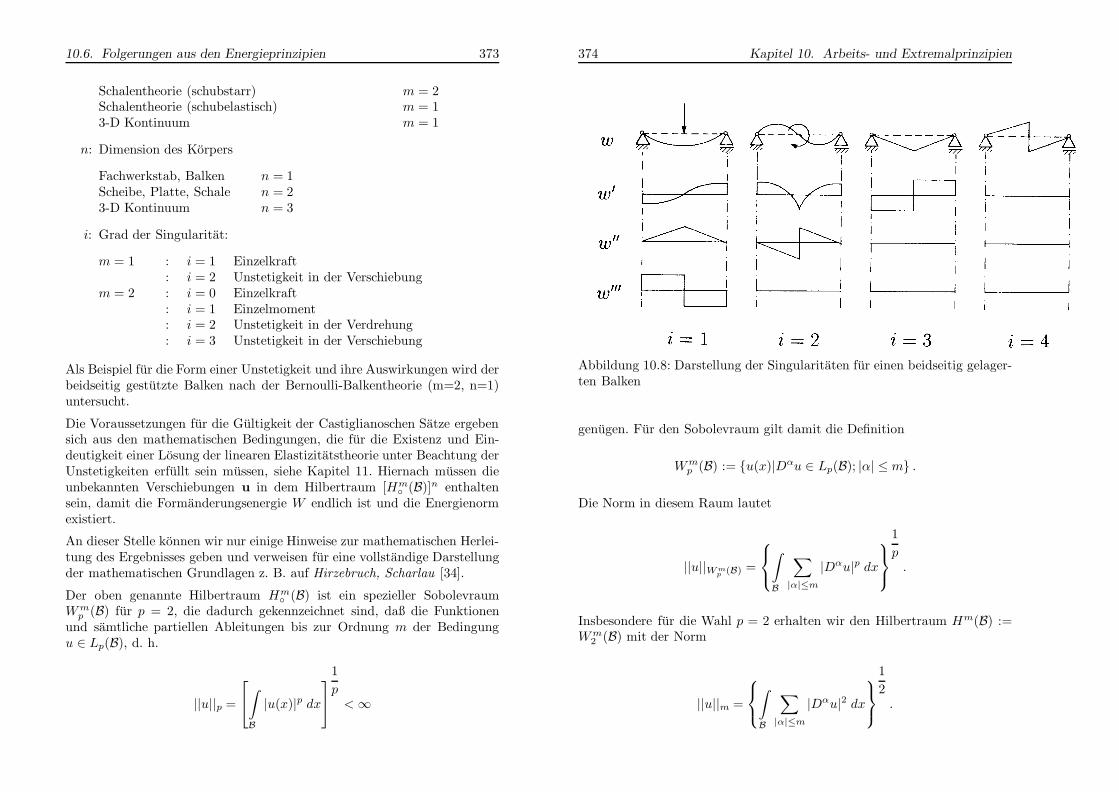
10.6. Folgerungen aus den Energieprinzipien 373
Schalentheorie (schubstarr) m = 2Schalentheorie (schubelastisch) m = 13-D Kontinuum m = 1
n: Dimension des Korpers
Fachwerkstab, Balken n = 1Scheibe, Platte, Schale n = 23-D Kontinuum n = 3
i: Grad der Singularitat:
m = 1 : i = 1 Einzelkraft: i = 2 Unstetigkeit in der Verschiebung
m = 2 : i = 0 Einzelkraft: i = 1 Einzelmoment: i = 2 Unstetigkeit in der Verdrehung: i = 3 Unstetigkeit in der Verschiebung
Als Beispiel fur die Form einer Unstetigkeit und ihre Auswirkungen wird derbeidseitig gestutzte Balken nach der Bernoulli-Balkentheorie (m=2, n=1)untersucht.
Die Voraussetzungen fur die Gultigkeit der Castiglianoschen Satze ergebensich aus den mathematischen Bedingungen, die fur die Existenz und Ein-deutigkeit einer Losung der linearen Elastizitatstheorie unter Beachtung derUnstetigkeiten erfullt sein mussen, siehe Kapitel 11. Hiernach mussen dieunbekannten Verschiebungen u in dem Hilbertraum [Hm
(B)]n enthaltensein, damit die Formanderungsenergie W endlich ist und die Energienormexistiert.
An dieser Stelle konnen wir nur einige Hinweise zur mathematischen Herlei-tung des Ergebnisses geben und verweisen fur eine vollstandige Darstellungder mathematischen Grundlagen z. B. auf Hirzebruch, Scharlau [34].
Der oben genannte Hilbertraum Hm (B) ist ein spezieller Sobolevraum
Wmp (B) fur p = 2, die dadurch gekennzeichnet sind, daß die Funktionen
und samtliche partiellen Ableitungen bis zur Ordnung m der Bedingungu ∈ Lp(B), d. h.
||u||p =
∫
B
|u(x)|p dx
1
p<∞
374 Kapitel 10. Arbeits- und Extremalprinzipien
Abbildung 10.8: Darstellung der Singularitaten fur einen beidseitig gelager-ten Balken
genugen. Fur den Sobolevraum gilt damit die Definition
Wmp (B) := u(x)|Dαu ∈ Lp(B); |α| ≤m .
Die Norm in diesem Raum lautet
||u||Wmp (B) =
∫
B
∑
|α|≤m
|Dαu|p dx
1
p.
Insbesondere fur die Wahl p = 2 erhalten wir den Hilbertraum Hm(B) :=Wm
2 (B) mit der Norm
||u||m =
∫
B
∑
|α|≤m
|Dαu|2 dx
1
2.
10.6. Folgerungen aus den Energieprinzipien 375
Fur die Durchbiegung w einer Kirchhoff-Platte erhalten wir die H2-Norm:
||w||2 =
∫
B
(w2 +w2,1 +w2
,2 + w2,11 +w2
,22 + w2,21) dA
1
2.
Durch die Wahl des Raumes [Hm (B)]n ist gesichert, daß die Formande-
rungenergie W fur endliche Verschiebungen endlich bleibt, d. h. W < ∞.Weiterhin weist jede sinnvolle Wahl einer Formanderungsenergiefunktiondie Eigenschaft auf, daß fur Verschiebungen ||u|| → ∞ die Formanderungs-energie ebenfalls unendlich wird (Koerzivitat).
Neben der obigen Bedingung ist fur die Gultigkeit der CastiglianoschenSatze die Stetigkeit der Arbeit der außeren Krafte t
∣∣∣∣∣∣
∫
B
t · u da
∣∣∣∣∣∣< c · ||u||m
erforderlich. Hierbei bezeichnet c eine Konstante und ||u||m die Norm derVerschiebung u im betrachteten Hilbertraum [Hm
]n.
Auf der Grundlage des Lax-Milgram-Lemmas (siehe Kapitel 11) und desEinbettungssatzes von Sobolev erhalten wir hieraus die Aussage
Die Satze von Castigliano konnen nur dann angewendet werden, wenndie Formanderungsenergie endlich ist und die jeweils konjugiertenGroßen beschrankt bleiben. Dieses ist der Fall, wenn die drei Großenm, n und i mit den Bedeutungen
m: Ordnung der maximalen Ableitung im Ausdruck fur dieFormanderungsenergie,
n: Dimension des Korpers und
i: Grad der Singularitat
die Ungleichung
m− i > n
2(10.143)
erfullen.
376 Kapitel 10. Arbeits- und Extremalprinzipien
Die Auswertung der obigen Bedingung ist fur Balken, Platten und dreidi-mensionale Korper z. B. in Hartmann [31] vorgenommen worden.
Als Beispiel fur die Bedeutung der Formel (10.143) fur die Gultigkeit derCastiglianoschen Satze betrachten wir die Auswirkungen einer EinzelkraftF , die auf einem Balken, auf einer Platte (Kirchhoff-Love) und in einemdreidimensionalen Korpers wirkt.
• Einzelkraft auf einem Balken (m = 2, n = 1, i = 0):
Fur eine Einzelkraft auf einen elastischen Bernoulli-Balken erhaltenwir einen Sprung im Querkraft- und einen Knick im Momentenverlauf.Damit ist die Formanderungsenergie beschrankt und wir bestatigendie Gultigkeit der aus der Festigkeitslehre bekannten CastiglianoschenSatze fur den Bernoulli-Balken.
• Einzelkraft auf eine Platte (m = 2, n = 2, i = 0):
Greift eine Einzelkraft z. B. in der Mitte einer kreisformigen Platte(Kirchhoff-Love) an, so konnen wir den Zustand der Platte in Polarko-ordinaten beschreiben. Fur die Querkrafte, d. h. die dritte Ableitungder Durchbiegung w, erhalten wir qualitativ den singularen Verlaufr−1. Durch Integration erhalten wir fur die Krummungen qualitativln r, sowie fur die Neigungen r ln r − r und fur die Durchbiegungenr · 0(1). Damit ist die Durchbiegung in Plattenmitte beschrankt unddie Formanderungsenergie der Platte (siehe Abschnitt 10.7) bleibt be-schrankt. Damit sind die Castiglianoschen Satze auch fur eine Einzel-last auf einer Platte (Kirchhoff-Love Theorie) gultig.
• Einzelkraft in einem dreidimensionalen Korper m = 1, n = 3, i = 1):
Greift eine Einzelkraft z. B. im Zentrum einer elastischen Kugel an,so erhalten wir unter Verwendung von Kugelkoordinaten fur die Ver-zerrungen qualitativ den Verlauf r−2 und durch Integration fur dieVerschiebungen r−1. Damit ist die Verschiebung im Zentrum unbe-schrankt und die Formanderungsenergie wachst gegen unendlich. So-mit sind die Voraussetzungen fur die Castiglianoschen Satze nichterfullt und bei Einzelkraften in elastischen Korpern durfen die Satzevon Castigliano nicht angewendet werden.
Es kann auch gezeigt werden, daß fur Scheiben (zweidimensionale Span-nungszustande) die Castiglianoschen Satze ebenfalls nicht gultig sind.

10.7. Die Herleitung der DGL der Platte 377
10.7 Die Herleitung der Differentialgleichungder Platte durch Variation des elasti-
schen Potentials
In diesem Abschnitt geben wir am Beispiel der Kirchhoffschen Plattentheo-rie die Anwendungsmoglichkeit der Variationsformulierung zur Herleitungder Eulerschen Differentialgleichung an.
10.7.1 Die Herleitung des elastischen Potentials derPlatte
Wir schranken uns dabei auf die Theorie dunner Platten, d. h. die Platten-dicke h ist klein im Vergleich zu den Abmessungen der Plattenmittelflache,setzen kleine Durchbiegungen und Verzerrungen voraus und konnen damitdie linearisierte Theorie anwenden.
Die folgenden Annahmen, die sich mit der geringen Plattendicke begrundenlassen, stellen die Grundlagen der Kirchoffschen Plattentheorie dar:
1. Alle untereinanderliegenden Plattenpunkte erfahren dieselbe, von derKoordinate z unabhangige Durchbiegung w = w(x, y) der Plattenmit-telflache.
2. Die Normalen zur Mittelflache der Platte stehen auch nach der De-formation senkrecht auf der verformten Mittelflache, siehe Abbildung
10.9, d. h. fur die Beschrankung auf kleine Neigungen∂w
∂xund
∂w
∂ygilt mit der Durchbiegung w = w(x, y) der Plattenmittelflache
u(x, y, z) = −z ∂w(x, y)
∂xund v(x, y, z) = −z ∂w(x, y)
∂y.
3. Die Normalspannung σz wird vernachlassigt.
Die kinematischen Annahmen schranken die unbekannten Verschiebungenein, so daß in der Kichhoffschen Plattentheorie nur noch die Durchbiegungder Plattenmittelflache auftritt. Mit diesen Annahmen werden die Verzer-rungen infolge der Schubspannungen vernachlassigt und die Schubkrafteleisten keine Arbeit. Damit treten, wie wir im weiteren sehen werden, nur
378 Kapitel 10. Arbeits- und Extremalprinzipien
Abbildung 10.9: Die Kinematik der Kirchhoffschen Plattentheorie
noch Anteile der reinen Biegung im inneren Potential Π(i) auf. Die hier be-schriebenen Voraussetzungen sowie die vollstandige, direkte Herleitung derKirchhoffschen Plattengleichung findet man z. B. in Szabo [73].
Aus den linearisierten geometrischen Beziehungen nach (3.87) erhalten wirfur die oben festgelegte Kinematik die Darstellung
εx = −z · ∂2w
∂x2, εy = −z · ∂
2w
∂y2und εxy = −z · ∂
2w
∂y∂x
und mit der Vernachlassigung der Spannung σz = 0 folgt fur das HookescheWerkstoffgesetz nach (7.119)
σx =E
1− ν2(εx + νεy), σy =
E
1− ν2(εy + νεx), und σxy = 2Gεxy.
Durch Einsetzen der geometrischen Beziehungen in das Hookesche Gesetzfolgt damit
σx = − E · z1− ν2
(∂2w
∂x2+ ν
∂2w
∂y2
)
σy = − E · z1− ν2
(∂2w
∂y2+ ν
∂2w
∂x2
)
σxy = − E · z1 + ν
∂2w
∂x∂y.
(10.144)
10.7. Die Herleitung der DGL der Platte 379
Damit sind die notwendigen Beziehungen zur Beschreibung der potentiellenEnergie hergeleitet. Fur das innere Potential Π(i) nach (10.74) folgt
Π(i) =1
2
∫
B
(σx εx + σy εy + σz εz︸ ︷︷ ︸=0
+σxy εxy
+ σxz εxz︸ ︷︷ ︸=0
+σyz εyz︸ ︷︷ ︸=0
) dxdydz︸ ︷︷ ︸dV
. (10.145)
Setzt man nun das Hookesche Gesetz in der Form
εx =1
E(σx − νσy), εy =
1
E(σy − νσx) und εxy =
1 + ν
Eσxy
in Gleichung (10.145) ein, so ergibt sich fur das innere Potential
Π(i) =1
2E
∫
B
σ2
x + σ2y − 2νσxσy + 2(1 + ν)σ2
xy
dV. (10.146)
Im weiteren spezifizieren wir unseren Korper B als eine Rechteckplatte mit0 ≤ x ≤ a und 0 ≤ y ≤ b und allseitig gelenkig gelagerten Randern. Setztman weiterhin Gleichung (10.144) in Gleichung (10.146) ein und fuhrt dieIntegration uber z von −h
2bis +h
2aus, so ergibt sich z. B. fur
1
E
+ h2∫
−h2
σ2xdz =
E · h3
12(1− ν)︸ ︷︷ ︸=:K
· 1
1− ν2
(∂2w
∂x2+ ν
∂2w
∂y2
)2
und damit fur das innere Potential
Π(i) =K
2
a∫
x=0
b∫
y=0
(∂2w
∂x2+∂2w
∂y2
)2
− 2(1− ν)(∂2w
∂x2
∂2w
∂y2−[∂2w
∂x∂y
]2)dxdy.
(10.147)
Hierin wird die Konstante K =Eh3
12(1− ν2)als Plattensteifigkeit bezeichnet.
380 Kapitel 10. Arbeits- und Extremalprinzipien
Das außere Potential Π(a) einer konstanten Flachenlast p = p(x, y) bei rei-nen geometrischen Randbedingungen ergibt sich zu
Π(a) = −a∫
x=0
b∫
y=0
p(x, y) · w(x, y) dxdy. (10.148)
Fur das Gesamtpotential Π = Π(i)+Π(a) erhalten wir mit den Abkurzungen
wxx =∂2w
∂x2; wyy =
∂2w
∂y2und wxy =
∂2w
∂x∂y
die Darstellung
Π =
a∫
x=0
b∫
y=0
F (x, y, w, wxx, wyy, wxy) dxdy. (10.149)
10.7.2 Die Behandlung des Variationsproblems
Bei der Platte ist die Durchbiegungsfunktion w eine Funktion von zweiunabhangigen Ortskoordinaten x und y, d. h. w = w(x, y). Das Variations-problem lautet nach (10.149)
Π =
a∫
x=0
b∫
y=0
F (x, y, w, wxx, wyy, wxy) dxdy =⇒ Min.
Die allgemeine Fassung des Variationsproblems sieht nach Abschnitt (10.4)folgendermaßen aus
J =
a∫
x=0
b∫
y=0
F (x, y, w, wx, wy, wxx, wyy, wxy) dxdy =⇒ Min.
Als Eulersche Differentialgleichung fur die gesuchte Extremalfunktion ergibtsich nach (10.54) die partielle Differentialgleichung
Fw −∂
∂xFwx− ∂
∂yFwy
+∂2
∂x2Fwxx
+∂2
∂y2Fwyy
+∂2
∂x∂yFwxy
= 0
10.7. Die Herleitung der DGL der Platte 381
mit den Bezeichnungen
Fw =∂F
∂w, Fwx
=∂F
∂wx
, wx =∂w
∂x, wy =
∂w
∂y, wxx =
∂2w
∂x2usw.
Fur das Potential der Platte gilt mit (10.147) und (10.148)
Π =
a∫
x=0
b∫
y=0
−pw +
K
2
[(wxx + wyy)
2 − 2(1− ν)(wxxwyy −w2xy)]
︸ ︷︷ ︸F (x, y, w, wxx, wyy, wxy)
dxdy
(10.150)und mit der Eulerschen Differentialgleichung
Fw +∂2
∂x2Fwxx
+∂2
∂y2Fwyy
+∂2
∂x∂yFwxy
= 0 (10.151)
erhalt man nach der Berechnung von
Fw =∂F
∂w= −p,
Fwxx=
∂F
∂wxx
=K
2[2(wxx + wyy) − 2(1− ν) ·Wyy],
∂2Fwxx
∂x2= K[wxxxx +wyyxx − (1− ν)wyyxx],
∂2Fwyy
∂y2= K[wyyyy + wxxyy − (1− ν)wxxyy],
Fwxy=
K
22(1− ν)2wxy und
∂2Fwxy
∂x∂y= K2(1− ν)wxxyy
die Beziehung
∂2Fwxx
∂x2+∂2Fwyy
∂y2+∂2Fwxy
∂x∂y= K(wxxxx + 2wxxyy + wyyyy)
und damit nach (10.151) die Kirchhoffsche Plattengleichung
∆∆w =p
K. (10.152)
382 Kapitel 10. Arbeits- und Extremalprinzipien
Kapitel 11
Die mathematischeBehandlung derlinearisiertenElastizitatstheorie
In der bisherigen Betrachtung der Elastizitatstheorie haben wir hinreichendglatte Problemdaten vorausgesetzt, so daß die formal durchgefuhrten ma-thematischen Operationen stets sinnvoll waren. Weiterhin sind wir davonausgegangen, daß die hergeleiteten Bedingungsgleichungen, z. B. das Rand-wertproblem der Elastizitatstheorie (siehe Seite 249), eine eindeutig be-stimmte Losung besitzen.
Eine eingehende Betrachtung aus mathematischer Sicht ist in den letztenJahrzehnten vorgenommen und zumindest fur die linearisierte Theorie wei-testgehend zum Abschluß gebracht worden. Um dem Leser den Einstiegin die mathematisch orientierte Literatur uber die Elastizitatstheorie zuerleichtern, werden wir in diesem Kapitel die Fragen der Existenz und Ein-deutigkeit der Losung der linearisierten Elastizitatstheorie behandeln.
Die hierzu notwendigen weiterreichenden Begriffe und Konzepte der Funk-tionalanalysis konnen an dieser Stelle nicht dargelegt werden und sind dermathematischen Literatur, siehe z. B. Hirzebruch, Scharlau [34], zu entneh-men.
383
384 Kapitel 11. Mathematische Elastizitatstheorie
11.1 Zusammenstellung der klassischen line-arisierten Elastizitatstheorie
Zuerst sollen in diesem Abschnitt die Ergebnisse unserer bisherigen Untersu-chungen zusammengefaßt werden. Die Bezeichnung
”klassisch“ kennzeich-
net dabei die Ergebnisse der bisherigen Kapitel, die unter der Vorausset-zung hinreichender stetiger Differenzierbarkeit der Problemdaten und derLosungen erzielt wurden. Im Gegensatz dazu stehen die
”mathematischen“
Untersuchungen zur Elastizitatstheorie, bei der die notwendigen und hin-reichenden Bedingungen an die Problemdaten genannt werden, unter denendie Existenz und Eindeutigkeit der Losung zu zeigen ist.
11.1.1 Das Randwertproblem der klassischen lineari-sierten Elastizitatstheorie
Im Abschnitt 8.2.1 wurde mit den Gleichungen (8.29), (8.30) und (8.31) dasklassische, lineare Randwertproblem
Divλ (tr ǫǫǫ (u)) 1 + 2 µ ǫǫǫ (u)+ ρ(b − u) = 0 ∀ X ∈ B
u = u ∀ X ∈ ∂B u
λ (tr ǫǫǫ (u)) 1 + 2 µ ǫǫǫ (u) N = t ∀ X ∈ ∂Bσ
fur die unbekannten Verschiebungen u formuliert. Als vorgegebene Randbe-dingungen sind die Verschiebungen auf dem Randbereich ∂Bu vorgegebenund es treten volumenhaft verteilte Spannungen ρb in B und Oberfla-chenspannungen t auf dem Randbereich ∂Bσ auf.
Das oben dargestellte Randwertproblem der klassischen linearisierten Ela-stizitatstheorie soll zunachst in der Notation der mathematischen Litera-tur formuliert werden. Dabei behalten wir jedoch die satztechnische Un-terscheidung der Vektoren und Tensoren zu den skalarwertigen Funktionenbei und beschranken uns auf homogene Verschiebungsrandbedingungen mitu = u = 0 ∀X ∈ ∂B u
Dazu betrachten wir eine beschrankte, offene, zusammenhangende Teilmen-ge Ω ⊂ IR3 mit einem hinreichend glatten Rand Γ. Auf dem Randbereich
11.1. Klassische Elastizitatstheorie 385
Γ1 := ∂Bu sind die Verschiebungen u unterdruckt und auf Γ2 := ∂Bσ
sind die Oberflachenspannungen t vorgegeben. Damit gilt wiederum
Γ = Γ1 ∪ Γ2 und Γ1 ∩ Γ2 = ∅.
Der Abschluß Ω von Ω stellt damit die Referenzkonfiguration B dar. DiePunkte X der Referenzkonfiguration B werden nun mit x ∈ Ω bezeichnet.Weiterhin wird definiert
L[u(x)] := −Divλ (tr ǫǫǫ (u)) 1 + 2 µ ǫǫǫ (u), (11.1)
B[u(x)] := λ (tr ǫǫǫ (u)) 1 + 2 µ ǫǫǫ (u) N, (11.2)
f := ρb, (11.3)
g := t. (11.4)
Damit erhalten wir das klassische Randwertproblem der linearisierten Ela-stizitatstheorie in der mathematischen Literatur ublichen Schreibweise
L[u(x)] = f (x) in Ω, (11.5)
u = 0 auf Γ1, (11.6)
B[u(x)] = g(x) auf Γ2. (11.7)
Wir betrachten das durch die Gleichungen (11.1) bis (11.4) gegebene Rand-wertproblem in einem reellen Vektorraum, der mit dem Skalarprodukt
(u,v) :=
∫
Ω
u(x) · v(x) dx fur u,v ∈ C(Ω) (11.8)
versehen ist.
11.1.2 Das Energieprinzip der klassischen linearisier-ten Elastizitatstheorie
In Abschnitt 10.5 wurde das Prinzip vom Minimum der potentiellen Energiein der Form
Π(u) = minv∈V
Π(v) (11.9)
mit
Π(v) =1
2
∫
B
σσσ(v) : ǫǫǫ(v) dV −∫
B
ρb · v dV −∫
∂Bσ
t · v dA (11.10)
386 Kapitel 11. Mathematische Elastizitatstheorie
bereitgestellt, wobei V den Raum der zulassigen Testfunktionen bezeichnet.Unter Verwendung des Gaußschen Integralsatzes und der Beziehungen
σσσ : ǫǫǫ = σσσ : Gradv = Div(σσσTv)− v ·Divσσσ (11.11)
erhalten wir aus (11.10)
2Π =
∫
B
−Divσσσ − 2ρb · v dV −∫
∂Bσ
t · v dA. (11.12)
Fur den Fall eines reinen Verschiebungs–Randwertproblems (Dirichlet–Rand-wertproblem) mit Γ = Γ1 und Γ2 = ∅ folgt hieraus
2Π =
∫
B
−Divσσσ − 2ρb · v dV
=
∫
B
(−Divλ (tr ǫǫǫ (v)) 1 + 2 µ ǫǫǫ (v) · v dV − 2
∫
B
ρb · v dV
Mit der oben eingefuhrten Notation gilt
I[v] := 2Π =
∫
B
L[v(x)] · v(x) dx− 2
∫
B
f · v dx. (11.13)
Mit dem Skalarproduktes (11.8) erhalten wir fur das oben definierte Funk-tional I[v] die Darstellung I[v] = (L[v],v)− 2(f ,v). Damit haben wir dasPrinzip vom Minimum der potentiellen Energie fur den Fall eines reinenVerschiebungsproblems in der Form des klassischen Minimalproblems
I[u] = minv∈V
I[v] (11.14)
mitI[v] = (L[v],v)− 2(f ,v) (11.15)
dargestellt. Damit laßt sich fur den Differentialoperator L das FunktionalI[v] konstruieren.
11.1.3 Existenz- und Eindeutigkeit in der klassischenlinearisierten Elastizitatstheorie
In den Abschnitten 11.1.1 und 11.1.2 haben wir das klassische Randwert-problem (11.1) bis (11.4) und das klassische Minimalproblem (11.14) be-

11.1. Klassische Elastizitatstheorie 387
schrieben. Wir beschranken uns hierbei auf die Betrachtung des reinen Ver-schiebungsproblems mit Γ = Γ1, Γ2 = ∅ und verweisen fur alle anderenSituationen auf die Literatur, z. B. Rektorys [63].
Fur die Beziehung zwischen der Randwertaufgabe und dem Minimalproblemgilt die wichtige Aussage des Minimum Functional Theorem von Mikhlin[49]:
Sei L : DL ⊂ V → V ein linearer, symmetrischer, positiv definiterOperator in einem reellen Vektorraum V mit Skalarprodukt (., .) unddem allgemeinen Definitionsbereich DL ⊂ V von L. Dann gelten diefolgenden Aussagen:
(i) Besitzt die Randwertaufgabe L[u] = f eine Losung u ∈ DL,dann ist u das eindeutig bestimmte Minimum des FunktionalsI[u], definiert fur alle v ∈ DL durch
I[v] = (L[v],v)− 2(f ,v).
(ii) Ist DL eine dichte Teilmenge des inneren Produktraumes V undexistiert ein Minimum u ∈ DL von I[v], dann ist u eine Losungvon L[v] = f .
Bemerkungen:
1. Es wird nicht die Existenz einer Losung bewiesen, sondern vorausge-setzt, um damit die Aquivalenz der Losung des Minimalproblems zurLosung der Randwertaufgabe zu beweisen
2. Zur Anwendung des Minimum Functional Theorem auf das reine Ver-schiebungsproblem der linearisierten Elastizitatstheorie sind die Vor-aussetzungen des Satzes zu uberprufen, d. h.
• L : DL ⊂ V → V ist linear,
• L ist symmetrisch,
• L ist positiv definit.
388 Kapitel 11. Mathematische Elastizitatstheorie
11.2 Die schwache Form des Gleichgewichts
In Abschnitt 11.1 haben wir die Aquivalenz zwischen dem klassischen Rand-wertproblem und dem klassischen Minimalproblem unter den dort genann-ten Voraussetzungen fur hinreichend glatte Problemdaten bewiesen. DieFrage der Existenz von Losungen konnte in dem Zusammenhang nicht be-antwortet werden. In diesem Abschnitt wollen wir mit der Formulierung derschwachen Form des Gleichgewichts die Grundlage einer weitreichenden ma-thematischen Behandlung der linearisierten Elastizitatstheorie vornehmen.
Hierbei ist zentral, daß wir fortan nicht mehr hinreichend stetige Funktionenu, f , g, z. B. u, f , g ∈ C2(Ω) betrachten wollen, sondern wir formulierenunsere Gleichungen fur Funktionen u, f , g ∈ V , wobei V einen geeignetenHilbertraum bezeichnet.
Zur Herleitung der schwachen Form des Gleichgewichts betrachten wir dasRandwertproblem der linearisierten Elastizitatstheorie, d. h. fur eine Wahlvon f und der Randbedingungen gelten die Gleichungen (11.5), (11.6) und(11.7)
L[u(x)] = f (x) in Ω,
u = 0 auf Γ1,
B[u(x)] = g(x) auf Γ2,
wobei u Element eines geeigneten Hilbertraumes V ist (siehe hierzu Ab-schnitt 11.4.1). Mit einer beliebigen Testfunktion v ∈ V erhalten wir damitaus (11.16) mit dem Skalarprodukt (., .) des Hilbertraumes V die Beziehung
(L[u],v)− (f ,v) = 0, (11.16)
d. h. durch Ausschreiben des Skalarproduktes, dem Gaußschen Integralsatzund Berucksichtigung der Randbedingungen folgt
0 = (L[u],v)− (f ,v)
=
∫
Ω
−(Divσσσ (u)) · v − f · v dx
=
∫
Ω
σσσ (u) : Grad (v) −Div(σσσTv)
dx−
∫
Ω
f · v dx
=
∫
Ω
σσσ (u) : ǫǫǫ (v) dx−∫
Ω
f · v dx−∫
Γ
(σσσ N) · v ds
11.2. Die schwache Form des Gleichgewichts 389
=
∫
Ω
σσσ (u) : ǫǫǫ (v) dx−∫
Ω
f · v dx−∫
Γ2
g · v ds.
Damit haben wir die schwache Form des Gleichgewichts hergeleitet, d. h. esgilt der Satz (schwache Form des linearisierten Verschiebungs-Spannungs-Randwertproblems):
Die Bestimmung einer Losung u des linearen Randwertproblems
L[u(x)] = f (x) in Ω, (11.17)
u = 0 auf Γ1, (11.18)
B[u(x)] = g(x) auf Γ2, (11.19)
mit L und B nach Abschnitt 11.1 ist formal aquivalent zur Bestimmungeiner Losung u ∈ V der schwachen Form
a(u,v) = F (v) ∀ v ∈ V, (11.20)
mit der Bilinearform bzw. Linearform
a(u,v) :=
∫
Ω
λ (tr ǫǫǫ (u) tr ǫǫǫ (v)) + 2µǫǫǫ (u) : ǫǫǫ (v) dx,(11.21)
F (v) :=
∫
Ω
f · v dx+
∫
Γ2
g · v ds. (11.22)
V bezeichnet dabei einen Raum mit hinreichend glatten Funktionenu : V → IR3, die auf Γ1 verschwinden.
Bemerkungen:
1. Die schwache Form des Gleichgewichts ist streng genommen nicht mitdem Prinzip der virtuellen Arbeit zu verwechseln, da die Anforde-rungen an die Testfunktion bzw. an die virtuelle Verschiebung un-terschiedlich sind. Zur Erlauterung dieser Bemerkung betrachten wirGleichung (10.56), d. h.
δu(x) = εη(x),
390 Kapitel 11. Mathematische Elastizitatstheorie
die sich in der in den Kapitel 10 und 11 benutzten Notation als
δu = εηηη
schreiben laßt. Wahrend bei dem Prinzip der virtuellen Arbeit eineinfinitesimal kleine Verschiebung δu betrachtet wird, tritt diese For-derung fur die beliebige Testfunktion v = ηηη ∈ V nicht auf.
2. Die schwache Form des Gleichgewichts ist auch fur geometrisch undphysikalisch nichtlineare Probleme aufzustellen. In diesem Fall tre-ten dann jedoch keine Bilinearformen bzw. Linearformen auf, und diehier dargestellte Theorie ist nicht auf den Problemkreis nichtlinearerRandwertaufgaben anzuwenden.
3. Die Losung des Randwertproblems (11.17) bis (11.19) wird als starkeLosung bezeichnet. Die starke Losung besitzt hinreichende Differen-zierbarkeitseigenschaften, so daß die im Randwertproblem auftreten-den Ableitungen im starken Sinne zu verstehen sind.
4. Die Losung der schwachen Form des Gleichgewichts (11.20) wird alsschwache Losung bezeichnet.
5. Die Formulierung der schwachen Form des Gleichgewichts (11.20) er-fordert von den Problemdaten und der Losung geringere Stetigkeits-anforderungen als die fur das Randwertproblem (11.17) bis (11.19)erforderlich sind und zwar gilt
• Beim Randwertproblem der Ordnung 2n ist es erforderlich, daßalle starken Ableitungen bis zum Grade 2n existieren und stetigsind. Fur die dreidimensionale Elastizitatstheorie gilt insbeson-dere v ∈ C2(Ω) und f , g ∈ C(Ω).
• Bei der schwachen Form des Gleichgewichts (11.20) ist es dage-gen nur erforderlich, daß die auftretenden Integrale existieren.Hinreichend hierfur ist, daß die Problemdaten f , g im Lebesgue-schen Sinne (Lebesgue–Integral) quadratisch integrierbar sind,d. h. f , g ∈ L2(Ω) oder
∫
Ω
f · f dx <∞ und
∫
Γ
g · g ds <∞. (11.23)
11.2. Die schwache Form des Gleichgewichts 391
Weiterhin muß fur alle Testfunktionen v die Formanderungsener-gie endlich bleiben, d. h.
1
2
∫
Ω
σσσ(v) : ǫǫǫ(v) < ∞. (11.24)
Dies bedeutet, daß v ∈ H1(Ω) gelten muß.
6. Die schwache Form des Gleichgewichts ist der Ausgangspunkt dermathematischen Untersuchung der Existenz- und Eindeutigkeit vonLosungen. Genauer ergeben sich hierbei vier Fragestellungen:
Existenz einer Losung: Gibt es zu den vorgegebenen Problemda-ten, d. h. Form des Gebietes, Form des Randes, Auswahl derMaterialeigenschaften, außere Belastung in Ω und auf Γ2, geome-trische Randbedingungen auf Γ1 usw. uberhaupt eine schwacheLosung?
Eindeutigkeit der Losung: Sind die Problemdaten in solcher Wei-se ausgewahlt, daß genau eine schwache Losung existiert?
Stabilitat der Losung: Ist das Problem in dem Sinne wohldefiniert,daß die schwache Losung stetig von den Problemdaten abhangt,d. h. daß eine kleine Storung der Problemdaten auch nur kleineVeranderungen in der Losung bewirkt?
Regularitat der Losung: Unter welchen (zusatzlichen) Stetigkeits-anforderungen an die Problemdaten ist es moglich, daß die schwa-che Losung von (11.20) auch starke Losung von (11.17) bis (11.19)und damit auch Losung im klassischen Sinne ist?
392 Kapitel 11. Mathematische Elastizitatstheorie
11.3 Variationsaufgaben
Im folgenden Abschnitt werden wir die Existenz- und Eindeutigkeit derLosung der schwachen Form des Gleichgewichts in einem geeigneten reellenHilbertraum beweisen. Dazu betrachten wir in diesem Abschnitt zunachstdie allgemeine Theorie der Variationsaufgaben und werden die sich darausergebenden Resultate durch Verifikation der Voraussetzungen im Abschnitt11.4 auf die dreidimensionale Elastizitatstheorie anwenden.
11.3.1 Existenz- und Eindeutigkeit der Losung von Va-riationsaufgaben
Wir betrachten die allgemeine Variationsaufgabe
Bestimme ein u ∈ V , so daß
a(u,v) = F (v) ∀ v ∈ V. (11.25)
Die Existenz, Eindeutigkeit und Stabilitat ist durch die Aussage des Lax-Milgram-Lemma aus dem Jahre 1954, siehe z. B. Rektorys [63] gegeben:
Sei a(u,v) eine stetige und V -elliptische Bilinearform auf V , d. h. esexistieren Konstanten α > 0 und M > 0, so daß
|a(u,v)| ≤M‖u‖V ‖v‖V ∀ u,v ∈ V, (11.26)
a(u,u) ≥ α‖u‖2V ∀ u ∈ V. (11.27)
Sei F eine stetige Linearform auf V . Dann existiert genau eine Losungu ∈ V von (11.25).
Beweis:(i) Zuerst soll die Eindeutigkeit der Losung bewiesen werden.Dazu betrachten wir zwei stetige Linearformen F1 und F2 und die zugehori-gen Losungen u1 und u2, d. h. es gelte
a(u1,v) = F1(v) ∀ v ∈ V, (11.28)
a(u2,v) = F2(v) ∀ v ∈ V. (11.29)

11.3. Variationsaufgaben 393
Setzen wir v = u2−u1 in (11.28) und v = u1−u2 in (11.29), dann erhaltenwir durch Addition der Gleichungen (11.28) und (11.29) und der Linearitatder Bilinearform a(., .) sowie der Linearform F (.) die Beziehung
a(u2 − u1,u2 − u1) = (F2 − F1)(u2 − u1). (11.30)
Mit der V -Elliptizitat (auch Koerzitivitat) von a(., .) und der Stetigkeit vonF1 bzw. F2 folgt daraus
α‖u2 − u1‖2V ≤ |a(u2 − u1,u2 − u1)| = |(F2 − F1)(u2 − u1)|≤ ‖F2 − F1‖V ′ ‖u2 − u1‖V
und damit
‖u2 − u1‖V ≤1
α‖F2 − F1‖V ′ . (11.31)
Aus dieser Ungleichung erhalten wir zum einen fur F1 = F2 die Eindeutig-keit der Losung und zum anderen die stetige Abhangigkeit der Losung vonden Daten.
(ii) Die Existenz der Losung bleibt zu zeigen.Fur ein festes u ∈ V ist die Bilinearform a(., .) als ein lineares, stetigesFunktional in v ∈ V aufzufassen, d. h.
l(v) := a(u,v) fur ein festes u ∈ V. (11.32)
Nach dem Rieszschen Darstellungssatz (siehe z. B. Rektorys [63]) gibt es zujedem linearen, stetigen Funktional l eines Hilbertraumes V mit zugehori-gem Skalarprodukt (., .) ein Element L(u) ∈ V , so daß die Beziehung
a(u,v) = l(v) = (L(u),v) ∀ u,v ∈ V (11.33)
gilt. Wenden wir den Rieszschen Darstellungssatz auf das stetige, lineareFunktional F (v) an, so erhalten wir mit f ∈ V die Beziehung
F (u) = (f ,v) ∀ v ∈ V. (11.34)
Aus (11.33) und (11.34) folgt somit
(L(u),v) = (f ,v) ∀ u,v ∈ V (11.35)
und damit sofortL(u) = f ∀ u,v ∈ V. (11.36)
Da L ein lineare, stetige und invertierbare Abbildung ist, folgt damit
u = L−1(f ), (11.37)
d. h. die Existenz der Losung.
394 Kapitel 11. Mathematische Elastizitatstheorie
11.3.2 Beziehung der schwachen Form zu Minimalpro-blemen
In der Voraussetzung des Lax-Milgram-Lemmas (11.25) wurde die Stetig-keit und V -Elliptizitat der Bilinearform a(., .) verlangt. Fordern wir nunzusatzlich, daß die Bilinearform a(., .) auch symmetrisch ist, so kann mita(., .) ein zusatzliches Skalarprodukt, das wir mit (., .)E bezeichnen wollen,definiert werden.
Damit konnen wir die Beziehung der schwachen Form des Gleichgewichtszu dem Minimalproblem
I[u] = infv∈V
I[v] (11.38)
mit
I[v] :=1
2a(v,v)− F (v) (11.39)
herstellen. Es gilt dann der Satz
Gegeben seien die Voraussetzungen des Lax-Milgram-Lemmas. Zusatz-lich sei die Bilinearform a(., .) symmetrisch. In diesem Fall ist die Va-riationsaufgabe (11.25) aquivalent zum Minimalproblem (11.38), d. h.die eindeutig bestimmte Losung u der Variationsaufgabe (11.25) istebenfalls eindeutig bestimmte Losung des Minimalproblems (11.38).
Beweis:(i) Sei u die Losung des Variationsproblems.Aus der Definition des Funktionals I[v] durch I[v] := 1
2a(v,v)− F (v) er-halten wir I′[u]v = a(u,v)− F (v) und I′′[u](v,v) = a(v,v). Damit ergibtsich fur die Taylorreihenentwicklung
I[u + v] = I[u] + (a(u,v)− F (v)) +1
2a(v,v). (11.40)
Mit der Gultigkeit der Variationsgleichung (11.25) fur a der Stelle u folgt
I[u + v]− I[u] =1
2a(v,v) ≥ 1
α‖v‖2V ∀ v ∈ V, (11.41)
d. h. u ist das eindeutige Minimum von I.

11.3. Variationsaufgaben 395
(ii) Sei u die eindeutige Losung des Minimalproblems.Fur ein beliebiges v ∈ V gilt mit (11.40) fur jedes θ ∈ IR
0 ≤ I[u + v]− I[u] = θ (a(u,v)− F (v)) +1
2a(v,v). (11.42)
Hieraus folgt
a(u,v)− F (v) = 0 ∀ v ∈ V, (11.43)
denn fur ein hinreichend kleines θ ließe sich sonst ein Widerspruch
0 ≤ I[u + v]− I[u] < 0 (11.44)
konstruieren.
Bemerkungen:
1. Das durch die symmetrische Bilinearform a(., .) definierte Skalarpro-dukt wird mit (., .)E und die sich daraus ergebende Norm mit ‖.‖Ebezeichnet. Der Index E motiviert sich aus der Betrachtung der Norm
‖u‖2E := (u,u)2E := a(u,u), (11.45)
die im Fall der linearisierten Elastizitatstheorie die innere Formande-rungsenergie darstellt und daher Energienorm genannt wird.
2. Aus der Aquivalenz der Variationsaufgabe zum Minimalproblem erge-ben sich zwei unterschiedliche Zugange zur Losung des Randwertpro-blems:
• Bei den direkten Verfahren der Variationsrechnung wird eineLosung des Minimalproblems gesucht.
• Daneben ist es auch moglich die Randwertaufgabe zu betrachten.
11.3.3 Die Regularitat der Losung
Nachdem die Kriterien fur die Existenz und Eindeutigkeit einer schwachenLosung des Variationsproblems (11.25) im Hilbertraum V angegeben wur-den, stellt sich die Frage nach der Regularitat dieser schwachen Losung.Genauer ist zu fragen:Welche Voraussetzungen mussen an die Problemdaten zusatzlich gestellt
396 Kapitel 11. Mathematische Elastizitatstheorie
werden, damit die eindeutig existierende schwache Losung u des Variati-onsproblems
a(u,v) = F (v) ∀ v ∈ Vhinreichende Differenzierbarkeit besitzt, um auch starke Losung der klassi-schen Randwertaufgabe zu sein.
Damit ist der Zusammenhang zwischen der klassischen (starken) Losungund der schwachen Losung der Operatorgleichung
L[u] = f , (11.46)
versehen mit den Randbedingungen, gesucht.
Diese Frage laßt sich mit Hilfe der Einbettungssatze von Sobolev beantwor-ten, die Kriterien dafur angeben, daß die Elemente eines Sobolevraumesebenfalls Elemente eines Raumes stetiger Funktionen sind. Die Theorie derSobolevraume findet man in Buchern uber Funktionalanalysis, z. B. Adams[1], und kann hier nicht naher behandelt werden.
Fur die Regularitat der Losung ist auch das Verhalten der Funktion u aufdem Rand Γ des Gebietes zu betrachten. Eine umfassende Behandlung die-ser Problematik ist an dieser Stelle nicht moglich, vielmehr wird im Ab-schnitt 11.4 das Ergebnis dieser Regularitatsbetrachtung fur das Beispieleiner reinen Verschiebungs-Randwertaufgabe angegeben.

11.4. Losung der schwachen Form 397
11.4 Losung der schwachen Form des Gleich-gewichts
Im vorigen Abschnitt wurden die Voraussetzungen an die Problemdatenhergeleitet, damit eine eindeutige Losung des abstrakten Variationsproblems(11.25)
a(u,v) = F (v) ∀ v ∈ Vexistiert. An dieser Stelle sollen die Voraussetzungen
• a(., .) ist eine stetige, symmetrische Bilinearform,
• a(., .) ist V -elliptisch und
• F ist eine stetige Linearform
fur den Fall der linearisierten Elastizitatstheorie mit
a(u,v) =1
2
∫
Ω
σσσ(u) : ǫǫǫ(v) dx (11.47)
F (v) =
∫
Ω
f · v dx+
∫
Γ2
g · v ds (11.48)
uberpruft werden. Dabei ist auch die Wahl des geeigneten Hilbertraumes Vzu motivieren. Wir beschranken uns hier auf die Betrachtung eines reinenVerschiebungs-Randwertproblems mit v = 0 auf Γ1 mit Γ = Γ1 und Γ2 = ∅.
11.4.1 Die Wahl des geeigneten Hilbertraumes V
Die Angabe eines geeigneten Hilbertraumes V fur die Variationsaufgabeder linearisierten Elastizitatstheorie ergibt sich aus der Untersuchung derStetigkeit der Bilinearform a : V ×V → IR und der Linearform F : V → IR.Man beachte, daß dabei die Stetigkeit von der Wahl der Norm und damitauch von der Wahl des Raumes abhangt.
Mit der Definition
a(u,v) =1
2
∫
Ω
σσσ(u) : ǫǫǫ(v) dx (11.49)
398 Kapitel 11. Mathematische Elastizitatstheorie
und der Linearitat von σσσ und ǫǫǫ fur die Verschiebungen u ist die Bilinearitatvon a : V × V → IR offensichtlich. Daher bleibt die Stetigkeit von a imHilbertraum V mit der Norm ‖.‖V zu zeigen, d. h. es existiere ein M > 0,so daß
|a(u,v)| ≤M‖u‖V ‖v‖V ∀ u,v ∈ V.Hierzu betrachten wir die Bilinearform
|a(u,v)| =
∣∣∣∣∣∣1
2
∫
Ω
σσσ(u) : ǫǫǫ(v) dx
∣∣∣∣∣∣=
1
2
∣∣∣∣∣∣
∫
Ω
tr(σσσ(u)ǫǫǫ(v)) dx
∣∣∣∣∣∣.
Mit der Cauchy-Schwarz-Ungleichung
|a(u,v)| ≤ (u,u)12 (v,v)
12 ,
der Beziehung
σσσ = λ (tr ǫǫǫ) 1 + 2 µ ǫǫǫ und ǫǫǫ : ǫǫǫ = tr(ǫǫǫ ǫǫǫT ) = tr(ǫǫǫ2) ≥ (tr ǫǫǫ)2
erhalten wir
|a(u,v)| =1
2
∣∣∣∣∣∣
∫
Ω
tr(σσσǫǫǫ) dx
∣∣∣∣∣∣≤ 1
2
∫
Ω
tr(σσσ2) dx
12
∫
Ω
tr(ǫǫǫ2) dx
12
=1
2
∫
Ω
[3λ2(tr ǫǫǫ)2 + 4µλ(tr ǫǫǫ)2 + 4µ2 tr(ǫǫǫ2)
]dx
12
∫
Ω
tr(ǫǫǫ2) dx
12
≤ 1
2
∫
Ω
[(3λ2 + 4µλ+ µ2) tr(ǫǫǫ2)
]dx
12
∫
Ω
tr(ǫǫǫ2) dx
12
≤ 3λ+ 2µ
2
∫
Ω
tr(ǫǫǫ2(u)) dx
12
∫
Ω
tr(ǫǫǫ2(v)) dx
12
. (11.50)
Mit der additiven Aufspaltung H = ǫǫǫ + Rlin mit ǫǫǫ = 12(H + HT ) und
Rlin = 12 (H−HT ) sowie der Gleichung ǫǫǫ : Rlin = 0 ergibt sich
tr(HHT ) = H : H = (ǫǫǫ+ Rlin) : (ǫǫǫ+ Rlin)
11.4. Losung der schwachen Form 399
= ǫǫǫ : ǫǫǫ+ 2ǫǫǫ : Rlin + Rlin : Rlin
= tr (ǫǫǫ ǫǫǫT ) + tr (RlinRTlin) > tr (ǫǫǫ ǫǫǫT ) = tr (ǫǫǫ2).
Damit folgt ∫
Ω
tr (HHT ) dx ≥∫
Ω
tr (ǫǫǫ ǫǫǫT ) (11.51)
und wir erhalten fur die Bilinearform a mit M := 3λ+2µ2 > 0
|a(u,v)| ≤ M
∫
Ω
tr (H(u)HT (u)) dx
12
∫
Ω
tr (H(v)HT (v)) dx
12
≤ M
∫
Ω
[u · u + tr (H(u)HT (u))
]dx
12
+
∫
Ω
[v · v + tr (H(v)HT (v))
]dx
12
= M ‖u‖H1(Ω) ‖v‖H1(Ω). (11.52)
Damit haben wir gezeigt, daß die Bilinearform a : V × V → IR stetigbezuglich der Hilbertraum-Norm ‖.‖H1(Ω) ist. Da wir an dieser Stelle diereine Verschiebungs-Randwertaufgabe mit v = 0 auf Γ betrachten, erhaltenwir als geeigneten Hilbertraum
V := v ∈ (H1(Ω))3 | v = 0 auf Γ. (11.53)
11.4.2 Die V -Elliptizitat der Bilinearform
Im weiteren ist die V -Elliptizitat der Bilinearform zu zeigen, d. h. es mußeine Konstante α > 0 existieren mit
a(u,u) ≥ α‖u‖2V ∀ u ∈ V ⊂ (H1(Ω))3. (11.54)
Dazu betrachten wir a : V × V → IR mit
a(u,u) =1
2
∫
Ω
σσσ : ǫǫǫ dx =1
2
∫
Ω
tr(σσσ ǫǫǫ) dx
400 Kapitel 11. Mathematische Elastizitatstheorie
=1
2
∫
Ω
[λ(tr ǫǫǫ)2 + 2µ tr (ǫǫǫ2)
]dx
≥ µ
∫
Ω
tr (ǫǫǫ2) dx. (11.55)
Der entscheidende Schritt zum Beweis der V -Elliptizitat liegt darin, fur alleverschiebungen v des gewahlten Hilbertraumes V = (H1(Ω))3 die Aquiva-lenz der Halbnorm
v ∈ (H1(Ω))3 → |ǫǫǫ(v)|,Ω :=
∫
Ω
ǫǫǫ(v) : ǫǫǫ(v) dx
12
(11.56)
mit der Norm ‖.‖1,Ω des Hilbertraums V
v ∈ (H1(Ω))3 → ‖v‖1,Ω :=
∫
Ω
[v · v + H(v) : H(v)] dx
12
(11.57)
zu zeigen, d. h. die Gultigkeit der Beziehung
c−1 ‖v‖1,Ω ≤ |ǫǫǫ(v)|,Ω ≤ c |ǫǫǫ(v)|1,Ω ∀v ∈ (H1(Ω))3. (11.58)
Dieser Schritt ist mit der wichtigen Kornschen Ungleichung moglich, die wirim weiteren ohne Beweis angeben werden. Weitere Hinweise zur KornschenUngleichung und zahlreiche weitere Literaturstellen finden sich in Villagio[86] und Ciarlet [9, Theorem 6.3-3]:
Sei Ω ein Gebiet im IR3. Fur jedes v ∈ (H1(Ω))3 sei ǫǫǫ ∈ (L2(Ω))3.Dann existiert eine Konstante c > 0, so daß
‖v‖1,Ω ≤ c |v|2,Ω + |ǫǫǫ(v)|2,Ω
12 ∀ v ∈ (H1(Ω))3, (11.59)
und damit ist die Abbildung
v →|ǫǫǫ(v)|2,Ω + |ǫǫǫ(v)|2,Ω
12
(11.60)
auf dem Hilbertraum (H1(Ω))3 aquivalent zur Norm ‖.‖1,Ω.
11.4. Losung der schwachen Form 401
Hieraus folgt die wichtige Ungleichung
c−1 ‖v‖1,Ω ≤ |ǫǫǫ(v)|,Ω ≤ c |ǫǫǫ(v)|1,Ω (11.61)
fur alle v ∈ V , d. h. auf dem Raum V = v ∈ (H1(Ω))3 | v = 0 auf Γ istdie Halbnorm v → |ǫǫǫ(v)|,Ω eine Norm, aquivalent zu ‖.‖1,Ω. Der Beweishierzu ist z. B. bei Ciarlet [9, Theorem 6.3-4] zu finden.
Damit konnen wir die Abschatzung der Bilinearform fortsetzen und erhaltenaus (11.55) mit (11.61)
a(u,u) = µ
∫
Ω
tr(ǫǫǫ ǫǫǫ) dx = µ |ǫǫǫ(u)|,Ω (11.62)
≥ µ c ‖u‖1,Ω ∀ v ∈ V. (11.63)
Mit α := µ c > 0 erhalten wir die V -Elliptizitat
a(u,u) ≥ α ‖u‖2V ∀ u ∈ V. (11.64)
402 Kapitel 11. Mathematische Elastizitatstheorie
Kapitel 12
Einfuhrung in dieFinite-Elemente-Methode(FEM)
12.1 Vorbemerkungen
Die Finite-Elemente-Methode (FEM) ist in ihrer ursprunglichen und bisheute am meisten angewandten Form, der Verschiebungsmethode, und beiExistenz einer gesamten potentiellen Energie zugleich ein direktes Variati-onsverfahren – Ritzsches Verfahren (W. Ritz 1908) [64] – mit bereichsweisenParameter-Ansatzen fur die Verschiebungen. Die endlichen Teilbereiche desGesamtgebietes heißen finite Elemente. Oft bezeichnet man die Topologieeines Elementes einschließlich des Ansatzes als finites Element.
Die FEM ist ein Naherungsverfahren zur Losung von Randwertproblemengewohnlicher und insbesondere partieller Differentialgleichungen in der va-riationellen - oder schwachen - Form, siehe Abschnitt 11.2, Gleichung (11.25)und (11.38), (11.39).
Der mathematische Zugang ergibt sich durch die Erweiterung des RitzschenVerfahrens, siehe z. B. Velte [85], bei dem die Parameteransatze zunachst imGesamtgebiet erfolgen. Es ist offensichtlich, daß das systematische Auffindenhoherer Ritz-Ansatze bei komplizierten Berandungen (im einfachsten Fall
403
404 Kapitel 12. Einfuhrung in die FEM
ein L-formiges Gebiet) eines Gesamtgebietes praktisch unmoglich ist, denndiese Ansatze mussen einzeln folgende Bedingungen erfullen:
• Allgemeine Bedingungen an die Ansatzfunktionen
1. Lineare Unabhangigkeit,
2. relative Vollstandigkeit(Zur Erzielung der gleichmaßigen Approximation im quadrati-schen Mittel),
3. Differenzierbarkeitsbedingungen,
4. Symmetriebedingungen fur die Ansatzordnungen,
• Spezielle Bedingungen fur das Ritzsche- und das Bubnov-Galerkin-Verfahren
5. H10 -Integrierbarkeit im Ansatzgebiet (bei DGLn 2. Ordnung),
6. Geometrische Feldbedingungen,
7. Geometrische Randbedingungen.
Insbesondere 7. in Verbindung mit 2. ist fur Ansatze im Gesamtgebiet sehrschwierig.
Wegen dieses Dilemmas ist der Grundgedanke der FEM, in finiten, to-pologisch gleichen Teilbereichen die gleichen Ansatze zu wahlen und zurVerbesserung der Losung die Zahl der Teilbereiche (Elemente) zu erhohen(h-Methode, h charakteristisches Elementmaß), geradezu offensichtlich undvorteilhaft gegenuber der Erhohung der Ansatze im Gesamtgebiet.
Zwei Probleme mussen allerdings beachtet werden,
a) die komplizierte Konvergenzanalyse in Sobolevraumen, die zuerst vonI. Babuska und W.I. Rheinboldt [2] erbracht wurde und
b) die Losung großer symmetrischer algebraischer Gleichungssysteme (li-near bei linearen Operatoren) fur die Verschiebungskomponenten allerverschieblichen Knotenpunkte (s. z. B. Schwarz [66] und Deufelhard,Hohmann [13]) und fur iterative Loser Hackbusch [29]).
Aus der Konvergenzanalyse folgt anschaulich, daß die Element-Ansatze au-ßer 7. zusatzlich
12.1. Vorbemerkungen 405
8. die geometrischen Ubergangsbedingungen an den Elementrandern(C0-Kontinuitat bei DGLn 2. Ordnung, C1-Kontinuitat bei DGLn4. Ordnung),
9. die Starrkorperverschiebungen jedes Elementes und
10. zumindest konstante Spannungen in den Elementen
beschreiben mussen.
Erst die elektronischen Digitalrechner (seit Mitte der 50er Jahre allgemeinzuganglich) mit ihren atemberaubenden Leistungssprungen ermoglichtendie Losung der großen algebraischen Gleichungssysteme mit heute bis et-wa 250000 Unbekannten. Es sei jedoch erwahnt, daß die Entwicklung neuerund verfeinerter Losungsmethoden bis heute etwa gleich hohe Effektivitats-zuwachse brachte wie die Erhohung der Mflops der Rechner.
Als ingenieurmaßige funktionalanalytische Begrundung und Darstellung derFEM konnen die Arbeiten von Babuska und Stein, Peisker [71] empfohlenwerden. Ingenieur-Lehrbucher sind u.a. Zienkiewicz, Taylor [90], Bathe [3]und Hughes [35].
Der Mathematiker R. Courant gab als erster in den Jahren 1923 und 1943[11] die FEM fur Eigenwertberechnungen nach Rayleigh-Ritz an.
Bemerkenswert ist, daß die sturmische Entwicklung der FEM – in Verbin-dung mit der EDV – von Ingenieuren zustande gebracht wurde und zwaraus den Anforderungen neuer Technologien. Die erste Arbeit zur FEM in in-genieurmaßiger Begrundung erschien 1956 von M.J. Turner , R.W. Clough,H.C. Martin und L.J. Topp [84]. Sie enthalt die Berechnung von Schei-ben, also ebene Spannungszustande, insbesondere Schubfelder, in den Deck-flachen gepfeilter Tragflugel von Uberschallflugzeugen mit Hilfe von dreiecki-gen, linearen Verschiebungselementen. Diese Darstellung erfolgt unmittelbaraus der Anwendung des Prinzips der virtuellen Arbeit, zunachst fur jedesElement und dann – nach dem geometrischen Zusammenbau der Elementein den Knoten – auch fur das Gesamtsystem.
Seit den 70er-Jahren besteht ein zunehmender Bedarf nach der mathema-tischen Fehleranalysis, der Voraussetzung fur die Entwicklung von Feh-lerschatzern zur adaptiven Netzverfeinerung.
Nur durch selbststeuernde, d. h. automatische, mathematisch abgesicherteVerfahren lassen sich asymptotisch exakte Losungen gewunschter Genauig-keit in effektiver Form bezuglich Kosten und Zeitaufwand erzielen.
406 Kapitel 12. Einfuhrung in die FEM
12.2 Ingenieurmaßige Darstellung der linea-ren FEM mit Verschiebungsansatzen in
Matrizenschreibweise
12.2.1 Prinzip der virtuellen Arbeit
Der historischen Entwicklung von Ingenieurdarstellungen folgend wird alsAusgangspunkt die schwache Form der linearen statischen Feldbedingungen
DTσ + ρb = 0 ∀x in Ωe ≡ Ωσe,
d. h. in allen Teilgebieten Ωe mit Ω =ne⋃
e=1Ωe und ∂Ω =
ne⋃e=1
Γeσ in der Form
g(σ, η) =
ne⋃
e=1
∫
Ωe
αηT (DTσ + ρb)
dV = 0 (12.1)
gewahlt.
g stellt das Residuum der schwachen Form dar. ηT = [η1(x1, x2x3), η2, η3]ist die Spaltenmatrix der zulassigen Funktionen η(x) (test functions).
αη = δu(x) ist die Spaltenmatrix der virtuellen Verruckungen mit α ∈ IRbeliebig.
Fur die virtuellen Verruckungen η bzw. δu ergeben sich die folgenden Be-dingungen
1. geometrisch zulassig, d. h.
a) einmal stetig differenzierbar in Ωe = Ωe ∪ Γe
b) η = 0 auf Γeu(12.2)
c)[[η]]
:= η+ − η− = 0 auf Γe, d. h. C0 − stetig auf Γe
2. αη im ubrigen beliebig.
Nach Teilintegration von ∫
Ωe
δuT (DTσ)dV
12.2. Ingenieurmaßige Darstellung der linearen FEM 407
und Anwendung des Gaußschen Integralsatzes auf die ersten Terme erhaltman
g(σ, η) =
∫
∂Ω
δuT NTσ︸ ︷︷ ︸t=t
dA−∫
∂Ω
δu+T
t+ − δu−t−dA
−∫
Ω
(δuTDT
︸ ︷︷ ︸δεT
)σdV +
∫
Ω
δu+ρbdV = 0.
(12.3)
Durch Aufspalten der Element-Randgroßen in arithmetische Mittel (mitt-lere Großen) und Differenzen gemaß
δu+ =1
2(δu+ + δu−)︸ ︷︷ ︸
δum
− 1
2(δu+ − δu−)︸ ︷︷ ︸
12
[[δu]]
auf Γe
−δu− = −δum +1
2
[[δu]
]auf Γe
sowie entsprechend
t+ = tm +1
2
[[δt]]
mit[[δt]]
= t+ − t− auf Γe
−t− = tm +1
2
[[δt]]
auf Γe
(12.4)ergibt sich wegen (12.2) die gewunschte Form des Prinzips der virtuellenArbeit
g(σ, η) = −∫
Ω
δεT σ dV +
∫
Ω
δuTρb dV
+
∫
∂Ω
δuT t dA −∫
∂Ω
δuTm︸︷︷︸
6=0
[[δt]]
︸ ︷︷ ︸=0
dA = 0,(12.5)
welche die statischen Feldbedingungen in Ωe, die statischen Randbedingun-gen auf Γeσ und die statischen Ubergangsbedingungen auf Γe enthalt. Wirsetzen δum = δu auf Γe.
408 Kapitel 12. Einfuhrung in die FEM
12.2.2 Potentialeigenschaften der inneren und außerenKrafte
Mit Einfuhrung des Hookeschen Gesetzes fur die Spannungen
σ(u) = E(D u) (12.6)
gewinnt man die Ausgangsform fur die FEM
g(u, η) = −∫
Ω
(δuTDT )E(D u)dV +
∫
Ω
δuT ρbdV +
∫
∂Ω
δuT tdA = 0. (12.7)
Mit dem Hookeschen Gesetz sind die Spannungen aus einer Potentialfunk-tion ableitbar
σ =∂Ws
∂εmit Ws =
1
2εTEε =
1
2(D u)TED u.
Fur die Formanderungsenergie erhalten wir durch Integration die Darstel-lung
W = Π(i) =
∫
Ωe
WsdV. (12.8)
Damit existiert das totale Differential der Formanderungsenergie
dWs = dεT (u)σ(u),
und der erste Term in (12.6) kann in die 1. Variation der potentiellen Energie
∫
Ω
(δuTDT )E(D u)dV −→ δ
∫
Ω
1
2(uTDT )E D udV
︸ ︷︷ ︸Π(i)
−→ δΠ(i)
(12.9)
uberfuhrt werden.
Mit der Forderung monogenetischer Lasten, namlich
ρb =∂(uT ρb)
∂uin Ωe
und t =∂(uT t)
∂uauf Γe
(12.10)
12.2. Ingenieurmaßige Darstellung der linearen FEM 409
existieren Potentiale der außeren Krafte und aus den 2. und 3. Termen in(12.6) entsteht
−δ
−∫
Ω
δuTρb dV −∫
∂Ω
uT t dA
︸ ︷︷ ︸−2A=Π(a)
. (12.11)
Mit den Potentialeigenschaften der inneren und außeren Krafte entsteht ausdem Prinzip der virtuellen Arbeit die 1. Variation der gesamten potentiellenEnergie, also aus g(u, η) = 0 wird
−δΠ(i) − δΠ(a) = −δ(Π(i) + Π(a)) = −δΠ = 0.
Die gesamte potentielle Energie im Losungspunkt lautet damit
Π(u) =
∫
Ω
1
2(uTDT )E D u dV −
∫
Ω
uTρb dV −∫
∂Ω
uT t dA (12.12)
und es gibt die Stationaritatsbedingungen
Π = stat←→
δΠ = 0oder−g(u, η) = 0.
(12.13)
12.2.3 Direkte Darstellung des Dirichletprinzips
Geht man aufgrund der Assoziiertheit der Lame-Differentialgleichungen voneinem Funktional Π(v) mit dem Einbettungsansatz v(x) = u(x)+αη(x) aus,so liefert das Nullsetzen der Gateauxableitung
δΠ(v) = δuT ∂Π(v)
∂α
∣∣∣∣α=0
(12.14)
das bekannte Ergebnis (12.6), namlich
Π(v)|α=0 = stat←→ δΠ(v)|α=0 = −g(u, η) = 0, (12.15)
mit
δΠ(v)|α=0 =
∫
Ω
δεT (u)E(ε u) dV −∫
Ω
δuTρb dV
−∫
∂Ω
δuT t dA = 0(12.16)
410 Kapitel 12. Einfuhrung in die FEM
und die Minimaleigenschaft von Π
Π(u) = min←→ δ2Π(v) =
∫
Ω
δεTEδε dV > 0. (12.17)
δ2Π(v) ist positiv definit fur ε 6= 0 wegen der eingefuhrten Potentialeigen-schaften.
12.2.4 Einfuhrung von Finite-Element Ansatzen furzweidimensionale Gebiete
Es wird ein Ansatzraum
V = v(x) ∈ Ωe | v(x) ∈ H10 ⊂ IR2 (12.18)
mit der Bezeichnungv(x) = uh(x) (12.19)
fur die FE-Ansatze (trial functions) eingefuhrt.
Es muß also geltenuh ∈ L2 (Ωe)εh ∈ L2 (Ωe)uh = 0 auf Γeh
[[uh]] = 0 auf Γe.
(12.20)
Damit entsteht eine Naherungslosung fur die Stationaritatsbedingungen
δΠh = −g(uh, η) = 0. (12.21)
Es gilt dann weiter wegen der positiv definiten quadratischen Form, Gl.12.17,die Minimalfolge Πh −→ Π mit Πh > Π.
Die Ansatze uh seien hier als Lagrangepolynome (Einheitsverschiebungszu–stande fur Kontenverschiebungen) in dimensionslosen Koordinaten gewahlt,d. h.
uh =
[u1h
u2h
]
︸ ︷︷ ︸u
h
=
[N1
N2
]
︸ ︷︷ ︸N
[v1
v2
]
︸ ︷︷ ︸v
und N1 = N2, (12.22)
sowie mit N = [N1(ξ, η) N2 N3 N4] (12.23)

12.2. Ingenieurmaßige Darstellung der linearen FEM 411
fur bilineare Ansatze uber dem Einheitsquadrat der Form
NI =1
4(1 + ξIξ)(1 + ηIη) fur die Knoten I = 1, 2, 3, 4 (12.24)
und den Knotenverschiebungen
v1 = [u1I u1II u1III u1IV ] , entspr. v2. (12.25)
Wir erhalten ausuh = N(ξ, η)ve in Ωe (12.26)
die Verzerrungenεh = D N ve in Ωe. (12.27)
Fur symmetrische Galerkin-Verfahren und automatisch fur das Ritz-Verfahren ergeben sich die gleichen Ansatze fur die virtuellen Verruckungen
δu(x) = N(x)δve in Ωe. (12.28)
12.2.5 Darstellung der Element-Steifigkeitsmatrizen
Die Variation der potentiellen Energie δΠ = 0 liefert
ne⋃
e=1
δv
Te
∫
Ωe
BTE B dV ve −∫
Ωe
NTρb dV −∫
Γeσ
NT t dA
= 0. (12.29)
Die Elementsteifigkeitsmatrix ergibt sich zu
ke =
∫
Ωe
BTE B dV = kTe , (12.30)
wobei ke positiv semidefinit ist, mit einem Rangabfall gleich der Zahl derzugelassenen Starrkorperverschiebungen.
Fur den Elementlastvektor gilt
pe
=
∫
Ωe
NT ρb dV +
∫
Γeσ
NT t dA. (12.31)
Damit erhalt man aus der Bedingung δΠ = 0
ne⋃
e=1
δvT [keve − p]
= 0. (12.32)
412 Kapitel 12. Einfuhrung in die FEM
12.2.6 Einfuhrung globaler Knotenverschiebungsvektoren
Mit Einfuhrung der globalen, durch Berucksichtigung der geometrischenRandbedingungen, reduzierter Knotenverschiebungsvektor V und Darstel-lung der geometrischen Ubergangsbedingungen mit Hilfe der Knoten–Inzidenzmatrizen ae gemaß
ve = aeV (12.33)
ergibt sich die 1. Variation des Gesamtpotentials (oder genaherte schwacheForm des Gleichgewichts) δΠh = 0 zu
δV T
ne⋃
e=1
(aTe keae)︸ ︷︷ ︸
K
V −ne⋃
e=1
aTe pe
︸ ︷︷ ︸P
= 0. (12.34)
Hierbei stellt K die globale Steifigkeitsmatrix mit K = KT dar, und es gilt
detK 6= 0 sowie V TK V > 0 fur V 6= 0.
Damit erhalt man das globale Gleichungssystem
K V = P (12.35)
und es existiert ein Losungsvektor der Knotenverschiebungen
V = K−1P (12.36)
Bei geeigneter Numerierung der Unbekannten – insbesondere bei mehrfachzusammenhangenden Gebieten – wird K randorientiert. Die Spannungenwerden mit optimaler Genauigkeit in den Gaußschen Interpolationspunktenangegeben. Sie ergeben sich aus
σh = E B ve in Ωe
Falls die Ansatzordnung p ist, ergibt sich nach der Konvergenzanalyse derFehler der Verschiebung
12.2. Ingenieurmaßige Darstellung der linearen FEM 413
e = u− uh
fur die DGLn 2. Ordnung in der Ordnung
0(eh) = hp+1
und der Fehler der Spannungen
eσ = σ − σh
in der Fehlerordnung0(eσ) = hp.
414 Kapitel 12. Einfuhrung in die FEM

Anhang A
Bezeichnungen
• Abbildung
f Abbildung f : A → B mit x 7→ y = f(x), genauer be-schrieben durch die Notation
f :
A → Bx 7→ y = f(x)
A Urbildmenge einer Abbildung f : A→ B
B Zielmenge einer Abbildung f : A→ B
f(A) Bildmenge einer Abbildung f : A→ B definiert durch
f(A) := y ∈ B | es existiert ein x ∈ A mit y = f (x)
• Raume
Et Dreidimensionaler Euklidischer Punktraum (ohne Be-zugspunkt) zum Zeitpunkt t, Raum der physikalischenAnschauung
415
416 Anhang A. Bezeichnungen
T Eindimensionaler Raum der Zeitpunkte t ∈ TE Ereignis-Welt der physikalischen Ereignisse
E =⋃
t ∈ TEt
P Raumpunkt des Euklidischen Punktraumes P ∈ EO Bezugspunkt im Euklidischen Punktraum zur Ein-
fuhrung des Euklidischen Vektorraumes
IE3 Euklidischer Vektorraum (mit Bezugspunkt, Basis)
~x :=−−→OP Vektor ~x im Euklidischen Vektorraum IE3, d. h. zwischen
den Punkten O und P des Euklidischen Punktraumes E~e1, ~e2, ~e3 Basisvektoren des Euklidischen Vektorraumes
~x = xi~ei Darstellung des Vektors ~x :=−−→OP mittels der Basis
~e1, ~e2, ~e3 des Euklidischen Vektorraumes und der Ein-steinschen Summenkonvention
x1, x2, x3 Koeffizienten des Vektors ~x bezuglich der Basis~e1, ~e2, ~e3
IR Menge der reellen Zahlen
IR3 Vektorraum der Zahlentrippel
x Spaltenmatrix der Koeffizienten xi des Vektors ~x be-zuglich der Basis Euklidischen Vektorraumes ~e1, ~e2, ~e3,d. h.
x =
x1
x2
x3
∈ IR3
ei Raumfeste kartesische Basisgi Beliebige Basis
x = xiei Ortsvektor
417
• Materieller Korper
B Kontinuum (materieller Korper im Anschauungsraumohne Metrik)
P Beliebiger Teilkorper des materieller Korpers B∂B Berandung des Kontinuums ∂B = ∂Bσ ∪ ∂Bu, ∂Bσ ∩
∂Bu = ∅∂Bu Teil der Berandung des Kontinuums B auf der das Ver-
schiebungsfeld vorgegeben ist
∂Bσ Teil der Berandung des Kontinuums B auf der die Span-nung vorgegeben ist
M Materieller Punkt des KontinuumsM∈ B
• Bewegung, Konfiguration
χ Abbildung der materiellen PunkteM zu den Raumpunk-ten P
χ :
B × IR → IR3
(M, t) → x = χ(M, t).
χt Abbildung der materiellen PunkteM zu den Raumpunk-ten P zu einem bestimmten festgehaltenen Zeitpunkt t.
χt :
B → IR3
M → x = χt(M) := χ(M, t).
χM Abbildung eines bestimmten und festgehaltenen mate-riellen Punktes M ∈ B auf die Raumpunkte P (Be-wegung des materiellen Punktes M zu allen Zeiten t)
χM :
IR → IR3
t → x = χM(t) := χ(M, t).
418 Anhang A. Bezeichnungen
t, t beliebiger Zeitpunkt t, Anfangszeit (Referenzzeit) t = 0
Bt Konfiguration des materiellen Korpers M zum beliebi-gen Zeitpunkt t (Momentankonfiguration), d. h. Bt =χt(B)
x Ortsvektor eines materiellen Punktes zu dem beliebigenZeitpunkt t, d. h.
x = χ(M, t) = χt(M) = χM(t).
B Konfiguration des materiellen KorpersM zum Referenz-zeitpunkt t (Referenzkonfiguration), d. h.B := Bt = χ(B) =: χ(B)
X Ortsvektor eines materiellen Punktes zur Referenzzeit t ,d. h.
X = χ(M, t ) = χt (M) = χ(M)
• Referenzbeschreibung
Φ Abbildung einer Referenzkonfiguration B zu einerbeliebigen Referenzzeit t auf die Momentankonfigu-ration Bt zu einem beliebigen Zeitpunkt t, d. h.
Φ :
IR3 × IR × IR → IR3
(X, t, t ) → x = Φ(X, t, t )
Φt,t Abbildung einer Referenzkonfiguration B zu einer fest-gehaltenen Referenzzeit t auf die Momentankonfigura-tion Bt zu einem festgehaltenen Zeitpunkt t, d. h.
Φt,t :
IR3 → IR3
X → x = Φt,t (X) := Φ(X, t, t )
Fur die Konfiguration des materiellen Korpers gilt Bt =Φt,t (B ). (Zur Vereinfachung der Schreibweise verein-baren wir hierfur auch die Darstellung Bt = Φ(B ).

419
∂Btu Teil des Randes der Momentankonfiguration mit vorge-gebener Verschiebung u
∂Btσ Teil des Randes der Momentankonfiguration mit vorge-gebener Spannung
∂Bu Teil des Randes der Referenzkonfiguration mit vorgege-bener Verschiebung u
∂Bσ Teil des Randes der Referenzkonfiguration mit vorgege-bener Spannung
• Verzerrungen
u Verschiebungsvektor vom Ortsvektor X eines materiellenPunktes M in der Referenzkonfiguration zu dem Orts-vektor x des selben materiellen Punktes in der Momen-tankonfiguration , d. h. u = x−X
Hierbei sind die unterschiedlichen funktionalen Abhan-gigkeiten zu unterscheiden, d. h. es gilt
u = u(x) = u(X)
F Materieller Deformationsgradient F := Grad x = ∂x
∂X
F = F−1 Raumlicher Deformationsgradient
F = F−1 = grad X = ∂X
∂x
J Jakobische Funktionaldeterminante J := detF = det ∂x
∂X
H Materieller Verschiebungsgradient H := Grad u = ∂u
∂X
H Raumlicher Verschiebungsgradient H := grad u = ∂u
∂x=
1− F = 1− F−1
U Rechts-Streck-Tensor (symmetrisch, positiv definit)
V Links-Streck-Tensor (symmetrisch, positiv definit)
R Drehtensor (eigentlich orthogonaler Tensor)
Polare Zerlegung des Deformationsgradienten
420 Anhang A. Bezeichnungen
F = RU = VR
C Rechts-Cauchy-Green-Tensor
C := FT F = (RU)T RU = UTRTRU = UTU = U2
B Links-Cauchy-Green-Tensor
B := FFT = VR(VR)T = VRRTVT = VVT = V2
E Greenscher Verzerrungstensor
E :=1
2(FTF− 1) =
1
2(H + H
T + HT H)
E(A) Almansischer Verzerrungstensor
E(A) =1
2(1− F−TF−1) =
1
2(H + HT − HT H)
Elin,Enlin Linearer und nichtlinearer Anteil des Greenschen Verzer-rungstensor E = Elin + Enlin mit
Elin :=1
2(H + HT ) = ET
lin
Enlin :=1
2(HTH) = ET
nlin .
EK ,ED EK Kugeltensoranteil bzw. ED Deviatoranteil desGreenschen Verzerrungstensors E = EK + ED mit
EK :=1
3(tr E) 1 =
1
3(E11 + E22 +E33) 1

421
ED = E−EK = E− 1
3(tr E) 1
Rlin Antimetrischer Anteil des Verschiebungsgradienten alsTensor der linearen Drehung Rlin := Hasym
H = Hsym + Hasym
Hsym :=1
2(H + HT ) Hasym :=
1
2(H−HT )
ǫǫǫ Linearisierter Verzerrungstensor
σσσ Linearisierte Spannungstensoren
τ Matrix der Spannungen aus der Ingenieurtheorie
γ Matrix der Ingenieurverzerrungen
• Invarianten der Verzerrungstensoren
I, II, III Invarianten eines zweistufigen Tensors (gekennzeichnetdurch den Index) z. B. fur C gilt IC, IIC, IIIC
Charakterisctische Gleichung
det(C− λ21) = 0
λ6 − ICλ4 + IICλ2 − IIIC = 0
Darstellung der Eigenwerte in absoluter Tensordarstel-lung und in Koeffizientenform (bezogen auf eine kartesi-sche Basis)
IC = tr C = CAA = λ21 + λ2
2 + λ23 ,
IIC =1
2
[(tr C)2 − tr C2
]
=1
2[CAACBB −CABCAB ]
= λ21 λ
22 + λ2
2 λ23 + λ2
3 λ21
IIIC = detC = eABC CA1CB2CC3 = λ21 λ
22 λ
23 .
422 Anhang A. Bezeichnungen
IEK , . . . Invarianten des Kugeltensoranteils EK von E, d. h.IEK , IIEK , IIIEK
IKE = IE = tr E = EAA = E11 + E22 + E33
IIKE =1
2
((tr EK)2 − tr (EK)2
)=
1
3(E11 + E22 +E33)
2
IIIKE = det EK =1
27(E11 + E22 +E33)
3
IED , . . . Invarianten des Deviatoranteils ED von E, d. h.IED , IIED , IIIED
IDE = 0
IIDE = −1
2tr (ED)2
IIIDE = detED
• Langen-, Flachen- und Volumenelemente
dx, dX Langenelemente in der Momentankonfiguration dx undin der Referenzkonfiguration dX
dx = FdX
dv, dV Volumenelemente in der Momentankonfiguration dv undin der Referenzkonfiguration dV
dv = det F dV
da, dA Flachenelemente in der Momentankonfiguration da undin der Referenzkonfiguration dA
423
da = detF(FT )−1dA
• Zeitliche Ableitungen
v Geschwindigkeit
a Beschleunigung
l Raumlicher Geschwindigkeitsgradient
l := grad x
d Raumlicher Verzerrungsgeschwindigkeitstensor
d :=1
2(grad x + (grad x)T )
• Massenbilanz
ρ, ρ ρ Massendichte in der Momentenkonfiguration Bt
ρ Massendichte in der Referenzkonfiguration B .
ρ = lim∆v→0
∆m
∆v=dm
dv
dm Massenelement dm = ρ dv
m,m Die Gesamtmasse des materiellen Korpers B bleibt er-halten.
• Globale Massenbilanz m = konst
m =Dm
Dt=
D
Dt
∫
Bt
ρ dv = 0
424 Anhang A. Bezeichnungen
m =
∫
B
dm =
∫
B
ρ dV =
∫
Bt
ρ dv =
∫
Bt
dm = m
1. Lokale Form der Massenerhaltung
ρ = ρdet F
2. Lokale Form der Massenerhaltung
ρ+ ρ div x = 0 ∀ x ∈ B
• Erhaltungssatz von der Bewegungsgroße
I Bewegungsgroße des materiellen Korpers
I :=
∫
Bt
ρ x dv =
∫
B
ρ detF x dV =
∫
B
ρ x dV .
t, t Eingepragte Oberflachenkraftdichte
Ft
Eingepragte Oberflachenkraft
Ft
=
∫
∂Bt
t da =
∫
∂B
tdA .
b,b Eingepragte Volumenkraftdichte
Fb
Eingepragte Volumenkraft
Fb
=
∫
Bt
ρ b dv =
∫
B
ρ b dV .
425
Erhaltungssatz von der Bewegungsgoße
I =DI
Dt= F
t+ F
b
Raumliche Formulierung
D
Dt
∫
Bt
ρ x dv =
∫
Bt
ρ x dv =
∫
Bt
ρ b dv +
∫
∂Bt
t da
Materielle Formulierung
∫
B
ρx dV =
∫
B
ρ b dV +
∫
∂B
tdA
• Drehimpulserhaltungssatz
L Drehimpuls des materiellen Korpers
L :=
∫
Bt
(x− x)× ρx dv
Mt
Moment der eingepragten außeren Oberflachenkraftdich-te t
Mt
=
∫
∂Bt
(x− x)× t da
Mb
Moment der eingepragten außeren Volumenkraftdichte b
Mb
=
∫
Bt
(r× ρb) dv
426 Anhang A. Bezeichnungen
Drehimpulserhaltungssatz
L =DL
Dt= M
t+ M
b
• Raumliche Formulierung
DL
Dt=
D
Dt
∫
Bt
ρ (x − x)× x dv
=
∫
Bt
(x − x)× ρb dv +
∫
∂Bt
(x− x) × t da
Materielle Formulierung
DL
Dt=
D
Dt
∫
B
ρ (x − x)× x dV
=
∫
B
(x − x)× ρb dV +
∫
∂B
(x − x)× t dA
• Spannungstensoren
f Kraftvektort Spannungsvektor in einem Punkt x der Oberflache des
materiellen Korpers in der Momentankonfiguration
t := lim∆a→0
∆f
∆a=df
da
t := lim∆a→0
∆f
∆a=df
da
427
Das Cauchy-Postulat
t = t(x, t,n) .
Das Cauchy-Fundamentallemma
t(x, t,n) = −t(x, t,−n)
Das Cauchy-Theorem (Cauchyscher Spannungstensor)
t(x, t,n) = T(x, t)n
T = T ikek ⊗ ei
P 1. Piola-Kirchhoff-Spannungstensor
P := det F T F−T
P 6= PT
S 2. Piola-Kirchhoff-Spannungstensor
S := F−1P = detF F−1 TF−T
S = ST
TB Biotscher Spannungstensor
TB := RTP = det FRTTF−T
TB 6= TTB
428 Anhang A. Bezeichnungen
• Dynamische Feldgleichungen
Dynamische Feldgleichungen (in Momentankonfigurati-on)
Die 1. Cauchysche Bewegungsgleichung
divT + ρ (b− x) = 0
Die 2. Cauchysche Bewegungsgleichung
T = TT
Dynamische Feldgleichungen (in Referenzkonfiguration)
DivP + ρ(b − x) = 0
Div(FS) + ρ(b − x) = 0
• Linearisierung
L[...]X Dieses bezeichnet allgemein die Linearisierung einerGroße in der Referenzkonfiguration
Linearisierter Greenscher Verzerrungstensor L[E]X
ǫǫǫ := L[E]X =1
2(H + HT ) = Elin
• Materialtheorie
E Elastizitatsmatrixρ = ρ(M, t) Dichte im materiellen Punkt
Θ = Θ(M, t) Temperatur
χ = χ(M, t) Bewegung des materiellen Punktes
429
ǫ = ǫ(M, t) innere Energie
T = T(M, t) Spannungen
s = s(M, t) spezifische Entropie
Spannungsdefinition bei hyperelastischen Materialien
T(X,F) =∂W
∂F(X,F) ∀ X, ∀ F
Die Definition des Spannungstensors der klassischen Ela-stizitatstheorie
σσσ := L[T]X = L[P]X = L[S]X
Darstellung des Hookeschen Werkstoffgesetzes in Index-schreibweise
σij = Cijkl εkl
Cijkl = Cjikl = Cijlk = Cjilk
Cijkl =∂σij
∂εkl
=∂W
∂εij ∂εkl
=∂W
∂εkl ∂εij
=∂σkl
∂εij
= Cklij
Cijkl = λ δij δkl + µ (δikδjl + δil δjk)
Das Prinzip der materiellen Objektivitat
Q T(F) QT = T(Q F)
Das Prinzip der materiellen Symmetrie
430 Anhang A. Bezeichnungen
T(F Q) = T(F)
Der Darstellungssatz von Rivlin-Ericksen fur isotropeTensoren
S(C) = γ(iC)1 + γ1(iC) C + γ2(iC)C2
Der 2. Piola-Kirchhoff-Spannungstensor in der Nahe derReferenzkonfiguration
S(x,C) = −π(x) 1 + λ(x) (tr E) 1 + 2µ(x) E + o(E)
∀ C = 1 + 2E
St. Venant-Kirchhoff-Material
S(E) = S(1 + 2E) = λ(tr E) 1 + 2µ E
Das Hookesche Gesetz in tensorieller Darstellung
σσσ = λ(tr ǫǫǫ) 1 + 2µǫǫǫ
Das Hooksche Gesetz fur den ebenen Spannungszustand(ESZ)
σESZ = σ11 σ22 σ12T
εESZ = ε11 ε22 2ε12T
σESZ = EESZ εESZ
431
EESZ =E
1− ν2
1 ν 0ν 1 00 0 1−ν
2
ε33 = − ν
1− ν (ε11 + ε22)
Das Hookesche Gesetz fur den ebenen Verzerrungszu-stand (EVZ)
σEV Z = σ11, σ22, σ12T
εEV Z = ε11, ε22 2ε12T
σEV Z = EEV ZεEV Z
EEV Z =E
(1 + ν)(1− 2ν)
1− ν ν 0ν 1− ν 00 0 1−2ν
2
σ33 =Eν
(1 + ν)(1− 2ν)(ε11 + ε22)
• Grundgleichungen
Die Lame-Navierschen Verschiebungsdifferentialglei-chungen in tensoranalytischer Darstellung
(µ + λ) Grad (Divu) + µ Div (Gradu) + ρb = ρu
432 Anhang A. Bezeichnungen
Die Lame-Navierschen Verschiebungsdifferentialglei-chung in Komponentendarstellung bzgl. einer beliebigenBasis
(µ+ λ)ui |ij +µuj |ii +ρbj = ρ∂2uj
∂t2
Die Darstellung in Matrizenschreibweise der
Verzerrungs-Verschiebungsbeziehungen
ε = D u
ε =
ε11
ε22
ε33
2ε12
2ε23
2ε13
; u =
u1
u2
u3
D =
∂1 0 00 ∂2 00 0 ∂3
∂2 ∂1 00 ∂3 ∂2
∂3 0 ∂1
Statische Feldgleichungen
DTσ + k = 0
σ =
σ11
σ22
σ33
σ12
σ23
σ13
; k =
k1
k2
k3
433
Konstitutive Beziehung
σ = E ε
Statische Randbedingungen
NTσ = t auf ∂B σ
Statische Feldgleichung nach Einsetzen der Kinematikund der konstitutiven Beziehung
DTE D u+ k = 0 in B
Das Hookesche Gesetz mit Berucksichtigung der Tempe-ratureinwirkung
εik =1
2G(σik −
ν
1 + νσllδik) + αT θ δik
σik = 2G
[εik +
ν
1− 2νeδik −
1 + ν
1− 2ναT θ δik
]
Die Lame-Navierschen Verschiebungsdifferentialglei-chungen unter Berucksichtigung des Temperatureinfluß-es
(1− 2ν)∆uk + e,k − 2(1 + ν)αTθ,k +1− 2ν
Gρbk = 0
Die biharmonische Differentialgleichung fur die Verschie-bungskomponenten
∆∆ uj = 0
434 Anhang A. Bezeichnungen
Die biharmonische Differentialgleichung fur die Span-nungskomponenten
∆∆σil = 0
Die Gleichung von Beltrami in Koeffizientendarstellung
∆σil +1
1 + νσkk,li = − ν
1− ν δilk0k,k − (k0i,l + k0l,i)
Die Gleichung von Michell in Koeffizientendarstellung
∆σil +1
1 + νσkk,li = 0
• Arbeitsprinzipien
Das Prinzip der virtuellen Arbeit
∫
Bt
T : grad δv dv =
∫
Bt
ρ(b− x) · δv dv +
∫
∂Bt
t · δvda

Literaturverzeichnis
[1] Adams, R.A.: Sobolev Spaces. New York: Academic Press, 1975.
[2] Babuska, I.; Rheinboldt, W. C.: Error Estimates for Adaptive FiniteElement Computations. SIAM J. Num. Anal., 15, S. 736-754, 1978.
[3] Bathe, K.J.: Finite Elemente Methoden. Berlin: Springer, 1986.
[4] Becker, E.; Burger, W.: Kontinuumsmechanik. Stuttgart: B.G. Teub-ner, 1975.
[5] Bertram, A.: Axiomatische Einfuhrung in die Kontinuumsmechanik.Mannheim, Wien, Zurich: BI-Wissenschaftsverlag, 1989.
[6] Blatter, C.: Analysis I. 3. Auflage. Heidelberger Taschenbucher Bd. 151.Berlin, Heidelberg, New York: Springer, 1980.
[7] Boer, R. de: Vektor- und Tensorrechnung fur Ingenieure. Berlin, Hei-delberg, New York: Springer, 1982.
[8] Boussinesq, J.: Applications des potentiels a L’etudes de l’equilibre etdu mouvement des solides elastique. Paris: Gauthier-Villars, 1885.
[9] Ciarlet, Ph.G.: Mathematical Elasticity, Volume I: Three-dimensionalElasticity. Amsterdam: North-Holland, 1988.
[10] Collatz, L.: The Numerical Treatment of Differential Equations, In:Die Grundlagen der mathematischen Wissenschaften in Einzeldarstel-lungen, Bd. 60. Berlin: Springer, 1966.
[11] Courant, R.: Variational methods for the solutions of problems of equi-librium and vibrations. Bull. Amer. Math. Soc., 49, S. 1-23, 1943.
435
436 LITERATURVERZEICHNIS
[12] Courant, R.; Hilbert, D.: Methoden der mathematischen Physik. Bd. 1,3. Auflage 1968. Bd. 2, 2. Auflage 1968. Berlin, Heidelberg, New York:Springer, Heidelberger Taschenbucher Bd. 30 und 31.
[13] Deuflhard, P.; Hohmann, A.: Numerische Mathematik. Berlin: W. deGruyter, 1991.
[14] Doyle, T.C.; Ericksen, J.L.: Nonlinear Elasticity, in Applied Mechanics(H.L. Dryden & T. von Karman, Editors). New York: Academic Press,1956, S. 53–115.
[15] Eringen, A.C.: Nonlinear Theory of Continuous Media. New York:McGraw-Hill, 1962.
[16] Eringen, A.C.: Mechanics of Continua. New York, London, Sidney: J.Wiley & Sons, 1967.
[17] Eschenauer, H.; Schnell, W.: Elastizitatstheorie I. Mannheim: BI Wis-senschaftsverlag, 1981.
[18] Fichera, G.: Existence theorems in elasticity. In: Handbuch der Physik,VIa/2. Berlin: Springer, 1972.
[19] Filonenko-Borodich, M.: Theory of Elasticity. New York: Dover Publi-cations, 1965.
[20] Flory, P.J.: Thermodynamic relations for high elastic materials. Trans.Faraday. Soc. 57, (1961), S. 829–838.
[21] Fraeijs de Veubeke, B.M.: A Course in Elastisity. New York: Springer,1979.
[22] Fung, Y.C.: Foundation of Solid Mechanics. Englewood Cliffs: Pren-tice-Hall, 1965.
[23] Galerkin, B.G.: Reihenentwicklung fur einige Falle des Gleichgewichtesvon Platten und Balken. Wjestnik Ingenerow Petrograd, 10, 1915.
[24] Girkmann, K.: Flachentragwerke. Wien: Springer, 1954.
[25] Green, A.E.; Adkins, J.E.: Large Elastic Deformations, Second edition.Oxford: Claredon Press, 1970.
[26] Green, A.E.; Zerna, W.: Theoretical Elasticity. Oxford: ClarendonPress, 1968.
LITERATURVERZEICHNIS 437
[27] Gurtin, M.E.: The Linear Theory of Elasticity. In: Handbuch der Phy-sik, Vol VIa/2. Berlin: Springer, 1972.
[28] Gurtin, M.E.: An Introduction to Continuum Mechanics. New York:Academic Press, 1981.
[29] Hackbusch, W.: Iterative Losung großer schwachbesetzter Gleichungs-systeme. Stuttgart: Teubner, 1991.
[30] Hanyga, A.: Mathematical Theory of Non-Linear Elasticity. Warschau:PWN-Polish Scientific Publishers, Chichester: Ellis Horwood, 1985.
[31] Hartmann, F.: The Mathematical Foundation of Structural Mechanics.Berlin: Springer, 1985.
[32] Heuser, H.: Lehrbuch der Analysis: Teil 1. 2. Auflage. Stuttgart: B.G.Teubner, 1982.
[33] Heuser, H.: Lehrbuch der Analysis: Teil 2. 2. Auflage. Stuttgart: B.G.Teubner, 1983.
[34] Hirzebruch, F.; Scharlau, W.: Einfuhrung in die Funktionalanalysis.Mannheim, Wien, Zurich: BI-Wissenschaftsverlag, 1971.
[35] Hughes, T.J.R.: The Finite Element Method. Englewood Cliffs:Prentice-Hall, 1987.
[36] Hughes, T.J.R.; Pister, K.S.: Consistent linearization in mechanics ofsolids and structures. Comp. & Structures 8, 1978, S. 391–397.
[37] Kauderer, H.: Nichtlineare Mechanik. Berlin: Springer, 1958.
[38] Klingbeil, E.: Tensorrechnung fur Ingenieure. Mannheim, Wien, Zurich:BI-Wissenschaftsverlag, 1966.
[39] Kroner, E.: Kontinuumstheorie der Versetzungen und Eigenspannun-gen. Berlin: Springer, 1958.
[40] Lehmann, Th.: Elemente der Mechanik II: Elastostatik. Braunschweig:Vieweg, 1975.
[41] Leipholz, H.: Einfuhrung in die Elastizitatstheorie. Karlsruhe: Braun,1968.
438 LITERATURVERZEICHNIS
[42] Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity. 4.Aufl. Cambrige: University Press, 1927. New York: Reprinted by DoverPublications, 1963.
[43] Lurje, A.I.: Raumliche Probleme der Elastizitatstheorie. Berlin: Aka-demie-Verlag, 1963.
[44] Marsden, J.E.; Hughes, T.J.R.: Mathematical Foundation of Elasticity.Englewood Cliffs: Prentice Hall, 1983.
[45] Mason, J.: Variational, Incremental and Energy Methods in Solid Me-chanics and Shell Theory. Amsterdam, Oxford, New York, Tokio: El-sevier, 1980.
[46] Mason, J.: Methods of Functional Analysis for Application in SolidMechanics. Amsterdam, Oxford, New York, Tokio: Elsevier, 1985.
[47] Mase, G.E.: Continuum Mechanics. In: Schaum’s Outline Series. NewYork: McGraw-Hill, 1970.
[48] Miehe, C.: Zur numerischen Behandlung thermomechanischer Prozes-se. Dissertation. Hannover: Institut fur Baumechanik und NumerischeMechanik, Universitat Hannover, 1988.
[49] Mikhlin, S.G.: The Problem of the Minimum of a Quadratic Function.(Ubersetzung der russischen Originalausgabe (1952) von A. Feinstein).San Francisco, London, Amsterdam: Holden-Day, 1965.
[50] Muskhelishvili, N.J.: Some Basic Problems of the Theory of Elasticity.(Ubersetzung der dritten russischen Ausgabe von R.M. Radok.) Gro-ningen, Niederlande: Noordhoff, 1953.
[51] Neuber, H.: Ein neuer Ansatz zur Losung raumlicher Probleme derElastizitatstheorie. Der Hohlkegel unter Einzellast als Beispiel. Zeit.Angew. Math. Mech. 14, (1934), S. 203–212.
[52] Neuber, H.: Kerbspannungslehre: Grundlagen fur Genaue Spannungs-berechnung. 1. Auflage. Berlin: Springer, 1937.
[53] Neuber, H.: Kerbspannungslehre. 2. Auflage. Berlin: Springer, 1958.
[54] Necas, J.; Hlavacek, I.: Mathematical Theory of Elastic and Elasto-Plastic Bodies: An Introduction. Amsterdam, Oxford, New York, To-kio: Elsevier, 1981.
LITERATURVERZEICHNIS 439
[55] Noll, W.: The Foundations of Mechanics nad Thermodynamics. Selec-ted Papers. Berlin, Heidelberg, New York: Springer, 1974.
[56] Novozhilov, V.V.: Foundations of the Nonlinear Theory of Elasticity.New York: Graylock Press, 1953.
[57] Novozhilov, V.V.: Theory of Elasticity (ubersetzt aus dem russischenvon J.K. Lusher). New York: Pergamon Press, 1961.
[58] Novozhilov, V.V.: Thin Shell Theory. Groningen: P. Noordhoff, 1970.
[59] Ogden, R.W.: Non-Linear Elastic Deformations. Chichester: Ellis Hor-wood und John Wiley, 1984.
[60] Papkovitsch, P.F.: Solution generale des equations differentielles fonda-mentales d’elasticite, exprimee par trois fonctions harmoniques. C.R.Acad. Sci. Paris. Vol. 195, (1932), S. 513–515.
[61] Papkovitsch, P.F.: Expressions generales des composantes des tensions,ne renfermant comme fonctions arbitraires que des fonctions harmoni-que. C.R. Acad. Sci. Paris. Vol. 195, (1932), S. 754–756.
[62] Prager, W.: Introduction of Mechanics of Continua. Boston: Ginn andCo, 1961.
[63] Rektorys, K.: Variational Methods in Mathematics, Science and Engi-neering. Dordrecht, Boston: Reidel, 1977.
[64] Ritz, W.: Uber die Methoden zur Losung gewisser Probleme der ma-thematischen Physik. J. Reine und angewandte Mathematik, 135, 1909.
[65] Rivlin, R.S.; Ericksen, J.L.: Stress-Deformation relations for isotropicmaterials J. Rational Mech. Anal. 4, 323 – 425, 1955.
[66] Schwarz, H. R.: Methode der finiten Elemente. Stuttgart: Teubner,1980.
[67] Simo, J.; Taylor, R.L.: Quasi-incompressible finite elasticity in princi-pal stretches. continuum basis and numerical algorithms. Comp. Meth.Appl. Mech. Eng. 85, (1991), S. 273–310.
[68] Sokolnikoff, J.S.: Mathematical Theory of Elasticity. New York, Lon-don: McGraw-Hill, 1956.
[69] Southwell, R.V.: Theory of Elasticity. Oxford: The Claredon Press,1936, 1941.
440 LITERATURVERZEICHNIS
[70] Stein, E.: Tensorrechnung fur Ingenieure. Hannover: Vorlesungsskript,1986.
[71] Stein, E.; Peisker, P.: Funktionalanalytische Grundlagen der Finite-Element-Methode fur Ingenieure. Hannover: Vorlesungsskript, 1992.
[72] Stoker, J.J.: Nonlinear Elasticity. New York: Gordon and Breach, 1968.
[73] Szabo, I.: Hohere Technische Mechanik. 2. Auflage. Berlin, Gottingen,Heidelberg: Springer, 1958.
[74] Szabo, I.: Geschichte der mechanischen Prinzipien und ihrer wichtigstenAnwendungen. Basel, Boston, Stuttgart: Birkhauser, 1987.
[75] Timoshenko, S.: Theory of Elasticity. New York, London: McGraw-Hill,1951.
[76] Timoshenko, S.P.; Goodier, J.N.: Theory of Elasticity. New York: McGraw-Hill, 1970.
[77] Trefftz, E: Ein Gegenstuck zum Ritzschen Verfahren. Zurich: Verh.Kongreß Techn. Mechanik, 1926.
[78] Treloar, L.R.G.: Stress-Strain Data for Vulcanized Rubber under Va-rious Types of Deformation. Transactions of the Faraday Society. Vol.40, S. 59-70, 1944.
[79] Treloar, L.R.G.: The Physics of Rubber Elasticity 3. Aufl. Oxford: Ox-ford University Press, 1975.
[80] Truesdell, C.; Toupin, R.: The Classical Field Theories. In: Handbuchder Physik, Bd. III/1. Berlin: Springer, 1960.
[81] Truesdell, C.; Noll, W.: The Non-Linear Field Theories of Mechanics.In: Handbuch der Physik, Bd. III/3. Berlin: Springer, 1965.
[82] Truesdell, C: A First Course in Rational Continuum Mechanics. NewYork: Academic Press, 1977.
[83] Truesdell, C.: The Elements of Continuum Mechanics. New York:Springer, 1985.
[84] Turner, M. J.; Clough, R. W.; Martin, H. C.; Topp, L. J.: Stiffnessand deflection analysis of complex structures. Journal of AeronauticalSciences, 23, S. 805-823, 1956.
LITERATURVERZEICHNIS 441
[85] Velte, W.: Direkte Methoden der Variationsrechnung. Stuttgart: B.G.Teubner, 1976.
[86] Villaggio, P.: Qualitative Methods in Elasticity. Leyden: Noordhoff,1977.
[87] Wang, C.-C.; Truesdell, C.: Introduction to Rational Elasticity. Leyden:Noordhoff, 1973.
[88] Washizu, K.: Variational Methods in Elasticity and Plasticity. 2. Auf-lage. Oxford: Pergamon, 1975.
[89] Wriggers, P.: Konsistente Linearisierungen in der Kontinuumsmecha-nik und ihre Anwendung auf die Finite-Element-Methode. Habilitati-onsschrift. Hannover: Institut fur Baumechanik und Numerische Me-chanik, Universitat Hannover, 1986.
[90] Zienkiewicz, O. C.; Taylor, R. L.: The Finite Element Method, Vol.I: Basic Formulations and Linear Problems, Fourth Edition. London:McGraw-Hill, 1989.
442 LITERATURVERZEICHNIS