teoría del error
DESCRIPTION
Teoría del errorTRANSCRIPT

CAPITULO 3 AJUSTE DE CURVAS
INDICE
1. TEORIA DEL ERROR.
2. CEROS DE FUNCIONES
3. AJUSTE DE CURVAS
En este capítulo trataremos de aproximar por medio de una función un conjunto de
datos dados, para esto estudiaremos algunos métodos, esto lo que crea es a partir de un
conjunto de datos una función que los modela (explica), de manera que se pueden
generar algunos datos adicionales.
En particular trabajaremos el método de mínimos cuadrados y algunas de sus variantes
(linealizaciones), aproximación polinomial y por ultimo splines.
3.1 REGRESION.
El método de regresión, es en realidad en método de mínimos cuadrados ajustado a
las necesidades propias del modelo, para empezar estudiemos a fondo la teoría de
mínimos cuadrados.
El enfoque que daremos; es diferente al visto en estadística, aquí, nos interesara la
teoría general de mínimos cuadrados y compararla con la teoría particular de
regresión lineal aplicada a funciones no lineales por medio de un proceso llamado
linealizacion.
3.1.1 METODO DE MINIMOS CUADRADOS
El método de mínimos cuadrados varía en mucho con los demás métodos numéricos
siempre estudiados, la diferencia principal es que la mayoría de métodos numéricos
buscan acercarse a las aproximaciones, sin embargo, el método de mínimos
cuadrados lo que estudia es el error del método y busca minimizarlo.
Consideremos un conjunto de puntos {( x1 , y1 ) ,…, (xn , yn )} que se comporten de
manera funcional, es decir, x i≠ x j cuando i≠ j, ahora, si queremos un modelo
matemático que explique estos datos, debemos fijar primero el número de parámetros
(o estimadores) que debe tener el modelo, este número puede ser cualquier entero
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 1

CAPITULO 3 AJUSTE DE CURVAS
positivo, generalmente se buscan modelos que tengan dos parámetros, por ejemplo
una función y=f (x ) que dependa de los parámetros {β0 , β1 } .
Ejemplos de este tipo de funciones son las rectas, que dependen solo de dos
parámetros, la pendiente y el punto de corte con el eje dependiente, es decir el modelo
de una recta se puede escribir como y=f ( x )=β0+β1 x, este caso particular de
mínimos cuadrados es usualmente conocido como regresión lineal, otro ejemplo de
tipo de funciones que dependan de dos parámetros son de la forma
(1) f ( x )=βo e β1 x
(2) f ( x )=β0
β1+ x2 .
Sin embargo, puede darse el caso que los modelos dependan de más estimadores,
por ejemplo
(3) f ( x )=β0+β1 x+β2 x2+…+ βm xm
Donde esta depende de m+1 estimadores y la función es un polinomio de grado m,
este tipo, cuando el modelo es de esta forma, es usual llamarlo regresión polinomial.
Notemos que en todos los casos anteriores, el número de variables es el mismo, 2, sin
embargo, es posible buscar modelos que no dependan únicamente de dos variables
sino de más, por ejemplo, consideremos un conjunto de datos
(4) {( x0 , y0 , z0 ) , (x1 , y1 , z1 ) ,…, (xn , yn , zn ) } que son datos de 3 variables, los modelos que se buscan en este tipo de datos son de
la forma
(5) z=f (x , y )
donde la función f puede depender también de varios parámetros, en caso más
sencillo sería un modelo de la forma
(6) f ( x , y )=β0+β1 x+β2 y
Que describe en tres dimensiones un plano, este es el caso análogo de la recta y es
llamado regresión lineal múltiple. Como se observa, este modelo depende de tres
parámetros los cuales son {β0 , β1 , β2 }, observemos que el número de variables y el
número de estimadores son independientes.
Daremos de forma general en dos variables el método de mínimos cuadrados para
dos estimadores, este método se puede escribir de la misma forma para más variables
y estimadores, consideremos el conjunto de datos bidimensional
(7) {( x1 , y1 ) , (x2 , y2) ,…, (xn , yn ) }Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 2

CAPITULO 3 AJUSTE DE CURVAS
supongamos que queremos un modelo que dependa de dos parámetros {β0 , β1 }, asi
buscamos la funcion f β 0 , β1(x), veamos la siguiente grafica
Gráfica 1
Los valores que se quieren aproximar por medio del modelo son los { y i } y el modelo
los aproxima por medio de los {f β0 , β1(x i)}, es decir, en cada punto hay un error llamado
residuo
(8) e i= y i−f β0 , β1(x i )
notemos que hay tantos residuos como puntos los cuales se pueden ordenar en un
vector e=(e1 , e2 ,…,en) este seria el vector formado por los residuos, ahora queremos
que este vector sea el mas pequeño posible, midamos este vector, recordemos que la
norma de un vector es la raíz de la suma de los cuadrados, así
(9) ‖e‖=√e12+e2
2+…+en2
pero esta norma es una función que depende de β0 y β1 ya que los x i y los y i son los
datos dados inicialmente, es decir, tenemos una funcion que depende de dos variables
la cual debemos minimizar, sin embargo, minimizar esta función es igual que minimizar
el cuadrado de esta función, por lo tanto buscaremos minimizar el cuadrado de esa
norma, la cual llamaremos error cuadrático
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 3

CAPITULO 3 AJUSTE DE CURVAS
(10) Ec (β0 , β1 )=∑i=1
n
¿¿
si f es una funcion diferenciable, podemos hallar las derivadas parciales de esta
funcion con respecto a los estimadores e igualar a cero, es decir, hallar el vector
gradiente e igualar a cero.
(11)∂ Ec
∂ β0
=−2∑i=1
n
( y i− f β 0 , β1(x i)) ( ∂ f β0 , β1
∂ β0(x i ))
(12)∂ Ec
∂β1
=−2∑i=1
n
( y i−f β 0 , β1(x i)) ( ∂ f β0 , β1
∂ β1
(x i))al igualar a cero llegamos a un sistema de ecuaciones con dos incógnitas (esto se
debe a el número de parámetros en el modelo), dado por
(13) ∑i=1
n
(¿ y i−f β0 , β1(x i))( ∂ f β0 , β1
∂ β0
(x i))=0¿
(14) ∑i=1
n
(¿ y i− f β0 , β1(x i))( ∂ f β0 , β1
∂ β1
(x i))=0¿
esto reduce nuestro problema a hallar soluciones reales de este sistema, en el caso en
que el modelo buscado sea una recta, este sistema es un sistema lineal, el cual puede
solucionarse fácilmente por medio de matrices o determinantes, sin embargo,
dependiendo la complejidad del modelo buscado, este sistema puede conducirnos a
uno no lineal, el cual puede ser MUY difícil de resolver, esta es la razón principal por la
cual no se trabaja usualmente mínimos cuadrados, más adelante veremos un ejemplo
de ello.
Veamos ahora algunas aplicaciones del método de mínimos cuadrados.
3.1.2 REGRESION LINEAL
La regresión lineal es muy conocida en aplicaciones estadísticas y por ende la más
usada en varias ramas de las ciencias, es simplemente aplicar el método de mínimos
cuadrados a un conjunto de datos bidimensionales y un modelo de dos parámetros de
la forma y=f β0 , β1( x )=β0+β1 x, el cual representa una linea recta, de alli el nombre del
método. Realizaremos el proceso de mínimos cuadrados, en primer lugar formaremos
la función error cuadrático vista en la ecuación (10) así
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 4

CAPITULO 3 AJUSTE DE CURVAS
(15) Ec (β0 , β1 )=∑i=1
n
¿¿
ya que el modelo buscado es una función diferenciable, podemos hallar las derivadas
parciales y llegamos a
(16)∂ Ec
∂ β0
=−2∑i=1
n
(¿ y i−(β0+β1 x i))¿
(17)∂ Ec
∂β1
=−2∑i=1
n
(¿ y i−(β0+β1 x i))(x i)¿
ya que f es una función lineal, el sistema que formaremos es lineal, así
(18) ∑i=1
n
(¿ y i−β0−β1 xi)=0¿
(19) ∑i=1
n
(¿ y i x i−β0 x i−β1 x i2)=0¿
usando la linealidad de la sumatoria podemos reescribir este sistema como
(20) ∑i=1
n
yi=nβ0+β1∑i=1
n
x i
(21) ∑i=1
n
x i y i=β0∑i=1
n
xi+β1∑i=1
n
x i2
este sistema es fácilmente solucionado por el método de cramer llegando a
(22) β0=∑i=1
n
x i2∑
i=1
n
y i−∑i=1
n
xi y i∑i=1
n
xi
n∑i=1
n
x i2−(∑
i=1
n
x i)2
(23) β1=n∑
i=1
n
xi y i−∑i=1
n
x i∑i=1
n
y i
n∑i=1
n
x i2−(∑
i=1
n
x i)2
Ejemplo 1 Dados los siguientes puntos:
(1,0.5) ,(2,2.5) ,(3,2.0),(4,4.0) ,(5,3.5),(6,6.0) ,(7,5.5)
realice regresión lineal para ajustar los puntos a una recta.
Solución
Aplicando los resultados de las ecuaciones (22) y (23) obtenemos que
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 5

CAPITULO 3 AJUSTE DE CURVAS
(24) β0=0.0714285714285706 y β1=0.839285714285715
quedando el modelo lineal de la siguiente manera
(25) y=0.839285714285715 . x+0.0714285714285706
3.1.3 REGRESION POLINOMIAL
Nuevamente, consideremos un conjunto de datos bidimensionales y tomaremos un
modelo que dependa de tres parámetros el cual tenga una forma de polinomio de
grado 2;
(26) f β 0 , β1 , β2(x )=β2 x2+ β1 x+ β0
al aplicar el mismo algoritmo dado por el método de mínimos cuadrados, llegaremos
al sistema de tres ecuaciones y tres variables lineal (recordemos que el tamaño de
este sistema depende del número de parámetros)
(27) (n )β0+(∑i=1
n
xi) β1+(∑i=1
n
x i2) β2=∑
i=1
n
y i
(28) (∑i=1
n
x i)β0+(∑i=1
n
x i2) β1+(∑
i=1
n
x i3) β2=∑
i=1
n
x i y i
(29) (∑i=1
n
x i2) β0+(∑
i=1
n
xi2)β1+(∑
i=1
n
x i4) β2=∑
i=1
n
x i2 y i
resolviendo por cramer llegamos a las formulas
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 6

CAPITULO 3 AJUSTE DE CURVAS
(30) β0=
| ∑i=1
n
y i (∑i=1
n
x i) (∑i=1
n
x i2)
∑i=1
n
xi y i (∑i=1
n
x i2) (∑
i=1
n
x i3)
∑i=1
n
x i2 y i ∑
i=1
n
x i2 y i (∑
i=1
n
x i4)|
| (n ) (∑i=1
n
x i) (∑i=1
n
xi2)
(∑i=1
n
x i) (∑i=1
n
x i2) (∑
i=1
n
xi3)
(∑i=1
n
xi2) ∑
i=1
n
x i2 y i (∑
i=1
n
x i4)|
(31) β1=
| (n ) ∑i=1
n
y i (∑i=1
n
x i2)
(∑i=1
n
x i) ∑i=1
n
x i y i (∑i=1
n
x i3)
(∑i=1
n
xi2) ∑
i=1
n
x i2 yi (∑
i=1
n
x i4)|
| (n ) (∑i=1
n
x i) (∑i=1
n
x i2)
(∑i=1
n
x i) (∑i=1
n
xi2) (∑
i=1
n
x i3)
(∑i=1
n
xi2) ∑
i=1
n
x i2 yi (∑
i=1
n
x i4)|
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 7

CAPITULO 3 AJUSTE DE CURVAS
(32) β2=
| (n ) ∑i=1
n
y i (n )
(∑i=1
n
x i) ∑i=1
n
x i y i (∑i=1
n
x i)(∑
i=1
n
x i2) ∑
i=1
n
xi2 y i (∑
i=1
n
x i2)|
| (n ) (∑i=1
n
x i) (∑i=1
n
x i2)
(∑i=1
n
x i) (∑i=1
n
xi2) (∑
i=1
n
x i3)
(∑i=1
n
xi2) ∑
i=1
n
x i2 y i (∑
i=1
n
x i4)|
Ejemplo 2
Ajustar a un polinomio de segundo orden los siguientes datos
(33) (0,2.1) ,(1,7.7) ,(2,13.6) ,(3,27.2) ,(4,40.9), (5,61.1)
Solución
Aplicando los resultados de las ecuaciones (30), (31) y Error: Reference source not
found obtenemos que
(34) β0=2,47857 β1=2,35929 y β2=1,86071
quedando el modelo cuadrático de la siguiente forma
(35) y=2,47857+2,35929. x+1,86071. x2
3.1.4 REGRESION MULTIPLE
Los casos anteriores de regresion lineal y polinomial son ejemplos particulares de datos
bidimensionales, consideremos ahora un conjunto de datos tridimensional, por ejemplo
{( x1 , y1 , z1 ) , (x2 , y2 , z2 ) ,…, (xn , yn , zn )},el analogo a una recta en dos dimensiones es el plano en tres dimensiones, esto nos lleva a
pensar que el modelo natural en tres dimensiones para generalizar la regresion lineal es de
la forma
z=f β 0 , β1 , β2( x , y )=β0+β1 x+β2 y (26)
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 8

CAPITULO 3 AJUSTE DE CURVAS
esta funcion depende de tres parametros, asi aplicando el algoritmo de minimos cuadrados y
formando la funcion error cuadratico tenemos
Ec (β0 , β1 , β2 )=∑i=1
n
¿¿ (27)
y tomando las derivadas parciales con respecto a los parametros e igualando a cero
llegamos a
∑i=1
n
zi=nβ0+β1∑i=1
n
x i+β2∑i=1
n
y i (28)
∑i=1
n
x i zi=β0∑i=1
n
x i+β1∑i=1
n
x i2+β2∑
i=1
n
x i yi (29)
∑i=1
n
yi zi=β0∑i=1
n
y i+ β1∑i=1
n
x i y i+β2∑i=1
n
yi2 (30)
este sistema es fácilmente solucionado por el método de cramer llegando a los valores de
β0 , β1 , β2 (ver Ejercicio 1)
Ejemplo 3
Ajustar a un polinomio de segundo orden los siguientes datos
(36) (0,0,5) ,(2,1,10) ,(2.5,2,9) ,(1,3,0),(4,6,3) ,(7,2,27)
Solución
Aplicando los resultados de las ecuaciones (28), (29) y (30) obtenemos que
β0=5, β1=4 y β3=−3 quedando el modelo lineal multiple (Plano) de la siguiente
manera
(37) z=f β 0 , β1 , β2( x , y )=5+4 x−3 y
3.1.5 MINIMOS CUADRADOS A UN MODELO EXPONENCIAL
Volvamos a nuestro caso bidimensional, consideremos nuevamente un conjunto de
datos
{( x1 , y1 ) , (x2 , y2) ,…, (xn , yn ) }y un modelo de forma exponencial
(38) f ( x )=βo e β1 x
En primer lugar formaremos la función error cuadrático vista en la ecuación (10) así
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 9

CAPITULO 3 AJUSTE DE CURVAS
(39) Ec (β0 , β1 )=∑i=1
n
¿¿
(40) Ec (β0 , β1 )=∑i=1
n
(〖 y i−(βo eβ 1 x i) )〗2
ya que el modelo buscado es una función diferenciable, podemos hallar las derivadas
parciales y llegamos a
(41)∂ Ec
∂ β0
=−2∑i=1
n
(¿ y i−βo eβ 1 x i)(e β1 x i)¿
(42)∂ Ec
∂β1
=−2∑i=1
n
(¿ y i−βo eβ 1 x i)(βo x ieβ 1 x i)¿
ya que f es una funcion exponencial, el sistema que formaremos no es lineal, así
(43) ∑i=1
n
(¿ y i eβ1 xi−βo e2β1 xi)=0¿
(44) ∑i=1
n
(¿ y i βo x i eβ1 x i−βo
2 xi e2β1 xi)=0¿
este sistema no es lineal por lo tanto puede ser muy complicado de solucionar con las
herramientas que contamos hoy en día, aunque bajo condiciones “buenas” podríamos como
en el siguiente ejemplo.
Ejemplo 4
Dados los siguientes datos (1,1),(2,3),(3,8),(4,15),(5,30) encuentre por medio de
mínimos cuadrados ; un modelo exponencial de la forma f ( x )=βo e β1 x
Solución
Al escribir la función error cuadrático, encontrar las derivadas parciales e igualarlas a cero
llegamos al siguiente sistema de dos ecuaciones con dos incógnitas el cual NO es lineal, así
no se puede escribir en forma matricial.
Utilizando el software Maple; se resolvió el problema para estos cinco puntos, a continuación
mostraremos los comando utilizados para tal fin.
Gráfica 2
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 10

CAPITULO 3 AJUSTE DE CURVAS
encontrar la solución real de manera analítica es imposible; ya que equivaldría a
solucionar un polinomio de grado 10, si realizáramos la sustitución de w=e β0, por lo cual
recurrimos a maple que nos arroja los siguientes resultados:
(45) βo=0,8775305761β1=0,7071637087
Reemplazando en el modelo obtenemos:
(46) y=0,8775305761e0,7071637087 x
Como se observa en el ejemplo anterior, aplicar el algoritmo de mínimos cuadrados a un
modelo, en general puede ser un trabajo muy difícil, por no decir imposible ya que si el
número de datos es muy grande el sistema de ecuaciones al que se llega es inmanejable,
por esto es necesario una herramienta que nos permita aproximar sin necesidad de aplicar
mínimos cuadrados directamente al modelo, esto se consigue con un proceso llamado
linealizacion, el cual nos permite trabajar únicamente con la regresión lineal aplicada a unos
datos convenientes.
3.1.6 LINEALIZACION
El proceso de linealizacion busca mediante un cambio de variables adecuado expresar un
modelo matematico no lineal como uno lineal por medio de manipulaciones algebraicas
adecuadas, por ejemplo, consideremos la ecuacion,
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 11

CAPITULO 3 AJUSTE DE CURVAS
(47)e x
ex+3=5
inicialmente esta ecuación no es lineal, sin embargo al sustituir la variable por w=e x
llegamos a
(48)w
w+3=5
la cual sigue siendo no lineal, pero al manipular algebraicamente conseguimos
(49) w=5(w+3)
donde la última ecuación ya es lineal.
Otro ejemplo de estos es la ecuación
(50) ln (3∗5x)=10
la cual aparentemente no es lineal, en esta ecuación basta manipular algebraicamente
haciendo uso de las propiedades del logaritmo para llegar a
(51) ln 3+x ln 5=10
en esta ecuación no hay ninguna función logarítmica (notemos que ln 3 y ln 5 son
escalares), es decir, esta es una ecuacion lineal.
Básicamente queremos usar la misma idea a fin de transformar un modelo no lineal en uno
lineal, por ejemplo, consideremos el modelo exponencial de ejemplo anterior,
(52) y=αo eα 1 x
aplicando logaritmo natural en la ecuación anterior obtenemos
(53) ln y=ln(αo eα 1 x)
y por ultimo aplicando las propiedades de los logaritmos obtenemos
(54) ln y=ln(αo)+α 1 x
el cual es una recta en la variables ln y y x; haciendo el cambio de variables sugerido
por la anterior ecuacion podemos tomar w=ln ( y ) , β0=ln (α o) , β1=α1
llegando al modelo visto en la regresión lineal
(55) w=f β 0 , β1(x )=β0+β1 x
Ejemplo 5 Un modelo Exponencial es de la forma
(56) f ( x )= y=βo eβ1 x,
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 12

CAPITULO 3 AJUSTE DE CURVAS
Dados los siguientes datos (1,1), (2,3),(3,8) ,(4,15),(5,30) encuentre un modelo
exponencial de la forma f ( x )= y=βo eβ1 x, por medio de regresión lineal, para esto
linealicemos el modelo, asi:
Aplicar logaritmo natural a ambos lados
(57) ln ( y )=ln (βo eβ1 x )
Aplicando propiedades de logaritmos obtenemos:
(58) ln ( y )=ln (βo )+β1(x)
La regresión lineal se aplica a las variables ln ( y ) y x
Obteniendo el modelo Linealizado y¿=βo¿+β1
¿ x
Aplicamos el comando en Maple
Obtenemos el modelo linealizado
(59) ln ( y )=−0,66608952+0,8411832676 (x)
En donde debemos hallar βo=eβo¿
y β1=β1¿
βo=e−0,66608952=0,5137135215 y β1=0,8411832676
Luego el modelo queda
(60) y=0,5137135215e0,8411832676 (x)
Quedando asi el modelo linealizado
Como se ve en el anterior ejemplo, el método consiste en aplicar regresión lineal a los datos
(61) {( x1 , ln y1 ) , (x2 , ln y2 ) ,… , (xn , ln yn )}Sin embargo, al realizar el proceso de linealizacion, como la función logarítmica no es lineal
el modelo que se encuentra no coincide con el modelo buscado en los mínimos cuadrados,
es decir, esta NO es la curva que más se ajusta a los datos
(62) {( x1 , y1 ) , (x2 , y2) ,…, (xn , yn ) }Sin embargo la recta ln ( y )=−0,66608952+0,8411832676 (x), SI es la curva que más se
ajusta a los datos {( x1 , ln y1 ) , (x2 , ln y2 ) ,… , (xn , ln yn )}.
Compararemos esta afirmación con un ejemplo hecho sobre los mismos datos, en el
Ejemplo 9 se realizaran las dos aproximaciones.
Ejemplo 6
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 13

CAPITULO 3 AJUSTE DE CURVAS
Un modelo Potencial es de la forma
(63) y=β0 xβ 1
donde β0 y β1 son constantes
Para este caso se linealiza con logaritmo, obteniendo
(64) ln y=ln β0+ β1 ln x
Obteniendo así el modelo lineal o la linealización en términos de ln x y ln y , es decir
realizaremos la regresión lineal a las variables ln x y ln y , por lo tanto trabajaremos con los
datos
(65) {( ln x1 , ln y1 ) , ( ln x2 , ln y2 ) ,…, ( ln xn , ln yn )}
Entonces las ecuaciones (22) y (23) toman la forma
(66) β0=∑i=1
n
( ln x i )2∑
i=1
n
(ln y i )−∑i=1
n
(ln x i ) ( ln y i )∑i=1
n
( ln xi )
n∑i=1
n
( ln xi )2−(∑
i=1
n
( ln x i))2
(67) β1=n∑
i=1
n
(ln x i ) ( ln y i )−∑i=1
n
( ln xi )∑i=1
n
( ln y i)
n∑i=1
n
(ln x i )2−(∑
i=1
n
(ln x i ))2
De lo cual, encontramos una recta en dichas variables asi,
(68) ln y=1.16355 ln x−0.4096573
Como la linealizacion se obtuvo por medio de la aplicación de la función logaritmo, es
natural pensar que para revertir el proceso apliquemos la función exponencial y llegar a
(69) y=0.6638775x1.16355
Nota 1 Los ejemplos anteriores muestran el proceso de linealizacion, este proceso de
manera general afirma que si se tiene una relación
(70) F ( x , y )=0
La cual por medio de algún tipo de manipulación algebraica se pueda llevar a la
forma
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 14

CAPITULO 3 AJUSTE DE CURVAS
(71) f 1 ( y )=β0+β1 f 2 ( x )
Donde f 1, f 2 son en general funciones monótonas, en Ejemplo 5 basto tomar
f 1 ( y )=ln y y f 2 ( x )=x, mientras en el Ejemplo 6, f 1 ( y )=ln y y f 2 ( x )=ln x .
Nota 2 En la siguiente tabla 1 se muestran diferentes tipos de modelos; los cuales ya estan
linealizados.
donde las variables con las cuales se van a trabajar se deja como ejercicio (ver
Ejercicio 5)
Nota 3 Hay que tener en cuenta que la recta que se está construyendo es en un sistema de
coordenadas diferente, es decir, gráficamente el proceso de linealizacion es
Gráfica 3
1 Metodos Numericos con Matlab, 3er edicion Mathews, Kurtis, Editorial Pearson
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 15

CAPITULO 3 AJUSTE DE CURVAS
Donde la recta que se consigue al linealiza r el modelo está en el plano f 1 ( x ) vs f 2 ( y ),
en el caso del Ejemplo 5 la recta se tiene en el plano x vs ln y y en el caso del
Ejemplo 6 en el plano ln x vs ln y.
3.1.7 TRASLACIONES AL LINEALIZAR
Consideremos el Ejemplo 5, como se trabaja con la función logaritmo, los datos que se
trabajan en la variable y deben ser positivos (debido al dominio de la función logaritmo),
así en general, si se quiere un modelo linealizado de la forma (71) se debe pedir que los
valores {x1 , x2 ,…,xn } deben pertenecer al dominio de la función f 2 y los valores
{ y1 , y2 ,…, yn } deben pertenecer al dominio de f 1, esto en general no se va a cumplir, por lo
tanto nos toca manipular de alguna manera dichos valores, esto se puede lograr por medio
de un cambio de variables que en general se presentan como traslaciones (aunque pueden
ser contracciones).
Supongamos que la linealizacion del modelo buscado es
(72) f 1 ( y )=∝0+∝1 f 2 ( x )
Consideraremos el caso de dominio más común, supongamos que el dominio de f 2 es
(a ,∞ ), si {x1 , x2 ,…,xn }⊂ (a ,∞ ) no hay necesidad de hacer desplazamientos, ahora si esto
no se cumple es por que mini=1,2… n
x i<a, debemos trasladar los datos de tal manera que se
cumpla mini=1,2… n
x i>a con lo cual consideraremos dos casos
Caso i Si mini=1,2… n
x i∈Z
tomaremos un desplazamiento de la forma
(73) h=|⟦ mini=1,2 ,..n
{x i }−a⟧|+1
Caso ii Si mini=1,2… n
x i∉Z
tomaremos un desplazamiento de la forma
(74) h=|⟦ mini=1,2 ,..n
{x i }−a⟧|y al hacer el mismo análisis para el caso del dominio de en la función f 1, suponiendo que es
(b ,∞ ), y que no se cumple la contenencia { y1 , y2 ,…, yn }⊂ (b ,∞ ) tomaremos en
consideración los mismos casos anteriores para el desplazamiento los cuales son
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 16

CAPITULO 3 AJUSTE DE CURVAS
Caso i Si mini=1,2… n
{ y i }∈Z
Tomaremos como desplazamiento
(75) k=|⟦ mini=1,2 ,..n
{ y i }−b⟧|+1
Caso ii Si mini=1,2… n
{ y i }∉Z
Tomaremos como desplazamiento
(76) k=|⟦ mini=1,2 ,..n
{ y i }−b⟧|Así, los datos con los cuales se trabajara son
(77) {( x1+h , y1+k ) , (x2+h , y2+k ) ,…, (xn+h , yn+k )}Y en este caso el modelo
(78) f 1 ( y+k )=∝0+∝1 f 2 ( x+h )
Esto lo vamos a ilustrar en el siguiente ejemplo.
Ejemplo 7 Dados los siguientes datos
(79) (1,1), (2 ,−3) ,(3 ,−8) ,(4,15) ,(5,30)
encuentre un modelo exponencial de la forma y=βo eβ 1 x, por medio de
regresión lineal aplicada a la linealización de los datos.
Del Ejemplo 5 tenemos que la linealización es dada por
(80) ln ( y )=ln (βo )+β1 x
En este caso como f 1 es la función logarítmica la cual tiene por dominio (0 ,∞ ) y
como mini=1,2… n
{ y i }∈Z utilizamos la formula en (75) para obtener
(81) k=|⟦−8 ⟧|+1=9
Y como la función f 2 es la identidad la cual no tiene problemas de dominio no
hay necesidad de hacer la traslación a la variable x por lo cual tomaremos
h=0.
Así el conjunto de datos sobre el cual trabajaremos es
(82) {(1,10),(2,6),(3,1) ,(4,24) ,(5,39) }Los cuales están en las variables x, y+k , por lo tanto el modelo buscado en
realidad tendrá la forma
(83) y+k=βo eβ1 x
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 17

CAPITULO 3 AJUSTE DE CURVAS
Es decir, la regresión lineal la pasaremos a las variables x e ln ( y+9 ). Es decir,
el modelo linealizado es
(84) ln ( y+9 )=ln (βo )+β1(x )
Aplicando la regresión obtenemos
(85) ln ( y+9 )=0 ,954717767499999+0 , 4108247467x
Y devolviendo el proceso por medio de la exponencial (o hallando los valores
de los parámetros) y despejando y
(86) y=2.597937257e0.4108247467 x−9
Nota 4 Otra forma de llegar al modelo que puede ser conveniente en algunos casos es
comparar la ecuación (84) con la ecuación (85) a fin de formar un sistema de
ecuaciones para hallar los valores de los parámetros y luego sustituirlos en el modelo
deseado, es decir, en la ecuación (83), que en este caso es
(87)ln (βo )=0 ,954717767499999
β1=0 ,4108247467.
Ejemplo 8 Dados los siguientes datos
(88) (1,1), (2 ,−3) ,(3 ,−8) ,(4,15) ,(5,30)
encuentre un modelo exponencial de la forma 2y=β0β 1√x, por medio de
regresión lineal aplicada a la linealización de los datos.
Linealizando tenemos:
(89) yLn2=ln β0+1β1
ln x
(90) y=ln β0
ln 2+ 1
β1 ln 2lnx
Es decir, el modelo linealizado quedo de la forma
y¿=β0¿+β1
¿ x¿
Ese decir
(91) x¿=lnx
(92) y¿= y
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 18

CAPITULO 3 AJUSTE DE CURVAS
(93) β0¿=
ln β0
ln 2
(94) β1¿= 1
β1 ln2
donde
(95) β0=e β0¿ ln 2
(96) β1=1
ln 2β1¿
Las variables con las cuales se realiza la regresion son lnx y y; que al aplicarle
el comando en Maple ;
obtenemos el modelo linealizado
(97) y=15,2874893804488 x−7,63774583479679
donde
(98) β0¿=−7,63774583479679
(99) β1¿=15,2874893804488
Aplicando (95) y (95) obtenemos:
(100) β0=0,005021221782
(101) β1=0,09437095949
obteniendo el modelo potencial de la siguiente manera
(102) 2y=0,0050212217820,09437095949√ x
3.1.8 MINIMOS CUADRADOS VS LINEALIZACION.
Mostraremos la diferencia entre encontrar un modelo por medio de mínimos cuadrados y el
mismo modelo por medio de una linealización, veremos las ventajas de uno y otro.
Ejemplo 9 Con los datos (1,1), (2,3),(3,8) ,(4,15),(5,30) encontrar un modelo exponencial
aplicando mínimos cuadrados y aplicando regresión lineal a los datos
linealizados, escoger el mejor modelo.
Como ya se vio en Ejemplo 4 el modelo aplicando mínimos cuadrados es
(103) y=0,8775305761e0,7071637087 x
Y en el Ejemplo 5 se tiene el modelo por linealización
(104) y=0,5137135215e0,8411832676 x
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 19

CAPITULO 3 AJUSTE DE CURVAS
Falta ahora ver cuál es el “mejor” modelo. Veamos gráficamente los dos
modelos
Gráfica 4
donde el modelo por mínimos cuadrados es la curva roja y el modelo por medio de
linealizacion es la curva azul.
Observamos que las dos aproximaciones, relativamente, son “buenas” ya que las gráficas
son muy cercanas, sin embargo esto no es un criterio decisivo, por lo tanto debemos buscar
otra forma de comparar las dos gráficas, para esto recurrimos a la teoría propia que hemos
construido y es natural pensar en compararlas por medio de los errores cuadráticos, en
realidad por la raiz de este, que es la medida euclideana del vector formado por los
residuos, para esto, hallemos primero el error cuadratico que en el caso del modelo por
minimos cuadrados es
(105) Ec (β0 , β1 )=∑i=1
5
¿¿
Por lo cual la medida del vector de los residuos es 1,2152868.
Y en el caso del modelo linealizado tenemos
(106) Ec (β0 , β1 )=∑i=1
5
¿¿
Por lo cual la medida del vector de los residuos es 4,74856608.
Por lo tanto el modelo que más se aproxima a los datos en el sentido de mínimos cuadrados
es el dado en la ecuación (105)
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 20

CAPITULO 3 AJUSTE DE CURVAS
Nota 5 El modelo por mínimos cuadrados siempre es mejor que el modelo linealizado, es
decir, al realizar el proceso de linealización se aumenta el error en el modelo, el cual
es dado por el error cuadrático.
Nota 6 La curva encontrada por medio de mínimos cuadrados es difícil de encontrar dada la
dificultad al resolver el sistema de ecuaciones, es más, para un gran número de
datos puede llegar a ser imposible con la tecnología que contamos actualmente, esta
es la principal razón por la que es tan usado el método de linealización.
Nota 7 Un error común en algunos autores es decir que el modelo presentado en la
linealización es “el modelo que más se ajusta a los datos en el sentido de mínimos
cuadrados” lo cual es falso.
En el caso de la regresión lineal existe una medida de verificar si el modelo en realidad se
ajusta a la curva, este es llamado coeficiente de correlación.
3.1.9 COEFICIENTE DE CORELACION.
Se define
2222
2
iiii
iiii
yynxxn
yxyxnr
Sy
SrSyr
; donde r2 es el
coeficiente de determinación y r es el coeficiente de correlación.
3.2 INTERPOLACION POLINOMIAL
Siguiendo en la búsqueda de modelos que puedan explicar el comportamiento de
algún conjunto de datos y a diferencia de los mínimos cuadrados que buscaban una
función que se aproximara a un conjunto de datos, en esta parte buscaremos un
modelo que pase exactamente por dichos datos, esto nos permitirá la construcción
de nuevos datos partiendo de los ya conocidos, lo que busca la interpolación es a
partir de un conjunto de datos {( x0 , y0 ) , (x1 , y1 ) ,…, (xn , yn )} encontrar una función f
que satisfaga la condición f (x i )= y i, antes de empezar esta búsqueda, al igual que
en mínimos cuadrados debemos primero fijar una forma particular del modelo, esta
forma se busca dependiendo del comportamiento de los datos y de que queremos
hacer con dicho modelo, por ejemplo, si buscamos estos para añadir este modelo a
una ecuación diferencial, pediremos que este modelo al menos sea continuo (o
porque no, diferenciable), si el modelo lo queremos para analizar una onda y estudiar
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 21

CAPITULO 3 AJUSTE DE CURVAS
sus propiedades sería bueno que este dado en forma de senos y cosenos, si el
comportamiento delos datos sugiere un crecimiento rápido se puede pensar en un
modelo logarítmico, la interpolación que vamos a considerar en esta parte
tomaremos los modelos que son más “fáciles” para nosotros, los polinomios, así la
interpolación que trabajaremos es una interpolación polinomial, es decir, buscaremos
una función polinomial que pase exactamente por los datos.
Si consideramos un conjunto de datos {( x0 , y0 ) , (x1 , y1 ) ,…, (xn , yn )} existen muchos
(infinitos) polinomios que pasan por estos datos, no es interesante desde este punto
de vista la interpolación, en este caso buscaremos un polinomio de grado lo menor
posible lo que facilita el estudio del modelo, este polinomio de menor grado resultara
ser único como consecuencia del teorema fundamental del algebra, el teorema será
presentado a continuación sin demostración.
Teorema 1 (Existencia y unicidad del polinomio interpolador)
Dado un conjunto de datos diferentes {( x0 , y0 ) , (x1 , y1 ) ,…, (xn , yn )} que se
comporten de manera funcional, es decir, x i≠ x j para i≠ j, existe un único
polinomio p(x ) de grado menor o igual que n que interpola dichos valores, es
decir, p (x i )= y i para i=0,1 ,…,n .
Gracias al teorema anterior, podemos asegurar que sin importar el método usado
para hallar el polinomio de interpolación siempre llegaremos al mismo, en esta
sección estudiaremos tres formas diferentes de hallar el polinomio de interpolación,
sin embargo, cada una de ellas presenta una forma diferente de escribir el polinomio
y gracias a esto pueden notarse ventajas y desventajas de unas sobre las otras
dependiendo lo que se quiera hacer con el polinomio de interpolación.
Empezaremos estudiando el método de Lagrange.
3.2.1 LAGRANGE
La interpolación de Lagrange es una de los métodos los métodos de interpolación más
sencillos desde el punto de vista geométrico, esta forma solo usa conceptos básicos sobre
las gráficas de las funciones (traslación y dilatación) junto con el teorema del factor.
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 22

CAPITULO 3 AJUSTE DE CURVAS
Recordemos que la suma de funciones es puntual, entonces buscaremos inicialmente
polinomios que pasen por cada uno de los puntos y en los otros que corten al eje x, así:
Para el primer )(0 xp , el polinomio pasa por (-2,5) y en los demás valores por (1,0) , ( 2,0) ,
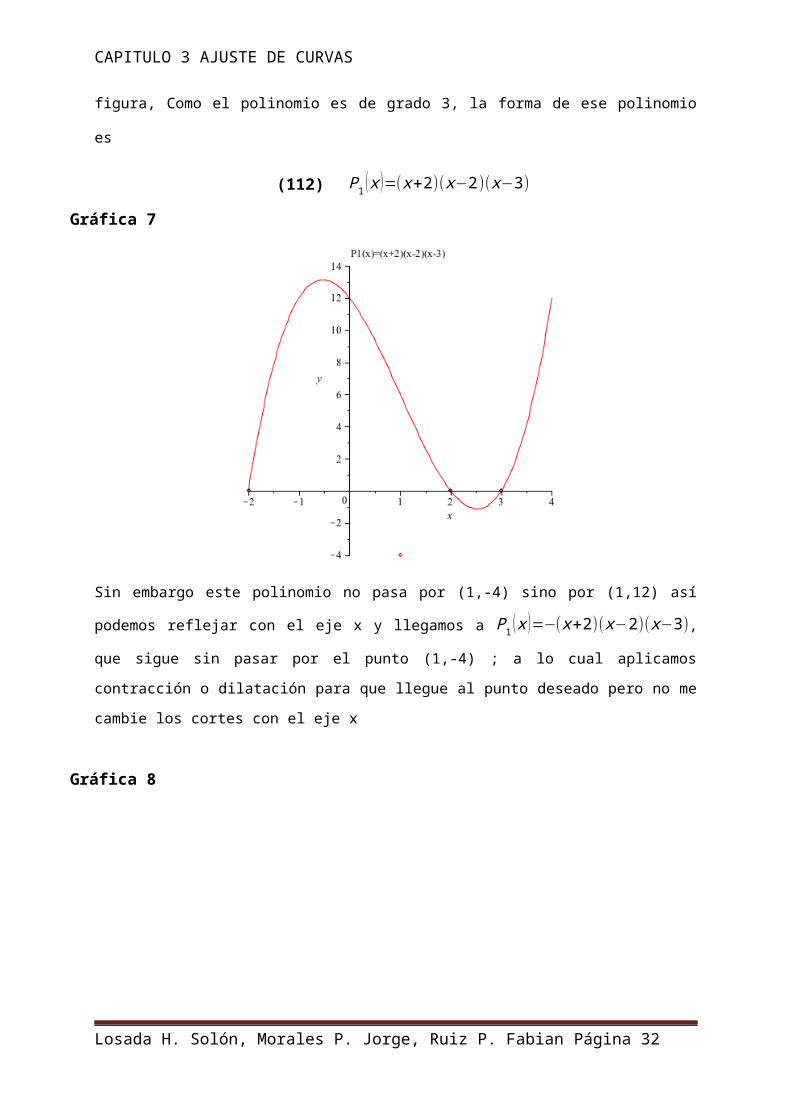
(3,0) como se observa en la figura, Como el polinomio es de grado 3, la forma de ese
polinomio es P0 ( x )=(x−1)(x−2)(x−3); aquí utilizamos el teorema del factor que dice “ Si
c es raíz (x-c) es factor “
Gráfica 5
sin embargo este polinomio no pasa por (-2,5) sino por (-2,-60) así podemos reflejar con el
eje x y llegamos a P0 ( x )=−(x−1)(x−2)(x−3), que sigue sin pasar por el punto (-2,5) ; a lo
cual aplicamos contracción o dilatación para que llegue al punto deseado pero no me
cambie los cortes con el eje x
Gráfica 6
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 23

CAPITULO 3 AJUSTE DE CURVAS
Para lo cual hacemos
(107))3)(2)(1(
12
1)(0
xxxxp
este −112
salio en forma geométrica; ahora lo haremos analíticamente:
(108) )3)(2)(1()( 00 xxxcxp
Ahora si queremos que pase por (-2,5) llegamos a:
(109) )3)(2)(1(5 0 xxxc
donde )32)(22)(12(
50 c
así
(110) )32)(22)(12(
)3)(2)(1(5)(0
xxxxp
en terminos de los datos
(111) P0 ( x )=y0(x−x1)(x−x2)(x−x3)
(x0−x1)(x0−x2)(x¿¿0−x3)¿
Para el segundo P1(x)), es el polinomio que pasa por (1,-4) y en los demás valores por (-
2,0) , (2,0) , (3,0) como se observa en la figura, Como el polinomio es de grado 3, la forma
de ese polinomio es
(112) P1 (x )=(x+2)(x−2)(x−3)
Gráfica 7
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 24

CAPITULO 3 AJUSTE DE CURVAS
Sin embargo este polinomio no pasa por (1,-4) sino por (1,12) así podemos reflejar con el
eje x y llegamos a P1 (x )=−(x+2)(x−2)(x−3), que sigue sin pasar por el punto (1,-4) ; a lo
cual aplicamos contracción o dilatación para que llegue al punto deseado pero no me
cambie los cortes con el eje x
Gráfica 8
Para lo cual hacemos P1 (x )=−23(x+2)(x−2)(x−3); este
−23
salio en forma geométrica;
ahora lo haremos analíticamente:
)3)(2)(2()( 11 xxxcxp ahora si queremos que pase por (1,-4) llegamos a:
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 25

CAPITULO 3 AJUSTE DE CURVAS
)3)(2)(2(4 0 xxxc donde )31)(21)(21(
40
c
así
(113) )31)(21)(21(
)3)(2)(2(4)(1
xxxxp
es decir
(114) ))()((
))()(()(
312101
32011 xxxxxx
xxxxxxyxp
Para el tercer P2(x ), es el polinomio que pasa por (2,1) y en los demás valores por (-2,0) ,
(1,0) , (3,0) a lo cual aplicamos contracción o dilatación para que llegue al punto deseado
pero no me cambie los cortes con el eje x; llegando a
(115) P2 (x )=−13(x+2)(x−1)(x−3);
Gráfica 9
Procedemos de forma analoga obteniendo
(116) p2 ( x )=y2(x−x0)(x−x1)( x−x2)
(x1−x0)(x1−x2)(x¿¿1−x3)¿
Para el cuarto polinomio P3(x ), es el polinomio que pasa por (3,-1) y en los demás valores
por (-2,0),(1,0) , (2,0) a lo cual aplicamos contracción o dilatación para que llegue al punto
deseado pero no me cambie los cortes con el eje x y obtenemos
(117) P3 ( x )=−110
( x+2 ) ( x−1 ) ( x−2 )
procedemos de forma analogas alos anteriores polinomios y llegamos a
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 26

CAPITULO 3 AJUSTE DE CURVAS
(118) p3 ( x )=y3( x−x0)(x−x1)(x−x2)
(x2−x0)(x2−x1)(x¿¿2−x3)¿
su grafica es
Gráfica 10
Ahora realizando la suma puntual de funciones; obtenemos el polinomio que pasa por los
puntos escritos inicialmente; GRAFICA NEGRA
Gráfica 11
sumando los p(x ) llegamos a nuestro polinomio de Lagrange como:
(119) L ( x )=P0 (x )+P1 ( x )+P2 ( x )+P3 ( x )
reemplazando tenemos:
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 27

CAPITULO 3 AJUSTE DE CURVAS
(120)
L ( x )=−112
( x−1 ) ( x−2 ) ( x−3 )−23(x+2)(x−2)(x−3)−1
3(x+2)(x−1)(x−3)−1
3(x+2)(x−1)(x−3)− 1
10(x+2)(x−1)(x−2)
notemos que cada polinomio pi(x ), es un polinomio de grado 3 (excepto que y i=0), asi
cuando armamos el polinomio de Lagrange que es la suma de estos, llegamos a un
polinomio de grado 3 o menor, este polinomio encontrado es el polinomio de menor grado
que pasa por los datos dados, es decir, es el polinomio de interpolacion.
Extendiendo el mismo argumento con n + 1 puntos; tendremos que cada polinomio pi(x )
tiene la forma
(121) )())(())((
)())(())(()(
1110
1110
niiiiiii
niiii xxxxxxxxxx
xxxxxxxxxxyxp
donde i=0,1 ,…,n.
Escribiéndolo en forma compacta, para n+1 puntos, tenemos:
(122) pi ( x )= y i∏j=0j ≠i
n (x−x j)(x i−x j)
En donde cada término
(123) y i∏j=0j ≠i
n1
(x i−x j)
es el que genera la contracción o dilatación de la función para que pueda tomar en el punto
deseado, y el término ∏j=0j ≠ i
n
(x i−x j)es el que “pega” al piso la función en los valores x j. Para
j=0,1 ,…,i−1 , i+1,…,n
Y definimos el polinomio interpolante de Lagrange como:
(124) L ( x )=∑i=0
n
y i∏j=0j ≠i
n ( x−x j)(x i−x j)
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 28

CAPITULO 3 AJUSTE DE CURVAS
para aclarar un poco la formula, la escribiremos en una forma extendida para los casos n=1
y n=2
Caso n=1
(125) L ( x )= y0
x−x1
x0−x1
+ y1
x−x0
x1−x0
Caso n=2
(126) L(x )= y0
x−x1
x0−x1
x−x2
x0−x2
+ y1
x−x0
x1−x0
x−x2
x1−x2
+ y2
x−x0
x2−x0
x−x1
x2−x1
Caso n=3
(127)
L ( x )= y0
x−x1
x0−x1
x−x2
x0−x2
x−x3
x0−x3
+ y1
x−x0
x1−x0
x−x2
x1−x2
x−x3
x1−x3
+ y2
x−x0
x2−x0
x−x1
x2−x1
x−x3
x2−x3
+ y2
x−x0
x3−x0
x−x1
x3−x1
x−x2
x3−x2
A pesar de la facilidad de calcular el polinomio de Lagrange, este presenta varias
desventajas, una de ellas es el elevado número de operaciones que hay que
desarrollar a fin de obtener el polinomio de interpolación de la manera estandar,
otra es que el polinomio de interpolación escrito en la forma de lagrange, es decir
la forma dada por la formula (124) no presenta explícitamente el grado del
polinomio. Estudiaremos otra forma de calcular el polinomio de interpolación el
cual usa el concepto de diferencias finitas.
3.2.2 NEWTON
En esencia la interpolación de Newton es una generalización de la forma punto pendiente de
la recta, veamos una aproximación con el siguiente ejemplo:
Consideremos dos puntos (1,3) y (2,8); hallemos la ecuación de la recta
(128) m=8−32−1
=5
y usando la forma punto y pendiente:
(129) y− y0=m(x−x0)
asi
(130) y=m (x−x0 )+ y0
si tomamos (1 ,3 )=(x0, y0), luego
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 29

CAPITULO 3 AJUSTE DE CURVAS
(131) y=5 ( x−1 )+3
Ahora generando la tabla obtenemos:
Tabla 1
x i y i
1 3
2 8
Ahora recordemos que la pendientes como las diferencias de y sobre las diferencias de las
de x
Es decir
(132)y1− y0
x1−x0
Como esta es la primera aproximcion de la derivada; a llamaremos las primeras diferencias
divididas y las notaremos
(133) F [ x0 , x1 ]=f (x1 )−f (x0)
x1−x0
Así la tabla 3 toma la forma
Tabla 2
x i y i P.D.D.
x0 y0F [ x0 , x1 ]
x1 y1
Luego la ecuación (3) queda escrita como
(134) y=F [ x0 , x1 ](x−x0)+y0
Consideremos ahora un ejemplo de 3 puntos
Tabla 3
x i y i
1 3
2 8
5 4
Aquí no hay una única Primera Diferencia Dividida en este orden hay dos que nos interesan
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 30

CAPITULO 3 AJUSTE DE CURVAS
Tabla 4
x i y i P.D.D.
1 3 8−32−1
=5
4−85−2
=−43
2 8
5 4
Como vimos en el método de Lagrange, con tres puntos se puede interpolar un polinomio de
grado 2 (o menor), así; esta información es necesaria pero no suficiente para hallarlo,
debemos buscar una forma de aproximar la segunda derivada (ver Taylor) recordemos que
la segunda derivada es la derivada de la derivada, esto nos lleva a crear una Segunda
Diferencia Dividida (SDD)
Tabla 5
x i y i P.D.D
.
SDD
1 3 5 −43−5
(5−2 )+(2−1)=
−1934=−1912
2 8-4/3
5 4
Es decir
Tabla 6
x i y i P.D.D. SDD
1 3 5−1912
2 8-4/3
5 4
Ahora siguiendo la misma idea, (pero recordando Taylor), que la segunda derivada va
acompañada de un factor cuadrático; tenemos:
(135) N ( x )=−1912
( x−1 ) ( x−2 )+5 ( x−1 )+3
que es equivalente a escribir
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 31
CAPITULO 3 AJUSTE DE CURVAS
(136) N ( x )=F [ x0 , x1 , x2 ] (x−x0 ) (x−x1 )+F [ x0 , x1 ] (x−x0 )+ y0
Donde notaremos la SDD de los puntos x0 , x1 y x2 como
(137) F [ x0 , x1 , x2 ]=F [ x1 , x2 ]−F [ x1 , x0]
x2−x0
Generalizando estos conceptos, tenemos
I. La n-ésima diferencia dividida centrada en cero y hacia delante
(138) F [ x0 , x1 ,…,xn ]=F [ x1 ,…,xn ]−F [ x0 ,…, xn−1]
xn−x0
II. El polinomio de Newton de grado nse define
(139)
N ( x )=F [ x0 , x1 ,…,xn ]∏i=0
n−1
(x−xi )+F [ x1 ,…, xn−1 ]∏i=0
n−2
(x−xi )+…+F [x0¿, x1](x−x0 )+ y0¿
Reordenandolo tenemos
(140) N ( x )= y0+∑j=1
n
F [ x0 ,…,x j ]∏i=0
j−1
(x− xi)
Por ejemplo un polinomio de grado 3 la formula
(141) N ( x )= y0+∑j=1
3
F [ x0 ,…,x j ]∏i=0
j−1
(x− xi)
Dado que la sumatoria va de j=1 hasta 3; hay tres términos
(142)
N ( x )= y0+F [ x0 , x1 ]∏i=0
0
(x−x i)+F [ x0 , x1 , x2 ]∏i=0
1
(x−x i)F [ x0 , x1 , x2 , x3 ]∏i=0
2
(x−x i)
En la primera productoria va de i=0 a 0, solo hay un termino; en la segunda productoria va
de i=0 hasta 1, hay dos terminos y la tercer productoria va de i=0 hasta 2 , hay tres
terminos
(143)
N ( x )= y0+F [ x0 , x1 ](x−x0)+F [ x0 , x1 , x2 ](x−x0)(x−x1)F [ x0 , x1 , x2 , x3 ](x−x0)(x−x1)¿
Nota 8 Una de las ventajas del método de newton es que se conoce a partir de su
construcción el grado del polinomio de interpolación, esto se debe al hecho que si las
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 32

CAPITULO 3 AJUSTE DE CURVAS
diferencias en algún momento se vuelven constante entonces este es el grado del
polinomio.
A continuacion mostraremos algunos ejemplos del polinomio de Newton.
Ejemplo 10
Dados los puntos (1,3); (2,5), hallar N (x )
i x i f (x i) PDD
0 1 31
1 3 5
N (x )=3+1∗(x –1)
Ejemplo 11
La siguiente tabla muestra la construcción del polinomio interpolante de Newton para el caso
n=4.
Tabla 1
i x i y i PDD SDD TDD CDD
0 1 0.7651977-0.48370567
-0.548946
-0.578612
-0.571521
-0.10873389
-0.04944333
0.01181833
0.0658784
0.068068510.00182509
1 1.3 0.6200860
2 1.6 0.4554022
3 1.9 0.2818186
4 2.2 0.1103623
El Polinomio de Newton es:
N ( x )=0,7651977−0,48370567 x−0,10873389 x (x−1 )+0,0658784 x ( x−1 ) ( x−1,3 )+0,00182509x ( x−1 ) ( x−1,3 ) (x−1,6 )
Ejemplo 12
Dados los puntos (-3,11),(-1,3),(2,6) y (4,18), encontrar los polinomios de Newton que pasan
por los dos primeros puntos, los tres primeros puntos y por los cuatro puntos; aproximar en
cada caso para x=1
Solución
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 33

CAPITULO 3 AJUSTE DE CURVAS
Para resolver el ejemplo realizaremos la tabla de diferencias
Tabla 2
i x i y i PDD SDD TDD
0 -3 11 -4
1
6
1
101 -1 3
2 2 6
3 4 18
Entonces el polinomio queda como,
(144) N ( x )=11−4 ( x+3 )+1 ( x+3 ) (x+1 )+0 (x+3)(x+1)(x−2)
y la aproximación es
(145) N (1 )=3
Ahora veamos otra forma de interpolación la cual recurre al uso de determinantes y
matrices.
3.2.3 AITKEN
Este método se basa en una sucesión de polinomios que se dan en forma triangular , el cual
nos permite generar los polinomios de grados más altos partiendo de polinomios de grados
más bajos.
Inicialmente se genera la primer columna , que son las imágenes de los puntos dados,
Se genera un dispositivo triangulas de polinomios Pk,d mediante un determinante de orden 2.
Aquí Pk,d es cierto polinomio de grado d que se interpola sobre un conjunto de d+1 puntos
que dependen de k.
El esquema de Aitken es el que sigue:
Para d=0 ,1 ,2 ,......... , n genérese el polinomio Pk , d como sigue:
(146) Pk , 0= y0 k=0 ,1 ,2 , ........ ,n
si d es diferente de cero se utiliza la siguiente iteracion:
(147)nddk
xx
xPxxxPxxxP
dk
dkdddkdk .........,,2,1;
)()()()()(
1
1,11,1,
En términos matriciales tenemos:
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 34

CAPITULO 3 AJUSTE DE CURVAS
(148)nddk
xxP
xxP
xxxP
kdk
ddd
dkdk .........,,2,1;
1)(
1,
11,1
1,
La disposición de los polinomios Pk,d se muestra en la siguiente tabla:
Tabla 3
d 0 1 2 ............. n
x0 P0,0 X0 – X
x1 P1,0 P1,1 X1 – X
x2 P2,0 P2,1 P2,2 X2 – X
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
xk Pk,0 Pk,1 Pk,2 Xk – X
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
xn Pn,0 Pn,1 Pk,2 Pn,n Xn – X
A continuacion generaremos los polinomios de Aitken para n=2,3 y 4
Polinomio de Aitken que pasa por dos puntos (x0 , y0 ) y (x1 , y1 ) :
(149) P1,1=1
x1−x0|P0,0 x0−xP1,0 x1−x|
Polinomio de Aitken que pasa por tres puntos (x0 , y0 ), (x1 , y1 ) y (x2 , y2 ):
(150) P2,2=1
x2−x1|P1,1 x1−xP2,1 x2−x|
Polinomio de Aitken que pasa por cuatro puntos puntos (x0 , y0 ), (x1 , y1 ),(x2 , y2 )y
(x3 , y3 ) :
(151) P3,3=1
x3−x2|P2,2 x2−xP3,2 x3−x|
Ejemplo 13
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 35

CAPITULO 3 AJUSTE DE CURVAS
Dado el siguiente cojunto de datos; hallar el polinomio de Aitkeny reaice una aproximacion
para x=3
xk Pk , 0
x0 -4 256
x1 -2 16
x2 0 0
x3 2 16
x4 4 256
(152)
5843216
34256
42
11)(
10,1
00,0
011,1
xxP
xxP
xxxP
(153)
192300
34256
40
11)(
20,2
00,0
021,2
xxP
xxP
xxxP
(154)
243216
34256
42
11)(
30,3
00,0
031,3
xxP
xxP
xxxP
(155)
25634256
34256
44
11)(
40,4
00,0
041,4
xxP
xxP
xxxP
(156)
39630192
32584
20
11)(
21,2
11,1
122,2
xxP
xxP
xxxP
(157)
1163224
32584
22
11)(
31,3
11,1
132,3
xxP
xxP
xxxP
(158)
11634256
32584
24
11)(
41,4
11,1
142,4
xxP
xxP
xxxP
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 36

CAPITULO 3 AJUSTE DE CURVAS
(159)
2432116
30396
02
11)(
32,3
22,2
233,3
xxP
xxP
xxxP
(160)
18634116
30396
04
11)(
42,4
22,2
243,4
xxP
xxP
xxxP
(161)
8134186
3224
24
11)(
43,4
33,3
344,4
xxP
xxP
xxxP
Los cuales al ingresarlos en la tabla de Aitken obtenemos:
Tabla 4
k Xk Pk,0 Pk,1 Pk,2 Pk,3 Pk,4
0 -4 256
1 -2 16 -584
2 0 0 -192 396
3 2 16 -24 116 -24
4 4 256 256 116 186 81
Y así la aproximación con el polinomio de Aitken para los cuatro puntos dados es 81.
Ejemplo 14 Dados los puntos (-3,11),(-1,3),(2,6) y (4,18), encontrar los polinomios de Aiken
que pasan por los dos primeros puntos, los tres primeros puntos y por los
cuatro puntos; aproximar en cada caso para x=1
Solución
Polinomio por los puntos (-3,11) y (-1,3)
Utilizando la fórmula (29) obtenemos que
(162) A ( x )=P1,1=1
−1+3 |11 −3−x−1 −1−x|
y la aproximación es
(163) A (1 )=−5
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 37

CAPITULO 3 AJUSTE DE CURVAS
Polinomio por los puntos (-3,11), (-1,3) y (2,6)
Utilizando la fórmula (30) obtenemos que
(164) A ( x )=P2,2=1
2+1|−5 −1−x−35
22−x |
y la aproximación es
(165) A ( x )=P2,2=1
2+1|−5 −1−1−35
22−1 |=1
3(−5−35 )=3
Polinomio por los puntos (-3,11), (-1,3),(2,6) y (4,18)
Utilizando la fórmula (31) obtenemos que
(166) P3,3=1
4−2| 3 2−xP3,2 4−x|
y la aproximación es
A (1 )=3
3.2.4 COMPARACION DE LOS TRES METODOS
Aunque desde un principio se dijo que sin importar el metodo que se utilice; el polinomio
interpolante que aproxima, un numero cualquiera de puntos, es el menor polinomio que pasa
por todos los puntos; existen diferencias.
Tomando como referencia los ejemplos 20, 21 y 23; al realizar el desarrollo de cada uno de
estos polinomios se obtiene el polinomio
(167) f ( x )=x2+2
que es el mismo en los tres casos (era de esperarse dado el teorema de unicidad del
polinomio), este es el polinomio de interpolacion que se buscaba el cual denotaremos por
(168) I ( x ) ¿ x2+2
al observar L(x), N(x) y A(x) se evidencian ciertas ventajas de un metodo sobre los otros, por
ejemplo,
En el caso del metodo de Newton, las Segundas diferencias y el mismo N(x)
nos indican de manera explicita el grado de este polinomio
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 38

CAPITULO 3 AJUSTE DE CURVAS
Otra de las ventajas de Newton es el numero de operaciones a realizar en cada
uno de los metodos las cuales son: Newton n(n+1), Lagrange 4 n(n+1) y
Aitken (FALTA)
Otra ventaja del metodo de Newton es que si se quiere adicionar un punto, las
cuentas hechas en el metodo de Newton no se pierden, ya que esta formula es
recursiva y utiliza el resultado anterior para dar un resultado nuevo; cosa que
no ocurre en Lagrange, en el cual toca recalcular nuevamente cada termino, ni
en Aitke donde se debe incrementar el orden del determinante generando un
incremento de forma factorial en la operaciones.
3.3 OTROS AJUSTES DE CURVAS
3.3.1 CURVAS DE BESIER
3.3.2 SPLINES CUBICOS
3.4 ERROR EN EL POLINOMIO INTERPOLANTE
Con respecto al error en un polinomio interpolante; es el mismo sin importar el camino
(recordemos que llegaremos al mismo polinomio sin importar el camino), y este se difine asi:
3.4.1 Si se conoce la función(Lo cual seria ilógico ya que estamos aproximando
esta funcion), se utiliza el error de la serie de Taylor.
(169) )...,,max()...,,min(
)).......()(()!1(
)(
1010
10
1
nn
n
n
n
xxxxxxxxdonde
xxxxxxn
FR
3.4.2 Si no se conoce la función; que trabajemos, se toma un dato adicional al
cual se le aplica Diferencias finitas divididas y nos dara el error de esta.
(170) )).......()()(,......,( 1001 nnnn xxxxxxxxxFR
Ejemplo 15 Del ejempo (2) tenemos la tabla de diferencias
Tabla 5
i x i f (x i) PDD SDD TDD CDD
0 1 0.7651977-0.48370567
-0.548946
-0.578612
-0.571521
-0.10873389
-0.04944333
0.01181833
0.0658784
0.068068510.00182509
1 1.3 0.6200860
2 1.6 0.4554022
3 1.9 0.2818186
4 2.2 0.1103623
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 39

CAPITULO 3 AJUSTE DE CURVAS
Tomaremos como datos iniciales del ejemplo (2) los cuatro primeros y el quinto dato (4 ,
2.2), sera el dato adicional, el cual nos dara el Rn, luego la aproximacion del polinomio de
grado 4 queda de la siguiente forma:
I ( x )=0,9705222505−0,0944566845 x−0,3656596292x2+0,06587839497 x3+Rn
Donde Rn=0,00182509x ( x−1 ) ( x−1,3 ) ( x−1,6 ) ( x−1,9 )
Si queremos una aproximacion para x=1,8; reemplazamos el valor en I ( x ), tenemos:
I (1,8 )=−0.5691487584
Para mayor información sobre las aplicaciones, sugerimos algunos enlaces externos
Algoritmo de interpolación por aproximación
Algoritmo de interpolación bilineal
Algoritmo de interpolación bicúbica
Ejemplos de interpolación en escalera (Stair Interpolation)
Algoritmo de interpolación S-Spline usada por programas como PhotoZoom o S-Spline.
Algoritmo de interpolación de Lanczos usada por programas como IrfanView
Ejemplos de interpolación por GF con Genuine Fractals
Interpolación de imágenes, en inglés
Interpolación de imágenes, en inglés
EJERCICIOS PROPUESTOS
Ejercicio 1 De las ecuaciones (28), (29) y (30) despeje los parámetros β0 , β1 y β2.
Ejercicio 2 Considere los datos
Tabla 1
x y1 3,6782 5,2415 9,9538 14,664
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 40

CAPITULO 3 AJUSTE DE CURVAS
12 20,94213 22,515
a) Encuentre la regresión lineal
b) Encuentre por medio de mínimos cuadrados un modelo cuadrático
c) Encuentre por medio de mínimos cuadrados un modelo cubico
Ejercicio 3 Considere los datos del Ejercicio 2.
a) Encuentre por medio de mínimos cuadrados un modelo de la forma
f β 0 , β1 , β2 , β3 , β 4 , β5=β0+β1 x+β2 x2+β3 x3+β4 x4+β5 x5
b) Calcule el error cuadrático para el anterior modelo.
c) Halle el polinomio de interpolación.
d) Justifique estos resultados.
Ejercicio 4 sean los datos
Tabla 2
x y1 3,6782 5,2415 9,9538 14,664
12 20,94213 22,515
a) Compare los modelos logarítmicos de la forma y=β0 ln ( x )+β1 hallados al
aplicar los mínimos cuadrados y la linealizacion.
b) Compare los modelos logarítmicos de la forma y=β0 ln (x+β1 ) hallados al
aplicar los minimos cuadrados y la linealizacion.
c) Compare los modelos logarítmicos de la forma y=ln (β0 x+β1 ) hallados al
aplicar los minimos cuadrados y la linealizacion.
d) Determine de todos ellos cual fue el mejor modelo de ajuste.
e) Será que en general para cualquier conjunto de datos la conclusión del punto
anterior es cierta?
Ejercicio 5 De la Nota 2, indique con cuales variables se va a trabajar y aplique todos los
modelos a los datos del Ejercicio 4.
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 41

CAPITULO 3 AJUSTE DE CURVAS
Ejercicio 6 Dado el modelo expoencial β1√ y=β02x, aindique las variables con las cuales se van
a trabajar, y halle el modelo exponencial para los datos de Tabla 2
Ejercicio 7 Hallar el valor de 2 utilizando 3 funciones diferentes y llenar la siguiente tabla
Primer grado Segundo grado Tercer grado
Aproximación EN Aproximación EN Aproximación EN
F(x)
G(x)
H(x)
Ejercicio 8 Obtenga el Polinomio interpolante de de Lagrange de grado 2 a partir del Polinomio
interpolante de Newton.
Ejercicio 9 Estime el log 5 usando interpolación lineal, cuadrática y cúbica; y compare los
errores. ¿Cuál es el mejor método? ¿Porqué?.
Ejercicio 10 Halle el polinomio de interpolación que pasa por los puntos
{(−h , f (−h ) ) , (0 , f (0 ) ) , (h , f (h ) )}Ejercicio 11 Halle el polinomio de interpolación que pasa por los puntos
{(−h , f (−h ) ) , (0 , f (0 ) ) , (h , f (h ) ) ,(2h , f (2h ))}Ejercicio 12 Halle el polinomio de interpolación que pasa por los puntos
{(−2h , f (2h ) ) , (−h , f (−h ) ) , (0 , f (0 ) ) , (h , f (h ) ) ,(2h , f (2h ))}
Ejercicio 13 Úsese el método de Aitken para obtener una aproximación del valor de 4
senx
Ejercicio 14 Encuentre un valor aproximado de 2 por interpolación, usando el método de
Aitken. Para los valores de la función XxF 2)( en los puntos X = -2 ,-1,0,1,2,3
Ejercicio 15 Demuestre que P2,2 = L2(x), donde L2(x) es el polinomio langrangeano de orden 2.
Ejercicio 16 Hallar utilizando interpolación de:
i. Newton
ii. Lagrange
iii. Aitken
Cada uno de 1°, 2° y tercer grado. Decir cual es mejor en cada grado para los puntos
x0=0 , x1=1 , x2=2 , x3=3 , x3=4 , x5=5
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 42

CAPITULO 3 AJUSTE DE CURVAS
Ejercicio 17 Aproximar f(x)=31/2 con la función f(x)=3x tabulada en los puntos x1=-2, x2=-1, x3=0,
x4=1 y x5=2. Utilizar los métodos de Neville y Aitken, y comparar los
Losada H. Solón, Morales P. Jorge, Ruiz P. Fabian Página 43