torsione non uniforme.pptx
TRANSCRIPT
Università degli Studi di Padova
Corso di Laurea Specialistica in Ingegneria Civile
COMPLEMENTI DI SCIENZA DELLE COSTRUZIONI
Professore Luciano Simoni Studente: Turcato Andrea
Anno Accademico 2011-2012
LASTRA INFLESSA(STUDIO DELLA LASTRA CIRCOLARE)
La Torsione secondo la teoria di De Saint Venant
Si consideri una sezione generica con sistema di riferimento principale d’inerzia e si supponga che la sezione ruoti attorno al suo baricentro G. Si definisce quindi:
z Rotazione della sezione, lineare sulla lunghezza della trave
Angolo di rotazione unitario (pari alla rotazione relativa tra sezioni poste a distanza unitaria)
Si definisce quindi il modello cinematico, scomponendo il generico vettore spostamento S nelle sue componenti:
),(
-
yxUw
xzv
yzu
t
Il termine Ut (x,y) rappresenta la funzione di ingobbamento
e ricavando le componenti di deformazione attraverso il legame spostamenti-deformazioni:
0 zw/
0y v/
0/
z
y
x xu
)(yw/ zv/
)(x w/zu/
0xv//
,
,
xU
yU
zzyu
ytzy
xtzx
yx
Questo conferma l’indeformabilità della sezione nel suo piano.
La Torsione secondo la teoria di De Saint Venant
Si suppone che il materiale sia elastico lineare e isotropo. Ne segue che le uniche componenti di tensione caratterizzanti il problema vengono espresse nel seguente modo
Dalla terza equazione indefinita di equilibrio e dalle equazioni di congruenza si ricava:
cost2y/x/ )( zxzy Grot z
Queste arrivano a definire il seguente sistema di soluzione:
yxnt
t
xyU
U
,
2 0
)( y)w/zu/G(
)( x)w/zv/G(
,
,
xUGG
yUGG
ytzyzy
xtzxzx
0)(y/x/ )( ,,zyzx yytxxtz UUGdiv 02 tU
0)( ,, yyytxxxtZ xUyUGn
yxnt xyU ,
Condizione di congruenza
Condizione di equilibrio
Condizione di equilibrio al contorno
Questo sistema di equazioni che risolve il problema della torsione secondo DSV prende il nome di problema di Dini-Neumann.
La Torsione secondo la teoria di De Saint Venant
La soluzione del problema di Dini-Neumann soddisfa la congruenza interna e l’equilibrio in sede indefinita e sulla superficie laterale scarica, ma è definita a meno di una costante (esistenza di più soluzioni) che ha il significato di una traslazione rigida lungo z.Si deve inoltre verificare che le tensioni sulle sezioni di estremità diano luogo a soli momenti torcenti, a questo proposito si può fare una considerazione:- la tensione sz è nulla, quindi impone l’annullarsi di sforzi assiali e di momenti flettenti.Quindi si è certi che l’unica sollecitazione risultante sia un momento torcente.Si osservi inoltre che la funzione Ut è funzione della sola geometria della sezione.
Si suppone di operare con una sezione simmetrica: il momento torcente è antisimmetrico, quindi lo saranno pure i suoi effetti e in particolare lo spostamento w in direzione z. Ne segue che:
001
dAUwdAA
w t
Dove: dAU t rappresenta il momento statico di ingobbamento
Per valutare l’angolo di rotazione unitario devo imporre l’equilibrio di un elemento infinitesimale di area dA:
dAyxM zxzyt )(
La Torsione secondo la teoria di De Saint Venant
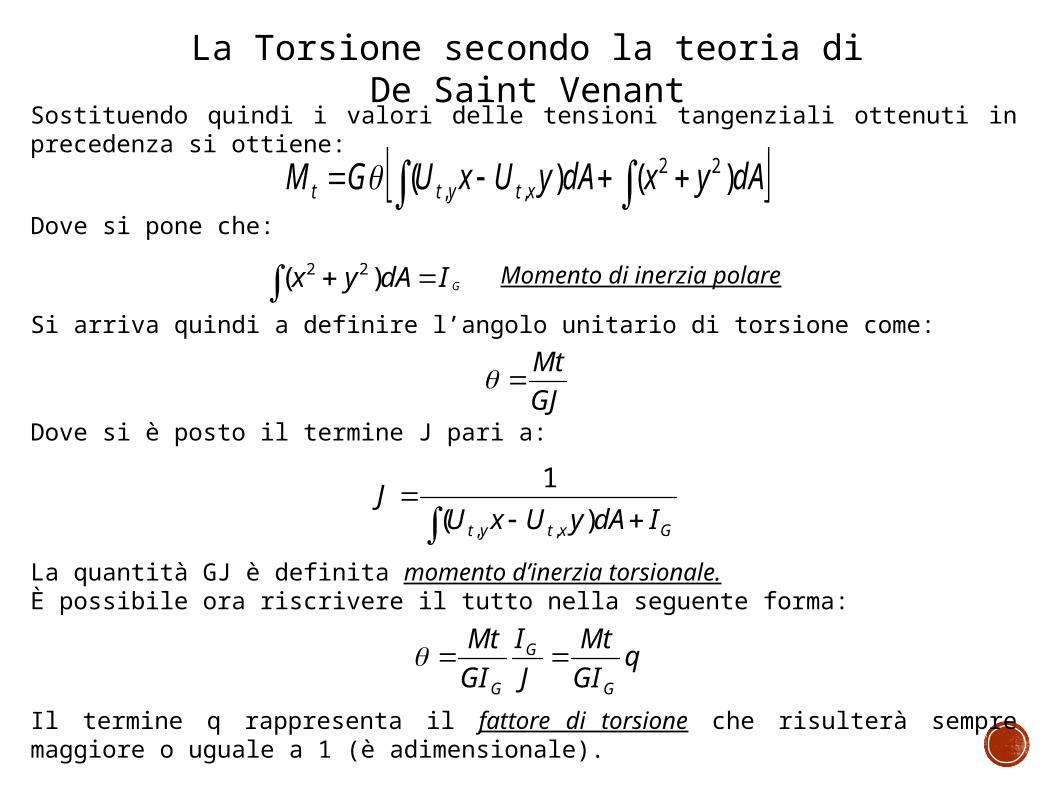
Sostituendo quindi i valori delle tensioni tangenziali ottenuti in precedenza si ottiene:
dAyxdAyUxUGM xtytt )()( 22,,
Dove si pone che:
GIdAyx )( 22 Momento di inerzia polare
Si arriva quindi a definire l’angolo unitario di torsione come:
GJ
Mt
Dove si è posto il termine J pari a:
Gxtyt IdAyUxUJ
)(
1
,,
La quantità GJ è definita momento d’inerzia torsionale.È possibile ora riscrivere il tutto nella seguente forma:
qGI
Mt
J
I
GI
Mt
G
G
G
Il termine q rappresenta il fattore di torsione che risulterà sempre maggiore o uguale a 1 (è adimensionale).
La Torsione secondo la teoria di De Saint Venant- IL CENTRO DI TORSIONE -
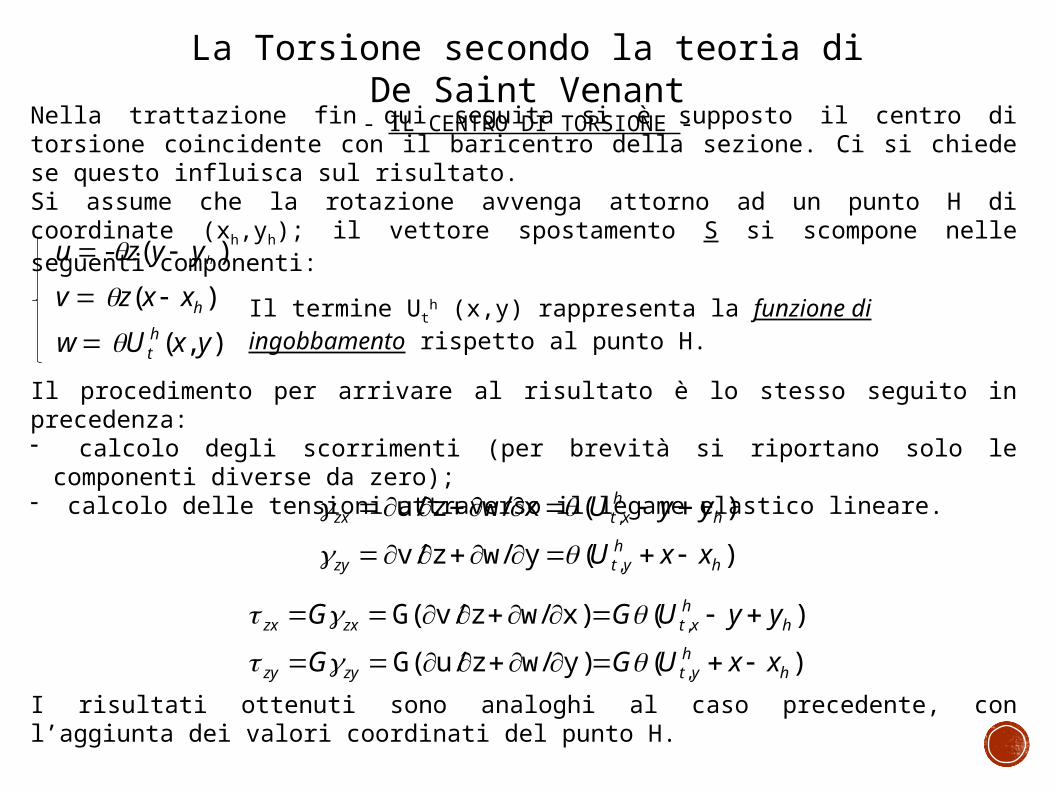
Nella trattazione fin qui seguita si è supposto il centro di torsione coincidente con il baricentro della sezione. Ci si chiede se questo influisca sul risultato.Si assume che la rotazione avvenga attorno ad un punto H di coordinate (xh,yh); il vettore spostamento S si scompone nelle seguenti componenti:
),(
)(
)(-
yxUw
xxzv
yyzu
ht
h
h
Il termine Uth (x,y) rappresenta la funzione di ingobbamento rispetto al punto H.
Il procedimento per arrivare al risultato è lo stesso seguito in precedenza:- calcolo degli scorrimenti (per brevità si riportano solo le componenti diverse da zero);- calcolo delle tensioni attraverso il legame elastico lineare.
)( y)w/zu/G(
)( x)w/zv/G(
,
,
hh
ytzyzy
hh
xtzxzx
xxUGG
yyUGG
)(yw/ zv/
)(x w/zu/
,
,
hh
ytzy
hh
xtzx
xxU
yyU
I risultati ottenuti sono analoghi al caso precedente, con l’aggiunta dei valori coordinati del punto H.
La Torsione secondo la teoria di De Saint Venant-IL CENTRO DI TORSIONE-
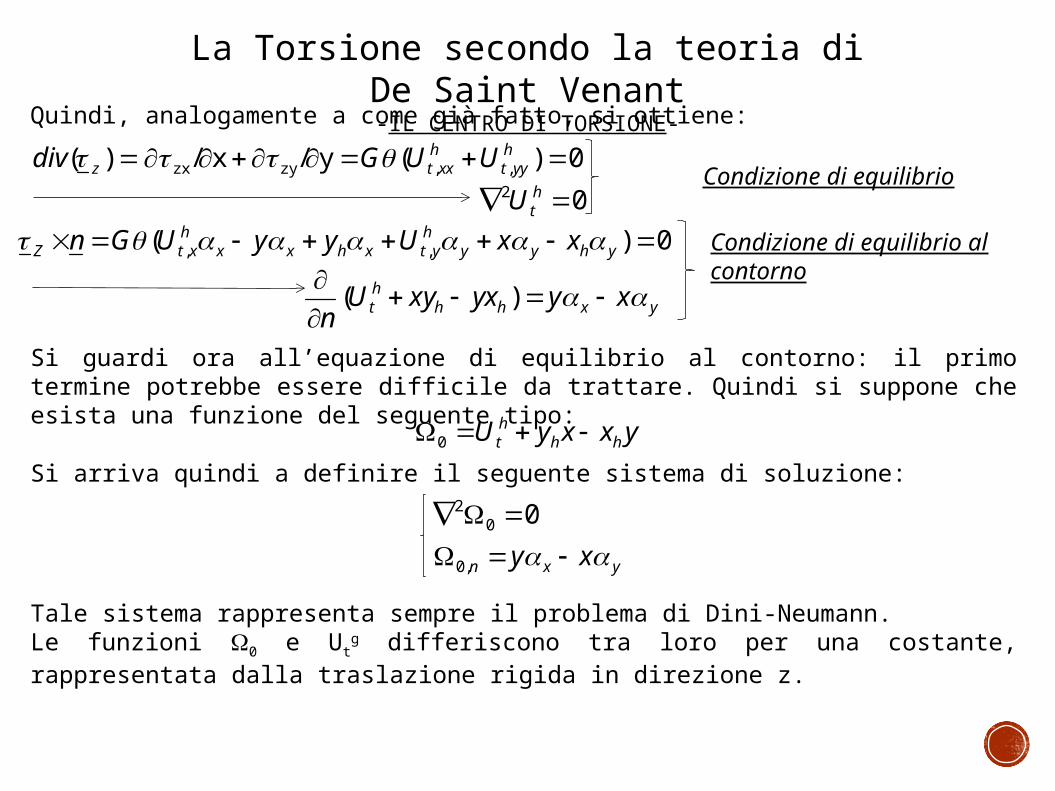
Quindi, analogamente a come già fatto, si ottiene:
0)(y/x/ )( ,,zyzx hyyt
hxxtz UUGdiv
02 htU
0)( ,, yhyyh
ytxhxxh
xtZ xxUyyUGn
yxhhht xyyxxyU
n
)(
Condizione di equilibrio
Condizione di equilibrio al contorno
Si guardi ora all’equazione di equilibrio al contorno: il primo termine potrebbe essere difficile da trattare. Quindi si suppone che esista una funzione del seguente tipo:
yxxyU hhht 0
Si arriva quindi a definire il seguente sistema di soluzione:
yxn xy
,0
02 0
Tale sistema rappresenta sempre il problema di Dini-Neumann.Le funzioni W0 e Ut
g differiscono tra loro per una costante, rappresentata dalla traslazione rigida in direzione z.
La Torsione secondo la teoria di De Saint Venant-IL CENTRO DI TORSIONE-
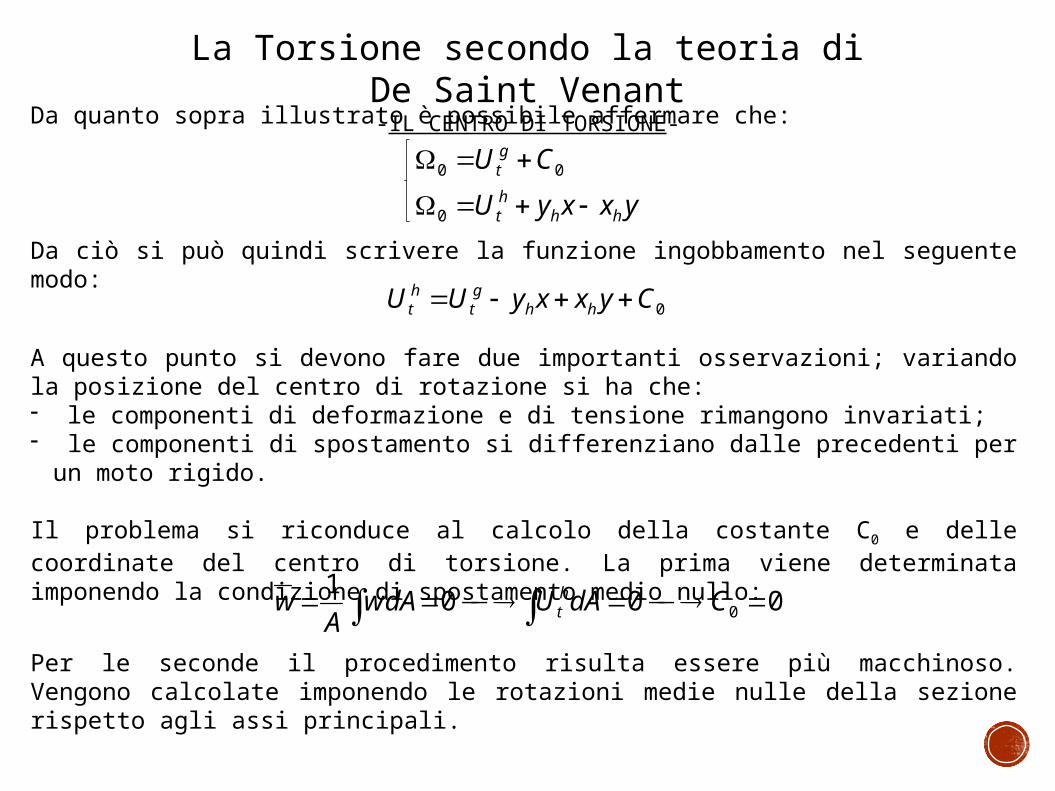
Da quanto sopra illustrato è possibile affermare che:
A questo punto si devono fare due importanti osservazioni; variando la posizione del centro di rotazione si ha che:- le componenti di deformazione e di tensione rimangono invariati;- le componenti di spostamento si differenziano dalle precedenti per un moto rigido.
Il problema si riconduce al calcolo della costante C0 e delle coordinate del centro di torsione. La prima viene determinata imponendo la condizione di spostamento medio nullo:
0CyxxyUU hhgt
ht
yxxyU
CU
hhht
gt
0
00
Da ciò si può quindi scrivere la funzione ingobbamento nel seguente modo:
0001
0 CdAUwdAA
w ht
Per le seconde il procedimento risulta essere più macchinoso. Vengono calcolate imponendo le rotazioni medie nulle della sezione rispetto agli assi principali.

La Torsione secondo la teoria di De Saint Venant-IL CENTRO DI TORSIONE-
Tralasciando i calcoli si riportano in seguito i risultati:
Ne segue che la scelta del centro di rotazione risulta essere arbitraria, la soluzione rimane invariata salvo la presenza di un moto rigido.
OSSERVAZIONISe la sezione possiede un asse di simmetria allora il punto H si colloca sull’asse di simmetria e la funzione ingobbamento è antimetrica rispetto a tale asse.Se la sezione possiede due assi di simmetria allora il punto H coincide con il baricentro della sezione stessa.
dAxUI
y
dAyUI
x
gt
yh
gt
xh
1
1
La Torsione secondo la teoria di De Saint Venant-DETERMINAZIONE DELLA FUNZIONE DI INGOBBAMENTO-
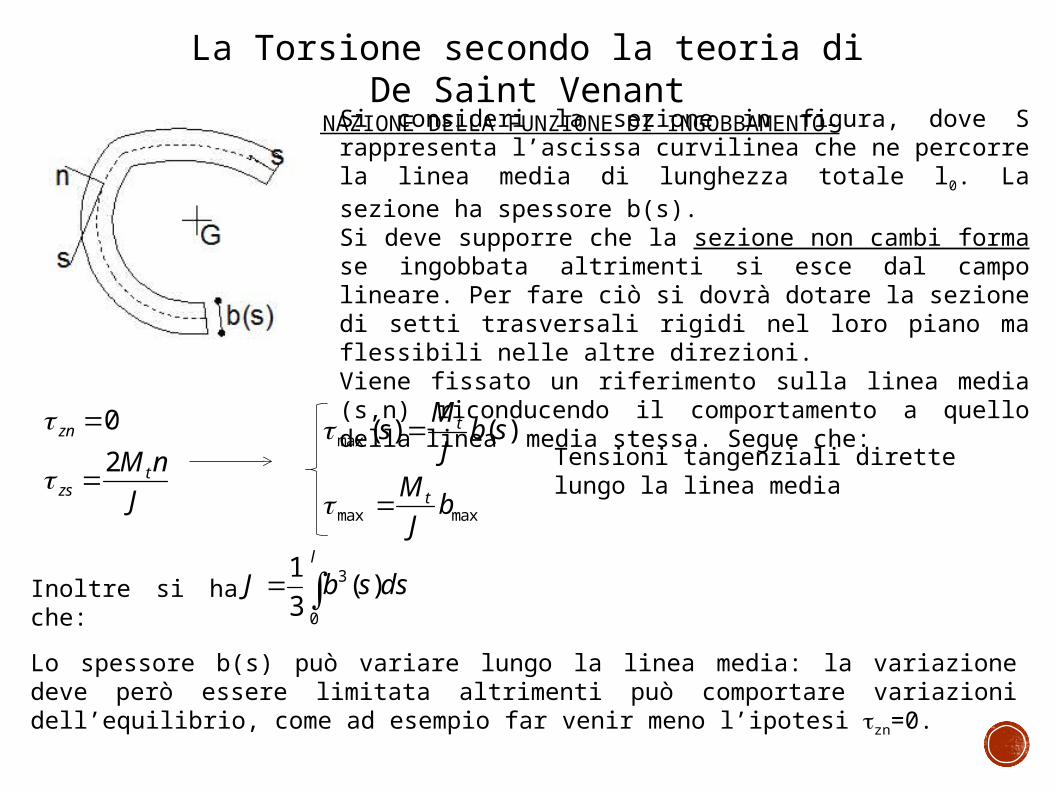
Si consideri la sezione in figura, dove S rappresenta l’ascissa curvilinea che ne percorre la linea media di lunghezza totale l0. La sezione ha spessore b(s).Si deve supporre che la sezione non cambi forma se ingobbata altrimenti si esce dal campo lineare. Per fare ciò si dovrà dotare la sezione di setti trasversali rigidi nel loro piano ma flessibili nelle altre direzioni.Viene fissato un riferimento sulla linea media (s,n) riconducendo il comportamento a quello della linea media stessa. Segue che:
Inoltre si ha che:
J
nM tzs
zn
2
0
maxmax
max )()(
bJ
M
sbJ
Ms
t
t
Tensioni tangenziali dirette lungo la linea media
l
dssbJ0
3 )(3
1
Lo spessore b(s) può variare lungo la linea media: la variazione deve però essere limitata altrimenti può comportare variazioni dell’equilibrio, come ad esempio far venir meno l’ipotesi tzn=0.
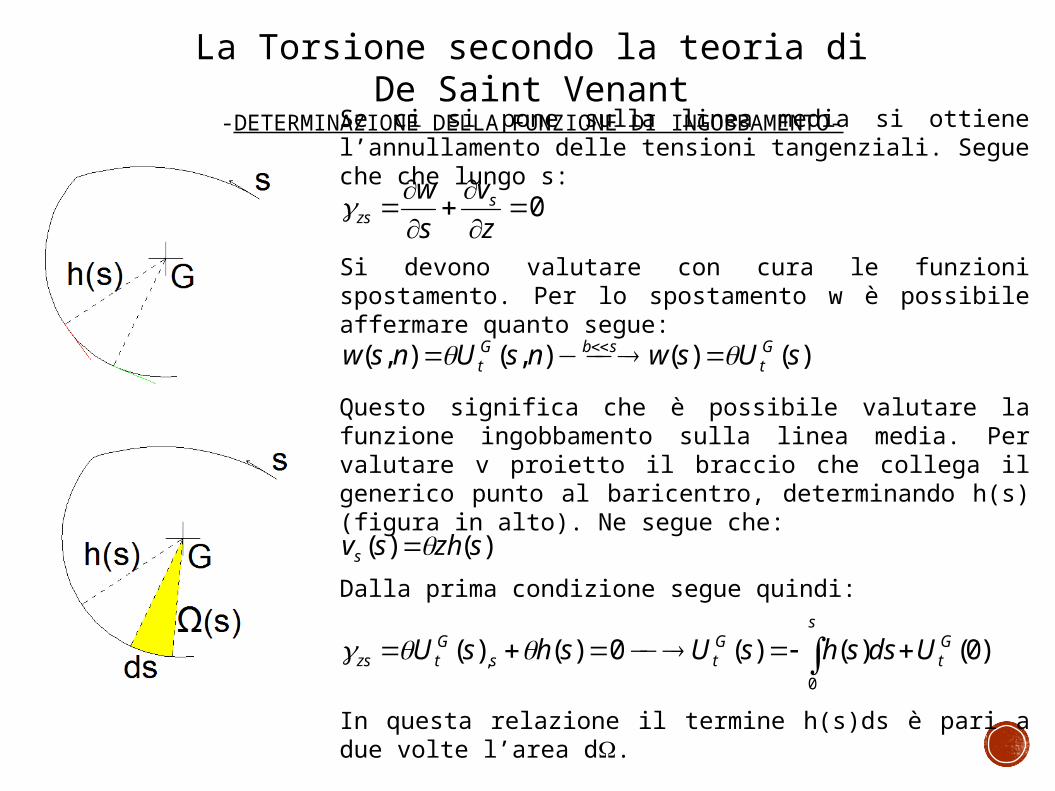
Se ci si pone sulla linea media si ottiene l’annullamento delle tensioni tangenziali. Segue che che lungo s:
Questo significa che è possibile valutare la funzione ingobbamento sulla linea media. Per valutare v proietto il braccio che collega il generico punto al baricentro, determinando h(s) (figura in alto). Ne segue che:
0
z
v
s
w szs
Si devono valutare con cura le funzioni spostamento. Per lo spostamento w è possibile affermare quanto segue:
)()(),(),( sUswnsUnsw Gt
sbGt
)()( szhsvs Dalla prima condizione segue quindi:
)0()()(0)()(0
,Gt
sGts
Gtzs UdsshsUshsU
In questa relazione il termine h(s)ds è pari a due volte l’area dW.
La Torsione secondo la teoria di De Saint Venant-DETERMINAZIONE DELLA FUNZIONE DI INGOBBAMENTO-
Ne risulta che la funzione ingobbamento è un’area settoriale ed è determinata dalla seguente relazione:
)0()(2)( GtG
Gt UssU
Ora, come già fatto in precedenza, cerco il punto in cui lo spostamento w si annulla. Tale punto è definito dall’annullarsi del momento statico di ingobbamento e definisce il baricentro dell’area settoriale. Divide quindi la sezione in due zone: una in cui W>0 e una in cui W<0. In particolare il segno dipende dalla concordanza tra la rotazione fornita dal vettore S e quella fornita dal momento torcente. Ora si procede al calcolo della costante di integrazione:
GGGt
GtG
GtG
Gt
dAsA
UAUdAs
dAUdAsdAsUw
2)(
2)0(0)0()(2
0)0()(20)(0
Dove il termine G2 rappresenta il valore medio dell’area settoriale.
Concludendo si ottiene la seguente formulazione per la funzione di ingobbamento:
))()((2)( sssU GGGt
A questo punto è possibile calcolare le coordinate del centro di rotazione H e quindi la funzione di ingobbamento Ut
h.
La Torsione secondo la teoria di De Saint Venant-DETERMINAZIONE DELLA FUNZIONE DI INGOBBAMENTO-
La teoria della torsione secondo DSV prende il nome di torsione uniforme e ha le seguenti caratteristiche:- la rotazione delle sezioni varia linearmente lungo la coordinata z;- le sezioni si ingobbano tutte nella stessa misura (angolo unitario costante);- momento torcente costante;- lo spostamento w risulta essere libero e indipendente da z.In particolare quest’ultima caratteristica comporta che:
0
z
wz
Questo significa che le fibre non si deformano in direzione assiale e in particolare che la componente di tensione sz risulta essere nulla. Questa condizione può essere ottenuta in due modi:1) Ponendo al posto del vincolo un sistema di forze autoequilibrato;2) Ponendo un vincolo ideale, cioè un incastro nel baricentro della sezione.
La Torsione secondo la teoria di De Saint Venant-CONCLUSIONI-
La Torsione Non Uniforme
Il vincolo viene applicato a tutto il contorno della sezione e non più al solo baricentro. Quindi l’ingobbamento risulta essere contrastato al pari dello spostamento w lungo z. Questo comporta uno stato tensionale e deformativo totalmente diverso dal caso precedente. In particolare vale la seguente condizione:
)(zGJ
zM t )(
Si definisce quindi il modello cinematico scomponendo il generico vettore spostamento S nelle sue componenti e ricavando le rispettive deformazioni:
)()(
)(z)(
)(z)(-
' sUzw
xxv
yyu
ht
h
h
Angolo di rotazione unitario variabile con z
Rotazione delle sezioni non lineare, ma funzione di z
0
0
z
wEE
z
w
zz
z
Anche in questo caso rimane valida l’ipotesi per cui le sezioni mantengono la propria forma.Come si vedrà in seguito tale stato tensionale risulta essere equilibrato da delle “nuove” tensioni tangenziali differenti da quelle fornite dalla teoria di DSV.
La Torsione Non Uniforme
Si analizza ora lo stato deformativo e tensionale in direzione z:
Di tutto ciò va ovviamente verificata la congruenza, cioè che in ogni sezione la risultante degli sforzi dia luogo a solo momento torcente (azioni assiali e flettenti nulle):
Questo comporta il venir meno dell’arbitrarietà della posizione del centro di taglio osservata nel caso di DSV. Per la torsione non uniforme il centro di torsione è definito in modo univoco e coincide con il centro di taglio.
)()(
)()(
)()(
''
''
'
sUzEE
sUzz
w
sUzw
htzz
htz
ht
Variabile con z e da un punto all’altro della sezione
Utilizzando un legame di tipo elastico lineare
0
0
0
''
''
''
A
ht
A
zy
A
ht
A
zx
A
ht
A
z
dAxUEdAxM
dAyUEdAyM
dAUEdAN
Annullamento del momento centrifugo di ingobbamento
Annullamento del momento centrifugo di ingobbamento
Annullamento del momento statico di ingobbamento
La Torsione Non Uniforme
Questo stato tensionale va ovviamente equilibrato. Quindi si consideri un elemento infinitesimo di trave di dimensioni ds, dz di spessore (b) qualunque. Quest’ultimo viene supposto piccolo in modo da poter considerare anche le tensioni sz uniformemente distribuite sullo spessore. Si esegue quindi l’equilibrio trasversale in direzione z da cui si evince che l’incremento di sz non risulta equilibrato; si necessita di tensioni tangenziali tzs,2 diverse da quelle di DSV.
Il risultato va integrato scegliendo come origine per S un punto in cui la superficie laterale è scarica:
)()()())((
0))(()(
0))(()()()()()(
''',2
,2,
,222,
sUzEsbsb
sbsb
dsdzsbdzsbdzsbdsdzsbdssbdssb
htszs
szszz
szszszszzzz
dssbsUzEsbdssbs
htzs
s
zs )()()()()(0
'''2
0
2
Si noti che l’integrale delle tensioni si annulla per s=0 dove cioè non si hanno forze applicate. Infine si ottiene la seguente espressione per tzs,2 :
)(
)()()(0
'''
2 sb
dssbsUzEs
ht
zs
La Torsione Non Uniforme
Si deve osservare che le tensioni tangenziali tzs,2 non corrispondono ad una azione tagliante. Infatti integrando il termine tzs,2 b sulla lunghezza della linea media la loro risultante risulta essere nulla. Quindi sono diverse da zero punto per punto (per equilibrare sz) ma globalmente sono nulle.Inoltre le tzs,2 generano un momento torcente Mt2 diverso da quello della teoria di DSV:
Si osservi che il termine h(s)ds è un’area settoriale, quindi posso scrivere:
00
0 0
'''
0
22 )()()()()()(l s
ht
l
zst dsshdssbsUzEdsshsbM
htdUdssh )(
Inoltre è possibile introdurre la seguente grandezza:
dssbUss
ht )()(
0
Ottenendo quindi:
0
0
'''2 )()(
lhtt dUszEM
La Torsione Non Uniforme
Integrando per parti si ottiene:
Si osservi quindi che:
dAUdssbUd
dAUdssbUl
dssbU
ht
ht
A
ht
lht
ht
)(
0)()(
0)()0(
0
0
0
0
0
Ottenendo quindi:
00
00
'''2 )()()()(
lht
lhtt dsUsUszEM
0
0
00'''
2 )()0()0()()()(l
ht
ht
htt dsUUlUlzEM
dAUzEMl
htt
2
0
'''2 )()(
0
La Torsione Non Uniforme
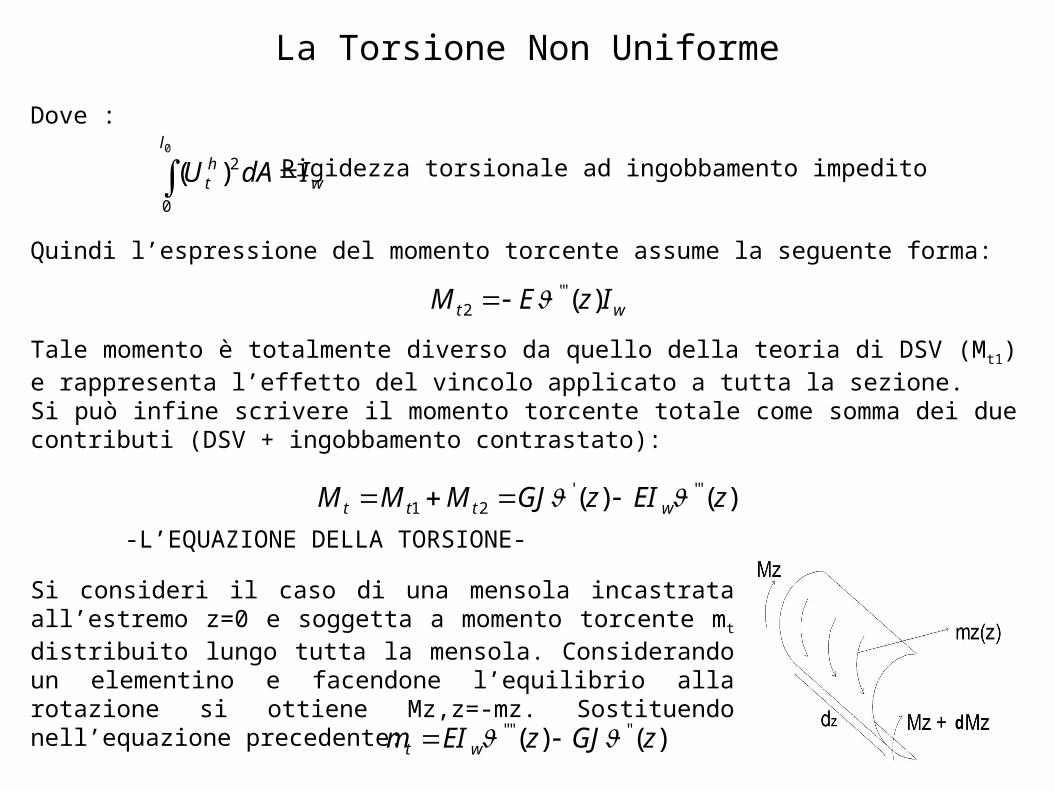
Dove :
Quindi l’espressione del momento torcente assume la seguente forma:
Tale momento è totalmente diverso da quello della teoria di DSV (M t1) e rappresenta l’effetto del vincolo applicato a tutta la sezione.Si può infine scrivere il momento torcente totale come somma dei due contributi (DSV + ingobbamento contrastato):
wt IzEM )('''2
w
lht IdAU 2
0
)(0
Rigidezza torsionale ad ingobbamento impedito
)()( ''''21 zEIzGJMMM wttt
-L’EQUAZIONE DELLA TORSIONE-
Si consideri il caso di una mensola incastrata all’estremo z=0 e soggetta a momento torcente mt distribuito lungo tutta la mensola. Considerando un elementino e facendone l’equilibrio alla rotazione si ottiene Mz,z=-mz. Sostituendo nell’equazione precedente:
)()( '''''' zGJzEIm wt
La Torsione Non Uniforme
Dove il termine mt rappresenta un momento distribuito per unità di lunghezza. Ora si introduce il seguente termine, con l’intento di avere un parametro di controllo:
Quindi si ottiene:
Ponendo le condizioni al contorno, statiche (su M e s) e cinematiche (sulle rotazioni), l’equazione differenziale assume la seguente soluzione:
)()( zDl
zCBeAez p
zz
Dove l’ultimo termine rappresenta l’integrale particolare ed è funzione della distribuzione del momento. Nel caso di momento uniformemente distribuito (mz=cost), assume la seguente forma:
)()( '''''' 2 zzEI
m
w
t
wEI
GJ2
2
2
1)( z
GJ
mz t
p
In seguito verranno affrontati i seguenti casi particolari confrontando le soluzioni analitiche con quelle numeriche fornite da Straus:1) Mensola sollecitata all’estremo libero2) Trave con momento torcente distribuito e due appoggi torsionali3) Trave con momento torcente distribuito e un appoggio torsionale
Bimomento
Considero una sezione ad H incastrata ad una estremità e con l’altro estremo libero.La sezione è doppiamente simmetrica quindi conosco la posizione del centro di torsione che, nella fattispecie, coincide con il baricentro della sezione.
0,5 S1 h nell’ala superiore Ut
h = 0 nell’anima-0,5 S1 h nell’ala inferiore
Ricordando che:
E osservando che
Si evince che le σz hanno lo stesso andamento di Uth e le interpreto come dei momenti sul piano delle
ali : Momenti di flangia. L’esistenza di questi momenti fa nascere anche i tagli di flangia.Questo insieme di sollecitazioni lo chiamo BIMOMENTO [B] ed è un nuovo parametro della sollecitazione dato dalla risultante delle σz derivanti dalla T.N.U.
htz UE ''
tE cos''
D
ht
C
zh
t dAUEbdsUB 2)(''
Bimomento
In definitiva si ottiene:
Quindi si ha:
Di conseguenza si può ricavare σz
''EIB
EI
B''
ht
htz U
I
BEU
EI
B
Mensola sollecitata all’estremo libero
Si consideri una trave a sezione costante incastrata all’estremità z=0 e soggetta a momento torcente M t all’estremo libero. Quindi essendo mt=0 l’integrale particolare va anch’esso a zero. Vengono poste le seguenti condizioni al contorno:
Si ottiene un sistema di quattro equazioni in quattro incognite che fornisce la seguente soluzione:
0)(
)()(
0)0(
0)0(
''
'''''2
'
l
Mll t
l
zlzt
el
eee
l
z
GJ
lMz
2
2
1
11)(
Il parametro guida del problema è al (è adimensionale), che contiene al suo interno le rigidezze, le caratteristiche del materiale e la lunghezza dell’elemento. In pratica fornisce una misura dell’effetto di vincolo.
Condizioni cinematiche
Condizioni statiche
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI-
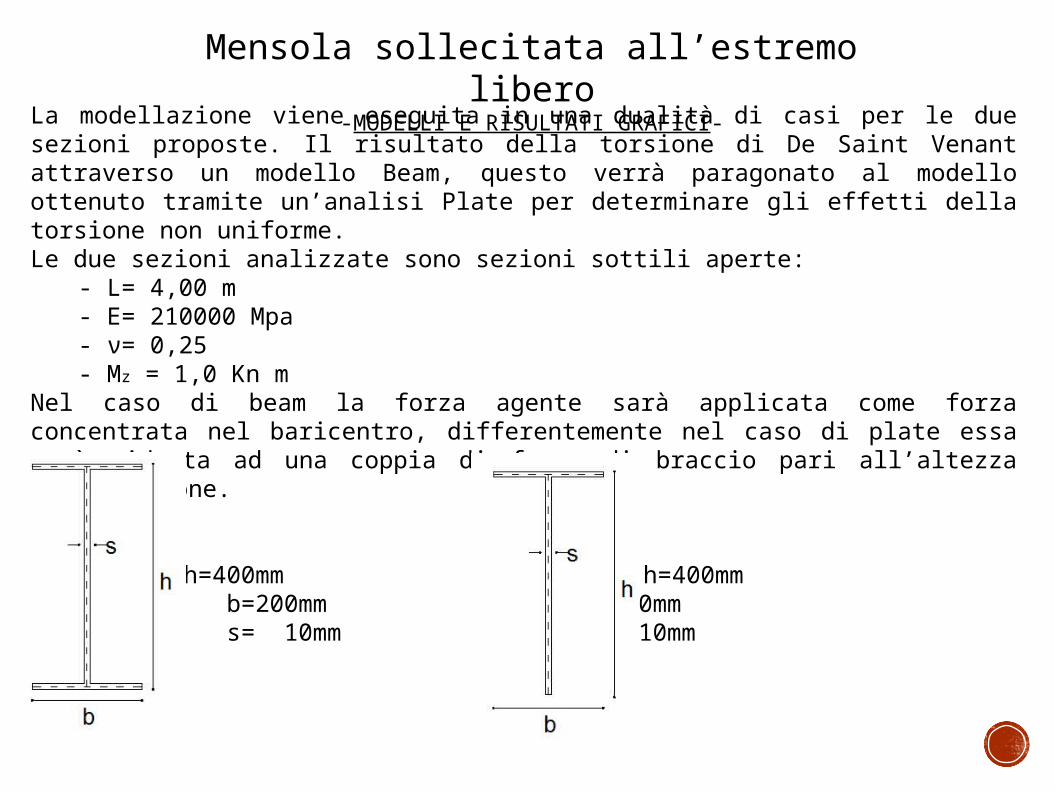
La modellazione viene eseguita in una dualità di casi per le due sezioni proposte. Il risultato della torsione di De Saint Venant attraverso un modello Beam, questo verrà paragonato al modello ottenuto tramite un’analisi Plate per determinare gli effetti della torsione non uniforme.Le due sezioni analizzate sono sezioni sottili aperte:
- L= 4,00 m- E= 210000 Mpa- ν= 0,25- Mz = 1,0 Kn m
Nel caso di beam la forza agente sarà applicata come forza concentrata nel baricentro, differentemente nel caso di plate essa sarà ridotta ad una coppia di forze di braccio pari all’altezza della sezione.
Sezioni:IPE h=400mm Sez. a T h=400mm b=200mm b=200mm s= 10mm s= 10mm
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI-
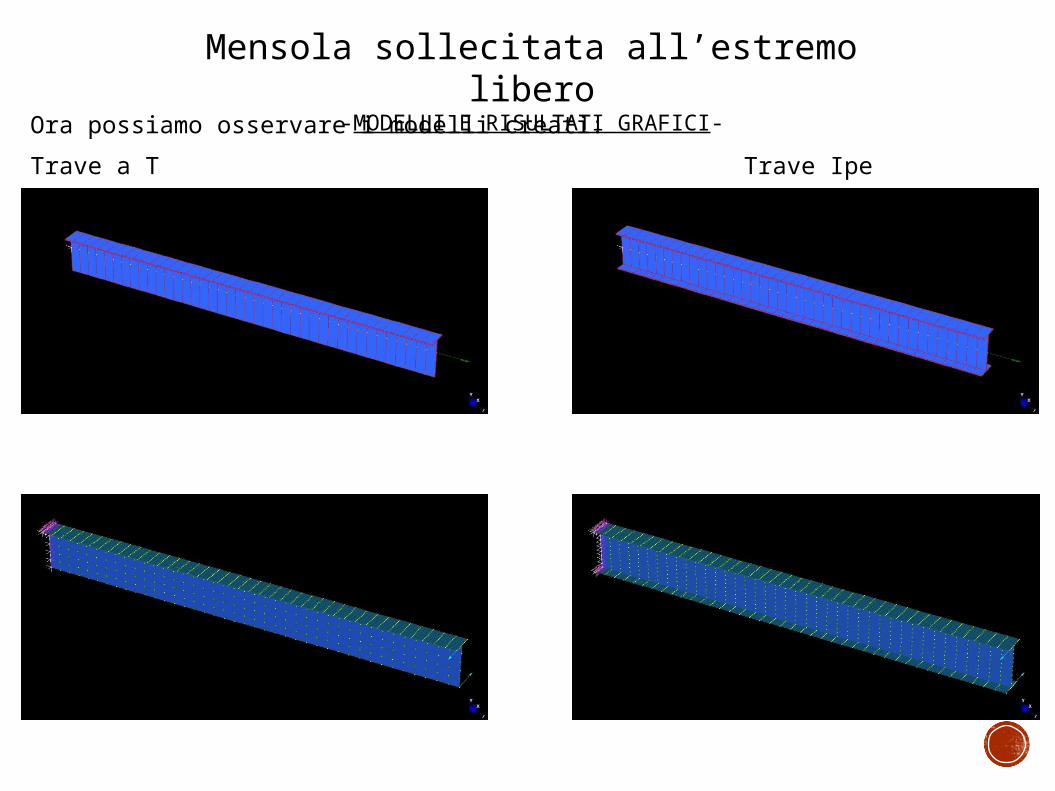
Ora possiamo osservare i modelli creati:
Trave a T Trave Ipe
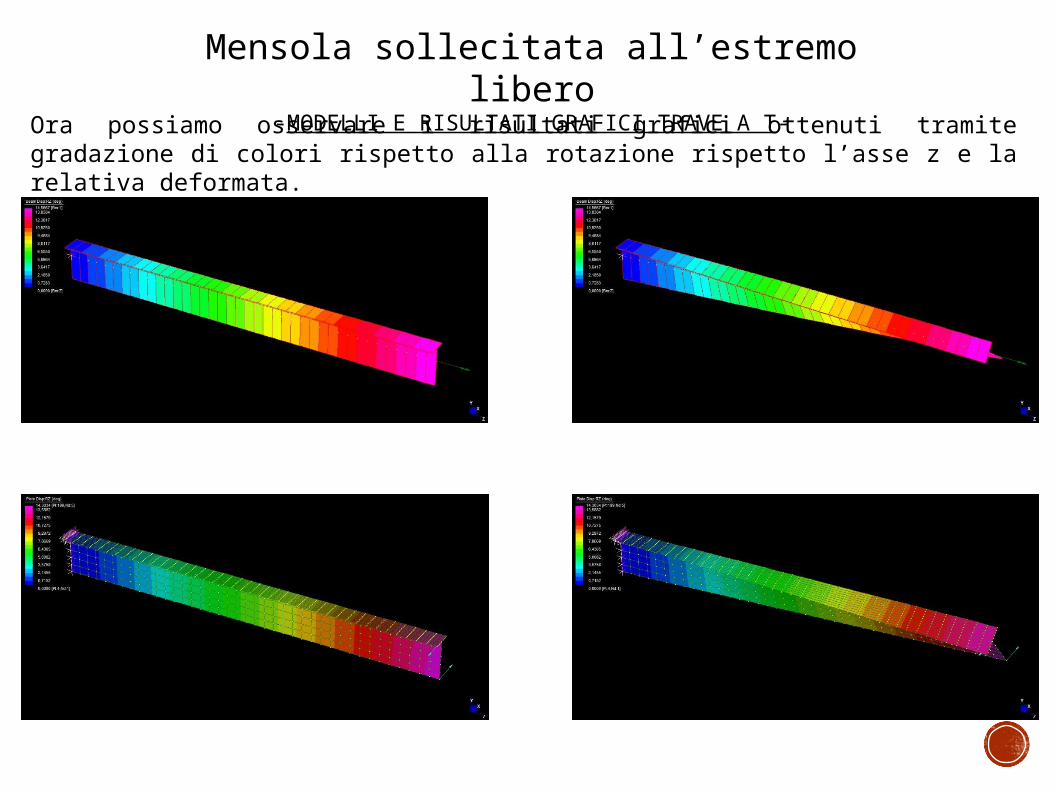
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE A T-
Ora possiamo osservare i risultati grafici ottenuti tramite gradazione di colori rispetto alla rotazione rispetto l’asse z e la relativa deformata.
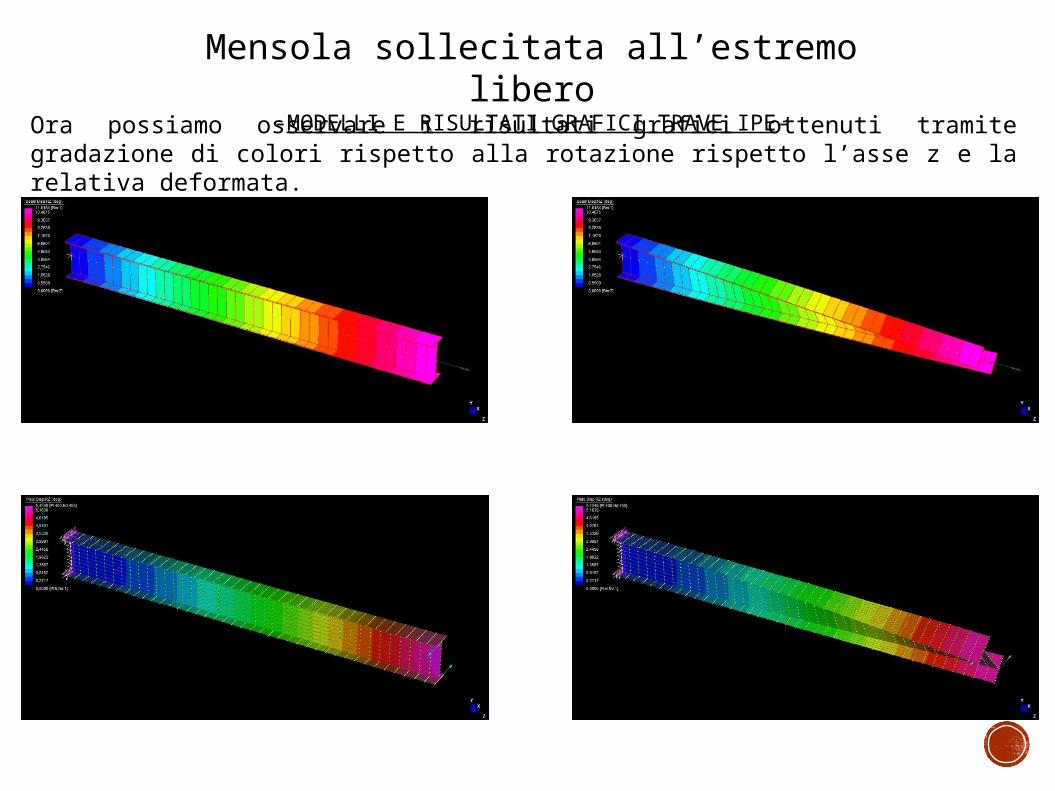
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE IPE-
Ora possiamo osservare i risultati grafici ottenuti tramite gradazione di colori rispetto alla rotazione rispetto l’asse z e la relativa deformata.
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE A T-
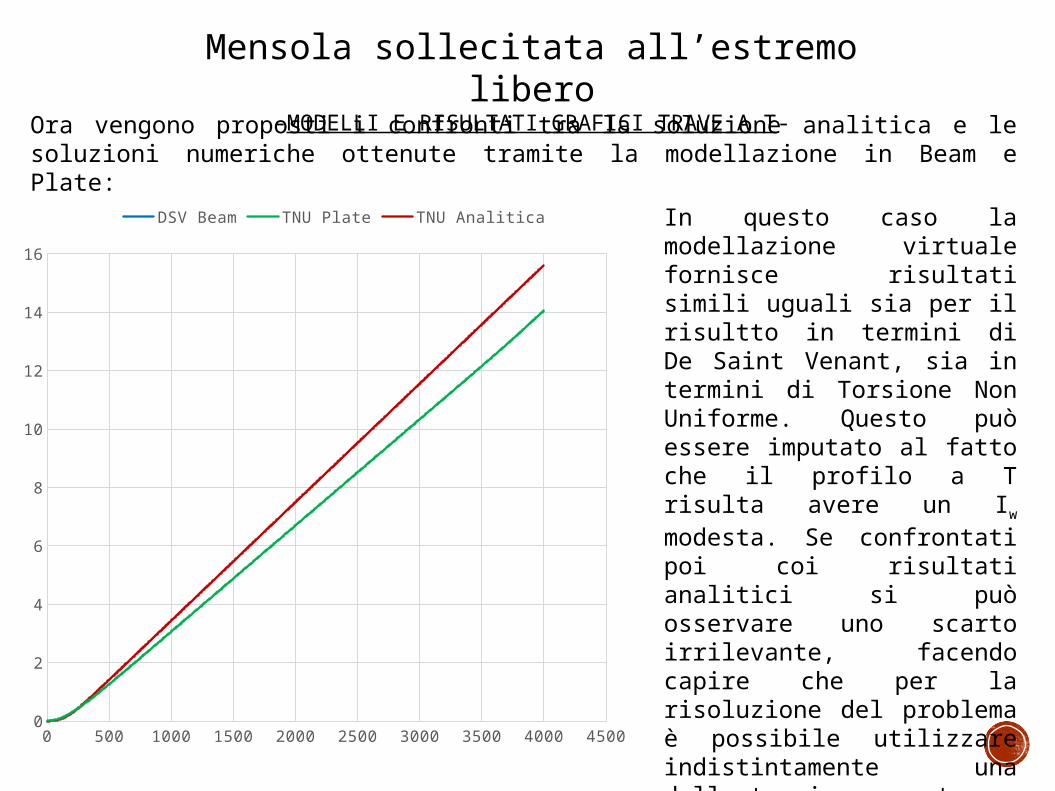
Ora vengono proposti i confronti tra la soluzione analitica e le soluzioni numeriche ottenute tramite la modellazione in Beam e Plate:
In questo caso la modellazione virtuale fornisce risultati simili uguali sia per il risultto in termini di De Saint Venant, sia in termini di Torsione Non Uniforme. Questo può essere imputato al fatto che il profilo a T risulta avere un Iw
modesta. Se confrontati poi coi risultati analitici si può osservare uno scarto irrilevante, facendo capire che per la risoluzione del problema è possibile utilizzare indistintamente una delle teorie proposte.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
2
4
6
8
10
12
14
16
DSV Beam TNU Plate TNU Analitica
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE IPE-
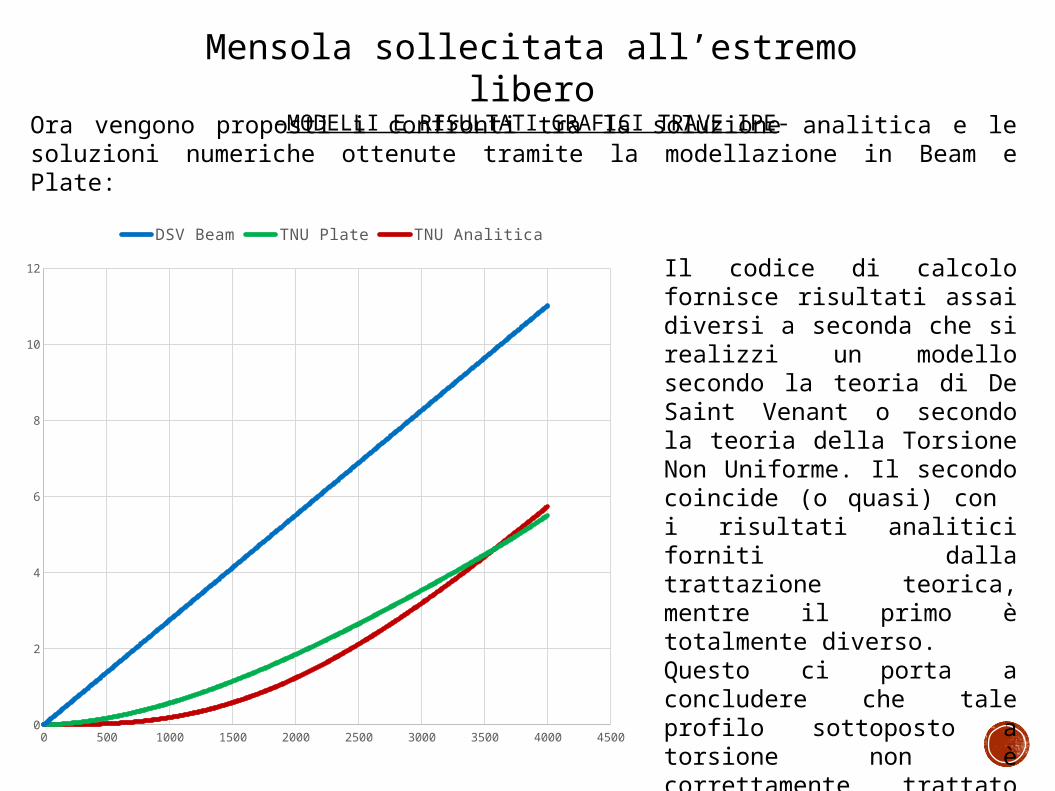
Ora vengono proposti i confronti tra la soluzione analitica e le soluzioni numeriche ottenute tramite la modellazione in Beam e Plate:
Il codice di calcolo fornisce risultati assai diversi a seconda che si realizzi un modello secondo la teoria di De Saint Venant o secondo la teoria della Torsione Non Uniforme. Il secondo coincide (o quasi) con i risultati analitici forniti dalla trattazione teorica, mentre il primo è totalmente diverso.Questo ci porta a concludere che tale profilo sottoposto a torsione non è correttamente trattato dalla teoria di DSV.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
2
4
6
8
10
12
DSV Beam TNU Plate TNU Analitica
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE A T-
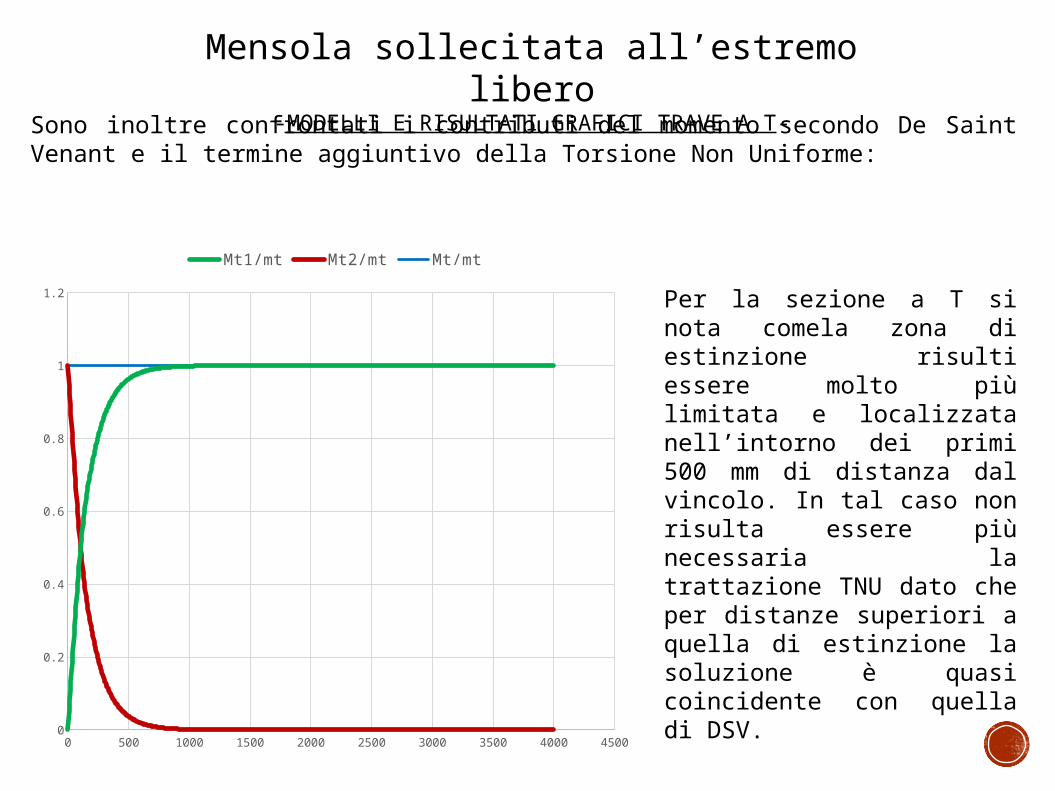
Sono inoltre confrontati i contributi del momento secondo De Saint Venant e il termine aggiuntivo della Torsione Non Uniforme:
Per la sezione a T si nota comela zona di estinzione risulti essere molto più limitata e localizzata nell’intorno dei primi 500 mm di distanza dal vincolo. In tal caso non risulta essere più necessaria la trattazione TNU dato che per distanze superiori a quella di estinzione la soluzione è quasi coincidente con quella di DSV.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
0.2
0.4
0.6
0.8
1
1.2
Mt1/mt Mt2/mt Mt/mt
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE IPE-
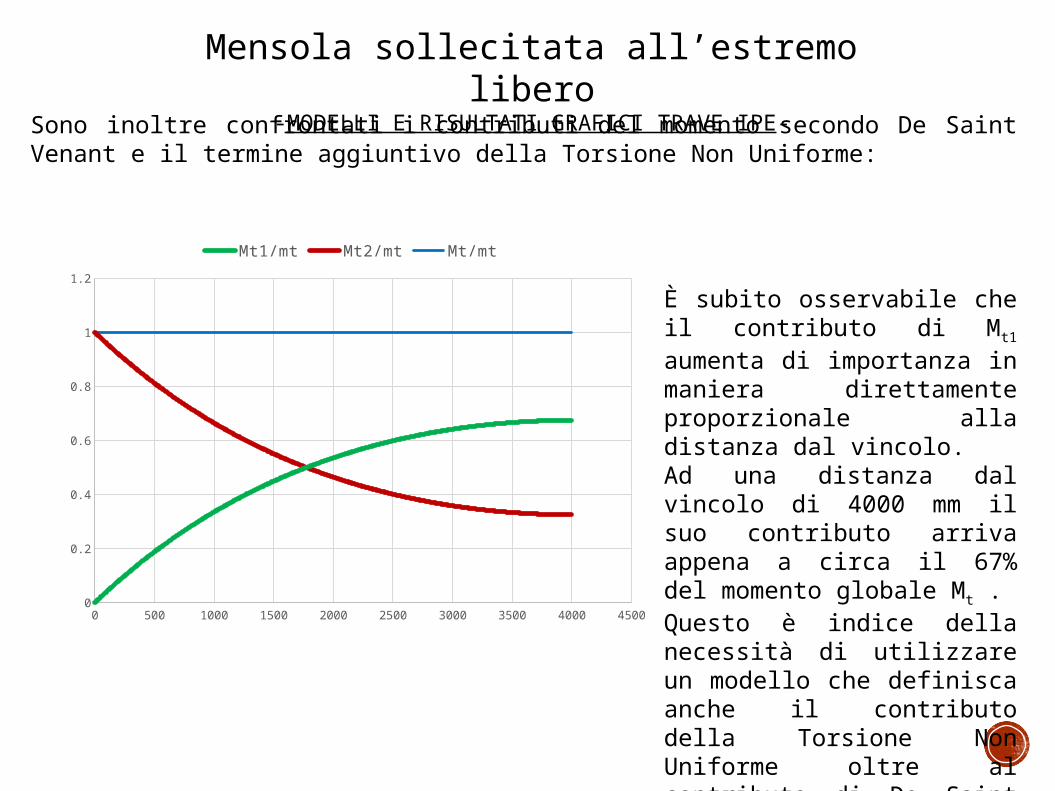
Sono inoltre confrontati i contributi del momento secondo De Saint Venant e il termine aggiuntivo della Torsione Non Uniforme:
È subito osservabile che il contributo di Mt1 aumenta di importanza in maniera direttamente proporzionale alla distanza dal vincolo. Ad una distanza dal vincolo di 4000 mm il suo contributo arriva appena a circa il 67% del momento globale Mt .
Questo è indice della necessità di utilizzare un modello che definisca anche il contributo della Torsione Non Uniforme oltre al contributo di De Saint Venant.
0 500 1000 1500 2000 2500 3000 3500 4000 45000
0.2
0.4
0.6
0.8
1
1.2
Mt1/mt Mt2/mt Mt/mt
Mensola sollecitata all’estremo libero-MODELLI E RISULTATI GRAFICI TRAVE IPE-
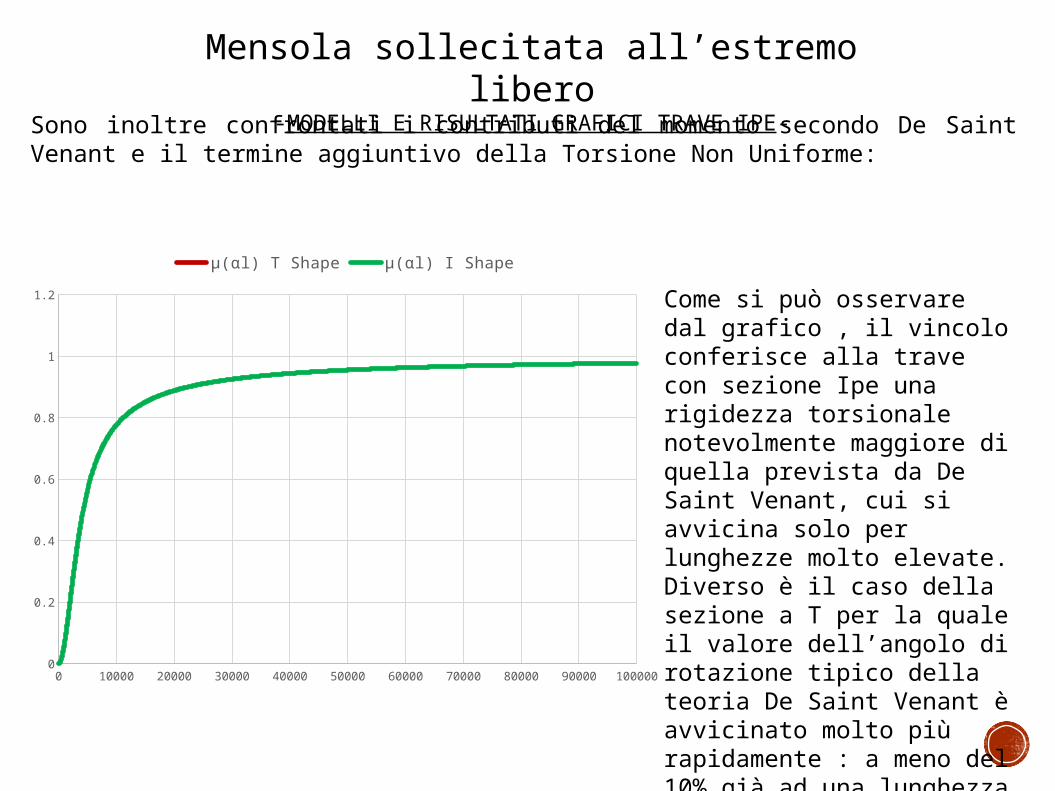
Sono inoltre confrontati i contributi del momento secondo De Saint Venant e il termine aggiuntivo della Torsione Non Uniforme:
Come si può osservare dal grafico , il vincolo conferisce alla trave con sezione Ipe una rigidezza torsionale notevolmente maggiore di quella prevista da De Saint Venant, cui si avvicina solo per lunghezze molto elevate. Diverso è il caso della sezione a T per la quale il valore dell’angolo di rotazione tipico della teoria De Saint Venant è avvicinato molto più rapidamente : a meno del 10% già ad una lunghezza di 1600 mm il che configura una mensola ancora piuttosto tozza, cioè con dimensioni che non sono quelle tipiche della trave.
0 10000 20000 30000 40000 50000 60000 70000 80000 90000 1000000
0.2
0.4
0.6
0.8
1
1.2
μ(αl) T Shape μ(αl) I Shape
Conclusione
Possiamo concludere osservando come la trattazione di De Sain Venant ha numerose limitazioni, specie nello studio di sezioni aperte quali Ipe ed He, le quali nel campo dell’edilizia sono ampiamente diffuse. Quest’ultime infatti possiedono un elevata rigidezza torsionale nei confronti dell’ingobbamento, resistenza tale da obblòigarci ad utilizzare la teoria della Torsione Non Uniforme.Inoltre la Torsione Non Uniforme è secondaria in un profilo che presenta una resistenza all’ingobbamento ridotta. Infatti possiamo affermare come l’effetto della TNU sia immaginabile come un effetto locale contenuto nella zona di estinzione dovuta alla oresenza dei vincoli.