Ứng dụng giải thuật bầy đàn để xác định thông số bộ pid trong điều...
DESCRIPTION
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011Ứng dụng giải thuật bầy đàn để xác định thông số bộ PID trong điều khiển tốc độ động cơ không đồng bộ ba pha Optimal Gain Tuning of PI Controller For Induction Motor Using Particle Swarm Optimization1Huỳnh Đức ChấnTrường ĐH Lạc Hồng Đồng Nai e-Mail: [email protected]ê Thị Thanh HoàngTrường ĐH SPKT TPHCM e-Mail: [email protected]ễn Minh TâmTrường ĐH SPKT TPHCM e-Mail: [email protected]óm tắt Bài báo tTRANSCRIPT

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Ứng dụng giải thuật bầy đàn để xác định thông số bộ PID trong điều khiển
tốc độ động cơ không đồng bộ ba pha
Optimal Gain Tuning of PI Controller For Induction Motor Using Particle
Swarm Optimization
1Huỳnh Đức Chấn
Trường ĐH Lạc Hồng Đồng Nai
e-Mail: [email protected]
2Lê Thị Thanh Hoàng
Trường ĐH SPKT TPHCM
e-Mail: [email protected]
3Nguyễn Minh Tâm
Trường ĐH SPKT TPHCM
e-Mail: [email protected]
Tóm tắt
Bài báo trình bày về phương pháp điều khiển định
hướng từ thông (Field Orientated Control - FOC) cho
động cơ không đồng bộ ba pha và giải thuật bầy đàn
(Particle swarm optimization- PSO) để xác định thông
số bộ điều khiển PID. Phương pháp FOC và giải thuật
xác định thông số bộ điều khiển PID bằng phương
pháp cổ điển Ziegler - Nichols và bằng giải thuật tối
ưu bầy đàn PSO được trình bày chi tiết trong bài báo
này. Để kiểm tra tính đúng đắn của giải thuật, bài báo
này sử dụng ngôn ngữ lập trình Matlab/Simulink để
mô phỏng điều khiển FOC động cơ không đồng bộ ba
pha bằng phương pháp Ziegler - Nichols và giải thuật
bầy đàn. Kết quả mô phỏng cho thấy bộ điều khiển
PID với thông số được xác định bằng giải thuật PSO
hoạt động tốt.
Abstract:
This paper presents field oriented control (FOC) of
induction motor (IM) and Particle swarm
optimazation algorithm. It presents in details about
tuning of PID controller using Ziegler –Nichols (ZN)
and Particle swarm optimazation (PSO) methods.
Constructing the control model and checking the
correctness of model are also included in this paper.
This paper uses the programe language MATLAB
SIMULINK for tuning of PID controller of induction
motor using Ziegler –Nichols (ZN) and Particle
swarm optimazation (PSO). The simmulation results
show that the proposed method has good
performance.
Ký hiệu
Ký hiệu Đơn vị Ý nghĩa
ibestG vị trí tốt nhất của cá thể
trong quần thể
isd, isq A dòng điện dọc trục và
ngang trục của từ thông
rotor
Kgh độ lợi giới hạn
ibestP vị trí tốt nhất của cá thể
thứ i
usd, usq V điện áp dọc trục và ngang
trục của từ thông rotor
,s su u V điện áp dọc trục và ngang
trục của stator
( )
,
t
i mv vận tốc cá thể thứ i ở lần
lặp lại thứ t
( )
,
t
i mx vị trí cá thể thứ i ở lần lặp
lại thứ t
s, r rad/s vận tốc góc stator vận tốc
góc rotor
rd Vs thành phần dọc của từ
thông rotor
Chữ viết tắt
FOC Field Oriented Control
PID Proportional-integral-derivative
PSO Particle Swarm Optimazation
ZN Ziegler – Nichols
332

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
1. Phần mở đầu Hiện nay phương pháp điều khiển định hướng từ
thông (FOC) được sử dụng phổ biến với hiệu suất cao
trong việc điều khiển động cơ vì từ thông và moment
có thể được điều khiển độc lập. FOC là phương pháp
điều khiển dòng stator chủ yếu dựa vào biên độ và
góc pha và đặc trưng là các vector. Điều khiển này cơ
bản dựa vào sự tham chiếu về thời gian và tốc độ trên
hệ trục d – q đây là hệ trục bất biến. Sự tham chiếu
này nhằm mục đích để hướng việc khảo sát động cơ
không đồng bộ thành việc khảo sát của động cơ một
chiều. Tuy nhiên do hệ động lực của động cơ xoay
chiều có nhiều tham số bất định nên việc điều khiển
động cơ theo các phương pháp cổ truyền có cảm biến
hay không có cảm biến đều không đảm bảo chất
lượng khi có tải thay đổi lớn. Trong trường hợp này
các phương pháp điều khiển thích nghi [7], phương
pháp điều khiển PID kết hợp với mạng nơron, thuật
toán di truyền (PID- GA) hoặc thuật toán bầy đàn
(PID-PSO: Particle swarm optimization) [4], [5], [8]
là phương pháp điều khiển tối ưu.
2. Nội dung chính 2.1. Nội dung phương pháp FOC
Cấu trúc của hệ thống điều khiển định hướng từ thông
rotor trong điều khiển động cơ không đồng bộ ba pha
được trình bày như hình 1. [1], [2]
H. 1 Cấu trúc cơ bản của FOC
Bằng việc mô tả các thành phần của động cơ
không đồng bộ ba pha trên hệ tọa độ từ thông
rotor (d – q), vector dòng stator si
sẽ chia thành
hai thành phần sdi và sqi , thành phần sdi điều
khiển từ thông rotor còn thành phần sqi điều khiển
moment quay. [1], [3]
Trên hệ tọa độ qd dòng sdi được coi là đại
lượng điều khiển cho từ thông rotor, tuy nhiên
giữa hai đại lượng tồn tại khâu trễ bậc nhất với
hằng số thời gian rT . [1]
sd
r
mrd i
sT
L.
1 (1)
Từ các giá trị đo được sdi , sqi và ta tính được
góc .
'.
sq
r
r rd
s r
s
i
T
s
(2)
2.2. Vector không gian và các đại lương ba pha
2..2.1. Hệ tọa độ cố định stator ( )
Bằng cách chiếu vector không gian lên hai truc tọa độ
( -β) [1]. Ta có thành phần vector điện áp trong hệ
trục tọa độ ( -β):
scsbsbsas
sas
uuuuu
uu
3
12
3
1
(3)
H. 2 Hệ tọa độ stator (α - β)
2.2.2. Hệ tọa độ từ thông rotor ( )d q
Trong mặt phẳng của hệ tọa độ (α – β) ta xét thêm
một tọa độ thứ hai có trục hoành d và trục tung q, hệ
tọa độ này có chung điểm gốc và nằm lệch đi một góc
s so với hệ tọa độ stator. [1]
H. 3 Mối liên hệ giữa tọa độ (α – β) và tọa độ (d-q)
Từ hình trên ta có thể biểu diễn mối liên hệ giữa hai
tọa độ như sau: [2]
ssqssds
ssqssds
uuu
uuu
cossin
sincos (4)
Tương tự, ta có:
sssssq
sssssd
uuu
uuu
cossin
sincos (5)
333

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
H. 4 Biểu diễn vector không gian trên hệ tọa độ (d – q)
Trong hệ tọa độ từ thông rotor, thành phần từ thông
rotor trên trục (q) có giá trị là 0 do vuông góc với từ
thông rotor trùng với trục (d), do đó từ thông rotor chỉ
còn thành phần theo trục (d) và là đại lượng một
chiều. [1]
2.3. Điều chỉnh bộ điều khiển PID theo phương
pháp Ziegler Nichols
Phương pháp thực nghiệm Ziegler - Nichols để xác
định tham số bộ điều khiển PID như sau: [4]
H. 5 Sơ đồ khối của hệ kín có bộ tỉ lệ P
Phương pháp này thay bộ điều khiển PID trong hệ kín
bằng bộ khuếch đại sau đó tăng K cho đến khi hệ
nằm ở biên giới ổn định. Lúc này ta có Kgh và Tgh.
Tham số cho bộ điều khiển PID chọn như sau:
PI: KP= 0.45*Kgh, TI= Tgh/1.2
PID: KP= 0.6*Kgh, TI= Tgh/2, TD= Tgh/8
Với /I P IK K T và *I P DK K T
2.4. Tổng quan về giải thuật bầy đàn (PSO)
PSO là một kỹ thuật tối ưu hóa ngẫu nhiên dựa trên
một quần thể và sau đó tìm nghiệm tối ưu bằng cách
cập nhật các thế hệ, được phát triển bỡi Dr.Eberhart
và Dr.Kennedy (1995) phỏng theo hành vi của các
bầy chim hay các đàn cá trong quá trình tìm kiếm
thức ăn. [4], [5].
Mỗi cá thể trong quần thể cập nhật vị trí của nó
theo vị trí tốt nhất của nó và của cá thể trong quần
thể tính tới thời điểm hiện tại [4]. Quá trình cập
nhật các particles dựa trên công thức sau:
( 1) ( ) ( ) ( )
, , 1 , , 2 ,. * ()*( ) * ()*( )t t t t
i m i m i m i m m i mv wv c rand Pbest x c Rand Gbest x (6)
( 1) ( ) ( 1)
, , , ; 1,2,..., ; 1,2,...t t t
i m i m i mx x v i n m d (7)
Trong đó:
n: Số lượng bầy đàn; d: Kích thước quần thể
(dimension); t: Số lần lặp lại; vi,m(t)
: Vận tốc của phần
tử thứ i ở lần lặp lại thứ t; w: Hệ số trọng lượng quán
tính; c1,c2: Hệ số gia tốc; Rand (): Là một số ngẫu
nhiên trong khoảng (0,1); xi,m(t)
: Vị trí của phần tử thứ
i ở lần lặp thứ t.
Khái niệm về sự thay đổi những điểm tìm kiếm của
giải thuật PSO được biễu diễn ở hình 6.
H. 6 Khái niệm về sự thay đổi điểm tìm kiếm của PSO
Trong đó:
Xk: Vị trí cá thể ở thời điểm hiện tại; X
k+1: Vị trí cá
thể đã được cập nhật; Vk: Vận tốc cá thể ở thời điểm
hiện tại; Vk+1
: Vận tốc cá thể đã được cập nhật; VPbest
:
Vận tốc theo Pbest; VGbest
: Vận tốc theo Gbest
2.5. Điều chỉnh PID theo phương pháp bầy đàn
Hàm mục tiêu: Là hàm dùng để đánh giá các lời giải
của bài toán, tùy vào từng bài toán mà hàm mục tiêu
khác nhau. Do yêu cầu mong muốn là tối thiểu hoá sai
số ngõ ra nên hàm mục tiêu có thể chọn như sau:
2
0
( )Fitness e t dt
(8)
Một bộ điều khiển PID sử dụng giải thuật PSO để
hiệu chỉnh tham số bộ PID trong điều khiển tốc độ
động cơ không đồng bộ ba pha như hình 7. [5]
H. 7 Cấu trúc Bộ điều khiển PID-PSO
Trong giải thuật PSO thì mỗi phần tử sẽ chứa 2 tham
số Kp, Ki, điều đó có nghĩa là không gian tìm kiếm là
hai tham số trên, từ đó ta sẽ có lưu đồ giải thuật của
hệ thống điều khiển PID-PSO như sau:
Step 1: Khởi tạo cho mỗi cá thể thứ i trong quần thể:
Step 1.1: Khởi tạo giá trị vị trí (Xk) cho từng cá thể
trong quần thể với giá trị vị trí ngẫu nhiên.
Step 1.2: Khởi tạo giá trị vận tốc Vk.
Step 2: Chạy mô hình
Pbesti
ViPbest
Gbesti
Xik+1
Vik+1
ViGbest
Xik
Vik
Tốc độ
đặt
Tốc độ
ngõ ra -
.
Bộ điều khiển PID
KP
KI
KD
PID ĐCKĐB
3 Pha
PSO
Hàm mục tiêu
334
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Step 2.1: Chạy mô hình điều khiển tốc độ động cơ
không đồng bộ ba pha với những tham số đã thiết lập
trước.
Step 2.2: Tìm tham số KP và KI của bộ điều khiển PI.
Step 2.3: Tìm hàm mục tiêu.
Step 2.4: Đánh giá hàm vị trí Xk theo giá trị hàm mục
tiêu (fitness).
Step 3: Cập nhật lại giá trị vị trí và vận tốc cho từng
cá thể:
Step 3.1: Cập nhật giá trị vận tốc và vị trí theo công
thức (6) và (7).
Step 3.2: Đánh giá hàm mục tiêu (fitness)
Step 3.3: Nếu fitness < Pbest_fitness thì
Pbest = Xk, Pbest_fitness = fitness.
Step 3.4: Cập nhật giá trị Gbest cho từng cá thể tương
ứng với vị trí nhỏ nhất hiện tại của hàm mục tiêu
trong quần thể.
Step 4: Tìm giá trị phần tử mới
Nếu giá trị của phần tử mới tốt hơn giá trị tốt nhất của
phần tử trước đó trong bầy đàn, thì thay thế giá trị tốt
nhất trước đó bằng giá trị mới hiện tại.
Step 5: Lặp lại bước 2 cho đến khi đã đủ số lần lặp
lại.
Mục tiêu của phương pháp hiệu chỉnh PID dùng giải
thuật PSO là: [5]
Cực tiểu hoá hàm mục tiêu.
Tìm được bước đáp ứng của hệ thống và làm giảm
sai số.
Lập lại các bước thực hiện cho đến khi đủ số bước
lặp lại.
2.6. Kết quả mô phỏng
2.6.1. Thông số của động cơ khi chạy bằng
Matlab/Simulink
Các thông số mô phỏng được cho như sau:
Rs = 1,723 (Ohm): Điện trở stator.
Rr = 2,001 (Ohm): Điện trở rotor.
Ls = 0,1666 (H): Điện cảm stator.
Lr = 0,169 (H): Điện cảm rotor.
Lm = 0,1592 (H): Điện cảm hỗ cảm.
p = 2: Số đôi cực.
J = 0,001 (Kg.m2): Moment quán tính.
wref = 200 (rad/s): Tốc độ đặt.
U1dm= 220 (V): Điện áp định mức.
I1dm= 2,73 (A): Dòng điện định mức.
Imax= 7 (A): Dòng điện lớn nhất.
Mmax= 14,8 (Nm): Moment lớn nhất.
P = 5HP: Công suất của động cơ.
Udc= 400 (V): Điện áp DC giới hạn.
f = 50 (Hz): Tần số.
n= 80: Số lượng bầy đàn.
bird_setp =7: Số bước lặp.
dim = 2: Không gian tìm kiếm là 2 phần tử KP và KI.
w= 0.9: Trọng số quán tính c1= 0.12: Hằng số gia tốc c1
c2= 1.2: Hằng số gia tốc c2
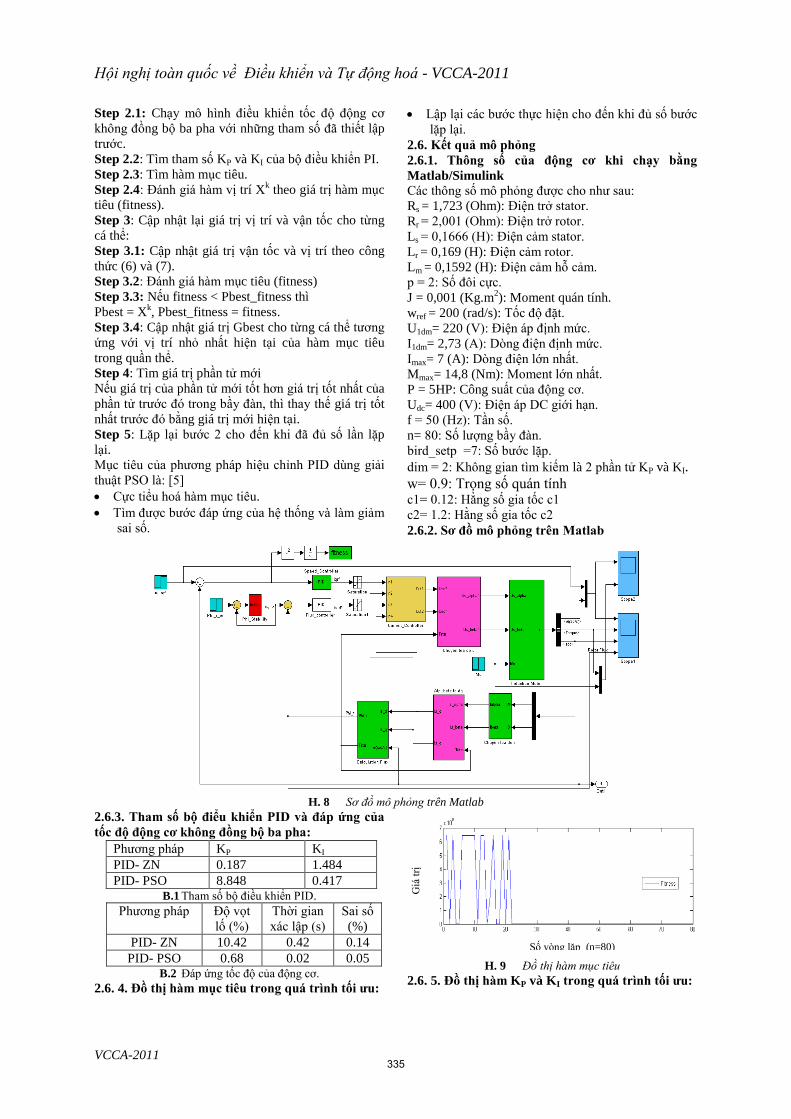
2.6.2. Sơ đồ mô phỏng trên Matlab
H. 8 Sơ đồ mô phỏng trên Matlab
2.6.3. Tham số bộ điểu khiển PID và đáp ứng của
tốc độ động cơ không đồng bộ ba pha:
B.1 Tham số bộ điều khiển PID.
Phương pháp Độ vọt
lố (%)
Thời gian
xác lập (s)
Sai số
(%)
PID- ZN 10.42 0.42 0.14
PID- PSO 0.68 0.02 0.05 B.2 Đáp ứng tốc độ của động cơ.
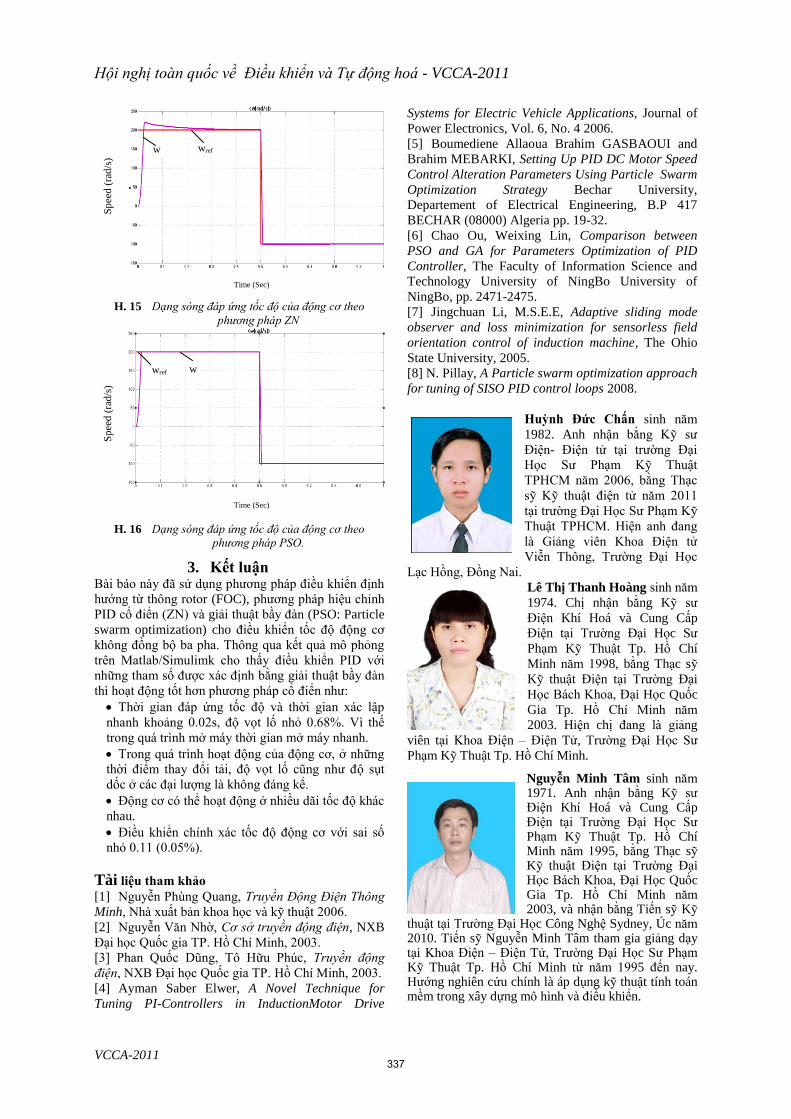
2.6. 4. Đồ thị hàm mục tiêu trong quá trình tối ưu:
H. 9 Đồ thị hàm mục tiêu
2.6. 5. Đồ thị hàm KP và KI trong quá trình tối ưu:
Phương pháp KP KI
PID- ZN 0.187 1.484
PID- PSO 8.848 0.417
Giá
trị
Số vòng lặp (n=80)
335

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
H. 10 Đồ thị hàm KP và KI
2.6.6. Hình ảnh mô phỏng
2.6.6.1. Động cơ khởi động không tải
Đáp ứng của động cơ:
+ Tốc độ đặt 200 (rad/s), thời gian mô phỏng từ 0 đến
1s. ( 0 1 : _ 200( / )t s w ref rad s )
+ Từ thông đặt là 0.5 (wb), thời gian mô phỏng từ 0
đến 1s. ( 5.0_:10 refFist ).
+ Moment tải đặt là 0 (Nm), thời gian mô phỏng từ 0
đến 1s. ( 0:10 cMt ).
H. 11 Dạng sóng đáp ứng tốc độ của động cơ theo
phương pháp ZN
H. 12 Dạng sóng đáp ứng tốc độ của động cơ theo
phương pháp PSO
2.6.6.2. Động cơ khởi động không tải, sau đó đóng
tải
Đáp ứng của động cơ:
+ Tốc độ đặt 200 (rad/s), thời gian mô phỏng từ 0 đến
1s. ( 0 1 : _ 200( / )t s w ref rad s )
+ Từ thông đặt là 0.5 (wb), thời gian mô phỏng từ 0
đến 1s. ( 5.0_:10 refFist ).
+ Tại thời điểm từ 0 đến 0.5s thì moment tải đặt là 0
(Nm), sau đó đóng tải với moment tải là 5 (Nm) ở
thời điểm 0.5 đến 1s.
( 0 0.5 : 0t s Mc ;
0.5 1 : 5( )t s Mc Nm ).
H. 13 Dạng sóng đáp ứng tốc độ và moment của động cơ
theo phương pháp ZN
H. 14 Dạng sóng đáp ứng tốc độ và moment của động cơ
theo phương pháp PSO`
2.6.6.3. Động cơ khởi động không tải, sau đó đảo
chiều quay
Đáp ứng của động cơ:
+ Tại thời điểm từ 0 đến 0.5s thì tốc độ đặt là 200
(rad/s), sau đó đảo chiều quay với tốc độ đặt là -100
(rad/s) ở thời điểm 0.5 đến 1s .
( 0 0.5 : _ 200( / )t s w ref rad s ;
0.5 1 : _ 100( / )t s w ref rad s ).
+ Từ thông đặt là 0.5 (wb), thời gian mô phỏng từ 0
đến 1s. ( 5.0_:10 refFist ).
+ Moment tải đặt là 0 (Nm), thời gian mô phỏng từ 0
đến 1s. ( 0:10 cMt ).
Giá
trị
Số vòng lặp (n=80)
Sp
eed
(ra
d/s
)
Time (Sec)
Time (Sec)
Sp
eed
(ra
d/s
)
Sp
eed
(ra
d/s
) T
orq
ue
(Nm
)
Time (Sec)
Sp
eed
(ra
d/s
) T
orq
ue
(Nm
)
Time (Sec)
wref w
wref w
wref w
wref w
Mcref Mc
Mcref Mc
336
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
H. 15 Dạng sóng đáp ứng tốc độ của động cơ theo
phương pháp ZN
H. 16 Dạng sóng đáp ứng tốc độ của động cơ theo
phương pháp PSO.
3. Kết luận Bài báo này đã sử dụng phương pháp điều khiển định
hướng từ thông rotor (FOC), phương pháp hiệu chỉnh
PID cổ điển (ZN) và giải thuật bầy đàn (PSO: Particle
swarm optimization) cho điều khiển tốc độ động cơ
không đồng bộ ba pha. Thông qua kết quả mô phỏng
trên Matlab/Simulimk cho thấy điều khiển PID với
những tham số được xác định bằng giải thuật bầy đàn
thì hoạt động tốt hơn phương pháp cổ điển như:
Thời gian đáp ứng tốc độ và thời gian xác lập
nhanh khoảng 0.02s, độ vọt lố nhỏ 0.68%. Vì thế
trong quá trình mở máy thời gian mở máy nhanh.
Trong quá trình hoạt động của động cơ, ở những
thời điểm thay đổi tải, độ vọt lố cũng như độ sụt
dốc ở các đại lượng là không đáng kể.
Động cơ có thể hoạt động ở nhiều dãi tốc độ khác
nhau.
Điều khiển chính xác tốc độ động cơ với sai số
nhỏ 0.11 (0.05%).
Tài liệu tham khảo
[1] Nguyễn Phùng Quang, Truyền Động Điện Thông
Minh, Nhà xuất bản khoa học và kỹ thuật 2006.
[2] Nguyễn Văn Nhờ, Cơ sở truyền động điện, NXB
Đại học Quốc gia TP. Hồ Chí Minh, 2003.
[3] Phan Quốc Dũng, Tô Hữu Phúc, Truyền động
điện, NXB Đại học Quốc gia TP. Hồ Chí Minh, 2003.
[4] Ayman Saber Elwer, A Novel Technique for
Tuning PI-Controllers in InductionMotor Drive
Systems for Electric Vehicle Applications, Journal of
Power Electronics, Vol. 6, No. 4 2006.
[5] Boumediene Allaoua Brahim GASBAOUI and
Brahim MEBARKI, Setting Up PID DC Motor Speed
Control Alteration Parameters Using Particle Swarm
Optimization Strategy Bechar University,
Departement of Electrical Engineering, B.P 417
BECHAR (08000) Algeria pp. 19-32.
[6] Chao Ou, Weixing Lin, Comparison between
PSO and GA for Parameters Optimization of PID
Controller, The Faculty of Information Science and
Technology University of NingBo University of
NingBo, pp. 2471-2475.
[7] Jingchuan Li, M.S.E.E, Adaptive sliding mode
observer and loss minimization for sensorless field
orientation control of induction machine, The Ohio
State University, 2005.
[8] N. Pillay, A Particle swarm optimization approach
for tuning of SISO PID control loops 2008.
Huỳnh Đức Chấn sinh năm
1982. Anh nhận bằng Kỹ sư
Điện- Điện tử tại trường Đại
Học Sư Phạm Kỹ Thuật
TPHCM năm 2006, bằng Thạc
sỹ Kỹ thuật điện tử năm 2011
tại trường Đại Học Sư Phạm Kỹ
Thuật TPHCM. Hiện anh đang
là Giảng viên Khoa Điện tử
Viễn Thông, Trường Đại Học
Lạc Hồng, Đồng Nai.
Lê Thị Thanh Hoàng sinh năm
1974. Chị nhận bằng Kỹ sư
Điện Khí Hoá và Cung Cấp
Điện tại Trường Đại Học Sư
Phạm Kỹ Thuật Tp. Hồ Chí
Minh năm 1998, bằng Thạc sỹ
Kỹ thuật Điện tại Trường Đại
Học Bách Khoa, Đại Học Quốc
Gia Tp. Hồ Chí Minh năm
2003. Hiện chị đang là giảng
viên tại Khoa Điện – Điện Tử, Trường Đại Học Sư
Phạm Kỹ Thuật Tp. Hồ Chí Minh.
Nguyễn Minh Tâm sinh năm 1971. Anh nhận bằng Kỹ sư Điện Khí Hoá và Cung Cấp Điện tại Trường Đại Học Sư Phạm Kỹ Thuật Tp. Hồ Chí Minh năm 1995, bằng Thạc sỹ Kỹ thuật Điện tại Trường Đại Học Bách Khoa, Đại Học Quốc Gia Tp. Hồ Chí Minh năm 2003, và nhận bằng Tiến sỹ Kỹ
thuật tại Trường Đại Học Công Nghệ Sydney, Úc năm 2010. Tiến sỹ Nguyễn Minh Tâm tham gia giảng dạy tại Khoa Điện – Điện Tử, Trường Đại Học Sư Phạm Kỹ Thuật Tp. Hồ Chí Minh từ năm 1995 đến nay. Hướng nghiên cứu chính là áp dụng kỹ thuật tính toán mềm trong xây dựng mô hình và điều khiển.
Sp
eed
(ra
d/s
)
Time (Sec)
Sp
eed
(ra
d/s
)
Time (Sec)
wref w
wref w
337