universidad autónoma del estado de morelos · física vol. 1. méxico: compañia editorial...
TRANSCRIPT
Universidad Autónoma del Estado de Morelos
Dinámica y cinemática: dossier 2
Braulio Rojas Mayoral
Agosto de 2015
A continuación se presentan dos conjuntos de preguntas que sirven de guía para terminar la lectura delos temas de aceleración y caída libre. Además, se agregaron partes del capítulo 2 de tres libros distintos,la sugerencia ee que el orden de lectura es el libro Serway & Jewett (2013), después el de Young &Freedman (2009) y finalmente el de Resnick et al. (2001); ese es el orden en el que aparecen aquí.
1. Aceleración
¿Cuál es la definición de aceleración promedio?
¿Cuáles son las unidades de la aceleración en el sistema internacional y cómo se justifica que seanesas unidades?
¿Cuál es la interpretación gráfica de aceleración y aceleración promedio?
¿Qué condición se debe de cumplir para que un objeto aumente o disminuya su velocidad?
De tu curso de cálculo ¿qué información te da la segunda derivada (cuál es su interpretación)?
Explica la frase: “aceleración es a la velocidad lo que la velocidad es a la posición”.
Con base en el cálculo diferencial ¿cuál es la definición de aceleración instantánea?
2. Aceleración constante y caída libre
Desde el punto de vista de la geometría analítica ¿qué representa la ecuación de la velocidad finalde un objeto en movimiento con aceleración constante?
¿Cómo se calcula la velocidad media de un objeto en movimiento con aceleración constante?
¿Cuál es la interpretación geométrica y qué información te da una gráfica x − t de movimientos conaceleración constante?
¿Qué pasa en las ecuaciones de movimiento con aceleración constante, cuando la aceleración es ceroa = 0?
Comprueba que: la pendiente de la gráfica x − t con aceleración constante es igual a la velocidaden dicho instante y en particular que para el timepo inicial, t = 0, la velocidad es v = vo.
Explica lo mejor que puedas la definición de un “objeto en caída libre”.
¿Qué suposiciones se hacen para decir que un “objeto en caída libre” es el de una partícula conaceleración constante?
¿Cuál es la aceleración de la gravedad en la superficie de los planetas del sistema solar y de cuatrolunas?
Referencias
Resnick, R., Halliday, D. & Krane, K. (2001). Física Vol. 1. México: Compañia Editorial Conti-nental, tercera ed.
Serway, R. A. & Jewett, J. W. (2013). Física para Ciencias e Ingeniería. México: CENGAGELearning, séptima ed.
Young, H. D. & Freedman, R. A. (2009). Física universitaria. México: PEARSON Educación,decimosegunda ed.

constante. La pendiente de la línea recta es vx y la ordenada al origen y es xi en ambas representaciones.
EJEMPLO 2.4 Modelado de un corredor como partícula
Una científica estudia la biomecánica del cuerpo humano. Ella determina la velocidad de un sujeto experimental mientras corre a lo largo de una línea recta con una rapidez constante. La científica activa el cronómetro cuando el corredor pasa por un punto conocido y lo detiene después de que el corredor pasa por otro punto a 20 m de distancia. El intervalo de tiempo que indica el cronómetro es 4.0 s.
A) ¿Cuál es la velocidad del corredor?
SOLUCIÓN
Piense acerca del corredor en movimiento. El corredor se representa como partícula porque su tamaño y el movimiento de brazos y piernas son detalles innecesarios. Puesto que el problema establece que el sujeto corre con una rapidez constante, se representa como una partícula bajo velocidad constante.
Aplique la ecuación 2.6 para encontrar la velocidad constante del corredor:
B) Si el corredor continúa su movimiento después de desactivar el cronómetro, ¿cuál es su posición después de transcurri-dos 10 s?
SOLUCIÓN
Aplique la ecuación 2.7 y la velocidad que encontró en el inciso A) para descubrir la posición de la partícula en el tiempo t � 10 s:
Note que este valor es más del doble que el de la posición de 20 m donde se desactivó el cronómetro. ¿Este valor es consis-tente con el tiempo de 10 s que es más del doble que el tiempo de 4.0 s?
Sección 2.4 Aceleración 27
Las manipulaciones matemáticas para la partícula bajo velocidad constante están con-tenidas de la ecuación 2.6 y su descendente, la ecuación 2.7. Estas ecuaciones sirven para resolver cualquier variable que resulte desconocida en las ecuaciones, si las otras varia-bles son conocidas. Por ejemplo, en el inciso B) del ejemplo 2.4, se encuentra la posición cuando la velocidad y el tiempo se conocen. De igual modo, si se conocen la velocidad y la posición final, se aplica la ecuación 2.7 para encontrar el tiempo cuando el corredor está en dicha posición.
Una partícula bajo velocidad constante se mueve con una rapidez constante a lo largo de una línea recta. Ahora considere una partícula que se mueve con una rapidez constante a lo largo de una trayectoria curva. Esta situación se representa con el modelo de partícula bajo rapidez constante. La ecuación básica para este modelo es la ecuación 2.3, con la rapidez promedio vprom sustituida por la rapidez constante v:
vd¢t
(2.8)
Como ejemplo, considere una partícula que se mueve con rapidez constante en una trayectoria circular. Si la rapidez es 5.00 m/s y el radio de la trayectoria es de 10.0 m, se calcula el intervalo de tiempo requerido para completar un viaje alrededor del círculo:
vd¢t
S ¢tdv
2prv
2p 110.0 m 25.00 m>s 12.6 s
2.4 AceleraciónEn el ejemplo 2.3 se trabajó con una situación común en la cual la velocidad de una par-tícula cambia mientras se mueve. Cuando la velocidad de ésta cambia con el tiempo, se dice que la partícula acelera. Por ejemplo, la magnitud de la velocidad de un automóvil aumenta cuando se pisa el acelerador y disminuye cuando se aplican los frenos. Vea cómo cuantificar la aceleración.
xf xi vxt 0 15.0 m>s 2 110 s 2 50 m
vx¢x¢t
xf xi
¢t20 m 0
4.0 s5.0 m>s
28 Capítulo 2 Movimiento en una dimensión
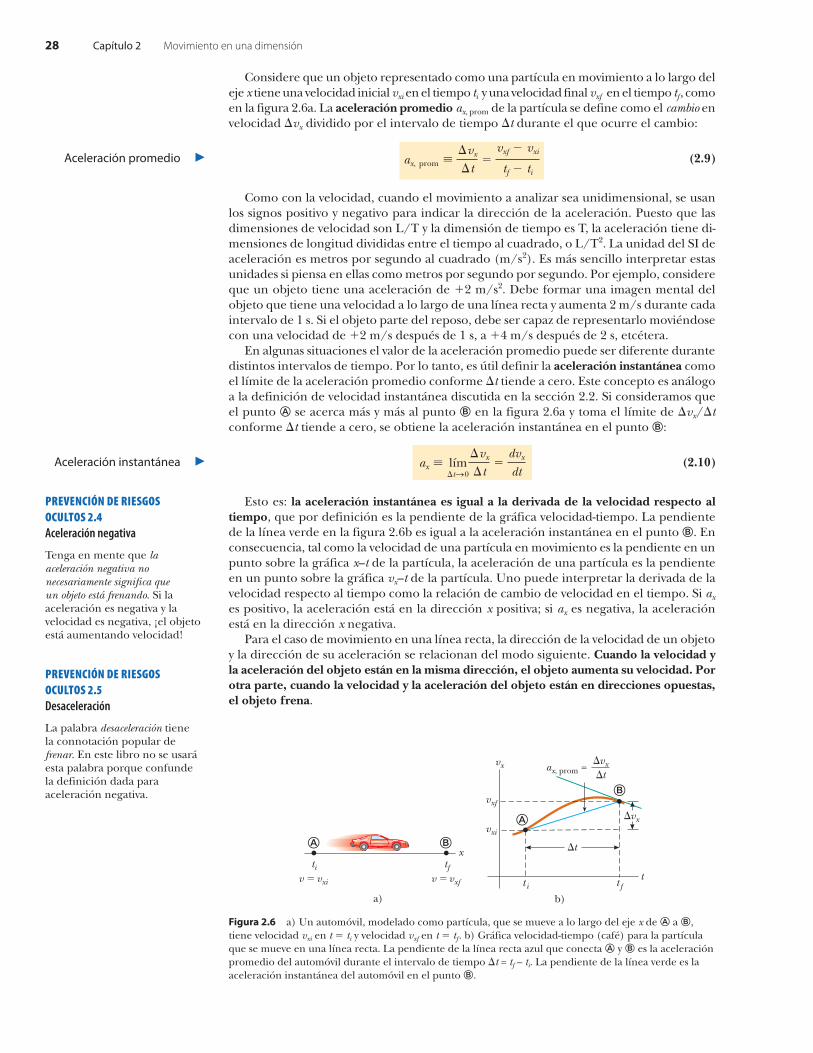
Considere que un objeto representado como una partícula en movimiento a lo largo del eje x tiene una velocidad inicial vxi en el tiempo ti y una velocidad final vxf en el tiempo tf , como en la figura 2.6a. La aceleración promedio ax, prom de la partícula se define como el cambio en velocidad �vx dividido por el intervalo de tiempo �t durante el que ocurre el cambio:
ax, prom¢vx
¢t
vxf vxi
tf ti
(2.9)
Como con la velocidad, cuando el movimiento a analizar sea unidimensional, se usan los signos positivo y negativo para indicar la dirección de la aceleración. Puesto que las dimensiones de velocidad son L/T y la dimensión de tiempo es T, la aceleración tiene di- mensiones de longitud divididas entre el tiempo al cuadrado, o L/T2. La unidad del SI de aceleración es metros por segundo al cuadrado (m/s2). Es más sencillo interpretar estas unidades si piensa en ellas como metros por segundo por segundo. Por ejemplo, considere que un objeto tiene una aceleración de �2 m/s2. Debe formar una imagen mental del objeto que tiene una velocidad a lo largo de una línea recta y aumenta 2 m/s durante cada intervalo de 1 s. Si el objeto parte del reposo, debe ser capaz de representarlo moviéndose con una velocidad de �2 m/s después de 1 s, a �4 m/s después de 2 s, etcétera.
En algunas situaciones el valor de la aceleración promedio puede ser diferente durante distintos intervalos de tiempo. Por lo tanto, es útil definir la aceleración instantánea como el límite de la aceleración promedio conforme �t tiende a cero. Este concepto es análogo a la definición de velocidad instantánea discutida en la sección 2.2. Si consideramos que el punto � se acerca más y más al punto � en la figura 2.6a y toma el límite de �vx/�t conforme �t tiende a cero, se obtiene la aceleración instantánea en el punto �:
ax lím¢tS0
¢vx
¢tdvx
dt (2.10)
Esto es: la aceleración instantánea es igual a la derivada de la velocidad respecto al tiempo, que por definición es la pendiente de la gráfica velocidad-tiempo. La pendiente de la línea verde en la figura 2.6b es igual a la aceleración instantánea en el punto �. En consecuencia, tal como la velocidad de una partícula en movimiento es la pendiente en un punto sobre la gráfica x–t de la partícula, la aceleración de una partícula es la pendiente en un punto sobre la gráfica vx–t de la partícula. Uno puede interpretar la derivada de la velocidad respecto al tiempo como la relación de cambio de velocidad en el tiempo. Si ax es positivo, la aceleración está en la dirección x positiva; si ax es negativa, la aceleración está en la dirección x negativa.
Para el caso de movimiento en una línea recta, la dirección de la velocidad de un objeto y la dirección de su aceleración se relacionan del modo siguiente. Cuando la velocidad y la aceleración del objeto están en la misma dirección, el objeto aumenta su velocidad. Por otra parte, cuando la velocidad y la aceleración del objeto están en direcciones opuestas, el objeto frena.
PREVENCIÓN DE RIESGOS OCULTOS 2.4Aceleración negativa
Tenga en mente que la aceleración negativa no necesariamente significa que un objeto está frenando. Si la aceleración es negativa y la velocidad es negativa, ¡el objeto está aumentando velocidad!
Aceleración instantánea �
Aceleración promedio �
PREVENCIÓN DE RIESGOS OCULTOS 2.5Desaceleración
La palabra desaceleración tiene la connotación popular de frenar. En este libro no se usará esta palabra porque confunde la definición dada para aceleración negativa.
Figura 2.6 a) Un automóvil, modelado como partícula, que se mueve a lo largo del eje x de � a �, tiene velocidad vxi en t � ti y velocidad vxf en t � tf . b) Gráfica velocidad-tiempo (café) para la partícula que se mueve en una línea recta. La pendiente de la línea recta azul que conecta � y � es la aceleración promedio del automóvil durante el intervalo de tiempo �t = tf – ti. La pendiente de la línea verde es la aceleración instantánea del automóvil en el punto �.
�
�
�
t ft i
vxi
vxf
vx ax, prom =
�t
�vx
�vx�t
t
b)
ti tf
a)
x
v � vxi v �vxf
�
Para ayudar con esta discusión de los signos de velocidad y aceleración, se relaciona la aceleración de un objeto con la fuerza total ejercida sobre el objeto. En el capítulo 5 se establece formalmente que la fuerza es proporcional a la aceleración:
Fx � ax (2.11)
Esta proporcionalidad indica que la aceleración es causada por una fuerza. Más aún, fuerza y aceleración son vectores, y los vectores actúan en la misma dirección. Debido a esto, piense acerca de los signos de la velocidad y la aceleración al considerar una fuerza aplicada a un objeto y que causa su aceleración. Suponga que velocidad y aceleración están en la misma dirección. Esta situación corresponde a un objeto que experimenta una fuerza que actúa en la misma dirección que su velocidad. En este caso, ¡el objeto aumenta su velocidad! Ahora suponga que velocidad y aceleración están en direcciones opuestas. En esta situación, el objeto se mueve en alguna dirección y experimenta una fuerza que actúa en la dirección opuesta. Por lo tanto, ¡el objeto frena! Es muy útil igualar la dirección de la aceleración a la dirección de una fuerza, porque es más fácil, a partir de la experiencia cotidiana, pensar acerca de qué efecto tendrá una fuerza sobre un objeto que pensar sólo en términos de la dirección de la aceleración.
Pregunta rápida 2.3 Si un automóvil viaja hacia el este y frena, ¿cuál es la dirección de la fuerza sobre el automóvil que hace que frene? a) hacia el este, b) hacia el oeste, c) ni al este ni al oeste.
Desde ahora se usará el término aceleración para dar a entender aceleración instantánea. Cuando se hable de aceleración promedio, siempre se usará el adjetivo promedio. Puesto que vx = dx/dt, la aceleración también se escribe como
axdvx
dtddta dx
dtb d2x
dt2 (2.12)
Esto es: en un movimiento unidimensional, la aceleración es igual a la segunda derivada de x respecto del tiempo.
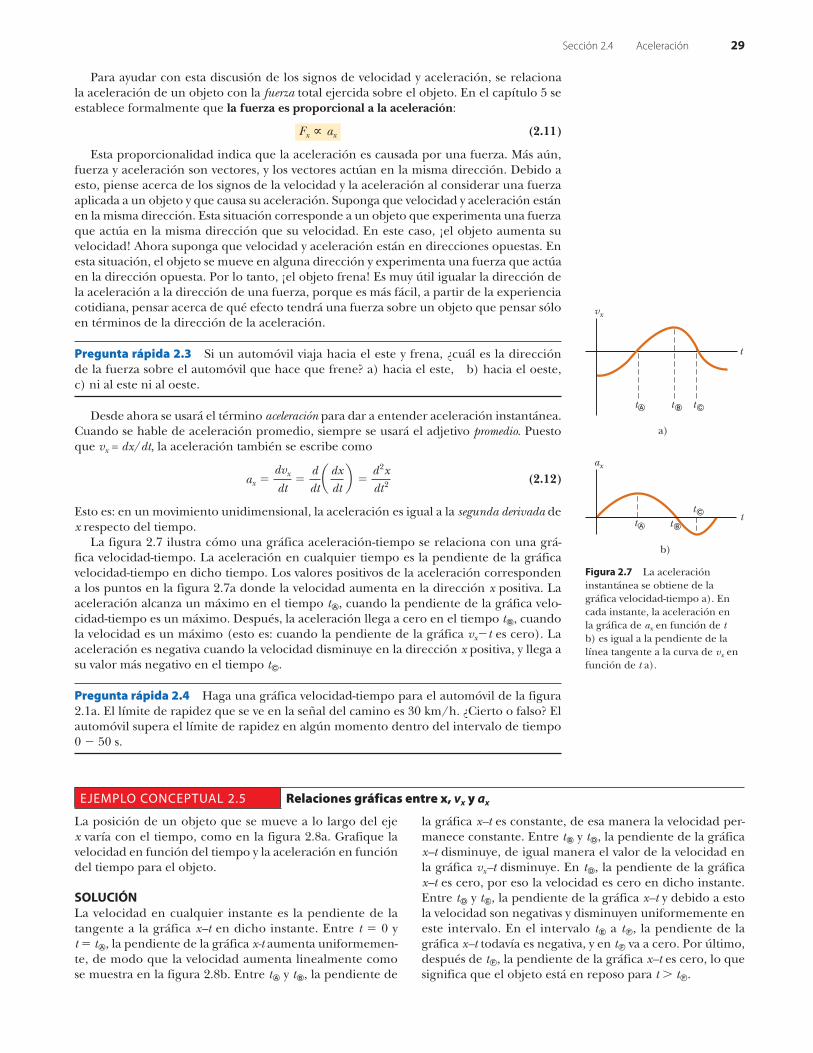
La figura 2.7 ilustra cómo una gráfica aceleración-tiempo se relaciona con una grá-fica velocidad-tiempo. La aceleración en cualquier tiempo es la pendiente de la gráfica velocidad-tiempo en dicho tiempo. Los valores positivos de la aceleración corresponden a los puntos en la figura 2.7a donde la velocidad aumenta en la dirección x positiva. La aceleración alcanza un máximo en el tiempo t�, cuando la pendiente de la gráfica velo-cidad-tiempo es un máximo. Después, la aceleración llega a cero en el tiempo t�, cuando la velocidad es un máximo (esto es: cuando la pendiente de la gráfica vx�t es cero). La aceleración es negativa cuando la velocidad disminuye en la dirección x positiva, y llega a su valor más negativo en el tiempo t�.
Pregunta rápida 2.4 Haga una gráfica velocidad-tiempo para el automóvil de la figura 2.1a. El límite de rapidez que se ve en la señal del camino es 30 km/h. ¿Cierto o falso? El automóvil supera el límite de rapidez en algún momento dentro del intervalo de tiempo 0 � 50 s.
Sección 2.4 Aceleración 29
Figura 2.7 La aceleración instantánea se obtiene de la gráfica velocidad-tiempo a). En cada instante, la aceleración en la gráfica de ax en función de t b) es igual a la pendiente de la línea tangente a la curva de vx en función de t a).
t
b)
a)
ax
t� t�
t�
t� t� t�
vx
t
EJEMPLO CONCEPTUAL 2.5 Relaciones gráficas entre x, vx y ax
La posición de un objeto que se mueve a lo largo del eje x varía con el tiempo, como en la figura 2.8a. Grafique la velocidad en función del tiempo y la aceleración en función del tiempo para el objeto.
SOLUCIÓNLa velocidad en cualquier instante es la pendiente de la tangente a la gráfica x–t en dicho instante. Entre t � 0 y t � t�, la pendiente de la gráfica x-t aumenta uniformemen-te, de modo que la velocidad aumenta linealmente como se muestra en la figura 2.8b. Entre t� y t�, la pendiente de
la gráfica x–t es constante, de esa manera la velocidad per-manece constante. Entre t� y t�, la pendiente de la gráfica x–t disminuye, de igual manera el valor de la velocidad en la gráfica vx–t disminuye. En t�, la pendiente de la gráfica x–t es cero, por eso la velocidad es cero en dicho instante. Entre t� y t�, la pendiente de la gráfica x–t y debido a esto la velocidad son negativas y disminuyen uniformemente en este intervalo. En el intervalo t� a t�, la pendiente de la gráfica x–t todavía es negativa, y en t� va a cero. Por último, después de t�, la pendiente de la gráfica x–t es cero, lo que significa que el objeto está en reposo para t � t�.
30 Capítulo 2 Movimiento en una dimensión
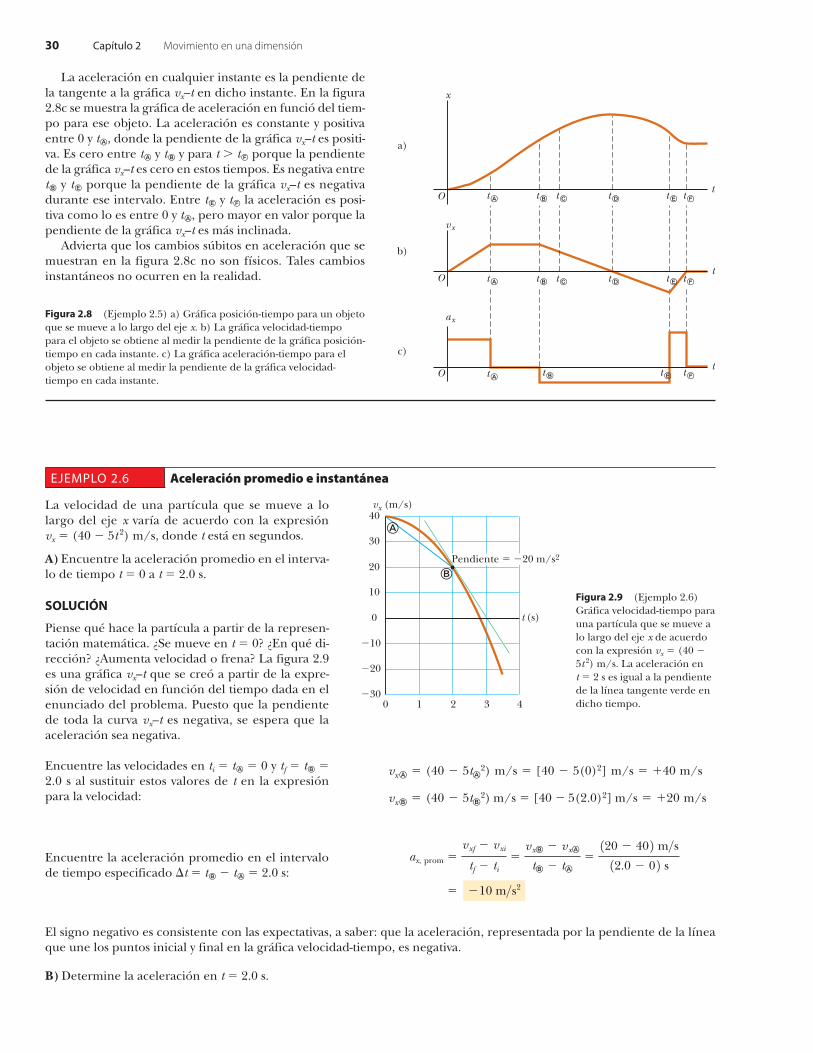
La aceleración en cualquier instante es la pendiente de la tangente a la gráfica vx–t en dicho instante. En la figura 2.8c se muestra la gráfica de aceleración en funció del tiem-po para ese objeto. La aceleración es constante y positiva entre 0 y t�, donde la pendiente de la gráfica vx–t es positi-va. Es cero entre t� y t� y para t � t� porque la pendiente de la gráfica vx–t es cero en estos tiempos. Es negativa entre t� y t� porque la pendiente de la gráfica vx–t es negativa durante ese intervalo. Entre t� y t� la aceleración es posi-tiva como lo es entre 0 y t�, pero mayor en valor porque la pendiente de la gráfica vx–t es más inclinada.
Advierta que los cambios súbitos en aceleración que se muestran en la figura 2.8c no son físicos. Tales cambios instantáneos no ocurren en la realidad.
Figura 2.8 (Ejemplo 2.5) a) Gráfica posición-tiempo para un objeto que se mueve a lo largo del eje x. b) La gráfica velocidad-tiempo para el objeto se obtiene al medir la pendiente de la gráfica posición-tiempo en cada instante. c) La gráfica aceleración-tiempo para el objeto se obtiene al medir la pendiente de la gráfica velocidad-tiempo en cada instante.
EJEMPLO 2.6 Aceleración promedio e instantánea
La velocidad de una partícula que se mueve a lo largo del eje x varía de acuerdo con la expresión vx � (40 � 5t 2) m/s, donde t está en segundos.
A) Encuentre la aceleración promedio en el interva-lo de tiempo t � 0 a t � 2.0 s.
SOLUCIÓN
Piense qué hace la partícula a partir de la represen-tación matemática. ¿Se mueve en t � 0? ¿En qué di- rección? ¿Aumenta velocidad o frena? La figura 2.9 es una gráfica vx–t que se creó a partir de la expre-sión de velocidad en función del tiempo dada en el enunciado del problema. Puesto que la pendiente de toda la curva vx–t es negativa, se espera que la aceleración sea negativa.
Encuentre las velocidades en ti � t� � 0 y tf � t� � 2.0 s al sustituir estos valores de t en la expresión para la velocidad:
Encuentre la aceleración promedio en el intervalo de tiempo especificado �t � t� � t� � 2.0 s:
El signo negativo es consistente con las expectativas, a saber: que la aceleración, representada por la pendiente de la línea que une los puntos inicial y final en la gráfica velocidad-tiempo, es negativa.
B) Determine la aceleración en t � 2.0 s.
a)
b)
c)
x
t�t�t�t�t�t�
t�t�t�t�t�t
t�O
tO
tO t�t�t�t�
vx
ax
10
�10
0
0 1 2 3 4
t (s)
vx (m/s)
20
30
40
�20
�30
Pendiente � �20 m/s2
�
�
Figura 2.9 (Ejemplo 2.6) Gráfica velocidad-tiempo para una partícula que se mueve a lo largo del eje x de acuerdo con la expresión vx � (40 � 5t 2) m/s. La aceleración en t � 2 s es igual a la pendiente de la línea tangente verde en dicho tiempo.
vx (40 5t 2) m/s [40 5(0)2] m/s 40 m/s
vx (40 5t 2) m/s [40 5(2.0)2] m/s 20 m/s
10 m>s2
ax, prom
vxf vxi
tf ti
vx vx
t t
120 40 2 m>s12.0 0 2 s
SOLUCIÓN
Al saber que la velocidad inicial en cualquier tiempo t es vxi � (40 � 5t 2) m/s, encuentre la velocidad en cualquier tiempo ulterior t � �t :
Encuentre el cambio en velocidad en el intervalo de tiempo �t :
Para encontrar la aceleración en cualquier tiempo t, divida esta expresión entre �t y tome el límite del resultado con-forme �t tiende a cero:
Sustituya t � 2.0 s:
Puesto que la velocidad de la partícula es positiva y la aceleración es negativa en este instante, la partícula disminuye su veocidad.
Note que las respuestas a los incisos A) y B) son diferentes. La aceleración promedio en A) es la pendiente de la línea azul que en la figura 2.9 conecta los puntos � y �. La aceleración instantánea en B) es la pendiente de la línea verde tan-gente a la curva en el punto �. Repare también en que la aceleración no es constante en este ejemplo. Las situaciones que involucran aceleración constante se tratan en la sección 2.6.
Hasta el momento se han evaluado las derivadas de una función al comenzar con la definición de la función y luego tomar el límite de una relación específica. Si está familia-rizado con el cálculo, reconocerá que hay reglas específicas para tomar derivadas. Estas reglas, que se mencionan en el apéndice B.6, le permiten evaluar derivadas rápidamente. Por ejemplo, una regla dice que la derivada de cualquier constante es cero. Como otro ejemplo, considere que x es proporcional a alguna potencia de t, como en la expresión
x � At n
donde A y n son constantes. (Esta expresión es una forma funcional muy común.) La derivada de x respecto a t es
dxdt
nAtn 1
Al aplicar esta regla al ejemplo 2.5, en el que vx � 40 � 5t 2, de inmediato se encuentra que la aceleración es ax � dvx/dt � �10t.
2.5 Diagramas de movimientoCon frecuencia los conceptos de velocidad y aceleración se confunden uno con otro, pero en realidad son cantidades muy diferentes. Al formar una representación mental de un objeto en movimiento, a veces es útil usar una representación pictórica llamada diagrama de movimiento para describir la velocidad y la aceleración mientras un objeto está en movimiento.
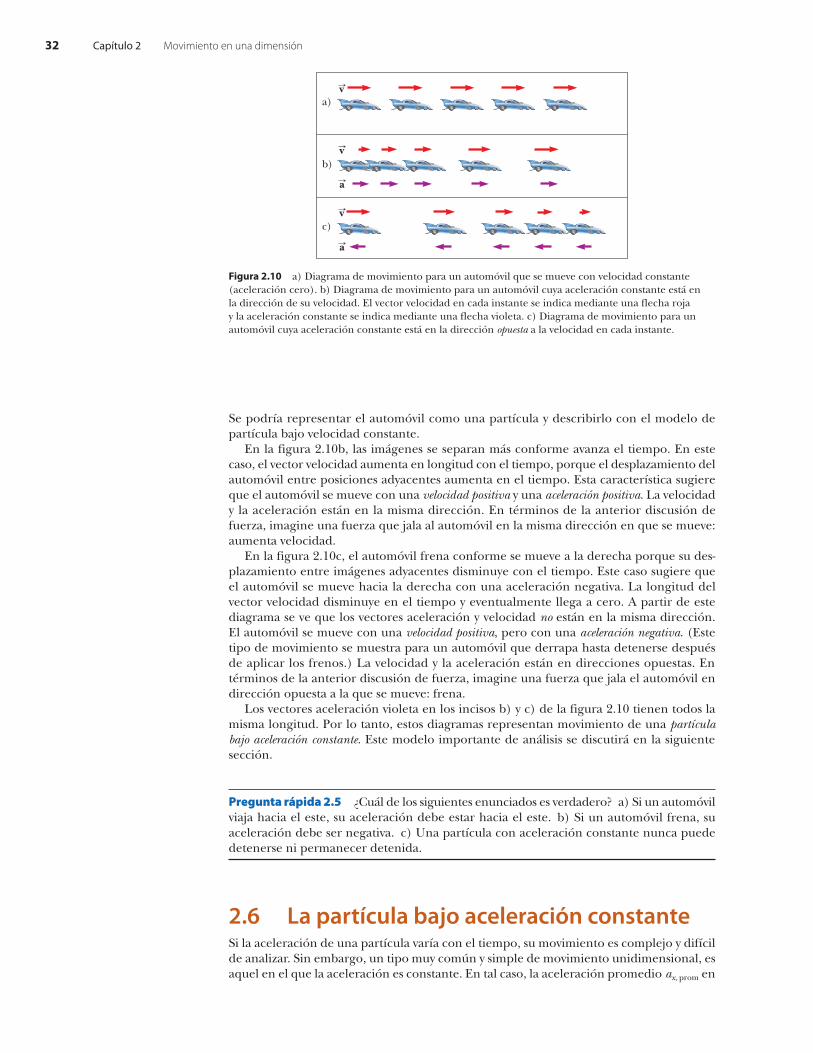
Un diagrama de movimiento se forma al considerar una fotografía estroboscópica de un objeto en movimiento, que muestra varias imágenes del objeto tomadas conforme la luz estroboscópica destella en intervalos constantes. La figura 2.10 representa tres conjuntos de fotografías estroboscópicas de automóviles que se mueven a lo largo de una autopista recta en una sola dirección, de izquierda a derecha. Los intervalos de tiempo entre los destellos del estroboscopio son iguales en cada parte del diagrama. De modo que, para no confundir las dos cantidades vectoriales, en la figura 2.10 se usa rojo para los vectores velocidad y violeta para los vectores aceleración. Los vectores se muestran en varios ins-tantes durante el movimiento del objeto. Describa el movimiento del automóvil en cada diagrama.
En la figura 2.10a, las imágenes del automóvil están igualmente espaciadas, lo que muestra que el automóvil se mueve a través del mismo desplazamiento en cada intervalo de tiempo. Este espaciamiento igual es consistente con el automóvil que se mueve con velocidad positiva constante y aceleración cero.
ax lím¢tS0
¢vx
¢tlím¢tS0
1 10t 5¢t 2 10t m>s2
¢vx vxf vxi 3 10t ¢t 5 1¢t 22 4 m>svxf 40 5 1t ¢t 22 40 5t2 10t ¢t 5 1¢t 22
ax 1 10 2 12.0 2 m>s2 20 m>s2
Sección 2.5 Diagramas de movimiento 31
32 Capítulo 2 Movimiento en una dimensión
Se podría representar el automóvil como una partícula y describirlo con el modelo de partícula bajo velocidad constante.
En la figura 2.10b, las imágenes se separan más conforme avanza el tiempo. En este caso, el vector velocidad aumenta en longitud con el tiempo, porque el desplazamiento del automóvil entre posiciones adyacentes aumenta en el tiempo. Esta característica sugiere que el automóvil se mueve con una velocidad positiva y una aceleración positiva. La velocidad y la aceleración están en la misma dirección. En términos de la anterior discusión de fuerza, imagine una fuerza que jala al automóvil en la misma dirección en que se mueve: aumenta velocidad.
En la figura 2.10c, el automóvil frena conforme se mueve a la derecha porque su des-plazamiento entre imágenes adyacentes disminuye con el tiempo. Este caso sugiere que el automóvil se mueve hacia la derecha con una aceleración negativa. La longitud del vector velocidad disminuye en el tiempo y eventualmente llega a cero. A partir de este diagrama se ve que los vectores aceleración y velocidad no están en la misma dirección. El automóvil se mueve con una velocidad positiva, pero con una aceleración negativa. (Este tipo de movimiento se muestra para un automóvil que derrapa hasta detenerse después de aplicar los frenos.) La velocidad y la aceleración están en direcciones opuestas. En términos de la anterior discusión de fuerza, imagine una fuerza que jala el automóvil en dirección opuesta a la que se mueve: frena.
Los vectores aceleración violeta en los incisos b) y c) de la figura 2.10 tienen todos la misma longitud. Por lo tanto, estos diagramas representan movimiento de una partícula bajo aceleración constante. Este modelo importante de análisis se discutirá en la siguiente sección.
Pregunta rápida 2.5 ¿Cuál de los siguientes enunciados es verdadero? a) Si un automóvil viaja hacia el este, su aceleración debe estar hacia el este. b) Si un automóvil frena, su aceleración debe ser negativa. c) Una partícula con aceleración constante nunca puede detenerse ni permanecer detenida.
2.6 La partícula bajo aceleración constanteSi la aceleración de una partícula varía con el tiempo, su movimiento es complejo y difícil de analizar. Sin embargo, un tipo muy común y simple de movimiento unidimensional, es aquel en el que la aceleración es constante. En tal caso, la aceleración promedio ax, prom en
a)
b)
c)
v
v
v
a
a
Figura 2.10 a) Diagrama de movimiento para un automóvil que se mueve con velocidad constante (aceleración cero). b) Diagrama de movimiento para un automóvil cuya aceleración constante está en la dirección de su velocidad. El vector velocidad en cada instante se indica mediante una flecha roja y la aceleración constante se indica mediante una flecha violeta. c) Diagrama de movimiento para un automóvil cuya aceleración constante está en la dirección opuesta a la velocidad en cada instante.
cualquier intervalo de tiempo es numéricamente igual a la aceleración instantánea ax en cualquier instante dentro del intervalo, y la velocidad cambia con la misma proporción a lo largo del movimiento. Esta situación ocurre con suficiente frecuencia como para que se le identifique como un modelo de análisis: la partícula bajo aceleración constante. En la discusión que sigue se generan varias ecuaciones que describen el movimiento de una partícula para este modelo.
Si en la ecuación 2.9 sustituye ax, prom con ax y toma ti � 0 y tf como cualquier tiempo t posterior, se encuentra que
ax
vxf vxi
t 0
o
vxf � vxi � axt (para ax constante) (2.13)
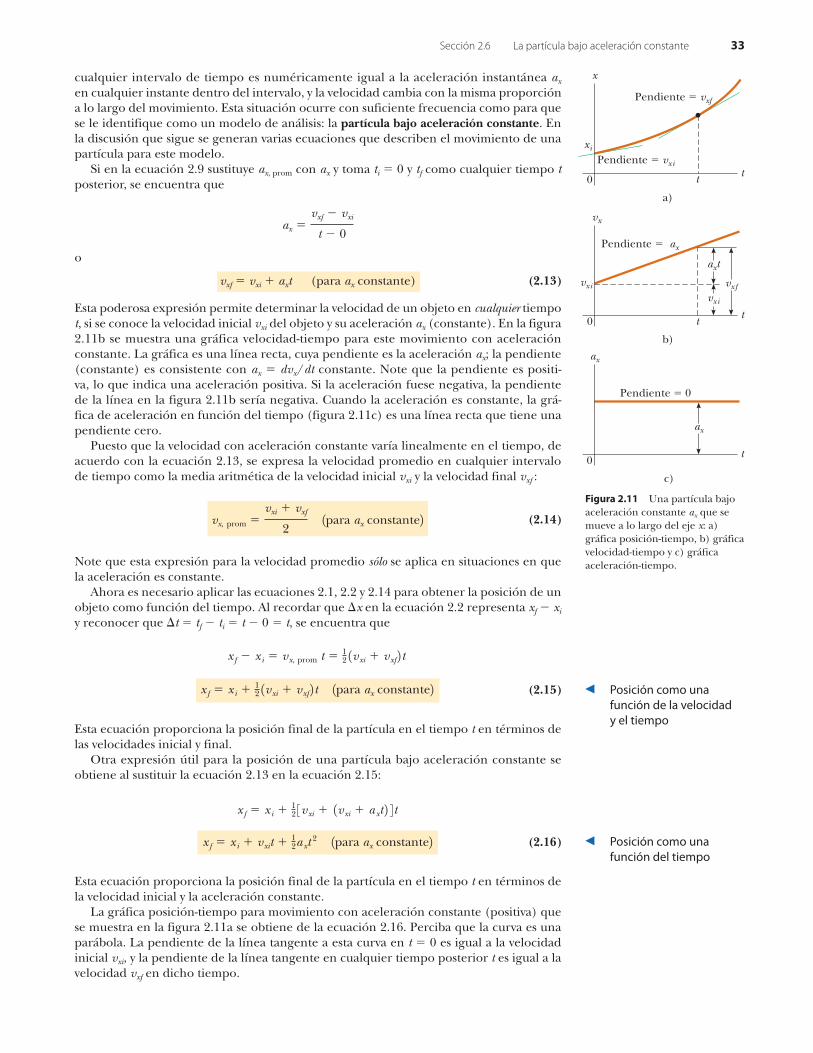
Esta poderosa expresión permite determinar la velocidad de un objeto en cualquier tiempo t, si se conoce la velocidad inicial vxi del objeto y su aceleración ax (constante). En la figura 2.11b se muestra una gráfica velocidad-tiempo para este movimiento con aceleración constante. La gráfica es una línea recta, cuya pendiente es la aceleración ax; la pendiente (constante) es consistente con ax � dvx/dt constante. Note que la pendiente es positi-va, lo que indica una aceleración positiva. Si la aceleración fuese negativa, la pendiente de la línea en la figura 2.11b sería negativa. Cuando la aceleración es constante, la grá- fica de aceleración en función del tiempo (figura 2.11c) es una línea recta que tiene una pendiente cero.
Puesto que la velocidad con aceleración constante varía linealmente en el tiempo, de acuerdo con la ecuación 2.13, se expresa la velocidad promedio en cualquier intervalo de tiempo como la media aritmética de la velocidad inicial vxi y la velocidad final vxf :
vx, prom
vxi vxf
2 1para ax constante2 (2.14)
Note que esta expresión para la velocidad promedio sólo se aplica en situaciones en que la aceleración es constante.
Ahora es necesario aplicar las ecuaciones 2.1, 2.2 y 2.14 para obtener la posición de un objeto como función del tiempo. Al recordar que �x en la ecuación 2.2 representa xf � xi y reconocer que �t � tf � ti � t � 0 � t, se encuentra que
xf x i12 1vxi vxf 2 t 1para ax constante2xf x i vx, prom t 1
2 1vxi vxf 2 t (2.15)
Esta ecuación proporciona la posición final de la partícula en el tiempo t en términos de las velocidades inicial y final.
Otra expresión útil para la posición de una partícula bajo aceleración constante se obtiene al sustituir la ecuación 2.13 en la ecuación 2.15:
xf x i vxit12axt
2 1para ax constante2xf x i12 3vxi 1vxi axt 2 4 t
(2.16)
Esta ecuación proporciona la posición final de la partícula en el tiempo t en términos de la velocidad inicial y la aceleración constante.
La gráfica posición-tiempo para movimiento con aceleración constante (positiva) que se muestra en la figura 2.11a se obtiene de la ecuación 2.16. Perciba que la curva es una parábola. La pendiente de la línea tangente a esta curva en t � 0 es igual a la velocidad inicial vxi, y la pendiente de la línea tangente en cualquier tiempo posterior t es igual a la velocidad vxf en dicho tiempo.
� Posición como una función de la velocidad y el tiempo
� Posición como una función del tiempo
Figura 2.11 Una partícula bajo aceleración constante ax que se mueve a lo largo del eje x: a) gráfica posición-tiempo, b) gráfica velocidad-tiempo y c) gráfica aceleración-tiempo.
b)
vx
vxi
0
vxf
t
vxi
axt
t
Pendiente � ax
c)
ax
0
ax
t
Pendiente � 0
a)
x
0t
xi
Pendiente � vxi
t
Pendiente � vxf
Sección 2.6 La partícula bajo aceleración constante 33

34 Capítulo 2 Movimiento en una dimensión
Por último, es posible obtener una expresión para la velocidad final que no contenga tiempo como variable al sustituir el valor de t de la ecuación 2.13 en la ecuación 2.15:
vxf
2 vxi2 2ax 1xf xi 2 1para ax constante2
xf x i12 1vxi vxf 2 a vxf vxi
axb xi
vxf2 vxi
2
2ax
(2.17)
Esta ecuación proporciona la velocidad final en términos de la velocidad inicial, la acele-ración constante y la posición de la partícula.
Para movimiento con aceleración cero, se ve de las ecuaciones 2.13 y 2.16 que
vxf vxi vx
xf xi vxtf cuando ax 0
Esto es, cuando la aceleración de una partícula es cero, su velocidad es constante y su po-sición cambia linealmente con el tiempo. En términos de modelos, cuando la aceleración de una partícula es cero, el modelo de partícula bajo aceleración constante se reduce al modelo de partícula bajo velocidad constante (sección 2.3).
Pregunta rápida 2.6 En la figura 2.12, relacione cada gráfica vx–t de la parte superior con la gráfica ax–t de la parte inferior que mejor describa el movimiento.
Velocidad como una función de la posición
�
Figura 2.12 (Pregunta rápida 2.6) Los incisos a), b) y c) son gráficas vx–t de objetos en movimiento unidimensional. Las posibles aceleraciones de cada objeto se muestran en forma desordenada en d), e) y f).t
vx
a)
t
ax
d)
t
vx
b)
t
ax
e)
t
vx
c)
t
ax
f)
Las ecuaciones de la 2.13 a la 2.17 son ecuaciones cinemáticas útiles para resolver cual-quier problema que involucre una partícula bajo aceleración constante en una dimensión. Las cuatro ecuaciones cinemáticas que se usan con más frecuencia se mencionan en la tabla 2.2. La elección de cuál ecuación usar en una situación dada depende de qué sepa de antemano. A veces es necesario usar dos de estas ecuaciones para resolver dos incógnitas. Debe reconocer que las cantidades que varían durante el movimiento son la posición xf, la velocidad vxf y el tiempo t.
Al resolver numerosos ejercicios y problemas obtendrá mucha experiencia en el uso de estas ecuaciones. Muchas veces descubrirá que se puede usar más de un método para
TABLA 2.2Ecuaciones cinemáticas para movimiento de una partícula bajo aceleración constante
Número de ecuación Ecuación Información que se conoce por la ecuación
2.13 vxf vxi axt Velocidad como función del tiempo2.15 xf x i
12 1vxi vxf 2 t Posición como función de velocidad y tiempo
2.16 xf x i vxit12axt
2 Posición como función del tiempo2.17 vxf
2 vxi2 2ax 1xf x i 2 Velocidad como función de la posición
Nota: El movimiento es a lo largo del eje x.
obtener una solución. Recuerde que estas ecuaciones de cinemática no se pueden usar en una situación en que la aceleración varía con el tiempo. Son útiles sólo cuando la acele-ración es constante.
EJEMPLO 2.7 Aterrizaje en portaaviones
Un jet aterriza en un portaaviones a 140 mi/h (� 63 m/s).
A) ¿Cuál es su aceleración (constante) si se detiene en 2.0 s debido a un cable de arresto que traba al jet y lo deja en reposo?
SOLUCIÓN
Es posible que haya visto películas o programas de televisión en los que un jet aterriza sobre un portaaviones y se lleva al reposo sorprendentemente rápido mediante un cable de arresto. Puesto que la aceleración del jet se supone constante, se le representa como una partícula bajo aceleración constante. El eje x se define como la dirección de movimiento del jet. Una lectura cuidadosa del problema revela que, además de estar dada la rapidez inicial de 63 m/s, también se sabe que la rapidez final es cero. Perciba también que no se tiene información acerca del cambio en posición del jet mientras frena.
La ecuación 2.13 es la única en la tabla 2.2 que no involucra la posición, de modo que se le usa para encontrar la acelera-ción del jet, representado como partícula:
B) Si el jet toca al portaaviones en la posición xi = 0, ¿cuál es su posición final?
SOLUCIÓN
Aplique la ecuación 2.15 para resolver la posición final: xf x i12 1vxi vxf 2 t 0 1
2 163 m>s 0 2 12.0 s 2 63 m
Si el jet recorre más allá de 63 m, puede caer al océano. La idea de usar cables de arresto para frenar a la aeronave que aterriza y permitirle aterrizar con seguridad en los barcos surgió en la primera Guerra Mundial. Los cables todavía son una parte vital de la operación de los modernos portaaviones.
¿Qué pasaría si? Suponga que el jet aterriza en la cubierta del portaaviones con una rapidez mayor que 63 m/s pero tiene la misma aceleración debida al cable calculada en el inciso A). ¿Cómo cambiará esto la respuesta del inciso B)?
Respuesta Si el jet viaja más rápido que al principio se detendrá más lejos de su punto de partida, de modo que la respuesta del inciso B) sería más grande. Matemáticamente, en la ecuación 2.15 se ve que, si vxi es más grande, xf será más grande.
EJEMPLO 2.8 ¡Observe el límite de rapidez!
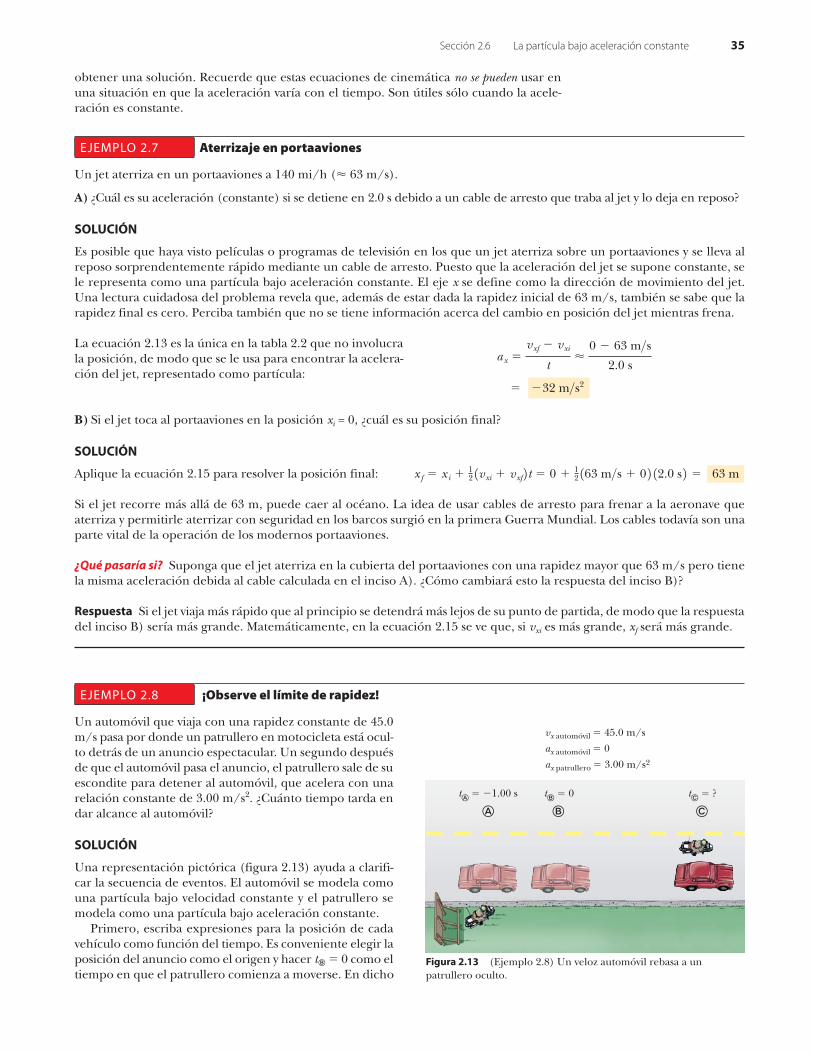
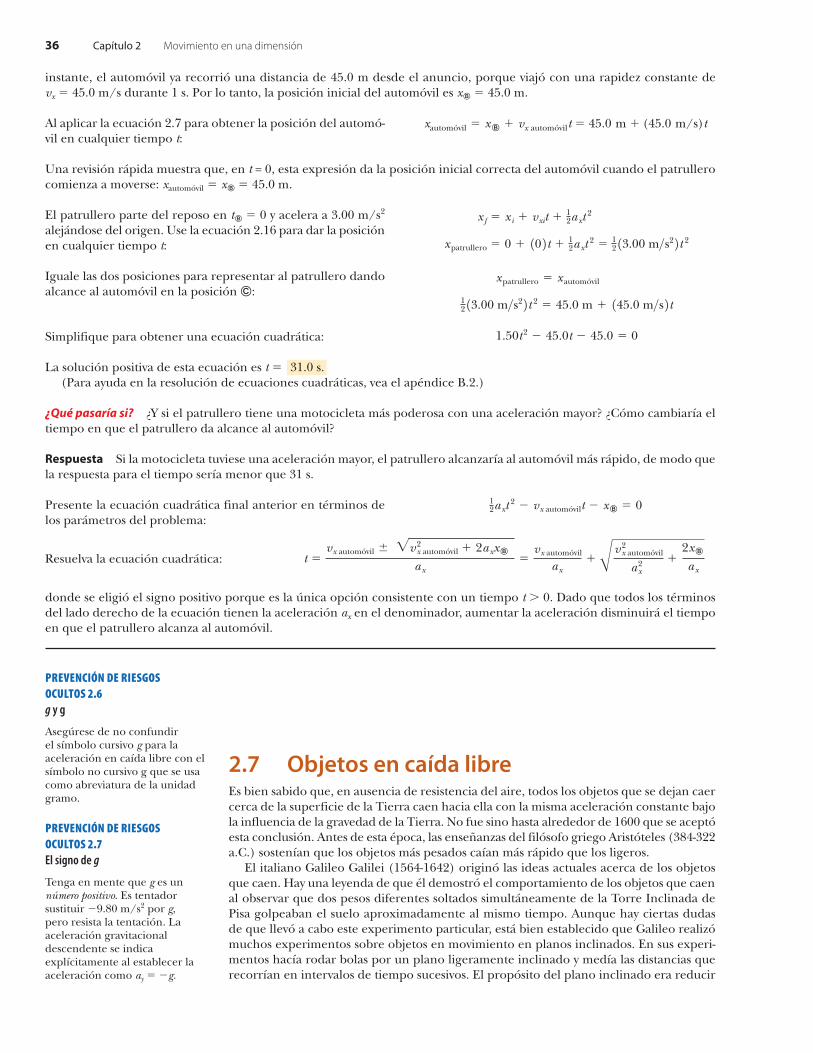
Un automóvil que viaja con una rapidez constante de 45.0 m/s pasa por donde un patrullero en motocicleta está ocul-to detrás de un anuncio espectacular. Un segundo después de que el automóvil pasa el anuncio, el patrullero sale de su escondite para detener al automóvil, que acelera con una relación constante de 3.00 m/s2. ¿Cuánto tiempo tarda en dar alcance al automóvil?
SOLUCIÓN
Una representación pictórica (figura 2.13) ayuda a clarifi-car la secuencia de eventos. El automóvil se modela como una partícula bajo velocidad constante y el patrullero se modela como una partícula bajo aceleración constante.
Primero, escriba expresiones para la posición de cada vehículo como función del tiempo. Es conveniente elegir la posición del anuncio como el origen y hacer t� � 0 como el tiempo en que el patrullero comienza a moverse. En dicho
Figura 2.13 (Ejemplo 2.8) Un veloz automóvil rebasa a un patrullero oculto.
vx automóvil � 45.0 m/s
ax automóvil � 0
ax patrullero � 3.00 m/s2
��
t� � �1.00 s t� � 0 t� � ?
�
32 m>s2
ax
vxf vxi
t
0 63 m>s2.0 s
Sección 2.6 La partícula bajo aceleración constante 35
36 Capítulo 2 Movimiento en una dimensión
instante, el automóvil ya recorrió una distancia de 45.0 m desde el anuncio, porque viajó con una rapidez constante de vx � 45.0 m/s durante 1 s. Por lo tanto, la posición inicial del automóvil es x� � 45.0 m.
Al aplicar la ecuación 2.7 para obtener la posición del automó-vil en cualquier tiempo t:
Una revisión rápida muestra que, en t = 0, esta expresión da la posición inicial correcta del automóvil cuando el patrullero comienza a moverse: xautomóvil � x� � 45.0 m.
El patrullero parte del reposo en t� � 0 y acelera a 3.00 m/s2 alejándose del origen. Use la ecuación 2.16 para dar la posición en cualquier tiempo t:
Iguale las dos posiciones para representar al patrullero dando alcance al automóvil en la posición �:
Simplifique para obtener una ecuación cuadrática:
La solución positiva de esta ecuación es t � 31.0 s.(Para ayuda en la resolución de ecuaciones cuadráticas, vea el apéndice B.2.)
¿Qué pasaría si? ¿Y si el patrullero tiene una motocicleta más poderosa con una aceleración mayor? ¿Cómo cambiaría el tiempo en que el patrullero da alcance al automóvil?
Respuesta Si la motocicleta tuviese una aceleración mayor, el patrullero alcanzaría al automóvil más rápido, de modo que la respuesta para el tiempo sería menor que 31 s.
Presente la ecuación cuadrática final anterior en términos de los parámetros del problema:
Resuelva la ecuación cuadrática:
donde se eligió el signo positivo porque es la única opción consistente con un tiempo t � 0. Dado que todos los términos del lado derecho de la ecuación tienen la aceleración ax en el denominador, aumentar la aceleración disminuirá el tiempo en que el patrullero alcanza al automóvil.
2.7 Objetos en caída libreEs bien sabido que, en ausencia de resistencia del aire, todos los objetos que se dejan caer cerca de la superficie de la Tierra caen hacia ella con la misma aceleración constante bajo la influencia de la gravedad de la Tierra. No fue sino hasta alrededor de 1600 que se aceptó esta conclusión. Antes de esta época, las enseñanzas del filósofo griego Aristóteles (384-322 a.C.) sostenían que los objetos más pesados caían más rápido que los ligeros.
El italiano Galileo Galilei (1564-1642) originó las ideas actuales acerca de los objetos que caen. Hay una leyenda de que él demostró el comportamiento de los objetos que caen al observar que dos pesos diferentes soltados simultáneamente de la Torre Inclinada de Pisa golpeaban el suelo aproximadamente al mismo tiempo. Aunque hay ciertas dudas de que llevó a cabo este experimento particular, está bien establecido que Galileo realizó muchos experimentos sobre objetos en movimiento en planos inclinados. En sus experi-mentos hacía rodar bolas por un plano ligeramente inclinado y medía las distancias que recorrían en intervalos de tiempo sucesivos. El propósito del plano inclinado era reducir
PREVENCIÓN DE RIESGOS OCULTOS 2.7El signo de g
Tenga en mente que g es un número positivo. Es tentador sustituir �9.80 m/s2 por g, pero resista la tentación. La aceleración gravitacional descendente se indica explícitamente al establecer la aceleración como ay � �g.
PREVENCIÓN DE RIESGOS OCULTOS 2.6g y g
Asegúrese de no confundir el símbolo cursivo g para la aceleración en caída libre con el símbolo no cursivo g que se usa como abreviatura de la unidad gramo.
xautomóvil x vx automóvilt 45.0 m (45.0 m/s)t
xpatrullero 0 10 2 t 12axt
2 12 13.00 m>s2 2 t 2
xf x i vxit12axt
2
12 13.00 m>s2 2 t 2 45.0 m 145.0 m>s 2 txpatrullero xautomóvil
1.50t2 45.0t 45.0 0
12axt
2 vx automóvilt x 0
tvx automóvil �v2
x automóvil 2axx
ax
vx automóvil
ax
v2x automóvil
ax2
2xax

la aceleración, lo que hizo posible que tomara mediciones precisas de los intervalos de tiempo. Al aumentar gradualmente la pendiente del plano, al final fue capaz de extraer conclusiones acerca de los objetos en caída libre, porque una bola en caída libre es equi-valente a una bola que se mueve por un plano inclinado vertical.
Acaso quiera intentar el siguiente experimento. Suelte simultáneamente, desde la misma altura, una moneda y un trozo de papel arrugado. Si los efectos de la resistencia del aire son despreciables, ambos tendrán el mismo movimiento y golpearán el suelo al mismo tiempo. En el caso idealizado, en el que la resistencia del aire está ausente, a tal movimiento se le refiere como movimiento en caída libre. Si este mismo experimento se pudiese realizar en un vacío, en el que la resistencia del aire realmente es despreciable, el papel y la moneda caerían con la misma aceleración aun cuando el papel no esté arrugado. El 2 de agosto de 1971, el astronauta David Scott realizó tal demostración en la Luna. Soltó simultáneamente un martillo y una pluma y los dos objetos cayeron al mismo tiempo en la superficie lunar. ¡Seguramente esta simple demostración habría complacido a Galileo!
Cuando se usa la expresión objeto en caída libre no necesariamente se hace referencia a un objeto que se suelta desde el reposo. Un objeto en caída libre es cualquier objeto que se mueve libremente sólo bajo la influencia de la gravedad, sin importar su movimiento inicial. Los objetos que se lanzan hacia arriba o abajo y los que se liberan desde el reposo están todos en caída libre una vez que se liberan. Cualquier objeto en caída libre experi-menta una aceleración dirigida hacia abajo, sin importar su movimiento inicial.
La magnitud de la aceleración de caída libre se denotará mediante el símbolo g. El valor de g cerca de la superficie de la Tierra disminuye conforme aumenta la altitud. Además, ocurren ligeras variaciones en g con cambios en latitud. En la superficie de la Tierra, el valor de g es aproximadamente 9.80 m/s2. A menos que se establezca de otro modo, se usará este valor para g cuando se realicen cálculos. Para hacer estimaciones rápidas, use g � 10 m/s2.
Si se ignora la resistencia del aire y se supone que la aceleración de caída libre no varía con la altitud en distancias verticales cortas, el movimiento de un objeto en caída libre que se mueve verticalmente es equivalente al movimiento de una partícula bajo aceleración constante en una dimensión. Debido a eso, se aplican las ecuaciones desarrolladas en la sección 2.6 para objetos que se mueven con aceleración constante. La única modificación que se necesita hacer en estas ecuaciones para los objetos en caída libre es notar que el movimiento es en la dirección vertical (la dirección y) antes que en la dirección horizontal (x) y que la aceleración es hacia abajo y tiene una magnitud de 9.80 m/s2. En consecuen-cia, siempre se elegirá ay � �g � �9.80 m/s2, donde el signo negativo significa que la aceleración de un objeto en caída libre es hacia abajo. En el capítulo 13 se estudiará cómo tratar con las variaciones en g con la altitud.
Pregunta rápida 2.7 Examine las siguientes opciones: a) aumenta, b) disminuye, c) aumenta y luego disminuye, d) disminuye y luego aumenta, e) permanece igual. A partir de estas opciones, seleccione lo que le ocurre a i) la aceleración y ii) la rapidez de una bola después de que se lanza hacia arriba en el aire.
PREVENCIÓN DE RIESGOS OCULTOS 2.8Aceleración en lo alto del movimiento
Un error común es considerar que la aceleración de un proyectil en lo alto de su trayectoria es cero. Aunque la velocidad en lo alto del movimiento de un objeto que se lanza hacia arriba momentáneamente va a cero, la aceleración todavía corresponde a la gravedad en este punto. Si la velocidad y la aceleración fuesen cero, el proyectil permanecería en lo alto.
GALILEO GALILEIFísico y astrónomo italiano (1564-1642)Galileo formuló las leyes que gobiernan el movimiento de los objetos en caída libre e hizo muchos otros descubrimientos reveladores en física y astronomía. Galileo defendió públicamente la afirmación de Nicolás Copérnico de que el Sol está en el centro del Universo (sistema heliocéntri-co). Publicó Diálogo sobre los dos grandes sistemas del mundo para apoyar el modelo copernicano, que la Iglesia católica declaró herético.
EJEMPLO CONCEPTUAL 2.9 Los paracaidistas osados
Un paracaidista salta de un helicóptero suspendido. Pocos segundos después, salta otro paracaidista y ambos caen a lo largo de la misma línea vertical. Ignore la resistencia del aire, de modo que ambos paracaidistas caen con la misma aceleración. ¿La diferencia en sus magnitudes de velocidad permanece igual a lo largo de la caída? ¿La distancia vertical entre ellos permanece igual durante la caída?
SOLUCIÓN
En cualquier instante dado, las magnitudes de velocidad de los paracaidistas son diferentes porque uno salta primero.
Sin embargo, en cualquier intervalo de tiempo �t después de este instante, los dos paracaidistas aumentan sus rapi-deces en la misma cantidad porque tienen la misma ace-leración. Por lo tanto, la diferencia en sus magnitudes de velocidad permanece igual a lo largo de la caída.
El primero que saltó siempre tiene una mayor rapidez que el segundo. Por lo tanto, en un intervalo de tiempo dado, el primer paracaidista cubre una mayor distancia que el segundo. En consecuencia, la distancia de separación entre ellos aumenta.
Nor
th W
ind
Pict
ure
Arch
ives
Sección 2.7 Objetos en caída libre 37
38 Capítulo 2 Movimiento en una dimensión
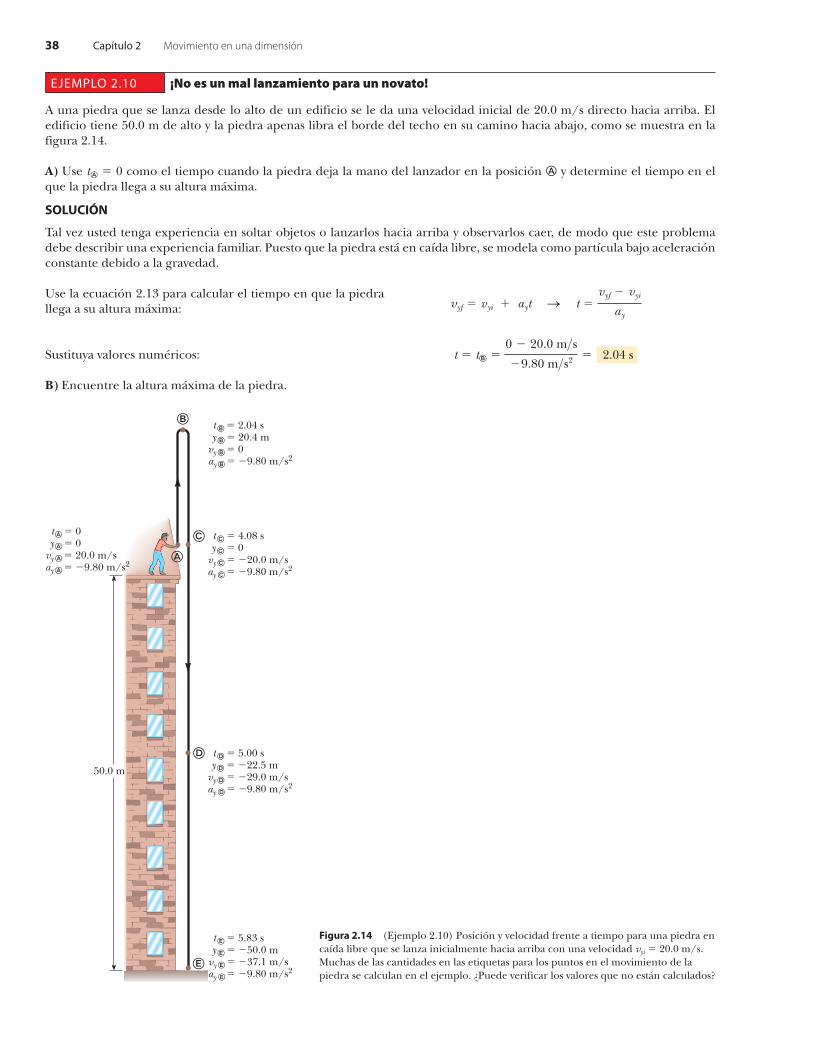
EJEMPLO 2.10 ¡No es un mal lanzamiento para un novato!
A una piedra que se lanza desde lo alto de un edificio se le da una velocidad inicial de 20.0 m/s directo hacia arriba. El edificio tiene 50.0 m de alto y la piedra apenas libra el borde del techo en su camino hacia abajo, como se muestra en la figura 2.14.
A) Use t� � 0 como el tiempo cuando la piedra deja la mano del lanzador en la posición � y determine el tiempo en el que la piedra llega a su altura máxima.
SOLUCIÓN
Tal vez usted tenga experiencia en soltar objetos o lanzarlos hacia arriba y observarlos caer, de modo que este problema debe describir una experiencia familiar. Puesto que la piedra está en caída libre, se modela como partícula bajo aceleración constante debido a la gravedad.
Use la ecuación 2.13 para calcular el tiempo en que la piedra llega a su altura máxima:
Sustituya valores numéricos:
B) Encuentre la altura máxima de la piedra.
�
�
�
�
t � � 5.00 sy � � �22.5 m
vy � � �29.0 m/say � � �9.80 m/s2
t � � 4.08 sy � � 0
vy � � �20.0 m/say � � �9.80 m/s2
t � � 2.04 sy � � 20.4 m
vy � � 0ay � � �9.80 m/s2
50.0 m
t � � 5.83 sy � � �50.0 m
vy � � �37.1 m/say � � �9.80 m/s2
t� � 0y� � 0
vy � � 20.0 m/say � � �9.80 m/s2
�
Figura 2.14 (Ejemplo 2.10) Posición y velocidad frente a tiempo para una piedra en caída libre que se lanza inicialmente hacia arriba con una velocidad vyi � 20.0 m/s. Muchas de las cantidades en las etiquetas para los puntos en el movimiento de la piedra se calculan en el ejemplo. ¿Puede verificar los valores que no están calculados?
vyf vyi ayt S tvyf vyi
ay
t t0 20.0 m>s
9.80 m>s2 2.04 s
SOLUCIÓN
Sea y� � 0 y sustituya el tiempo del inciso A) en la ecuación 2.16 para encontrar la altura máxima:
C) Determine la velocidad de la piedra cuando regresa a la altura desde la que se lanzó.
Sustituya los valores conocidos en la ecuación 2.17:
Cuando se saca la raíz cuadrada, se elige una raíz positiva o una negativa. Se elige la raíz negativa porque se sabe que la piedra se mueve hacia abajo al punto �. La velocidad de la piedra cuando llega de vuelta a su altura original es igual en magnitud a su velocidad inicial pero es opuesta en dirección.
D) Encuentre la velocidad y posición de la piedra en t � 5.00 s.
Calcule la velocidad en � a partir de la ecua-ción 2.13:
Use la ecuación 2.16 para encontrar la posi-ción de la piedra en t� � 5.00 s:
La elección del tiempo definida como t � 0 es arbitraria y depende de usted seleccionarla. Como ejemplo de esta arbitra-riedad, elija t � 0 como el tiempo en que la piedra está en el punto más alto de su movimiento. Luego resuelva los incisos C) y D) de nuevo usando este nuevo instante inicial y note que sus respuestas son iguales que las anteriores.
¿Qué pasaría si? ¿Y si el edificio tuviese 30.0 m de altura en lugar de 50.0 m? ¿Qué respuestas cambiarían en los incisos A) a D)?
Respuesta Ninguna de las respuestas cambiaría. Todo el movimiento tiene lugar en el aire durante los primeros 5.00 s. (Observe que incluso para un edificio de 30.0 m de alto, la piedra está arriba del suelo en t � 5.00 s.) Por lo tanto, la altura del edificio no es un problema. Matemáticamente, si se observan de nuevo los cálculos, se ve que nunca se ingresó la altu- ra del edificio en ninguna ecuación.
2.8 Ecuaciones cinemáticas deducidas del cálculo
Esta sección supone que el lector está familiarizado con las técnicas del cálculo integral. Si aún no estudia integración en su curso de cálculo, debe saltar esta sección o cubrirla después de que se familiarice con la integración.
La velocidad de una partícula que se mueve en línea recta se obtiene si se conoce su posición como función del tiempo. En términos matemáticos, la velocidad es igual a la derivada de la posición respecto al tiempo. También es posible encontrar la posición de una partícula si se conoce su velocidad como función del tiempo. En cálculo, al procedi-miento que se usa para realizar esta tarea se le conoce como integración o como encontrar la antiderivada. En términos gráficos, es equivalente a encontrar el área bajo una curva.
Ponga por caso que la gráfica vx–t para una partícula que se mueve a lo largo del eje x es como se muestra en la figura 2.15. Divida el intervalo de tiempo tf � ti en muchos pequeños intervalos, cada uno de duración �tn. A partir de la definición de velocidad promedio es claro que el desplazamiento de la partícula durante cualquier intervalo pequeño, como el
y 0 120.0 m>s 2 12.04 s 2 12 1 9.80 m>s2 2 12.04 s 22 20.4 m
ymáx y y vx t 12a yt
2
vy 20.0 m>svy2 120.0 m>s 22 2 1 9.80 m>s2 2 10 0 2 400 m2>s2
vy2 vy
2 2ay 1y y 2
vy vy ayt 20.0 m>s 1 9.80 m>s2 2 15.00 s 2 29.0 m>s
22.5 m
0 120.0 m>s 2 15.00 s 2 12 1 9.80 m>s2 2 15.00 s 22y y vy t 1
2ayt2
Sección 2.8 Ecuaciones cinemáticas deducidas del cálculo 39

40 Capítulo 2 Movimiento en una dimensión
sombreado en la figura 2.15, se conoce por �xn = vxn, prom �tn, donde vxn, prom es la velocidad promedio en dicho intervalo. En consecuencia, el desplazamiento durante este pequeño intervalo simplemente es el área del rectángulo sombreado. El desplazamiento total para el intervalo tf � ti es la suma de las áreas de todos los rectángulos desde ti hasta tf :
¢xn
vxn, prom¢tn
donde el símbolo � (letra griega mayúscula sigma) significa una suma que incluye todos los términos, esto es, completos los valores de n. Ahora, conforme los intervalos se hacen cada vez más pequeños, el número de términos en la suma aumenta y la suma tiende a un valor igual al área bajo la gráfica velocidad-tiempo. Debido a esto, en el límite n � �, o �tn � 0, el desplazamiento es
¢x lím¢tn S 0 n
vxn ¢tn (2.18)
Observe que en la suma se sustituyó la velocidad promedio vxn, prom con la velocidad ins-tantánea vxn. Como puede ver en la figura 2.15, esta aproximación es válida en el límite de intervalos muy pequeños. En consecuencia, si se conoce la gráfica vx–t para movimiento a lo largo de una línea recta, se obtiene el desplazamiento durante cualquier intervalo de tiempo al medir el área bajo la curva correspondiente a dicho intervalo de tiempo.
El límite de la suma que se muestra en la ecuación 2.18 se llama integral definida y se escribe
lím¢tn S 0 n
vxn ¢tn
tf
ti
vx 1t 2dt (2.19)
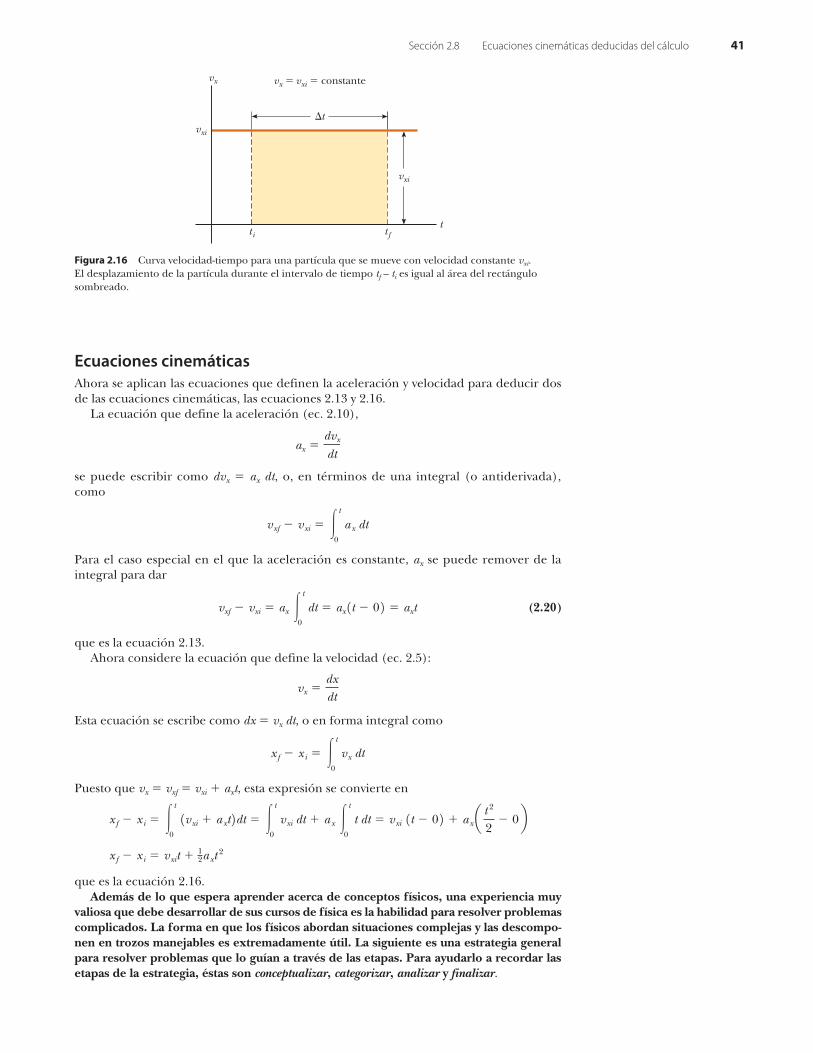
donde vx(t) denota la velocidad en cualquier tiempo t. Si se conoce la forma funcional explícita de vx(t) y se proporcionan los límites, se evalúa la integral. A veces la gráfica vx–t para una partícula en movimiento tiene una forma mucho más simple que la mostrada en la figura 2.15. Por ejemplo, suponga que una partícula se mueve con velocidad cons-tante vxi. En este caso, la gráfica vx–t es una línea horizontal, como en la figura 2.16, y el desplazamiento de la partícula durante el intervalo de tiempo �t simplemente es el área del rectángulo sombreado:
�x � vxi �t (cuando vx � vxi � constante)
Figura 2.15 Velocidad en función del tiempo para una partícula que se mueve a lo largo del eje x. El área del rectángulo sombreado es igual al desplazamiento �x en el intervalo de tiempo �tn, mientras que el área total bajo la curva es el desplazamiento total de la partícula.
vx
t
Área � vxn, prom �tn
�t n
t i t f
vxn, prom
Integral definida �
Ecuaciones cinemáticasAhora se aplican las ecuaciones que definen la aceleración y velocidad para deducir dos de las ecuaciones cinemáticas, las ecuaciones 2.13 y 2.16.
La ecuación que define la aceleración (ec. 2.10),
axdvx
dt
se puede escribir como dvx � ax dt, o, en términos de una integral (o antiderivada), como
vxf vxi
t
0
ax dt
Para el caso especial en el que la aceleración es constante, ax se puede remover de la integral para dar
vxf vxi ax t
0
dt ax 1t 0 2 axt (2.20)
que es la ecuación 2.13.Ahora considere la ecuación que define la velocidad (ec. 2.5):
vxdxdt
Esta ecuación se escribe como dx � vx dt, o en forma integral como
xf x i
t
0
vx dt
Puesto que vx � vxf � vxi � axt, esta expresión se convierte en
xf x i vxit12axt
2
xf x i
t
0
1vxi axt 2dtt
0
vxi dt ax t
0
t dt vxi 1t 0 2 ax a t 2
20 b
que es la ecuación 2.16.Además de lo que espera aprender acerca de conceptos físicos, una experiencia muy
valiosa que debe desarrollar de sus cursos de física es la habilidad para resolver problemas complicados. La forma en que los físicos abordan situaciones complejas y las descompo-nen en trozos manejables es extremadamente útil. La siguiente es una estrategia general para resolver problemas que lo guían a través de las etapas. Para ayudarlo a recordar las etapas de la estrategia, éstas son conceptualizar, categorizar, analizar y finalizar.
vx � vxi � constante
t f
vxi
t
�t
t i
vx
vxi
Figura 2.16 Curva velocidad-tiempo para una partícula que se mueve con velocidad constante vxi. El desplazamiento de la partícula durante el intervalo de tiempo tf – ti es igual al área del rectángulo sombreado.
Sección 2.8 Ecuaciones cinemáticas deducidas del cálculo 41
ESTRATEGIA GENERAL PARA RESOLVER PROBLEMASConceptualizar• La primera cosa que debe hacer cuando aborde un problema es
pensar y comprender la situación. Estudie cuidadosamente cuales-quiera representaciones de la información (por ejemplo: diagra-mas, gráficas, tablas o fotografías) que acompañen al problema. Imagine una película, que corra en su mente, de lo que sucede en el problema.
• Si no se le proporciona una representación pictórica, casi siem-pre debe hacer un dibujo rápido de la situación. Indique cua-lesquiera valores conocidos, acaso en una tabla o directamente en su bosquejo.
• Ahora enfóquese en qué información algebraica o numérica se proporciona en el problema. Lea con cuidado el enunciado del problema y busque frases clave como “parte del reposo” (vi � 0), “se detiene” (vf � 0) o “cae libremente” (ay � �g � �9.80 m/s2).
• Ahora enfóquese en el resultado que se espera del problema resuelto. ¿Exactamente qué es lo que plantea la pregunta? ¿El resultado final será numérico o algebraico? ¿Sabe qué uni-dades esperar?
• No olvide incorporar información de su propia experiencia y sentido común. ¿Cómo sería una respuesta razonable? Por ejem-plo, no esperaría calcular la rapidez de un automóvil como 5 � 106 m/s.
Categorizar• Una vez que tenga una buena idea de lo que trata el problema,
necesita simplificar el problema. Quite los detalles que no sean importantes para la solución. Por ejemplo, modele un objeto en movimiento como partícula. Si es adecuado, ignore la resis-tencia del aire o la fricción entre un objeto que se desliza y una superficie.
• Cuando simplifique el problema, es importante categorizar el problema. ¿Es un simple problema de sustitución en el que los números se sustituyen en una ecuación? Si es así, es probable que el problema termine cuando realice esta sustitución. Si no, enfrenta lo que se llama problema analítico: la situación se debe analizar más profundamente para llegar a una solución.
• Si es un problema analítico, necesita categorizarlo aún más. ¿Ha visto este tipo de problemas antes? ¿Cae en la creciente lista de tipos de problemas que ha resuelto anteriormente? Si es así, identifique cualquier modelo de análisis apropiado al problema para preparar la etapa de analizar siguiente. Los primeros tres tipos de modelos de análisis se vieron en este capítulo: partícu-la bajo velocidad constante, partícula bajo rapidez constante y partícula bajo aceleración constante. Ser capaz de clasificar un problema con un modelo de análisis hace mucho más sencillo tender un plan para resolverlo. Por ejemplo, si su simplificación
muestra que el problema se puede tratar como una partícula bajo aceleración constante y ya resolvió un problema similar (como los ejemplos de la sección 2.6), la solución al presente problema sigue un patrón similar.
Analizar• Ahora debe analizar el problema y esforzarse por una solución
matemática. Puesto que ya categorizó el problema e identificó un modelo de análisis, no debe ser muy difícil seleccionar ecua-ciones relevantes que se apliquen al tipo de situación en el pro-blema. Por ejemplo, si involucra una partícula bajo aceleración constante, las ecuaciones de la 2.13 a la 2.17 son relevantes.
• Use álgebra (y cálculo, si es necesario) para resolver simbólica-mente la variable desconocida en términos de lo que está dado. Sustituya los números adecuados, calcule el resultado y redon-dee al número adecuado a cifras significativas.
Finalizar• Examine su respuesta numérica. ¿Tiene las unidades correc-
tas? ¿Satisface las expectativas de su conceptualización del pro-blema? ¿Qué hay acerca de la forma algebraica del resultado? ¿Tiene sentido? Examine las variables del problema para ver si la respuesta cambiaría en una forma físicamente significativa si las variables aumentan o disminuyen drásticamente o incluso si se vuelven cero. Buscar casos limitados para ver si producen valores esperados es una forma muy útil de asegurarse de que obtiene resultados razonables.
• Piense acerca de cómo se compara este problema con otros que ha resuelto. ¿Cómo fue similar? ¿En qué formas críticas difiere? ¿Por qué se asignó este problema? ¿Puede imaginar qué apren-dió al hacerlo? Si es una nueva categoría de problema, asegúrese de que lo comprendió para que pueda usarlo como modelo para resolver problemas similares en el futuro.
Cuando resuelva problemas complejos, es posible que necesite identificar una serie de subproblemas y aplicar la estrategia para resolver cada uno. Para problemas simples, probablemente no necesite esta estrategia. Sin embargo, cuando intente resolver un problema y no sepa qué hacer a continuación, recuerde las etapas en la estrategia y úselas como guía.
Para practicar sería útil que vuelva a revisar los ejemplos tra-bajados en este capítulo e identifique los pasos conceptualizar, cate-gorizar, analizar y finalizar. En el resto de este libro se etiquetarán estas etapas en los ejemplos trabajados. Muchos capítulos del libro incluyen una sección de “Estrategia para Resolución de Problemas” que le ayudarán a través de los puntos difíciles. Estas secciones se organizan de acuerdo con esta “Estrategia General para Resolver Problemas” y se hacen a la medida de los tipos específicos de pro-blemas que se abordan en dicho capítulo.
42

Cuando una partícula se mueve a lo largo del eje x desde alguna posición inicial xi hasta alguna posición final xf, su desplazamiento es
�x � xf � xi (2.1)
La velocidad promedio de una partícula durante cierto intervalo de tiempo es el desplazamiento �x dividido entre el intervalo de tiempo �t durante el que ocurre dicho desplazamiento:
vx, prom¢x¢t
(2.2)
La rapidez promedio de una partícula es igual a la relación de la distancia total que recorre al intervalo de tiempo total durante el que recorre dicha distancia:
vpromd¢t
(2.3)
La velocidad instantánea de una partícula se define como el límite de la proporción �x/�t conforme �t tiende a cero. Por definición, este límite es igual a la derivada de x respecto a t, o la relación de cambio en el tiempo de la posición:
vx lím¢t S 0
¢x¢t
dxdt
(2.5)
La rapidez instantánea de una partícula es igual a la magnitud de su velocidad instantánea.
La aceleración promedio de una partícula se define como la relación de cambio en su velocidad �vx dividida entre el intervalo de tiempo �t durante el que ocurre dicho cambio:
ax, prom¢vx
¢t
vxf vxi
tf ti (2.9)
La aceleración instantánea es igual al límite de la proporción �vx/�t conforme �t tiende a 0. Por definición, este límite es igual a la derivada de vx respecto a t, o la relación de cambio en el tiempo de la velocidad:
ax lím¢t S 0
¢vx
¢tdvx
dt (2.10)
Cuando la velocidad y la aceleración de un objeto están en la misma dirección, el objeto aumenta su velocidad. Por otra parte, cuando la velocidad y la aceleración del objeto están en direcciones opuestas, el objeto frena. Recuerde que Fx � ax es una forma útil de identificar la dirección de la aceleración al asociarla con una fuerza.
Un objeto en caída libre en presencia de la gravedad de la Tierra experimenta aceleración de caída libre di-rigida hacia el centro de la Tierra. Si la resistencia del aire es despreciable, el movimiento ocurre cerca de la superficie de la Tierra y si el intervalo del movimiento es pequeño comparado con el radio de la Tierra, la ace-leración de caída libre g es constante durante el rango de movimiento, donde g es igual a 9.80 m/s2.
Los problemas complicados se abordan mejor en una forma organizada. Recuerde y aplique los pasos conceptualizar, categorizar, analizar y finalizar de la “Estrategia General para Resolver Problemas” cuando los necesite.
(continúa)
Resumen 43
ResumenDEFINICIONES
CONCEPTOS Y PRINCIPIOS

44 Capítulo 2 Movimiento en una dimensión
1. O Una gota de aceite cae recta hacia abajo en el camino desde el motor de un automóvil en movimiento cada 5 s. La figura P2.1 muestra el patrón de las gotas que quedan en el pavimen-to. ¿Cuál es la rapidez promedio del automóvil en esta sec-ción de su movimiento? a) 20 m/s, b) 24 m/s, c) 30 m/s, d) 100 m/s, e) 120 m/s.
Figura P2.1
2. Si la velocidad promedio de un objeto es cero en cierto inter-valo de tiempo, ¿qué puede decir acerca del desplazamiento del objeto durante dicho intervalo?
3. O ¿La velocidad instantánea de un objeto en un instante de tiempo alguna vez es mayor en magnitud que la velocidad pro-medio en un intervalo de tiempo que contenga al instante? ¿Alguna vez es menor?
4. O Un carro es empujado a lo largo de una pista horizontal recta. a) En cierta sección de su movimiento, su velocidad original es vxi � �3 m/s y experimenta un cambio en velo-cidad de �vx � �4 m/s. ¿En esta sección de su movimiento aumenta su velocidad o frena? ¿Su aceleración es positiva o negativa? b) En otra parte de su movimiento, vxi � �3 m/s y �vx � �4 m/s. ¿Experimenta aumento o disminución neta en rapidez? ¿Su aceleración es positiva o negativa? c) En un tercer segmento de su movimiento, vxi � �3 m/s y �vx � �4 m/s. ¿Tiene una ganancia o pérdida neta en rapidez? ¿Su
aceleración es positiva o negativa? d) En un cuarto intervalo de tiempo, vxi � �3 m/s y �vx � �4 m/s. ¿El carro gana o pierde rapidez? ¿Su aceleración es positiva o negativa?
5. Dos automóviles se mueven en la misma dirección en pistas paralelas a lo largo de una autopista. En algún instante, lavelocidad del automóvil A supera la velocidad del automóvil B. ¿Esto significa que la aceleración de A es mayor que la de B? Explique.
6. O Cuando el piloto invierte la hélice en un bote que se mueve al norte, el bote se mueve con una aceleración dirigida al sur. Si la aceleración del bote sigue constante en magnitud y direc-ción, ¿qué le ocurrirá al bote (elija una)? a) Eventualmente se detendrá y luego permanecerá en reposo. b) Al final se de-tendrá y luego comenzará a aumentar rapidez en la dirección hacia adelante. c) Eventualmente se detendrá y luego comen-zará a aumentar rapidez en la dirección contraria. d) Nunca se detendrá sino que perderá rapidez cada vez más lentamente por siempre. e) Nunca se detendrá sino que continuará ganan-do rapidez en la dirección hacia adelante.
7. O Cada una de las fotografías estroboscópicas a), b) y c) de la figura P2.7 se tomó de un solo disco que se mueve hacia la de-recha, que se toma como la dirección positiva. Dentro de cada fotografía, el intervalo de tiempo entre imágenes es constan-te. i) ¿Cuál(es) fotografía(s), si alguna, muestra(n) velocidad cero constante? ii) ¿Cuál(es) fotografía(s), si alguna, mues-tra aceleración cero constante? iii) ¿Cuál(es) fotografía(s), si alguna, muestran velocidad constante positiva? iv) ¿Cuál(es) fotografía(s), si alguna, muestra aceleración constante posi-tiva? v) ¿Cuál(es) fotografía(s), si alguna, muestra(n) algún movimiento con aceleración negativa?
PreguntasO indica pregunta complementaria.
MODELOS DE ANÁLISIS PARA RESOLVER PROBLEMAS
Partícula bajo velocidad constante. Si una partícula se mueve en línea recta con una rapidez constante vx, su velocidad constante se conoce por
vx¢x¢t
(2.6)
y su posición se proporciona por
xf � xi � vxt (2.7)
v
Partícula bajo aceleración constante. Si una partícula se mueve en línea recta con aceleración constante ax, su movimiento se describe mediante las ecuaciones cinemáticas:
vxf2 vxi
2 2ax xf xi
xf xi vxit12axt
2
xf xi12 1vxi vxf 2
1 2t
vx, prom
vxi vxf
2
vxf vxi axt
v
a
Partícula bajo rapidez constante. Si una partícula se mueve una distancia d a lo largo de una trayectoria curva o recta con rapidez constante, su rapidez constante se conoce por
vd¢t
(2.8)
v
(2.13)
(2.14)
(2.15)
(2.16)
(2.17)
600 m
2 .3 Aceleración media e instantánea 43
2.3 Aceleración media e instantáneaAsí como la velocidad describe la tasa de cambio de posición con el tiempo, la acele-ración describe la tasa de cambio de velocidad con el tiempo. Al igual que la veloci-dad, la aceleración es una cantidad vectorial. En el movimiento rectilíneo, su únicacomponente distinta de cero está sobre el eje en que ocurre el movimiento. Como ve-remos, en el movimiento rectilíneo la aceleración puede referirse tanto a aumentar larapidez como a disminuirla.
Aceleración mediaConsideremos otra vez el movimiento de una partícula en el eje x. Suponga que, en eltiempo tl, la partícula está en el punto Pl y tiene una componente x de velocidad (ins-tantánea) v1x, y en un instante posterior t2 está en P2 y tiene una componente x de velo-cidad v2x. Así, la componente x de la velocidad cambia en Dvx 5 v2x 2 v1x en elintervalo Dt5 t2 2 t1.
Definimos la aceleración media de la partícula al moverse de Pl a P2 como unacantidad vectorial cuya componente x es amed-x igual a Dvx, el cambio en la compo-nente x de la velocidad, dividido entre el intervalo de tiempo Dt:
(aceleración media, movimiento rectilíneo) (2.4)
En el movimiento rectilíneo a lo largo del eje x, por lo general llamaremos vmed-x a laaceleración media. (Veremos otras componentes del vector de aceleración media en el capítulo 3.)
Si expresamos la velocidad en metros por segundo y el tiempo en segundos, laaceleración media está en metros por segundo por segundo, o bien (m>s)>s. Esto sue-le escribirse como m>s2 y se lee “metros por segundo al cuadrado”.
CUIDADO Aceleración contra velocidad ¡No confunda aceleración con velocidad! Lavelocidad describe el cambio de la posición de un objeto con el tiempo; nos indica con qué rapi-dez y en qué dirección se mueve el objeto. La aceleración describe cómo cambia la velocidadcon el tiempo; es decir, nos dice cómo cambian la rapidez y la dirección del movimiento. Podríaser útil recordar la frase “aceleración es a velocidad lo que velocidad es a posición”. Tambiénayudaría imaginarse a usted mismo yendo en un automóvil con el cuerpo en movimiento. Si elauto acelera hacia delante y aumenta su rapidez, usted se sentiría empujado hacia atrás hacia su asiento; si acelera hacia atrás y disminuye su rapidez, se sentiría empujado hacia delante. Sila velocidad es constante y no hay aceleración, no sentiría sensación alguna. (Analizaremos lacausa de estas sensaciones en el capítulo 4.) ❚
amed-x 5v2x 2 v1x
t2 2 t15
Dvx
Dt
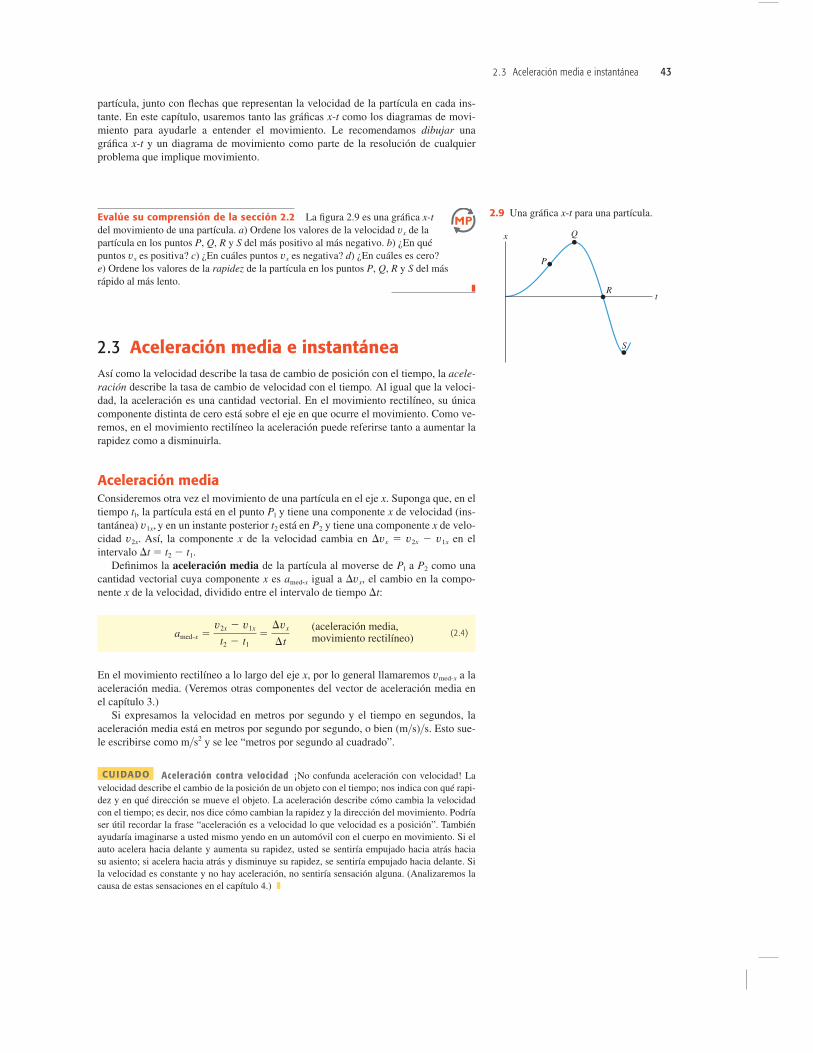
Evalúe su comprensión de la sección 2.2 La figura 2.9 es una gráfica x-tdel movimiento de una partícula. a) Ordene los valores de la velocidad vx de lapartícula en los puntos P, Q, R y S del más positivo al más negativo. b) ¿En quépuntos vx es positiva? c) ¿En cuáles puntos vx es negativa? d) ¿En cuáles es cero? e) Ordene los valores de la rapidez de la partícula en los puntos P, Q, R y S del más rápido al más lento.
❚
partícula, junto con flechas que representan la velocidad de la partícula en cada ins-tante. En este capítulo, usaremos tanto las gráficas x-t como los diagramas de movi-miento para ayudarle a entender el movimiento. Le recomendamos dibujar unagráfica x-t y un diagrama de movimiento como parte de la resolución de cualquierproblema que implique movimiento.
Rt
S
Q
P
x
2.9 Una gráfica x-t para una partícula.
44 C APÍTU LO 2 Movimiento en línea recta
Aceleración instantáneaYa podemos definir la aceleración instantánea con el mismo procedimiento que se-guimos para la velocidad instantánea. Como ejemplo, suponga que un piloto de ca-rreras acaba de entrar en una recta como se muestra en la figura 2.11. Para definir laaceleración instantánea en P1, tomamos el segundo punto P2 en la figura 2.11 cadavez más cerca de P1, de modo que la aceleración media se calcule en intervalos cada vez más cortos. La aceleración instantánea es el límite de la aceleración mediaconforme el intervalo de tiempo se acerca a cero. En el lenguaje del cálculo, la aceleración instantánea es la tasa instantánea de cambio de la velocidad con eltiempo. Así,
(aceleración instantánea, movimiento rectilíneo) (2.5)ax 5 límDtS0
Dvx
Dt5
dvx
dt
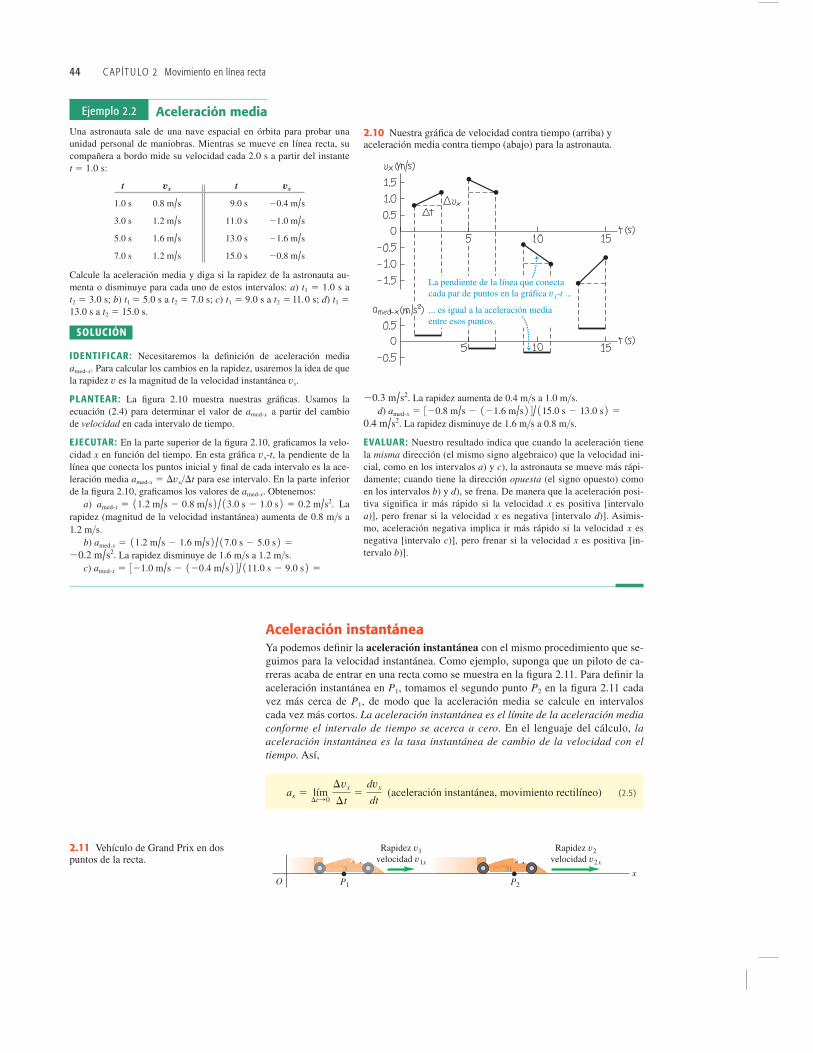
Ejemplo 2.2 Aceleración mediaUna astronauta sale de una nave espacial en órbita para probar unaunidad personal de maniobras. Mientras se mueve en línea recta, sucompañera a bordo mide su velocidad cada 2.0 s a partir del instante t 5 1.0 s:
t t
Calcule la aceleración media y diga si la rapidez de la astronauta au-menta o disminuye para cada uno de estos intervalos: a) t1 5 1.0 s a t2 5 3.0 s; b) t1 5 5.0 s a t2 5 7.0 s; c) t1 5 9.0 s a t2 5 l l .0 s; d) t1 513.0 s a t2 5 15.0 s.
SOLUCIÓN
IDENTIFICAR: Necesitaremos la definición de aceleración mediaamed-x. Para calcular los cambios en la rapidez, usaremos la idea de quela rapidez v es la magnitud de la velocidad instantánea vx.
PLANTEAR: La figura 2.10 muestra nuestras gráficas. Usamos laecuación (2.4) para determinar el valor de amed-x a partir del cambio de velocidad en cada intervalo de tiempo.
EJECUTAR: En la parte superior de la figura 2.10, graficamos la velo-cidad x en función del tiempo. En esta gráfica vx-t, la pendiente de la línea que conecta los puntos inicial y final de cada intervalo es la ace-leración media amed-x 5 Dvx>Dt para ese intervalo. En la parte inferiorde la figura 2.10, graficamos los valores de amed-x. Obtenemos:
a) Larapidez (magnitud de la velocidad instantánea) aumenta de 0.8 m>s a1.2 m>s.
b) La rapidez disminuye de 1.6 m>s a 1.2 m>s.
c) amed-x 5 321.0 m/s 2 120.4 m/s 2 4 / 111.0 s 2 9.0 s 2 520.2 m/s2.amed-x 5 11.2 m/s 2 1.6 m/s 2 / 1 7.0 s 2 5.0 s 2 5amed-x 5 11.2 m/s 2 0.8 m/s 2 / 13.0 s 2 1.0 s 2 5 0.2 m/s2.
20.8 m/s15.0 s1.2 m/s7.0 s
21.6 m/s13.0 s1.6 m/s5.0 s
21.0 m/s11.0 s1.2 m/s3.0 s
20.4 m/s9.0 s0.8 m/s1.0 s
vxvx
La rapidez aumenta de 0.4 m>s a 1.0 m>s.d)
La rapidez disminuye de 1.6 m>s a 0.8 m>s.
EVALUAR: Nuestro resultado indica que cuando la aceleración tienela misma dirección (el mismo signo algebraico) que la velocidad ini-cial, como en los intervalos a) y c), la astronauta se mueve más rápi-damente; cuando tiene la dirección opuesta (el signo opuesto) comoen los intervalos b) y d), se frena. De manera que la aceleración posi-tiva significa ir más rápido si la velocidad x es positiva [intervalo a)], pero frenar si la velocidad x es negativa [intervalo d)]. Asimis-mo, aceleración negativa implica ir más rápido si la velocidad x esnegativa [intervalo c)], pero frenar si la velocidad x es positiva [in-tervalo b)].
0.4 m/s2.amed-x 5 320.8 m/s 2 121.6 m/s 2 4 / 115.0 s 2 13.0 s 2 520.3 m/s2.
La pendiente de la línea que conectacada par de puntos en la gráfica vx-t ...
... es igual a la aceleración mediaentre esos puntos.
2.10 Nuestra gráfica de velocidad contra tiempo (arriba) y aceleración media contra tiempo (abajo) para la astronauta.
Rapidez v2velocidad v2x
Rapidez v1velocidad v1x
P2P1Ox
2.11 Vehículo de Grand Prix en dos puntos de la recta.

Observe que la ecuación (2.5) es realmente la definición de la componente x delvector de aceleración o la aceleración instantánea; en el movimiento rectilíneo, lasdemás componentes de este vector son cero. A partir de aquí, al hablar de “acelera-ción” nos referiremos siempre a la aceleración instantánea, no a la aceleración media.
2 .3 Aceleración media e instantánea 45
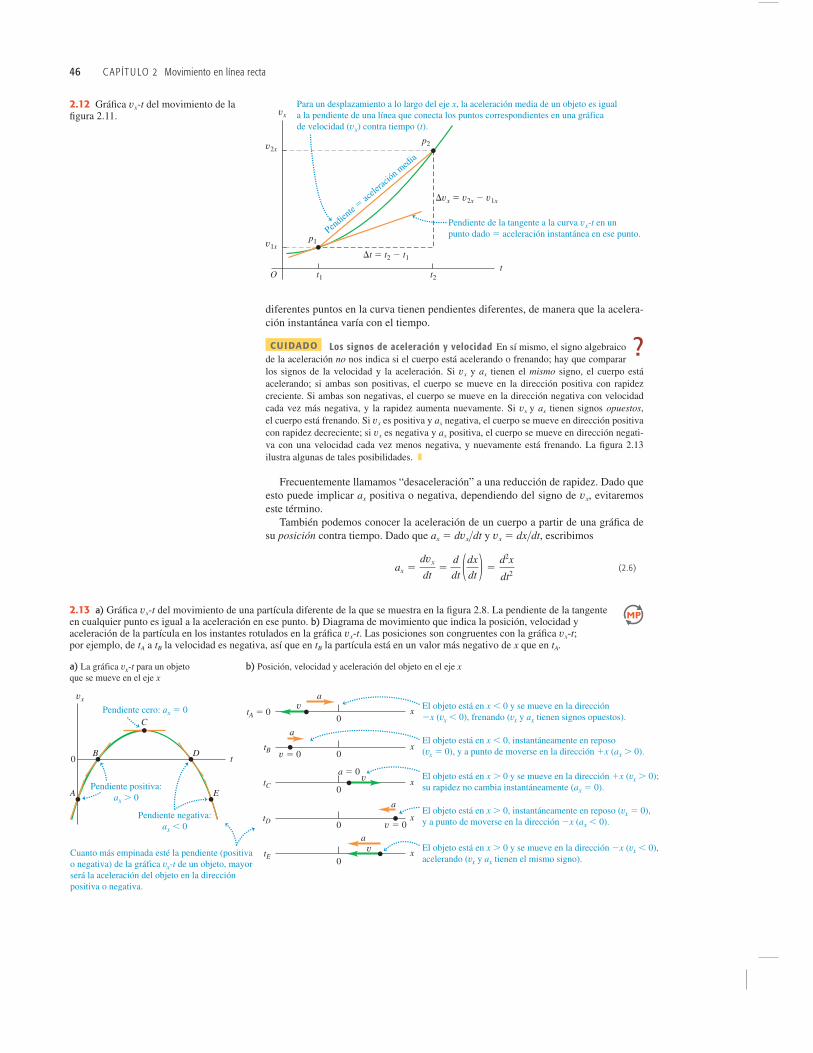
Obtención de la aceleración en una gráfica vx- t o una gráfica x-tEn la sección 2.2 interpretamos las velocidades media e instantánea en términos dela pendiente de una gráfica de posición contra tiempo. Igualmente, podemos enten-der mejor las aceleraciones media e instantánea graficando la velocidad instantáneavx en el eje vertical y el tiempo t en el eje horizontal, es decir, usando una gráfica vx-t(figura 2.12). Los puntos rotulados p1 y p2 corresponden a los puntos Pl y P2 de la figura 2.11. La aceleración media amed-x 5 Dvx>Dt durante este intervalo es la pen-diente de la línea p1p2. Al acercarse P2 a P1 en la figura 2.11, p2 se acerca a p1 en lagráfica vx-t de la figura 2.12, y la pendiente de la línea p1p2 se acerca a la pendientede la tangente a la curva en el punto p1. Así, en una gráfica de velocidad en funcióndel tiempo, la aceleración instantánea en cualquier punto es igual a la pendiente dela tangente de la curva en ese punto. En la figura 2.12, las tangentes trazadas en
Ejemplo 2.3 Aceleraciones media e instantánea
Suponga que la velocidad vx del auto en la figura 2.11 en el tiempo t está dada por
a) Calcule el cambio de velocidad del auto en el intervalo entre t1 51.0 s y t2 5 3.0 s. b) Calcule la aceleración media en este intervalo. c) Obtenga la aceleración instantánea en t1 5 1.0 s tomando Dt prime-ro como 0.1 s, después como 0.01 s y luego como 0.001 s. d) Deduzcauna expresión para la aceleración instantánea en cualquier instante yúsela para obtener la aceleración en t 5 1.0 s y t 5 3.0 s.
SOLUCIÓN
IDENTIFICAR: Este ejemplo es similar al ejemplo 2.1 de la sección2.2. (Recomendamos repasar ahora ese ejemplo.) Ahí, calculamos lavelocidad media en intervalos cada vez más cortos considerando elcambio en el desplazamiento, y obtuvimos la velocidad instantánea di-ferenciando la posición en función del tiempo. En este ejemplo, deter-minaremos la aceleración media considerando cambios de velocidaden un intervalo de tiempo. Asimismo, obtendremos la aceleración ins-tantánea diferenciando la velocidad en función del tiempo.
PLANTEAR: Usaremos la ecuación (2.4) de la aceleración media y laecuación (2.5) de la aceleración instantánea.
EJECUTAR: a) Primero obtenemos la velocidad en cada instante susti-tuyendo cada valor de t en la ecuación. En el instante t1 5 1.0 s,
En el instante t2 5 3.0 s,
El cambio en la velocidad Dvx es
El intervalo de tiempo es Dt 5 3.0 s 2 1.0 s 5 2.0 s.
Dvx 5 v2x 2 v1x 5 64.5 m/s 2 60.5 m/s 5 4.0 m/s
v2x 5 60 m/s 1 10.50 m/s3 2 1 3.0 s 2 2 5 64.5 m/s
v1x 5 60 m/s 1 10.50 m/s3 2 1 1.0 s 2 2 5 60.5 m/s
vx 5 60 m/s 1 10.50 m/s3 2 t 2
b) La aceleración media durante este intervalo es
Durante el intervalo de t1 5 1.0 s a t2 5 3.0 s, la velocidad y la ace-leración media tienen el mismo signo (positivo en este caso) y el autoacelera.
c) Cuando y obtenemos
Repita este modelo con y los resultados sonamed-x 5 1.005 m>s2 y amed-x 5 1.0005 m>s2, respectivamente. Al redu-cirse Dt, la aceleración media se acerca a 1.0 m>s2, por lo que conclui-mos que la aceleración instantánea en t 5 1.0 s es 1.0 m>s2.
d) La aceleración instantánea es ax 5 dvx>dt. La derivada de unaconstante es cero y la derivada de t 2 es 2t. Con esto, obtenemos
Cuando t 5 1.0 s,
Cuando t 5 3.0 s,
EVALUAR: Observe que ninguno de los valores que obtuvimos en elinciso d) es igual a la aceleración media obtenida en b). La aceleracióninstantánea del auto varía con el tiempo. La tasa de cambio de la acele-ración con el tiempo se suele denominar el “tirón”.
ax 5 11.0 m/s3 2 1 3.0 s 2 5 3.0 m/s2
ax 5 11.0 m/s3 2 1 1.0 s 2 5 1.0 m/s2
5 10.50 m/s3 2 1 2t 2 5 11.0 m/s3 2 t ax 5dvx
dt5
d
dt 360 m/s 1 10.50 m/s3 2 t2 4
0.001 s;Dt 5Dt 5 0.01 s
amed-x 5Dvx
Dt5
0.105 m/s0.1 s
5 1.05 m/s2
Dvx 5 0.105 m/s v2x 5 60 m/s 1 10.50 m/s3 2 1 1.1 s 2 2 5 60.605 m/s
t2 5 1.1 sDt 5 0.1 s,
amed-x 5v2x 2 v1x
t2 2 t15
4.0 m/s2.0 s
5 2.0 m/s2
46 C APÍTU LO 2 Movimiento en línea recta
diferentes puntos en la curva tienen pendientes diferentes, de manera que la acelera-ción instantánea varía con el tiempo.
CUIDADO Los signos de aceleración y velocidad En sí mismo, el signo algebraicode la aceleración no nos indica si el cuerpo está acelerando o frenando; hay que compararlos signos de la velocidad y la aceleración. Si vx y ax tienen el mismo signo, el cuerpo está acelerando; si ambas son positivas, el cuerpo se mueve en la dirección positiva con rapidez creciente. Si ambas son negativas, el cuerpo se mueve en la dirección negativa con velocidadcada vez más negativa, y la rapidez aumenta nuevamente. Si vx y ax tienen signos opuestos,el cuerpo está frenando. Si vx es positiva y ax negativa, el cuerpo se mueve en dirección positivacon rapidez decreciente; si vx es negativa y ax positiva, el cuerpo se mueve en dirección negati-va con una velocidad cada vez menos negativa, y nuevamente está frenando. La figura 2.13ilustra algunas de tales posibilidades. ❚
Frecuentemente llamamos “desaceleración” a una reducción de rapidez. Dado queesto puede implicar ax positiva o negativa, dependiendo del signo de vx, evitaremoseste término.
También podemos conocer la aceleración de un cuerpo a partir de una gráfica desu posición contra tiempo. Dado que ax 5 dvx>dt y vx 5 dx>dt, escribimos
(2.6)ax 5dvx
dt5
d
dt 1dx
dt 2 5d2x
dt2
vx
v2x
v1x
t2t1t
O
p1
p2
Dt 5 t2 2 t1
Dvx 5 v2x 2 v1x
Pendiente de la tangente a la curva vx-t en unpunto dado 5 aceleración instantánea en ese punto.
Para un desplazamiento a lo largo del eje x, la aceleración media de un objeto es iguala la pendiente de una línea que conecta los puntos correspondientes en una gráficade velocidad (vx) contra tiempo (t).
Pendien
te 5
acele
ración m
edia
2.12 Gráfica vx-t del movimiento de la figura 2.11.
Pendiente cero: ax 5 0
Cuanto más empinada esté la pendiente (positivao negativa) de la gráfica vx-t de un objeto, mayorserá la aceleración del objeto en la direcciónpositiva o negativa.
El objeto está en x , 0 y se mueve en la dirección2x (vx , 0), frenando (vx y ax tienen signos opuestos).
El objeto está en x . 0 y se mueve en la dirección 2x (vx , 0),acelerando (vx y ax tienen el mismo signo).
El objeto está en x . 0 y se mueve en la dirección 1x (vx . 0);su rapidez no cambia instantáneamente (ax 5 0).
El objeto está en x , 0, instantáneamente en reposo(vx 5 0), y a punto de moverse en la dirección 1x (ax . 0).
El objeto está en x . 0, instantáneamente en reposo (vx 5 0),y a punto de moverse en la dirección 2x (ax , 0).
Pendiente positiva:ax . 0
Pendiente negativa:ax , 0
a) La gráfica vx-t para un objeto que se mueve en el eje x
b) Posición, velocidad y aceleración del objeto en el eje x
0
A
B
C
D
E
t
vx
tE
tA 5 0
tB
tC
tD
0x
0x
0x
0x
a
a
va 5 0
v
v 5 0
0x
a
v 5 0
va
2.13 a) Gráfica vx-t del movimiento de una partícula diferente de la que se muestra en la figura 2.8. La pendiente de la tangente en cualquier punto es igual a la aceleración en ese punto. b) Diagrama de movimiento que indica la posición, velocidad y aceleración de la partícula en los instantes rotulados en la gráfica vx-t. Las posiciones son congruentes con la gráfica vx-t; por ejemplo, de tA a tB la velocidad es negativa, así que en tB la partícula está en un valor más negativo de x que en tA.
?
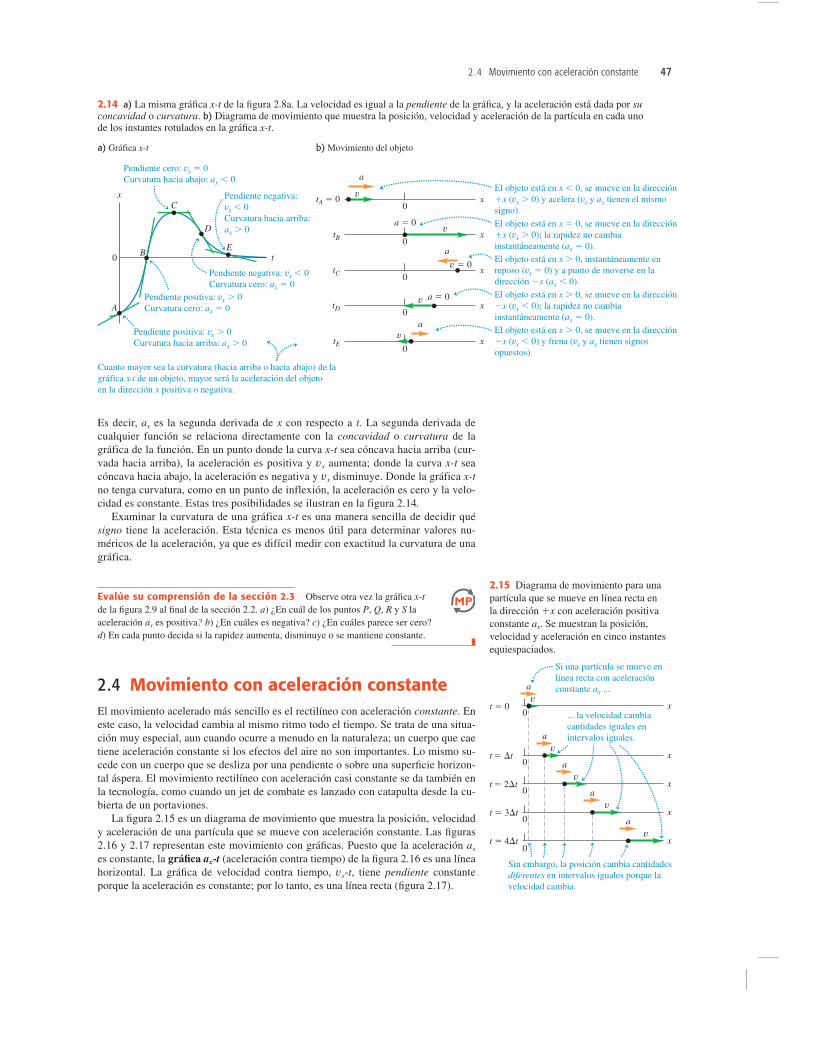
2 .4 Movimiento con aceleración constante 47
Es decir, ax es la segunda derivada de x con respecto a t. La segunda derivada decualquier función se relaciona directamente con la concavidad o curvatura de lagráfica de la función. En un punto donde la curva x-t sea cóncava hacia arriba (cur-vada hacia arriba), la aceleración es positiva y vx aumenta; donde la curva x-t seacóncava hacia abajo, la aceleración es negativa y vx disminuye. Donde la gráfica x-tno tenga curvatura, como en un punto de inflexión, la aceleración es cero y la velo-cidad es constante. Estas tres posibilidades se ilustran en la figura 2.14.
Examinar la curvatura de una gráfica x-t es una manera sencilla de decidir quésigno tiene la aceleración. Esta técnica es menos útil para determinar valores nu-méricos de la aceleración, ya que es difícil medir con exactitud la curvatura de unagráfica.
Cuanto mayor sea la curvatura (hacia arriba o hacia abajo) de lagráfica x-t de un objeto, mayor será la aceleración del objetoen la dirección x positiva o negativa.
Pendiente positiva: vx . 0Curvatura hacia arriba: ax . 0
Pendiente positiva: vx . 0Curvatura cero: ax 5 0
Pendiente negativa: vx , 0Curvatura cero: ax 5 0
Pendiente negativa:vx , 0Curvatura hacia arriba:ax . 0
Pendiente cero: vx 5 0Curvatura hacia abajo: ax , 0
0
A
B
C
D
Et
x
a) Gráfica x-t
El objeto está en x , 0, se mueve en la dirección1x (vx . 0) y acelera (vx y ax tienen el mismosigno).
El objeto está en x . 0, se mueve en la dirección2x (vx , 0) y frena (vx y ax tienen signosopuestos).
El objeto está en x . 0, instantáneamente enreposo (vx 5 0) y a punto de moverse en ladirección 2x (ax , 0).
El objeto está en x 5 0, se mueve en la dirección1x (vx . 0); la rapidez no cambiainstantáneamente (ax 5 0).
El objeto está en x . 0, se mueve en la dirección2x (vx , 0); la rapidez no cambiainstantáneamente (ax 5 0).
tC
tD
tB
tE
tA 5 0
b) Movimiento del objeto
0x
0x
0x
0x
v
v
v 5 0
v
v
0x
a
a 5 0
a
a 5 0
a
2.14 a) La misma gráfica x-t de la figura 2.8a. La velocidad es igual a la pendiente de la gráfica, y la aceleración está dada por suconcavidad o curvatura. b) Diagrama de movimiento que muestra la posición, velocidad y aceleración de la partícula en cada unode los instantes rotulados en la gráfica x-t.
Si una partícula se mueve enlínea recta con aceleraciónconstante ax ...
... la velocidad cambiacantidades iguales enintervalos iguales.
Sin embargo, la posición cambia cantidadesdiferentes en intervalos iguales porque lavelocidad cambia.
t ϭ 2Dt0
t ϭ 3Dt0
0t ϭ Dt
t ϭ 4Dt0
vt ϭ 0
0
a
v
v
v
va
a
a
a
x
x
x
x
x
2.15 Diagrama de movimiento para unapartícula que se mueve en línea recta en la dirección 1x con aceleración positivaconstante ax. Se muestran la posición, velocidad y aceleración en cinco instantesequiespaciados.
Evalúe su comprensión de la sección 2.3 Observe otra vez la gráfica x-t de la figura 2.9 al final de la sección 2.2. a) ¿En cuál de los puntos P, Q, R y S la aceleración ax es positiva? b) ¿En cuáles es negativa? c) ¿En cuáles parece ser cero? d) En cada punto decida si la rapidez aumenta, disminuye o se mantiene constante.
❚
2.4 Movimiento con aceleración constanteEl movimiento acelerado más sencillo es el rectilíneo con aceleración constante. Eneste caso, la velocidad cambia al mismo ritmo todo el tiempo. Se trata de una situa-ción muy especial, aun cuando ocurre a menudo en la naturaleza; un cuerpo que caetiene aceleración constante si los efectos del aire no son importantes. Lo mismo su-cede con un cuerpo que se desliza por una pendiente o sobre una superficie horizon-tal áspera. El movimiento rectilíneo con aceleración casi constante se da también enla tecnología, como cuando un jet de combate es lanzado con catapulta desde la cu-bierta de un portaviones.
La figura 2.15 es un diagrama de movimiento que muestra la posición, velocidady aceleración de una partícula que se mueve con aceleración constante. Las figuras2.16 y 2.17 representan este movimiento con gráficas. Puesto que la aceleración ax
es constante, la gráfica ax-t (aceleración contra tiempo) de la figura 2.16 es una líneahorizontal. La gráfica de velocidad contra tiempo, vx-t, tiene pendiente constanteporque la aceleración es constante; por lo tanto, es una línea recta (figura 2.17).
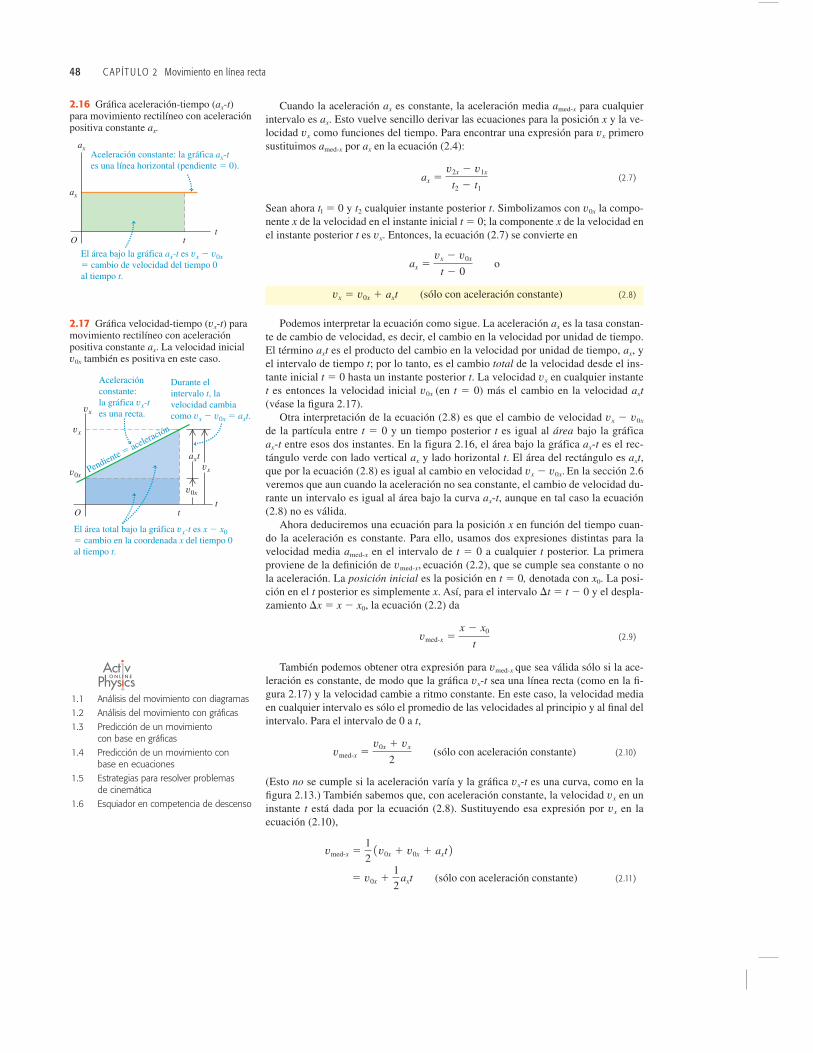
48 C APÍTU LO 2 Movimiento en línea recta
Cuando la aceleración ax es constante, la aceleración media amed-x para cualquierintervalo es ax. Esto vuelve sencillo derivar las ecuaciones para la posición x y la ve-locidad vx como funciones del tiempo. Para encontrar una expresión para vx primerosustituimos amed-x por ax en la ecuación (2.4):
(2.7)
Sean ahora tl 5 0 y t2 cualquier instante posterior t. Simbolizamos con v0x la compo-nente x de la velocidad en el instante inicial t5 0; la componente x de la velocidad enel instante posterior t es vx. Entonces, la ecuación (2.7) se convierte en
(sólo con aceleración constante) (2.8)
Podemos interpretar la ecuación como sigue. La aceleración ax es la tasa constan-te de cambio de velocidad, es decir, el cambio en la velocidad por unidad de tiempo.El término axt es el producto del cambio en la velocidad por unidad de tiempo, ax, yel intervalo de tiempo t; por lo tanto, es el cambio total de la velocidad desde el ins-tante inicial t 5 0 hasta un instante posterior t. La velocidad vx en cualquier instantet es entonces la velocidad inicial v0x (en t 5 0) más el cambio en la velocidad axt(véase la figura 2.17).
Otra interpretación de la ecuación (2.8) es que el cambio de velocidad vx 2 v0x
de la partícula entre t 5 0 y un tiempo posterior t es igual al área bajo la gráfica ax-t entre esos dos instantes. En la figura 2.16, el área bajo la gráfica ax-t es el rec-tángulo verde con lado vertical ax y lado horizontal t. El área del rectángulo es axt,que por la ecuación (2.8) es igual al cambio en velocidad vx 2 v0x. En la sección 2.6veremos que aun cuando la aceleración no sea constante, el cambio de velocidad du-rante un intervalo es igual al área bajo la curva ax-t, aunque en tal caso la ecuación(2.8) no es válida.
Ahora deduciremos una ecuación para la posición x en función del tiempo cuan-do la aceleración es constante. Para ello, usamos dos expresiones distintas para lavelocidad media amed-x en el intervalo de t 5 0 a cualquier t posterior. La primeraproviene de la definición de vmed-x, ecuación (2.2), que se cumple sea constante o nola aceleración. La posición inicial es la posición en t 5 0, denotada con x0. La posi-ción en el t posterior es simplemente x. Así, para el intervalo Dt 5 t 2 0 y el despla-zamiento Dx 5 x 2 x0, la ecuación (2.2) da
(2.9)
También podemos obtener otra expresión para vmed-x que sea válida sólo si la ace-leración es constante, de modo que la gráfica vx-t sea una línea recta (como en la fi-gura 2.17) y la velocidad cambie a ritmo constante. En este caso, la velocidad mediaen cualquier intervalo es sólo el promedio de las velocidades al principio y al final delintervalo. Para el intervalo de 0 a t,
(sólo con aceleración constante) (2.10)
(Esto no se cumple si la aceleración varía y la gráfica vx-t es una curva, como en lafigura 2.13.) También sabemos que, con aceleración constante, la velocidad vx en uninstante t está dada por la ecuación (2.8). Sustituyendo esa expresión por vx en laecuación (2.10),
(sólo con aceleración constante) (2.11)5 v0x 11
2 ax t
vmed-x 51
2 1v0x 1 v0x 1 ax t 2
vmed-x 5v0x 1 vx
2
vmed-x 5x 2 x0
t
vx 5 v0x 1 ax t
ax 5vx 2 v0x
t 2 0 o
ax 5v2x 2 v1x
t2 2 t1
Aceleración constante: la gráfica ax-tes una línea horizontal (pendiente 5 0).
El área bajo la gráfica ax-t es vx 2 v0x5 cambio de velocidad del tiempo 0al tiempo t.
O
ax
ax
tt
2.16 Gráfica aceleración-tiempo (ax-t)para movimiento rectilíneo con aceleraciónpositiva constante ax.
Aceleraciónconstante:la gráfica vx-t es una recta.
Durante elintervalo t, lavelocidad cambiacomo vx 2 v0x 5 axt.
Pendiente 5 aceleración
El área total bajo la gráfica vx-t es x 2 x05 cambio en la coordenada x del tiempo 0al tiempo t.
vx
vx
v0x
Ot
t
vx
ax t
v0x
2.17 Gráfica velocidad-tiempo (vx-t) paramovimiento rectilíneo con aceleración positiva constante ax. La velocidad inicialv0x también es positiva en este caso.
1.1 Análisis del movimiento con diagramas
1.2 Análisis del movimiento con gráficas
1.3 Predicción de un movimiento con base en gráficas
1.4 Predicción de un movimiento con base en ecuaciones
1.5 Estrategias para resolver problemas de cinemática
1.6 Esquiador en competencia de descenso
O N L I N E
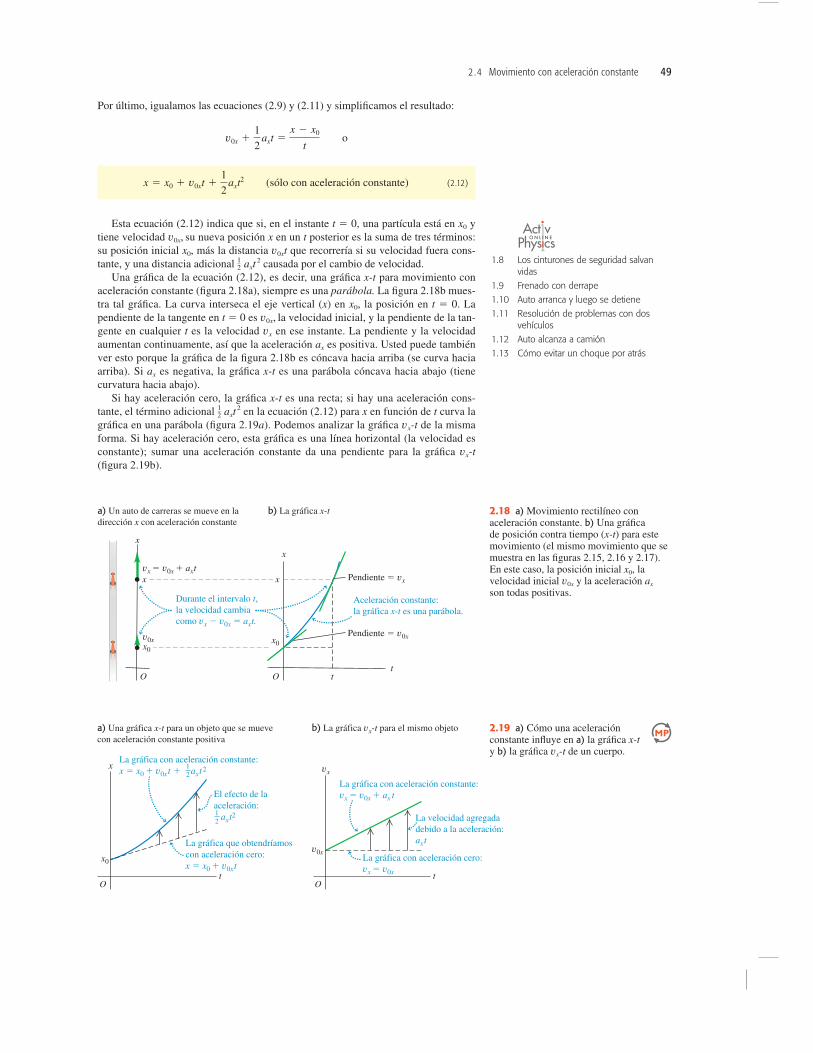
2 .4 Movimiento con aceleración constante 49
Por último, igualamos las ecuaciones (2.9) y (2.11) y simplificamos el resultado:
(sólo con aceleración constante) (2.12)
Esta ecuación (2.12) indica que si, en el instante t 5 0, una partícula está en x0 ytiene velocidad v0x, su nueva posición x en un t posterior es la suma de tres términos:su posición inicial x0, más la distancia v0xt que recorrería si su velocidad fuera cons-tante, y una distancia adicional axt
2 causada por el cambio de velocidad.Una gráfica de la ecuación (2.12), es decir, una gráfica x-t para movimiento con
aceleración constante (figura 2.18a), siempre es una parábola. La figura 2.18b mues-tra tal gráfica. La curva interseca el eje vertical (x) en x0, la posición en t 5 0. Lapendiente de la tangente en t 5 0 es v0x, la velocidad inicial, y la pendiente de la tan-gente en cualquier t es la velocidad vx en ese instante. La pendiente y la velocidadaumentan continuamente, así que la aceleración ax es positiva. Usted puede tambiénver esto porque la gráfica de la figura 2.18b es cóncava hacia arriba (se curva haciaarriba). Si ax es negativa, la gráfica x-t es una parábola cóncava hacia abajo (tienecurvatura hacia abajo).
Si hay aceleración cero, la gráfica x-t es una recta; si hay una aceleración cons-tante, el término adicional axt
2 en la ecuación (2.12) para x en función de t curva lagráfica en una parábola (figura 2.19a). Podemos analizar la gráfica vx-t de la mismaforma. Si hay aceleración cero, esta gráfica es una línea horizontal (la velocidad esconstante); sumar una aceleración constante da una pendiente para la gráfica vx-t(figura 2.19b).
12
12
x 5 x0 1 v0x t 11
2 ax t2
v0x 11
2 ax t 5
x 2 x0
t o
Durante el intervalo t,la velocidad cambiacomo vx 2 v0x 5 axt.
Aceleración constante:la gráfica x-t es una parábola.
a) Un auto de carreras se mueve en ladirección x con aceleración constante
b) La gráfica x-t
v0x
vx 5 v0x 1 axt
x
xx
x0x0
O
x
Ot
t
Pendiente 5 vx
Pendiente 5 v0x
2.18 a) Movimiento rectilíneo con aceleración constante. b) Una gráfica de posición contra tiempo (x-t) para estemovimiento (el mismo movimiento que semuestra en las figuras 2.15, 2.16 y 2.17).En este caso, la posición inicial x0, la velocidad inicial v0x y la aceleración ax
son todas positivas.
2.19 a) Cómo una aceleración constante influye en a) la gráfica x-ty b) la gráfica vx-t de un cuerpo.
1.8 Los cinturones de seguridad salvan vidas
1.9 Frenado con derrape
1.10 Auto arranca y luego se detiene
1.11 Resolución de problemas con dos vehículos
1.12 Auto alcanza a camión
1.13 Cómo evitar un choque por atrás
O N L I N E

50 C APÍTU LO 2 Movimiento en línea recta
Así como el cambio de velocidad de la partícula es igual al área bajo la gráfica ax-t, el desplazamiento (es decir, el cambio de posición) es igual al área bajo la gráfi-ca vx-t. Específicamente, el desplazamiento x 2 x0 de la partícula entre t 5 0 y cual-quier instante t posterior es igual al área bajo la curva vx-t entre esos dos instantes.En la figura 2.17 el área bajo la gráfica se dividió en un rectángulo oscuro con ladovertical v0x, lado horizontal t y un triángulo rectángulo claro con lado vertical axt ylado horizontal t. El área del rectángulo es v0xt, y la del triángulo, axt
2,así que el área total bajo la curva vx-t es
axt2
lo que concuerda con la ecuación (2.12).El desplazamiento durante un intervalo siempre puede obtenerse del área bajo la
curva vx-t, incluso si la aceleración no es constante, aunque en tal caso la ecuación(2.12) no sería válida. (Demostraremos esto en la sección 2.6.)
Podemos comprobar si las ecuaciones (2.8) y (2.12) son congruentes con el su-puesto de aceleración constante derivando la ecuación (2.12). Obtenemos
que es la ecuación (2.8). Diferenciando otra vez, tenemos simplemente
que concuerda con la definición de aceleración instantánea.Con frecuencia es útil tener una relación entre posición, velocidad y aceleración
(constante) que no incluya el tiempo. Para obtenerla, despejamos t en la ecuación (2.8),sustituimos la expresión resultante en la ecuación (2.12) y simplificamos:
Transferimos el término x0 al miembro izquierdo y multiplicamos la ecuación por 2ax:
Por último, al simplificar obtenemos
(sólo con aceleración constante) (2.13)
Podemos obtener una relación más útil igualando dos expresiones para vmed-x,ecuaciones (2.9) y (2.10), y multiplicando por t. Al hacerlo, obtenemos
(sólo aceleración constante) (2.14)
Observe que la ecuación (2.14) no contiene la aceleración ax. Esta ecuación es útilcuando ax es constante pero se desconoce su valor.
x 2 x0 5 1v0x 1 vx
2 2 tvx
2 5 v0x
2 1 2ax 1 x 2 x0 22ax 1 x 2 x0 2 5 2v0x vx 2 2v0x
2 1 vx
2 2 2v0x vx 1 v0x
2
x 5 x0 1 v0x 1vx 2 v0x
ax2 1 1
2 ax 1vx 2 v0x
ax2 2 t 5
vx 2 v0x
ax
dvx
dt5 ax
vx 5dx
dt5 v0x 1 ax t
x 2 x0 5 v0x t 11
2
12 1 axt 2 1 t 2 5 1
2
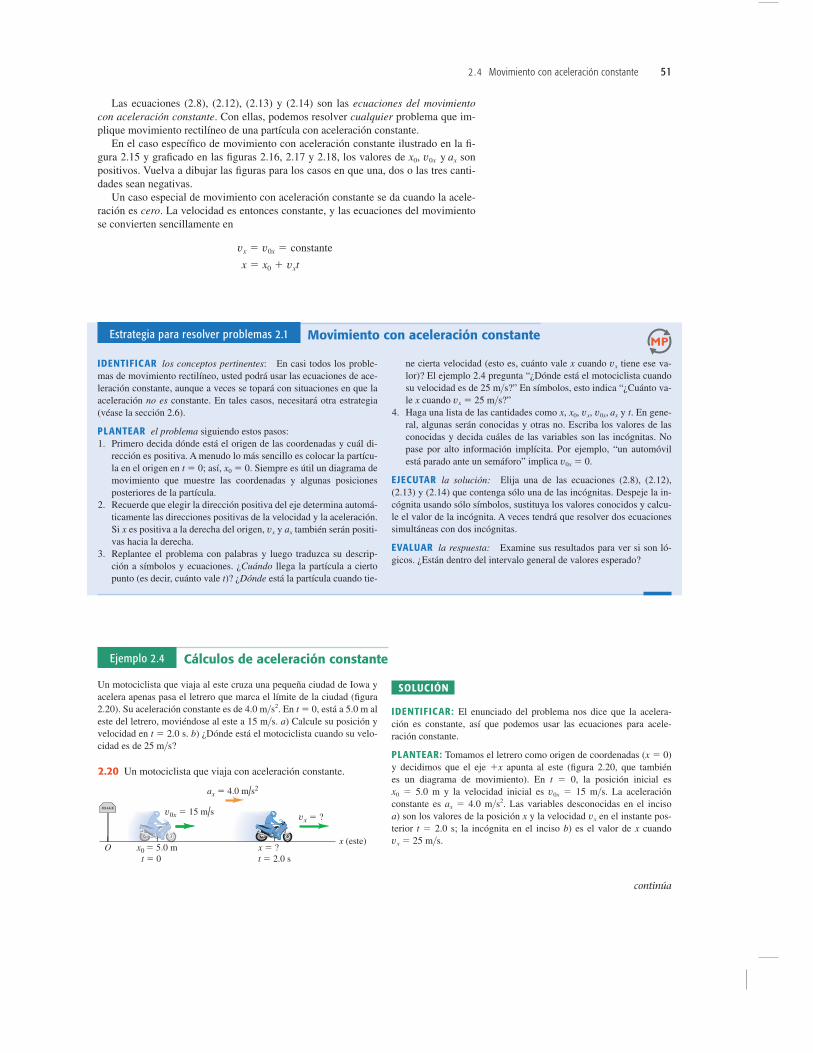
2 .4 Movimiento con aceleración constante 51
Estrategia para resolver problemas 2.1 Movimiento con aceleración constante
IDENTIFICAR los conceptos pertinentes: En casi todos los proble-mas de movimiento rectilíneo, usted podrá usar las ecuaciones de ace-leración constante, aunque a veces se topará con situaciones en que laaceleración no es constante. En tales casos, necesitará otra estrategia(véase la sección 2.6).
PLANTEAR el problema siguiendo estos pasos:1. Primero decida dónde está el origen de las coordenadas y cuál di-
rección es positiva. A menudo lo más sencillo es colocar la partícu-la en el origen en t5 0; así, x0 5 0. Siempre es útil un diagrama demovimiento que muestre las coordenadas y algunas posicionesposteriores de la partícula.
2. Recuerde que elegir la dirección positiva del eje determina automá-ticamente las direcciones positivas de la velocidad y la aceleración.Si x es positiva a la derecha del origen, vx y ax también serán positi-vas hacia la derecha.
3. Replantee el problema con palabras y luego traduzca su descrip-ción a símbolos y ecuaciones. ¿Cuándo llega la partícula a ciertopunto (es decir, cuánto vale t)? ¿Dónde está la partícula cuando tie-
ne cierta velocidad (esto es, cuánto vale x cuando vx tiene ese va-lor)? El ejemplo 2.4 pregunta “¿Dónde está el motociclista cuandosu velocidad es de 25 m>s?” En símbolos, esto indica “¿Cuánto va-le x cuando vx 5 25 m>s?”
4. Haga una lista de las cantidades como x, x0, vx, v0x, ax y t. En gene-ral, algunas serán conocidas y otras no. Escriba los valores de lasconocidas y decida cuáles de las variables son las incógnitas. Nopase por alto información implícita. Por ejemplo, “un automóvilestá parado ante un semáforo” implica v0x 5 0.
EJECUTAR la solución: Elija una de las ecuaciones (2.8), (2.12),(2.13) y (2.14) que contenga sólo una de las incógnitas. Despeje la in-cógnita usando sólo símbolos, sustituya los valores conocidos y calcu-le el valor de la incógnita. A veces tendrá que resolver dos ecuacionessimultáneas con dos incógnitas.
EVALUAR la respuesta: Examine sus resultados para ver si son ló-gicos. ¿Están dentro del intervalo general de valores esperado?
Ejemplo 2.4 Cálculos de aceleración constante
Un motociclista que viaja al este cruza una pequeña ciudad de Iowa yacelera apenas pasa el letrero que marca el límite de la ciudad (figura2.20). Su aceleración constante es de 4.0 m>s2. En t5 0, está a 5.0 m aleste del letrero, moviéndose al este a 15 m>s. a) Calcule su posición yvelocidad en t 5 2.0 s. b) ¿Dónde está el motociclista cuando su velo-cidad es de 25 m>s?
SOLUCIÓN
IDENTIFICAR: El enunciado del problema nos dice que la acelera-ción es constante, así que podemos usar las ecuaciones para acele-ración constante.
PLANTEAR: Tomamos el letrero como origen de coordenadas (x 5 0)y decidimos que el eje 1x apunta al este (figura 2.20, que también es un diagrama de movimiento). En t 5 0, la posición inicial es x0 5 5.0 m y la velocidad inicial es v0x 5 15 m>s. La aceleración constante es ax 5 4.0 m>s2. Las variables desconocidas en el inciso a) son los valores de la posición x y la velocidad vx en el instante pos-terior t 5 2.0 s; la incógnita en el inciso b) es el valor de x cuando vx 5 25 m>s.
19651AWx
19651AWx
x (este)x 5 ?t 5 2.0 s
O
v0x 5 15 m/s vx 5 ?
ax 5 4.0 m/s2
x0 5 5.0 m t 5 0
OSAGE
2.20 Un motociclista que viaja con aceleración constante.
Las ecuaciones (2.8), (2.12), (2.13) y (2.14) son las ecuaciones del movimientocon aceleración constante. Con ellas, podemos resolver cualquier problema que im-plique movimiento rectilíneo de una partícula con aceleración constante.
En el caso específico de movimiento con aceleración constante ilustrado en la fi-gura 2.15 y graficado en las figuras 2.16, 2.17 y 2.18, los valores de x0, v0x y ax sonpositivos. Vuelva a dibujar las figuras para los casos en que una, dos o las tres canti-dades sean negativas.
Un caso especial de movimiento con aceleración constante se da cuando la acele-ración es cero. La velocidad es entonces constante, y las ecuaciones del movimientose convierten sencillamente en
x 5 x0 1 vx t
vx 5 v0x 5 constante
continúa
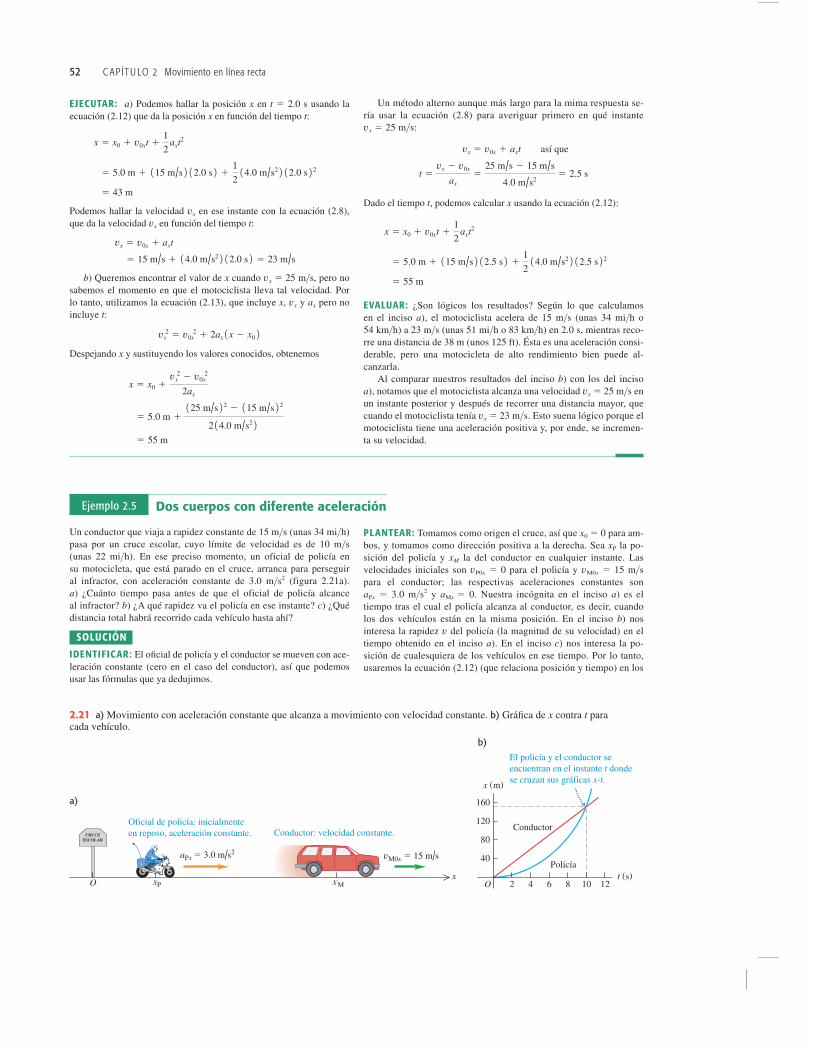
52 C APÍTU LO 2 Movimiento en línea recta
EJECUTAR: a) Podemos hallar la posición x en t 5 2.0 s usando laecuación (2.12) que da la posición x en función del tiempo t:
Podemos hallar la velocidad vx en ese instante con la ecuación (2.8),que da la velocidad vx en función del tiempo t:
b) Queremos encontrar el valor de x cuando vx 5 25 m>s, pero nosabemos el momento en que el motociclista lleva tal velocidad. Por lo tanto, utilizamos la ecuación (2.13), que incluye x, vx y ax pero noincluye t:
Despejando x y sustituyendo los valores conocidos, obtenemos
5 55 m
5 5.0 m 1125 m/s 2 2 2 1 15 m/s 2 2
2 14.0 m/s2 2 x 5 x0 1vx
2 2 v0x
2
2ax
vx
2 5 v0x
2 1 2ax 1 x 2 x0 2 5 15 m/s 1 1 4.0 m/s2 2 1 2.0 s 2 5 23 m/s
vx 5 v0x 1 ax t
5 43 m
5 5.0 m 1 1 15 m/s 2 1 2.0 s 2 11
2 1 4.0 m/s2 2 1 2.0 s 2 2
x 5 x0 1 v0x t 11
2 ax t2
Un método alterno aunque más largo para la mima respuesta se-ría usar la ecuación (2.8) para averiguar primero en qué instante vx 5 25 m>s:
Dado el tiempo t, podemos calcular x usando la ecuación (2.12):
EVALUAR: ¿Son lógicos los resultados? Según lo que calculamos en el inciso a), el motociclista acelera de 15 m>s (unas 34 mi>h o 54 km>h) a 23 m>s (unas 51 mi>h o 83 km>h) en 2.0 s, mientras reco-rre una distancia de 38 m (unos 125 ft). Ésta es una aceleración consi-derable, pero una motocicleta de alto rendimiento bien puede al-canzarla.
Al comparar nuestros resultados del inciso b) con los del incisoa), notamos que el motociclista alcanza una velocidad vx 5 25 m>s enun instante posterior y después de recorrer una distancia mayor, quecuando el motociclista tenía vx 5 23 m>s. Esto suena lógico porque elmotociclista tiene una aceleración positiva y, por ende, se incremen-ta su velocidad.
5 55 m
5 5.0 m 1 1 15 m/s 2 1 2.5 s 2 11
2 1 4.0 m/s2 2 1 2.5 s 2 2
x 5 x0 1 v0x t 11
2 ax t2
t 5vx 2 v0x
ax
525 m/s 2 15 m/s
4.0 m/s25 2.5 s
vx 5 v0x 1 ax t así que
Ejemplo 2.5 Dos cuerpos con diferente aceleración
Un conductor que viaja a rapidez constante de 15 m>s (unas 34 mi>h)pasa por un cruce escolar, cuyo límite de velocidad es de 10 m>s(unas 22 mi>h). En ese preciso momento, un oficial de policía en su motocicleta, que está parado en el cruce, arranca para perseguir al infractor, con aceleración constante de 3.0 m>s2 (figura 2.21a). a) ¿Cuánto tiempo pasa antes de que el oficial de policía alcance al infractor? b) ¿A qué rapidez va el policía en ese instante? c) ¿Quédistancia total habrá recorrido cada vehículo hasta ahí?
SOLUCIÓN
IDENTIFICAR: El oficial de policía y el conductor se mueven con ace-leración constante (cero en el caso del conductor), así que podemosusar las fórmulas que ya dedujimos.
PLANTEAR: Tomamos como origen el cruce, así que x0 5 0 para am-bos, y tomamos como dirección positiva a la derecha. Sea xP la po-sición del policía y xM la del conductor en cualquier instante. Las velocidades iniciales son vP0x 5 0 para el policía y vM0x 5 15 m>s para el conductor; las respectivas aceleraciones constantes son aPx 5 3.0 m>s2 y aMx 5 0. Nuestra incógnita en el inciso a) es el tiempo tras el cual el policía alcanza al conductor, es decir, cuandolos dos vehículos están en la misma posición. En el inciso b) nos interesa la rapidez v del policía (la magnitud de su velocidad) en eltiempo obtenido en el inciso a). En el inciso c) nos interesa la po-sición de cualesquiera de los vehículos en ese tiempo. Por lo tanto,usaremos la ecuación (2.12) (que relaciona posición y tiempo) en los
POLICE
Oficial de policía: inicialmenteen reposo, aceleración constante.
El policía y el conductor seencuentran en el instante t dondese cruzan sus gráficas x-t.
Conductor: velocidad constante.
xPO
aPx 5 3.0 m/s2 vM0x 5 15 m/s
xM
40
80
120
160
x (m)
xO 1210862
t (s)
Conductor
Policía
4
a)
b)
CRUCEESCOLAR
2.21 a) Movimiento con aceleración constante que alcanza a movimiento con velocidad constante. b) Gráfica de x contra t para cada vehículo.
2 .5 Cuerpos en caída libre 53
2.5 Cuerpos en caída libreEl ejemplo más conocido de movimiento con aceleración (casi) constante es la caídade un cuerpo bajo la influencia de la atracción gravitacional de la Tierra. Dicho movi-miento ha interesado a filósofos y científicos desde la Antigüedad. En el siglo IV a.C.,Aristóteles pensaba (erróneamente) que los objetos pesados caían con mayor rapidezque los ligeros, en proporción a su peso. Diecinueve siglos después, Galileo (véase lasección 1.1) afirmó que los cuerpos caían con una aceleración constante e indepen-diente de su peso.
Los experimentos muestran que si puede omitirse el efecto del aire, Galileo está enlo cierto: todos los cuerpos en un lugar específico caen con la misma aceleración ha-cia abajo, sea cual fuere su tamaño o peso. Si además la distancia de caída es pequeñaen comparación con el radio terrestre, y si ignoramos los pequeños efectos debidos ala rotación de la Tierra, la aceleración es constante. El modelo idealizado que surgede tales supuestos se denomina caída libre, aunque también incluye el movimientoascendente. (En el capítulo 3 extenderemos el estudio de la caída libre para incluir elmovimiento de proyectiles, que se mueven tanto horizontal como verticalmente.)
La figura 2.22 es una fotografía de una pelota que cae tomada con una lámparaestroboscópica que produce una serie de destellos intensos a intervalos iguales. Encada destello, la película registra la posición de la pelota. Como los intervalos entre
incisos a) y c), y la ecuación (2.8) (que relaciona velocidad y tiempo)en el inciso b).
EJECUTAR: a) Buscamos el valor del tiempo t cuando el conductor yel policía están en la misma posición. Aplicando la ecuación (2.12),
axt2, a cada vehículo, tenemos:
Puesto que xM 5 xP en el tiempo t, igualamos las dos expresiones ydespejamos t:
Hay dos instantes en que los vehículos tienen la misma coordenada x.El primero, t 5 0, es cuando el conductor pasa por el cruce donde estáestacionada la motocicleta. El segundo, t 5 10 s, es cuando el policíaalcanza al conductor.
t 5 0 o t 52vM0x
aPx
52 1 15 m/s 23.0 m/s2
5 10 s
vM0x t 51
2 aPx t2
xP 5 0 1 10 2 t 11
2 aPx t2 5
1
2 aPx t2
xM 5 0 1 vM0x t 11
2 10 2 t2 5 vM0x t
x 5 x0 1 v0x t 1 12
b) Queremos la magnitud de la velocidad del policía vPx en el ins-tante t obtenido en a). Su velocidad en cualquier momento está dadapor la ecuación (2.8):
Usando t 5 10 s, hallamos vPx 5 30 m>s. Cuando el policía alcanza alconductor, va al doble de su rapidez.
c) En 10 s, la distancia recorrida por el conductor es
y la distancia que el policía recorre es
Esto comprueba que cuando el policía alcanza al conductor, ambos hanrecorrido la misma distancia.
EVALUAR: La figura 2.21b muestra las gráficas de x contra t para am-bos vehículos. Aquí vemos también que hay dos instantes en que la posición es la misma (donde se cruzan las gráficas). En ninguno deellos los dos vehículos tienen la misma velocidad (es decir, las gráficasse cruzan con distinta pendiente). En t 5 0, el policía está en reposo; en t 5 10 s, la rapidez del policía es del doble que la del conductor.
xP 51
2 aPx t2 5
1
2 13.0 m/s2 2 1 10 s 2 2 5 150 m
xM 5 vM0x t 5 1 15 m/s 2 1 10 s 2 5 150 m
vPx 5 vP0x 1 aPx t 5 0 1 1 3.0 m/s2 2 t
Evalúe su comprensión de la sección 2.4 Se muestran cuatro posibles gráficas vx-t para los dos vehículos del ejemplo 2.5. ¿Cuál es la gráfica correcta?
a) b) c) d)
vx
O 10
t (s)
Conductor
Policía
vx
O 10
t (s)
Conductor
Policía
vx
O 10
t (s)
Conductor
Policía
vx
O 10
t (s)
Conductor
Policía
❚
2.22 Fotografía con múltiples destellos de una pelota en caída libre.
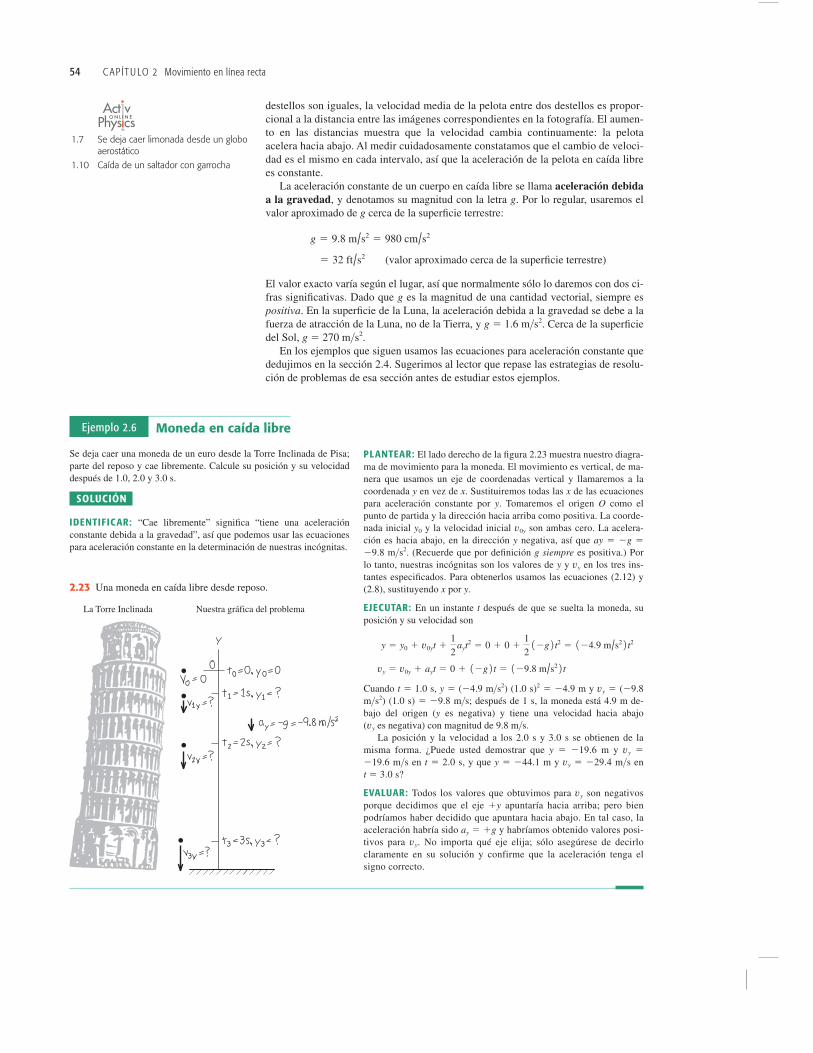
54 C APÍTU LO 2 Movimiento en línea recta
destellos son iguales, la velocidad media de la pelota entre dos destellos es propor-cional a la distancia entre las imágenes correspondientes en la fotografía. El aumen-to en las distancias muestra que la velocidad cambia continuamente: la pelotaacelera hacia abajo. Al medir cuidadosamente constatamos que el cambio de veloci-dad es el mismo en cada intervalo, así que la aceleración de la pelota en caída librees constante.
La aceleración constante de un cuerpo en caída libre se llama aceleración debidaa la gravedad, y denotamos su magnitud con la letra g. Por lo regular, usaremos elvalor aproximado de g cerca de la superficie terrestre:
(valor aproximado cerca de la superficie terrestre)
El valor exacto varía según el lugar, así que normalmente sólo lo daremos con dos ci-fras significativas. Dado que g es la magnitud de una cantidad vectorial, siempre espositiva. En la superficie de la Luna, la aceleración debida a la gravedad se debe a lafuerza de atracción de la Luna, no de la Tierra, y g 5 1.6 m>s2. Cerca de la superficiedel Sol, g5 270 m>s2.
En los ejemplos que siguen usamos las ecuaciones para aceleración constante quededujimos en la sección 2.4. Sugerimos al lector que repase las estrategias de resolu-ción de problemas de esa sección antes de estudiar estos ejemplos.
5 32 ft/s2
g 5 9.8 m/s2 5 980 cm/s2
Ejemplo 2.6 Moneda en caída libre
Se deja caer una moneda de un euro desde la Torre Inclinada de Pisa;parte del reposo y cae libremente. Calcule su posición y su velocidaddespués de 1.0, 2.0 y 3.0 s.
SOLUCIÓN
IDENTIFICAR: “Cae libremente” significa “tiene una aceleraciónconstante debida a la gravedad”, así que podemos usar las ecuacionespara aceleración constante en la determinación de nuestras incógnitas.
PLANTEAR: El lado derecho de la figura 2.23 muestra nuestro diagra-ma de movimiento para la moneda. El movimiento es vertical, de ma-nera que usamos un eje de coordenadas vertical y llamaremos a lacoordenada y en vez de x. Sustituiremos todas las x de las ecuacionespara aceleración constante por y. Tomaremos el origen O como elpunto de partida y la dirección hacia arriba como positiva. La coorde-nada inicial y0 y la velocidad inicial v0y son ambas cero. La acelera-ción es hacia abajo, en la dirección y negativa, así que ay 5 2g 529.8 m>s2. (Recuerde que por definición g siempre es positiva.) Porlo tanto, nuestras incógnitas son los valores de y y vy en los tres ins-tantes especificados. Para obtenerlos usamos las ecuaciones (2.12) y(2.8), sustituyendo x por y.
EJECUTAR: En un instante t después de que se suelta la moneda, suposición y su velocidad son
Cuando t 5 1.0 s, y 5 (24.9 m>s2) (1.0 s)2 5 24.9 m y vy 5 (29.8m>s2) (1.0 s) 5 29.8 m>s; después de 1 s, la moneda está 4.9 m de-bajo del origen (y es negativa) y tiene una velocidad hacia abajo (vy es negativa) con magnitud de 9.8 m>s.
La posición y la velocidad a los 2.0 s y 3.0 s se obtienen de lamisma forma. ¿Puede usted demostrar que y 5 219.6 m y vy 5219.6 m>s en t 5 2.0 s, y que y 5 244.1 m y vy 5 229.4 m>s en t 5 3.0 s?
EVALUAR: Todos los valores que obtuvimos para vy son negativosporque decidimos que el eje 1y apuntaría hacia arriba; pero bienpodríamos haber decidido que apuntara hacia abajo. En tal caso, laaceleración habría sido ay 5 1g y habríamos obtenido valores posi-tivos para vy. No importa qué eje elija; sólo asegúrese de decirlo claramente en su solución y confirme que la aceleración tenga elsigno correcto.
vy 5 v0y 1 ay t 5 0 1 12g 2 t 5 129.8 m/s2 2 t y 5 y0 1 v0y t 11
2 ay t2 5 0 1 0 1
1
2 12g 2 t2 5 124.9 m/s2 2 t2
La Torre Inclinada Nuestra gráfica del problema
2.23 Una moneda en caída libre desde reposo.
1.7 Se deja caer limonada desde un globoaerostático
1.10 Caída de un saltador con garrocha
O N L I N E

2 .5 Cuerpos en caída libre 55
Ejemplo 2.7 Movimiento ascendente y descendente en caída libre
Imagine que usted lanza una pelota verticalmente hacia arriba desdela azotea de un edificio. La pelota sale de la mano, en un punto a la al-tura del barandal de la azotea, con rapidez ascendente de 15.0 m>s,quedando luego en caída libre. Al bajar, la pelota libra apenas el barandal. En este lugar, g5 9.8 m>s2. Obtenga a) la posición y veloci-dad de la pelota 1.00 s y 4.00 s después de soltarla; b) la velocidadcuando la pelota está 5.00 m sobre el barandal; c) la altura máxima alcanzada y el instante en que se alcanza; y d) la aceleración de la pelota en su altura máxima.
SOLUCIÓN
IDENTIFICAR: Las palabras “caída libre” en el enunciado del proble-ma implican que la aceleración es constante y debida a la gravedad.Las incógnitas son la posición [en los incisos a) y c)], la velocidad [enlos incisos a) y b)] y la aceleración [en el inciso d)].
PLANTEAR: En la figura 2.24 (que también es un diagrama de movi-miento para la pelota), la trayectoria descendente se muestra desplaza-da un poco a la derecha de su posición real por claridad. Sea el origenel barandal, donde la pelota sale de la mano, y sea la dirección positivahacia arriba. La posición inicial y0 es cero, la velocidad inicial v0y es115.0 m>s y la aceleración es aY 5 2g 5 29.80 m>s2. Usaremos otravez las ecuaciones (2.12) y (2.8) para calcular la posición y la veloci-dad, respectivamente, en función del tiempo. En el inciso b), nos pidenhallar la velocidad en cierta posición, no en cierto tiempo, así que nosconvendrá usar la ecuación (2.13) en esa parte.
EJECUTAR: a) La posición y y la velocidad vy, en cualquier instante tuna vez que se suelta la pelota están dadas por las ecuaciones (2.12) y(2.8), cambiando las x por y:
5 15.0 m/s 1 129.80 m/s2 2 t vy 5 v0y 1 ay t 5 v0y 1 12g 2 t 5 1 0 2 1 1 15.0 m/s 2 t 11
2 129.80 m/s2 2 t2
y 5 y0 5 v0y t 11
2 ay t2 5 y0 1 v0y t 1
1
212g 2 t2
Cuando t 5 1.00 s, estas ecuaciones dan
La pelota está 10.1 m sobre el origen (y es positiva) y se mueve haciaarriba (vy es positiva) con rapidez de 5.2 m>s, menor que la rapidez ini-cial porque la pelota frena mientras asciende.
Cuando t5 4.00 s, las ecuaciones para y y vy en función del tiempot dan
La pelota pasó su punto más alto y está 18.4 m debajo del origen (y esnegativa); tiene velocidad hacia abajo (vy es negativa) de magnitud24.2 m>s. Conforme sube, la pelota pierde rapidez, luego la gana aldescender; se mueve a la rapidez inicial de 15.0 m>s cuando pasa haciaabajo por su punto de lanzamiento (el origen) y continúa ganando rapi-dez conforme desciende por debajo de este punto.
b) La velocidad vy en cualquier posición y está dada por la ecua-ción (2.13) cambiando las x por y:
Con la pelota a 5.00 m sobre el origen, y 5 15.00 m, así que
Obtenemos dos valores de vy, pues la pelota pasa dos veces por elpunto y 5 15.00 m (véase la figura 2.24), una subiendo con vy posi-tiva y otra bajando con vy negativa.
c) En el instante en que la pelota llega al punto más alto, está mo-mentáneamente en reposo y vy 5 0. La altura máxima y1 puede obte-nerse de dos formas. La primera es usar la ecuación (2.13) y sustituirvy 5 0, y0 5 0 y ay 5 2g:
La segunda consiste en calcular el instante en que vy 5 0 usando laecuación (2.8), vy 5 v0y 1 ayt, y sustituir este valor de t en la ecuación(2.12), para obtener la posición en ese instante. Por la ecuación (2.8),el instante tl en que la pelota llega al punto más alto es
Sustituyendo este valor de t en la ecuación (2.12) obtenemos
Observe que la primera forma de hallar la altura máxima es más senci-lla, ya que no es necesario calcular primero el tiempo.
11
2 129.8 m/s2 2 1 1.53 s 2 2 5 111.5 m
y 5 y0 1 v0y t 11
2 ay t2 5 1 0 2 1 1 15 m/s 2 1 1.53 s 2 t1 5
v0y
g5
15.0 m/s9.80 m/s2
5 1.53 s
vy 5 0 5 v0y 1 12g 2 t1
y1 5v0y
2
2g5
1 15.0 m/s 2 2
2 1 9.80 m/s2 2 5 111.5 m
0 5 v0y
2 1 2 12g 2 1 y1 2 0 2 vy 5 611.3 m/s vy
2 5 115.0 m/s 2 2 1 2 129.80 m/s2 2 1 5.00 m 2 5 127 m2/s2
5 115.0 m/s 2 2 1 2 129.80 m/s2 2 y vy
2 5 v0y
2 1 2ay 1 y 2 y0 2 5 v0y
2 1 2 12g 2 1 y 2 0 2y 5 218.4 m vy 5 224.2 m/s
y 5 110.1 m vy 5 15.2 m/s
La pelota realmente se mueve hacia arribay después hacia abajo; por claridad,presentamos una trayectoria conforma de U.
t 5 0, v0y 5 15.0 m/s
t 5 1.00 s, vy 5 ?y 5 ?y 5 ?
y 5 ?
y 5 5.00 m
y 5 0
y
t 5 4.00 svy 5 ?
vy 5 ?t 5 ?
t 5 ?vy 5 0
ay 5 2g
t 5 ?, vy 5 ?
5 29.80 m/s2
2.24 Posición y velocidad de una pelota que se lanza vertical-mente hacia arriba.
continúa
56 C APÍTU LO 2 Movimiento en línea recta
d) CUIDADO Un error acerca de la caída libre Es un errorcomún pensar que en el punto más alto del movimiento en caída librela velocidad es cero y la aceleración es cero. Si fuera así, ¡la pelotaquedaría suspendida en el punto más alto en el aire para siempre! Re-cuerde que la aceleración es la tasa de cambio de la velocidad. Si laaceleración fuera cero en el punto más alto, la velocidad de la pelota yano cambiaría y, al estar instantáneamente en reposo, permanecería enreposo eternamente. ❚
De hecho, en el punto más alto la aceleración sigue siendo ay52g529.80 m>s2, la misma que cuando está subiendo y cuando está bajan-do. Por ello, la velocidad de la pelota está cambiando continuamente,de valores positivos a valores negativos, pasando por cero.
EVALUAR: Una forma útil de verificar cualquier problema de movi-miento consiste en dibujar las gráficas de posición y de velocidad enfunción del tiempo. La figura 2.25 muestra estas gráficas para esteproblema. Como la aceleración es constante y negativa, la gráfica y-tes una parábola con curvatura hacia abajo, y la gráfica vy-t es una recta con pendiente negativa.
Antes de t 5 1.53 sla velocidades positiva.
Antes de t 5 1.53 s la pelotase mueve hacia arriba.
Después det 5 1.53 s lapelota se muevehacia abajo.
a) Gráfica y-t (la curvatura eshacia abajo porque ay 5 2g es negativa)
5
10
15
220
215
210
25
225
0
b) Gráfica vy-t (recta con pendientenegativa porque ay 5 2g es constante y negativa)
431t (s)
2
vy (m/s)
431t (s)
2
5
10
15
y (m)
220
215
210
25
0Después det 5 1.53 sla velocidades negativa.
2.25 a) Posición y b) velocidad en función del tiempo para unapelota lanzada hacia arriba con una rapidez inicial de 15 m>s.
Ejemplo 2.8 ¿Dos soluciones o una?
Determine el instante en que la pelota del ejemplo 2.7 está 5.00 m pordebajo del barandal.
SOLUCIÓN
IDENTIFICAR: Se trata de nuevo de un problema de aceleración cons-tante. La incógnita es el tiempo en que la pelota está en cierta posición.
PLANTEAR: Otra vez elegimos el eje y como en la figura 2.24, así quey0, v0y y ay 5 2 g tienen los mismos valores que en el ejemplo 2.7. Denuevo, la posición y en función del tiempo t está dada por la ecuación(2.12):
Queremos despejar t con y 5 2 5.00 m. Puesto que la ecuación inclu-ye t 2, es una ecuación cuadrática en t.
EJECUTAR: Primero replanteamos la ecuación en la forma cuadráticaestándar para una x desconocida, Ax2 1 Bx 1 C 5 0:
entonces, A 5 g>2, B 5 2v0y y C 5 y 2 y0. Usando la fórmula cua-drática (véase el Apéndice B), vemos que esta ecuación tiene dos soluciones:
Sustituyendo los valores y0 5 0, v0y 5 115.0 m>s, g 5 9.80 m>s2 y y 5 25.00 m, obtenemos
t 5 13.36 s o t 5 20.30 s
t 5115.0 m/s 26" 115.0 m/s 2 2 2 2 1 9.80 m/s2 2 125.00 m 2 0 2
9.80 m/s2
5v0y 6 "v0y
2 2 2g 1 y 2 y0 2g
52 12v0y 2 6 " 12v0y 2 2 2 4 1g/2 2 1 y 2 y0 2
2 1 g/2 2 t 52B6"B2 2 4AC
2A
112 g 2 t2 1 12v0y 2 t 1 1 y 2 y0 2 5 At2 1 Bt 1 C 5 0
y 5 y0 1 v0y t 11
2 ay t2 5 y0 1 v0y t 1
1
2 12g 2 t2
Para decidir cuál de éstas es la respuesta correcta, la pregunta clave es:“¿son lógicas estas respuestas?” La segunda, t 5 20.30 s, simplemen-te es absurda; ¡se refiere a un instante 0.30 s antes de soltar la pelota!Lo correcto es t 5 13.36 s. La pelota está 5.00 m debajo del barandal3.36 s después de que sale de la mano.
EVALUAR: ¿De dónde salió la “solución” errónea t 5 20.30 s? Re-cuerde que la ecuación se basa en el su-puesto de que la aceleración es constante para todos los valores de t,positivos, negativos o cero. Tal cual, esta ecuación nos diría que la pelota se ha estado moviendo hacia arriba en caída libre desde losalbores del tiempo, y pasó por la mano en y 5 0 en el instante especialque decidimos llamar t 5 0, y después continuó su caída libre. Sin embargo, todo lo que esta ecuación describa como sucedido antes de t5 0 es ficción pura, ya que la pelota entró en caída libre sólo despuésde salir de la mano en t 5 0; la “solución” t 5 20.30 s es parte de tal ficción.
Repita estos cálculos para determinar cuándo la pelota está 5.00 msobre el origen (y 5 15.00 m). Las dos respuestas son t 5 10.38 s y t 5 12.68 s; ambos son valores positivos de t y se refieren al movi-miento real de la pelota una vez soltada. El primer instante es cuandola pelota pasa por y 5 15.00 m de subida, y el segundo, cuando pasapor ahí de bajada. (Compare esto con el inciso b) del ejemplo 2.7.)
Determine también los instantes en que y 5 115.0 m. En este caso, ambas soluciones requieren obtener la raíz cuadrada de un nú-mero negativo, así que no hay soluciones reales. Esto es lógico; en elinciso c) del ejemplo 2.7 vimos que la altura máxima de la pelota es y 5 111.5 m, así que nunca llega a y 5 115.0 m. Aunque una ecua-ción cuadrática como la (2.12) siempre tiene dos soluciones, a vecesuna o ambas soluciones no tienen sentido físico.
y 5 y0 1 v0y t 1 12 12g 2 t2
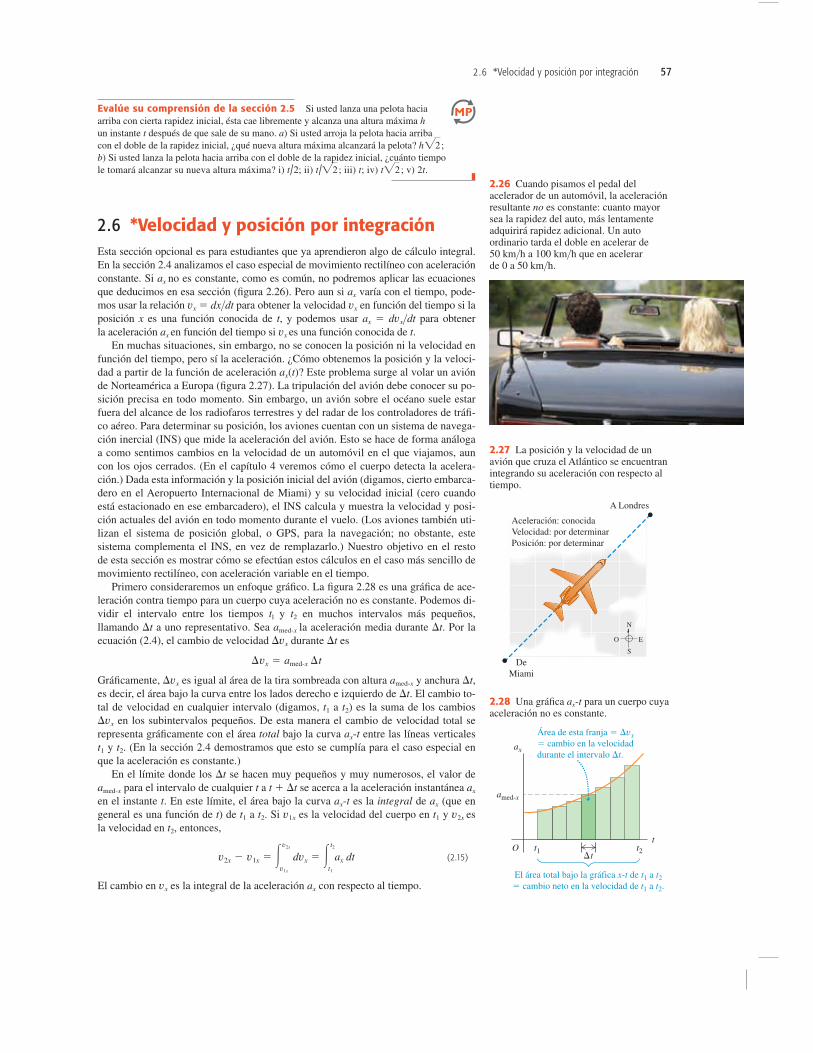
2 .6 *Velocidad y posición por integración 57
Aceleración: conocidaVelocidad: por determinarPosición: por determinar
A Londres
DeMiami
N
EO
S
2.27 La posición y la velocidad de unavión que cruza el Atlántico se encuentranintegrando su aceleración con respecto altiempo.
2.26 Cuando pisamos el pedal del acelerador de un automóvil, la aceleraciónresultante no es constante: cuanto mayorsea la rapidez del auto, más lentamente adquirirá rapidez adicional. Un auto ordinario tarda el doble en acelerar de 50 km>h a 100 km>h que en acelerar de 0 a 50 km>h.
2.28 Una gráfica ax-t para un cuerpo cuyaaceleración no es constante.
Evalúe su comprensión de la sección 2.5 Si usted lanza una pelota hacia arriba con cierta rapidez inicial, ésta cae libremente y alcanza una altura máxima hun instante t después de que sale de su mano. a) Si usted arroja la pelota hacia arriba con el doble de la rapidez inicial, ¿qué nueva altura máxima alcanzará la pelota? b) Si usted lanza la pelota hacia arriba con el doble de la rapidez inicial, ¿cuánto tiempo le tomará alcanzar su nueva altura máxima? i) ii) iii) t; iv) v) 2t.
❚t "2 ;t/"2 ;t/2;
h "2 ;
2.6 *Velocidad y posición por integraciónEsta sección opcional es para estudiantes que ya aprendieron algo de cálculo integral.En la sección 2.4 analizamos el caso especial de movimiento rectilíneo con aceleraciónconstante. Si ax no es constante, como es común, no podremos aplicar las ecuacionesque deducimos en esa sección (figura 2.26). Pero aun si ax varía con el tiempo, pode-mos usar la relación vx 5 dx>dt para obtener la velocidad vx en función del tiempo si laposición x es una función conocida de t, y podemos usar ax 5 dvx>dt para obtener la aceleración ax en función del tiempo si vx es una función conocida de t.
En muchas situaciones, sin embargo, no se conocen la posición ni la velocidad enfunción del tiempo, pero sí la aceleración. ¿Cómo obtenemos la posición y la veloci-dad a partir de la función de aceleración ax(t)? Este problema surge al volar un aviónde Norteamérica a Europa (figura 2.27). La tripulación del avión debe conocer su po-sición precisa en todo momento. Sin embargo, un avión sobre el océano suele estarfuera del alcance de los radiofaros terrestres y del radar de los controladores de tráfi-co aéreo. Para determinar su posición, los aviones cuentan con un sistema de navega-ción inercial (INS) que mide la aceleración del avión. Esto se hace de forma análogaa como sentimos cambios en la velocidad de un automóvil en el que viajamos, auncon los ojos cerrados. (En el capítulo 4 veremos cómo el cuerpo detecta la acelera-ción.) Dada esta información y la posición inicial del avión (digamos, cierto embarca-dero en el Aeropuerto Internacional de Miami) y su velocidad inicial (cero cuandoestá estacionado en ese embarcadero), el INS calcula y muestra la velocidad y posi-ción actuales del avión en todo momento durante el vuelo. (Los aviones también uti-lizan el sistema de posición global, o GPS, para la navegación; no obstante, estesistema complementa el INS, en vez de remplazarlo.) Nuestro objetivo en el resto de esta sección es mostrar cómo se efectúan estos cálculos en el caso más sencillo demovimiento rectilíneo, con aceleración variable en el tiempo.
Primero consideraremos un enfoque gráfico. La figura 2.28 es una gráfica de ace-leración contra tiempo para un cuerpo cuya aceleración no es constante. Podemos di-vidir el intervalo entre los tiempos tl y t2 en muchos intervalos más pequeños,llamando Dt a uno representativo. Sea amed-x la aceleración media durante Dt. Por laecuación (2.4), el cambio de velocidad Dvx durante Dt es
Gráficamente, Dvx es igual al área de la tira sombreada con altura amed-x y anchura Dt,es decir, el área bajo la curva entre los lados derecho e izquierdo de Dt. El cambio to-tal de velocidad en cualquier intervalo (digamos, t1 a t2) es la suma de los cambiosDvx en los subintervalos pequeños. De esta manera el cambio de velocidad total se representa gráficamente con el área total bajo la curva ax-t entre las líneas verticales t1 y t2. (En la sección 2.4 demostramos que esto se cumplía para el caso especial enque la aceleración es constante.)
En el límite donde los Dt se hacen muy pequeños y muy numerosos, el valor deamed-x para el intervalo de cualquier t a t1 Dt se acerca a la aceleración instantánea ax
en el instante t. En este límite, el área bajo la curva ax-t es la integral de ax (que en general es una función de t) de t1 a t2. Si v1x es la velocidad del cuerpo en t1 y v2x es la velocidad en t2, entonces,
(2.15)
El cambio en vx es la integral de la aceleración ax con respecto al tiempo.
v2x 2 v1x 5 3v2x
v1x
dvx 5 3 t2
t1
ax dt
Dvx 5 amed-x Dt

58 C APÍTU LO 2 Movimiento en línea recta
Ejemplo 2.9 Movimiento con aceleración cambiante
Sally conduce su Mustang 1965 por una autopista recta. En el instantet5 0, cuando Sara avanza a 10 m>s en la dirección 1x, pasa un letreroque está en x5 50 m. Su aceleración es una función del tiempo:
a) Deduzca expresiones para su velocidad y posición en función deltiempo. b) ¿En qué momento es máxima su velocidad? c) ¿Cuál es esavelocidad máxima? d) ¿Dónde está el automóvil cuando alcanza la ve-locidad máxima?
SOLUCIÓN
IDENTIFICAR: La aceleración es función del tiempo, así que no pode-mos usar las fórmulas para aceleración constante de la sección 2.4.
PLANTEAR: Utilizamos las ecuaciones (2.17) y (2.18) para obtener la velocidad y la posición en función del tiempo. Una vez que ten-gamos esas funciones, podremos contestar diversas preguntas acercadel movimiento.
EJECUTAR: a) En t5 0, la posición de Sally es x0 5 50 m y su veloci-dad es v0x 5 10 m>s. Puesto que se nos da la aceleración ax en funcióndel tiempo, primero usamos la ecuación (2.17) para obtener la veloci-dad vx en función del tiempo t. La integral de tn es con n ≠ 21, así que
5 10 m/s 1 1 2.0 m/s2 2 t 21
2 10.10 m/s3 2 t2
vx 5 10 m/s 1 3 t
0
32.0 m/s2 2 10.10 m/s3 2 t 4 dt
∫tn dt 5 1n 1 1 tn11
ax 5 2.0 m/s2 2 10.10 m/s3 2 t Luego usamos la ecuación (2.18) para obtener x en función de t:
La figura 2.29 muestra las gráficas de ax, vx y x en función del tiempo.Observe que, para cualquier t, la pendiente de la gráfica vx-t es igual alvalor de ax y la pendiente de la gráfica x-t es igual al valor de vx.
b) El valor máximo de vx se da cuando vx deja de aumentar y co-mienza a disminuir. En este instante, dvx>dt 5 ax 5 0. Igualando a cerola expresión de la aceleración,
c) Obtenemos la velocidad máxima sustituyendo t 5 20 s (cuandov es máxima) en la ecuación para vx del inciso a):
5 30 m/s
vmáx-x 5 10 m/s 1 12.0 m/s2 2 1 20 s 2 21
2 1 0.10 m/s3 2 1 20 s 2 2
t 52.0 m/s2
0.10 m/s35 20 s
0 5 2.0 m/s2 2 1 0.10 m/s3 2 t 5 50 m 1 110 m/s 2 t 1
1
2 1 2.0 m/s2 2 t2 2
1
6 1 0.10 m/s3 2 t3
x 5 50 m 1 3 t
0
S10 m/s 1 1 2.0 m/s2 2 t 21
2 1 0.10 m/s3 2 t2 T dt
Podemos seguir exactamente el mismo procedimiento con la curva de velocidadcontra tiempo. Si x1 es la posición de un cuerpo en t1 y x2 es su posición en t2, por laecuación (2.2) el desplazamiento Dx en un intervalo Dt pequeño es vmed-x Dt, dondevmed-x es la velocidad media durante Dt. El desplazamiento total x2 2 x1 durante t2 2 t1
está dado por
(2.16)
El cambio en la posición x (es decir, el desplazamiento) es la integral en el tiempo dela velocidad vx. Gráficamente, el desplazamiento entre t1 y t2 es el área bajo la curvavx-t entre esos dos instantes. [Éste es el resultado que obtuvimos en la sección 2.4 para el caso especial en que vx está dada por la ecuación (2.8).]
Si tl 5 0 y t2 es cualquier instante posterior t, y si x0 y v0x son la posición y la velo-cidad en t 5 0, respectivamente, entonces rescribimos las ecuaciones (2.15) y (2.16)como:
(2.17)
(2.18)
Aquí, x y vx son la posición y la velocidad en el instante t. Si conocemos la acelera-ción ax en función del tiempo y la velocidad inicial v0x, podremos usar la ecuación(2.17) para obtener la velocidad vx en cualquier instante; es decir, podemos obtener vx
en función del tiempo. Una vez conocida esta función, y dada la posición inicial x0,podemos usar la ecuación (2.18) para calcular la posición x en cualquier instante.
x 5 x0 1 3 t
0
vx dt
vx 5 v0x 1 3 t
0
ax dt
x2 2 x1 5 3x2
x1
dx 5 3 t2
t1
vx dt
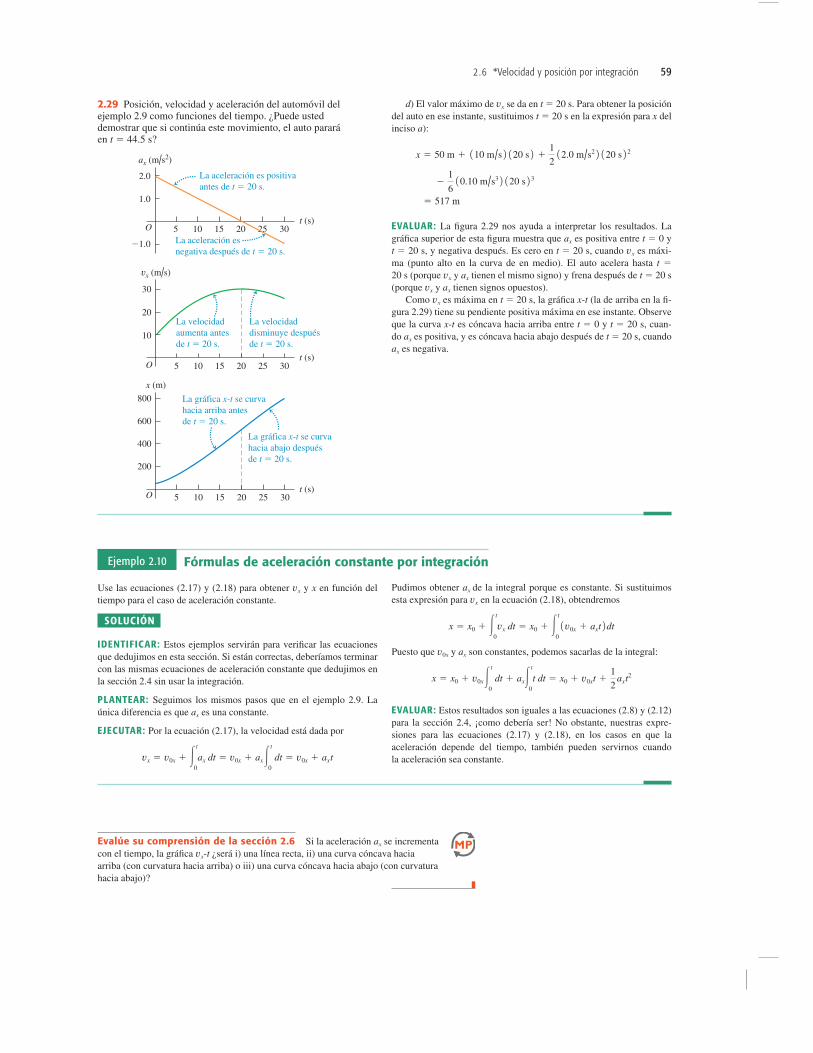
2 .6 *Velocidad y posición por integración 59
25
La gráfica x-t se curvahacia abajo despuésde t 5 20 s.
La gráfica x-t se curvahacia arriba antesde t 5 20 s.
La velocidadaumenta antesde t 5 20 s.
La velocidaddisminuye despuésde t 5 20 s.
La aceleración es positivaantes de t 5 20 s.
La aceleración esnegativa después de t 5 20 s.
vx (m/s)
O
10
20
30
5 10 15 20 25 30t (s)
x (m)
t (s)O
200
400
600
800
5 10 15 20 25 30
ax (m/s2)
O
1.0
2.0
5 10 15 20 30
Ϫ1.0
t (s)
2.29 Posición, velocidad y aceleración del automóvil delejemplo 2.9 como funciones del tiempo. ¿Puede usted demostrar que si continúa este movimiento, el auto parará en t 5 44.5 s?
d) El valor máximo de vx se da en t5 20 s. Para obtener la posicióndel auto en ese instante, sustituimos t5 20 s en la expresión para x delinciso a):
EVALUAR: La figura 2.29 nos ayuda a interpretar los resultados. Lagráfica superior de esta figura muestra que ax es positiva entre t 5 0 y t 5 20 s, y negativa después. Es cero en t 5 20 s, cuando vx es máxi-ma (punto alto en la curva de en medio). El auto acelera hasta t 520 s (porque vx y ax tienen el mismo signo) y frena después de t5 20 s(porque vx y ax tienen signos opuestos).
Como vx es máxima en t 5 20 s, la gráfica x-t (la de arriba en la fi-gura 2.29) tiene su pendiente positiva máxima en ese instante. Observeque la curva x-t es cóncava hacia arriba entre t 5 0 y t 5 20 s, cuan-do ax es positiva, y es cóncava hacia abajo después de t5 20 s, cuandoax es negativa.
5 517 m
21
6 10.10 m/s3 2 1 20 s 2 3
x 5 50 m 1 110 m/s 2 1 20 s 2 11
2 1 2.0 m/s2 2 1 20 s 2 2
Ejemplo 2.10 Fórmulas de aceleración constante por integración
Use las ecuaciones (2.17) y (2.18) para obtener vx y x en función deltiempo para el caso de aceleración constante.
SOLUCIÓN
IDENTIFICAR: Estos ejemplos servirán para verificar las ecuacionesque dedujimos en esta sección. Si están correctas, deberíamos terminarcon las mismas ecuaciones de aceleración constante que dedujimos enla sección 2.4 sin usar la integración.
PLANTEAR: Seguimos los mismos pasos que en el ejemplo 2.9. Laúnica diferencia es que ax es una constante.
EJECUTAR: Por la ecuación (2.17), la velocidad está dada por
vx 5 v0x 1 3 t
0
ax dt 5 v0x 1 ax 3 t
0
dt 5 v0x 1 axt
Pudimos obtener ax de la integral porque es constante. Si sustituimosesta expresión para vx en la ecuación (2.18), obtendremos
Puesto que v0x y ax son constantes, podemos sacarlas de la integral:
EVALUAR: Estos resultados son iguales a las ecuaciones (2.8) y (2.12)para la sección 2.4, ¡como debería ser! No obstante, nuestras expre-siones para las ecuaciones (2.17) y (2.18), en los casos en que la aceleración depende del tiempo, también pueden servirnos cuando la aceleración sea constante.
x 5 x0 1 v0x 3 t
0
dt 1 ax3 t
0
t dt 5 x0 1 v0x t 11
2 axt
2
x 5 x0 1 3 t
0
vx dt 5 x0 1 3 t
0
1v0x 1 ax t 2dt
Evalúe su comprensión de la sección 2.6 Si la aceleración ax se incrementacon el tiempo, la gráfica vx-t ¿será i) una línea recta, ii) una curva cóncava hacia arriba (con curvatura hacia arriba) o iii) una curva cóncava hacia abajo (con curvatura hacia abajo)?
❚
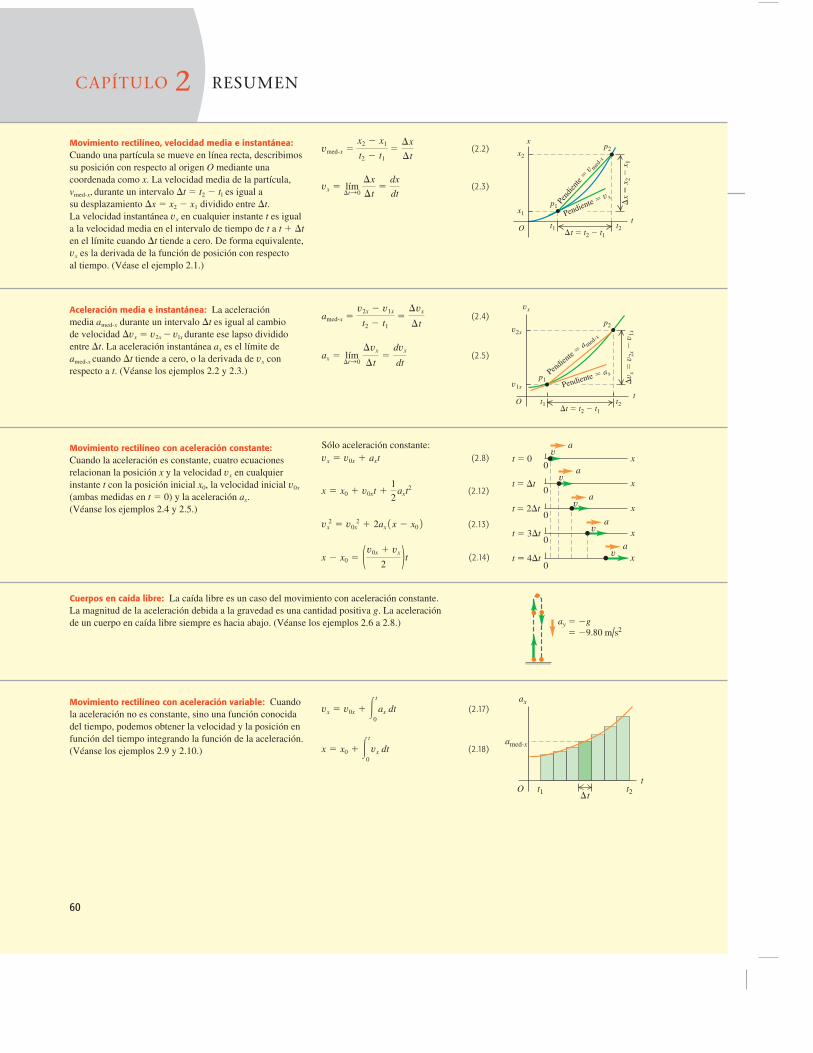
60
(2.4)
(2.5)ax 5 límDtS0
Dvx
Dt5
dvx
dt
amed-x 5v2x 2 v1x
t2 2 t15
Dvx
Dt
x
p1
p2
Ot
⌬x
5 x
2 2
x1
⌬t 5 t2 2 t1t2t1
x1
x2
Pend
iente
5 v m
ed-x
Pendiente 5 v x
Aceleración media e instantánea: La aceleración media amed-x durante un intervalo Dt es igual al cambio de velocidad Dvx 5 v2x2 vlx durante ese lapso divididoentre Dt. La aceleración instantánea ax es el límite de amed-x cuando Dt tiende a cero, o la derivada de vx conrespecto a t. (Véanse los ejemplos 2.2 y 2.3.)
vx
v2x
v1x
t2t1t
O
p1
p2
Dt 5 t2 2 t1
Dv x
5 v
2x 2
v1x
Pendien
te 5
a med-x
Pendiente 5 ax
Movimiento rectilíneo con aceleración constante:Cuando la aceleración es constante, cuatro ecuaciones relacionan la posición x y la velocidad vx en cualquier instante t con la posición inicial x0, la velocidad inicial v0x
(ambas medidas en t 5 0) y la aceleración ax.(Véanse los ejemplos 2.4 y 2.5.)
Sólo aceleración constante:(2.8)
(2.12)
(2.13)
(2.14)x 2 x0 5 1v0x 1 vx
2 2 tvx
2 5 v0x
2 1 2ax 1 x 2 x0 2x 5 x0 1 v0x t 11
2 ax t2
vx 5 v0x 1 ax t
0
0
0
0
0
t 5 2Dt
t 5 3Dt
t 5 Dt
t 5 4Dt
t 5 0v
a
va
va
va
va
x
x
x
x
x
Cuerpos en caída libre: La caída libre es un caso del movimiento con aceleración constante. La magnitud de la aceleración debida a la gravedad es una cantidad positiva g. La aceleración de un cuerpo en caída libre siempre es hacia abajo. (Véanse los ejemplos 2.6 a 2.8.)
Movimiento rectilíneo con aceleración variable: Cuandola aceleración no es constante, sino una función conocidadel tiempo, podemos obtener la velocidad y la posición enfunción del tiempo integrando la función de la aceleración.(Véanse los ejemplos 2.9 y 2.10.)
ay 5 2g 5 29.80 m/s2
O
amed-x
ax
t1 t2t
Dt
(2.17)
(2.18)x 5 x0 1 3 t
0
vx dt
vx 5 v0x 1 3 t
0
ax dt
CAPÍTULO 2 RESUMEN
Movimiento rectilíneo, velocidad media e instantánea:Cuando una partícula se mueve en línea recta, describimossu posición con respecto al origen O mediante unacoordenada como x. La velocidad media de la partícula,vmed-x, durante un intervalo Dt5 t2 2 tl es igual a su desplazamiento Dx5 x2 2 x1 dividido entre Dt. La velocidad instantánea vx en cualquier instante t es igual a la velocidad media en el intervalo de tiempo de t a t 1 Dten el límite cuando Dt tiende a cero. De forma equivalente,vx es la derivada de la función de posición con respecto al tiempo. (Véase el ejemplo 2.1.)
(2.2)
(2.3)vx 5 límDtS0
Dx
Dt5
dx
dt
vmed-x 5x2 2 x1
t2 2 t15
Dx
Dt