ניתוח הליכה פברואר 2011
TRANSCRIPT

הליכה כהניתוח תוח הל נ
נידאל נדאףB.P.T
2011מרץ–פברואר 2011מרץ פברואר
1
עניינים תוכן ענייניםתוכן
:נושאי לימודוטרמינולוגיה1 הקדמה ה1. נולוג הקדמה וטרמקינמטיקה2.קינטיקה3.שרירית4 פעילות ת4. ר לות שר פעצריכת אנרגיה5.הערכת הליכה6.
2
הקדמההקדמהאחת:הגדרה• מנקודה הגוף את שמעבירות תנועות של רצף רצף של תנועות שמעבירות את הגוף מנקודה אחת :הגדרה•
או במילה אחת , לנקודה שניה באופן יציב ויעיל מבחינה אנרגטית)Propulsion-קדימה )התקדמות )Propulsion -התקדמות קדימה.(
:להתקדמות בטוחה ויעילה צריכים להתקיים התנאים הבאיםHAT)(Head, Trunk, Armsתמיכה ב1.מ "שמירה על יציבה זקופה ועל ש2.פקוח על מסלול הרגל מרגע הנפתה ועד לנחיתתה3.של4 ההתקדמות מהירות שימור לשם מכאנית אנרגיה יצור יכולת רות ההתקדמות של 4. מור מה ת לשם ש ה מכאנ צור אנרג כולת
הגוף או הגברתהזעזועים5 בלימת לשם מכאנית אנרגיה ספיגת שמירתיכולת שמירת , יכולת ספיגת אנרגיה מכאנית לשם בלימת זעזועים5.
3. יציבות והאטה של תנועת הגוף

הקדמההקדמה
.בהליכה הגוף מתחלק למסיע ונוסע•נוסע• בין משקל ).30%/70%(מסיע/יחסי ן נוסע ע/חס משקל ב ).30%/70%(מס
:תפקידי המסיעומניע1 ו .דוחף ומניע1.
.יציבות בשלבי הדריכה2.
.בלימת זעזועים3.
אנרגטי4. .חיסכון סכון אנרגט4. .ח
4

יסוד מושגי יסודמושגיStל ל ל ל •Step : המרחק בין נקודת מגע ראשונה של רגל אחת לנקודת המגע הראשונה של
. הרגל הנגדית במעגל ההליכה•Stride:של הבאה המגע לנקודת אחת רגל של ראשונה מגע נקודת בין המרחק Stride : ן נקודת מגע ראשונה של רגל אחת לנקודת המגע הבאה של המרחק ב
.אותה הרגל בתוך מעגל ההליכהg -ומשך– Lengthאורך:מדדים2-בשתי הקטיגוריות מעלה חשוב לשים לב ל•
.Period•:Stance phaseשלב בו הרגל נמצאת במגע עם הרצפה
ל ל •:Swing phaseשלב בו הרגל נמצאת באוויר•Single Support (Single Stance): משקל הגוף נשען על רגל אחת
D bl S t (D bl St על( נשען הגוף רגליים2משקל •:Double Support (Double Stance) רגליים 2משקל הגוף נשען על•Flight Period (in running) : הרגליים מרחפות באוויר 2מצב בו
5

6

יסוד מושגי יסודמושגי
•Center of Mass (COM): נקודה היפוטטית בהף.מרוכזת מסת הגוף
•Center of Gravity (COG) : נקודה היפוטטית בה כוחהגוף כל על פועל .הכובד פועל על כל הגוףהכובד
•Center of Pressure (COP):נקודה היפוטטית בה ( ).מרוכזים כוחות תגובה מהרצפה
7

8

עמידהעמידה
ל קו הכובד עובר דרך מפרק הירך ולפני מפרק •הברך והקרסול
Soleusפעילות בשרירי הסובך בעיקר של •קהעברות משקל מרגל לרגל–בעמידה ממושכת•
)(Postural Swayממושכת• הרגל-עמידה בכף פרונציה דה ממושכת ה בכף הרגלעמ פרונצ
.למתיחת המבנים והקשת של כף הרגל היציבות• על משפיעים שלו והגובה האדם משקל משקל האדם והגובה שלו משפיעים על היציבות •
.יותר מדובר על יחסי גובה ומשקל בין נוסע ומסיע, שלו בעמידה
9
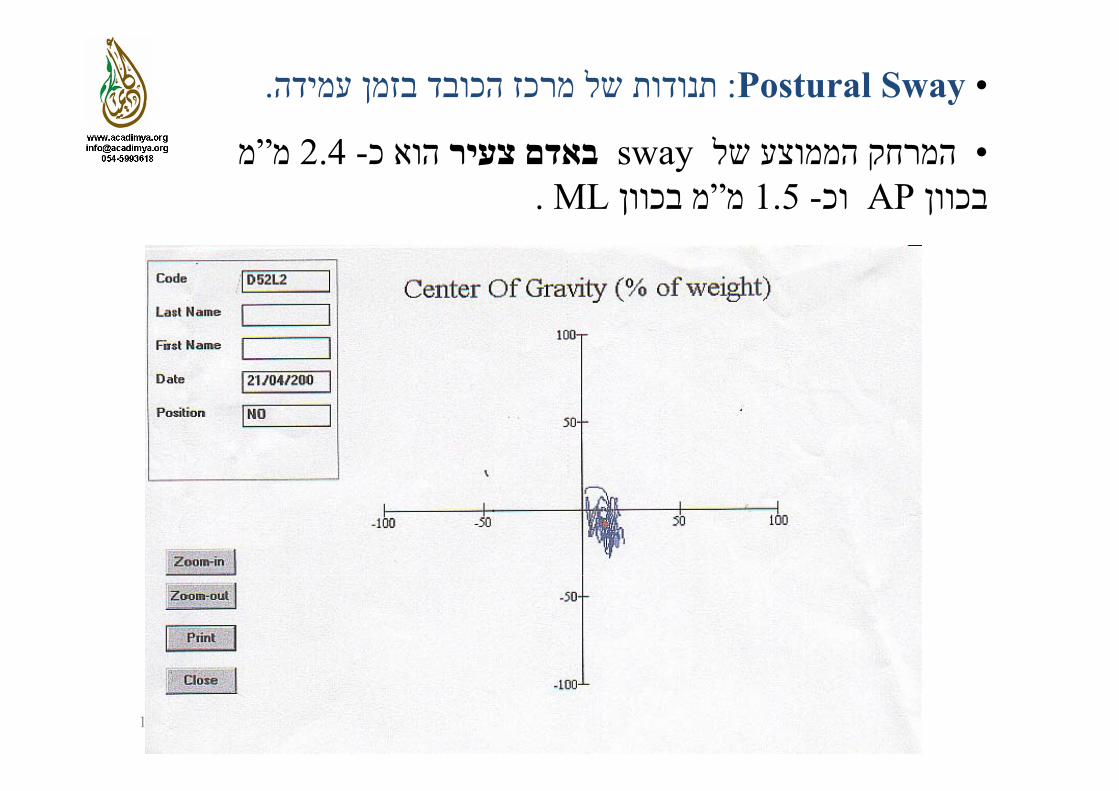
• Postural Sway :תנודות של מרכז הכובד בזמן עמידה.
מ ”מ 2.4 -הוא כ באדם צעיר swayהמרחק הממוצע של •. MLמ בכוון”מ1.5-וכ APבכוון
10
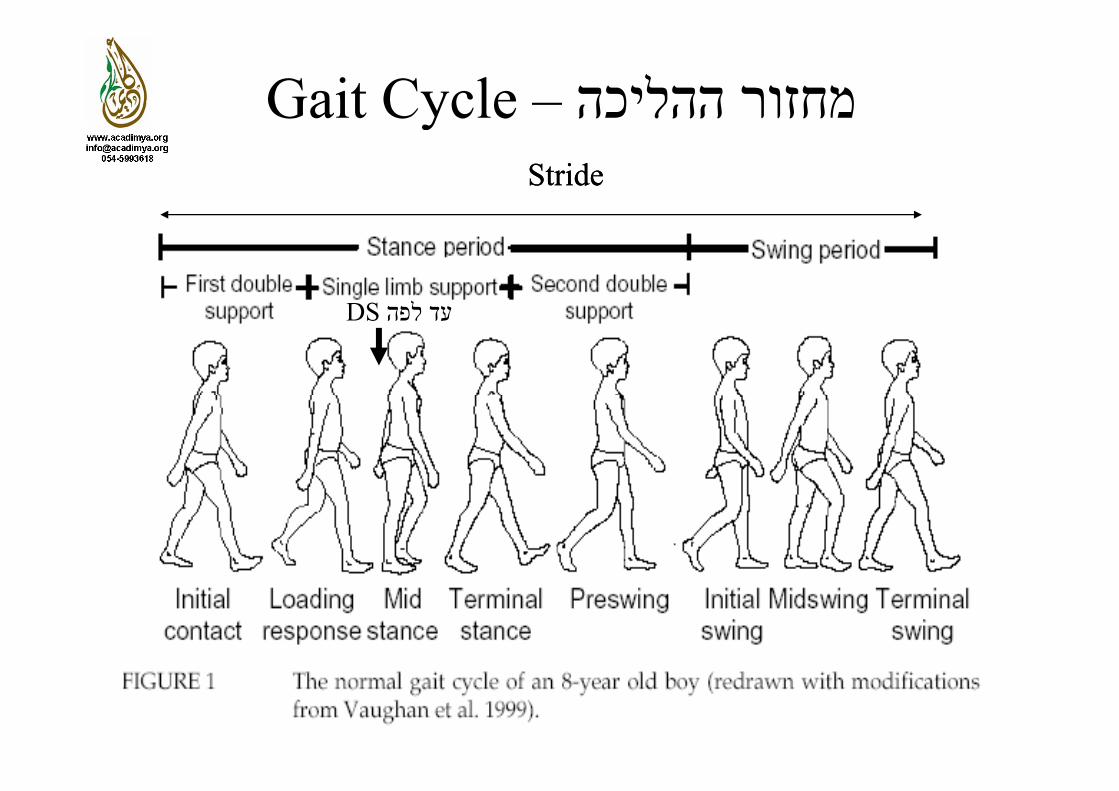
Gait Cycley–מחזור ההליכהStrideStride
ל DSע DSעד לפה
11
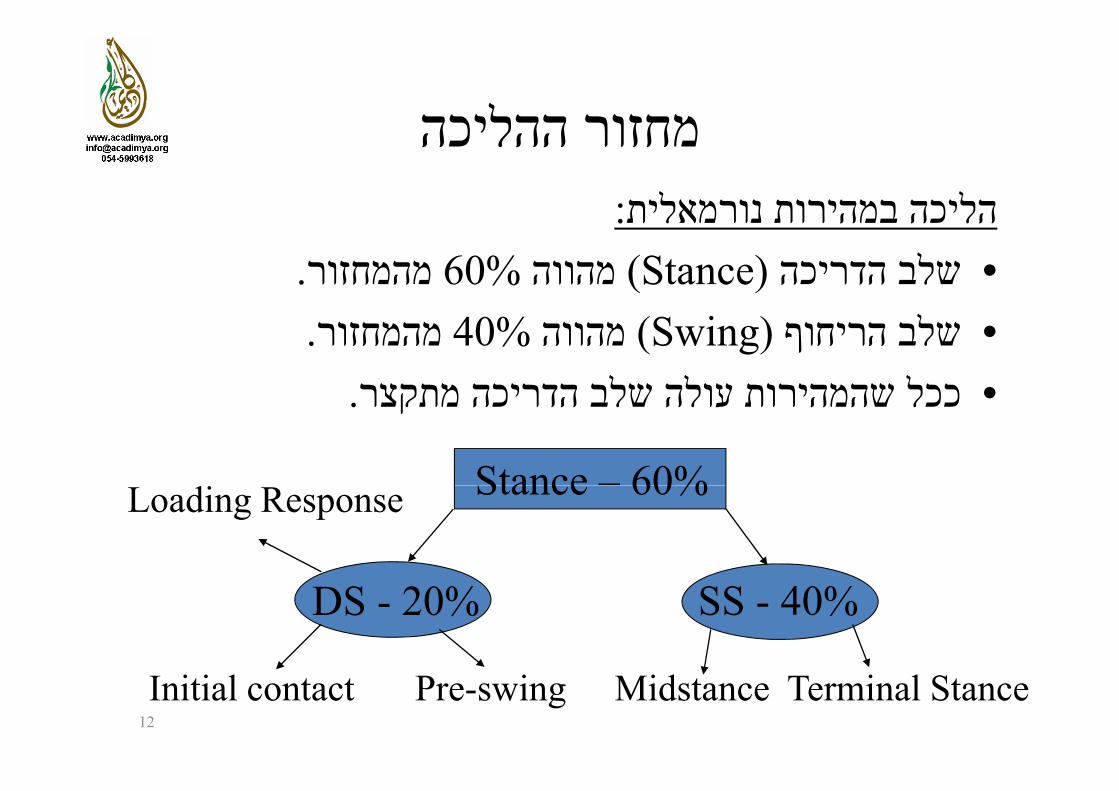
ההליכה מחזור ההליכהמחזורנורמאלית במהירות ת:הליכה רות נורמאל כה במה :הל
.מהמחזור 60%מהווה Stance)(שלב הדריכה •.מהמחזור 40%מהווה Swing)(שלב הריחוף •מתקצר• הדריכה שלב עולה שהמהירות ככל .ככל שהמהירות עולה שלב הדריכה מתקצר•
Stance – 60%Stance 60%Loading Response
SS 40% - DS - 20%
12
Initial contact Pre-swing Midstance Terminal Stance

ההליכה שלבי ההליכהשלבי
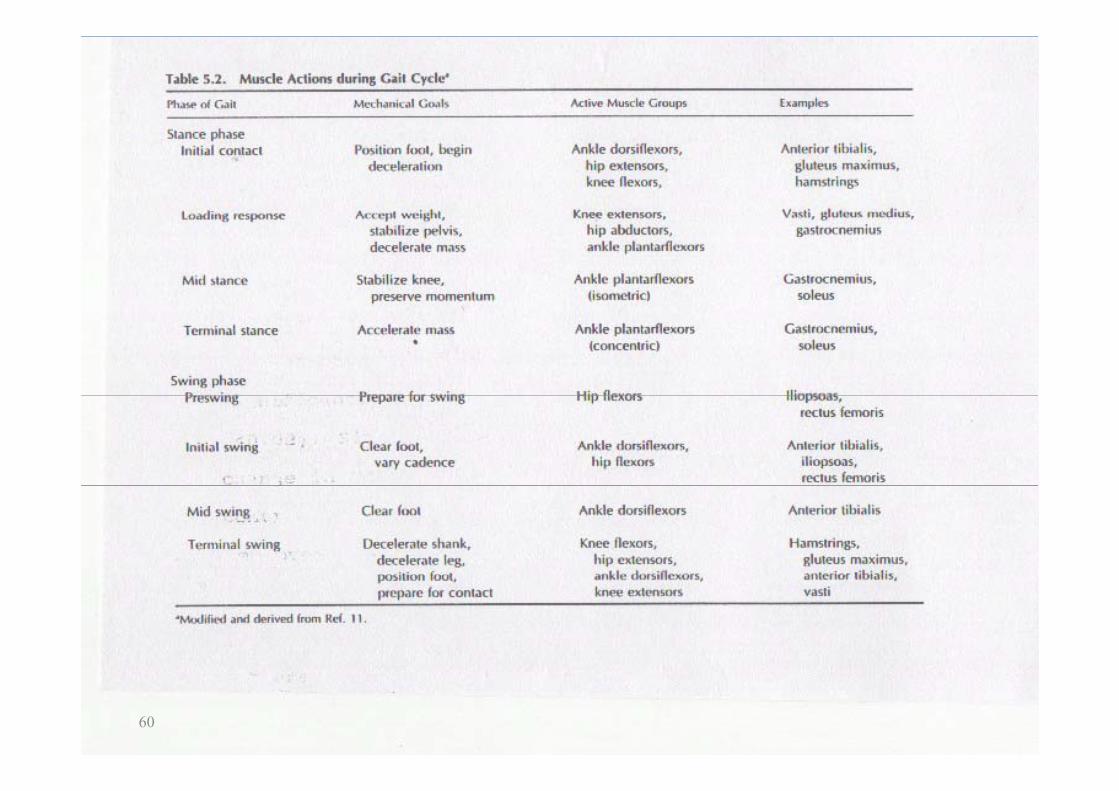
.1Initial contact2%-0:.שלב בו יש מגע ראשוני עם הרצפה•.בבריאים דריכה על העקב•דריכהמטרה• והתחלת הגוף משקל קבלת .קבלת משקל הגוף והתחלת דריכה–מטרה•
.2 Loading Response 10%-2:ל לל ל )Midfoot- העברת המשקל מהעקב ל(המשך הדריכה על הרגל •
התקדמות הגוף בחלל , המשך דריכה, בלימת זעזועים: מטרות•.וייצובו
13

Weight AcceptanceWeight Acceptance
14

ההליכה שלבי ההליכהשלבי
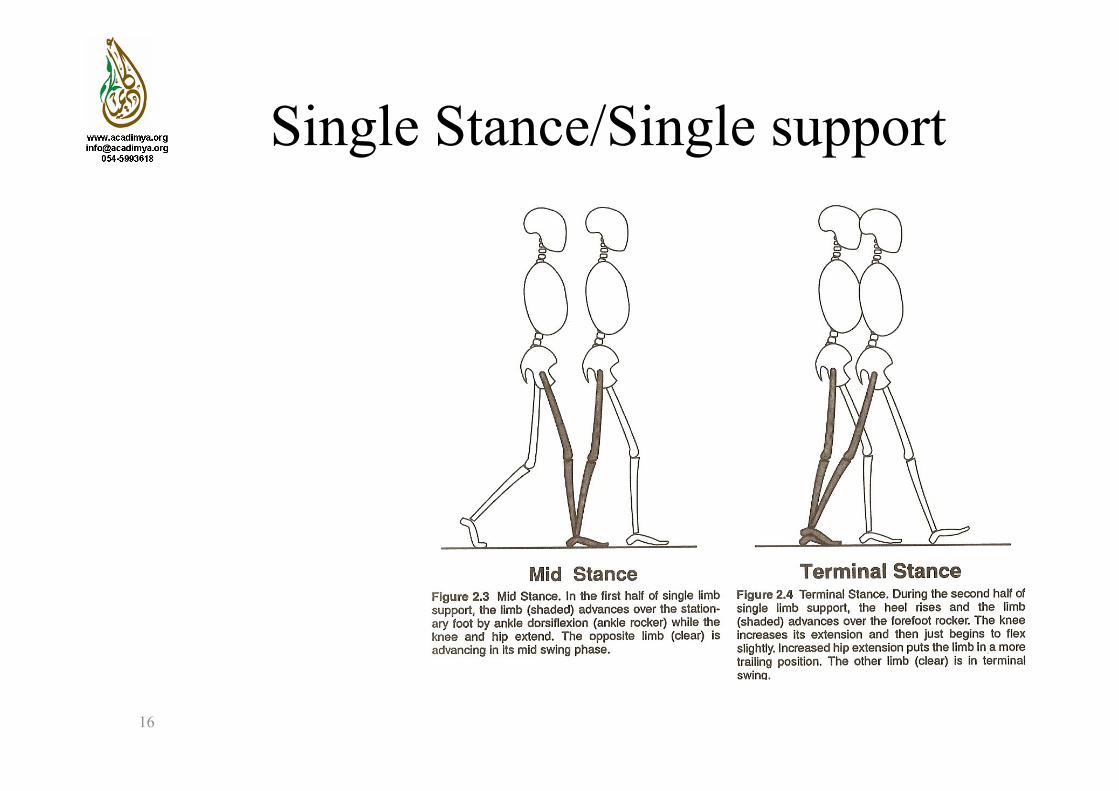
.3Mid stance 30%-10:ךמתחיל בניתוק הרגל הנגדית ממשטח הדריכה ונמשך עד• ק
.)Fore foot(להעברת המשקל לקדמת כף הרגל חשוב , התקדמות הגוף מעבר לרגל העומדים עליה:מטרה• ף ק
. לדרוך באופן יציב.4Terminal stance50%-30:מתחיל עם הרמת העקב ברגל הנושאת משקל ונמשך רגע •
.של הרגל הנגדיתIC-לפני ה.המשך התקדמות הגוף בחלל: מטרה•
15
Single Stance/Single supportSingle Stance/Single support
16

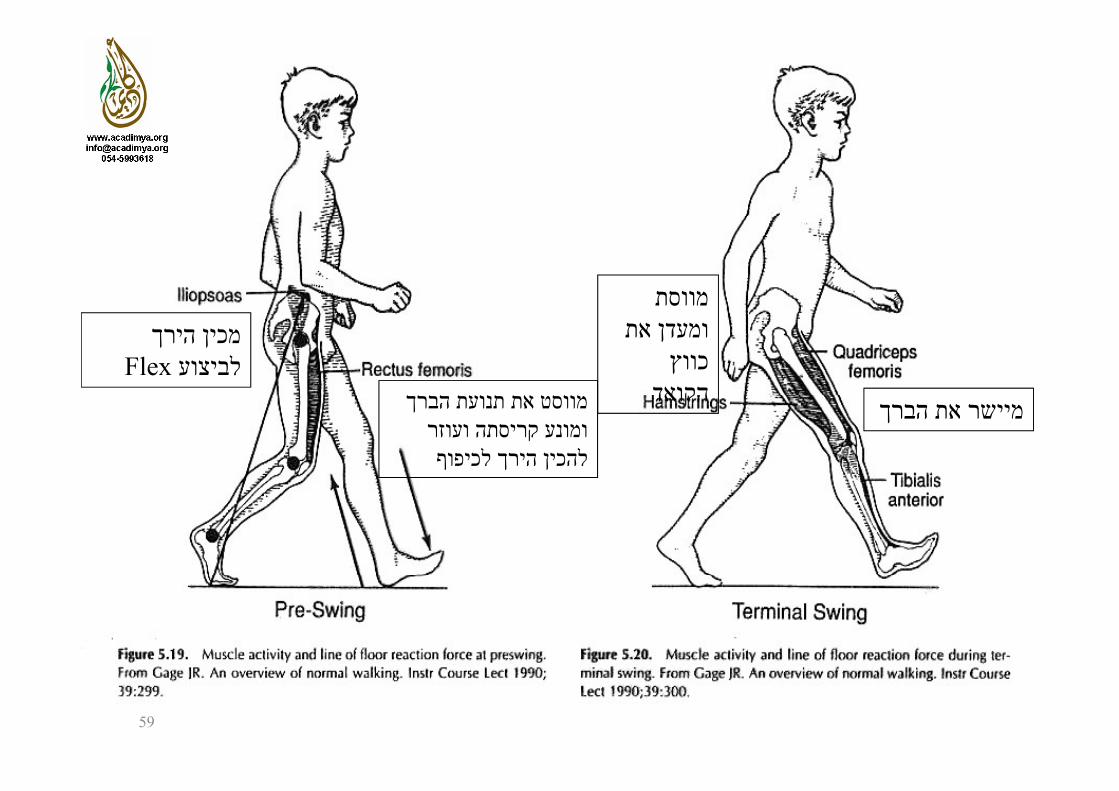
ההליכה שלבי ההליכהשלבי5S iP60%50 .5Swing-Pre 60%-50:•Second DS ,מתחיל ב-IC ונמשך עד לרגע ברגל נגדית
משקל שנושאת הרגל הרמת .לפני הרמת הרגל שנושאת משקללפני.ייצוב ומיקום הרגל לפני ההרמה שלה: מטרה•
.6Swing-Initial 73%-60:נמשך מרגע הרמת הרגל עד למצב שהשוק תקביל לרגל •
.נגדית. ייצוב הרגל באוויר ולאפשר התקדמותה באוויר: מטרה•
17

Limb advancement -התקדמות הרגל באוויר
18
שלבי ההליכה
7Mid swing87%-73: .7Mid swing 87%-73:ועד שהטיביה ) העומדת(מרגע שהרגל מקבילה לרגל הנגדית •
הדריכה למשטח אנכית לעמדה .מגיעה לעמדה אנכית למשטח הדריכהמגיעה.המשך התקדמות הרגל בחלל: מטרה•
.8Terminal swing 100%-87:מרגע שהטיביה אנכית ועד רגע לפני מגע הראשוני של •
.העקב עם הרצפהלקראת:מטרה• והכנה התקדמותה את לסיים לרגל לאפשר ם את התקדמותה והכנה לקראת :מטרה לאפשר לרגל לס
.הדריכה ונשיאת משקל הגוף
19

באוויר הרגל התקדמות רסיום ום התקדמות הרגל באוו ס
20
קינמטיקהקינמטיקהלל תחום העוסק במשתנים שמתארים את התנועה ללא קשר•
.לכוחות היוצרים אותה:משתני המדידה•
תאוצה1.
מהירות2.
).XYלפי ציר (מיקום 3.כי –אלה משתנים לינארים וזוויתיים מוחלטים ויחסיים •
.ההליכה במישורים לינארים וזוויתייםמצלמות עם , טרדמיל, גניומטר, סטופר: מכשירי מדידה•
.מרקרים
21

בהליכה הכובד מרכז תנועת מרכז הכובד בהליכהתנועת"COMלS2 S2-קדמית ל–נמצא בגובה אגןCOMכ"בד•
מרכז הכובד עולה ויורד בזמן ההליכה כאשר השיא שלו –אנכית •MidSל i /Mid -והכי נמוך זה באמצע הMidSwing/Midstanceבשלב
Double support )טווח עולה עם העליה במהירות.(1 7"1 2" מ באשה"ס± 1.2מ בגבר ו"ס1.7±•
לטראלי וזה נקרא -במישור מידיו COM-תזוזת ה–אופקית •Di i i)ל( Diviation)יורד עם העליה במהירות.(
לנשים ± 1.5מ לגברים ו "ס ± 2.1•הגו משכך את ההסטות והתאוצות על מנת לייצב את הראש•
.והמבט ולמנוע גירוי יתר של המערכת הויסטיבולרית
22
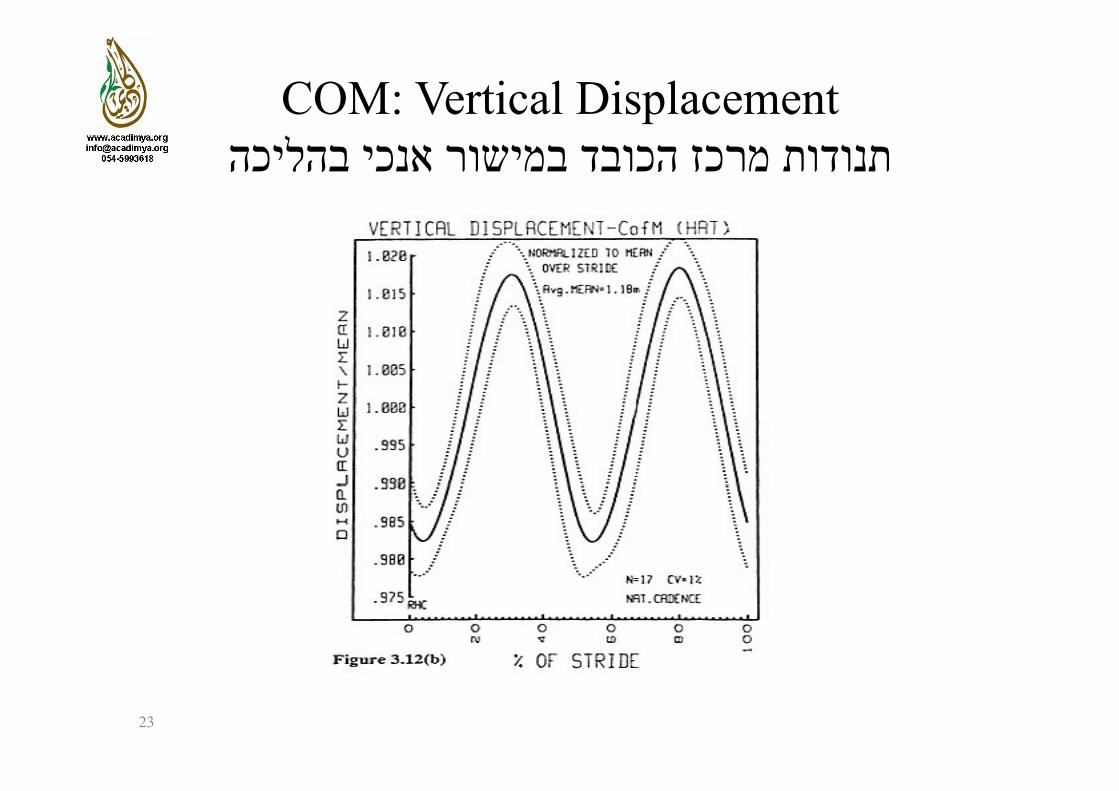
COM: Vertical Displacementתנודות מרכז הכובד במישור אנכי בהליכה
23

COM: Stickplotמסלול התקדמות מרכז הכובד בהליכה
ירך
בהגו
ברך
ירך
קרסול
ברך
קרסול
24
התקדמות

Forward VelocityForward Velocity
COM-מהירות התקדמות ה•.נמצאת ביחס הפוך לגובהו ך
המהירות הכי DSבשלב של •נמוך הכי והגובה . גבוהה והגובה הכ נמוך.גבוהה
.יחס הפוך SSבשלב •אנרגיה העברת על חושבים חושבים על העברת אנרגיה•
.בין גובה ומהירות
25
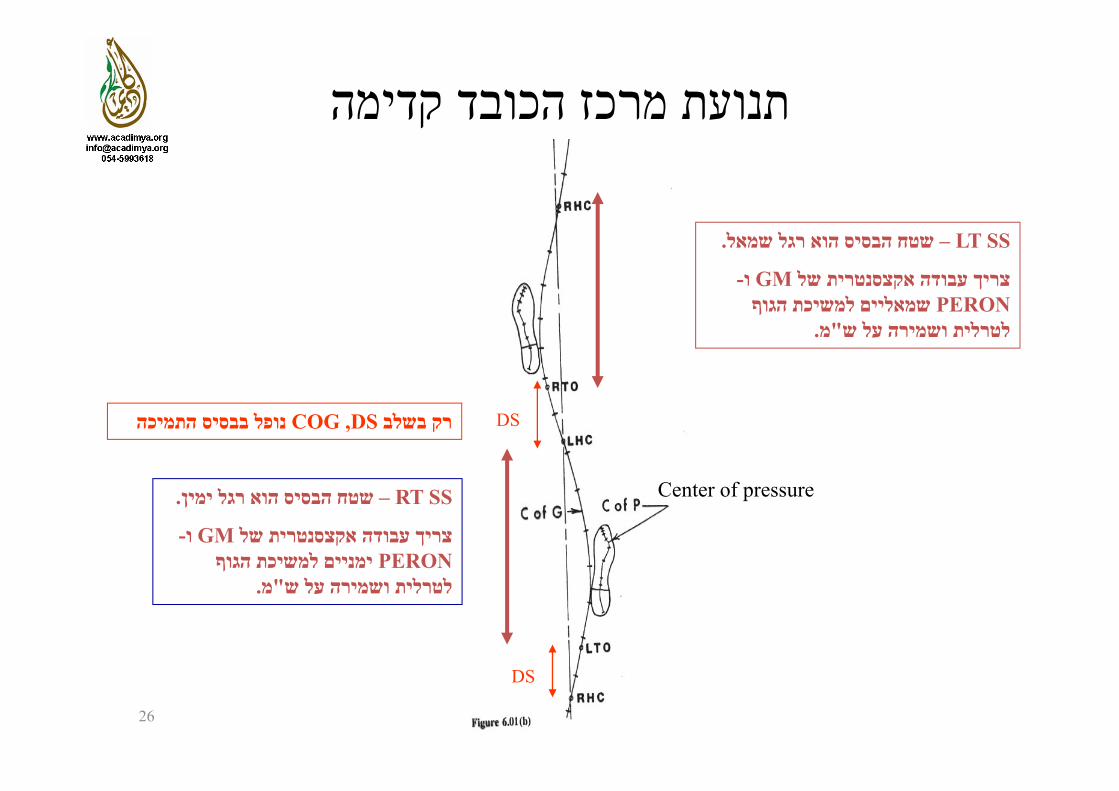
קתנועת מרכז הכובד קדימה
LT SS–שטח הבסיס הוא רגל שמאל.
- ו GMצריך עבודה אקצסנטרית של PERONהגוף למשיכת שמאליים PERON שמאליים למשיכת הגוף
.מ"לטרלית ושמירה על ש
DS רק בשלבDS ,COG נופל בבסיס התמיכה
C t fRT SS–שטח הבסיס הוא רגל ימין.
- ו GMצריך עבודה אקצסנטרית של PERON ימניים למשיכת הגוף
Center of pressure
.מ"לטרלית ושמירה על ש
26
DS

בהליכה"ש מ מ בהליכהשל עמידה
.1COM & COG מצוייםהליכה
.1COM & COG נעים ,לSSCOGל .בבסיס התמיכה ויציבים
Triceps Suraeשרירי2.נופל SSCOG,בשלב
.מחוץ לבסיס התמיכה2G
p.דומננטים
2בעמידה אנו יציבים על 3..GLUTשרירי הירך2.
Peroneaiושרירי דומננטים .דומננטים.רגליים
צורך לייצוב רגל בסוף 3.Swingהגוף להחזרת Swing להחזרת הגוף
.מ"לש
27

המפרקים זוויות המפרקיםזוויות
מדידה יחסית•קרסולברךירך• קרסול,ברך,רךפרופיל אישי אצל כל (זוויות משתנות בין נבדקים שונים •
). נבדק)•Inter-subject and intra-subject variabilitye subjec d subjec v b yתנועה זו היא התוצר הסופי של תנועות זוויתיות של •
והמפרקים הסגמנטים והמפרקיםהסגמנטים
28

הליכה במהירות נורמאלית–זוויות המפרקים
יישור
עדיין יישור ונע לכוון כיפוף
Heel offT ff
29
Toe off
Midstance Terminal s preswing Midswing
Terminal swing

30

בזמן הליכה COMתנועתיות
AP Tilt
Lateral deviationsLateral
Medial
31

רוטציות האגן
הסגיטלי• º4)(Pelvical-כ:במישור AP tilt טל שור הסג Pelvical AP tilt)(4 כ:במ
º - 7.5 )(Pelvic Listכ : במישור הפרונטלי•
º - 8-11 )(Pelvicכ : במישור הטרנסורסלי• Rotation
ההליכה• במהירות עליה עם גדלה רוטציה רוטציה גדלה עם עליה במהירות ההליכה•
32
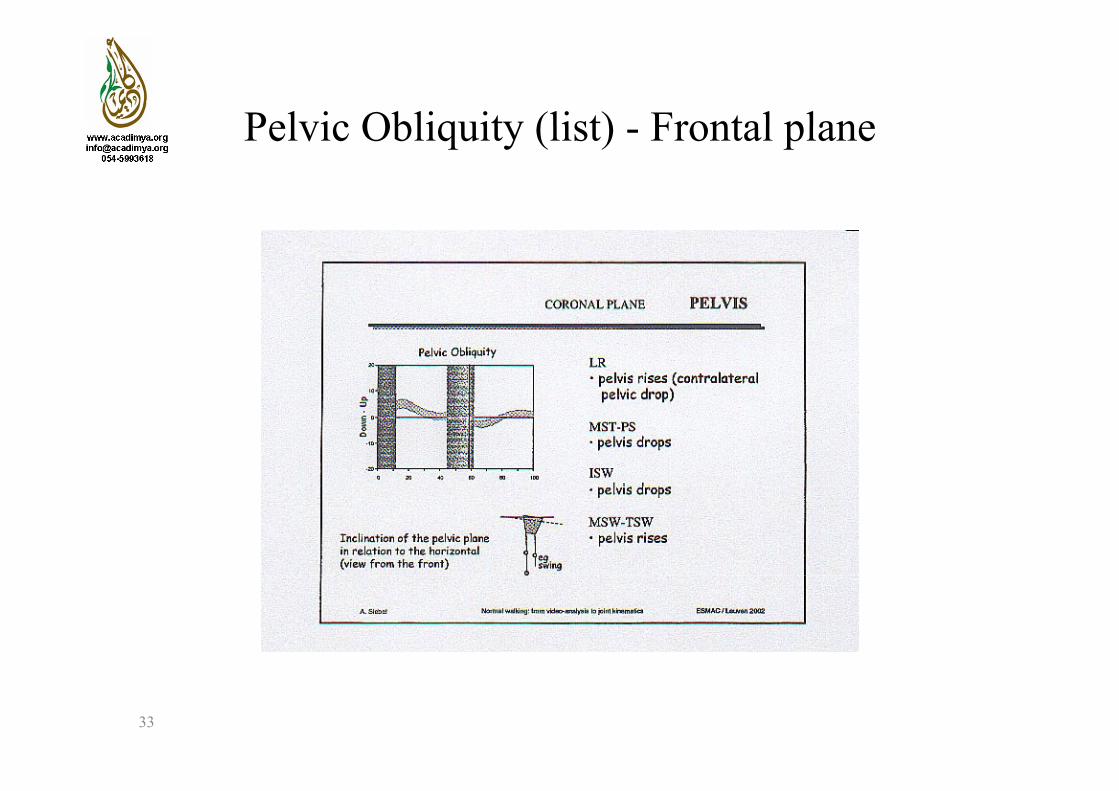
Pelvic Obliquity (list) Frontal planePelvic Obliquity (list) - Frontal plane
33

Pelvic Rotation Transverse planePelvic Rotation - Transverse plane
34
Kineticsקינטיקה Kinetics-קינטיקה
-ענף העוסק במשתנים הגורמים לתנועה כמוביח1 נמדד שריר ניוטן'כוח ח1. ר נמדד ב וטן כוח שר נN/M' מומנט המופעל על מפרק ביח2.מכניסים אלמנט –) Power(הספק של עבודה שריר 3.
Watt-הזמן עם הכוח נמדד ב דד ח ה ע ן Wהז
35

ליצור מאפשרת הנוירומוסקולרית המערכת של הגמישות הגמישות של המערכת הנוירומוסקולרית מאפשרת ליצור •מדגמים קינמטים זהים באמצעות השימוש בצירופי
.שרירים שוניםשונה• שרירים עבודת של רבות ואריאציות ם שונה קיימות ר ות רבות של עבודת שר אצ מות ואר ק
).Output(שיכולה לגרום לאותה פעולה ל ל ל ל בקלינקה אין לנו אפשרות לבדוק את זה כי אנחנו יכולים •
Output-לראות את ה. EMGלמדידת הפעילות השרירית צריך להשתמש •
36

Ground Reaction Force (GRF)Ground Reaction Force (GRF)
כוח התגובה המופעל ממשטח ההליכה על הגוף•כוח• פלטת באמצעות נמדד באמצעות פלטת כוחנמדדהכוחות הנמדדים באמצעות הפלטה הם הכוח האנכי •
)(Sh .Shear)(וכוחות החיכוך
37

Ground Reaction Forces in G ou d eact o o cesWalking
38
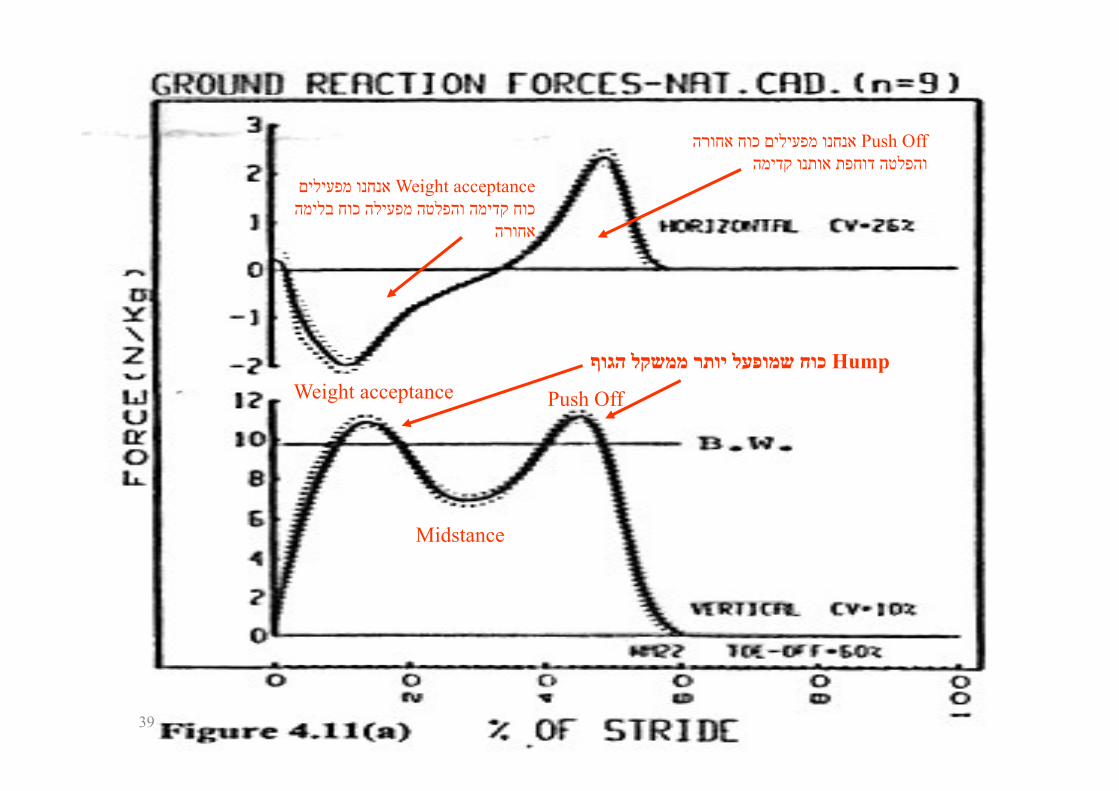
Weight acceptance אנחנו מפעיליםכוח קדימה והפלטה מפעילה כוח בלימה
Push Off אנחנו מפעילים כוח אחורהוהפלטה דוחפת אותנו קדימה
קאחורה
Hump כוח שמופעל יותר ממשקל הגוףWeight acceptance P h OffWeight acceptance Push Off
Midstance
39

Ground Reaction Force (GRF)Ground Reaction Force (GRF)
עולה וההבדלים GRF-ככל שעולה מהירות ההליכה ה•.בין הפיק העליון והתחתון עולה ן ן ק ן
כ מקובל לנרמל את הערכים למשקל הגוף לכן זה "בד•ב N/Kgנמדד N/Kg-נמדד ב
, במדידות של אותו אדם מקובל למצע למהירות ההליכה•.מהירה ונורמאלית, מהיריות איטית 3-ממצעים ל
40
Ground Reaction Force (GRF)Ground Reaction Force (GRF)
41

Moments of Force (Nm)Moments of Force (Nm)
שקול הכוחות העובדים על מפרק כדי לשנות את :מומנט•.הזווית שלו
המומנטים החיצוניים הפועלים על גופנו הם תוצאה של •הכובד כוח אחריםGRFחיכוךפעולת חיצוניים וכוחות וכוחות חיצוניים אחריםGRF,חיכוך,פעולת כוח הכובד
המומנטים הפנימיים הם המתנגדים למומנטים החיצוניים •והם בעיקר תוצאה של עבודת שרירים ומתח ברצועות
הפסיביים ם.ובמייצבים ב ם הפס צב .ובמ
42
Support MomentSupport Moment
.STANCE-המומנט שתומך בנו בשלב ה:הגדרה•הירך• סביב המומנטים סכום של פונקציה הברךהוא רך ב ה ם סב ה של סכום המומנט הברך , הוא פונקצ
.והקרסולל ל ל ל הוא צריך להיות אקסטנסורי על מנת למנוע קריסה של •
.הגוף ולשמור על זקיפות כנגד כוח הכובד. יש מוסכמות שמומנט אקסטנסורי הוא מומנט חיובי•
HוGבירך tאקסטנסורי כוח על שומרים , שומרים על כוח אקסטנסוריHamst-וGmaxבירך•Triceps suraeובקרסול Quadבברך
43

Stל סכום Stance-בשלב ה•. המומנטים הוא אקסטנסורי
בירך ובקרסול המומנט •אקטסטנסורי לאורך כל
.השלבהשלב
בברך המומנט אינו •ה שלב בכל -אקסטנסורי בכל שלב האקסטנסורי
Stance זה אומר שה-QUADל הרבה תורם -לא QUADלא תורם הרבה ל
SM.
44
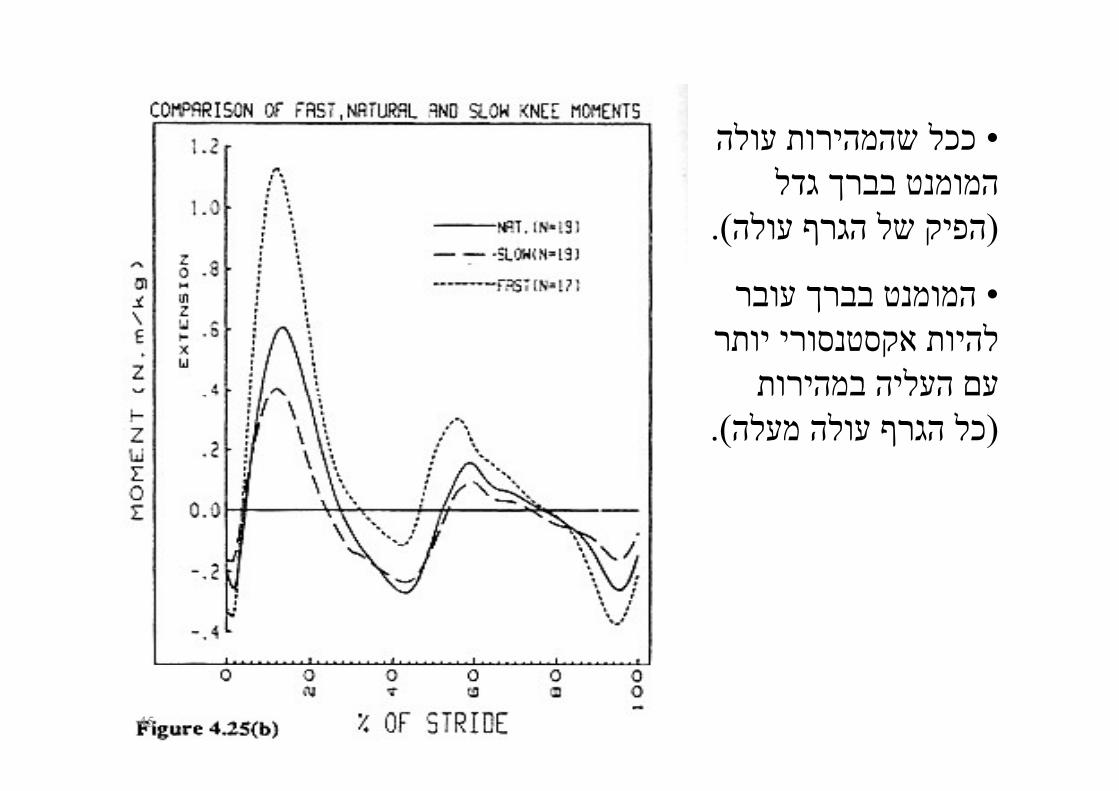
ל ל ככל שהמהירות עולה•המומנט בברך גדל
ל( )ל ).הפיק של הגרף עולה(
עובר• בברך המומנט בברך עובר המומנטלהיות אקסטנסורי יותר
רותעם העליה במהירות ה ה העל ע).כל הגרף עולה מעלה(
45
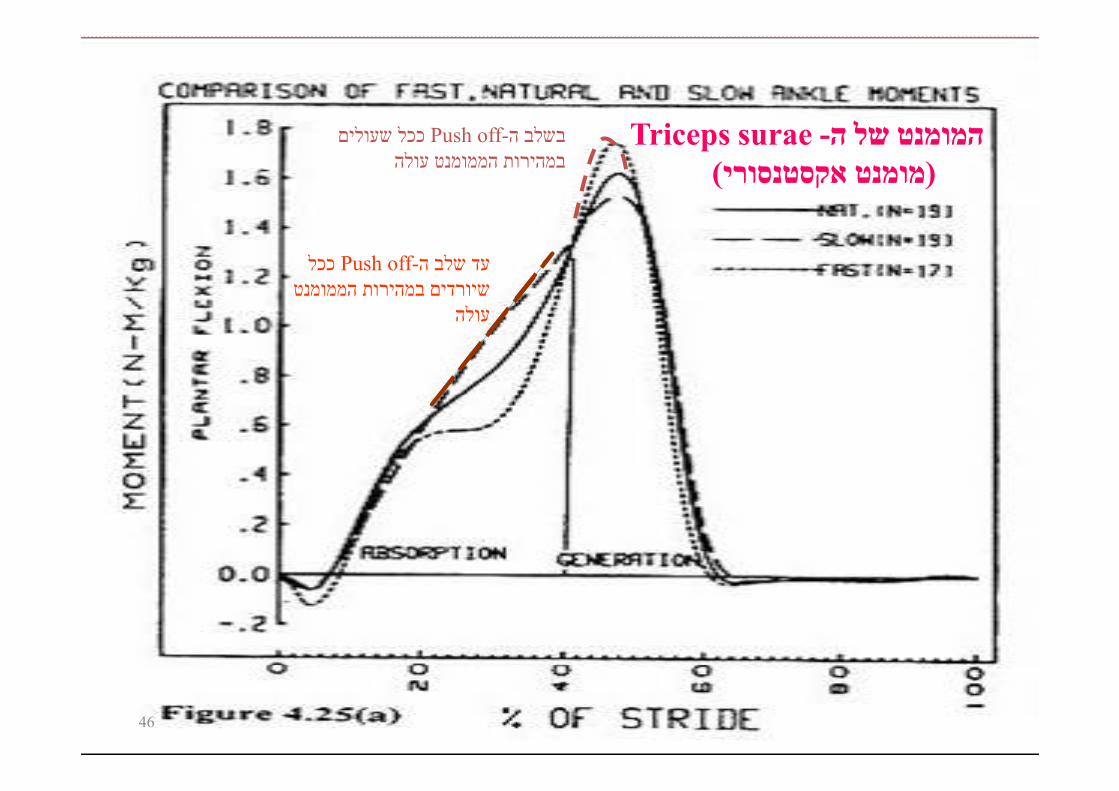
Tל iלל ל Triceps surae-המומנט של ה)מומנט אקסטנסורי(
ככל שעוליםPush off-בשלב הבמהירות הממומנט עולה
ככל Push off-עד שלב השיורדים במהירות הממומנט
עולהל
46
בהליכה אנרגטיקה בהליכהאנרגטיקה
.י הגפיים התחתונות"רוב העבודה בהליכה נעשית ע•באנרגיה• לחיסכון מנגנונים יש ולמפרקים הלסגמנטים סכון באנרג ם לח ש מנגנונ ם ם ולמפרק .לסגמנטשמירה על יציבות ההליכה והתקדמות הגוף בחלל דורשת •
.עבודה שריריתי ספיגה ושחרור של "מנגנוני חיסכון אנרגיה בהליכה ע• ע ה ה ה ן חח ה
.אנרגיה מיכנית ופוטנציאליתואקצנטרים קונצנטריים כווצים בעזרת נעשה זה , זה נעשה בעזרת כווצים קונצנטריים ואקצנטרים•
. בהתאמה
47
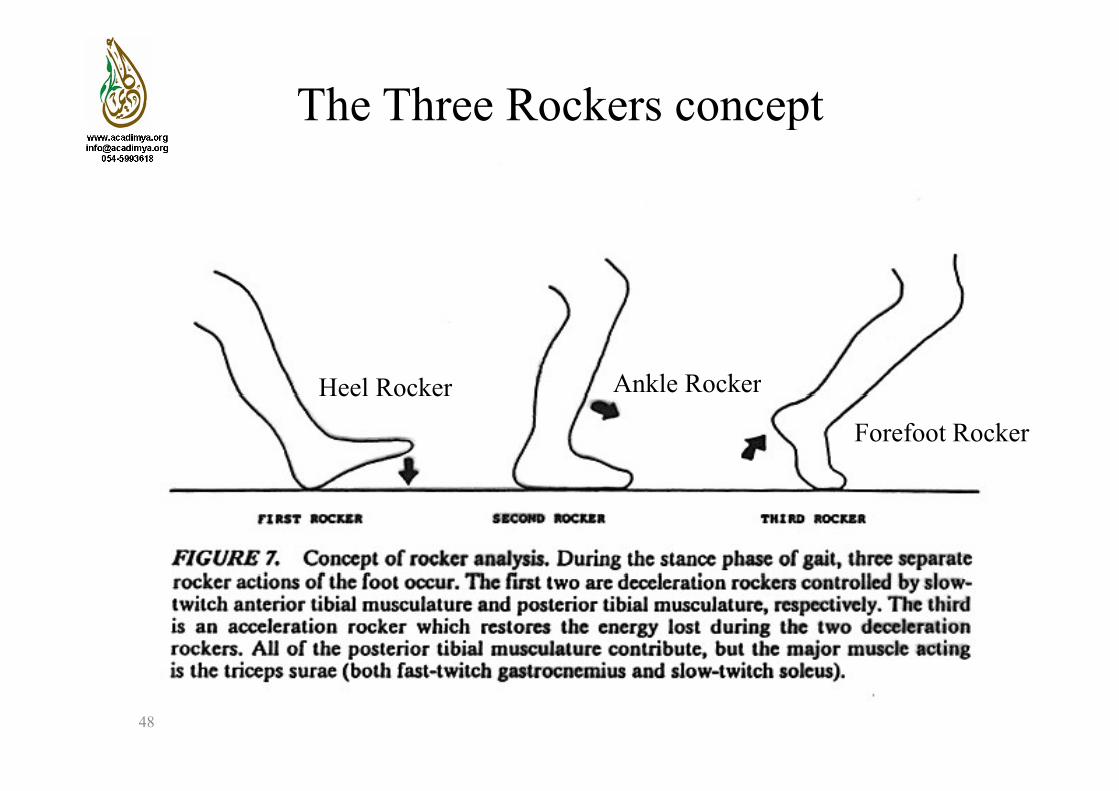
The Three Rockers conceptp
Heel Rocker Ankle RockerHeel Rocker
Forefoot Rocker
48

Powerהספק Power-הספק
הספק הוא המשתנה המייצג את תפקוד השרירים בעת•.התכווצותם
• P (Watt) = Mj (Nm) * ωj (rad/sec)מ ועל י*מומנט זווי ו י מ .המהירות הזוויתית*המומנט הפועל במפרק=ההספק•
ההספק –כאשר כוון המומנט וכוון המהירות הם זהים• ן קן. ההספק שלילי–חיובי וכאשר מנוגדים
ובאקסצנטרי• חיובי ההספק קונצנטרי שליליבכווץ שלילי -בכווץ קונצנטרי ההספק חיובי ובאקסצנטרי•
49

ןההספק סביב מפרקי הגף התחתון בהליכה ף ק ק
•- H3 שלבPreswing בו פלקסוריFהירך עובדים קונצנטרי לכוון
ההספק –והירך נעה לאותו כוון .חיוביחיובי
• K1 - שלבWeight acceptance )( עובד )הקואד(בו מיישר הברך,
לכוון יישור והברך נעה –אקסצנטרי כיפוף שלילילכוון ההספק לכן פוף ל,לכוון כ .לכן ההספק של
•A2 - שלבPush off , הטרייספסלכוון לPFעובדים נע והקרסול -והקרסול נע לPFעובדים לכוון
PF ,לכן ההספק חיובי .
50
זה ההספק שתורם הכי הרבה •.להתקדמות הגוף

הליכה בזמן שרירית פעילות שרירית בזמן הליכהפעילות
.עובדים שרירים שונים,בשלבי ההליכה השונים•באמצעות• נמדדת השרירית EMGהפעילות ת נמדדת באמצעות ר לות השר EMGהפע
). רישום פעילות חשמלית של שריר–אלקטרומיוגרפיה (ל ל ל כל אקטיבציה של יחידה מוטורית גורמת להיווצרות•
. פוטנציאל חשמלימייצג את סיכום הפעילות של כל היחידות EMG -אות ה•
המדידה של זמן פרק באותו שנקלטה .המוטוריות שנקלטה באותו פרק זמן של המדידההמוטוריות
51

בהליכהEMGרישומי בהליכהEMGרישומי
.נטרול רעשי רקע בעזרת פילטרים–החלקת האות•צעדים• מספר נבדק)10-כ(מיצוע באותו ם צוע מספר צעד .באותו נבדק)10כ(מלוקחים את ממוצע המדידות של –מיצוע בין נבדקים •
.האותות).כ ימין"בד(מודדים צד אחד של הגוף–סימטריות• ף ה חד ד ).ןד(דד•EMG דרכו לא –מדווח על פעילות שרירית בלבד
הכווץ סוג את לדעת )אקסצנטרי/קונצנטרי(יכולים ).אקסצנטרי/קונצנטרי(יכולים לדעת את סוג הכווץ
52
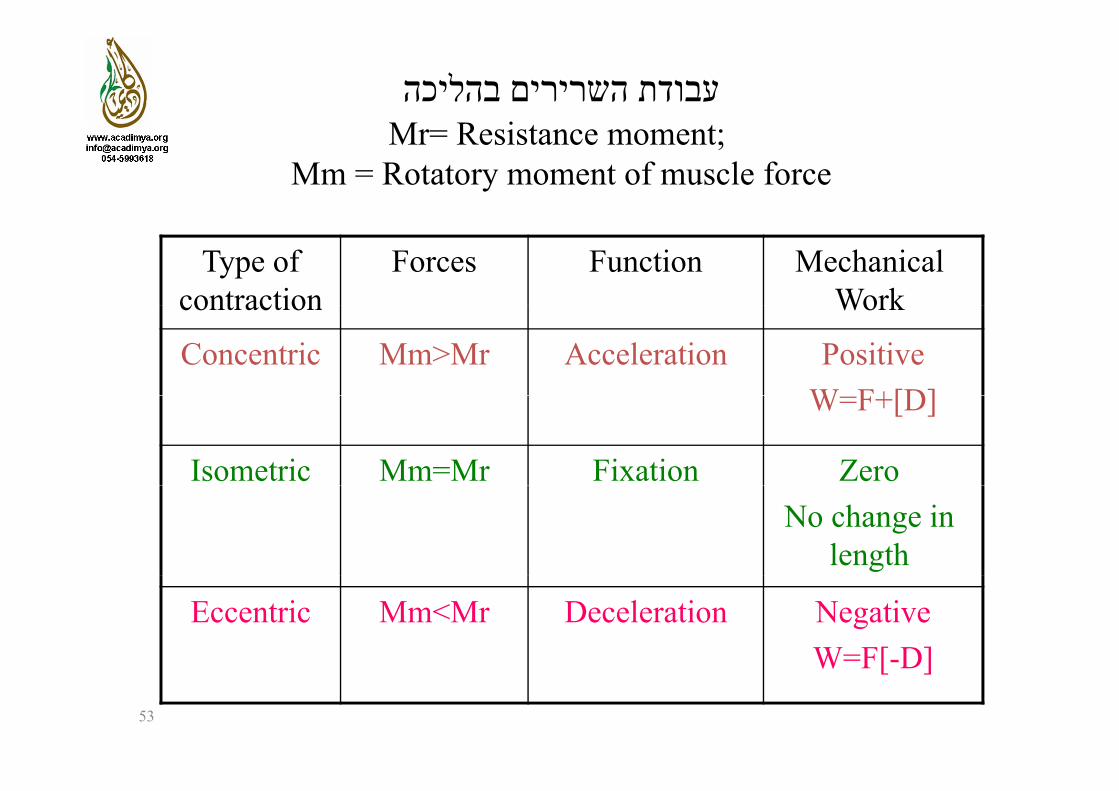
עבודת השרירים בהליכהM R i t tMr= Resistance moment;
Mm = Rotatory moment of muscle force
Mechanical Work
FunctionForcesType of contraction Workcontraction
PositiveW F+[D]
AccelerationMm>MrConcentricW=F+[D]
ZeroFixationMm=MrIsometricNo change in
length
NegativeW=F[-D]
DecelerationMm<MrEccentricW F[ D]
53

פעילות שרירית בכל שלב בהליכה
54
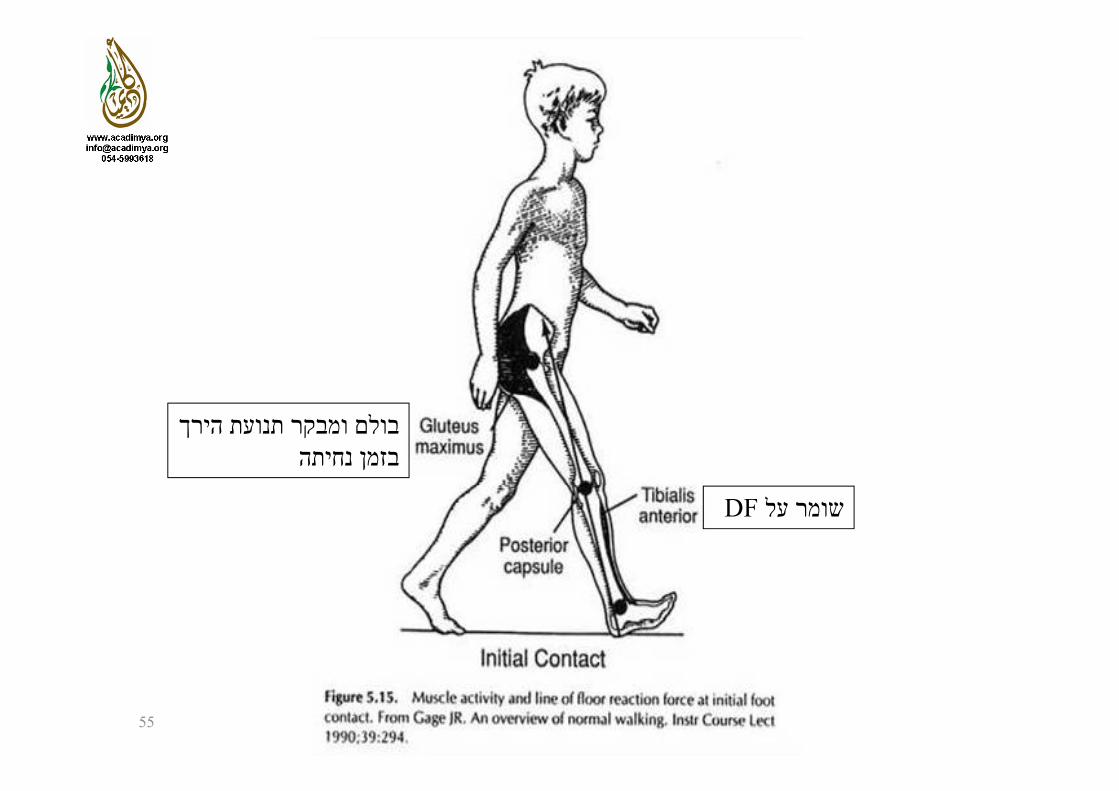
בולם ומבקר תנועת הירך בזמן נחיתה
DFשומר על
55

מווסט את תנועת הברך ומונע קריסתה
Triceps surae - מבקריםתנועת הטיביא ומושכים אותה התקדמות את ומווסטים ם את התקדמות אחורה אחורה ומווסט
הגוף על הרגל
56

שומרים על ברך ישרה
57

כווץ –PFמבצעים קונצנטרקונצנטרי
58
מווסת
הברך תנועת את מווסט
מכין הירך Flexלביצוע
ומעדן את כווץ מווסט את תנועת הברך הקואד
ומונע קריסתה ועוזר להכין הירך לכיפוף
הקואדמיישר את הברך
59
60

עבודת שרירים במעגל ההליכה הבדל בין נבדקים שונים
61

Gluteus MaximusGluteus Maximus
:מיקום אלקטרודותלקו המחבר בין PSISבין•
Greater Trochanter ל-Ischial Tuberosityy
:פעילותבשלב• Weightבעיקר Weightבעיקר בשלב•
Acceptance עובדה שלב ובסוף -אקסצנטרית ובסוף שלב ה-אקסצנטרית
Swing עוזר ליישור הירךקונצנטרי .בכווץ קונצנטריבכווץ
62
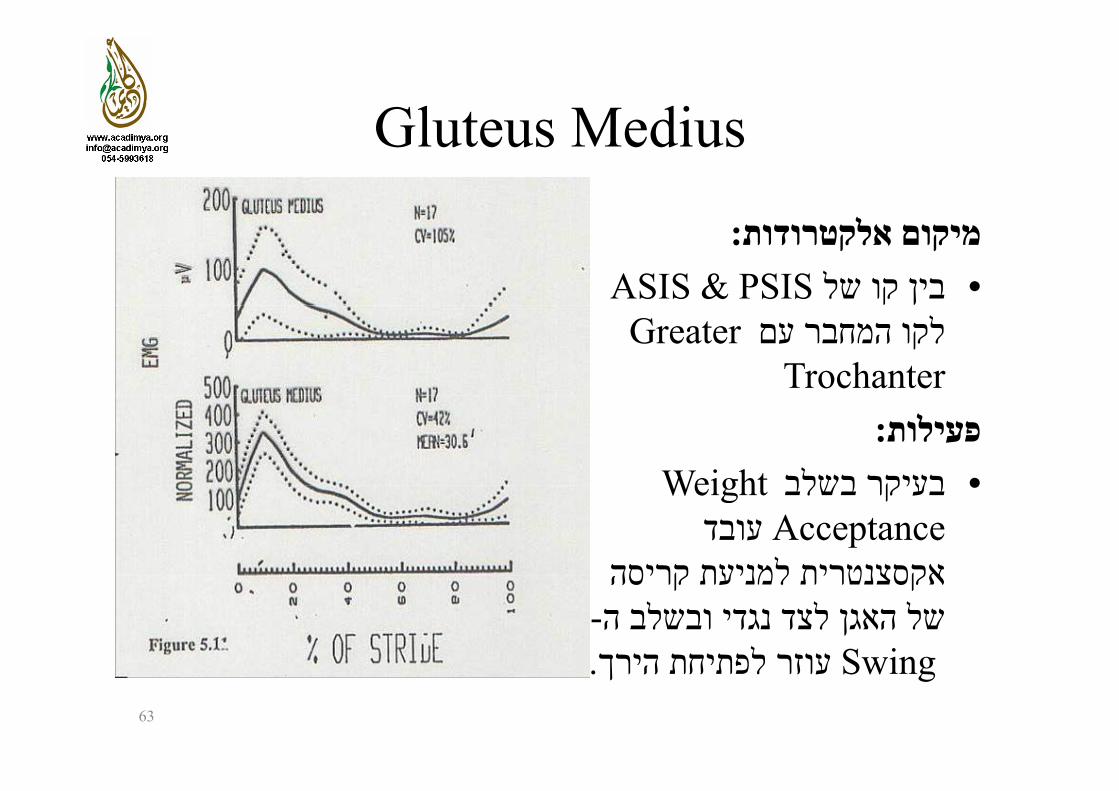
Gluteus MediusGluteus Medius
:מיקום אלקטרודות& PSISASISבין קו של•
Greaterלקו המחבר עם Trochanter
:פעילותבשלב• Weightבעיקר Weightבעיקר בשלב•
Acceptance עובדקריסה למניעת אקסצנטרית למניעת קריסה אקסצנטרית-של האגן לצד נגדי ובשלב ה
Swingהירך לפתיחת עוזר Swing עוזר לפתיחת הירך.63

HamstringsHamstrings
:מיקום אלקטרודות-באמצע בין ראש הפיבולא ל•
Ischial Tuberosityלות:פעילות :פע
Weightבעיקר בשלב •Acceptanceעובד Acceptanceעובד
אקסצנטרית למניעת קריסת הקואד עבודת וויסות הברך וויסות עבודת הקואדהברך
לכיפוף Swing-ובשלב הקונצנטרית עובד .הברך עובד קונצנטריתהברך
64
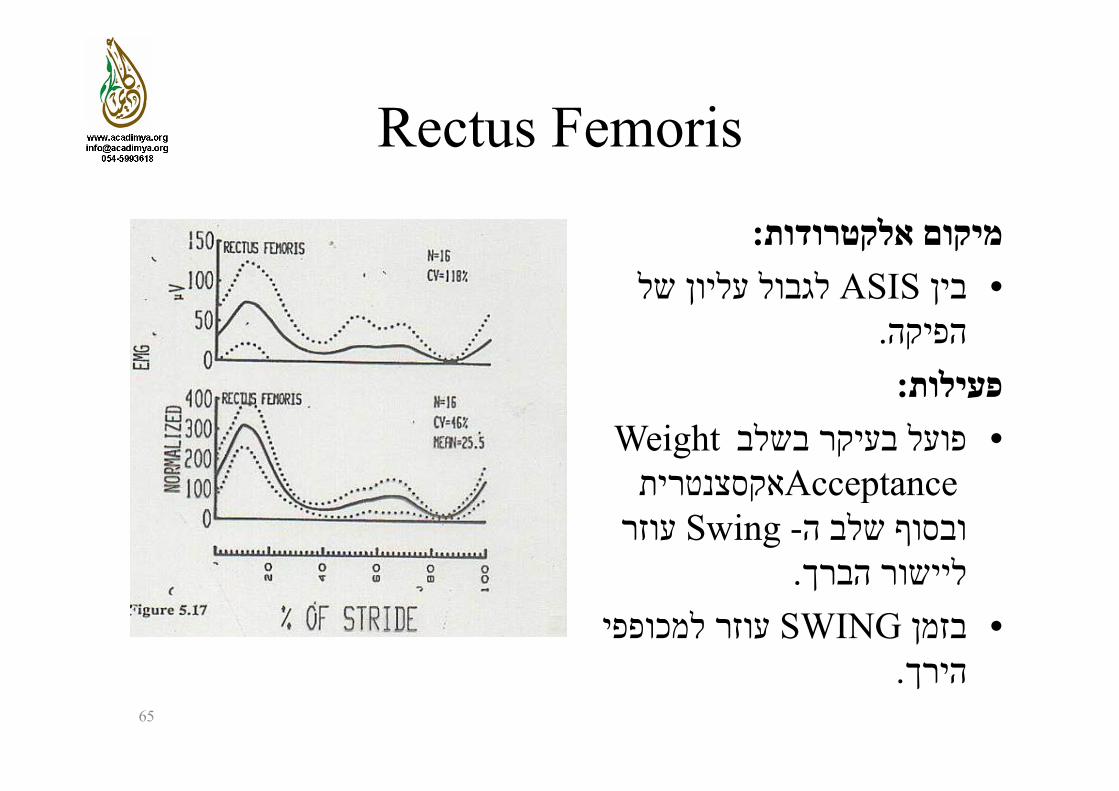
Rectus FemorisRectus Femoris
:מיקום אלקטרודותלגבול עליון של ASISבין•
.הפיקהלות:פעילות :פע
Weightפועל בעיקר בשלב •AcceptanceאקסצנטריתAcceptance אקסצנטריתעוזר Swing-ובסוף שלב ההברך . ליישור הברךליישור
עוזר למכופפי SWINGבזמן •.הירךהירך
65

Vastus LateralisVastus Lateralis
:מיקום אלקטרודותבאזור דיסטלי של הירך •
Rectusלטרלית לשריר Femoris
:פעילותבשלב• Weightבעיקר Weightבעיקר בשלב•
Acceptance עובדה שלב ובסוף -אקסצנטרית ובסוף שלב ה-אקסצנטרית
Swing עוזר ליישור הברך.
66

Adductor LongusAdductor Longus
:מיקום אלקטרודות Pubic-מ מתחת ה"ס8•
Tubercleלות:פעילות :פע
-ב 10%-פאזה ראשונה ב•Stanceמרחיקי מול עובד Stance עובד מול מרחיקיופאזה שניה בתחילת , הירך
Swingירך למכופפי עוזר Swing עוזר למכופפי ירך.לתנועת הרגל קדימה
67

Adductor MagnusAdductor Magnus
:מיקום אלקטרודותבשליש מקורב פנימי של •
. הירךלות:פעילות :פע
Adductor-דומה ל•LongusLongus.
68
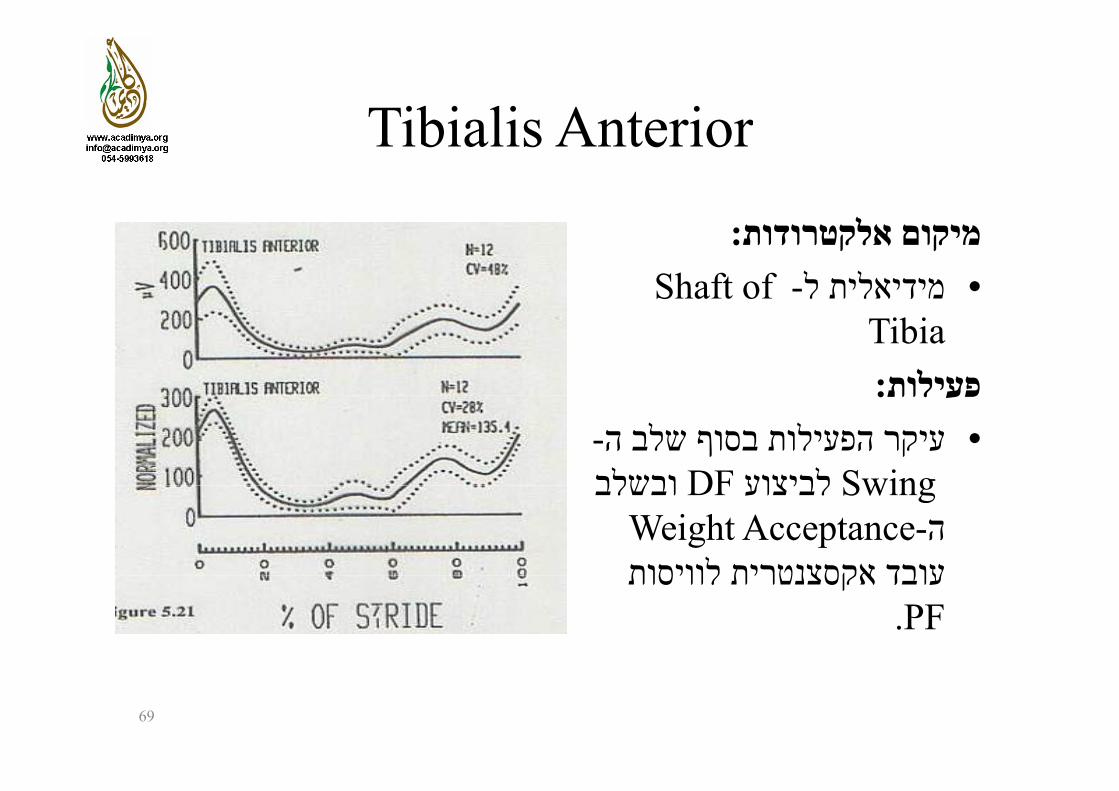
Tibialis AnteriorTibialis Anterior
:מיקום אלקטרודות Shaft of-מידיאלית ל•
Tibiaלות:פעילות :פע
-עיקר הפעילות בסוף שלב ה•SwingלביצועDFובשלב Swing לביצועDF ובשלב
Weight Acceptance- הלוויסות אקסצנטרית עובד אקסצנטרית לוויסות עובד
PF.
69

GastrocnemiusGastrocnemius
:מיקום אלקטרודותבאזור המסה השרירית בשוק •
.אחוריתלות:פעילות :פע
Push offבעיקר בשלב •הPFלביצוע שלב ובסוף -ובסוף שלב ה,PFלביצוע
Swing עובד מול מיישריבקו קונטרקציה-הברך .קונטרקציה-הברך בקו
70
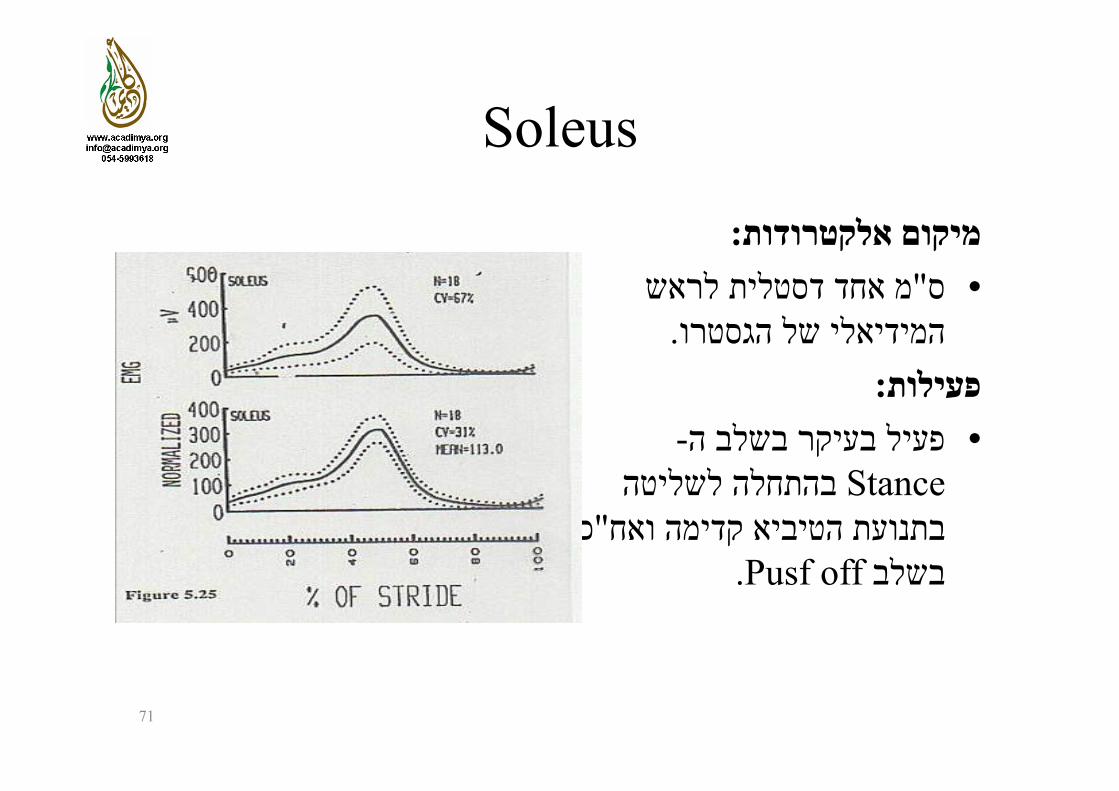
SoleusSoleus
:מיקום אלקטרודותמ אחד דסטלית לראש "ס•
.המידיאלי של הגסטרולות:פעילות :פע
-פעיל בעיקר בשלב ה•Stanceלשליטה בהתחלה Stance בהתחלה לשליטה
כ "בתנועת הטיביא קדימה ואחPusfבשלב off .Pusf offבשלב
71
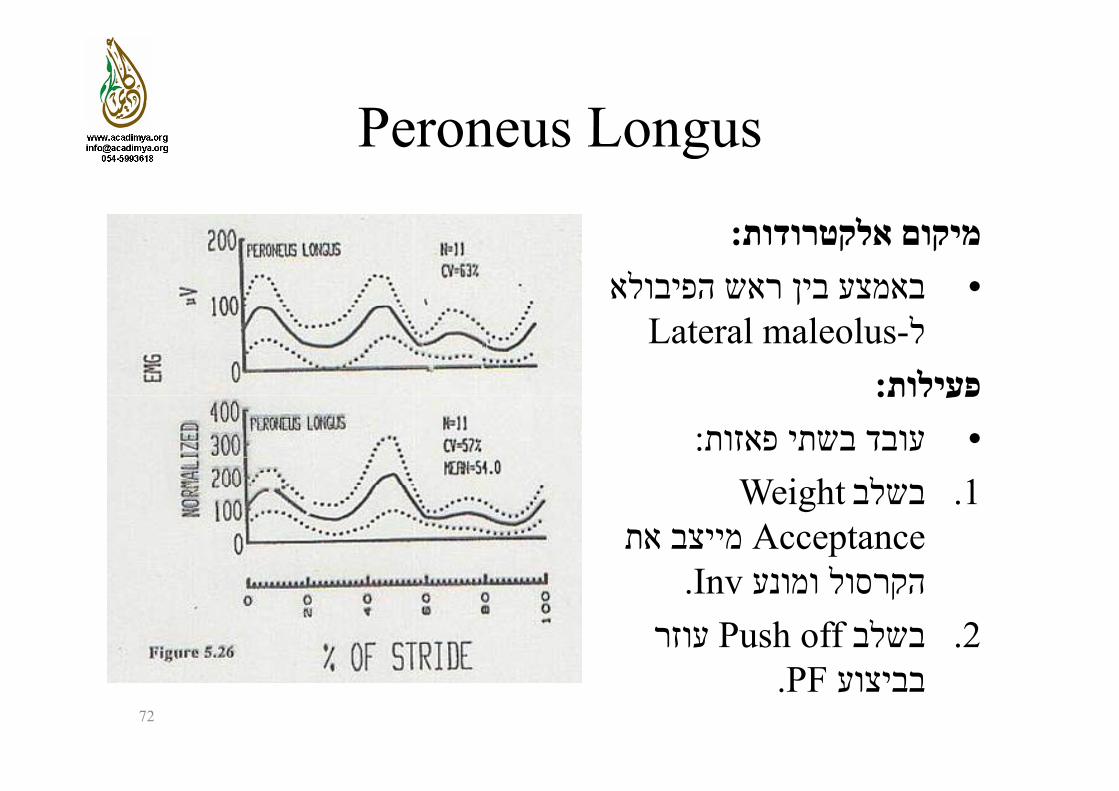
Peroneus LongusPeroneus Longus
:מיקום אלקטרודותבאמצע בין ראש הפיבולא•
Lateral maleolus-ללות:פעילות :פע
:עובד בשתי פאזות•Wבשלב1 i ht Weightבשלב1.
Acceptance מייצב אתומונע Iהקרסול Inv.הקרסול ומונע
עוזר Push offבשלב 2..PFבביצוע
72
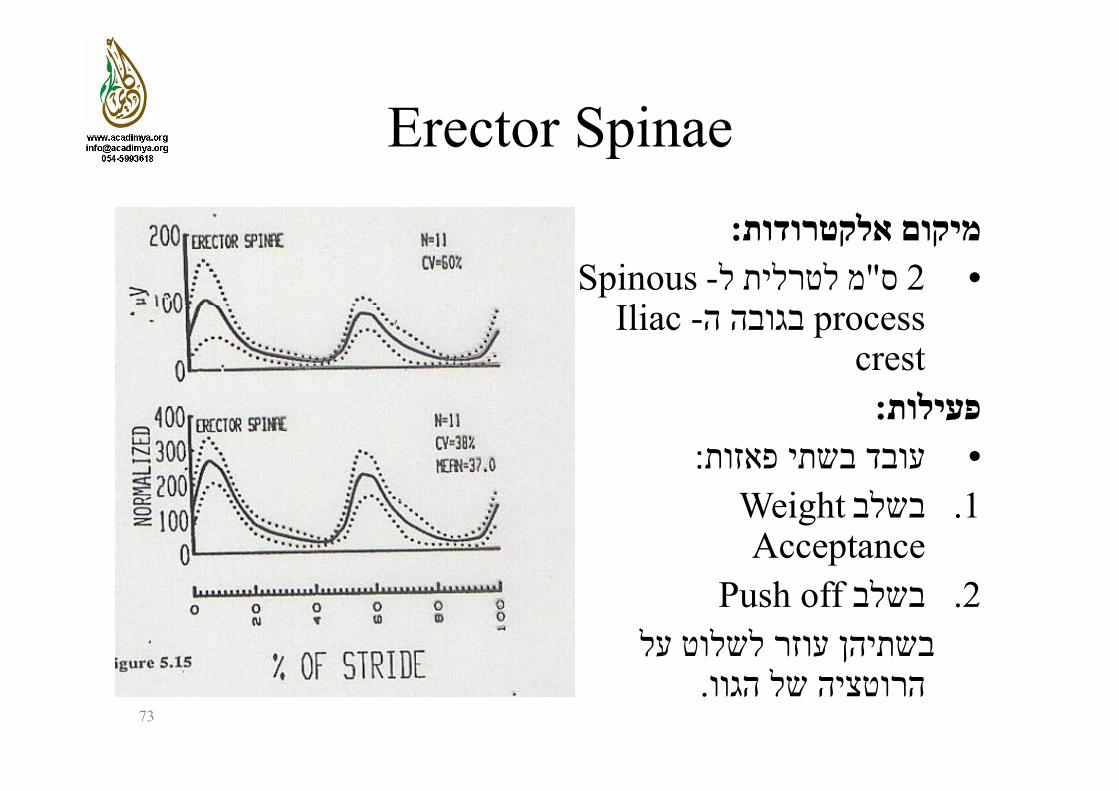
Erector SpinaeErector Spinae:מיקום אלקטרודותל
Spinous-מ לטרלית ל"ס 2•Ili processבגובה ה-Iliac
crest:פעילותל
:עובד בשתי פאזות• Weightבשלב1.
AcceptancePush offבשלב2.
בשתיהן עוזר לשלוט על .הרוטציה של הגוו
73

74

בהליכה אנרגיה צריכת אנרגיה בהליכהצריכת
מטרת ההליכה הינה להצעיד את הגוף קדימה תוך •.שימוש במינימום אנרגיה מכנית ופיזיולוגית
אנרגיה פיזיולוגית הינה אנרגיה המופקת מהפעלת •הגוף .שרירי הגוףשרירי
:אנרגיה מכנית כולל•אנרגיה פוטנציאלית1.קינטית2 אנרגיה אנרגיה קינטית2.אנרגיה אלסטית3.
75
סימטריה ותיאום בתנועות הגפיים נועדו למינימום בזבוז •. של אנרגיה מכנית
ה של התנועה להפחתת האחראים מנגנונים ישנם - ישנם מנגנונים האחראים להפחתת התנועה של ה•COM של ה- HAT למעלה ולצדדים לשם חסכוןבאנרגיה
הסגמנטים• בין אנרגיה להעברת האחראים מנגנונים ם ישנם ן הסגמנט ה ב ם להעברת אנרג ם האחרא שנם מנגנונ:כמו, של הגוף לאפשר יעילות הליכה מרבית
W i h A Weight Acceptance-כיפוף בברך בזמן ה•ןמנגנון הרוטציה של הגוו•
76

אנרגיה צריכת מדידת צריכת אנרגיהמדידת
•O2 Rate:מבטא את–כמות החמצן הנצרכת בדקההקושי של המשימה ותלוי בזמן
•O2 Cost : תלוי במרחק – כמות החמצן ליחידת מרחק).כמות האנרגיה לביצוע משימה(ולא בזמן )(ן
•RER–Respiratory exchange ratio : יחס ייצורCO2ב עולהO2-לשימוש היחס המאמץ שעולה ככל CO2מוש ב חס עולה. O2-לש , ככל שעולה המאמץ ה.מעיד על פעילות אנארובית 0.9מעל
VO2יכול שהפרט המקסימאלית החמצן כמות •VO2 max: כמות החמצן המקסימאלית שהפרט יכול).מדד כושר גופני(לנצל בעת ביצוע פעילות גופנית
77

ב תלויה החמצן ה ב-צריכת כת החמצן תלו צרגיל•מין•הליכה• שיפוע שיפוע הליכה•פני השטח•מדרגות•יותר(עומס• גבוהה העליה דסטלי שיותר )ככל )ככל שיותר דסטלי העליה גבוהה יותר(עומס•, )ככל שיותר פרוקסימלי העליה גבוהה יותר(קיבוע •
.32%ירך,23%ברך,3%קרסול
78
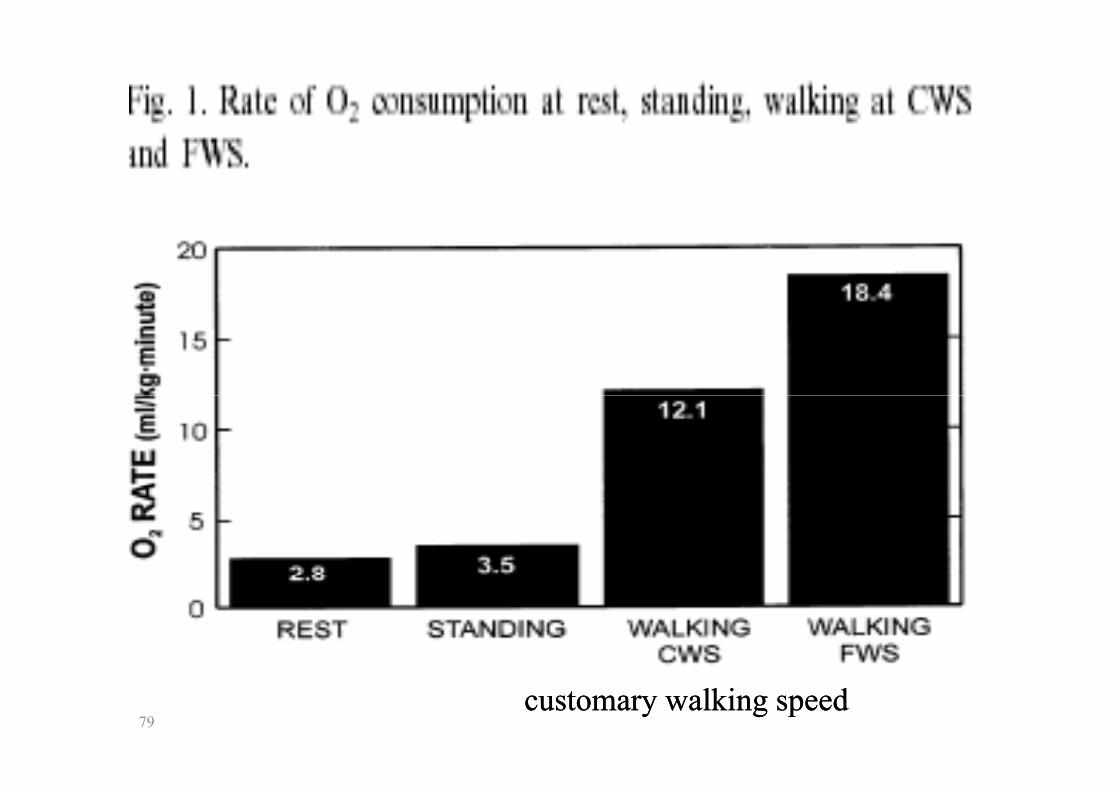
customary walking speedcustomary walking speed79

לאיזה קבוצה יש את ההליכה ?הכי יעילה מבחינה אנרגתית?ל
80

קביים בעזרת הליכה בעזרת קבייםהליכה
•PWB -בקצב צריכת החמצן33%-עליה כ•NWB-עד 78%עליה NWBה עד 78%על
81

Hemipelvectomyp yHip-Disarticulation
82

בקליניקה הליכה ניתוח הליכה בקליניקהניתוח
:מטרות ניתוח ההליכה בקליניקהנורמאלית1 מהליכה וסטיות הבדלים תיאור ת.1 כה נורמאל ות מהל ם וסט אור הבדל .ת.קביעת חומרת הנכות בהליכה. 2. קביעת מטרות טיפול ומדדי שיפור. 3בהליכה4 לליקוי שגורם הבעיה מקור אבחון .אבחון מקור הבעיה שגורם לליקוי בהליכה.4.בדיקת תרומת אביזרי עזר. 5.תכנון מודיפיקציות בסביבת החולה . 6
83
הליכה מרחקי הליכהמרחקי
הליכה פונקציונאלית מחייבת יכולת לעבור מרחק של •).מרחק מחניה לחנות(מטרים300 )ק(
15–10בגיל מבוגר , דקות 5בממוצע צריך לקחת •.דקותדקות
84
בהליכה בעיות בהליכהבעיות
.כאב מפרקי שגורם להולך להפחית נשיאת משקל•לחץ• מינימום יש שבו מום לחץ:מצב נ ש מ :מצב שבו
Plantar Flexמעלות 15בקרסול 1.
מעלות כיפוף 30-40בברך 2.כיפוף30בירך3 מעלות רך3. פוף30ב מעלות כהליכה בתבנית אבנורמאלית יכולה לגרום לבעיות •
חולשה ואטרופיה ,קונטרקטורות–משניות כמו.....שרירית
85

סולמות הערכה
86

87

88
Checklist
(Winter, 1991)
89

ליקויים בהליכה
Foot slap at heel strike (A ירידה בפעילות שרירים דורסיפלקסוריםHSבזמן
Flatfoot at initial contact (B .1 פעילות יתר של פלנטרפלקסוריםSwingבסוף
הגבלה בטווח תנועה של הקרסול 2.).מבנית(
.קיצור אורך צעד3.
C(1.קיצור אורך צעדPush offחלש לפני ה-Swing ך) gק-חולשה מכופפי ירך בתחילת ה2.
Swinggפעילות יתר של מיישרי הירך 3.
Push offבשלב Swingהאטה מוגברת בסוף 4.GMED90חולשה של 5.

Stiff – legged weight bearing (D הברך , פעילות מוגברת של מיישרי הקרסולStance-והירך בתחילת ה
Weak push off accompanied by (E .1חולשת פלנטרפלקסורים בזמןPush p p y (observable pull off
ן קoff
פעילות מוגברת של מכופפי ירך 2.Swingבתחילת
Hip hiking in swing (F1ירך מכופפי בזמןחולשת וקרסול ברך Hip hiking in swing (F +- circumduction
רך1. ברך וקרסול בזמן , חולשת מכופפ Swing
- פעילות מוגברת של מיישרים ב2.Swing
Trendelenburg gait (G.1חולשת מרחיקי ירךל2 ל פעילות מוגברת של מקרבי ירך2.
91
תבניות הליכה אבנורמלית
92

93

C it •Compass gait:. הליכה עם ברכיים נעולות ובלי רוטציה– הליכת מחוגה•
בה עולה ויורד COMאינה יעילה מבחינה אנרגתית כי .הרבההרבה
94
מפרקי האצבעות
95
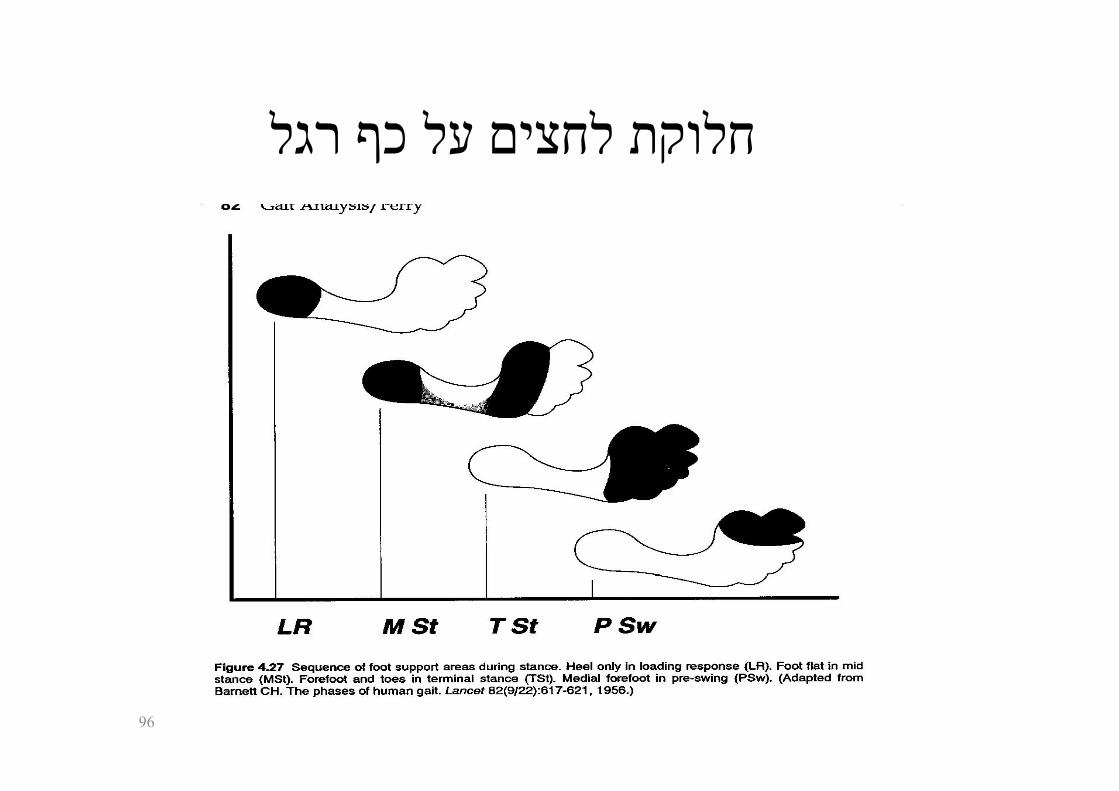
רגל כף על לחצים חלוקת לחצים על כף רגלחלוקת
96

MetatarsophalangealMetatarsophalangeal
97

פתולוגיותפתולוגיות
:בעיות במפרקים אלה••Hallux rigidusHallux rigidus•Metatarsalgiaאללה דברים שיכולים לקצר את אורך הצעד בגלל הגבלה •
בהליכה PUSH OFF-בטווח תנועה ולהפריע לשלב ה ה ע ה עה USח Oה ה.עצמה
98

תודה על ההקשבה ובהצלחהל
99