능동형 후드 시스템
TRANSCRIPT
능동형 후드 시스템
1 조2009730186 이수민2009730204 황규진 ( 발표자 )2010740177 박승빈
실시간시스템설계 1 조
전기 자동차를 위한
( 충돌 감지 시스템 )

목 차• 설계 목적• 기능 설명• 주요 부품• 블록다이어그램• 제작과정• 기준값 결정• 최종제품스펙• 트러블슈팅• 설계일정• 예 산• 역할분담
실시간시스템설계 1 조
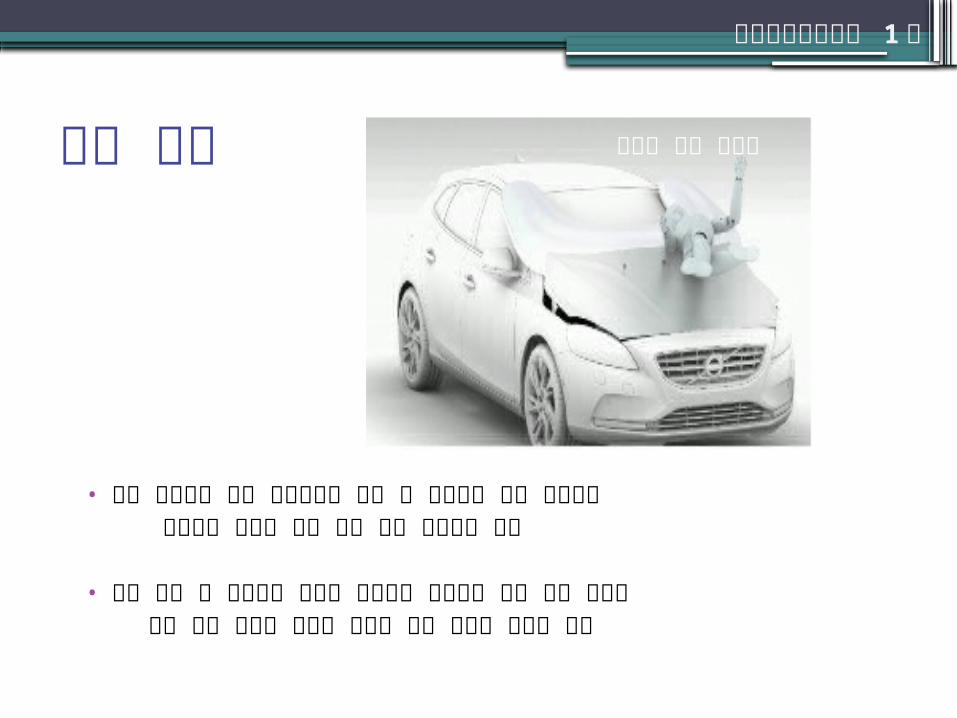
설계 목적
• 전기 자동차를 위한 시스템으로 운행 중 보행자와 충돌 상황에서 보행자의 안전을 위해 충돌 감지 시스템을 설계
• 충돌 감지 시 구동기가 보닛의 뒷부분을 상승시켜 충돌 흡수 공간을 확보 사고 발생시 보행자 머리와 엔진 사이의 충돌을 완화
실시간시스템설계 1 조
능동형 후드 시스템

기능 설명
1. Push Button SW 를 이용하여 충돌 감지
2. 충돌시 Acceleration Sensor 를 이용하여 충돌체 판단
3. 충돌체가 보행자로 판단시 보닛 상승
실시간시스템설계 1 조
주요 부품
DSP2811Core : 주로 디지털 신호를 고속으로 처리하기 위하여 덧셈 · 뺄셈 · 곱셈 등의 반복 연산을 고속으로 처리할 수 있는 집적회로
실시간시스템설계 1 조
주요 부품
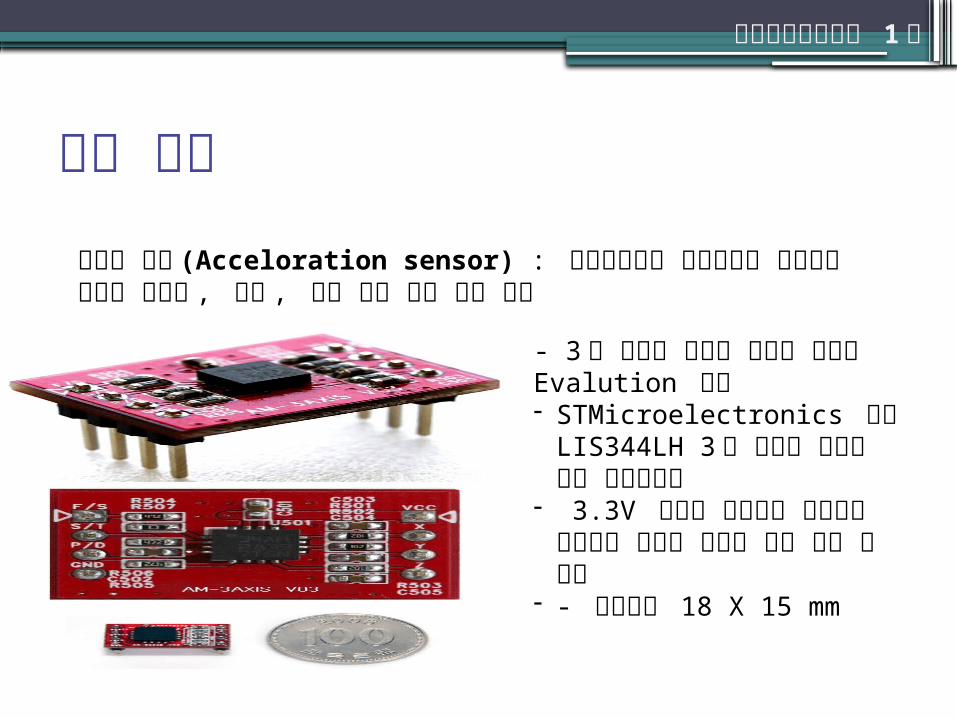
가속도 센서 (Acceloration sensor) : 가속도센서는 출력신호를 처리하여 물체의 가속도 , 진동 , 충격 등의 동적 힘을 측정
실시간시스템설계 1 조
- 3 축 가속도 센서를 이용한 초소형 Evalution 보드- STMicroelectronics 사의
LIS344LH 3 축 센서를 필터와 함께 설계하였음
- 3.3V 전원만 인가하면 추가적인 회로없이 가속도 센서를 동작 시킬 수 있음
- - 외관크기 18 X 15 mm

주요 부품
실시간시스템설계 1 조
DC 모터 : 고정자로 영구자석을 사용하고 , 회전자로 코일을 사용하여 구성한 것으로 , 전기자에 흐르는 전류의 방향을 전환함으로써 자력의 반발 , 흡인력으로 회전력을 생성시키는 모터
정격전압 : DC 5V정격토크 : 3.54g-cm정격회전수 : 8,670rpm정격전류 : 90mA 이하무부하 회전수 : 10,860rpm무부하 전류 : 20mA 이하

블록 다이어그램
실시간시스템설계 1 조
AccelerationSensor
Push button SW
DSPKit
LED
DC Motor
Hood Up

제작 과정

소프트웨어 알고리즘시작
YES
NO
보닛 동작
NO
YES
실시간시스템설계 1 조
보행자충돌
LED ON
충돌체 강도 , 무게 판단
push button 눌림
강한충돌
LED ON
전체 알고리즘
기준값 결정1. 벽
무게와 강도가 크기 때문에 충돌 시 가속도의 변화와 x 축의 변화에 따른 주파수가 높을 것으로 예상하여 결정- 충돌시 차량 정지
2. 보행자 ( 사람의 팔로 대체 ) 무게와 강도가 벽과 비교 했을 때 낮을 것으로 예상되며 벽에 충돌 시 기준점을 잡음- 충돌시 순간 전진
3. 가벼운 물체 ( 캔으로 대체 )무게와 강도가 상대적으로 낮기 때문에 기준점보다 가속도 변화량과 주파수가 작을 것으로 예상하여 결정- 충돌 시 물체를 밀어내며 전진

기준값 결정최대가속도 가속도변화량 주파수 ( 가속도 )
벽
1478 25 260
1398 28 400
1499 22 309
1623 20 351
1203 28 252
1348 23 499
2034 40 520
1639 36 546
1235 30 275
1503 27 364

기준값 결정최대가속도 가속도변화량 주파수 ( 가속도 )
팔
593 16 99
822 18 103
732 17 205
941 15 195
629 11 209
1040 20 183
735 18 293
769 15 270
953 19 128
452 15 383

기준값 결정최대가속도 가속도변화량 주파수 ( 가속도 )
캔
380 7 27
478 6 48
70 4 29
302 7 49
263 10 17
248 5 28
126 5 53
93 4 29
207 9 16
109 4 37
기준값 결정•모의테스트 결과 ( 각 10 회 실시 )•각각의 물체를 테스트한 결과
각각 물체의 가우시안 ( 정규 ) 분포로 기준값을 정함
벽 (1000~2000)보행자 (500~999)가벼운물체 (0~499)•위와같이 기준값이 정해졌으며 이를 바탕으로
프로그래밍한 결과 우리의 작품이 인식률 및 판단률이 약 75% 정도임

최종제품스펙
실시간시스템설계 1 조
내용 Spec
작품 보행자를 위한능동형 후드시스템
예상크기[mm]
150*120*110가로 * 세로 * 높이
보닛 상승높이 17[mm]
상승 완료 시간
200[ms] 이내
트러블슈팅1. DC 모터의 토크가 작아서 보닛을 들어올릴 수
없었음 ( LED 로 대체 , 보닛부분을 없앰으로써 육안으로 모터의 구동을 확인할 수 있음 )
2. - DC 모터의 정격 (3V) 이상의 전압 (5V) 를 인가함으로 인해 과전류로 인해 모터드라이브 파손
3. 가속도 센서의 데이터시트와 측정값이 달라
문제해결이 어려움
트러블슈팅
4. ADC 의 단락으로 인한 파손으로 DSP 모듈 교체
5. 결과물과 DSP 를 연결할때 선이 빠짐으로 인해 측정의 어려움을 겪음
6. 미니카의 배터리 소모로 인하여 미니카의 속도가 느려짐에 따라 가속도센서의 제어가 바뀜

설계일정
실시간시스템설계 1 조
일 월 화 수 목 금 토27 28 29
- 설계공지30 31
1 2
3 4- 제안서 작성1
5 6- 제안서 작성2
7- 제안서발표
8 9- 아이디어 회의
10 11 12 13- 부품구입
14- 회로구성
15 16
17- 케이스제작
18- 작품제작- 트러블슈팅
19- 작품제작- 트러블슈팅
20- 작품제작
21 22 23
24- 작품제작
25 26- 제작완료 및 트러블슈팅
27-결과보고서 작성
28- 결과보고서발표
29 30
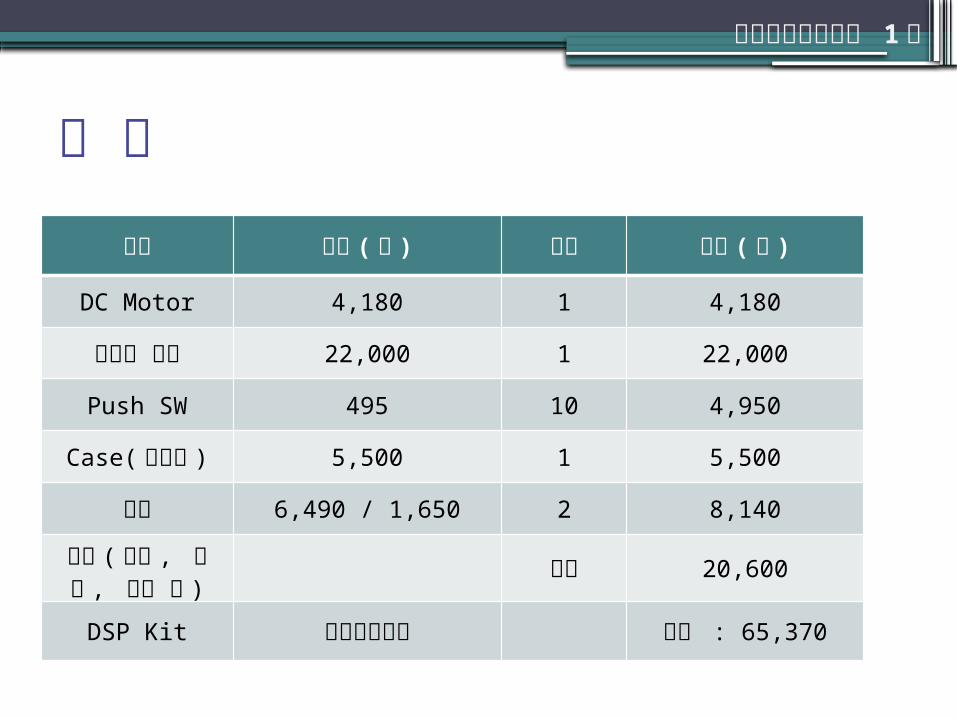
예 산
실시간시스템설계 1 조
내용 단가 (원 ) 개수 가격 (원 )
DC Motor 4,180 1 4,180
가속도 센서 22,000 1 22,000
Push SW 495 10 4,950
Case( 포맥스 ) 5,500 1 5,500
기판 6,490 / 1,650 2 8,140
기타 ( 경첩 , 본드 , 저항 등 )
다수 20,600
DSP Kit 학교물품대여 합계 : 65,370

역할분담
실시간시스템설계 1 조
보고서작성
외형프로그래밍(알고리즘 )
자료검색
이수민 20% 10% 70% 20%
황규진 40% 45% 15% 40%
박승빈 40% 45% 15% 40%
Q&A
감사합니다