เครื่องท าความสะอาดพื้น...
TRANSCRIPT
เครองท าความสะอาดพนอตโนมต รนท 3
นายเรองเดช ใจหนน นายพฒพงศ บญกม
นายศกดชย สวรรณโชต
ปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก
ปการศกษา พ.ศ. 2557
เครองท าความสะอาดสะอาดพนอตโนมต รนท 3
นายเรองเดช ใจหนน นายพฒพงศ บญกม
นายศกดชย สวรรณโชต
ปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณทต สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา**ตาก
ปการศกษา พ.ศ. 2557
AUTOMATIC FLOOR CLEANING MACHINE VERSION 3
MR. RUANGDET JAINUN MR. PUTTIPONG BOONKIM *
MR. SAKCHAI SUWANNACHOT ** **
A PROJECT REPORT SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF BACHELOR OF ENGINEERING
PROGRAM OF ELECTRICAL ENGINEERING FACULTY OF ENGINEERING RAJAMANGALA UNIVERSITY OF TECHNOLOGY LANNA TAK
ACADEMIC YEAR 2014

ปรญญานพนธเรอง เครองท าความสะอาดพนอตโนมต รนท 3 ชอนกศกษา นายเรองเดช ใจหนน รหสนกศกษา 54243207004-4 นายพฒพงศ บญกม รหสนกศกษา 54243207024-2 นายศกดชย สวรรณโชต รหสนกศกษา 54243207027-5 หลกสตร วศวกรรมศาสตรบณฑต สาขาวชา วศวกรรมไฟฟา คณะ วศวกรรมศาสตร อาจารยทปรกษา อาจารย ดร.จกรกฤษณ เคลอบวง ปการศกษา 2557
คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก อนมตใหปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา
......................................................... รองอธการบดมหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก
(ผชวยศาสตราจารยประสาร รจระศกด) คณะกรรมการสอบปรญญานพนธ
....................................................... ประธานกรรมการ (อาจารยสมนก เครอสอน) ...................................................... กรรมการ (อาจารยสวสด ยคะลง) ...................................................... กรรมการ (อาจารยสทธพงษ เพงประเดม) ....................................................... กรรมการ (อาจารย ดร.จกรกฤษณ เคลอบวง) ลขสทธของคณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา
ง ชอปรญญานพนธ เครองท าความสะอาดพนอตโนมต รนท 3 ชอนกศกษา นายเรองเดช ใจหนน รหสนกศกษา 54243207004-4 นายพฒพงศ บญกม รหสนกศกษา 54243207024-2 นายศกดชย สวรรณโชต รหสนกศกษา 54243207027-5 อาจารยทปรกษา อาจารย ดร.จกรกฤษณ เคลอบวง หลกสตร วศวกรรมศาสตรบณฑต วชาเอก วศวกรรมไฟฟา สาขา วศวกรรมไฟฟา ปการศกษา 2557
บทคดยอ
ปรญญานพนธฉบบนเปนการจดสรางเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดมโดยมสวนประกอบหลกสองสวน คอ สวนแรกเปนสวนของโครงสรางมขนาด 35 x 40 เซนตเมตร ท าจากเหลกกลองขนาด 1 นว พนท าดวยอะลมเนยมหนา 1 มลลเมตร ซอนกน 2 ชน การเคลอนทใชมอเตอรไฟฟากระแสตรง 2 ตว เปนตวขบเคลอนลอของเครองท าความสะอาดพนอตโนมต สวนทสองเปนสวนของวงจรควบคมใชไมโครคอนโทรลเลอรตระกล AVR รน Arduino ท างานโดยรบค าสงการท างานจากสวตชปด-เปดเครอง รวมกบตวตรวจจบฝนและตวตรวจรอนๆเพอหลกเลยงการท างานของเครองท าความสะอาดพนอตโนมตแบบซ าทเดม
ผลการทดสอบเวลาของการเขาถงพนทการท างานของเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม พบวาเวลาเฉลยในการเขาถงพนททงหมด 10 ครง อยทเวลา 12 นาท และการทดสอบก าลงไฟฟา ของเวลาการเขาถงพนท 12 นาท แบบไมมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.2216 กโลวตต-ชวโมง น ามาเปรยบเทยบกบผลของการทดสอบก าลงไฟฟา ของเวลาการเขาถงพนท 12 นาท แบบไมมสงกดขวาง มเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.0898 กโลวตต-ชวโมง พบวาแบบมเซนเซอรตรวจวดฝนประหยดก าลงไฟฟาไดดกวา 0.1318 กโลวตต-ชวโมง
ค าส าคญ : มอเตอรไฟฟากระแสตรง, ไมโครคอนโทรลเลอร, เซนเซอร
จ
Project title AUTOMATIC FLOOR CLEANING MACHINE VERSION 3 Students Mr. Ruangdet Jainun Student ID. 54243207004-4
Mr. Puttipong Boonkim * StudStudent ID. 54243207024-2 Mr. Sakchai Suwannachot Student ID. 54243207027-5 Project Advisor Dr. Jukkrit Kluabwang Curriculum Bachelor of Engineering Major Field Electrical Engineering Academic Year 2014
Abstract
This project is aimed to make an automatic floor cleaning machine, which
do not work on the previous area. It consists of two parts. The first part is the structural part with 35 x 40 cm size built from 1 inch steel box and double layers of 1 mm aluminum sheet as a floor. The movement of the proposed machine depends on two DC motors driving on each wheel. The second part is the control circuit using AVR Microcontroller namely Arduino. It works by receiving command signal of the on - off power switch as well as dust sensors and also other sensors to avoid working repeatedly same area.
Experimental result on time to access the working area of floor cleaning machines, automatic cleaning does not repeat is 12 minutes averaged from 10 trials. The electrical consumed in 12 minutes without obstacles and dust sensor, the average energy consumed is 0.2216 kWh. Comparison to the case access time in 12 minutes without and dust sensor the average energy consumed is 0.0898 kWh. IT can conclude that proposed machine with dust sensors can save energy 0.1318 kWh with respect to another machine without dust sensors.
Keywords: DC Motor, Microcontroller, Sensor
กตตกรรมประกาศ
ปรญญานพนธเลมนไดด าเนนการส าเรจลลวงไดดวยดเพราะไดรบค าแนะน าอยางดจากอาจารย ดร. จกรกฤษณ เคลอบวง ทเปนอาจารยทปรกษาใหแกผจดท าโครงงาน รวมทงอาจารยประจ าสาขาวศวกรรมไฟฟา และเจาหนาท ทเกยวของทกทานทใหความชวยเหลอ รวมทงบดา มารดาและผปกครองทคอยสนบสนนใหมโอกาสไดศกษา และคาใชจายตางๆในการจดท าโครงงาน คณะผจดท าขอขอบพระคณทกทานทใหความชวยเหลอมาโดยตลอดรวมถงผลงานทางวชาการทไดอางองในเอกสารอางอง ขอขอบคณสาขาวชาวศวกรรมไฟฟา มหาลยเทคโนโลยราชมงคลลานนาตาก ทไดใหการสนบสนนอปกรณ และเครองมอทางไฟฟาทจ าเปนในการจดท า
ขอขอบคณเพอนๆ ทกคนทไดใหค าปรกษา และชวยเหลอรวมทงใหก าลงใจเสมอมาโดยตลอด
คณะผจดท า เรองเดช ใจหนน
พฒพงศ บญกม ศกดชย สวรรณโชต
26 พฤษภาคม 2558

สารบญ
หนา
บทคดยอภาษาไทย ง
บทคดยอภาษาองกฤษ จ
กตตกรรมประกาศ ฉ
สารบญ ช
สารบญรป ญ
สารบญตาราง ฐ
รายการสญลกษณ ฑ
บทท 1 บทน า 1
1.1 ความเปนมาและความส าคญของปญหา 1
1.2 วตถประสงคของโครงงาน 1
1.3 ขอบเขตของโครงงาน 1
1.4 แผนการด าเนนงาน 2
1.5 ประโยชนทคาดวาจะไดรบจากโครงงาน 3
บทท 2 ทฤษฎทเกยวของ 4
2.1 บทน า 4
2.2 ทฤษฏมอเตอรไฟฟากระแสตรง 4
2.3 ไมโครคอนโทรลเลอรตระกล AVR ดวย Arduino 10
2.4 บอรดอาดอโนเมกา 2560 12
2.5 เครองท าความสะอาดพน 13
2.6 ตวตรวจรอนฟาเรดส าหรบตรวจรบวตถ 14
2.7 ตวตรวจรอนฟาเรดส าหรบตรวจจบเสน 18
2.8 โซลดสเตตรเลย 21
2.9 เซนเซอรตรวจวดฝน 23
2.10 บอรดขบมอเตอรดซ แบบ H-Bridge รน SE-HB40-1 25
ซ
สารบญ(ตอ)
หนา
บทท 3 การออกแบบและพฒนาระบบเครองท าความสะอาดพนอตโนมต
แบบหลบสงกดขวางได 27
3.1 บทน า 27
3.2 การออกแบบชดขบเคลอน ระบบเดม 27
3.3 การค านวณหาพกดมอเตอรเครองถพนระบบเดม 29
3.4 การออกแบบโครงสรางระบบเดม 30
3.5 บลอกไดอะแกรมการท างานของเครองท าความสะอาดพนอตโนมต ระบบเดมและแบบท าความสะอาดไมซ าทเดม 31
3.6 การออกแบบวงจรไฟฟาระบบเดม 31 3.7 การออกแบบวงจรไฟฟาระบบใหม 34 3.8 ลกษณะการท างานและขอบเขตการท างานระบบใหม 36 บทท 4 ผลการด าเนนงาน 39
4.1 บทน า 39
4.2 การทดสอบการเขาถงพนท 39
4.3 การทดสอบก าลงไฟฟาและรอยละการท าความสะอาด
แบบไมมสงกดขวาง 41
4.4 การทดสอบก าลงไฟฟาและรอยละการท าความสะอาด
แบบมสงกดขวาง 45
บทท 5 สรปผลการด าเนนโครงงานและขอเสนอแนะ 49
5.1 บทน า 49
5.2 สรปผลการด าเนนโครงงาน 49
5.3 ปญหาและอปสรรคในการจดการโครงงาน 50
5.4 ขอเสนอแนะในการพฒนาโครงงาน 50
เอกสารอางอง 51

ฌ
สารบญ(ตอ)
หนา
ภาคผนวก 52
ก. เครองมอทใชในการท าปรญญานพนธ 52
ข. โปรแกรมควบคมการท างานของเครองท าความสะอาดพนอตโนมต
แบบท าความสะอาดไมซ าทเดม 56
ประวตผเขยน 73
สารบญรป
รปท หนา
2.1 โครงสรางของมอเตอรไฟฟากระแสตรง 5
2.2 โครงสรางจรงของมอเตอรไฟฟากระแสตรง 5
2.3 สวนทอยกบทของมอเตอรไฟฟากระแสตรง 6
2.4 สวนทเคลอนทของมอเตอรไฟฟากระแสตรง 6
2.5 วงจรมอเตอรไฟฟากระแสตรงแบบอนกรม 7
2.6 วงจรมอเตอรไฟฟากระแสตรงแบบขนาน 7
2.7 วงจรมอเตอรไฟฟากระแสตรงแบบผสมชนดชอรทชนท 8
2.8 วงจรมอเตอรไฟฟากระแสตรงแบบผสมชนดลองชนท 8
2.9 ขดลวดทมกระแสไฟฟาไหลผาน 9
2.10 บอรด Arduino 11
2.11 บอรดอาดอโนเมกา 2560 12
2.12 สวนประกอบของเครองดดฝน 14
2.13 เซนเซอรแสงอนฟาเรด รน IRD-202 14
2.14 โครงสรางและพอรตของ IRD-202 15
2.15 สญญาณเอาตพต และขาตอแรงดนไฟเลยงใหกบโมดล 15
2.16 การปรบตงระยะการตรวจจบของเอาตพต 1 16
2.17 การปรบตงระยะการตรวจจบของเอาตพต 2 17
2.18 การท างานของเซนเซอรเมอตรวจจบวตถไดในต าแหนงท 2 และ 1 ตามล าดบ
ซงไดก าหนดไวจากขนตอนการปรบตงทผานมา 18
2.19 ลกษณะของตวตรวจรอนฟาเรดส าหรบตรวจจบเสน 18
2.20 โครงสรางบอรดและอนเตอรเฟชพอรต 19
2.21 การบดกรเลอกการท างานทลอจก “0” 20
ฎ
สารบญรป (ตอ)
รปท หนา
2.22 การบดกรเลอกการท างานทลอจก “1” 20
2.23 สญญาณเอาตพต และขาตอแรงดน 20
2.24 โซลดสเตตรเลย 21
2.25 วงจรการตอใชงาน 22
2.26 เซนเซอรตรวจวดฝน 23
2.27 การตอเซนเซอรตรวจวดฝนกบบอรด Arduino 24
2.28 กราฟคาแรงดนดานออกกบปรมาณของฝน 25
2.29 บอรดขบมอเตอรดซ แบบ H-Bridge รน SE- HB40-1 25
3.1 ลอขบเคลอนหนยนต 29
3.2 ชดผาขดพน 30
3.3 โครงสรางของเครองท าความสะอาดพน 30
3.4 บลอกไดอะแกรมการท างาน 31
3.5 วงจรอนพตของไมโครคอนโทรลเลอร 32
3.6 วงจรควบคมมอเตอรลอหลง ลอท 1 33
3.7 วงจรควบคมมอเตอรลอหลง ลอท 2 33
3.8 วงจรควบคมมอเตอรเครองดดฝน 34
3.9 วงจรเซนเซอรตรวจวดฝน 35
3.10 วงจรควบคมเครองดดฝน 35
3.11 วงจรควบคมมอเตอรไฟฟากระแสตรง 36
3.12 เซนเซอรตวซาย ตวซายตวกลาง หรอทงสามตวตรวจพบสงกดขวาง
ถอยหลงแลวเลยวขวา 37
3.13 เซนเซอรตวขวา ตวกลาง หรอตวขวาตวกลางตรวจพบสงกดขวาง
ถอยหลงแลวเลยวซาย 37
3.14 ขอบเขตในการท าความสะอาดพน 3 x 3 เมตร 38

ฏ
สารบญรป (ตอ)
รปท หนา
4.1 เครองท าความสะอาดพนอตโนมต รนท 3 39
4.2 กอนการทดสอบการเขาถงพนทการท างาน 40
4.3 หลงการทดสอบการเขาถงพนทการท างาน 40
4.4 กอนการทดสอบแบบไมมสงกดขวาง 42
4.5 หลงการทดสอบแบบไมมสงกดขวาง 42
4.6 กอนการทดสอบแบบมสงกดขวาง 45
4.7 หลงการทดสอบแบบมสงกดขวาง 45

สารบญตาราง
ตารางท หนา
1.1 แผนการด าเนนงาน 2
2.1 ขาทใชตอระหวางเซนเซอรกบบอรดArduino 24
2.2 คณสมบตบอรดขบมอเตอรดซ 26
4.1 การทดสอบเวลาของการเขาถงพนทการท างานทงหมดของเครอง
ท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม 41
4.2 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบไมมสงกดขวาง
ไมมเซนเซอรตรวจวดฝน 43
4.3 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบไมมสงกดขวาง
มเซนเซอรตรวจวดฝน 44
4.4 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบมสงกดขวาง
ไมมเซนเซอรตรวจวดฝน 46
4.5 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบมสงกดขวาง
มเซนเซอรตรวจวดฝน 47
4.6 ตารางเปรยบก าลงไฟฟาในพนทการท างานของเครองท าความสะอาดพนอตโนมต
ในเวลา 12 นาท 48
ค าอธบายสญลกษณค ายอและอกษรยอ
S = ระยะทาง (เมตร) r = รศมของลอ (มลลเมตร) V = ความเรว (เมตรตอวนาท)
A = ความเรง (เมตรตอวนาท )
F = แรง (นวตน) = แรงบด (นวตน-เมตร)
P = ก าลงมอเตอร (วตต)
= ความเรวเชงมม (เรเดยนตอวนาท) B = ความหนาแนนของฟลกซแมเหลก (เวเบอรตอตารางเมตร) I = กระแส (แอมแปร) L = ความยาวขดลวด (เมตร) SMD คอ อปกรณทมขนาดเลกมลกษณะเปนขาแบบแบนเรยบ ไมสามารถเสยบลงรของลายวงจร ตองหลอมตะกวใหตดกบลายวงจร พลสวตมอส คอ ความกวางของพลส ในการควบคมแรงดน และกระแส AVR คอ ไอซไมโครคอนโทรลเลอรของบรษท Atmel โดยใชสญญาณนาฬกาเพยง 1 ลกในการ ปฏบตงานใน 1 ค าสง Bumper L คอ เซนเซอรตรวจจบวตถตวซาย
Bumper R คอ เซนเซอรตรวจจบวตถตวขวา
Bumper C คอ เซนเซอรตรวจจบวตถตวกลาง
Track L คอ เซนเซอรตรวจจบเสนตวซาย
Track R คอ เซนเซอรตรวจจบเสนตวขวา
Track C คอ เซนเซอรตรวจจบเสนตวกลาง
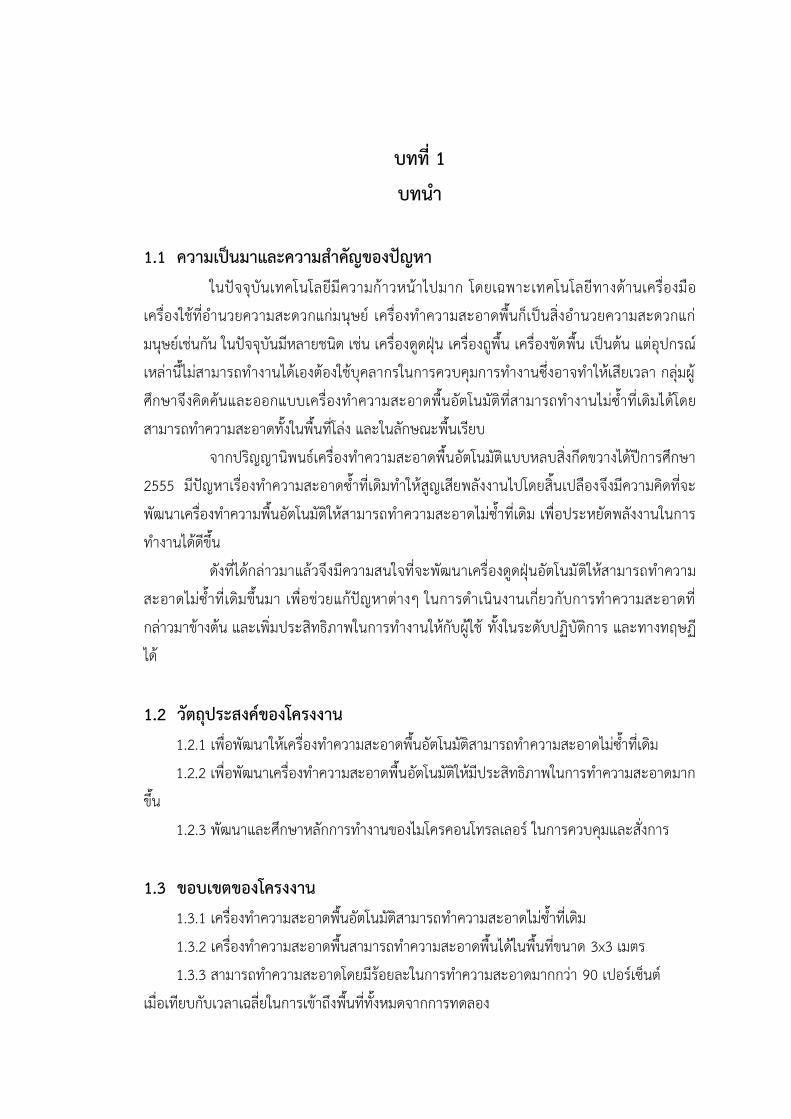
บทท 1 บทน า
1.1 ความเปนมาและความส าคญของปญหา ในปจจบนเทคโนโลยมความกาวหนาไปมาก โดยเฉพาะเทคโนโลยทางดานเครองมอเครองใชทอ านวยความสะดวกแกมนษย เครองท าความสะอาดพนกเปนสงอ านวยความสะดวกแกมนษยเชนกน ในปจจบนมหลายชนด เชน เครองดดฝน เครองถพน เครองขดพน เปนตน แตอปกรณเหลานไมสามารถท างานไดเองตองใชบคลากรในการควบคมการท างานซงอาจท าใหเสยเวลา กลมผศกษาจงคดคนและออกแบบเครองท าความสะอาดพนอตโนมตทสามารถท างานไมซ าทเดมไดโดยสามารถท าความสะอาดทงในพนทโลง และในลกษณะพนเรยบ จากปรญญานพนธเครองท าความสะอาดพนอตโนมตแบบหลบสงกดขวางไดปการศกษา 2555 มปญหาเรองท าความสะอาดซ าทเดมท าใหสญเสยพลงงานไปโดยสนเปลองจงมความคดทจะพฒนาเครองท าความพนอตโนมตใหสามารถท าความสะอาดไมซ าทเดม เพอประหยดพลงงานในการท างานไดดขน ดงทไดกลาวมาแลวจงมความสนใจทจะพฒนาเครองดดฝนอตโนมตใหสามารถท าความสะอาดไมซ าทเดมขนมา เพอชวยแกปญหาตางๆ ในการด าเนนงานเกยวกบการท าความสะอาดทกลาวมาขางตน และเพมประสทธภาพในการท างานใหกบผใช ทงในระดบปฏบตการ และทางทฤษฏได
1.2 วตถประสงคของโครงงาน 1.2.1 เพอพฒนาใหเครองท าความสะอาดพนอตโนมตสามารถท าความสะอาดไมซ าทเดม 1.2.2 เพอพฒนาเครองท าความสะอาดพนอตโนมตใหมประสทธภาพในการท าความสะอาดมากขน 1.2.3 พฒนาและศกษาหลกการท างานของไมโครคอนโทรลเลอร ในการควบคมและสงการ
1.3 ขอบเขตของโครงงาน 1.3.1 เครองท าความสะอาดพนอตโนมตสามารถท าความสะอาดไมซ าทเดม 1.3.2 เครองท าความสะอาดพนสามารถท าความสะอาดพนไดในพนทขนาด 3x3 เมตร 1.3.3 สามารถท าความสะอาดโดยมรอยละในการท าความสะอาดมากกวา 90 เปอรเซนต เมอเทยบกบเวลาเฉลยในการเขาถงพนททงหมดจากการทดลอง
2
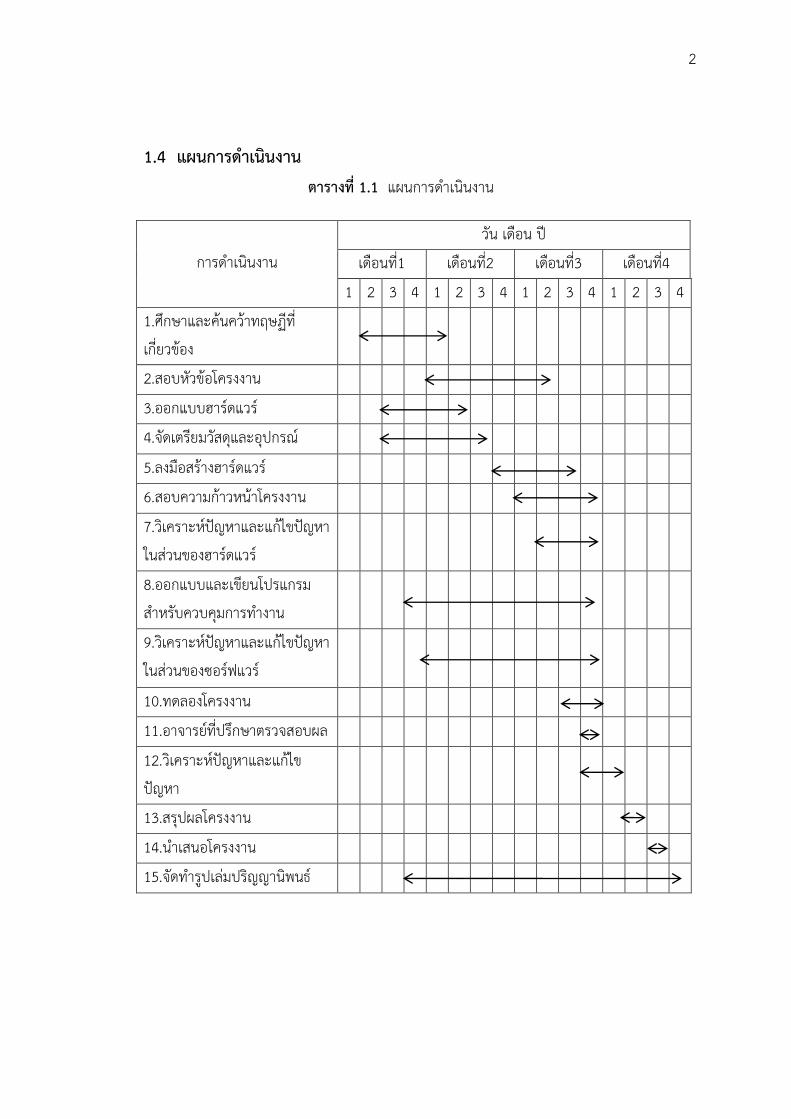
1.4 แผนการด าเนนงาน
ตารางท 1.1 แผนการด าเนนงาน
การด าเนนงาน
วน เดอน ป เดอนท1 เดอนท2 เดอนท3 เดอนท4
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1.ศกษาและคนควาทฤษฏทเกยวของ
2.สอบหวขอโครงงาน 3.ออกแบบฮารดแวร 4.จดเตรยมวสดและอปกรณ 5.ลงมอสรางฮารดแวร 6.สอบความกาวหนาโครงงาน 7.วเคราะหปญหาและแกไขปญหาในสวนของฮารดแวร
8.ออกแบบและเขยนโปรแกรมส าหรบควบคมการท างาน
9.วเคราะหปญหาและแกไขปญหาในสวนของซอรฟแวร
10.ทดลองโครงงาน 11.อาจารยทปรกษาตรวจสอบผล 12.วเคราะหปญหาและแกไขปญหา
13.สรปผลโครงงาน 14.น าเสนอโครงงาน 15.จดท ารปเลมปรญญานพนธ

3
1.5 ประโยชนทคาดวาจะไดรบจากโครงงาน 1.5.1 ไดเครองท าความสะอาดพนทสามารถท าความสะอาดไมซ าทเดม 1.5.2 ไดเครองท าความสะอาดพนทสามารถท าความสะอาดไดอยางมประสทธภาพและประหยดพลงงานไดดขน 1.5.3 ไดความรในการออกแบบและเขยนโปรแกรมส าหรบควบคมการท างานของเครองท าความสะอาดพนอตโนมตดวยไมโครคอนโทรลเลอร

บทท 2 ทฤษฎทเกยวของ
2.1 บทน า ในบทนกลาวถงหลกทฤษฏทเกยวของกบโครงงาน ไดแกทฤษฏมอเตอรไฟฟากระแสตรง ไมโครคอนโทรลเลอรตระกล (AVR) โซลดสเตตรเลย เครองท าความสะอาดพน เซนเซอร โปรแกรม Arduino
2.2 ทฤษฏมอเตอรไฟฟากระแสตรง
มอเตอรไฟฟากระแสตรง คอ เครองกลชนดหนงทเปลยนแปลงพลงงานไฟฟามาเปนพลงงานกลโครงสรางของมอเตอรไฟฟากระแสตรงจะเหมอนกบเครองก าเนดไฟฟากระแสตรง ทกอยาง ดงนนเครองก าเนดไฟฟากระแสตรงจงสามารถตอใหเปนมอเตอรไฟฟากระแสตรงได เครองกลไฟฟากระแสตรง เปนเครองกลไฟฟารนแรกๆทใชงานมาอยางยาวนาน เครองกลไฟฟากระแสตรงสามารถท างานไดสองแบบ คอ ท างานเปนเครองก าเนดไฟฟากระแสตรงและเปนมอเตอรไฟฟากระแสตรง ซงปจจบนนยมไดมการน าเอามอเตอรไฟฟากระแสตรงไปใชงานในงานอตสาหกรรมเพราะควบคมความเรวกบแรงบดของมอเตอรไดงาย เชน โรงงานทอผา โรงงานเสนใยโพลเอสเตอร โรงงานถลงโลหะ หรอใชเปนตนก าลงในการขบเคลอนรถไฟฟา เปนตน
2.2.1 โครงสรางของมอเตอรไฟฟากระแสตรง
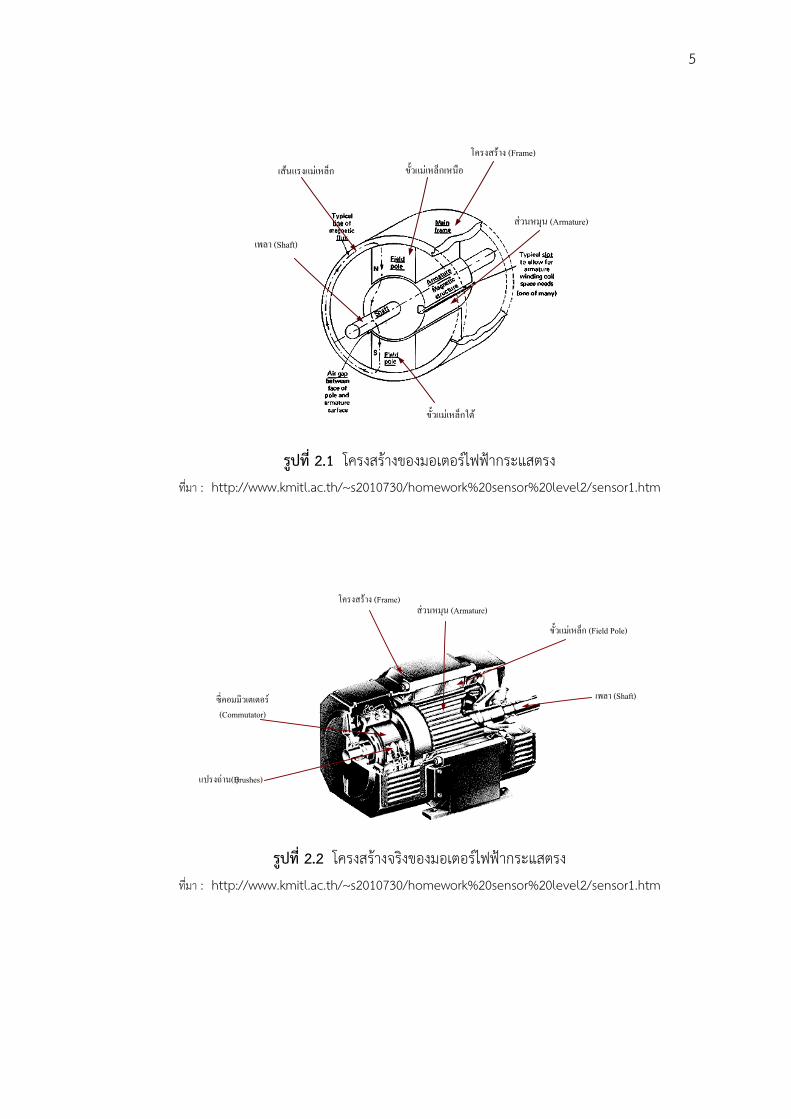
พจารณาในรปท 2.1 แสดงสวนประกอบหลกๆของเครองกลไฟฟากระแสตรงทประกอบ ดวยสเตเตอร เปนโครงสรางภายนอกของเครองกลไฟฟากระแสตรงทยดกบขวแมเหลกเหนอ N Field Pole และขวแมเหลกใต S Field Pole ท าหนาทสงเสนแรงแมเหลกจากขวเหนอสขวใตและทส าคญมากอกสวนคอสวนหมน (Armature) ในสวนนภายในจะพนขดลวดกรณทจายแรงดนไฟฟาจะท างานเปนเครองก าเนดไฟฟากระแสตรง (DC Generator) กรณทท างานขบโหลดจะท างานเปนมอเตอรไฟฟากระแสตรงซงแตละสวนแสดงดงรปท 2.2
5
ขวแมเหลกเหนอ
ขวแมเหลกใต
สวนหมน (Armature)
เพลา (Shaft)
โครงสราง (Frame)เสนแรงแมเหลก
รปท 2.1 โครงสรางของมอเตอรไฟฟากระแสตรง ทมา : http://www.kmitl.ac.th/~s2010730/homework%20sensor%20level2/sensor1.htm
ซคอมมวเตเตอร(Commutator)
แปรงถาน( Brushes)
สวนหมน (Armature)
เพลา (Shaft)
โครงสราง (Frame)
ขวแมเหลก (Field Pole)
รปท 2.2 โครงสรางจรงของมอเตอรไฟฟากระแสตรง ทมา : http://www.kmitl.ac.th/~s2010730/homework%20sensor%20level2/sensor1.htm
6
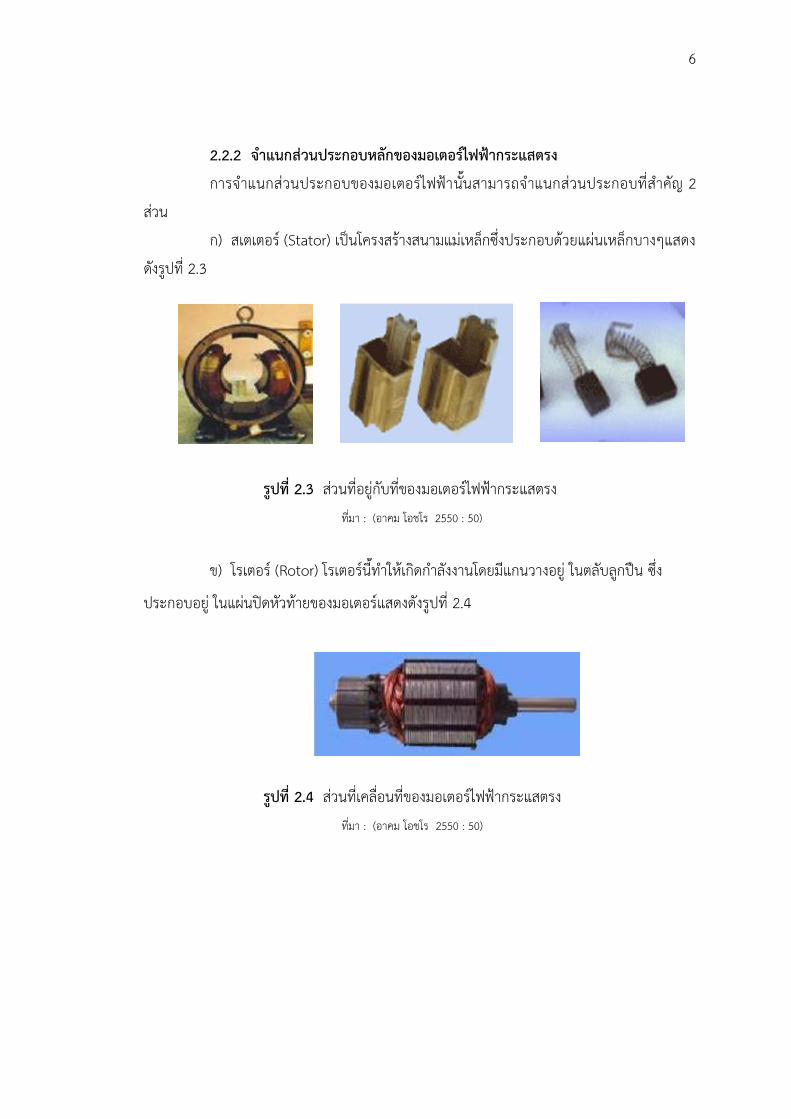
2.2.2 จ าแนกสวนประกอบหลกของมอเตอรไฟฟากระแสตรง การจ าแนกสวนประกอบของมอเตอรไฟฟานนสามารถจ าแนกสวนประกอบทส าคญ 2 สวน ก) สเตเตอร (Stator) เปนโครงสรางสนามแมเหลกซงประกอบดวยแผนเหลกบางๆแสดงดงรปท 2.3
รปท 2.3 สวนทอยกบทของมอเตอรไฟฟากระแสตรง ทมา : (อาคม โอชโร 2550 : 50)
ข) โรเตอร (Rotor) โรเตอรนท าใหเกดก าลงงานโดยมแกนวางอย ในตลบลกปน ซง
ประกอบอย ในแผนปดหวทายของมอเตอรแสดงดงรปท 2.4
รปท 2.4 สวนทเคลอนทของมอเตอรไฟฟากระแสตรง ทมา : (อาคม โอชโร 2550 : 50)

7
2.2.3 ชนดของมอเตอรไฟฟากระแสตรง ก) มอเตอรไฟฟากระแสตรงแบบอนกรม (Series Motor) คอ มอเตอรทตอขดลวดสนามแมเหลกตออนกรมกบขดลวดอารเมเจอร เรยก มอเตอรชนดนวา ซรสฟลด (Series Field) มคณลกษณะทดคอใหแรงบดสงนยมใชเปนตนก าลงของรถไฟฟา,รถยกของ,เครนไฟฟา เปนตน ความเรวรอบของมอเตอรกระแสตรงแบบอนกรมเมอไมมภาระงานความเรวจะสงมาก แตถามภาระงานมาตอความเรวกจะลดลงตามภาระงานแสดงดงรปท 2.5
รปท 2.5 วงจรมอเตอรไฟฟากระแสตรงแบบอนกรม ทมา : (กจจา แกนศร 2549 : 181)
ข) มอเตอรไฟฟากระแสตรงแบบขนาน ( Shunt Motor) หรอเรยกวา ชนทมอเตอร มอเตอรกระแสตรงแบบขนานนขดลวดสนามแมเหลกจะตอขนานกบขดลวดอาเมเจอร มอเตอรกระแสตรงแบบขนานมคณลกษณะทดมความเรวคงทแรงบดเรมหมนต าแตความเรวรอบคงทชนทมอเตอรสวนมากเหมาะกบงานประเภทพดลมเพราะพดลมตองการความเรวคงทแสดงดงรปท 2.6
รปท 2.6 วงจรมอเตอรไฟฟากระแสตรงแบบขนาน ทมา : (กจจา แกนศร 2549 : 182)
ค) มอเตอรกระแสตรงแบบผสม (Compound Motor) หรอเรยกวาคอมเปานดมอเตอร มอเตอรกระแสตรงแบบผสมนจะน าคณลกษณะทดของมอเตอรกระแสตรงแบบขนานและมอเตอรกระแสตรงแบบอนกรมมารวมกน มอเตอรกระแสตรงแบบผสมม คณลกษณะพเศษคอ มแรงบดสง
8
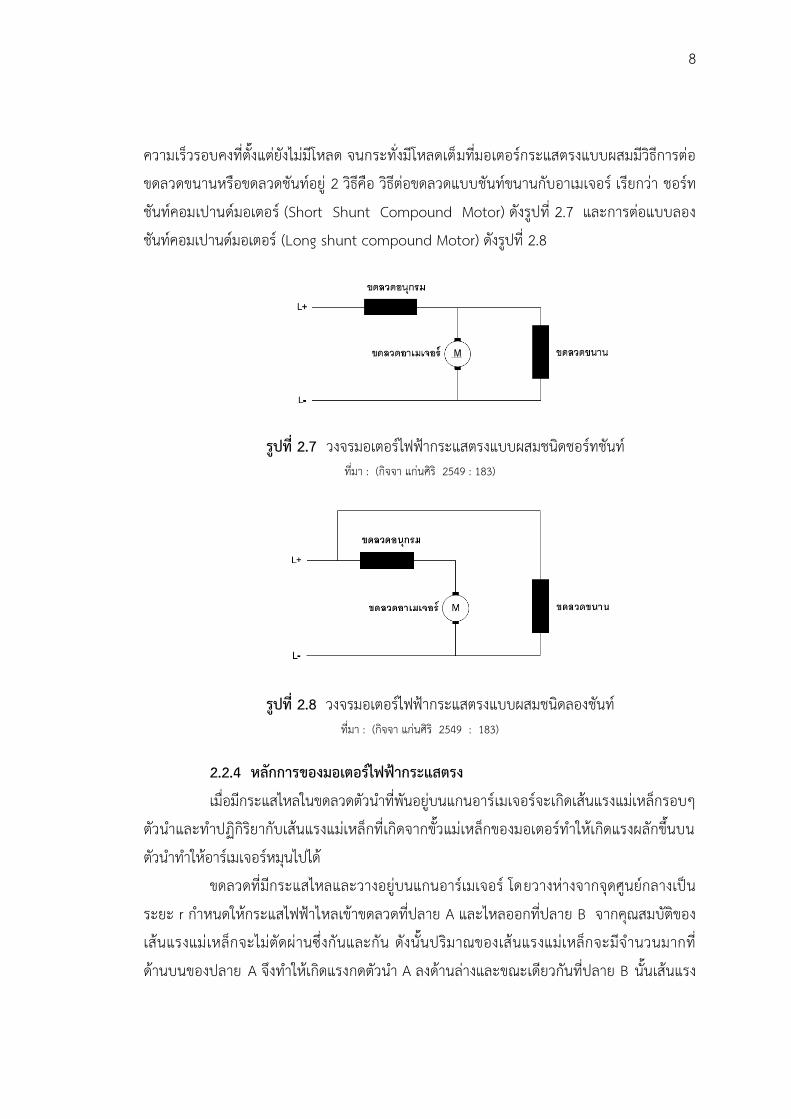
ความเรวรอบคงทตงแตยงไมมโหลด จนกระทงมโหลดเตมทมอเตอรกระแสตรงแบบผสมมวธการตอขดลวดขนานหรอขดลวดชนทอย 2 วธคอ วธตอขดลวดแบบชนทขนานกบอาเมเจอร เรยกวา ชอรทชนทคอมเปานดมอเตอร (Short Shunt Compound Motor) ดงรปท 2.7 และการตอแบบลองชนทคอมเปานดมอเตอร (Long shunt compound Motor) ดงรปท 2.8
รปท 2.7 วงจรมอเตอรไฟฟากระแสตรงแบบผสมชนดชอรทชนท ทมา : (กจจา แกนศร 2549 : 183)
รปท 2.8 วงจรมอเตอรไฟฟากระแสตรงแบบผสมชนดลองชนท ทมา : (กจจา แกนศร 2549 : 183)
2.2.4 หลกการของมอเตอรไฟฟากระแสตรง เมอมกระแสไหลในขดลวดตวน าทพนอยบนแกนอารเมเจอรจะเกดเสนแรงแมเหลกรอบๆ ตวน าและท าปฏกรยากบเสนแรงแมเหลกทเกดจากขวแมเหลกของมอเตอรท าใหเกดแรงผลกขนบนตวน าท าใหอารเมเจอรหมนไปได ขดลวดทมกระแสไหลและวางอยบนแกนอารเมเจอร โดยวางหางจากจดศนยกลางเปนระยะ r ก าหนดใหกระแสไฟฟาไหลเขาขดลวดทปลาย A และไหลออกทปลาย B จากคณสมบตของเสนแรงแมเหลกจะไมตดผานซงกนและกน ดงนนปรมาณของเสนแรงแมเหลกจะมจ านวนมากทดานบนของปลาย A จงท าใหเกดแรงกดตวน า A ลงดานลางและขณะเดยวกนทปลาย B นนเสนแรง

9
แมเหลกจะมปรมาณมากทดานหนาท าใหเกดแรงดนใหตวน า B เคลอนท ผลรวมของแรงทกระท าตอตวน า A และ B นท าใหอารเมเจอรของมอเตอรเกดการเคลอนทไปไดแสดงดงรปท 2.9
รปท 2.9 ขดลวดทมกระแสไฟฟาไหลผาน ทมา : http://ciovainlove.blogspot.com/2010_01_01_archive.html
แรงทเกดขนในตวน าทมกระแสไหลผานในขณะทวางอยในสนามแมเหลกจะแปรผนตามกบความหนาแนนของเสนแรงแมเหลก ความยาวของตวน าและคากระแสไฟฟาทไหลผานตวน า แรงทเกดขนบนตวน าสามารถหาไดจากสมการดงน
……….(2.1)
เมอ F คอแรงทเกดขนบนตวน า : [ ] B คอความหนาแนนของฟลกซแมเหลก : [ ] I คอกระแสทไหลผานลวดตวน า : [ ] L คอความยาวลวดตวน า : [ ]
2.2.5 การเกดแรงบดทสนามแมเหลก
แรงบด หมายถง โมเมนตของแรงทท าใหเกดการหมนหรอการบดรอบแกนอนหนง ซงสามารถวดไดโดยใชผลคณของแรงกบรศม ณ จดทถกกระท าไดดงสมการดงน
……….(2.2)
เมอ คอแรงบด : [N-m] r คอรศมของรอบการหมนเนองจากแรงกระท า : [ ] F คอคาของแรงกระท า : [ ]

10
ก าลงของมอเตอรหาไดจาก
……….(2.3)
เมอ P คอก าลงของมอเตอร : [ ] คอแรงบด : [N-m] คอความเรวเชงมม : [ ] r คอรศม : [ ]
2.3 ไมโครคอนโทรลเลอรตระกล AVR ดวย Arduino
Arduino เปนภาษา อตาลซงใชเปนชอของโครงการพฒนาไมโครคอนโทรลเลอรตระกล AVR แบบ Open Source ทไดรบการปรบปรงมาจากโครงการพฒนา Open Source ของ AVR อกโครงการหนงทชอวา “Wiring แตเนองจากโครงการของ “Wiring” เลอกใช AVR เบอร ATmega128 ซงเปนไมโครคอนโทรลเลอรทมจ านวนของหนวยความจ าและ I/O คอนขางมากและทส าคญATmega128 เปนชพทมตวถงแบบ SMD จงท าใหเปนอปสรรคส าหรบผเรมตนในการสรางบอรดและตอวงจรขนมาใชงานกนเองและบอรดจะมขนาดคอนขางใหญอาจจะดเกนความจ าเปนส าหรบผเรมตน จงไมคอยไดรบความนยมเทาทควร แตเมอ Arduino น า Source Code ของ “Wiring”มาพฒนาและปรบปรงโดยใหสามารถใชงานกบไมโครคอนโทรลเลอร AVR ขนาดเลกอยาง Mega8 และ Mega168 จงท าใหระบบวงจรของบอรดมขนาดเลกลงกวา “Wiring” มากและยงใชอปกรณนอยชนท าใหงายตอการตอวงจรใหงานกนเองและประหยดตนทนในการสรางบอรดไปไดมากจงท าให “Arduino” ไดรบความนยมจากผใชงานทวโลกเปนอยางมาก Arduino มจดเดนในเรองความงายในการเรยนรและการใชงานเนองจากมการออกแบบค าสงตางๆขนมาสนบสนนการใชงานดวยรปแบบทงายไมซบซอนซงถงแมวา Arduino จะมรปแบบการใชงานคลายกนกบไมโครคอนโทรลเลอรอยาง Basic Stamp ของ Parallax, BX-24 ของ Netmedias และ Handy Board ของ MIT แตกมจดเดนกวาของรายอนๆหลายอยางเปนตนวา
1). ราคาไมแพง เนองจากม Source Code และวงจรแจกใหฟรสามารถตอวงจรขนมาใชงานไดเอง

11
2). โปแกรมทใชพฒนาของ Arduino รองรบการท างานทง Windows, Linux และ Macintosh OSX 3). มค าสงทงายตอการใชงานแตสามารถน าไปใชงานจรงๆทมความซบซอนมากๆไดและยงสามารถสรางค าสงและ Library ใหมๆขนมาใชงานเองไดเมอมความช านาญมากขนแลว 4). มการเปดเผยวงจรและ Source Code ทงหมดท าใหสามารถน าไปพฒนาตอยอดเพมเตมไดตามความตองการทงฮารดแวรและซอฟตแวร Arduino เปนบอรดไมโครคอนโทรลเลอรโดยใช AVR ขนาดเลกเปนตวประมวลผลและสงงาน เหมาส าหรบน าไปใชในการศกษาและเรยนรระบบไมโครคอนโทรลเลอรและไปประยกตใชเกยวกบการควบคมอปกรณ Input และ Output ตางๆไดทงในแบบทเปนการท างานตวเดยวอสระหรอเชอมตอสงงานรวมกบอปกรณอนๆเชน คอมพวเตอร ทงนกเนองมาจาก Arduino สนบสนนการเชอมตอกบอปกรณ Input และ Output ไดทงแบบดจตอลและอนาลอกเชนการรบคาจากสวตชหรออปกรณตรวจจบ (Sensor) รวมไปถงการควบคมอปกรณเอาทพตตางๆตงแตแอลอด มอเตอร รเลย แสดงดงรปท 2.10
รปท 2.10 บอรด Arduino ทมา : http://www.arduino.cc/en/Main/arduinoBoardDuemilanove
12
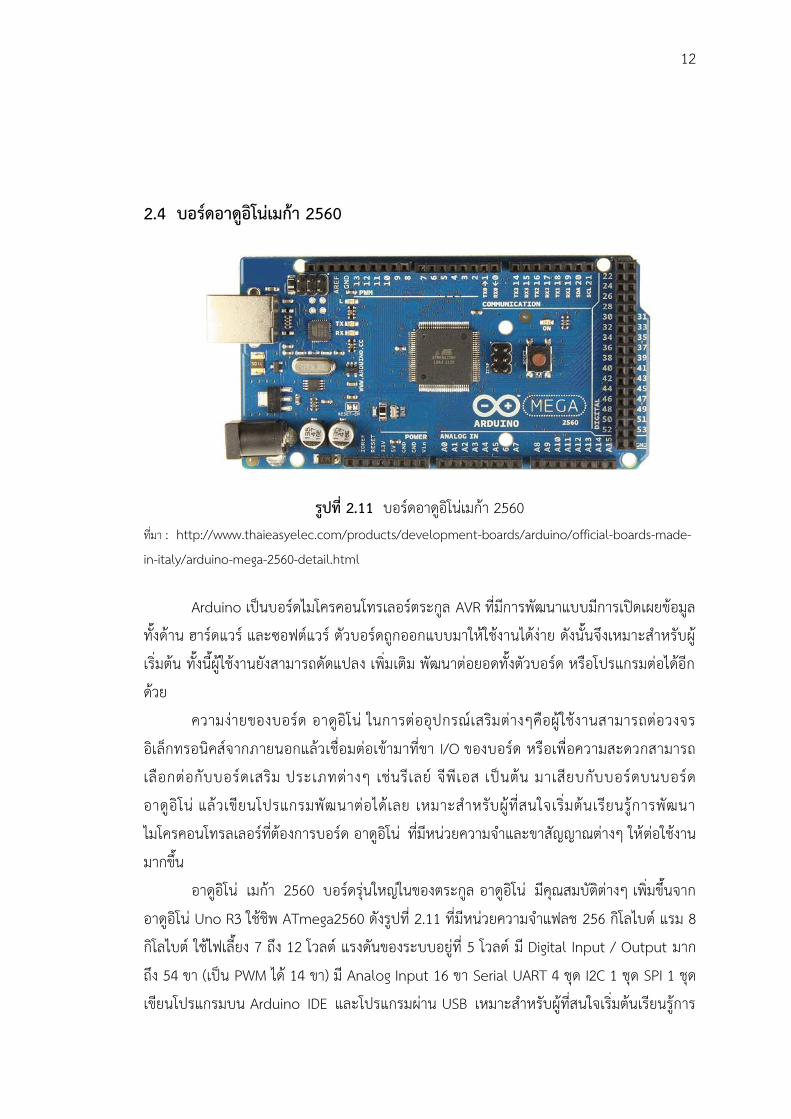
2.4 บอรดอาดอโนเมกา 2560
รปท 2.11 บอรดอาดอโนเมกา 2560
ทมา : http://www.thaieasyelec.com/products/development-boards/arduino/official-boards-made-in-italy/arduino-mega-2560-detail.html
Arduino เปนบอรดไมโครคอนโทรเลอรตระกล AVR ทมการพฒนาแบบมการเปดเผยขอมลทงดาน ฮารดแวร และซอฟตแวร ตวบอรดถกออกแบบมาใหใชงานไดงาย ดงนนจงเหมาะส าหรบผเรมตน ทงนผใชงานยงสามารถดดแปลง เพมเตม พฒนาตอยอดทงตวบอรด หรอโปรแกรมตอไดอกดวย
ความงายของบอรด อาดอโน ในการตออปกรณเสรมตางๆคอผใชงานสามารถตอวงจรอเลกทรอนคสจากภายนอกแลวเชอมตอเขามาทขา I/O ของบอรด หรอเพอความสะดวกสามารถเลอกตอกบบอรดเสรม ประเภทตางๆ เชนรเลย จพเอส เปนตน มาเสยบกบบอรดบนบอรด อาดอโน แลวเขยนโปรแกรมพฒนาตอไดเลย เหมาะส าหรบผทสนใจเรมตนเรยนรการพฒนาไมโครคอนโทรลเลอรทตองการบอรด อาดอโน ทมหนวยความจ าและขาสญญาณตางๆ ใหตอใชงานมากขน
อาดอโน เมกา 2560 บอรดรนใหญในของตระกล อาดอโน มคณสมบตตางๆ เพมขนจาก อาดอโน Uno R3 ใชชพ ATmega2560 ดงรปท 2.11 ทมหนวยความจ าแฟลช 256 กโลไบต แรม 8 กโลไบต ใชไฟเลยง 7 ถง 12 โวลต แรงดนของระบบอยท 5 โวลต ม Digital Input / Output มากถง 54 ขา (เปน PWM ได 14 ขา) ม Analog Input 16 ขา Serial UART 4 ชด I2C 1 ชด SPI 1 ชด เขยนโปรแกรมบน Arduino IDE และโปรแกรมผาน USB เหมาะส าหรบผทสนใจเรมตนเรยนรการ
13
พฒนาไมโครคอนโทรลเลอรทตองการบอรดอาดอโน ทมหนวยความจ าและขาสญญาณตางๆ ใหตอใชงานมากขน
ขอมลทางเทคนค ไมโครคอนโทรลเลอร ATmega2560 แรดนของระบบ 5 โวลต ไฟเลยง 7-12 โวลตดซ ขาดจตอล อนพต/เอาตพต 54 ขา ขาอนาลอก อนพต 16 ขา หนวยความจ า 256 กโลไบค หนวยความจ าชวคราว 8 กโลไบค หนวยความจ าถาวร 4 กโลไบค ความเรวสญญาณนาฬกา 16 เมกกะเฮรต
2.5 เครองท าความสะอาดพน 2.5.1 เครองดดฝน ในปจจบนนเครองดดฝนเปนเครองใชไฟฟาทนยมกนมากในชวตประจ าวน เครองดดฝน เปนเครองชวยท าความสะอาดภายในบานโดยใชระบบสญญากาศดดผงฝนและเศษขยะตางๆเขาไปเกบในทเกบ เครองดดฝนแบงออกเปน 2 ชนด คอ เครองดดฝนแบบถงและเครองดดฝนแบบทรงกระบอกใบพดทใชในเครองดดฝนเปนใบพดประเภทเดยวกบพดลมดดอากาศและใชมอเตอรแบบยนเวอรแซล มสวนประกอบแสดงดงรปท 2.12
2.5.2 หลกการท างานของเครองดดฝน จะเรมท างานไดกตอเมอเราเปดสวตซพดลมดดซงจะท าหนาทดดเอาฝนละอองเขามาตามทอดด หลงจากนนฝนจะถกเกบไวทถงเกบหรอกลองเกบฝน เครองดดฝนชนดนเปนประเภทแยกสวนซงจะชวยท าความสะอาดพนโดยมแปรงปดฝนชวยในการปดฝนใหฟงกระจายขนจากพนเพอใหดดฝนไดสะดวกยงขน

14
รปท 2.12 สวนประกอบของเครองดดฝน
ทมา : http://www.rmutphysics.com/charud/invention/invention1/vacuum-
cleaner/vacuum-cleaner3.htm
2.6 ตวตรวจรอนฟาเรดส าหรบตรวจจบวตถ (Sensor) เซนเซอรส าหรบการตรวจจบวตถทขวางกนดวยแสงอนฟาเรด โดยใชหลกการสงคลนแสงไปกระทบกบวตถและตรวจจบการสะทอนกลบของแสง ในระยะ 20 ซม. แสดงดงรปท 2.13
รปท 2.13 เซนเซอรแสงอนฟาเรด รน IRD-202 ทมา : http://www.micro-research.co.th/Manual/IRD_202_UM_Th.pdf
2.6.1 คณสมบตของเซนเซอรรน IRD-202 ก) เซนเซอรทตรวจจบวตถดวยแสงอนฟาเรด ข) ความถของชดสงสญญาณอนฟาเรด 38 kHz ค) มเอาตพต จ านวน 2 ชด สามารถก าหนดระยะการตรวจจบได ง) ระยะการตรวจจบสงสดท 20 ซม. เมอทดสอบกบวตถสขาว เชน กลอง
15
จ) สญญาณเอาตพต 5 V สามารถตอเขากบขาสญญาณไมโครคอนโทรลเลอรไดโดยตรง
2.6.2 โครงสรางและพอรตการใชงานของ IRD-202
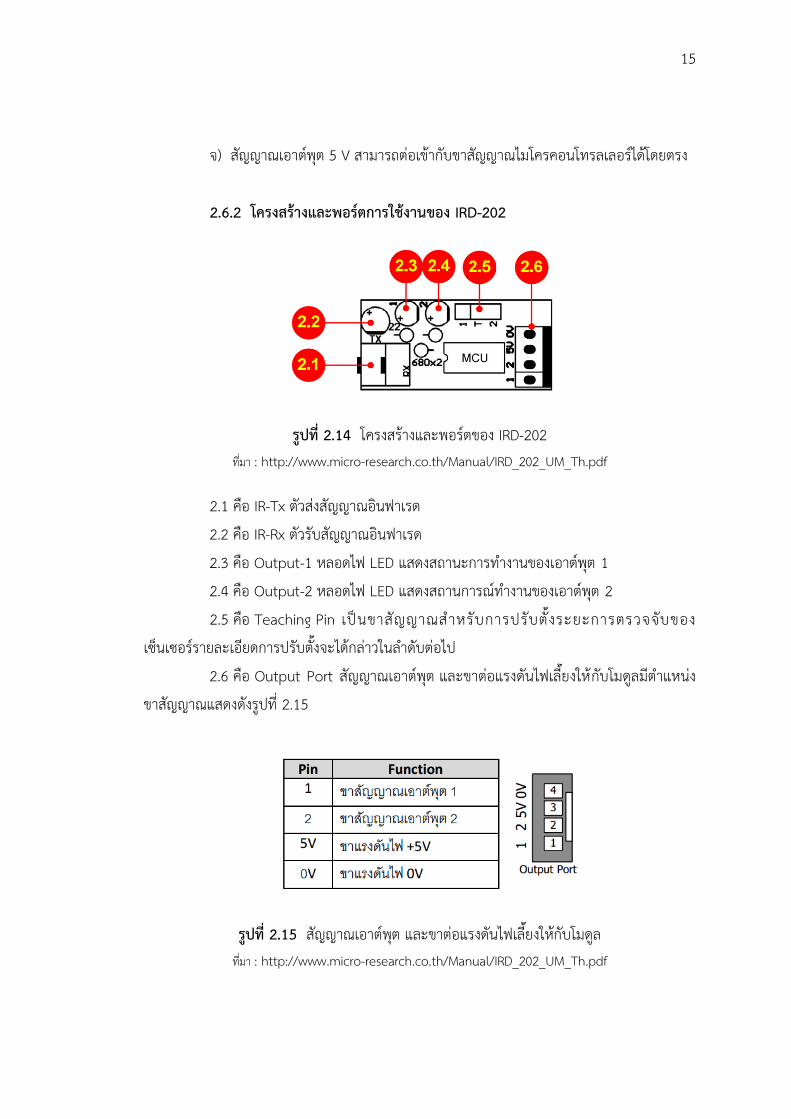
รปท 2.14 โครงสรางและพอรตของ IRD-202 ทมา : http://www.micro-research.co.th/Manual/IRD_202_UM_Th.pdf
2.1 คอ IR-Tx ตวสงสญญาณอนฟาเรด 2.2 คอ IR-Rx ตวรบสญญาณอนฟาเรด 2.3 คอ Output-1 หลอดไฟ LED แสดงสถานะการท างานของเอาตพต 1 2.4 คอ Output-2 หลอดไฟ LED แสดงสถานการณท างานของเอาตพต 2
2.5 คอ Teaching Pin เปนขาสญญาณส าหรบการปรบต งระยะการตรวจจบของเซนเซอรรายละเอยดการปรบตงจะไดกลาวในล าดบตอไป 2.6 คอ Output Port สญญาณเอาตพต และขาตอแรงดนไฟเลยงใหกบโมดลมต าแหนงขาสญญาณแสดงดงรปท 2.15
รปท 2.15 สญญาณเอาตพต และขาตอแรงดนไฟเลยงใหกบโมดล ทมา : http://www.micro-research.co.th/Manual/IRD_202_UM_Th.pdf
16
2.6.3 ขนตอนการปรบตงระยะการตรวจจบ
เซนเซอรแสงอนฟาเรดรน IRD-202 ควบคมการท างานดวยไมโครคอนโทรลเลอร และออกแบบใหมฟงกชนเรยนรระยะการตรวจจบหรอทเรยกวา Teaching Function ซงมความสะดวกและสามารถปรบตงระยะไดงาย การท างานของเอาตพต 1 และเอาตพต 2 สามารถท างาน ไดอยางอสระดงนนการปรบตงระยะการตรวจจบทงสองจงเปนอสระตอกน
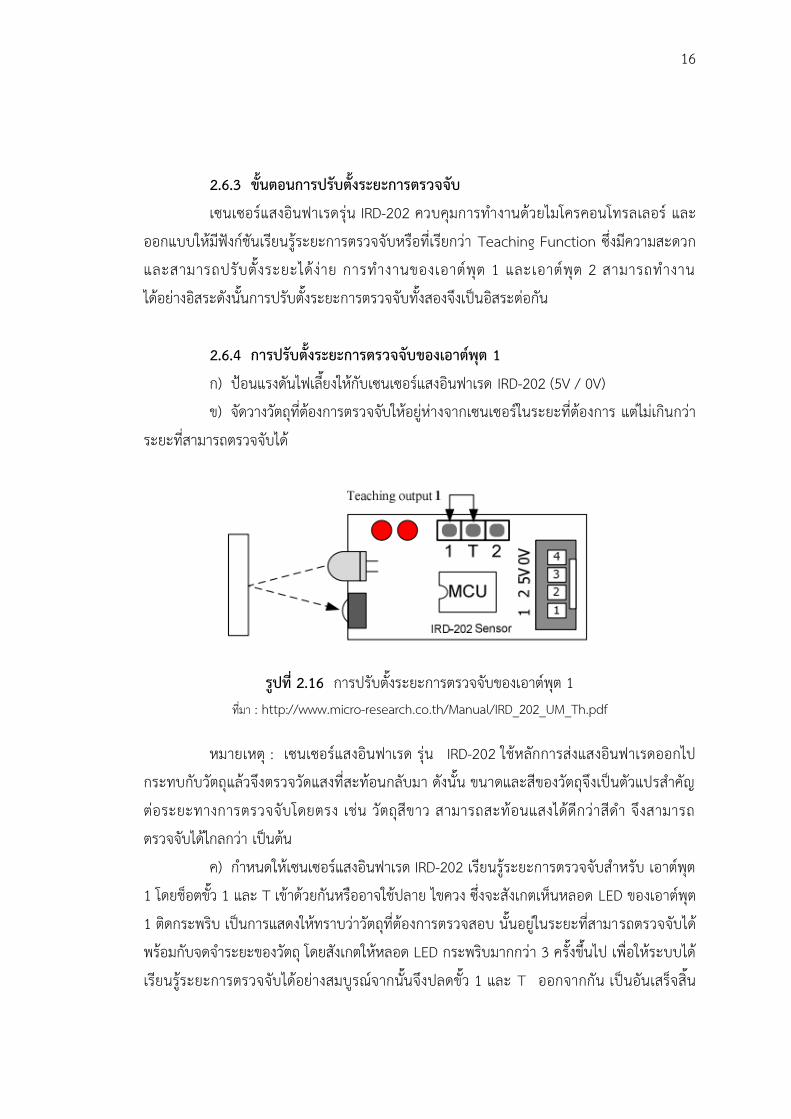
2.6.4 การปรบตงระยะการตรวจจบของเอาตพต 1 ก) ปอนแรงดนไฟเลยงใหกบเซนเซอรแสงอนฟาเรด IRD-202 (5V / 0V) ข) จดวางวตถทตองการตรวจจบใหอยหางจากเซนเซอรในระยะทตองการ แตไมเกนกวาระยะทสามารถตรวจจบได
รปท 2.16 การปรบตงระยะการตรวจจบของเอาตพต 1
ทมา : http://www.micro-research.co.th/Manual/IRD_202_UM_Th.pdf
หมายเหต : เซนเซอรแสงอนฟาเรด รน IRD-202 ใชหลกการสงแสงอนฟาเรดออกไปกระทบกบวตถแลวจงตรวจวดแสงทสะทอนกลบมา ดงนน ขนาดและสของวตถจงเปนตวแปรส าคญตอระยะทางการตรวจจบโดยตรง เชน วตถสขาว สามารถสะทอนแสงไดดกวาสด า จงสามารถตรวจจบไดไกลกวา เปนตน ค) ก าหนดใหเซนเซอรแสงอนฟาเรด IRD-202 เรยนรระยะการตรวจจบส าหรบ เอาตพต 1 โดยชอตขว 1 และ T เขาดวยกนหรออาจใชปลาย ไขควง ซงจะสงเกตเหนหลอด LED ของเอาตพต 1 ตดกระพรบ เปนการแสดงใหทราบวาวตถทตองการตรวจสอบ นนอยในระยะทสามารถตรวจจบไดพรอมกบจดจ าระยะของวตถ โดยสงเกตใหหลอด LED กระพรบมากกวา 3 ครงขนไป เพอใหระบบไดเรยนรระยะการตรวจจบไดอยางสมบรณจากนนจงปลดขว 1 และ T ออกจากกน เปนอนเสรจสน

17
ขนตอนการปรบต งระยะการตรวจจบของเอาต พต 1 และระยะการปรบต งจะถกบนทก ไวในหนวยความจ า EEPROM ซงจะยงคงอยแมวาจะหยดจายไฟเลยงใหกบระบบ 2.6.5 การปรบตงระยะการตรวจจบของเอาตพต 2 ก) ปอนแรงดงไฟเลยงใหกบเซนเซอรแสงอนฟาเรด IRD-202 (5V / 0V) ข) จดวางวตถทตองการตรวจจบใหอยหางจากเซนเซอรในระยะทตองการ แตไมเกนกวาระยะทสามารถตรวจจบได ค) ก าหนดให IRD-202 เรยนรระยะการตรวจจบส าหรบเอาตพต 2 โดยชอตขว 2 และ T เขาดวยกนหรออาจใชปลายไขควง ซงจะสงเกตเหนหลอด LED ของเอาตพต 2 ตดกระพรบ เปนการแสดงใหทราบวาวตถทตองการตรวจสอบนนอยในระยะทสามารถตรวจจบได พรอมกบจดจ าระยะของวตถโดยสงเกตใหหลอด LED กระพรบมากกวา 3 ครงขนไป เพอใหระบบไดเรยนรระยะการตรวจจบไดอยางสมบรณ จากนนจงปลดขว 2 และ T ออกจากกน เปนอนเสรจสนขนตอนการปรบตงระยะการตรวจจบของเอาตพต 2 และระยะการปรบตงจะถกบนทกไวในหนวย ความจ า EEPROM ซงจะยงคงอยแมวาจะหยดจายไฟเลยงใหกบระบบ
รปท 2.17 การปรบตงระยะการตรวจจบของเอาตพต 2 ทมา : http://www.micro-research.co.th/Manual/IRD_202_UM_Th.pdf
2.6.6 การอนเตอรเฟสกบไมโครคอนโทรลเลอร โมดลIRD-202 สามารถท างานไดดวยแรงดนไฟเลยง 5V ของระบบไมโครคอนโทรลเลอรทวๆ ไปไดทนท อกท งยงใหสญญาณเอาต พตเปนแบบTTLจงสามารถตอเขากบพอรตของไมโครคอนโทรลเลอรไดโดยตรง เอาตพต 1และ2 จะใหการท างานเมอสามารถตรวจจบวตถไดในลกษณะลอจก “0” หรอทเรยกวา Active Low
18
รปท 2.18 การท างานของเซนเซอรเมอตรวจจบวตถไดในต าแหนงท 2 และ 1 ตามล าดบ ซงไดก าหนดไวจากขนตอนการปรบตงทผานมา ทมา : http://www.micro-research.co.th/Manual/IRD_202_UM_Th.pdf
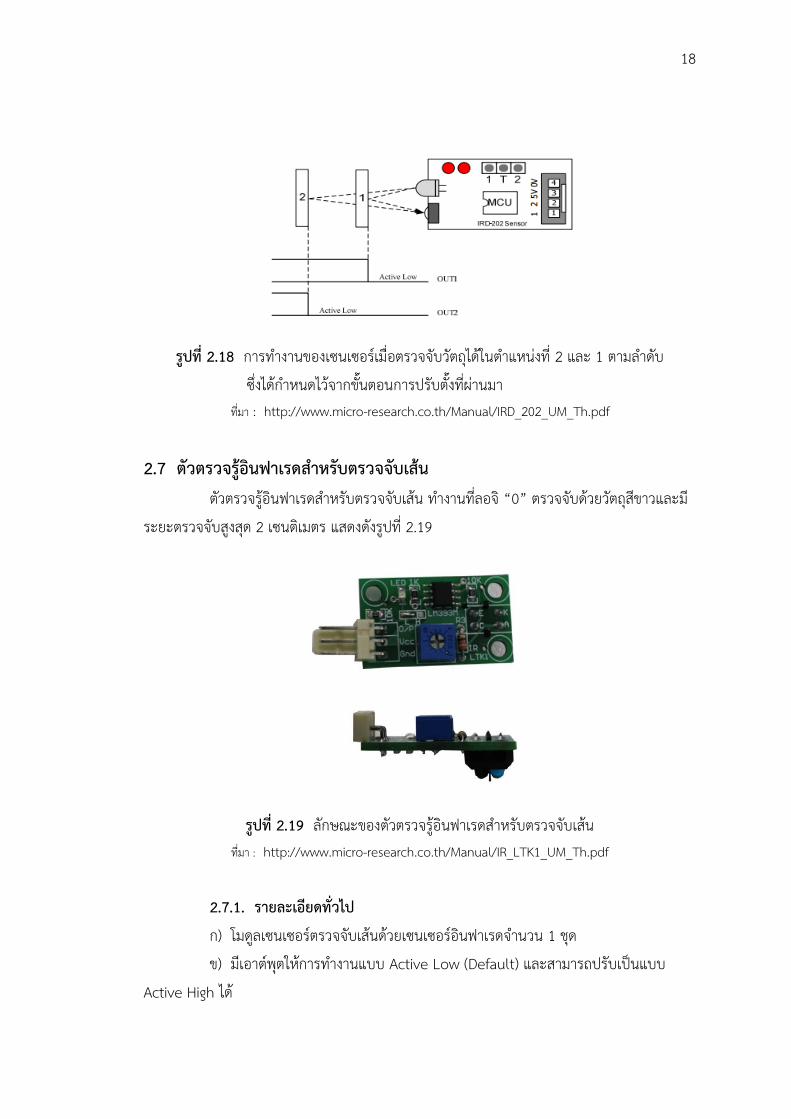
2.7 ตวตรวจรอนฟาเรดส าหรบตรวจจบเสน ตวตรวจรอนฟาเรดส าหรบตรวจจบเสน ท างานทลอจ “0” ตรวจจบดวยวตถสขาวและมระยะตรวจจบสงสด 2 เซนตเมตร แสดงดงรปท 2.19
รปท 2.19 ลกษณะของตวตรวจรอนฟาเรดส าหรบตรวจจบเสน ทมา : http://www.micro-research.co.th/Manual/IR_LTK1_UM_Th.pdf
2.7.1. รายละเอยดทวไป ก) โมดลเซนเซอรตรวจจบเสนดวยเซนเซอรอนฟาเรดจ านวน 1 ชด ข) มเอาตพตใหการท างานแบบ Active Low (Default) และสามารถปรบเปนแบบ Active High ได
19
ค) สามารถปรบความไวในการตรวจจบได (VR Adjust) ง) มหลอด LED แสดงสถานะการท างาน จ) ระยะการตรวจจบสงสดท 2 ซม. ทดสอบดวยวตถสขาว ช) ระดบสญญาณเอาตพตเปน TTL-5V สามารถตอเขากบขาสญญาณไมโครคอนโทรลเลอรไดโดยตรง ซ) ใชกบแรงดนไฟฟา 5VDC
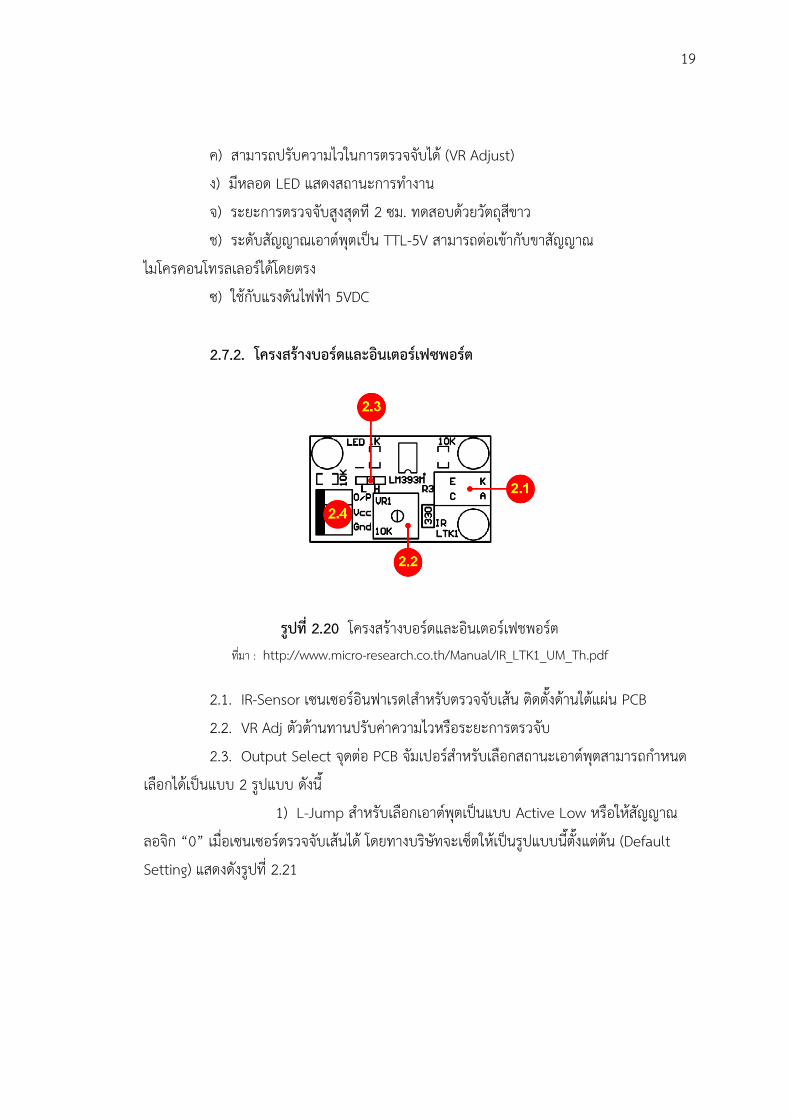
2.7.2. โครงสรางบอรดและอนเตอรเฟซพอรต
รปท 2.20 โครงสรางบอรดและอนเตอรเฟชพอรต ทมา : http://www.micro-research.co.th/Manual/IR_LTK1_UM_Th.pdf
2.1. IR-Sensor เซนเซอรอนฟาเรดlส าหรบตรวจจบเสน ตดตงดานใตแผน PCB 2.2. VR Adj ตวตานทานปรบคาความไวหรอระยะการตรวจบ 2.3. Output Select จดตอ PCB จมเปอรส าหรบเลอกสถานะเอาตพตสามารถก าหนดเลอกไดเปนแบบ 2 รปแบบ ดงน 1) L-Jump ส าหรบเลอกเอาตพตเปนแบบ Active Low หรอใหสญญาณลอจก “0” เมอเซนเซอรตรวจจบเสนได โดยทางบรษทจะเซตใหเปนรปแบบนตงแตตน (Default Setting) แสดงดงรปท 2.21
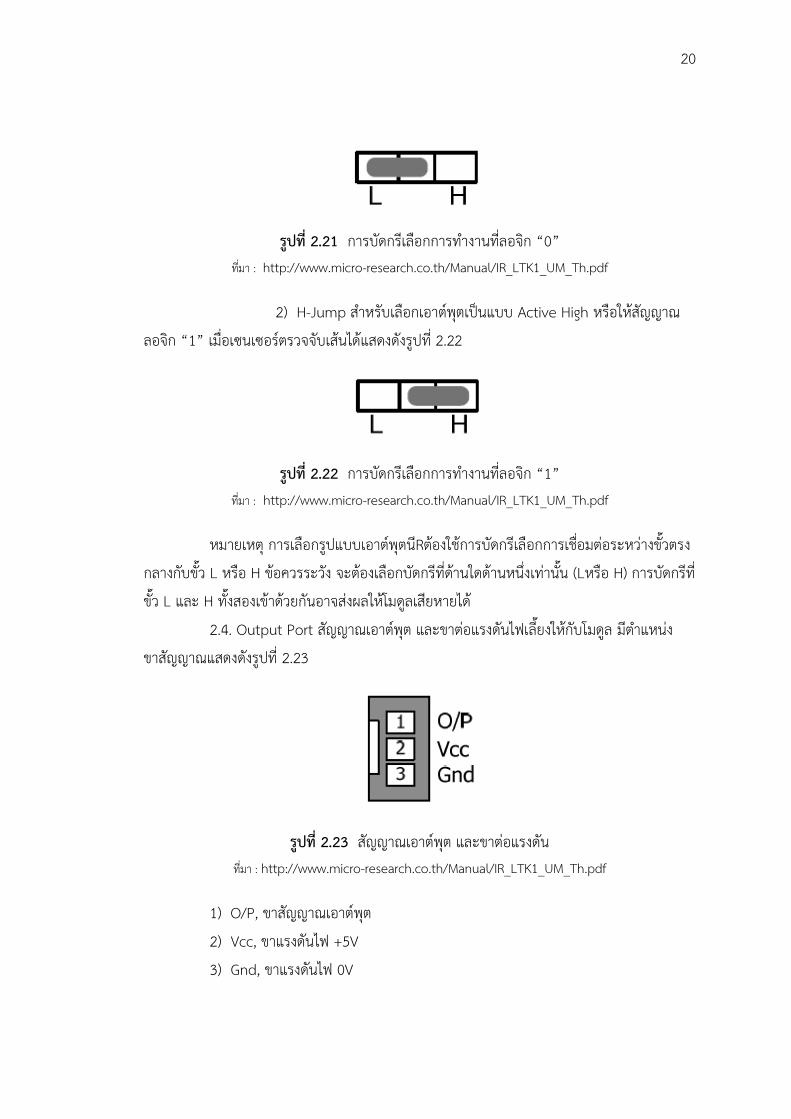
20
รปท 2.21 การบดกรเลอกการท างานทลอจก “0” ทมา : http://www.micro-research.co.th/Manual/IR_LTK1_UM_Th.pdf
2) H-Jump ส าหรบเลอกเอาตพตเปนแบบ Active High หรอใหสญญาณลอจก “1” เมอเซนเซอรตรวจจบเสนไดแสดงดงรปท 2.22
รปท 2.22 การบดกรเลอกการท างานทลอจก “1” ทมา : http://www.micro-research.co.th/Manual/IR_LTK1_UM_Th.pdf
หมายเหต การเลอกรปแบบเอาตพตนRตองใชการบดกรเลอกการเชอมตอระหวางขวตรงกลางกบขว L หรอ H ขอควรระวง จะตองเลอกบดกรทดานใดดานหนงเทานน (Lหรอ H) การบดกรทขว L และ H ทงสองเขาดวยกนอาจสงผลใหโมดลเสยหายได 2.4. Output Port สญญาณเอาตพต และขาตอแรงดนไฟเลยงใหกบโมดล มต าแหนงขาสญญาณแสดงดงรปท 2.23
รปท 2.23 สญญาณเอาตพต และขาตอแรงดน ทมา : http://www.micro-research.co.th/Manual/IR_LTK1_UM_Th.pdf
1) O/P, ขาสญญาณเอาตพต 2) Vcc, ขาแรงดนไฟ +5V 3) Gnd, ขาแรงดนไฟ 0V
21
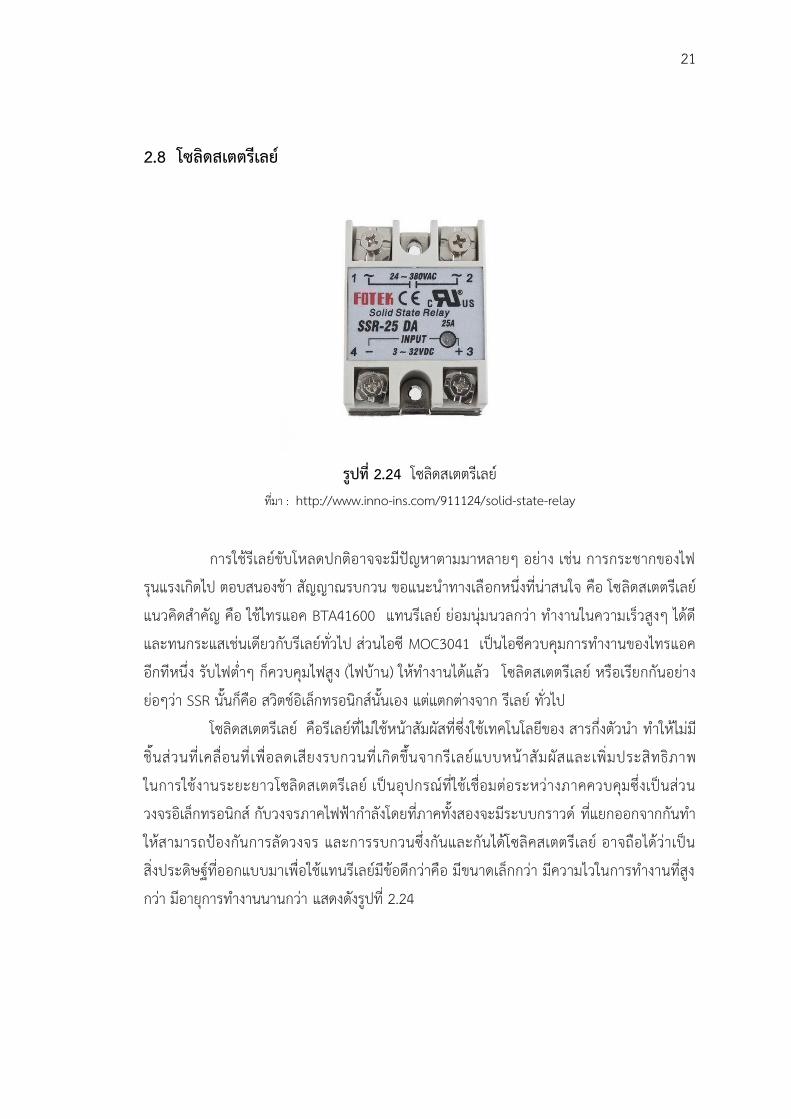
2.8 โซลดสเตตรเลย
รปท 2.24 โซลดสเตตรเลย ทมา : http://www.inno-ins.com/911124/solid-state-relay
การใชรเลยขบโหลดปกตอาจจะมปญหาตามมาหลายๆ อยาง เชน การกระชากของไฟ
รนแรงเกดไป ตอบสนองชา สญญาณรบกวน ขอแนะน าทางเลอกหนงทนาสนใจ คอ โซลดสเตตรเลย แนวคดส าคญ คอ ใชไทรแอค BTA41600 แทนรเลย ยอมนมนวลกวา ท างานในความเรวสงๆ ไดด และทนกระแสเชนเดยวกบรเลยทวไป สวนไอซ MOC3041 เปนไอซควบคมการท างานของไทรแอคอกทหนง รบไฟต าๆ กควบคมไฟสง (ไฟบาน) ใหท างานไดแลว โซลดสเตตรเลย หรอเรยกกนอยางยอๆวา SSR นนกคอ สวตชอเลกทรอนกสนนเอง แตแตกตางจาก รเลย ทวไป
โซลดสเตตรเลย คอรเลยทไมใชหนาสมผสทซงใชเทคโนโลยของ สารกงตวน า ท าใหไมมชนสวนทเคลอนท เพอลดเสยงรบกวนท เกดขนจากรเลยแบบหนาสมผสและเพมประสทธภาพ ในการใชงานระยะยาวโซลดสเตตรเลย เปนอปกรณทใชเชอมตอระหวางภาคควบคมซงเปนสวน วงจรอเลกทรอนกส กบวงจรภาคไฟฟาก าลงโดยทภาคทงสองจะมระบบกราวด ทแยกออกจากกนท าใหสามารถปองกนการลดวงจร และการรบกวนซงกนและกนไดโซลคสเตตรเลย อาจถอไดวาเปนสงประดษฐทออกแบบมาเพอใชแทนรเลยมขอดกวาคอ มขนาดเลกกวา มความไวในการท างานทสงกวา มอายการท างานนานกวา แสดงดงรปท 2.24
22
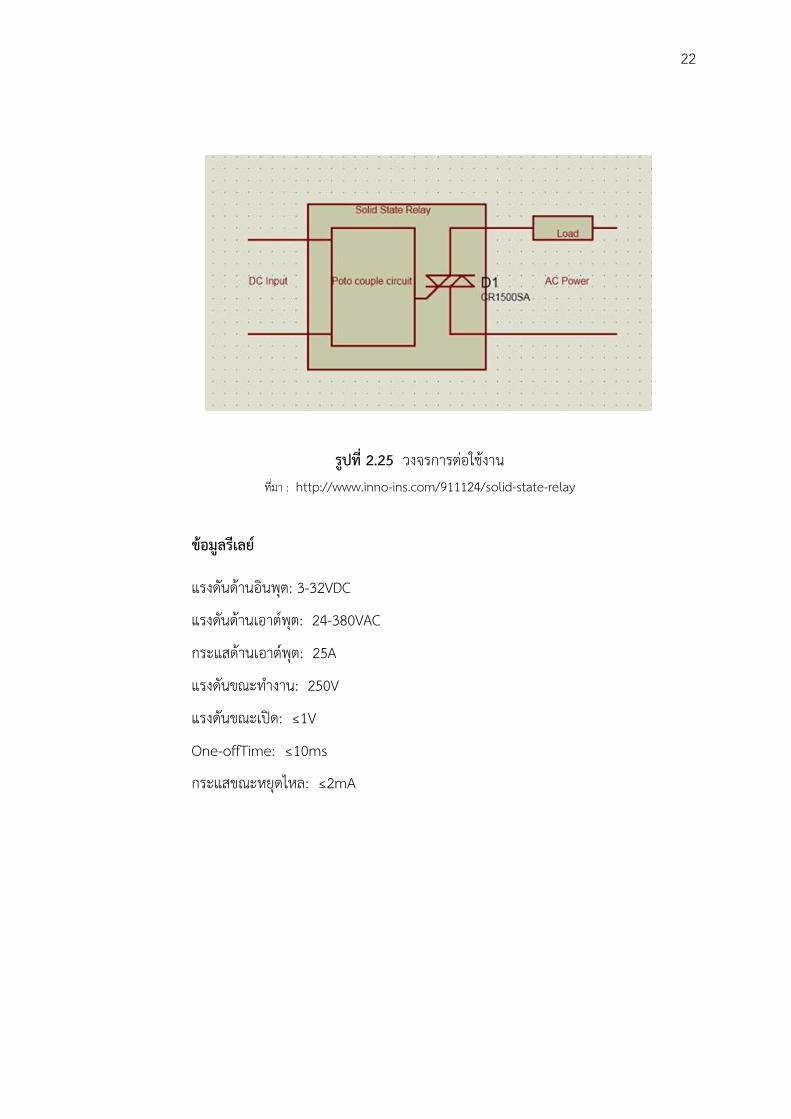
รปท 2.25 วงจรการตอใชงาน ทมา : http://www.inno-ins.com/911124/solid-state-relay
ขอมลรเลย
แรงดนดานอนพต: 3-32VDC
แรงดนดานเอาตพต: 24-380VAC
กระแสดานเอาตพต: 25A
แรงดนขณะท างาน: 250V
แรงดนขณะเปด: ≤1V
One-offTime: ≤10ms
กระแสขณะหยดไหล: ≤2mA
23
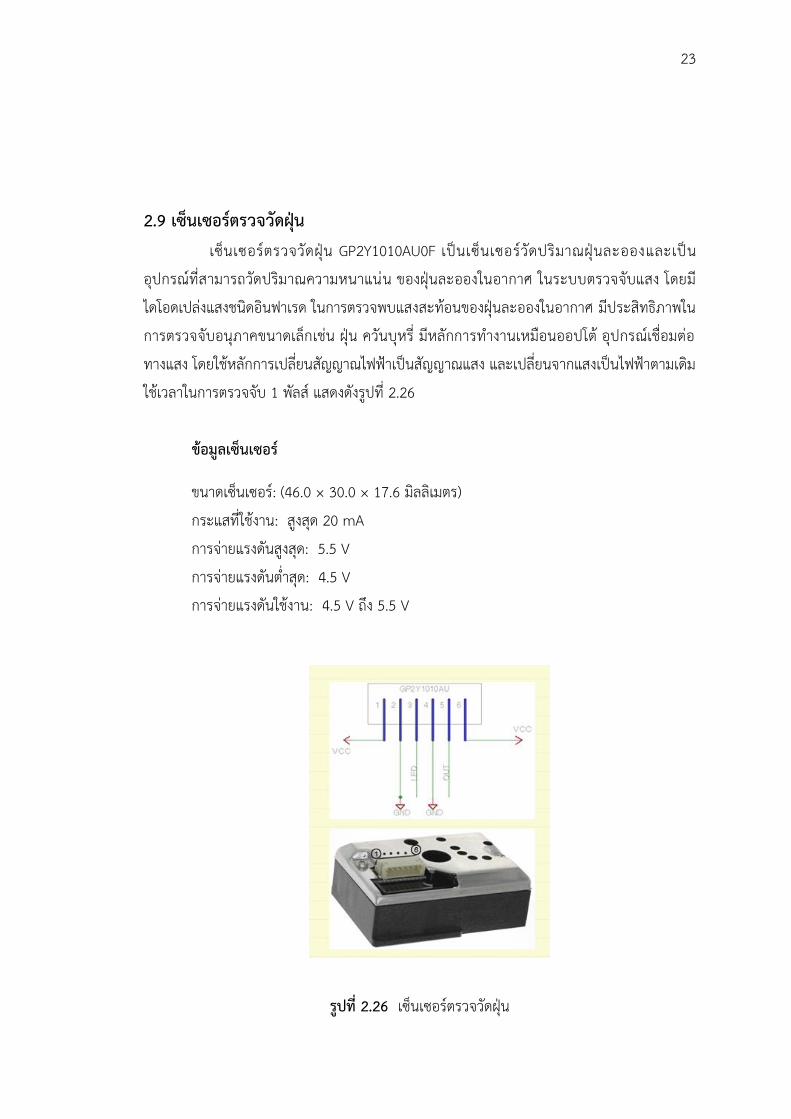
2.9 เซนเซอรตรวจวดฝน เซนเซอรตรวจวดฝน GP2Y1010AU0F เปนเซนเซอรวดปรมาณฝนละอองและเปนอปกรณทสามารถวดปรมาณความหนาแนน ของฝนละอองในอากาศ ในระบบตรวจจบแสง โดยมไดโอดเปลงแสงชนดอนฟาเรด ในการตรวจพบแสงสะทอนของฝนละอองในอากาศ มประสทธภาพในการตรวจจบอนภาคขนาดเลกเชน ฝน ควนบหร มหลกการท างานเหมอนออปโต อปกรณเชอมตอทางแสง โดยใชหลกการเปลยนสญญาณไฟฟาเปนสญญาณแสง และเปลยนจากแสงเปนไฟฟาตามเดม ใชเวลาในการตรวจจบ 1 พลส แสดงดงรปท 2.26
ขอมลเซนเซอร
ขนาดเซนเซอร: (46.0 × 30.0 × 17.6 มลลเมตร) กระแสทใชงาน: สงสด 20 mA การจายแรงดนสงสด: 5.5 V การจายแรงดนต าสด: 4.5 V การจายแรงดนใชงาน: 4.5 V ถง 5.5 V
รปท 2.26 เซนเซอรตรวจวดฝน
24
ทมา : http://www.circuitshops.com/articles/42124801/Arduino-กบ-sensor-วดฝนละออง.html
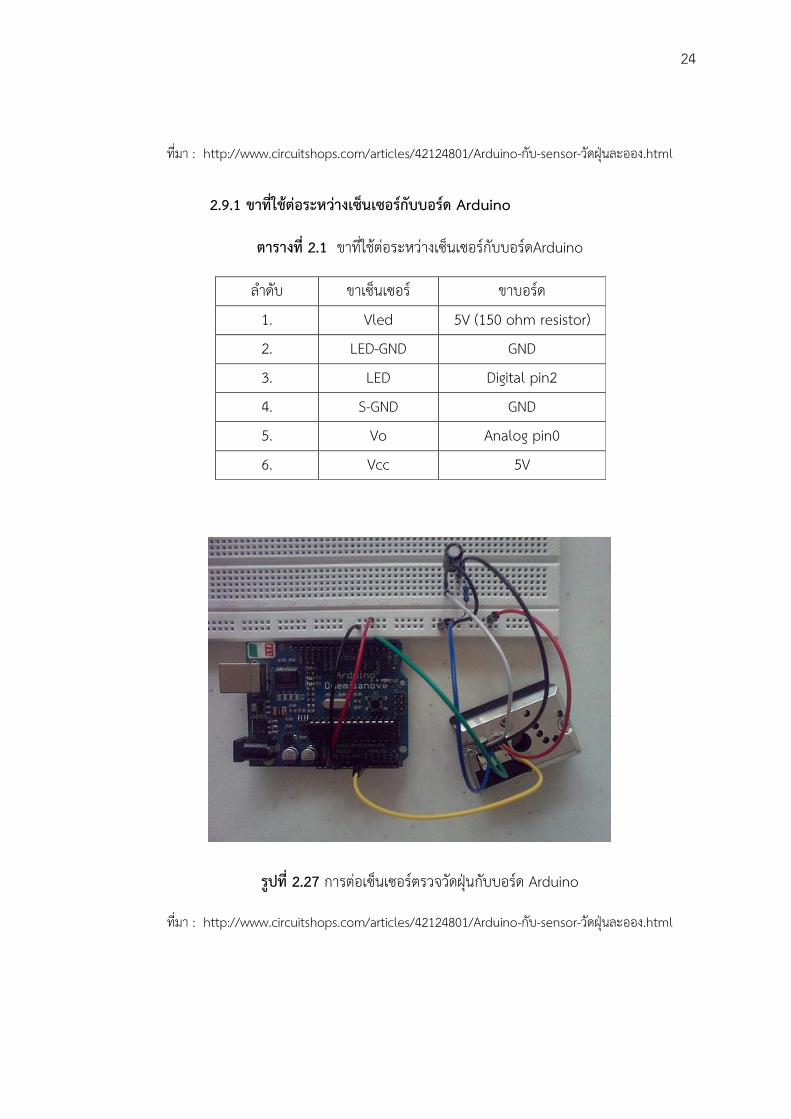
2.9.1 ขาทใชตอระหวางเซนเซอรกบบอรด Arduino
ตารางท 2.1 ขาทใชตอระหวางเซนเซอรกบบอรดArduino
ล าดบ ขาเซนเซอร ขาบอรด
1. Vled 5V (150 ohm resistor) 2. LED-GND GND
3. LED Digital pin2
4. S-GND GND 5. Vo Analog pin0
6. Vcc 5V
รปท 2.27 การตอเซนเซอรตรวจวดฝนกบบอรด Arduino
ทมา : http://www.circuitshops.com/articles/42124801/Arduino-กบ-sensor-วดฝนละออง.html
25
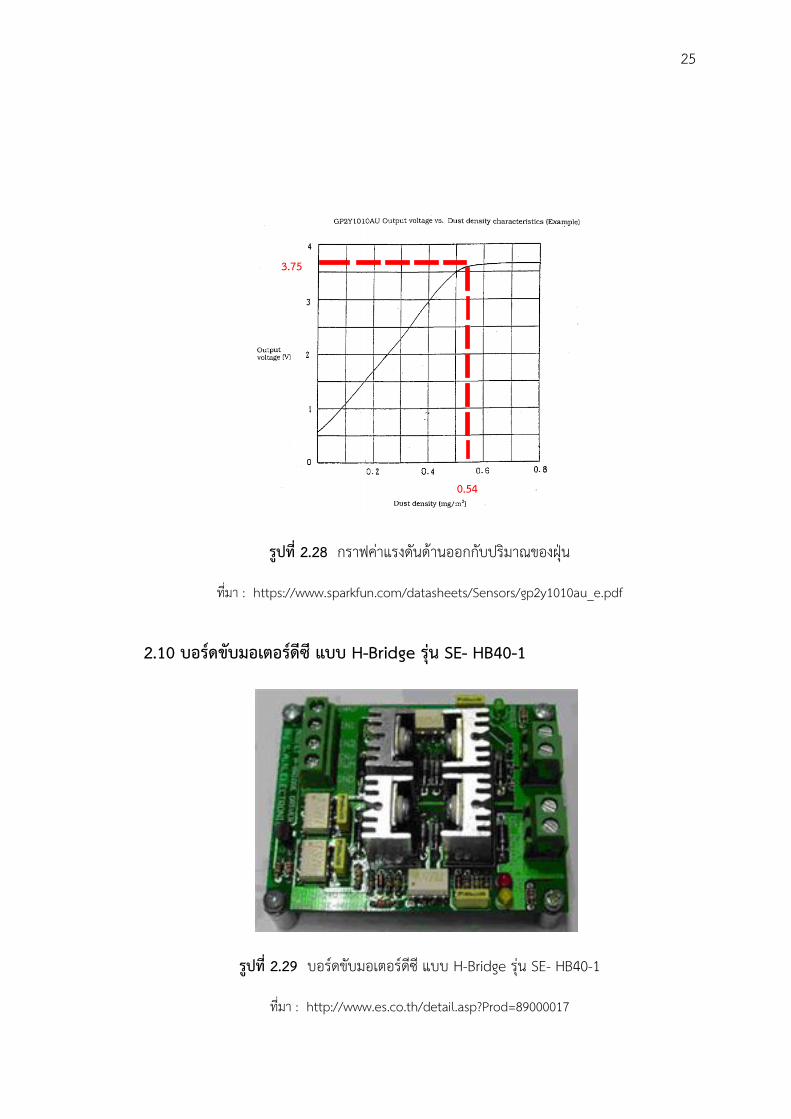
รปท 2.28 กราฟคาแรงดนดานออกกบปรมาณของฝน
ทมา : https://www.sparkfun.com/datasheets/Sensors/gp2y1010au_e.pdf
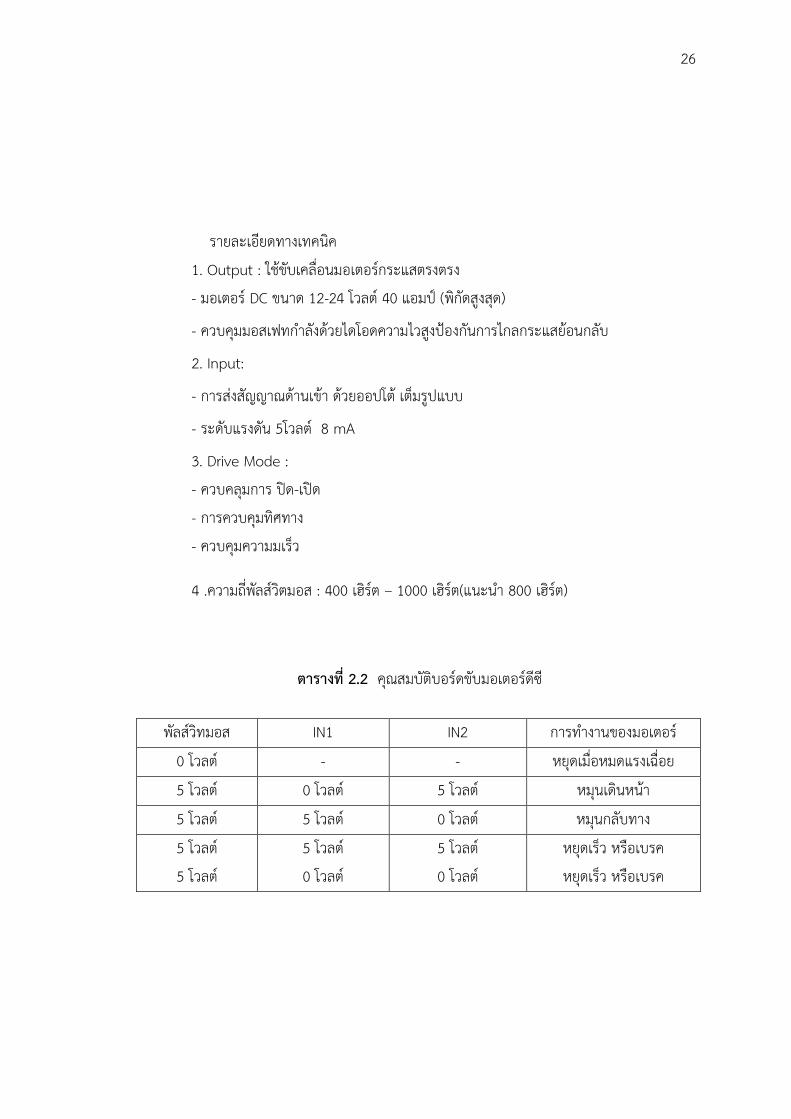
2.10 บอรดขบมอเตอรดซ แบบ H-Bridge รน SE- HB40-1
รปท 2.29 บอรดขบมอเตอรดซ แบบ H-Bridge รน SE- HB40-1
ทมา : http://www.es.co.th/detail.asp?Prod=89000017
3.75
0.54
26
รายละเอยดทางเทคนค 1. Output : ใชขบเคลอนมอเตอรกระแสตรงตรง - มอเตอร DC ขนาด 12-24 โวลต 40 แอมป (พกดสงสด)
- ควบคมมอสเฟทก าลงดวยไดโอดความไวสงปองกนการไกลกระแสยอนกลบ
2. Input:
- การสงสญญาณดานเขา ดวยออปโต เตมรปแบบ
- ระดบแรงดน 5โวลต 8 mA
3. Drive Mode : - ควบคลมการ ปด-เปด - การควบคมทศทาง - ควบคมความมเรว
4 .ความถพลสวตมอส : 400 เฮรต – 1000 เฮรต(แนะน า 800 เฮรต)
ตารางท 2.2 คณสมบตบอรดขบมอเตอรดซ
พลสวทมอส IN1 IN2 การท างานของมอเตอร 0 โวลต - - หยดเมอหมดแรงเฉอย
5 โวลต 0 โวลต 5 โวลต หมนเดนหนา
5 โวลต 5 โวลต 0 โวลต หมนกลบทาง 5 โวลต 5 โวลต
5 โวลต 0 โวลต
5 โวลต 0 โวลต
หยดเรว หรอเบรค หยดเรว หรอเบรค

บทท 3
การออกแบบและพฒนาระบบเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม
3.1 บทน า จากการศกษาและวเคราะหระบบงานของเครองดดฝนอตโนมตทสามารถท าความสะอาดไมซ าทเดม พบวาระบบการท างานบางสวนยงมความซบซอนสงผลท าใหไมสะดวกตอการใชงานจรง ผจดท าโครงการจงคดคนและออกแบบระบบการท างานขนใหม และอางองขอมลเดมจากรนกอน เพอความเหมาะสมในการใชงานและเพอความสะดวกตอการน าไปใช ผจดท าโครงการจงคดโดยการออกแบบและพฒนาระบบมดงน
1. การออกแบบชดขบเคลอน 2. บลอกไดอะแกรมการท างานของเครองดดฝนอตโนมตแบบท าความสะอาดไมซ าทเดม 3. การออกแบวงจรไฟฟา 4. การค านวณหาพกดมอเตอรเครองถพน 5. ลกษณะการท างานและขอบเขตการท างาน
3.2 การออกแบบชดขบเคลอนระบบเดม การออกแบบชดขบเคลอนของเครองท าความสะอาดพนอตโนมตท ระบบเดม โดยมการเคลอนทโดยใชลอหลง 2 ลอเปนตวขบเคลอนใหเดนหนาหรอถอยหลง และเปนตวบงคบทศทางใหเลยวซายและเลยวขวา โดยใชมอเตอรกระแสตรง 100 รอบตอนาท และลอมขนาดเสนผานศนยกลาง 152.4 มลลเมตร
หาระยะทาง (S) การเคลอนทตอหนงรอบของลอไดจากเสนรอบวงของลอ ( r = 0.0762 )
จาก S = 2 ……….(3.1) S = 2 (0.0762) S = 0.48 m
28
หรอเคลอนทดวยความเรว เทากบ จาก V =
……….(3.2)
(100 )
= 0.8 m/s
3.2.1 การค านวณพกดของมอเตอรขบเคลอนลอหลง น าหนกของเครองโดยประมาณ 30 กโลกรม รศมของลอยาว
จาก a =
……….(3.3)
a =
= 0.8 m/
หาแรงในขณะเครองก าลงเรมเคลอนท
จาก F = ma ……….(3.4)
= (30)(0.8)
= 24 N.
จาก = F x rCos ……….(3.5) = (24)(0.0762) Cos 0 = 1.83 N-m
หาก าลงมอเตอร เทากบ
จาก P = = ( 2 f ) ……….(3.6)
= 1.83 ( 2
)
= 19.16 W ดงนนจะใชมอเตอรทมความเรวรอบ 100 รอบตอนาท ทมพกดก าลงมากกวา 20 W

29
รปท 3.1 ลอขบเคลอนหนยนต
3.3 การค านวณหาพกดมอเตอรเครองถพนระบบเดม น าหนกชดผาถพนมแรงกดลงพนประมาณ 30 กโลกรม เสนผานศนยกลางผาถพน 0.2 เมตร
จาก สมการท 3.4 F = ma = (30)(9.81) F = 294.3 N. จาก สมการท 3.5 = F x rCos
= (294.3)(0.1)Cos 0 = 29.43 N-m
จาก สมการท 3.6 P = = ( 2 f ) = 29.43 ( 2
)
= 462.28 = 465 W
ดงนนจงใชมอเตอรเครองถพนพกดก าลง 465 วตต

30
รปท 3.2 ชดผาขดพน
3.4 การออกแบบโครงสรางระบบเดม เครองท าความสะอาดพน มขนาด 35 x 40 เซนตเมตร สง 70 เซนตเมตร โครงสรางท า
จากเหลกกลองขนาด 1 นว มระบบขบเคลอนเปนลอยาง สามารถท าความสะอาดพนได 2 ขนตอน คอ ดดฝน และถพน สามารถเคลอนทไดอสระ
รปท 3.3 โครงสรางของเครองท าความสะอาดพน
เครองดดฝน
แปรงดดฝน
ลอ
ผาขดพน
มอเตอร
แปรงขดพน
31
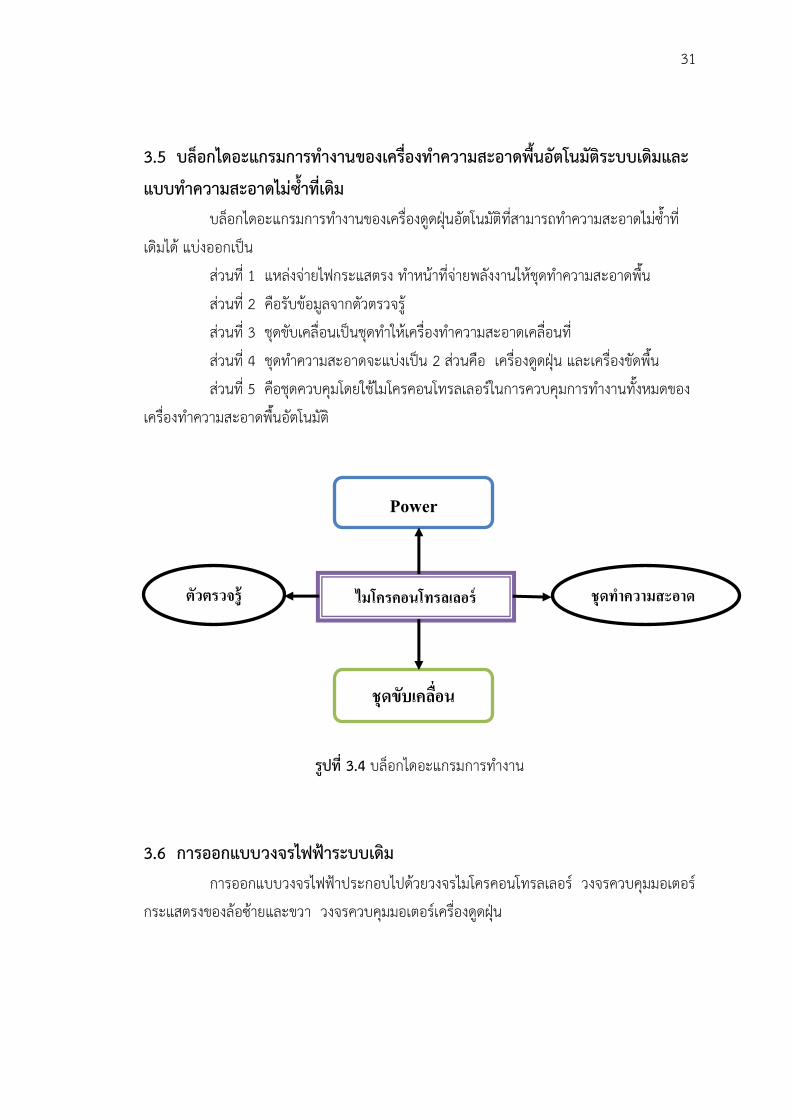
3.5 บลอกไดอะแกรมการท างานของเครองท าความสะอาดพนอตโนมตระบบเดมและแบบท าความสะอาดไมซ าทเดม บลอกไดอะแกรมการท างานของเครองดดฝนอตโนมตทสามารถท าความสะอาดไมซ าทเดมได แบงออกเปน สวนท 1 แหลงจายไฟกระแสตรง ท าหนาทจายพลงงานใหชดท าความสะอาดพน สวนท 2 คอรบขอมลจากตวตรวจร สวนท 3 ชดขบเคลอนเปนชดท าใหเครองท าความสะอาดเคลอนท สวนท 4 ชดท าความสะอาดจะแบงเปน 2 สวนคอ เครองดดฝน และเครองขดพน สวนท 5 คอชดควบคมโดยใชไมโครคอนโทรลเลอรในการควบคมการท างานทงหมดของเครองท าความสะอาดพนอตโนมต
รปท 3.4 บลอกไดอะแกรมการท างาน
3.6 การออกแบบวงจรไฟฟาระบบเดม การออกแบบวงจรไฟฟาประกอบไปดวยวงจรไมโครคอนโทรลเลอร วงจรควบคมมอเตอรกระแสตรงของลอซายและขวา วงจรควบคมมอเตอรเครองดดฝน
ไมโครคอนโทรลเลอร
Power
ชดขบเคลอน
ชดท าความสะอาด ตวตรวจร

32
3.6.1 การออกแบบวงจรไมโครคอนโทรลเลอร
รปท 3.5 วงจรอนพตของไมโครคอนโทรลเลอร
SW คอ สวตซของปม START ส าหรบเรมตนการท างาน ทตอกนพอรต P1:0 SWL คอ ตวตรวจรทใชในการตรวจจบวตถทางดานซายของโครงเครองดดฝนทตอกบพอรตP1:1 SWR คอ ตวตรวจรทใชในการตรวจจบวตถทางดานขวาของโครงเครองดดฝนทตอกบพอรต P1: 2 SWM คอ ตวตรวจรทใชในการตรวจจบวตถทางดานหนาของโครงเครองดดฝนทตอกบพอรต P1: 3
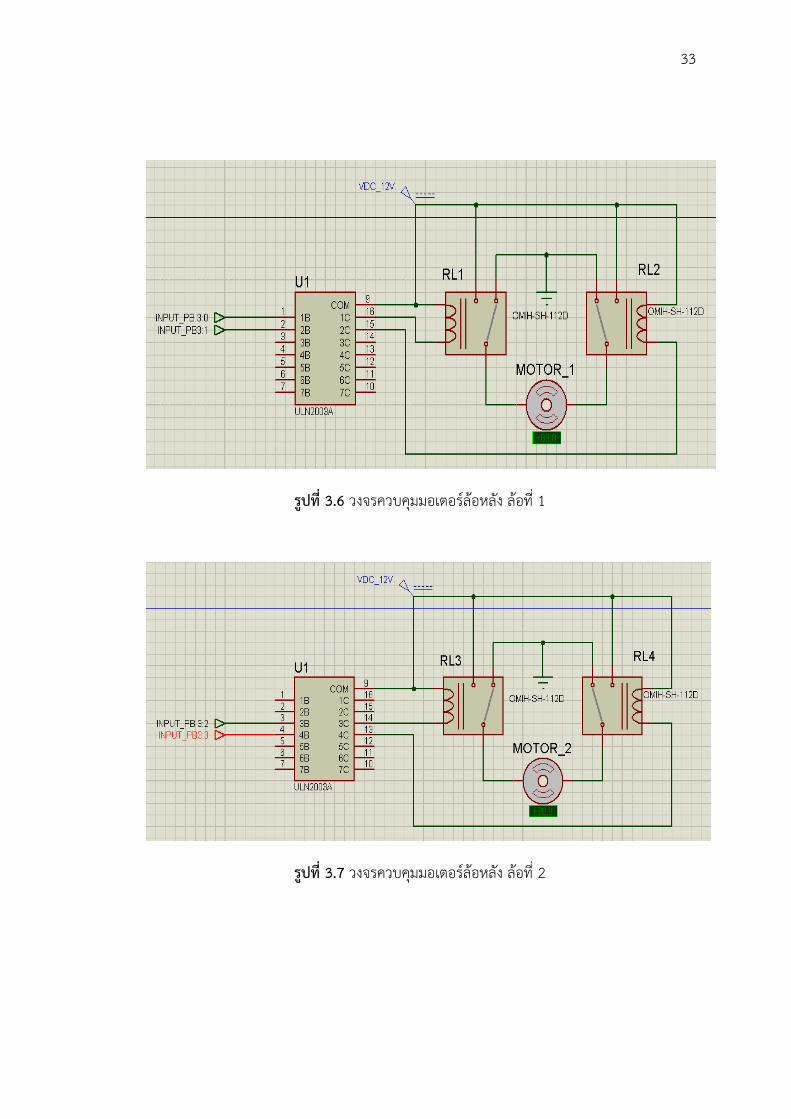
3.6.2 วงจรควบคมมอเตอรกระแสตรงของลอหลง
มอเตอรกระแสตรงสามารถกลบทศทางการหมนไดดวยการกลบขวไฟกระแสตรงทจาย
ใหกบมอเตอร อปกรณทชวยกลบทศทางทางผจดท าโครงการไดเลอกใชวงจรรเลยเปนตวกลบการจาย
ขวบวกกบขวลบใหแกมอเตอร
33
รปท 3.6 วงจรควบคมมอเตอรลอหลง ลอท 1
รปท 3.7 วงจรควบคมมอเตอรลอหลง ลอท 2

34
3.6.3 วงจรควบคมวงจรควบคมมอเตอรเครองดดฝน
วงจรส าหรบควบคมการเปด-ปดมอเตอรของเครองดดฝน ใชรเลยควบคมการท างาน
พอรตท 3 ขา 6
รปท 3.8 วงจรควบคมมอเตอรเครองดดฝน
3.7 การออกแบบวงจรไฟฟาระบบใหม การออกแบบวงจรไฟฟาประกอบไปดวยวงจร เซนเซอรตรวจวดฝน วงจรควบคม เครองดดฝน วงจรควบคมมอเตอรกระแสตรง

35
3.7.1 การออกแบบวงจรเซนเซอรตรวจวดฝน
รปท 3.9 วงจรเซนเซอรตรวจวดฝน
3.7.2 วงจรควบคมเครองดดฝน
รปท 3.10 วงจรควบคมเครองดดฝน

36
+12 V
R11.2 K
+12 V
+12 V
+12 V
+12 V
+12 V
+12 V
+12 V
+12 V +12 V
+12 VCH1CH2PWMGND 1
234
LED
220R7
TPL250
TPL250
TPL250
TPL250
4321
5678
4321
4321
4
321
5678
5678
5678
MOTOR DC
D1
D2D3
D4R6220
R15220
R14220
R1150
R1250
R16100
R13100
C3
100 µF
C4
100 µFD14215V
D16215V
R10100K
R11100K
R19220
R201K
COBC27
C1
IRFZ44
C2
IRFZ44
C3
IRFZ44
C4
IRFZ44
D1MUR120
D3MUR120
D2MUR120
D4MUR120
D5IRFZ44
D6
IRFZ44
R22.2K
R10100K
R9100K
R750
R850
D10ABD2-EF
D9ABD2-EF
D7ABD2-EF
D8ABD2-EF
D12215V
D11215V
R5200
R6200
C1
100 nF
C2
100 nF
D15
3.7.3 วงจรควบคมมอเตอรไฟฟากระแสตรง
รปท 3.11 วงจรควบคมมอเตอรไฟฟากระแสตรง

37
3.8 ลกษณะการท างานและขอบเขตการท างานระบบใหม 3.8.1 ลกษณะการท างานขณะทมสงกดขวาง
รปท 3.12 เซนเซอรตวซาย ตวซายตวกลาง หรอทงสามตวตรวจพบสงกดขวาง
ถอยหลงแลวเลยวขวา
รปท 3.13 เซนเซอรตวขวา ตวกลาง หรอตวขวาตวกลางตรวจพบส งกดขวาง ถอยหลง แลวเลยวซาย

38
3.8.2 ขอบเขตในการท าความสะอาดพน
รปท 3.14 ขอบเขตในการท าความสะอาดพน 3 x 3 เมตร
3 เมตร
3 เมตร
บทท 4
ผลการด าเนนงาน
4.1 บทน า เนอหาในบทนจะกลาวถงลกษณะการท างานและการทดสอบการท างานของเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดมทใชทดสอบในการท างานจรง
4.2 การทดสอบการเขาถงพนท
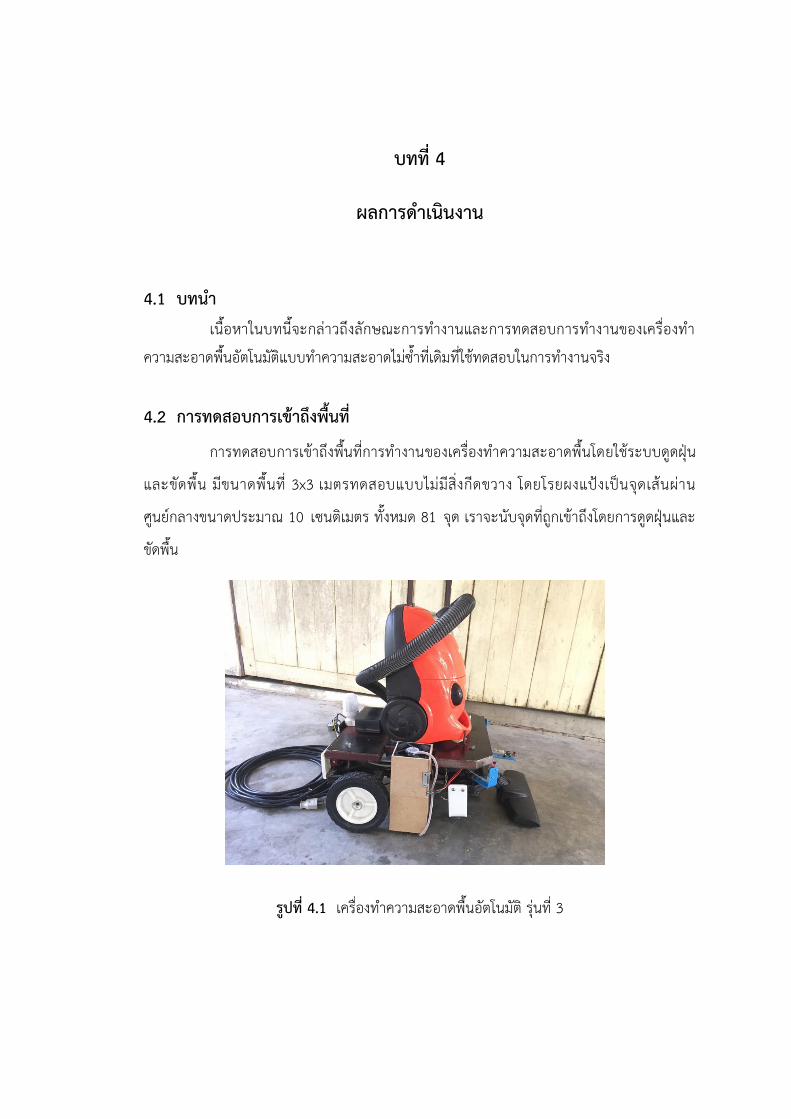
การทดสอบการเขาถงพนทการท างานของเครองท าความสะอาดพนโดยใชระบบดดฝน
และขดพน มขนาดพนท 3x3 เมตรทดสอบแบบไมมสงกดขวาง โดยโรยผงแปงเปนจดเสนผาน
ศนยกลางขนาดประมาณ 10 เซนตเมตร ทงหมด 81 จด เราจะนบจดทถกเขาถงโดยการดดฝนและ
ขดพน
รปท 4.1 เครองท าความสะอาดพนอตโนมต รนท 3

40
รปท 4.2 กอนการทดสอบการเขาถงพนทการท างาน
รปท 4.3 หลงการทดสอบการเขาถงพนทการท างาน
41
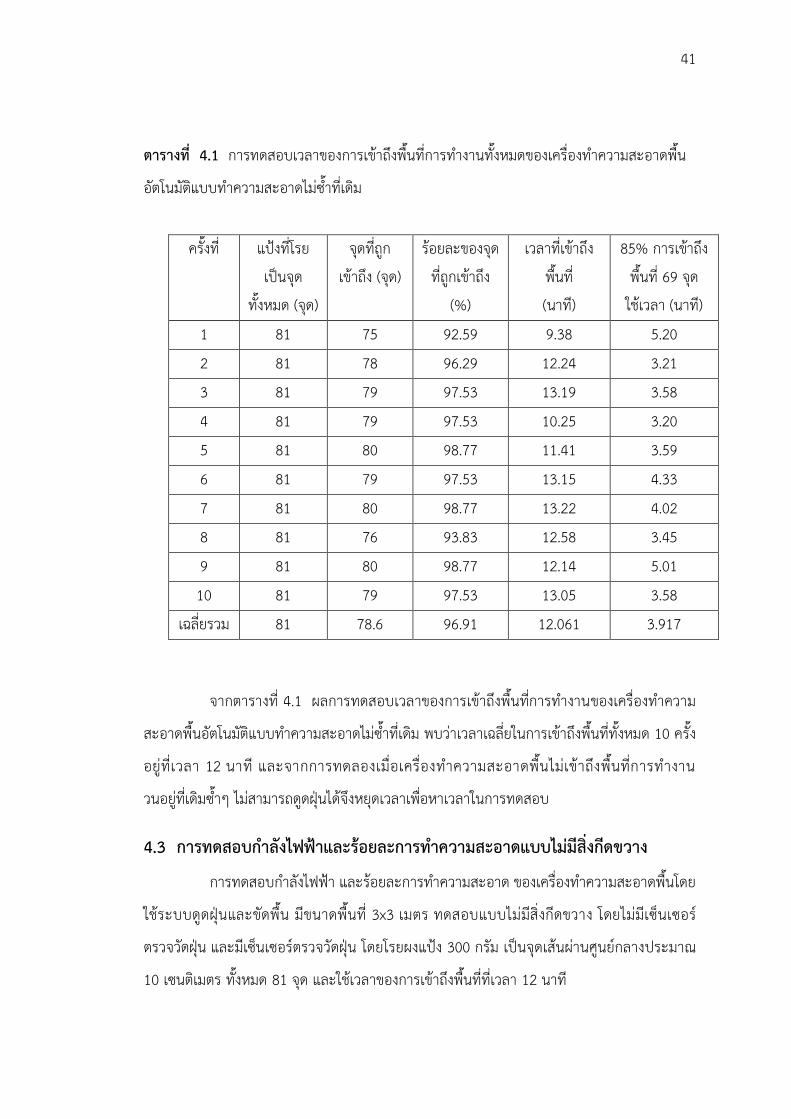
ตารางท 4.1 การทดสอบเวลาของการเขาถงพนทการท างานทงหมดของเครองท าความสะอาดพน
อตโนมตแบบท าความสะอาดไมซ าทเดม
ครงท แปงทโรย
เปนจดทงหมด (จด)
จดทถกเขาถง (จด)
รอยละของจดทถกเขาถง
(%)
เวลาทเขาถงพนท (นาท)
85% การเขาถงพนท 69 จด ใชเวลา (นาท)
1 81 75 92.59 9.38 5.20
2 81 78 96.29 12.24 3.21 3 81 79 97.53 13.19 3.58
4 81 79 97.53 10.25 3.20 5 81 80 98.77 11.41 3.59
6 81 79 97.53 13.15 4.33
7 81 80 98.77 13.22 4.02 8 81 76 93.83 12.58 3.45
9 81 80 98.77 12.14 5.01
10 81 79 97.53 13.05 3.58 เฉลยรวม 81 78.6 96.91 12.061 3.917
จากตารางท 4.1 ผลการทดสอบเวลาของการเขาถงพนทการท างานของเครองท าความ
สะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม พบวาเวลาเฉลยในการเขาถงพนททงหมด 10 ครง
อยทเวลา 12 นาท และจากการทดลองเมอเครองท าความสะอาดพนไมเขาถงพนทการท างาน
วนอยทเดมซ าๆ ไมสามารถดดฝนไดจงหยดเวลาเพอหาเวลาในการทดสอบ 4.3 การทดสอบก าลงไฟฟาและรอยละการท าความสะอาดแบบไมมสงกดขวาง
การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด ของเครองท าความสะอาดพนโดย
ใชระบบดดฝนและขดพน มขนาดพนท 3x3 เมตร ทดสอบแบบไมมสงกดขวาง โดยไมมเซนเซอร
ตรวจวดฝน และมเซนเซอรตรวจวดฝน โดยโรยผงแปง 300 กรม เปนจดเสนผานศนยกลางประมาณ
10 เซนตเมตร ทงหมด 81 จด และใชเวลาของการเขาถงพนททเวลา 12 นาท

42
รปท 4.4 กอนการทดสอบแบบไมมสงกดขวาง
รปท 4.5 หลงการทดสอบแบบไมมสงกดขวาง
43
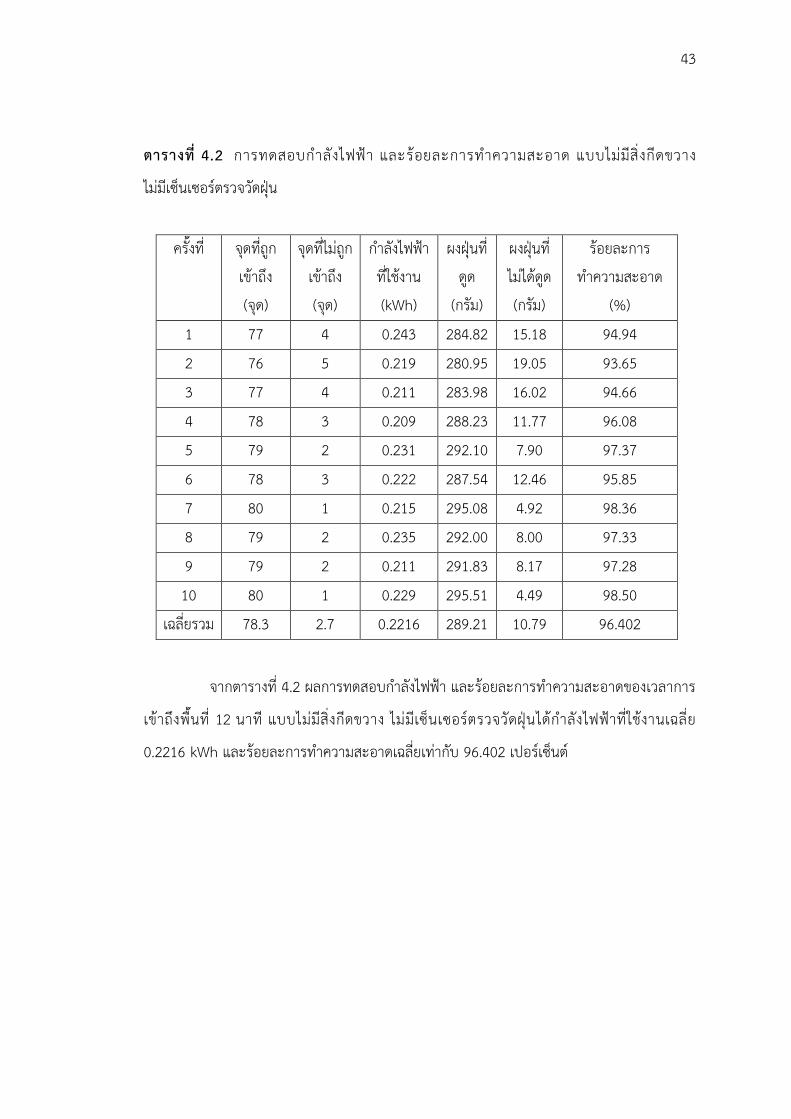
ตารางท 4.2 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบไมมสงกดขวาง
ไมมเซนเซอรตรวจวดฝน
ครงท จดทถก
เขาถง (จด)
จดทไมถกเขาถง (จด)
ก าลงไฟฟาทใชงาน (kWh)
ผงฝนทดด
(กรม)
ผงฝนทไมไดดด (กรม)
รอยละการ ท าความสะอาด
(%)
1 77 4 0.243 284.82 15.18 94.94
2 76 5 0.219 280.95 19.05 93.65 3 77 4 0.211 283.98 16.02 94.66
4 78 3 0.209 288.23 11.77 96.08 5 79 2 0.231 292.10 7.90 97.37
6 78 3 0.222 287.54 12.46 95.85
7 80 1 0.215 295.08 4.92 98.36 8 79 2 0.235 292.00 8.00 97.33
9 79 2 0.211 291.83 8.17 97.28
10 80 1 0.229 295.51 4.49 98.50 เฉลยรวม 78.3 2.7 0.2216 289.21 10.79 96.402
จากตารางท 4.2 ผลการทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเวลาการ
เขาถงพนท 12 นาท แบบไมมสงกดขวาง ไมมเซนเซอรตรวจวดฝนไดก าลงไฟฟาทใชงานเฉลย
0.2216 kWh และรอยละการท าความสะอาดเฉลยเทากบ 96.402 เปอรเซนต
44
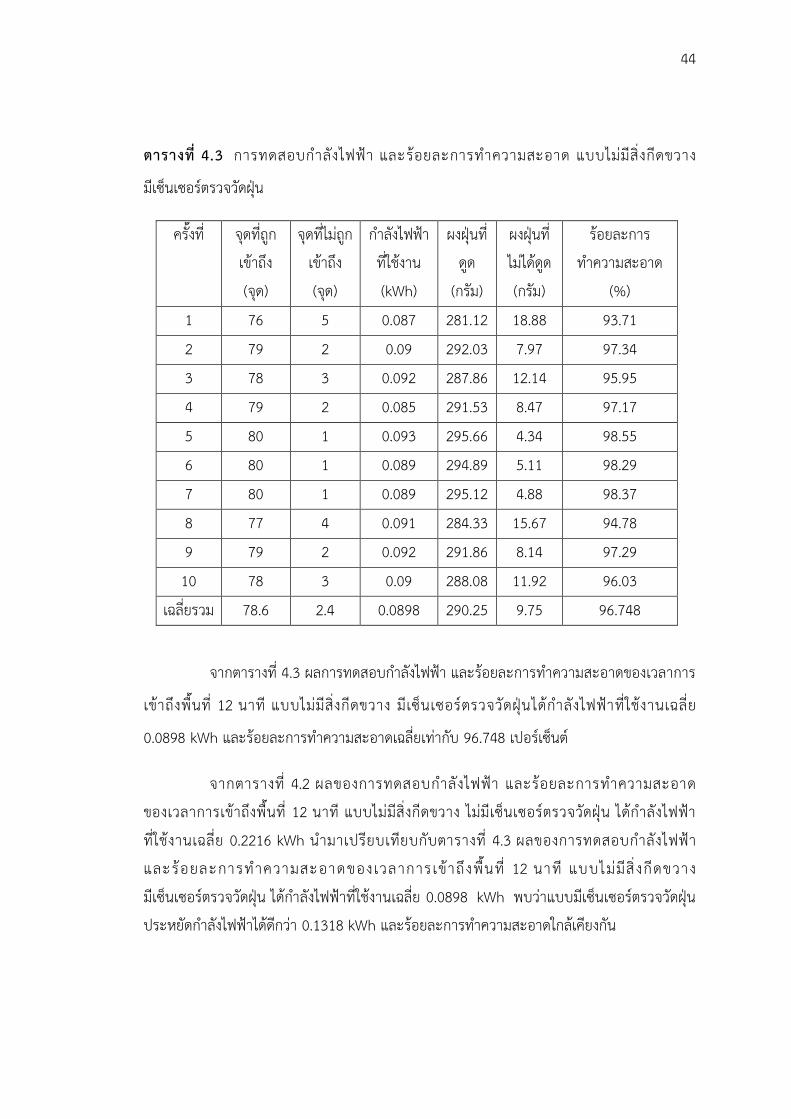
ตารางท 4.3 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบไมมสงกดขวาง
มเซนเซอรตรวจวดฝน
ครงท จดทถกเขาถง (จด)
จดทไมถกเขาถง (จด)
ก าลงไฟฟาทใชงาน (kWh)
ผงฝนทดด
(กรม)
ผงฝนทไมไดดด (กรม)
รอยละการ ท าความสะอาด
(%) 1 76 5 0.087 281.12 18.88 93.71
2 79 2 0.09 292.03 7.97 97.34 3 78 3 0.092 287.86 12.14 95.95
4 79 2 0.085 291.53 8.47 97.17
5 80 1 0.093 295.66 4.34 98.55 6 80 1 0.089 294.89 5.11 98.29
7 80 1 0.089 295.12 4.88 98.37
8 77 4 0.091 284.33 15.67 94.78 9 79 2 0.092 291.86 8.14 97.29
10 78 3 0.09 288.08 11.92 96.03
เฉลยรวม 78.6 2.4 0.0898 290.25 9.75 96.748
จากตารางท 4.3 ผลการทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเวลาการ
เขาถงพนท 12 นาท แบบไมมสงกดขวาง มเซนเซอรตรวจวดฝนไดก าลงไฟฟาทใชงานเฉลย
0.0898 kWh และรอยละการท าความสะอาดเฉลยเทากบ 96.748 เปอรเซนต
จากตารางท 4.2 ผลของการทดสอบก าลงไฟฟา และรอยละการท าความสะอาด ของเวลาการเขาถงพนท 12 นาท แบบไมมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟา ทใชงานเฉลย 0.2216 kWh น ามาเปรยบเทยบกบตารางท 4.3 ผลของการทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบไมมส งกดขวาง มเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.0898 kWh พบวาแบบมเซนเซอรตรวจวดฝนประหยดก าลงไฟฟาไดดกวา 0.1318 kWh และรอยละการท าความสะอาดใกลเคยงกน

45
4.4 การทดสอบก าลงไฟฟาและรอยละการท าความสะอาดแบบมสงกดขวาง
การทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเครองท าความสะอาดพนโดย
ใชระบบดดฝนและขดพน มขนาดพนท 3x3 เมตร ทดสอบแบบมสงกดขวางโดยไมมเซนเซอรตรวจวด
ฝน และมเซนเซอรตรวจวดฝน โดยโรยผงแปง 300 กรม เปนจดเสนผานศนยกลางประมาณ
10 เซนตเมตร ทงหมด 81 จด และใชเวลาของการเขาถงพนททเวลา 12 นาท
รปท 4.6 กอนการทดสอบแบบมสงกดขวาง
รปท 4.7 หลงการทดสอบแบบมสงกดขวาง
46
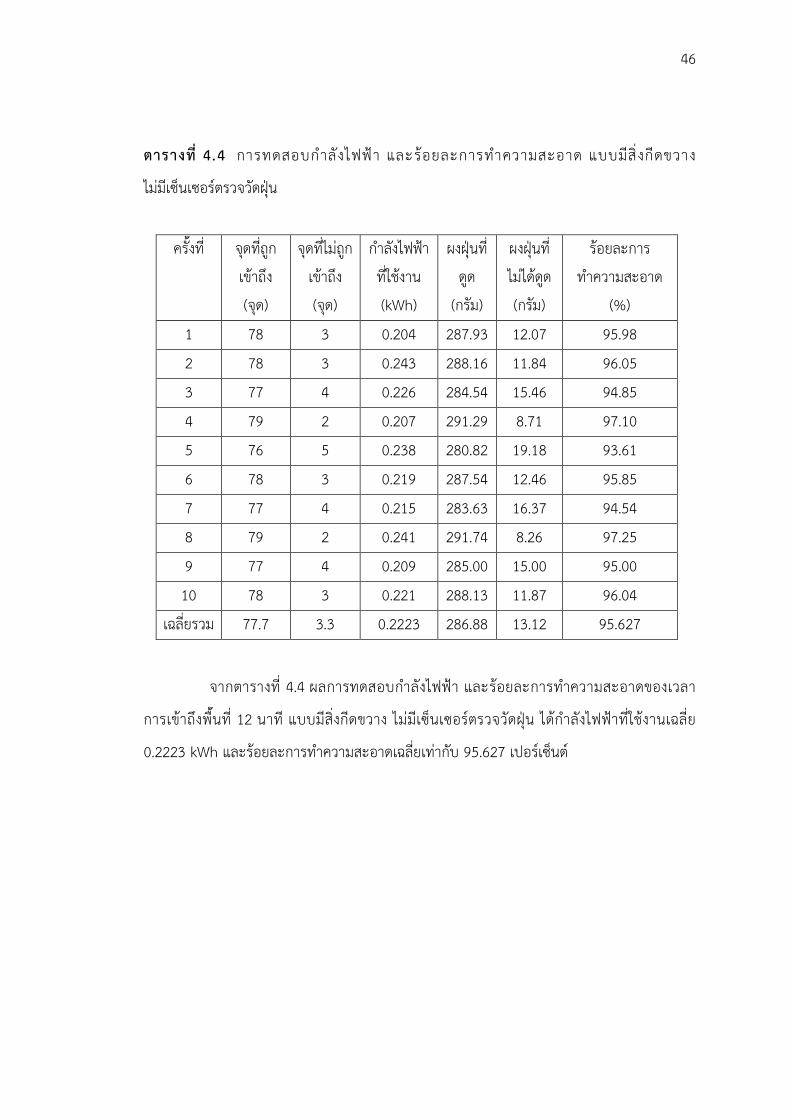
ตารางท 4.4 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบมส งกดขวาง
ไมมเซนเซอรตรวจวดฝน
ครงท จดทถก
เขาถง (จด)
จดทไมถกเขาถง (จด)
ก าลงไฟฟาทใชงาน (kWh)
ผงฝนทดด
(กรม)
ผงฝนทไมไดดด (กรม)
รอยละการ ท าความสะอาด
(%)
1 78 3 0.204 287.93 12.07 95.98
2 78 3 0.243 288.16 11.84 96.05 3 77 4 0.226 284.54 15.46 94.85
4 79 2 0.207 291.29 8.71 97.10 5 76 5 0.238 280.82 19.18 93.61
6 78 3 0.219 287.54 12.46 95.85
7 77 4 0.215 283.63 16.37 94.54 8 79 2 0.241 291.74 8.26 97.25
9 77 4 0.209 285.00 15.00 95.00
10 78 3 0.221 288.13 11.87 96.04 เฉลยรวม 77.7 3.3 0.2223 286.88 13.12 95.627
จากตารางท 4.4 ผลการทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเวลา
การเขาถงพนท 12 นาท แบบมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย
0.2223 kWh และรอยละการท าความสะอาดเฉลยเทากบ 95.627 เปอรเซนต

47
ตารางท 4.5 การทดสอบก าลงไฟฟา และรอยละการท าความสะอาด แบบมส งกดขวาง
มเซนเซอรตรวจวดฝน
ครงท จดทถก
เขาถง (จด)
จดทไมถกเขาถง (จด)
ก าลงไฟฟาทใชงาน (kWh)
ผงฝนทดด
(กรม)
ผงฝนทไมไดดด (กรม)
รอยละการ ท าความสะอาด
(%)
1 73 8 0.119 270.08 29.92 90.03
2 75 6 0.094 277.42 22.58 92.47 3 76 5 0.142 280.18 19.82 93.39
4 76 5 0.144 281.04 18.96 93.68 5 76 5 0.118 280.77 19.23 93.59
6 78 3 0.121 288.31 11.69 96.10
7 77 4 0.132 284.50 15.50 94.83 8 77 4 0.099 284.33 15.67 94.78
9 79 2 0.111 292.11 7.89 97.37
10 78 3 0.126 288.00 12.00 96.00 เฉลยรวม 76.5 4.5 0.1206 282.67 17.33 94.224
จากตารางท 4.5 ผลการทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเวลาการ
เขาถงพนท 12 นาท แบบมส งกดขวาง มเซนเซอรตรวจวดฝนไดก าลงไฟฟาท ใชงานเฉลย
0.1206 kWh และรอยละการท าความสะอาดเฉลยเทากบ 94.224 เปอรเซนต
จากตารางท 4.4 ผลของการทดสอบก าลงไฟฟา และรอยละการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.2223 kWh น ามาเปรยบเทยบกบตารางท 4.5 ผลของการทดสอบก าลงไฟฟาและรอยละการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบมส งกดขวาง ม เซนเซอรตรวจวดฝ น ไดก าลงไฟฟาทใชงานเฉลย 0.1206 kWh พบวาแบบมเซนเซอรตรวจวดฝนประหยดก าลงไฟฟาไดดกวา 0.1017 kWh และรอยละการท าความสะอาดใกลเคยงกน
48
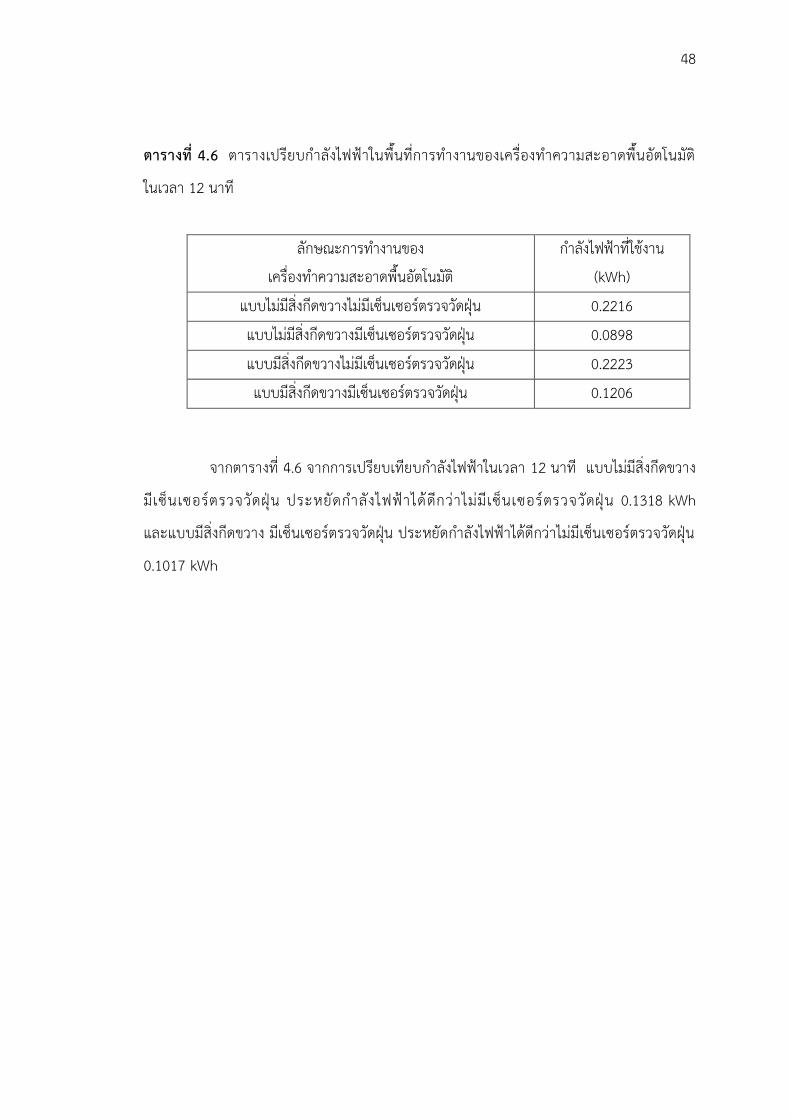
ตารางท 4.6 ตารางเปรยบก าลงไฟฟาในพนทการท างานของเครองท าความสะอาดพนอตโนมต
ในเวลา 12 นาท
ลกษณะการท างานของ
เครองท าความสะอาดพนอตโนมต ก าลงไฟฟาทใชงาน
(kWh)
แบบไมมสงกดขวางไมมเซนเซอรตรวจวดฝน 0.2216 แบบไมมสงกดขวางมเซนเซอรตรวจวดฝน 0.0898
แบบมสงกดขวางไมมเซนเซอรตรวจวดฝน 0.2223 แบบมสงกดขวางมเซนเซอรตรวจวดฝน 0.1206
จากตารางท 4.6 จากการเปรยบเทยบก าลงไฟฟาในเวลา 12 นาท แบบไมมสงกดขวาง
มเซนเซอรตรวจวดฝน ประหยดก าลงไฟฟาไดดกวาไมมเซนเซอรตรวจวดฝน 0.1318 kWh
และแบบมสงกดขวาง มเซนเซอรตรวจวดฝน ประหยดก าลงไฟฟาไดดกวาไมมเซนเซอรตรวจวดฝน
0.1017 kWh
บทท 5 สรปผลการด าเนนโครงงานและขอเสนอแนะ
5.1 บทน า เนอหาในบทนจะกลาวถงการสรปผลการด าเนนงาน ปญหาและอปสรรคในการจดท าโครงงาน และขอเสนอแนะในการพฒนาโครงงานน
5.2 สรปผลการด าเนนโครงงาน จากการทดสอบประสทธภาพการท างานของเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม สามารถสรปการท างานลกษณะการท างานทก าหนดไวไดดงตอไปน ตอนท 1 ทดสอบเวลาของการเขาถงพนทการท างานของเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม พบวาเวลาเฉลยในการเขาถงพนททงหมด 10 ครง อยทเวลา 12 นาท ตอนท 2 ทดสอบก าลงไฟฟา และประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบไมมส งกดขวาง ไมม เซนเซอรตรวจวดฝนไดก าลงไฟฟาท ใชงานเฉลย 0.2216 kWh และประสทธภาพการท าความสะอาดเฉลยเทากบ 96.402 เปอรเซนต ตอนท 3 ทดสอบก าลงไฟฟา และประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบไมมสงกดขวาง มเซนเซอรตรวจวดฝนไดก าลงไฟฟาทใชงานเฉลย 0.0898 kWh และประสทธภาพการท าความสะอาดเฉลยเทากบ 96.748 เปอรเซนต
ตอนท 4 ทดสอบก าลงไฟฟา และประสทธภาพการท าความสะอาด ของเวลาการเขาถงพนท 12 นาท แบบไมมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.2216 kWh น ามาเปรยบเทยบกบตารางท 4.3 ผลของการทดสอบก าลงไฟฟาและประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบไมมสงกดขวาง มเซนเซอรตรวจวดฝน ไดก าลงไฟฟา ทใชงานเฉลย 0.0898 kWh พบวาแบบมเซนเซอรตรวจวดฝนประหยดก าลงไฟฟาไดดกวา 0.1318 kWh และประสทธภาพการท าความสะอาดใกลเคยงกน
ตอนท 5 ทดสอบก าลงไฟฟา และประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.2223 kWh และประสทธภาพการท าความสะอาดเฉลยเทากบ 95.627 เปอรเซนต
50
ตอนท 6 ทดสอบก าลงไฟฟา และประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบมสงกดขวาง มเซนเซอรตรวจวดฝนไดก าลงไฟฟาทใชงานเฉลย 0.1206 kWh และประสทธภาพการท าความสะอาดเฉลยเทากบ 94.224 เปอรเซนต
ตอนท 7 ทดสอบก าลงไฟฟา และประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบมสงกดขวาง ไมมเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.2223 kWh น ามาเปรยบเทยบกบตารางท 4.5 ผลของการทดสอบก าลงไฟฟาและประสทธภาพการท าความสะอาดของเวลาการเขาถงพนท 12 นาท แบบมสงกดขวาง มเซนเซอรตรวจวดฝน ไดก าลงไฟฟาทใชงานเฉลย 0.1206 kWh พบวาแบบมเซนเซอรตรวจวดฝนประหยดก าลงไฟฟาไดดกวา 0.1017 kWh และประสทธภาพการท าความสะอาดใกลเคยงกน 5.3 ปญหาและอปสรรคในการจดท าโครงงาน 5.3.1 โครงสรางมขนาดใหญและน าหนกมาก ท าใหไมสะดวกในการเคลอนยาย 5.3.2 ตองจบสายไฟ 220 โวลตเพอไมใหขวางการท างานของเครองท าความสะอาดพน 5.3.3 ตวเครองท าความสะอาดพนแบบอตโนมตยงมทศทางการเคลอนทไมแนนอน 5.3.4 ในบางชวงเซนเซอรยงตรวจจบไมพบวตถจงท าใหหลบสงกดขวางไมพน 5.3.5 ตองมการตงคาเซนเซอรกอนการทดลองทกครง 5.4 ขอเสนอแนะในการพฒนาโครงงาน 5.4.1 ควรออกแบบโครงสรางใหมขนาดเลกลง 5.4.2 ท าเสาตดตงสายไฟขนาด 220 โวลตเพอความสะดวกตอการใชงาน 5.4.3 ควรใชเซนเซอรทมความเสถยรและมนคงในการท างาน 5.4.4 ควรมการตดตงเซนเซอรเพมเตมดานหลงและหาเซนเซอรทมประสทธภาพทดเพอทจะตรวจจบวตถไดหลายชนด 5.4.5 สวนในการพฒนาโครงงานควรปรบแหลงจายไฟ จากทใชสายไฟเปลยนเปน แบตเตอรและการท าความสะอาดในพนทกวางโดยไมตองก าหนดกรอบของการท างาน

51
เอกสารอางอง
[1] 2013. Arduino Startup Kit. (Online), 26 ธนวาคม 2556. https://www.gravitechthai. com/guru2.php?p=258 [2] เอกชย มะการ, เรยนรเขาใจใชงานไมโครคอนโทรลเลอรตระกล AVR ดวย Arduino. พมพครงท 1 .กรงเทพฯ:บรษทอททจ ากด,2552. [3] กฤษกร แกวแสนตอ,ธวชชย แสนอนภบาล,เครองท าความสะอาดพนอตโนมต, ปรญญานพนธปรญญาตร สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก ,2554. [4] พลเทพ วงศละ,เครองท าความสะอาดพนอตโนมตแบบหลบสงกดขวางได, ปรญญานพนธปรญญาตร สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก ,2556. [5] กตตชย ชวาสขถาวร, ภาษาซ ทละกาว. พมพครงท 1 .กรงเทพฯ:เคทพ คอมพ แอนด คอลซลท,2550.

ภาคผนวก ก.
เครองมอและอปกรณทใชท าปรญญานพนธ

53
รปท ก-1 มลตมเตอรแบบเขม
รปท ก-2 บอรดบอรดอาดอโนเมกา 2560

54
รปท ก-3 เครองวดกโลวตตฮาวร
รปท ก-4 สาย USB เสยบบอรด

55
รปท ก-5 เครองท าความสะอาดพนทใชงาน
รปท ก-6 โครงสรางเครองท าความสะอาดพน

56
ภาคผนวก ข.
โปรแกรมควบคมการท างานของเครองท าความสะอาดพนอตโนมตแบบท าความสะอาดไมซ าทเดม
57
1.ขนตอนการท างานของโปรแกรม
โปรแกรมหลก
Start
COMMON
CHK
SW

58
โปรแกรมยอย CHK
CHK
Bumper L
Bumper R
Bumper C
Bumper L&C
Bumper R&C
Bumper L&R&
C
Turn right
Turn left
Turn left
Turn right
Turn left
Turn right
NO
NO
NO
NO
NO
YES
YES
YES
YES
YES
YES
59
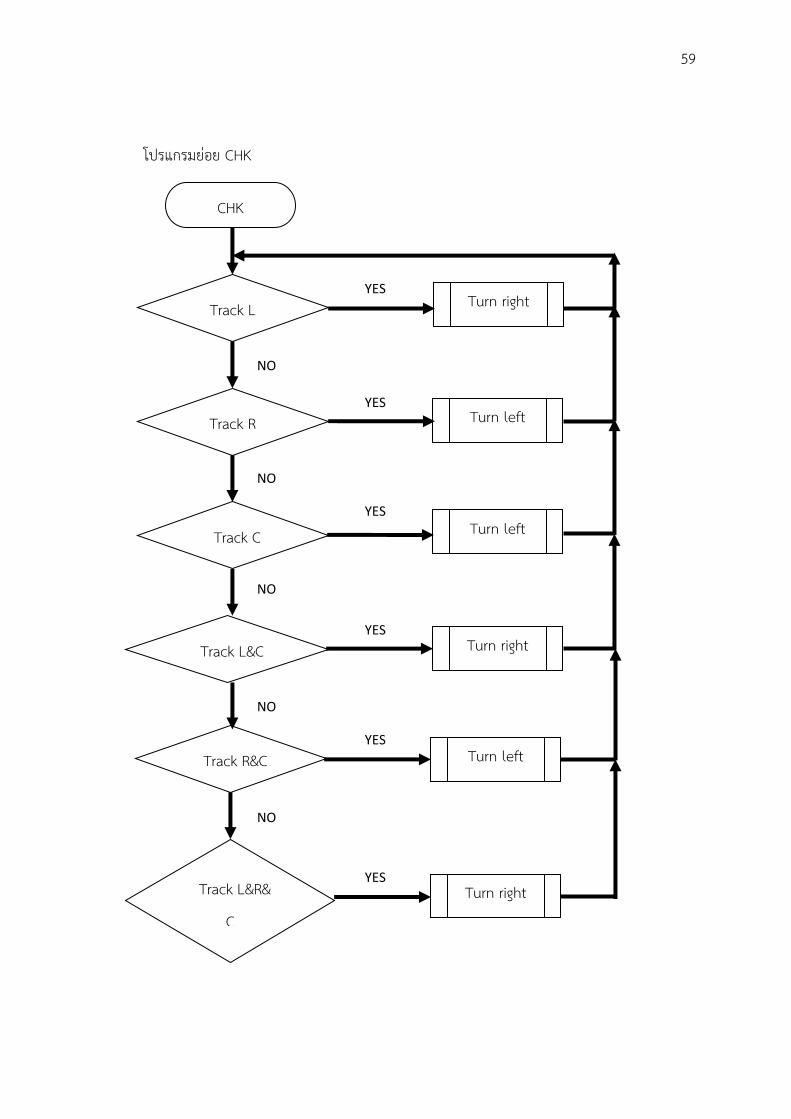
โปรแกรมยอย CHK
CHK
Track L
Track R
Track C
Track L&C
Track R&C
Track L&R&
C
Turn right
Turn left
Turn left
Turn right
Turn left
Turn right
NO
NO
NO
NO
NO
YES
YES
YES
YES
YES
YES
60
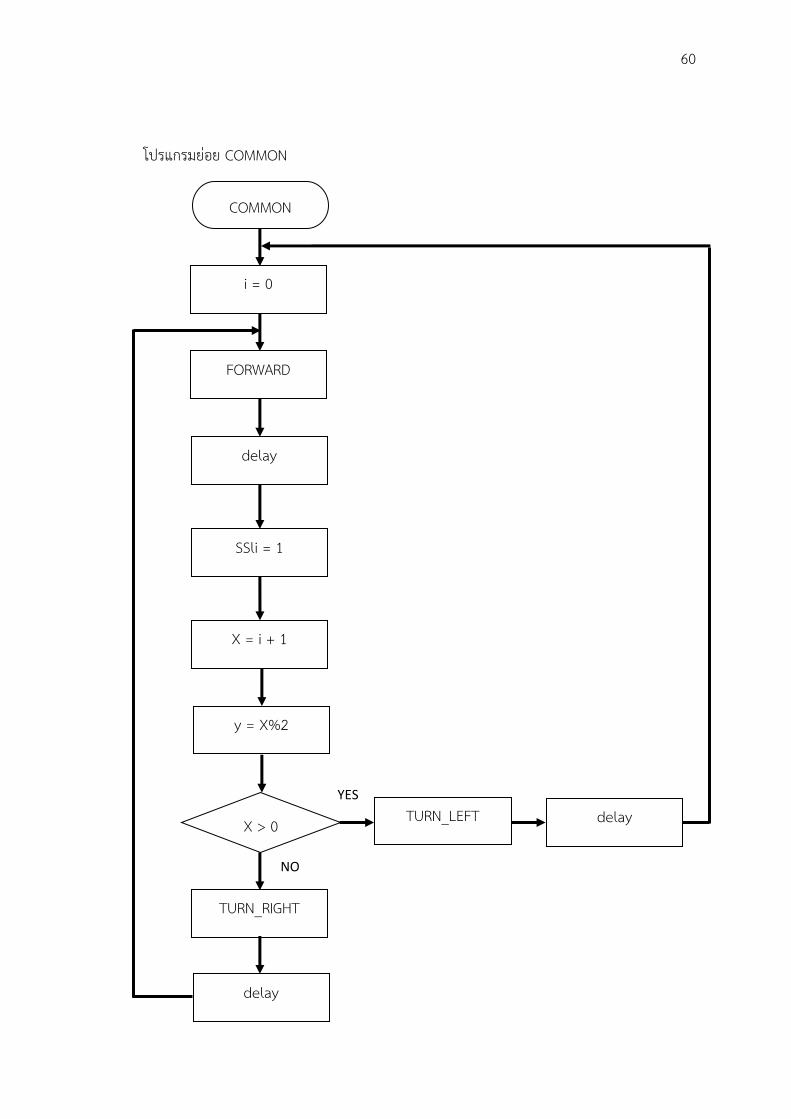
โปรแกรมยอย COMMON
COMMON
i = 0
FORWARD
delay
X = i + 1
y = X%2
X > 0
TURN_RIGHT
TURN_LEFT
delay
delay
SSli = 1
YES
NO

61
โปรแกรมยอย turn right
โปรแกรมยอย turn left
Turn right
BACKWARD
delay
TURN_RIGHT
delay
Turn left
BACKWARD
delay
TURN_LEFT
delay

62
2.ชดค าสงโปรแกรมการท างาน
//*********** Pin For Hardware
#define MLPwm 10 //****ก าหนดพลสวดมอดเลชน ควบคมความเรวมอเตอร ขา10
#define MLIn2 9 //****ก าหนดมอเตอรซายอนพต2 ขา9
#define MLIn1 8 //****ก าหนดมอเตอรซายอนพต1 ขา8 #define MRPwm 13 //****ก าหนดพลสวดมอดเลชน ควบคมความเรวมอเตอร ขา13 #define MRIn2 12 //****ก าหนดมอเตอรขวาอนพต2 ขา12
#define MRIn1 11 //****ก าหนดมอเตอรขวาอนพต1 ขา11 #define TrackRight 7 //****ก าหนดเซนเซอรจบเสนขวา ขา7
#define TrackCenter 6 //****ก าหนดเซนเซอรจบเสนกลาง ขา6
#define TrackLeft 5 //****ก าหนดเซนเซอรจบเสนซาย ขา5 #define BumperRight 24 //****ก าหนดเซนเซอรจบวตถขวา ขา24
#define BumperCenter 26 //****ก าหนดเซนเซอรจบวตถกลาง ขา26
#define BumperLeft 28 //****ก าหนดเซนเซอรจบวตถซาย ขา28 #define SSR 42 //****ก าหนดโซลดสเตตรเลย ขา42 #define measurePin A0 //****ก าหนดขาเซนเซอร ขาA0
#define ledPower A4 //****ก าหนดLED ขาA4 int samplingTime = 280;
int deltaTime = 40;
int sleepTime = 9680; float voMeasured = 0;
float calcVoltage = 0;
float dustDensity = 0;

63
float DustVolt = 3.75; // Set Dust //////////////////////////////////////
//******* Void Set UP***************//
//////////////////////////////////////
void setup()
{
pinMode(MLIn1, OUTPUT);
pinMode(MLIn2, OUTPUT); pinMode(MRIn1, OUTPUT);
pinMode(MRIn2, OUTPUT); pinMode(SSR, OUTPUT); pinMode(TrackRight, INPUT);
pinMode(TrackCenter, INPUT);
pinMode(TrackLeft, INPUT); pinMode(BumperRight, INPUT);
pinMode(BumperCenter, INPUT);
pinMode(BumperLeft, INPUT); Serial.begin(9600);
pinMode(ledPower,OUTPUT);
}//End Void Setup //////////////////////////////////////
//******* Void Loop***************//

64
//////////////////////////////////////
void loop()
{
Forward(150);
ReadDust();
if(calcVoltage > DustVolt)
{
digitalWrite(SSR, HIGH);
}
else{
digitalWrite(SSR, LOW);
} if(digitalRead(TrackLeft) == HIGH)
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnRight(150,0);
delay(2500);
}
else if(digitalRead(BumperLeft) == LOW)
{
Stop();
delay(1000);
Reverse(170);
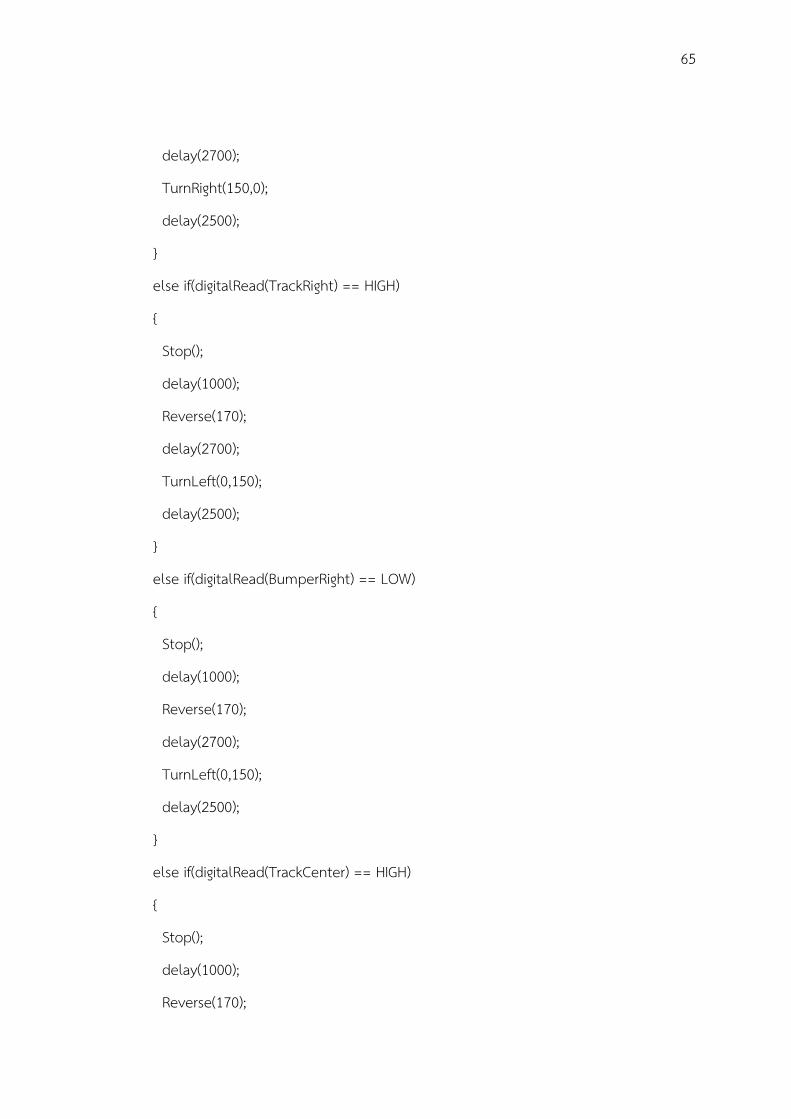
65
delay(2700);
TurnRight(150,0);
delay(2500);
}
else if(digitalRead(TrackRight) == HIGH)
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnLeft(0,150);
delay(2500);
}
else if(digitalRead(BumperRight) == LOW)
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnLeft(0,150);
delay(2500);
}
else if(digitalRead(TrackCenter) == HIGH)
{
Stop();
delay(1000);
Reverse(170);
66
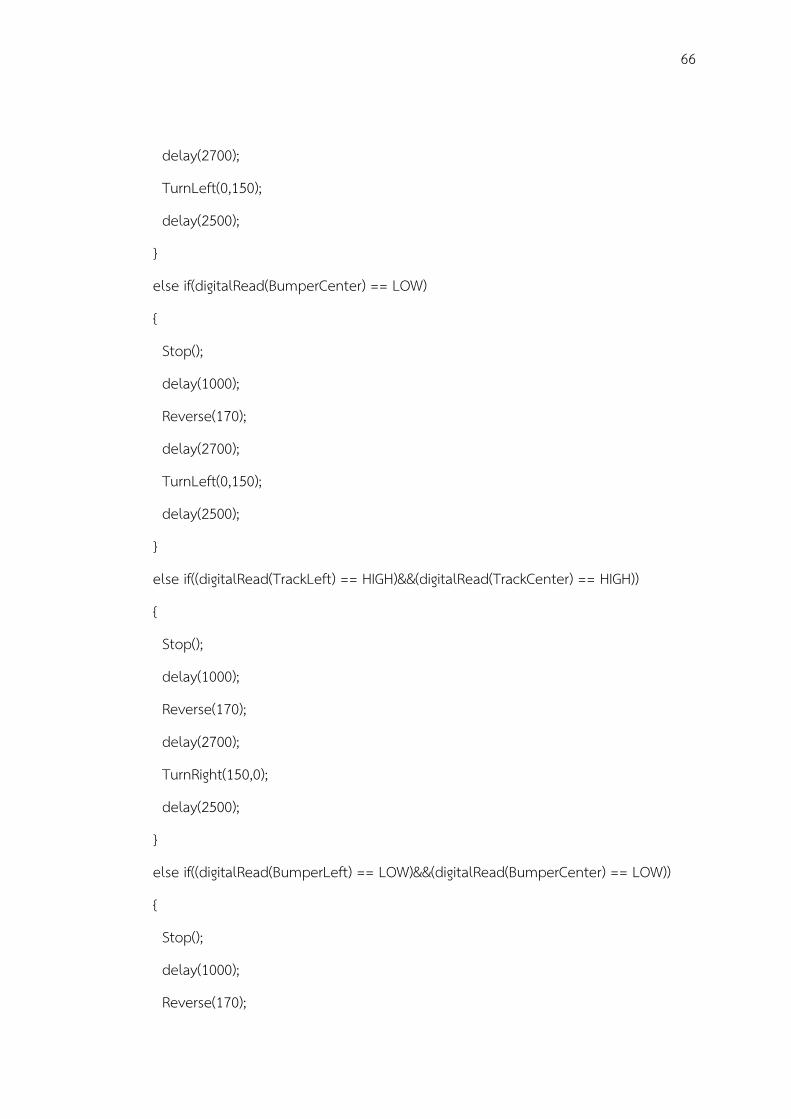
delay(2700);
TurnLeft(0,150);
delay(2500);
}
else if(digitalRead(BumperCenter) == LOW)
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnLeft(0,150);
delay(2500);
}
else if((digitalRead(TrackLeft) == HIGH)&&(digitalRead(TrackCenter) == HIGH))
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnRight(150,0);
delay(2500);
}
else if((digitalRead(BumperLeft) == LOW)&&(digitalRead(BumperCenter) == LOW))
{
Stop();
delay(1000);
Reverse(170);

67
delay(2700);
TurnRight(150,0);
delay(2500);
}
else if((digitalRead(TrackRight) == HIGH)&&(digitalRead(TrackCenter) == HIGH))
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnLeft(0,150);
delay(2500);
}
else if((digitalRead(BumperRight) == LOW)&&(digitalRead(BumperCenter) == LOW))
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnLeft(0,150);
delay(2500);
}
else if((digitalRead(TrackRight) == HIGH)&&(digitalRead(TrackCenter) ==
HIGH)&&(digitalRead(TrackLeft) == HIGH))
{
Stop();
delay(1000);
68
Reverse(170);
delay(2700);
TurnRight(150,0);
delay(2500);
}
else if((digitalRead(BumperRight) == LOW)&&(digitalRead(BumperCenter) ==
LOW)&&(digitalRead(BumperLeft) == LOW))
{
Stop();
delay(1000);
Reverse(170);
delay(2700);
TurnRight(150,0);
delay(2500);
}
}// End Loop //////////////////////////////////////
//***** Function For Motor Left*****//
//////////////////////////////////////
void LeftForward(int speedM)
{
digitalWrite(MLIn1, HIGH);
digitalWrite(MLIn2, LOW);
analogWrite(MLPwm, speedM);
}
void LeftReverse(int speedM)
69
{
digitalWrite(MLIn1, LOW);
digitalWrite(MLIn2, HIGH);
analogWrite(MLPwm, speedM);
}
void LeftStop()
{
digitalWrite(MLIn1, LOW);
digitalWrite(MLIn2, LOW);
analogWrite(MLPwm, 0);
} //////////////////////////////////////
//**** Function For Motor Right*****//
//////////////////////////////////////
void RightForward(int speedM)
{
digitalWrite(MRIn1, HIGH);
digitalWrite(MRIn2, LOW);
analogWrite(MRPwm, speedM);
}
void RightReverse(int speedM)
{
digitalWrite(MRIn1, LOW);
digitalWrite(MRIn2, HIGH);
analogWrite(MRPwm, speedM);
}
70
void RightStop()
{
digitalWrite(MRIn1, LOW);
digitalWrite(MRIn2, LOW);
analogWrite(MRPwm, 0);
} void Reverse(int speedM)
{
RightReverse(speedM);
LeftReverse(speedM);
}
void Forward(int speedM)
{
RightForward(speedM);
LeftForward(speedM);
}
void TurnLeft(int SpeedL, int SpeedR)
{
LeftForward(SpeedL);
RightForward(SpeedR);
}
void TurnRight(int SpeedL, int SpeedR)
{
LeftForward(SpeedL);
RightForward(SpeedR);
}

71
void Stop()
{
LeftStop();
RightStop();
} void ReadDust()
{
digitalWrite(ledPower,LOW); // power on the LED
delayMicroseconds(samplingTime); voMeasured = analogRead(measurePin); // read the dust value delayMicroseconds(deltaTime);
digitalWrite(ledPower,HIGH); // turn the LED off
delayMicroseconds(sleepTime); // 0 - 3.3V mapped to 0 - 1023 integer values
// recover voltage
calcVoltage = voMeasured * (5.0 / 1024.0); // linear eqaution taken from http://www.howmuchsnow.com/arduino/airquality/
// Chris Nafis (c) 2012
dustDensity = 0.17 * calcVoltage - 0.1;
Serial.print("Raw Signal Value (0-1023): ");
Serial.print(voMeasured); Serial.print(" - Voltage: ");
Serial.print(calcVoltage);
72
Serial.print(" - Dust Density: ");
Serial.println(dustDensity); }
73
ประวตผเขยน
ชอ – นามสกล นายเรองเดช ใจหนน
วน เดอน ปเกด 31 สงหาคม 2535
ทอย 595/1 ถ.รามค าแหง ต.หวเดยด อ.เมองตาก จ.ตาก 63000
ประวตการศกษา
พ.ศ. 2553 มธยมศกษาตอนปลาย สายวชา วทยาศาสตร – คณตศาสตร
โรงเรยนตากพทยาคม
12 ถ.ทาเรอ ต.ระแหง อ.เมอง จ.ตาก 63000
74
ประวตผเขยน
ชอ – นามสกล นายพฒพงศ บญกม
วน เดอน ปเกด 3 พฤษภาคม 2532
ทอย 117 หม 11 ต.ทาฉนวน อ.กงไกรลาศ จ.สโขทย 64170
ประวตการศกษา
พ.ศ. 2551 ประกาศนยบตรวชาชพ สาขาวชา ไฟฟาก าลง
วทยาลยเทคนคสโขทย
2/4 ม.5 ถ.จรดวถถอง ต.บานกลวย อ.เมอง จ.สโขทย 64000
75
ประวตผเขยน
ชอ – นามสกล นายศกดชย สวรรณโชต
วน เดอน ปเกด 22 เมษายน 2534
ทอย 40 หม 14 ต.โกสมพ อ.โกสมพนคร จ.ก าแพงเพชร 62000
ประวตการศกษา
พ.ศ. 2551 ประกาศนยบตรวชาชพ สาขาวชา ไฟฟาก าลง
เทคโนโลยภาคตะวนออก
321 หม 2 ต.หนองต าลง อ.พานทอง จ.ชลบร 20160