ﭘﺎﺳﺦ ﺳﻴﺴﺘﻤﻬﺎﯼ دﻳﻨﺎﻣﻴﮑﯽ response of dynamics systems
TRANSCRIPT

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 1 of 27
پاسخ سيستمهای ديناميکیResponse of Dynamics Systems
به عنوان . مونيتورينگ پاسخ سيستم به تغييرات ورودی قابل دست يابی استاطالعات مهم سيستم با طور ناگهانی مجبور به راندن بمثال اگر فردی به راندن خودرو کوچکی عادت نموده باشد، در صورتيکه
درتی گردد، ناخودآگاه با فشار پدال گاز به ميزان کمی به دنبال دست يابی به خودرو بزرگی با موتور پر قپس از آگاهی از رابطه سرعت خودرو با پدال گاز، سرعت خودرو را " طبيعتا. پاسخ موتور خواهد بود
عمل فشار پدال گاز و نگهداشتن. کم نموده و بدنبال آگاهی از پاسخ سيستم ترمز به پدال ترمز خواهد بود. ناميده می شود "(Step Change)تغيير پله ای " آن در اين وضعيت برای مدت طوالنی به نام " و " (Ramp)شيب " ، " (Impulse)ضربه " آزمايش های مهم تغييرات ورودی عبارت از
ل گاز تا می توان حالت فشار پدا" ضربه" به عنوان تقريبی برای . می باشند" (Sinusoid)سينوسی نيز می توان به " شيب"برای . نتها را برای کسر کوچکی از ثانيه و سپس رها نمودن آن در نظر گرفتا
نيز با تغيير " سينوسی " همچنين تغييرات ورودی . حالت افزايش تدريجی فشار پدال گاز اشاره نموده هر يک از منحنی های ذيل نشاندهند. وضعيت پدال گاز به شکل سينوسی قابل دست يابی خواهد بود
. تغييرات بيان شده به همرا توابع انتقال آنها می باشند

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 2 of 27
پاسخ سيستم درجه يک به ورودی تابع ضربهtem to an Impulse ChangesResponse of a First Order Sy
در صورتيکه تغيير ضربه ای به سيستم درجه يک نشان داده شده در شکل زير اعمال شود، پاسخ چگونه خواهد بود؟ سيستم
:سيستم بصورت زير تعريف شده است
( ) ( )( ) 1+
==Ts
KsUsYsG
:می باشد، بنابراين 1تابع تبديل تابع ضربه برابر ( ) 1=sU
:و در نتيجه
( ) ( )
( )1
11
+=
+==
TsKsY
TsKsYsG
ان مثال ممکن است که به عنو. اين معادله متأسفانه اطالعات زيادی درباره پاسخ سيستم نشان نمی دهدثانيه بعد از تغيير ورودی نياز باشد که برای تعيين آن بايد از معکوس تبديل 5به پاسخ سيستم در با استفاده از جدول تبديل الپالس می توان ديد که معکوس تابع فوق بصورت زير . الپالس استفاده نمود
: است
( ) TteTKty −=
t ثانيه يعنی بالفاصله پس از تغيير 0پس از . ن تغيير ضربه اتفاق افتاده استنشانگر زمان است چو
به y(t)فزايش زمان تا بينهايت، مقدار ا اب. خواهد بود K/Tبرابر y(t)ضربه، پاسخ سيستم برابر در 2Tو در K/T(100e-1)يعنی K/T از %36.8سيستم در Tدر زمان . سمت صفر ميل می نمايد
نام به " عموما 4Tزمان . خواهد بود K/Tاز %2در 4Tو در K/Tمقدار %5در 3Tو در 13.5%شکل ذيل نشان . زمان تثبيت يا آرامش سيستم پس از اعمال يا تغيير ورودی ضربه ناميده می شود
:دهنده چگونگی پاسخ سيستم نسبت به زمان می باشد

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 3 of 27
روجی سيستم در هر زمانی را برای ورودی ضربه اکنون تابع تبديل سيستم حل شده است و می توان خ .تعيين نمود
پله ای ) ورودی(پاسخ سيستم درجه يک به تغيير tem to a Step ChangesResponse of First Order Sy
:پاسخ سيستم به ورودی پله عبارت خواهد بود با. سيستم درجه يک قبل را در نظر می گيريم
( )s
sU 1=
:ابراينبن
( ) ( )
( )1
1
+−=
+=
TsKT
sKsY
TssKsY
:با استفاده از معکوس الپالس
( ) ( )TteKty −−= 1 می باشد و با افزايش به سمت بينهايت، 0برابر y(t)مقدار 0رابطه فوق بيانگر آن است که در زمان
Tپس از زمان y(t). ناميده می شود" مقدار حالت دائم " به نام K. خواهد رسيد Kمقدار آن به مقدار مقدار %95وبه 2Tپس از زمان Kمقدار %86.5، به Kمقدار (e-1-1) 100 يعنی %63.2به مقدار
K 3 پس از زمانT مقدار %98وبهK 4 پس از زمانT خواهد رسيد . :پاسخ سيستم بصورت منحنی به شکل زير خواهد بود

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 4 of 27
برابر صفر uو yبديل الپالس مقادير اوليه بايد به خاطر داشته باشيم که در هنگام استفاده از ت
نشان دهنده تغييرات خروجی به سبب تغيير در ورودی سيستم " واقعا y(t)می باشند، بنابراين معادله باشد، با 5به عنوان مثال چنانچه خروجی سيستم در هنگام تغيير ورودی به تابع پله ای برابر . می باشد
. ميل خواهد نمود K+5هايت پاسخ سيستم به مقدار ميل زمان به سمت بين
شناسائی سيستم مرتبه يکFirst Order System Identification
در بخش قبل نشان داده شد که چگونه برای تابع تبديل يک سيستم می توان پاسخ سيستم به ازاء ورودی وه استخراج تابع تبديل سيستم همچنين در بخش دو نح. را تعيين نمود) تغييرات ورودی(های متفاوت
. های مکانيکی تشريح گرديد، اگر چه در پاره ای موارد استخراج تابع تبديل سيستم مشکل می باشدبه عنوان مثال . روش ديگر شناسائی تابع تبديل سيستم آناليز پاسخ سيستم به تغييرات ورودی است
تغيير نموده %50تا %30گاز که از منحنی زير نشاندهنده تغيير سرعت خودرو با تغيير دريچه . ، می باشد) %20يعنی ورودی پله ای (است

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 5 of 27
سيستم بصورت (Gain)بهره . يک فرض می شود) درجه(سيستم رسته Change in output/change in input
:بنابراين. تعريف می شود
5.030503040
=−−
=K
. تغيير کل آن است %63ای سيستم تا رسيدن به مدت زمان طی شده بر ثابت زمانی سيستم برابرمی باشد بنابراين ثابت زمانی برابر زمان طی شده ای است که 10در اين سيستم تغيير کل خروجی برابر
بنابراين ثابت زمانی . ثانيه می باشد 10برابر " افزايش می يابد که اين زمان حدودا 6.3خروجی تا مقدار :تابع تبديل مربوط به وضعيت گاز به سرعت خودرو بصورت زير خواهد بود ثانيه و 10سيستم برابر
1105.0+s
2) درجه(پاسخ ديناميکی سيستم های رسته
SystemsDynamic Response of Second Order ، سيستم رسته دو تا مادامی که تغييرات (Damper)در غياب هرگونه مستهلک کننده ای
نوسان به نام فرکانس اين نوع فرکانس. اعمالی وارد گردد، نوسان خواهد نمود در نيروی)طبيعی سيستم )nω دو بصورت زير ) رسته(معادله عمومی سيستم درجه . ناميده می شود
:می باشد
uKydtdy
dtyd
nnn22
2
2
2 ωωζω =++
سيستم بوده و نشاندهنده ميزان (damping ratio)معرف ضريب استهالک ζکه به ترتيب ورودی و خروجی yو uبهره سيستم و Kنوسانی بودن سيستم می باشد،
:تبديل الپالس معادله فوق بصورت زير است .می باشند سيستم
( ) ( )( ) 22
2
2 nn
n
ssK
sUsYsG
ωζωω
++==
پاسخ پله ای
Step Response :تغيير پله ای برای

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 6 of 27
:ئی تجزيه می گرددکه به کسرهای جز
:به اعمال معکوس الپالس
سيستم ناميده شده و برابر ريشه های معادله مشخصه سيستم (poles)به نام قطب های p2و p1که 02 22 =++ nnss ωζω می باشند که برابر خواهند بود با:
A1 وA2 می شوند ثابتهائی هستند که بصورت زير تعريف:
212
212
22
21
KKA
KKA
−−
=
−−
−=
ζζζζ
هر پاسخ به شکل . وجود دارد 2پاسخ ممکن برای سيستم رسته 3نشان می دهد که y(t)تحليل معادله p1 وp2 بستگی دارد .
over dampedپاسخ . دو ريشه حقيقی منفی نامساوی
critically dampedپاسخ . دو ريشه حقيقی منفی مساوی
oscillatory or under damped پاسخ. يک جفت ريشه موهومی مزدوج
.الزم است p2و p1برای نمايش اين اختالفات، حل معادله رسته دو برای هر يک از مقادير
( )
( ) ( )22
2
2
1
nn
n
sssKsY
ssU
ωζωω
++=
=
( )2
2
1
11ps
Aps
As
sY−
+−
+=
( ) tptp eAeAty 21211 ++=
12
442
2
222
21
−±−=
−±−=
ζωζω
ωωζζω
nn
nnnpandp
1>ζ
1=ζ
1<ζ
رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 7 of 27
ζ<1: اگر
: اگر
( )( )
( ) ( )[ ]teKtyssKsY n
t
n
n n ωωω ω +−=⇒+
= − 112
2
ζ>1: اگر
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−+−= − tteKty dd
tn ωζ
ζωζω sin1
cos12
:که
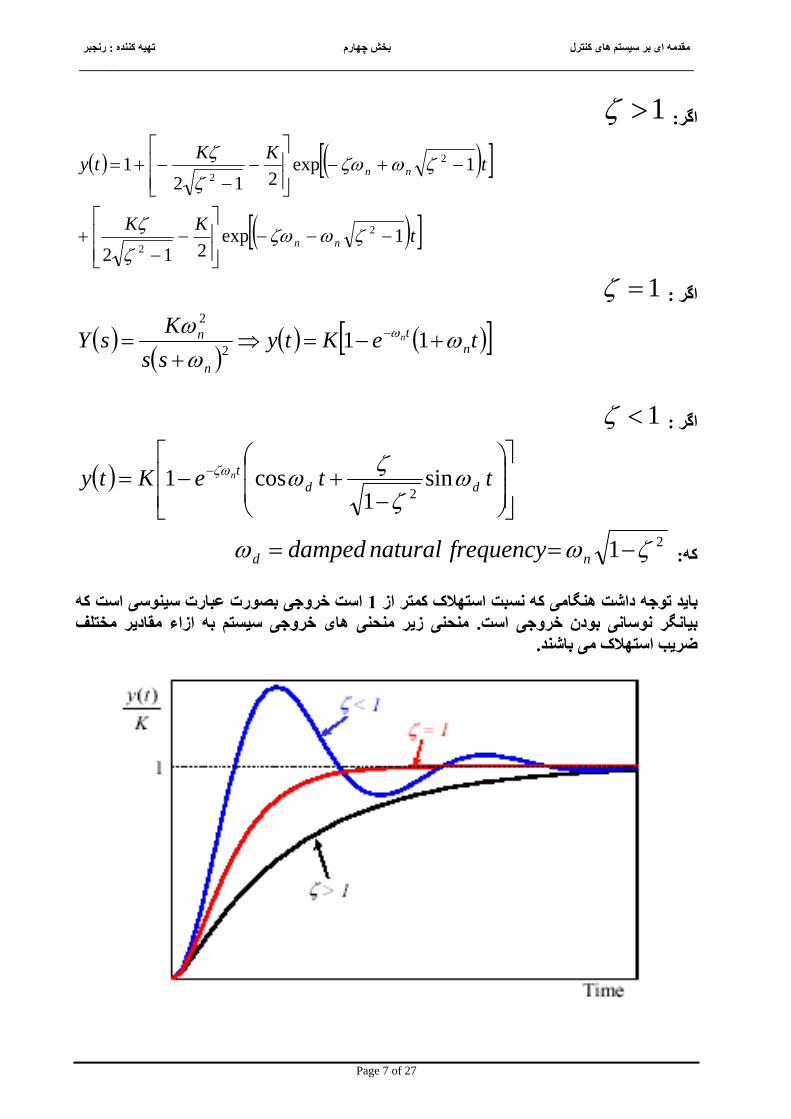
است خروجی بصورت عبارت سينوسی است که 1هنگامی که نسبت استهالک کمتر از بايد توجه داشتمنحنی زير منحنی های خروجی سيستم به ازاء مقادير مختلف . بيانگر نوسانی بودن خروجی است
.ضريب استهالک می باشند
( ) ( )[ ]
( )[ ]tKK
tKKty
nn
nn
1exp212
1exp212
1
2
2
2
2
−−−⎥⎥⎦
⎤
⎢⎢⎣
⎡−
−+
−+−⎥⎥⎦
⎤
⎢⎢⎣
⎡−
−−+=
ζωζωζ
ζ
ζωζωζ
ζ
1=ζ
21 ζωω −== nd frequencynaturaldamped
رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 8 of 27
. به نسبت افزايش ضريب استهالک پاسخ خروجی آهسته تر می شود
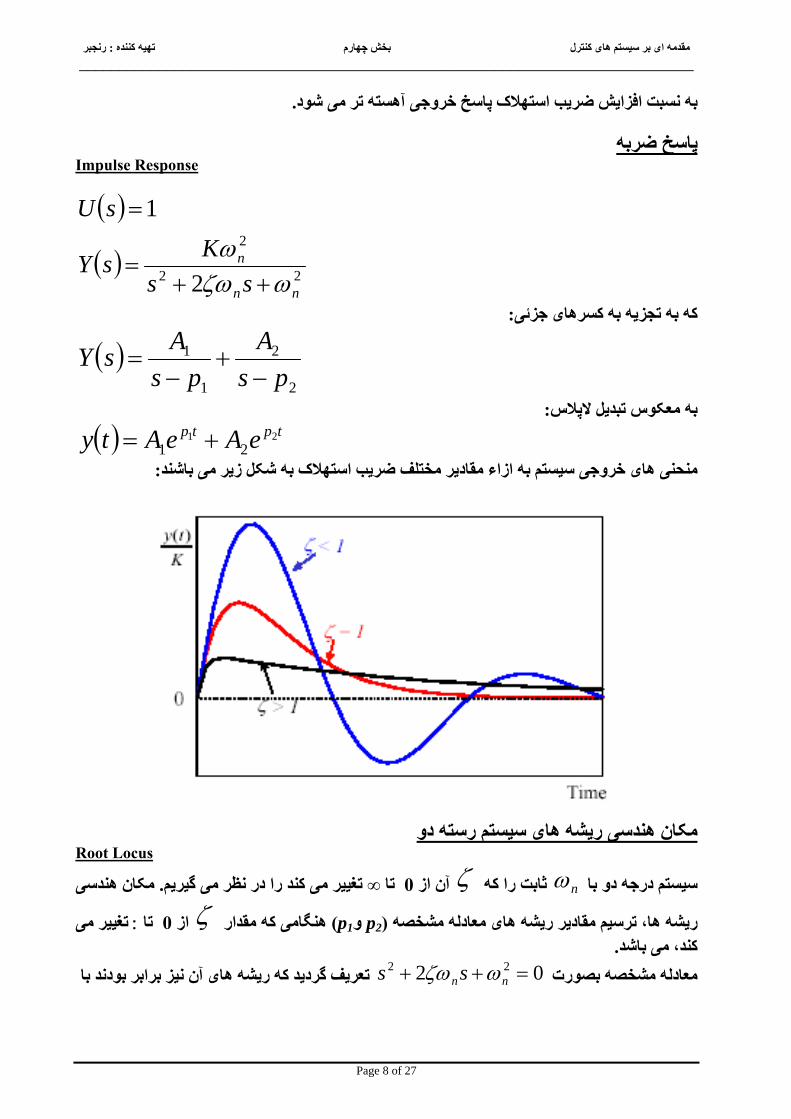
پاسخ ضربهsponseImpulse Re
( )
( ) 22
2
2
1
nn
n
ssKsY
sU
ωζωω
++=
=
:که به تجزيه به کسرهای جزئی
( )2
2
1
1
psA
psAsY
−+
−=
:به معکوس تبديل الپالس
( ) tptp eAeAty 2121 +=
:منحنی های خروجی سيستم به ازاء مقادير مختلف ضريب استهالک به شکل زير می باشند
ی سيستم رسته دومکان هندسی ريشه هاRoot Locus
مکان هندسی . تغيير می کند را در نظر می گيريم ∞تا 0آن از ζثابت را که nωسيستم درجه دو با
تغيير می :تا 0از ζهنگامی که مقدار ) p1و p2(ترسيم مقادير ريشه های معادله مشخصه ،ريشه ها . اشدکند، می ب
02معادله مشخصه بصورت 22 =++ nnss ωζω ريشه های آن نيز برابر بودند با تعريف گرديد که

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 9 of 27
1& 221 −±−= ζωζω nnpp
با يکديگر برابر و مساوی p1و p2می باشد، 0به عنوان مثال وقتی که ضريب استهالک برابر
njω± خواهند بود کهj می باشد، 1هنگامی که ضريب استهالک برابر . می باشد −1برابرp2 وp1
... می باشند و ساير حاالت −nωهر دو برابر با
1& 221 −±−= ζωζω nnpp
niبرای jp ωζ ±=⇒= 0
برای 2110 ζωζωζ −±−=⇒<< nni jp
به شکل زير تعريف φرا می دهند که φو زاويه nωاع ريشه ها تشکيل نيم دايره ای با شع .می شود
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −= −
ζζ
φ2
1 1tan
1&0برای 21 →−∞→⇒≥ ppζ
:کنيم منحنی زير حاصل خواهد شد تغيير می نمايد، رسم ζرا وقتی که p1و p2اگر مقادير
. ناميده می شود )Root Locus( مکان هندسی ريشه ها ،مسير قرمز رنگ ضخيم ترسيم شده-Under damped)" سيستم درجه دو با ميرائی ضعيف" در اين درس توجه خاص به حالت سوم،
Second Order System) ها مختلط، مزدوج با در اين حالت همانگونه که بيان شد قطب. می باشد :قسمت حقيقی منفی می باشند که به شکل زير نشان می دهيم
2110 ζωζωζ −±−=⇒<< nn js

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 10 of 27
:که چنانچه با شکل عمومی زير مقايسه شود
djs ωα ±−=
در اينصورت nζωα
11و " ثابت زمانی سيستم" =
21 ζωω −= nd عی فرکانس طبي" را
.ناميده می شوند" ميرا شدهمطابق شکل ارائه ζ" نسبت ميرائی" مکان اين قطب ها به عنوان تابعی از nωبرای مقدار معين
. خواهد بود nωهمانگونه که مالحظه می شود مکان يک نيم دايره به شعاع . شده باال خواهد بود
ζφو نسبت ميرائی توسط رابطه ωزاويه 1cos−= به يکديگر مرتبط می باشند.
رابطه بين قطب ها و پاسخ سيستم Relations Between Poles and System Response
:برای سادگی. پاسخ سيستم به سادگی و با تعيين موقعيت قطب ها قابل دست يابی است .ی از سيستم دارای بخش موهومی غير صفر باشد، نوسانی استاگر قطب +−∞اگر قطبی از سيستم دارای بخش حقيقی غير صفر باشد، خروجی به سمت ميل /
دليل آن اينکه سيستم دارای قطب مثبت بوده و لذا خروجی آن بصورت . خواهد کرد( ) tptp eAeAty 21
21 عبارت اکسپوننشيال با آرگومان مثبت خواهد بود که حاوی =+ .می باشد که با ميل زمان به سمت بی نهايت، به سمت بی نهايت ميل خواهد نمود
قطب های نزديکتر به محور موهومی در سمت چپ آن بيشترين تأثير در پاسخ سيستم قطب های واقع در سمت چپ محور موهومی و نزديک به آن به نام قطب های غالب. دارند
(dominant poles) ناميده می شوند.
:سئواالت درسیTutorial Questions
.رسم نمائيد Rپاسخ سيستم زير را با فرض ورودی پله ای واحد برای .1
.ضربه در ورودی رسم نمائيد ورودیپاسخ تابع تبديل داده شده زير را به ازاء .2
a. 2
10 1G(s)
s=
+

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 11 of 27
b. 252 1
G(s)s s
=+ +
c. 212 8
G(s)s s
=+ +
با فرض ضريب استهالک يا ميرائی و پاسخ سيستم ها با قطب های نشان داده شده در مکان .3
. های زير را به ازاء ورودی پله ای واحد رسم نمائيد
:سيستم کنترل سرعت دور در جای موتور خودروئی دارای تابع تبديل زير است .4
( ) ( )( )( )( )06.003.0405
215022 ++++
++=
sssssssG
.مکان هندسی ريشه های تابع تبديل سيستم به ازاء ورودی پله ای واحد رسم نمائيد
:ديناميک يک کوره صنعتی به صورت معادله زير قابل تقريب زده شده است .5( ) ( ) ( )tKuty
dttdyT =+
T وK مقادير ثابت بوده وu(t) وy(t) و سوخت ورودی ( ورودی و خروجی های سيستم به ترتيبرا بدست y(t). می گردد تابع پله ای به سيستم اعمال (t = 0) در اين زمان. می باشند) دمای کوره
. آوريد

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 12 of 27
تعيين خصوصيات پاسخDetermining Response Characteristics
:اين خصوصيات عبارتند از. تعدادی خصوصيات مهم وجو دارند که تعيين کننده پاسخ سيستم می باشند
تا مقدار دائمی خود 0می کشد تا سيستم از مقدار زمانی که طول: Rise Time, trصعود زمان تا %10اين زمان برابر زمان رسيدن پاسخ سيستم از over dampedبرای سيستم های . می رسد
.می باشدمقدار دائمی اش %95تا %5، يا از مقدار دائمی آن 90%
فراجهش زمان طی شده برای آنکه پاسخ سيستم به اولين مقدار : Peak Time, tp زمان اوج . برسد overshootيا ) ماکزيمم مقداردامنه(
نسبت فراجهشماکزيمم مقدار : Maximum Overshoot, Mp )به درصد(حداکثر فراجهش 1به
:فاده می شودنمی باشد، از رابطه زير است 1در صورتی که مقدار حالت ماندگار خروجی يا پاسخ برابر ( ) ( )
( ) %100% ×∞
∞−=
cctc
M pP
زمان مورد نياز برای آنکه پاسخ سيستم به محدوده مقدار : Settling Time, ts زمان نشست
. رسيده و باقی بماند) مقدار نهائی %5الی %2" حدودا( نهائی
:خصوصيات بيان شده بر روی منحنی پاسخ سيستم نمونه ای نشان داده شده اند
با فرض . صوصيات بيان شده با استفاده از رياضيات از تابع پاسخ سيستم قابل دست يابی می باشندخ
:اين مقادير بصورت زير قابل محاسبه می شوند با ورودی پله ای واحد 2سيستم درجه

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 13 of 27
pt, Peak Time: زمان اوج
:لذا dtdy=0:اين زمان هنگامی اتفاق می افتد که
( )
⎥⎥⎦
⎤
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−++
⎢⎢⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−+=
−
−
tte
tteKdt
tdy
dd
ddt
ddt
n
n
n
ωζ
ζωωω
ωζ
ζωζω
ζω
ζω
cos1
sin
sin1
cos
2
2
( ) ( )
πππωωζ
ωω ζω
3,2,,00sin
01
sin2
=⇒=⇒
=−
=⇒ −
=
pdpd
tnpd
tt
tt
etKdt
tdy pn
p
:مربوط است، لذا) overshoot( فراجهشبه اولين )Peak Time, tp زمان اوج (زمان پيک
dppd tt
ωππω =⇒=
: Maximum Overshoot, Mpحداکثر فراجهش
:حداکثر فراجهش در زمان اوج اتفاق می افتد( )
( )
2
1
2
11
%100
%100sin1
cos
%100
2
ζωω
πζ
ζπ
ζζπ
ωπζω
−=
=
×⎟⎟⎠
⎞⎜⎜⎝
⎛
−+−=
×−
=
⎟⎠⎞⎜
⎝⎛ −−
−
dn
p
p
pp
eM
eM
KKty
M
dn
: Rise Time, trن صعود زما
:بنابراين. برای سيستم ميرا زمان مذکور زمانی است که خروجی به مقدار دائمی خود می رسد
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−+−== −
rdrdt
r tteKKty rn ωζ
ζωζω sin1
cos12
−≠0چون rnte ζω :پس

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 14 of 27
0sin1
cos2
=−
+ rdrd tt ωζ
ζω
rdکه در صورت تقسيم آن به tωcos خواهيم داشت:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−=
=−
+
−
ζζ
πω
ωζ
ζ
21
2
1tan1
0tan1
1
dr
rd
t
t
مقدار نهائی دائمی می %90تا %10برای سيستم ميرا زمان صعود مدت زمانی است که سيستم از . رسد
: Settling Time, ts زمان نشست
اين زمان . زمان نشست می تواند زمانی که ديگر حرکت نوسانی قابل اهمييت نمی باشد، در نظر گرفت . مقدار حالت دائم است پيک در محدوده بين زمانی است که ارتفاع " عموما
:است، عبارتست از زمانی که در آن
:لذا. است مضربی از پيک هنگامی اتفاق می افتد که
.خواهد بود باشد در اينصورت يعنی چنانچه اگر
خالصهSummary
%52/ to−+( )
KKtyovershoot −
×=100%
%% xovershoot <
100sin1
cos2
×⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−+−= −
sdsdt ttex sn ω
ζζωζω
sd tωπ
( )n
s
t
xt
exsd
ζω
ζω
100ln100
−=⇒
=⇒ −
%2=xn
st ζω9.3
=

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 15 of 27
سئواالت درسی
Tutorial Question تعاريف را برای سيستم زير بدست آورده و سپس بدقت پاسخ و ساير (rise time)زمان اوج .6
.سيستم را به ورودی پله ای واحد رسم نمائيد
( )n
ss
dr
dr
r
p
p
p
dpp
xttTimeSettling
tort
tTimeRise
forMor
eM
MOvershootMaximum
ttTimePeak
ζω
ωπ
ζζ
πω
ζζ
ωπ
ζπζ
100ln:
21
tan1
:
6.006.0
1
100
:
:
21
1 2
−=
≈⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−=
≤≤−≈
=
=
−
⎟⎠⎞⎜
⎝⎛ −−

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 16 of 27
:برای دياگرام بلوکی داده شده -1مسئله ف د ) ال تفاده از قواع ا اس اهش ب ر ک جب
.را بدست آوريدسيستم بلوکی تابع تبديل ون ) ب تفاده از روش ميس ا اس ب
(Mason) ابع ديل ت تم تب ت سيس را بدس .آوريد
:حل
2H
2G
3G
++ + +
++
+ _ R Y
3H
1G
1G
2H
2G
3H
3G
++
+ +
+
+
+ _ R Y
YX
33
33 1 HG
GG−
=
22
22 1 HG
GG−
=
1G 22
2
1 HGG
−
33
3
1 HGG
−
+ +
+ _ R Y

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 17 of 27
R ⎟⎟⎠
⎞⎜⎜⎝
⎛−
+22
21 1
1HG
GG
33
3
1 HGG
−
+ _ Y
)الف
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−
++
⎟⎟⎠
⎞⎜⎜⎝
⎛−
+=
33
3
22
21
22
21
1111
11
HGG
HGGG
HGGG
RY
( )( ) ( )
( )( ) ( ) 32122313322
332133221
111111
GGGHGGGHGHGHGGGHGHGG
RY
+−+−−−+−−
=
)ب
:مسيرهای پيشرو •
12
211
1234612356
GpGGp
==
:حلقه ها •
3212
311
23572347
GGGLGGL
==
:تابع تبديل •
( )( )231
21
21
21
111
1 GGGGG
LLpp
RY
+++
=++
+=
.را قرار داده شوند، حاصل مشابه نتيجه الف خواهد بود 3G و 2Gاگر مقادير ( )
( )231
21
111
GGGGG
RY
+++
=
ئله ان -2مس تم نش رای سيس به ای تاور پل ده گش )داده ش )tT
:مظلوبست. اعمال شده است :تابع تبديل سيستم) الف
( ) ( ) ( )sTssG 2θ=
راجهش درصد ) ب ان نشست (Overshoot; Mp%)ف ان اوج (settling time; ts)، زم و زم(peak time; tp) برای( )t2θ
1G 22
22 1 HG
GG−
=
33
33 1 HG
GG−
=
+ +
+ _ R Y
1 2
3
4
5 6
7

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 18 of 27
م : حل ای . ابتدا بايد معادله حرکت را بدست آوري د زواي ر پيچشی می توانن ه جرم و فن ود ک د دقت نم باي . لذا دو معادله حرکت الزم استلذا سيستم دو درجه آزادی و . پيچش متفاوتی داشته باشند
:جسم آزاد سيستمدياگرام •
:حاکممعادالت •
21 1
1 2
2 2
0T(s) T Js
T T
T k
θ
θ
− =⎧⎪ − =⎨⎪ =⎩
( )1 1 2
2 2
T Ds
T k
θ θθ
= −⎧⎨ =⎩
( )( )
21 2 1
1 2 2
T(s) Ds Js
Ds k
θ θ θθ θ θ− − =⎧
⎨− =⎩
21 1 2
2 1 20T(s) Js Ds Ds
Ds Ds k
θ θ θθ θ θ= + −⎧
⎨ = − +⎩
:سيستمديناميک •( ) ( ) ( ) ( )
( ) ( ) ( )sKsDssDssDssDssJssT
212
2112
0 θθθθθθ
+−=−+=
:با جايگذاری مقادير ثابت و مرتب کردن معادالت، خواهيم داشت
( ) ( ) ( ) ( )
( ) ( ) ( )ss
ss
ssssssT
21
212
1 θθ
θθ+
=
−+=
:با چايگذاری از معادله دوم در معادله اول خواهيم داشت
( ) ( ) ( ) ( ) ( )
11
)()()(
1
22
222
++==
−+
+=
sssTssG
ssss
ssssT
θ
θθ
د پارامترهای ضريب برای تعيين پارامترهای درصد فراجهش، زمان) ب نشست و زمان اوج سيستم باي
.برای سيستم درجه دو را تعيين نمائيم nωو فرکانس طبيعی ζاستهالک
J D k

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 19 of 27
:تابع تبديل عمومی سيستم درجه دو عبارتست از
2
2
2)(
nn
n
ssKsG
ωζωω
+++=
:با مقايسه دو سيستم داريم
5.011
==⇒=
ζω Kn
:بنابراين مقادير خواسته شده برای سيستم مورد نظر بصورت زير محاسبه می گردند :درصد فراجهش •
%3.16100%21 =×==⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−−
ζ
ζπ
eMOS P :زمان نشست •
84==
nsT
ζω
:زمان اوج •
63.31 2
=−
=ζω
π
n
PT
ئله ور -مس ت موت رل موقعي رای کنت دلی ب م
ابق شکل dcالکتريکی ادير . می باشدمط مق
1K 2وK را طوری بدست آوريد که زمان راجهش sec5.0اوج ).(.و ف OP ک رای ي ب
ورودی پله5.0..2%يعنی .( ناچيز باشد << OP(
:تابع تبديل سيستم مدار بسته : حل
( )( )( )
( ) ( ) ( ) 1212
1
21
1
21
1
1111
11
1)(KsKKs
KsKKss
K
sssKK
ssK
sT+++
=+++
=
++
+
+=
:مطابق تعريف
):(زمان اوج PTPeakTime :زمان اولين فراجهش 21
= =−
Pd n
T π πω ω ζ
راجهش ):.(.ف OPOverShoot: 2
. . 100exp1
⎛ ⎞= −⎜ ⎟
⎜ ⎟−⎝ ⎠P O ζπ
ζ
)(sY )(sR + _
sK21+
( )11
+ssK

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 20 of 27
:داريم 2ه با مقايسه مخرج تابع تبديل سيستم مدار بسته با سيستم رست( )
( ) ( ) ( )1
2121211
121222
21
2112
12
KKKKKKKandK
KsKKsss
nnn
nn
+=
+=→+==
+++=++
ωςςωω
ωςω
sTP:با توجه با خواسته های مسئله يعنی ..2%و ≥5.0 <OP خواهيم داشت:
02.01
exp
5.01
2
2
<⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−−
=−
ςςπ
ςωπ
n
:شتاز پارامترهای سيستم خواهيم دا ςو nωبا جايگذاری مقادير
ل ا ح بنامعادالت فوق
ابق ( مطMathCad Script خواهيم داشت) ذيل :
sradn /313.1078.0
==
ως
:خواهيم داشت با استفاده از معادالت باالو 142.0&349.106 21 == KK
( )
( )211
2
22
22
21
12
304.151
912.31
02.0ln1
5.01
KKandK
K
nn +==
<−
→<−
→<−
−
≤−
ςωω
ςπς
ςςπ
ςςπ
ςπ

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 21 of 27
ωn 2:=
ζ 0.5:=
Given
π
ωn 1 ζ2
−⋅0.5≤
ζ π⋅
1 ζ2
−
⎛⎜⎝
⎞⎟⎠
− ln 0.02( )<
ωn
ζ
⎛⎜⎝
⎞⎟⎠
Find ωn ζ,( ):=
ωn
ζ
⎛⎜⎝
⎞⎟⎠
10.313
0.78⎛⎜⎝
⎞⎟⎠
=
K1 ωn2
:= K22ζ ωn⋅( ) 1−
K1:=
K1 106.349= K2 0.142=
ده ی مطابق شکل دياگرام بلوکی با فيدبک اای مدار بسته 2سيستم رسته -مسئله واحد بوسيله کنترل کننره ا به ی ب ی Kانتگرال يعن
sKsGC . کنترل می شود )(=د ی فرآين انس طبيع فرک
24=nω تهالک ريب اس و ض . می باشندζ=919.0آن برابر :مطلوبست
sT)(تابع تبديل سيستم مدار بسته ) الف sΔ)(معادله مشخصه سيستم ) ب رای ) ج ا ب ان هندسی ريشه ه ی مک ≥≥∞منحن Ko رای رسم ای الزم ب ه پارامتره ا محاسبه کلي ب
مکان هندسی ريشه ها
ocessPr Control
+ )(sY )(sR _ 22
2
2 nn
n
s ωζωω
++ )(sGC
رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 22 of 27
)249(2410
24249)24()249()(
)24()249()24(
)2()(
2
232
2222
2
+++=
+++=+++=Δ
+++=
+++=
sssK
KsssKssss
KsssK
KsssKsT
nnn
n
ωωζωω
2
3 0
0, 4.5 24 (4.5), ,4.5 4.5 3
360 ,180 ,300
= =
= − ± −
= ∞ ∞ ∞− −
= = −
=
P Z
i
i
A
A
n and n
p jz
σ
φ
3s 1 24
9 K241s 92424 K− 0s K24
99
24240 ≤→−≤ KK
2402499 2 jss ±=→=×+
( )
∓
7.662287.0
6032265
2:4,2,86241830
024)249(:
2
2
321
2122
2
−=⋅+−−−=
−=−=⋅−−−≈
−−−=⋅±−−=→++=++=
=∂
++−∂=
∂∂
−
ππππθ
πππππθ
θθθππ
n
n
nAnglessssss
ssss
sKawayBreak
P
P
PPP
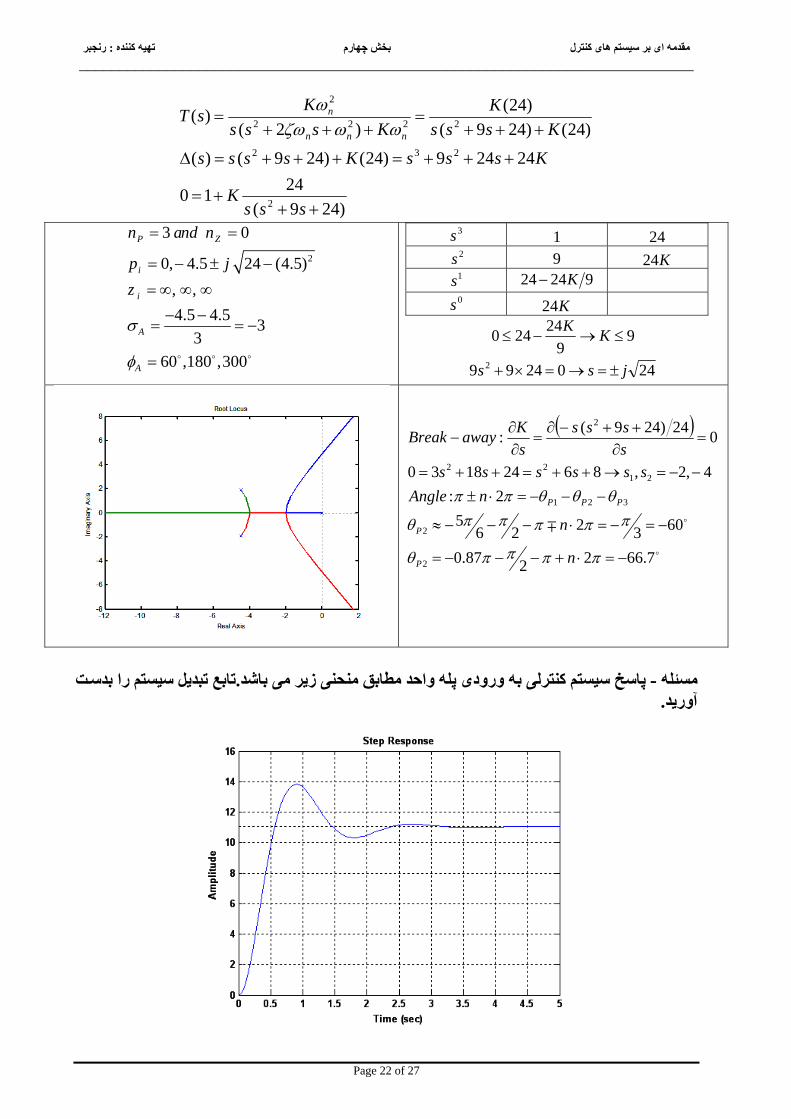
بدست تابع تبديل سيستم را .ی به ورودی پله واحد مطابق منحنی زير می باشدسيستم کنترلپاسخ -مسئله .آوريد
2s

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 23 of 27
:با توجه به منحنی پاسخ پله، سيستم را رسته دو با تابع تبديل زير در نظر می گيريم: حل
22 2)(
nnssKsG
ωζω ++=
. ز دياگرام می توان بدست آوردمقدار فراجهش را با اندازه گيری ا
%9.2510011
1185.13% =×−
=OS
:روابط مورد استفاده
: رابطه درصد فراجهش •⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−−
×=21100% ζ
πζ
eOS : زمان نشست •
nsT
ζω4
=
دازه • ادير ان ذاری مق ا جايگ ب :گيری شده داريم
:با توجه به اينکه •11=finalC
:داريم Kدر نتيجه برای بهره
dT
85.13
OS13.85 11−
11100⋅:= OS =
Ts 2.7s:=
ζ
lnOS100
⎛⎜⎝
⎞⎟⎠
−
π2 ln
OS100
⎛⎜⎝
⎞⎟⎠
⎛⎜⎝
⎞⎟⎠
2+
:= ζ =
Ts4
ζ ωn⋅ωn
4ζ Ts⋅
:= ωn =

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 24 of 27
2 22 11 11 3 8 154 8n
KK . . s
ω−= → = × =
:و لذا تابع تبديل سيستم بصورت زير است
44.1404.38.154)( 2 ++
=ss
sG
دياگرام بلوکی سيستم کنترل سرعت توربين بخاری که سرعت دورانی توربين را بصورت قطع و : مسئله
ا . وصل جريان کنترل می نمايد، بصورت شکل زير می باشد ی عموم ين سيستم کنترل رل " در چن عمل کنترد و سيست ا، با استفاده از يک شير محرک و ورودی مرجع صورت می گي م در محدوده وسيعی از دم
. لرزشها و شتاب و نيز تشعشعات الکترومغناطيس و غيره غيرحساس بوده و قابليت اطمينان خوبی دارد وان ه ت اری ک وربين بخ رای ت رل دور ب تم کنت ت سيس ر اس ذا در نظ ی kW500ل رعت دوران در س
rpm12000 ه ن د ب وربين را در محدوده توليد می نماي ه سرعت خروجی ت ائيم ک 5%حوی طراحی نمدارد ع نگه رعت مرج ادير . س د مق دون بع ت ب ورتيکه در حال 5.01و J ،1.0=f=1در ص =K
:باشند، مطلوبست تابع تبديل مدار بسته سيستم) الف نمايش فضای حالت معادالت) ب معادله مشخصه سيستم مدار بسته با استفاده از معادالت حالت) ج
: حل :تابع تبديل سيستم مدار بسته) الف
10 1 1
( ) 1010( ) 010 1 1( ) ( 10)( ) 101
10
ω⎛ ⎞⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟+ +⎝ ⎠⎝ ⎠⎝ ⎠= → = =
+ + +⎛ ⎞⎛ ⎞⎛ ⎞+ ⎜ ⎟⎜ ⎟⎜ ⎟+ +⎝ ⎠⎝ ⎠⎝ ⎠
ds s s Js fAssume T s
R s s s Js fs s Js f
ورودی مرجع
فيلتر
1010+s
شير محرک
s1
توربين
fJs +1)(sR )(sω
1K
)(sTd
+ +
+
_
ورودی مزاحم
سرعتويه ایزا

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 25 of 27
1( ) ( 10)( ) 0
10 1 1( ) ( 10)( ) 10110
10 ( 10)( ) ( ) ( )( 10)( ) 10 ( 10)( ) 10
ω
ω
⎛ ⎞⎜ ⎟ ++⎝ ⎠= → = =
+ + +⎛ ⎞⎛ ⎞⎛ ⎞+ ⎜ ⎟⎜ ⎟⎜ ⎟+ +⎝ ⎠⎝ ⎠⎝ ⎠+
= ++ + + + + +
d
d
s s sJs fAssume R sT s s s Js f
s s Js fs ss R s T s
s s Js f s s Js f
)(0تابع تبديل مدار بسته با فرض =sTd :
10))(10(10
)()(
+++=
fJssssRsω
تنمايش فضای حال) ب
:را مطابق شکل زير در نظر ميگيريم ixسيگنال های حالت
:معادالت حالت عبارتند از
RxxKxxKRxxxxxxKRx
xxxxxxxxsxxs
x
xxxxxsxxs
x
xJ
xJfxxfxJxfxJsxx
fJsx
x
101010)(10101010
10101010101010
10
1
11
31131133433
114
43333433434
32232323
2111111212
1
+−−=→−+−=→+−=−=
+−=→+=→+=→=+
=→=→=→=
+−=→+=+=→=+
=ω
:که معادالت حالت عبارتند از
فيلتر
1010+s
شير محرک
s1
)(sR )(sω
1K
+ _ ورودی سرعت
مرجع
1x 2x 3x 4x
توربين
fJs +1
رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 26 of 27
RxxKxxx
xJ
xJfx
x
101010
1
3113
32
211
1
+−−==
+−=
= ω
:که به شکل ماتريسی خواهيم داشت
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−
−
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
3
2
1
3
2
1
13
2
1
001
1000
10010100
01
xxx
Rxxx
K
JJf
xxx
ω
: athlabMکاربرد ا فر را ب ر ص ات براب رض اغتشاش ا ف تم ب ديل سيس ابع تب وکی ت اگرام بل ت و دي ادالت حال از دو روش مع
.يکديگر مقايسه می نمائيم%State Space f=0.1;J=1.0;K1=0.5;R=1; A=[-f/J 1/J 0;0 0 1;-10*K1 0 -10]; B=[0;0;10*R]; C=[1 0 0]; D=[0]; sys=ss(A,B,C,D); T=tf(sys) %Block Diagram G1=tf(10,[1 10]); G2=tf(1,[1 0]); G3=tf(1,[1 0.1]); sys1=series(G1,G2); sys=series(sys1,G3); Tb=feedback(sys,0.5) >> Transfer function: 10 --------------------------- s^3 + 10.1 s^2 + s + 5

رنجبر: م تهيه کننده چهاربخش مقدمه ای بر سيستم های کنترل _____________________________________________________________________________
Page 27 of 27
Transfer function: 10 --------------------------- s^3 + 10.1 s^2 + s + 5
.که در هر دو حالت پاسخ يکسان می باشد :معادله مشخصه سيستم با استفاده از معادالت حالت) ب
: Mathlabکاربرد %State Space f=0.1;J=1.0;K1=0.5;R=1; A=[-f/J 1/J 0;0 0 1;-10*K1 0 -10]; B=[0;0;10*R]; C=[1 0 0]; D=[0]; syms s I=eye(size(A)); G=inv(s*I-A)*B
:پاسخ مخرج تابع تبديل سيستم مدار بسته است
G = [ 100/(10*s^3+101*s^2+10*s+50)] [ 10*(10*s+1)/(10*s^3+101*s^2+10*s+50)] [ 10*(10*s+1)*s/(10*s^3+101*s^2+10*s+50)]
:که
)(51.10 :معادله مشخصه سيستم عبارتست از 23 +++=Δ ssss
تم انی سيس خ زم پاس :به ورودی پله واحد