Введение year/Киреев... · 2 Содержание Введение ..... 3
TRANSCRIPT

1
2
Содержание
Введение .................................................................................................................. 3
Классификация механизмов для подводной добычи .................................... 4
Установки с гибким тяговым элементом ........................................................ 6
Гидравлический подъем .................................................................................... 11
Эрлифтный земснаряд ....................................................................................... 12
Гидравлические драги ....................................................................................... 14
Донные технические средства .......................................................................... 17
Рабочие органы для подводной добычи ......................................................... 19
Технологии глубоководной добычи XXI века ............................................... 20
Вывод ..................................................................................................................... 23
Список литературы ............................................................................................ 24
3
Введение
Мировой океан - хранилище огромного количества полезных ископаемых,
биологических ресурсов, энергии и её носителей, первичного сырья для химической и
фармацевтической промышленности. Знания о ресурсах мирового океана показывают, что
этот потенциал во многих отношениях сможет со временем заменить истощающиеся
запасы ресурсов суши. Таким образом, дальнейшее исследование и освоение мирового
океана способны существенно повлиять на состояние и перспективы решения ряда
глобальных проблем.
Освоение минеральных ресурсов Океана практически находится в начальной стадии
и, в основном, производится разработка полезных ископаемых шельфа, а горные работы
осуществляются на сравнительно небольших глубинах. Так как разработка рыхлых
шельфовых отложений производится в аналогичных условиях, естественно стремление
максимально использовать технику и технологию, широко применяемую при
гидромеханизировынных работах на материке.
К современным механизмам для производства подводных горных работ следует
отнести землесосные снаряды, эрлифтные и эжекторные снаряды, механические драги,
канатно-скреперные установки и комбинации перечисленных механизмов. Однако в
настоящее время разработка твердых полезных ископаемых на больших глубинах не
ведется. Это связано в первую очередь с тем, что нет определенной, проверенной
технологии добычи полезных ископаемых дна. Как известно, добыча нефти и газа в
шельфовых зонах морей и океанов ведется достаточно интенсивно, и постоянно
развивается. Это определяется экономической рентабельностью разработки шельфовых
месторождений нефти и газа. Стоит отметить, что при добыче твердых полезных
ископаемых можно использовать некоторые технологии, которые применяются в
шельфовой разработке нефти.
В данной работе попробуем проследить за прогрессом в изобретении и применении
средств для подводной добычи. Отметим основные этапы в проектировании, создании
опытных образцов. Подробнее изучим история технического и технологического
совершенствования средств подводной механизации.
4
Классификация механизмов для подводной добычи
Систематизировать оборудование, применяемое и проектируемое для
использования в процессе подводной добычи полезных ископаемых, целесообразно,
положив в основу вид энергии, используемой для добычных или транспортных целей. Такая
классификация была предложена профессором Добрецовым В.Б. и представлена в таблице
1 [1].
Таблица 1
Систематизация механизмов для подводной добычи на основе используемой энергии
Тип механизма Группа механизмов для рабочих процессов
Выемки Транспорта
Многочерпаковые снаряды и драги
Грейферные снаряды и драги
Скреперные драги
Экскаваторы-драглайны
Скреперно-канатные установки
Штанговые снаряды
Самоходные и прицепные скреперы
Подводные самоходные аппараты
Механические Механические
Землесосные снаряды
Эжекторные снаряды и драги с
механическими рыхлителями
Механогидравлические Гидравлические
Эжекторные снаряды и драги с
гидравлическими рыхлителями
Гидравлические драги
Эрлифтные снаряды
Гидравлические Воздушные
В тоже время ключевым параметром для применения различных механизмов добычи
подводных полезных ископаемых является глубина залегания. Дж. Меро классифицировал
различные методы добычи, указывая глубину, которая является максимальной для каждого
метода, исходя из экономической эффективности. Такая классификация представлена на
рисунке 1 [2].
Таблица 2
5
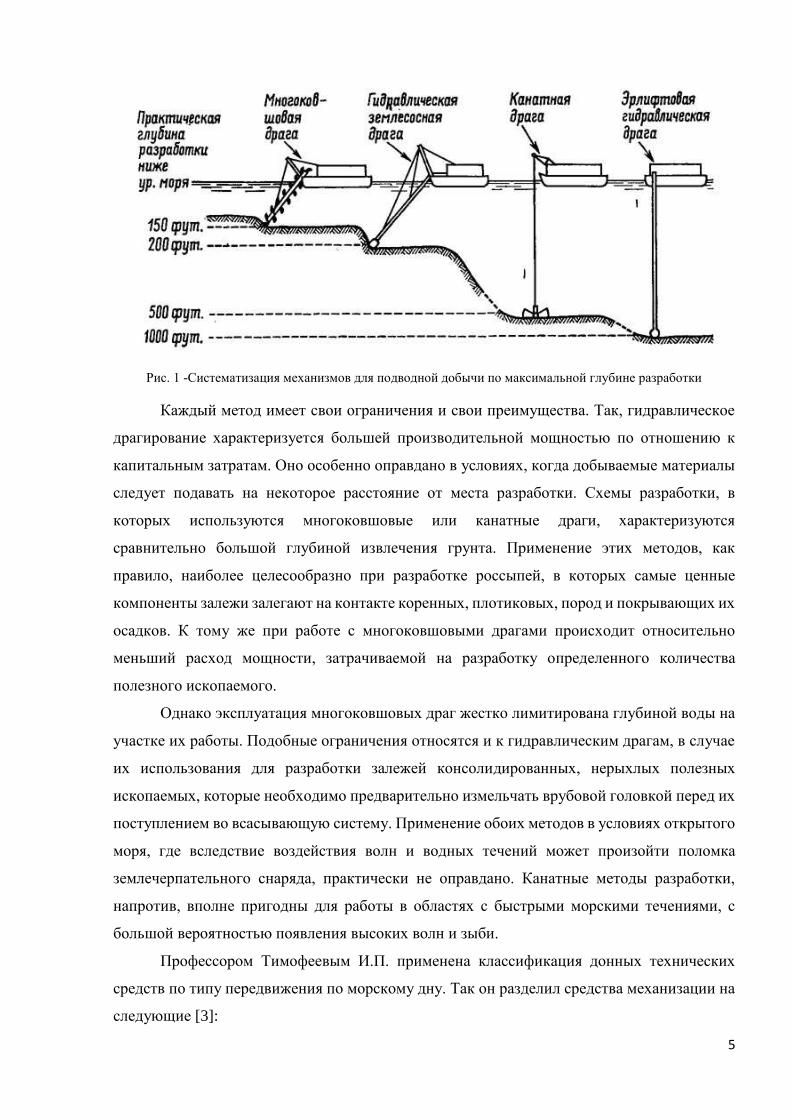
Рис. 1 -Систематизация механизмов для подводной добычи по максимальной глубине разработки
Каждый метод имеет свои ограничения и свои преимущества. Так, гидравлическое
драгирование характеризуется большей производительной мощностью по отношению к
капитальным затратам. Оно особенно оправдано в условиях, когда добываемые материалы
следует подавать на некоторое расстояние от места разработки. Схемы разработки, в
которых используются многоковшовые или канатные драги, характеризуются
сравнительно большой глубиной извлечения грунта. Применение этих методов, как
правило, наиболее целесообразно при разработке россыпей, в которых самые ценные
компоненты залежи залегают на контакте коренных, плотиковых, пород и покрывающих их
осадков. К тому же при работе с многоковшовыми драгами происходит относительно
меньший расход мощности, затрачиваемой на разработку определенного количества
полезного ископаемого.
Однако эксплуатация многоковшовых драг жестко лимитирована глубиной воды на
участке их работы. Подобные ограничения относятся и к гидравлическим драгам, в случае
их использования для разработки залежей консолидированных, нерыхлых полезных
ископаемых, которые необходимо предварительно измельчать врубовой головкой перед их
поступлением во всасывающую систему. Применение обоих методов в условиях открытого
моря, где вследствие воздействия волн и водных течений может произойти поломка
землечерпательного снаряда, практически не оправдано. Канатные методы разработки,
напротив, вполне пригодны для работы в областях с быстрыми морскими течениями, с
большой вероятностью появления высоких волн и зыби.
Профессором Тимофеевым И.П. применена классификация донных технических
средств по типу передвижения по морскому дну. Так он разделил средства механизации на
следующие [3]:

6
1. Установки с гибким тяговым элементом
2. Устройства с колесными движителями
3. Машины на гусеничном и шнековом ходу
4. Установки шагающего типа
Теперь рассмотрим непосредственно средства механизации подводных горных
работ. Они не изменяются при применении того или иного типа классификации.
Установки с гибким тяговым элементом
Сущность канатных способов разработки заключается в том, что дночерпательные
снаряды, подвешенные на стальных тросах, погружаются в осадок, заполняются им и затем
поднимаются на поверхность. Драги широко используются для отбора образцов - горных
пород с океанского дна, где глубины достигают 30000 футов. Однако невозможность
контроля за положением драги на дне исключает использование этого способа для
промышленной эксплуатации морских месторождений. Эти методы можно также успешно
применять при разработке мелководных (не более 1000 футов глубины) морских залежей,
например скоплений фосфоритовых конкреций. Для наиболее эффективного извлечения
рудного материала из залежи следует применять систему направляющих тросов, которая
позволяет контролировать движение драги от поверхности воды до океанского дна.
Специалисты по морскому бурению разработали и испытали на практике следующий
метод: баржи с буровыми установками движутся, останавливаясь для добычи, по
направлениям, которые трассированы системой тросов. Концы тросов при этом закреплены
на буровых судах.
Месторождения, залегающие на малых глубинах моря (5-10 м), как правило,
расположены вдоль береговой зоны и могут успешно разрабатываться скреперными
установками, лебедка которых размещается на берегу, а концевой блок – на дне моря. Этот
способ получил широкое распространение в США, ФРГ и Японии, где созданы различные
конструкции скреперов и специальных лебедок. Концевой блок для скреперования может
монтироваться на специальной тележке, передвигающейся по рельсам, уложенным на дне
вдоль береговой линии. Скреперная лебедка при этом устанавливается на салазках или
имеет собственный ход для передвижения вдоль береговой линии. Обычно в схеме такой
скреперной установки используется экскаватор, оборудованный лебедкой, стойкой и
отклоняющими блоками. Канат с лебедки через отклоняющие и концевые блоки направлен
на скрепер и лебедку.
Основной проблемой при скреперной разработке является перенос концевого блока
по дну моря. Для этого разрабатываются специальные подводные конструкции скреперов,
иногда с собственным приводом, иногда его движение осуществляется колесным способом

7
с помощью тягового каната. Скреперы имеют обтекаемую форму и снабжаются крыльями
различной конструкции для снижения сопротивления движению воды.
Для примера рассмотрим схему придонной разработки и обогащения магнитной
фракции [4]. Группой инженеров под руководством Г.П. Давидянца предложено несколько
конструкций для придонной разработки и обогащения магнитной фракции подводных
россыпей. Рабочим органом скреперной установки служит скреперный ковш. Общий вид
такой установки представлен на рис.2.
Рис.2 - Принципиальная схема скреперной установки
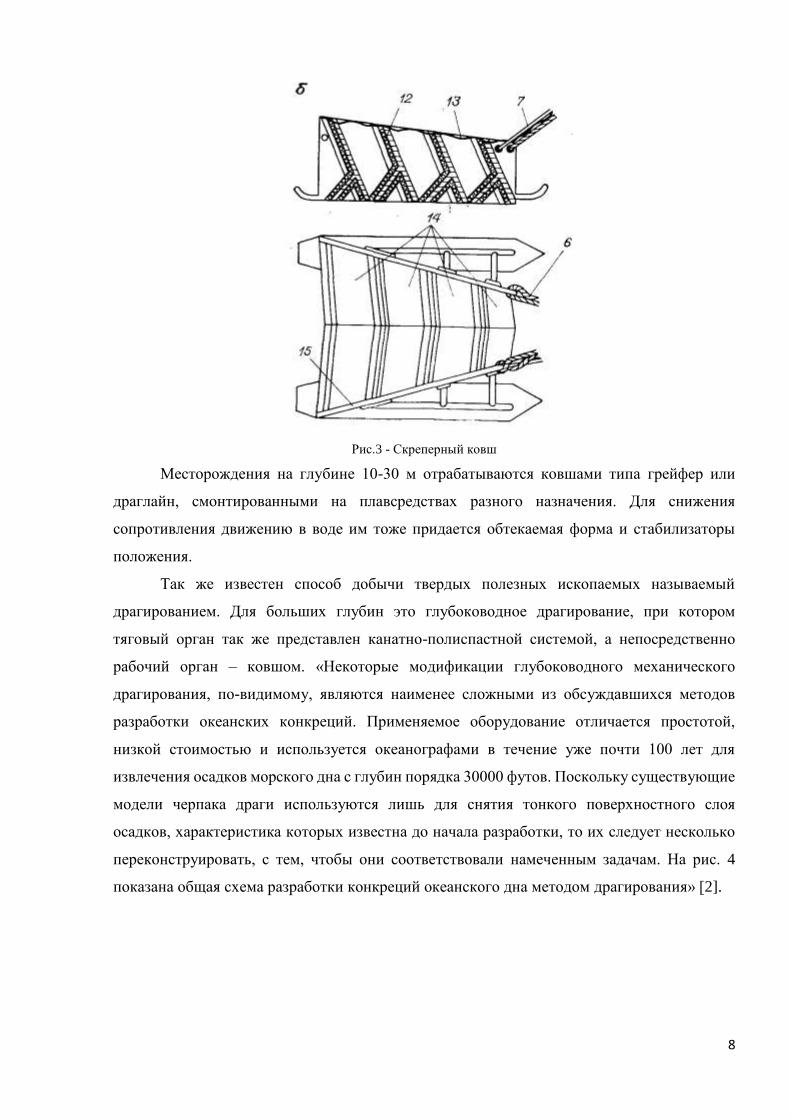
Внешне скреперная установка имеет вид волокуши с усовершенствованным ковшом
(рис.3), который состоит из боковых стенок, предназначенных для осуществления связи и
ряда плужков, размещенных наклонно между стенками. Предполагается, что при работе
ковш врезается в толщу россыпи. Горная масса пересыпается через плужки и попадает в
зону действия включенных электромагнитов. Полезное ископаемое, обладающее
определенными магнитными свойствами, притягивается к поверхности плужков, а пустая
порода беспрепятственно просыпается сквозь ковш. При прохождении ковша над опорами,
установленными на берегу, электромагниты отключаются, и полезный компонент
высыпается в бункер. Применение установки целесообразно для разработки подводных
месторождений, расположенных в 300-400 м от береговой линии.
8
Рис.3 - Скреперный ковш
Месторождения на глубине 10-30 м отрабатываются ковшами типа грейфер или
драглайн, смонтированными на плавсредствах разного назначения. Для снижения
сопротивления движению в воде им тоже придается обтекаемая форма и стабилизаторы
положения.
Так же известен способ добычи твердых полезных ископаемых называемый
драгированием. Для больших глубин это глубоководное драгирование, при котором
тяговый орган так же представлен канатно-полиспастной системой, а непосредственно
рабочий орган – ковшом. «Некоторые модификации глубоководного механического
драгирования, по-видимому, являются наименее сложными из обсуждавшихся методов
разработки океанских конкреций. Применяемое оборудование отличается простотой,
низкой стоимостью и используется океанографами в течение уже почти 100 лет для
извлечения осадков морского дна с глубин порядка 30000 футов. Поскольку существующие
модели черпака драги используются лишь для снятия тонкого поверхностного слоя
осадков, характеристика которых известна до начала разработки, то их следует несколько
переконструировать, с тем, чтобы они соответствовали намеченным задачам. На рис. 4
показана общая схема разработки конкреций океанского дна методом драгирования» [2].

9
Рис.4 - Глубоководное драгирование
Стоит отметить, что опускание ковша на дно происходило со скоростью свободного
падения. На ковше монтировались специальные звуковые устройства, которые
сигнализировали о достижении дна. Так же на ковше были установлены камеры для
контроля заполнения ковша, и оценки обстановки в целом. После заполнения ковш
поднимался на поверхность. Коэффициент заполнения ковша не превышал 65%.
Естественно, что производительность такой системы была крайне не велика, однако была
проста в устройстве и эксплуатации. Наибольшее применение получила при
геологоразведочных работах.
Для увеличения производительности в канатной системе увеличивают количество
ковшей, тем самым получается замкнутая многочерпаковая канатная система. Одним из
примеров такой системы является опытная установка, разработанная в 1970 году японской
компанией Sumitomo. Такая система представляет механический способ добычи,
основанный на использовании многочерпаковой канатной системы со свободно
двигающейся по дну океана петлей. Такая установка была испытана в Тихом океане на
глубине 4500 м. Стоит отметить, что мощность лебедок составляла всего 22 кВт. Ковши
черпали донные отложения и восходящей ветвью поднимались на палубу для разгрузки.
Испытания дали положительный результат. Однако, недостатком такой системы стал
низкий коэффициент заполнения ковшей, который составлял 25-30%, иногда доходил до
60%. После положительных результатов испытаний данная система была

10
усовершенствована: была увеличена глубина разработки, емкость ковшей, и тем самым
производительность системы.
Так же известны многочерпаковые снаряды. У них отделение породы от целика и
транспортирование на борт судна осуществляется при помощи бесконечной (замкнутой)
цепи из черпаков (рис.5). Для дополнительного предварительного рыхления пород иногда
отдельные черпаки в цепи оборудуются специальными кирками, которые изготавливаются
из марганцовистой или хромоникелевой стали. Емкость черпаков является основным
критерием, определяющим размер многочерпаковой драги или снаряда. Обычно емкость
черпаков находится в пределах от 20 до 900 л. Средняя глубина разработки
многочерпаковыми снарядами составляет 20 м.
Рис. 5 - Общий вид многочерпаковой драги
Такой вид разработки является достаточно производительным, в первую очередь из-
за непрерывной работы черпаков, однако, ключевым недостатком таких систем является
небольшая глубина разработки. С ростом глубины очень сильно растет металлоемкость.
Однако общий недостаток всех канатно-ковшовых устройств – плохое заполнение
ковшей из-за их свободного протаскивания по дну, и как следствие, низкое качество
отработки донных участков месторождения. [3]
Для улучшения качества разработки используются системы с разделением функции
черпания и транспортирования. Стоит отметить, что наиболее трудоемкий и
энергозатратный процесс при добычи подводных полезных ископаемых, находящихся на
больших глубинах, является процесс транспортировки на поверхность. Так наиболее
перспективным и эффективным методам является гидравлический подъем.
11
Гидравлический подъем
Гидравлический подъем — транспортировка гидросмеси на поверхность
из шахты или со дна водоёма; осуществляется с помощью насосов (углесосов, грунтовых
насосов), гидроэлеваторов, эрлифтов и др.
При подземной гидродобыче гидравлический подъем производится по вертикальным и
наклонным напорным трубопроводам (при эрлифтном гидравлическом подъеме — только
по вертикальным). Перед выдачей на поверхность полезных ископаемых (после дробления
кусков свыше 80-100 мм) поступает в зумпф установки гидравлического подъема. Наличие
этой ёмкости позволяет снизить влияние неравномерности поступления гидросмеси из
забоев шахты, а также использовать её (совместно с пульпосборниками) для приёма
гидросмеси из напорного трубопровода при прекращении работы гидравлического
подъема. Применяются главным образом двухступенчатые центробежные углесосы с
напором до 3,1 МПа, и расходом до 900-1400 м3/ч. При гидравлическом подъеме кусковых
или сильно абразивных материалов из шахт глубиной более 300-500 м применяют
загрузочные аппараты, позволяющие для создания в трубопроводе высокого давления
использовать многоступенчатые центробежные насосы, предназначенные для
перекачки воды.
При добыче полезных ископаемых со дна водоёмов гидравлический подъем
осуществляется с помощью эрлифтов или погружных грунтовых насосов. Добычные
снаряды с погружными грунтовыми насосами обеспечивают гидравлический подъем с
глубины около 30-50 м. Полезное ископаемое, иногда предварительно разрыхлённое,
засасывается с водой в трубопровод и далее поднимается на плавучий добычный снаряд
или драгу, имеющую оборудование для обогащения полезных ископаемых.
Эрлифтный подъем — подъём жидкости или гидросмеси, осуществляемый с
помощью сжатого воздуха (газа) специальным подъёмником — эрлифтом. Эрлифтный
подъём организуется при выдаче нефти через скважины, на плавучих снарядах для
подводной добычи полезных ископаемых, на гидрошахтах, при откачке воды из
затопленных шахт и др. Принцип действия эрлифтного подъёма заключается в следующем:
воздух компрессором по трубе подаётся в смеситель (кольцевую камеру), размещаемый
между всасывающим наконечником и пульповодом. В этой камере образуется смесь
жидкости (гидросмеси) с воздухом, через отверстия поступающая в пульповод и
выдаваемая таким образом на поверхность. При проходе через воздухоотделитель газовая
фракция отделяется, а гидросмесь транспортируется к потребителю.
При подъёме гидросмеси или другой жидкости из зумпфа забор её производится
непосредственно всасыванием, а при разработке полезных ископаемых в массиве — с
12
предварительным рыхлением. При больших высотах подъёма применяется ступенчатый
эрлифтный подъём. В этом случае в конце трубопровода каждой ступени устанавливается
воздухоотделитель, а гидросмесь сбрасывается в смеситель следующей ступени, к
которому подаётся воздух.
Эрлифтный земснаряд
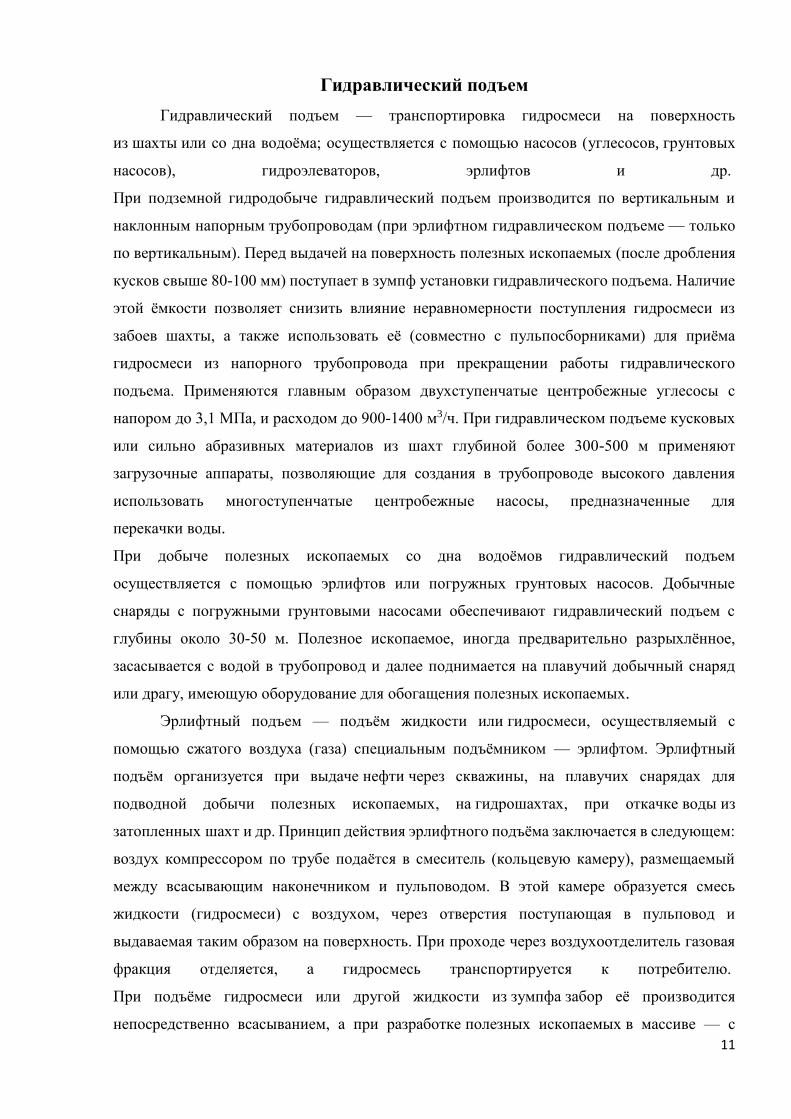
Итак, для более глубоководной добычи используются эрлифты, которые добывают
полезные ископаемые гидравлическим способом. Принцип действия эрлифтного
земснаряда состоит в следующем. С борта земснаряда в устье всасывающей трубы подается
сжатый воздух и перемешивается в ней с водой или гидросмесью. Образовавшаяся двух или
трехфазная смесь легче воды. Поэтому она вытесняется столбом воды из водоема и
поступает на земснаряд. Эрлифтные земснаряды обеспечивают большую глубину
разработки по сравнению с земснарядами с трюмными грунтовыми насосами. Однако, они
имеют меньший коэффициент полезного действия и непригодны для наклонного и
горизонтального транспорта гидросмеси. Так же они могут работать только в закрытых от
больших волнений морских акваториях при глубине до 60 м. Общий вид эрлифтного
представлен на рис.6.
Рис.6. Эрлифтный земснаряд
На данном рисунке цифрами обозначены следующие позиции: 1 – всасывающий
патрубок; 2 – компрессор; 3 – ресивер; 4 – трубопровод сжатого воздуха; 5 – ввод воздуха
в подъемную трубу; 6 – подъемная труба; 7 – трюм.

13
Для глубоководной разработки полезных ископаемых морского дна эрлифтные
снаряды использует американская компания «Дипси венчас»[4]. Она производила опытную
разработку марганцевых конкреций с глубины 900 м (рис.7). Все оборудование эрлифтного
снаряда размещалось на специальном судне водоизмещением 7500 т. В центре судна
смонтирована шахта, через которую специальным подъемным устройством спускали
грунтозаборный пульповод диаметром 250 мм. В нижней части вертикальный отрезок
пульповода при помощи шарового шарнира соединялся с наклонным отрезком,
смонтированным в защитной ферме, расположенной под углом 30 градусов к горизонту.
Нижний конец всасывающего пульповода соединялся специальным сгребающим
устройством. При работе установка обеспечивала производительность до 60 т/час.
Рис.7 - Эрлифтный снаряд компании «Дипси венчас»
На рис.7. обозначены следующие позиции: 1 – специализированное судно, 2 –
подруливающая установка, 3 – форсунки эрлифта, 4 – двигатель, 5 – подъемный
трубопровод, 6 – шарнирный компенсатор, 7 – сгребающий агрегат, 8 – конкреции.

14
На основе отечественного и зарубежного опыта эксплуатации эрлифтных снарядов
можно сделать вывод: наиболее рациональная область применения эрлифтов – разработки
рыхлых донных отложений при сравнительно небольших глубинах.
Гидравлические драги
«Гидравлическое драгирование донных морских осадков является, при современном
уровне развития горнодобывающих средств, одним из самых крупномасштабных и
эффективных методов разработки. Как правило, гидравлические драги оборудованы
двигателем и помпой, находящимися внутри корпуса корабля. Помпа обычно помещается
несколько ниже уровня воды бассейна, где движется корабль. Необходимым условием
метода является создание на всасывающем патрубке помпы вакуума, позволяющего
прокачивать через нее гидромассу (смесь воды и частиц грунта). Таким образом,
применение гидравлического драгирования жестко ограничивается глубиной, с которой
может производиться откачивание. В атмосферных условиях максимальное всасывание,
создаваемое помпой, равно либо атмосферному давлению, либо напору примерно 34 футов
водяного столба. Однако при образовании вакуума на всасывающем патрубке помпы
возможно кипение воды. В целом гидравлическое драгирование эффективно до 25-футовой
глубины погружения всасывающей головки. Если же мы пренебрежем трением жидкости и
допустим, что в трубопроводе отношение жидкость/твердое вещество равно 10:1, то
максимальная глубина, с которой можно было бы поднимать осадки, считая, что плотность
воды постоянна на всех глубинах, составит около 250 футов. Это отношение может быть
увеличено и тем самым существенно увеличена глубина драгирования. Однако, учитывая
расход энергии на преодоление трения жидкости, а также на подъем твердых веществ по
грунтопроводу, следует иметь в виду те предельные значения глубин, выше которых оплата
расходуемой энергии резко увеличивает стоимость извлекаемого материала. Поэтому, если
глубина воды не меньше нескольких сотен футов, помпа должна быть погружена в воду вне
зависимости от типа применяемой гидравлической драги. Однако это вовсе не означает, что
помпа должна быть размещена непосредственно близ океанского дна. Положение помпы
относительно поверхности океана определяется величиной отношения жидкость/твердое
вещество в транспортируемой по трубопроводу пульпе и скоростью подачи жидкости.
Согласно некоторым точкам зрения, имеются определенные преимущества, когда помпа
приближена к поверхности на максимально возможное расстояние. Такое положение
помпы обосновывается следующими приводимыми ниже расчетами.»[2]

15
«Основными элементами системы, при помощи которой осуществляется
глубоководное гидравлическое драгирование, являются линия трубопровода, помпа и
двигатель, всасывающие головки и плавательные средства. В одном из вариантов этого
метода разработки предусматривается спуск в воду агрегатов системы, которые закреплены
в подвешенном состоянии на плавающем судне. Однако такая комбинация имеет ряд
недостатков. Вертикальные колебания судна, происходящие под воздействием волн,
передаются на агрегаты системы в виде попеременных сжатий линии трубопровода, что
приводит к его поломке. Кроме того, вся эта система, включая судно и землесосные
агрегаты, оказывается практически непригодной к эксплуатации в штормовых условиях.
Появляется необходимость монтажа агрегатов на особых поплавках, которые тем самым
становятся составной частью всей системы. Как показано на рис. 8, главный поплавковый
резервуар располагается ниже поверхностного, турбулентного, слоя океана, благодаря чему
вертикальные волновые движения не передаются на землесосный агрегат. Второй
поплавок, стабилизирующий, находящийся на поверхности, позволяет удерживать
землесосные агрегаты на плаву. Поскольку 98% веса землесосных агрегатов падает на
основной поплавок, вертикальные колебания, возникающие от воздействия волновых
движений на стабилизирующий поплавок, в целом не будут передаваться на землесосные
агрегаты. Двигатель и помпа рассматриваемой системы размещены внутри основного
поплавка. Последний имеет несколько более крупные габариты, чем это можно было бы
полагать, исходя из конструктивных особенностей заключенных в нем узлов. В качестве
балласта поплавок загружают морской водой, что позволяет драгирующей системе
сохранять правильное положение. В случае неисправности двигателя или помпы балласт
откачивается из резервуара, и весь агрегат всплывает на поверхность. Через люк,
находящийся в верхней части корпуса поплавкового резервуара, команда может легко
проникнуть внутрь для ведения ремонтных работ. При внезапной поломке помпы или
двигателя должны автоматически открыться клапаны обратного хода, находящиеся по всей
длине трубопровода, что приведет к спуску имеющихся в системе конкреций и, таким
образом, предотвратит засорение трубопровода.»[2]

16
Рис. 8 - Гидравлическая драга конструкции Дж. Меро
По подсчетам Дж. Меро ориентировочная производительность гидравлической
драги равна 4 тыс. тонн конкреций в сутки. Стоимость конкреций при данной добыче
составляла 4 доллара за тонну в 1970 годах. [5]
Стоит отметить, что для увеличения производительности системы транспортировки
увеличивают мощности погружных насосов, диаметры пульповодов. Так же уже в
настоящее время ведутся исследования по транспортировки суспензий и пульп с
процентным содержанием твердого в жидком 60 – 70 %. Для этого используются
специальные пастовые сгустители. При данной концентрации удельная энергия
транспортирования уменьшается. В настоящее время в Горном университете исследования
на данную тему проводит профессор Александров В.И. Таким образом, при установке
такого сгустители непосредственно у дна можно значительно сократить энергетические
затраты.
Разобрав системы транспортировки, перейдем непосредственно к рабочим органам,
способным отбивать твердое полезное ископаемое от океанского дна. Очевидно, что при
использовании, как эрлифтов, так и гидравлических драг, на поверхность поднимаются
только рыхлые донные осадки. А говоря о рабочих органах, необходимо понимать, что и
17
устанавливать их надо будет на специальные машины. Такие схемы разработки стали
появляться уже в 80-х годах 20 века и проектируются до настоящего времени.
Донные технические средства
Как мы уже упоминали, подобную классификацию проводил профессор И.П.
Тимофеев. Перейдем к рассмотрению всех типов этих средств.
Если говорить о положительных сторонах устройств с колесным оборудованием, то
это в первую очередь хорошее сцепление с дорогой и высокая маневренность. Однако
проходимость машины колесного типа оставляет много вопросов. При возникновении
сложных препятствий колесо может не справиться с ним. Так же при достаточно мягком
грунте, колеса будут оставлять колею, которая негативно будет сказываться на
проходимости и энергетических затратах. Так же возможна буксировка колес. При
создании колесных движителей для подводных работ разработчики старались снизить
указанные недостатки, путем увеличения числа колес, оснащения поверхности качания
протекторами разной формы для лучшего сцепления, введением индивидуального привода
на каждое колесо, увеличением диаметра и ширины колеса и других конструктивных
решений. Хотя такие конструктивные решения считаются прогрессивными,
многочисленность рабочих узлов, эксплуатируемых в сложной абразивно-водной среде,
будет резко снижать надежность работы такого движителя.
Гусеничный ход в подводных машинах используется в основном для привода
бульдозеров различного назначения при работе на шельфе с глубиной моря до 60 м.
Большого успеха в разработке бульдозеров достигли японские фирмы «Komatsu» и
«Hitachi», которые модернизировали наземные бульдозеры. Первый опыт был сделан
фирмой «Hitachi» в 1969 г, компания выпустила бульдозер для работы на глубине 5 метров.
Такой бульдозер широко использовался для очистки морского дна, рытья траншей и.т.д.
Позже эта же фирма выпустила бульдозер для работы на глубине до 60 метров. Он
использовался при создании площадок под гидротехнические сооружения. Достоинства
гусеничного хода заключаются в первую очередь в хорошей проходимости, достаточно
небольшим давлением на грунт, однако он требует повышенных мощностей из-за низкого
КПД, а так же вызывает замутнения окружающей среды.
Понятно, что основными движителями подводных горных машин являются либо
колеса, либо гусеницы. Оба типа имеют значительные преимущества, которые мы
описывали выше, однако еще раз выделим три существенных недостатка: весьма большую
массу, нужную для обеспечения достаточного сцепления с грунтом, и необходимость
большой площади гусениц или колес; быстрый абразивный износ гусеничного и колесного
18
хода; необходимость частых перемещений агрегатов. В связи с этими недостатками
возможен еще один тип движителя – шагающий ход.
Существуют различные конструкции шагающих машин, однако, мы остановимся на
шагающей машине, придуманной, Тимофеевым И.П. Общий вид такой машины
представлен на рис. 9.
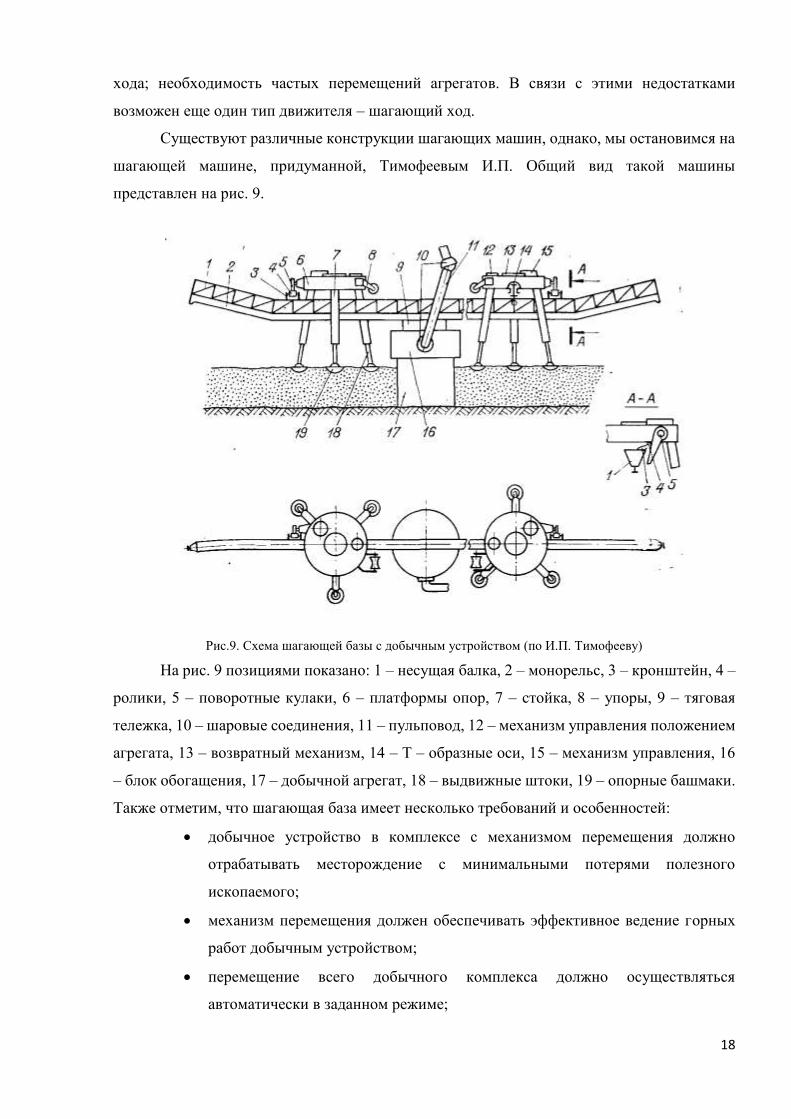
Рис.9. Схема шагающей базы с добычным устройством (по И.П. Тимофееву)
На рис. 9 позициями показано: 1 – несущая балка, 2 – монорельс, 3 – кронштейн, 4 –
ролики, 5 – поворотные кулаки, 6 – платформы опор, 7 – стойка, 8 – упоры, 9 – тяговая
тележка, 10 – шаровые соединения, 11 – пульповод, 12 – механизм управления положением
агрегата, 13 – возвратный механизм, 14 – Т – образные оси, 15 – механизм управления, 16
– блок обогащения, 17 – добычной агрегат, 18 – выдвижные штоки, 19 – опорные башмаки.
Также отметим, что шагающая база имеет несколько требований и особенностей:
добычное устройство в комплексе с механизмом перемещения должно
отрабатывать месторождение с минимальными потерями полезного
ископаемого;
механизм перемещения должен обеспечивать эффективное ведение горных
работ добычным устройством;
перемещение всего добычного комплекса должно осуществляться
автоматически в заданном режиме;

19
дистанционное управление должно сводиться к координации программы,
управляющей циклом добычи-перемещения, которая может
корректироваться в связи с изменением горно-гидрогеологической
обстановки;
все узлы и конструкция должна быть надежными в работе, долговечными и
рассчитанными на специфику ведения добычи в подводных условиях.
После рассмотрения донных технических средств, перейдем к рассмотрению
непосредственно рабочих органов. Их условно можно разделить на 2 типа: рабочие органы
для рыхления твердых пород с поднятием на поверхность и полезного компонента и пустой
породы; рабочие органы с частичным обогащением.
Рабочие органы для подводной добычи
Рабочие органы, предназначенные для объемной дезинтеграции забоя, могут быть
представлены механическими рыхлителями или гидравлическими рыхлителями. Для более
твердых пород применяют механические рыхлители. Их общий вид представлен на рис. 10.
Рис. 10 Механический рыхлитель
Рыхлитель на рис. 10 – это отвальная фреза, эффективная при разработке глинистых
грунтов средней плотности. Так же существуют фрезы открытого типа, фрезы закрытого
типа, фрезы плужного типа, ковшовые фрезы, винтовые рыхлители и др. Существуют и
рыхлители комбинирующие механическую и гидравлическую энергии – фрезерно-
гидравлические рыхлители. Производительность земснаряда с таким рыхлителем
повышалась на 50-80%[1].
20
Существуют огромное количество патентов как российских, так и зарубежных на
различные рабочие органы устройств для подводной добычи. Внешней вид и принцип
работы рабочих органов для подводной добычи схож с рабочими органами, применяемыми
на шахтах и рудниках, а также в карьерах и на строительных площадках. Поэтому известны
рабочие органы в виде шнеков, барабанных рабочих органов, коронок и др.
Рабочие органы с частичным обогащением используют в своей основе
гидрофизические методы разработки. «Физическая сущность и технологические
особенности гидрофизических методов заключаются в изолировании определенного
объема россыпи и по всей ее мощности путем гидравлического и механического (при
необходимости) внедрения несущего корпуса устройства от кровли россыпи до плотика или
подошвы с последующими (или параллельно протекающими) процессами обогащения,
происходящими непосредственно в самом устройстве» [1]
Пример рабочего органа с частичным обогащением был разобран и
проиллюстрирован на рис. 2 в главе «Установки с гибким тяговым элементом».
Стоит отметить, что с развитием методов обогащения помимо плотности и
магнитной восприимчивости (на данный момент это основные параметры по которым
происходит отделение ПИ от пустой породы) будут использоваться и другие физические
свойства россыпей и вмещающих пород.
Технологии глубоководной добычи XXI века
Первое промышленное освоение глубоководного месторождения возможно в
ближайшем будущем. Канадская компания Nautilus Minerals со своим проектом Solwara,
планирует добычи руды, золота, серебра и других полезных компонентов со дна
Новогвинейского моря в 30 км от побережья острова Новая Ирландия. Месторождения
было обнаружено в 1996 году, с 2007 года ведется разведка месторождения.
Обсуждать экономические аспекты данного проекта не входит в поставленную цель,
хотя естественно при росте цен на медь и осложнении добычи подземным способом,
добыча подводным способом может быть рентабельна. Перейдем непосредственно к
технологии предполагаемой добычи. Она изображена на рис. 11
21
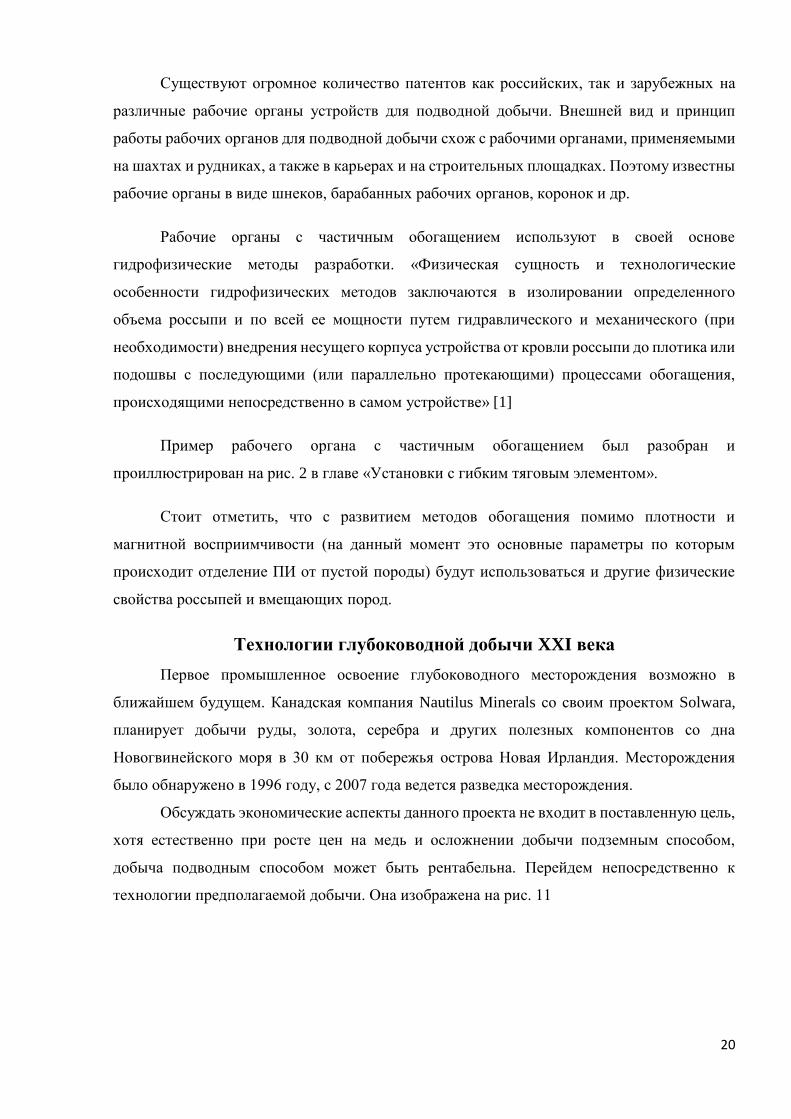
Рис. 11 Технология добычи руды в проекте Solwara
Предполагаемый процесс добычи можно представить следующим образом: имеется
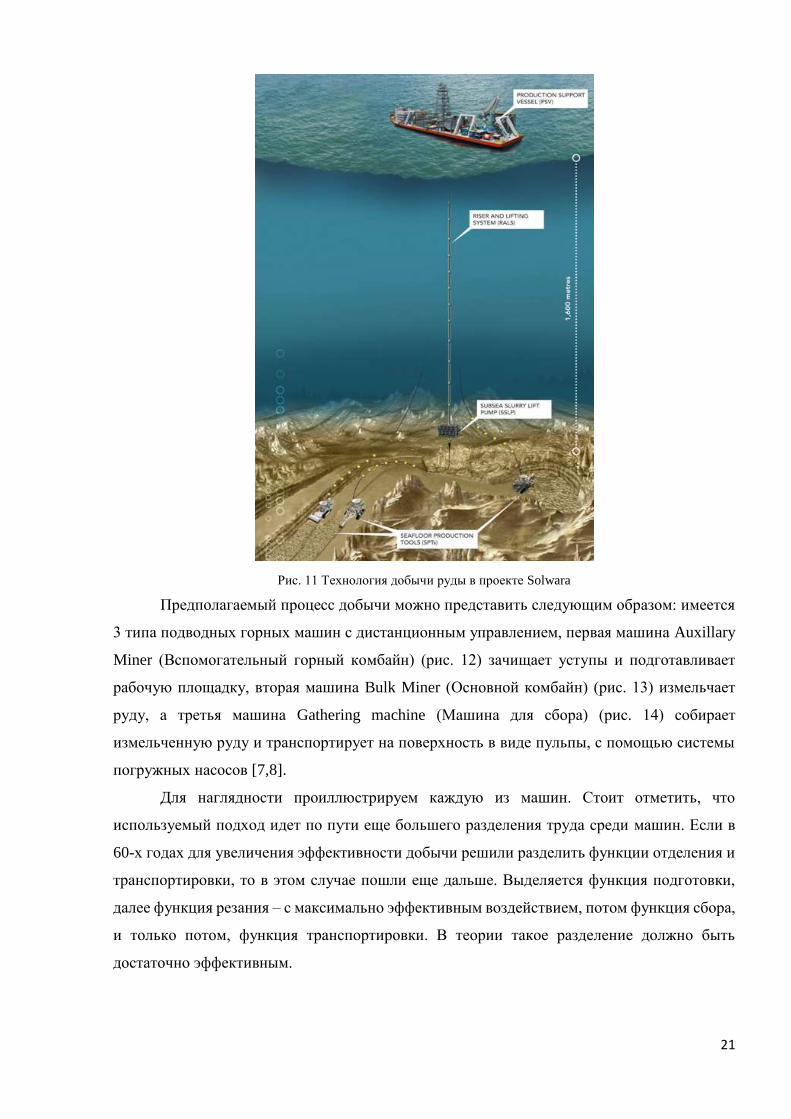
3 типа подводных горных машин с дистанционным управлением, первая машина Auxillary
Miner (Вспомогательный горный комбайн) (рис. 12) зачищает уступы и подготавливает
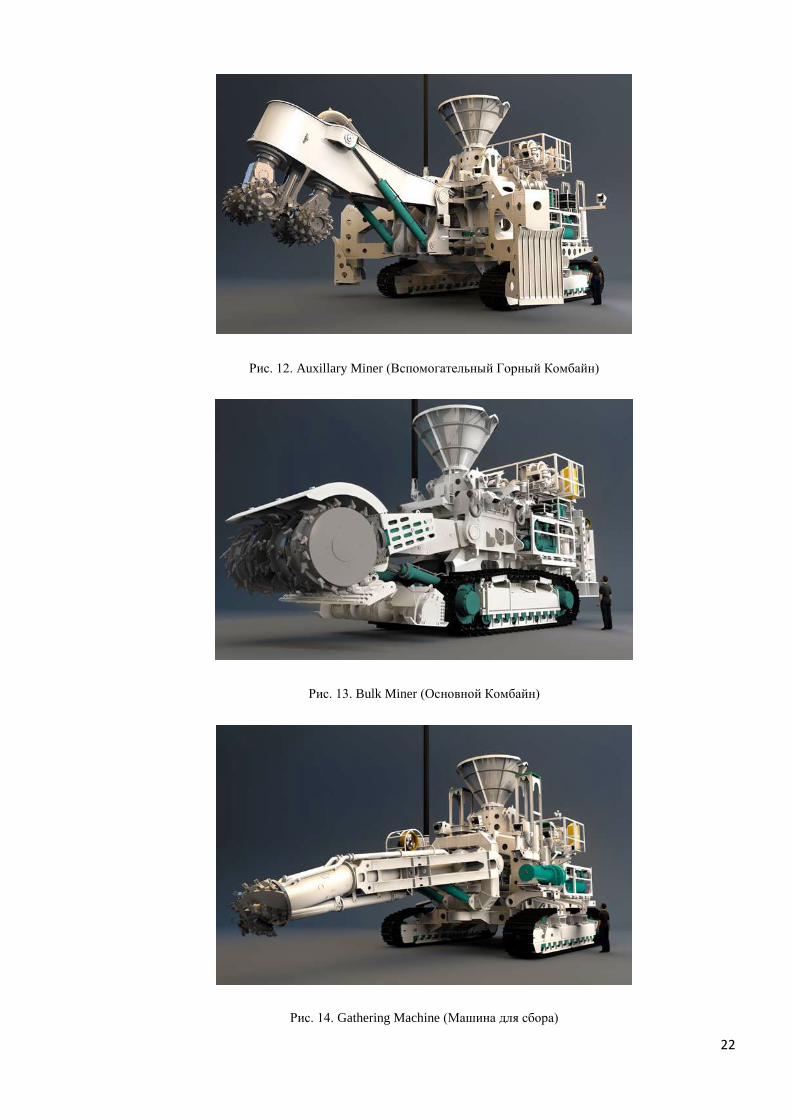
рабочую площадку, вторая машина Bulk Miner (Основной комбайн) (рис. 13) измельчает
руду, а третья машина Gathering machine (Машина для сбора) (рис. 14) собирает
измельченную руду и транспортирует на поверхность в виде пульпы, с помощью системы
погружных насосов [7,8].
Для наглядности проиллюстрируем каждую из машин. Стоит отметить, что
используемый подход идет по пути еще большего разделения труда среди машин. Если в
60-х годах для увеличения эффективности добычи решили разделить функции отделения и
транспортировки, то в этом случае пошли еще дальше. Выделяется функция подготовки,
далее функция резания – с максимально эффективным воздействием, потом функция сбора,
и только потом, функция транспортировки. В теории такое разделение должно быть
достаточно эффективным.
22
Рис. 12. Auxillary Miner (Вспомогательный Горный Комбайн)
Рис. 13. Bulk Miner (Основной Комбайн)
Рис. 14. Gathering Machine (Машина для сбора)

23
Вывод
На данный момент ни одно глубоководное месторождение полезных ископаемых не
имеет промышленной разработки. Технические средства, описанные в данном реферате, в
лучшем случае имели опытные образцы. Конечно, это не относится к тем средствам, с
помощью которых добыча возможна на относительно не больших глубинах (скреперные
драги, многоковшовые драги и др., применяемые для добычи песка). Во всех других
случаях трудно реально оценить технологию добычи, и предугадать все ситуации
возможные на глубине. Единственное, что можно сделать на данном этапе развития
подводных добычных технологий – это ждать первого промышленного опыта, который,
если верить новостям, должен будет случиться через несколько лет.
При всем многообразии технологий добычи, самих твердых полезных ископаемых
их разработка целиком и полностью зависит от экономической рентабельности. И пока на
суше будут существовать аналоги подводным месторождениям, предпочтения будут
отдаваться именно им, в первую очередь из-за проверенной и отработанной технологии
добычи.
С уверенностью можно сказать, что все 50 лет, в течение которых ведется поиск и
разведка месторождений, а так же разрабатывается технологий и техника извлечения не
пройдет зря. Очень сильно видна тенденция к разделению основных функций различных
машин и механизмов, использования инноваций. И, естественно, множество
конструктивных решений заимствуется из подземной, открытой горной технологии.
24
Список литературы
1. Добрецов В.Б., Рогалев В.А. Основные вопросы освоения минеральных ресурсов
Мирового океана. - СПб, 2003. - 524с.
2. Меро Д. Минеральные богатства океана. М, 1969. - 440с.
3. Тимофеев И.П. Шагающие машины для освоения ресурсов морского дна. - Л. ЛГИ.
1987. – 176с.
4. Добрецов В.Б. Освоение минеральных ресурсов шельфа. Л., 1980. – 272с.
5. Нурок Г.А., Бруякин Ю.В., Бубис Ю.В. Технология добычи полезных ископаемых
со дна озер, морей и океанов. М., 1979. – 381с
6. Горная энциклопедия [электронный ресурс] URL: http://www.mining-enc.ru
7. Phill Jankowski, Erich Heymann, Peter Chwastiak. Offshore Production System Definition
and Cost Study. 2010. – 275p.
8. Nautilus Minerals [электронный ресурс] // Seafloor Production Tools
URL: http://www.nautilusminerals.com/irm/content/seafloor-production-
tools.aspx?RID=333 (дата обращения 10.03.16)