11继电 组员:林冬雄 林钦源 林泽明 刘培映
DESCRIPTION
微机继电保护调试实训. 11继电 组员:林冬雄 林钦源 林泽明 刘培映. 电流继电器. 读取电流继电器的整定值,为4A,根据接线方式预判其动作电流。 选择a相电流,其他相电流正定为0A,Ia为第一变量。 选择程控,调整电流变化范围和每步时间。 一般情况下,电流的变化步长应由大到小,步长越小,精度越高。. 串联. 步长:0.010A,变化范围:4.1~4.5A 结果:动作电流为4.160A. 并联. 步长:0.5A,变化范围:7~9A 结果:8.3A. 电压继电器. - PowerPoint PPT PresentationTRANSCRIPT

11 继电
组员:林冬雄 林钦源 林泽明 刘培映
微机继电保护调试实训

电流继电器
读取电流继电器的整定值,为 4A ,根据接线方式预判其动作电流。
选择 a 相电流,其他相电流正定为 0A , Ia为第一变量。
选择程控,调整电流变化范围和每步时间。
一般情况下,电流的变化步长应由大到小,步长越小,精度越高。

串联
步长: 0.010A ,变化范围: 4.1~4.5A
结果:动作电流为 4.160A

并联
步长: 0.5A ,变化范围: 7~9A
结果: 8.3A

电压继电器
读取电压继电器的整定值,为 50V, 根据接线方式预判其动作电流。
选择 a 相电压,其他相电流正定为 0V , Ua 为第一变量。
选择程控,调整电流变化范围和每步时间。
一般情况下,电压的变化步长应由大到小,步长越小,精度越高。
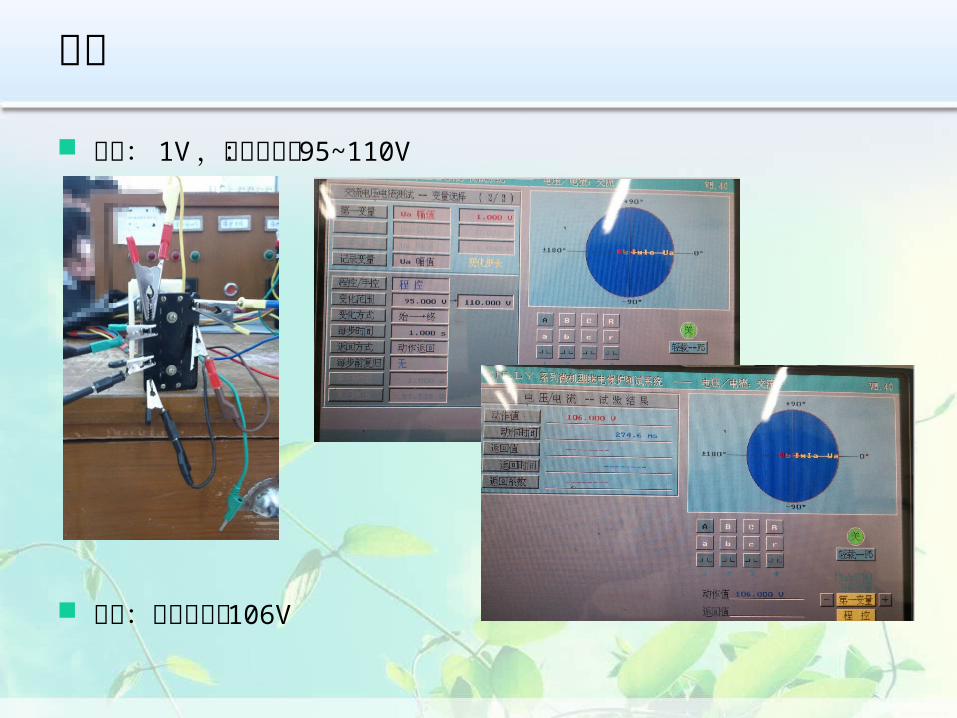
串联
步长: 1V ,变化范围: 95~110V
结果:动作电压为 106V
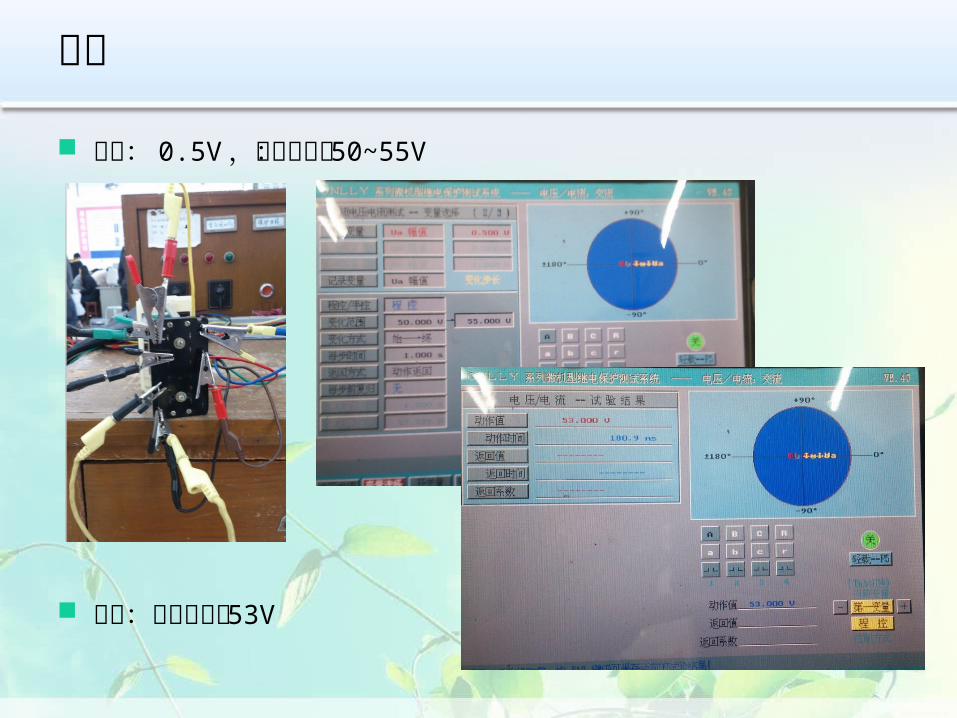
并联
步长: 0.5V ,变化范围: 50~55V
结果:动作电压为 53V
功率方向继电器
功率方向继电器整定的是 45° ,在查找其动作边界时,我们一般从不动作区扫描到动作区。
调试仪中 Ua 整定 57.735V, 三相电流为 1A 。Ua 相角为第一变量,步长设定为 1° 。

接线

结果


发电机差动保护
差动速切 ON 速切定值 3.066A 平衡系数 1.001A 额定电流 1.001A 差动保护 ON 差动门槛 0.476A 制动门槛 1.567A 差动比例 0.504
基本参数:

差动速切
刚开始做的是差动速切的调试,微机里的差动速切应该投入,为 ON 状态。

差动保护
差动速切退出,为 OFF 状态。差动保护投入。Ia 为变量,从 0 开始变化,步长 0.2A ,最后结果:制动门槛
为 0.600A 。下面是结果图:
差动保护比例系数
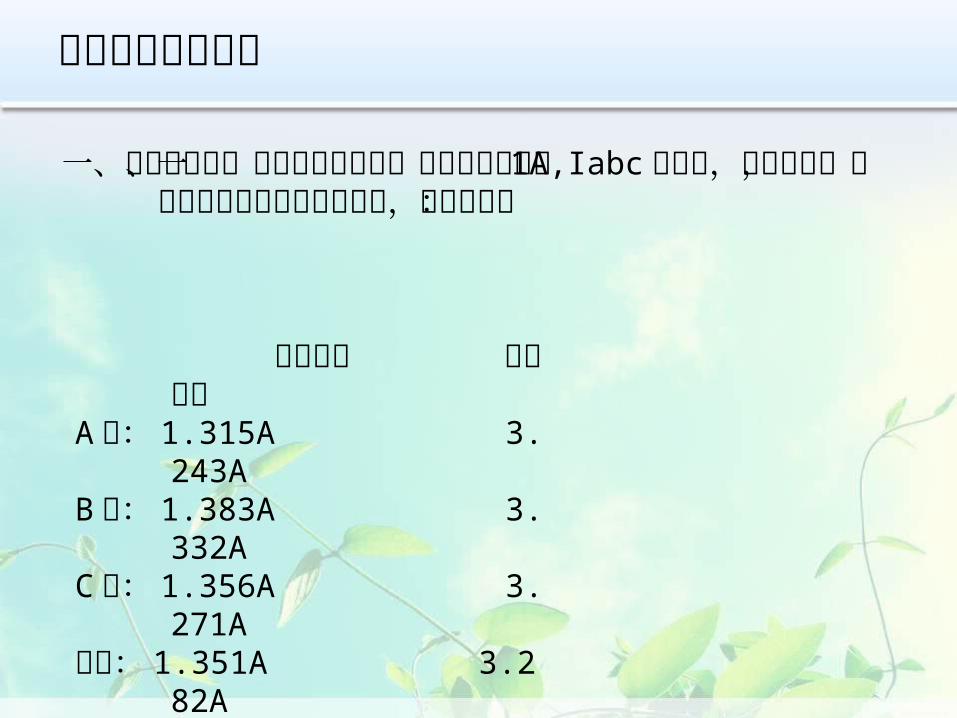
一、差动保护高、低压侧每相施加一倍的额定电流为 1A,Iabc 为变量,选择手控,手动加电流直到保护动作为止,记录数据:
差动电流 制动电流A 相: 1.315A 3.243AB 相: 1.383A 3.332AC 相: 1.356A 3.271A平均: 1.351A 3.282A

差动保护比例系数
二、差动保护高、低压侧每相施加两倍的额定电流为 2A,Iabc 为变量,选择手控,手动加电流直到保护动作为止,记录数据:
差动电流 制动电流A 相: 3.386A 7.312AB 相: 3.366A 7.319AC 相: 3.386A 7.339A平均: 3.379A 7.323A
差动保护比例系数
5019.0282.3323.7
351.1379.3
K
实训心得
一个星期的实训很快就结束了,在这几天里,大家都显得比较积极热情,通过自己动手去调试,加深了对微机继电保护的理解,同时也巩固了书本上学到知识。当然,期间也有不少不懂的地方,不过经过大家的思考和讨论,再加上老师的指导,这些难题也就迎刃而解。总而言之,这次的实训进行的比较顺利,大家都从中学到了不少知识,既加强了个人的独立思考能力,也培养了大家的团结协作精神,对以后工作有一定的帮助!