3 trabajo y energia -...
TRANSCRIPT

3 TRABAJO Y ENERGIA
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2010


Índice general
3. Trabajo y energía 13.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13.2. Impulso (I) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23.3. Trabajo (W) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3.3.1. Casos particulares de la ecuación (3.5) . . . . . . . . . . . . . . . . . . . . . . . 33.3.2. Interpretación geométrica de la ecuación (3.5) . . . . . . . . . . . . . . . . . . 43.3.3. Trabajo de una fuerza en componentes rectangulares . . . . . . . . . . . . . . 43.3.4. Trabajo realizado por la fuerza resultante . . . . . . . . . . . . . . . . . . . . . 5
3.4. Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.5. Energía cinética(∆Ek) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.5.1. Casos particulares del teorema del trabajo y la energía . . . . . . . . . . . . . 93.6. Fuerzas conservativas y energía potencial . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.6.1. Trabajo realizado por una fuerza constante . . . . . . . . . . . . . . . . . . . . 113.6.2. Trabajo realizado por la fuerza gravitacional . . . . . . . . . . . . . . . . . . . 113.6.3. Trabajo realizado por la fuerza elástica de un resorte . . . . . . . . . . . . . . 12
3.7. Conservación de la energía para una partícula . . . . . . . . . . . . . . . . . . . . . . 143.8. Fuerzas no conservativas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.9. Derivada direccional y energía potencial . . . . . . . . . . . . . . . . . . . . . . . . . . 173.10. Movimiento rectilíneo bajo fuerzas conservativas . . . . . . . . . . . . . . . . . . . . . 203.11. Curvas de energía potencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.12. Colisiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.13. Movimiento bajo fuerzas centrales conservativas . . . . . . . . . . . . . . . . . . . . 27
3

Capı́tulo 3Trabajo y energía
ObjetivosEn esta unidad se busca
Identificar y definir las cantidades físi-cas relacionadas con la dinámica de unapartícula, empleando los conceptos de tra-bajo y energía.
Analizar, desde un punto de vista diferen-te, la dinámica de una partícula.
Aplicar los conceptos de trabajo y energía asituaciones físicas particulares.
CONCEPTOS BASICOSEn esta unidad de trabajo y energía, se definiránlos siguientes conceptos que son básicos en elestudio de la dinámica de una partícula: traba-jo (W), potencia(P), energía cinética (Ek), Teore-ma del trabajo y la energía (W = ∆Ek), energíapotencial(Ep), fuerza conservativa y no conser-vativa, sistema conservativo y no conservativo,conservación de la energía mecánica (∆E = 0),derivada direccional y energía potencial, curvasde energía potencial y colisiones.
3.1. Introducción
El problema fundamental de la dinámica deuna partícula, es poder predecir su posiciónen función del tiempo t, sabiendo con cuálespartículas interactúa, además de conocer lascondiciones iniciales a las que está sometida.De acuerdo con las dos unidades anteriores, elprocedimiento que se debe llevar a cabo es el
siguiente: se determina la fuerza neta F, queactúa sobre la partícula de masa m y median-te la segunda ley de Newton para masa cons-tante F = ma, se encuentra la aceleración dela partícula. Luego, utilizando la definición deaceleración a = dv/dt, se obtiene la velocidadde la partícula en función del tiempo v(t). Final-mente, por medio de la definición de velocidadv = dr/dt, se resuelve el problema fundamen-tal de la dinámica al poder determinar la posi-ción del cuerpo en función del tiempo r(t).
En esta unidad se trata la dinámica de unapartícula desde otro punto de vista, que permi-tirá de nuevo resolver completamente el pro-blema de la dinámica de una partícula. Nece-sariamente, para definir los nuevos conceptos,se debe partir de las leyes de Newton ya queson el soporte de la dinámica de una partícula.Por otro lado, se observa que la notación de es-tas cantidades físicas, excepto el vector impulso,corresponde a cantidades escalares, lo que ge-neralmente evita el uso de cantidades vectoria-les en los procedimientos matemáticos. En sín-tesis, para su estudio se dispone de los concep-tos cinemáticos y dinámicos descritos y analiza-dos en las dos unidades anteriores. Igual que enla cinemática y en la dinámica sólo se conside-ra el movimiento de traslación de los cuerpos, osea, que estos se pueden seguir tratando bajo elmodelo de partícula.
Igual que en la unidad anterior, cuando seanaliza el comportamiento dinámico de uncuerpo, se llevan a cabo los mismos pasos, es-to es:

2 CAPÍTULO 3. TRABAJO Y ENERGÍA
Definir el sistema, que generalmente estáformado por varios cuerpos.
Elegir, del sistema, el cuerpo al cual se le vaa analizar el movimiento, es decir, el cuerpoo partícula de interés.
Delimitar el medio ambiente o alrededores, for-mado por el resto del sistema, o sea, porlos cuerpos cercanos que interactúan con elcuerpo de interés.
En principio, en cuanto a la forma funcional dela fuerza, matemáticamente, se pueden conside-rar dos casos
1. Que la fuerza sea función del tiempo, es de-cir, F(t).
2. Que la fuerza sea función de la posición, es-to es F(r).
Como se verá más adelante, la forma fun-cional de la fuerza con la posición es la de ma-yor interés, ya que este es tipo de fuerzas quegeneralmente se presentan en la naturaleza.
3.2. Impulso (I)
Para el caso en el cual la fuerza depende deltiempo F(t), la segunda ley de Newton F =dp/dt, se puede escribir en la forma∫ p
po
dp =∫ t
to
Fdt,
donde al integrar y evaluar, se obtiene
∆p = p − po
=
t∫to
F(t)dt
≡ I, (3.1)
donde la integral de la ecuación (3.1) definela cantidad física denominada impulso I. Porlo tanto, el impulso es igual al cambio en elmomento lineal de la partícula. Esto hace quelas dimensiones y unidades de impulso seanlas mismas de momento lineal. De este modo,
por definición, el impulso no depende explíci-tamente de la masa m ni de la velocidad inicialvo de la partícula, ya que sólo importa el cambioen su momento lineal.
De acuerdo con la ecuación 3.1, se tienen dosformas de conseguir el mismo valor en el im-pulso de una partícula
1. Que una fuerza grande actúe sobre lapartícula durante un tiempo pequeño,ya que esto puede ocasionar un cambiogrande en el momento lineal. Esta situaciónse presenta, por ejemplo, cuando en un par-tido de béisbol el bateador golpea la pelota,pues en este caso, se le aplica una fuerzamuy grande a la pelota durante un interva-lo de tiempo muy pequeño.
2. Igualmente, que una fuerza pequeña actúedurante un tiempo grande, de esta forma,se puede ocasionar un cambio en el mo-mento lineal igual al anterior. Por ejemp-lo, la fuerza gravitacional actuando sobrela pelota de béisbol durante un intervalo detiempo grande.
Una situación particular se obtiene cuando lafuerza es constante, en este caso, la ecuación(3.1) se transforma en
I = F(t − to)
= p − po
= ∆p.
Como el objetivo de la dinámica es poder deter-minar la posición de una partícula en funcióndel tiempo, se reemplaza la definición de mo-mento lineal, p = mv, en la ecuación (3.1), paraobtener mv − mvo = I, o sea, v − vo = I/m.Ahora, utilizando la definición de velocidad esposible llegar a
r(t) = ro + vo(t − to) +1m
t∫to
Idt. (3.2)
Mediante la ecuación (3.2) se resuelve el proble-ma completamente si se conoce la forma fun-cional de la fuerza con el tiempo F(t).

3.3. TRABAJO (W) 3
Como en la naturaleza generalmente lasfuerzas se conocen en función de la posición,F(r) ó F(x,y,z), para resolver la ecuación (3.1)se hace necesario conocer la forma como varíael vector posición con el tiempo r(t), pero estoes lo que se busca desde el comienzo, es decir,hay que resolver el problema de interés antesde poder resolver la ecuación (3.2). Por estarazón, es necesario definir otros conceptos quesí permiten cumplir con el objetivo propuesto,tal como ocurre con el trabajo realizado por unafuerza y la energía total de una partícula.
3.3. Trabajo (W)
Se considera una partícula de masa m sobre laque actúa una fuerza F(r). Si en un tiempo dtla partícula sufre un desplazamiento dr debidoa la acción de la fuerza, el trabajo realizado porella durante tal desplazamiento, se define por
dW ≡ F · dr. (3.3)
Si se toma |dr| = dS, mediante la definición deproducto escalar, la ecuación (3.3) adquiere laforma dW = FcosθdS.
De la figura 3.1, se observa que FT = Fcosθ esla componente de la fuerza a lo largo de la tan-gente a la trayectoria seguida por la partícula.De este modo,
dW = FTdS. (3.4)
qm
FT
dr
F
FN
Figura 3.1: Trabajo realizado por F en un dt.
De acuerdo con la ecuación (3.4), se concluyeque la componente de la fuerza normal a latrayectoria seguida por la partícula, no realizatrabajo. Así, en general, las fuerzas perpendicu-lares al desplazamiento de una partícula no rea-lizan trabajo. Esta situación se presenta siemprecon la normal (N) y con el peso (W) en el casode un cuerpo que se mueve sobre una superfi-cie horizontal; igualmente, ocurre con la fuerzacentrípeta cuando un cuerpo se mueve sobreuna trayectoria circular.
Generalmente, interesa determinar el traba-jo total realizado por la fuerza F, cuando lapartícula se mueve desde un punto A hastaun punto B de su trayectoria, como en el casomostrado en la figura 3.2. Como el trabajo to-tal corresponde a la suma de los trabajos infi-nitesimales entre los dos puntos considerados,la sumatoria se transforma en una integral porlo que las ecuaciones (3.3) y (3.4) adquieren laforma
W =
B∫A
F · dr
=
B∫A
FTdS. (3.5)
A
B
FN
FFT
Figura 3.2: Trabajo realizado por F entre A y B.
3.3.1. Casos particulares de la ecuación(3.5)
1. Una partícula con movimiento rectilíneo,está sometida a la acción de una fuerzaconstante F que forma un ángulo θ con la

4 CAPÍTULO 3. TRABAJO Y ENERGÍA
trayectoria, como se ilustra en la figura 3.3.En este caso, mediante la ecuación (3.5), seencuentra que el trabajo realizado por lafuerza entre las posiciones A y B está dadopor
W = Fcosθ(xB−xA).
A Bx
q
Movimiento
O
F F
Figura 3.3: Trabajo realizado por F no paralela aldesplazamiento.
2. Cuando la partícula tiene movimiento rec-tilíneo, pero la fuerza constante F es par-alela al desplazamiento, el trabajo realiza-do por ella entre las posiciones A y B de lafigura 3.4 es
W = F(xB−xA).
BA WFcos(x-x) q =
A Bx
Movimiento
O
F F
Figura 3.4: Trabajo realizado por F paralela al des-plazamiento.
Dimensiones y unidades fuerzaTeniendo en cuenta la definición de trabajo, da-da por la ecuación (3.3), se tiene que sus di-mensiones son [W] = ML2T−2. De este mo-do, la unidad en el sistema internacional deunidades es kg · m2 · s−2, en el sistema gaus-siano de unidades g · cm2 · s−2 y en el sistemainglés lb · p.
Es costumbre designar estas unidades con lossiguientes nombres: 1 J ≡ 1 kgcdotm2 · s−2 en elsistema SI, 1 ergio ≡ 1 g · cm2 · s−2 en el sistemagaussiano. Por consiguiente, la relación entreestas unidades es 1 J ≡ 107 ergios.
3.3.2. Interpretación geométrica de laecuación (3.5)
Cuando se conoce la gráfica de la forma comovaría la componente tangencial de la fuerza conel desplazamiento de la partícula, es posible in-terpretar la ecuación (3.5) de la siguiente mane-ra. Si esta componente de la fuerza varía en laforma mostrada en la figura 3.5, el área del pe-queño rectángulo, dA = FTdS, es igual al tra-bajo infinitesimal realizado por la fuerza corres-pondiente durante el desplazamiento dS. Aho-ra, el área total bajo la curva entre las posicionesA y B, es igual a la suma de las áreas de to-dos los pequeños rectángulos dibujados entredichos puntos; pero como las áreas son infinite-simales, la suma se transforma en una integraly así el área total corresponde a la integral dadapor la ecuación (3.5). En conclusión, el trabajototal realizado por la fuerza entre las posicionesA y B es igual al área total bajo la curva.
FT
FT
dSA BS
Figura 3.5: Variación de FT en función de S.
El análisis anterior, se puede expresarmatemáticamente en la forma
Area bajo la curva = W
=
B∫A
F · dr
=
B∫A
FTdS.
3.3.3. Trabajo de una fuerza en compo-nentes rectangulares
En tres dimensiones y en componentes rectan-gulares, la fuerza que actúa sobre una partícula

3.3. TRABAJO (W) 5
se expresa en la forma F = Fxi + Fyj + Fzk; enforma similar, el vector desplazamiento está da-do por dr = dxi + dyj + dzk. Así, al efectuarel producto escalar entre estos dos vectores, seencuentra que el trabajo total realizado por lafuerza entre los puntos A y B es dado por
W =
B∫A
(Fxdx + Fydy + Fzdz). (3.6)
Si la fuerza F y el vector desplazamiento drse encuentran, por ejemplo, en el plano xy, laecuación (3.6) se transforma en
W =
B∫A
(Fxdx + Fydy).
3.3.4. Trabajo realizado por la fuerza re-sultante
Si en la ecuación (3.5), la fuerza F correspon-de a la fuerza resultante o neta de todas lasfuerzas que actúan sobre la partícula, esto essi F = ∑ Fi = F1 + F2 + F3 + · · · , el trabajoneto o total realizado sobre la partícula por lafuerza resultante, para llevarla desde la posi-ción A hasta la posición B de la figura 3.6, seobtiene mediante la expresión
A
B
A
B
F
F1
F2
F3 F
4
Figura 3.6: Trabajo realizado por la resultante.
W =
B∫A
(F1 · dr + F2 · dr + F3 · dr + · · · )
=
B∫A
F · dr.
Por consiguiente, el trabajo realizado por lafuerza resultante es igual a la suma de los tra-bajos realizados por cada una de las fuerzas queactúan sobre la partícula.
Ejemplo 3.1.Un pequeño cuerpo de masa m, que partedel punto A de la figura, desliza sobre latrayectoria circular de radio R. Suponerque la magnitud de la fuerza de fricción Fkes constante, con valor un décimo del pe-so del cuerpo. a) Determine el trabajo netorealizado sobre el pequeño cuerpo, cuan-do pasa por el punto B. b) Si m = 500 g,R = 20 cm, para β = 45o, 90o, 135o, 180o,hallar el valor de la cantidad obtenida enel numeral anterior.
C
B
A D
b
mR
SoluciónComo consecuencia de la ecuación (3.5), eltrabajo realizado por una fuerza está dadapor
W =
B∫A
FcosθdS
=
B∫A
FTdS,
pero en una trayectoria circular y paraun desplazamiento angular infinitesimaldS = Rdθ, se tiene
W = RB∫
A
Fcosθdθ = RB∫
A
FTdθ. (1)
a) De acuerdo con el diagrama de cuer-po libre del pequeño cuerpo, de las tresfuerzas que actúan, sólo realizan trabajo elpeso y la fuerza de fricción dinámica.
Para la posición genérica de la figuraanterior, luego de integrar y evaluar, se en-cuentra que
Wmg = mgRsenβ, (2)
WFk = − 110
mgRβ. (3)

6 CAPÍTULO 3. TRABAJO Y ENERGÍA
Fk
mg
Nq
q
Por consiguiente, el trabajo total es
W = mgR(senβ − β
10).
b) Reemplazando valores, con m =500 g ≡ 0.5 kg y R = 20 cm ≡ 0.2 m setiene
β(o) W(J)
45 0.6290 0.83135 0.46180 −0.31
De acuerdo con los resultados obtenidos,cuando β = 45o, el trabajo es positivo loque indica que es mayor el trabajo rea-lizado por el peso, que el realizado porla fuerza de fricción dinámica, igual quepara 90o y 135o . En cambio, para β =
180o, el trabajo neto realizado por el pesoes nulo a diferencia del trabajo realizadopor la fuerza de fricción que es diferentede cero y negativo.
Ejemplo 3.2.Un bloque de masa m, asciende sobre lasuperficie del plano inclinado de la figura,debido a la acción de la fuerza F. El coe-ficiente de fricción entre las superficies encontacto es µ y la magnitud de la fuerzaaplicada es 2mg. Cuando el bloque ha as-cendido una altura h, determine a) El tra-bajo realizado por la fuerza resultante. b)El trabajo neto realizado sobre el bloque,considerando por separado cada una delas fuerzas. c) El valor del trabajo total sim = 500 g, h = 0.5 m y µ = 0.3, para dife-rentes valores del ángulo θ.Solucióna) De acuerdo con el diagrama de cuer-po libre mostrado en la siguiente figura, la
h
F
m
q
componente de la fuerza neta paralela aldesplazamiento del bloque, es constante yestá dada por
Fx = mg(2 − senθ − µcosθ),
donde se ha tomado el sentido demovimiento como positivo. Así, el traba-jo realizado sobre el bloque al desplazarsela distancia h/senθ es
W = mgh(2cscθ − 1 − µcotθ).
h
N F
Fk
mgq
b) El trabajo realizado por cada fuerza es
WF = 2mghcscθ,WN = 0,
ya que es una fuerza perpendicular al des-plazamiento.
Wmg = −mgh,WFk = −µmghcotθ.
Se observa que la única fuerza que realizatrabajo positivo es la fuerza aplicada, yaque esta actúa en el sentido del desplaza-miento.
Sumando los trabajos anteriores, se en-cuentra que el trabajo neto, total o resul-tante, realizado por las fuerzas que actúansobre el bloque está dado por
W = mgh(2cscθ − 1 − µcotθ),
que es idéntico al obtenido en el numeralanterior.

3.4. POTENCIA 7
c) Reemplazando valores se obtiene lasiguiente tabla
θ(o) W(J)
10 21.630 6.0845 3.7460 2.7875 2.43
De acuerdo con estos resultados, se tieneque el trabajo neto disminuye a medidaque la inclinación del plano se incremen-ta. ¿Por qué?
Ejercicio 3.1.Halle el valor de θ, para el cual el trabajorealizado sobre el bloque del ejemplo 3.2es mínimo.
3.4. Potencia
Como se observa en la definición dada por laecuación (3.3), el trabajo es una cantidad escalarque no depende del tiempo. Por esta razón enla práctica y particularmente en la industria, nointeresa el trabajo total que pueda realizar unamáquina sino la rapidez con la cual esta hacetrabajo.
La potencia es una cantidad escalar que tieneen cuenta este hecho y se define como la rapidezcon la cual se realiza trabajo. Matemáticamente,la potencia media en un intervalo de tiempo t,se define por
P ≡ Wt
,
y la potencia instantánea en un instante de tiem-po t, está dada por
P ≡ dWdt
. (3.7)
En el caso particular que la potencia sea cons-tante, la potencia media es igual a la potenciainstantánea.
Mediante las ecuaciones (3.3) y (3.7), la poten-cia instantánea se puede expresar en función del
vector velocidad, en la forma
P = F · drdt
= F · v.
Dimensiones y unidades de potenciaDe acuerdo con su definición, las dimensionesde potencia son [P] = ML2T−3. Es costumbreemplear, en este caso, la unidad del sistema in-ternacional de unidades kg · m2 · s−3. Se defineel vatio mediante la relación 1 w ≡ 1 kg · m2 ·s−3. Por comodidad, se emplean el kilovatio(Kw) y el megavatio (Mw), dados por 1 Kw ≡103 w y 1 Mw ≡ 106 w, respectivamente. Otraunidad que no es de mucho uso en la ciencia,aunque sí lo es en los casos prácticos, es el ca-ballo vapor (hp), que se relaciona con la unidadSI mediante la expresión 1 hp ≡ 746 w.
Mediante la definición de potencia es posibleobtener otra unidad de trabajo, que es bastanteempleada en el caso de las hidroeléctricas, a es-ta unidad se le conoce como el Kilovatio-horay su relación con la unidad SI es 1 Kw − h ≡3.6 × 106 J. La liquidación de energía facturadapor las Empresas Públicas, se hace de acuerdocon el número de Kilovatios-hora consumidospor mes.
Ejemplo 3.3.Como se indica en la figura, un bloque demasa M asciende con velocidad constan-te v por una colina que forma un ánguloθ con la horizontal. El bloque está unido aun motor mediante una cuerda que pasapor una polea y el coeficiente de fricciónentre las superficies en contacto es µ . De-termine, en función del ángulo θ, la poten-cia desarrollada por el motor.
M
q
SoluciónDiagrama de cuerpo libre para el bloque
Como el bloque se encuentra en equi-librio dinámico, la fuerza F ejercida por el

8 CAPÍTULO 3. TRABAJO Y ENERGÍA
NF
Fk
Mgq
motor tiene magnitud
F = Mg(senθ + µcosθ).
De esta forma, la potencia desarrolladapor el motor es
P = Mgv(senθ + µcosθ).
En la siguiente tabla, se muestran los va-lores del término entre paréntesis, para di-ferentes valores del ángulo θ y del coefi-ciente de fricción µ.
θ(o) 0 15 30 45 60 75 90µ
0.2 0.2 0.45 0.67 0.85 0.97 1.02 1.00.4 0.4 0.64 0.85 0.99 1.07 1.07 1.00.6 0.6 0.84 1.02 1.13 1.17 1.12 1.00.8 0.8 1.03 1.19 1.27 1.27 1.17 1.0
De la tabla anterior se pueden obtener dosconclusiones
a) Se observa que para un valor dadode µ, la potencia aumenta hasta unvalor máximo, a partir del cual de-crece hasta un valor que tiende a launidad.
b) Adicionalmente, para un valor da-do del ángulo θ, la potencia aumentacontinuamente con el aumento en elcoeficiente de fricción
Ejercicio 3.2.Como se indica en la figura, un bloque demasa M asciende con velocidad constan-te v por una colina que forma un ánguloθ con la horizontal. El bloque está unido aun motor mediante una cuerda que pasapor una polea y las superficies en contactoson lisas. Determine, en función del ángu-lo θ, la potencia desarrollada por el motor.Compare el resultado con el obtenido en elejemplo 3.3.
M
q
3.5. Energía cinética(∆Ek)
Se considera el movimiento de un cuerpo demasa m, sobre el que actúa una fuerza neta F.
Escribiendo la segunda ley de Newton en laforma
F = mdvdt
,
y reemplazando en la ecuación (3.5), se encuen-tra que el trabajo realizado sobre la partículapor la fuerza neta, entre la posición A y la posi-ción B de la figura 3.7, es dado por
W = mB∫
A
dvdt
· dr
= mvB∫
vA
v · dv. (3.8)
x
y
O
BA
m
mF
vA
vB
Figura 3.7: Movimiento de m entre A y B sometidaa F.
Luego de resolver y evaluar la segunda inte-gral de la ecuación (3.8), se obtiene
W = 12 mv2
B − 12 mv2
A. (3.9)
La cantidad escalar 12 mv2, que depende de la
magnitud de la velocidad, mas no de su direc-ción, se define como la energía cinética Ek de la

3.5. ENERGÍA CINÉTICA(∆EK) 9
partícula, es decir
Ek ≡ 12 mv2
= 12 mv · v
=p2
2m, (3.10)
donde se ha utilizado la definición de momentolineal.
Teniendo en cuenta las ecuaciones (3.9) y(3.10), el trabajo realizado sobre la partícula porla fuerza neta F, independientemente del tipode fuerza, está dado por
W = EkB − EkA
= ∆Ek. (3.11)
De la ecuación (3.11), se puede concluir que lavariación de la energía cinética de una partículasiempre es igual al trabajo realizado por la fuerzaneta que actúa sobre ella durante el movimien-to. Como la energía cinética es una cantidad físi-ca que depende de la velocidad, entonces debedepender del sistema de referencia ya que lavelocidad depende de él. Igualmente, al ser laenergía cinética una función de la magnitud dela velocidad, es una energía que se le asocia a lapartícula como consecuencia de su movimiento.Las ecuaciones (3.9) y (3.11), expresan lo que enfísica se conoce como el teorema del trabajo y laenergía.
3.5.1. Casos particulares del teorema deltrabajo y la energía
1. Si la velocidad de una partícula permanececonstante en magnitud y dirección, como en lafigura 3.8, el cambio en la energía cinética es nu-lo, es decir, ∆Ek = 0. Por consiguiente, el trabajorealizado sobre la partícula es nulo y posee unmovimiento rectilíneo uniforme.2. Si la velocidad de la partícula permanececonstante en magnitud mas no en dirección, co-mo en la figura 3.9, en forma similar, se tieneque el cambio en la energía cinética es nulo,∆Ek = 0. Por tanto, de nuevo el trabajo rea-lizado sobre la partícula es nulo y posee unmovimiento circular uniforme.
x
O
v = Constante
Figura 3.8: Cuerpo con movimiento rectilíneo uni-forme.
O
R
v
Figura 3.9: Cuerpo con movimiento circular uni-forme.
3. Cuando un cuerpo, como en la figura3.10, tiene movimiento rectilíneo uniforme-mente acelerado, tal como ocurre cuando en unauto se aplica el acelerador, la velocidad aumen-ta, o sea, que la energía cinética aumenta y eltrabajo es positivo. Este caso también se presen-ta cuando un cuerpo desciende por una planoinclinado liso, debido a la componente del pesoparalela al desplazamiento.
x
O
Movimiento
F
Figura 3.10: Cuerpo con movimiento rectilíneo uni-formemente acelerado.
4. Cuando el cuerpo, como se ilustra en la figu-ra 3.11, tiene movimiento rectilíneo uniforme-mente desacelerado, situación que se presentacuando en un auto se aplican los frenos, la ve-locidad disminuye, o sea, que la energía cinéti-ca disminuye y el trabajo realizado es negativo.Igual cosa ocurre cuando un cuerpo asciendepor un plano inclinado liso, ya que la compo-nente del peso se opone al desplazamiento de

10 CAPÍTULO 3. TRABAJO Y ENERGÍA
la partícula. Otra fuerza que siempre realiza tra-bajo negativo, es la fuerza de fricción dinámicaque actúa sobre un cuerpo en movimiento.
x
O
Movimiento
F
Figura 3.11: Cuerpo con movimiento rectilíneo uni-formemente desacelerado.
En síntesis: Cuando la energía cinética de unapartícula aumenta o disminuye, es porque sobreella actúa una fuerza neta que realiza trabajo; si suenergía cinética permanece constante, la fuerza netaes cero y la partícula se encuentra en equilibrio.
Dimensiones y unidades de energía cinéticaDe acuerdo con las ecuaciones (3.9) y (3.11), lasdimensiones y unidades de la energía cinéticason las mismas de trabajo.
En mecánica cuántica y particularmente físi-ca nuclear, se encuentra que las unidadesdefinidas anteriormente para trabajo y energíason muy grandes, por ello, a nivel microscópicose utiliza otra unidad más pequeña de energíallamada electronvoltio (eV) y cuya relación conla unidad SI es
1 eV ≡ 1 .602 × 10−19 J.
Un múltiplo de esta unidad bastante utilizadoes el MeV, cuya relación es 1 MeV ≡ 106 eV.
Ejemplo 3.4.Un bloque de masa m, se suelta desde laparte más alta del plano inclinado de lafigura. El coeficiente de fricción entre lassuperficies en contacto es µ. Determine a)La velocidad del bloque, en el instante quellega a la base del plano inclinado. b) Elángulo mínimo a partir del cual tiene sig-nificado físico la velocidad.SoluciónDiagrama de cuerpo libre para el bloque
a) Por el teorema del trabajo y la ener-gía, se tiene
W = 12 mv2
B, (1)
h
m
q
h
NF
k
mg
q
A
B
donde el trabajo total realizado sobre elbloque, cuando se mueve entre las posi-ciones A y B, es
W = mgh(1−µcotθ). (2)
Reemplazando la ecuación (2) en laecuación (1), se obtiene para la velocidaddel bloque en el punto B
vB =√
2gh(1−µcotθ). (3)
En la tabla siguiente, se indica la formacomo varía el término entre paréntesis dela ecuación (3), donde NO significa que lavelocidad no tiene significado físico.
θ(o) 10 15 30 45 60 90µ
0.2 NO 0.25 0.65 0.80 0.88 1.00.4 NO NO 0.31 0.60 0.77 1.00.6 NO NO NO 0.40 0.65 1.00.8 NO NO NO 0.20 0.54 1.01.0 NO NO NO 0 0.42 1.0
Se observa que para velocidades con sig-nificado físico, si el ángulo es fijo menores la velocidad del bloque a medida queaumenta el coeficiente de fricción, es de-cir, entre más ásperas sean las superficies.Ahora, para un coeficiente de fricción fijo,a mayor ángulo mayor es la velocidad delbloque en el punto B
b) Para que la velocidad tenga signifi-cado físico, de acuerdo con la ecuación (3),se debe satisfacer la condición
tanθ ≥ µ. (4)

3.6. FUERZAS CONSERVATIVAS Y ENERGÍA POTENCIAL 11
Así, el ángulo mínimo a partir del cual lavelocidad tiene significado físico, se ob-tiene al tomar la igualdad en la ecuación(4), esto es
θ mín = tan−1µ. (5)
En la tabla siguiente, se muestran los valo-res de θ mín correspondiente a los valoresdel coeficiente de fricción considerados enla tabla anterior.
µ θmín(o)
0.2 11.30.4 21.80.6 31.00.8 38.71.0 45.0
Se concluye entonces que entre másásperas sean las superficies en contacto,mayor es el ángulo a partir del cual elbloque inicia el movimiento.
Ejercicio 3.3.Un bloque de masa m, se suelta desde laparte más alta del plano inclinado de lafigura. Suponiendo que las superficies encontacto son lisas, determine a) La veloci-dad del bloque, en el instante que llega ala base del plano inclinado. b) El ángulomínimo a partir del cual tiene significadofísico la velocidad. Compare los resulta-dos con los del ejemplo 3.4.
h
m
q
3.6. Fuerzas conservativas y ener-gía potencial
En esta sección se define un tipo muy im-portante de fuerzas que se presentan en lanaturaleza, como son las fuerzas conservati-vas. Adicionalmente, se encuentra una relación
matemática entre fuerza conservativa y la ener-gía potencial.
3.6.1. Trabajo realizado por una fuerzaconstante
Como se ilustra en la figura 3.12, se considerauna partícula de masa m sometida a la acciónde una fuerza F constante en magnitud y direc-ción. Una condición se debe imponer sobre estafuerza y es que no puede ser una fuerza de fric-ción (más adelante se da la razón de esta restric-ción
x
y
O
A
B
(a)
(b)
(c)
rA
rB
F
Figura 3.12: Trabajo realizado por una fuerza cons-tante.
Para este caso la ecuación (3.5) se transformaen
W = F ·B∫
A
dr
= F · rB − F · rA. (3.12)
La ecuación (3.12), indica que el trabajo reali-zado por una fuerza constante es independientede la trayectoria seguida por la partícula, ya quesólo depende de las posiciones inicial y final. Deeste resultado se puede concluir que para las di-ferentes trayectorias mostradas en la figura 3.12,el trabajo realizado por la fuerza constante es elmismo, es decir, W(a) = W(b) = W(c).
3.6.2. Trabajo realizado por la fuerzagravitacional
Aunque este es un ejemplo de fuerza constan-te, para alturas cercanas a la superficie de latierra, el trabajo realizado por ella es de gran

12 CAPÍTULO 3. TRABAJO Y ENERGÍA
importancia en muchas situaciones físicas. Parael caso mostrado en la figura 3.13, las compo-nentes rectangulares del peso mg y de los vec-tores posición rA y rB, están dadas por mg =−mgj, rA = xAi + yAj y rB = xBi + yBj. Reem-plazando estas expresiones y efectuando los res-pectivos productos escalares, la ecuación (3.12)se transforma en
W = mgyA − mgyB
= −∆(mgy). (3.13)
y
O x
y yA B-
A
B
mg
xA
yA
xB
yB
i
j
Figura 3.13: Trabajo realizado por el peso.
La ecuación (3.13) muestra, en este caso y co-mo es de esperar, que el trabajo realizado porel peso de la partícula es independiente de latrayectoria seguida por ella, pues depende sólode las posiciones inicial y final, en otras pala-bras, depende de la diferencia de alturas entrelas posiciones A y B.
3.6.3. Trabajo realizado por la fuerzaelástica de un resorte
Este es un ejemplo de fuerza variable que tam-bién posee gran importancia en la física. Se con-sidera el sistema de la figura 3.14, que consisteen un cuerpo de masa m adherido a un re-sorte de constante elástica k y que puede mo-verse sobre una superficie horizontal lisa. En es-ta situación, las componentes rectangulares dela fuerza variable F y del vector desplazamientodr , están dadas por F = −kxi y dr = dxi. Paradeterminar el trabajo realizado por la fuerzaelástica del resorte, al llevar el cuerpo de la posi-ción xA a la posición xB, se reemplazan la fuerza
y el vector desplazamiento en la ecuación (3.5),obteniéndose luego de integrar y evaluar, la ex-presión
W = 12 kx2
A − 12 kx2
B
= −∆( 12 kx2). (3.14)
m
m
O
O
xA
x
x
xB
F
Figura 3.14: Trabajo realizado por la fuerza elásticade un resorte.
Aunque la fuerza es variable, el resultadoobtenido en la ecuación (3.14) indica que denuevo el trabajo realizado por la fuerza no de-pende de la trayectoria sino de las posicionesinicial y final.
Los dos casos anteriores, trabajo de la fuerzagravitacional y trabajo de la fuerza elástica, sondos ejemplos de un grupo de fuerzas que se pre-sentan en la naturaleza y que se llaman fuerzasconservativas.
De forma general y matemáticamente, se de-fine una fuerza conservativa F(r) = F(x,y,z)de manera que el trabajo realizado por ella sepuede expresar como la diferencia de los va-lores inicial y final de una cantidad escalarEp(x,y,z), llamada energía potencial, es decir,la fuerza F(r) = F(x,y,z), es conservativa sicumple la condición
W =
B∫A
F · dr
≡ EpA(x, y, z)− EpB(x, y, z)= −∆Ep(x, y, z). (3.15)
En conclusión, la ecuación (3.15) sólo es vá-lida si la fuerza considerada es conservativa;además, muestra que la cantidad Ep(x,y,z) esfunción de las coordenadas x, y, z.
3.6. FUERZAS CONSERVATIVAS Y ENERGÍA POTENCIAL 13
Al comparar las ecuaciones (3.13) y (3.14) conla ecuación (3.15), se observa que el trabajo rea-lizado por la fuerza gravitacional y el trabajorealizado por la fuerza elástica de un resortesatisfacen la definición de fuerza conservativa.Por consiguiente, se puede asignar una funciónde energía potencial a un sistema cuerpo-tierra ya un sistema masa-resorte. De este modo, la ener-gía potencial gravitacional asociada al sistemacuerpo-tierra queda definida por
Ep(y) ≡ mgy,
y la energía potencial elástica asociada al sis-tema masa-resorte por
Ep(x) ≡ 12 kx2.
Teniendo en cuenta estas dos definiciones, eltrabajo realizado por la fuerza gravitacional sepuede expresar en la forma
W = EpA(y)−EpB(y)≡ mgyA − mgyB
= −∆Ep ,
y el trabajo realizado por la fuerza elástica en laforma
W = EpA(x)−EpB(x)
= 12 kx2
A − 12 kx2
B
= −∆Ep(x).
Se presenta una diferencia cuando el trabajo deuna fuerza se expresa en función de la ener-gía cinética y en función de la energía poten-cial. En el primer caso la expresión a utilizares W = ∆Ek, y es válida independientementede la fuerza que actúe sobre la partícula; en elsegundo caso la expresión es W = −∆Ep, devalidez únicamente si la fuerza que actúa sobrela partícula es conservativa.
En sistemas donde se deba emplear el con-cepto de energía potencial, primero se debedefinir lo que se conoce como el nivel cero deenergía potencial, que corresponde a una posi-ción arbitraria, dependiendo de la fuerza con-servativa que se esté considerando y de lasituación física particular.
Para un sistema cuerpo-tierra, el nivel cero deenergía potencial gravitacional coincide con elorigen de coordenadas, ya que en este caso ladependencia es lineal con la coordenada verti-cal. Para el caso de un sistema masa-resorte, elnivel cero de energía potencial elástica se tomaen la posición donde la fuerza elástica se hacecero, es decir, en la posición donde el resorte noha sufrido estiramiento alguno.
Cuando se trata de un sistema satélite-tierra,la función de energía potencial asociada al sis-tema es inversamente proporcional a la distan-cia r entre el satélite y la tierra, esto es, tiene laforma funcional Ep ∝ 1/r. Es por ello que el ni-vel cero de energía potencial para este sistemase toma en el infinito, ya que allí la energía po-tencial se hace cero.
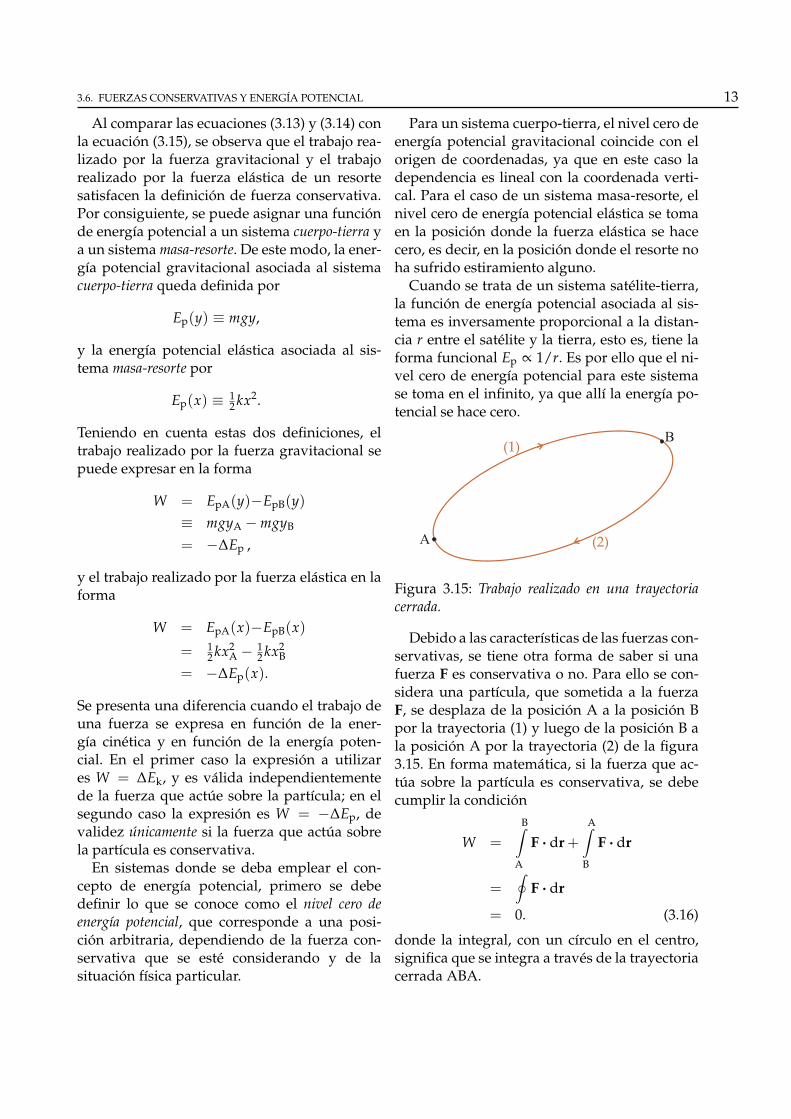
A
(1)B
(2)
Figura 3.15: Trabajo realizado en una trayectoriacerrada.
Debido a las características de las fuerzas con-servativas, se tiene otra forma de saber si unafuerza F es conservativa o no. Para ello se con-sidera una partícula, que sometida a la fuerzaF, se desplaza de la posición A a la posición Bpor la trayectoria (1) y luego de la posición B ala posición A por la trayectoria (2) de la figura3.15. En forma matemática, si la fuerza que ac-túa sobre la partícula es conservativa, se debecumplir la condición
W =
B∫A
F · dr +A∫
B
F · dr
=∮
F · dr
= 0. (3.16)
donde la integral, con un círculo en el centro,significa que se integra a través de la trayectoriacerrada ABA.

14 CAPÍTULO 3. TRABAJO Y ENERGÍA
La ecuación (3.16) permite saber si una fuerzadada es conservativa o no, es decir, es otradefinición de fuerza conservativa. En el caso dela fuerza de fricción, se encuentra que el traba-jo realizado por ella es diferente de cero ya quedepende de la trayectoria; esta es la razón por lacual no se incluye dentro del grupo de fuerzasconservativas.
3.7. Conservación de la energíapara una partícula
Sobre la partícula de la figura 3.16, de masa m,simultáneamente actúan varias fuerzas. De estemodo, su resultante F realiza un trabajo W entrelos puntos A y B de la trayectoria, dado por
W = ∆Ek, (3.17)
con ∆Ek = EkB − EkA. Ahora, si todas fuerzasson conservativas, su resultante es conservativay el trabajo realizado por ella es
W = −∆Ep, (3.18)
donde ∆Ep = EpB − EpA.
B
A m
F
Figura 3.16: Fuerza conservativa actuando sobre m.
Como las ecuaciones (3.17) y (3.18) se refierenal trabajo realizado por la misma fuerza, se sa-tisface la igualdad
EkB + EpB = EkA + EpA,
donde se define la energía mecánica total, o sim-plemente energía total, en la forma
E ≡ Ek + Ep = 12 mv2 + Ep(x,y,z).
EA = EB.
Como en la situación que se está analizando lospuntos A y B son arbitrarios, se tiene que laenergía total de una partícula permanece cons-tante si todas las fuerzas a las que está sometidason conservativas.
Matemáticamente, para fuerzas conservati-vas
E = 12 mv2 + Ep(x,y,z)
= Constante. (3.19)
La ecuación (3.19) permite definir una fuerzaconservativa, como aquella que permite conser-vación de la energía, de ahí su nombre.
Casos particulares de la ecuación (3.19):
1. Para un cuerpo en caída libre, sistemacuerpo-tierra de la figura 3.18, la energíatotal se conserva por ser la fuerza gravita-cional conservativa. Matemáticamente, seexpresa en la forma
E = 12 mv2 + mgy
= Constante.
En este caso, cuando el cuerpo desciendela energía potencial se transforma en ener-gía cinética, y cuando asciende la energíacinética se transforma en energía potencial.O sea, mientras el cuerpo se mueve ver-ticalmente hay una transformación de untipo de energía en otro.
y
O
y
Tierra
m
Ep = 0
v
Figura 3.17: Sistema cuerpo-tierra.
2. Para el sistema masa-resorte de la figura3.18, con movimiento sobre una superficie

3.7. CONSERVACIÓN DE LA ENERGÍA PARA UNA PARTÍCULA 15
lisa, la energía total también se conserva yaque la fuerza elástica de un resorte es con-servativa. Matemáticamente,
E = 12 mv2 + 1
2 kx2
= Constante.
k
m
xx
Ep = 0
v
Figura 3.18: Sistema masa-resorte.
En esta situación, el cuerpo adquiere unmovimiento que se repite a intervalosiguales de tiempo o de vaivén, tal que laenergía permanece constante, o sea, quedurante el movimiento de la partícula setiene una transformación de energía cinéti-ca a potencial y viceversa.
Ejemplo 3.5.Mediante el pequeño bloque de masa m,un resorte de constante k sufre una de-formación d, como se muestra en la figu-ra. Una vez que el bloque es dejado en li-bertad, se mueve sobre la superficie hori-zontal hasta el punto A, a partir del cualasciende por un plano inclinado. El bloqueno está adherido al resorte y las superfi-cies son lisas. a)Halle la rapidez del bloquecuando pasa por el punto A. b) Encuentreel desplazamiento máximo del bloque so-bre el plano inclinado. c) Halle el valor delas cantidades obtenidas en los numeralesanteriores si k = 100Nm−1, m = 5g, d =2cm y θ = 35o.
m
OE
pg= 0q
A
kd
B
Solucióna) En el trayecto horizontal actúan, la nor-mal que no realiza trabajo, el peso quetampoco realiza trabajo y la fuerza elásti-ca del resorte que es conservativa y actúahasta el punto O. Así, el sistema es conser-vativo, esto es, se conserva la energía del
sistema cuando se mueve sobre la superfi-cie horizontal. Matemáticamente
12 mv2
A = 12 kd2.
De este modo, cuando pasa por el punto Atiene una rapidez
vA =
√km
d.
Por lo tanto, entre mayor sea la deforma-ción inicial del resorte la rapidez en A esmayor, ya que existe una proporcionali-dad directa entre la velocidad y la defor-mación.
b) Entre A y B sólo la componente delpeso mg sen θ realiza un trabajo negativosobre el bloque, ya que se opone a su des-plazamiento.
N
mg
qA
B
Movim
iento
Ep=0
Como el sistema sigue siendo conser-vativo, con vB = 0
mgSsenθ = 12 kd2,
donde S es el máximo desplazamiento delbloque sobre el plano inclinado; así
S =kd2
2mgsenθ.
De este resultado se tiene que para una de-formación fija del resorte, a mayor ángulode inclinación menor es el desplazamientodel bloque sobre el plano inclinado. Aho-ra, para un ángulo de inclinación fijo, en-tre mayor sea la deformación inicial delresorte mayor es el desplaza-miento delbloque sobre el plano inclinado.
c) Reemplazando los valores dados, seencuentra que la rapidez cuando pasa porel punto A y el máximo desplazamientosobre el plano inclinado son, respectiva-mente
vA = 2.8 ms−1,S = 0.7 m,

16 CAPÍTULO 3. TRABAJO Y ENERGÍA
Pregunta¿Entre qué puntos la velocidad del bloquees la misma que en A? ¿Por qué?
Ejercicio 3.3.Comprobar que las dimensiones yunidades de las cantidades obtenidas enel ejemplo 3.5, son correctas.
Ejercicio 3.4.Un pequeño bloque de masa m se sueltasobre un plano inclinado liso, desde unaaltura h respecto a su base. Luego de lle-gar a la base del plano inclinado, el bloquedesliza sobre un superficie horizontal lisahasta que se encuentra con un resorte deconstante elástica k. a) Halle la rapidez delbloque cuando pasa por el punto A. b)Encuentre la máxima deformación del re-sorte. c) Determine el valor de las canti-dades obtenidas en los numerales anterio-res si k = 100 N · m−1, m = 5 g, h = 5 cm yθ = 35o.
m
OEpg= 0q
A
k
B
h
3.8. Fuerzas no conservativas
Se considera una partícula sometida a la acciónde varias fuerzas simultáneamente aplicadas. Sial evaluar el trabajo realizado por estas fuerzasen una trayectoria cerrada, se encuentra que esdiferente de cero, se tiene que al menos hay unafuerza que no permite que la energía se con-serve, es decir, la energía mecánica se disipa yde manera no recuperable. A las fuerzas de estetipo se les conoce como fuerzas no conservativas.
La experiencia muestra que cuando se lanzaun cuerpo sobre una superficie horizontal ru-gosa, el cuerpo pierde toda su energía mecánicaque se transforma en calor y hace que las super-ficies en contacto se calienten. Por ello, la fuerzade fricción es una fuerza no conservativa.
En general, si sobre una partícula actúan si-multáneamente fuerzas conservativas y no con-servativas se tiene que el trabajo total, realizadopor todas las fuerzas, es dado por
WT = Wc + Wnc ,
donde Wc es el trabajo realizado por las fuerzasconservativas y Wnc el efectuado por las fuerzasno conservativas. Además, como siempre esválido que el trabajo total, realizado por todaslas fuerzas, está dado por WT = ∆Ek, y para elcaso de las fuerzas conservativas está dado porWc = −∆Ep, se tiene que el trabajo realizadopor las fuerzas no conservativas se puede ex-presar en la forma
Wnc = ∆Ek + ∆Ep
= EB − EA = ∆E. (3.20)
Cuando se determina el trabajo realizado porla fuerza de fricción, este es negativo, o sea, laenergía total disminuye. Así, la ecuación (3.20)da la pérdida de energía total, debida a lasfuerzas no conservativas. En cualquier caso,donde se presenten fuerzas no conservativas,representa una transformación de energía. En elcaso de la fuerza de fricción, la energía mecáni-ca se transforma en energía calórica. Este temase tratará en la unidad de Termodinámica.
Ejemplo 3.6.Una partícula de masa m se suelta desdeel punto A del carril mostrado en la figu-ra. Analizar el comportamiento energéticode la partícula mientras se encuentra enmovimiento sobre el carril, cuando a) Nose considera la fricción. b) Se presenta fric-ción entre las superficies en contacto.
A
B CEp = 0
Solucióna) Entre A y B las fuerzas que actúan sonel peso y la normal. La normal no realizatrabajo por ser perpendicular al desplaza-miento y el peso, que es una fuerza conser-vativa, realiza trabajo. De este modo, entre

3.9. DERIVADA DIRECCIONAL Y ENERGÍA POTENCIAL 17
A y B el sistema es conservativo, es decir,la energía total de la partícula se conserva.De acuerdo con esto, mientras la partícu-la desciende la energía potencial gravita-cional se transforma en energía cinética. Apartir del punto B, ni la normal ni el pesorealizan trabajo, o sea que el sistema siguesiendo conservativo, de tal forma que elcuerpo se mueve con velocidad constan-te para garantizar que la energía total seconserve en esta parte de la trayectoria.
b) Cuando se presenta fricción en-tre las superficies en contacto, el sistemaya no es conservativo en ninguno de lostramos de la figura. En este caso, mientrasdesciende entre A y B, disminuye la ener-gía potencial transformándose parte deella en energía cinética y el resto disipán-dose en forma de calor, lo que conlle-va a una disminución de la energía total.Igualmente, a partir de B, donde sólo setiene energía cinética, la energía continúadisipándose en calor hasta que la partícu-la alcanza un estado de reposo. En sínte-sis, toda la energía mecánica que tenía lapartícula inicialmente, se disipa completa-mente en calor.
Ejemplo 3.7.Mediante el pequeño bloque de masa m,un resorte de constante k sufre una de-formación d, como se muestra en la figu-ra. Una vez que el bloque es dejado en li-bertad, se mueve sobre la superficie hori-zontal hasta el punto A, a partir del cualasciende por un plano inclinado. El bloqueno está adherido al resorte, suponga queel coeficiente de fricción entre las superfi-cies en contacto es µ y que la distancia OAes 2d. a)Halle la rapidez del bloque cuan-do pasa por el punto A. b) Encuentre eldesplazamiento máximo del bloque sobreel plano inclinado. c) Halle el valor de lascantidades obtenidas en los numerales an-teriores si k = 100Nm−1, m = 5g, d = 2cmy θ = 35o y µ = 0.4.
m
OE
pg= 0q
A
kd
B
Solución
a) En el trayecto horizontal, a diferenciadel ejemplo 3.5, el sistema no es conser-vativo ya que se presenta fricción sobre elbloque y la no conservación de la energíaexige que para este caso
−3µmgd = 12 mv2
A − 12 kd2,
de donde se encuentra que la rapidez en elpunto A es
vA =
√km
d2 − 6µgd.
Al comparar este resultado con elobtenido en el ejemplo 3.5, se tiene eltérmino adicional −6µgd, que reduce larapidez como consecuencia de la fricciónque actúa sobre el bloque. Además, se pre-senta una restricción respecto a la rapidez,y es que sólo son posibles magnitudes develocidad reales si se cumple la condición
kdm
≥ 6µg.
b) En el trayecto AB, el sistema sigue sien-do no conservativo, lo que permite encon-trar que el máximo desplazamiento sobreel plano inclinado es
S =kd2 − 6µmgd
2mg(senθ + µcosθ),
donde aparece el mismo término adicionaldebido a la fricción. En este caso, el despla-zamiento tiene significado físico si el tér-mino del numerador es positivo.
c) Reemplazando valores se tiene quela rapidez y el máximo desplazamiento,respectivamente, están dados por
vA = 2.7 m · s−1,S = 0.4 m.
3.9. Derivada direccional y ener-gía potencial
En esta sección se determina otra relación im-portante entre una fuerza conservativa y suenergía potencial asociada. Para ello se conside-ra la fuerza conservativa F que actúa sobre lapartícula, de la figura 3.16.

18 CAPÍTULO 3. TRABAJO Y ENERGÍA
(Conservativa)dr qF
Figura 3.19: La fuerza conservativa F y dr formanun ángulo θ.
Teniendo en cuenta la definición de trabajodada por la ecuación (3.4) y la definición defuerza conservativa dada por la ecuación (3.15),el trabajo realizado por la fuerza conservativaen un intervalo de tiempo dt se puede expresaren la forma
dW = F cos θdS= −dEp.
Ahora, a partir de la figura 3.19, se obtiene
FT = F cos θ
= −dEp
dS.
De este modo, cuando se conoce la forma fun-cional de la energía potencial con la coordenadaS, esto es, Ep(S), es posible determinar la com-ponente de la fuerza en la dirección del despla-zamiento, correspondiente a esta coordenada.Esto es, la componente de la fuerza en una di-rección determinada, es igual a menos la deriva-da de la energía potencial con respecto a la coor-denada en esa dirección; por ello a esta derivadase le conoce como derivada direccional de la ener-gía potencial Ep(S).
En este punto se debe hacer una distinciónen lo referente a la derivada, ya que la ener-gía potencial asociada a una fuerza conservati-va puede ser función de una, dos ó tres coor-denadas, dependiendo que el movimiento ocu-rra en una, dos ó tres dimensiones, es decir,depende del sistema que se esté analizando.Así, mientras en el movimiento de caída librela energía potencial depende sólo de la coorde-nada vertical, en el caso del movimiento de la
tierra alrededor del sol depende de dos coor-denadas, y en general, para movimiento en tresdimensiones puede depender de tres coordena-das, tales como x, y, z.
En el caso simple de movimiento en una di-mensión, donde Ep = Ep(x), es posible obte-ner la fuerza conservativa que actúa sobre lapartícula paralelamente al eje x, mediante la ex-presión
Fx = −dEp(x)
dx,
donde se emplea el concepto matemático dederivada total, al utilizar el operador diferen-cial d
/dx. En dos dimensiones, por ejemplo
para movimiento en el plano xy, la energía po-tencial asociada a la respectiva fuerza conser-vativa puede ser de la forma Ep = Ep(x,y),donde simultáneamente aparecen las variablesx, y. Así, mediante el concepto de derivada di-reccional es posible determinar las componentesde la fuerza en las direcciones x y y. Para ellose emplea el concepto de derivada parcial, quepermite derivar la función respecto a una de lasvariables y tomar la otra variable como si fuerauna constante. En este caso se utiliza el símbolo∂ en lugar de la letra d para una dimensión. Deeste modo, las componentes rectangulares de lafuerza conservativa están dadas por
Fx = −∂E(x,y)∂x
con y = Constante,
Fy = −∂E(x,y)∂y
con x = Constante.
Aunque se ha tratado la forma funcional de laenergía potencial en coordenadas rectangulares,lo anterior también es válido para el caso decoordenadas polares, como se muestra posteri-ormente.
Cuando se trata el movimiento de unapartícula en tres dimensiones, la energía poten-cial en coordenadas rectangulares tiene la for-ma funcional Ep = Ep(x,y,z). Por consiguiente,al generalizar se tiene que las componentes rec-tangulares de la fuerza conservativa correspon-

3.9. DERIVADA DIRECCIONAL Y ENERGÍA POTENCIAL 19
diente están dadas por
Fx = −∂Ep(x,y,z)
∂x, con y y z constantes,
Fy = −∂Ep(x,y,z)
∂y, con x y z constantes,
Fz = −∂Ep(x,y,z)
∂z, con x y y constantes,
donde de nuevo se ha empleado el concepto dederivada parcial. A diferencia del caso de dosdimensiones, cuando se deriva respecto a unavariable se toman las otras dos variables comosi fueran constantes.
Continuando con el concepto de derivada di-reccional, al tener en cuenta las relaciones an-teriores, la fuerza conservativa en componentesrectangulares se expresa en la forma
F = −∂Ep(x,y,z)
∂xi −
∂Ep(x,y,z)∂y
j −∂Ep(x,y,z)
∂zk,
o equivalentemente
F = −(
∂
∂xi +
∂
∂yj +
∂
∂zk)
Ep(x,y,z),
donde se define el operador nabla como
∇ ≡ ∂
∂xi +
∂
∂yj +
∂
∂zk.
O sea,
F = −grad Ep
= −∇Ep.
Así, la fuerza es igual a menos el gradiente de laenergía potencial. En general, al aplicar el ope-rador nabla a un escalar se obtiene un vector, ya la operación correspondiente se le conoce co-mo gradiente. Por otro lado, este resultado esde validez general independiente del sistema decoordenadas que se esté empleando, solo que laforma del operador es diferente para cada sis-tema.
Casos particulares1. En el caso gravitacional, como se muestra enla figura 3.20, la energía potencial gravitacionalestá dada por Ep(y) = mgy, entonces
Fy = −dEp(y)
dy= −mg,
que corresponde al negativo de la magnitud delpeso de la partícula, donde el signo menos in-dica que esta fuerza apunta en sentido verticalhacia abajo, como es de esperarse.
y
xOTierra
Movimientomg
Figura 3.20: Fuerza gravitacional.
Como ocurre en el caso general, la fuerzagravitacional es perpendicular a las superficiesdonde la energía potencial es constante y que seconocen como superficies equipotenciales o deigual potencial.
En la figura 3.20, la superficie de la tierra esuna superficie equipotencial, igual que las su-perficies paralelas a la superficie terrestre, y lafuerza es perpendicular a dichas superficies.2. Para un sistema masa-resorte, la función deenergía potencial asociada a la partícula de lafigura 3.21, está dada por Ep(x) = 1
2 kx2, en-tonces la fuerza elástica correspondiente estádada por
Fx = −dEp(x)
dx= −kx,
que no es mas que la ley de Hooke.
O
x
m
k
Figura 3.21: Fuerza elástica de un resorte.
3. En el caso de movimiento en un plano, em-pleando las coordenadas polares r y θ, si seconoce la energía potencial Ep(r,θ), de acuerdocon la figura 3.22 se tiene- En la dirección radial la componente de lafuerza es Fr y el desplazamiento respectivo

20 CAPÍTULO 3. TRABAJO Y ENERGÍA
r
q
O
Fr
Fq
F
Figura 3.22: Fuerza radial y transversal.
dS = dr, entonces,
Fr = −∂Ep(r,θ)
∂r.
- Ahora, en la dirección transversal la compo-nente de la fuerza es Fθ y el desplazamiento co-rrespondiente es dS = rdθ, así, en esta direcciónla componente de la fuerza se obtiene mediantela expresión
Fθ = −1r
∂Ep(r,θ)∂θ
.
En sistema tales como, tierra-luna, sol-tierra, oel modelo de Bohr para el átomo de hidrógeno,la energía potencial asociada sólo depende de ladistancia de separación r entre los cuerpos inte-ractuantes, o sea, es independiente de la coorde-nada θ. De este modo, la componente transver-sal es cero, y la fuerza al tener únicamente com-ponente radial, es tal que su línea de acciónpasa por un punto fijo correspondiente al cen-tro de fuerza. En los casos que se presenta es-ta situación, se dice que la fuerza es central. Así,para una fuerza central la energía potencial sólodepende de la distancia de la partícula al centrode fuerza, lo que permite afirmar que las fuerzascentrales son conservativas.
Para fuerzas no centrales se tiene una compo-nente en la dirección transversal y la magnituddel vector |r × F| está dada por
|r × F| = Fθr =∂Ep(r,θ)
∂θ.
Ahora, como
r × F =dLdt
,
se tiene que al depender la energía potencial dela coordenada θ el momento angular varía conel tiempo mientras la partícula se encuentra enmovimiento. Por lo tanto, siempre que la ener-gía potencial depende de θ, el producto r × F esdiferente de cero, lo que genera un cambio en elvector momento angular en dirección perpen-dicular al plano del ángulo θ. 3.10.
3.10. Movimiento rectilíneo bajofuerzas conservativas
Cuando sólo actúan fuerzas conservativas so-bre una partícula, mediante consideraciones deenergía, es posible resolver completamente elproblema de la dinámica, es decir, se puede de-terminar la posición de la partícula en funcióndel tiempo. Como ejemplo, se considera unapartícula de masa m que se mueve sobre unatrayectoria coincidente con el eje x, debido a laacción de una fuerza conservativa. Esto permiteasociarle una función de energía potencial de laforma Ep(x).
Como el sistema es conservativo, la ley deconservación de la energía exige que
E = 12 mv2 + Ep(x)
= Constante. (3.21)
Partiendo de la ecuación (3.21) se puede encon-trar la posición de la partícula en función deltiempo, siempre y cuando se conozca la formafuncional de la energía potencial con la posiciónx. Ahora, si se cumplen las condiciones impues-tas, se despeja la velocidad de la ecuación (3.21),obteniéndose la expresión
dxdt
=
√2m{E − EP(x)}, (3.22)
donde se ha empleado la definición de veloci-dad.
Finalmente, partiendo de la ecuación (3.22),separando variables e integrando, se llega a laexpresión√
m2
x∫xo
dx
{E − Ep(x)}1/2 = t, (3.23)

3.11. CURVAS DE ENERGÍA POTENCIAL 21
donde por conveniencia se ha tomado to = 0.De este modo, mediante la ecuación (3.23) es
posible determinar la posición de la partículasi se conoce la forma como varía la energíapotencial con la coordenada x.
Ejemplo 3.8.Obtenga, con ayuda de la ecuación (3.23),la posición en función del tiempo para unapartícula de masa m que se lanza desdela tierra verticalmente hacia arriba con ve-locidad vo.Solución
y
OTierra
mE
p= 0
vo
De acuerdo con el sistema de refe-rencia mostrado en la figura, la energíapotencial en función de coordenada y esEp(y) = mgy. De esta forma, la ecuación(3.23) adquiere la forma
√m2
y∫0
dy
[E − mgy]1/2 = t.
Donde luego de integrar, evaluar y simpli-ficar, es posible llegar a
y(t) =
√2Em
t − 12 gt2.
Como en el instante de lanzar la partícula,to = 0, la energía total E es completamentecinética, se tiene que E = 1
2 mv2o, lo cual in-
dica que el coeficiente del tiempo corres-ponde a la velocidad inicial, es decir,
y(t) = vot − 12 gt2,
que es la ecuación cinemática de posi-ción para un cuerpo que se mueve verti-calmente sometido a la aceleración de lagravedad, esto es en caída libre, como seencontró en la unidad de cinemática deuna partícula por un método diferente.
Ejemplo 3.9.Obtenga la ecuación cinemática de posi-ción para una partícula de masa m que semueve sobre una superficie horizontal lisay sujeta a un resorte de constante elásticak, como se ilustra en la figura.
k
O
x
m
Movimiento
SoluciónEn este caso, la función de energía poten-cial está dada por Ep(x) = 1
2 kx2. Reem-plazando en la ecuación (3.23), se obtiene
(m/2)1/2x∫
0
dx
[E − 12 kx2]1/2 = t,
donde luego de integrar, evaluar y simpli-ficar se llega a la expresión
x(t) =
√2Ek
sen
[(km
)1/2t
].
que tiene la forma x(t) = Asenωt, con
A =√
2Ek , y ω = (k/m)1/2. Este resul-
tado corresponde al movimiento periódi-co, o más precisamente al movimiento ar-mónico simple, adquirido por un cuerpocuando se encuentra sujeto a un resorte.
3.11. Curvas de energía potencial
En muchas situaciones físicas, para sistemasconservativos, es posible conocer gráficamentela forma como varía la energía potencial conlas coordenadas. Su conocimiento es de granimportancia ya que permite obtener informa-ción cualitativa sobre el comportamiento delsistema, incluyendo los tipos de movimientoque se pueden presentar. Primero se analiza elcaso particular de un sistema masa-resorte yluego se hace un análisis más general.
1. Sistema masa-resorte. Para el caso de un cuerposometido a la fuerza elástica de un resorte, sis-tema conocido como oscilador armónico, la figura
22 CAPÍTULO 3. TRABAJO Y ENERGÍA
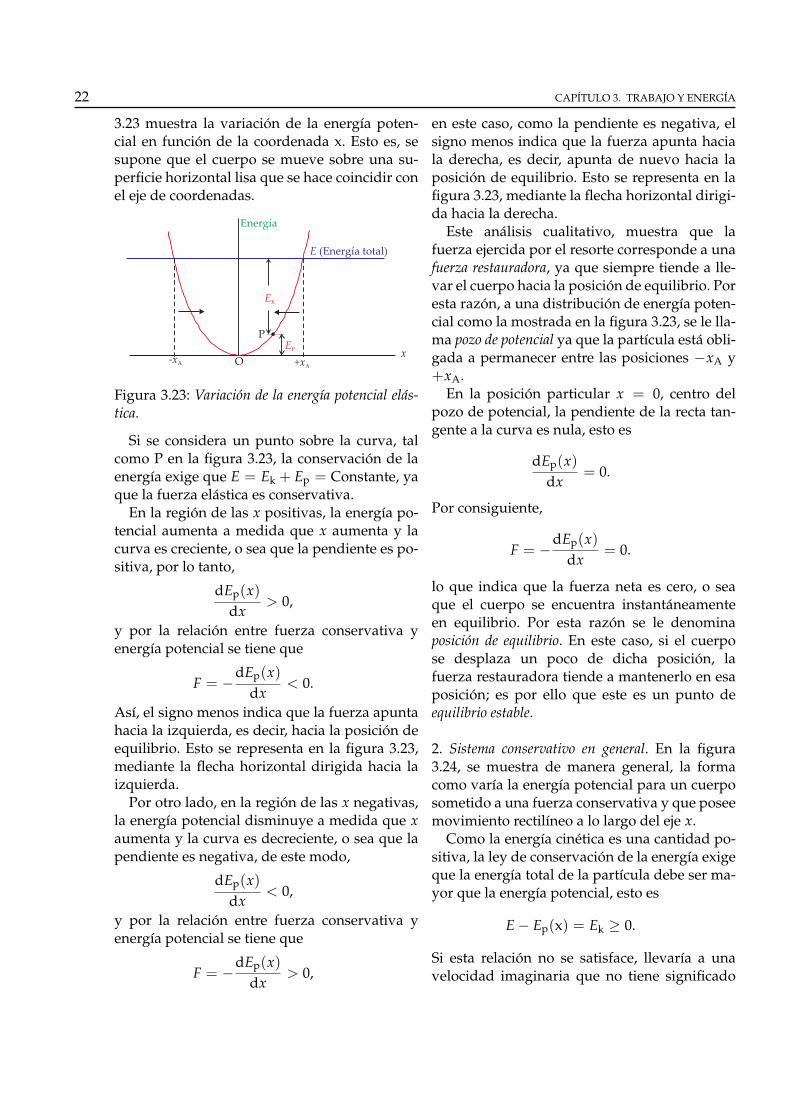
3.23 muestra la variación de la energía poten-cial en función de la coordenada x. Esto es, sesupone que el cuerpo se mueve sobre una su-perficie horizontal lisa que se hace coincidir conel eje de coordenadas.
Energía
E (Energía total)
x+xA
-xA
EP
EK
O
P
Figura 3.23: Variación de la energía potencial elás-tica.
Si se considera un punto sobre la curva, talcomo P en la figura 3.23, la conservación de laenergía exige que E = Ek + Ep = Constante, yaque la fuerza elástica es conservativa.
En la región de las x positivas, la energía po-tencial aumenta a medida que x aumenta y lacurva es creciente, o sea que la pendiente es po-sitiva, por lo tanto,
dEp(x)dx
> 0,
y por la relación entre fuerza conservativa yenergía potencial se tiene que
F = −dEp(x)
dx< 0.
Así, el signo menos indica que la fuerza apuntahacia la izquierda, es decir, hacia la posición deequilibrio. Esto se representa en la figura 3.23,mediante la flecha horizontal dirigida hacia laizquierda.
Por otro lado, en la región de las x negativas,la energía potencial disminuye a medida que xaumenta y la curva es decreciente, o sea que lapendiente es negativa, de este modo,
dEp(x)dx
< 0,
y por la relación entre fuerza conservativa yenergía potencial se tiene que
F = −dEp(x)
dx> 0,
en este caso, como la pendiente es negativa, elsigno menos indica que la fuerza apunta haciala derecha, es decir, apunta de nuevo hacia laposición de equilibrio. Esto se representa en lafigura 3.23, mediante la flecha horizontal dirigi-da hacia la derecha.
Este análisis cualitativo, muestra que lafuerza ejercida por el resorte corresponde a unafuerza restauradora, ya que siempre tiende a lle-var el cuerpo hacia la posición de equilibrio. Poresta razón, a una distribución de energía poten-cial como la mostrada en la figura 3.23, se le lla-ma pozo de potencial ya que la partícula está obli-gada a permanecer entre las posiciones −xA y+xA.
En la posición particular x = 0, centro delpozo de potencial, la pendiente de la recta tan-gente a la curva es nula, esto es
dEp(x)dx
= 0.
Por consiguiente,
F = −dEp(x)
dx= 0.
lo que indica que la fuerza neta es cero, o seaque el cuerpo se encuentra instantáneamenteen equilibrio. Por esta razón se le denominaposición de equilibrio. En este caso, si el cuerpose desplaza un poco de dicha posición, lafuerza restauradora tiende a mantenerlo en esaposición; es por ello que este es un punto deequilibrio estable.
2. Sistema conservativo en general. En la figura3.24, se muestra de manera general, la formacomo varía la energía potencial para un cuerposometido a una fuerza conservativa y que poseemovimiento rectilíneo a lo largo del eje x.
Como la energía cinética es una cantidad po-sitiva, la ley de conservación de la energía exigeque la energía total de la partícula debe ser ma-yor que la energía potencial, esto es
E − Ep(x) = Ek ≥ 0.
Si esta relación no se satisface, llevaría a unavelocidad imaginaria que no tiene significado

3.11. CURVAS DE ENERGÍA POTENCIAL 23
x
Energía
E xP( )
E1
E2
E3
E4
xo x1
Eo
x2x1' x3
Figura 3.24: Variación general de la energía poten-cial, Ep(x) .
físico. A las regiones donde se presenta estasituación, se les conoce como regiones clásica-mente prohibidas.
Así, para que la relación se pueda satisfacer,es necesario que
E ≥ Ep(x). (3.24)
En la figura 3.24, la ecuación (3.24) se satisfacepara energías totales mayores que Eo, esto es, laenergía mínima de la partícula con significadofísico es Eo, pues para energías menores la ener-gía potencial sería mayor que la energía total.
Cuando la partícula adquiere la energía to-tal Eo, toda su energía es potencial y su energíacinética es nula, es decir, la partícula se encuen-tra en reposo en xo si E = Eo.
Para una energía mayor que Eo, tal comoE1 en la figura 3.24, la partícula sólo se puedemover entre las posiciones x1 y x,
1 ya que úni-camente entre estos dos puntos se cumple lacondición impuesta por la ecuación (3.24). Deeste modo, si la partícula parte de la posiciónxo, su velocidad disminuye al acercarse a x1 óx,
1, donde la partícula se detiene instantánea-mente y es obligada a cambiar el sentido demovimiento. Estas dos posiciones extremas seconocen como puntos de retorno del movimientoy la partícula con energía E1 se comporta comoen el caso de un sistema masa-resorte, esto es,se encuentra en un pozo de potencial.
Para la energía mayor E2, en la figura 3.24se presentan cuatro puntos de retorno, o sea, lapartícula puede oscilar en cualquiera de los dospozos de potencial, con la condición de que si
se encuentra en un pozo no puede pasar al otro.¿Por qué?
Para la energía E3, se tienen dos puntos de re-torno y mientras la partícula esté en movimien-to entre ellos, la energía cinética aumenta si laenergía potencial disminuye y viceversa.
Para una energía E4 sólo hay un puntode retorno. Si la partícula inicialmente tienemovimiento en el sentido negativo de las x, sedetiene en el punto de retorno y luego adquieremovimiento en el sentido positivo de las x, au-mentando su velocidad al disminuir la energíapotencial y la disminuirá al aumentar la energíapotencial.
Como se analizó antes, en xo la energía po-tencial es mínima, por lo que la pendiente de larecta tangente a la curva es cero y por ende lafuerza es cero. Si la partícula se encuentra ini-cialmente en reposo en xo, permanecerá en eseestado mientras no se incremente su energía to-tal. De este modo, si la partícula se mueve lige-ramente en cualquier sentido, esta tiende a re-gresar y oscilará respecto a la posición de equi-librio. A la posición xo , se le conoce como unaposición de equilibrio estable.
Por otro lado, en x2, la energía potencial sehace máxima, o sea, la pendiente de la recta tan-gente a la curva es cero y de nuevo la fuerza escero. Si la partícula está inicialmente en reposoen este punto, permanecerá en reposo; pero si lapartícula se mueve a partir de esta posición, porpequeño que sea el desplazamiento, la fuerzatiende a alejarla aún más de la posición de equi-librio; por ello a esta posición se le denomina deequilibrio inestable.
En la vecindad de x3, la energía potencial esconstante y por tanto la pendiente de la rectatangente a la curva es cero o sea que la fuerzanuevamente es cero. Aquí se tiene un intervalode equilibrio indiferente y la partícula se quedarádonde se le coloque, al no actuar ninguna otrafuerza sobre ella.
En síntesis, si se conoce la forma como varíala energía potencial con la posición, en la regióndonde se mueve un cuerpo, es posible ob-tener mucha información cualitativa sobre sumovimiento.
Igual que en el caso del oscilador armónico, si

24 CAPÍTULO 3. TRABAJO Y ENERGÍA
la curva crece con el incremento de x, la fuerzaestá dirigida hacia la izquierda, es decir, es ne-gativa, y si la curva decrece con el incrementode x, la fuerza estará dirigida hacia la derecha,o sea que es positiva. El sentido de la fuerza estáindicado en la figura 3.24 por medio de vectoreshorizontales.
3.12. Colisiones
Se habla de una colisión, cuando ocurre una in-teracción entre dos o más partículas, en un in-tervalo muy corto de tiempo y en una regiónlimitada del espacio.
En toda colisión, la interacción entre laspartículas altera su movimiento y en general sepresenta un intercambio de momento lineal yde energía. Lo anterior, no significa necesaria-mente que las partículas hayan estado en con-tacto físico. En general, se quiere indicar que haocurrido una interacción cuando las partículasestaban próximas como se muestra en la regiónencerrada de la figura 3.25 para el caso de dospartículas. Cuando se presenta contacto físicoentre las partículas, se acostumbra denominar lacolisión como un choque, como ocurre por ejem-plo entre dos bolas de billar.
En algunos casos, las partículas antes de unchoque son diferentes a las partículas despuésdel choque, como ocurre cuando chocan el áto-mo A con la molécula BC, dando un resultadofinal, por ejemplo, de aparecer la molécula ABy el átomo C, esto es A + BC ↔ AB + C; es-ta es la forma como ocurren muchas reaccionesquímicas. En cambio, se dice que ocurre una dis-persión, cuando en un choque las partículas ini-ciales son las mismas partículas finales.
Región decolisión
m1
m1'
m2
m2'
v1
v2v2'
v1'
Figura 3.25: Colisión entre dos partículas.
Como en una colisión únicamente inter-vienen fuerzas internas, para el sistema forma-do por las partículas que interactúan, tanto elmomento lineal total del sistema como la ener-gía total del sistema se conservan.
Así, el momento lineal total de un sistema es igualantes y después de una colisión. Matemáticamentey para el caso de dos partículas se tiene
p1 + p2 = p,1 + p,
2, (3.25)
donde p1 y p2 son los momentos lineales decada una de las partículas antes de la colisión,p,
1 y p,2 los momentos lineales de cada una de
las partículas después de la colisión.Comúnmente, la ecuación (3.25) se escribe en
la forma
m1v1 + m2v2 = m,1v,
1 + m,2v,
2,
donde m1, m2son las masas de las partículasantes de la colisión y m,
1, m,2las masas después
de la colisión.En general, uno de los objetivos al analizar
una colisión es poder relacionar las velocidadesde las partículas antes y después que esta ocu-rra. Para el caso de una colisión en dos dimen-siones y entre dos partículas, si se conocen lasvelocidades antes de la colisión se tienen cua-tro incógnitas, correspondientes a las compo-nentes de las velocidades de cada partícula enlas dos dimensiones; pero como la conservacióndel momento lineal sólo proporciona dos ecua-ciones, una en cada dirección, es necesario obte-ner más información y para ello se recurre a laconservación de la energía.
Para considerar la conservación de la energía,se define el factor de colisión Q en la forma
Q ≡ E′k − Ek,
donde Ek y E,k son, respectivamente, las ener-
gías cinéticas totales del sistema antes y des-pués de la colisión.
Para el caso de dos partículas que colisionan,el factor de colisión adquiere la forma
Q = ( 12 m,
1v,21 + 1
2 m,2v,2
2 )
−( 12 m1v2
1 +12 m2v2
2). (3.26)
Dependiendo del valor en el factor de colisión,puede ocurrir

3.12. COLISIONES 25
i) Que la colisión sea elástica, esto se presentacuando Q = 0 y en este caso, no hay cam-bio en la energía cinética del sistema, o sea,E
′k = Ek.
ii) Que la colisión sea inelástica, ello se presen-ta cuando Q ̸= 0 y en esta situación, laenergía cinética aumenta si Q > 0 o dis-minuye si Q < 0 . En el primer caso, laspartículas al colisionar desprenden partede su energía interna y en el segundo ab-sorben parte de la energía mecánica inter-cambiada en la colisión.
Si después del choque sólo aparece una partícu-la, se dice que se tiene una colisión completamenteinelástica o plástica.
El parámetro de impacto b, es una cantidad quepermite saber si una colisión ocurre en una odos dimensiones. Este parámetro está dado porla distancia de separación b entre la línea demovimiento de la partícula incidente y la líneaparalela que pasa por la otra partícula, como semuestra en la figura 3.26.
bm
1
m2
m1
m2
v1
v1'
v2= 0
v2'
j
Figura 3.26: Parámetro de impacto.
De este modo, el parámetro de impacto es ladistancia por la cual una colisión deja de serfrontal. Una colisión frontal, o en una dimen-sión, corresponde a b = 0 y valores mayores quecero para b, indican que la colisión es oblicua, oen dos dimensiones.
Ejemplo 3.10.Como se muestra en la figura, un bloquede masa m1 y con velocidad v1, chocafrontalmente con un segundo bloque demasa m2 inicialmente en reposo. Analice lacolisión de los bloques si esta es a) comple-tamente inelástica, b) elástica. c) Sabien-do que m1 = 300 g, m2 = 700 g y v1 =
10 m · s−1, halle los valores de las canti-dades obtenidas en los numerales anterio-res.
m1
m2
v1 v
2= 0
SoluciónComo en toda colisión se conserva el mo-mento lineal total del sistema, la ecuación(3.25) adquiere la forma
m1v1 = m1v,1 + m2v,
2, (1)
donde se ha tomado como positivo el sen-tido inicial de movimiento para m1.
Por otro lado, por la conservación dela energía, la ecuación (3.26) para el factorde colisión, se transforma en
Q =(
12 m1v,
12 + 1
2 m2v,2
2)− 1
2 m1v21. (2)
a) Cuando la colisión es completamenteinelástica, después del choque aparece só-lo una partícula de masa m1 + m2 con ve-locidad v,
1 = v,2 = V.
Así, mediante la ecuación (1) se en-cuentra que la velocidad final del sistematiene la forma
V =m1
m1 + m2v1. (3)
Por consiguiente, independientemente dela relación entre las masas m1 y m2, des-pués de la colisión plástica, la velocidaddel sistema es menor y apunta en el mismosentido que la velocidad con la cual incideel bloque de masa m1.
Igualmente, para el factor de colisión,la ecuación (2) permite llegar a
Q = − m1m2
2(m1 + m2)v2
1. (4)
Equivalentemente, en esta colisión, partede la energía cinética del sistema se trans-forma en energía interna ya que Q < 0, sindepender de la relación entre las masas m1y m2, o sea que la colisión es inelástica.
b) Si la colisión es elástica, el factor decolisión es nulo y las ecuaciones (1) y (2)se pueden escribir, respectivamente, en laforma
m1(v,1 − v1) = −m2v,
2, (5)

26 CAPÍTULO 3. TRABAJO Y ENERGÍA
m1(v,1 − v1)(v
,1 + v1) = −m2v,
22. (6)
Dividiendo las ecuaciones (5) y (6) se ob-tiene
v,1 + v1 = v,
2. (7)
Finalmente, por medio se las ecuaciones(5) y (7), luego de simplificar se encuen-tra que las velocidades de los bloques des-pués del choque son
v,1 =
m1 − m2
m1 + m2v1
v,2,=
2m1
m1 + m2v1. (8)
En esta colisión, la velocidad del bloquem2 tiene el mismo sentido que la velocidadde incidencia de m1. En cambio, el senti-do de movimiento de m1 después de lacolisión, depende de la relación entre lasmasas de los bloques, esto es, si m1 > m2el bloque de masa m1 se mueve en el mis-mo sentido que m2; si m1 < m2 el bloquede masa m1 se mueve en sentido opuestoa m2, y si m1 = m2 el bloque de masa m1queda en reposo después de la colisión.
c) Reemplazando valores, con m1 =0.3 kg, m2 = 0.7 kg, se tiene
- Para la colisión completamente ine-lástica, por las ecuaciones (3) y (4), se en-cuentra
V = 3.0 m · s−1,Q = −10.5 J.
- Para la colisión elástica, la ecuación (8)lleva a los valores
v,1 = −4.0ms−1,
v,2 = 6.0ms−1.
El signo menos en la velocidad de m1, sig-nifica que este bloque rebota en el choquepor cumplirse la relación m1 < m2.
Ejercicio 3.5.Como se muestra en la figura, un bloquede masa m1 y con velocidad v1 hacia laderecha, choca frontalmente con un se-gundo bloque de masa m2 que inicial-mente se mueve hacia la izquierda convelocidad v2 = −v1. Analice la colisiónde los bloques si esta es a) completa-mente inelástica, b) elástica. c) Sabiendo
que m1 = 300 g, m2 = 700 g y v1 =
10 m · s−1, halle los valores de las canti-dades obtenidas en los numerales anterio-res.
m1
m2
v1
v2
Ejemplo 3.11.El cuerpo de la figura de masa m1 y veloci-dad v1, tiene una colisión oblicua con elcuerpo de masa m2 inicialmente en reposo.a) Determine la magnitud de la veloci-dad de los bloques inmediatamente des-pués del choque, si las masas después dela colisión se mueven en las direccionesmostradas. b) Resolver para m1 = 0.2kg,m2 = 0.3kg, v1 = 15.0ms−1, φ1 = 30o yφ=40o. ¿Es la colisión elástica o inelástica?
j2
m1
m2
m1
m2
v1
v1'
v2= 0
v2'
x
y
j1
Solucióna) Como el momento lineal total de lasdos partículas se conserva en la colisión,la ecuación (3.25) adquiere la forma
m1v1 = m1v,1 + m2v,
2.
Descomponiendo las velocidades en suscomponentes rectangulares, se obtienepara las direcciones x y y, respectiva-mente, las expresiones
m1v1 = m1v,1cosφ1 + m2v,
2cosφ2, (1)
0 = −m1v,1senφ1 + m2v,
2senφ2. (2)
Resolviendo las ecuaciones (1) y (2), se ob-tiene
v,1 =
senφ2
sen(φ1 + φ2)v1,
v,2 =
m1
m2
senφ1
sen(φ1 + φ2)v1.
De estos resultados se tiene que para va-lores fijos de φ1 y φ2, la velocidad de m1

3.13. MOVIMIENTO BAJO FUERZAS CENTRALES CONSERVATIVAS 27
después del choque es independiente dela masa de los cuerpos, mientras que param2 la velocidad sí de-pende de la relaciónentre las masas de los cuerpos.
b) Reemplazando valores se encuentraque la magnitud de las velocidades son
v,1 = 10.3ms−1,
v,2 = 5.3ms−1.
Al calcular el factor de colisión, se encuen-tra que la colisión es inelástica ya que Q =
−7.7J. De este modo, parte de la energíamecánica se transforma en energía internade las partículas.
3.13. Movimiento bajo fuerzascentrales conservativas
Como se trata de fuerzas centrales conservati-vas, estas sólo tienen componente en la direc-ción radial, es decir, F = F(r).
Se considera una partícula de masa m someti-da a una fuerza central F = F(r), que por serconservativa se le puede asociar una función deenergía potencial dependiente únicamente de ladistancia de la partícula al centro de fuerza, esdecir, Ep = Ep(r). De este modo, la energía totaladquiere la forma
E = 12 mv2 + Ep(r). (3.27)
Como se sabe, la velocidad de la partícula encoordenadas polares se puede expresar en laforma
v2 = v2r + v2
θ ,
donde al emplear las definiciones vr = dr/dt yvθ = rdθ/dt, la velocidad se puede escribir enla forma
v2 =
(drdt
)2
+ r2(
dθ
dt
)2
. (3.28)
En la ecuación (3.28) aparecen las coordena-das polares r y θ. El objetivo en esta secciónes resolver completamente el problema dinámi-co, esto significa determinar las coordenadas enfunción del tiempo, es decir, r(t) y θ(t).
Debido a que la fuerza es central, el momentoangular es una constante del movimiento. Aho-ra, utilizando la definición de momento angulary las expresiones para las componentes de ve-locidad radial y transversal, se encuentra que elmomento angular satisface las expresiones
L = mr2(
dθ
dt
)r2
(dθ
dt
)2
=L2
(mr)2 , (3.29)
donde el momento angular es una constante, es-to es, L = Constante.
Reemplazando la ecuación (3.29) en laecuación (3.28) se encuentra que el cuadrado dela rapidez está dado por
v2 =
(drdt
)2
+L2
(mr)2 . (3.30)
Además, mediante las ecuaciones (3.30) y (3.27)se obtiene para la energía total, la expresión
E = 12 m
(drdt
)2
+L2
2mr2 + Ep(r). (3.31)
Comparando la ecuación (3.31) con la ecuación(3.27) para la energía mecánica total de lapartícula, en el caso de un sistema conserva-tivo, es posible considerar que la partícula enmovimiento está sometida a una energía poten-cial efectiva, en lo que al movimiento radial serefiere, dada por
Ep,eff(r) =L2
2mr2 + Ep(r).
Por otro lado, definiendo el potencial de energíacentrífuga como
Ep,c(r) =L2
2mr2 ,
la fuerza asociada al potencial centrífugo, es-taría dada por
Fc(r) = −dEp,c(r)
dr=
L2
mr3 > 0.
Como Fc > 0, la fuerza asociada al potencialcentrífugo apunta hacia afuera del origen, es de-cir, es una fuerza centrífuga.

28 CAPÍTULO 3. TRABAJO Y ENERGÍA
Aunque se ha llegado a este resultado, real-mente ninguna fuerza centrífuga actúa sobre lapartícula, pues se consideró inicialmente que laúnica fuerza que actúa sobre la partícula se debeal potencial real Ep(r) asociado a la fuerza cen-tral, en el caso de que este sea repulsivo.
Por ello, se puede concluir que la fuerza cen-trífuga Fc es sólo un concepto matemáticamenteútil. Físicamente, este concepto describe la ten-dencia de la partícula, de acuerdo con la ley deinercia, a moverse en línea recta evitando hacer-lo en curva.
Por lo anterior, la ecuación (3.31) adquiere laforma
E = 12 m
(drdt
)2
+ Ep,eff(r). (3.32)
Mediante la ecuación (3.32), luego de separarvariables, se llega a√
m2
r∫ro
dr
{E − Ep,eff(r)}1/2 = t. (3.33)
Mediante la ecuación (3.33) es posible obtenerr(t), es decir, se obtiene la solución completadel problema dinámico en lo que se refiere almovimiento radial, donde se ha tenido en cuen-ta únicamente la conservación de la energía.
Para el movimiento en la dirección transver-sal, se tiene en cuenta la conservación del mo-mento angular, donde es válida la expresión
dθ
dt=
Lmr2 ,
donde al separar variables e integrar se encuen-tra para la posición angular
θ = θo +
t∫to
Lmr2 dt. (3.34)
Finalmente al reemplazar la expresión para r(t)obtenida mediante la ecuación (3.33), es posibleconocer la solución radial, θ(t).
En síntesis, las ecuaciones (3.33) y (3.34)permiten resolver completamente el problemadinámico de una partícula sometida a unafuerza central conservativa.
Para conocer la ecuación de la trayectoria, pormedio de las ecuaciones paramétricas r(t) y θ(t)se encuentra la expresión de la forma r(θ).
En forma inversa, partiendo de la ecuaciónde la trayectoria es posible determinar la fuerzaque actúa sobre la partícula.
Por lo analizado en esta sección, se tiene quecuando el movimiento se debe a una fuerzacentral se hace necesario considerar la conser-vación de la energía para la parte radial y la con-servación del momento angular para la partetransversal, ya que la conservación de la ener-gía no permite conocer dirección por tratarse deuna cantidad escalar. Esto es diferente al caso demovimiento rectilíneo donde la conservación dela energía es suficiente para resolver el proble-ma, pues de antemano la dirección está dada.
PREGUNTAS1. Una persona levanta verticalmente un cuer-po, hasta una posición determinada. ¿Qué sepuede decir del trabajo neto realizado sobreel cuerpo, cuando este asciende con velocidadconstante y cuando lo hace con aceleraciónconstante? ¿Por qué?2. Dos cuerpos de masas m1 y m2 (m1 > m2)tienen el mismo momento lineal. ¿Sobre cuál sedebe realizar mayor trabajo para detenerlo? Jus-tifique su respuesta.3. Un pasajero lanza un cuerpo en el interiorde un auto, en movimiento respecto a la vía.Para cualquier observador, ¿la energía cinéticadel cuerpo, siempre depende de la velocidaddel auto? ¿Por qué?4. Desde la terraza de un edificio, una personalanza simultáneamente dos cuerpos de igualmasa y con velocidades de igual magnitud. Siun cuerpo se lanza verticalmente hacia arriba yel otro verticalmente hacia abajo, ¿qué se puededecir de sus velocidades en la parte más baja deledificio?5. Dos cuerpos de igual masa, se mueven so-bre la misma trayectoria circular pero en senti-dos opuestos. Si las velocidades de los cuerpostienen igual magnitud, ¿qué se puede afirmar alcomparar sus energías cinéticas? ¿Por qué?6. Un cuerpo, con movimiento circular uni-forme, se mueve en un plano vertical. ¿Se con-serva la energía del cuerpo? Justifique su res-

3.13. MOVIMIENTO BAJO FUERZAS CENTRALES CONSERVATIVAS 29
puesta.7. El momento lineal total de un sistema aisla-do, formado por dos cuerpos, es cero. ¿Significaesto que la energía cinética total del sistema seanula? ¿Por qué?8. Dos partículas chocan elásticamente. ¿Es-to quiere decir que la energía cinética de ca-da partícula permanece constante? Justifique surespuesta.9. Un futbolista patea un balón desde la super-ficie de la tierra, de tal manera que su velocidadinicial forma un ángulo diferente de cero con lahorizontal. a) En el instante que el balón regre-sa a tierra, ¿qué trabajo neto realizó el peso so-bre el balón? Justifique su respuesta. b) ¿Cambiael resultado anterior, si se considera la fricciónque el aire ejerce sobre el balón? ¿Por qué? c)¿Qué diferencia se presenta cuando se comparala energía de salida con la energía de llegada delbalón, si se tiene en cuenta o no la fuerza de fric-ción? ¿Por qué?10. Una persona ejerce a una fuerza horizon-tal constante sobre un bloque. Sabiendo que elcuerpo se mueve con velocidad constante sobreuna superficie horizontal, ¿qué se puede afir-mar, respecto a la existencia o no de fricción en-tre las superficies en contacto? Justifique su res-puesta.11. Sobre un cuerpo en movimiento actúansimultáneamente cuatro fuerzas, dos de lascuales son conservativas. En este caso a) ¿Sepuede hablar de conservación de la energía?¿Por qué? b) ¿Se puede hablar de energía po-tencial? ¿Por qué?12. Un oscilador armónico clásico, tiene unaenergía total de 10J. ¿En este caso se presentanregiones clásicamente prohibidas? Justifique surespuesta.