การส ารวจด้วยดาวเทียมระบบจีพีเอส...
TRANSCRIPT

1 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
การส ารวจดวยดาวเทยมระบบจพเอส (Global Positioning System)
1. บทน า การส ารวจรงวด เปนวธการท างานภาคสนามเพอหาขอมลทางต าแหนงของสงทอยบน หรอใกลผวโลก แลวน ามาค านวณหาปรมาณตางๆ ทตองการ ในการรงวดเพอท าแผนทภมประเทศ สงหนงซงมความจ าเปนกคอจะตองมระบบพกดอางอง เพอการก าหนดต าแหนงของรายละเอยดทไดถายทอดจากพนผวภมประเทศลงบนแผนทตามขอก าหนดความถกตอง เพอทจะน าไปใชงานไดตรงตามวตถประสงค ดงนนในการด าเนนงานเพอใหไดมาซงผลการรงวด หรอแผนทตามความตองการดงกลาวนน กอนอนจะตองมหมดหลกฐานถาวรทมคาพกดซงยอมรบได ดวยวธการทใชกนอยทวไปคอ การสามเหลยม (Triangulation) และการท าวงรอบ (Traversing) โดยอาศยวธการรงวดมม และระยะ แลวน ามาค านวณหาคาพกดสมพนธตอเนองกนไป ปจจบน ความจ าเปนในการรงวดเพอสรางหมดหลกฐานมมากขน และจะตองเพมปรมาณใหมจ านวนมากเพยงพอ โดยเฉพาะอยางยงในบรเวณทมรายละเอยดหนาแนน และมการเปลยนแปลงคอนขางเรว ดวยการก าหนดต าแหนงโดยวธเดม ซงมขดความสามารถทจะด าเนนงานไดอยางจ ากด อนเนองจากปญหาดานวธการ ก าลงคน คาใชจายและเครองมอ การก าหนดต าแหนงดวยดาวเทยม จงเรมเขามามบทบาท ตงแต ค.ศ.1967 ดวยระบบดาวเทยมเพองานรงวด ทมชอวา ระบบ TRANSIT ระบบ TRANSIT เปนระบบน าวถดวยดาวเทยมของกองทพเรอ แหงสหรฐอเมรกา (Navy Navigation Satellite System: NNSS) พฒนาโดยศนยปฏบตการฟสกสประยกต (Applied Physics Laboratory: APL) แหงมหาวทยาลยจอหนฮอปกนส ระบบประกอบดวยดาวเทยมจ านวน 6 ดวง อยสงจากผวโลกประมาณ 1,075 กโลเมตร ปฎบตการไดทกสภาพอากาศ แตไมตลอด 24 ชวโมง สามารถรงวดก าหนดต าแหนงไดแบบอสระ โดยไมตองโยงยดกบหมดททราบคาแลว หรอทเรยกวา การก าหนดต าแหนงแบบสมบรณ (Absolute Positioning) จงท าใหลดขนตอนในการปฏบตงานลง สามารถด าเนนงานไดอยางรวดเรว และประหยดคาใชจาย ถงแมเครองมอจะมราคาคอนขางสง แตคมคากบการลงทนเมอพจารณาจากผลงานทไดรบ อยางไรกตาม ระบบ TRANSIT กไดสนสดการปฏบตงานลงเมอประมาณ ค.ศ.1995 และระบบใหมทเขามาแทนท กคอ ระบบ GPS (Global Positioning System)

2 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
2. ดาวเทยมระบบ GPS ระบบ GPS เปนระบบน าวถทใชในการหาพกดต าแหนงจากการรบสญญาณคลนวทย ซงไดพฒนาตอเนองมาจากดาวเทยมระบบ TRANSIT โดยหนวยงานทางทหาร (Department Of Defense: DOD) ของสหรฐอเมรกา หลกการรงวดเพอหาพกดต าแหนง คอมสถานภาคพนดนคอยตดตามการเคลอนทของดาวเทยมอยตลอดเวลา ท าใหทราบวงโคจรหรอต าแหนงของดาวเทยมทขณะเวลาตางๆ ขอมลการรงวดของสถานตดตามดาวเทยม จะน าไปพยากรณวงโคจรลวงหนา จากนนจงสงไปเกบบนทกไวในดาวเทยม เพอทจะสงกระจายลงมาพรอมกบคลนวทยความถสง ถาตองการทราบพกดต าแหนงของจดใด กน าเครองรบสญญาณ ดาวเทยมไปตงวาง ณ จดนน แลวน าขอมลทรงวดไดมาประมวลผล เพอหาต าแหนงของจดทเครองรบวางอยตอไป ระบบ GPS มขอดเมอเทยบกบระบบ TRANSIT คอ ประการแรก ระบบ GPS ใชประโยชนในการก าหนดต าแหนงไดตลอด 24 ชวโมง ณ ทกจดบนผวโลก และประการทสอง ใชเวลาในการรงวดนอยกวา และใหความถกตองทางต าแหนงทดกวาระบบ TRANSIT หลายเทา กลาวคอ ความถกตองทางต าแหนงของระบบ TRANSIT ประมาณ 2-3 เมตร แตจากการปฏบตงานระบบ GPS ในปจจบน จะมความถกตองทางต าแหนงอยในระดบเซนตเมตร หรอต ากวาเทานน
3. แผนงานของระบบ GPS ใน ค.ศ.1973 กระทรวงกลาโหมแหงสหรฐอเมรกา ไดจดตงส านกงานโครงการวางแผนรวม (Joint Program Office: JPO) เพอท าหนาทพฒนา ทดสอบ ก าหนดความถกตองในการใชระบบก าหนดต าแหนงดวยดาวเทยม โดยใหกองทพเรอและกองทพอากาศท าการพฒนาระบบรวมกน เกดเปนระบบดาวเทยม ทมชอวา NAVigation Satellite Timing And Ranging Global Positioning System (NAVSTAR GPS) มกเรยกกนวา ระบบ GPS ระบบ GPS เปนระบบทใชในกจการดานตางๆ ของสหรฐอเมรกา ด าเนนการโดยส านกงานโครงการวางแผนรวม โดยมหนวยงาน และองคกรตางๆ รวมอยในโครงการ ไดแก กองทพอากาศ กองทพเรอ กองทพบก หนวยนาวกโยธน หนวยงานแผนทและภาพถายแหงชาต (National Imagery and Mapping Agency: NIMA) กรมการขนสง และองคการสนธสญญาปองกนแอตแลนตกเหนอ (North Atlantic Treaty Organization; NATO) โดยมองคกร Aerospace Corporation ท าหนาทในการสนบสนนดานวศวกรรม จดเรมตนของแผนงาน ไดกอก าเนดขนเมอเดอนสงหาคม ค.ศ.1979 ตามมตของ Defense System Acquisition Review Council (DSARC II) โดยการด าเนนการจากขนตอนแรกคอ การยอมรบหลกการ

3 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
(Concept Validation Phase) กอนการกาวไปสขนตอนการพฒนาดานวศวกรรมอยางเตมรปแบบ (Full Scale Engineering Development: FSED) ซงเปนขนตอนทท าใหระบบ GPS ทไดก าหนดไวอยางกวางๆ สมบรณขน และเรมก าหนดในรายละเอยดเกยวกบขดความสามารถในการปฏบตการและสนบสนน ตลอดจนแผนการทดสอบ ประเมนผลการพฒนา และปฏบตการขนตน ซงจะน าไปสขนตอนสดทาย คอ การพฒนาและผลตดาวเทยมปฏบตการ เพอพรอมทจะปลอยขนสวงโคจรและปฏบตงานตอไป GPS เปนระบบดาวเทยมทใชในการรงวดเพอก าหนดต าแหนงดวยสญญาณคลนวทย การน าหนกระท าไดทกสภาพกาลอากาศ มขดความสามารถทเปนประโยชนอยางสงตอผใช ดวยมผใชอยางไมจ ากดจ านวนทสามารถใชระบบนไดโดยพรอมกน และใชไดอยางเสร คาพกดทไดจะอางองกบระบบสากลซงใชกนทวโลกคอ World Geodetic System 1984 (WGS84)
4. องคประกอบของระบบ GPS ระบบ GPS มองคประกอบ 3 สวน (Segment) ไดแก สวนควบคม สวนอวกาศ และสวนผใช ความสมพนธขององคประกอบทงสาม แสดงไดดงภาพท 1 มรายละเอยดของสวนตางๆ ดงตอไปน
ภาพท 1 องคประกอบของระบบ GPS
4.1 สวนควบคม (Control Segment) มหนาทรบผดชอบในการปฏบตงานของระบบทงหมด ประกอบดวยสถานควบคมหลก (Master Control Station; MCS) ซงตงอย ณ ฐานทพอากาศฟอลคอน (Falcon Air Force Base) มลรฐโคโลราโดสปรงส (Colorado Springs) ประเทศสหรฐอเมรกา สถานตดตามดาวเทยม (Monitor Stations; MS)
Diego Garcia Ascension Island Kwajalein
Hawaii
Monitor
Stations
User
Segment
Space Segment
Control Segment

4 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
จ านวน 5 แหง ซงกระจายอยรอบโลก ดงแสดงในภาพท 2 ไดแก หมเกาะควาจาเลยน (Kwajalein Island) ของฟลปปนส หมเกาะดเอโกการเซย (Diego Garcia Island) ในมหาสมทรอนเดย หมเกาะแอสเซนชน (Ascension Island) ในมหาสมทรแอตแลนตก หมเกาะฮาวาย (Hawaii Island) ในมหาสมทรแปซฟก ทงนรวมถงสถานควบคมหลก ซงตงอย ณ มลรฐโคโลราโดสปรงสดวย ขอมลทรงวดไดจากสถานตดตามดาวเทยม จะถกสงผานมายงสถานควบคมหลก เพอท าการประมวลผลวงโคจรของดาวเทยมดวงตางๆ และท าการพยากรณต าแหนงของดาวเทยมลวงหนา หลงจากนนกจะท าการสงขอมลทไดปรบปรงใหทนสมยแลว พรอมกบขอมลเวลา และขอมลอตนยมวทยาไปยงสถานรบสงสญญาณ ซงไดตดตงเสาอากาศรบสญญาณภาคพนดน (Ground Antennas; GAs) จ านวน 3 แหง ไดแก สถานซงตงอย ณ หมเกาะควาจาเลยน หมเกาะดเอโกการเซย และหมเกาะแอสเซนชน เพอสงขนไปเกบบนทกไวบนดาวเทยมตอไป
ภาพท 2 ต าแหนงของสถานควบคมหลกและสถานตดตามดาวเทยม ทมา: http://www.colorado.edu/geography/gcraft/notes/gps/gps.html
4.2 สวนอวกาศ (Space Segment) ประกอบดวยดาวเทยม NAVSTAR จ านวน 24 ดวง (ในจ านวนน จะมดาวเทยมส ารอง 3 ดวง เพอทดแทนการปฏบตงานของดาวเทยมดวงทเกดขดของไดทนท) จดเปนวงโคจร (GPS Constellation) อยใน 6 ระนาบๆ ละ 4 ดวง โดยแตละระนาบเอยงท ามม 55 กบระนาบศนยสตร และท ามมระหวางกน 60 ดงแสดงในภาพท 3-5 ดาวเทยมเหลานอยสงจากผวโลกประมาณ 20,200 กโลเมตร ใชเวลาในการโคจร

5 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
รอบโลก 12 ชวโมง และมเวลาอยเหนอเสนขอบฟาในแตละสถานทราว 5 ชวโมง ดวยการออกแบบกลมดาวเทยมในลกษณะน จงท าใหมดาวเทยมอยางนอย 4 ดวง อยเหนอทกๆ จดบนพนผวโลกตลอดเวลา
ภาพท 3 วงโคจรดาวเทยมระบบ GPS ทมา: http://pnt.gov/public/images/
ภาพท 4 วงโคจรและต าแหนงของดาวเทยมระบบ GPS ทมา: http://www.colorado.edu/geography/gcraft/notes/gps/gps.html
6 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
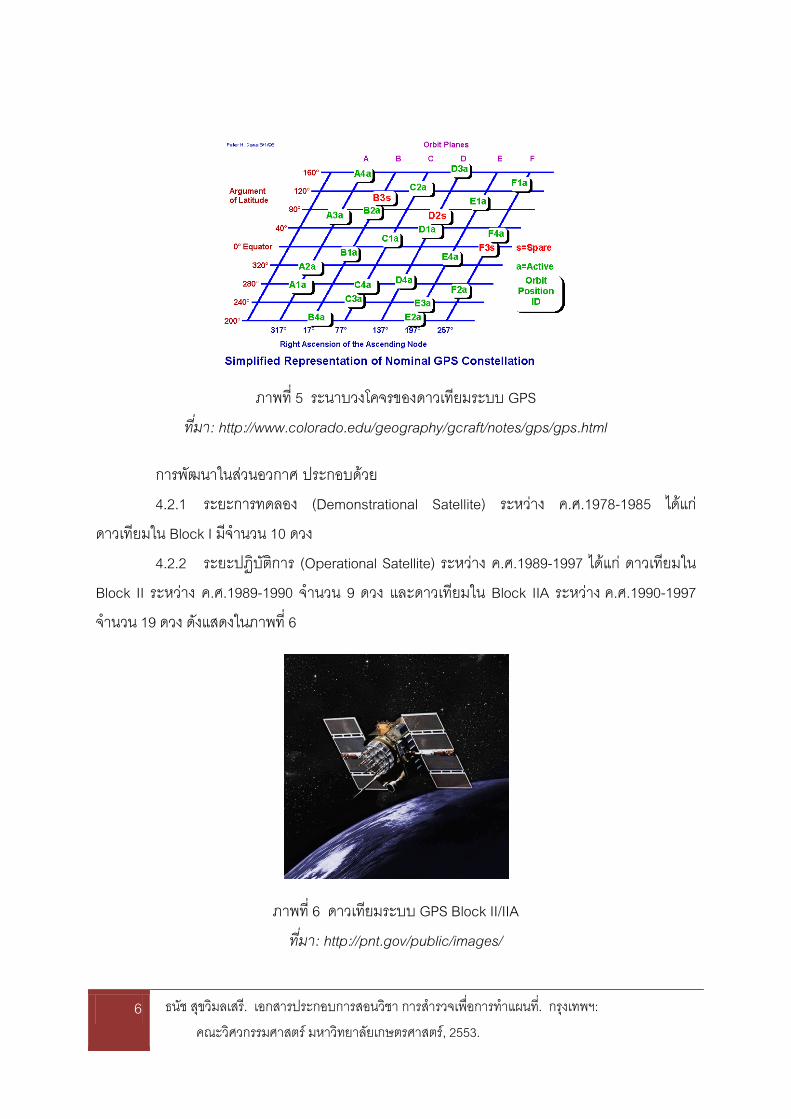
ภาพท 5 ระนาบวงโคจรของดาวเทยมระบบ GPS ทมา: http://www.colorado.edu/geography/gcraft/notes/gps/gps.html
การพฒนาในสวนอวกาศ ประกอบดวย 4.2.1 ระยะการทดลอง (Demonstrational Satellite) ระหวาง ค.ศ.1978-1985 ไดแก ดาวเทยมใน Block I มจ านวน 10 ดวง 4.2.2 ระยะปฏบตการ (Operational Satellite) ระหวาง ค.ศ.1989-1997 ไดแก ดาวเทยมใน Block II ระหวาง ค.ศ.1989-1990 จ านวน 9 ดวง และดาวเทยมใน Block IIA ระหวาง ค.ศ.1990-1997 จ านวน 19 ดวง ดงแสดงในภาพท 6
ภาพท 6 ดาวเทยมระบบ GPS Block II/IIA ทมา: http://pnt.gov/public/images/

7 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
4.2.3 ระยะการเพมเตมใหกบระบบ (Replenishment Satellite) ระหวาง ค.ศ.1997-2009 ไดแก ดาวเทยมใน Block IIR (Replenishment satellite design) ระหวางค.ศ.1997-2004 มจ านวน 12 ดวง ดงแสดงในภาพท 7 และดาวเทยมใน Block IIR-M (Replenishment satellite design with Modernized features) ระหวาง ค.ศ.2005-2009 ดงแสดงในภาพท 8
ภาพท 7 ดาวเทยมระบบ GPS Block IIR ทมา: http://www.deagel.com/library/GPS-Block-IIR_m02006120300541.aspx
ภาพท 8 ดาวเทยมระบบ GPS Block IIR-M ทมา: http://pnt.gov/public/images/
4.2.4 ระยะการสนบสนน (Follow-on Satellite) ระหวาง ค.ศ.2010-2011 ไดแก ดาวเทยมใน Block IIF มจ านวน 10 ดวง ดงแสดงในภาพท 9

8 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 9 ดาวเทยมระบบ GPS Block IIF ทมา: http://pnt.gov/public/images/
ในการสงดาวเทยมขนสวงโคจรนน กองทพอากาศแหงสหรฐอเมรกา ไดท าการพฒนาจรวด Delta II ขน ดงแสดงในภาพท 10 ภายหลงจากประสบความลมเหลวในการสงยาน Challenger จรวด Delta II ไดเขาประจ าการในกองทพอากาศ เมอเดอนกมภาพนธ ค.ศ.1987 และกองทพอากาศไดท าสญญาวาจางบรษท McDonnell Douglas ในการสรางจรวด Delta II จ านวน 18 ล า เพอใชในการสงดาวเทยมระบบ GPS โดยล าแรกไดสงดาวเทยมขนสวงโคจร เมอวนท 14 กมภาพนธ ค.ศ.1989 จรวด Delta II ทส าคญมอย 2 รน (Version) ไดแก รนแรกคอ Delta II (6925) ไดท าการสงดาวเทยม 9 ดวงแรกใน Block II ขนสวงโคจร และอกรนหนงคอ Delta II (7925)
ภาพท 10 จรวด Delta II ทมา: http://www.deagel.com/C3ISTAR-Satellites/GPS-Block-IIR_a000238003.aspx

9 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
บนดาวเทยมจะมชดของนาฬกาอะตอมมค ซงมแหลงก าเนดความถเปนรบเดยมจ านวน 2 เรอน และซเซยมจ านวน 2 เรอน ท าใหเวลามาตรฐานของดาวเทยมมความถกตองสงมาก นอกจากนนาฬกาชดนยงใชในการควบคมความถของคลนสง และรหสทใชในระบบดาวเทยมทงหมดอกดวย คลนวทยทสงออกมาจากดาวเทยมเปนคลนในชวง L-band ม 2 ความถ คอ คลน Link 1 หรอ L1 ทความถ 1575.42 MHz มความยาวคลน 19 เซนตเมตร และคลน Link 2 หรอ L2 ทความถ 1227.60 MHz มความยาวคลนเปน 24 เซนตเมตร คลนวทยเหลานจะถกผสม (Modulate) ดวยรหส ซงมประโยชนตอการหาคาพกดต าแหนงมาก มลกษณะเปนรหสเลขฐานสอง (Binary) ทถกสรางขนดวยสตรทางคณตศาสตรทแนนอน เรยกวา Pseudo-Random Noise รหสทใชมอย 2 ชนด คอ รหส C/A (Coarse/Acquisition Code) และรหส P (Precision Code) รหส C/A มความถ 1.023 MHz มความยาวคลน 300 เมตร มคาบเวลา 1 ใน 1,000 วนาท รหสนเปดใหพลเรอนใชไดอยางอสระ ส าหรบรหส P มความถ 10.23 MHz มความยาวคลน 30 เมตร มคาบเวลา 267 วน รหสนจะถกสงวนไวใชเฉพาะในวงการทหาร และบางหนวยงานของรฐบาลสหรฐอเมรกาเทานน 4.3 สวนผใช (User Segment) ประกอบดวยผใชในสวนของพลเรอนและทหาร รวมถงการใชเครองรบสญญาณดาวเทยมซงตดตงอยบนพนดน บนยานพาหนะเชน รถยนต เรอ หรอเครองบน ดงแสดงในภาพท 11 อาจรวมถงฮารดแวร และซอฟตแวรทใชในการประมวลผลขอมล ซงจะครอบคลมไปถงวธการค านวณ และปรบแกขอมลตางๆ ดวย แนวคดในสวนของผใช เพอใหบรรลถงความละเอยดถกตองสงส าหรบงานรงวดดวยดาวเทยมระบบจพเอส คอความพยายามทจะลดขนาด และปรมาณของความคลาดเคลอนทเกยวของกบงานรงวดลง ซงไดแก ความคลาดเคลอนในขอมลดาวเทยม (Ephemeris) ความคลาดเคลอนของเวลาทงในสวนของนาฬกาดาวเทยมและเครองรบสญญาณ ความคลาดเคลอนอนเนองจากการหกเหของคลนในชนบรรยากาศ เปนตน ดงนนจงมความจ าเปนทจะตองเขาใจถงสาเหต รวมถงวธการลดความคลาดเคลอนเหลาน ดวยการพฒนาเครองมอ วธการรงวด และการประมวลผล เปนตน

10 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 11 สวนผใชในระบบ GPS ทมา: http://www.colorado.edu/geography/gcraft/notes/gps/gps.html
5. วธการรงวดดาวเทยมระบบ GPS วธการรงวดดาวเทยมระบบ GPS (GPS Measurement Method) ทนยมใชม 2 วธ ไดแก 5.1 วธการวดซโดเรนจ (Pseudo-Ranges) ซโดเรนจ คอ ระยะทางซงวดจากดาวเทยมมายงเครองรบสญญาณ ในการวดระยะทางน เครองรบจะสรางรหสขนมาเปรยบเทยบกบรหสทไดจากการรบสญญาณ ท าใหทราบระยะเวลาทคลนวทยเดนทางจากดาวเทยมมาถงเครองรบ เมอน าความเรวของคลนสงวทยคณกบเวลา จะไดระยะทางระหวางดาวเทยมกบเครองรบ โดยเหตทรหสทสงจากดาวเทยมไดมาจากนาฬกาของดาวเทยม ในขณะทรหสทสรางขนในเครองรบ กไดมาจากนาฬกาของเครองรบ ดงนนจงหลกเลยงความคลาดเคลอนของเวลา อนเนองมาจากความแตกตางของนาฬกาทงสองไมได ซโดเรนจทวดไดจงมคาคลาดเคลอนไปจากระยะทางจรง ระยะทางจรง (True Range) จากดาวเทยมมายงเครองรบสญญาณ เกดจากการรวมคาซโดเรนจและคาระยะทาง อนเนองมาจากความคลาดเคลอนของนาฬกาเขาดวยกน ในทางปฏบตตองการทราบคาพกดต าแหนงของเครองรบ ซงจะมตวไมทราบคา (Unknown) จ านวน 3 คา คอ X, Y และ Z นอกจากน ยงมคาความคลาดเคลอนของนาฬกาเพมขนอกหนงตวในสมการ ดงนนจงตองท าการวดระยะทางเพมขนจาก 3 เสน เปน 4 เสน ท าใหสามารถค านวณเพอหาต าแหนงของเครองรบไดถกตองมากขน ดงแสดงในภาพท 12 วธนเหมาะส าหรบงานทไมตองการความละเอยดสง

11 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 12 การวดระยะทางจากดาวเทยมมายงเครองรบ ทมา: http://www.colorado.edu/geography/gcraft/notes/gps/gps.html
5.2 วธการวดเฟสของคลนสง (Carrier Phases) การวดเฟสของคลนสง เปนการเปรยบเทยบ หรอคาตางระหวางเฟสของคลนสงทดาวเทยมสงลงมากบเฟสของคลนทเครองรบสรางขนมา คลนสงทดาวเทยมสงลงมาน แยกออกไดเปน 2 สวน คอ สวนของคลนทเปนจ านวนเตมรอบ (เตมลกคลน) กบสวนทไมเตมรอบ (เฟส) ในการรบสญญาณนน เครองรบไมสามารถจะนบจ านวนเตมรอบของคลนทสงลงมาได จ านวนเตมรอบนเรยกวา เลขปรศนา (Ambiguity) ซงสามารถหาคาไดจากการค านวณในภายหลง วธนจะใหคาทละเอยดถกตองมากกวาวธการวดซโดเรนจ
6. การก าหนดต าแหนงดวยเครองรบสญญาณดาวเทยมระบบ GPS 6.1 เครองรบสญญาณแบบน าหน (Navigation Receiver) เครองรบสญญาณแบบน าหน (ดงภาพท 13) รบสญญาณทเปนคลนวทยจากดาวเทยม ในขณะเดยวกนกสรางรหส C/A ขนมาเปรยบเทยบกบรหสทถอดไดจากสญญาณ เมอเปรยบเทยบไดรหสทตรงกน จะท าใหทราบเวลาทคลนวทยใชในการเดนทางจากดาวเทยมมายงเครองรบ ซงเมอน าความเรวของคลนวทยคณเขาไปกจะไดระยะทางระหวางดาวเทยมกบเครองรบ ทเรยกวา ซโดเรนจ ในการหาต าแหนงแบบสามมตจะตองวดระยะทางไปยงดาวเทยมพรอมกน 4 ดวง ในกรณทมดาวเทยมอยในทองฟามากกวา 4 ดวง เครองรบจะเลอกดาวเทยม 4 ดวง ทมรปลกษณเชงเรขาคณตทดทสด หรอมคา PDOP ต าทสด มาใชในการค านวณต าแหนงของเครองรบ

12 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 13 เครองรบสญญาณแบบน าหน
6.1.1 การก าหนดต าแหนงแบบสมบรณ (Absolute Positioning) การก าหนดต าแหนงแบบสมบรณเปนการหาต าแหนงของจดเดยว วธน ตองการเครองรบแบบน าหนเพยงเครองเดยว น าเครองรบไปวางทจดตองการหาต าแหนง เมอเครองรบสามารถรบสญญาณไดครบ 4 ดวง กแสดงคาพกดต าแหนงไดในทนท ความถกตองของการหาต าแหนงจดเดยวโดยใชรหส C/A อยในเกณฑประมาณ +10 ถง 25 เมตร ซงมความคลาดเคลอนทางต าแหนงคอนขางมาก 6.1.2 การก าหนดต าแหนงแบบสมพทธ (Relative Positioning) การก าหนดต าแหนงแบบสมพทธ หรอ Differential Positioning เปนวธการหาต าแหนงเปรยบเทยบกนระหวางจดสองจด วตถประสงคของการหาต าแหนงแบบสมพทธ คอ ตองการใหความถกตองของต าแหนงเครองรบดขนกวาการหาต าแหนงของจดเดยว ในการท างานโดยใชวธการหาต าแหนงแบบสมพทธน ถาเรมตนจากหมดหลกฐานทมคาพกดต าแหนงสมบรณอย จดอนๆ ทสรางขนมาใหมโดยวธท างานแบบสมพทธจะมคาพกดต าแหนงสมบรณไดเชนกน การหาต าแหนงแบบสมพทธนตองใชเครองรบแบบน าหนตงแตสองเครองขนไป เครองรบเครองหนงจะวางรบสญญาณทหมดหลกฐานซงทราบต าแหนงแลว เรยกวาสถานฐาน (Base Station) เครองรบอนทเหลอน าไปวางตามจดทตองการหาต าแหนงเปรยบเทยบกบสถานฐาน จดเหลานเรยกวา จดรโมท (Remote Station) หลกการท างานของการหาต าแหนงแบบสมพทธ คอ เครองรบทสถานฐานและทจดรโมทจะตองรงวดไปยงดาวเทยมกลมเดยวกนและทขณะเวลาเดยวกน ทสถานฐาน เครอง GPS จะท าหนาทเหมอนจดอางอง สามารถใชคาปรบแกของเครองนกบเครองอนทอยในบรเวณเดยวกน และสามารถน าไปใชเปนคาแกส าหรบค านวณต าแหนงอนไดเชนเดยวกน

13 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
การหาต าแหนงแบบสมพทธโดยใชเครองรบแบบน าหน สามารถจะทราบต าแหนงทถกตองของจดรโมทไดในทนท ถาหากคลนวทยสอสารกนไดระหวางสถานฐานกบจดรโมท โดยทสถานฐานจะสงคาตรวจแกทางต าแหนงหรอคาตรวจแกของซโดเรนจทค านวณไดไปใหจดรโมท เพอใชปรบแกคาทวดไดใหถกตอง ดงภาพท 14 โดยเหตทความคลาดเคลอนมระบบ (Systematic Error) เชน ความคลาดเคลอนวงโคจร ความคลาดเคลอนในชนบรรยากาศ ความคลาดเคลอนนาฬกาเครองรบ เปนตน มผลตอซโดเรนจ และการค านวณต าแหนง ในลกษณะทคลายกนและมขนาดเทากน เมอค านวณคาตางของต าแหนงทงสอง ความคลาดเคลอนมระบบเหลานจงหกลางกนไปจนเกอบหมด ความถกตองของการหาต าแหนงแบบสมพทธนอยในเกณฑ 2 ถง 5 เมตร
ภาพท 14 การก าหนดต าแหนงแบบสมพทธ ทมา: http://www.colorado.edu/geography/gcraft/notes/gps/gps.html
6.2 เครองรบสญญาณแบบรงวด (Survey or Geodetic Receiver) การท างานของเครองรบสญญาณแบบรงวด (ดงภาพท 15) มหลกการส าคญ 3 ประการ คอ ประการแรก การใชคลนสงวดระยะแทนการใชรหส C/A ท าใหการวดระยะมความถกตองสงขน ประการทสองคอ การใชวธการวดแบบสมพทธเปนวธการขจดความคลาดเคลอนแบบมระบบ (Systematic Errors) ทอยในขอมลหรอทเกดขนในการวดระยะทางใหหมดไปหรอลดนอยลงได ดวยเหตน ความคลาดเคลอนทางต าแหนงจงลดลง ประการทสาม การวดระยะดวยคลนสง เครองรบสญญาณวดระยะระหวางเครองรบกบดาวเทยมไดเพยงบางสวนเทานน จ าเปนตองอาศยการประมวลผลชวยหาระยะทขาดหายไป ขอเทจจรง

14 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
คอ เมอแรกรบสญญาณดาวเทยมได การวดระยะดวยคลนสง เปนการสรางคลนทมความถใกลเคยงกบของคลนสงดาวเทยมมาเปรยบเทยบ ดงนน สงทไดจากการวด คอ คาตางเฟสของคลนทงสอง หรออกนยหนงจะรเพยงสวนยอยของคลนสงเทานน จ านวนเตมรอบของคลนสงทอยระหวางเครองรบกบดาวเทยมไมสามารถวดได ดงนนหลกการทส าคญของการหาต าแหนงดวยเครองรบสญญาณแบบรงวดคอ ตองมขอมลเพยงพอทจะประมวลผลหาวาจ านวนคลนเตมรอบนเปนเทาใด จงจะไดระยะทางระหวางเครองรบกบดาวเทยมทถกตอง และเมอน าไปค านวณต าแหนงเครองรบจงจะไดต าแหนงทมความถกตอง วธการท างานคอ น าเครองรบสญญาณแบบรงวดไปวางทหมดทตองการหาต าแหนงเปรยบเทยบกนเปนเวลาตงแต 30 นาทขนไป จากนนน าขอมลทไดจากการรบสญญาณมาประมวลผลไดเปน เสนฐาน และน าขอมลดงกลาว มาประมวลผลรวมกบขอมลทไดจากการรงวดต าแหนงอนๆ ทตองการทราบคาเพอหาคาพกดทถกตองของต าแหนงนน การท างานรงวด แบงออกเปน 5 วธ คอ
ภาพท 15 เครองรบสญญาณแบบรงวด
6.2.1 การรงวดแบบสถต (Static Survey) การรงวดแบบสถต (ดงภาพท 16) เปนวธพนฐานของการวดระยะโดยใชคลนสง เปนการท างานโดยใชเครองรบตงแตสองเครองขนไป โดยเครองรบเครองหนงจะน าไปวางอย ณ จดททราบต าแหนงแลว สวนเครองทเหลอวางไว ณ จดทตองการหาต าแหนงเพมเตม โดยปกตเครองรบจะถกวางไวไมนอยกวาหนงชวโมง ทงนเพอใหมขอมลของการวดระยะทเพยงพอจะประมวลผลหาจ านวนคลนเตมรอบทไมสามารถวดได โดยหลกการแลววธการนใชหาต าแหนงสมพทธระหวางจดสองจดทอยหางกนเปน

15 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ระยะทางยาวได แตการใชซอฟตแวรเชงพาณชยหรอซอฟตแวรของโรงงานผลตเครองรบนน ระยะทางสงสดทใหความถกตองไดตามขอก าหนดของเครองรบจะอยประมาณ 20-30 กโลเมตร เทานน
ภาพท 16 การรงวดแบบสถต ทมา: http://www.gmat.unsw.edu.au/currentstudents/ug/projects/Phipps/results.htm
6.2.2 การรงวดแบบจลน (Kinematic Survey) การรงวดแบบจลน ถกพฒนาขนเพอใหสามารถหาต าแหนงของจดทตองการไดเรวขน คอจะใชเวลาในการรบขอมล ณ จดทตองการในเวลาไมถงหนงนาท แตวธการนกมจดดอยคอ มวธการเรมงาน (Initialization) ซงเปนวธการท างานเพอใหสามารถประมวลผลหาจ านวนคลนเตมรอบได หลงจากน เครองรบจะตองรบสญญาณตอเนองจากดาวเทยมอยางนอย 4 ดวงตลอดเวลา แมกระทง ในขณะทก าลงเคลอนยายจากจดหนงไปยงอกจดหนง ถาหากรบสญญาณดาวเทยมไดนอยกวา 4 ดวงเมอใด จะตองท าขนตอนของวธการเรมงานใหมอกครงหนง แลวจงไปรงวดทจดอนๆ ตอไปไดอก ในการรงวดแบบจลนนเครองรบเครองหนงจะถกวางไวทจดอางองทรต าแหนงแลวตลอดเวลา เครองอนๆ เมอท าขนตอนวธการเรมงานแลว จงน าไปวางตามจดทตองการหาต าแหนง 6.2.3 การรงวดแบบกงสถต (Pseudostatic Survey) การรงวดแบบกงสถต เปนทางเลอกทอยระหวางการรงวดแบบสถตและการรงวดแบบจลน การรงวดแบบสถตตองใชเวลาในการรงวดแตละจดนานเปนชวโมง สวนการรงวดแบบจลนมขอจ ากดทตองรบสญญาณดาวเทยมใหไดอยางนอย 4 ดวงตลอดเวลา รวมทงในขณะทก าลงเคลอนยายระหวางจดดวย นอกจากนยงมวธการเรมงานทตองกระท าเมอเรมตนท าการรงวดในแตละคาบท างาน 6.2.4 การรงวดแบบสถตอยางเรว (Rapid Static Survey)

16 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
การรงวดแบบสถตอยางเรว มวธการท างานเหมอนกบการรงวดแบบสถตธรรมดา แตตองการขอมลนอยกวา เพอน ามาประมวลผลหาจ านวนคลนเตมรอบ ในการหาต าแหนงของจดทอยหางจากจดอางองไมเกน 5 กโลเมตร จะใชเวลาในการเกบขอมลราว 10 นาท อลกอรทมทใชในการประมวลผลวธรงวดสถตอยางเรวจะแตกตางจากวธรงวดแบบสถตธรรมดาตามปกตจะใชไดส าหรบจดทอยห างจากจดอางองไมเกน 15 กโลเมตร 6.2.5 การรงวดแบบจลนในทนท (Real Time Kinematic Survey: RTK) การรงวดแบบจลนในทนท (ดงภาพท 17) เปนวธการท างานรงวดแบบจลนนนเอง แตแสดงผลลพธคอ คาพกดต าแหนงไดทนทในสนาม โดยเหตทการท างานยงเปนการหาต าแหนงแบบสมพทธ หมายความวา ขอมลจากทงสองจดตองน ามาประมวลผลรวมกน ดงนน จงตองใชคลนวทยในการรบสงขอมลระหวางกน เนองจากจดอางองเปนจดรต าแหนงอยแลว ในการท างานแบบ RTK น จงเปนการสงขอมลทรบสญญาณดาวเทยมไดไปยงจดทตองการหาต าแหนงเครองรบ ณ จดทตองการหาต าแหนงจะรบขอมลแลวน าไปประมวลผล และแสดงคาพกดไดอยางรวดเรวในทนท ระยะหางระหวางจดทใชท างานไดไมเกน 15 กโลเมตร นอกจากนยงขนอยกบก าลงของคลนวทยทใช ในการรบสงขอมลระหวางกน
ภาพท 17 RTK Base and Rover Station ทมา: http://www.azwater.gov/AzDWR/Hydrology/Geophysics/GPS.htm

17 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
7. การประยกตใชงานรงวดดาวเทยมระบบ GPS GPS เปนระบบการก าหนดต าแหนงทมประสทธภาพสง เมอเทยบกบระบบการรงวดแบบเดม (Conventional Surveying) อาทเชน ใหความถกตองทางต าแหนงในระบบสามมต สามารถท างานไดทกสภาพอากาศ และต าแหนงของหมดทใชในการรงวด ไมจ าเปนตองมองเหนกน เปนตน จงเหมาะแกการประยกตใชในงานรงวดชนสง เพอสรางหมดหลกฐานส าหรบประเทศหรอภมภาค ดงแสดงในภาพท 18-20 การประยกตใชในการเกบรายละเอยดเพอการท าแผนทภมประเทศ ดงแสดงในภาพท 21 การประยกตใชในการสรางจดควบคมส าหรบงานท าแผนทดวยภาพถายทางอากาศ ดงแสดงในภาพท 22 และการประยกตใชในงานดานวทยาศาสตรและวศวกรรมแขนงตางๆ เชน ในสาขาธรณวทยา อาจใชเพอศกษาการเคลอนตวของเปลอกโลก หรอในสาขาวศวกรรมโยธา ดงตวอยางของโครงการกอสรางถนน อาจใชวธการส ารวจดวยภาพถายทางอากาศ โดยการถายภาพเปนแนวยาวตอเนองกนไปตามเสนทางทเลอกไว แลวก าหนดต าแหนงของจดควบคมในงานดงกลาว ดวยการรบสญญาณจากดาวเทยม เปนตน นอกจากนระบบ GPS ยงสามารถประยกตใชในการก าหนดต าแหนงของขอมลเชงพนท (Spatial Data) ทมความถกตอง เพอเชอมโยงกบระบบสารสนเทศภมศาสตร (Geographic Information System หรอ GIS) ไดอกดวย ในปจจบน ชางรงวดและวศวกรไดใหความสนใจในการน าดาวเทยมระบบ GPS มาประยกตใชเพอหาคาความสงออรโทเมตรก (Orthometric Height) หรออกนยหนงคอ ความสงเหนอระดบน าทะเลปานกลาง (Mean Sea Level) ซงจะน ามาแทนทวธการถายระดบดวยกลองระดบ (Differential Leveling) อกทงยงเปนทางเลอกหนงทจะลดคาใชจาย และเวลาในการปฏบตงานลง
ภาพท 18 หมดหลกฐานดาวเทยม GPS แบบถาวร ในฮองกง (Siu Lang Shui) ทมา: http://www.gmat.unsw.edu.au/snap/new/ntu_hkpu2000.htm

18 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 19 โครงขายหมดหลกฐานดวยดาวเทยมระบบ GPS โดยกรมแผนททหาร ประเทศไทย ทมา: The Royal Thai Survey Department, 2003

19 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 20 ต าแหนงหมดหลกฐานดวยดาวเทยมระบบ GPS โดยกรมแผนททหาร ประเทศไทย ทมา: กองยออเดซและยออฟสกส กรมแผนททหาร, 2547

20 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
ภาพท 21 การประยกตใชในการเกบรายละเอยดเพอการท าแผนทภมประเทศ ทมา: http://www.leica-geosystems.co.uk/en/GNSSGPS-Surveying-Systems-Leica- GPS900_62015.htm
ภาพท 22 การประยกตใชในการสรางจดควบคมส าหรบงานท าแผนทดวยภาพถายทางอากาศ ทมา: http://www.finnmap.com/geodetics.html
เอกสารอางอง
ชเกยรต วเชยรเจรญ. เอกสารประกอบการฝกอบรม การส ารวจรงวดดวยดาวเทยมระบบ GPS. (ม.ป.ท.). (อดส าเนา) ธนช สขวมลเสร. ระบบดาวเทยมในงานรงวด. วศวกรรมสาร มก. 13, 39 (ธนวาคม 2542- มนาคม 2543): 40-48. วชย เยยงวรชน. การส ารวจรงวด: ทฤษฎและการประยกตใช. กรงเทพมหานคร: ส านกพมพแหงจฬาลงกรณมหาวทยาลย, 2548.

21 ธนช สขวมลเสร. เอกสารประกอบการสอนวชา การส ารวจเพอการท าแผนท. กรงเทพฯ: คณะวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร, 2553.
สนอง มงสมร, พ.อ.(พเศษ). การส ารวจดวยดาวเทยมระบบ GPS. เอกสารประกอบการฝกอบรมเชง วชาการเรอง การน าเทคโนโลยการรงวดและท าแผนทสมยใหมมาประยกตกบการท าแผนท รปถายทางอากาศในระบบดจตอล. (ม.ป.ท.). (อดส าเนา) The Royal Thai Survey Department. Thailand: Report on the geodetic work period
1999-2002. Presented at the XXIII General Assembly of the International Union of Geodesy and Geophysics by the International Association of Geodesy, 30 June-11 July 2003, Sapporo, Japan.