ac servo driver - nssystem.co.krnssystem.co.kr/pdf/2010서보메뉴얼.pdf · 서보모터 운반...
TRANSCRIPT

사용자 설명서
AC SERVO DRIVER
TANGO-A Series
NS SYSTEM Co., Ltd.
엔에스시스템 인천광역시 남동구 남촌동 617-6번지 5블록 7로트 홈페이지 : www.nssystem.co.kr TEL: 032-812-7493~6 FAX: 032-812-7497

목차
NS SYSTEM CO., LTD.
CHAPTER 1 기능과 사양
1.1 특징 ........................................................................................................1-1
1.2 제어 모드의 종류 ......................................................................................1-1 1.2.1 위치제어 모드 ........................................................................................................................1-1
1.2.2 속도제어 모드 ........................................................................................................................1-2
1.2.3 토크제어 모드 ........................................................................................................................1-2
1.3 사양 ........................................................................................................1-3
1.4 제품 형식 표기 .........................................................................................1-5 1.4.1 서보 드라이버 명판 ................................................................................................................1-5
1.4.2 서보 드라이버 형식 표기 .........................................................................................................1-5
1.5 서보 드라이버와 서보 모터의 조합 ..............................................................1-6
1.6 외형도.......................................................................................................1-7 1.6.1 BOOK TYPE1 외형 치수 ..........................................................................................................1-7
1.6.2 BOOK TYPE2 외형 치수 ..........................................................................................................1-7
1.7 설치 ........................................................................................................1-8 1.7.1 제품의 확인 ...........................................................................................................................1-8
1.7.2 서보 드라이버의 설치 .............................................................................................................1-8
1.7.3 서보 모터의 설치 ...................................................................................................................1-9
1.7.4 설치 환경 조건 ......................................................................................................................1-9
1.7.5 모터축의 허용 하중 ................................................................................................................1-9
CHAPTER 2 배선
2.1 주변기기의 설치 및 배선 ............................................................................2-1
2.2 각부의 명칭 ..............................................................................................2-2
2.3 전체 결선도 ..............................................................................................2-3
2.4 엔코더 (CN3) ............................................................................................2-4
2.5 제어 입출력 신호 (CN1) .............................................................................2-5
CHAPTER 3 튜닝
3.1 기계 강성의 이해 ......................................................................................3-1
3.2 게인 조정 (튜닝) ........................................................................................3-2

목차
NS SYSTEM CO., LTD.
CHAPTER 4 위치 제어 모드
4.1 위치 제어의 이해 ......................................................................................4-1
4.2 결선도 .....................................................................................................4-2 4.2.1 위치제어 모드 결선도 (CN1) ......................................................................................................4-2
4.2.2 단자배치 및 신호명 ..................................................................................................................4-3
4.2.3 정/역회전 펄스열 입력 ..............................................................................................................4-4
4.2.4 제어용 입력 신호 .....................................................................................................................4-5
4.2.5 제어용 출력 신호 .....................................................................................................................4-6
CHAPTER 5 속도 제어 모드
5.1 속도 제어의 이해 ......................................................................................5-1
5.2 결선도 .....................................................................................................5-3
CHAPTER 6 토크 제어 모드
6.1 토크 제어의 이해 ......................................................................................6-1
6.2 결선도 .....................................................................................................6-2
CHAPTER 7 복합 제어 모드
7.1 결선도 .....................................................................................................7-1
CHAPTER 8 파라미터
8.1 파라미터 목록 ...........................................................................................8-1
8.2 파라미터 설명 .........................................................................................8-10
CHAPTER 9 검사 ...............................................................................................9-1
9.1 검사 목록 .................................................................................................9-1
9.2 검사 항목 설명 .........................................................................................9-2
CHAPTER 10 표시 .............................................................................................10-1
10.1 표시 목록 ...............................................................................................10-1
10.2 표시 항목 설명 ........................................................................................10-2
목차
NS SYSTEM CO., LTD.
CHAPTER 11 알람 표시 .....................................................................................11-1
11.1 알람 목록 ...............................................................................................11-1
11.2 알람 항목 설명 ........................................................................................11-2
CHAPTER 12 통신 기능 .....................................................................................12-1
12.1 통신 기능 개요 ........................................................................................12-1
12.2 통신 코넥터 (CN2) ...................................................................................12-2

목차
NS SYSTEM CO., LTD.
안전을 위한 주의사항
(사용자 설명서를 충분히 이해하신 후에 사용하여 주십시오.)
설치, 운전, 보수 전에 반드시 사용설명서를 숙독하고 올바르게 사용하여 주십시요.
숙돇하신 후에는 사용자설명서를 쉽게 사용하실수 있도록 보관하십시요.
본 사용자 설명서는 안전을 위한 주의사항의 등급을 “위험”과 “주의”로 구분하여 설명하고 있습니다.
위험 : 취급을 잘못한 경우 위험한 상황을 초래하여 사망 또는
중상을 입을 가능성이 있는 경우.
주의 : 취급을 잘못한 경우 위험한 상황을 초래하여 경상을 입을
가능성이 있는 경우 및 물적 손해가 발생할 가능성이 있는 경우.
기재된 내용이 주의에 해당하는 사항에서도 상황에 따라 중대한 결과를 초래할 가능성이
있습니다.
위험 감전 방지를 위하여
배선작업과 점검은 전원차단 후 10 분 이상 경과하고, 충전램프가 꺼진 것을 확인한 후, 테스터 등으로
전압을 확인하고서 행하여 주십시오. 감전사고의 원인이 됩니다.
서보드라이버 및 서보모터는 설치한 후에 배선작업을 하십시오. 감전사고의 원인이 됩니다.
접지단자를 반드시 어스(D종접지)시켜 주십시오. 감전사고 또는 화재의 위험이 있습니다.
젖은 손으로 작업하지 마십시오. 감전사고의 원인이 됩니다.
케이블이 손상되지 않도록 주의 하십시오. 감전사고 또는 화재의 위험이 있습니다.
배선작업은 전기공사 전문가가 해 주십시오. 감전사고 또는 화재의 위험이 있습니다.
위험 화재방지를 위하여
서보드라이버, 서보모터 및 회생저항기는 불연체에 취부 하여 주십시오. 화재의 원인이 됩니다.
서보드라이버가 고장난 경우에는 입력전원을 차단하여 주십시오. 화재의 원인이 됩니다.
회생저항기를 설치한 경우 발열을 주의 하시고, 회생회로의 고장으로 회생저항기가 과열 될 수 있습니다.
화재의 원인이 됩니다.
서보드라이버를 밀폐된 공간에 취부 할 때는 냉각팬을 부착하여 주위온도가 55이하가 되도록 하십시오.
화재의 원인이 됩니다.

목차
NS SYSTEM CO., LTD.
주의 상해방지를 위하여
운반시는 충분히 주의하십시오. 떨어지면 부상의 위험이 있습니다.
각 단자에는 사용설명서에 지정된 전압 이외에는 인가하지 마십시오. 파손의 원인이 됩니다.
각 단자접속에 오류가 없도록 주의하십시오. 파손의 원인이 됩니다.
방열판, 회생저항기 및 서보모터는 고온이 되므로 손대지 마십시오. 화상의 위험이 있습니다.
주의 운반시 주의사항
서보모터 운반 시 케이블, 축, 엔코더를 잡고 운반하지 마십시오. 파손의 원인이 됩니다.
서보드라이버 운반 시 커버를 잡고 운반하지 마십시오. 떨어뜨릴 우려가 있습니다.
제품의 중량에 따라서 적절한 방법으로 운반하십시오.
높은 곳에 올려놓거나 무거운 것을 얹어두지 마십시오.
주의 설치 및 보관시 주의사항
설치는 중량을 견딜 수 있는 곳에 사용설명서에 따라 설치하십시오.
설치방향은 반드시 지켜주십시오.
서보드라이버와 제어반 내의 기타 기기와의 간격은 규정거리 이상이 되도록 공간을 확보하십시오.
서보드라이버, 서보모터 내부에 전도성 이물질이나 기름등의 가연성 이물질이 들어가지 않도록 하십시오.
단독으로 실내/실외에 사용하지 마시고 금속 케이스나 단자함 등에 넣어서 사용하십시오.
서보모터는 충분히 확실하게 기계에 고정하십시오. 충분히 고정되지 않으면 회전시에 이탈될 우려가
있습니다.
서보모터의 회전부는 절대로 만질 수 없도록 보호 커버를 설치하여 주십시오.
서보모터의 축에 커플링 또는 풀리 등을 결합할 때 망치로 두드리는 등 과도한 충격을 주지 마십시오.
엔코더 고장의 원인이 됩니다.
감속기부착 서보모터는 반드시 지정방향으로 설치하십시오. 기름이 새는 원인이 됩니다.
서보모터의 축에 허용하중 이상의 하중을 가하지 마십시오. 축이 부러지는 원인이 됩니다.
다음의 환경조건하에서 설치 및 보관하여 주십시오.
항목 서보 드라이버 서보 모터
주위온도 운전 0 ∼ +55(동결이 없을 것) 0 ∼ +40 (동결이 없을 것)
보관 -20 ∼ +65(동결이 없을 것) -15 ∼ +70(동결이 없을 것)
주위습도 운전 80%RH 이하 (결로가 없을 것) 80%RH 이하 (결로가 없을 것)
보관 90%RH 이하 (결로가 없을 것) 90%RH 이하 (결로가 없을 것)
주위환경 옥내(직사광선이 닿지 않을 것)
부식성 가스, 인화성 가스, 오일 미스트, 먼지 없을 것
표고 해발 1000m 이하
진동 0.6G 이하 2.5G 이하
목차
NS SYSTEM CO., LTD.
주의 배선시 주의사항
전원입력 단자(R,S,T,E)와 모타 출력단자(U,V,W,FG)를 바꾸어 접속하지 마십시오. 고장의 원인이 됩니다.
전원단자 및 모터 출력단자의 나사를 확실하게 채워주십시오.
모타 출력단자(U,V,W,FG)의 순서를 바꾸어 접속하지 마십시오. 오동작의 원인이 됩니다.
모타 출력 쪽에는 진상콘덴서, 서지흡수기, 노이즈필터 등을 설치하지 마십시오. 오동작의 원인이 됩니다.
제어출력신호용 DC 릴레이를 사용하는 경우에는 반드시 서지흡수용 다이오드를 부착하고 부착극성에
주의하십시오.
서보모터에 상용전원을 직접 접속하지 마십시오. 고장의 원인이 됩니다.
주의 시운전 및 운전시 주의사항
운전을 시작하기 전에 사용자 정수를 적절하게 설정하십시오. 기계에 따라 예기치 못한 동작이 발생할 수
있습니다.
시운전 중에 예기치 못한 사고를 방지하기 위해 모타 축과 기계를 연결하지 않은 상태로 먼저 운전해
주십시오.
사용자 정수의 극단적인 변경은 동작이 불안정해지므로 조금씩 변경하여 조정 하십시오.
즉시 운전을 정지하고 전원을 차단할 수 있도록 외부에 비상정지 회로를 설치하십시오.
서보모타 및 드라이버를 분해수리 하지 마십시오.
제품의 개조는 절대로 하지 마십시오.
서보모타와 드라이버는 지정된 조합으로 사용 하십시오.
운전중에는 입출력 신호를 체크하지 마십시오.
서보모타에 부착된 브레이크는 서보 OFF 시 브레이크 작용을 하므로 운전중 통상적인 제동에는 사용하지
마십시오.
순간정지 하였다가 갑자기 재시동 될 가능성이 있으므로 기계에 접근하지 마십시오.
노이즈필터 등으로 전자장애의 영향을 줄입시다. 서보드라이버 가까이에서 사용되는 전자기기에
전자장애를 줄 염려가 있습니다.
에러 발생시는 원인을 제거하고 안전을 확보한 다음 에러 리셋 후 재시동 하십시오.
주의 보수 및 점검시 주의사항
전해 콘덴서는 열화에 의해 용량이 서서히 저하됩니다. 고장에 의한 2 차 재해를 예방하기 위해 일반적인
환경으로 사용할 경우 5년 정도로 교환할 것을 권장합니다. 교환은 당사 서비스에서 행합니다.
주회로 전원을 차단한 후 10 분 이상 경과하고, 충전램프가 꺼진 것을 확인한 후, 테스터 등으로 전압을
확인하고서 보수, 점검 해 주십시오. 감전사고의 원인이 됩니다.
서보드라이버는 전자회로로 설계되어 먼지 및 이물질에 의해 오동작의 가능성이 있으므로
정기적으로(1년) 먼지청소 및 헐거운 나사를 조여 주어야 합니다.

목차
NS SYSTEM CO., LTD.

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 1
1.1 특징 NS SYSTEM 의 범용 서보 드라이브인 “TANGO” 시리즈는 고속 DSP 를 이용하여 고속, 고정도 제어가
가능한 Full Digital 방식의 AC 서보모터 구동장치 입니다. 제어모드의 종류는 위치제어, 속도제어, 토크제어
등이 있습니다.
공작기계, 자동화기계의 위치결정, 정교한 회전속도제어, 라인속도제어 및 장력제어 등 광범위한 분야에
적용할 수 있습니다. 또한 오토튜닝 기능이 있어 서보게인을 초보자도 손쉽게 조정할 수 있습니다.
시리얼통신(RS-232C,RS-422,USB)기능을 내장하고 있어 PC 를 이용하여 각종 파라미터 전송, 원격제어
등을 행할 수 있습니다.
가격대비 성능과 기능에 있어서 최고의 제어를 구현할 수 있는 서보모터 구동장치 입니다.
제품의 특징 FEATURES OF PRODUCT
- 다양한 위치지령 Pulse 형태 입력가능
- 고속 위치지령펄스 주파수 : 500,000 (Pulse / sec)
- 전자 기어비 설정 및 사용가능
- 위치결정시간 단축을 위한 Feed-forward 기능
- 가감속 형태를 기계에 맞게 설정( S자, 선형, 지수함수)
- 다양한 속도 지령방식 사용(내부속도 모드, 아날로그 제어전압 입력)
- 고정밀 속도제어(속도제어 범위 : 1:2000 또는 1:5000)
- 토크(전류)제한으로 기계의 파손을 방지
- 서보 정지를 위한 제로 클램프(Zero Clamp) 기능
- 속도 및 토크 모니터링 기능
- 네트웍 환경을 위한 통신 기능
1.2 제어모드의 종류 1.2.1 위치제어 모드
최대 500kpps 의 고속 펄스열 입력을 받아 서보모터의 회전속도 및 방향을 제어하여 1/10000~20000 의
고정도 분해능을 가진 고정밀도 위치 결정을 수행합니다. 상위제어기에서 모터엔코더의 펄스수에 관계없이
위치지령 펄스당 모터 이동량을 임의로 설정할 수 있는 전자기어비 기능을 가지고 있습니다. 위치지령에
대한 가감속 기능이 있어 급격한 위치지령을 완만하게 처리할 수 있습니다. 또한 급격한 가감속과
과부하에의한 과전류를 보호하기 위하여 토크제한 기능을 가지고 있습니다.

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 2
1.2.2 속도제어 모드
아날로그 속도지령(0~±10V), 외부 접점입력 다단속도지령 또는 파라미터에 의한 내부속도지령에 의해서
서보모터의 회전속도 및 방향을 정교하고 부드럽게 제어합니다. 속도지령에 대한 가감속 기능이 있어 급격한
속도지령을 완만하게 처리할 수 있습니다. 또한 급격한 가감속과 과부하에의한 과전류를 보호하기 위하여
토크제한 기능을 가지고 있습니다. 또한 속도지령에 대한 제로 클램프(Zero Clamp) 기능, 옵셋보정 기능
등을 가지고 있습니다.
1.2.3 토크제어 모드
외부 아날로그 토크지령(0~±10V) 또는 파라미터에 의한 내부토크지령에 의해서 서보모터의 출력토크 및
방향을 정교하게 제어합니다. 토크지령에 대한 가감속 기능이 있어 급격한 토크지령을 완만하게 처리할 수
있습니다.
경부하시의 폭주를 보호하기 위해 최대속도 제한기능을 가지고 있으므로 장력제어 등에 대한 적용이
가능합니다.

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 3
1.3 사양
모델 TANGO-A08 TANGO-A10 TANGO-A15
입력 전원
전원 전압 3상 AC 220 [V] +10~-15%, 50/60[Hz]±5%
전원 용량[kVA] 1.6 2.0 3.0
적용 모터
전압 형태 3상 정현파 구동형 AC 서보 모터
정격 출력 800[W] 1.0[KW] 1.5[KW]
최대출력전류 [rms A] 14.8 18.4 21.2
엔코더 형식 15선/9선 증분형(1000~9999 CT), 17비트 절대치
최대 속도[rpm] 5000
구조 Book Type2
냉각 방식 자연공냉
중량 1.5Kg
모델 TANGO-AA5 TANGO-A01 TANGO-A02 TANGO-A04
입력 전원
전원 전압 3상 AC 220 [V] +10~-15%, 50/60[Hz]±5%
전원 용량[kVA] 0.1 0.2 0.4 0.8
적용 모터
전압 형태 3상 정현파 구동형 AC 서보 모터
정격 출력 50[W] 100[W] 200[W] 400[W]
최대출력전류 [rms A] 4.6 6.1 6.1 9.4
엔코더 형식 15선/9선 증분형(1000~9999 CT), 17비트 절대치
최대 속도[rpm] 5000
구조 Book Type1
냉각 방식 자연 공냉
무게 0.9Kg

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 4
구동 방식 3상 전압형 Sine PWM 구동
제어 방식 위치제어, 속도제어 토크제어, 복합제어(속도/위치, 속도/토크, 위치/토크)
위치 제어
입력 펄스 주파수 최대 500 [kpps]
입력 펄스 종류 방향+펄스, 정회전펄스+역회전펄스, 2상펄스(A상+B상)
입력 펄스 하드웨어 포토 커플러 절연 (DC 5[V])
가감속 형태 직선, S-커브
속도 제어
속도 제어범위 외부지령: (1 : 2048), 내부지령: (1 : 5000)
주파수 응답특성 400[Hz] 이상
속도지령입력 외부지령 : DC ±10[V], 내부지령 : 다단속 4단
속도지령 Offset기능 유 Zero Lock/clamp
기능 유
가감속 형태 직선, S-커브
토크 제어
토크지령입력 외부지령 : DC ±10[V], 내부지령 : 300%
속도제한설정 유
보호기능 과전압, 과전류, 저전압, 회생과다, A/D이상. 엔코더, 과부하, 과속도, 편차과대, 전자기어비, 설정오류, 메모리 이상등
모니터 출력 출력포트(2점) 모니터출력종류: 지령속도, 현재속도, 지령토크, 현재토크, 지령펄스, 에러펄스
브레이크
회생제동저항 외장형 (Option)
다이나믹 제동 내장형
전자 브레이크 전자 브레이크용 무접점 출력
통신 기능 RS232C, RS422(Option), USB(Option)
엔코더 분주출력 1/1 ~ 1/16384
사용환경
주위온도 0 ~ 40
주위습도 90% 이하 (결로현상이 없을 것)
절연저항 DC 500[V], 10[MΩ]이상

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 5
1.4 제품 형식 표기 1.4.1 서보 드라이버 명판
Model name Capacity Input power Serial number
1.4.2 서보 드라이버 형식 표기
TANGO - Series Capacity Name Amplifier type
모델 드라이버 타입
A 범용
B 단축제어기형
C 저가형
D 주문형
E 다축형
symbol 정격출력
A5 50[W]
01 100[W]
02 200[W]
04 400[W]
08 800[W]
10 1[KW]
15 1.5[KW]
Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 6
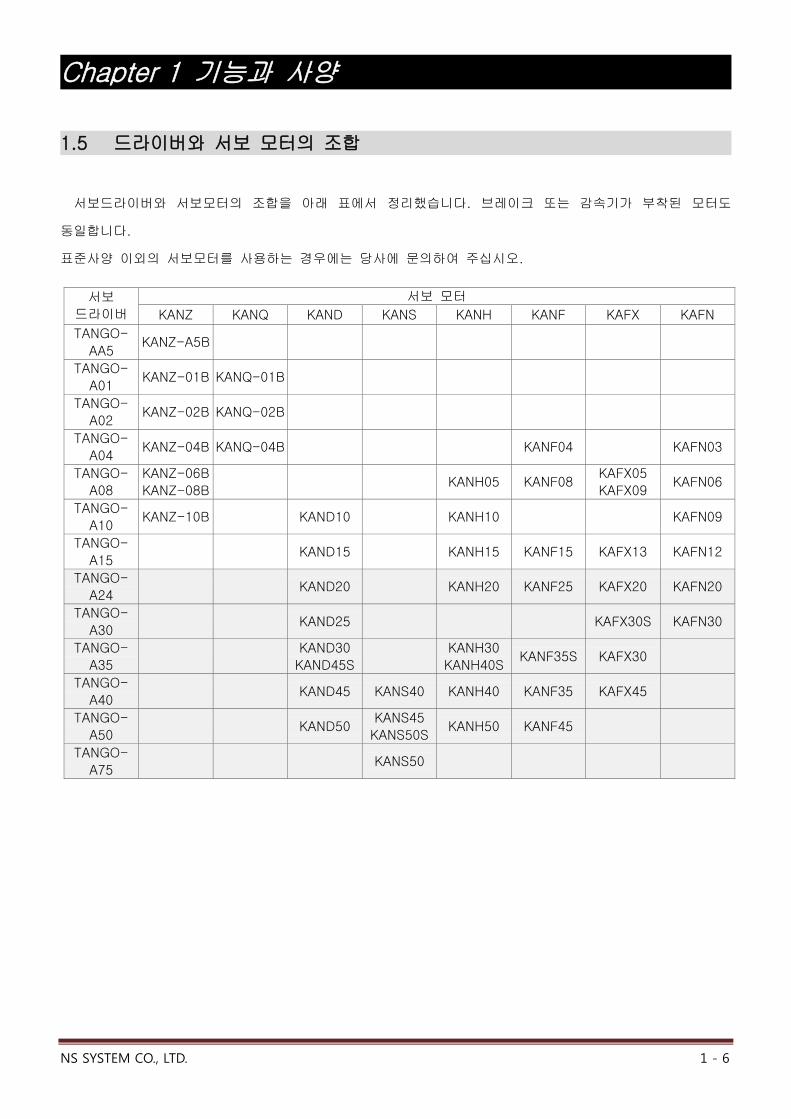
1.5 드라이버와 서보 모터의 조합
서보드라이버와 서보모터의 조합을 아래 표에서 정리했습니다. 브레이크 또는 감속기가 부착된 모터도
동일합니다.
표준사양 이외의 서보모터를 사용하는 경우에는 당사에 문의하여 주십시오.
서보 드라이버
서보 모터 KANZ KANQ KAND KANS KANH KANF KAFX KAFN
TANGO-AA5 KANZ-A5B
TANGO-A01 KANZ-01B KANQ-01B
TANGO-
A02 KANZ-02B KANQ-02B
TANGO-A04 KANZ-04B KANQ-04B
KANF04
KAFN03
TANGO-A08
KANZ-06B KANZ-08B
KANH05 KANF08 KAFX05 KAFX09 KAFN06
TANGO-A10 KANZ-10B
KAND10
KANH10
KAFN09
TANGO-A15
KAND15
KANH15 KANF15 KAFX13 KAFN12
TANGO-A24
KAND20
KANH20 KANF25 KAFX20 KAFN20
TANGO-A30
KAND25
KAFX30S KAFN30
TANGO-A35
KAND30 KAND45S
KANH30 KANH40S KANF35S KAFX30
TANGO-
A40 KAND45 KANS40 KANH40 KANF35 KAFX45
TANGO-
A50 KAND50 KANS45
KANS50S KANH50 KANF45
TANGO-A75 KANS50

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 7
1.6 서보 드라이버의 외형 1.6.1 BOOK TYPE1 외형치수 ( TANGO-A01/A02/A04/A06 )
1.6.2 BOOK TYPE2 외형 치수 ( TANGO-A08/A12/A18 )

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 8
1.7 설치 1.7.1 제품의 확인 제품을 인수하신 후 아래의 항목을 반드시 확인하여 주십시오. 1. 제품이 주문사양과 일치하는가. 2. 운송 중 제품이 파손되지 않았는가. 3. 고정부분이 헐거워지지 않았나. 4. 서보모터축이 손으로 돌렸을 때 부드럽게 돌아가는가. 5. 서보드라이버와 서보모터의 조합이 올바른가. 이상이 있을 경우에는 즉시 구입점 및 당사 영업소로 연락하여 주십시오.
1.7.2 서보 드라이버의 설치
서보 드라이브는 벽걸이 취부형으로 설계되어 있습니다. 자연대류에 의한 냉각효과를 얻기 위해 반드시 아래 그림과
같이 설치하여 주십시오.
Driver Mounted wall
Ventilation
제어반에 내에 취부 할 경우 주위온도가 허용온도(55) 범위를 초과하는 경우에는 냉각팬을 설치해야 합니다.
주위온도는 제품의 수명에 영향을 미치므로 가능한 낮은 온도에서 사용 하십시오.
제어반 내에서의 설치간격은 아래 그림과 같이 설치하여 주십시오.
A
B C
D 제어반 조립 시에는 드릴 등에 의한 금속가루가 서보드라이버 내부에 들어가지 않도록 하십시오.
유해가스와 먼지가 많은 장소에 제어반이 설치되는 경우에는 에어퍼지를 실시하여 제어반 내부에
유해가스나 먼지가 들어가지 않도록 하십시오. 케이블의 고정 방법을 충분히 고려하고 케이블 접속부에 굴곡
스트레스 및 자체중량 스트레스가 가해지지 않도록 하십시오.
A B C D 50mm이상 30mm이상 10mm 이상 50mm 이상

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 9
1.7.3 서보 모터의 설치
서보모터는 수평, 수직방향 어느 쪽으로도 설치가 가능합니다. 그러나 설치환경이 나쁘면 모터의 수명이
짧아지거나 사고의 원인이 되므로 아래의 설명에 따라 설치 및 운전하시기 바랍니다.
축단부나 플렌지에는 보관중에 녹이 슬지 않도록 방청제가 칠해져 있으므로 설치 전에 깨끗이
닦아주십시오.
서보모터는 옥내사용을 원칙으로 하고 있으므로 주위에 물, 기름 등이 많은 경우에는 보호커버를 부착하는
등 대책을 세워 주십시오. 부하결합 시 모터축과 상대 부하축을 서로 일치시켜야 하며 축이 일치하지 않을
경우 진동, 소음 등을 일으켜 베어링을 손상시킬 수도 있습니다. 동심도는 3/100 이하이어야 하고, 갭은
3/100 이하이어야 합니다.
과도한 외부 충격을 가할 경우 모터의 베어링 및 엔코더가 손상될 수도 있습니다.
기어박스, 커플링, 풀리 등을 사용할 경우 모터축에 과도한 충격(50G 이하)을 주지 마십시오.
1.7.4 설치 환경 조건
항목 서보 드라이버 서보 모터
주위온도 운전 0 ∼ +55(동결이 없을 것) 0 ∼ +40(동결이 없을 것)
보관 -20 ∼ +65(동결이 없을 것) -15 ∼ +70(동결이 없을 것)
주위습도 운전 80%RH 이하(결로가 없을 것) 80%RH 이하(결로가 없을 것)
보관 90%RH 이하(결로가 없을 것) 90%RH 이하(결로가 없을 것)
주위환경 옥내(직사광선이 닿지 않을 것) 부식성가스, 인화성가스, 오일미스트, 먼지 없을 것
표고 해발 1000m 이하
진동 0.6G 이하 2.5G 이하
1.7.5 모터축의 허용 하중
레이디얼 하중 트러스트 하중
N kgf N kgf
196 20 49 5

Chapter 1 기능과 사양
NS SYSTEM CO., LTD. 1 - 10

Chapter 2 배선
NS SYSTEM CO., LTD. 2 - 1
2.1 주변기기의 설치 및 배선
전원전선 : 3상 AC 200V ~ 230V
노휴즈 차단기(NFB)
노이즈 필터
전자 접촉기
필요한 경우에 설치하여 주십시오. 용량은 NFB와 같도록 선정해 주십시오.
회생저항기 전선
모터 전선
접지: 제 D종 접지 (100옴 이하) 이상의 접지를 해 주십시오.
반드시 한점 접지를 해 주십시오. 접지루프를 만들지 마십시오
드라이버 전선[] 드라이버 전선[] 드라이버 전선[] TANGO-A01 2(AWG14) TANGO-A12 2(AWG14) TANGO-A40 5.5(AWG10) TANGO-A02 2(AWG14) TANGO-A18 3.5(AWG12) TANGO-A50 5.5(AWG10) TANGO-A04 2(AWG14) TANGO-A24 3.5(AWG12) TANGO-A75 8(AWG8) TANGO-A06 2(AWG14) TANGO-A30 5.5(AWG10)
TANGO-A08 2(AWG14) TANGO-A35 5.5(AWG10)
드라이버 NFB 드라이버 NFB 드라이버 NFB TANGO-A01 250V/5A TANGO-A12 250V/20A TANGO-A40 250V/50A TANGO-A02 250V/5A TANGO-A18 250V/30A TANGO-A50 250V/60A TANGO-A04 250V/10A TANGO-A24 250V/30A TANGO-A75 250V/75A TANGO-A06 250V/15A TANGO-A30 250V/40A
TANGO-A08 250V/15A TANGO-A35 250V/40A
드라이버 정격 드라이버 정격 드라이버 정격 TANGO-A01 250V/5A TANGO-A12 250V/20A TANGO-A40 250V/50A TANGO-A02 250V/5A TANGO-A18 250V/30A TANGO-A50 250V/60A TANGO-A04 250V/10A TANGO-A24 250V/30A TANGO-A75 250V/75A TANGO-A06 250V/15A TANGO-A30 250V/40A
TANGO-A08 250V/15A TANGO-A35 250V/40A
드라이버 전선[] TANGO-A35 이하 2(AWG14)
TANGO-A40/A50/A75 3.5(AWG12)
드라이버 전선[] 드라이버 전선[] 드라이버 전선[] TANGO-A01 1.25(AWG16) TANGO-A12 2(AWG14) TANGO-A40 5.5(AWG10) TANGO-A02 1.25(AWG16) TANGO-A18 3.5(AWG12) TANGO-A50 5.5(AWG10) TANGO-A04 1.25(AWG16) TANGO-A24 3.5(AWG12) TANGO-A75 8(AWG8) TANGO-A06 1.25(AWG16) TANGO-A30 5.5(AWG10)
TANGO-A08 2(AWG14) TANGO-A35 5.5(AWG10)
드라이버 전선[] TANGO-A35 이하 2(AWG14)
TANGO-A40/A50/A75 3.5(AWG12)
Chapter 2 배선
NS SYSTEM CO., LTD. 2 - 2
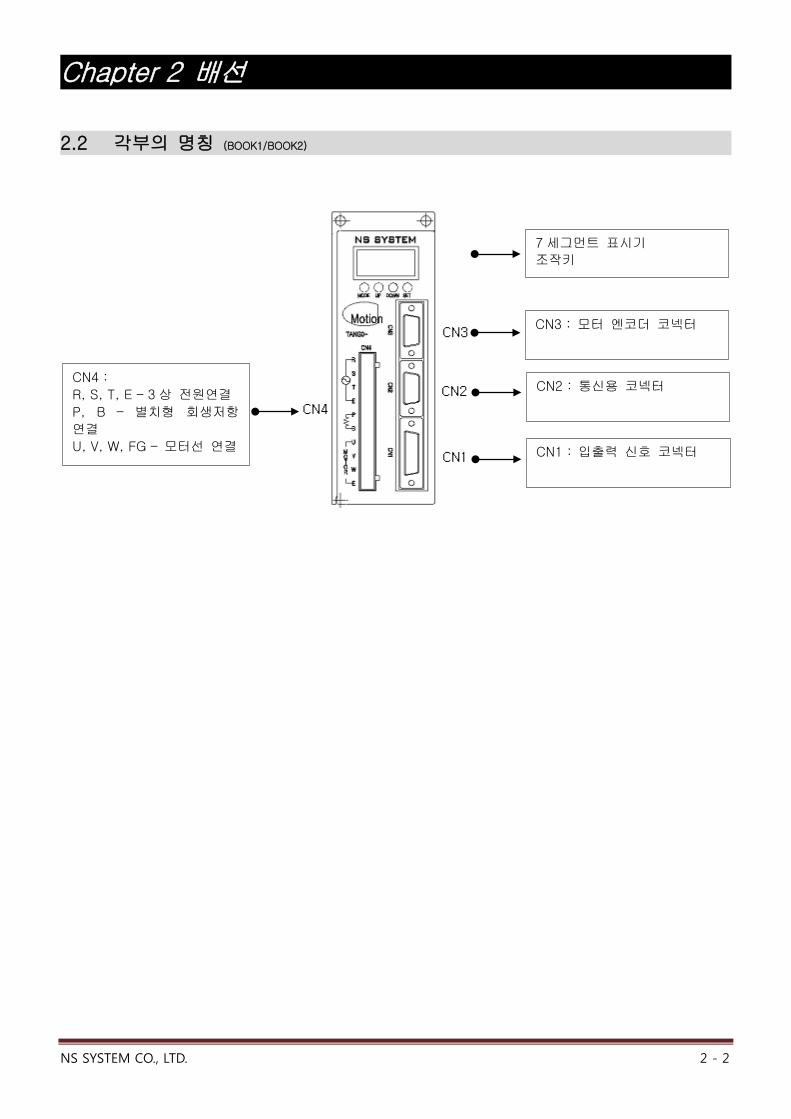
2.2 각부의 명칭 (BOOK1/BOOK2)
CN2 : 통신용 코넥터
7세그먼트 표시기 조작키
CN1 : 입출력 신호 코넥터
CN3 : 모터 엔코더 코넥터
CN4 : R, S, T, E – 3상 전원연결 P, B – 별치형 회생저항 연결 U, V, W, FG – 모터선 연결

Chapter 2 배선
NS SYSTEM CO., LTD. 2 - 3
2.3 전체 결선도
T
SERVO1
SERVO MOTORENC
U
V
W
FG
CN3
FG
CN2
S
1
MONITOROUTPUT(CN6)
E
2
ABS. ENCODERPOWER(CN7 :OPTION)
B
3
INPUTPOWERAC220V50/60Hz3PHASE
INTERFACE (CN1)
P
4
BRAKE REGISTER(OPTION)
U
6
MAINPOWER(CN4)
5
USB PORT
INTERFACE
COM.PORT
8
(CN5 : OPTION)
+15V
7
10
PC or HOSTCONTROLLERWITH ANALOGPOWER TRQMON
9
R
BATTERY forABS.ENCODER
PC or HOSTCONTROLLER
SPDMON SE
RV
O D
RIV
ER
-15V
V
0V
ENCODER
BAT+
W
BAT-

Chapter 2 배선
NS SYSTEM CO., LTD. 2 - 4
2.4 엔코더 (CN3)
핀번호 배선기호 신호 내용 6 A A 상 입력 11 /A /A 상 입력 1 B B 상 입력 7 /B /B 상 입력 12 Z Z 상 입력 2 /Z /Z 상 입력 8 U U 상 입력 13 /U /U 상 입력 3 V V 상 입력 9 /V /V 상 입력 14 W W 상 입력 4 /W /W 상 입력 10 VCC 5V power 15 0V/BAT- 0V / 베터리 - 5 BAT+ 베터리 +

Chapter 2 배선
NS SYSTEM CO., LTD. 2 - 5
2.5 제어 입출력 신호 (CN1)
핀번호 배선기호 신호 내용
19 SPDCOM 아날로그 속도 지령 입력
1 TRQCOM 아날로그 토크 지령 입력
10 AGND 아날로그 인터페이스용 GND
20 +PP 정회전 펄스열 +
2 -PP 정회전 펄스열 -
12 +NP 역회전 펄스열 +
21 -NP 역회전 펄스열 -
16 AO 엔코더 A상 출력
25 /AO 엔코더 /A상 출력
7 BO 엔코더 B상 출력
17 /BO 엔코더 /B상 출력
26 ZO 엔코더 Z상 출력
8 /ZO 엔코더 /Z상 출력
18 DGND 디지털 인터페이스용 GND
3 24V 인터페이스용 DC 24V
5 OUT0 알람 출력
24 OUT1 브리이크 출력
15 OUT2 준비 출력
6 OUT GND 출력 코몬
핀번호 배선기호 제어모드
위치제어 속도제어 토크제어 복합제어
13 IN0 SVON ← ← ←
22 IN1 ARST ← ← ←
14 IN2 CCWL CCWL/DSPD1 CCWL/DTRQ1 ←
4 IN3 CWL CWL/DSPD2 CWL/DTRQ2 ←
11 IN4 STOP ← ← ←
23 IN5 DIR/PCON/GAIN ← ← ←
9 IN6 TRQL TRQL SPDL MODE

Chapter 2 배선
NS SYSTEM CO., LTD. 2 - 6
핀번호 배선기호 위치제어 모드
13 IN0 SVON Servo On
22 IN1 ARST Alarm Reset
14 IN2 CCWL CCW Limit (See PB10)
4 IN3 CWL CW Limit (See PB10)
11 IN4 STOP Stop
23 IN5 DIR/PCON/GAIN (See PA15)
9 IN6 TRQL Torque Limit
핀번호 배선기호 속도제어 모드
13 IN0 SVON Servo On
22 IN1 ARST Alarm Reset
14 IN2 CCWL/DSPD1 CCW Limit (See PB10)
4 IN3 CWL/DSPD2 CW Limit (See PB10)
11 IN4 STOP Stop
23 IN5 DIR/PCON/GAIN (See PA15)
9 IN6 TRQL Torque Limit
핀번호 배선기호 토크제어 모드
13 IN0 SVON Servo On
22 IN1 ARST Alarm Reset
14 IN2 CCWL/DTRQ1 CCW Limit (See PB10)
4 IN3 CWL/DTRQ2 CW Limit (See PB10)
11 IN4 STOP Stop
23 IN5 DIR/PCON/GAIN (See PA15)
9 IN6 SPDL Speed Limit
핀번호 배선기호 복합제어 모드
13 IN0 SVON Servo On
22 IN1 ARST Alarm Reset
14 IN2 CCWL CCW Limit (See PB10)
4 IN3 CWL CW Limit (See PB10)
11 IN4 STOP Stop
23 IN5 DIR/PCON/GAIN (See PA15)
9 IN6 MODE Mode Select

Chapter 3 튜닝
NS SYSTEM CO., LTD. 3 - 1
3.1 기계 강성의 이해 기계 강성이란 “외력에 의한 변형에 저항하는 단단함” 이라고 정의된다.
기계에 외력이 가해지면, 변형이 완료될 때까지 기계의 반응은 지연됩니다. 그래서 고 강성 기계는 저 강성 기계에 비해
빠른 반응을 할 수 있습니다. 기계시스템의 강성은 고유주파수로 표현할 수 있습니다. 고 강성의 의미는 기계가 고 고유
주파수와 고 제어성을 가진다는 뜻 입니다.
서보제어의 측면에서 보면, 제어동작에 반응 할 수 없으므로 위치제어주파수(위치루프게인)는 기계시스템의
고유주파수를 초과하면 않됩니다. 고 강성은 높은 위치루프게인을 가질 수 있습니다. 그래서, 제어를 하고자 하는 기계의
강성을 아는 것은 꼭 필요합니다.
예를 들면, 하모닉 기어 감속기를 가진 관절형 로봇의 경우에는 강성이 매우 낮습니다, 이유는 하모닉 기어감속기의
고유주파수가 10~20Hz이기 때문입니다. 이런 경우 위치루프게인은 10~20Hz로 설정할 수 있습니다. 칩마운트장비,
IC본딩장비, 고정밀 머시닝장비등은 고유 주파수가 70Hz정도이거나 이상입니다. 그래서 위치루프게인은 70Hz나
그이상을 설정할 수 있습니다. 그래서, 높은 응답성이 요구되면, 응답성이 높은 서보 시스템(제어게인, 모터 그리고
엔코더)뿐만 아니라 기계시스템의 높은 강성도 요구됩니다.
기계 특성에 따른 강성레벨은 다음 표에 따릅니다.
강성
레벨 고유 주파수 기계 형태와 연결 장치
매우높음 70~160Hz
타이밍 벨트로 구동되는 경량 인덱서
짧은 길이의 볼스크류로 직결 구동되는 경량 리니어 모션테이블
예 : LED본딩 장비, 칩 실장 장비, PCB 검사장비
높음 50~70Hz
짧은 길이의 볼스크류로 직결 구동되는 경량 또는 중간무게 리니어 모션테이블.
초고정밀 기어감속기를 통한 볼스크류 구동 장비
타이밍 벨트로 구동되는 중간 무게 인덱서
예 : 칩 마운팅 장비, 본딩 장비, 고정밀 머신툴, 고정밀 인덱서
보통 30~50Hz
긴 길이의 볼스크류로 직결 구동되는 중간 또는 무거운 무게의 리니어 모션테이블.
일반정밀도의 기어감속기를 통한 볼스크류 구동 장비
타이밍 벨트로 구동되는 중간 무게의 리니어 모션테이블
타이밍 벨트로 구동되는 짧은 콘베이어 벨트
예 : 일반 머신툴, 가로축 로봇, 짧은 콘베이어
낮음 10~20Hz
타이밍 벨트로 구동되는 무거운 무게의 리니어 모션테이블
체인으로 구동되는 긴 콘베이어 벨트
하모닉 기어 감속기를 사용한 관절형 로봇
벡레쉬가 큰 감속기를 사용한 일반 기계
예 : 긴 콘베이어, 관절형 로봇
Chapter 3 튜닝
NS SYSTEM CO., LTD. 3 - 2
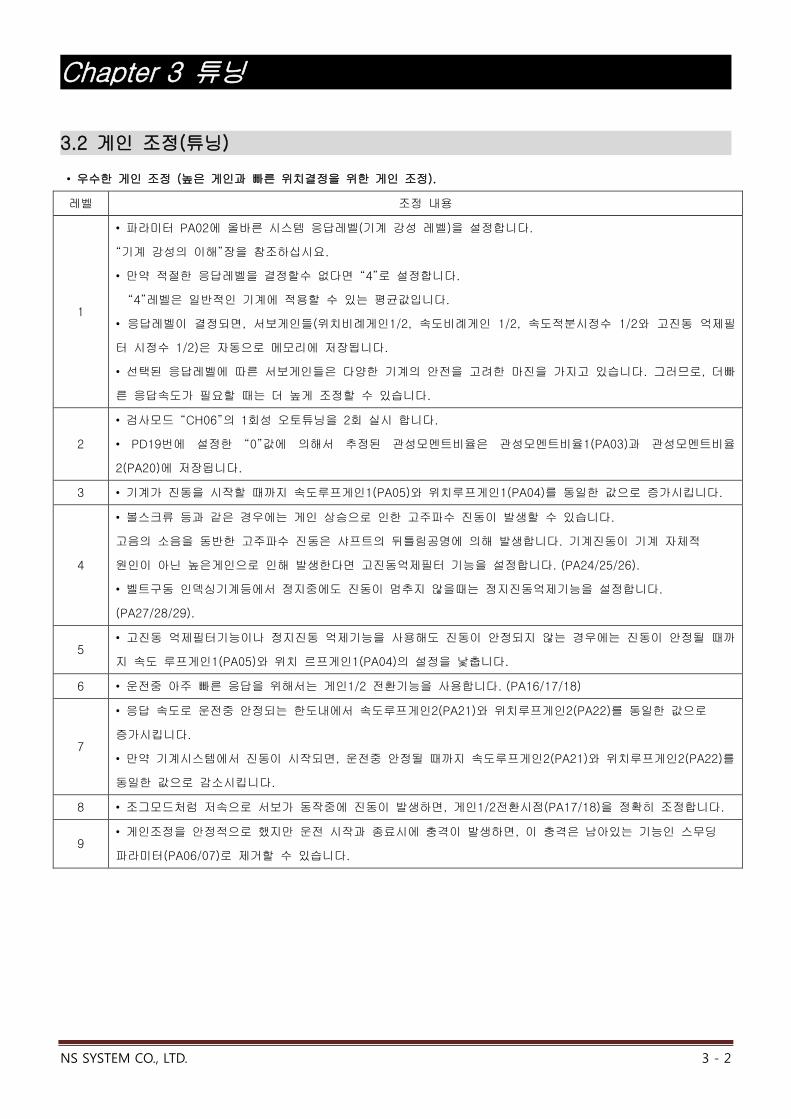
3.2 게인 조정(튜닝) • 우수한 게인 조정 (높은 게인과 빠른 위치결정을 위한 게인 조정).
레벨 조정 내용
1
• 파라미터 PA02에 올바른 시스템 응답레벨(기계 강성 레벨)을 설정합니다.
“기계 강성의 이해”장을 참조하십시요.
• 만약 적절한 응답레벨을 결정할수 없다면 “4”로 설정합니다.
“4”레벨은 일반적인 기계에 적용할 수 있는 평균값입니다.
• 응답레벨이 결정되면, 서보게인들(위치비례게인1/2, 속도비례게인 1/2, 속도적분시정수 1/2와 고진동 억제필
터 시정수 1/2)은 자동으로 메모리에 저장됩니다.
• 선택된 응답레벨에 따른 서보게인들은 다양한 기계의 안전을 고려한 마진을 가지고 있습니다. 그러므로, 더빠
른 응답속도가 필요할 때는 더 높게 조정할 수 있습니다.
2
• 검사모드 “CH06”의 1회성 오토튜닝을 2회 실시 합니다.
• PD19번에 설정한 “0”값에 의해서 추정된 관성모멘트비율은 관성모멘트비율1(PA03)과 관성모멘트비율
2(PA20)에 저장됩니다.
3 • 기계가 진동을 시작할 때까지 속도루프게인1(PA05)와 위치루프게인1(PA04)를 동일한 값으로 증가시킵니다.
4
• 볼스크류 등과 같은 경우에는 게인 상승으로 인한 고주파수 진동이 발생할 수 있습니다.
고음의 소음을 동반한 고주파수 진동은 샤프트의 뒤틀림공명에 의해 발생합니다. 기계진동이 기계 자체적
원인이 아닌 높은게인으로 인해 발생한다면 고진동억제필터 기능을 설정합니다. (PA24/25/26).
• 벨트구동 인덱싱기계등에서 정지중에도 진동이 멈추지 않을때는 정지진동억제기능을 설정합니다.
(PA27/28/29).
5 • 고진동 억제필터기능이나 정지진동 억제기능을 사용해도 진동이 안정되지 않는 경우에는 진동이 안정될 때까
지 속도 루프게인1(PA05)와 위치 르프게인1(PA04)의 설정을 낯춥니다.
6 • 운전중 아주 빠른 응답을 위해서는 게인1/2 전환기능을 사용합니다. (PA16/17/18)
7
• 응답 속도로 운전중 안정되는 한도내에서 속도루프게인2(PA21)와 위치루프게인2(PA22)를 동일한 값으로
증가시킵니다.
• 만약 기계시스템에서 진동이 시작되면, 운전중 안정될 때까지 속도루프게인2(PA21)와 위치루프게인2(PA22)를
동일한 값으로 감소시킵니다.
8 • 조그모드처럼 저속으로 서보가 동작중에 진동이 발생하면, 게인1/2전환시점(PA17/18)을 정확히 조정합니다.
9 • 게인조정을 안정적으로 했지만 운전 시작과 종료시에 충격이 발생하면, 이 충격은 남아있는 기능인 스무딩
파라미터(PA06/07)로 제거할 수 있습니다.
Chapter 3 튜닝
NS SYSTEM CO., LTD. 3 - 3
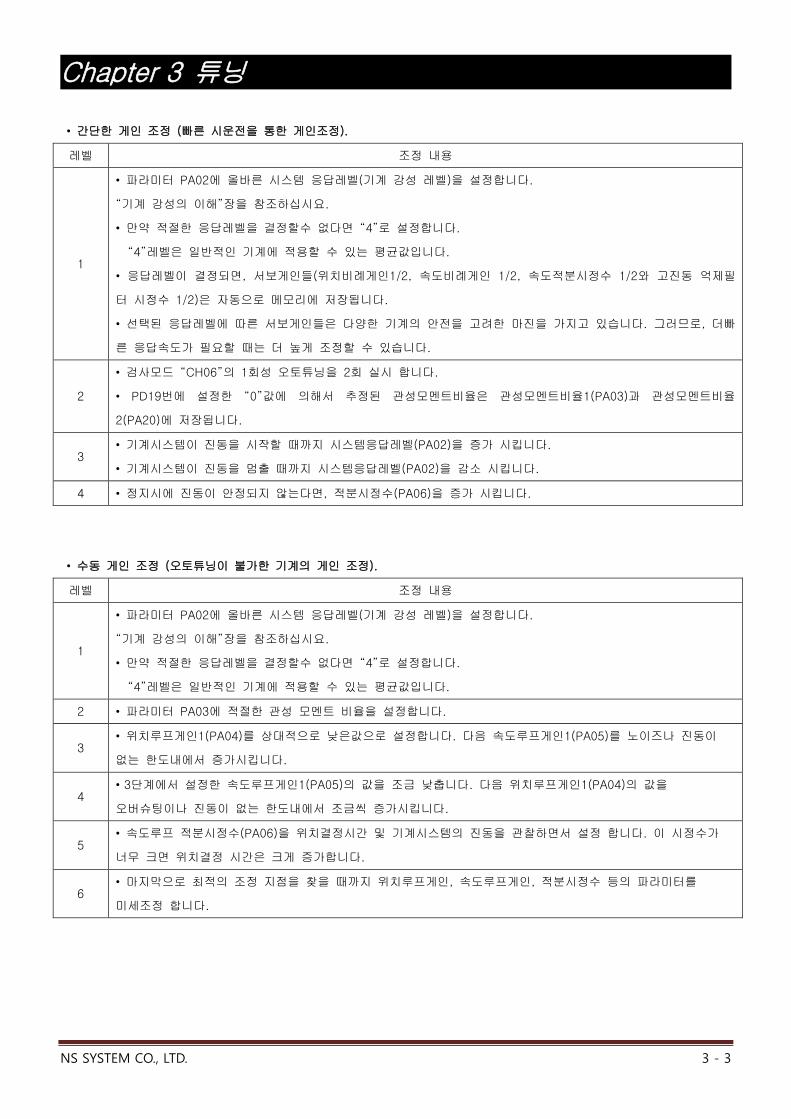
• 간단한 게인 조정 (빠른 시운전을 통한 게인조정).
레벨 조정 내용
1
• 파라미터 PA02에 올바른 시스템 응답레벨(기계 강성 레벨)을 설정합니다.
“기계 강성의 이해”장을 참조하십시요.
• 만약 적절한 응답레벨을 결정할수 없다면 “4”로 설정합니다.
“4”레벨은 일반적인 기계에 적용할 수 있는 평균값입니다.
• 응답레벨이 결정되면, 서보게인들(위치비례게인1/2, 속도비례게인 1/2, 속도적분시정수 1/2와 고진동 억제필
터 시정수 1/2)은 자동으로 메모리에 저장됩니다.
• 선택된 응답레벨에 따른 서보게인들은 다양한 기계의 안전을 고려한 마진을 가지고 있습니다. 그러므로, 더빠
른 응답속도가 필요할 때는 더 높게 조정할 수 있습니다.
2
• 검사모드 “CH06”의 1회성 오토튜닝을 2회 실시 합니다.
• PD19번에 설정한 “0”값에 의해서 추정된 관성모멘트비율은 관성모멘트비율1(PA03)과 관성모멘트비율
2(PA20)에 저장됩니다.
3 • 기계시스템이 진동을 시작할 때까지 시스템응답레벨(PA02)을 증가 시킵니다.
• 기계시스템이 진동을 멈출 때까지 시스템응답레벨(PA02)을 감소 시킵니다.
4 • 정지시에 진동이 안정되지 않는다면, 적분시정수(PA06)을 증가 시킵니다.
• 수동 게인 조정 (오토튜닝이 불가한 기계의 게인 조정).
레벨 조정 내용
1
• 파라미터 PA02에 올바른 시스템 응답레벨(기계 강성 레벨)을 설정합니다.
“기계 강성의 이해”장을 참조하십시요.
• 만약 적절한 응답레벨을 결정할수 없다면 “4”로 설정합니다.
“4”레벨은 일반적인 기계에 적용할 수 있는 평균값입니다.
2 • 파라미터 PA03에 적절한 관성 모멘트 비율을 설정합니다.
3 • 위치루프게인1(PA04)를 상대적으로 낮은값으로 설정합니다. 다음 속도루프게인1(PA05)를 노이즈나 진동이
없는 한도내에서 증가시킵니다.
4 • 3단계에서 설정한 속도루프게인1(PA05)의 값을 조금 낮춥니다. 다음 위치루프게인1(PA04)의 값을
오버슈팅이나 진동이 없는 한도내에서 조금씩 증가시킵니다.
5 • 속도루프 적분시정수(PA06)을 위치결정시간 및 기계시스템의 진동을 관찰하면서 설정 합니다. 이 시정수가
너무 크면 위치결정 시간은 크게 증가합니다.
6 • 마지막으로 최적의 조정 지점을 찾을 때까지 위치루프게인, 속도루프게인, 적분시정수 등의 파라미터를
미세조정 합니다.

Chapter 3 튜닝
NS SYSTEM CO., LTD. 3 - 4

Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 1
4.1 위치 제어의 이해
위치제어루프는 위치지령에 따른 목표위치에 도달하기 위한 빠른 속도지령을 생성합니다. 하지만 빠른 응답성은
기계강성에 의해 시간지연이라는 방해를 받습니다. 이 시간 지연의 결과로 서보는 최적의 성능을 얻을수 없습니다. 이
시간지연을 보상하기 위해 위치제어루프는 최대한 빨리 위치 오차를 “0”으로 만들기 위해 노력합니다. 위치제어의
블록다이어그램은 아래와 같습니다.
+-
위치제어
비례게인위치명령
위치
피드백
속도기준
(명령)강성
지연위치 출력
위치
오차 속도
제어
전류
제어
내부제어루프
위치 지연 보상
(위치 제어 블록 다이어그램)
위치제어루프게인은 다음 두가지 제한사항을 가지고 있습니다.
• 기계시스템에 의한 제한조건.
위치루프게인은 기계시스템의 자연주파수보다 높게 설정할 수 없습니다. 위치루프게인이 기계시스템의 자연주파수를
초과하면 기계진동이 발생합니다. 그러므로 위치루프게인은 기계시스템에서 진동이 발생하는 지점까지 높게 설정할 수
있습니다. 높은 게인을 얻기 위해서는 기계시스템을 좀더 강하게 만들어 자연주파수를 증가시켜야 합니다. 강한 강성은
높은 위치루프게인을 허용합니다.
“기계강성의 이해”장을 참조하십시요.
• 제어규칙에 따른 제한조건
Keep in mind that inner loop must have higher response speed than outer loop for stability of multi-loop feedback
control system. Position loop gain must not exceed the speed loop gain. If the position loop gain is higher than the
speed loop gain, speed reference output from the position loop cannot follow the position loop response due to the
slower speed loop response. As a result, the speed reference output from the position loop will oscillate as shown in
the following figure. If this happens, reduce the position loop gain or increase the speed loop gain.
Speed reference output when normal
Speed reference output when abnormal
Time
Therefore, to increase the position loop gain, you must first increase the speed loop gain. If only the position loop gain
is increased, oscillation will result in the speed reference output and positioning time will increase, not decrease.

Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 2
4.2 결선도 4.2.1 위치제어 모드 결선도 (CN1)
22
1
AO
15
DIR/PCON/GAIN
ALARM RESET INPUT
14
19
/AO
6
TRQL
CCW LIMIT INPUT
24V
BO
20
ALARM+
4
3
SVON
/BO
12
BRAKE+
CW LIMIT INPUT
ALMRST
ZO
2
READY+
11
CCWL
/ZO
21
OUT GND
STOP INPUT
DGND
16
VD
C 24V
23
A-PHASEOUTPUT 25
+PP
13
DIR/PCON/GAIN INPUT
B-PHASEOUTPUT 17
-PP
9
Z-PHASEOUTPUT
7
+NP
TORQUE LIMIT INPUT
SE
RV
O D
RIV
ER
8
-NP
ALARM OUTPUT
TRQCOM
26
2.4K
5
SPDCOM
DIGITAL GROUND
150
BRAKE OUTPUT
AGND
18
150
24
CWL
SERVO ON INPUT
Analog toDigitalConverter
10
COMMANDPULSEINPUT
READY OUTPUT
STOP

Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 3
4.2.2 단자배치 및 신호명
Pin No. Symbol Name
19 SPDCOM Analog Speed Command
1 TRQCOM Analog Torque Command
10 AGND Gnd for Anolog Interface
20 +PP Pulse Forward +
2 -PP Pulse Forward -
12 +NP Pulse Reverse +
21 -NP Pulse Reverse -
16 AO Encoder A Phase Output
25 /AO Encoder /A Phase Output
7 BO Encoder B Phase Output
17 /BO Encoder /B Phase Output
26 ZO Encoder Z Phase Output
8 /ZO Encoder /Z Phase Output
18 DGND Gnd for Digital Interface
3 24V 24V for Interface
5 OUT0 ALARM
24 OUT1 BRAKE
15 OUT2 READY/NEAR
6 OUT GND OUT COMMON
Pin No. Symbol POSITION CONTORL
13 IN0 SVON Servo On
22 IN1 ARST Alarm Reset
14 IN2 CCWL CCW Limit (See PB10)
4 IN3 CWL CW Limit (See PB10)
11 IN4 STOP Stop
23 IN5 DIR/PCON/GAIN (See PA15)
9 IN6 TRQL Torque Limit
Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 4
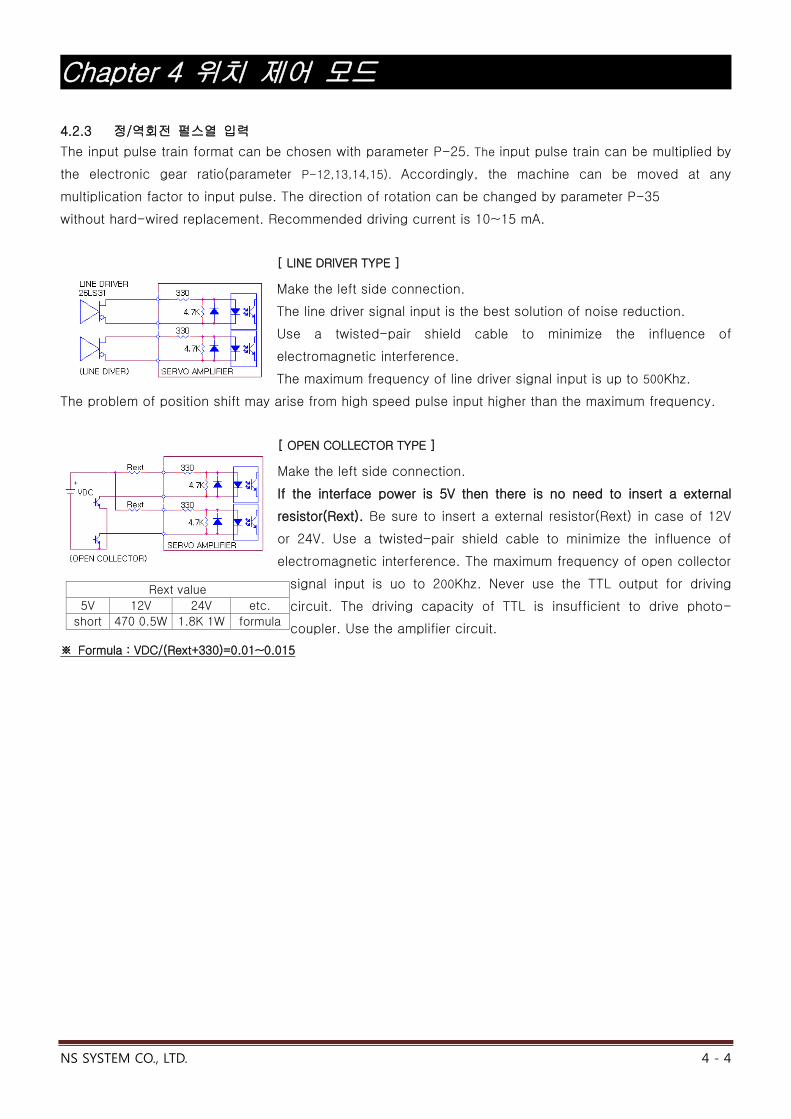
4.2.3 정/역회전 펄스열 입력 The input pulse train format can be chosen with parameter P-25. The input pulse train can be multiplied by
the electronic gear ratio(parameter P-12,13,14,15). Accordingly, the machine can be moved at any
multiplication factor to input pulse. The direction of rotation can be changed by parameter P-35
without hard-wired replacement. Recommended driving current is 10~15 mA.
[ LINE DRIVER TYPE ]
Make the left side connection.
The line driver signal input is the best solution of noise reduction.
Use a twisted-pair shield cable to minimize the influence of
electromagnetic interference.
The maximum frequency of line driver signal input is up to 500Khz.
The problem of position shift may arise from high speed pulse input higher than the maximum frequency.
[ OPEN COLLECTOR TYPE ]
Make the left side connection.
If the interface power is 5V then there is no need to insert a external
resistor(Rext). Be sure to insert a external resistor(Rext) in case of 12V
or 24V. Use a twisted-pair shield cable to minimize the influence of
electromagnetic interference. The maximum frequency of open collector
signal input is uo to 200Khz. Never use the TTL output for driving
circuit. The driving capacity of TTL is insufficient to drive photo-
coupler. Use the amplifier circuit.
※ Formula : VDC/(Rext+330)=0.01~0.015
Rext value 5V 12V 24V etc.
short 470 0.5W 1.8K 1W formula

Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 5
4.2.4 제어용 입력 신호
The power supply for input interface is 24Vdc±10%, 200mA or more.
The symbol of the ground for 24Vdc is 24VGND hereafter.
All input interface signals are isolated by photo-coupler.
The function and application of input interface signals are described as the following table.
Name Symbol Pin No. Function and Application
Servo On
(IN0) SVON 13
Short SVON-24VGND to switch the base citcuit on, making the servo amplifier ready to operate. Open them to shut off the base circuit, making the servo motor free.
Reset (IN1) ALMRST 22
Short ALMRST-24VGND for longer than 50msec to reset alarm. The pulse width of ALMRST is between 50msec and 200msec and it be a one-shot signal. When the servo amplifier is in the state of "servo on", ALMRST input makes the servo amplifier to do reset.
CCW Limit
(IN2) CCWL 14 To start operation, short CWLMT and CCWLMT-24VGND.
Open them to bring the motor to a emergency stop and bring the amplifier to
a alarm status CW Limit
(IN3) CWL 4
STOP
(IN4) STOP 11
STOP INPUT
ZERO LOCK FUNCTION (See PB24)
DIR/PCON/GAIN (IN5) DIR/PCON/GAIN 23
DIRECTION INPUT
P/PI CONTOL INPUT
GAIN 1/2 SELECT INPUT
(See PA15) TORQUE Limit
(IN6) TRQL 9 TORQUE LIMIT INPUT

Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 6
4.2.5 제어용 출력 신호
All output interface signals are isolated by photo-coupler.
Each output port has the capacity of 100Vdc, 120mA.
The surge absorbing diode installed on the DC output signal relay must be wired in the specified direction. Otherwise,
the servo amplifier output damaged by over-current permanently.
The function and application of output interface signals are described as the following table.
Name Symbol Pin No. Function and Application
Alarm ALARM+ (OUT0) 5
Alarm signal output terminal. ALM output is normally contacted with OUTCOM. ALM-OUTCOM are disconnected when an alarm occurs. When an alarm occurs, the alarm message is display at segment display unit.
Brake BRAKE+
(OUT1) 24
Brake signal output terminal.
BRK-OUTCOM are disconnected at servo off or alarm.
Use a servo motor with electromagnetic brake which is designed to prevent from a load
drop on a vertical shaft or which ensure double safety at an emergency stop.
In parameter PC01, set a time delay between electromagnetic brake signal output on and
servo on.
In parameter PC02, set a safety speed of electromagnetic brake action.
When the servo motor is stopped freely at a running, the timing of electromagnetic brake
signal off is delayed until the speed reaches safety level.
In parameter PC03, set a time of electromagnetic brake action when servo-off.
OUT2 OUT2+ 15 INPOSITION signal output terminal.
(See PC05)
OUT GND OUT
GND 6 OUTPUT SIGNALS COMMON GROUND

Chapter 4 위치 제어 모드
NS SYSTEM CO., LTD. 4 - 1
4.2 결선도 4.2.1 위치제어 모드 결선도 (CN1)
26
RBRAKE/READY OUTPUT
ZO
INPOSITION+
DIGITAL GROUND
24
/ZO
OUT GND
18
INPOSITION OUTPUT
DGND
VD
C 24V
R
10
15
A-PHASEOUTPUT
14
+PP
1
6
B-PHASEOUTPUT
CCW LIMIT INPUT
-PP
19
3
ALARM RESET INPUT
Z-PHASEOUTPUT
4
+NP
R
24V
20
22
SE
RV
O D
RIV
ER
CW LIMIT INPUT
-NP
SVON
12
SERVO ON INPUT
TRQCOM
11
2.4K
ALMRST
2
SPDCOM
STOP INPUT
150
CCWL
21
AGND
23
150
CWL
16
Analog toDigitalConverter
DIR/PCON/GAIN INPUT
COMMANDPULSEINPUT
STOP
25
9
AO
DIR/PCON/GAIN
17
TORQUE LIMIT INPUT
13
/AO
TRQL
7
ALARM OUTPUT
BO
ALARM+
8
5
/BO
BRAKE+/READY+

Chapter 5 속도 제어 모드
NS SYSTEM CO., LTD. 5 - 1
5.1 속도 제어의 이해 Speed control loop generates current command in order to quickly reach to the target speed by speed command.
But, quick response is disturbed due to time delay from load inertia moment. As result of time delay, servo cannot
obtain the optimum performance. To recover the time delay, speed control loop try to make the speed error to zero as
fast as possible. Block diagram of speed control is as following figure.
+-
Speedcontrol
Speedcommand
Speedfeedback
Currentreference
(command) Speedoutput
Speederror Current
control
Inner current loop
Compensate speed delay
(Speed Control Block Diagram)
Currentlimit
Torqueconstant
(Kt)
1Jm
If inner current loop is perfect, that can be considered as “1” in the block diagram.
And, if load inertia moment is accurately compensated in speed control, speed control block diagram is simplified as
following figure.
+-
Speedcommand
Speedfeedback
Speedoutput
KtJm
Jc*KpsKt
1
Speedcontrol
Currentcontrol
Kps: speed p-gainJc=Jm
Jm: load inertia moment
machine
+-
Speedcommand
Speedfeedback
SpeedoutputKps
speed outputKps
(1+Kps)= x speed command
(Simplified Speed Control Block Diagram)
Kt=torque constant
The servo will be most stable and responsive when speed loop gain is set as high as possible within the vibration-free
range. If speed loop gain (Kps) is enough high, speed output is almost same as speed command.
But, small amount of speed error cannot be eliminated even though high gain. That error is called steady-state error.
For example, if speed loop gain (Kps) is set to 100Hz, steady-state error becomes 1%. It is not negligible value.
To eliminate the steady-state error, increasing of speed loop gain (Kps) is limited due to system stability.
Therefore, steady-state error is removed through the integration control of speed error. The integral control is defined
as integral time constant. The PI (proportional and integral) control block diagram of speed loop is as following figure.
+-
Speedcommand
Speedfeedback
KtJm
Jc*KpsKt
1
Currentcontrol machine
Jc*KpsKt
1Ti*S
x
P-control
I-control
Speed control
++
Kps: speed p-gain
Jc=Jm
Jm: load inertia momentKt=torque constant
Ti=integral time constant
Speedoutput
(Speed PI-Control Block Diagram)

Chapter 5 속도 제어 모드
NS SYSTEM CO., LTD. 5 - 2
The speed loop gain and integral time constant have limitation conditions as followings.
• Limitation condition of speed loop gain.
Keep in mind that inner loop must have higher response speed than outer loop for stability of multi-loop feedback
control system. Therefore, the speed loop gain must be higher than the position loop gain. If the speed loop gain is
too low, it will delay the outer position loop and cause overshooting and vibration of the speed reference. If this
happens, reduce the position loop gain or increase the speed loop gain. In general, it is easy way that speed loop gain
is set to the same value as position loop gain.
• Limitation condition of integral time constant.
Integral element causes a delay in the servo system, so, set this value within the range where no problem occurs.
If you set smaller value, you can obtain a shorter positioning time, but too small value may cause overshooting or
vibration. If you set too large value, the speed loop cannot respond to very small command and cannot eliminate
steady-state error. For the stability, consider the relationship between speed loop gain and integral time constant as indicated in the following guideline expressions.
* Guideline for good performance: Speed integral time constant [0.1msec] = (8000~6000) ÷ Speed loop
gain[Hz]
* Guideline for min. limitation: Speed integral time constant [0.1msec] ≥ (3200~4700) ÷ Speed loop gain[Hz]
If the load inertia moment is large, make sure that the integral time constant is large enough, because, servo cannot
perfectly eliminate the time delay from load inertia moment due to current limit function. Speed loop response time is
limited because that maximum allowable acceleration speed is limited by current limit function as following expression.
* Maximum allowable acceleration speed = Load inertia moment ÷ Torque.
Therefore, if you want the faster response time, make the load inertia moment to be small, or, use the low inertia
moment motor, or, use the speed reducer as like timing pulley and belt.
When speed reducer is installed, the amount of load inertia moment is reduced as following expression.
* Reduced load inertia moment = Load inertia moment ÷ (reduction ratio)².
Also, if the mechanical system is likely to vibrate, make sure that the integral time constant is large enough.

Chapter 5 속도 제어 모드
NS SYSTEM CO., LTD. 5 - 3
5.2 결선도 (CN1)
SPDCOM
10
23
STOP
18
/BO
ZO
ANALOG GROUND
DIR/PCON/GAIN INPUT
+NP
21
AGND
ALARM+
BRAKE OUTPUT
14
DIR/PCON/GAIN
6
B-PHASEOUTPUT
24
+PP
CCW LIMIT INPUT
-10V to+10V
26
TRQCOM
7
/ZO
4
3
11
150
2
/AO
CW LIMIT INPUT
STOP INPUT
DGND
8
2.4K
13
TORQUE COMMAND INPUT
SER
VO D
RIV
ER
19
READY+
SERVO ON INPUT
1
24V
SPEED COMMAND INPUT
A-PHASEOUTPUT
16
CWL/DSPD2
17
-PP
22
BO
ALARM OUTPUT
TRQL
ALARM RESET INPUT
Z-PHASEOUTPUT
5
15020
SVON
READY OUTPUT
BRAKE+
25
ALMRST
15
VD
C 24V
9
CCWL/DSPD1
12
-NP
OUT GND
TORQUE LIMIT INPUT
Analog toDigitalConverter
DIGITAL GROUND
AO

Chapter 5 속도 제어 모드
NS SYSTEM CO., LTD. 5 - 4
INPUT SIGNALS FOR CONTROL
The power supply for input interface is 24Vdc±10%, 200mA or more.
The symbol of the ground for 24Vdc is 24VGND hereafter.
All input interface signals are isolated by photo-coupler.
The function and application of input interface signals are described as the following table.
Name Symbol Pin No. Function and Application
Servo On
(IN0) SVON 13
Short SVON-24VGND to switch the base citcuit on, making the servo amplifier ready to operate. Open them to shut off the base circuit, making the servo motor free.
Reset (IN1) ALMRST 22
Short ALMRST-24VGND for longer than 50msec to reset alarm. The pulse width of ALMRST is between 50msec and 200msec and it be a one-shot signal. When the servo amplifier is in the state of "servo on", ALMRST input makes the servo amplifier to do reset.
CCW Limit
(IN2) CCWL 14
To start operation, short CWLMT and CCWLMT-24VGND. Open them to bring the motor to a emergency stop and bring the amplifier to
a alarm status
DIGITAL SPEED INPUT
DIGITAL TORQUE INPUT
(See PB10)
CW Limit
(IN3) CWL 4
STOP
(IN4) STOP 11
STOP INPUT
ZERO LOCK FUNCTION (See PB24)
DIR/PCON/GAIN (IN5) DIR/PCON/GAIN 23
DIRECTION INPUT
P/PI CONTOL INPUT
GAIN 1/2 SELECT INPUT
(See PA15) TORQUE Limit
(IN6) TRQL 9 TORQUE LIMIT INPUT

Chapter 6 토크 제어 모드
NS SYSTEM CO., LTD. 6 - 1
6.1 토크 제어의 이해 Current control loop generates voltage command in order to quickly reach to the target current by current command.
But, quick response is disturbed due to time delay from motor coil. As result of time delay, servo cannot obtain the
optimum performance. To recover the time delay, current control loop try to make the current error to zero as fast as
possible. If current flows into motor coil, torque is generated proportionally to product of current and torque const (Kt)
by Fleming’s left hand rule. Finally, motor runs at certain speed according to the machine conditions (inertia moment,
friction, etc). Block diagram of current control is as following figure
+-
Currentcommand
Currentfeedback
1Jm
MachineCurrent PI
control
Kpi: current loop gain Jm: load inertia momentKt=torque constant
Speedoutput
(Current PI-Control Block Diagram)
Kpi(R+Ls)
Voltage command 1
R+Ls
Current limiter
Motorcoil Motor
current Torque constant
(Kt)
Motortorque
Compensate current delay
The servo driver is designed to ensure that the current loop has good response performance against applied motor.
The user needs only to adjust the position loop and speed loop gain.

Chapter 6 토크 제어 모드
NS SYSTEM CO., LTD. 6 - 2
6.2 결선도 (CN1)
21
14
/AO
BRAKE+
10
11
CCW LIMIT INPUT
TRQCOM
150
ALARM OUTPUT
STOP INPUT
READY OUTPUT
ALMRST
SPDL
5
BRAKE OUTPUT
15
AGND
Z-PHASEOUTPUT
READY+
24
6
ALARM+
SPDCOM
STOP
26
DIGITAL GROUND
24V
17
CWL/DTRQ2
VD
C 24V
23
18
/BO
8
A-PHASEOUTPUT
SVON
DIR/PCON/GAIN INPUT
22
Analog toDigitalConverter
20
2.4K
BO
TORQUE COMMAND INPUT
ALARM RESET INPUT
-10V to+10V
2
+PP
SER
VO D
RIV
ER
1
16
25
AO
DGND
19
12
CCWL/DTRQ1
-NP
SPEED COMMAND INPUT
4
B-PHASEOUTPUT
150
13
3
CW LIMIT INPUT
DIR/PCON/GAIN
+NP
SERVO ON INPUT
9
/ZO
ZO
7
SPEED LIMIT INPUT
OUT GND
-PP
ANALOG GROUND
Chapter 6 토크 제어 모드
NS SYSTEM CO., LTD. 6 - 3
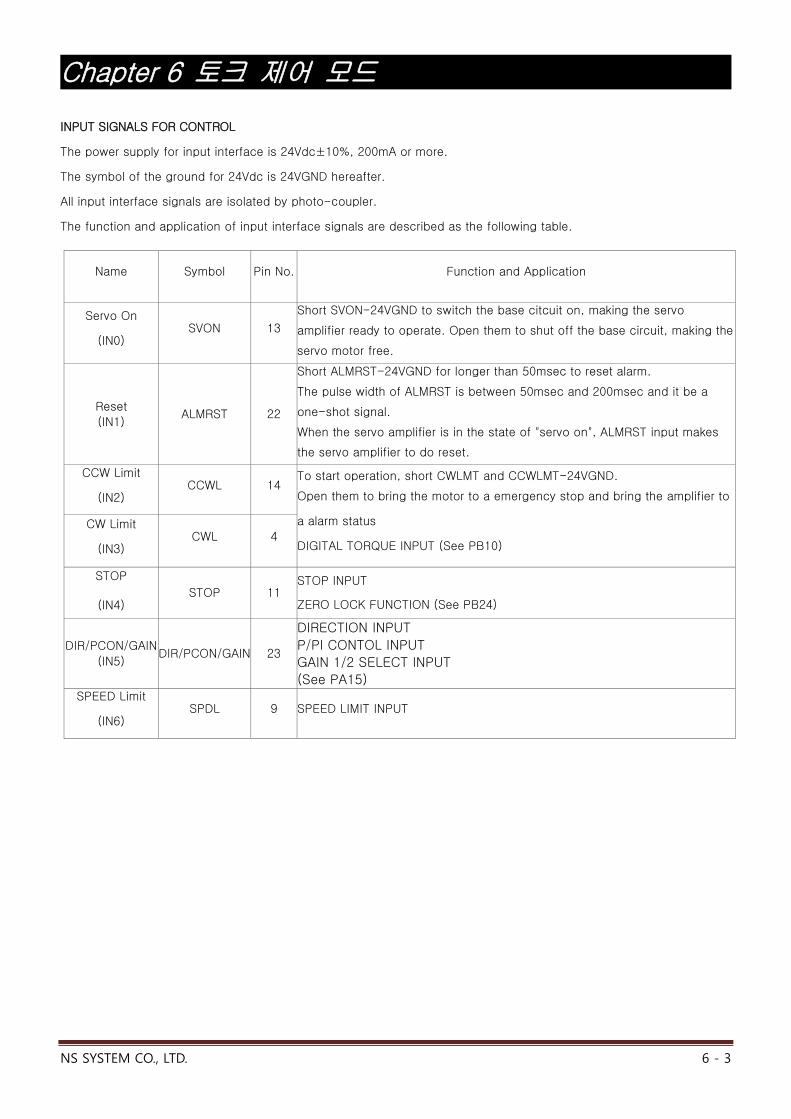
INPUT SIGNALS FOR CONTROL
The power supply for input interface is 24Vdc±10%, 200mA or more.
The symbol of the ground for 24Vdc is 24VGND hereafter.
All input interface signals are isolated by photo-coupler.
The function and application of input interface signals are described as the following table.
Name Symbol Pin No. Function and Application
Servo On
(IN0) SVON 13
Short SVON-24VGND to switch the base citcuit on, making the servo amplifier ready to operate. Open them to shut off the base circuit, making the servo motor free.
Reset (IN1) ALMRST 22
Short ALMRST-24VGND for longer than 50msec to reset alarm. The pulse width of ALMRST is between 50msec and 200msec and it be a one-shot signal. When the servo amplifier is in the state of "servo on", ALMRST input makes the servo amplifier to do reset.
CCW Limit
(IN2) CCWL 14
To start operation, short CWLMT and CCWLMT-24VGND. Open them to bring the motor to a emergency stop and bring the amplifier to
a alarm status
DIGITAL TORQUE INPUT (See PB10) CW Limit
(IN3) CWL 4
STOP
(IN4) STOP 11
STOP INPUT
ZERO LOCK FUNCTION (See PB24)
DIR/PCON/GAIN (IN5) DIR/PCON/GAIN 23
DIRECTION INPUT
P/PI CONTOL INPUT
GAIN 1/2 SELECT INPUT
(See PA15) SPEED Limit
(IN6) SPDL 9 SPEED LIMIT INPUT

Chapter 6 토크 제어 모드
NS SYSTEM CO., LTD. 6 - 4

Chapter 7 복합 제어 모드
NS SYSTEM CO., LTD. 7 - 1
7.1 결선도 (CN1)
12
ANALOG GROUND
OUT GND
SPEED COMMAND INPUT
-PP
4
10
/AO
13
BRAKE+
CW LIMIT INPUT
ALARM OUTPUT
TRQCOM
SERVO ON INPUT
150
9
5
ALMRST
7
MODEMODE INPUT
READY+
AGND
21
Z-PHASEOUTPUT
14
STOP
ALARM+
11
SPDCOM
CCW LIMIT INPUT
COMMANDPULSEINPUT
24V
STOP INPUT
CWL
READY OUTPUT
VD
C 24V
/BO
BRAKE OUTPUT
A-PHASEOUTPUT
15
SVON
Analog toDigitalConverter
24
2.4K
6
BO
17
-10V to+10V
26
+PP
DIGITAL GROUND
SE
RV
O D
RIV
ER
8
AO
18 DGND
20
23
CCWL
22
-NP
DIR/PCON/GAIN INPUT
B-PHASEOUTPUT
ALARM RESET INPUT
150
2
TORQUE COMMAND INPUT
DIR/PCON/GAIN
16
+NP
25
1
3
/ZO
19
ZO

Chapter 7 복합 제어 모드
NS SYSTEM CO., LTD. 7 - 2
INPUT SIGNALS FOR CONTROL
The power supply for input interface is 24Vdc±10%, 200mA or more.
The symbol of the ground for 24Vdc is 24VGND hereafter.
All input interface signals are isolated by photo-coupler.
The function and application of input interface signals are described as the following table.
Name Symbol Pin No. Function and Application
Servo On
(IN0) SVON 13
Short SVON-24VGND to switch the base citcuit on, making the servo amplifier ready to operate. Open them to shut off the base circuit, making the servo motor free.
Reset (IN1) ALMRST 22
Short ALMRST-24VGND for longer than 50msec to reset alarm. The pulse width of ALMRST is between 50msec and 200msec and it be a one-shot signal. When the servo amplifier is in the state of "servo on", ALMRST input makes the servo amplifier to do reset.
CCW Limit
(IN2) CCWL 14
To start operation, short CWLMT and CCWLMT-24VGND. Open them to bring the motor to a emergency stop and bring the amplifier to
a alarm status
DIGITAL SPEED INPUT
DIGITAL TORQUE INPUT
(See PB10)
CW Limit
(IN3) CWL 4
STOP
(IN4) STOP 11
STOP INPUT
ZERO LOCK FUNCTION (See PB24)
DIR/PCON/GAIN (IN5) DIR/PCON/GAIN 23
DIRECTION INPUT
P/PI CONTOL INPUT
GAIN 1/2 SELECT INPUT
(See PA15) MODE
(IN6) MODE 9 CONTROL MODE SELECT INPUT

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 1
8.1 파라미터 리스트
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PA00 제어모드 CMODE Min 0
2 - R S A P S T
Max 5 √ √ √ √
PA01 오토튜닝 모드 AMODE Min 0
0 - R S A P S T
Max 2 √ √ √ √
PA02 시스템 응답성 SYS Min 0
10 - R S A P S T
Max 39 √ √ √ √
PA03 부하관성모멘트 1 IMR1 Min 1.00
1.00 0.01
times
R S A P S T
Max 99.99 √ √ √ √
PA04 위치비례게인 1 PPG1 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
PA05 속도비례게인 1 SPG1 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
PA06 속도적분시정수 1 SITC1 Min 2.0
13.3 0.1
msec
R S A P S T
Max 999.9 √ √ √
PA07 피드포워드게인 FFG Min 0
0 % R S A P S T
Max 100 √ √
PA08 피드포워드 시정수 FFTC Min 0.00
0.00 0.01
msec
R S A P S T
Max 99.99 √ √
PA09 속도바이어스 SBIAS Min 0
0 rpm R S A P S T
Max 400 √ √
PA10 속도바이어스폭 SBIASW Min 1
10 pulse R S A P S T
Max 9999 √ √
PA11 자동 PI/P 전환 APIP Min 0
0 - R S A P S T
Max 3 √ √ √
PA12 PI/P 토크모드 PIPT Min 20
200 % R S A P S T
Max 250 √ √ √
PA13 PI/P 속도모드 PIPS Min 5
100 rpm R S A P S T
Max 5000 √ √ √
PA14 PI/P 펄스편차모드 PIPP Min 5
100 pulse R S A P S T
Max 9999 √ √
PA15 IN5 수동기능 IN5MF Min 0
0 - R S A P S T
Max 2 √ √ √ √
PA16 자동 게인 1/2 전환 AGA12 Min 0
0 - R S A P S T
Max 2 √ √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 2
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PA17 게인 1/2 속도모드 GA12S Min 5
30 rpm R S A P S T
Max 5000 √ √ √
PA18 게인 1/2 펄스편차모드 GA12P Min 5
20 pulse R S A P S T
Max 9999 √ √ √
PA19 게인 1/2 필터 시정수 GA12TC Min 0.00
0.00 0.01
msec
R S A P S T
Max 10.00 √ √ √
PA20 부하관성모멘트비율 2 IMR2 Min 1.00
1.00 0.01
times
R S A P S T
Max 99.99 √ √ √
PA21 위치비례게인 2 PPG2 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
PA22 속도비례게인 2 SPG2 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
PA23 속도적분시정수 2 SITC2 Min 2.0
13.3 0.1
msec
R S A P S T
Max 999.9 √ √ √
PA24 고진동억제필터 HVF Min 0
0 - R S A P S T
Max 2 √ √ √
PA25 고진동억제필터
시정수 1 HVFTC1
Min 0.00 0.50
0.01
msec
R S A P S T
Max 5.00 √ √ √
PA26 고진동억제필터
시정수 2 HVFTC2
Min 0.00 0.50
0.01
msec
R S A P S T
Max 5.00 √ √ √
PA27 정지진동억제범위 SVSR Min 0
0 pulse R S A P S T
Max 4 √ √
PA28 정지진동억제게인 SVSG Min 20
50 % R S A P S T
Max 80 √ √
PA29 정지진동억제시간 SVST Min 1
500 msec R S A P S T
Max 3000 √ √
PA30 가감속 토크
피드포워드 게인 TFG
Min 0 0 %
R S A P S T
Max 100 √ √ √
PA31
가감속 토크
피드포워드 필터
시정수
TFF
Min 0
0 0.01
msec
R S A P S T
Max 9999 √ √ √
PA32 자동 위치결정 응답성 APR Min 0
0 - R S A P S T
Max 3 √ √
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 3
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
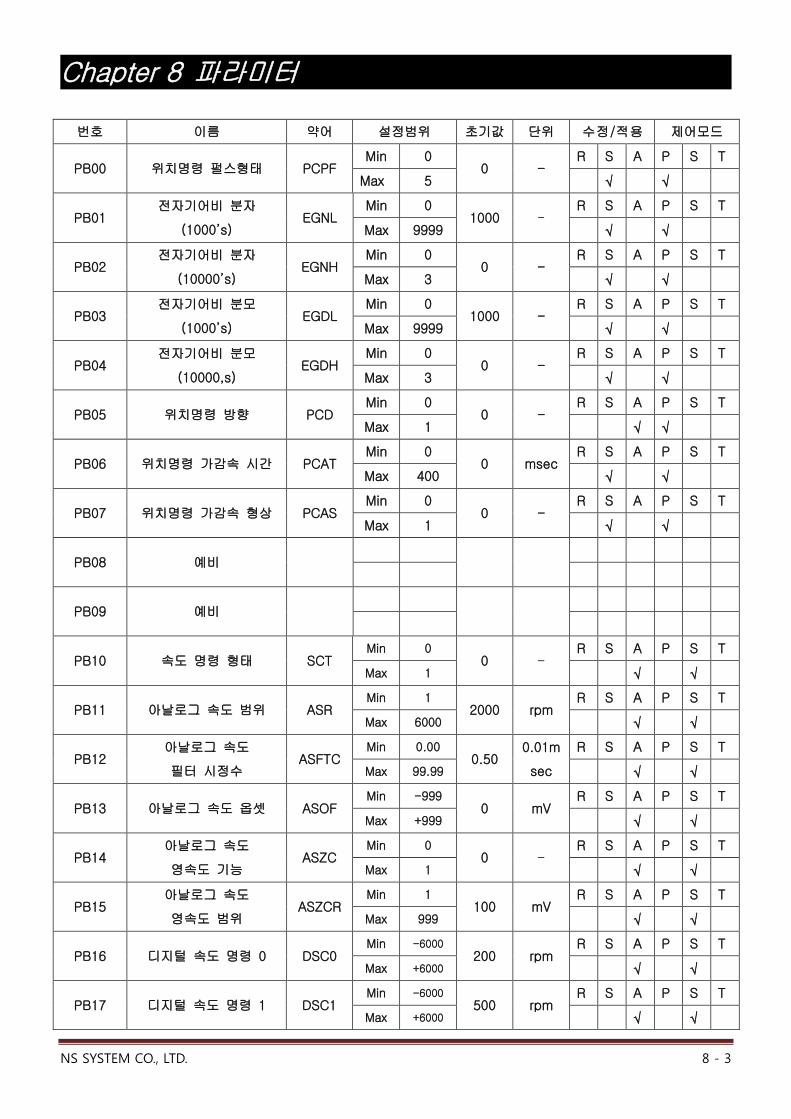
PB00 위치명령 펄스형태 PCPF Min 0
0 - R S A P S T
Max 5 √ √
PB01 전자기어비 분자
(1000’s) EGNL
Min 0 1000 -
R S A P S T
Max 9999 √ √
PB02 전자기어비 분자
(10000’s) EGNH
Min 0 0 -
R S A P S T
Max 3 √ √
PB03 전자기어비 분모
(1000’s) EGDL
Min 0 1000 -
R S A P S T
Max 9999 √ √
PB04 전자기어비 분모
(10000,s) EGDH
Min 0 0 -
R S A P S T
Max 3 √ √
PB05 위치명령 방향 PCD Min 0
0 - R S A P S T
Max 1 √ √
PB06 위치명령 가감속 시간 PCAT Min 0
0 msec R S A P S T
Max 400 √ √
PB07 위치명령 가감속 형상 PCAS Min 0
0 - R S A P S T
Max 1 √ √
PB08 예비
PB09 예비
PB10 속도 명령 형태 SCT Min 0
0 - R S A P S T
Max 1 √ √
PB11 아날로그 속도 범위 ASR Min 1
2000 rpm R S A P S T
Max 6000 √ √
PB12 아날로그 속도
필터 시정수 ASFTC
Min 0.00 0.50
0.01m
sec
R S A P S T
Max 99.99 √ √
PB13 아날로그 속도 옵셋 ASOF Min -999
0 mV R S A P S T
Max +999 √ √
PB14 아날로그 속도
영속도 기능 ASZC
Min 0 0 -
R S A P S T
Max 1 √ √
PB15 아날로그 속도
영속도 범위 ASZCR
Min 1 100 mV
R S A P S T
Max 999 √ √
PB16 디지털 속도 명령 0 DSC0 Min -6000
200 rpm R S A P S T
Max +6000 √ √
PB17 디지털 속도 명령 1 DSC1 Min -6000
500 rpm R S A P S T
Max +6000 √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 4
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PB18 디지털 속도 명령 2 DSC2 Min -6000
800 rpm R S A P S T
Max +6000 √ √
PB19 디지털 속도 명령 3 DSC3 Min -6000
1000 rpm R S A P S T
Max +6000 √ √
PB20 속도 명령 방향 SCD Min 0
0 - R S A P S T
Max 1 √ √
PB21 속도 명령 가속 시간 SCAT Min 0
0 msec R S A P S T
Max 9999 √ √
PB22 속도 명령 감속 시간 SCDT Min 0
0 msec R S A P S T
Max 9999 √ √
PB23 속도 명령 가감속 형태 SCADT Min 0
0 - R S A P S T
Max 1 √ √
PB24 영속도 잠금기능 ZLF Min 0
0 - R S A P S T
Max 1 √ √
PB25 영속도 잠금속도 ZLS Min 1
30 rpm R S A P S T
Max 300 √ √
PB26 토크 바이어스 TBIAS Min -50
0 % R S A P S T
Max +50 √ √ √
PB27 토크 명령 형태 TCT Min 0
0 - R S A P S T
Max 1 √ √
PB28 아날로그 토크 범위 ATR Min 1
100 % R S A P S T
Max 100 √ √
PB29 아날로그 토크
필터 시정수 ATFTC
Min 0.00 0.50
0.01
msec
R S A P S T
Max 99.99 √ √
PB30 아날로그 토크 옵셋 ATOF Min -999
0 mV R S A P S T
Max +999 √ √
PB31 아날로그 토크 영속도 ATZC Min 0
0 - R S A P S T
Max 1 √ √
PB32 아날로그 토크
영속도 범위 ATZCR
Min 1 100 mV
R S A P S T
Max 999 √ √
PB33 디지털 토크 명령 0 DTC0 Min -6000
10 % R S A P S T
Max +6000 √ √
PB34 디지털 토크 명령 1 DTC1 Min -6000
20 % R S A P S T
Max +6000 √ √
PB35 디지털 토크 명령 2 DTC2 Min -6000
30 % R S A P S T
Max +6000 √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 5
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB36 디지털 토크 명령 3 DTC3 Min -6000
40 % R S A P S T
Max +6000 √ √
PB37 토크 명령 방향 TCD Min 0
0 - R S A P S T
Max 1 √ √
PB38 예비
PB39 예비
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC00 위치편차카운터
최대값 EPE
Min 1 900
100
pulse
R S A P S T
Max 9999 √ √
PC01 브레이크 동작시
서보 오프 지연시간 SOD
Min 1 10 msec
R S A P S T
Max 500 √ √ √ √
PC02 브레이크 동작속도 BOS Min 5
50 rpm R S A P S T
Max 500 √ √ √ √
PC03 브레이크 동작시간 BOT Min 1
100 msec R S A P S T
Max 1000 √ √ √ √
PC04 다중 기능 출력 MFO Min 0
0 - R S A P S T
Max 1 √ √ √ √
PC05 위치 완료 출력 범위 IPO Min 10
40 pulse R S A P S T
Max 9999 √ √
PC06 속도 출력 형태 SOT Min 0
0 - R S A P S T
Max 1 √ √ √
PC07 속도 도달 출력 범위 SAO Min 5
100 rpm R S A P S T
Max 6000 √ √ √
PC08 속도 완료 출력 범위 ISO Min 5
30 rpm R S A P S T
Max 100 √ √ √
PC09 엔코더 출력 분자
(1000’s) EONL
Min 0 1 -
R S A P S T
Max 9999 √ √ √ √ √
PC10 엔코더 출력 분자
(10000’s) EONH
Min 0 0 -
R S A P S T
Max 1 √ √ √ √ √
PC11 엔코더 출력 분모
(1000’s) EODL
Min 0 1 -
R S A P S T
Max 9999 √ √ √ √ √
PC12 엔코더 출력 분모
(10000,s) EODH
Min 0 0 -
R S A P S T
Max 1 √ √ √ √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 6
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC13 엔코더 출력 방향 EOD Min 0
0 - R S A P S T
Max 1 √ √ √ √
PC14 엔코더 출력 Z상 형태 EOZT Min 0
0 - R S A P S T
Max 1 √ √ √ √ √
PC15 저전압 알람 복구 RLVA Min 0
1 - R S A P S T
Max 1 √ √ √ √
PC16 회생 제동 동작 시간 RBOT Min 50
200 msec R S A P S T
Max 500 √ √ √ √
PC17 출력 0~2 로직 OLG02 Min 000
001 - R S A P S T
Max 111 √ √ √ √
PC18 입력 0~3 로직 ILG03 Min 0000
0000 - R S A P S T
Max 1111 √ √ √ √
PC19 입력 4~6 로직 ILG46 Min 000
000 - R S A P S T
Max 111 √ √ √ √
PC20 스트로크 제한 기능 SLF Min 0
0 - R S A P S T
Max 2 √ √ √ √
PC21 아날로그 모니터 1
출력 형태 MOT1
Min 0 0 -
R S A P S T
Max 5 √ √ √ √
PC22 아날로그 모니터 1
출력 극성 MOP1
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
PC23 아날로그 모니터 1
출력 스케일링 MOS1
Min 0.1 1.0
0.1
times
R S A P S T
Max 50.0 √ √ √ √
PC24 아날로그 모니터 1
출력 옵셋 MOO1
Min -999 0 mV
R S A P S T
Max +999 √ √ √ √
PC25 아날로그 모니터 2
출력 형태 MOT2
Min 0 1 -
R S A P S T
Max 5 √ √ √ √
PC26 아날로그 모니터 2
출력 극성 MOP2
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
PC27 아날로그 모니터 2
출력 스케일링 MOS2
Min 0.1 1.0
0.1
times
R S A P S T
Max 50.0 √ √ √ √
PC28 아날로그 모니터 2
출력 옵셋 MOO2
Min -999 0 mV
R S A P S T
Max +999 √ √ √ √
PC29 예비

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 7
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PD00 시험 운전 속도 0 TSP0 Min +6000 +100 rpm R S A P S T
Max -6000 √ √
PD01 시험 운전 속도 1 TSP1 Min +6000
-100 rpm R S A P S T
Max -6000 √ √
PD02 시험 운전 속도 2 TSP2 Min +6000
+1000 rpm R S A P S T
Max -6000 √ √
PD03 시험 운전 속도 3 TSP3 Min +6000
-1000 rpm R S A P S T
Max -6000 √ √
PD04 시험 운전 시간 0 TST0 Min 1 10 sec R S A P S T
Max 300 √ √
PD05 시험 운전 시간 1 TST1 Min 1
10 sec R S A P S T
Max 300 √ √
PD06 시험 운전 시간 2 TST2 Min 1
10 sec R S A P S T
Max 300 √ √
PD07 시험 운전 시간 3 TST3 Min 1
10 sec R S A P S T
Max 300 √ √
PD08 Z-상 검색 속도 ZSS Min 5
10 rpm R S A P S T
Max 300 √ √ √ √
PD09 위치결정 시험 속도 PTS Min 1
500 rpm R S A P S T
Max 6000 √ √
PD10 위치결정 시험 거리 PTD Min 0.01
10.00 0.01
turns
R S A P S T
Max 99.99 √ √
PD11 위치결정 시험 반복횟수 PTR Min 1
1 - R S A P S T
Max 9999 √ √
PD12 위치결정 시험
반복 대기시간 PTI
Min 1 1000 msec
R S A P S T
Max 9999 √ √
PD13 1회성 오토튜닝 모드 OTAM Min 0
0 - R S A P S T
Max 1 √ √ √
PD14 1회성 오토튜닝
마찰토크 OTAI
Min 0.0 3.0 0.1%
R S A P S T
Max 30.0 √ √ √
PD15 1회성 오토튜닝
관성모멘트비율 OTAF
Min 1.00 2.00
0.01
times
R S A P S T
Max 50.00 √ √ √
PD16 1회성 오토튜닝
속도 OTAS
Min 500 1000 rpm
R S A P S T
Max 2000 √ √ √
PD17 1회성 오토튜닝
거리 OTAD
Min 0.10 2.00
0.01
turns
R S A P S T
Max 20.00 √ √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 8
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PD18 1회성 오토튜닝
반복횟수 OTAR
Min 1 10 _
R S A P S T
Max 100 √ √ √
PD19 1회성 오토튜닝
결과저장 방법 OTAS
Min 0 0 -
R S A P S T
Max 1 √ √ √
PD20 예비
PD21 시리얼통신
원격제어 SCRC
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
PD22 시리얼통신 방법 SCT Min 0
2 - R S A P S T
Max 2 √ √ √ √
PD23 시리얼통신
드라이버 주소 SCDA
Min 0 0 -
R S A P S T
Max 255 √ √ √ √
PD24 시리얼통신 속도 SCS Min 0
3 - R S A P S T
Max 6 √ √ √ √
PD25 시리얼통신
응답 대기시간 SCRDT
Min 0 10 μsec
R S A P S T
Max 6000 √ √ √ √
PD26 시리얼통신 프로토콜 SCP Min 0
0 - R S A P S T
Max 1 √ √ √ √
PD27 과부하 보호기능 OLD Min 0
0 rpm R S A P S T
Max 1 √ √ √ √
PD28 사용자 설정
과부하 토크 MOTQ
Min 10 100 %
R S A P S T
Max 250 √ √ √ √
PD29 사용자 설정
과부하 감지 시간 MOTM
Min 100 3000 msec
R S A P S T
Max 9999 √ √ √ √
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PE00 PE 파라미터
잠금기능 PEML
Min 0 1 -
R S A P S T
Max 1 √ √ √ √
PE01 모터 고유번호(ID) MID Min 0
- - R S A P S T
Max 399 √ √ √ √ √
PE02 모터 관성 모멘트 단위 MIMU Min 0
- - R S A P S T
Max 2 √ √ √ √
PE03 모터 관성모멘트 MIM
Min 1
-
0.001/
0.01/0.1
gf·cm·
s²
R S A P S T
Max 9999
√ √ √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 9
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PE04 모터 토크 상수 MTC
Min 1
-
0.01
Kgf·cm
/Arms
R S A P S T
Max 3000 √ √ √ √
PE05 모터 상 인덕턴스 단위 MPIU Min 0
- - R S A P S T
Max 1 √ √ √ √
PE06 모터 상 인덕턴스 MPI Min 1
- 0.001/0
.01 mH
R S A P S T
Max 9999 √ √ √ √
PE07 모터 상 저항 MPR Min 0.001
- 0.001Ω R S A P S T
Max 9.999 √ √ √ √
PE08 모터 정격 전류 MRC Min 0.01
- 0.01
Arms
R S A P S T
Max 99.99 √ √ √ √
PE09 모터 최대 속도 MMS Min 1
- rpm R S A P S T
Max 9999 √ √ √ √
PE10 모터 정격 속도 MRS Min 1
- rpm R S A P S T
Max 9999 √ √ √ √
PE11 모터 극수 MPN Min 2
- pole R S A P S T
Max 98 √ √ √ √
PE12 내장 과부하 보호레벨 BOPL Min 10
100 % R S A P S T
Max 100 √ √ √ √ √
PE13 CCW
토크 제한치 CCWTL
Min 1 300 %
R S A P S T
Max 300 √ √ √ √
PE14 CW
토크 제한치 CWTL
Min 1 300 %
R S A P S T
Max 300 √ √ √ √
PE15 엔코더 종류 ETYPE Min 0
0 - R S A P S T
Max 4 √ √ √ √ √
PE16 엔코더 회전당 펄스수 EPPR Min 1000
2500 pulse R S A P S T
Max 9999 √ √ √ √ √
PE17 9-선식 엔코더
UVW입력 지연시간 EUVW
Min 10 70 msec
R S A P S T
Max 500 √ √ √ √ √
PE18 9-선식 엔코더
ABZ입력 지연시간 EABZ
Min 10 70 msec
R S A P S T
Max 500 √ √ √ √ √
PE19 Z-상 시프트 각도 EZSA Min 0
0 ° R S A P S T
Max 359 √ √ √ √ √
PE20 9-선식 엔코더
신호 입력 타입
Min 0 0 °
R S A P S T
Max 2 √ √ √ √ √

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 10
8.2 파라미터 설명
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PA00 제어모드 CMODE Min 0
2 - R S A P S T
Max 5 √ √ √ √
제어모드를 설정합니다.
제어모드 0~2는 고정 제어모드이며 IN6을 토크제한 입력으로 사용합니다.
제어모드 3~5는 조합 제어모드이며 IN6을 모드변환 입력으로 사용합니다.
속도제어중 영속도 잠금기능은 제어모드 3과4에서는 사용이 불가합니다.
설정값 제어 모드 IN6에 따른 제어모드의 변환
Off On
0
고정 제어모드
토크 X X
1 속도 X X
2 위치 X X
3
복합 제어모드
위치/속도 위치 속도
4 토크/속도 토크 속도
5 토크/위치 토크 위치
번호. 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PA01 오토튜닝 모드 AMODE Min 0
0 - R S A P S T
Max 2 √ √ √ √
오토튜닝 모드를 설정합니다.
설정값 설명
0
서보시스템은 미리 지정된 부하관성모멘트비율에 따라 제어됩니다.
수동
오토튜닝
수동 오토튜닝은 기계시스템 및 서보의 응답성을 사용자가 확인 가능할 때
부하관성모멘트비율 1, 2번을 사용자가 수동으로 설정하고자 할 때 사용합니다.
1회성
오토튜닝
1회성 오토튜닝은 부하관성모멘트비율 1, 2번을 사용자의 설정이 필요 없이 설정할
때 사용합니다. 부하관성모멘트비율은 검사모드6번에 의해서 자동으로 산정됩니다.
1 실시간
오토튜닝
실시간 오토튜닝은 서보구동중에 최적의 게인값으로 부하관성모멘트비율 1번을
산정합니다.
2 고급 실시간
오토튜닝
고급 실시간 오토튜닝은 기계시스템 특성값에 맞도록 서보구동중에 최적의
게인값으로 부하관성모멘트비율 1번을 산정합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 11
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA02 시스템 응답성 SYS Min 0
10 - R S A P S T
Max 39 √ √ √ √
서보시스템의 응답성(기계강성)을 설정합니다.
응답성이 설정되면, 서보의 게인(위치비례게인1/2, 속도비례게인1/2, 속도적분시정수1/2와 고진동억제필터시정수1/2)이
다음 테이블에 준하여 메모리에 저장됩니다. 응답성이 상승되면 추적능력은 증가하고 명령에 대한 안정화시간은
감소하지만, 너무 높은 응답성은 진동을 발생시킵니다. 그러므로, 진동이 없는 범위내에서 원하는 값을 얻을때까지
설정을 확인하십시요. 기계공진 때문에 응답성의 값을 100Hz이상까지 늘릴 수 없다면, 고진동억제필터 또는
기계공진억제필터를 기계공진을 억제하는데 사용할 수 있습니다.
기계공진을 억제하면 응답성을 높게 설정할 수 있게 합니다.
(위치비례게인: PPG, 속도비례게인: SPG, 속도적분시정수: SITC, 진동억제필터시정수: LPF)
설정값 PPG
Hz
SPG
Hz
SITC
0.1msec
LPF
0.01msec
응답시간[msec] 기계 특성(공진 주파수)과 강성
Position Speed
0 15 15 53.3 2.66 200 33 낮음
↑
↑
↑
↑
보통
↓
↓
↓
↓
높음
↓
↓
↓
↓
↓
매우높음
(예제)
하모닉 기어감속기를 장착한
관절형 로봇
강성 0~2
팔형 로봇, 콘베이어
강성 2~4
일반 기계
강성 4 ~ 6
자동삽입기, 실장기, 본딩기
강성 7 ~ 10
1 20 20 40.0 2.00 150 25
2 25 25 32.0 1.60 120 20
3 30 30 26.7 1.33 100 17
4 40 40 20.0 1.00 75 13
5 50 50 16.0 0.80 60 10
6 60 60 13.3 0.67 50 9
7 70 70 11.4 0.57 43 7
8 80 80 1 .0 0.50 38 6
9 90 90 8.9 0.44 33 6
10 100 100 8.0 0.40 30 5
11 110 110 7.3 0.36 27 5
12 120 120 6.7 0.33 25 4
13 130 130 6.2 0.30 23 4
14 140 140 5.7 0.28 21 4
15 150 150 5.3 0.26 20 3
16 160 160 5.0 0.25 19 3
17 180 180 4.4 0.22 17 3 Special
18 200 200 4.0 0.20 15 3 Special
19 230 230 4.0 0.17 13 2 Special
20 260 260 4.0 0.15 12 2 Special
21 290 290 4.0 0.13 10 2 Special

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 12
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA03 부하관성모멘트 1 IMR1 Min 1.00
1.00 0.01[배] R S A P S T
Max 99.99 √ √ √ √
서보모터의 관성모멘트에 대한 부하관성모멘트의 비율을 설정합니다.
공장 출하 초기값은 무부하 서보모터 단독상태인 1.00[배]입니다.
내부 서보제어게인(위치비례게인, 속도비례게인과 속도적분시정수)는 부하관성모멘트에 따라서 자동으로 산정됩니다.
부하관성모멘트는 다음 테이블에 따라서 계산됩니다.
PA01 설명
0
수동
오토튜닝
수동 오토튜닝은 서보 또는 기계의 응답을 확인할 수 있어서 부하관성모멘트비율을
미리 알고 있거나 사용자가 부하관성모멘트비율 1,2번을 수동 설정하고 싶을 때 사용
합니다.
서보는 고정부하관성모멘트비율 1,2번에 의해 제어됩니다.
1회성
오토튜닝
1회성 오토튜닝은 부하관성모멘트비율 1,2번의 수동설정이 필요 없이 자동설정만으로
사용할 수 있습니다. 부하관성모멘트비율은 검사모드 6번에 의해 측정됩니다.
서보는 측정된 부하관성모멘트비율 1,2번에 의해 제어됩니다.
1 실시간
오토튜닝
실시간 오토튜닝은 서보가 가감속을 수행하는 동안 항상 가장 최근의
부하관성모멘트비율 1번을 추정하고 이 값에 따라 최적의 게인값을 설정합니다.
추정된 설정값은 매 60초 마다 서보의 메모리에 저장됩니다.
저장된 값은 전원이 인가되어 실시간 오토튜닝이 시작되면 사용됩니다.
2
고급
실시간
오토튜닝
고급 실시간 오토튜닝은 서보가 가감속을 수행하거나 기계공진을 하는 동안에도 항상
가장 최근의 부하관성모멘트비율 1번을 추정합니다. 이 설정은 부하관성모멘트비율
1번을 기계적 특성과 공진주파수에 적합하도록 최적의 서보게인을 설정합니다.
추정된 설정값은 매 60초 마다 서보의 메모리에 저장됩니다.
저장된 값은 전원이 인가되어 고급 실시간 오토튜닝이 시작되면 사용됩니다.
부하관성모멘트비율
산정이 불가능한
경우
• 가감속 시간이 400rpm/sec이상인 경우.
• 가감속 토크가 정격토크의 10% 미만인 경우.
• 회전속도가 100rpm미만이거나, 기준속도가 계단형인 경우.
• 운동범위가 너무 좁은 경우, 즉 너무 작은 회전량.
• 벨트구동 기계시스템, 점성마찰이 높은 기계시스템등 부하강성이 낮거나 진동이
쉽게 발생할 수 있는 경우.
• 부하관성모멘트비율이 서보모터의 관성모멘트의 100배 이상인 경우.
• 비례제어를 사용중인 경우.
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 13
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
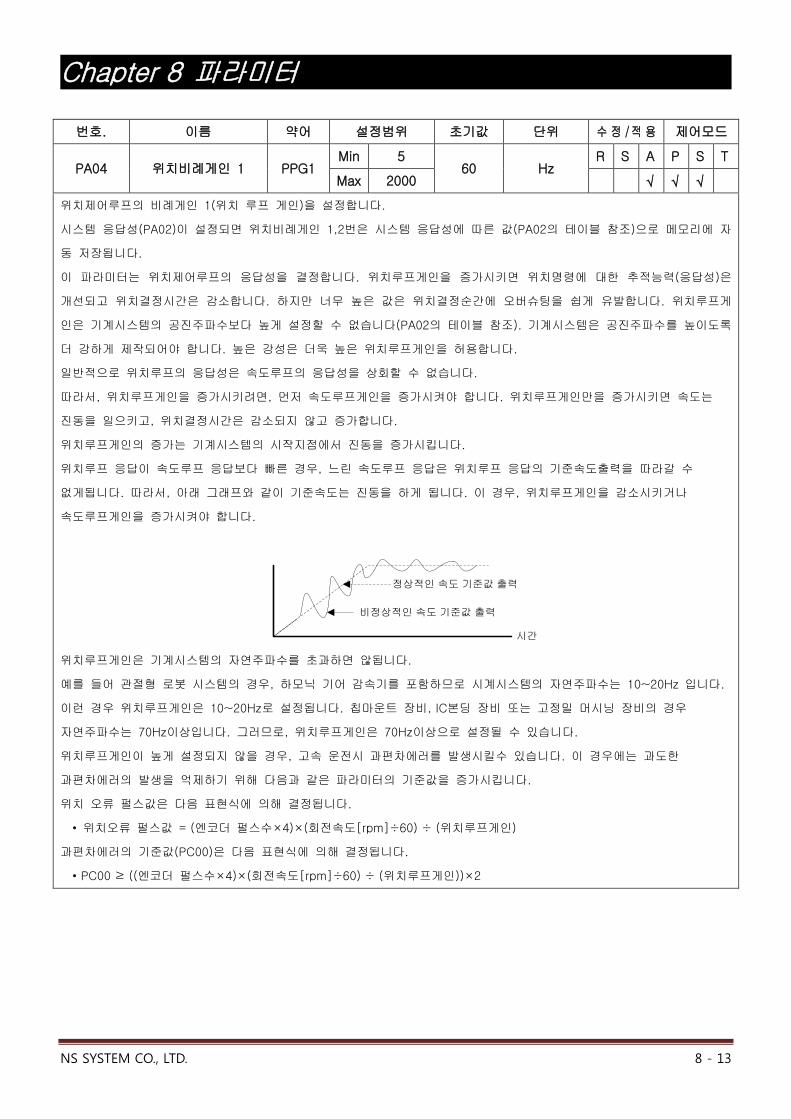
PA04 위치비례게인 1 PPG1 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
위치제어루프의 비례게인 1(위치 루프 게인)을 설정합니다.
시스템 응답성(PA02)이 설정되면 위치비례게인 1,2번은 시스템 응답성에 따른 값(PA02의 테이블 참조)으로 메모리에 자
동 저장됩니다.
이 파라미터는 위치제어루프의 응답성을 결정합니다. 위치루프게인을 증가시키면 위치명령에 대한 추적능력(응답성)은
개선되고 위치결정시간은 감소합니다. 하지만 너무 높은 값은 위치결정순간에 오버슈팅을 쉽게 유발합니다. 위치루프게
인은 기계시스템의 공진주파수보다 높게 설정할 수 없습니다(PA02의 테이블 참조). 기계시스템은 공진주파수를 높이도록
더 강하게 제작되어야 합니다. 높은 강성은 더욱 높은 위치루프게인을 허용합니다.
일반적으로 위치루프의 응답성은 속도루프의 응답성을 상회할 수 없습니다.
따라서, 위치루프게인을 증가시키려면, 먼저 속도루프게인을 증가시켜야 합니다. 위치루프게인만을 증가시키면 속도는
진동을 일으키고, 위치결정시간은 감소되지 않고 증가합니다.
위치루프게인의 증가는 기계시스템의 시작지점에서 진동을 증가시킵니다.
위치루프 응답이 속도루프 응답보다 빠른 경우, 느린 속도루프 응답은 위치루프 응답의 기준속도출력을 따라갈 수
없게됩니다. 따라서, 아래 그래프와 같이 기준속도는 진동을 하게 됩니다. 이 경우, 위치루프게인을 감소시키거나
속도루프게인을 증가시켜야 합니다.
속도
속도
위치루프게인은 기계시스템의 자연주파수를 초과하면 않됩니다.
예를 들어 관절형 로봇 시스템의 경우, 하모닉 기어 감속기를 포함하므로 시계시스템의 자연주파수는 10~20Hz 입니다.
이런 경우 위치루프게인은 10~20Hz로 설정됩니다. 칩마운트 장비, IC본딩 장비 또는 고정밀 머시닝 장비의 경우
자연주파수는 70Hz이상입니다. 그러므로, 위치루프게인은 70Hz이상으로 설정될 수 있습니다.
위치루프게인이 높게 설정되지 않을 경우, 고속 운전시 과편차에러를 발생시킬수 있습니다. 이 경우에는 과도한
과편차에러의 발생을 억제하기 위해 다음과 같은 파라미터의 기준값을 증가시킵니다.
위치 오류 펄스값은 다음 표현식에 의해 결정됩니다.
• 위치오류 펄스값 = (엔코더 펄스수×4)×(회전속도[rpm]÷60) ÷ (위치루프게인)
과편차에러의 기준값(PC00)은 다음 표현식에 의해 결정됩니다.
• PC00 ≥ ((엔코더 펄스수×4)×(회전속도[rpm]÷60) ÷ (위치루프게인))×2

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 14
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA05 속도비례게인 1 SPG1 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
속도제어루프의 비례게인 1 (속도루프게인)을 설정합니다.
시스템 응답성(PA02)이 설정되면 속도비례게인 1,2번은 시스템 응답성에 따른 값(PA02의 테이블 참조)으로 메모리에 자
동 저장됩니다.
이 파라미터는 속도루프의 응답성을 결정합니다. 부하관성모멘트비율 (PA03)이 정확하게 설정되었으면 속도루프게인의
값은 설정된 위치루프게인의 값과 비슷하게 설정됩니다.
진동이 없는 한도내에서 속도루프게인이 최대한 높게 설정되면 서보는 가장 안정적이고 응답성이 좋게 됩니다.
속도루프의 응답성이 너무 낮으면, 외부 위치루프의 지연, 오버슈팅과 기준속도의 발진이 발생합니다.
부하관성모멘트비율(PA03)이 적절하게 설정되면, 실제 속도루프게인은 부하관성모멘트비율(PA03)과 비례하게 되므로,
오토튜닝 방식에서 적절하게 설정해야 합니다.
* 수동 게인 조정 *
사용자가 기본 부하관성모멘트비율(=1.00)에 맞추어 수동으로 실제 속도루프게인을 추정하려면, 다음 표현식에
표시된대로 부하관성모멘트비율과의 관계를 고려 하십시요.
• 속도루프게인[Hz] = (시스템응답성에 준한 속도비례게인)×(예상 부하관성모멘트비율)
• 수동 게인조정은 다음의 순서에 준해서 수행하십시요.
1. 비교적 낮은 값으로 위치루프게인을 설정하고, PA05에 소음이나 진동이 없는 한도내에서 속도루프게인을
증가시키면서 설정합니다.
2. 1단계에서 설정한 속도루프게인을 약간 감소시킨 후 오버슈팅이 없는 한도내에서 위치루프게인을 증가시키면서
설정합니다.
3. 위치결정시간과 기계시스템의 진동을 보고 속도적분시정수를 PA06에 설정합니다. 이 시정수가 너무 크면
위치결정시간이 길어집니다.
4. 볼스크류 등이 사용되면 높은 공진주파수는 게인값을 높게 조정할 수 있습니다.
높은 공진주파수는 축단의 비틀림으로 인해 고음의 진동소음을 발생합니다.
이런 경우, PA24/25/26 (See PA24).에 고진동억제필터를 설정합니다.
5. 마지막으로, 위치루프게인, 속도루프게인, 속도적분시정수를 미세조정하여 최적점을 찾습니다.
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 15
번호. 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
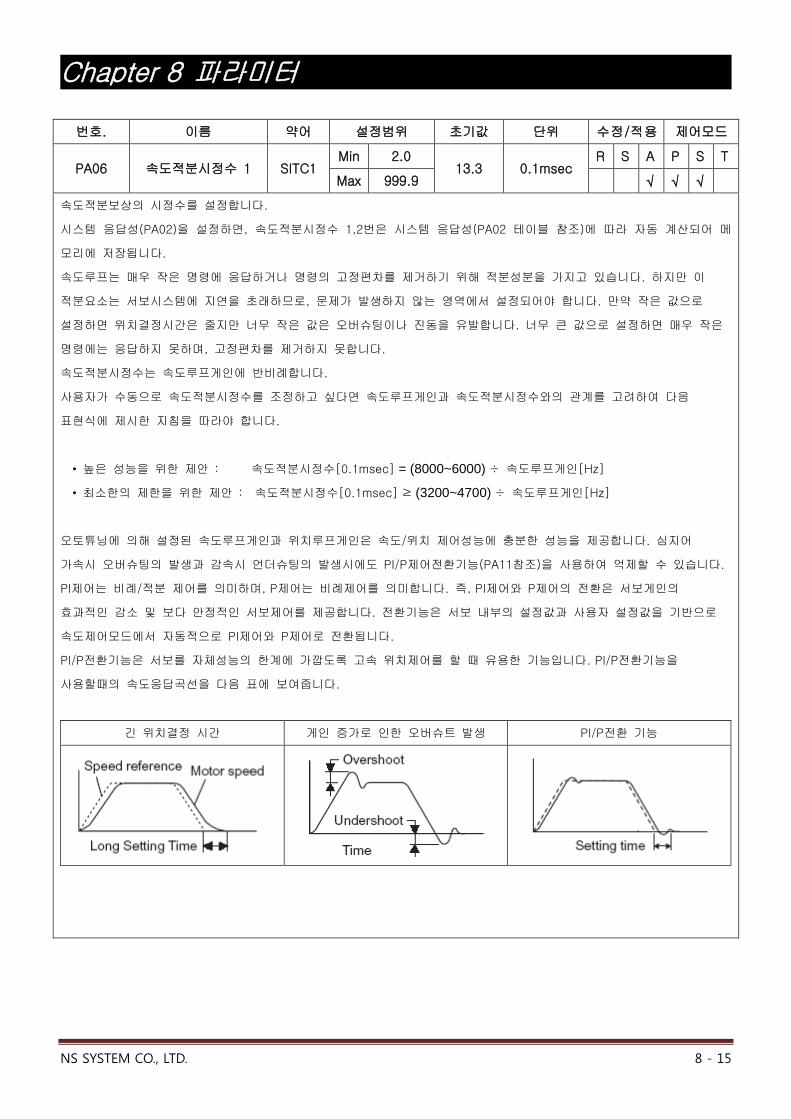
PA06 속도적분시정수 1 SITC1 Min 2.0
13.3 0.1msec R S A P S T
Max 999.9 √ √ √
속도적분보상의 시정수를 설정합니다.
시스템 응답성(PA02)을 설정하면, 속도적분시정수 1,2번은 시스템 응답성(PA02 테이블 참조)에 따라 자동 계산되어 메
모리에 저장됩니다.
속도루프는 매우 작은 명령에 응답하거나 명령의 고정편차를 제거하기 위해 적분성분을 가지고 있습니다. 하지만 이
적분요소는 서보시스템에 지연을 초래하므로, 문제가 발생하지 않는 영역에서 설정되어야 합니다. 만약 작은 값으로
설정하면 위치결정시간은 줄지만 너무 작은 값은 오버슈팅이나 진동을 유발합니다. 너무 큰 값으로 설정하면 매우 작은
명령에는 응답하지 못하며, 고정편차를 제거하지 못합니다.
속도적분시정수는 속도루프게인에 반비례합니다.
사용자가 수동으로 속도적분시정수를 조정하고 싶다면 속도루프게인과 속도적분시정수와의 관계를 고려하여 다음
표현식에 제시한 지침을 따라야 합니다.
• 높은 성능을 위한 제안 : 속도적분시정수[0.1msec] = (8000~6000) ÷ 속도루프게인[Hz]
• 최소한의 제한을 위한 제안 : 속도적분시정수[0.1msec] ≥ (3200~4700) ÷ 속도루프게인[Hz]
오토튜닝에 의해 설정된 속도루프게인과 위치루프게인은 속도/위치 제어성능에 충분한 성능을 제공합니다. 심지어
가속시 오버슈팅의 발생과 감속시 언더슈팅의 발생시에도 PI/P제어전환기능(PA11참조)을 사용하여 억제할 수 있습니다.
PI제어는 비례/적분 제어를 의미하며, P제어는 비례제어를 의미합니다. 즉, PI제어와 P제어의 전환은 서보게인의
효과적인 감소 및 보다 안정적인 서보제어를 제공합니다. 전환기능은 서보 내부의 설정값과 사용자 설정값을 기반으로
속도제어모드에서 자동적으로 PI제어와 P제어로 전환됩니다.
PI/P전환기능은 서보를 자체성능의 한계에 가깝도록 고속 위치제어를 할 때 유용한 기능입니다. PI/P전환기능을
사용할때의 속도응답곡선을 다음 표에 보여줍니다.
긴 위치결정 시간 게인 증가로 인한 오버슈트 발생 PI/P전환 기능

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 16
가속 속도
검사
PA08
필터
PA07
게인
위치 루프 게인 위치 명령
위치 피드백
속도 명령 +
= -
=
+
= +
=
피드포워드 보상
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA07 피드포워드게인 FFG Min 0
0 % R S A P S T
Max 100 √ √
PA08 피드포워드 시정수 FFTC Min 0.00
0.00 0.01msec R S A P S T
Max 99.99 √ √
피드포워드보상의 게인과 필터를 설정합니다.
PA07의 값이 “0”이면 피드포워드기능은 사용되지 않습니다.
피드포워드제어는 효과적으로 서보게인을 높이고 시스템응답성을 향상시킬 수 있습니다.
하지만, 이 기능은 위치루프게인이 너무 높게 설정되면 효과적이지 않습니다.
이 피드포워드보상기는 속도기준값(위치제어기출력)에 다음 블록다이어그램에 표현처럼 차등값을 더합니다.
적절한 피드포워드게인을 가진 상대적으로 낮은 위치루프게인은 다음 그림처럼 위치결정시간을 단축시킵니다.
만약 피드포워드게인이 너무 높으면, 오버슈트가 발생하거나, 시스템이 불안정화될수 있습니다. 그래서 이값은
작은값에서 높은 값으로 단계적으로 늘려야 합니다.
일반적인 기계시스템의 피드포워드게인은 80% 이하입니다. 갑작스런 위치변경명령은 시스템을 불안정조건으로 만들수
있습니다. 이런 경우, 피드포워드필터는 갑작스런 변화에 대한 진동을 감쇠시킵니다.
100%로 설정되면, 정속운전시의 위치편차량은 거의 없습니다. 그러나, 갑작스런 가감속은 오버슈팅을 발생시킵니다.
가이드라인은 정격속도에서 피드포워드게인이 100%일경우 가감속시간은 1초 이상이어야 합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 17
번호. 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PA09 속도바이어스 SBIAS Min 0
0 rpm R S A P S T
Max 400 √ √
PA10 속도바이어스폭 SBIASW Min 1
10 pulse R S A P S T
Max 9999 √ √
위치에러펄스에 관한 속도바이어스와 그것의 폭(너비)를 설정합니다.
PA09번의 값이 “0”이면 이 기능은 사용하지 않습니다.
위치결정시간이 적은 경우, 속도바이어스 보상기는 PA10에 설정한 값을 초과하는 위치에러펄스를 속도바이어스(PA09)에
맞추어서 기준속도(위치제어출력)에 더합니다.
속도바이어스(PA09)는 “rpm”이고, 바이어스 폭은 위치오차펄스가 단위입니다.
속도바이어스 기능은 짧은 위치결정시간을 위한 또 다른 피드포워드 기법입니다.
만약 속도바이어스는 매우 크고, 바이어스 폭은 매우 작으면 시스템은 오버슈트가 발생하거나 불안정해집니다.
그러므로, 이값은 작은값에서 높은값으로 단계적으로 증가시켜서 최적의 값을 찾아야만 합니다.
이 기능의 블록다이어그램은 다음 그림과 같습니다.
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 18
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
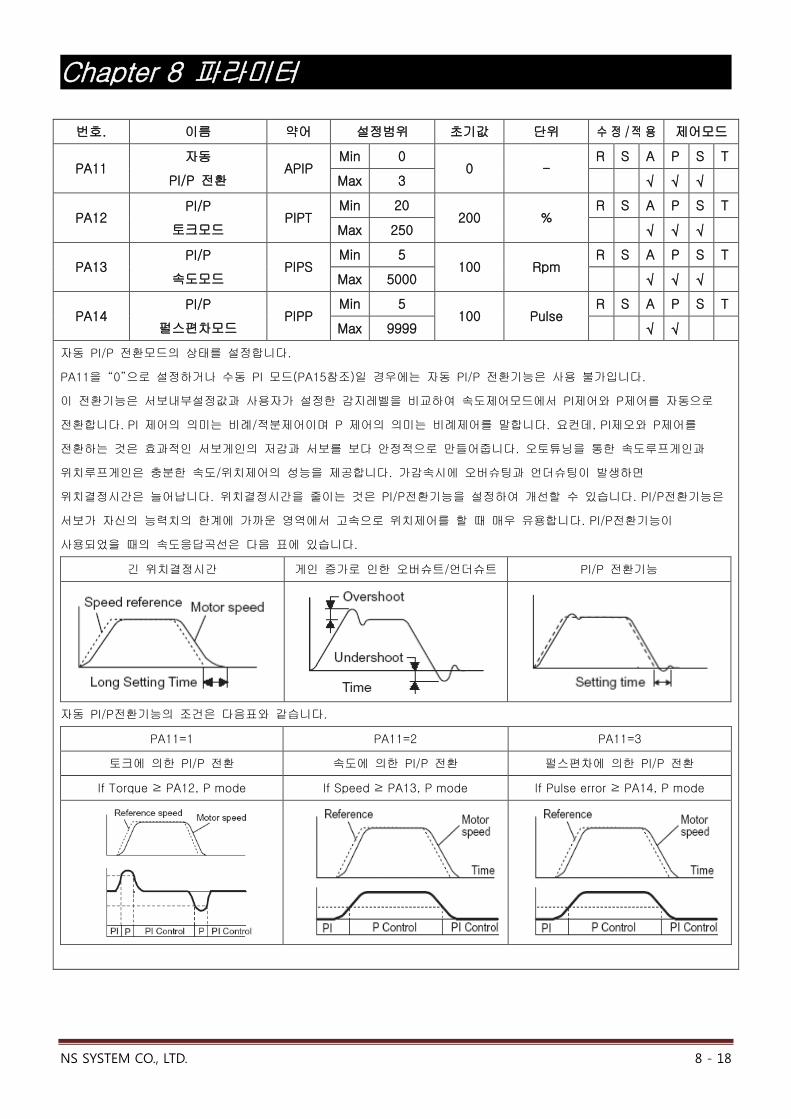
PA11 자동
PI/P 전환 APIP
Min 0 0 -
R S A P S T
Max 3 √ √ √
PA12 PI/P
토크모드 PIPT
Min 20 200 %
R S A P S T
Max 250 √ √ √
PA13 PI/P
속도모드 PIPS
Min 5 100 Rpm
R S A P S T
Max 5000 √ √ √
PA14 PI/P
펄스편차모드 PIPP
Min 5 100 Pulse
R S A P S T
Max 9999 √ √
자동 PI/P 전환모드의 상태를 설정합니다.
PA11을 “0”으로 설정하거나 수동 PI 모드(PA15참조)일 경우에는 자동 PI/P 전환기능은 사용 불가입니다.
이 전환기능은 서보내부설정값과 사용자가 설정한 감지레벨을 비교하여 속도제어모드에서 PI제어와 P제어를 자동으로
전환합니다. PI 제어의 의미는 비례/적분제어이며 P 제어의 의미는 비례제어를 말합니다. 요컨데, PI제오와 P제어를
전환하는 것은 효과적인 서보게인의 저감과 서보를 보다 안정적으로 만들어줍니다. 오토튜닝을 통한 속도루프게인과
위치루프게인은 충분한 속도/위치제어의 성능을 제공합니다. 가감속시에 오버슈팅과 언더슈팅이 발생하면
위치결정시간은 늘어납니다. 위치결정시간을 줄이는 것은 PI/P전환기능을 설정하여 개선할 수 있습니다. PI/P전환기능은
서보가 자신의 능력치의 한계에 가까운 영역에서 고속으로 위치제어를 할 때 매우 유용합니다. PI/P전환기능이
사용되었을 때의 속도응답곡선은 다음 표에 있습니다.
긴 위치결정시간 게인 증가로 인한 오버슈트/언더슈트 PI/P 전환기능
자동 PI/P전환기능의 조건은 다음표와 같습니다.
PA11=1 PA11=2 PA11=3
토크에 의한 PI/P 전환 속도에 의한 PI/P 전환 펄스편차에 의한 PI/P 전환
If Torque ≥ PA12, P mode If Speed ≥ PA13, P mode If Pulse error ≥ PA14, P mode

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 19
번호. 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PA15 입력 5
수동기능 IN5MF
Min 0 0 -
R S A P S T
Max 2 √ √ √ √
입력5번의 수동기능을 설정합니다. (IN5).
PA15 IN5 설명
0
수동 회전방향 전환 모드 : 회전방향은 IN5에 의해 결정됩니다.
서보가 한방향 명령만을 가지고 있을 때 사용자는 입력5번을 이용하여 유용하게 수동회전방향을 전환할 수
있습니다.
Off 회전방향은 명령방향과 동일.
On 회전방향은 명령방향의 반대방향.
1
수동 PI/P 전환 모드 : PI/P 전환은 입력5번에 의해 결정됩니다.
PA15의 값이 “1”이면, 수동 PI/P 전환모드로 사용됩니다, 자동 PI/P 전환모드(PA11)는 사용 안함 상태가 됩
니다.
Off PI 모드에 의한 속도 루프 제어.
On P 모드에 의한 속도 루프 제어.
2
수동 게인1/2 전환 모드 : 게인 1,2번은 입력5번에 의해 전환됩니다.
PA15의 값이 “2”로 설정되면, 수동 게인 1/2 전환모드로 사용됩니다. 자동 게인 1/2전환모드는 무효화됩니
다. 자세한 사항은 PA16을 참조
이 기능은 작동중에 부하관성모멘트비율이 크게 다르게 될 때 외부신호를 이용하여 게인을 변경해서
서보시스템의 안정성을 보장하기 위해 사용됩니다.
아래그림과 같은 예에서, 로봇은 물체를 다른 장소로 이동시키고 물체를 내려놓은 후 원점으로 부하없이
복귀합니다. 만약 사용자가 다른부하조건에서 같은 게인이나 같은 부하관성모멘트비율로 운영을 한다면
한방향 운전에서는 응답성이 떨어지게 됩니다. 이런 경우 입력5번을 이용한 수동 게인1/2전환기능을
효과적으로 사용하실 수 있습니다.
대량 부하 게인1과 부하관성모멘트비율1
사용
소량 부하 게인2와 부하관성모멘트비율2
사용
Off 위치/속도 루프는 게인1과 부하관성모멘트비율1로 제어됩니다.
On 위치/속도 루프는 게인2과 부하관성모멘트비율2로 제어됩니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 20
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA16 자동
게인1/2 전환 AGA12
Min 0 0 -
R S A P S T
Max 2 √ √ √
PA17 게인1/2
속도 모드 GA12S
Min 5 30 Rpm
R S A P S T
Max 5000 √ √ √
PA18 게인1/2
펄스편차모드 GA12P
Min 5 20 Pulse
R S A P S T
Max 9999 √ √ √
PA19 게인1/2
필터 시정수 GA12TC
Min 0 0 0.01msec
R S A P S T
Max 1000 √ √ √
PA20 부하관성모멘트비율
2 IMR2
Min 1.00 1.00 0.01times
R S A P S T
Max 99.99 √ √ √
PA21 위치비례게인 2 PPG2 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
PA22 속도비례게인 2 SPG2 Min 5
60 Hz R S A P S T
Max 2000 √ √ √
PA23 속도적분시정수 2 SITC2 Min 2.0
13.3 0.1msec R S A P S T
Max 999.9 √ √ √
자동 게인 1/2 전환모드의 조건을 설정합니다.
PA16의 값이 “0”이거나 수동게인1/2전환모드(PA15참조)가 유효이면, 자동게인1/2전환기능은 사용 안 함 상태가 됩니다.
자동게인전환기능은 서보의 내부 설정값과 사용자가 설정한 감지 기준값을 비교해서 게인1(PA03/04/05/06)과 게인2
(PA20/21/22/23)를 자동으로 전환합니다. 부하관성모멘트비율의 변화가 없는 경우(일반적으로) PA20은 PA03과 같은
값을 설정합니다. 자동게인1/2전환기능은 다음과 같은 경우에 사용합니다 :
• 서보정지시에는 게인을 증가시키고 회전시에는 진동을 감소시키기 위해 게인을 감소시키고 싶은 경우.
• 정지시 위치결정시간을 줄이기 위한 경우.
게인1과 게인2의 차이가 너무 크면 게인1과 게인2를 전환하는 동안에 진동이 발생할 수 있습니다. 이때에는 적절한
필터시정수(PA19)를 설정하여 진동을 억제할 수 있습니다.
PA16=1 PA16=2 필터시정수 (PA19)
속도에 의한 게인1/2 전환 펄스편차에 의한 게인 1/2 전환 필터가 적용이 않되면 (PA19=0),
게인1/2 는 즉시 바뀜.
If Speed ≥ PA17, Gain2 If Pulse error ≥ PA18, Gain2
필터가 적용이 되면 게인1/2는
서서히 바뀜.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 21
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA24 고진동억제필터 HVF Min 0
0 - R S A P S T
Max 2 √ √ √
PA25 고진동억제필터
시정수1 HVFTC1
Min 0 50 0.01msec
R S A P S T
Max 500 √ √ √
PA26 고진동억제필터
시정수2 HVFTC2
Min 0 50 0.01msec
R S A P S T
Max 500 √ √ √
고진동억제필터의 조건을 설정합니다.
PA24를 “0”으로 설정하면 고진동억제필터기능은 사용 안함 상태가 됩니다.
PA24를 “1”로 설정하면 필터시정수는 구동게인조건에 따라 자동적으로 추정됩니다.
PA24를 “2”로 설정하면 필터시정수는 PA25와 PA26의 값을 기준으로 게인1/2전환조건에 따라 수동으로 조정할 수
있습니다. 서보의 운전조건이 게인1이면 필터시정수는 PA25가 사용됩니다. 서보의 운전조건이 게인2이면 필터시정수는
PA26이 사용됩니다.
볼스크류등이 사용되는 경우 게인이 증가하면 고주파수진동이 발생할 수 있습니다.
고주파수진동은 샤프트의 비틀림 공명에 의해 고음의 소음을 발생시킵니다.
만약 기계진동이 높은 게인(기계자체가 아니고)에서 파생된 경우, 속도제어출력(토크기준값)에 저역통과필터를 적용하면
진동을 억제할 수 있습니다. 저역통과필터는 필터시정수로 표현됩니다.
필터시정수의 값이 너무 작으면, 진동을 충분히 억제하지 못하거나 저역통과필터에 영향을 주지 못합니다. 필터시정수의
값이 너무 크면, 시스템은 불안정화되며, 응답시간은 길어집니다. 그러므로, 설정값은 낮은값에서부터 높은값으로
단계적으로 올려 최적값을 찾아야 합니다.
다음 표현식에 최적값과 한계값의 지침을 나타냅니다.
• 최적값의 지침 : 필터시정수[0.01msec] = ( 3000 ~ 4000 ) ÷ 속도루프게인[Hz].
• 한계값의 지침 : 필터시정수[0.01msec] ≤ 5000 ÷ 속도루프게인[Hz].
PA24 설명
0 고진동억제필터 사용 안함.
공장출하기본값.
1 자동 고진동
억제필터모드
이 모드는 서보시스템의 응답성(PA02) 증가로 인해 고주파수진동이 발생할 경우, 손쉽게
진동을 제거하는 방법을 제공합니다.
필터시정수는 운전 게인조건에 따라 자동으로 추정됩니다.
2 수동 고진동
억제필터모드
자동 고진동 억제필터모드로 진동이 효율적으로 억제되지 않는 경우에는 수동 고진동
억제필터모드를 사용할 수 있습니다. 필터시정수는 게인 1/2전환조건에 따라 PA25또는
PA26에 의해 수동 조정됩니다.
게인 1 모드 게인1 조건에서는 PA25가 필터시정수로 사용됩니다.
게인 2 모드 게인2 조건에서는 PA26이 필터시정수로 사용됩니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 22
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA27 정지진동억제범위 SVSR Min 0
0 pulse R S A P S T
Max 4 √ √
PA28 정지진동억제게인 SVSG Min 20
50 % R S A P S T
Max 80 √ √
PA29 정지진동억제시간 SVST Min 1
500 msec R S A P S T
Max 3000 √ √
정지진동억제기능을 설정합니다.
PA27의 값을 “0”으로 설정하면, 정지진동억제기능은 사용 안함 상태가 됩니다.
서보게인이 증가되었을때, 운전중에는 진동이 없지만 정지시(예:제한적인 사이클) 진동이 발행하는 경우가 있습니다.
정지진동억제기능은 정지시에만 내부서보게인을 낮춥니다. 정지진동억제시간(PA29)에 지정한 시간 이후에는 위치명령이
“0”이 될 때까지 다음식에 지정한 비율로 내부서보게인이 줄어듭니다.
• 게인감소량 = (게인1×PA28÷100) + ((게인1-(게인1×PA28÷100))×펄스편차량)÷PA27.
게인전환시점은 필터시정수(PA19)에 영향을 받습니다.
PA27 설명
0 정지진동억제기능 사용 안함. 공장출하기본값.
펄스편차에 따른 게인 저감 정지진동억제 시간측정도표
1
정지진동억제시간(PA29)에 지정된 후에 위치명령이
“0”이 될 때까지 게인은 왼쪽의 표와 같이 감소됩니다.
만약 감속시간보다 PA29에 설정한 시간이 짧을 경우,
게인저감으로 인한 위치결정시간이 증가할 수
있습니다. 그래서, 위치명령의 감속시간을 신중히
결정해야 합니다.
서보가 다시 움직이기 시작하면 게인1은 즉시
적용됩니다.
2
3
4

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 23
Position Feedforward
PA07 / PA08
Position
Loop Gain
Position
command
Position feedback
Speed
command
+
= -
=
Feedforward Compensation
Torque Feedforward
PA30 / PA31
Torque
Acc/Dec Compensation
Speed Compensation
Speed
PI
Current
PI
+
=
+
=
+
=
+
=
<위치 제어 모드>
Torque Feedforward
PA30 / PA31
Speed
PI
Speed
command
feedback
Torque
command
+
= -
=
Acc/Dec Compensation
Compensation
Current
PI
+
=
+
=
<속도 제어 모드>
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA30 가감속 토크
피드포워드 게인 TFG
Min 0 0 %
R S A P S T
Max 100 √ √ √
PA31
가감속 토크
피드포워드 필터
시정수
TFF
Min 0
0 0.01
msec
R S A P S T
Max 9999 √ √ √
가감속을 수행할 때 사용할 토크 피드포워드 게인과 필터 시정수를 설정합니다.
PA30의 값이 “0”이면 가감속 토크 피드포워드기능은 사용되지 않습니다.
가감속 토크 피드포워드제어는 이송중 가감속을 수행할 때 효과적으로 서보게인을 높이고 시스템응답성을 향상시킬 수
있습니다.
하지만, 이 기능은 위치루프게인이 너무 높게 설정되면 효과적이지 않습니다.
이 가감속 토크 피드포워드보상기는 토크기준값(속도제어기출력)에 다음 블록다이어그램에 표현처럼 차등값을 더합니다.
만약 피드포워드게인이 너무 높으면, 오버슈트가 발생하거나, 시스템이 불안정화될수 있습니다. 그래서 이값은
작은값에서 높은 값으로 단계적으로 늘려야 합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 24
일반적인 기계시스템의 피드포워드게인은 80% 이하입니다. 갑작스런 위치변경명령은 시스템을 불안정조건으로 만들수
있습니다. 이런 경우, 피드포워드필터는 갑작스런 변화에 대한 진동을 감쇠시킵니다.
100%로 설정되면, 정속운전시의 위치편차량은 거의 없습니다. 그러나, 갑작스런 가감속은 오버슈팅을 발생시킵니다.
가이드라인은 정격속도에서 피드포워드게인이 100%일경우 가감속시간은 1초 이상이어야 합니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PA32 자동 위치결정
응답성 APR
Min 0 0 -
R S A P S T
Max 3 √ √ √ √
자동 위치결정의 응답성을 설정합니다.
자세한 내용은 오토튜닝 설명을 참고하세요.
설정값 내용
0 수동 응답성
모든 제어는 사용자가 설정한 파라미터에 따라 동작합니다.
파라미터가 자동으로 변경되지 않습니다.
1 중속 응답성 (게인1 사용)
PA07 = 0 : 피드포워드 게인 사용 안함.
PA16 = 0 : 게인1/2 변환모드 사용 안함.
위의 두가지 파라미터의 설정값이 자동으로 설정됩니다.
일반적인 시스템에서 유용합니다.
2 고속 응답성 (게인1 + 피드포워드 게인 사용)
PA07 = 40% : 피드포워드 게인 사용함.
PA08 = 5.00msec : 피드포워드 시정수
PA16 = 0 : 게인1/2 전환 모드 사용 안함.
위의 3가지 파라미터의 설정값이 자동으로 설정됩니다.
일반적인 시스템중 빠른 응답성을 요구하는 시스템에 유용합니다. 위치 결정의 응답성이 빨라집니다.
3 초고속 응답성 (게인1/2 + 피드포워드 게인 사용)
PA07 = 40% : 피드포워드 게인 사용함.
PA08 = 5.00msec : 피드포워드 시정수
PA16 = 2 : 게인1/2 전환 모드 사용함(펄스 편차값 기준).
PA18 = 20 : PA16 펄스 편차값의 기준
PA21 = PA04의 140% : 위치 비례 게인2
PA22 = PA05의 120% : 속도 비례 게인2
위의 6가지 파라미터의 설정값이 자동으로 설정됩니다.
매우 빠른 응답성을 요구하는 시스템에 유용합니다. 위치 결정의 응답성이 매우 빨라집니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 25
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB00 위치명령 펄스형태 PCPF Min 0
0 - R S A P S T
Max 5 √ √
펄스열 입력신호의 입력형태를 설정합니다.
펄스명령은 선택할 수 있는 정논리 또는 부논리의 3가지 형태로 입력될 수 있습니다.
표상의 위쪽화살표(↑) 또는 아래쪽화살표(↓)는 펄스열을 가져오는 시점을 나타냅니다.
A/B상 펼스열은 4배수가 입력된 후 가져옵니다.
Value 로직 형태 CCW(정방향) 펄스열 CW(역방향) 펄스열
0
부논리
2-펄스형태
CCW 펄스열
CW 펄스열
1 1-펄스형태
펄스열
방향
2 A/B상 형태
A상 펄스
B상 펄스
3
정논리
2-펄스형태
CCW 펄스열
CW 펄스열
4 1-펄스형태
펄스열
방향
5 A/B상 형태
A상 펄스
B상 펄스
펄스열 인터페이스
라인드라이버 인터페이스
• 최대 500kpps
• 이 방식을 추천합니다.
• 26LS31 또는 동급품
5V전원 오픈콜렉터 인터페이스
• 최대 200kpps.
• 외부저항 필요없음.
높은 전원용 오픈콜렉터 인터페이스
• 최대 200kpps
• 외부저항 필요함. (10mA).
12V 1kΩ/0.5W 24V 2kΩ 0.5W

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 26
번호. 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB01 전자기어비 분자
(1000’s) EGNL
Min 0 1000 -
R S A P S T
Max 9999 √ √
PB02 전자기어비 분자
(10000’s) EGNH
Min 0 0 -
R S A P S T
Max 3 √ √
PB03 전자기어비 분모
(1000’s) EGDL
Min 0 1000 -
R S A P S T
Max 9999 √ √
PB04 전자기어비 분모
(10000,s) EGDH
Min 0 0 -
R S A P S T
Max 3 √ √
PB05 위치명령 방향 PCD Min 0
0 - R S A P S T
Max 1 √ √
PB06 위치명령 가감속 시간 PCAT Min 0
0 Msec R S A P S T
Max 400 √ √
PB07 위치명령 가감속 형상 PCAS Min 0
0 - R S A P S T
Max 1 √ √
위치제어모드에서 다음 그림과 표에 따라 전처리 조건을 설정합니다.
위치명령의 전자기어비율과 가감속 시간을 고려할 수 있습니다.
특히, 충격 없는 매우 빠른 위치명령의 가감속시간 및 형상을 고려할 수 있습니다. 칩마운트장비, 다이본딩장비,
영상검사장비등의 동작은 매우 짧은 거리를 빠르게 움직입니다. 따라서, 높은 충격이 발생합니다. 이 충격은 가감속
운전관련 파라미터(PB06/PB07)의 설정으로 제거할 수 있습니다.
여기에는 두가지 종류의 가감속 운전 방법이 있습니다.
사인파타입은 분할지점이 없어서 가장 효율적인 방법입니다.
사다리꼴 타입은 가장 일반 방법이지만 속도변환점에서 오버슈트가 발생할 수 있습니다.
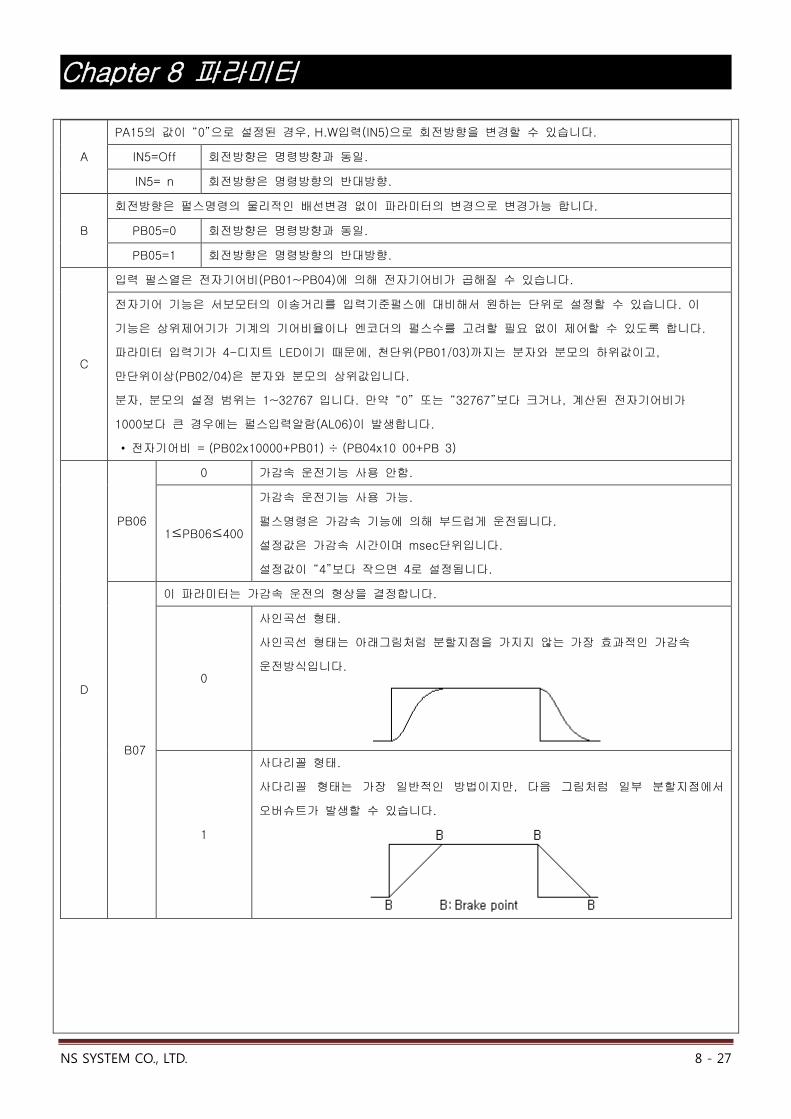
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 27
A
PA15의 값이 “0”으로 설정된 경우, H.W입력(IN5)으로 회전방향을 변경할 수 있습니다.
IN5=Off 회전방향은 명령방향과 동일.
IN5= n 회전방향은 명령방향의 반대방향.
B
회전방향은 펄스명령의 물리적인 배선변경 없이 파라미터의 변경으로 변경가능 합니다.
PB05=0 회전방향은 명령방향과 동일.
PB05=1 회전방향은 명령방향의 반대방향.
C
입력 펄스열은 전자기어비(PB01~PB04)에 의해 전자기어비가 곱해질 수 있습니다.
전자기어 기능은 서보모터의 이송거리를 입력기준펄스에 대비해서 원하는 단위로 설정할 수 있습니다. 이
기능은 상위제어기가 기계의 기어비율이나 엔코더의 펄스수를 고려할 필요 없이 제어할 수 있도록 합니다.
파라미터 입력기가 4-디지트 LED이기 때문에, 천단위(PB01/03)까지는 분자와 분모의 하위값이고,
만단위이상(PB02/04)은 분자와 분모의 상위값입니다.
분자, 분모의 설정 범위는 1~32767 입니다. 만약 “0” 또는 “32767”보다 크거나, 계산된 전자기어비가
1000보다 큰 경우에는 펄스입력알람(AL06)이 발생합니다.
• 전자기어비 = (PB02x10000+PB01) ÷ (PB04x10 00+PB 3)
D
PB06
0 가감속 운전기능 사용 안함.
1≤PB06≤400
가감속 운전기능 사용 가능.
펄스명령은 가감속 기능에 의해 부드럽게 운전됩니다.
설정값은 가감속 시간이며 msec단위입니다.
설정값이 “4”보다 작으면 4로 설정됩니다.
B07
이 파라미터는 가감속 운전의 형상을 결정합니다.
0
사인곡선 형태.
사인곡선 형태는 아래그림처럼 분할지점을 가지지 않는 가장 효과적인 가감속
운전방식입니다.
1
사다리꼴 형태.
사다리꼴 형태는 가장 일반적인 방법이지만, 다음 그림처럼 일부 분할지점에서
오버슈트가 발생할 수 있습니다.
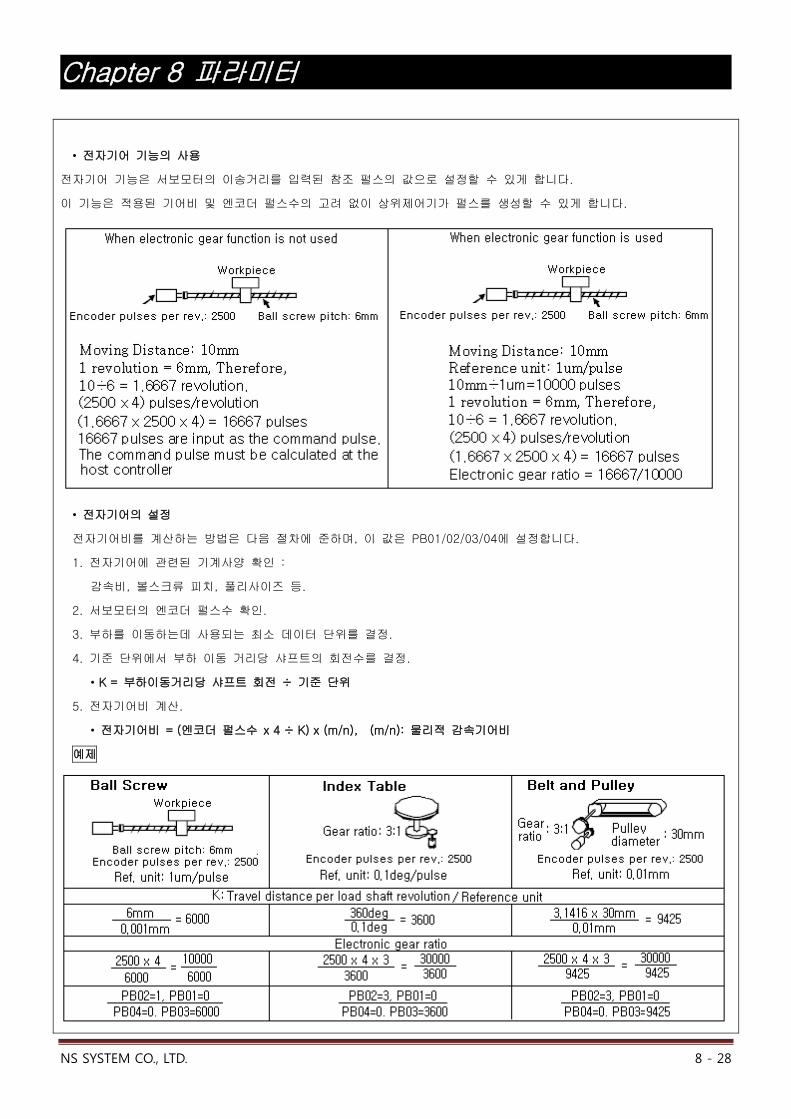
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 28
• 전자기어 기능의 사용
전자기어 기능은 서보모터의 이송거리를 입력된 참조 펄스의 값으로 설정할 수 있게 합니다.
이 기능은 적용된 기어비 및 엔코더 펄스수의 고려 없이 상위제어기가 펄스를 생성할 수 있게 합니다.
• 전자기어의 설정
전자기어비를 계산하는 방법은 다음 절차에 준하며, 이 값은 PB01/02/03/04에 설정합니다.
1. 전자기어에 관련된 기계사양 확인 :
감속비, 볼스크류 피치, 풀리사이즈 등.
2. 서보모터의 엔코더 펄스수 확인.
3. 부하를 이동하는데 사용되는 최소 데이터 단위를 결정.
4. 기준 단위에서 부하 이동 거리당 샤프트의 회전수를 결정.
• K = 부하이동거리당 샤프트 회전 ÷ 기준 단위
5. 전자기어비 계산.
• 전자기어비 = (엔코더 펄스수 x 4 ÷ K) x (m/n), (m/n): 물리적 감속기어비
예제

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 29
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB08 예비자리
PB09 예비자리
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB10 속도 명령 형태 SCT Min 0
0 - R S A P S T
Max 1 √ √
PB11 아날로그 속도 범위 ASR Min 1
2000 rpm R S A P S T
Max 6000 √ √
PB12 아날로그 속도
필터 시정수 ASFTC
Min 0 50 0.01msec
R S A P S T
Max 9999 √ √
PB13 아날로그 속도 옵셋 ASOF Min -999
0 mV R S A P S T
Max +999 √ √
PB14 아날로그 속도
영속도 기능 ASZC
Min 0 0 -
R S A P S T
Max 1 √ √
PB15 아날로그 속도
영속도 범위 ASZCR
Min 1 100 mV
R S A P S T
Max 999 √ √
PB16 디지털 속도 명령 0 DSC0 Min -6000
200 rpm R S A P S T
Max +6000 √ √
PB17 디지털 속도 명령 1 DSC1 Min -6000
500 rpm R S A P S T
Max +6000 √ √
PB18 디지털 속도 명령 2 DSC2 Min -6000
800 rpm R S A P S T
Max +6000 √ √
PB19 디지털 속도 명령 3 DSC3 Min -6000
1000 rpm R S A P S T
Max +6000 √ √
PB20 속도 명령 회전 방향 SCD Min 0
0 - R S A P S T
Max 1 √ √
PB21 속도 명령 가속 시간 SCAT Min 0
0 msec R S A P S T
Max 9999 √ √
PB22 속도 명령 감속 시간 SCDT Min 0
0 msec R S A P S T
Max 9999 √ √
PB23 속도 명령 가감속 형태 SCADT Min 0
0 - R S A P S T
Max 1 √ √
다음 페이지 참조.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 30
다음 그림과 표를 참조하여 속도제어 모드에서 속도 명령의 전처리 조건을 설정합니다.
레벨 관련
파라미터
설명
A PB12
아날로그 속도명령의 필터 시정수를 설정합니다.
아날로그 입력에 노이즈가 있는 경우, 저역통과필터는 이것을 제거할 수 있습니다. 만약 필터
시정수가 너무 크면, 시스템은 불안정화되거나 응답시간이 길어집니다. 그래서, 이 값은 작은
값에서 큰값으로 단계적으로 최적의 값을 찾아 증가시켜야 합니다.
B PB13
아날로그 속도 명령 입력의 옵셋값 설정.
아날로그 속도 명령으로 0V가 인가될 경우 정지하지 않거나 심지어는 아주 느린속도로 회전할
수 있습니다. 이러한 경우는 상위 제어기나 외부회로의 기준전압에 약간의 옵셋(수 mV)이
있을 때 발생합니다. 서보는 이 옵셋을 0V로 제대로 맞춰주면 정지합니다.
C
PB14
아날로그 속도명령 영속도기능의 설정.
0 영속도 기능 동작안함.
1 영속도 기능 동작 함.
PB15
아날로그 속도명령의 영속도 클램프 전압 범위를 설정.
아날로그 속도명령의 전압이 설정된 값보다 작으면 0V와 같이 처리됩니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 31
D PB11 아날로그 속도명령이 10V일 때 최대 속도범위를 설정합니다.
설정값이 서보모터의 정격최대속도보다 높은 경우 서보모터의 정격최대속도로 설정됩니다.
E
PB16
PB17
PB18
PB19
다단계 디지털 속도 명령을 설정합니다.
내부 다단계 디지털 속도명령 기능은 다음 표에 따라 IN2/IN3으로 선택됩니다.
IN3 IN2 디지털 속도명령
Off Off PB16에 설정된 디지털 속도명령 0
Off On PB17 에 설정된 디지털 속도명령 1
On Off PB18 에 설정된 디지털 속도명령 2
On On PB19 에 설정된 디지털 속도명령 3
F PB10
속도 제어모드를 위한 속도 명령 형태를 설정합니다.
0 아날로그 속도 명령 사용.
1 내부 디지털 속도 명령 사용.
G PA15
PA15의 값이 “0”으로 설정되면, 회전방향은 H/W입력(IN5)에 의해 전환됩니다.
IN5=Off 회전방향은 명령방향과 동일.
IN5=On 회전방향은 명령방향의 반대방향.
H PB20
속도명령의 극성을 바꾸지 않고 내부 파라미터에 의해서 회전방향을 변경할 수 있습니다.
PB05=0 회전방향은 명령방향과 동일.
PB05=1 회전방향은 명령방향의 반대방향.
I
PB21
속도제어모드에서 가감속운전의 가속시간을 설정합니다.
0 가속기능 사용 안함.
1~9999 가속기능 사용함.
만약 상위 제어기가 풀 폐루프제어를 할 경우, 이 기능은 사용하지 마십시요.
PB22
속도제어모드에서 가감속운전의 감속시간을 설정합니다.
0 감속기능 사용 안함.
1~9999 감속기능 사용함.
만약 상위 제어기가 풀 폐루프제어를 할 경우, 이 기능은 사용하지 마십시요.
PB23
가감속 운전의 형태를 설정합니다.
0
사인파형 가감속 기능.
1
직선형 가감속 기능.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 32
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB24 영속도 잠금기능 ZLF Min 0
0 - R S A P S T
Max 1 √ √
PB25 영속도 잠금속도 ZLS Min 1
30 rpm R S A P S T
Max 300 √ √
영속도 잠금기능과 그 기준 속도를 설정합니다.
아날로그 속도명령은 작은 옵셋이 남아서 정확한 0V 가 되지 않습니다. 이런 경우 서보모터는 느린속도로 회전합니다.
서보모터를 정확하게 정지시키려면, 영속도 잠금기능을 사용합니다. 영속도 잠금기능이 켜지면 내부 위치루프는
순간적으로 한 펄스안에 서보모터를 정지합니다. 외부의 힘으로 서보모터가 회전을 한 경우 서보모터는 영속도
잠금위치로 돌아갑니다.
영속도 잠금기능은 다음 그림과 표에 따라 동작합니다.
S/W(파라미터)와 H/W(외부정지입력 IN4)에 의한 영속도 잠금기능
PB24
0 영속도 잠금기능 사용 안함.
1
다음 조건이 만족하는 경우 S/W(파라미터)에 의한 영속도 잠금기능을 사용합니다.
조건 1 PB14=1
영속도 잠금기능 사용함.
조건 2 -PB15 ≤ 아날로그 속도명령 ≤ +PB15
아날로그 속도 명령이 아날로그 속도명령 영속도 범위(PB15)보다 작은 경우.
조건 3 -PB25 ≤ 실재 모터 속도 ≤ +PB25
실재 모터속도가 영속도 잠금속도(PB25) 보다 작은 경우.
다음 조건이 만족하는 경우 H/W(외부 정지 입력)에 의한 영속도 잠금기능을 사용합니다.
IN4
Off 영속도 잠금기능 사용 안함.
On -PB25 ≤ 실재 모터 속도 ≤ +PB25
실재 모터속도가 영속도 잠금속도(PB25) 보다 작은 경우.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 33
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB26 토크 바이어스 TBIAS Min -50
0 % R S A P S T
Max +50 √ √ √
외부의 힘이 항상 적용되는 시스템에 저항하는 토크 바이어스를 설정합니다.
다음 그림은 외부의 힘이 항상 적용되는 시스템을 보여 줍니다.
수직 샤프트 어플리케이션이나 중력에 의한 회전, 힘의 손실등을 방지하기 위해 브레이크가 있는 서보모터를
사용하십시요.
브레이크가 있는 서보모터를 사용하더라도, 기계시스템은 서보온 시 순간적인 부하드랍과 진동이 발생합니다.
해당 부하에 대해 토크 바이어스를 적절히 설정하면, 초기작업시 세로침체를 방지할 수 있습니다.
적절한 값의 설정은 다음절차를 사용합니다.
1. 모터회전방(정방향/역방향)향과 하중방향(상승/하강) 점검합니다.
2. 서보 정지 제어로 부하를 정지시킵니다.
3. 정지된 상태의 토크명령값을 디스플레이모드로 확인합니다(DP09).
4. 이 값을 PB26에 설정함니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 34
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB27 토크 명령 형태 TCT Min 0
0 - R S A P S T
Max 1 √ √
PB28 아날로그 토크 범위 ATR Min 1
100 % R S A P S T
Max 100 √ √
PB29 아날로그 토크
필터 시정수 ATFTC
Min 0 50 0.01msec
R S A P S T
Max 9999 √ √
PB30 아날로그 토크 옵셋 ATOF Min -999
0 mV R S A P S T
Max +999 √ √
PB31 아날로그 토크 영속도 ATZC Min 0
0 - R S A P S T
Max 1 √ √
PB32 아날로그 토크 영속도 범
위 ATZCR
Min 1 100 mV
R S A P S T
Max 999 √ √
PB33 디지털 토크 명령 0 DTC0 Min -6000
10 % R S A P S T
Max +6000 √ √
PB34 디지털 토크 명령 1 DTC1 Min -6000
20 % R S A P S T
Max +6000 √ √
PB35 디지털 토크 명령 2 DTC2 Min -6000
30 % R S A P S T
Max +6000 √ √
PB36 디지털 토크 명령 3 DTC3 Min -6000
40 % R S A P S T
Max +6000 √ √
PB37 토크 명령 방향 TCD Min 0
0 - R S A P S T
Max 1 √ √
다음 페이지 참조.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 35
다음 그림과 표를 참조하여 토크제어모드에서의 전처리 조건을 설정합니다.
레벨 관련
파라미터 설명
A PB29
아날로그 토크명령의 필터 시정수를 설정합니다.
아날로그 입력에 노이즈가 있을때, 저역통과필터는 이것을 제거할 수 있습니다. 만약 필터 시
정수가 너무 크면, 시스템은 불안정화되고, 응답시간은 길어집니다. 그래서, 이 값은 작은값에
서 큰값으로 단계적으로 최적의 값을 찾아 증가시켜야 합니다.
B PB30
아날로그 토크명령의 옵셋값을 설정합니다.
아날로그 토크 명령으로 0V가 인가될 경우 정지하지 않거나 심지어는 아주 느린속도로 회전할
수 있습니다. 이러한 경우는 상위 제어기나 외부회로의 기준전압에 약간의 옵셋(수 mV)이
있을 때 발생합니다. 서보는 이 옵셋을 0V로 제대로 맞춰주면 정지합니다
C
PB31
아날로그 토크 명령의 영속도 기능을 설정합니다.
0 영속도 기능 사용 안함.
1 영속도 기능 사용함.
PB32
아날로그 토크 명령의 영속도 전압의 범위를 설정합니다.
아날로그 토크명령의 전압이 설정치보다 작으면 0V와 같이 처리됩니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 36
D PB28
아날로그 토크 명령의 전압이 10V일 때 최대 토크의 범위를 설정합니다.
단위는 %로 모터의 정격토크에 기준합니다.
만약 설정값이 토크제한치(PE13/14)의 값보다 크면, 이 값은 토크제한치로 처리됩니다.
E
PB33
PB34
PB35
PB36
다단계 디지털 토크명령 기능을 설정합니다.
내부 다단계 디지털 토크명령 기능은 다음 표에 따라 IN2/IN3으로 선택됩니다.
IN3 IN2 디지털 토크 명령
Off Off PB33에 설정된 디지털 토크 0
Off On PB34에 설정된 디지털 토크 1
On Off PB35에 설정된 디지털 토크 2
On On PB36에 설정된 디지털 토크 3
F PB27
토크 제어모드를 위한 토크 명령 형태를 설정합니다.
0 아날로그 토크 명령 사용.
1 내부 디지털 토크 명령 사용.
G PA15
PA15의 값이 “0”으로 설정되면, 토크의 방향은 H/W입력(IN5)에 의해 전환됩니다.
IN5=Off 토크방향은 명령방향과 동일.
IN5=On 토크방향은 명령방향의 반대방향.
H PB37
토크명령의 극성을 바꾸지 않고 내부 파라미터에 의해서 토크방향을 변경할 수 있습니다.
PB37=0 토크방향은 명령방향과 동일.
PB37=1 토크방향은 명령방향의 반대방향.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PB38 예비자리
PB39 예비자리
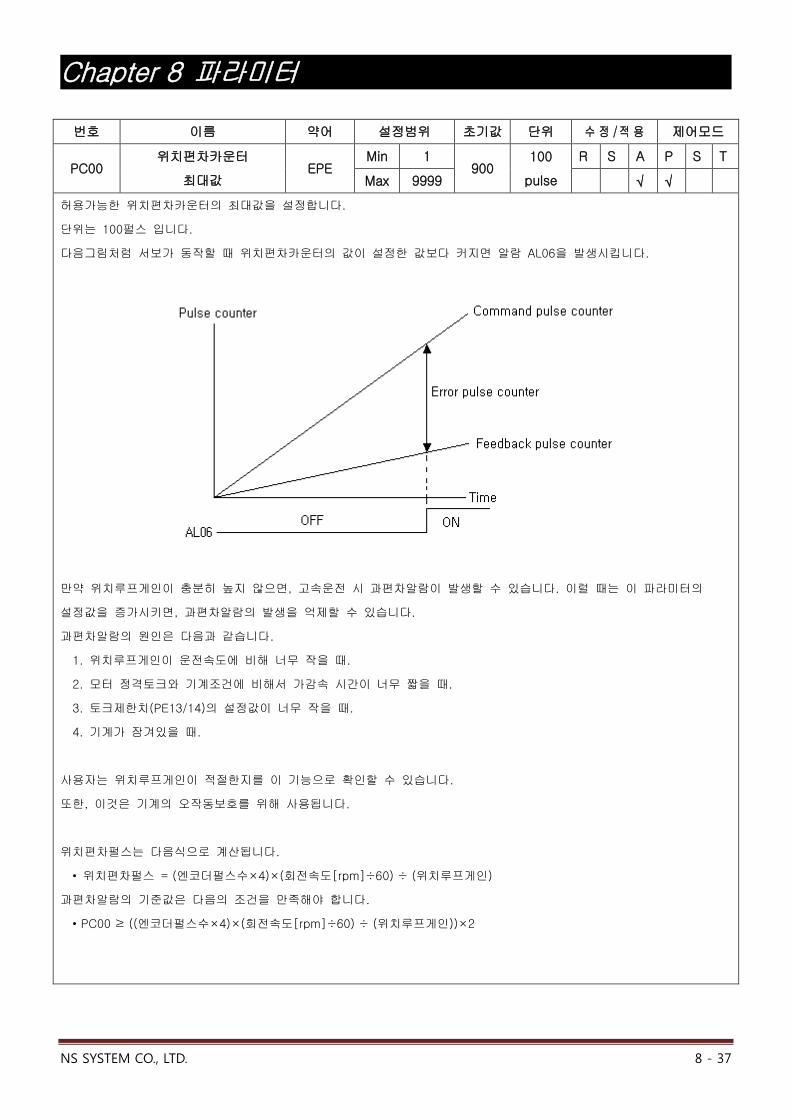
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 37
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC00 위치편차카운터
최대값 EPE
Min 1 900
100
pulse
R S A P S T
Max 9999 √ √
허용가능한 위치편차카운터의 최대값을 설정합니다.
단위는 100펄스 입니다.
다음그림처럼 서보가 동작할 때 위치편차카운터의 값이 설정한 값보다 커지면 알람 AL06을 발생시킵니다.
만약 위치루프게인이 충분히 높지 않으면, 고속운전 시 과편차알람이 발생할 수 있습니다. 이럴 때는 이 파라미터의
설정값을 증가시키면, 과편차알람의 발생을 억제할 수 있습니다.
과편차알람의 원인은 다음과 같습니다.
1. 위치루프게인이 운전속도에 비해 너무 작을 때.
2. 모터 정격토크와 기계조건에 비해서 가감속 시간이 너무 짧을 때.
3. 토크제한치(PE13/14)의 설정값이 너무 작을 때.
4. 기계가 잠겨있을 때.
사용자는 위치루프게인이 적절한지를 이 기능으로 확인할 수 있습니다.
또한, 이것은 기계의 오작동보호를 위해 사용됩니다.
위치편차펄스는 다음식으로 계산됩니다.
• 위치편차펄스 = (엔코더펄스수×4)×(회전속도[rpm]÷60) ÷ (위치루프게인)
과편차알람의 기준값은 다음의 조건을 만족해야 합니다.
• PC00 ≥ ((엔코더펄스수×4)×(회전속도[rpm]÷60) ÷ (위치루프게인))×2

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 38
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC01 브레이크 동작 시
서보 오프 지연시간 SOD
Min 1 10 msec
R S A P S T
Max 500 √ √ √ √
PC02 브레이크 동작속도 BOS Min 5
50 rpm R S A P S T
Max 500 √ √ √ √
PC03 브레이크 동작시간 BOT Min 1
100 msec R S A P S T
Max 1000 √ √ √ √
브레이크 출력(OUT1)의 동작 타이밍을 설정합니다.
브레이크 동작의 타이밍은 다음 표와 그림에 표시됩니다.
PC01
서보잠금상태에서 브레이크 콘트롤 출력이 적용될 때까지의 서보오프 지연시간을 설정합니다.
전자기 브레이크가 사용된 수직리프트 응용장비 등에서는 중력의 영향으로 서보오프시 기계조건과
브레이크의 특성에 따라 미세하게 움직일 수 있습니다. 이 경우 작은값에서 단계적으로 기계가 정지할
때까지 이 파라미터의 설정값을 조정하십시요.
• 전자기 브레이크가 하강하지 않는 지연시간과 같은 시간으로 이 파라미터를 설정하십시요.
• 설정값이 너무 크면, 강제로 잠기려는 힘 때문에 브레이크의 수명이 짧아지거나 모터축이 손상될 수
있습니다.
PC02
동작중에 서보가 오프된 경우 브레이크 동작의 속도 레벨을 설정합니다.
PC03
동작중에 서보가 오프된 경우 브레이크 동작 시간을 설정합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 39
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC04 다중 기능 출력 MFO Min 0
0 - R S A P S T
Max 1 √ √ √ √
PC05 위치 완료 출력 범위 IPO Min 10
40 pulse R S A P S T
Max 9999 √ √
PC06 속도 출력 형태 SOT Min 0
0 - R S A P S T
Max 1 √ √ √
PC07 속도 도달 출력 범위 SAO Min 5
100 rpm R S A P S T
Max 6000 √ √ √
PC08 속도 완료 출력 범위 ISO Min 5
30 rpm R S A P S T
Max 100 √ √ √
다음 표와 그림에 따라 다중 기능 출력(OUT2)의 동작타이밍과 조건을 설정합니다.
PC04=0 PC04의 값이 “0”이면 다중 기능 출력은 전원준비신호로 사용됩니다.
전원준비신호는 주전원이 정삭적이면 동작합니다.
다음 그림은 자세한 시간도표입니다.
PC04=1 PC04의 값이 “1”이면 다중 기능 출력은 근접 감지 신호로 사용됩니다.
근접 감지 신호는 서보 제어모드에 따라 다르게 사용됩니다.
위치
제어모드
PC04의 값이 “1”이고 서보가 위치제어모드로 동작하면, 다
중 기능 출력은 위치 완료(위치 결정 완료)신호로 사용됩니
다. 위치 완료 신호는 펄스편차의 값이 PC05에 값보다 작
으면 동작합니다.
속도
제어모드
/
토크
제어모드
PC06=0 PC06=1
PC04의 값이 “1”이고 PC06의 값이 “0”일 때 서
보가 속도나 토크제어모드로 동작하면, 다중 기능
출력은 속도 도달 신호로 사용됩니다.
속도 도달 신호는 모터의 속도가 PC07에 설정한
속도보다 높아지면 작동합니다.
PC04의 값이 “1”이고 PC06의 값이 “1”일 때 서보가
속도나 토크제어모드로 동작하면, ±다중 기능 출력은
속도 도달(속도 일치) 신호로 사용됩니다.
속도 도달 신호는 모터의 속도가 ±PC08에 설정한
속도안에 들어가면 작동합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 40
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC09 엔코더 출력 분자
(1000’s) EONL
Min 0 1 -
R S A P S T
Max 9999 √ √ √ √ √
PC10 엔코더 출력 분자
(10000’s) EONH
Min 0 0 -
R S A P S T
Max 1 √ √ √ √ √
PC11 엔코더 출력 분모
(1000’s) EODL
Min 0 1 -
R S A P S T
Max 9999 √ √ √ √ √
PC12 엔코더 출력 분모
(10000,s) EODH
Min 0 0 -
R S A P S T
Max 1 √ √ √ √ √
PC13 엔코더 출력 방향 EOD Min 0
0 - R S A P S T
Max 1 √ √ √ √
PC14 엔코더 출력 Z상 형태 EOZT Min 0
0 - R S A P S T
Max 1 √ √ √ √ √
엔코더 펄스 출력의 분주비와 조건을 설정합니다.
서보드라이버는 다음처럼 상위제어기로 엔코더 펄스를 출력하기 전에 엔코더 펄스수를 조정할 수 있습니다.
1. 사용자는 PC09/10(분자)와 PC11/12(분모)로 분주비를 설정할 수 있습니다.
• 분주비 = (PC10x10000+PC09) ÷ (PC12x10000+PC11).
파라미터 입력기는 4개의 7-세그먼트로 구성되어 있으므로 분자와 분모의 천단위 이하는 PC09/PC11에 설정하고
만단위 이상은 PC10/PC12에 설정합니다. 분자와 분모의 설정범위는 1~65,384입니다. 만약 “0”또는 “65,384”
이상으로 설정하거나, 계산된 분주비가 1 이상인 경우에는 엔코더 알람(AL01)이 발생합니다.
2. 사용자는 엔코더 펄스 출력(A상과 B상의 관계를 고려)의 방향을 PC13으로 설정할 수 있습니다.
3. 사용자는 Z상 출력의 펄스폭을 PC14로 설정할 수 있습니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 41
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC15 저전압 알람 복구 RLVA Min 0
1 - R S A P S T
Max 1 √ √ √ √
저전압 알람(AL13)의 복구 동작을 설정합니다.
설정값 설명
0 사용자는 전원이 알람 상태에서 복구되었을 때 수동으로 알람리셋 신호를 인가하거나 검사모드 0(CH00)의
조작으로 알람을 해제해야 합니다.
1 전원이 알람 상태에서 복구되면, 저전압 알람(al13)은 자동으로 해제됩니다.
공장 초기값.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC16 회생 제동
동작 시간 RBOT
Min 50 200 msec
R S A P S T
Max 500 √ √ √ √
회생 제동 동작의 허용 가능한 최대시간을 설정합니다.
서보드라이버의 주회로 전압은 서보 모터에서 서보 드라이버로 거꾸로 회생되는 에너지로 인해서 증가합니다. 이것을
회생전력이라고 합니다.
서보는 다음조건에서 회생(발전)모드가 됩니다 :
• 과도한 속도와 큰 부하관성에 비하여 너무 짧은 감속 시간.
• 수직축에 부하가 가해진 운전.
• 서보 연속 운전중 부하측에서의 외력에 의한 구동.
회생전력은 스무딩 콘덴서에 흡수됩니다, 하지만 콘덴서의 충전 제한 전함을 초과하면 회생전력은 전력 반도체소자의
안전을 위해 빠르게 외부의 회생제동저항으로 방전됩니다. 내장 회생저항은 옵션입니다. 그러므로, 사용자는 필요하다면
외부에 회생저항을 꼭 설치해야 합니다. 회생제동저항으로 회생전력을 방전시켜도, 이 파라미터에 설정한 방전시간을
초과하면 회생제동저항이 파괴되기전에 과회생알람(AL08)이 발생합니다.
• 외부 회생제동저항의 설치
서보 드라이버 용량 회생저항 용량 저항 재질
400W 이하 50Ω/50W, 50Ω/100W 메탈-클레드 저항
0.5kw~1.5kw 50Ω/50W, 50Ω/100W, 25Ω/200W 메탈-클레드 저항
• 참조
1. 저항값은 상기 표의 값보다 크거나 같은 값인지 확인 하십시요.
2. 자연대류일때는 정격부하의 20%, 강제공기냉각일때는 정격부하의 50%를 넘지 않도록 저항을 사용 하십시요.
3. 저항은 안전을 위해 온도감지차단기와 함께 사용 하십시요.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 42
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC17 출력 0~2
로직 OLG02
Min 000 001 -
R S A P S T
Max 111 √ √ √ √
PC18 입력 0~3
로직 ILG03
Min 0000 0000 -
R S A P S T
Max 1111 √ √ √ √
PC19 입력 4~6
로직 ILG46
Min 000 000 -
R S A P S T
Max 111 √ √ √ √
비트단위 입력접점과 출력접점의 논리 로직을 다음 표에 따라 설정합니다.
출력 로직
0~2
로직 출력 번호
BIT 설정
0 1 BIT 2 BIT 1 BIT 0
ON
되었을 때 동작
(A-접점)
OFF
되었을 때 동작
(B-접점)
OUT0 x X 1 or 0
OUT1 x 1 or 0 x
OUT2 1 or 0 X x
설정범위 111 ~ 000
예1 OUT2=0, OUT1=0, OUT0=1 0 0 1
예2 OUT2=1, OUT1=0, OUT0=1 1 0 1
입력 로직
0~3
로직 입력 번호
BIT 설정
0 1 BIT3 BIT 2 BIT 1 BIT 0
ON
되었을 때 동작
(A-접점)
OFF
되었을 때 동작
(B-접점)
IN0 x x X 1 or 0
IN1 x x 1 or 0 x
IN2 x 1 or 0 X x
IN3 1 or 0 x X x
설정범위 1111 ~ 0000
예1 IN3=1 ,IN2=1, IN1=0, IN0=0 1 1 0 0
예2 IN3=0 ,IN2=0, IN1=0, IN0=1 0 0 0 1
입력 로직
4~6
로직 입력 번호.
BIT 설정
0 1 BIT 2 BIT 1 BIT 0
ON
되었을 때 동작
(A-접점)
OFF
되었을 때 동작
(B-접점)
IN4 x X 1 or 0
IN5 x 1 or 0 x
IN6 1 or 0 X x
설정범위 111 ~ 000
예1 IN6=0, IN5=0, IN4=1 0 0 1
예2 IN6=1, IN5=1, IN4=1 1 1 1

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 43
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC20 스트로크 제한 기능 SLF Min 0
0 - R S A P S T
Max 2 √ √ √ √
IN2(CCW 리미트)와 IN3(CW 리미트)에 의한 스트로크 제한기능을 설정합니다.
스트로크 제한기능은 다음표와 같이 제어모드에 따라 다르게 동작합니다.
제어모드 설정값 설명 리미트 입력
IN3 IN2
위치제어
0 스트로크 제한기능 사용 안함. x x
1
스트로크 제한기능은 모터의 회전방향이 리미트 입력의 방향과
같을 때 사용됩니다. 리미트 입력이 켜지면 모터는 정지하고
펄스명령입력은 무시됩니다. 따라서, 과편차 알람은 리미트 입력을
끄고 서보를 재시작 할 때까지 동작을 안합니다.
CW리미트 CCW리미트
2
스트로크 제한기능은 모터의 회전방향이 리미트 입력의 방향과
같을 때 사용됩니다. 리미트 입력이 켜지면 모터는 정지하고
펄스명령입력은 무시되지 않습니다. 따라서, 과편차 알람은 정상
동작합니다.
CW리미트 CCW리미트
속도제어
0 스트로크 제한기능 사용 안함. x x
1 or 2
아날로그
속도모드
(PB10=0)
스트로크 제한기능은 모터의 회전방향이 리미트 입
력의 방향과 같을 때 사용됩니다. 리미트 입력이
켜지면 모터는 정지합니다.
CW리미트 CCW리미트
디지털
속도모드
(PB10=1)
스트로크 제한기능을 사용
안합니다. 리미트입력은 디지털
속도선택명령으로 사용됩니다.
디지털 속도 0 OFF OFF
디지털 속도 1 OFF ON
디지털 속도 2 ON OFF
디지털 속도 3 ON ON
토크제어
0 스트로크 제한기능 사용 안함. x x
1 or 2
아날로그
토크모드
(PB27=0)
스트로크 제한기능은 모터의 회전방향이 리미트 입
력의 방향과 같을 때 사용됩니다. 리미트 입력이
켜지면 모터는 정지합니다.
CW리미트 CCW리미트
디지털
토크모드
(PB27=1)
스트로크 제한기능을 사용
안합니다. 리미트입력은 디지털
토크선택명령으로 사용됩니다.
디지털 토크 0 OFF OFF
디지털 토크 1 OFF ON
디지털 토크 2 ON OFF
디지털 토크 3 ON ON

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 44
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC21 아날로그 모니터 1
출력 형태 MOT1
Min 0 0 -
R S A P S T
Max 5 √ √ √ √
PC22 아날로그 모니터 1
출력 극성 MOP1
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
PC23 아날로그 모니터 1
출력 스케일링 MOS1
Min 1 10 0.1times
R S A P S T
Max 500 √ √ √ √
PC24 아날로그 모니터 1
출력 옵셋 MOO1
Min -999 0 mV
R S A P S T
Max +999 √ √ √ √
아날로그 모니터1 출력의 조건을 설정합니다.
서보의 정보는 아날로그 전압출력단자로 모니터링 할 수 있습니다. 이 아날로그 전압 출력은 출력
스케일링기능(PC23)으로 어떠한 단위로도 곱해질 수 있고, 전압 옵셋(PC24)이 더해질 수 있습니다. 또한, 극성
기능(PC22)으로 극성을 부여하거나 부여하지 않고 모니터링 할 수 있습니다. 만약 출력전압이 5V를 초과하면, 이 값은
5V로 고정됩니다.
Type
(PC21) 모니터 정보 모니터 기준
모니터링 계산식
, Polarity: PC22, Scale: PC23, Offset: PC24
0 명령 속도 모터 최대 속도
1 피드백 속도 모터 최대 속도
2 명령 토크 모터 정격 토크의
300%
3 피드백 토크 모터 정격 토크의
300%
4 명령 펄스 500kpps
5 오차 펄스 과편차에러 (PC00)
파형 양극성
(PC22=0)
단극성
(PC22=1)

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 45
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC25 아날로그 모니터 2
출력 형태 MOT2
Min 0 1 -
R S A P S T
Max 5 √ √ √ √
PC26 아날로그 모니터 2
출력 극성 MOP2
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
PC27 아날로그 모니터 2
출력 스케일링 MOS2
Min 1 10 0.1times
R S A P S T
Max 500 √ √ √ √
PC28 아날로그 모니터 2
출력 옵셋 MOO2
Min -999 0 mV
R S A P S T
Max +999 √ √ √ √
아날로그 모니터2 출력의 조건을 설정합니다.
서보의 정보는 아날로그 전압출력단자로 모니터링 할 수 있습니다. 이 아날로그 전압 출력은 출력
스케일링기능(PC27)으로 어떠한 단위로도 곱해질 수 있고, 전압 옵셋(PC28)이 더해질 수 있습니다. 또한, 극성
기능(PC26)으로 극성을 부여하거나 부여하지 않고 모니터링 할 수 있습니다. 만약 출력전압이 5V를 초과하면, 이 값은
5V로 고정됩니다.
Type
(PC25) 모니터 정보 모니터 기준
모니터링 계산식
, Polarity: PC26, Scale: PC27, Offset: PC28
0 명령 속도 모터 최대 속도
1 피드백 속도 모터 최대 속도
2 명령 토크 모터 정격 토크의
300%
3 피드백 토크 모터 정격 토크의
300%
4 명령 펄스 500kpps
5 오차 펄스 과편차에러 (PC00)
파형 양극성
(PC26=0)
단극성
(PC26=1)

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 46
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PC29 예비자리

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 47
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD00 시험 운전 속도 0 TSP0 Min +6000
+100 rpm R S A P S T
Max -6000 √ √
PD01 시험 운전 속도 1 TSP1 Min +6000
-100 rpm R S A P S T
Max -6000 √ √
PD02 시험 운전 속도 2 TSP2 Min +6000
+1000 rpm R S A P S T
Max -6000 √ √
PD03 시험 운전 속도 3 TSP3 Min +6000
-1000 rpm R S A P S T
Max -6000 √ √
PD04 시험 운전 시간 0 TST0 Min 1
10 Sec R S A P S T
Max 300 √ √
PD05 시험 운전 시간 1 TST1 Min 1
10 Sec R S A P S T
Max 300 √ √
PD06 시험 운전 시간 2 TST2 Min 1
10 Sec R S A P S T
Max 300 √ √
PD07 시험 운전 시간 3 TST3 Min 1
10 Sec R S A P S T
Max 300 √ √
검사모드의 수동 시험 운전 모드(CH02,CH03)의 속도와 시간을 설정합니다.
설정값은 다음 표에 따릅니다.
번호 이름 설명
PD00 시험 운전 속도 0 검사모드(CH02/03)의 시험 운전 속도 0을 설정합니다.
양수는 CCW회전을 음수는 CW회전을 의미합니다.
PD01 시험 운전 속도 1 검사모드(CH02/03)의 시험 운전 속도 1을 설정합니다.
양수는 CCW회전을 음수는 CW회전을 의미합니다.
PD02 시험 운전 속도 2 검사모드(CH02/03)의 시험 운전 속도 2을 설정합니다.
양수는 CCW회전을 음수는 CW회전을 의미합니다.
PD03 시험 운전 속도 3 검사모드(CH02/03)의 시험 운전 속도 3을 설정합니다.
양수는 CCW회전을 음수는 CW회전을 의미합니다.
PD04 시험 운전 시간 0 검사모드(CH02/03)의 시험 운전 시간 0을 설정합니다.
이 파라미터는 시험 운전 속도 0의 동작시간입니다.
PD05 시험 운전 시간 1 검사모드(CH02/03)의 시험 운전 시간 1을 설정합니다.
이 파라미터는 시험 운전 속도 1의 동작시간입니다.
PD06 시험 운전 시간 2 검사모드(CH02/03)의 시험 운전 시간 2을 설정합니다.
이 파라미터는 시험 운전 속도 2의 동작시간입니다.
PD07 시험 운전 시간 3 검사모드(CH02/03)의 시험 운전 시간 3을 설정합니다.
이 파라미터는 시험 운전 속도 3의 동작시간입니다.
• 수동 시험 운전모드(CH02)는 다음 그림과 같이 동작됩니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 48
CH02(수 속도 )
Set
니오
PD00 ( 속도 0)
PD02 ( 속도 2) PD01 ( 속도 1)
PD03 ( 속도 3)
Up
Down
수 속도 은 방
수 속도 반 방
니오
Mode
니오
지/
니오
속도
• 자동 시험 운전 모드(CH03)은 다음 그림과 같이 동작합니다.
CH03( 속도 )
Up
Down
니오
Mode
니오
지/
니오
속도 0(PD00)
속도 1(PD01)
속도 2(PD02)
속도 3(PD03)
0(PD04)
1(PD05)
2 (PD06)
3(PD07)
( 반 0~4 )
0rpm

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 49
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD08 Z-상 검색 속도 ZSS Min 5
10 Rpm R S A P S T
Max 300 √ √ √ √
Z-상 검색모드(CH04)의 속도를 설정합니다.
• Z-상 검색모드(CH04)는 다음 그림과 같이 동작합니다.
CH04(Z- )
니오
Up
Down
니오
Mode
니오
지/
Z- 속도(PD08)
Z-
CCW방 Z-
Z- 속도(PD08)
Z-
CW방 Z-
Set
일 지
니오

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 50
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD09 위치결정 시험
속도 PTS
Min 1 500 rpm
R S A P S T
Max 6000 √ √
PD10 위치결정 시험
거리 PTD
Min 0.01 10.00 0.01turns
R S A P S T
Max 99.99 √ √
PD11 위치결정 시험
반복횟수 PTR
Min 1 1 -
R S A P S T
Max 9999 √ √
PD12 위치결정 시험
반복 대기시간 PTI
Min 1 1000 msec
R S A P S T
Max 9999 √ √
검사모드5번(CH05) 수동위치결정시험의 속도, 거리, 반복횟수, 반복 대기시간을 설정합니다.
설정값은 다음 표에 따릅니다.
번호 이름 Descriptions
PD09 위치결정 시험
속도
수동 위치결정 시험모드의 위치결정 속도를 설정합니다.
가감속 시간과 형태는 PB06과 PB07이 결정합니다.
PD10 위치결정 시험
거리
수동 위치결정 시험모드의 위치결정 거리를 설정합니다.
단위는 모터 1회전에 0.01턴 입니다.
PD11 위치결정 시험
반복횟수
수동 위치결정 시험모드의 반복횟수를 설정합니다.
회전 방향은 매 주기마다 반대로 변경됩니다.
PD12 위치결정 시험
반복 대기시간
각 반복 주기와 정지간의 대기시간을 설정합니다.
• 수동 위치 시험운전 모드(CH05)는 다음 그림처럼 운영됩니다.
CH05(수 위치 )
니오
Up Down 니오
Mode
니오
지/
Set
일 지
니오
CCW
CW
CCW
CW
(PD12)
반 =1 반 =2 반 =n
CCW
CW
CCW
CW
(PD12)
반 =1 반 =n
CCW CW
속도=PD09 리=PD10반 =PD11
속도=PD09 리=PD10반 =PD11
반 =2

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 51
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD13 1회성 오토튜닝 모드 OTAM Min 0
0 - R S A P S T
Max 1 √ √ √
PD14 1회성 오토튜닝
마찰 토크 OTAI
Min 0.0 3.0 0.1%
R S A P S T
Max 30.0 √ √ √
PD15 1회성 오토튜닝
관성 모멘트 비율 OTAF
Min 1.00 2.00 0.01times
R S A P S T
Max 50.00 √ √ √
PD16 1회성 오토튜닝
속도 OTAS
Min 500 1000 rpm
R S A P S T
Max 2000 √ √ √
PD17 1회성 오토튜닝
거리 OTAD
Min 0.10 2.00 0.01turns
R S A P S T
Max 20.00 √ √ √
PD18 1회성 오토튜닝
반복횟수 OTAR
Min 1 10 _
R S A P S T
Max 100 √ √ √
PD19 1회성 오토튜닝
Result Save OTAS
Min 0 0 -
R S A P S T
Max 1 √ √ √
검사모드 CH06의 1회성 오토튜닝의 조건을 설정합니다.
1회성 오토튜닝은 PD13의 설정에 따라 두가지 유형으로 분류됩니다.
PD13의 값이 “0”인 경우 다음 그림과 설명처럼 전자동 모드로 처리됩니다.
PD13의 값이 “1”인 경우 다음 그림과 설명처럼 반자동 모드로 처리됩니다.
1회성 오토튜닝의 목표는 모터토크정보와 가속속도정보를 토대로 부하관성모멘트비율을 추정하는 것 입니다. 그러므로,
마찰토크값을 제거하면서 모터가 가속시에 필요한 정확한 토크값을 측정하는 것은 매우 중요합니다.
전자동 모드는 관성모멘트비율을 추정할 때 마찰토크값을 보정하기 때문에 반자동 모드보다 정확한 관성모멘트비율을
추정하는데 더 좋은 방법입니다.
반자동 모드의 경우, 마찰토크값을 고려하지 않고 관성모멘트비율을 추정하기 때문에 원래값에 비해 조금 높은 값을
추정합니다. 그래서, 반자동 모드는 마찰토크값을 기계의 특성을 통해 추정할 수 없을 때 사용할 수 있습니다.
• 검사모드(CH06)의 1회성 오토튜닝의 동작은 다음표의 키 입력으로 동작합니다.
키 이름 설명
UP UP키가 눌려지면 CCW방향을 향해 동작합니다.
DOWN DOWN키가 눌려지면 CW방향을 향해 동작합니다.
SET SET키가 눌려지면 추정된 값을 저장하고 기본화면으로 복귀합니다.
저장방법은 PD19에서 결정합니다.
MODE MODE키가 눌려지면 동작은 정지하고 기본화면으로 복귀합니다.
• 전자동 모드의 동작 단계 (PD13=0).

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 52
1. 시험 관성모멘트비율(PD15)이 표시됨.
2. UP키가 눌려지면 CCW방향으로, DOWN키가 눌려지면 CW방향으로 마찰토크의 추정작업을 시작합니다.
3. PD17에 설정된 거리를 PD16에 설정된 속도의 절반값으로 이동하면서 추정된 결과값을 표시합니다.
4. 마찰토크가 정상적으로 추정되면 가장왼쪽 숫자가 깜빡입니다.
사용자는 가장 왼쪽 숫자의 깜빡임으로 추정상태를 확인할 수 있습니다.
5. PD18의 설정값과 반복횟수가 같아질 때까지 3단계와 4단계를 반복합니다.
PD18에 설정한 횟수만큼 반복하여 마찰토크를 제대로 추정하면, 다음 6단계로 진행합니다.
PD18에 설정한 횟수만큼 반복하였음에도 마찰토크를 제대로 추정하지 못한 경우, 추정작업을 중지하고 마찰토크
추정오류(F-Er)를 표시합니다.
6. 관성모멘트 추정작업을 시작합니다.
7. PD17에 설정된 거리를 PD16에 설정된 속도로 이동하면서 추정된 결과값을 표시합니다.
8. 관성모멘트 비율이 정상적으로 추정되면 가장왼쪽 숫자가 깜빡입니다.
사용자는 가장 왼쪽 숫자의 깜빡임으로 추정상태를 확인할 수 있습니다.
9. PD18의 설정값과 반복횟수가 같아질 때까지 7단계와 8단계를 반복합니다.
PD18에 설정한 횟수만큼 반복하여 관성모멘트 비율을 제대로 추정하면, 다음 10단계로 진행합니다.
PD18에 설정한 횟수만큼 반복하였음에도 관성모멘트 비율을 제대로 추정하지 못한 경우, 추정작업을 중지하고
관성모멘트 비율 추정오류(I-Er)를 표시합니다.
10. PD19에 설정된 방법에 따라 마찰토크와 관성모멘트 비율의 결과값을 저장합니다.
관성 멘트 율 속도
마찰토크 속도
리
리
(PD16)
(PD17)
(PD16)/2
(PD17) 리
(PD17)
리
(PD17)
#1
#2
#3
#4
#1
#2
#3
#4
반 횟수(PD18)= #n
반 횟수(PD18)= #n
(마찰토크 추) (관성 멘트 율 추)
표 (PD15) 마찰 표 마찰 과 표 관성 표 관성 과 표
마찰 에러 표
관성 에러 표
과
저장
종료
(PD13=0)
견본
• 반자동 모드의 동작 단계 (PD13=1).
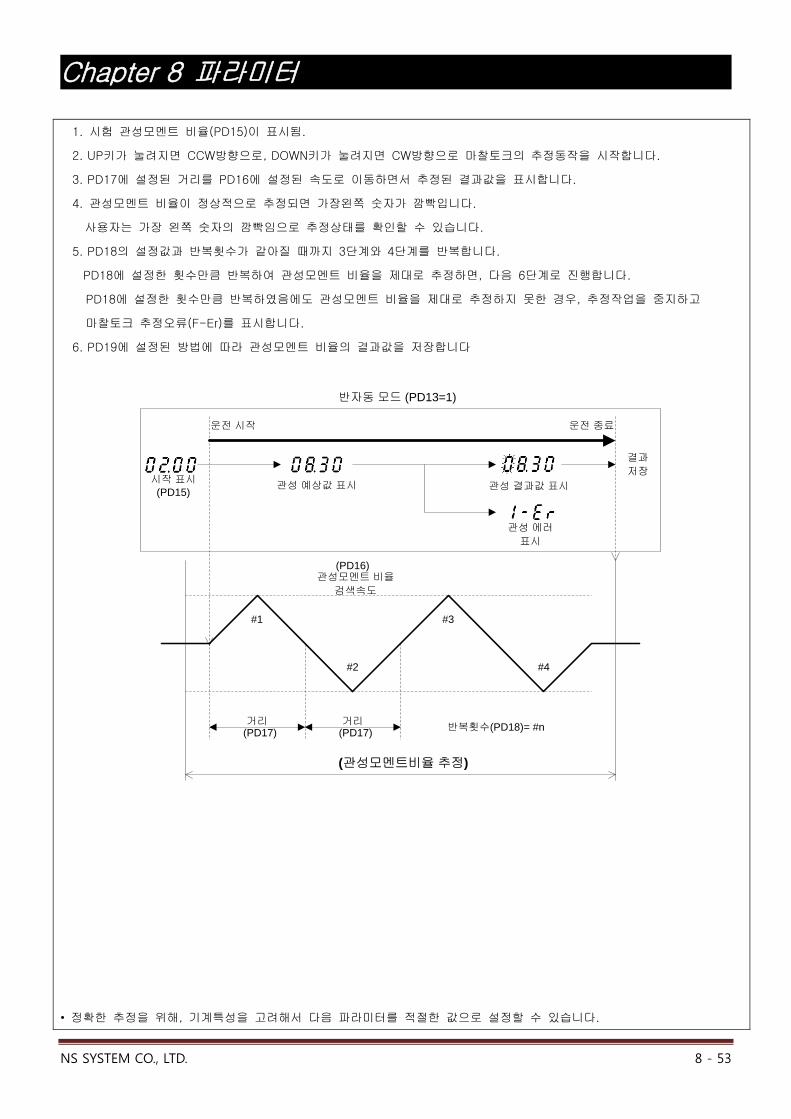
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 53
1. 시험 관성모멘트 비율(PD15)이 표시됨.
2. UP키가 눌려지면 CCW방향으로, DOWN키가 눌려지면 CW방향으로 마찰토크의 추정동작을 시작합니다.
3. PD17에 설정된 거리를 PD16에 설정된 속도로 이동하면서 추정된 결과값을 표시합니다.
4. 관성모멘트 비율이 정상적으로 추정되면 가장왼쪽 숫자가 깜빡입니다.
사용자는 가장 왼쪽 숫자의 깜빡임으로 추정상태를 확인할 수 있습니다.
5. PD18의 설정값과 반복횟수가 같아질 때까지 3단계와 4단계를 반복합니다.
PD18에 설정한 횟수만큼 반복하여 관성모멘트 비율을 제대로 추정하면, 다음 6단계로 진행합니다.
PD18에 설정한 횟수만큼 반복하였음에도 관성모멘트 비율을 제대로 추정하지 못한 경우, 추정작업을 중지하고
마찰토크 추정오류(F-Er)를 표시합니다.
6. PD19에 설정된 방법에 따라 관성모멘트 비율의 결과값을 저장합니다
관성 멘트 율 속도
(PD16)
(관성 멘트 율 추)
반 (PD13=1)
표 (PD15) 관성 표 관성 과 표
관성 에러 표
종료
과
저장
리(PD17)
리(PD17) 반 횟수(PD18)= #n
#1
#2
#3
#4
• 정확한 추정을 위해, 기계특성을 고려해서 다음 파라미터를 적절한 값으로 설정할 수 있습니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 54
번호 설명
PD14
반자동모드의 마찰토크를 설정합니다.
단위는 모터정격의 0.1%단위입니다. 반자동 모드일 때는 측정된 토크를 설정된 마찰토크에서 뺍니다. 값이
잘못 설정된 경우, 관성모멘트 비율은 잘못 추정되거나 추정을 완료할 수 없습니다.
• 다음 절차에 따라 해당값을 설정하십시요.
1. PD16의 절반속도로 모터를 회전합니다.
2. DP09의 토크명령 디스플레이모드로 값을 확인합니다.
3. 10배의 값을 PD14에 설정합니다.
전자동모드에서는 이 값을 자동으로 측정하여 저장합니다. 사용자는 설정할 필요가 없습니다.
PD15
일회성 오토튜닝이 시작되면 서보는 이 관성모멘트 비율로 동작합니다.
추정이 불가능한 경우, 서보는 이값을 단계적으로 증가시키면서 오토튜닝을 재시작합니다.
기계특성에 비해 이 값을 너무 작게 설정한 경우, 낮은 게인으로 인해 서보는 관성모멘트 비율의 추정을
실패하거나 잘못된 값을 추정할 수 있습니다. 이런 경우, 사용자는 이 값을 단계적으로 증가시켜서
오토튜닝을 재시작 할 수 있습니다. 기계특성에 비해 이 값을 너무 크게 설정한 경우, 높은 게인으로 인해
서보는 관성모멘트 비율의 추정을 실패하거나 잘못된 값을 추정할 수 있습니다. 이런 경우, 사용자는 이 값을
단계적으로 감소시켜서 오토튜닝을 재시작 할 수 있습니다.
PD16
1회성 오토튜닝의 모터 속도를 설정합니다.
기계특성에 비해 이 값을 너무 작게 설정한 경우, 낮은 가속속도로 인해 서보는 관성모멘트 비율의 추정을
실패하거나 잘못된 값을 추정할 수 있습니다. 이런 경우, 사용자는 이 값을 단계적으로 증가시켜서
오토튜닝을 재시작 할 수 있습니다. 기계특성에 비해 이 값을 너무 높게 설정한 경우, 진동이나 충격으로
인해 서보는 관성모멘트 비율의 추정을 실패하거나 잘못된 값을 추정할 수 있습니다. 이런 경우, 사용자는 이
값을 단계적으로 감소시켜서 오토튜닝을 재시작 할 수 있습니다.
PD17 1회성 오토튜닝의 운전거리를 설정합니다.
기계의 안전을 고려해서 이 값을 설정하십시요.
PD18
1회성 오토튜닝모드의 위치결정 반복횟수를 설정합니다.
이 값이 너무 작으면, 서보는 너무 적은 측정시간으로 인해 관성모멘트 비율을 추정할 수 없습니다.
만약 오토튜닝이 종료되었을 때 시작지점으로 돌아오고 싶다면 이 값을 짝수로 설정 하십시요.
PD19
추정된 마찰토크와 관성모멘트 비율을 저장하는 방법을 설정합니다.
0 PD13=0
추정된 마찰토크는 PD14에 저장됩니다.
추정된 관성모멘트 비율은 PA03과 PA20에 동시에 저장됩니다.
PD13=1 추정된 관성모멘트 비율은 PA03과 PA20에 동시에 저장됩니다.
1 PD13=0
추정된 마찰토크는 PD14에 저장됩니다.
추정된 관성모멘트 비율은 PA03에 저장됩니다.
PD13=1 추정된 관성모멘트 비율은 PA03에 저장됩니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 55
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD20 예비자리

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 56
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD21 시리얼통신
원격 제어 SCRC
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
PD22 시리얼통신 방법 SCT Min 0
2 - R S A P S T
Max 2 √ √ √ √
PD23 시리얼통신
드라이버 주소 SCDA
Min 0 0 -
R S A P S T
Max 255 √ √ √ √
PD24 시리얼통신 속도 SCS Min 0
3 - R S A P S T
Max 6 √ √ √ √
PD25 시리얼통신
응답 대기시간 SCRDT
Min 0 10 μsec
R S A P S T
Max 6000 √ √ √ √
PD26 시리얼통신
프로토콜 SCP
Min 0 0 -
R S A P S T
Max 1 √ √ √ √
시리얼통신의 조건을 설정합니다.
번호 설명
PD21
시리얼통신의 원격 제어모드를 설정합니다.
0 서보는 입력포트를 통한 로컬모드로 동작합니다.
1 서보는 시리얼통신을 통한 원격모드로 동작합니다.
PD22
시리얼통신의 방법을 설정합니다.
0 USB
1 RS422
2 RS232C
PD23
시리얼통신의 드라이버 주소(인식번호)를 설정합니다.
0 설정값이 “0”이면 시리얼통신은 사용되지 않습니다.
1~255 서보드라이버는 주소가 일치 할 때만 요구에 응답합니다.
PD24
시리얼통신의 속도를 설정합니다 (보-레이트).
0 1200 bps
1 2400 bps
2 4800 bps
3 9600 bps
4 19200 bps
5 38400 bps
6 57600 bps
PD25 상위제어기에 응답하는 지연시간을 설정합니다. 단위는 1/1000초(μsec)입니다.
PD26 추가기능을 위한 예비자리
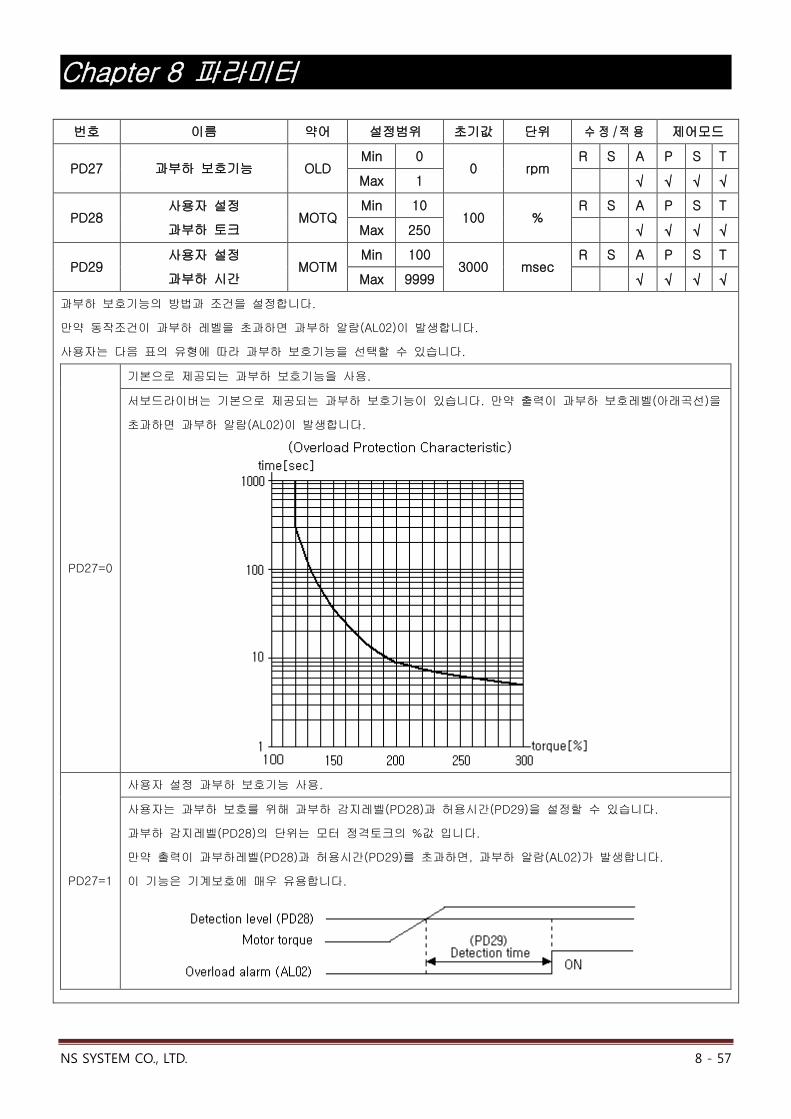
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 57
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PD27 과부하 보호기능 OLD Min 0
0 rpm R S A P S T
Max 1 √ √ √ √
PD28 사용자 설정
과부하 토크 MOTQ
Min 10 100 %
R S A P S T
Max 250 √ √ √ √
PD29 사용자 설정
과부하 시간 MOTM
Min 100 3000 msec
R S A P S T
Max 9999 √ √ √ √
과부하 보호기능의 방법과 조건을 설정합니다.
만약 동작조건이 과부하 레벨을 초과하면 과부하 알람(AL02)이 발생합니다.
사용자는 다음 표의 유형에 따라 과부하 보호기능을 선택할 수 있습니다.
PD27=0
기본으로 제공되는 과부하 보호기능을 사용.
서보드라이버는 기본으로 제공되는 과부하 보호기능이 있습니다. 만약 출력이 과부하 보호레벨(아래곡선)을
초과하면 과부하 알람(AL02)이 발생합니다.
PD27=1
사용자 설정 과부하 보호기능 사용.
사용자는 과부하 보호를 위해 과부하 감지레벨(PD28)과 허용시간(PD29)을 설정할 수 있습니다.
과부하 감지레벨(PD28)의 단위는 모터 정격토크의 %값 입니다.
만약 출력이 과부하레벨(PD28)과 허용시간(PD29)를 초과하면, 과부하 알람(AL02)가 발생합니다.
이 기능은 기계보호에 매우 유용합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 58
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE00 PE 메뉴 잠금기능 PEML Min 0
1 - R S A P S T
Max 1 √ √ √ √
파라미터 메뉴중 PE메뉴의 잠금기능을 설정합니다.
파라미터 PE메뉴는 매우 중요한 영역입니다. 안전을 위해 PE00을 “0”으로 설정해야만 편집이 가능합니다.
사용자는 PE00이 “1”이면 파라미터 편집이 불가능합니다.
설정값 설명
0 파라미터 PE메뉴 편집 가능.
1 파라미터 PE메뉴 편집 불가.
번호 이름 약어 설정범위 초기값 단위 수정/적용 제어모드
PE01 모터 고유번호(ID) MID Min 0
- - R S A P S T
Max 399 √ √ √ √ √
적용된 모터의 고유번호(ID)를 설정합니다.
모터의 고유번호(0을 제외)가 변경되면, 관련된 모든 파라미터(PE02~PE11)는 자동으로 변경됩니다.
만약 모터의 고유번호가 “0”이 아니면 모터관련 파라미터(PE02~PE11)는 검사를 위해 표시할 뿐 편집할 수 없습니다.
만약 모터의 고유번호가 “0”이면 모터관련 파라미터(PE02~PE11)는 변경할 수 있습니다.
설정값 설명
0 사용자 지정 모터 사용. PE02~PE11 변경 가능.
1~399 공장 등록 모터 사용. PE02~PE11 변경 불가.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE02 모터 관성모멘트 단위 MIMU Min 0
- - R S A P S T
Max 2 √ √ √ √
PE03 모터 관성모멘트 MIM Min 1
- 0.001/0.01/0.1
gf·cm·s²
R S A P S T
Max 9999 √ √ √ √
모터관성모멘트의 단위와 값을 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
PE02 설명
0 0.001 [g·f·cm·s²]
1 0.01 [g·f·cm·s²]
2 0.1 [g·f·cm·s²]
모터 관성모멘트(PE03)의 단위는 PE02가 결정합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 59
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE04 모터 토크 상수 MTC Min 1
- 0.01
Kgf·cm/Arms
R S A P S T
Max 3000 √ √ √ √
모터 토크상수를 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE05 모터 상 인덕턴스 단위 MPIU Min 0
- - R S A P S T
Max 1 √ √ √ √
PE06 모터 상 인덕턴스 MPI Min 1
- 0.001/0.01
mH
R S A P S T
Max 9999 √ √ √ √
모터 상 인덕턴스의 단위와 값을 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
PE05 Descriptions
0 0.001 [mH]
1 0.01 [mH]
모터 상 인덕턴스(PE06)의 단위는 PE05가 결정합니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE07 모터 상 저항 MPR Min 0.001
- 0.001Ω R S A P S T
Max 9.999 √ √ √ √
모터 상 저항을 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE08 모터 정격 전류 MRC Min 0.01
- 0.01Arms R S A P S T
Max 99.99 √ √ √ √
모터 정격 전류를 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE09 모터 최대 속도 MMS Min 1
- rpm R S A P S T
Max 9999 √ √ √ √
모터 최대 속도를 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
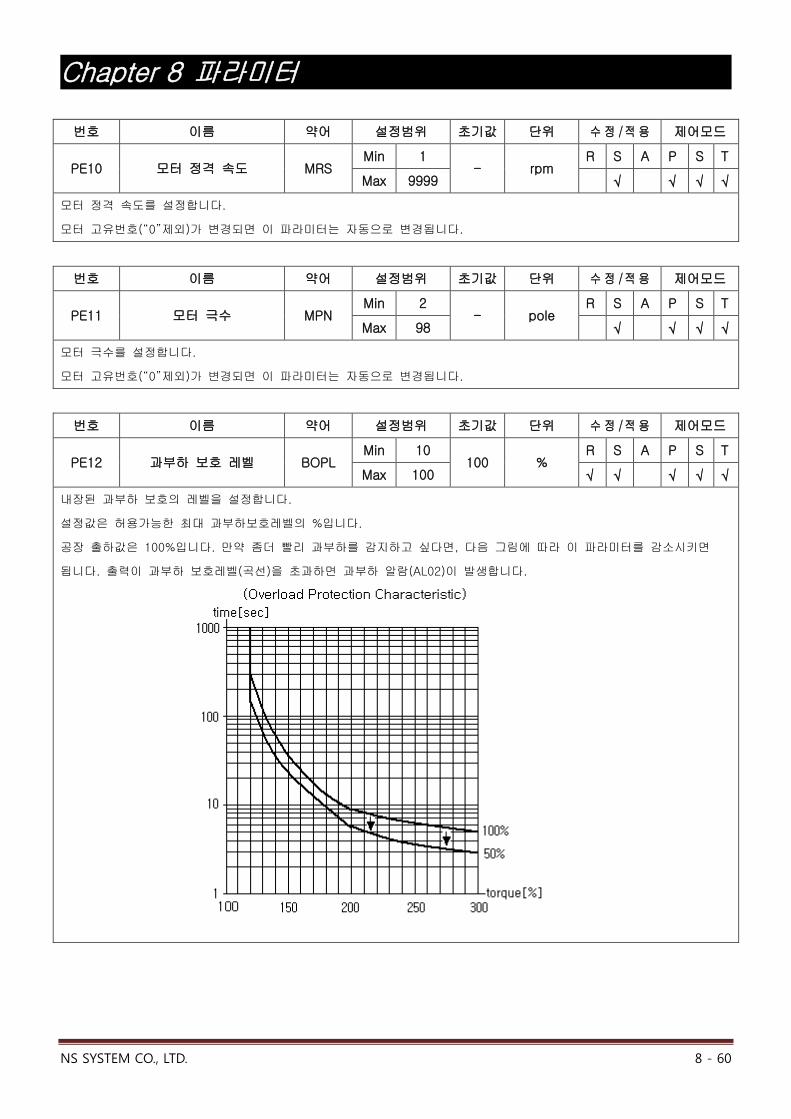
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 60
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE10 모터 정격 속도 MRS Min 1
- rpm R S A P S T
Max 9999 √ √ √ √
모터 정격 속도를 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE11 모터 극수 MPN Min 2
- pole R S A P S T
Max 98 √ √ √ √
모터 극수를 설정합니다.
모터 고유번호(“0”제외)가 변경되면 이 파라미터는 자동으로 변경됩니다.
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE12 과부하 보호 레벨 BOPL Min 10
100 % R S A P S T
Max 100 √ √ √ √ √
내장된 과부하 보호의 레벨을 설정합니다.
설정값은 허용가능한 최대 과부하보호레벨의 %입니다.
공장 출하값은 100%입니다. 만약 좀더 빨리 과부하를 감지하고 싶다면, 다음 그림에 따라 이 파라미터를 감소시키면
됩니다. 출력이 과부하 보호레벨(곡선)을 초과하면 과부하 알람(AL02)이 발생합니다.

Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 61
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE13 CCW
토크 제한치 CCWTL
Min 1 300 %
R S A P S T
Max 300 √ √ √ √
PE14 CW
토크 제한치 CWTL
Min 1 300 %
R S A P S T
Max 300 √ √ √ √
CCW및 CW회전시의 토크 제한치를 설정합니다.
단위는 모터 정격토크의 %값입니다.
토크 제한치는 다음 표처럼 서보 제어모드와 IN6입력에 따라 다르게 적용됩니다.
제어모드 설명
속도제어모드
(PA00=1)
or
위치제어모드
(PA00=2)
토크제한기능은 IN6입력에 의해 제어됨.
IN6=OFF IN6=ON
IN6이 OFF이면, 토크제한치의
기준값은 파라미터 PE13과
PE14으로 결정됩니다.
CCW/CW방향의 제한치는 다르게
적용됩니다.
IN6이 ON이면, 토크제한치의 기준값은 파라미터 PB27로
결정됩니다.
CCW/CW방향의 제한치는 같게 적용됩니다.
PB27=0
(아날로그 모드)
PB27=1
(디지털 모드)
CCW
제한치
파라미터 PE13의
설정값으로 결정
토크제한치는
아날로그토크명령
입력으로 결정됩니다.
토크제한치는 IN2/IN3입력의 디지털
토크입력으로 결정됩니다.
IN3 IN2 디지털 토크 명령
Off Off 디지털 토크 명령 0
CW
제한치
파라미터 PE14의
설정값으로 결정
Off On 디지털 토크 명령 1
On Off 디지털 토크 명령 2
On On 디지털 토크 명령 3
복합제어모드
(PA00=3~5)
토크제한치의 기준값은 IN6입력에 상관없이 PE13과 PE14에 의해서 결정됩니다.
CCW/CW방향의 제한치는 다르게 적용됩니다.
CCW
제한치 파라미터 PE13의 설정값으로 결정
CW
제한치 파라미터 PE14의 설정값으로 결정
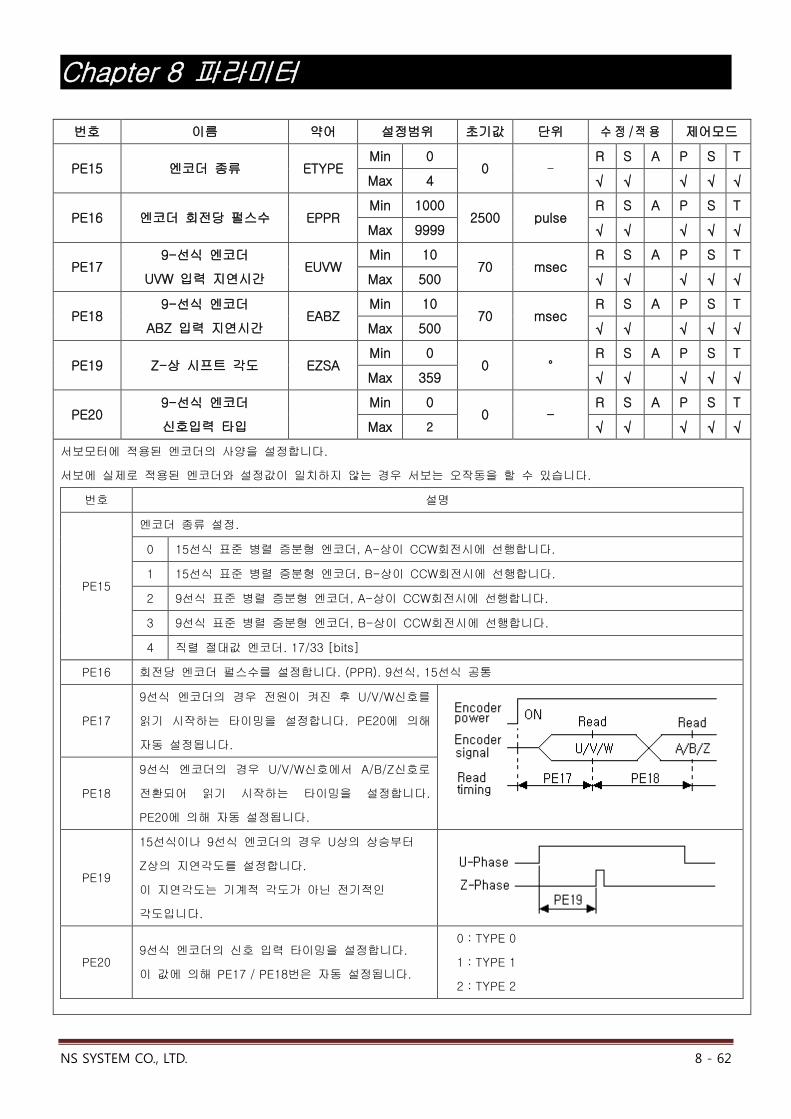
Chapter 8 파라미터
NS SYSTEM CO., LTD. 8 - 62
번호 이름 약어 설정범위 초기값 단위 수 정 /적 용 제어모드
PE15 엔코더 종류 ETYPE Min 0
0 - R S A P S T
Max 4 √ √ √ √ √
PE16 엔코더 회전당 펄스수 EPPR Min 1000
2500 pulse R S A P S T
Max 9999 √ √ √ √ √
PE17 9-선식 엔코더
UVW 입력 지연시간 EUVW
Min 10 70 msec
R S A P S T
Max 500 √ √ √ √ √
PE18 9-선식 엔코더
ABZ 입력 지연시간 EABZ
Min 10 70 msec
R S A P S T
Max 500 √ √ √ √ √
PE19 Z-상 시프트 각도 EZSA Min 0
0 ° R S A P S T
Max 359 √ √ √ √ √
PE20 9-선식 엔코더
신호입력 타입
Min 0 0 -
R S A P S T
Max 2 √ √ √ √ √
서보모터에 적용된 엔코더의 사양을 설정합니다.
서보에 실제로 적용된 엔코더와 설정값이 일치하지 않는 경우 서보는 오작동을 할 수 있습니다.
번호 설명
PE15
엔코더 종류 설정.
0 15선식 표준 병렬 증분형 엔코더, A-상이 CCW회전시에 선행합니다.
1 15선식 표준 병렬 증분형 엔코더, B-상이 CCW회전시에 선행합니다.
2 9선식 표준 병렬 증분형 엔코더, A-상이 CCW회전시에 선행합니다.
3 9선식 표준 병렬 증분형 엔코더, B-상이 CCW회전시에 선행합니다.
4 직렬 절대값 엔코더. 17/33 [bits]
PE16 회전당 엔코더 펄스수를 설정합니다. (PPR). 9선식, 15선식 공통
PE17
9선식 엔코더의 경우 전원이 켜진 후 U/V/W신호를
읽기 시작하는 타이밍을 설정합니다. PE20에 의해
자동 설정됩니다.
PE18
9선식 엔코더의 경우 U/V/W신호에서 A/B/Z신호로
전환되어 읽기 시작하는 타이밍을 설정합니다.
PE20에 의해 자동 설정됩니다.
PE19
15선식이나 9선식 엔코더의 경우 U상의 상승부터
Z상의 지연각도를 설정합니다.
이 지연각도는 기계적 각도가 아닌 전기적인
각도입니다.
PE20 9선식 엔코더의 신호 입력 타이밍을 설정합니다.
이 값에 의해 PE17 / PE18번은 자동 설정됩니다.
0 : TYPE 0
1 : TYPE 1
2 : TYPE 2

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 1
9.1 검사 목록
검사번호 이름 약어
CH00 수동 알람 리셋 MARST
CH01 파라미터 잠금 PLOCK
CH02 수동 속도 시험운전 MSTR
CH03 자동 속도 시험운전 ASTR
CH04 Z상 검색 ZPHS
CH05 수동 위치결정 시험운전 MPTR
CH06 1회성 오토튜닝 OTAT
CH07 입력/출력 검사 IOC
CH08 엔코더 A/B상 검사 ABPH
CH09 엔코더 U/V/W상 검사 UVWPH
CH10 속도비례게인 검사 SPGC
CH11 속도적분게인 검사 SPIC
CH12 Speed A-gain Check SPAC
CH13 전류센서 조정 CST
CH14 아날로그 속도지령 옵셋 조정 ASCOT
CH15 아날로그 토크지령 옵셋 조정 ATCOT
CH16 출력 ON/OFF 시험 OUTT
CH17 냉각 팬 ON/OFF 시험 CFANT
CH18 파라미터 초기화 PINI
CH19 예비자리
CH20 예비자리
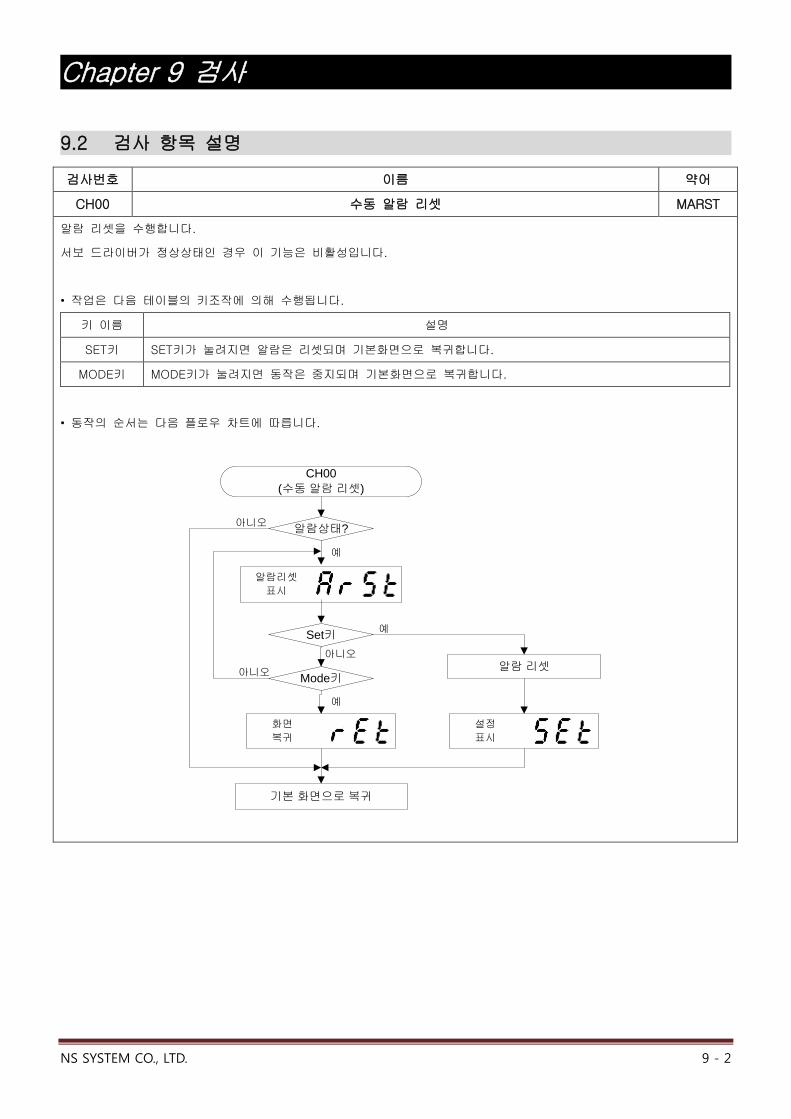
Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 2
9.2 검사 항목 설명
검사번호 이름 약어
CH00 수동 알람 리셋 MARST 알람 리셋을 수행합니다.
서보 드라이버가 정상상태인 경우 이 기능은 비활성입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
SET키 SET키가 눌려지면 알람은 리셋되며 기본화면으로 복귀합니다.
MODE키 MODE키가 눌려지면 동작은 중지되며 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH00(수동 알람 리셋)
알람상태?
예
아니오
기본 화면으로 복귀
예Set키
Mode키
아니오
예
아니오알람 리셋
화면
복귀
설정
표시
알람리셋
표시
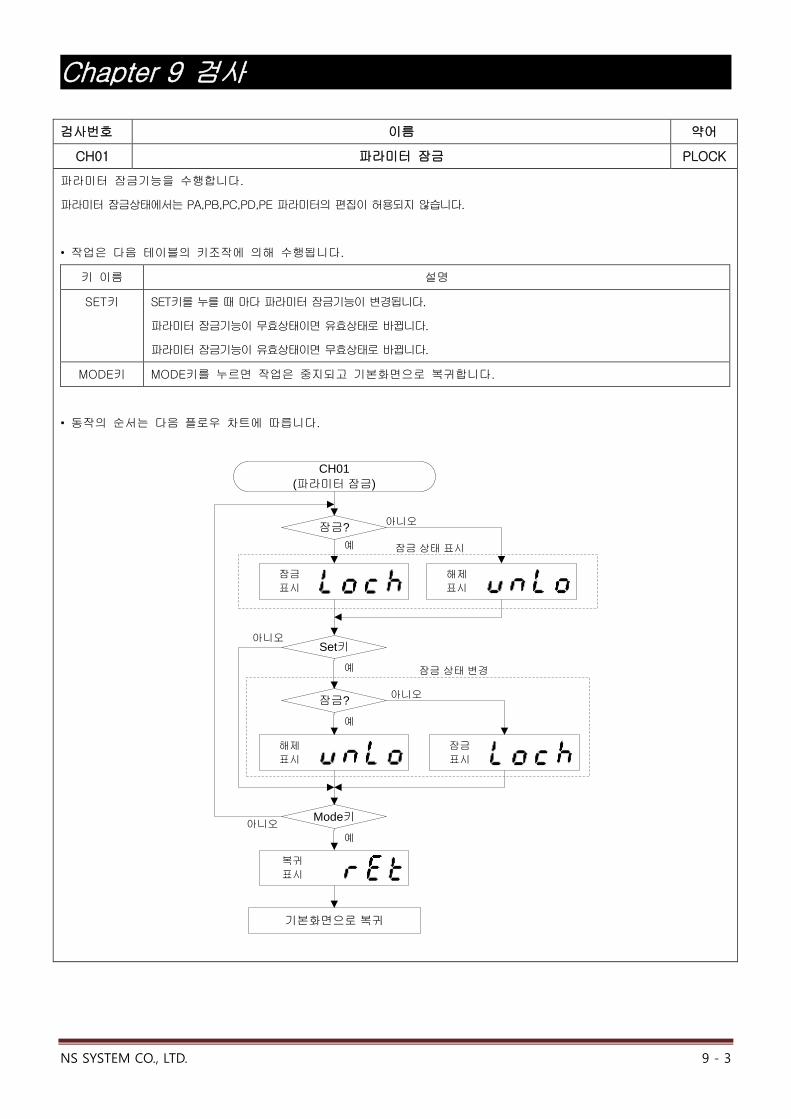
Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 3
검사번호 이름 약어
CH01 파라미터 잠금 PLOCK 파라미터 잠금기능을 수행합니다.
파라미터 잠금상태에서는 PA,PB,PC,PD,PE 파라미터의 편집이 허용되지 않습니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
SET키 SET키를 누를 때 마다 파라미터 잠금기능이 변경됩니다.
파라미터 잠금기능이 무효상태이면 유효상태로 바뀝니다.
파라미터 잠금기능이 유효상태이면 무효상태로 바뀝니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH01
(파라미터 잠금)
아니오
예
잠금?
기본화면으로 복귀
예
아니오
Set키
아니오
예
잠금? 아니오
예 잠금 상태 표시
잠금 상태 변경
잠금
표시
복귀
표시
해제
표시
잠금
표시
해제
표시
Mode키

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 4
검사번호 이름 약어
CH02 수동 속도 시험운전 MSTR 수동 속도 시험운전을 수행합니다.
관련 파라미터는 PD00/01/02/03입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키를 누르면 CCW방향으로 시험운전을 수행합니다.
DOWN키 DOWN 키를 누르면 CW방향으로 시험운전을 수행합니다.
SET키 SET키를 누를 때 마다 PD00~PD03에 설정한 시험속도가 차례로 선택됩니다.
PD00/01/02/03에 설정한 부호는 무시되고 UP키나 DOWN키에 의해 방향이 결정됩니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH02(수동 속도 시험 운전)
Set키
예
아니오
PD00 (test speed 0)
PD02 (test speed 2) PD01 (test speed 1)
PD03 (test speed 3)
Up키
Down키
CCW방향 회전 CW방향 회전
예 아니오
Mode키
예
아니오
정지 & 복귀
예
아니오
속도
선택
알람?
서보온?
알람
표시
서보온
표시
복귀
표시
예
아니오
예
아니오
속도
표시
회전 정지

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 5
검사번호 이름 약어
CH03 자동 속도 시험운전 ASTR 자동 속도 시험운전을 수행합니다.
관련 파라미터는 PD00/01/02/03/04/05/06/07입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키
또는
DOWN키
UP키 또는 DOWN키를 누르면 시험운전을 수행합니다.
PD04~PD07에 설정된 시험시간이 경과되면 자동으로 PD00~PD03에 설정한 시험속도로 설정됩니다.
PD00/01/02/03에 설정된 부호로 회전방향이 결정되며, PD04/05/06/07에 설정된 시간으로
시험운전시간이 결정됩니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH03(자동 속도 시험운전)
Mode키
정지 & 복귀
예
아니오
알람?
서보온?
알람
표시
서보온
표시
복귀
표시
예
아니오
예
아니오
속도
표시
Up키 또는 DOWN키 아니오
예
시험속도 0(PD00)
시험속도 1(PD01)
시험속도 2(PD02)
시험속도 3(PD03)
시험시간 0(PD04)
시험시간 1(PD05)
시험시간 2 (PD06)
시험시간 3(PD07)
자동 시험운전 ( 반복 0~4 )
0rpm

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 6
검사번호 이름 약어
CH04 Z상 검색 ZPHS Z상 검색 기능을 수행합니다.
관련 파라미터는 PD08입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키를 누르면 PD08에 설정한 속도로 CCW방향을 향해 검색을 시작합니다.
DOWN키 DOWN키를 누르면 PD08에 설정한 속도로 CW방향을 향해 검색을 시작합니다.
SET키 SET키를 누르면 일시정지하고, UP키 또는 DOWN키를 누르면 다시 시작합니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH04(Z상 검색)
아니오
Up키
Down키
예 아니오
Mode키
예
아니오
정지 & 복귀
예
Z상 검색 속도(PD08)
Z상 신호
CCW방향으로 Z상 검색
Z상 검색 속도(PD08)
Z상 신호
CW방향으로 Z상 검색
Set키
검색 일시정지
아니오
예
알람?
서보온?
알람
표시
서보온
표시예
아니오
예
아니오
위치
표시
복귀
표시

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 7
검사번호 이름 약어
CH05 수동 위치결정 시험운전 MPTR 수동 위치결정 시험운전을 수행합니다.
관련 파라미터는 PD09/10/11/12입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키를 누르면 CCW방향을 향해 시험운전을 시작합니다.
DOWN키 DOWN키를 누르면 CW방향을 향해 시험운전을 시작합니다.
SET키 SET키를 누르면 일시정지하고 다시 누르면 다시 시작합니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH05(수동 위치결정 시험운전)
아니오
Up키 Down키예아니
오
Mode키
예
아니
오
정지 & 복귀
예
Set키
일시정지 또는 재시작
아니오
예
CCW
CW
CCW
CW
Interval(PD12)
Repeat=1 Repeat=2 Repeat=n
CCW
CW
CCW
CW
Interval(PD12)
Repeat=1 Repeat=2 Repeat=n
CCW 시작 CW 시작
알람?
서보온?
알람
표시
서보온
표시예
아니오
예
아니오
위치
표시
복귀
표시
속도=PD09거리=PD10반복횟수=PD11
속도=PD09거리=PD10
반복횟수=PD11

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 8
검사번호 이름 약어
CH06 1회성 오토튜닝 OTAT 1회성 오토튜닝을 수행합니다.
• 관련 파라미터는 다음 표와 같이 PD13/14/15/16/17/18/19입니다.
파라미터 설명
PD13
1회성 오토튜닝의 모드를 설정합니다.
0 전자동 모드
1 반자동 모드
PD14 PD13=0 전자동 모드에서는 이값은 자동으로 측정되어 저장됩니다. 사용자는 설정할 필요가 없습니다.
PD13=1 반자동 모드의 마찰토크를 설정합니다.
PD15 1회성 오토튜닝을 시작할 때의 시험용 부하관성모멘트비율을 설정합니다.
PD16 모터 속도를 설정합니다.
PD17 이동 거리를 설정합니다.
D18 위치결정 반복 횟수를 설정합니다.
PD19 산정된 마찰토크와 부하관성모멘트비율의 저장방법을 설정합니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키를 누르면 CCW방향으로 시험을 수행합니다.
DOWN키 DOWN키를 누르면 CW방향으로 시험을 수행합니다.
SET키 SET키를 누르면 산정된 결과값을 저장하고 기본화면으로 복귀합니다.
저장 방법은 PD19에서 설정합니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
1회성 오토튜닝은 PD13에 의해서 두가지 유형으로 분류됩니다.
PD13의 값이 “0”이면 아래의 그림과 설명처럼 전자동으로 동작합니다.
PD13의 값이 “1”이면 아래의 그림과 설명처럼 반자동으로 동작합니다.
1회성 오토튜닝의 목표는 모터 토크와 가속시간에 따른 관성모멘트비율의 측정입니다. 그래서, 가속시에 마찰부하요소를
제거하고 외부 부하요소를 측정하는 것이 매우 중요합니다.
그러므로, 전자동 모드에서 마찰부하요소를 보상하여 관성모멘트비율을 측정하는 방법이 반자동 모드에서 정확한
관성모멘트비율을 측정하는 것보다 좋은 방법입니다.
반자동 모드의 경우, 마찰토크요소를 고려하지 않고 관성모멘트비율을 측정하므로 원래의 값보다 높을 수 있습니다.
그러므로, 반자동 모드는 시스템 특성에 따른 마찰토크요소를 정확하게 측정할 수 없을 때 사용합니다.

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 9
• 전자동 모드의 동작 순서 (PD13=0).
1. 시험용 관성모멘트 비율(PD15)가 표시됩니다.
2. UP키를 누르면 CCW방향으로, DOWN키를 누르면 CW방향으로 마찰토크측정 작업을 시작합니다.
3. PD17에 설정된 거리를 PD16에 설정된 속도의 절반 속도로 결과값이 측정되어 표시될 때까지 이동합니다.
4. 마찰토크가 정상적으로 측정될 때까지 가장 왼쪽 자리는 깜박입니다.
가장 왼쪽 자리의 깜박임 여부로 측정작업의 상태를 확인할 수 있습니다.
5. PD18에 설정한 반복횟수만큼 3단계와 4단계를 반복합니다.
PD18에 설정한 횟수를 수행하는 동안 정확한 마찰토크가 측정되면 다음 6단계로 진행합니다.
PD18에 설정한 횟수를 수행하는 동안 정확한 마찰토크를 측정하지 못하면, 측정 작업을 정지하고 마찰토크 측정
이상(F-Er)을 표시합니다.
6. 관성모멘트비율 측정작업을 시작합니다.
7. PD17에 설정된 거리를 PD16에 설정된 속도로 결과값이 측정되어 표시될 때까지 이동합니다.
8. 관성모멘트비율이 정상적으로 측정될 때까지 가장 왼쪽 자리는 깜박입니다.
가장 왼쪽 자리의 깜박임 여부로 측정작업의 상태를 확인할 수 있습니다.
9. PD18에 설정한 반복횟수만큼 7단계와 8단계를 반복합니다.
PD18에 설정한 횟수를 수행하는 동안 정확한 관성모멘트비율이 측정되면 다음 10단계로 진행합니다.
PD18에 설정한 횟수를 수행하는 동안 정확한 관성모멘트비율을 측정하지 못하면, 측정 작업을 정지하고
관성모멘트비율 측정 이상 (I-Er)을 표시합니다.
10. PD19에 설정된 방법에 따라 마찰토크와 관성모멘트비율의 결과값을 저장합니다.
관성모멘트비율
측정속도마찰토크
특정속도
거리
거리
(PD16)
(PD17)
(PD16)/2
(PD17) 거리
(PD17)
거리
(PD17)
#1
#2
#3
#4
#1
#2
#3
#4
반복횟수(PD18)= #n
반복횟수(PD18)= #n
(마찰토크 측정) (관성모멘트비율 측정)
시작 표시(PD15)
측정된 마찰토크 표시
마찰토크 결과값 표시
측정된 관성모멘트비율
표시
관성모멘트비율 결과값 표시
마찰토크 이상 표시
관성모멘트비
율 이상 표시
결과
저장
작업
종료
작업
시작
전자동 모드 (PD13=0)
동작
패턴

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 10
• 반자동 오토튜닝의 동작 순서 (PD13=1).
1. 시험용 관성모멘트비율(PD15)이 표시됩니다.
2. UP키를 누르면 CCW방향으로, DOWN키를 누르면 CW방향으로 관성모멘트비율측정 작업을 시작합니다.
3. PD17에 설정된 거리를 PD16에 설정된 속도로 결과값이 측정되어 표시될 때까지 이동합니다.
4. 관성모멘트비율이 정상적으로 측정될 때까지 가장 왼쪽 자리는 깜박입니다.
가장 왼쪽 자리의 깜박임 여부로 측정작업의 상태를 확인할 수 있습니다.
5. PD18에 설정한 반복횟수만큼 3단계와 4단계를 반복합니다.
PD18에 설정한 횟수를 수행하는 동안 정확한 관성모멘트비율이 측정되면 다음 6단계로 진행합니다.
PD18에 설정한 횟수를 수행하는 동안 정확한 관성모멘트비율을 측정하지 못하면, 측정 작업을 정지하고
관성모멘트비율 측정 이상 (I-Er)을 표시합니다.
6. PD19에 설정된 방법에 따라 마찰토크와 관성모멘트비율의 결과값을 저장합니다.
부라관성모멘트 측정속도
(PD16)
(관성모멘트비율 측정)
반자동 모드 (PD13=1)
시작 표시(PD15)
측정된 관성모멘트비율
표시
관성모멘트비율 결과값 표시
관성모멘트비율 이상 표시
작업
종료
작업
시작
결과
저장
거리(PD17)
거리(PD17) 반복횟수(PD18)= #n
#1
#2
#3
#4

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 11
검사번호 이름 약어
CH07 입력/출력 검사 IOC 이검사는 사용자 입력 및 출력 포트의 상태와 배선 실수를 확인합니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 입력과 출력포트(논리 설정에 관계없이)의 현재상태를 7세그먼트 바에 다음 표처럼 표시합니다.
1. 수직바의 위쪽은 입력의 상태를 보여줍니다.
2. 수직바의 아래쪽은 출력의 상태를 보여줍니다.
3. 입력 또는 출력이 ON상태이면 해당 바는 밝게 변합니다.
4. 수평바는 CH07모드에서는 다음 그림처럼 항상 밝게 유지됩니다.
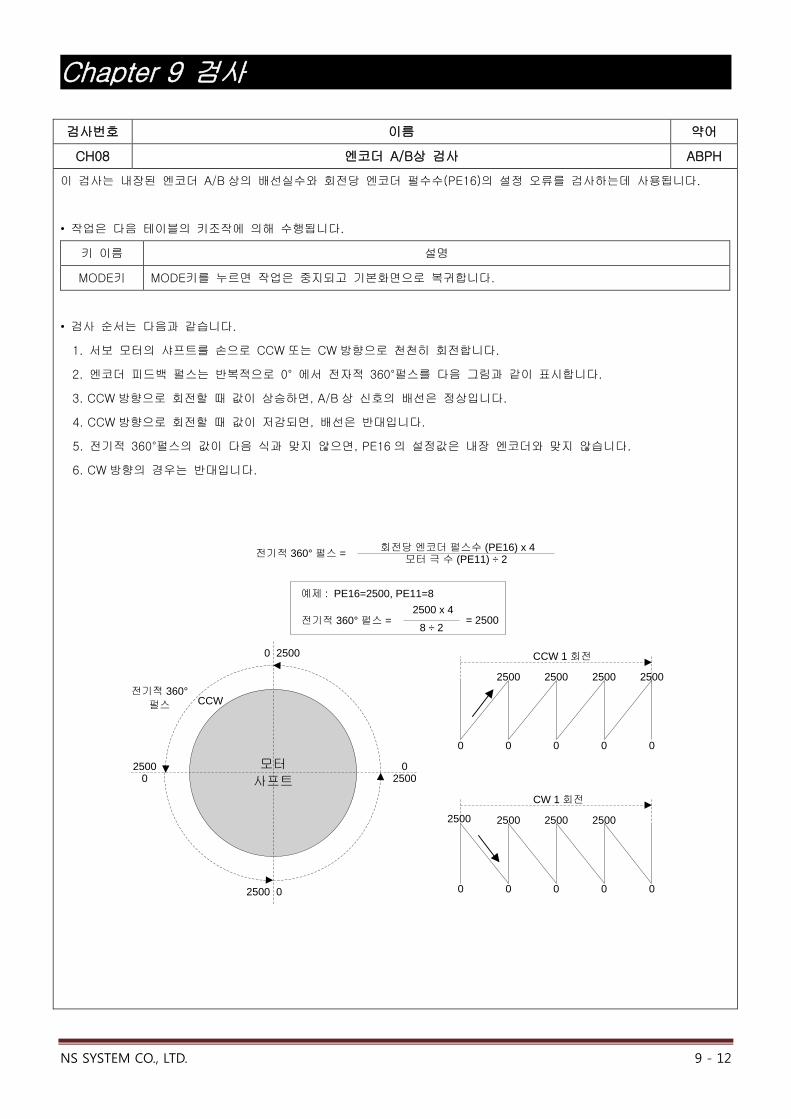
Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 12
검사번호 이름 약어
CH08 엔코더 A/B상 검사 ABPH 이 검사는 내장된 엔코더 A/B 상의 배선실수와 회전당 엔코더 펄수수(PE16)의 설정 오류를 검사하는데 사용됩니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 검사 순서는 다음과 같습니다.
1. 서보 모터의 샤프트를 손으로 CCW또는 CW방향으로 천천히 회전합니다.
2. 엔코더 피드백 펄스는 반복적으로 0° 에서 전자적 360°펄스를 다음 그림과 같이 표시합니다.
3. CCW방향으로 회전할 때 값이 상승하면, A/B상 신호의 배선은 정상입니다.
4. CCW 방향으로 회전할 때 값이 저감되면, 배선은 반대입니다.
5. 전기적 360°펄스의 값이 다음 식과 맞지 않으면, PE16 의 설정값은 내장 엔코더와 맞지 않습니다.
6. CW 방향의 경우는 반대입니다.
회전당 엔코더 펄스수 (PE16) x 4모터 극 수 (PE11) ÷ 2전기적 360° 펄스 =
예제 : PE16=2500, PE11=82500 x 4
8 ÷ 2전기적 360° 펄스 = = 2500
02500
25000
2500 0
25000
CCW전기적 360° 펄스
모터 사프트
CCW 1 회전
0 0 0 0 0
2500 2500 2500 2500
CW 1 회전
0 0 0 0 0
2500 2500 2500 2500

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 13
검사번호 이름 약어
CH09 엔코더 U/V/W상 검사 UVWPH 이 검사는 15 선식 병렬 증분형 엔코더의 U/V/W 상 신호의 배선오류를 검사합니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 검사 순서는 다음과 같습니다.
1. 서보 모터의 샤프트를 손으로 CCW또는 CW방향으로 천천히 회전합니다.
2. 엔코더 U/V/W상 신호는 다음그림처럼 101부터 001으로 반복적으로 표시됩니다.
3. CCW 방향으로 회전시 다음 그림과다른 순서로 표시될 경우 배선은 잘못된 것 입니다.
4. CW 방향의 경우는 반대입니다.
Motor shaft
101100
110
010
011
001
101
100
110
010011
001 101100
110
010
011
001
101
100
110
010011
001
CCW revolution
(Encoder U/V/W phase signals)
U V WSign of CH09
Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 14
검사번호 이름 약어
CH10 속도 P 게인 검사 SPGC
CH11 속도 I 게인 검사 SPIC
CH12 속도 A 게인 검사 SPAC 공장 출하 설정용입니다.

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 15
검사번호 이름 약어
CH13 전류 센서 조정 CST 공장 출하 설정용입니다.
전류센서의 옵셋전압을 검사하고 조정합니다.
점이 표시되지 않으면 옵셋 전압은 양(+)입니다.
점이 표시되면 옵셋 전압은 부(-)입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키를 누르면 전류센서1의 옵셋 전압을 표시합니다.
DOWN키 DOWN키를 누르면 전류센서2의 옵셋 전압을 표시합니다.
SET키 SET키를 누르면 전류센서1,2의 옵셋전압을 메모리에 저장합니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH13(전류센서 조정)
Up키?
예
아니오
기본화면으로 복귀
예Set키
Mode키
아니오
예
아니오
센서 옵셋 전압 저장
복귀
표시
저장
표시
센서1옵셋 표시
Down키?
센서2옵셋 표시
예
아니오

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 16
검사번호 이름 약어
CH14 아날로그 속도지령 옵셋 조정 ASCOT 아날로그 속도지령의 옵셋 전압을 검사하고 조정합니다.
아날로그 속도지령으로 0V가 인가 되도 서보는 정지하지 않고 매우 느린 속도로 회전하는 경우가 있습니다.
이것은 호스트제어기의 기준전압과 외부회로에 약간의 옵셋전압(in mV units)이 있을 경우 발생합니다.
서보는 이 옵셋전압을 0V로 인지하여 정지해야 합니다.
점이 표시되지 않으면, 옵셋전압은 양(+)입니다.
점이 표시되면, 옵셋전압은 음(-)입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
SET키 SET키를 누르면 아날로그 속도지령의 옵셋전압은 PB13에 저장됩니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH14(아날로그 속도지령 옵셋 조정)
아니
오
기본화면으로 복귀
예Set키
Mode키
예
아니오옵셋전압 저장
복귀
표시
저장
표시
옵셋
표시

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 17
검사번호 이름 약어
CH15 아날로그 토크지령 옵셋 조정 ATCOT 아날로그 토크지령의 옵셋 전압을 검사하고 조정합니다.
아날로그 토크지령으로 0V가 인가 되도 서보는 정지하지 않고 매우 느린 속도로 회전하는 경우가 있습니다.
이것은 호스트제어기의 기준전압과 외부회로에 약간의 옵셋전압(in mV units)이 있을 경우 발생합니다.
서보는 이 옵셋전압을 0V로 인지하여 정지해야 합니다.
점이 표시되지 않으면, 옵셋전압은 양(+)입니다.
점이 표시되면, 옵셋전압은 음(-)입니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
SET키 SET키를 누르면 아날로그 토크지령 옵셋 전압이 파라미터 PB30에 저장됩니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH15(아날로그 토크지령 옵셋전압 조정)
아니오
기본화면으로 복귀
예Set키
Mode키
예
아니오옵셋 전압 저장
복귀
표시
저장
표시
옵셋
표시

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 18
검사번호 이름 약어
CH16 출력 ON/OFF 시험 OUTT 출력포트의 인터페이스를 확인합니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키를 누르면 포트번호는 1씩 증가합니다.
DOWN키 DOWN키를 누르면 포트번호는 1씩 감소합니다.
SET키 SET키를 누르면 선택한 출력포트가 ON-OFF / OFF-ON을 수행합니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 출력포트번호와 ON/OFF상태는 아래그림처럼 표시합니다.
Out No. : 0~2 On : HI Out No. : 0~2 Off : LO
(ON display) (OFF display)
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH16(출력 ON/OFF 시험)
아니오
기본화면으로 복귀
예
Set키
Mode키
예
아니오
복귀
표시
Off표시
On?
On표시
YES
Up키 Down키
출력번호 증가 출력번호 감소
예 예
아니오 아니오
아니오
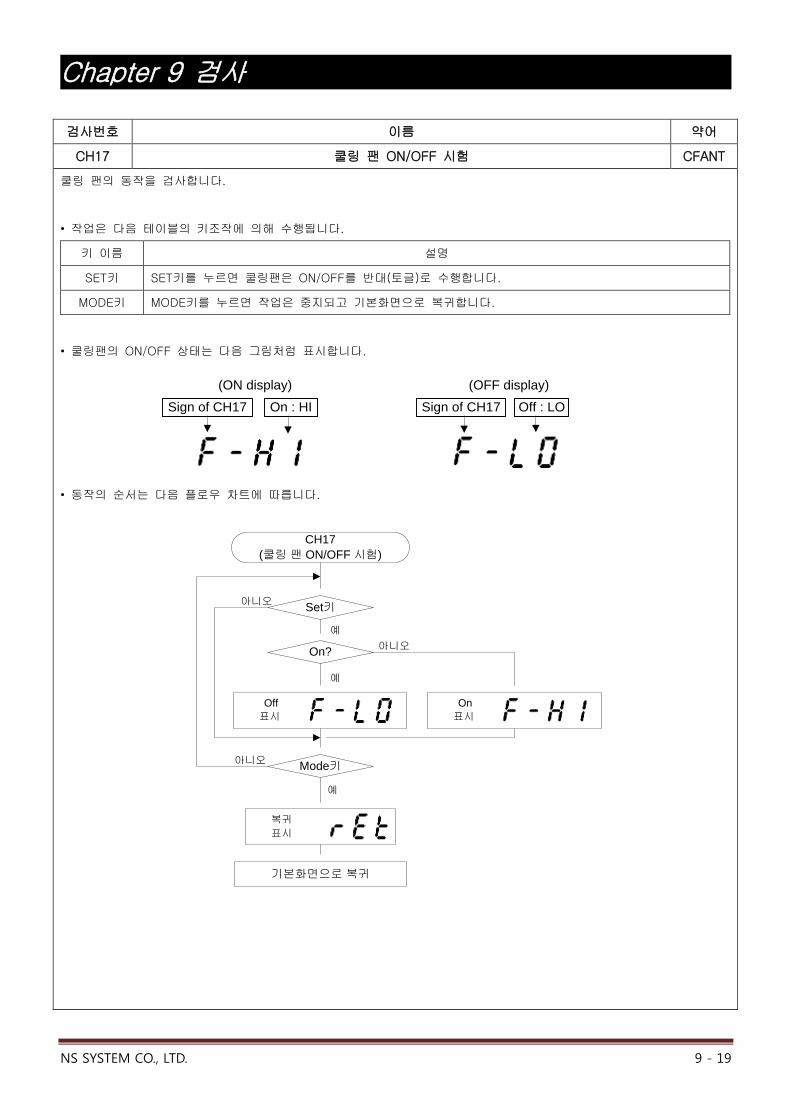
Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 19
검사번호 이름 약어
CH17 쿨링 팬 ON/OFF 시험 CFANT 쿨링 팬의 동작을 검사합니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
SET키 SET키를 누르면 쿨링팬은 ON/OFF를 반대(토글)로 수행합니다.
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 쿨링팬의 ON/OFF 상태는 다음 그림처럼 표시합니다.
Sign of CH17 On : HI Sign of CH17 Off : LO
(ON display) (OFF display)
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH17
(쿨링 팬 ON/OFF 시험)
아니오
기본화면으로 복귀
예
Set키
Mode키
예
아니오
복귀
표시
Off표시
On?
On표시
예
아니오

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 20
검사번호 이름 약어
CH18 파라미터 초기화 PINI 파라미터 (PA/PB/PC/PD)를 공장 출하 기본값으로 변경합니다.
이 모드에 들어오면, 안전을 위해 'SUrE' 를 화면에 표시합니다.
변경을 원치 않으면 MODE 키를 눌러 기본화면으로 복귀합니다.
• 작업은 다음 테이블의 키조작에 의해 수행됩니다.
키 이름 설명
UP키 UP키와 DOWN키를 동시에 누르면 파라미터 (PA/PB/PC/PD)를 공장 출하 기본값으로 변경합니다.
DOWN키
MODE키 MODE키를 누르면 작업은 중지되고 기본화면으로 복귀합니다.
• 동작의 순서는 다음 플로우 차트에 따릅니다.
CH18(파라미터 초기화)
아니오
기본화면으로 복귀
Mode키
예
아니오
복귀
표시
예
알람?
서보온?
알람
표시
서보온
표시예
아니오
예
아니오
초기화
확인
Up+Down키
초기화
파라미터 초기화(PA,PB,PC,PD)
리셋
표시
서보 리셋

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 21
검사번호 이름 약어
CH19 Reserved
CH20 Reserved It is used for factory-set.

Chapter 9 검사
NS SYSTEM CO., LTD. 9 - 22

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 1
10.1 표시 목록
표시번호 이름 약어
DP00 서보 드라이버 상태 SDST
DP01 모터 속도 MSPD
DP02 지령 속도 CSPD
DP03 지령 펄스 CPLS
DP04 피드백 펄스 FPLS
DP05 펄스 편차 EPLS
DP06 제어 모드 CMOD
DP07 순시 부하량 ITRQ
DP08 0.2초 평균 부하량 STRQ
DP09 10초 평균 부하량 LTRQ
DP10 최대 부하량(피크 부하량) PTRQ
DP11 DC 주전원 전압 평균값 ADCV
DP12 DC 주전원 전압 순시값 IDCV
DP13 AC 전원 입력 전압값 ACPV
DP14 회생제동 동작시간 RBTM
DP15 속도 PI/P 제어 SPIP
DP16 관성모멘트 비율 DIMR
DP17 입력/출력 모니터링 IOMO
DP18 직렬 통신 주소 SCAD
DP19 직렬 통신 코드 SCCO
DP20 선적일 SDAT
DP21 제품 버전 BVER

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 2
10.1 표시 항목 설명
표시번호 이름 약어 설정값 단위 제어모드
DP00 서보 드라이버 상태 SDST Min -
P S T
Max - √ √ √ 서보드라이버의 상태를 아래와 같이 표시합니다.
상태 표시
서보 온(Servo On) Sign of ON
서보 오프(Servo OFF) Sign of OFF
알람(Servo Alarm)
Sign of alarm Alarm No.
표시번호 이름 약어 설정값 단위 제어모드
DP01 모터 속도 MSPD Min -9999
rpm P S T
Max +9999 √ √ √ 0.2초간의 모터 속도 평균값을 아래와 같이 표시합니다.
상태 표시
CCW 회전 (점 표시않됨)
CW 회전 (모든 점 표시됨)
표시번호 이름 약어 설정값 단위 제어모드
DP02 지령 속도 CSPD Min -9999
rpm P S T
Max +9999 √ √ √ 0.2초간의 지령 속도의 평균값을 아래와 같이 표시합니다.
상태 표시
CCW 회전 (점 표시않됨)
CW 회전 (모든 점 표시됨)
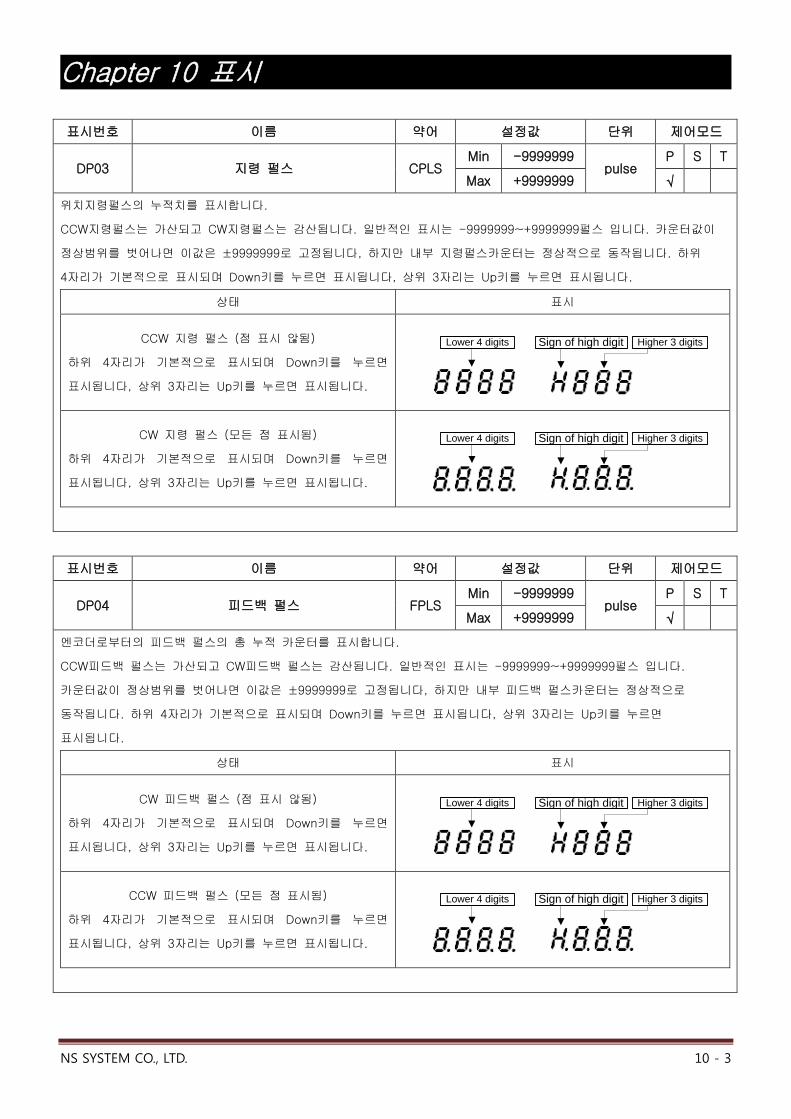
Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 3
표시번호 이름 약어 설정값 단위 제어모드
DP03 지령 펄스 CPLS Min -9999999
pulse P S T
Max +9999999 √ 위치지령펄스의 누적치를 표시합니다.
CCW지령펄스는 가산되고 CW지령펄스는 감산됩니다. 일반적인 표시는 -9999999~+9999999펄스 입니다. 카운터값이
정상범위를 벗어나면 이값은 ±9999999로 고정됩니다, 하지만 내부 지령펄스카운터는 정상적으로 동작됩니다. 하위
4자리가 기본적으로 표시되며 Down키를 누르면 표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
상태 표시
CCW 지령 펄스 (점 표시 않됨)
하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
Higher 3 digitsLower 4 digits Sign of high digit
CW 지령 펄스 (모든 점 표시됨)
하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
Higher 3 digitsLower 4 digits Sign of high digit
표시번호 이름 약어 설정값 단위 제어모드
DP04 피드백 펄스 FPLS Min -9999999
pulse P S T
Max +9999999 √ 엔코더로부터의 피드백 펄스의 총 누적 카운터를 표시합니다.
CCW피드백 펄스는 가산되고 CW피드백 펄스는 감산됩니다. 일반적인 표시는 -9999999~+9999999펄스 입니다.
카운터값이 정상범위를 벗어나면 이값은 ±9999999로 고정됩니다, 하지만 내부 피드백 펄스카운터는 정상적으로
동작됩니다. 하위 4자리가 기본적으로 표시되며 Down키를 누르면 표시됩니다, 상위 3자리는 Up키를 누르면
표시됩니다.
상태 표시
CW 피드백 펄스 (점 표시 않됨)
하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
Higher 3 digitsLower 4 digits Sign of high digit
CCW 피드백 펄스 (모든 점 표시됨)
하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
Higher 3 digitsLower 4 digits Sign of high digit

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 4
표시번호 이름 약어 설정값 단위 제어모드
DP05 펄스 편차 EPLS Min -9999999
pulse P S T
Max +9999999 √ 펄스 편차값(위치결정 정확도)를 표시합니다.
편차값은 서보가 운전을 시작하면 자동으로 초기화됩니다.
점 표시는 서보가 CW방향으로 펄스편차값 “0”을 향해 회전한다는 의미입니다.
점이 표시되지 않은 경우는 서보가 CCW방향으로 펄스편차값 “0”을 향해 회전한다는 의미입니다.
일반적인 표시는 -9999999~+9999999펄스 입니다. 카운터값이 정상범위를 벗어나면 이값은 ±9999999로 고정됩니다,
하지만 내부 펄스 편차 카운터는 정상적으로 동작됩니다. 하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
상태 표시
CCW 펄스 편차 (점 표시 않됨)
하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
Higher 3 digitsLower 4 digits Sign of high digit
CCW 펄스 편차 (모든 점 표시됨)
하위 4자리가 기본적으로 표시되며 Down키를 누르면
표시됩니다, 상위 3자리는 Up키를 누르면 표시됩니다.
Higher 3 digitsLower 4 digits Sign of high digit
표시번호 이름 약어 설정값 단위 제어모드
DP06 제어 모드 CMOD Min 0
- P S T
Max 2 √ √ √ 로컬/원격 모드와 서보제어모드 타입을 표시합니다.
로컬제어모드(PD21=0)의 의미는 일반적인 입력/출력의 연결에 의한 서보제어입니다.
원격제어모드(PD21=1)의 의미는 직렬통신에 의한 서보제어입니다.
제어모드 로컬 모드 원격 모드
토크제어
속도제어
위치제어

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 5
표시번호 이름 약어 설정값 단위 제어모드
DP07 순시 부하량 ITRQ Min -300
% P S T
Max +300 √ √ √ 순시 부하량을 표시합니다.
이 값은 지령토크의 검사에 사용됩니다. 단위는 모터 정격토크의 %값입니다.
상태 표시
CCW 토크 (점 표시 않됨) Sign of DP07 CCW Torque
CW 토크 (모든 점 표시됨) Sign of DP07 CW Torque
표시번호 이름 약어 설정값 단위 제어모드
DP08 0.2초 평균 부하량 STRQ Min 0
% P S T
Max 300 √ √ √ 서보모터에 가해지는 부하량을 0.2초간 평균하여 표시합니다.
이 값은 가속/감속 동작시의 부하량 검사와 순간적인 오버로드의 검사에 사용됩니다.
단위는 모터 정격토크의 %값 입니다.
Sign of DP08 Torque
표시번호 이름 약어 설정값 단위 제어모드
DP09 10초 평균 부하량 LTRQ Min 0
% P S T
Max 300 √ √ √ 서보모터에 가해지는 부하량을 10초간 평균하여 표시합니다.
이 값은 서보모터 용량의 정상적인 선정여부를 검사하는데 사용됩니다.
이 값이 70%를 초과하면, 모터 용량을 높여야 합니다.
단위는 모터 정격토크의 %값 입니다.
Sign of DP09 Torque

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 6
표시번호 이름 약어 설정값 단위 제어모드
DP10 최대 부하량(피크 부하량) PTRQ Min -300
% P S T
Max +300 √ √ √ 최대 부하량을 표시합니다.
이 값은 전체 시스템의 최대 부하량 검사에 사용됩니다. 단위는 모터 정격토크의 %값 입니다.
상태 표시
CCW 방향 부하 (점 표시 않됨) Sign of DP10 CCW Torque
CW 방향 부하 (모든 점 표시됨) Sign of DP10 CW Torque
표시번호 이름 약어 설정값 단위 제어모드
DP11 DC 주전원 전압 평균값 ADCV Min -
Volt P S T
Max - √ √ √ DC 주전원 전압의 0.25초간의 평균값을 표시합니다.
이 값은 가속/감속 동작을 수행할 때 DC 주전원 전압의 변동을 검사하는데 사용됩니다. 이것은 서보오프 상태에서의
AC 주전원 전압의 1.414배 입니다.
Sign of DP11 DC Voltage
표시번호 이름 약어 설정값 단위 제어모드
DP12 DC 주전원 전압 순시값 IDCV Min -
Volt P S T
Max - √ √ √ DC 주전원 전압의 순시값을 표시합니다.
이 값은 가속/감속을 수행할 때의 전압변동을 검사하는데 사용됩니다.
감속할 때 이 값이 390vdc를 초과하면 회생제동저항을 추가하거나 변경해야합니다. 가속할 때 이 값이 220vdc에
미달하면 서보 드라이버의 파워부를 즉시 교체해야 합니다.
Sign of DP12 DC Voltage
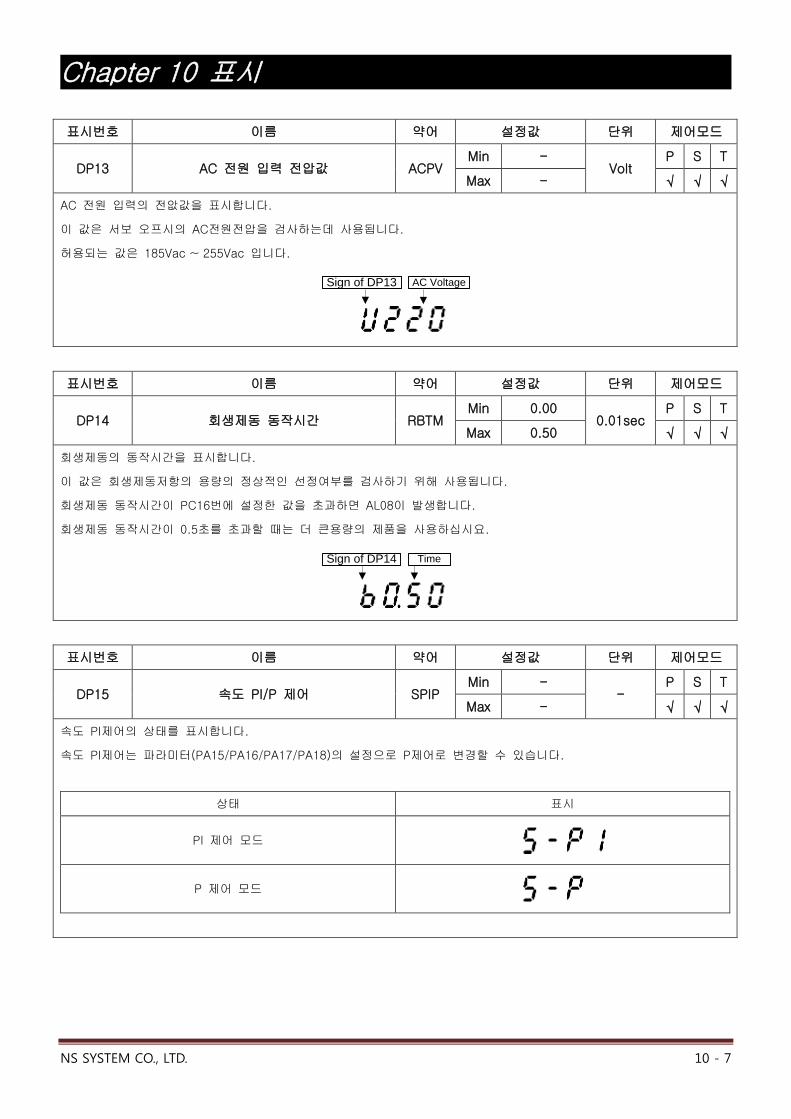
Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 7
표시번호 이름 약어 설정값 단위 제어모드
DP13 AC 전원 입력 전압값 ACPV Min -
Volt P S T
Max - √ √ √ AC 전원 입력의 전앖값을 표시합니다.
이 값은 서보 오프시의 AC전원전압을 검사하는데 사용됩니다.
허용되는 값은 185Vac ~ 255Vac 입니다.
Sign of DP13 AC Voltage
표시번호 이름 약어 설정값 단위 제어모드
DP14 회생제동 동작시간 RBTM Min 0.00
0.01sec P S T
Max 0.50 √ √ √ 회생제동의 동작시간을 표시합니다.
이 값은 회생제동저항의 용량의 정상적인 선정여부를 검사하기 위해 사용됩니다.
회생제동 동작시간이 PC16번에 설정한 값을 초과하면 AL08이 발생합니다.
회생제동 동작시간이 0.5초를 초과할 때는 더 큰용량의 제품을 사용하십시요.
Sign of DP14 Time
표시번호 이름 약어 설정값 단위 제어모드
DP15 속도 PI/P 제어 SPIP Min -
- P S T
Max - √ √ √ 속도 PI제어의 상태를 표시합니다.
속도 PI제어는 파라미터(PA15/PA16/PA17/PA18)의 설정으로 P제어로 변경할 수 있습니다.
상태 표시
PI 제어 모드
P 제어 모드

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 8
표시번호 이름 약어 설정값 단위 제어모드
DP16 관성모멘트 비율 DIMR Min 1.0
0.1times P S T
Max 99.9 √ √ 서보모터의 관성모멘트에 대한 부하 관성모멘트의 비율을 표시합니다.
단위는 서보모터의 관성모멘트의 0.1배입니다.
Sign of DP16 Inertia
표시번호 이름 약어 설정값 단위 제어모드
DP17 입력/출력 모니터링 IOMO Min -
- P S T
Max - √ √ √ 입력 및 출력의 성정된 로직을 고려한 현재상태를 표시합니다.
입력 및 출력의 배선오류를 검사하기 위해 사용됩니다.
• 입력 및 출력포트의 현재상태는 7세그먼트의 각각의 바에 다음과 같이 표시됩니다.
1. 수직 바의 위쪽은 입력의 상태를 보여줍니다.
2. 수직 바의 아래쪽은 출력의 상태를 보여줍니다.
3. 입력 및 출력이 ON상태이면 해당 바는 켜짐 상태입니다.
4. 중앙의 수평바는 표시모드(DP17)에 따라 항상 다음 그림처럼 켜짐 상태입니다.

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 9
표시번호 이름 약어 설정값 단위 제어모드
DP18 직렬 통신 주소 SCAD Min 0
- P S T
Max 255 √ √ √ 직렬 통신을 위한 드라이버의 통신 주소를 표시합니다.
이 표시는 여러 드라이버를 사용하는 경우 각 드라이버의 할당된 통신 주소를 확인하는데 사용됩니다.
Sign of DP18 Address
표시번호 이름 약어 설정값 단위 제어모드
DP19 직렬 통신 코드 SCCO Min -
- P S T
Max - √ √ √ 호스트 제어기로부터 전송된 가장 최근의 직렬 통신 코드를 표시합니다.
이 표시는 직렬 통신의 상태를 확인하는데 사용됩니다.
Sign of DP19 Code
표시번호 이름 약어 설정값 단위 제어모드
DP20 선적일 SDAT Min -
- P S T
Max - √ √ √ 사후 서비스 및 유지관리를 위한 선적일을 표시합니다.
Year Month
표시번호 이름 약어 설정값 단위 제어모드
DP21 제품 버전 BVER Min -
- P S T
Max - √ √ √ 사후 서비스 및 유지관리를 위한 공장 출하시의 소프트웨어 및 하드웨어의 버전을 표시합니다.
S/W Version H/W Version

Chapter 10 표시
NS SYSTEM CO., LTD. 10 - 10

Chapter 11 알람 표시
NS SYSTEM CO., LTD. 11 - 1
11.1 알람 목록
알람번호 이름 약어
AL01 엔코더 이상 ENCA
AL02 과부하 이상 OLA
AL03 과속도 이상 OSA
AL04 하드웨어 이상 HWA
AL05 편차 과대 이상 EPEA
AL06 펄스 입력 이상 PIA
AL07 모터 출력 이상 MOA
AL08 회생제동 이상 ORA
AL09 절대치 엔코더 이상 AEEA
AL10 과열 이상 OHA
AL11 과전압 이상 OVA
AL12 과전류 이상 OCA
AL13 저전압 이상 LVA
AL14 전류 센서 이상 CSEA
AL15 직렬 통신 이상 SCEA
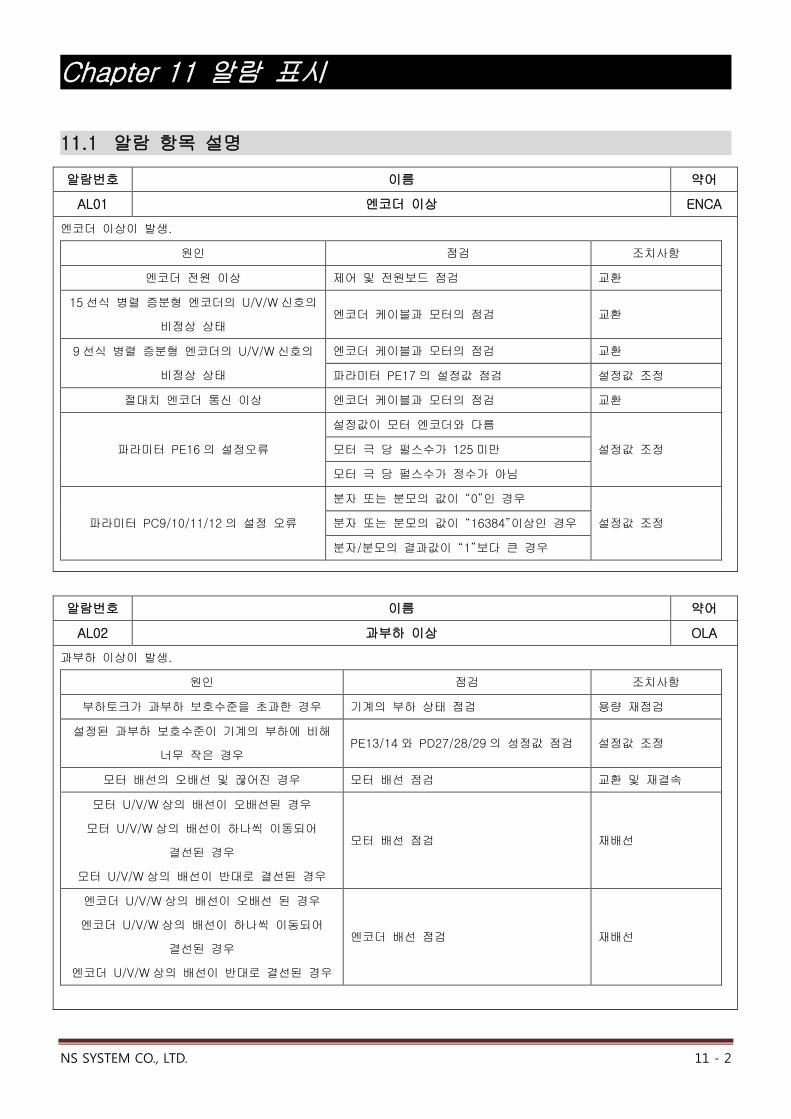
Chapter 11 알람 표시
NS SYSTEM CO., LTD. 11 - 2
11.1 알람 항목 설명
알람번호 이름 약어
AL01 엔코더 이상 ENCA 엔코더 이상이 발생.
원인 점검 조치사항
엔코더 전원 이상 제어 및 전원보드 점검 교환
15선식 병렬 증분형 엔코더의 U/V/W신호의
비정상 상태 엔코더 케이블과 모터의 점검 교환
9선식 병렬 증분형 엔코더의 U/V/W신호의
비정상 상태
엔코더 케이블과 모터의 점검 교환
파라미터 PE17의 설정값 점검 설정값 조정
절대치 엔코더 통신 이상 엔코더 케이블과 모터의 점검 교환
파라미터 PE16의 설정오류
설정값이 모터 엔코더와 다름
설정값 조정 모터 극 당 펄스수가 125미만
모터 극 당 펄스수가 정수가 아님
파라미터 PC9/10/11/12의 설정 오류
분자 또는 분모의 값이 “0”인 경우
설정값 조정 분자 또는 분모의 값이 “16384”이상인 경우
분자/분모의 결과값이 “1”보다 큰 경우
알람번호 이름 약어
AL02 과부하 이상 OLA 과부하 이상이 발생.
원인 점검 조치사항
부하토크가 과부하 보호수준을 초과한 경우 기계의 부하 상태 점검 용량 재점검
설정된 과부하 보호수준이 기계의 부하에 비해
너무 작은 경우 PE13/14와 PD27/28/29의 성정값 점검 설정값 조정
모터 배선의 오배선 및 끊어진 경우 모터 배선 점검 교환 및 재결속
모터 U/V/W상의 배선이 오배선된 경우
모터 U/V/W상의 배선이 하나씩 이동되어
결선된 경우
모터 U/V/W상의 배선이 반대로 결선된 경우
모터 배선 점검 재배선
엔코더 U/V/W상의 배선이 오배선 된 경우
엔코더 U/V/W상의 배선이 하나씩 이동되어
결선된 경우
엔코더 U/V/W상의 배선이 반대로 결선된 경우
엔코더 배선 점검 재배선

Chapter 11 알람 표시
NS SYSTEM CO., LTD. 11 - 3
알람번호 이름 약어
AL03 과속도 이상 OSA 과속도 이상이 발생.
모터의 속도가 정격 최대속도를 초과한 경우에 발생합니다.
원인 점검 조치사항
엔코더 A/B상의 배선이 오배선인 경우
엔코더 A/B상의 배선이 반대로 결선된 경우 엔코더 A/B상의 배선 점검 재배선
알람번호 이름 약어
AL04 하드웨어 이상 HWA 하드웨어 이상의 발생.
원인 점검 조치사항
메모리가 비정상인 경우 제어 보드의 점검 교환
하드웨어가 비정상인 경우
알람번호 이름 약어
AL05 편차 과대 이상 EPEA 편차 과대 이상의 발생.
펄스 편차 카운터의 값이 허용 최대 펄스 편차의 값을 초과한 경우.
원인 점검 조치사항
위치 루프 게인의 값이 동작 속도에 비해
너무 작은 경우 동작 환경의 점검 동작 환경의 조정
동작 속도에 비해 허용 위치 편차의
설정값이 너무 작은 경우 파라미터 PC00의 설정값 점검 설정값 조정
모터 정격 토크와 기계상태에 비해 가속 및
감속 시간이 너무 짧은 경우 동작 환경의 점검 동작 환경의 조정
토크 제한값 (PE13/14)이 너무 작은 경우 설정값의 점검 설정갑 조정
기계의 잠김현상 기계의 점검 기계의 수리
모터와 엔코더 배선의 비정상 모터와 엔코더 배선의 점검 교환

Chapter 11 알람 표시
NS SYSTEM CO., LTD. 11 - 4
알람번호 이름 약어
AL06 펄스 입력 이상 PIA 펄스 입력 이상의 발생.
위치 지령 펄스 입력의 이상.Position pulse input is abnormal.
원인 점검 조치사항
전자기어비(PB01/02/03/04)의 비정상 설정
분자 또는 분모의 값이 “0”인 경우
설정값 조정 분자 또는 분모의 값이 “32767”이상인 경우
분자/분모의 값이 “1000”이상인 경우
펄스 입력 초과
입력 펄스와 전자기어비 연산의 결과값이
너무 큰 경우
파라미터 PB01~PB04의
점검
펄스 입력 주파수가 너무 빠른 경우 펄스 입력 점검
알람번호 이름 약어
AL07 모터 출력 이상 MOA 모터 출력 이상의 발생.
원인 점검 조치사항
모터 출력이 비정상인 경우 모터와 엔코더 배선 점검 교환
드라이버 파워보드의 점검 교환
알람번호 이름 약어
AL08 회생제동 이상 ORA 회생제동 이상의 발생.
회생 제동의 동작시간이 허용 최대시간을 초과한 경우.
원인 점검 조치사항
회생제동 저항의 미설치 회생제동 저항의 설치 점검 회생제동 저항의 설치
회생제동의 동작시간이 설정값보다 긴 경우 회생제동 동작시간의 점검 설정값 조정
회생제동 배선의 끊김 회생제동 배선의 점검 교환
감속시간이 너무 작은경우 감속시간을 증가시킴 설정값 조정
입력 전원전압이 너무 높은 경우 전압 변환기의 설치 설치
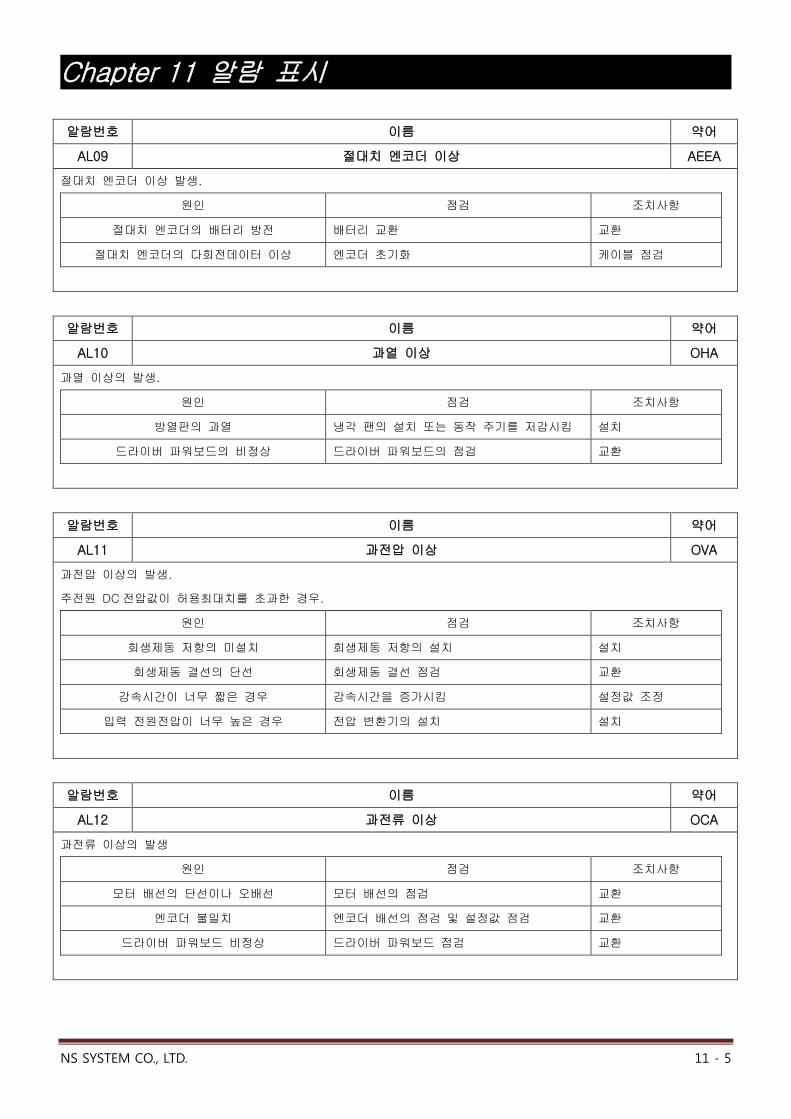
Chapter 11 알람 표시
NS SYSTEM CO., LTD. 11 - 5
알람번호 이름 약어
AL09 절대치 엔코더 이상 AEEA 절대치 엔코더 이상 발생.
원인 점검 조치사항
절대치 엔코더의 배터리 방전 배터리 교환 교환
절대치 엔코더의 다회전데이터 이상 엔코더 초기화 케이블 점검
알람번호 이름 약어
AL10 과열 이상 OHA 과열 이상의 발생.
원인 점검 조치사항
방열판의 과열 냉각 팬의 설치 또는 동작 주기를 저감시킴 설치
드라이버 파워보드의 비정상 드라이버 파워보드의 점검 교환
알람번호 이름 약어
AL11 과전압 이상 OVA 과전압 이상의 발생.
주전원 DC전압값이 허용최대치를 초과한 경우.
원인 점검 조치사항
회생제동 저항의 미설치 회생제동 저항의 설치 설치
회생제동 결선의 단선 회생제동 결선 점검 교환
감속시간이 너무 짧은 경우 감속시간을 증가시킴 설정값 조정
입력 전원전압이 너무 높은 경우 전압 변환기의 설치 설치
알람번호 이름 약어
AL12 과전류 이상 OCA 과전류 이상의 발생
원인 점검 조치사항
모터 배선의 단선이나 오배선 모터 배선의 점검 교환
엔코더 불일치 엔코더 배선의 점검 및 설정값 점검 교환
드라이버 파워보드 비정상 드라이버 파워보드 점검 교환

Chapter 11 알람 표시
NS SYSTEM CO., LTD. 11 - 6
알람번호 이름 약어
AL13 저전압 이상 LVA 저전압 이상 발생.
원인 점검 조치사항
입력 전원전압이 너무 낮은 경우 전압 변환기의 설치 설치
주전원이 켜지지 않은 경우 호스트 제어기의 서보온 신호의 점검 호스트 제어기 점검
드라이버 파워보드 비정상 드라이버 파워보드 점검 교환
알람번호 이름 약어
AL14 전류 센서 이상 CSEA 전류 센서의 이상 발생.
원인 점검 조치사항
전류 센서의 옵셋값이 초과된 경우 드라이버 파워보드 점검 교환
알람번호 이름 약어
AL15 직렬 통신 이상 SCEA 직렬 통신의 이상 발생.
원인 점검 조치사항
RS232C/RS422 통신 이상 케이블, 통신속도, 드라이버 제어보드의 점검 점검 및 교환
USB 통신 이상 케이블, 통신속도, 드라이버 제어보드의 점검 점검 및 교환

Chapter 12 통신 기능
NS SYSTEM CO., LTD. 12 - 1
12.1 통신 기능 개요 서보 드라이버는 RS-232C 시리얼 통신기능을 가지고 있습니다.
이 기능을 사용하여 서보의 운전, 파라미터 변경, 모니터 기능 등을 수행할 수 있습니다.
옵션기능으로 RS-422 시리얼 통신기능을 가지고 있습니다.
시리얼 통신속도 및 종류는 파라미터 PD22에서 결정합니다.
[ 파라미터 PD22 / 시리얼 통신의 종류 ]
0 USB
1 RS422
2 RS232C
[ 파라미터 PD24 / 시리얼 통신속도 ]
0 1200 bps
1 2400 bps
2 4800 bps
3 9600 bps
4 19200 bps
5 38400 bps
6 57600 bps
각각의 서보 드라이버는 파라미터 PD23에 ID 번호를 가지고 있습니다.
ID 번호가 일치하는 경우에만 응답을 합니다.
통신기능을 사용하지 않을 경우에는 반드시 “0”으로 설정하여 주십시오.
[ 파라미터 PD23 ]
0 설정값이 “0”이면 시리얼통신은 사용되지 않습니다.
1~255 서보드라이버는 주소가 일치 할 때만 요구에 응답합니다.
서보 드라이버는 통신기능의 사용여부를 설정할수 있습니다.
이 기능은 파라미터 PD21에서 설정합니다.
[ 파라미터 PD21 ]
0 서보는 입력포트를 통한 로컬모드로 동작합니다.
1 서보는 시리얼통신을 통한 원격모드로 동작합니다.

Chapter 12 통신 기능
NS SYSTEM CO., LTD. 12 - 2
12.2 통신 코넥터 (CN2)
# RS422의 경우 1:1연결 또는 다단 접속의 종단일 경우에는 “종단저항” 단자(7번핀)를
“수신-“ 단자(RDN 8번핀)에 접속하여 주십시요. 내부적으로 종단저항이 연결됩니다.
# 변환기를 사용하는 경우에는 반드시 전기적으로 절연된 제품을 사용하여 주십시요.
# 변환기의 RDP/RDN 양단에 반드시 종단저항(120옴 0.5W)을 설치하여 주십시요.
RS232C
핀 번호
배선기호 신호명
2 TXD 송신
3 RXD 수신
5 GND 그라운드
9 FG 접지
RS422
핀 번호
배선기호 신호명
1 SDP 송신 PLUS
6 SDN 송신 MINUS
4 RDP 수신 PLUS
8 RDN 수신 MINUS
5 GND 그라운드
7 TR 종단저항
9 FG 접지
COMPUTER
594837261
TXD
GND
TXD RXD
GND
RXD
TANGO-A
594837261
GND
수신+
SDNSDP
TR
송신+
종단저항
RDN수신-RDP
TANGO-A
594837261
송신-