第三章 基礎控制觀念w3.uch.edu.tw/cyitme/hydroservo/pptpdf/第三章 基礎... ·...
TRANSCRIPT
第三章 基礎控制觀念
Basic Control Concepts

圖3.1開迴路控制實例1:汽車速度控制
影響汽車速度的其他因素: ● 汽車載重量。 ● 順風或逆風。 ● 上坡或下坡。 ● 引擎、油路、電路的狀況。
訊號輸入 引擎及傳動系統 速度輸出
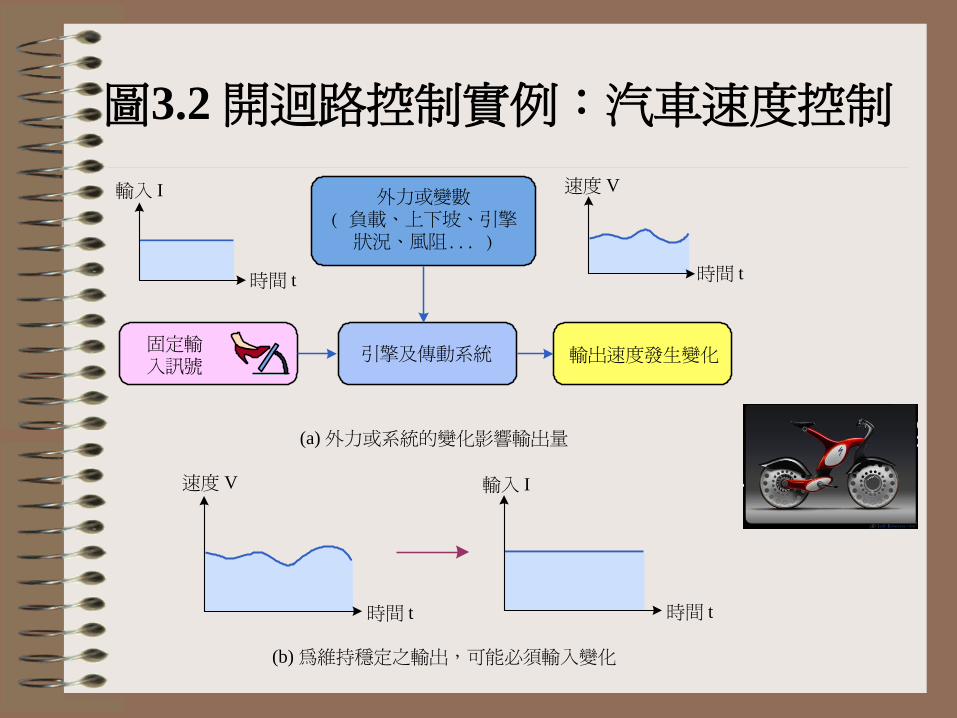
圖3.2 開迴路控制實例:汽車速度控制
(b) 為維持穩定之輸出,可能必須輸入變化
(a) 外力或系統的變化影響輸出量
I輸入
t時間t時間
V速度
固定輸入訊號
引擎及傳動系統 輸出速度發生變化
外力或變數( 負載、上下坡、引擎狀況、風阻... )
t時間
V速度I輸入
t時間
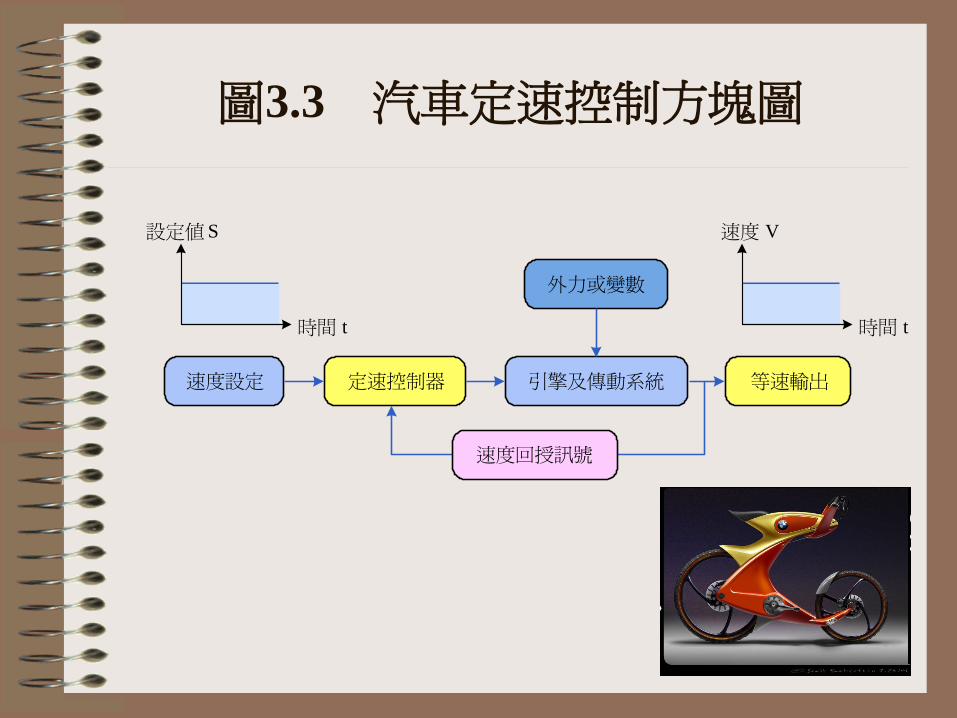
圖3.3 汽車定速控制方塊圖
S設定值
t時間
V速度
t時間
速度設定 定速控制器
外力或變數
引擎及傳動系統 等速輸出
速度回授訊號
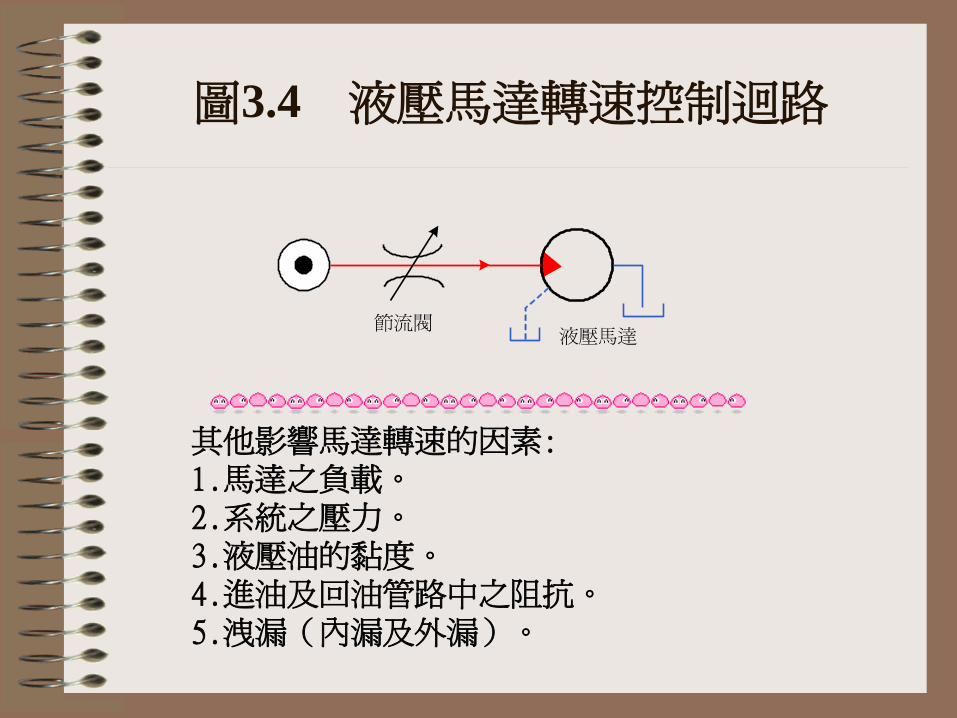
圖3.4 液壓馬達轉速控制迴路
其他影響馬達轉速的因素: 1.馬達之負載。 2.系統之壓力。 3.液壓油的黏度。 4.進油及回油管路中之阻抗。 5.洩漏(內漏及外漏)。
節流閥液壓馬達
液壓閉迴路伺服控制系統可分成三種
基本類型:
1. 位置控制 (線性或旋轉)。
2. 速度控制 (線性或旋轉)。
3. 力控制 (壓力,扭矩或負載控制)。
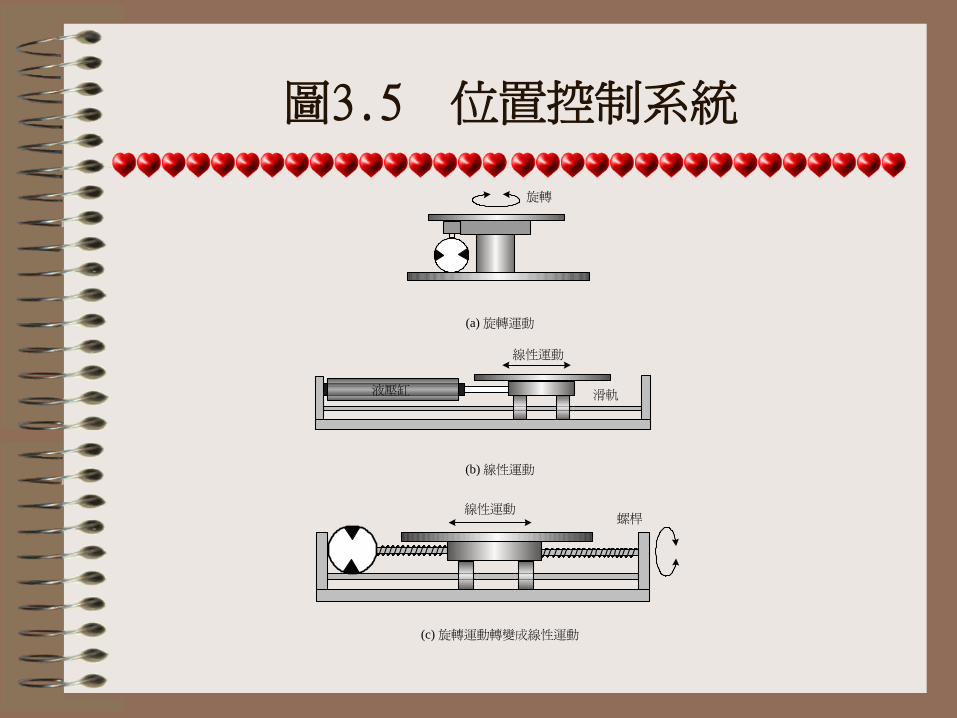
圖3.5 位置控制系統
(a) 旋轉運動
(b) 線性運動
(c) 旋轉運動轉變成線性運動
旋轉
線性運動
滑軌液壓缸
線性運動螺桿
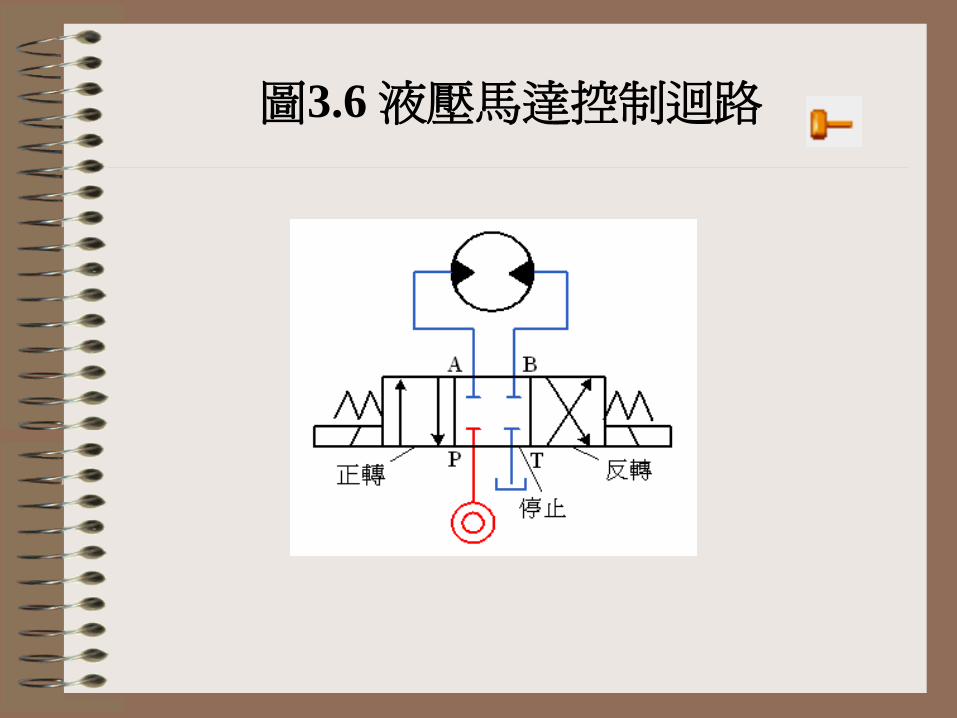
圖3.6 液壓馬達控制迴路
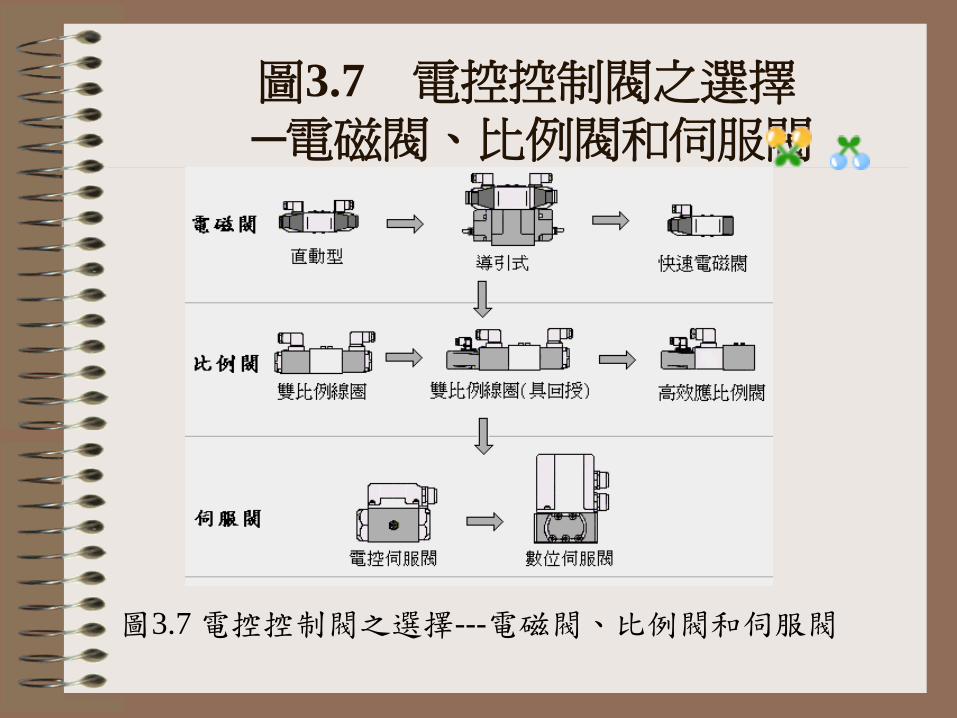
圖3.7 電控控制閥之選擇
─電磁閥、比例閥和伺服閥
圖3.7 電控控制閥之選擇---電磁閥、比例閥和伺服閥
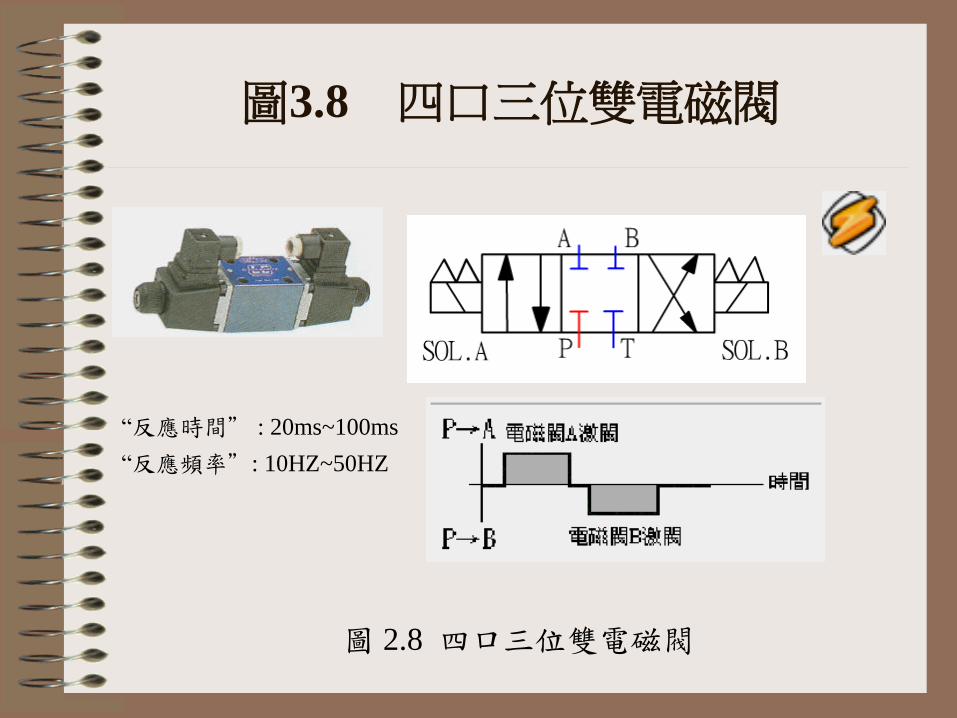
圖3.8 四口三位雙電磁閥
圖 2.8 四口三位雙電磁閥
“反應時間” : 20ms~100ms
“反應頻率”: 10HZ~50HZ
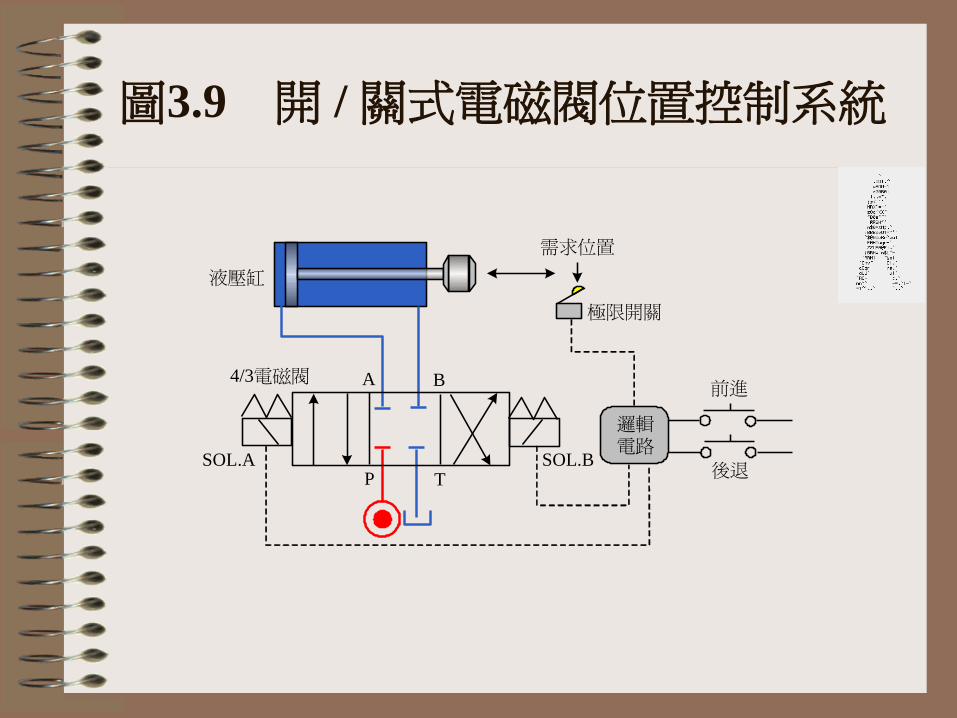
圖3.9 開 / 關式電磁閥位置控制系統
液壓缸
需求位置
極限開關
邏輯電路
前進
後退
4/3電磁閥
P T
A B
SOL.BSOL.A

圖3.10 負載實際停止位置之不確定區域
負載將停於此區域中之任意位於
液壓缸
4/3電磁閥 A B
P TSOL.A
SOL.B
前進
後退
極限開關
邏輯電路
停止距離
從切動極限開關時液壓缸之位置到其實際上停止時位置間之距離稱為停止距離,此”停止距離”會受到許多因素影響,主要如下:
• 電磁閥實際閉合時間的延遲
• 負載慣性
• 系統剎車能力
• 其他不確定因素
電磁閥的實際閉合時間的延遲
延遲電磁閥的實際閉合時間之因素有:
1. 極限開關的反應時間
2. 繼電器的切換時間
3. PLC的運轉週期時間 (如使用PLC控制)
4. 電磁閥的回應時間
5. 負載之慣性
6. 液壓系統之剛性及洩漏量
負載慣性
影響負載慣性的因素有:
1. 液壓缸的速度
2. 負載大小
3. 負載阻抗的大小
系統剎車能力
影響系統剎車能力的因素有:
1. 液壓油的可壓縮性
2. 液壓元件之變形量
3. 壓元件中的滲漏
4. 元件中壓縮油的數量
不確定因素
一些不確定之因素在負載將停止時導致許多的不確定性,如:
1. 溫度之變化,改變液壓油的黏度。
2. 空氣分子之滲入,改變液壓油的可壓縮性。
3. 磨損之產生,增加液壓元件的內部滲漏。
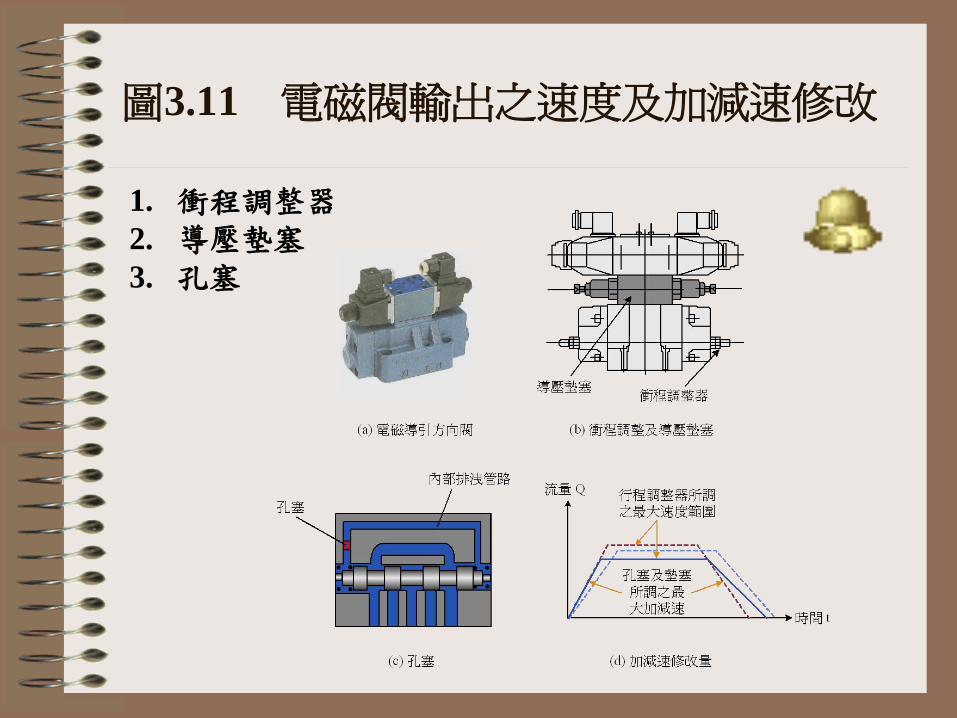
圖3.11 電磁閥輸出之速度及加減速修改
1. 衝程調整器
2. 導壓墊塞
3. 孔塞

圖3.12 孔塞對位置精確度之影響
閥有孔塞之停止距離
A B
P TSOL.A SOL.B
閥無孔塞之停止距離

圖3.13 直動型電控比例閥符號及動作特性曲線
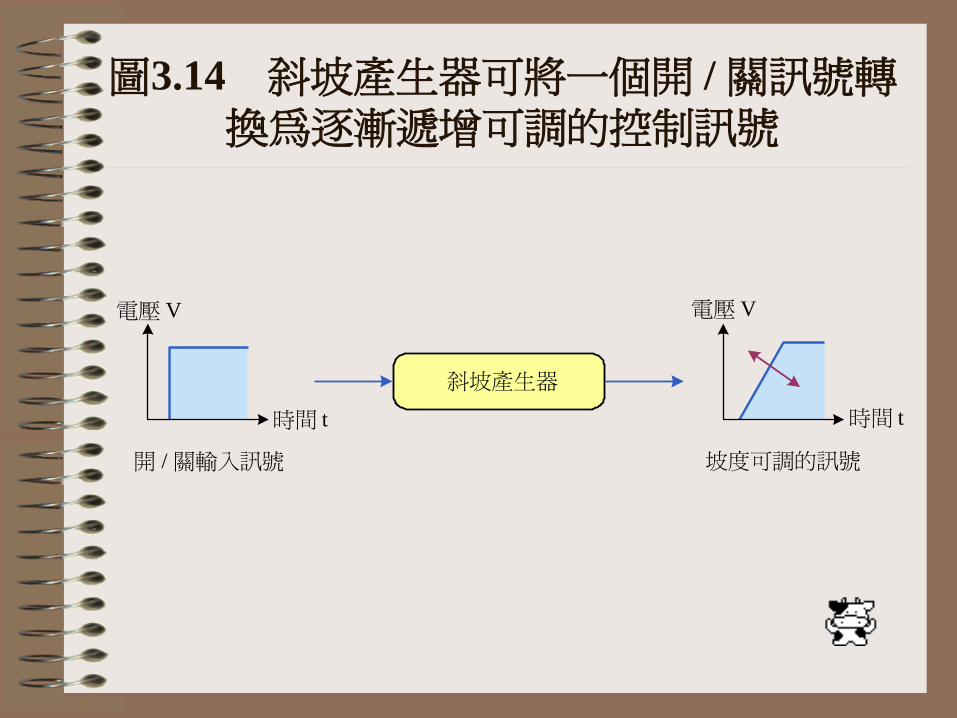
圖3.14 斜坡產生器可將一個開 / 關訊號轉換為逐漸遞增可調的控制訊號
斜坡產生器
V電壓
t時間
V電壓
t時間
開 / 關輸入訊號 坡度可調的訊號
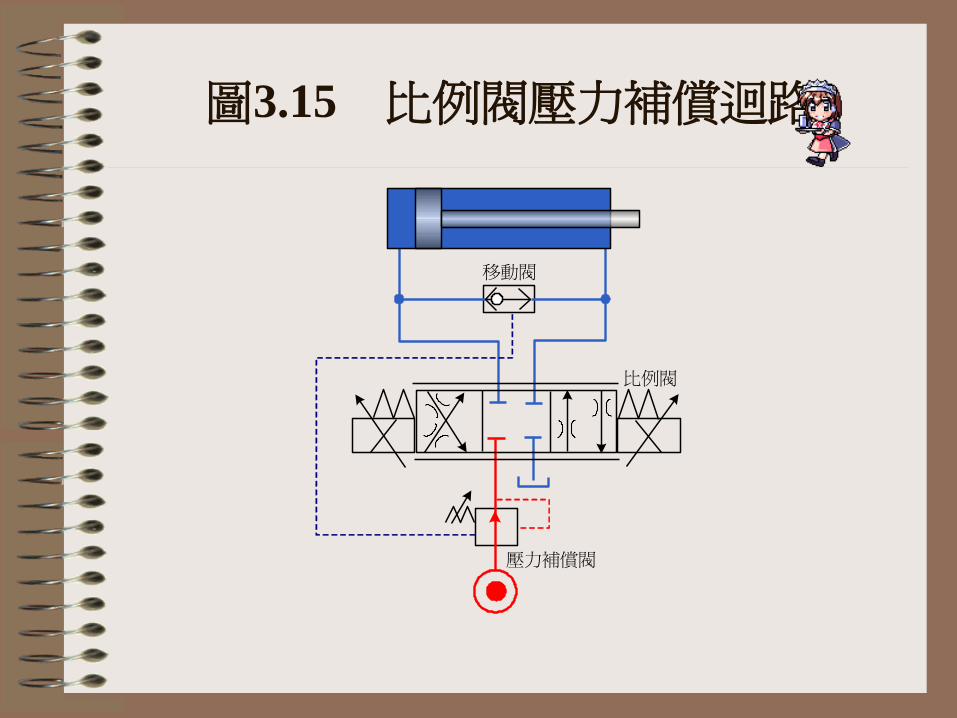
圖3.15 比例閥壓力補償迴路
移動閥
壓力補償閥
比例閥
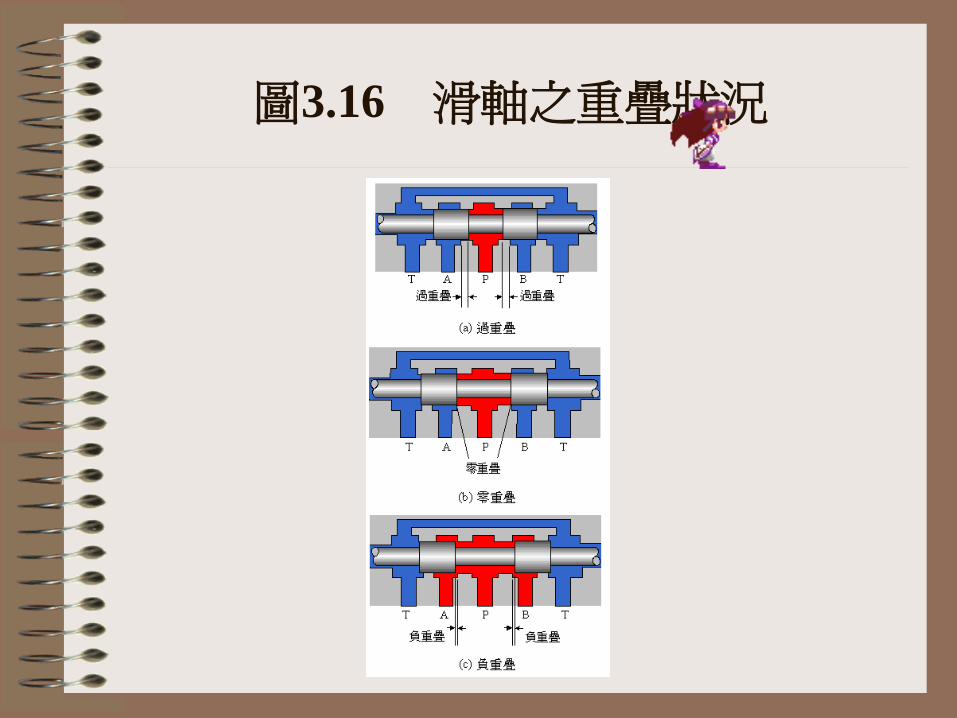
圖3.16 滑軸之重疊狀況
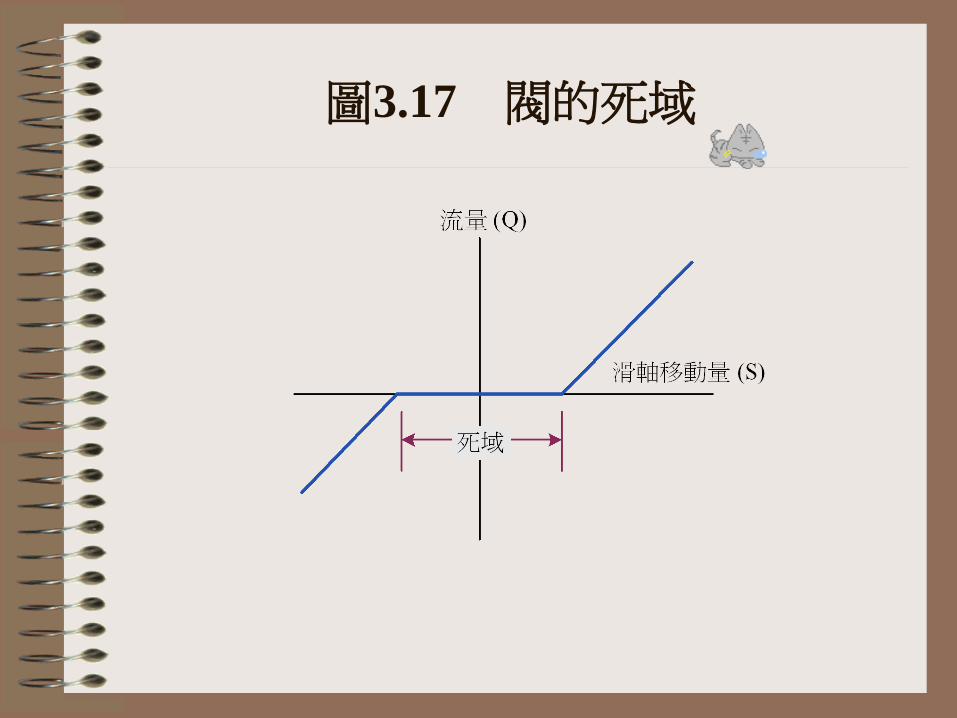
圖3.17 閥的死域
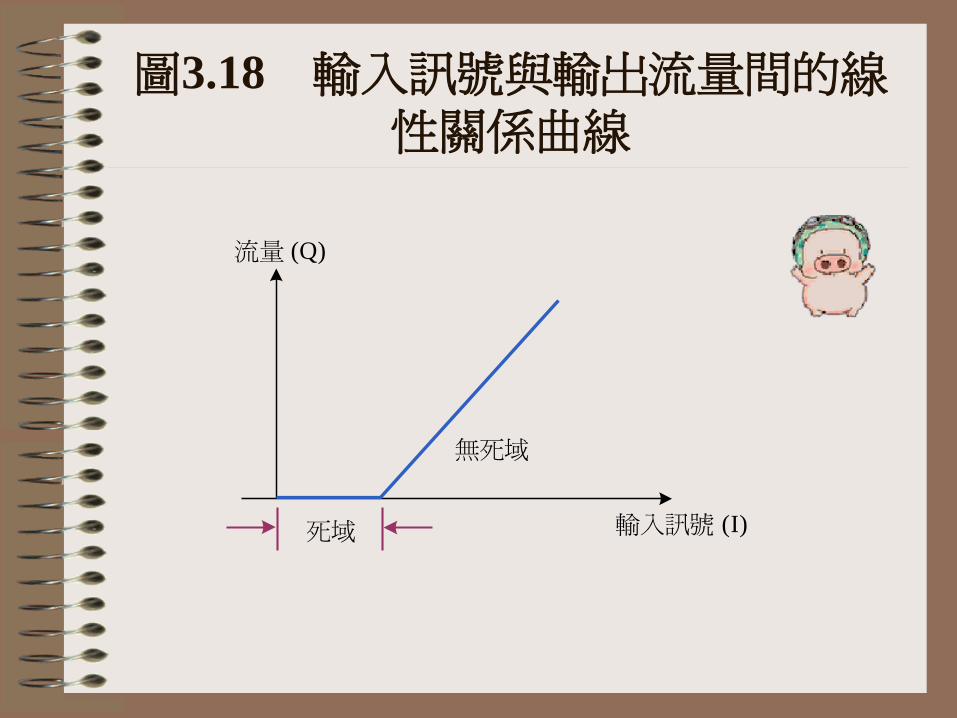
圖3.18 輸入訊號與輸出流量間的線性關係曲線
死域
無死域
)I(輸入訊號
)Q(流量

圖3.19 零重疊滑軸動作曲線
無死域
)I(輸入訊號
)Q(流量
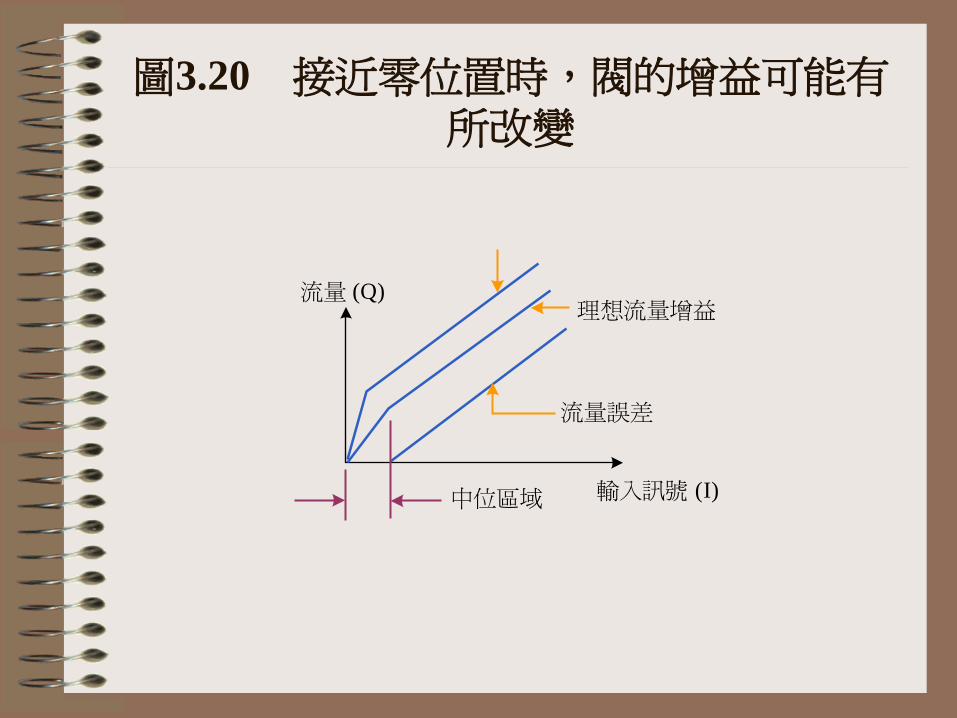
圖3.20 接近零位置時,閥的增益可能有所改變
流量誤差
理想流量增益
中位區域 )I(輸入訊號
)Q(流量

圖3.21 負重疊滑軸閥口的輸入訊號與流量關係
在中位時仍有流量發生
)I(輸入訊號
)Q(流量
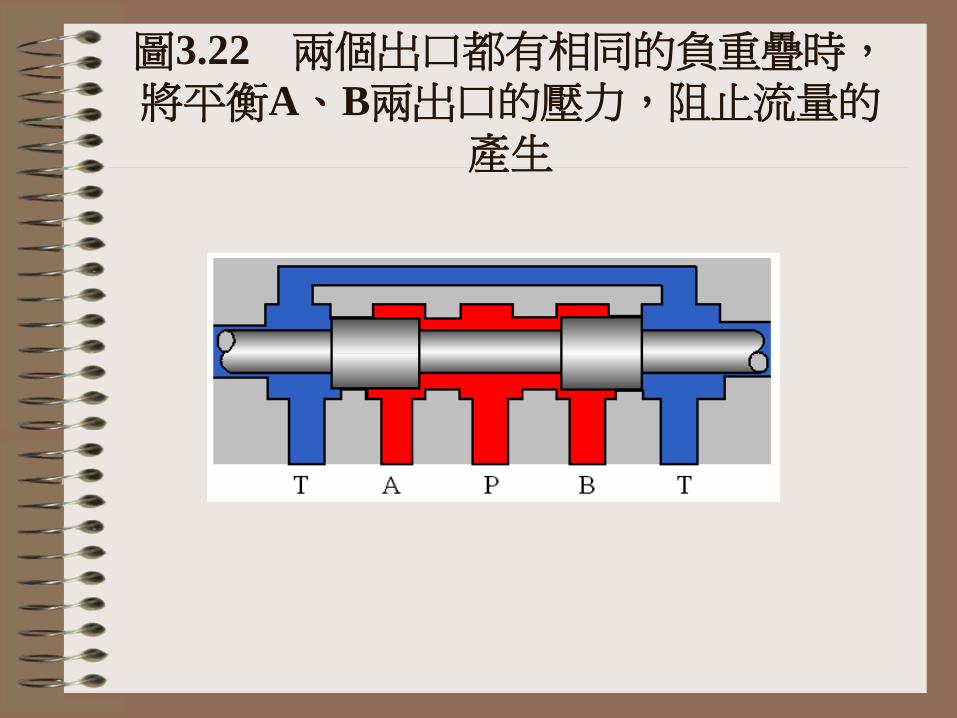
圖3.22 兩個出口都有相同的負重疊時,將平衡A、B兩出口的壓力,阻止流量的
產生
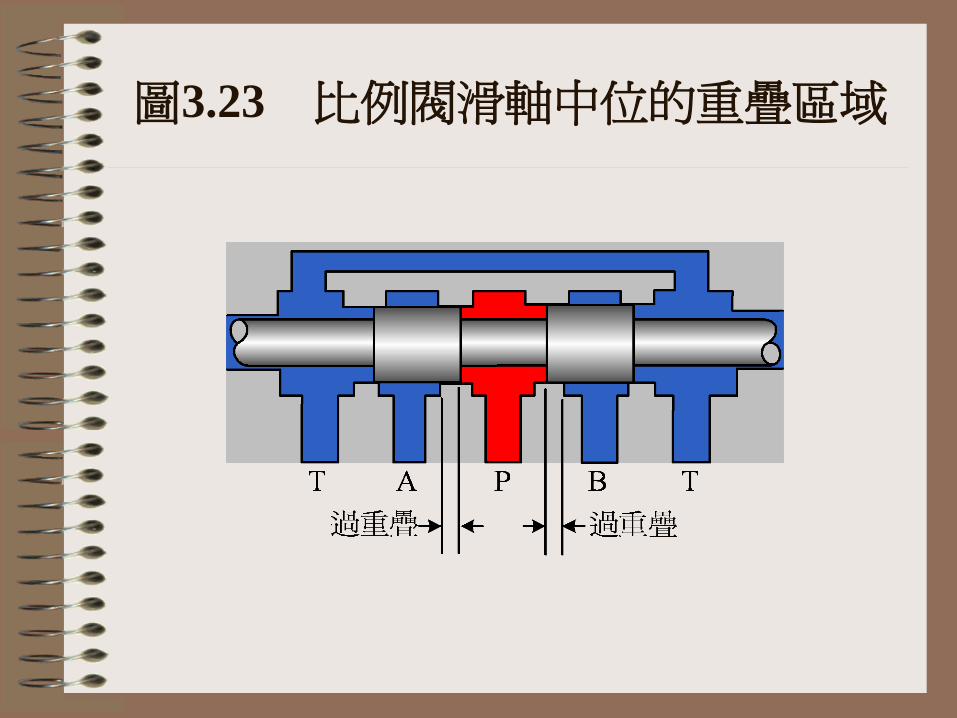
圖3.23 比例閥滑軸中位的重疊區域
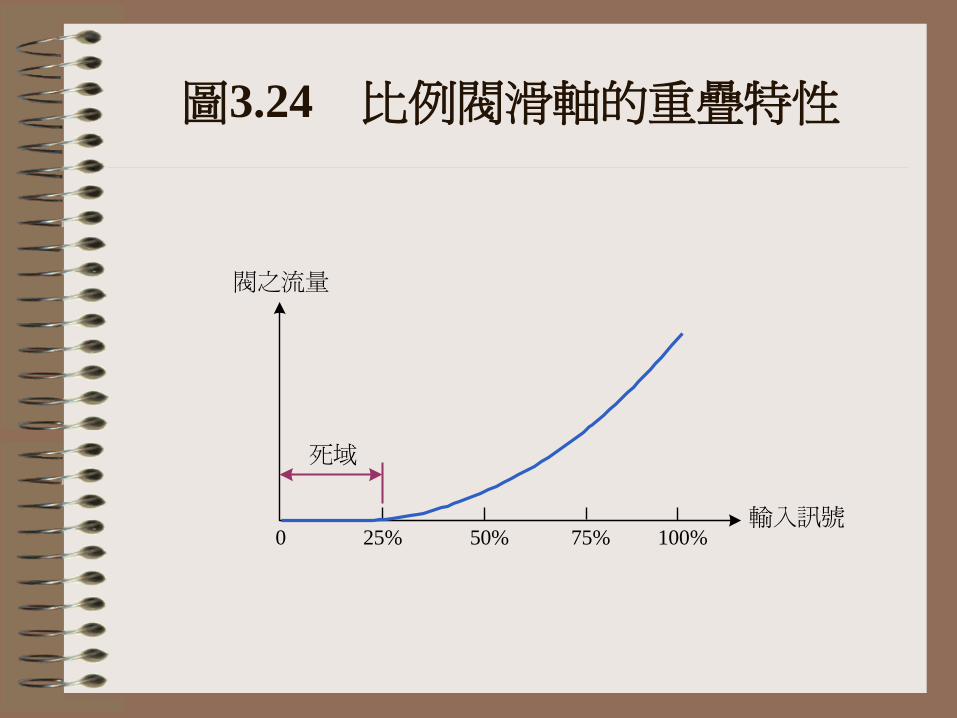
圖3.24 比例閥滑軸的重疊特性
0 25% 50% 75% 100%輸入訊號
死域
閥之流量
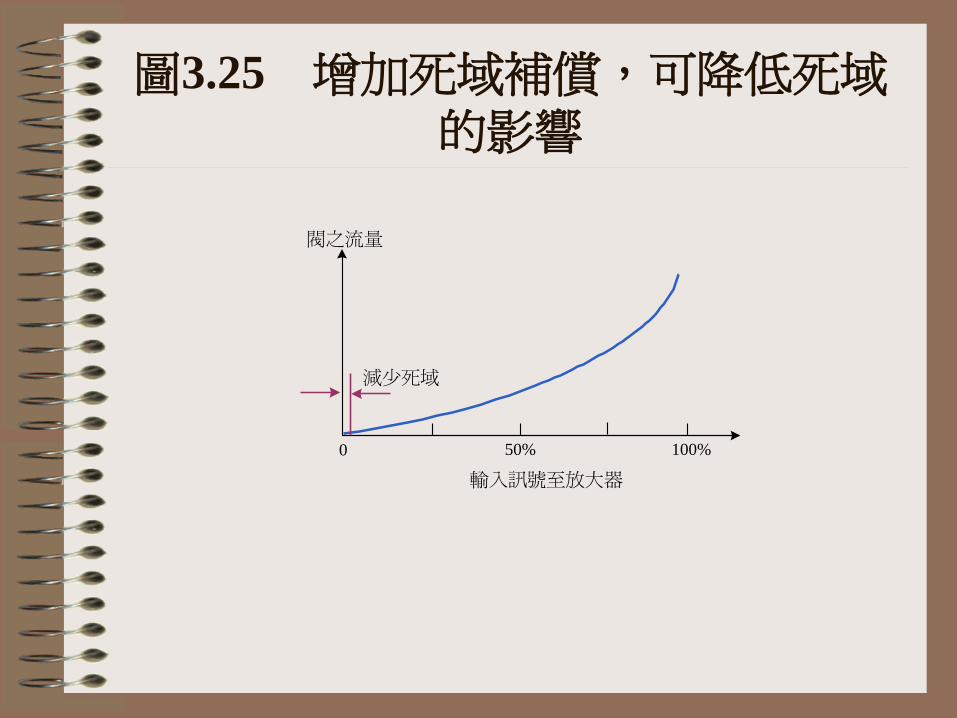
圖3.25 增加死域補償,可降低死域的影響
0 50% 100%
輸入訊號至放大器
閥之流量
減少死域
遲滯(Hysteresis)
• 起因於滑軸於不同之位移時,由於靜態摩擦或負載阻抗等因素影響,而需要不同之電磁閥電流
• 於比例閥中約佔控制動力之2%到8%
• 它的影響有可能會被放大器中加入的顫震(Dither)減少
顫震(Dither)
• 由放大器持續發送到電磁閥中的高頻(60 Hz到100Hz)訊號,它使滑軸震動,可抵抗滑軸於將要進入到定位時所遭遇到的磁滯。
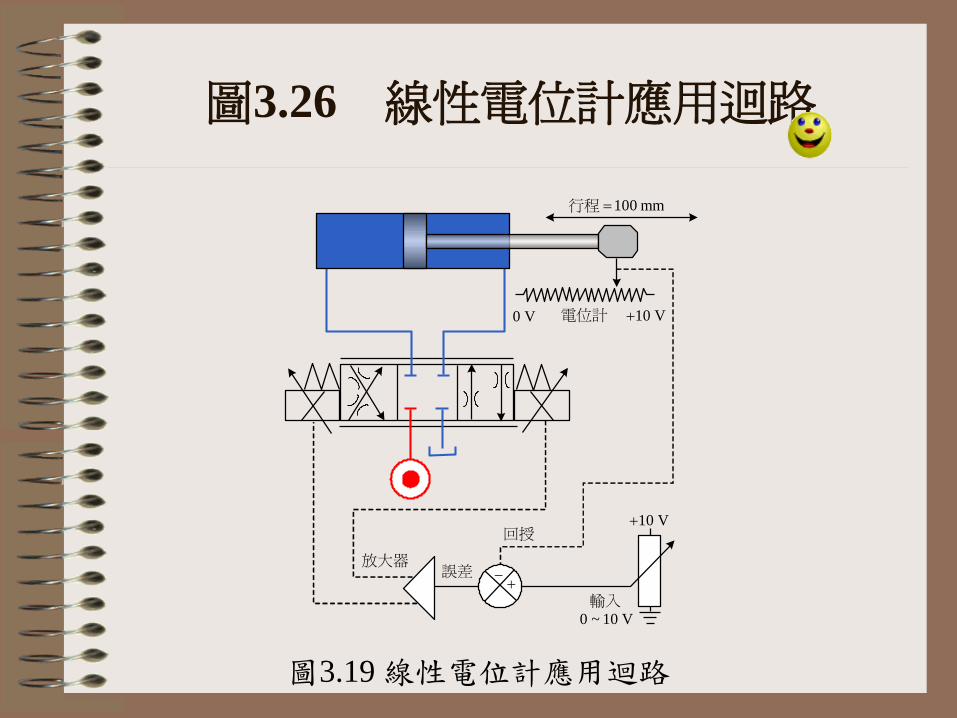
圖3.26 線性電位計應用迴路
圖3.19 線性電位計應用迴路
mm100行程
電位計V0 V10
放大器誤差
回授
V10~0
輸入
V10
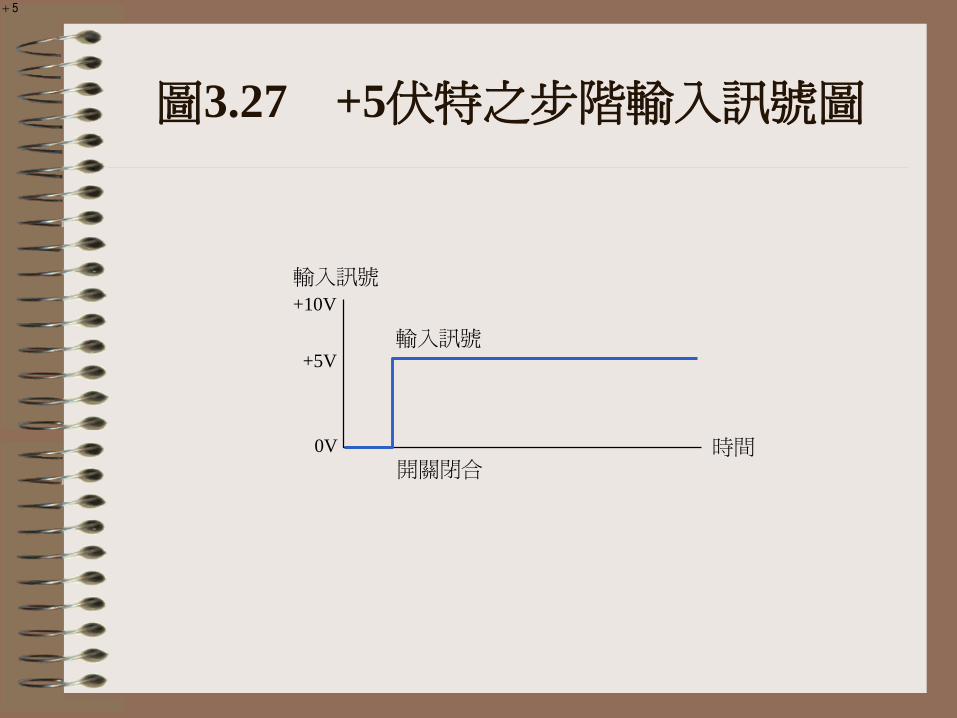
圖3.27 +5伏特之步階輸入訊號圖
+10V
+5V
0V
輸入訊號
開關閉合時間
輸入訊號
5
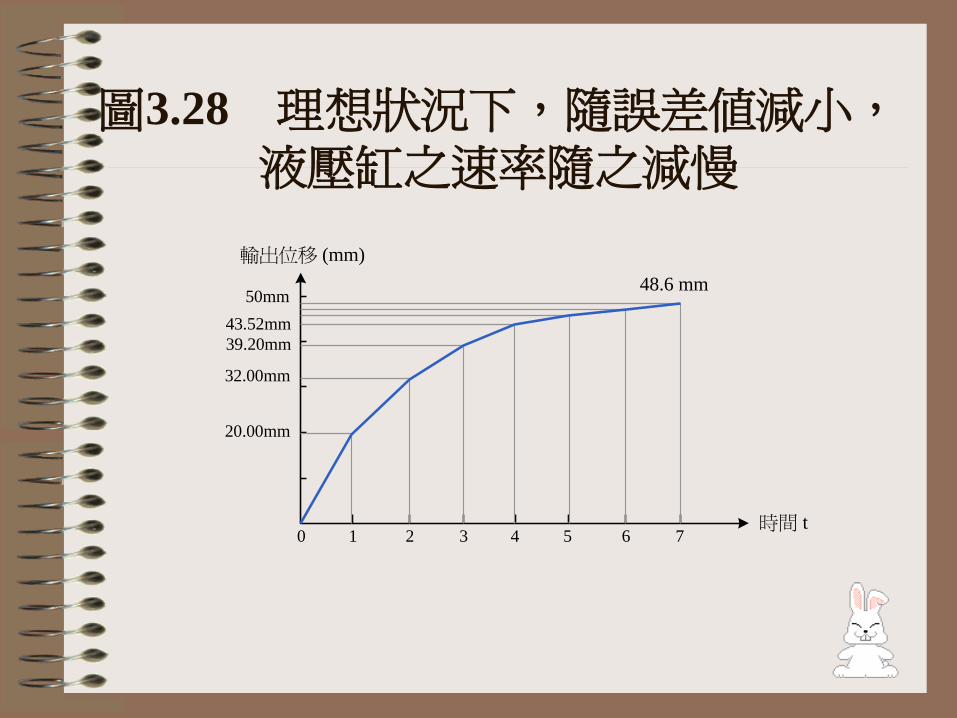
圖3.28 理想狀況下,隨誤差值減小,液壓缸之速率隨之減慢
輸出位移 (mm)
50mm
43.52mm
39.20mm
32.00mm
20.00mm
0 1 2 3 4 5 6 7
48.6 mm
時間 t

圖3.29 實際狀況下,誤差訊號降至2.5伏特以下時,致動器停止,誤差約50%
50mm
25mm
5V
2.5V
輸出位移
輸入訊號
誤差訊號
回授訊號
t時間
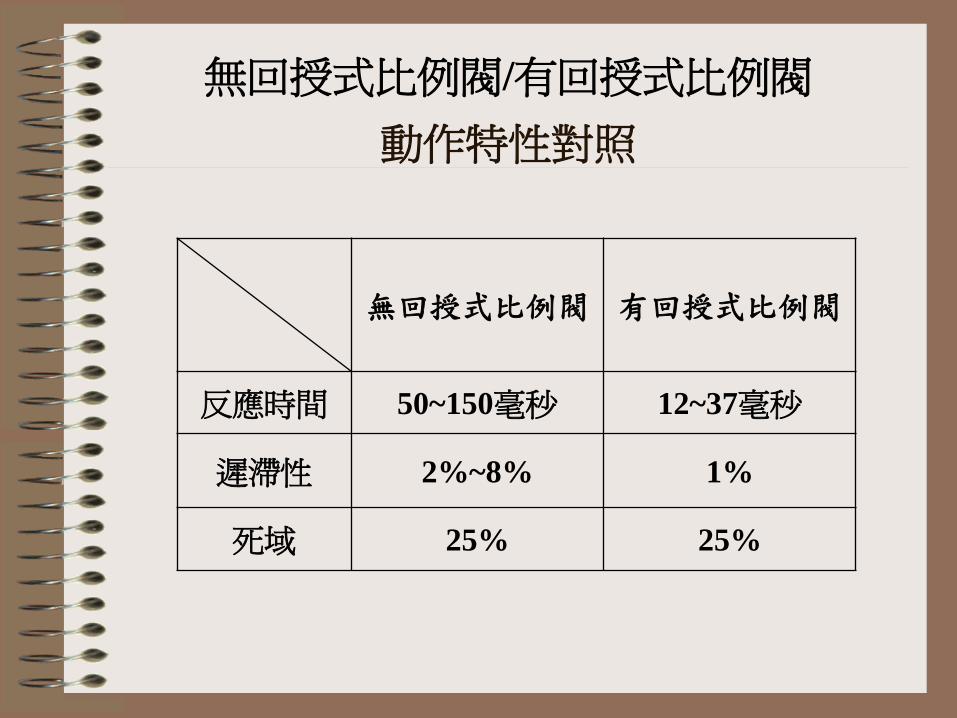
無回授式比例閥/有回授式比例閥
動作特性對照
無回授式比例閥 有回授式比例閥
反應時間 50~150毫秒 12~37毫秒
遲滯性 2%~8% 1%
死域 25% 25%
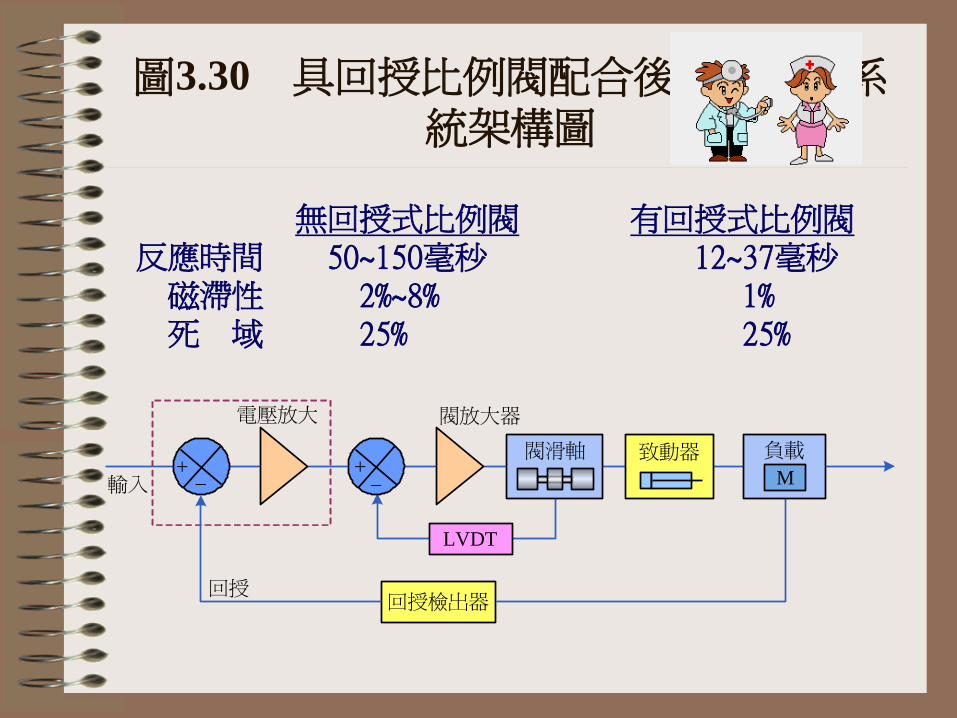
圖3.30 具回授比例閥配合後置放大器系統架構圖
無回授式比例閥 有回授式比例閥 反應時間 50~150毫秒 12~37毫秒 磁滯性 2%~8% 1% 死 域 25% 25%
電壓放大 閥放大器
回授檢出器回授
閥滑軸 致動器 負載
M
LVDT
輸入
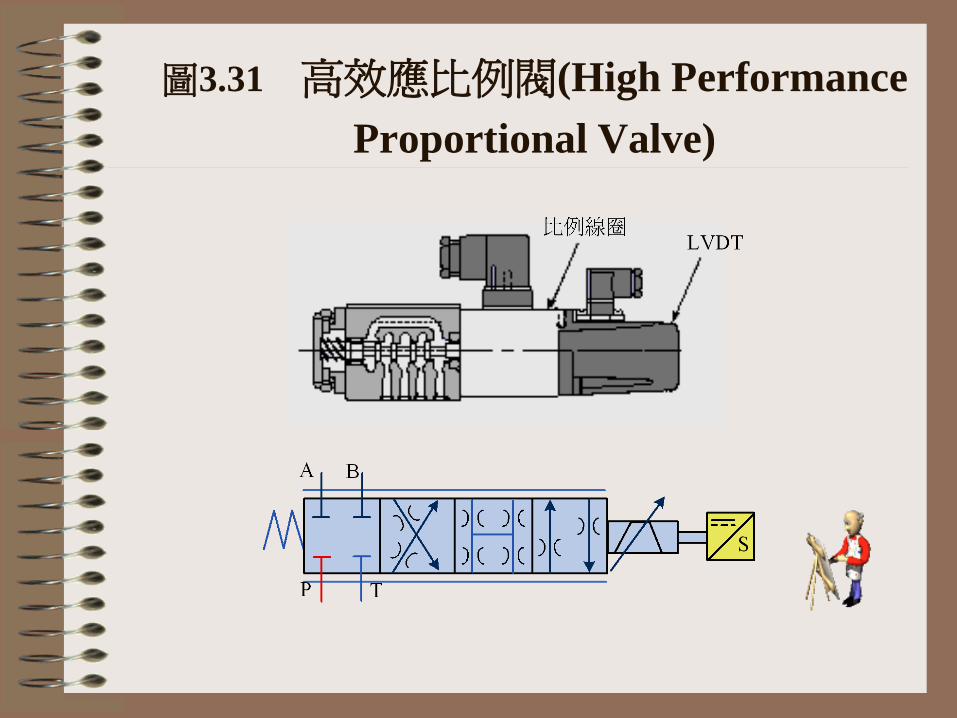
圖3.31 高效應比例閥(High Performance
Proportional Valve)
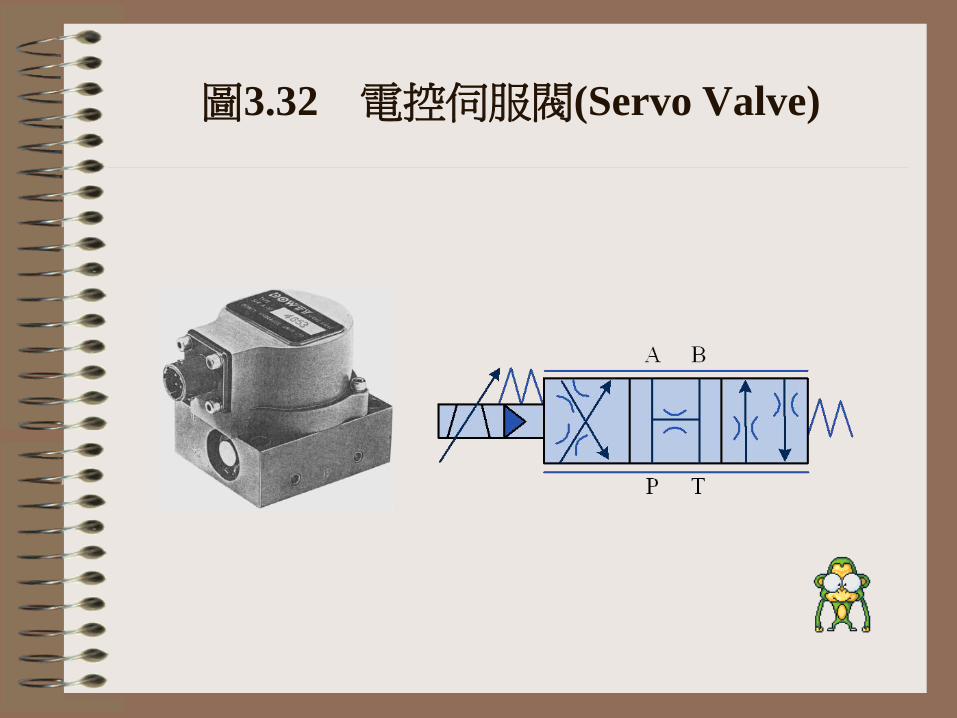
圖3.32 電控伺服閥(Servo Valve)
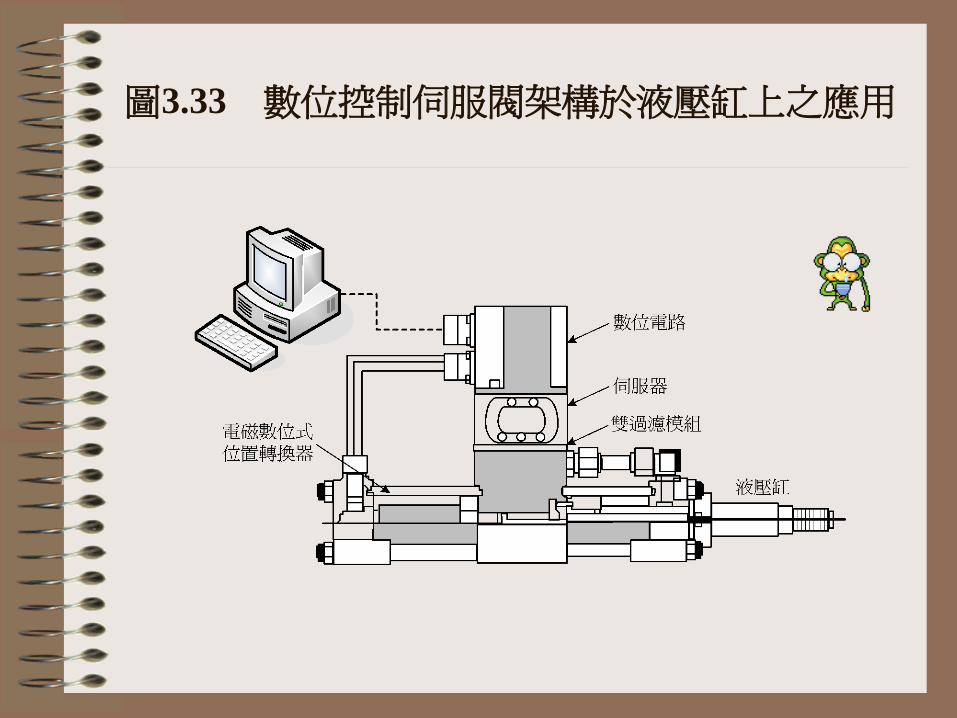
圖3.33 數位控制伺服閥架構於液壓缸上之應用

圖3.34 可調式節流閥控速迴路
節 流孔大小不是唯一決定致動器速度的因數,其中能流過的流量將受下列因素影響: ● ●系統壓力變化 ●負載壓力 ● ●流體密度 ●溫度變化
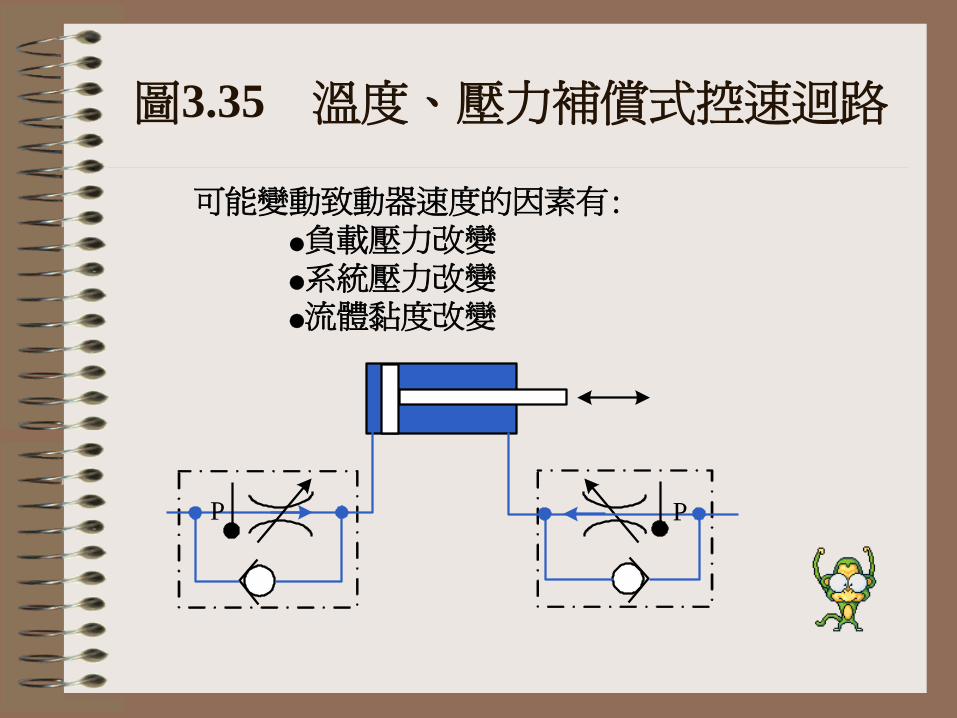
圖3.35 溫度、壓力補償式控速迴路
可能變動致動器速度的因素有: ●負載壓力改變 ●系統壓力改變 ●流體黏度改變
P P
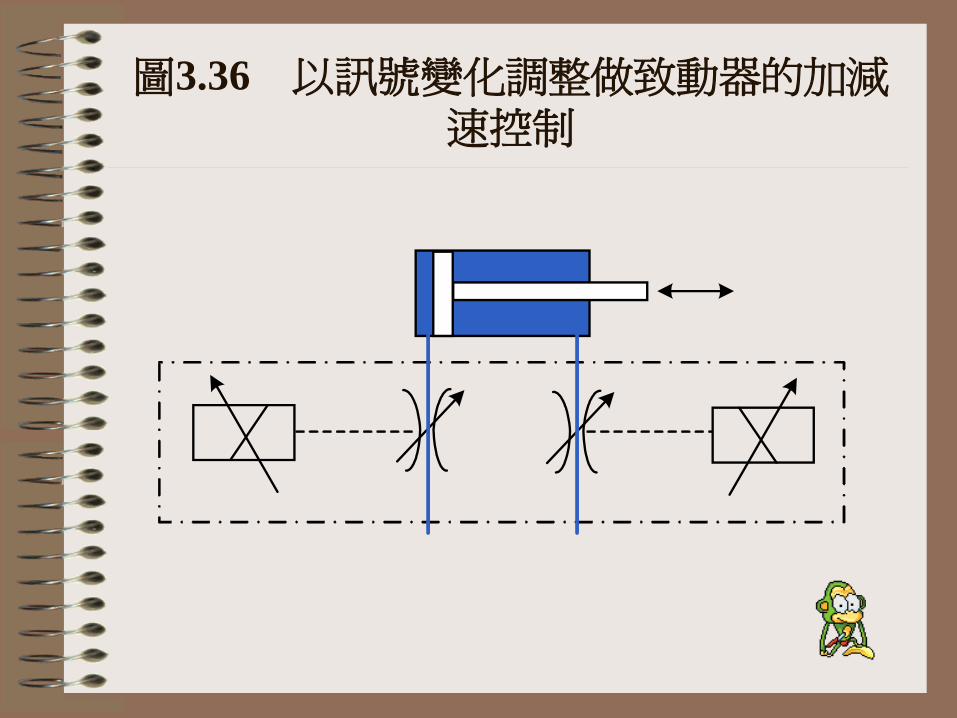
圖3.36 以訊號變化調整做致動器的加減速控制
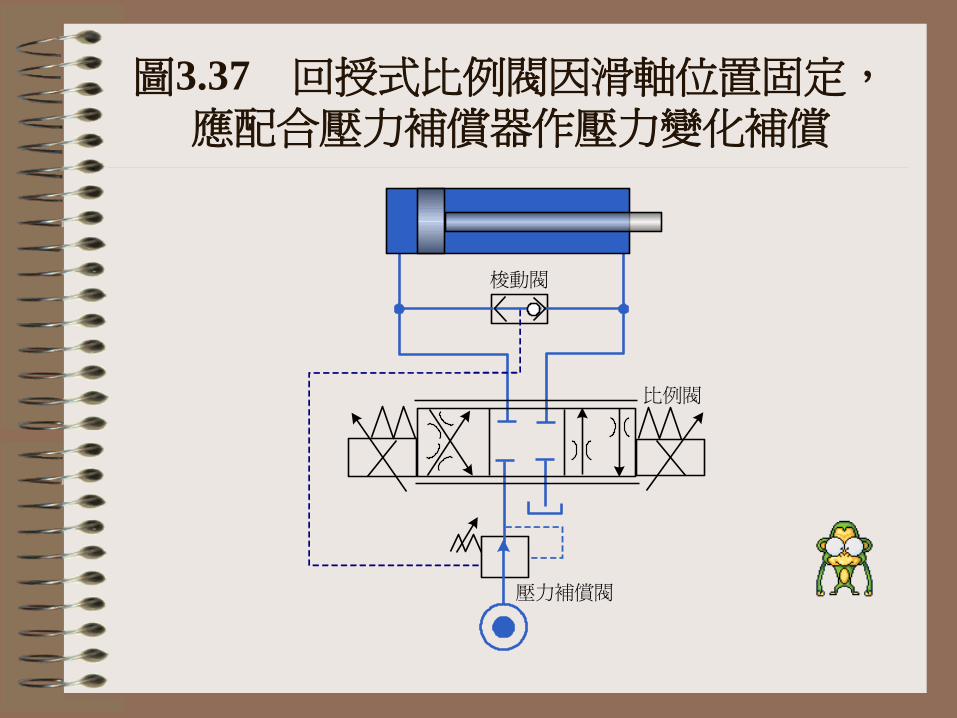
圖3.37 回授式比例閥因滑軸位置固定,應配合壓力補償器作壓力變化補償
梭動閥
壓力補償閥
比例閥
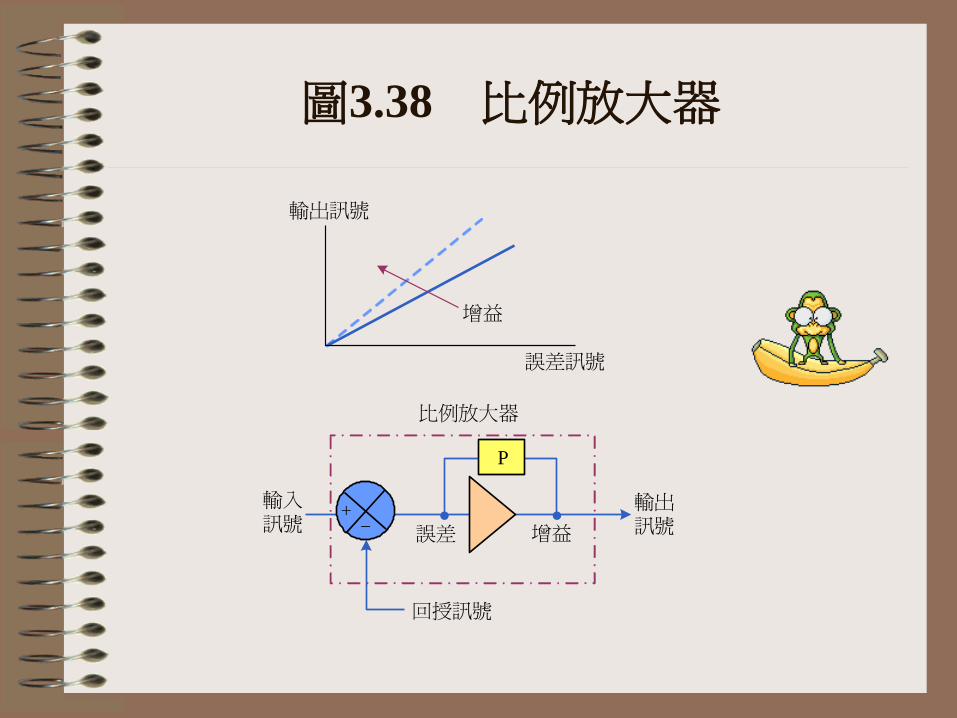
圖3.38 比例放大器
比例放大器
輸入訊號
輸出訊號
回授訊號
誤差 增益
P
增益
誤差訊號
輸出訊號
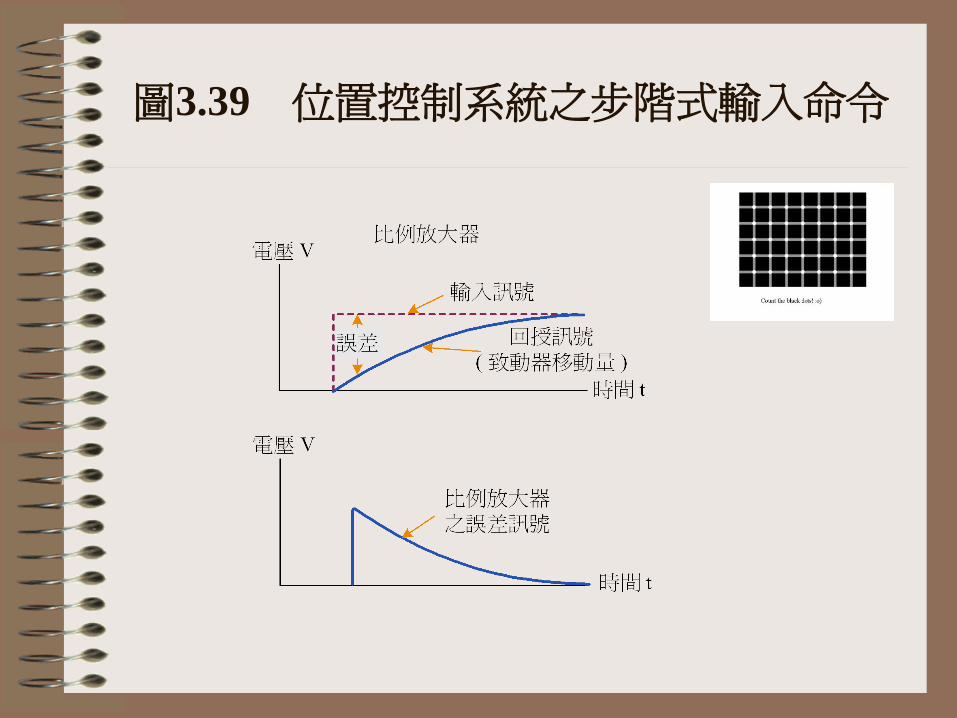
圖3.39 位置控制系統之步階式輸入命令
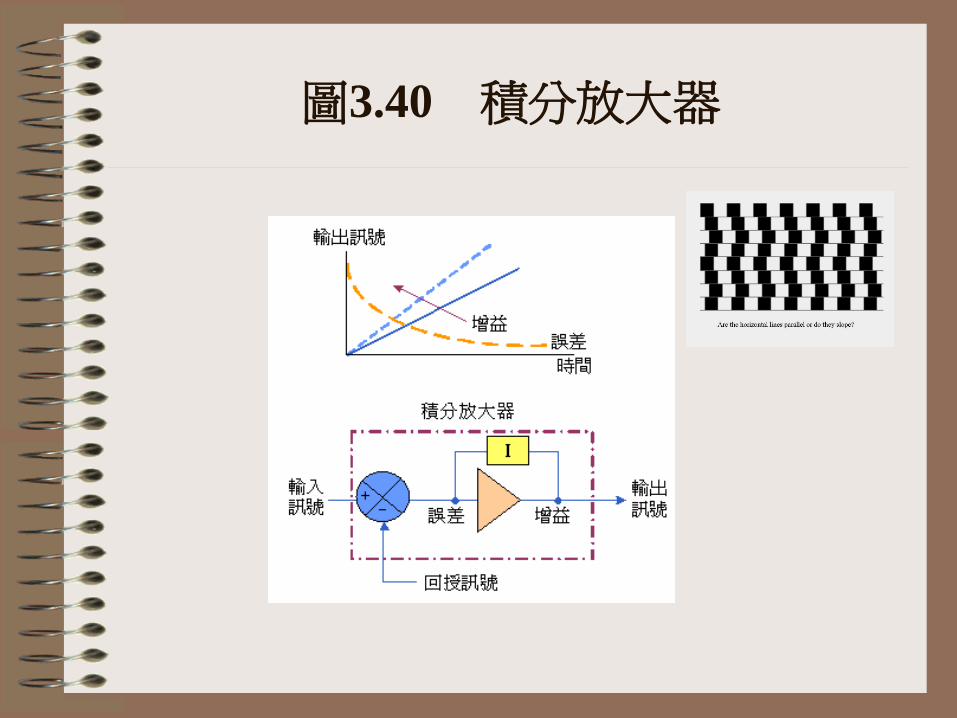
圖3.40 積分放大器
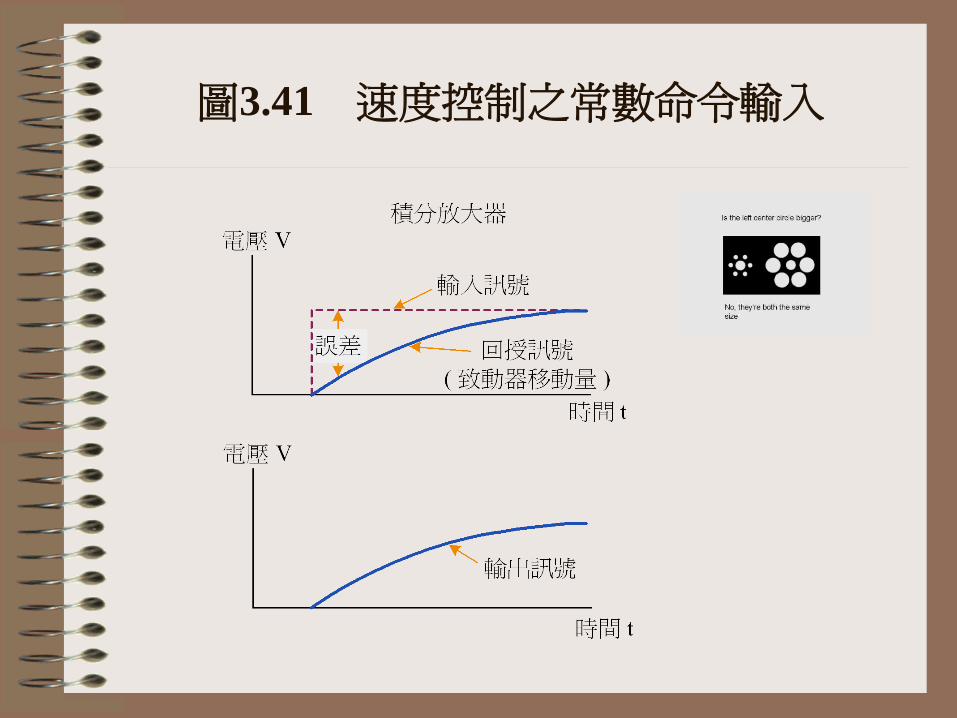
圖3.41 速度控制之常數命令輸入
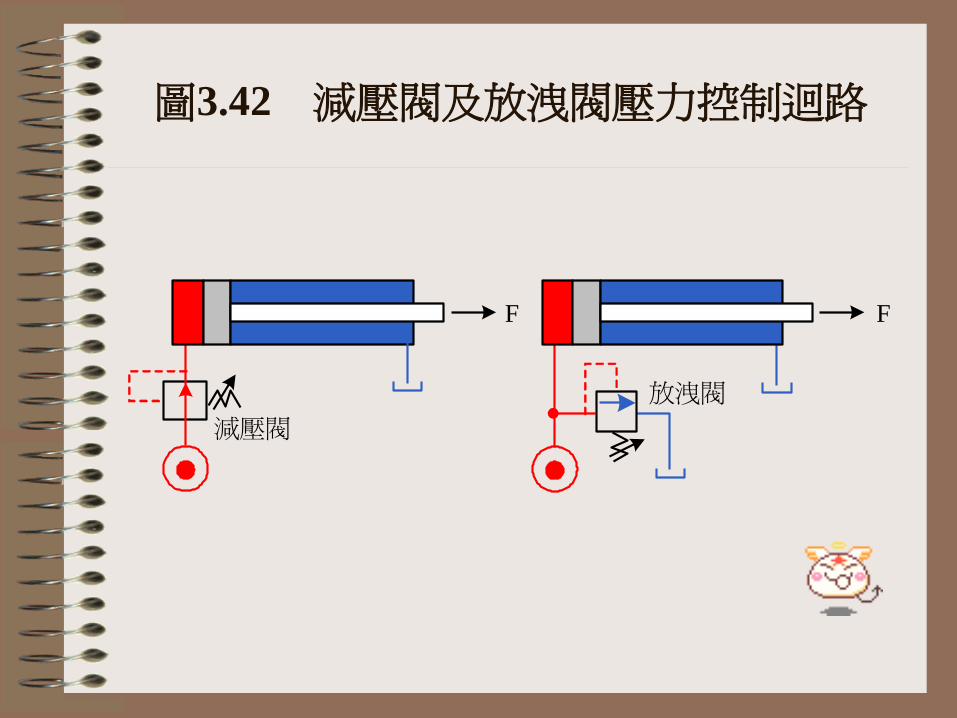
圖3.42 減壓閥及放洩閥壓力控制迴路
減壓閥
放洩閥
F F
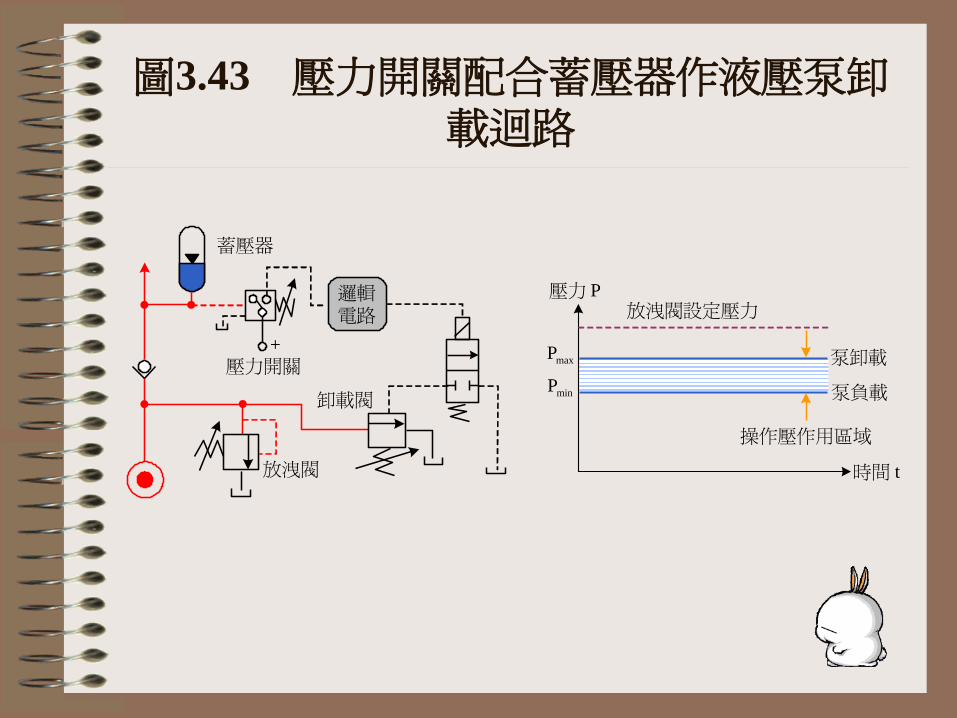
圖3.43 壓力開關配合蓄壓器作液壓泵卸載迴路
放洩閥設定壓力
泵卸載
泵負載
操作壓作用區域
P壓力
t時間
maxP
minP
蓄壓器
壓力開關
邏輯電路
卸載閥
放洩閥
+
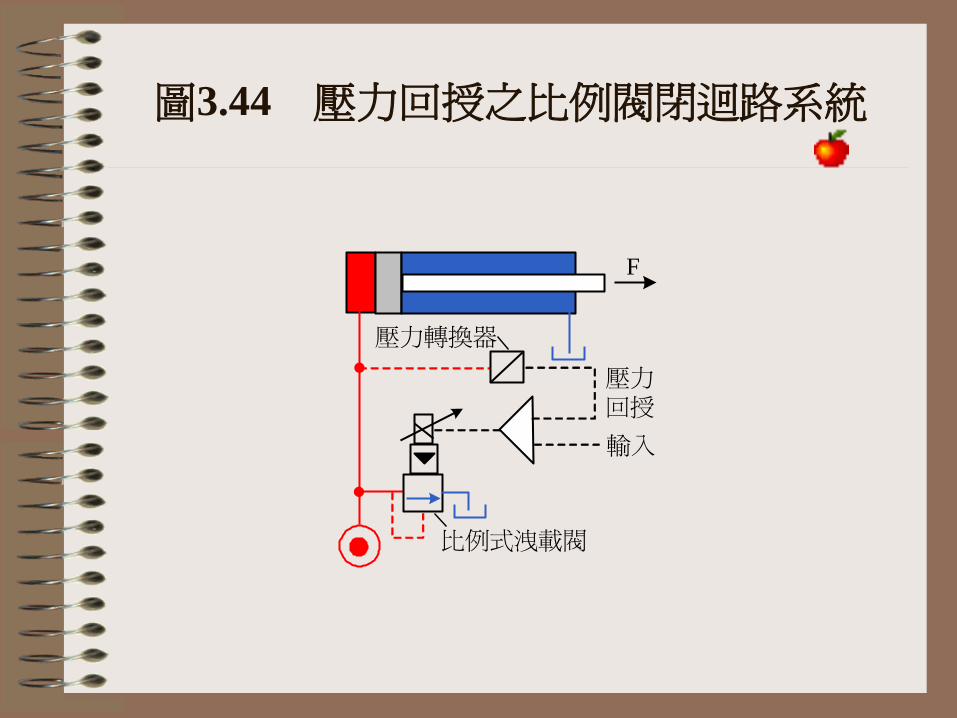
圖3.44 壓力回授之比例閥閉迴路系統
壓力轉換器
比例式洩載閥
壓力回授
輸入
F
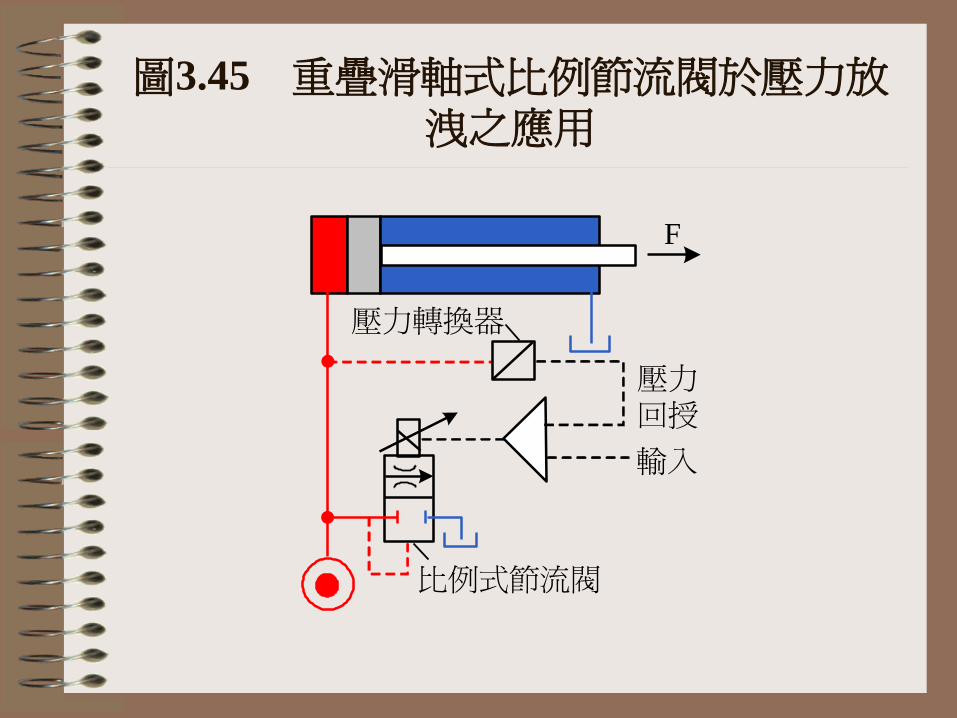
圖3.45 重疊滑軸式比例節流閥於壓力放洩之應用
壓力轉換器
壓力回授
F
比例式節流閥
輸入

圖3.46 閉迴路壓力控制系統
壓差回授
輸入
高效能比例閥
A B
P T
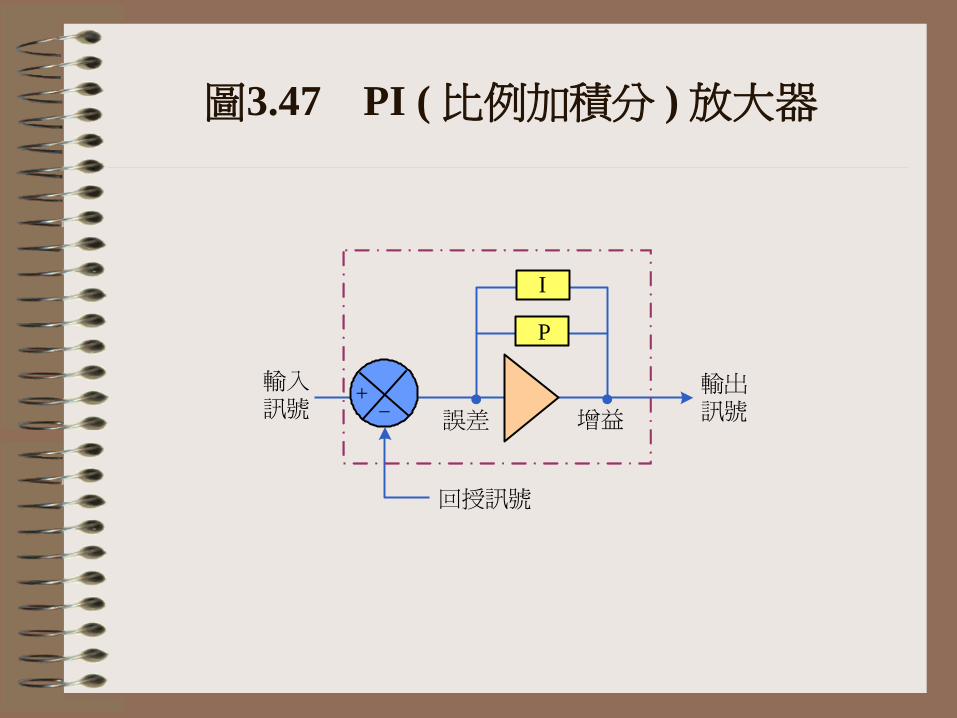
圖3.47 PI ( 比例加積分 ) 放大器
輸入訊號
輸出訊號
回授訊號
誤差 增益
P
I
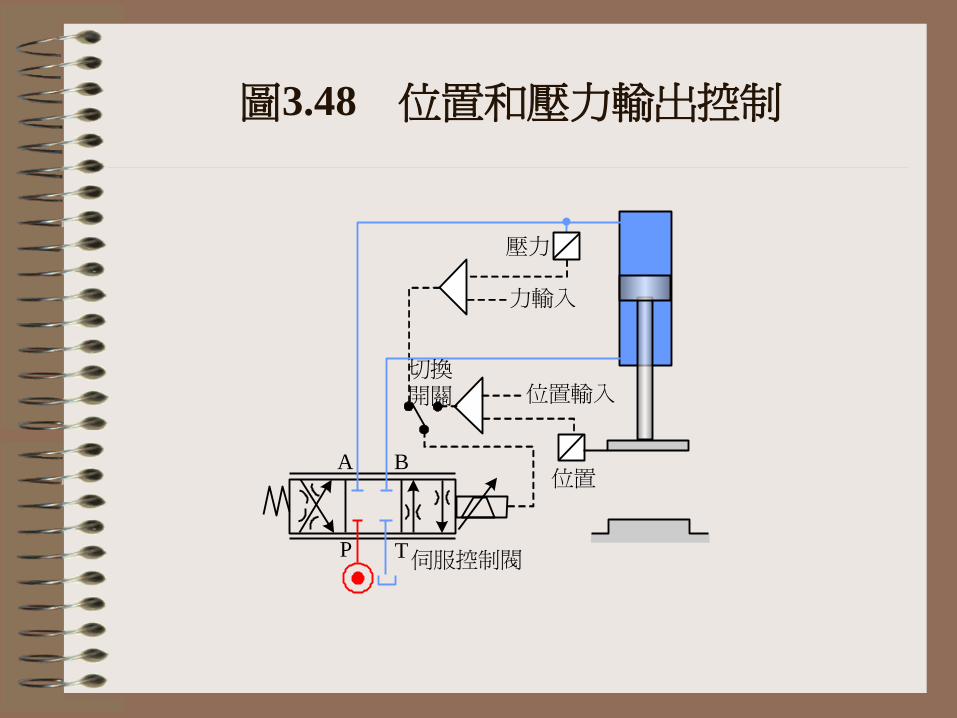
圖3.48 位置和壓力輸出控制
壓力
力輸入
位置輸入
位置
切換開關
伺服控制閥
A B
P T

THE END