d. kanehara j. asama a. chiba** (*shizuoka university, japan … · 2014. 10. 9. · belm_unit1...
TRANSCRIPT

Thrust PM ring
Radial PM
Iron disk
C-shapedstator core
Windings
Magnetizeddirection
Rotor
Stator
0
10
20
30
40
50
0 0.5 1 1.5 2
Eff
icie
ncy
[%]
Torque current iq[A]
1000rpm 2000rpm 3000rpm
Powder core Bulk core
+25%
0
5
10
15
20
25
0 0.5 1 1.5 2 2.5 3 3.5 4
Torq
ue[m
Nm
]
Torque current iq[A]
1000rpm 2000rpm 3000rpm
Powder coreBulk core
Powder
core
Bulk
core1000 20.1 20.8
2000 19.4 17.6
3000 18.6 13.1
Rotational
speed[rpm]
kT[mNm/A]
0
5
10
15
1000 1500 2000 2500 3000
Pow
er co
nsu
mption[W
]
Total Copper loss Iron loss
回転速度[rpm]
圧粉
回転速度[rpm]
Suspension
Rotational speed[rpm]
Motor Total
0
5
10
15
Pow
er co
nsu
mption[W
]
Copper lossIron loss
Rotational speed[rpm]
Powdercore
Bulk core
1000 30002000 4000
-85%
0
5
10
15
Pow
er co
nsu
mption[W
]
Suspension Motor
回転速度[rpm]Rotatinal speed[rpm]
1000 2000 3000 4000
Bulk core
Powder core
-74%
Efficiency improvement of a bearingless motor with powder iron core D. Kanehara*, J. Asama*, T. Oiwa, A. Chiba** (*Shizuoka University, Japan **Tokyo Institute of Technology, Japan)
Introduction
□A motor which combines magnetic bearing function
and rotation in the same unit
□Application:Chemical pumps, Blood pumps, etc
□Proposed a compact bearingless motor (fig.1)
□Succeeded in stable suspension and rotation
□Problem:Motor loss is large ⇒ Low efficiency (fig.3)
Proposed bearingless motor
□Improvement of efficiency with powder iron core
Fig.1 Proposed structure
□Radial direction:Suspension force is generated by
superposition of PM flux and suspension flux
□Radial position (suspension force) is actively regulated
□Axial/tilting direction:Passively stable with magnetic
attractive force
fig.2 Suspension principle (b) Tilting direction (c) Axial direction
Iron loss reduction
□Powder iron core is material which compresses
insulated iron powder
□ High electrical resistance ⇒ Reduced eddy current
⇒ Reduced iron loss
□Use powder iron core for stator core of proposed
bearingless motor
□Stator core is molded with epoxy resin
⇐ Because powder iron core is very brittle
□Rotor motion range in radial direction is ±0.25mm
fig.5 Fabricated test machine
fig.4 Powder iron core
Iron powder (φ 100μm)
Resin binder
Insulating layer
Conclusion □It is effective to use powder iron core for proposed
bearingless motor to improve efficiency
◎ No wear particles, Lubricant-free
PM flux
Suspension flux Suspension force
(a) Radial direction Restoring torque Restoring force
Test machine loss (with bulk core)
fig.3 Power consumption
□Motor loss is 70% or more of total loss
□Iron loss is 60% of motor loss ⇐ Eddy current
Powder iron core performance
□Total:74% reduction (Motor loss reduction is large)
□Iron loss:85% reduction ⇒ Eddy current is reduced
fig.6 Measured power consumption
x
z
y
Stator Rotor
φ 45
Stator core (Powder iron)
Epoxy resin
Gap sensor
Thrust PM ring
Sensor target
Radial PM
Iron disk
Frame
(a) Real view (b) Schematic view
10
×Low permeability than bulk
⇒ Torque and force are reduced?
⇒ Investigation of motor
performance with powder iron core
(b) Only motor (a) Total
□Torque (kT[mNm/A]) at 3000rpm : Powder > Bulk
⇐ Eddy current works as brakes
□Efficiency:25% improvement (at 3000rpm)
fig.7 Measured torque fig.8 Efficiency
□Rotor:Two iron disks (with PM) and a PM ring
□Stator:C-shape ⇒ Reduction motor height
□Two kind of windings
:Suspension and motor are combined
Ptotal = Poutput+ Pmech+ Pcopper+ Piron
Piron = Physteresis+ Peddy current
No load Frictionless
Increase
Y. Yamamoto1, J. Asama1,
BACKGROUND AND OBJECTIVE
1 Shizuoka University, Japan.
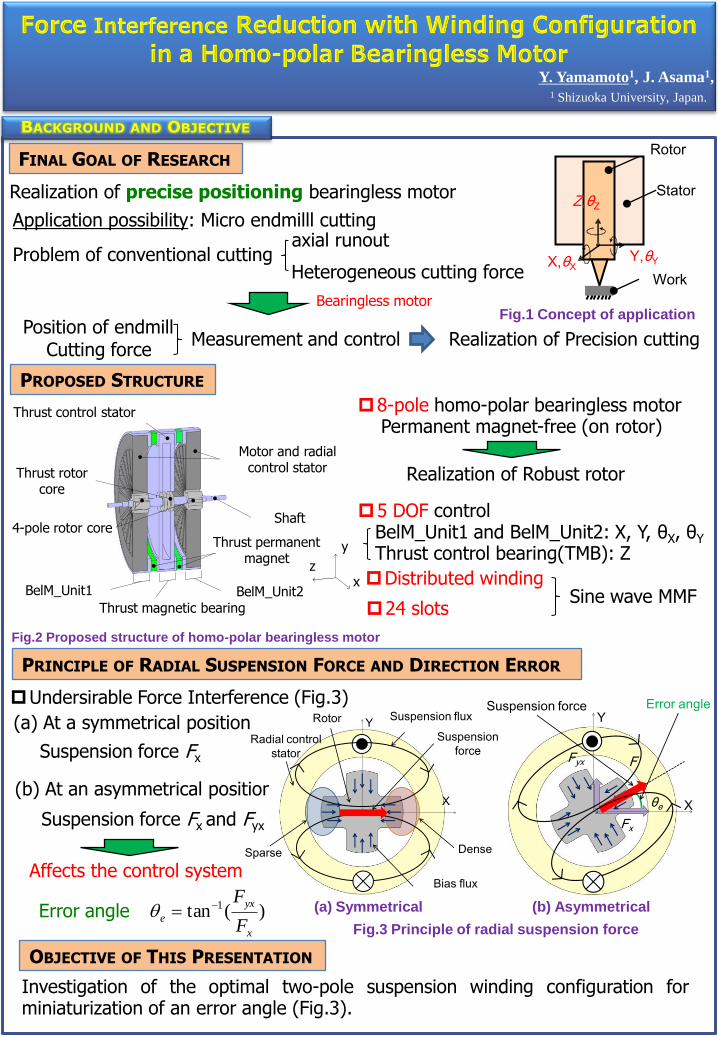
FINAL GOAL OF RESEARCH
Realization of precise positioning bearingless motor
PRINCIPLE OF RADIAL SUSPENSION FORCE AND DIRECTION ERROR
OBJECTIVE OF THIS PRESENTATION
Investigation of the optimal two-pole suspension winding configuration for miniaturization of an error angle (Fig.3).
Application possibility: Micro endmilll cutting Z,θZ
X,θX Y,θY
Rotor
Stator
Work
Problem of conventional cutting axial runout
Heterogeneous cutting force
Fig.1 Concept of application
PROPOSED STRUCTURE
Bearingless motor
5 DOF control BelM_Unit1 and BelM_Unit2: X, Y, θX, θY
Thrust control bearing(TMB): Z
8-pole homo-polar bearingless motor Permanent magnet-free (on rotor)
Realization of Robust rotor
Fig.3 Principle of radial suspension force
(a) Symmetrical (b) Asymmetrical
Undersirable Force Interference (Fig.3)
Affects the control system
(a) At a symmetrical position
Suspension force Fx
Suspension force Fx and Fyx
(b) At an asymmetrical position
)(tan 1
x
yx
eF
F
Distributed winding
24 slots
Error angle
Position of endmill Cutting force
Measurement and control Realization of Precision cutting
Sine wave MMF
X
YRotor Suspension flux
Radial control
stator
Bias flux
DenseSparse
Suspension
forceF
θe
Fx
Fyx
X
YError angle Suspension force
BelM_Unit1 BelM_Unit2Thrust magnetic bearing
Motor and radial control stator
Thrust permanent magnet
Thrust control stator
Shaft4-pole rotor core
Thrust rotor core
x
y
z
Fig.2 Proposed structure of homo-polar bearingless motor

00.2
0.40.6
0.81
0
0.01
0.02
00.2
0.40.6
0.81
L -
RM
S va
lue
of
err
or
angl
e °
K -
Minimum value (K-0.4, L=0.1)
INVESTIGATION OF OPTIMAL SUSPENSION WINDING CONFIGURATION
CONCLUSIONS
Suspension winding configuration of Model 2 is optimal.
3D-FEM analysis results agree well with theoretical calculated results.
Production test model in near future.
Fig.4 Single-layer winding (Model 1)
THEORETICAL CALCULATION
dA
g
RlFx )cos()(
2
2
2
0
0
dA
g
RlFyx )sin()(
2
2
2
0
0
Calculated error angle θe
Calculated magnetomotive force distribution A(φ) Fx, Fyx ,θe
μ0: the permeability of free space
g0: the air gap length R: the mean air-gap radius l : the stack length
Single-layer winding model
Double-layer winding model (Model 2)
U-phase 1 A V-phase -0.5 A W-phase -0.5 A
Slot No.2,3: 1 turn
Slot No.1,4: M turn (M=0, 0.1, 0.2, …, 0.9, 1)
Fig.5 RMS value of error angle
0
1
2
3
4
5
0 0.2 0.4 0.6 0.8 1
RM
S v
alu
e o
f err
or
angle
°
Winding ratio M -
Optimal winding ratio (M=1)
U-phase 1 A V-phase -0.5 A W-phase -0.5 A
U
WV
1
1
2
2
3
3
4
4
V
U
W
1
1
2
2
3
3
4
4
1
1
2
2
3
3
4
4
1 turn1 turn
5 6 87
5867
5
6
7
8
57
8 6
8
5
6
75
6
7
8
K turn
L turn
Fig.7 RMS value of error angle
Fig.6 Double-layer winding (Model 2)
Slot No.1~4: 1 turn
Slot No.5,6: K turn
(K,L=0, 0.1, 0.2, …, 0.9, 1) Slot No.7,8: L turn
Fig.8 Comparison of Model 1 and Model 2
U
W
W V
V
U
1
1
2
2
3
3
4
4
V
U
W1
1
2
2
3
3
4
4
1
1
2
2
3
3
4
4
M turn1 turn
M turn
1 turn
M turn
1 turn
RMS value of Model 2: 95.5% decreased against RMS value of Model 1
-2
-1
0
1
2
0 15 30 45 60 75 90
Err
or angle
°
Rotation angle °
Model 1 (M=1)
Model 2(K=0.4, L=0.1)
99.5%
RMS 1.11°
RMS 0.005°
3D-FEM ANALYSIS
-4
-2
0
2
4
6
0 15 30 45 60 75 90
Err
or angle
°
Rotation angle °
Model 1(theoretical calculation)
Model 1(FEM analysis)
Model 2(theoretical calculation)
Model 2(FEM analysis)
Fig.9 Comparison of theoretical
calculation and FEM analysis
Analyze error angle θe
Table.1 RMS value of Theoretical calculation
and FEM analysis
Calculation FEM
Model 1 1.11° 2.22°
Model 2 0.005° 0.300°
Certified validity of theoretical calculation
Design and Test Results
of a One-DOF Actively Positioned Bearingless Motor
Introduction
D.Watanabe*, J.Asama*, T.Oiwa*, A.Chiba** *Shizuoka University, Japan **Tokyo Institute of Technology, Japan
Configuration & Drive Principle
Conclusions
Electromagnetic Analysis
・One three-phase inverter
・Position control(Z) :d-axis current (id)
・Rotation(θz) :q-axis current (iq)
q
d
w
v
u
i
i
θcosθsin
θsinθcos
2321
2321
01
3
2
i
i
i
・Radial direction(X,Y) ,Tilting direction(θX,θY)
Test Model
Stator
Rotor
Passive Magnetic Bearing
(PMB)
Motor
Coreless
Coil
Permanent
Magnet (PM)
Z
Y X
Yoke
Fig.2 Proposed model
N
S
N
S
S N N ○Small size
0
5
10
15
0 15 30 45 60
Torq
ue
(mN
m)
Rotation angle (˚)
0.0
0.5
1.0
1.5
0 15 30 45 60
Susp
enti
on
forc
e (N
)
Rotation angle (˚)
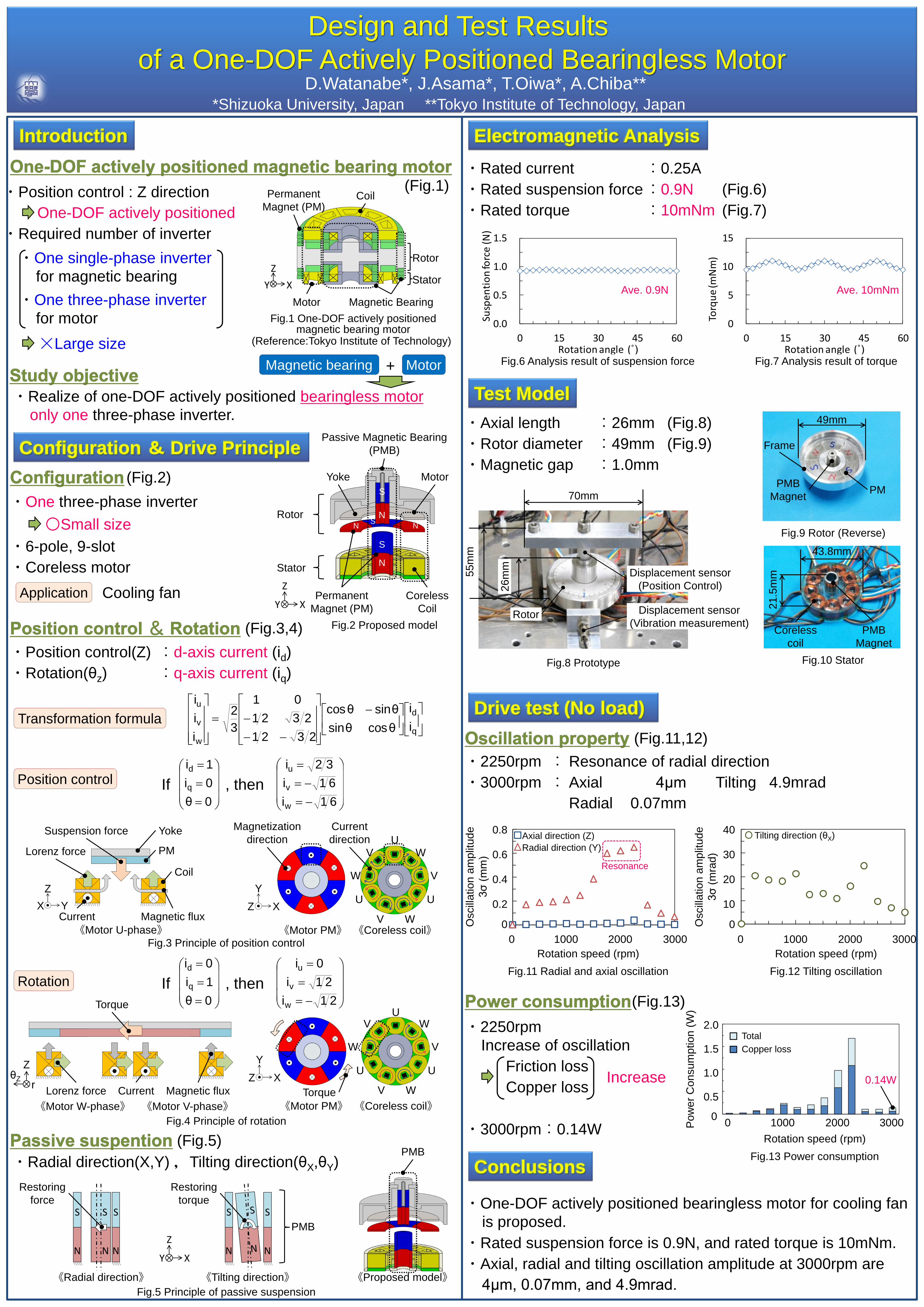
・Rated current :0.25A
・Rated suspension force :0.9N (Fig.6)
・Rated torque :10mNm (Fig.7)
Y
X Z
U V
W
U
V
V
W
U
W
《Coreless coil》 《Motor PM》
Current
direction
Magnetization
direction
Y
X Z
《Coreless coil》 《Motor PM》
Z
Y X
《Motor U-phase》
Lorenz force
Magnetic flux Current
Suspension force
N
S
N
S
N
S
N
S
N
S
《Radial direction》 《Tilting direction》
Restoring
force
Restoring
torque
PMB
0θ
0i
1i
q
d
If , then
61i
61i
32i
w
v
u
0θ
1i
0i
q
d
If , then
21i
21i
0i
w
v
u
Transformation formula
Position control
Rotation
・Realize of one-DOF actively positioned bearingless motor
only one three-phase inverter.
PMB
(Fig.1)
(Fig.2)
・6-pole, 9-slot
・Coreless motor
《Proposed model》
Ave. 0.9N Ave. 10mNm
Displacement sensor
(Position Control)
70mm
55
mm
Displacement sensor
(Vibration measurement)
26
mm
Rotor
Fig.8 Prototype
Coreless
coil
PMB
Magnet
43.8mm
21
.5m
m
Fig.10 Stator
PM
49mm
PMB
Magnet
Frame
Fig.9 Rotor (Reverse)
・Axial length :26mm (Fig.8)
・Rotor diameter :49mm (Fig.9)
・Magnetic gap :1.0mm
Drive test (No load)
Fig.3 Principle of position control
Fig.4 Principle of rotation
Fig.5 Principle of passive suspension
(Fig.3,4)
(Fig.5)
・2250rpm : Resonance of radial direction
・3000rpm : Axial 4μm Tilting 4.9mrad
Radial 0.07mm
(Fig.11,12)
Fig.6 Analysis result of suspension force Fig.7 Analysis result of torque
・2250rpm
Increase of oscillation
Friction loss
Copper loss
・3000rpm:0.14W
0.0
0.2
0.4
0.6
0.8
0 1000 2000 3000
振動振幅
3σ
mm
回転速度 rpm
Oscill
ation
am
plit
ud
e
3σ
(m
m)
0 1000 2000 3000
0
0.8
0.2
0.4
0.6 Radial direction (Y)
Axial direction (Z)
Resonance
Fig.11 Radial and axial oscillation
Rotation speed (rpm)
0
10
20
30
40
0 1000 2000 3000
振動振幅
3σ
mra
d
回転速度 rpm
0
40
10
20
30
Oscill
ation
am
plit
ud
e
3σ
(m
rad
)
0 1000 2000 3000
Tilting direction (θX)
Fig.12 Tilting oscillation
Rotation speed (rpm)
×Large size
(Fig.13)
Increase
0.0
0.5
1.0
1.5
2.0
0 500 1000 1500 2000 2500 3000
消費電力
W
回転速度 rpm
0
2.0
0.5
1.0
1.5
Pow
er
Consum
ptio
n (
W)
0 1000 2000 3000
Total
Copper loss
Fig.13 Power consumption
Rotation speed (rpm)
0.14W
《Motor W-phase》
Lorenz force Current Magnetic flux
Torque
《Motor V-phase》
・One-DOF actively positioned bearingless motor for cooling fan
is proposed.
・Rated suspension force is 0.9N, and rated torque is 10mNm.
・Axial, radial and tilting oscillation amplitude at 3000rpm are
4μm, 0.07mm, and 4.9mrad.
Coil
PM
Yoke
Cooling fan Application
・Required number of inverter
・One single-phase inverter
for magnetic bearing
・One three-phase inverter
for motor
・Position control : Z direction
One-DOF actively positioned
Motor Magnetic bearing +
Magnetic Bearing Motor
Coil Permanent
Magnet (PM)
Z
Y X Stator
Rotor
(Reference:Tokyo Institute of Technology)
Fig.1 One-DOF actively positioned magnetic bearing motor
U V
W
U
V
V
W
U
W
Torque
Z
Y X
Z θZ
r

Fabrication of a three-phase votage source inverter and its drive Y. Fujii, J. Asama
(Shizuoka University, Japan)
Outline of Inverter
Principle of Drive Circuit
Inverter control by PWM(pulse width modulation) control
Introduction
Fabrication of three-phase voltage source inverter and its drive circuit
Goal of Research
Conclusion
Amplitude of modulation wave
Control circuit: low electric system Drive circuit: high electric system 15V or-15V output by DC-DC converter
PWM(Pulse width modulation) Control
Fig.5. small amplitude of modulation wave
Interior of TLP250
1
2
3
4
CCV
0V
0V
GND 5
6
7
8
AMP
Fig.9. Fabricated Drive Circuit Fig.10. Confirmed Three Phase Wave
Fabrication of inverter and its drive circuit Confirmed Three-phase wave
Fig.2.Variable Load voltage by switching
Conventional AC motor control
Supply of AC by commercial power ×Variable frequency , ×Variable voltage
Solution
Variable voltage Variable frequency(VVVF) control Performance of inverter Important fabrication of drive circuit
Forward Convert Circuit: rectifier from AC to DC
Reverse Convert Circuit:from DC to AC
Control Circuit :transmission of PWM signal Drive Circuit:switching semiconductor device
Principle of behavior
Fig.1. Outline of Inverter
Forward convert circuitAC→DC
Inverter Main Circuit
Reverse convert circuitDC→AC
1Tr
2Tr
3Tr
4Tr
5Tr
6Tr
viui
wi
PWM Signal
Drive CircuitControl Circuit
<Example> focus on U-phase Tr1=ON Vu=E/2 Tr2=ON Vu=-E/2
viui
wi
6Tr
1Tr 3Tr5Tr
4Tr2Tr
2/E
2/E
Vu
Vv Vw
t
E/2
0
Tr1ON
Vu
Tr2ON Tr1ON Tr2ON Tr1ON
-E/2
Approximation sinusoidal wave by PWM
Comparison of carrier wave and modulation wave in control circuit In case of Modulation wave =Sinusoidal modulation wave Output of approximation sinusoidal wave
Fig.4. Principle of PWM control
es>ec→Vu=E/2 es<ec→Vu=-E/2
Fig.3. Carrier wave comparison
+
-
PWM signal
Sinusoidal wave es
Carrier wave ec
ComparatorCarrier wave ecSinusoidal modulation wave es
Approximation sinusoidal wave
E/2
-E/20
Vu
EcES
t
t
tEc
ES
t
E/2
-E/2
0
Vu
Smaller amplitude of modulation wave than Fig.4. Amplitude of approximation sinusoidal wave Proportion to amplitude of modulation wave
Fig.6. Principle of drive circuit
ⅰ. PWM ON signal ⅱ. 6 and 7 pin Vo=15V ⅲ. VGE=15V→IGBT ON ⅳ. Start ICE
IGBT ON
Isolation by photocoupler
ⅰ. PWM OFF signal ⅱ. 6 and 7 pin Vo=-15V ⅲ. VGE=-15V→IGBT OFF ⅳ. Stop ICE
IGBT OFF
Control Circuit
V0
PWM SignalV5
390
GND2
1
2
3
4
CCV
0V
0V
GND 5
6
7
8
PhotocouplerTLP250
V5DC-DC
ConverterOut In Stabilizaion
power
C
E
CEi
GEV
F. 10
k10
V15
G
V15GND1
ON Voltage
OFF Voltage
Gate resistance
IGBT
Isolation
Experiment of chopper circuit
-20
-14
-8
-2
4
10
16
-0.15 -0.1 -0.05 0 0.05 0.1
Voltage
V
Time ms
VGEVL
Fig.7. Experiment of chopper circuit Fig.8. Response of VL
Confirmed response of VL(Fig.8) Optimization of Surge voltage and switch speed
RG=15.6Ω,Shorter length of LS,Insertion of capacitance
Fabrication of Drive circuit
Control Circuit
V0
PWM SignalV5
390
GND2
V5DC-DC
ConverterOut In Stabilizaion
power
F. 10
k10
V15
V15GND1
ON Voltage
OFF Voltage
Gate resistance
1
2
3
4
CCV
0V
0V
GND 5
6
7
8
PhotocouplerTLP250
Isolation
CCEi
GEV
off
Load
SL
V6
Wiring inductance
F10G
E
StabilizationPower
LV
Li
GR
Fabrication of drive circuit by optimized value of chopper experiment(Fig.9) Check of fabricated inverter
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0 0.01 0.02 0.03 0.04
Load c
urr
ent
A
Time s