denİz sİsmİk ÇaliŞmalarinda nav gasyon ÖlÇmeler … · harita ve kadastro mühendisleri...
TRANSCRIPT

Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 257
DENİZ SİSMİK ÇALIŞMALARINDA NAVİGASYON ÖLÇMELERİ (2005 YILI BATI VE ORTA KARADENİZ DENİZ SİSMİK ÇALIŞMASI)
M. AKÇA, İ. İLHAN, H. UCA
1 Türkiye Petrolleri Anonim Ortaklığı, Arama Daire Başkanlığı, Jeofizik Operasyonlar Müdürlüğü, Harita Başmühendisliği, Ankara, [email protected], [email protected], [email protected]
Özet TPAO ( Türkiye Petrolleri Anonim Ortaklığı ) 1954 yılında, ülkemizin hidrokarbon zenginliklerini keşfetmek, sondaj yaparak bu zenginlikleri ülkemize kazandırmak, üretimini ve pazarlamasını yapmak amacıyla kurulmuş olan ve kurulduğu günden buyana hizmet veren bir kamu kurumudur. Türkiye Petrolleri Anonim Ortaklığı (TPAO), kendi bünyesinde kurmuş olduğu arazi ekipleri ile yoğun bir şekilde yürüttüğü kara sismik çalışmaları yanında, ülkemizin karasuları içerisinde Petrol ve Doğalgaz Arama Çalışmaları kapsamında, geçmiş yıllarda Doğu, Orta ve Batı Karadenizde İki Boyutlu (2B) ve Üç Boyutlu (3B) deniz sismik çalışmaları yürütmüş olup her geçen yıl bu çalışmalar yoğun şekilde devam etmektedir. Bu çalışmada, 2005 yılı içerisinde, Karadeniz’ de yapılan 2B Deniz Sismik Çalışmaları çerçevesinde navigasyon ölçmeleri, ölçme donanımı ile ölçmelerin yapılması ve ölçme sonuçlarının değerlendirilmesi ele alınmaktadır. Anahtar Kelimeler: Deniz sismiği, Navigasyon ölçmeleri, GPS, Gyrocompas 1. Giriş Geçmiş yıllarda yapılmış çalışmalara ek olarak, Petrol ve Doğalgaz Arama Programları kapsamında 2005 yılı içerisinde Batı ve Orta Karadeniz sahaları içerisinde Deniz Sismik Çalışmaları yürütülmektedir. Burada Deniz Sismik Veri Toplama çalışmalarında Navigasyon Biriminin uygulamalarından, bu çalışma bünyesinde kullanılan navigasyon cihazları ve yazılımlardan, navigasyon ölçmelerinin Deniz Sismik Veri Toplama çalışmasına ve sonuçlarına ne gibi etkileri olduğundan söz edeceğiz. 2. Çalışmanın Amacı, Yapılışı ve İlgili Parametreler 2.1 Amaç Petrol ve doğalgaz gibi hidrakarbon potansiyellerinin araştırılması, tespit edilmesi ve geliştirilmesi amacıyla kullanılan sismik yöntemler karalarda olduğu günümüz bilim ve teknolojisinde kaydedilen ilerlemeler sayesinde denizlerde uygulama alanı bulmuştur. Yeraltı jeolojisinin doğru tarifi ancak doğru kayıt edilecek koordinat verisi ile mümkün olabileceğinden denizlerde yapılan sismik arama faaliyetlerinin son teknoloji ürünü navigasyon aletleri ile gerçekleştirilmesi önem taşımaktadır. Elde

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 258
edilen tüm sismik ve navigasyon verilerinin değerlendirilmesi sonucunda aşağıda görülen sismik kesitler elde edilir (Şekil 1).
Şekil 1. Sismik kesit Bu çalışmaların yapılması amacıyla, TPAO (Türkiye Petrolleri Anonim Ortaklığı ) tarafından Deniz Sismik Çalışmaları için gerekli cihazlarla donatılmış ve bu tür çalımalar için özel olarak dizayn edilmiş sismik gemi (Şekil 2) kiralanmıştır.
Şekil 2. M / V C-Orion
2.2 Çalışmanın Yapılışı Deniz sismik çalışması öncesinde, hedef jeolojik yapıyı tarifleyecek profiller projeyi hazırlayan birim tarafından ön çalışma ile oluşturulur ve çalışma sahasının haritası üzerindeki konumları belirlenir. Sismik çalışma, harita üzerindeki konumları belirlenen hatların uygulama esnasındaki yapılış sırası ve yönü navigasyon birimi tarafından belirlenerek programa ait hatlar üzerinde (şekil-3) ve önceden belirlenmiş parametrelerin, ilgili donanım ve yazılımlarda uygulanarak hat boyunca sismik, navigasyon, gravite ve manyetik verilerinin toplanması şeklinde yürütülmektedir. Çalışma sahasına ait parametrelere bağlı olarak her atış noktasında, kaynak (gun) patlamalarının meydana getirdiği, önceden belirlenmiş şiddetteki ses dalgalarının yer altı tabakalarından geri dönen yansımaları “streamer” üzerindeki alıcılar

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 259
tarafından önceden belirlenmiş süre kadar toplanır ve aynı anda tüm sistemin koordinatları GPS noktası referans alınarak hesaplanır ve kayıt edilir. Kayıt edilen tüm sismik ve navigasyon verileri gemide bulunan veri işlem birimleri tarafından programa ait sismik kesitlerin çıkarılması için işlenir.
Şekil-3 2005 Yılı Karadeniz Sismik Çalışması Programı Sismik veri toplama açısından önemli olan ve çalışma boyunca belirli doğruluklarla korunması zorunlu olan ve birkısmı navigasyon birimi tarafından sürekli kontrol edilen ve takibi yapılan proje parametreleri ile kullanılan jeodezik ve datum dönüşüm parametreleri aşağıda özetlenmiştir.
Tablo 1. Sismik parametreler SIĞ DENİZ / SHALLOW
WATER DERİN DENİZ / DEEP WATER
Veri toplama şekli 2D tek streamer / tek kaynak 2D tek streamer / tek kaynak
Atış aralığı 25m 37.5m Kaynak Ölçüsü 1,700 inç küp/2000 psi 3,560 inç küp/2000 psi Kaynak (gun) derinliği 6 m, +/- 0.5m 6 m, +/- 0.5m Streamer / Grup Aralığı / Kanal Sayısı
6000m / 12.5 m / 480 kanal
7200 m / 12.5 m / 576 kanal
Streamer derinliği 7 m, +/- 1m 7 m, +/- 1m Compass (pusula) sayısı 22 26
2.3. Navigasyon Parametreleri Jeodezik ve Datum Transformasyon Parametreleri Elipsoid : International Hayford 1924 Elipsoid Büyük Yarıekseni (a) : 6,378,388.0 metre Elipsoidal Basıklık (1/f) : 297.000 Ölçü Alınan Datum : WGS 84

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 260
Transformasyon Yapılan Datum : ED-50 Datum Transformasyon Yöntemi : WGS84 den ED50 ( Bursa Wolf Dönüşümü ) DX : +87.05 metre DY : +86.03 metre DZ : +121.56 metre UTM Zone : 36 N Dilim Orta Meridyeni : 33 Derece Doğu Ekleme katsayısı (Doğu) : 500,000.0 metre Ekleme katsayısı (Kuzey) : 0.0 metre Projeksiyon : UTM Ölçek Faktörü : 0.9996 3. Navigasyon Sistemi Navigasyon sistemi, geminin ve tüm diğer sistemlerin koordinatlandırılması için gerekli olan GPS, gyrocompas, birdcompas cihazları ve tüm verilerin değerlendirilmesini ve navigasyon hesaplamalarının yapılmasını sağlayan ve Deniz Sismik Veri Toplama çalışmalarında navigasyon amaçlı kullanılan özel bir yazılım olan SPECTRA ile birlikte uydulardan alınan ham GPS verilerinin değerlendirilerek sonuç koordinatlarının hesaplanmasını sağlayan ve bütün uydu ve GPS bilgilerinin gösterildiği STARFIX SUIT 6.2 program setinden oluşur. Spectra, “streamer” (içerisinde ses dalgalarını algılayan alıcılar bulunan özel bir kablo) ın şeklinin ve derinliğinin istenen durumda olup olmadığının kontrolu ve istenen değerlerde kalmasının sağlanması , sapma (feather) açısının takibi, kaynak (gun) derinliğinin istenen değerde olup olmadığının takibi, kaynak patlamalarının istenen basınç değerlerinde olup olmadığının izlenmesi, patlama zamanlarının belirlenmesi ve ne kadar gecikme ile patladığının takibi, geminin istenen hat üzerinde ve istikamette hareketinin sağlanması, bu ölçme işlemlerinin kalite kontrolunun sağlanması ve standart sapmalarının rakamsal ve grafiksel olarak gösterilmesi işlemlerinin yürütülmesini sağlayan ve diğer sistemlerle uyumlu çalışan bütünleşmiş bir sistemdir. Gemideki GPS anteninin bulunduğu nokta diğer tüm koordinat hesaplamaları için referans alınır.Tüm gemi, kaynak, streamer ve kuyruk şamandırasının (tailbuoy) ofset değerleri çalışma başlamadan önce navigasyon sistemine girilir. Her kaynak patlaması anında kaynak (gun), streamer alıcı konumları ve kuyruk şamandırasının konumu, önceden sisteme girilen ofset değerleri, gyro okumaları, streamer üzerine belirli aralıklarla sabitlenmiş “bird compas” okumaları ve kuyruk şamandırası üzerinde bulunan RGPS okumaları yardımıyla hesaplanır ve kayıt edilir. Navigasyon Donanımı ve Yazılımları
1) DGPS Sistemi 2) RGPS Sistemi 3) Gyrocompas 4) Birdcompas 5) Spectra, Starfix Suit 6.2 yazılımı
3.1. DGPS Sistemi (Diferansiyel GPS Sistemi)
DGPS sistemi navigasyonun en önemli parçasıdır. Geminin gitmek istediği noktaya kolay bir şekilde ulaşmasını ve bulunduğu yerin koordinatlarını sağlar böylece gemi çalışma hatları üzerinde ilerleyebilir.
Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 261
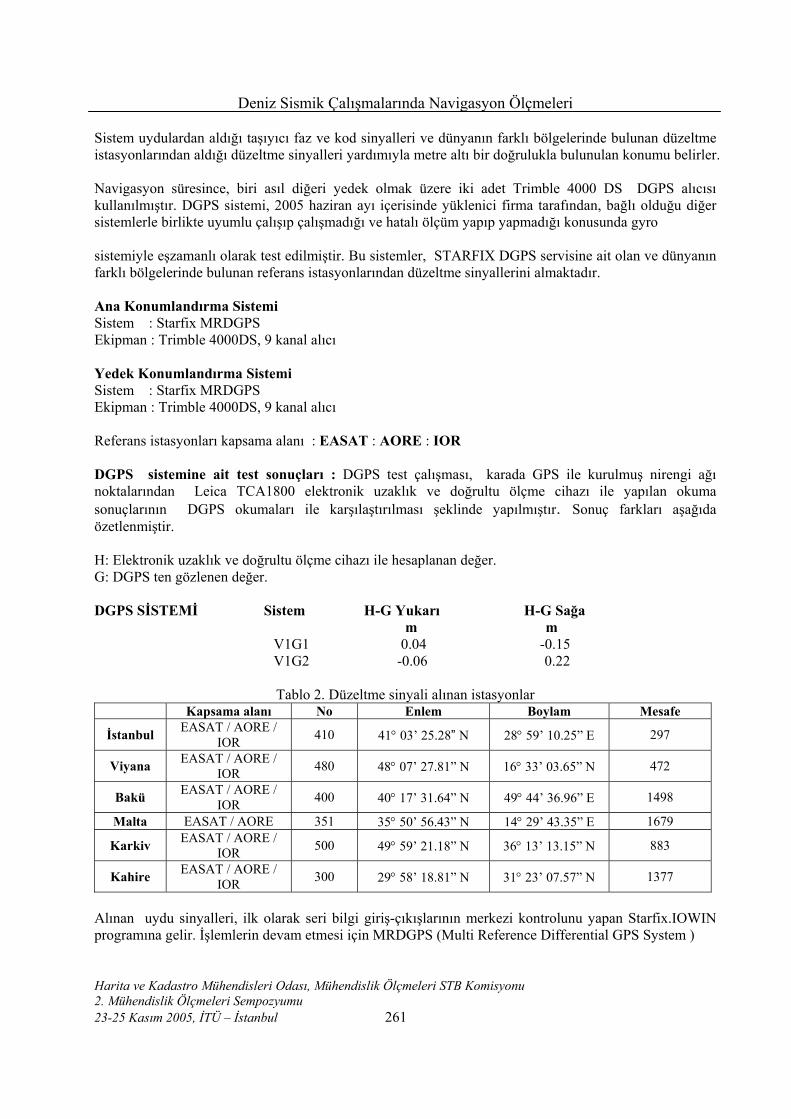
Sistem uydulardan aldığı taşıyıcı faz ve kod sinyalleri ve dünyanın farklı bölgelerinde bulunan düzeltme istasyonlarından aldığı düzeltme sinyalleri yardımıyla metre altı bir doğrulukla bulunulan konumu belirler. Navigasyon süresince, biri asıl diğeri yedek olmak üzere iki adet Trimble 4000 DS DGPS alıcısı kullanılmıştır. DGPS sistemi, 2005 haziran ayı içerisinde yüklenici firma tarafından, bağlı olduğu diğer sistemlerle birlikte uyumlu çalışıp çalışmadığı ve hatalı ölçüm yapıp yapmadığı konusunda gyro sistemiyle eşzamanlı olarak test edilmiştir. Bu sistemler, STARFIX DGPS servisine ait olan ve dünyanın farklı bölgelerinde bulunan referans istasyonlarından düzeltme sinyallerini almaktadır. Ana Konumlandırma Sistemi Sistem : Starfix MRDGPS Ekipman : Trimble 4000DS, 9 kanal alıcı Yedek Konumlandırma Sistemi Sistem : Starfix MRDGPS Ekipman : Trimble 4000DS, 9 kanal alıcı Referans istasyonları kapsama alanı : EASAT : AORE : IOR DGPS sistemine ait test sonuçları : DGPS test çalışması, karada GPS ile kurulmuş nirengi ağı noktalarından Leica TCA1800 elektronik uzaklık ve doğrultu ölçme cihazı ile yapılan okuma sonuçlarının DGPS okumaları ile karşılaştırılması şeklinde yapılmıştır. Sonuç farkları aşağıda özetlenmiştir. H: Elektronik uzaklık ve doğrultu ölçme cihazı ile hesaplanan değer. G: DGPS ten gözlenen değer. DGPS SİSTEMİ Sistem H-G Yukarı H-G Sağa m m V1G1 0.04 -0.15 V1G2 -0.06 0.22
Tablo 2. Düzeltme sinyali alınan istasyonlar Kapsama alanı No Enlem Boylam Mesafe
İstanbul EASAT / AORE / IOR 410 41° 03’ 25.28” N 28° 59’ 10.25” E 297
Viyana EASAT / AORE / IOR 480 48° 07’ 27.81” N 16° 33’ 03.65” N 472
Bakü EASAT / AORE / IOR 400 40° 17’ 31.64” N 49° 44’ 36.96” E 1498
Malta EASAT / AORE 351 35° 50’ 56.43” N 14° 29’ 43.35” E 1679
Karkiv EASAT / AORE / IOR 500 49° 59’ 21.18” N 36° 13’ 13.15” N 883
Kahire EASAT / AORE / IOR 300 29° 58’ 18.81” N 31° 23’ 07.57” N 1377
Alınan uydu sinyalleri, ilk olarak seri bilgi giriş-çıkışlarının merkezi kontrolunu yapan Starfix.IOWIN programına gelir. İşlemlerin devam etmesi için MRDGPS (Multi Reference Differential GPS System )

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 262
yazılımı ham data bilgilerine ve “Pseudo Range” uydu düzeltmelerine ihtiyaç duyar. IOWIN ilk olarak bu bilgileri elde etmek için ilgili aygıtlarla bağlantı kurar ( GPS alıcısı ve uydu demodulatorü) ve bu verileri değerlendirilmesi amacıyla MRDGPS yazılımına gönderir. MRDGPS yazılımında değerlendirilen bu bilgiler sonucunda hesaplanmış koordinat değerlerine ulaşılır. IOWIN hesaplanmış kesin koordinat bilgilerini MRDGPS den tekrar alarak bağlantılı diğer birimler ve yazılımlara gönderir. DGPS sisteminin temelini oluşturan MRDGPS programı, ham ve işlenmiş verilere ait bilgileri gösteren sekiz ayrı bölümden oluşur. Bu bölümlerde, kesin koordinatlar ve pozisyondan türetilen ve onunla ilişkili istatiksel bilgiler, referans istasyonunun kalite kontrol ve baz çözümleme bilgileri, hata elipsi bilgileri, gözlenen uydu yükseklik ve azimut değerlerinin grafiksel gösterimi, düzeltme alınan istasyonların uydulara olan uzaklıklarının DGPS çözümlemelerinden elde edilen istatiksel değerleri ve uydu efemeris bilgileri vb. takip edilebilir. 3.2. RGPS Sistemi (Rölatif GPS Sistemi) RGPS hareket halindeki cisimlerin konumlarını diğer bir cisme göreceli (rölatif) olarak tespit etmek amacıyla kullanılan bir sistemdir. Sistem, 2005 haziran ayı içerisinde yüklenici firma tarafından DGPS ve GYRO ile birlikte eş zamanlı olarak test edilmiştir. RGPS, kuyruk şamandırasının hareketini izleyen “tailbuoy Tracking Sistemi” ve bu hareketi kontrol eden Gemi Kontrol Ünitesi (VCU) olmak üzere iki sistemden oluşur. Bu deniz sismiği çalışmasında, streamer kablosunun sonunda bulunan ( gemiye yaklaşık 7 km ) kuruk şamandırasının üzerine sabitlenmiş halde, geminin hareketiyle uyumlu bir şekilde sürekli aktif konumda bulunan Seatrack 200 model RGPS “transponder alıcısı” kullanılmıştır. Transponder alıcısı GPS L1 taşıyıcı faz ve kod sinyallerini alır ve bunları ana merkez olan gemideki kontrol ünitesine UHF radyo dalgaları ile veya kablo aracılığı ile ulaştırır. Gemide, transponder alıcısı ile sürekli bağlantı halinde olan Seatrack VCU 200 ünitesi kullanılır ve alınan veriler Seadiff RNAV yazılımı aracılğı ile işlenir (proses) ve kuyruk şamandırasının göreceli (rölatif) konumu hesaplaınr. Veri transferi, metreden santimetreye kadar olan bir konum doğruluğu sağlayar ve gemide “pseudorange” veya RTK (Gerçek zamanlı) veri işleme imkanını sağlar. Transponder, bütün elektronik cihazları, GPS alıcısı, GPS anteni, UHF anteni ve bağlantı kablolarını bir arada tutan ve bunları su geçirmeyen bir kap içerisinde barındıran bir sistemdir.
Şekil 4. RGPS sisteminin çalışma yöntemi, kuyruk şamandırası ve transponder alıcısı

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 263
RDGPS sistemine ait test sonuçları: Test çalışması, RGPS anteninin kıyıda koordinatı bilinen bir noktaya yerleştirilip, 15-30 dakikalık oturumlar şeklinde yapılmış olup her oturumda 6 adet RGPS alıcı ünitesi kullanılarak göreceli (rölatif) konum belirleme sistemi test edilmiştir.Test sonuçları, hesaplanan değer ile gözlenen değer arasındaki farklar şeklinde aşağıda özetlenmiştir. RGPS SİSTEMİ Unite tipi ve H-G Yukarı H-G Sağa Seri No. Fark (m ) Fark (m) TBU 689 -0.51 -0.73 TBU 1341 -1.08 -0.20 GU 909 -1.13 0.54 GU 504 -0.77 0.76 GU 500 -0.32 -0.79 GU 465 -0.70 -0.38 Ortalama -0.76 -0.13
Şekil 5. Sapma (Feather) açısı RGPS Sistemi, Sapma (Feather) açısının ve streamer kablosu içerisinde bulunan alıcı gruplarının koordinatlarının hesaplanması için kullanılır. 3.3. Gyrocompas Gyrocompas, üç eksen etrafında dönen hassas elektronik parçalardan oluşan ve geminin hareket doğrultusunun ( Kıç-Burun Doğrultusu) gerçek kuzey istikametinden olan açısal farkını veren bir elektronik pusuladır. Manyetik alandan etkilenmeyen gyrocompas cihazları çok hassas elektronik parçalardan oluşması ve elektrikle çalışması nedeniyle elektrik akımında meydana gelen değişimlere karşı çok duyarlıdır.
Sapma (Feather) Açısı
Hat
Tailbuoy ve RGPS
Streamer Gun

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 264
Şekil 6. Gyrocompas
Gemide, geminin burun ve kıç ekseni üzerinde sabitlenmiş, bir tanesi veri işlem odasında diğeri ise gemi kontrol odasında olmak üzere iki adet Robertson RGC12 model gyrocompas cihazı mevcuttur. Geminin istenen doğrultuda hareketinin sağlanması, kaynak (gun) ve ilk alıcı konumlarının belirlenmesi açısından önemli olan gyrocompas cihazının kalibrasyonu 22-23 Haziran 2005 tarihinde, yüklenici firma tarafından sözleşme gereği yapılmıştır. GPS yardımıyla karada döşenmiş nirengi noktalarından elektronik uzaklık ve doğrultu ölçme aleti yardımıyla, geminin ekseni üzerinde, burun ve kıç noktalarında, iki farklı günde ve her gün 1-2 dakika ara ile 30-60 dakika boyunca prizma okumaları yapılmıştır. Eğer iki defa kalibrasyon yapılacaksa bu, gemi 180 derece dödürülerek gerçekleştirilir. Burada, geminin burun doğrultusunun gerçek kuzeyden olan açısal farkı, burun ve kıç eksenininde yapılan pirizma okumalarına, gemi eksenine olan pirizma ofset değeri ve meridyen konvergenz açısı düzetmeleri uygulanarak hesaplanmıştır. Eşzamanlı olarak gerçekleştirilen gyrocompas cihazı data kayıtları ve gerekli hesaplamalar sonucunda her iki gyrocompas cihazında şu kalibrasyon değerlerine ( okunan ve gerçek değer arasındaki fark) ulaşılmıştır.
DERECE CİNSİNDEN HATA MİKTARLARI
Sistem odasında Köprüde GYRO İstikamet H-G IR Gyro H-G Köprü Gyro derece derece derece 143 -3.12 -3.24 345 -3.18 -3.17 Ortalama -3.15 -3.21 Akıntı, rüzgar, dalga gibi dış etkilere bağlı olarak geminin her zaman hat üzerinde ve burun doğrultusunda hareketi mümkün olmaz. Bu durumlarda hareket doğrultusu DGPS ile hesaplanırken, geminin burun doğrultusu gyrocompas cihazı yardımıyla bulunur ve bu değer “streamer” ve kaynak (gun) referans noktalarının hesaplanmasında esas alınır.

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 265
Şekil 7. Geminin burun ve hareket doğrultusu
Akıntı, rüzgar, dalga gibi dış etkilere bağlı olarak geminin her zaman hat üzerinde ve burun doğrultusunda hareketi mümkün olmaz. Bu durumlarda hareket doğrultusu DGPS ile hesaplanırken, geminin burun doğrultusu gyrocompas cihazı yardımıyla bulunur ve bu değer “streamer” ve gun referans noktalarının hesaplanmasında esas alınır. 3.4. Birdcompas 6000/7200 m uzunluğundaki “streamer” ( içerisinde ses dalgalarını algılayan hassas alıcılar bulunan özel bir kablo ) kablosunun üzerine belirli aralıklarla ( 22-26 adet) sabitlenmiş ve “streamer” kablosunun deniz yüzeyinden itibaren istenen derinlikte ( 7 m / ±0.5 m ) kalmasını sağlayan “bird” adı verilen parçanın üzerinde monte edilmiş vaziyette bulunan “birdcompas” ( DigiCOURSE 5011 model) lar, “bird” lerin hareket doğrultularının kuzeyden itibaren olan açılarını kablolar aracılığı ile gemi ana navigasyon sistemine göndererek burada uygulanan birtakım filtreleme ve düzeltmelerden sonra, kuyruk şamandırasından gelen “streamer” kablosunun son noktasının koordinatları da kullanılarak, “bird” lerin bulunduğu noktaların ve alıcı guruplarının ( 480/576 adet ) her atış anındaki konumlarının hesaplanmasına, dolayısı ile “streamer” kablosunun şeklinin belirlenmesine yardımcı olurlar.
Şekil 8. Bird, Birdcompas ve Streamer kablosu
Gyro dan alınan , geminin burun doğrultusu
DGPS ten hesaplanan geminin hareket doğrultusu
Hat

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 266
3.4.1. Birdcompas Datalarına Uygulanan İşlemler Yalnızca belirli merkezlerde ( HARRAHAN ve LOUSIANA) kalibrasyonu yapılabilen “birdcompass” lardan elde edilen verilere, kalibrasyon sonucu belirlenmiş A,B ve C pusula sapması düzeltmeleri uygulanır. Bu sapmalar, sürekli manyetik alan etkisinden meydana gelmektedir. A : Bu, sistemin iç yapısından kaynaklanan ve pusulanın tüm doğrultu ölçmelerinde görülen sabit bir değerdir. B : Birdcompas’ ın içinde, ön ve arka kısmında bulunan metal parçaların neden olduğu manyetik etkiden kaynaklanır. Pusula doğrultu açısının sinüsü ile orantılı bir sapmadır. Pusula doğrultusunun doğu-batı istikametinde olması durumunda en büyük, kuzey-güney istikametinde ise en küçük değeri alır. C : Birdcompas’ ın içinde ön ve arka kısmında bulunan metal parçaların neden olduğu manyetik etkiden kaynaklanır. Pusula doğrultu açısının kosinüsü ile orantılı bir sapmadır. Pusula doğrultusunun doğu-batı istikametinde olması durumunda en küçük, kuzey-güney istikametinde ise en büyük değeri alır. D,E : Bu sapmalar çok küçük değerlerdir ve kullanılan birdcompas (5011) larda dikkate alınmaz. Birdcompaslardan gelen verilere ilk olarak “spike editing” filtreleme işlemi uygulanır. Burada yapılan ilk iş, geçersiz okumaların tuzakta tutulmasıdır. Bir önceki doğrultu okumasından 10 dereceye kadar farklı bir değer okunmuşsa bunun yanlış olduğu varsayılır. Arka arkaya, 5 den fazla okuma değeri aynı şekilde alınmışsa bu okumalar geçersiz kabul edilir. Ardışık, altı okuma aynı şekilde hatalı okunmuşsa geçerli bir okuma alınıncaya kadar bu okumalar tuzakta tutulur. “Spike Edit” işlemiden sonra veriler hafızada tutulan kalibrasyon katsayıları ile düzeltilir. 3.5. Spectra Spectra, navigasyon biriminin kullanmış olduğu, diğer tüm sistemlerle bütünleşmiş ve UNIX işletim sistemi ağı üzerine kurulmuş kapsamlı bir sismik navigasyon programıdır. Bu program, gerçek zamanlı (real time) olarak elde edilen navigasyon verilerinin gözlenmesini, gemi sismik ölçmelerinde yüksek çözüm gerektiren 3B (üç boyutlu) ve daha basit olan 2B (iki boyutlu ) streamer ve kaynak (gun) konumlandırma işlemlerinin yapılmasını, veri dağıtım ünitesi sistemi ile bağlantılı olarak, buradan aldığı verilerle, karmaşık tüm gemi ölçmelerinin konfigürasyonunu sağlar. Sismik ve akustik sistemlerin eşzamanlı olarak uzaktan kontrol edilmesini sağlar ve GPS alıcısıyla bütünleşmiş gerçek zamanlı (real-time) veri toplama ünitesi ile birlikte 100 den fazla navigasyon alıcı kayıtlarının 50 mikro-saniyeye kadar toplanıp değerlendirilmesini sağlar. Bütün veri kayıtlarını, deniz sismik navigasyon ölçmelerinde uluslararası bir standart olan UKOOA P1/90 ve P2/94 formatlarında gerçekleştirir. Tüm verilerin ve hesapların kalite kontrolunu yapar ve sınır dışı bir durum olması halinde kullanıcıyı uyarır. Hat üzerinde iken alınan veriler hakkında geniş analiz imkanı sağlar ve hat bitiminde tüm verilerin grafik olarak raporlanması işlemini yapar. Otopilot arabirim kontrolu sağlayarak, geminin sistem odasından kontrol edilmesi imkanını verir bu da hat değişimlerinde büyük kolaylık ve verimlilik sağlar. Bu sayede gemi bir sonraki hatta zaman kaybetmeden ve kolayca geçebilir.

Deniz Sismik Çalışmalarında Navigasyon Ölçmeleri
Harita ve Kadastro Mühendisleri Odası, Mühendislik Ölçmeleri STB Komisyonu 2. Mühendislik Ölçmeleri Sempozyumu 23-25 Kasım 2005, İTÜ – İstanbul 267
Şekil 9. Navigasyon birimi ve spectra sistemi
3.5.1. P2/94, P1/90 UKOOA ( U.K. OFFSHORE OPERATORS ASSOCIATION ) adındaki bir kuruma ait ( SURVEYING AND POSITIONING COMMITTEE) ölçme ve konumlandırma komitesi tarafından deniz çalışmaları için, denizcilikte konumlandırma amaçlı yapılan ölçmelere ait ham verilerin format değişimi ve kayıt edilmesi amacıyla hazırlanmıştır. Bu format, UKOOA tarafından petrol ve gaz arama faaliyetlerinde özellikle tavsiye edilir ve tüm dünyada yaygın olarak kullanılır. Bu sayede Navigasyon Birimi tarafından yapılan ve takip edilen tüm ölçmelere ( DGPS okumalar, streamer alıcı konumlandırmaları, kuyruk şamandırası koordinatları, kaynak (gun) konumları, echosounder okumaları “su derinliği okumaları” ) ait ham dataların, her atış anındaki değerleri, hat bazında ham olarak P2/94 formatında, işlenen veriler ise P1/90 formatında kayıt edilir ve sismik veri kayıtlarının değerlendirilmesi aşamasında kullanılmak üzere veri-işlem (proses) merkezine gönderilir. 5. Sonuç Navigasyon, bilindiği gibi denizcilikte geminin bir yerden istenen başka bir yere güvenli ve hızlı bir şekilde seyir etmesi anlamına gelir. Çok eski yıllarda gezegenlere, yıldızlara yapılan gözlemlerle ve manyetik pusulalarla denizcilerin yönlerini ve konumlarını bulmak amacıyla yapmış oldukları navigasyon ölçmeleri, günümüzde GPS sayesinde oldukça güvenli ve hızlı bir şekilde gerçekleştirilmesinin yanında deniz sismiği gibi birçok mühendislik çalışmalarında da kullanılmaktadır. GPS (Küresel Konumlandırma Sistemi) deki hızlı gelişim onu karadaki mühendislik ölçmelerinde olduğu gibi denizde yapılan mühendislik çalışmalarının da ayrılmaz ve vazgeçilmez bir parçası haline getirmiştir. Birçok yazılım ve sistemlerin GPS’teki gelişime göre yeniden yapılandırıldığını söylemek mümkündür. Bu sistem sayesinde, diğer mühendislik çalışmalarında olduğu gibi deniz sismik çalışmalarında da projenin, çalışma sahasında istenildiği gibi uygulanması ve yapılan diğer ölçmelerle birlikte ( yeraltı sismik veri kayıtlarını elde etmek amacıyla) eşzamanlı olarak yeterli hassasiyette koordinatlandırılması mümkün olmaktadır. Oldukça pahalı bir çalışma olan deniz sismik çalışmalarında, navigasyon sisteminin en önemli parçası olan GPS sisteminde oluşacak bir arızanın tüm çalışmanın durması anlamına geldiğini düşünürsek, buradan GPS’in diğer tüm gemi sistemlerinin vazgeçilmez bir parçası olduğu ortaya çıkmaktadır. Ayrıca, navigasyon ölçmeleri yapılarak elde edilen deniz sismik verileriyle yeraltı tabakalarının doğru biçimde ortaya çıkarılmasının petrol ve doğalgaz aramacılığındaki en önemli aşamalardan biri olduğu da görülmektedir.