Download - Fuzzy logic part6
55//1313//20132013
11
Fuzzy Systems
Fuzzy Controller berdasarStep Response
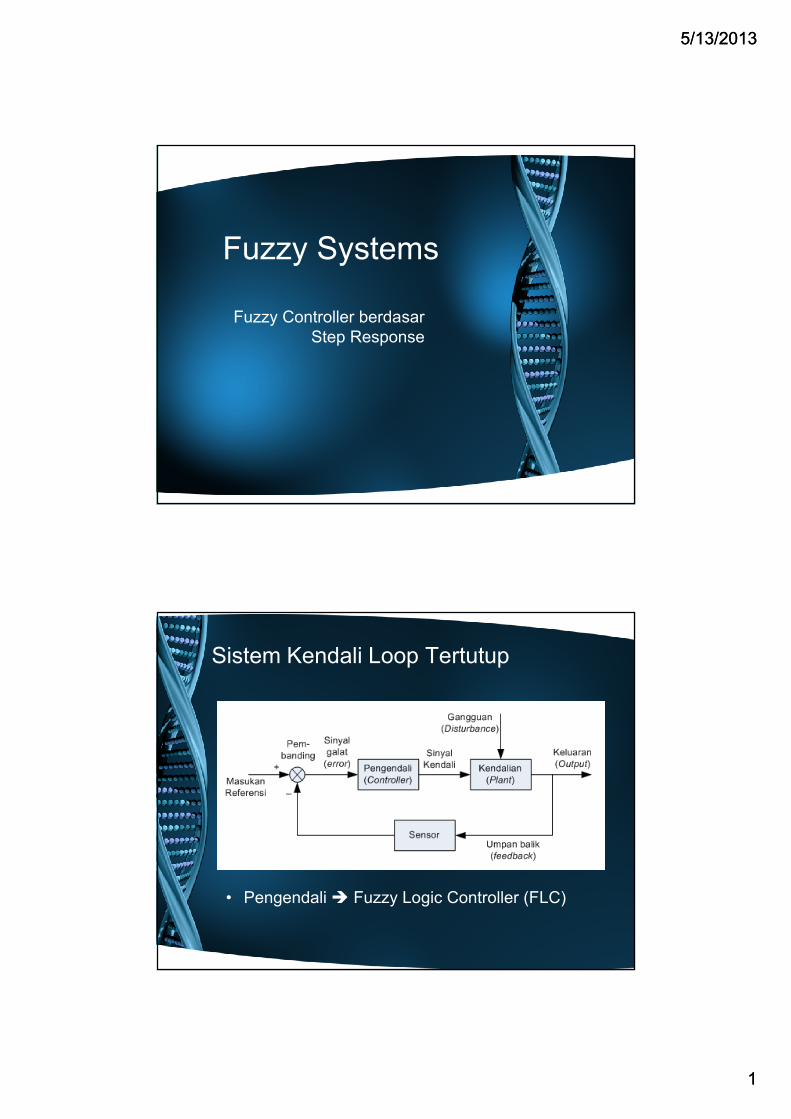
Sistem Kendali Loop Tertutup
• Pengendali Fuzzy Logic Controller (FLC)
55//1313//20132013
22
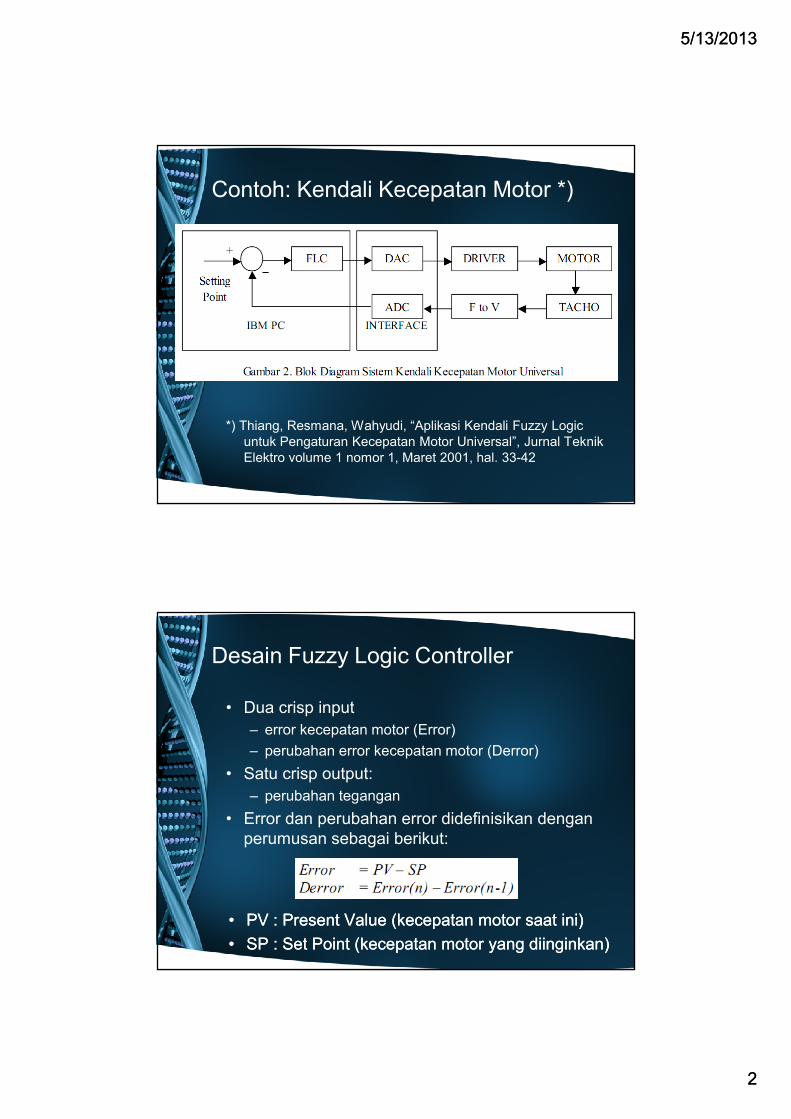
Contoh: Kendali Kecepatan Motor *)
*) Thiang, Resmana, Wahyudi, “Aplikasi Kendali Fuzzy Logic untuk Pengaturan Kecepatan Motor Universal”, Jurnal Teknik Elektro volume 1 nomor 1, Maret 2001, hal. 33-42
Desain Fuzzy Logic Controller
• Dua crisp input
– error kecepatan motor (Error)
– perubahan error kecepatan motor (Derror)
• Satu crisp output:
– perubahan tegangan
• Error dan perubahan error didefinisikan dengan perumusan sebagai berikut:
•• PV : Present Value (PV : Present Value (kecepatankecepatan motor motor saatsaat iniini))
•• SP : Set Point (SP : Set Point (kecepatankecepatan motor yang motor yang diinginkandiinginkan))
55//1313//20132013
33
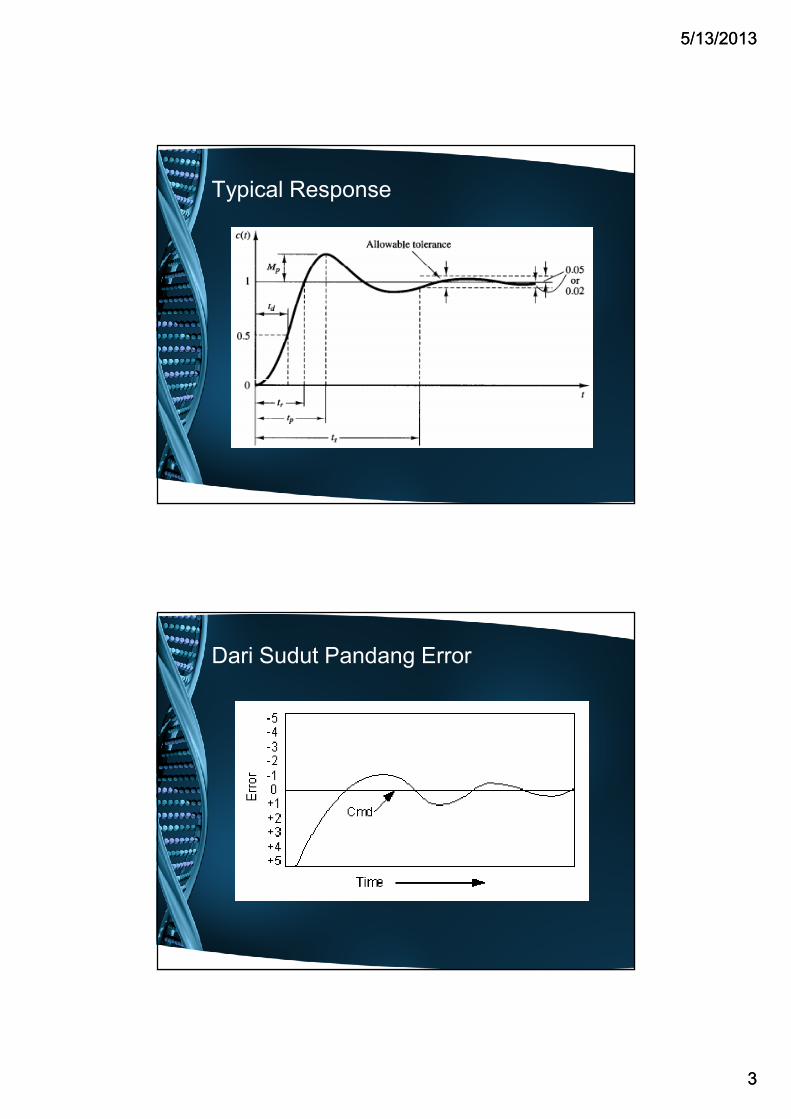
Typical Response
Dari Sudut Pandang Error

55//1313//20132013
44
Bentuk Membership Function
• Dengan 3 label
Bentuk Membership Function
• Dengan 5 label
55//1313//20132013
55
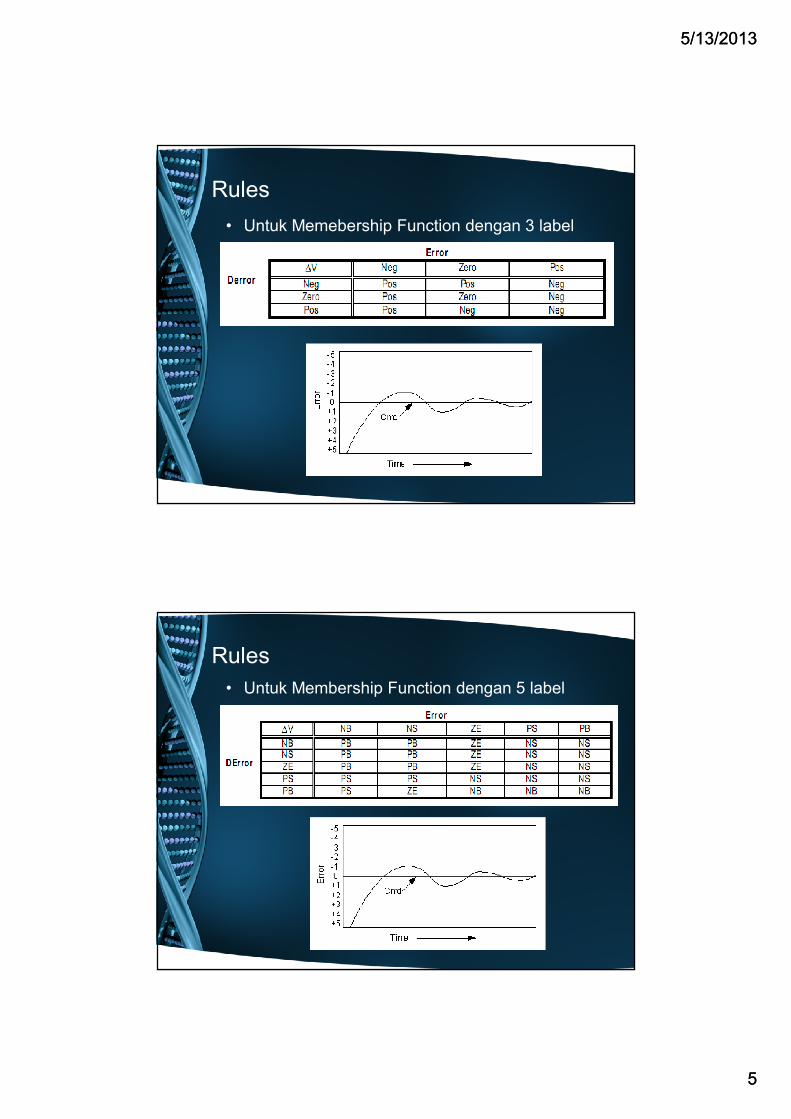
Rules
• Untuk Memebership Function dengan 3 label
Rules
• Untuk Membership Function dengan 5 label
55//1313//20132013
66
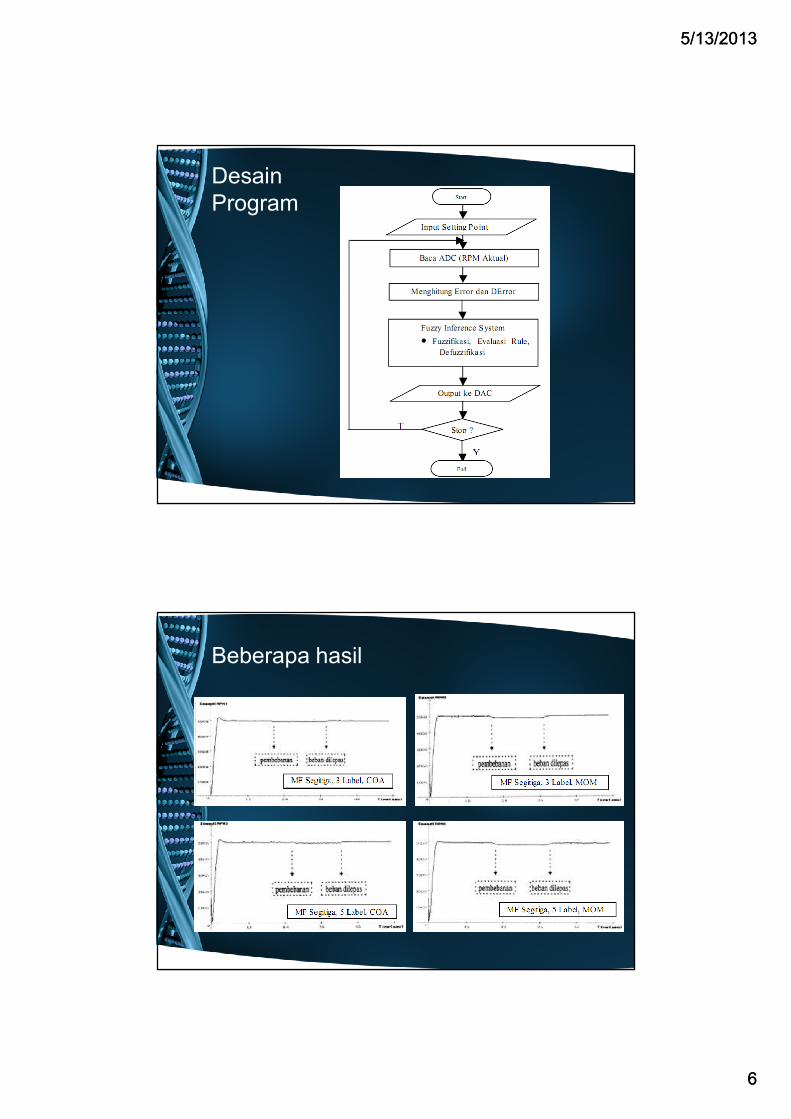
Desain Program
Beberapa hasil
55//1313//20132013
77
Kesimpulan
• Kendali fuzzy logic relatif mudah diimplementasikan karena tidak membutuhkan model matematika tetapi bekerja berdasarkan rule yang dapat diekstrak dari pengalaman dan keahlian seorang operator.
• Semakin banyak jumlah label dalam membership function memungkinkan untuk menghasilkan kendali yang lebih baik terutama untuk metode defuzzifikasi mean of maxima




![[2] Fuzzy Logic](https://cdn.vdocuments.pub/doc/165x107/577c77c51a28abe0548d6bc0/2-fuzzy-logic.jpg)


