
Metody komputerowe
w inżynierii komunikacyjnej
Matematyczne odwzorowanie
osi drogi
doc. dr inż. Tadeusz Zieliński
r. ak. 2013/14

Układ wykładu
elementy składowe osi
metody projektowania
metoda składania osi z elementów
osie polinomialne
Elementy składowe
proste
łuki kołowe
krzywe przejściowe:
cel stosowania
klotoidy
krzywe Blossa
spirale logarytmiczne
płynna zmiana krzywizny między elementami o różnej krzywiźnie (łagodny przyrost siły bocznej)
utworzenie rampy (zmiany przechyłki) między elementami o różnym pochyleniu poprzecznym
Elementy składowe
Krzywe przejściowe - cel stosowania (1)
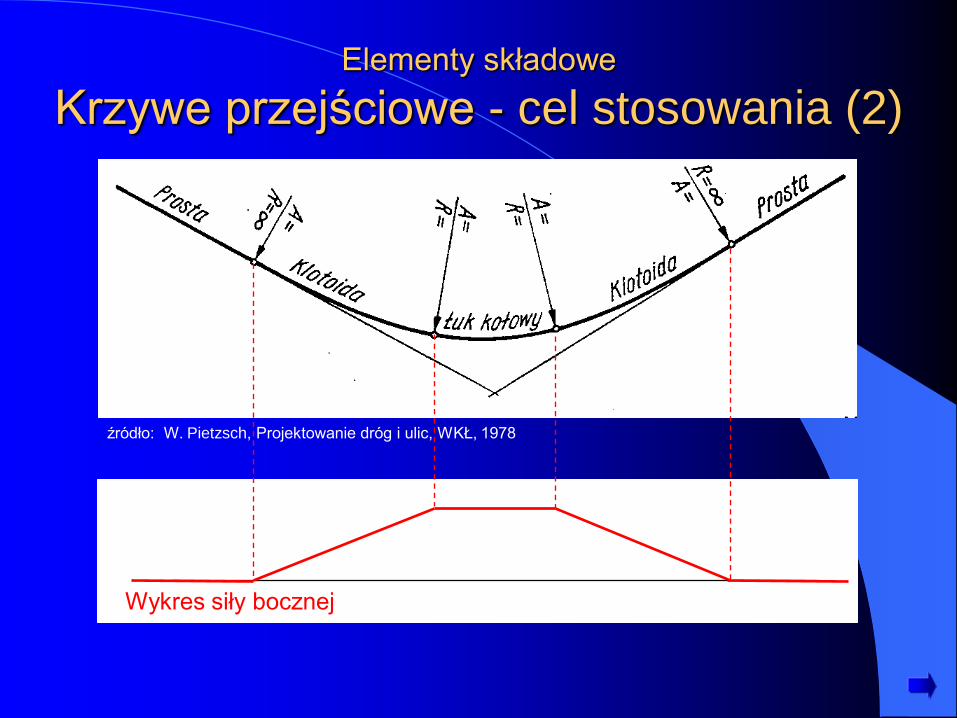
źródło: W. Pietzsch, Projektowanie dróg i ulic, WKŁ, 1978
Wykres siły bocznej
Elementy składowe
Krzywe przejściowe - cel stosowania (2)

źródło: W. Dębski, Drogi kołowe, WKŁ, 1976
Elementy składowe
Krzywe przejściowe - cel stosowania (3)

Elementy składowe
Krzywe przejściowe - klotoidy
podstawowy typ krzywej
wyprowadzona przy
założeniu:
prędkość liniowa = const
prędkość kątowa = const
łuk kołowy z 2 klotoidami
krzywe złożone:
esowa
owalna
źródło: M. Lipiński, Tablice do tyczenia
krzywych, PPWK, 1978
y= L3/6A2 – L7/336A6 – L11/42240A10 + …

źródło: W. Pietzsch, Projektowanie dróg i ulic, WKŁ, 1978
Elementy składowe
Krzywe przejściowe - łuk kołowy z klotoidami

źródło: J. Kukiełka, A. Szydło, Projektowanie i budowa dróg, WKŁ, 1976
Elementy składowe
Krzywe przejściowe - esowa

źródło: J. Kukiełka, A. Szydło, Projektowanie i budowa dróg, WKŁ, 1976
Elementy składowe
Krzywe przejściowe - owalna
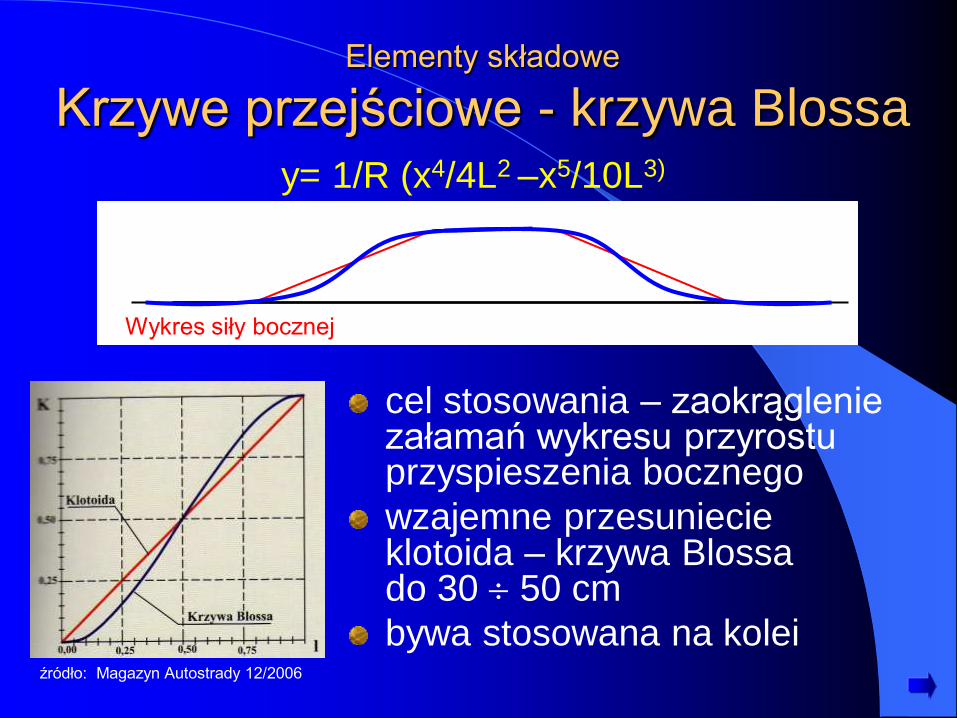
cel stosowania – zaokrąglenie załamań wykresu przyrostu przyspieszenia bocznego
wzajemne przesuniecie klotoida – krzywa Blossa do 30 50 cm
bywa stosowana na kolei
Elementy składowe
Krzywe przejściowe - krzywa Blossa y= 1/R (x4/4L2 –x5/10L3)
Wykres siły bocznej
źródło: Magazyn Autostrady 12/2006
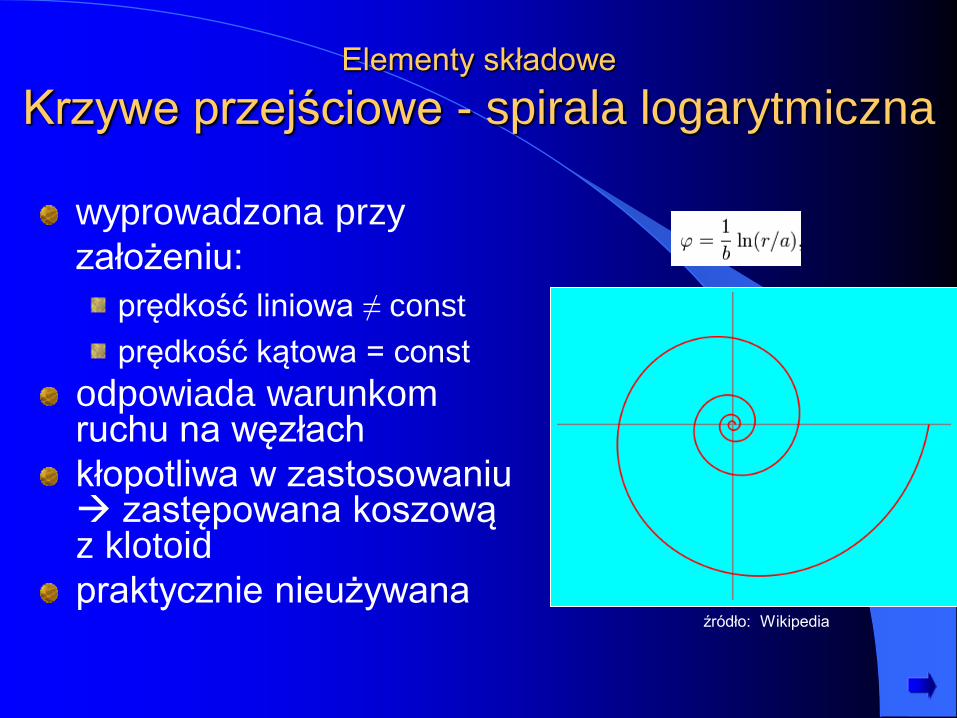
wyprowadzona przy
założeniu:
prędkość liniowa ≠ const
prędkość kątowa = const
odpowiada warunkom ruchu na węzłach
kłopotliwa w zastosowaniu zastępowana koszową z klotoid
praktycznie nieużywana
Elementy składowe
Krzywe przejściowe - spirala logarytmiczna
źródło: Wikipedia

Metody projektowania
wierzchołkowa
składanie z elementów
osie polinomialne

Metody projektowania
Wierzchołkowa
klasyczna
wzięta z projektowania
linii kolejowych
długie proste,
krótkie łuki
odwzorowanie osi
w układzie
liniowo-kątowym

Metody projektowania
Składanie z elementów
podstawy
proces projektowania
więcej: Zieliński T. Projektowanie osi drogi metodą składania z elementów, Magazyn Autostrady 10/2005

Metody projektowania
Składanie z elementów
Podstawy
powstała w wyniku rozwoju dsr
badania warunków ruchu wykazały, że długa prosta to:
monotonia jazdy
nieuświadomiony prędkości
czujności wypadków
wniosek: odejście od długich prostych
warunek ciągłej krzywizny tendencja do projektowania według odręcznie rysowanej linii
odwzorowanie osi w układzie współrzędnych prostokątnych

Metody projektowania
Składanie z elementów
Proces projektowania
ustalenie położenia przeszkód terenowych
ustalenie podstawowych wymogów geometrycznych (Rmin, Ri/Ri+1 itp.)
szkic odręczny trasy krzywik elastyczny
opisanie trasy łukami, klotoidami i ewentualnie prostymi ułożenie trasy z linijek i krzywików
ewentualna optymalizacja – kłopotliwa, bo dodatkowe ograniczenia wynikają z konieczności stosowania klotoid i łuków kołowych

Metody projektowania
Osie polinomialne
opis osi za pomocą krzywych: trygonometrycznych (dawniej)
wielomianów
z definicji zapewniają ciągłą krzywiznę
proces projektowania jak dla osi składanej z elementów, ale kończy się z chwilą określenia punktów, przez które ma przechodzić trasa (nie trzeba dobierać krzywych – łuków i klotoid)
zadane punkty określają wielomian (ciąg wielomianów sklejanych) wyznaczany za pomocą oprogramowania
odwzorowanie osi w układzie współrzędnych prostokątnych
Metoda składania z elementów
definicja elementu
typy elementów
typy punktów
ułożenie osi
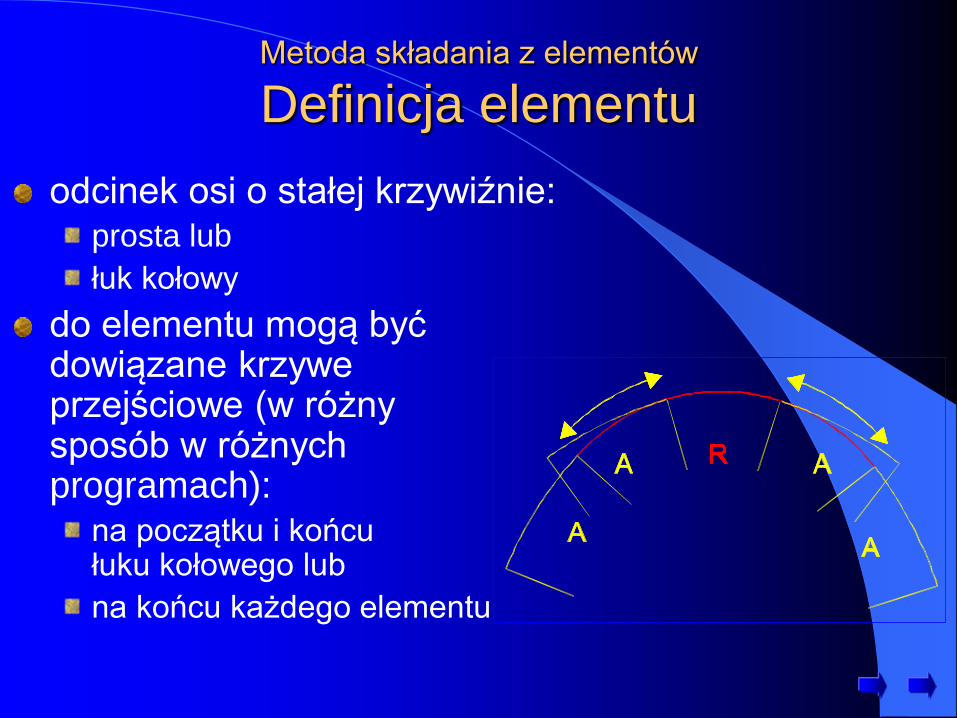
Metoda składania z elementów
Definicja elementu
odcinek osi o stałej krzywiźnie: prosta lub
łuk kołowy
do elementu mogą być dowiązane krzywe przejściowe (w różny sposób w różnych programach):
na początku i końcu łuku kołowego lub
na końcu każdego elementu

Metoda składania z elementów
Typy elementów
stałe
obrotowe
buforowe

Metoda składania z elementów
Typy elementów
Stałe
ich położenie jest jednoznacznie
zdefiniowane
ich długość wynika z dopasowania do
sąsiednich elementów (nie jest określona)
mogą być zdefiniowane na różne sposoby:
przez 2 punkty i promień
przez 3 punkty
przez punkt i kierunek

Metoda składania z elementów
Typy elementów
Obrotowe
zdefiniowany jest punkt,
przez który muszą
przechodzić
mogą być zdefiniowane
na różne sposoby:
przez punkt i promień
przez punkt i kierunek
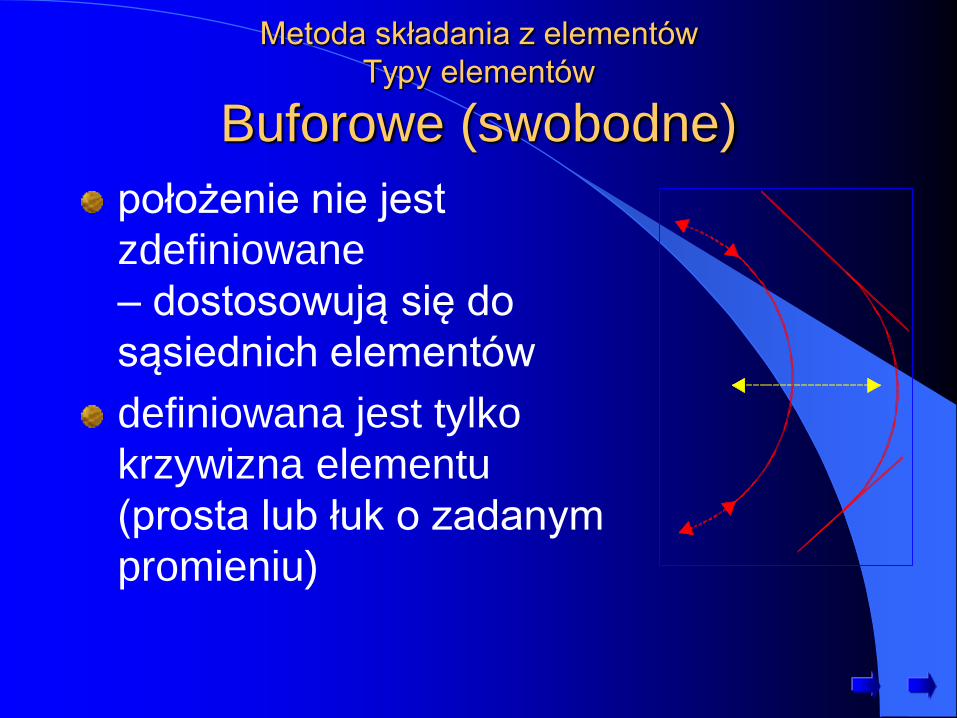
Metoda składania z elementów
Typy elementów
Buforowe (swobodne)
położenie nie jest
zdefiniowane
– dostosowują się do
sąsiednich elementów
definiowana jest tylko
krzywizna elementu
(prosta lub łuk o zadanym
promieniu)
Metoda składania z elementów
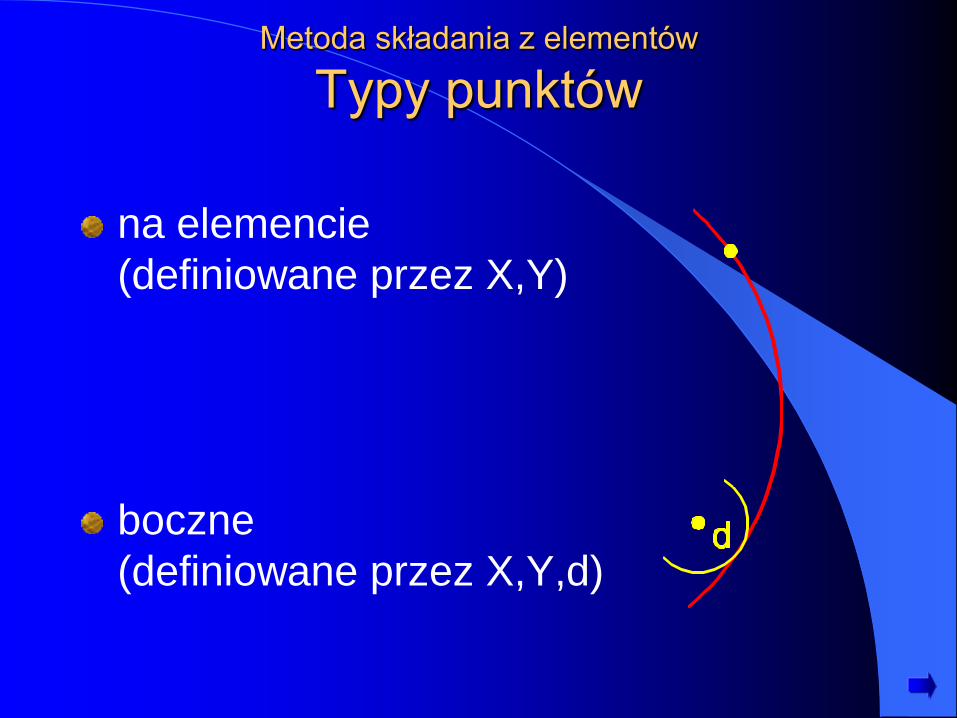
Typy punktów
na elemencie
(definiowane przez X,Y)
boczne
(definiowane przez X,Y,d)
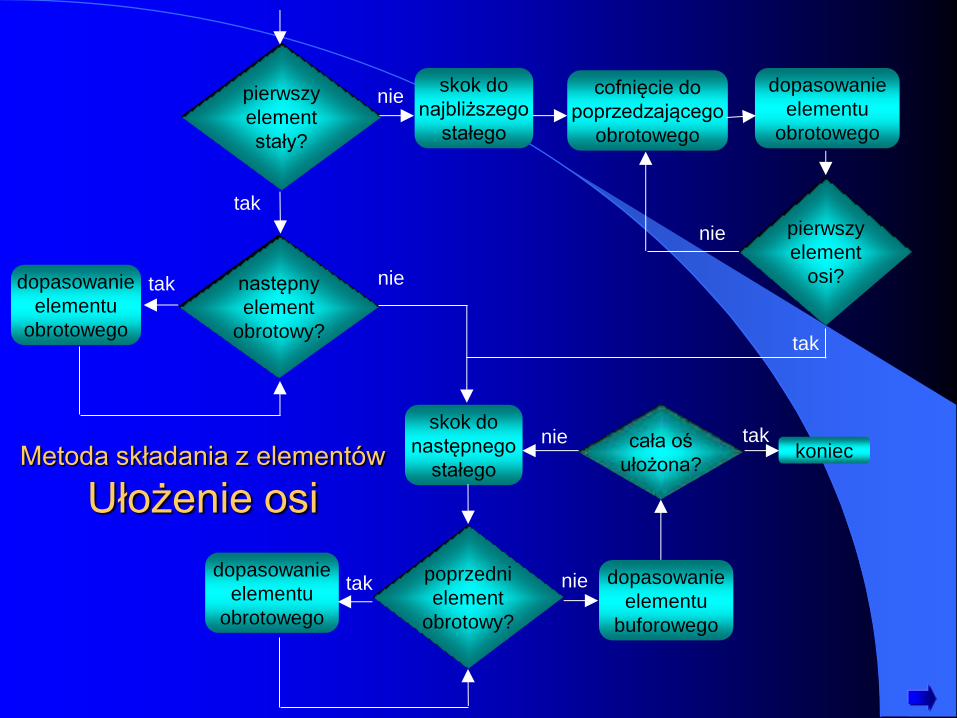
Metoda składania z elementów
Ułożenie osi
pierwszy
element
stały?
tak
skok do
najbliższego
stałego
cofnięcie do
poprzedzającego
obrotowego
dopasowanie
elementu
obrotowego
pierwszy
element
osi? następny
element
obrotowy?
dopasowanie
elementu
obrotowego
skok do
następnego
stałego
poprzedni
element
obrotowy?
dopasowanie
elementu
obrotowego
dopasowanie
elementu
buforowego
cała oś
ułożona? koniec
nie
tak nie
tak nie
nie tak
tak
nie

Osie polinomialne
typy
historia
podsumowanie
literatura
Osie polinomialne
Typy
w zależności od ostrości (sztywności)
narzuconych ograniczeń wyróżniamy
2 typy osi polinomialnych:
przechodzące dokładnie przez zadane
punkty
przechodzące w pobliżu zadanych
punktów

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
dane
tok działania
obliczenia
wyniki
ocena metody

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Dane ciąg punktów Pi = (xi, yi) dla i=1, 2, ... k
warunki brzegowe: kierunek stycznej i R na początku i końcu trasy (dowiązanie do dróg istniejących)
ograniczenia: Rmin, Ri/ Ri+1, przyrost przyspieszenia Δa (a=V2/R)
wygodnie przyjmować początki układów lokalnych w zadanych punktach, bo:
są określone współrzędne
dla y(x=0)=0
1
Osie polinomialne
Typy
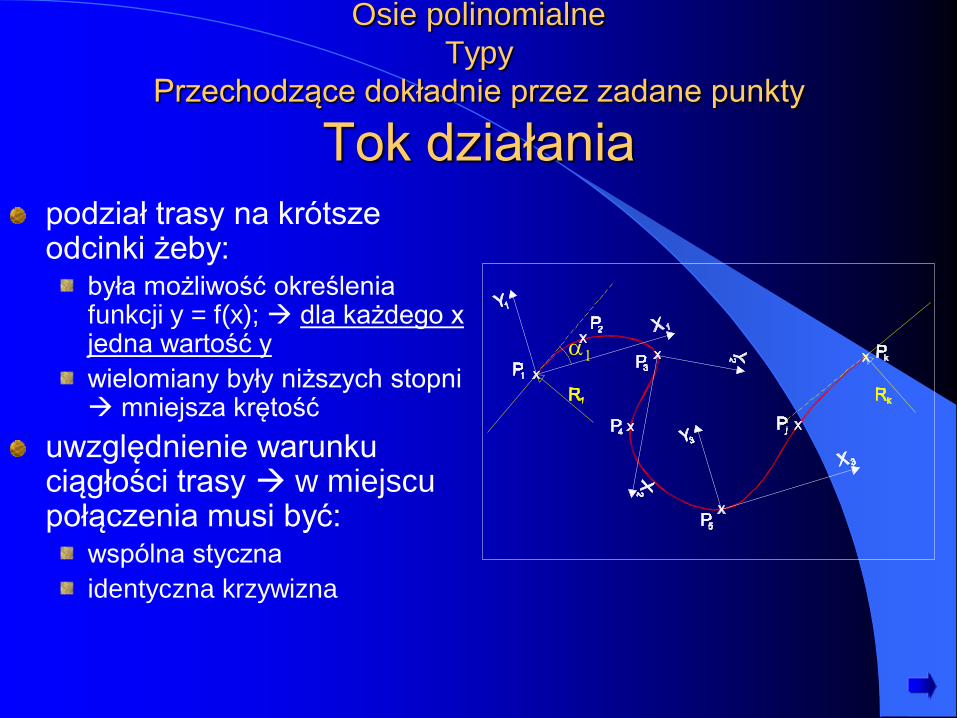
Przechodzące dokładnie przez zadane punkty
Tok działania
podział trasy na krótsze odcinki żeby:
była możliwość określenia funkcji y = f(x); dla każdego x jedna wartość y
wielomiany były niższych stopni mniejsza krętość
uwzględnienie warunku ciągłości trasy w miejscu połączenia musi być:
wspólna styczna
identyczna krzywizna
1

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Obliczenia
zakładamy postać pierwszego wielomianu:
y = a0 + a1x + a2x2 + ... anx
n n+1 niewiadomych
uwzględniamy warunki brzegowe: trasa przechodzi przez zadany punkt P1 = (0, 0)
pochylenie stycznej w P1 wynosi tg 1
promień krzywizny na początku trasy jest określony i wynosi R1
postać wielomianu
stopień wielomianu
rozwiązanie układu równań

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Obliczenia – przejście przez punkt P1
y = a0 + a1x + a2x2 + ... anx
n
jeśli początek układu w punkcie P1(0,0): y(x=0) = 0 a0 = 0
1

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Obliczenia – pochylenie stycznej w P1
y = a0 + a1x + a2x2 + ... anx
n jeśli pochylenie stycznej w P1(0,0) wynosi tg 1: y’(x=0) = tg 1
y’ = a1 + 2a2x + 3a3x2 +... nanx
n-1
y’(x=0) = a1 a1 = tg 1
1

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Obliczenia – promień krzywizny w P1 jeśli promień krzywizny w P1(0,0) wynosi R1:
R = (1+y’
2)3/2
y”
y”(x=0) = (1+tg
2 1)
3/2
R1
R1 = (1+y’(x=0)
2)3/2
y”(x=0)
y”(x=0) = 2a2 a2= y”(x=0) =
(1+tg2 1)
3/2
2 2R1
y = a0 + a1x + a2x2 + ... anx
n
y’ = a1 + 2a2x + 3a3x2 +... nanx
n-1
y” = 2a2 + 6a3x +... n (n-1) anxn-2

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Obliczenia – ostateczna postać wielomianu
wyjściowa postać wielomianu:
y = a0 + a1x + a2x2 + ... anx
n
po podstawieniach:
y = x tg1 + (1+tg
21)
3/2
x2 + a3 x3 + ... an x
n 2R1
Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Obliczenia – stopień wielomianu
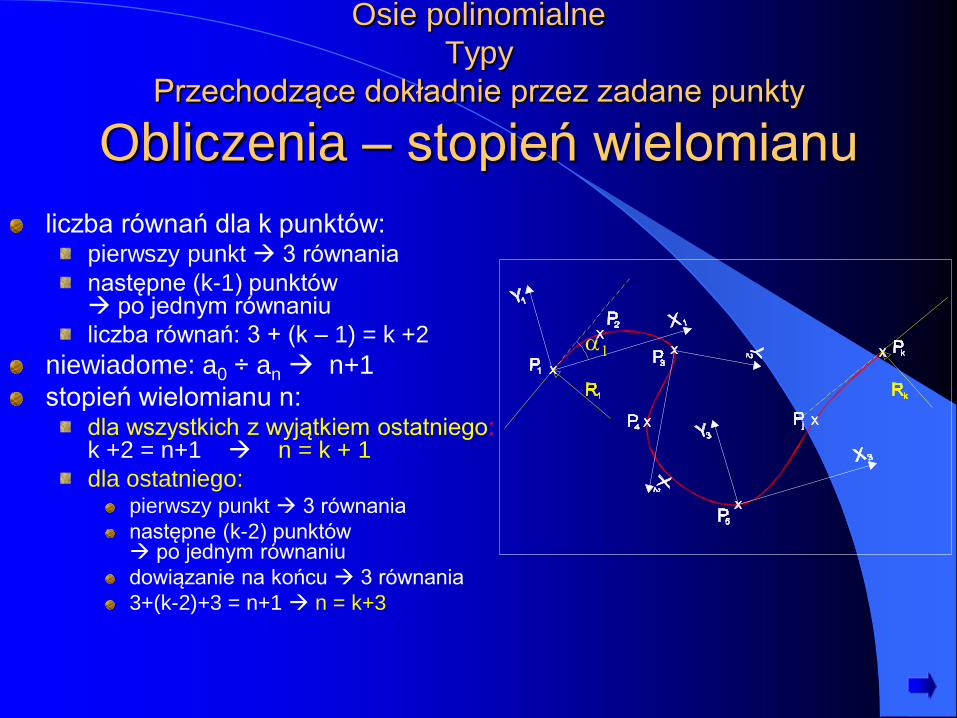
liczba równań dla k punktów: pierwszy punkt 3 równania
następne (k-1) punktów po jednym równaniu
liczba równań: 3 + (k – 1) = k +2
niewiadome: a0 ÷ an n+1
stopień wielomianu n: dla wszystkich z wyjątkiem ostatniego: k +2 = n+1 n = k + 1
dla ostatniego: pierwszy punkt 3 równania
następne (k-2) punktów po jednym równaniu
dowiązanie na końcu 3 równania
3+(k-2)+3 = n+1 n = k+3
1

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Wyniki po rozwiązaniu układu otrzymuje się równanie wielomianu i można określić:
pikietaż: (y – funkcja opisana wyżej)
promień:
dla skoku pikietażu ΔL sprawdza się warunki normatywne: R > Rmin
Ri/ Ri+1
przyrost przyspieszenia Δa (a=V2/R)
jeśli nie ma rozwiązania lub nie są spełnione warunki trzeba: zmienić układ punktów
ewentualnie wprowadzić punkty dodatkowe (np.: żeby R > Rmin) stopnia wielomianu
z reguły wykonuje się kilka prób
dxLx
y 0
21
R = (1+y’
2)3/2
y”

Osie polinomialne
Typy
Przechodzące dokładnie przez zadane punkty
Ocena metody
wady:
trzeba wyznaczać ścisłe położenie
punktów, przez które ma przechodzić
trasa, choć nie jest to uzasadnione
względami technicznymi
krzywiznę kontroluje się po fakcie;
z praktyki wynika, że trzeba wyznaczyć
punkty co ok. 100 m, aby warunek
krzywizny był spełniony
Osie polinomialne
Typy
Przechodzące w pobliżu zadanych punktów
dane
tok działania
praktyczne zastosowanie
Osie polinomialne
Typy
Przechodzące w pobliżu zadanych punktów
Dane
ciąg punktów Pi(xi,yi,wi) dla i=1, 2, ..., l, ..., m przy czym:
wi – waga punktu
i ≤ l – punkty stałe (wi = )
l < i ≤ m – punkty przybliżone
warunki brzegowe – kierunek stycznej i R na początku i końcu trasy (dowiązanie do dróg istniejących)
ograniczenia: Rmin
Ri/Ri+1
przyrost przyspieszenia Δa (a=V2/R)
Osie polinomialne
Typy
Przechodzące w pobliżu zadanych punktów
Tok działania
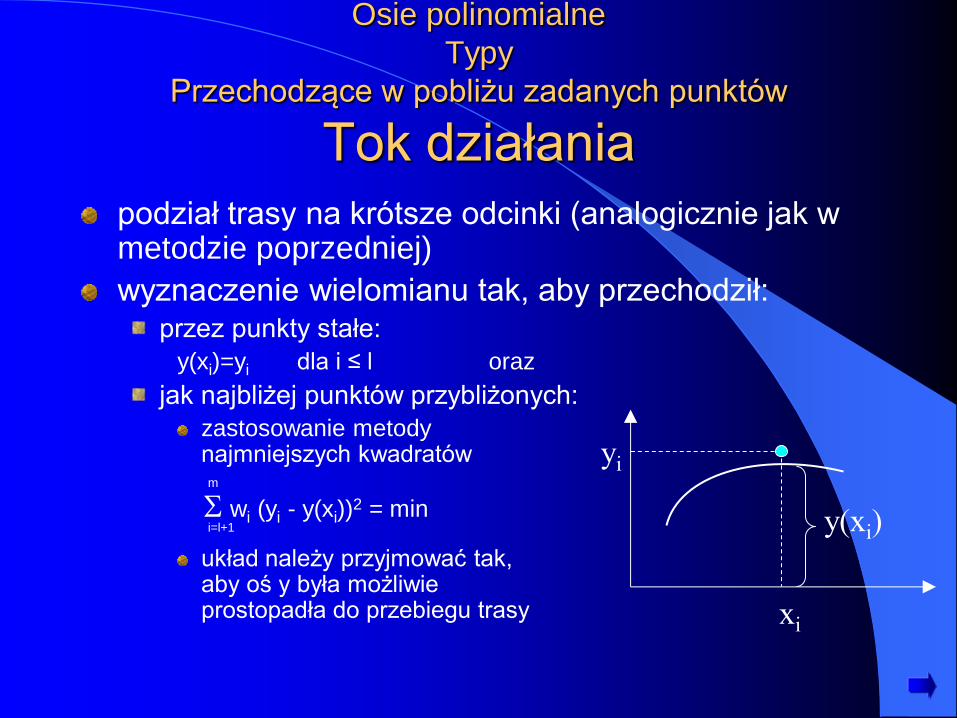
podział trasy na krótsze odcinki (analogicznie jak w metodzie poprzedniej)
wyznaczenie wielomianu tak, aby przechodził: przez punkty stałe:
y(xi)=yi dla i ≤ l oraz
jak najbliżej punktów przybliżonych:
zastosowanie metody najmniejszych kwadratów m
wi (yi - y(xi))2 = min
i=l+1
układ należy przyjmować tak, aby oś y była możliwie prostopadła do przebiegu trasy
yi
y(xi)
xi
Osie polinomialne
Typy
Przechodzące w pobliżu zadanych punktów
Praktyczne zastosowanie
program Calogero
możliwe są obliczenia zarówno dla trasy
jak i niwelety
wymagane dane
obliczenia

typ danych trasa niweleta uwagi
D – odległość określająca
maksymalne (dla W i=1)
odchylenie osi od punktu
np. 20 m dla trasy np. 1.5 m
dla niwelety
W – waga odległości
U – maksymalny kat odchylenia
od zadanego kierunku (dla Ui=1)
U – waga kąta
promienie minimalne Rmin Rmin, Rmin
U
ścisły punkt i kierunek + R
(warunki brzegowe)
X, Y, tg , R pik. P, h, i, R
przybliżony punkt X, Y, W; W≥1
np. WA=1, WB=100
P, H, W
Pi
ścisły punkt X, Y; odchylenie = 0 W= P, H, W=
ścisły punkt i kierunek (narzucony
kierunek stycznej)
X, Y, tg , U=
P, H, i, U=
bardzo przydatne
dla niwelety przybliżony punkt i kierunek X, Y, W; tg , U≥1 P, H, W, i, U≥1
Osie polinomialne
Typy
Przechodzące w pobliżu zadanych punktów
Praktyczne zastosowanie - dane
D/Wi
D/Wi
Osie polinomialne
Typy
Przechodzące w pobliżu zadanych punktów
Praktyczne zastosowanie - obliczenia
obliczenia wykonuje się iteracyjnie
wyniki: współczynniki wielomianów
dla zadanego ΔL i dla zadanych punktów: pikietaż
Xi, Yi, Ri
1/Ri
Ai – parametr równoważny klotoidy
odległość punktów kierunkowych od trasy
dowiązanie do zadanego poligonu (dane do wytyczenia)
wykreślenie trasy i wykresu 1/Ri
Osie polinomialne
Historia
świat: 1969 r – Calogero – doktorat w Londynie (przejście przez punkty ścisłe i przybliżone)
rozwój we Włoszech, Francji, W. Brytanii (stosowana w BIPS-ie, MOSS-ie)
Polska: prace na Politechnice Wrocławskiej (I etap prac nad programem do optymalizacji niwelety)
wykorzystanie przy modernizacji dróg (rzadkie)
praca doktorska D. Godlewskiego – optymalizacja łącznic na węźle
praca dyplomowa na początku lat 80-tych - trasa przechodząca dokładnie przez zadane punkty
Osie polinomialne
Podsumowanie
zalety
wady
wnioski
Osie polinomialne
Podsumowanie
Zalety
wzrost jakości projektu: płynność trasy (freihandlinie):
płynna zmiana krzywizny
lepsze wpisanie w teren na ogół mniejsze roboty ziemne
lepsze wkomponowanie w ograniczenia wynikające z zagospodarowania terenu; szczególnie przydatna przy modernizacji drogi (punkty stałe w planie i w profilu oraz ΔD2 = min możliwie minimalna przebudowa)
ułatwia optymalizację trasy i niwelety wprowadzając prostszy, łatwiejszy do przetwarzania matematyczny opis osi
uproszczenie projektowania: pominięcie części tradycyjnego procesu projektowania (pominięty etap opisywania łukami i klotoidami, dobieranie R, A) – na odcinkach nieistotnych wybór trasy przeniesiony na oprogramowanie
łatwość wytyczenia – obliczenia są od razu podstawą do wytyczenia (x, y) co ΔL; jedynie proste tyczyć łatwiej, ale są one niepożądanym elementem trasy

Osie polinomialne
Podsumowanie
Wady
ciągła zmienność przechyłki
(nieustanna rampa kłopoty wykonawcze)
problemy przy trasach bardzo krętych (węzły,
serpentyny):
żeby oś była funkcją, trzeba bardzo często
zmieniać układy współrzędnych
można ominąć ten problem wprowadzać funkcje
parametryczne: x=at, y=bt
brak empirycznych badań warunków ruchu
na takich trasach
Osie polinomialne
Podsumowanie
Wnioski
trasowanie polinomialne można stosować do
projektowania tak trasy jak i niwelety
obecnie stosowane rzadko; przyczyna:
rozwój programów do projektowania
łatwość tworzenia trasy z łuków kołowych
i klotoid (metoda składania z elementów)
najczęstsze zastosowania:
modernizacja
wstęp do optymalizacji
Osie polinomialne
Literatura
Kossakowski M. – Drogowe trasy polinomialne, Drogownictwo 2/1976.
Pikiewicz J. – Zastosowanie rozwinięć wielomianowych w projektowaniu planu sytuacyjnego dróg, praca dyplomowa 1982
Zieliński T. – Projektowanie osi drogi metodą składania z elementów, Magazyn Autostrady 10/2005
Gumuła A. – Projektowanie krzywej Blossa w AutoCad-zie, Magazyn Autostrady 12/2006







