duality for nondifferentiable multiobjective higher-order symmetric programs over cones involving...
TRANSCRIPT
Gupta et al. Journal of Inequalities and Applications 2012, 2012:298http://www.journalofinequalitiesandapplications.com/content/2012/1/298
RESEARCH Open Access
Duality for nondifferentiable multiobjectivehigher-order symmetric programs over conesinvolving generalized (F ,α,ρ,d)-convexitySK Gupta1*, N Kailey2 and Sumit Kumar3
*Correspondence:[email protected] of Mathematics,Indian Institute of Technology,Patna, 800 013, IndiaFull list of author information isavailable at the end of the article
AbstractIn this paper, a pair of Wolfe type higher-order symmetric nondifferentiablemultiobjective programs over arbitrary cones is formulated and appropriate dualityrelations are then established under higher-order-K-(F,α,ρ ,d)-convexity assumptions.A numerical example which is higher-order K-(F,α,ρ ,d)-convex but not higher-orderK-F-convex has also been illustrated. Special cases are also discussed to show that thispaper extends some of the known works that have appeared in the literature.MSC: 90C29; 90C30; 49N15
Keywords: higher-order symmetric duality; support function; multiobjectiveprogramming; cones; efficient solutions
1 IntroductionMangasarian [] introduced the concept of second- and higher-order duality for nonlinearproblems. He has also indicated that the study is significant due to the computationaladvantage over the first-order duality as it provides tighter bounds for the value of theobjective function when approximations are used. Motivated by the concept in [], severalresearchers [–] have worked in this field.Multiobjective optimization has a large number of applications. As an example, it is gen-
erally used in goal programming, risk programming etc.Optimality conditions for multi-objective programming problems can be found in Miettinen [] and Pardalos et al. [].Recently, Chinchuluun and Pardalos [] discussed recent developments in multiobjec-tive optimization. These include optimality conditions, applications, global optimizationtechniques, the new concept of epsilon pareto optimal solutions and heuristics.Chen [] considered a pair of symmetric higher-order Mond-Weir type nondifferen-
tiable multiobjective programming problems and established usual duality results underhigher-order F-convexity assumptions. Gulati and Gupta [] proved duality theorems fora pair of Wolfe type higher-order nondifferentiable symmetric dual programs. Ahmad etal. [] formulated a general Mond-Weir type higher-order dual for a nondifferentiablemultiobjective programming problem and established usual duality results.Gulati and Geeta [] pointed out certain omissions in some papers on symmetric du-
ality in multiobjective programming and discussed their corrective measures. Later on,Ahmad and Husain [] and Gulati et al. [] formulated second-order multiobjective sym-metric dual programs with cone constraints and established duality results under second-
© 2012 Gupta et al.; licensee Springer. This is an Open Access article distributed under the terms of the Creative Commons Attribu-tion License (http://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in anymedium, provided the original work is properly cited.

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 2 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
order invexity assumptions. An omission in the strong duality theorem in Yang et al. []has been rectified in Gupta and Kailey [].The concept of (F ,ρ)-convexity was introduced by Preda [] as an extension of F-
convexity [] and ρ-convexity []. Yang et al. [] formulated several second-order du-als for scalar programming problem and proved duality results involving generalized F-convex functions. Zhang and Mond [] extended the class of (F ,ρ)-convex functions tosecond-order and obtained duality relations for multiobjective dual problems.Motivated by various concepts of generalized convexity, Liang et al. [] introduced
a unified formulation of generalized convexity, called (F ,α,ρ,d)-convexity and obtainedcorresponding optimality conditions and duality relations for a single objective fractionalproblem. This was later on extended to multiobjective fractional programming problemin Liang et al. []. Inspired by the concept given in [, , ], Ahmad and Husain[] introduced second-order (F ,α,ρ,d)-convex functions and proved duality relationsfor Mond-Weir type second-order multiobjective problems. In the recent work of Ahmadand Husain [], an attempt is made to remove certain omissions and inconsistencies inthe work of Mishra and Lai [].Agarwal et al. [] achieved duality results for a pair of Mond-Weir type multiobjec-
tive higher-order symmetric dual programs over arbitrary cones under higher-order K-F-convexity assumptions. Recently, Agarwal et al. [] have filled some gap in the work ofChen [] and proved a strong duality theorem forMond-Weir type multiobjective higher-order nondifferentiable symmetric dual programs.In this paper, we formulate a pair of symmetric higher-order Wolfe type nondifferen-
tiable multiobjective programs over arbitrary cones and prove weak, strong and converseduality theorems under higher-order-K-(F ,α,ρ,d)-convexity assumptions. We also givea nontrivial example of a function lying in the class of higher-order K-(F ,α,ρ,d)-convexbut not in the class of higher-order K-F-convex. Our study extends some of the knownresults that appeared in [, , , ].
2 Notations and preliminariesConsider the following multiobjective programming problem:
K-minimize φ(x)
subject to x ∈ X ={x ∈ S : –g(x) ∈ C
},
(P)
where S ⊆ Rn is open, φ : S → Rk , g : S → Rm, K is a closed convex pointed cone in Rk withintK �= φ and C is a closed convex cone in Rm with nonempty interior.
Definition [] The positive polar cone C* of C is defined as
C* ={z : ξTz� , for all ξ ∈ C
}.
Definition [] A point x ∈ X is a weak efficient solution of (P) if there exists no otherx ∈ X such that
φ(x) – φ(x) ∈ intK .

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 3 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
Definition [] A point x ∈ X is an efficient solution of (P) if there exists no otherx ∈ X such that
φ(x) – φ(x) ∈ K\{}.
Definition [, , ] Let D be a compact convex set in Rn. The support function of D isdefined by
S(x |D) = max{xTy : y ∈D
}.
A support function, being convex and everywhere finite, has a subdifferential, that is, thereexists z ∈ Rn such that
S(y |D)� S(x |D) + zT (y – x) for all y ∈D.
The subdifferential of S(x |D) is given by
∂S(x |D) = {z ∈D : zTx = S(x | D)}.
For any set S ⊂ Rn, the normal cone to S at a point x ∈ S is defined by
NS(x) ={y ∈ Rn : yT (z – x)� for all z ∈ S
}.
It can be easily seen that for a compact convex set D, y is in ND(x) if and only if S(y | D) =xTy, or equivalently, x is in ∂S(y |D).
Definition [, ] A functional F : X × X × Rn �→ R (where X ⊆ Rn) is sublinear withrespect to the third variable if, for all (x,u) ∈ X ×X,
(i) F(x,u;a + a)� F(x,u;a) + F(x,u;a) for all a,a ∈ Rn, and(ii) F(x,u;αa) = αF(x,u;a), for all α ∈ R+ and a ∈ Rn.
For notational convenience, we write
F(x,u;a) = Fx,u(a).
Let F : S × S × Rn �→ R be a sublinear functional with respect to the third variable. Now,we recall the concept of higher-order K-F-convexity introduced in [].
Definition A differentiable function φ : S → Rk is said to be higher-order K-F-convexat u on S with respect to ζ : S × Rn �→ Rk if, for all x ∈ S and q ∈ Rn, we have
{φ(x) – φ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u
[∇xφ(u) +∇qζ(u,q)], . . . ,
φk(x) – φk(u) – ζk(u,q) + qT∇qζk(u,q) – Fx,u[∇xφk(u) +∇qζk(u,q)
]} ∈ K .
Remark (i) If K = Rk
+, then the above definition reduces to higher-order F-convexity given in [,, ].
(ii) If K = Rk+ and ζi(u,q) =
qT∇xxφi(u)q, i = , , . . . ,k, then Definition becomes
second-order F-convexity as considered in [, ].

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 4 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
(iii) Taking K = Rk+, ζi(u,q) =
qT∇xxφi(u)q and Fx,u(a) = η(x,u)Ta, then the definition
reduces to second-order invexity (or η bonvexity) given in [, , ].
Definition A differentiable function φ : S → Rk is said to be higher-order K-(F ,α,ρ,d)-convex at u on S with respect to ζ : S × Rn �→ Rk if for all x ∈ S and q ∈ Rn, there existvector ρ ∈ Rk , a real valued function α : S × S → R+\{} and d : S × S → Rk such that
{φ(x) – φ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u
[α(x,u)
(∇xφ(u) +∇qζ(u,q))]
– ρd (x,u), . . . ,φk(x) – φk(u) – ζk(u,q) + qT∇qζk(u,q)
– Fx,u[α(x,u)
(∇xφk(u) +∇qζk(u,q))]– ρkd
k (x,u)} ∈ K .
Remark (i) If K = R+, α(x,u) = and ζi(u,q) =
qT∇xxφi(u)q, i = , , . . . ,k, the definition of
higher-order K-(F ,α,ρ,d)-convexity reduces to second-order (F ,ρ)-convexitygiven by Srivastava and Bhatia [].
(ii) If K = R+, α(x,u) = and ρ = , then Definition reduces to higher-orderF-convexity (see [, ]).
(iii) If we take K = R+, α(x,u) = , ρ = , ζ(u,q) =
qT∇xxφ(u)q and Fx,u(a) = η(x,u)Ta,
where η is a function from S × S to Rn, then the above definition becomessecond-order η-convexity given in [].
Next, we illustrate a nontrivial example of higher-order K-(F ,α,ρ,d)-convex functionswhich are not higher-order K-F-convex.
Example Let X = [–.,–.] ⊂ R, n =m = , k = , K = {(x, y) : x� , y� }. Considerthe function ψ : X → R to be defined by ψ(x) = (ψ(x),ψ(x)), where
ψ(x) = x sinx, ψ(x) = x,
and α : X × X → R+\{} to be identified by α(x,u) = (u + ). Let the functional F : X ×X × R → R be defined by
Fx,u(a) = ( – u)a.
Suppose d : X ×X → R is given by d(x,u) = (d(x,u),d(x,u)), where
d(x,u) =(x + u
) , d(x,u) =
(x + u
)
and ζ : X × R → R is defined by ζ (u,q) = (ζ(u,q), ζ(u,q)), where
ζ(u,q) = u + q, ζ(u,q) = sin u + q.
To show ψ is higher-order (F ,α,ρ,d)-convex, we need to prove
L ={ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q)
– Fx,u[α(x,u)
(∇xψ(u) +∇qζ(u,q))]

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 5 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
– ρd (x,u),ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q)
– Fx,u[α(x,u)
(∇xψ(u) +∇qζ(u,q))]– ρd
(x,u)} ∈ K ,
which for ρ = – and ρ = – gives
L ={x sin
x– u sin
u– u – ( – u)
[(u +
)(–u cos
u+ u sin
u+
)]
+ (x + u
),x – u – sin u + q – ( – u)[(u +
)(u + q
)]
+ (x + u
)} ∈ K
= {L,L} ∈ K ,
where
L = x sinx– u sin
u– u – ( – u)
[(u +
)(–u cos
u+ u sin
u+
)]
+ (x + u
)� ∀x,u ∈ X as can be seen from Figure (E)
and
L = x – u – sin u + q – ( – u)[(u +
)(u + q
)]+
(x + u
)= L + L.
Figure 1 Graph of L1 (Expression (E1)) against x and u.

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 6 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
Figure 2 Graph of L21 (Expression (E2)) against x and u.
But
L = x – u – sin u – ( – u)[u
(u +
)]+
(x + u
)� ∀x,u ∈ X as can be seen from Figure (E)
and
L = q – ( – u)[q
(u +
)]� ∀u ∈ X and q ∈ (
–, )as can be seen from Figure . (E)
Hence, L � . Therefore, ψ is higher-order K-(F ,α,ρ,d)-convex with respect to ζ .Next, we need to show that ψ is not higher-order K-F-convex with respect to ζ . To
prove it, we will show that
M ={ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u
[∇xψ(u) +∇qζ(u,q)],
ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u[∇xψ(u) +∇qζ(u,q)
]}/∈ K
i.e., either
ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u[∇xψ(u) +∇qζ(u,q)
]�
or
ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u[∇xψ(u) +∇qζ(u,q)
]� .
Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 7 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
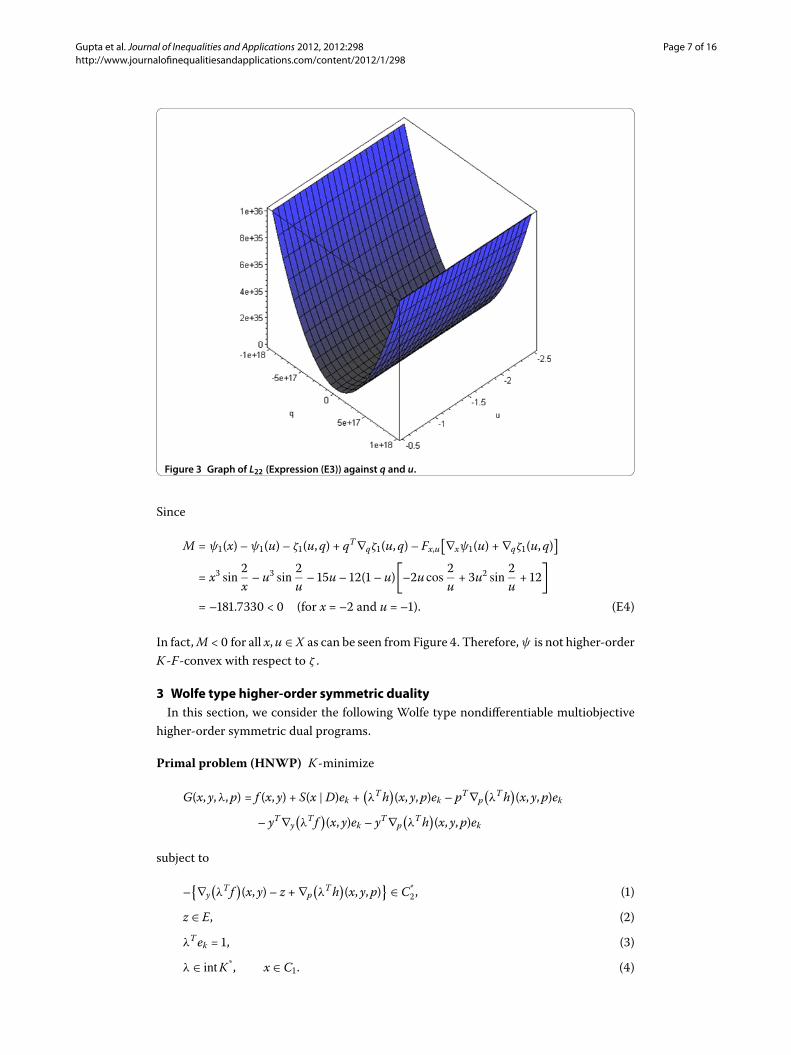
Figure 3 Graph of L22 (Expression (E3)) against q and u.
Since
M = ψ(x) –ψ(u) – ζ(u,q) + qT∇qζ(u,q) – Fx,u[∇xψ(u) +∇qζ(u,q)
]
= x sinx– u sin
u– u – ( – u)
[–u cos
u+ u sin
u+
]
= –. < (for x = – and u = –). (E)
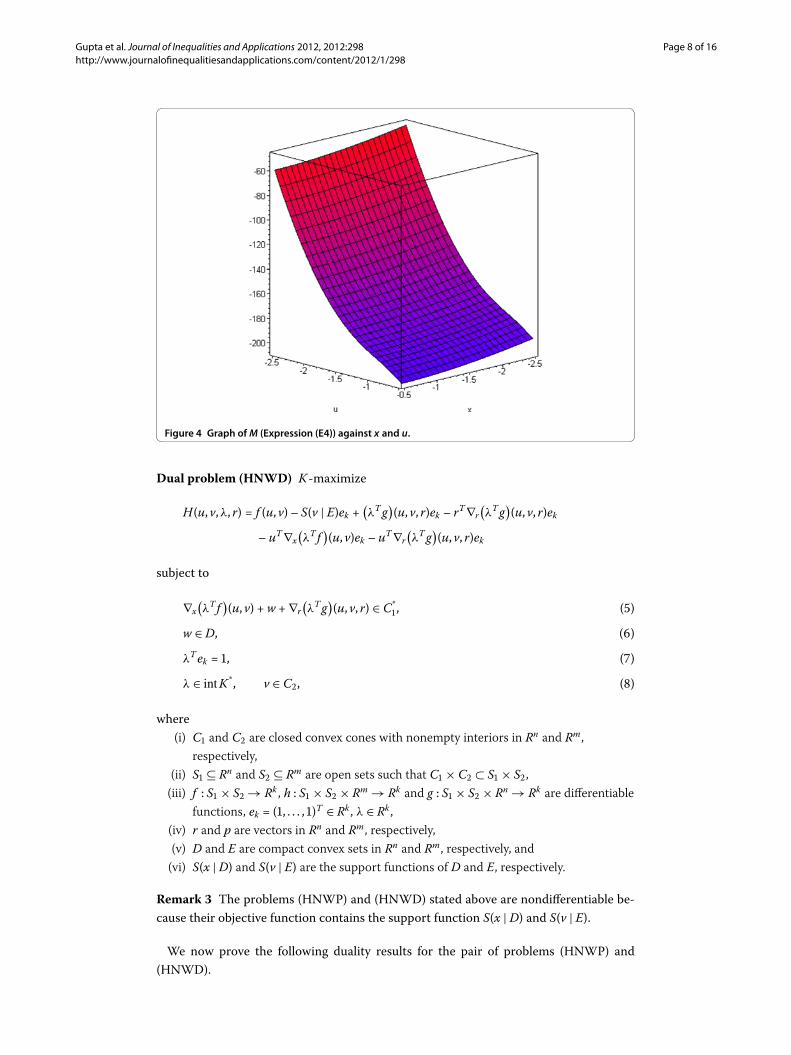
In fact,M < for all x,u ∈ X as can be seen from Figure . Therefore,ψ is not higher-orderK-F-convex with respect to ζ .
3 Wolfe type higher-order symmetric dualityIn this section, we consider the following Wolfe type nondifferentiable multiobjective
higher-order symmetric dual programs.
Primal problem (HNWP) K-minimize
G(x, y,λ,p) = f (x, y) + S(x |D)ek +(λTh
)(x, y,p)ek – pT∇p
(λTh
)(x, y,p)ek
– yT∇y(λT f
)(x, y)ek – yT∇p
(λTh
)(x, y,p)ek
subject to
–{∇y
(λT f
)(x, y) – z +∇p
(λTh
)(x, y,p)
} ∈ C*, ()
z ∈ E, ()
λTek = , ()
λ ∈ intK *, x ∈ C. ()
Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 8 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
Figure 4 Graph ofM (Expression (E4)) against x and u.
Dual problem (HNWD) K-maximize
H(u, v,λ, r) = f (u, v) – S(v | E)ek +(λTg
)(u, v, r)ek – rT∇r
(λTg
)(u, v, r)ek
– uT∇x(λT f
)(u, v)ek – uT∇r
(λTg
)(u, v, r)ek
subject to
∇x(λT f
)(u, v) +w +∇r
(λTg
)(u, v, r) ∈ C*
, ()
w ∈D, ()
λTek = , ()
λ ∈ intK *, v ∈ C, ()
where(i) C and C are closed convex cones with nonempty interiors in Rn and Rm,
respectively,(ii) S ⊆ Rn and S ⊆ Rm are open sets such that C ×C ⊂ S × S,(iii) f : S × S → Rk , h : S × S × Rm → Rk and g : S × S × Rn → Rk are differentiable
functions, ek = (, . . . , )T ∈ Rk , λ ∈ Rk ,(iv) r and p are vectors in Rn and Rm, respectively,(v) D and E are compact convex sets in Rn and Rm, respectively, and(vi) S(x |D) and S(v | E) are the support functions of D and E, respectively.
Remark The problems (HNWP) and (HNWD) stated above are nondifferentiable be-cause their objective function contains the support function S(x |D) and S(v | E).
We now prove the following duality results for the pair of problems (HNWP) and(HNWD).

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 9 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
Theorem (Weak duality) Let (x, y,λ, z,p) be feasible for the primal problem (HNWP)and (u, v,λ,w, r) be feasible for the dual problem (HNWD). Let the sublinear functionalsF : Rn × Rn × Rn �→ R and G : Rm × Rm × Rm �→ R satisfy the following conditions:
Fx,u(a) + α– aTu� , for all a ∈ C*
, (A)
Gv,y(b) + α– bTy� , for all b ∈ C*
. (B)
Suppose that (i) either∑k
i= λi[ρ()i (d()
i (x,u)) +ρ()i (d()
i (v, y))]� or ρ() � and ρ() � ,(ii) f (·, v) + (·)Twek is higher-order K-(F ,α,ρ(),d())-convex at u with respect to g(u, v, r),and (iii) –{f (x, ·) – (·)Tzek} is higher-order K-(G,α,ρ(),d())-convex at y with respect to–h(x, y,p). Then
G(x, y,λ,p) –H(u, v,λ, r) /∈ –K\{}. ()
Proof Since f (·, v) + (·)Twek is higher-order K-(F ,α,ρ(),d())-convex with respect tog(u, v, r), we have
{f(x, v) + xTw – f(u, v) – uTw – g(u, v, r) + rT∇rg(u, v, r)
– Fx,u[α(x,u)
(∇xf(u, v) +w +∇rg(u, v, r))]– ρ
()
(d() (x,u)
), . . . ,fk(x, v) + xTw – fk(u, v) – uTw – gk(u, v, r) + rT∇rgk(u, v, r)
– Fx,u[α(x,u)
(∇xfk(u, v) +w +∇rgk(u, v, r))]– ρ
()k
(d()k (x,u)
)} ∈ K .
It follows from λ ∈ intK *, λTek = , and sublinearity of F that
(λT f
)(x, v) + xTw –
(λT f
)(u, v) – uTw –
(λTg
)(u, v, r)
+ rT∇r(λTg
)(u, v, r) – Fx,u
[α(x,u)
(∇x(λT f
)(u, v) +w +∇r
(λTg
)(u, v, r)
)]
–k∑i=
λiρ()i
(d()i (x,u)
) � . ()
As –{f (x, ·) – (·)Tzek} is higher-order K-(G,α,ρ(),d())-convex with respect to –h(x, y,p),therefore we get
{f(x, y) – yTz – f(x, v) + vTz + h(x, y,p) – pT∇ph(x, y,p)
–Gv,y[–α(v, y)
(∇yf(x, y) – z +∇ph(x, y,p))]– ρ
()
(d() (v, y)
), . . . ,fk(x, y) – yTz – fk(x, v) + vTz + hk(x, y,p) – pT∇phk(x, y,p)
–Gv,y[–α(v, y)
(∇yfk(x, y) – z +∇phk(x, y,p))]– ρ
()k
(d()k (v, y)
)} ∈ K .
Again, using λ ∈ intK *, λTek = , and sublinearity of G, we obtain
(λT f
)(x, y) – yTz –
(λT f
)(x, v) + vTz +
(λTh
)(x, y,p) – pT∇p
(λTh
)(x, y,p)
–Gv,y[–α(v, y)
(∇y(λT f
)(x, y) – z +∇p
(λTh
)(x, y,p)
)]
–k∑i=
λiρ()i
(d()i (v, y)
) � . ()

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 10 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
Further, adding the inequalities () and (), we have
(λT f
)(x, y) –
(λT f
)(u, v) + xTw – uTw – yTz + vTz +
(λTh
)(x, y,p)
– pT∇p(λTh
)(x, y,p) –
(λTg
)(u, v, r) + rT∇r
(λTg
)(u, v, r)
� Fx,u[α(x,u)
(∇x(λT f
)(u, v) +w +∇r
(λTg
)(u, v, r)
)]+Gv,y
[–α(v, y)
(∇y(λT f
)(x, y) – z +∇p
(λTh
)(x, y,p)
)]
+k∑i=
λi[ρ()i
(d()i (x,u)
) + ρ()i
(d()i (v, y)
)]. ()
Now, since (x, y,λ, z,p) is feasible for the primal problem (HNWP) and (u, v,λ,w, r) is fea-sible for the dual problem (HNWD), α(x,u) > , by the dual constraint (), the vectora = α(x,u)[∇x(λT f )(u, v) + w + ∇r(λTg)(u, v, r)] ∈ C*
, and so from the hypothesis (A), weobtain
Fx,u(a) + α– aTu� . ()
Similarly,
Gv,y(b) + α– bTy� , ()
for the vector b = –α(v, y)[∇y(λT f )(x, y) – z +∇p(λTh)(x, y,p)] ∈ C*.
Using (), () and the hypothesis (i) in (), we have
(λT f
)(x, y) –
(λT f
)(u, v) + xTw – uTw – yTz + vTz +
(λTh
)(x, y,p) – pT∇p
(λTh
)(x, y,p)
–(λTg
)(u, v, r) + rT∇r
(λTg
)(u, v, r)� –α–
aTu – α– bTy.
Further, substituting the values of a and b, we have
(λT f
)(x, y) + xTw +
(λTh
)(x, y,p) – pT∇p
(λTh
)(x, y,p)
– yT∇y(λT f
)(x, y) – yT∇p
(λTh
)(x, y,p)
�(λT f
)(u, v) – vTz +
(λTg
)(u, v, r) – rT∇r
(λTg
)(u, v, r)
– uT∇x(λT f
)(u, v) – uT∇r
(λTg
)(u, v, r).
In view of the fact that xTw� S(x |D), vTz� S(v | E) and λTek = , the last inequality yields
(λT f
)(x, y) + S(x |D) + (
λTh)(x, y,p) – pT∇p
(λTh
)(x, y,p)
– yT∇y(λT f
)(x, y) – yT∇p
(λTh
)(x, y,p)
�(λT f
)(u, v) – S(v | E) + (
λTg)(u, v, r) – rT∇r
(λTg
)(u, v, r)
– uT∇x(λT f
)(u, v) – uT∇r
(λTg
)(u, v, r). ()
Now, suppose contrary to the result that () does not hold, that is,
G(x, y,λ,p) –H(u, v,λ, r) ∈ –K\{},

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 11 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
or
{f (x, y) + S(x |D)ek +
(λTh
)(x, y,p)ek – pT∇p
(λTh
)(x, y,p)ek – yT∇y
(λT f
)(x, y)ek
– yT∇p(λTh
)(x, y,p)ek
}–
{f (u, v) – S(v | E)ek +
(λTg
)(u, v, r)ek
– rT∇r(λTg
)(u, v, r)ek – uT∇x
(λT f
)(u, v)ek – uT∇r
(λTg
)(u, v, r)ek
} ∈ –K\{}.
It follows from λ ∈ intK * and λTek = that
(λT f
)(x, y) + S(x |D) + (
λTh)(x, y,p) – pT∇p
(λTh
)(x, y,p)
– yT∇y(λT f
)(x, y) – yT∇p
(λTh
)(x, y,p)
<(λT f
)(u, v) – S(v | E) + (
λTg)(u, v, r) – rT∇r
(λTg
)(u, v, r)
– uT∇x(λT f
)(u, v) – uT∇r
(λTg
)(u, v, r),
which contradicts (). Hence the result. �
Theorem (Strong duality) Let f : S × S → Rk be a twice differentiable function and let(x, y, λ, z, p) be a weak efficient solution of (HNWP). Suppose that
(i) the matrix ∇pp(λTh)(x, y, p) is nonsingular,(ii) the vectors {∇yf(x, y), . . . ,∇yfk(x, y)} are linearly independent,(iii) the vector {∇y(λTh)(x, y, p) –∇p(λTh)(x, y, p) +∇yy(λT f )(x, y)p} /∈
span{∇yf(x, y), . . . ,∇yfk(x, y)}\{},(iv) ∇y(λTh)(x, y, p) –∇p(λTh)(x, y, p) +∇yy(λT f )(x, y)p = implies p = ,(v) (λTh)(x, y, ) = (λTg)(x, y, ), ∇y(λTh)(x, y, ) = , ∇p(λTh)(x, y, ) = ,
∇x(λTh)(x, y, ) = ∇r(λTg)(x, y, ) and(vi) K is a closed convex pointed cone with Rk
+ ⊆ K .Then
(I) there exists w ∈ D such that (x, y, λ, w, r = ) is feasible for (HNWD), and(II) G(x, y, λ, p) =H(x, y, λ, r).
Also, if the hypotheses of Theorem are satisfied for all feasible solutions of (HNWP) and(HNWD), then (x, y, λ, w, r = ) is an efficient solution for (HNWD).
Proof Since (x, y, λ, z, p) is a weak efficient solution of (HNWP), by the Fritz John neces-sary optimality conditions [], there exist α ∈ K *, β ∈ C, η ∈ R, such that the followingconditions are satisfied at (x, y, λ, z, p):
{αT(∇xf (x, y) + γ ek
)+∇x
(λTh
)(x, y, p)
(αTek
)+∇xy
(λT f
)(x, y)
[β –
(αTek
)y]+∇px
(λTh
)(x, y, p)
× [β –
(αTek
)(y + p)
]}(x – x)� , for all x ∈ C, ()
∇yf (x, y)[α –
(αTek
)λ]+
[∇y(λTh
)(x, y, p)
–∇p(λTh
)(x, y, p)
](αTek
)+∇yy
(λT f
)(x, y)
[β –
(αTek
)y]
+∇py(λTh
)(x, y, p)
[β –
(αTek
)(y + p)
]= , ()
∇pp(λTh
)(x, y, p)
[β –
(αTek
)(y + p)
]= , ()
Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 12 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
{∇yf (x, y)[β –
(αTek
)y]+ h(x, y, p)
(αTek
)+ ηek
+∇ph(x, y, p)[β –
(αTek
)(y + p)
]}(λ – λ)� , for all λ ∈ intK *, ()
βT[∇y(λT f
)(x, y) – z +∇p
(λTh
)(x, y, p)
]= , ()
ηT[λTek –
]= , ()
β ∈NE(z), ()
γ ∈D, γ T x = S(x |D), ()
(α, β , η) �= . ()
From () and nonsingularity of ∇pp(λTh)(x, y, p), we have
β =(αTek
)(y + p). ()
Also, () is equivalent to
∇yf (x, y)[β –
(αTek
)y]+ h(x, y, p)
(αTek
)+ ηek +∇ph(x, y, p)
[β –
(αTek
)(y + p)
]= .
If α = , then () yields β = . Further, the above equality gives ηek = or η = . Conse-quently, (α, β , η) = , contradicting (). Hence, α �= .Since Rk
+ ⊆ K ⇒ K * ⊆ Rk+, therefore α ∈ K * ⇒ α � .
But α �= ⇒ α ≥ or
αTek > . ()
Now, using () and () in (), we get
∇y(λTh
)(x, y, p) –∇p
(λTh
)(x, y, p) +∇yy
(λT f
)(x, y)p
= –
αTek∇yf (x, y)
[α –
(αTek
)λ], ()
which, by the hypotheses (iii) and (iv), implies
p = . ()
Using the hypothesis (iii) in (), we obtain
∇yf (x, y)[α –
(αTek
)λ]= .
Since the vectors {∇yf(x, y), . . . ,∇yfk(x, y)} are linearly independent, therefore the aboveequation yields
α =(αTek
)λ. ()
From () in (), we get
β =(αTek
)y. ()
Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 13 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
Using () and ()-() in (), we have
{∇x(λT f
)(x, y) + γ +∇x
(λTh
)(x, y, p)
}(x – x)� , for all x ∈ C.
From the hypothesis (v), for r = , the above inequality yields
{∇x(λT f
)(x, y) + γ +∇r
(λTg
)(x, y, r)
}(x – x)� . ()
Let x ∈ C. Then x + x ∈ C, and so () implies
{∇x(λT f
)(x, y) + γ +∇r
(λTg
)(x, y, r)
}Tx� , for all x ∈ C.
Therefore,
{∇x(λT f
)(x, y) + γ +∇r
(λTg
)(x, y, r)
} ∈ C*. ()
Also, from (), () and β ∈ C, we obtain y ∈ C. Thus (x, y, λ, w = γ , r = ), satisfies thedual constraints from () to () in (HNWD), and so it is a feasible solution for the dualproblem (HNWD). Now, letting x = and x = x in (), we get
xT[∇x
(λT f
)(x, y) + γ +∇r
(λTg
)(x, y, r)
]= , or
xT[∇x
(λT f
)(x, y) +∇r
(λTg
)(x, y, r)
]= –xT γ = –S(x |D). ()
From () and (), (αTek)y ∈ NE(z). Since αTek > , y ∈ NE(z). Also, as E is a compactconvex set in Rm, yT z = S(y | E).Further, from (), () and () and the above relation, we obtain
yT[∇y
(λT f
)(x, y) +∇p
(λTh
)(x, y, p)
]= yT z = S(y | E). ()
Therefore, using (), (), () and the hypothesis (v), for r = , we get
f (x, y) + S(x |D)ek +(λTh
)(x, y, p)ek – pT∇p
(λTh
)(x, y, p)ek
– yT∇y(λT f
)(x, y)ek – yT∇p
(λTh
)(x, y, p)ek
= f (x, y) – S(y | E)ek +(λTg
)(x, y, r)ek – rT∇r
(λTg
)(x, y, r)ek
– xT∇x(λT f
)(x, y)ek – xT∇r
(λTg
)(x, y, r)ek ,
that is, the two objective values are equal.Now, let (x, y, λ, w, r = ) be not an efficient solution of (HNWD), then there exists
(u, v, λ, w, r = ) feasible for (HNWD) such that
f (x, y) – S(y | E)ek +(λTg
)(x, y, r)ek – rT∇r
(λTg
)(x, y, r)ek – xT∇x
(λT f
)(x, y)ek
– xT∇r(λTg
)(x, y, r)ek – f (u, v) + S(v | E)ek –
(λTg
)(u, v, r)ek + rT∇r
(λTg
)(u, v, r)ek
+ uT∇x(λT f
)(u, v)ek + uT∇r
(λTg
)(u, v, r)ek ∈ –K\{}.

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 14 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
As xT [∇x(λT f )(x, y)+∇r(λTg)(x, y, r)] = –S(x |D), yT [∇y(λT f )(x, y)+∇p(λTh)(x, y, p)] = S(y |E) and from the hypothesis (v), for r = , we obtain
{f (x, y) + S(x |D)ek +
(λTh
)(x, y, p)ek – pT∇p
(λTh
)(x, y, p)ek – yT∇y
(λT f
)(x, y)ek
– yT∇p(λTh
)(x, y, p)ek
}–
{f (u, v) – S(v | E)ek +
(λTg
)(u, v, r)ek
– rT∇r(λTg
)(u, v, r)ek – uT∇x
(λT f
)(u, v)ek – uT∇r
(λTg
)(u, v, r)ek
} ∈ –K\{},
which contradicts Theorem . Hence, (x, y, λ, w, r = ) is an efficient solution of (HNWD).�
Theorem (Converse duality) Let f : S × S → Rk be a twice differentiable function andlet (u, v, λ, w, r) be a weak efficient solution of (HNWD). Suppose that
(i) the matrix ∇rr(λTg)(u, v, r) is nonsingular,(ii) the vectors {∇xf(u, v), . . . ,∇xfk(u, v)} are linearly independent,(iii) the vector {∇x(λTg)(u, v, r) –∇r(λTg)(u, v, r) +∇xx(λT f )(u, v)r} /∈ span{∇xf(u, v), . . . ,
∇xfk(u, v)}\{},(iv) ∇x(λTg)(u, v, r) –∇r(λTg)(u, v, r) +∇xx(λT f )(u, v)r = implies r = ,(v) (λTg)(u, v, ) = (λTh)(u, v, ), ∇x(λTg)(u, v, ) = , ∇r(λTg)(u, v, ) = ,
∇y(λTg)(u, v, ) = ∇p(λTh)(u, v, ) and(vi) K is a closed convex pointed cone with Rk
+ ⊆ K .Then
(I) there exists z ∈ E such that (u, v, λ, z, p = ) is feasible for (HNWP), and(II) G(u, v, λ, p) =H(u, v, λ, r).
Also, if the hypotheses of Theorem are satisfied for all feasible solutions of (HNWP) and(HNWD), then (u, v, λ, z, p = ) is an efficient solution for (HNWP).
Proof It follows on the lines of Theorem . �
4 Special casesIn this section, we consider some of the special cases of the problems studied in Sec-tion . In all these cases, K = Rk
+, C = Rn+, C = Rm
+ , (λTh)(x, y,p) = p
T∇yy(λT f )(x, y)p and(λTg)(u, v, r) =
rT∇xx(λT f )(u, v)r.
(i) For k = , D = {Ay : yTAy� }, E = {Bx : xTBx� }, where A and B are positivesemidefinite matrices, (xTAx)/ = S(x | D) and (yTBy)/ = S(y | E). In this case,(HNWP) and (HNWD) reduce to the problems considered in Ahmad and Husain[].
(ii) Let k = , D = {} and E = {}, then our problems (HNWP) and (HNWD) becomethe problems studied in Gulati et al. [].
(iii) If k = , then our problems (HNWP) and (HNWD) reduce to the programs studiedin Yang et al. [].
(iv) Let D = {} and E = {}, our problems reduce to (MP) and (MD) considered inYang et al. [] along with nonnegativity restrictions x� and v� . However,taking Fx,u(a) = (x – u)Ta and Gv,y(b) = (v – y)Tb along with the hypotheses (A) and(B) of Theorem in [] gives x� and v� .

Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 15 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
5 ConclusionsApair ofWolfe-typemultiobjective higher-order symmetric dual programs involving non-differentiable functions over arbitrary cones has been formulated. Further, an exampleof higher-order K-(F ,α,ρ,d)-convex which is not higher-order K-F-convex has been il-lustrated. Weak, strong and converse duality theorems under higher-order K-(F ,α,ρ,d)-convexity assumptions have also been established. It is to be noted that some of the knownresults, including those of Ahmad and Husain [], Gulati et al. [] and Yang et al. [, ],are special cases of our study. This work can be further extended to study nondifferentiablehigher-order multiobjective symmetric dual programs over arbitrary cones with differentpi ’s and different support functions.
Competing interestsThe authors declare that they have no competing interests.
Authors’ contributionsAll authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Author details1Department of Mathematics, Indian Institute of Technology, Patna, 800 013, India. 2Department of Applied Sciences,Gulzar Institute of Engineering and Technology, Khanna, 141 401, India. 3Faculty, Operations & Information Systems,Indian Institute of Management, Udaipur, 313 001, India.
AcknowledgementsThe authors wish to thank the referee for her/his valuable suggestions which have considerably improved thepresentation of the paper.
Received: 24 August 2012 Accepted: 10 November 2012 Published: 14 December 2012
References1. Mangasarian, OL: Second and higher-order duality in nonlinear programming. J. Math. Anal. Appl. 51, 607-620 (1975)2. Agarwal, RP, Ahmad, I, Jayswal, A: Higher-order symmetric duality in nondifferentiable multiobjective programming
problems involving generalized cone convex functions. Math. Comput. Model. 52, 1644-1650 (2010)3. Ahmad, I: Second-order symmetric duality in nondifferentiable multiobjective programming. Inf. Sci. 173, 23-34
(2005)4. Ahmad, I, Husain, Z: On nondifferentiable second-order symmetric duality in mathematical programming. Indian J.
Pure Appl. Math. 35, 665-676 (2004)5. Ahmad, I, Husain, Z: On multiobjective second-order symmetric duality with cone constraints. Eur. J. Oper. Res. 204,
402-409 (2010)6. Ahmad, I, Husain, Z, Sharma, S: Higher-order duality in nondifferentiable multiobjective programming. Numer. Funct.
Anal. Optim. 28, 989-1002 (2007)7. Chen, X: Higher-order symmetric duality in nondifferentiable multiobjective programming problems. J. Math. Anal.
Appl. 290, 423-435 (2004)8. Gulati, TR, Ahmad, I, Husain, I: Second-order symmetric duality with generalized convexity. Opsearch 38, 210-222
(2001)9. Gulati, TR, Gupta, SK: Higher-order nondifferentiable symmetric duality with generalized F-convexity. J. Math. Anal.
Appl. 329, 229-237 (2007)10. Gulati, TR, Gupta, SK: Higher-order symmetric duality with cone constraints. Appl. Math. Lett. 22, 776-781 (2009)11. Gulati, TR, Saini, H, Gupta, SK: Second-order multiobjective symmetric duality with cone constraints. Eur. J. Oper. Res.
205, 247-252 (2010)12. Gupta, SK, Kailey, N: A note on multiobjective second-order symmetric duality. Eur. J. Oper. Res. 201, 649-651 (2010)13. Hanson, MA: Second-order invexity and duality in mathematical programming. Opsearch 30, 313-320 (1993)14. Srivastava, MK, Bhatia, M: Symmetric duality for multiobjective programming using second-order (F,ρ)-convexity.
Opsearch 43, 274-295 (2006)15. Suneja, SK, Lalitha, CS, Khurana, S: Second-order symmetric duality in multiobjective programming. Eur. J. Oper. Res.
144, 492-500 (2003)16. Yang, XM, Yang, XQ, Teo, KL: Non-differentiable second-order symmetric duality in mathematical programming with
F-convexity. Eur. J. Oper. Res. 144, 554-559 (2003)17. Yang, XM, Yang, XQ, Teo, KL, Hou, SH: Multiobjective second-order symmetric duality with F-convexity. Eur. J. Oper.
Res. 165, 585-591 (2005)18. Yang, XM, Yang, XQ, Teo, KL, Hou, SH: Second order duality for nonlinear programming. Indian J. Pure Appl. Math. 35,
699-708 (2004)19. Zhang, J, Mond, B: Second order duality for multiobjective nonlinear programming involving generalized convexity.
In: Glower, BM, Craven, BD, Ralph, D (eds.) Proceedings of the Optimization Miniconference III, pp. 79-95. University ofBallarat, Ballarat (1997)
20. Miettinen, KM: Nonlinear Multiobjective Optimization. Kluwer, Boston (1999)
Gupta et al. Journal of Inequalities and Applications 2012, 2012:298 Page 16 of 16http://www.journalofinequalitiesandapplications.com/content/2012/1/298
21. Pardalos, PM, Siskos, Y, Zopounidis, C: Advances in Multicriteria Analysis. Kluwer, Netherlands (1995)22. Chinchuluun, A, Pardalos, PM: A survey of recent developments in multiobjective optimization. Ann. Oper. Res. 154,
29-50 (2007)23. Gulati, TR, Geeta, M: On some symmetric dual models in multiobjective programming. Appl. Math. Comput. 215,
380-383 (2009)24. Preda, V: On efficiency and duality for multiobjective programs. J. Math. Anal. Appl. 166, 356-377 (1992)25. Hanson, MA, Mond, B: Further generalization of convexity in mathematical programming. J. Inf. Optim. Sci. 3, 25-32
(1986)26. Vial, JP: Strong and weak convexity of sets and functions. Math. Oper. Res. 8, 231-259 (1983)27. Liang, ZA, Huang, HX, Pardalos, PM: Optimality conditions and duality for a class of nonlinear fractional programming
problems. J. Optim. Theory Appl. 110, 611-619 (2001)28. Liang, ZA, Huang, HX, Pardalos, PM: Efficiency conditions and duality for a class of multiobjective fractional
programming problems. J. Glob. Optim. 27, 447-471 (2003)29. Ahmad, I, Husain, Z: Second order (F,α,ρ ,d)-convexity and duality in multiobjective programming. Inf. Sci. 176,
3094-3103 (2006)30. Ahmad, I, Husain, Z: Second order symmetric duality in multiobjective programming involving cones. Optim. Lett.
(2012, article in press). doi:10.1007/s11590-012-0508-231. Mishra, SK, Lai, KK: Second-order symmetric duality in multiobjective programming involving generalized cone-invex
functions. Eur. J. Oper. Res. 178, 20-26 (2007)32. Agarwal, RP, Ahmad, I, Gupta, SK: A note on higher-order nondifferentiable symmetric duality in multiobjective
programming. Appl. Math. Lett. 24, 1308-1311 (2011)33. Suneja, SK, Aggarwal, S, Davar, S: Multiobjective symmetric duality involving cones. Eur. J. Oper. Res. 141, 471-479
(2002)34. Khurana, S: Symmetric duality in multiobjective programming involving generalized cone-invex functions. Eur. J.
Oper. Res. 165, 592-597 (2005)
doi:10.1186/1029-242X-2012-298Cite this article as: Gupta et al.: Duality for nondifferentiable multiobjective higher-order symmetric programs overcones involving generalized (F,α,ρ ,d)-convexity. Journal of Inequalities and Applications 2012 2012:298.