ecuación del movimiento libre de un grado de libertad...
TRANSCRIPT

1 1.3. Oscilador armónico amortiguado
» Ecuación del movimiento libre de un grado de libertad
amortiguado:
• ED lineal de 2º orden homogénea cuya solución es de la forma:
• Si introducimos esta solución en la ED:

2 1.3. Oscilador armónico amortiguado
• Para obtener una solución distinta de la trivial el primer miembro
debe ser cero:
» Las raíces pueden ser:
• reales y distintas
• reales e iguales
• complejas conjugadas
» La solución general será de la forma:

3 1.3. Oscilador armónico amortiguado
» Si el radicando es cero se obtiene el amortiguamiento crítico ccr:
» El amortiguamiento de un sistema se puede representar como un
porcentaje con respecto del crítico. Se define el ratio de
amortiguamiento , como el cociente entre el amortiguamiento del
sistema y el crítico:
» Las raíces pueden expresarse en función del ratio de
amortiguamiento y la frecuencia n:
4 1.3. Oscilador armónico amortiguado
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6x 10
-4
t
x(t
)
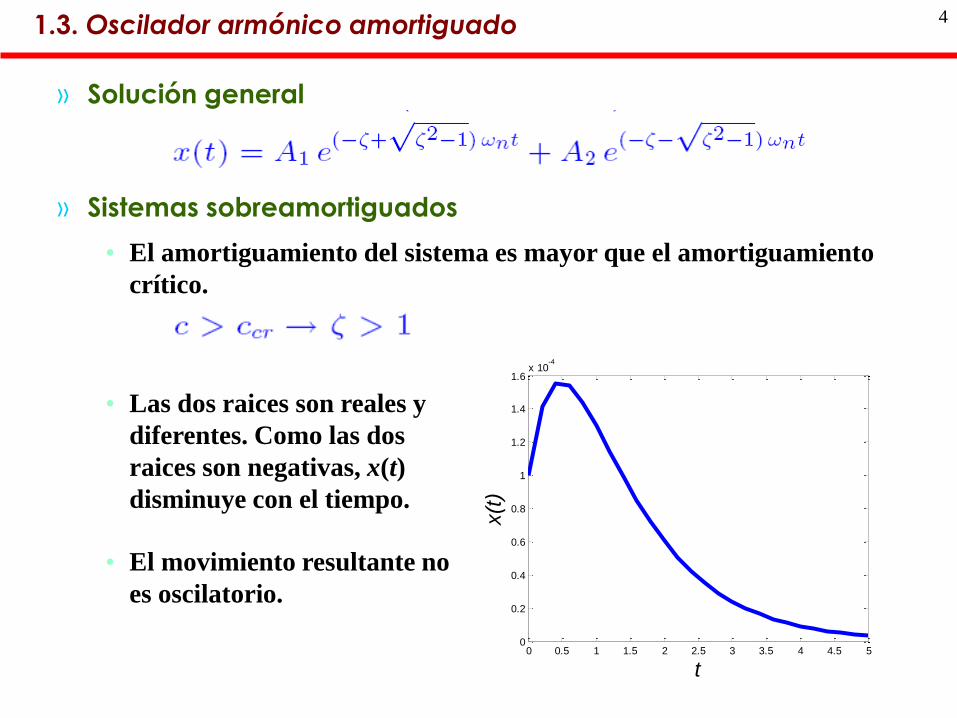
» Solución general
» Sistemas sobreamortiguados
• El amortiguamiento del sistema es mayor que el amortiguamiento
crítico.
• Las dos raices son reales y
diferentes. Como las dos
raices son negativas, x(t)
disminuye con el tiempo.
• El movimiento resultante no
es oscilatorio.

5 1.3. Oscilador armónico amortiguado
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
6
8
10
12
14
16
18
20
t
x(t)
» Sistemas con amortiguamiento crítico
• El amortiguamiento del sistema es igual al crítico.
• Las raíces son:
• Desplazamiento del sistema:
• x disminuye con el tiempo; el
movimiento resultante no es
oscilatorio:
6 1.3. Oscilador armónico amortiguado
» Sistemas subamortiguados
• El amortiguamiento del sistema es menor que el crítico.
• Las dos raíces son complejas conjugadas. El desplazamiento del
sistema tiende, como en los casos anteriores, a anularse con el tiempo
pero en este caso se produce una verdadera oscilación. Los valores de
las raíces son:
siendo d la “frecuencia” angular de la vibración amortiguada (libre):
7 1.3. Oscilador armónico amortiguado
• El desplazamiento del sistema será:
• La ecuación que representa el movimiento del sistema tiene la
forma:
• El primer término representa el efecto disipativo y el segundo la
función armónica.
• “El periodo” Td y “frecuencia” circular de oscilación del sistema
amortiguado será :
• Tiempo de relajación para la amplitud (envolvente): tiempo que la
amplitud tarda en llegar a valer 1/e de su valor inicial:
8 1.3. Oscilador armónico amortiguado
• Valores de las constantes de integración a partir del desplazamiento
x0 y velocidad v0 en t=0 :
» Ejercicio

9 1.3. Oscilador armónico amortiguado
T d=2p/ d
A e -nt
A e -ntsen(d t+j 0)
x
t
• El desplazamiento tiende a cero pero oscila con frecuencia fd=d/2p
entre los límites fijados por las curvas de decrecimiento exponencial.

10 1.3. Oscilador armónico amortiguado
» Decremento logaritmico • Determina como varía la amplitud del movimiento oscilatorio
amortiguado.
• Se define como el logaritmo neperiano del cociente de las
oscilaciones máximas en dos ciclos consecutivos separados Td.
• Para pequeños amortiguamientos se puede aproximar:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
t
x(t
)
Td
x1x2
Permite determinar el
amortiguamiento de un
sistema si se conoce la
evolución temporal de la
posición

11 1.3. Oscilador armónico amortiguado
Atractor
Sistema estable
» Sistemas amortiguados en el espacio de estados

12 1.4. Vibraciones forzadas
– Vibraciones forzadas
» Originadas por fuerzas externas exteriores al sistema.
» La ecuación del movimiento es una ecuación de 2º orden no
homogenea.
» Las fuerzas excitadoras, en función de su variación con el
tiempo, pueden ser:
• Excitaciones armónicas.
• Excitaciones periódicas.
• Impulsos, choques
• Excitaciones aleatorias.
13 1.4. Vibraciones forzadas
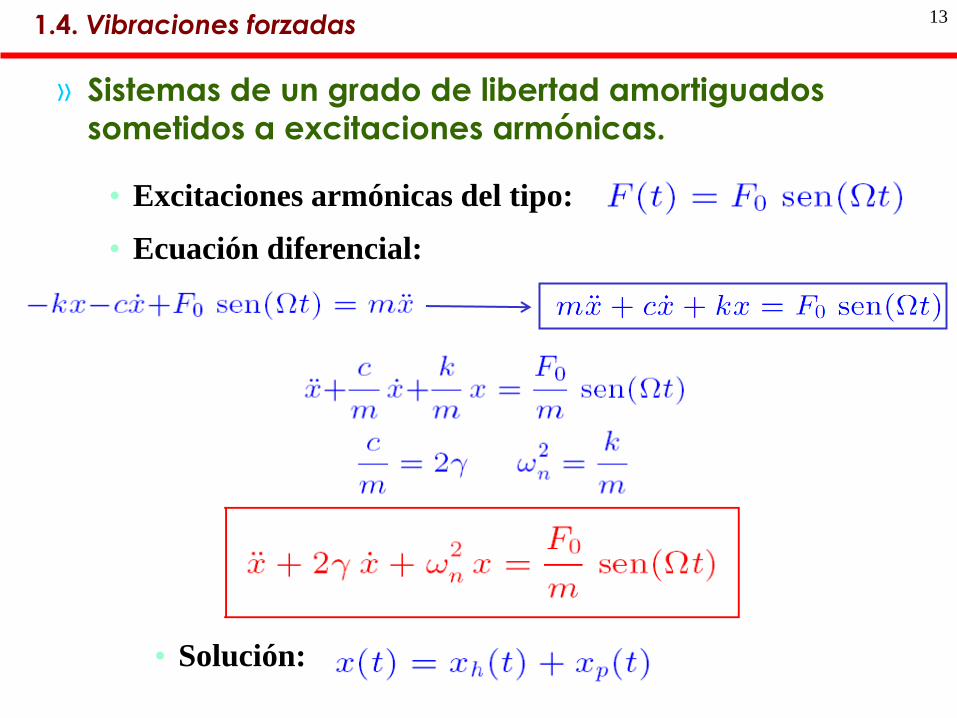
» Sistemas de un grado de libertad amortiguados
sometidos a excitaciones armónicas.
• Excitaciones armónicas del tipo:
• Ecuación diferencial:
• Solución:
14 1.4. Vibraciones forzadas
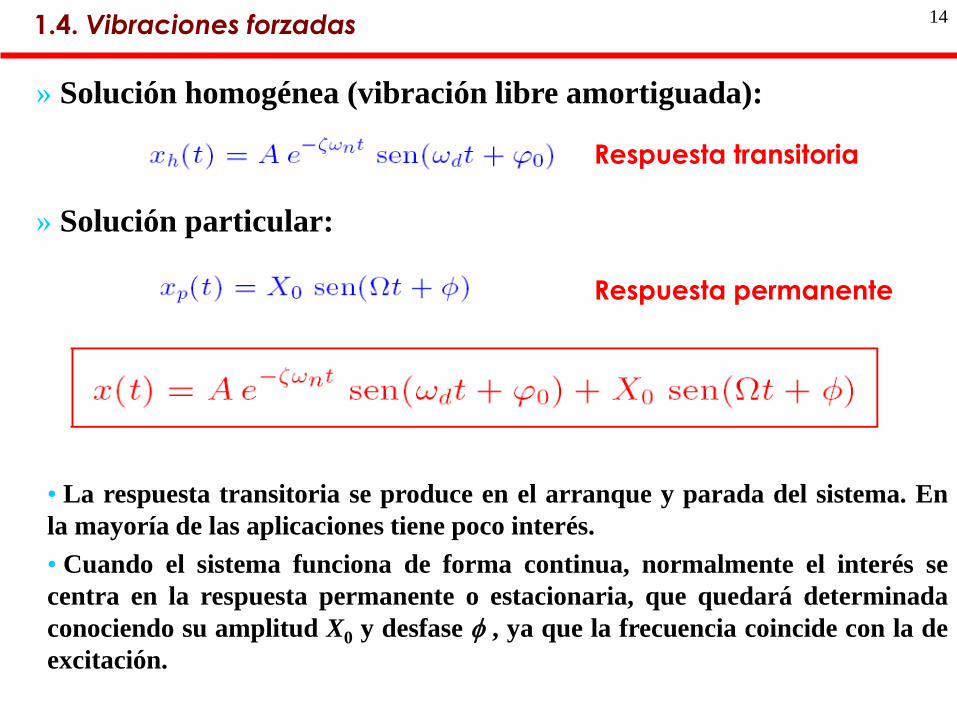
» Solución homogénea (vibración libre amortiguada):
» Solución particular:
Respuesta transitoria
Respuesta permanente
• La respuesta transitoria se produce en el arranque y parada del sistema. En
la mayoría de las aplicaciones tiene poco interés.
• Cuando el sistema funciona de forma continua, normalmente el interés se
centra en la respuesta permanente o estacionaria, que quedará determinada
conociendo su amplitud X0 y desfase , ya que la frecuencia coincide con la de
excitación.
t
x(t)
+
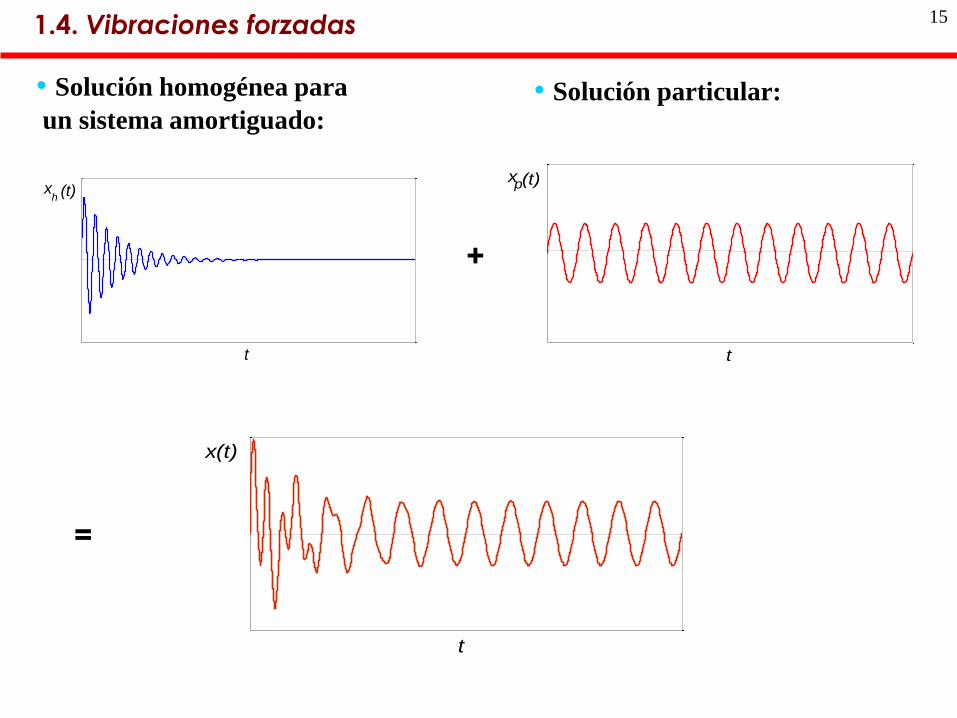
1.4. Vibraciones forzadas
=
t
xh (t)
• Solución homogénea para
un sistema amortiguado:
t
xp(t)
• Solución particular:
15
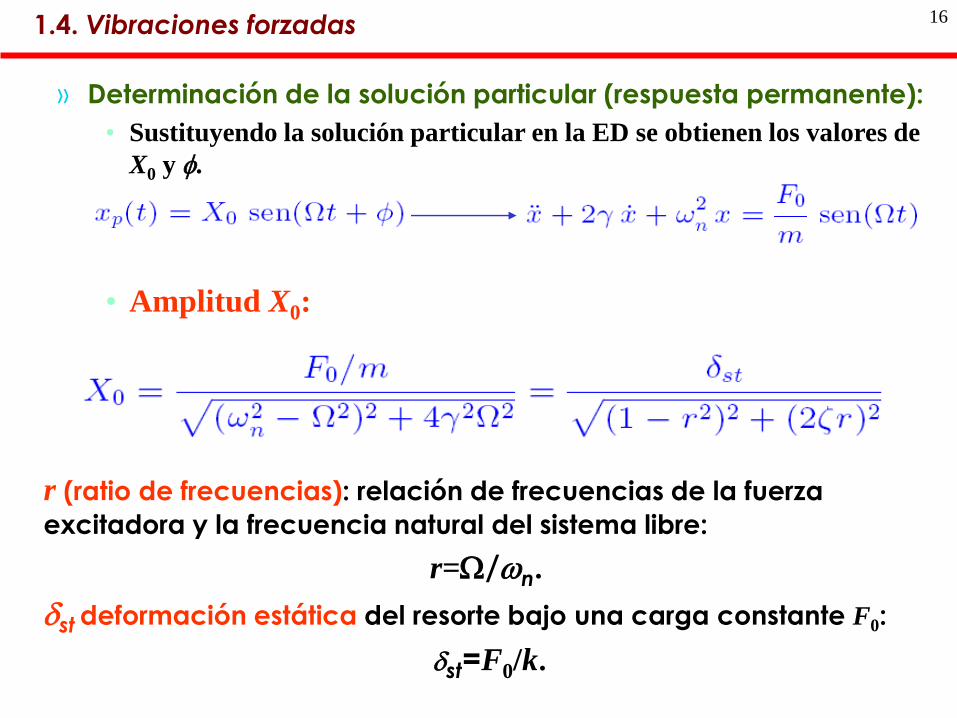
16 1.4. Vibraciones forzadas
r (ratio de frecuencias): relación de frecuencias de la fuerza
excitadora y la frecuencia natural del sistema libre:
r=/n.
st deformación estática del resorte bajo una carga constante F0:
st=F0/k.
» Determinación de la solución particular (respuesta permanente):
• Sustituyendo la solución particular en la ED se obtienen los valores de
X0 y .
• Amplitud X0:
17 1.4. Vibraciones forzadas
• Desfase : retraso de la respuesta respecto de la fuerza aplicada.
• Factor dinámico de amplificación H: número de veces que la
amplitud de oscilación dinámica sobrepasa a la estática.
18 1.4. Vibraciones forzadas
0
0,5
1
1,5
2
2,5
3
0,0 0,5 1,0 1,5 2,0 2,5 3,0
|H|
/n
=0=0.1
=0.2
=0.3
=0.4
=0.5
=1
=1.5=3
=5
0
0,5
1
1,5
2
2,5
3
0,0 0,5 1,0 1,5 2,0 2,5 3,0
|H|
/n
=0=0.1
=0.2
=0.3
=0.4
=0.5
=1
=1.5=3
=5
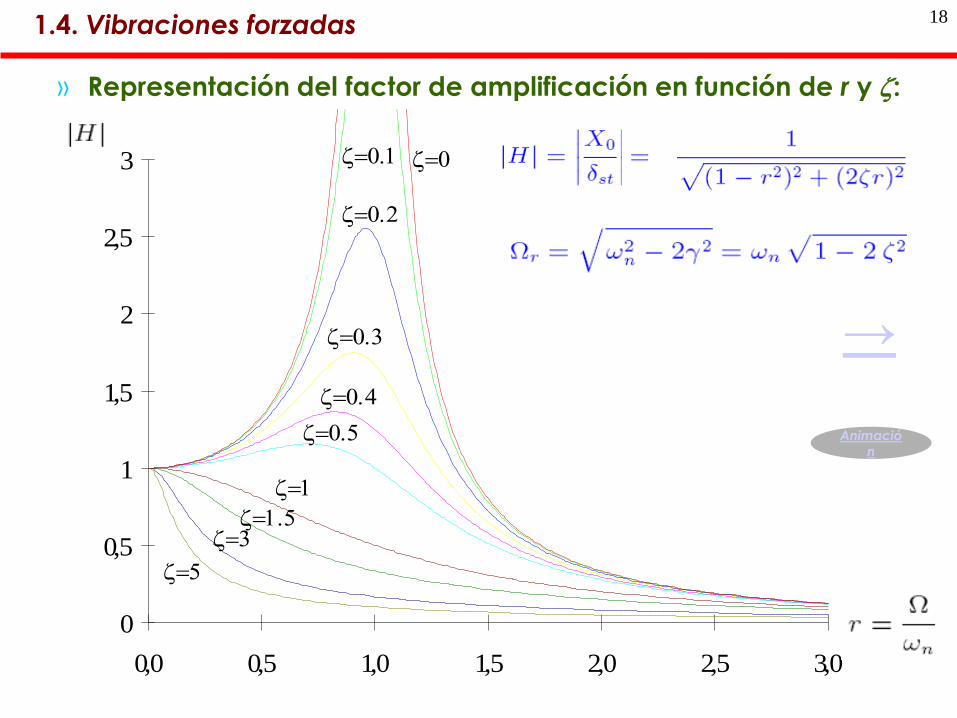
» Representación del factor de amplificación en función de r y :
→
Animació
n
19 1.4. Vibraciones forzadas
-180
-135
-90
-45
0
0 0,5 1 1,5 2 2,5 3=0=0.1
=0.2
=0.3
=0.4 =0.5
=1
=1.5
=3
=5
F0(º)
/n
-180
-135
-90
-45
0
0 0,5 1 1,5 2 2,5 3=0=0.1
=0.2
=0.3
=0.4 =0.5
=1
=1.5
=3
=5
F0(º)
/n
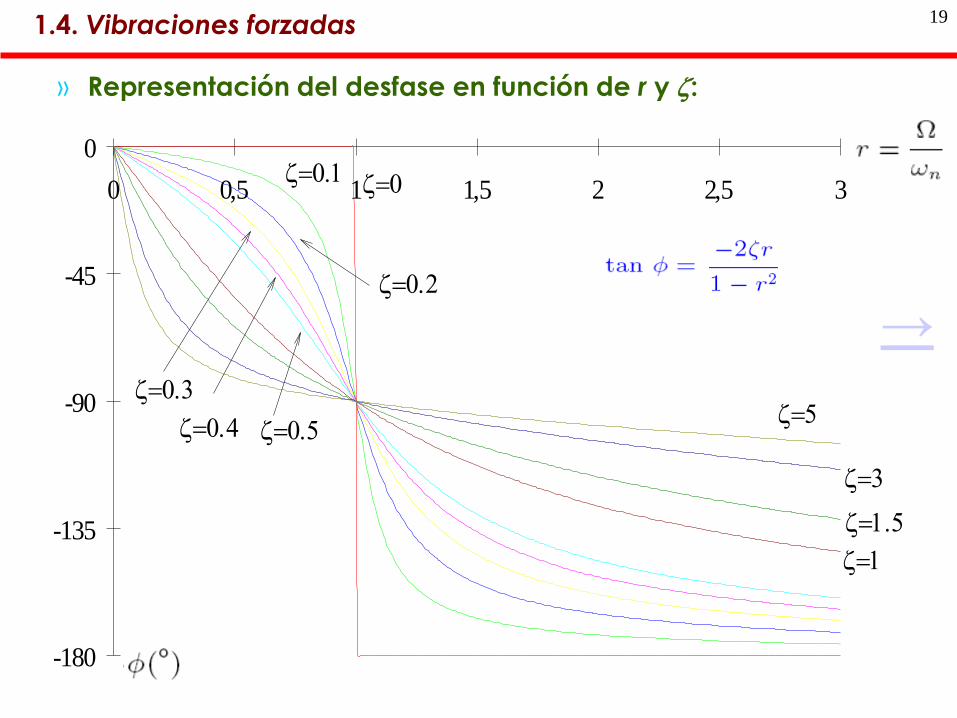
» Representación del desfase en función de r y :
→
20 1.4. Vibraciones forzadas
» Análisis de los gráficos:
• Para frecuencias de excitación menores que la mitad de
la frecuencia propia del sistema, la amplitud es del
mismo orden que la deflexión estática. →
• Para frecuencias de excitación muy próximas a la
propia del sistema la amplitud se incrementa
bruscamente: RESONANCIA. →
• Para frecuencias de excitación cercanas a la propia,
pero no muy próximas: PULSACIÓN. →
• Para frecuencias de excitación doble de la propia la
amplitud de vibración es muy pequeña. →
• “El ancho” de la curva de aumenta con el
amortiguamiento. →
• Hay un cambio de fase para una frecuencia de
excitación igual a la frecuencia propia →
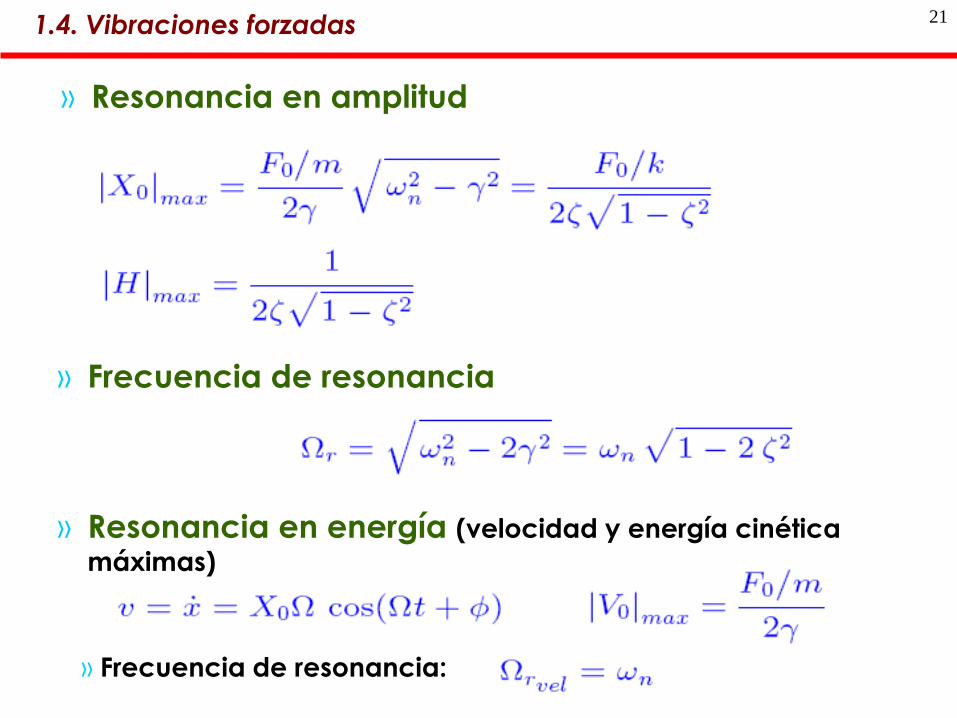
21 1.4. Vibraciones forzadas
» Resonancia en amplitud
» Frecuencia de resonancia:
» Frecuencia de resonancia
» Resonancia en energía (velocidad y energía cinética
máximas)

22 1.5. Vibraciones en sistemas de varios grados de libertad
Un sistema de n grados de libertad, tendrá n frecuencias propias y n modos de vibración.
» Ejemplo: Sistema de dos grados de libertad:
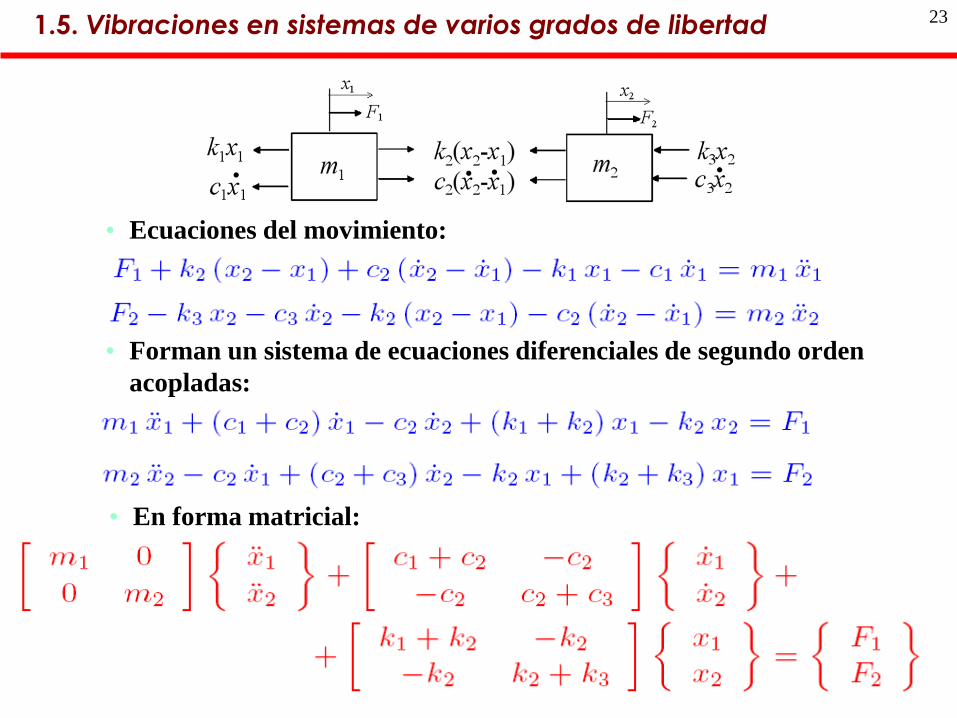
23 1.5. Vibraciones en sistemas de varios grados de libertad
• Ecuaciones del movimiento:
• Forman un sistema de ecuaciones diferenciales de segundo orden
acopladas:
• En forma matricial:
1.5. Vibraciones en sistemas de varios grados de libertad
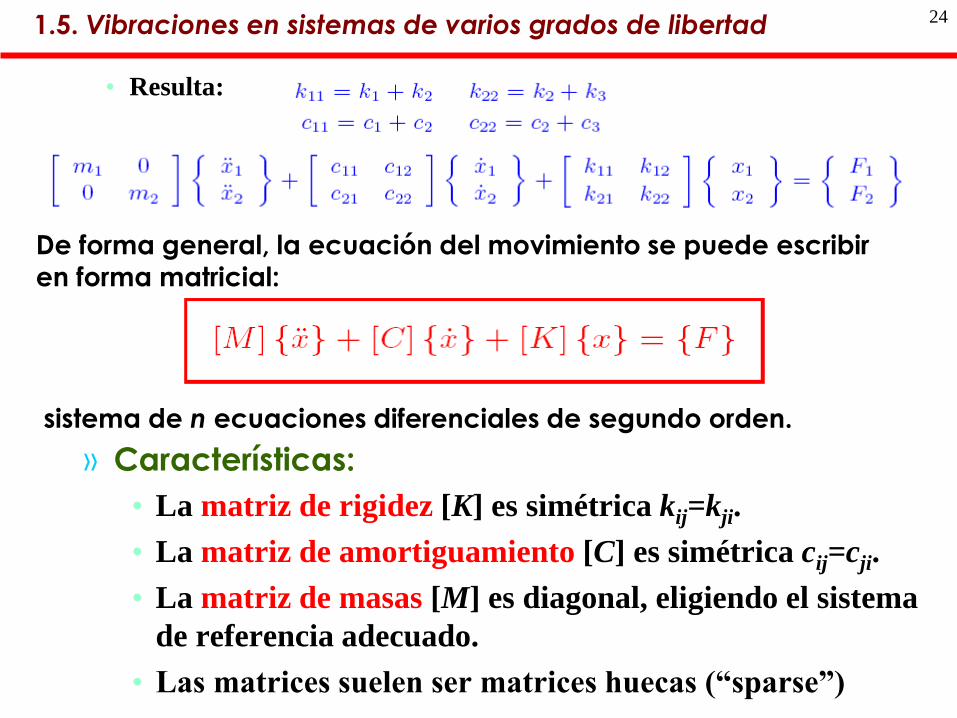
» Características:
• La matriz de rigidez [K] es simétrica kij=kji.
• La matriz de amortiguamiento [C] es simétrica cij=cji.
• La matriz de masas [M] es diagonal, eligiendo el sistema
de referencia adecuado.
• Las matrices suelen ser matrices huecas (“sparse”)
24
De forma general, la ecuación del movimiento se puede escribir en forma matricial:
sistema de n ecuaciones diferenciales de segundo orden.
• Resulta:
25 1.5. Vibraciones en sistemas de varios grados de libertad
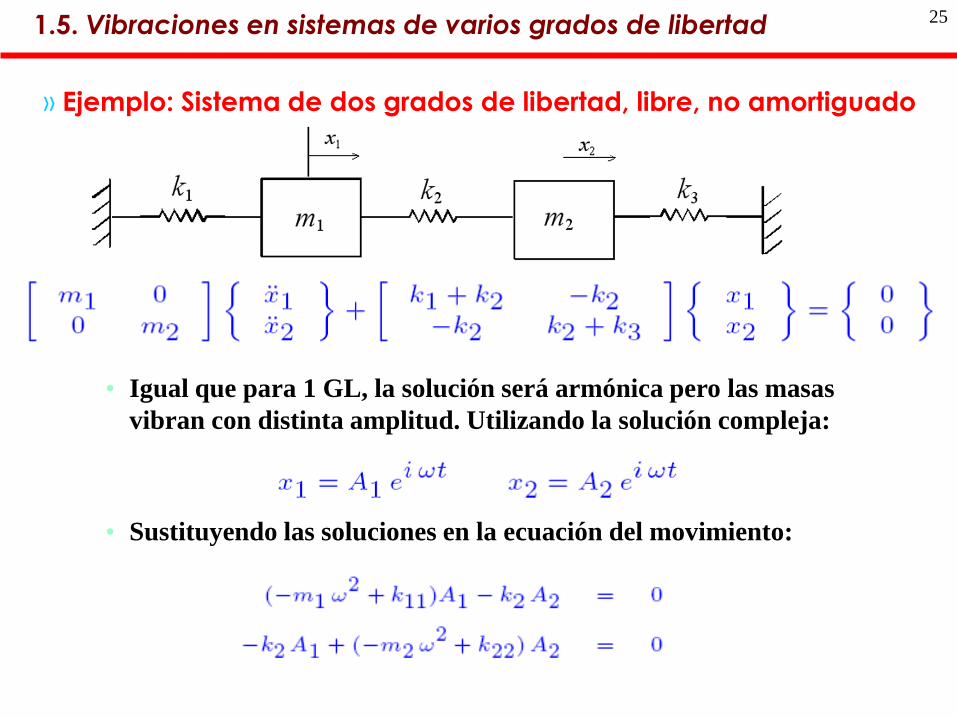
» Ejemplo: Sistema de dos grados de libertad, libre, no amortiguado
• Igual que para 1 GL, la solución será armónica pero las masas
vibran con distinta amplitud. Utilizando la solución compleja:
• Sustituyendo las soluciones en la ecuación del movimiento:
26 1.5. Vibraciones en sistemas de varios grados de libertad
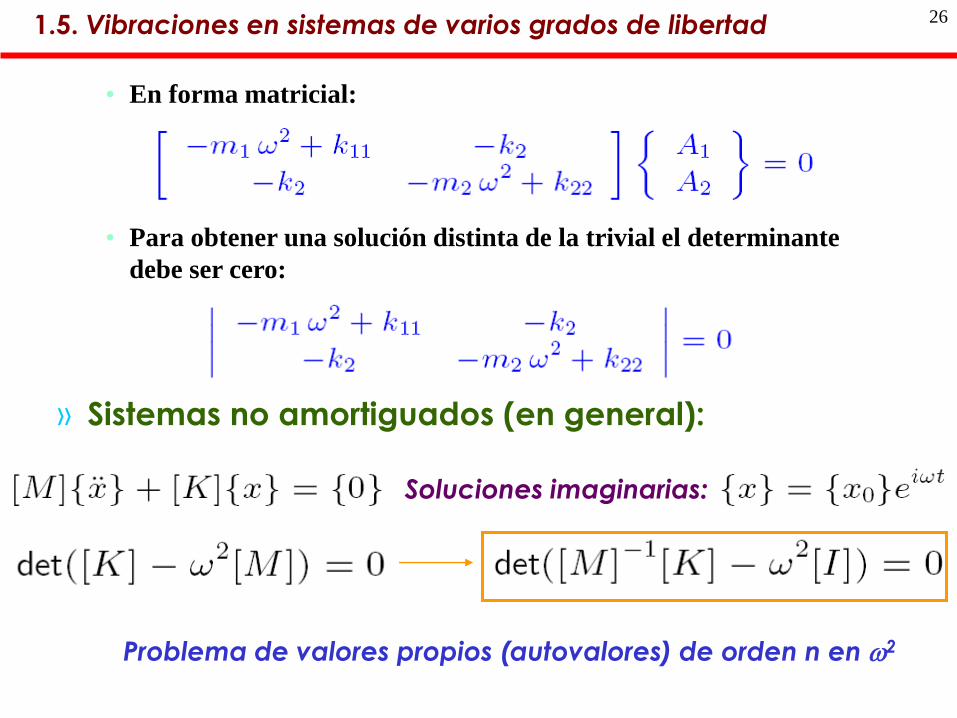
• En forma matricial:
• Para obtener una solución distinta de la trivial el determinante
debe ser cero:
» Sistemas no amortiguados (en general):
Soluciones imaginarias:
Problema de valores propios (autovalores) de orden n en 2
27 1.5. Vibraciones en sistemas de varios grados de libertad
» Consecuencias
• La resolución de la ecuación obtenida para 2 da dos
soluciones 12 y 2
2 que son las frecuencias propias del
sistema (o n frecuencias en el caso de orden n).
• La frecuencia menor 1 se denomina fundamental.
• Las frecuencias propias dependen de las características
del sistema: masas y rigideces.
• Las frecuencias propias son independientes de las
condiciones iniciales de desplazamiento y velocidad. Las
condiciones iniciales determinan el grado de excitación
de cada frecuencia.

1.5. Vibraciones en sistemas de varios grados de libertad
• Si se introducen en las ecuaciones los valores de 1 y 2, se obtiene la
relación que existe entre las amplitudes del movimiento para los modos
1 y 2, respectivamente:
28
1
2
• Hay dos modos naturales, uno por cada frecuencia. Si se desplaza el
sistema de su posición de equilibrio según un modo natural y se deja
evolucionar libremente, oscila armónicamente a la frecuencia
correspondiente a ese modo.
• Las dos soluciones obtenidas para los modos propios son armónicas.
• La solución general es una combinación lineal de los modos propios. El
movimiento general es suma de dos movimientos armónicos de distinta
frecuencia y el resultado es un movimiento no armónico.

29 1.6 Aplicación a sistemas mecánicos simples
– Rigidez equivalente
Acumula la misma energía potencial que el sistema
» Fuerza: F=-kx Energía potencial: U=kx2/2
» Vigas:
• Deflexión st sometido a la fuerza F
keq = F/ st
» Resortes en paralelo: Fs=k1 st+ k2 st
Fs=keq st
keq= ki
30 1.6 Aplicación a sistemas mecánicos simples
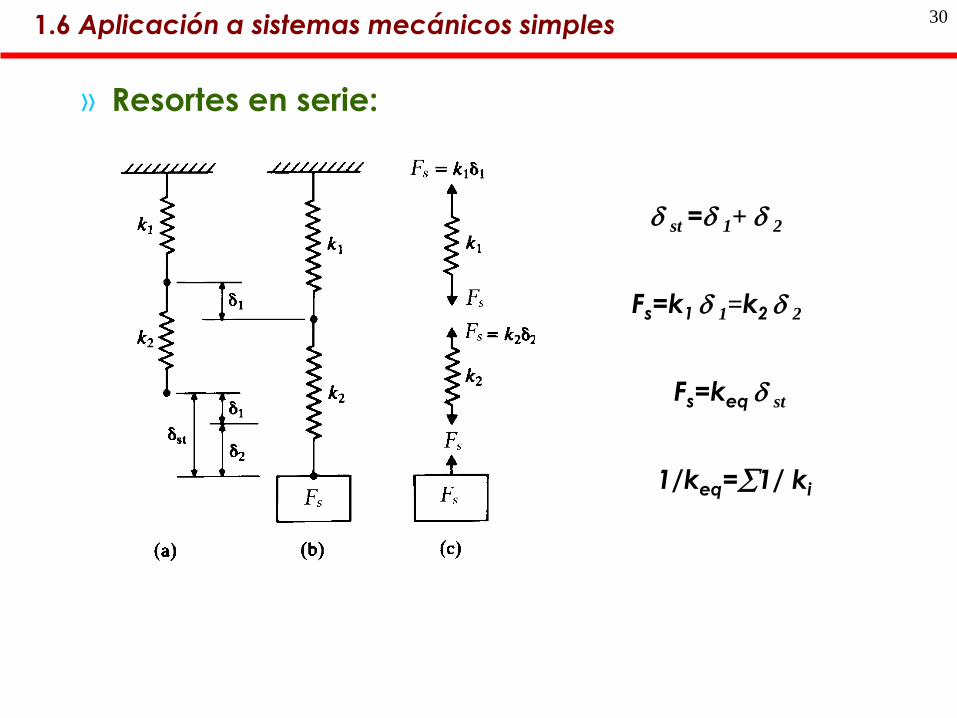
» Resortes en serie:
Fs=k1 1=k2 2
Fs=keq st
1/keq=1/ ki
st = 1+ 2
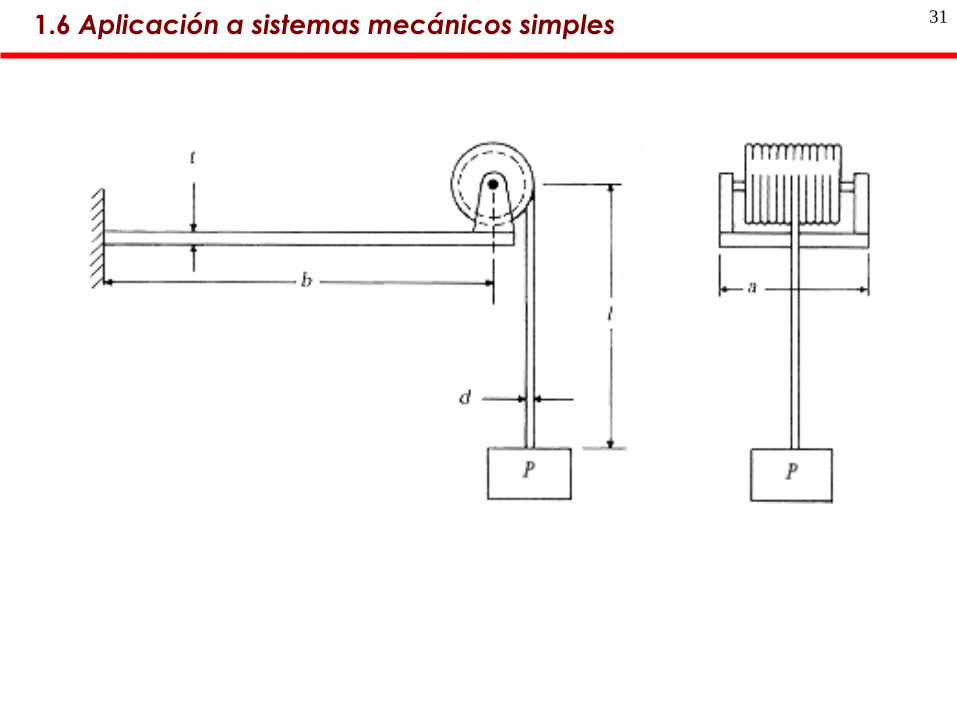
31 1.6 Aplicación a sistemas mecánicos simples
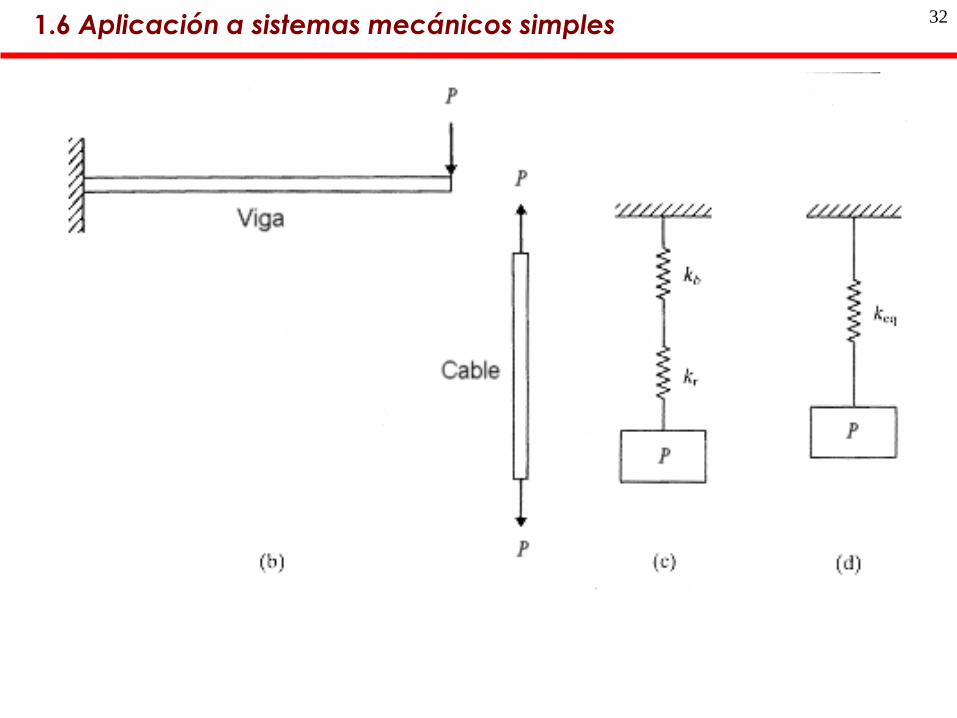
32 1.6 Aplicación a sistemas mecánicos simples

33 1.6 Aplicación a sistemas mecánicos simples
– Viga
– Cable