人間共存・協調ロボット のための近接覚・触覚セン...
TRANSCRIPT

人間共存・協調ロボットのための近接覚・触覚センサ
福岡大学 工学部 電気工学科助教 辻 聡史
1

提案技術の概要
センサ接触面
近接覚(非接触)
触覚(圧力)
単一システムで近接・接触測定が可能
近接測定:対象の有無接触測定:圧力
自己静電容量測定単電極(E)とGND間の静電容量C
A
CE
GND
2
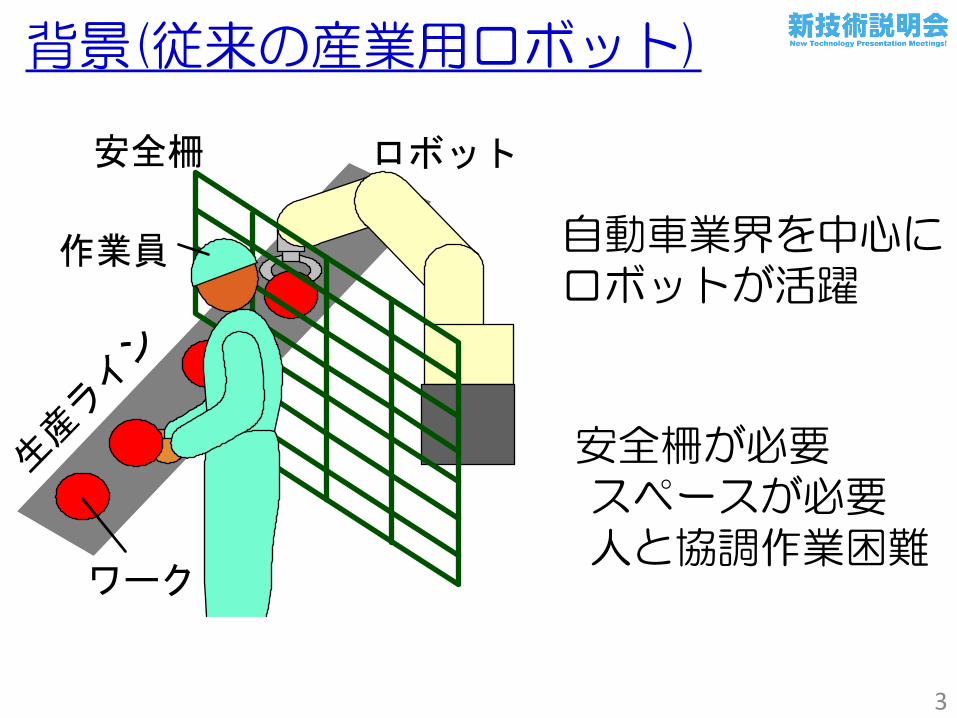
ロボット安全柵
作業員
ワーク
背景(従来の産業用ロボット)
安全柵が必要スペースが必要人と協調作業困難
自動車業界を中心にロボットが活躍
3

背景
人間共存型ロボット(協調ロボット)が注目
安全確保が必要
ロボット全体を覆う近接覚・触覚センサの開発
Work
Robot
Productionline
Worker
Safety fance Worker
WorkRobot
Sensor
Productionline
4

近接覚 触覚
衝突回避安全性 作業性
安全性向上作業性(直感的な操作)
目的
Sensor
Robot
Object Detectionarea
5

Conductor(GND) Other
近接覚・対象の接近を検出
触覚・圧力を検出・材質を識別
デモ
6

Proximity ■ProximityTactile■GND■Other
押込み量(圧力)センサ 制御回路
圧力 識別
デモ
7IEEE Sensors 2015 (2015)

接続AE2-E1間C2 測定
接触の有無 押し込み量
対象の有無 材質識別
接続BE1-対象間C1 測定
原理
E1
E2
C2
E1
E2
C2
Object
E2
C1
E1
E2
C1
E1
Detectioncircuit
A
BS
Elastic body
SA
B
E1
E2Shield
CDC
自己静電容量測定を利用接続A、Bを連続的に切替 8

センサシステム
148
60
70
80I
II
III
IV
I
IIIIIIV E1
E2 C2
E1
E2
C1
E1:大 非接触検知能力向上
E2:小 接触分解能向上
センサ裏(横)に測定回路9

提案センサの特徴
・近接測定、接触(圧力)測定
・自己静電容量測定のみ・センサ構造が単純
・測定システムが単純
・形の変更、曲面に配置可
・低コスト
・I2Cバスで通信、省配線
・後付が可能
単純なシステムでロボット全体を覆うことが可能
Elastic body
E1
E2
10
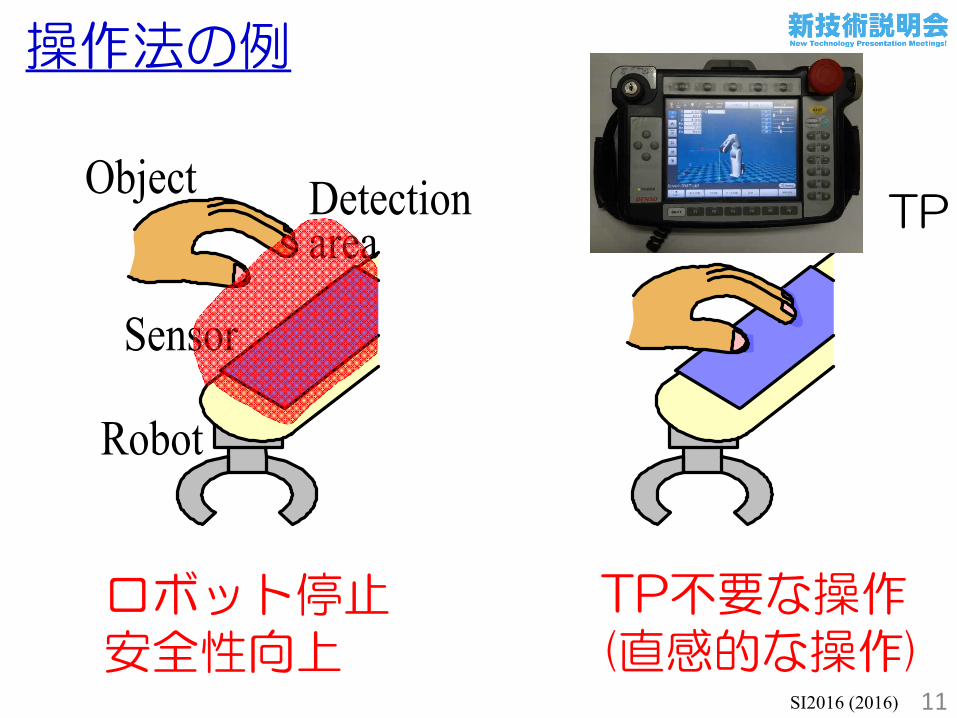
操作法の例
Sensor
Robot
Object Detectionarea
ロボット停止安全性向上
TP不要な操作(直感的な操作)
TP
SI2016 (2016) 11
0
1000
2000
3000
0
1000
2000
3000
0
1000
2000
3000
1000
2000
3000
00
1000
2000
3000
0
500
1000
1500
0
500
1000
1500
0
500
1000
1500
500
1000
1500
0 0
500
1000
1500
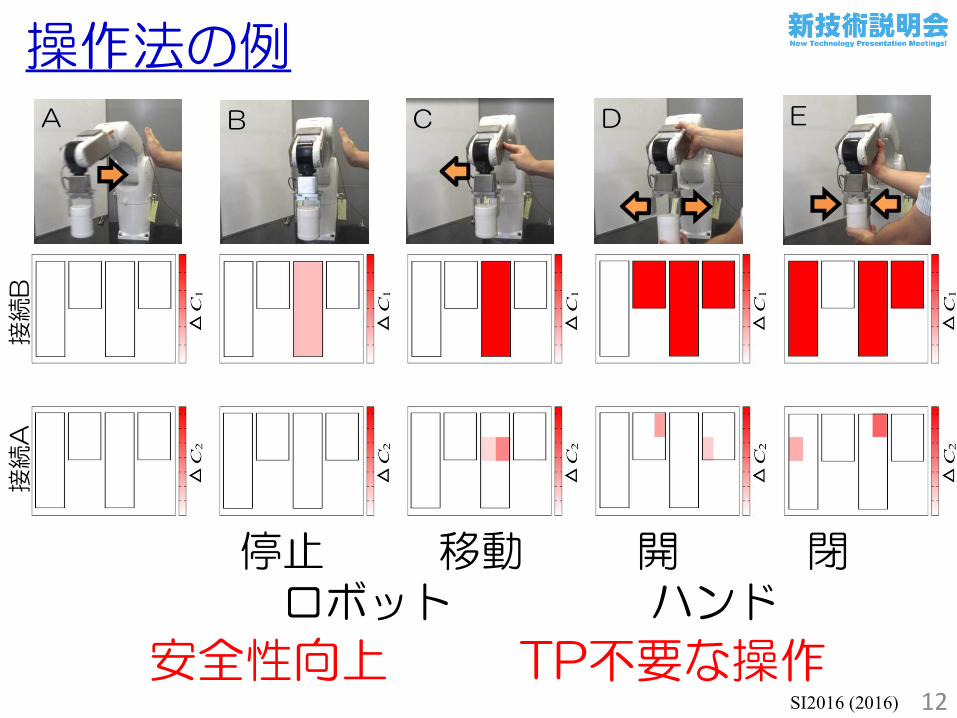
操作法の例
停止 移動 開 閉ロボット ハンド
安全性向上 TP不要な操作
接続
A
接続
B
12SI2016 (2016)
A B C D E

Proximity ■Proximity
Tactile■GND■Other
I
III IIIV
IIIIIIIV
IIIIIIIV
13SI2016 (2016)
操作法の例(デモ)

曲面への取り付け
14IEEE ICIT2017 (2017)

Proximity ■ProximityTactile■GND■Other
曲面への取り付け(デモ)
15IEEE ICIT2017 (2017)

想定される用途
センサ
近接検出範囲
産業用ロボット ヒューマノイド 車いす(医療分野)
ロボット
センサ
近接検出範囲
作業員
ワークロボット
センサ
16

想定される用途①
作業員
ワークロボット
センサ
生産ライン
・非接触対象検出:ロボットを減速、停止:安全性向上・圧力検出:圧力に合わせロボットを操作:操作性向上
ロボットアーム(産業用ロボット)
センサ
近接検出範囲
産業用ロボット
17

想定される用途②
・非接触対象検出:ロボットを減速、停止:安全性向上・圧力検出:圧力に合わせロボットを操作:操作性向上
ロボット
センサ
近接検出範囲
対象
ヒューマノイド
18

想定される用途③
センサ
近接検出範囲
・非接触検出:衝突回避、搭乗者に通知:安全性向上・圧力検出:外部から操作、搭乗者に通知:操作性向上
(電動)車いす (医療分野)
19

実用化に向けた課題企業への期待
現状、研究室レベルでの研究、検証
・実環境下における影響・ロボットの動き・温湿度・周辺機器からのノイズ
・精度向上による近接検出距離向上
・サンプリング周波数の向上
実用化への展開20

まとめ
・近接覚・触覚手法の提案・単純な構造、システム
・ロボット等の触覚への可能性
特許出願済 :「近接・触覚センサ」PCT/JP2013/81231
特許出願済 :「近接・触覚センサ及び情報端末」特願2015-040239
21

その他の研究①近接・圧力タッチパネル
計測研究会 (2016)一般的なタッチパネルの構造
・電極が大きい
・電極が半分に分離可・相互容量測定
近接:対象の位置検出
接触:中心位置・圧力測定
Pressuresensor
Film
E1
E2
Cover
22

その他の研究① 近接(遠)
近接(近)
接触
Pressuresensor
Film
E1
E2
Cover
CT1
CT2
E1E2
Glass Pressuresensor
CT2
Detection circuit
CT2
Detection circuit
Detection circuit
計測研究会 (2016) 23
お問い合わせ先
福岡大学 研究推進部 産学官連携センタ―担当コーディネーター 川上 由基人
TEL 092-871-6631(内線 2806 )FAX 092-866-2308e-mail [email protected]
共同開発・研究を希望しています。興味のある方は、声をかけて下さい。
24