閉ループ系の安定性解析oku/control/lec8handout.pdf2...
TRANSCRIPT

Lecturenote
8:S
ISO閉ループ系の安定性解析
電子情報通信工学科
奥宏史
制御工学
I
Osaka
InstituteofTechnology

参考文献
•藤井隆雄編著,「制御理論」オーム社
,2002.
•野波,西村,「
MAT
LA
Bによる制御理論の基礎」東京電機大学出版局
,1998.
•嘉納他,「動的システムの解析と制御」コロナ社,
1991.
•G
.Goodw
in,etal.,“ControlSystem
Design,”
PrenticeH
all,New
Jersey,2001.
Osaka
InstituteofTechnology
制御工学
I2

フィードバック構造
C(s)
G (s)
+-
o
U(s)
E(s)R(s)
Y(s)
Y (s)m
Go (S
):制御対象
(plant)C
(s):制御器
(controller)
U(s):制
御入力
(controlinput)Y
(s):プラント出力
(plantoutput)
Ym
(s):観測出力
(measurem
ent)R
(s):参照信号
(set-pointorreference)
Osaka
InstituteofTechnology
制御工学
I3

フィードバック構造
(続き
)
C(s)
G (s)
+-
+
+
+
+
+
+o
D (s)o
D (s)i
D (s)m
U(s)
E(s)R(s)
Y(s)
Y (s)m
Go (S
):制御対象
(plant)C
(s):制御器
(controller)
U(s):制
御入力
(controlinput)Y
(s):プラント出力
(plantoutput)
Ym
(s):観測出力
(measurem
ent)R
(s):参照信号
(set-pointorreference)
Osaka
InstituteofTechnology
制御工学
I4

フィードバック構造
(続き
)
C(s)
G (s)
+-
+
+
+
+
+
+o
D (s)o
D (s)i
D (s)m
U(s)
E(s)R(s)
Y(s)
Y (s)m
U(s),Y
m(s),R
(s):わかる量
Y(s):
厳密にはわからない量
Osaka
InstituteofTechnology
制御工学
I5

フィードバック構造
(続き
)
C(s)
G (s)
+-
+
+
+
+
+
+o
D (s)o
D (s)i
D (s)m
U(s)
E(s)R(s)
Y(s)
Y (s)m
Y(s)=
Go (s)(U
(s)+D
i (s))+
Do (s)
U(s)=
C(s)E
(s)
E(s)=
R(s)−
Ym
(s)=
R(s)−
Y(s)−
Dm
(s)
Osaka
InstituteofTechnology
制御工学
I6

演習問題
U(s),Y
(s)を
Go (s),C
(s),R(s),D
i (s),Do (s),D
m(s)で表せ.
C(s)
G (s)
+-
+
+
+
+
+
+o
D (s)o
D (s)i
D (s)m
U(s)
E(s)R(s)
Y(s)
Y (s)m
Y=
Go(U
+D
i )+
Do
U=
CE
E=
R−
Y−
Dm
Osaka
InstituteofTechnology
制御工学
I7

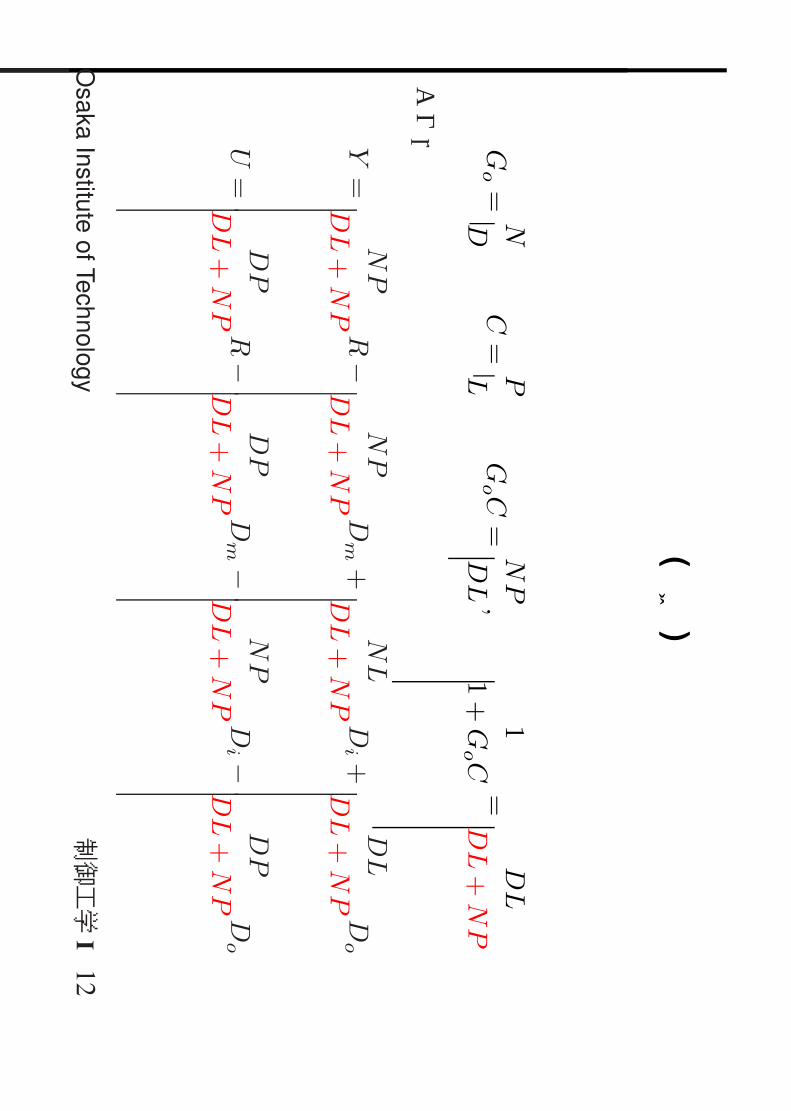
解答
(引数
sを省略
)
Y=
Go C
1+
Go C
R−
Go C
1+
Go C
Dm
+G
o
1+
Go C
Di+
1
1+
Go C
Do
U=
C
1+
Go C
R−
C
1+
Go C
Dm−
CG
o
1+
Go C
Di −
C
1+
Go C
Do
Osaka
InstituteofTechnology
制御工学
I8

行列形式で表現
C(s)
G (s)
+-
+
+
+
+
+
+o
D (s)o
D (s)i
D (s)m
U(s)
R(s)Y(s)
Y
(s)
U(s)
= G
o (s)C(s)
−G
o (s)C(s)
Go (s)
1
C(s)
−C
(s)−
C(s)G
o (s)−
C(s)
1+
Go (s)C
(s)
R(s)
Dm
(s)
Di (s)
Do (s)
Osaka
InstituteofTechnology
制御工学
I9

内部安定
伝達関数
G
o (s)C(s)
−G
o (s)C(s)
Go (s)
1
C(s)
−C
(s)−
C(s)G
o (s)−
C(s)
1+
Go (s)C
(s)
の8つの要素がすべて安定のとき,閉ループ系は内部安定
(Inter-nalstability) と
呼ばれる.
Osaka
InstituteofTechnology
制御工学
I10

分数表記
•a
i (i=
1,···,n)を
実数とする.
n次の実係数多項式
:
ans
n+
an−
1 sn−
1+···+
a1 s
+a0
•G
o (s),C(s)が
sに関する実係数多項式
N(s),D
(s),P(s),L
(s)で次のよう
に表せるとする.G
o (s)=
N(s)
D(s)
C(s)
=P
(s)L
(s)
•このとき,1+
Go (s)C
(s)=
1+
N(s)
D(s)
P(s)
L(s)
=D
(s)L(s)+
N(s)P
(s)D
(s)L(s)
Osaka
InstituteofTechnology
制御工学
I11
分数表記
(続き
)
Go
=ND
C=
PLG
o C=
NP
DL
,1
1+
Go C
=D
L
DL
+N
P
より,Y
=N
P
DL
+N
PR−
NP
DL
+N
PD
m+
NL
DL
+N
PD
i +D
L
DL
+N
PD
o
U=
DP
DL
+N
PR−
DP
DL
+N
PD
m−
NP
DL
+N
PD
i −D
P
DL
+N
PD
o
Osaka
InstituteofTechnology
制御工学
I12

内部安定に関する補題
補題
(Internalstability)前述の閉ループ系を考えたとき,
「閉ループ系が内部安定」
�「特性方程式
D(s)L
(s)+
N(s)P
(s)=
0
の根がすべて複素平面上の開左半平面にある.」
Osaka
InstituteofTechnology
制御工学
I13
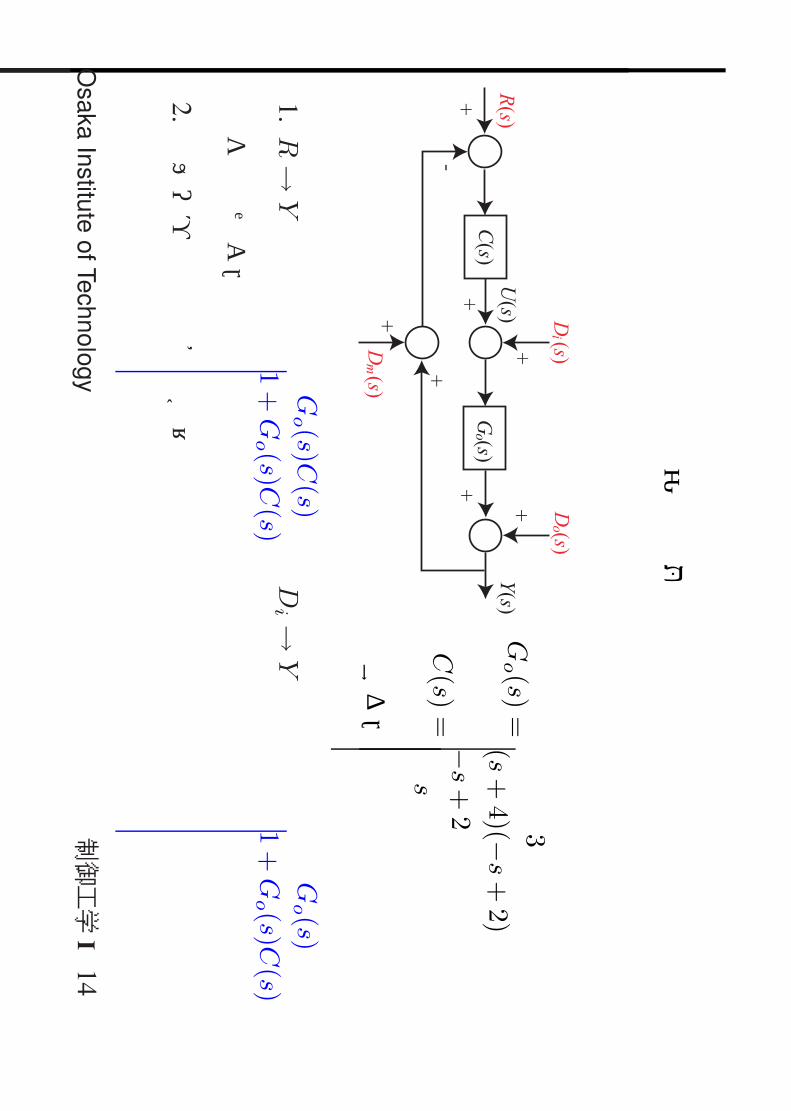
演習問題
C(s)
G (s)
+-
+
+
+
+
+
+o
D (s)o
D (s)i
D (s)m
U(s)
R(s)Y(s)
Go (s)
=3
(s+
4)(−s
+2)
C(s)
=−
s+
2s
とする.
1.R
→Yの伝達関数
Go (s)C
(s)1
+G
o (s)C(s)と
Di →
Yの伝達関数
Go (s)
1+
Go (s)C
(s)を計算せよ.
2.閉ループ系は内部安定か?
Osaka
InstituteofTechnology
制御工学
I14

安定性と多項式の解析
•以上の議論より,閉ループ系の安定性は閉ループ系の特性方程式の根を調
べることでわかる.
•方程式を解くことなく,根の性質を調べたい.
•実係数多項式
p(s):=
sn
+a
n−1 s
n−1
+···+
a1 s
+a0
このとき,
「p(s)
のすべての根の実部が負ならば必ず,全ての係数は
ai>
0(i
=0,···
,i−1) を
満足する.」
−→多項式の係数が
1つでも負ならば,実部が正の根が少なくとも
1つ存
在する.
Osaka
InstituteofTechnology
制御工学
I16

安定性と多項式の解析
(続き
)
•係数が全て正だからといって,代数方程式
p(s)=
0の根の実部が全て負だ
とは限らない!
p(s):=
sn
+a
n−1 s
n−1
+···+
a1 s
+a0
→実際に根を求めることなく方程式の根の性質をどうやって調べるか?
Osaka
InstituteofTechnology
制御工学
I17

Routh
の安定条件
•多項式
ans
n+
an−
1 sn−
1+···+
a1 s
+a0
に対して,
γ2,1
:=a
n−1 a
n−2 −
ana
n−3
an−
1
γ2,2
:=a
n−1 a
n−4 −
ana
n−5
an−
1
...
γ3,1
:=γ2,1 a
n−3 −
an−
1 γ2,2
γ2,1
sn
an
an−
2a
n−4
···s
n−1
an−
1a
n−3
an−
5···
sn−
2γ2,1
γ2,2
γ2,3
···s
n−3
γ3,1
γ3,2
γ3,3
···...
......
...
s2
γn−
2,1
γn−
2,2
s1
γn−
1,1
s0
γn
,1
第1列の符号が全て同符合であ
ること
Osaka
InstituteofTechnology
制御工学
I18

例題
1
次の方程式について調べる.
s4
+s3
+3s
2+
2s+
1=
0
根は
−0.1049±
1.5525i
−0.3951±
−0.5068i
s4
13
1
s3
12
s2
11
s1
1
s0
1
安定
Osaka
InstituteofTechnology
制御工学
I19

例題
2
次の方程式について調べる.
s5
+5s
4+
12s3
+13s
2+
3s+
6=
0
根は
−1.5000±
1.9365i
−2.2056
0.1028±−
0.6655i
s5
112
3
s4
513
6
s3
475
95
s2
566
47
6
s1
−816
283
s0
6
不安定
Osaka
InstituteofTechnology
制御工学
I20

演習問題
次の代数方程式の根の安定性を調べよ.
1.
s3
+17s
2+
80s+
600=
0
2.
s3
+17s
2+
80s+
1500=
0
Osaka
InstituteofTechnology
制御工学
I21

演習問題
3.
G(s)
=−
s+
1(0.5s
+1)(s
+1)
,C
(s)=
1s
+1
としたとき,閉ループ系の内部安定性を調べよ.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I22

閉ループ伝達関数と一巡伝達関数
C(s)
G(s)
+−
U(s)
R(s)Y(s)
•閉ループ伝達関数
T(s)
(入出力関係
Y(s)
=T
(s)R(s))
T(s)
:=G
(s)C(s)
1+
G(s)C
(s)
•一巡伝達関数
GO
L (s)
GO
L (s):=
G(s)C
(s)
Osaka
InstituteofTechnology
制御工学
I25

Routh
の安定条件の応用
•例題
1(ゲインの変動と閉ループの安定性の関係
)
一巡伝達関数が
G(s)C
(s)=
K
s(s+
2)2
で与えられるとき,閉ループを内部安定にする
Kの範囲を求めよ.ただ
し,一巡伝達関数が不安定な極零相殺をその内部にもたないと仮定する.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I26

内部安定に関する補題
(復習
)
補題
(Internalstability)
G(s)
=N
(s)D
(s) ,C
(s)=
P(s)
L(s)とする.前述の閉ループ系を考え
たとき,
「閉ループ系が内部安定」
�「特性方程式p(s)
:=D
(s)L(s)
+N
(s)P(s)
=0
の根がすべて複素平面上の開左半平面にある.」
Osaka
InstituteofTechnology
制御工学
I27

Routh
の安定条件の応用
(続き
)
•例題
1の解答
G(s)C
(s)=
K
s(s+
2)2より,特性
方程式は
p(s)=
D(s)L
(s)+
N(s)P
(s)
=s(s
+2)
2+
K
=s3+
4s2+
4s+
K=
0
s3
14
s2
4K
s1
16−
K4
s0
K
Routh
の安定条件より,
16−K
>0かつ
K>
0
が必要.
したがって,
Kが満たすべき範囲
は0
<K
<16.
Osaka
InstituteofTechnology
制御工学
I28

Routh
の安定条件の応用
(続き
)
閉ループ伝達関数
G(s)C
(s)1
+G
(s)C(s)のステップ応答
K=
15
Tim
e (sec.)
Amplitude
Step R
esponse
050
−3
−2
−1 0 1 2 3 4
K=
17
Tim
e (sec.)
Amplitude
Step R
esponse
020
4060
80−
3
−2
−1 0 1 2 3 4
Osaka
InstituteofTechnology
制御工学
I29

Routh
の安定条件の応用
(続き
)
•例題
2(過渡応答の改善
)
一巡伝達関数が
G(s)C
(s)=
K
s(s+
4)2
で与えられるとき,閉ループを内部安定にし,すべての極の実部を
−1よ
り小さくする
Kの範囲を求めよ.ただし,一巡伝達関数が不安定な極零相
殺をその内部にもたないと仮定する.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I30

Routh
の安定条件の応用
(続き
)
•例題
2の解答
w=
s+
1とおき,
GO
L (s)=
G(s)C
(s)=
K
s(s+
4)2
に代入すると,
GO
L(w
)=
K
(w−
1)(w−
1+
4)2
=K
(w−
1)(w+
3)2
=K
w3+
5w2+
3w−
9
特性方程式
:p(w
)=
w3
+5w
2+
3w+
K−
9
w3
13
w2
5K
−9
w1
24−
K5
w0
K−
9
Routh
の安定条件より,
24−K
>0かつ
K−
9>
0
が必要.したがって,
Kが満たすべ
き範囲は
9<
K<
24.
Osaka
InstituteofTechnology
制御工学
I31

Routh
の安定条件の応用
(続き
)
•変数変換について
w=
wR
+jw
I ,s
=s
R+
jsIと表す.
w=
s+
1より,
wR
<0ならば,
sR
+1
<0,つまり,
sR
<−
1
•例
:閉ループ伝達関数は
G(s)C
(s)1
+G
(s)C(s)
=K
s(s
+4)2
1+
Ks(s
+4)2
=K
s3
+8s
2+
16s+
K
その極は
(例題の解
9<
K<
24に注意!
)
K=
10−
5.37,−
1.32±j0.36
K=
8.9−
5.30,−
1.74,−0.97
K=
23−
5.97,−
1.02±j1.68
K=
24.1−
6.00,−
0.998±j1.74
Osaka
InstituteofTechnology
制御工学
I32

演習問題
•G
(s)=
1s2
+2s
+3,
C(s)
=Ksのとき,閉ループ系が内部安定となるよ
うな
Kの範囲を求めよ.
•K
=2として,閉ループ伝達関数の極を計算せよ.
Osaka
InstituteofTechnology
制御工学
I33

極零相殺に関する注意
•例題
1一巡伝達関数が
G(s)C
(s)=
1
s(s+
2)2
で与えられるとき,閉ループは内部安定か判定せよ.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I35

内部安定に関する補題
(復習
)
補題
(Internalstability)
G(s)
=N
(s)D
(s) ,C
(s)=
P(s)
L(s)とする.前述の閉ループ系を考えたとき,
「閉ループ系が内部安定」
�「特性方程式
p(s):=
D(s)L
(s)+
N(s)P
(s)=
0
の根がすべて複素平面上の開左半平面にある.
(根がすべて安定
)」
Osaka
InstituteofTechnology
制御工学
I36

極零相殺に関する注意
(続き
)
•例題
1.1
G(s)
=1
(s+
2)2(s
+1) ,
C(s)
=s
+1
s
のとき,閉ループは内部安定か判定せよ.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I37

極零相殺に関する注意
(続き
)
•例題
1.1の解答
G(s)
=1
(s+
2)2(s
+1) ,
C(s)
=s
+1
sより,特性方程式は
p(s)=
D(s)L
(s)+N
(s)P(s)
=s(s
+1)(s
+2)
2+
(s+
1)
=(s
+1)(s
3+
4s2
+4s
+1)
=0
s=
−1は安定な根だから,
pa (s)
:=s3
+4s
2+
4s+
1
について調べればよい.
s3
14
s2
41
s1
154
s0
1
Routh
の安定条件より,
pa (s)
=0
は安定な根だけをもつ.したがっ
て,閉ループ系は内部安定である.
Osaka
InstituteofTechnology
制御工学
I38

極零相殺に関する注意(続き)
•例題
1.2
G(s)
=1
(s+
2)2(s−
1) ,C
(s)=
s−1
s
のとき,閉ループは内部安定か判定せよ.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I39

極零相殺に関する注意
(続き
)
•例題
1.2の解答
G(s)
=1
(s+
2)2(s−
1) ,C
(s)=
s−1
sより,特性方程式は
p(s)=
D(s)L
(s)+N
(s)P(s)
=s(s−
1)(s+
2)2
+(s−
1)
=(s−
1)(s3
+4s
2+
4s+
1)=
0
不安定な根
s=
1をもつので,閉ループ系は内部安定でない.
Osaka
InstituteofTechnology
制御工学
I40

極零相殺に関する注意
•例題
1一巡伝達関数が
G(s)C
(s)=
1
s(s+
2)2
で与えられるとき,閉ループは内部安定か判定せよ.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I41

極零相殺に関する注意
(続き
)
•例題
1の解答
G(s)C
(s)=
1s(s
+2)2より,特性方程式は一見
p(s)=
s(s+
2)2
+1
=s3
+4s
2+
4s+
1=
0
のように思えるが,この特性方程式から内部安定性を判別するためには次の仮
定が必要である.G
(s)と
C(s)は不安定な極零相殺をもたない.
したがって,
•G
(s)と
C(s)が上の仮定を満たすとき,例題
1.1より,閉ループ系は内部
安定である.
•そうでないとき,例題
1.2より,閉ループ系は内部安定でない.
Osaka
InstituteofTechnology
制御工学
I42

例題
1.2について
制御対象
G(s)
=1
(s+
2)2(s−
1)に対して,例えば制御器を
C(s)
=12s
2+
10s+
2s(s
+1.6)
=12
+1.25s
−10.45
s+
1.6
と選ぶと,特性方程式は
p(s)=
s5
+4.6s
4+
4.8s3
+8s
2+
3.6s+
2
=15 (5s
5+
23s4
+24s
3+
40s2
+18s
+10 )
=0
である.
Osaka
InstituteofTechnology
制御工学
I43

例題
1.2について
pa (s)
:=5s
5+
23s4
+24s
3+
40s2
+18s
+10
=0
にラウスの安定判別法を適用すると,
s5
524
18
s4
2340
10
s3
352
23
364
23
s2
3061
176
10
s1
494684
70403
s0
10
安定
したがって,閉ループ系は内部安定で
ある.
確かに実際に根を求めてみると,
−3.84,
−0.12±
j1.16,−
0.26±j0.56,
Osaka
InstituteofTechnology
制御工学
I44

例題
1.2について
このとき,閉ループ伝達関数は
T(s)
=12s
2+
10s+
2p(s)
で表される.
T(s)の
ステップ応答
は右図のようになる.
Tim
e (sec.)
Amplitude
Step R
esponse
05
1015
2025
3035
4045
50
−1
−0.5 0
0.5 1
1.5 2
2.5 3
3.5 4
Osaka
InstituteofTechnology
制御工学
I45

演習問題
•制御対象と制御器がそれぞれ
G(s)
=1
(s+
2)(s−1) ,
C(s)
=as
+b
s+
12
で与えられるとき,閉ループを内部安定にする
a,bの範囲を図示せよ.
C(s)
G(s)
+−
U(s)
R(s)Y(s)
Osaka
InstituteofTechnology
制御工学
I46