iniciação científica - pedro victor gomes
DESCRIPTION
Relatório Parcial do Projeto de IC - Pedro Victor GomesTRANSCRIPT

ÁREA1 – FACULDADE DE CIÊNCIA E TECNOLOGIA
CONTROLE DE NÍVEL UTILIZANDO UM CONTROLADOR
ELETRÔNICO ANALÓGICO PID
PEDRO VICTOR GOMES CABRAL DE BRITO
Salvador
2012

CONTROLE DE NÍVEL UTILIZANDO UM CONTROLADOR
ELETRÔNICO ANALÓGICO PID
Orientador: Prof. Lázaro Edmilson Brito
Projeto de Iniciação Científica apresentado à
Coordenação da Faculdade ÁREA1, como
requisito parcial à avaliação do Programa de
Bolsa de Iniciação Científica e Tecnológica –
PICT, sob orientação do professor Lázaro
Edmilson Brito.
Salvador
2012

SUMÁRIO
1 INTRODUÇÃO .................................................................................................................... 4
2 JUSTIFICATIVA ................................................................................................................. 5
3 OBJETIVOS ......................................................................................................................... 5
4 MÉTODO .............................................................................................................................. 7
4.1 Modelagem Matemática ................................................................................................... 8
4.1.1 Considerações simplificadoras ................................................................................... 8
4.1.2 Linearização do sistema ............................................................................................. 9
4.2 Sensores e Atuadores ...................................................................................................... 10
4.2.1 Atuadores do Sistema ............................................................................................... 10
4.2.2 Sensor de Nível ........................................................................................................ 10
4.3 Microcontrolador ............................................................................................................ 12
4.4 Controlador Proporcional, Integral e Derivativo (PID) .................................................. 15
4.4.1 Tipos de Implementação do Algoritmo PID ............................................................ 15
4.4.2 Controlador Eletrônico com Amplificador Operacional .......................................... 18
5 FORMA DE ANÁLISE DOS RESULTADOS ................................................................ 19
6 CRONOGRAMA ................................................................. Erro! Indicador não definido.
REFERÊNCIAS ..................................................................................................................... 21

1 INTRODUÇÃO
Controlar um sistema significa agir sobre o mesmo de modo a obter um
resultado arbitrariamente especificado. O modelo matemático do sistema é fundamental
para o projeto desse controle automático. O presente desafio é a modelagem e o controle
de sistemas modernos, complexos e interligados, como sistemas de controle de trafego,
processos químicos, sistemas robóticos e automação industrial.
“Um sistema de controle em malha-fechada é aquele no qual o sinal de saída
possui um efeito direto na ação de controle. Isto é, sistema de controle em malha-
fechada são sistemas de controle realimentados. O sinal de erro atuante, que é a
diferença entre o sinal de entrada e o sinal realimentado (que pode ser o sinal de saída
ou uma função do sinal de saída e suas derivadas), é alimentado no controlador de modo
a reduzir o erro e manter a saída do sistema em um valor desejado. Em outras palavras,
o termo “malha-fechada” implica o uso de ação de realimentação com a finalidade de
reduzir o erro do sistema.“ (OGATA; KATSUHIKO, 1998, p. 4).
Essa vantagem do sistema de controle em malha-fechada o torna relativamente
insensível a distúrbios externos e variações internas em parâmetros do sistema. É
plausível a utilização de componentes baratos e sem muita precisão para obter o
controle preciso de um dado processo. Para obter o melhor resultado é desejável medir e
controlar diretamente as variáveis que indicam estado do sistema. Entretanto, nem
sempre essa prática é viável, tornando-se necessário controlar uma variável secundária.
Por exemplo, variáveis (tais como temperatura e pressão) que são diretamente
relacionadas ao processo podem fornecer uma solução para se adaptar um controle com
variáveis secundárias.
Figura 1 – Diagrama de blocos de um Sistema de Controle em malha-fechada.

Em resumo, os sistemas de malha-fechada verificam a ocorrência de desvios,
pois contém um sensor, que monitora a saída, fornecendo um sinal que retorna à
entrada, formando uma malha de realimentação. A entrada e esta realimentação se
juntam num comparador, que combinam ambos e fornece um sinal de erro, diferença
entre os sinais, que orienta o controlador.
2 JUSTIFICATIVA
Os processos envolvendo controle de nível são muito importantes na indústria de
petróleo, química, alimentícia e muitas outras. Estes processos são responsáveis por
manter a vazão de entrada igual à vazão de saída, em um determinado ponto de
operação. Em processos com este tipo de controle, perturbações originadas em outra
seção da planta industrial são transmitidas mais lentamente a outras seções. Assim, os
sistemas de controle de nível devem ser sintetizados de forma a atenuar o ruído trazido
de outro subsistema pertencente ao processo.
O processo de nível de líquidos mostrou-se adequado para integrar os
conhecimentos teóricos absorvidos na área de controle, instrumentação (sensores e
atuadores), matemática (modelagem e linearização do modelo), comunicações,
computação (algoritmos), etc. Através do sistema, conceitos aprendidos em sala de aula
são vistos na prática. Dessa forma, adquire-se experiência por constatação prática dos
conceitos teóricos, fixando de forma sólida e coerente o que foi apresentado nas aulas
teóricas expositivas.
3 OBJETIVOS
Este projeto tem como primeiro objetivo arquitetar mecanismos de controle
através do projeto de um Controlador Eletrônico Proporcional, Integral e Derivativo
(PID). Porém, existem outras técnicas de controle muito eficientes, com as quais podem
ser obtidos resultados satisfatórios, e cuja experimentação é de grande valia para o
aprendizado de controle. Uma destas técnicas consiste no controle no domínio da
freqüência. As técnicas de respostas no domínio da freqüência são ferramentas
amplamente utilizadas na análise de sistemas de controle e poderá ser aplicada, se
necessário, com o projeto de compensadores para atuar na dinâmica do sistema.

O processo a ser controlado consiste em um tanque (reservatório) confeccionado
de tal forma que a sua geometria gerasse não-linearidades de modo a dificultar a
modelagem matemática do sistema. No entanto, para reduzir os efeitos das não-
linearidades, iremos modelar e controlar o sistema em torno de um ponto de operação.
Em síntese, o sistema é caracterizado por controlar o nível de água do tanque. Serão
utilizadas duas bombas com o intuito de injetar um sinal de entrada positivo ou
negativo, possibilitando o controle do nível do líquido tanto no enchimento como no
esvaziamento do tanque. Um microcontrolador fará o papel de aquisição dos dados de
referência através de uma interface física (teclado numérico). Assim, a saída do sistema
corresponde ao nível de água no tanque.
A Figura 2 apresenta um esboço esquemático da planta experimental.
Figura 2 – Esboço do controle da planta.
Ao idealizar este projeto, observou-se que o sistema de nível de líquido, possui
certa complexidade um pouco elevada e alguns inconvenientes (detalhes ainda não
previstos) no momento da construção. A princípio, algumas soluções foram pesquisadas
para minimizar esses efeitos, como filtros para amortizar a turbulência causada pela
entrada/saída de água no tanque, métodos mais eficientes para a calibração dos sensores,
procedimentos mais criteriosos para obter com uma maior precisão na medição,
flexibilidade física na planta para facilitar eventuais manutenções, troca de componentes
danificados, ou mesmo a simples retirada dos tanques para limpezas.

Figura 3 – Esquemático simplificado do sistema.
4 MÉTODO
O controlador usa a diferença entre o nível do sensor e o valor ajustado para
enviar, quando necessário, o sinal de comando às bombas. A Figura 3 revela o diagrama
esquemático da planta. A entrada do sistema é dada pela vazão na bomba 2 (sinal de
entrada positivo) ou na bomba 1 (sinal de entrada negativa). A saída do sistema
corresponde ao nível de água no tanque. Um reservatório auxiliar funcionará como o
fornecimento de água para o sistema. Neste reservatório, as bombas irão injetar ou
drenar água para munir o tanque controlado.

4.1 Modelagem Matemática
O processo de obtenção do modelo permeia as leis e princípios físicos, ou seja, é
uma modelagem física do sistema.
4.1.1 Considerações simplificadoras
Para modelar o processo, serão consideradas as equações que governam o
balanço de massa nos tanques. Com esse método, é possível obter modelos bem
próximos dos reais e a partir deles projetar os controladores PID. Para isso, é necessário
que algumas considerações simplificadoras sejam assumidas nessa etapa:
O sistema será considerado a parâmetros concentrados. Assim sendo, só será de
interesse conhecer algumas variáveis em alguns pontos específicos;
A perda de carga nas conexões e nas bombas será desprezada;
As dinâmicas dos sensores e dos atuadores são muito mais velozes do que as
dinâmicas dos tanques. Dessa forma, estes elementos serão modelados como
sistemas de ordem zero;
O fluido (água) é incompressível e seu peso específico não varia;
A pressão atmosférica em cada ponto do sistema é a mesma;
Figura 4 – Exemplo de um tanque com relação não-linear entre a área da sua
seção transversal e altura.
Em destaque, na figura acima, tem-se uma visualização de uma coluna ao qual a
sua seção transversal varia conforme a altura de líquido na coluna. É fácil notar que a
área não é a mesma em todos os pontos da coluna. Logo, a área A(h) não possui relação
linear com a altura da coluna.

4.1.2 Linearização do sistema
Linearização é o processo de encontrar um modelo linear que seja uma boa
aproximação do sistema não-linear em questão. Então, para projetar um sistema de
controle para um para um sistema não-linear, pode-se seguramente obter uma
aproximação linear deste modelo, em torno de um ponto de operação. Uma forma de
verificar se um sistema é linear é observar se a relação entre entrada e a saída atende ao
princípio da superposição:
Para aproximar o sistema não-linear por um sistema linear, é necessário que ele
opere em torno de um ponto de equilíbrio e que os sinais envolvidos sejam pequenos em
relação ao ponto de operação. A Figura 5 mostra um exemplo de linearização de uma
mola não-linear.
Figura 5 – Linearização de um sistema massa-mola não-linear.
O método mais empregado para o processo de linearização envolve o
desenvolvimento da função não-linear em uma série de Taylor, de forma que os termos
de ordem mais elevadas possam ser desprezados devido à aplicação de pequenos sinais
em torno do ponto de equilíbrio.

Figura 6 – Translação dos eixos coordenados com a finalidade de trazer a
origem para o ponto de operação do sistema.
4.2 Sensores e Atuadores
4.2.1 Atuadores do Sistema
Os atuadores do sistema, responsáveis pela alimentação dos tanques, consistem
em duas moto-bombas DC proporcionais que operam com tensões entre 0 e 12V. Estes
atuadores poderão ser bombas de limpadores de pára-brisa de automóveis ou bombas de
sucção submersíveis de aplicação náutica com uma corrente nominal máxima de 2,5A.
A água drenada (ou despejada) do tanque possivelmente proporcionará uma turbulência
acentuada, tornando a medição menos precisa, sendo necessário o projeto de filtros para
atenuar o ruído provocado.
4.2.2 Sensor de Nível
O tipo de sensor que será instalado vai depender de alguns fatores que ainda
serão experimentalmente avaliados. Entre os diversos modelos de sensor que podem ser
empregados no projeto, um sensor de pressão piezoresistivo ou um transdutor resistivo
de posição acoplado a uma bóia demonstraram, até o momento, serem os mais
adequados.

O sensor de pressão piezoresistivo é de alta precisão e com saídas de tensão
linearmente proporcionais às pressões aplicadas. Como mencionado, o sensor fará a
medição da pressão da coluna d’água no fundo do tanque e utilizando a expressão de
Pascal, pode-se envolver uma relação matemática para determinar o nível. Nota-se
imediatamente pela Equação (2) que a diferença de pressão depende da densidade do
líquido, da gravidade local e da variação da altura. Considerando a densidade e a
gravidade constantes, a única componente da equação que varia a pressão é a altura.
Portanto, a geometria não-linear do tanque não influencia nas aferições da altura.
Figura 7 – Sensor de Pressão MPX2010 da Motorola.
O outro sensor é fundamentado em um transdutor de posição resistivo rotativo.
Um potenciômetro com uma haste que o liga a uma bóia, permitindo, assim alterações
no valor da resistência à medida que se modifique a altura da coluna de água. Tendo em
vista que a resistência do potenciômetro linear é diretamente proporcional ao ângulo, é
possível de terminar uma relação entre a mesma e a altura dos níveis. O esboço pode ser
observado na Figura 8:
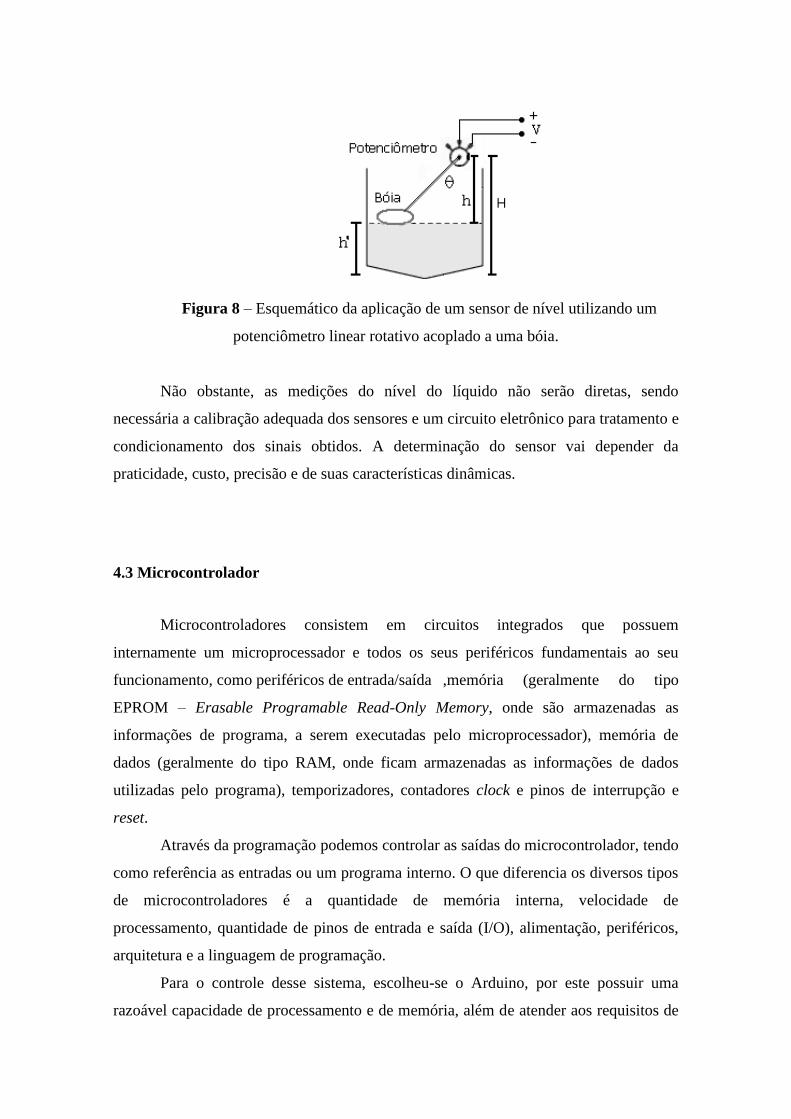
Figura 8 – Esquemático da aplicação de um sensor de nível utilizando um
potenciômetro linear rotativo acoplado a uma bóia.
Não obstante, as medições do nível do líquido não serão diretas, sendo
necessária a calibração adequada dos sensores e um circuito eletrônico para tratamento e
condicionamento dos sinais obtidos. A determinação do sensor vai depender da
praticidade, custo, precisão e de suas características dinâmicas.
4.3 Microcontrolador
Microcontroladores consistem em circuitos integrados que possuem
internamente um microprocessador e todos os seus periféricos fundamentais ao seu
funcionamento, como periféricos de entrada/saída ,memória (geralmente do tipo
EPROM – Erasable Programable Read-Only Memory, onde são armazenadas as
informações de programa, a serem executadas pelo microprocessador), memória de
dados (geralmente do tipo RAM, onde ficam armazenadas as informações de dados
utilizadas pelo programa), temporizadores, contadores clock e pinos de interrupção e
reset.
Através da programação podemos controlar as saídas do microcontrolador, tendo
como referência as entradas ou um programa interno. O que diferencia os diversos tipos
de microcontroladores é a quantidade de memória interna, velocidade de
processamento, quantidade de pinos de entrada e saída (I/O), alimentação, periféricos,
arquitetura e a linguagem de programação.
Para o controle desse sistema, escolheu-se o Arduino, por este possuir uma
razoável capacidade de processamento e de memória, além de atender aos requisitos de

entrada e saída de maneira prática e confiável. O Arduino é baseado em um
microcontrolador (ATmega), utilizando uma linguagem própria baseada em C/C++. Seu
hardware é constituído pelo microncontrolador da ATmega e seus periféricos essenciais,
como representado na Figura 9.
Figura 9 – Microcontrolador Arduino.
Os modelos disponíveis da plataforma de desenvolvimento Arduino possuem
conversores A/D com 10 bits de resolução, ou seja, uma entrada analógica cujo valor
varia entre 0V e 5V, terá a sua correspondência em binário a valores entre 0
(0000000000) e 1023 (1111111111) respectivamente. Entregando resoluções na ordem
dos 5mV. Assim, suas funções de quantização do sinal são bastante aceitáveis, podendo
afirmar ser suficiente para haver uma reconstrução do sinal amostrado sem perda de
informações. O sinal “lido” pelo Arduino será “tratado” através de uma programação
estruturada e convertido novamente para um sinal analógico, onde voltará ao sistema
em estado de tensão, representando a altura da coluna d’água do tanque. A Figura 10
esquematiza o fenômeno da conversão A/D e D/A no microcontrolador.

Figura 10 – Esboço do fenômeno de amostragem e quantização do sinal do
sensor.
A tabela abaixo apresenta as principais especificações técnicas do Arduino:
Tensão de operação 5 V
Tensão de entrada (recomendada) 7-12 V – limites(6-20V)
Pinos E/S digitais 14 ( 6 dos quais são saídas PWM)
Pinos de entrada analógicos 6
Corrente CC por pino E/S 40 mA
Corrente CC por pino 3.3 V 50 mA
Memória Flash 32 KB, sendo 2 KB utilizados pelo bootloader
SRAM 2 KB
EEPROM 1 KB
Velocidade de Clock 16 MHz
Tabela 1 - Características básicas do Arduino versão Duemilinove.
Os requisitos de desempenho do microcontrolador vão depender também da
versão empregada. O ATmega 328 tem 32kb de memória flash sendo 2kb utilizados
pelo bootloader do Arduino restando 30kb para armazenamento de código. O ATmega
328 além dos 32kb de memória flash tem 2kb SRAM e 1kb de EEPROM que pode ser
acedida através da biblioteca EEPROM. O ATmega contido no Arduino já traz o
bootloader gravado, assim basta um cabo USB, um computador e a IDE do Arduino
para começar a programar.
No projeto do sistema de controle, o Arduino fará o papel apenas de processador
de comunicação. Ele terá uma comunicação direta com os sensores para poder enviar

um sinal e comutar os atuadores, indicando qual moto-bomba irá operar. Além disso,
um teclado numérico fará uma interface física com o operador para que seja definido o
valor do nível de referência. O valor informado será interpretado pelo microcontrolador
e enviado para o circuito eletrônico dos amplificadores operacionais, onde será
comparado com a saída atual do processo para o controle do sistema.
Um periférico de saída também será implementado com a instalação de um
display LCD para apresentar os valores de referência informados pelo operador.
Figura 11 – Display LCD – PCD 8544 Nokia 5110/3310
4.4 Controlador Proporcional, Integral e Derivativo (PID)
4.4.1 Tipos de Implementação do Algoritmo PID
O Controlador PID combina as vantagens do controlador PI e PD. O efeito
desestabilizador do controlador PI é contrabalanceado pela ação derivativa que tende a
aumentar a estabilidade relativa do sistema ao mesmo tempo em que torna a resposta do
sistema mais rápida devido ao seu efeito antecipatório. Através do Controlador PID a

ação derivativa tira proveito da informação de processo que permite prever, em curto
prazo, a tendência da variável de processo. Assim, ao observar que a variável está
aumentando, a ação derivativa atuará no sentido de reduzi-la, mesmo que o erro e a
integral do erro apontem em outra direção. Desta forma, a ação derivativa torna a
resposta do controlador mais rápida.
A equação do Controlador PID paralelo clássico é dada por:
Onde o ganho proporcional também multiplica o termo integral e o termo
derivativo. O fator multiplicativo (Td) é conhecido como o tempo derivativo do
controlador. Ele é dito paralelo porque as suas ações: proporcional (P), integral (I) e
derivativa (D) são calculadas em paralelo e em seguida somadas. A Figura 12 mostra
um diagrama de blocos desse algoritmo.
Figura 12 – Diagrama de blocos do PID paralelo clássico.
Entretanto, a implementação da equação anterior em um equipamento físico
(pneumático ou eletrônico analógico) não é possível em função do termo derivativo:
(Td.s). Este termo não é “realizável”, pois a função de transferência possui o grau do
numerador maior do que o do denominador. Esta função de transferência tem um ganho

que cresce sem limites, quando a freqüência do sinal aumenta. Uma solução muito
utilizada na prática é projetar um filtro na ação derivativa:
Onde o fator “ ” costuma ser um valor pequeno em torno de 1/8, fazendo com
que o numerador prepondere que é a ação derivativa desejada. Alguns fabricantes de
sistemas de controle permitem que o usuário ajuste o fator “ ”, enquanto outros mantêm
um valor fixo e constante.
Em função desta dificuldade de implementação do termo derivativo, os
fabricantes de controladores analógicos utilizaram tradicionalmente o algoritmo de
controle PID do tipo Série ou Interativo, cuja equação é a seguinte, usando a notação de
Transformada de Laplace:
Nota-se que o termo derivativo é inserido por uma função de transferência cuja
ordem do numerador é idêntica, à do denominador, logo é viável fisicamente. Outra
característica deste algoritmo PID série é que o termo PI é calculado em paralelo:
Em seguida (em “série”), o resultado do termo “PI” passa pelo termo derivativo
para calcular a saída do “PID”:

4.4.2 Controlador Eletrônico com Amplificador Operacional
O controlador automático é formado pelo detector de erro e um amplificador,
cuja função é transformar o sinal de erro, que é de baixa potência em um sinal de
potência um pouco mais elevada. O atuador transforma o sinal de erro amplificado no
valor de entrada da planta, com o objetivo de que a saída da planta se aproxime do valor
de referência. Existem diversas configurações para o circuito eletrônico. Na Figura 13
podemos observar um modelo de controlador eletrônico PID analógico com
Amplificadores Operacionais.
O controlador PID analógico vai receber o sinal do sensor e um sinal de
referência, proveniente do microcontrolador. Com base no erro calculado entre os
sinais, o controlador calcula uma ação de controle, disponibilizando um sinal de
controle na saída do circuito a ser aplicado em uma das bombas. O microcontrolador
também vai receber o sinal do sensor e vai indicar qual bomba irá atuar, enviando um
sinal para um circuito comutador. O circuito comutador selecionará a moto-bomba que
irá receber o sinal analógico procedente do controlador.
Figura 13 – Circuito Eletrônico do controlador PID com Amplificadores Operacionais

Para a determinação dos valores dos componentes eletrônicos do controlador, é
necessário estabelecer os critérios de desempenho que podem ser usados para a sintonia
do controlador PID. Os métodos de sintonia de controladores PID podem ser divididos
em duas classes: a dos métodos analíticos, que precisam do modelo do processo para
obter os parâmetros do controlador, e a dos métodos empíricos, que utilizam resultados
experimentais ou de simulação.
No caso dos métodos analíticos, as ferramentas mais utilizadas são o método do
Lugar das Raízes e os métodos de controle baseado na resposta em freqüência. Entre os
métodos empíricos está o método de Ziegler-Nichols, muito utilizado na prática. Em
ambos os casos, o projeto do controlador e também a identificação do sistema a ser
controlado, podem ser realizados com o auxílio de ferramentas computacionais como o
MATLAB.
A sintonia de um controlador é um aspecto fundamental no controle de um
processo. Na prática industrial, o controlador PID é usado quase sempre como uma
“solução de prateleira” para os problemas de controle. De fato, ele possui características
que o tornam apropriado para controle realimentado: é simples, possui uma única
equação (execução rápida, não introduzindo atraso na malha e sem cálculos interativos,
sem risco de não convergência), oferece flexibilidade de adaptação de desempenho a
diferentes tipos de processos por meio do ajuste de três parâmetros que podem ser
selecionados para modificar o comportamento do sistema realimentado.
Essas características fazem do PID o controlador mais utilizado. No entanto, não
basta à escolha de PID para solucionar o problema de controle. É fundamental o uso de
uma sintonia adequada dos seus parâmetros para que o desempenho do sistema não
fique pobre ou mesmo caminhe para a instabilidade em malha fechada.
5 FORMA DE ANÁLISE DOS RESULTADOS
O ótimo desempenho de sistemas de controle é uma condição sempre almejada,
porém, difícil de ser alcançada, visto a sua complexidade. Ficando limitados a
dispositivos eletrônicos, sensores, atuadores e o próprio controlador atuando sobre
condições não ideais. Assim, os resultados obtidos por simulação e em resposta a
variadas entradas serão analisados e avaliados com relação a índices de desempenho
comumente utilizados na Engenharia de Controle. Estes índices podem ser calculados

através da trajetória da variável controlada em relação ao seu valor de referência
desejado ao longo de ma janela de avaliação. Alguns índices de desempenho e sua
definição são relacionados na Tabela 2.
Índices de Desempenho Descrição Expressão
IAE Integral do módulo do erro
ISE Integral dos erros ao quadrado
ITAE Integral do módulo do erro vezes o tempo
Tabela 2 – Índices de desempenho para avaliação do controle em malha fechada.

REFERÊNCIAS
BOYLESTAD, R. L. e Nashelsky, L. (1998). Dispositivos Eletrônicos e Teoria de
Circuitos. Prentice-Hall do Brasil.
DORF, Richard C.; BISHOP Robert H. Sistemas de Controle Moderno. 8 Ed. Rio de
Janeiro, RJ, BRASIL. LTC. 2001.
OGATA, Katsuhiko. Engenharia de Controle Moderno. 4 Ed. São Paulo, SP, BRASIL.
Prentice Hall, 2003
CAMPOS, M. e TEIXEIRA, H., Controles Típicos de Equipamentos e Processos
Industriais, Edgard Blücher, 2006.