instituto politÉcnico nacional · 2020. 2. 25. · en el sistema eléctrico de potencia, existe un...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS” ZACATENCO
“DESARROLLO DE UNA INTERFAZ GRÁFICA PARA EL ANÁLISIS DE FLUJOS DE POTENCIA”
TESIS
QUE PARA OBTENER EL TÍTULO DE
INGENIERO ELECTRICISTA
P R E S E N T A N
ESPINOZA LÓPEZ GUSTAVO IVÁN
RODRÍGUEZ GARCÍA JOSÉ DANIEL
SALINAS BECERRIL JAVIER
ASESORES:
M. EN C. LÓPEZ ZEPEDA MANUEL ALEJANDRO
LIC. FEREGRINO LEYVA BLANCA MARINA
CIUDAD DE MÉXICO, NOVIEMBRE 2017


ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA – UNIDAD ZACATENCO
1 | P á g i n a
ÍNDICE
I. RESUMEN ...................................................................................................................................4
II. INTRODUCCIÓN .......................................................................................................................5
III. PLANTEAMIENTO DEL PROBLEMA ....................................................................................6
IV. JUSTIFICACIÓN ......................................................................................................................7
V. VIABILIDAD ...............................................................................................................................8
VI. OBJETIVOS ..............................................................................................................................9
VI.I. Objetivo General ............................................................................................................9
VI.II. Objetivo Específico ...................................................................................................9
CAPÍTULO 1 SISTEMAS ELÉCTRICOS DE POTENCIA ...................................................... 10
1.1. Introducción ..................................................................................................................... 11
1.2. Antecedentes ................................................................................................................... 12
1.3. Representación de los Componentes de un Sistema de Potencia ......................... 15
1.3.1. Diagrama unifilar ...................................................................................................... 15
1.3.2. Diagrama de impedancia y reactancia .................................................................. 17
1.3.3. Cantidad por unidad ................................................................................................ 17
1.3.4. Generadores .............................................................................................................. 18
1.3.5. Transformadores ...................................................................................................... 21
1.3.6. Líneas de transmisión ............................................................................................. 25
1.4. Tipos de nodos ................................................................................................................ 29
1.4.1. Nodo de carga ........................................................................................................... 29
1.4.2. Nodo compensador .................................................................................................. 30
1.4.3. Nodo de voltaje controlado o generación. ........................................................... 30
CAPÍTULO 2 FLUJOS DE POTENCIA .................................................................................... 32

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
2 | P á g i n a
2.1. Introducción ..................................................................................................................... 33
2.2. Solución por Modelos Matemáticos ............................................................................. 33
2.3. Método de solución ........................................................................................................ 37
2.3.1. Método de Gauss-Seidel ......................................................................................... 37
2.3.2. Método de Newton-Raphson .................................................................................. 40
2.3.3. Método Desacoplado Rápido ................................................................................. 43
2.4. Ecuaciones de Flujos de Potencia Aplicando el Método de Newton Raphson ..... 46
CAPÍTULO 3 ESTUDIO TÉCNICO ........................................................................................... 50
3.1. Introducción ..................................................................................................................... 51
3.2. Diseño de la Interfaz Gráfica ......................................................................................... 51
3.2.1. Creación de un documento nuevo ........................................................................ 52
3.2.2. Diseño de Portada .................................................................................................... 55
3.2.3. Diseño de Menú de selección ................................................................................ 58
3.3.3. Diseño de Interfaz de los sistemas ........................................................................ 60
3.2. Aplicación de la Interfaz Gráfica ................................................................................... 67
CAPÍTULO 4 ESTUDIO ECONÓMICO .................................................................................... 74
4.1. Presupuesto de la Interfaz gráfica ................................................................................ 75
4.1.1. Inversión .................................................................................................................... 75
4.1.2. Capital de trabajo ..................................................................................................... 76
4.1.4. Presupuesto .............................................................................................................. 76
CONCLUSIONES ........................................................................................................................ 77
REFERENCIAS ............................................................................................................................ 79
ANEXOS ....................................................................................................................................... 80
ANEXO A. Datos del sistema eléctrico de potencia Sistema Exposito 3 Nodos ...... 81
ANEXO B. Datos del sistema eléctrico de potencia Sistema Murty 3 Nodos ........... 82
ANEXO C. Datos del sistema eléctrico de potencia Sistema Stevenson 4 Nodos ... 83

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
3 | P á g i n a
ANEXO D. Datos del sistema eléctrico de potencia Sistema Stagg 5 Nodos ........... 84
ANEXO E. Datos del sistema eléctrico de potencia Sistema Arthur 5 Nodos .......... 85
ANEXO F. Datos del sistema eléctrico de potencia Sistema William 5 Nodos ......... 86
ANEXO G. Datos del sistema eléctrico de potencia Sistema Bergen 5 Nodos ......... 87
ANEXO H. Datos del sistema eléctrico de potencia Sistema Glover 7 Nodos .......... 88
ANEXO I. Datos del sistema eléctrico de potencia Sistema IEEE 13 Nodos ............. 89
ANEXO J. Diagrama de flujo del método de Newton – Raphson. ............................... 91
ANEXO K. Diagrama de flujo del método de Gauss - Seidel. ...................................... 93
ANEXO L. Diagrama de flujo del método de Desacoplado - Rápido. ......................... 95
ÍNDICE DE TABLAS ............................................................................................................ 96
ÍNDICE DE FIGURAS .......................................................................................................... 97

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
4 | P á g i n a
I. RESUMEN
En el presente proyecto se elabora una herramienta computacional que permite, a
partir de una interfaz gráfica, visualizar la solución a problemas de flujos de potencia.
La finalidad es presentar los parámetros del sistema, así como la topología de la red,
mostrando datos de impedancias de línea, potencias de generación y carga, valores
de magnitud y ángulo de tensión, facilitando la comprensión del comportamiento de la
red.
Mediante la programación de los métodos iterativo de: Newton – Raphson, Gauss –
Seidel y Desacoplado Rápido, se desarrollaron los estudios para problemas
planteados de flujos de potencia, siendo utilizado como herramienta de solución dentro
del paquete computacional MATLAB 7.10. Asimismo se han incluido técnicas y
conceptos asociados a sistemas eléctricos de potencia, teniendo como propósito el
comprender y emplear los métodos iterativos de solución, dando conocimiento del
programa y la interfaz gráfica.
Con la inmersión de la interfaz gráfica como herramienta de flujos de potencia se
presenta el beneficio de un mejor entendimiento, análisis, evaluación y visualización
de un sistema eléctrico de potencia.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
5 | P á g i n a
II. INTRODUCCIÓN
El presente proyecto está comprendido por cuatro capítulos, los primeros dos de
aspecto teórico, seguido del estudio técnico y finalizando con el cuarto sobre el estudio
económico; seguido a los capítulos anteriores se tiene la sección de conclusiones y
resultados.
El Capítulo 1 “Sistemas Eléctricos de Potencia”, menciona brevemente los
antecedentes de cómo se originaron estos sistemas en México, además de describir
los dispositivos y elementos que conforman a un sistema de potencia, como funcionan
y cuáles son los parámetros que los componen y la configuración que presentan.
El Capítulo 2 “Flujos de Potencia”, comprende de la descripción de los métodos
existentes para llevar a cabo la resolución de flujos de potencia, además de expresar
los modelos matemáticos para los mismos. Se plantean las ecuaciones y el desarrollo
para los métodos iterativos de solución, Newton–Raphson, Gauss – Seidel y
Desacoplado Rápido por ser seleccionados para la solución de flujos de potencia en
este trabajo.
El Capítulo 3 “Estudio Técnico”, se aborda el desarrollo de la interfaz, su aplicación y
los resultados que presenta, se muestran los problemas de flujo de potencia que se
seleccionaron para ser resueltos, los parámetros que los componen y los enlaces
nodales. Finalmente la visualización de la solución por pasos y las muestras de la
topología de red.
El Capítulo 4 “Estudio Económico”, se conforma por dos puntos, una elaboración del
costo del programa al cuantificar y detallar los costos de inversión directa e indirecta,
la ganancia y demás factores que permitieran desarrollar de manera adecuada el
presupuesto para ofrecerlo como una herramienta de uso técnico. El segundo punto,
la estimación del costo de inversión con fines de uso educativo.
La parte final se compone de las conclusiones acerca del desarrollo de la interfaz,
comentando las ventajas y desventajas que presenta, así como la mención de si se
obtuvo el resultado esperado y las mejoras que se le podrían realizar.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
6 | P á g i n a
III. PLANTEAMIENTO DEL PROBLEMA
El sistema eléctrico de potencia se encuentra integrado por unidades generadoras,
cargas y líneas de trasmisión que tienen como fin el generar, transformar, transmitir y
distribuir la energía eléctrica.
Los estudios de flujos de potencia buscan encontrar el vector de estado el cual es el
conjunto de tensiones y ángulos de todos los nodos excepto el slack, se desarrollan
con el fin de determinar las mejores condiciones de operación del sistema eléctrico de
potencia, así como para planear o diseñar una expansión futura del sistema.
Un gran inconveniente al resolver flujos de potencia, es el tiempo que conlleva
realizarlos manualmente ya que los métodos que se utilizan para resolverlos deben de
iterar varias veces para que el sistema converja y la cantidad de ecuaciones que
emplean estos métodos, están en función a la cantidad de nodos con los que cuenta
el sistema, por lo que se vuelve un gran problema si el sistema es demasiado grande,
además de que se invierte demasiado tiempo en cada iteración.
Ante esta problemática se desarrolla un programa computacional empleando los
métodos iterativos tales como Newton – Raphson, Gauss – Seidel y Desacoplado
Rápido para la solución a flujos de potencia que a través de una interfaz gráfica permita
observar los datos obtenidos del sistema.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
7 | P á g i n a
IV. JUSTIFICACIÓN
En el presente proyecto se propone el diseño y desarrollo de una interfaz gráfica que
permita la solución de flujos de potencia aplicando los métodos iterativos
computacionales, Newton - Raphson, Gauss – Seidel y Desacoplado Rápido.
En el sistema eléctrico de potencia, existe un flujo continuo de potencia que demanda
la carga del sistema, por lo que es de gran importancia el contar con estimaciones de
variación de tensión, ángulo y potencias para el crecimiento futuro y condiciones
óptimas del sistema eléctrico.
El construir una interfaz gráfica hará posible la visualización de la topología de la red
y la obtención de los parámetros característicos del sistema.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
8 | P á g i n a
V. VIABILIDAD
El diseño de una interfaz gráfica pretende dar beneficio a nivel educativo en la
academia de Potencia, de la Escuela Superior de Ingeniería Mecánica y Eléctrica,
brindando a los alumnos la posibilidad de visualizar la topología del sistema a partir de
ingresar los parámetros de las líneas de transmisión y datos de los nodos.
En con junto a la visualización del sistema, se tiene el programa computacional que dé
cálculo a la estimación de la magnitud y ángulo de tensión para la resolución de flujos
de potencia.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
9 | P á g i n a
VI. OBJETIVOS
VI.I. Objetivo General
Desarrollar una interfaz gráfica que permita solucionar flujos de potencia de un Sistema
Eléctrico aplicando los métodos de solución de Newton-Raphson, Gauss – Seidel y
Desacoplado Rápido.
VI.II. Objetivo Específico
Describir las características generales de flujos de potencia en un Sistema Eléctrico
de Potencia.
Utilizar un lenguaje de programación para la elaboración de los métodos iterativos de
solución.
Explicar el desarrollo y estructura de una interfaz para solución de problemas
matemáticos.
Mostrar la interfaz con la solución obtenida para los Sistemas Eléctricos de Potencia.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
10 | P á g i n a
CAPÍTULO 1
SISTEMAS ELÉCTRICOS DE
POTENCIA

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
11 | P á g i n a
1.1. Introducción
El Sistema Eléctrico de Potencia se encuentra constituido básicamente por cuatro
grupos: generación, transmisión, distribución y consumo. La figura 1 representa el
esquema del Sistema Eléctrico de Potencia.
Figura 1. Representación de un Sistema Eléctrico de Potencia. (Gómez, 2002, p. 12).
Cada grupo tiene una función definida en el sistema, “las líneas de transmisión
constituyen los eslabones de conexión entre las centrales generadoras y las redes de
distribución. La red de distribución conecta las cargas aisladas de una zona con las
líneas de transmisión” (Grainger & Stevenson, 1996).
Este sistema existe en un equilibrio instantáneo y permanente en lo concerniente a
generación y demanda. Incluso se puede decir que es el sistema “en equilibrio

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
12 | P á g i n a
dinámico de enorme tamaño (probablemente el mayor sistema dinámico ideado y
construido por el ser humano a día de hoy)” (Gómez, 2002).
Se puede ver seriamente amenazado si existen contratiempos que pongan en peligro
el equilibrio y que puede provocar una crisis en el abastecimiento de electricidad en
extensas zonas, siendo razón la existencia de sistemas tan sofisticados de control,
supervisión y seguimiento en tiempo real, sumándole gran importancia a los elementos
de protección.
De las partes que componen al Sistema, el grupo de generación produce normalmente
tensiones entre 6 y 20 kV, pasando directamente al grupo de transmisión y alcanzando
niveles de 85, 115, 138, 220, 400 kV. “La elevación de la tensión permite trasladar
grandes cantidades de energía eléctrica a grandes distancias con una tecnología de
cables razonablemente barata y sin grandes pérdidas de energía” (Gómez, 2002).
1.2. Antecedentes
En México se inició la generación de energía eléctrica a finales del siglo XIX, con la
primera planta generadora la cual se instaló en 1879, estuvo en León Guanajuato y
fue utilizada por la fábrica textil “La americana”. Esta forma de generar energía tomo
gran auge casi inmediatamente en la industria minera y en menor grado fue utilizada,
para la iluminación residencial y publica.
Para 1889 ya estaba operando la primera planta hidroeléctrica ubicada en Batopilas
Chihuahua, esta extendió sus redes de distribución hacia mercados urbanos donde la
población tenía mayor economía, (Comisión Federal de Electricidad, 2016).
Compañías internacionales con gran capacidad empezaron a llegar al país a crear
filiales, algunas de estas son:
The Mexican Light and Power Company, de origen canadiense la cual se ubicó
en el centro del país.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
13 | P á g i n a
El consorcio The American and Foreign Power Company, la cual contaba con
tres sistemas interconectados ubicados en el norte del país.
La compañía Eléctrica de Chapala, la cual se encontraba ubicada en el
occidente del país.
La generación de energía eléctrica de empresas privadas para inicios del siglo XX era
de 31 MW y para 1910 era de 50 MW de los cuales el 80% de esa generación los
generaba la empresa The Mexican Light and Power Company con el primer gran
proyecto hidroeléctrico, el cual era la planta Necaxa ubicada en puebla.
Durante este periodo se creó la Comisión Nacional para el Fomento y Control de la
industria de generación, esto se consideró como el primer gran esfuerzo para poder
ordenar la industria eléctrica. El 2 de diciembre de 1933 se decretada que son
actividades de utilidad pública la generación y distribución de electricidad.
En 1937 México tenía una capacidad de generación de 629 MW, con una población
de 18.3 millones de habitantes, de los cuales solo 7 millones contaban con suministro
de electricidad. En ese momento ese suministro solo lo aportaban tres empresas
privadas con serias dificultades, por esta razón las tarifas de energía eléctrica eran
muy elevadas además de que las interrupciones eran constantes, debido a que estas
empresas privadas solo se dedican a los mercados urbanos donde tenían mayor
ganancia olvidándose de las poblaciones rurales las cuales representaban más del 62
% de la población.
La Comisión Federal de Electricidad (CFE) fue creada el 14 de agosto de 1937 y tenía
como objetivo “Organizar y dirigir un sistema nacional de generación, transmisión y
distribución de energía eléctrica, basado en principios técnicos y económicos, sin
propósitos de lucro y de igual manera lograr generar el mayor rendimiento posible para
el beneficio de los intereses generales”, Comisión Federal de Electricidad, 2016,
recuperado de : http://www.cfe.gob.mx/ConoceCFE/1 AcercadeCFE/CFE y la
electricidad en Mexico/Paginas/CFEylaelectricidadMexico.aspx.
Para el año de 1938 CFE tenía una capacidad de generación de 64 KW, misma que
se incrementó a 45, 594 KW ocho años después, en ese entonces las empresas

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
14 | P á g i n a
privadas dejaron de invertir y CFE se vio obligada a empezar a generar energía con el
fin de que estas la distribuyeran en sus redes por medio de la reventa.
Para el año de 1960 la capacidad instalada en el país era de 2,308 MW y la generación
que aportaba cada una de las empresas era la siguiente:
CFE aportaba el 54 %.
The Mexican Light aportaba 25 %.
La American and Foreign el 12 %.
El resto de las compañías el 9 %.
El presidente Adolfo Lopez Mateos decidió nacionalizar la industria eléctrica, el 27 de
septiembre de 1960, con el fin de incrementar la población que contaba con el beneficio
de energía eléctrica, que para ese entonces era del 44 %.
La capacidad del país para el año de 1961 era de 3,250 MW, para ese entonces la
participación de CFE en cuanto a propiedades de centrales generadoras paso de cero
al 54%, además de que vendía el 25% de energía eléctrica de la que producía.
En esas épocas se construyeron importantes cetros generadores, entré los que se
encontraban los de Infiernillo y Temascal entre otras, logrando alcanzar una capacidad
de 7,874 MW en 1971. Entre los años de 1970 y 1980 se construyeron más centrales
generadoras, dando una capacidad instalada de 17,360 MW.
En los principios de la industria eléctrica existían en operación varios sistemas
aislados, que tenían características técnicas diferentes, llegando a tener en ese
entonces casi 30 voltajes de distribución diferentes, siete voltajes diferentes para
líneas de trasmisión de alta tensión y dos frecuencias diferentes de 50 y 60 Hertz.
Por esta situación se dificultaba el suministro de energía eléctrica, por lo que CFE tuvo
que definir y unificar los criterios técnicos y económicos del sistema eléctrico,
normalizando primero los voltajes de operación, esto con la finalidad de poder
estandarizar los equipos. Posteriormente se unificaron las frecuencias dejándola a 60
Hertz, para que CFE integrara los sistemas de trasmisión en el sistema Interconectado
Nacional.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
15 | P á g i n a
Para el año de 1991 la capacidad de generación instalada del país ascendió a 26,797
MW, que para el año 2000 se incrementó a 35,385 MW teniendo así una cobertura del
servicio eléctrico del 94.7% a nivel nacional, teniendo una red de trasmisión y
distribución de 614,653 Kms lo que equivaldría a darle 15 vueltas a la tierra, contando
con más de 18.6 millones de usuarios, Comisión Federal de Electricidad, 2016,
recuperado de: http://www.cfe.gob.mx/ConoceCFE/1 AcercadeCFE/CFE y la
electricidad en Mexico/Paginas/CFEylaelectricidadMexico.aspx.
CFE fue asignada como la encargada de suministrar el servicio de energía eléctrica
en todo el país en octubre del 2009.
1.3. Representación de los Componentes de un Sistema de Potencia
En los sistemas eléctricos de potencia se puede representar los elementos que la
componen mediante el uso de símbolos normalizados, facilitando así el diseño de
planos o diagramas de manera estandarizada, o logrando similitudes entre los mismos,
ya sea en la representación de transformadores, generadores, cargas o algún otro
elemento del área eléctrica.
1.3.1. Diagrama unifilar
En un sistema trifásico donde las cargas son balanceadas se puede resolver de
manera equivalente a un circuito monofásico en el cual se tiene una línea del sistema
trifásico y el neutro de retorno, debido a esto es regular representar una fase y neutro.
A menudo se hace la simplificación de suprimir el cierre del circuito por medio del
neutro e indicando las partes de los componentes por medio de símbolos normalizados
que por el circuito equivalente correspondiente a cada elemento, los parámetros del
circuito no se indican y la línea es representada por un solo hilo de extremo a extremo,
este diagrama resultante que simplifica un sistema eléctrico se llama diagrama unifilar.
Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
16 | P á g i n a
El objetivo del diagrama unifilar es mostrar de manera precisa la información más
importante del sistema, la importancia de las características de un sistema varía
dependiendo del problema que se considere y la cantidad de información que se
incluye en el diagrama para el fin que se desea, por ejemplo, la ubicación de los
interruptores o relevadores no tienen gran importancia para un estudio de cargas por
lo que no se colocarán si el fin es realizar dicho estudio.
Por el contrario si se desea determinar la estabilidad de un sistema en condiciones de
régimen transitorio ante una falla, dependerá parte de la velocidad con la que los
relevadores e interruptores operen. La información contenida en un diagrama unifilar
depende al problema que se estudia y a la compañía que pertenece.
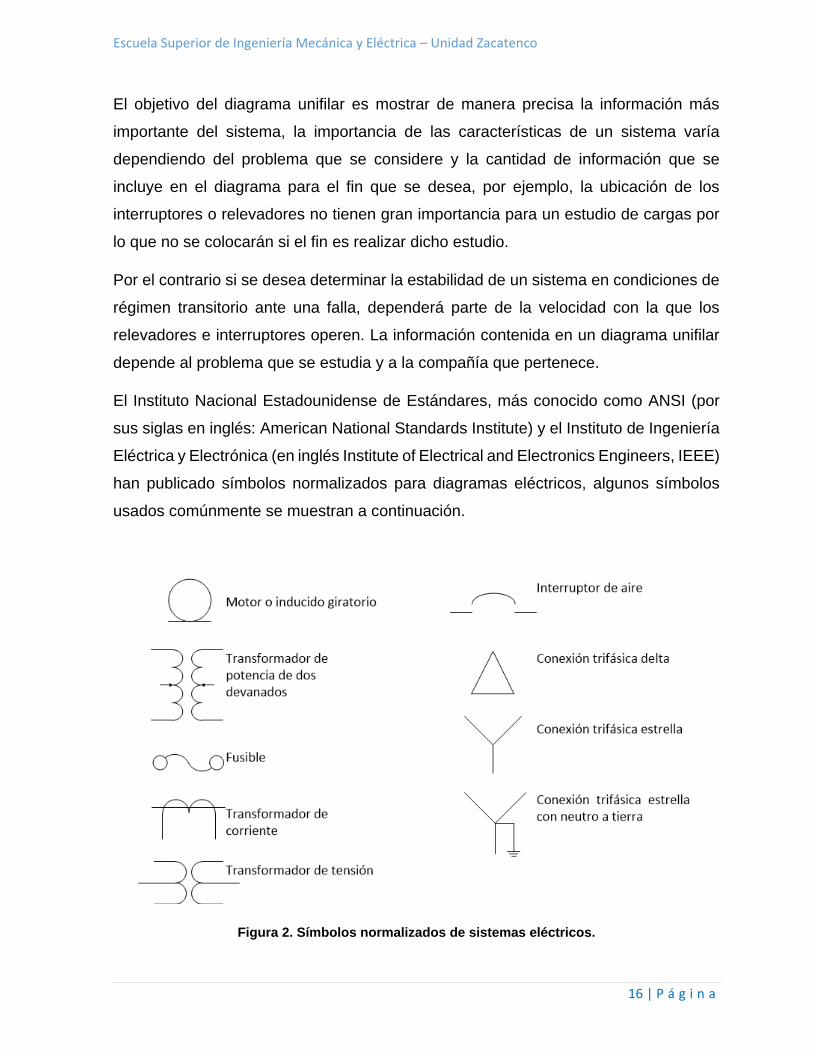
El Instituto Nacional Estadounidense de Estándares, más conocido como ANSI (por
sus siglas en inglés: American National Standards Institute) y el Instituto de Ingeniería
Eléctrica y Electrónica (en inglés Institute of Electrical and Electronics Engineers, IEEE)
han publicado símbolos normalizados para diagramas eléctricos, algunos símbolos
usados comúnmente se muestran a continuación.
Figura 2. Símbolos normalizados de sistemas eléctricos.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
17 | P á g i n a
1.3.2. Diagrama de impedancia y reactancia
Para el estudio correspondiente a un corto circuito o al comportamiento de un sistema
de carga, el diagrama unifilar debe cambiarse a un diagrama de impedancias,
mostrando el circuito equivalente para cada componente del sistema refiriéndose al
mismo lado de uno de los transformadores.
Para cada transformador se muestra la resistencia, reactancia de dispersión y el paso
para la corriente magnetizante. Para cada generador se representa por la tensión
generada en serie con los valores de resistencia y reactancia.
El diagrama de impedancias no se incluye impedancias limitadoras de corriente que
se representen en el diagrama unifilar entre los neutros de los generadores y tierra,
esto porque en condiciones de equilibrio no circulan corrientes a tierra y los neutros se
encuentran a un mismo nivel de potencial al neutro del sistema.
1.3.3. Cantidad por unidad
Magnitudes como la tensión, corriente, impedancia y kVA de un circuito se expresan a
menudo en por ciento o por unidad de un valor base para cada una de las magnitudes
mencionadas. Es decir, para un tensión base de 120 kV, las tensiones de valor igual a
108, 120 y 126 kV corresponden a 0.90, 1.00 y 1.05 en por unidad o 90, 100 y 105%
respectivos.
El valor en por unidad es la razón del mismo valor al valor base y se expresa en
decimal, el valor en por ciento es 100 veces el valor por unidad, estos métodos
resultan ser más fáciles de usar en el cálculo que usando los propios valores reales de
potencia, corriente, voltaje o resistencia, una ventaja que ofrece el método de por
unidad ante tanto por ciento es que el producto de dos magnitudes en por unidad esta
expresado en por unidad mientras que el producto de dos magnitudes en por ciento se
deben de dividir en 100 para obtener el resultado en tanto por ciento.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
18 | P á g i n a
Las magnitudes de tensión, corriente, voltaje y reactancias se relacionan entre sí, de
forma que a partir del conocimiento de dos magnitudes se puede determinar las
demás. Por ejemplo una impedancia base que genere una caída de tensión igual a la
tensión base cuando la corriente que circula a través de la impedancia es igual a la
corriente base. En sistemas monofásicos o trifásicos la terminación de “corriente” se
refiere a la corriente de línea del sistema, para la tensión se refiere a la tensión que
existe al neutro y los kVA se refieren a los kVA de fase, dichas magnitudes se pueden
relacionar a partir de las siguientes ecuaciones.
Corriente base A = kVA1∅ base
tensión base en kVLN ( 1)
Impedancia base = tensión base VLN
corriente base en A ( 2)
Impedancia base = (tensión base en kVLN)
2 Χ 1000
kVALN base ( 3)
Impedancia base = (tensión base en kVLN)
2
MVA1∅ base ( 4)
Potencia base en kW1∅ = kVA1∅ base ( 5)
Potencia base en MW1∅ = MVA1∅ base ( 6)
Impedancia por unidad = impedancia real Ω
impedancia base Ω ( 7)
1.3.4. Generadores
Un generador es una maquina eléctrica rotativa que puede trasformar energía
mecánica en eléctrica, esto lo consigue mediante la interacción de las dos partes más
importantes que lo compone las cuales son: el rotor que es la parte móvil y el estator
que es la parte estática.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
19 | P á g i n a
Si se produjera mecánicamente un movimiento relativo entre el estator y el rotor uno
de estos generara un flujo magnético actuando como inductor para que el otro lo
trasforme en electricidad actuando como inducido.
Los generadores se pueden clasificar, principalmente, según el tipo de corriente que
generan, de esta forma tenemos dos grandes grupos los cuales son: generadores de
corriente alterna y generadores de corriente directa, Endesa educa, 2014, recuperado
de: http://www.endesaeduca.com/Endesa educa/recursos-interactivos/conceptos-
basicos/v.-funcionamento-basico-de-generadores.
1.3.4.1. Generadores de corriente alterna
En la figura 3 se puede ver un generador de corriente alterna, básico, el cual está
construido por una bobina que gira a 60 revoluciones por minuto entre los polos Norte
(N) y sur (S) de un imán permanente. La rotación la produce una fuerza externa que
no se muestra, esta puede ser un motor. La bobina está conectada a dos anillos
colectores y estos a su vez se conectan a una carga externa, la cual está conectada
por medio de dos escobillas estacionarias 𝑋 y 𝑌.
Figura 3. Diagrama de un generador de corriente alterna. (Wildi, 2007, p. 71).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
20 | P á g i n a
Observando la figura 3 se puede analizar que conformé la bobina gira, se induce un
voltaje en las terminales 𝐴 y 𝐷. Este voltaje aparece en la carga a través de las
escobillas. El voltaje se genera por que el flujo producido por los polos N y S es
atravesado por los conductores de la bobina, por esta causa el voltaje máximo
(aproximadamente 20 V) que se podrá inducir será cuando la bobina este
momentáneamente en posición horizontal, (Wildi, 2007).
Caso contrario ocurre cuando la bobina está en posición vertical, ya que cuando se
encuentre en esta posición ningún flujo es atravesado por lo tanto el voltaje es cero en
esos momentos. Una característica que tiene este voltaje es que su polaridad cambia
cada vez que la bobina gira media vuelta, por lo que se puede representar el voltaje
en función del ángulo de rotación como me muestra en la figura 4.
Figura 4. Voltaje del inducido de un generador de corriente alterna en función del ángulo de
rotación. (Wildi, 2007, p. 72).
Si consideramos que la bobina gira a una velocidad constante. Por lo tanto cada ángulo
de rotación corresponderá a un intervalo de tiempo especificó y como la bobina da una
vuelta por segundo, el ángulo de 360º de la figura 4 corresponderá a un intervalo de
tiempo de un segundo. Por esta razón se puede representar también el voltaje inducido
en función del tiempo como se muestra en la figura 5, (Wildi, 2007).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
21 | P á g i n a
Figura 5. Voltaje del inducido de un generador de corriente alterna en función del tiempo.
(Wildi, 2007, p. 72).
1.3.5. Transformadores
“Los transformadores juegan el papel fundamental en el funcionamiento y estructura
de los sistemas de potencia. Puede afirmarse que la existencia misma de los sistemas
de generación y transporte en corriente alterna se debe al descubrimiento del
transformador. “ (Goméz, Martínez, Rosendo, Romero, & Riquelme, 2003).
Este elemento es fundamental en las redes eléctricas, siendo utilizados para elevar,
reducir o regular los diversos niveles de tensión.
1.3.5.1. Transformador monofásico
El transformador de potencia monofásico se constituye principalmente “por dos
devanados arrollados sobre un núcleo de material ferromagnético” (Gómez, 2002). El
transformador ideal trabaja una relación en p.u. 1:1, siendo que las tensiones sean
nominales y de acuerdo con 𝑉𝐵1 = 𝑛𝑉𝐵2. El circuito del transformador monofásico se
representa en la figura 9 y tiene una relación de transformación de:
𝑛 =𝑁𝑃
𝑁𝑠 ( 8)

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
22 | P á g i n a
Las pérdidas óhmicas son presentadas como 𝑍𝑃 y 𝑍𝑠, conformándose por la reactancia
para el efecto de flujo de dispersión y como resistencia a las pérdidas en cada
devanado, también se anexa 𝑍𝑚, la impedancia de derivación, conformada por las
pérdidas en el núcleo debidas a histéresis y corrientes parásitas (resistencia) corriente
de magnetización en vacío (reactancia) (Goméz, Martínez, Rosendo, Romero, &
Riquelme, 2003).
Figura 6. Circuito equivalente de un transformador monofásico. (Goméz, Martínez, Rosendo,
Romero, & Riquelme, 2003, p. 25).
En ensayos de vacío se considera el valor de 𝑍𝑚 explicado anteriormente, sin
embargo, considerando que se estuviese en corto circuito la impedancia sería 𝑍𝑐𝑐, que
al ser presentada en el sistema de p.u. sería la sumatoria de 𝑍𝑝 + 𝑍𝑠 y se aprecia en
la figura 10, (Goméz, Martínez, Rosendo, Romero, & Riquelme, 2003).
Figura 7. Circuito en p.u. de un transformador representando la impedancia de corto circuito.
(Goméz, Martínez, Rosendo, Romero, & Riquelme, 2003, p. 25).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
23 | P á g i n a
1.3.5.2. Transformador trifásico
Al interconectar eléctricamente tres bancos monofásicos, o al devanar tres pares de
arrollamientos sobre columnas de un núcleo magnético se obtiene un transformador
trifásico. Para cualquier composición se puede asumir que “desde un punto de vista
puramente eléctrico, ambas disposiciones se analizan y se comportan de igual modo
en circuitos trifásicos perfectamente equilibrados”.
La conexión de los transformadores puede ser en alguna de las dos disposiciones:
estrella (Y) o delta (∆) permitiendo diferentes relaciones de transformación con similar
configuración magnética. La figura 11 muestra la conexión estrella-estrella de un
transformador, así mismos se visualizan los vectores de tensión de fase y línea que se
encuentran en fase.
Figura 8. Conexión Y-Y de un transformador trifásico. (Gómez, Martínez, Rosendo, Romero, &
Riquelme, 2003, p. 26).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
24 | P á g i n a
La figura 12 representa la conexión estrella-delta de un trasformador, de igual manera
se aprecian los vectores de tensión, pero para este caso existe un desfase de 30° del
primario con el secundario (Goméz, Martínez, Rosendo, Romero, & Riquelme, 2003).
Figura 9. Conexión Y-D de un transformador trifásico con desfase de 30°. (Gómez, Martínez,
Rosendo, Romero, & Riquelme, 2003, p. 27).
Para los transformadores trifásicos la relación de transformación resulta ser un número
complejo, para tal motivo, las ecuaciones del transformador trifásico ideal serían:
𝑈𝐴𝑁 = 𝑛𝑈𝑎𝑛 ; 𝐼𝑎𝑛 = 𝑛∗𝐼𝐴𝑁 ( 9)
La relación de transformación:
𝑛 =𝑁𝑃
𝑁𝑠∠0° (𝑌 − 𝑌); 𝑛 =
𝑁𝑃
𝑁𝑠∠ − 30° (𝑌 − ∆) ( 10)
Es de tomarse en cuenta que una conexión en estrella da como resultado un sistema
a cuatro hilos, siendo el neutro aislado o conectado a tierra eficazmente o por medio
de una impedancia.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
25 | P á g i n a
La conexión delta, permite aislar de armónicos de tercer orden y corrientes
homopolares que se presenten en el devanado, (Goméz, Martínez, Rosendo, Romero,
& Riquelme, 2003).
1.3.6. Líneas de transmisión
Las líneas son los elementos básicos que constituyen un sistema Eléctrico, su función
es básicamente el transportar la energía de un punto a otro, este funcionamiento se
caracterizan parámetros importantes a considerar (Resistencia, inductancia,
capacitancia y conductancia) para el modelado de una línea en un circuito eléctrico.
1.3.6.1. Resistencia
Se define como resistencia activa a la relación entre potencia en pérdidas que se
produce cuando a través de él pasa una corriente 𝐼. Cuando la resistencia se refiere a
circuitos de corriente alterna se define por:
𝑅𝐶𝐴 =𝑃𝑝
𝐼2𝐼𝑎𝑛 = 𝑛
∗𝐼𝐴𝑁 ( 11)
El valor de esta resistencia coincide con la resistencia de corriente continuo solo
cuando la corriente que circula a través del conductor es uniformemente distribuida,
para conductores donde su sección es uniforme y pequeño comparado a su longitud,
la resistencia que presenta es proporcional a su longitud e inversa a su sección.
𝑅𝑐𝑐 = 𝜌𝑙
𝑆
( 12)
Donde 𝜌 es una constante que depende del material, la resistencia 𝑅𝑐𝑐 esta expresada
en ohmios, 𝑙 es la longitud y esta expresada en metros.
También la tempera influye en el valor de la resistencia, esta variación de resistencia
con respecto a la temperatura tiene una relación aproximadamente lineal cuando se

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
26 | P á g i n a
trabaja dentro de rangos de temperatura de funcionamiento para un mismo material,
por lo tanto a partir de un valor de resistencia 𝑅1 a una temperatura determinada 𝜃1 se
puede determinar el nuevo valor de resistencia 𝑅2 ante un cambio de temperatura 𝜃2
con la siguiente expresión:
𝑅2 = 𝑅1[1 + 𝛼( 𝜃2 − 𝜃1)] ( 13)
Donde el valor de 𝛼 corresponde al valor de coeficiente de variación de resistencia con
la temperatura y depende para cada material, también puede ser expresada mediante
la siguiente relación:
𝑅2𝑅1=𝑇𝑂 + 𝜃2𝑇𝑂 + 𝜃1
( 14)
Donde 𝑇𝑂 corresponde a la temperatura característica del material.
Otro parámetro que influye en el valor de la resistencia es la frecuencia de la corriente
por la cual circula a través del conductor, el fenómeno electromagnético llamado efecto
skin, origina que la intensidad de corriente que pasa a través del conductor tienda a
centrarse en las zonas más próximas a la superficie del conductor, este fenómeno
depende de la resistencia del conductor, dimensiones del conductor y la frecuencia de
corriente, por lo tanto sus efectos son mayores cuando la frecuencia es grande y menor
la resistividad.
Una de las consecuencias por el efecto de skin es que se reduce la sección del
conductor lo que significa un incremento en el valor de resistencia efectiva.Otro efecto
es de la proximidad entre dos conductores que puede provocar la distorsión en la
distribución de corriente lo que significa un aumento de resistencia efectiva, este efecto
se llama “efecto proximidad en líneas”,
El efecto proximidad en líneas es importante en líneas que están constituidas a base
de cables que se encuentran aislados, sin embargo debido al espaciamiento que existe
entre conductores en las líneas aéreas este efecto es despreciable.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
27 | P á g i n a
1.3.6.2. Inductancia
La Corriente eléctrica que circula a través de un conductor crea un campo magnético
que rodea al conductor, si la corriente 𝑖(𝑡) varia con respecto al tiempo entonces
también el flujo del campo magnético lo será e inducirá un voltaje a algún circuito
eléctrico que concatene con el flujo:
𝑣(𝑡) = 𝑑𝛷𝑡
𝑑𝑡
( 15)
Donde 𝛷(𝑡) corresponde al flujo concatenado del circuito.
Este flujo concatenado es proporcional a la corriente que pasa a través del conductor,
el coeficiente de inducción permanece constante y solo depende de la geometría del
circuito.
𝐿 =𝛷(𝑡)
𝑖(𝑡)
( 16)
1.3.6.3. Capacitancia
La capacidad se encuentra ligada al campo eléctrico que se genera a partir de la carga
eléctrica que existe en los conductores. El análisis del campo eléctrico permite
relacionar la carga eléctrica 𝑞 con su potencial 𝑣 a un punto de referencia, esto es:
𝐶 =𝑞
𝑣 ( 17)
1.3.6.4. Línea de longitud corta
Son aquellas líneas de transmisión que no exceden de los 80 Km de longitud, para
esta línea los parámetros se consideran en su forma concentrada siendo las
magnitudes 𝑅 y 𝐿 de mayor importancia, por lo que el valor de la capacitancia 𝐶 es
muy pequeña que se desprecia.
A continuación se observa que la resistencia 𝑅 y la inductancia 𝐿 forman un circuito
serie simple donde 𝑍 es el valor de la impedancia de la línea de transmisión.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
28 | P á g i n a
Figura 10. Circuito equivalente de línea corta. (Gómez, 2002, p. 82).
1.3.6.5. Línea de longitud mediana
Las líneas de longitud media son mayores a las correspondientes líneas de longitud
corta sin embargo no rebasa de 240 Km de longitud, de igual forma los parámetros se
consideran de forma concentrada, siendo para el parámetro de admitancia en paralelo
𝑌 de gran importancia comparado a la conductancia 𝐺 que se desprecia. El modelado
de dicha línea se presenta a continuación.
El modelo de esta línea media se representa por dos capacitores en los extremos que
representan la capacitancia, a este modelado se le llama circuito 𝜋, se muestra en la
figura siguiente.
Figura 11. Circuito nominal 𝝅 de la línea media.
1.3.6.6. Línea de longitud larga

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
29 | P á g i n a
Son aquellas líneas de trasmisión donde su longitud ya supera los 240 km de longitud,
se considera de la misma forma que línea media, sin embargo la diferencia es que sus
parámetros deben considerados como parámetros concentrados.
Figura 12. Línea de transmisión larga con parámetros distribuidos. (Gómez, 2002, p. 82)
1.4. Tipos de nodos
En estudios de flujos de potencia existen cuatro tipos de variables las cuales se quieren
conocer, estas son: la potencia reactiva (𝑄), la potencia activa (𝑃), la magnitud de
voltaje (𝑉) y el ángulo de voltaje (𝛿).
Al igual que las variables que se quieren conocer, es necesario para el estudio de flujos
de potencia designar tipos de nodos (buses). En estos nodos (buses) se conocerán
dos de las cuatro variables (𝑄, 𝑃, 𝑉, 𝛿), los cuales se describen a continuación.
1.4.1. Nodo de carga

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
30 | P á g i n a
En estos tipos de nodos (buses) las variables que se conocen son la potencia tanto
activa como reactiva de la carga, pero no así sus similares de generación. En la
práctica para poder obtener estos datos se hace por medio de registro de planeación
de las cargas y/o mediciones.
Estos tipos de nodos (buses) también son conocidos como buses 𝑃 − 𝑄, esto porque
se conocen las potencias de carga, lo que se buscara conocer de este nodo serán la
magnitud de voltaje (𝑉) y el ángulo de voltaje (𝛿).
1.4.2. Nodo compensador
Este tipo de nodos (buses) por lo general no se les asigna potencia activa y reactiva
de generación lo que le permite absorber las pérdidas del sistema, para poder hacer
controlable a este nodo se le asigna como variables conocidas la magnitud de voltaje
(𝑉) y el ángulo de voltaje (𝛿).
1.4.3. Nodo de voltaje controlado o generación.
El nodo de voltaje controlado puede ser cualquier nodo (bus) del sistema donde la
tensión de este, se mantenga constante. Cualquier nodo (bus) donde exista conectado
un generador se puede regular la magnitud de tensión por medio de la excitación del
generador y la generación de potencia activa por medio del ajuste de la fuente de
energía mecánica.
Por lo tanto las variables conocidas en este nodo (bus) son la magnitud de voltaje (𝑉)
y la potencia activa (𝑃). A este nodo (bus) también se le conoce como bus 𝑃 − 𝑉 por
las variables que ya se conocen sobre él, por lo tanto, lo que se busca en este nodo
es conocer las variables de potencia reactiva (𝑄)y el angulo de voltaje (𝛿).
La tabla 1 resume lo visto anteriormente respecto a las características que tienen cada
uno de los nodos (buses).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
31 | P á g i n a
Tabla 1. Característica de los tipos de nodo de un sistema eléctrico se potencia. (Sandoval,
2008, p. 29).
Tipo de Nodo (bus)
Variables conocidas
Variables desconocidas
Nodo de carga 𝑷, 𝑽 𝑸, 𝜹
Nodo compensador 𝑷,𝑸 𝑽, 𝜹
Nodo de voltaje controlado
o generación
𝑽, 𝜹
𝑷,𝑸
Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
32 | P á g i n a
CAPÍTULO 2
FLUJOS DE POTENCIA

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
33 | P á g i n a
2.1. Introducción
Realizar un estudio de flujos de potencias consiste en obtener el vector de estado el
cual está conformado, por el conjunto de tensiones y ángulos de todos los nodos del
sistema excepto el nodo slack. Para poder empezar a realizar el estudio de flujos de
potencia se toma como datos de partida el consumo e inyección de potencia de todos
los nodos que conforman al sistema, exceptuando la potencia reactiva de los nodos
de voltaje controlado, que en esos casos se sustituirá por el módulo de voltaje
controlado.
La primer y más importante tarea de flujos de potencia es conocer las tensiones
complejas de todos los nodos del sistema, dado que cualquier magnitud de un circuito
eléctrico queda definido al conocer estas. Las restricciones impuestas de potencia
indican un sistema no lineal de ecuaciones, por lo que implica un proceso iterativo.
Una vez obtenidos estos resultados y queriendo conocer otras magnitudes de interés
como son potencia activa y reactiva, perdidas, etc. Sé tendría que desarrollar una serie
de cálculos rutinarios posteriores, (Goméz, Martínez, Rosendo, Romero, & Riquelme,
2003).
2.2. Solución por Modelos Matemáticos
Desarrollar un modelo matemático para la solución de algún problema específico,
considera las cantidades físicas del mismo y la relación que presentan. Se debe
considerar el método más apropiado de solución considerando las características del
problema y obteniendo una solución rápida y exacta (Glenn W., 1994).
Para llevar a cabo la solución de problemas por métodos matemáticos existen una
diversidad de modelos, sin embargo todos estos caen dentro de dos tipos generales:
Métodos directos: Constan de llegar a una solución mediante un número definido de
operaciones aritméticas, se considera un método exacto.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
34 | P á g i n a
Métodos iterativos: Llegan a una sucesión de soluciones aproximadas, las cuales
pueden converger con una aceptable exactitud o un porcentaje de error, además de
su convergencia también se puede presentar una divergencia.
Para un problema de flujos de potencia, desarrollar una solución matemática consiste
“en obtener las condiciones de operación en régimen permanente de un sistema de
energía eléctrica” (Gómez, 2002, p.139).
Para definir de una manera concreta las características que presenta un problema de
flujos de potencia, se establece el consumo de cada nodo, la potencia generada de
cada alternador, se buscan las tensiones en los nodos, en las líneas de transmisión y
transformadores se buscan los flujos de potencia (Gómez, 2002).
Para desarrollar el estudio se necesita el conocimiento de cada una de las siguientes
variables en el bus del sistema, en este caso se ejemplificara con el bus 𝑘:
𝑃𝑘 Potencia real o activa
𝑄𝑘 Potencia reactiva
𝑉𝑘 Magnitud de tensión
𝜃𝑘 Ángulo de fase de tensión
De las variables anteriores sólo dos son conocidas, para determinar las restante es
necesario definir el tipo de bus que existe:
Bus de tensión controlada. La potencia activa que es inyectada 𝑃𝑘 se específica, la
magnitud de tensión 𝑉𝑘 se mantiene como un valor especifico debido a la inyeccion de
potencia reactiva.
Bus de tensión no controlada. Para este bus se especifía la potencia total inyectada
en la red 𝑃𝑘 + 𝑗𝑄𝑘. Para pequeñas variaciones de tensión los parámetros no seven
afectados.
Bus slack. Este bus contempla la referencia del sistema en cuanto a tensión se refiere,
se puede considerar como la estación encargada del control de frecuencia en el
sistema y se expresa:

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
35 | P á g i n a
𝐸𝑆 = 𝑉𝑆𝜃𝑆 ( 18)
Un cálculo de flujos de potencia se compone de dos etapas:
Obtención de las tensiones complejas en los nodos.
Cálculo de las magnitudes de interés: flujos de potencia activa y reactiva, pérdidas,
etc.
Para la formulación del problema de flujos de potencia, se establecen las Leyes de
Kirchhoff, determinando que para una red eléctrica de n nodos su estado será verá
satisfecho por las tensiones complejas que se presentan en cada uno de los nodos,
las ecuaciones que satisfacen esta condición son:
Referido en impedancia
𝐸𝐵𝑈𝑆 = 𝑍𝐵𝑈𝑆𝐼𝐵𝑈𝑆 ( 19)
En forma de admitancia
𝐼𝐵𝑈𝑆 = 𝑌𝐵𝑈𝑆𝐸𝐵𝑈𝑆 ( 20)
𝐼𝑖 = ∑𝑌𝑖𝑗𝐸𝑗
𝑛
𝑖=1
𝑖 = 1,2, … , 𝑛
( 21)
𝐷𝑜𝑛𝑑𝑒:
𝐸: 𝑉𝑒𝑐𝑡𝑜𝑟 𝑑𝑒 𝑡𝑒𝑛𝑠𝑖𝑜𝑛𝑒𝑠 𝑑𝑒 𝑏𝑢𝑠
𝐼: 𝑉𝑒𝑐𝑡𝑜𝑟 𝑑𝑒 𝑖𝑛𝑡𝑒𝑛𝑠𝑖𝑑𝑎𝑑𝑒𝑠 𝑛𝑒𝑡𝑎𝑠 𝑖𝑛𝑦𝑒𝑐𝑡𝑎𝑑𝑎𝑠 𝑒𝑛 𝑙𝑜𝑠 𝑏𝑢𝑠𝑒𝑠
𝑌:𝑀𝑎𝑡𝑟𝑖𝑧 𝑛𝑥𝑛 𝑑𝑒 𝑎𝑑𝑚𝑖𝑡𝑎𝑛𝑐𝑖𝑎𝑠 𝑑𝑒 𝑏𝑢𝑠𝑒𝑠
𝑍:𝑀𝑎𝑡𝑟𝑖𝑧 𝑛𝑥𝑛 𝑑𝑒 𝑖𝑚𝑝𝑒𝑑𝑎𝑛𝑐𝑖𝑎𝑠 𝑑𝑒 𝑏𝑢𝑠𝑒𝑠
Se puede formar la matriz de admitancia e impedancia de la red incluyendo el bus de
tierra. Así, al incluir dicho bus, se le anexaran a los elementos de las matrices los
efectos de los elementos en paralelo que pueden ser reactores, capacitores, líneas de
carga y demás elementos en paralelo (Glenn W., 1994).
Si no se incluye el bus de tierra en la red, no se plasmaran los efectos de elemento
conectados en paralelo a las matrices de admitancia e impedancia.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
36 | P á g i n a
Las ecuaciones de potencia real como reactiva para un bus de carga se da por:
𝑃𝑖−𝑗𝑄𝑖 = 𝐸𝑖∗𝐼𝑖 ( 22)
Por tanto, para la corriente:
𝐼𝑖 =𝑃𝑖𝑗𝑄𝑖𝑉𝑖∗
( 23)
Sin embargo, la ecuación (44) es aplicable cuando se toman en cuenta los elementos
en paralelo existentes en la red (Glenn W., 1994). Para el caso en el que el bus de
tierra no es incluido la corriente total será calculada mediante la siguiente expresión:
𝐼𝑘 =𝑃𝑘 − 𝑗𝑄𝑘𝑉𝑘∗ − 𝑌𝑘𝐸𝑘
( 24)
𝐷𝑜𝑛𝑑𝑒:
𝑌𝑘: 𝐴𝑑𝑚𝑖𝑡𝑎𝑛𝑐𝑖𝑎 𝑡𝑜𝑡𝑎𝑙 𝑒𝑛 𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑜
Una vez desarrollado la solución para las tensiones de línea utilizando la ecuación
anterior, se plantea la ecuación para calcular el flujo en las líneas que conecta a dos
buses, en este caso el bus 𝑘 y el bus 𝑙, expresada a continuación:
𝐼𝑘𝑙 = (𝐸𝑘 − 𝐸𝑙)𝑌𝑘𝑙 + 𝐸𝑘𝑌´𝑘𝑙2
( 25)
𝐷𝑜𝑛𝑑𝑒:
𝑌𝑘𝑙: 𝐴𝑑𝑚𝑖𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝑙𝑎 𝑙í𝑛𝑒𝑎
𝑌´𝑘𝑙: 𝐴𝑑𝑚𝑖𝑡𝑎𝑛𝑐𝑖𝑎 𝑡𝑜𝑡𝑎𝑙 𝑑𝑒 𝑙𝑎 𝑐𝑎𝑟𝑔𝑎 𝑒𝑛 𝑙𝑎 𝑙í𝑛𝑒𝑎
Se debe tener en cuenta el cumplimiento de la siguiente ecuación para cada nodo:
𝑆𝑖 = 𝑆𝐺𝑖 − 𝑆𝐶𝑖 = 𝐸𝑖𝐼𝑖 ( 26)
Se tiene en la ecuación anterior a Si como la potencia compleja que se inyecta en el
nodo i al ser el resultado de la diferencia entre la potencia generada y la consumida

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
37 | P á g i n a
por la carga en tal nodo. Al descomponer la potencia compleja en una parte real y una
imaginaria, 𝑆 = 𝑃 + 𝑗𝑄, y para la matriz de admitancias, 𝑌 = 𝐺 + 𝑗𝐵, y expresando las
tensiones en coordenadas polares, 𝐸 = 𝐸∠𝜃, así obteniendo las ecuaciones (47) y (48)
(Grainger & Stevenson, 1996).
𝑃𝑖 = 𝑉𝑖∑𝑉𝑗(𝐺𝑖𝑗𝑐𝑜𝑠𝜃𝑖𝑗 + 𝐵𝑖𝑗𝑠𝑒𝑛𝜃𝑖𝑗)
𝑛
𝑗=1
( 27)
𝑄𝑖 = 𝑉𝑖∑𝑉𝑗(𝐺𝑖𝑗𝑠𝑒𝑛𝜃𝑖𝑗 + 𝐵𝑖𝑗𝑐𝑜𝑠𝜃𝑖𝑗)
𝑛
𝑗=1
( 28)
“Dado que las ecuaciones resultantes son no lineales, su solución debe ser
forzosamente iterativa”, por lo mencionado anteriormente, se designaran valores
iniciales para las variables de problema (Gómez, 2002, p. 84).
2.3. Método de solución
El estudio de flujos de potencia es importante para determinar el diseño, crecimiento y
mejores condiciones de operación en un sistema eléctrico. La información que se
obtiene del estudio de potencia es la magnitud y el ángulo de fase en cada nodo y las
potencias activas y reactivas que fluyen a través de la línea, (Grainger & Stevenson,
1996). A continuación se desarrollan los métodos existentes más comunes para la
solución de flujos de potencia.
2.3.1. Método de Gauss-Seidel
El método de Gauss-Seidel “emplea valores iniciales y después itera para obtener
mejores aproximaciones a la solución”, siendo de esta manera una herramienta útil
cuando el número de ecuaciones es amplio(Chapra & Canale, 2007).
Al realizar un proceso iterativo, se calcula un nuevo conjunto de tensiones,
repitiéndose hasta alcanzar el valor mínimo especificado en cada bus.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
38 | P á g i n a
La ecuación que representa al método de Gauss-Seidel se expresa en (49).
𝑥𝑘 (𝑖 + 1) =1
𝐴𝑘𝑘[𝑦𝑘 −∑𝐴𝑘𝑛𝑥𝑛(𝑖 + 1) − ∑ 𝐴𝑘𝑛𝑥𝑛𝑖
𝑁
𝑛=𝑘+1
𝑘−1
𝑛=1
]
( 29)
Al expresar en forma de matriz la ecuación anterior, del método de Gauss-Seidel se
obtiene:
𝐷 = [
𝐴11 0𝐴21 𝐴22
0 … 00 … 0
⋮ ⋮𝐴𝑁1 𝐴𝑁2
⋱ ⋮ … 𝐴𝑁𝑁
]
( 30)
Para la solución de flujos de potencia mediante el método de Gauss-Seidel, se tienen
un conjunto de ecuaciones lineales del tipo 𝑎𝑦 = 𝐴𝑥, siendo las ecuaciones en los
nodos 𝐼 = 𝑌𝐵𝑈𝑆 𝑉. En la figura 22 se aprecia el bus k y las variables que intervienen en
su análisis (Duncan & Sarma, 2000).
Figura 13. Variables del BUS. (Duncan & Sarma, 2000).
Los datos del bus se pueden dividir en dos grupos:
Datos 𝑃𝑘 y 𝑄𝑘 para buses de carga.
Datos 𝑃𝑘 y 𝑉𝑘 para buses de tensión controlada.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
39 | P á g i n a
Ajustando las ecuaciones en los nodos, para cada carga se obtendrá la siguiente
ecuación no lineal:
𝐼𝑘 =𝑃𝑘 − 𝑗𝑄𝑘𝑉𝑘∗
( 31)
Aplicando la ecuación () a las ecuaciones nodales para el valor 𝐼𝑘 , se tiene:
𝑉𝑘 (𝑖 + 1) =1
𝑌𝑘𝑘[𝑃𝑘 − 𝑗𝑄𝑘𝑉𝑘∗(𝑖)
−∑𝑌𝑘𝑛𝑉𝑛(𝑖 + 1) − ∑ 𝑌𝑘𝑛𝑉𝑛𝑖
𝑁
𝑛=𝑘+1
𝑘−1
𝑛=1
]
( 32)
La ecuación anterior solamente es aplicable a los buses de carga donde se especifican
las potencias real y reactiva (Grainger & Stevenson, 1996).
El método de Gauss-Seidel permite reducir el número de iteraciones requeridas si se
le agrega una constante que multiplique cada corrección de tensión. Factor de
aceleración, es como se le denota al multiplicador que produce la convergencia. La
diferencia que se tiene entre el valor de tensión que se ha calculado y aquel que fue
evaluado en el bus se multiplica por el factor de aceleración:
𝑉𝑖,𝑎𝑐(𝑘)= (1−∝)𝑉𝑖,𝑎𝑐
(𝑘−1)+∝ 𝑉𝑖,𝑎𝑐(𝑘)
( 33)
Siendo ∝ el factor de aceleración, en el nodo 𝑖. De acuerdo a lo anterior, si ∝= 1, ahora
el valor de la tensión 𝑉, se almacena como el valor actual. Por lo cual 0 <∝< 1, es
ponderado el valor de Gauss-Seidel y se almacena. Si se tiene que 1 <∝< 2, ahora el
valor se extrapola y se almacena. De manera general, en estudios de flujo de potencia
el factor de aceleración tiene una valor de 1.6, si la divergencia estuviera a punto de
ocurrir el valor no podría exceder a 2.
Si en un bus se especifica la magnitud de tensión y no la potencia reactiva, las
componentes real e imaginaria de tensión pera cada iteración se basa en el cálculo de
la potencia reactiva. Se tiene entonces un bus de voltaje controlado, la incógnita será
𝑄𝑘, y se calcula mediante:

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
40 | P á g i n a
𝑄𝑘 = [𝑉𝑘 (𝑖)∑𝑌𝑘𝑛 𝑉𝑛 (𝑖)𝑠𝑒𝑛[𝛿𝑘 (𝑖) − 𝛿𝑛 (𝑖) − 𝜃𝑘𝑛
𝑁
𝑛=1
]
( 34)
Asimismo
𝑄𝐺𝑘 = 𝑄𝑘 + 𝑄𝐿𝑘 ( 35)
“El procedimiento de Gauss-Seidel es uno de los métodos para resolver el problema
de flujos de potencia. Sin embargo hoy en día se emplea por lo general el método
iterativo alterno de Newton-Raphson” (Grainger & Stevenson, 1996, p.322).
2.3.2. Método de Newton-Raphson
La base del método de Newton - Raphson para la solución de problemas de flujos de
potencia, es la expansión de series de Taylor para una función que contenga dos o
más variables.
Se iniciara el estudio de este método con el análisis de la solución de un problema
donde intervienen solo dos ecuaciones con dos variables, que al término de este se
verá como extenderlo a la solución de ecuaciones de flujos de potencia.
La primera ecuación se considera como de una función ℎ1, de dos variables 𝑥1 y 𝑥2
que se expresara como:
𝑔1(𝑥1, 𝑥2, 𝑢) = ℎ1(𝑥1, 𝑥2, 𝑢) − 𝑏1 = 0 ( 36)
Y la segunda ecuación se considerara como una función ℎ2 tal que:
𝑔2(𝑥1, 𝑥2, 𝑢) = ℎ2(𝑥1, 𝑥2, 𝑢) − 𝑏2 = 0 ( 37)
𝐷𝑜𝑛𝑑𝑒:
𝑏1 = Es una constante.
𝑏2 = Es una constante.
𝑢 = Representa un control independiente que se considerara constante.
g1= Es una función que se introduce por conveniencia para permitir el análisis de las

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
41 | P á g i n a
diferencias de los valores calculados h1 y h2 y los valores especificados b1 y b2.
𝑔2= Es una función que se introduce por conveniencia para permitir el análisis de las
diferencias de los valores calculados ℎ1 y ℎ2 y sus valores especificados 𝑏1 y 𝑏2.
Para poder tener un valor especificado de 𝑢 se tendrá que estimar que la solución de
estas ecuaciones son 𝑥1(0)
y 𝑥2(0)
. Los superíndices cero indican que esos valores son
estimados iniciales y no son las soluciones reales 𝑥1∗ y 𝑥2
∗.Para obtener las soluciones
correctas de 𝑥1∗ y 𝑥2
∗ se designan ∆𝑥1(0)
y ∆𝑥2(0) como las correcciones de los valores
que se tiene que sumar a 𝑥1(0)
y 𝑥2(0)
, por lo que se pueden escribir las ecuaciones
anteriores de la siguiente forma:
𝑔1(𝑥1∗, 𝑥2
∗, 𝑢) = 𝑔1(𝑥1(0) + ∆𝑥1
(0), 𝑥2(0) + ∆𝑥2
(0), 𝑢) = 0 ( 38)
𝑔2(𝑥1∗, 𝑥2
∗, 𝑢) = 𝑔2(𝑥1(0) + ∆𝑥1
(0), 𝑥2(0) + ∆𝑥2
(0), 𝑢) = 0 ( 39)
Para encontrar las soluciones de ∆𝑥1(0)
y ∆𝑥2(0) se hace al expandir las ecuaciones 3 y
4 en series de Taylor alrededor de la solución propuesta, para poder tener lo siguiente:
𝑔1(𝑥1∗, 𝑥2
∗, 𝑢) = 𝑔1(𝑥1(0), 𝑥2
(0), 𝑢) + ∆𝑥1(0) 𝜕𝑔1
𝜕𝑥1|(0)
+ ∆𝑥2(0) 𝜕𝑔1
𝜕𝑥2|(0)
+⋯ = 0 ( 40)
𝑔2(𝑥1∗, 𝑥2
∗, 𝑢) = 𝑔2(𝑥1(0), 𝑥2
(0), 𝑢) + ∆𝑥1(0) 𝜕𝑔2
𝜕𝑥1|(0)
+ ∆𝑥2(0) 𝜕𝑔2
𝜕𝑥2|(0)
+⋯ = 0 ( 41)
Las derivadas parciales de la expansión, que son de orden mayor a 1en la serie de
términos no se enlistaron. Donde el término 𝜕𝑔1 𝜕𝑥1⁄ |(0) indica que la derivada parcial
se evaluara para los valores estimados 𝑥1(0)
y 𝑥2(0)
, por lo que los términos semejantes
se deberán evaluar igual.
Despreciando las derivadas parciales de orden mayor a 1 se pueden rescribir las
ecuaciones (60) y (61) en forma matricial de la siguiente forma:

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
42 | P á g i n a
[
𝜕𝑔1
𝜕𝑥1
𝜕𝑔1
𝜕𝑥2𝜕𝑔2
𝜕𝑥1
𝜕𝑔2
𝜕𝑥2
]
(0)
⏟ 𝐽(0)
= [∆𝑥1
(0)
∆𝑥2(0)] = [
0 − 𝑔1(𝑥1(0), 𝑥2
(0), 𝑢)
0 − 𝑔2(𝑥1(0), 𝑥2
(0), 𝑢)] = [
𝑏1 − ℎ1(𝑥1(0), 𝑥2
(0), 𝑢)
𝑏2 − ℎ2(𝑥1(0), 𝑥2
(0), 𝑢)]
( 42)
Donde 𝐽(0) es la matriz cuadrada de derivadas parciales, que es conocida como matriz
jacobina e indica que se han empleado los estimados iniciales 𝑥1(0)
y 𝑥2(0)
para lograr
obtener los valores de las derivadas parciales. En la ecuación (62) se puede observar
que 𝑔1(𝑥1(0), 𝑥2
(0), 𝑢) es el valor calculado para 𝑔1 basándose en los valores estimados
𝑥1(0)
y 𝑥2(0)
, aunque este valor no es el valor cero que se especifica en la ecuación (56),
a no ser que los valores estimados sean los correctos. Se define el error ∆𝑔1(0)
como
la diferencia del valor especificado 𝑔1 menos el valor calculado 𝑔1, de esta manera
también se definirá el error ∆𝑔2(0)
, (Grainger & Stevenson, 1996).
De esta manera se tendrá el siguiente sistema lineal de ecuaciones de error:
𝐽 = [∆𝑥1
(0)
∆𝑥2(0)] = [
∆𝑔1(0)
∆𝑔2(0)]
( 43)
Para poder determinar los valores 𝑥1(0)
y 𝑥2(0)
se tendrá que resolver las ecuaciones de
error, uno de los métodos que se pueden emplear para resolverlas es la factorización
triangular de la jacobina o invirtiendo la matriz (si el sistema es muy pequeño). Como
se truncó la expansión en serie, los valores que se añadieron a los iniciales no bastaran
para determinaran la solución correcta, por lo tanto se tendrá que hacer nuevamente
un intento suponiendo valores estimados 𝑥1(1)
y 𝑥2(1)
por lo que se tiene lo siguiente:
𝑥1(1) = 𝑥1
(0) + ∆𝑥1(0); 𝑥2
(1) = 𝑥2(0) + ∆𝑥2
(0)𝐽 = [∆𝑥1
(0)
∆𝑥2(0)] = [
∆𝑔1(0)
∆𝑔2(0)]
( 44)
Se tendrá que repetir este proceso hasta lograr que la corrección sea tan pequeña en
magnitud, para lograr satisfacer el índice de precisión seleccionado Ɛ > 0; esto
significa que hasta que |∆𝑥1| y |∆𝑥2| sean ambas menores que Ɛ, (Grainger &
Stevenson, 1996).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
43 | P á g i n a
2.3.3. Método Desacoplado Rápido
En la práctica la matriz jacobiana se calcula nuevamente para cada cierto número de
iteraciones dando velocidad al proceso de solución. La solución final queda
determinada por los valores de errores de potencia y voltajes en los nodos, cuando se
presenta un sistema eléctrico grande, el método de desacoplado rápido presenta una
alternativa de solución que reduce el número de iteraciones y en el caso de
aplicaciones computacionales reduce los requisitos de memoria. El método de
desacoplado rápido es semejante al método de Newton-Raphson y se basa en los
siguientes principios.
Ante un cambio al ángulo de voltaje en un nodo del sistema eléctrico, afecta al flujo de
potencia activa P en las líneas de transmisión y relativamente sin cambio a la potencia
reactiva Q.
Ante un cambio de voltaje en el sistema eléctrico, afecta principalmente al flujo de
potencia reactiva Q en las líneas de transmisión y relativamente sin cambio a la
potencia activa P.
En la primera observación se establece que la derivada parcial 𝜕𝑃𝑖 𝜕𝛿𝑗⁄ es mucho
mayor que 𝜕𝑄𝑖 𝜕𝛿𝑗⁄ por lo que se considera como cero.
En la segunda observación se considera que 𝜕𝑄𝑖 𝜕|𝑉𝑗|⁄ es mucho mayor que 𝜕𝑃𝑖 𝜕|𝑉𝑗|⁄
por lo que se considera como cero.
Al aplicar estas observaciones en el jacobiano hace que las submatrices 𝑱𝟏𝟐 y 𝑱𝟐𝟏 sean
cero. Por lo tanto se tienen dos sistemas de ecuaciones.
2 22 2
2 4
11
4 4
2 4 4 2
PP P
J
P P
P
( 45)

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
44 | P á g i n a
2 2 2 22 4
2 4 2
22
4 4 42 4
2 4 4 4
Q Q V QV V
V V V
J
Q Q VV V
V V V Q
( 46)
Las ecuaciones se encuentran desacopladas ya que las correcciones del ángulo de
voltaje ∆𝛿 se calculan con los errores de la potencia real ∆𝑃, para las correciones de
la magnitud de voltaje se usan solo los errores ∆𝑄.
Para un sistema de transmisión de potencia tenemos que:
Las diferencias de ángulos que existen entre dos nodos (𝛿𝑖 − 𝛿𝑗), son muy pequeños
que:
cos(δi − δj) = 1; sen(δi − δj) ≈ (δi − δj) ( 47)
En las líneas el efecto de la susceptancia es mucho más grande que el de la
conductancia:
Gijsen(δi − δj) ≪ Bijcos(δi − δj) ( 48)
La potencia reactiva que se inyecta a una barra del sistema es mucho menor que la
potencia reactiva que fluiría si las barras de la red están en corto circuito con la
referencia.
𝑄𝑖 ≪ |𝑉𝑖|2𝐵𝑖𝑖 ( 49)
Para los elementos que se encuentran fuera de la diagonal de J11 y J22 se tiene:
∂Pi
∂δj= |Vj|
∂Qi
∂|Vj|= −|ViVjYij|sen(θij + δj − δi)
( 50)
Aplicando la identidad sen(α + β) = sen α cos β + cos α sen β, se tiene:
∂Pi
∂δj= |Vj|
∂Qi
∂|Vj|= −|ViVj|{Bijcos(δj − δi) + Gijsen(δj − δi)}
( 51)
Estas aproximaciones llevan a los elementos que se encuentran fuera de la diagonal:

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
45 | P á g i n a
∂Pi
∂δj= |Vj|
∂Qi
∂|Vj|= −|ViVj|Bij
( 52)
Para los elementos de la diagonal de 𝐽11 y 𝐽22 se aplica la desigualdad de
𝑄𝑖 ≪ |𝑉𝑖|2𝐵𝑖𝑖 por lo que se llega a:
∂Pi
∂δj≅ |Vj|
∂Qi
∂𝛿𝑖≅ −|𝑉𝑖|
2𝐵𝑖𝑖 ( 53)
Sustituyendo las aproximaciones en las matrices 𝐽11 y 𝐽22 se tiene:
2 2 22 2 3 23 2 4 24 2 2
2 3 32 3 3 33 3 4 34 3 3
2 4 42 3 4 43 4 4 44 4 4
2322 24 2
32 33 34 3
42 43 44 4
V V B V V B V V B P
V V B V V B V V B P
V V B V V B V V B P
BB B
B B B
B B B
2
2
3
3
4
4
22322 24 2
2
32 33 34 3 3
3
42 43 44 4 4
4
__
P
V
P
V
P
V
VBB B Q
V
B B B V Q
V
B B B V Q
V
B
( 54)
y
22 3 32 2 3 23 2 4 24 2
2
2 3 32 3 3 33 3 4 34 3 3
3
42 4 42 3 4 43 4 4 444
4
VV V B V V B V V B QV
V V B V V B V V B V Q
V
QV V B V V B V V B V
V
( 55)

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
46 | P á g i n a
La primera fila se multiplica por el vector de corrección y dividiendo entre |𝑉2|.
−𝐵22∆|𝑉2| − 𝐵23∆|𝑉3| − 𝐵24∆|𝑉4| =∆𝑄2
|𝑉2| ( 56)
En esta ecuación los coeficientes son constantes e iguales a cero, de la misma forma
para los errores en las potencias:
−𝐵22|𝑉2|∆𝛿2 − 𝐵23|𝑉3|∆𝛿3 − 𝐵24|𝑉4|∆𝛿4 =∆𝑄2
|𝑉2| ( 57)
De esta manera se llegan a dos sistemas de ecuaciones desacoplados para las barras
de la red.
2322 24 2 2
2
32 33 34 3 3
3
42 43 44 4 4
4
BB B P
V
B B B P
V
B B B P
V
( 58)
y
22322 24 2
2
32 33 34 3 3
3
42 43 44 4 4
4
VBB B Q
V
B B B V Q
V
B B B V Q
V
( 59)
Por lo general esta matriz B es simétrica y exactamente iguales al negativo de las
susceptancias de 𝑌𝐵𝑈𝑆 , esta matriz B se forma fácilmente y sus factores triangulares
no se tienen que volver a calcular con lo que se obtienen iteraciones más rápidas,
(Grainger & Stevenson, 1996).
2.4. Ecuaciones de Flujos de Potencia Aplicando el Método de Newton Raphson

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
47 | P á g i n a
El método iterativo de Newton-Raphson “es empleado para resolver problemas de flujo
de potencia en sistemas eléctricos de potencia de tamaño real”, (Hernández, 2012).
La aplicación del método de Newton-Raphson para dar solución a las ecuaciones de
flujo de potencia, requiere que las tensiones y las admitancias de línea se expresen en
forma polar.
La potencia de para cualquier nodo se expresa con la siguiente ecuación:
𝑃𝑘 − 𝑄𝑘 =∑𝑉𝑖 𝑌𝑘 𝑉𝑗
𝑁
𝐽=1
( 60)
Los datos de tensión se expresan en forma polar, los daos de admitancia se expresan
en su composición de conductancia (G) y susceptancia (B), teniendo de tal modo:
𝑉𝑖 = |𝑉𝑖 |∠Ө = |𝑉𝑖 |(𝑐𝑜𝑠Ө𝑖 + 𝑗𝑠𝑒𝑛Ө𝑖 ) ( 61)
𝑌𝑖𝑗 = 𝐺𝑖𝑗 + 𝑗𝐵𝑖𝑗 ( 62)
Para describir el error de potencia para un bus cualquiera:
∆𝑃𝑖 = 𝑃𝑖,𝑝𝑟𝑜𝑔 − 𝑃𝑖.𝑐𝑎𝑙𝑐 ( 63)
∆𝑄𝑖 = 𝑄𝑖,𝑝𝑟𝑜𝑔 − 𝑄𝑖.𝑐𝑎𝑙𝑐 ( 64)
Escribiendo las ecuaciones de error en ejemplo para un sistema de cuatro buses, la
potencia real estaría de acuerdo a la siguiente ecuación:
∆𝑃𝑖 =𝜕𝑃𝑖 𝜕𝛿2
∆𝛿2 +𝜕𝑃𝑖 𝜕𝛿3
∆𝛿3 +𝜕𝑃𝑖 𝜕𝛿4
∆𝛿4 +𝜕𝑃𝑖 𝜕|𝑉2 |
∆|𝑉2 | +𝜕𝑃𝑖 𝜕|𝑉3|
∆|𝑉3 | +𝜕𝑃𝑖 𝜕|𝑉4 |
∆|𝑉4 | ( 65)
Multiplicando y dividiendo los últimos tres términos por sus magnitudes de tensión:
∆𝑃𝑖 =𝜕𝑃𝑖 𝜕𝛿2
∆𝛿2 +𝜕𝑃𝑖 𝜕𝛿3
∆𝛿3 +𝜕𝑃𝑖 𝜕𝛿4
∆𝛿4 +𝜕𝑃𝑖 ∆|𝑉2 |
𝜕|𝑉2 ||𝑉2 |+𝜕𝑃𝑖 ∆|𝑉3 |
𝜕|𝑉3 ||𝑉3 |+𝜕𝑃𝑖 ∆|𝑉4 |
𝜕|𝑉4 ||𝑉4 |
( 66)
De forma similar se puede escribir para la potencia reactiva:

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
48 | P á g i n a
∆𝑄𝑖 =𝜕𝑄𝑖 𝜕𝛿2
∆𝛿2 +𝜕𝑄𝑖 𝜕𝛿3
∆𝛿3 +𝜕𝑄𝑖 𝜕𝛿4
∆𝛿4 +𝜕𝑄𝑖 ∆|𝑉2 |
𝜕|𝑉2 ||𝑉2 |+𝜕𝑄𝑖 ∆|𝑉3 |
𝜕|𝑉3 ||𝑉3 |+𝜕𝑄𝑖 ∆|𝑉4 |
𝜕|𝑉4 ||𝑉4 |
( 67)
Se conjuntan todas las ecuaciones de error en una matriz-vector, conocida como
Jacobiana:
( 68)
Las derivadas parciales para cada sección de la matriz-vector serían:
𝐽1, elementos fuera de la diagonal principal:
𝐽1,𝑖𝑗 =𝜕𝑃𝑖 𝜕Ө𝑗
= −|𝑉𝑖 𝑉𝑗 𝑌𝑖𝑗 |𝑠𝑒𝑛(Ө𝑖𝑗 + Ө𝑗 − Ө𝑖 ) ( 69)
𝐽1, elementos de la diagonal principal:
𝐽1,𝑖𝑖 =𝜕𝑃𝑖 𝜕Ө𝑖
= −𝑄𝑗 − |𝑉𝑖 |2𝐵𝑖𝑖
( 70)
𝐽2, elementos fuera de la diagonal principal:
𝐽2,𝑖𝑗 =𝜕𝑃𝑖 𝜕Ө𝑗
= −|𝑉𝑖 𝑉𝑗 𝑌𝑖𝑗 |𝑐𝑜𝑠(Ө𝑖𝑗 + Ө𝑗 − Ө𝑖 ) ( 71)
𝐽2, elementos de la diagonal principal:
𝐽2,𝑖𝑖 =𝜕𝑃𝑖 𝜕Ө𝑖
= 𝑃𝑗 − |𝑉𝑖 |2𝐺𝑖𝑖
( 72)
𝐽3, elementos fuera de la diagonal principal:

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
49 | P á g i n a
𝐽3,𝑖𝑗 =𝜕𝑄𝑖 𝜕Ө𝑗
= −|𝑉𝑖 𝑉𝑗 𝑌𝑖𝑗 |𝑐𝑜𝑠(Ө𝑖𝑗 + Ө𝑗 − Ө𝑖 ) ( 73)
𝐽3, elementos de la diagonal principal:
𝐽3,𝑖𝑖 =𝜕𝑃𝑖 𝜕Ө𝑖
= 𝑃𝑗 − |𝑉𝑖 |2𝐺𝑖𝑖
( 74)
𝐽1, elementos fuera de la diagonal principal:
𝐽1,𝑖𝑗 =𝜕𝑄𝑖 𝜕Ө𝑗
= −|𝑉𝑖 𝑉𝑗 𝑌𝑖𝑗 |𝑠𝑒𝑛(Ө𝑖𝑗 + Ө𝑗 − Ө𝑖 ) ( 75)
𝐽1, elementos de la diagonal principal:
𝐽1,𝑖𝑖 =𝜕𝑃𝑖 𝜕Ө𝑖
= 𝑄𝑗 − |𝑉𝑖 |2𝐵𝑖𝑖
( 76)
A partir de la siguiente ecuación se concentran los valores de la matriz Jacobiana y los
errores calculados a partir de los valores estimados de tensión:
[𝐽1 𝐽2𝐽3 𝐽4
] [∆𝜃∆𝑉] = [
∆𝑃∆𝑄]
( 77)
Finalmente se obtienen los nuevos valores de magnitud de tensión y ángulo de tensión,
de acuerdo a las siguientes expresiones:
𝜃𝑖(𝑘+1)
= 𝜃𝑖(𝑘)+ ∆𝜃𝑖
(𝑘) ( 78)
|𝑉|𝑖(𝑘+1)
= 𝑉𝑖(𝑘)+ ∆𝑉𝑖
(𝑘) ( 79)
Las aplicaciones aplican para 𝑘 = 0, hasta lograr el mínimo de convergencia requerido.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
50 | P á g i n a
CAPÍTULO 3
ESTUDIO TÉCNICO

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
51 | P á g i n a
3.1. Introducción
Las GUI (Graphical User Interfase), son herramientas que brindan ventajas hacia los
usuarios para la interacción con el software, facilitando la manipulación de aplicaciones
o estudios. MATLAB 7.10 contiene un entorno de programación visual, GUIDE.
El presente capítulo consta del creación e implementación de la interfaz gráfica
diseñada en MATLAB 7.10 en la solución de flujos de potencia, aplicando la
programación de los método de solución iterativos, Newton – Raphson en
comparación con Gauss - Seidel. En los capítulos anteriores se obtuvo la información
necesaria para determinar los factores que intervienen en este tipo de problemas
permitiendo así la estructura de la interfaz gráfica en el software MATLAB 7.10.
3.2. Diseño de la Interfaz Gráfica
Previo al diseño de la interfaz es necesario considerar los datos del sistema que se
van a llevar a estudio, en principio para la elaboración de la topología del sistema,
seguido de la muestra de parámetros para cada bus, punto de generación y de carga.
Todo ello, en primer punto, para realizar las imágenes pertenecientes a cada sistema
eléctrico de potencia.
Figura 14. Imagen prediseñada de la topología del Sistema Exposito.
Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
52 | P á g i n a
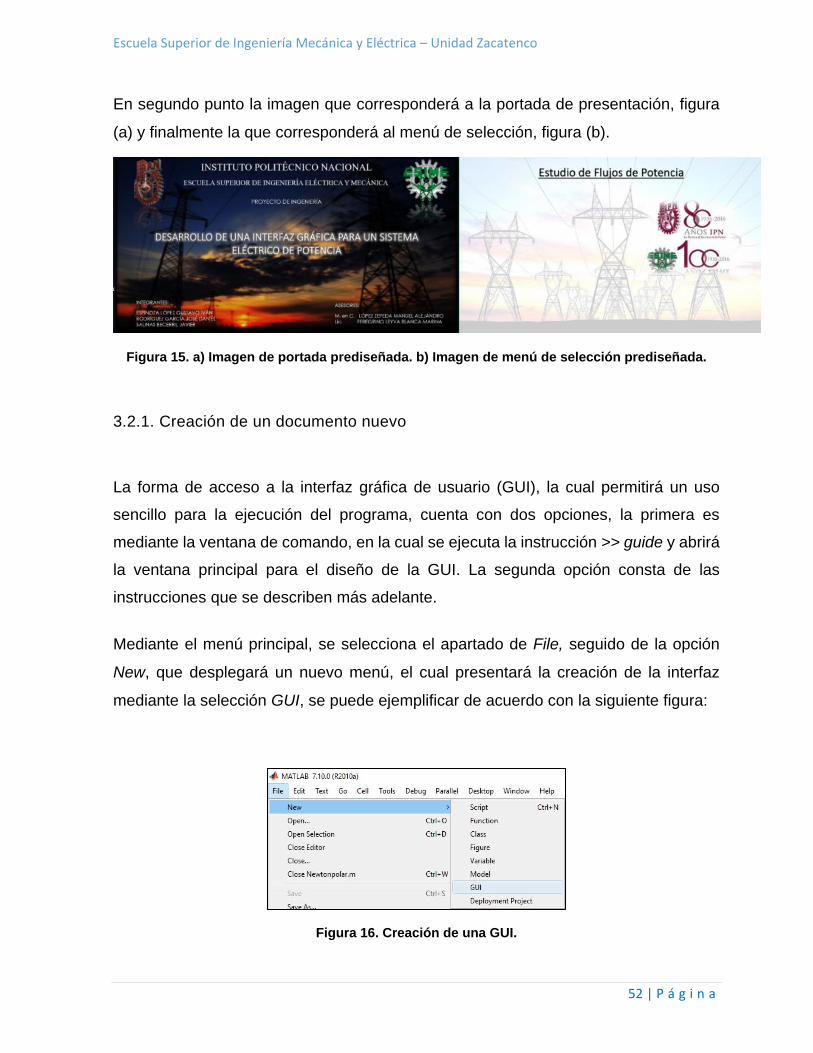
En segundo punto la imagen que corresponderá a la portada de presentación, figura
(a) y finalmente la que corresponderá al menú de selección, figura (b).
Figura 15. a) Imagen de portada prediseñada. b) Imagen de menú de selección prediseñada.
3.2.1. Creación de un documento nuevo
La forma de acceso a la interfaz gráfica de usuario (GUI), la cual permitirá un uso
sencillo para la ejecución del programa, cuenta con dos opciones, la primera es
mediante la ventana de comando, en la cual se ejecuta la instrucción >> guide y abrirá
la ventana principal para el diseño de la GUI. La segunda opción consta de las
instrucciones que se describen más adelante.
Mediante el menú principal, se selecciona el apartado de File, seguido de la opción
New, que desplegará un nuevo menú, el cual presentará la creación de la interfaz
mediante la selección GUI, se puede ejemplificar de acuerdo con la siguiente figura:
Figura 16. Creación de una GUI.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
53 | P á g i n a
Al haber sido seleccionada la opción GUI, se presenta una nueva ventana de
opciones, de acuerdo con la siguiente figura:
Figura 17. Creación de una nueva GUI.
En la pantalla se presentan las siguientes opciones:
Tabla 2. Opciones para la creación de una GUI.
Blank GUI (DEFAULT) Presenta el formato para una interfaz gráfica de usuario en blanco.
GUI with Uicontrols Presenta el ejemplo para calcular masa, teniendo la densidad y el
volumen, en algún sistema de unidad.
GUI with Axes and
Menu
Similar a la anterior contiene un ejemplo con el menú File y
presenta las opciones Open, Print y Close.
Modal Question
Dialog
Al seleccionar esta opción se muestra un cuadro de dialogo, que
integra dos botones (Yes y No), una imagen y una etiqueta.
Teniendo en cuenta los parámetros y datos que serán integrados a la interfaz se
selecciona un documento totalmente en blanco, Blank GUI (Default), que permite
desarrollar las funciones necesarias para el propósito del proyecto. El panel de la
nueva GUI se aprecia en la figura 18, junto con las herramientas que la componen y
la ventana en que se trabajará.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
54 | P á g i n a
Figura 18. Panel de control de la interfaz gráfica.
Al lado izquierdo del panel de trabajo se muestran los componentes que maneja el
entorno de diseño de la GUI y se describen en la siguiente tabla:
Tabla 3. Componentes de una GUI
COMPONENTES DE LA INTERFAZ GRÁFICA
CONTROL VALOR DE ESTILO DESCRIPCIÓN
Check box ´checkbox´ Indica estado de opción o atributo
Editable Text ´edit´ Caja para editar texto
Pop-up menu ´popupmenu´ Lista de opciones
List Box ´listbox´ Muestra una lista deslizable
Push Button ´pushbutton´ Invoca un evento inmediatamente
Radio Button ´radio´ Indica una opción que puede ser seleccionada
Toggle Button ´togglebutton´ Dos estados “on” y “off”
Static Text ´text´ Muestra un sitring de texto en un bloque
Button Group ---- Permite exclusividad de selección con los radio button
Table ---- Permite la creación de una tabla que almacene valores
Panel button ---- Agrupa botones como un grupo
El ambiente de diseño de la interfaz es de uso muy sencillo, teniendo en cuenta las
herramientas mencionadas anteriormente, sin embargo la manipulación de esta puede
darse directamente desde el panel de control de la interfaz gráfica o mediante

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
55 | P á g i n a
instrucciones en su código. Al crear un nuevo documento GUI se crean dos archivos
en la carpeta que este se guarda: .m y .fig. El archivo .m contiene el código de la
interfaz gráfica, el archivo .fig contiene los elementos gráficos o lo que se aprecia en
el panel de control de la interfaz, como se muestra en la figura 19.
Figura 19. a) Archivo .fig del nuevo documento. b) Archivo .m del nuevo documento.
El proyecto consta de una serie de GUI´s que están vinculadas entre sí, las cuales se
pueden dividir en tres sectores:
1. Portada
2. Menú de selección
3. Interfaz de los sistemas
3.2.2. Diseño de Portada
Para el diseño de la interfaz de portada se siguieron los pasos descritos en la
introducción del punto 3.3.1 para obtener una ventana nueva (figura 18). La portada
solamente consta de dos botones, el primero con la opción “Continuar” y el segundo
para “Salir”, como se pretende está primera interfaz es la presentación del proyecto
por lo cual solo requiere el vínculo para continuar con el análisis.
Paran agregar los botones mencionados anteriormente es necesario ubicarse en la
barra de herramientas y dar selección en “Push Button”, así obteniendo un primer

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
56 | P á g i n a
componente. Para editar las propiedades (color, tamaño, texto, etc.) se tienen dos
casos, como manera más sencilla e inmediata es el ubicarse con el cursor donde se
encuentra el elemento y dar doble click e inmediatamente abrirá las propiedades del
elemento, o como segunda opción dar click derecho y seleccionar la leyenda Property
Inspector, desplegando así el menú de propiedades que se aprecia en la figura 20.
Figura 20. Acceso a las propiedades de un Push Button.
Para el segundo caso de modificación de propiedades es necesario abrir el archivo .m
que se genera, esto es mediante el mismo menú que se abrió al dar click derecho en
el elemento, pero se da selección a la opción “View Callbacks”, seguido de Callback.
Figura 21. Acceso al código del Push Button.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
57 | P á g i n a
Se obtienen la ventana de la imagen 22.
Figura 22. Código del Push Button.
Para este caso, si por ejemplo se quiere editar el nombre que este tiene “Push Button”
y designar “Continuar” se llevará a cabo mediante la siguiente instrucción:
set(handles.pushbutton1, 'String', 'Continuar')
La cual se compone de tres puntos: El nombre del elemento que se va a modificar
“pushbutton1”, la propiedad que se quiere cambiar “String”, y por último el cambio a
efectuar, en este caso el nuevo nombre “Continuar”. Una vez detallado lo anterior y
efectuando cambios de color del botón y color de la letra en la ventana de propiedades,
los Push Button de portada se ilustran en la siguiente figura.
Figura 23. Push Button de portada "Continuar" y "Salir".

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
58 | P á g i n a
Para finalizar el diseño de la interfaz de portada se agrega la imagen de la figura 15(a).
La imagen de fondo se agrega en el archivo .m, ya que es mediante la instrucción
siguiente:
%Inserta una imagen im = imread('portada.png'); image(im); axis image; % ajusta la tasa de aspecto del despliegue axis off; % remueve los ejes
La figura siguiente corresponde a la portada de inicio de la interfaz gráfica para la
solución de flujos de potencia, además de los datos generales que se aprecian se
tienen los botones de selección con las leyendas de “Continuar” y “Salir”.
Figura 24. Portada de inicio de la interfaz gráfica para solución de flujos de potencia.
3.2.3. Diseño de Menú de selección
La siguiente GUI consta de los mismos pasos para su creación, sin embargo algunos
de los componentes que la integran son diferentes. Se mantiene la instrucción para
insertar la imagen prediseñada de fondo de la figura 15(b):
%Inserta iuna imagen im = imread('fondo1.png'); imshow(im); axis image; % ajusta la tasa de aspecto del despliegue axis off; % remueve los ejes
De forma similar se agregan dos Push Button, el primero con la descripción “Regresar”
permitiendo el retorno a la GUI de portada, el segundo con la leyenda “Salir”
permitiendo cerrar la ventana.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
59 | P á g i n a
Figura 25. Botones de Regreso y Salida de la Interfaz del menú de selección.
Un nuevo elemento a agregar es listbox, que permite la creación de una lista
desplegable, en el caso del proyecto, para el análisis de flujos de potencia, se crean
dos listas, la que enuncia los métodos de análisis y la que incluye los sistemas a ser
analizados.
Por último se emplea el elemento Static Text, simplemente como especificación de
cada lista, agregando uno para el enunciado “Método a utilizar” y otro para “Sistema a
analizar”.
´´´pppppppppppjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
Figura 26. Interfaz del menú de selección con sus diferentes componentes.
La manera en que son agregadas las listas, es en la propiedad String en la cual se
borra el nombre que está dado por defecto y se escriben los sistemas o los métodos
de solución.
Para que se reconozca cada sistema, se hace uso de una función switch en el
documento .m de la interfaz de menú de selección, así se mandan a llamar cada una
de las interfaces de los sistemas.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
60 | P á g i n a
%sistema=get(handles.popupmenu1,'String') sistema = get(hObject, 'String'); val = get(hObject,'Value'); str = get(hObject,'String'); switch str{val} case 'Sistema Exposito: 3 Nodos' sistema1 case 'Sistema Murty: 3 Nodos' sistema2 case 'Sistema Stevenson: 4 Nodos' sistema3 case 'Sistema Stagg: 5 Nodos' sistema4 case 'Sistema Arthur: 5 Nodos' sistema5 case 'Sistema William: 5 Nodos' sistema6 case 'Sistema Bergen: 5 Nodos' sistema7 case 'Sistema IEEE: 7 Nodos' sistema8 case 'Sistema IEEE: 14 Nodos' sistema9 end
La nueva interfaz muestra un panel en el cuál se pueden seleccionar opciones para el
método de estudio de flujos de potencia y los diferentes sistemas a ser analizados, se
puede apreciar en la figura 27.
Figura 27. Ámbito de selección de la interfaz gráfica.
3.3.3. Diseño de Interfaz de los sistemas

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
61 | P á g i n a
Finalmente se crea el diseño de la interfaz principal, ya que esta es la que muestra los
aspectos generales y específicos del sistema. Previo al diseño es necesario enlistar
los datos que se necesitan visualizar, los cuales se muestran en la tabla 4.
Tabla 4. Datos requeridos en los Sistemas Eléctrico de Potencia.
DATOS
TOPOLOGÍA DEL SISTEMA TABLA
Datos de Conexiones Datos de Conexiones
Datos de Carga Datos de Carga
- Generación de matriz Ybus
- Generación de Jacobiano
Resultado del análisis Resultado del análisis
Observando la tabla anterior se determina la forma en que se requieren ver los datos,
en primer término de una manera gráfica, en la cual se aprecie el sistema que se va a
analizar y los datos de entrada en cada uno de los componentes del mismo, de igual
manera los datos de salida se puedan visualizar en cada carga o cada generador. En
segundo término se requiere obtener los datos, tanto de entrada, de proceso de
análisis y de salida, las tablas serán los elementos que permitan su manipulación para
algún otro fin.
Como primer paso es desarrollar la parte gráfica de la interfaz, a diferencia de las
realizadas anteriormente no se requiere que la imagen del sistema abarque la totalidad
de la ventana, para lo cual se hace uso de otra herramienta, Axes, que permite
delimitar el tamaño de una imagen dentro de una GUI. La instrucción para agregar la
imagen es la explicada en puntos anteriores. La siguiente figura muestra el ejemplo
del sistema 1 utilizando la herramienta Axes.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
62 | P á g i n a
Figura 28. Uso de la herramienta Axes en el panel de control.
Los datos que se apreciarán en el sistema se incorporan mediante el Static Text de
manera manual, desplazando tantos se requieran. Para el ejemplo del Sistema 1 los
datos de conexiones implican G, B y y/2 para cada línea.
Figura 29.Conjutos de Static Text para muestra de datos del sistema.
Los datos de carga G, B y y/2 son propias de cada línea de conexión.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
63 | P á g i n a
Figura 30. Datos de G, B y Y/2 para cada línea del Sistema Exposito.
Por último, los resultados tienen que ir, de manera similar que los datos de carga en
cada bus, pero estos se pueden plasmar al otro extremo del elemento.
En cuestión se ha completado una sección de la muestra de datos en forma gráfica,
sin embargo es claro que todos los datos no van a mostrarse en un mismo instante,
para los cual se asocia cada conjunto de datos a un Toggle Button, el cual al ser
presionado aparecerán los datos solicitados y al dar click nuevamente estos
desaparecerán, dando aplicación a su descripción on y off. La forma de editar sus
propiedades es similar a como se editan para el Push Button, teniendo uno para “Datos
de nodos”, seguido de “Conexiones del sistema” y finalmente “Resultados”.
Para asociar los Static Text al Tuggle Button correspondiente, es necesario ubicarse
en el Callback de este y dar la condición de prendido o apagado mediante las
instrucciones que se muestran a continuación.
in = get(hObject,'Value'); if in == 1 %set(handles.uitable1, 'Visible', 'on') set(handles.text1, 'Visible', 'on') set(handles.text1, 'String', 'G=') else set(handles.text1, 'Visible', 'off')
En la siguiente imagen se aprecian los tres Tuggle Button correspondientes a los datos
que se visualizarán en la topología del sistema, además de haberse agregado la
herramienta panel, esto con la función de separarlos de aquellos que corresponderán

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
64 | P á g i n a
a los que mostrarán datos en tabla. El panel, como se explica en su aplicación, permite
agrupar una serie de botones.
Figura 31. Panel con Push Button para mostrar datos en el sistema.
A continuación corresponde la creación de la tabla que tendrá como contenido los
datos de: Datos de Conexiones, Datos de Carga, Generación de matriz Ybus,
Generación de Jacobiano y Resultado del análisis. Se selecciona la herramienta Table,
el tamaño de filas y columnas puede ajustarse al dar click derecho y en el menú
seleccionar Table Property Editor…, ahí se abrirá una nueva ventana de opciones para
editar dichos campos. Respecto al proyecto no es necesario ajustar un número n de
filas y columnas, ya que al solicitar los datos la tabla se ajusta a las que sean
necesarias.
Figura 32. Editar propiedades en el elemento Table.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
65 | P á g i n a
Lo referente a los datos que serán mostrados en tabla su creación procede de manera
distinta que los datos en la topología del sistema debido a que ya no se agregan Tuggle
Button, en este caso serían cinco Push Button que abarcarían los diversos parámetros
obtenidos. La lección de esta herramienta es que al ser seleccionado abrirá la tabla y
ésta puede ser cerrada directamente. Para llevar a cabo la asignación de datos a la
tabla es mediante la siguiente instrucción:
[conexiones]=sistema1Exposito1; set(handles.uitable1,'data',conexiones)
La instrucción llama los datos “conexiones” de la función “sistema1Exposito1” para
colocarlos dentro de la tabla “uitable1”. Así, utilizando la misma tabla se hace el
llamado de los diversos valores utilizando los Push Button. Todos los botones que son
encargados de mostrar los datos mediante la tabla se agrupan en un panel.
Figura 33. Panel con Push Button para mostrar datos del sistema mediante tabla..
Para conveniencia del proyecto se requiere que la tabla sólo aparezca cuando es
presionado algún botón que este asociado a ella, para lo cual se utiliza la instrucción:
set(handles.uipanel9, 'Visible', 'off')
para mantenerla no visible, y la instrucción:
set(handles.uitable3, 'Visible', 'on')
que permite su aparición. Así como se aprecia en la figura (a), la interfaz no muestra
la tabla, pero al ser presionado, en este caso el Tuggle Button de “Datos de nodos”,
aparece la tabla, figura (b).

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
66 | P á g i n a
Figura 34. a) Ejemplo de instrucción off. b) Ejemplo de instrucción on.
Finalmente se agrega el Push Button para “Salir” de la GUI y así continuar para la
selección de un nuevo sistema.
Figura 35. Total de elementos para el Sistema Exposito.
El diseño de la interfaz que se toma como base para los diferentes sistemas es el de
la figura 35.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
67 | P á g i n a
3.2. Aplicación de la Interfaz Gráfica
El presente proyecto tiene como función dar solución a diferentes Sistemas Eléctricos
de Potencia mediante alguno de los métodos de Newton – Raphson, Gauss Seidel o
Desacoplado Rápido, a través de una plataforma interactiva diseñada en el ambiente
computacional de MATLAB.
Al ejecutar el programa lo primero en visualizarse será la portada del proyecto, que
incluye el título del mismo, así como los datos generales de escuela y quienes lo
realizaron, tal cual se aprecia en la siguiente figura.
Figura 36. GUI de Portada.
Al seleccionar en la interfaz gráfica la opción “Salir” cerrara en automático la ventana
y se dejará de ejecutar el programa, por el caso contrario si la elección es “Continuar”
se cerrara la GUI actual para dar partida a una nueva interfaz.
Debido a que el programa presenta una vinculación de funciones, donde al dar termino
a la función de portada se da inicio a la función para seleccionar el método y sistema
a utilizar.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
68 | P á g i n a
Figura 37. GUI de menú de selección de métodos y sistemas.
La leyenda de la nueva GUI es Estudio de Flujos de Potencia, en este caso se cuentan
con dos menús desplegables, el primero para la selección del método de solución,
proceso que llevará a cabo el estudio del sistema, como se aprecia a continuación:
Figura 38. Selección del método a emplear.
Una vez seleccionado el método de solución para el estudio de flujos de potencia se
selecciona el sistema eléctrico que estará evaluado por dicho método de solución, se
aprecian sistemas diferentes a evaluar, cada uno consta de cierto número de nodos y
diferentes parámetros de tensión, los cuales se aprecian en los anexos del proyecto.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
69 | P á g i n a
Figura 39. Selección del Sistema a estudiar.
La prioridad de la interfaz es permitir una comunicación entre el usuario y el programa,
de modo que facilite el proceso que se está realizando, por tal motivo al ser
seleccionado alguno de los sistemas inmediatamente se dará apertura a una nueva
ventana que presentará un compendio de los datos que son posibles visualizar.
Figura 40. Interfaz del sistema a evaluar.
La interfaz del sistema a estudiar presenta la información de acuerdo a la opción que
se escoja “Mostrar en Sistema” o bien “Mostrar en tabla”, así para visualizar los datos

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
70 | P á g i n a
de los nodos en la topología de la red es necesario seleccionar el botón que lo indica,
de tal modo se apreciaran los datos como se muestra a continuación.
Figura 41. Datos de nodos visualizados en la topología de red.
Si por otra parte se pretenden ver los parámetros de las conexiones del sistema
plasmados en la red es preciso dar selección a “Conexiones del sistema”. Se aprecia
el ejemplo en la figura 35.
Figura 42. Datos de las líneas vistas en la topología de la red.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
71 | P á g i n a
Finalmente si se requieren ver los resultados del sistema eléctrico de potencia en cada
nodo de carga o generación, presentando los datos pertinentes del estudio se
selecciona “Resultados”.
Figura 43. Resultados en cada nodo del Sistema Eléctrico.
La interfaz además de mostrar los datos en la topología de la red, está abierta a
presentarlos mediante una tabla, la cual va a aparecer cuando se de selección a alguno
de sus opciones. Cada botón de selección al ser accionado proporcionara la
información requerida, en primer punto se presenta Datos de nodos, el cual brindara
los parámetros de tensión y potencias iniciales.
Figura 44. Parámetros de opción Datos de nodos, vistos en tabla.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
72 | P á g i n a
Como segunda opción los datos a observar serán los de impedancia de cada línea,
así mostrando la susceptancia y admitancia, además del efecto capacitivo.
Figura 45. Parámetros de Conexiones del sistema mostrados en tabla.
Una vez visualizadas las opciones anteriores se puede apreciar el diseño de la matriz
Ybus, elaborada a partir de los datos anteriores.
Figura 46. Matriz Ybus del sistema mostrada en tabla.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
73 | P á g i n a
La siguiente opción en lista es para muestra del Jacobiano, que será el paso a la
obtención de resultados del Sistema Eléctrico de Potencia y se puede apreciar en la
imagen 30.
Figura 47. Jacobiano del sistema mostrado en tabla..
Para apreciar la solución de la topología del sistema se presiona la opción de
resultados, mostrando así, para cada nodo, la tensión y potencias activas y reactivas.
Figura 48. Resultados del análisis del sistema vistos en tabla.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
74 | P á g i n a
CAPÍTULO 4
ESTUDIO ECONÓMICO

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
75 | P á g i n a
El presente capitulo detalla el aspecto financiero del proyecto, evaluando los puntos
de inversión, gastos generados y la obtención del presupuesto de la interfaz gráfica,
incluyendo un porcentaje adicional de ganancia.
El estudio económico se compone de cuatro puntos:
Inversión fija
Inversión diferida
Capital de trabajo
Presupuesto
4.1. Presupuesto de la Interfaz gráfica
4.1.1. Inversión
En este punto se detalla todo aquel servicio, producto, licencia o concepto que fue de
utilidad para la elaboración de la interfaz, así como el costo generado por cada uno.
En la siguiente tabla se aprecian los conceptos utilizados.
Tabla 5. Montos de inversión.
CONCEPTO MONTO
Licencia de software Matlab versión 7.10 $10,000.00
Computadora personal $7,000.00
Insumos $6,000.00
Gastos de papelería $150.00
Gastos de servicios públicos $4,300.00
SUBTOTAL $23,450.00
Imprevistos (5%) $703.50
TOTAL DE INVERSIÓN $24,153.50

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
76 | P á g i n a
4.1.2. Capital de trabajo
En este punto se describen los gastos generados por mano de obra para el periodo
bimestral, debido al tiempo de realización de la interfaz. La siguiente tabla muestra el
personal utilizado y el sueldo que se le asigno.
Tabla 6. Capital de Trabajo.
PERSONAL
PERIODO DE
TRABAJO
SUELDO
MENSUAL
TOTAL DE
EMPLEADOS
CAPITAL DE
TRABAJO
TOTAL
Ingeniero
electricista
2 $4,000.00 3 $24,000.00
4.1.4. Presupuesto
La siguiente tabla muestra el presupuesto total para la elaboración de la interfaz gráfica
para solución de flujos de potencia.
Tabla 7. Presupuesto.
CONCEPTO MONTO
Total de inversión $24,153.50
Capital de trabajo $24,000.00
Imprevistos* $2,407.68
SUBTOTAL $50,561.20
IVA (16%) $8,089.50
TOTAL $58,650.70
Ganancia (30%) $17,595.20
PRESUPUESTO TOTAL DEL
PROYECTO
$76,245.90

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
77 | P á g i n a
CONCLUSIONES
Para culminación del proyecto cabe destacar el cumplimiento de cada uno de los
objetivos descritos a partir de las siguientes conclusiones:
Los sistemas eléctricos de potencia han logrado expandirse últimamente debido al
incremento de la carga en la red, por lo que, el estudio de flujos de potencia ha
adquirido gran importancia en el análisis de la planeación, operación, control,
comportamiento y crecimiento de la red. La información que se adquiere a partir del
análisis a dichos sistemas de potencia es la obtención de magnitud y ángulo de
tensión, así como las potencias activa y reactiva en cada nodo y así conocer la
generación y demanda del sistema.
El aspecto fundamental para llevar a cabo el análisis de flujos de potencia fue conocer
los parámetros que intervienen, datos de impedancia de línea, siendo estos manejados
en valores de admitancia para lograr facilitar el cálculo; así mismo fue primordial
conocer los elementos eléctricos que componen al sistema eléctrico de potencia y la
aportación de datos que presentan para la solución.
Los datos de la red pueden ir variando conforme a que aumente la carga, nuevas
fuentes generadoras, líneas de transmisión o interconexión, gracias al análisis de
diferentes modelos en la ejecución del programa se obtiene un panorama del
comportamiento del sistema para diferentes parámetros, para el crecimiento del
sistema.
La existencia de diversos métodos iterativos para facilitar la solución a problemas de
flujo de potencia hace evidente la necesidad de hacer uso de herramientas
computacionales que faciliten la solución a los mismos, por lo que desarrollar la
programación del método de solución iterativa Newton – Raphson tuvo una mayor
importancia ante otros métodos, debido a que se adquiere una convergencia con
menor número de iteraciones, se llega a un menor porcentaje de error, para grandes
sistemas las matrices a solucionar se les dedica un tiempo menor de solución.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
78 | P á g i n a
Una vez examinados los datos de la topología de la red y siendo estos analizados
mediante los métodos de Newton – Raphson, Gauss – Seidel y Desacoplado Rápido,
se obtienen las potencias, ángulos y magnitudes de tensión que caracterizan al
Sistema Eléctrico de Potencia, con la inconveniencia de no visualizar los datos en la
red, ventaja que se tiene con el desarrollo de la interfaz.
La interfaz elaborada ha logrado el propósito de mostrar de manera gráfica los
parámetros de los sistemas eléctricos de potencia, logrando así una manera interactiva
entre el ingeniero a cargo de ejecutar el programa y la manera en que se interpretan
los resultados mediante la interfaz.
Las ventajas del diseño de la interfaz es poder modificar los datos del sistema,
simulando crecimiento de la demanda o de la generación, así el programa desarrollado
efectuara normalmente el cálculo y arrojara nuevos resultados que se podrán aprecias
gráficamente para cada bus del sistema, incluso si hubiese interconexiones o se
perdiera parte de la carga a causa de un fallo podría ser simulado y mostrados los
datos mediante la interfaz.
La adquisición de un proyecto de esta naturaleza puede ser la apertura al desarrollo
de una metodología que permita, de manera gráfica y no sólo mediante el cálculo, el
estudio a sistemas eléctricos de potencia de grandes magnitudes a costo de una sola
inversión y amplio beneficio, incluso con la posibilidad de modificaciones para su
mejoramiento o necesidad.
Ante el gran avance en programación se hace importante la introducción de este tipo
de herramientas a nivel educativo, incluso a nivel industrial, donde el análisis de flujos
de potencia no sea el sólo tener los datos sino plasmarlos en el instante en la parte del
sistema que está describiendo, siendo así una apertura a una interacción directa con
el sistema, conocer cuáles son las variables que componen al sistema en tiempo real,
proporcionar a los futuros ingenieros la posibilidad de desarrollar sus habilidades en
materia de ingeniería eléctrica.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
79 | P á g i n a
REFERENCIAS
Chapra, S., & Canale, R. (2007). Métodos numéricos para ingenieros. Ciudad de
México: McGraw-Hill/Interamericana.
Comisión Federal de Electricidad. (20 de Septiembre de 2016). CFE Comisión Federal
de Electricidad. Obtenido de http://www.cfe.gob.mx/paginas/Home.aspx
Duncan, J., & Sarma, M. (2000). Sistemas de Potencia: ANÁLISIS Y DISEÑO.
CIENCIAS E INGENIERIAS .
Endesa educa. (2014). Endesa enduca. Obtenido de
http://www.endesaeduca.com/Endesa_educa/
Glenn W., A. H. (1994). Computer Methods in Power System Analisis. Tokyo: McGraw-
Hill.
Gómez, A. (2002). Análisis y operación de sistemas de energía eléctrica. McGraw-Hill.
Goméz, A., Martínez, J., Rosendo, J., Romero, E., & Riquelme, J. (2003). Sistemas
Eléctricos de Potencia. Madrid: Pearson Educación.
Grainger, J., & Stevenson, W. (1996). ANÁLISIS DE SISTEMAS DE POTENCIA.
Naucalpan de Juárez: McGraw-Hill.
Hernández, L. D. (OCTUBRE de 2012). CÁLCULO DE FLUJOS DE POTENCIA
APLICANDO EL CONCEPTO DE MATRIZ DOMINANTE. MENDOZA, VERACRUZ,
MÉXICO.
Sandoval, A. P. (2008). Expansión de la transmisión de un sistema de potencia de 57
nodos. México.
Wildi, T. (2007). Máquinas eléctricas y sistemas de potencia. México: Pearson
Educación.

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
80 | P á g i n a
ANEXOS

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
81 | P á g i n a
ANEXO A. Datos del sistema eléctrico de potencia Sistema Exposito 3 Nodos
Total de nodos del sistema: 3
Número de líneas de trasmisión del sistema eléctrico de potencia: 3
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 10 -20 0.05125
1 3 5 -15 0.03875
2 3 20 -40 0.03875
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0 0 50 0 1.02 0.00 3
2 50 0 0 0 1.02 0.00 1
3 0 0 100 60 0.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
82 | P á g i n a
ANEXO B. Datos del sistema eléctrico de potencia Sistema Murty 3 Nodos
Total de nodos del sistema: 3
Número de líneas de trasmisión del sistema eléctrico de potencia: 3
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 1.25 -3.75 0.0
1 3 5 -15 0.0
2 4 15.29 -4.587 0.0
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0 0 0 0 1.05 0.00 3
2 20 0 50 20 1.03 0.00 1
3 0 0 100 25 0.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
83 | P á g i n a
ANEXO C. Datos del sistema eléctrico de potencia Sistema Stevenson 4 Nodos
Total de nodos del sistema: 4
Número de líneas de trasmisión del sistema eléctrico de potencia: 4
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 3.815629 -19.078144 0.05125
1 3 5.169561 -25.847809 0.03875
2 4 5.169561 -25.847809 0.03875
3 4 3.023705 -15.118528 0.06375
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0 0 50 30.99 1.00 0.00 3
2 0 0 170 105.35 1.00 0.00 1
3 0 0 200 123.94 1.00 0.00 1
4 318 0 80 49.58 1.02 0.00 2

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
84 | P á g i n a
ANEXO D. Datos del sistema eléctrico de potencia Sistema Stagg 5 Nodos
Total de nodos del sistema: 5
Número de líneas de trasmisión del sistema eléctrico de potencia: 7
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 5.00 -15.0 0.030
1 3 1.25 -3.75 0.025
2 3 1.66 -5.00 0.200
2 4 2.06 -4.63 0.020
2 5 2.50 -7.50 0.025
3 4 10.0 -30.0 0.010
4 5 1.72 -4.31 0.025
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0 0 0 0 1.06 0.00 3
2 30 10 5 3 1.00 0.00 1
3 0 0 40 10 1.00 0.00 1
4 0 0 80 20 1.00 0.00 1
5 0 0 50 25 1.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
85 | P á g i n a
ANEXO E. Datos del sistema eléctrico de potencia Sistema Arthur 5 Nodos
Total de nodos del sistema: 5
Número de líneas de trasmisión del sistema eléctrico de potencia: 6
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 0.495 -4.950 0.025
2 3 13.79 -34.48 0.025
3 4 0.124 -2.494 0.025
3 5 6.897 -17.94 0.025
4 5 8.219 -21.92 0.025
1 5 8.219 -21.92 0.025
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0 0 0 0 1.00 0.00 3
2 80 35 25 15 1.00 0.00 1
3 0 0 0 0 1.00 0.00 1
4 0 0 45 15 1.00 0.00 1
5 0 0 55 20 1.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
86 | P á g i n a
ANEXO F. Datos del sistema eléctrico de potencia Sistema William 5 Nodos
Total de nodos del sistema: 5
Número de líneas de trasmisión del sistema eléctrico de potencia: 6
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 0.5882 -2.3529 0.03875
1 4 0.3921 -1.5686 0.03875
1 5 1.1764 -4.7058 0.03875
2 3 1.1764 -4.7058 0.03875
2 4 0.5882 -2.3529 0.03875
3 5 1.1764 -4.7058 0.03875
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0 0 0.0 0.0 1.02 0.00 3
2 0 0 -0.6 -0.3 1.00 0.00 1
3 1.0 0 0.0 0.0 1.04 0.00 1
4 0 0 -0.4 -0.1 1.00 0.00 1
5 0 0 -0.6 -0.2 1.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
87 | P á g i n a
ANEXO G. Datos del sistema eléctrico de potencia Sistema Bergen 5 Nodos
Total de nodos del sistema: 5
Número de líneas de trasmisión del sistema eléctrico de potencia: 6
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 1 -10 0
1 4 1 -10 0
2 3 1 -10 0
2 4 1 -10 0
3 5 1 -10 0
4 5 1 -10 0
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 0.00 0 0.00 0.00 1.00 0.00 3
2 88.30 0 0.00 0.00 1.00 0.00 1
3 20.76 0 20.00 10.0 1.00 0.00 1
4 0.00 0 171.40 59.83 1.00 0.00 1
5 0.00 0 173.55 54.96 1.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
88 | P á g i n a
ANEXO H. Datos del sistema eléctrico de potencia Sistema Glover 7 Nodos
Total de nodos del sistema: 7
Número de líneas de trasmisión del sistema eléctrico de potencia: 11
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 0.00 -16.67 0.025
1 3 0.00 -4.17 0.025
2 3 0.00 -5.56 0.025
2 4 0.00 -5.56 0.025
2 5 0.00 -8.33 0.025
2 6 0.00 -16.67 0.025
3 4 0.00 -33.33 0.025
4 5 0.00 -4.17 0.025
5 7 0.00 -16.67 0.025
6 7 0.00 -8.33 0.025
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 160 0 0 0 1.00 0.00 1
2 150 0 0 40 1.00 0.00 1
3 0 0 110 0 1.00 0.00 1
4 50 0 80 0 1.00 0.00 1
5 0 0 130 0 1.00 0.00 1
6 200 0 200 0 1.00 0.00 1
7 200 0 200 0 1.00 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
89 | P á g i n a
ANEXO I. Datos del sistema eléctrico de potencia Sistema IEEE 13 Nodos
Total de nodos del sistema: 13
Número de líneas de trasmisión del sistema eléctrico de potencia: 11
Base del sistema en MVA: 100
Datos de conexiones del sistema
Bus i Bus j G B Y/2
1 2 0.01938 0.05917 0.02640
1 5 0.05403 0.22304 0.02640
2 3 0.04699 0.19797 0.02190
2 4 0.05811 0.17632 0.01700
2 5 0.05695 0.17388 0.01730
3 4 0.06701 0.17103 0.00640
4 5 0.01335 0.04211 0.00000
4 7 0.00000 0.20912 0.00000
4 9 0.00000 0.55618 0.00000
5 6 0.00000 0.25502 0.00000
6 11 0.09498 0.19890 0.00000
6 12 0.12291 0.25581 0.00000
6 13 0.06615 0.13027 0.00000
7 8 0.00000 0.17615 0.00000
7 9 0.00000 0.11001 0.00000
9 10 0.03181 0.08450 0.00000
9 14 0.12711 0.27038 0.00000
10 11 0.08205 0.19207 0.00000
12 13 0.22092 0.19988 0.00000
13 14 0.17093 0.34802 0.00000

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
90 | P á g i n a
Datos de los nodos del sistema
Nodo Pg Qg Pc Qc Vm Va Tipo de nodo
1 230 0 0 0 1.06 0.00 1
2 36 42 21 12 1.04 0.00 1
3 28 23 94 19 1.01 0.00 1
4 0 0 47 -3 1.01 0.00 1
5 0 0 7 1 1.01 0.00 1
6 0 12 11 7 1.06 0.00 1
7 0 0 0 0 1.04 0.00 1
8 8 17 0 0 1.06 0.00 1
9 0 0 29 16 1.04 0.00 1
10 0 0 9 6 1.03 0.00 1
11 0 0 3 2 1.04 0.00 1
12 0 0 6 1 1.04 0.00 1
13 0 0 13 5 1.03 0.00 1
14 0 0 15 5 1.02 0.00 1

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
91 | P á g i n a
ANEXO J. Diagrama de flujo del método de Newton – Raphson.
INICIO
Calcular Y - Bus
K = 0
Calcular potencias
∆ 𝑃 𝑖 ( 𝑘 )
= 𝑃 𝑖 𝑁𝑒𝑡𝑎 − 𝑃 𝑖 ( 𝑘 )
∆ 𝑄 𝑖 ( 𝑘 )
= 𝑄 𝑖 𝑁𝑒𝑡𝑎 − 𝑄 𝑖 ( 𝑘 )
𝑖 = 1 , 2 , 3 … 𝑛 .
𝑖 ≠ 𝑆𝐿𝐴𝐶𝐾
Tol ΔP
Tol ΔP
Calculo de las potencias de los nodos.
Stop
FIN
𝐼 𝑖 ( 𝑘 )
= 𝑃 𝑖
( 𝑘 ) − 𝑗 𝑄 𝑖
( 𝑘 )
( 𝐸 𝑖 ( 𝑘 )
) 𝑘
Calcular elementos del Jacobiano
𝐾 ≤ 𝐶𝑜𝑛𝑣𝑒𝑟𝑔𝑒𝑛𝑐𝑖𝑎
1
3

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
92 | P á g i n a
1
[ ∆ P ⋯ ∆ Q
] = J1 ⋮ J4 ⋯ ⋯ ⋯ J2 ⋮ J3
[ ∆ δ ⋯ ∆ P
]
Calcular nuevos voltajes
δ i k + 1 = δ i
k + ∆ δ i k
E i k + 1 = E i
k + E δ i k
i = 1 , 2 , 3 , … n
i = SLACK
Reemplazar
δ i k por δ i
k + 1
E i k por E i
k + 1
K = K + +
3
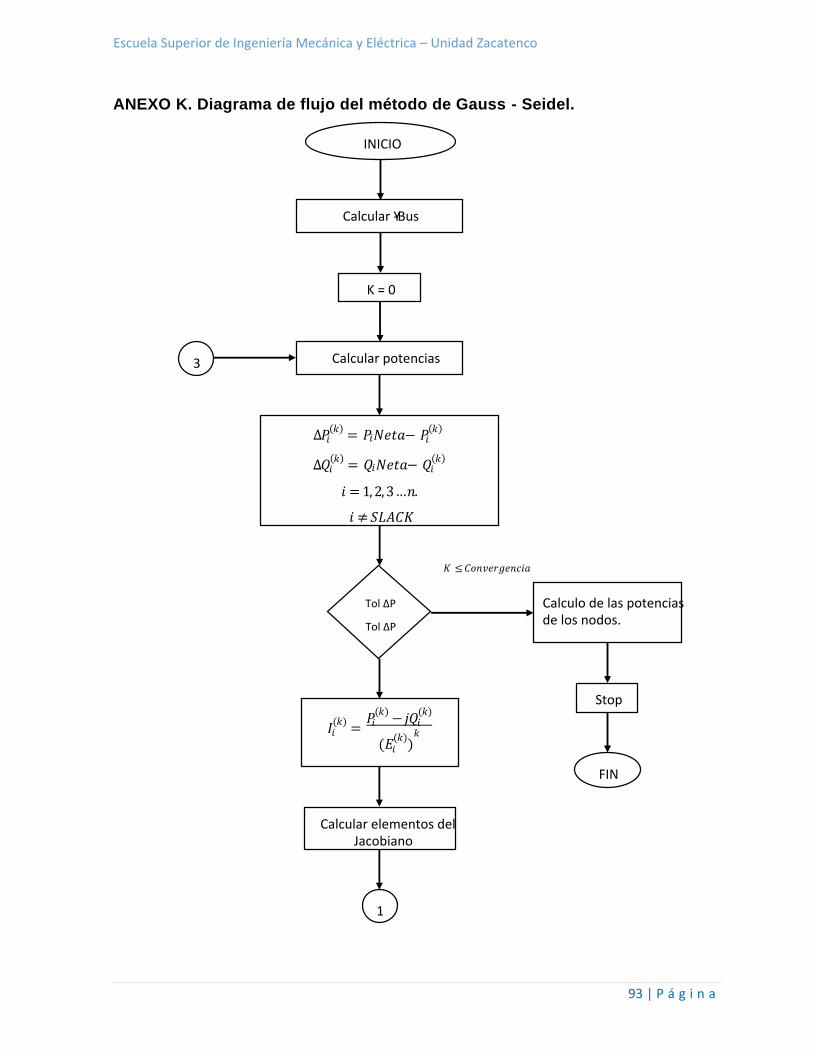
Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
93 | P á g i n a
ANEXO K. Diagrama de flujo del método de Gauss - Seidel.
INICIO
Calcular Y - Bus
K = 0
Calcular potencias
∆ 𝑃 𝑖 ( 𝑘 )
= 𝑃 𝑖 𝑁𝑒𝑡𝑎 − 𝑃 𝑖 ( 𝑘 )
∆ 𝑄 𝑖 ( 𝑘 )
= 𝑄 𝑖 𝑁𝑒𝑡𝑎 − 𝑄 𝑖 ( 𝑘 )
𝑖 = 1 , 2 , 3 … 𝑛 .
𝑖 ≠ 𝑆𝐿𝐴𝐶𝐾
Tol ΔP
Tol ΔP
Calculo de las potencias de los nodos.
Stop
FIN
𝐼 𝑖 ( 𝑘 )
= 𝑃 𝑖
( 𝑘 ) − 𝑗 𝑄 𝑖
( 𝑘 )
( 𝐸 𝑖 ( 𝑘 )
) 𝑘
Calcular elementos del Jacobiano
𝐾 ≤ 𝐶𝑜𝑛𝑣𝑒𝑟𝑔𝑒𝑛𝑐𝑖𝑎
1
3

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
94 | P á g i n a
1
[ ∆ P ⋯ ∆ Q
] = J1 ⋮ J4 ⋯ ⋯ ⋯ J2 ⋮ J3
[ ∆ δ ⋯ ∆ P
]
Calcular nuevos voltajes
δ i k + 1 = δ i
k + ∆ δ i k
E i k + 1 = E i
k + E δ i k
i = 1 , 2 , 3 , … n
i = SLACK
Reemplazar
δ i k por δ i
k + 1
E i k por E i
k + 1
K = K + +
3

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
95 | P á g i n a
No
Si Converge ∆Q
FIN
[∆P/V]=[B][ ∆δ]
Actualizar
Converge [∆Q/V]
Converge
[∆P/V]=[B´´][∆δ]
No
Si Converge ∆P
ANEXO L. Diagrama de flujo del método de Desacoplado - Rápido.
INICIO
Calcular Y - Bus
Calcular Jacobiano
Calcular potencias
Calcula [∆P/∆]
Si
Converge

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
96 | P á g i n a
ÍNDICE DE TABLAS
Tabla 1. Característica de los tipos de nodo de un sistema eléctrico se potencia. (Sandoval,
2008, p. 29). ......................................................................................................................................... 31
Tabla 2. Opciones para la creación de una GUI. ........................................................................... 53
Tabla 3. Componentes de una GUI .................................................................................................. 54
Tabla 4. Datos requeridos en los Sistemas Eléctrico de Potencia. ............................................. 61
Tabla 5. Montos de inversión. ........................................................................................................... 75
Tabla 6. Capital de Trabajo. .............................................................................................................. 76
Tabla 7. Presupuesto. ......................................................................................................................... 76

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
97 | P á g i n a
ÍNDICE DE FIGURAS
Figura 1. Representación de un Sistema Eléctrico de Potencia. (Gómez, 2002, p. 12). ......... 11
Figura 2. Símbolos normalizados de sistemas eléctricos. ............................................................ 16
Figura 3. Diagrama de un generador de corriente alterna. (Wildi, 2007, p. 71). ....................... 19
Figura 4. Voltaje del inducido de un generador de corriente alterna en función del ángulo de
rotación. (Wildi, 2007, p. 72). ............................................................................................................. 20
Figura 5. Voltaje del inducido de un generador de corriente alterna en función del tiempo.
(Wildi, 2007, p. 72). ............................................................................................................................. 21
Figura 6. Circuito equivalente de un transformador monofásico. (Goméz, Martínez, Rosendo,
Romero, & Riquelme, 2003, p. 25). .................................................................................................. 22
Figura 7. Circuito en p.u. de un transformador representando la impedancia de corto circuito.
(Goméz, Martínez, Rosendo, Romero, & Riquelme, 2003, p. 25). .............................................. 22
Figura 8. Conexión Y-Y de un transformador trifásico. (Gómez, Martínez, Rosendo, Romero,
& Riquelme, 2003, p. 26). .................................................................................................................. 23
Figura 9. Conexión Y-D de un transformador trifásico con desfase de 30°. (Gómez, Martínez,
Rosendo, Romero, & Riquelme, 2003, p. 27). ................................................................................ 24
Figura 10. Circuito equivalente de línea corta. (Gómez, 2002, p. 82). ....................................... 28
Figura 11. Circuito nominal π de la línea media. ............................................................................ 28
Figura 12. Línea de transmisión larga con parámetros distribuidos. (Gómez, 2002, p. 82) .... 29
Figura 13. Variables del BUS. (Duncan & Sarma, 2000). ............................................................. 38
Figura 14. Imagen prediseñada de la topología del Sistema Exposito. ...................................... 51
Figura 15. a) Imagen de portada prediseñada. b) Imagen de menú de selección prediseñada.
................................................................................................................................................................ 52
Figura 16. Creación de una GUI. ...................................................................................................... 52
Figura 17. Creación de una nueva GUI. .......................................................................................... 53
Figura 18. Panel de control de la interfaz gráfica. .......................................................................... 54
Figura 19. a) Archivo .fig del nuevo documento. b) Archivo .m del nuevo documento. ........... 55
Figura 20. Acceso a las propiedades de un Push Button. ............................................................ 56
Figura 21. Acceso al código del Push Button. ................................................................................ 56
Figura 22. Código del Push Button. .................................................................................................. 57

Escuela Superior de Ingeniería Mecánica y Eléctrica – Unidad Zacatenco
98 | P á g i n a
Figura 23. Push Button de portada "Continuar" y "Salir". ............................................................. 57
Figura 24. Portada de inicio de la interfaz gráfica para solución de flujos de potencia. .......... 58
Figura 25. Botones de Regreso y Salida de la Interfaz del menú de selección. ....................... 59
Figura 26. Interfaz del menú de selección con sus diferentes componentes. ........................... 59
Figura 27. Ámbito de selección de la interfaz gráfica. ................................................................... 60
Figura 28. Uso de la herramienta Axes en el panel de control. ................................................... 62
Figura 29.Conjutos de Static Text para muestra de datos del sistema. ..................................... 62
Figura 30. Datos de G, B y Y/2 para cada línea del Sistema Exposito. ..................................... 63
Figura 31. Panel con Push Button para mostrar datos en el sistema. ........................................ 64
Figura 32. Editar propiedades en el elemento Table. .................................................................... 64
Figura 33. Panel con Push Button para mostrar datos del sistema mediante tabla.. ............... 65
Figura 34. a) Ejemplo de instrucción off. b) Ejemplo de instrucción on. .................................... 66
Figura 35. Total de elementos para el Sistema Exposito. ............................................................ 66
Figura 36. GUI de Portada. ................................................................................................................ 67
Figura 37. GUI de menú de selección de métodos y sistemas. ................................................... 68
Figura 38. Selección del método a emplear. ................................................................................... 68
Figura 39. Selección del Sistema a estudiar. .................................................................................. 69
Figura 40. Interfaz del sistema a evaluar. ....................................................................................... 69
Figura 41. Datos de nodos visualizados en la topología de red. ................................................. 70
Figura 42. Datos de las líneas vistas en la topología de la red. .................................................. 70
Figura 43. Resultados en cada nodo del Sistema Eléctrico. ........................................................ 71
Figura 44. Parámetros de opción Datos de nodos, vistos en tabla. ............................................ 71
Figura 36. Parámetros de Conexiones del sistema mostrados en tabla. ................................... 72
Figura 36. Matriz Ybus del sistema mostrada en tabla. ................................................................ 72
Figura 36. Jacobiano del sistema mostrado en tabla.. .................................................................. 73
Figura 36. Resultados del análisis del sistema vistos en tabla. ................................................... 73