mio1ia mihovilovia...
TRANSCRIPT
Sveučilište u Zagrebu
Fakultet kemijskog inženjerstva i tehnologije
Primijenjena kemija
Uvod u matematičke metode u inženjerstvu
Fakultet kemijskog inženjerstva i tehnologije
Uvod u matematičke metode u inženjerstvu
Lotka-Volterra model
Grabežljivac i plijen
Moris Mihovilović i Mande Miošić
Zagreb, lipanj 2014.
SADRŽAJ: 1. UVOD ......................................................................................................................................... 3
2. LOTKA - VOLTERRA MODEL ............................................................................................... 4
2.1. Lotka - Volterra jednadžbe ................................................................................................... 4
2.1.1. Fizikalno značenje jednadžbi......................................................................................... 5
2.1.2. Plijen .............................................................................................................................. 5
2.1.3. Grabežljivac ................................................................................................................... 6
2.2. Rješenja jednadžbe ............................................................................................................... 7
2.2.1. Ravnoteža populacije ..................................................................................................... 7
2.2.1. Vektorsko polje.............................................................................................................. 8
2.3. Primjer problema .................................................................................................................. 9
2.4. Dinamika sustava ............................................................................................................... 10
3. Primjeri Lotka-Volterra modela u Mathematici ....................................................................... 11
3.1. Dinamička ravnoteža .......................................................................................................... 14
3.2. Mijenjanje početne točke ................................................................................................... 16
4. ZAKLJUČAK ........................................................................................................................... 22
5. LITERATURA ......................................................................................................................... 23
3
1. UVOD
1910. godine je prvi put predložen Lotka-Volterra model: Grabežljivac i plijen, a
predstavio ga je Alfred J. Lotka u ˝Teoriji autokatalitičkih kemijskih reakcija˝. Taj model se
sastoji od logističkih jednadžbi koje je izveo Pierre François Verhulst.
Lotka-in model iz 1910. godine je deset godina kasnije proširen putem Kolmogorovog
modela za ˝organske sustave˝ korištenjem biljnih te životinjskih biljojednih vrsta, a od 1925.
godine se pretežito koristi za analizu jednadžbe interakcije grabežljivac-plijen.1
Umberto D’Ancona (1896-1964), rođen u Rijeci, sredinom dvadesetih godina prošlog
stoljeća proučavao je veličinu populacije raznih vrsta riba u okolici mnogih jadranskih luka te je
prema tome stvorio statističku analizu ulova riba u Jadranu. Proučavanjem prikupljenih podataka
uočio je da se broj grabežljivaca tijekom ratnih godina povećao, a to je objašnjavao time što je
zbog smanjenog izlova za grabežljivce bilo više hrane pa se njihov broj povećao. No, nije znao
objasniti fenomen smanjivanja broja konzumirane ribe u isto vrijeme kada nije bilo izlova pa se
obratio poznatom talijanskom matematičaru Viti Volterra-i (1860-1940).
Volterra je 1926. godine podijelio ribe u grabežljivce i plijen te formulirao, tzv.
Grabežljivac-plijen matematički model. Bio je to isti model koji je Lotka predložio 1920. godine
primijenjenim istraživanjima u kemiji.2 Taj model je 1959. godine C.S. Holling još jednom
proširio, prezentiravši ga u dva rada u kojima je predložio ideju funkcionalnog odgovora na
prisutni fenomen. Lotka-Volterra model i Hollingovo proširenje korišteni su za modeliranje
populacije losa i vuka u Isle Royale Nacionalnom parku, te su s preko 50 objavljenih radova
jedna od najboljih studija odnosa grabežljivac-plijen.1
Populacije grabežljivca i plijena mogu utjecati jedni drugima na evoluciju. Ona vrsta u
prirodi koja ima bolje sposobnosti pronalaženja i hvatanja plijena bit će definirana kao
grabežljivac, dok će slabija vrsta koja ima potrebu samo braniti se, tj. ne biti pojedena, biti
definirana kao plijen. Osobine tih dviju vrsta nisu kompatibilne, što utječe na dinamiku
populacija grabežljivca i plijena. Dinamički odnos između grabežljivca i plijena jedna je od
dominantnih tema u ekologiji.

4
2. LOTKA - VOLTERRA MODEL
2.1. Lotka - Volterra jednadžbe
Lotka - Volterra jednadžbe također su poznate kao jednadžbe grabežljivac-plijen. To su
nelinearne diferencijalne jednadžbe prvoga reda koje se često koriste za opisivanje dinamike
bioloških sustava u kojima djeluju međusobno dvije vrste, grabežljivac i plijen.3
Neka u određenom staništu obitavaju samo jedna vrsta grabežljivca i jedna vrsta plijena;
neka x(t) označava veličinu populacije plijena, a y(t) veličinu populacije grabežljivca u trenutku
t. Svi modeli temelje se na ideji da su stope rasta populacija grabežljivca i plijena funkcije
veličine obaju populacija:
���� = ���, �
���� = ��, �
Prema Volterra-i rast tih rivalskih populacija opisan je sustavom diferencijalnih
jednadžbi: 3
���� = �� − ��
���� = −�� + ���
Mi ćemo gledati lisice i zečeve:
• y - broj grabežljivaca (lisica);
• x - broj plijena (zec);
• dy/dt, dx/dt - brzina rasta dviju populacija s vremenom;
• t - vrijeme;
• α, β, γ, δ - paramteri koji predstavljaju interakciju dviju vrsta (uvijek pozitivni).

5
2.1.1. Fizikalno značenje jednadžbi
Lotka - Volterra model zasnovan je na temelju pretpostavki o okolini i evoluciji
populacije grabežljivca i plijena:
1. Populacija plijena pronalazi dovoljno hrane u svakom trenutku.
2. Zalihe hrane za grabežljivca ovise isključivo o populaciji plijena.
3. Stopa promjene populacije proporcionalna je njenoj veličini. Stopa nataliteta grabežljivaca
ovisi o brojnosti plijena, dok stopa mortaliteta ne ovisi o gustoći plijena, već o biološkim
karakteristikama grabežljivaca. Stopa nataliteta kod plijena ne ovisi o brojnom stanju
grabežljivaca, nego o njegovoj reproduktivnoj sposobnosti, dok je mortalitet u proporcionalnoj
vezi s brojem grabežljivaca.
4. Tijekom procesa okoliš se ne mijenja u korist jedne vrste, a genetska prilagodba je spora.
Budući da su korištene diferencijalne jednadžbe, rješenja su realna (deterministička) i
kontinuirana. To podrazumijeva da se populacije plijena i predatora kontinuirano preklapaju, tj.
populacija predatora prati populaciju plijena sa malim zaostatkom u vremenu.
2.1.2. Plijen
���� = �� − ��
Pojasnimo značenje parametara:
• α je stopa rasta populacije plijena ako nema grabežljivaca. Drugim riječima, Volterra je
pretpostavio da za plijen hrane ima u izobilju, te da mu je stanište dovoljno veliko da mu
populacija može neograničeno rasti u odsutnosti grabežljivca po Malthusovom zakonu:
���� = ��
• βy je stopa mortaliteta populacije plijena uzrokovana grabežljivošću - plijen je pojeden od
strane grabežljivca. Prema Volterra-i, broj susreta u jedinici vremena između grabežljivca
i plijena je proporcionalan produktu xy. Samo jedan dio tih susreta će završiti predacijom.
Parametar β predstavlja efikasnost predacije.
6
Kada bi pretpostavili da su zalihe hrane neograničene i kada ne bi bilo grabežljivaca,
plijen bi se razvijao eksponencijalno u vremenu t. Taj član odgovara brzini rasta, a iz
njega proizlazi da je rad eksponencijalan.
Pretpostavlja se da je stopa istrebljenosti plijena proporcionalna stopi susretanja
grabežljivca i plijena, što je opisano -βxy članom. Ako su x ili y u drugom članu
jednadžbe jednaki nuli, onda nema istrebljivanja. Jednadžba prikazuje promjenu u
populaciji plijena; stopa rasta plijena umanjena za stopu susretanja grabežljivca i plijena
(plijen pojeden od grabežljivca).4
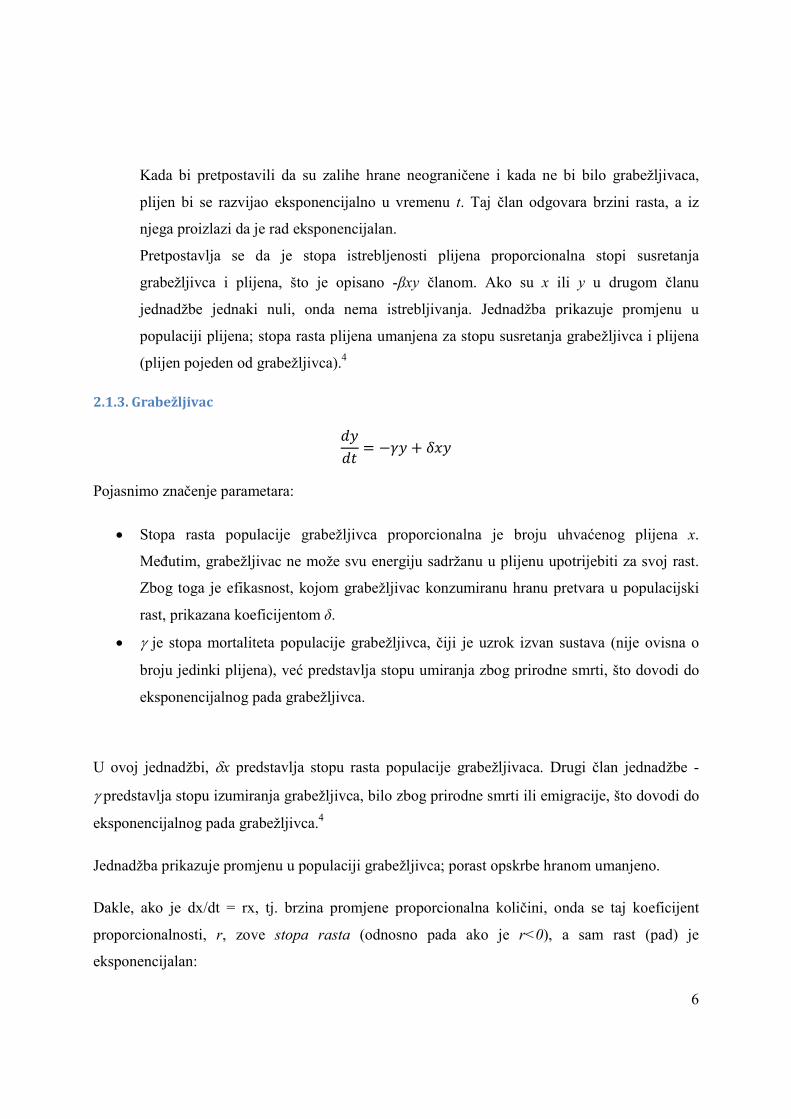
2.1.3. Grabežljivac
���� = −�� + ���
Pojasnimo značenje parametara:
• Stopa rasta populacije grabežljivca proporcionalna je broju uhvaćenog plijena x.
Međutim, grabežljivac ne može svu energiju sadržanu u plijenu upotrijebiti za svoj rast.
Zbog toga je efikasnost, kojom grabežljivac konzumiranu hranu pretvara u populacijski
rast, prikazana koeficijentom δ.
• γ je stopa mortaliteta populacije grabežljivca, čiji je uzrok izvan sustava (nije ovisna o
broju jedinki plijena), već predstavlja stopu umiranja zbog prirodne smrti, što dovodi do
eksponencijalnog pada grabežljivca.
U ovoj jednadžbi, δx predstavlja stopu rasta populacije grabežljivaca. Drugi član jednadžbe -
γ predstavlja stopu izumiranja grabežljivca, bilo zbog prirodne smrti ili emigracije, što dovodi do
eksponencijalnog pada grabežljivca.4
Jednadžba prikazuje promjenu u populaciji grabežljivca; porast opskrbe hranom umanjeno.
Dakle, ako je dx/dt = rx, tj. brzina promjene proporcionalna količini, onda se taj koeficijent
proporcionalnosti, r, zove stopa rasta (odnosno pada ako je r<0), a sam rast (pad) je
eksponencijalan:

7
��� = ��0���
2.2. Rješenja jednadžbe
Jednadžbe imaju periodna rješenja koja nemaju jednostavni izraz u smislu uobičajenih
trigonometrijskih funkcija. Međutim, linearizacija jednadžbi daje rješenja, slična jednostavnom
harmonijskom gibanju s populacijom grabežljivca, koja prate populaciju plijena za 90°:
Slika 1. Promjena populacija grabežljivca i plijena u vremenu5
2.2.1. Ravnoteža populacije
Ravnoteža populacije u modelu se postiže kada obje populacije miruju (ne mijenjaju se),
odnosno kada su obje derivacije jednake nuli:
��� − � = 0
−��� − �� = 0
Rješavanjem navedenih diferencijalnih jednadžbi dolazimo do ovih rješenja:
�� = 0, � = 0�
I
�� = � , � = �
��

8
Dakle, postoje dvije ravnoteže.
Prvo rješenje predstavlja izumiranje obiju vrsta, što znači da obje populacije ostaju jednake 0.
Drugo rješenje predstavlja fiksnu točku u kojoj obje populacije imaju svoju trenutnu vrijednost,
koja je različita od nule. Zastupljenost populacije pri kojoj se postižu navedene ravnoteže ovisi o
vrijednostima parametara α, β, γ, δ.7
2.2.1. Vektorsko polje Lotka - Volterra model ima dvije fiksne točke: dx/dt=0 i dy/dt=0, koje predstavljaju brzinu rasta
dvaju populacija, a ona je jednaka nuli:
• Ishodište (0,0)
• γ/δ, α/β (konstantna populacija plijena ovisi samo o parametrima usko povezanima s
grabežljivcima i obrnuto)
Nakon Jacobijeve analize se može dokazati da je fiksna točka (0,0) sedlo, a (γ/δ, α/β) je
središte (to je vektorsko polje koje rotira oko točke bez ikakvog privlačenja ili odbijanja), tj.
orbite kruže oko te fiksne točke (periodne trajektorije).3
Slika 2. Skica vektorskog polja Lotka - Volterra modela

9
2.3. Primjer problema Pretpostavimo da postoje dvije vrste životinja: plijen i grabežljivac. Ako su početni uvjeti
100 jedinki plijena i 10 jedinki grabežljivaca, može se prikazati napredak dviju vrsta u nekom
određenom vremenu. Vremenski interval je proizvoljan.5
Slika 3. Promjena populacija u vremenu na primjeru grabežljivac i plijen
Rast populacija grabežljivca i vremena u nekom vremenskom intervalu za početne
parametre korištene kod izrade modela na Slici 3.:
���� = �� − �� = 1 ∗ 100 − 0,05 ∗ 100 ∗ 10 = 50
���� = −�� + ��� = −0,3 ∗ 10 + 0,03 ∗ 100 ∗ 10 = 27
Mogu se prikazati i parcijalna rješenja koja odgovaraju prirodnoj oscilaciji populacija
dviju vrsta. Sustav se pri različitim početnim uvjetima u bilo kojem vremenu nalazi negdje
unutar eliptičnih rješenja. Početni uvjeti unutar granica ciklusa nisu posebni, a prema tome ni
rješenje nije uvijek isto, odnosno nije stabilno. Bez obzira na to, uvijek se postiže neki konačan
rezultat. (Slika 4.)

10
Slika 4. Parcijalna rješenja prirodne oscilacije populacija grabežljivca i plijena
Ovaj prikaz pokazuje kako se u svakom ciklusu populacija plijena smanjuje na male
vrijednosti, unatoč njihovom oporavku, dok se populacija grabežljivca znatno ne mijenja ni kod
izrazito smanjenog broja populacije plijena. Međutim, sa sve većim izumiranjem plijena,
populacija grabežljivca će postepeno odumirati.3
2.4. Dinamika sustava U modelu grabežljivac napreduje kada ima plijena u izobilju, ali nakon određenog
vremena pojede sav plijen te dolazi do smanjenja populacije grabežljivaca, a zatim i njihovog
izumiranja. Kada je populacija grabežljivaca niska, populacija plijena će se ponovno povećati.
Ta dinamika je opisana kontinuiranim ciklusom rasta i pada.7
0 20 40 60 80x0
20
40
60
80y

11
3. Primjeri Lotka-Volterra modela u Mathematici
Prilikom rješavanja sustava Lotka-Volterra modela u Mathematici za primjer plijena smo
uzeli zeca, a za grabežljivca lisicu.
pt - promjena populacije plijena (zec)
gt - promjena populacije grabežljivca (lisica)
p[t]- broj zečeva u vremenu t
g[t]- broj lisica u vremenu t
α - stopa rasta jedinki zečeva
δ - stopa rasta jedinki lisica
β - stopa napada lisica
γ - stopa umiranja lisica neovisno o zečevima
Početni parametri u našem modelu:
α:=1 β:=0.05 γ:=0.3 δ:=0.03 p0:=100 -> početna populacija zečeva g0 := 10 -> početna populacija lisica pocetnatocka:={p0,g0}
PLIJEN: pt = "′[�] == � ∗ "[�] − ∗ [�] ∗ "[�];
GRABEŽLJIVAC: gt = ′[�] == � ∗ "[�] ∗ [�] − � ∗ [�];
12
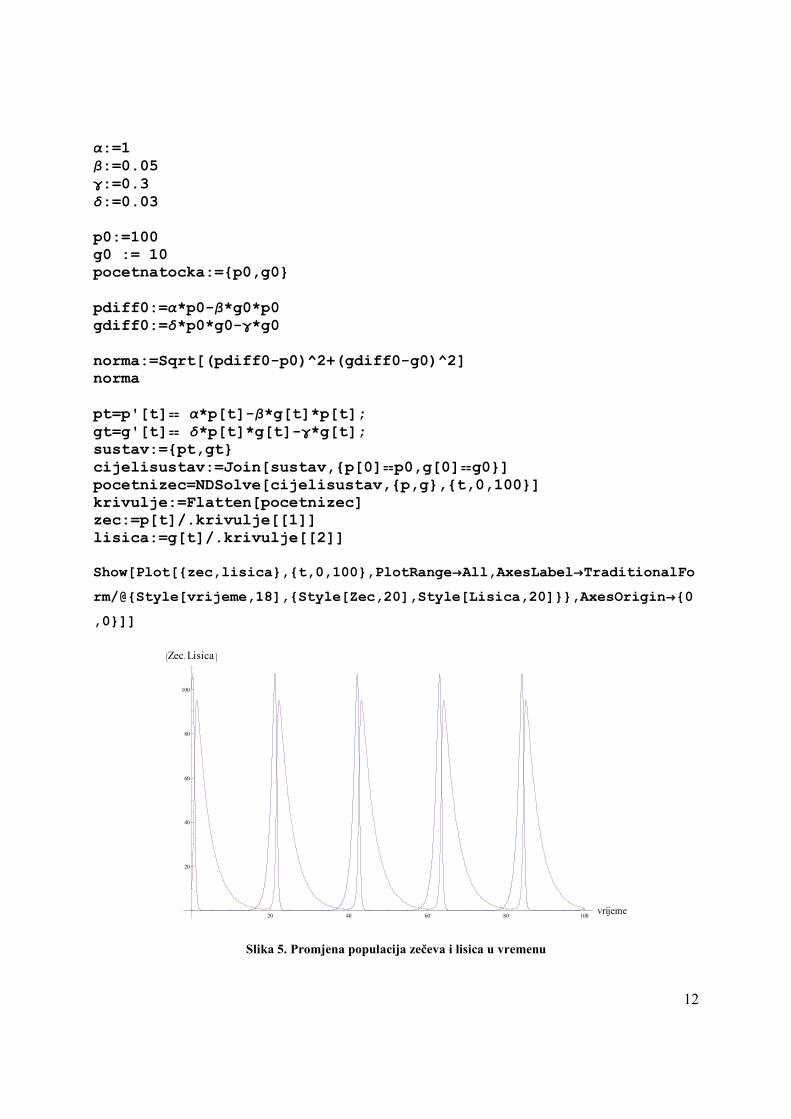
α:=1 β:=0.05 γ:=0.3 δ:=0.03 p0:=100 g0 := 10 pocetnatocka:={p0,g0} pdiff0:=α*p0-β*g0*p0 gdiff0:=δ*p0*g0-γ*g0 norma:=Sqrt[(pdiff0-p0)^2+(gdiff0-g0)^2] norma pt=p'[t]� α*p[t]-β*g[t]*p[t]; gt=g'[t]� δ*p[t]*g[t]-γ*g[t]; sustav:={pt,gt} cijelisustav:=Join[sustav,{p[0]�p0,g[0]�g0}] pocetnizec=NDSolve[cijelisustav,{p,g},{t,0,100}] krivulje:=Flatten[pocetnizec] zec:=p[t]/.krivulje[[1]] lisica:=g[t]/.krivulje[[2]] Show[Plot[{zec,lisica},{t,0,100},PlotRange→All,AxesLabel→TraditionalFo
rm/@{Style[vrijeme,18],{Style[Zec,20],Style[Lisica,20]}},AxesOrigin→{0
,0}]]
Slika 5. Promjena populacija zečeva i lisica u vremenu
20 40 60 80 100vrijeme
20
40
60
80
100
:Zec, Lisica >
13
Na slici 5. Prikazana je međusobna ovisnost populacija zečeva i lisica preko navedenih
nelinearnih diferencijalnih jednadžbi. Plava linija prikazuje populaciju zečeva, dok crvena linija
pokazuje populaciju lisica. Početna populacija zečeva je 100, a lisica 10 te je u vremenskom
periodu od 100 populacija zečeva veća od populacije lisica zbog velikog stupnja rasta zečeva
α=1 u odnosu na stopu rasta lisica δ=0,03.
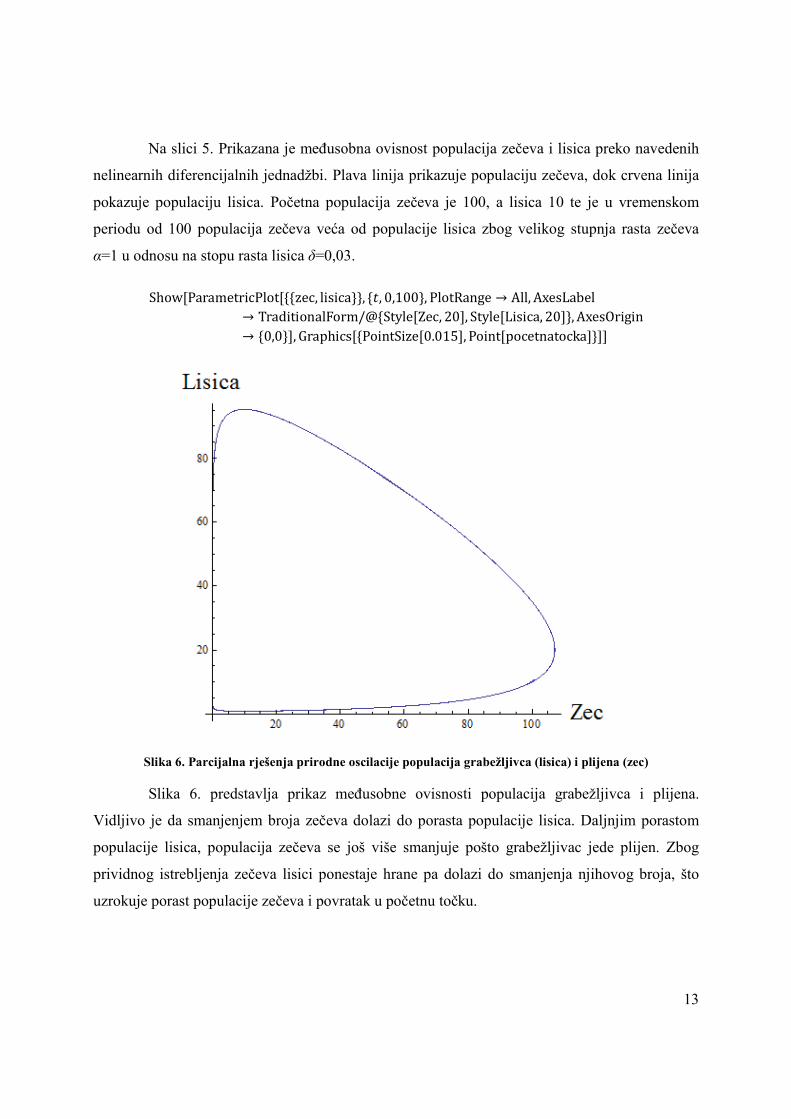
Show[ParametricPlot[��zec, lisica��, ��, 0,100�, PlotRange → All, AxesLabel→ TraditionalForm/@�Style[Zec, 20], Style[Lisica, 20]�, AxesOrigin→ �0,0�], Graphics[�PointSize[0.015], Point[pocetnatocka]�]]
Slika 6. Parcijalna rješenja prirodne oscilacije populacija grabežljivca (lisica) i plijena (zec)
Slika 6. predstavlja prikaz međusobne ovisnosti populacija grabežljivca i plijena.
Vidljivo je da smanjenjem broja zečeva dolazi do porasta populacije lisica. Daljnjim porastom
populacije lisica, populacija zečeva se još više smanjuje pošto grabežljivac jede plijen. Zbog
prividnog istrebljenja zečeva lisici ponestaje hrane pa dolazi do smanjenja njihovog broja, što
uzrokuje porast populacije zečeva i povratak u početnu točku.

14
3.1. Dinamička ravnoteža
Prikazat ćemo dinamičku ravnotežu faznim dijagramima iz kojih je vidljiva
međuovisnost populacije plijena i grabežljivca. Početni parametri su ujedno i koordinate fiksne
točke, stoga vidimo da je sustav u ravnoteži, i da je broj lisica i zečeva stalan u vremenu.
Za odabrane parametre bilo je potrebno izračunati fiksnu točku.
H = I�� ,� J = I 0,30,03 ,
10,05J = �10,20
α:=1 β:=0.05 γ:=0.3 δ:=0.03 p0:=10 g0:=20 pocetnatocka:={p0,g0} pdiff0:=α*p0-β*g0*p0 gdiff0:=δ*p0*g0-γ*g0 norma:=Sqrt[(pdiff0-p0)^2+(gdiff0-g0)^2] norma pt=p'[t]�α*p[t]-β*g[t]*p[t]; gt=g'[t]�δ*p[t]*g[t]-γ*g[t]; sustav:={pt,gt} cijelisustav:=Join[sustav,{p[0]�p0,g[0]�g0}] pocetnizec=NDSolve[cijelisustav,{p,g},{t,0,100}] krivulje:=Flatten[pocetnizec] zec:=p[t]/.krivulje[[1]] lisica:=g[t]/.krivulje[[2]] Show[Plot[{zec,lisica},{t,0,100},PlotRange→All,AxesLabel→TraditionalForm/@{Style[vrijeme,18],{Style[Zec,20],Style[Lisica,20]}},AxesOrigin→{0,0}]]
Show[ParametricPlot[{{zec,lisica}},{t,0,100},PlotRange→All,AxesLabel→T
raditionalForm/@{Style[Zec,20],Style[Lisica,20]},AxesOrigin→{0,0}],Gra
phics[{PointSize[0.015],Point[pocetnatocka]}]]

15
Slika 7. Vrijednosti broja lisica i zečeva u vremenu t (stalne u sustavu dinamičke ravnoteže)
Slika 8. Fiksna točka (10,20) dinamičke ravnoteže
Kao što je i očekivano, na Slici 7. vidi se konstantan odnos porasta grabežljivca i plijena
jer su početne vrijednosti jednake vrijednostima fiksne točke pa sustav ne odstupa od ravnoteže u
nijednom trenutku. Slika 8. nam prikazuje samo fiksnu točku.
20 40 60 80 100vrijeme
5
10
15
20
:Zec, Lisica>
5 10 15 20Zec
5
10
15
20
25
30
Lisica

16
3.2. Mijenjanje početne točke Kada početne vrijednosti nisu jednake koordinatama fiksne točke, vidljivo je da sustav
zatvara cikluse oko nje. Za navedeni slučaj smo uveli više različitih kombinacija početnih
vrijednosti koje odstupaju od fiksne točke i prikazali ih na faznim dijagramima.
− Početna točka T(15,25) α:=1 β:=0.05 γ:=0.3 δ:=0.03 p0:=15 g0:=25 pocetnatocka:={p0,g0} fiksnatocka:={10,20} pdiff0:=α*p0-β*g0*p0 gdiff0:=δ*p0*g0-γ*g0 norma:=Sqrt[(pdiff0-p0)^2+(gdiff0-g0)^2] norma pt=p'[t]�α*p[t]-β*g[t]*p[t]; gt=g'[t]�δ*p[t]*g[t]-γ*g[t]; sustav:={pt,gt} cijelisustav:=Join[sustav,{p[0]�p0,g[0]�g0}] pocetnizec=NDSolve[cijelisustav,{p,g},{t,0,100}] krivulje:=Flatten[pocetnizec] zec:=p[t]/.krivulje[[1]] lisica:=g[t]/.krivulje[[2]] Show[Plot[{zec,lisica},{t,0,100},PlotRange→All,AxesLabel→TraditionalForm/@{Style[vrijeme,18],{Style[Zec,20],Style[Lisica,20]}},AxesOrigin→{0,0}]] Show[ParametricPlot[{{zec,lisica}},{t,0,100},PlotRange→All,AxesLabel→T
raditionalForm/@{Style[Zec,20],Style[Lisica,20]},AxesOrigin→{0,0}],Gra
phics[{PointSize[0.015],Point[fiksnatocka]}]]
17
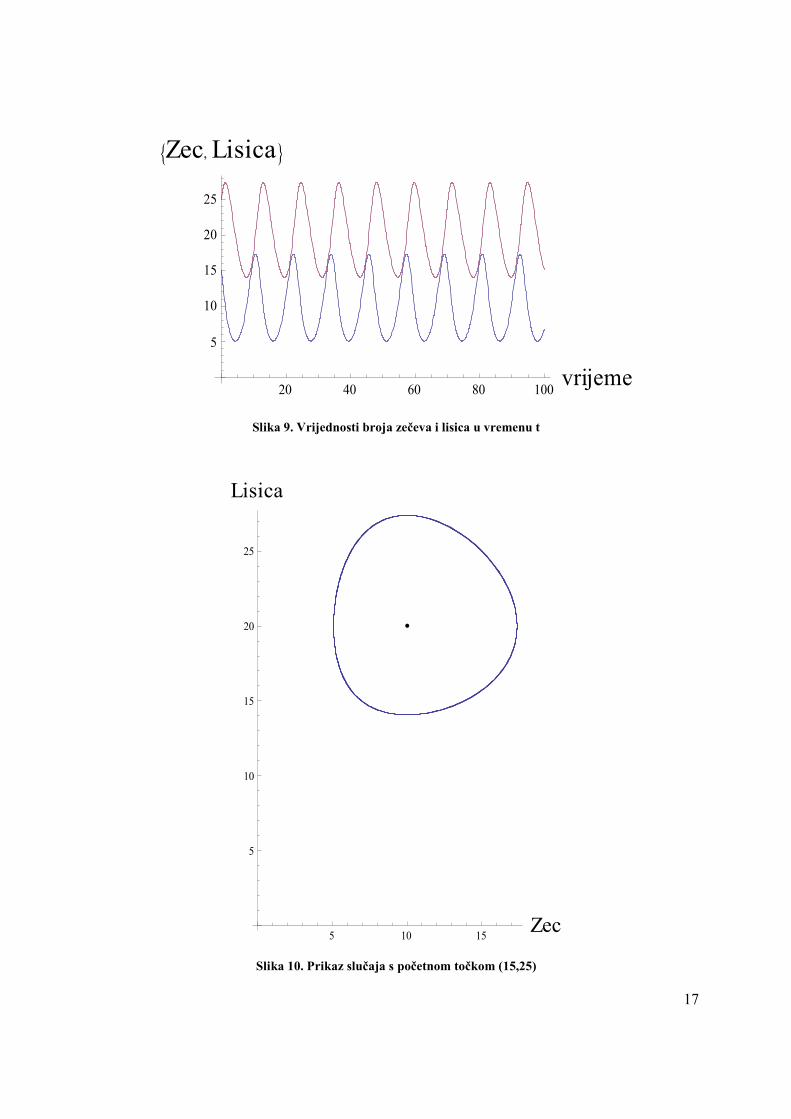
Slika 9. Vrijednosti broja zečeva i lisica u vremenu t
Slika 10. Prikaz slučaja s početnom točkom (15,25)
20 40 60 80 100vrijeme
5
10
15
20
25
:Zec, Lisica>
5 10 15Zec
5
10
15
20
25
Lisica

18
Slika 9. prikazuje promjene rasta populacije zečeva, odnosno lisica u vremenu te vidimo
da je sada ta promjena različita u vremenu pošto se početne vrijednosti ne podudaraju s fiksnom
točkom ispitivanog sustava.
Budući da se vrijednosti početne točke ne razlikuju puno od fiksne točke, odnos plijena i
grabežljivca na Slici 10. ima još uvijek relativno pravilni kružni oblik. Povećanjem populacije
grabežljivaca smanjuje se populacija plijena, a nadalje smanjenje populacije plijena uzrokuje i
smanjenje populacije grabežljivca te se sustav vraća u početnu točku.
- Početna točka (30,50)
Programski kod ostao je nepromijenjen, samo su vrijednosti početne točke drugačije.
Slika 11. Promjena broja lisica i zečeva u vremenu t
Na slici 11. uočavamo da u uvjetima kad je početna točka T=(30,50) plijen ne zaostaje
mnogo sa svojim maksimalnim brojem populacije od populacije grabežljivca, kao što je to bilo u
prethodnom slučaju, iako je njihov omjer jednak.
20 40 60 80 100vrijeme
10
20
30
40
50
60
:Zec, Lisica>

19
Slika 12. Prikaz slučaja s početnom točkom (30,50)
Za razliku od prethodnog ispitivanog slučaja, na slici 12. se uočava eliptični oblik
krivulje međusobnog odnosa plijena i grabežljivca zbog većeg odstupanja početne točke od
fiksne. Nakon povećanja populacije grabežljivca i smanjenja populacije plijena uočava se
izuzetno oštar pad populacije grabežljivca nakon kojeg se sustav s porastom broja plijena vraća u
početnu točku.
- Grafički prikaz faznog portreta s različitim vrijednostima početne točke
α:=1 β:=0.05 γ:=0.3 δ:=0.03 min:=3 max:=5 korak:=(max-min)/brojtocaka brojtocaka:=4 granica:=80 fiksnatocka:=ListPlot[{{10,20}},PlotStyle→PointSize[0.02]] tmax:=20
10 20 30 40 50Zec
10
20
30
40
50
Lisica

20
pocetni=Flatten[Table[{x,y},{x,min,max,korak},{y,min,max,korak}],1]; jednadzbe[x0_,y0_]:={x'[t]�α*x[t]-β*x[t]*y[t],y'[t]�-γ*y[t]+δ*x[t]*y[t],x[0]==x0,y[0]==y0}; graf[x0_,y0_]:=Module[{xans,yans},{xans,yans}={x[t],y[t]}/.Flatten[NDSolve[jednadzbe[x0,y0],{x[t],y[t]},{t,0,tmax}]];ParametricPlot[{xans,yans},{t,0,tmax},PlotRange->{{0,granica},{0,granica}},AxesLabel->{"x","y"},AspectRatio->1,DisplayFunction->Identity,PlotStyle->RGBColor[1,0,0]]]; Module[{i,x0temp,y0temp,par,novigraf},fazni={};Do[par=pocetni[[i]];x0temp=par[[1]];y0temp=par[[2]];novigraf=graf[x0temp,y0temp];fazni=Append[fazni,novigraf],{i,1,Length[pocetni]}]]; Show[{fazni,fiksnatocka},DisplayFunction->$DisplayFunction]
Kod za ispis početnih točaka:
max:=5 korak:=0.5 pocetni=Flatten[Table[{x,y},{x,0,max,korak},{y,0,max,korak}],1]; pocetni
{{0.,0.},{0.,0.5},{0.,1.},{0.,1.5},{0.,2.},{0.,2.5},{0.,3.},{0.,3.5},{
0.,4.},{0.,4.5},{0.,5.},{0.5,0.},{0.5,0.5},{0.5,1.},{0.5,1.5},{0.5,2.}
,{0.5,2.5},{0.5,3.},{0.5,3.5},{0.5,4.},{0.5,4.5},{0.5,5.},{1.,0.},{1.,
0.5},{1.,1.},{1.,1.5},{1.,2.},{1.,2.5},{1.,3.},{1.,3.5},{1.,4.},{1.,4.
5},{1.,5.},{1.5,0.},{1.5,0.5},{1.5,1.},{1.5,1.5},{1.5,2.},{1.5,2.5},{1
.5,3.},{1.5,3.5},{1.5,4.},{1.5,4.5},{1.5,5.},{2.,0.},{2.,0.5},{2.,1.},
{2.,1.5},{2.,2.},{2.,2.5},{2.,3.},{2.,3.5},{2.,4.},{2.,4.5},{2.,5.},{2
.5,0.},{2.5,0.5},{2.5,1.},{2.5,1.5},{2.5,2.},{2.5,2.5},{2.5,3.},{2.5,3
.5},{2.5,4.},{2.5,4.5},{2.5,5.},{3.,0.},{3.,0.5},{3.,1.},{3.,1.5},{3.,
2.},{3.,2.5},{3.,3.},{3.,3.5},{3.,4.},{3.,4.5},{3.,5.},{3.5,0.},{3.5,0
.5},{3.5,1.},{3.5,1.5},{3.5,2.},{3.5,2.5},{3.5,3.},{3.5,3.5},{3.5,4.},
{3.5,4.5},{3.5,5.},{4.,0.},{4.,0.5},{4.,1.},{4.,1.5},{4.,2.},{4.,2.5},
{4.,3.},{4.,3.5},{4.,4.},{4.,4.5},{4.,5.},{4.5,0.},{4.5,0.5},{4.5,1.},
{4.5,1.5},{4.5,2.},{4.5,2.5},{4.5,3.},{4.5,3.5},{4.5,4.},{4.5,4.5},{4.
5,5.},{5.,0.},{5.,0.5},{5.,1.},{5.,1.5},{5.,2.},{5.,2.5},{5.,3.},{5.,3
.5},{5.,4.},{5.,4.5},{5.,5.}}

21
Slika 13. Parcijalna rješenja prirodne oscilacije populacija grabežljivca i plijena
Fazni portret na Slici 13. nam pokazuje parcijalna rješenja prirodne oscilacije populacija
grabežljivca i plijena oko fiksne točke. Sa sve većim smanjenjem početne vrijednosti broja
jedniki populacije plijena, populacija grabežljivca se znatno ne mijenja, ali se pretpostavlja da će
kod vrlo malih populacija plijena populacija grabežljivaca početi postepeno izumirati. Upravo to
predstavlja izuzetno važan biološki problem koji znanstvenici pokušavaju kontrolirati
intenzivnijim istraživanjem i obilježavanjem jedinki određenih populacija u divljini.
0 20 40 60 80x0
20
40
60
80y

22
4. ZAKLJUČAK
Slučaj međusobne ovisnosti grabežljivca i plijena jedan je od mnogih slučajeva
dinamičke ravnoteže u prirodi. Model Lotka-Volterra stvoren je da bi opisao tu ovisnost, i dao
priliku ljudima da usklade i ponovno postignu ravnotežu, kad ju neki vanjski utjecaji poremete.
Naglim nestankom plijena smanji se populacija obje vrste, jer sada dominantni broj grabežljivaca
preživljava od ostatka plijena koji biva ulovljen, a nakon nekog vremena i grabežljivac ostaje bez
hrane pa se i njegov broj smanjuje. Nestankom grabežljivca može doći do prepopulacije plijena,
što je često nepovoljno za prirodu i ljude. U našem primjeru bio je promatran slučaj zavisnosti
broja lisica kao grabežljivca o broju zečeva kao plijena. Fokusirali smo se na promjenu
vrijednosti početnih uvjeta i promatranje ponašanja sustava s unesenim početnim parametrima.
Potrebno je napomenuti da odabrani parametri nisu u potpunosti realni, za nekakav prirodni
slučaj bilo bi logičnije da je broj zečeva barem za red veličine veći od broja lisica, no uz naše
parametre bio je manji od broja lisica. Za početak izračunata je fiksna točka koja je predstavljala
broj jedinki koji uz dane parametre postiže ravnotežu i ne odstupa od nje. Daljnjim
povećavanjem početnih uvjeta vidljivo je kruženje sustava oko fiksne točke kako se kreću
populacije grabežljivca i plijena te konačni povratak u početnu točku i završetak ciklusa. Moguće
je zaključiti da odstupanje od fiksne točke daje velike oscilacije u populacijama, koje mogu biti
nepovoljne za grabežljivca, odnosno plijen.

23
5. LITERATURA
1. http://en.wikipedia.org/wiki/Lotka%E2%80%93Volterra_equation
2. http://www.mathos.unios.hr/modeli/Lotka.pdf
3.http://openwetware.org/wiki/IGEM:IMPERIAL/2006/project/Oscillator/Theoretical_Analyses/2D_Model1
4. http://mathworld.wolfram.com/Lotka-VolterraEquations.html
5. http://en.wikipedia.org/wiki/Lotka%E2%80%93Volterra_equation
6. http://demonstrations.wolfram.com/PredatorPreyEquations/
7.http://matematika.fkit.hr/novo/izborni/referati/Iva%20Kovacic%20i%20Sonja%20Omerzo%20-%20Lotka-Volterra%20model.pdf