mote - wireless sensor networks - 住友精密工業株式 … - wireless sensor networks mts/mda...
TRANSCRIPT

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp
Crossbow Technology, Inc.
MOTE - Wireless Sensor Networks
MPR - Mote Processor Radio Board
MIB - Mote Interface /
Programming Board User's Manual 日本語ガイド
MPR500CA, MPR510CA, MPR520CA
MPR400CB, MPR410CB, MPR420CB
MPR300CA, MPR310CA
MIB300CA, MIB500CA
MIB510CA, MIB600CA
Rev. A, December 2003
Document 7430-0021-05JP
本ガイドは参考用であり正規の文章は英語版を参照してください。
一切の資料は参考用であり MOTE の使用責任は全て使用者にあるものとします。
©クロスボー株式会社
www.SmartDust.jp
不許転載
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp
目次
1 はじめに ......................................................................................................... 1
2 MPR400/MPR410/MPR420 (MICA2) .............................................................. 2 2.1 電源供給 .............................................................................................................................. 2
2.1.1 バッテリオペレーション ................................................................................................. 2 2.1.2 外部電源........................................................................................................................... 3
2.2 無線/アンテナの考察 ......................................................................................................... 4 2.2.1 無線伝達パワー................................................................................................................. 4 2.2.2 アンテナ........................................................................................................................... 6 2.2.3 MICA2 とホイップのアンテナ用コネクタ ...................................................................... 7
2.3 データロガーとその他特徴 .................................................................................................. 9 2.4 バッテリ電圧モニタ............................................................................................................. 9 2.5 Atmega128 ヒューズ .......................................................................................................... 10
2.5.1 Atmega103 互換性モードヒューズ................................................................................ 10 2.5.2 JTAG ヒューズ............................................................................................................... 10 2.5.3 UISP の使用 ................................................................................................................... 10
2.6 センサボード ......................................................................................................................11 2.7 拡張コネクタ ......................................................................................................................11
3 MPR500/MPR510/MPR520 (MICA2DOT)..................................................... 13 3.1 MOTE の電源供給.............................................................................................................. 13 3.2 無線/アンテナの考察 ....................................................................................................... 13 3.3 データロガー ..................................................................................................................... 14 3.4 バッテリ電圧モニタ........................................................................................................... 14 3.5 Atmega128 ヒューズ .......................................................................................................... 15 3.6 オンボードサーミスタ ....................................................................................................... 15 3.7 センサボード ..................................................................................................................... 15 3.8 拡張コネクタ ..................................................................................................................... 15
4 MPR300/MPR310 (MICA) ............................................................................. 17 4.1 MOTE の電源供給.............................................................................................................. 17 4.2 無線/アンテナの考察 ....................................................................................................... 17 4.3 データロガー ..................................................................................................................... 17
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp
4.4 拡張コネクタ ..................................................................................................................... 17 4.5 回路図 ................................................................................................................................ 18
5 MIB300/MIB500 インターフェースボード .................................................... 19 5.1 MOTE のプログラミング ................................................................................................... 19 5.2 RS-232 インターフェース .................................................................................................. 20
6 MIB510 シリアルインターフェースボード ................................................... 21 6.1 MOTE のプログラミング ................................................................................................... 21 6.2 ISP ..................................................................................................................................... 21 6.3 MIB510 でのプログラミング ............................................................................................. 22 6.4 MICA2 と MICA2DOT コネクタ ....................................................................................... 23
6.4.1 リセット......................................................................................................................... 23 6.4.2 JTAG .............................................................................................................................. 23 6.4.3 電源................................................................................................................................ 23 6.4.4 RS-232 インターフェース.............................................................................................. 23
7 MIB600CA..................................................................................................... 24 7.1 紹介.................................................................................................................................... 24
7.1.1 Mote ネットワーク - イーサネットゲートウェイ ...................................................... 24 7.1.2 Mote ネットワークプログラミングとバンド外診断チャンネル .................................... 25
7.2 セットアップ/インストール ............................................................................................ 25 7.2.1 フィジカル ..................................................................................................................... 25 7.2.2 MICA Mote 接続 ............................................................................................................ 25 7.2.3 電源................................................................................................................................ 25 7.2.4 MIB600-LAN 接続 ......................................................................................................... 26
7.3 ホストソフトウェア........................................................................................................... 26 7.3.1 UISP............................................................................................................................... 26
7.4 MIB600 の使用................................................................................................................... 27 7.4.1 コントロールとインジケータ ......................................................................................... 27
7.4.2 Mote UART(シリアルポート) ................................................................................... 28 7.4.3 インシステムプログラミング ........................................................................................ 28
7.5 JTAG.................................................................................................................................. 30
8 回路図........................................................................................................... 32 8.1 MPR400/410/420、MICA2 の回路図 ................................................................................. 32
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp
8.2 MPR500/510/520 MICA2DOT の回路図............................................................................ 37 8.3 MIB500 の回路図 ............................................................................................................... 41
付録 A:10/100 BASE-T 標準ケーブル ........................................................... 46

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 1
1 はじめに このユーザーズマニュアルは、MOTE プロセッサ無線(MPR)ワイヤレスノードのハードウェア
の特徴について記述します。現在、Crossbow は MICA、MICA2、そして MICA2DOT MOTE の 3
種類を販売しています。それはリアルワールドセンサネットワークアプリケーションでの
MOTE ハードウェアの設計の理解と効力を意図しています。このユーザーズマニュアルは、
さらにベースステーションおよびプログラミングに必要な MOTE インターフェースボード
(MIB)について記述し説明します。
このマニュアルは、TinyOS/nesC の MOTE のプログラムのソフトウェアガイドではありませ
ん。また、MOTE にプリインストールされたパッケージソフトのガイドでもありません。ソ
フトウェアに関しては次の 2つのリソースが利用出来ます:
Crossbow 社の TinyOS Getting Started Guide (Document 7430-0022-03)
http://webs.cs.berkeley.edu/tos
Mote Hardware Platform MICA2 MICA2DOT MICA
Models (as of Nov. 2003) MPR400/410/420 MPR500/510/520 MPR300/310
10-Bit ADC ✓ ✓ ✓
Digital I/O ✓ ✓ ✓
UART ✓ ✓
LEDs 3 1 3
AM Radio ✓
FM Tunable Radio ✓ ✓
Base Radio Frequency
(MHz) 916/433/315 916/433/315 916/433
Flash Data Logger Memory ✓ ✓ ✓
Antenna Connector ✓
3.3V Booster ✓

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 2
2 MPR400/MPR410/MPR420 (MICA2) MPR400 (916 MHz)、MPR410 (433 MHz)、そして MPR420 (315 MHz)シリーズハードウェアは
Crossbow の最新 MOTE テクノロジです。全てのモデルは、拡張の出来る強力な Atmega128L
マイクロコントローラと周波数調整可能な無線を使用しています。MPR4X0 と MPR5X0 の無線
は互換性をもち、互いと通信することができます。
図 1 MICA2(MPR4X0)アンテナ無しの写真
2.1 電源供給
2.1.1 バッテリオペレーション MPR400 はバッテリでの電源供給です。MPR400 は、2 つのアルカリバッテリと合うように設
計しました;しかし、出力が 2.7-3.3VDC の間であれば、どんなバッテリの組み合わせでも
(AAA、C、D、セルなど)使用することができます。
選択したバッテリが要求されたオペレーションの間、MOTE が必要としているキャパシティ
があるか注意すべきです。また温度の範囲など関連するキャパシティ低下を確かめてくだ
さい。下記の表は、バッテリライフのガイダンスです。スプレッドシートは
http://www.xbow.com のサポートセクションにあります。
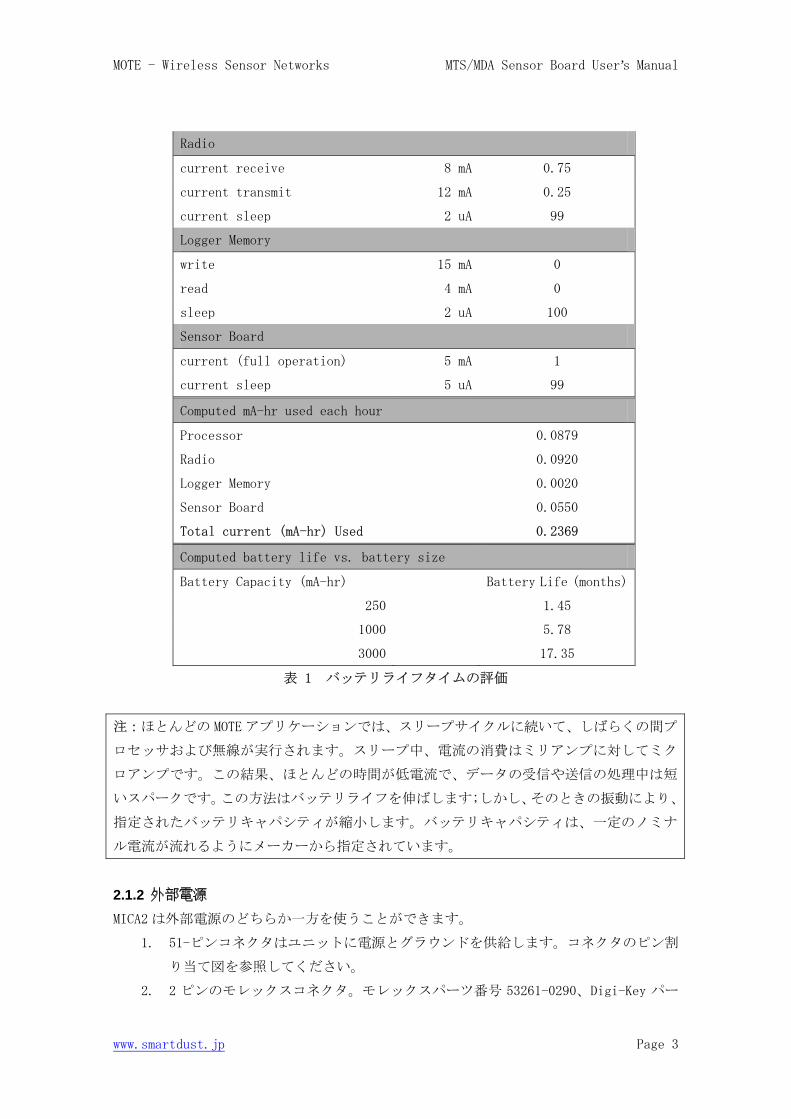
SYSTEM SPECIFICATIONS
Currents Example Duty Cycle
Processor
current (full operation) 8 mA 1
current sleep 8 uA 99
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 3
Radio
current receive 8 mA 0.75
current transmit 12 mA 0.25
current sleep 2 uA 99
Logger Memory
write 15 mA 0
read 4 mA 0
sleep 2 uA 100
Sensor Board
current (full operation) 5 mA 1
current sleep 5 uA 99
Computed mA-hr used each hour
Processor 0.0879
Radio 0.0920
Logger Memory 0.0020
Sensor Board 0.0550
Total current (mA-hr) Used 0.2369
Computed battery life vs. battery size
Battery Capacity (mA-hr) Battery Life (months)
250 1.45
1000 5.78
3000 17.35
表 1 バッテリライフタイムの評価
注:ほとんどの MOTE アプリケーションでは、スリープサイクルに続いて、しばらくの間プ
ロセッサおよび無線が実行されます。スリープ中、電流の消費はミリアンプに対してミク
ロアンプです。この結果、ほとんどの時間が低電流で、データの受信や送信の処理中は短
いスパークです。この方法はバッテリライフを伸ばします;しかし、そのときの振動により、
指定されたバッテリキャパシティが縮小します。バッテリキャパシティは、一定のノミナ
ル電流が流れるようにメーカーから指定されています。
2.1.2 外部電源 MICA2 は外部電源のどちらか一方を使うことができます。
1. 51-ピンコネクタはユニットに電源とグラウンドを供給します。コネクタのピン割
り当て図を参照してください。
2. 2 ピンのモレックスコネクタ。モレックスパーツ番号 53261-0290、Digi-Key パー
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 4
ツ番号 WM1753-ND。
2.2 無線/アンテナの考察 MICA2 の無線はオペレーションの意図したバンドで複数のチャンネルオペレーションがで
きます。MPR420 は、315MHz バンドでオペレーションの 4チャンネルまでまたがることがで
きます。MPR410 は、433MHz のバンド(433.05-434.79MHz)でオペレーションの 4チャンネル
までまたがることができます。MPR400 は 2 つの周波数領域で作動することができま
す:868-870MHz(4 チャンネルまでの)および 902-928MHz(54 チャンネルまでの)です。実際に
利用可能なチャンネル数はすべての MICA2 MOTE より多いです。しかし、利用可能なチャン
ネル数を縮小して、隣接したチャンネルの妨害を回避するために、隣接したチャンネルの
間 隔 が 少 な く と も 500kHz に す べ き で す 。 周 波 数 を 変 更 す る 方 法 は 、
http://www.tinyos.net/tinyos-1.x/doc/mica2radio/CC1000.html にあります。
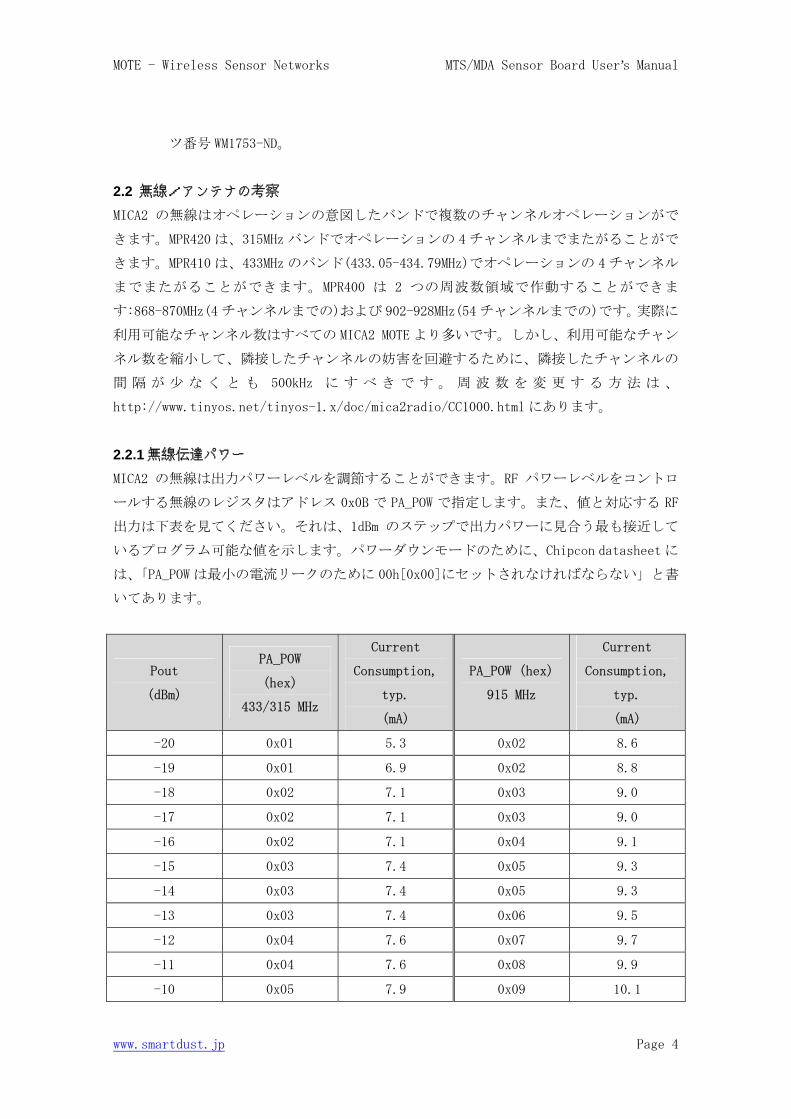
2.2.1無線伝達パワー MICA2 の無線は出力パワーレベルを調節することができます。RF パワーレベルをコントロ
ールする無線のレジスタはアドレス 0x0B で PA_POW で指定します。また、値と対応する RF
出力は下表を見てください。それは、1dBm のステップで出力パワーに見合う最も接近して
いるプログラム可能な値を示します。パワーダウンモードのために、Chipcon datasheet に
は、「PA_POW は最小の電流リークのために 00h[0x00]にセットされなければならない」と書
いてあります。
Pout
(dBm)
PA_POW
(hex)
433/315 MHz
Current
Consumption,
typ.
(mA)
PA_POW (hex)
915 MHz
Current
Consumption,
typ.
(mA)
-20 0x01 5.3 0x02 8.6
-19 0x01 6.9 0x02 8.8
-18 0x02 7.1 0x03 9.0
-17 0x02 7.1 0x03 9.0
-16 0x02 7.1 0x04 9.1
-15 0x03 7.4 0x05 9.3
-14 0x03 7.4 0x05 9.3
-13 0x03 7.4 0x06 9.5
-12 0x04 7.6 0x07 9.7
-11 0x04 7.6 0x08 9.9
-10 0x05 7.9 0x09 10.1
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 5
-9 0x05 7.9 0x0b 10.4
-8 0x06 8.2 0x0c 10.6
-7 0x07 8.4 0x0d 10.8
-6 0x08 8.7 0x0f 11.1
-5 0x09 8.9 0x40 13.8
-4 0x0a 9.4 0x50 14.5
-3 0x0b 9.6 0x50 14.5
-2 0x0c 9.7 0x60 15.1
-1 0x0e 10.2 0x70 15.8
0 0x0f 10.4 0x80 16.8
1 0x40 11.8 0x90 17.2
2 0x50 12.8 0xb0 18.5
3 0x50 12.8 0xc0 19.2
4 0x60 13.8 0xf0 21.3
5 0x70 14.8 0xff 25.4
6 0x80 15.8
7 0x90 16.8
8 0xc0 20.0
9 0xe0 22.1
10 0xff 26.7
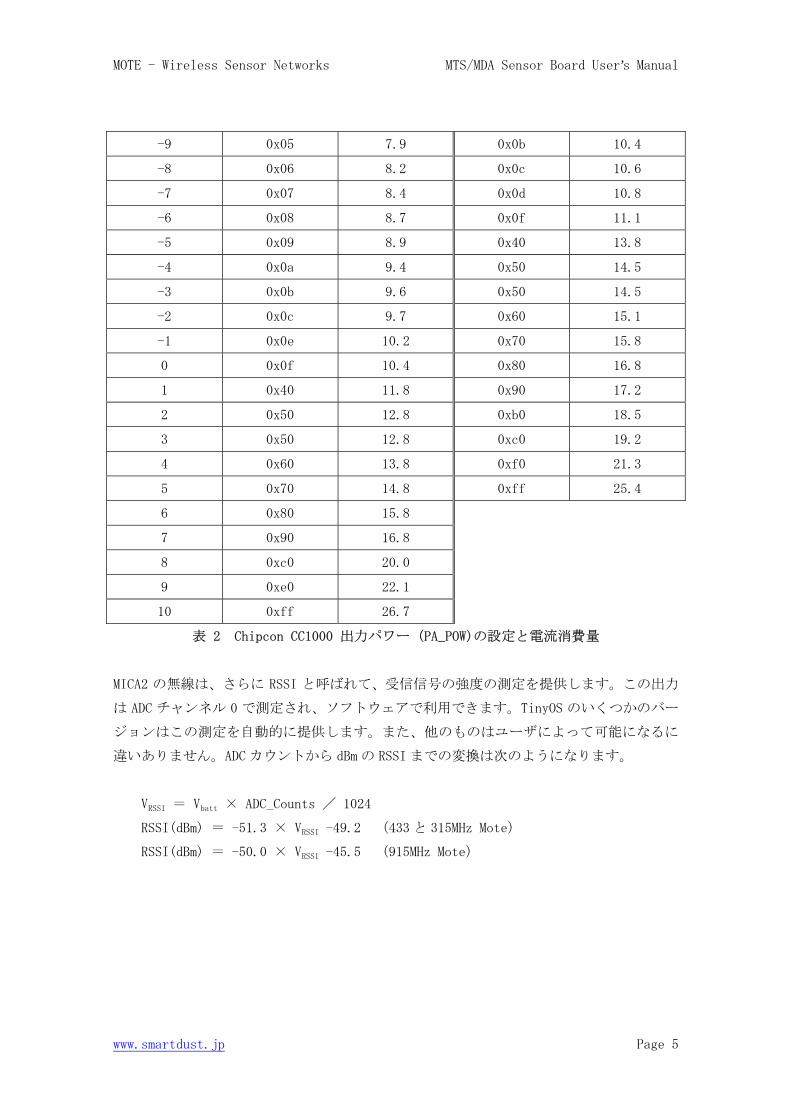
表 2 Chipcon CC1000 出力パワー (PA_POW)の設定と電流消費量
MICA2 の無線は、さらに RSSI と呼ばれて、受信信号の強度の測定を提供します。この出力
は ADC チャンネル 0 で測定され、ソフトウェアで利用できます。TinyOS のいくつかのバー
ジョンはこの測定を自動的に提供します。また、他のものはユーザによって可能になるに
違いありません。ADC カウントから dBm の RSSI までの変換は次のようになります。
VRSSI = Vbatt × ADC_Counts / 1024
RSSI(dBm) = -51.3 × VRSSI -49.2 (433 と 315MHz Mote)
RSSI(dBm) = -50.0 × VRSSI -45.5 (915MHz Mote)
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 6
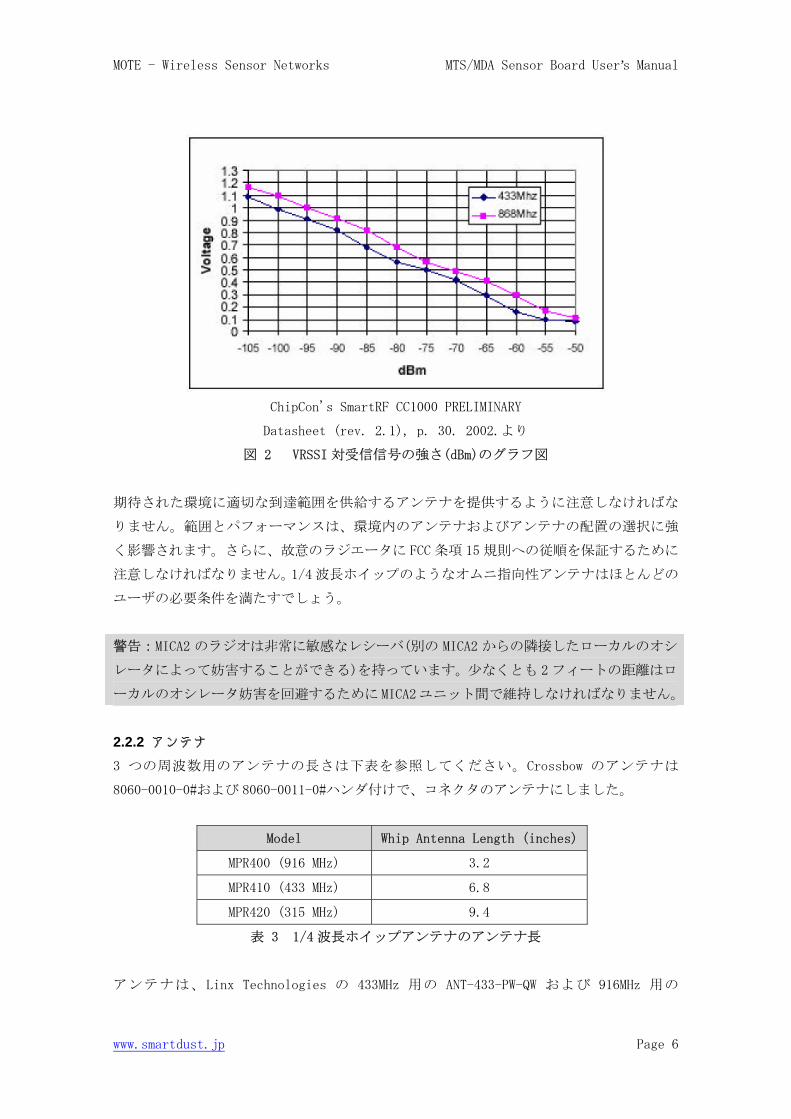
ChipCon's SmartRF CC1000 PRELIMINARY
Datasheet (rev. 2.1), p. 30. 2002.より
図 2 VRSSI 対受信信号の強さ(dBm)のグラフ図
期待された環境に適切な到達範囲を供給するアンテナを提供するように注意しなければな
りません。範囲とパフォーマンスは、環境内のアンテナおよびアンテナの配置の選択に強
く影響されます。さらに、故意のラジエータに FCC 条項 15 規則への従順を保証するために
注意しなければなりません。1/4 波長ホイップのようなオムニ指向性アンテナはほとんどの
ユーザの必要条件を満たすでしょう。
警告:MICA2 のラジオは非常に敏感なレシーバ(別の MICA2 からの隣接したローカルのオシ
レータによって妨害することができる)を持っています。少なくとも 2フィートの距離はロ
ーカルのオシレータ妨害を回避するためにMICA2ユニット間で維持しなければなりません。
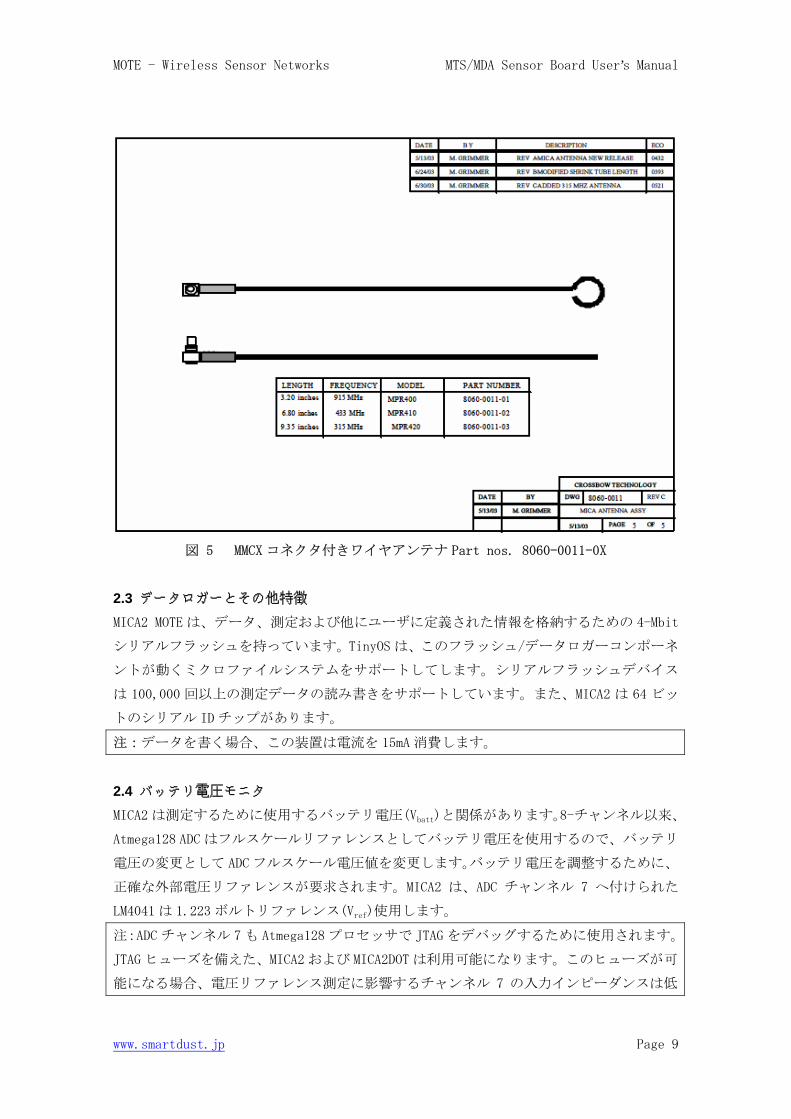
2.2.2 アンテナ 3 つの周波数用のアンテナの長さは下表を参照してください。Crossbow のアンテナは
8060-0010-0#および 8060-0011-0#ハンダ付けで、コネクタのアンテナにしました。
Model Whip Antenna Length (inches)
MPR400 (916 MHz) 3.2
MPR410 (433 MHz) 6.8
MPR420 (315 MHz) 9.4
表 3 1/4 波長ホイップアンテナのアンテナ長
アンテナは、Linx Technologies の 433MHz 用の ANT-433-PW-QW および 916MHz 用の

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 7
ANT-916-PW-QW が利用できます。これらのアンテナの終端は切断したままなので、MMCX コ
ネクタを付けなければなりません。また、下図に示されるように、グランドの板に付ける
と最も機能します。グランドの板はプラスチックの囲いの蓋に付けられたアルミニウムか
銅のテープの層、あるいは金属囲いの蓋になります。
図 3 Linx アンテナとグランドの板の実例
2.2.3 MICA2とホイップのアンテナ用コネクタ MICA2 は外部アンテナを付けるために MMCX コネクタを持っています。これらに合うコネク
タは Digi-Key から購入することができます。Johnson Components と Hirose Electric Ltd
の 2 つの製造者があります。ストレートと直角になっているコネクタが合います。また、
同軸ケーブルの RG178 /U と RG 316/U の 2 つをサポートしています。さらに MMCX から SMA
へのコンバージョンケーブルを売っているベンダーがいます。
Type Coax Digi-Key PN Johnson PN
Straight Plug RG178/U J589-ND 135-3402-001
Straight Plug RG316/U J590-ND 135-3403-001
Right Angle RG178/U J593-ND 135-3402-101
Right Angle RG316/U J594-ND 135-3403-101
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 8
Right Angle RG 316 DS J595-ND 135-3404-101
表 4 Johnson Components の MMCX に合うコネクタ*
*これらのコネクタは次のハンドクリンプとダイセットが必要です。(Digi-Key パーツ# / ジ
ョ ン ソ ン パ ー ツ #): a) ハ ン ド ク リ ン プ (J572-ND / 140-0000-952) 、 b) ダ イ
(JD604-ND/140-0000-953))。
Type Coax Digi-Key PN Hirose PN
Straight Plug RG178/U H3224-ND MMCX-J-178B/U
Right Angle RG178/U H3221-ND MMCX-LP-178B/U
Right Angle RG316/U H3222-ND MMCX-LP-316/U
表 5 Hirose MMCX コネクタ
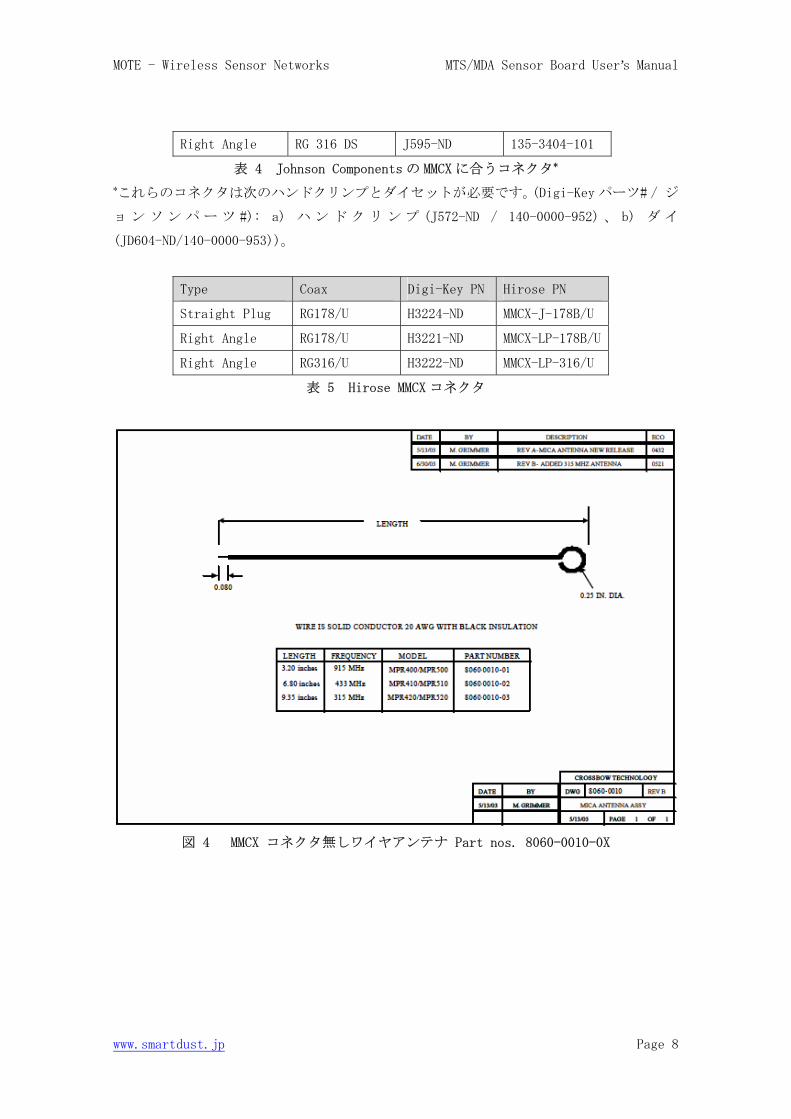
図 4 MMCX コネクタ無しワイヤアンテナ Part nos. 8060-0010-0X
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 9
図 5 MMCX コネクタ付きワイヤアンテナ Part nos. 8060-0011-0X
2.3 データロガーとその他特徴 MICA2 MOTE は、データ、測定および他にユーザに定義された情報を格納するための 4-Mbit
シリアルフラッシュを持っています。TinyOS は、このフラッシュ/データロガーコンポーネ
ントが動くミクロファイルシステムをサポートしてします。シリアルフラッシュデバイス
は 100,000 回以上の測定データの読み書きをサポートしています。また、MICA2 は 64 ビッ
トのシリアル ID チップがあります。
注:データを書く場合、この装置は電流を 15mA 消費します。
2.4 バッテリ電圧モニタ MICA2 は測定するために使用するバッテリ電圧(Vbatt)と関係があります。8-チャンネル以来、
Atmega128 ADC はフルスケールリファレンスとしてバッテリ電圧を使用するので、バッテリ
電圧の変更として ADC フルスケール電圧値を変更します。バッテリ電圧を調整するために、
正確な外部電圧リファレンスが要求されます。MICA2 は、ADC チャンネル 7 へ付けられた
LM4041 は 1.223 ボルトリファレンス(Vref)使用します。
注:ADC チャンネル 7も Atmega128 プロセッサで JTAG をデバッグするために使用されます。
JTAG ヒューズを備えた、MICA2 および MICA2DOT は利用可能になります。このヒューズが可
能になる場合、電圧リファレンス測定に影響するチャンネル 7 の入力インピーダンスは低
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 10
下します。ADC チャンネル 7が使用される場合、ヒューズは無効になるべきです。Atmega128
ヒューズのセットについての情報に関しては、以降sを見てください。
バッテリ電圧の計算:
1. BAT_MON プロセッサピン(PA5/AD5)を HI にしてください。
2. ADCチャンネル7を測定するようにアプリケーションコードをプログラムしてくだ
さい。
3. チャンネル 7のデータからバッテリ電圧、Vbattを計算してください:
Vbatt = Vref × ADC_FS / ADC_Count
Vbatt = バッテリ電圧
ADC_FS = 1024
Vref = 外部電圧リファレンス = 1.223volts
ADC_Count = チャンネル 7の ADC 測定データ
2.5 Atmega128ヒューズ MICA2 の Atmega128 プロセッサは、様々なパラメータをコントロールするために多くのプロ
グラム可能なヒューズを持っています。Atmega128 ヒューズのディスカッションに関しては
Atmel の技術情報(http://www.atmel.com/dyn/resources/prod_documents/2467s.pdf)を参
照してください。不正確なヒューズをセットするとユニットが正しく作動しません。
2.5.1 Atmega103互換性モードヒューズ このヒューズは Atmega103 互換性モードに Atmega128 を入れました。このヒューズは、古
い世代の MICA ユニットのために設定されていました。それは MICA2 と MICA2DOT のために
無効になるに違いありません。
2.5.2 JTAGヒューズ ユーザはイン回路コードのデバッグのためにこのヒューズによって Atmel JTAG ポッドを使
用することができます。ユニットは JTAG が可能になることで送られます。バッテリ電圧の
モニタリングについて前のセクションで議論されたように、JTAG が可能になる場合、それ
は ADC チャンネル 7の不正確な測定を引き起こすでしょう。
2.5.3 UISPの使用 プログラミングボードの MICA2 へのコードをダウンロードするために使用される UISP ユー
ティリィティも Atmel ATMega128 のヒューズをセットまたはリセットして使用することが
できます。

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 11
Action Command
Disable JTAG fuse uisp -dprog=<programmer>* --wr_fuse_h=0xD9
Enable JTAG fuse uisp -dprog=<programmer> --wr_fuse_h=0x19
Enable native 128 mode uisp -dprog=<programmer> --wr_fuse_e=ff
*<programmer>はコンピュータから MOTE に接続するために使用している装置です。現在のオ
プションは dapa(MIB500 のための)、MIB510 のための dev/ttyS<#> (<#> = 0 for COM1, 1 for
COM1, 2 for COM3, etc.)、そして EPRB のための EPRB および AVRSP のための AVRSP です。
表 6 ATMega128 のヒューズをセットするための UISP コマンド
ユーザはさらに cygwin/etc ディレクトリにある profile を編集することができ、alias を
入力します。次の例は JTAG ヒューズを不能にする別名です:
alias fuse_dis="uisp -dprog=<programmer> --wr_fuse_h=0xD9"
fuse_dis が Cygwin コマンドラインからタイプされるとスクリプトが実行されます。
2.6 センサボード Crossbow は MICA2 に様々なセンサボードを供給します。カスタマイズされたセンサボード
の設計のための情報は Crossbow のウェブサイトにあります。
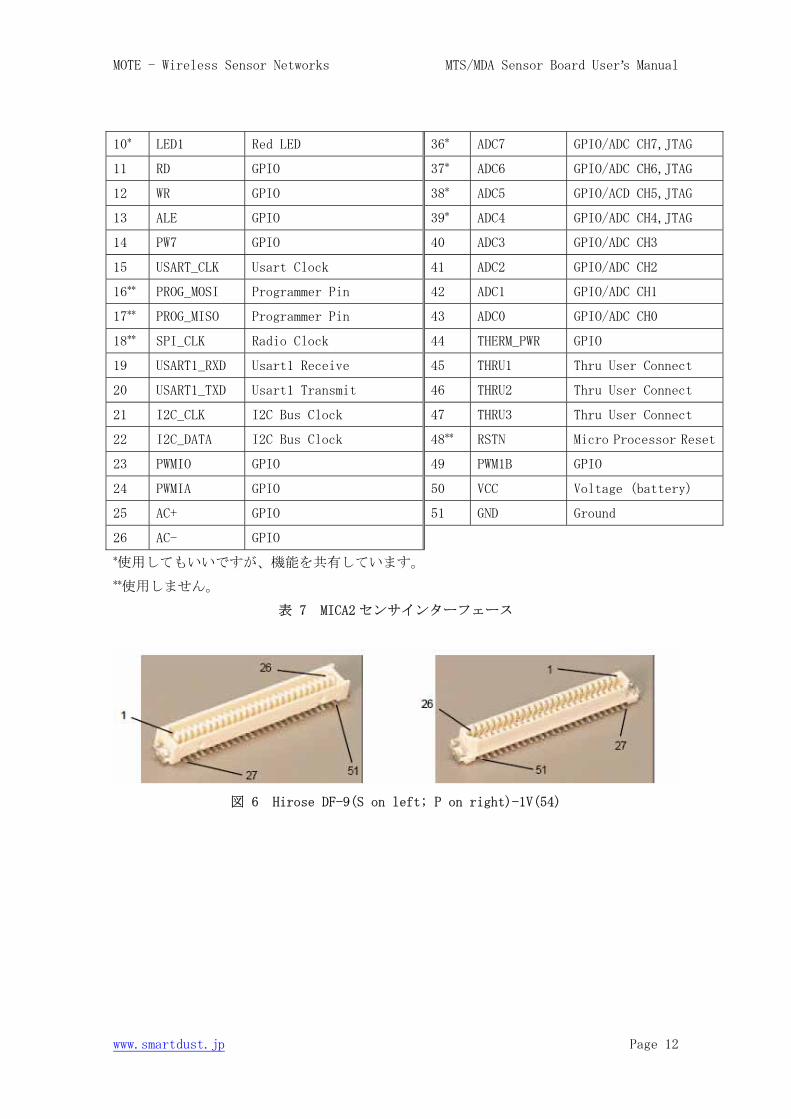
2.7 拡張コネクタ 拡張コネクタは追加センサボードのためにユーザインターフェースを提供します。コネク
タは、電源とグランド、周辺のセンサ、センサ出力を読むための ADC 入力、UART インター
フェースおよび I2C インターフェースの電源コントロール、汎用のデジタル IO および他の
ためのインターフェースを含んでいます。
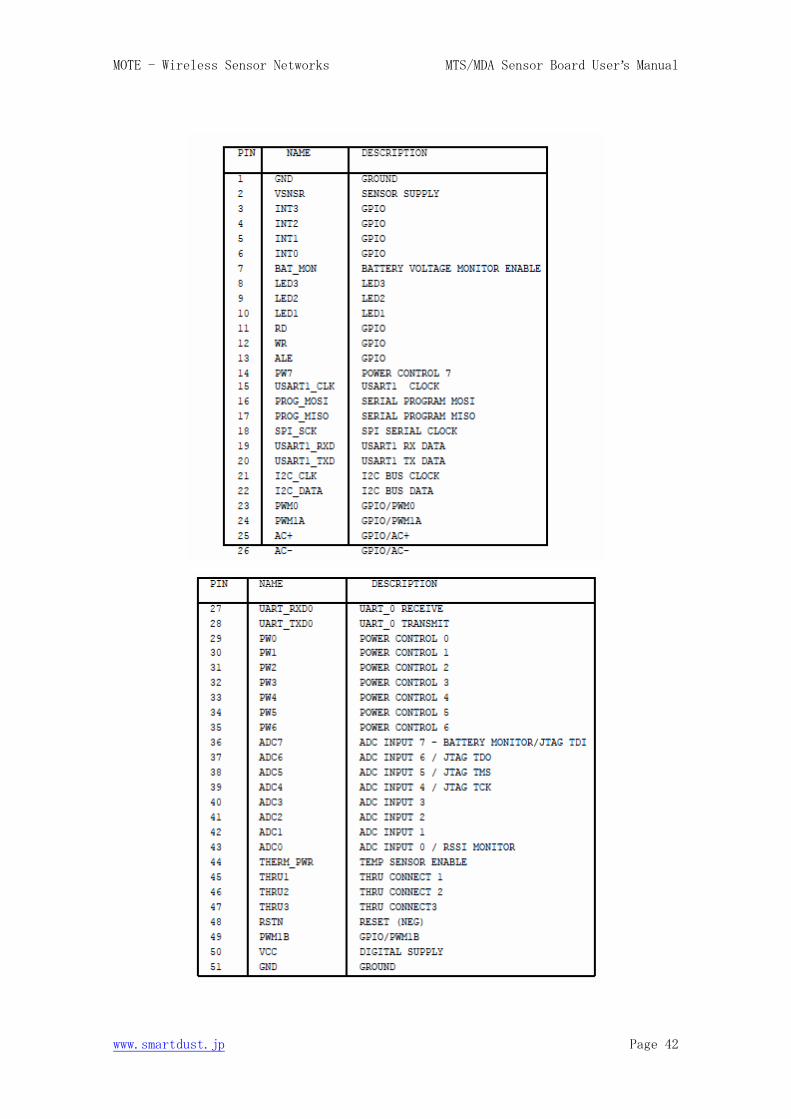
Pin Name Description Pin Name Description
1 GND Ground 27* UART_RXDO Uart Receive
2 VSNR Voltage (battery 28* UART_TXDO Uart Transmit
3 INT3 GPIO 29 PWO GPIO/PWM
4 INT2 GPIO 30 PW1 GPIO/PWM
5 INT1 GPIO 31 PW2 GPIO/PWM
6 INT0 GPIO 32 PW3 GPIO/PWM
7* BAT_MON Battery Voltage Monitor 33 PW4 GPIO/PWM
8* LED3 Green LED 34 PW5 GPIO/PWM
9* LED2 Yellow LED 35 PW6 GPIO/PWM
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 12
10* LED1 Red LED 36* ADC7 GPIO/ADC CH7,JTAG
11 RD GPIO 37* ADC6 GPIO/ADC CH6,JTAG
12 WR GPIO 38* ADC5 GPIO/ACD CH5,JTAG
13 ALE GPIO 39* ADC4 GPIO/ADC CH4,JTAG
14 PW7 GPIO 40 ADC3 GPIO/ADC CH3
15 USART_CLK Usart Clock 41 ADC2 GPIO/ADC CH2
16** PROG_MOSI Programmer Pin 42 ADC1 GPIO/ADC CH1
17** PROG_MISO Programmer Pin 43 ADC0 GPIO/ADC CH0
18** SPI_CLK Radio Clock 44 THERM_PWR GPIO
19 USART1_RXD Usart1 Receive 45 THRU1 Thru User Connect
20 USART1_TXD Usart1 Transmit 46 THRU2 Thru User Connect
21 I2C_CLK I2C Bus Clock 47 THRU3 Thru User Connect
22 I2C_DATA I2C Bus Clock 48** RSTN Micro Processor Reset
23 PWMIO GPIO 49 PWM1B GPIO
24 PWMIA GPIO 50 VCC Voltage (battery)
25 AC+ GPIO 51 GND Ground
26 AC- GPIO
*使用してもいいですが、機能を共有しています。
**使用しません。
表 7 MICA2 センサインターフェース
図 6 Hirose DF-9(S on left; P on right)-1V(54)

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 13
3 MPR500/MPR510/MPR520 (MICA2DOT)
3.1 MOTEの電源供給 MPR500 (916 MHz)、MPR510 (433 MHz)、そして MPR520 (315 MHz)はバッテリ電源です。MPR500
のフォームファクタは、1つのコインセルバッテリとよく調和することを目指しました;し
かしながら、もし出力が 2.7-3.3VDC の間にあれば、どんなバッテリコンビネーション(AAA、
C、D、セルなど)でも使用することができます。
図 7 MICA2DOT の写真 (a)上側、(b)下側
バッテリの選択の際に、MOTE の必要なエネルギおよびそれらの配置に注意しなければなり
ません。さらに温度範囲および関連するキャパシティ低下をあらかじめ確かめてください。
下記のセクションは、バッテリライフのガイダンスを提供します。スプレッドシートは
http//www.xbow.com のサポートセクションにあります。
3.2 無線/アンテナの考察 期待された環境に適切な報道を供給するアンテナを提供するために注意するべきです。範
囲とパフォーマンスは、環境内のアンテナおよびアンテナ配置の選択によって強く影響さ
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 14
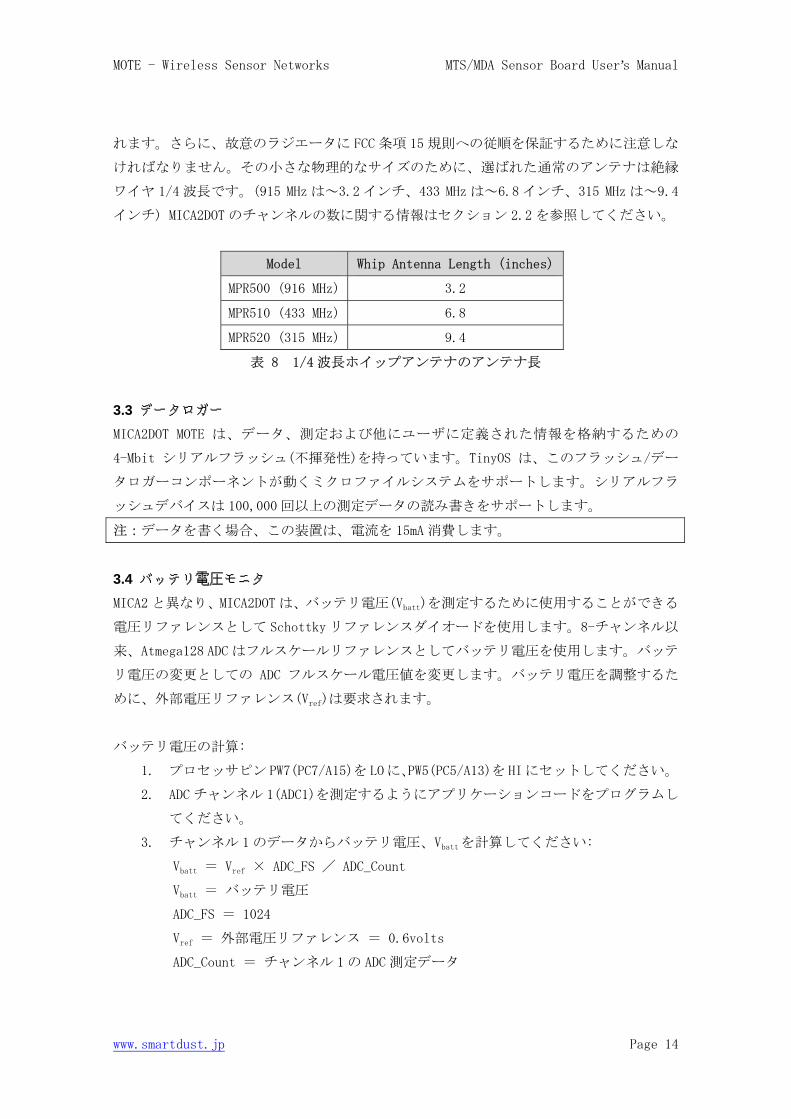
れます。さらに、故意のラジエータに FCC 条項 15 規則への従順を保証するために注意しな
ければなりません。その小さな物理的なサイズのために、選ばれた通常のアンテナは絶縁
ワイヤ 1/4 波長です。(915 MHz は~3.2 インチ、433 MHz は~6.8 インチ、315 MHz は~9.4
インチ) MICA2DOT のチャンネルの数に関する情報はセクション 2.2 を参照してください。
Model Whip Antenna Length (inches)
MPR500 (916 MHz) 3.2
MPR510 (433 MHz) 6.8
MPR520 (315 MHz) 9.4
表 8 1/4 波長ホイップアンテナのアンテナ長
3.3 データロガー MICA2DOT MOTE は、データ、測定および他にユーザに定義された情報を格納するための
4-Mbit シリアルフラッシュ(不揮発性)を持っています。TinyOS は、このフラッシュ/デー
タロガーコンポーネントが動くミクロファイルシステムをサポートします。シリアルフラ
ッシュデバイスは 100,000 回以上の測定データの読み書きをサポートします。
注:データを書く場合、この装置は、電流を 15mA 消費します。
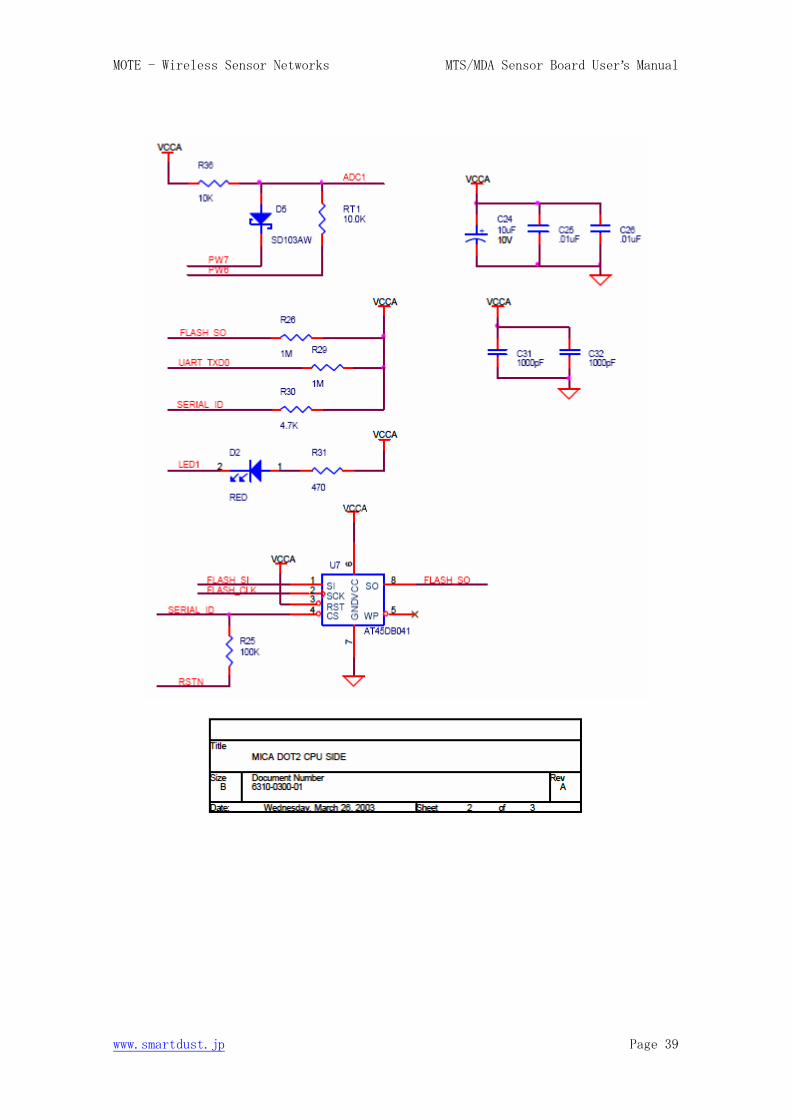
3.4 バッテリ電圧モニタ MICA2 と異なり、MICA2DOT は、バッテリ電圧(Vbatt)を測定するために使用することができる
電圧リファレンスとして Schottky リファレンスダイオードを使用します。8-チャンネル以
来、Atmega128 ADC はフルスケールリファレンスとしてバッテリ電圧を使用します。バッテ
リ電圧の変更としての ADC フルスケール電圧値を変更します。バッテリ電圧を調整するた
めに、外部電圧リファレンス(Vref)は要求されます。
バッテリ電圧の計算:
1. プロセッサピンPW7(PC7/A15)を LOに、PW5(PC5/A13)を HIにセットしてください。
2. ADC チャンネル 1(ADC1)を測定するようにアプリケーションコードをプログラムし
てください。
3. チャンネル 1のデータからバッテリ電圧、Vbattを計算してください:
Vbatt = Vref × ADC_FS / ADC_Count
Vbatt = バッテリ電圧
ADC_FS = 1024
Vref = 外部電圧リファレンス = 0.6volts
ADC_Count = チャンネル 1の ADC 測定データ

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 15
3.5 Atmega128ヒューズ MICA2 製品に関しては Atmega128 ヒューズセクションを参照してください。
3.6 オンボードサーミスタ MICA2DOT は、サーフェースマウントコンポーネントであるオンボードサーミスタ
(Panasonic ERT-J1VR103J)を持っています。それはボードの ATmega 側のラベル"RT1"です。
その出力は ADC1 にあり、PW6(PC6/A14)を LO に、PW7(PC7/A15)を HI にセットすることで利
用可能になります。MOTE の ADC 出力は摂氏 0-50 度以上の次の近似を使用して、ケルヴィン
に変換することができます:
1/T(K) = a + b × ln(Rthr) + c × [ln(Rthr)]3
Rthr = R1 × ADC/(ADC_FS-DC)
a = 0.00130705
b = 0.000214381
c = 0.000000093
R1 = 10 k?
ADC_FS = 1023
ADC = MOTE の ADC 測定出力値
3.7 センサボード Crossbow は、カスタマイズ可能な MICA2DOT のための MDA500CA と呼ばれるボードのプロト
タイプのセンサ持っています。カスタマイズされたセンサボードの設計のための情報は
Crossbow ウェブサイトにあります。
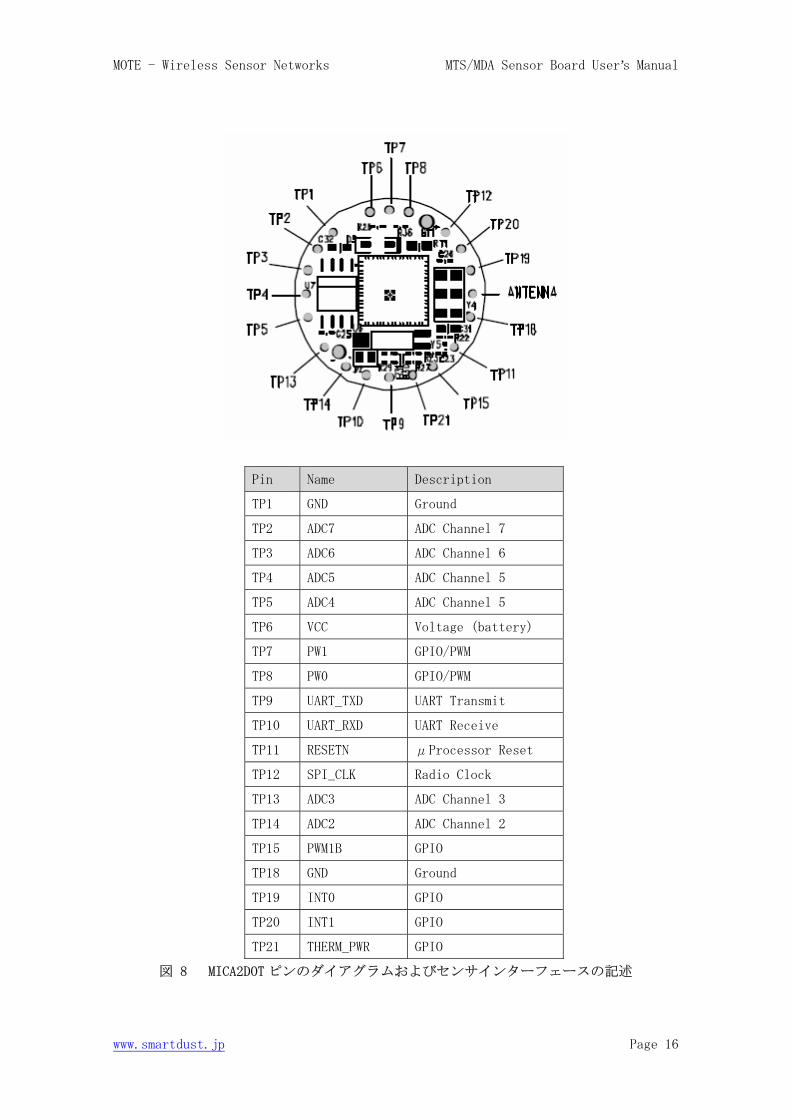
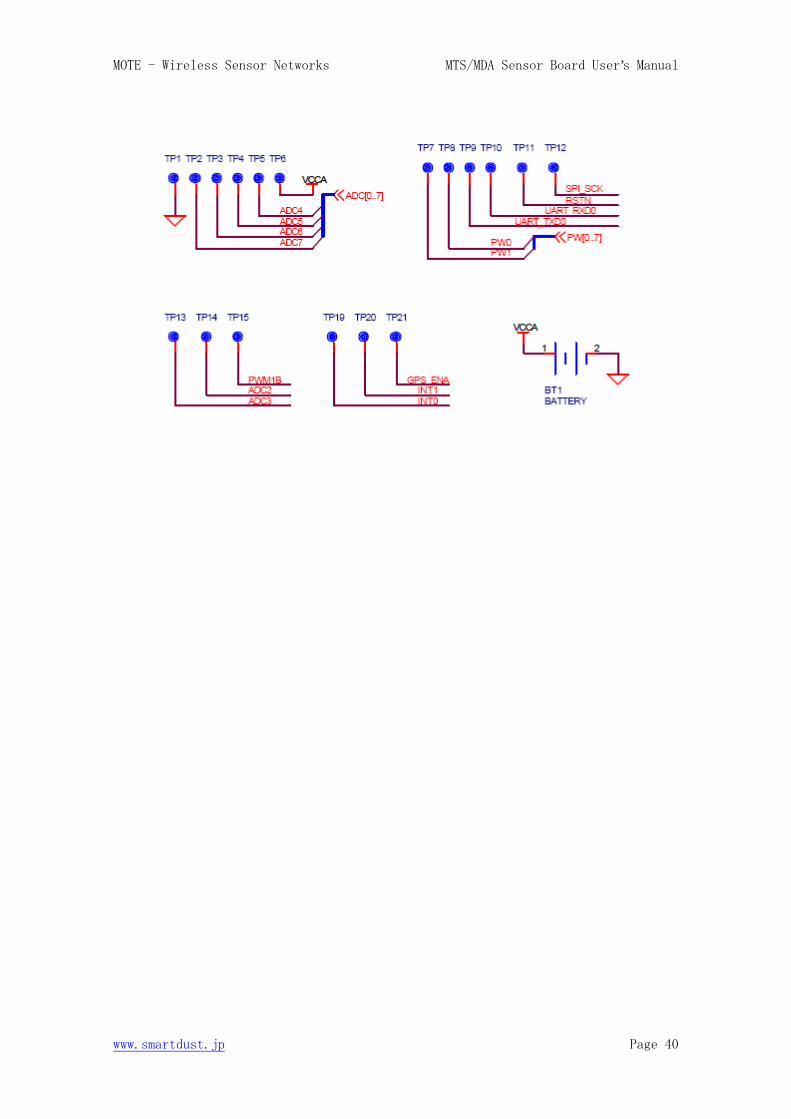
3.8 拡張コネクタ MPR500 へのインターフェースは、MPR500 の周囲近くに一定間隔で配置された一連の 19 本
のピンを通ってあります。それらは、MPR400 で利用可能なピンのサブセットです。それら
は 1セットの電源コントロールピン、ADC チャンネル、電源、グランド、ある一般的な目的
のデジタル IO およびシリアルプログラミングポートを含んでいます。デジタル IO を備え
たアプリケーションについては、ADC ピンは両方ではなくデジタル入力/出力として再構成
することができます。
警告:TP12 SPI_CK ピンは無線によってコントロールされます。大多数のアプリケーション
では、それが使用されてはなりません。さらに、それはプロセッサのプログラムのために
使用されます。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 16
Pin Name Description
TP1 GND Ground
TP2 ADC7 ADC Channel 7
TP3 ADC6 ADC Channel 6
TP4 ADC5 ADC Channel 5
TP5 ADC4 ADC Channel 5
TP6 VCC Voltage (battery)
TP7 PW1 GPIO/PWM
TP8 PW0 GPIO/PWM
TP9 UART_TXD UART Transmit
TP10 UART_RXD UART Receive
TP11 RESETN μProcessor Reset
TP12 SPI_CLK Radio Clock
TP13 ADC3 ADC Channel 3
TP14 ADC2 ADC Channel 2
TP15 PWM1B GPIO
TP18 GND Ground
TP19 INT0 GPIO
TP20 INT1 GPIO
TP21 THERM_PWR GPIO
図 8 MICA2DOT ピンのダイアグラムおよびセンサインターフェースの記述

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 17
4 MPR300/MPR310 (MICA)
4.1 MOTEの電源供給 MPR300/MPR310 はバッテリ電源です。MPR300 のファクタは、2 つの AA バッテリとよく調和
することを目指しました;しかしながら、もし出力が 2.7-3.3VDC の間にあれば、どんなバ
ッテリコンビネーション(AAA、C、D、セルなど)でも使用することができます。
バッテリの選択の際に、MOTE の必要なエネルギおよびそれらの配置に注意しなければなり
ません。さらに温度範囲および関連するキャパシティ低下をあらかじめ確かめてください。
下記のセクションは、バッテリライフのガイダンスを提供します。スプレッドシートは
http//www.xbow.com のサポートセクションにあります。
4.2 無線/アンテナの考察 期待された環境に適切な報道を供給するアンテナを提供するために注意するべきです。範
囲とパフォーマンスは、環境内のアンテナおよびアンテナ配置の選択によって強く影響さ
れます。さらに、故意のラジエータに FCC 条項 15 規則への従順を保証するために注意しな
ければなりません。その小さな物理的なサイズのために、選ばれた通常のアンテナは絶縁
ワイヤ 1/4 波長です。(915 MHz は~3.5 インチ、433 MHz は~8インチ)
4.3 データロガー MICA2DOT MOTE は、データ、測定および他にユーザに定義された情報を格納するための
4-Mbit シリアルフラッシュ(不揮発性)を持っています。TinyOS は、このフラッシュ/デー
タロガーコンポーネントが動くミクロファイルシステムをサポートします。シリアルフラ
ッシュデバイスは 100,000 回以上の測定データの読み書きをサポートします。
注:データを書く場合、この装置は、電流を 15mA 消費します。
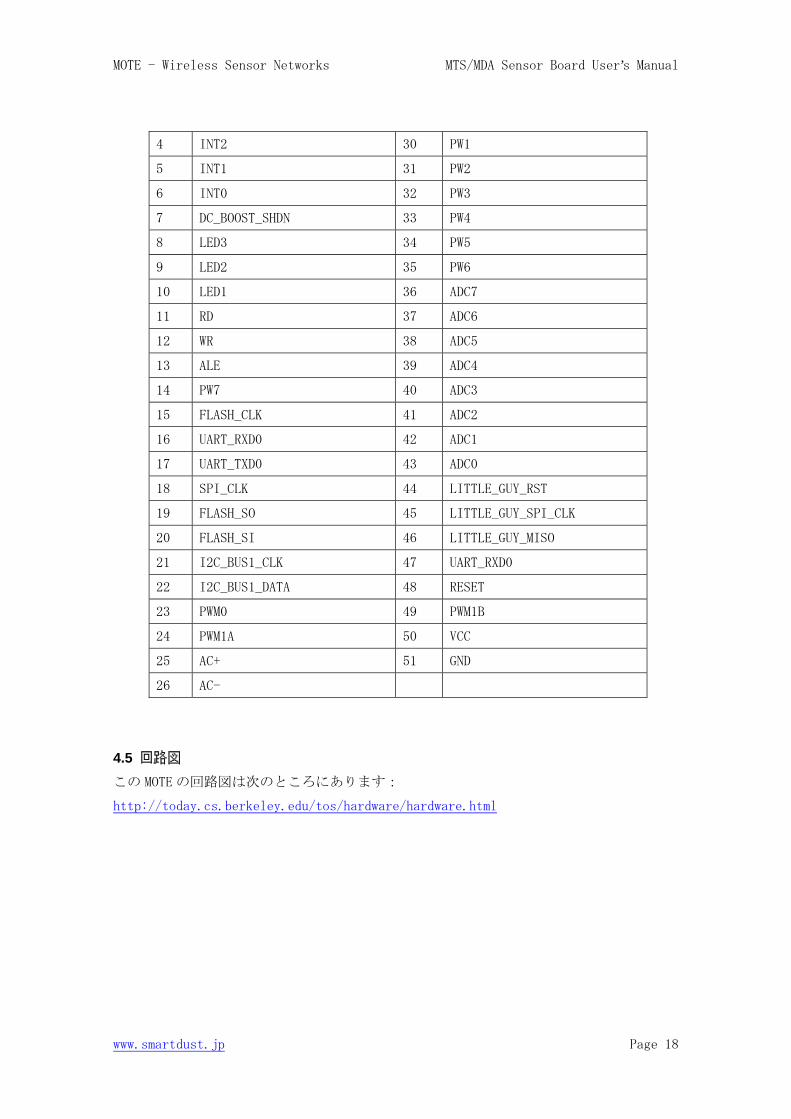
4.4 拡張コネクタ 拡張コネクタは追加のセンサボードのためにユーザインターフェースを提供します。コネ
クタは、電源とグランド(周辺のセンサ、センサ出力を読むための ADC 入力、UART インタ
ーフェースおよび I2C インターフェースの電源コントロール、一般的なデジタル IO および
その他)のためのインターフェースを含んでいます。
PIN DESCRIPTION PIN DESCRIPTION
1 GND 27 UART_RXD0
2 VDD_ANALOG 28 UART_TXD0
3 INT3 29 PW0
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 18
4 INT2 30 PW1
5 INT1 31 PW2
6 INT0 32 PW3
7 DC_BOOST_SHDN 33 PW4
8 LED3 34 PW5
9 LED2 35 PW6
10 LED1 36 ADC7
11 RD 37 ADC6
12 WR 38 ADC5
13 ALE 39 ADC4
14 PW7 40 ADC3
15 FLASH_CLK 41 ADC2
16 UART_RXD0 42 ADC1
17 UART_TXD0 43 ADC0
18 SPI_CLK 44 LITTLE_GUY_RST
19 FLASH_SO 45 LITTLE_GUY_SPI_CLK
20 FLASH_SI 46 LITTLE_GUY_MISO
21 I2C_BUS1_CLK 47 UART_RXD0
22 I2C_BUS1_DATA 48 RESET
23 PWM0 49 PWM1B
24 PWM1A 50 VCC
25 AC+ 51 GND
26 AC-
4.5 回路図 この MOTE の回路図は次のところにあります:
http://today.cs.berkeley.edu/tos/hardware/hardware.html
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 19
5 MIB300/MIB500インターフェースボード 警告:MIB500 で MICA2 をプログラミングする場合はバッテリスイッチをオフにしてくださ
い。MICA2DOT は MIB500 に付ける前にバッテリを外してください。MICA2 および MICA2DOT
は、外部およびバッテリ電源の間で切り替えるダイオードを持っていません。
5.1 MOTEのプログラミング MIB300/MIB500 インターフェースボードは、製品の MICA ファミリと共に使用される多目的
のインターフェースボードです。それらは外部電源アダプタオプションによって装置に動
力を供給し、RS232 シリアルポートのためのインターフェースおよび再プログラムするポー
ト(パラレルプリンタインターフェースを使用して)を提供します。MIB300 は外部の 3VDC 電
源供給で使用することができます。あるいは、MOTE から供給されたバッテリ電源を利用す
ることができます。
MIB500 は、5~7VDC を受け取るオンボードレギュレータを持っています。そして、MICA へ
3VDC に調整して供給します。MIB500 は壁面電源供給で伝えられます。さらに、MICA の LED
を反映する LED モニタを持っています。
これらは、低電圧モニタが内蔵されており、もし電源の電圧が低い場合は再プログラミン
グが出来なくなります。適切なプログラミング電圧がある場合 - パラレル 1 ポート付近
にある緑色の LED が光ります - D6。もし、電圧が 2.95V 未満の場合は、緑色の LED D6 は
消えてプログラミングが出来なくなります。
さらに MIB500 は MICA2DOT の再プログラミングのためのインターフェースコネクタを持っ
ています。MOTE のプログラミングは、コンピュータのパラレルポートに MIB300/MIB500 を
接続することにより行われます。そして実行にはプログラミングソフトウェアを必要とし
ます - UISP - TinyOS のインストールで供給されます。
注:MIB500CA によってプログラミングする MOTE に関して困難な多数の報告がありました。
これらはプログラム失敗、フラッシュ検証エラーおよび死んでいる MOTE を含んでいます。
これらの問題の原因は、ほとんどが 2つの問題のうちの 1つです:1)低電圧でのプログラミ
ング 2)ホスト PC の UISP の問題。詳細なアプリケーションノートはサポートの
http://www.xbow.com にあります。もしプログラミングに問題がある場合はこのアプリケー
ションノートを見てください。MOTE を不適当にあるいは悪い UISP でプログラミングすると
MOTE の CPU に永久なダメージを与えることになります。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 20
5.2 RS-232インターフェース RS-232 インターフェースは標準の一つのチャンネルで、外部コンピュータに接続する DB9
コネクタとの双方向インターフェースです。それは送信と受信のラインのみ使用します。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 21
6 MIB510シリアルインターフェースボード 注:MIB510 は、MICA2 および MICA2DOT で使用される Atmega128 プロセッサと作動します。
それは、Atmega103 のような初期のプロセッサではなく Atmega128 プロセッサを持っている
古い MICA ユニットで作動するでしょう。
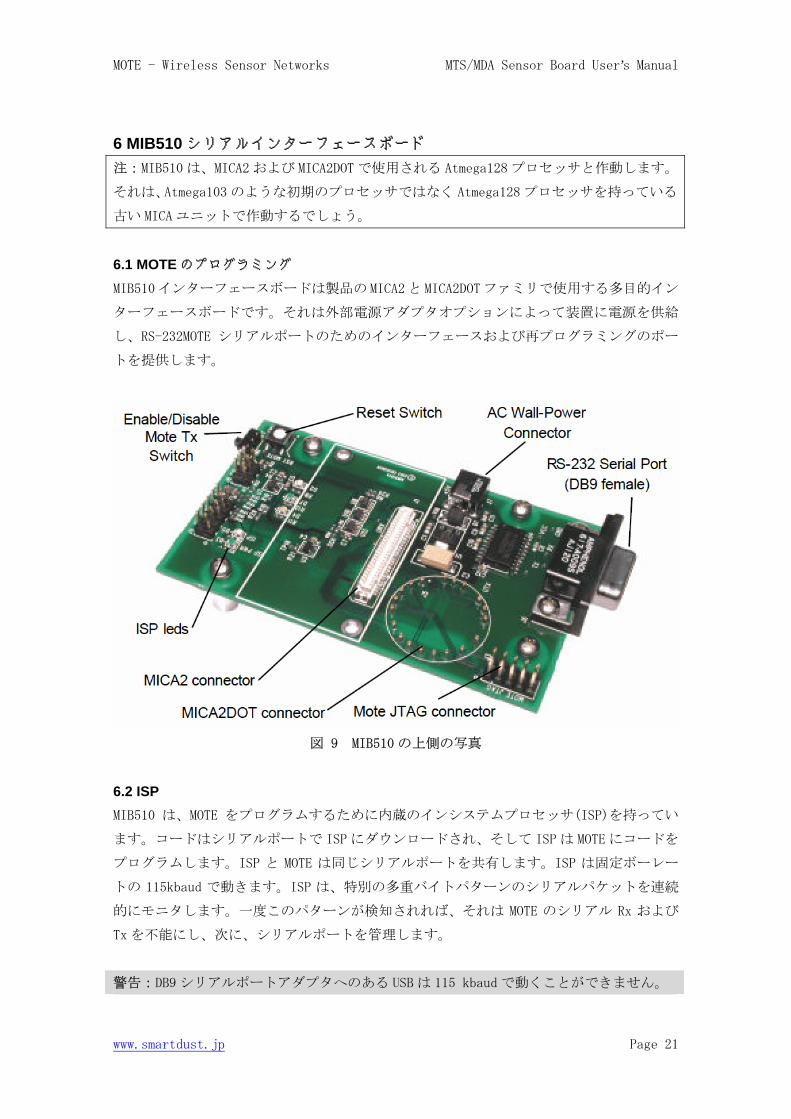
6.1 MOTEのプログラミング MIB510インターフェースボードは製品のMICA2と MICA2DOTファミリで使用する多目的イン
ターフェースボードです。それは外部電源アダプタオプションによって装置に電源を供給
し、RS-232MOTE シリアルポートのためのインターフェースおよび再プログラミングのポー
トを提供します。
図 9 MIB510 の上側の写真
6.2 ISP MIB510 は、MOTE をプログラムするために内蔵のインシステムプロセッサ(ISP)を持ってい
ます。コードはシリアルポートで ISP にダウンロードされ、そして ISP は MOTE にコードを
プログラムします。ISP と MOTE は同じシリアルポートを共有します。ISP は固定ボーレー
トの 115kbaud で動きます。ISP は、特別の多重バイトパターンのシリアルパケットを連続
的にモニタします。一度このパターンが検知されれば、それは MOTE のシリアル Rx および
Tx を不能にし、次に、シリアルポートを管理します。
警告:DB9 シリアルポートアダプタへのある USB は 115 kbaud で動くことができません。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 22
ISP プロセッサは 2つの LED、‘SP PWR’(緑色)と ISP(赤色)を持っています。SP PWR は
MIB510 の電源状態を示すために使用されます(以下を参照)。ISP がオンの場合、MIB510 は
シリアルポートのコントロールを行っています。RESET ボタンがアクティブの時、点滅しま
す。
6.3 MIB510でのプログラミング MIB510 で MOTE をプログラムするために、ダウンロードするコマンド全ての前に
MIB510=/dev/<port>を付けます。<port>は装置を付けるシリアルポート名です。(もし USB
と DB9 シリアルポートのコンバータを使っている場合は、コンバータがアサインされてい
る COM 番号を知っていなければなりません。)
例:
$ MIB510=/dev/ttyS0 make (re)install <hardware>
使用しているシリアルポート COM1 を仮定しています。そうでなければ、それは COM2 のた
めの ttyS1、COM3 のための ttyS2、COM4 などのための ttyS3 などです。標準コマンド(例え
ば、make mica install)の使用はデフォルトで MIB500 プログラマボードになります。
<hardware>は mica2 または mica2dot なります。
これは apps ディレクトリの Makelocal ファイルを作成(あるいは編集)してあらかじめ設定
しておくことが出来ます。MIB510 をデフォルトプログラマにするためには、Makelocal の
中に次のラインを加えてください。
MIB510=/dev/ttyS<#>
“<#>”は、標準の COM ポートがアサインされた番号あるいは USB・DB9 シリアルポートコ
ンバータのアサインされたポート番号です。Makelocal ファイルの作成および編集について
のより詳細に関しては http://www.tinyos.net/tinyos-1.x/doc/tutorial/buildenv.html
を参照してください。
警告:cygwin で、もし MOTE が連続的にパケットをハイレートでシリアル Tx ラインに送信
していれば、ISP はシリアルポートをコントロールしてはいけません。これが起こる場合、
uisp はハングするでしょう。これは次のものによって固定することができます:
1. Cntrl C をタイプして、もう一度試みてください。
2. SW2 を‘on’にしてください。これは MOTE の TX ラインを不能にします。もし
ベースステーションの MOTE(例:GenericBase)を使用する場合、MOTE のプ
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 23
ログラミングのあと‘off’に設定してください。
6.4 MICA2と MICA2DOTコネクタ MIB510 は、MICA2 および MICA2DOT の両方のためのコネクタを持っています。下記の図を参
照してください。MICA2 のセンサボード用の別のコネクタが MIB510 の下側にあります。バ
ッテリコネクタを備えた MICA2DOT はボードの底側にマウントすることができます。
6.4.1 リセット RST MOTE スイッチは ISP と MOTE の両方のプロセッサをリセットします。RST は ISP をリセ
ットします;ISP 電源投入後に、MOTE のプロセッサをリセットします。
6.4.2 JTAG MIB510 はコネクタ、内蔵回路デバッギングのための Atmel JTAG pod に接続する J3(MOTE
JTAG)を持っています。このコネクタは JTAG pod に電源を供給します;外部電源は pod のた
めに必要でありません。
警告:MIB510 は、さらに ISP プロセッサ用の JTAG と ISP のコネクタを持っています。これ
らは工場での使用のみのためにあります。
6.4.3 電源 MIB510 は、5~7VDC を受け取り MICA に調整された 3V を供給する内蔵のレギュレータを持
っています。MIB510 は壁面電源供給で伝えられます。
警告:7VDC 以上は内蔵のリニアレギュレータが破損します。
電源電圧が低い場合に再プログラミングが出来なくなるように低電圧モニタが内蔵されて
います。適切なプログラミング電圧がある場合、ISP PWR はオンです。電圧が 2.9V 未満の
場合、ISP PWR は点滅し、任意のコードのダウンロードから MOTE を不能にするでしょう。
電圧は低すぎて ISP に電源を供給することができない場合、ISP PWR はオフになります。
警告:MIB510でMICA2をプログラムする場合、バッテリスイッチを切ってください。MICA2DOT
は MIB510 に付ける前にバッテリを外してください。MICA2 および MICA2DOT は、外部および
バッテリ電源を切り替えるダイオードを持っていません。
6.4.4 RS-232インターフェース RS-232 インターフェースは標準の一つのチャンネルで、外部コンピュータに接続する DB9
コネクタとの双方向インターフェースです。それは送信と受信のラインのみ使用します。

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 24
7 MIB600CA
7.1 紹介 MIB600CA は、コミュニケーションおよびインシステムプログラミング用の MICA2 ファミリ
MOTE にイーサネット(10/100 Base-T)接続を供給します。その 2つの標準の構成は、a)MOTE
ネットワークのためのイーサネットゲートウェイ、b)MOTE ネットワークプログラミングお
よびアウトバンドの診断チャンネルです。
MIB600CA 装置は 4.5”×2.25”のプラットフォームに次のものが搭載されています。
MICA2 MOTE 54 ピンコネクタ(J1)
MOTE アンビリカルコネクタ(J11)
MOTE ターゲット JTAG ポート(J12)
TCP/IP シリアルサーバ
UISP STK500 と互換性をもつインシステムプログラマ
内蔵の電源調整とモニタ
Power Over Ethernet(POE)電源供給
図 10 MIB600CA の上側の写真
7.1.1 Moteネットワーク - イーサネットゲートウェイ TOSBase または GenericBase を実行する MICA2 MOTE が、MIB600 に付いています。これは、
イーサネットブリッジへの MOTE RF を形成します。

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 25
7.1.2 Moteネットワークプログラミングとバンド外診断チャンネル MICA2は、LANの接続されたホストコンピュータからのUISPプログラミングのためのMIB600
に接続します。バンド外(非 RF)の診断は MOTE からホストのモニタ/コントロールコンピュ
ータへ LAN の UART ポート経由で転送することができます。
7.2 セットアップ/インストール このセクションは、TinyOS v1.1 の環境で使用するための MIB600 のインストールおよび構
成について記述します。
7.2.1 フィジカル 一時的なもの以外は、MIB600 はグランドに絶縁するべきです。
7.2.2 MICA Mote接続 MICA と MICA2 の MOTE は、J1 で、標準の MOTE 51-ピン HIROSE コネクタで MIB600 に直接接
続します。2つの穴は、J1 でインストールされた時 MICA2 MOTE を安全にするために提供さ
れます。MIB600 に信頼できる機械的・電気的な接続を保証するために、備え付けのポイン
トを使用することを勧めます。
7.2.3 電源 2 つの電源供給元は MIB600 で利用出来ます。
AC 壁面電源アダプタからの外部 5VDC
イーサネット上の電源
外部 5VDC 電源供給
AC 110-240V の電源に外部 5VDC 電源を接続してください。
MIB600 SW2 を POE 位置にします。
MIB600 の J7 に DC のプラグを接続します。
注:SW2 が 5V 位置で MIB はオンになります。SW2 が POE 位置でオフになります。
イーサネット上の電源・IEEE802.3af(POE)
警告:MOTE“ground”は POE のポテンシャルがあります(-48V)。POE を使用する場合、設備
/建物のグランドに MIB600 を接続しないでください。
IEEE 802.3af の適合した電源供給が、POE の装備された機能に提供されます。イーサネッ
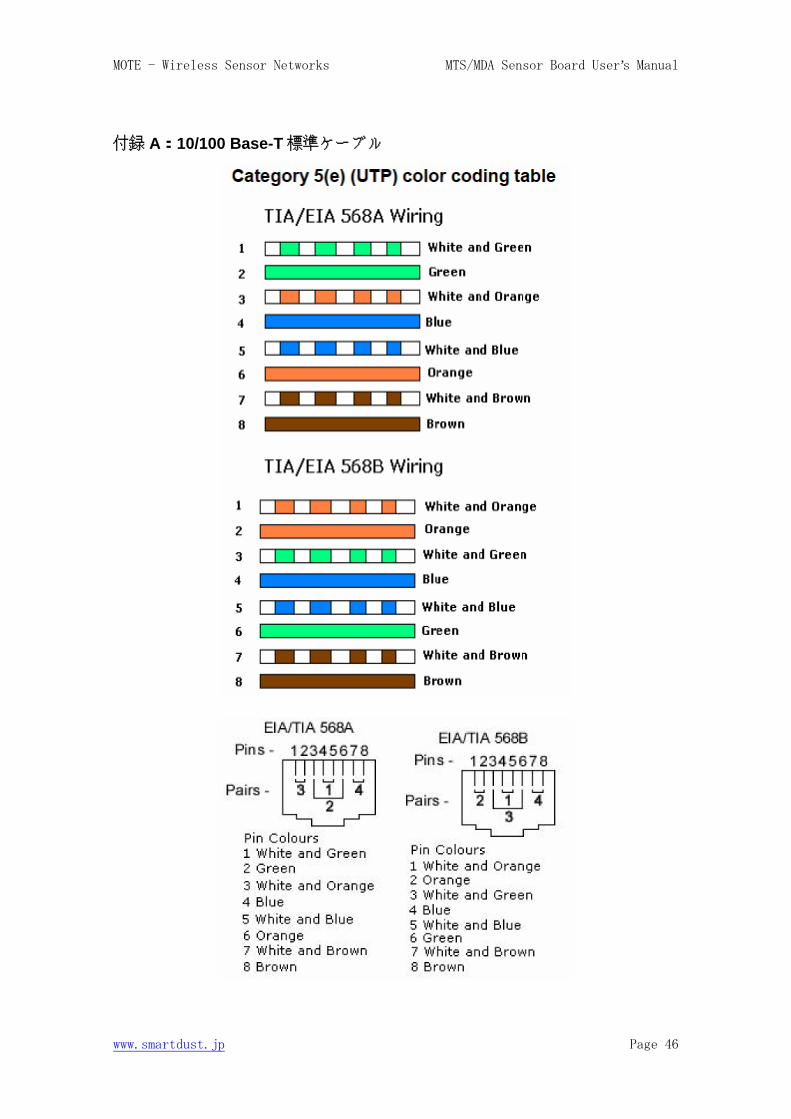
ト装置の電源(-48V)は、10/100Base-T RJ45 プラグの、ピン 4/5 および 7/8 で供給されます。
Base-T の配線情報に関しては付録 Aを参照してください。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 26
MIB600 POE 回路は IEEE 802.13f の適合した電源順序付けと分類電気回路構成を含んでいま
す。逆に、過剰電圧保護が提供されます。
注:MIB600 は“スペアワイヤの 4/5 と 7/8”の POE をのみサポートします。それは、Base-T
信号ラインで共有された POE をサポートしません。
POE に装備をされた LAN ポートに MIB600 を接続してください。
MIB600 SW2 を POE 位置にして MIB600 をオンしてください。
SW2 を 5V 位置にするとオフになります。(外部 5VDC 供給が切られて)
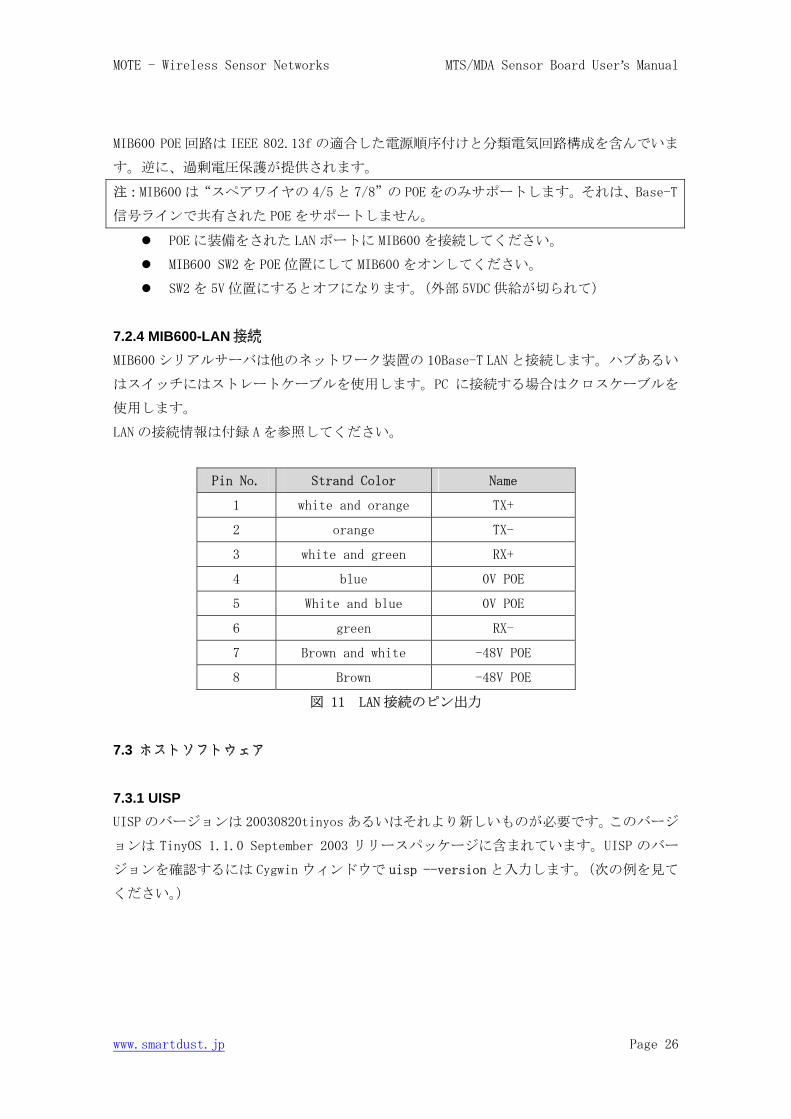
7.2.4 MIB600-LAN接続 MIB600 シリアルサーバは他のネットワーク装置の 10Base-T LAN と接続します。ハブあるい
はスイッチにはストレートケーブルを使用します。PC に接続する場合はクロスケーブルを
使用します。
LAN の接続情報は付録 Aを参照してください。
Pin No. Strand Color Name
1 white and orange TX+
2 orange TX-
3 white and green RX+
4 blue 0V POE
5 White and blue 0V POE
6 green RX-
7 Brown and white -48V POE
8 Brown -48V POE
図 11 LAN 接続のピン出力
7.3 ホストソフトウェア
7.3.1 UISP UISP のバージョンは 20030820tinyos あるいはそれより新しいものが必要です。このバージ
ョンは TinyOS 1.1.0 September 2003 リリースパッケージに含まれています。UISP のバー
ジョンを確認するには Cygwin ウィンドウで uisp --version と入力します。(次の例を見て
ください。)

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 27
図 12 UISP --version のスクリーンショット
7.4 MIB600の使用
7.4.1 コントロールとインジケータ 電源。MIB600 の電源(と MOTE に付いている電源)は“SW2”のラベルが付いているスイッ
チでコントロールします。
警告:MOTE の取り付け/取り外しの際は必ず MIB600 の電源はオフにしてください。
Position Function
5V External 5V DC power supply selected
POE Power Over Ethernet supply selected
表 9 SW2 スイッチの設定
電源が入ると D5 の LED がオンになります。
LAN アクティブインジケータ(RJ45)。緑色はネットワークが接続されていることを示しま
す。黄色は ISP シリアルポートのトラフィックがアクティブなことを示しています。
RESET。RESET ボタン(SW1)を押すと MIB600 と取り付けられた MOTE がリセットされます。
シリアルサーバはリセットされませんので注意してください。
シリアルサーバ RESET。サーバのサブモジュール(U15)の S1 スイッチを押すとイーサネッ
トシリアルサーバがリセットされます。
注:MIB600 と取り付けられた MOTE はリセットされません。シリアルサーバはポート 9999
の Telnet でもリセットできます。
ISP LED。MOTE のインシステムプログラミング中は ISP LED(D3)はオンです。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 28
Mote LED。3 つの LED(赤、緑、黄色)が取り付けられた MOTE のインジケータになります。
7.4.2 Mote UART(シリアルポート) Mote のシリアルポートは Port#10002 を使用して、Telnet によってアクセスすることがで
きます。
出荷時のシリアルサーバのレートは TOSBase と GenericBase の標準 TinyOS V1.1 リリース
と互換性がある 57.6kbaud です。
他のボーレートと通信パラメータを MOTE アプリケーションで使用する場合、シリアルサー
バコンフィグレーションを変更しなければなりません。
7.4.3 インシステムプログラミング MIB600 ISP マイクロコントローラは Port#10001 に取り付けられます。UISP のデフォルト
はこのポートです。
Cygwin コマンドラインの UISP は標準の TinyOS プログラミングツールです。MIB600 互換の
次のオプションは、…/tinyos/appsにあるMakerulesファイルに追加することが出来ます。
-dprog=stk500
-dhost=<IP address>
-dpart=Atmega128
コマンドラインは次のようになります。
uisp -dprog=stk500 -dhost=<IP address or HostID> -dpart=Atmega128 <standard uisp
commands>
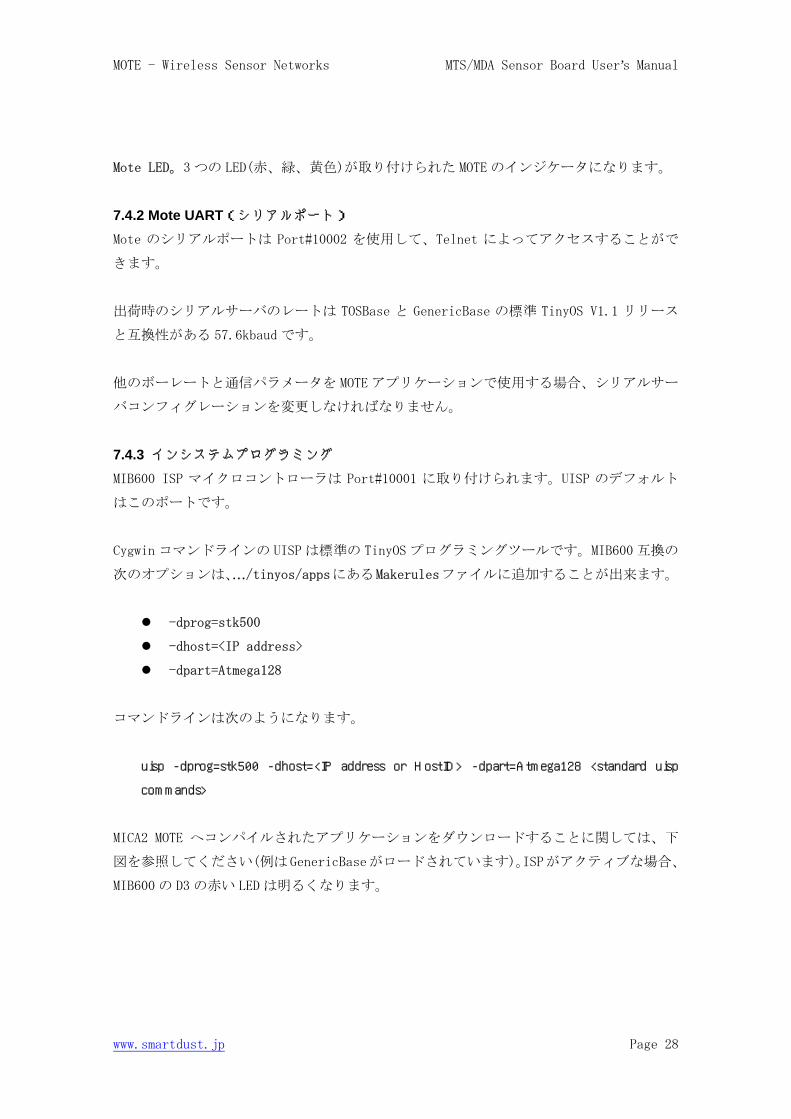
MICA2 MOTE へコンパイルされたアプリケーションをダウンロードすることに関しては、下
図を参照してください(例はGenericBaseがロードされています)。ISPがアクティブな場合、
MIB600 の D3 の赤い LED は明るくなります。
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 29
図 13 プログラミング時の MOTE からのレスポンス
インシステムプログラミング中に、Telnet ポート#10002(MICA2 UART ポート)がごみ/関係
のない文字を表示するかもしれないことに注意してください。
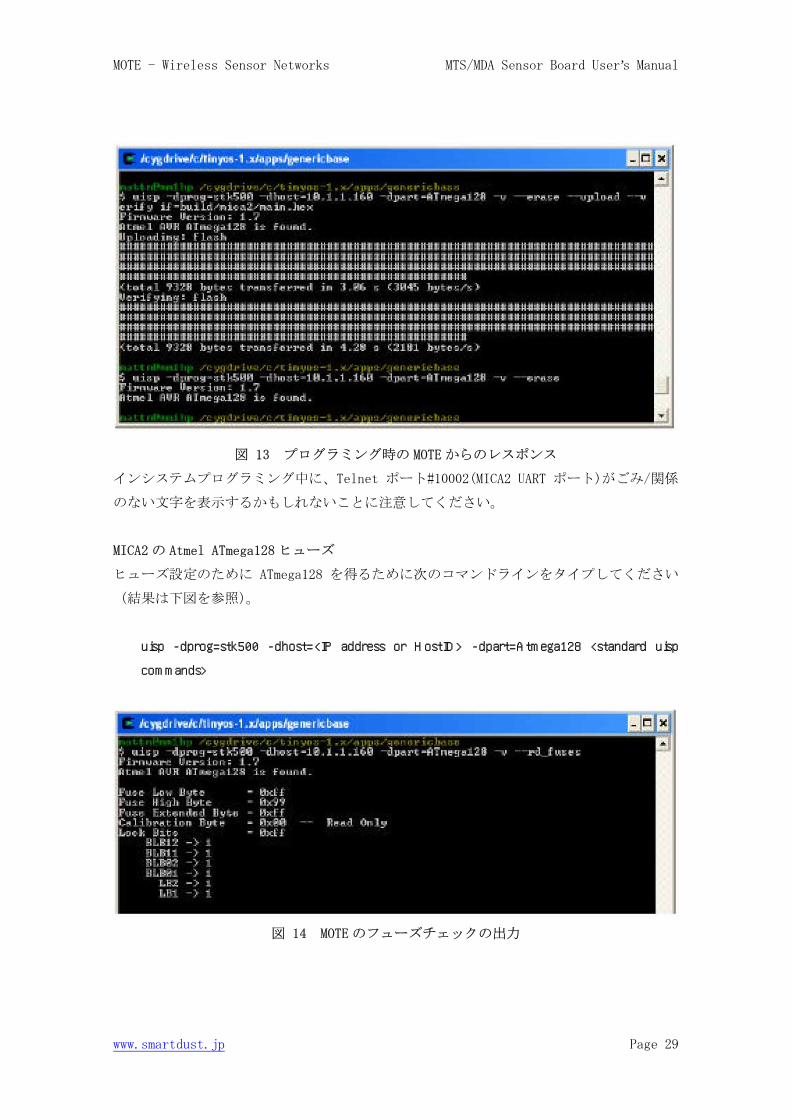
MICA2 の Atmel ATmega128 ヒューズ
ヒューズ設定のために ATmega128 を得るために次のコマンドラインをタイプしてください
(結果は下図を参照)。
uisp -dprog=stk500 -dhost=<IP address or HostID> -dpart=Atmega128 <standard uisp
commands>
図 14 MOTE のフューズチェックの出力
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 30
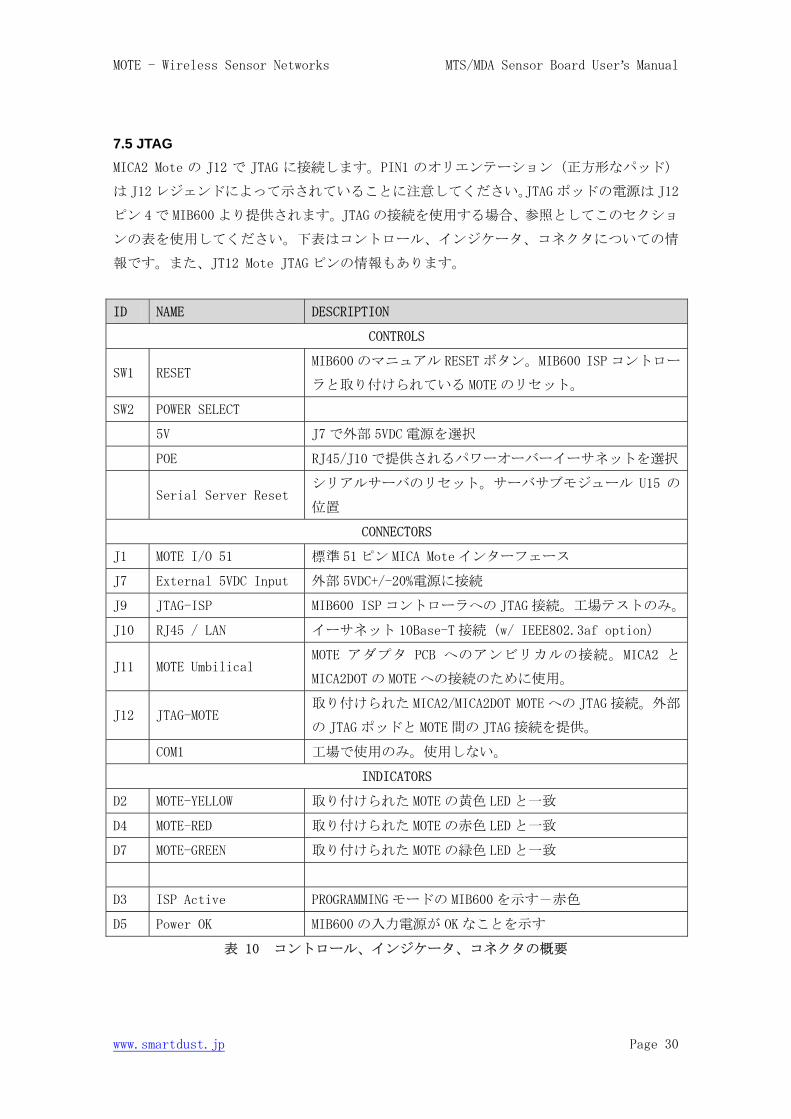
7.5 JTAG MICA2 Mote の J12 で JTAG に接続します。PIN1 のオリエンテーション(正方形なパッド)
は J12 レジェンドによって示されていることに注意してください。JTAG ポッドの電源は J12
ピン 4で MIB600 より提供されます。JTAG の接続を使用する場合、参照としてこのセクショ
ンの表を使用してください。下表はコントロール、インジケータ、コネクタについての情
報です。また、JT12 Mote JTAG ピンの情報もあります。
ID NAME DESCRIPTION
CONTROLS
SW1 RESET MIB600 のマニュアル RESET ボタン。MIB600 ISP コントロー
ラと取り付けられている MOTE のリセット。
SW2 POWER SELECT
5V J7 で外部 5VDC 電源を選択
POE RJ45/J10 で提供されるパワーオーバーイーサネットを選択
Serial Server Reset シリアルサーバのリセット。サーバサブモジュール U15 の
位置
CONNECTORS
J1 MOTE I/O 51 標準 51 ピン MICA Mote インターフェース
J7 External 5VDC Input 外部 5VDC+/-20%電源に接続
J9 JTAG-ISP MIB600 ISP コントローラへの JTAG 接続。工場テストのみ。
J10 RJ45 / LAN イーサネット 10Base-T 接続(w/ IEEE802.3af option)
J11 MOTE Umbilical MOTE アダプタ PCB へのアンビリカルの接続。MICA2 と
MICA2DOT の MOTE への接続のために使用。
J12 JTAG-MOTE 取り付けられた MICA2/MICA2DOT MOTE への JTAG 接続。外部
の JTAG ポッドと MOTE 間の JTAG 接続を提供。
COM1 工場で使用のみ。使用しない。
INDICATORS
D2 MOTE-YELLOW 取り付けられた MOTE の黄色 LED と一致
D4 MOTE-RED 取り付けられた MOTE の赤色 LED と一致
D7 MOTE-GREEN 取り付けられた MOTE の緑色 LED と一致
D3 ISP Active PROGRAMMING モードの MIB600 を示す-赤色
D5 Power OK MIB600 の入力電源が OK なことを示す
表 10 コントロール、インジケータ、コネクタの概要

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 31
PIN NAME DESCRIPTION
1 TCK/ADC4 MICA2(DOT) JTAG Clock
2 GND Ground
3 TDO MICA2(DOT) JTAG Data Out
4 VCC 3.3V Power
5 TMS MICA2 (DOT) JTAG Sync
6 RSTN MICA2 (DOT) Reset
7 VCC 3.3V Power to JTAG Pod
8 N/C Not connected
9 TDI MICA2(DOT) JTAG Data In
10 GND Ground
表 11 J12 Mote JAG

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 32
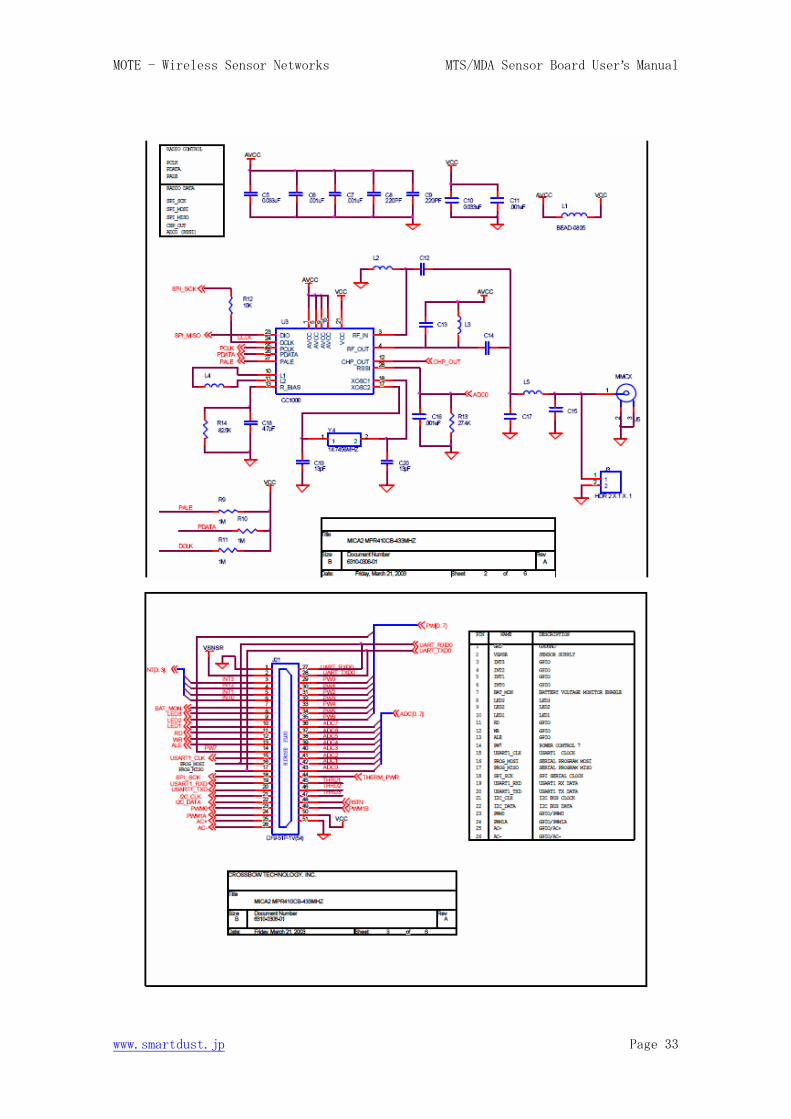
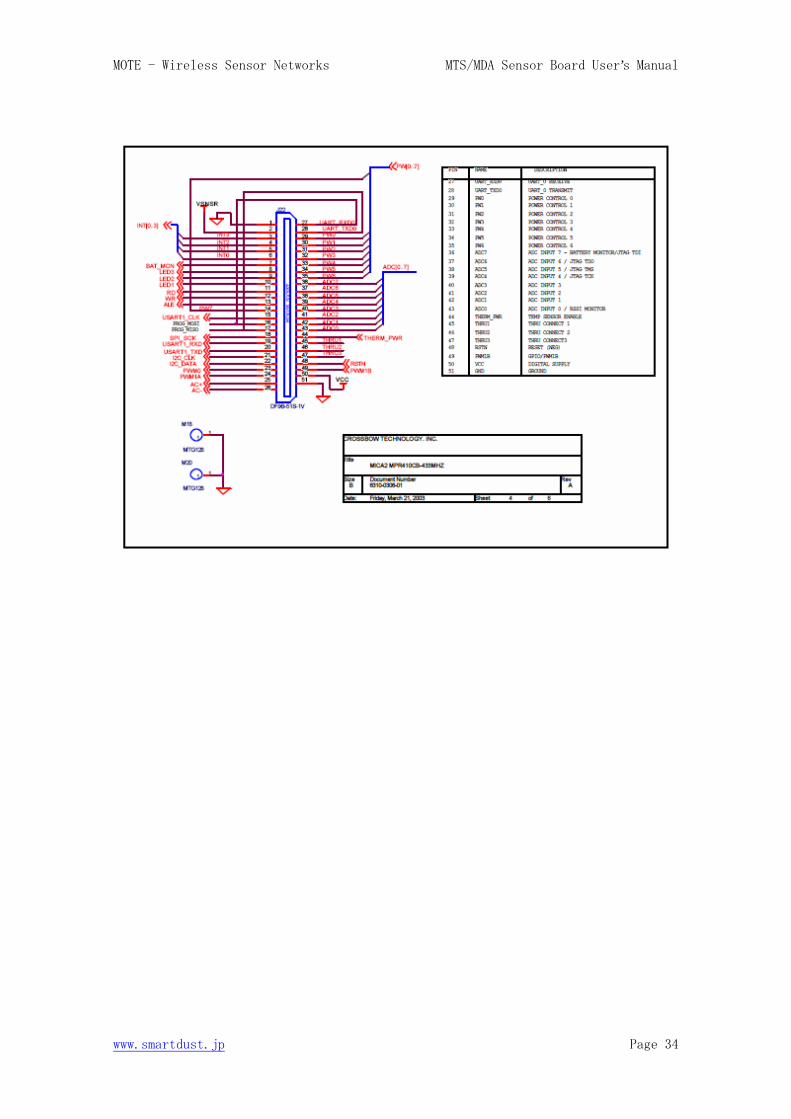
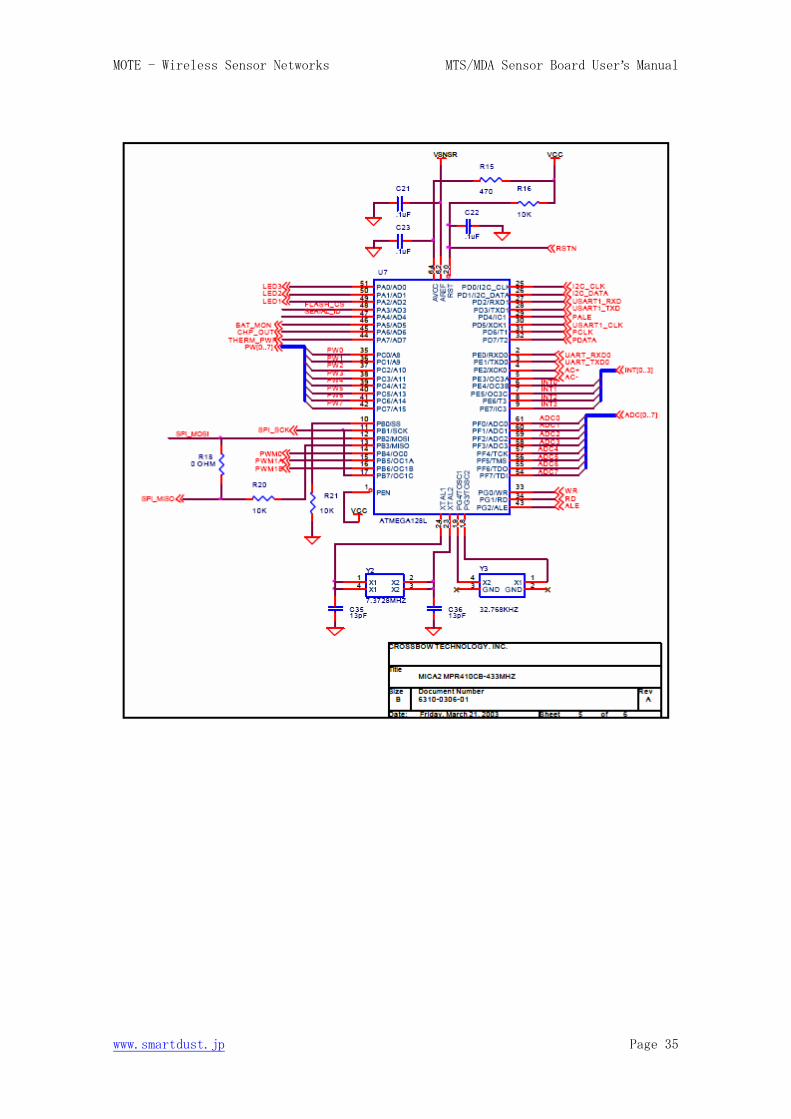
8 回路図
8.1 MPR400/410/420、MICA2の回路図
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 33
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 34
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 35

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 36
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 37
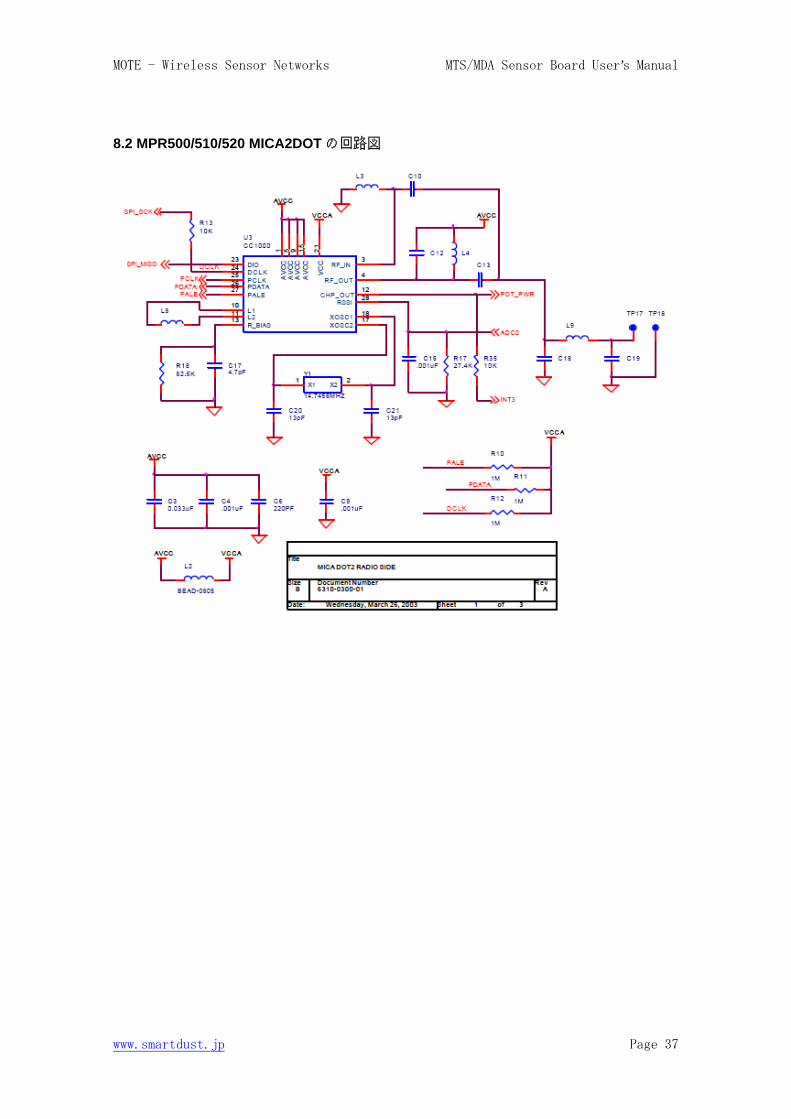
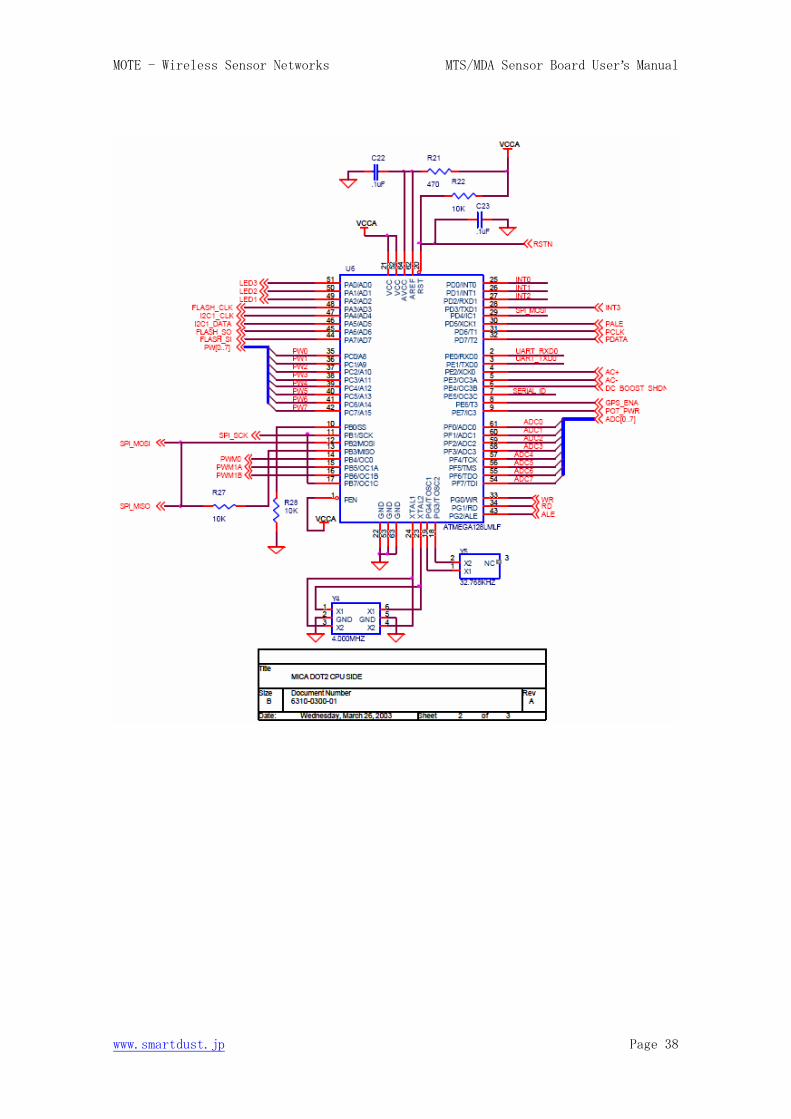
8.2 MPR500/510/520 MICA2DOTの回路図
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 38
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 39
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 40
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 41
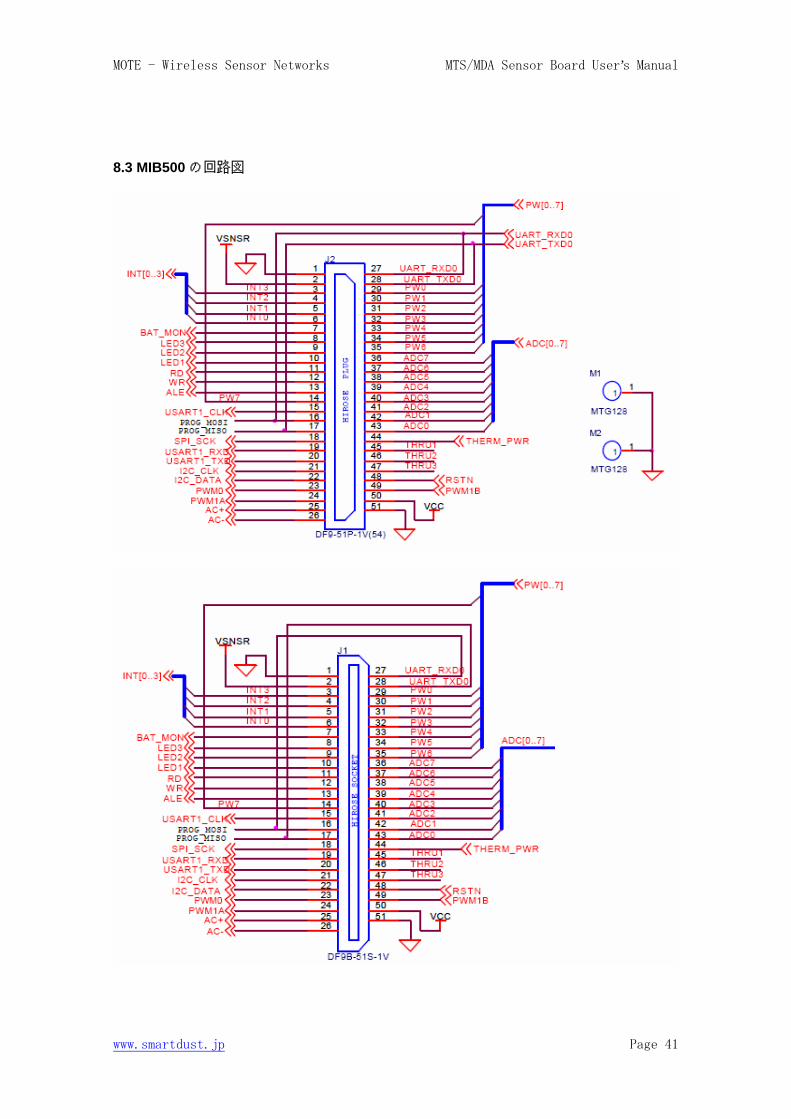
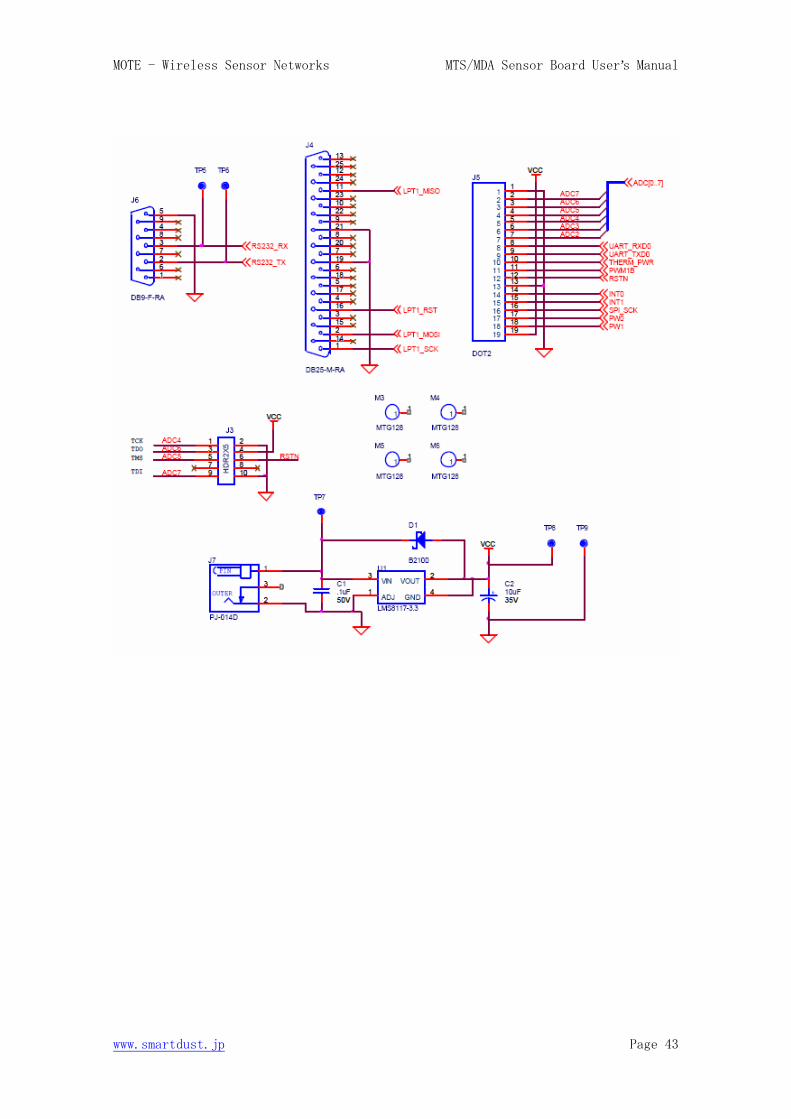
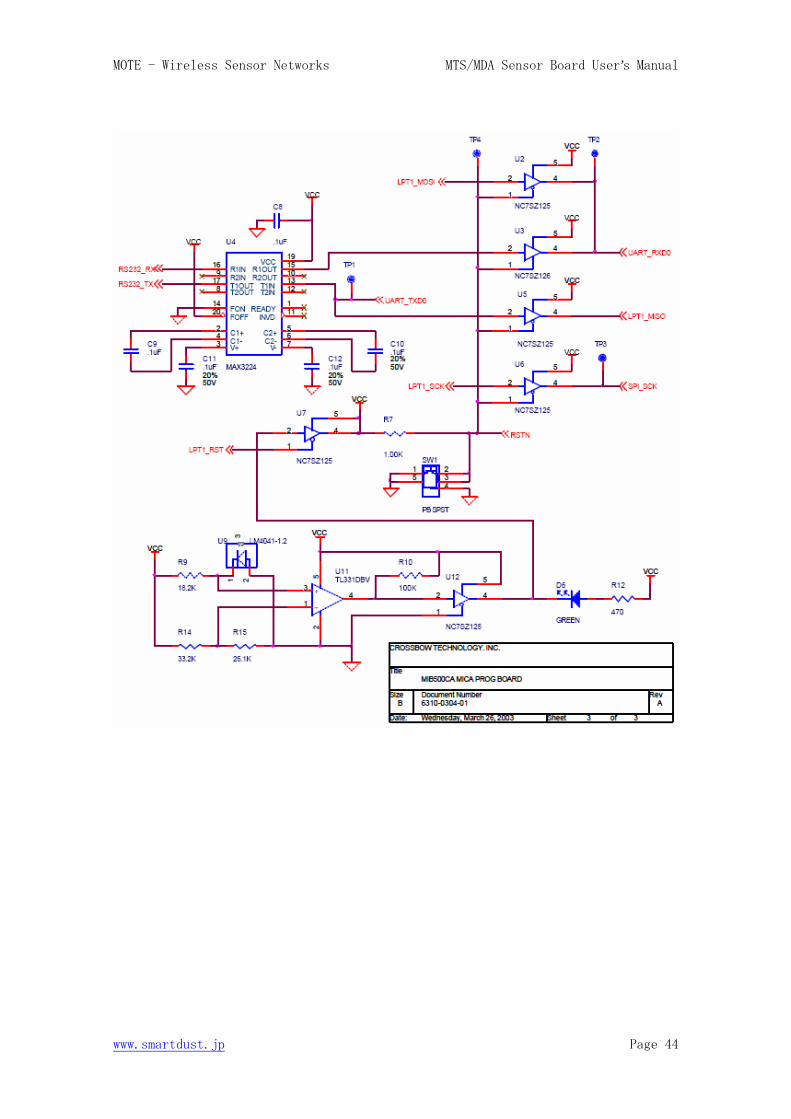
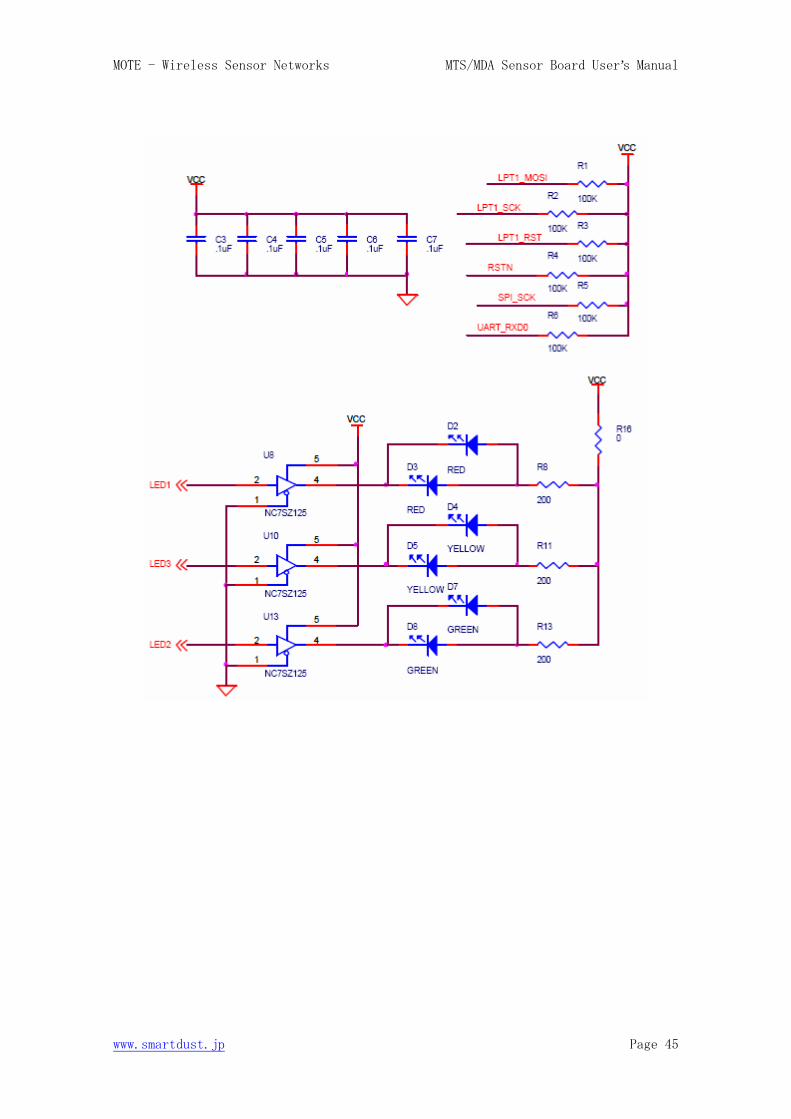
8.3 MIB500の回路図
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 42
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 43
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 44
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 45
MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 46
付録 A:10/100 Base-T標準ケーブル

MOTE - Wireless Sensor Networks MTS/MDA Sensor Board User’s Manual
www.smartdust.jp Page 47
製品のお問い合わせは:
クロスボー株式会社
電話 06-6489-5922 FAX 06-6489-5910 Email: sales @smartdust.jp
〒660-0891 兵庫県尼崎市扶桑町 1-10 (住友精密構内)