motors de ca 2015
TRANSCRIPT

MOTORS DE CORRENT ALTERN
Electrotècnia
Glòria García 2010-2011

Motors de CA classificació
Velocitat de gir del rotor:– Síncrons: el rotor gira a la velocitat del camp. El rotor
s’alimenta de cc.
– Asíncrons: el rotor gira més a poc a poc que el camp. I segons la seva fabricació poden ser: Rotor amb bobines en curtcircuit
Rotor en gàbia d’esquirol
Tipus de ca:– Monofàsics: tensió variable
– Bifàsics: 230-240V
– Trifàsics: 380-400V
– Polifàsics: >400V
2

Per què triar un determinat tipus de motor?.
Els motors cc s'usen quan el valor del
seu fàcil i precís control de velocitat
justifica el seu alt cost i manteniment.
Els motors síncrons es reserven principalment
per a instal·lacions grans on la seva alta
eficiència compensa els seus alts costos
d’instal·lació. Tenen poca aplicació industrial.
3

Per què triar un determinat tipus de motor?.
Els motors asíncrons o d’inducció s’utilitzen
on es tenen com a necessitats més importants
la fiabilitat i el baix cost, per aquesta raó són
els que s’utilitzen més industrialment
(90%).
4

5
Motors de CC/CD Motors de CAS’aplica corrent continu en l’induït
(rotor) i en l’inductor. (estator)
S’aplica corrent altern
Es creen camps magnètics en les
bobines inductores i en les induïdes
En el rotor s’indueix una fem induïda.
L’estator té un camp magnètic
La velocitat augmenta amb la tensió
aplicada
Es regula la velocitat amb variadors
electrònics de freqüència
Par motor: proporcional al corrent de
l’induït i al fluxe del camp magnètic de
l’inductor
Par motor: depèn del camp giratori
Parts bàsiques: Inductor, induït,
col·lector
Parts bàsiques: Estator i rotor
Perden velocitat de gir amb la càrrega Perden velocitat de gir amb la càrrega
Té velocitat variable Funcionen a velocitats fixes
No poden operar a velocitats baixes

Es poden utilitzar en aplicacions de baixa
i alta potència
Son més econòmics de fabricar
S’utilitzen per alimentar dispositius que
requereixen una entrada de potència
variable
Són compatibles amb la majoria dels
aparells moderns
Són motors monofàsics Poden ser monofàsics o trifàsics
S’utilitzen quan la velocitat del motor ha
de ser controlada
Poc control de la velocitat
Tipus:
De excitació Independent
Sèri, paral·lel i compound
Tipus:
Motor d’Inducció (Motor Asíncron)
Motor Síncron
Par d’engega molt fort Par d’engegada baix
Aplicacions: Elevadors, Ferrocarrils… Aplicacions Industrials
Per treball pesat Per treball amb precisió6

Motors síncrons
El corrent de l’inductor es subministrat des
de l’exterior per una font de CC.
L’inductor és el rotor.
Baixa aplicació industrial.
7

Constitució motors CA síncrons
Estator:
– Carcassa exterior
– Corona interior amb ranures tallades a on es
situaran tantes bobines com fases. En els motors
trifàsics les bobines estan desfasades 120º i
estan connectades a les tres fases de CA.
– No hi ha connexió elèctrica entre les bobines
de l’estator i rotor.
8
Constitució motors CA síncrons
Rotor:
– Alimentació amb CC.
– Barres de Cu o Al formen un cilindre unides pels
extrems per anells metàl·lics.
– Bobines inductores situades sobre les barres
formant pol nord i sud alternativament.
– Anells de fregament metàl·lics: que envolten un
extrem de l’eix i que estan aïllats entre ells. Cada
bobina està connectada a un dels anells i aquests
mitjançant les escombretes es connecten a
l’exterior.9

Estator ranuratRotor bobinat
Tipus Pols Sortints
Pols sortints
Alimentació DC
Tipus de motors CA síncrons
Anells de
fregament
10

Estator ranuratRotor bobinat tipus llis
Anells de fregament
Alimentació DC
Tipus de motors CA síncrons
11

Motor síncron
12

Motor síncron trifàsic
13

14

Funcionament motor síncron
Es necessita un CC pel bobinatge inductor
del rotor i un CA pel bobinatge de l’estator o
induït.
Un sistema trifàsic de corrents circulant pels
bobinats de l’estator, produeix un camp
magnètic giratori que interactúa amb el camp
magnètic del rotor produint un parell al eix de
la màquina.
15
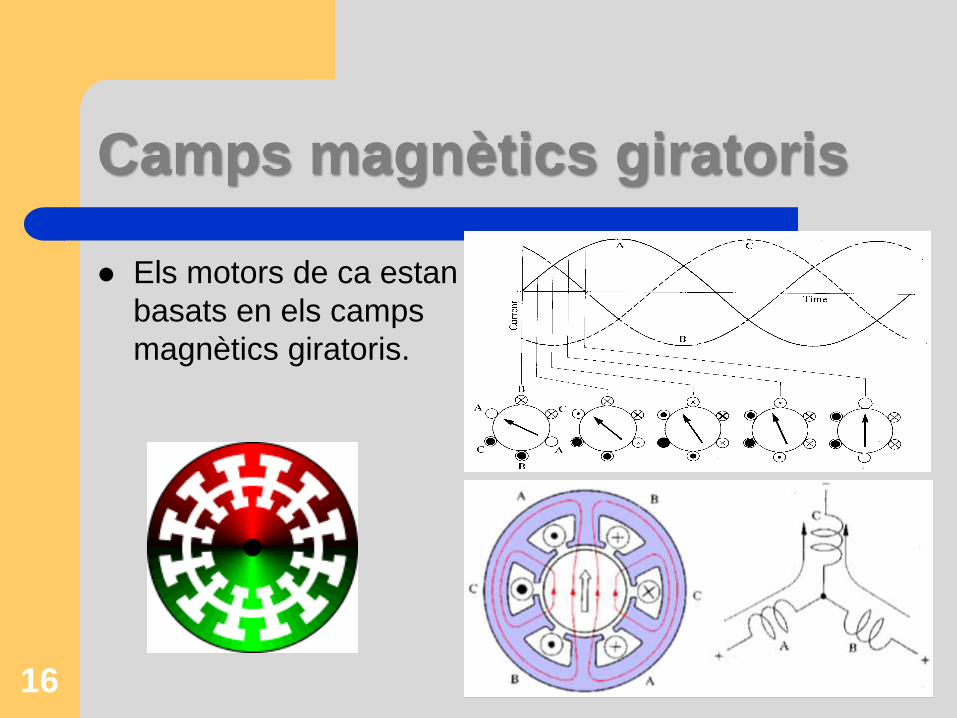
Camps magnètics giratoris
Els motors de ca estan
basats en els camps
magnètics giratoris.
16

Camps magnètics giratoris
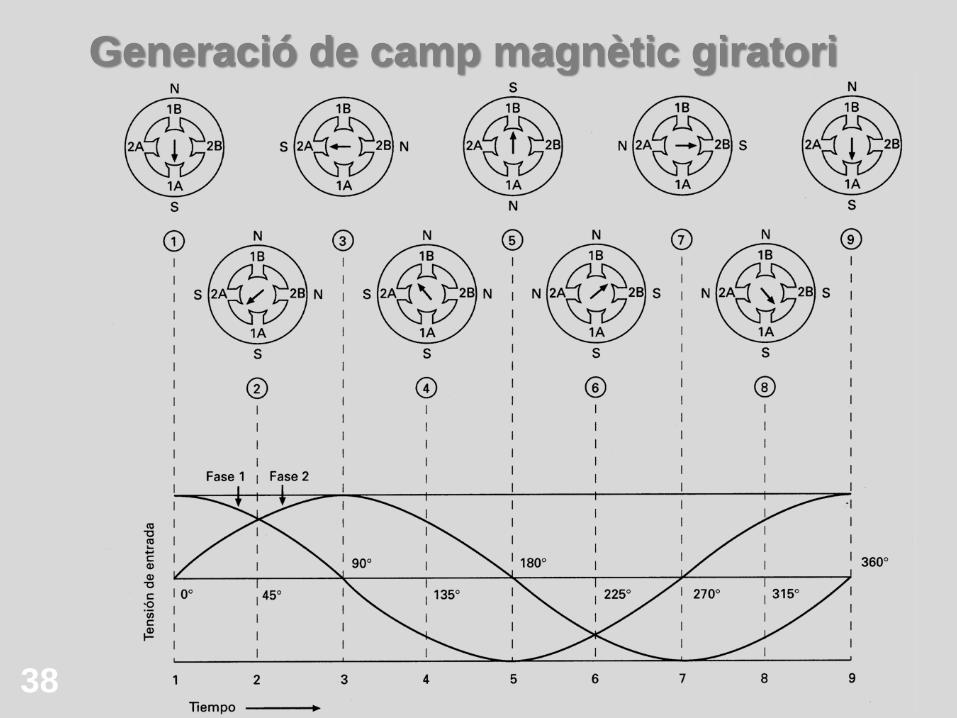
Perquè el camp sigui giratori es necessiten
dues condicions:
– Les bobines en l’estator han d’estar desplaçadas
un angle (120º).
– Els camps sinusoïdals han d’estar desfasats en el
temps (1/3 de període).
17

Camps magnètics giratoris
Cada bobina crea un camp magnètic longitudinalment
amb el seu eix però d’intensitat i sentit variable com el ca
d’alimentació i es representa per un vector.
En tot moment el camp magnètic resultat és la suma dels
tres creats per a cada bobina. El vector resultat té una
longitud fixa i gira a velocitat cte al voltant del seu origen.
Si es permuten entre si dues de
les fases es veu com el camp magnètic inverteix el
seu sentit de gir.
18

Camps magnètics giratoris
19

Funcionament motor síncron
La circulació del cc pel rotor crea un camp
magnètic Br i la seva direcció i sentit
s’estableix seguint el regla del tirabuixó o mà
dreta.
En l’estator a on poden haver 2 o 3 bobines es
crea un camp magnètic giratori. Degut a la
seva alimentació ca sinusoïdal el camp
magnètic té una direcció i valors instantanis
que varian amb la mateixa freqüència.20

Funcionament motor síncron
21

22

P
A
R
Velocitat Sincrònica
PUNT NOMINAL DE TREBALL:
Corba dels motors síncrons
Quan es varia el
valor de la càrrega
la n es manté cte:
(%)100·0
PC
PC
N
NNSR
=023

Què passa quan augmenta la càrrega si la ns és cte?:
– S’aplica a canvi un par torsor més gran.
– El rotor perd sincronisme perquè no segueix el
camp giratori de l’estator, llisca, frena i comença
a vibrar.
– El motor necessita més potència d’alimentació i
ha de augmentar el cosφ i disminuir φ :
P= 3·Vf·If·cosφ
24

Engegada dels motors síncrons
No poden engegar-se sols perquè el motor
vibra molt i s’escalfa sense arribar a girar.
Reduir la velocitat de gir del camp
magnètic de l’estator: es varia la freqüència
d’alimentació de les bobines de l’estator i es
baixa el voltatge de les fases.
Utilització d’un motor extern per accelerar
el rotor fins que assoleixi la ns i es fa sempre
en buit.25

Engegada dels motors síncrons
Utilització de bobinatges esmorteïdors al rotor:
connectades entre sí i no amb les bobines del rotor.
Quan s’engega el motor es crea el camp magnètic
giratori BS i alhora a les bobines esmorteïdes una
є=Bs·l·v i la circulació d’aquesta crea un 2n camp
magnètic BESM i la interacció dels dos camps creen un
moment torsor i el rotor comença a girar. En el moment
d’acceleració es fa passar CC per les bobines del rotor
assolint-se la ns.
Donen gran estabilitat al motor, si la ns disminueix
s’accelera per l’aparició del BESM.26
Motor asíncròn trifàsic
Funciona gràcies als fenòmens d’inducció
electromagnètica.
Són els més utilitzats industrialment:
– Sencills
– Fàcil manteniment
– Mantenen bastant estable la n per diferents règims
de càrrega.
– Bon parell d’engegada
La seva n es regula mitjançant l’alimentació
amb variadors electrònics de freqüència.27

Constitució: Estator del m. Asíncron
Xapes magnètiques
ranurades a on es situen les
bobines.
Les tres bobines es
desplacen 120º i es poden
connectar en estrella o en
triangle. Cada bobina es
connectarà a una fase de
corrent altern del sistema
trifàsic d’alimentació.28

Constitució: Rotor del m. Asíncron
Bobinat: té bobines estan
muntades sobre xapes ranurades
formant pols que han de coincidir
en el nombre amb els de l’estator.
Els terminals de les bobines
s’uneixen als anells de fregament
que estan aïllats entre sí. Permet
la connexió amb l’exterior
mitjançant escombretes.29

Tipus de motors asíncronsRotor bobinat
30

Constitució: Rotor del m. Asíncron
Gàbia d’esquirol: barres d’Al situades o
fusionades sobre les ranures del rotor
curtcircuitades pels seus extrems.
No hi ha possibilitat de connexió amb
l’exterior.
31

Tipus de motors asíncronsRotor en Gàbia d’esquirol
32

Motor asíncron Gàbia d’Esquirol
33

Símil de funcionament m. Asíncron
34
Motor síncron: si fem girar un
imant en forma U a ns alvoltant
d’una agulla imantada aquesta
girarà n=ns.
Motor asíncron: si fem girar
un imant a ns alvoltant d’una
massa circular metàl·lica
aquesta girarà n<ns.

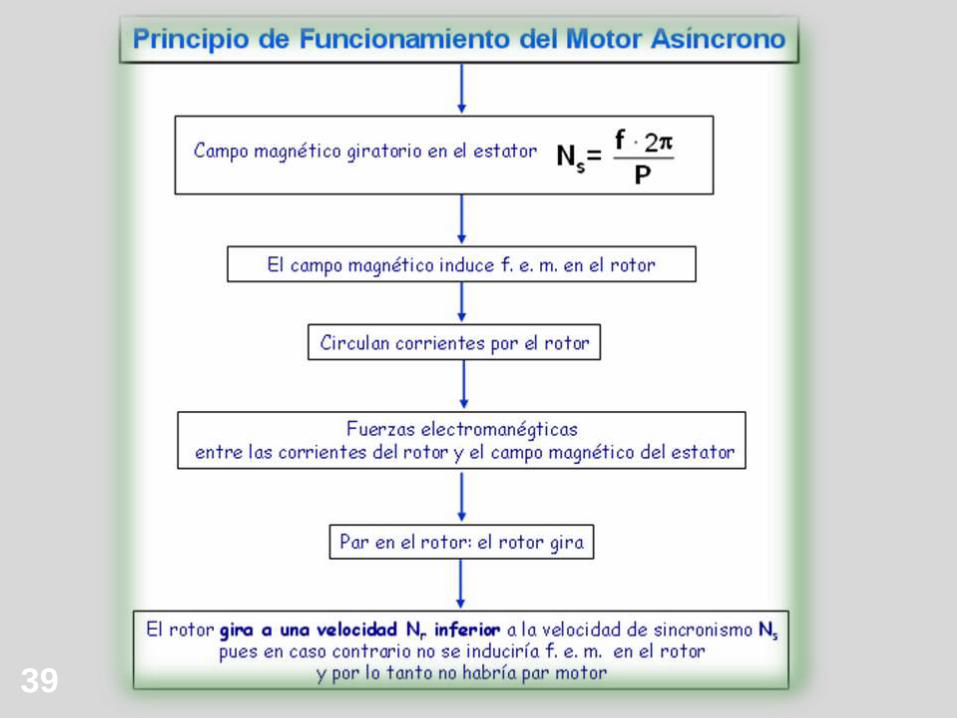
Funcionament del m asíncron
A l’estator es crea un camp magnètic giratori
perquè es fa passar corrent altern per cada
una de les tres bobines. Aquest camp talla
els conductors del rotor i per inducció
electromagnètic es genera una є, un corrent
induït i per tant un nou camp magnètic. La
interacció dels dos camps magnètics origina
un par motor que fa que el motor giri en el
mateix sentit que el camp magnètic de
l’estator.35

Funcionament del m. asíncron
La velocitat del rotor mai pot assolir la
velocitat del camp magnètic giratori. Si fos
així, el moviment relatiu entre els dos
s’anul·laria, el camp magnètic deixaria de ser
variable, no s’induiria una fem al rotor i per
tant no existiria par motor.
La velocitat del rotor és asíncrona i sempre
més baixa que la del camp giratori.
36

Velocitat asíncrona del rotor
37
Camp magnètic giratori (Ns)
Marca de referència en el rotor (Nr)
38
Generació de camp magnètic giratori
39

Quina és la velocitat del motor asíncron?
40
p
f
sn
60
• Velocitat de sincronisme de l’estator:
• Velocitat de gir rotor: n
•Lliscament relatiu (S): diferència entre la ns i la velocitat de
gir rotor (n).
•Lliscament absolut (S):
100
s
s
s n
nn
n
ns
nnss

Lliscaments motors asíncrons
Per una freqüència de 50 Hz:
41

42
Corba d’un motor asíncron trifàsic
43

Corba d’un motor asíncron trifàsic
44
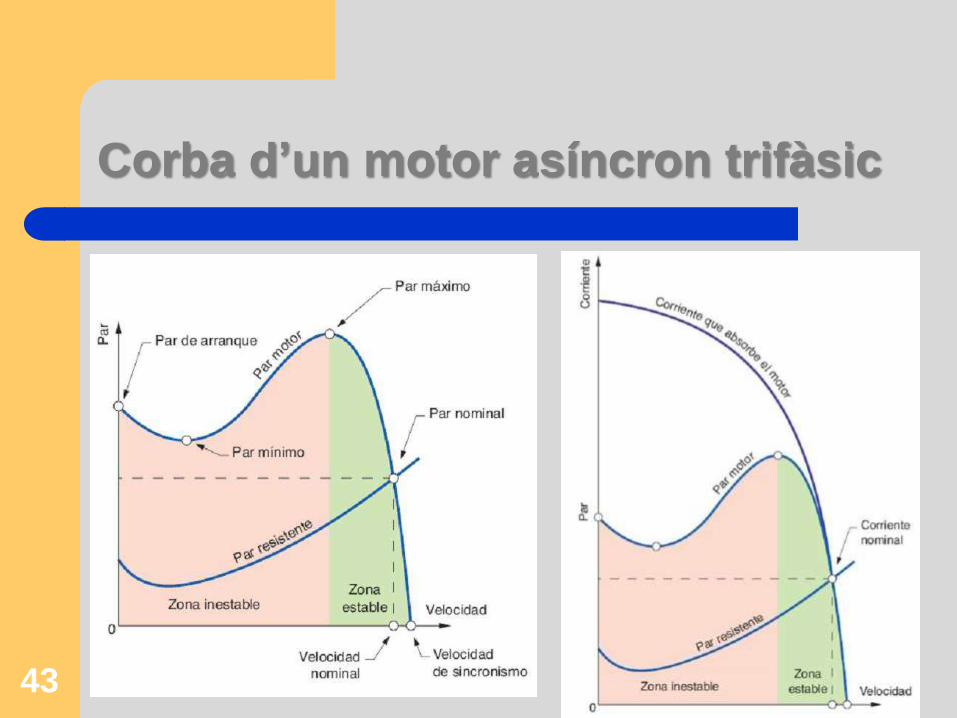
• Engegada: n=0, Iabs=6-8
In i el M=1,5 MN. Permet
engegar amb càrregues
molt grans.
• Acceleració: I es va
reduïnt, el M disminueix
al principi i després torna
a augmentar fins arribar
al Mmax quan la n de gir
és 75% la nn i s també
disminueix.
• Velocitat nominal de
sincronisme: la
intensitat com el parell
són molt petits.

Corba par-velocitat amb càrrega
La nn s’assoleix
quan el par
resistent=par
motor. El motor
és estable i
apartir d’aquest
punt es descriu
una zona lineal
de treball del
motor. Si creix
la n disminueix
el M. Una petita
disminució de
la n incrementa
molt el M.45

Connexió dels motors asíncrons
46
Connexió estrella (400V) Connexió triangle (230V)

Tensions d’un motor trifàsic
Quan observem la placa de característiques d’un motor trifàsic
apareixen 2 tensions 230/400V
La menor és la de TRIANGLE La gran és la d’ESTRELLA
47

Engegada dels motors asíncrons
Quan es connecta directament el motor a la
xarxa absorbeix una I tan gran que pot
afectar a la duració dels aparells de connexió
i de les línies d’alimentació.
Les companyies d’energia prescriuen
reglaments per reduir els corrents
d’engegada a uns valors acceptables.
L’engegada directa està permesa a motors
petits amb potència inferior a 5,5 kW.48

Engegada directa
49

Sistemes d’engegada reduïnt el V
Reducció de la tensió d’alimentació del
motor: també es disminueix el par
d’engegada perquè al disminuir el V, el fluxe
de l’estator disminueix al igual que la f.e.m
induïda i la I rotòrica. El M disminueix amb
el quadrat de la tensió.
50

Sistemes per reduir el voltatge d’alimentació
Engegada estrella-triangle.
Engegada amb resistències estatòriques.
Engegada amb resistències rotòriques.
Engegada per autotransformador.
51

Engegada estrella-triangle
52

Engegada estrella-triangle
53
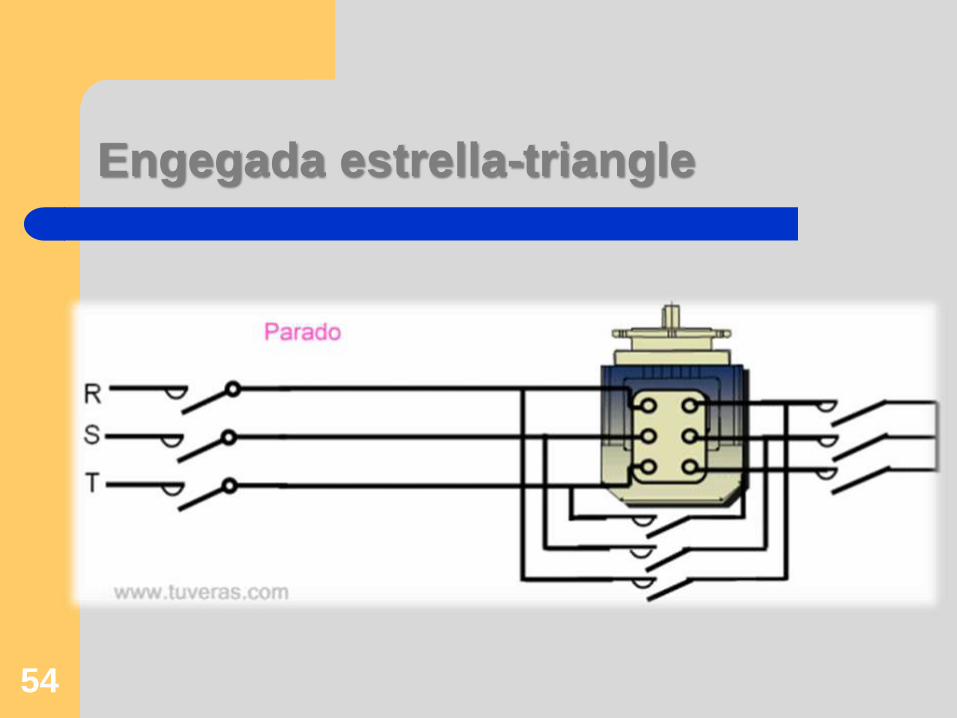
Engegada estrella-triangle
54

Engegada per resistències estatòriques
Consisteix en reduir la tensió que produeixen
unes resistències connectades en sèrie amb
l’estator.
Inconvenient: la I disminueix d’una forma lineal
amb la caida de tensió, en canvi el M
disminueix amb el quadrat de la caiguda de
tensió. Per tant s’aplica en motors a on el M
d’engegada resistent es baix.
En general es fa servir poc, en cas d’urgència.55

Engegada per resistències estatòriques
56

Engegada per resistències estatòriques
57

Engegada per resistències estatòriques
58

Engegada per resistències rotòriques
Només és vàlid en motors amb rotor bobinat
i anells de fregament.
59

Engegada per autotransformador
Consisteix en connectar un
autotransformador en l’alimentació del motor.
Es consegueix disminuir la tensió i el corrent
d’engegada. L’estator es connecta amb un
60-70% de tensió de línea.
L’I i el M queden reduïts segons el quadrat
de la tensió reduïda.
Dóna bones característiques d’engegada
però té l’inconvenient de que és un mètode
molt car.60

Engegada per autotransformador
61

Variació de la velocitat
Es pot variar la n actuant sobre alguna de les
variables de les que depèn:
62

Potència en el motor asíncron
63
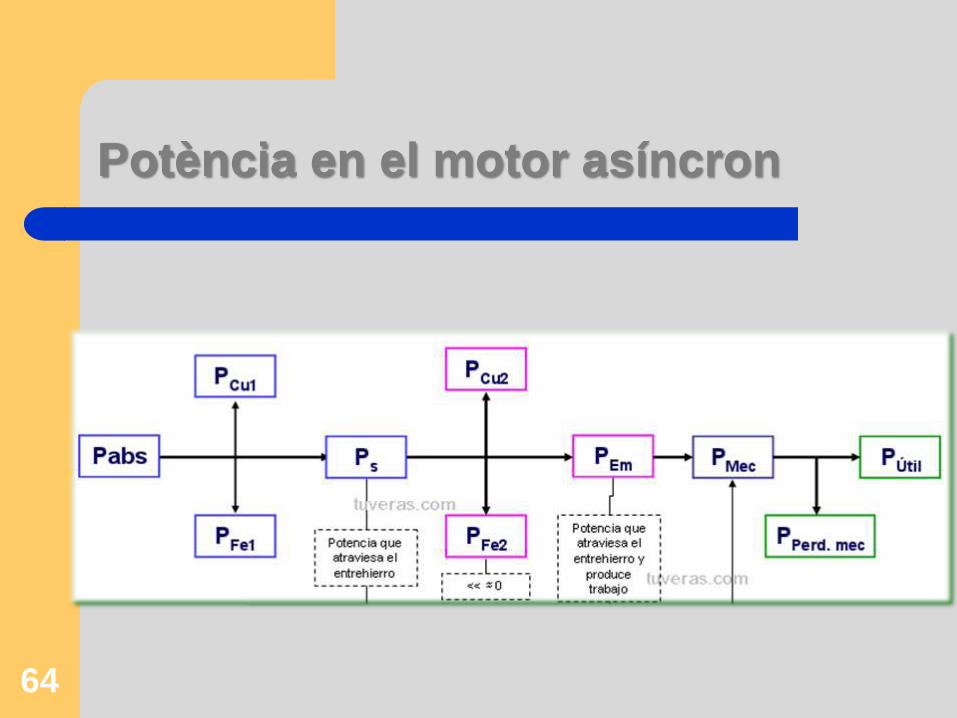
Potència en el motor asíncron
64
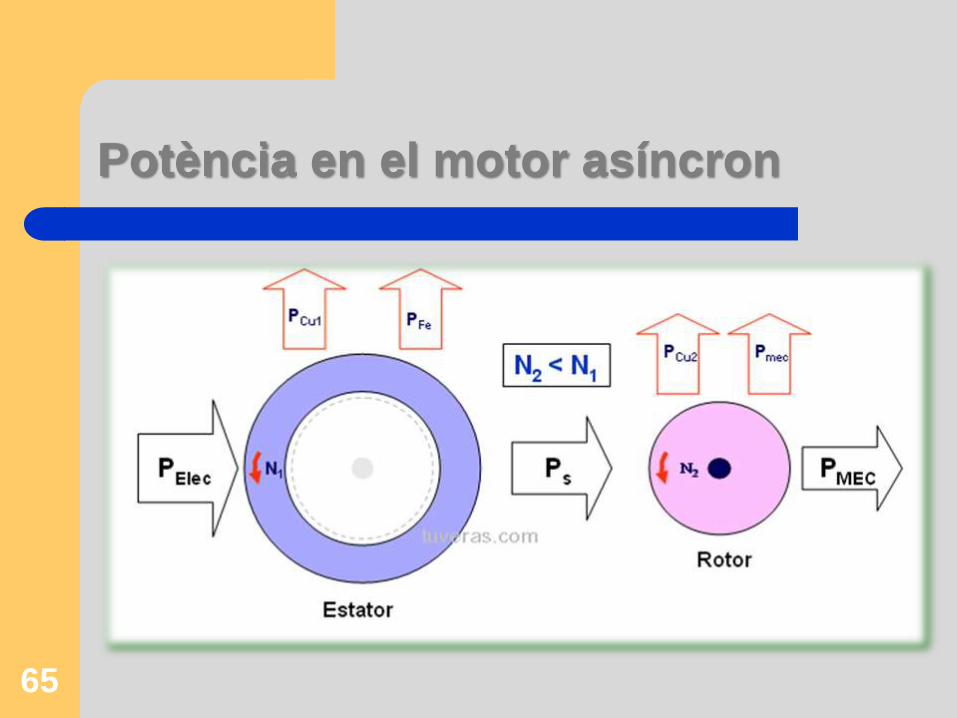
Potència en el motor asíncron
65

Rendiment del rotor
El rendiment del rotor
(r) depèn del
lliscament per això
quan més petit sigui
més gran serà el
rendiment.
Les pèrdues
mecàniques i
magnètiques es
determinen en buit.66
Motors amb rotor en gàbia d’esquirol
Construcció senzilla i robusta. Econòmics i fàcil
manteniment.
Elevat parell d’engegament 2-3 Mn en engegament directa.
Es poden engegar a plena càrrega.
Mmax és superior al Meng, permet puntes de càrrega.
La n amb la càrrega disminueix molt lentament i es manté cte.
Es regula la velocitat en un marge considerable variant la
freqüència.
A l’engegament absorbeixen I=5-8In, per això es posen en
marxa directament motors de poca potència. Motors de mitjana
o elevada potència s’ha de reduir l’Ieng.
Bon rendiment i bon cosφ~0,8.
Es poden connectar a dos voltatges 400-240V.67
Motors amb rotor bobinat
Són més voluminosos i cars. Necessiten d’un
millor manteniment. Hi ham monofàsics i trif.
Milloren les característiques d’engegada: gran par i
I més baixa. Tenen una engegada progressiva per
màquines de gran potència. No es poden engegar
sols si són trifàsics.
El nº de pols de l’estator ha de ser igual al nº del
rotor per millorar l’engegada.
Es pot regular la velocitat amb més facilitat
mitjançant les resistències rotòriques.68

Motor universalMotor monofàsic en sèrie
Es pot alimentar amb CC o CA. Generalment
s’alimenten amb CA monofàsica.
La seva estructura és similar a la d’un motor de
CC en sèrie. Les bobines de l’estator i del rotor
es connecten en sèrie. L’estator format per xapes
magnètiques.
El par d’engegada és 2 -3 el par nominal. Es
poden engegar amb plena càrrega.
La velocitat canvia segons la càrrega. Quan
augmenta el par disminueix la velocitat.69

Motor universalMotor monofàsic en sèrie
Nn entre 3000-8000 rpm. No són adeqüats
per treballar amb velocitats constants.
Per variar la n necessitem variar el V
d’alimentació i es fa amb un reòstat.
El canvi de gir es controlable intercanviant
una fase en l’estator o en el rotor.
Són de petit tamany.
Aplicacions molt variades: electrodomèstics
com aspiradores, trepants portàtils…70

Motor universal
71

Motor pas a pas
Motor síncron dissenyat per girar un
nombre determinat de graus d’acord amb
el nombre de pulsacions elèctriques que
s’apliquin per minut.
Llarga vida, velocitat de resposta elevada.
Posicionament precís.
Freqüència de treball variable.
Funcionament sincrònic bidireccional.
No té escombretes.72

Aplicacions:
– Taxímetres.
– Impresores.
– Plotters.
– Braços i Robots.
– Rellotges elèctrics.
– Posicionament de vàlvules en controls industrials.
73
Motor pas a pas
N = α · fpas / 360º

Motor pas a pas
74

Contactor electromagnètic
És un dispositiu de maniobra (electroimant) que
permet obrir contactes mitjançant el pas de
corrent per una bobina i s’utilitza per controlar
receptors a distància com poden ser els motors.
Pot operar a I altes 6-12In.
Té una ràpida resposta i poca inèrcia mecànica.
Indespensables en automatització i combinat
amb reés s’utilitzen per protecció de càrregues
(motors).75

Parts del contactor
Contactes principals: 1-2, 3-4, 5-6
– Tenen per finalitat obrir o tancar
el circuit de força o potència.
Contactes auxiliars: 13-14 (NO)
– S’utilitzen en el circuit de
comandament o maniobres.
Suporten Intensitats més
baixes.
Circuit electromagnètic:
– El nucli: en forma de’E i és la
part fixa, concentra el Ф.
– La bobina: A1-A2.
– L'armadura: Part mòbil76
Bobina
Contacte
auxiliar NO
Contactes
Principals

Marcat dels borns
77
• Bobina: es marca amb A1 i A2.
• Contactes auxiliars:
Contactes NO: Se'ls assignaran amb
2 xifres, la primera xifra
indica el número d’ordre i la segona ha
de ser 3 i 4. Exemples: 13-14,
23-24, 33-34.
Contactes NT: Se'ls assignaran amb 2
xifres, la primera xifra indica el número
d’ordre i la segona ha de ser 1 i 2.
Exemples: 11-12, 21-22, 31-32.
Contactes principals: Es marquen amb
els números o lletres 1-2, 3-4, 5-6, o L1-
T1, L2-T2, L3-T3.
El Contactor es denomina amb les lletres
KM seguides d'un nombre.

Circuit de potència posada marxa
78
Relé tèrmic
Contactor
Magnetotèrmic
Motor

Circuit de comandament i de connexions
79

Esquema motor en funcionament
80