projeto e implementaÇÃo de um filtro ativo sÉrie...
TRANSCRIPT
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA
CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA - ÊNFASE ELETROTÉCNICA
BRUNO ANTONIO VOICECHOVSKI DOS SANTOS
PRISCILA FACCO DE MELO
WILLI UMEO DANELUZ
PROJETO E IMPLEMENTAÇÃO DE UM FILTRO ATIVO SÉRIE MONOFÁSICO
PARA CORREÇÃO DE DISTORÇÃO HARMÔNICA DE TENSÃO CONTROLADO
POR PROCESSADOR DIGITAL DE SINAIS
CURITIBA
2007

BRUNO ANTONIO VOICECHOVSKI DOS SANTOS
PRISCILA FACCO DE MELO
WILLI UMEO DANELUZ
PROJETO E IMPLEMENTAÇÃO DE UM FILTRO ATIVO SÉRIE MONOFÁSICO
PARA CORREÇÃO DE DISTORÇÃO HARMÔNICA DE TENSÃO CONTROLADO
POR PROCESSADOR DIGITAL DE SINAIS
Trabalho apresentado na disciplina de Projeto
Final de Curso II como requisito parcial para a
conclusão do curso de Engenharia Industrial
Elétrica – Ênfase em Eletrotécnica, do
Departamento Acadêmico de Eletrotécnica, da
Universidade Tecnológica Federal do Paraná.
Orientador: Prof. Eduardo Félix Ribeiro
Romaneli, Dr. Eng.
Co-orientador: Prof. Roger Gules, Dr. Eng.
CURITIBA
2007
Bruno Antonio Voicechovski dos Santos
Priscila Facco de Melo
Willi Umeo Daneluz
PROJETO E IMPLEMENTAÇÃO DE UM FILTRO ATIVO SÉRIE MONOFÁSICO PARA CORREÇÃO DE DISTORÇÃO HARMÔNICA DE TENSÃO CONTROLADO
POR PROCESSADOR DIGITAL DE SINAIS
Este Projeto Final de Graduação foi julgado e aprovado como requisito parcial para obtenção do tıtulo
de Engenheiro Eletricista pelo Universidade Federal Tecnológica do Paraná.
Curitiba, 13 de novembro de 2007.
________________________________________ Prof. Paulo Sérgio Walenia, Esp.
Coordenador de Curso
Engenharia Industrial Elétrica – Eletrotécnica
________________________________________ Prof. Ivan Eidt Colling, Dr. Eng.
Coordenador de Projeto Final de Graduação
Engenharia Industrial Elétrica – Eletrotécnica
________________________________________ Prof. Eduardo Félix Ribeiro Romaneli, Dr. Eng.
Orientador
________________________________________ Prof. Roger Gules, Dr. Eng.
Co-Orientador
________________________________________ Prof. Alexandre Ferreira Lobo, M.Sc.
________________________________________ Rogers Demonti, Dr. Eng.
________________________________________ Prof. Rosângela Winter, M.Sc.

A Deus, nossos pais e amigos.
AGRADECIMENTOS
Agradecemos ao nosso orientador, professor Eduardo Félix Ribeiro Romaneli, por
todo apoio, ensino, exigência, disponibilidade e comprometimento durante a realização deste
trabalho.
Ao professor Roger Gules, co-orientador do trabalho, pelo acompanhamento durante
todo o projeto e por todas as colaborações e sugestões.
À empresa NHS Sistemas Eletrônicos Ltda., que nos forneceu as placas auxiliares e
os componentes para a montagem do protótipo, assim como o laboratório e os equipamentos
necessários para o ensaio do mesmo.
Ao amigo Rafael Christiano pelo auxílio durante todas as fases do projeto, por seu
incentivo e por todas suas contribuições essenciais.
À engenheira e amiga Kristie Kaminski Küster, pela disponibilização bibliográfica e
pelo incentivo inicial para o projeto.
Ao amigo Diego Franco pelas dicas no desenvolvimento do leiaute da placa de
circuito impresso do protótipo.
Aos engenheiros Danilo e Gisely Adur, que sempre se mostraram prestativos e
solícitos.
Aos engenheiros e amigos Persio Farah Seredinick, Ricardo Paes Paulo e Walter
Meneguette dos Santos pela disponibilização bibliográfica.
À Patricia Facco Cardoso de Melo, pela confecção do banner referente a este
trabalho.
À UTFPR e aos professores, pelo conhecimento adquirido ao longo da engenharia,
que muito contribuíram para nossa formação profissional e pessoal.
Ao CITEC, pela disponibilização do laboratório para ensaios do protótipo do filtro
ativo.
Aos membros da banca examinadora pelas revisões, sugestões e correções.
Aos amigos e familiares por todo incentivo e pela compreensão da importância que
essa obra representa em nossas vidas.
RESUMO
Este trabalho utiliza o controle digital para implementação de um filtro ativo série
monofásico, com o objetivo de corrigir distorções harmônicas de tensão advindas da rede
elétrica. A implementação do projeto utiliza como elemento de controle o processador digital
de sinais DSP 56F8013, o qual é responsável pelo monitoramento das condições da rede
elétrica e também pelo monitoramento e controle da qualidade da tensão na carga.
Apresenta-se uma revisão bibliográfica sobre alguns assuntos referentes à qualidade
de energia elétrica, como distorção harmônica e os principais filtros utilizados para correção
dessas distorções. Também é apresentada a teoria sobre as estruturas e métodos aplicados no
projeto (inversor meia ponte, filtro LC, técnica de modulação por largura de pulso PWM e
controle digital), bem como um estudo sobre o processador digital utilizado (no caso, o DSP
56F8013, fabricado pela Freescale).
Para aplicação prática dos conhecimentos revisados construiu-se um protótipo, sendo
apresentado desde o desenvolvimento da placa de circuito impresso utilizada nesse protótipo
até a lógica do algoritmo de controle gravado no DSP. São também justificados todos os
cálculos e as simulações efetuadas para o dimensionamento e desenvolvimento da parte de
potência do circuito.
Por fim, são apresentados os resultados práticos obtidos com o protótipo
implementado, utilizando-se uma carga de 200W para comprovar o desempenho do filtro
ativo proposto.
Palavras-chave:
Filtro ativo série, inversor meia ponte, controle digital, DSP, TDH, distorção harmônica, filtro
LC.

ABSTRACT
This work uses the digital control for implementation of a single-phase series active
filter, in order to correct voltage harmonic distortions of the electric line. The implementation
of the project uses digital signal processor (DSP 56F8013) as control element, which is
responsible for the monitoring of the conditions of the line and also for the tracking and
control of the quality of the voltage in the load.
A bibliographical revision is presented on some subjects referring to the quality of
electric energy, as harmonic distortion and the main filters used for correction of these
distortions. Also it is presented the theory on structures and methods applied in the project
(half-bridge inverter, LC filter, pulse width modulation and digital control), as well as a study
on the implemented digital processor (in the case, the DSP 56F8013, manufactured by
Freescale).
For experimental analysis a lab model was built, being presented since the
development of the printed circuit board until the logic of the control recorded in the DSP.
The calculations and the simulations performed for development of the power circuit are all
confirmed.
Finally, are presented the experimental results using the fully operational lab model
using a 200 W load that confirmed theoretical analysis.
Keywords:
Series active filter, half-bridge inverter, digital control, DSP, THD, harmonic distortion, LC
filter.
LISTA DE ABREVIATURAS
Abreviatura Descrição A/D Analógico/Digital
ADC Analog-to-Digital Converter (Conversor analógico digital) AGU Address Generation Unit (Unidade geradora de endereços)
CA Componente Alternada CC Componente Contínua
COP Computer Operating Properly
CSI Current Source Inverter (Inversor com fonte de corrente) D/A Digital/Analógico
Data ALU Data Arithmetic Logic Unit (Unidade lógica aritmética) DSC Digital Signal Controler (Controlador digital de sinais)
DSP Digital Signal Processor (Processador digital de sinais) FA Filtro Ativo de Potência
FAP Filtro Ativo Paralelo
FAS Filtro Ativo Série FD Fator de Distorção
IEC International Electrotechnical Commission
IEEE Institute of Electrical and Electronics Engineers
JTAG Join Teste Action Group
MAC Multiply-Accumulate
MIPS Milhões de Instruções por Segundo
NTC Negative Thermal Coefficient (Coeficiente Térmico Negativo) PCC Ponto de Concentração Comum
PD Controlador Proporcional Derivativo PI Controlador Proporcional Integral
PID Controlador Proporcional Integral Derivativo
PLC Power Line Condition
PWM Pulse Width Modulation (Modulação por largura de pulsos)
RAM Random Access Memory (Memória de acesso aleatório) TDH Taxa de Distorção Harmônica TMR Timer (Temporizador)
VSI Voltage Source Inverter (Inversor com fonte de tensão)
ZOH Zero Order Hold (Amostrador de ordem zero)
LISTA DE SÍMBOLOS
Abreviatura Descrição
C Capacitor
Cf Capacitor de filtragem
D Diodo
E Tensão
E(s) Sinal de erro de um sistema no domínio da freqüência
e(t) Sinal de erro de um sistema no domínio do tempo
f Freqüência
fa Freqüência de amostragem
fp Freqüência da onda portadora triangular
i Corrente
io Corrente de saída ou corrente na carga
io(t) Corrente instantânea na carga
Io1ef Valor eficaz da componente fundamental da corrente de carga
Ioef Corrente eficaz total na carga
Iomáx Corrente máxima
efcI 1 Corrente eficaz da fundamental no capacitor
is Corrente da fonte
Idpk Corrente de pico máxima nos diodos
Idef Corrente eficaz máxima nos diodos
Idmed Corrente média nos diodos
maxchaveI Corrente máxima sobre as chaves semicondutoras
chaveefI Corrente eficaz sobre as chaves semicondutoras
chavemedI Corrente média sobre as chaves semicondutoras
ILmax Corrente máxima no indutor
Kd Ganho da parcela derivativa
Ki Ganho da parcela integral
Kp Ganho da parcela proporcional
Lf Indutor de filtragem do filtro LC
M Índice de modulação PWM
η Rendimento
P Potência
Pin Potência de entrada ou na fonte
Pout Potência de saída ou na carga
Po1 Potência da componente fundamental na saída ou na carga
R Resistência
Ro Resistência equivalente da carga
)(ondsR Resistência drain-source do MOSFET
Rjc Resistência térmica entre a junção e cápsula do MOSFET
Rcs Resistência térmica entre cápsula e dissipador
Rja Resistência térmica total entre a junção e o ambiente externo
S Chave semicondutora
T Período de chaveamento
Ta Período de amostragem
Td Tempo derivativo
Ti Tempo integral
Tp Semiperíodo da onda portadora triangular
Ts Período da onda portadora senoidal
tc Tempo de condução dos diodos
maxdPKV Tensão reversa máxima sobre os diodos
U(s) Ação de controle no domínio da freqüência
u(t) Ação de controle no domínio do tempo
V Tensão
v n(t) Amplitude instantânea da tensão do harmônico de ordem n
v(t) Tensão instantânea
V*dc Tensão de referência contínua
V1 Amplitude da onda moduladora senoidal
V2 Valor de pico da onda portadora triangular
Vca Tensão no capacitor
Vcmin Tensão mínima do capacitor
min1PKcV Tensão de pico mínima do capacitor
Vdc Tensão contínua do barramento CC do inversor
Vh Tensão harmônica
Vin Tensão de entrada (alimentação)
Vinmáx Tensão de entrada máxima
Vinmin Tensão de entrada mínima
Vo Tensão de saída ou tensão na carga
vo(t) Tensão instantânea na carga
vo1(t) Função da componente fundamental da tensão
vo1ef Valor eficaz da componente fundamental da tensão
Voef Valor eficaz da tensão
Vomáx Valor máximo da tensão de saída ou na carga
Vout Tensão de saída
Vs Tensão da fonte
Vshr Harmônicos da tensão da rede
VLmin Tensão mínima sobre o indutor
AMVACINV Amostra de tensão da entrada CA
VF Tensão de condução do diodo
Z1 Impedância da carga
Zo Impedância da carga
ξ Fator de amortecimento
ωo Freqüência angular
τ Constante de tempo
LISTA DE FIGURAS
Fig. 1.1 – Forma de onda de tensão v(t) distorcida pela presença de harmônicos e formas de ondas v1(t), v3(t) e
v5(t), representando individualmente as componentes harmônicas 1ª, 3ª e 5ª respectivamente
(CAMARGO,2002). .................................................................................................................................... 17
Fig. 1.2 – Exemplo de topologia de filtro ativo série (RIBEIRO, 2003, com modificações). ............................... 19
Fig. 1.3 - Tensões de entrada(Vs), no capacitor Ca (Vca) e de saída (Vo da carga) (100V/div. – 2ms/div.)
(RIBEIRO,2003).......................................................................................................................................... 20
Fig. 2.1 – Espectro harmônico de uma onda distorcida com a presença de harmônicos (CAMARGO, 2002). .... 25
Fig. 2.2 - Filtro passivo de corrente confinando “n” harmônicos (ERICKSON & MAKSIMOVIC, 2004). ........ 28
Fig. 2.3 – Funcionamento de um FAP (Lindeke, 2003). ....................................................................................... 30
Fig. 2.4 – Princípio de funcionamento de um FAS (LINDEKE, 2003). ................................................................ 31
Fig. 2.5 – Filtro Ativo Universal (LINDEKE, 2003)............................................................................................. 32
Fig. 2.6 – Topologias de filtros híbridos: a)FAP associado com filtro passivo paralelo e b) FAS associado com
filtro passivo paralelo (CAMARGO, 2002)................................................................................................. 33
Fig. 2.7 – Diagrama de blocos básico do inversor................................................................................................. 34
Fig. 2.8 – Topologias básicas do inversor ponte completa(a) e meia ponte(b)...................................................... 36
Fig. 2.9 – Etapas de funcionamento do inversor meia ponte (URBANETZ, 2002, com modificações). .............. 37
Fig. 2.10 – Principais formas de onda para o inversor meia ponte (BATSCHAUER,2002). ................................ 39
Fig. 2.11 – Reguladores de tensão série (a) e chaveado (b), supondo uma tensão de entrada CC (POMILIO,
2006). ........................................................................................................................................................... 42
Fig. 2.12 – Princípio da modulação PWM(POMILIO, 2006, com modificações)................................................. 44
Fig. 2.13 – Formas de onda de tensão e de corrente em modulação PWM de dois e de três níveis (POMILIO,
2006, com modificações). ............................................................................................................................ 45
Fig. 2.14 – Topologias de filtros de saída (MARTINS & BARBI, 2005). ............................................................ 47
Fig. 2.15 – Exemplo de formas de ondas obtidas para um inversor monofásico em ponte completa com filtro
LC.(a) Tensão gerada pelo inversor; (b) Tensão na saída do filtro; (c) Espectro da tensão na saída do filtro
(MICHELS et al., 2005)............................................................................................................................... 48

Fig. 2.16 – Freqüência de corte(fo) e exemplo de atenuações mais suaves e mais acentuadas. ............................. 49
Fig. 2.17 – Diagrama de Bode da função de transferência do filtro LC para carga resistiva. ............................... 50
Fig. 2.18 – (a) Degrau unitário; (b) Sinal de saída do controlador (OGATA, 2000)............................................. 54
Fig. 2.19 – Rampa unitária de entrada(a) e sinal de saída do controlador (b). (OGATA, 2000). .......................... 55
Fig. 2.20 – Rampa unitária de entrada(a) e sinal de saída do controlador (b). (OGATA, 2000). .......................... 56
Fig. 2.21 – Diagrama em blocos de um sistema de controle discreto (RIBEIRO, 2003). ..................................... 58
Fig. 2.22 – Sinal contínuo i(t) e sinal amostrado in (LINDEKE, 2003). ................................................................ 58
Fig. 2.23 – Efeito de aliasing que ocorre na amostragem (LINDEKE, 2003)....................................................... 59
Fig. 2.24 – (a) Sinal amostrado no formato trem de pulsos; (b) Sinais de entrada e saída o amostrador e do
extrapolador de ordem zero (ZOH) (RIBEIRO, 2003). ............................................................................... 60
Fig. 2.25 – Diagrama em blocos do sistema de controle digital do filtro ativo série (Ribeiro, 2003, com
modificações)............................................................................................................................................... 62
Fig. 2.26 – Diagrama de blocos do núcleo 56800E (FREESCALE,2006a). ......................................................... 65
Fig. 2.27 – Diagrama de blocos do 56F8013 (FREESCALE,2006c). ................................................................... 66
Fig. 2.28 – Pinagem do 56F8013 (FREESCALE, 2006c). .................................................................................... 67
Fig. 2.29 – Diagrama do circuito simulado do FAS............................................................................................... 68
Fig. 2.30 – Tensão de entrada Vs distorcida pelo terceiro harmônico. .................................................................. 70
Fig. 2.31 – Análise de Fourier da tensão de entrada.............................................................................................. 70
Fig. 2.32 – Tensão de saída Vo. ............................................................................................................................. 71
Fig. 2.33 – Análise de Fourier da tensão de saída Vo. ........................................................................................... 72
Fig. 2.34 – Tensão de entrada Vs, tensão de saída Vo e tensão no capacitor C3. ................................................... 72
Fig. 3.1 – Diagrama de blocos do filtro ativo série a ser implementado. .............................................................. 74
Fig. 3.2 – Circuito retificador monofásico operando como dobrador de tensão.................................................... 76
Fig. 3.3 – Diagrama esquemático da fonte auxiliar 12 V (KÜSTER, 2006). ........................................................ 77
Fig. 3.4 – Esquema da fonte de alimentação TNY de 12 Vcc e do regulador de tensão de 3,3 Vcc......................... 77
Fig. 3.5 – Pinagem do DSP 56F8013. ................................................................................................................... 78
Fig. 3.6 – Divisor resistivo para amostragem da tensão de entrada....................................................................... 80
Fig. 3.7 – Amplificador operacional utilizado na obtenção de 1,65 V. ................................................................. 81
Fig. 3.8 – Esquema de acionamento das chaves do inversor meia ponte através do driver................................... 82
Fig. 3.9 – Pinagem HCPL-316J............................................................................................................................. 83
Fig. 3.10 – Esquema simplificado do circuito do FAS. ......................................................................................... 84
Fig. 3.11 – Leiaute da placa - distribuição dos componentes. ............................................................................... 85
Fig. 3.12 – Leiaute da placa - TopLayer. .............................................................................................................. 85
Fig. 3.13 - Leiaute da placa - BottomLayer ........................................................................................................... 86
Fig. 3.14 - Leiaute da placa - perspectiva 3D........................................................................................................ 86
Fig. 3.15 – Formas de onda: a) da tensão de entrada; b) da tensão nos capacitores Vc1 e Vc2 e oscilação Vc no
barramento; c) tempo de condução dos diodos. ........................................................................................... 88
Fig. 3.16 – Esquema simulado do retificador monofásico operando como dobrador de tensão............................ 91
Fig. 3.17 – Resultados da simulação do circuito dobrador de tensão. ................................................................... 92
Fig. 3.18 – Circuito simulado para avaliar a corrente nos MOSFETs. .................................................................. 94
Fig. 3.19 – Correntes nas chaves do inversor meia ponte...................................................................................... 95
Fig. 3.20 – Telas do software utilizado para o cálculo dos parâmetros do indutor................................................ 98
Fig. 3.21 – Gráfico da variação da indutância em relação à variação de corrente no indutor. .............................. 99
Fig. 3.22 – Esquemático representativo das resistências térmicas entre o semicondutor e o ambiente externo. . 101
Fig. 3.23 – Interface da etapa de potência e malha feed-forward implementada no DSP. ................................. 103
Fig. 3.24 – Diagrama em blocos do controlador repetitivo (ANDRADE, 2005) ................................................ 105
Fig. 3.25 - Interface da etapa de potência e malha feed-forward com repetitivo implementada no DSP. ........... 106
Fig. 3.26 – Algoritmo implementado do compensador repetitivo. ...................................................................... 108
Fig. 3.27 – Janela do compilador CodeWarrior. ................................................................................................. 109
Fig. 3.28 – Estrutura geral das entradas e saídas do DSP. ................................................................................... 110
Fig. 3.29 – Sinalização dos LEDs indicadores, conforme a situação................................................................... 111
Fig. 3.30 – Fluxograma simplificado do programa. ............................................................................................ 112
Fig. 3.31 – Vista superior da placa de circuito impresso. .................................................................................... 113
Fig. 3.32 – Vista da parte inferior da placa de circuito impresso. ....................................................................... 114
Fig. 3.33 – Fonte TNY 12 Vcc. ............................................................................................................................. 115
Fig. 3.34 – Driver para o acionamento das chaves.............................................................................................. 115
Fig. 3.35 – Protótipo com a fonte TNY e driver do FAS...................................................................................... 116
Fig. 3.36 – DSP soldado na placa........................................................................................................................ 117
Fig. 3.37 – Filtro LC de saída afixado à placa..................................................................................................... 117
Fig. 3.38 – MOSFETs e seus dissipadores........................................................................................................... 118
Fig. 3.39 – Protótipo completo. ........................................................................................................................... 119
Fig. 4.1 – Tensão de entrada e barramentos positivo e negativo (50V/div – 5ms/div)........................................ 120
Fig 4.2 – Comandos PWM do inversor meia ponte (2V/div - 10us/div). ............................................................ 121
Fig. 4.3 – (a) Tensão de saída sem correção (100V/div - 5ms/div); (b) Tensão de saída corrigida pelo filtro ativo
(100V/div - 5ms/div). ................................................................................................................................ 122
Fig. 4.4 – Tensão de saída (100V/div - 10ms/div) e tensão no capacitor série (10V/div - 10ms/div). ................ 122
Fig. 4.5 – Espectro harmônico da tensão sem correção....................................................................................... 123
Fig. 4.6 – Espectro harmônico da tensão com correção. ..................................................................................... 124
Fig. 4.7 – Tensão de entrada (50V/div – 10ms/div) e tensão no capacitor série (20V/div – 10ms/div). ............ 125
Fig. 4.8 – Espectro harmônico da tensão de entrada a ser corrigida.................................................................... 125
Fig. 4.9 – Espectro harmônico da tensão no capacitor série. ............................................................................... 126
Fig. 4.10 – (a) Tensão de entrada (50V/div - 2,5ms/div); (b) Tensão de saída corrigida pelo filtro ativo (50V/div
- 2,5ms/div)................................................................................................................................................ 126
Fig. 4.11 – Espectro harmônico da tensão de saída corrigida.............................................................................. 127
Fig. 4.12 – Espectro harmônico percentual em relação a amplitude da fundamental (a) Tensão de entrada; (b)
Tensão de saída corrigida pelo filtro.......................................................................................................... 128
Fig. 4.13 – Tensão de entrada (100V/div - 10ms/div) e tensão de saída (100V/div - 10ms/div)......................... 129
Fig. 4.14 – Espectro harmônico da tensão de entrada. ........................................................................................ 129
Fig. 4.15 – Espectro harmônico da tensão de saída. ............................................................................................ 130
Fig. 4.16 – (1) Tensão de saída (100V/div - 10ms/div); (2) Tensão de entrada (100V/div - 10ms/div); (3)
Corrente de saída (500mA/div - 10ms/div)................................................................................................ 131
Fig. 4.17 – Espectro harmônico da tensão de entrada com carga. ....................................................................... 131
Fig. 4.18 – Espectro harmônico da tensão de saída com carga............................................................................ 132
Fig. 4.19 – Tensão e corrente de saída do filtro ativo.......................................................................................... 133
Fig. 4.20 – Tensão composta pela componente fundamental e o terceiro harmônico (50V/div – 2,5ms/div). .... 134
Fig. 4.21 – Espectro harmônico da tensão produzida com terceiro harmônico. .................................................. 135
Fig. 4.22 – Tensão de entrada, tensão de saída e tensão no capacitor série (50V/div - 2,5ms/div). .................... 135
Fig. 4.23 – Composição da tensão no capacitor série.......................................................................................... 136
Fig. 4.24 – Espectro harmônico referente à tensão de saída................................................................................ 136
Fig. 4.25 – Tensão composta pela componente fundamental e o quinto harmônico (50V/div – 2,5ms/div). ...... 137
Fig. 4.26 – Espectro harmônico da tensão produzida com quinto harmônico. .................................................... 138
Fig. 4.27 – Tensão de entrada, tensão de saída e tensão no capacitor série (50V/div - 2,5ms/div). .................... 138
Fig. 4.28 – Espectro harmônico da tensão de saída. ............................................................................................ 139
LISTA DE TABELAS
Tabela 2.1 - Limites de distorção de tensão (POMILIO, 1995a)........................................................................... 26
Tabela 3.1 – Simbologia e função dos pinos do DSP. ........................................................................................... 78
Tabela 3.2 – Características elétricas do resistor NTC SCK152R58, conforme datasheet. .................................. 87
Tabela 3.3 – Características elétricas do diodo 1N5408, conforme datasheet. ..................................................... 91
Tabela 3.4 – Características elétricas da chave semicondutora IRF840, conforme datasheet............................... 96
Tabela 4.1 – Resultados obtidos com o protótipo implementado........................................................................ 139
SUMÁRIO
1 INTRODUÇÃO GERAL .................................................................................................17
1.1 INTRODUÇÃO...................................................................................................................17
1.2 PROBLEMA .......................................................................................................................18
1.3 JUSTIFICATIVA ...............................................................................................................20
1.4 OBJETIVOS .......................................................................................................................21 1.4.1 OBJETIVO GERAL...................................................................................................................... 21 1.4.2 OBJETIVOS ESPECÍFICOS ........................................................................................................ 21
1.5 MÉTODO DE PESQUISA.................................................................................................22
1.6 ESTRUTURA DO TRABALHO.......................................................................................22
2 REVISÃO BIBLIOGRÁFICA ........................................................................................24
2.1 DISTORÇÕES HARMÔNICAS E SUAS CARACTERÍSTICAS.................................24 2.1.1 DEFINIÇÃO DE HARMÔNICOS................................................................................................ 24 2.1.2 TAXA DE DISTORÇÃO HARMÔNICA (TDH) E FATOR DE DISTORÇÃO (FD)................. 25 2.1.3 NORMA SOBRE DISTORÇÃO HARMÔNICA DE TENSÃO: A IEC 519 ............................... 26
2.2 FILTROS PARA A CORREÇÃO DAS DISTORÇÕES HARMÔNICAS ...................27 2.2.1 FILTROS PASSIVOS ................................................................................................................... 27 2.2.2 FILTROS ATIVOS ....................................................................................................................... 29
2.2.2.1 Filtro Ativo Paralelo............................................................................................................. 30 2.2.2.2 Filtro Ativo Série ................................................................................................................. 31 2.2.2.3 Filtro Ativo Universal .......................................................................................................... 32 2.2.2.4 Filtro Híbrido ....................................................................................................................... 33
2.3 ANÁLISE DAS ESTRUTURAS UTILIZADAS NO FILTRO ATIVO SÉRIE............34 2.3.1 INVERSOR ................................................................................................................................... 34
2.3.1.1 Tipos de inversores .............................................................................................................. 35 2.3.1.2 O inversor meia ponte de tensão .......................................................................................... 37 2.3.1.3 Equacionamento do inversor meia ponte ............................................................................. 39 2.3.1.4 O controle da tensão nos conversores CC-CA ..................................................................... 42
2.3.2 A MODULAÇÃO PWM SENOIDAL APLICADA A INVERSORES ........................................ 43 2.3.3 FILTRO LC DE SAÍDA APLICADO AO INVERSOR MEIA PONTE ...................................... 46
2.3.3.1 Topologias de filtros para inversores de tensão ................................................................... 47 2.3.3.2 O filtro LC passa-baixas....................................................................................................... 47
2.3.4 CRITÉRIOS PARA A DEFINIÇÃO DA METODOLOGIA DE PROJETO DO FILTRO DE SAÍDA 51
2.3.4.1 Formulação para o capacitor e o indutor de filtragem.......................................................... 52
2.4 MÉTODOS DE CONTROLE............................................................................................52 2.4.1 COMPENSADORES BÁSICOS................................................................................................... 53
2.4.1.1 Compensador Proporcional Integral (PI) ............................................................................. 53 2.4.1.2 Proporcional Derivativo (PD) .............................................................................................. 54 2.4.1.3 Proporcional Integral Derivativo (PID) ............................................................................... 55
2.4.2 CONTROLE DIGITAL................................................................................................................. 56 2.4.2.1 Conversão Analógico-Digital (A/D) .................................................................................... 57
2.4.3 ESTRATÉGIA DE CONTROLE DO FAS.................................................................................... 60 2.4.3.1 Valores médios instantâneos ................................................................................................ 61
2.5 PROCESSADOR DIGITAL DE SINAIS (DSP)..............................................................63 2.5.1 CARACTERÍSTICAS DO DSP 56F8013..................................................................................... 64
2.6 SIMULAÇÃO......................................................................................................................68

2.6.1 PRINCIPAIS FORMAS DE ONDA ............................................................................................. 69
2.7 CONCLUSÃO.....................................................................................................................73
3 PROJETO DO FILTRO ATIVO SÉRIE........................................................................74
3.1 INTRODUÇÃO...................................................................................................................74
3.2 DESCRIÇÃO DO CIRCUITO..........................................................................................74 3.2.1 RETIFICADOR MONOFÁSICO OPERANDO COMO DOBRADOR DE TENSÃO................ 75 3.2.2 FONTE CC 12 V E REGULADOR 3,3 V .................................................................................... 76 3.2.3 O DSP E A AQUISIÇÃO DE SINAIS.......................................................................................... 78
3.2.3.1 Aquisição de Sinais .............................................................................................................. 80 3.2.4 CIRCUITO DE ACIONAMENTO DAS CHAVES (DRIVER) .................................................... 82 3.2.5 ESQUEMA GERAL SIMPLIFICADO......................................................................................... 83 3.2.6 LEIAUTE DA PLACA ................................................................................................................. 84
3.3 MEMORIAL DE CÁLCULOS .........................................................................................87 3.3.1 RESISTOR NTC ........................................................................................................................... 87 3.3.2 CIRCUITO DOBRADOR DE TENSÃO ...................................................................................... 88
3.3.2.1 Dimensionamento dos capacitores ....................................................................................... 89 3.3.2.2 Dimensionamento dos diodos .............................................................................................. 90 3.3.2.3 Simulação............................................................................................................................. 91
3.3.3 DIMENSIONAMENTO DAS CHAVES SEMICONDUTORAS ................................................ 93 3.3.3.1 Circuito Snubber .................................................................................................................. 96
3.3.4 DIMENSIONAMENTO DO INDUTOR E DO CAPACITOR DE FILTRAGEM....................... 97 3.3.5 CÁLCULO TÉRMICO ................................................................................................................. 99
3.3.5.1 Perdas nos diodos do dobrador de tensão........................................................................... 100 3.3.5.2 Perdas nas chaves semicondutoras..................................................................................... 100
3.4 PROJETO DO CONTROLE DIGITAL ........................................................................102 3.4.1 LAÇO FEED-FORWARD ........................................................................................................... 102 3.4.2 LAÇO FEED-FORWARD E COMPENSADOR REPETITIVO................................................. 104 3.4.3 CONTROLE REPETITIVO........................................................................................................ 104
3.4.3.1 Implementação do Controlador Repetitivo ........................................................................ 106
3.5 IMPLEMENTAÇÃO E DESCRIÇÃO DO PROGRAMA UTILIZADO ...................109
3.6 IMPLEMENTAÇÃO DO PROTÓTIPO........................................................................113 3.6.1 PLACA DE CIRCUITO IMPRESSO.......................................................................................... 113 3.6.2 FONTE TNY 12 V E DRIVER ..................................................................................................... 114 3.6.3 DSP.............................................................................................................................................. 116 3.6.4 FILTRO LC ................................................................................................................................. 117 3.6.5 CHAVES SEMICONDUTORAS ............................................................................................... 118 3.6.6 PROTÓTIPO COMPLETO......................................................................................................... 118
3.7 CONCLUSÃO...................................................................................................................119
4 RESULTADOS EXPERIMENTAIS ............................................................................120
4.1 CIRCUITO DOBRADOR DE TENSÃO........................................................................120
4.2 MALHA ABERTA COM LAÇO FEED-FORWARD ..................................................121
4.3 MALHA FECHADA COM LAÇO FEED-FORWARD E REPETITIVO .................124
4.4 TABELA COMPARATIVA COM OS RESULTADOS OBTIDOS............................139
4.5 CONCLUSÃO...................................................................................................................140
5 CONCLUSÕES GERAIS ..............................................................................................141
6 REFERÊNCIAS BIBLIOGRÁFICAS .........................................................................143
7 APÊNDICES .................................................................................................................147
7.1 APÊNDICE 1 – ESQUEMÁTICO COMPLETO DO CIRCUITO..............................147
7.2 APÊNDICE 2 – DATASHEET DO DIODO 1N5408.....................................................149
7.3 APÊNDICE 3 – DATASHEET DO MOSFET IRF840 .................................................150
7.4 APÊNDICE 4 – DATASHEET DO DISSIPADOR HS3512 .........................................151

17
1 INTRODUÇÃO GERAL
1.1 INTRODUÇÃO
Nas últimas décadas, com a popularização dos aparelhos eletrônicos, ocorreu
também uma invasão de fontes chaveadas no sistema elétrico, as quais trouxeram vários
benefícios, principalmente reduzindo o tamanho desses aparelhos e aumentando a sua
eficiência. Porém, o uso dessas fontes causa transtornos na rede elétrica, a chamada distorção
harmônica. Equipamentos como fornos a arco, inversores de freqüência, sistemas de
iluminação com lâmpadas de descarga, microcomputadores, aparelhos de som e outros
eletrodomésticos são alguns dos responsáveis pela poluição da rede elétrica com harmônicos.
Na figura 1.1 tem-se a forma de onda de uma tensão distorcida e sua decomposição
na freqüência fundamental e em seus harmônicos.
Fig. 1.1 – Forma de onda de tensão v(t) distorcida pela presença de harmônicos e formas
de ondas v1(t), v3(t) e v5(t), representando individualmente as componentes harmônicas
1ª, 3ª e 5ª respectivamente (CAMARGO,2002).
18
Os harmônicos apresentam freqüências múltiplas à freqüência da fundamental. Por
exemplo, o 3º harmônico teria, no caso de uma rede elétrica de 60 Hz, uma freqüência três
vezes maior que a da fundamental, ou seja, 180 Hz. Esse sinal de 180 Hz se soma a
componente de freqüência fundamental do sinal, ocasionando sua distorção. O resultado é a
distorção na tensão de saída dos transformadores de distribuição.
Os harmônicos afetam a qualidade da energia e podem causar vários transtornos.
Existem várias formas de se corrigir essas perturbações elétricas, como a utilização de filtros
passivos, híbridos ou ativos.
Tendo em vista a severidade da poluição harmônica dos sistemas elétricos e o fato de
ser uma solução dinâmica e ajustável, os filtros ativos têm sido foco de inúmeros trabalhos
técnicos nos últimos anos (RIBEIRO, 2003).
Este projeto consiste no estudo e implementação de um filtro ativo série monofásico
para compensação de harmônicos de tensão causados por cargas não-lineares controlado por
um processador digital de sinais (DSP).
1.2 PROBLEMA
Equipamentos de telecomunicações e equipamentos médicos em geral são sensíveis a
componentes harmônicas de tensão, ou seja, tais equipamentos necessitam de uma tensão cuja
senóide seja a mais perfeita possível para que mantenham a qualidade de suas funções. Pela
ampla utilização desses equipamentos e pelos danos que os harmônicos exercem sobre eles,
existe a necessidade de se filtrar esses harmônicos da rede a fim de minimizar os prejuízos
que os mesmos causam.
Segundo Pomílio (1997), o grau com que harmônicos podem ser tolerados em um
sistema de alimentação depende da susceptibilidade da carga (ou da fonte de potência). Os
mais sensíveis são aqueles que, em seu projeto, assumem a existência de uma alimentação
senoidal como, por exemplo, equipamentos de comunicação e de processamento de dados. No
entanto, mesmo para as cargas de baixa susceptibilidade, a presença de harmônicos (de tensão
ou de corrente) pode ser prejudicial, produzindo maiores esforços nos componentes e
isolantes.
19
Nas últimas duas décadas houve uma maior preocupação com a regulamentação dos
níveis de distorção harmônica permitidos e algumas normas internacionais foram criadas,
como a IEC 1000-2-2 e as regulamentações IEEE-519.
Em termos de Brasil, as normas relacionadas à qualidade de energia elétrica se
encontram em processo de criação e desenvolvimento, estas provavelmente seguirão uma
tendência mundial, devido principalmente à globalização e aos processos de exportação e
importação de equipamentos eletro-eletrônicos (CAMARGO, 2002).
Dessa forma, faz-se necessária a busca de soluções para a filtragem desses
harmônicos, tanto para que as cargas sensíveis a essa distorção possam continuar operando
normalmente, quanto para o cumprimento das normas que virão a existir nacionalmente.
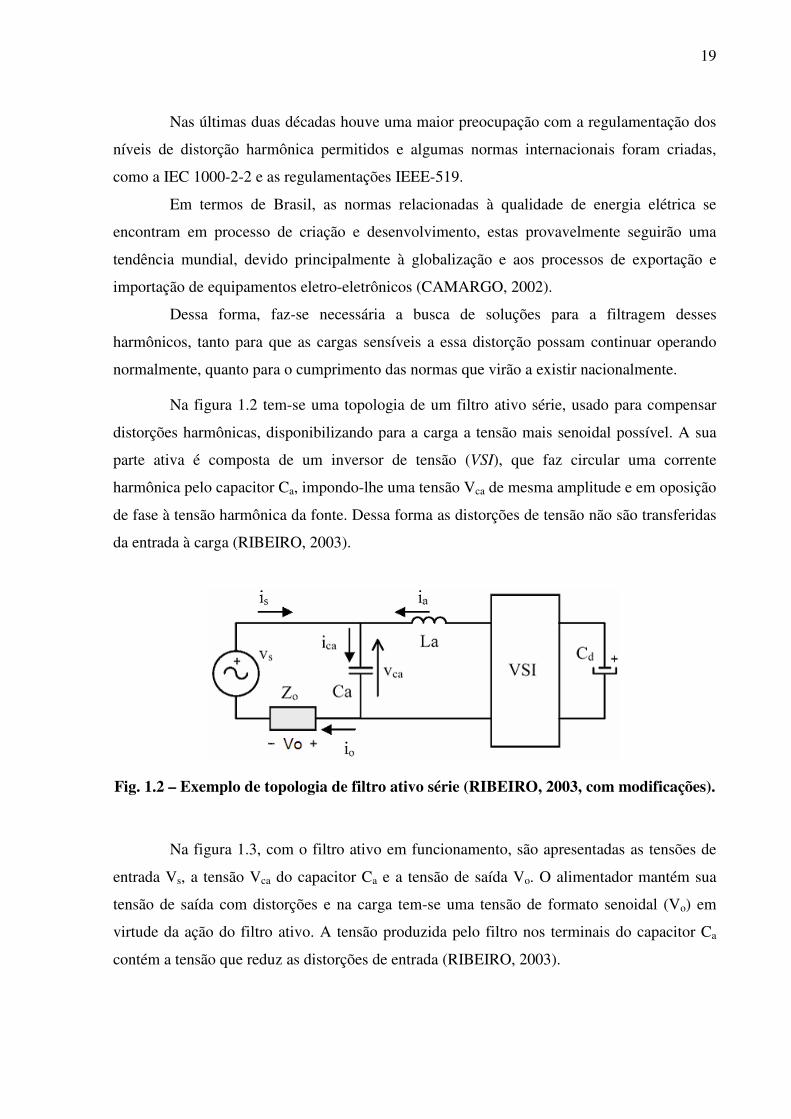
Na figura 1.2 tem-se uma topologia de um filtro ativo série, usado para compensar
distorções harmônicas, disponibilizando para a carga a tensão mais senoidal possível. A sua
parte ativa é composta de um inversor de tensão (VSI), que faz circular uma corrente
harmônica pelo capacitor Ca, impondo-lhe uma tensão Vca de mesma amplitude e em oposição
de fase à tensão harmônica da fonte. Dessa forma as distorções de tensão não são transferidas
da entrada à carga (RIBEIRO, 2003).
Fig. 1.2 – Exemplo de topologia de filtro ativo série (RIBEIRO, 2003, com modificações).
Na figura 1.3, com o filtro ativo em funcionamento, são apresentadas as tensões de
entrada Vs, a tensão Vca do capacitor Ca e a tensão de saída Vo. O alimentador mantém sua
tensão de saída com distorções e na carga tem-se uma tensão de formato senoidal (Vo) em
virtude da ação do filtro ativo. A tensão produzida pelo filtro nos terminais do capacitor Ca
contém a tensão que reduz as distorções de entrada (RIBEIRO, 2003).

20
Fig. 1.3 - Tensões de entrada(Vs), no capacitor Ca (Vca) e de saída (Vo da carga)
(100V/div. – 2ms/div.) (RIBEIRO,2003).
1.3 JUSTIFICATIVA
O filtro ativo série é uma das melhores soluções para compensar harmônicos na
tensão de alimentação de cargas sensíveis a essas distorções e apresenta a vantagem de, por se
tratar de uma abordagem corretiva, possibilitar a correção ou eliminação dos distúrbios do
sistema elétrico sem exigir a substituição do equipamento.
A razão principal pela definição deste projeto foi o desejo de aprofundamento nos
conhecimentos em eletrônica de potência e controle digital, aliando isso à área de qualidade
de energia, área esta foco de diversos estudos nos últimos tempos. O filtro ativo se encaixa
perfeitamente nesses interesses.
Assim, o projeto e a implementação desse filtro irá reunir principalmente conceitos
de eletrônica de potência, qualidade de energia e controle digital.

21
1.4 OBJETIVOS
1.4.1 OBJETIVO GERAL
Desenvolver um filtro ativo série monofásico para a correção de distorções
harmônicas de tensão controlado por um processador digital de sinais (DSP), para circuitos de
potência de até 200 W com entrada de 127 V.
1.4.2 OBJETIVOS ESPECÍFICOS
• Apresentar os principais tipos de filtros existentes, apresentando
comparações entre eles e também suas aplicações;
• Fazer uma revisão bibliográfica sobre distorção harmônica, controle digital e
processador digital de sinais (DSP);
• Conhecer o hardware do DSP a ser utilizado na implementação do projeto;
• Estudar a linguagem de programação utilizada no DSP;
• Analisar e definir o melhor método para implementar o protótipo, como tipo
de chaveamento, estratégia de controle, entre outros;
• Analisar e dimensionar os componentes necessários para a implementação
do filtro;
• Simular o circuito desenvolvido;
• Montar o protótipo;
• Realizar ensaios práticos para análise dos resultados obtidos.
22
1.5 MÉTODO DE PESQUISA
O método de pesquisa será através dos conceitos teóricos consolidados sobre filtros
ativos, em especial o série, apresentados em artigos, livros, sites na Internet, revistas, entre
outros.
A redação da monografia será realizada com base nas referências bibliográficas antes
pesquisadas. Nela serão descritos os principais tipos de filtros ativos, suas vantagens e suas
desvantagens.
Projetar-se-á um circuito base, o qual será aprimorado durante as pesquisas. O uso de
programas auxiliará nessa parte do projeto, como a utilização do ORCAD®, para a simulação
do circuito do filtro ativo, do CODEWARRIOR® para o desenvolvimento do algoritmo do
DSP.
Com o auxílio de um software dedicado, será feito o leiaute da placa de circuito
impresso, para posterior montagem do protótipo.
Finalmente, depois de concluído o protótipo, serão realizados ensaios em laboratório
para análise, obtenção de resultados e possíveis ajustes finais.
Durante todo o período do projeto haverá a necessidade de reuniões da equipe com o
professor orientador para que sejam definidos parâmetros do projeto.
1.6 ESTRUTURA DO TRABALHO
O trabalho será composto por cinco capítulos. No primeiro capítulo, apresentar-se-á a
introdução, os objetivos, as idéias e propostas e a metodologia de pesquisa utilizada.
O segundo capítulo será composto por todo o embasamento teórico, englobando os
principais tipos de filtros existentes, suas aplicações e topologias, as definições de distorção
harmônica, de controle digital e as características e propriedades do processador digital de
sinais (DSP).
O terceiro capítulo abordará o desenvolvimento do projeto, incluindo o memorial de
cálculos, a forma de controle do sistema e a topologia final do circuito. O quarto capítulo

23
apresentará os resultados obtidos com os ensaios e os ajustes efetuados. E finalmente, no
quinto e último capítulo, serão apresentadas as conclusões.
24
2 REVISÃO BIBLIOGRÁFICA
2.1 DISTORÇÕES HARMÔNICAS E SUAS CARACTERÍSTICAS
2.1.1 DEFINIÇÃO DE HARMÔNICOS
O sistema elétrico é composto por várias cargas não lineares, isto é, cargas que
drenam correntes com formato de onda diferente da onda de tensão que recebem. Essas
correntes distorcidas, quando circulam nas impedâncias da rede elétrica, acabam por
ocasionar distorções de tensão, gerando ondas cujo formato difere do senoidal padrão definido
para o sistema elétrico alternado. Dessa forma, a tensão de alimentação acaba por apresentar
deformações.
Utilizando-se do Teorema de Fourier, que afirma que toda onda de formato não
senoidal pode ser representada por uma série de ondas senoidais com freqüências distintas (e,
eventualmente, por uma componente contínua), pode-se representar a onda deformada através
de uma soma de ondas senoidais. Assim, é possível separar a onda senoidal desejada das
distorções nela presentes, os chamados harmônicos.
Tem-se, então, que os harmônicos são componentes senoidais, tanto de tensão como
de corrente, que apresentam freqüências inteiras e múltiplas da freqüência principal de um
sistema de energia, sendo que esta freqüência principal é geralmente chamada de freqüência
fundamental, normalmente de 50 Hz ou 60 Hz. No caso deste projeto, os harmônicos
estudados serão apenas os encontrados na forma de onda da tensão.
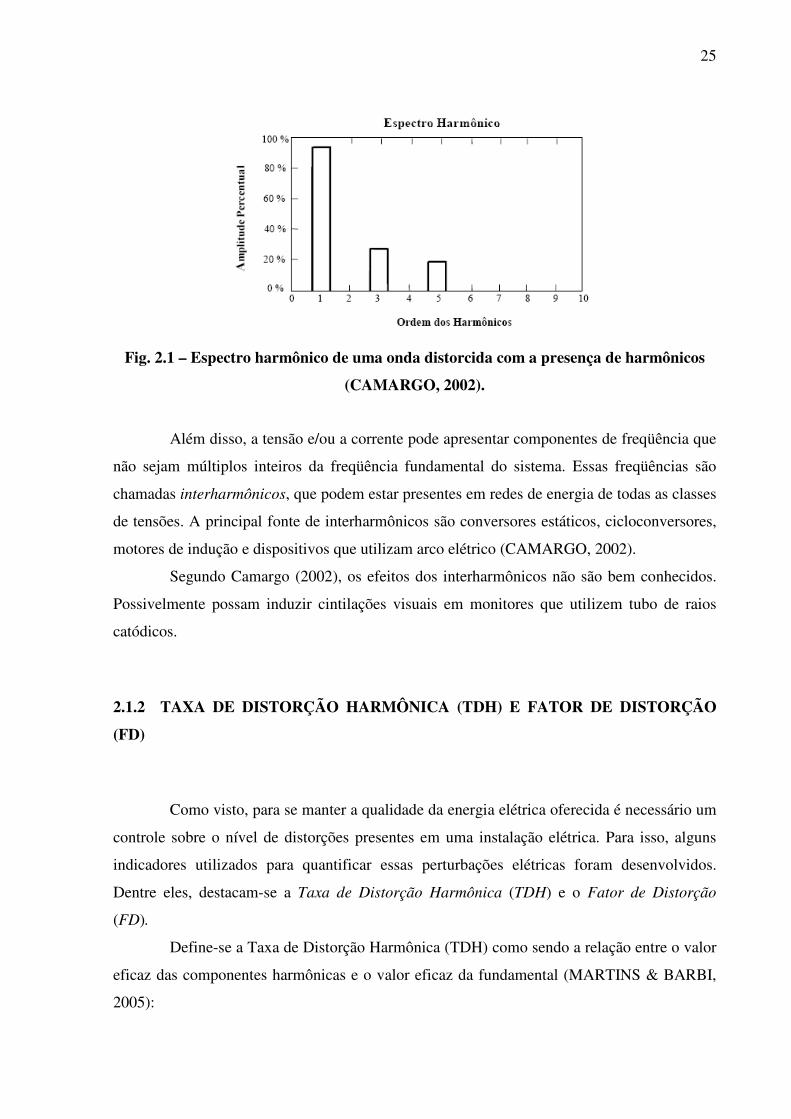
Segundo Filgueiras & Moura (2005), uma outra forma de demonstrar o Teorema de
Fourier é através da construção de um espectro de freqüência, conforme figura 2.1. Nessa
figura estão representadas as componentes harmônicas de 3ª (180 Hz) e 5ª (300 Hz) ordem,
além da componente fundamental (60 Hz). O espectro quantifica o percentual de contribuição
que cada componente harmônica tem sobre a onda deformada.
25
Fig. 2.1 – Espectro harmônico de uma onda distorcida com a presença de harmônicos
(CAMARGO, 2002).
Além disso, a tensão e/ou a corrente pode apresentar componentes de freqüência que
não sejam múltiplos inteiros da freqüência fundamental do sistema. Essas freqüências são
chamadas interharmônicos, que podem estar presentes em redes de energia de todas as classes
de tensões. A principal fonte de interharmônicos são conversores estáticos, cicloconversores,
motores de indução e dispositivos que utilizam arco elétrico (CAMARGO, 2002).
Segundo Camargo (2002), os efeitos dos interharmônicos não são bem conhecidos.
Possivelmente possam induzir cintilações visuais em monitores que utilizem tubo de raios
catódicos.
2.1.2 TAXA DE DISTORÇÃO HARMÔNICA (TDH) E FATOR DE DISTORÇÃO
(FD)
Como visto, para se manter a qualidade da energia elétrica oferecida é necessário um
controle sobre o nível de distorções presentes em uma instalação elétrica. Para isso, alguns
indicadores utilizados para quantificar essas perturbações elétricas foram desenvolvidos.
Dentre eles, destacam-se a Taxa de Distorção Harmônica (TDH) e o Fator de Distorção
(FD).
Define-se a Taxa de Distorção Harmônica (TDH) como sendo a relação entre o valor
eficaz das componentes harmônicas e o valor eficaz da fundamental (MARTINS & BARBI,
2005):

26
∑∞
=
=,...5,4,3,2
2
1
)(1
nefo
efon
VV
TDH , sendo: (1)
• efoV 1 : amplitude da tensão do harmônico fundamental.
• efonV : amplitude da tensão do harmônico de ordem ‘n’;
O conteúdo harmônico total de uma forma de onda é obtido a partir da TDH.
Contudo, se o interesse está em determinar o conteúdo harmônico de um determinado
componente, deve-se utilizar a definição do fator de distorção, que indica a quantia de
distorção harmônica que resta em uma forma de onda particular, após os harmônicos daquela
forma de onda terem sido submetidos a uma atenuação de segunda ordem, ou seja, divididos
por n². O FD é definido como (MARTINS & BARBI, 2005):
∑∞
=
=
...5,4,3,2
2
21
1
n
efno
efo n
V
VFD (2)
2.1.3 NORMA SOBRE DISTORÇÃO HARMÔNICA DE TENSÃO: A IEC 519
A tabela 2.1 apresenta os limites de distorção de tensão aceitáveis segundo a norma IEC 519.
Tabela 2.1 - Limites de distorção de tensão (POMILIO, 1995a). DISTORÇÃO INDIVIDUAL TDH
69 kV e abaixo 3% 5%
69.001 até 161 kV 1,5% 2,5%
Acima de 161 kV 1% 1,5%
27
2.2 FILTROS PARA A CORREÇÃO DAS DISTORÇÕES HARMÔNICAS
Os filtros para correção de distorções harmônicas, tanto de tensão como de corrente,
são divididos em três grupos: Passivo, Ativo e Híbrido.
2.2.1 FILTROS PASSIVOS
Os filtros passivos têm sido utilizados como uma solução para os problemas
resultantes dos harmônicos de corrente, mas apresentam várias desvantagens, nomeadamente
(WATANABE et al., 2001):
• Apenas filtram as freqüências para as quais foram previamente sintonizados;
• Precisam freqüentemente ser sobredimensionados, uma vez que como não é
possível limitar a sua operação a uma certa carga, acabam por absorver
harmônicos do próprio sistema elétrico;
• O dimensionamento dos filtros passivos deve ser coordenado com as
necessidades de potência reativa da carga, sendo difícil fazê-lo de forma a
evitar-se que o conjunto opere com fator de potência capacitivo em algumas
condições de funcionamento;
• São pesados e volumosos (em comparação com soluções ativas).
• Alguns circuitos não podem operar numa larga faixa da tensão de entrada
(90 a 240 V) (POMILIO, 1997);
• Não possibilitam regulação da tensão de saída (POMILIO, 1997);
• A resposta dinâmica é pobre (POMILIO, 1997);
• Podem ocorrer ressonâncias em outras freqüências elevando o nível dos
harmônicos que não causavam perturbações antes de sua instalação. Um
estudo criterioso da planta deve ser feito antes da instalação do filtro passivo
e também toda vez que houver aumento de carga, pois o filtro apresenta
características de compensação fixa (SOUZA, 2000);
• As características de filtragem dependem da impedância da rede (SOUZA,
2000).
28
Soluções passivas oferecem características como (POMILIO, 1997):
• Robustez;
• Alta confiabilidade;
• Insensibilidade a surtos;
• Operação silenciosa;
• A principal vantagem é a ausência de elementos ativos.
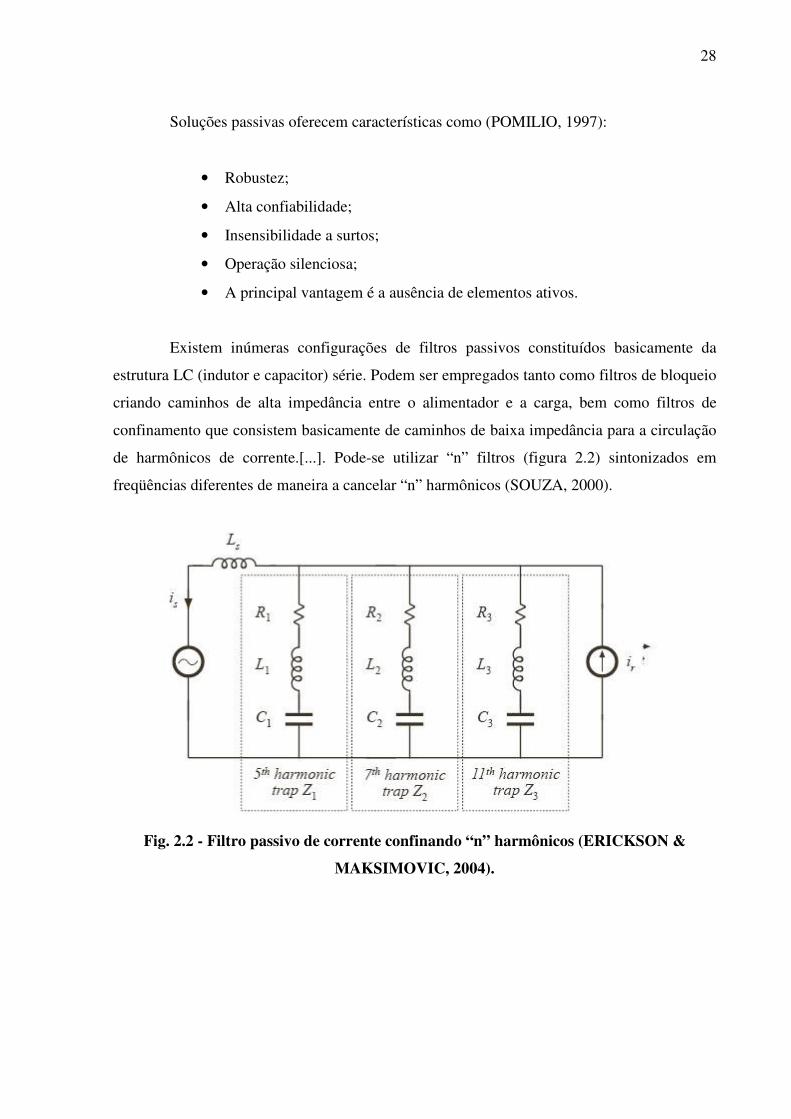
Existem inúmeras configurações de filtros passivos constituídos basicamente da
estrutura LC (indutor e capacitor) série. Podem ser empregados tanto como filtros de bloqueio
criando caminhos de alta impedância entre o alimentador e a carga, bem como filtros de
confinamento que consistem basicamente de caminhos de baixa impedância para a circulação
de harmônicos de corrente.[...]. Pode-se utilizar “n” filtros (figura 2.2) sintonizados em
freqüências diferentes de maneira a cancelar “n” harmônicos (SOUZA, 2000).
Fig. 2.2 - Filtro passivo de corrente confinando “n” harmônicos (ERICKSON &
MAKSIMOVIC, 2004).
29
2.2.2 FILTROS ATIVOS
É possível inferir da literatura técnica, que o filtro ativo de potência (FA) define um
equipamento ou sistema, incorporando circuitos eletrônicos, semicondutores de potência,
filtros e elementos armazenadores de energia (indutor ou capacitor), capaz de compensar a
potência reativa e harmônica das cargas não lineares (RIBEIRO, 2003).
Com todos os avanços tecnológicos, os FA’s, atualmente, são capazes de oferecer um
melhor desempenho, na compensação de determinados distúrbios periódicos, tais como,
harmônicos de tensão ou corrente, correntes de neutro e promover a devida correção no fator
de potência. Sua grande desvantagem ainda é o custo e complexidade, principalmente quando
usado isoladamente (CAMARGO, 2002).
Os filtros ativos são conectados com a rede de maneira a eliminar distorções da
tensão da rede (filtro ativo série) e harmônicas de corrente (filtro ativo paralelo). Comparando
com os filtros passivos, apresentam (SOUZA, 2000):
• Um volume menor;
• Não há problemas de ressonância com a rede;
• Têm a capacidade de se adaptar às modificações de carga, ou seja, as
características de compensação não são fixas.
Por ser um filtro dinâmico, não há a necessidade de se conhecer as características da
carga e da fonte, uma vez que o mesmo se adapta ao sistema em que é instalado, sendo
necessário apenas respeitar a potência para a qual foi projetado.
Os FA’s podem ser classificados segundo quatro categorias básicas (CAMARGO,
2002):
a) Quanto à natureza do barramento CC: pode ser tanto com inversor alimentado
por uma fonte de corrente (CSI - Current Source Inverter) quanto alimentado
por fonte de tensão (VSI – Voltage Source Inverter);
b) Quanto à configuração: série (FAS), paralelo (FAP) e o com associação de um
série com um paralelo, denominado Filtro Ativo Universal;
c) Quanto ao sistema de suprimento de energia: monofásico ou trifásico;
d) Quanto ao número de níveis do inversor: a dois níveis (para baixas potências) e
a três níveis (para altas potências).

30
2.2.2.1 Filtro Ativo Paralelo
O filtro do tipo paralelo (FAP) é geralmente empregado para corrigir harmônicos de
corrente de cargas não-lineares. Ele é conectado em paralelo com a rede e com a carga
(figura. 2.3), atuando como um dispositivo que injeta ou drena uma corrente do ponto de
concentração comum (PCC) de sorte que a corrente total drenada da rede elétrica, que é a
corrente da carga mais a do filtro ativo, seja senoidal. Pela rede elétrica circula então apenas a
componente fundamental da corrente da carga, resultando para a rede elétrica um
comportamento de carga resistiva (carga não-linear + filtro ativo) (LINDEKE, 2003).
Fig. 2.3 – Funcionamento de um FAP (Lindeke, 2003).
Os filtros ativos do tipo paralelo funcionam como um caminho de baixa impedância
para as harmônicas de corrente emulando uma carga linear. Se controlado adequadamente,
pode compensar também a defasagem entre a tensão da rede e a corrente da carga, de maneira
que o conjunto carga e filtro ativo absorvam da rede uma corrente senoidal e em fase com a
tensão da rede (SOUZA, 2000).
O filtro paralelo propriamente dito é representado pelo inversor fonte de tensão (VSI
– Voltage Source Inverter) e seu controle. [...]. Aqui vale dizer que correntes não desejadas,
na maioria dos casos são os harmônicos, mas podem, em alguns casos, serem correntes na
freqüência fundamental (corrente reativa ou de desequilíbrio) (WATANABE et al., 2001).
O FAP é utilizado principalmente em equipamentos cujo funcionamento pode ser
prejudicado quando submetido a distorções na corrente. Outra característica do FAP é que
para ser instalado não há a necessidade de se alterar a carga, uma vez que ele é conectado em
31
paralelo com a mesma. Assim, se houver algum problema com o FAP, a carga não deixará de
ser alimentada.
2.2.2.2 Filtro Ativo Série
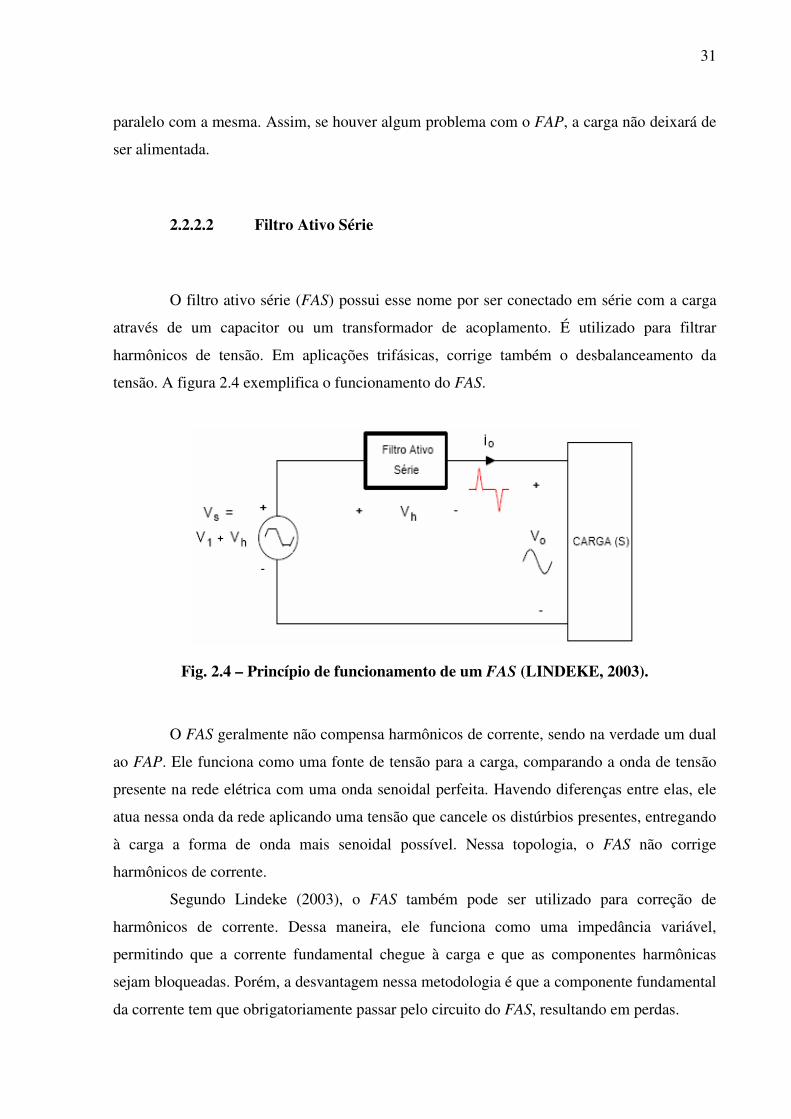
O filtro ativo série (FAS) possui esse nome por ser conectado em série com a carga
através de um capacitor ou um transformador de acoplamento. É utilizado para filtrar
harmônicos de tensão. Em aplicações trifásicas, corrige também o desbalanceamento da
tensão. A figura 2.4 exemplifica o funcionamento do FAS.
Fig. 2.4 – Princípio de funcionamento de um FAS (LINDEKE, 2003).
O FAS geralmente não compensa harmônicos de corrente, sendo na verdade um dual
ao FAP. Ele funciona como uma fonte de tensão para a carga, comparando a onda de tensão
presente na rede elétrica com uma onda senoidal perfeita. Havendo diferenças entre elas, ele
atua nessa onda da rede aplicando uma tensão que cancele os distúrbios presentes, entregando
à carga a forma de onda mais senoidal possível. Nessa topologia, o FAS não corrige
harmônicos de corrente.
Segundo Lindeke (2003), o FAS também pode ser utilizado para correção de
harmônicos de corrente. Dessa maneira, ele funciona como uma impedância variável,
permitindo que a corrente fundamental chegue à carga e que as componentes harmônicas
sejam bloqueadas. Porém, a desvantagem nessa metodologia é que a componente fundamental
da corrente tem que obrigatoriamente passar pelo circuito do FAS, resultando em perdas.
32
Uma desvantagem em relação ao FAP é sua conexão em série com a carga, pois, uma
vez que algum defeito interrompa o funcionamento do FAS, a carga a ele acoplada também
deixará de ser alimentada. Outra característica do FAS é que ele deve suportar a corrente
entregue a carga, uma vez que ele é inserido em série com a carga.
A compensação baseada em tensão é empregada na regulação e balanceamento de
tensão próximo à carga ou na linha (de distribuição ou transmissão). É utilizada também para
atenuar ou eliminar harmônicos e diminuir a propagação de harmônicos causados pelo efeito
de ressonância entre as impedâncias da fonte e filtros passivos instalados no sistema elétrico
(CAMARGO, 2002).
Assim como o FAP, o FAS é composto também por um inversor e um capacitor em
seu lado CC. O chaveamento do inversor é que possibilita que seja corrigida a forma de onda
da tensão.
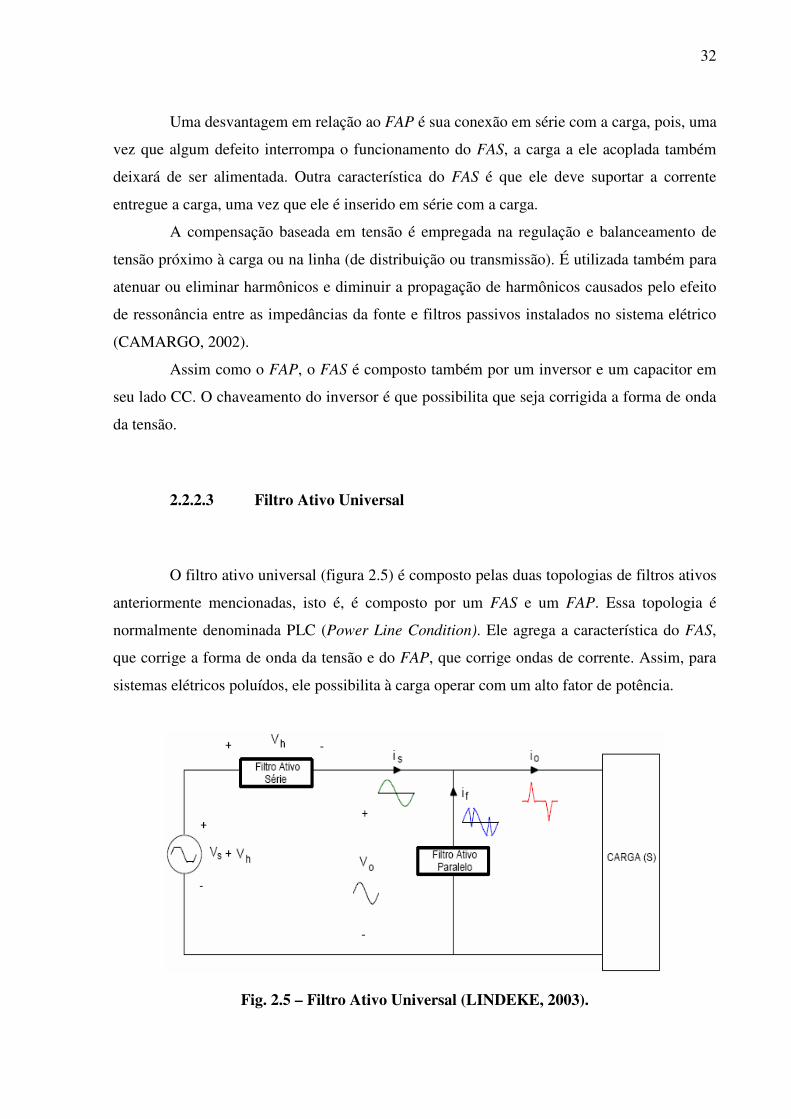
2.2.2.3 Filtro Ativo Universal
O filtro ativo universal (figura 2.5) é composto pelas duas topologias de filtros ativos
anteriormente mencionadas, isto é, é composto por um FAS e um FAP. Essa topologia é
normalmente denominada PLC (Power Line Condition). Ele agrega a característica do FAS,
que corrige a forma de onda da tensão e do FAP, que corrige ondas de corrente. Assim, para
sistemas elétricos poluídos, ele possibilita à carga operar com um alto fator de potência.
Fig. 2.5 – Filtro Ativo Universal (LINDEKE, 2003).
33
2.2.2.4 Filtro Híbrido
Apesar dos filtros ativos serem, em alguns aspectos, melhores do que os passivos,
eles também apresentam desvantagens, as quais são superadas com o uso dos filtros híbridos.
Os filtros ativos e os passivos, ao serem combinados, apresentam melhores características do
que aquelas que apresentariam cada um separadamente. Eles se tornaram populares devido à
redução da potência, do tamanho e do custo dos dispositivos semicondutores empregados na
parte ativa do conjunto (RIBEIRO, 2003).
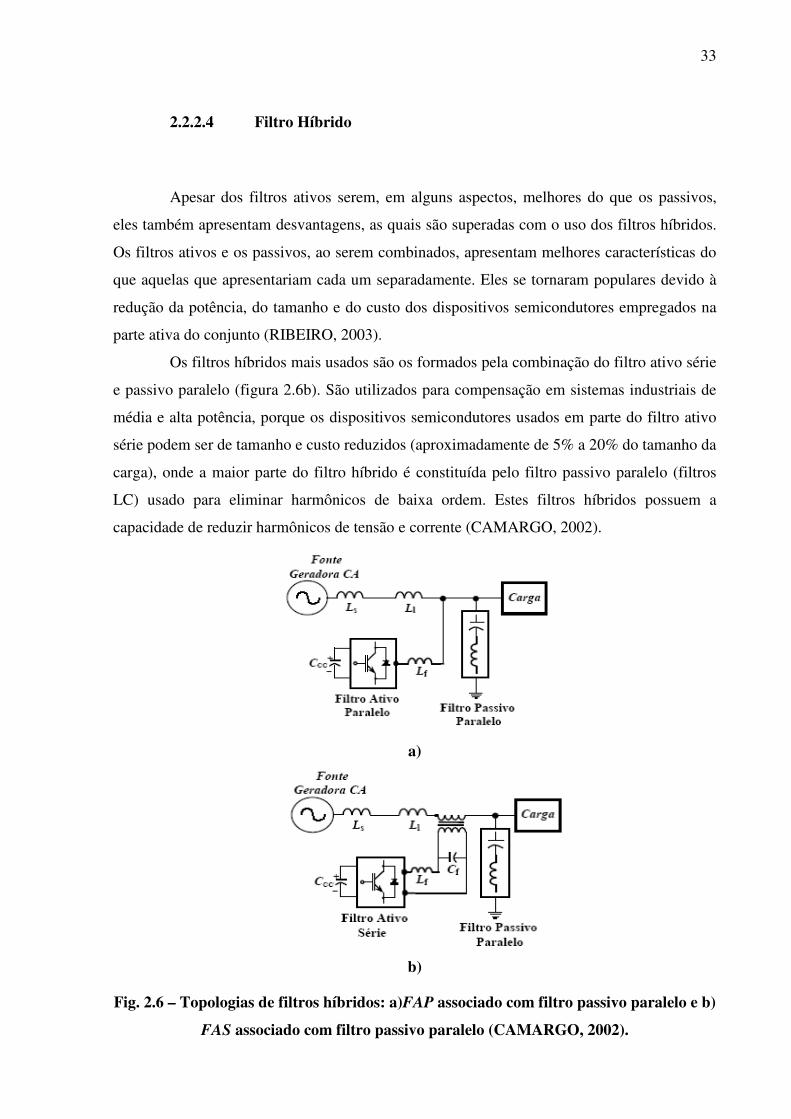
Os filtros híbridos mais usados são os formados pela combinação do filtro ativo série
e passivo paralelo (figura 2.6b). São utilizados para compensação em sistemas industriais de
média e alta potência, porque os dispositivos semicondutores usados em parte do filtro ativo
série podem ser de tamanho e custo reduzidos (aproximadamente de 5% a 20% do tamanho da
carga), onde a maior parte do filtro híbrido é constituída pelo filtro passivo paralelo (filtros
LC) usado para eliminar harmônicos de baixa ordem. Estes filtros híbridos possuem a
capacidade de reduzir harmônicos de tensão e corrente (CAMARGO, 2002).
a)
b)
Fig. 2.6 – Topologias de filtros híbridos: a)FAP associado com filtro passivo paralelo e b)
FAS associado com filtro passivo paralelo (CAMARGO, 2002).

34
2.3 ANÁLISE DAS ESTRUTURAS UTILIZADAS NO FILTRO ATIVO
SÉRIE
2.3.1 INVERSOR
Inversor é o nome dado aos conversores de uma fonte de tensão ou corrente CC em
fonte CA (figura 2.7). Sua característica é, recebendo uma certa tensão CC, convertê-la numa
tensão CA simétrica de amplitude e freqüência desejadas. Essa tensão e também a freqüência
de saída podem ser fixas ou variáveis, tendo a tensão de saída um valor médio nulo.
Fig. 2.7 – Diagrama de blocos básico do inversor.
As formas de onda da tensão na saída do inversor têm forma retangular e apresentam
grande quantidade de distorção harmônica devido ao chaveamento existente no inversor.
Segundo Rashid (1999), para baixas e médias potências, ainda são aceitáveis ondas de forma
quadrada. Porém, para potências mais elevadas, é necessária uma onda senoidal com o
mínimo de distorções e ruídos. Com o avanço dos semicondutores de alta velocidade e com a
aplicação de técnicas de chaveamento, essas distorções podem ser minimizadas.
Existem duas formas de se obter uma tensão CA variável na saída do inversor. A
primeira seria alterando-se a amplitude da tensão CC de entrada. A segunda seria ajustando-se
o ganho do inversor. O método a se utilizar irá depender das características do sistema.
O ganho do inversor é dado pela relação entre a tensão CA de saída e a tensão CC de
entrada, o qual é normalmente realizado através do controle de modulação de pulso (PWM),
que ocorre dentro do inversor.
35
2.3.1.1 Tipos de inversores
De acordo com Martins & Barbi (2005), existem quatro tipos de inversores, que
podem ser monofásicos ou trifásicos:
a) Conversor CC-CA de corrente (CSI): Este conversor tem como característica
principal se comportar como uma fonte de corrente alternada para a carga. De
acordo com Martins & Barbi (2005), esse tipo de inversor é recomendado para
o acionamento de máquinas CA trifásicas de alta potência, pois havendo um
torque excessivo no eixo, a máquina é naturalmente protegida contra
sobrecorrentes, além da ponte com chaves semicondutoras permitir a frenagem
regenerativa1 do sistema fonte-carga.
b) Conversor CC-CA regulado em corrente: Semelhante ao conversor CC-CA de
corrente, esse conversor também apresenta em sua saída a característica de
fonte de corrente contínua. A diferença entre eles está na fonte de entrada, pois
nesse conversor ela apresenta a tensão contínua ao invés da corrente contínua.
São aplicados quando se faz necessário controlar a corrente de saída.
c) Conversor CC-CA de fase controlada: dentre os quatro tipos de conversores,
esse é o único que não é capaz de gerar uma fonte alternada independente. Na
verdade, esse inversor trabalha com o fluxo de energia reverso, sendo
denominado inversor não autônomo, sendo uma interface entre de
processamento de energia entre a fonte CC e a fonte CA existente.
d) Conversor CC-CA de tensão (VSI): podem ser definidos como sendo
conversores estáticos destinados a controlar o fluxo de energia entre uma fonte
de tensão contínua e uma carga com características de fonte de corrente
alternada, monofásica ou trifásica, com controle dos níveis de tensão de saída
e/ou da sua freqüência, dependendo da aplicação.
De acordo com Ahmed (2000), o conversor CC-CA de tensão é o mais utilizado,
caracterizando-se por apresentar na entrada uma fonte de tensão contínua e constante que
independe da corrente solicitada pela carga. Um capacitor de grande valor é colocado em
paralelo com a entrada do inversor para garantir que o chaveamento não altere de modo
1 Frenagem regenerativa é o processo pelo qual o fluxo de energia é invertido da carga para a fonte durante um processo de frenagem, sendo a energia devolvida para a fonte.
36
significativo à tensão CC. A entrada pode ser obtida através de um banco de baterias, células
fotovoltaicas ou mesmo por um retificador alimentado por uma rede CA com filtros.
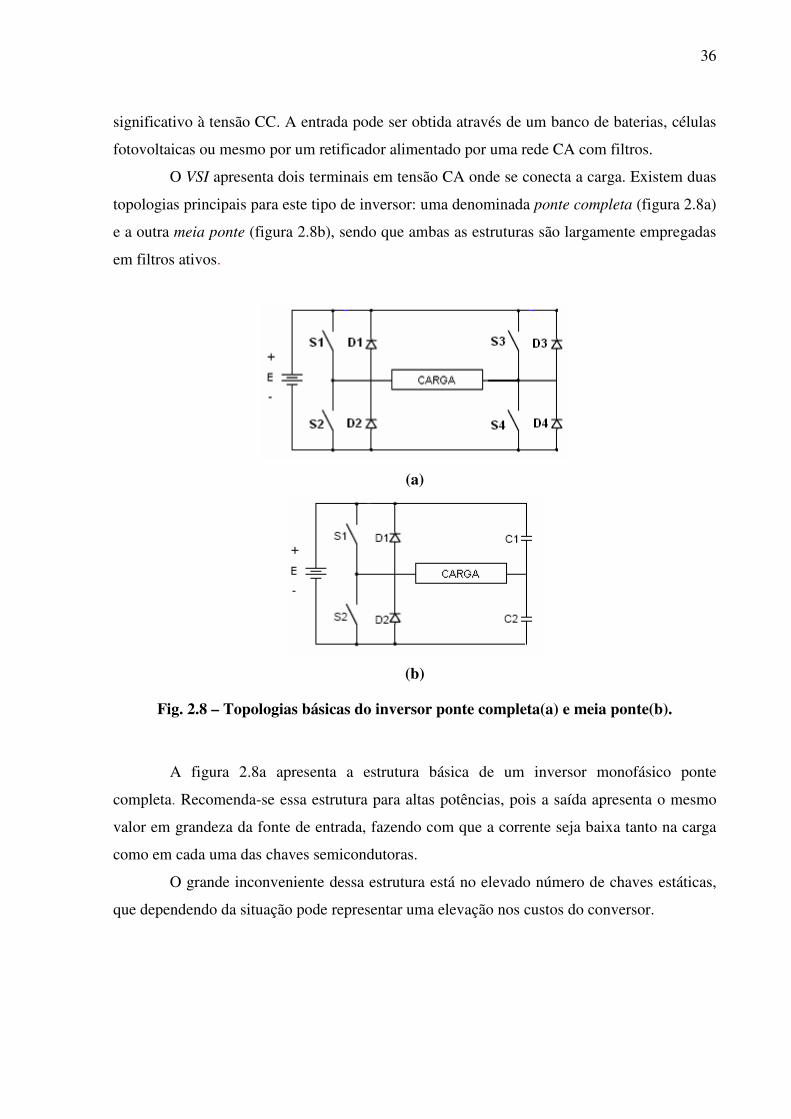
O VSI apresenta dois terminais em tensão CA onde se conecta a carga. Existem duas
topologias principais para este tipo de inversor: uma denominada ponte completa (figura 2.8a)
e a outra meia ponte (figura 2.8b), sendo que ambas as estruturas são largamente empregadas
em filtros ativos.
(a)
(b)
Fig. 2.8 – Topologias básicas do inversor ponte completa(a) e meia ponte(b).
A figura 2.8a apresenta a estrutura básica de um inversor monofásico ponte
completa. Recomenda-se essa estrutura para altas potências, pois a saída apresenta o mesmo
valor em grandeza da fonte de entrada, fazendo com que a corrente seja baixa tanto na carga
como em cada uma das chaves semicondutoras.
O grande inconveniente dessa estrutura está no elevado número de chaves estáticas,
que dependendo da situação pode representar uma elevação nos custos do conversor.
37
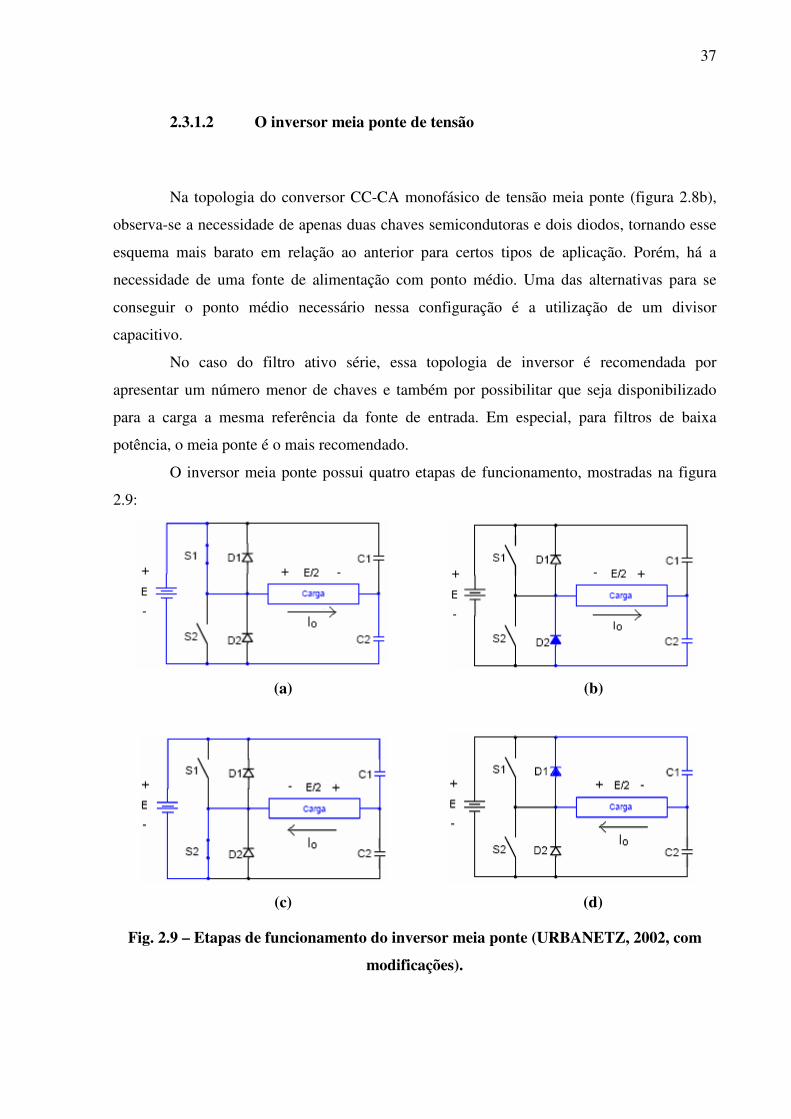
2.3.1.2 O inversor meia ponte de tensão
Na topologia do conversor CC-CA monofásico de tensão meia ponte (figura 2.8b),
observa-se a necessidade de apenas duas chaves semicondutoras e dois diodos, tornando esse
esquema mais barato em relação ao anterior para certos tipos de aplicação. Porém, há a
necessidade de uma fonte de alimentação com ponto médio. Uma das alternativas para se
conseguir o ponto médio necessário nessa configuração é a utilização de um divisor
capacitivo.
No caso do filtro ativo série, essa topologia de inversor é recomendada por
apresentar um número menor de chaves e também por possibilitar que seja disponibilizado
para a carga a mesma referência da fonte de entrada. Em especial, para filtros de baixa
potência, o meia ponte é o mais recomendado.
O inversor meia ponte possui quatro etapas de funcionamento, mostradas na figura
2.9:
(a) (b)
(c) (d)
Fig. 2.9 – Etapas de funcionamento do inversor meia ponte (URBANETZ, 2002, com
modificações).

38
• 1ª etapa (figura 2.9a): entre to e t1, a chave S1 está conduzindo, enquanto a S2
está bloqueada, entregando à carga a energia da fonte CC. Os diodos estão
bloqueados.
• 2ª etapa (figura 2.9b): a partir de t1 até T/2, a chave S1 é aberta. Para uma
carga indutiva, existe a necessidade de se manter o sentido da corrente Io até
que se encerre a energia armazenada nela. Assim, a polaridade na carga é
invertida para se manter o sentido da corrente, fazendo com que o diodo D2
seja polarizado diretamente. A energia armazenada na carga indutiva é
descarregada para o capacitor C2 através desse diodo de maneira
exponencial decrescente.
• 3ª etapa (figura 2.9c): o ciclo entre T/2 e t2 inicia-se quando a corrente Io
atinge seu valor nulo. A chave S2 entra em condução, transferindo
novamente energia da fonte CC para a carga, agora de forma exponencial
crescente. O sentido da corrente é invertido, mas a polaridade continua a
mesma.
• 4ª etapa (figura. 2.9d): nesta etapa, que compreende entre t2 e T, a chave S2 é
aberta e novamente a carga não pode ter o sentido da corrente alterado,
dando início novamente ao processo de roda-livre, agora com o diodo D1 em
condução. A energia é transferida da carga para o capacitor C1, fazendo com
que a corrente decresça exponencialmente. Anulada a corrente Io, o processo
retorna a 1ª etapa.
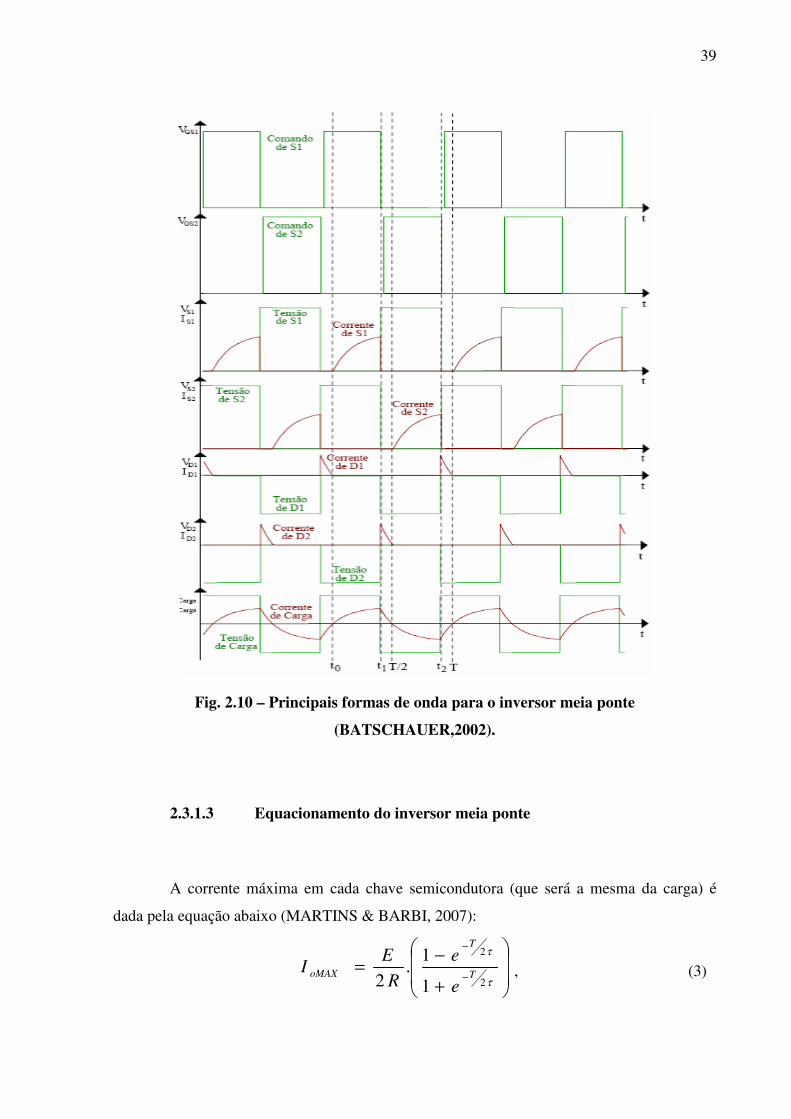
As formas de onda em todas as etapas são exibidas na figura 2.10, para um processo
sem o emprego de nenhuma técnica de modulação.
39
Fig. 2.10 – Principais formas de onda para o inversor meia ponte
(BATSCHAUER,2002).
2.3.1.3 Equacionamento do inversor meia ponte
A corrente máxima em cada chave semicondutora (que será a mesma da carga) é
dada pela equação abaixo (MARTINS & BARBI, 2007):
+
−=
−
−
τ
τ
2
2
1
1.
2 T
T
oMAX
e
e
R
EI , (3)

40
sendo: R
L=τ , em que: (4)
• E – valor eficaz da tensão CC de entrada;
• R – valor da resistência da carga;
• L – valor da indutância da carga;
• T – período de um ciclo;
• τ – constante de tempo no circuito.
A tensão eficaz na carga é obtida através de:
24.
2 2
0
2 Edt
E
TV
T
oef == ∫ (5)
A tensão instantânea na carga pode ser determinada por meio da série de Fourier:
)(.2
)(2.4)(
...5,3,1..3,2,1
tnsenn
Etnsen
n
Etv
nno ω
πω
π∑∑
∞
=
∞
=
== , (6)
o que equivale a:
.....)5(5
2)3(
3
2)(
2)( +++= tsen
Etsen
Etsen
Etv o ω
πω
πω
π, (7)
onde ω=2.π.f, sendo f a freqüência de saída do inversor.
Através da equação (7) obtém-se a componente fundamental (n=1) da tensão de
saída, isto é:
)(2
)(1 tsenE
tv o ωπ
= , (8)
cujo valor eficaz será:
EE
v efo .45,02
21 ==
π (9)
41
Para a corrente instantânea na carga, temos:
∑∑∞
=
∞
=
−=−=...5,3,1...5,3,1
)(..
.2)(
..2.4
)(n
nnn
nn
o tnsenZn
Etnsen
Zn
Eti θω
πθω
π , (10)
onde:
( )22 .. LnRZ n ω+= e (11)
= −
R
Lnn
..tan 1 ω
θ (12)
A expressão da corrente fundamental (n=1) é expressa por:
)(.
.2)( 1
11 θω
π−= tsen
Z
Etio (13)
sendo, ( )221 .LRZ ω+= (14)
O valor eficaz da corrente é dado por:
11
1 .45,02..
.2
Z
E
Z
EI efo ==
π (15)
O valor total da corrente eficaz na carga será:
....)()()()( 25
23
2
,...5,3,1
2 +++== ∑∞
=efoefooef
nefooef IIIII
n (16)
A potência de saída fundamental (para n=1) será:
211111 .cos.. efoefoefoo IRIVP == θ (17)
RZ
ER
Z
EPo .2,0.
2..
.22
1
2
1
1
=
=
π (18)
42
A potência total de saída será:
).().(cos.. 2
,...5,3,1
2
,...5,3,11 oef
nefo
nnefoefoo IRIRIVP
nnn=== ∑∑
∞
=
∞
=
θ (19)
2.3.1.4 O controle da tensão nos conversores CC-CA
Uma vez que as fontes de alimentação são, tipicamente, de valor constante, sejam
elas CA ou CC, caso seja preciso variar a tensão aplicada sobre uma carga, é necessário o
emprego e algum dispositivo que seja capaz de "dosar" a quantidade de energia transferida. Se
o controle deve ser feito sobre a tensão, o dispositivo deve ter uma posição em série entre a
fonte e a carga. Pode-se ter um atuador linear, sobre o qual se tem uma queda de tensão
proporcional à sua impedância. Este tipo de controle da tensão tem como inconveniente a
perda de energia sobre a resistência série (POMILIO, 2006).
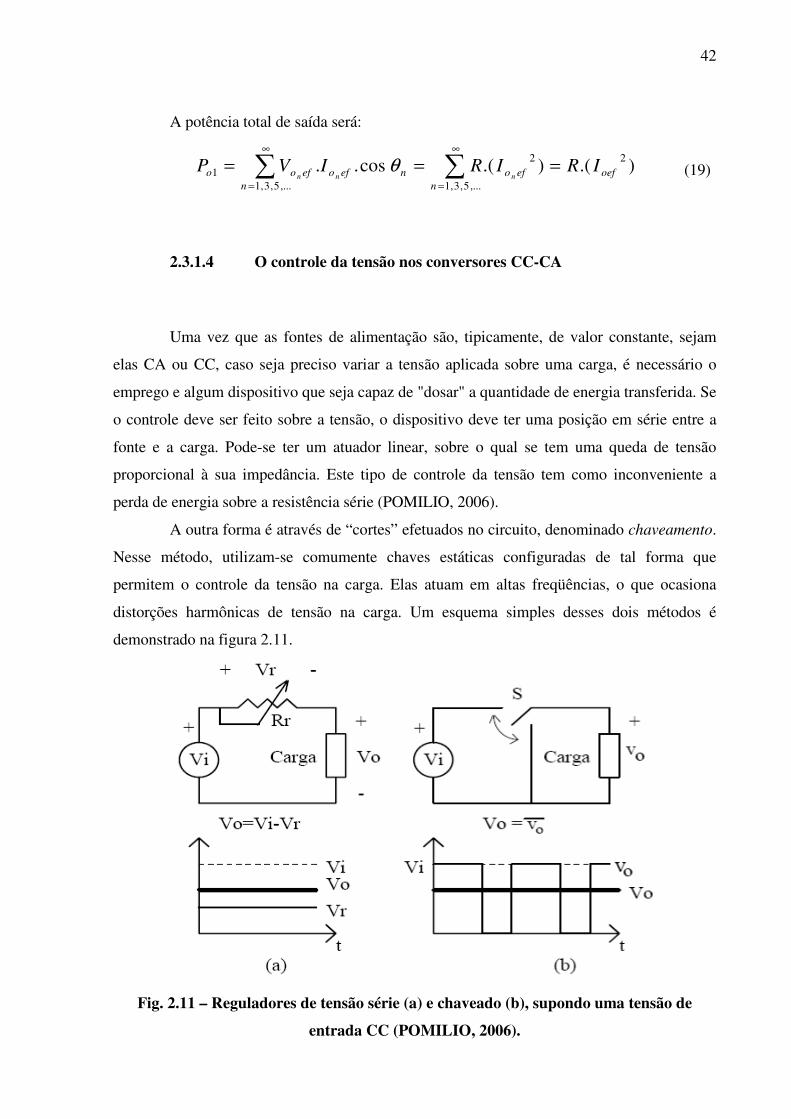
A outra forma é através de “cortes” efetuados no circuito, denominado chaveamento.
Nesse método, utilizam-se comumente chaves estáticas configuradas de tal forma que
permitem o controle da tensão na carga. Elas atuam em altas freqüências, o que ocasiona
distorções harmônicas de tensão na carga. Um esquema simples desses dois métodos é
demonstrado na figura 2.11.
Fig. 2.11 – Reguladores de tensão série (a) e chaveado (b), supondo uma tensão de
entrada CC (POMILIO, 2006).

43
Segundo Martins & Barbi (2005), o controle da tensão nos conversores CC-CA de
tensão são agrupados nos seguintes modos: controle da tensão na entrada do inversor;
controle da tensão na saída do inversor; controle da tensão dentro do inversor por
modulação ou por defasagem. Atualmente, o último vem sendo mais utilizado pela sua
eficiência, e sua técnica tem evoluído nos últimos anos. De uma forma bem ampla, pode-se
dizer que o controle da tensão de saída através das técnicas de modulação ou defasagem é
efetuado por meio do ajuste do intervalo de condução das chaves estáticas controladas, em
relação ao período de comutação. Por essa razão utiliza-se genericamente o termo PWM
(Modulação por Largura de Pulso) para a maioria dos controles da tensão realizados dentro do
circuito do inversor.
2.3.2 A MODULAÇÃO PWM SENOIDAL APLICADA A INVERSORES
Esse tipo de modulação se baseia na comparação de uma onda de referência senoidal
(onda moduladora) de baixa freqüência com uma onda triangular (onda portadora) de alta
freqüência. A interseção dessas duas formas de onda estabelece a duração dos sinais de
comando das chaves estáticas controladas. Em cada semiperíodo, a largura dos pulsos é
máxima na parte central; a partir do centro a largura dos pulsos decresce para ambos os lados
segundo uma função senoidal.
A freqüência da onda moduladora senoidal define a freqüência da componente
fundamental da tensão de saída, enquanto que a freqüência da onda portadora triangular
define a freqüência de comutação das chaves estáticas. A tensão de saída, que é aplicada a
carga, é formada por uma sucessão de ondas retangulares de amplitude igual à tensão de
alimentação CC de entrada (MARTINS & BARBI, 2005).
A figura 2.12 ilustra o princípio da modulação PWM senoidal de dois níveis. Nela,
têm-se duas ondas: a referencial senoidal e a onda portadora triangular. Quando o valor
instantâneo da onda senoidal for maior que o da onda triangular, a tensão de saída será +E, e
quando a onda senoidal for menor que a triangular, a tensão de saída será de –E. Como a
tensão instantânea pode atingir somente dois níveis de tensão, –E ou +E, ela é chamada de
modulação PWM senoidal a dois níveis.

44
Fig. 2.12 – Princípio da modulação PWM(POMILIO, 2006, com modificações).
As duas formas de onda são sincronizadas, de modo que a relação entre as
freqüências seja um número inteiro N (número de pulsos por semiperíodo). Então:
f
f
T
TN p
p
s
22== , sendo: (20)
• N = número de pulsos por semiperíodo;
• Ts = período da onda portadora senoidal;
• Tp = semiperíodo da onda portadora triangular;
• fp = freqüência da onda portadora triangular;
• f = freqüência da onda portadora senoidal.
Assim, aumentando-se a freqüência da onda portadora triangular (fp),
conseqüentemente aumenta-se a freqüência de chaveamento (comutação). Isso permite
deslocar as componentes harmônicas para freqüências mais elevadas, facilitando sua
filtragem.
A relação entre V1 e V2 define o índice de modulação M:
2
1
V
VM = , sendo: (21)
• V1 = amplitude da onda moduladora senoidal;
• V2 = valor de pico da onda portadora triangular.
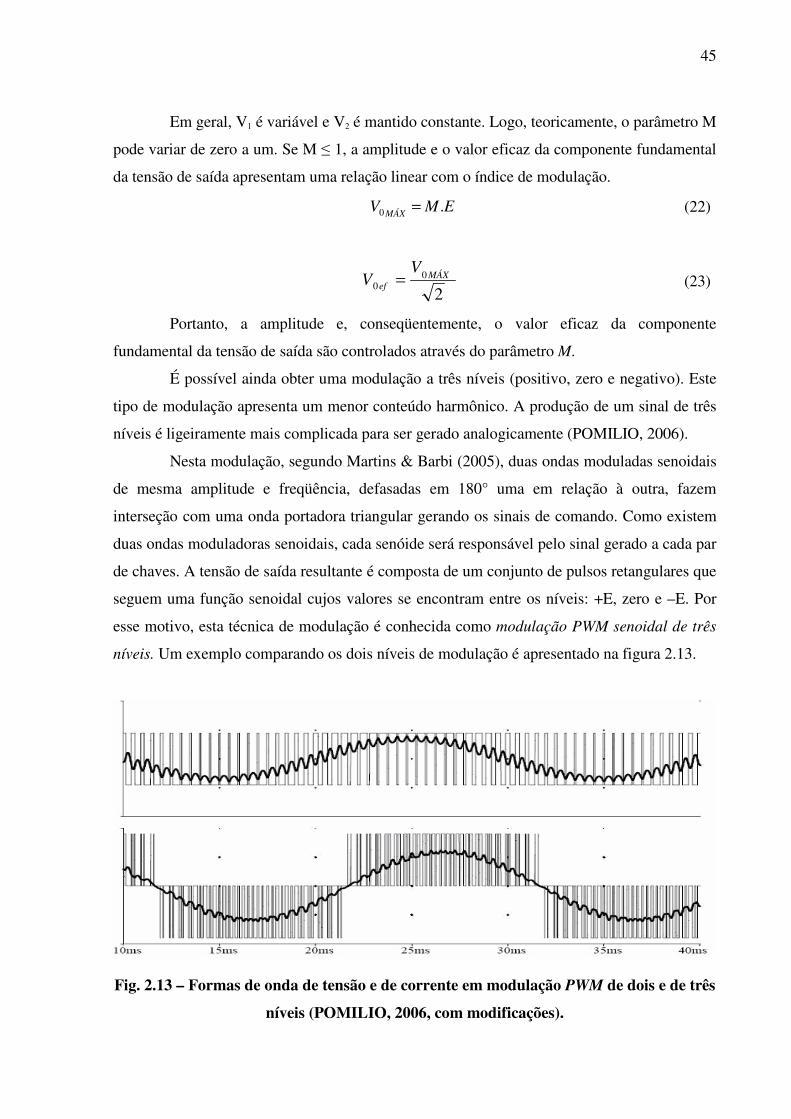
45
Em geral, V1 é variável e V2 é mantido constante. Logo, teoricamente, o parâmetro M
pode variar de zero a um. Se M ≤ 1, a amplitude e o valor eficaz da componente fundamental
da tensão de saída apresentam uma relação linear com o índice de modulação.
EMV MÁX .0 = (22)
20
0MÁX
ef
VV = (23)
Portanto, a amplitude e, conseqüentemente, o valor eficaz da componente
fundamental da tensão de saída são controlados através do parâmetro M.
É possível ainda obter uma modulação a três níveis (positivo, zero e negativo). Este
tipo de modulação apresenta um menor conteúdo harmônico. A produção de um sinal de três
níveis é ligeiramente mais complicada para ser gerado analogicamente (POMILIO, 2006).
Nesta modulação, segundo Martins & Barbi (2005), duas ondas moduladas senoidais
de mesma amplitude e freqüência, defasadas em 180° uma em relação à outra, fazem
interseção com uma onda portadora triangular gerando os sinais de comando. Como existem
duas ondas moduladoras senoidais, cada senóide será responsável pelo sinal gerado a cada par
de chaves. A tensão de saída resultante é composta de um conjunto de pulsos retangulares que
seguem uma função senoidal cujos valores se encontram entre os níveis: +E, zero e –E. Por
esse motivo, esta técnica de modulação é conhecida como modulação PWM senoidal de três
níveis. Um exemplo comparando os dois níveis de modulação é apresentado na figura 2.13.
Fig. 2.13 – Formas de onda de tensão e de corrente em modulação PWM de dois e de três
níveis (POMILIO, 2006, com modificações).

46
2.3.3 FILTRO LC DE SAÍDA APLICADO AO INVERSOR MEIA PONTE
Como previamente visto, a modulação por largura de pulso (PWM), muito utilizada
como estratégia de chaveamento em inversores, caracteriza-se pelo chaveamento numa
freqüência elevada. Assim, no caso dos inversores, a forma de onda na saída dos mesmos
apresenta um grande conteúdo harmônico de alta freqüência, uma vez que para um período da
componente fundamental da onda de tensão são inseridas diversas formas de onda
retangulares de alta freqüência.
Pelo fato destes inversores apresentarem uma elevada distorção harmônica nas
tensões de saída devido às componentes harmônicas de alta freqüência introduzidas pela
modulação, é de praxe a introdução de filtros LC passa-baixas entre o inversor e a carga. Para
os inversores que operam em freqüências de comutação na ordem de dezenas de kHz, estes
filtros são projetados para atender às especificações de projeto da máxima TDH aceitável nas
tensões de saída, levando em consideração a estratégia de modulação empregada (MICHELS
et al., 2005).
Para atenuar essas altas freqüências, faz-se necessário à utilização de filtros na saída
dos inversores. Esses filtros utilizam dois componentes básicos, os quais respondem a
variação de freqüência de um sinal de maneira oposta: o capacitor e o indutor.
Basicamente, o capacitor apresenta maior oposição à passagem de baixas
freqüências, enquanto o indutor apresenta maior oposição às altas freqüências. Devido a essa
característica, eles são denominados componentes reativos.
O procedimento de projeto de filtros LC de inversores de tensão para atender às
especificações de TDH máxima admissível nas tensões de saída, sem entrar no mérito com
relação à interferência eletromagnética conduzida de alta freqüência, é constituído de duas
etapas distintas. A primeira etapa consiste na determinação da freqüência natural do filtro.
[...]. A segunda etapa consiste na obtenção da melhor relação entre as capacitâncias e as
indutâncias do filtro para a freqüência natural obtida na etapa anterior. Esta relação deve
atender às especificações de projeto, tendo conhecimento dos tipos de carga a serem utilizadas
no inversor (MICHELS et al., 2005).

47
2.3.3.1 Topologias de filtros para inversores de tensão
As principais topologias de filtros utilizadas na saída dos inversores estão apresentadas
na figura 2.14.
Fig. 2.14 – Topologias de filtros de saída (MARTINS & BARBI, 2005).
Dentre essas topologias, a mais simples e nem por isso menos eficiente é a do filtro
LC passa-baixas apresentado na figura 2.14, item (e). De acordo com Martins & Barbi
(2005), esse filtro é particularmente eficiente em aplicações que se deseja reduzir
componentes harmônicas de freqüência elevada (no caso do PWM senoidal, gerador de
harmônicos de alta freqüência), além de ter baixo custo de construção.
2.3.3.2 O filtro LC passa-baixas
Como já mencionado, utiliza-se o filtro LC passa-baixas para reduzir componentes
harmônicas de alta freqüência na onda de tensão alternada na saída do inversor, reduzindo o
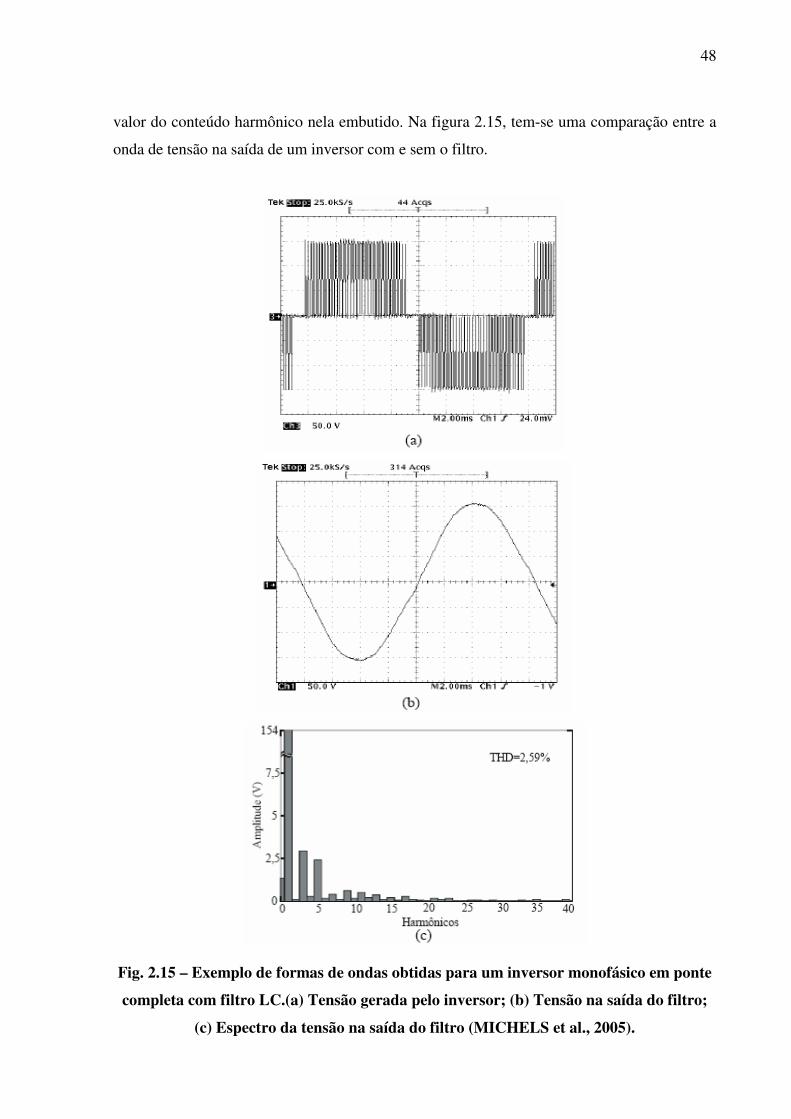
48
valor do conteúdo harmônico nela embutido. Na figura 2.15, tem-se uma comparação entre a
onda de tensão na saída de um inversor com e sem o filtro.
Fig. 2.15 – Exemplo de formas de ondas obtidas para um inversor monofásico em ponte
completa com filtro LC.(a) Tensão gerada pelo inversor; (b) Tensão na saída do filtro;
(c) Espectro da tensão na saída do filtro (MICHELS et al., 2005).

49
A freqüência máxima que o filtro passa-baixas deixa passar sem atenuação é
denominada freqüência central, freqüência de ressonância ou freqüência de corte (figura
2.16). A partir dessa freqüência, o ganho do circuito cai, obtendo-se assim uma atenuação
mais ou menos acentuada do sinal. O valor dessa atenuação vai depender da configuração ou
ordem do filtro.
Fig. 2.16 – Freqüência de corte(fo) e exemplo de atenuações mais suaves e mais
acentuadas.
A relação entre a tensão de saída e a de entrada desse filtro é dada por:
0
21
1
Z
LjCL
V
V
fff
in
out
ωω +−
= (24)
Um procedimento simples para projeto do filtro é considerar a condição de carga
nula, ou seja, ∞→0Z . Desse modo, a freqüência de corte do filtro será ff CLf π2/10 = .
[...] Qualquer componente com freqüência muito próxima da freqüência de ressonância fo será
amplificada. (MARTINS & BARBI, 2005).
Por definição, tem-se que a freqüência angular natural de oscilação (ωo) do filtro LC
é dada por:
ff CL
10 =ω (25)
e ao fator de amortecimento (ξ) é:
f
f
C
L
R02
1=ξ (26)
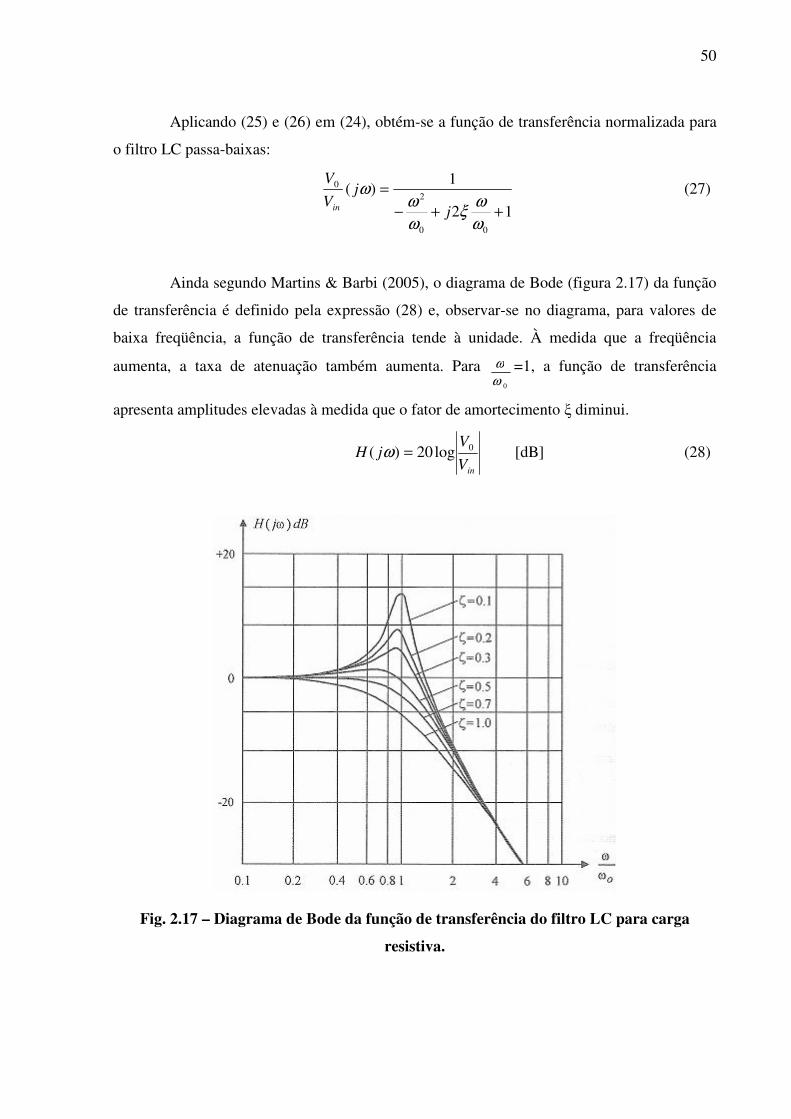
50
Aplicando (25) e (26) em (24), obtém-se a função de transferência normalizada para
o filtro LC passa-baixas:
12
1)(
00
20
++−
=
ω
ωξ
ω
ωω
j
jV
V
in
(27)
Ainda segundo Martins & Barbi (2005), o diagrama de Bode (figura 2.17) da função
de transferência é definido pela expressão (28) e, observar-se no diagrama, para valores de
baixa freqüência, a função de transferência tende à unidade. À medida que a freqüência
aumenta, a taxa de atenuação também aumenta. Para 0ω
ω =1, a função de transferência
apresenta amplitudes elevadas à medida que o fator de amortecimento ξ diminui.
inV
VjH 0log20)( =ω [dB] (28)
Fig. 2.17 – Diagrama de Bode da função de transferência do filtro LC para carga
resistiva.

51
Assim, a freqüência de corte deve ser definida abaixo da menor freqüência que se
deseja atenuar, e o fator de amortecimento de modo a evitar oscilações elevadas na freqüência
de corte.
2.3.4 CRITÉRIOS PARA A DEFINIÇÃO DA METODOLOGIA DE PROJETO DO
FILTRO DE SAÍDA
Em geral o projeto do filtro de saída é realizado considerando carga resistiva pura e
observando-se certos critérios, tais como (MARTINS & BARBI, 2005):
• O fator de amortecimento deve ser maior que 0,707 para evitar amplificação
dos harmônicos de baixa freqüência, mais precisamente na freqüência de
corte;
• A freqüência de corte fo deve estar posicionada uma década abaixo da
freqüência de chaveamento mínima, a fim de atenuar e/ou eliminar os
harmônicos de amplitude elevada, que se encontram na freqüência de
chaveamento e, ser pelo menos trinta vezes maior que a freqüência da
componente fundamental da tensão alternada de saída, para que o
deslocamento de fase seja praticamente nulo;
• A influência do capacitor de filtragem sobre a componente fundamental da
corrente na entrada do filtro. Deseja-se que a componente fundamental da
corrente na entrada do filtro Iin1 seja esteja próxima da componente
fundamental da corrente na carga Io1;
• A influência do indutor de filtragem sobre a regulação de tensão. Deseja-se
que a componente fundamental da tensão na entrada esteja próxima da
fundamental da tensão na entrada do filtro.

52
2.3.4.1 Formulação para o capacitor e o indutor de filtragem
O capacitor de filtragem é definido pela fórmula:
00 ...4
1
RfC f
ξπ= , (29)
onde Ro é o resistor equivalente da carga, definido por:
φcos0
201
00 P
VZR ef
== (30)
Já o indutor de filtragem é definido por:
( ) f
fCf
L...2
12
0π= (31)
2.4 MÉTODOS DE CONTROLE
Os sistemas de eletrônica de potência ao serem controlados requerem o
desenvolvimento de variadas funções, tais como: filtragem de sinais, geração de sinais de
disparo, medições, proteções, etc. (RIBEIRO, 2003). Nas últimas décadas, com o
desenvolvimento dos microprocessadores, cada vez mais se tem o uso do controle digital
nessas plantas, que traz vantagens como flexibilidade e não variação dos parâmetros de
controle devido ao envelhecimento dos componentes e devido à temperatura a que eles estão
expostos.
Utilizar-se-á, para o controle do inversor meia ponte aplicado no filtro ativo série, a
técnica PWM, na qual há a variação da razão cíclica a freqüência constante. O método de
controle a ser utilizado é o controle digital da tensão por valores médios instantâneos, através
de um processador digital de sinais (DSP).
Nos tópicos seguintes será feita a descrição de compensadores de sistemas de
controle, além de uma abordagem geral sobre controle digital e sobre o DSP a ser utilizado no
projeto e uma descrição da técnica que será utilizada no controle do filtro ativo série.
53
2.4.1 COMPENSADORES BÁSICOS
Um compensador, segundo Ogata (2000), compara o valor real da grandeza de saída
do processo com a grandeza de referência (valor desejado), determina o desvio e produz um
sinal de controle que reduzirá o erro. A maneira pela qual o controlador produz um sinal de
controle é chamada ação de controle. Os principais tipos de controladores são do tipo:
Proporcional Integral (PI), Proporcional Derivativo (PD) e Proporcional Integral Derivativo
(PID).
2.4.1.1 Compensador Proporcional Integral (PI)
Considere um sistema cuja saída encontra-se no domínio do tempo. Para um
compensador proporcional integral sua equação, segundo Ogata (2000), fica:
∫+=t
i
p
p dtteT
KteKtu
0)()()(
(32)
Sua função de transferência é:
).
11(
)(
)(
STK
sE
sU
ip += (33)
sendo pK o ganho proporcional e s
Ki o ganho integral.
Segundo Ogata (2000), iT é chamado tempo integral. Tanto pK quanto iT são
ajustáveis. O tempo integral ajusta a ação do controle integral, enquanto a mudança no valor
de pK afeta tanto ao ajuste proporcional como o integral. A taxa de restabelecimento é o
número de vezes por minuto que a parte proporcional da ação de controle é duplicada. Esta é
medida em termos de repetições por minuto. Se um sinal de erro )(te for uma entrada em
degrau unitário (figura 2.18a), esse resultará em um sinal de saída do controlador )(tu como
mostrado na figura 2.18b.
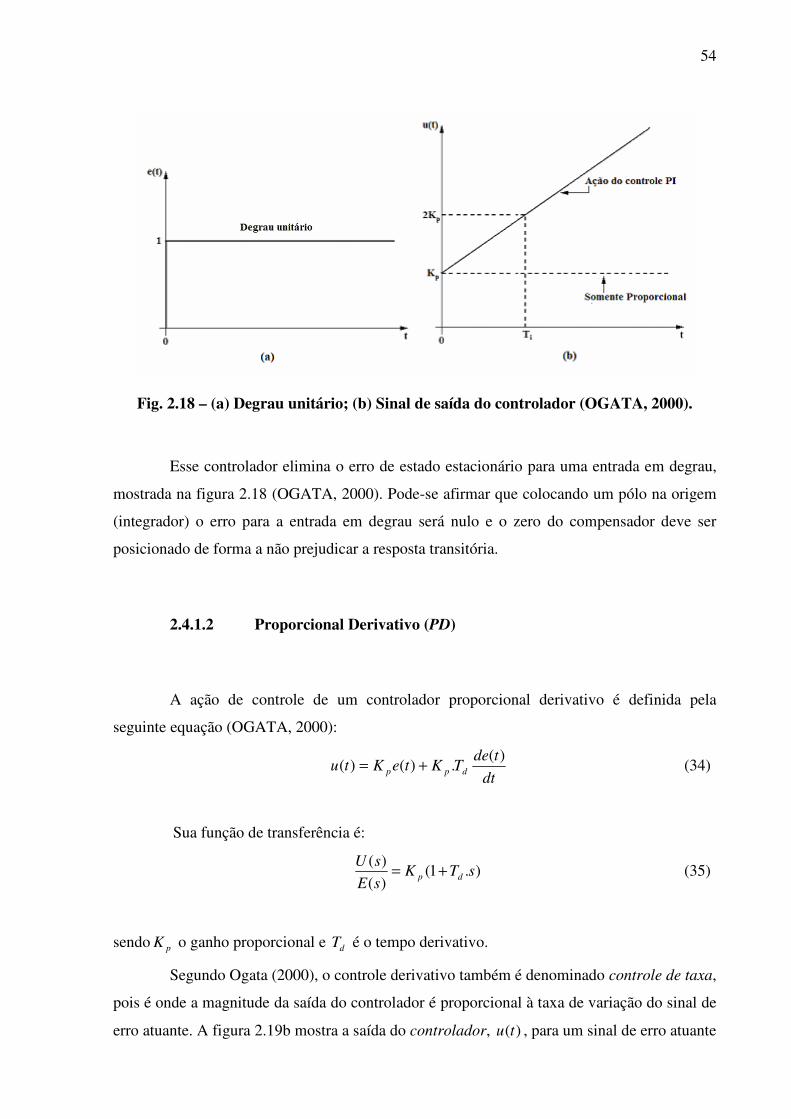
54
Fig. 2.18 – (a) Degrau unitário; (b) Sinal de saída do controlador (OGATA, 2000).
Esse controlador elimina o erro de estado estacionário para uma entrada em degrau,
mostrada na figura 2.18 (OGATA, 2000). Pode-se afirmar que colocando um pólo na origem
(integrador) o erro para a entrada em degrau será nulo e o zero do compensador deve ser
posicionado de forma a não prejudicar a resposta transitória.
2.4.1.2 Proporcional Derivativo (PD)
A ação de controle de um controlador proporcional derivativo é definida pela
seguinte equação (OGATA, 2000):
dt
tdeTKteKtu dpp
)(.)()( += (34)
Sua função de transferência é:
).1()(
)(sTK
sE
sUdp += (35)
sendo pK o ganho proporcional e dT é o tempo derivativo.
Segundo Ogata (2000), o controle derivativo também é denominado controle de taxa,
pois é onde a magnitude da saída do controlador é proporcional à taxa de variação do sinal de
erro atuante. A figura 2.19b mostra a saída do controlador, )(tu , para um sinal de erro atuante
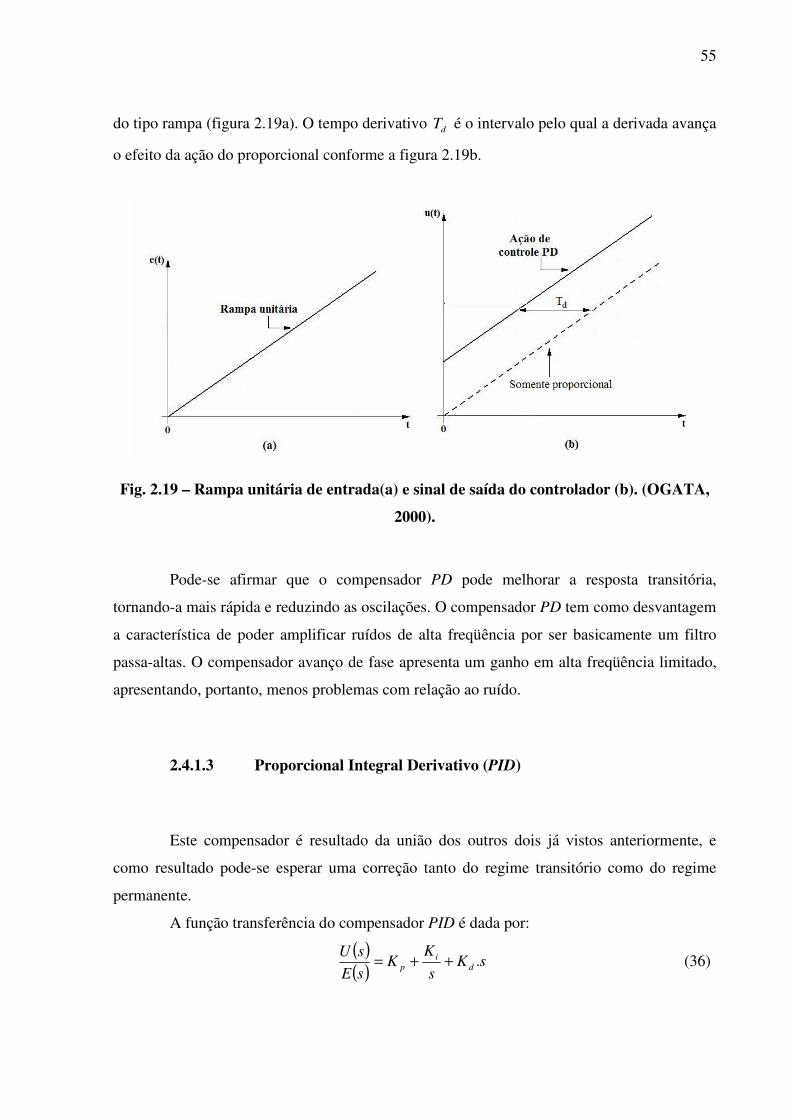
55
do tipo rampa (figura 2.19a). O tempo derivativo dT é o intervalo pelo qual a derivada avança
o efeito da ação do proporcional conforme a figura 2.19b.
Fig. 2.19 – Rampa unitária de entrada(a) e sinal de saída do controlador (b). (OGATA,
2000).
Pode-se afirmar que o compensador PD pode melhorar a resposta transitória,
tornando-a mais rápida e reduzindo as oscilações. O compensador PD tem como desvantagem
a característica de poder amplificar ruídos de alta freqüência por ser basicamente um filtro
passa-altas. O compensador avanço de fase apresenta um ganho em alta freqüência limitado,
apresentando, portanto, menos problemas com relação ao ruído.
2.4.1.3 Proporcional Integral Derivativo (PID)
Este compensador é resultado da união dos outros dois já vistos anteriormente, e
como resultado pode-se esperar uma correção tanto do regime transitório como do regime
permanente.
A função transferência do compensador PID é dada por:
( )( )
sKs
KK
sE
sUd
ip .++= (36)
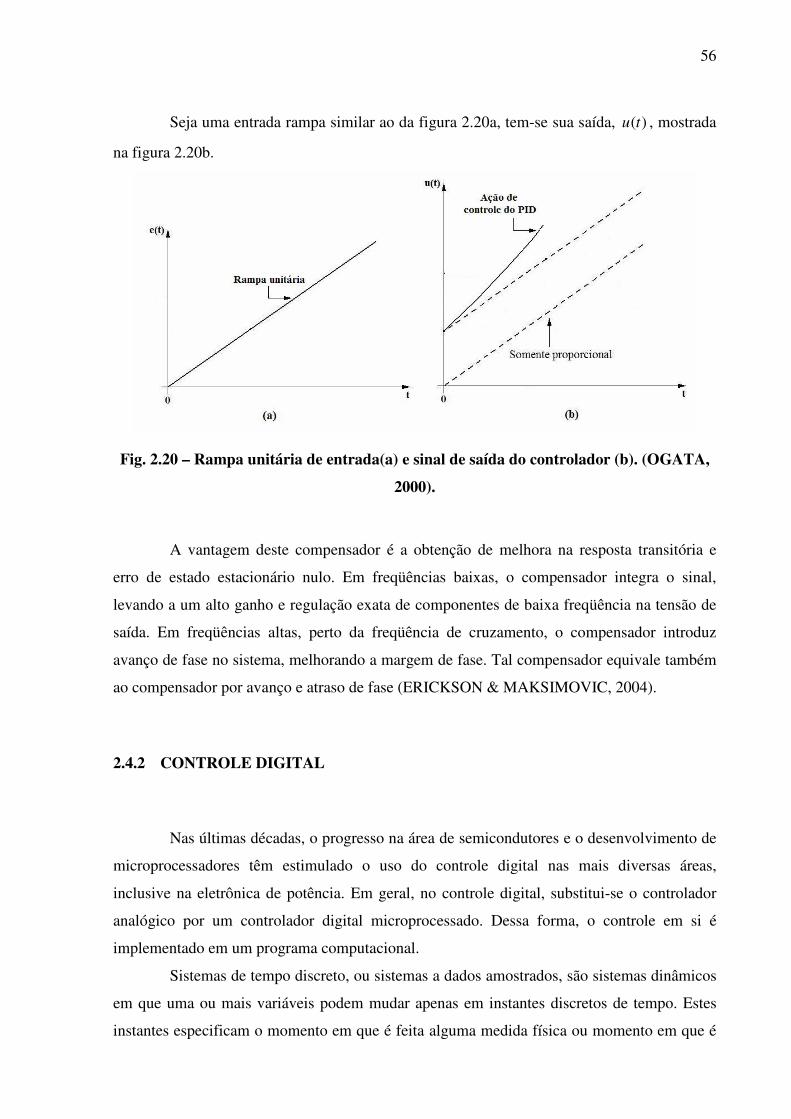
56
Seja uma entrada rampa similar ao da figura 2.20a, tem-se sua saída, )(tu , mostrada
na figura 2.20b.
Fig. 2.20 – Rampa unitária de entrada(a) e sinal de saída do controlador (b). (OGATA,
2000).
A vantagem deste compensador é a obtenção de melhora na resposta transitória e
erro de estado estacionário nulo. Em freqüências baixas, o compensador integra o sinal,
levando a um alto ganho e regulação exata de componentes de baixa freqüência na tensão de
saída. Em freqüências altas, perto da freqüência de cruzamento, o compensador introduz
avanço de fase no sistema, melhorando a margem de fase. Tal compensador equivale também
ao compensador por avanço e atraso de fase (ERICKSON & MAKSIMOVIC, 2004).
2.4.2 CONTROLE DIGITAL
Nas últimas décadas, o progresso na área de semicondutores e o desenvolvimento de
microprocessadores têm estimulado o uso do controle digital nas mais diversas áreas,
inclusive na eletrônica de potência. Em geral, no controle digital, substitui-se o controlador
analógico por um controlador digital microprocessado. Dessa forma, o controle em si é
implementado em um programa computacional.
Sistemas de tempo discreto, ou sistemas a dados amostrados, são sistemas dinâmicos
em que uma ou mais variáveis podem mudar apenas em instantes discretos de tempo. Estes
instantes especificam o momento em que é feita alguma medida física ou momento em que é
57
lida a memória de um computar digital, por exemplo. O intervalo de tempo entre dois
instantes discretos é considerado suficientemente pequeno para que não altere
significativamente o sinal amostrado.
O controle digital está ficando cada vez mais comum devido a sua versatilidade
frente aos controladores analógicos e também, em grande parte, a popularização dos
microcontroladores. Podem-se citar algumas vantagens do controle digital em relação ao
controle analógico:
• Sistemas flexíveis a novas adaptações: mudanças podem ser feitas através de
modificações no programa, sem alterações de hardware;
• Menor número de componentes: um único microprocessador pode substituir
vários componentes responsáveis pelo controle analógico, tornando o
circuito mais leve e compacto;
• Não há erros devido à variação nos componentes;
• Maior facilidade para a implementação de leis de controle mais complexas.
A desvantagem do controle digital, segundo Nise (2002), é a maior dificuldade da
análise matemática e do projeto da amostragem do sinal, que pode comprometer a qualidade
do processo. O controle digital é mais complexo, na maioria das vezes, quando comparado ao
controle contínuo.
Para se aplicar o controle digital num sistema, é necessário efetuar a conversão dos
sinais conforme a sua aplicação. Assim, para que o processador interprete um sinal contínuo,
é necessário que esse sinal seja convertido num sinal discreto (Conversão A/D).
2.4.2.1 Conversão Analógico-Digital (A/D)
Na figura 2.21 tem-se um diagrama em blocos de um sistema de controle discreto. A
interface de entrada do processador digital é o conversor analógico-digital (o conversor A/D).
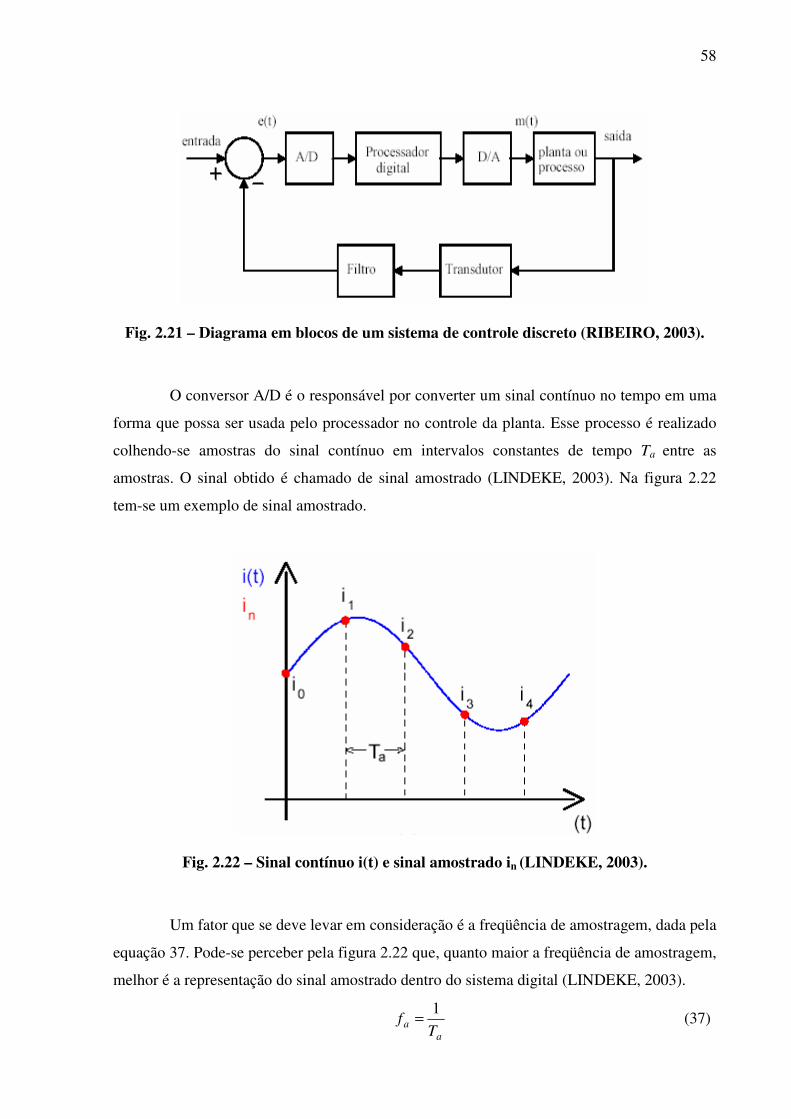
58
Fig. 2.21 – Diagrama em blocos de um sistema de controle discreto (RIBEIRO, 2003).
O conversor A/D é o responsável por converter um sinal contínuo no tempo em uma
forma que possa ser usada pelo processador no controle da planta. Esse processo é realizado
colhendo-se amostras do sinal contínuo em intervalos constantes de tempo Ta entre as
amostras. O sinal obtido é chamado de sinal amostrado (LINDEKE, 2003). Na figura 2.22
tem-se um exemplo de sinal amostrado.
Fig. 2.22 – Sinal contínuo i(t) e sinal amostrado in (LINDEKE, 2003).
Um fator que se deve levar em consideração é a freqüência de amostragem, dada pela
equação 37. Pode-se perceber pela figura 2.22 que, quanto maior a freqüência de amostragem,
melhor é a representação do sinal amostrado dentro do sistema digital (LINDEKE, 2003).
aa T
f1
= (37)
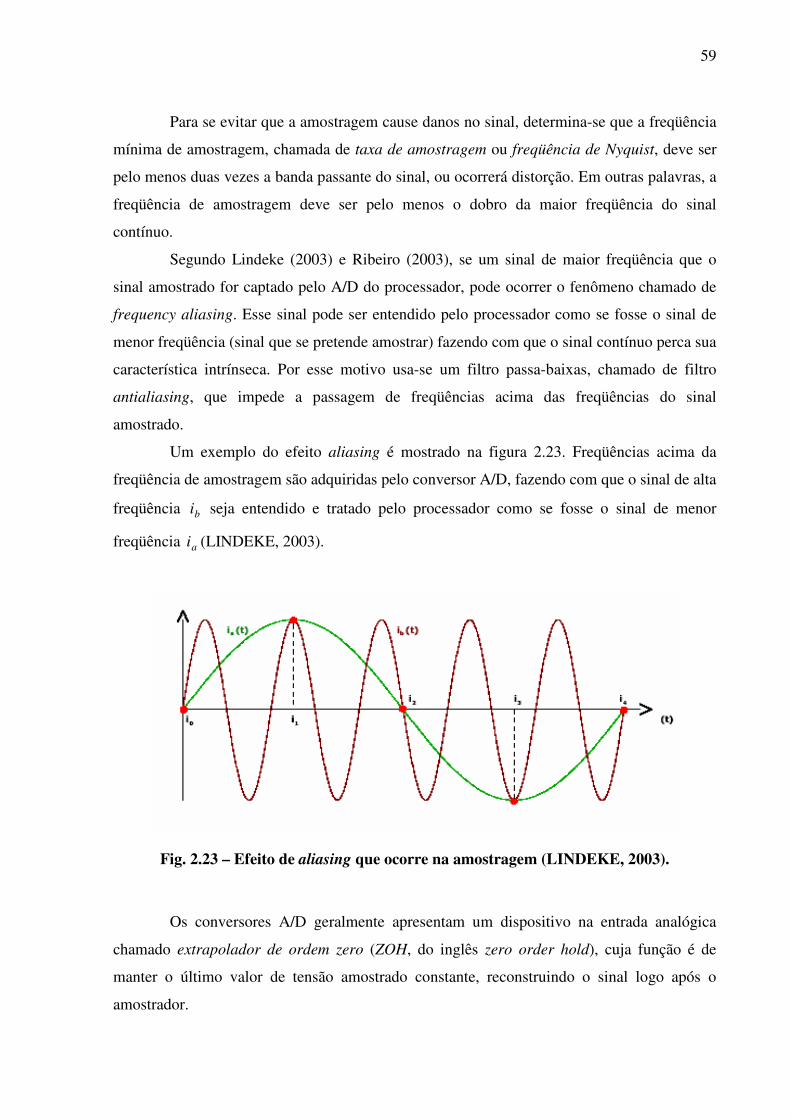
59
Para se evitar que a amostragem cause danos no sinal, determina-se que a freqüência
mínima de amostragem, chamada de taxa de amostragem ou freqüência de Nyquist, deve ser
pelo menos duas vezes a banda passante do sinal, ou ocorrerá distorção. Em outras palavras, a
freqüência de amostragem deve ser pelo menos o dobro da maior freqüência do sinal
contínuo.
Segundo Lindeke (2003) e Ribeiro (2003), se um sinal de maior freqüência que o
sinal amostrado for captado pelo A/D do processador, pode ocorrer o fenômeno chamado de
frequency aliasing. Esse sinal pode ser entendido pelo processador como se fosse o sinal de
menor freqüência (sinal que se pretende amostrar) fazendo com que o sinal contínuo perca sua
característica intrínseca. Por esse motivo usa-se um filtro passa-baixas, chamado de filtro
antialiasing, que impede a passagem de freqüências acima das freqüências do sinal
amostrado.
Um exemplo do efeito aliasing é mostrado na figura 2.23. Freqüências acima da
freqüência de amostragem são adquiridas pelo conversor A/D, fazendo com que o sinal de alta
freqüência bi seja entendido e tratado pelo processador como se fosse o sinal de menor
freqüência ai (LINDEKE, 2003).
Fig. 2.23 – Efeito de aliasing que ocorre na amostragem (LINDEKE, 2003).
Os conversores A/D geralmente apresentam um dispositivo na entrada analógica
chamado extrapolador de ordem zero (ZOH, do inglês zero order hold), cuja função é de
manter o último valor de tensão amostrado constante, reconstruindo o sinal logo após o
amostrador.
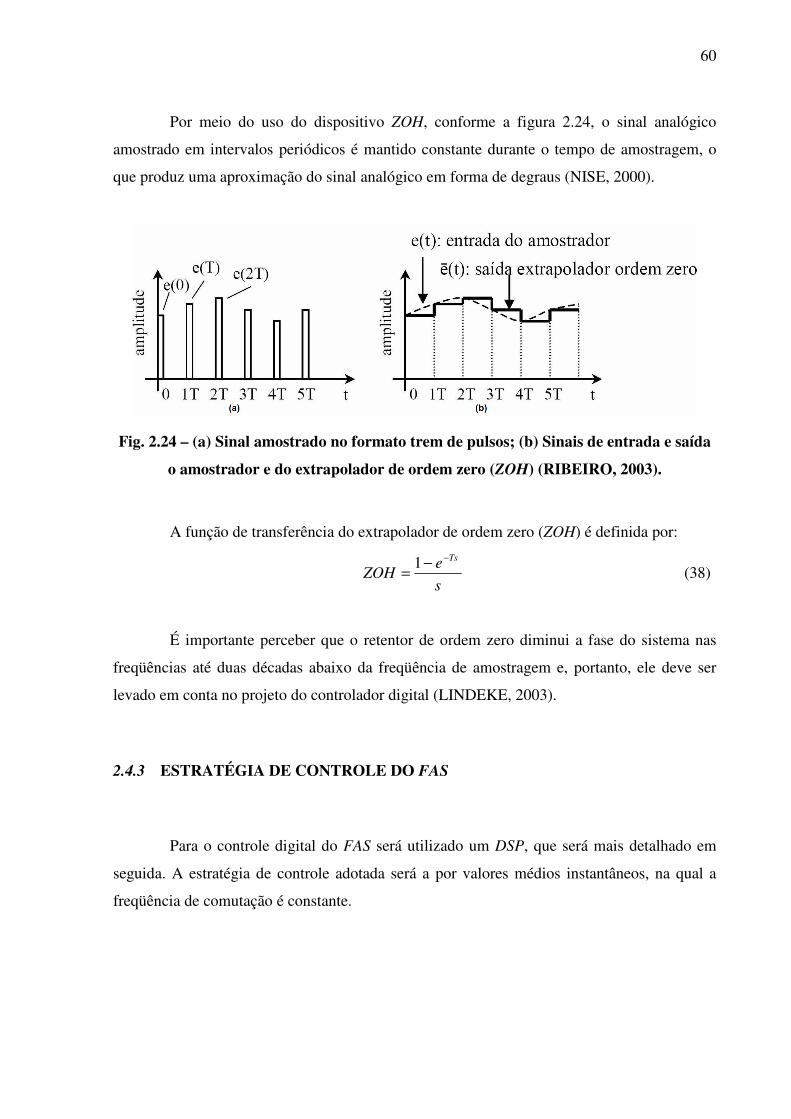
60
Por meio do uso do dispositivo ZOH, conforme a figura 2.24, o sinal analógico
amostrado em intervalos periódicos é mantido constante durante o tempo de amostragem, o
que produz uma aproximação do sinal analógico em forma de degraus (NISE, 2000).
Fig. 2.24 – (a) Sinal amostrado no formato trem de pulsos; (b) Sinais de entrada e saída
o amostrador e do extrapolador de ordem zero (ZOH) (RIBEIRO, 2003).
A função de transferência do extrapolador de ordem zero (ZOH) é definida por:
s
eZOH
Ts−−=
1 (38)
É importante perceber que o retentor de ordem zero diminui a fase do sistema nas
freqüências até duas décadas abaixo da freqüência de amostragem e, portanto, ele deve ser
levado em conta no projeto do controlador digital (LINDEKE, 2003).
2.4.3 ESTRATÉGIA DE CONTROLE DO FAS
Para o controle digital do FAS será utilizado um DSP, que será mais detalhado em
seguida. A estratégia de controle adotada será a por valores médios instantâneos, na qual a
freqüência de comutação é constante.
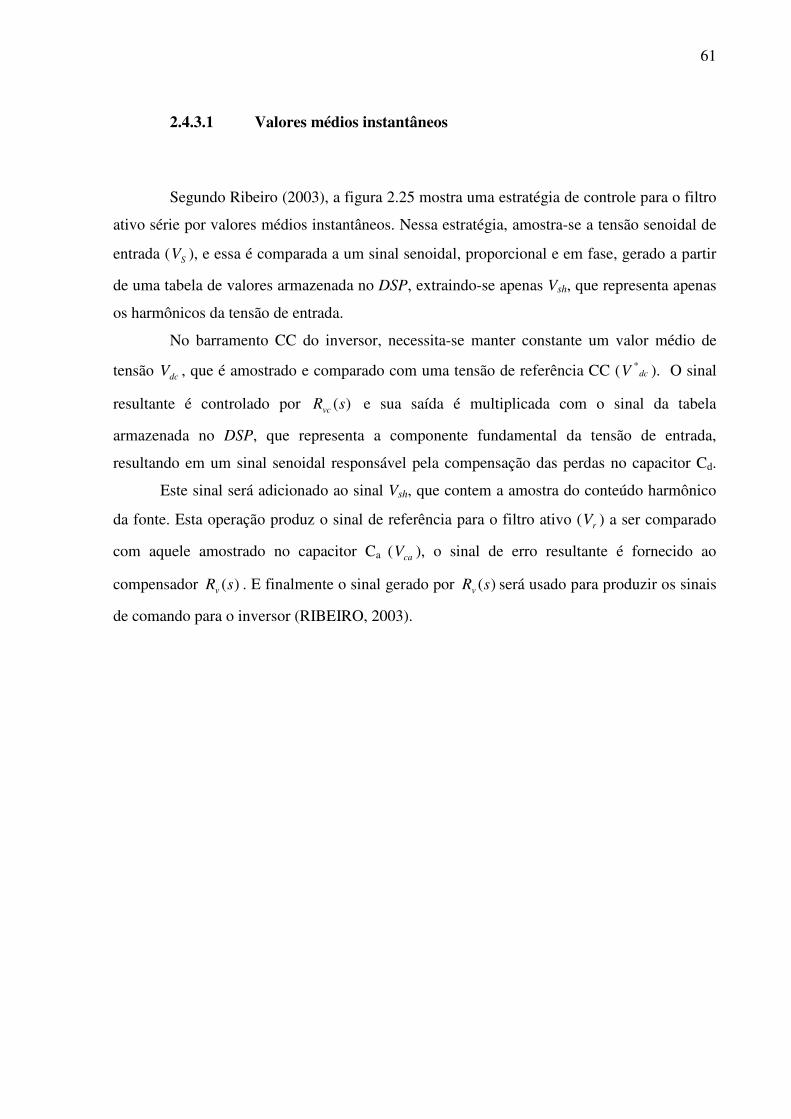
61
2.4.3.1 Valores médios instantâneos
Segundo Ribeiro (2003), a figura 2.25 mostra uma estratégia de controle para o filtro
ativo série por valores médios instantâneos. Nessa estratégia, amostra-se a tensão senoidal de
entrada ( SV ), e essa é comparada a um sinal senoidal, proporcional e em fase, gerado a partir
de uma tabela de valores armazenada no DSP, extraindo-se apenas Vsh, que representa apenas
os harmônicos da tensão de entrada.
No barramento CC do inversor, necessita-se manter constante um valor médio de
tensão dcV , que é amostrado e comparado com uma tensão de referência CC ( dcV * ). O sinal
resultante é controlado por )(sRvc e sua saída é multiplicada com o sinal da tabela
armazenada no DSP, que representa a componente fundamental da tensão de entrada,
resultando em um sinal senoidal responsável pela compensação das perdas no capacitor Cd.
Este sinal será adicionado ao sinal Vsh, que contem a amostra do conteúdo harmônico
da fonte. Esta operação produz o sinal de referência para o filtro ativo ( rV ) a ser comparado
com aquele amostrado no capacitor Ca ( caV ), o sinal de erro resultante é fornecido ao
compensador )(sRv . E finalmente o sinal gerado por )(sRv será usado para produzir os sinais
de comando para o inversor (RIBEIRO, 2003).
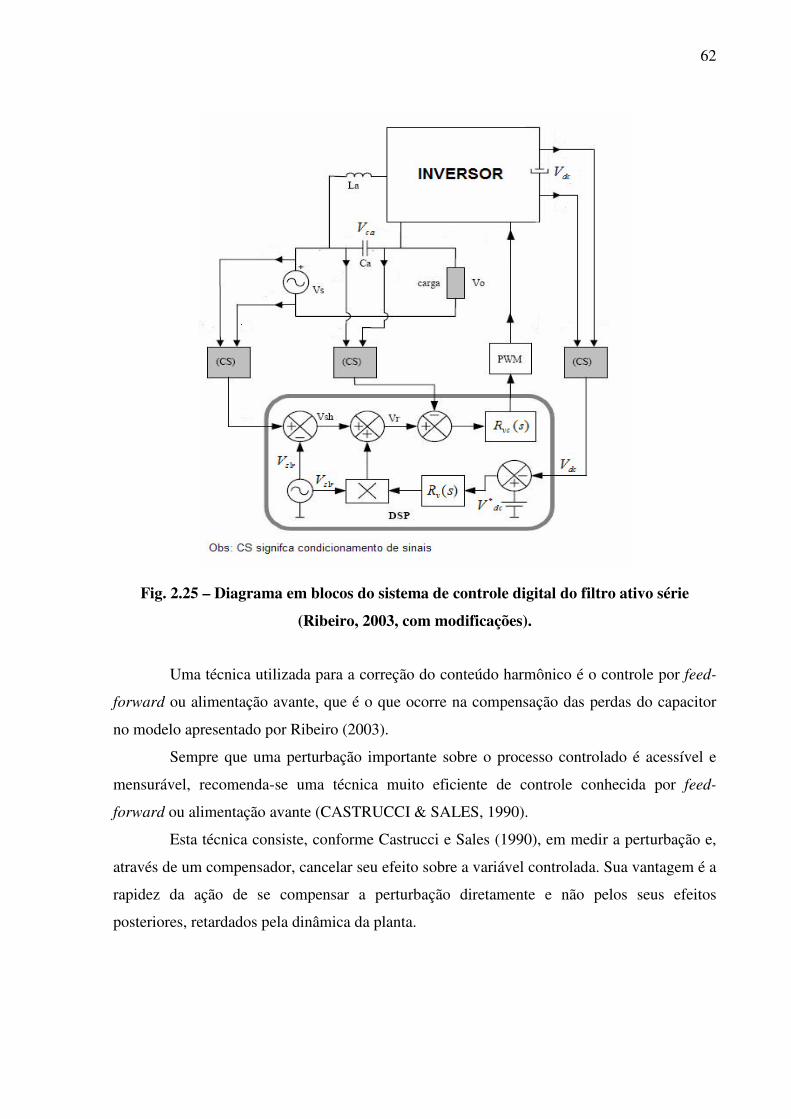
62
Fig. 2.25 – Diagrama em blocos do sistema de controle digital do filtro ativo série
(Ribeiro, 2003, com modificações).
Uma técnica utilizada para a correção do conteúdo harmônico é o controle por feed-
forward ou alimentação avante, que é o que ocorre na compensação das perdas do capacitor
no modelo apresentado por Ribeiro (2003).
Sempre que uma perturbação importante sobre o processo controlado é acessível e
mensurável, recomenda-se uma técnica muito eficiente de controle conhecida por feed-
forward ou alimentação avante (CASTRUCCI & SALES, 1990).
Esta técnica consiste, conforme Castrucci e Sales (1990), em medir a perturbação e,
através de um compensador, cancelar seu efeito sobre a variável controlada. Sua vantagem é a
rapidez da ação de se compensar a perturbação diretamente e não pelos seus efeitos
posteriores, retardados pela dinâmica da planta.
63
2.5 PROCESSADOR DIGITAL DE SINAIS (DSP)
A partir da metade do século XX, com o surgimento dos semicondutores e,
conseqüentemente, dos circuitos internos programáveis, houve um grande progresso na área
de eletrônica digital e tudo que depende e diz respeito a ela.
O uso de microcontroladores cresceu significativamente desde o surgimento de seus
primeiros dispositivos, lançados no final da década de 60. Com a evolução da tecnologia
digital, foram desenvolvidos os DSPs (do inglês Digital Signal Processors), focados em
aplicações de processamento digital de sinais e apresentando um aumento do poder de
processamento.
Atualmente, há diversos modelos comercias de processadores digitais de sinais que
cobrem praticamente todos os tipos de soluções que requeiram esse tipo de processamento,
isto é, desde um simples controlador focado em eliminar ruídos provenientes da leitura de um
sensor acoplado a uma máquina industrial ou um DSP exclusivo para modems, até os mais
complexos DSPs usados em satélites, sistemas complexos de navegação, etc. (RODRIGUES
& SOUZA Jr., 2005).
Os DSPs são projetados levando em consideração as operações mais comuns no
processamento digital de sinais, como a adição, a multiplicação e a transferência de memória.
Essas operações são usadas, freqüentemente, nos algoritmos de processamento de sinais e de
controle, como nos filtros digitais, na transformada rápida de Fourier e nos controladores PID
(RIBEIRO, 2003). Dessa forma, existem instruções de repetição que tornam possível a
execução de instruções complexas usando apenas um único ciclo de clock. Uma dessas
instruções é instrução MAC (do inglês Multiply-Accumulate), que realiza operações de
multiplicação e acumulação em um ciclo de clock, o que permite o processamento matemático
de algoritmos em alta velocidade.
Os DSPs, em geral, apresentam arquitetura Harvard, isto é, apresentam um
barramento exclusivo para dados e um outro exclusivo para instruções (programa) para as
transferências entre memória e núcleo. Além disso, os barramentos podem transferir
informações simultaneamente, aumentando consideravelmente o desempenho do controlador
(RODRIGUES & SOUZA Jr., 2005).
Para a implementação do controle digital do projeto foi escolhido um DSP da
Freescale Semiconductor, o 56F8013. Este DSP foi escolhido por ter o nível de
64
processamento desejado e por apresentar o conjunto de periféricos necessário para a
implementação do controle digital, além da Freescale™ disponibilizar um compilador que
apresenta suporte para linguagem C.
2.5.1 CARACTERÍSTICAS DO DSP 56F8013
O 56F8013 é um membro da família de controladores digitais de sinais (DSCs) de 16
bits com núcleo 56800E. Ele combina, em um único chip, o poder de processamento de um
DSP e a funcionalidade de um microcontrolador, com a flexibilidade de um grupo de
periféricos que trazem o melhor custo benefício como solução. Por causa de seu custo baixo,
flexibilidade de configuração e programação compacta, o 56F8013 é usado em muitas
aplicações. (FREESCALE, 2006c).
O grande número de registradores internos, versáteis modos de endereçamento,
unidade para manipulação de bits, entre outras, deixam as tarefas de controle tradicionais
serem executadas com facilidade, sem a complexidade e limitações que são normalmente
associadas aos dispositivos DSP (RODRIGUES & SOUZA Jr., 2005).
O núcleo do 56F8013, o 56800E, é composto por várias unidades funcionais e
independentes entre si. As unidades Data ALU – Data Arithmetic Logic Unit (Unidade Lógica
Aritmética), Program Controller (Controlador de Programa), AGU – Address Generation
Unit (Unidade Geradora de Endereços) contém seus próprios registradores e controle lógico,
permitindo que operem independentemente. Há também uma unidade de manipulação de bits
(bit-manipulation) independente, que permite operações de manipulação de bits bastante
eficientes. Cada unidade funcional comunica-se com as outras unidades, com a memória
(programa e dados) e com os periféricos por meio dos barramentos internos (dados e
endereços). A figura 2.26 apresenta a arquitetura do núcleo 56800/E (RODRIGUES&
SOUZA Jr.).
Algumas das principais características do núcleo 56800E são (FREESCALE, 2006b):
• Processador de 16 bits com arquitetura Harvard;
• Buffer circular;
• Interrupções por software com vários níveis de prioridade e programáveis;
• Tipos de dados de 8, 16 e 32 bits;
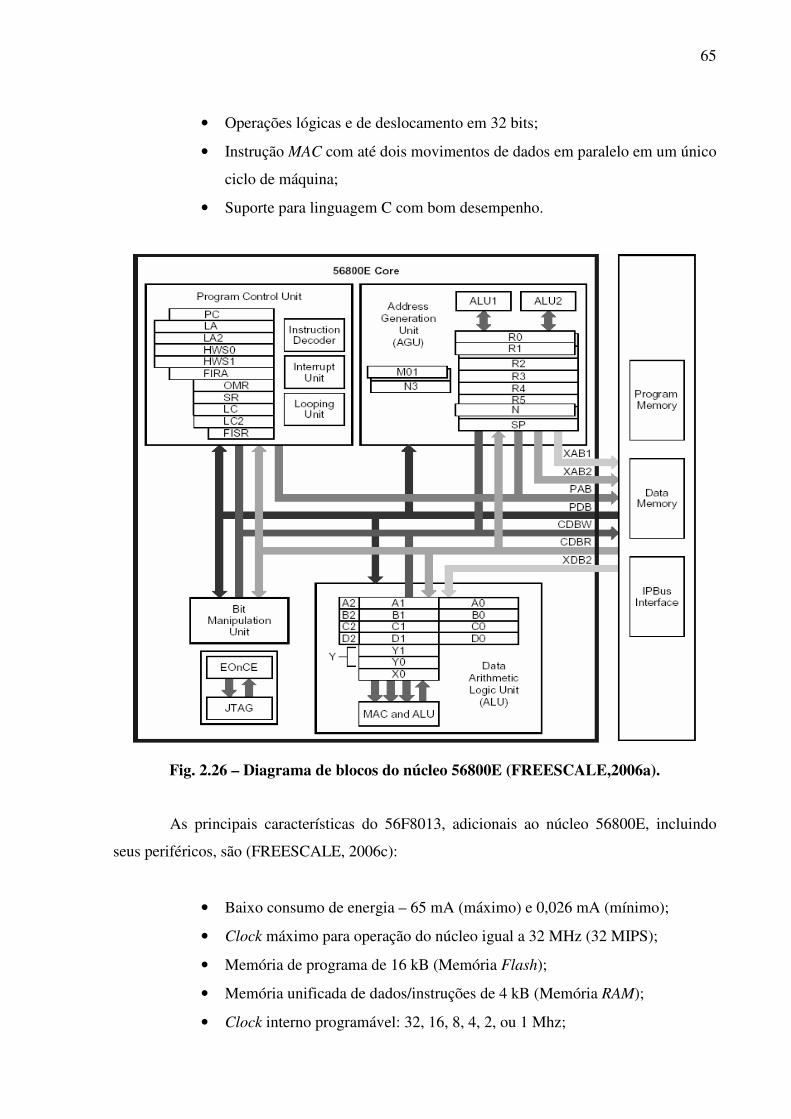
65
• Operações lógicas e de deslocamento em 32 bits;
• Instrução MAC com até dois movimentos de dados em paralelo em um único
ciclo de máquina;
• Suporte para linguagem C com bom desempenho.
Fig. 2.26 – Diagrama de blocos do núcleo 56800E (FREESCALE,2006a).
As principais características do 56F8013, adicionais ao núcleo 56800E, incluindo
seus periféricos, são (FREESCALE, 2006c):
• Baixo consumo de energia – 65 mA (máximo) e 0,026 mA (mínimo);
• Clock máximo para operação do núcleo igual a 32 MHz (32 MIPS);
• Memória de programa de 16 kB (Memória Flash);
• Memória unificada de dados/instruções de 4 kB (Memória RAM);
• Clock interno programável: 32, 16, 8, 4, 2, ou 1 Mhz;
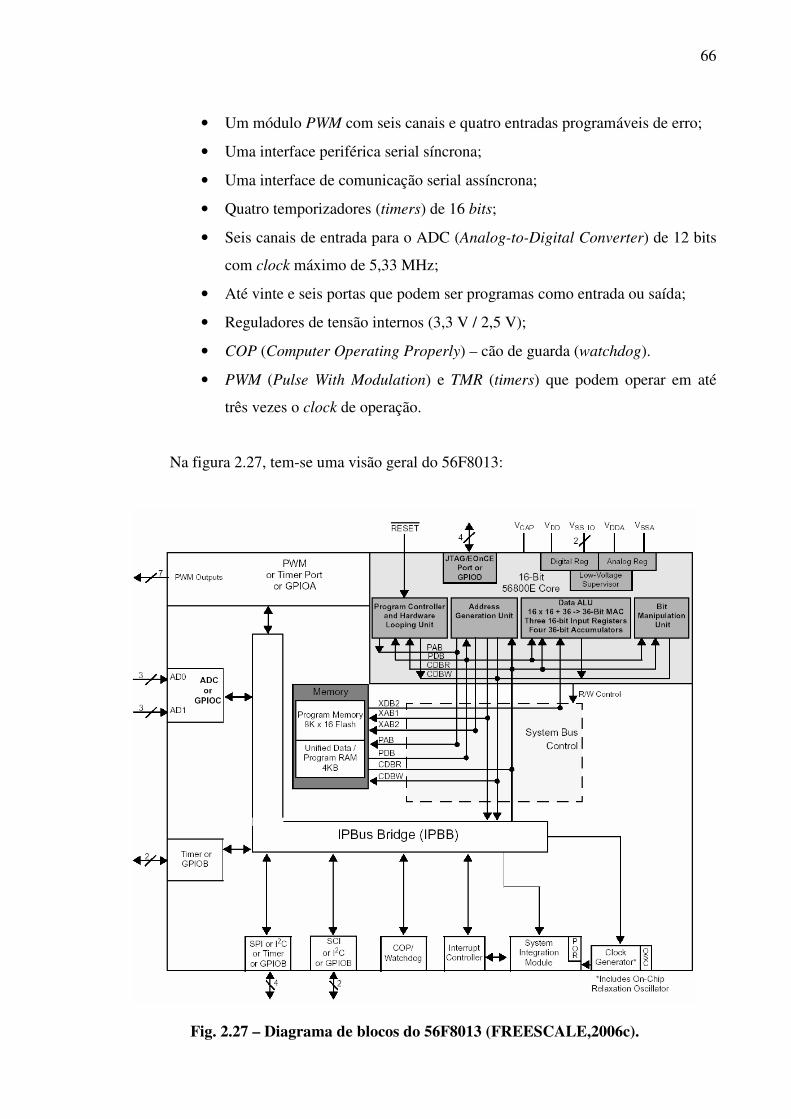
66
• Um módulo PWM com seis canais e quatro entradas programáveis de erro;
• Uma interface periférica serial síncrona;
• Uma interface de comunicação serial assíncrona;
• Quatro temporizadores (timers) de 16 bits;
• Seis canais de entrada para o ADC (Analog-to-Digital Converter) de 12 bits
com clock máximo de 5,33 MHz;
• Até vinte e seis portas que podem ser programas como entrada ou saída;
• Reguladores de tensão internos (3,3 V / 2,5 V);
• COP (Computer Operating Properly) – cão de guarda (watchdog).
• PWM (Pulse With Modulation) e TMR (timers) que podem operar em até
três vezes o clock de operação.
Na figura 2.27, tem-se uma visão geral do 56F8013:
Fig. 2.27 – Diagrama de blocos do 56F8013 (FREESCALE,2006c).
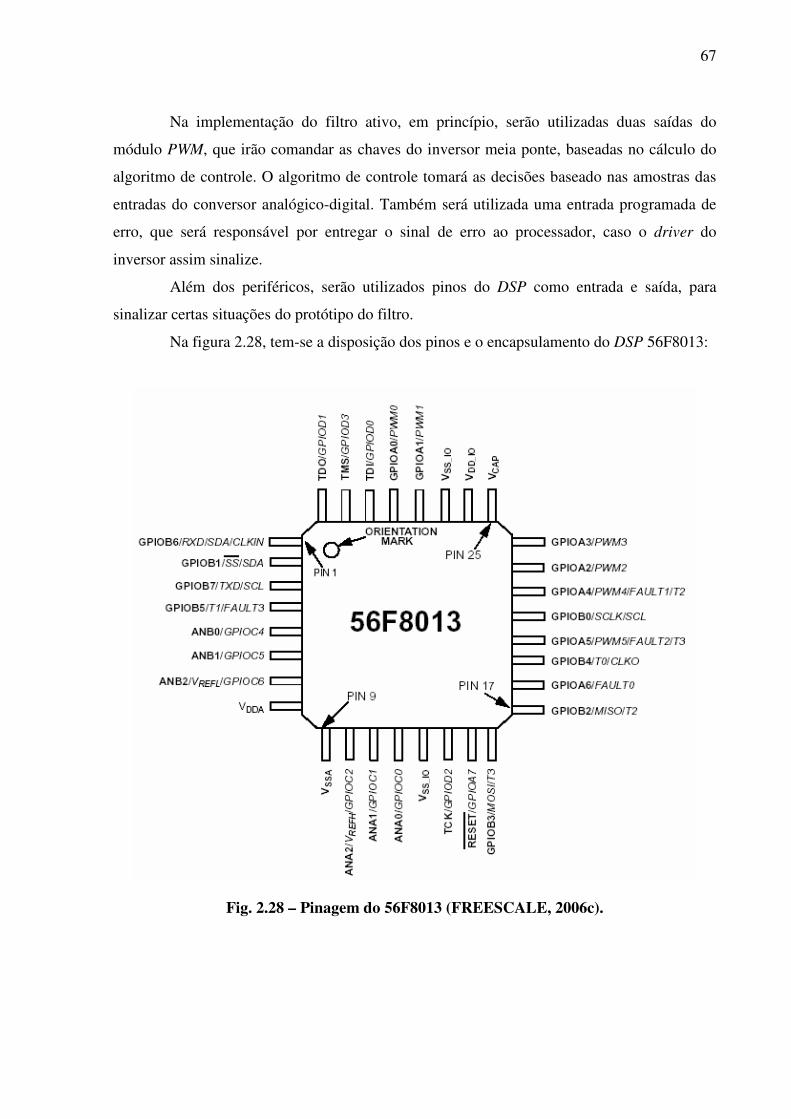
67
Na implementação do filtro ativo, em princípio, serão utilizadas duas saídas do
módulo PWM, que irão comandar as chaves do inversor meia ponte, baseadas no cálculo do
algoritmo de controle. O algoritmo de controle tomará as decisões baseado nas amostras das
entradas do conversor analógico-digital. Também será utilizada uma entrada programada de
erro, que será responsável por entregar o sinal de erro ao processador, caso o driver do
inversor assim sinalize.
Além dos periféricos, serão utilizados pinos do DSP como entrada e saída, para
sinalizar certas situações do protótipo do filtro.
Na figura 2.28, tem-se a disposição dos pinos e o encapsulamento do DSP 56F8013:
Fig. 2.28 – Pinagem do 56F8013 (FREESCALE, 2006c).

68
Para a programação do 56F8013, a Freescale™ disponibiliza um avançado e
integrado ambiente de desenvolvimento (programação, simulação, depuração e gravação) de
novos projetos denominado CodeWarrior® (RODRIGUES & SOUZA, 2005).
Nesse ambiente, é possível programar em Assembly, utilizando o conjunto de
instruções do 56F8013, ou em C, já que o compilador apresenta suporte para isso.
2.6 SIMULAÇÃO
Para o melhor entendimento do funcionamento do filtro ativo série proposto neste
trabalho foi realizada uma simulação do circuito operando em malha fechada com controle
analógico, utilizando o software ORCAD.
O diagrama do filtro ativo série simulado é mostrado na figura 2.29:
Fig. 2.29 – Diagrama do circuito simulado do FAS.
69
O filtro está conectado em série com a fonte e uma carga não linear. Trata-se, esta
última, de um retificador monofásico em ponte completa com filtro capacitivo alimentando
um resistor. O valor do capacitor de filtro é de 100 µF e do resistor de 70 Ω.
Para a simulação foi considerada a tensão de alimentação constituída de duas fontes:
uma com a componente fundamental de 60 Hz e a outra com uma componente de 3ª ordem.
Também foram consideradas as seguintes características:
• Valor eficaz da tensão fundamental de entrada: 127 V;
• Valor eficaz da componente harmônica de 3ª ordem: 21,92 V;
• Freqüência de chaveamento: 48 kHz;
• Carga não linear na saída.
Os resultados e as formas de onda de maior importância são apresentados nesta
seção, onde se pode observar o bom funcionamento do circuito.
2.6.1 PRINCIPAIS FORMAS DE ONDA
A tensão de entrada distorcida Vs é apresentada na figura 2.30. Pode-se perceber a
distorção na onda da tensão de entrada devido à presença do terceiro harmônico.
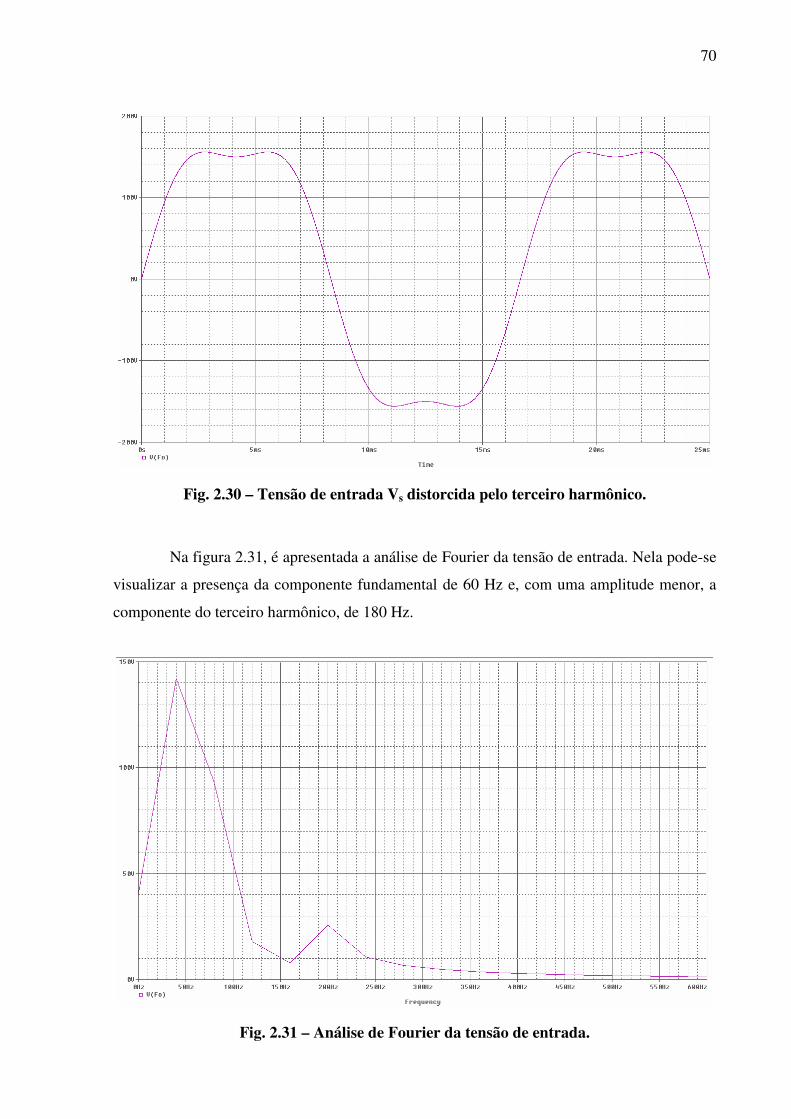
70
Fig. 2.30 – Tensão de entrada Vs distorcida pelo terceiro harmônico.
Na figura 2.31, é apresentada a análise de Fourier da tensão de entrada. Nela pode-se
visualizar a presença da componente fundamental de 60 Hz e, com uma amplitude menor, a
componente do terceiro harmônico, de 180 Hz.
Fig. 2.31 – Análise de Fourier da tensão de entrada.

71
A tensão Vo disponibilizada para a carga é mostrada na figura 2.32.
Fig. 2.32 – Tensão de saída Vo.
Na figura 2.33 tem-se a análise de Fourier da tensão de saída. Pode-se observar que a
componente de 3ª ordem foi eliminada e a carga recebe apenas a componente fundamental de
60 Hz.
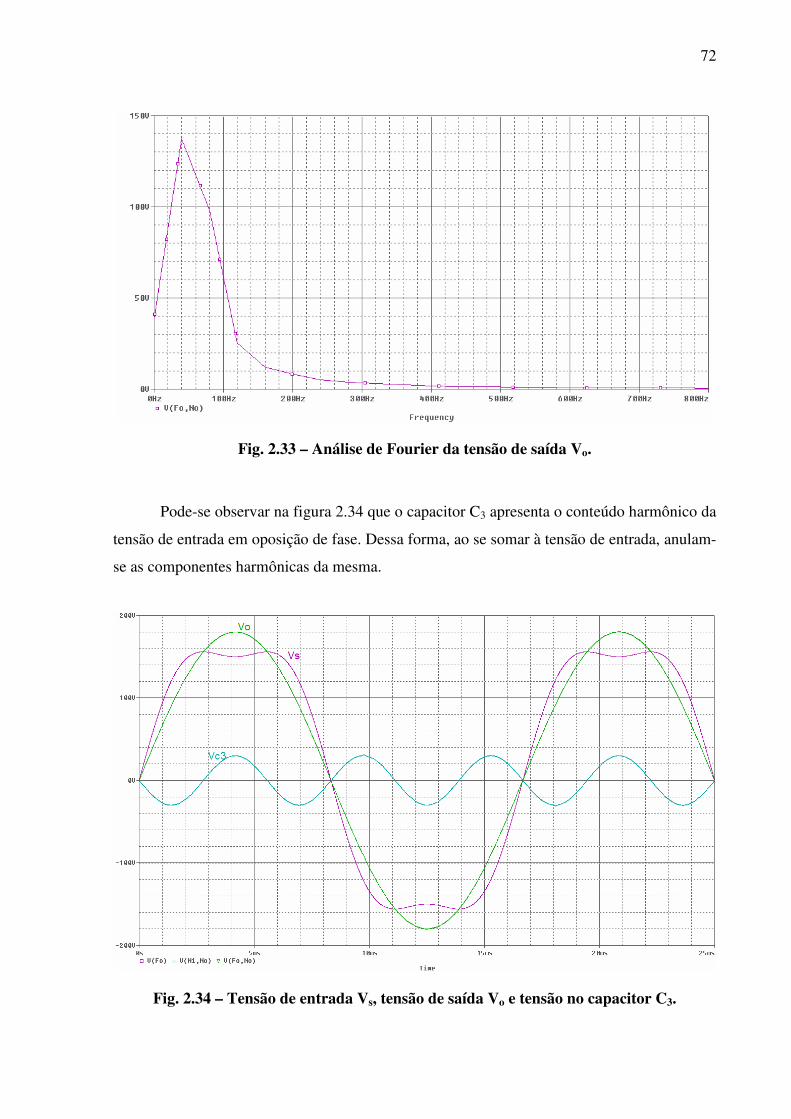
72
Fig. 2.33 – Análise de Fourier da tensão de saída Vo.
Pode-se observar na figura 2.34 que o capacitor C3 apresenta o conteúdo harmônico da
tensão de entrada em oposição de fase. Dessa forma, ao se somar à tensão de entrada, anulam-
se as componentes harmônicas da mesma.
Fig. 2.34 – Tensão de entrada Vs, tensão de saída Vo e tensão no capacitor C3.
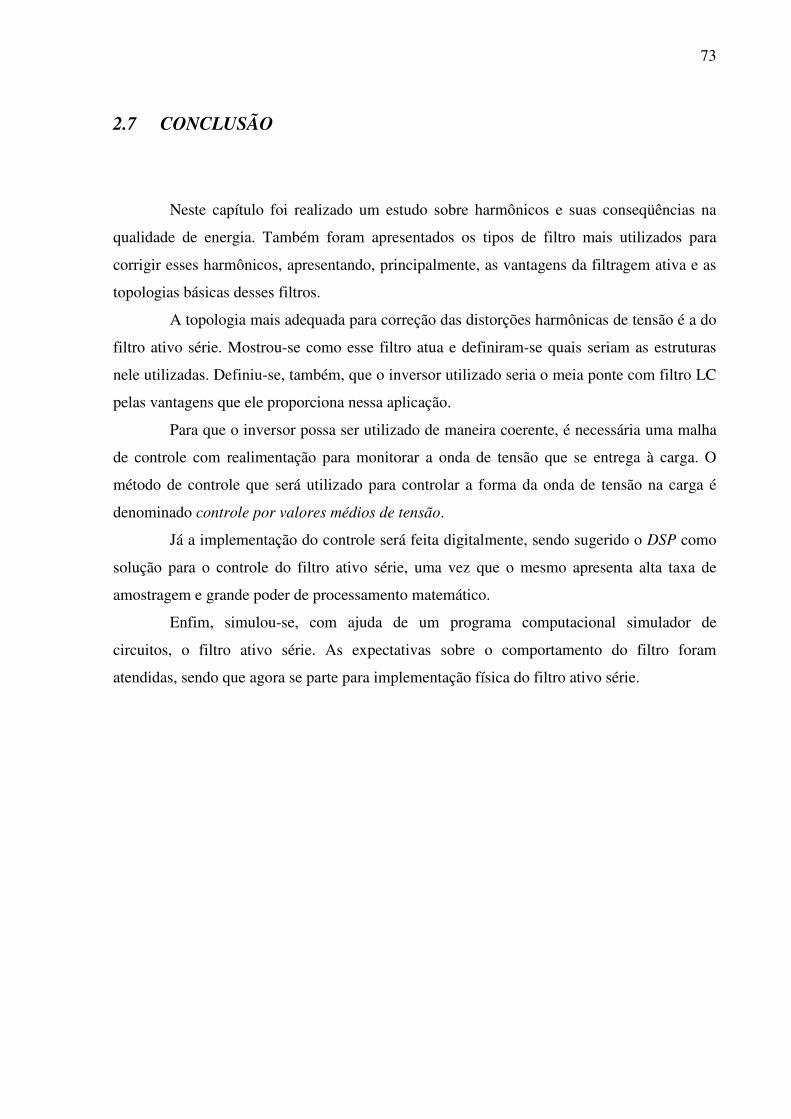
73
2.7 CONCLUSÃO
Neste capítulo foi realizado um estudo sobre harmônicos e suas conseqüências na
qualidade de energia. Também foram apresentados os tipos de filtro mais utilizados para
corrigir esses harmônicos, apresentando, principalmente, as vantagens da filtragem ativa e as
topologias básicas desses filtros.
A topologia mais adequada para correção das distorções harmônicas de tensão é a do
filtro ativo série. Mostrou-se como esse filtro atua e definiram-se quais seriam as estruturas
nele utilizadas. Definiu-se, também, que o inversor utilizado seria o meia ponte com filtro LC
pelas vantagens que ele proporciona nessa aplicação.
Para que o inversor possa ser utilizado de maneira coerente, é necessária uma malha
de controle com realimentação para monitorar a onda de tensão que se entrega à carga. O
método de controle que será utilizado para controlar a forma da onda de tensão na carga é
denominado controle por valores médios de tensão.
Já a implementação do controle será feita digitalmente, sendo sugerido o DSP como
solução para o controle do filtro ativo série, uma vez que o mesmo apresenta alta taxa de
amostragem e grande poder de processamento matemático.
Enfim, simulou-se, com ajuda de um programa computacional simulador de
circuitos, o filtro ativo série. As expectativas sobre o comportamento do filtro foram
atendidas, sendo que agora se parte para implementação física do filtro ativo série.

74
3 PROJETO DO FILTRO ATIVO SÉRIE
3.1 INTRODUÇÃO
Após estudo e embasamento teórico visto nos capítulos anteriores, este capítulo
apresenta a implementação do projeto. A primeira etapa do projeto do filtro ativo série elucida
o início do desenvolvimento de um circuito esquemático, com descrições de cada parte
constituinte e com os cálculos dos componentes utilizados. Na segunda etapa, são
apresentadas as características do método de controle utilizado. Na terceira etapa, é montada a
placa com a parte de potência do filtro e são testadas algumas funções. Na quarta etapa, a
lógica de programação do DSP é apresentada.
3.2 DESCRIÇÃO DO CIRCUITO
Para o circuito elaborado, foi considerado o diagrama de blocos apresentado na
figura 3.1.
Fig. 3.1 – Diagrama de blocos do filtro ativo série a ser implementado.
75
A partir de uma entrada CA 127 V (rede elétrica), fez-se necessária sua conversão
para CC, através do circuito retificador, para alimentação do circuito inversor meia ponte. As
chaves semicondutoras do inversor, por sua vez, são acionadas através de um driver
controlado pelo DSP. Verifica-se a necessidade da adequação da tensão de entrada (127 V),
para as tensões utilizadas pelos elementos ativos do circuito: o driver, através de uma fonte
CC de 12 V, e o circuito do DSP que trabalha com tensões de 3,3 Vcc.
Estando todos os componentes alimentados, a tensão de saída, ou seja, a tensão na
carga é amostrada para o DSP, assim como a tensão de entrada, sendo que a partir delas e da
lógica implementada no DSP, as chaves semicondutoras são controladas para que a carga
receba a forma de onda de tensão mais senoidal possível.
A seguir é detalhado, com mais profundidade, cada um desses elementos acima
citados.
3.2.1 RETIFICADOR MONOFÁSICO OPERANDO COMO DOBRADOR DE
TENSÃO
O retificador monofásico operando como dobrador de tensão, representado na figura
3.2, é o responsável por retificar a rede CA e carregar os capacitores que servirão como fonte
de energia para o inversor meia ponte.
A principal característica desse retificador é a necessidade de apenas dois diodos
retificadores que, conforme o ciclo da onda senoidal de entrada (ciclo positivo ou ciclo
negativo), irão carregar um dos dois capacitores. Assim, quando a entrada estiver no ciclo
positivo da senóide de entrada, o diodo D1 estará conduzindo, carregando o capacitor C1,
enquanto o diodo D2 estará bloqueado. Já no ciclo negativo, o processo será o contrário: o
diodo D2 estará conduzindo e permitindo que o capacitor C2 seja carregado, enquanto o diodo
D1 estará bloqueado, não permitindo que a energia da entrada seja repassada para o capacitor
C1.
Nota-se que cada capacitor é carregado diretamente pela rede. Dessa forma, cada um
deles apresentará a tensão de pico da rede. Por esse motivo ele é denominado dobrador de
tensão, pois a tensão resultante sobre os dois capacitores será o dobro da tensão de pico da
entrada. Isso faz com que este circuito seja ideal para a alimentação dos capacitores do braço
do inversor meia ponte.
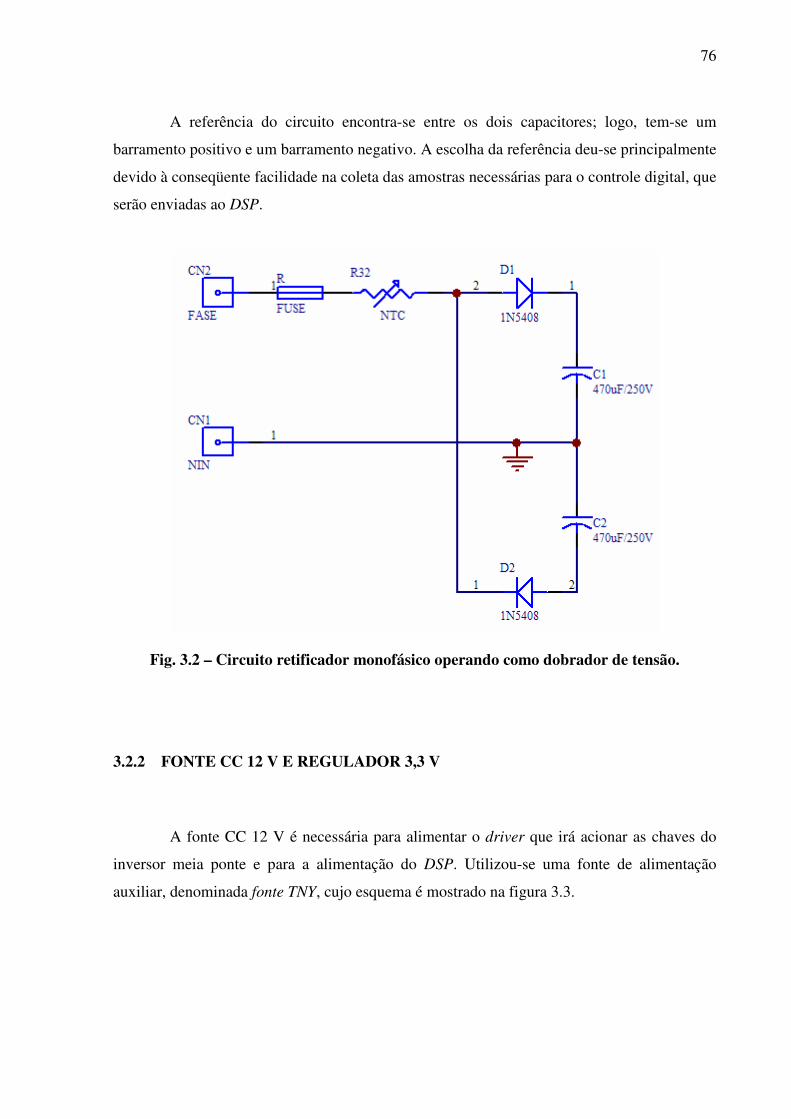
76
A referência do circuito encontra-se entre os dois capacitores; logo, tem-se um
barramento positivo e um barramento negativo. A escolha da referência deu-se principalmente
devido à conseqüente facilidade na coleta das amostras necessárias para o controle digital, que
serão enviadas ao DSP.
Fig. 3.2 – Circuito retificador monofásico operando como dobrador de tensão.
3.2.2 FONTE CC 12 V E REGULADOR 3,3 V
A fonte CC 12 V é necessária para alimentar o driver que irá acionar as chaves do
inversor meia ponte e para a alimentação do DSP. Utilizou-se uma fonte de alimentação
auxiliar, denominada fonte TNY, cujo esquema é mostrado na figura 3.3.

77
Fig. 3.3 – Diagrama esquemático da fonte auxiliar 12 V (KÜSTER, 2006).
A fonte auxiliar é um flyback que utiliza um circuito integrado dedicado, o TNY268,
que, em um único dispositivo, integra o MOSFET e a parte responsável pelo controle do
chaveamento do mesmo.
O DSP escolhido na implementação do protótipo necessita de uma fonte de
alimentação em 3,3 Vcc. Dessa forma, é utilizado o regulador de tensão LD1086V33, que
disponibiliza 3,3 Vcc a partir de uma fonte de 12 Vcc. A figura 3.4 apresenta o esquema da
fonte de alimentação.
Fig. 3.4 – Esquema da fonte de alimentação TNY de 12 Vcc e do regulador de tensão de
3,3 Vcc.
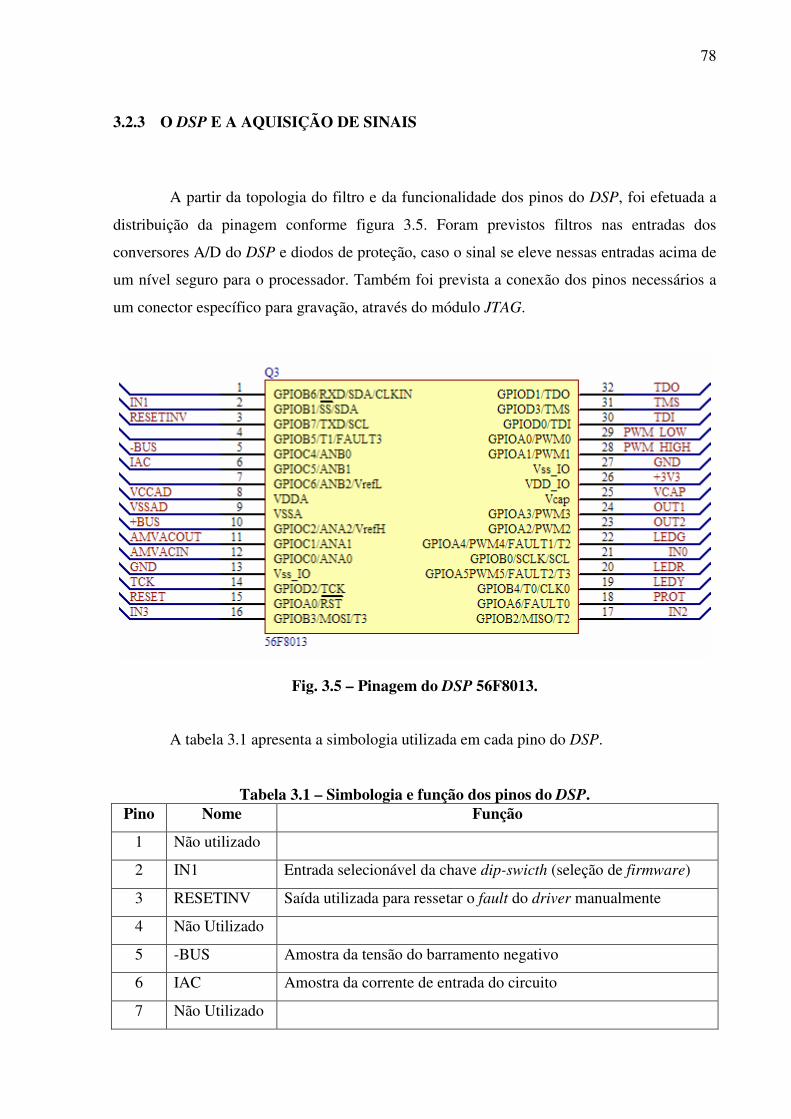
78
3.2.3 O DSP E A AQUISIÇÃO DE SINAIS
A partir da topologia do filtro e da funcionalidade dos pinos do DSP, foi efetuada a
distribuição da pinagem conforme figura 3.5. Foram previstos filtros nas entradas dos
conversores A/D do DSP e diodos de proteção, caso o sinal se eleve nessas entradas acima de
um nível seguro para o processador. Também foi prevista a conexão dos pinos necessários a
um conector específico para gravação, através do módulo JTAG.
Fig. 3.5 – Pinagem do DSP 56F8013.
A tabela 3.1 apresenta a simbologia utilizada em cada pino do DSP.
Tabela 3.1 – Simbologia e função dos pinos do DSP. Pino Nome Função
1 Não utilizado
2 IN1 Entrada selecionável da chave dip-swicth (seleção de firmware)
3 RESETINV Saída utilizada para ressetar o fault do driver manualmente
4 Não Utilizado
5 -BUS Amostra da tensão do barramento negativo
6 IAC Amostra da corrente de entrada do circuito
7 Não Utilizado
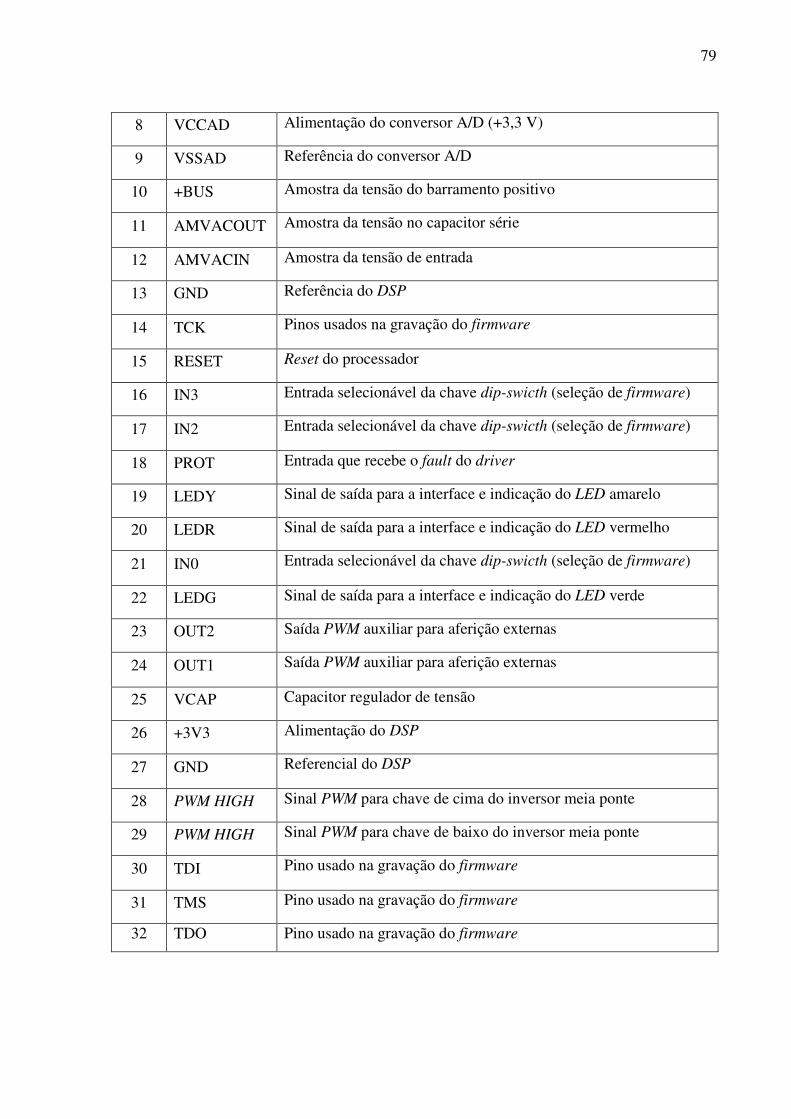
79
8 VCCAD Alimentação do conversor A/D (+3,3 V)
9 VSSAD Referência do conversor A/D
10 +BUS Amostra da tensão do barramento positivo
11 AMVACOUT Amostra da tensão no capacitor série
12 AMVACIN Amostra da tensão de entrada
13 GND Referência do DSP
14 TCK Pinos usados na gravação do firmware
15 RESET Reset do processador
16 IN3 Entrada selecionável da chave dip-swicth (seleção de firmware)
17 IN2 Entrada selecionável da chave dip-swicth (seleção de firmware)
18 PROT Entrada que recebe o fault do driver
19 LEDY Sinal de saída para a interface e indicação do LED amarelo
20 LEDR Sinal de saída para a interface e indicação do LED vermelho
21 IN0 Entrada selecionável da chave dip-swicth (seleção de firmware)
22 LEDG Sinal de saída para a interface e indicação do LED verde
23 OUT2 Saída PWM auxiliar para aferição externas
24 OUT1 Saída PWM auxiliar para aferição externas
25 VCAP Capacitor regulador de tensão
26 +3V3 Alimentação do DSP
27 GND Referencial do DSP
28 PWM HIGH Sinal PWM para chave de cima do inversor meia ponte
29 PWM HIGH Sinal PWM para chave de baixo do inversor meia ponte
30 TDI Pino usado na gravação do firmware
31 TMS Pino usado na gravação do firmware
32 TDO Pino usado na gravação do firmware
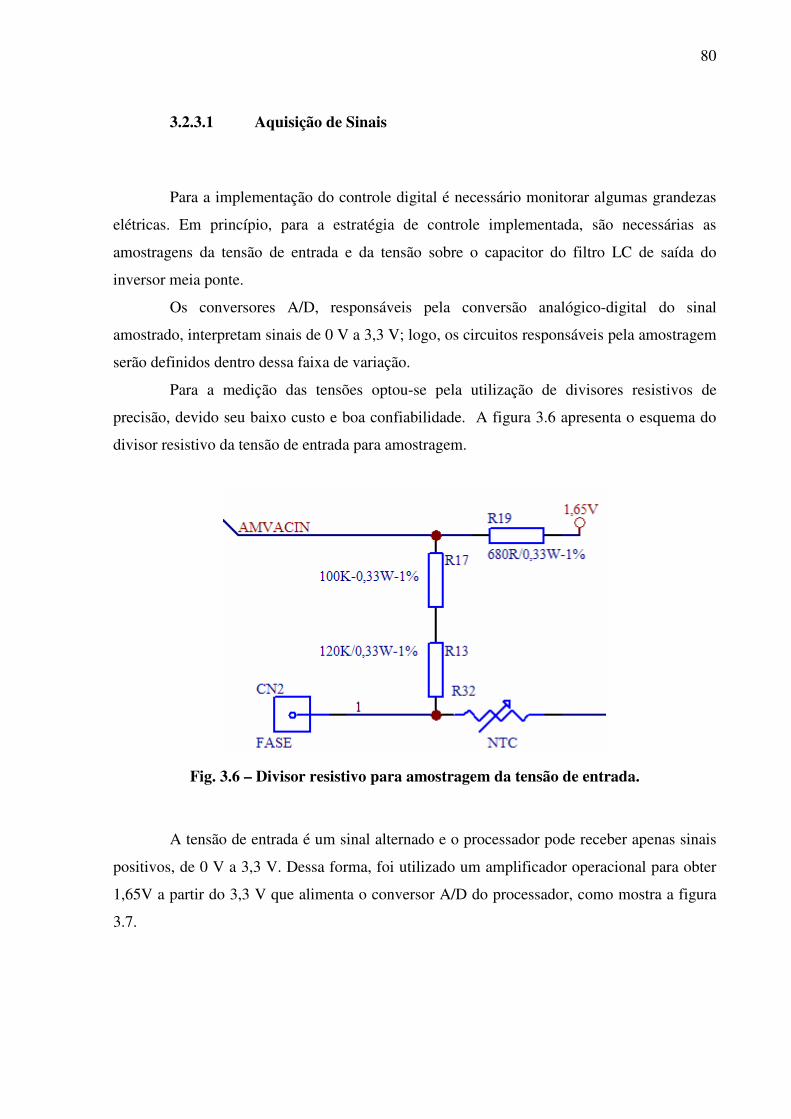
80
3.2.3.1 Aquisição de Sinais
Para a implementação do controle digital é necessário monitorar algumas grandezas
elétricas. Em princípio, para a estratégia de controle implementada, são necessárias as
amostragens da tensão de entrada e da tensão sobre o capacitor do filtro LC de saída do
inversor meia ponte.
Os conversores A/D, responsáveis pela conversão analógico-digital do sinal
amostrado, interpretam sinais de 0 V a 3,3 V; logo, os circuitos responsáveis pela amostragem
serão definidos dentro dessa faixa de variação.
Para a medição das tensões optou-se pela utilização de divisores resistivos de
precisão, devido seu baixo custo e boa confiabilidade. A figura 3.6 apresenta o esquema do
divisor resistivo da tensão de entrada para amostragem.
Fig. 3.6 – Divisor resistivo para amostragem da tensão de entrada.
A tensão de entrada é um sinal alternado e o processador pode receber apenas sinais
positivos, de 0 V a 3,3 V. Dessa forma, foi utilizado um amplificador operacional para obter
1,65V a partir do 3,3 V que alimenta o conversor A/D do processador, como mostra a figura
3.7.
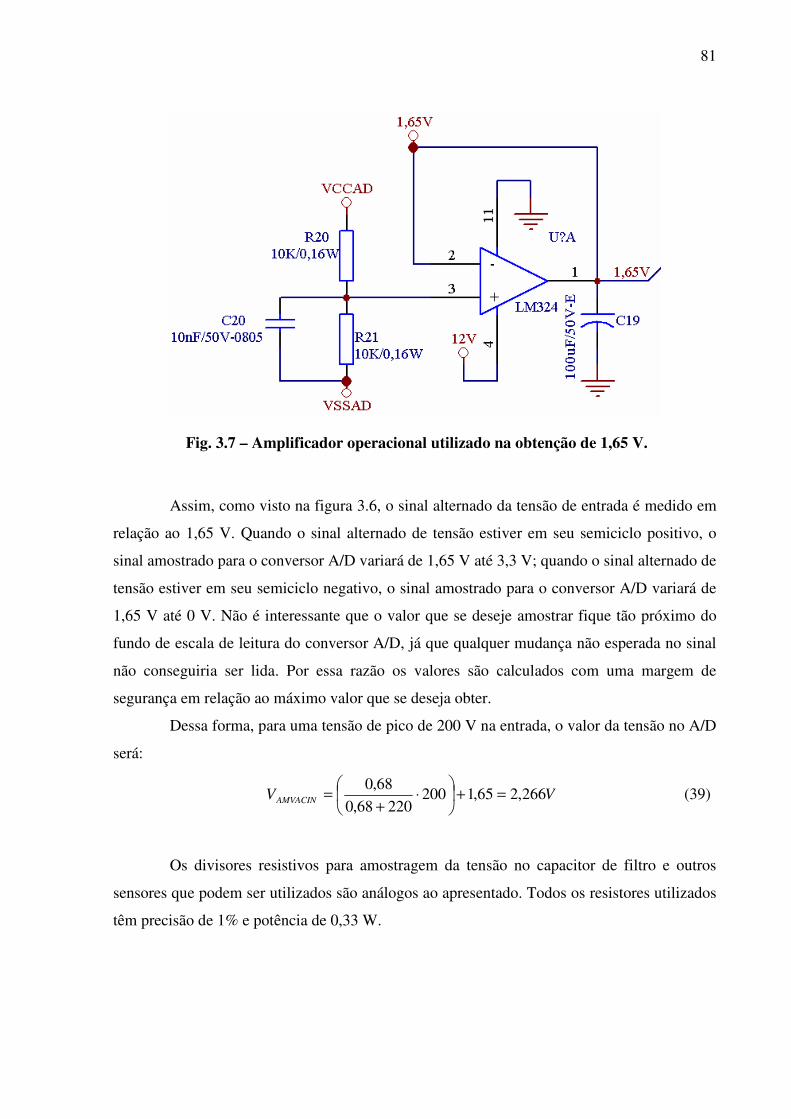
81
Fig. 3.7 – Amplificador operacional utilizado na obtenção de 1,65 V.
Assim, como visto na figura 3.6, o sinal alternado da tensão de entrada é medido em
relação ao 1,65 V. Quando o sinal alternado de tensão estiver em seu semiciclo positivo, o
sinal amostrado para o conversor A/D variará de 1,65 V até 3,3 V; quando o sinal alternado de
tensão estiver em seu semiciclo negativo, o sinal amostrado para o conversor A/D variará de
1,65 V até 0 V. Não é interessante que o valor que se deseje amostrar fique tão próximo do
fundo de escala de leitura do conversor A/D, já que qualquer mudança não esperada no sinal
não conseguiria ser lida. Por essa razão os valores são calculados com uma margem de
segurança em relação ao máximo valor que se deseja obter.
Dessa forma, para uma tensão de pico de 200 V na entrada, o valor da tensão no A/D
será:
VVAMVACIN 266,265,120022068,0
68,0=+
⋅
+= (39)
Os divisores resistivos para amostragem da tensão no capacitor de filtro e outros
sensores que podem ser utilizados são análogos ao apresentado. Todos os resistores utilizados
têm precisão de 1% e potência de 0,33 W.

82
3.2.4 CIRCUITO DE ACIONAMENTO DAS CHAVES (DRIVER)
Para o acionamento das chaves do inversor meia ponte utilizou-se uma placa auxiliar
de driver, visto que o objetivo do projeto não engloba o desenvolvimento de um circuito de
hardware responsável pelo acionamento das chaves. A placa auxiliar de driver utiliza o
circuito integrado HCPL-316J, que é isolado opticamente.
A placa de driver é responsável por condicionar os sinais do chaveamento PWM
vindos do DSP a um nível de tensão e corrente adequados para acionamento dos MOSFETs
do inversor meia ponte. Ela também separa a referência de cada uma das chaves.
Outra característica dessa placa é a de apresentar uma saída de erro, que é invertida
em relação à leitura do fault do DSP, fazendo-se necessário o circuito de inversão.
O esquema do acionamento do inversor é apresentado na figura 3.8.
Fig. 3.8 – Esquema de acionamento das chaves do inversor meia ponte através do driver.
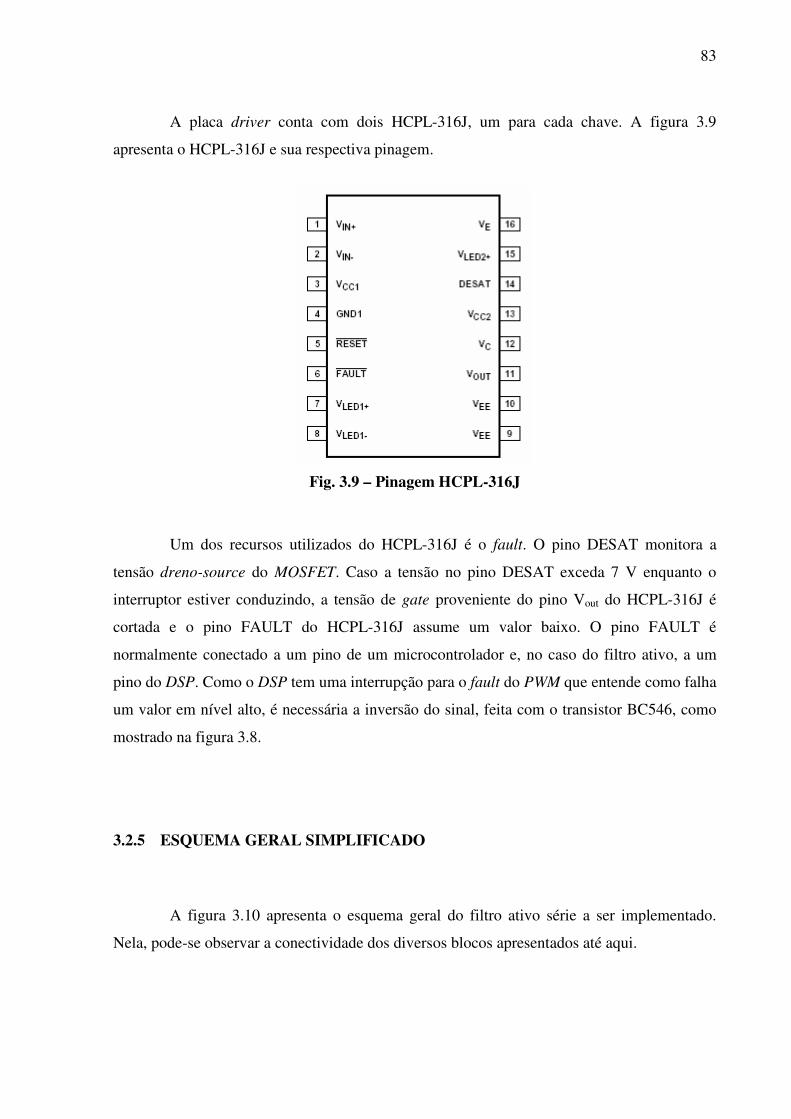
83
A placa driver conta com dois HCPL-316J, um para cada chave. A figura 3.9
apresenta o HCPL-316J e sua respectiva pinagem.
Fig. 3.9 – Pinagem HCPL-316J
Um dos recursos utilizados do HCPL-316J é o fault. O pino DESAT monitora a
tensão dreno-source do MOSFET. Caso a tensão no pino DESAT exceda 7 V enquanto o
interruptor estiver conduzindo, a tensão de gate proveniente do pino Vout do HCPL-316J é
cortada e o pino FAULT do HCPL-316J assume um valor baixo. O pino FAULT é
normalmente conectado a um pino de um microcontrolador e, no caso do filtro ativo, a um
pino do DSP. Como o DSP tem uma interrupção para o fault do PWM que entende como falha
um valor em nível alto, é necessária a inversão do sinal, feita com o transistor BC546, como
mostrado na figura 3.8.
3.2.5 ESQUEMA GERAL SIMPLIFICADO
A figura 3.10 apresenta o esquema geral do filtro ativo série a ser implementado.
Nela, pode-se observar a conectividade dos diversos blocos apresentados até aqui.
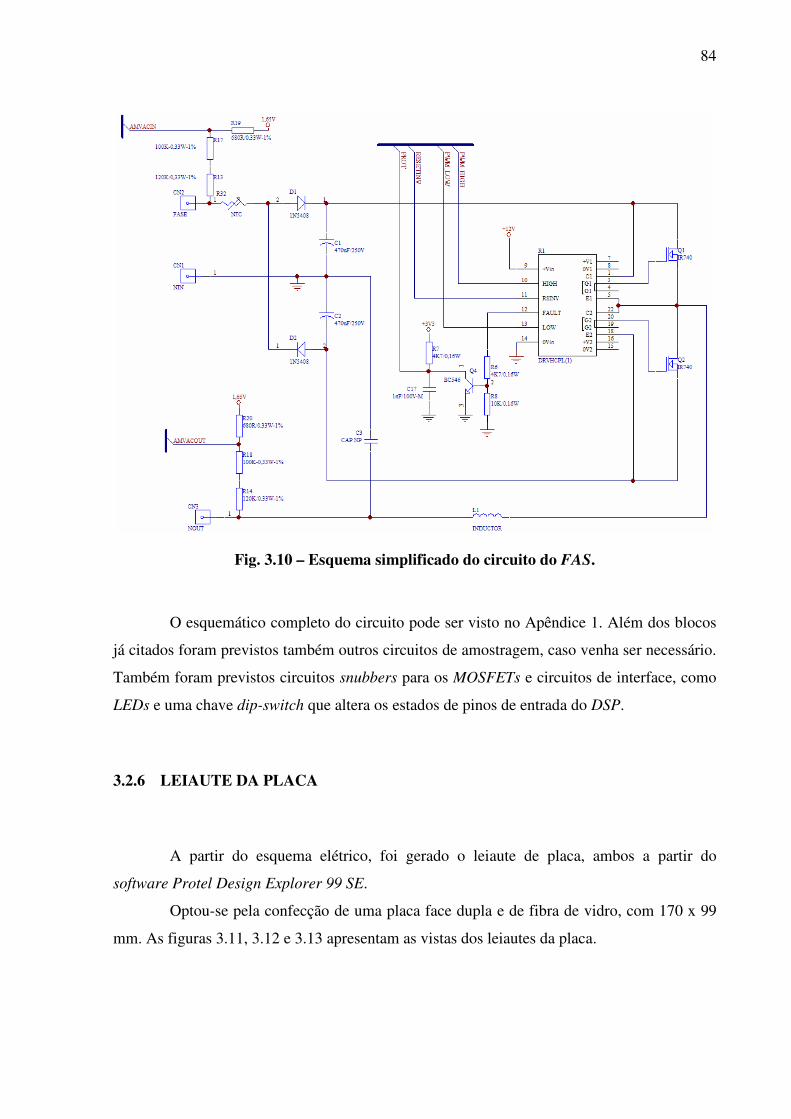
84
Fig. 3.10 – Esquema simplificado do circuito do FAS.
O esquemático completo do circuito pode ser visto no Apêndice 1. Além dos blocos
já citados foram previstos também outros circuitos de amostragem, caso venha ser necessário.
Também foram previstos circuitos snubbers para os MOSFETs e circuitos de interface, como
LEDs e uma chave dip-switch que altera os estados de pinos de entrada do DSP.
3.2.6 LEIAUTE DA PLACA
A partir do esquema elétrico, foi gerado o leiaute de placa, ambos a partir do
software Protel Design Explorer 99 SE.
Optou-se pela confecção de uma placa face dupla e de fibra de vidro, com 170 x 99
mm. As figuras 3.11, 3.12 e 3.13 apresentam as vistas dos leiautes da placa.

85
Fig. 3.11 – Leiaute da placa - distribuição dos componentes.
Fig. 3.12 – Leiaute da placa - TopLayer.
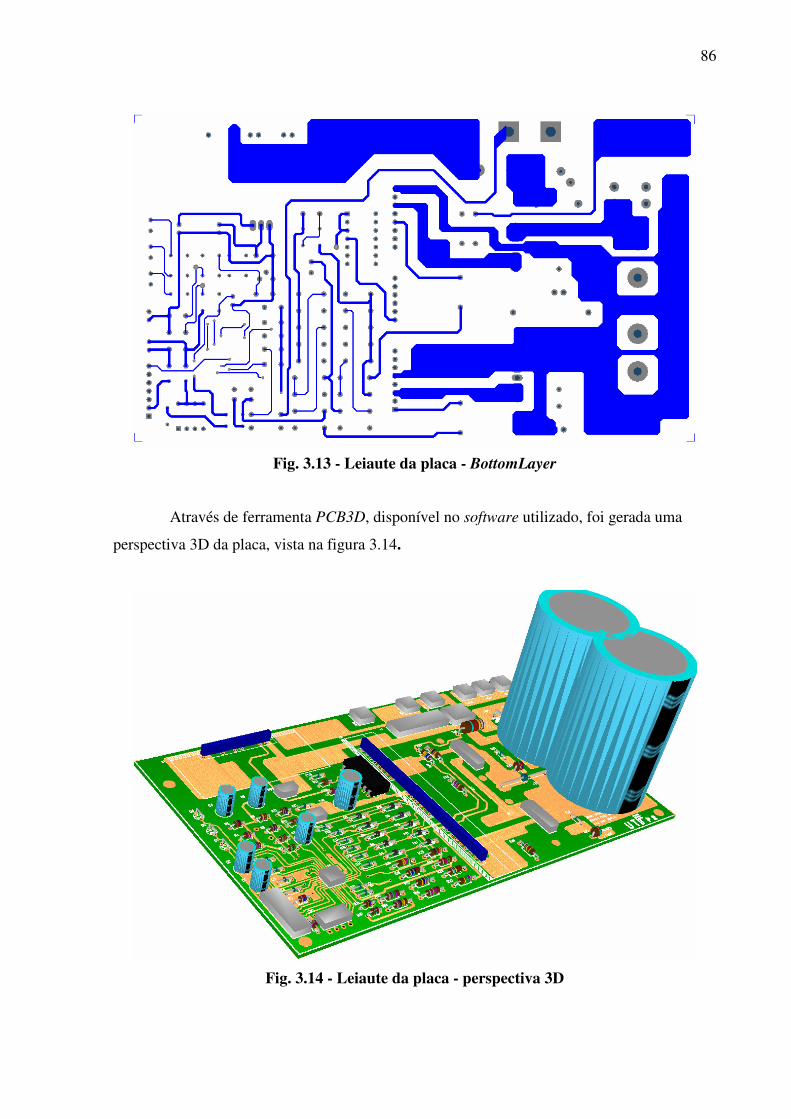
86
Fig. 3.13 - Leiaute da placa - BottomLayer
Através de ferramenta PCB3D, disponível no software utilizado, foi gerada uma
perspectiva 3D da placa, vista na figura 3.14.
Fig. 3.14 - Leiaute da placa - perspectiva 3D
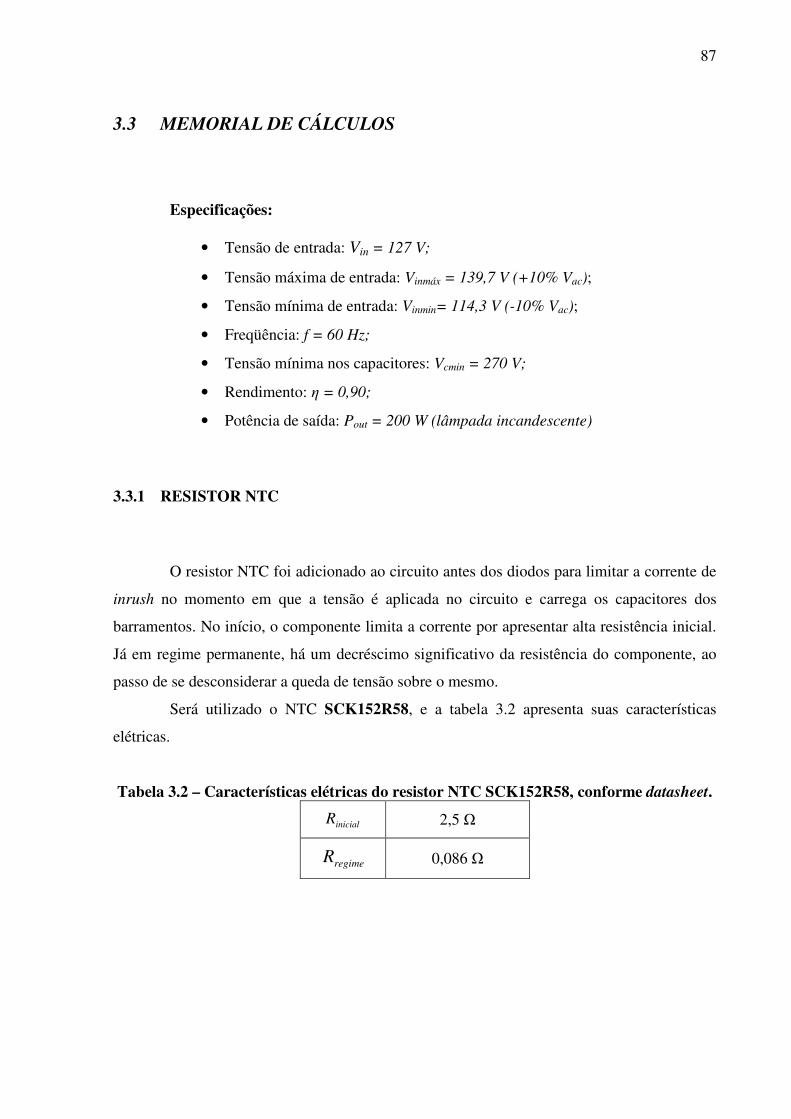
87
3.3 MEMORIAL DE CÁLCULOS
Especificações:
• Tensão de entrada: Vin = 127 V;
• Tensão máxima de entrada: Vinmáx = 139,7 V (+10% Vac);
• Tensão mínima de entrada: Vinmin= 114,3 V (-10% Vac);
• Freqüência: f = 60 Hz;
• Tensão mínima nos capacitores: Vcmin = 270 V;
• Rendimento: η = 0,90;
• Potência de saída: Pout = 200 W (lâmpada incandescente)
3.3.1 RESISTOR NTC
O resistor NTC foi adicionado ao circuito antes dos diodos para limitar a corrente de
inrush no momento em que a tensão é aplicada no circuito e carrega os capacitores dos
barramentos. No início, o componente limita a corrente por apresentar alta resistência inicial.
Já em regime permanente, há um decréscimo significativo da resistência do componente, ao
passo de se desconsiderar a queda de tensão sobre o mesmo.
Será utilizado o NTC SCK152R58, e a tabela 3.2 apresenta suas características
elétricas.
Tabela 3.2 – Características elétricas do resistor NTC SCK152R58, conforme datasheet.
inicialR 2,5 Ω
regimeR 0,086 Ω
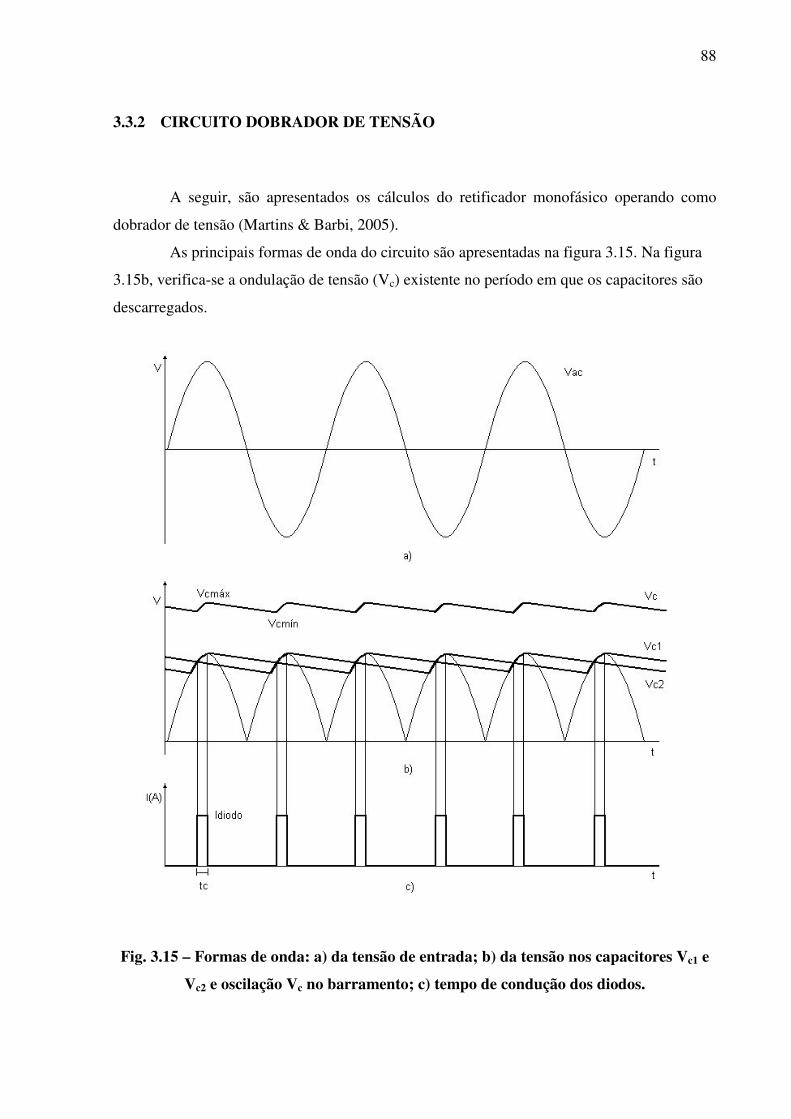
88
3.3.2 CIRCUITO DOBRADOR DE TENSÃO
A seguir, são apresentados os cálculos do retificador monofásico operando como
dobrador de tensão (Martins & Barbi, 2005).
As principais formas de onda do circuito são apresentadas na figura 3.15. Na figura
3.15b, verifica-se a ondulação de tensão (Vc) existente no período em que os capacitores são
descarregados.
Fig. 3.15 – Formas de onda: a) da tensão de entrada; b) da tensão nos capacitores Vc1 e
Vc2 e oscilação Vc no barramento; c) tempo de condução dos diodos.
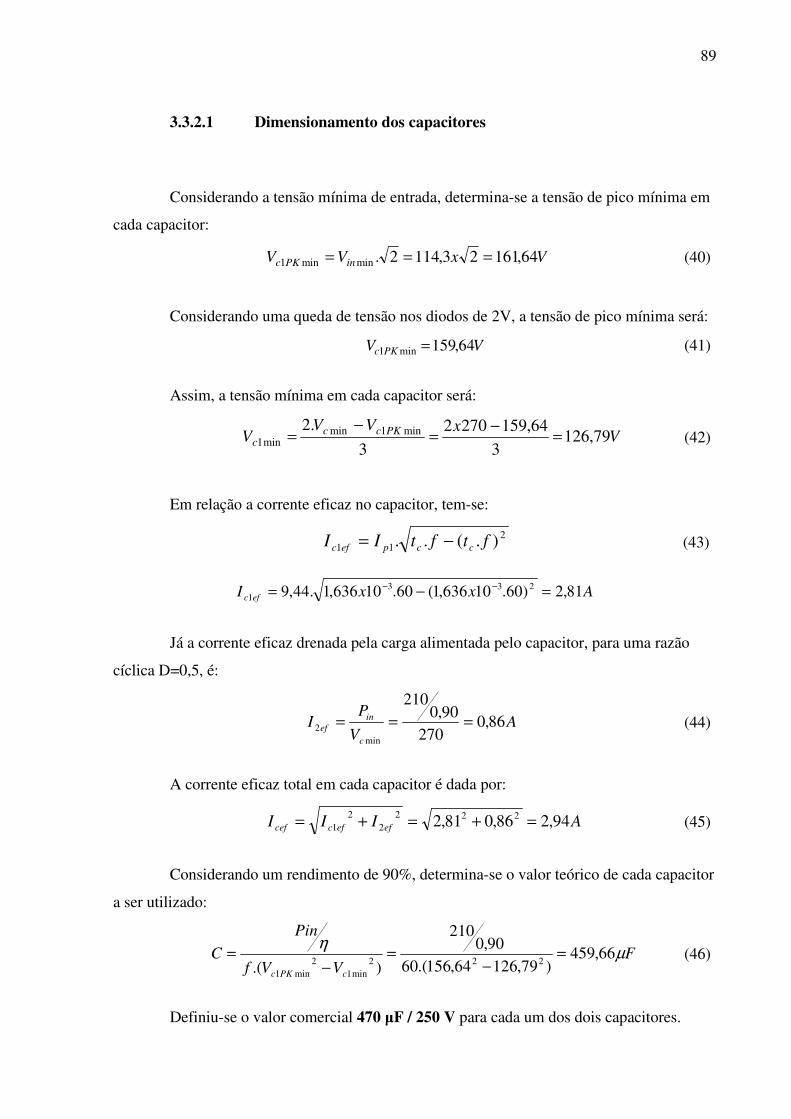
89
3.3.2.1 Dimensionamento dos capacitores
Considerando a tensão mínima de entrada, determina-se a tensão de pico mínima em
cada capacitor:
VxVV inPKc 64,16123,1142.minmin1 === (40)
Considerando uma queda de tensão nos diodos de 2V, a tensão de pico mínima será:
VV PKc 64,159min1 = (41)
Assim, a tensão mínima em cada capacitor será:
VxVV
V PKccc 79,126
3
64,1592702
3
.2 min1minmin1 =
−=
−= (42)
Em relação a corrente eficaz no capacitor, tem-se:
211 ).(.. ftftII ccpefc −= (43)
AxxI efc 81,2)60.10636,1(60.10636,1.44,9 2331 =−= −−
Já a corrente eficaz drenada pela carga alimentada pelo capacitor, para uma razão
cíclica D=0,5, é:
AV
PI
c
inef 86,0
27090,0
210
min2 === (44)
A corrente eficaz total em cada capacitor é dada por:
AIII efefccef 94,286,081,2 2222
21 =+=+= (45)
Considerando um rendimento de 90%, determina-se o valor teórico de cada capacitor
a ser utilizado:
FVVf
Pin
CcPKc
µη
66,459)79,12664,156.(60
90,0210
).( 222min1
2min1
=−
=−
= (46)
Definiu-se o valor comercial 470 µF / 250 V para cada um dos dois capacitores.
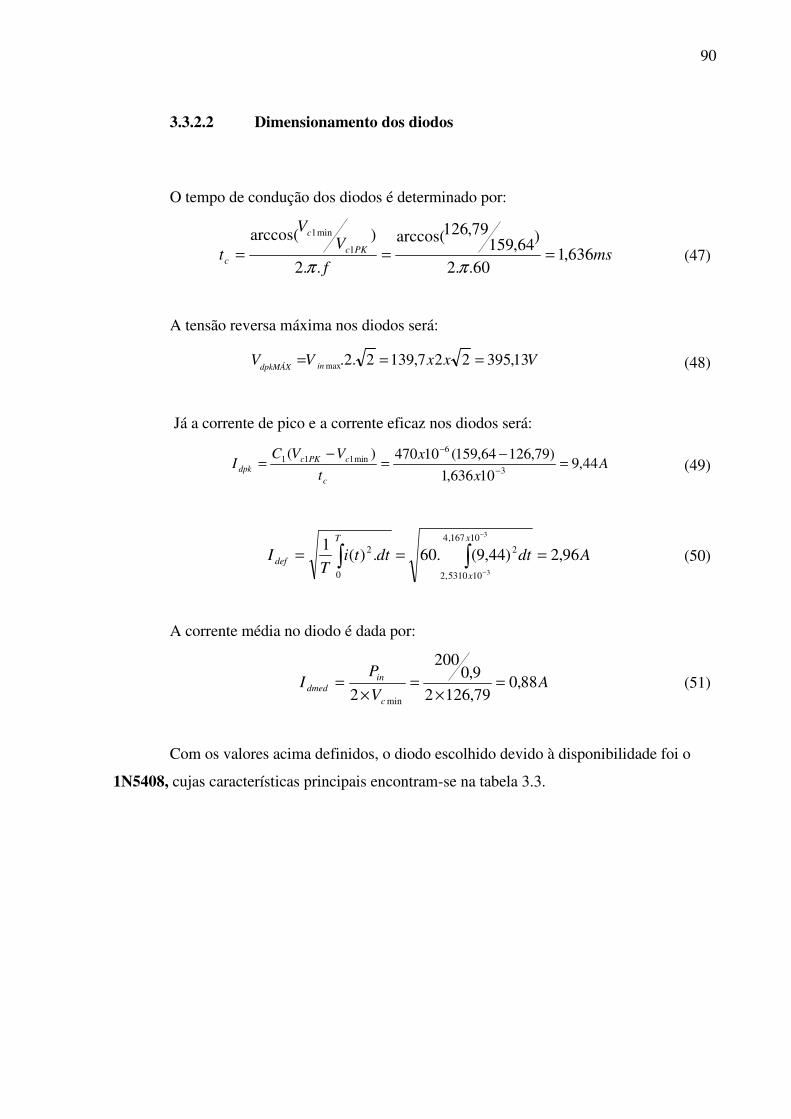
90
3.3.2.2 Dimensionamento dos diodos
O tempo de condução dos diodos é determinado por:
msf
VV
t PKc
c
c 636,160..2
)64,15979,126arccos(
..2
)arccos(1
min1
===ππ
(47)
A tensão reversa máxima nos diodos será:
VxxVV indpkMÁX13,395227,1392.2.max === (48)
Já a corrente de pico e a corrente eficaz nos diodos será:
Ax
x
t
VVCI
c
cPKcdpk 44,9
10636,1
)79,12664,159(10470)(3
6min111 =
−=
−=
−
−
(49)
AdtdttiT
Ix
x
T
def 96,2)44,9(.60.)(1
3
3
10167,4
105310,2
2
0
2 === ∫∫−
−
(50)
A corrente média no diodo é dada por:
AV
PI
c
indmed 88,0
79,12629,0
200
2 min
=×
=×
= (51)
Com os valores acima definidos, o diodo escolhido devido à disponibilidade foi o
1N5408, cujas características principais encontram-se na tabela 3.3.
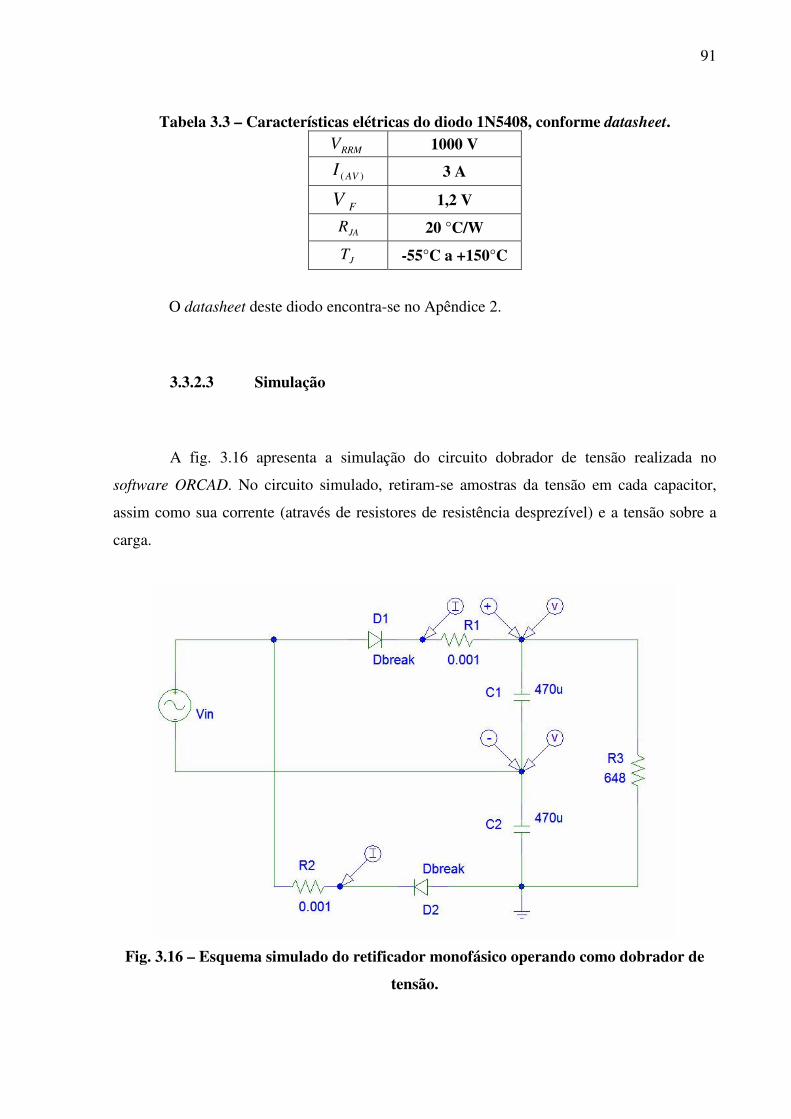
91
Tabela 3.3 – Características elétricas do diodo 1N5408, conforme datasheet.
RRMV 1000 V
)( AVI 3 A
FV 1,2 V
JAR 20 °C/W
JT -55°C a +150°C
O datasheet deste diodo encontra-se no Apêndice 2.
3.3.2.3 Simulação
A fig. 3.16 apresenta a simulação do circuito dobrador de tensão realizada no
software ORCAD. No circuito simulado, retiram-se amostras da tensão em cada capacitor,
assim como sua corrente (através de resistores de resistência desprezível) e a tensão sobre a
carga.
Fig. 3.16 – Esquema simulado do retificador monofásico operando como dobrador de
tensão.
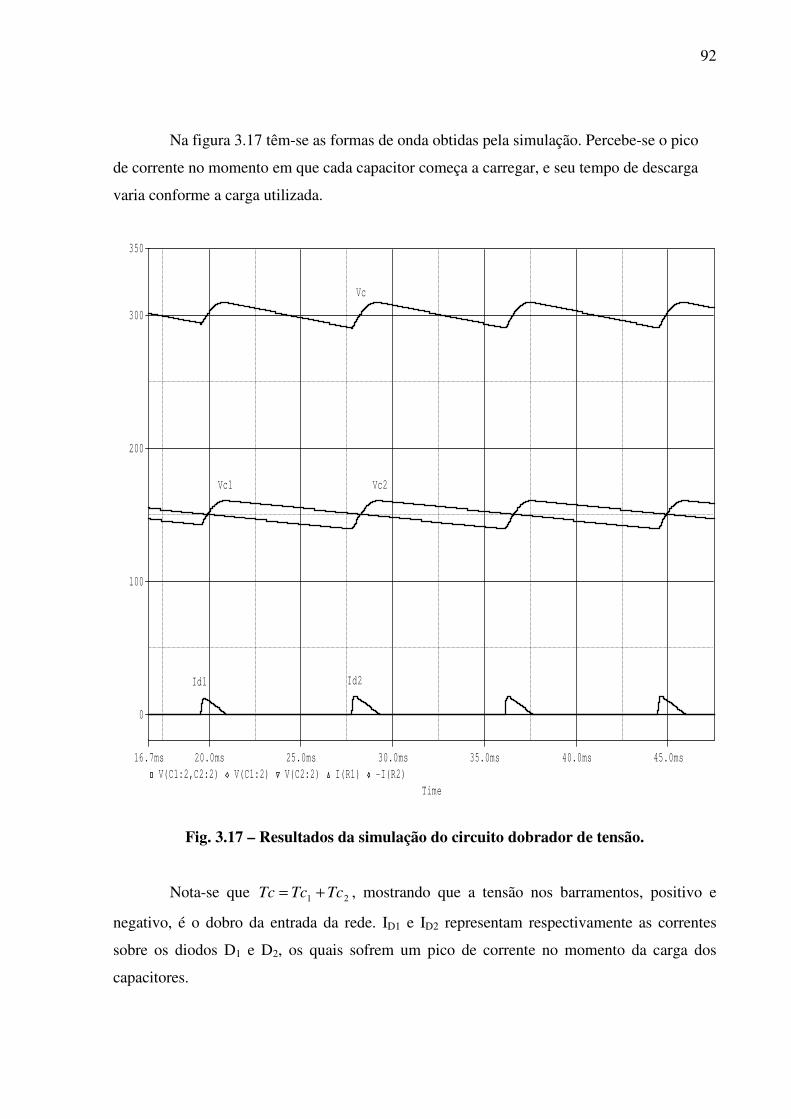
92
Na figura 3.17 têm-se as formas de onda obtidas pela simulação. Percebe-se o pico
de corrente no momento em que cada capacitor começa a carregar, e seu tempo de descarga
varia conforme a carga utilizada.
Time
20.0ms 25.0ms 30.0ms 35.0ms 40.0ms 45.0ms16.7ms
V(C1:2,C2:2) V(C1:2) V(C2:2) I(R1) -I(R2)
0
100
200
300
350
Id2Id1
Vc2Vc1
Vc
Fig. 3.17 – Resultados da simulação do circuito dobrador de tensão.
Nota-se que 21 TcTcTc += , mostrando que a tensão nos barramentos, positivo e
negativo, é o dobro da entrada da rede. ID1 e ID2 representam respectivamente as correntes
sobre os diodos D1 e D2, os quais sofrem um pico de corrente no momento da carga dos
capacitores.

93
3.3.3 DIMENSIONAMENTO DAS CHAVES SEMICONDUTORAS
Para o dimensionamento das chaves semicondutoras pesquisou-se qual seria o
semicondutor mais indicado para o uso. Os componentes semicondutores rápidos de potência
mais utilizados são: o TJB (Transistor de junção bipolar), o MOSFET (Metal Oxide
Semiconductor Field Effect Transistor) e o IGBT (Insulated Gate Bipolar Transistor).
Utiliza-se o seguinte critério, segundo Pomílio (1995b), para definição dos
semicondutores a serem utilizados:
• Em alta freqüência e baixa potência: MOSFET;
• Em baixa tensão: MOSFET;
• Em alta potência: IGBT;
• Em baixa freqüência: IGBT;
• Custo mínimo, sem maiores exigências de desempenho: TJB.
Conforme as características acima, definiu-se a utilização do MOSFET para
implementação desse projeto.
Definido o tipo do semicondutor, simulou-se o circuito com auxílio do software
ORCAD para se determinar os valores de corrente sobre as chaves semicondutoras. Para isso,
foi considerada uma condição de carga 20% acima da condição nominal. Dessa forma, o valor
da resistência da carga será:
Ω=== 20,67240
12722
0in
in
P
VR (52)
A figura 3.18 apresenta o circuito simulado, bem com os pontos de coleta de valores.
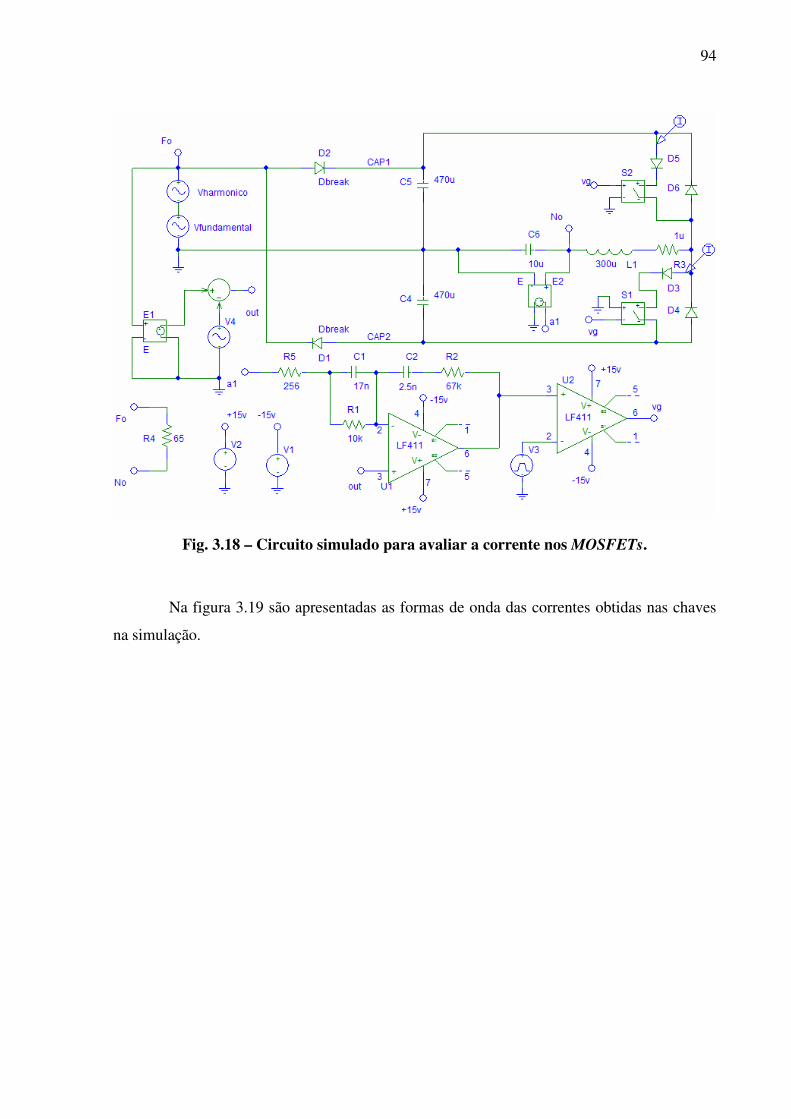
94
Fig. 3.18 – Circuito simulado para avaliar a corrente nos MOSFETs.
Na figura 3.19 são apresentadas as formas de onda das correntes obtidas nas chaves
na simulação.
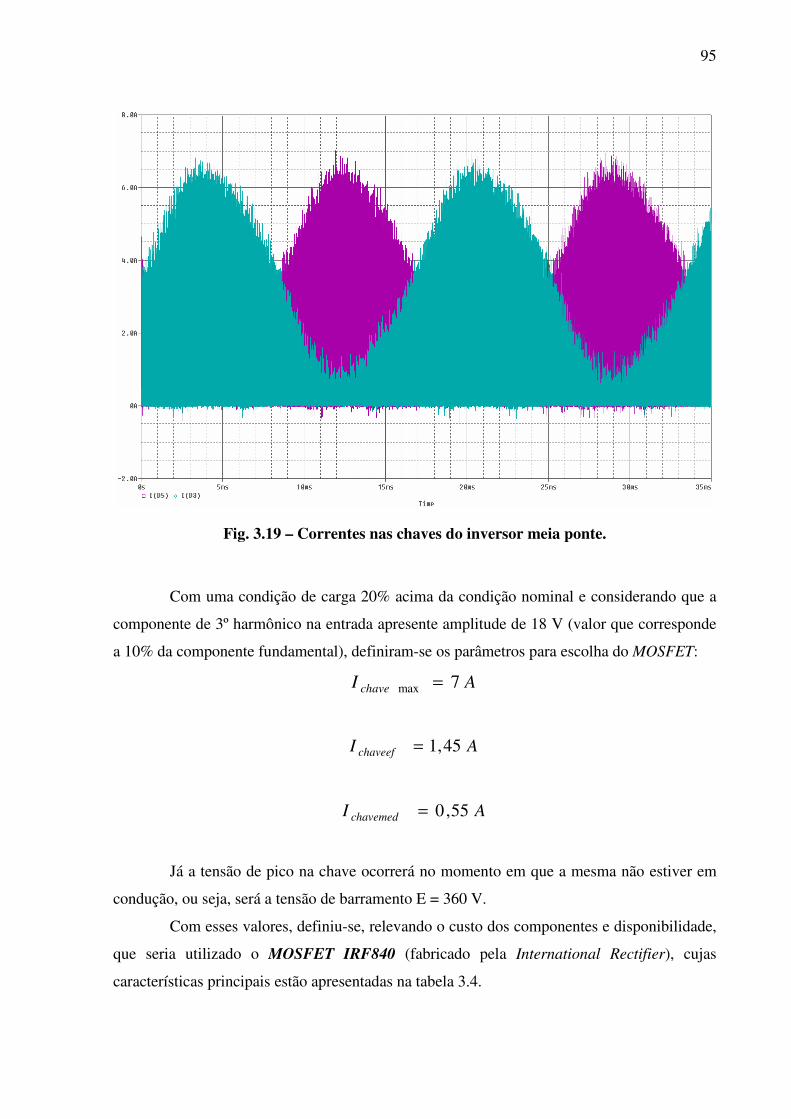
95
Fig. 3.19 – Correntes nas chaves do inversor meia ponte.
Com uma condição de carga 20% acima da condição nominal e considerando que a
componente de 3º harmônico na entrada apresente amplitude de 18 V (valor que corresponde
a 10% da componente fundamental), definiram-se os parâmetros para escolha do MOSFET:
AI chave 7max =
AI chaveef 45,1=
AI chavemed 55,0=
Já a tensão de pico na chave ocorrerá no momento em que a mesma não estiver em
condução, ou seja, será a tensão de barramento E = 360 V.
Com esses valores, definiu-se, relevando o custo dos componentes e disponibilidade,
que seria utilizado o MOSFET IRF840 (fabricado pela International Rectifier), cujas
características principais estão apresentadas na tabela 3.4.
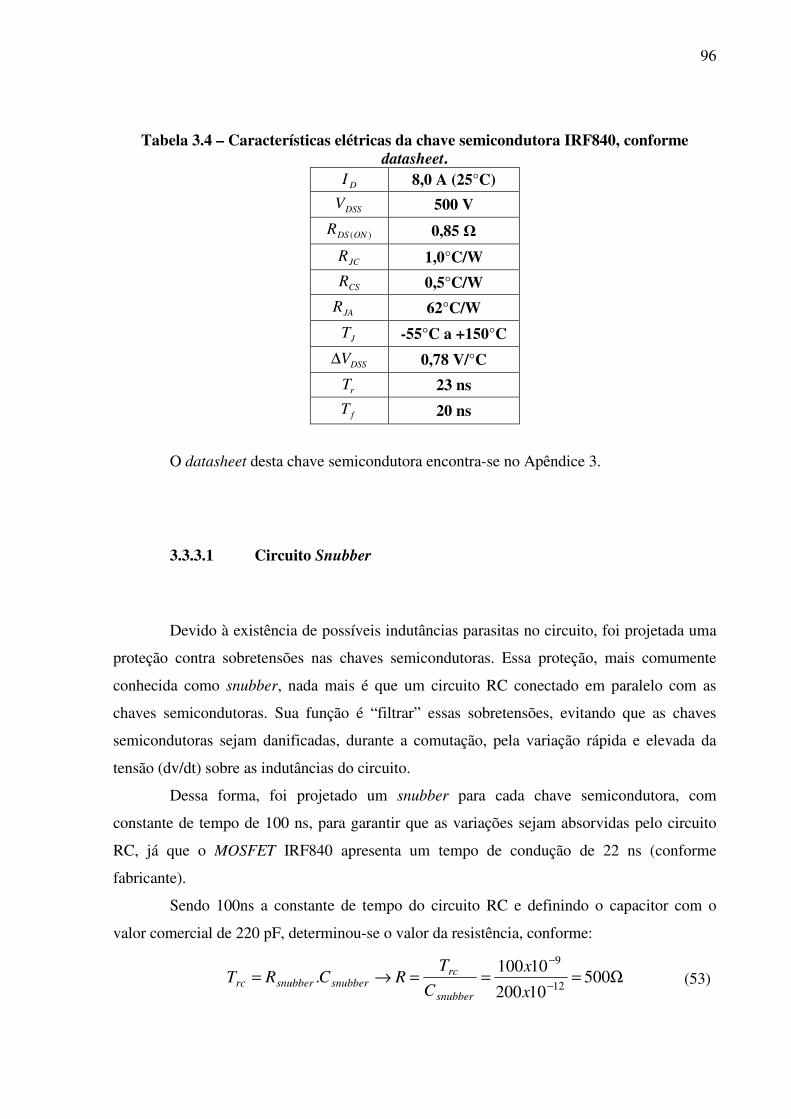
96
Tabela 3.4 – Características elétricas da chave semicondutora IRF840, conforme
datasheet.
DI 8,0 A (25°C)
DSSV 500 V
)(ONDSR 0,85 Ω
JCR 1,0°C/W
CSR 0,5°C/W
JAR 62°C/W
JT -55°C a +150°C
DSSV∆ 0,78 V/°C
rT 23 ns
fT 20 ns
O datasheet desta chave semicondutora encontra-se no Apêndice 3.
3.3.3.1 Circuito Snubber
Devido à existência de possíveis indutâncias parasitas no circuito, foi projetada uma
proteção contra sobretensões nas chaves semicondutoras. Essa proteção, mais comumente
conhecida como snubber, nada mais é que um circuito RC conectado em paralelo com as
chaves semicondutoras. Sua função é “filtrar” essas sobretensões, evitando que as chaves
semicondutoras sejam danificadas, durante a comutação, pela variação rápida e elevada da
tensão (dv/dt) sobre as indutâncias do circuito.
Dessa forma, foi projetado um snubber para cada chave semicondutora, com
constante de tempo de 100 ns, para garantir que as variações sejam absorvidas pelo circuito
RC, já que o MOSFET IRF840 apresenta um tempo de condução de 22 ns (conforme
fabricante).
Sendo 100ns a constante de tempo do circuito RC e definindo o capacitor com o
valor comercial de 220 pF, determinou-se o valor da resistência, conforme:
Ω===→=−
−
50010200
10100.
12
9
x
x
C
TRCRT
snubber
rcsnubbersnubberrc (53)
97
Devido a disponibilidade, utilizou-se um resistor de 470 Ω / 2 W e o capacitor de
220 pF / 1000 V para o snubber.
3.3.4 DIMENSIONAMENTO DO INDUTOR E DO CAPACITOR DE FILTRAGEM
Para o dimensionamento do filtro de saída, definiu-se primeiramente o valor do
capacitor de filtragem em 10 µF.
Sabe-se que a freqüência de corte, conforme visto no capítulo anterior, deve estar
uma década abaixo da freqüência de chaveamento e ser pelo menos 30 vezes maior que a
freqüência da rede.
A freqüência de chaveamento escolhida foi de 48 kHz, devido a estar fora da
freqüência audível e proporcionar uma compactação das chaves semicondutoras, do
dissipador e do próprio filtro de saída do inversor meia ponte.
Assim, para a freqüência de chaveamento de 48 kHz e para a freqüência da rede de
60 Hz, deve-se escolher um valor de freqüência de corte entre 1,8 kHz e 4,8 kHz. Dessa
maneira, definiu-se o valor de 3 kHz.
A partir desses valores, utiliza-se a equação (25):
000 ..2 ,.
1fonde
CLπωω ==
6
3
1010.
1103.1416,3.2
−=
xLx
F
HLF µ45,281=
Para efeito de projeto, o valor do indutor foi definido em 300 µH.
Utilizando-se de uma tensão mínima de 114,3 V (tensão eficaz) e da potência de
saída 200 W, calcula-se a corrente máxima que circula pelo indutor:
minL
inLmáx V
PI = (54)
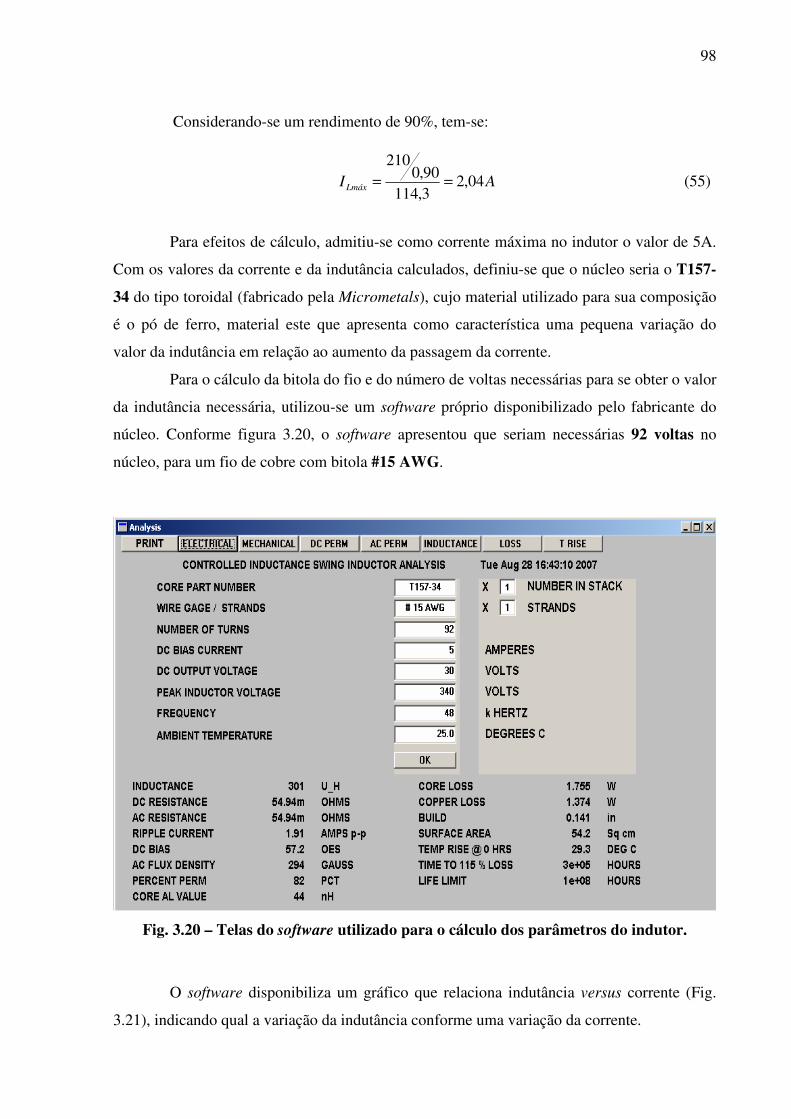
98
Considerando-se um rendimento de 90%, tem-se:
AILmáx 04,23,11490,0
210== (55)
Para efeitos de cálculo, admitiu-se como corrente máxima no indutor o valor de 5A.
Com os valores da corrente e da indutância calculados, definiu-se que o núcleo seria o T157-
34 do tipo toroidal (fabricado pela Micrometals), cujo material utilizado para sua composição
é o pó de ferro, material este que apresenta como característica uma pequena variação do
valor da indutância em relação ao aumento da passagem da corrente.
Para o cálculo da bitola do fio e do número de voltas necessárias para se obter o valor
da indutância necessária, utilizou-se um software próprio disponibilizado pelo fabricante do
núcleo. Conforme figura 3.20, o software apresentou que seriam necessárias 92 voltas no
núcleo, para um fio de cobre com bitola #15 AWG.
Fig. 3.20 – Telas do software utilizado para o cálculo dos parâmetros do indutor.
O software disponibiliza um gráfico que relaciona indutância versus corrente (Fig.
3.21), indicando qual a variação da indutância conforme uma variação da corrente.
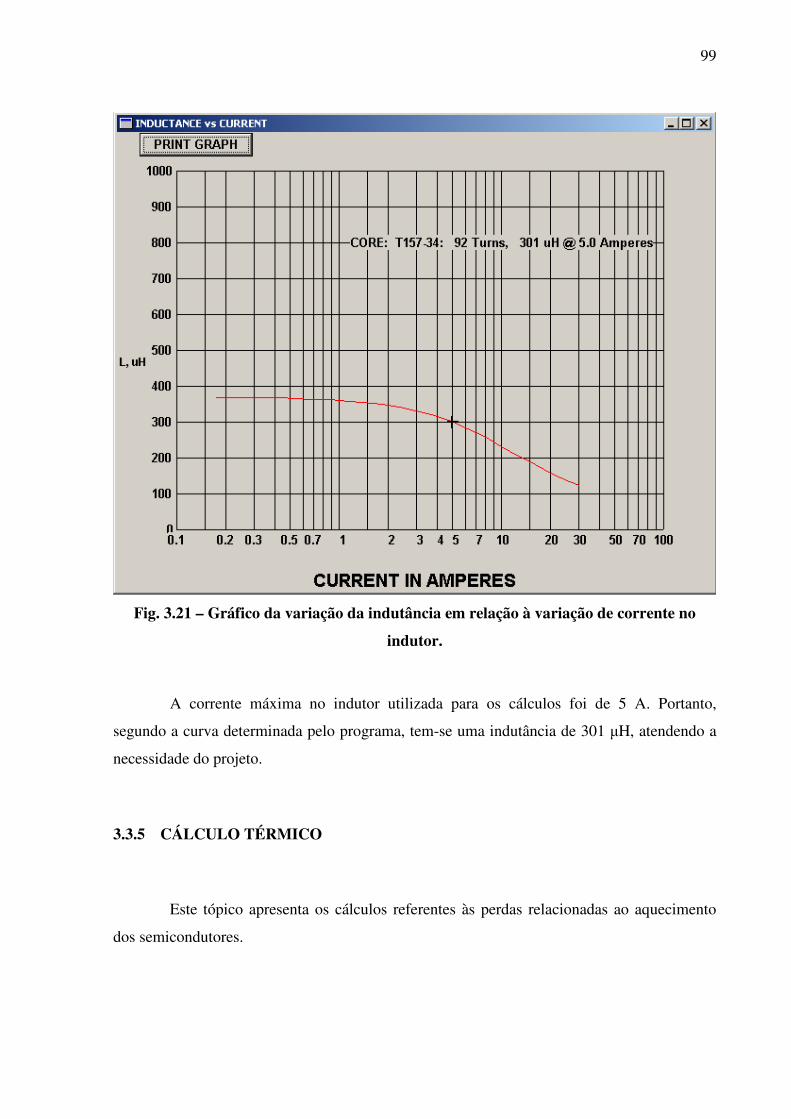
99
Fig. 3.21 – Gráfico da variação da indutância em relação à variação de corrente no
indutor.
A corrente máxima no indutor utilizada para os cálculos foi de 5 A. Portanto,
segundo a curva determinada pelo programa, tem-se uma indutância de 301 µH, atendendo a
necessidade do projeto.
3.3.5 CÁLCULO TÉRMICO
Este tópico apresenta os cálculos referentes às perdas relacionadas ao aquecimento
dos semicondutores.

100
3.3.5.1 Perdas nos diodos do dobrador de tensão
Conforme Barbi (2002), as perdas por condução no semicondutor são determinadas
por:
WxIVPerdas dmedF 6,332,1 ==×= (56)
Desconsiderando-se as perdas por comutação, o aquecimento do diodo será:
CxxPerdasRT JA °===∆ 726,320θ (57)
O JARθ , fornecido pela folha de dados do componente escolhido (1N5408), é de
20ºC/W. Não será necessário uso de dissipador.
3.3.5.2 Perdas nas chaves semicondutoras
As perdas em cada MOSFET, segundo Barbi (2002), são dadas pela equação:
WIRP chaveefondscond 78,1)45,1.(85,0. 22)( === (58)
( ) DSoffSfrs
com VIttf
P ⋅
⋅⋅+⋅=π
2
2 max (59)
( ) WPcom 65,13602
71020232
10.48 93
=⋅
⋅⋅⋅+⋅= −
π,
sendo:
• Pcond: perdas durante a condução;
• Pcom: perdas durante a comutação.
A perda total em cada chave é dada pela soma das duas perdas citadas, sendo:
WPPP comcondtot 4,365,178,1 =+=+= (60)
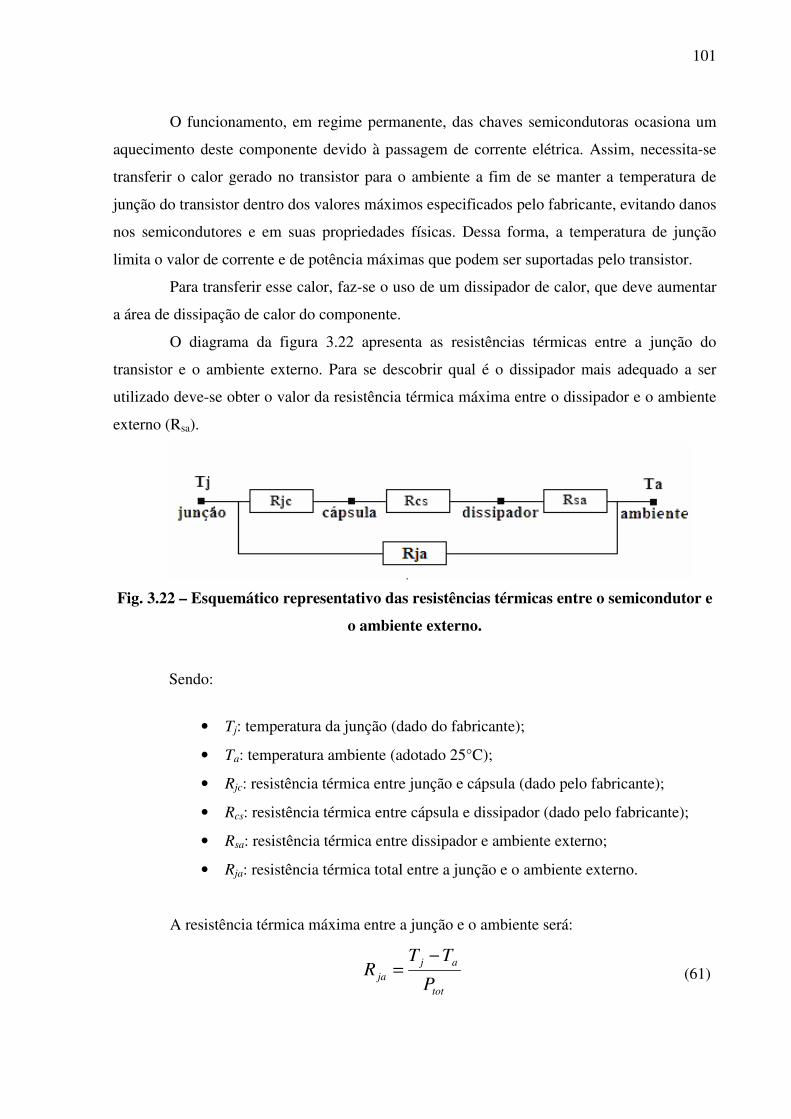
101
O funcionamento, em regime permanente, das chaves semicondutoras ocasiona um
aquecimento deste componente devido à passagem de corrente elétrica. Assim, necessita-se
transferir o calor gerado no transistor para o ambiente a fim de se manter a temperatura de
junção do transistor dentro dos valores máximos especificados pelo fabricante, evitando danos
nos semicondutores e em suas propriedades físicas. Dessa forma, a temperatura de junção
limita o valor de corrente e de potência máximas que podem ser suportadas pelo transistor.
Para transferir esse calor, faz-se o uso de um dissipador de calor, que deve aumentar
a área de dissipação de calor do componente.
O diagrama da figura 3.22 apresenta as resistências térmicas entre a junção do
transistor e o ambiente externo. Para se descobrir qual é o dissipador mais adequado a ser
utilizado deve-se obter o valor da resistência térmica máxima entre o dissipador e o ambiente
externo (Rsa).
Fig. 3.22 – Esquemático representativo das resistências térmicas entre o semicondutor e
o ambiente externo.
Sendo:
• Tj: temperatura da junção (dado do fabricante);
• Ta: temperatura ambiente (adotado 25°C);
• Rjc: resistência térmica entre junção e cápsula (dado pelo fabricante);
• Rcs: resistência térmica entre cápsula e dissipador (dado pelo fabricante);
• Rsa: resistência térmica entre dissipador e ambiente externo;
• Rja: resistência térmica total entre a junção e o ambiente externo.
A resistência térmica máxima entre a junção e o ambiente será:
tot
ajja P
TTR
−= (61)
102
Definindo-se uma variação de temperatura de 50°C, obtém-se o valor de resistência
térmica máxima entre a junção e o ambiente (Rja):
WCR ja /º70,144,3
50==
Enfim, com o valor de resistência máxima entre a junção e o ambiente, obtém-se o
valor da resistência térmica máxima do dissipador (Rsa), conforme ao diagrama da fig. 3.19:
WCRRRR csjcjasa /20,130,15,096,11 °=−−=−−= (62)
O dissipador a ser utilizado deve apresentar resistência térmica inferior à 13,20ºC/W.
Escolheu-se o dissipador HS3512, cuja resistência térmica é WCRsa /35,8 °= , atendendo aos
cálculos. O datasheet deste dissipador encontra-se no Apêndice 4.
3.4 PROJETO DO CONTROLE DIGITAL
Nesta parte do trabalho serão abordadas as técnicas utilizadas para realizar o controle
digital do filtro ativo série. Em princípio foi implementada uma malha feed-forward, a qual
não atendeu a todas as expectativas esperadas. Dessa forma, foi adicionada uma malha de
controle de tensão no capacitor, compensada através de um controlador repetitivo.
3.4.1 LAÇO FEED-FORWARD
O laço feed-forward (ou alimentação avante) tem como idéia fundamental apenas
subtrair a amostra da tensão de entrada colhida pelo DSP de uma referência senoidal
armazenada pelo processador. Essa diferença, que representa os harmônicos da tensão de
entrada em oposição de fase, é aplicada nos PWMs do inversor meia ponte.
Além do laço feed-forward, foi implementada a compensação da ondulação dos
barramentos, já que distorções no barramento afetam diretamente a forma de onda chaveada.
Na figura 3.23 pode-se visualizar a interface de potência com a lógica para o laço feed-
forward do filtro ativo. A amostra da tensão de entrada é comparada a uma referência
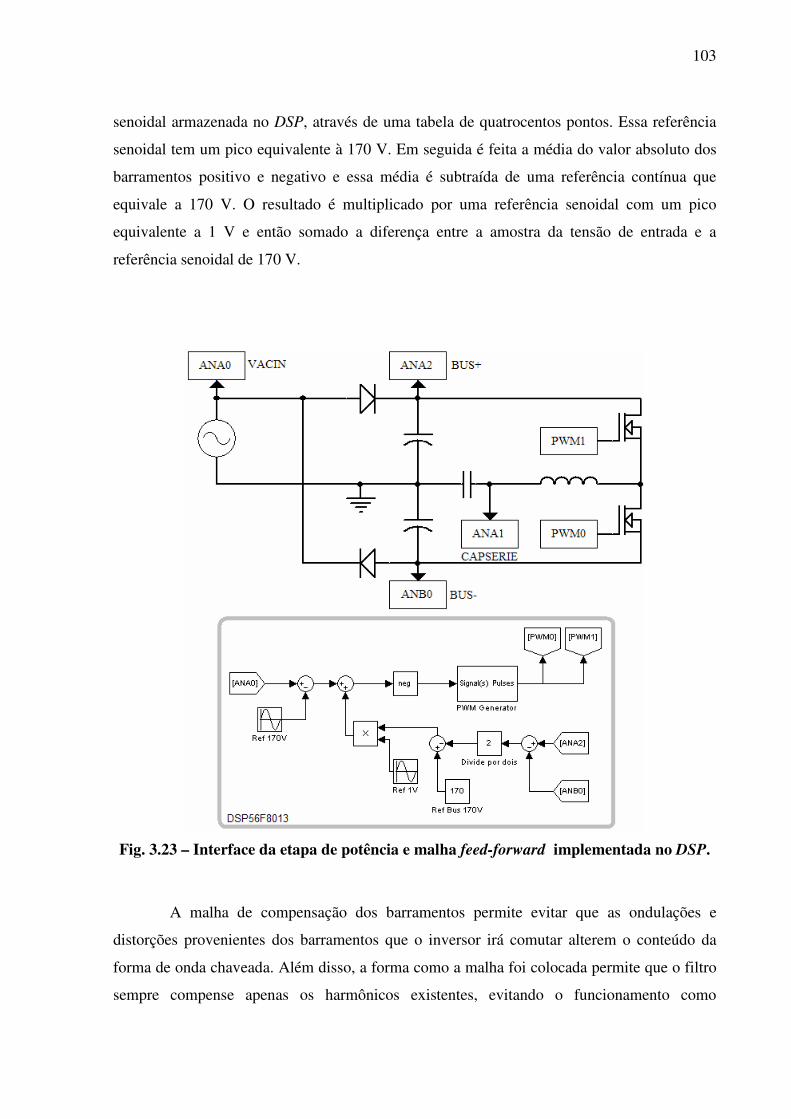
103
senoidal armazenada no DSP, através de uma tabela de quatrocentos pontos. Essa referência
senoidal tem um pico equivalente à 170 V. Em seguida é feita a média do valor absoluto dos
barramentos positivo e negativo e essa média é subtraída de uma referência contínua que
equivale a 170 V. O resultado é multiplicado por uma referência senoidal com um pico
equivalente a 1 V e então somado a diferença entre a amostra da tensão de entrada e a
referência senoidal de 170 V.
Fig. 3.23 – Interface da etapa de potência e malha feed-forward implementada no DSP.
A malha de compensação dos barramentos permite evitar que as ondulações e
distorções provenientes dos barramentos que o inversor irá comutar alterem o conteúdo da
forma de onda chaveada. Além disso, a forma como a malha foi colocada permite que o filtro
sempre compense apenas os harmônicos existentes, evitando o funcionamento como
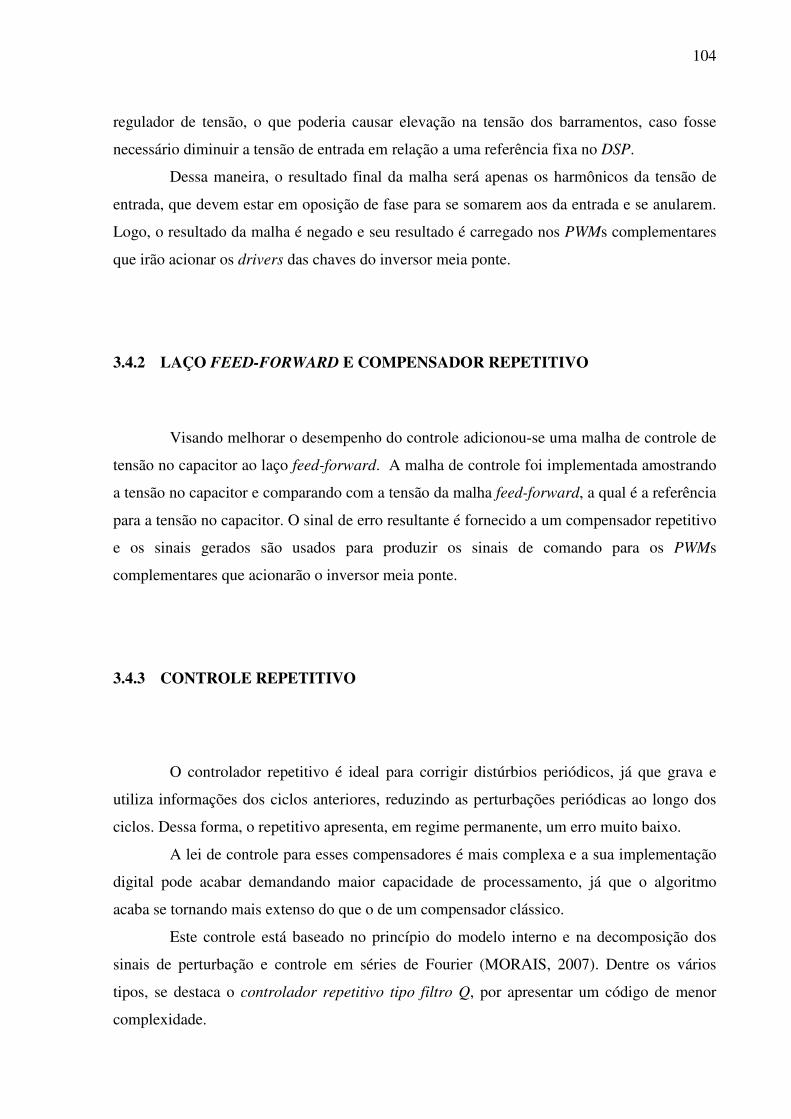
104
regulador de tensão, o que poderia causar elevação na tensão dos barramentos, caso fosse
necessário diminuir a tensão de entrada em relação a uma referência fixa no DSP.
Dessa maneira, o resultado final da malha será apenas os harmônicos da tensão de
entrada, que devem estar em oposição de fase para se somarem aos da entrada e se anularem.
Logo, o resultado da malha é negado e seu resultado é carregado nos PWMs complementares
que irão acionar os drivers das chaves do inversor meia ponte.
3.4.2 LAÇO FEED-FORWARD E COMPENSADOR REPETITIVO
Visando melhorar o desempenho do controle adicionou-se uma malha de controle de
tensão no capacitor ao laço feed-forward. A malha de controle foi implementada amostrando
a tensão no capacitor e comparando com a tensão da malha feed-forward, a qual é a referência
para a tensão no capacitor. O sinal de erro resultante é fornecido a um compensador repetitivo
e os sinais gerados são usados para produzir os sinais de comando para os PWMs
complementares que acionarão o inversor meia ponte.
3.4.3 CONTROLE REPETITIVO
O controlador repetitivo é ideal para corrigir distúrbios periódicos, já que grava e
utiliza informações dos ciclos anteriores, reduzindo as perturbações periódicas ao longo dos
ciclos. Dessa forma, o repetitivo apresenta, em regime permanente, um erro muito baixo.
A lei de controle para esses compensadores é mais complexa e a sua implementação
digital pode acabar demandando maior capacidade de processamento, já que o algoritmo
acaba se tornando mais extenso do que o de um compensador clássico.
Este controle está baseado no princípio do modelo interno e na decomposição dos
sinais de perturbação e controle em séries de Fourier (MORAIS, 2007). Dentre os vários
tipos, se destaca o controlador repetitivo tipo filtro Q, por apresentar um código de menor
complexidade.
105
O controlador repetitivo apresenta o diagrama em blocos detalhado na figura 3.24.
Fig. 3.24 – Diagrama em blocos do controlador repetitivo (ANDRADE, 2005)
Logo, o repetitivo apresenta a seguinte função de transferência:
N
NRRP
zzQ
zCzc
zE
U−
−
−=
).(1
)(
)( (63)
O filtro Q(z) tem por objetivo atenuar a integração do erro e deve ter módulo menor
que a unidade. Ele pode ser apenas uma constante qr, que irá atenuar todas as freqüências de
erro da mesma forma, ou um filtro passa-baixas sem deslocamento de fase. A vantagem do
uso do filtro passa-baixas é que o ganho do controlador pode ser aumentado, já que
normalmente são as altas freqüências que intervêm na estabilidade do sistema.
No projeto do controlador repetitivo do filtro ativo, foi escolhido o uso de uma
constante, devido a sua simplicidade e a várias referências consultadas usarem esta constante.
Quanto mais próxima da unidade for a constante, melhor será a eficácia do repetitivo, porém
isso diminui a margem de estabilidade do sistema. Segundo Michels e Grundling, se a escolha
for uma constante qr, é recomendável esta esteja entre 0,95 e 0,99.
Dessa forma, assumindo que Q(z) é uma constante, a lei de controle do repetitivo
baseada na equação (63) pode ser escrita como:
)()()( nkuqnNkecku RPrrRP −+−+= (64)
O filtro C(z) é projetado de forma a compensar o atraso de fase da planta em relação
à saída do controlador antes do filtro. Dessa forma, tem-se:
dzzC =)( , (65)
onde d = 1, 2, 3, 4, 5, etc.
O ganho cr pode ser considerado parte do filtro C(z) e é projetado de forma a garantir
estabilidade do controlador repetitivo. Sabe-se que quanto maior o valor de cr, melhor o
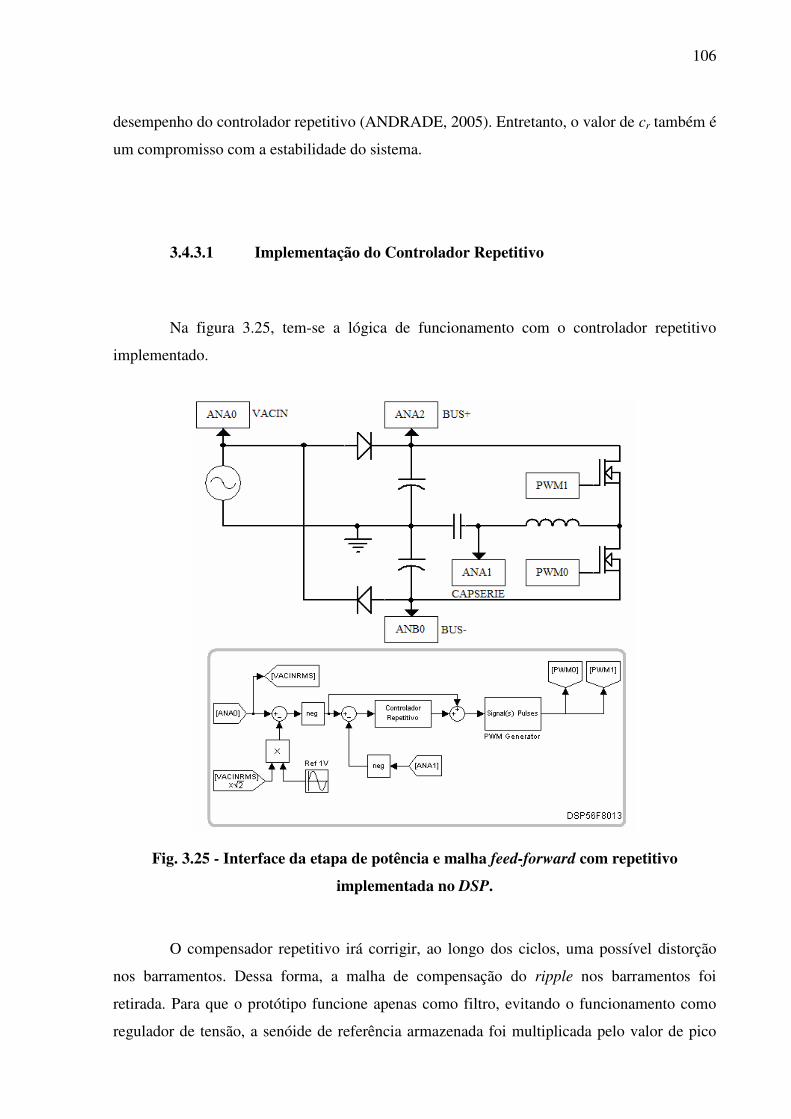
106
desempenho do controlador repetitivo (ANDRADE, 2005). Entretanto, o valor de cr também é
um compromisso com a estabilidade do sistema.
3.4.3.1 Implementação do Controlador Repetitivo
Na figura 3.25, tem-se a lógica de funcionamento com o controlador repetitivo
implementado.
Fig. 3.25 - Interface da etapa de potência e malha feed-forward com repetitivo
implementada no DSP.
O compensador repetitivo irá corrigir, ao longo dos ciclos, uma possível distorção
nos barramentos. Dessa forma, a malha de compensação do ripple nos barramentos foi
retirada. Para que o protótipo funcione apenas como filtro, evitando o funcionamento como
regulador de tensão, a senóide de referência armazenada foi multiplicada pelo valor de pico
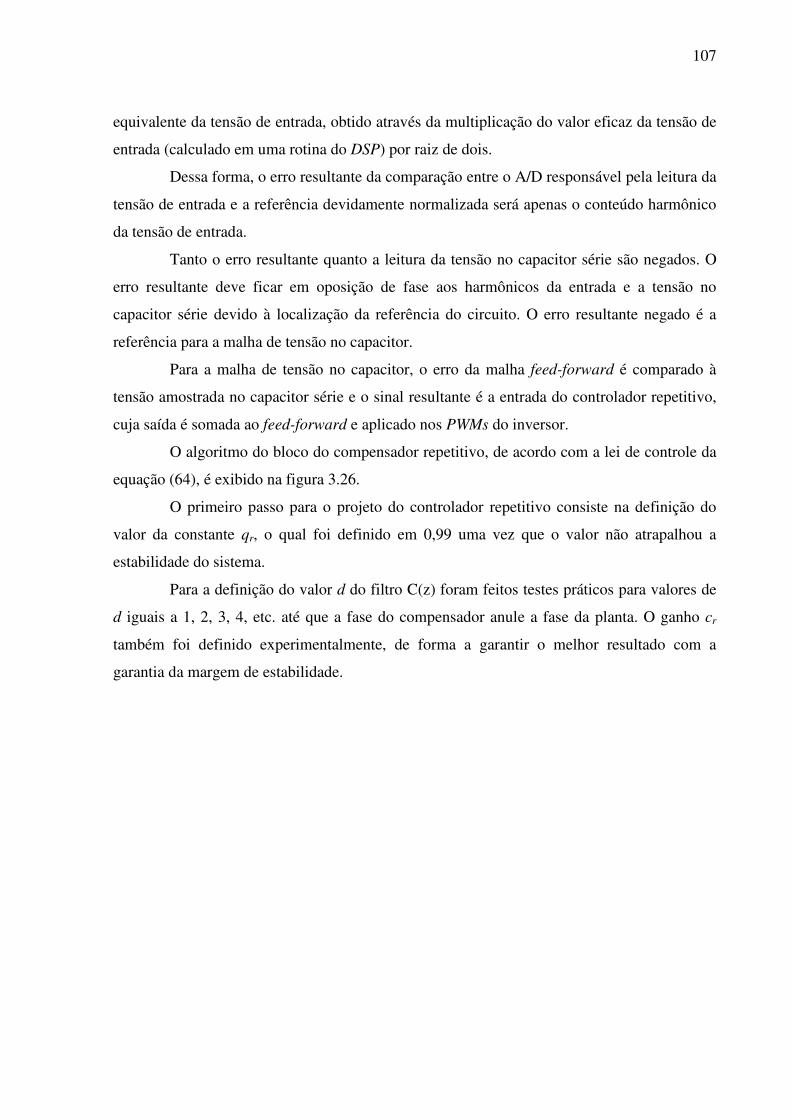
107
equivalente da tensão de entrada, obtido através da multiplicação do valor eficaz da tensão de
entrada (calculado em uma rotina do DSP) por raiz de dois.
Dessa forma, o erro resultante da comparação entre o A/D responsável pela leitura da
tensão de entrada e a referência devidamente normalizada será apenas o conteúdo harmônico
da tensão de entrada.
Tanto o erro resultante quanto a leitura da tensão no capacitor série são negados. O
erro resultante deve ficar em oposição de fase aos harmônicos da entrada e a tensão no
capacitor série devido à localização da referência do circuito. O erro resultante negado é a
referência para a malha de tensão no capacitor.
Para a malha de tensão no capacitor, o erro da malha feed-forward é comparado à
tensão amostrada no capacitor série e o sinal resultante é a entrada do controlador repetitivo,
cuja saída é somada ao feed-forward e aplicado nos PWMs do inversor.
O algoritmo do bloco do compensador repetitivo, de acordo com a lei de controle da
equação (64), é exibido na figura 3.26.
O primeiro passo para o projeto do controlador repetitivo consiste na definição do
valor da constante qr, o qual foi definido em 0,99 uma vez que o valor não atrapalhou a
estabilidade do sistema.
Para a definição do valor d do filtro C(z) foram feitos testes práticos para valores de
d iguais a 1, 2, 3, 4, etc. até que a fase do compensador anule a fase da planta. O ganho cr
também foi definido experimentalmente, de forma a garantir o melhor resultado com a
garantia da margem de estabilidade.
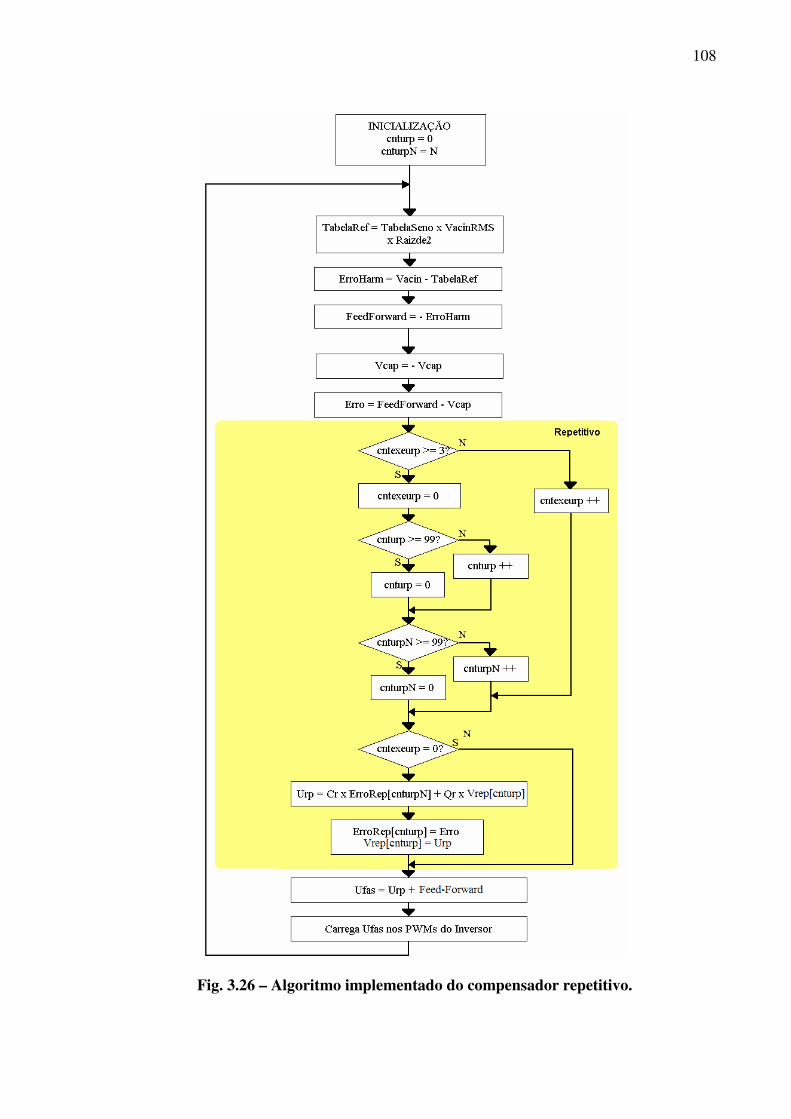
108
Fig. 3.26 – Algoritmo implementado do compensador repetitivo.

109
3.5 IMPLEMENTAÇÃO E DESCRIÇÃO DO PROGRAMA UTILIZADO
O programa foi desenvolvido em linguagem C, utilizando como ferramenta principal
o compilador CodeWarrior, disponibilizado pela Freescale. Na figura 3.27, tem-se a janela
principal do firmware, com uma das rotinas do programa desenvolvido.
Fig. 3.27 – Janela do compilador CodeWarrior.
O programa recebe valores de entrada e através destes toma decisões por meio do
algoritmo, que são enviadas para as saídas do DSP. Na figura 3.28 é possível visualizar as
entradas e saídas do DSP. Através do conversor A/D são colhidas as amostras necessárias
para o controle e para a sinalização do filtro ativo. O algoritmo é processado no DSP e os
sinais são enviados para os pinos de saída, que no caso do filtro são os sinais PWMs
responsáveis pelo acionamento do driver e a sinalização criada a partir dos LEDs indicadores.

110
Fig. 3.28 – Estrutura geral das entradas e saídas do DSP.
Na inicialização do DSP, configuram-se todos os periféricos e interrupções que serão
utilizadas. Logo, tem-se a configuração das portas I/O (entrada/saída), do conversor A/D, do
PWM e das interrupções necessárias. Também se efetuam as declarações das variáveis globais
que serão manipuladas ao longo do desenvolvimento do algoritmo e das constantes
necessárias, como, por exemplo, a senóide usada como referência para o controle.
Além da inicialização e da definição das variáveis e das constantes, tem-se ainda
cinco rotinas, responsáveis pelo processamento dos sinais recebidos pelo DSP. A rotina de
sincronismo é responsável por ajustar o zero da senóide de referência do DSP ao zero da
amostra da tensão senoidal de entrada. Ela é necessária, já que no algoritmo de controle
comparam-se as duas senóides e, para isso, elas devem estar em fase.
A rotina de monitoração analisa os dados de entrada, como a tensão de entrada e a
tensão nos dois barramentos, e, através da comparação com constantes definidas, estipula
níveis seguros para as tensões de entrada e de barramento, ativando ou não a malha de
controle, que define o chaveamento dos MOSFETs. Caso haja um valor abaixo ou acima do
esperado, a rotina de monitoração sinaliza através dos LEDs, conforma figura 3.29, e não
ativa a malha de controle.
111
Fig. 3.29 – Sinalização dos LEDs indicadores, conforme a situação.
A rotina das funções é onde se incluem todos os tratamentos matemáticos para os
valores do DSP, como a função para se multiplicar valores inteiros por valores fracionários e
a função para a extração da raiz quadrada.
A rotina PWM é chamada através de uma interrupção, a PWM Reload, que acontece
a cada 24 kHz (a cada duas interrupções de PWM). Nessa rotina estão todas as leituras dos
A/Ds e as contas dos valores eficaz e médio necessários, a detecção da passagem por zero para
a rotina de sincronismo e o algoritmo de controle, com a atualização dos valores de duty-cycle
que serão enviados ao periférico PWM, que irá acionar o driver das chaves do inversor meia
ponte.
Para uma melhor visualização do código implementado, a figura 3.30 traz um
fluxograma simplificado do algoritmo implementado no DSP.
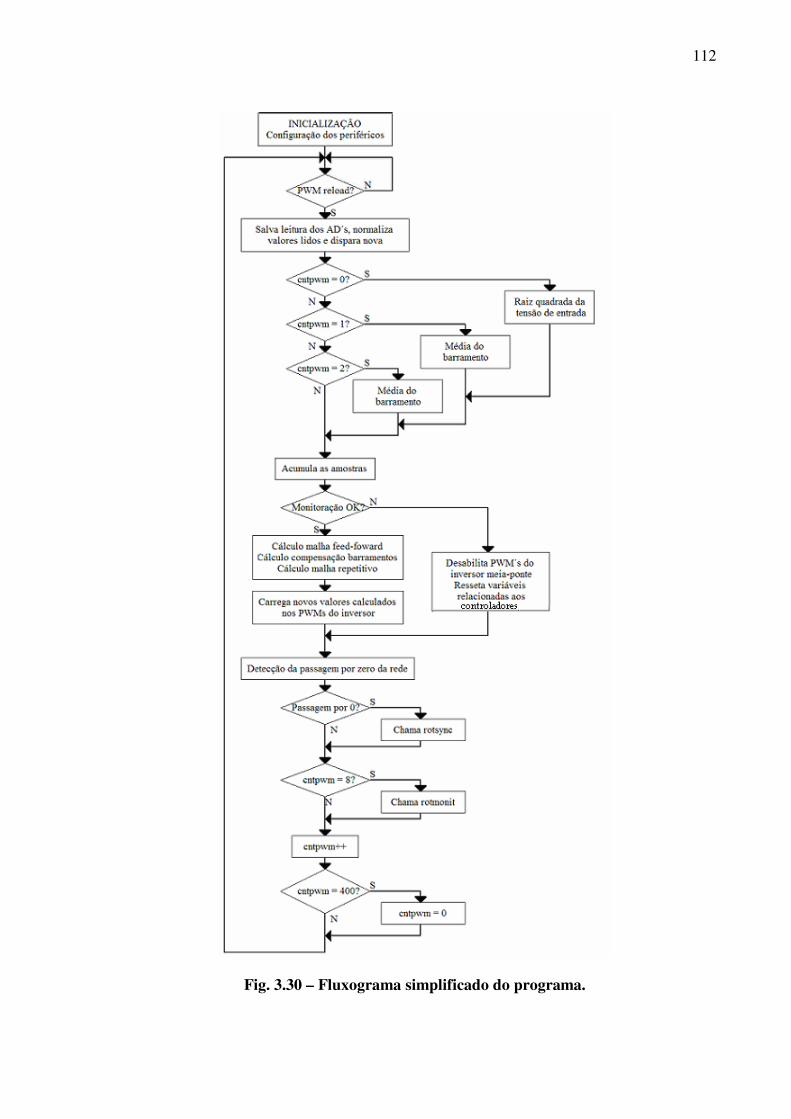
112
Fig. 3.30 – Fluxograma simplificado do programa.
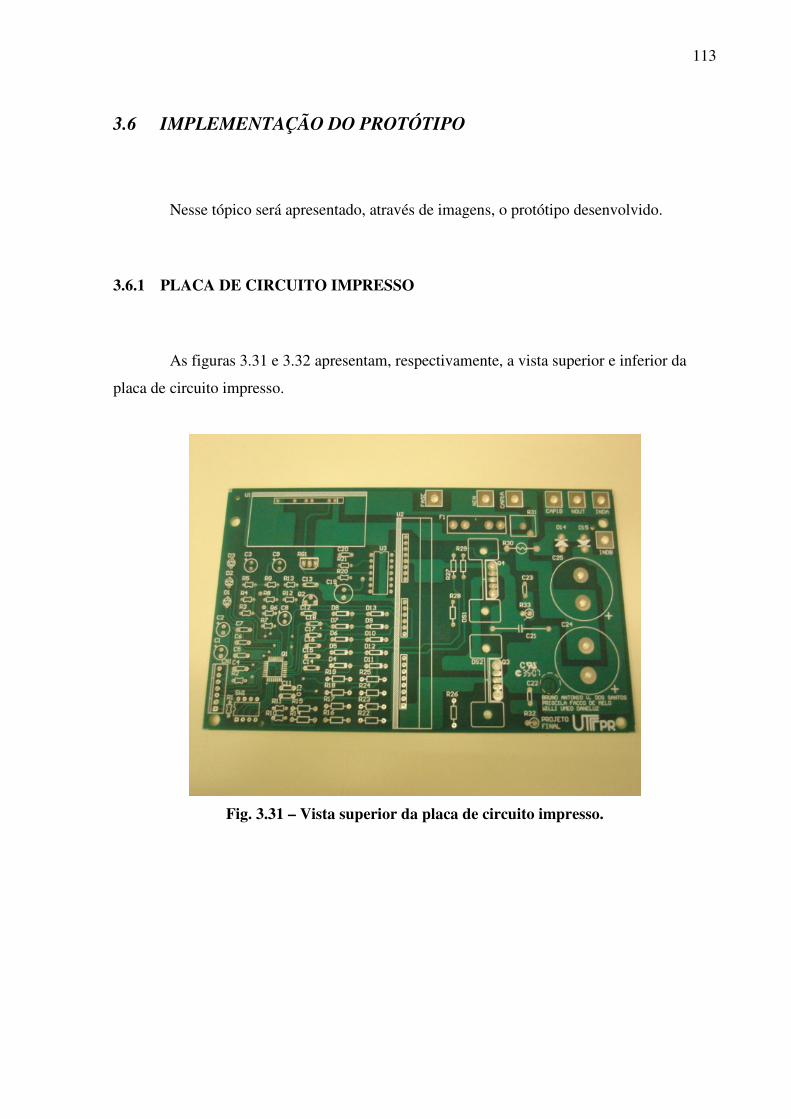
113
3.6 IMPLEMENTAÇÃO DO PROTÓTIPO
Nesse tópico será apresentado, através de imagens, o protótipo desenvolvido.
3.6.1 PLACA DE CIRCUITO IMPRESSO
As figuras 3.31 e 3.32 apresentam, respectivamente, a vista superior e inferior da
placa de circuito impresso.
Fig. 3.31 – Vista superior da placa de circuito impresso.
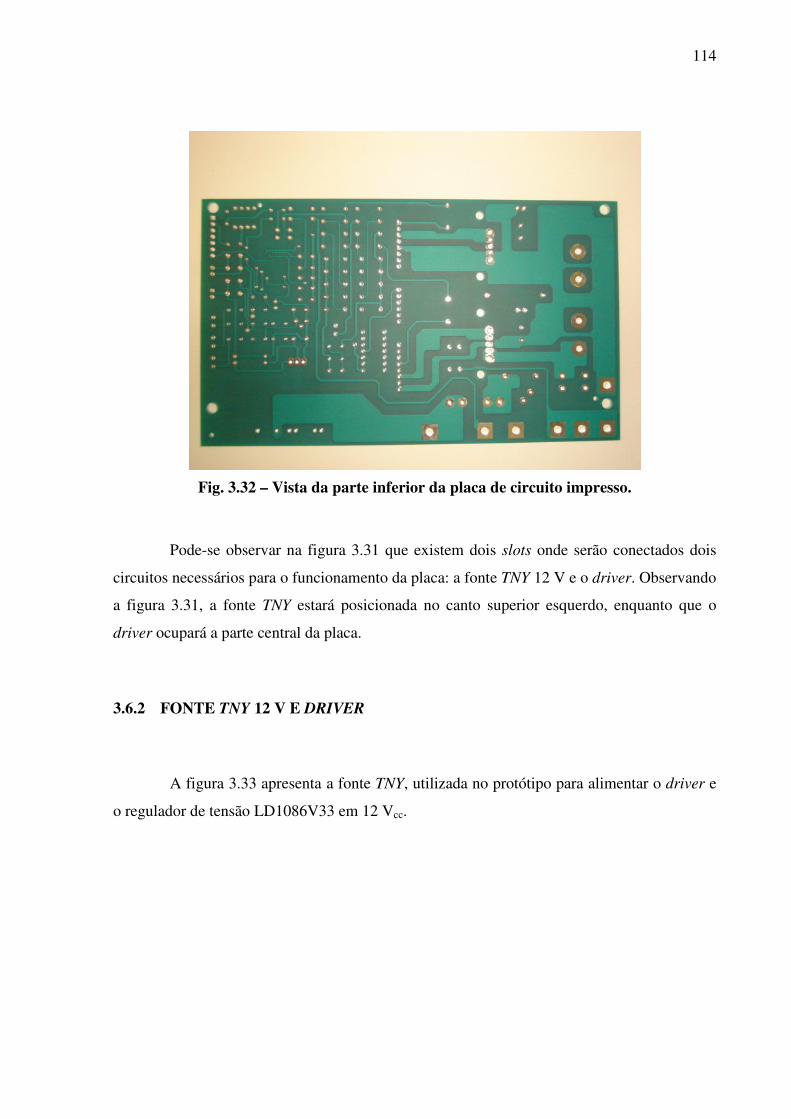
114
Fig. 3.32 – Vista da parte inferior da placa de circuito impresso.
Pode-se observar na figura 3.31 que existem dois slots onde serão conectados dois
circuitos necessários para o funcionamento da placa: a fonte TNY 12 V e o driver. Observando
a figura 3.31, a fonte TNY estará posicionada no canto superior esquerdo, enquanto que o
driver ocupará a parte central da placa.
3.6.2 FONTE TNY 12 V E DRIVER
A figura 3.33 apresenta a fonte TNY, utilizada no protótipo para alimentar o driver e
o regulador de tensão LD1086V33 em 12 Vcc.
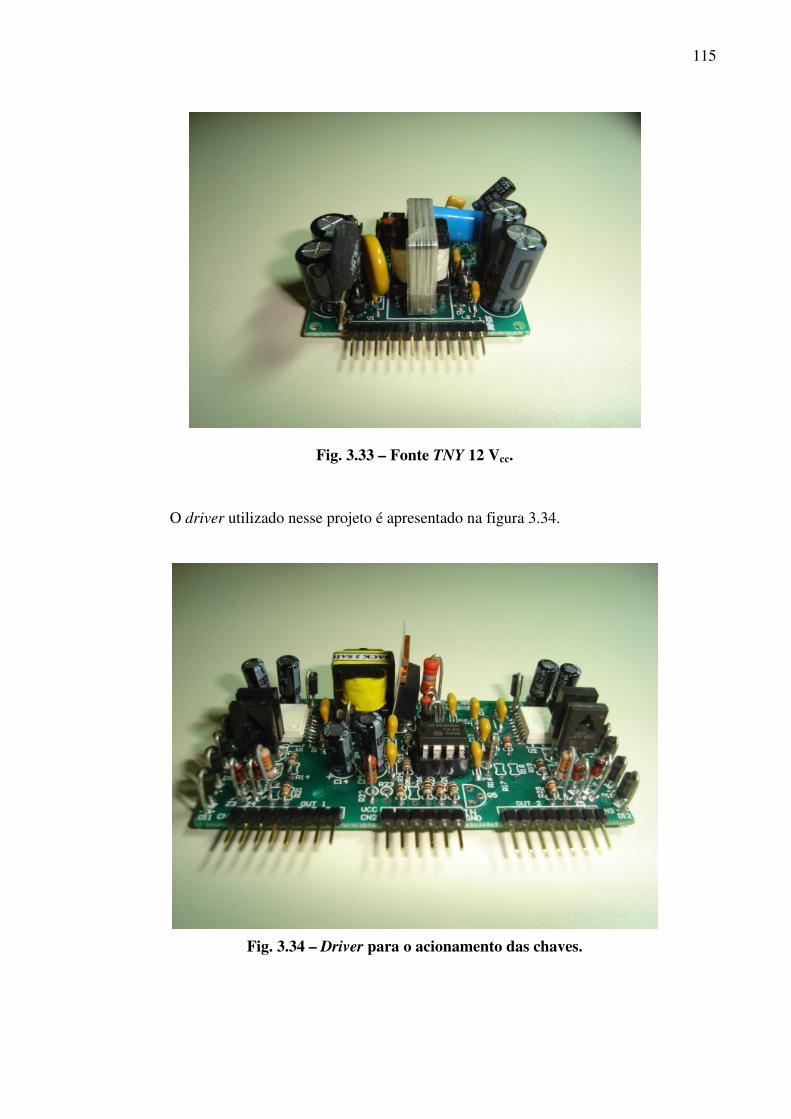
115
Fig. 3.33 – Fonte TNY 12 Vcc.
O driver utilizado nesse projeto é apresentado na figura 3.34.
Fig. 3.34 – Driver para o acionamento das chaves.

116
A figura 3.35 apresenta o protótipo já com os módulos externos acoplados, bem
como os capacitores do dobrador de tensão e outros componentes já soldados à placa.
Fig. 3.35 – Protótipo com a fonte TNY e driver do FAS.
3.6.3 DSP
O DSP utilizado nesse protótipo (56F8013, da Freescale Semiconductor) é
apresentado já soldado ao protótipo na figura 3.36.

117
Fig. 3.36 – DSP soldado na placa.
3.6.4 FILTRO LC
O indutor de filtragem foi posicionado sobre a placa. Já o capacitor de filtragem foi
posicionado externamente à placa, como se pode observar na figura 3.37.
Fig. 3.37 – Filtro LC de saída afixado à placa.

118
3.6.5 CHAVES SEMICONDUTORAS
As chaves semicondutoras e seus respectivos dissipadores são apresentados na figura
3.38.
Fig. 3.38 – MOSFETs e seus dissipadores.
3.6.6 PROTÓTIPO COMPLETO
O protótipo concluído é apresentado na figura 3.39.

119
Fig. 3.39 – Protótipo completo.
3.7 CONCLUSÃO
Neste capítulo foram detalhados todos os procedimentos, cálculos e métodos
utilizados na implementação do protótipo do filtro ativo série.
Inicialmente, foi apresentada a descrição das várias partes que compõem o circuito
do protótipo, bem como simulações e cálculos necessários para o correto funcionamento de
cada uma delas. Também foi apresentado o leiaute da placa desenvolvido para a montagem do
protótipo.
Em seguida foram expostas as técnicas de controle utilizadas no filtro ativo, dando
ênfase para o controlador repetitivo implementado. Também foi feita uma descrição geral
sobre programa desenvolvido em linguagem C para o DSP 56F8013, com uma breve
descrição das rotinas de firmware implementadas.
Com a montagem da placa realizada, apresentada neste capítulo, e o programa para o
DSP desenvolvido, iniciou-se a fase dos testes do protótipo, cujos resultados são apresentados
no capítulo 4.
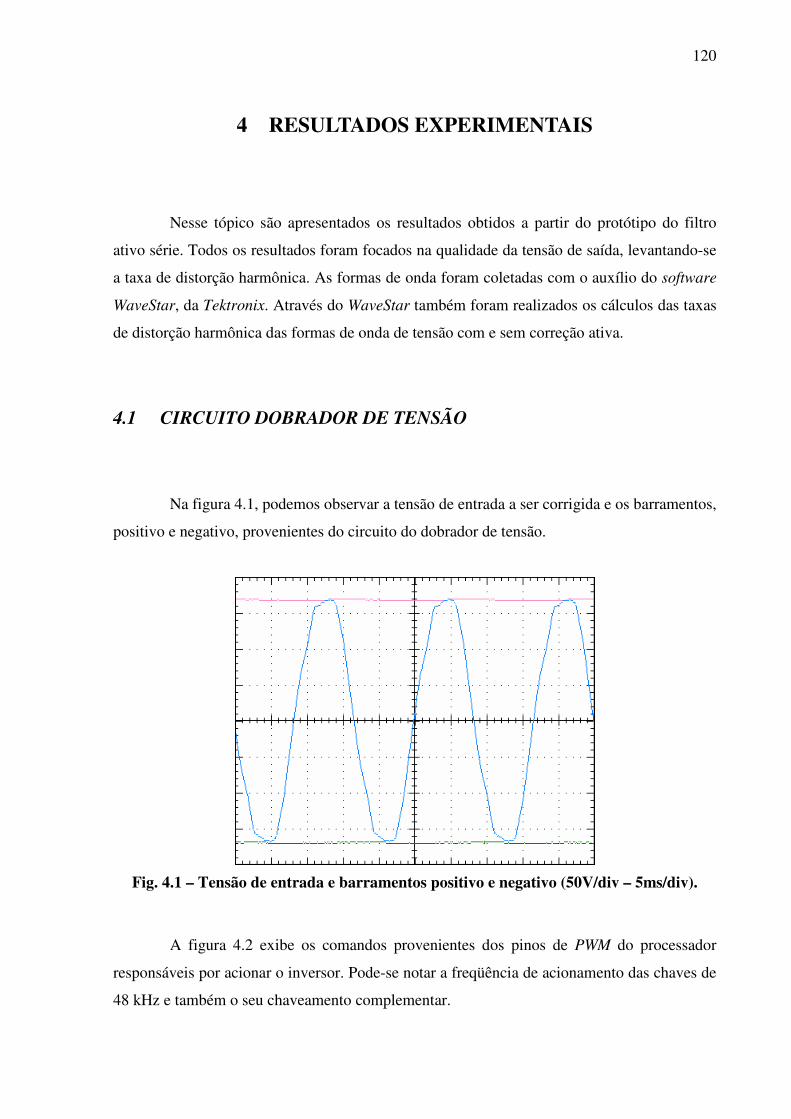
120
4 RESULTADOS EXPERIMENTAIS
Nesse tópico são apresentados os resultados obtidos a partir do protótipo do filtro
ativo série. Todos os resultados foram focados na qualidade da tensão de saída, levantando-se
a taxa de distorção harmônica. As formas de onda foram coletadas com o auxílio do software
WaveStar, da Tektronix. Através do WaveStar também foram realizados os cálculos das taxas
de distorção harmônica das formas de onda de tensão com e sem correção ativa.
4.1 CIRCUITO DOBRADOR DE TENSÃO
Na figura 4.1, podemos observar a tensão de entrada a ser corrigida e os barramentos,
positivo e negativo, provenientes do circuito do dobrador de tensão.
Fig. 4.1 – Tensão de entrada e barramentos positivo e negativo (50V/div – 5ms/div).
A figura 4.2 exibe os comandos provenientes dos pinos de PWM do processador
responsáveis por acionar o inversor. Pode-se notar a freqüência de acionamento das chaves de
48 kHz e também o seu chaveamento complementar.
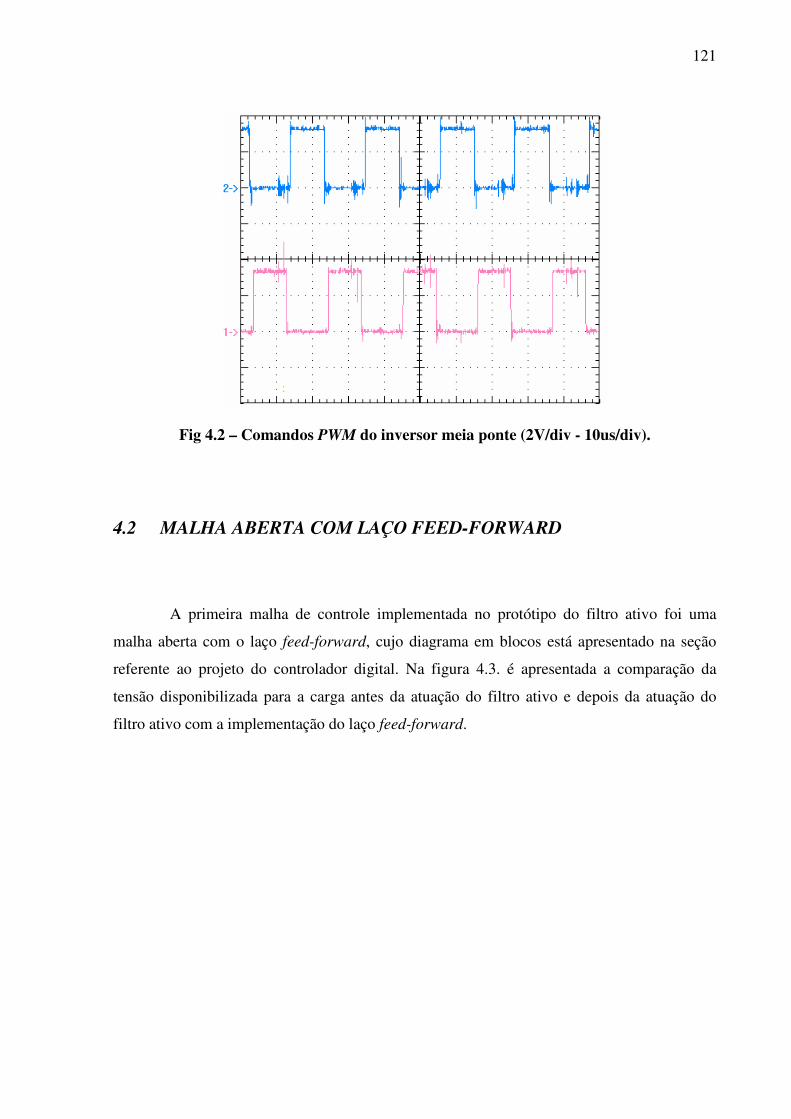
121
Fig 4.2 – Comandos PWM do inversor meia ponte (2V/div - 10us/div).
4.2 MALHA ABERTA COM LAÇO FEED-FORWARD
A primeira malha de controle implementada no protótipo do filtro ativo foi uma
malha aberta com o laço feed-forward, cujo diagrama em blocos está apresentado na seção
referente ao projeto do controlador digital. Na figura 4.3. é apresentada a comparação da
tensão disponibilizada para a carga antes da atuação do filtro ativo e depois da atuação do
filtro ativo com a implementação do laço feed-forward.
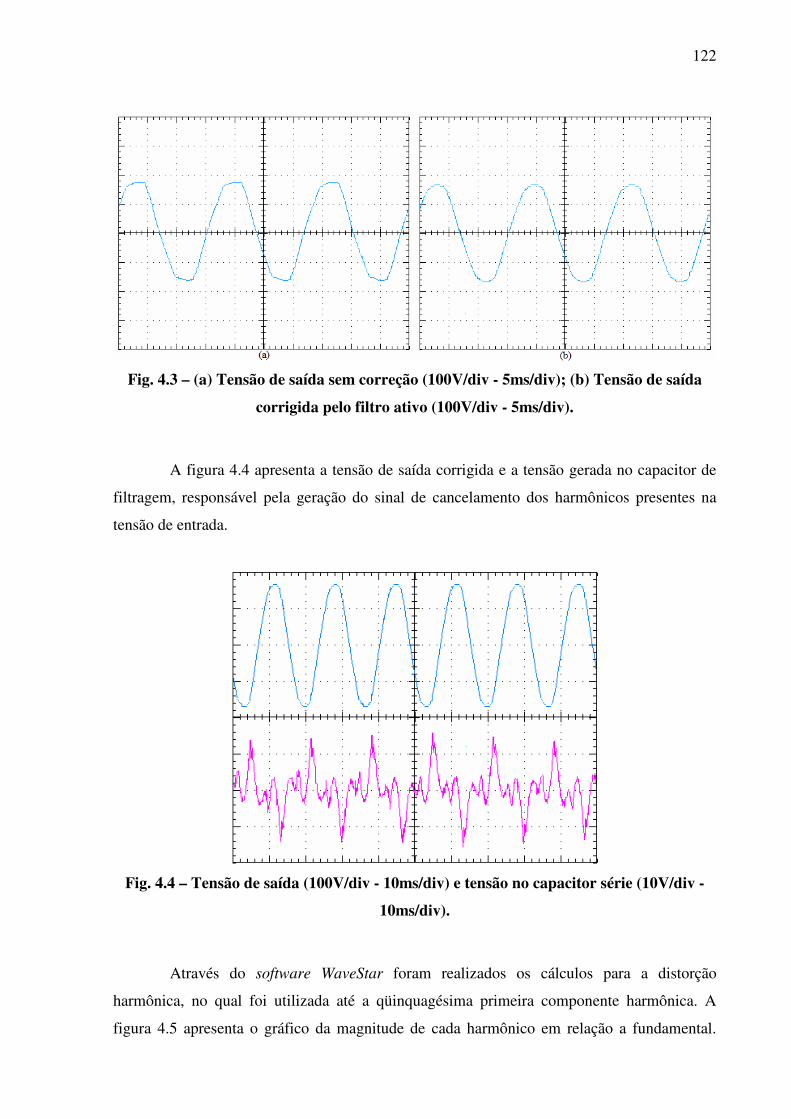
122
Fig. 4.3 – (a) Tensão de saída sem correção (100V/div - 5ms/div); (b) Tensão de saída
corrigida pelo filtro ativo (100V/div - 5ms/div).
A figura 4.4 apresenta a tensão de saída corrigida e a tensão gerada no capacitor de
filtragem, responsável pela geração do sinal de cancelamento dos harmônicos presentes na
tensão de entrada.
Fig. 4.4 – Tensão de saída (100V/div - 10ms/div) e tensão no capacitor série (10V/div -
10ms/div).
Através do software WaveStar foram realizados os cálculos para a distorção
harmônica, no qual foi utilizada até a qüinquagésima primeira componente harmônica. A
figura 4.5 apresenta o gráfico da magnitude de cada harmônico em relação a fundamental.
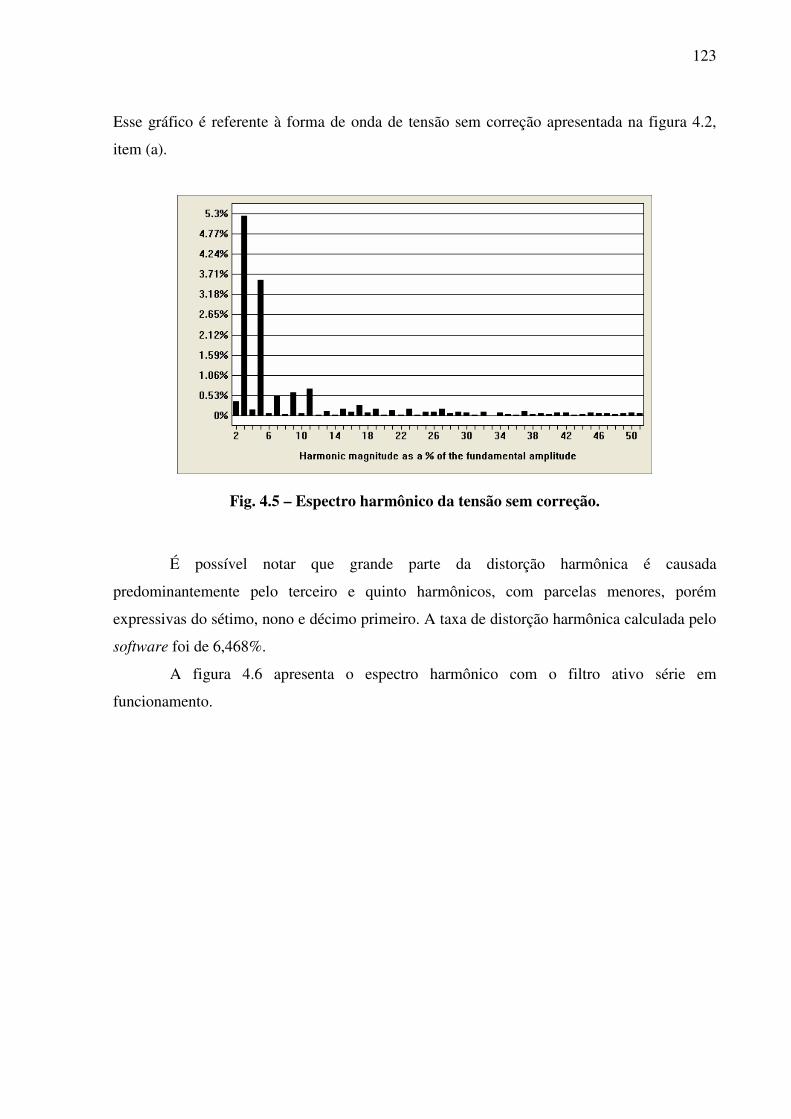
123
Esse gráfico é referente à forma de onda de tensão sem correção apresentada na figura 4.2,
item (a).
Fig. 4.5 – Espectro harmônico da tensão sem correção.
É possível notar que grande parte da distorção harmônica é causada
predominantemente pelo terceiro e quinto harmônicos, com parcelas menores, porém
expressivas do sétimo, nono e décimo primeiro. A taxa de distorção harmônica calculada pelo
software foi de 6,468%.
A figura 4.6 apresenta o espectro harmônico com o filtro ativo série em
funcionamento.

124
Fig. 4.6 – Espectro harmônico da tensão com correção.
Com o funcionamento do filtro, mesmo apenas com a malha feed-forward, já se pode
notar uma melhoria na distorção harmônica de tensão, com as amplitudes das componentes
harmônicas diminuindo substancialmente. Esse decréscimo é notado na taxa de distorção
harmônica, que caiu para 3,877%.
4.3 MALHA FECHADA COM LAÇO FEED-FORWARD E REPETITIVO
Para melhorar o desempenho do controle, adicionou-se uma malha de controle da
tensão no capacitor série. A malha de controle foi implementada amostrando-se a tensão no
capacitor e comparando-a com a tensão da malha feed-forward, a qual é a referência para a
tensão do capacitor. O erro entre as tensões passa por um controlador repetitivo e a sua saída é
somada a malha feed-forward.
Na figura 4.7 tem-se a tensão de entrada, isto é, a tensão antes da correção, e a tensão
chaveada pelo inversor meia ponte no capacitor de filtragem. Essa tensão no capacitor será a
responsável pela correção dos harmônicos presentes na tensão de entrada.

125
Fig. 4.7 – Tensão de entrada (50V/div – 10ms/div) e tensão no capacitor série (20V/div –
10ms/div).
A figura 4.8 apresenta o espectro harmônico da tensão de entrada e a figura 4.9 o
espectro da tensão no capacitor de filtragem. É possível identificar que os espectros
apresentam níveis harmônicos muito próximos, significando que a tensão de saída terá quase
todo seu conteúdo harmônico cancelado.
Fig. 4.8 – Espectro harmônico da tensão de entrada a ser corrigida.
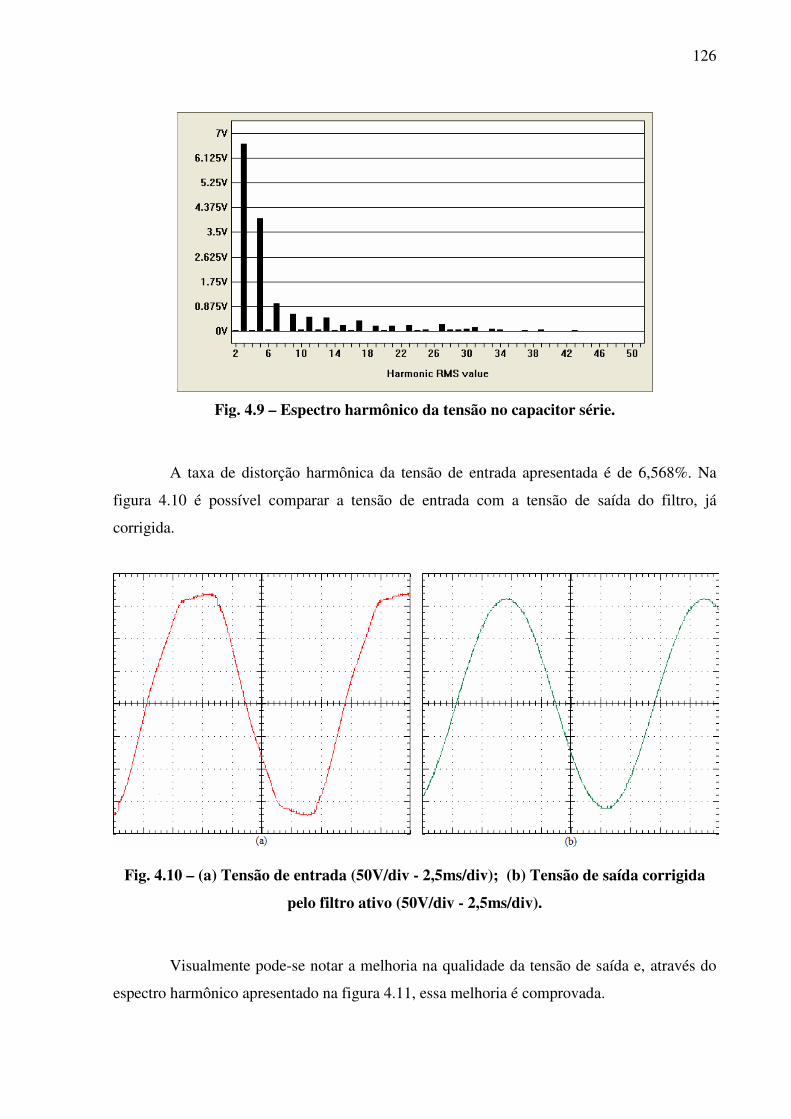
126
Fig. 4.9 – Espectro harmônico da tensão no capacitor série.
A taxa de distorção harmônica da tensão de entrada apresentada é de 6,568%. Na
figura 4.10 é possível comparar a tensão de entrada com a tensão de saída do filtro, já
corrigida.
Fig. 4.10 – (a) Tensão de entrada (50V/div - 2,5ms/div); (b) Tensão de saída corrigida
pelo filtro ativo (50V/div - 2,5ms/div).
Visualmente pode-se notar a melhoria na qualidade da tensão de saída e, através do
espectro harmônico apresentado na figura 4.11, essa melhoria é comprovada.
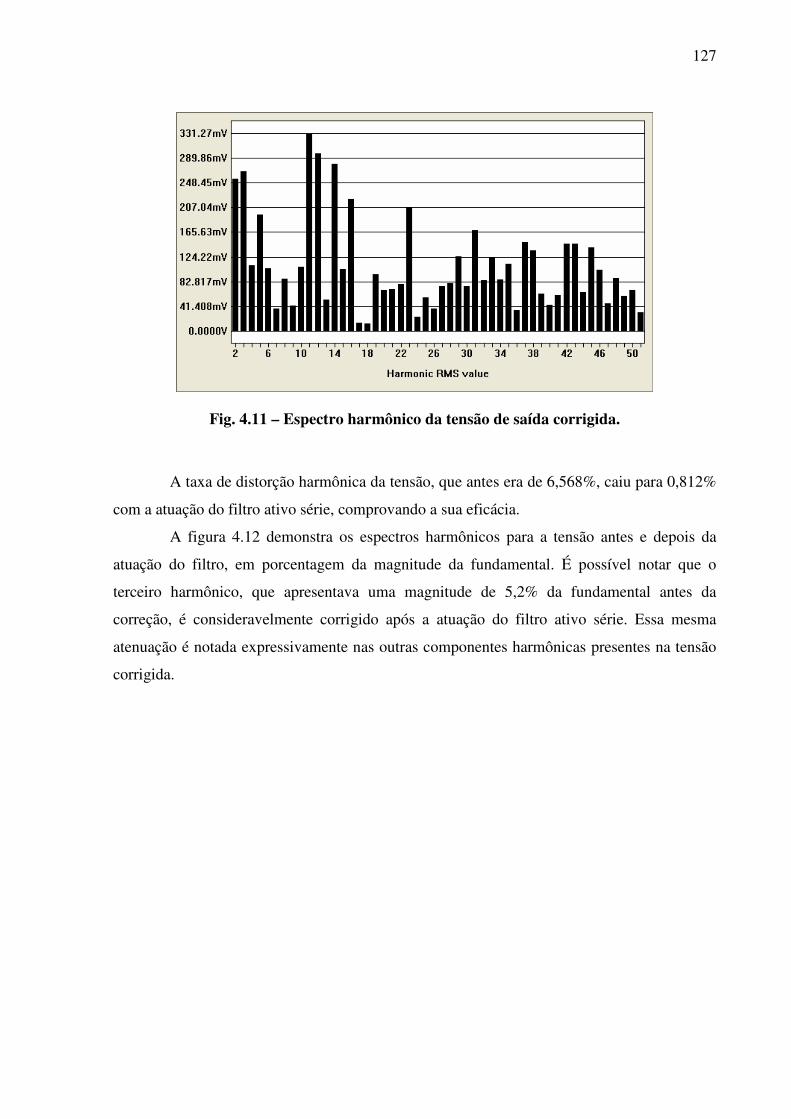
127
Fig. 4.11 – Espectro harmônico da tensão de saída corrigida.
A taxa de distorção harmônica da tensão, que antes era de 6,568%, caiu para 0,812%
com a atuação do filtro ativo série, comprovando a sua eficácia.
A figura 4.12 demonstra os espectros harmônicos para a tensão antes e depois da
atuação do filtro, em porcentagem da magnitude da fundamental. É possível notar que o
terceiro harmônico, que apresentava uma magnitude de 5,2% da fundamental antes da
correção, é consideravelmente corrigido após a atuação do filtro ativo série. Essa mesma
atenuação é notada expressivamente nas outras componentes harmônicas presentes na tensão
corrigida.
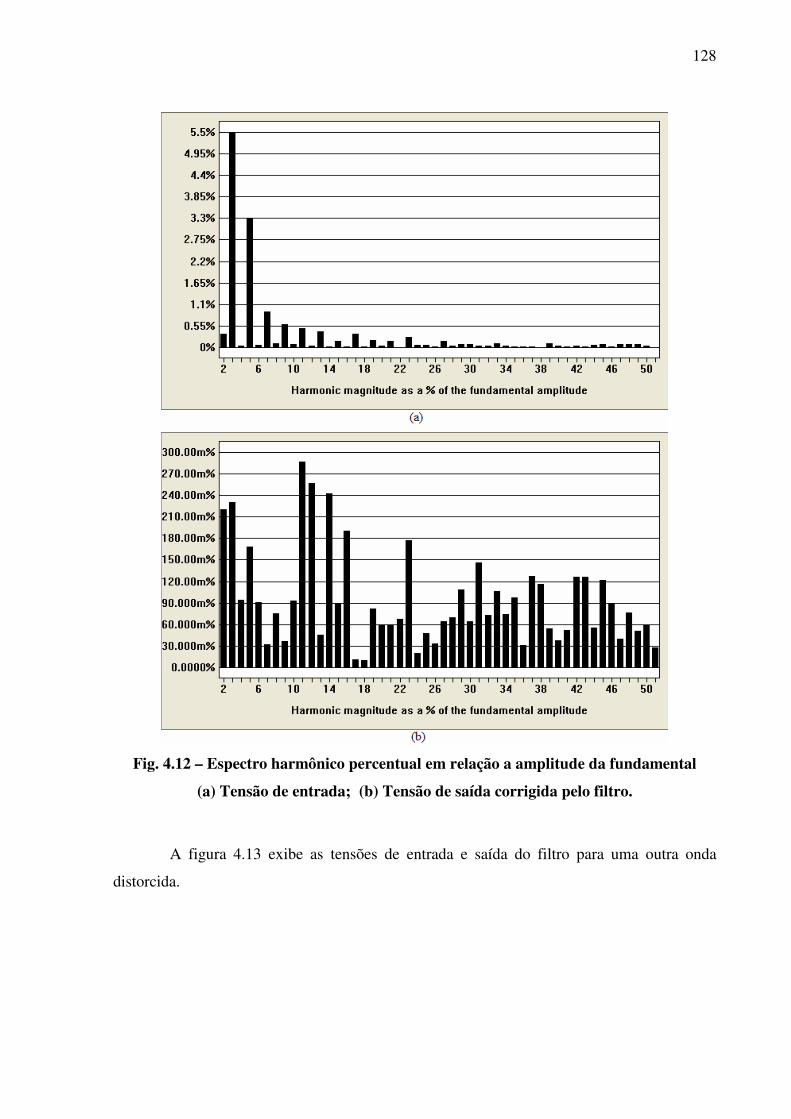
128
Fig. 4.12 – Espectro harmônico percentual em relação a amplitude da fundamental
(a) Tensão de entrada; (b) Tensão de saída corrigida pelo filtro.
A figura 4.13 exibe as tensões de entrada e saída do filtro para uma outra onda
distorcida.
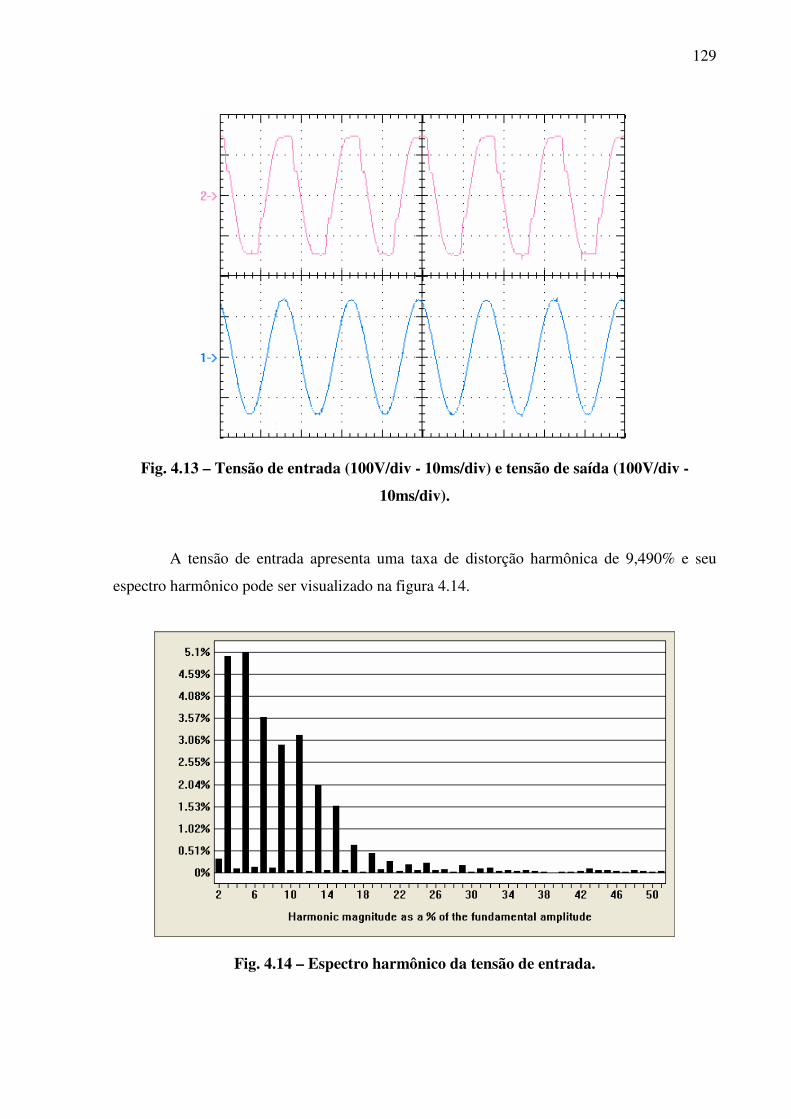
129
Fig. 4.13 – Tensão de entrada (100V/div - 10ms/div) e tensão de saída (100V/div -
10ms/div).
A tensão de entrada apresenta uma taxa de distorção harmônica de 9,490% e seu
espectro harmônico pode ser visualizado na figura 4.14.
Fig. 4.14 – Espectro harmônico da tensão de entrada.
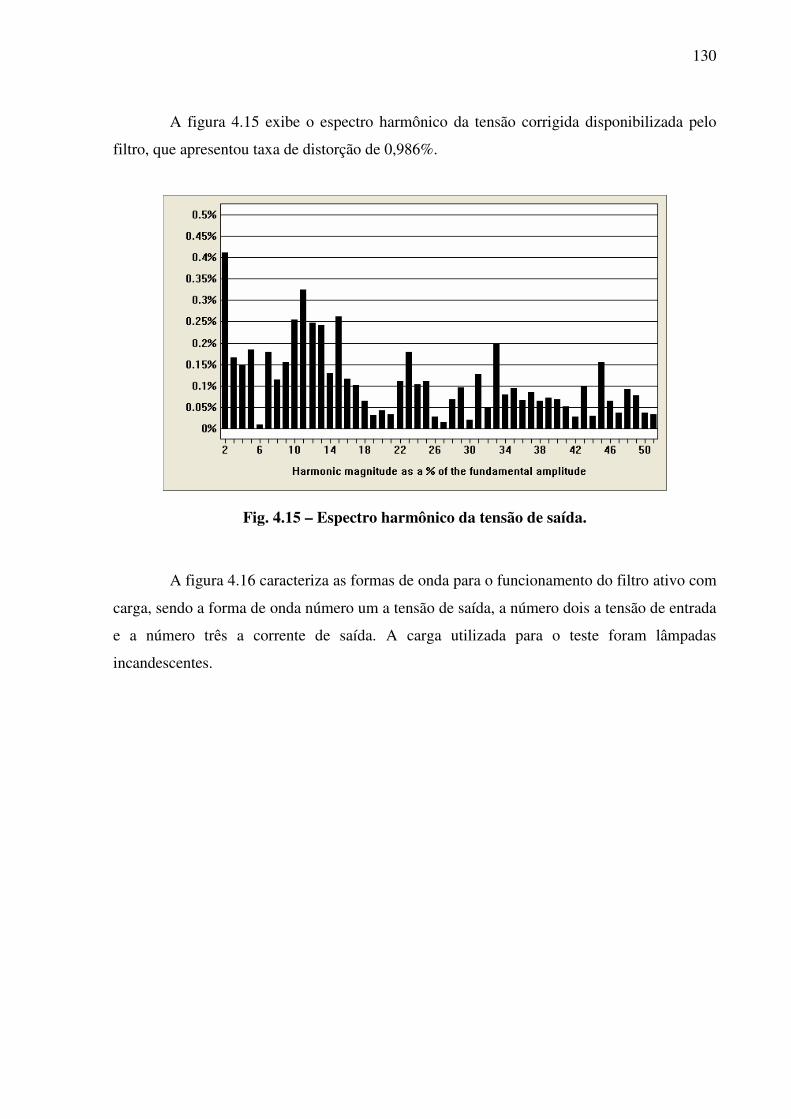
130
A figura 4.15 exibe o espectro harmônico da tensão corrigida disponibilizada pelo
filtro, que apresentou taxa de distorção de 0,986%.
Fig. 4.15 – Espectro harmônico da tensão de saída.
A figura 4.16 caracteriza as formas de onda para o funcionamento do filtro ativo com
carga, sendo a forma de onda número um a tensão de saída, a número dois a tensão de entrada
e a número três a corrente de saída. A carga utilizada para o teste foram lâmpadas
incandescentes.
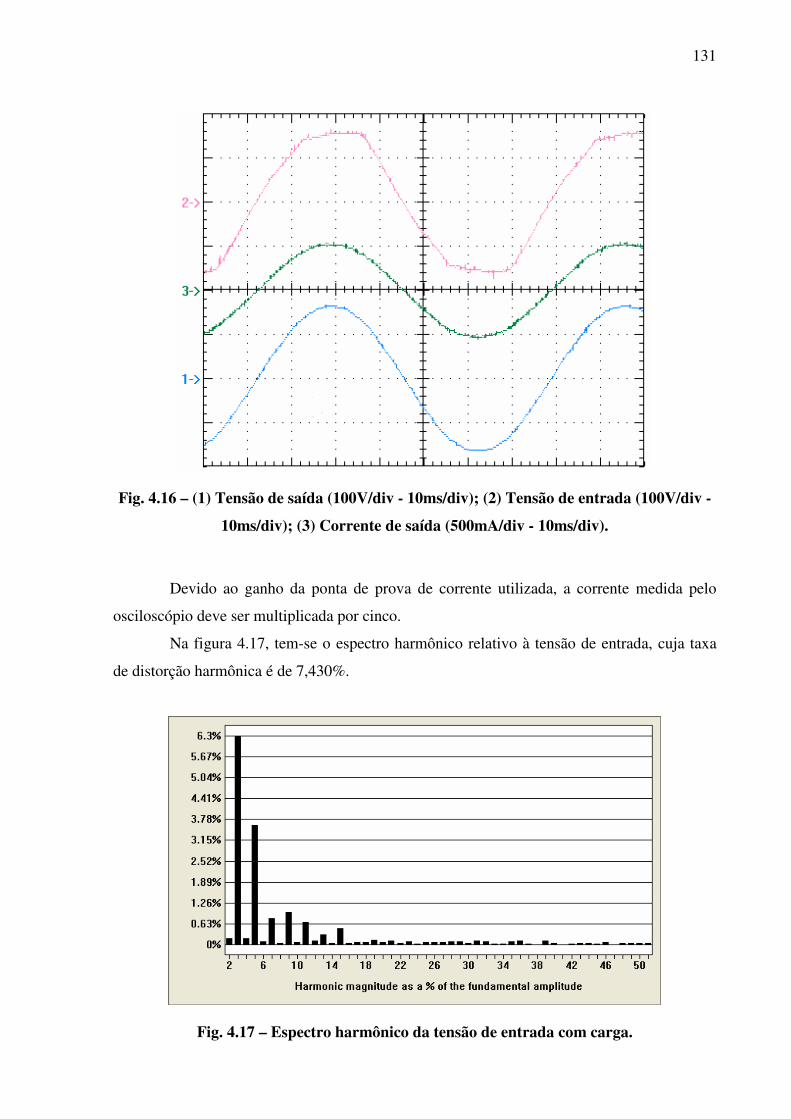
131
Fig. 4.16 – (1) Tensão de saída (100V/div - 10ms/div); (2) Tensão de entrada (100V/div -
10ms/div); (3) Corrente de saída (500mA/div - 10ms/div).
Devido ao ganho da ponta de prova de corrente utilizada, a corrente medida pelo
osciloscópio deve ser multiplicada por cinco.
Na figura 4.17, tem-se o espectro harmônico relativo à tensão de entrada, cuja taxa
de distorção harmônica é de 7,430%.
Fig. 4.17 – Espectro harmônico da tensão de entrada com carga.
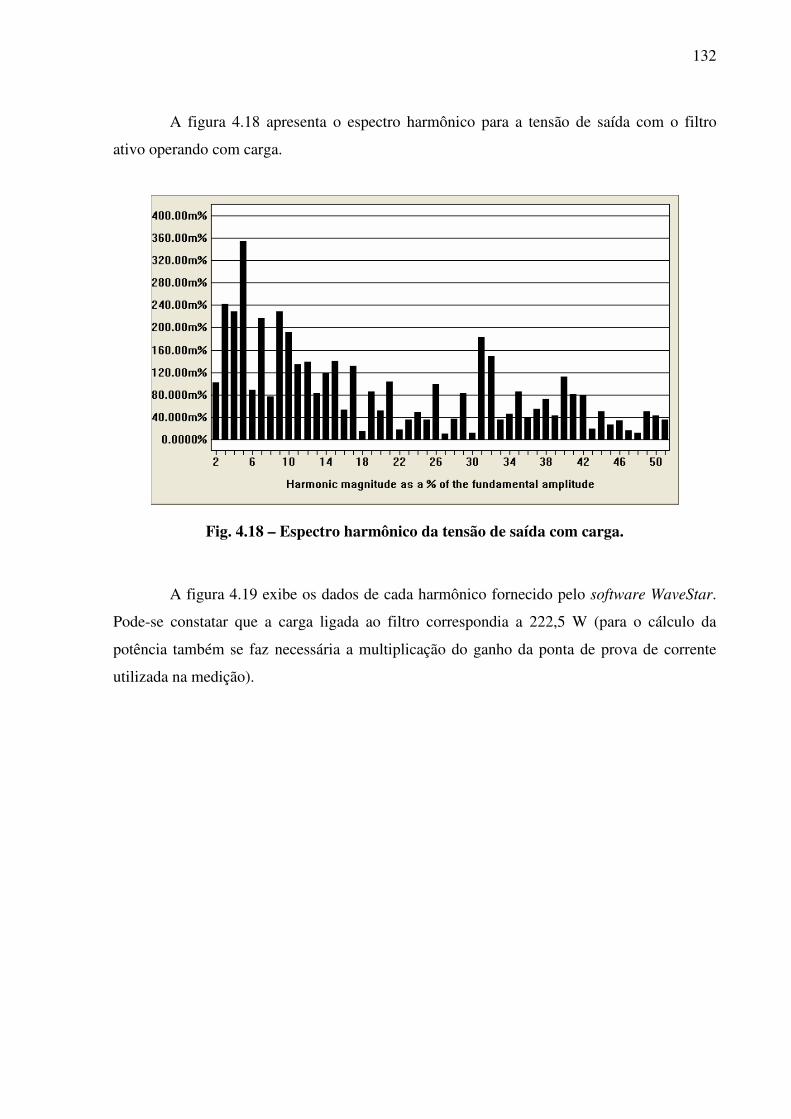
132
A figura 4.18 apresenta o espectro harmônico para a tensão de saída com o filtro
ativo operando com carga.
Fig. 4.18 – Espectro harmônico da tensão de saída com carga.
A figura 4.19 exibe os dados de cada harmônico fornecido pelo software WaveStar.
Pode-se constatar que a carga ligada ao filtro correspondia a 222,5 W (para o cálculo da
potência também se faz necessária a multiplicação do ganho da ponta de prova de corrente
utilizada na medição).
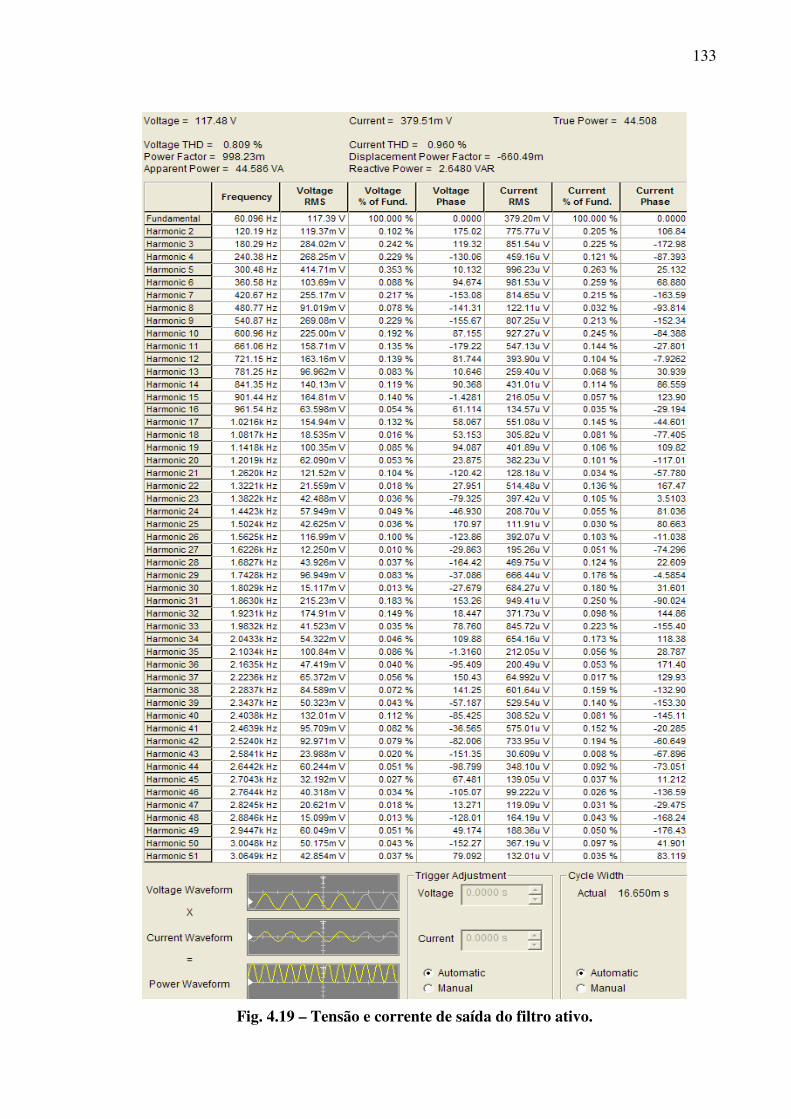
133
Fig. 4.19 – Tensão e corrente de saída do filtro ativo.
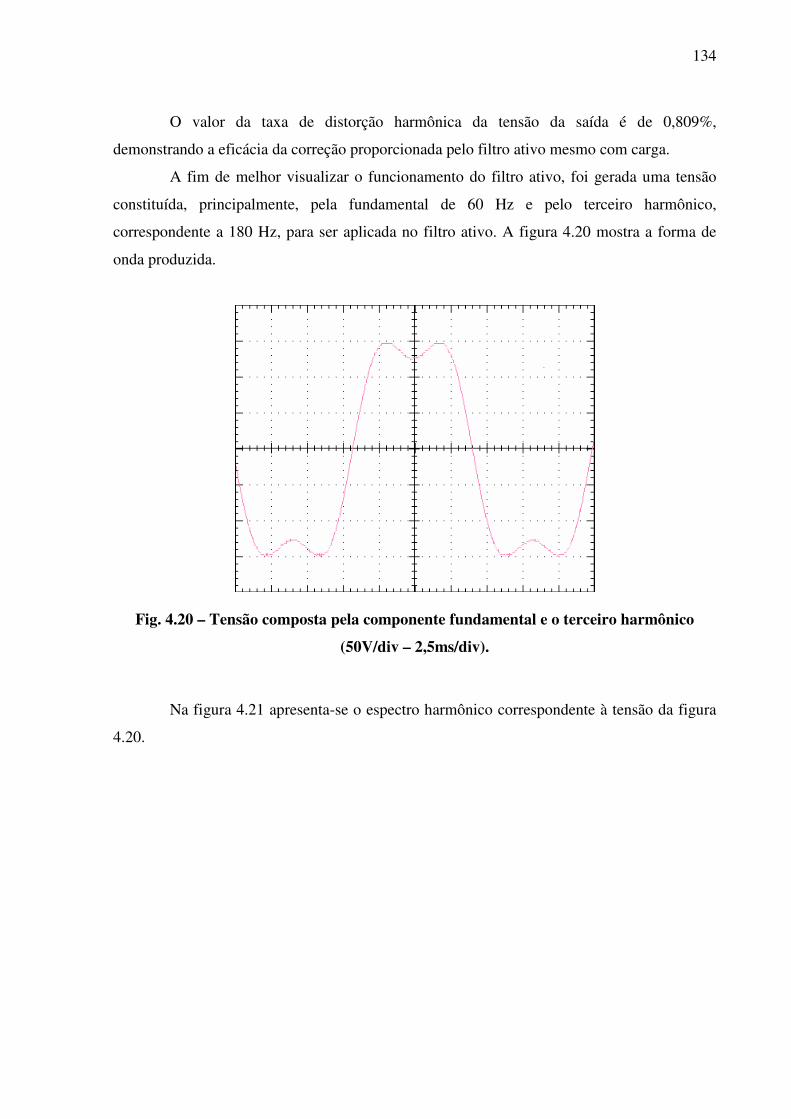
134
O valor da taxa de distorção harmônica da tensão da saída é de 0,809%,
demonstrando a eficácia da correção proporcionada pelo filtro ativo mesmo com carga.
A fim de melhor visualizar o funcionamento do filtro ativo, foi gerada uma tensão
constituída, principalmente, pela fundamental de 60 Hz e pelo terceiro harmônico,
correspondente a 180 Hz, para ser aplicada no filtro ativo. A figura 4.20 mostra a forma de
onda produzida.
Fig. 4.20 – Tensão composta pela componente fundamental e o terceiro harmônico
(50V/div – 2,5ms/div).
Na figura 4.21 apresenta-se o espectro harmônico correspondente à tensão da figura
4.20.
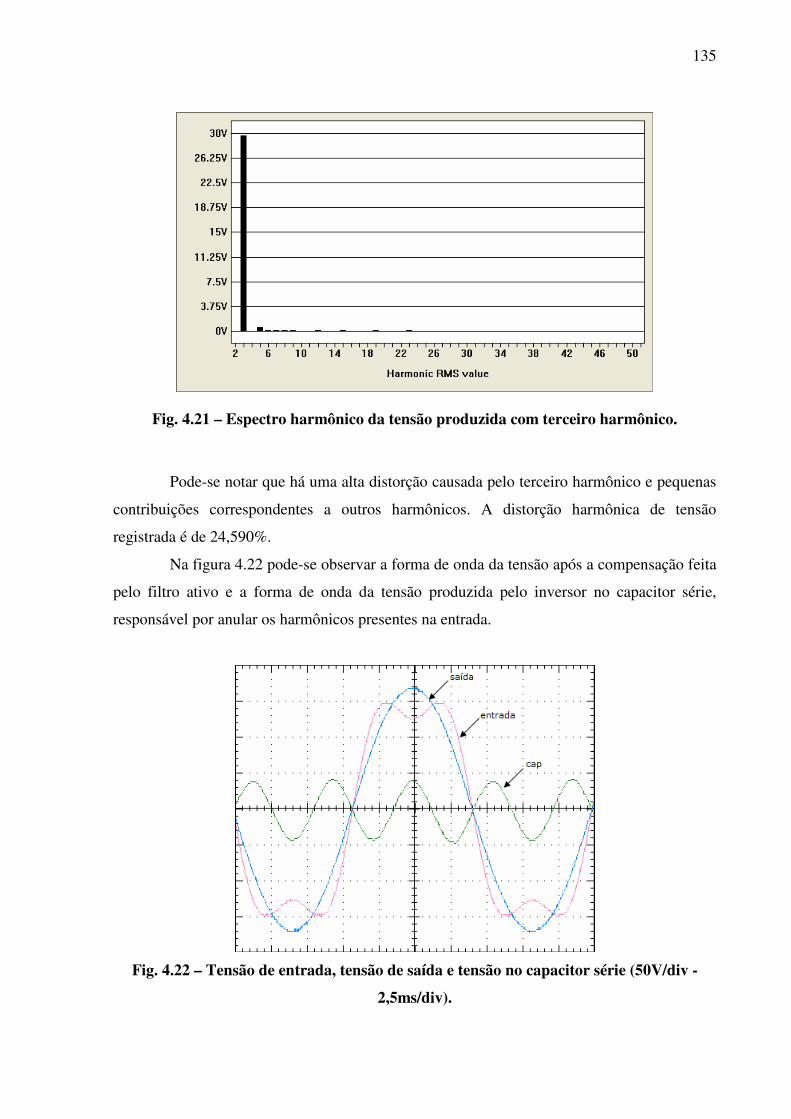
135
Fig. 4.21 – Espectro harmônico da tensão produzida com terceiro harmônico.
Pode-se notar que há uma alta distorção causada pelo terceiro harmônico e pequenas
contribuições correspondentes a outros harmônicos. A distorção harmônica de tensão
registrada é de 24,590%.
Na figura 4.22 pode-se observar a forma de onda da tensão após a compensação feita
pelo filtro ativo e a forma de onda da tensão produzida pelo inversor no capacitor série,
responsável por anular os harmônicos presentes na entrada.
Fig. 4.22 – Tensão de entrada, tensão de saída e tensão no capacitor série (50V/div -
2,5ms/div).
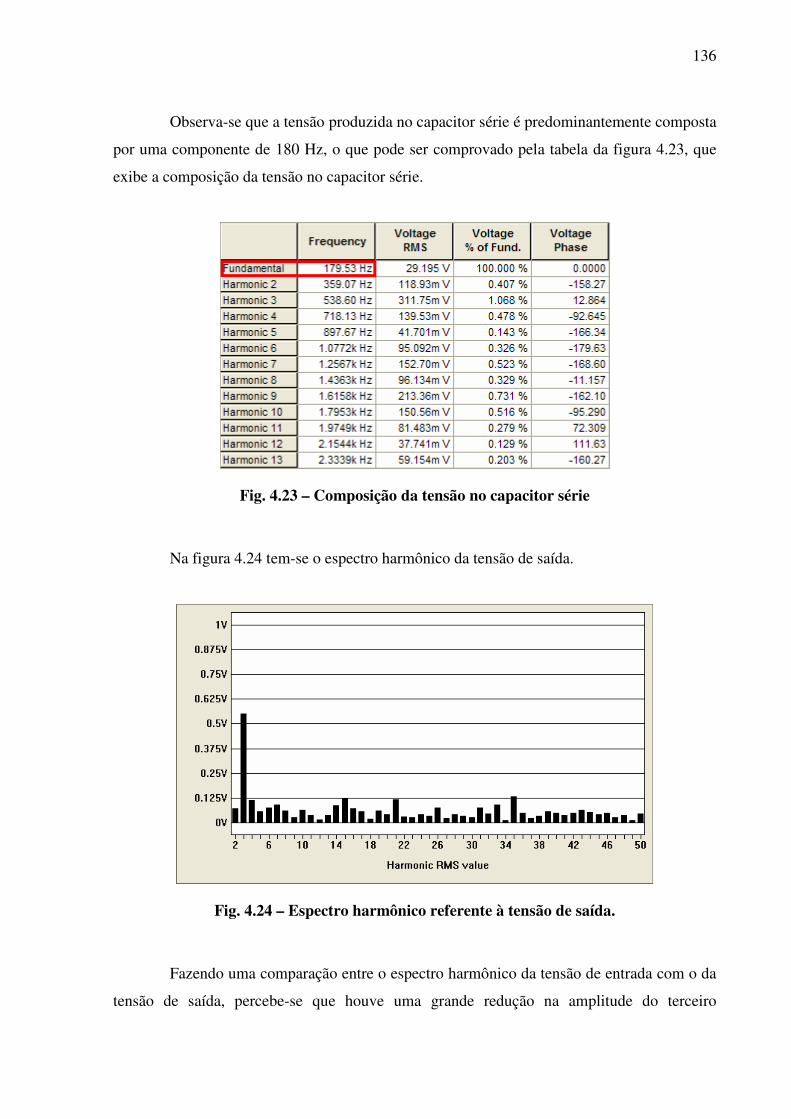
136
Observa-se que a tensão produzida no capacitor série é predominantemente composta
por uma componente de 180 Hz, o que pode ser comprovado pela tabela da figura 4.23, que
exibe a composição da tensão no capacitor série.
Fig. 4.23 – Composição da tensão no capacitor série
Na figura 4.24 tem-se o espectro harmônico da tensão de saída.
Fig. 4.24 – Espectro harmônico referente à tensão de saída.
Fazendo uma comparação entre o espectro harmônico da tensão de entrada com o da
tensão de saída, percebe-se que houve uma grande redução na amplitude do terceiro
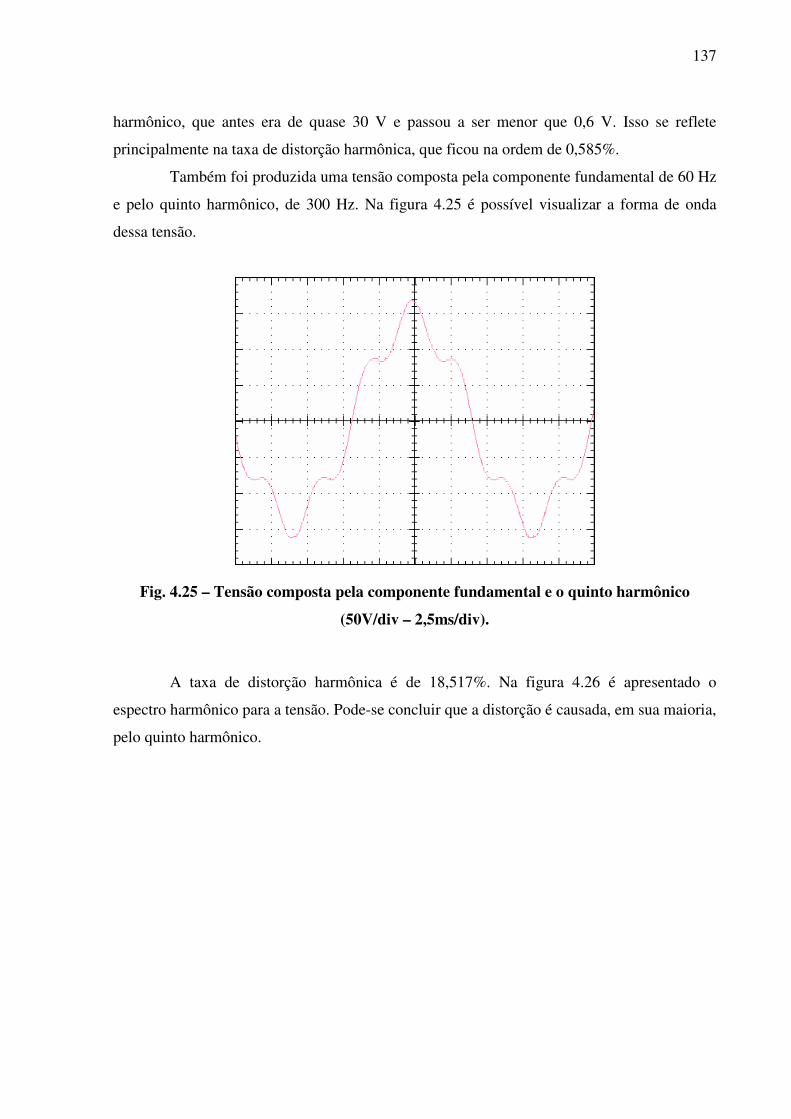
137
harmônico, que antes era de quase 30 V e passou a ser menor que 0,6 V. Isso se reflete
principalmente na taxa de distorção harmônica, que ficou na ordem de 0,585%.
Também foi produzida uma tensão composta pela componente fundamental de 60 Hz
e pelo quinto harmônico, de 300 Hz. Na figura 4.25 é possível visualizar a forma de onda
dessa tensão.
Fig. 4.25 – Tensão composta pela componente fundamental e o quinto harmônico
(50V/div – 2,5ms/div).
A taxa de distorção harmônica é de 18,517%. Na figura 4.26 é apresentado o
espectro harmônico para a tensão. Pode-se concluir que a distorção é causada, em sua maioria,
pelo quinto harmônico.
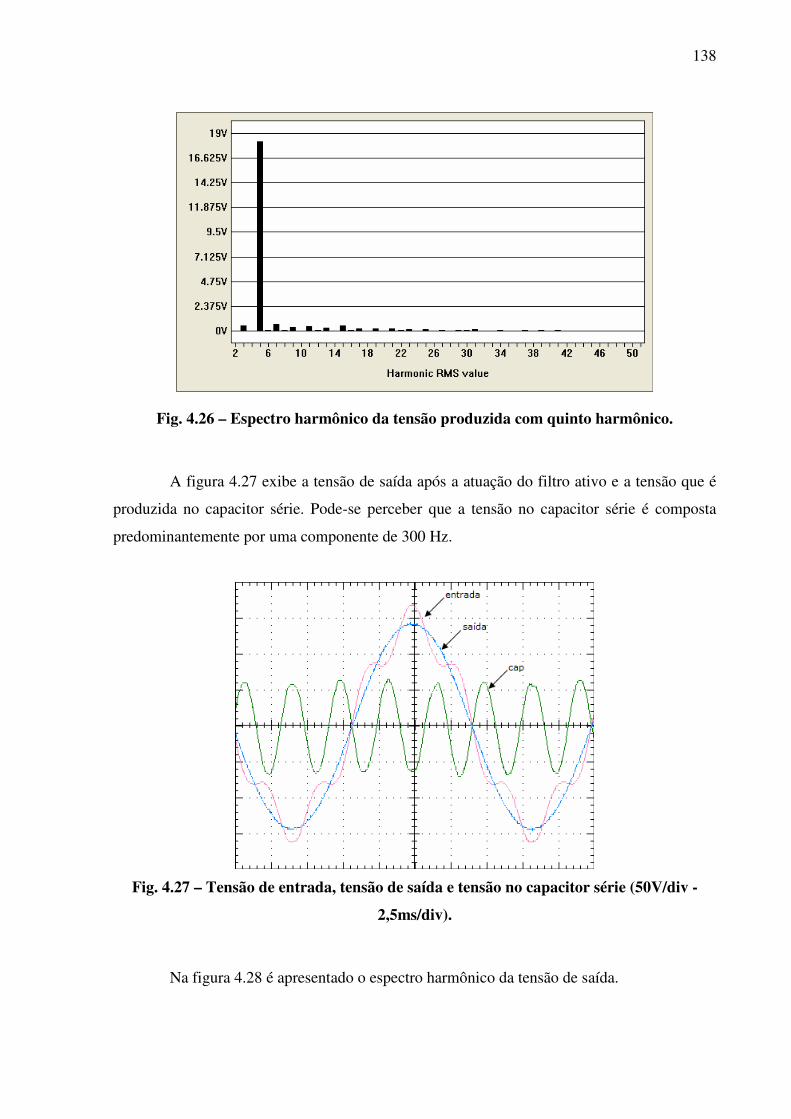
138
Fig. 4.26 – Espectro harmônico da tensão produzida com quinto harmônico.
A figura 4.27 exibe a tensão de saída após a atuação do filtro ativo e a tensão que é
produzida no capacitor série. Pode-se perceber que a tensão no capacitor série é composta
predominantemente por uma componente de 300 Hz.
Fig. 4.27 – Tensão de entrada, tensão de saída e tensão no capacitor série (50V/div -
2,5ms/div).
Na figura 4.28 é apresentado o espectro harmônico da tensão de saída.
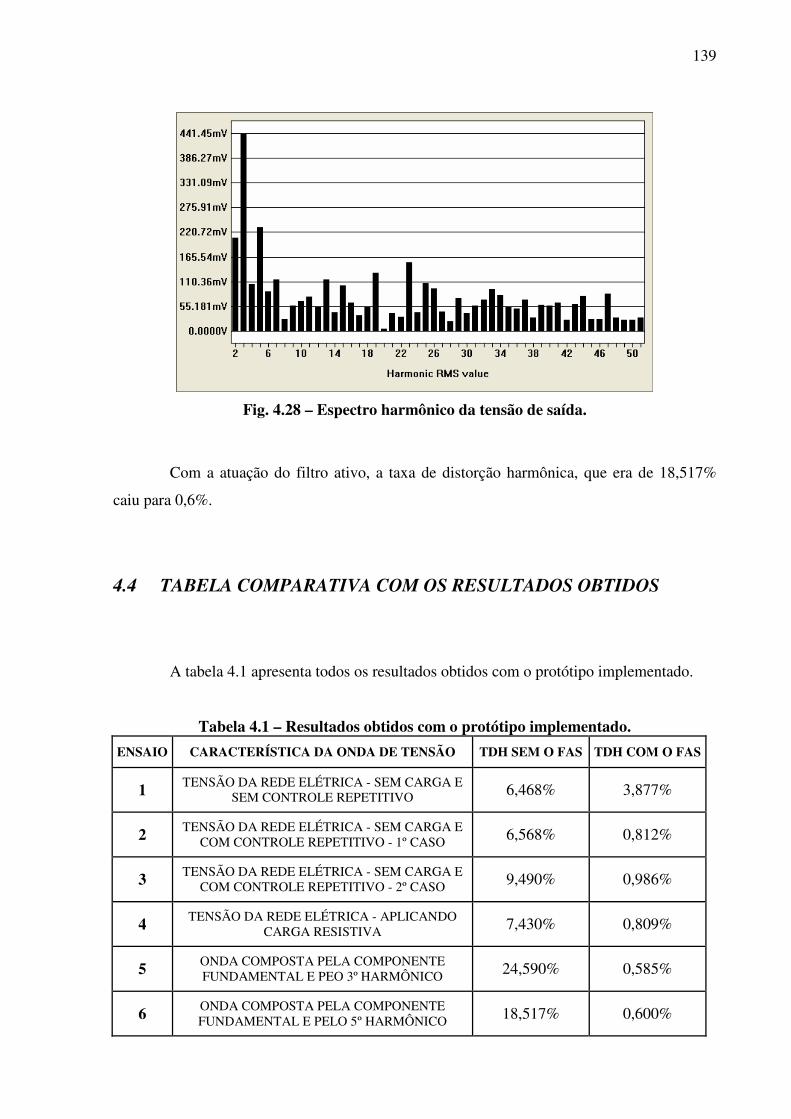
139
Fig. 4.28 – Espectro harmônico da tensão de saída.
Com a atuação do filtro ativo, a taxa de distorção harmônica, que era de 18,517%
caiu para 0,6%.
4.4 TABELA COMPARATIVA COM OS RESULTADOS OBTIDOS
A tabela 4.1 apresenta todos os resultados obtidos com o protótipo implementado.
Tabela 4.1 – Resultados obtidos com o protótipo implementado.
ENSAIO CARACTERÍSTICA DA ONDA DE TENSÃO TDH SEM O FAS TDH COM O FAS
1 TENSÃO DA REDE ELÉTRICA - SEM CARGA E SEM CONTROLE REPETITIVO 6,468% 3,877%
2 TENSÃO DA REDE ELÉTRICA - SEM CARGA E COM CONTROLE REPETITIVO - 1º CASO 6,568% 0,812%
3 TENSÃO DA REDE ELÉTRICA - SEM CARGA E COM CONTROLE REPETITIVO - 2º CASO 9,490% 0,986%
4 TENSÃO DA REDE ELÉTRICA - APLICANDO CARGA RESISTIVA 7,430% 0,809%
5 ONDA COMPOSTA PELA COMPONENTE FUNDAMENTAL E PEO 3º HARMÔNICO 24,590% 0,585%
6 ONDA COMPOSTA PELA COMPONENTE FUNDAMENTAL E PELO 5º HARMÔNICO 18,517% 0,600%

140
4.5 CONCLUSÃO
Neste capítulo foram apresentados os principais resultados obtidos com o protótipo
do filtro ativo série.
A primeira parte apresenta o funcionamento do retificador dobrador de tensão e o os
sinais PWMs responsáveis pelo acionamento do inversor.
Em seguida são mostrados os resultados adquiridos apenas com a malha feed-
forward, com as respectivas formas de onda e seus espectros harmônicos.
Na última etapa é exposto o funcionamento do filtro ativo série com a malha fechada
compensada por um controlador repetitivo. São exibidas as formas de onda da tensão antes e
depois da correção, bem como suas respectivas taxas de distorção harmônica, obtidas através
do espectro harmônico.
141
5 CONCLUSÕES GERAIS
No início deste trabalho foi feito um estudo sobre harmônicos e os problemas por
eles causados, como a distorção da tensão. Foram levantados os possíveis métodos corretivos
e efetuou-se uma revisão a respeito dos filtros em geral (ativos e passivos, série e paralelo,
híbridos e também os universais ou chamados condicionadores de energia), apresentando as
aplicações de cada um e fazendo uma comparação entre os mesmos. Concluiu-se que os
filtros ativos série são os que melhor respondem às necessidades de baixa distorção harmônica
de tensão.
Em seguida, iniciou-se a pesquisa da topologia a ser utilizada no protótipo do filtro
ativo série, através do estudo dos tipos de inversores e, especificamente, do inversor meia
ponte, visto que o mesmo apresenta uma estrutura simples para a implementação do protótipo.
Também foi feita uma revisão a respeito da modulação PWM a ser utilizada para o
acionamento das chaves do inversor meia ponte, e também sobre o filtro de saída do inversor,
o qual foi definido como um filtro LC passa-baixas.
Para o controle digital do filtro foi escolhido o DSP 56F8013, da Freescale. Foi
realizada uma revisão sobre o DSP, apresentando suas principais características. Também foi
apresentada uma abordagem sobre controle, citando as vantagens do controle digital em
relação ao analógico.
Foram então feitas simulações da estrutura definida para o filtro ativo série com o
auxílio de um software e os resultados foram satisfatórios.
No capítulo 3 foi apresentado todo o projeto do protótipo: o desenvolvimento do
circuito, o dimensionamento dos componentes utilizados, a concepção do leiaute da placa, as
lógicas de controle implementadas, a configuração do programa do DSP e a montagem do
protótipo.
Após a montagem do protótipo foram efetuados ensaios envolvendo principalmente a
comparação entre a taxa de distorção harmônica da tensão de entrada com a tensão da saída.
Os testes foram concebidos com carga resistiva, sendo esta composta por lâmpadas
incandescentes.
Os resultados dos ensaios foram julgados satisfatórios, visto que sempre mostraram
uma taxa de distorção harmônica na saída abaixo de 1% com o controlador repetitivo
implementado. Logo, eles comprovam a eficácia da técnica de filtragem ativa. Para cargas
142
susceptíveis, um nível de distorção harmônica de 2% a 3% é tolerável, visto que essa
distorção provavelmente não irá prejudicar o funcionamento dessas cargas.
Para trabalhos futuros sugere-se o desenvolvimento de outros tipos de filtros ativos
(paralelo e universal); o aperfeiçoamento deste protótipo, com a possibilidade de seu
funcionamento também como regulador de tensão; estudos de outras topologias de filtro ativo
série. Também se propõem o desenvolvimento de outras lógicas de controle para o filtro ativo
série, como a lógica fuzzy e redes neurais.
Uma dificuldade encontrada durante o projeto foi a de se simular situações reais de
perturbações na rede elétrica. Dessa forma, também se sugere o desenvolvimento de uma
bancada didática simuladora de perturbações na rede elétrica, como harmônicos,
chaveamentos de capacitores, afundamento de tensão, entre outros.

143
6 REFERÊNCIAS BIBLIOGRÁFICAS
AHMED, Ashfaq. Eletrônica de potência. São Paulo: Prentice Hall, 2000.
ANDRADE, Bruno Gomes de. Contribuição ao controle e paralelismo de UPS.
2005. Dissertação (Mestrado em Energia Elétrica). Programa de Pós-Graduação em
Engenharia Elétrica, Universidade Federal de Minas Gerais.
BATSCHAUER, Alessandro Luiz. Projeto de reatores eletrônicos para lâmpadas de
vapor de sódio de alta pressão de 250W e 400W. 2002. Dissertação (Mestrado em
Energia Elétrica). Área de concentração de Eletrônica de Potência, Universidade
Federal de Santa Catarina. Disponível em:
http://www.ivobarbi.com/dissertacoes/Dissertacao_Alessandro%20Batschauer.pdf.
Acessado em Abril de 2007.
BARBI, Ivo. Eletrônica de potência. Florianópolis: Edição do Autor, 2002. 4ª Edição.
CAMARGO, Robinson Figueiredo de. Contribuição ao estudo de filtros ativos de
potência. 2002. Dissertação (Mestrado em Engenharia Elétrica). Programa de Pós-
Graduação em Engenharia Elétrica, Universidade Federal de Santa Maria.
CASTRUCCI, Plínio & SALES, Roberto Moura. Controle digital. São Paulo: Edgard
Blüncher, 1990.
ERICKSON, Robert W. & MAKSIMOVIC, Dragan. Fundamentals of power
electronics, Massachusetts: Kluwer Academic Publishers, 2004.
FILGUEIRAS, Alexandre R. & de MOURA, Ailson P. Qualidade de tensão em uma
subestação conectada com um parque eólico. 21 a 24 de agosto de 2005. VI Seminário
Brasileiro sobre Qualidade da Energia Elétrica (SBQEE). Belém – PA
144
FREESCALE. 56F8000 Peripheral reference manual. Rev. 2 10/2005. Disponível em:
www.freescale.com. Acessado em: Maio de 2007.
FREESCALE. DSP56800E Reference manual. Rev. 2.16 11/2005. Disponível em:
www.freescale.com. Acessado em: Maio de 2007.
FREESCALE. DSP56F8013 Datasheet. Rev. 5 4/2006. Disponível em:
www.freescale.com. Acessado em: Maio de 2007.
KÜSTER, Kristie Kaminski. Projeto e implementação de um conversor boost
monofásico aplicado à correção de fator de potência controlado por processador
digital de sinais. 2006. Monografia de Projeto Final 2 (Graduação em Engenharia
Elétrica, ênfase Eletrotécnica). Universidade Tecnológica Federal do Paraná – UTFPR.
LINDEKE, Dirk, Projeto de um filtro ativo paralelo usando técnica de controle
analógico e digital. 2003. Dissertação (Mestrado em Engenharia Elétrica). Programa de
Pós-Graduação em Engenharia Elétrica, Universidade Federal de Santa Catarina.
MORAIS, Lenin Martins Ferreira. Estudo, análise e implementação de formas de
onda de tensão sintetizadas através de PWM, com estágio de ignição e de correção
de fator de potência para reatores eletrônicos para lâmpadas HPS. 2007. Tese
(Doutorado em Energia Elétrica). Programa de Pós-Graduação em Engenharia Elétrica,
Universidade Federal de Minas Gerais.
MARTINS, Denizar & Cruz BARBI, Ivo. Eletrônica de potência: introdução ao estudo
dos conversores CC-CA. Florianópolis: Edição dos Autores, 2005.
MICHELS, Leandro; CAMARGO, Robinson F. de; BOTERRÓN, Fernando &
PINHEIRO, Roberto. Metodologia de projeto de filtros de segunda ordem para
inversores de tensão com modulação PWM digital. Revista Controle & Automação,
Maio e Junho 2005. Disponível em:
http://www.scielo.br/pdf/ca/v16n2/a10v16n2.pdf.Acessado em Abril de 2007.
145
MICHELS, Leandro & GRUNDLING, Hilton A. Procedimento de projeto de
controladores repetitivos aplicados em inversores para fontes ininterruptas de
energia. Grupo de Eletrônica de Potência e Controle (GEPOC), Universidade Federal
de Santa Maria.
NISE, Norman S. Engenharia de sistemas de controle. Rio de Janeiro: LTC, 2002. 3ª
Edição.
OGATA, Katsuhiko. Engenharia de controle moderno. Rio de Janeiro: LTC, 2000. 3ª
Edição.
POMILIO, José Antenor. Pré-reguladores de fator de potência. 1995a. Apostila
Didática. Disponível em: http://www.dsce.fee.unicamp.br/~antenor/. Acessado em:
Março de 2007.
POMILIO, José Antenor. Fontes chaveadas. 1995b. Apostila Didática. Disponível em:
http://www.dsce.fee.unicamp.br/%7Eantenor/fontchav.html Acessado em: Setembro de
2007.
POMILIO, José Antenor. Fator de potência e distorção harmônica. 1997. Apostila
Didática. Disponível em: http://www.dsce.fee.unicamp.br/~antenor/. Acessado em:
Março de 2007.
POMILIO, José Antenor. Eletrônica de potência. Apostila Didática. 2006. Disponível
em: http://www.dsce.fee.unicamp.br/%7Eantenor/elpot.html. Acessado em: Abril de
2007.
RASHID, Muhammad H.. Eletrônica de potência: circuitos, dispositivos e
aplicações. Makron Books, 1999.
RIBEIRO, Enio Roberto. Filtros ativos série para a compensação harmônica de
tensão. 2003. Tese (Doutorado em Engenharia Elétrica). Programa de Pós-Graduação
em Engenharia Elétrica, Universidade Federal de Santa Catarina.
146
RODRIGUES, Renato Paixão & SOUZA Jr., José Carlos de. Controlador digital de
Sinais: Família 56F800/E, baseado no MC56F8013 – Microarquitetura e prática. São
Paulo: Érica, 2005.
SOUZA, Fabiana Pöttker de. Correção do fator de potência para instalações de
baixa potência empregando filtros ativos. 2000. Tese (Doutorado em Engenharia
Elétrica). Programa de Pós-Graduação em Engenharia Elétrica, Universidade Federal de
Santa Catarina. Acessado em: Abril de 2007.
URBANETZ, Jair Jr. Sistema trifásico de 10 KW com alto fator de potência e
controle de luminosidade para um grupo de lâmpadas fluorescentes. 2002.
Dissertação (Mestrado em Energia Elétrica). Área de concentração de Eletrônica de
Potência e Acionamento Elétrico, Universidade Federal de Santa Catarina. Disponível
em: http://www.ivobarbi.com/dissertacoes/Dissertacao%20Jair.pdf. Acessado em:
Março de 2007.
WATANABE, H. Edson; AFONSO, João L.; MARTINS, Júlio S. & AREDES,
Maurício. Filtro ativo paralelo com controle digital de baixo custo. 12 a 17 de agosto
de 2001. VI Seminário Brasileiro sobre Qualidade da Energia Elétrica (SBQEE). Porto
Alegre – RS
147
7 APÊNDICES
7.1 APÊNDICE 1 – ESQUEMÁTICO COMPLETO DO CIRCUITO
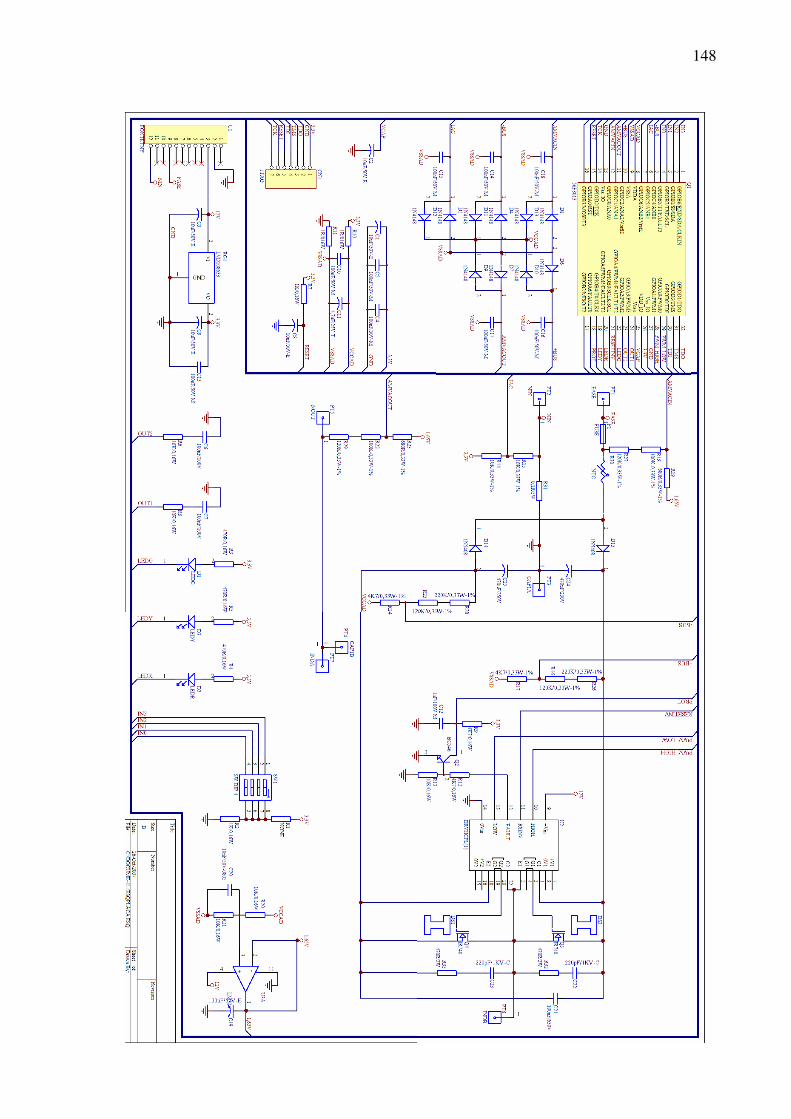
148

149
7.2 APÊNDICE 2 – DATASHEET DO DIODO 1N5408

150
7.3 APÊNDICE 3 – DATASHEET DO MOSFET IRF840

151
7.4 APÊNDICE 4 – DATASHEET DO DISSIPADOR HS3512