resumen -...
TRANSCRIPT

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 1
Resumen
El servofreno es una parte del sistema de frenado de los vehículos que amplifica, entre cuatro y nueve veces aproximadamente, la fuerza realizada por el conductor sobre el pedal de freno, gracias a la aportación de vacío por parte del motor, para posteriormente, aportar presión al líquido de frenos y así poder disminuir la velocidad del vehículo. Debido a que existen infinidad de modelos de automóviles con características muy diferentes, como por ejemplo su peso, es necesario adaptar el funcionamiento del servofreno y de todo el conjunto del sistema de frenos, a cada uno de los vehículos para obtener así una mayor eficacia en la frenada.
Para tal efecto, en este proyecto, se realiza la puesta a punto de un banco de pruebas de servofrenos con el fin de poder conocer de forma rápida y sencilla las principales características del servofreno estudiado. En este documento se presenta el esquema de configuración y conexiones de todos los elementos que forman parte del banco de pruebas, así como una breve explicación del funcionamiento de cada uno de ellos.
Finalmente, se realiza un estudio y posterior análisis del funcionamiento sobre tres servofrenos de diferentes características, para poder observar, gracias al banco de pruebas, la diferencia de funcionamiento de cada uno de ellos. A su vez, este estudio se realizará bajo diferentes condiciones, simulando diversos estados en los que se puede encontrar el servofreno durante la marcha del vehículo.

Pág. 2 Memoria

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 3
Sumario RESUMEN ___________________________________________________1
SUMARIO ____________________________________________________3
1. GLOSARIO _______________________________________________7
2. INTRODUCCIÓN __________________________________________9
3. INTRODUCCIÓN A LOS SISTEMAS DE FRENO ________________11 3.1. Tiempo de frenado......................................................................................... 12 3.2. Resistencias sobre el vehículo. ..................................................................... 13 3.3. Conceptos físicos que intervienen en el frenado........................................... 13
3.3.1. Fuerzas sobre los neumáticos. ...........................................................................13 3.3.2. Fuerza de rozamiento..........................................................................................14 3.3.3. Coeficiente de adherencia...................................................................................15 3.3.4. Inconvenientes del bloqueo de ruedas. ..............................................................16 3.3.5. Deslizamiento. .....................................................................................................16 3.3.6. Transferencia de peso en la frenada. .................................................................17
3.4. Eficacia de los frenos. .................................................................................... 18
4. COMPONENTES DE LA INSTALACIÓN DE FRENOS. ___________21 4.1. Distribución de los circuitos de frenado. ........................................................ 21 4.2. Elementos del sistema de frenado. ............................................................... 22 4.3. Pedal de freno................................................................................................ 23 4.4. Servofreno......................................................................................................24
4.4.1. Esquema del servofreno MasterVac...................................................................25 4.4.2. Funcionamiento del servofreno...........................................................................27 4.4.3. Generación de vacío ...........................................................................................30
4.5. Cilindro Maestro Tándem, CMT..................................................................... 31 4.5.1. Funcionamiento del CMT ....................................................................................32 4.5.2. Fallo del circuito primario.....................................................................................33 4.5.3. Fallo del circuito secundario................................................................................33
4.6. Líquido de frenos............................................................................................ 34 4.7. Compensador de frenada .............................................................................. 36
4.7.1. Principio de funcionamiento ................................................................................37
5. DESCRIPCIÓN DEL BANCO DE PRUEBAS ___________________41 5.1. Pedal de freno................................................................................................ 42
Pág. 4 Memoria
5.2. Servofreno y Cilindro maestro tándem.......................................................... 42 5.3. Compensador de frenada.............................................................................. 42 5.4. Bomba de vacío. ............................................................................................ 43
6. DESCRIPCIÓN DEL EQUIPO DE ADQUISICIÓN DE DATOS ______45 6.1. Transductores de presión. ............................................................................. 45 6.2. Potenciómetro. ............................................................................................... 46 6.3. Célula de carga. ............................................................................................. 47 6.4. Tarjeta de adquisición de datos..................................................................... 51 6.5. Ordenador PC................................................................................................ 53 6.6. Conexiones realizadas en el banco de pruebas. .......................................... 54
7. SOFTWARE UTILIZADO EN EL BANCO DE PRUEBAS __________55 7.1. Descripción del programa SOFTWIRE ......................................................... 55 7.2. Descripción del programa de adquisición de datos SERVO......................... 56 7.3. Macro de Excel para el análisis de los resultados......................................... 60
8. PRUEBAS EXPERIMENTALES______________________________61 8.1. Curva de frenado ........................................................................................... 61 8.2. Curva Característica del Servofreno.............................................................. 62 8.3. Test de carrera............................................................................................... 63
9. ESTUDIOS REALIZADOS __________________________________65 9.1. Planning de ensayos...................................................................................... 65 9.2. Estudio de la influencia del diámetro del servofreno..................................... 66 9.3. Estudio de la influencia del nivel de vacío en el comportamiento del
servofreno ...................................................................................................... 68 9.4. Estudio del comportamiento del compensador ............................................. 70 9.5. Estudio del recorrido del pedal de freno........................................................ 72
10. POSIBLES CAMBIOS EN LAS CARACTERÍSTICAS DEL SERVOFRENO ___________________________________________73
10.1. Fuerza de Ataque .......................................................................................... 73 10.2. Fuerza Fs o ‘Salto’.......................................................................................... 74 10.3. Ratio de asistencia......................................................................................... 74 10.4. Punto de saturación ....................................................................................... 75 10.5. Actuaciones sobre el compensador de frenada............................................ 75
11. VALORACIÓN ECONÓMICA________________________________77
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 5
12. APORTACIÓN DEL ALUMNO _______________________________79
CONCLUSIONES _____________________________________________81
AGRADECIMIENTOS__________________________________________83
BIBLIOGRAFÍA ______________________________________________85 Referencias bibliográficas........................................................................................ 85 Bibliografía complementaria .................................................................................... 85
ANEXO
RESUMEN ANEXO
SUMARIO ANEXO
A. ENSAYOS REALIZADOS A.1. Estudio de la influencia del diámetro del servofreno
A.1.1. Ensayo realizado en servofreno de 9” de diámetro y CMT de 20.8 mm. A.1.2. Ensayo realizado en servofreno de 10” de diámetro y CMT de 22.2 mm. A.1.3. Ensayo realizado en servofreno de 11” de diámetro y CMT de 23.8 mm.
A.2. Estudio de la influencia del nivel de vacío en el comportamiento del servofreno A.2.1. Ensayo realizado con vacío de 800 mbar. A.2.2. Ensayo realizado con vacío de 550 mbar. A.2.3. Ensayo realizado con vacío de 400 mbar. A.2.4. Ensayo realizado con vacío de 180 mbar. A.2.5. Ensayo realizado con vacío de 0 mbar.
A.3. Estudio del comportamiento del compensador de frenada A.4. Estudio del recorrido del pedal de freno
B. CARACTERÍSTICAS DEL SENSOR DE PRESIÓN
C. CARACTERÍSTICAS DE LA TARJETA DE ADQUISICIÓN DE DATOS
BIBLIOGRAFIA Referencias bibliográficas

Pág. 6 Memoria

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 7
1. Glosario
1. ABS: abreviatura de Antilock Braking System, sistema encargado de evitar el bloqueo de ruedas durante el proceso de frenado.
2. Booster: Palabra que designa servofreno en inglés.
3. CMT o TMC: abreviatura de Cilindro Maestro Tándem.
4. Conexión USB: abreviatura de Bus de Serie Universal. Sistema de conexión entre el ordenador y periférico, que proporciona alimentación y comunicación con el ordenador.
5. DAQ: abreviatura de adquisición de datos.
6. DOT + nº: número que distingue la clase de líquido de freno que se trata. Existen diferentes clases de líquido de freno dependiendo de su punto de ebullición.
7. ECE13: Normativa europea que regula los sistemas de frenado en vehículos utilitarios.
8. GND: abreviatura de GROUND (tierra) en sistemas eléctricos.
9. MasterVac: uno de los diferentes sistemas de funcionamiento del servofreno.
NOTACIÓN
A Distancia en reposo, entre el disco de reacción y pistoncino
CH0IN Canal de entrada 0 analógico, de la tarjeta de adquisición de datos
D Distancia de frenado
F Fuerza que actúa sobre el compensador de frenada debida al peso
FO Fuerza de salida del pedal de freno
Fn Fuerza normal sobre el neumático
FP Fuerza ejercida sobre el pedal de freno
Fr Fuerza de rozamiento
Fs Fuerza lateral sobre el neumático debida a la dirección
Pág. 8 Memoria
Fu Fuerza de impulsión sobre el neumático
FO Fuerza de salida del pedal de freno
K o α Constante de proporcionalidad del compensador de frenada
k Constante de proporcionalidad del muelle
P Peso del vehículo
Pc Presión de corte del compensador de frenada
Pe Presión de entrada del compensador de frenada
Ps Presión de salida del compensador de frenada
r Coeficiente de rodadura
Rr Resistencia a la rodadura
Sp Superficie del pistoncino
SD Superficie del disco de reacción
T1 Tiempo de reacción del conductor
T1’ Tiempo en el que comienza la frenada
T2 Tiempo en el cual se alcanza un 75% del poder de frenado
T3 Tiempo en que se detiene el vehículo
vf Velocidad del vehículo
vu Velocidad periférica del neumático
λ Coeficiente de deslizamiento
μb Coeficiente de adherencia
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 9
2. Introducción
El objetivo principal del proyecto es la puesta a punto de un banco de pruebas de servofrenos para vehículos utilitarios, existente en el centro de la Escuela Tècnica Superior d’Enginyers Industrials de Barcelona (ETSEIB), proporcionado por la compañía Bosch Sistemas de Frenado S.L.
El alcance del proyecto contempla la puesta a punto de todos los elementos del sistema de frenado existentes en la bancada (pedal de freno, servofreno, cilindro maestro tándem, compensador de frenada y pinzas de freno), comprobar su funcionamiento óptimo, y la configuración de un sistema de adquisición de datos, para poder captar los datos obtenidos durante los ensayos. Con esta finalidad, se ha debido incorporar dos sensores de presión, para medir la presión de frenado existente en las pinzas de freno, una célula de carga, para medir la fuerza ejercida sobre el pedal de freno por el conductor, y un potenciómetro, para medir el desplazamiento del pedal de freno en el proceso de frenado y desfrenado. También se ha debido incorporar una tarjeta de adquisición de datos capaz de captar todas estas señales provenientes del banco de pruebas y descargarlas en el ordenador.
La programación del sistema de adquisición de datos se realiza en lenguaje C, mediante el programa Microsoft Visual Basic .NET complementado con la ayuda del programa Softwire, de la compañía Measurement Computing, que incorpora una serie de instrucciones para el sistema de adquisición de datos. Con la ayuda de este software se ha realizado el programa SERVO, que será el programa encargado de guardar los datos en el ordenador, y de actuar como interfaz entre el banco de pruebas y la persona que realice los ensayos. Y finalmente, mediante una macro creada con la ayuda del programa de tratamiento de datos Microsoft Excel, obtendremos los parámetros y gráficos necesarios para comprender el funcionamiento de cada servofreno analizado.
Una vez configurado el banco de pruebas, se han realizado tres ensayos de tres servofrenos de diferentes características, para comprobar mediante los datos obtenidos, su diferencia de comportamiento. Además, también se ha realizado otro ensayo para analizar el comportamiento del compensador de frenada existente en la bancada.

Pág. 10 Memoria
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 11
3. Introducción a los sistemas de freno
La finalidad de las instalaciones de frenos consiste en su capacidad para disminuir la velocidad de un vehículo, hacer que se detenga, o mantenerlo detenido.
En el desarrollo del automóvil, los frenos van a constituir uno de los principales dispositivos de seguridad, y por ello, la instalación de frenos va a ser indispensable para el buen funcionamiento del vehículo.
Las instalaciones de frenos están sometidas a estrictas estipulaciones legales, y la homologación de un sistema de frenado depende del cumplimiento de diversas normas internacionales y nacionales.
Las fuerzas de frenado son: las resistencias a la marcha, la retención del motor y la proporcionada por el sistema de frenos.
Si con el vehículo en movimiento cesa la acción del motor, las resistencias a la marcha van agotando su energía cinética y terminan por detenerlo. Este sistema de frenado no es válido debido a su poca eficacia y a que se escapa del control del conductor. Si bien se suma a las otras fuerzas de frenado.
Cuando el conductor decide aminorar la velocidad del vehículo, lo primero que hace es dejar de pisar el acelerador. Con esta acción el motor deja de tirar del coche, y es arrastrado por él a una velocidad superior a la correspondiente a la velocidad de ralentí, velocidad que aumenta si se introduce en el cambio una marcha más reducida; este arrastre se produce a costa de la energía cinética del vehículo y supone una disminución de su velocidad. La retención del motor puede ser suficiente como medida preventiva, cuando se dispone del tiempo apropiado para tomar la decisión de si es necesaria una frenada más enérgica, y también, introduciendo la marcha más adecuada, para mantener la velocidad en las bajadas prolongadas sin hacer uso constante del freno. En la práctica, aparte de las situaciones antedichas, la retención del motor es insuficiente para disminuir la velocidad del vehículo en la mayor parte de los casos.
El sistema de frenos tiene por objeto aportar otra resistencia a la marcha de mayor eficacia que las anteriores, que aplicada a las ruedas, permite reducir la velocidad del vehículo o detenerlo, a voluntad del conductor, en un tiempo y espacio mínimos. El procedimiento empleado consiste en transformar la energía cinética del vehículo en energía calorífica por medio de rozamiento, disipando por radiación el calor resultante a la atmósfera.

Pág. 12 Memoria
3.1. Tiempo de frenado
El proceso de frenado abarca todos los procesos comprendidos entre el instante en que se actúa sobre el dispositivo de accionamiento de los frenos (pedal de freno) y el final del frenado. El proceso de frenado se caracteriza según la figura 3.1:
Fig. 3.1 – Tiempo de frenado
• Tiempo de reacción T1. Tiempo transcurrido desde la percepción del objeto o de
peligro hasta que aplicamos esfuerzo sobre el pedal de freno.
• Tiempo de respuesta T1’-T1. Tiempo transcurrido desde el inicio en que se produce
el movimiento del pedal de freno, hasta que se produce la fuerza de frenado.
• Duración efecto umbral T2-T1. Tiempo transcurrido entre el instante en que la fuerza
de frenado se hace efectiva, hasta que alcanza un valor correspondiente a un 75%
de la presión de frenado.
• Tiempo de frenado T3-T1. Tiempo que transcurre desde el inicio del movimiento de la
pieza del dispositivo de accionamiento, sobre la que actúa el esfuerzo, hasta que
desaparece la fuerza de frenado.
• Duración del efecto de frenado T3-T1’. Tiempo que transcurre desde que aparece la
fuerza de frenado hasta que ésta desaparece. Al parar el vehículo por el
mantenimiento de la fuerza de frenado, el comienzo de la parada representa
entonces el final del efecto de frenado.
Tiempo de Frenado
Velo
cida
d
T1T=0 T1’ T2 T3Tiempo
Tiempo de Frenado
Velo
cida
d
T1T=0 T1’ T2 T3Tiempo

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 13
3.2. Resistencias sobre el vehículo.
Cuando un vehículo circula a velocidad constante el motor tiene que vencer las siguientes resistencias:
Resistencia por rozamientos. Aquí están incluidos los rozamientos que se producen en los elementos de la transmisión: embrague, caja de cambios, diferencial, transmisiones y los cojinetes de las ruedas.
Resistencia a la rodadura. Se da el nombre de coeficiente de rodadura r a la relación F/P, siendo F la fuerza necesaria para mantener el vehículo en movimiento y P el peso del mismo. El concepto de este coeficiente es similar al del rozamiento, la diferencia consiste en que este último el desplazamiento se efectúa entre dos superficies que rozan, y en de rodadura se interponen las ruedas entre ambas, con lo que resulta mucho menor que el primero. Suponiendo que la calzada se encuentra en buen estado y que la presión de inflado de los neumáticos está de acuerdo con la carga, se admite que el valor promedio para un automóvil es r = 0.018. La fuerza F es la que se conoce como resistencia a la rodadura Rr y su valor será:
Rr = P · r (Ec. 3.1)
Resistencia al aire. Esta resistencia es la que se opone el aire quieto (sin viento) a la marcha del coche, y su valor es considerable. Esta resistencia dependerá de la velocidad del vehículo (aumenta proporcionalmente al cuadrado de la velocidad), de su superficie frontal y de la forma del vehículo.
Otras posibles resistencias son: la debida a la de la pendiente y la debida al viento.
3.3. Conceptos físicos que intervienen en el frenado.
Todo cuerpo tiende a permanecer en su posición de reposo o bien a conservar su estado de movimiento. Con el objeto de efectuar una modificación del estado respectivo, es necesaria la aplicación de una determinada fuerza.
3.3.1. Fuerzas sobre los neumáticos.
Las fuerzas de los neumáticos representan las únicas fuerzas que hacen posible el detener objetivamente el movimiento de un vehículo, o la modificación de su movimiento.
Pág. 14 Memoria
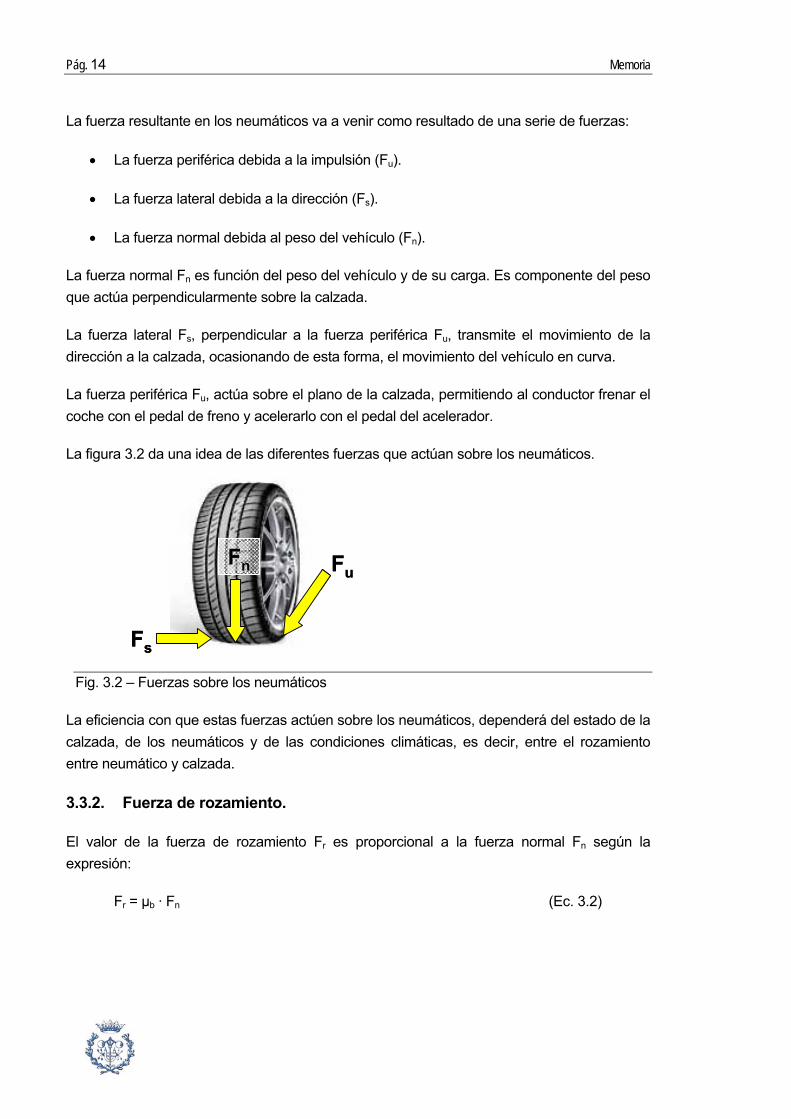
La fuerza resultante en los neumáticos va a venir como resultado de una serie de fuerzas:
• La fuerza periférica debida a la impulsión (Fu).
• La fuerza lateral debida a la dirección (Fs).
• La fuerza normal debida al peso del vehículo (Fn).
La fuerza normal Fn es función del peso del vehículo y de su carga. Es componente del peso que actúa perpendicularmente sobre la calzada.
La fuerza lateral Fs, perpendicular a la fuerza periférica Fu, transmite el movimiento de la dirección a la calzada, ocasionando de esta forma, el movimiento del vehículo en curva.
La fuerza periférica Fu, actúa sobre el plano de la calzada, permitiendo al conductor frenar el coche con el pedal de freno y acelerarlo con el pedal del acelerador.
La figura 3.2 da una idea de las diferentes fuerzas que actúan sobre los neumáticos.
Fig. 3.2 – Fuerzas sobre los neumáticos
La eficiencia con que estas fuerzas actúen sobre los neumáticos, dependerá del estado de la calzada, de los neumáticos y de las condiciones climáticas, es decir, entre el rozamiento entre neumático y calzada.
3.3.2. Fuerza de rozamiento.
El valor de la fuerza de rozamiento Fr es proporcional a la fuerza normal Fn según la expresión:
Fr = μb · Fn (Ec. 3.2)
Fn Fu
Fs
Fn Fu
Fs

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 15
Donde μb representa el coeficiente de la fuerza de frenado o coeficiente de adherencia y Fn la fuerza normal. En el valor de los factores μb y Fn intervienen numerosas variables, como se expone a continuación.
3.3.3. Coeficiente de adherencia.
El factor de proporcionalidad μb (coeficiente de adherencia o coeficiente de arrastre de fuerza) representa la fuerza de rozamiento disponible entre los neumáticos y la calzada.
El coeficiente de adherencia va a constituir una medida para la fuerza de frenado que pueda transmitirse, y va a condicionar en gran medida la estabilidad lateral del vehículo (adherencia transversal) y distancia de frenado (adherencia longitudinal). El coeficiente de adherencia depende particularmente de las características de los neumáticos (nivel de presión, desgaste, etc.) y del estado del suelo.
El coeficiente de adherencia, para los neumáticos de los vehículos, va a variar entre en máximo que se correspondería con condiciones de calzada seca y limpia, y un mínimo correspondiéndose a conducción sobre hielo. Otros medios como el agua o suciedad disminuyen el coeficiente de la fuerza de frenado. Se expresa según un coeficiente que varía de 0 (adherencia nula) a valores superiores a 1 (adherencia perfecta).
En la tabla adjunta se presentan valores para el coeficiente de adherencia, en función del estado de la calzada y de los neumáticos, para diferentes velocidades de marcha.
Mojada Lluvia fuerte Encharcada(altura agua (altura agua (altura agua
aprox aprox aprox0,2 mm.) 1 mm.) 2 mm.)
nuevos 0,85 0,65 0,55 0,5 0,1 y gastados 1 0,5 0,4 0,25 menosnuevos 0,8 0,6 0,3 0,05gastados 0,95 0,2 0,1 0,1nuevos 0,75 0,55 0,2 0,2gastados 0,9 0,2 0,1 0,1
Coeficiente de adherencia (μb)
50
Estado de la carretera
Seca Helada
90
130
Velocidad de marcha (Km/h)
Estado de los neumáticos
Tabla 3.3 – Coeficientes de adherencia
Cabe destacar el valor tan bajo que tiene el hielo, alrededor de 0.1. Generalmente el valor de coeficiente de adherencia va a ser inferior a 1, y únicamente con neumáticos de competición se consiguen coeficientes de adherencia de hasta de 1,5.
Pág. 16 Memoria
La velocidad es siempre un factor importante que influye sobre el coeficiente de frenado, agravándose en caso de circular sobre calzadas húmedas.
Circulando a altas velocidades y en condiciones húmedas de la calzada, puede producirse el bloqueo de las ruedas cuando debido a un bajo valor del coeficiente de adherencia, no sea posible garantizar la adherencia de las ruedas sobre la superficie de la calzada. Al bloquearse tan sólo una rueda, ésta no podrá transmitir ninguna fuerza lateral, en consecuencia, será imposible el control sobre el vehículo.
3.3.4. Inconvenientes del bloqueo de ruedas.
Cuando la fuerza de frenado es mayor que la fuerza de rozamiento, ya sea debido a una frenada de emergencia o porque la calzada posea un bajo coeficiente de frenado, las ruedas se bloquean y no giran.
Al no girar los discos contra las pastillas de freno, la fuerza de frenado disminuye, ya que queda sustituida por la fuerza de rozamiento que es menor que la de frenado. Esto conlleva que el espacio de frenada aumenta.
Además de este grave inconveniente, las ruedas bloqueadas producen inestabilidad sobre cada uno de los ejes del vehículo. Mientras que las ruedas delanteras pierden capacidad directriz, en las traseras se inicia un derrapaje que tiende a girar el vehículo.
3.3.5. Deslizamiento.
Los procesos de resbalamiento pueden producirse durante la rodadura de neumáticos de goma y se denominan deslizamiento.
Durante el movimiento de un vehículo, las ruedas se encuentran sometidas a fuerzas de impulsión o de frenado produciéndose en la superficie de éstas, complicados procesos físicos por los que los elementos de goma se tensan, produciéndose movimientos deslizantes aunque la rueda no se haya bloqueado.
La magnitud de deslizamiento λ, está expresado en porcentaje y nos da la medida para la proporción de resbalamiento en el movimiento de rodadura, y viene definida por la expresión:
λ = ( vf – vu ) · 100 / vf (Ec. 3.3)
Siendo vf la velocidad del vehículo y vu la velocidad periférica de la rueda.
La fórmula expresa que el deslizamiento por frenado se presenta tan pronto la rueda gira más lento que la velocidad de marcha del vehículo. Únicamente bajo estas condiciones se presentan fuerzas de frenado.
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 17
Cuando la rueda gira libremente, las velocidades del vehículo y rueda son iguales y el valor del deslizamiento es 0%, pero cuando la rueda se encuentra bloqueada, su velocidad periférica es 0, no gira, y consecuentemente el deslizamiento es del 100%.
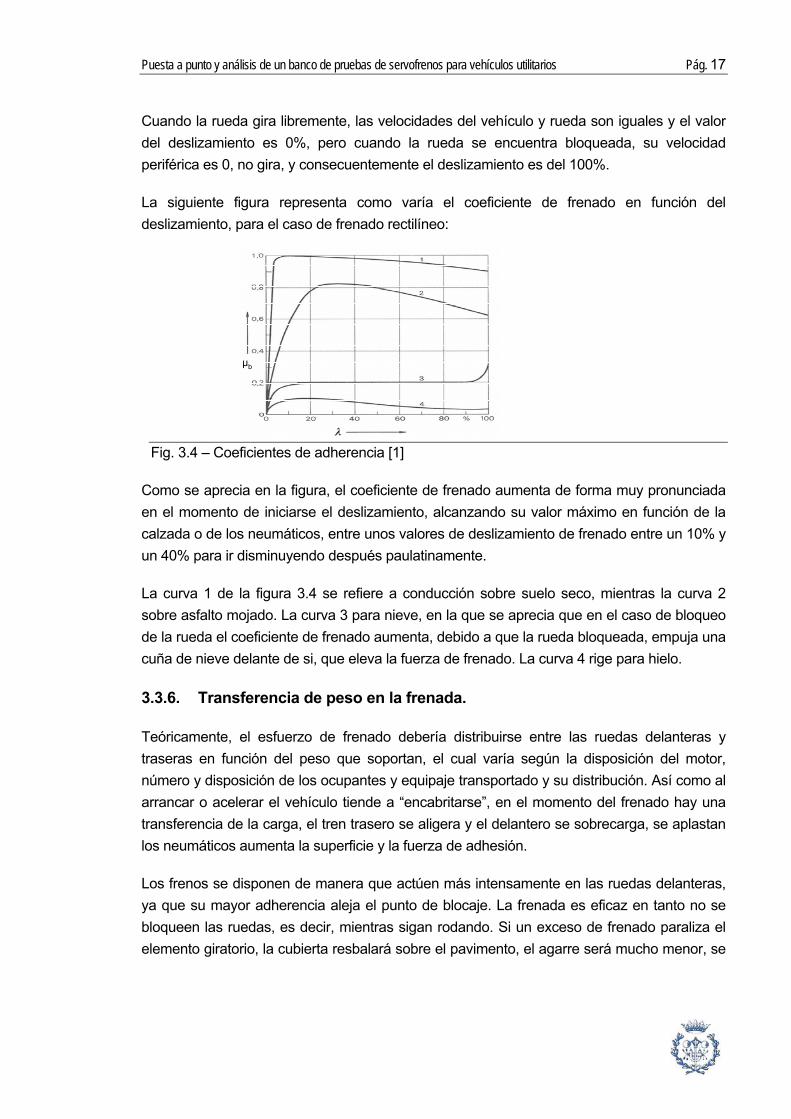
La siguiente figura representa como varía el coeficiente de frenado en función del deslizamiento, para el caso de frenado rectilíneo:
Fig. 3.4 – Coeficientes de adherencia [1]
Como se aprecia en la figura, el coeficiente de frenado aumenta de forma muy pronunciada en el momento de iniciarse el deslizamiento, alcanzando su valor máximo en función de la calzada o de los neumáticos, entre unos valores de deslizamiento de frenado entre un 10% y un 40% para ir disminuyendo después paulatinamente.
La curva 1 de la figura 3.4 se refiere a conducción sobre suelo seco, mientras la curva 2 sobre asfalto mojado. La curva 3 para nieve, en la que se aprecia que en el caso de bloqueo de la rueda el coeficiente de frenado aumenta, debido a que la rueda bloqueada, empuja una cuña de nieve delante de si, que eleva la fuerza de frenado. La curva 4 rige para hielo.
3.3.6. Transferencia de peso en la frenada.
Teóricamente, el esfuerzo de frenado debería distribuirse entre las ruedas delanteras y traseras en función del peso que soportan, el cual varía según la disposición del motor, número y disposición de los ocupantes y equipaje transportado y su distribución. Así como al arrancar o acelerar el vehículo tiende a “encabritarse”, en el momento del frenado hay una transferencia de la carga, el tren trasero se aligera y el delantero se sobrecarga, se aplastan los neumáticos aumenta la superficie y la fuerza de adhesión.
Los frenos se disponen de manera que actúen más intensamente en las ruedas delanteras, ya que su mayor adherencia aleja el punto de blocaje. La frenada es eficaz en tanto no se bloqueen las ruedas, es decir, mientras sigan rodando. Si un exceso de frenado paraliza el elemento giratorio, la cubierta resbalará sobre el pavimento, el agarre será mucho menor, se
μbμb

Pág. 18 Memoria
perderá el control, y el eje bloqueado tenderá a colocarse siempre de modo que vaya por delante.
Al frenar, el peso se va hacia adelante y las ruedas traseras se aligeran y si la frenada es fuerte se pueden bloquear porque dicho agarre no tiene fuerza para vencer el apriete de las zapatas al disco. Por tanto, son las que corren el riesgo de bloquearse, y si lo hacen tenderán a colocarse por delante perdiéndose el control de su dirección.
Por este motivo, conviene evitar un exceso de frenado en las ruedas traseras que no lo soportan. En cambio, un exceso en las delanteras podrá hacerlas patinar, pero sin riesgo de coleo, porque ya van por delante. Para que las traseras no se bloqueen se han ideado varios sistemas. Otra condición a cumplir por los frenos es que la frenada debe ser idéntica para las ruedas de un mismo tren pues de no cumplir este requisito el vehículo tirará del lado de la rueda que más frene. Como podremos observar en el punto 4.7 existen diversos dispositivos que permiten modificar la relación de presiones entre los circuitos delantero y trasero del vehículo.
3.4. Eficacia de los frenos.
Los constructores de vehículos procuran disponer de mecanismos y repartir el peso de modo que casi todo éste se aprovecha para obtener adherencia útil. La máxima eficacia de los frenos se dice que es del 100% cuando la fuerza del frenado es igual al peso del vehículo. Normalmente se consideran buenos frenos a los que tienen una eficacia del orden del 80%.
La distancia de frenado ‘D’, espacio recorrido por el vehículo desde que actúa sobre los frenos hasta que queda completamente parado, depende de varios factores, y puede calcularse aproximadamente por la fórmula:
D (metros) = V2 (Km/h) / 200 (Ec 3.4)
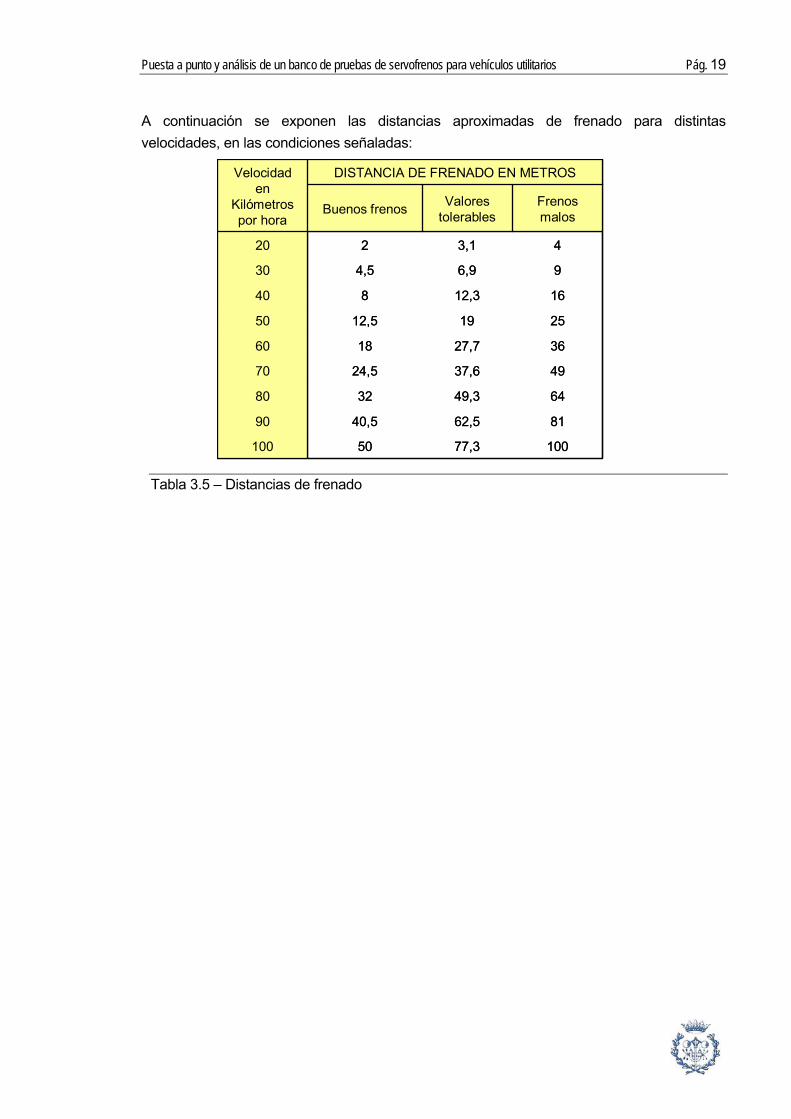
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 19
A continuación se exponen las distancias aproximadas de frenado para distintas velocidades, en las condiciones señaladas:
Tabla 3.5 – Distancias de frenado
10077,350100
8162,540,590
6449,33280
4937,624,570
3627,71860
251912,550
1612,3840
96,94,530
43,1220
Frenos malos
Valores tolerablesBuenos frenos
DISTANCIA DE FRENADO EN METROSVelocidad en
Kilómetros por hora
10077,350100
8162,540,590
6449,33280
4937,624,570
3627,71860
251912,550
1612,3840
96,94,530
43,1220
Frenos malos
Valores tolerablesBuenos frenos
DISTANCIA DE FRENADO EN METROSVelocidad en
Kilómetros por hora

Pág. 20 Memoria
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 21
4. Componentes de la instalación de frenos.
4.1. Distribución de los circuitos de frenado.
Las disposiciones legales exigen para los vehículos, un sistema de frenos con dos circuitos independientes, de forma que el vehículo pueda detenerse en caso de que falle alguno de los circuitos.
El cilindro principal tándem, en realidad está compuesto de dos cilindros principales separados por un émbolo móvil colocados juntos, de forma que si se produce un fallo en uno de los circuitos hidráulicos, el otro circuito no se verá alterado, y continuará actuando.
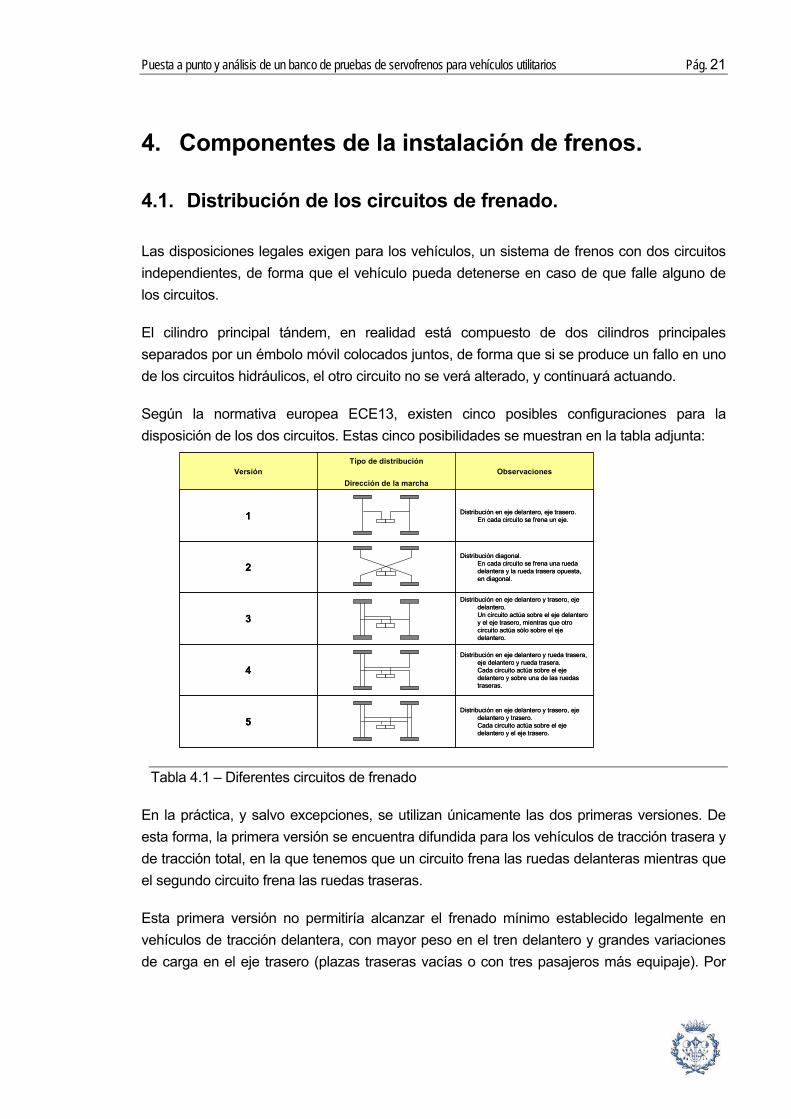
Según la normativa europea ECE13, existen cinco posibles configuraciones para la disposición de los dos circuitos. Estas cinco posibilidades se muestran en la tabla adjunta:
Tabla 4.1 – Diferentes circuitos de frenado
En la práctica, y salvo excepciones, se utilizan únicamente las dos primeras versiones. De esta forma, la primera versión se encuentra difundida para los vehículos de tracción trasera y de tracción total, en la que tenemos que un circuito frena las ruedas delanteras mientras que el segundo circuito frena las ruedas traseras.
Esta primera versión no permitiría alcanzar el frenado mínimo establecido legalmente en vehículos de tracción delantera, con mayor peso en el tren delantero y grandes variaciones de carga en el eje trasero (plazas traseras vacías o con tres pasajeros más equipaje). Por
Distribución en eje delantero y trasero, eje delantero y trasero. Cada circuito actúa sobre el eje delantero y el eje trasero.
5
Distribución en eje delantero y rueda trasera, eje delantero y rueda trasera. Cada circuito actúa sobre el eje delantero y sobre una de las ruedas traseras.
4
Distribución en eje delantero y trasero, eje delantero. Un circuito actúa sobre el eje delantero y el eje trasero, mientras que otro circuito actúa sólo sobre el eje delantero.
3
Distribución diagonal. En cada circuito se frena una rueda delantera y la rueda trasera opuesta, en diagonal.
2
Distribución en eje delantero, eje trasero. En cada circuito se frena un eje.1
Dirección de la marchaObservaciones
Tipo de distribuciónVersión
Distribución en eje delantero y trasero, eje delantero y trasero. Cada circuito actúa sobre el eje delantero y el eje trasero.
5
Distribución en eje delantero y rueda trasera, eje delantero y rueda trasera. Cada circuito actúa sobre el eje delantero y sobre una de las ruedas traseras.
4
Distribución en eje delantero y trasero, eje delantero. Un circuito actúa sobre el eje delantero y el eje trasero, mientras que otro circuito actúa sólo sobre el eje delantero.
3
Distribución diagonal. En cada circuito se frena una rueda delantera y la rueda trasera opuesta, en diagonal.
2
Distribución en eje delantero, eje trasero. En cada circuito se frena un eje.1
Dirección de la marchaObservaciones
Tipo de distribuciónVersión
Pág. 22 Memoria
ello, para los vehículos de tracción delantera, prácticamente la totalidad de turismos, se dispone un circuito de frenos con distribución diagonal según la segunda versión.
4.2. Elementos del sistema de frenado.
El proceso de frenado figura entre las actividades más frecuentes al conducir un automóvil. Debido a esto, los componentes de una instalación de frenos deben poder convertir de manera óptima, la fuerza ejercida por el conductor con su pie sobre el pedal de freno, para conseguir el efecto de frenado. La eficacia de un sistema de frenos hidráulicos depende del adecuado cálculo y dimensionado de los distintos componentes del sistema, en relación con las características de peso y velocidad del vehículo.
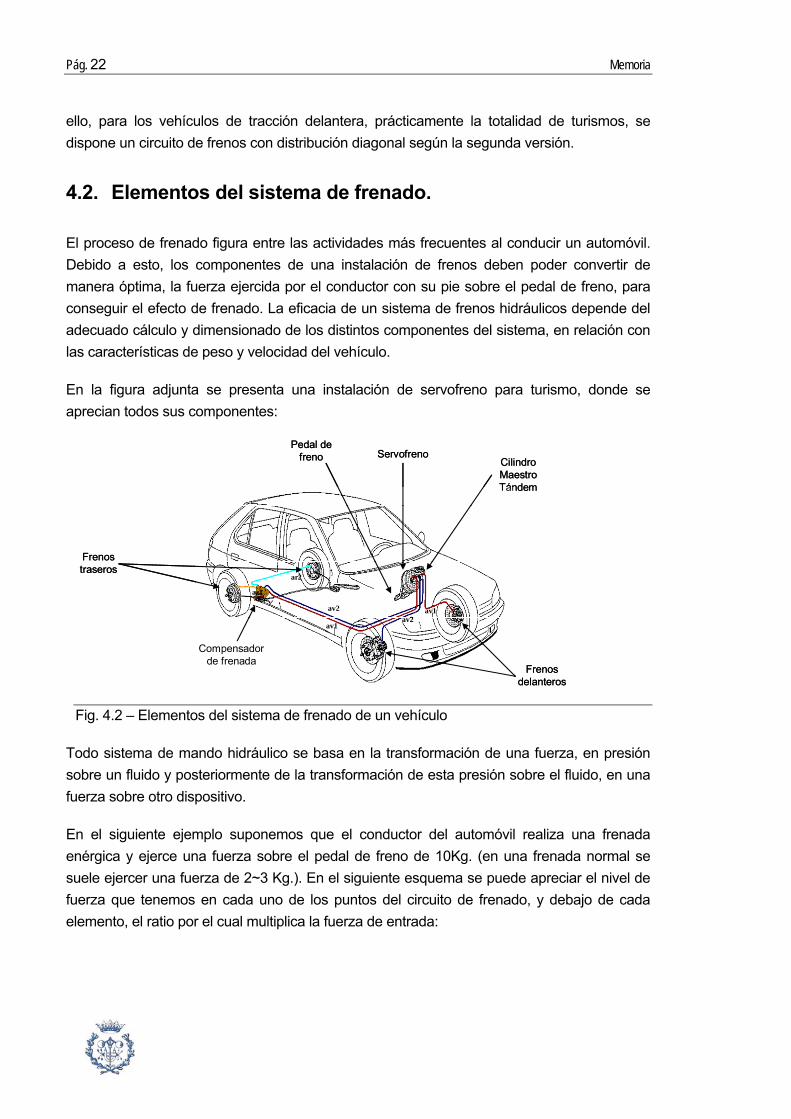
En la figura adjunta se presenta una instalación de servofreno para turismo, donde se aprecian todos sus componentes:
Fig. 4.2 – Elementos del sistema de frenado de un vehículo
Todo sistema de mando hidráulico se basa en la transformación de una fuerza, en presión sobre un fluido y posteriormente de la transformación de esta presión sobre el fluido, en una fuerza sobre otro dispositivo.
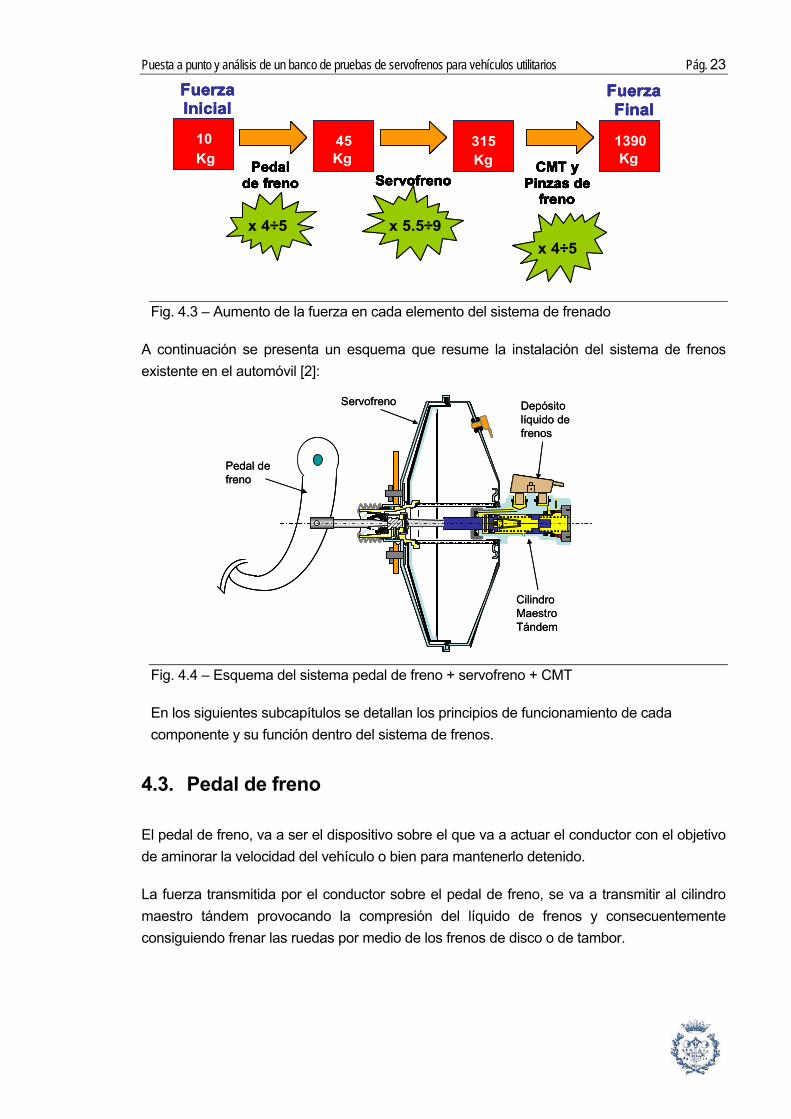
En el siguiente ejemplo suponemos que el conductor del automóvil realiza una frenada enérgica y ejerce una fuerza sobre el pedal de freno de 10Kg. (en una frenada normal se suele ejercer una fuerza de 2~3 Kg.). En el siguiente esquema se puede apreciar el nivel de fuerza que tenemos en cada uno de los puntos del circuito de frenado, y debajo de cada elemento, el ratio por el cual multiplica la fuerza de entrada:
av1
av1av2av2
ar2
ar1
av1
av1av2av2
ar2
ar1
Cilindro Maestro Tándem
ServofrenoPedal de
freno
Compensador de frenada
Frenos delanteros
Frenos traseros
av1
av1av2av2
ar2
ar1
av1
av1av2av2
ar2
ar1
Cilindro Maestro Tándem
ServofrenoPedal de
freno
Compensador de frenada
Frenos delanteros
Frenos traseros
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 23
Fig. 4.3 – Aumento de la fuerza en cada elemento del sistema de frenado
A continuación se presenta un esquema que resume la instalación del sistema de frenos existente en el automóvil [2]:
Fig. 4.4 – Esquema del sistema pedal de freno + servofreno + CMT
En los siguientes subcapítulos se detallan los principios de funcionamiento de cada componente y su función dentro del sistema de frenos.
4.3. Pedal de freno
El pedal de freno, va a ser el dispositivo sobre el que va a actuar el conductor con el objetivo de aminorar la velocidad del vehículo o bien para mantenerlo detenido.
La fuerza transmitida por el conductor sobre el pedal de freno, se va a transmitir al cilindro maestro tándem provocando la compresión del líquido de frenos y consecuentemente consiguiendo frenar las ruedas por medio de los frenos de disco o de tambor.
x 4÷5 x 5.5÷9x 4÷5
Pedal de freno
10 daN
45 daN
ServofrenoCMT y
Pinzas de freno
315 daN
1390 daN
Fuerza Inicial
Fuerza Final
Pedal de freno
10 daN
45 daN
ServofrenoCMT y
Pinzas de freno
315 daN
1390 daN
Pedal de freno
10 daN10 Kg
45 daN45 Kg
ServofrenoCMT y
Pinzas de freno
315 daN315 Kg
1390 daN1390 Kg
Fuerza Inicial
Fuerza Final
x 4÷5 x 5.5÷9x 4÷5
Pedal de freno
10 daN
45 daN
ServofrenoCMT y
Pinzas de freno
315 daN
1390 daN
Pedal de freno
10 daN10
daN45
daN45
daNServofreno
CMT y Pinzas de
freno
315 daN315 daN
1390 daN1390 daN
Fuerza Inicial
Fuerza Final
Pedal de freno
10 daN10
daN45
daN45
daNServofreno
CMT y Pinzas de
freno
315 daN315 daN
1390 daN1390 daN
Pedal de freno
10 daN10 Kg
45 daN45 Kg
ServofrenoCMT y
Pinzas de freno
315 daN315 Kg
1390 daN1390 Kg
Fuerza Inicial
Fuerza Final
Pedal de freno
Servofreno
Cilindro Maestro Tándem
Depósito líquido de frenos
Pedal de freno
Servofreno
Cilindro Maestro Tándem
Depósito líquido de frenos

Pág. 24 Memoria
La fuerza aplicada sobre el eje del cilindro principal de freno va a estar en función de la geometría del pedal de freno, y esta fuerza va a ser la que nos definirá el grado de frenado del vehículo. En la figura adjunta, la acción de una fuerza FP sobre el pedal de freno, genera una fuerza FO sobre el cilindro. Esta fuerza, teniendo en cuenta la relación de fuerzas para un brazo palanca, es función de la geometría quedando definida por la siguiente expresión:
Fo = Fp · cos α · (L2+L1)/L1 (Ec 4.1)
Fig. 4.5 – Multiplicación de fuerzas ofrecida por el pedal de freno
Esta relación de longitudes del pedal de freno (L1 y L2) nos ofrece una fuerza Fo que suele ser entre 4 y 5 veces mayor a la fuerza de entrada Fp.
Para obtener una poderosa fuerza de frenado, se requiere generar una presión importante sobre el líquido en el cilindro maestro. Una solución, es aumentar el brazo de palanca del pedal, de modo que con el mismo esfuerzo se consiga aumentar la fuerza FO aplicada al cilindro maestro. Sin embargo, los aumentos en carrera y brazo de palanca están sujetos a limitaciones de carácter constructivo, de espacio y de comodidad de accionamiento para el conductor.
4.4. Servofreno
La fuerza resultante del pedal de freno puede ser suficiente para vehículos pequeños, e incluso para los de tipo medio con frenos de tambor. Como en la actualidad casi todos los vehículos van equipados con frenos de disco, al menos en la parte delantera, y estos precisan mayores presiones de accionamiento, se han impuesto los servofrenos. El servofreno es un dispositivo accionado por el vacío del colector de admisión en los motores Otto, o accionado por un depresor en los vehículos con motor diesel, que intercalado entre el pedal de freno y el cilindro maestro, suma su fuerza a la del conductor para obtener elevadas presiones en el circuito.
Fp
Fo
L1
Fp
L2
Fo
α
Fp
Fo
L1
Fp
L2
Fo
α

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 25
En el siguiente gráfico podemos observar la importancia de la actuación del sistema de servofreno, comparado con el mismo sistema sin servofreno:
Fig. 4.6 – Multiplicación de fuerzas ofrecida por el servofreno
Los primeros servofrenos tuvieron su aplicación en los grandes vehículos a fin de disminuir los esfuerzos tan importantes que debía realizar el conductor para frenar, y que muchas veces resultaban inútiles en caso de emergencia por la lentitud y poca eficacia de las pesadas palancas y mandos.
Cuando aún no se había generalizado el mando hidráulico de los frenos se desarrollaron nuevos sistemas que, como el de Clayton Dewandre, de 1928, comenzaron a utilizar el vacío de la admisión del motor como fuente de energía.
En automóviles de turismos la aplicación del servo comenzó en modelos grandes y caros, aunque rápidamente se fue extendiendo a los demás, alcanzando su auténtico ‘boom’ cuando comenzó la generalización de los frenos de disco.
4.4.1. Esquema del servofreno MasterVac
El sistema MasterVac es el sistema del servofreno más utilizado actualmente. Se caracteriza por ir intercalado entre el pedal de freno y el cilindro maestro, de forma que este último recibe directamente de la barra de empuje del servo la fuerza suministrada por el pedal de freno, más la ejercida por el vacío en el servofreno.
Fuerza sobre el pedal
Pres
ión
Fren
ado
Con servofrenoSin servofreno
Fuerza sobre el pedal
Pres
ión
Fren
ado
Con servofrenoSin servofreno
Pág. 26 Memoria
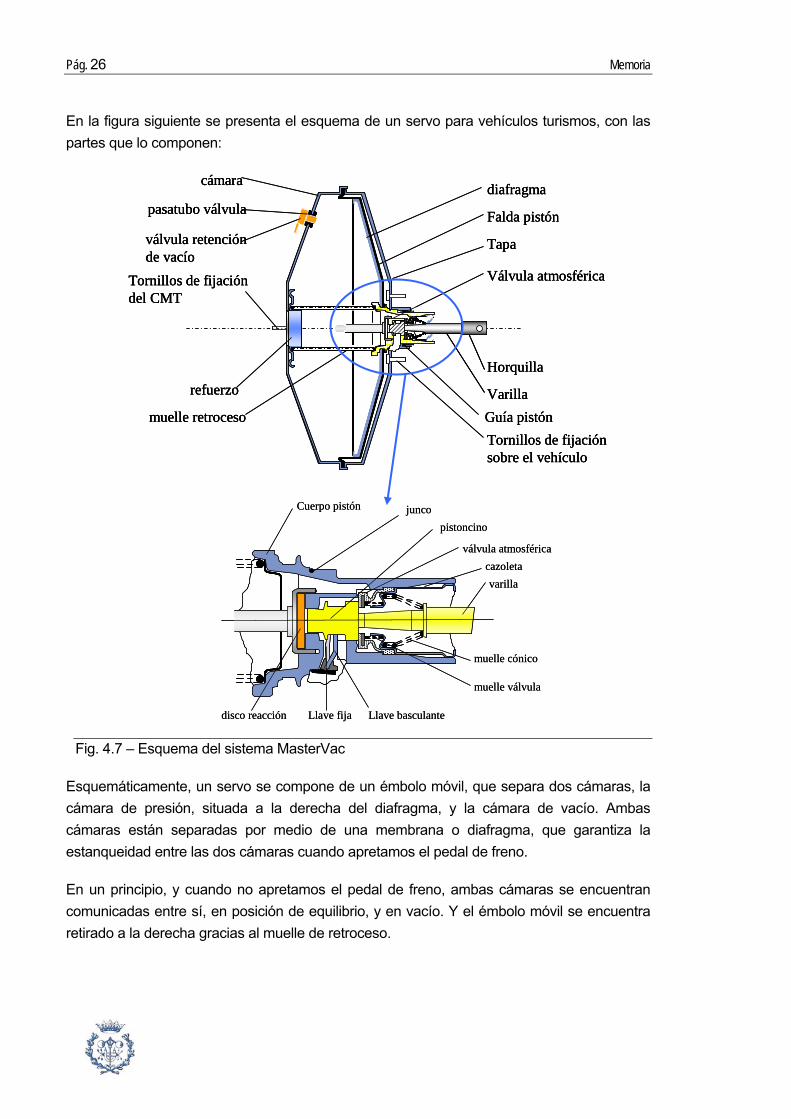
En la figura siguiente se presenta el esquema de un servo para vehículos turismos, con las partes que lo componen:
Fig. 4.7 – Esquema del sistema MasterVac
Esquemáticamente, un servo se compone de un émbolo móvil, que separa dos cámaras, la cámara de presión, situada a la derecha del diafragma, y la cámara de vacío. Ambas cámaras están separadas por medio de una membrana o diafragma, que garantiza la estanqueidad entre las dos cámaras cuando apretamos el pedal de freno.
En un principio, y cuando no apretamos el pedal de freno, ambas cámaras se encuentran comunicadas entre sí, en posición de equilibrio, y en vacío. Y el émbolo móvil se encuentra retirado a la derecha gracias al muelle de retroceso.
cámara
válvula retenciónde vacío
pasatubo válvula
muelle retroceso
refuerzo
Tornillos de fijacióndel CMT
Válvula atmosférica
Falda pistón
Tornillos de fijaciónsobre el vehículo
Tapa
diafragma
Varilla
Horquilla
Guía pistón
cámara
válvula retenciónde vacío
pasatubo válvula
muelle retroceso
refuerzo
Tornillos de fijacióndel CMT
cámara
válvula retenciónde vacío
pasatubo válvula
muelle retroceso
refuerzo
Tornillos de fijacióndel CMT
Válvula atmosférica
Falda pistón
Tornillos de fijaciónsobre el vehículo
Tapa
diafragma
Varilla
Horquilla
Guía pistón
Válvula atmosférica
Falda pistón
Tornillos de fijaciónsobre el vehículo
Tapa
diafragma
Varilla
Horquilla
Guía pistón
Cuerpo pistón
cazoleta
muelle válvula
pistoncino
disco reacción
válvula atmosférica
varilla
junco
Llave basculanteLlave fija
muelle cónico
Cuerpo pistón
cazoleta
muelle válvula
pistoncino
disco reacción
válvula atmosférica
varilla
junco
Llave basculanteLlave fija
muelle cónico

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 27
Cuando el conductor aprieta el pedal de freno, se interrumpe la comunicación entre las dos cámaras, quedando tan solo en vacío la cámara situada a la izquierda, mientras que en la cámara de presión se permite la entrada libre de aire que se encuentra a presión atmosférica.
La diferencia de presión entre las cámaras por la superficie del pistón-diafragma da el esfuerzo suministrado por la asistencia del servo.
F = ΔP · S (Ec 4.2)
En resumen, el servo es un dispositivo que utilizando una fuente de energía, como el vacío, va a amplificar la presión proporcionada por el esfuerzo del conductor.
4.4.2. Funcionamiento del servofreno
Durante la marcha del vehículo, cuando el conductor no ejerce ninguna presión sobre el pedal de freno, las dos cámaras del servofreno se encuentran con el vacío creado por las válvulas de admisión del motor (motores Otto) o por la bomba de depresión (motores diesel). En esta posición las dos cámaras se encuentran comunicadas, ya que la válvula ‘A’, que sirve de comunicación entre las dos cámaras del servofreno, queda abierta, en vacío y aislada del exterior, ya que la membrana está en contacto con el pistoncino (válvula ‘B’) no permitiendo la entrada de aire a Patm.
Fig. 4.8 – Posición de Reposo
Al accionar el eje de entrada del servofreno, y al superar la oposición del muelle cónico como efecto del esfuerzo realizado por el conductor sobre el pedal de freno, se interrumpe la comunicación entre cámaras, abriéndose la válvula atmosférica permitiendo la entrada de aire en la cámara de presión.
Por efecto de la entrada de aire a Patm en la cámara de presión, el nivel de vacío desciende en ésta cámara. Y esta diferencia de presiones entre las dos cámaras hace mover el pistón-diafragma hacia la izquierda actuando sobre la varilla de presión que acciona el pistón primario del cilindro maestro tándem.
Vacío
Presión atmosférica
A
B
Cámaradelantera
Cámara trasera
VacíoVacío
Presión atmosféricaPresión atmosférica
A
B
A
B
Cámaradelantera
Cámara trasera
Vacío
Presión atmosférica
A
B
Cámaradelantera
Cámara trasera
VacíoVacío
Presión atmosféricaPresión atmosférica
A
B
A
B
Cámaradelantera
Cámara trasera
Pág. 28 Memoria
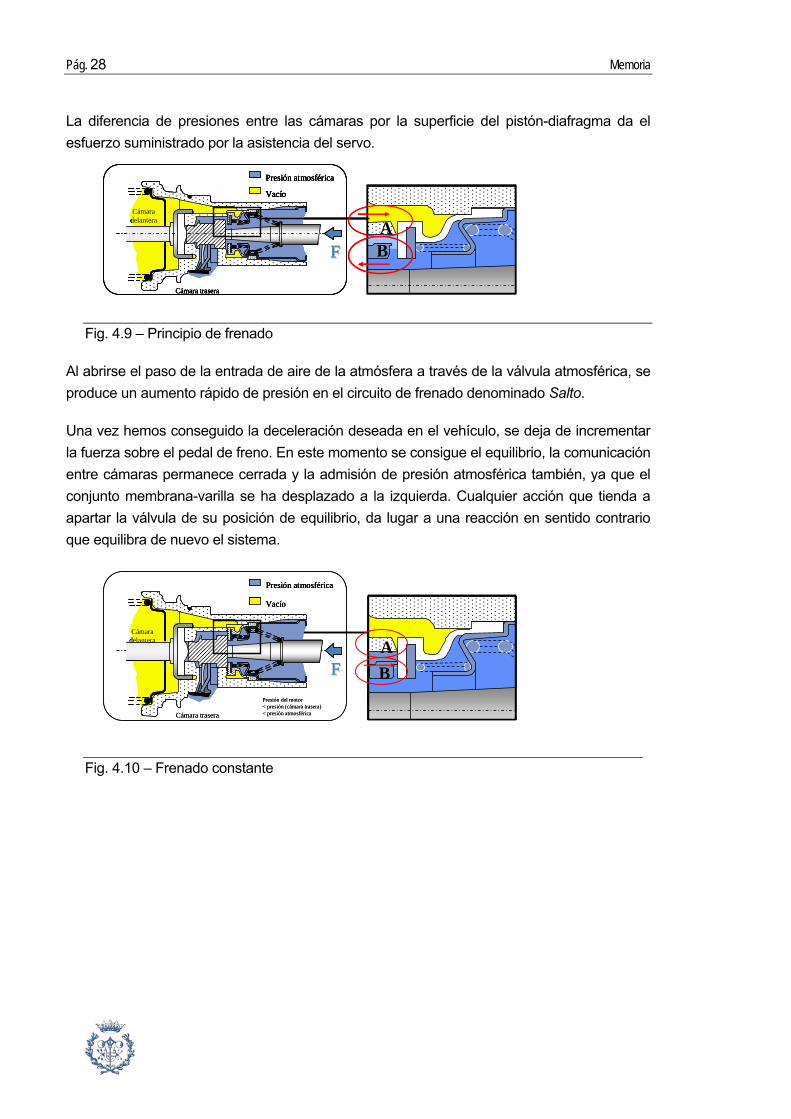
La diferencia de presiones entre las cámaras por la superficie del pistón-diafragma da el esfuerzo suministrado por la asistencia del servo.
Fig. 4.9 – Principio de frenado
Al abrirse el paso de la entrada de aire de la atmósfera a través de la válvula atmosférica, se produce un aumento rápido de presión en el circuito de frenado denominado Salto.
Una vez hemos conseguido la deceleración deseada en el vehículo, se deja de incrementar la fuerza sobre el pedal de freno. En este momento se consigue el equilibrio, la comunicación entre cámaras permanece cerrada y la admisión de presión atmosférica también, ya que el conjunto membrana-varilla se ha desplazado a la izquierda. Cualquier acción que tienda a apartar la válvula de su posición de equilibrio, da lugar a una reacción en sentido contrario que equilibra de nuevo el sistema.
Fig. 4.10 – Frenado constante
Vacío
Presión atmosférica
AB
Cámaradelantera
Cámara trasera
FF
Vacío
Presión atmosférica
AB
Cámaradelantera
Cámara trasera
FF
Vacío
Presión atmosférica
AB
Cámaradelantera
Cámara trasera
FF
Vacío
Presión atmosférica
AB
Cámaradelantera
Cámara trasera
FF
AB
Vacío
Presión atmosférica
Presión del motor< presión (cámara trasera) < presión atmosférica
Cámaradelantera
Cámara trasera
FFAB
VacíoVacío
Presión atmosféricaPresión atmosférica
Presión del motor< presión (cámara trasera) < presión atmosférica
Cámaradelantera
Cámara trasera
FFFF

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 29
En una situación de deceleración muy elevada, en la cual nos acercamos al máximo recorrido del pedal de freno, el conjunto membrana-varilla no puede desplazarse más a la izquierda, con lo que el servofreno se encuentra en su máximo punto de asistencia. En este punto, existe la máxima diferencia de presiones entre las dos cámaras, y se denomina punto de saturación.
Y la única fuerza que podamos aportar a partir de este momento, será la fuerza aplicada sobre el pedal de freno por el conductor.
Fig. 4.11 – Frenado después del punto de saturación
Por otro lado, si se reduce la fuerza sobre el eje de entrada se abre la comunicación entre cámaras permitiendo una cierta recuperación del nivel de vacío en la cámara de presión, por lo que la diferencia de presiones entre las cámaras disminuye implicando una disminución de la fuerza de salida y alcanzando de nuevo una posición de equilibrio.
Fig. 4.12 – Retorno del pedal de freno
Al dejar de ejercer fuerza sobre el pedal de freno, el eje de entrada retrocede por la acción del muelle de posicionamiento de la válvula. La válvula de comunicación entre cámaras se abre completamente y el servo vuelve a su posición inicial de equilibrio por la acción del muelle de recuperación.
Vacío
Presión atmosférica
ABFF
Cámaradelantera
Cámara trasera
Vacío
Presión atmosférica
ABFF
Cámaradelantera
Cámara trasera
Vacío
Presión atmosférica
ABFF
Cámaradelantera
Cámara trasera
Vacío
Presión atmosférica
ABFF
Cámaradelantera
Cámara trasera
Vacío
Presión atmosférica
Cámaradelantera
Cámara trasera
AB
Vacío
Presión atmosférica
Cámaradelantera
Cámara trasera
AB
Vacío
Presión atmosférica
Cámaradelantera
Cámara trasera
AB
Vacío
Presión atmosférica
Cámaradelantera
Cámara trasera
AB
Pág. 30 Memoria
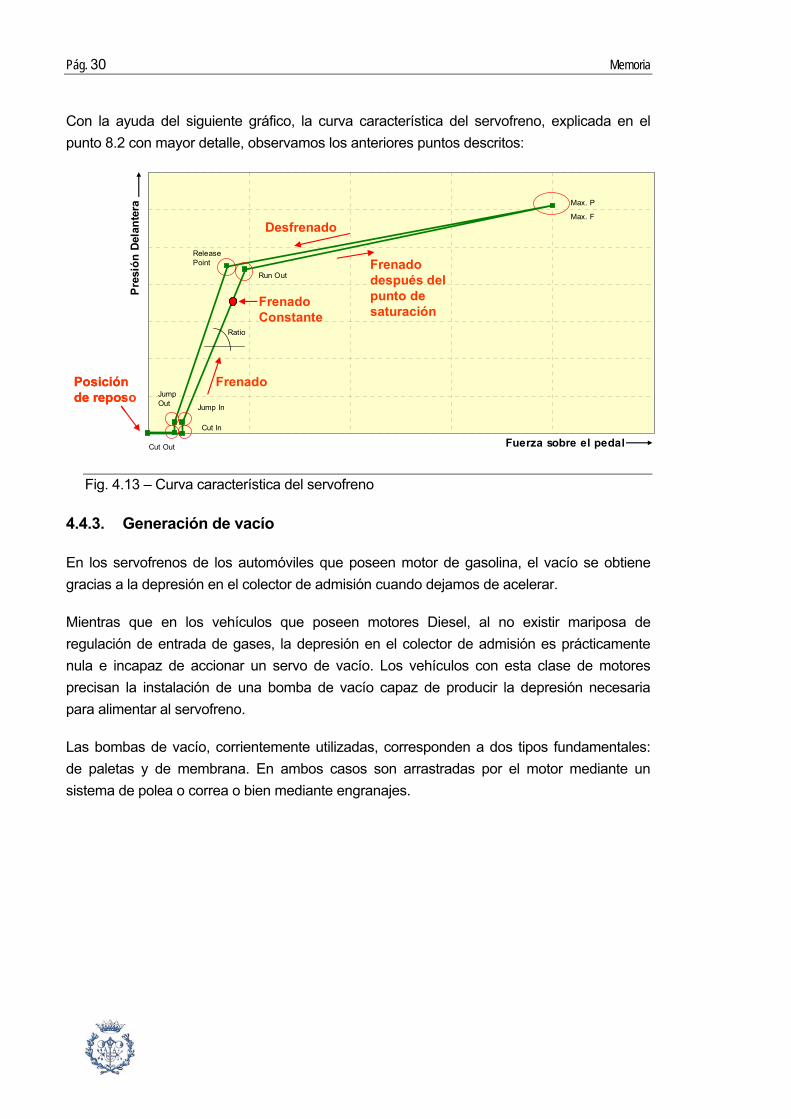
Con la ayuda del siguiente gráfico, la curva característica del servofreno, explicada en el punto 8.2 con mayor detalle, observamos los anteriores puntos descritos:
Fig. 4.13 – Curva característica del servofreno
4.4.3. Generación de vacío
En los servofrenos de los automóviles que poseen motor de gasolina, el vacío se obtiene gracias a la depresión en el colector de admisión cuando dejamos de acelerar.
Mientras que en los vehículos que poseen motores Diesel, al no existir mariposa de regulación de entrada de gases, la depresión en el colector de admisión es prácticamente nula e incapaz de accionar un servo de vacío. Los vehículos con esta clase de motores precisan la instalación de una bomba de vacío capaz de producir la depresión necesaria para alimentar al servofreno.
Las bombas de vacío, corrientemente utilizadas, corresponden a dos tipos fundamentales: de paletas y de membrana. En ambos casos son arrastradas por el motor mediante un sistema de polea o correa o bien mediante engranajes.
Fuerza sobre el pedal
Pres
ión
Dela
nter
a Max. P
Max. F
Run Out
Release Point
Ratio
Cut Out
Jump Out
Cut In
Jump In
Fuerza sobre el pedal
Pres
ión
Dela
nter
a Max. P
Max. F
Run Out
Release Point
Ratio
Cut Out
Jump Out
Cut In
Jump In
Posición de reposo
Frenado
Frenado Constante
Frenado después del punto de saturación
Desfrenado
Fuerza sobre el pedal
Pres
ión
Dela
nter
a Max. P
Max. F
Run Out
Release Point
Ratio
Cut Out
Jump Out
Cut In
Jump In
Fuerza sobre el pedal
Pres
ión
Dela
nter
a Max. P
Max. F
Run Out
Release Point
Ratio
Cut Out
Jump Out
Cut In
Jump In
Posición de reposo
Frenado
Frenado Constante
Frenado después del punto de saturación
Desfrenado

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 31
4.5. Cilindro Maestro Tándem, CMT
El cilindro maestro tándem, también conocido como bomba de freno, es el elemento encargado de iniciar y controlar el proceso de frenado. Debido a disposiciones legales, todo automóvil debe contar con dos circuitos de frenos separados, de forma que el vehículo pueda detenerse en caso de que falle alguno de los circuitos.
Los dos circuitos de freno independientes, se consiguen por medio de un circuito principal de freno, ejecutado en versión tándem. En la siguiente figura se presenta el esquema de un cilindro maestro tándem:
Fig. 4.14 – Esquema de un CMT
La fuerza ejercida sobre el pedal de freno de la figura anterior, multiplicada por la actuación del servofreno, actúa directamente sobre el pistón primario del cilindro maestro tándem, empujándolo hacia la izquierda.
Al desplazarse el émbolo de presión hacia la izquierda, éste sobrepasa el taladro de flujo, con lo que el líquido de frenos retenido en la cámara primaria, empuja al émbolo flotante o pistón secundario, igualmente hacia la izquierda.
Una vez desplazado también el émbolo flotante, éste sobrepasa el taladro de flujo de la cámara secundaria, quedando ésta aislada, al igual que la primaria. Al hacer mayor presión sobre el pedal de freno, y debido a la retención del líquido de frenos en las cámaras primaria y secundaria, la presión del líquido de frenos aumenta.
Al disminuir la fuerza del pie, el émbolo de presión y el émbolo flotante se mueven hacia la derecha, hasta que los taladros de flujo se encuentran libres y el líquido de frenos pueda fluir de nuevo al depósito de compensación, quedando los frenos sin presión.
El cilindro maestro tándem, en realidad está de dos cilindros principales separados por un émbolo móvil y colocados juntos. De esta forma el émbolo móvil nos independizan dos
Pistón Primario
Pistón Secundario
Muelle Primario
Muelle Secundario
Copela de Presión
Cámara Secundaria
Cámara Primaria
Taladros de flujo
Pistón Primario
Pistón Secundario
Muelle Primario
Muelle Secundario
Copela de Presión
Cámara Secundaria
Cámara Primaria
Taladros de flujo
Pág. 32 Memoria
cámaras, y en caso de producirse un fallo en uno de los circuitos hidráulicos, el otro circuito no se verá alterado, y continuará funcionando.
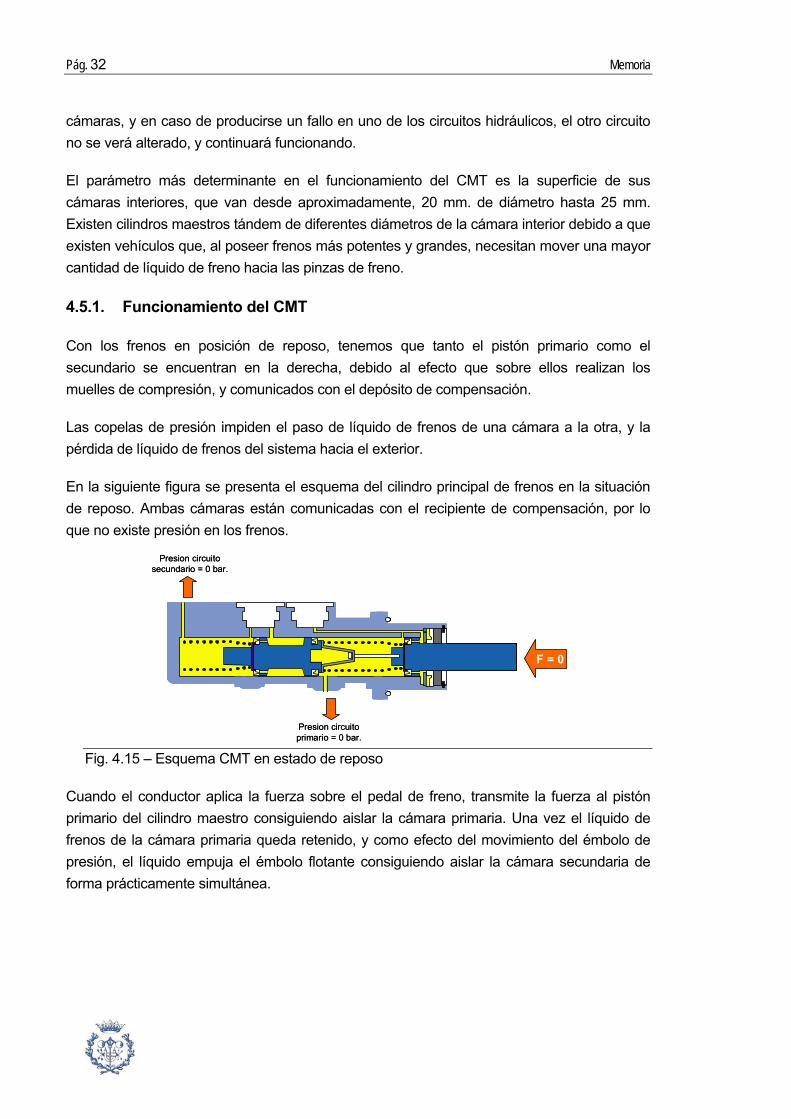
El parámetro más determinante en el funcionamiento del CMT es la superficie de sus cámaras interiores, que van desde aproximadamente, 20 mm. de diámetro hasta 25 mm. Existen cilindros maestros tándem de diferentes diámetros de la cámara interior debido a que existen vehículos que, al poseer frenos más potentes y grandes, necesitan mover una mayor cantidad de líquido de freno hacia las pinzas de freno.
4.5.1. Funcionamiento del CMT
Con los frenos en posición de reposo, tenemos que tanto el pistón primario como el secundario se encuentran en la derecha, debido al efecto que sobre ellos realizan los muelles de compresión, y comunicados con el depósito de compensación.
Las copelas de presión impiden el paso de líquido de frenos de una cámara a la otra, y la pérdida de líquido de frenos del sistema hacia el exterior.
En la siguiente figura se presenta el esquema del cilindro principal de frenos en la situación de reposo. Ambas cámaras están comunicadas con el recipiente de compensación, por lo que no existe presión en los frenos.
Fig. 4.15 – Esquema CMT en estado de reposo
Cuando el conductor aplica la fuerza sobre el pedal de freno, transmite la fuerza al pistón primario del cilindro maestro consiguiendo aislar la cámara primaria. Una vez el líquido de frenos de la cámara primaria queda retenido, y como efecto del movimiento del émbolo de presión, el líquido empuja el émbolo flotante consiguiendo aislar la cámara secundaria de forma prácticamente simultánea.
Presion circuito secundario = 0 bar.
Presion circuito primario = 0 bar.
F = 0
Presion circuito secundario = 0 bar.
Presion circuito primario = 0 bar.
F = 0
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 33
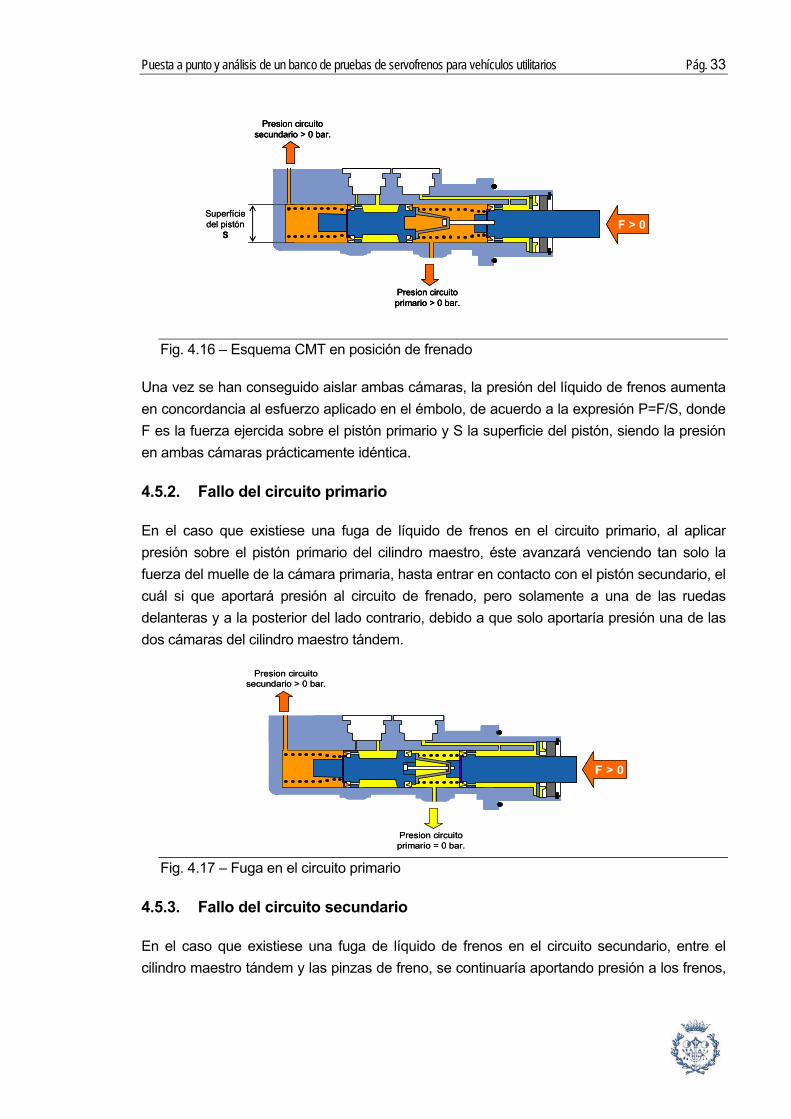
Fig. 4.16 – Esquema CMT en posición de frenado
Una vez se han conseguido aislar ambas cámaras, la presión del líquido de frenos aumenta en concordancia al esfuerzo aplicado en el émbolo, de acuerdo a la expresión P=F/S, donde F es la fuerza ejercida sobre el pistón primario y S la superficie del pistón, siendo la presión en ambas cámaras prácticamente idéntica.
4.5.2. Fallo del circuito primario
En el caso que existiese una fuga de líquido de frenos en el circuito primario, al aplicar presión sobre el pistón primario del cilindro maestro, éste avanzará venciendo tan solo la fuerza del muelle de la cámara primaria, hasta entrar en contacto con el pistón secundario, el cuál si que aportará presión al circuito de frenado, pero solamente a una de las ruedas delanteras y a la posterior del lado contrario, debido a que solo aportaría presión una de las dos cámaras del cilindro maestro tándem.
Fig. 4.17 – Fuga en el circuito primario
4.5.3. Fallo del circuito secundario
En el caso que existiese una fuga de líquido de frenos en el circuito secundario, entre el cilindro maestro tándem y las pinzas de freno, se continuaría aportando presión a los frenos,
F > 0
Presion circuito secundario > 0 bar.
Presion circuito primario > 0 bar.
Superfície del pistón
SF > 0
Presion circuito secundario > 0 bar.
Presion circuito primario > 0 bar.
F > 0
Presion circuito secundario > 0 bar.
Presion circuito primario > 0 bar.
Superfície del pistón
S
Presion circuito secundario > 0 bar.
Presion circuito primario = 0 bar.
F > 0
Presion circuito secundario > 0 bar.
Presion circuito primario = 0 bar.
F > 0

Pág. 34 Memoria
pero solamente a una de las ruedas delanteras y a la posterior del lado contrario, debido a que solo aportaría presión la cámara primaria del CMT.
En esta situación, al aplicar presión sobre el pistón primario del cilindro maestro, éste avanzará hacia la izquierda, aportando presión sobre el pistón secundario, hasta que éste, venciendo tan sólo la fuerza del muelle de la cámara secundaria, haga tope con la pared del cilindro maestro tándem.
Fig. 4.18 – Fuga en el circuito secundario
4.6. Líquido de frenos
El líquido de freno es el elemento que al ser presurizado por la bomba, empuja los cilindros de las pinzas contra las pastillas, produciéndose así la acción de frenado. Como veremos a continuación sus características son las que aseguran una correcta frenada, pero es un elemento que con el uso y el paso del tiempo se degrada y debe de ser sustituido.
Las características fundamentales del líquido de freno son las siguientes:
• Es incompresible (como todos los fluidos).
• Su punto de ebullición mínimo debe ser superior a los 230ºC. Así conseguirá permanecer en estado líquido, sin entrar en ebullición, cuando las solicitaciones de frenada sean muy exigentes.
• Debe de tener baja viscosidad para desplazarse rápidamente por el circuito.
• Debe de ser lubricante para que los elementos móviles del sistema de freno con los que se encuentra en contacto no se agarroten.
• Debe de ser estable químicamente, para no corroer los elementos del sistema de freno con los que se encuentran en contacto.
F > 0
Presion circuito secundario = 0 bar.
Presion circuito primario > 0 bar.
F > 0
Presion circuito secundario = 0 bar.
Presion circuito primario > 0 bar.
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 35
• Debe tener bajo punto de congelación (menor de -40ºC).
En la actualidad, la mayoría de los líquidos de freno cumplen con todos los requisitos que le son demandados, pero como contrapartida y debido a la composición de elementos que tiene, posee una propiedad que obliga a que su sustitución sea necesaria aproximadamente cada 2 años. Esta propiedad es la propiedad higroscópica, es decir, tiene una gran capacidad de absorber agua.
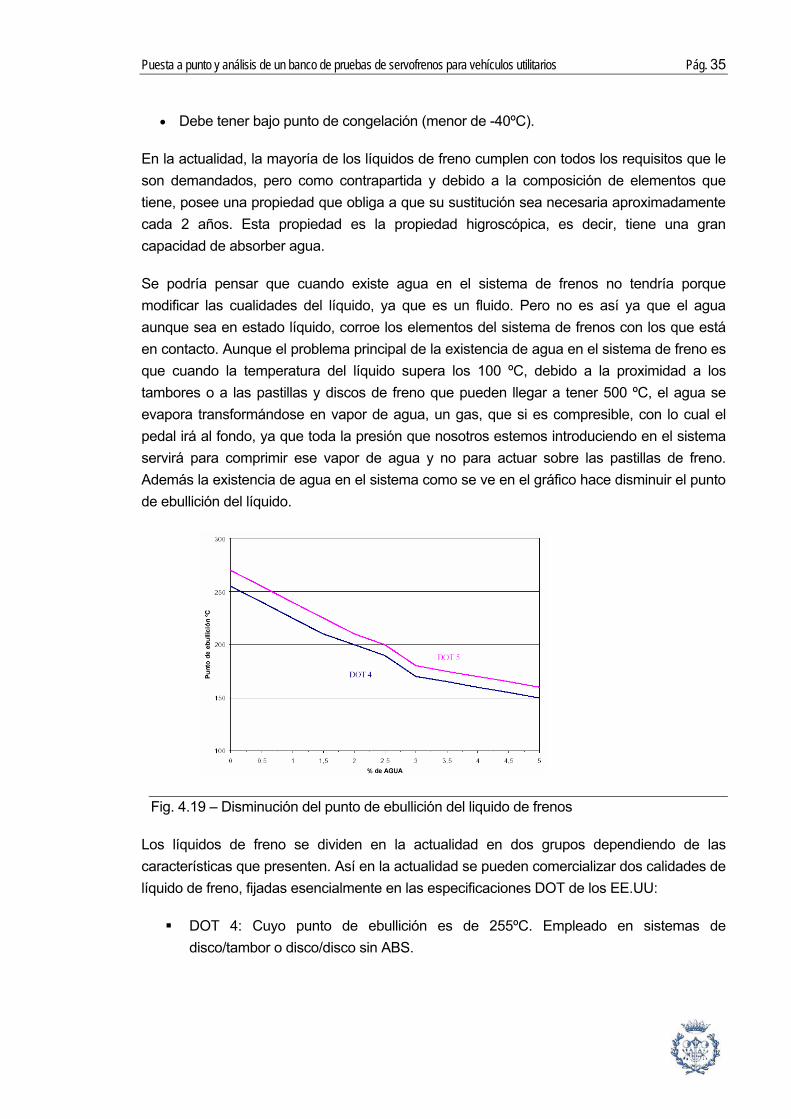
Se podría pensar que cuando existe agua en el sistema de frenos no tendría porque modificar las cualidades del líquido, ya que es un fluido. Pero no es así ya que el agua aunque sea en estado líquido, corroe los elementos del sistema de frenos con los que está en contacto. Aunque el problema principal de la existencia de agua en el sistema de freno es que cuando la temperatura del líquido supera los 100 ºC, debido a la proximidad a los tambores o a las pastillas y discos de freno que pueden llegar a tener 500 ºC, el agua se evapora transformándose en vapor de agua, un gas, que si es compresible, con lo cual el pedal irá al fondo, ya que toda la presión que nosotros estemos introduciendo en el sistema servirá para comprimir ese vapor de agua y no para actuar sobre las pastillas de freno. Además la existencia de agua en el sistema como se ve en el gráfico hace disminuir el punto de ebullición del líquido.
Fig. 4.19 – Disminución del punto de ebullición del liquido de frenos
Los líquidos de freno se dividen en la actualidad en dos grupos dependiendo de las características que presenten. Así en la actualidad se pueden comercializar dos calidades de líquido de freno, fijadas esencialmente en las especificaciones DOT de los EE.UU:
DOT 4: Cuyo punto de ebullición es de 255ºC. Empleado en sistemas de disco/tambor o disco/disco sin ABS.

Pág. 36 Memoria
DOT 5: Cuyo punto de ebullición es de 270ºC. Debe ser el utilizado para vehículos de altas prestaciones y aquellos que vayan dotados de sistemas ABS.
Ambas calidades de líquido son miscibles entre sí, pero no se recomienda el mezclado de ambos. Los líquidos usuales están compuestos por, aproximadamente, un 98% de eter-glicol y un 2% de aditivos contra la degradación química por efecto del calor y la corrosión.
4.7. Compensador de frenada
Cuando se frena, las ruedas delanteras resultan más cargadas que las traseras, con lo que éstas últimas pierden capacidad de agarre con el suelo. Para evitar el bloqueo se instala en el circuito de las ruedas traseras un compensador o corrector de frenada, que tiene la misión de disminuir la presión del líquido que llega a los frenos traseros, tanto si son frenos de disco como si son de tambor, sin influir en la que llega a los delanteros. En los sistemas de freno constituidos por dos circuitos independientes en X, se monta un compensador para cada rueda trasera, si bien estos dos compensadores pueden formar un solo bloque. Los compensadores pueden ser independientes de la suspensión o accionados por ella.
Existen diferentes modos de funcionamiento de los correctores:
• Compensadores con punto de corte fijo: Este sistema es independiente de la suspensión del vehículo. Cuando la presión alcanza un valor fijo deja de admitir más presión hacia el circuito trasero.
Fig. 4.20 – Curva de frenado de un compensador de corte fijo
• Dependientes de la carga sobre el eje trasero: dependiendo de la carga del vehículo el compensador de frenada permite el paso de más o menos presión en el circuito de frenado trasero. Recordemos que cuanto mayor sea el peso soportado por el eje mayor es la fuerza necesaria para frenar dicho eje.
Presión Frenos Delanteros
Pres
ión
Fren
os T
rase
ros
Presión Frenos Delanteros
Pres
ión
Fren
os T
rase
ros

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 37
Fig. 4.21 – Curva de frenado de un compensador de corte fijo
Los reductores de presión dependientes de la carga, se utilizan en aquellos vehículos que en diferentes condiciones de conducción, tengan carga en el eje trasero variable.
El reductor de presión se encuentra fijado a la carrocería y unido por medio de varillaje al eje trasero del vehículo. Como consecuencia del movimiento de oscilación relativo entre el eje y la carrocería, se comprime el muelle, modificando de esta forma el punto de conmutación. Con esto se consigue una adaptación de la presión del eje trasero, en función del estado de carga, consiguiendo una frenada equilibrada en ambos ejes.
De la figura 4.21, se comprueba que a medida que aumenta la carga sobre el eje trasero, aumenta también la presión ejercida sobre los frenos traseros, dado a una mayor capacidad de agarre de las ruedas con el suelo.
4.7.1. Principio de funcionamiento
En la siguiente figura podemos observar el esquema de un compensador de frenada dependiente del estado de carga del eje trasero:
Fig. 4.22 – Esquema de un compensador de frenada
Presión Frenos Delanteros
Pres
ión
Fren
os T
rase
ros
Presión Frenos Delanteros
Pres
ión
Fren
os T
rase
ros
- Carga +
Carga del vehículo
PentradaPsalida ruedas
traseras
Válvula cónica Copelas
de presión
Carga del vehículo
PentradaPsalida ruedas
traseras
Válvula cónica Copelas
de presión
Pág. 38 Memoria
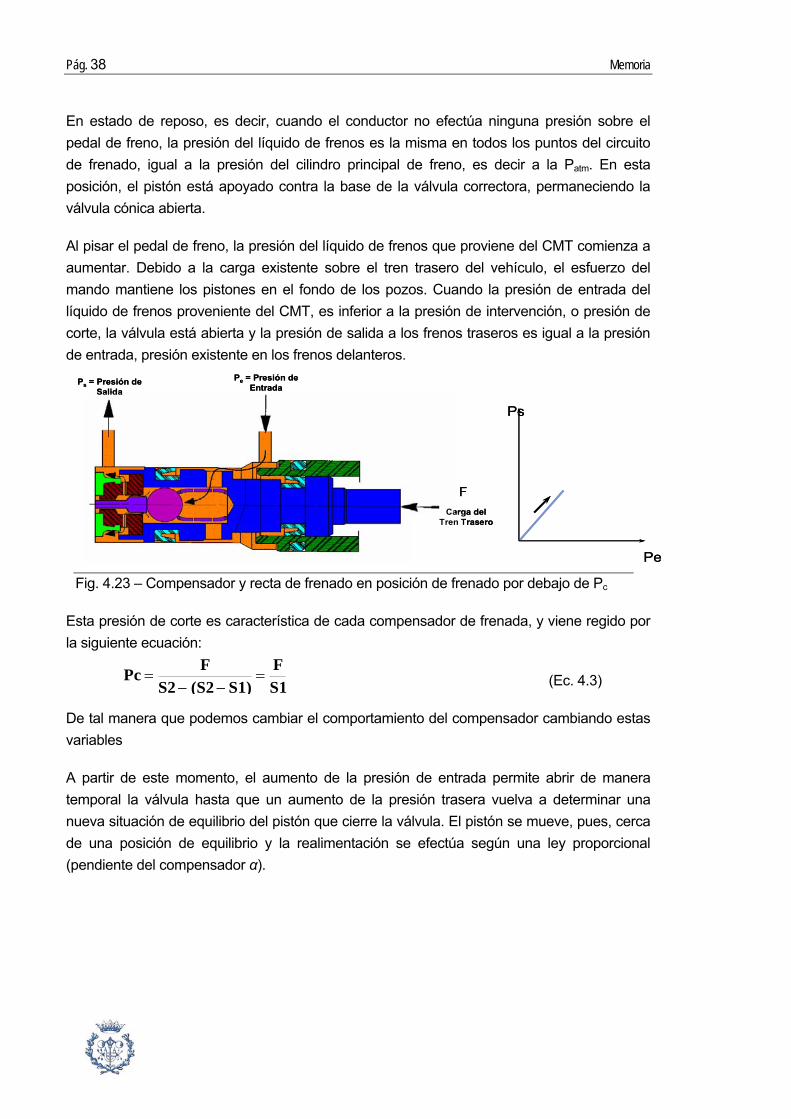
En estado de reposo, es decir, cuando el conductor no efectúa ninguna presión sobre el pedal de freno, la presión del líquido de frenos es la misma en todos los puntos del circuito de frenado, igual a la presión del cilindro principal de freno, es decir a la Patm. En esta posición, el pistón está apoyado contra la base de la válvula correctora, permaneciendo la válvula cónica abierta.
Al pisar el pedal de freno, la presión del líquido de frenos que proviene del CMT comienza a aumentar. Debido a la carga existente sobre el tren trasero del vehículo, el esfuerzo del mando mantiene los pistones en el fondo de los pozos. Cuando la presión de entrada del líquido de frenos proveniente del CMT, es inferior a la presión de intervención, o presión de corte, la válvula está abierta y la presión de salida a los frenos traseros es igual a la presión de entrada, presión existente en los frenos delanteros.
Fig. 4.23 – Compensador y recta de frenado en posición de frenado por debajo de Pc
Esta presión de corte es característica de cada compensador de frenada, y viene regido por la siguiente ecuación:
(Ec. 4.3)
De tal manera que podemos cambiar el comportamiento del compensador cambiando estas variables
A partir de este momento, el aumento de la presión de entrada permite abrir de manera temporal la válvula hasta que un aumento de la presión trasera vuelva a determinar una nueva situación de equilibrio del pistón que cierre la válvula. El pistón se mueve, pues, cerca de una posición de equilibrio y la realimentación se efectúa según una ley proporcional (pendiente del compensador α).
Ps
Pe
Ps
Pe
Pc FS2 (S2 S1)
FS1
=− −
=
Pe = Presión de Entrada
Ps = Presión de Salida
Carga del Tren Trasero
F
Pe = Presión de Entrada
Ps = Presión de Salida
Carga del Tren Trasero
F

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 39
Fig. 4.24 – Compensador y recta de frenado en posición de frenado por encima de Pc
A partir de este punto, y con una carga sobre el tren trasero constante, la recta de frenado se regirá por la siguiente ecuación:
(Ec 4.4)
La pendiente α del compensador viene regida por la ecuación 4.5, de tal manera que variando cualquiera de las variables presentes en la ecuación (S2, S1 o Scaplet) podremos cambiar el comportamiento del compensador adaptándolo al comportamiento deseado.
(Ec 4.5)
α =−
(S2-S1) - S clapetS S clapet2
Pe = Presión de Entrada
Ps = Presión de Salida
Carga del Tren Trasero
FS2 S1Sclapet
Pe = Presión de Entrada
Ps = Presión de Salida
Carga del Tren Trasero
FS2 S1Sclapet
Psalida = Pcorte + α · (Pentrada – Pcorte)
Ps
Pe
Ps
Pe
Pc
Ps
Pe
Ps
Pe
Pc

Pág. 40 Memoria
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 41
5. Descripción del banco de pruebas
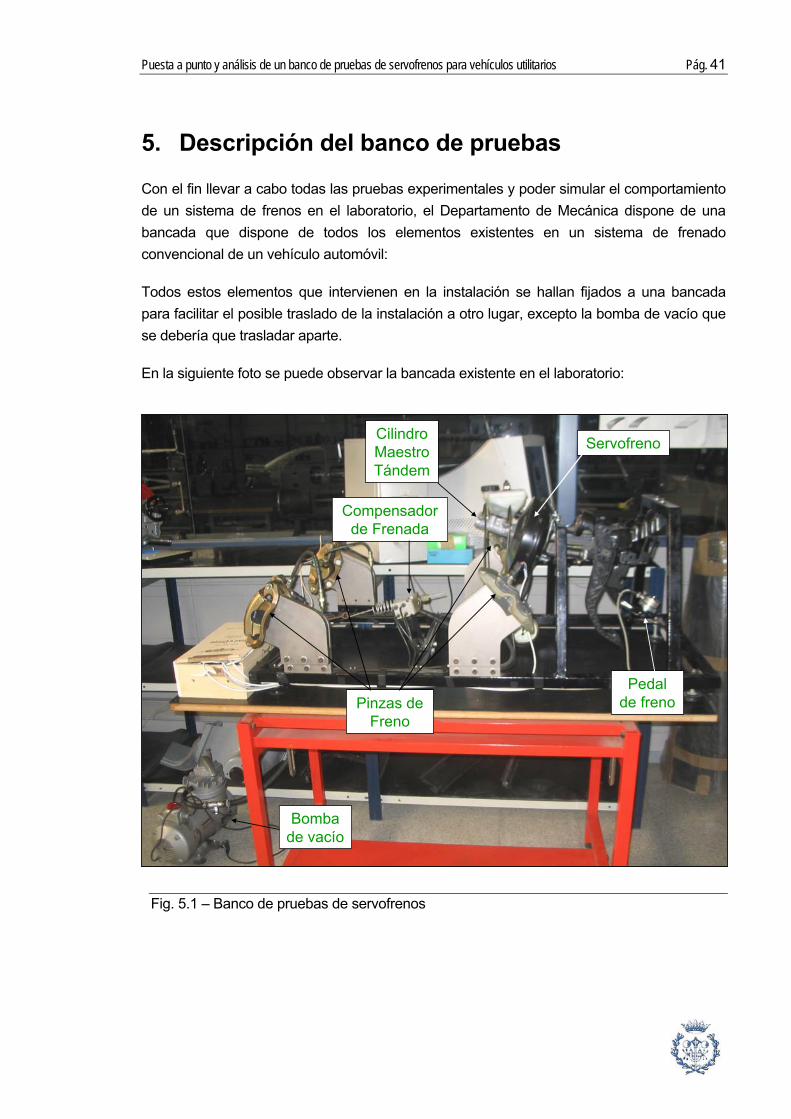
Con el fin llevar a cabo todas las pruebas experimentales y poder simular el comportamiento de un sistema de frenos en el laboratorio, el Departamento de Mecánica dispone de una bancada que dispone de todos los elementos existentes en un sistema de frenado convencional de un vehículo automóvil:
Todos estos elementos que intervienen en la instalación se hallan fijados a una bancada para facilitar el posible traslado de la instalación a otro lugar, excepto la bomba de vacío que se debería que trasladar aparte.
En la siguiente foto se puede observar la bancada existente en el laboratorio:
Fig. 5.1 – Banco de pruebas de servofrenos
Bomba de vacío
Pedal de freno
ServofrenoCilindro Maestro Tándem
Compensador de Frenada
Pinzas de Freno
Bomba de vacío
Pedal de freno
ServofrenoCilindro Maestro Tándem
Compensador de Frenada
Pinzas de Freno
Pág. 42 Memoria
5.1. Pedal de freno
El pedal de freno instalado en la banco de pruebas, es del modelo de automóvil SEAT IBIZA con número de referencia: W SPAIN PN3
6K1 937582-A
La relación de palanca del pedal de freno es 4.36 según de detalla en la memoria.
5.2. Servofreno y Cilindro maestro tándem
El servofreno y cilindro maestro instalados en la banco de ensayo, son de la casa Bendix y diseñados para el modelo de vehículo VOLKSWAGEN-POLO con especificaciones:
Allied Signal
Brakes 2536B IHI 612 105D
Diámetro servofreno: 225 mm. o 9” pulgadas.
Normalmente al hablar del diámetro del servofreno se utilizan la unidad de pulgadas en lugar del sistema métrico.
Especificaciones del cilindro maestro principal:
W-96-7-23-20
Diámetro émbolo: 20.80 mm.
5.3. Compensador de frenada
El compensador de frenada instalado en el banco de ensayos, es de la casa Bendix y diseñada para el modelo de coche FORD FIESTA con referencia:
FORD 96FB – 2L532 – AC
La válvula es de tipo progresivo, de forma que permitirá el aumento progresivo de presión sobre el eje trasero en función del aumento de presión en el eje delantero. Para simular el estado de carga del vehículo, incorpora un sistema de varillaje con muelle cogido a la bancada. Mediante el giro de un tornillo tensaremos o liberaremos de tensión al muelle de reacción, simulando de esta forma el estado de carga del vehículo.
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 43
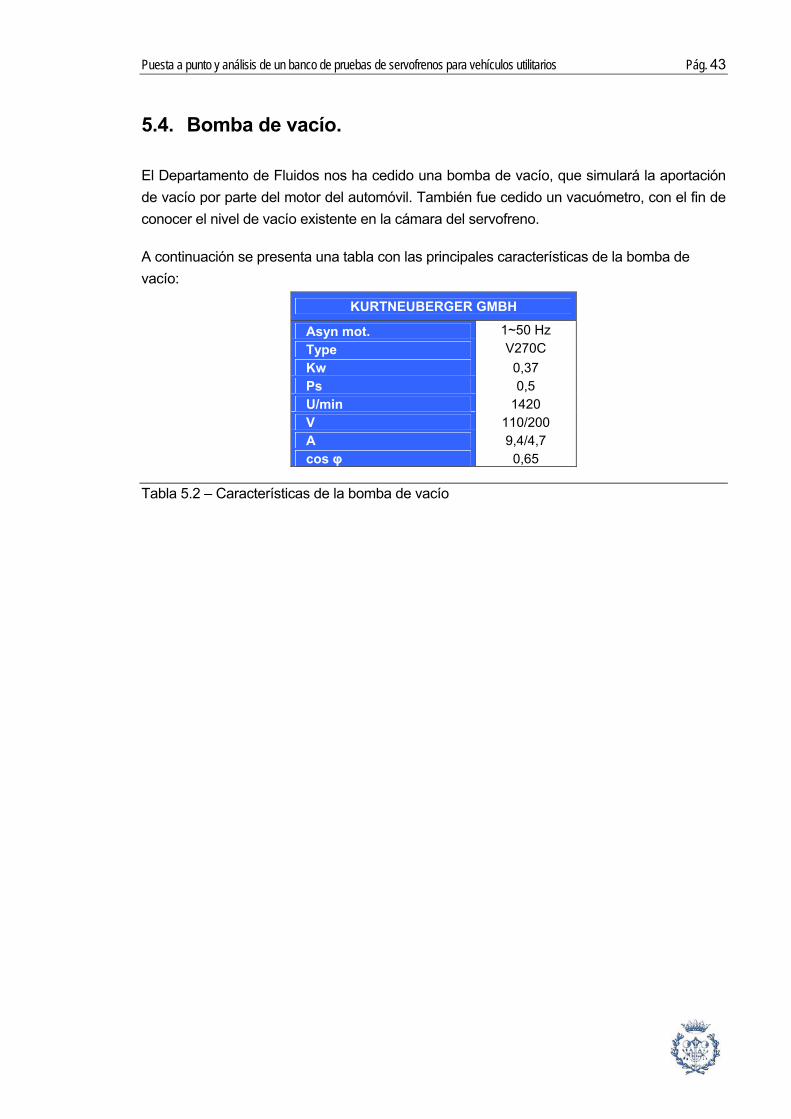
5.4. Bomba de vacío.
El Departamento de Fluidos nos ha cedido una bomba de vacío, que simulará la aportación de vacío por parte del motor del automóvil. También fue cedido un vacuómetro, con el fin de conocer el nivel de vacío existente en la cámara del servofreno.
A continuación se presenta una tabla con las principales características de la bomba de vacío:
KURTNEUBERGER GMBH
Asyn mot. 1~50 Hz Type V270C Kw 0,37 Ps 0,5 U/min 1420 V 110/200 A 9,4/4,7 cos φ 0,65
Tabla 5.2 – Características de la bomba de vacío

Pág. 44 Memoria

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 45
6. Descripción del equipo de adquisición de datos
Una vez montados todos los componentes del sistema de frenado en la bancada, es necesario equipar el banco de pruebas con un equipo de adquisición de datos, con el fin de poder captar todos los parámetros necesarios durante los ensayos que se realicen, para que una vez descargados en el ordenador, podamos analizar las características y comportamiento del servofreno y demás elementos del sistema de frenado.
Los parámetros que se consideran indispensables para analizar dichos componentes del sistema de frenado son los siguientes;
Presión del líquido de frenos en las pinzas de freno delanteras. Para conocer esta
presión del líquido en las pinzas de freno se ha colocado un sensor de presión.
Presión del líquido de frenos en las pinzas de freno traseras. Para conocer esta
presión del líquido en las pinzas de freno se ha colocado un segundo sensor de
presión.
Fuerza ejercida sobre el pedal de freno. Para conocer este parámetro se ha colocado
en el pedal de freno una célula de carga que nos dará a conocer en todo momento la
fuerza aplicada por el conductor sobre el pedal de freno.
Recorrido del pedal de freno. A tal efecto se ha colocado un potenciómetro en el
pedal de freno para conocer el recorrido del pedal de freno.
Nivel de vacío en la cámara del servofreno. Para ello se ha colocado, entre la bomba
de vacío y el servofreno, un vacuómetro que nos dará a conocer con qué nivel de
vacío está trabajando el servofreno.
6.1. Transductores de presión.
Con el fin de poder conocer la presión del líquido de frenos en las pinzas de freno de disco tanto en el circuito de frenado delantero como en el trasero, se han adquirido dos transductores de presión.
La evolución de la presión en los frenos delanteros y traseros va a diferir en función de la carga aplicada al tren trasero del automóvil, por la actuación del compensador de frenada, por lo que a tal efecto y para contrastar el diferente comportamiento de estas presiones,
Pág. 46 Memoria
dispondremos de estos dos sensores para medir la evolución de la presión en los frenos delanteros y en los frenos traseros
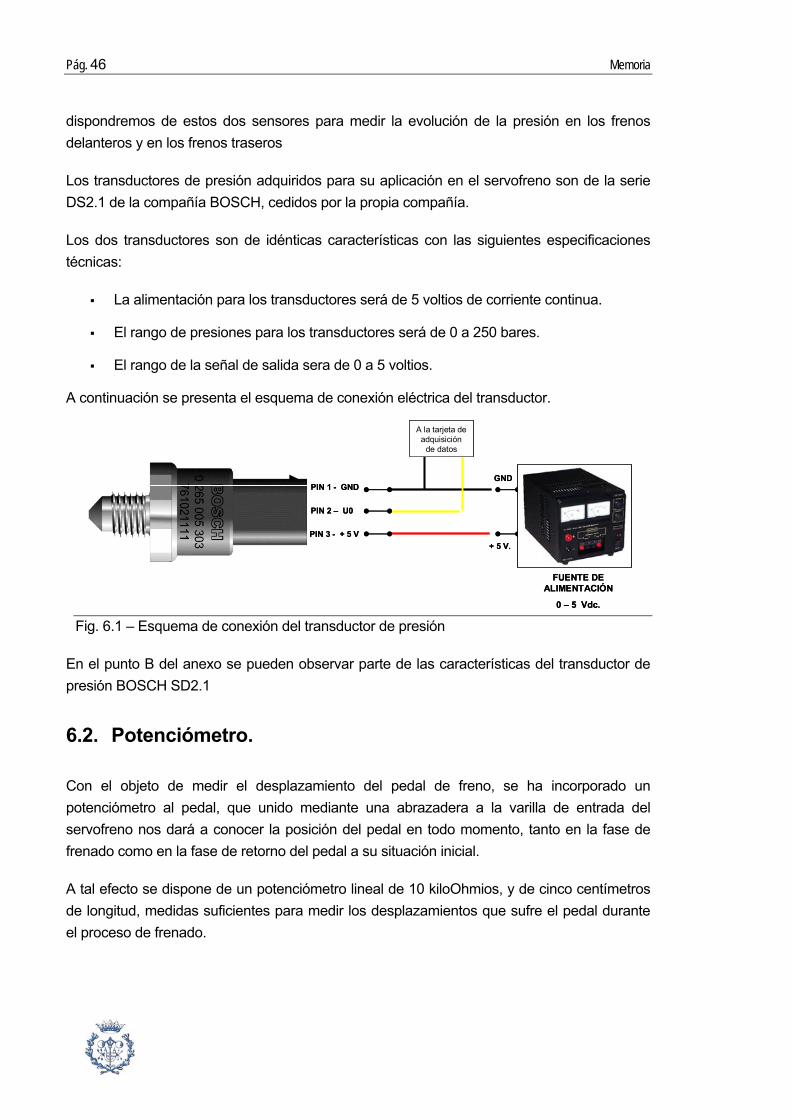
Los transductores de presión adquiridos para su aplicación en el servofreno son de la serie DS2.1 de la compañía BOSCH, cedidos por la propia compañía.
Los dos transductores son de idénticas características con las siguientes especificaciones técnicas:
La alimentación para los transductores será de 5 voltios de corriente continua.
El rango de presiones para los transductores será de 0 a 250 bares.
El rango de la señal de salida sera de 0 a 5 voltios.
A continuación se presenta el esquema de conexión eléctrica del transductor.
Fig. 6.1 – Esquema de conexión del transductor de presión
En el punto B del anexo se pueden observar parte de las características del transductor de presión BOSCH SD2.1
6.2. Potenciómetro.
Con el objeto de medir el desplazamiento del pedal de freno, se ha incorporado un potenciómetro al pedal, que unido mediante una abrazadera a la varilla de entrada del servofreno nos dará a conocer la posición del pedal en todo momento, tanto en la fase de frenado como en la fase de retorno del pedal a su situación inicial.
A tal efecto se dispone de un potenciómetro lineal de 10 kiloOhmios, y de cinco centímetros de longitud, medidas suficientes para medir los desplazamientos que sufre el pedal durante el proceso de frenado.
PIN 2 – U0
PIN 1 - GND
PIN 3 - + 5 V
FUENTE DE ALIMENTACIÓN
0 – 5 Vdc.
GND
+ 5 V.
A la tarjeta de adquisición
de datos
PIN 2 – U0
PIN 1 - GND
PIN 3 - + 5 V
FUENTE DE ALIMENTACIÓN
0 – 5 Vdc.
GND
+ 5 V.
A la tarjeta de adquisición
de datos

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 47
Alimentaremos el potenciómetro con 5 Vdc, provenientes de una fuente de alimentación, y captaremos la señal de salida, con un rango de 0-5 V, con la tarjeta de adquisición de datos.
Al alimentar el potenciómetro con 5 Vdc, y al ser éste lineal y de cinco centímetros de longitud, tendremos que la equivalencia entre recorrido y tensión de salida será de 1 voltio equivalente a 1 cm. de recorrido.
En la figura siguiente se presenta el potenciómetro instalado en la varilla de entrada del servofreno:
Fig. 6.2 – Esquema de conexión del potenciómetro
6.3. Célula de carga.
Para medir la fuerza que el conductor realiza sobre el pedal de freno en el proceso de frenado, ha sido necesaria la implantación de una célula de carga en el pedal de freno. La célula de carga adquirida es de la compañía T.Hydronics Incorporated y fabricada íntegramente en acero inoxidable.
En la siguiente figura se muestra un dibujo de la célula de carga instalada en el pedal de freno, y su esquema de cables:
Fig. 6.3 – Conexionado de cables de la célula de carga
Cable conductor de 7 hilos
Alimentación +
Alimentación -
Señal +
Señal -
Sensing +
Sensing +
Apantallamiento +
Cable conductor de 7 hilos
Alimentación +
Alimentación -
Señal +
Señal -
Sensing +
Sensing +
Apantallamiento +
FUENTE DE ALIMENTACIÓN
GND
+ 5 V.
FUENTE DE ALIMENTACIÓN
GND
+ 5 V.
A la tarjeta de adq. de datos
FUENTE DE ALIMENTACIÓN
GND
+ 5 V.
FUENTE DE ALIMENTACIÓN
GND
+ 5 V.
A la tarjeta de adq. de datos
Pág. 48 Memoria
La capacidad de la célula de carga queda definida por la carga que el usuario puede llegar a realizar en una situación de frenado de emergencia. De esta forma se ha decidido incorporar una célula de carga con una capacidad de medir 100 Kg.
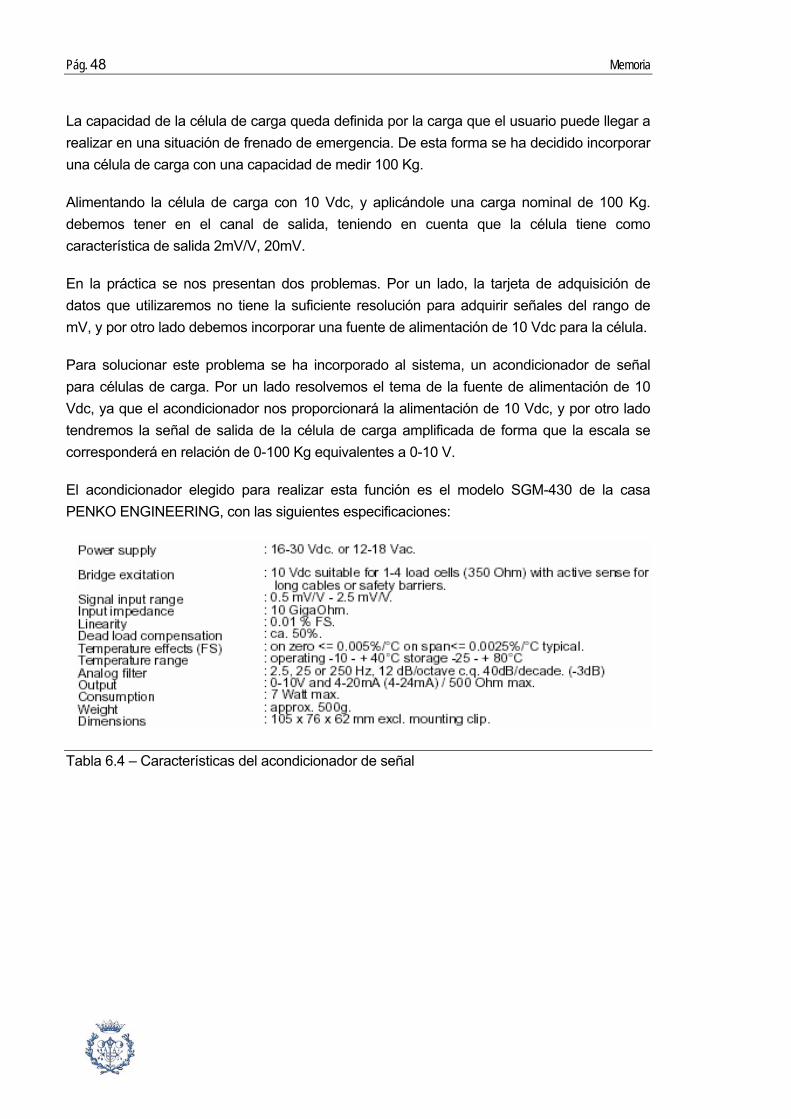
Alimentando la célula de carga con 10 Vdc, y aplicándole una carga nominal de 100 Kg. debemos tener en el canal de salida, teniendo en cuenta que la célula tiene como característica de salida 2mV/V, 20mV.
En la práctica se nos presentan dos problemas. Por un lado, la tarjeta de adquisición de datos que utilizaremos no tiene la suficiente resolución para adquirir señales del rango de mV, y por otro lado debemos incorporar una fuente de alimentación de 10 Vdc para la célula.
Para solucionar este problema se ha incorporado al sistema, un acondicionador de señal para células de carga. Por un lado resolvemos el tema de la fuente de alimentación de 10 Vdc, ya que el acondicionador nos proporcionará la alimentación de 10 Vdc, y por otro lado tendremos la señal de salida de la célula de carga amplificada de forma que la escala se corresponderá en relación de 0-100 Kg equivalentes a 0-10 V.
El acondicionador elegido para realizar esta función es el modelo SGM-430 de la casa PENKO ENGINEERING, con las siguientes especificaciones:
Tabla 6.4 – Características del acondicionador de señal
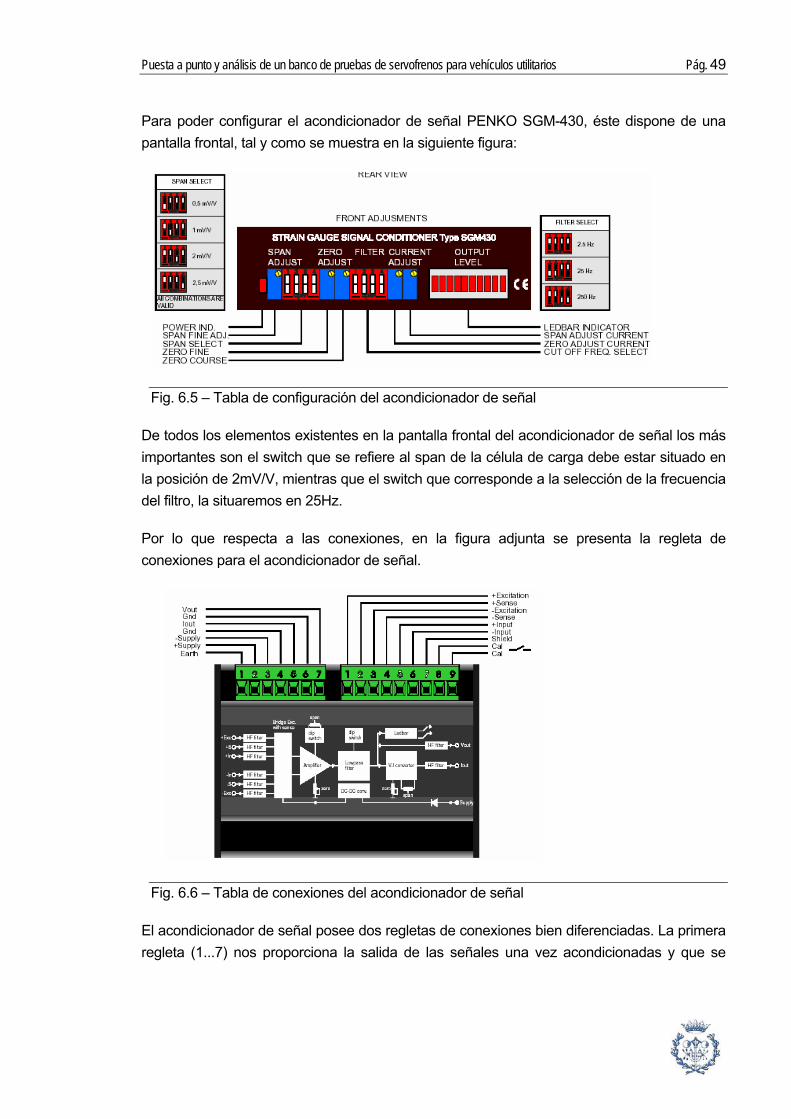
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 49
Para poder configurar el acondicionador de señal PENKO SGM-430, éste dispone de una pantalla frontal, tal y como se muestra en la siguiente figura:
Fig. 6.5 – Tabla de configuración del acondicionador de señal
De todos los elementos existentes en la pantalla frontal del acondicionador de señal los más importantes son el switch que se refiere al span de la célula de carga debe estar situado en la posición de 2mV/V, mientras que el switch que corresponde a la selección de la frecuencia del filtro, la situaremos en 25Hz.
Por lo que respecta a las conexiones, en la figura adjunta se presenta la regleta de conexiones para el acondicionador de señal.
Fig. 6.6 – Tabla de conexiones del acondicionador de señal
El acondicionador de señal posee dos regletas de conexiones bien diferenciadas. La primera regleta (1...7) nos proporciona la salida de las señales una vez acondicionadas y que se
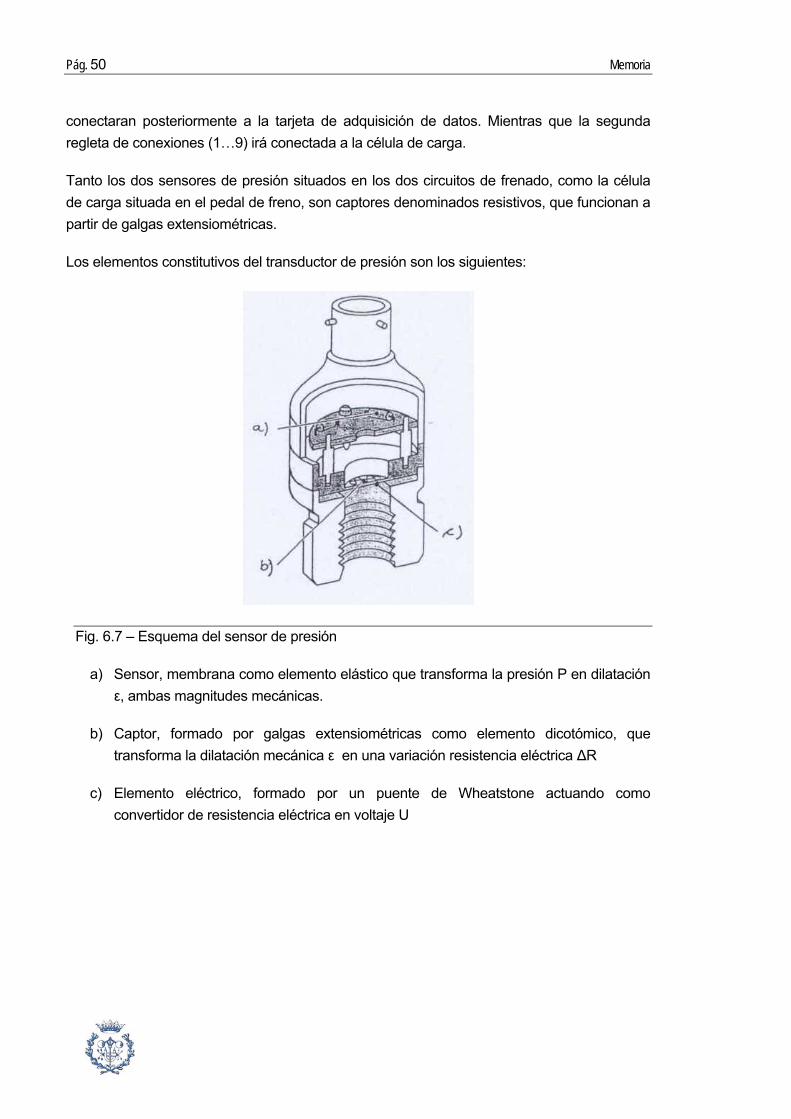
Pág. 50 Memoria
conectaran posteriormente a la tarjeta de adquisición de datos. Mientras que la segunda regleta de conexiones (1…9) irá conectada a la célula de carga.
Tanto los dos sensores de presión situados en los dos circuitos de frenado, como la célula de carga situada en el pedal de freno, son captores denominados resistivos, que funcionan a partir de galgas extensiométricas.
Los elementos constitutivos del transductor de presión son los siguientes:
Fig. 6.7 – Esquema del sensor de presión
a) Sensor, membrana como elemento elástico que transforma la presión P en dilatación ε, ambas magnitudes mecánicas.
b) Captor, formado por galgas extensiométricas como elemento dicotómico, que transforma la dilatación mecánica ε en una variación resistencia eléctrica ΔR
c) Elemento eléctrico, formado por un puente de Wheatstone actuando como convertidor de resistencia eléctrica en voltaje U

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 51
En la siguiente figura se observan las diferentes etapas de un transductor de presión a partir de galgas extensiométricas:
Fig. 6.8 – Etapas de un transductor de presión resistivo
6.4. Tarjeta de adquisición de datos.
Con el fin de medir las señales eléctricas provenientes de los diferentes sensores situados en el banco de pruebas, ha sido necesaria la instalación de una tarjeta de adquisición de datos.
La tarjeta adquirida es el modelo PDM-1208FS de la casa Measurement Computing. La tarjeta incorpora un software, con el cuál podremos obtener y tratar los datos obtenidos de las pruebas experimentales.
Fig. 6.9 – Tarjeta de adquisición de datos PDM-1208FS

Pág. 52 Memoria
La tarjeta de adquisición de datos se conectará a través del puerto USB del PC. Esta conexión proporciona un voltaje de salida de +5V para la alimentación de la tarjeta, y también comunicación entre la tarjeta y el ordenador.
Las conexiones que se utilizaran para adquirir para la adquisición de los datos, serán las entradas analógicas situadas en los pins de 1-9. Se conectaran de la siguiente manera:
Canal de entrada CH0IN : Transductor de presión del circuito trasero.
Canal de entrada CH1IN : Transductor de presión del circuito delantero.
Canal de entrada CH2IN : Célula de carga.
Canal de entrada CH3IN : Potenciómetro.
La tarjeta incorpora la regleta de conexiones mostrada en la siguiente figura.
Fig. 6.10 – Regleta de conexiones de la tarjeta PDM-1208FS
Las principales características de la tarjeta se exponen en la siguiente tabla:
Tabla 6.11 – Tabla de características de la tarjeta de adquisición de datos
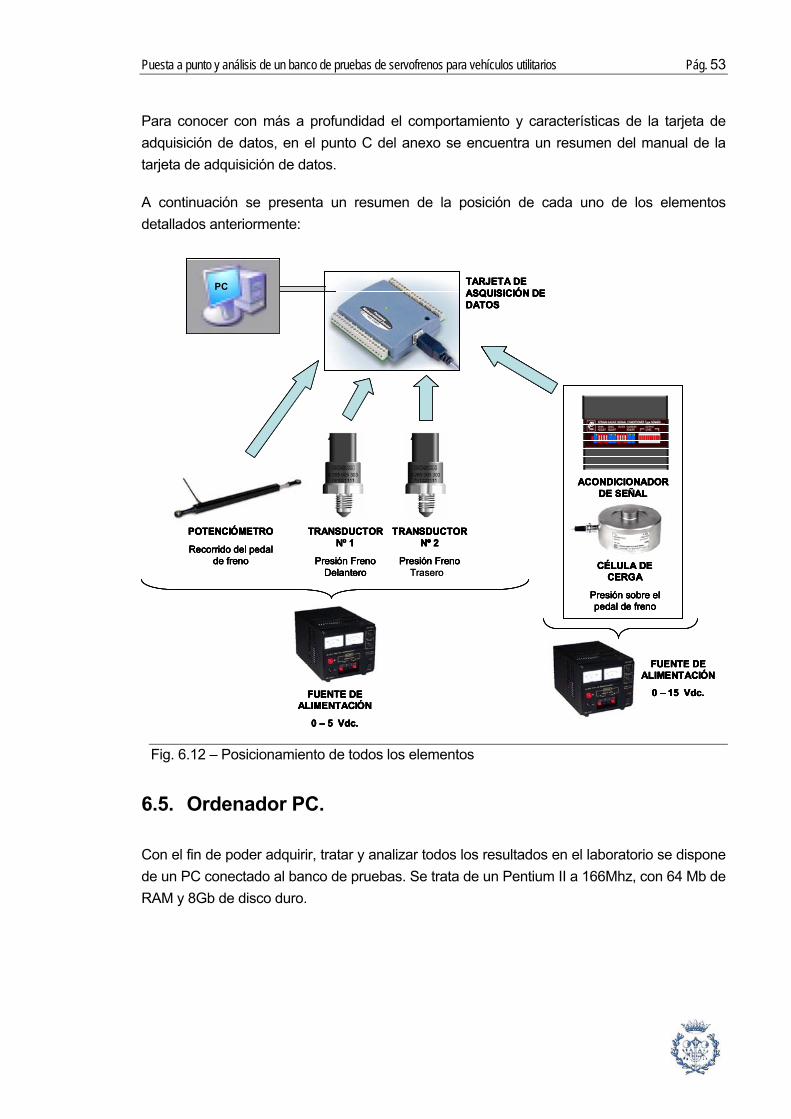
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 53
Para conocer con más a profundidad el comportamiento y características de la tarjeta de adquisición de datos, en el punto C del anexo se encuentra un resumen del manual de la tarjeta de adquisición de datos.
A continuación se presenta un resumen de la posición de cada uno de los elementos detallados anteriormente:
Fig. 6.12 – Posicionamiento de todos los elementos
6.5. Ordenador PC.
Con el fin de poder adquirir, tratar y analizar todos los resultados en el laboratorio se dispone de un PC conectado al banco de pruebas. Se trata de un Pentium II a 166Mhz, con 64 Mb de RAM y 8Gb de disco duro.
TRANSDUCTOR Nº 1
Presión Freno Delantero
TRANSDUCTOR Nº 2
Presión Freno CÉLULA DE CERGA
Presión sobre el pedal de freno
POTENCIÓMETRO
Recorrido del pedal de freno
FUENTE DE ALIMENTACIÓN
0 – 5 Vdc.
FUENTE DE ALIMENTACIÓN
0 – 15 Vdc.
ACONDICIONADOR DE SEÑAL
PC TARJETA DE ASQUISICIÓN DE DATOS
TRANSDUCTOR Nº 1
Presión Freno Delantero
TRANSDUCTOR Nº 2
Presión Freno Trasero
CÉLULA DE CERGA
Presión sobre el pedal de freno
POTENCIÓMETRO
Recorrido del pedal de freno
FUENTE DE ALIMENTACIÓN
0 – 5 Vdc.
FUENTE DE ALIMENTACIÓN
0 – 15 Vdc.
ACONDICIONADOR DE SEÑAL
PC TARJETA DE ASQUISICIÓN DE DATOS
TRANSDUCTOR Nº 1
Presión Freno Delantero
TRANSDUCTOR Nº 2
Presión Freno CÉLULA DE CERGA
Presión sobre el pedal de freno
POTENCIÓMETRO
Recorrido del pedal de freno
FUENTE DE ALIMENTACIÓN
0 – 5 Vdc.
FUENTE DE ALIMENTACIÓN
0 – 15 Vdc.
ACONDICIONADOR DE SEÑAL
PC TARJETA DE ASQUISICIÓN DE DATOS
TRANSDUCTOR Nº 1
Presión Freno Delantero
TRANSDUCTOR Nº 2
Presión Freno Trasero
CÉLULA DE CERGA
Presión sobre el pedal de freno
POTENCIÓMETRO
Recorrido del pedal de freno
FUENTE DE ALIMENTACIÓN
0 – 5 Vdc.
FUENTE DE ALIMENTACIÓN
0 – 15 Vdc.
ACONDICIONADOR DE SEÑAL
PC TARJETA DE ASQUISICIÓN DE DATOS
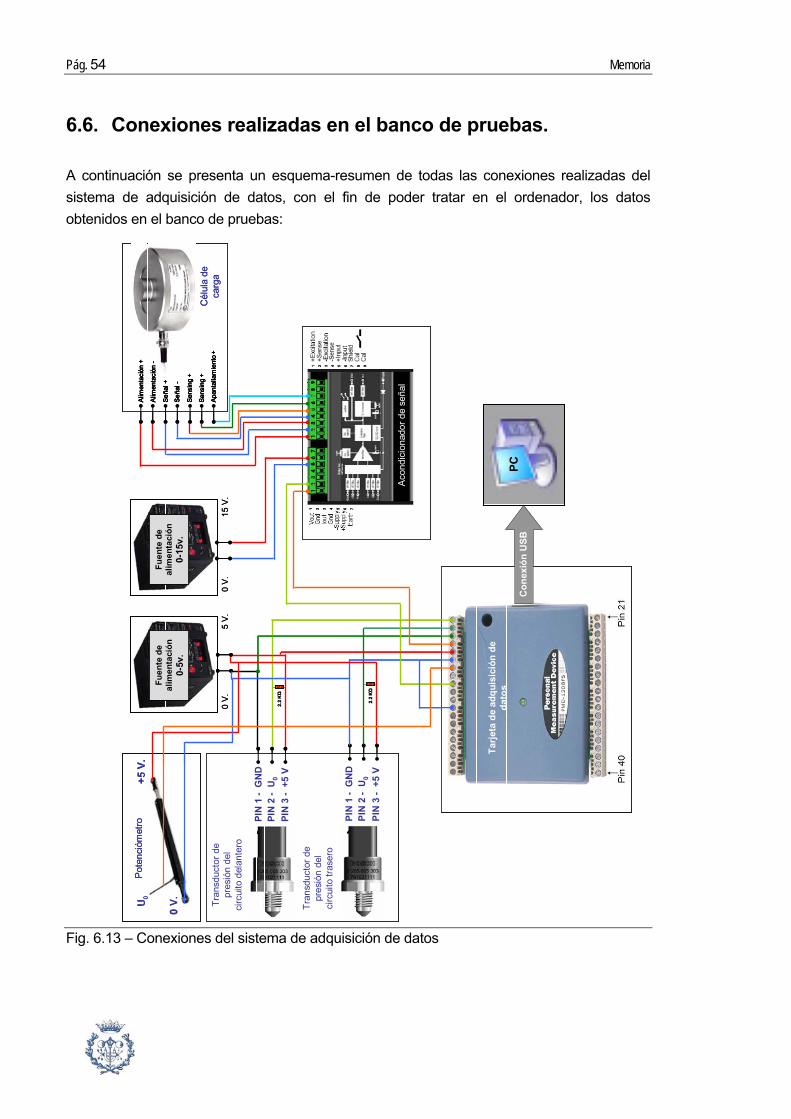
Pág. 54 Memoria
6.6. Conexiones realizadas en el banco de pruebas.
A continuación se presenta un esquema-resumen de todas las conexiones realizadas del sistema de adquisición de datos, con el fin de poder tratar en el ordenador, los datos obtenidos en el banco de pruebas:
Fig. 6.13 – Conexiones del sistema de adquisición de datos
Fuen
te d
e al
imen
taci
ón
0-5v
.
Fuen
te d
e al
imen
taci
ón
0-15
v.
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7
Aco
ndic
iona
dor d
e se
ñal
Tarje
ta d
e ad
quis
ició
n de
da
tos
PC
Cél
ula
de
carg
a
Alim
enta
ción
+
Alim
enta
ción
-
Seña
l +
Seña
l -
Sens
ing
+
Sens
ing
+
Apan
talla
mie
nto
+
Alim
enta
ción
+
Alim
enta
ción
-
Seña
l +
Seña
l -
Sens
ing
+
Sens
ing
+
Apan
talla
mie
nto
+
0 V.
15 V
.5
V.0
V.
Tran
sduc
tor d
e pr
esió
n de
l ci
rcui
to tr
aser
o
PIN
2 -
U0
PIN
1 -
GN
D
PIN
3 -
+5 V
Tran
sduc
tor d
e pr
esió
n de
l ci
rcui
to d
elan
tero
PIN
2 -
U0
PIN
1 -
GN
D
PIN
3 -
+5 V
Con
exió
n U
SB
2.2
KΏ
2.2
KΏ
Pote
nció
met
ro+5
V.
0 V.U 0
Fuen
te d
e al
imen
taci
ón
0-5v
.
Fuen
te d
e al
imen
taci
ón
0-5v
.
Fuen
te d
e al
imen
taci
ón
0-15
v.
Fuen
te d
e al
imen
taci
ón
0-15
v.
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7
Aco
ndic
iona
dor d
e se
ñal
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7
Aco
ndic
iona
dor d
e se
ñal
Tarje
ta d
e ad
quis
ició
n de
da
tos
PCPC
Cél
ula
de
carg
aC
élul
a de
ca
rga
Alim
enta
ción
+
Alim
enta
ción
-
Seña
l +
Seña
l -
Sens
ing
+
Sens
ing
+
Apan
talla
mie
nto
+
Alim
enta
ción
+
Alim
enta
ción
-
Seña
l +
Seña
l -
Sens
ing
+
Sens
ing
+
Apan
talla
mie
nto
+
Alim
enta
ción
+
Alim
enta
ción
-
Seña
l +
Seña
l -
Sens
ing
+
Sens
ing
+
Apan
talla
mie
nto
+
Alim
enta
ción
+
Alim
enta
ción
-
Seña
l +
Seña
l -
Sens
ing
+
Sens
ing
+
Apan
talla
mie
nto
+
0 V.
15 V
.5
V.0
V.
Tran
sduc
tor d
e pr
esió
n de
l ci
rcui
to tr
aser
o
PIN
2 -
U0
PIN
1 -
GN
D
PIN
3 -
+5 V
Tran
sduc
tor d
e pr
esió
n de
l ci
rcui
to d
elan
tero
PIN
2 -
U0
PIN
1 -
GN
D
PIN
3 -
+5 V
Con
exió
n U
SB
2.2
KΏ
2.2
KΏ
Pote
nció
met
ro+5
V.
0 V.U 0
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 55
7. Software utilizado en el banco de pruebas
El software elegido para gestionar la obtención de datos del banco de pruebas es el programa SOFTWIRE, de la compañía Measurement Computing, programa que venía junto a la tarjeta de adquisición de datos PMD-1280FS adquirida. Este programa funciona bajo el entorno de Visual Basic, y posee un completo paquete gráfico de herramientas de programación, con el cual se ha diseñado el programa de adquisición de datos.
7.1. Descripción del programa SOFTWIRE
Con la ayuda del programa Microsoft Visual Basic.NET se puede programar infinidad de programas, pero es necesario tener un buen nivel del lenguaje de programación Visual Basic para utilizar correctamente este programa.
El programa Softwire nos facilita esta tarea ya que programaremos en un entorno gráfico, de tal manera que nos hará mucho más rápida y sencilla la tarea de obtención de cualquier programa, y en particular, del programa de adquisición de datos DAQ.
Al abrir el programa SOFTWIRE nos aparecen dos ventanas principales:
Figura 7.1- Pantalla principal del programa SOFTWIRE
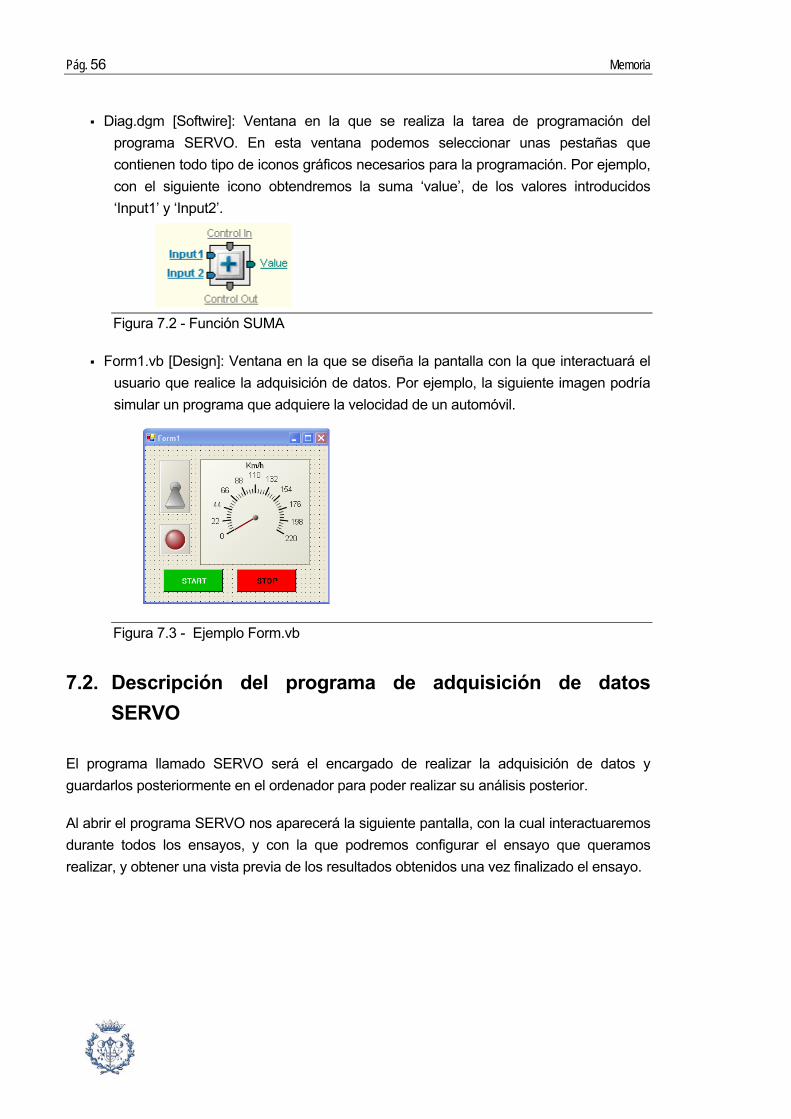
Pág. 56 Memoria
Diag.dgm [Softwire]: Ventana en la que se realiza la tarea de programación del programa SERVO. En esta ventana podemos seleccionar unas pestañas que contienen todo tipo de iconos gráficos necesarios para la programación. Por ejemplo, con el siguiente icono obtendremos la suma ‘value’, de los valores introducidos ‘Input1’ y ‘Input2’.
Figura 7.2 - Función SUMA
Form1.vb [Design]: Ventana en la que se diseña la pantalla con la que interactuará el usuario que realice la adquisición de datos. Por ejemplo, la siguiente imagen podría simular un programa que adquiere la velocidad de un automóvil.
Figura 7.3 - Ejemplo Form.vb
7.2. Descripción del programa de adquisición de datos SERVO
El programa llamado SERVO será el encargado de realizar la adquisición de datos y guardarlos posteriormente en el ordenador para poder realizar su análisis posterior.
Al abrir el programa SERVO nos aparecerá la siguiente pantalla, con la cual interactuaremos durante todos los ensayos, y con la que podremos configurar el ensayo que queramos realizar, y obtener una vista previa de los resultados obtenidos una vez finalizado el ensayo.
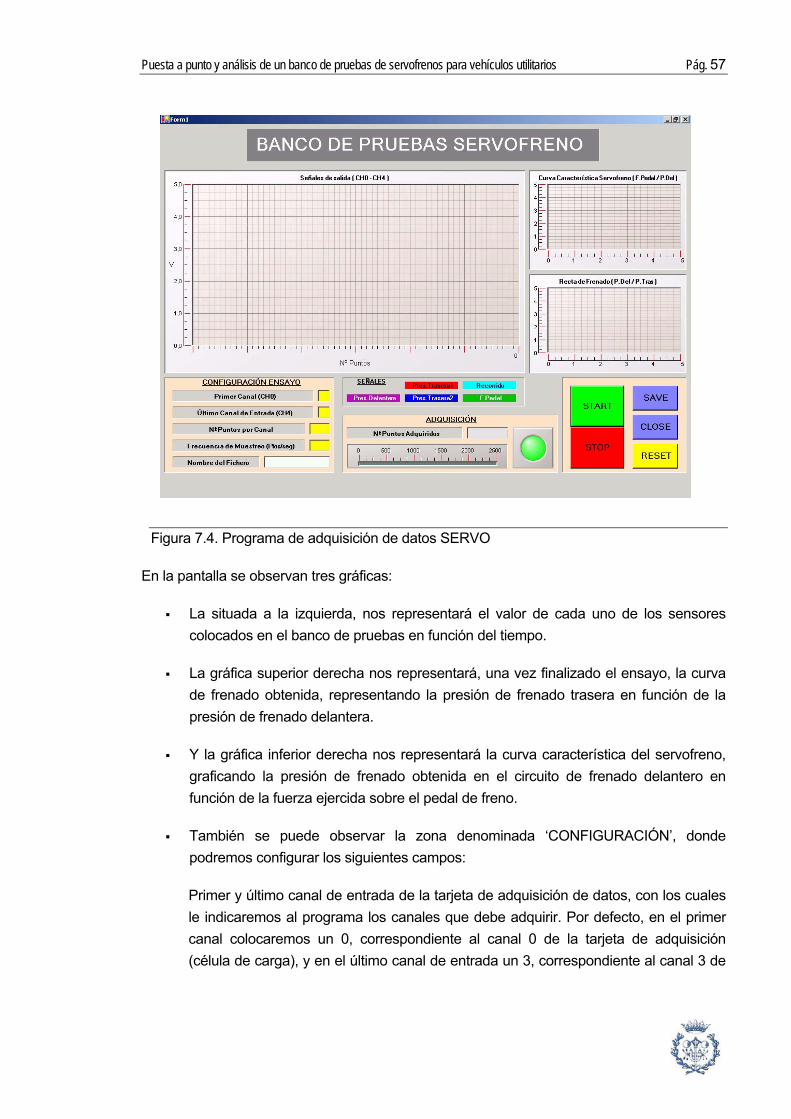
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 57
Figura 7.4. Programa de adquisición de datos SERVO
En la pantalla se observan tres gráficas:
La situada a la izquierda, nos representará el valor de cada uno de los sensores colocados en el banco de pruebas en función del tiempo.
La gráfica superior derecha nos representará, una vez finalizado el ensayo, la curva de frenado obtenida, representando la presión de frenado trasera en función de la presión de frenado delantera.
Y la gráfica inferior derecha nos representará la curva característica del servofreno, graficando la presión de frenado obtenida en el circuito de frenado delantero en función de la fuerza ejercida sobre el pedal de freno.
También se puede observar la zona denominada ‘CONFIGURACIÓN’, donde podremos configurar los siguientes campos:
Primer y último canal de entrada de la tarjeta de adquisición de datos, con los cuales le indicaremos al programa los canales que debe adquirir. Por defecto, en el primer canal colocaremos un 0, correspondiente al canal 0 de la tarjeta de adquisición (célula de carga), y en el último canal de entrada un 3, correspondiente al canal 3 de
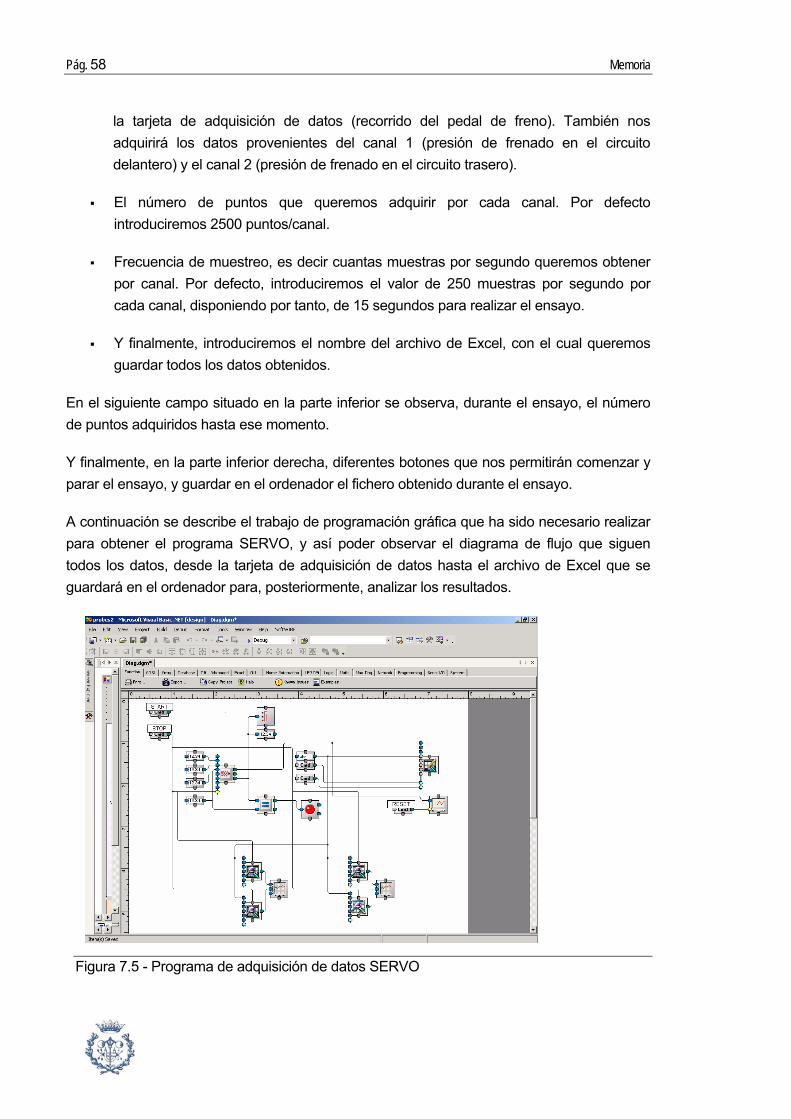
Pág. 58 Memoria
la tarjeta de adquisición de datos (recorrido del pedal de freno). También nos adquirirá los datos provenientes del canal 1 (presión de frenado en el circuito delantero) y el canal 2 (presión de frenado en el circuito trasero).
El número de puntos que queremos adquirir por cada canal. Por defecto introduciremos 2500 puntos/canal.
Frecuencia de muestreo, es decir cuantas muestras por segundo queremos obtener por canal. Por defecto, introduciremos el valor de 250 muestras por segundo por cada canal, disponiendo por tanto, de 15 segundos para realizar el ensayo.
Y finalmente, introduciremos el nombre del archivo de Excel, con el cual queremos guardar todos los datos obtenidos.
En el siguiente campo situado en la parte inferior se observa, durante el ensayo, el número de puntos adquiridos hasta ese momento.
Y finalmente, en la parte inferior derecha, diferentes botones que nos permitirán comenzar y parar el ensayo, y guardar en el ordenador el fichero obtenido durante el ensayo.
A continuación se describe el trabajo de programación gráfica que ha sido necesario realizar para obtener el programa SERVO, y así poder observar el diagrama de flujo que siguen todos los datos, desde la tarjeta de adquisición de datos hasta el archivo de Excel que se guardará en el ordenador para, posteriormente, analizar los resultados.
Figura 7.5 - Programa de adquisición de datos SERVO
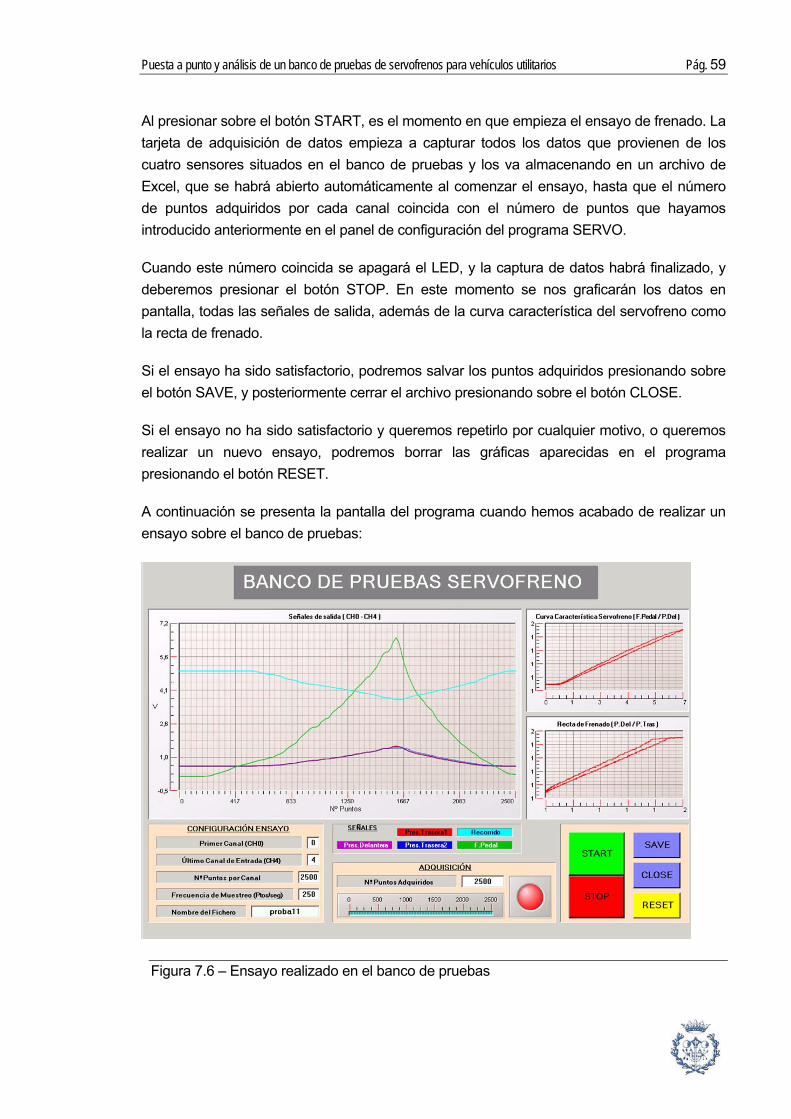
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 59
Al presionar sobre el botón START, es el momento en que empieza el ensayo de frenado. La tarjeta de adquisición de datos empieza a capturar todos los datos que provienen de los cuatro sensores situados en el banco de pruebas y los va almacenando en un archivo de Excel, que se habrá abierto automáticamente al comenzar el ensayo, hasta que el número de puntos adquiridos por cada canal coincida con el número de puntos que hayamos introducido anteriormente en el panel de configuración del programa SERVO.
Cuando este número coincida se apagará el LED, y la captura de datos habrá finalizado, y deberemos presionar el botón STOP. En este momento se nos graficarán los datos en pantalla, todas las señales de salida, además de la curva característica del servofreno como la recta de frenado.
Si el ensayo ha sido satisfactorio, podremos salvar los puntos adquiridos presionando sobre el botón SAVE, y posteriormente cerrar el archivo presionando sobre el botón CLOSE.
Si el ensayo no ha sido satisfactorio y queremos repetirlo por cualquier motivo, o queremos realizar un nuevo ensayo, podremos borrar las gráficas aparecidas en el programa presionando el botón RESET.
A continuación se presenta la pantalla del programa cuando hemos acabado de realizar un ensayo sobre el banco de pruebas:
Figura 7.6 – Ensayo realizado en el banco de pruebas
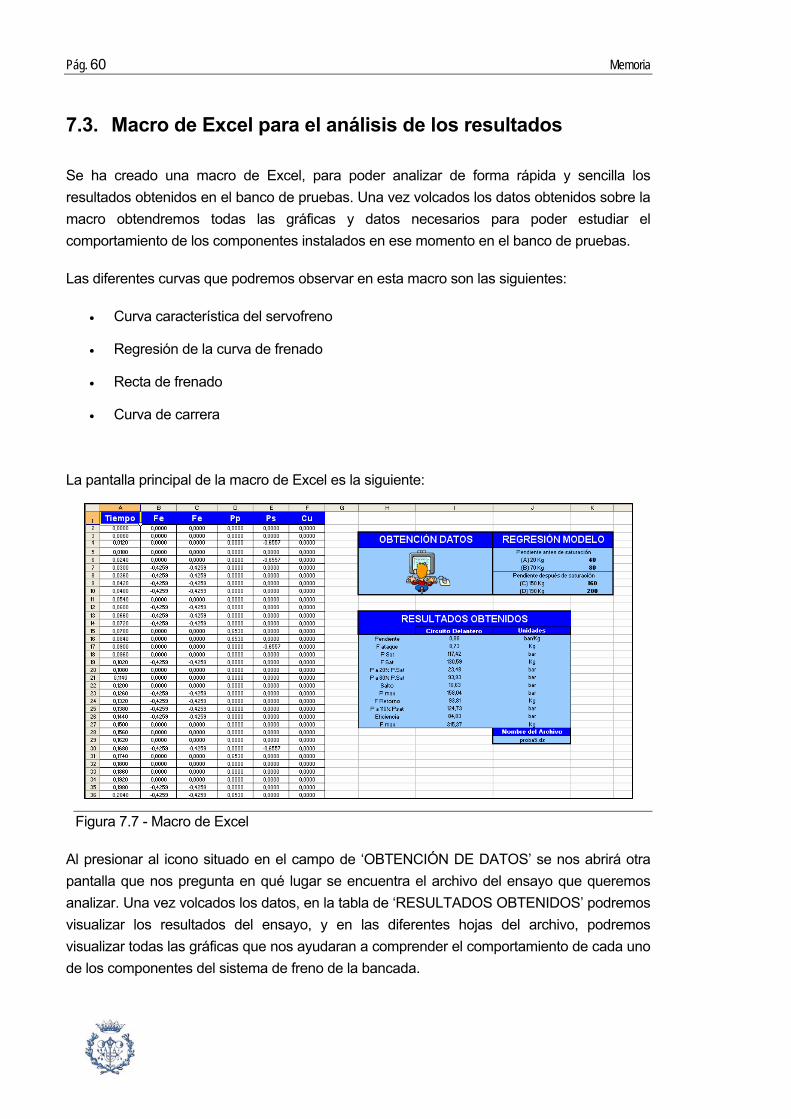
Pág. 60 Memoria
7.3. Macro de Excel para el análisis de los resultados
Se ha creado una macro de Excel, para poder analizar de forma rápida y sencilla los resultados obtenidos en el banco de pruebas. Una vez volcados los datos obtenidos sobre la macro obtendremos todas las gráficas y datos necesarios para poder estudiar el comportamiento de los componentes instalados en ese momento en el banco de pruebas.
Las diferentes curvas que podremos observar en esta macro son las siguientes:
• Curva característica del servofreno
• Regresión de la curva de frenado
• Recta de frenado
• Curva de carrera
La pantalla principal de la macro de Excel es la siguiente:
Figura 7.7 - Macro de Excel
Al presionar al icono situado en el campo de ‘OBTENCIÓN DE DATOS’ se nos abrirá otra pantalla que nos pregunta en qué lugar se encuentra el archivo del ensayo que queremos analizar. Una vez volcados los datos, en la tabla de ‘RESULTADOS OBTENIDOS’ podremos visualizar los resultados del ensayo, y en las diferentes hojas del archivo, podremos visualizar todas las gráficas que nos ayudaran a comprender el comportamiento de cada uno de los componentes del sistema de freno de la bancada.
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 61
8. Pruebas Experimentales
Una vez realizado un ensayo de frenado, y adquiridos los datos que provienen del banco de pruebas, podremos realizar el estudio del conjunto del servofreno y el compensador de frenada. A continuación se presentan los posibles estudios que podemos realizar que nos dará a conocer sus principales características.
8.1. Curva de frenado
La curva de frenado nos relaciona la presión de frenado existente en las ruedas traseras respecto a la presión de frenado de las ruedas delanteras. Idealmente es una curva que nos representa el punto teóricamente óptimo de reparto de frenada al que se debe intentar llegar a la hora de aprovechar al máximo la frenada. No obstante, es muy difícil por no decir imposible, llegar a situarse en la práctica sobre la curva de frenado y obtener una eficiencia del 100%. En la práctica, hablaremos de recta de frenado, que se intentará aproximar lo máximo posible a la curva de frenado:
Existen infinitas curvas de frenado para un mismo vehículo, dependiendo del estado de carga del vehículo, entre su estado de carga máxima, y su estado de orden de marcha, es decir, con sólo el conductor (considerando su peso 75 Kg), más los depósitos llenos. En el resto de condiciones de circulación la curva de equiadherencia del vehículo se encontrará entre estas dos curvas.
Los puntos característicos que podremos encontrar en la recta de frenado son los siguientes:
Presión de corte (Pc): Es la presión a partir de la cual el compensador de frenada comienza a actuar, restringiendo el aumento de presión al circuito de frenos trasero. Hasta ese momento existe la misma presión en los frenos delanteros que en los traseros.
Cuanto más cargado se encuentre el vehículo más alta será la presión de corte, ya que las ruedas traseras se encontraran más cargadas, y será más difícil de poder bloquearlas.
Índice de la válvula (K, α): Es la pendiente de la recta de frenado posterior a la presión de corte, característico de cada compensador de frenada.
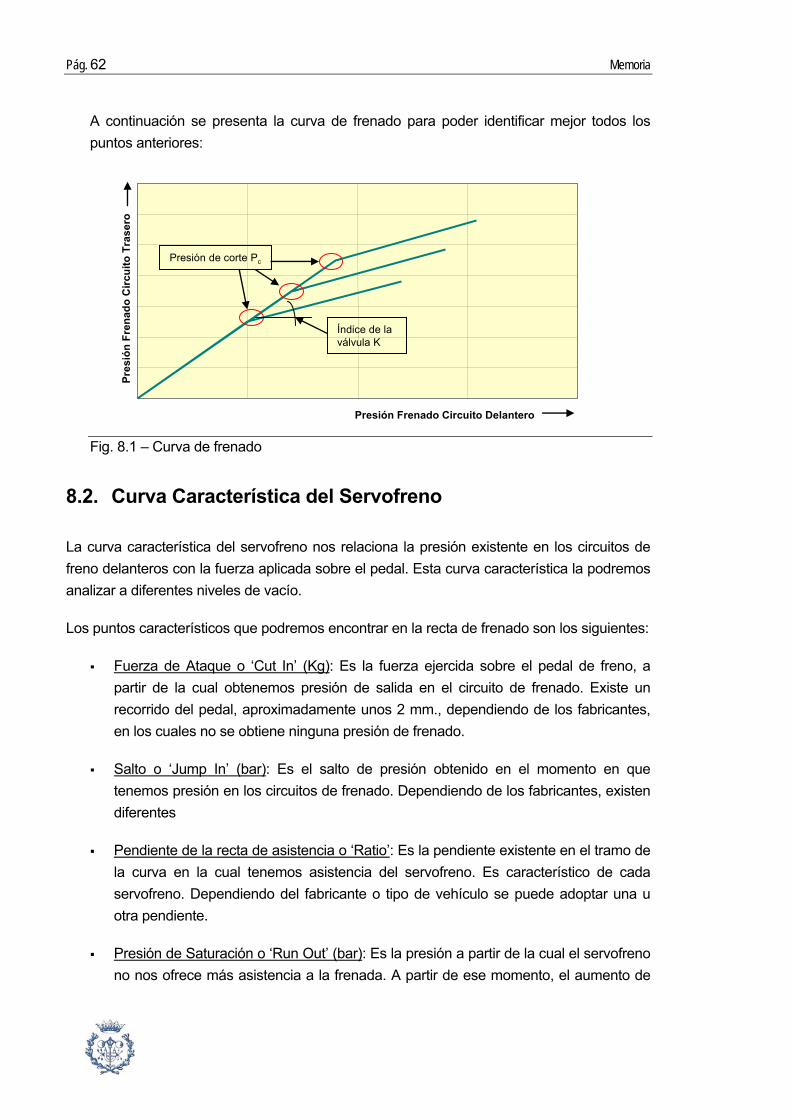
Pág. 62 Memoria
A continuación se presenta la curva de frenado para poder identificar mejor todos los puntos anteriores:
Fig. 8.1 – Curva de frenado
8.2. Curva Característica del Servofreno
La curva característica del servofreno nos relaciona la presión existente en los circuitos de freno delanteros con la fuerza aplicada sobre el pedal. Esta curva característica la podremos analizar a diferentes niveles de vacío.
Los puntos característicos que podremos encontrar en la recta de frenado son los siguientes:
Fuerza de Ataque o ‘Cut In’ (Kg): Es la fuerza ejercida sobre el pedal de freno, a partir de la cual obtenemos presión de salida en el circuito de frenado. Existe un recorrido del pedal, aproximadamente unos 2 mm., dependiendo de los fabricantes, en los cuales no se obtiene ninguna presión de frenado.
Salto o ‘Jump In’ (bar): Es el salto de presión obtenido en el momento en que tenemos presión en los circuitos de frenado. Dependiendo de los fabricantes, existen diferentes
Pendiente de la recta de asistencia o ‘Ratio’: Es la pendiente existente en el tramo de la curva en la cual tenemos asistencia del servofreno. Es característico de cada servofreno. Dependiendo del fabricante o tipo de vehículo se puede adoptar una u otra pendiente.
Presión de Saturación o ‘Run Out’ (bar): Es la presión a partir de la cual el servofreno no nos ofrece más asistencia a la frenada. A partir de ese momento, el aumento de
Presión Frenado Circuito Delantero
Pres
ión
Fren
ado
Circ
uito
Tra
sero
Presión de corte Pc
Índice de la válvula K
Presión Frenado Circuito Delantero
Pres
ión
Fren
ado
Circ
uito
Tra
sero
Presión de corte Pc
Índice de la válvula K

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 63
presión en los circuitos de frenado será debido solamente al esfuerzo del pie del conductor sobre el pedal.
Max Presión (bar): Es la presión obtenida con la máxima carrera del pedal, una vez hemos hecho tope en el cilindro maestro tándem.
Presión de Retorno o ‘Release Point’ (bar): Es la presión de frenado obtenida en el proceso de retorno del pedal a su posición inicial, en la cual tenemos asistencia del servofreno.
A continuación se presenta la curva característica de un servofreno para poder identificar mejor todos los puntos anteriores.
Fig. 8.2 – Curva característica del servofreno
8.3. Test de carrera
Esta curva nos relaciona la presión obtenida en los circuitos de frenado en función del recorrido del pedal de freno.
Los puntos característicos que podemos encontrar en esta curva son los siguientes:
Carrera a 10bar (mm): Es la carrera realizada por el pedal de freno al obtener una presión de salida de 10bar en el circuito de frenado delantero, ya que éste no se encuentra condicionado por el compensador de frenado.
Carrera a 75bar (mm): Es la carrera realizada por el pedal de freno al obtener una presión de salida de 75bar en el circuito de frenado delantero.
Fuerza sobre el pedal
Pres
ión
Del
ante
ra Max. P
Max. F
Run Out
Release Point
Ratio
Cut Out
Jump Out
Cut In
Jump In
Fuerza sobre el pedal
Pres
ión
Del
ante
ra Max. P
Max. F
Run Out
Release Point
Ratio
Cut Out
Jump Out
Cut In
Jump In
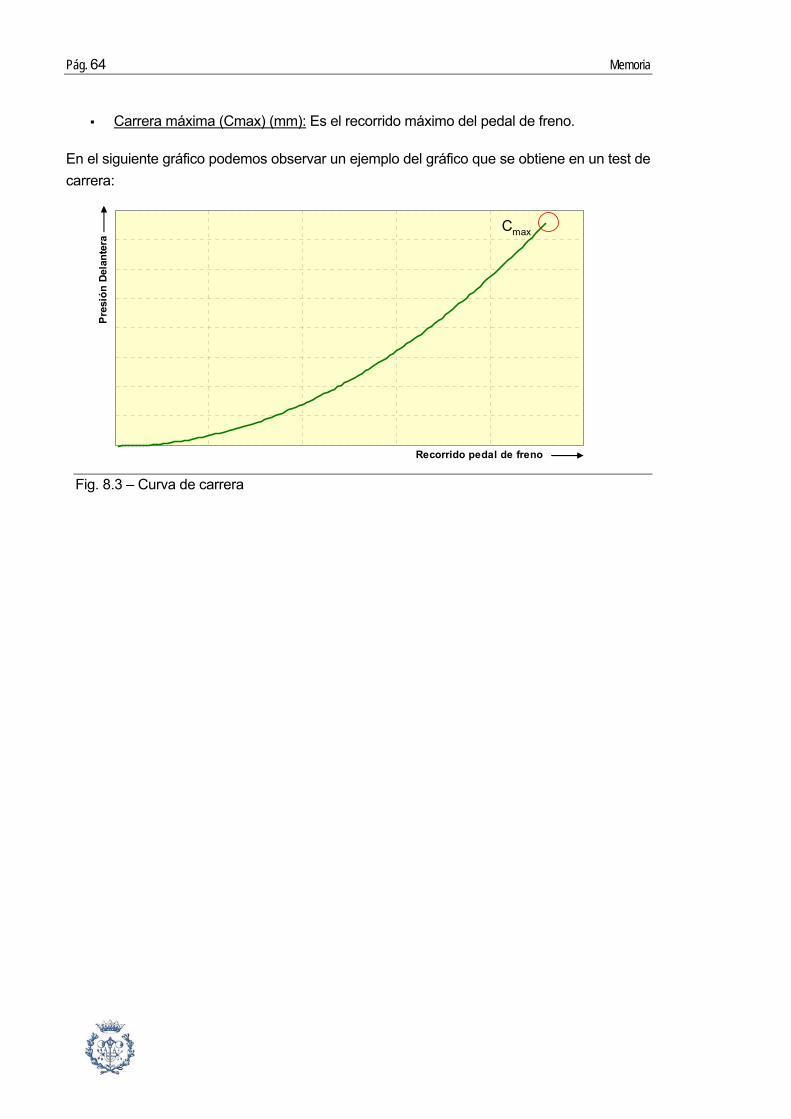
Pág. 64 Memoria
Carrera máxima (Cmax) (mm): Es el recorrido máximo del pedal de freno.
En el siguiente gráfico podemos observar un ejemplo del gráfico que se obtiene en un test de carrera:
Fig. 8.3 – Curva de carrera
Recorrido pedal de freno
Pres
ión
Dela
nter
a
Cmax
Recorrido pedal de freno
Pres
ión
Dela
nter
a
Cmax

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 65
9. Estudios Realizados
9.1. Planning de ensayos
Para la realización de todos los ensayos se disponen de los siguientes servofrenos con sus cilindros maestros respectivos:
Servofreno de 9” de diámetro y un CMT de 20.8mm. de diámetro.
Servofreno de 10” de diámetro y un CMT de 22.2mm. de diámetro.
Servofreno de 11” de diámetro y un CMT de 23.8mm. de diámetro.
A continuación se presenta una tabla detallando todos los ensayos que se realizarán en el banco de pruebas:
Influencia del diámetro del servofreno Curva característica a 800 mbar de vacío
Servofreno 9" + CMT 20,80 mm. X Servofreno 10" + CMT 22,20 mm. X Servofreno 11" + CMT 23,80 mm. X
Influencia del nivel de vacío en la cámara del servofreno Curva característica con vacío 0 mbar 150 mbar 400 mbar 550 mbar 800 mbarServofreno 9" + CMT 20,80 mm. X X X X X
Influencia sobre el compensador de la carga del vehículo Rectas de frenado a nivel de carga Carga máx Carga mín.Servofreno 9" + CMT 20,80 mm. X X X X X
Estudio del recorrido del pedal de freno Curvas de carrera 800mbar de vacío Servofreno 9" + CMT 20,80 mm. X
Tabla 9.1 – Planning de ensayos
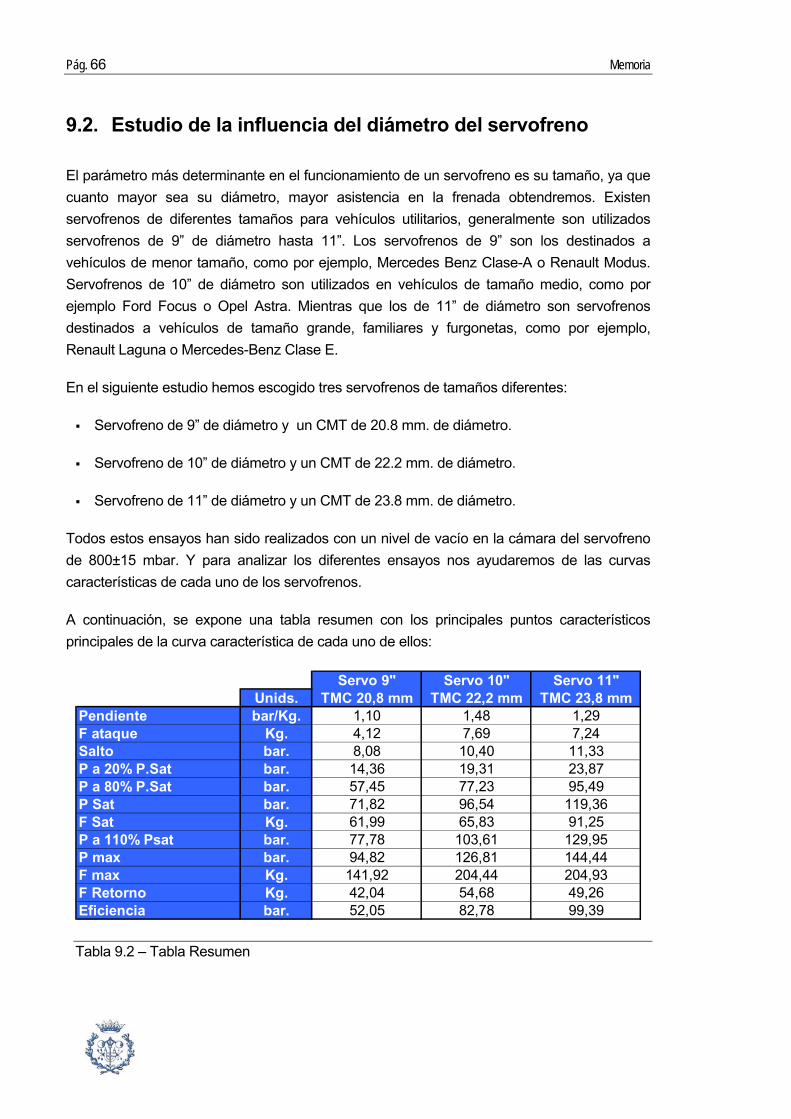
Pág. 66 Memoria
9.2. Estudio de la influencia del diámetro del servofreno
El parámetro más determinante en el funcionamiento de un servofreno es su tamaño, ya que cuanto mayor sea su diámetro, mayor asistencia en la frenada obtendremos. Existen servofrenos de diferentes tamaños para vehículos utilitarios, generalmente son utilizados servofrenos de 9” de diámetro hasta 11”. Los servofrenos de 9” son los destinados a vehículos de menor tamaño, como por ejemplo, Mercedes Benz Clase-A o Renault Modus. Servofrenos de 10” de diámetro son utilizados en vehículos de tamaño medio, como por ejemplo Ford Focus o Opel Astra. Mientras que los de 11” de diámetro son servofrenos destinados a vehículos de tamaño grande, familiares y furgonetas, como por ejemplo, Renault Laguna o Mercedes-Benz Clase E.
En el siguiente estudio hemos escogido tres servofrenos de tamaños diferentes:
Servofreno de 9” de diámetro y un CMT de 20.8 mm. de diámetro.
Servofreno de 10” de diámetro y un CMT de 22.2 mm. de diámetro.
Servofreno de 11” de diámetro y un CMT de 23.8 mm. de diámetro.
Todos estos ensayos han sido realizados con un nivel de vacío en la cámara del servofreno de 800±15 mbar. Y para analizar los diferentes ensayos nos ayudaremos de las curvas características de cada uno de los servofrenos.
A continuación, se expone una tabla resumen con los principales puntos característicos principales de la curva característica de cada uno de ellos:
Servo 9" Servo 10" Servo 11"Unids. TMC 20,8 mm TMC 22,2 mm TMC 23,8 mm
Pendiente bar/Kg. 1,10 1,48 1,29F ataque Kg. 4,12 7,69 7,24Salto bar. 8,08 10,40 11,33P a 20% P.Sat bar. 14,36 19,31 23,87P a 80% P.Sat bar. 57,45 77,23 95,49P Sat bar. 71,82 96,54 119,36F Sat Kg. 61,99 65,83 91,25P a 110% Psat bar. 77,78 103,61 129,95P max bar. 94,82 126,81 144,44F max Kg. 141,92 204,44 204,93F Retorno Kg. 42,04 54,68 49,26Eficiencia bar. 52,05 82,78 99,39
Tabla 9.2 – Tabla Resumen

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 67
En el siguiente gráfico podemos observar superpuestas las tres curvas características de los tres servofrenos estudiados para comprobar más fácilmente su diferencia de funcionamiento:
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:OCTUBRE 2005 Nivel de carga:
Curva característica del Servofreno
Ensayo sobre: Servofrenos de 9", 10" y 11" de diámetro
800 mbar---
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100 120 140 160 180 200 220Fuerza de entrada en el Servofreno (Kg.)
Pres
ión
circ
uito
del
ante
ro (b
ar)
Servofreno 9"Servofreno 10"Servofreno 11"
Fig. 9.3 – Comparación funcionamiento servofreno 9”, 10” y 11”
Podemos observar fácilmente como vamos obteniendo mayor ayuda por parte del servofreno cuanto mayor sea el tamaño de éste, como hemos visto en la ecuación 4.2. Cuanto mayor sea el tamaño del servofreno y mayor diferencia de presiones exista entre las dos cámaras del servofreno, mayor ayuda obtendremos. En el caso del servofreno de 9”, la presión de saturación se sitúa en 71.82 bar, mientras que para el servofreno de 10” se sitúa en 96.56 bar, y para el de 11” en 119.36 bar. Igualmente pasa con la presión máxima obtenida en el circuito de frenado.
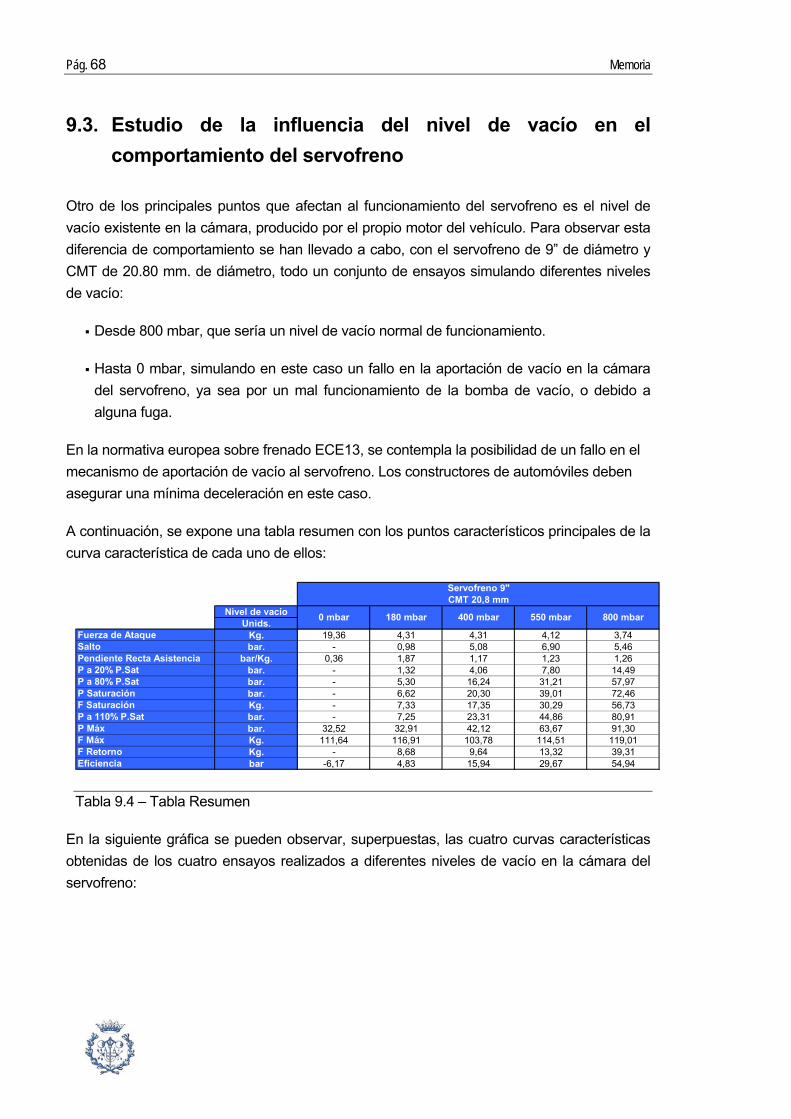
Pág. 68 Memoria
9.3. Estudio de la influencia del nivel de vacío en el comportamiento del servofreno
Otro de los principales puntos que afectan al funcionamiento del servofreno es el nivel de vacío existente en la cámara, producido por el propio motor del vehículo. Para observar esta diferencia de comportamiento se han llevado a cabo, con el servofreno de 9” de diámetro y CMT de 20.80 mm. de diámetro, todo un conjunto de ensayos simulando diferentes niveles de vacío:
Desde 800 mbar, que sería un nivel de vacío normal de funcionamiento.
Hasta 0 mbar, simulando en este caso un fallo en la aportación de vacío en la cámara del servofreno, ya sea por un mal funcionamiento de la bomba de vacío, o debido a alguna fuga.
En la normativa europea sobre frenado ECE13, se contempla la posibilidad de un fallo en el mecanismo de aportación de vacío al servofreno. Los constructores de automóviles deben asegurar una mínima deceleración en este caso.
A continuación, se expone una tabla resumen con los puntos característicos principales de la curva característica de cada uno de ellos:
Nivel de vacíoUnids.
Fuerza de Ataque Kg. 19,36 4,31 4,31 4,12 3,74Salto bar. - 0,98 5,08 6,90 5,46Pendiente Recta Asistencia bar/Kg. 0,36 1,87 1,17 1,23 1,26P a 20% P.Sat bar. - 1,32 4,06 7,80 14,49P a 80% P.Sat bar. - 5,30 16,24 31,21 57,97P Saturación bar. - 6,62 20,30 39,01 72,46F Saturación Kg. - 7,33 17,35 30,29 56,73P a 110% P.Sat bar. - 7,25 23,31 44,86 80,91P Máx bar. 32,52 32,91 42,12 63,67 91,30F Máx Kg. 111,64 116,91 103,78 114,51 119,01F Retorno Kg. - 8,68 9,64 13,32 39,31Eficiencia bar -6,17 4,83 15,94 29,67 54,94
Servofreno 9"CMT 20,8 mm
0 mbar 180 mbar 400 mbar 550 mbar 800 mbar
Tabla 9.4 – Tabla Resumen
En la siguiente gráfica se pueden observar, superpuestas, las cuatro curvas características obtenidas de los cuatro ensayos realizados a diferentes niveles de vacío en la cámara del servofreno:
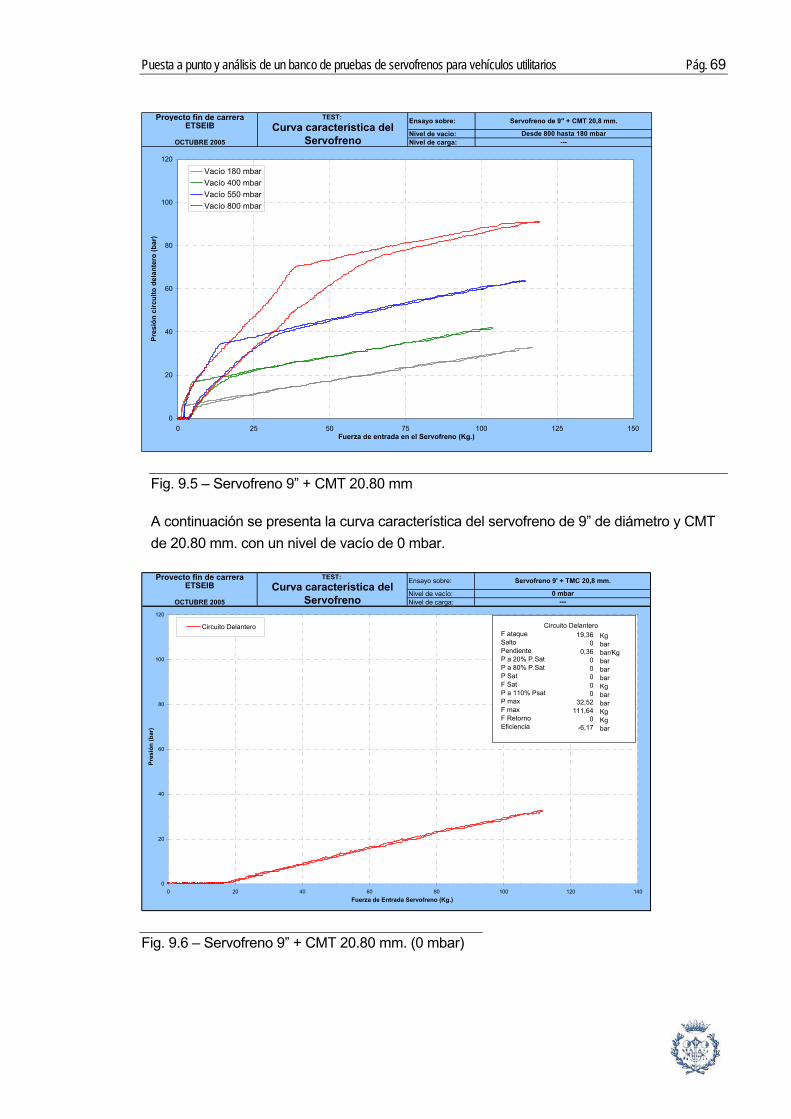
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 69
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:OCTUBRE 2005 Nivel de carga:
Curva característica del Servofreno
Ensayo sobre: Servofreno de 9" + CMT 20,8 mm.
Desde 800 hasta 180 mbar---
0
20
40
60
80
100
120
0 25 50 75 100 125 150Fuerza de entrada en el Servofreno (Kg.)
Pres
ión
circ
uito
del
ante
ro (b
ar)
Vacío 180 mbarVacío 400 mbarVacío 550 mbarVacío 800 mbar
Fig. 9.5 – Servofreno 9” + CMT 20.80 mm
A continuación se presenta la curva característica del servofreno de 9” de diámetro y CMT de 20.80 mm. con un nivel de vacío de 0 mbar.
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:OCTUBRE 2005 Nivel de carga:
Curva característica del Servofreno
Ensayo sobre: Servofreno 9' + TMC 20,8 mm.
0 mbar---
0
20
40
60
80
100
120
0 20 40 60 80 100 120 140Fuerza de Entrada Servofreno (Kg.)
Pres
ión
(bar
)
Circuito DelanteroF ataqueSaltoPendienteP a 20% P.SatP a 80% P.SatP SatF SatP a 110% PsatP maxF maxF RetornoEficiencia
19,360
0,3600000
32,52111,64
0-6,17
Kgbarbar/KgbarbarbarKgbarbarKgKgbar
Circuito Delantero
Fig. 9.6 – Servofreno 9” + CMT 20.80 mm. (0 mbar)

Pág. 70 Memoria
Podemos observar fácilmente como influye la diferencia de presiones entre las dos cámaras del servofreno. Cuanta mayor diferencia exista mayor ayuda en la frenada obtendremos. A 800 mbar de presión de vacío la presión de saturación del servofreno se sitúa en 72.46 bar, mientras que para 180 mbar de vacío esta presión de saturación baja hasta los 6.62 bar.
9.4. Estudio del comportamiento del compensador
Para estudiar el comportamiento del compensador presente en el banco de pruebas se han llevado a cabo una serie de ensayos de frenado simulando diferentes estados de carga del tren trasero del automóvil. Desde un estado de carga máxima sobre el tren trasero, hasta un estado de carga liviano, pasando por diferentes estados intermedios.
Todos estos ensayos han sido realizados a un nivel de vacío de 800±15 mbar, y con el servofreno de 9” de diámetro y CMT de 20.80 mm. de diámetro.
Con estos cinco ensayos realizados se puede observar la influencia de la carga en el tren trasero del automóvil, en el comportamiento del compensador de frenada. A mayor carga sobre el tren trasero, mayor será la presión de corte del compensador permitiendo así mayor paso de presión al circuito posterior de frenado.
En las siguientes gráficas se pueden observar las rectas de frenado de los cinco ensayos realizados (tan sólo se muestra el proceso de frenado):
Fig. 9.7 – Servofreno 9” + CMT 20.80mm
A continuación, se presenta una tabla resumen de los cinco ensayos realizados con los puntos característicos principales de la recta de frenado:
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:OCTUBRE 2005 Nivel de carga:
Ensayo sobre: Servofreno 9' + TMC 20,8 mm.
Recta de frenado 800 mbarTodos los niveles de carga
0
20
40
60
80
100
120
0 20 40 60 80 100 120 140 160 180
Presión Circuito Delantero (bar)
Pres
ión
Circ
uito
Tra
sero
(bar
)
Nivel de carga mínima
Nivel de carga máxima
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:OCTUBRE 2005 Nivel de carga:
Ensayo sobre: Servofreno 9' + TMC 20,8 mm.
Recta de frenado 800 mbarTodos los niveles de carga
0
20
40
60
80
100
120
0 20 40 60 80 100 120 140 160 180
Presión Circuito Delantero (bar)
Pres
ión
Circ
uito
Tra
sero
(bar
)
Nivel de carga mínima
Nivel de carga máxima

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 71
Unidades + -Presión de Corte (Pc) bar 81,95 55,08 35,92 13,44 0,00
Índice de la Válvula (K) --- 3,15 3,21 3,24 3,17 3,05
Servofreno 9" + TMC 20,8Carga Máxima Carga MínimaCarga Media
Tabla 9.8 – Tabla Resumen
El comportamiento teórico de la recta de frenado deberían ser dos rectas encadenadas separadas en la presión de corte (Pc), la primera sin actuación del compensador, y la segunda bajo la acción del compensador.
Pero en alguna de las obtenidas se puede observar, que además de estas dos rectas, existe una zona plana, justo después de la presión de corte, debido a los rozamientos internos existentes en el compensador. En este tramo la presión de frenado del circuito trasero no aumenta hasta que son superados estos rozamientos, y a partir de entonces el compensador de frenada ya actúa correctamente.
Fig. 9.9 – Incorrecto funcionamiento del compensador
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:JUNIO 2005 Nivel de carga:
Curva característica del Servofreno
Ensayo sobre: Servofreno 9' + TMC 20 mm.
660 mbar
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120 140 160 180 200P Delantera (bar)
P Tr
aser
a (b
ar)
Circuito Delantero
Pendiente 1er TramoPresión de CorteIndice Comp
1,0180,652,82
bar
Circuito Delantero
Zona de actuación del compensador
Zona sin actuación del compensador
Mal funcionamiento del compensador
Comportamiento correcto del compensador
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:JUNIO 2005 Nivel de carga:
Curva característica del Servofreno
Ensayo sobre: Servofreno 9' + TMC 20 mm.
660 mbar
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120 140 160 180 200P Delantera (bar)
P Tr
aser
a (b
ar)
Circuito Delantero
Pendiente 1er TramoPresión de CorteIndice Comp
1,0180,652,82
bar
Circuito Delantero
Zona de actuación del compensador
Zona sin actuación del compensador
Mal funcionamiento del compensador
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:JUNIO 2005 Nivel de carga:
Curva característica del Servofreno
Ensayo sobre: Servofreno 9' + TMC 20 mm.
660 mbar
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120 140 160 180 200P Delantera (bar)
P Tr
aser
a (b
ar)
Circuito Delantero
Pendiente 1er TramoPresión de CorteIndice Comp
1,0180,652,82
bar
Circuito Delantero
Zona de actuación del compensador
Zona sin actuación del compensador
Mal funcionamiento del compensador
Comportamiento correcto del compensador
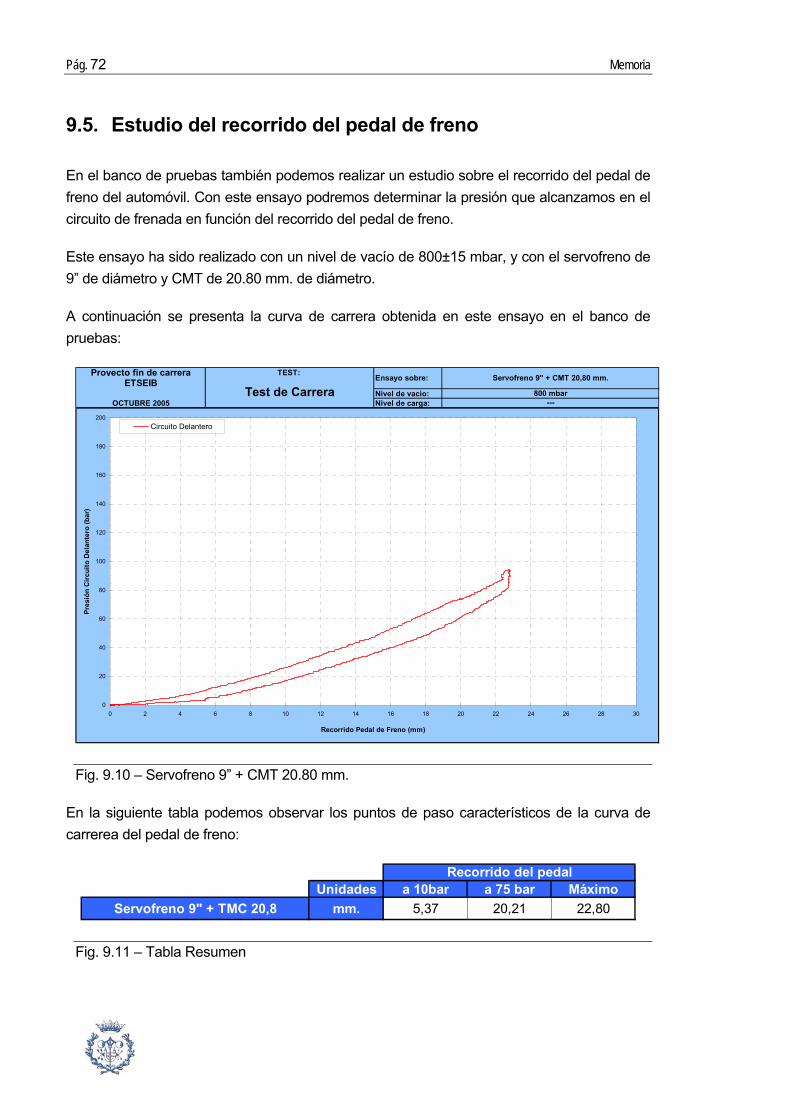
Pág. 72 Memoria
9.5. Estudio del recorrido del pedal de freno
En el banco de pruebas también podemos realizar un estudio sobre el recorrido del pedal de freno del automóvil. Con este ensayo podremos determinar la presión que alcanzamos en el circuito de frenada en función del recorrido del pedal de freno.
Este ensayo ha sido realizado con un nivel de vacío de 800±15 mbar, y con el servofreno de 9” de diámetro y CMT de 20.80 mm. de diámetro.
A continuación se presenta la curva de carrera obtenida en este ensayo en el banco de pruebas:
Proyecto fin de carrera TEST: ETSEIB
Nivel de vacío:OCTUBRE 2005 Nivel de carga:
Ensayo sobre: Servofreno 9" + CMT 20,80 mm.
Test de Carrera 800 mbar---
0
20
40
60
80
100
120
140
160
180
200
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
Recorrido Pedal de Freno (mm)
Pres
ión
Circ
uito
Del
ante
ro (b
ar)
Circuito Delantero
Fig. 9.10 – Servofreno 9” + CMT 20.80 mm.
En la siguiente tabla podemos observar los puntos de paso característicos de la curva de carrerea del pedal de freno:
Unidades a 10bar a 75 bar MáximoServofreno 9" + TMC 20,8 mm. 5,37 20,21 22,80
Recorrido del pedal
Fig. 9.11 – Tabla Resumen
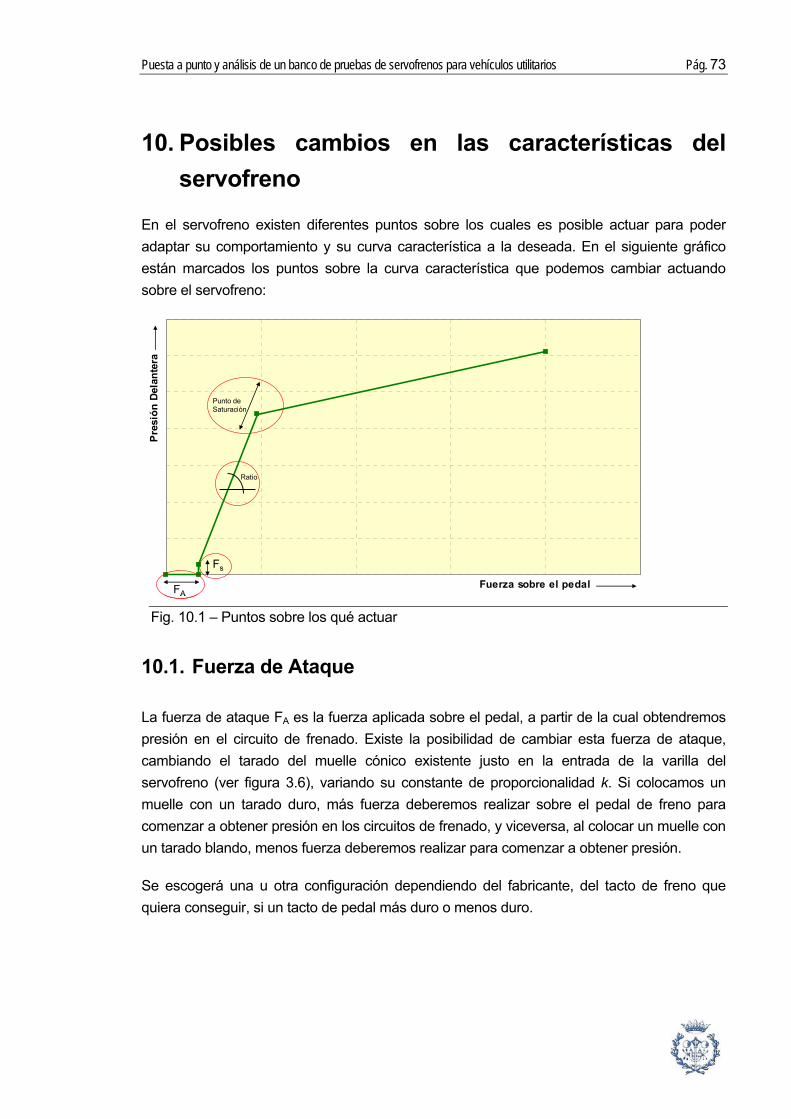
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 73
10. Posibles cambios en las características del servofreno
En el servofreno existen diferentes puntos sobre los cuales es posible actuar para poder adaptar su comportamiento y su curva característica a la deseada. En el siguiente gráfico están marcados los puntos sobre la curva característica que podemos cambiar actuando sobre el servofreno:
Fig. 10.1 – Puntos sobre los qué actuar
10.1. Fuerza de Ataque
La fuerza de ataque FA es la fuerza aplicada sobre el pedal, a partir de la cual obtendremos presión en el circuito de frenado. Existe la posibilidad de cambiar esta fuerza de ataque, cambiando el tarado del muelle cónico existente justo en la entrada de la varilla del servofreno (ver figura 3.6), variando su constante de proporcionalidad k. Si colocamos un muelle con un tarado duro, más fuerza deberemos realizar sobre el pedal de freno para comenzar a obtener presión en los circuitos de frenado, y viceversa, al colocar un muelle con un tarado blando, menos fuerza deberemos realizar para comenzar a obtener presión.
Se escogerá una u otra configuración dependiendo del fabricante, del tacto de freno que quiera conseguir, si un tacto de pedal más duro o menos duro.
Fuerza sobre el pedal
Pres
ión
Dela
nter
a
Ratio
Fs
FA
Punto de Saturación
Fuerza sobre el pedal
Pres
ión
Dela
nter
a
Ratio
Fs
FA
Punto de Saturación

Pág. 74 Memoria
10.2. Fuerza Fs o ‘Salto’
La fuerza Fs, o salto, es el primer pico de presión en el circuito obtenido durante el proceso de frenado, al abrirse la válvula que deja entrar aire a presión atmosférica en el interior del servofreno.
También podemos actuar sobre este parámetro, para encontrar el funcionamiento que deseemos. En este caso, deberemos actuar principalmente sobre dos puntos:
- La distancia A inicial, en reposo, existente entre el disco de reacción y el pistoncino.
- La dureza de la goma del disco de reacción.
Fig. 10.2 – Cambio en el salto
Actuando sobre estos parámetros obtendremos un mayor o menor pico de presión en el inicio de la frenada. Existen fabricantes que prefieren una frenada potente desde el primer momento, sobretodo en vehículos deportivos, y otros fabricantes que prefieren una frenada más confortable. Y actuando sobre estos dos parámetros podremos colocarnos en el rango deseado.
10.3. Ratio de asistencia
La pendiente de asistencia del servofreno se rige por la siguiente ecuación:
(Ec 10.1)
Disco de reacción
Pistoncino
Distancia A
SD SP
Disco de reacción
Pistoncino
Distancia A
SD SP
RatioF entrada
F salida=

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 75
En este caso el parámetro sobre el cual deberemos actuar para cambiar la pendiente del ratio de asistencia será el diámetro del pistoncino.
10.4. Punto de saturación
El único punto sobre el cual podemos actuar para aumentar o disminuir el nivel de asistencia ofrecida por el servofreno es el tamaño del propio servofreno.
F = Δ P · S (Ec. 10.2)
Cuanto mayor sea el diámetro exterior del servofreno, mayor será el nivel de asistencia del propio servofreno. El tamaño del diámetro exterior del servofreno puede variar aproximadamente, desde 7” hasta 11”, siendo los servofrenos de menor tamaño para vehículos pequeños, como por ejemplo el Opel Corsa, y los de mayor tamaño para vehículos más pesados y de mayores prestaciones, como por ejemplo, Mercedes Benz Clase C.
10.5. Actuaciones sobre el compensador de frenada
Podemos actuar sobre diversos parámetros en el cilindro maestro tándem para adaptar su funcionamiento al deseado:
a). Con el fin de poder cambiar la presión de corte, adaptándola a la deseada dependiendo del tipo de vehículo, deberemos actuar sobre la S1. Cuánto mayor sea la S1 menor será la presión de corte Pc obtenida, y viceversa, según la ecuación 4.3.
b). También podremos actuar sobre las superficies S1, S2 y Sclapet, para variar la pendiente de la recta, que es el relación entre la presión de frenado en el circuito trasero y el delantero, ya explicado en el punto 4.7.1.
Fig. 10.3 – Posibles cambios sobre el compensador de frenada
Ps
Pe
Ps
Pe
Pc
Ps
Pe
Ps
Pe
Pc
a).b).
P circuito delantero
P ci
rcui
to tr
aser
oPs
Pe
Ps
Pe
Pc
Ps
Pe
Ps
Pe
Pc
a).b).
Ps
Pe
Ps
Pe
Pc
Ps
Pe
Ps
Pe
Pc
Ps
Pe
Ps
Pe
Pc
Ps
Pe
Ps
Pe
Pc
a).b).
P circuito delantero
P ci
rcui
to tr
aser
o
Pe = Presión de Entrada
Ps = Presión de Salida
S2 S1Sclapet
Pe = Presión de Entrada
Ps = Presión de Salida
S2 S1Sclapet
F
Carga del Tren Trasero
Pe = Presión de Entrada
Ps = Presión de Salida
S2 S1Sclapet
Pe = Presión de Entrada
Ps = Presión de Salida
S2 S1Sclapet
F
Carga del Tren Trasero

Pág. 76 Memoria

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 77
11. Valoración económica
El presente proyecto se puede considerar con un trabajo realizado por un ingeniero contratado por una fábrica, que a partir de los medios que le son proporcionados debe satisfacer una serie de exigencias y dar respuesta a un conjunto de necesidades.
Por tanto, el aspecto económico relativo al presente proyecto no debe enfocarse como el presupuesto del banco de pruebas. La valoración económica comprende la realización del presupuesto de diseño del banco de pruebas, programación, ejecución de ensayos, elaboración de documentación, puesta a punto y finalmente las horas dedicadas por la persona encargada de realizar el proyecto.
A continuación se presenta la valoración económica desglosada en cada uno de sus aspectos: Coste del material electrónico
Concepto Coste total (€)
Tarjeta de adquisición de datos 285 2 Sensores de presión 425 Célula de carga 350 Potenciómetro 8 Resto material (cableado, regletas…) 60
Total coste de material electrónico (€) 1128 Coste del material del sistema de frenado
Concepto Coste total (€)
Bancada 60 Pedal de freno 110 Servofreno + CMT + Depósito 455 Compensador de frenada 125 Pinzas de freno 460 Líquido de frenos 12 Bomba de vacío 110 Resto material (racores, tuberías…) 55
Total coste de material del sistema de frenado (€) 1387

Pág. 78 Memoria
Coste de material informático
Concepto Tiempo de empleo (semanas)
Coste amortización (€/semana)
Coste total amortización (€)
Software Microsoft Visual Studio .NET 10 110 1100 Software Microsoft Office 30 30 900 Material informático 30 25 750
Total coste de material informático (€) 2750 Coste de elaboración de la documentación
Concepto Coste Horario (€/h)
Número de horas (h)
Coste total amortización (€)
Redacción, gráficos y dibujos de documentación
10 320 3200
Total coste elaboración de documentación (€) 3200 Coste del realización de ensayos y puesta a punto del banco de pruebas
Concepto Coste horario (€/h) Número de horas Coste total (€)
Pruebas en el banco 25 30 750 Análisis de pruebas 25 25 625 Total coste de realización de ensayos y puesta a punto del banco de pruebas (€) 1375
Tablas 11.1 – Desglose de los costes
Y finalmente se presenta el presupuesto total del proyecto, que resultará de la suma de cada uno de los costes desglosados anteriormente:
Concepto Coste total (€)
Coste de material electrónico 1128
Coste de material del sistema de frenado 1387
Coste de material informático 2750
Coste elaboración de documentación 3200
Coste de realización de ensayos y puesta a punto del banco de pruebas 1375
PRESUPUESTO TOTAL (€) 9840
Fig. 11.2 – Presupuesto total
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 79
12. Aportación del alumno
Antes de la realización del proyecto:
• Existencia de una bancada con todo el sistema de frenado existente en cualquier vehículo utilitario.
Aportación por parte del alumno:
• Puesta a punto de todos los elementos existentes en la bancada, y comprobar su correcto funcionamiento.
• Adquisición de todos los elementos necesarios para crear el banco de pruebas y el sistema de adquisición de datos, tanto sensores, como tarjeta de adquisición de datos
• Creación de un programa en Microsoft Visual Basic .NET, encargado de adquirir los datos de la tarjeta de adquisición, y de guardar los ensayos realizados en el disco duro del ordenador. Este programa también actuará como interfaz con el usuario durante el proceso del ensayo.
• Creación de una macro en Excel, capaz de analizar rápidamente los resultados obtenidos en el ensayo.
• Realización de un análisis del servofreno existente en la bancada
Pág. 80 Memoria
Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 81
Conclusiones
En este proyecto se ha desarrollado de forma satisfactoria la puesta a punto de un banco de pruebas de servofrenos para vehículos utilitarios. Se ha tenido que adquirir e incorporar al banco de pruebas diversos elementos como sensores de presión, células de carga y una tarjeta de adquisición de datos para capturar los datos de los diferentes ensayos, y también se han implementado de forma satisfactoria diversos programas para poder obtener de forma sencilla aquellos parámetros que nos harán comprender rápidamente el comportamiento del servofreno.
Este banco de pruebas posee todos los elementos necesarios para analizar el comportamiento tanto del servofreno como del compensador de frenada. Pero sobretodo por limitaciones económicas, tanto los equipos de medida (sensores de presión, célula de carga y potenciómetro), como la tarjeta de adquisición de datos no poseen la características de calidad y de precisión que nos podría proporcionar sensores y tarjetas que pueden llegar a ser mucho hasta diez veces más caras. Pero poseen una buena precisión y calidad de suficiente para poder realizar ensayos y diferenciar fácilmente el comportamiento de cada servofreno estudiado. Una ventaja de este banco de ensayos es que es mucho más fácil transportarlo que otros más avanzados.
Existe la posibilidad de realizar diferentes mejoras sobre el banco de pruebas para mejorar su funcionamiento, e incluso para poder realizar nuevos ensayos.
De todas las mejoras que se podrían introducir en el banco de ensayos, la más importante sería el sistema de accionamiento de la fuerza de entrada al servofreno. Se podría sustituir el pedal de freno por un actuador neumático o un motor eléctrico que transmitiese la fuerza directamente sobre la varilla de entrada del servofreno. De tal manera, podríamos regular, a un valor constante, la fuerza de entrada del servofreno, en el caso de tener un accionador neumático, o podríamos controlar la velocidad de accionamiento de la fuerza a un valor también constante, en el caso de tener un motor eléctrico, dependiendo del ensayo que se quiera realizar.
Con estas mejoras, existiría la posibilidad de realizar nuevos ensayos, como por ejemplo, realizar un ensayo de ‘Tiempo de Respuesta’, que consiste en comprobar el tiempo en que tarda el sistema de frenado desde un nivel nulo de presión, en posición de reposo, hasta que se alcanza una presión de frenado determinada. Actualmente, no se puede realizar este ensayo ya que para comparar resultados, debemos aplicar a los diferentes servofrenos la misma velocidad de la fuerza de entrada.

Pág. 82 Memoria
Otros ensayos que se suelen realizar son los denominados ‘Ensayos de Ruido’, donde se mide el nivel sonoro de la aspiración de aire desde el compartimiento del vehículo, donde se encuentra el conductor del vehículo y acompañantes, hacia el interior del servofreno, a través del filtro de aire existente en la varilla de entrada del servofreno. Para realizar estos ensayos se debería de disponer de micrófonos, para mesurar el nivel sonoro, y una cámara anecóica, para insonorizar el ruido del servofreno del exterior. También se suelen realizar ensayos a diferentes temperaturas, para comprobar cómo afecta la temperatura al comportamiento del servofreno, ya que éste se encuentra cerca del motor del vehículo, y debe funcionar perfectamente a temperaturas extremas. Se suelen realizar ensayos desde temperaturas de -40ºC hasta los 120ºC. Pero ésta sería una mejora muy cara ya que se debería adquirir una cámara climática.
En cuanto a los ensayos realizados durante este proyecto tan sólo comentar que se han obtenido los resultados que se esperaban, ya que estos ensayos se han realizado sobre tres servofrenos de tres tamaños diferentes, y como que el tamaño es el factor más importante en el funcionamiento del servofreno, se ha podido diferenciar fácilmente que la ayuda a la frenada que ofrece un servofreno de 11” de diámetro es mucho mayor que la ayuda que ofrece un servofreno de 9”.
También se ha podido comprobar de forma satisfactoria el comportamiento del compensador de frenada, y su diferencia de comportamiento simulando diferentes estados de carga sobre el tren trasero del vehículo.
Finalmente, destacar que este banco de pruebas se quedará en la Escola Tècnica d’Enginyers Industrials de Barcelona, y que podrá ser utilizado en prácticas en la asignatura de Vehículos II.

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 83
Agradecimientos
Me gustaría, en primer lugar, dar gracias a Eugéni Valencia, persona que aceptó ser tutor de mi Proyecto Final de Carrera, así como a Francisco Liesa y agradecerles su comprensión y su dedicación de tiempo y energía.
Quisiera también destacar a Joan Cuadrado, persona que ha sido mi tutor durante un año de mis prácticas en la empresa Bosch Sistemas de Frenado S.L. que me ha ayudado a comprender el funcionamiento y características del servofreno, así como a Josep Oliveras y Tino Pérez, personas que me proporcionaron una gran ayuda en la parte eléctrica y electrónica del banco, como la aportación de diferentes componentes básicos instalados en el banco de pruebas.
También agradecer a Josep Busquets por la cesión del banco de pruebas al Departamento de Mecánica, así como la cesión de más material por parte del Departamento de Fluidos.
Gracias a todos.

Puesta a punto y análisis de un banco de pruebas de servofrenos para vehículos utilitarios Pág. 85
Bibliografía
Referencias bibliográficas
[1] ROBERT BOSCH GMBH. Servofreno Mastervac y Cilindro Maestro Tándem. Barcelona, 2001.
[2] MANUAL CEAC DEL AUTOMÓVIL. Madrid 2004.
[3] LE FREINAGE DES VÉHICULES AUTOMOBILES SUR ROUTE. Henri Perrot. París 1992.
[4] AUTOMOBILE CHASSIS. Design and calculations. P.Lukin, G.Gasparyants, V.Radionov. Moscú 1988.
Bibliografía complementaria
Normativa europea sobre sistemas de frenado:
Regulation No. 13H. ECE13. Mayo 1998
Programa Visual Basic .NET
VISUAL BASIC .NET. Lenguaje y aplicaciones. Barcelona 2004.
Programa Softwire
SOFTWIRE USER’S MANUAL. Measurement Computing. October 2004