t e s i s - posgrado.mat.uson.mx · el algoritmo de ne za arroja una menor cantidad, como se...
TRANSCRIPT

UNIVERSIDAD DE SONORA
DIVISION DE CIENCIAS EXACTAS Y NATURALES
Programa de Posgrado en Matematicas
Aspectos algorıtmicos y computacionales en Teorıa deMorse Discreta
T E S I S
Que para obtener el grado academico de:
Maestro en Ciencias (Matematicas)
Presenta:
Daniel Mora de la Cruz
Directores de tesis:Dr. Jesus Francisco Espinoza F.
Dr. Rafael Roberto Ramos F.
Hermosillo, Sonora, Mexico Noviembre de 2017


Sinodales
Dr. Martın Eduardo Frıas ArmentaDepartamento de Matematicas,Universidad de Sonora
Dr. Gabriela Hinojosa PalafoxDepartamento de Matematicas,Universidad Autonoma del Estado de Morelos
Dr. Jesus Francisco Espinoza FierroDepartamento de Matematicas,Universidad de Sonora
Dr. Rafael Roberto Ramos FigueroaDepartamento de Matematicas,Universidad de Sonora
i


“No one ever stops being a studentin the classroom of life”
-Chris Colfer


Agradecimientos
Agradezco infinitamente a mis padres y hermano que siempre me han apoyado entodos los aspectos a pesar de la distancia. A Betti que ademas de ser mi companera detrabajo ha sido mi amiga y siempre me ha hecho sentir parte de su familia. A Angeles eIsaac por siempre estar ahı cuando necesito a alguien. A todos mis amigos que he conocidoen Hermosillo que han hecho que mi experiencia en esta ciudad sea mas amena. A Melinaque a pesar de estar del otro lado del mundo siempre estuvo ahı para darme su apoyo.
A mis profesores, el Dr. Jesus Espinoza y el Dr. Rafael Ramos por sus ensenanzasy el tiempo dedicado a esta investigacion. Gracias a mis demas sinodales: Dr. GabrielaHinojoza y Dr. Eduardo Frıas por tomarse el tiempo de revisar esta tesis, gracias por sussugerencias y observaciones. Muchas gracias a todos los profesores que tuve a lo largo dela maestrıa por sus clases y el fortalecimiento de mis conocimientos.
Por ultimo, agradezco al Consejo Nacional de Ciencia y Tecnologıa por el apoyo re-cibido, sin el cual no habrıa sido posible la realizacion y culminacion de la Maestrıa enCiencias (Matematicas) en la Universidad de Sonora, ası como esta tesis.
Daniel Mora de la Cruz
v


Indice general
Introduccion IX
1. Homologıa simplicial y teorıa de Morse discreta 11.1. Complejos simpliciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Homologıa simplicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3. Teorıa de Morse discreta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.4. Campo vectorial gradiente y flujo asociado . . . . . . . . . . . . . . . . . . . . 19
2. Emparejamientos generalizados 312.1. Campo vectorial gradiente algebraico . . . . . . . . . . . . . . . . . . . . . . . . 312.2. Emparejamientos generalizados de Morse . . . . . . . . . . . . . . . . . . . . . 352.3. Acciones de grupos en complejos simpliciales . . . . . . . . . . . . . . . . . . . 392.4. G-complejos CW modelados por productos torcidos. . . . . . . . . . . . . . . . 442.5. Consecuencias para G-complejos simpliciales. . . . . . . . . . . . . . . . . . . . 502.6. Aplicaciones en teorıa de graficas . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3. Resultados 713.1. Algoritmo para generar un emparejamiento de Morse generalizado . . . . . . 713.2. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753.3. Complejo de Morse para un emparejamiento de Morse generalizado . . . . . 793.4. EMG vs. ExtractRaw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A. Codigos 87A.1. EMG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87A.2. ExtractRaw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93A.3. EMG vs. ExtractRaw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Bibliografıa 101
vii

viii

Introduccion
Una de las areas de investigacion que ha tomado fuerza durante la ultima decadaes el analisis topologico de datos (ATD), la cual se dedica al analisis de conjuntos dedatos utilizando tecnicas de topologıa algebraica, inicialmente motivado por el estudiode la “forma” de los datos. El ATD combina herramientas de la topologıa algebraica yotras areas de las matematicas para permitir un estudio matematicamente riguroso dela estructura topologica de un conjunto de datos. Una manera de analizar la forma deun conjunto de datos es construir un complejo simplicial abstracto filtrado con ellos yluego calcular los grupos de homologıa persistente de este. La informacion codificada enla homologıa persistente es representada graficamente en un codigo de barras o diagramade persistencia, e ilustra aquellas caracterısticas topologicas mas significativas a traves dela filtracion.
Una de las herramientas mas utilizadas en el ATD es la teorıa de Morse discreta,desarrollada por Robin Forman en 1998 [6], esta es una adaptacion discreta de la teorıade Morse [12] y pretende encontrar un metodo mas economico para calcular la homologıasimplicial de un complejo simplicial abstracto. Dicho metodo consiste en calcular unafuncion real f ∶ K → R definida sobre un complejo simplicial abstracto K asociadoa un conjunto de datos, llamada funcion de Morse discreta. Dicha funcion induce unemparejamiento, esto es, una particion de K en clases de equivalencia que consisten enparejas de simplejos y elementos crıticos. Los elementos crıticos son fundamentales parael calculo de los grupos de homologıa simplicial de K pues con ellos podemos construir uncomplejo de cadenas, llamado complejo de Morse-Forman cuyos grupos de homologıa sonisomorfos a los de K. Este complejo de cadenas presenta ventajas para calcular los gruposde homologıa, pues los elementos que generan al complejo de Morse-Forman son menos ypor tanto se reducen considerablemente los calculos de los grupos de homologıa.
En 2005, H. King, K. Knudson y N. Mramor presentaron un algoritmo para calcular unemparejamiento en un complejo simplicial abstracto [10]. Este recibe el complejo K y unafuncion inyectiva h definida en el conjunto de vertices de K, el algoritmo arroja tres listas,dos permiten formar las parejas y la tercera con los elementos crıticos. Este resultadopresenta una manera eficiente (y optima en dimension 2) para calcular el complejo deMorse-Forman. Posteriormente, en 2008 Ragnar Freij [8] presenta una variante de lateorıa de Morse discreta generalizando el concepto de emparejamiento, permitiendo quelos emparejamientos generalizados sean clases de equivalencia que tengan mas elementos.Ademas, esto ultimo presenta una ventaja cuando involucramos acciones de grupos en uncomplejo simplicial K, pues el complejo de Morse clasico asociado en general no respetalas simetrıas que posee K por la accion de un grupo G, en consecuencia es necesariocrear una variante de la teorıa de Morse discreta que respete acciones de grupos, es
ix

decir construir un complejo de Morse M que es homotopicamente equivalente a K demanera G−equivariante. La generalizacion de Freij proporciona la suficiente flexibilidadpara construir dicha G-homotopıa siempre que se cumplan ciertas hipotesis razonablesimpuestas sobre la accion de G en K con respecto al emparejamiento generalizado eligido.
El objetivo de este trabajo es presentar un algoritmo inspirado en el de Neza Mramorque calcule un emparejamiento generalizado como los que define R. Freij. Para ello hemosorganizado este texto en tres capıtulos.
El primer capıtulo esta dividido en dos secciones: en la primera se presentan losconceptos estandar sobre los complejos simpliciales abstractos y el calculo de sus gruposde homologıa, y en la segunda la teorıa de Morse presentada por R. Forman.
A continuacion, en el segundo capıtulo, se presenta la teorıa de emparejamientosgeneralizados dada por Freij. Tambien vemos la ventaja de trabajar con G-complejossimpliciales e incluimos una aplicacion de la teorıa de Morse discreta equivariante a lateorıa de graficas.
En el ultimo capıtulo presentaremos nuestro algoritmo con sus respectivos pseudocodi-gos enfatizando en las ventajas que ofrece sobre el algoritmo de Neza. Para esto realizamosexperimentos en el que comparamos la cantidad de elementos crıticos y la duracion deambos algoritmos. Observamos que conforme incrementamos la cantidad de simplejosmaximales en la estructura simplicial, la cantidad de simplejos crıticos es similar, aunqueel algoritmo de Neza arroja una menor cantidad, como se muestra en la siguiente grafica.
Figura 1: Cantidad promedio de crıticos que arrojan ambos algoritmos segun la cantidadde simplejos maximales de dimension 10.
x

INDICE GENERAL
Sin embargo, cuando comparamos los tiempos de duracion de ambos algoritmos obser-vamos que nuestro algoritmo mantiene una duracion menor a un minuto sin importar ladimension y la cantidad de simplejos maximales, y el algoritmo de Neza tiene una tasade crecimiento exponencial cuando aumentamos la dimension, como vemos en la siguientegrafica.
Figura 2: Duracion promedio de ambos algoritmos segun la cantidad de simplejos maxi-males de dimension 10.
En cada una de las simulaciones que se realizaron, nuestro algoritmo genero una can-tidad ligeramente mayor de elementos crıticos, pero presento una mejora considerable encuanto a duracion en comparacion contra el algoritmo de Neza.
xi

xii

Capıtulo 1
Homologıa simplicial y teorıa deMorse discreta
En este capıtulo se presentaran los conceptos y resultados estandar para el estudiode complejos simpliciales y de la teorıa de Morse discreta. En las siguientes seccionespresentamos definiciones y resultados tanto de [5], [6], [9] y [15], con las cuales se construirala teorıa de homologıa.
La homologıa es una herramienta esencial en la topologıa algebraica. La idea intuitivaque se pretende dar es que estudia la forma de un objeto mediante sus agujeros y comose relacionan estos entre sı. Hay muchas clases de homologıa, pero aquı trataremos con lahomologıa simplicial.
Veremos que una de las utilidades de la teorıa de Morse discreta es que nos permitecalcular los grupos de homologıa de un complejo simplicial utilizando menos elementos queen su calculo usual.
1.1. Complejos simpliciales
En esta seccion comenzaremos hablando de los objetos de estudio que seran los com-plejos simpliciales, cabe mencionar que en la bibliografıa consultada los resultados quepresentamos estan en el contexto de los complejos CW o singulares, pero debido a suscomplicaciones decidimos utilizar los complejos simpliciales, pues ademas estos son masaptos computacionalmente.
1.1.1. Complejos simpliciales abstractos
Para poder llegar a utilizar los complejos simpliciales computacionalmente debemos dedar una definicion abstracta de ellos, pues podemos pasar de esta definicion a la topologicacomo veremos con los complejos simpliciales geometricos.
Definicion 1.1.1. Sea V un conjunto finito. Un complejo simplicial abstracto o sim-plemente complejo K es una familia de subconjuntos de V , llamados simplejos, tal que
i) si v ∈ V , entonces {v} ∈K,
1

Capıtulo 1
ii) si σ ∈K y σ′ ⊂ σ, entonces σ′ ∈K.
De momento llamaremos a V el conjunto de vertices de K, i.e., Vert(K) = V .
En el siguiente ejemplo veremos varios complejos simpliciales abstractos generados porel mismo conjunto de vertices.
Ejemplo 1.1.2. Sea V = {1,2,3}. Entonces
K1 = 2V = {∅,{1},{2},{3},{1,2},{2,3},{1,3},{1,2,3}}
K2 = {∅,{1},{2},{1,2}}
K3 = {∅,{1},{2},{3},{1,2},{2,3},{1,3}}
son complejos simpliciales abstractos. Podemos ver una representacion geometrica de estosen la siguiente figura, mas adelante veremos la definicion precisa de complejos simplicialesgeometricos que justificara esta representacion.
Figura 1.1: Representacion geometrica de K1,K2,K3 en el ejemplo anterior.
Nota 1.1.3. Por definicion el conjunto {∅} siempre debera pertenecer a la estructurasimplicial K, pero lo omitiremos excepto cuando sea necesario.
Si un simplejo σ ∈ K tiene d + 1 elementos, decimos que la dimension de σ es d (o queσ es un d-simplejo) y lo denotamos por σd, o simplemente σ si no hay confusion.
Cuando se tiene la dimension de los simplejos, podemos hablar ahora de la dimensiondel complejo. Esto da pie a la siguiente definicion:
Definicion 1.1.4. Si K es un complejo, dim(K) = max{dim(σ)∣σ ∈K}.
Si σ, τ ∈K son tales que σ ⊆ τ decimos que σ es cara de τ (denotado por σ ≤ τ) y queτ es supercara de σ (denotado por τ ≥ σ). Diremos que σ es cara inmediata de τ (y que τes supercara inmediata de σ) si dimσ + 1 = dim τ . Ademas, si σ no es cara de ningun otrosimplejo, decimos que σ es una cara libre de τ .
Definicion 1.1.5. Si K ⊂K es una subcoleccion que por sı misma es un complejo, entoncesdecimos que K es un subcomplejo de K.
Al subcomplejo que consiste de todos los l-simplejos con l ≤ d, lo llamamos el d-esqueleto de K y lo denotamos con K(d).
Definicion 1.1.6. Una filtracion de un complejo simplicial K es una coleccion de sub-complejos de K: K1,K2, . . . ,KM , que satisface
∅ ⊂K1 ⊂K2 ⊂ ⋅ ⋅ ⋅ ⊂KM =K.
2

Homologıa simplicial y teorıa de Morse discreta
Todo complejo de dimension d tiene la filtracion dada por los l−esqueletos, con l =0, . . . , d, es decir, la filtracion en K esta dada por
K(0) ⊂K(1) ⊂ ⋅ ⋅ ⋅ ⊂K(d) =K.
Con el fin de analizar las relaciones entre complejos introducimos un tipo que funcionesque se comportan adecuadamente con la estructura simplicial.
Definicion 1.1.7. Si K y L son complejos, entonces un morfismo simplicial ϕ ∶K → Les una funcion ϕ ∶ Vert(K) → Vert(L) tal que para cada simplejo {v0, . . . , vq} en K, setiene que {ϕ(v0), . . . , ϕ(vq)} es un simplejo en L (obviamente, es posible tener repeticionesen este ultimo).
Ejemplo 1.1.8. Consideremos K = {v1, v2, v3, v4, v1v2, v1v3, v2v3, v2v4}. Sea f ∶ K → K lafuncion tal que f(v1) = v3, f(v2) = v2, f(v3) = v1, f(v4) = v4 y extendemos simplicialmente,veamos que es un morfismo simplicial:
f(v1v2) = v3v2 ∈K
f(v1v3) = v3v1 ∈K
f(v2v3) = v2v1 ∈K
f(v2v4) = v2v4 ∈K
por tanto f es un morfismo simplicial.
Ahora consideremos g ∶ K → K tal que g(v1) = v4, g(v2) = v2, g(v3) = v3, g(v4) = v1 yextendemos simplicialmente, podemos ver que g(v1v3) = v4v3 ∉ K, por tanto g no es unmorfismo simplicial.
1.1.2. Complejos simpliciales geometricos
Hasta aquı hemos trabajado con los complejos y sus simplejos de modo combinato-rio, pero ahora buscamos que la representacion tambien sea geometrica, es decir que laestructura sea geometrica y que los simplejos se obtengan a partir de esta.
1.1.2.1. Realizacion geometrica
Buscamos que los complejos simpliciales tengan una realizacion geometrica, de estamanera obtener la estructura visual de los complejos. Se ve con mas claridad a la horade utilizar filtraciones y complejos en general, que se vera mas adelante. Por lo pronto, seintroduce teorıa que nos permite definir las realizaciones geometricas de los complejos.
Definicion 1.1.9.
Un subconjunto A de un espacio euclidiano es llamado afın si para todo par depuntos x /= x′ ∈ A, la lınea determinada por x,x′ esta contenida en A.
Un subconjuntoX de Rn es convexo si, para cada par de puntos x, y ∈X, el segmentode lınea que une a x y y esta contenida en X. En otras palabras, si x, y ∈X, entoncestx + (1 − t)y ∈X para todo t ∈ [0,1].
3

Capıtulo 1
Dos ejemplos de espacios afines son el vacıo y el conjunto de un solo punto. Ademas losespacios afines son convexos. Estos conjuntos complen la propiedad de que la interseccionde subconjuntos convexos (afines) de Rn tambien es convexa (afın).
Sea {Xj ∣ j ∈ J} y tomemos x, y ∈ ⋂Xj . Entonces x, y ∈ Xj para cada j ∈ J , dondecada uno es convexo, por lo que {(1 − t)x + ty}, con 0 ≤ t ≤ 1, pertenece a Xj para cadaj ∈ J . Ası, el segmento {(1− t)x+ ty}, con 0 ≤ t ≤ 1, esta en la interseccion. Para el caso desubconjuntos afines, se cambia la restriccion de t ∈ R.
Definicion 1.1.10. Una combinacion afın de puntos p0, . . . , pn ∈ Rn es un punto definidocomo
x = t0p0 + t1p1 +⋯ + tmpm,
donde ∑mi=0 ti = 1. Una combinacion convexa es una combinacion afın con ti ≥ 0 paratoda i = 1, . . . ,m.
Por ejemplo, sean x0, x1 dos puntos distintos en Rn. Su combinacion afın serıa
{t0x0 + t1x1∣t0, t1 ∈ R, t0 + t1 = 1} = {t0x0 + (1 − t0)x1∣t0 ∈ R},
es decir, la lınea que pasa por x0 y x1. Mientras que la combinacion convexa de los mismospuntos serıa:
{t0x0 + t1x1 ∣ t0, t1 ≥ 0, t0 + t1 = 1} ={t0x0 + (1 − t0)x1 ∣ t0 ≥ 0,1 − t0 ≥ 0}={t0x0 + (1 − t0)x1 ∣ t0 ∈ [0,1]},
es decir, el segmento que une x0 con x1.
Teorema 1.1.11. Si p0, . . . , pm ∈ Rn entonces el conjunto convexo generado por estos,[p0, . . . , pm], es el conjunto de todas las combinaciones convexas de p0, . . . , pm.
La prueba de este resultado, se puede ver en [15, p.32]. Ademas, se tiene que el espacioafın generado por p0, . . . , pm ∈ Rn consiste de todas las combinaciones afines de esos puntos.
Definicion 1.1.12. Un conjunto ordenado de puntos {p0, . . . , pm} ⊂ Rn es afın indepen-diente si {p1 − p0, p2 − p0, . . . , pm − p0} es un subconjunto linealmente independiente deRn.
Por lo que cualquier subconjunto de Rn linealmente independiente es un conjunto afınindependiente. Por ejemplo, si tomamos e0, . . . , en, una base de Rn, 0, e0, . . . , en es afınindependiente aunque no sea linealmente independiente.
En [15, p.33], podemos ver que con un conjunto ordenado de puntos p0, . . . , pm en Rn,las siguientes condiciones son equivalentes:
1. {p0, . . . , pm} es afın independiente
2. Si {s0, . . . , sm} ⊂ R satisfacem
∑i=0
sipi = 0 ym
∑i=0
si = 0 entonces si = 0 para toda i =
0, . . . ,m
4

Homologıa simplicial y teorıa de Morse discreta
3. Para cada x ∈ A, el conjunto afın generado por {p0, . . . , pm} tiene una unica expresion
como combinacion afın x =m
∑i=0
tipi ym
∑i=0
ti = 1
Definicion 1.1.13. Un conjunto de puntos {a1, . . . , ak} en Rn esta en posicion generalsi cada n + 1 de estos puntos forman un conjunto afın independiente.
Si tenemos un complejo K, recordemos que V = Vert(K). Si suponemos que los ele-mentos de V son puntos que estan en una posicion general en algun espacio euclidiano,entonces el espacio topologico ∣K ∣ esta definido por
⋃σ∈K
∣σ∣,
donde ∣σ∣ denota la envolvente convexa de los puntos en σ. Entonces decimos que ∣K ∣ esuna realizacion geometrica de K.
Nota 1.1.14. Observemos que si x ∈ ∣K ∣ = ⋃σ∈K ∣σ∣, existe algun σ ∈ K, con σ ={∑aivi∣∑ai = 1, ai ≥ 0} tal que x ∈ ∣σ∣ , en consecuencia, x se puede escribir como ∑aivi.Teniendo en cuenta esta observacion, de ahora en adelante cada vez que tengamos quex ∈ ∣K ∣, escribiremos x = ∑aivi omitiendo esta construccion.
Dado un complejo K podemos definir una “subestructura” con mas elementos que nossera util mas adelante.
Definicion 1.1.15. Dado un complejo K, definimos la subdivision baricentrica de K,denotada por K ′, como sigue:
Los vertices de K ′ son simplejos de K.
{v0, . . . , vn} es un simplejo en K ′ si v0, . . . , vn es una cadena, es decir, despues dereordenar tenemos vi0 ⊆ ⋅ ⋅ ⋅ ⊆ vin ∈K.
Figura 1.2: Subdivision baricentrica de el 2-simplejo estandar
1.1.3. Orientacion
Como trabajamos con objetos combinatorios (y sus etiquetas) es natural querer dar unaorientacion en ellas. Para esto le daremos una orientacion a los vertices de los complejos ya su vez sus simplejos heredaran una orientacion como veremos mas adelante.
Definicion 1.1.16. Sea K un complejo y σ ∈K. Una orientacion en σ es un orden totalde sus vertices modulo una permutacion par de ellos.
5

Capıtulo 1
Una forma natural de orientar un simplejo es enumerar sus vertices. Siσd = {v0, v1, . . . , vd} esta orientado por el orden de sus subındices denotaremos suorientacion con (v0, v1, . . . , vd). Si el simplejo tiene dimension d = 0, entonces unaorientacion consiste en colocar un signo + o -.
Figura 1.3: Simplejos orientados con un orden en sus vertices.
Si σd = {v0, v1, . . . , vd} esta dotado con la orientacion (v0, v1, . . . , vd) yαd−1i = {v0, v1, . . . vi . . . , vd} (la (d − 1)-cara de σ generada por todos los vertices ex-
cepto vi), entonces la orientacion en αi determinada por (−1)i(v0, v1, . . . vi . . . , vd) estabien definida.
Definicion 1.1.17. Si σd = {v0, v1, . . . , vd} esta dotado con la orientacion (v0, v1, . . . , vd) yαd−1i = {v0, v1, . . . vi . . . , vd} (donde vi denota que omitimos el vertice que este en la posicioni.), entonces la orientacion sobre αd−1
i esta definida por (−1)i(v0, v1, . . . vi . . . , vd), a la cualle llamamos la orientacion heredada de σd.
Poniendo un poco de atencion a la figura anterior, especıficamente al 2-simplejo dellado izquierdo, podemos ver que con la orientacion que tiene, a sus aristas les hereda lassiguientes orientaciones: (01), (12)y − (02).
Definicion 1.1.18. Supongamos que K es un c.s.a. y σd−1, τd, τd ∈ K tales que σ < τ yσ < τ .
i) Si τ, τ estan orientados y heredan orientaciones diferentes sobre σ, entonces decimosque ellos estan orientados coherentemente.
ii) Si solo τ esta orientado, entonces para obtener la orientacion en τ primero necesitamosque σ obtenga su orientacion heredada por τ . Ası, a τ se le dota de la orientacion talque σ hereda la orientacion contraria a la que hereda por τ , a dicha orientacion en τse le conoce como la orientacion deslizada.
Ejemplo 1.1.19. Sea K el complejo simplicial con caras maximales τ = {v0, v1, v2},τ = {v0, v2, v3}, Si escogemos las orientaciones (v0, v1, v2), (v0, v2, v3) respectivamentetenemos que las orientaciones heredadas en σ = {v0, v2} son (−1)1(v0, v2) = −(v0, v2) y(−1)2(v0, v2) = (v0, v2) respectivamente, por tanto decimos que con estas orientaciones τy τ estan coherentemente orientados.
Si escogemos las orientaciones (v0, v1, v2), (v0, v3, v2) respectivamente tenemosque las orientaciones heredadas en σ = {v0, v2} son (−1)1(v0, v2) = −(v0, v2) y
6

Homologıa simplicial y teorıa de Morse discreta
(−1)1(v0, v2) = −(v0, v2) respectivamente, por tanto decimos que con estas orienta-ciones τ y τ no estan coherentemente orientados.
Ahora por lo anterior, si la orientacion de τ es (v0, v1, v2) tenemos que la orientaciondeslizada por σ para τ es (v0, v2, v3).
Notese que la orientacion deslizada sobre τ se define para hacerla coherente con la orien-tacion en τd. Ademas, se debe tener claro que la orientacion heredada es hacia un simplejode dimension inmediatamente menor y la orientacion deslizada es hacia un simplejo de lamisma dimension.
1.1.4. Colapsos entre complejos simpliciales
En esta seccion se tratara el concepto de colapsar complejos, que intuitivamente significareducir de tamano un complejo simplicial abstracto de tal modo que complejo resultantesea “homotopico” al original. Recordemos que una cara libre de un simplejo es aquellacara de dimension inmediatamente menor, que solamente lo tiene a el como supercara dedimension inmediata.
Definicion 1.1.20. Sea K un complejo simplicial,
i) Si τd, σd−1 ∈K son tales que σ es cara libre de τ , entonces decimos que K∖{τd, σd−1}se obtiene de K al colapsar τ a traves de σ.
ii) Si K ⊂ K es un subcomplejo que se obtiene de aplicar un numero finito de colapsosen K, entonces decimos que K se colapsa en K y escribimos K ↘ K.
iii) Si K es un complejo simplicial tal que K ↘K o K ↘ K, entonces decimos que K yK son simplicialmente homotopicos.
Podemos observar que el concepto de “simplicialmente homotopicos” es una relacion deequivalencia entre complejos simpliciales. Ademas si K es un complejo simplicial sin caras
7

Capıtulo 1
libres, entonces sobre K no se pueden hacer colapsos. Un caso particular son los comple-jos simpliciales que son triangulaciones de una variedad sin frontera (por ejemplo, el toro).
Tambien podemos observar que todo simplejo estandar de dimension d se puede colapsaren cualquiera de sus vertices.
Figura 1.4: Posibles pasos para colapsar un 2-simplejo sobre uno de sus vertices.
Por ultimo, si K1,K2 son simplicialmente homotopicos, entonces se vera que tienengrupos de homologıa isomorfos. Esto se debe a que al colapsar eliminamos un disco que eshomologicamente trivial en K.
1.1.5. Ejemplos. Los complejos de Cech y de Vietoris-Rips
En esta seccion mostraremos dos metodos para construir una estructura simplicial aso-ciada a una nube de puntos, es decir a una coleccion finita de puntos con una metrica. Estasestructuras simpliciales son muy empleadas en la literatura para estudiar la forma de lanube de datos a traves de cierta filtracion reducida y su homologıa persistente (vease en [4]).
Definicion 1.1.21. Si V = {v0, v1, . . . , vd} ⊂ Rn y ε > 0, entonces el complejo de Cechcon parametro de proximidad ε, denotado por C (V, ε)), es el complejo cuyos m-simplejosse corresponden a los subconjuntos A ⊂ V tales que la cardinalidad de A es m + 1 y que
⋂vi∈A
B (vi;ε
2) ≠ ∅ donde B(v; r) = {p ∈ Rn ∣ d(p, v) < r} .
En la siguiente figura podemos ver la estructura simplicial de Cech para distintos valoresdel parametro de proximidad, cuando V es un conjunto de 3 puntos.
Figura 1.5: estructura simplicial de Cech para ε1 = 0.5 , ε2 =2.7 , ε3 = 3.
Notese que para ε suficientemente pequeno, C (V, ε) = V y para ε suficientementegrande, C (V, ε) es isomorfo al simplejo estandar ∆∣V ∣. Ademas, si ε1 < ε2, entonces C (V, ε1)es un subcomplejo de C (V, ε2).
8

Homologıa simplicial y teorıa de Morse discreta
Como todo d-simplejo tiene 2d+1 caras, entonces el numero de simplejos en el complejode Cech crece de forma exponencial con la cardinalidad de V , por lo que se requiere demucha memoria en una computadora para almacenarlo.
Definicion 1.1.22. Si V = {v0, v1, . . . , vd}, ε > 0 y dV ∶ V ×V → R es una metrica, entoncesel complejo de Vietoris-Rips con parametro de proximidad ε, denotado por V R(V, ε),es el complejo simplicial cuyos m-simplejos se corresponden con los subconjuntos A ⊂ Vtales que la cardinalidad de A es m + 1 y para toda pareja vi, vj ∈ A, d(vi, vj) < ε.
En la siguiente figura podemos ver distintas estructuras simpliciales de Vietoris-Rips,donde V tambien es un conjunto de tres puntos y diferentes valores del parametro deproximidad ε.
Figura 1.6: filtracion de Vietoris-Rips generada para ε1 =0.5 , ε2 =2.7.
Nuevamente se cumple que V R(V, ε) = V para ε suficientemente pequeno; para εsuficientemente grande, V R(V, ε) es isomorfo al simplejo estandar ∆∣V ∣, y si ε1 < ε2,entonces V R(V, ε1) es un subcomplejo de V R(V, ε2).
Notese que si {v0, . . . , vm} ⊂ V es tal que cualquier pareja de puntos esta a distanciamenor que ε, entonces todo el m-simplejo generado por estos puntos pertence a V R(V, ε).De manera que este es mas sencillo de almacenar en una computadora pues solo bastaalmacenar el 1-esqueleto de los simplejos y por lo tanto se requiere menos memoria.
De las definiciones se puede verificar que para un ε > 0 fijo, todo simplejo en C (V, ε) estambien simplejo de V R(V, ε), por lo que existe un encaje natural de C (V, ε) en V R(V, ε).
1.2. Homologıa simplicial
En esta seccion definiremos los grupos de homologıa simplicial. Supondremos de aquı enadelante que tenemos un complejo K de dimension n.
1.2.1. Definicion
Construiremos grupos con cada dimension menor o igual a la dimension de K, paradespues relacionarlos entre si, es decir a los elementos del grupo de dimension d los man-daremos al grupo de dimension d − 1, para hacer esto necesitaremos definir la frontera deun simplejo.
9

Capıtulo 1
Definicion 1.2.1. Para todo d ≥ 0, definimos las d−cadenas como el grupo abelianolibre generado por los d-simplejos orientados de K, sobre Z, denotado por:
Cd(K,Z).
Si αd > σd−1, donde son los simplejos orientados α = [v0, . . . , vd] y σ = [v0, . . . , vi, . . . , vd],entonces definimos
ε(α,σ) ∶= (−1)i
como el numero de incidencia de σ en α.
Para un simplejo σ de dimension d, definimos su frontera como la (d− 1)−cadena quetiene como sumandos todas las caras de dimension d − 1 de σ. Extendiendo linealmente,podemos definir el siguiente operador frontera:
Definicion 1.2.2. Definimos el operador frontera ∂d ∶ Cd(K,Z) → Cd−1(K,Z) comosigue: para cada d−simplejo τd ∈K, definimos
∂d ∶ Cd(K,Z) → Cd−1(K,Z)τd ↦ ∑
σd−1<τdε(τ, σ)σ
donde ε(τ, σ) es el numero de incidencia, extendemos Z−linealmente a todo Cd(K,Z).
Al definir estos operadores, buscamos tener una sucesion larga que nos relacione todoslos grupos de d−cadenas definidos anteriormente, pero para poder definir esta sucesion esimportante que los operadores cumplan con la siguiente propiedad:
Proposicion 1.2.3. Para cada d, el operador frontera satisface
∂d−1 ○ ∂d = 0.
Utilizaremos la idea de la demostracion de [15], pues ahı se prueba para complejossingulares. Para dicha demostracion, debemos definir un tipo de funciones que nospermiten calcular las caras inmediatas de un simplejo.
Sea K un complejo y sea σ = {v0, . . . , vd} un d−simplejo de K, definimos la aplicacioncara como
εdi ∶ Cd(K,Z) → Cd−1(K,Z)σd ↦ {v0, . . . , vi, . . . , vd},
recordemos que vi denota que omitimos el vertice que este en la posicion i.
Estas funciones tienen la siguiente propiedad, que es importante para demostrar elresultado antes mencionado:
Lema 1.2.4. Sea K un complejo Si k ≤ j, entonces para toda d ≥ 0, las aplicaciones carasatisfacen
εd−1j ○ εdk = εd−1
k ○ εdj+1.
10

Homologıa simplicial y teorıa de Morse discreta
Demostracion. Sea K un complejo y sea σ = {v0, . . . , vd} un d−simplejo de K. Primeroveamos el caso donde k < j, por un lado tenemos que
εd−1j ○ εdk({v0, . . . , vd}) = εd−1
j ({v0, . . . , vk, . . . , vd})= {v0, . . . , vk, . . . , vj , . . . , vd}
y por el otro tenemos que
εd−1k ○ εdj+1({v0, . . . , vd}) = εd−1
k ({v0, . . . , vj+1, . . . , vd})= {v0, . . . , vk, . . . , vj+1, . . . , vd}
pero ahora vj+1 esta realmente en la posicion j, por lo que se cumple la igualdad. Ahoraveamos el caso donde k = j,
εd−1j ○ εdj({v0, . . . , vd}) = εd−1
j ({v0, . . . , vj , . . . , vd})= {v0, . . . , vj , vj+1, . . . , vd} pues vj+1 esta en la posicion j
= εd−1j ({v0, . . . , vj+1, . . . , vd})
= εd−1j ○ εdj+1({v0, . . . , vd})
Ahora tenemos las herramientas para la prueba de la Proposicion 1.2.3.
Demostracion. Sea K un complejo y sea σ un d−simplejo de K.
∂d−1 ○ ∂d(σ) = ∂d−1 (d
∑i=0
(−1)iεdi (σ))
=d
∑i=0
(−1)i∂d−1(εdi (σ))
=d
∑i=0
d−1
∑j=0
(−1)i+jεd−1j εdi (σ)
= ∑i≤j
(−1)i+jεd−1j εdi (σ) +∑
i>j(−1)i+jεd−1
j εdi (σ)
= ∑i≤j
(−1)i+jεd−1i εdj+1(σ) +∑
i>j(−1)i+jεd−1
j εdi (σ) por el Lema 1.2.4
= ∑p<q
(−1)p+q−1εd−1p εdq(σ) +∑
j<i(−1)i+jεd−1
j εdi (σ) donde p = i, q = j + 1
= 0
Con lo anterior, diremos que una sucesion de grupos de d-cadenas,
C∗ ∶ 0Ð→ Cd(K,Z) ∂dÐ→ Cd−1(K,Z) ∂d−1ÐÐ→ ⋯ ∂1Ð→ C0(K,Z)Ð→ 0,
que cumplan que ∂d−1 ○∂d = 0 para toda d, sera llamada complejo de cadenas. Con estospodemos definir los grupos de homologıa de K.
Definicion 1.2.5. Sea K un complejo. Definimos el d−esimo grupo de homologıasimplicial de K, sobre Z como
Hd(K,Z) ∶= Ker(∂d ∶ Cd(K,Z)→ Cd−1(K,Z)) /Im(∂d+1 ∶ Cd+1(K,Z)→ Cd(K,Z)) .
Al rango de Hd(K,Z) lo llamamos el d−esimo numero de Betti y lo denotamos porβd(K).
11

Capıtulo 1
Cuando no haya confusion, pondremos simplemente Hd o βd, sin mencionar el complejoy los coeficientes a usar. Igualmente, a los operadores frontera, los denotaremos por ∂, sinhacer referencia al subındice que indica la dimension.
1.2.2. Propiedades funtoriales
Veamos ahora que Hd es un funtor entre las categorıas de los complejos simpliciales yla de grupos abelianos. Veamos primero los siguientes resultados que daran pie a la prueba.
Sean K y L complejos, si ϕ ∶K → L es un morfismo simplicial, denotamos por
ϕ# ∶ Cd(K)→ Cd(L)∑aσσ ↦∑aσϕ(σ)
al morfismo inducido, para cada d ≥ 0.
ϕ# esta bien definido pues Cd(K) es un grupo abeliano libre con base los elementos deK. ϕ# cumple la siguiente propiedad.
Lema 1.2.6. Si ϕ ∶ K → L es un morfismo simplicial, entonces ϕ# ∶ Cd(K) → Cd(L)cumple que ϕ#∂ = ∂ϕ#
Demostracion. Sea ∑aσσ ∈ Cq(K),
ϕ#∂ (∑aσσ) = ϕ# (∑aσ∂σ)= ϕ# (∑aσ∑(−1)iσi)=∑aσ∑(−1)iϕ(σi).
Por otro lado,
∂ϕ# (∑aσσ) = ∂ (∑aσϕ(σ))=∑aσ∑(−1)iϕ(σi).
Por tanto, ϕ#∂ = ∂ϕ#.Tenemos lo necesario para poder probar el siguiente resultado, el cual es al que se querıa
llegar.
Teorema 1.2.7. Para toda d ≥ 0, Hd es un funtor entre las categorıas K (complejossimpliciales) y Ab (grupos abelianos), i.e.
Hd ∶ K → Ab.
Demostracion. Hd esta definida para objetos de K y para morfismos simpliciales ϕ ∶K →L, definimos de manera natural el siguiente morfismo inducido:
K
ϕ
��
// Hd(K,Z) = Ker∂d /Im∂d+1
ϕ∗
��
L // Hd(L,Z) = Ker∂d /Im∂d+1
12

Homologıa simplicial y teorıa de Morse discreta
donde ϕ∗ esta definida como sigue
ϕ∗ ∶Hd(K)→Hd(L)z + Im∂d+1(K)↦ ϕ#(z) + Im∂d+1(L)
el cual ya esta definido con objetos de Ab. Por el Lema 1.2.6 ϕ#(Im∂) ⊆ Im∂, por tantoϕ∗ esta bien definida. Es facıl probar que Hd ∶ K → Ab es un funtor.
Por lo que, si tenemos un morfismo simplicial ϕ ∶K → L, podemos hablar del morfismoinducido en homologıa ϕ∗ ∶Hd(K)→Hd(L).
Corolario 1.2.8. Si K y L son homeomorfos (denotado por K ≅ L), entonces Hd(K) yHd(L) son isomorfos (Hd(K) ≅Hd(L)), para toda d.
Existe un funtor entre K y Top, asociando a cada complejo simplicial abstracto surealizacion geometrica.
Teorema 1.2.9. El espacio subyacente de un complejo simplicial define ∣ ⋅ ∣ ∶ K → Top, elfuntor entre las categorıas K y Top.
Demostracion. Sea ϕ ∶ K → L un morfismo simplicial entre los complejos simpliciales Ky L. Para cada s ∈K definimos fs ∶ s→ ∣L∣ como la aplicacion afın determinada por
ϕ∣Vert(s) ∶ s→ ∣L∣
que es un morfismo simplicial.Entonces, por la condicion de interseccion de la definicion de complejo simplicial, las fun-ciones coinciden en sus intersecciones.Tambien, por el lema del pegado, tenemos una unica funcion continua
∣ϕ∣ ∶ ∣K ∣→ ∣L∣,
veamos que es un funtor:Primero veamos que sucede con el morfismo identidad:
∣Id∣(s) = Id∣Vert(s)(∑ tivi) =∑ tiId∣Vert(s)(vi) =∑ tivi = Id(s)
Ahora con la composicion, por un lado tenemos que
∣f ○ g∣(s) = f ○ g∣Vert(s)(∑ tivi) =∑ ti(f ○ g∣Vert(s)(vi)) =∑ ti(f ○ g(vi)),
y por el otro lado tenemos que
∣f ∣ ○ ∣g∣(s) = ∣f ∣(g∣Vert(s)(∑ tivi)) = ∣f ∣(∑ tig(vi)) =∑ ti(f ○ g(vi)).
De esta manera, se tiene que ∣ ⋅ ∣ es un funtor.
13

Capıtulo 1
1.2.3. Un ejemplo
Para dejar claro los conceptos y resultados vistos en la seccion, mostraremos un ejemplodonde se hacen los calculos pertinentes. Regresaremos a este ejemplo en varias ocasionesen capıtulos siguientes:
Ejemplo 1.2.10. Consideremos el complejo K, con la siguiente estructura simplicial:
K ∶ {v1, v2, v3, v4, v5,{v1, v2},{v2, v3},{v2, v4},{v3, v4},{v3, v5},{v4, v5},{v3, v4, v5}}.
Este induce el siguiente complejo de cadenas:
C∗(K) ∶ ⋅ ⋅ ⋅→ 0→ ⟨{v3, v4, v5}⟩∂2Ð→ ⟨{v1, v2},{v2, v3},{v2, v4},{v3, v4},{v3, v5},{v4, v5}⟩
∂1Ð→ ⟨v1, v2, v3, v4, v5⟩∂0Ð→ 0.
Entonces, como el contradominio de ∂0 es 0, tenemos que
ker∂0 ≅ Z[v1]⊕Z[v2]⊕Z[v3]⊕Z[v4]⊕Z[v5].
Sea α un elemento arbitrario de C1(K), entonces,
α = a1{v1, v2} + a2{v2, v3} + a3{v2, v4} + a4{v3, v4} + a5{v3, v5} + a6{v4, v5}.
Por tanto,
∂1(α) = a1(v2 − v1) + a2(v3 − v2) + a3(v4 − v2) + a4(v4 − v3) + a5(v5 − v3) + a6(v5 − v4).
Luego,
Im(∂1) ≅ Z[v2 − v1]⊕Z[v3 − v2]⊕Z[v4 − v2]⊕Z[v4 − v3]⊕Z[v5 − v3]⊕Z[v5 − v4].
Ası,
H0(K) = Ker∂0 /Im∂1
≅ Z[v1]⊕Z[v2]⊕Z[v3]⊕Z[v4]⊕Z[v5]Z[v2 − v1]⊕Z[v3 − v2]⊕Z[v4 − v2]⊕Z[v4 − v3]⊕Z[v5 − v3]⊕Z[v5 − v4]
≅ Z[v1],
14

Homologıa simplicial y teorıa de Morse discreta
pues v1 = v2 = ⋅ ⋅ ⋅ = v5.
Ahora,
∂1(α) = a1(v2 − v1) + a2(v3 − v2) + a3(v4 − v2) + a4(v4 − v3) + a5(v5 − v3) + a6(v5 − v4)= −a1v1 + (a1 − a2 − a3)v2 + (a2 − a4 − a5)v3 + (a3 + a4 − a6)v4 + (a5 + a6)v5.
Si ∂1(α) = 0, tenemos que a1 = 0, a2 = −a3 = a4 + a5 y a6 = −a5. Por tanto,
ker∂1 ≅ Z[w1]⊕Z[w2],
donde:w1 = {v2, v3} − {v2, v4} + {v3, v4},
w2 = {v2, v3} − {v2, v4} + {v3, v5} − {v4, v5}.
Ahora, sea β un elemento cualquiera de C2(K), es decir
β = b{v3, v4, v5}.
Entonces,
∂2(β) = b({v4, v5} − {v3, v5} + {v3, v4}).
Por tanto,im∂2 ≅ Z[{v4, v5} − {v3, v5} + {v3, v4}].
Y ası,
H1(K) =ker∂1 /im∂2
≅Z[{v2, v3} − {v2, v4} + {v3, v4}]⊕Z[{v2, v3} − {v2, v4} + {v3, v5} − {v4, v5}]Z[{v4, v5} − {v3, v5} + {v3, v4}]
≅Z[{v2, v3} − {v2, v4} + {v3, v4}],
Pues {v3, v4} = {v3, v5} − {v4, v5}. Para n ≥ 2 tendremos que Hn(K) = 0.
1.3. Teorıa de Morse discreta
En esta seccion se presentan las definiciones basicas de teorıa de Morse discreta, conel objetivo de mostrar una alternativa eficiente para el calculo de la homologıa simplicial.Como vimos en el ejemplo anterior se requiere toda la estructura simplicial para podercalcular la homologıa de K, la teorıa de Morse discreta nos ofrece el calculo de la homologıautilizando solo ciertos elementos.
1.3.1. Funcion de Morse discreta
Definicion 1.3.1. Si K es un complejo simplicial abstracto y f ∶ K → R es una funcion,decimos que f es una funcion de Morse discreta (FMD) si para todo d-simplejo αd ∈Kse cumple:
1. ∣{βd+1 > αd ∣ f(βd+1) ≤ f(αd)}∣ ≤ 1
15

Capıtulo 1
2. ∣{γd−1 < αd ∣ f(γd−1) ≥ f(αd)}∣ ≤ 1,
donde ∣∣ denota la cardinalidad del conjunto.
En el siguiente ejemplo, definimos dos funciones distintas en un mismo complejo K,una es FMD y la otra no. Pondremos los valores de la funcion de Morse sobre su simplejo,no se debe de confundir con la etiqueta que usemos para el vertice.
Figura 1.7: En el lado izquierdo se muestra una FMD, y en el lado derecho una que no loes.
La idea general es que las funciones de Morse discretas asignen numeros mayores asimplejos de dimension mayor “casi siempre”.
Observacion. 1.3.2. Notese que las condiciones (1) y (2) en la Definicion 1.3.1 son talesque, si uno de los conjuntos tiene cardinalidad uno, entonces el otro es vacıo:En efecto, supongamos que σp ∈ K tal que existen vp−1, τp+1 ∈ K con vp−1 < σp < τp+1 yf(τ) ≤ f(σ) ≤ f(v). Sea σp ≠ σp tal que vp−1 < σp < τp+1, este simplejo existe pues p ≥ 1 (Ası,si τp+1 = {t0, t1, . . . , tp, tp+1} y en particular σp = {t0, t1, . . . , tp}, entonces podemos tomar,por ejemplo, σp = {t1, . . . , tp, tp+1}). Ahora, como f(τ) ≤ f(σ) entonces f(τ) > f(σ), ycomo f(v) ≥ f(σ) entonces f(σ) > f(v). Por tanto f(τ) ≤ f(σ) ≤ f(v) < f(σ) < f(τ), locual es una contradiccion.
Por la definicion de FMD podemos distinguir distintos tipos de simplejos. Si K es uncomplejo simplicial abstracto y f ∶K → R es un FMD, entonces decimos que αd ∈K es unsimplejo crıtico de ındice d si:
1. ∣{βd+1 > αd ∣ f(βd+1) ≤ f(αd)}∣ = 0
2. ∣{γd−1 < αd ∣ f(γd−1) ≥ f(αd)}∣ = 0
Si αd no es crıtico, se llama simplejo regular.
Dado un complejo simplicial K, siempre existe una FMD f ∶K → R dada por,
f ∶K → Rσd ↦ d
esto es f(σ) = dim(σ). La caracterıstica mas importante de esta funcion es que todos lossimplejos resultan ser simplejos crıticos. Podemos ver esta funcion en la siguiente figura.
16

Homologıa simplicial y teorıa de Morse discreta
Mas adelante se probara que si md(f) es el numero de simplejos crıticos de dimensiond de f , entonces K es homotopicamente equivalente a un complejo celular Mk, que tieneexactamente md(f) celdas de dimension d.
Las funciones de Morse cumplen las siguientes propiedades:
Proposicion 1.3.3. Sea K un complejo simplicial y f ∶K → R una FMD, se tiene que:
(1) Si K1 ⊂ K es un subcomplejo y f1 es la restriccion de f a K1, entonces f1 es unaFMD y los simplejos crıticos de f tambien son simplejos crıticos de f1.
(2) Existe una funcion inyectiva f ∶K → R que tiene los mismos simplejos crıticos que f .
(3) Sean αd, τp ∈K son tales que αd < τp, entonces existe σd+1 ∈K tal que αd < σd+1 ≤ τpy f(σ) ≤ f(τ).
(4) Si σ es crıtico, entonces para cualquier τ > σ, tenemos que f(τ) > f(σ).Demostracion. Las demostraciones 1 2 y 3 se pueden encontrar en [9, pp.29-30].Probemos 4 mediante induccion sobre d = dim(τ) − dim(σ).Para d = 1 se sigue de la definicion de simplejo crıtico.Para d ≥ 2 tenemos que existen d caras inmediatas de τ que contienen a σ. Por hipotesisde induccion cada una de esas d caras inmediatas tiene un valor mayor que σ. Pero a losmas en una de ellas f podrıa valer mas o igual que τ lo que deja d − 1 simplejos ρ dondecada uno de ellos cumple f(σ) < f(ρ) < f(τ).
A continuacion una definicion, que nos sera util mas adelante.
Definicion 1.3.4. Si K es un complejo simplicial, f ∶K → R es una FMD y c ∈ R, entoncesdefinimos el subcomplejo de nivel c como
K(c) = ⋃f(τ)≤c
(⋃σ≤τ
σ).
Entonces K(c) se puede reescribir como:
K(c) = ⋃f(τ)≤c
(⋃σ≤τ
σ)
={σ ≤ τ ∣f(τ) ∈ (−∞, c]}={σ ≤ τ ∣τ ∈ f−1(−∞, c]}= ⋃τ∈f−1(−∞,c]
(⋃σ≤τ
σ)
= ⋃σ⊆τ∈f−1(−∞,c]
σ.
17
Capıtulo 1
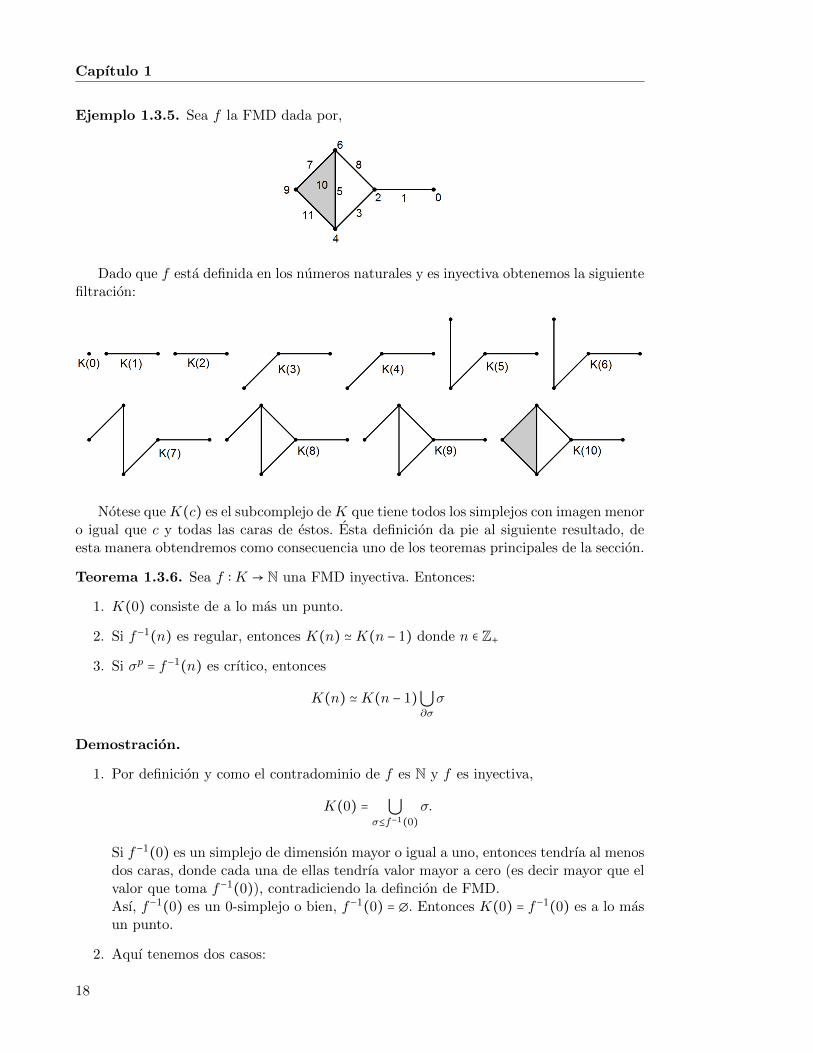
Ejemplo 1.3.5. Sea f la FMD dada por,
Dado que f esta definida en los numeros naturales y es inyectiva obtenemos la siguientefiltracion:
Notese que K(c) es el subcomplejo de K que tiene todos los simplejos con imagen menoro igual que c y todas las caras de estos. Esta definicion da pie al siguiente resultado, deesta manera obtendremos como consecuencia uno de los teoremas principales de la seccion.
Teorema 1.3.6. Sea f ∶K → N una FMD inyectiva. Entonces:
1. K(0) consiste de a lo mas un punto.
2. Si f−1(n) es regular, entonces K(n) ≃K(n − 1) donde n ∈ Z+
3. Si σp = f−1(n) es crıtico, entonces
K(n) ≃K(n − 1)⋃∂σ
σ
Demostracion.
1. Por definicion y como el contradominio de f es N y f es inyectiva,
K(0) = ⋃σ≤f−1(0)
σ.
Si f−1(0) es un simplejo de dimension mayor o igual a uno, entonces tendrıa al menosdos caras, donde cada una de ellas tendrıa valor mayor a cero (es decir mayor que elvalor que toma f−1(0)), contradiciendo la defincion de FMD.Ası, f−1(0) es un 0-simplejo o bien, f−1(0) = ∅. Entonces K(0) = f−1(0) es a lo masun punto.
2. Aquı tenemos dos casos:
18

Homologıa simplicial y teorıa de Morse discreta
Si existe un σ > f−1(n) = τ tal que f(σ) ≤ n, entonces por ser f inyectivatenemos que f(σ) ≤ n − 1. Esto implica que
τ = f−1(n) ∈ ⋃f(σ)≤n−1
(⋃τ≤σ
τ) =K(n − 1),
por tanto τ = f−1(n) ∈ K(n − 1) y por ser K(n − 1) un complejo simplicial (obien por la misma definicion de K(n − 1)) tenemos que todas las caras de τtambien pertenecen a K(n − 1). Por tanto K(n) =K(n − 1).
Si no existe tal σ, existe algun ρ < f−1(n) con f(ρ) ≥ n (ya que f−1(n) es nocrıtico). Entonces por ser f de Morse existe un unico τ > ρ con f(τ) ≤ f(ρ),lo que implica τ = f−1(n). Si β > ρ con β ≠ τ entonces f(ρ) < f(β), comon = f(τ) ≤ f(ρ) < f(β), tenemos que β /∈ K(n). Por tanto ρ es una cara librede τ en K(n). Pero para cualquier otra cara σ < τ , f(σ) < f(τ) = n, por tantof(σ) ≤ n − 1.Ası, los unicos simplejos en K(n) ∖K(n − 1) son ρ y τ . Ahora colapsando τa traves de su cara libre ρ tenemos un complejo homotopicamente equivalente,por tanto K(n) ≃K(n − 1).
3. Si τ = f−1(n) es crıtico, es claro que la frontera de τ esta en K(n− 1). Por otro lado,por la Proposicion 1.3.3 se sigue que τ no puede estar en K(n − 1).Ası que K(n) es obtenido a partir de K(n − 1) agregando τ junto con su frontera,por tanto
K(n) ≃K(n − 1)⋃∂τ
τ.
Del teorema anterior, se sigue inmediantamente el resultado:
Corolario 1.3.7. Sea f una FMD en un complejo K. Entonces K es homotopicamenteequivalente a un complejo CW con una celda de dimension p por cada p-simplejo crıticoen K con respecto a f .
En esta seccion vimos una prueba combinatoria del teorema principal de la teorıa deMorse discreta el cual se busca presentar a detalle en diferentes contextos, simplemente seutilizaron propiedades simpliciales.
1.4. Campo vectorial gradiente y flujo asociado
Hemos visto que los simplejos crıticos asociados a una FMD definida en un complejo Kdeterminan el tipo de homotopıa del complejo K. Construiremos un complejo de cadenascon dichos simplejos crıticos (que llamaremos complejo de Morse-Forman) y probaremosque existe un isomorfismo entre el complejo de cadenas simplicial usual de K y al complejode cadenas de Morse-Forman de K.
Para precisar esta relacion necesitamos definir el concepto de campo vectorial gradien-te. Fijemos K un complejo, f una FMD y demos una orientacion para cada simplejo σ ∈K.
19

Capıtulo 1
Definimos un producto interno en Cp(K,Z) de la siguiente manera:
⟨, ⟩ ∶ Cp(K,Z) ×Cp(K,Z)→Z(∑aiσi,∑ biσi)↦∑aibi.
Definicion 1.4.1. Sea σp ∈K. Si existe un τp+1 > σ con f(τ) ≤ f(σ) definimos
V (σ) = −⟨∂τ, σ⟩τ,
si no existe tal τ definimos V (σ) = 0.
Para cada p extendemos Z-linealmente V a un homomorfismo de Z-modulos
V ∶ Cp(K,Z)→ Cp+1(K,Z).
A V lo llamaremos el campo vectorial gradiante asociado a K por f .
Ejemplo 1.4.2. Consideremos el siguiente complejo simplicial K ordenado por la nume-racion de sus vertices con la FMD f denotada en estos:
Para cada σ ∈ K, la flecha que sale de σ apunta a su supercara tal que su f -valor esmenor. El campo ilustrado por las flechas sera el campo vectorial asociado por esta funcionde Morse.
El campo vectorial gradiente y la estructura que nos dan las flechas como en el ejemploanterior nos permiten dar la siguiente definicion que mas adelante nos sera util en el calculode la homologıa del complejo de Morse-Forman.
Definicion 1.4.3. Un camino gradiente asociado a una funcion de Morse f es unasucesion
(σd0 , τd+10 ), (σd1 , τd+1
1 ), . . . , (σdr , τd+1r )
de parejas determinadas por f (es decir que τi es la unica supercara de σi tal que f(τi) <f(σi) para toda i) tales que σdi+1 < τd+1
i .
Por ejemplo un camino gradiente en el Ejemplo 1.4.2 esta formado por la sucesion:
(v5,{v3, v5}), (v3,{v3, v4}), (v4,{v2, v4}), (v2,{v1, v2}), (v1).
20

Homologıa simplicial y teorıa de Morse discreta
Definicion 1.4.4. Para cualquier simplejo orientado σ ∈K, definimos el flujo gradienteφ como
φ(σ) = σ + ∂V (σ) + V ∂(σ).Para cada p, extendemos Z-linealmente a un homomorfismo de Z-modulos
φ ∶ Cp(K,Z)→ Cp(K,Z).
Ejemplo 1.4.5. Consideremos el complejo y su FMD como en el ejemplo anterior, calcu-lemos el flujo de la arista {v4, v5}:
V ({v4, v5}) = − ⟨∂{v3, v4, v5},{v4, v5}⟩{v3, v4, v5}= − ⟨{v4, v5} − {v3, v5} + {v3, v4},{v4, v5}⟩{v3, v4, v5}= − {v3, v4, v5}
∂(V ({v4, v5})) =∂(−{v3, v4, v5}) = −∂({v3, v4, v5})= − {v4, v5} + {v3, v5} − {v3, v4}
∂({v4, v5}) =v5 − v4
V (∂({v4, v5})) =V (v5) − V (v4) = −⟨∂{v3, v5}, v5⟩{v3, v5} + ⟨∂{v2, v4}, v4⟩{v2, v4}= − ⟨v5 − v3, v5⟩{v3, v5} + ⟨v4 − v2, v4⟩{v2, v4} = −{v3, v5} + {v2, v4}
Tenemos los siguientes resultados:
Teorema 1.4.6. SeaK un complejo simplicial abstracto y f una funcion de Morse asociadaa K. Entonces se cumplen las siguientes afirmaciones:
1. V ○ V = 0.
2. Si σp esta orientado, entonces ∣{vp−1∣V (v) = ±σ}∣ ≤ 1.
3. Si σp esta orientado, entonces σ es crıtico si y solo si σ /∈ im(V ) y V (σ) = 0.
Demostracion.
1. Si V (vp−1) = ±σ entonces v < σ y f(σ) ≤ f(v). Pero por 1.3.2, no existe τp+1 > σ conf(τ) ≤ f(σ), por tanto V (σ) = 0, y entonces V ○ V (v) = 0.
21

Capıtulo 1
2. Si V (vp−1) = ±σp entonces v < σ y f(σ) ≤ f(v), y por definicion de FMD v es unico.
3. Por definicion σ es crıtico si y solo si no existe vp−1 < σ con f(v) ≥ f(σ) y no existeτp+1 > σ con f(τ) ≤ f(σ). Esto es equivalente a que no existe vp−1 con V (v) = ±σ yno existe τ > σ tal que V (σ) = ±τ , esto implica que σ /∈ Im(v) y V (σ) = 0.
Este resultado nos permite caracterizar a los simplejos de la siguiente manera:
Corolario 1.4.7. Dada una FMD f ∶ K → N para cada p-simplejo de K se cumpleexactamente una de las siguientes propiedades:
1. σ es crıtico.
2. ±σ ∈ ImVf .
3. Vf(σ) ≠ 0.
Teorema 1.4.8. Se cumplen las siguientes afirmaciones:
1. φ∂ = ∂φ, donde φ es el flujo gradiente.Sean σ1, . . . , σn los p-simplejos de K. Cada uno con una orientacion fija. Denotamos
φ(σi) =n
∑j=1
aijσj .
2. Para cada i, aii = 0 o 1, y aii = 1 si y solo si σi es crıtico.
3. Si i ≠ j, aij ∈ Z, si ademas aij /= 0 entonces f(σj) < f(σi) para todo σj .
Demostracion.
1. Tenemos que φ∂ = (Id + V ∂ + ∂V )∂ = ∂ + V ∂∂ + ∂V ∂ = ∂ + ∂V ∂. Por otra parte,∂φ = ∂(Id + V ∂ + ∂V ) = ∂ + ∂V ∂ + ∂∂V = ∂ + ∂V ∂.
2. y 3. Como V y ∂ mandan cadenas enteras en cadenas enteras, tenemos que aij ∈ Z.Por el Corolario 1.4.7 cada σp cumple exactamente una de las siguientes propiedades:σ es crıtico, ±σ ∈ Im(V ) o V (σ) ≠ 0.
(i) Si σ es crıtico, entonces V (σ) = 0, por tanto φ(σ) = σ + V (∂σ) = σ +∑vp−1<σ ε(σ, v)V (v). Como σ /∈ Im(V ) tenemos que para cada vp−1 < σ, f(v) <f(σ) y V (v) = 0 o V (v) = σp con f(σ) ≤ f(v) < f(σ). Entonces,
φ(σ) = σ + ∑vp−1<σ,σ≠σ
aσσ,
donde aσ ≠ 0 implica que f(σ) < f(σ) y en este caso aii = 1.
(ii) Si σ no es crıtico, por Teorema 1.4.6 σ no es crıtico si y solo si ±σ ∈ Im(V )o V (σ) ≠ 0. Si σ ∈ ImV entonces σ ⊂ Ker, por Teorema 1.4.6(1), por tantoφ(σ) = σ + V (∂σ) = σ + ∑vp−1<σ ε(σ, v)V (v). De nuevo por Teorema 1.4.6(2)existe una unica (p− 1)-cara v < σ con V (v) = ±σ. Ahora, como ε(σ, v) = ⟨∂σ, v⟩y tenemos que V (v) = −⟨∂σ, v⟩σ entonces ε(σ, v)V (v) = −σ. Mas aun, si v ≠ v < σentonces V (v) = 0 o V (v) = σ con f(σ) ≤ f(v) < f(σ). Esto implica que
φ(σ) = σ − σ + ∑vp−1<σ,σ≠σ
aσσ,
donde aσ ≠ 0 implica que f(σ) < f(σ), y en este caso aii = 0.
22

Homologıa simplicial y teorıa de Morse discreta
(iii) Si σ no es crıtico y V (σ) ≠ 0, entonces V (σ) = −⟨∂τ, σ⟩τ ≠ 0 para algun τp+1 > σcon f(τ) ≤ f(σ), entonces φ(σ) = σ + V ∂σ + ∂V σ. Como en (i) y (ii):
V ∂σ = ∑vp−1<σ,σ≠σ
aσσ.
Ademas,
∂V σ = − ⟨∂τ, σ⟩∂τ= − ⟨∂τ, σ⟩(∑
σ<τε(τ, σ)σ)
= − ⟨∂τ, σ⟩⟨∂τ, σ⟩σ +∑ bσσ
= − σ + ∑σ<τ,σ≠σ
bσσ,
donde bσ ≠ 0 implica que f(σ) ≤ f(τ) < f(σ) y en este caso al sumar paraobtener φ(σ) vemos que tambien aii = 0.
En conclusion; probamos que si σ es crıtico entonces aii = 1. Y probamos que si σ noes crıtico entonces aii = 0. Por tanto, si aii = 1 entonces aii ≠ 0 lo cual implica que σes crıtico. Por tanto aii = 1 si y solo σ es crıtico.
Sea Cφp (K,Z) = {c ∈ Cp(K,Z)∣φ(c) = c}, llamaremos a estos conjuntos cadenas φ-
invariantes de K. Veamos que ∂(Cφp ) ⊆ Cφp−1: Sea c ∈ ∂(Cφp ) esto implica que c = ∂(σ)donde σ ∈ Cφp , es decir φ(σ) = σ, ahora por Teorema 1.4.8 tenemos que φ(c) = φ∂(σ) =∂φ(σ) = ∂(σ) = c, por tanto c ∈ Cφp−1. Entonces tenemos el siguiente complejo de cadenas,
Cφp ∶ 0→ Cφn(K,Z) ∂Ð→ Cφn−1(K,Z) ∂Ð→ ⋯ ∂Ð→ Cφ0 (K,Z)→ 0,
llamado complejo de Morse-Forman. Tenemos que el complejo de Morse-Forman es uncomplejo de cadenas porque es una restriccion del complejo de cadenas simplicial usual.
Nuestro objetivo sera mostrar que los grupos de homologıa de Cφp y de K son los
mismos. Para esto analizaremos el homomorfismo estabilizador φ∞ ∶ C∗ → Cφ∗ definido porφ∞ = lım
N→∞φN , donde φN denota la composicion de φ consigo misma N veces. Veremos
que para N suficientemente grande φ∞ = φN . Pero antes de eso, necesitamos el siguienteresultado.
Lema 1.4.9. Sea c ∈ Cφp (K,Z); donde c = ∑σ∈Kp aσσ y Kp denota a los simplejos dedimension p en K. Sea σ∗ cualquier elemento que maximize el conjunto {f(σ)∣aσ ≠ 0}.Entonces σ∗ es crıtico en f .
Demostracion. Como c es φ-invariante tenemos que c = φ(c) = ∑σ∈Kp aσφ(σ). Ahora,aσ∗ = ⟨c, σ∗⟩ = ⟨∑aσφ(σ), σ∗⟩ = ∑aσ⟨φ(σ), σ∗⟩. Por Teorema 1.4.8(3) si σ ≠ σ∗ y f(σ) ≤f(σ∗) entonces aσ = 0, esto implica que aσ⟨φ(σ), σ∗⟩ = 0 para σ ≠ σ∗ por tanto 0 ≠aσ∗ = aσ∗⟨φ(σ∗), σ∗⟩ entonces ⟨φ(σ∗), σ∗⟩ ≠ 0, lo cual implica que ⟨φ(σ∗), σ∗⟩ = 1, es decirφ(σ∗) = σ∗ y ası σ∗ ∈ Cφp . Pero ⟨φ(σ∗), σ∗⟩ = 1 pero por el Teorema 1.4.8(2) significatambien que σ∗ es crıtico.
23

Capıtulo 1
Teorema 1.4.10. Para N suficiente grande φN = φN+1 = ⋯ = φ∞.
Demostracion. Sea σ ∈K, demostraremos que φN(σ) = φN+1(σ) = ⋯ = φ∞(σ). Hagamosinduccion sobre r = #{σ ∈K ∣f(σ) < f(σ)}:
Para r = 0. Sea σi ∶= σ tenemos que φ(σi) = ∑σj∈K aijσj y por Teorema 1.4.8(3) aij = 0para todo j ≠ i, por tanto φ(σ) = σ o φ(σ) = 0, en cualquier caso φ(σ) = φ∞(σ).
Para r > 0, veamos dos casos, con la siguiente hipotesis de induccion: Suponga-mos que para cualquier σ tal que #{σ ∈ K ∣f(σ) < f(σ)} ≤ r − 1 existe Nσ tal queφN(σ) = φN+1(σ) = ⋅ ⋅ ⋅ = φ∞(σ). Sea σ tal que #{σ ∈K ∣f(σ) < f(σ)} ≤ r.
Supongamos que σ no es crıtico: por Teorema 1.4.8(2) y (3) φ(σ) = ∑f(σ)<f(σ) aσσ.
Veamos que podemos aplicar la hipotesis de induccion a los elementos de {σ ∈K ∣f(σ) < f(σ)}, sea σ0 ∈ {σ ∈ K ∣f(σ) < f(σ)}, tenemos que {σ ∈ K ∣f(σ) < f(σ0)} ⊊{σ ∈ K ∣f(σ) < f(σ)} pues en particular σ0 /∈ {σ ∈ K ∣f(σ) < f(σ0)}, por tanto#{σ ∈K ∣f(σ) < f(σ0)} ≤ r − 1 para cada σ0 en la sumatoria.
Entonces, por hipotesis de induccion para cada σ en la sumatoria existe Nσ tal que
φNσ(σ) es φ-invariante siempre que f(σ) < f(σ).
Sea N = max Nσ. Tenemos que,
φN+1(σ) = φN(φ(σ)) = ∑f(σ)<f(σ)
aσφN(σ) (⋆)
esto implica que φN+1(σ) es φ-invariante, pues: por (⋆),
φ(φN+1(σ)) =φ( ∑f(σ)<f(σ)
aσφN(σ))
= ∑f(σ)<f(σ)
aσφ(φN(σ))
= ∑f(σ)<f(σ)
aσφN(σ) pues φN(σ) es φ-invariante
=φN( ∑f(σ)<f(σ)
aσσ)
=φN(φ(σ))
=φN+1(σ).
Supongamos que σ es crıtico por el Teorema 1.4.6 tenemos que V (σ) = 0, sea c =V (∂σ), esto implica que,
φ(σ) =σ + ∂V σ + c = σ + cφ2(σ) =φ(σ) + φ(c) = σ + c + φ(c)
⋮φm(σ) =σ + c + φ(c) +⋯ + φm−1(c)
24

Homologıa simplicial y teorıa de Morse discreta
Se sigue que φN(σ) es invariante si y solo si φN(c) = 0 para algun N .
Dado que σ es crıtico tenemos por definicion que
φ(σ) = σ + V (∂σ).
Por tanto, por prueba del Teorema 1.4.8
c = V (∂σ) = φ(σ) − σ = (σ +∑σ≠σ
f(σ)<f(σ)
aσσ) − σ =∑σ≠σ
f(σ)<f(σ)
aσσ,
Pero por el mismo argumento de arriba y por hipotesis de induccion existe N tal
que φN(c) es φ-invariante. Observemos que c ∈ ImV y ImV es φ-invariante (comoconjunto), es decir φ(ImV ) ⊆ ImV pues:
φV = (Id + ∂V + V ∂)V = V + ∂V 2 + V ∂V = V + V ∂V = V (Id + ∂V ),
lo que implica que φN(c) ∈ ImV .
Notemos que ImV es ortogonal a las caras crıticas pues recordemos por Teorema1.4.6, que σ es crıtico si y solo si V (σ) = 0 y σ /∈ ImV . Ası para cualquier τ ∈ ImV ,dado que σ es crıtico tenemos que τ ≠ σ lo cual implica que ⟨τ, σ⟩ = 0 para todoτ ∈ ImV , mas explicitamente,
⟨τ, σ⟩ = ⟨ ∑α∈Kp
aαV (α), σ⟩ =∑aα⟨V (α), σ⟩ = 0.
Supongamos que φN(c) ≠ 0, entonces podemos escribir φN(c) = ∑ bσσ con bσ ≠ 0para todo σ en la sumatoria. Sea σ∗ el elemento que maximiza el conjunto {f(σ)∣bσ ≠0}. Por el Lema 1.4.9 σ∗ es crıtico, por tanto ⟨φN(c), σ∗⟩ = 0, pero por otra parte
⟨φN(c), σ∗⟩ = bσ∗ , es decir bσ∗ = 0, lo cual es una contradiccion y por tanto φN(c) = 0
y ası φN(σ) es φ-invariante.
En el Teorema 1.4.10 probamos que para cada cadena C existe un N suficientementegrande tal que φN(C) = φN+1(C) = φN+2(C) = ⋯. Denotamos por φ∞(C) a esta cadenaφ-invariante. Entonces para cada p tenemos los siguientes homomorfismos:
φ∞ ∶ Cp(K,Z)→ Cφp (K,Z)
i ∶ Cφp (K,Z)↪ Cp(K,Z)
Notese que φ∞ ○ i es la identidad en Cφp (K,Z).
Teorema 1.4.11. Sea Cφ∗ el complejo de Morse-Forman de K. Entonces para cada p,
Hp(Cφ∗ ) ≅Hp(K,Z).
25

Capıtulo 1
Demostracion. Por 1.4.8 y 1.4.10 tenemos que existe que N tal que φ∞∂ = φN∂ = ∂φN =∂φ∞, ademas siempre se cumple que i∂ = ∂i. Entonces podremos considerar el siguientediagrama conmutativo:
C∗ ∶ 0 // Cd∂ //
φ∞
��
Cd−1∂ //
φ∞
��
⋯ ∂ // C0
φ∞
��
// 0
Cφ∗ ∶ 0 // Cφd∂ //
i
OO
Cφd−1∂ //
i
OO
⋯ ∂ // Cφ0//
i
OO
0
Seanφ∞∗ ∶H∗(K,Z)→H(Cφp )
i∗ ∶H(Cφp )→H∗(K,Z),los morfismos inducidos en homologıa. Demostraremos que φ∞∗ y i∗ son isomorfismos.Basta probar que son inversos uno del otro.
Como φ∞ ○ i = IdCφp
tenemos que:
IdH(Cφ
∗) = (Id
Cφp)∗ = (φ∞ ○ i)∗ = φ∞∗ ○ i∗.
Para ver que i∗ ○ φ∞∗ = IdHp(K,Z) es suficiente encontrar un operador
L = {Ln ∶ Cφn(K,Z)→ Cn+1(K,Z)}
tal que Id−i○φ∞ = ∂L+L∂, pues esto implicaria que Id ≃ i○φ∞ y por tanto, Id∗ = (i○φ∞)∗o lo que es lo mismo:
IdHp(K,Z) = i∗ ○ φ∞∗ .
Como i es la identidad en cadenas y φ∞ = φN para algun N suficientemente grande:
Id − i ○ φ∞ =Id − φN = (Id − φ)(Id + φ +⋯ + φN−1)=(Id − [Id + ∂V + V ∂])(Id + φ +⋯ + φN−1)=(−∂V − V ∂)(Id + φ +⋯ + φN−1)= − ∂V (Id + φ +⋯ + φN−1) − V ∂(Id + φ +⋯ + φN−1)=∂(−V (Id + φ +⋯ + φN−1)) + (−V (∂ + ∂φ +⋯ + ∂φN−1))=∂[−V (Id + φ +⋯ + φN−1)] + [−V (Id + φ +⋯ + φN−1)]∂.
Por tanto, sea L = −V (Id + φ +⋯ + φN−1).
Corolario 1.4.12. Hn(Cφn) no depende de la FMD f dada para K.
Por ultimo veamos que el complejo de cadenas de Morse es isomorfo al complejogenerado por los elementos crıticos de f en K.
Para cada p definamos:
Mp ∶= { ∑σ∈Kp
aσσ∣aσ ∈ Z y aσ ≠ 0 implica que σ es crıtico.}
26

Homologıa simplicial y teorıa de Morse discreta
Consideremos φ∞ ∶ Mp → Cφp (K,Z) como la restriccion de φ∞ ∶ Cφp (K,Z) → Cφp (K,Z),veremos que este nos funciona como isomorfismo. Pero primero necesitamos el siguienteresultado.
Lema 1.4.13. Sea σ un p-simplejo crıtico. Si σ ≠ σ es crıtico, entonces ⟨φ∞(σ), σ⟩ = 0.
Demostracion. Por Teorema 1.4.10 φ∞(σ) = φN(σ) para algun N suficientemente grande,ademas en la prueba de este Teorema se vio que si σ es crıtico entonces φN(σ) = σ+V ∂(σ)+φ(V ∂(σ)) + ⋯ + φN−1(V ∂(σ)), donde V ∂σ ∈ ImV y ImV es φ-invariante, lo que implicaque φN(σ) = σ + a, donde a ∈ ImV ⊆M. Lo que implica que
⟨φ∞(σ), σ⟩ = ⟨φN(σ), σ⟩ = ⟨σ + a, σ⟩ = ⟨σ, σ⟩ + ⟨a, σ⟩ = 0,
donde la ultima igualdad se da pues a ∈ ImV y σes crıtico y recordemos que ImV esortogonal al conjunto de simplejos crıticos, ademas que ⟨σ, σ⟩ = ⟨σ + 0 ⋅ σ,0 ⋅ σ + σ⟩ = 0 porla defnicion de este producto interno.
Teorema 1.4.14. La funcion φ∞ ∶Mp → Cφp (K,Z) es un isomorfismo.
Demostracion. Veamos que φ∞ es sobreyectiva: sea c ∈ Cφp (K,Z) y definamos
c ∶= ∑γ crıtico
⟨c, γ⟩γ ∈Mp.
Demostraremos que φ∞(c) = c. Tenemos que para cualquier crıtico σ,
⟨φ∞(c), σ⟩ =⟨φ∞(∑γ
⟨c, γ⟩γ), σ⟩
=∑γ
⟨c, γ⟩⟨φ∞(γ), σ⟩
=⟨c, σ⟩⟨φ∞(σ), σ⟩=⟨c, σ⟩⟨σ + a, σ⟩ con a ∈ ImV
=⟨c, σ⟩⟨σ,σ⟩ + ⟨c, σ⟩⟨a, σ⟩=⟨c, σ⟩,pues ⟨a, σ⟩ = 0.
donde la tercer igualdad se obtiene del Lema 1.4.13. Por otra parte, dado que φ∞(c)− c esφ-invariante, entonces para cada σ crıtico, por la igualdad anterior,
⟨φ∞(c) − c, σ⟩ = ⟨φ∞(c), σ⟩ − ⟨c, σ⟩ = ⟨c, σ⟩ − ⟨c, σ⟩ = 0.
Si tuvieramos que φ∞(c) − c ≠ 0, entonces tomando σ∗ el simplejo que maximiza f (queaparece en φ∞(c) − c) obtenemos una contradiccion pues por el Corolario 1.4.9 tenemos⟨φ∞(c) − c, σ∗⟩ = bσ∗ ≠ 0 y por la igualdad anterior. Por tanto φ∞(c) = c.
Ahora veamos que φ∞ es inyectiva: Supongamos que c ∈ Mp satisface φ∞(c) = 0,tenemos que para cada σ crıtico, ⟨φ∞(c), σ⟩ = ⟨0, σ⟩ = 0. Recordemos que
φ∞(c) = c + V ∂(c) + φ(V ∂(c)) +⋯ + φN−1(V ∂(c)).
Por tanto
0 = ⟨φ∞(c), σ⟩ = ⟨c + V ∂(c) + φ(V ∂(c)) +⋯ + φN−1(V ∂(c)), σ⟩ = ⟨c, σ⟩.
27

Capıtulo 1
Por tanto ⟨c, σ⟩ = 0 para cada crıtico enMp, lo cual implica que c = 0 es decir, Kerφ∞ = {0}.
El resultado anterior nos permite definir un operador frontera, y ası obtener el complejode cadenas generado por los elementos crıticos de f en K el cual resulta isomorfo porconstruccion al complejo de cadenas de Morse-Forman, tenemos el siguiente diagramaconmutativo:
Cφ∗ ∶ 0 // Cφn∂ // Cφn−1
∂ // ⋯ ∂ // Cφ0// 0
M ∶ 0 //Mn∂ //
φ∞ ≅
OO
Mn−1∂ //
φ∞ ≅
OO
⋯ ∂ //M0//
φ∞ ≅
OO
0
Donde definimos ∂n = (φ∞n−1)−1 ○ ∂n ○ φ∞n . Ademas podemos ver que
∂n ○ ∂n+1 = (φ∞n−1)−1 ○ ∂n ○ φ∞n ○ (φ∞n )−1 ○ ∂n+1 ○ φ∞n+1 = 0.
Por tantoM es un complejo simplicial y como es isomorfo a Cφ∗ tambien lo llamaremoscomplejo de Morse.
De esta manera obtenemos el siguiente resultado
Corolario 1.4.15. Hd(K,Z) ≅Hd(M) para toda d.
Demostracion. Como M ≅ Cφ∗ , por el Corolario 1.2.8 se sigue que Hd(M) ≅ Hd(Cφ∗ ) ypor el Teorema 1.4.11 tenemos que Hd(M) ≅Hd(Cφ∗ ) ≅Hd(K,Z).
Por tanto podemos calcular la homologıa de K utilizando solo sus simplejos crıticos.
Por ultimo calculemos el complejo de Morse-Forman de un complejo simplicial parailustrar las ventajas de la teorıa de Forman, para ello usaremos un metodo combinatoriopresentado en [9, Seccion 2.5] y en [6, Seccion 8].
Para un complejo simplicial K escojamos una orientacion sobre sus simplejos. Si τd
es un simplejo crıtico de una funcion de Morse f , entonces podemos calcular el operadorfrontera del complejo de Morse-Forman asociado a f de la siguiente manera:
∂(τd) ∶= ∑σd−1crıticos
cσ,τσd−1,
donde cσ,τ = ∑η∈Γ(τ,σ)m(η). Γ(τ, σ) denota el conjunto de los caminos gradiente quevan de las (d − 1)-caras de τ al (d − 1)-simplejo crıtico σ y m(η) = ∓1, dependiendo si laorientacion deslizada en σ es la orientacion escogida o la contraria.
Ejemplo 1.4.16. Sea K el complejo simplicial definido en el Ejemplo 1.2.10 y tomemosla estructura simplicial, ası como el campo vectorial gradiente definidos en el Ejemplo1.4.2, consideraremos la orientacion dada por los subindices de los vertices.
Tenemos los crıticos {v2, v3} y v1, por tanto el complejo de cadenas Morse-Formanqueda generado como sigue:
28

Homologıa simplicial y teorıa de Morse discreta
M ∶ . . . ∂2Ð→ ⟨{v2, v3}⟩∂1Ð→ ⟨v1⟩
∂0Ð→ 0.
Podemos ver que Hn(K,Z) ≅ 0 para n > 2. Calculemos los operadores frontera ∂n paran = 0,1,2. ∂2 = 0 pues su dominio es 0, y ∂0 = 0 pues su contradominio es 0. Para calcular∂1 veamos los caminos que van de {v2, v3} a v1:
η1 ∶ (v2,{v1, v2}), (v1).
η2 ∶ (v3,{v3, v4}), (v4,{v2, v4}), (v2,{v1, v2}), (v1).
Arrastrando la orientacion tenemos que m(η1) = 1,m(η2) = −1, por tantocv1,{v2,v3} = 1 − 1 = 0, de manera que ∂1({v2, v3}) = 0 ⋅ v1, es decir ∂1 = 0.
Ası,
H0(K,Z) ≅H0(M) = Ker ∂0 /Im ∂1 = Z /0 ≅ Z,
H1(K,Z) ≅H1(M) = Ker ∂1 /Im ∂2 = Z /0 ≅ Z,
H2(K,Z) ≅H2(M) = Ker ∂2 /Im ∂3 = 0 /0 ≅ 0.
29

30

Capıtulo 2
Emparejamientos generalizados
En esencia las funciones de Morse nos permiten definir una particion (llamadaemparejamiento) en un complejo simplicial K, donde cada elemento en K /∼ (donde ∼denota el emparejamiento) contiene a lo mas dos simplejos de K, de tal modo que lossimplejos que quedan aislados en la particion determinan la homologıa de K.
En este capıtulo generalizamos el concepto de emparejamiento permitiendo particionesde K donde cada elemento de la particion (que llamaremos intervalo) puede contenermas de dos simplejos. Dicha generalizacion proporciona mas flexibilidad permitiendonoseligir particiones mas economica computacionalmente reduciendo el numero de “parejas”.Ademas si involucramos una accion de un grupo G en K veremos que usar emparejameintosgeneralizados nos proporciona el margen de maniobra para elegir particiones que preservenlas simetrıas de K y demostramos que se puede construir un complejo simplicial K ′ conlos elementos aislados de la particion tal que K ′ es G-homotopico al complejo original K.Para lograr este objetivo es necesario generalizar algunos conceptos vistos en el capıtuloanterior.
2.1. Campo vectorial gradiente algebraico
Como vimos en la teorıa de Morse discreta, el concepto fundamental es el de empare-jamiento que es obtenido a traves del campo vectorial gradiente, para crear una variantede esto daremos una definicion mas general del campo gradiente.
Definicion 2.1.1. Sea C ∶ ⋅ ⋅ ⋅→ Cn∂Ð→ Cn−1 → . . . un complejo de cadenas.
Sea V ∶ C∗ → C∗+1 una aplicacion tal que:
1. V ∶ Ck → Ck+1 es un homomorfismo para cada k ∈ N,
2. V 2 = 0,
3. Para cada a ∈ C existe algun n ∈ N con
V (Id − ∂V )n(a) = 0.
La primera n para la que se cumpla 3. es llamada el grado de V -nilpotencia de a.Decimos que V es un campo vectorial gradiente algebraico.
31

Capıtulo 2
No es difıcil ver que el campo vectorial gradiente asociado a una FMD (vease en 1.4.1),cumple la definicion anterior.
Ahora para ver las propiedades que cumple el campo vectorial gradiente algebraico,definimos el siguiente operador auxiliar
W ∶ C∗ → C∗+1
a↦ ∑k≥0
V (Id − ∂V )k(a)
Ahora, como V 2 = 0, tenemos que (Id − ∂V )V = V − ∂V 2 = V , por tanto (Id − ∂V )nV = Vpara toda n, entonces W 2 = 0.
Podemos ver tambien que
W∂V (a) = ∑k≥0
V (Id − ∂V )k∂V (a)
= ∑k≥0
V (Id − ∂V )k(Id − Id + ∂V )(a)
= ∑k≥0
V (Id − ∂V )k(Id − (Id − ∂V ))(a)
= V [∑k≥0
(Id − ∂V )k(a) −∑k≥0
(Id − ∂V )k+1(a)]
= V (Id − ∂V )0(a)= V (a)
En la antepenultima igualdad se cancelan los terminos al desarrollar la sumatoria puestenemos una suma telescopica. Entonces,
W∂W =W∂∑k≥0
V (Id − ∂V )k = ∑k≥0
W∂V (Id − ∂V )k = ∑k≥0
V (Id − ∂V )k =W
Definicion 2.1.2. Sea V un c.v.g.a. definamos φ ∶ C∗ → C∗ como:
φ(a) = a − (∂W (a) +W∂(a)),
donde W (a) = ∑k≥0 V (Id − ∂V )k(a) para a ∈ C.
Nota 2.1.3. Denotamos a proposito a este morfismo como el morfismo que da el flujogradiente pues sera su analogo en este nuevo contexto.
φ es la version algebraica de lo que Forman llama φ∞. Este morfismo nos sera de utilidadpara demostrar uno de los resultados importantes que tenemos en la teorıa de Morse, peroantes unas propiedades que cumple φ.
Proposicion 2.1.4. El morfismo φ cumple las siguientes propiedades:
φ es un morfismo de cadena,
φ ≃ Id,
φ es una proyeccion, es decir φ2 = φ.
32

Emparejamientos generalizados
Demostracion.
∂φ = ∂ − ∂2W − ∂W∂ = ∂ − ∂W∂ −W∂2 = (Id − ∂W −W∂)∂ = φ∂,
por tanto φ es un morfismo de cadena.
De la definicion de φ, Id − φ =W∂ + ∂W , ası W define una homotopıa entre Id y φ.
Por ultimo,
φ2 = (Id − (∂W +W∂))2
= Id2 − 2(∂W +W∂) + (∂W +W∂)2
= Id − 2∂W − 2W∂ + ∂(W∂W ) + ∂WW∂ +W∂∂W + (W∂W )∂= Id − 2∂W − 2W∂ + ∂W +W∂
= Id − ∂W −W∂ por observaciones anteriores acerca de W
= φ
Lema 2.1.5. El morfismo φ ∶ C → φ(C) induce un isomorfismo en homologıa.
Demostracion. Como φ ≃ Id, tenemos que φ∗ = Id∗.
2.1.1. Simplejos crıticos
Como sabemos los simplejos crıticos asociados a una FMD nos dan informacion to-pologica, en este nuevo contexto no sera la excepcion.
Definicion 2.1.6. Sea V un c.v.g.a. fijo. Para cada p, sea
Mp = KerVp /ImVp−1
De nuevo, podemos observar que si V es el campo gradiente asociado a una FMD,pudimos haber definido los simplejos crıticos utilizando la definicion 2.1.6, pues de unresultado anterior (en el contexto de Forman) tenemos que σ es crıtico si y solo si V (σ) = 0y σ /∈ ImV esto es equivalente a que σ ∈ KerV y σ /∈ ImV (ver Teorema 1.4.6), Ası, σes crıtico si y solo si 0 ≠ σ ∈ KerV /ImV . Por tanto es natural querer demostrar que elcomplejo generado por los crıticos en este nuevo contexto tiene la misma homologıa queel complejo original.
Teorema 2.1.7. φ∣KerV ∶ KerV → φ(C) puede ser descompuesto como
KerV →M φ′Ð→ φ(C)[a]↦ φ(a),
donde el primer morfismo es un morfismo cociente, y el segundo es un isomorfismo.
33

Capıtulo 2
Demostracion. Consideremos la composicion φ ○ V . Podemos ver que
φ ○ V (a) = V (a) − ∂WV (a) −W∂V (a),pero W∂V = V y WV (a) = ∑k≥0 V (Id − ∂V )kV (a) = 0 (cada termino tiene el factor V 2).Ası que ImV ⊆ Kerφ, por tanto φ induce un homomorfismo bien definido,
M = KerV /ImVφ′Ð→ φ(C)
[b]↦ φ(b).Basta probar que el homomorfismo φ′ ∶M→ φ(C) definido por φ′b = φb (donde b es la
clase en KerV /ImV con representante b) es biyectivo, y entonces un isomorfismo.
Veamos que φ′ es inyectivo. Sea b ∈ KerV tal que φb = 0 (es decir b ∈ Kerφ′).Ahora,dado que V b = 0 implica que Wb = 0,
0 = φb = b − ∂Wb −W∂b = b −W∂b,
entonces b = W∂b ∈ ImW ⊆ ImV por definicion de W , por tanto b = 0, es decir,Kerφ′ = 0 y ası φ′ es inyectivo.
Veamos que φ′ es sobreyectivo. Demostraremos que para cualquier a ∈ Cp existeb ∈ Mp tal que φ′b = φa. De existir dicha b es representada por algun elementoc ∈ Ker(Vp) tal que φa = φc.Probaremos que tal c existe por induccion sobre n el grado de V -nilpotencia de a.Si n = 0 tenemos que V a = 0 entonces a ∈ KerVp y escogemos c = a.La hipotesis de induccion es: Supongamos que para cada a con V (Id − ∂V )na = 0para todo n′ ≤ n − 1 existe c ∈ KerVp tal que φ(a) = φ(c).Sea a tal que V (Id − ∂V )n(a) = 0, observemos que
φ(Id − ∂V ) =φ − (∂V − ∂W∂V −W∂2V )=φ − (∂V − ∂W∂V )=φ − (∂V − ∂V )=φ,
entonces φa = φ(Id − ∂V )a, y como (Id − ∂V )a tiene menor grado de V -nilpotenciaque a, entonces por hipotesis de induccion tenemos que existe c ∈ KerV tal queφ(c) = φ((Id − ∂V )a) = φ(a).
Corolario 2.1.8. Existe un operador ∂ tal que el complejo M ∶ . . .Mn∂Ð→Mn−1 → . . .
tiene la misma homologıa que C ∶ . . .Cn∂Ð→ Cn−1 → . . . .
Demostracion. Por Lema 2.1.5 los complejos de cadenas (C,∂) y (φ(C), ∂) tienenhomologıa isomorfa. Por Teorema 2.1.7Mp y φ(Cp) son isomorfos, y sus grupos de homo-logıa tambien lo son, con ∂ = φ′−1○∂○φ′ donde φ′ es como en la prueba del Teorema 2.1.7.
Observacion. 2.1.9. Si a ∈ KerV entonces ∂(a) = (Id− ∂V )n∂a donde n es (al menos) elgrado de nilpotencia de ∂a.
De esta manera concluimos que el campo vectorial algebraico generaliza al campo vec-torial definido en el capıtulo anterior, por tanto podremos hablar indistintivamente deellos.
34

Emparejamientos generalizados
2.2. Emparejamientos generalizados de Morse
En esta seccion extraeremos la propiedad de emparejar de las funciones de Morse (ode los campos vectoriales gradientes algebraicos), para despues dar una definicion masapropiada a nuestros fines.
Dado un complejo K, consideremos P (K) (el conjunto parcialmente ordenado de sim-plejos en K ordenados por la inclusion), podemos ver esto como un grafo dirigido, dondelas flechas indican la siguiente relacion: Decimos que τ cubre a σ si σ < τ y no existeelemento ρ con σ < ρ < τ . Note que esto equivale a decir que σ es una cara inmediata de τ .Pondremos una flecha de τ a σ.
Ejemplo 2.2.1. Consideremos K como en el Ejemplo 1.2.10. Podemos ilustrar P (K)utilizando el diagrama de Hasse.
{v3, v4, v5}
{v1, v2} {v2, v3} {v2, v4} {v3, v4} {v3, v5} {v4, v5}
{v1} {v2} {v3} {v4} {v5}
∅
Definicion 2.2.2. Un emparejamientoM en P (K) es una particion en P (K) que constade a lo mas dos elementos por clase y en cada clase (σp, τp+1), se cumple que σp < τp+1.
Ahora, una FMD (o un campo vectorial gradiente algebraico) inducen un empareja-miento en P (K), que llamaremos emparejamiento de Morse.
Recıprocamente, de tal emparejamiento, podemos recuperar el campo vectorialgradiente algebraico definiendo en sus componentes no-cero V (σ) = τ cuando hay unemparejamiento de σ a τ .
Es natural preguntarse, si dado un emparejamiento en P (K), si existe un empareja-miento de Morse (y por tanto produce un complejo de Morse). Para contestar esta preguntanecesitamos la siguiente definicion.
Definicion 2.2.3. Dada una grafica dirigida G = (V,A) y una relacion de equivalencia ∼en sus vertices, construimos la grafica G /∼ como sigue:
El conjunto de vertices de G /∼ es V /∼ .
Existe una arista de v1 a v2 si existen w1,w2 ∈ V con wi ∈ vi y una arista (w1,w2) ∈ A.
35

Capıtulo 2
Ejemplo 2.2.4. Consideremos la grafica G con vertices {1,2,3,4}, con aristas{(1,2), (1,3), (3,4)}:
1
2 3
4
y ∼ dada por las relaciones 1 ∼ 2 y 3 ∼ 4. Por tanto V /∼ = {1, 3}, A /∼ = {(1, 3)}entonces la grafica G /∼ tiene la forma:
1 3
Nota 2.2.5. De ahora en adelante, omitiremos las flechas que denotan la relacion de“cubrir”, y utilizar las flechas para denotar los emparejamientos que veremos mas adelante.La idea es no confundir al lector con la cantidad de lıneas. Las lineas que van de σ a τindicaran que σ es emparejado con τ .
Teorema 2.2.6. Un emparejamiento M en P (K) es un emparejamiento de Morse si ysolo si P (K) /M no tiene caminos dirigidos cerrados.
Demostracion. Supongamos que existe un camino cerrado w1 → w2 → ⋅ ⋅ ⋅ → wn → w1
en P (K) /M (Vease en [6, p.130]). Cada flecha en P (K) va de un (p + 1)-simplejo enun p-simplejo para alguna p, y cada wi consiste de un simplejo o una pareja de la forma(σp, τp+1). Entonces al camino cerrado podemos con respecto a su preimagen en P (K) dela siguiente forma:
τp+11
P (K)ÐÐÐ→ σp2M←Ð τp+1
2
P (K)ÐÐÐ→ . . .M←Ð τp+1
n
P (K)ÐÐÐ→ σp1
donde σi esta emparejado con τi por M para i = {0, . . . , n} y wj = (σj , τj) con τj > σj .
Ası, si M fuera inducido por una FMD f , tendrıamos
f(τ1) > f(σ2) ≥ f(τ2) > ⋅ ⋅ ⋅ ≥ f(τn) > f(σ1),
lo que implica f(τ1) > f(σ1). Pero como σ1 es emparejado con τ1, tendremos quef(σ1) ≥ f(τ1) lo cual nos produce una contradiccion. Ası M no es inducido por ningunaf , y entonces no es un emparejamiento de Morse.
Recıprocamente, supongamos que no existen caminos dirigidos cerrados en P (K) /M .Como K es finito , tenemos que P (K) /M es finito. Ası, cualquier camino en P (K) /Mtiene longitud finita. Definimos f ∶K → R tomando f(σ) como la longitud del camino maslargo comenzando en σ. Veamos que f es una FMD:
Si σp < τp+1 en K, existe una flecha τ → σ en P (K). Si esta flecha esta en elemparejamiento M tenemos que σ = τ , por tanto f(σ) = f(τ). De otra manera, cualquiercamino que comienza en σ (es decir en σ ∈ P (K) /M ) puede extenderse a uno maslargo comenzando en τ (es decir en τ ∈ P (K) /M ), en este caso f(σ) < f(τ). Por tanto,
36

Emparejamientos generalizados
f(σ) ≤ f(τ) con la igualdad si y solo si τ ∼M σ. Es decir f es una FMD e induce unemparejamiento de Morse.
¿Pueden estos argumentos ser llevados a P (K) /∼ para una particion ∼ que no es unemparejamiento?, para contestar esta pregunta presentaremos un tipo de particion diferenteutilizando los siguientes conjuntos.
Definicion 2.2.7. Sean σp, τp+m ∈K tal que σ ⊆ τ . Definimos
[σ, τ] ∶= {γ ∈K ∣σ ⊆ γ ⊆ τ}.
Observemos que esta definicion es valida para cualquier poset (conjunto parcialmenteordenado).
Nota 2.2.8. Dados σ = {v0, . . . , vn}, τ = {v0, . . . , vn+m} denotamos al intervalo formadopor ellos como
[{v0, . . . , vn},{v0, . . . , vn+m}],
o simplemente por[v0 . . . vn, v0 . . . vn+m].
De ahora en adelante ∼ sera una particion en intervalos. El caso clasico ocurre cuandocada intervalo tiene rango 1 o 2 (por rango nos referimos a el numero de elementos delintervalo), es decir, cuando ∼ es un emparejamiento.
Ejemplo 2.2.9. Consideremos K = {1,2,3,{1,2},{1,3},{2,3},{1,2,3}} con el empareja-miento ∼= {(3), (1,13), [2,123]}. El emparejamiento en el diagrama de Hasse esta dadopor:
1 2 3
{1,2} {1,3} {2,3}
{1,2,3}
Para contestar la pregunta al teorema anterior, tenemos el siguiente teorema:
Teorema 2.2.10. Sea ∼ una relacion de equivalencia en K cuyas clases de equivalenciason intervalos en P (K). Supongamos que P (K) /∼ no tiene caminos cerrados dirigidos.Entonces existe una FMD en K cuyos simplejos crıticos son exactamente aquellos queestan solos en su clase de equivalencia bajo ∼.
Demostracion. Dado cualquier intervalo [σ, τ] en P (K) no trivial, construyamos elsiguiente emparejamiento total en el:
Para algun vertice fijo v ∈ τ/σ (τ y σ pensados como subconjuntos de Vert(K) ),emparejamos ρ ∈ [σ, τ] con ρ∪{v} para toda ρ que no contenga a v. Note que ρ∪{v} ∈ [σ, τ]pues σ ⊆ ρ ∪ {v} ⊆ τ ademas como ρ ∪ {v} ⊆ τ ∈ K por definicion de complejo simplicial,
37

Capıtulo 2
ρ ∪ {v} ∈ [σ, τ]. Ademas es claro que dim(ρ − v) + 1 = dimρ.
Pongamos todos estos emparejamientos totales juntos, esto genera un emparejamientoM en P (K), que no genera mas simplejos aislados esto es por lo siguiente: para v ∈ τ /σfijo tenemos dos casos,
Si ρ ∈ [σ, τ] es tal que ρ contiene a v entonces ρ−v ⊊ ρ ⊆K esto implica que ρ−v ∈Ky ademas ρ − v ∈ {ρ ∈K ∣σ ⊆ ρ ⊆ τ}, por tanto ρ es emparejado con ρ − v y ρ ≠ ρ − v.
Si ρ ∈ [σ, τ] no contiene a v entonces ρ ∪ {v} ⊆ τ ∈ K lo que implica que ρ ∪ {v} ∈ K,por tanto ρ ∪ {v} ∈ {ρ ∈K ∣σ ⊆ ρ ⊆ τ} entonces ρ se empareja con ρ ∪ {v}.
Por tanto no se generan elementos aislados en un intervalo [σ, τ] no trivial. EntoncesM y ∼ deja los mismos simplejos sin emparejar. Veamos que M genera un campo vectorialgradiente, es decir una FMD: Si existiera un ciclo en P (K) /M tendrıa que estar contenidoen un elemento de P (K) /∼ , porque de otra forma, tendrıamos un ciclo dirigido entreclases de P (K) /∼ , el cual supusimos acıclico. Note que P (K) /M es un “refinamiento” deP (K) /∼ . Mas precisamente, tenemos una proyeccion canonica P (K) /M
πÐ→ P (K) /∼ .
Sea [σ, τ] ∈ P (K) /∼ . Supongamos que existe un ciclo en [σ, τ] /M , entonces, visto enla preimagen (en [σ, τ]) de un ciclo minimal contenido en [σ, τ] /M tendrıa la forma:
ρ1P (K)←ÐÐÐ (ρ2∪{v}
MÐ→ ρ2)P (K)←ÐÐÐ ρ3∪{v}
MÐ→ . . .P (K)←ÐÐÐ (ρn∪{v}
MÐ→ ρn)P (K)←ÐÐÐ (ρ1∪{v}
MÐ→ ρ1),
donde los ρ′is son diferentes, y ninguno de ellos contiene a {v}. Pero como existe una flecha
ρ1 ∪ {v} P (K)ÐÐÐ→ ρn ⊆ ρ1 ∪ {v}, esto implica que ρn es una cara inmediata de ρ1 ∪ {v}, esdecir v ∈ ρn o ρn = ρ1, donde cualquiera es una contradiccion. Por tanto no existen ciclosen P (K) /M .
Por Teorema 2.2.6 existe un campo vectorial gradiente (i.e. una FMD) cuyos crıticosson los mismo que M deja sin emparejar, que son los mismos que deja ∼.
Definicion 2.2.11. Una relacion de equivalencia ∼ en K que satisface las hipotesis delTeorema 2.2.10 , lo llamaremos emparejamiento de Morse generalizado (EMG).
Vimos en la prueba anterior que un emparejamiento de Morse generalizado puede refi-narse a un emparejamiento de Morse ordinario. Pero existen otras maneras de refinar unEMG a uno clasico:
1 2 3
{1,2} {1,3} {2,3}
{1,2,3}
Por otro lado, no todos los emparejamientos totales en [σ, τ] dan un emparejamientode Morse. Como contra ejemplo, consideremos el emparejamiento M para τ = σ∪{1,2,3,4}dado de la siguiente manera,
38

Emparejamientos generalizados
1 2 3 4
{1,2} {1,3} {1,4} {2,3} {2,4} {3,4}
{1,2,3} {1,2,4} {1,3,4} {2,3,4}
{1,2,3,4}
Podemos ver que en [σ, τ] /M tenemos [2,23] → [3,34] → [4,24] → [2,23], por tantono existe emparejamiento de Morse en [σ, τ] por M .
Podemos observar que si la co-dimension en el EMG es menor o igual a 3, cualquierrefinamiento genera un emparejamiento de Morse. Finalmente, existen particiones ∼ deP (K) que no son EMG pero pueden refinarse a un emparejamiento de Morse.
Consideremos el tetraedro con la siguiente particion:
1 2 3 4
{1,2} {1,3} {1,4} {2,3} {2,4} {3,4}
{1,2,3} {1,2,4} {1,3,4} {2,3,4}
{1,2,3,4}
Podemos ver que ∼ no es un EMG pues [2,124] → [1,134] → [3,234] → [2,124]. Sinembargo, podemos dar un refinamiento que genera una FMD clasica cuyo campo vectorialgradiente es el siguiente:
{1,2,3}→ {1,2,3,4}{1,2}→ {1,2,4}{1,3}→ {1,3,4}{2,3}→ {2,3,4}
1→ {1,4}2→ {2,4}3→ {3,4}
2.3. Acciones de grupos en complejos simpliciales
En este capıtulo tendremos como objetivo analizar la accion de un grupo G, en alguncomplejo simplicial. Veremos diferentes tipos de acciones de grupo con el fin de obteneremparejamientos G-equivariantes.
39

Capıtulo 2
En esta seccion fijaremos X como un espacio topologico, G un grupo, un homo-morfismo de grupos ρ ∶ G → aut(X) que llamaremos una accion del grupo G, dondeaut(X) = {h ∶X →X ∣h es homeomorfismo}. Denotaremos por gx a ρ(g)(x) ∈X.
Definicion 2.3.1. Supongamos que G actua en dos espacios X y Y . Una funcionf ∶X → Y es G-equivariante si f(gx) = gf(x) para todo g ∈ G.
Si existe un homeomorfismo G-equivariante X → Y , decimos que X y Y son G-homeomorfos, y lo denotaremos X ≅G Y .
Si X y Y son homotopicamente equivalentes, y las homotopıas pueden ser escogidastal que conmutan con la G-accion, escribimos X ≃G Y .
Definicion 2.3.2. Sea K un complejo supongamos que G actua en Vert(K) de tal maneraque manda simplejos en simplejos. Entonces decimos que G actua simplicialmente en K,y que K es un G-complejo simplicial.
Observacion. 2.3.3. Notese que tal accion es realmente una accion de grupos en K, dadapor gσ = {gv1, . . . gvn}, donde σ = {v1, . . . , vn} ∈K.
Sin embargo, existe una manera natural de extender la accion a una accion en ∣K ∣. Masprecisamente, Sea x ∈ ∣K ∣ = ⋃σ∈K ∣σ∣, lo que implica que x ∈ ∣σ∣ con σ = {v0, . . . , vn}, portanto x = ∑ni=0 aivi. Sea
gx ∶=∑aigvi ∈ g∣σ∣.
Pero tenemos que
g∣σ∣ = {g∑aivi∣∑ai = 1, ai ≥ 0}= {∑aigvi∣∑ai = 1, ai ≥ 0}= ∣gσ∣,
Entonces tenemos una funcion G × ∣K ∣→ ∣K ∣, que claramente es una accion.
Definicion 2.3.4. Sea G una accion simplicial en K.
a) Supongamos que, siempre que gv /= v, no existe simplejo que contenga a v y gv(almismo tiempo) para toda g ∈ G. Entonces diremos que K es llamado un G-complejosemi-regular. Equivalentemente diremos que dados cualesquiera τ ∈K, g ∈ G y v ∈ τtales que v, gv ∈ τ entonces se tiene que gv = v.
b) Consideremos la siguiente condicion:
(⋆)“Si g0, g1, . . . , gn son elementos de G y {v0, . . . , vn} y {g0v0, . . . , gnvn}son ambos simplejos de K, entonces existe un elemento g ∈ G tal quegvi = givi para todo i.”
Una accion simplicial de G en K que satisface esta condicion (⋆) para la accion decada subgrupo de G es llamada regular, y K es llamado un G-complejo regular.
40

Emparejamientos generalizados
Notese que la regularidad es estrictamente mas fuerte que la semi-regularidad:Supongamos que K es un G-complejo regular y que v y gv pertencen al mismo simplejo.Por definicion de simplejo {v, gv} ⊆ τ ∈K implica que {v, gv} ∈K. Entonces {v} y {v, gv}son simplejos de K, y como K es regular algun elemento de g manda {v} en {v, gv}, locual es una contradiccion, a menos que #{v, gv} = 1, por tanto v = gv. Es decir regularimplica semi-regular.
El recıproco no es cierto en general: Consideremos la accion de C3 = ⟨g⟩ en el hexagonoK, donde g es la rotacion en 120 grados.
Veamos que K es un complejo C3- semiregular. Claramente para todo v ∈ Vert(K)siempre que gv /= v implica que v, gv no estan en un mismo simplejo, por tanto K es uncomplejo C3- semiregular. Sin embargo no existe elemento en C3 que mande {1,2} en{2,3} por tanto no es regular.
Recordemos que K ′ denota la subdivision baricentrica de K (vease en 1.1.15). Note quela accion de G en K induce una accion natural en K ′, pues si τ ∈K ′ entonces τ = {σ0, . . . σk}con σi ∈K y σi ⊆ σi+1. Definimos naturalmente
gτ ∶= {gσ0, . . . gσk}.
Note tambien que gτ ∈K ′ pues σi ⊆ σi+1 implica gσi ⊆ gσi+1.
Teorema 2.3.5. Para cualquier G-complejo simplicial K,K ′ es un G-complejo semi-regular. Si K es un G-complejo semi-regular, K ′ es un G-complejo regular.
Demostracion. Supongamos que σ y gσ son dos vertices diferentes de K ′ (ası σ y gσson simplejos de K). Entonces tienen la misma dimension como simplejos de K (pues laaccion es biyectiva), ası ninguno esta contenido en el otro (en el sentido de K). Entoncespor definicion de K ′ no existe simplejo en el que contenga a ambos, pues se necesitarıaque dicho simplejo fuera de la forma {σ0 ⊆ ⋅ ⋅ ⋅ ⊆ σk} donde σ = σi y g(σ) = σj para algunosi, j . Por tanto K ′ es semi-regular.
Ahora supongamos que K es un G-complejo semi-regular, entonces tambien es un H-complejo semi-regular para cualquier subgrupo H de G. Sean σi con i = 1, . . . , n simplejos
41

Capıtulo 2
en K, supongamos que σ1 ⊂ ⋅ ⋅ ⋅ ⊂ σn. Entonces {σ1, . . . σn} es un simplejo general en K ′.Para demostrar que K ′ es regular, demostraremos que si {h1(σ1), . . . , hn(σn)} foman unsimplejo de K ′, con hi ∈H, existe un h ∈H tal que h(σi) = hi(σi) para toda i. Procedamospor induccion sobre n:Para n = 1 si h = h1 tenemos que h(σ) = h1(σ).Ahora supongamos que h(σi) = hi(σi) para cada i = 1, . . . , n − 1. Entoncesh−1{h1(σ1), . . . , hn(σn)} = {σ1, . . . , σn−1, h
′(σn)} es un simplejo de K ′ donde h′ = h−1hn.Pero como simplejos de K, σ1 ⊂ ⋅ ⋅ ⋅ ⊂ σn−1 ⊂ h′(σn). Ası σn−1 ⊂ σn ∩ h′(σn). Y por la semi-regularidad de K, h′ actua trivialmente en σn−1 (pues, para cualquier v ∈ σn−1, h′(σn)contiene a v y h′v, lo cual implica que v = h′v). Por tanto σi = h′(σi) = h−1hn(σi) parai = 1, . . . , n − 1, entonces hi(σi) = hn(σi) = h(σi) para i = 1, . . . , n − 1. Ası hn manda σi ahi(σi) para toda i = 1, . . . , n, y ası K ′ es un H-complejo regular en particular para H = G.
Se sigue de inmediato la siguiente observacion.
Observacion. 2.3.6. (K ′)′ es regular para cualquier G-complejo K.
Proposicion 2.3.7. Si K es un G-complejo semi-regular, entonces los simplejos G-invariantes de K forman un subcomplejo KG de K, y ∣K ∣G = ∣KG∣. Donde ∣K ∣G denota elconjunto de los puntos G-invariantes en ∣K ∣.
Demostracion. Sea σ ∈ K un simplejo fijo (i.e. gσ = σ para toda g ∈ G), veamosque sus caras tambien lo son: {v1, . . . , vn} = {gv1, . . . , gvn} implica que gvi, vi ∈ σ, peropor la semi-regularidad tenemos que gvi = vi y por tanto cualquier cara de σ tambienes fija, esto es, si τ ⊆ σ ∈KG entonces τ ∈KG. Y ası KG es un subcomplejo simplicial de K.
Por demostrar, ∣K ∣G = ∣KG∣: Sea x ∈ ∣KG∣, por tanto x = ∑aivi (Recordemos Nota1.1.14) donde gvi = vi para toda i y para toda g ∈ G pues todas las caras de σ soninvariantes, en particular los vertices, por tanto tenemos que gx = ∑aigvi = ∑aivi = x, yası x ∈ ∣K ∣G.
Recıprocamente, sea x ∈ ∣K ∣G, es decir, existe τ = {v0, . . . , vn} tal que x ∈ ∣τ ∣, por tantox = ∑ni=0 aivi. Reordando vertices, sea σ = {v0, . . . vp} simplejo de K tal que x = ∑pj=0 ajvjes tal que aj ≠ 0 para toda j = 0, . . . , p. Notemos que σ es el unico simplejo de dimension
mınima tal que x ∈ ∣σ∣, pues x ∈ ∣σ∣ con ∣σ∣ = {∑pi=0 aivi∣∑ai = 1, ai > 0} y ∣σ∣ es el unicosimplejo abierto que contiene a x (vease en [13]) .
Por otra parte, dado que x ∈ ∣K ∣G se cumple que gx = x, entonces tenemos que paratodo g ∈ G,
x =∑ajvj = g∑ajvj =∑ajgvj ,
por tanto x ∈ ∣gσ∣ y dado que aj ≠ 0 implica x ∈ g ∣σ∣. Ademas gσ es un simplejo de dimensionp pues g ⋅ () es biyeccion. Por unicidad, tenemos que gσ = σ para todo g ∈ G por tantoσ ∈KG y ası x ∈ ∣σ∣ ⊆ ∣KG∣.
Definicion 2.3.8. Para un G-complejo regular K, definimos el complejo abstracto K /Gcomo sigue:
Los vertices de K /G son las orbitas Gv con v ∈ Vert(K).
42

Emparejamientos generalizados
Los simplejos de K /G son los conjuntos {Gv1, . . . ,Gvn} para todo simplejo{v1, . . . , vn} de K.
Veamos que K /G es efectivamente un complejo simplicial:
Sea {Gv1, . . . ,Gvn} ∈ K /G y {Gv1, . . .Gvi−1,Gvi+1, . . . ,Gvn} ⊂ {Gv1, . . . ,Gvn},ahora, como {Gv1, . . . ,Gvn} ∈ K /G , tenemos que {v1, . . . vn} ∈ K, entonces{v1, . . . vi−1, vi+1, . . . , vn} ∈K y por tanto {Gv1, . . .Gvi−1,Gvi+1, . . . ,Gvn} ∈K /G .
Ejemplo 2.3.9. Sea K el siguiente complejo simplicial, con la accion de Z4 = ⟨g⟩ (el grupocıclico de orden 4).
Tenemos que los vertices de K /Z4 son: {Z4v0} y {Z4v4}, por tanto el unico simplejoes {Z4v0,Z4v4}.
De aquı en adelante denotaremos Gv ≡ [v].
Proposicion 2.3.10. Si K es un complejo regular, entonces ∣K /G ∣ ≅ ∣K ∣ /G .
Demostracion. Consideremos la siguiente funcion:
ϕ ∶ ∣K ∣ /G → ∣K /G ∣[∑aivi]↦∑ai[vi]
Veamos que esta bien definida: Supongamos que [∑aivi] = [∑aiui], entonces tenemosque existe g ∈ G tal que g∑aivi = ∑aiui, por tanto ∑aigvi = ∑aiui, ahora como larepresentacion convexa de un punto es unica tenemos que gvi = ui, es decir [vi] = [ui] ypor tanto ∑ai[vi] = ∑ai[ui].
Ahora veamos que ϕ es continua: Consideremos la funcion
ψ ∶ ∣K ∣→ ∣K /G ∣∑aivi ↦∑ai[vi].
Podemos ver que ψ = ϕ ○ π, donde π ∶ ∣K ∣ → ∣K ∣ /G es la proyeccion natural. Entoncesbasta ver que ψ es continua y G-equivariante para ası que ϕ tambien lo sea.Por demostrar lım
xn→xψ(xn) = ψ(x).
43

Capıtulo 2
Sea x = ∑pi=0 aivi y {xn} con xn = ∑ani vi tal que xn → x. Se puede ver que xn → x si ysolo si ani → ai para toda i = 0, . . . , p. Entonces,
lımxn→x
ψ(xn) = lımxn→x
ψ(∑ani vi) = lımxn→x
∑ani [vi] =∑ai[vi] = ψ(x)
Veamos que ϕ es inyectiva, supongamos que ϕ([∑aivi]) = ϕ([∑aiui]), es decir
∑ai[vi] = ∑ai[ui], por tanto ∑aivi = ∑aigiui. Pero como K es un G-complejo regular,tenemos que existe g ∈ G tal que ∑aivi = ∑aigui y por tanto ∑aivi = g∑aiui y entonces,[∑aivi] = [∑aiui].
Veamos que ϕ es sobre: Demostraremos que, para cualquier ∑ai[vi] ∈ ∣K /G ∣, existeun simplejo {ui} ∈K con [ui] = [vi] para cada i tal que [∑aiui] ∈ ∣K ∣ /G .
Como ∑ai[vi] ∈ ∣K /G ∣, tenemos que {[vi]} es un simplejo en K /G . Entonces pordefinicion existe un simplejo {ui} ∈ K con [ui] = [vi] ∈ K /G para toda i; por tanto,[∑aiui] ∈K /G es tal que ϕ([∑aiui]) = ∑aiui.
Hasta ahora hemos probado que ϕ es una biyeccion continua, entonces como ∣K ∣ escompacto, ∣K ∣ /G tambien lo sera, ademas ∣K /G ∣ es Hausdorff, por tanto ϕ es un homeo-morfismo.
2.4. G-complejos CW modelados por productos torcidos.
Definicion 2.4.1. Sea G un grupo y sea H un subgrupo de G actuando en un espacio X.Consideremos G como un espacio topologico otorgandole la topologıa discreta. Definamosuna relacion de equivalencia ∼ en G×X por (gh, x) ∼ (g, hx). Definimos el espacio G×HXpor el espacio cociente G ×X /∼ . Esta construccion es llamada producto torcido.
Veamos que ∼ es de equivalencia:
Tenemos que (g, x) = (ge, x) y (g, x) = (g, ex) donde e ∈ G es el elemento neutro. Portanto (g, x) ∼ (g, x).
Supongamos que (gh, x) ∼ (g, hx), tenemos que (g, hx) = (ghh−1, hx) ∼ (gh, h−1hx) =(gh, x), por tanto (g, hx) ∼ (gh, x).
Si (g1, x) ∼ (g2, y) implica que g1 = g2h y y = hx. Si (g2, y) ∼ (g3, z) tenemos queg2 = g3h
′ y z = h′y. Entonces g1 = g3h′h, z = h′hx, por tanto (g1, x) = (g3h
′h,x) ∼(g3, h
′hx) = (g3, z)
Definimos una accion deG enG×HX dada por g(g′, x) = (gg′, x), esta bien definida pues(g′h,x) ∼ (g′, hx) implica que g(g′h,x) = (gg′h,x) y g(g′, hx) = (gg′, hx) con (gg′h,x) ∼(gg′, hx) para toda g ∈ G.
Ejemplo 2.4.2. Consideramos un espacio con tres puntos con la accion natural de S3.Supongamos que x es el punto tal que (12)x = x. Tenemos que
S3 × {x} = {(g, x)∣g ∈ S3}.
Veamos cuales son las clases de S3 ×(12) {x}:
44

Emparejamientos generalizados
((12), x) = ((1)(12), x) ∼ ((1), (12)x) = ((1), x)((13), x) = ((123)(12), x) ∼ ((123), (12)x) = ((123), x)((23), x) = ((132)(12), x) ∼ ((132), (12)x) = ((132), x)
Entonces,S3 ×(12) {x} = {[((1), x)], [((123), x)], [((132), x)]}.
Tambien tenemos que (123) rota a los tres puntos en S3 ×(12) {x}, y que (12) intercambialos puntos [((123), x)] y [((132), x)].
Ahora, construiremos, para un grupo fijo G, complejos con productos torcidos comoceldas. Esto se hara inductivamente como sigue:
1. Comenzemos con un conjunto discreto de puntos X0, y una accion en X0 dada porG.
2. Dado Xn−1, peguemos los productos torcidos G ×Hα ∆mα a Xn−1 via inclusiones
G-invariantes de sus fronteras. Obtendremos Xn.
Los Hα’s son subgrupos de G. Aquı, ∆mα son m-simplejos (con las m’s posiblemente
diferentes entre ellas y de n), donde los Hα actuan sobre X0 por restriccion y seextienden a una accion lineal sobre
∆mα = ⟨Vert(∆m
α )⟩ = {m
∑i=0
aiei∣m
∑i=0
ai = 1, ai ≥ 0},
definida por g(∑mi=0 aiei) ∶= ∑mi=0 aigei.
Estrictamente hablando, ∆mα es un disco de una representacion de Hα, es decir,
HαρÐ→ aut(⟨Vert(∆m
α )⟩)g z→ ρg ∶ ⟨Vert(∆m
α )⟩Ð→ ⟨Vert(∆mα )⟩
ei z→ g ⋅ ei.
con Vert(∆mα ) = {ei}mi=0 Ahora α indexa todas las celdas que son agregadas a X en
el paso n.
Para ser preciso, consideremos los morfismos
ι ∶ G ×Hα ∂∆mα ↪ G ×Hα ∆m
α la inclusion natural (que es G-equivariante),
ϕα ∶ G ×Hα ∂∆mα →Xn−1 G-equivariante,
Xn es el espacioXn−1 ⊔α G ×Hα ∂∆m
α /ι(x) ∼ ϕα(x)
45

Capıtulo 2
G ×Hα ∂∆mα
ϕα//
� _
ι
��
Xn−1
��
G ×Hα ∆mα
// Xn
3. Tenemos inclusiones naturales X0 ⊂X1 ⊂ . . . , definimos X = ∪nXn.
Decimos que X es un G-complejo CW modelado en discos de representaciones.
Esto es analogo a la construccion estandar de complejos CW. Tomaremos siempreespacios y grupos finitos, sin embargo la construccion funciona sin estas restricciones.
Ahora, veremos como un G-complejo simplicial puede considerarse como un G-complejoCW modelado en discos de representaciones:
1. Sea K un G-complejo simplicial (para un grupo fijo G). Sea K0 su conjunto devertices.
2. Supongamos que hemos construido Kn−1. Particionemos el conjunto de n-simplejosde K en sus G-orbitas, Onα = {g∆n
α∣g ∈ G} (recordemos que tenemos una accion G ×K →K).
Sea ∆nα un representante de Onα, y sea Hα el subgrupo de G que consiste de aquellos
elementos que dejan ∆nα invariante, es decir,
Hα = {g ∈ G∣g∆nα = ∆n
α}.
Entonces Hα actua en ∆nα, y ası podemos ver que la union disjunta de los simplejos
en Onα es G-homeomorfa a G ×Hα ∆nα:
Demostracion. Consideremos,
φ ∶ G ×Hα ∆nα → Onα
(g, x)↦ gx
Veamos que φ es G-equivariante: Tenemos que para g ∈ G
φg(g′, x) = φ(gg′, x) = gg′x = gφ(g′, x)
Veamos que φ esta bien definida: Sea (g1, x) = (g2, y) es decir g1 = g2h, y = hx paraalguna h ∈Hα. Entonces
φ(g1, x) = g1x = g2hx = g2y = φ(g2, y)
Veamos que φ es continua: Sea gx ∈ Onα (con g ∈ G, x ∈ ∆nα) y sea Vg∆ un abierto
en Onα. Ahora podemos ver que Vg∆ = gV∆ donde V∆ es un abierto en ∆nα, en
particular x ∈ V∆, entonces si consideramos el abierto {g} × V∆, tendremos queφ({g} × V∆) ⊂ gV∆ = Vg∆.
46

Emparejamientos generalizados
Veamos que φ es inyectiva: Supongamos que g1x = g2y con x, y ∈ ∆nα, es decir
x = g−11 g2y ∈ ∆n
α con g−11 g2 ∈ G, por tanto g−1
1 g2 ∈ Hα. Si denotamos h = g−11 g2
tenemos que x = hy y g2 = g1h, por tanto (g2, y) = (g1h, y) ∼ (g1, hy) = (g1, x).
Veamos que φ es sobreyectiva: Sea α ∈ Onα es decir α = gx para algunos g ∈ G yx ∈ ∆n
α, entonces φ(g, x) = gx = α.
Ahora, como G×Hα ∆nα es compacto y Onα es Hausdorff tenemos que φ es un homeo-
morfismo.
Podemos dar una demostracion alternativa en [1, Proposicion 3.2, p.80].
Entonces, el n-esqueleto es obtenido de pegar G×Hα∆nα para toda α a Kn−1 vıa inclu-
siones de sus fronteras. Estas inclusiones seran G-equivariantes, ası la construcciondel esqueleto de Kn sigue fielmente la construccion de un G-complejo CW.
3. Ahora, el n-esqueleto de ∣K ∣ es ⋃l≤nKl, ası ∣K ∣ es el G-complejo CW ⋃nKn.
Ejemplo 2.4.3. Sea K como en el ejemplo 2.3.9; describiremos como el G-complejo simpli-cial K puede considerarse como un G-complejo CW modelado en discos de representaciones
Comenzamos la construccion del G-complejo CW con K0 como sigue:
Vemos que la unica orbita posible en K1 es la siguiente:
O1α ∶ V0V4 → V1V4 → V2V4 → V3V4 → V0V4.
47

Capıtulo 2
Sea ∆1α = V0V4 ∈ O1
α, en este caso, Hα = {e} (el elemento trivial de Z4). Ahora,
Z4 ×∆1α =⋃{{hi} ×∆1
α∣hi ∈ Z4}={{e} × V0V4,{g} × V0V4,{g2} × V0V4,{g3} × V0V4}.
Sean g ∈ Z4 y x ∈ ∆1α, entonces para cada h ∈ {e},
(g, x) = (ge, x) = (gh, x) ∼ (g, hx) = (g, ex) = (g, x).
Ası, utilizando el morfismo φα como en la demostracion anterior tenemos que:
Z4 ×{e} ∆1α ≅Z4 O
1α =
4
⊔α=1
∆1α.
(g, x)↦ g ⋅ x
Ahora,
Z4 × {V0, V4}φα∣
//� _
��
X0 =K0� _
��
G ×∆1α
// X1 =X0 ⊔Z4 ×∆1α /gVi ∼ (g, Vi)
.
Finalmente, el G-complejo CW resultante tiene la siguiente forma, (con las celdas pe-gadas en el sentido de gVi ∼ (g, Vi)):
Recuperando ası el G-complejo simplicial original K.
Notese que si G es no-abeliano, las diferentes “copias” de ∆mα , indexadas por G/Hα
no tienen los mismos grupos de invarianza. De hecho, si el grupo de invarianza de ∆ es H,g∆ tendra grupo de invarianza gHg−1 (i.e. seran conjugados).
Hg∆ ={g ∈ G∣gg∆ = g∆}={g ∈ G∣g−1gg∆ = ∆}=g{g ∈ G∣g∆ = ∆}g−1
=gH∆g−1
48

Emparejamientos generalizados
Ahora, los subgrupos Hα < G seran determinados salvo clase de conjugacion, y paradeterminarla exactamente necesitamos fijar un representante ∆n
α.Para ver que el G-complejo CW construido a partir de K esta bien definido, veremos
queG ×H ∆ ≅G G ×gHg−1 g∆.
Veamos la Proposicion y la observacion de [1, p.81], y los siguientes resultados.
Proposicion 2.4.4. Para un grupo G, H ≤ G y un espacio topologico X. Sea f ∶ G→ f(G)un isomorfismo y l ∶X → l(X) un homeomorfismo (no necesariamente equivariante) y unaaccion ⋅ ∶ f(H) × l(X)→ l(X). Entonces
∗ ∶H ×X →X(g, y)↦l−1(f(g) ⋅ l(y)),
es una accion.
Demostracion. Sea e el elemento neutro de G, tenemos que
e ∗ y = l−1(f(e) ⋅ l(y)) = l−1(e ⋅ l(y)) = l−1l(y) = y
Sean g1, g2 ∈ G, por un lado tenemos
(g1g2) ∗ y = l−1(f(g1g2) ⋅ l(y)) = l−1(f(g1)f(g2) ⋅ l(y))
tambien tenemos que
g1 ∗ (g2 ∗y) = g1 ∗ [l−1(f(g2) ⋅ l(y))] = l−1(f(g1) ⋅ l[l−1(f(g2) ⋅ l(y))]) = l−1(f(g1)f(g2) ⋅ l(y))
por tanto (g1g2) ∗ y = g1 ∗ (g2 ∗ y)
Definamos
I ∶ G ×H X →f(G) ×f(H) l(X)(g, y)↦(f(g), l(y)).
Veamos que I esta bien definida: como (g, y) ∼ (gh−1, h∗y) = (gh−1, l−1[f(h)⋅l(y)]) tenemosque
I(gh−1, h ∗ y) =I(gh−1, l−1[f(h) ⋅ l(y)])=(f(gh−1), l(l−1[f(h) ⋅ l(y)]))=(f(g)f(h)−1, f(h) ⋅ l(y))∼(f(g), l(y))=I(g, y),
por tanto I esta bien definido. Ahora veamos que I es G-equivariante, para esto sea g1 ∈ G,veamos que el siguiente diagrama conmuta:
G ×H X I //
g1
��
f(G) ×f(H) l(X)
f(g1)��
G ×H X I// f(G) ×f(H) l(X)
,
49

Capıtulo 2
donde la accion natural de g1 ∈ G esta dada por:
g1 ⋅ (g, y) ∶= (g1g, y).
Sea (g, y) ∈ G ×H X, entonces tenemos que como f es isomorfismo
(g, y) � I //_
g1��
(f(g), l(y))_
f(g1)��
(g1g, y) �I// (f(g1g), l(y)) = (f(g1)f(g), l(y))
.
Por tanto I es G-equivariante. Ahora consideremos la siguiente funcion
J ∶ f(G) ×f(H) l(X)→G ×H X(g, y)↦(f−1(g), l−1(y))
Podemos ver que J es inversa de I, demostremos que J esta bien definida: Sea (g, y) ∈f(G) ×f(H) l(X), esto implica que g = f(g′), y = l(x) para algunos x ∈ X,g′ ∈ G y (g, y) ∼(gh−1, hy) para algun h = f(h′) con h′ ∈ G, por tanto
J(gh−1, hy) =(f−1(gh−1), l−1(hy))=(f−1(g)f−1(h−1), l−1(f(h′) ⋅ l(x)))=(f−1(g)f−1(f(h′−1), h′x)=(f−1(g)h′−1, h′l−1(y))∼(f−1(g), l−1(y))=J(g, y).
Entonces J esta bien definida. Esto demuestra que I es un homeomorfismo G-equivariante.Tomando
X = ∆nα,
f ∶ G→Gh↦ghg−1,
l ∶ ∆nα →g∆n
α
x↦g ⋅ x
obtenemos la equivalenciaG ×H ∆ ≅G G ×gHg−1 g∆.
2.5. Consecuencias para G-complejos simpliciales.
En esta seccion veremos aplicaciones que tienen las acciones y construcciones vistasen la seccion pasada para ahora si incorporar de manera adecuada las simetrıas de uncomplejo simplicial y los nuevos emparejamientos generalizados. Antes unas definicionesnecesarias.
50

Emparejamientos generalizados
Definicion 2.5.1. Sea σ una cara propia de τ (i.e. σ < τ con σ ≠ τ). Definimos el dual deσ con respecto a τ denotado por σ∗τ como τ/σ.
Ejemplo 2.5.2. Sea K el 2-simplejo estandar con cara maximal {1,2,3}, tomemos σ ={2,3}, por tanto σ∗τ = τ/σ = {1}
Note que σ∗τ ∪ {σ} = {1} ∪ {2,3} = {1,2,3} = τ .
Podemos observar que σ∗τ es cara de τ , y que, σ y σ∗τ juntos contienen todos los verticesde τ .
Definicion 2.5.3. Sea σ una cara propia de τ . Definimos Pτ(σ) como la union de todaslas caras inmediatas de τ (es decir de dimension (dimτ − 1) ) que contienen a σ.
Ejemplo 2.5.4. Sea τ el 3-simplejo estandar, veamos los Pτ(σ) para las siguientes σ:
La idea es que cada simplejo τ sea colapsado en algo de dimension menor y en estecaso sera Pτ(σ), para alguna cara propia σ. El siguiente Lema nos dara una propiedadinteresante que usaremos mas adelante.
Lema 2.5.5. Si τ es un n-simplejo y σ es una cara propia de τ , entonces Pτ(σ) es un(n − 1)-disco topologico (Podemos verlo intuitivamente en el Ejemplo 2.5.4).
Demostracion. Notemos que Pτ(σ) es un (n−1)-subcomplejo puro de τ (i.e. todo simplejomaximal de Pτ(σ) tiene dimension n − 1):
51

Capıtulo 2
Supongamos sin perdida de generalidad que τ = {v1, . . . , vn+1} y σ = {v1, . . . , vk+1} conk < n + 1, ası σ ⊊ τ . Tenemos que
Pτ(σ) ={v1, . . . , vk+1, vk+2, vk+3, . . . , vn+1} ∪ {v1, . . . , vk+1, vk+2, vk+3, . . . , vn+1}∪⋅ ⋅ ⋅ ∪ {v1, . . . , vk+1, vk+2, vk+3, . . . , vn+1}
implica que cada cara maximal de Pτ(σ) es de la forma τ − v con v ∉ σ (es decir,v ∈ τ/σ = σ∗τ ). Ası si dim(τ) = n entonces la dimension de cada cara maximal de Pτ(σ) esn − 1.
Afirmamos que si K es cualquier (n − 1)-subcomplejo puro de un simplejo ∆n, conK ≠ ∂∆, entonces K es un (n − 1)-disco.
De hecho, esto es equivalente a el lema, ya que todo (n − 1)-subcomplejo puro de ∆n
es P∆(σ) para algun σ ⊊ ∆.
Sea k el numero de simplejos maximales en K. Procederemos a probar la afirmacionpor induccion sobre k y n:Si n = 1 tenemos que K es un punto (i.e. un 0-disco). Si k = 1 entonces K es un(n − 1)-simplejo.
En efecto, sea δ = {v0, . . . , vi, . . . , vn+1} dicha celda maximal, lo cual implica que δ ⊆K.Pero toda celda de K esta contenida en alguna maximal. Pero todas las celdas maximalesson de dimension n − 1 pues K es puro y solo hay una, esto implica que K ⊆ δ, por tantoK = δ.
Supongamos que la afirmacion es cierta para todo m < n y para m = n con j < k.Probaremos que es cierta para m = n con j = k: Sea K un (n − 1)-subcomplejo purode ∆n, con k simplejos maximales tal queK ≠ ∂∆, demostraremos queK es un (n−1)-disco.
Un simplejo maximal tıpico de K es ∆/v con v ∈ V ert(∆). Ası podemos escribir∣K ∣ = ∣K ′∣ ∪ ∣∆/v∣, donde K ′ tiene k − 1 simplejos maximales (es decir ∣K ′∣ = ⋃k−1
i=1 ∣∆/vi∣,con vi ∈ V ert(∆) y vi ≠ v). Entonces por hipotesis de induccion ∣K ∣ es la union de dos(n − 1)-discos, a traves de ∣K ′∣ ∩ ∣∆/v∣.
Note que
∣K ′∣ ⊊ ∣K ∣ ⊊ ∂∆n =n
⋃i=1
∣∆/vi∣,
por tanto ∣K ∣ ⊊ ⋃ni=1 ∣∆/vi∣. Entonces como ∣K ∣ es un (n − 1)-simplejo puro tenemos que
∣K ∣ ⊆n
⋃i=1i≠s
∣∆/vi∣
para algun i ≠ s, donde ∣K ∣ se puede expresar como la union de sus celdas maximales queson todas de dimension n − 1. Ahora, una celda tıpica maximal de K es ∆/σ para algunv = vr, por tanto podemos escribir
∣K ∣ = ∣K ′∣ ∪ ∣∆/σ∣
52

Emparejamientos generalizados
donde ∣K ′∣ se puede expresar como la union de sus celdas maximales que son todas dedimension n − 1. Ahora, tenemos
∣K ′∣ ⊆n
⋃i=1i≠ri≠s
∣∆/vi∣ ⊊n
⋃i=1i≠r
∣∆/vi∣ = ⋃vi≠v
∣∆/vi∣,
entonces
∣K ′∣ ∩ ∣∆/v∣ ⊊ (⋃vi≠v
∣∆/vi∣) ∩ ∣∆/v∣ =n
⋃i=1vi≠v
∣∆/{vi, v}∣ = ∂∣∆/v∣,
por tanto
∣K ′∣ ∩ ∣∆/v∣ ⊊ ∂∣∆/v∣, (2.1)
lo que implica que∣K ′∣ ∩ ∣∆/v∣ ⊊ ∣K ′∣ ∩ ∂∣∆/v∣.
Dado que ∣K ′∣ y ∂∣∆/v∣ son complejos simpliciales, solo se pueden intersectar en caras de∣K ′∣ y ∂∣∆/v∣. Pero todas las caras maximales de ∂∣∆/v∣ son de dimension (n − 2). Portanto tenemos que ∣K ′∣ se intersecta en caras de a lo mas dimension n− 2 con ∂∣∆/v∣. Perolas caras de dimension n − 2 son caras propias de ∣K ′∣ y dichas caras propias estan todascontenidas en ∂∣K ′∣, entonces
∣K ′∣ ∩ ∂∣∆/v∣ ⊆ ∂∣K ′∣ ∩ ∂∣∆/v∣. (2.2)
Ası por 2.1 y 2.2∣K ′∣ ∩ ∣∆/v∣ ⊆ ∂∣K ′∣ ∩ ∂∣∆/v∣.
Pero las celdas maximales del complejo simplicial ∣K ′∣∩ ∣∆/v∣ son aquellas (n−2)-celdas de∣K ′∣ que no contienen a v. Entonces ∣K ′∣∩ ∣∆/v∣ es un subcomplejo puro (n−2)-dimensionaldel simplejo ∣∆/v∣, por lo cual por 2.1, 2.2 y hipotesis de induccion tenemos que ∣K ′∣∩ ∣∆/v∣es un (n − 2)-disco. De manera que K es la union de dos (n − 1)-discos pegados por un(n− 2)-disco en la interseccion de sus fronteras, es decir, K es un (n− 1)-disco topologico.En particular, Pτ(K) es un (n − 1)-disco topologico.
En el siguiente Lema calcularemos la frontera de τ en terminos de Pτ(σ) y a su vezcalcularemos la frontera de Pτ(σ).
Lema 2.5.6. Para cualquier σ cara propia de τ ,
∂τ = Pτ(σ) ∪ Pτ(σ∗τ ).
Mas aun,∂Pτ(σ) = ∂Pτ(σ∗τ ) = Pτ(σ) ∩ Pτ(σ∗τ ).
Demostracion. Cualquier cara inmediata ρ de τn tiene dimension n − 1, ası que existev ∈ V ert(τ) tal que ρ = τ/v. Si v ∈ σ tenemos que ρ ∈ Pτ(σ∗τ ), pues v ∈ σ implica queτ/σ ⊆ τ/{v} ⊆ ⋃τ/σ⊆τ/{vi} τ/{vi} = Pτ(σ∗τ ). De otra manera ρ ∈ Pτ(σ), pues v ∉ σ implicaque σ ⊆ τ/{v} = ρ, por lo cual ρ ∈ ⋃σ⊆τ/{vi} τ/{vi} = Pτ(σ). Como cada punto en ∂τ estaen alguna cara inmediata de τ ,
∂τ = Pτ(σ) ∪ Pτ(σ∗τ ).
53

Capıtulo 2
Ahora, notemos que ninguna cara inmediata τ/v de τ puede estar en ambas Pτ(σ) yPτ(σ∗τ ), supongamos que τ/v ∈ Pτ(σ)∩Pτ(σ∗τ ), como τ/v ∈ Pτ(σ) tenemos que σ ⊆ τ/v porlo cual v ∉ σ y ası v ∈ τ/σ y como τ/v ∈ Pτ(σ∗τ ) tenemos que τ/σ ⊆ τ/v, ası v ∈ σ, de maneraque v ∈ σ ∩ (τ/σ) = σ ∩ σ∗τ = ∅. Entonces, Pτ(σ) y Pτ(σ∗τ ) tienen interiores disjuntos. Asıcualquier punto en Pτ(σ) ∩ Pτ(σ∗τ ) esta en las fronteras de Pτ(σ) y Pτ(σ∗τ ).Es decir,
∂Pτ(σ∗τ ) ⊇ Pτ(σ) ∩ Pτ(σ∗τ ) ⊆ ∂Pτ(σ).
Por otro lado, veamos como ambos ∂Pτ(σ) y ∂Pτ(σ∗τ ) consisten de aquellos (n−2)-simplejosque se escriben de la forma τ/{v,w} con v ∈ Vert(σ), w ∈ Vert(σ∗τ ):
Sea τ = {v0, . . . , vn}, recordemos que Vert(τ) = Vert(σ) ⊔ Vert(σ∗τ ), por tanto sinperdida de generalidad tomemos σ = {v0, . . . , vk}, σ∗τ = {vk+1, . . . , vn}. Por definicion, te-nemos que los elementos en Pτ(σ) son de la forma {v0, . . . , vk, vk+1, . . . , vi, . . . , vn} coni = k + 1, . . . , n. Notemos que vi ∈ Vert(σ∗τ ) para i = k + 1, . . . , n. Ahora, como ∂Pτ(σ) esde dimension n − 2 y σ ⊊ Pτ(σ)o tenemos que los elementos de ∂Pτ(σ) son de la forma{v0, . . . , vj , . . . , vk, vk+1, . . . , vi, . . . , vn} con i = k + 1, . . . , n y j = 0, . . . , k, es decir son de laforma τ/{vj , vi} con vj ∈ Vert(σ), vi ∈ Vert(σ∗τ ). Analogamente para ∂Pτ(σ∗τ ).
Ahora, vemos que τ/{v,w} ⊆ τ/{v} ∈ Pτ(σ∗τ ) y τ/{v,w} ⊆ τ/{w} ∈ Pτ(σ) con v ∈Vert(σ), w ∈ Vert(σ∗τ ), y ası tenemos que
∂Pτ(σ∗τ ) ⊆ Pτ(σ) ∩ Pτ(σ∗τ ) ⊇ ∂Pτ(σ).
Finalmente,∂Pτ(σ∗τ ) = Pτ(σ) ∩ Pτ(σ∗τ ) = ∂Pτ(σ).
Ahora si, veamos como es el colapso y ademas involucraremos una accion de grupos.
Proposicion 2.5.7. Sea σ una cara propia de τ . Entonces τ se colapsa en Pτ(σ∗τ ).Mas aun, sea g una permutacion de los vertices de τ , con g(σ) = σ.Extendemos g linealmente a el simplejo geometrico ∣τ ∣. Entonces, el colapso C ∶ ∣τ ∣× I → ∣τ ∣puede escogerse tal que
C(x,0) = x,C(x,1) ∈ Pτ(σ∗τ )y gC(x, s) = C(gx, s) para cualquier x ∈ τ y 0 ≤ s ≤ 1.
Demostracion. Denotemos por b el baricentro de σ y por b∗ el baricentro de σ∗τ . Afir-mamos que todo punto x ∈ ∣τ ∣ se puede escribir como x = tb + (1 − t)x∗ donde x∗ ∈ Pτ(σ∗τ )y 0 ≤ t ≤ 1: Todo punto en ∣σ∣ se puede escribir de esta manera ya que ∂σ ⊆ Pτ(σ∗τ ), pues∂σ = ⋃v∈σ σ − v ⊆ ⋃v∈σ τ − v = Pτ(σ∗τ ). Claramente todo punto en ∣σ∗τ ∣ tambien, ya queσ∗τ ⊂ Pτ(σ∗τ ). Pero entonces todo punto en ∣τ ∣ puede escribirse de esta forma ya que ∣σ∣ y∣σ∗τ ∣ generan ∣τ ∣ de manera convexa.
Entonces, definimos C(x, s) = t(sb∗ + (1− s)b)+ (1− t)x∗. En palabras, C esta definidopor b siendo colapsado a b∗, y el colapso siendo lineal.Ahora, tenemos que
C(x,0) = tb + (1 − t)x∗ = xC(x,1) = tb∗ + (1 − t)x∗.
Este ultimo es una combinacion convexa de dos puntos en un (n − 1)-simplejo quecontiene x∗, ya que x∗ ∈ Pτ(σ∗τ ). Entonces C(x,1) esta en el mismo (n− 1)-simplejo, y ası
54

Emparejamientos generalizados
C(x,1) ∈ Pτ(σ∗τ ).
Finalmente,
gC(x, s) =g(t[sb∗ + (1 − s)b] + (1 − t)x∗)=t[sg(b∗) + (1 − s)g(b)] + (1 − t)g(x∗),
como g solo permuta los vertices de σ∗τ , pues g ∶ τ → τ es biyeccion, ası g(σ) = σ implicag(τ − σ) ⊆ τ − σ, es decir, g(σ∗τ ) ⊆ σ∗τ por lo cual g(σ∗τ ) = σ∗τ . Entonces g deja al baricentrofijo, pues
g(b∗) =g( 1
dim(σ∗τ ) + 1∑
vi∈Vert(σ∗τ )vi)
= 1
dim(σ∗τ ) + 1∑
vi∈Vert(σ∗τ )vg(i)
=b∗,
por tantogC(x, s) = t[sb∗ + (1 − s)g(b)] + (1 − t)g(x∗) = C(gx, s)
Ahora veremos como un EMG produce un colapso de K a el equivalente del complejode Morse en el sentido clasico:
Teorema 2.5.8. Sea ∼ un EMG en un G-complejo simplicial finito. Supongamos que ∼ esG-equivariante, es decir: si [σ, τ] esta en ∼, entonces [gσ, gτ] tambien esta. Entonces existeun G-complejo CW M, tal que las celdas de M (tratado como un CW) son exactamentelas celdas en K que son crıticas con respecto a ∼, y K ≃GM.
Demostracion. Dado que ∼ es un EMG tenemos que P (K) /∼ es acıclico, por tantotiene sentido decir que P (K) /∼ es un poset definiendo w > v si hay un camino de w a vpara w, v ∈ P (K) /∼ , es decir, si w = [σ1, τ1], v = [σ2, τ2] existen x ∈ [σ1, τ1], y ∈ [σ2, τ2] talque y ⊆ x. Note que esta condicion se abrevia diciendo: hay un camino de w = [σ1, τ1] av = [σ2, τ2] si σ2 ⊂ τ1.
Veamos las siguientes observaciones:
a) “σ < τ implica g(σ) < g(τ)”Si σ = {v0, . . . , vk} y τ = {w0, . . . ,wk} entonces {v0, . . . , vk} ⊆ {w0, . . . ,wk} y ası
gσ = g{v0, . . . , vk} = {gv0, . . . , gvk} ⊆ {gw0, . . . , gwk} = gτ,
por tanto g(σ) < g(τ).
b) “Si hay un camino de w a v implica que hay un camino de gw a gv”Sean w = [σ1, τ1], v = [σ2, τ2], entonces tenemos que σ2 ⊆ τ1, por tanto gσ2 ⊆ gτ1 esdecir hay una flecha de [gσ1, gτ1] = g[σ1, τ1] a [gσ2, gτ2] = g[σ2, τ2], es decir hay uncamino de gw en gv.
55

Capıtulo 2
c) “La condicion v < gv nunca se cumple para todo v ∈ P (K) /∼ , g ∈ G ”Definimos (−∞, v] ∶= {w ∈ P (K) /∼ ∣w ≤ v} donde w ≤ v significa por definicion quehay una flecha de v a w o que w = v. Observemos que
g(−∞, v] =g{w ∈ P (K) /∼ ∣w ≤ v}={gw ∈ P (K) /∼ ∣w ≤ v}={w ∈ P (K) /∼ ∣g−1w ≤ v}={w ∈ P (K) /∼ ∣w ≤ gv}=(−∞, gv].
Dado que g() ∶ (−∞, v] → (−∞, gv] es una biyeccion tenemos que ∣(−∞, v]∣ =∣(−∞, gv]∣. Por otra parte, si suponemos que v < gv entonces (−∞, v] ⊆ (−∞, gv]y dado que P (K) es un conjunto finito tendriamos que (−∞, v] = (−∞, gv] lo cualimplica que v = gv lo que es una contradiccion.
d) “v < w implica que gw /< hv para todo g, h ∈ G,v,w ∈ P (K) /∼”Supongamos que v < w y gw < hv para algunos g, h ∈ G,v,w ∈ P (K) /∼ .Por a)Tenemos que gw < hv implica que w < g−1hv y en consecuencia v < w < g−1hv cong−1h ∈ G, lo cual contradice c).
De aquı podemos definir el poset P (K) /∼ /G por: G[σ] < G[τ] si y solo si g[σ] < h[τ] paraalgunos g, h ∈ G. Veamos que este poset esta bien definido: Supongamos que G[σ] < G[τ],es decir existen g, h ∈ G tal que g[σ] < h[τ]. Supongamos tambien que existen g, h ∈ Gtal que g[σ] > h[τ]. Sean x ∶= g[σ], y ∶= h[τ], ası x > y y por d) tenemos que g′x /< h′ypara todo g′, h′ ∈ G. Tomando g′ = gg−1, h′ = hh−1 se sigue que gg−1x /< hh−1y es decir,g[σ] /< h[τ] lo cual es una contradiccion. Por tanto no puede ocurrir que G[σ] < G[τ] y
G[τ] < G[σ] al mismo tiempo, es decir P (K) /∼ /G esta bien definido.
Recordemos que por el Teorema de extension, todo poset puede extenderse a un con-junto totalmente ordenado (es decir, todo poset tiene una extension lineal), para masinformacion revisar [3, p.114-117].
Entonces el poset P (K) /∼ /G tiene una extension lineal (finita)
v0 < v1 < ⋅ ⋅ ⋅ < vN ,
donde cada vi es una orbita de intervalos [σi, τi] ∈ P (K) /∼ , es decir,
v0 = G[σ0, τ0] < ⋅ ⋅ ⋅ < vN = G[σN , τN ].
Sea σ un simplejo cualquiera en vj = G[σ0, τ0], esto implica que σ ∈ [gσ0, gτ0] para algun
g ∈ G. Entonces cualquier cara ρ de σ, es tal que [ρ] < [σ] en P (K) /∼ , por tanto [ρ] ∈ vipara alguna i ≤ j. De aquı que
Kn ∶= ⋃k≤n
⋃[σ]∈vk
σ
es un G-subcomplejo de K.
Construiremos inductivamente las equivalencias G-homotopicas para algun G-CW-complejoMk construido a partir de aquellas celdas σ tales que vi = G{σ} para algun i ≤ k.
56

Emparejamientos generalizados
Haremos esto poniendo ciertos colapsos juntos.
Veamos la siguiente observacion:
e) “Todas las caras de un elemento maximal de un intervalo en v0 deben estar en elintervalo.”(De esto se sigue que los intervalos en v0 contienen a lo mas una 0-celda yası son todos crıticos)Sea [σ, τ] ∈ v0 = G[σ0, τ0]. Sea ρ < τ (subcara) tal que ρ ∉ [σ, τ] esto implica que ρ ∈ vipara algun i ≤ j = 0 pues el orden total extiende al orden parcial por tanto ρ ∈ v0 esdecir ρ ∈ [σ′, τ ′] ∈ G[σ0, τ0] por lo cual ρ ∈ [σ′, τ ′] ∩ [σ, τ] ≠ ∅ lo cual no es posiblepues [σ, τ], [σ′, τ ′] ∈∼ implica que [σ′, τ ′] ∩ [σ, τ] = ∅.Por tanto [σ, τ] ∈ G[σ0, τ0] = v0 implica que [σ, τ] contiene todas las subcaras de τ ydado que [σ, τ] es un intervalo tenemos que σ tiene que ser una 0-cara de τ . EntoncesG[σ0, τ0] contiene intervalos que solo tienen una 0-celda en particular [σ0, τ0] = {σ0}.Por tanto todos los gσ0 son crıticos.
Por lo que definimos M0 =K y el colapso es trivial.
Ahora supongamos que hemos contruido el colapso para Km − 1 ≃G Mm−1, tenemosdos casos
1. Si vm = G{σ} entonces todos los gσ son crıticos y ası
Km =Km−1 ⋃G×H∂σ
G ×H σ ≃GMm−1 ⋃G×H∂σ
G ×H σ ≃G=∶Mm,
donde H = {g ∈ G∣gσ = σ}.
2. Si vm = G[ρ, σ] con ρ ≠ σ, demostremos que Km ↘Km−1:Notemos primero que dado que ∼ es G-equivariante, entonces cualquier g ∈ Gque fije a σ tambien debe fijar a ρ, pues g[ρ, σ] = [gρ, gσ] = [gρ, σ] implica queσ ∈ [gρ, σ] ∩ [ρ, σ] ≠ ∅ y ası [ρ, σ] = [gρ, σ] por tanto gρ = ρ.
Sea [ρ, σ] ∈ vm y Hσ = {g ∈ G∣gσ = σ}, que es igual a {g ∈ G∣g[ρ, σ] = [ρ, σ]} y ademasρ es invariante por g para todo g ∈Hσ. Por tanto por Proposicion 2.5.7 σ ↘ Pσ(ρ∗σ),es decir σ se colapsa a traves de Pσ(ρ) (ρ ⊆ Pσ(ρ) ⊆ σ) a Pσ(ρ∗σ) y ademas de maneraequivariante.
Ahora, ninguna cara de Pσ(ρ∗σ) esta en el intervalo [ρ, σ], por tanto Pσ(ρ∗σ) ⊆Km−1.
Por otra parte para interpretar Km−1 ∪ (Km −Km−1) =Km como un GCW -complejomodelado en discos de representaciones, tomamos un representante σm de Gσm portanto σ ∈ Gσm = ∪[σ]∈vmσ y pegamos G ×Hσ σm a Km−1 mediante la inclusion
∂(G ×Hσ σm) = G ×Hα ∂σm ↪Km−1.
Ahora, colapsamos cada σm a Pσm(ρ∗σm) ⊆ Km−1. Repitiendo este proceso cuantasveces sea necesario obtenemos que Km ↘G Km−1. Dado que K = Kn para algun n,tenemos que K ≃G Mn =∶ M y M es el complejo CW con una p−celda por cadap−simplejo crıtico con respecto a σ.
57

Capıtulo 2
Finalmente, discutiremos porque los EMG se adaptan mejor al caso equivariante quelos emparejamientos clasicos.
En un emparejamiento de Morse clasico, en simplejo σ siempre esta emparejado conuna cara inmediata τ = σ/{v} para algun v ∈ Vert(σ). Si algun subgrupo H ⊆ G permutalos vertices de σ, puede no existir una cara inmediata de σ que sea invariante bajo H, apesar de que σ lo es. Entonces no podemos emparejar equivariantemente a σ, ası σ tieneque ser crıtico.
Ejemplo 2.5.9. Consideremos el 3-simplejo estandar con el diagrama de Hasse como sigue:
1 2 3 4
{1,2} {1,3} {1,4} {2,3} {2,4} {3,4}
{1,2,3} {1,2,4} {1,3,4} {2,3,4}
{1,2,3,4}
Y H = {(1), (12)(34)} subgrupo de S4. Si tomamos σ = {1,2,3,4}, tenemos que
H ⋅ {1,2,3,4} = {1,2,3,4},
Sin embargo, ninguna de sus caras inmediatas son invariantes bajo H:
(12)(34) ⋅ {1,2,3} = {1,2,4}
(12)(34) ⋅ {1,3,4} = {2,3,4}
Ahora, en un EMG, podemos emparejar σ con cualquier cara ρ de σ, es decir una conco-dimension diferente de uno. Entonces, si H es el grupo de invarianza de σ, podemosemparejar a σ con alguna de sus caras siempre que dicha cara sea H-invariante. Estoclaramente nos da mas posibilidades de emparejar equivariantemente que en el caso deemparejameintos de Morse clasicos y obtener menos crıticos.
2.6. Aplicaciones en teorıa de graficas
En la seccion 5 de [7], se discute una aplicacion en teorıa de graficas. Se utiliza lateorıa de Morse discreta para determinar el tipo de homotopıa de complejos de graficas noconexos. Mostraremos como la teorıa de Morse discreta equivariante fortalece esto paradeterminar el tipo de Γ-homotopıa de un complejo simplicial para un grupo Γ.
Notacion: G para graficas y Γ para grupos.
58

Emparejamientos generalizados
2.6.1. El complejo de graficas no conexas
Denotaremos por Nn el complejo de graficas no-conexas en n vertices, construido comosigue:Consideremos la grafica completa Gn de n vertices, y sea En su conjunto de aristas. SeaVert(Nn) = En, esto implica que ∣Vert(Nn)∣ = (n
2). Ahora, toda subgrafica generada por
Gn (es decir, aquellas subgraficas que contienen n vertices) corresponde naturalmente aun subconjunto de En. Los simplejos de Nn seran aquellos subconjuntos de En que corres-pondan a graficas no conexas en n vertices. Entonces Nn es un complejo simplicial, ya quela propiedad de ser no conexo es cerrada bajo subgraficas en n vertices.
Ejemplo 2.6.1. Consideremos la grafica completa en tres vertices G3,
Tenemos que E3 = {{1,2},{1,3},{2,3}} = Vert(N3). Ahora tenemos una biyeccionentre los subconjuntos de E3 y las subgraficas de G3 que contienen los tres vertices,podemos verlo en la siguiente tabla:
Subconjuntos de E3 Subgraficas de G3 que contienen tres vertices
{∅}
{{1,2}}
{{1,3}}
{{2,3}}
{{1,2},{1,3}}
{{1,2},{2,3}}
{{1,3},{2,3}}
{{1,2},{1,3},{2,3}}
59

Capıtulo 2
Observamos que solo los primeros cuatro subconjuntos de E3 se corresponden a unasubgrafica no conexa, por tanto estos son los simplejos de N3. Y ası
Ejemplo 2.6.2. Analogamente como en el ejemplo anterior, sea G4 la grafica completa encuatro vertices,
Ahora consideremos las subgraficas en cuatro vertices de G4:
Observando las subgraficas anteriores podemos deducir que el complejo de graficas noconexas N4 tiene la siguiente estructura:
60

Emparejamientos generalizados
Forman utiliza la teorıa de Morse para determinar el tipo de homotopıa de Nn. Es-te resultado fue presentado primero por Vassiliev [16] utilizando metodos elementales, eldemostro que
Nn ≃(n−1)!⋁i=1
Sn−3i .
Forman hizo esto construyendo un emparejamiento de Morse(o un campo vectorialgradiente) en Nn como vemos a continuacion: Denotemos por V12 como el campo vectorialque consiste de las parejas {G,G ∪ {1,2}} tal que G ∈ Nn y no contiene a {1,2} yG ∪ {1,2} ∈ Nn. Observemos que {1,2} no esta emparejado, lo denotaremos por G∗. Lasgraficas en Nn diferentes de G∗ que no estan emparejadas tienen dos componentes conexasuna que tiene el vertice 1 y otra al vertice 2. Denotamos esas componentes como G1 y G2.Sea G ≠ G∗ que no este emparejando en V12, y consideremos el vertice 3. 3 debe estar enG1 o G2.
Supongamos que 3 ∈ G1, si G no contiene a {1,3} entonces G ∪ {1,3} tampoco estaemparejado en V12 ası que podemos emparejar G con G∪{1,3}. Si 3 ∈ G1 entonces G siguesin pareja si y solo si G contiene {1,3} y G/{1,3} es union de tres componentes conexas.Similarmente si 3 ∈ G2. Denotemos por V3 como el campo vectorial resultante. Las graficassin pareja en V3 son G∗, y aquellos que contengan a la arista {1,3} o {2,3} y que tengan lapropiedad de que G/{1,3} o G/{2,3} sea la union de tres componentes conexas, una conel vertice 1, otra con el 2 y otra con el 3. Continuamos este proceso hasta n, denotamos aV = Vn.
Figura 2.1: Emparejamiento en N4.
Veamos que V efectivamente es un campo vectorial gradiente, es decir no tiene caminoscerrados. Primero veamos que V12 es un campo vectorial gradiente:
Sea γ = αp0, βp+10 , αp1 un V12-camino, tenemos que (α0, β0) ∈ V12, es decir β0 = α0∪{1,2}.
Ahora, como α1 es cara de β0 diferente de α0 tenemos que α1 = α0 ∪ {1,2}/e, donde e esuna arista de α0 diferente de {1,2}. Por tanto α1 contiene a {1,2} entonces α1 es final deflecha en V12, es decir γ no puede continuar a un V12-camino mas largo por tanto V12 notiene caminos cerrados.
61

Capıtulo 2
Ahora, supongamos que en Vi−1 no tenemos caminos cerrados, veremos que en Vitampoco tendremos:
Sea γ = α0, β0, α1 un Vi-camino. En particular tenemos que (α0, β0) ∈ Vi, entoncestenemos dos casos,
α1 es final de flecha en Vi en cuyo caso el V -camino no puede continuar.
α1 es emparejado en Vi−1, por hipotesis de induccion.
En cualquiera de los dos casos, γ no puede continuar, y analogamente no tiene caminoscerrados.
Esta construccion genera un complejo de Morse M que consiste de simplejos corres-pondientes a:
La grafica que consiste de la arista {1,2}.
Las graficas con exactamente dos componentes conexas, una con el vertice 1 y otracon el vertice 2. Mas aun las componentes conexas son arboles, y las etiquetas decada rama van creciendo a partir del 1 y 2 respectivamente.
Veamos que estos ultimos son (n − 1)!, procedamos por induccion sobre n:
Para n = 3, tenemos unicamente dos graficas, es decir (3 − 1)!
3 1 2
1 2 3
Supongamos que las graficas en el nivel n son (n−1)!, demostraremos que para el niveln + 1 son n! graficas. Tendremos que las graficas en el nivel n seran n por cada grafica enel nivel n − 1 (es decir, para cada grafica podemos hacer una rama nueva etiquetada conn+1 en cada vertice del arbol), por tanto son n(n − 1)! = n!.
Donde cada uno de estas graficas tiene n-2 aristas (n− 1− (12)) que le corresponden aun (n − 3)-simplejo de Nn. Se sigue que
Nn ≃(n−1)!⋁i=1
Sn−3i .
2.6.2. Colapso equivariante de NnLa propiedad de ser no-conexo es una propiedad de graficas, es decir solo depende del
tipo de isomorfismos de la grafica. Ası cualquier re-etiquetamiento de los vertices es dadopor una permutacion de {1,2, . . . , n}, tenemos una accion de Sn en Nn.
Sin embargo, esta accion de grupo no se restringe a el complejo de Morse M de lasubseccion anterior, ya que las etiquetas en las ramas de G crecen a partir de 1 y 2, estono puede ser ası despues de un re-etiquetamiento en los vertices. Geometricamente, esto
62

Emparejamientos generalizados
quiere decir que las equivalencias homotopicas que construyo Forman no respetan lassimetrıas de Nn.
Nos gustarıa construir un emparejamiento de Morse que respete las simetrıas de Nn, yque el complejo de Morse tenga un 0-simplejo y (n − 1)! simplejos de dimension n − 3. Nopodemos hacer esto Sn-equivariantemente, ya que no hay ningun 0-simplejo en Nn que sefije por Sn. Consideremos el subgrupo Γ ⊆ S que fije {1,2}. Podemos ver que Γ ≅ C2 ×Sn−2
ya que permuta {1,2} y {3, . . . , n} independientemente. Ası tendremos una accion de
C2 × Sn−2 en Nn. Este es el grupo Γ mas grande tal que Nn ≃ΓM si M ≅ ⋁(n−1)!i=1 Sn−3
i .
De aquı en adelante denotaremos por Γ a C2 × Sn−2. Construiremos un EMG ∼, cuyo
complejo de Morse sea isomorfo a ⋁(n−1)!i=1 Sn−3
i y que ∼ sea Γ-equivariante.
Denotemos por M el subconjunto de Nn que consiste de:
la grafica con solo la arista e = {1,2}.
las graficas que son union de dos cadenas, una con el vertice siendo el punto final deuna cadena y el vertice 2 siendo el final de la otra cadena.
La meta es emparejar por intervalos todas las graficas en Nn excepto las de M , elemparejamiento ∼ sera construido en dos etapas: Sea G ∈ N −M ,
1. Si la grafica G contiene la arista e = {1,2} y al menos una arista mas (es decirG/e ≠ ∅), emparejamos [G/e,G] en ∼. Note que G/e ∈ Nn y G/e ∉M .
Sea M ′ = {G ∈ Nn −M ∣e ⊊ G}, esto implica que Nn −M −M ′ es el conjunto de lasgraficas en Nn que consiste de la grafica e, y las graficas que no contienen a e, peroG ∪ e es conexo (es decir, tales que G ∪ e ∉ Nn).
2. Sea G una grafica no emparejada, es decir, G ∈ Nn −M ′ −M , esto implica queNn −M ′ −M tiene exactamente dos componentes, una componente que contieneal vertice 1 y otra componente al vertice 2. Denotemos sus componentes por G1 y G2.
Sigamos a G1 a partir de 1. Si G1 no es una cadena existe un primer vertice v1 enel cual esto no se puede hacer de manera unica. Mas aun, entre todos estos vertices,v1 es el de distancia minimal a 1. Sea S1 el conjunto de los vecinos de v1 menos elque forma la cadena de v1 a 1 (si v1 ≠ 1). Si G1 es una cadena, definimos S1 = ∅.Analogamente construimos S2 para G2. Podemos darnos una idea en la siguienteimagen.
63

Capıtulo 2
Podemos ver que si G no esta emparejada, es decir G ∈ Nn−M −M ′ si y solo si al me-nos v1 o v2 estan definidos y al menos un S1 o S2 es no vacıo con mas de un elemento.
Sea G = G1∪G2 una grafica no emparejada, es decir G ∈ Nn−M −M ′ y ademas G notiene aristas entre los vertices dentro de S1 o entre vertices dentro de S2. Construimosa partir de G la grafica G′ donde agregamos todas las posibles aristas en S1 y todaslas posibles aristas en S2, ası G′ restringida a Si es completa para cada i = 1,2. Noteque [G,G′] es el conjunto de graficas H tal que G ⊆ H ⊆ G′ y emparejamos [G,G′]en ∼. Finalmente, si H es una grafica tal que H ∈ N −M −M ′ que tiene aristas dentrode S1 o dentro de S2, quitamos dichas aristas y llamamos G a dicha grafica, entonceses claro que H ∈ [G,G′] y ası todas las graficas en Nn −M quedan emparejadas.
Veamos que ∼ es un EMG Γ-equivariante, pero primero veamos que efectivamente lasgraficas de M no son emparejadas.
Lema 2.6.3. Las graficas en Nn que quedan sin emparejar por ∼ son aquellas en M .
Demostracion. La grafica con solo la arista {1,2} esta claramente sin pareja. Todas lasgraficas H que estan sin emparejar despues de la primer etapa, que no estan en M , tienenS1 o S2 no-vacıo. Sea G construido a partir de H eliminando todas las aristas en S1 y S2.Entonces H ∈ [G,G′], ası H es emparejado en la segunda etapa. Por otro lado, las graficasen M no estan emparejadas en la primera etapa y tienen S1 y S2 vacıo, ası que son noemparejadas por ∼.
Proposicion 2.6.4. El emparejamiento ∼ anterior es un emparejamiento generalizado deMorse Γ-equivariante.
Demostracion. Primero veamos que ∼ es un EMG.
Supongamos por contradiccion que existe un ciclo cerrado v1 → v2 → ⋅ ⋅ ⋅ → vn → v1 ∈P (Nn) /∼ . su preimagen en P (Nn) tiene la forma
H1 ⊋ (G2 ⊆H2) ⊋ ⋯ ⊋ (Gn ⊆Hn) ⊋ (G1 ⊆H1),
donde Gi y Hi estan en el mismo intervalo en ∼ (posiblemente Gi y Hi son iguales), Hi yGi+1 difieren solo por una arista. Tenemos dos casos:
1. Si para algun i, Hi y Gi son emparejadas en la primera etapa, tenemos que e = {1,2} ∈Hi y Gi =Hi − e.Debe ocurrir que Gi+1 ≠ Gi implica que Gi+1 tambien contiene a e, en efecto:
(Gi =Hi − e ⊆Hi) ⊋ (Gi+1 ⊆Hi+1).
Pero Gi+1 difiere de Hi por solo una arista, es decir Gi+1 =Hi − f para alguna aristaf ∈Hi. lo cual implica que f ≠ e (pues si f = e, tendriamos que Gi =Hi − e =Hi − f =Gi+1) por tanto e ∈ Hi − f = Gi+1 ⊆ Hi+1 es decir e ∈ Gi+1 y e ∈ Hi+1, lo cual implicaque no es posible que Gi+1 ≠ Hi+1 pues por construccion o bien e ∈ Hi+1 y e ∉ Gi+1
o ni Gi+1 ni Hi+1 contienen a e. Por tanto Hi+1 = Gi+1 = Hi − f con f ≠ e, lo queimplica que e ∈Hi+1. Repitiendo el argumento e ∈Hi+2 = Gi+2 implica . . . e ∈Hn = Gnimplica que e ∈ G1 =H1 lo cual no es posible pues e ∉ G1.
64

Emparejamientos generalizados
2. Si e ∉ Hi para todo i. Todos los emparejamientos en el ciclo ocurren en la segundaetapa. Entonces, los pasos ⊆ en la sucesion no afectan ni Si ni vi o el camino de i a vipara i = 1,2, esto es inmediato de la construccion de ∼, podemos verlo en la siguienteimagen.
Ası para que el ciclo se cierre, esto no debe ser afectado tampoco en los pasos ⊋.Entonces, en los pasos ⊋, estamos removiendo aristas mas lejanas de vi que Si. Porotro lado, estas aristas no afectan lo que pasa en los pasos ⊆. Esto implica que talesaristas solo pueden ser removidas en el sentido derecho de la sucesion. Pero cada ⊋ esuna inclusion estricta, ya que Gi+1 es una cara propia de Hi en Nn. Esto contradiceque tengamos un ciclo cerrado.
Ahora, la construccion de ∼ es independiente de las etiquetas de los vertices 3, . . . , n, y nodepende de 1 y 2 por tanto se sigue que ∼ es C2 × Sn−2-equivariante.
Ahora analizaremos la accion del grupo en el complejo de Morse. Si las dos cadenasde G tienen la misma longitud, existe un unico elemeno de Γ que fija G, digamos aquelintercambiar las dos cadenas. Si las cadenas tienen diferente longitud, no existe elementoque fije a G, ya que tal elemento manda las etiquetas en la cadena larga en ellos mismos,y las etiquetas en la cadena mas corte en ellos mismos. La orbita de una grafica G esdeterminada por la longitud de la cadena mas grande de G, es decir, todas las graficas conla misma longitud en su cadena mas larga estan en la misma orbita. Esto puede ser unnumero entre n
2 y n − 1, ası hay ⌊12⌋ orbitas en M .
Ejemplo 2.6.5. Para n = 4, tenemos que M esta formado por las siguientes graficas:
65

Capıtulo 2
4 1 2 3
3 1 2 4
1 2 3 4
1 2 4 3
4 3 1 2
3 4 1 2
4 1 2 3
Γ, en este caso es C2 × S2, es decir
Γ = {(1) × (1), (1) × (34), (12) × (1), (12) × (34)}.
Entonces, las orbitas son
4 − 1 2 − 3(1)×(1)ÐÐÐÐ→4 − 1 2 − 3 1 2 − 3 − 4
(1)×(1)ÐÐÐÐ→1 2 − 3 − 4 4 1 − 2 3(1)×(1)ÐÐÐÐ→4 1 − 2 3
(1)×(34)ÐÐÐÐÐ→3 − 1 2 − 4(1)×(34)ÐÐÐÐÐ→1 2 − 4 − 3
(1)×(34)ÐÐÐÐÐ→4 1 − 2 3
(12)×(1)ÐÐÐÐÐ→3 − 1 2 − 4(12)×(1)ÐÐÐÐÐ→4 − 3 − 1 2
(12)×(1)ÐÐÐÐÐ→4 1 − 2 3
(12)×(34)ÐÐÐÐÐ→4 − 1 2 − 3(12)×(34)ÐÐÐÐÐ→3 − 4 − 1 2
(12)×(34)ÐÐÐÐÐ→4 1 − 2 3
Entonces tenemos tres orbitas.
Tenemos que hay un complejo de Morse M con una (p − 1)−celda por cada graficaen M con p aristas tal que M ≃Γ Nn, en efecto, una grafica con p-aristas en Nn tiene pvertices (por definicion los vertices son las aristas), por tanto es un (p − 1)−simplejo, esdecir una p − 1-celda.
Ahora determinaremos cuantas celdas tiene M , que dimensiones tienen las celdas deM y como es la accion del grupo Γ.
Por definicion M contiene una grafica con una arista, que es e = {1,2}. Todas las otrasgraficas de M consisten de dos cadenas ajenas. En general si hay n vertices, G ∈M tienen − 2 aristas.
Observacion. 2.6.6. Hay (n − 1)! graficas en M que son la union ajena de dos cadenas.
Demostracion. Para contarlas veamos los tipos de graficas que existen. Ya que los vertices1 y 2 estan fijos, transponiendo los demas vertices tenemos los siguientes tipos de graficas:
1 2 3 . . . n hay (n − 2)! graficas de este tipo
66

Emparejamientos generalizados
3 1 2 . . . n hay (n − 2)! graficas de este tipo
⋮
n . . . 3 2 1 hay (n − 2)! graficas de este tipo
entonces hay (n − 1) tipos de graficas con (n − 2)! graficas cada uno. Por tanto hay (n −1)(n − 2)! = (n − 1)! graficas en M
Recuerde que por definicion cada arista en M representa un vertice, la 0-celda quecorresponde a {1,2} y las (n − 1)! celdas corresponden a las graficas que son union ajenade dos cadenas donde en un extremo de una aparece el vertice 1 y en un extremo de laotra aparece el vertice 2 (por la observacion anterior hay (n − 1)! de estas graficas). Cadauna de estas graficas es de dimension (n − 3) pues cada grafica tiene (n − 2) aristas lo queimplica que el simplejo en Nn que representa dicha grafica tiene (n − 2) vertices, es decir,que es un (n − 2) − 1 = (n − 3) simplejo (recordemos que en general un simplejo de k + 1vertices es un k-simplejo por definicion).
Por el parrafo anterior tenemos que
M ≃(n−1)!⋁i=1
Sn−3i .
Procedamos ahora a determinar la accion de Γ: Sea G una grafica en M que no ese = {1,2}. Si las dos cadenas de G tienen la misma longitud, entonces existe exactamenteun elemento γ ≠ Id en Γ que fija G (explıcitamente el que intercambia las dos cadenas). Silas cadenas en G tienen distinta longitud entonces no existe elemento γ ≠ Id en Γ que fijea G ya que tal elemento deberıa enviar las etiquetas (vertices) de la cadena mas larga ensi mismas, y las etiquetas de la cadena mas corta en si mismas.
Sea G ∈ M una grafica con sus longitudes de cadenas distinas, entonces la orbita deG, Γ⋅G es tal que ∣Γ⋅G∣ = (n − 2)!2, pues hay (n − 2) etiquetas (diferentes de 1 y 2), portanto hay (n − 2)! posibilidades, luego multiplicamos por 2 pues podemos permutar al 1por 2. Ahora sea G ∈ M una grafica con longitudes de cadenas iguales, en este caso hayigual (n− 2) etiquetas, por tanto (n− 2)! posibilidades, pero en este caso no contamos conla permutacıon de 1 por 2 pues nos da una grafica repetida.
Tenemos que hay [n2 ] orbitas en M , en efecto la orbita de una grafica G ∈ M estadeterminada por la longitud de su cadena mas larga, es decir si G tiene una cadena delongitud m entonces todos los elementos de la orbita de G tienen la misma forma (unacadena de longitud m), entonces si n es par hay n
2 representantes por cada orbita y si n esimpar hay n−1
2 representantes, por tanto para una n en general hay [n2 ].
Definicion 2.6.7. Sean (X,x0) y (Y, y0). Definimos el producto smash como:
X ∧ Y =X × Y /({x0} × Y ∪X × {y0}) .
67

Capıtulo 2
Si Γ es un grupo topologico, definimos Γ+ como Γ con un punto base ajeno, fijado porΓ. Entonces Γ+ ∧ Sn es un cuna de esferas indexadas por Γ:
En general, si tenemos espacios topologicos punteados (X ⊔ +,+), (Y, y0) entonces
(X ⊔ +) ∧ Y = (X ⊔ +) × Y(+ × Y ) ∪ (X ⊔ +) × y0
= X × Y ⊔ (+ × Y )(+ × Y ) ∪X ⊔ y0(+ × y0)
≅X × YX × y0
≅ ⋁(x,y0)∈X×y0
{x} × Y
≅ ⋁x∈X
Y,
donde el cuarto homeomorfismo se obtiene ya que +×Y(+×Y )⊔(+×y0) se colapsa a un punto. Por
tanto,
Γ+ ∧ Sn ≅ Γ × SnΓ × s0
≅ ⋁γ∈Γ
Sn.
Si H ⊆ Γ actua en X, entonces H actua en Γ+ ∧X por
h[γ, x] = [γh−1, hx].
Veamos que esta bien definido, sea e ∈H el elemento neutro, por tanto
e[γ, x] = [γe, ex] = [γ, x],
sean h1, h2 ∈H, tenemos que
(h1h2)[γ, x] =[γ(h1h2)−1, h1h2x]=[γh−1
2 h−11 , h1h2x]
=h1[γh−12 , h2x]
=h1(h2[γ, x]),
por definicion, [γ, x] = (+, x) o (γ, x0), entonces si [γ, x] = (+, x),
h[γ, x] = h(+, x) = (+h−1, hx) = (+, hx) = [γh−1, hx]y si [γ, x] = (γ, x0)
h[γ, x] = h(γ, x0) = (γh−1, hx0) = (γh−1, x0) = [γh−1, hx].Sea Γ+ ∧H X = Γ+ ∧X /H hereda la accion de Γ en la primera coordenada.
Veamos que, como Γ-complejos, Γ+ ∧ Sn puede construirse a partir de Γ ×Dn pegan-dole una 0-celda, y a Γ+ ∧H Sn a partir de Γ ×H Dn pegandole una 0-celda. Mas aun,Γ+ ∧ Sn ≅ Γ+ ∧H Sn si H es trivial.
Regresando al tipo de homotopıa de Nn, tenemos dos casos. El caso cuando n es parlo veremos mas adelante. Cuando n es impar, la clasificacion se vuelve mas simple:
68

Emparejamientos generalizados
Teorema 2.6.8. Para n ≥ 3 con n impar,
Nn ≅Γ
n−12
⋁i=1
Γ+ ∧ Sn−3i .
Demostracion.
n−12
⋁i=1
Γ+ ∧ Sn−3i =
n−12
⋁i=1
(⋁γ∈Γ
Sn−3γ ) =
n−12
⋁i=1
(∣Γ∣⋁i=1
Sn−3j ) =
(n−1)!⋁i=1
Sn−3j ≃Γ Nn.
El lado derecho denota el cuna de n−12 orbitas de (n − 3)-celdas, donde la accion de
grupo es libro en cada orbita.
En el caso donde n es par, tenemos otro problema. Como una de las orbitas tiene accionde grupo no-libre, no podemos tener a priori que todas las celdas pueden ser identificadasa un punto. Por ejemplo para n = 4 la orbita de 4 − 1 2 − 3 no es libre por el elemento(12) × (34).
Lema 2.6.9. Cualesquiera dos graficas en M , excepto la grafica que contene solo a {1,2},estan no relacionadas en P (K) /∼ .
Demostracion. Supongamos que las graficas G y H son crıticas, y que G <H en P (K) /∼ .Entonces existe un camino
H ⊃ G1 ⊆H1 ⊃ ⋯ ⊃ Gn ⊆Hn ⊃ G,
donde Gi esta emparejado a Hi por ∼.
Como H es crıtico, entonces es la union de dos cadenas disjuntas, se sigue que G1 esla union de tres cadenas disjuntas. Pero tales graficas estan emparejadas a H1 = G1 ∪ econ e = {1,2}.
Por induccion vemos que todos los Gi contienen a e o al menos tres componentesconexas:
G2 = G1 o contiene a e. Supongamos que Gi contiene a e, esto implica que Hi = Gilo cual implica que Gi+1 = Hi/e es decir tiene tres componentes conexas o Gi+1 contienea e. Por otro lado, supongamos que Gi tiene tres componentes conexas, tenemos queHi = Gi ∪ e por tanto Gi+1 = Gi que tiene tres componentes conexas o Gi+1 tiene a e.
Ası no habra relaciones entre las graficas correspondientes a (n − 3)-celdas en elcomplejo de Morse. Entonces esto se puede probar bajo cualquier orden en la extensionlineal.
En particular, podemos ignorar las graficas con dos cadenas de igual longitud por elmomento. Sea M′ el complejo de Morse antes de agregar estos. Supongamos n par.
Las celdas correspondientes a graficas con cadenas de igual longitud, tienen grupo deinvarainza de orden 2, la transposicion (1,2) y n
2 − 1 transpociones de los demas vertices
69

Capıtulo 2
segun su posicion en la cadena.
Sea Λ ⊆ Γ el grupo cıclico de orden 2, generado por τ = (1,2)(3,4)⋯(n − 1, n). Ahora
M =M′ ⋃Γ×C2
∂Dn−3Γ ×C2 D
n−3.
La accion de grupo en cada orbita en M′ es libre, ası que el unico punto en M′ quequeda invariante para algun grupo es la 0-celda. Ası el operador frontera sera equivariante,y debera pegar estas ultimas celdas a la celda en M′. Entonces
Teorema 2.6.10. Sea n > 3 un numero par, entonces
Nn ≅Γ
n2
⋁i=1
Γ+ ∧Hi Sn−3i ,
donde Hi es trivial para i = 1, . . . , n2 − 1 y donde Hn2= Λ = ⟨τ⟩.
Demostracion. En general se cumple:
Hk(n
⋁i=1
Xi) ≅n
⊕i=1
Hk(Xi)
vease en [2, Problema 3, p.190].
Tambien G+ ∧H X ≅ (G /H )+ ∧X es un G-homeomorfismo (ver [11, p. 13]).
AdemasHn((G /H )+ ∧ Sn) ≅ H0((G /H )+) ≅H0(G /K ),
(ver [11, p. 17]).
Por tanto,
Hn−3(n2
⋁i=1
Γ+ ∧Hi Sn−3i ) =
n2
⊕i=1
Hn−3(Γ+ ∧Hi Sn−3i )
donde Hi es trivial para toda i ≠ n2 y Hn
2= ⟨τ⟩ = Λ. Esto implica que
Hn−3(Nn) =n2−1
⊕i=1
Hn−3(Γ+ ∧ Sn−3)⊕Hn−3(Γ+ ∧Λ Sn−3)
=n2−1
⊕i=1
Z[Γ]⊕Hn−3(Γ+ ∧Λ Sn−3),
pero Hn−3(Γ+ ∧Λ Sn−3) =H0(Γ /Λ) = Z[Γ /Λ] = Z[Sn−2], por tanto
Hn−3(Nn) =n2−1
⊕i=1
Z[Γ]⊕Z[Sn−2].
70

Capıtulo 3
Resultados
En este capıtulo presentaremos un algortimo para obtener un emparejamiento de Mor-se generalizado, a partir de un complejo simplicial y una funcion inyectiva definida en susvertices. Comenzaremos dando las definiciones de algunos conjuntos y funciones que seutilizan a lo largo de ambos algoritmos. Despues presentaremos los pseudocodigos que seutilizan en el algoritmo que presentamos e ilustraremos con algunos ejemplos. Demostrare-mos que efectivamente este emparejamiento efectivamente es un emparejamiento de Morsegeneralizado y expondremos como se realiza el calculo de sus grupos de homologıa. Porultimo haremos una comparacion en duracion y cantidad de crıticos que arrojan nuestroalgoritmo y el presentado en [10].
3.1. Algoritmo para generar un emparejamiento de Morsegeneralizado
En esta seccion nos inspiraremos en el trabajo de Neza [10], podemos encontrarel pseudocodigo de su algoritmo en A.2. Presentaremos un algoritmo que calcu-le un emparejamiento de Morse generalizado para un complejo simplicial finito K.Pediremos que K este expresado en sus caras maximales y con una funcion inyectivah ∶ Vert(K)→ N∪{0}. El algoritmo arrojara una lista L de intervalos de diferente longitud.
Antes de presentar el pseudo codigo, necesitamos establecer unas definiciones conocidasy definir algunas funciones y conjuntos.
Definicion 3.1.1. Para τ1, τ2 ∈ K, definimos el join(o junta) de τ1 y τ2 denotado porτ1 ∗ τ2 como
τ1 ∗ τ2 ∶= {σ1 ∪ σ2∣σi ∈ τi, i = 1,2}.
En palabras, el join de dos simplejos es el complejo simplicial formado por los verticesde ambos simplejos.
Ejemplo 3.1.2. Sean τ1 = {v1} y τ2 = {v2, v3}.
τ1 ∗ τ2 ={v1 ∪ ∅, v1 ∪ v2, v1 ∪ v3, v1 ∪ {v2, v3},∅ ∪∅,∅ ∪ v2,∅ ∪ v3,∅ ∪ {v2, v3}}={v1,{v1, v2},{v1, v3},{v1, v2, v3},∅, v2, v3,{v2, v3}}
71

Capıtulo 3
Definicion 3.1.3. Para σ ∈K, definimos el link de σ por
linkK(σ) ∶= {τ ∈K ∣σ ∗ τ ∈K,σ ∩ τ = ∅}.
Ahora veamos la siguiente funcion que viene en [10]:
mınh ∶K → Rσ ↦ mın
v∈Vert(σ)h(v)
E inspirados en la construccion del Lowerlink que de igual manera lo podemos encontraren [10], definamos el siguiente conjunto:
MaxlinkK(σ) ∶= {τ ∈ linkK(σ)∣mınh(τ) > mınh(σ)}.
Veamos que MaxlinkK(σ) es un subcomplejo de K.
Proposicion 3.1.4. MaxlinkK(σ) es un subcomplejo simplicial de linkK(σ).
Demostracion. Es claro que MaxlinkK(σ) ⊆ linkK(σ).
Sea δ = {v0, . . . , vm} ∈ MaxlinkK(σ) y α = {v0, . . . , vn} ⊂ δ con n < m. Veamos queα ∈ MaxlinkK(σ):
Como δ ∈ MaxlinkK(σ) tenemos que mınh(δ) > mınh(σ), por tanto existe i ∈{0,1, . . . ,m} tal que mınh(δ) = h(vi). Tenemos los siguientes casos:
Si i ∈ {0, . . . , n}, tenemos que mınh(α) = h(vi) > mınh(σ) y ası α ∈ MaxlinkK(σ).
Si i ∈ {n+1, . . . ,m} implica por la inyectividad de h que h(vi) ≠ mınh(α), veamos quemınh(α) > mınh(δ), si mınh(α) < mınh(δ) tendriamos por definicion de mınh quemınh(α) = mınh(δ) lo cual es una contradiccion. Por tanto mınh(α) > mınh(δ) >mınh(σ) y ası α ∈ MaxlinkK(σ).
72

Resultados
Ejemplo 3.1.5. Consideremos el siguiente complejo con la funcion denotada en sus verti-ces.
entonces Maxlink(4) = {6,9,{6,9}}.
Dados v ∈ Vert(K) y L una lista de intervalos definamos el siguiente conjunto
v ∗L ∶= {[v ∗ σ, v ∗ τ]∣[σ, τ] ∈ L},Ejemplo 3.1.6. Sea L = {[2,245], [3], [4,45]} y v = 1, entonces
1 ∗L = {[12,1245], [13], [14,145]},
donde ∗ denota a el operador Join.
Definamos un orden para los n−simplejos de un complejo inspirado en el orden lexi-cografico. Primero, ordenemos a los vertices por su valor en h, es decir, si σ = {v0, . . . , vn}entonces h(v0) < ⋅ ⋅ ⋅ < h(vn). Ahora, al n−simplejo σ le asignamos la siguiente sucesion
h(vn), h(vn−1), . . . , h(vo).
Dados dos n−simplejos σ = {v0, . . . , vn}, τ = {w0, . . . ,wn}, diremos que σ ≺h τ si susrespectivas sucesiones son diferentes y ademas sucede que h(vn−i) < h(wn−i) para laprimera i ∈ 0, . . . , n donde h(vn−i) y h(wn−i) difieren.
Veamos que ≺h es realmente un orden (ası como el orden lexicografico).
Proposicion 3.1.7. La relacion ≺h es un orden parcial.
Demostracion. Sean σ, τ, ρ ∈ K tal que, σ = {v0, . . . , vn}, τ = {w0, . . . ,wn}, ρ ={u0, . . . , un}.
Tenemos que para todo σ ∈K, σ =h σ pues h(vn−i) = h(vn−i) para todo i ∈ {0, . . . , n}.
Supongamos que σ <h τ y τ <h ρ, veamos que σ <h ρ: Como σ <h τ tenemos queexiste i ∈ {0, . . . , n} tal que h(vn−i) < h(wn−i) y como τ <h ρ tenemos que existej ∈ {0, . . . , n} tal que h(wn−j) < h(un−j). Entonces para k = mın i, j tenemos queh(vn−k) < h(un−k) y es la primera k para la que h(vn−k) y h(un−k) difieren, por tantoσ <h ρ.
Supongamos que σ ≤h τ y τ ≤h σ veamos que σ =h τ . Tenemos que existe i ∈ {0, . . . , n}tal que h(vn−i) ≤ h(wn−i) donde i es la primera en que h(vn−i) y h(wn−i) difieren,de la misma manera existe j ∈ {0, . . . , n} tal que h(wn−j) ≤ h(vn−j) donde j es laprimera en que h(wn−j) y h(vn−j) difieren. Entonces por definicion de ≺h tenemosque i = j pues ambas denotan la primera k para la que h(vn−k) y h(wn−k) difieren,por tanto h(vn−i) ≤ h(wn−i) ≤ h(vn−i), es decir h(vn−i) = h(wn−i) y ası σ =h τ .
73

Capıtulo 3
Por tanto ≺h es un orden parcial.Con este orden definimos hmax.simplex(K) como el simplejo maximo en K bajo el
orden ≺h.
la idea del algoritmo es que genere un emparejamiento de Morse generalizado dondecada simplejo sea emparejado con la supercara con dimension mas grande de este cuyosh-valores sean los mas grandes posibles. Al igual que en el algoritmo presentado en [10]este proceso se hara a traves de vertices.
El pseudocodigo del algoritmo principal que llamaremos EMG es el siguiente:
Algoritmo 1: EMG
Entrada: Estructura simplicial en caras maximales KSalida: Lista de intervalos L
1 d = ∅2 funcion EMG(K,d)3 si K = ∅ entonces4 L ∶= ∅5 en otro caso6 para v ∈ Vert(K)/Vert(d) hacer7 calcular MaxlinkK(v)8 si Maxlink = ∅ entonces9 L← [v]
10 en otro caso11 dv = hmax.simplex(MaxlinkK(v))12 L← [v, v ∗ dv]13 K ′ ∶= MaxlinkK(v)/dv14 L′ ∶=← EMG(K ′, dv)15 si L′ ≠ ∅ entonces16 L← v ∗L′
17 calcular Other.Critics(K,L, d)18 si Other.Critics(K,L, d) ≠ ∅ entonces19 L← Other.Critics(K,L, d)20 devolver L
Como estamos trabajando con caras maximales habra ocasiones en el procedimientode EMG hasta el punto 16 haya omitido ciertos simplejos (es decir, que no los incluya enningun intervalos). Other.Critics hara a estos, crıticos automaticamente. El pseudocodigoes el siguiente:
74

Resultados
Algoritmo 2: OtherCritics
Entrada: Estructura simplicial en caras maximales K,
Ultima pareja utilizada dSalida: Lista de crıticos que no aparecieron en EMG(K,d)
1 funcion (K,d)2 para v ∈ Vert(d) hacer3 calcular MaxlinkK(v)4 si Maxlink(K,v) ≠ ∅ entonces5 para x ∈ MaxlinkK(v) hacer6 dx ∶= v ∗ x7 si dx /⊆ L entonces8 OC ← [dx]
9 devolver OC
Nota 3.1.8. El algoritmo trabaja siempre con caras maximales, por ejemplo: Si K ={1,2,3,{1,2},{1,3},{2,3},{1,2,3}}, por definicion,
MaxlinkK(1) = {2,3,{2,3}}.
Pero en el algoritmo,MaxlinkK(1) = {2,3}.
Ahora demostraremos que EMG realmente construye un emparejamiento de Morsegeneralizado en K.
Proposicion 3.1.9. La funcion EMG genera un emparejamiento de Morse generalizado.
Demostracion. Denotemos ∼= {L}. Veamos que efectivamente ∼ es un EMG: Demostra-remos que la construccion no genera caminos cerrados. Sea
[a1, b1]→ [a2, b2]→ . . . [an, bn]→ [a1, b1],
un camino cerrado en P (K) /∼ . Tenemos que cada flecha en el camino implica que el verticemas grande de ai+1 digamos vi+1 esta en el Maxlink del vertice mas grande de ai, digamosvi. Por tanto vi < vi+1, es decir
v1 < v2 < ⋅ ⋅ ⋅ < vn < v1,
lo cual es una contradiccion.
3.2. Ejemplos
Ahora presentaremos dos ejemplos ilustrativos del algoritmo.
Ejemplo 3.2.1. Consideremos el siguiente complejo simplicial, con la funcion h denotadaen sus vertices:
75

Capıtulo 3
K = {{0,2},{2,4},{2,6},{2,6,9}}d← ∅Intervalos ← EMG(K,d) =K ≠ ∅Vert(K)/Vert(d) = 0,2,4,6,9
0MaxlinkK(0) = {2} ≠ ∅d0 = hmax.simplex({2}) = 2L← [0,0 ∗ 2]K ′ = {2}/2 = ∅L′ = EMG(∅,2) = ∅
2MaxlinkK(2) = {4},{6} ≠ ∅d2 = hmax.simplex({4},{6}) = {6}L← [2,2 ∗ 6]K ′ = {{4},{6}}/6 = {4}L′ = EMG({4},6) =K ′ ≠ ∅Vert(K ′)/Vert(6) = 4
� 4MaxlinkK′(4) = ∅L′ ← [4]Other.Critics = ∅L′ = [4]
L← 2 ∗ [4], es decir, L← [2 ∗ 4]
4MaxlinkK(4) = {6,9} ≠ ∅d4 = hmax.simplex({6,9}) = {6,9}L← [4,4 ∗ 69]K ′ = {6,9}/{6,9} = ∅L′ = EMG(∅,{6,9}) = ∅
6MaxlinkK(6) = {9} ≠ ∅
76

Resultados
d6 = hmax.simplex({9}) = {9}L← [6,6 ∗ 9]K ′ = {9}/9 = ∅L′ = EMG(∅,9) = ∅
9MaxlinkK(9) = ∅L← [9]
Other.Critics = ∅Intervalos = {[0,02], [2,26], [24], [4,469], [6,69], [9]}
A continuacion vemos el emparejamiento de Morse generalizado resultante:
Ahora analizemos un ejemplo mas grande en donde veamos la utilidad de Other.Critics.
Ejemplo 3.2.2. Consideremos el toro, con la siguiente estructura simplicial y con lossiguientes valores en sus vertices,
Por tanto:
K ={{0,1,5},{0,1,6},{0,4,5},{0,4,7},{0,6,8},{0,7,8},{1,2,6},{1,2,7},{1,3,5},{1,3,7},{2,4,5},{2,4,6},{2,5,8},{2,7,8},{3,4,6},{3,4,7},{3,5,8},{3,6,8}}
Para ilustrar la funcion Other.Critics solo aplicaremos el algoritmo al vertice 1 ∈ K,pues es el unico vertice en este ejemplo donde usamos esta funcion.
77
Capıtulo 3
1MaxlinkK(1) = {{2,6},{2,7},{3,5},{3,7}} ≠ ∅d1 = hmax.simplex({{2,6},{2,7},{3,5},{3,7}}) = {3,7}L← [1,1 ∗ 37]K ′ = {{2,6},{2,7},{3,5},{3,7}}/{3,7} = {{2,6},{2,7},{3,5}} ≠ ∅L′ = EMG(K ′,{3,7}) =
K ′ ≠ ∅Vert(K ′)/Vert({3,7}) = 2,5,6
� 2MaxlinkK′(2) = {6,7} ≠ ∅d′2 = hmax.simplex({6,7}) = 7L′ ← [2,2 ∗ 7]K ′′ = {6,7}/7 = {6} ≠ ∅L′ = EMG(K ′,7) = ∅K ′′ ≠ ∅Vert(K ′′)/Vert(7) = {6}○ 6
MaxlinkK′′(6) = ∅L′′ ← [6]
L′ ← 2 ∗ [6] = [2 ∗ 6] = [26]� 5
MaxlinkK′(5) = ∅L′ ← [5]
� 6MaxlinkK′(6) = ∅L′ ← [6]
Entonces L← 1 ∗L′ = 1 ∗ {[2,27], [26], [5], [6]}, es decir,
L = {[1,137], [12,127], [126], [15], [16]}.
Hasta este momento hemos emparejado a cada elemento que contiente al vertice 1 ∈Kexcepto a {1,3,5} ∈K, por tanto veamos que {1,3,5} aparece en Other.Critics(K ′, L′,37)y por tanto sera un crıtico en el EMG.
Other.Critics(K ′, L′,{3,7}) =Vert({3,7}) = 3,7
3MaxlinkK′(3) = {5} ≠ ∅d3 = 3 ∗ 5 = {3,5}
78

Resultados
{3,5} ∉ L′Other.Critics← [35]
7MaxlinkK′(7) = ∅
Por tanto,L′ ← Other.Critics = [35]L′ = {[2,27], [26], [5], [6], [35]}L← 1 ∗L′ = {[1,137], [12,127], [126], [15], [16], [135]}.
Despues de aplicar el algoritmo, a todo el c.s.a. obtenemos el siguiente EMG:
Intervalos = {[0,078], [01,016], [015], [04,047], [045], [05], [06,068], [1,137], [12,127],[126], [15], [16], [135], [2,278], [24,246], [245], [25,258], [26], [3,368], [34,347], [346],[35,358], [37], [4,47], [45], [46], [5,58], [6,68], [7,78], [8]}
A continuacion podemos ver el emparejamiento de Morse generalizado resultante en eltoro:
3.3. Complejo de Morse para un emparejamiento de Morsegeneralizado
Sabemos por la teorıa de Morse que para calcular los grupos de homologıa de uncomplejo simplicial podemos utilizar el complejo de Morse, que consiste de los elementoscrıticos que deja un emparejamiento. En caso de los EMG podremos hacer algo similar.Procedemos de manera analoga que en [14]
Definamos de igual maneraMn como el grupo libre generado por los elementos crıticosde dimension n en K que deja un EMG ∼.
79

Capıtulo 3
Ahora necesitamos un operador frontera ∂n ∶Mn →Mn−1. Para cada σ ∈Mn defina-mos,
∂n(σ) = ∑τ∈Mn−1
κ′(σ, τ)τ,
donde,
κ′(σ, τ) = κ(σ, τ) +∑ρ
mul(σ ρÐ→ τ).
Extendemos esto Z-linealmente. Como sabemos, esta construccion depende de los caminosque van de σn a los crıticos de dimension de n−1. Observemos que la definicion de caminono es compatible con la estructura de intervalo. Por tanto sera necesario tomar algunrefinamiento para cada intervalo y de esta manera calcular κ′(σ, τ) como en la teorıa deMorse usual. Veamos en un ejemplo que no importa la eleccion de refinamientos.
Ejemplo 3.3.1. Consideremos la siguiente estructura simplicial con el emparejamiento deMorse generalizado ilustrado con las flechas :
0 2 6 4 9
02 26 24 46 69 49
469
De este EMG, podemos tomar dos refinamientos:
1. Consideremos el siguiente diagrama de Hasse:
0 2 6 4 9
02 26 24 46 69 49
469
Tenemos los siguientes caminos:
ρ1 ∶ {2,4}→ {2}→ {2,6}→ {6}→ {6,9}→ {9}
ρ2 ∶ {2,4}→ {4}→ {4,9}→ {9}
80

Resultados
cuya respectiva multiplicidad es:
mul(ρ1) =κ({2,4},{2})κ({2,6},{6})κ({6,9},{9})
(−1)2κ({2,6},{2})κ({6,9},{6}) = −1
mul(ρ2) =κ({2,4},{4})κ({4,9},{9})
(−1)1κ({4,9},{9}) = 1
Por tanto κ′({2,4},{9}) = 0.
2. Consideremos el siguiente diagrama de Hasse:
0 2 6 4 9
02 26 24 46 69 49
469
Tenemos los siguientes caminos:
ρ1 ∶ {2,4}→ {2}→ {2,6}→ {6}→ {6,9}→ {9}
ρ2 ∶ {2,4}→ {4}→ {4,6}→ {6}→ {6,9}→ {9}
cuya multiplicidad son:
mul(ρ1) =κ({2,4},{2})κ({2,6},{6})κ({6,9},{9})
(−1)2κ({2,6},{2})κ({6,9},{6}) = −1
mul(ρ2) =κ({2,4},{4})κ({4,6},{6})κ({6,9},{9})
(−1)2κ({4,6},{4})κ({6,9},{6}) = 1
Por tanto κ′({2,4},{9}) = 0.
3.4. EMG vs. ExtractRaw
Por ultimo, compararemos la efectividad del algoritmo que proponemos contra elalgoritmo ExtractRaw trabajado en [10]. Cabe mencionar que ambos algoritmos generanun emparejamiento en un complejo con una cantidad no optima de crıticos.
Para comparar ambos algoritmos contruiremos complejos de la siguiente manera: fija-mos una dimension n, y una cantidad de simplejos maximales m, programamos un algorit-mo que genera un complejo simplicial abstracto K, con dimK ≤ n que consiste del wedgede m simplejos maximales. Entonces el algoritmo arrojara una estructura simplicial conuna funcion inyectiva en sus vertices
K =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
1 2 ⋯ n n + 11 n + 2 ⋯ n + i21 n + i2 + 1 ⋯ n + i2 + i3⋮1 n +∑m−1
j=2 ij + 1 ⋯ n +∑mj=2 ij
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎭
81

Capıtulo 3
donde ij ≤ n para j = 2, . . . ,m. Ahora, esta eleccion de valores para los vertices en K leda una ventaja al algoritmo de Neza pues generara solo un crıtico, por tanto es necesariogenerar una permutacion aleatoria en los valores de cada vertice. Consideramos el grupode permutaciones Sn+i2+⋯+im−1+im , tomaremos cualquier elemento g ∈ Sn+i2+⋯+im−1+im y loharemos actuar en K de la siguiente manera.
g ⋅K =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
g ⋅ 1 g ⋅ 2 ⋯ g ⋅ n g ⋅ (n + 1)g ⋅ 1 g ⋅ (n + 2) ⋯ g ⋅ (n + i2)g ⋅ 1 g ⋅ (n + i2 + 1) ⋯ g ⋅ (n + i2 + i3)⋮
g ⋅ 1 g ⋅ (n +∑m−1j=2 ij + 1) ⋯ g ⋅ (n +∑mj=2 ij)
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎭De esta manera ningun algoritmo tendra ninguna ventaja. Buscamos comparar
la duracion del algoritmo y la cantidad de crıticos que arrojan cada uno. Para nfija, y cada m′ entre 1 y m, realizamos el siguiente proceso 100 veces: Obtener uncomplejo K, calculamos EMG y ExtractRaw, y guardamos el tiempo de duracion yla cantidad de crıticos que arrojaron cada uno. Realizamos un promedio con estas 100entradas y lo guardamos. Entonces para cada m′ tendremos un tiempo y crıticos promedio.
Primero analizemos la duracion del algoritmo para simplejos de dimension maximal 5y 10 en la Figura 3.1, podemos ver que conforme aumentamos la cantidad de simplejosmaximales la duracion del algoritmo ExtractRaw incrementa exponencialmente. Porotro lado EMG mantiene una duracion menor a un minuto sin importar la cantidad desimplejos maximales.
Ahora, analizemos la cantidad de simplejos crıticos que arrojan ambos algoritmos parasimplejos maximales de dimension 5 y 10 en la Figura 3.2, podemos ver que la tasa decrecimiento de crıticos es similar para ambos algoritmos, con ExtractRaw haciendo menoscrıticos. Sin embargo si realizamos una comparacion con la cantidad de simplejos en totalque tiene el complejo simplicial, observamos que ambos algoritmos obtienen una cantidadrelativamente similar de crıticos, ver Figura 3.3.
Para comparar los crıticos y la duracion de ambos algoritmos en dimensiones superiores,por cuestiones de la duracion total del algoritmo, trabajamos en dimension 15 reduciendoel numero de repeticiones y la cantidad de simplejos maximales.
82
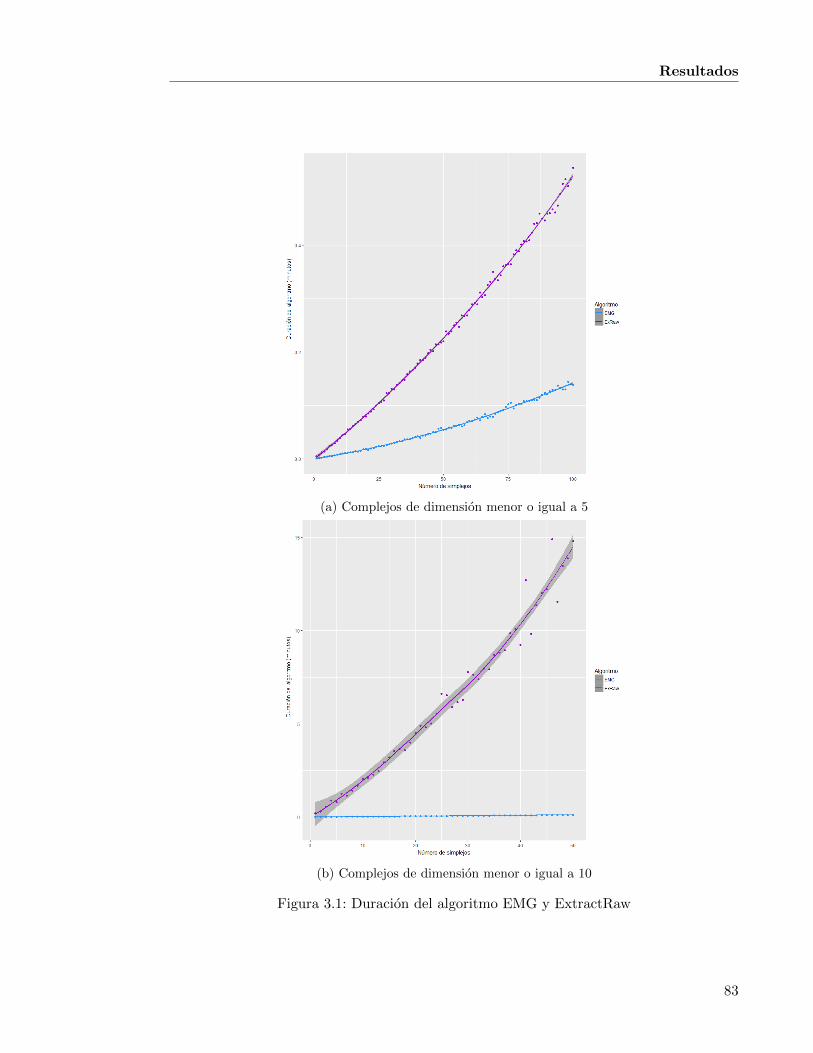
Resultados
(a) Complejos de dimension menor o igual a 5
(b) Complejos de dimension menor o igual a 10
Figura 3.1: Duracion del algoritmo EMG y ExtractRaw
83

Capıtulo 3
(a) Complejos de dimension menor o igual a 5
(b) Complejos de dimension menor o igual a 10
Figura 3.2: Cantidad de crıticos del algoritmo EMG y ExtractRaw
84

Resultados
(a) Complejos de dimension menor o igual a 5
(b) Complejos de dimension menor o igual a 10
Figura 3.3: Comparacion en cantidad de crıticos y simplejos
85
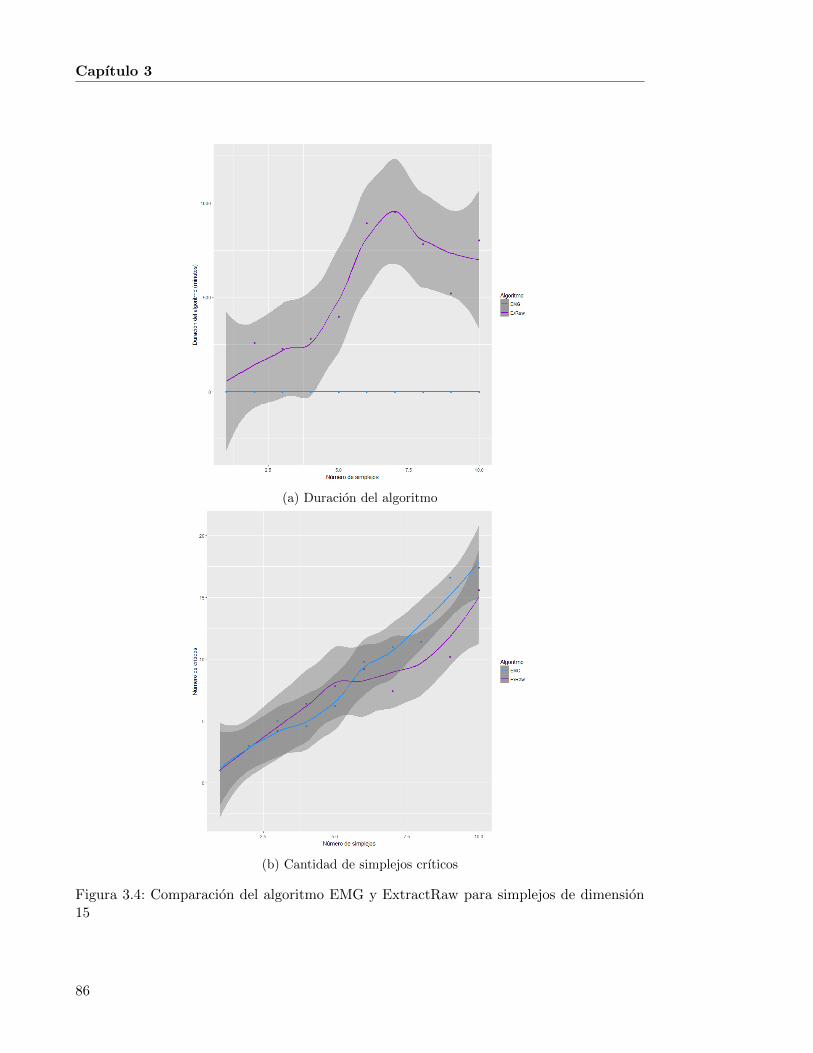
Capıtulo 3
(a) Duracion del algoritmo
(b) Cantidad de simplejos crıticos
Figura 3.4: Comparacion del algoritmo EMG y ExtractRaw para simplejos de dimension15
86

Apendice A
Codigos
En este apendice incluimos todos los codigos utilizados para programar los algoritmospropuestos, el de Neza [10] y los necesarios para hacer la comparacion. Utilizamos el pro-grama R (version 3.3.2) y R Studio (version 1.0.136) y una computadora con un procesadorIntel Core i5 (Memoria RAM de 8GB) sin paralelizacion.
A.1. EMG
Presentamos el codigo del algoritmo propuesto para calcular emparejamientos gene-ralizados de Morse que llamamos EMG. Primero damos el codigo principal para luego irmostrando poco a poco cada funcion utilizada.
EMG
Entrada: Estructura Simplicial K.Salida: Particion de K en intervalos de diferente longitud.
d<- NULL
EMG<-function(K,d){
L<-list()
int<-1
L1<-NULL
if(is.null(K)){
L<-NULL
} else {
for (v in Vert(K,d)){
mlink<-Max.Link(K,v)
if (is.null(mlink)){
L[[int]]<- list(v)
int<-int+1
} else {
c<-Candidatos(mlink)
d1<-hmax.simplex(c)
L[[int]]<- list(c(v),c(v,d1))
int<-int+1
87

Capıtulo A
K1<-Queue.Simplex(mlink,d1)
L1<-EMG(K1,d1)
if(!is.null(L1)){
L<-c(L,List.Joint(v,L1))
int<-length(L)+1
}
}
OC<-Other.Critics(K,d)
if(!is.null(OC)){
L<-append(L,OC)
}
}
return(L)
}
}
La funcion Vert calcula los vertices de un complejo simplicial, y en caso de quehayamos hecho una pareja esta funcion nos dira cuales son los vertices disponibles paraseguir emparejando.
Vert
Entrada: Estructura Simplicial K, ultima pareja utilizada d.Salida: Lista de vertices para realizar nuevos emparejamientos.
Vert<-function(K,d){
l<-length(d)
if(l == 0){
K<-unlist(as.list(K))
} else {
for( x in 1:l ){
K<-K[which(K != d[x])]
}
}
Vertices<-sort(unique(K))
return(Vertices)
}
Ejemplo A.1.1. Sea K con la siguiente estructura simplicial:
K ={{1,4},{3,4},{1,2,3}}.
88

Codigos
Si d = ∅ entonces Vert(K,d) = (1,2,3,4). Si d = {2,3} entonces Vert(K,d) = (1,4).
Ahora presentamos el codigo que utilizamos para programar la funcion Maxlink.
MaxLink
Entrada: Estructura Simplicial K, un vertice n.Salida: MaxlinkK(n).
Max.Link<- function(K,n){
mlink<-list()
S<-K[which(K == n, arr.ind = TRUE)[,1],]
if(length(S) == 0){
mlink<-NULL
} else {
if(is.null(nrow(S))){
mlink[[1]]<-S[-which(S<=n | is.na(S))]
mlink<-mlink[sapply(mlink, length) > 0]
}
if(!is.null(nrow(S))){
for (s in 1:nrow(S)){
mlink[[s]]<-S[s,-which(S[s,] <= n | is.na(S[s,]))]
mlink<-mlink[sapply(mlink, length) > 0]
}
}
if (length(mlink) == 0) {
mlink<-NULL
}
mlink<-unique(mlink)
l<-length(mlink)
entra<-NULL
e<-1
for(x in 1:l){
l1<-length(mlink)
for(y in 1:l1){
if(length(intersect(mlink[[x]],mlink[[y]]) != 0)){
if(length(mlink[[x]])>length(mlink[[y]])){
entra[e]<-y
89

Capıtulo A
e<-e+1
}
}
}
}
if (!is.null(entra)){
mlink<-mlink[-entra]}
}
return(mlink)
}
Ejemplo A.1.2. Si n = 1, Maxlink(K,n) = {{4},{2,3}}.
La funcion Candidatos toma a los simplejos maximales del Maxlink para poderasegurar que emparejemos un simplejo de dimension mayor.
Candidatos
Entrada: Estructura simplicial K.Salida: Simplejos de dimension maxima en K.
Candidatos<-function(mlink){
l1<- length(mlink)
L<-NULL
for(x in 1:l1){
L[x]<-length(mlink[[x]])
}
m<-which.max(L)
entra<- NULL
for(y in 1:l1){
if(length(mlink[[m]]) == length(mlink[[y]])) {
entra<- c(entra,y)
}
}
d<-NULL
if(!is.null(entra)){
for(y1 in 1:length(entra)){
d[y1]<-mlink[entra[y1]]
}
}
return(d)
}
Ejemplo A.1.3. Con el Maxlink del ejemplo anterior tenemos que Candidatos = {{2,3}}.
Ahora presentamos el codigo que utilizamos para programar la funcion hmax.simplex.
hmax.simplex
90

Codigos
Entrada: Estructura Simplicial K.Salida: hmax.simplex(K).
hmax.simplex <- function(K){
X <- matrix(unlist(K), ncol = length(K[[1]]), byrow =TRUE)
n <- dim(X)[2]
i <- 1
Ind <- which(X[,n]==max(X[,n]))
while(length(Ind)>1){
ind <- which(X[Ind,n-i]==max(X[,n-i]))
Ind <- Ind[ind]
i <- i+1
}
return(X[Ind,])
}
Ejemplo A.1.4. Si consideramos K ′ = {{1,4},{3,4}} ⊂ K, tenemos quehmax.simplex(K ′) = {3,4}.
La funcion Queue.Simplex toma en cuenta la ultima pareja utilizada y la quita delMaxlink para saber cuales son los siguientes posibles simplejos que podemos emparejar.
Queue.Simplex
Entrada: Estructura Simplicial K , ultima pareja utilizada d.Salida: K/d.
Queue.Simplex <- function(mlink,d){
l<-length(d)
X<-list()
for( x in 1:l ){
X[[x]]<-grep(d[x] , mlink)
}
y<-Reduce(intersect, X)
Y<-mlink[-y]
if(length(Y) != 0){
max.length <- max(sapply(Y, length))
Y <- lapply(Y, function(v) { c(v, rep(NA, max.length-length(v)))})
QS<-do.call(rbind,Y)
}
if(length(Y) == 0){
QS<-NULL
}
return(QS)
}
Ejemplo A.1.5. Consideramos el Maxlink calculado en A.1.2, y tomemos d = {2,3},entonces Queue.Simplex = {4}.
91

Capıtulo A
A continuacion presentamos una funcion List.Joint que nos permite hacer la operacion∗ (Joint) entre listas y vertices.
ListJoint
Entrada: vertice v, Lista de intervalos L.Salida: v ∗L.
List.Joint<-function(v,L){
l<-length(L)
listjoint<-rep( list(list()), l )
if(is.null(L)){
listjoint<-NULL
} else {
for(y in 1:l){
m<-length(L[[y]])
for(x in 1:m){
listjoint[[y]][[x]]<-append(v,L[[y]][[x]])
}
}
}
return(listjoint)
}
Podemos ver un ejemplo de como funciona esta funcion en el Ejemplo 3.1.6.
Ahora presentamos el codigo que utilzamos para programar la funcion Other.Critics.
OtherCritics
Entrada: Estructura Simplicial K, ultima pareja utilizada d.Salida: Lista de crıticos que no se calcularon en EMG.
Other.Critics<-function(K,d){
int<-1
I<-list()
for(o in d){
if(!is.null(Max.Link(K,o))){
mlink<-Max.Link(K,o)
l1<-length(mlink)
for(x in 1:l1){
d1<-list(c(o,mlink[[x]]))
V<-intersect(d,d1[[1]]) == d1[[1]]
if(any(!(V))){
I[[int]]<- d1
int<-int+1
}
}
}
}
92
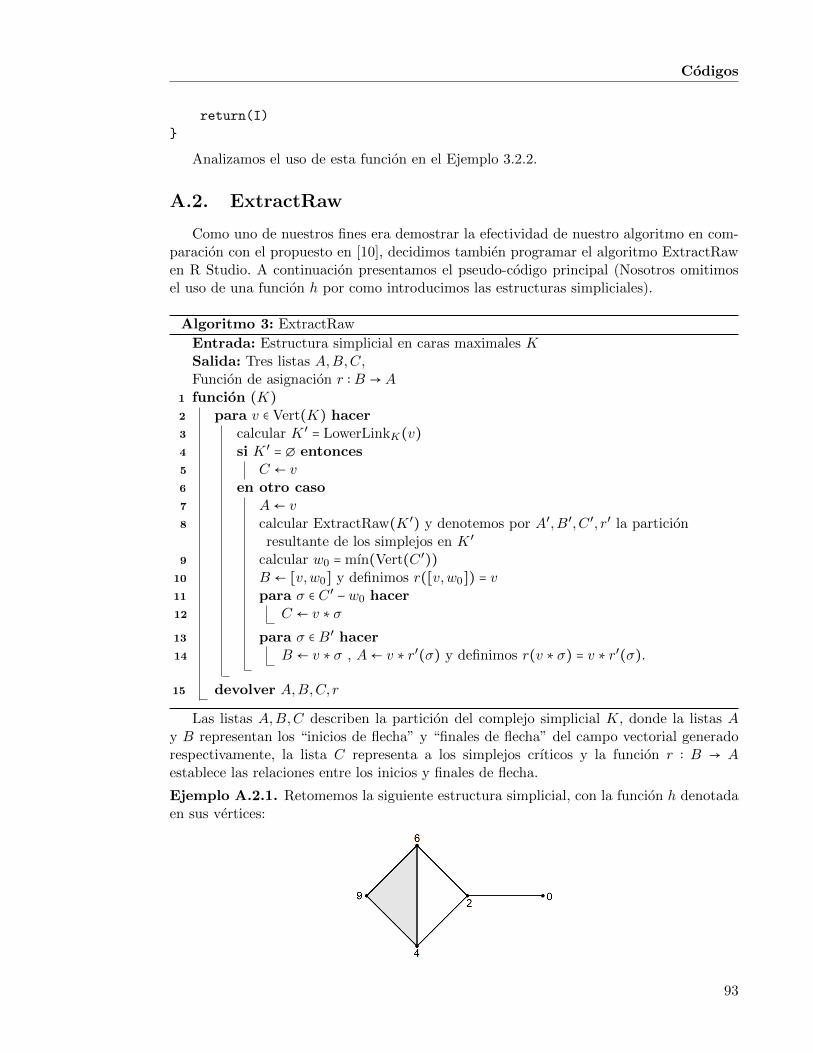
Codigos
return(I)
}
Analizamos el uso de esta funcion en el Ejemplo 3.2.2.
A.2. ExtractRaw
Como uno de nuestros fines era demostrar la efectividad de nuestro algoritmo en com-paracion con el propuesto en [10], decidimos tambien programar el algoritmo ExtractRawen R Studio. A continuacion presentamos el pseudo-codigo principal (Nosotros omitimosel uso de una funcion h por como introducimos las estructuras simpliciales).
Algoritmo 3: ExtractRaw
Entrada: Estructura simplicial en caras maximales KSalida: Tres listas A,B,C,Funcion de asignacion r ∶ B → A
1 funcion (K)2 para v ∈ Vert(K) hacer3 calcular K ′ = LowerLinkK(v)4 si K ′ = ∅ entonces5 C ← v6 en otro caso7 A← v8 calcular ExtractRaw(K ′) y denotemos por A′,B′,C ′, r′ la particion
resultante de los simplejos en K ′
9 calcular w0 = mın(Vert(C ′))10 B ← [v,w0] y definimos r([v,w0]) = v11 para σ ∈ C ′ −w0 hacer12 C ← v ∗ σ13 para σ ∈ B′ hacer14 B ← v ∗ σ , A← v ∗ r′(σ) y definimos r(v ∗ σ) = v ∗ r′(σ).
15 devolver A,B,C, r
Las listas A,B,C describen la particion del complejo simplicial K, donde la listas Ay B representan los “inicios de flecha” y “finales de flecha” del campo vectorial generadorespectivamente, la lista C representa a los simplejos crıticos y la funcion r ∶ B → Aestablece las relaciones entre los inicios y finales de flecha.
Ejemplo A.2.1. Retomemos la siguiente estructura simplicial, con la funcion h denotadaen sus vertices:
93

Capıtulo A
K = {{0,2},{2,4},{2,6},{2,6,9}}ExtractRaw(K) =
0K ′ = LowerlinkK(0) = ∅C ← 0
2K ′ = LowerlinkK(2) = 0 ≠ ∅A← 2ExtractRaw(K ′) =
� 0K ′′ = LowerlinkK′(0) = ∅C ′ ← 0
� A′ = ∅,B′ = ∅,C ′ = {0}
B ← {0,2}se define r({0,2}) = 2
4K ′ = LowerlinkK(4) = 2 ≠ ∅A← 4ExtractRaw(K ′) =
� 2K ′′ = LowerlinkK′(2) = ∅C ′ ← 2
� A′ = ∅,B′ = ∅,C ′ = {2}
B ← {2,4}se define r({2,4}) = 4
6K ′ = LowerlinkK(6) = 2,4 ≠ ∅A← 6ExtractRaw(K ′) =
� 2K ′′ = LowerlinkK′(2) = ∅C ′ ← 2
� 4K ′′ = LowerlinkK′(4) = ∅C ′ ← 4
� A′ = ∅,B′ = ∅,C ′ = {2},{4}
B ← {2,6}se define r({2,6}) = 7C ← {4,6}
9K ′ = LowerlinkK(9) = 4,6,{4,6} ≠ ∅A← 9ExtractRaw(K ′) =
� 4K ′′ = LowerlinkK′(4) = ∅C ′ ← 4
� 6K ′′ = LowerlinkK′(6) = 4 ≠ ∅A′ ← 6
○ 4K ′′′ = LowerlinkK′′(4) = ∅C ′′ ← 4
○ A′′ = ∅,B′′ = ∅,C ′′ = {4}
B′ ← {4,6}se define r′({4,6}) = 6
� A′ = {6},B′ = {4,6},C ′ = {4}
B ← {4,9},{4,6,9}A← {6,9}se define r({4,9}) = 9, r({4,6,9}) ={6,9}
A = 2,4,6,9,{6,9}B = {0,2},{2,4},{2,6},{4,9},{4,6,9}C = 0,{4,6}
94

Codigos
Ahora veamos el codigo que usamos para programarlo:
ExtractRaw
Entrada: Estructura Simplicial K.Salida: Particion de K listas A,B,C y la asignacion de las parejas r.
ExtractRaw<-function(K){
A<-list()
a<-1
B<-list()
b<-1
C<-list()
c<-1
d<- NULL
R<-list()
r<- 1
L<-rep( list(list()), 4 )
for(v in Vert(K,d)){
K1 = Lower.Link(K,v)
if( is.null(K1) ){
C[c]<- v
c<-c+1
} else {
A[a]<-v
a<-a+1
max.length <- max(sapply(K1, length))
K1 <- lapply(K1, function(v) { c(v, rep(NA, max.length-length(v)))})
K1 = do.call(rbind,K1)
L1 = ExtractRaw(K1)
A1 = L1[[1]]
B1 = L1[[2]]
C1 = L1[[3]]
r1 = L1[[4]]
w0 = min(unlist(C1))
B[[b]]<-c(v,w0)
b<-b+1
R[[r]]<-list(v,c(v,w0))
r<-r+1
for( s in C1[-grep(w0,C1)]){
C[[c]]<- c(v,s)
c<-c+1
}
OL<-unlist(r1, recursive=FALSE)
for( x in A1){
z<-Position(function(y) identical(y, x), OL, nomatch = 0)
A[[a]]<- c(v,x)
a<-a+1
95

Capıtulo A
B[[b]]<- c(v,OL[z+1][[1]])
b<-b+1
R[[r]]<- list(c(v,x),c(v,OL[z+1][[1]]))
r<-r+1
}
}
}
L[[1]]<-A
L[[2]]<-B
L[[3]]<-C
L[[4]]<-R
return(L)
}
La funcion Vert mencionada es la misma que se utiliza en EMG.
Ejemplo A.2.2. Consideremos al Toro con la estructura simplicial como vienen en elEjemplo 3.2.2, entonces ExtractRaw arroja las siguientes listas:
A ={1,2,3,4,{5,1},{5,3},{5,4},6,{6,1},{6,2},{6,4},7,{7,2},{7,3},{7,4},8,{8,5},{8,6},{8,7}}
B ={{1,0},{2,1},{3,1},{4,0},{5,0}{5,1,0},{5,3,1},{5,4,0},{6,0},{6,1,0},{6,2,1},{6,4,2},{7,0},{7,2,1},{7,3,1},{7,4,0},{8,0},{8,5,2},{8,6,0},{8,7,0}}
C ={0,{4,2},{4,3},{5,2},{5,4,2},{6,3},{6,4,3},{7,1},{7,4,3},{8,2},{8,3},{8,5,3},{8,6,3},{8,7,2}}
r =(1,{1,0}), (2,{2,1}), (3,{3,1}), (4,{4,0}), (5,{5,0}), ({5,1},{5,1,0}), ({5,3},{5,3,1}),({5,4},{5,4,0}), (6,{6,0}), ({6,1},{6,1,0}), ({6,2},{6,2,1}), ({6,4},{6,4,2}),(7,{7,0}), ({7,2},{7,2,1}), ({7,3},{7,3,1}), ({7,4},{7,4,0}), (8,{8,0}),({8,5},{8,5,2}), ({8,6},{8,6,0}), ({8,7},{8,7,0})
Ahora tenemos el codigo utilizado para programar la funcion LowerLink.
LowerLink
Entrada: Estructura Simplicial K, vertice n.Salida: LowerLinkK(n).
Lower.Link<- function(K,n){
mlink<-list()
S<-K[which(K == n, arr.ind = TRUE)[,1],]
if(length(S) == 0){
mlink<-NULL
} else {
if(is.null(nrow(S))){
mlink[[1]]<-S[-which(S>=n | is.na(S))]
96

Codigos
mlink<-mlink[sapply(mlink, length) > 0]
}
if(!is.null(nrow(S))){
for (s in 1:nrow(S)){
mlink[[s]]<-S[s,-which(S[s,] >= n | is.na(S[s,]))]
mlink<-mlink[sapply(mlink, length) > 0]
}
}
if (length(mlink) == 0) {
mlink<-NULL
}
mlink<-unique(mlink)
l<-length(mlink)
entra<-NULL
e<-1
for(x in 1:l){
l1<-length(mlink)
for(y in 1:l1){
if(length(intersect(mlink[[x]],mlink[[y]]) != 0 )){
if(length(mlink[[x]])>length(mlink[[y]])){
entra[e]<-y
e<-e+1
}
}
}
}
if (!is.null(entra)){
mlink<-mlink[-entra]
}
}
return(mlink)
}
Ejemplo A.2.3. Para K como en 3.2.2 si tomamos v = 8, entonces LowerLink(K,v) ={{0,6},{0,7},{2,5},{2,7},{3,5},{3,6}}.
A.3. EMG vs. ExtractRaw
Por ultimo presentamos los codigos que utilizamos para comparar la efectividad deambos algoritmos, primero tenemos el codigo principal del experimento.
d<-5
n<-100
r<-100
EMG.time <- c(rep(0,r))
ExRaw.time <- c(rep(0,r))
EMG.crit <- c(rep(0,r))
97

Capıtulo A
ExRaw.crit <- c(rep(0,r))
Simp <- c(rep(0,r))
EMG.res<-list( list(),list())
ExRaw.res<-list( list(),list())
Simp.res<- list()
pb<-txtProgressBar(min = 1, max = n ,style = 3)
for( N in seq(1, n,1)){
for( i in 1:r){
K<-complex(N,d)
m<-1
a<-0
while(m < N+1){
a <- a + Num.Simp(length(K[m,][!is.na(K[m,])])) - 1
m <- m +1
}
Simp[i]<- a + 1
setTxtProgressBar(pb, N)
EMG.time[i]<-system.time(EMG.test(K))[[1]]
ExRaw.time[i]<-system.time(ExtractRaw.Test(K))[[1]]
EMG.crit[i]<-EMG.test(K)
ExRaw.crit[i]<-ExtractRaw.Test(K)
}
Simp.res[N]<-mean(Simp)
EMG.res[[1]][N]<-mean(EMG.time)
EMG.res[[2]][N]<-mean(EMG.crit)
ExRaw.res[[1]][N]<-mean(ExRaw.time)
ExRaw.res[[2]][N]<-mean(ExRaw.crit)
}
Donde d representa la dimension del complejo simplicial que utilizaremos, n el numerode simplejos maximales, y r el numero de repeticiones del experimento por complejo.
La funcion EMG.test calcula cuantos simplejos crıticos arroja el algoritmo EMG.
EMG.test
EMG.test<-function(K){
d<- NULL
M<-EMG(K,d)
c<-0
for( s in 1:length(M)){
if( length(M[[s]]) == 1){
c<-c+1
}
}
return(c)
}
98

Codigos
De la misma manera, La funcion ExtractRaw.test calcula cuantos simplejos crticosarroja el algoritmo ExtractRaw.
ExtractRaw.Test
ExtractRaw.Test<-function(K){
M<-ExtractRaw(K)
L<-length(M[[3]])
return(L)
}
la funcion complex calcula de manera aleatoria un complejo simplicial de dimension dque consiste de el producto wedge de n simplejos donde la dimension de cada uno de elloses menor o igual a d, tambien asigna de manera aleatoria un valor para cada vertice demanera que ningun algoritmo tenga ventaja con la eleccion de los valores.
Complex
Entrada: Numero de simplejos n, Dimension d.Salida: Estructura simplicial de dimension d con n simplejos.
complex <- function(n, d){
CSA <- matrix(, n, d + 1)
r.1 <- 2
for(r in 1:n){
r.2 <- r.1 + sample(0:(d-1), 1)
CSA[r,1:(r.2 - r.1 + 2)] <- c(1, r.1:r.2)
r.1 <- r.2 + 1
}
M<-max(CSA, na.rm = TRUE)
imagen<-sample( 1:M , M , replace = FALSE)
perm <- function(n){
if(is.na(n)){
return(NA)
} else {
return(imagen[n])
}
}
Perm<-Vectorize(perm, vectorize.args = "n", SIMPLIFY = TRUE)
CSA <- matrix(Perm(CSA),N,d +1)
return(CSA)
}
Ejemplo A.3.1. Tomemos n, d = 5, entonces los resultados de complex son de la siguiente
99

Capıtulo A
forma:
complex(5,5) ={13,17,1,11},{13,10,16,9},{13,2,8,15,5,6},{13,4},{13,3,12,14,7}
la funcion Num.simp calcula el numero de simplejos que tiene un simplejo de dimensionn.
Num.Simp
Entrada: Numero natural n.Salida: Numero de simplejos en una estructura simplicial estandar de dimension n.
Num.Simp <- function(n) {
r<-0
a<-0
while( r < n ){
a<- a + choose(n,r)
r<- r + 1
}
return(a)
}
100

Bibliografıa
[1] G. E. Bredon. Introduction to compact transformation groups. Academic Press, 1972.
[2] G. E. Bredon. Topology and Geometry. 139. 1993.
[3] R. A. Brualdi. Introductory Combinatorics. Pearson Education, Inc., 2009.
[4] G. Carlsson. Topological pattern recognition for point cloud data. Department ofMathematics, Stanford University, 2013.
[5] M. E. Espinosa Lara. Homologıa Persistente. CIMAT.
[6] R. Forman. Morse theory for cell complexes. Adv. Math., 1998.
[7] R. Forman. A user’s guide to discrete morse theory. Seminaire Lotharingien deCombinatoire, 2002.
[8] R. Freij. Equivariant Discrete Morse Theory. PhD thesis, Chalmers University ofTechnology, 2007.
[9] J. A. Gonzalez Lemus. Teorıa de Morse Discreta y Graficas de Reeb aplicadas a ATD.CIMAT.
[10] H. King, K. Knudson, and N. Mramor. Generating discrete morse functions frompoint data. Experimental Mathematics, 14(4), 2005.
[11] J. P. May. Equivariant Homotopy and Cohomology Theory. American MathematicalSociety, 1996.
[12] J. Milnor. Morse Theory. Study 51. Princeton University Press, Princeton, NewJersey, 1963.
[13] J. R. Munkres. Elements of Algebraic Topology. Addison Wesley, 1984.
[14] V. Nanda. Discrete Morse theory for filtrations. PhD thesis, New Brunswick Rutgers,The State University of New Jersey, 2012.
[15] J. J. Rotman. An Introduction to Algebraic Topology. Springer, 1991.
[16] V. Vassiliev. Complexes of connected graphs. The Gelfand Mathematical Seminars,1990-1992.
101