tesis daniel
TRANSCRIPT
México D.F. Junio 2012
INSTITUTO POLITÉCNICO NACIONAL
UNIDAD PROFESIONAL INTERDISCIPLINARIA EN
INGENIERÍA Y TECNOLOGÍAS AVANZADAS
Trabajo Terminal I
“Prototipo de dispositivo orientador para el
aprovechamiento de la radiación solar”
Que para obtener el título de
“Ingeniero en Mecatrónica”
Presentan:
Juan Manuel Carrillo Moreno
Daniel Gasca García
Asesores:
M. en I. Diego Alonso Flores Hernández
Dr. Alberto Luviano Juárez


México D.F. Junio 2012
INSTITUTO POLITÉCNICO NACIONAL
UNIDAD PROFESIONAL INTERDISCIPLINARIA EN
INGENIERÍA Y TECNOLOGÍAS AVANZADAS
Trabajo Terminal I
“Prototipo de dispositivo orientador para el
aprovechamiento de la radiación solar”
Que para obtener el título de
“Ingeniero en Mecatrónica”
Presentan
______________________________________ ______________________________________ Juan Manuel Carrillo Moreno Daniel Gasca García
Asesor Asesor
______________________________________ ______________________________________ M. en I. Diego Alonso
Flores Hernández Dr. Alberto Luviano Juárez
Presidente del Jurado Profesor Titular
______________________________________ ______________________________________ Ing. Alejandra Sofía
Herrera Ramírez M. en C. Víctor Darío
Cuervo Pinto


Resumen El siguiente trabajo muestra el diseño y manufactura de un prototipo de dispositivo orientador
solar.
El objetivo del dispositivo es captar la radiación solar y concentrarla sobre una superficie, con el fin
aprovechar la energía solar como fuente de calor.
Para lograr el objetivo, el dispositivo utilizará un sistema que proporcione información sobre la
ubicación del Sol. Por medio de actuadores y control de posición, el dispositivo seguirá la
trayectoria del Sol a lo largo del día.
Para cubrir los requerimientos de energía eléctrica del dispositivo, se utilizarán celdas solares.
Éstas serán montadas sobre la estructura orientada al Sol, con la finalidad de aumentar la
eficiencia energética de las celdas solares.
El dispositivo tendrá la opción de operar en forma autónoma o manual.
Palabras clave: Seguimiento solar, dispositivo orientador solar, concentrador solar.
Abstract The following paper shows the design and manufacturing of a solar tracker prototype.
The goal of the device is to capture and concentrating solar radiation onto a surface, to use solar
energy as heat source.
To achieve the goal, the device will use a system to provide information on the location of the Sun.
Using actuators and position control, the device will track the sun along the day.
To achieve the electric power requirements of the device, solar cells will be used. These will be
mounted on the structure facing the Sun, in order to increase the energy efficiency of solar cells.
The device will have the option to operate autonomously or manually.
Keywords: Solar tracking, solar guiding device, solar concentrator.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García II
Contenido Resumen ............................................................................................................................................... I
Abstract ................................................................................................................................................ I
Simbología .......................................................................................................................................... VI
Introducción ........................................................................................................................................ 1
Objetivo general .............................................................................................................................. 2
Objetivos específicos ....................................................................................................................... 2
Trabajo Terminal I ....................................................................................................................... 2
Trabajo Terminal II ...................................................................................................................... 2
Antecedentes .................................................................................................................................. 3
Horno solar de Odeillo ................................................................................................................ 3
Solar Sinter .................................................................................................................................. 5
Planteamiento del problema .......................................................................................................... 7
Capítulo 1: Marco Teórico ................................................................................................................... 8
1.1 Radiación solar .......................................................................................................................... 9
1.2 Concentradores solares ........................................................................................................... 10
1.2.1 Espejo curvo ..................................................................................................................... 10
1.2.2 Lente de Fresnel ............................................................................................................... 12
1.3 Posición solar........................................................................................................................... 14
1.4 Fotorresistencia ....................................................................................................................... 15
1.5 Diseño de ejes de transmisión ................................................................................................ 16
1.6 Perfil estructural de aluminio .................................................................................................. 16
1.7 Sistema mecatrónico ............................................................................................................... 18
1.8 Especificación del diseño de producto (PDS) .......................................................................... 19
Capítulo 2: Desarrollo del sistema .................................................................................................... 20
2.1 Análisis funcional ..................................................................................................................... 21
2.2 Búsqueda de la posición solar ................................................................................................. 21
2.2.1 Selección del concepto ..................................................................................................... 21
2.2.2 Etapa en lazo abierto ........................................................................................................ 22
2.2.3 Etapa en lazo cerrado ....................................................................................................... 23

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García III
2.2.4 Integración sinérgica ........................................................................................................ 25
2.3 Concentrador solar .................................................................................................................. 26
2.3.1 Selección del tipo de concentrador solar ......................................................................... 26
2.3.2 Cálculo de temperatura teórica usando una lente de Fresnel ......................................... 26
2.3.3 Características del lente de Fresnel a utilizar ................................................................... 29
2.4 Dispositivo de orientación ....................................................................................................... 30
2.4.1 Análisis de dispositivo ...................................................................................................... 30
2.4.2 Diseño de la transmisión .................................................................................................. 32
2.4.3 Simulación del dispositivo ................................................................................................ 39
2.4.4 Selección de motores ....................................................................................................... 47
2.4.5 Descripción de componentes del dispositivo ................................................................... 48
2.5 Alimentación de sistema ......................................................................................................... 51
2.5.1 Selección del concepto ..................................................................................................... 51
2.5.2 Selección de celdas solares .............................................................................................. 51
2.5.3 Selección de controlador de carga y regulador ................................................................ 53
2.5.4 Selección de batería ......................................................................................................... 55
2.6 Interfaz de usuario .................................................................................................................. 55
2.7 Integración del sistema ........................................................................................................... 56
Conclusiones ..................................................................................................................................... 58
Referencias ........................................................................................................................................ 59
Glosario ............................................................................................................................................. 61
Apéndice A: Diagrama de Gantt para Trabajo Terminal II Apéndice B: Estructura de división del trabajo Apéndice C: Especificaciones del dispositivo Apéndice D: Cotización de materiales Apéndice E: Planos de manufactura Anexo A: Radiación solar promedio (1990 - 2004) Anexo B: Funcionamiento del EvoDrive ST-23 Anexo C: Esquemáticos del sistema mínimo STM32F103

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García IV
Ilustraciones Ilustración 1: Ubicación del horno solar de Odeillo. ........................................................................................... 3
Ilustración 2: Horno solar de Odeillo. ................................................................................................................. 3
Ilustración 3: Arreglo de espejos planos orientables (Helióstato). ..................................................................... 4
Ilustración 4: Receptor de calor. ......................................................................................................................... 4
Ilustración 5: Pieza sinterizada a partir de arena. .............................................................................................. 5
Ilustración 6: Solar Sinter. .................................................................................................................................. 5
Ilustración 7: Mecanismos del Solar Sinter. ........................................................................................................ 6
Ilustración 8: Actuadores del Solar Sinter. .......................................................................................................... 6
Ilustración 9: La constante solar. ........................................................................................................................ 9
Ilustración 10: Esquema de un espejo cóncavo. ............................................................................................... 10
Ilustración 11: Reflector parabólico construido a partir de espejos planos. ..................................................... 11
Ilustración 12: Espejo cóncavo para demostraciones en Odeillo. ..................................................................... 12
Ilustración 13: Construcción de una lente de Fresnel. ...................................................................................... 12
Ilustración 14: Comparación entre la lente convexa y la lente de Fresnel. ....................................................... 13
Ilustración 15: Algunas aplicaciones de las lentes de Fresnel. .......................................................................... 13
Ilustración 16: Diferencia de posición solar en verano e invierno. ................................................................... 14
Ilustración 17: Ángulo de elevación y azimutal. ............................................................................................... 14
Ilustración 18 Gráfica de resistencia vs iluminancia del GL5549 .................................................................... 15
Ilustración 19: Circuito divisor de tensión con fotorresistencias. ...................................................................... 15
Ilustración 20: Perfiles de aluminio estructural. ............................................................................................... 16
Ilustración 21: Deflexión del perfil por una fuerza F para esfuerzo estático. ................................................... 17
Ilustración 22: Perfil 30x30. .............................................................................................................................. 17
Ilustración 23: Perfil 40x40. .............................................................................................................................. 17
Ilustración 24: Elementos clave de un sistema mecatrónico ............................................................................ 18
Ilustración 25: Diagrama a bloques del dispositivo orientador solar. .............................................................. 21
Ilustración 26: Circuito utilizado para leer el valor de una fotorresistencia por un circuito lógico................... 23
Ilustración 27: Ubicación de las fotorresistencias. ........................................................................................... 24
Ilustración 28: Algoritmo utilizado para buscar la posición del Sol. ................................................................. 25
Ilustración 29: Curva de eficiencia. ................................................................................................................... 28
Ilustración 30: Lente de Fresnel a conseguir. .................................................................................................... 29
Ilustración 31: Marco de soporte para el lente de Fresnel. .............................................................................. 29
Ilustración 32: Diagrama del mecanismo de elevación. ................................................................................... 30
Ilustración 33: Modelo simplificado del mecanismo de elevación.................................................................... 30
Ilustración 34: Eje de mecanismo de elevación. ............................................................................................... 33
Ilustración 35: Diagramas de esfuerzo cortante y momento flector asociados al plano horizontal. ............... 34
Ilustración 36: Diagramas de esfuerzo cortante y momento flector del plano vertical del eje. ....................... 35
Ilustración 37: Distribución de fuerzas y reacciones en el eje (plano horizontal). ............................................ 36
Ilustración 38: Distribución de fuerzas en el eje (plano vertical). ..................................................................... 38
Ilustración 39: Modelo CAD del eje. .................................................................................................................. 39
Ilustración 40: Modelo del SOLID285................................................................................................................ 39
Ilustración 41: Eje mallado. .............................................................................................................................. 40
Ilustración 42: Modelo sujeto. .......................................................................................................................... 41
Ilustración 43: Diagrama con la deflexión del eje. ............................................................................................ 41

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García V
Ilustración 44: Esfuerzo de Von Mises. ............................................................................................................. 42
Ilustración 45: Modelo CAD del dispositivo. ..................................................................................................... 44
Ilustración 46 Modelo mallado. ........................................................................................................................ 45
Ilustración 47: Deflexiones del dispositivo. ....................................................................................................... 46
Ilustración 48: Esfuerzos de Von Mises. ............................................................................................................ 47
Ilustración 49: Transmisión del dispositivo de elevación. ................................................................................. 48
Ilustración 50: Dispositivo de orientación azimutal. ......................................................................................... 49
Ilustración 51: Prototipo con celdas solares montadas. ................................................................................... 50
Ilustración 52: Sistema de alimentación. .......................................................................................................... 51
Ilustración 53 Características de la celda solar de 50 W. ................................................................................ 52
Ilustración 54: Características de la celda solar Eplus-80 W. .......................................................................... 52
Ilustración 55: Características de la celda solar Eplus-50 W. ........................................................................... 53
Ilustración 56: Controlador de carga. ............................................................................................................... 54
Ilustración 57: Características del controlador de carga. ................................................................................. 54
Ilustración 58: Empaquetado TO-220. .............................................................................................................. 55
Ilustración 59: Interfaz de usuario. ................................................................................................................... 55
Ilustración 60: Sistema mínimo para el STM32F103VET. ................................................................................. 56
Ilustración 61: Diagrama del sistema de control. ............................................................................................. 57
Tablas Tabla 1: Datos de posición solar obtenidos el dia 23 de mayo 2012. ............................................................... 23
Tabla 2: Factores de carga y choque. ............................................................................................................... 35
Tabla 3: Frecuencias naturales del eje de transmisión. .................................................................................... 40
Tabla 4: Análisis modal del eje de transmisión ................................................................................................. 43

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García VI
Simbología Radiación solar
Área Irradiancia
Constante solar
Cálculo temperatura Eficiencia del prototipo
Eficiencia de la lente de Fresnel
Eficiencia de Carnot
Temperatura inicial K
Temperatura final K
Constante de Stefan Boltzman
Calor absorbido J
Calor perdido J
Calor proveniente del Sol J
Amplificación
Temperatura máxima alcanzable K
Cálculo transmisión
Centro de masa x del sistema Mm
Masa de las celdas solares Kg
Masa del marco y la lente kg G Constante de gravedad
Momento de inercia del eje
Radio del eje M
M Masa del eje Kg Momento de inercia total con efectos de gravedad
Aceleración angular
Potencia Hp
Velocidad angular Rpm
Momento torsor Fuerza tangencial
Reacción horizontal en el punto B. Reacción horizontal en l punto D.
Reacción vertical en el punto B. Reacción vertical en el punto D. Momento flector máximo
Constante de choque en flexión
Constante de choque en torsión
Diámetro critico del eje In
Esfuerzo cortante máximo

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García VII
Coeficiente de elasticidad del acero
Momento de inercia del eje con diámetro critico
Deflexión en el eje x
Deflexión en el eje y
Constante de integracion1
Constante de integración 2

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 1
En el siguiente capitulo se presentan los
antecedentes del proyecto, el planteamiento del
problema y los objetivos que debe cumplir:
• Objetivo general
• Objetivos específicos
• Antecedentes
• Planteamiento del problema
Introducción

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 2
Objetivo general Diseñar y manufacturar un prototipo de dispositivo de orientación solar para el aprovechamiento
de la radiación solar. El objetivo es captar la energía solar y concentrarla sobre un punto para
elevar la temperatura, y mantener el haz de luz enfocado en el punto a lo largo del día.
Objetivos específicos
Trabajo Terminal I
Determinar el rango de temperatura en el área focal de diferentes concentradores solares.
Determinar la eficiencia energética de los diversos concentradores solares y la
temperatura obtenida.
Determinar las dimensiones de la superficie que concentrará la radiación solar
Determinar la mejor forma en cuanto a costo y rendimiento para ubicar la posición del Sol,
posicionar el dispositivo y lograr un mejor aprovechamiento de la radiación solar,
haciendo énfasis en el uso mínimo de energía.
Realizar los planos de diseño y manufactura del prototipo.
Trabajo Terminal II
Manufacturar las diversas etapas, circuitería, mecanismos del prototipo.
Ensamblar el prototipo.
Realizar el software necesario para la unidad de control del prototipo.
Realizar puesta a punto del prototipo.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 3
Antecedentes En los últimos 60 años, se ha detectado un aumento de las concentraciones de gases invernadero
por causa de la acción del hombre. El uso generalizado de los combustibles fósiles, el
debilitamiento de la capa de ozono y la desaparición de grandes masas boscosas están
favoreciendo el aumento de la temperatura en la Tierra, provocando un futuro incierto para
nuestras próximas generaciones.
Por todo ello, nos vemos obligados a apostar por la energía solar, un recurso limpio, inagotable,
con una vida prolongada y que se adapta perfectamente al ámbito rural y urbano.
México tiene una ubicación privilegiada para la explotación de la energía solar, por lo que es
importante impulsar iniciativas que busquen aprovechar esta energía.
Con el fin de conocer cual es la tendencia actual en el uso de la energía solar como fuente de calor,
se mencionarán dos proyectos afines al desarrollado en este trabajo
Horno solar de Odeillo El horno de Odeillo, es el horno solar más grande del mundo, esta localizado en Font-Rumeu-Odeillo-Vía, localidad de Pirineos Orientales, región de Languedoc-Rousillón cerca de Puigcerdá, España y de Perpiñan, Francia (ver Ilustración 1). Sus coordenadas son Latitud 42°29’38”Norte, Longitud 2°1’45” Este.
Ilustración 1: Ubicación del horno solar de Odeillo.
Ilustración 2: Horno solar de Odeillo.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 4
Construido en 1970, por su localización, este horno cuenta con 300 días de Sol al año. Ésta ubicado
a una altura de 1535 msnm. La potencia del horno es una de las más grandes del mundo con 1
MW, alcanza temperaturas de hasta 3000 °C. Utiliza 63 espejos planos de 45 m2 dirigibles con 2
grados de libertad (ver Ilustración 3) los cuales se orientan según la posición del Sol, reflejando los
rayos solares hacia el reflector parabólico de 1830 m2 (ver Ilustración 2) y éste a su vez los refleja
hacia una superficie que captura la energía termina en la torre receptora de calor (ver Ilustración
4). [1]
Ilustración 3: Arreglo de espejos planos orientables (Helióstato).
Ilustración 4: Receptor de calor.
Comparativa
En la vista se pudieron ver las siguientes comparaciones respecto al prototipo a realizar:
Los espejos que se posicionan son de 2 grados de libertad.
Las dimensiones son muy grandes en comparación con el prototipo.
El horno solar de Odeillo utiliza un reflector con espejos curvos.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 5
Aunque este horno use otra tecnología para la generación de energía, fue un buen testimonio de
que la energía solar es algo que lleva al menos 40 años en países como Francia y lo que se vio,
sirvió como referencia para nuestro prototipo y ver los alcances del mismo en cuanto a
temperatura.
Solar Sinter Este es un cortador solar, el cual utiliza un sistema de visión artificial para orientar la energía
solar, y sinterizar arena para realizar grabados emulando una impresora 3D, la realización de esta
actividad esta preponderantemente orientada hacia los desiertos puesto que en ellos abunda la
arena y la energía solar, las primeras pruebas fueron realizadas en el desierto de Marruecos
obteniendo excelentes resultados como el siguiente ejemplo.
Ilustración 5: Pieza sinterizada a partir de arena.
Este trabajo fue de vital importancia, puesto que tiene características similares al prototipo, en
primer lugar, se puede ver que utiliza lentes de Fresnel (ver Ilustración 6).
Ilustración 6: Solar Sinter.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 6
Como se puede ver, otra similitud importante es que utiliza celdas solares para la recolección de
energía suministrándola a si mismo, además la ubicación de estas sirve como contrapeso para
buscar un mejor equilibrio. [2]
En cuanto a los mecanismos estos tienen la finalidad de mover al mecanismo en forma azimutal
y elevándolo, esto se puede apreciar mejor en la Ilustración 7.
Ilustración 7: Mecanismos del Solar Sinter.
En cuanto a la locomoción del Solar Sinter, éste utiliza motores de CD, además para la transmisión
de potencia utiliza bandas, esto se puede deber a la baja velocidad desarrollada, esto se puede
ver puede ver en forma más clara en la Ilustración 8. [2]
Ilustración 8: Actuadores del Solar Sinter.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 7
Comparativa
Este es un apartado obligado por el tipo de proyecto:
Utiliza lente de Fresnel como concentrador solar.
El movimiento azimutal lo hace sobre un aro de acero y utilizando una rueda conducida.
Utiliza como sensor una cámara CCD.
Las celdas solares van montadas sobre la estructura.
Utiliza un mecanismo tuerca / tornillo sin fin para mover el eje de elevación.
Funde arena, así que debe alcanzar entre 1300 a 1500 °C.
El dispositivo es desmontable.
Planteamiento del problema Se quiere concentrar la energía del Sol en una superficie con la ayuda de un mecanismo que sea
capaz de orientarse y mejorar la captación de energía. Para lograrlo se necesita orientar un
concentrador solar de forma que su superficie de captación siempre sea perpendicular al Sol.
Un problema es que el Sol se mueve a lo largo del tiempo debido al movimiento de rotación
terrestre y además a lo largo del año varia su trayectoria, por lo que el prototipo debe ser capaz
de obtener la posición del Sol y orientar el concentrador solar.
Por ultimo se planea implementar un sistema de alimentación por celdas solares para proveer de
energía al prototipo. El sistema será montado en la estructura del prototipo, con el fin de mejorar
su eficiencia gracias a la orientación respecto al Sol.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 8
En este capitulo se presentan los conceptos,
teorías e ideas generales que ayudan a entender
de una mejor manera el prototipo y a su
desarrollo:
• Radiación solar.
• Tipos de concentradores solares.
• Obtención de la posición solar.
• Diseño de ejes.
• Perfil estructural de aluminio
• Sistema mecatrónico.
Capítulo 1:
Marco Teórico

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 9
1.1 Radiación solar La radiación solar es el conjunto de radiaciones electromagnéticas emitidas por el Sol debido a la
serie de reacciones que producen una perdida de masa que se transforma en energía. La radiación
solar se distribuye del infrarrojo al ultravioleta. No toda la radiación alcanza la superficie terrestre,
porque las ondas ultravioletas mas cortas, son absorbidas por la capa de ozono y diversos gases de
la atmosfera. La magnitud que mide la radiación solar que llega a la Tierra es la Irradiancia. Su
unidad es el
.
La constante solar es la cantidad de radiación solar recibida por una superficie de 1 colocada
en la parte externa de la atmósfera terrestre en un plano perpendicular a los rayos del Sol (ver
Ilustración 9). Propiamente no es una constante, pero sí un parámetro que varía dentro de límites
estrechos, con un valor promedio de
.
Ilustración 9: La constante solar.
Por efectos de la rotación de la tierra, cuando la radiación solar llega a la atmosfera, se origina una
desviación que bajo ciertas condiciones produce el fenómeno de difracción, por lo que una parte
de la radiación llega a la superficie terrestre de forma difusa. La suma de la radiación directa y la
radiación difusa se denomina radiación global e es inferior a la constante solar. [3, pp. 9-13]
La distribución de la radiación solar recibida por la superficie terrestre puede visualizarse en el
"Anexo A, Radiación solar promedio (1990 - 2004)". Para los propósitos del presente trabajo, se
estable que de acuerdo a diversas referencias consultadas, México recibe aproximadamente
. [4] [5]

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 10
1.2 Concentradores solares Un concentrador solar es un dispositivo diseñado para captar la energía irradiada por el Sol y
concentrarla en un área reducida aumentando su intensidad. Existen diversos tipos de
concentradores, sin embargo este trabajo se enfoca a dos clases de dispositivos: lentes de Fresnel
y espejos curvos. A continuación se mencionará más sobre estos dispositivos.
1.2.1 Espejo curvo Es un espejo en forma cóncava con una superficie reflectante interna. Muchos de estos espejos
tienen superficies que están formadas de tal forma que son parte de una esfera. Los más comunes
son espejos de superficies parabólicas, estos pueden ser encontrados en telescopios reflectantes
entre otros dispositivos. [6]
En la Ilustración 10 se observa la forma de un espejo curvo. Donde C es el eje focal, S es la
superficie reflectante, F el punto focal y f la distancia focal.
Ilustración 10: Esquema de un espejo cóncavo.
La ecuación que gobierna estos lentes son las siguientes:
Donde f es la distancia focal es la distancia al objeto y es la distancia a la imagen.
Cuando se requiere un espejo de superficie considerable, puede construirse a partir de espejos
planos (ver Ilustración 11).

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 11
Ilustración 11: Reflector parabólico construido a partir de espejos planos.
Características
Dependiendo de la forma del reflector, se requiere 1 o 2 grados de libertad para orientarse al Sol.
Si se utiliza un reflector compuesto por espejos planos, cada espejo se debe alinear en forma parabólica.
Para alcanzar temperaturas entre 700°C a 800°C, se requiere un reflector de al menos . [7]
Para construir y utilizar un reflector parabólico de dimensiones considerables (mayores a ), se requieren estructuras y mecanismos complejos debido a la masa de los espejos planos.
Aplicaciones
Algunas aplicaciones las podemos encontrar en cocinas solares, donde se eleva la temperatura de
un recipiente de cocción. En calentadores de agua donde se hace correr el agua a través de una
red de tuberías sobre la cual se concentra la luz solar. Actualmente se están haciendo estudios en
la India para desarrollar un crematorio solar mediante un reflector de . [7]

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 12
Ilustración 12: Espejo cóncavo para demostraciones en Odeillo.
1.2.2 Lente de Fresnel En 1748, el conde Buffon (escritor y naturalista francés) propuso que las lentes podrían bajar de
peso sin alterar su enfoque, aunque fue el francés Agustín-Jean Fresnel quien la diseño, propuso
que si se quita la parte rosa del plano convexo (ver Ilustración 13) se puede reducir peso
encontrando una serie de lentes que funcionen como un todo.
Ilustración 13: Construcción de una lente de Fresnel.
Características
Algunas de sus propiedades son:
Las lentes de Fresnel son vidrios tallados o plásticos fabricados cuya misión es hacer que los rayos de luz que la atraviesen se comporten como en una lente plano-convexa (ver Ilustración 14).
Los rayos de luz que llegan paralelos al eje óptico se focalizan.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 13
Los rayos de luz que salen del foco atraviesan la lente y salen colimados.
Las lentes de Fresnel tienen en esencia las mismas propiedades que las lentes plano-convexas pero disminuyen su peso y su volumen considerablemente.
Si los diámetros de las lentes son muy grandes es conveniente usar una lente de Fresnel.
Ilustración 14: Comparación entre la lente convexa y la lente de Fresnel.
Aplicaciones
Se utiliza en luces de faros, luces de automóvil, proyectores de objetos opacos, lentes de aumento
y muchas otras aplicaciones donde se requiera de lentes delgadas, ligeras y de gran aumento. (Ver
Ilustración 15)
Ilustración 15: Algunas aplicaciones de las lentes de Fresnel.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 14
1.3 Posición solar El planeta Tierra tiene una desviación de 23° de su eje de rotación respecto al eje vertical, lo que
implica que durante el movimiento de traslación el Sol forme una curva parecida a una funcional
sinodal en el cielo (ver Ilustración 16).
Ilustración 16: Diferencia de posición solar en verano e invierno.
Para que un concentrador solar trabaje adecuadamente, su superficie debe estar orientada
perpendicularmente respecto a la posición del Sol y compensar el movimiento del mismo a lo
largo del día.
Para medir la posición de un astro, se utilizan dos ángulos, los cuales se pueden apreciar en la
Ilustración 17:
Ángulo azimutal: Ángulo medido desde el norte geográfico y en sentido horario.
Ángulo de elevación: Arco vertical medido desde el horizonte hasta el astro.
Ilustración 17: Ángulo de elevación y azimutal.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 15
1.4 Fotorresistencia La fotorresistencia es un componente fotosensible a la luz, si se le compara con la resistencia fija
donde el valor óhmico no varia, la fotorresistencia tiene la particularidad de variar su valor óhmico
en función de la luz que incide sobre ella, cuanto más luz recibe más bajo es su valor óhmico y
viceversa (ver Ilustración 18). [8]
Ilustración 18 Gráfica de resistencia vs iluminancia del GL5549
Una forma de utilizar este sensor es en base a un divisor de tensión (ver Ilustración 19), la señal
obtenida es proporcional a la luz recibida por las fotorresistencias y puede ser utilizada para para
diversos propósitos.
Ilustración 19: Circuito divisor de tensión con fotorresistencias.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 16
1.5 Diseño de ejes de transmisión El diseño de la transmisión se realizó mediante el código ASME (Sociedad Americana de
Ingenieros Mecánicos por sus siglas en inglés) el cual consta de los siguientes pasos:
1. Obtener la potencia de entrada y salida del eje de trasmisión.
2. Obtener las fuerzas en cada elemento.
3. Dividir al eje en planos para simplificar el análisis.
4. Obtener las reacciones en los elementos limitadores de movimiento.
5. Realizar los diagramas de esfuerzo cortante y momento flector.
6. Calcular el momento flector máximo.
7. Calcular el diámetro crítico.
8. Realizar análisis de rigidez.
9. Calcular el diámetro crítico.
10. Tomar el diámetro crítico mayor de los 2 obtenidos.
11. Realizar el análisis modal.
Se recomienda consultar [9] para conocer más sobre el diseño de ejes mediante el código ASME.
1.6 Perfil estructural de aluminio Para la construcción del dispositivo, después de evaluar diversos materiales, se opto por utilizar
perfiles de aluminio estructural. Una de sus principales cualidades es la fácil y rápida construcción
de estructuras gracias a que los perfiles poseen canales para filar mediante uniones, a otros
perfiles. Están constituidos de la aleación AW 6060, que posee un modulo de elasticidad de
. [10]
Ilustración 20: Perfiles de aluminio estructural.
En el catalogo del fabricante [10], cuenta con diagramas y ecuaciones para calcular la flexión por
fuerzas en distintos modos de empotramiento. Esto con la finalidad de facilitar la selección del
perfil adecuado según la necesitad.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 17
Ilustración 21: Deflexión del perfil por una fuerza F para esfuerzo estático.
El perfil 30x30 es adecuado para aplicaciones que requieran esfuerzos moderados como marcos
de soporte. [10, p. 2.21], en la Ilustración 22 se muestra su sección transversal y su momento de
inercia es
Ilustración 22: Perfil 30x30.
El perfil 40x40 es adecuado para mesas de trabajo pesadas y gabinetes de maquinaria. [10, p.
2.26], en la Ilustración 23 se muestra su sección transversal y su momento de inercia es
Ilustración 23: Perfil 40x40.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 18
1.7 Sistema mecatrónico Un sistema mecatrónico es la integración sinérgica de una combinación de diversas disciplinas
como son la mecánica, la electrónica, el control y la computación, cuya finalidad es ofrecer una
solución con resultados superiores a la implementación de dichas disciplinas de forma separada.
Se compone del modelado de sistemas físicos, el uso de sensores y actuadores, la adquisición de
datos y el procesamiento de señales en sistemas lógicos. [11, pp. 1.3 - 1.9]
Ilustración 24: Elementos clave de un sistema mecatrónico
Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 19
1.8 Especificación del diseño de producto (PDS) La especificación del diseño de producto (PDS por sus siglas en inglés) es una descripción a detalle
de los requerimientos y necesidades de lo que se planea diseñar y/o producir. En cualquier
proyecto de diseño, la realización del PDS es el primer paso esencial. [12]
Como un paso previo a la escritura del PDS, debe llevarse a cabo una buena investigación y
recopilar información suficiente de lo que se planea diseñar. Un primer borrador de un PDS debe
ser desarrollado antes de realizar cualquier intento de generar soluciones a un problema. Esta es
una disciplina importante ya que, tanto tiempo, esfuerzo y dinero se pueden perder al
proporcionar una solución para el problema equivocado.
El proceso de diseño es iterativo, y el PDS debe ser considerado como un documento flexible que
ha de desarrollarse y completarse en paralelo con el diseño. [13]
Cuando se están definiendo las especificaciones que conformarán el producto, se deben conocer
los valores nominales para cada variable de afectación que intervenga en la optimización de la
media de la característica de calidad que se desee [14]
El número de especificaciones del producto que deban concretarse dependerá de lo novedoso que
sea el producto, ya que es imposible cuantificar los requisitos de un producto todavía inexistente
que pretende cubrir una necesidad determinada [15]. Algunos elementos que se toman en cuenta
son:
Entorno de funcionamiento
Seguridad
Funcionamiento
Materiales
Ergonomía
Legalidad y Normalización
Instalación y mantenimiento
Vida útil
Peso y Tamaño
Transporte
Fiabilidad
Calidad
Periodo previsto de lanzamiento al mercado
Costo
Embalaje

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 20
En este capitulo se muestran los detalles técnicos
del desarrollo:
• Análisis funcional
• Búsqueda de la posición solar
• Concentrador solar
• Dispositivo de orientación
• Alimentación del sistema
• Interfaz de usuario
• Integración del sistema
Capítulo 2:
Desarrollo del sistema

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 21
2.1 Análisis funcional A continuación se muestra en la Ilustración 25 las áreas funcionales que se definieron para el
diseño. Para definirlas, se abstrajo las funciones más básicas que el dispositivo debe contener para
cumplir con el objetivo de concentrar la radiación solar en una superficie a lo largo del día.
Ilustración 25: Diagrama a bloques del dispositivo orientador solar.
En las siguientes secciones se muestra el diseño de las diversas áreas funcionales del dispositivo.
2.2 Búsqueda de la posición solar
2.2.1 Selección del concepto Durante la recopilación de información y la investigación sobre los métodos utilizados en la
actualidad para obtener la posición del Sol, se pudo distinguir dos métodos principales, usando
lazo cerrado y lazo abierto.
Métodos en lazo cerrado
Utiliza sensores que detecten la intensidad lumínica, como pueden ser las fotorresistencias, las
celdas solares o utilizando una cámara de video y visión artificial. El principal inconveniente es que
se depende de las condiciones climatológicas y es susceptible al ruido. Si una nube bloquea al Sol,
el método puede dar una posición del Sol errónea. Para lidiar con este problema, es necesario
contemplar y caracterizar los casos en los que el sensor puede fallar y por medio de lógica,
detectar cuando no es posible obtener la posición.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 22
Método en lazo abierto
Utiliza la teoría propia de la astronomía de posición para calcular los ángulos de elevación y
azimutal teóricos en los que se ubica el astro, en nuestro caso el Sol. (En la sección “1.3 Posición
solar” se muestra más información sobre estos ángulos). Debido a que es independiente de la
intensidad lumínica, es inmune al ruido ambiental debido a nubes. Presenta las desventajas de
requerir mayor poder de cómputo y periféricos que utilizando un método en lazo cerrado. La otra
desventaja es la necesidad de conocer la ubicación precisa del norte geográfico (La dirección norte
que entrega una brújula es la del norte magnético, que varia de acuerdo al año y requiere el
cálculo del ángulo de declinación magnética para compensar la ubicación del norte geográfico).
[16]
Solución planteada
Para obtener lo mejor de ambos métodos y compensar sus deficiencias, se optó por utilizar un
método hibrido que combine de forma sinérgica una etapa en lazo abierto, utilizando el cálculo de
la posición solar y la etapa en lazo cerrado, utilizando sensores.
Como sensor se utilizara un arreglo de fotorresistencias montado sobre la estructura del
concentrador solar.
2.2.2 Etapa en lazo abierto Para calcular la posición teórica del Sol, se utilizara el trabajo realizado por Kok-Keong Chong y
Chee-Woon Wong en los artículos [17] y [18]. Algunos de los puntos tratados en estos artículos
son:
Comparación entre los métodos de lazo abierto y lazo cerrado para ubicar al Sol.
La implementación de un sistema de seguimiento solar de dos ejes de libertad.
La utilización de la posición teórica del Sol para orientar al sistema.
El desarrollo de un método para compensar mediante software los errores de alineación de la estructura.
Debido a que el desarrollo de los temas tratados en [17] y [18] quedan fuera del alcance de los
objetivos del proyecto, se recomienda al lector consultar dichos artículos para conocer más acerca
del método.
Para calcular la posición teórica del, se requieren los siguientes datos:
Coordenadas de ubicación geográfica (Se definen al montar el dispositivo en sitio)

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 23
Hora y fecha local (Se configura al iniciar el sistema y se mantendrá actualizada por el sistema de control)
Los 3 ángulos de corrección (Calculados utilizando el método descrito en [18, pp. 7852-7855])
Es importante mencionar que para el cálculo de la posición, se requiere bastante procesamiento,
sin embargo, por las pruebas que se realizaron (ver Tabla 1), puede observarse que cada 90
minutos, el Sol cambia aproximadamente 20° de elevación y 8° de azimutal. Se esta pensando en
correr algoritmo cada 20 minutos, tiempo suficiente para que acabe cualquier calculo pendiente.
Tabla 1: Datos de posición solar obtenidos el dia 23 de mayo 2012.
Hora Ángulo azimutal (°)
Diferencia ángulo azimutal (°)
Ángulo de elevación (°)
Diferencia ángulo elevación (°)
07:00 67.76 0.00 0.02 0.00
09:00 75.91 -8.15 26.38 -26.36
10:30 80.18 -4.27 47.11 -20.73
12:00 82.75 -2.57 68.09 -20.98
01:30 31.81 50.94 88.53 -20.44
03:00 277.27 -245.46 69.64 18.89
04:30 279.62 -2.35 48.66 20.98
06:00 283.81 -4.19 27.91 20.75
07:30 289.46 -5.65 7.67 20.24
2.2.3 Etapa en lazo cerrado Para la etapa en lazo cerrado, se utilizara un circuito comparador implementado por software, el
cual tomara la lectura analógica de las fotorresistencias (ver Ilustración 26), la convertirá en un
valor digital y comparara el valor de las 4 fotorresistencias (ver Ilustración 27), orientando el
dispositivo hasta que tengan un valor por debajo de la tolerancia de error.
Ilustración 26: Circuito utilizado para leer el valor de una fotorresistencia por un circuito lógico.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 24
Ilustración 27: Ubicación de las fotorresistencias.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 25
2.2.4 Integración sinérgica Para lograr la sinergia de ambos métodos y el sistema en general, se utilizara el algoritmo
mostrado en Ilustración 28.
Ilustración 28: Algoritmo utilizado para buscar la posición del Sol.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 26
2.3 Concentrador solar
2.3.1 Selección del tipo de concentrador solar A continuación se hace una breve comparación entre los concentradores solares usando lentes de
Fresnel y espejos curvos, basándonos los datos encontrados durante la investigación previa al
diseño.
Tamaño:
En cuanto a esta característica la lente de Fresnel tiene una amplia ventaja puesto que con un
tamaño relativamente bajo es capaz de lograr temperaturas grandes si se le compara con un
espejo curvo y por mencionar un ejemplo esta el inmenso arreglo de espejos en Odeillo, Francia.
Masa
Este aspecto esta completamente ligado al anterior ya que una lente de Fresnel esta hecha de
Acrílico Óptico con una densidad de 1200
la cual dadas las dimensiones reducidas no
representa un gran aporte de masa, en cambio el horno solar de Odeillo es un edificio de 18 m de
altura.
Temperatura
Esta característica no es tan fácil de apreciar puesto que de alguna forma se pueden obtener
temperaturas iguales con ambos concentradores, sin embargo la lente de Fresnel es más sencilla
de implementar.
Conclusión
Debido a que para alcanzar temperaturas mayores a 700°C se requiere de una superficie de
aproximadamente 3.4 utilizando un reflector curvo (según [7]) y con una lente de Fresnel
dimensiones menores, se alcanzan temperaturas superiores a 1200°C (Pues se logra fundir arena
de sílice con el Solar Sinter, [2]), se ha seleccionado la lente de Fresnel como concentrador solar
para el dispositivo.
2.3.2 Cálculo de temperatura teórica usando una lente de Fresnel Para un sistema termodinámico con estas características, la máxima eficiencia se puede deducir
tomando en cuenta tanto propiedades de radiación térmica como el principio de Carnot. De
hecho la radiación debe ser convertida en calor a través de un receptor solar (el prototipo en
cuestión), dicho calor se convierte en trabajo mediante la eficiencia de Carnot, por tanto se utiliza
la siguiente expresión:
Donde:

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 27
Y
Donde , y son los flujos absorbido y perdido del sistema
respectivamente, además del flujo solar.
Según [19], la radiación que recibe México en la zona del D.F. es de aproximadamente 220
(A)
y si se tiene una lente de Fresnel con una amplificación de 1600 (C), es decir, una lente con
medidas y un área de proyección de , siendo así:
,
Otro dato interesante a recalcar es que el flujo perdido viene dado por la ecuación de Stefan-
Boltzmann, es decir:
Donde
es la constante de Stefan-Boltzmann. Entonces, sustituyendo (2.4),
(2.5) y (2.6) en (2.3) se tiene:
Entonces, finalmente si se sustituye (2.7) y (2.2) en (2.1) se tiene:
(
) (
)
Esta función tiene un comportamiento como el siguiente:

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 28
Ilustración 29: Curva de eficiencia.
Como se puede ver, la curva tiene un gran rango de alcances según la temperatura a la que se
quiera llegar, tomando en cuenta (2.8) se puede derivar la expresión de temperatura teórica
máxima, esto se debe a que la eficiencia no tiene un crecimiento monolítico, mientras la eficiencia
de Carnot crece con la temperatura, la eficiencia del concentrador decrece hasta llegar a cero
debido a un efecto de saturación, por lo que aplicando estas condiciones se tiene la siguiente
expresión:
Por lo que en nuestro caso se tiene:
(
)
En caso de que se tuviera una lente de x , y que ésta a su vez concentrase energía a una
superficie de x se obtiene la misma temperatura.
Aunque estos datos pueden variar puesto que el flujo que recibe la Tierra es de 1 000
, pero
por efectos de la atmósfera lo que llega a una zona como México es 220
en promedio, lo que
significa que este dato puede ser mayor o menor, pero el valor promedio es el antes calculado.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 29
2.3.3 Características del lente de Fresnel a utilizar
Ilustración 30: Lente de Fresnel a conseguir.
Dimensiones: 1000x1000mm
Distancia focal: 880mm
Espesor: 3mm
Distancia entre anillos: 0.3mm
Material: Acrílico Óptico
Ilustración 31: Marco de soporte para el lente de Fresnel.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 30
2.4 Dispositivo de orientación
2.4.1 Análisis de dispositivo Para el cálculo se usarán las dimensiones del diagrama de la Ilustración 32.
:
Ilustración 32: Diagrama del mecanismo de elevación.
Para simplificar los cálculos se supondrá la estructura como un elemento rígido, debido a que las
velocidades a las que trabajara el mecanismo son de baja magnitud (ver Apéndice C:
Especificaciones del dispositivo), se utilizará el modelo simplificado mostrado en esquema de la
Ilustración 33.
Ilustración 33: Modelo simplificado del mecanismo de elevación.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 31
Siendo así, se supondrá una velocidad constante de
o 10 rpm, pero para buscar un
torque capaz de mover el mecanismo, pero antes de esto, se va a obtener el centro de masa del
sistema, puesto que como se puede ver, éste no ésta equilibrado.
Este resultado es de gran importancia puesto que se puede modificar el sistema a una sola masa,
cuya posición está en 6.85 mm a partir de la posición del eje. Para el cálculo de la aceleración, se
supondrá un eje de acero de 25.4 mm de diámetro, una longitud de 230 mm, esto implica el
siguiente momento de inercia.
Donde,
Entones suponiendo el sentido anti horario como dirección positiva.
Sin embargo, debido a la presencia de la masa los demás elementos, el momento de inercia total
se calcula de la siguiente manera.
Implica:
Entonces, el momento a generar para romper el estado de reposo (estado más crítico) se calcula
de la siguiente forma:
Pero este punto es crucial, puesto que la aceleración debe tener una muy corta duración para que
la velocidad de referencia sea alcanzada en el menor tiempo posible, además, revisando la hoja
de especificaciones de los motores a utilizar, estos tienen la capacidad de moverse a una velocidad
de hasta
, por lo que suponiendo una aceleración de
, se tiene un momento de:
El cual se puede redondear a para tratar de minimizar el exceso de simplificaciones.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 32
2.4.2 Diseño de la transmisión
Cálculo por el método de resistencia.
Para el cálculo de un eje con las características que se desean, se pretende usar un piñón de 57 mm de diámetro, los motores a utilizar tienen valor nominal de torque de , sin embargo, según los cálculos previamente realizados solo es necesario el uso de a una velocidad de , lo que implica una potencia de , y usando el código ASME, el torque total transmitido es el siguiente:
Donde es la potencia en , y es la velocidad en rpm, por lo que sustituyendo se tiene:
Cabe mencionar que los cálculos se harán en el sistema inglés debido a la norma. Una vez aclarado
esto se obtiene las fuerzas de interés.
Y a su vez la fuerza radial viene dada por:
El caso más estándar es un ángulo de 20 ° y , el factor es el factor de fricción, éste
último valor se calcula de la siguiente forma:
Donde,
Velocidad de deslizamiento de la corona, la cual a su vez viene dada por:
Donde:
Diametro de paso de la corona.
Velocidad de giro de la corona.
Implica:
Por tanto:

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 33
Lo que implica una fricción de:
Por ultimo la fuerza tangencial es la siguiente:
Con estos valores de fuerzas se utilizara el siguiente diagrama del eje (Ilustración 34):
Ilustración 34: Eje de mecanismo de elevación.
Este eje para su análisis se divide en 2 planos, plano horizontal y vertical, el primero a analizar
será el plano horizontal, el cual contiene la fuerza tangencial, aplicando suma de fuerzas se tiene:
Pero debido a que esta ecuación es insuficiente, se hace suma de momentos en el punto D.
∑
Implica:

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 34
Con estos valores de reacciones se obtienen los diagramas de esfuerzo cortante (V) y momento
flector (M) (ver Ilustración 35):
Ilustración 35: Diagramas de esfuerzo cortante y momento flector asociados al plano horizontal.
Para el plano vertical se sigue un procedimiento similar, con la diferencia de que se obtienen las
siguientes reacciones:
De donde se obtiene de manera análoga los diagramas de esfuerzo cortante y momento flector
(ver Ilustración 36):

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 35
Ilustración 36: Diagramas de esfuerzo cortante y momento flector del plano vertical del eje.
A partir de estos diagramas, se obtiene el momento flector máximo, éste para evitar cálculos
innecesarios se obtiene en el punto A y tiene el siguiente valor:
Para la siguiente parte del análisis de utilizara el siguiente cuadro (ver Tabla 2).
Tabla 2: Factores de carga y choque.
Condición de carga Kf Kt
Carga aplicada gradualmente 1.5 1.0
Carga repentina (choque menor)
1.5 a 2.0 1.0 a 1.5
Carga repentina (choque mayor)
2.0 a 3.0 1.5 a 3.0

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 36
Para el propósito de este eje, se utiliza el caso intermedio, debido a que tendrá carga, pero ésta no
será un choque mayor, lo que implica:
Otro factor a considerar es el cortante máximo admisible, en el caso de este eje estará hecho de
acero lo que implica lo siguiente:
Por lo que el diámetro critico según el código ASME queda como sigue:
√
√( )
Cálculo por el método de rigidez.
Para este análisis se utilizará un enfoque distinto (aunque se sigan utilizando los 2 planos
de análisis), ya que depende de la flexión que sufre el eje debido a sus componentes,
para esto se aplicará la teoría de Timoshenko (ver Ilustración 37).
Ilustración 37: Distribución de fuerzas y reacciones en el eje (plano horizontal).
Plano horizontal
Primeramente se enumera el modulo de elasticidad del acero.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 37
Después se obtiene el momento de inercia, para lo cual se utiliza el diámetro anteriormente
calculado para saber si es el mínimo necesario.
Siendo así, las ecuaciones son las siguientes:
Integrando:
Volviendo a integrar:
Aplicando las condiciones de frontera:
Resolviendo se obtiene:
Implica:
De esta ecuación se pueden analizar los puntos de interés :
Este resultado es malo, puesto que el código ASME estipula que la deflexión debe ser de un valor
máximo de por lo que se debe cambiar a un diámetro mayor, este nuevo diámetro,
tomando en cuenta los valores que manejan los proveedores, se supondrá un diámetro tentativo
de o , siendo así, las nuevas deflexiones son:
Para

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 38
Para :
Para el plano vertical, se utiliza la Ilustración 38:
Ilustración 38: Distribución de fuerzas en el eje (plano vertical).
Debido a que la metodología para la resolución es igual a la anterior se omitirá, a continuación se
muestran los resultados:
Para
Para :
Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 39
Por ultimo para asegurar que las deflexiones no sobrepasan el límite permitido, se deberían
obtener las contribuciones de ambos planos, pero dado el valor de los calculados en el plano
vertical, se consideran despreciables, lo que implica que el diámetro obtenido es el adecuado para
el fin del eje
2.4.3 Simulación del dispositivo
Simulación del eje de transmisión
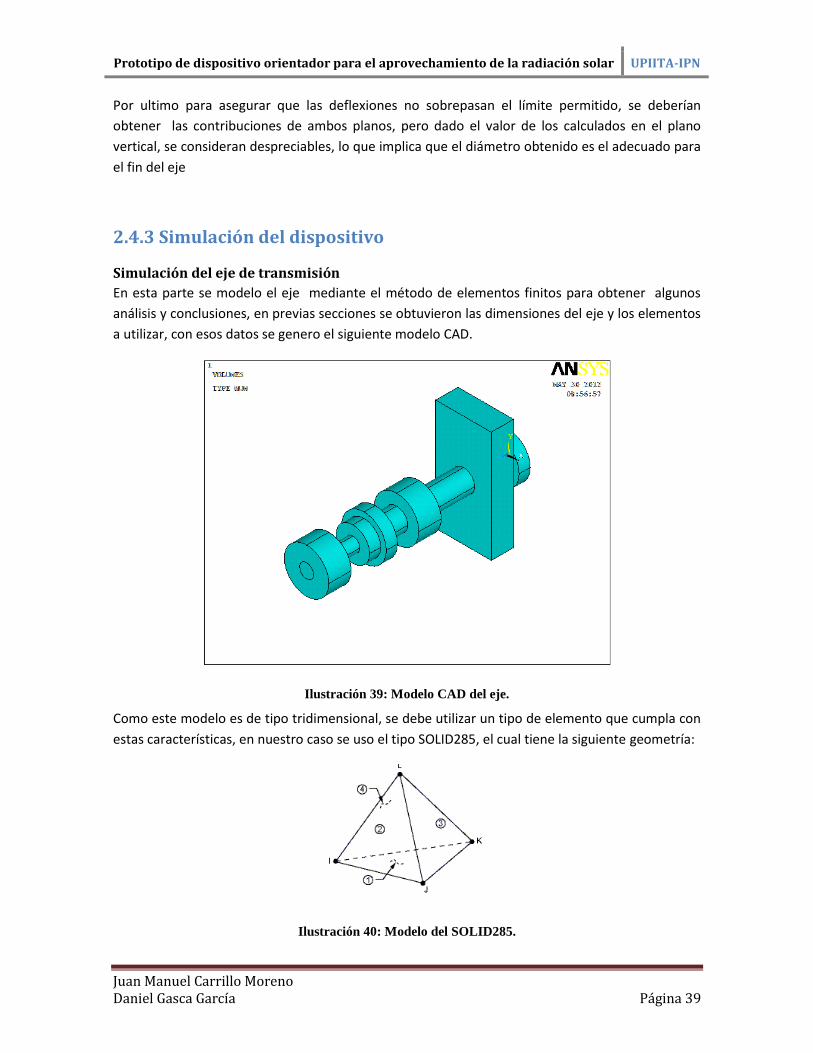
En esta parte se modelo el eje mediante el método de elementos finitos para obtener algunos
análisis y conclusiones, en previas secciones se obtuvieron las dimensiones del eje y los elementos
a utilizar, con esos datos se genero el siguiente modelo CAD.
Ilustración 39: Modelo CAD del eje.
Como este modelo es de tipo tridimensional, se debe utilizar un tipo de elemento que cumpla con
estas características, en nuestro caso se uso el tipo SOLID285, el cual tiene la siguiente geometría:
Ilustración 40: Modelo del SOLID285.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 40
Como se puede ver tiene una geometría tal, que se puede amoldar en las partes curvas en mejor
medida que un cubo.
Ilustración 41: Eje mallado.
Análisis dinámico
Este modelo como cualquiera en elementos finitos, se sometió a chequeos para verificar su
credibilidad, para esto se uso el criterio Modal Libre-Libre, con este criterio se encontraron las
primeras 8 frecuencias naturales mostradas en la tabla siguiente:
Tabla 3: Frecuencias naturales del eje de transmisión.
Frecuencia # Valor es
1 0
2 0
3 0
4 0
5 0.19294*
6 0.22915*
7 245.18
8 300.95
Como se puede ver con este resultado, se cumple el objetivo de la simulación, el cual fue verificar
que cuando el modelo esta libre de cargas se comporta como un solido rígido, es por este motivo
que las primeras 6 frecuencias naturales son muy cercanas a
Análisis estático
Este chequeo tiene la finalidad de verificar que el modelo se mueve correctamente y que las
fuerzas de reacción están controladas bajo la acción gravitatoria, el modelo se sujeta de un lado
como se muestra a continuación:

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 41
Ilustración 42: Modelo sujeto.
Una vez sujeto se aplica una carga gravitatoria en el sistema de referencia global en dirección a -Z,
con esto se obtuvo una masa de y una reacción en dirección al eje Z.
Análisis de flexión
Con este análisis se busco verificar que la flexión del eje no supera el valor admisible.
Ilustración 43: Diagrama con la deflexión del eje.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 42
Con la aplicación de las fuerzas teóricas, se obtuvo un valor de que corresponde
aproximadamente al valor teórico obtenido.
En cuanto al esfuerzo en la estructura se obtuvo lo siguiente:
Ilustración 44: Esfuerzo de Von Mises.
Como se puede ver el esfuerzo es de , lo que significa que tomando en cuenta que el
material utilizado es acero, no sobrepasa el límite de fluencia y tiene un factor de seguridad de
4.83.
Análisis modal
Para este análisis se obtuvieron las primeras 5 frecuencias naturales del sistema para verificar si
no se va a trabajar en algún valor que pueda resultar peligroso, donde se obtuvieron los resultados
mostrados en la Tabla 4.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 43
Tabla 4: Análisis modal del eje de transmisión
Frecuencia # Imagen Deformación
(in) Valor en
1
5.44 1169.3
2
6.035 1410.88
3
6.2299 1584.55
4
5,525 2289.81
5
7.60734 2494.56
Como se puede ver, ningún valor es parecido a valor de operación del eje de

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 44
Análisis de deflexión al dispositivo de elevación
Este analisis se desarrollo generando el modelo CAD del prototipo mediante la interfaz del
software ANSYS 13.0©, debido a que la importancion de un archivo IGES requiere de una extensa
depuración, en cuanto al modelo se obtuvo el siguiente:
Ilustración 45: Modelo CAD del dispositivo.
En cuanto al tipo de elemento utilizado para el mallado fue el solid45 que tiene una geometría
tetraédrica la cual es capaz de adaptarse a la forma de del dispositivo, el cual carece de curvas.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 45
Ilustración 46 Modelo mallado.
Por ultimo se introdujo una carga gravitatoria para observar el comportamiento del prototipo, se
supuso una aceleración de 9.81
para observar las deflexiones y esfuerzos en el dispositivo, en
cuanto a desplazamientos se encontraron los siguientes:

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 46
Ilustración 47: Deflexiones del dispositivo.
Como se puede ver la deflexión máxima es de 1.2 mm, la cual es muy poca si se compara con las
dimensiones del dispositivo de aproximadamente 1.3 m de longitud, por lo que se considera
despreciable. En cuanto a esfuerzos, se obtuvo el esfuerzo de Von Mises para saber si se esta
trabajando en una región segura, de lo cual se obtuvo la siguiente imagen.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 47
Ilustración 48: Esfuerzos de Von Mises.
En este caso, el factor de seguridad es el siguiente:
Por lo que se concluye que los esfuerzos no son cercanos a un valor critico como para pensar en
algún reajuste.
2.4.4 Selección de motores Según los cálculos obtenidos, tanto el mecanismo de elevación como el de orientación azimutal
requieren 4Nm aproximadamente. Se planeta utilizar un controlador de servomotores para
motores a pasos de hasta 19Nm. Consultar “Anexo B: Funcionamiento del EvoDrive ST-23”, para
mayor información sobre este actuador.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 48
2.4.5 Descripción de componentes del dispositivo
Ilustración 49: Transmisión del dispositivo de elevación.
1. Motor EvoDrive ST-23
2. Dispositivo de elevación
3. Dispositivo de orientación azimutal
4. Engrane corona
5. Tornillo sin fin
6. Chumaceras

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 49
Ilustración 50: Dispositivo de orientación azimutal.
1. Dispositivo de orientación azimutal
2. Eje conducido del dispositivo de elevación
3. Eje de apoyo del dispositivo de elevación
4. Base de sujeción al piso
5. Ruedas de soporte (Soportan 1000 N cada una)
6. Piso

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 50
Ilustración 51: Prototipo con celdas solares montadas.
1. Dispositivo de elevación
2. Marco de soporte para el lente de Fresnel
3. Lente de Fresnel
4. Celdas solares

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 51
2.5 Alimentación de sistema
2.5.1 Selección del concepto Esta es una de las partes más importantes puesto que define que es lo que dará energía al
prototipo, en cuanto a esto se pueden mencionar que se usara un sistema de alimentación a base
de celdas solares debido a que estas aprovechan al energía solar, en cuanto a la gestión de la
energía que estas generan se piensa utilizar un controlador de carga que alimente a los circuitos y
actuadores cuando éstos estén en uso, en caso contrario se pretende que el controlador
almacene energía en una batería para su posterior uso en situaciones donde las condiciones del
Sol no favorezcan una buena recepción de energía, por ultimo se usa un regulador para evitar
sobrecargas (ver Ilustración 52).
Ilustración 52: Sistema de alimentación.
2.5.2 Selección de celdas solares
Como se pudo ver en la sección anterior, el sistema de alimentación a utilizar funciona con celdas
solares, las cuales tienen una gran aceptación dentro de las tecnologías limpias, además de tener
la capacidad de transformar energía solar en eléctrica, para el prototipo se busco tener
proveedores nacionales encontrando uno con propuestas interesantes las cuales se enumeran a
continuación:
Modulo multicristalino de 50 W.
Modulo multicristalino Eplus-80 W.
Modulo multicristalino Eplus-50 W.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 52
Modulo multicristalino de 50 W Este tiene las siguientes características:
Ilustración 53 Características de la celda solar de 50 W.
Modulo multicristalino Eplus-80 W Este tiene las siguientes características:
Ilustración 54: Características de la celda solar Eplus-80 W.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 53
Modulo multicristalino Eplus-50 W Este tiene las siguientes características:
Ilustración 55: Características de la celda solar Eplus-50 W.
Observando las características de las 3 celdas solares se opto por la segunda opción, es decir, la
Eplus-50 porque a diferencia de la primera tiene una mejor eficiencia, y si se compara con la
segunda opción tiene un menor peso, además del precio.
2.5.3 Selección de controlador de carga y regulador Los controladores o reguladores de carga son muy similares a los reguladores de los coches, controlando tensión y corriente de un panel solar o generador eólico entregándolos a un acumulador o batería. Muchos paneles entregan 16 a 20 V que podrían llegar a estropear la batería por un efecto de sobrecarga, ya que esta necesita unos 14.5 V para una carga completa, aunque rara vez las celdas solares producen su tensión máxima (ver Ilustración 56)

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 54
Ilustración 56: Controlador de carga.
En nuestro caso, se va a adquirir un controlador de carga el cual no es diseñado porque es
bastante complicado, se escapa de los objetivos del prototipo, otra razón es su precio de 700
pesos el cual no es considerado como un gran gasto y tiene cabida dentro del presupuesto
establecido, además sus prestaciones son bastante adecuadas. (Ver Ilustración 57)
Ilustración 57: Características del controlador de carga.
En cuanto al regulador, se piensa utilizar un regulador convencional a 5 V de CD puesto que la electrónica digital a utilizar tendrá este valor como estándar, en cuanto a su selección se va a utilizar un LM8705CV, de empaquetado TO-220 con una capacidad de carga de hasta 1 A (ver Ilustración 58)

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 55
Ilustración 58: Empaquetado TO-220.
2.5.4 Selección de batería Para esta parte se utilizo el mismo proveedor de las celdas solares, de sus catálogos se selecciono
la batería 31H, con las siguientes prestaciones:
12 V, 115 Ah @ 100 hr y una vida útil de 3 a 4 años.
2.6 Interfaz de usuario A continuación se muestra una propuesta para la interfaz de usuario. Sus características son las
siguientes:
Utiliza puerto serial para conectarse al sistema.
Puede leerse la posición actual del orientador.
Puede definir la posición geográfica del prototipo.
Puede definir la hora de prototipo.
Muestra el nivel actual de la batería.
Ilustración 59: Interfaz de usuario.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 56
2.7 Integración del sistema Los diversos dispositivos del prototipo estarán conectados al sistema de control. El sistema de
control será implementado en un microcontrolador STM32F103VET.
Ilustración 60: Sistema mínimo para el STM32F103VET.
Las funciones del sistema de control son las siguientes:
Mantener la hora del sistema, gracias a su modulo de reloj con respaldo de batería.
Coordinar el funcionamiento de los mecanismos de orientación.
Coordinar los controladores de motores EvoDrive por medio de la interfaz RS232.
Calcular la posición del Sol.
Leer los valores analógicos de las fotorresistencias y realizar el control en lazo cerrado.
Orientar el concentrador solar usando la información de posición solar.
Monitorear el sistema de alimentación.
Comunicarse con la computadora para recibir configuraciones y enviar la posición actual de los actuadores.
Desactivar los dispositivos inactivos para ahorrar y mantener un bajo consumo de energía.
Desactivar el sistema en caso de paro de emergencia.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 57
Ilustración 61: Diagrama del sistema de control.
En el “Anexo C, Esquemáticos del sistema mínimo STM32F103” se encuentra el esquemático del
sistema mínimo a implementar.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 58
Conclusiones
Durante el desarrollo de este prototipo nos encontramos con varios inconvenientes, por ejemplo
desde la selección del concentrador, el cual como se pudo ver se escogió la lente de Fresnel por
tener mejores prestaciones y además maneja un peso mucho menor, en cuanto a otros
inconvenientes, los dispositivos del prototipo tuvieron que ser cambiados una gran cantidad de
ocasiones puesto que fue difícil encontrar una dinámica entre ellos que no sufriera de
interferencias y que se acoplara al objetivo de focalizar energía solar en un punto que no debe de
cambiar, en cuanto a algoritmos y demás, el algoritmo para la búsqueda del Sol fue una solución
eficiente debido a que contempla los movimientos del Sol tomando en cuenta la trayectoria que
sigue la Tierra alrededor de éste, el control y su implementación son cosas a las que se esta
plenamente acoplado a usar, lo que implica que una implementación simple ordenada y sin
contratiempo alguno.
En el caso de las cotizaciones, estas tienen el inconveniente de tener precios en otras divisas, lo
cual resulta conflictivo al momento de hablar de gastos, lo cual esperamos que se mantenga
estable durante los siguientes 6 meses.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 59
Referencias
[1] W. B. Davis, Living with the Sun: a guide for solar home heating, Solar Book, 1976.
[2] M. Kaiser, «Solar sinter,» 2010. [En línea]. Available: http://www.markuskayser.com/. [Último
acceso: 20 Marzo 2012].
[3] J. J. García-Badell, Cálculo de la energía solar, IGME, 1983.
[4] W. F. Edwin Campos, «Distribución espacio-temporal de la radiación solar neta en superficie
sobre el trópico americano del Hemisferio Norte,» Top. Meteor. Oceanogr., nº 3, pp. 55-61,
1996.
[5] M. V. B. Ignacio Galindo Estrada, México: Atlas de radiación solar, Universidad Nacional
Autonoma de Mexico, 1991.
[6] E. Hetch, Optics, Addison Wesley, 1987.
[7] W. Scheffler, «DEVELOPMENT OF A SOLAR CREMATORIUM,» Germany, 2006.
[8] LIDA OPTICAL & ELECTRONIC CO., LTD., CdS Photoconductuve cells - GL5549.
[9] J. L. C. Rodríguez, Elementos de máquinas: Teoría y problemas, Universidad de Oviedo, 2004 .
[10] Rexroth Bosch Group, Basic Mechanic Elements V12.1, 2011.
[11] R. H. H. Bishop, Mechatronics: An Introduction, CRC Taylor & Francis, 2006.
[12] A. B. Sánchez, "Prototipo Mecatrónico de Sistema CNC portátil para manufactura de PCB's",
México D.F.: UPIITA-IPN, 2011.
[13] K. S. Hurst, Engineering Design Principles, Elsevier, 1999.
[14] P. Figuera, Optimización de productos y procesos industriales, Barcelona: Gestión 2000, 2006,
pp. 50-53.
[15] M. G. Melón, Metodología del diseño industrial, Valencia: Universidad Politécnica de Valencia,
2001, pp. 18-20.
[16] L. Mazzotti, Manual de exploración, Exploradores peruanos, 2000.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 60
[17] K.-K. Chong, «General Formula for On-Axis Sun-Tracikng System,» Universiti Tunku Abdul
Rahman, Malaysia.
[18] K.-K. Chong, «Integration of an On-Axis General Sun-Tracking Formula in the Algorithm of an
Open-Loop Sun-Tracking System,» Sensors, nº 9, pp. 7849-7865, 2009.
[19] W. F. Edwin Campos, distribución espacio-temporal de la radiación solar neta en superficie
sobre el trópico americano del Hemisferio Norte., Costa Rica, 1996.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 61
Glosario Actuador: Convierte una señal de control en un cambio al sistema físico. Ejemplo: Motores,
pistones, solenoides, etc.
ADC: Acrónimo ingles de Analog-to-Digital Converter, es un dispositivo electrónico capaz de
convertir una señal analógica en un valor binario.
ASCII: Acrónimo inglés de American Standard Code for Information Interchange — Código
Estándar Estadounidense para el Intercambio de Información, el ASCII es un código numérico que
representa los caracteres, usando una escala decimal del 0 al 127. Esos números decimales son
convertidos en números binarios para ser posteriormente procesados.
Azimut: En astronomía, el azimut (representado por la letra griega phi ϕ) es el ángulo o longitud
de arco medido sobre el horizonte celeste que forman el punto cardinal Norte y la proyección
vertical del astro sobre el horizonte del observador situado en alguna latitud. Se mide en grados
desde el punto cardinal Norte en el sentido de las agujas del reloj, o sea Norte-Este-Sur-Oeste.
Cenit: Es la intersección de la vertical de un lugar y la esfera celeste. Es el punto más alto en el
cielo con relación al observador, que se encuentra justo sobre su cabeza (90°). La vertical de un
lugar, o dirección de la gravedad en ese lugar, corta a la esfera celeste en dos puntos. El cenit es el
punto que se encuentra por encima de la cabeza del observador.
Elevación: En astronomía, la elevación de un astro (representada por la letra griega theta θ) es el
arco de vertical contado desde el horizonte hasta el astro. Su valor absoluto es siempre menor o
igual que 90º y, por convenio, es un valor positivo si el astro es visible (es decir si está sobre el
horizonte) y negativo si no es visible (es decir si está bajo el horizonte).
GND: Ground (GND), del ingles tierra. En electrónica se denomina GND al nodo usado como
retorno común de las corrientes eléctricas. Sirve como referencia de tensión a 0 Volts.
Helióstato: Conjunto de espejos que se mueven sobre dos ejes normalmente en montura de
caballo, lo que permite, con los movimientos apropiados, mantener el reflejo de los rayos solares
que inciden sobre él en todo momento en un punto o pequeña superficie.
Metros sobre el nivel del mar (msnm): Se denomina nivel del mar al que sirve como referencia
para ubicar la altitud de las localidades y accidentes geográficos. Cualquier altitud que se quiera
calcular en dicho país se hará en comparación con respecto a ese nivel predeterminado. Estas
altitudes se denominan ortométricas.
Radiación: Fenómeno que consiste en la propagación de energía en forma de ondas
electromagnéticas o partículas subatómicas a través del vacío o de un medio material.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Juan Manuel Carrillo Moreno Daniel Gasca García Página 62
Reset: Reset, del inglés reponer o reiniciar. Se conoce como reset a la puesta en condiciones
iniciales de un sistema. Este puede ser mecánico, electrónico o de otro tipo. Normalmente se
realiza al conectar el mismo, aunque, habitualmente, existe un mecanismo, normalmente un
pulsador, que sirve para realzar la puesta en condiciones iniciales manualmente.
Sensor: dispositivo capaz de detectar magnitudes físicas o químicas y transformarlas en señales
eléctricas proporcionales. Pueden ser clasificados en activos y pasivos. Un sensor activo emite una
señal para estimar la propiedad del entorno que se desea medir. Un sensor pasivo no lo requiere.
[11]
Sinergia: Resultado de la acción conjunta de dos o más causas, pero caracterizado por tener un
efecto superior a la simple suma de dichas causas.
Software: Conjunto de instrucciones que proveen una computadora o microcontrolador los pasos
detallados para realizar una tarea determinada.

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Apéndices

Apéndice A: Diagrama de Gantt para Trabajo Terminal II

Apéndice B: Estructura de división del trabajo
Página 1
1. Conocer posición del Sol
1.1. Investigar sobre alternativas para
obtener la posición del Sol
1.1.1. Método de calculo teórico de la
posición del Sol
1.1.2. Probar algoritmo de calculo de
posición
1.1.3. Tipos de sensores activos
1.1.4. Caracterizar sensor activo
1.2. Diseñar sistema para ubicación de la
posición del Sol
1.2.1. Diseñar algoritmo de ubicación
1.2.2. Generar código del sistema de
ubicación
1.3. Probar sistema de ubicación
2. Concentrador solar
2.1. Investigar sobre diferentes tipos de
concentradores solares y
seleccionar el adecuado
2.1.1. Investigar tipos de
concentradores
2.1.2. Investigar teoría y leyes que
rigen su funcionamiento
2.1.3. Seleccionar el concentrador
solar que cumpla con los
requerimientos
2.1.4. Buscar proveedores
2.1.5. Contactar y cotizar con
proveedores
2.2. Determinar especificaciones del
concentrador
2.2.1. Determinar temperatura
máxima teóricamente
alcanzable
2.2.2. Determinar dimensiones de la
lente
2.2.3. Determinar numero de lentes
requerido
2.2.4. Determinar arreglo de las
lentes
2.3. Diseñar la estructura
2.3.1. Realizar diseño inicial de la
estructura
2.3.2. Consultar diseño con ingeniero
mecánico
2.3.3. Consultar diseño con un
ingeniero de manufactura
2.3.4. Aplicar recomendaciones y
realizar diseño detallado
2.3.5. Analizar esfuerzos con
elemento finito
2.3.6. Verificar resultados del análisis
de esfuerzos
2.3.7. Buscar proveedores y cotizar
material
2.3.8. Realizar planos de manufactura
estandarizados
2.4. Manufacturar la estructura
2.4.1. Adquirir componentes para
manufactura
2.4.2. Manufacturar componentes de
la estructura
2.5. Ensamblar la estructura
3. Mecanismo de enfoque
3.1. Determinar especificaciones del
mecanismo
3.1.1. Determinar rango de
movimiento
3.1.2. Determinar ubicación de
sensores
3.1.3. Determinar puntos de anclaje a
la estructura del concentrador
3.2. Diseñar mecanismo de enfoque
3.2.1. Realizar diseño inicial del
mecanismo
3.2.2. Seleccionar transmisión y
motor

Apéndice B: Estructura de división del trabajo
Página 2
3.2.3. Consultar diseño con ingeniero
mecánico
3.2.4. Consultar diseño con un
ingeniero de manufactura
3.2.5. Aplicar recomendaciones y
realizar diseño detallado
3.2.6. Analizar esfuerzos con
elemento finito
3.2.7. Verificar resultados del análisis
de esfuerzos
3.2.8. Buscar proveedores y cotizar
material
3.2.9. Realizar planos de manufactura
estandarizados
3.3. Manufacturar mecanismo de
enfoque
3.3.1. Adquirir componentes para
manufactura
3.3.2. Manufacturar componentes del
mecanismo
3.4. Ensamblar componentes
3.4.1. Ensamblar mecanismo y
conectar controlador de motor
3.4.2. Realizar pruebas de uso
4. Mecanismo de elevación
4.1. Determinar especificaciones del
mecanismo
4.1.1. Determinar rango de
movimiento
4.1.2. Determinar ubicación de
sensores
4.1.3. Determinar puntos de anclaje
al mecanismo de enfoque
4.2. Diseñar mecanismo de elevación
4.2.1. Realizar diseño inicial del
mecanismo
4.2.2. Seleccionar transmisión y
motor
4.2.3. Consultar diseño con ingeniero
mecánico
4.2.4. Consultar diseño con un
ingeniero de manufactura
4.2.5. Aplicar recomendaciones y
realizar diseño detallado
4.2.6. Analizar esfuerzos con
elemento finito
4.2.7. Verificar resultados del análisis
de esfuerzos
4.2.8. Buscar proveedores y cotizar
material
4.2.9. Realizar planos de manufactura
estandarizados
4.3. Manufacturar mecanismo de
elevación
4.3.1. Adquirir componentes para
manufactura
4.3.2. Manufacturar componentes del
mecanismo
4.4. Ensamblar componentes
4.4.1. Ensamblar mecanismo y
conectar controlador de motor
4.4.2. Realizar pruebas de uso
5. Mecanismo de azimut
5.1. Determinar especificaciones del
mecanismo
5.1.1. Determinar rango de
movimiento
5.1.2. Determinar ubicación de
sensores
5.1.3. Determinar puntos de anclaje
al mecanismo de elevación
5.2. Diseñar mecanismo de azimut
5.2.1. Realizar diseño inicial del
mecanismo
5.2.2. Seleccionar transmisión y
motor

Apéndice B: Estructura de división del trabajo
Página 3
5.2.3. Consultar diseño con ingeniero
mecánico
5.2.4. Consultar diseño con un
ingeniero de manufactura
5.2.5. Aplicar recomendaciones y
realizar diseño detallado
5.2.6. Analizar esfuerzos con
elemento finito
5.2.7. Verificar resultados del análisis
de esfuerzos
5.2.8. Buscar proveedores y cotizar
material
5.2.9. Realizar planos de manufactura
estandarizados
5.3. Manufacturar mecanismo de azimut
5.3.1. Adquirir componentes para
manufactura
5.3.2. Manufacturar componentes del
mecanismo
5.4. Ensamblar componentes
5.4.1. Ensamblar mecanismo y
conectar controlador de motor
5.4.2. Realizar pruebas de uso
6. Controlador de motores
6.1. Determinar especificaciones del
controlador de motores
6.1.1. Determinar consumo de cada
motor
6.1.2. Determinar tensión de trabajo
6.1.3. Determinar tipo de sensores
6.2. Diseñar controlador de motores
6.2.1. Diseñar algoritmo de control de
motores
6.2.2. Diseñar circuito esquemático
6.2.3. Consultar diseño con experto
en robótica o control
6.2.4. Aplicar recomendaciones y
realizar diseño detallado
6.2.5. Realizar diagrama
estandarizado
6.2.6. Cotizar componentes del
circuito de control de motores
6.3. Generar código y realizar pruebas
6.3.1. Realizar código del algoritmo
de control de motores
6.3.2. Documentar código del
programa
6.3.3. Verificar mediante simulación
el funcionamiento del diseño
6.3.4. Verificar mediante prototipo el
funcionamiento del diseño
6.4. Manufacturar circuito de control de
motores
6.4.1. Adquirir componentes para
manufactura
6.4.2. Manufacturar PCB
6.4.3. Soldar componentes del PCB
6.5. Realizar pruebas al circuito
7. Sistema de control del dispositivo
7.1. Selección de elementos del sistema
de control
7.1.1. Elegir interfaz de comunicación
circuito-computadora
7.1.2. Elegir interfaz de comunicación
circuito-circuito
7.1.3. Elegir controlador a
implementar
7.1.4. Definir entradas y salidas del
sistema de control
7.1.5. Definir tensión de alimentación
de circuitería
7.2. Diseñar sistema de control del
dispositivo
7.2.1. Realizar diagrama a bloques del
sistema de control

Apéndice B: Estructura de división del trabajo
Página 4
7.2.2. Diseñar algoritmo del sistema
de control (Programa del
controlador)
7.2.3. Diseñar algoritmo de la interfaz
de usuario (Programa de
computadora)
7.2.4. Diseñar circuito esquemático
7.2.5. Realizar diagrama
estandarizado
7.2.6. Cotizar componentes del
circuito de control
7.3. Generar código y realizar pruebas
7.3.1. Realizar código del controlador
7.3.2. Realizar código de la interfaz de
usuario
7.3.3. Documentar códigos de
programas
7.3.4. Verificar mediante simulación
el funcionamiento del diseño
7.3.5. Verificar mediante prototipo el
funcionamiento del diseño
7.4. Manufacturar circuito de control
7.4.1. Adquirir componentes para
manufactura
7.4.2. Manufacturar PCB
7.4.3. Soldar componentes del PCB
7.5. Realizar pruebas al circuito
8. Sistema de alimentación
8.1. Determinar los requisitos de energía
del sistema
8.1.1. Determinar el consumo de
energía del sistema
8.1.2. Determinar cantidad de celdas
necesarias
8.1.3. Determinar ubicación de las
celdas
8.2. Evaluar alternativas para el sistema
de alimentación
8.2.1. Buscar información sobre
controladores de carga
comerciales
8.2.2. Buscar información sobre el
diseño de controladores de
carga
8.2.3. Evaluar si se diseña o adquiere
el controlador de carga
8.3. Seleccionar alternativa
8.3.1. Diseñar o seleccionar el
controlador de carga adecuado
8.3.2. Verificar mediante simulación
funcionamiento del diseño
8.3.3. Cotizar controlador de carga o
sus componentes
8.3.4. Realizar documentación
estandarizada del circuito
8.4. Manufacturar o adquirir controlador
de carga
8.4.1. Adquirir controlador de carga o
componentes para
manufactura
8.4.2. Manufacturar PCB
8.4.3. Soldar componentes del PCB
8.4.4. Manufacturar gabinete
8.5. Realizar pruebas de uso

Apéndice C: Especificaciones del dispositivo
Característica Valor
Rango de movimiento elevación
0 a 90°
Rango de movimiento azimutal 0 a 180°
Velocidad elevación 1rad/s
Velocidad azimutal 1rad/s
Tensión de circuitería 5V
Tensión de motores 12V

Apéndice D: Cotización de materiales
Proveedor Fecha de
cotización Numero de parte Descripción Cantidad
Costo unitario
Costo Total
DEFETA 22/03/2012 Eplus 50 Celda Solar 50W 2 1,705.82 3,411.64
DEFETA 22/03/2012 CX-10 Controlador de carga 10A 1 737.26 737.26
DEFETA 22/03/2012 31H Batería 12V 100Ah 1 1,734.73 1,734.73
Metales Díaz 08/05/2012 30095 Barra redonda de acero inoxidable 304. Espesor 1", largo 1m 1 425.00 425.00
Metales Díaz 08/05/2012 Sin número Solera acero inoxidable 304. Espesor 1/4", ancho 2", largo 3.05m
1 733.62 733.62
OVEMEX 28/05/2012 3 842 993 120 Perfil 40x40, largo=820mm 12 458.40 5,500.83
OVEMEX 28/05/2012 3 842 993 120 Perfil 40x40, largo=700mm 12 391.33 4,695.92
OVEMEX 28/05/2012 3 842 993 120 Perfil 40x40, largo=100mm 4 55.95 223.78
OVEMEX 28/05/2012 3 842 993 120 Perfil 40x40, largo=140mm 4 78.21 312.83
OVEMEX 28/05/2012 3 842 990 720 Perfil 30x30, largo=1600mm 4 778.75 3,115.00
OVEMEX 28/05/2012 3 842 990 720 Perfil 30x30, largo=200mm 4 97.29 389.16
OVEMEX 28/05/2012 3 842 990 720 Perfil 30x30, largo=190mm 8 92.52 740.15
OVEMEX 28/05/2012 3 842 990 720 Perfil 30x30, largo=700mm 4 340.73 1,362.92
OVEMEX 28/05/2012 3 842 990 720 Perfil 30x30, largo=465mm 4 226.38 905.53
OVEMEX 28/05/2012 3 842 990 720 Perfil 30x30, largo=1010mm 4 491.51 1,966.03
OVEMEX 28/05/2012 8 981 019 579 Tornillo M6 con tuerca 8mm 8 43.08 344.63
OVEMEX 28/05/2012 3 842 523 970 Tornillo S8x25 autorroscante con cabeza de 5mm 12 12.14 145.72
OVEMEX 28/05/2012 8 981 021 344 Tornillo T para ranura 10mm con tuerca M8 8 43.08 344.63
OVEMEX 28/05/2012 3 842 530 325 Bloque-T antirrotación de 8mm 12 43.08 516.95
OVEMEX 28/05/2012 3 842 518 426 Conector en ángulo de 45° para perfil de 30mm 16 209.61 3,353.81
OVEMEX 28/05/2012 3 842 993 017 Perfil de sujeción 8mm, largo=3000mm 1 228.41 228.41
OVEMEX 28/05/2012 3 842 529 397 Esquina de 40mm 3S con tornillos 8 203.40 1,627.18
OVEMEX 28/05/2012 3 842 529 386 Escuadra 40x80mm con sujetadores 8 225.08 1,800.65
OVEMEX 28/05/2012 3 842 523 541 Escuadra 30x60mm con sujetadores 12 111.31 1,335.74
OVEMEX 28/05/2012 3 842 541 236 Rueda de trabajo pesado de 125mm 4 401.88 1,607.52
OVEMEX 28/05/2012 Sin número Maquinado de perfiles 120 14.46 1,734.73
Baleromex 28/05/2012 Seal Master SF-16 Chumacera para eje de 1" 1 809.20 809.20
Baleromex 28/05/2012 Seal Master SP-16 Chumacera para eje de 1" 2 1,095.15 2,190.30
Baleromex 28/05/2012 Seal Master SP-13 Chumacera para eje de 5/8" 2 983.70 1,967.40
SDP-SI 14/05/2012 A 1B66MYK20R025 Engrane modulo 2. Bronce, 25 dientes, buje de 16mm 2 810.41 1,620.82
SDP-SI 14/05/2012 A 1C 5MWK20RC Tornillo sin fin, buje de 14mm 2 774.70 1,549.40
SDP-SI 14/05/2012 A 9C39M050536 Chaveta de acero. B=5mm, H=5mm, L=36 4 8.96 35.85
Wuxi Bohai Opt. 27/02/2012 BHPA880-2 Lente de Fresnel de 1000x1000x3mm 1 1,951.57 1,951.57
EVODRIVE 20/02/2012 EVODRIVE ST-23 DEVKIT Servomotor 2 5,710.16 11,420.31
EBay 27/02/2012 STM32 STM32F103VCT6 Tarjeta de desarrollo para STM32F103 1 647.63 647.63
AG Electrónica 20/02/2012 Sin número Material electrónico diverso 1 1,000.00 1,000.00
Subtotal 62,486.85
IVA 9,997.90
Nota: La cotización esta en MXN. Precio del dólar: 14.4560 MXN
Total 72,484.75

Apéndice E: Planos de manufactura

Apéndice E: Planos de manufactura

Apéndice E: Planos de manufactura

Apéndice E: Planos de manufactura

Apéndice E: Planos de manufactura

Prototipo de dispositivo orientador para el aprovechamiento de la radiación solar UPIITA-IPN
Anexos

Anexo A: Radiación solar promedio (1990-2004)

Anexo B: Funcionamiento del EvoDrive ST-23
Página 1
Descripción El EvoDrive ST-23 es un controlador de motores, compatible con cualquier motor a pasos que siga
el estándar NEMA 23. Gracias a su algoritmo propietario de control vectorial, proporciona el
comportamiento en lazo cerrado de un servomotor.
El controlador posee dos modos de operación. Como controlador en lazo abierto provee una
precisión de 512 pasos con un comportamiento suave. Como un controlador en lazo cerrado,
transforma el motor a pasos en un servomotor.
El controlador EvoDrive ST-23 es modular, puede utilizarse sensores de mayor resolución o ubicar
en diferentes formas los componentes del sistema. En la Figura 1 se muestra la configuración
básica del sistema, en Figura 2 las funciones de sus conectores y en Figura 3 la descripción de los
pines del puerto de E/S.
Figura 1: Esquema del EvoDrive ST-23 con sensor angular y motor a pasos de eje dual.

Anexo B: Funcionamiento del EvoDrive ST-23
Página 2
Figura 2: Conectores del EvoDrive ST-23.
Figura 3: Pines del puerto de E/S del EvoDrive ST-23.
Modo de uso
El EvoDrive ST-23 es controlado mediante comandos en código ASCII enviados desde un
dispositivo maestro (como puede ser una computadora o microcontrolador), a través de alguna de
sus tres interfaces de comunicación: RS232, RS232 por USB o RS485.
Los comandos no distinguen entre mayúsculas o minúsculas y se ignoran los espacios para facilitar
el uso de la interfaz. La estructura básica de un comando se muestra en la Figura 4.

Anexo B: Funcionamiento del EvoDrive ST-23
Página 3
Figura 4: Estructura básica de un comando.
Cabecera: El carácter cabecera “/” (Diagonal) es usado para iniciar una línea de comando.
Dirección: La dirección es usada para identificar al EvoDrive cuando se utiliza un bus de
comunicación. Puede ser un carácter alfanumérico (1-9 y A-Y), permitiendo hasta 34 dispositivos
en un solo bus.
Comando: El comando que se desea ejecutar. Para conocer todos los comandos y sus parámetros
validos, consultar [1].
Parámetro: Los parámetros son números enteros, no todos los comandos usan parámetros.
Retorno de carro: El retorno de carro (0x0D) es un carácter de terminación y ordena al EvoDrive
que ejecute el comando.
Dimensiones En la Figura 1, se muestran las dimensiones físicas de la configuración utilizada, que se compone
de un motor a pasos de alto torque, un sensor de 8192 pulsos y el controlador EvoDrive. Las
dimensiones son en milímetros.
Figura 5: Dimensiones del EvoDrive ST-23.

Anexo B: Funcionamiento del EvoDrive ST-23
Página 4
Especificaciones técnicas Valores Máximos Permisibles
Entrada de alimentación 60 VCD
Salida de motor 60 VCD
Pico de corriente de motor 7.1 A
Señal de entrada de sensor 5.5 VCD
Pines de E/S 24 VCD
Comunicaciones
Interfaces RS232, RS232-USB, RS485
Tasa de transferencia máxima para RS232 115,200 bps
Tasa de transferencia máxima para RS485 230,400 bps
Digital E/S
Entradas de propósito general 4
Salida de propósito general 4
Frecuencia de trabajo máxima 30 KHz
Tipo de salida digital Salida negada, 200 mA de corriente máxima
Rango de entrada digital para nivel bajo 0 VCD a 0.9 VCD
Rango de entrada digital para nivel alto 1.4 VCD a 24 VCD
Medio Ambiente
Temperatura de operación 10°C a 55°C
Humedad relativa de operación 8% a 80% sin condensación
Temperatura de almacenamiento -40°C a 120°C
Humedad relativa de almacenamiento 5% a 95% sin condensación
Más información Toda la información de esta sección ha sido recopilada de los manuales y documentación del
fabricante. Si se desea mayor información, consultar [2] y [1].
Referencias
[1] EVA Robotics, EvoDrive Programmers Manual (FW-UM001 Rev C), EVA Robotics, 2011.
[2] EVA Robotics, EvoDrive ST-23 Integration Manual (FW-UM009 Rev A), EVA Robotics, 2011.

Anexo C: Esquemáticos del sistema mínimo STM32F103
Página 1

Anexo C: Esquemáticos del sistema mínimo STM32F103
Página 2

Anexo C: Esquemáticos del sistema mínimo STM32F103
Página 3