低温レーザー干渉計 clio への wfs の導入
DESCRIPTION
低温レーザー干渉計 CLIO への WFS の導入. 我妻一博 ,新井宏二 A ,宮川治 B ,大橋正健,内山 隆,三代木伸二,寺田聡一 C ,山元一広 D ,黒田和明 東大宇宙線研,国立天文台 A , California 工科大 B , 産総研 C , MaxPlank 研 D. もくじ. CLIO の MC に Alignment Control を導入した 1 .目的 2 . MC Alignment Servo Control の構築 ・ WFS ・ デジタル制御 3 .ドリフト量の測定結果 ・ 測定方法 ・ MC ASC の効果 - PowerPoint PPT PresentationTRANSCRIPT

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 1
低温レーザー干渉計 CLIO への WFS の導入我妻一博,新井宏二 A,宮川治 B,大橋正健,内山 隆,三代木伸二,寺田聡一 C,山元一広 D,黒田
和明
東大宇宙線研,国立天文台 A , California工科大 B ,産総研 C ,MaxPlank研 D

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 2
もくじCLIO の MC に Alignment Control を導入した1 .目的2 . MC Alignment Servo Control の構築 ・ WFS ・ デジタル制御3 .ドリフト量の測定結果 ・ 測定方法 ・ MC ASC の効果 ・ 入射光ドリフトと MC 透過光ドリフト4. まとめと今後の課題
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 3
もくじCLIO の MC に Alignment Control を導入した1 .目的2 . MC Alignment Servo Control の構築 ・ WFS ・ デジタル制御3 .ドリフト量の測定結果 ・ 測定方法 ・ MC ASC の効果 ・ 入射光ドリフトと MC 透過光ドリフト4. まとめと今後の課題

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 4
目的背景• MC の透過光にドリフトが存在する• MC のアラインメント制御が組み込まれていない考えられるドリフトの原因• 入射レーザーのビームジッター• MC のアラインメントのドリフト• ステアリング鏡や BS のドリフト解決策• MC にアラインメント制御を導入 ⇒ MC のドリフト対策 ⇒ MC ミラーのモニター ⇒ Wave Front Sensor ( TAMA の Dead Copy により、迅速に導入が可能)
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 5
Wave Front Sensor
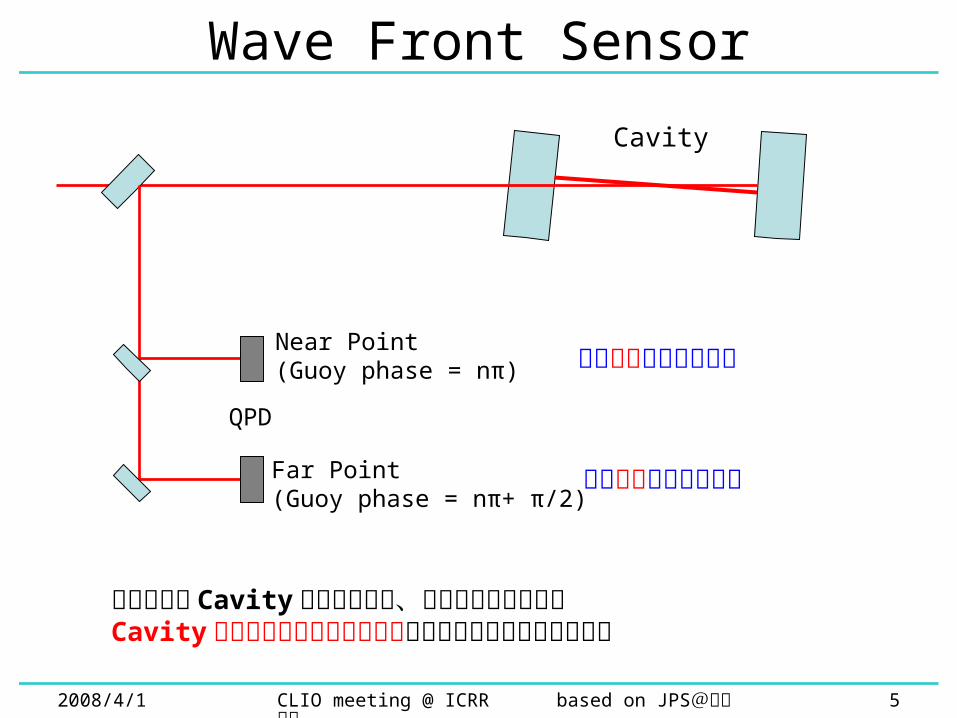
入射光軸と Cavity 光軸の差から、鏡の角度変化によるCavity 光軸の回転運動と並進運動を見ることのできるセンサー
QPD
Near Point(Guoy phase = nπ)
Far Point(Guoy phase = nπ+ π/2)
光軸回転に感度を持つ
光軸並進に感度を持つ
Cavity
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 6
Wave Front Sensor
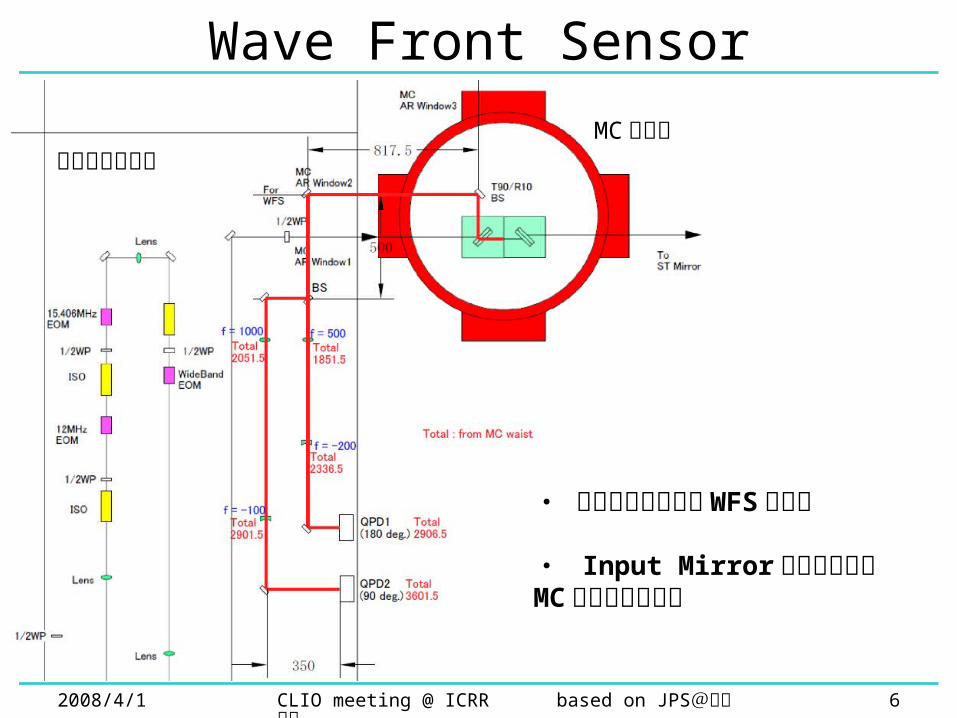
・ レーザーベンチに WFS を設置・ Input Mirror の透過光からMC 光軸をモニター
MC タンクレーザーベンチ

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 7
Wave Front Sensor
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 8
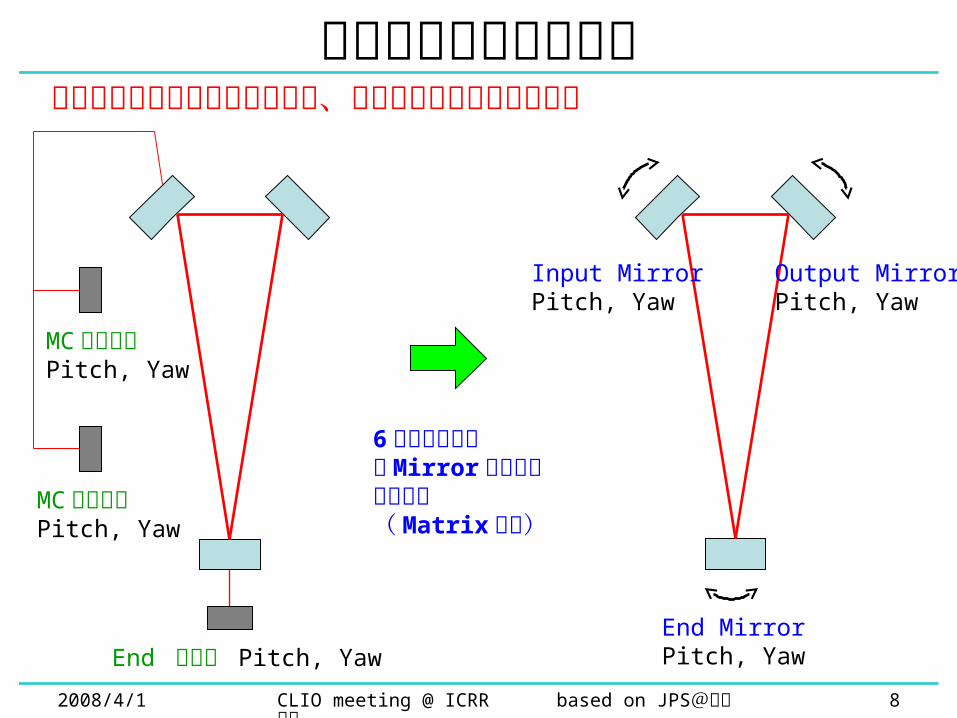
センサー信号の対角化
End 透過光 Pitch, Yaw
MC 光軸回転Pitch, Yaw
MC 光軸並進Pitch, Yaw
6 つの自由度を各 Mirror の動きに変換する( Matrix 変換)
End MirrorPitch, Yaw
Input MirrorPitch, Yaw
Output MirrorPitch, Yaw
各ミラーを独立に操作するため、センサー信号を対角化する

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 9
デジタル制御
LabVIEWを用いたデジタル制御システムを構築した
① 3 秒に 1 回、各ミラーの傾きを判別② ある敷居値を越えたときに、ある一定量の力を傾きと逆方向に加える制御
敷居値 1 回に返す量
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 10
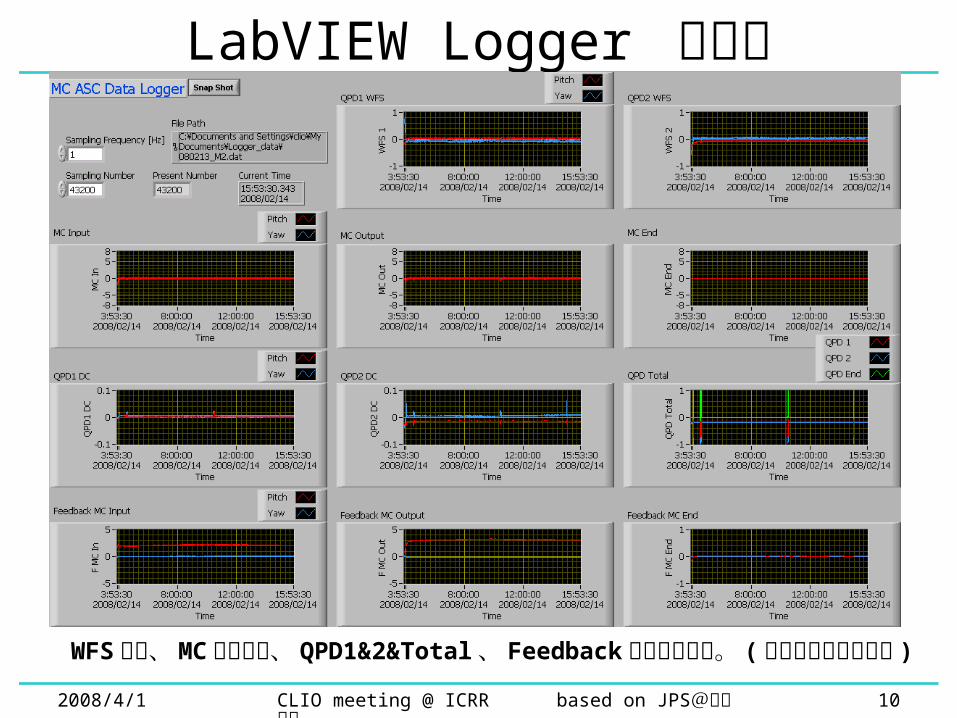
LabVIEW Logger の導入
WFS 信号、 MC 各ミラー、 QPD1&2&Total 、 Feedback を記録できる。 ( 半日動かしたデータ )

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 11
Logger の問題点 その 1
1 日分の記録に対して 6 秒の遅れが生じる ⇒ マシンパワーが足りない?

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 12
Logger の問題点 その 2
10-7
10-5
10-3
10-1
101
[V/rt
Hz]
0.001 0.01 0.1 1 10 100Frequency [Hz]
Pitch WFS2_y WFS2_y_SPnoise WFS2_P_1Hz WFS2_P_AAF_2Hz WFS2_P_AAF_1Hz WFS2_P_AAF_0.5Hz WFS2_P_AAF_0.5Hz_NOview
10-7
10-5
10-3
10-1
[V/rt
Hz]
0.001 0.01 0.1 1 10 100Frequency [Hz]
Yaw WFS2_x WFS2_x_SPnoise WFS2_Yaw_1Hz WFS2_Y_AAF_2Hz WFS2_Y_AAF_1Hz WFS2_Y_AAF_0.5Hz WFS2_Y_AAF_0.5Hz_NOview
1Hz Sampling で測定した場合には、 0.5Hz に AAF を入れているが、 0.5Hz で 3dB の減衰になっていない。⇒AAF を独立の vi として動かしているため、同期されていないのが原因か?
スペクトルから判断するに、当面は AAF 無しでも 0.1Hz 以下のデータに関しては問題は無さそうではある。

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 13
LabVIEW Logger の問題点と解決策
問題点• 時間遅れ• AAF の不一致当面の解決策• AAF を取り除く⇒ マシンパワーの確保それでも時間遅れがある場合には、表示部分を減らす。 AAF をちゃんとやるには AAF をサーボのメインループに組み込めば良いが、マシンパワーが心配
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 14
もくじCLIO の MC に Alignment Control を導入した1 .目的2 . MC Alignment Servo Control の構築 ・ WFS ・ デジタル制御3 .ドリフト量の測定結果 ・ 測定方法 ・ MC ASC の効果 ・ 入射光ドリフトと MC 透過光ドリフト4. まとめと今後の課題

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 15
目的および測定方法目的• MC Alignment Servo Control の効果を確認する• ビームジッターと MC のドリフトでどちらが大きいか比べる• ドリフトの温度変化との関連を調べる測定方法• MC タンクの入射前と後に QPD を置き、 MC ASCの ON, OFF でドリフトがどう変化するかを見る• QPD の近くに温度計を置き、温度変化との関連性を調べる
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 16
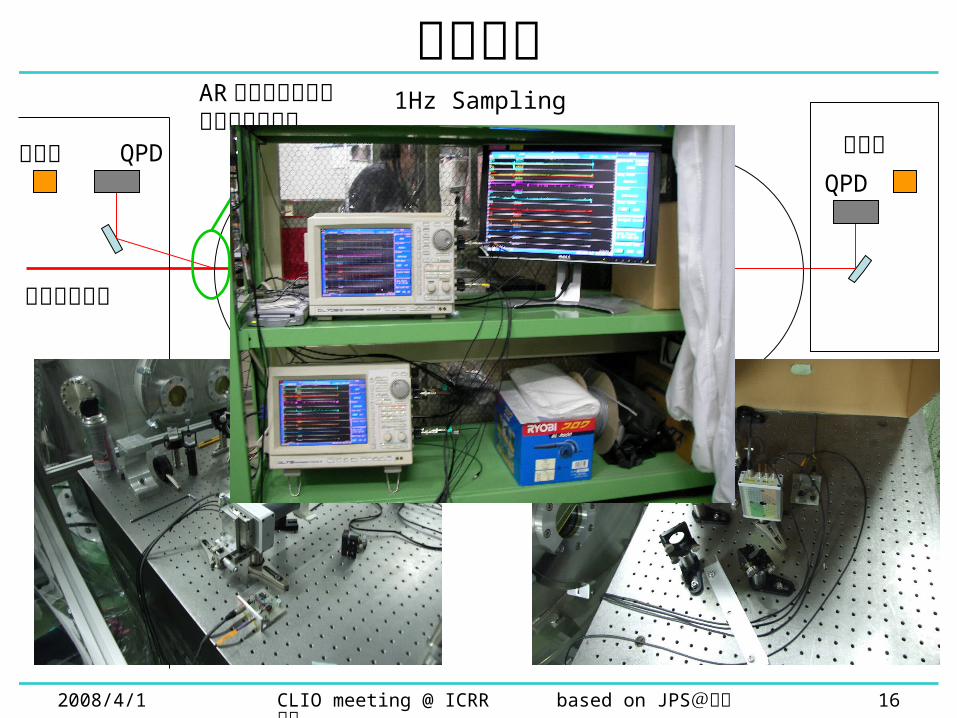
測定方法
入射レーザー
MC タンク ステアリングミラー
QPD温度計QPD
温度計
WFS
AR コーティング窓の反射光を利用 1Hz Sampling

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 17
Next Goal== ドリフトの原因究明 ==• ● 目的 : MC ドリフトの温度変化との関連を調べる ③ MC の近くでの温度ドリフト 温度計位置: MC の近く• ● 目的 : MC のどの鏡が最もドリフトに影響しているか調べる ④ WFS 系のドリフト QPD 位置: WFS に用いている QPD と MC End QPD• ● 目的 : ドリフトが一番大きい場所を見つける ⑤ 各測定ポイントでのレーザードリフト量 QPD 位置: MC タンク入射口 ( )② 、 MC 透過後 ( )① 、 MMT 各 Mirror 透過後の
2 つ、 Inline ニア• ● 目的 : 各ドリフトの温度変化との関連を調べる ⑥ 各測定ポイントでの温度ドリフト 温度計位置: Inline ニア、 Inline エンド、 MC タンク側 ( )③ 、光学定盤上シールドの内部の 4 点== ドリフトの干渉計への影響 ==干渉計のドリフトに対するロバストさを調べる• ● 目的 : 干渉計からの要求値を調べる (ドリフトをどの程度抑える必要があるかの要求値を 干渉計側に与える影響から見積もる) ⑦ Inline 透過光量の変化( Suggestion from Dr. Grote ) 各ミラー (MC, MMT, Inline N/E) を傾け、 どの程度光軸が変化するかを
Calibrate しておき、 Inline 透過光量を何%以内に保つという条件から制限を付ける

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 18
温度計

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 19
測定方法
BS
TH02QPD_MC
TH01QPD_Laser
QPD_MMT1
QPD_MMT2
TH03QPD_Near
TH04QPD_End
WFS
Inline 側に測定系を構築した

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 20
測定可能なチャンネル
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 21
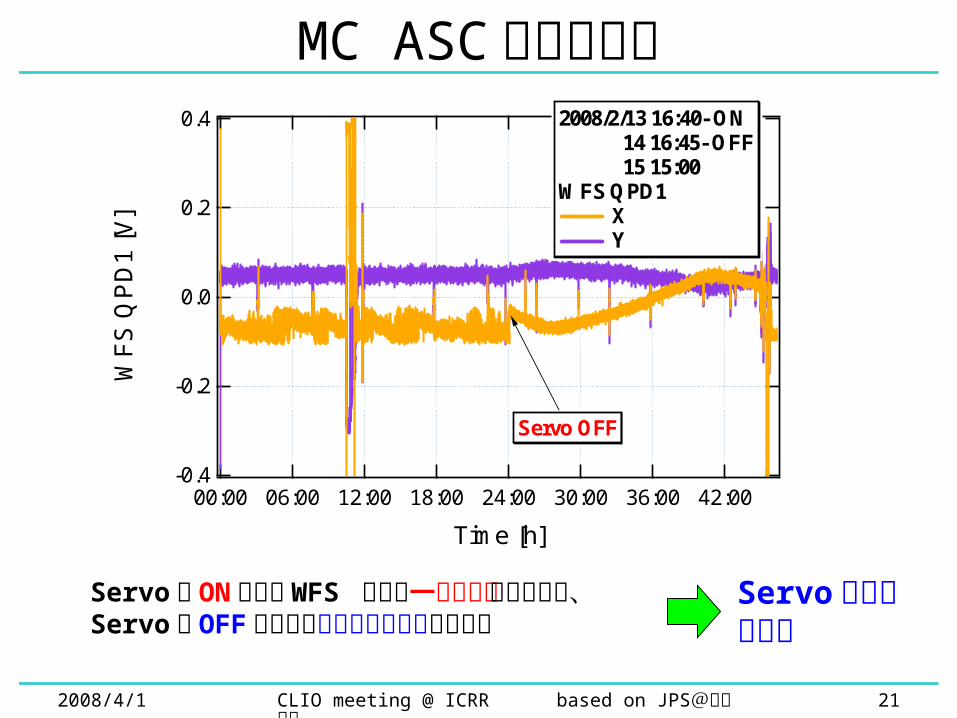
MC ASC の動作確認
Servo が ON の間は WFS 信号を一定に保つように働き、Servo が OFF になるとドリフトの動きが見える Servo が正常に動作
-0.4
-0.2
0.0
0.2
0.4W
FS Q
PD
1 [V
]
00:00 06:00 12:00 18:00 24:00 30:00 36:00 42:00
Time [h]
2008/2/13 16:40- ON14 16:45- OFF15 15:00
WFS QPD1 X Y
Servo OFF
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 22
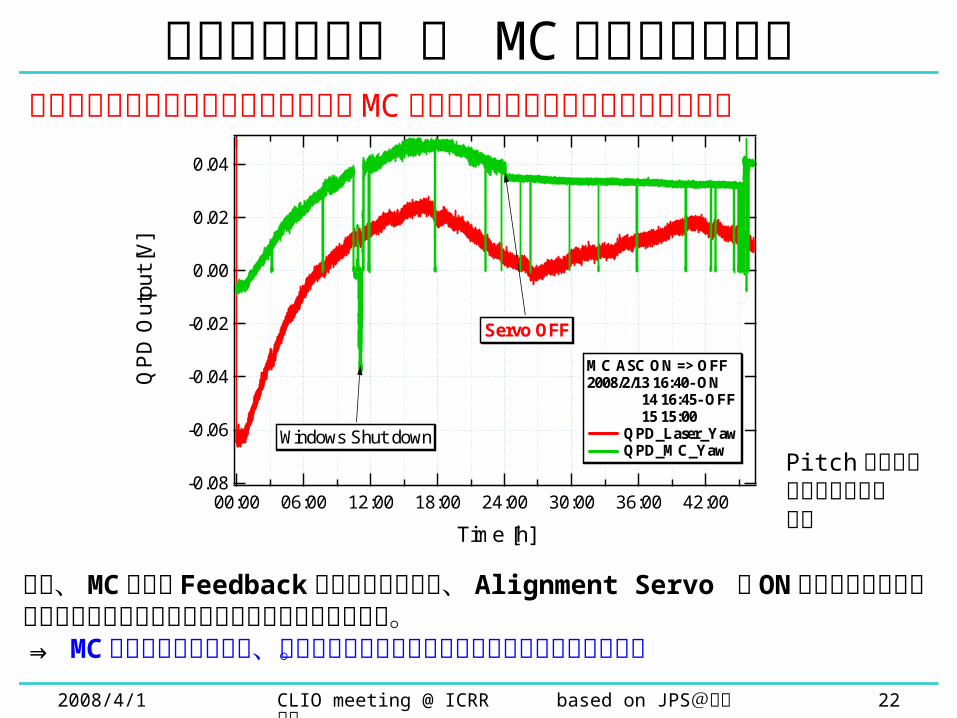
入射光ドリフト と MC 透過光ドリフト
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.04Q
PD
Out
put [
V]
00:00 06:00 12:00 18:00 24:00 30:00 36:00 42:00
Time [h]
MC ASC ON => OFF2008/2/13 16:40- ON
14 16:45- OFF15 15:00
QPD_Laser_Yaw QPD_MC_Yaw
Servo OFF
Windows Shut down
入射レーザーのビームジッターの方が MC のドリフトより大きいことが分かった
現在、 MC の鏡に Feedback を返しているため、 Alignment Servo を ONにすると入射レーザーの動きに合わせて鏡を動かす制御になっている。 ⇒ MC は良く機能しており、ドリフトの大きいビームジッターを改善している。
Pitch は動きが少なかったため省略

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 23
-0.10
-0.05
0.00
0.05
QP
D O
utpu
t [V
]
03:00 06:00 09:00 12:00 15:00 18:00 21:00 24:00 27:00
Time [h]
WFS ON2008/2/19 9:00-
20 13:00 QPD_Laser_Pitch QPD_Laser_Yaw QPD_MC_Pitch QPD_MC_Yaw
別の日の測定( MC ASC ON )
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 24
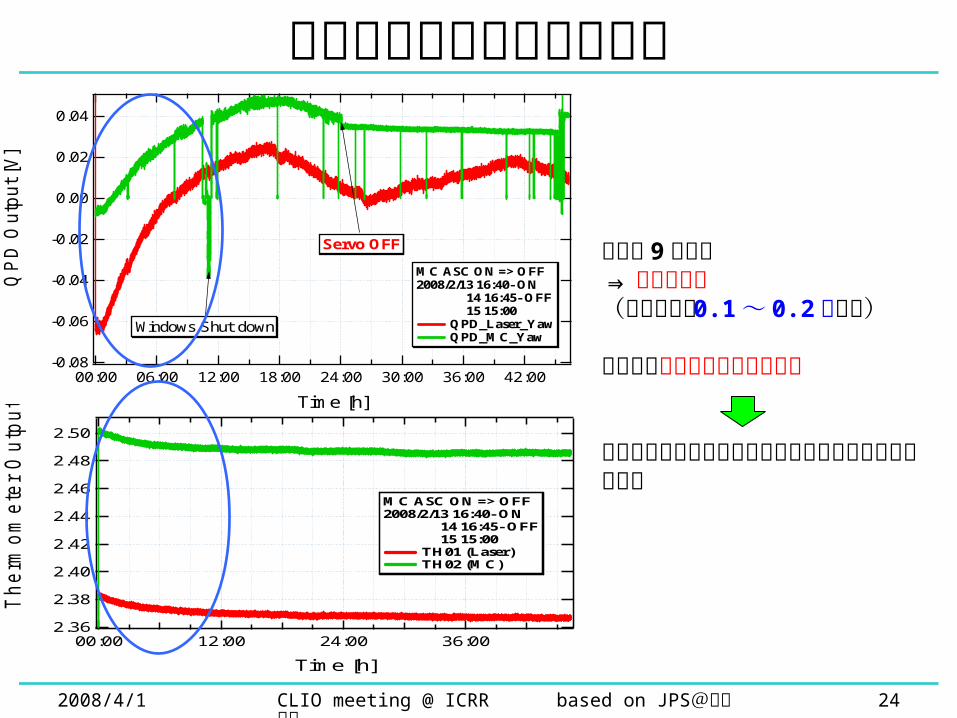
温度変化とドリフトの関係
2.50
2.48
2.46
2.44
2.42
2.40
2.38
2.36
Ther
mom
eter
Out
put [
V]
00:00 12:00 24:00 36:00
Time [h]
MC ASC ON => OFF2008/2/13 16:40- ON
14 16:45- OFF15 15:00
TH01 (Laser) TH02 (MC)
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.04
QP
D O
utpu
t [V
]
00:00 06:00 12:00 18:00 24:00 30:00 36:00 42:00
Time [h]
MC ASC ON => OFF2008/2/13 16:40- ON
14 16:45- OFF15 15:00
QPD_Laser_Yaw QPD_MC_Yaw
Servo OFF
Windows Shut down
最初の 9 時間位⇒ 温度変化大(といっても 0.1 ~ 0.2 度程度)その間のドリフト量の勾配が急
わずかな温度変化でも大きく影響している可能性がある

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 25
まとめ と 今後まとめ• WFS を用いたアラインメント制御システムを
MC に構築した• 長時間ドリフト測定を行い、ビームジッターが
MC のドリフトより大きいことが分かった今後• MC ドリフトを最小にするにはどこに(レーザー側や MMT など) Feed back を返すかを考える• Pre MC の導入の検討• 腕にも WFS を導入し、腕アラインメント制御システムを構築する
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 26
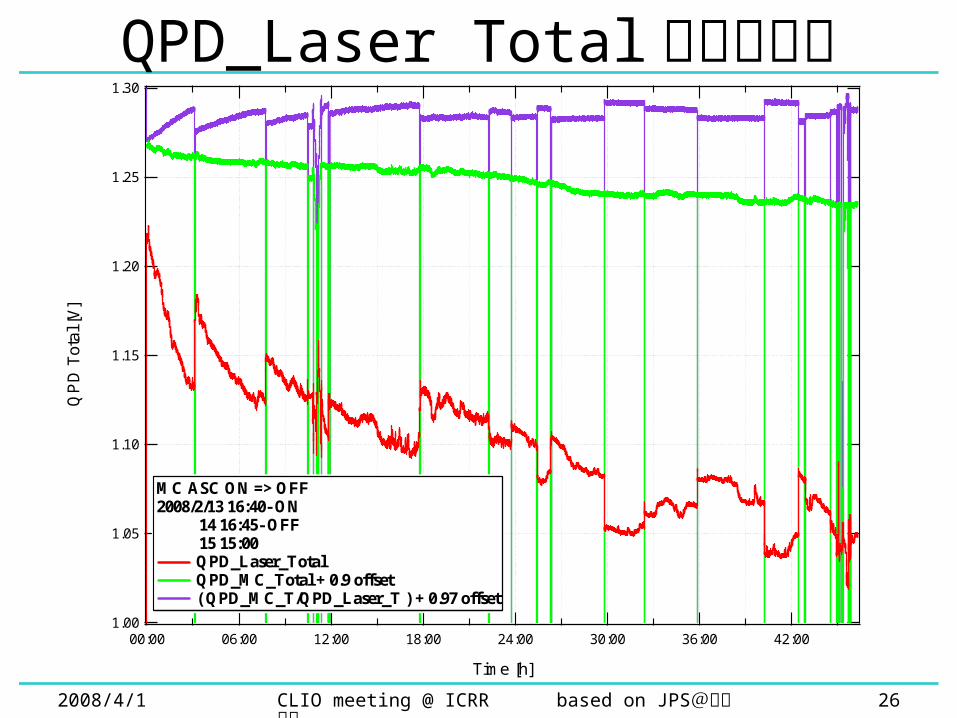
QPD_Laser Total の飛び問題1.30
1.25
1.20
1.15
1.10
1.05
1.00
QP
D T
otal
[V]
00:00 06:00 12:00 18:00 24:00 30:00 36:00 42:00
Time [h]
MC ASC ON => OFF2008/2/13 16:40- ON
14 16:45- OFF15 15:00
QPD_Laser_Total QPD_MC_Total + 0.9 offset ( QPD_MC_T/QPD_Laser_T ) + 0.97 offset

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 27
MC PZT fbと QPD_Laser の相関
1.16
1.14
1.12
1.10
1.08
1.06
1.04
QP
D T
otal
[V]
24:00 27:00 30:00 33:00 36:00 39:00
Time [h]
-10
-8
-6
-4
-2
0
2
MC PZT [V]
MC ASC ON => OFF2008/2/13 16:40- ON
14 16:45- OFF15 15:00
QPD_Laser_Total MC_PZT
2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 28
考えられる原因• 高次モードの発生• MC を通る偏光モードの発生• AR コーティングによる影響• レーザー自体の問題か?• 途中の光学系か? (FI など )

2008/4/1 CLIO meeting @ ICRR based on JPS@近畿大学 29
終