7 no b vcc 3.6v 5.5v gnd gnd sg fg reserve n.c.( ) txd (out) rs-232c rxd (in) rs-232c cts (in)...
TRANSCRIPT
ユーザーズマニュアル
小型組込タイプ
無線モデム装置
VDM-1220F
株式会社 バーテックススタンダード

1
目 次
ご使用上の注意事項 ...................................................................................................................................2
主な特長 ....................................................................................................................................................4
システム構成..............................................................................................................................................5
各部の名称と説明.......................................................................................................................................6
接続仕様 ....................................................................................................................................................7
コネクタ仕様..............................................................................................................................................8
ケーブル接続方法.......................................................................................................................................8
機能説明 ....................................................................................................................................................9
コマンド一覧表 ....................................................................................................................................... 13
標準コマンド.......................................................................................................................................13
レスポンス一覧 ...................................................................................................................................14
コマンドとレスポンスの説明..............................................................................................................15
●SNDコマンド ........................................................................................................................15
●RCVコマンド ........................................................................................................................17
●STOコマンド ........................................................................................................................18
●WCNコマンド ........................................................................................................................20
●RCNコマンド ........................................................................................................................20
●CNSコマンド ........................................................................................................................21
●WYDコマンド ........................................................................................................................22
●RYDコマンド ........................................................................................................................23
●RIDコマンド ........................................................................................................................23
●KEYコマンド ........................................................................................................................24
●POLコマンド ........................................................................................................................25
●PCLコマンド ........................................................................................................................25
●CSCコマンド ........................................................................................................................26
●CHSコマンド ........................................................................................................................26
●RSSコマンド ........................................................................................................................27
●OCLコマンド ........................................................................................................................28
●TSCコマンド ........................................................................................................................29
●TSTコマンド ........................................................................................................................30
●CDLコマンド ........................................................................................................................31
●XCTコマンド ........................................................................................................................32
●TOTコマンド ........................................................................................................................32
●SAVコマンド ........................................................................................................................33
●SVRコマンド ........................................................................................................................33
●VERコマンド ........................................................................................................................34
●EECコマンド ........................................................................................................................34
テスト送信方法 ....................................................................................................................................... 35
本体取り付け時の注意事項...................................................................................................................... 36
故障と思う前に ....................................................................................................................................... 37
通信手順 ................................................................................................................................................. 39
主な仕様 ................................................................................................................................................. 41
外形および各部の寸法............................................................................................................................. 42
付録......................................................................................................................................................... 43
接続ケーブル仕様 ...............................................................................................................................43
CH周波数表.......................................................................................................................................44
2
ご使用上の注意事項
このたびは、(株)バーテックススタンダードの小型組込タイプ無線モデム装置 “VDM-1220F”
をお買い上げいただきまして、誠にありがとうございます。
本装置を正しく安全にお使いいただくため、ご使用前にこの取り扱い説明書を良くお読みください。
ご使用法に誤りがありますと、本装置の性能が十分に発揮できないばかりでなく、思わぬトラブルや故障
の原因になります。お読みになった後もお手元に置き、ご活用ください。
◆ 本装置を安全にご使用いただくために
マークの種類と意味
本装置を安全にお使いになるために、必ず守っていただきた
い注意項目です。
本装置を安全にお使いになるために、行ってはならない禁止
項目です。
装置を湿気や埃の多い場所に置かないで
ください。
装置の近くにクリップなどの小さな金属
物を置かないでください。
火災や故障の原因となります。
装置を直射日光の当たる場所や熱器
具の付近に置かないでください。
故障や変色、変形の原因になります。
本体、若しくは取付けた装置を傾いた所
などの不安定な場所に置かないでくださ
い。
落ちたり倒れたりして、故障やけがの
原因となります。
ご使用電圧には指定された電圧範囲でご
使用下さい。指定以外の電圧を加えると
火災や故障の原因となります。
装置の取り付けに使用するビスは、
必ず指定サイズのものを使用してく
ださい。
異なるサイズのビスを使用すると、
ケース割れの原因となります。
装置の分解や改造をしないでくださ
い。
故障やけがの原因となります。
電波法により禁止されています。

3
・本装置は、1200MHz帯“特定小電力無線局テレメータ用、テレコントロール用、およびデー
タ伝送用無線設備(ARIB STD-T67)”に合致し、技術適合基準に合格した無線設備で
す。ご使用に際しての免許手続き等は一切必要ありませんが、下記の内容に注意してご使用される
ようお願いいたします。
本体を開けたり、ネジを外したりして内部を改造しないでください。
本体に貼られている機種銘板には、技術基準適合認証番号が書かれていますので銘板を剥さな
いでください。
本装置は一般電子機器(電子計算機、OA機器、通信機器、計測機器、工作機械、産業用ロボ
ット、AV機器、家電品等)に使用されることを目的として作られています。
輸送用機器(航空機、列車、自動車)の制御と安全性に関わるユニットやシステム、交通信号、
ガス漏れ検知器、各種安全装置等にご使用の際は、お客様において適切な処置を講じてくださ
い。
また、衛星機器,原子力機器,海底中継器,人命に直接関わる医療用機器等極めて高い信頼性
を要求される用途には絶対に使用しないでください。
・不法改造機器を使用した場合は、電波法によって罰せられることがあります。
・ご使用法の誤りが原因で故障が生じた場合は、保証期間中でも有償修理扱いにさせていただくこと
がありますのでご注意ください。
・内部の点検、調整等は、お買い上げ頂きました販売代理店に依頼してください。
・ケーブルの抜き差しは電源を切ってから行ってください。電源を入れたまま抜き差しを行うと故障
の原因となります。
・ 無線通信で相手モデムからの応答が受信できない場合、受信側は正常にデータを受信しているのに、
送信側は異常終了(ENG)と認識してしまう状態が発生します。このとき再送を行うと、受信側
は同じデータを2回受信してしまいます。この状態は、無線モデムでは対処できません。アプリケ
ーションで対応してください。

4
[ 主な特長 ]
◆特定小電力無線モデムです
・ VDM-1220Fは、特定小電力無線局標準規格に準拠した1200MHz帯データ
伝送用の組込み型無線モデム装置です。
・ 特定小電力タイプですので、面倒な開局手続きは一切不要です。
・ チャネル自動選択機能(MCA方式)を持っていますので、他の端末が通信中でも自動
的に空いているチャネルに切り替えて混信の無い通信ができます。
・ 通信CHとして、データCH:20CH、制御CH:1CHが使用可能です。
・ 無線方式は単信方式です。
・ 無線間の通信速度は16Kbpsです。
・ 通信距離として見通しで約300mの通信が可能です。
・ 場所を特定しないでデータの入出力ができるので、ケーブルレスのシステムが手軽に構
築できます。
◆I/0コネクタインターフェース
・ RS-232C及びCMOSレベルの端末に接続できます。
・ 通信速度は2400/4800/9600/19200/38400bpsのいずれか
を選択できますので種々の機器への接続が可能です。
◆信頼性の高い無線データ伝送方式
・ 本無線モデムは、送信データを1つのパケットとして1回の送信で相手局へ送信します。
端末装置側は、送信データを無線モデムに送った後は応答を待つだけでよく、データに
誤りがあった場合は、誤り訂正、誤り検出といった通信処理に関する全ての処理は、無線
モデム側で行いますので、信頼性の高いデータ伝送が行えます。
また、新規に開発したBCHエラー訂正符号方式により、弱電界時でも通信エラーの少
ない安定した通信が可能です。
相手先無線モデムの製造シリアルNo.8桁を相手先IDとして指定すれば、簡単にデ
ータ伝送が可能です。
秘話性として3桁のKEYコードを設定できるのでKEYコードが一致したモデム間の
みデータ伝送が可能です。
混信防止として、固定チャネル設定時、01~20チャネルの設定、MCA(マルチチ
ャネルアクセス:空きチャネルを自動で探しデータ伝送)機能をサポートしています。
◆機器組込みを目的とした軽量、コンパクトな設計
・ 外形の小型化、薄型化を計り、機器に組み込み易い形状になっていますので、機器への
取付けスペースを最小限にできます。
・ アンテナの保護として、柔軟性と強度のあるエラストマを使用していますので、小型ケ
ース内への取付けにも柔軟に対応できます。

5
[システム構成]
本無線モデムはシステムを構築する上での運用形態として、次の通信モードで行なうことが出来
ます。
【1:N 通信モード(1:1 通信モード含む)】
基本的に親局、子局の識別はありません。通信相手局のID No.を指定することで1台の発呼
局から複数の被発呼局との通信を行うことができます。ID No.は本装置の製造番号の8桁で構成
されていますので通信相手局数の制限はありません。
1:Nの場合、ポーリング方式で構築してください。
被発呼局
DTE
DTE 発呼局
N 局

6
[ 各部の名称と説明 ]
① 本体 :モールドケースです
② アンテナ :送受信アンテナ(保護用にアンテナラバーとしてエラストマを使用)
③ 接続コネクタ :電源入力、及びRS-232C、CMOSレベル等のコネクタ
④ 電源表示LED:電源ON:赤色点灯
動作エラー時、通信中:点滅
⑤ 取付け用丸穴 :M3ビス用の丸穴です。取付の際は、必ず同梱のワッシャをビスにセット
してから、締めつけてください。
⑥ 機種銘板
(正面図)
(底面図)
(側面図)(背面図)
②アンテナ
①本体ケース
⑤取付け用丸穴(2箇所)
③接続コネクター(1番ピン)
④電源表示 LED
⑥機種銘板

7
[ 接続仕様 ]
ピン No 信号名 信号の方向 機 能 レベル
* 1 +B 端末装置⇒無線モデム (+)電源(VCC) 3.6V~5.5V
2 GND 端末装置⇒無線モデム GND(SG・FG兼用)
* 3 RESERVE N.C.(未接続) 予備端子
4 TXD 無線モデム⇒端末装置(OUT) RS-232C/送信データ
5 RXD 端末装置⇒無線モデム(IN) RS-232C/受信データ
6 CTS 端末装置⇒無線モデム(IN) RS-232C/CTS
7 RTS 無線モデム⇒端末装置(OUT) RS-223C/RTS
RS-232C レベル
VIH=2V~25V
VIL=0.8V~-25V
VTOUT=5V
8 C-TXD 無線モデム⇒端末装置(OUT) CMOS/送信データ
9 C-RXD 端末装置⇒無線モデム(IN) CMOS/受信データ
10 C-CTS 端末装置⇒無線モデム(IN) CMOS/CTS
11 C-RTS 無線モデム⇒端末装置(OUT) CMOS/RTS
*12 232C/CMOS 端末装置⇒無線モデム(IN) RS-232C/CMS の選択
*13 INIT 端末装置⇒無線モデム(IN) モード設定の解除
CMOS レベル
VIH=2.64V~VCC
VIL=0.66V 以下
VOH=2.8V~VCC
VOL=0.5V 以下
VCC=3.3V
* 電源表示LEDを上側にして底面から見ると、左側が1番ピンになります。
尚、オプション接続ケーブル/CT-107 では赤線が1番ピンになります。
* 12番ピンは「High」⇒RS-232C モード、「Low」⇒CMOS モードになります。
ノーマル状態ではプルアップされていて「High」状態の RS-232C のモードになっています。
* 3番ピンは予備端子としてますので機能していません。他の信号線を接続しないでください。
* コマンドレスモード中に電源ON状態から 13番ピンを「Low」にすると、コマンドレスモード
を解除してコマンドモードに戻ります。
コマンドモード中に 13番ピンを「Low」状態から電源をONにすると、初期設定状態に戻ります。
* CMOSポートに接続の際には、内部動作電圧が 3.3V で動作していますので、入力信号レベル
が 3.3V を超えないようにお願いします。
5V系の機器に接続の際には、電圧変換用の回路を信号間に挿入してください。
* IN:入力 OUT:出力 を示す。
* 13番ピン(INIT)を電源投入時に Low にしていると、EEPROM の値を初期化し、かつコマンド
レスモードであれば、コマンドモードに移行します。
電源が入っている状態で13番ピンを Low にするとコマンドレスモード時にコマンドモードに
移行するだけです。
* 10~13番ピンは、内部でプルアップしています。
* 10、11番ピンは、Lowアクティブをしめす。
* フロー制御を RTS/CTS にしてコマンドレスモードにした場合、必ず RTS信号、CTS信号(また
は C-CTS, C-RTS)は接続して下さい。

8
[ コネクター仕様 ]
・本体実装コネクター型名:ベース付ピン S13B-ZR-SM2-TF
・勘合コネクター型名 :圧接タイプソケット 13ZR-8M(AWG#28)
:圧着タイプハウジング ZHR-13
:コンタクト SZH-002T-P0.5(AWG#26)
※ 詳細は日本圧着端子製造(株)の資料をご覧ください。
※ オプション接続ケーブルとして長さ30cmの「CT-107」を用意しております。
本文末の[付録 接続コネクター仕様]を参照してください。
[ ケーブル接続方法 ]
※ オプションケーブルCT-107の場合、赤色の線が、本体・接続コネクタの①番ピン(電源表示
LEDを上側にして、左側)に接続される向きで挿入して下さい。
※ CT-107以外のケーブルをご使用の場合は、弊社営業部までご相談ください。
※ ケーブルは、プラグ部が本体ケースに丁度収まる位置まで、確実に挿入して下さい。
赤色の線(①番ピン) プラグ部
9
[ 機能説明 ]
◆ 端末装置-無線モデム間の通信方式
コマンドを使用した無線モデムの制御モードとしてコマンドモードがあり、コマンドを使用
しないモードとしてコマンドレスモードがあります。モード選択は、コマンドにより行われま
すので同一システム内で各モードを混在して使用することも可能です。
① コマンドモード
本無線モデム独自の各種コマンドを使用して端末装置と無線モデム間で、要求、確認、通知、応
答のやりとりを行います。
本無線モデムを制御するには、端末装置は、無線モデムに対して種種の要求を出し、これを受け
た無線モデムは、端末装置に対して確認(応答)を返します。また無線モデムが他局からデータ
を受信した場合、端末装置に対してデータを送信(通知)します。
これら要求、確認、応答、通知、各種コマンドは、JISコードにより表現されますので端末装
置側では、容易にプログラム開発ができ、無線データ伝送が可能になります。
コマンドモード時、SNDコマンドによりデータ伝送を行え、リターンコード(0D(H))によ
り最終データを認識します。
データ数が、560バイトを超えると“CER”を返します。
1回のデータ数は、560バイト以内で送信ください。
② コマンドレスモード
コマンドレスモードは、CDLコマンドを実行することにより移行します。
コマンドモードに移行するには、13番ピン(INIT)を Low にして下さい。(30ms 以上)端
末装置から送られたデータは一度無線モデム内の受信バッファに蓄えられますがデータ入力の時間
がデータタイムアウト(TOTコマンド設定)を超えると受信終了とみなし、相手局へ送信を行
います。
また、無線モデム内の受信バッファが480バイトを超えるとフロー制御でバッファがフルに近いこと
を知らせます。そしてデータ送信が終了するとフロー制御で端末装置にデータ入力を許可します。
もし受信データバッファが、580バイトを超えた場合、“CER“を返しデータ伝送は行いま
せん。
フロー制御として、XON/XOFF 方式と RTS/CTS 方式をサポートしています。
XCTコマンドで選択できます。(初期値:RTS/CTS方式)コマンドモードで予め相手先ID(W
YDコマンド)とKEYコード(KEYコマンド)、通信チャネル(固定チャネルの場合)の設
定(WCNコマンド 又はSCNコマンド)をしておいてください。
コマンドレスモード状態で電源を切るとコマンドレス状態は、保持されていますので、電源を再
投入してもコマンドレス状態になります。

10
② -1:XON/XOFF コードによる制御
無線モデムは、端末装置から送信データを受信し、データ間がデータ間タイムアウト時間以上空
かずに端末装置からの送信データが480バイトを超えると無線モデムの受信バッファがフル
に近くなります。端末装置へ XOFF コード(13(H))を送信しますので、端末装置は、データの
送信を停止して下さい。受信データが、データ間タイムアウト時間以上空かずに580バイトを
超えた場合、無線モデムは、“CER”を返し、データ送信を行いません。
無線モデム-無線モデム間の無線通信が終了し、無線モデムのバッファが空くと端末装置へ
XON コード(11(H))を送信します。端末装置は、XON コードを受信した時点でデータの送信が可
能になります。
また、反対に端末装置から XOFF コードを受信した場合、無線モデムは、無線通信の受信データ
がある場合、データを送信しません。
端末装置から XON コードを受信したら、データを端末装置に送信します。
※ 注:送受信データに XON(11(H))、XOFF(13(H))コードを使用しないで下さい。
② -2:RTS/CTS 信号による制御
②-1同様、端末装置からのデータがデータ間タイムアウト時間以上空かずに480バイトを
超えると、RTS信号を OFF(RTS:Low、C-RTS:High)にします。
無線モデム-無線モデム間の無線通信を終了すると、RTS信号を ON(RTS:High、C-RTS:
Low)にしますので、無線モデムは、端末装置からのデータの受信が可能になります。
また、反対に端末装置がCTS信号を OFF(CTS:Low、C-CTS:High)にした場合、無線モ
デムは、端末装置へのデータ送信をしません。
端末装置がCTS信号を ON(CTS:High、C-CTS:Low)にして、無線モデムは、端末装置 へ
のデータ送信が可能になります。
③ INIT端子(13番ピン)
電源が入った状態でコマンドレスモードの場合、INIT端子を Low(30ms 以上)にするとコマンド
モードに移行します。
電源投入時に INIT端子をLowにしておくと無線モデムの各種設定値を初期値に戻し、EEPROM
を書き換え、かつ、もしコマンドレスモードであれば、コマンドモードに移行します。
④ RS232/CMOS 端子(12番ピン)
この端子をオープン(内部プルアップ)または、High で RS232C 通信が有効、Low で CMOS
シリアル通信が有効となります。

11
◆ 無線モデム- 無線モデム間の通信方式
本無線モデムは、無線モデム間の通信方式として、アドホック通信が基本で、1対1で通信を行えば
アドホック通信(子機間通信 1:1通信)となります。
ポーリング方式を行うには、無線モデムの 1台を親機として、端末装置からポーリングを行うように
して下さい。
本無線モデムには、親、子の区別はありませんので、ポーリング方式で親、子関係をもたせる場合
は、端末装置の 1台を親機として制御し他の端末装置を子機として制御して下さい。
無線モデムの初期値
STOコマンド: 3,0,0,0,01
WYDコマンド: 00000000
(RDYコマンド)
RSSコマンド: 9600、1、N
TOTコマンド: 40
XCTコマンド: 0
KEYコマンド: 000
WCNコマンド: 01
(RCNコマンド)
※ WCNの値とSTOの 4番目の値は、同一です。
◆ コマンドモードの設定例
① RS232C/CMOSシリアルの設定
接続される端末装置に合わせて、38400bps、STOPbit:1、パリティ無し:Nに
設定します。(RSSコマンド)
② 各種パラメータの設定
STOコマンドで、リトライ回数2、ヘッダ有り:0、エンドコードはリターンコード:0、
固定チャネル方式:1、チャネル:10 に設定します。
③ KEYコードの設定
KEYコマンドでKEYコードを123に設定します。
④ 相手先IDの設定
WYDコマンドで、相手先無線モデムID(製造シリアルNo.8桁)を設定します。
⑤ 以上の設定が終わりましたら、通信テストをして下さい。

12
◆ コマンドレスモードの設定例
① コマンドモードの設定:①~④を同様に行ってください。
② 接続する端末装置にあわせて、データ間タイムアウトを設定。
TOTコマンドにて、20と設定して下さい。
③ 無線モデムと端末装置間の制御方式(XON/OFF または RTS/CTS )を選択。
XCTコマンドで1を設定し、XON/OFF制御。
④ コマンドレスモード移行。
CDLコマンドでコマンドレスモードに移行して下さい。
⑤ 以上の設定が終わりましたら、通信テストをして下さい。

13
[ コマンド一覧 ]
【 標準コマンド 】
コマンド名 機 能
SND データ送信
STO 各種パラメータの一括設定 、読込み
WCN チャネル番号の書込み(EEPROMへ)
RCN チャネル番号の読み出し
RID 自局ID(製造シリアル番号:8桁)の読み出し
WYD 相手先ID(8桁)の設定(書込み:EEPROMへ)
RYD 相手先ID(8桁)の読み出し
KEY KEYコードの設定 、読込み
POL ポーリング要求送信
PCL ポーリングデータ クリアー
CSC キャリアの確認
RSS RS-232Cの設定(書込み:EEPROMへ)
OCL 電界強度の出力要求
CHS 空きチャネルサーチ
TSC 指定局への試験呼び出(リンク確認)
TST テスト送信の設定
CDL コマンドレスモードの設定
XCT コマンドレスモード時の制御方式の設定
TOT コマンドレスモード時のデータ間タイムアウト設定
SAV セービング設定
SVR セービング解除
VER バージョンコード表示
EEC EEPROMのチェック、初期設定
CNS チャネル番号の設定(RAM上での一時的変更)

14
【 レスポンス一覧 】
コマンド名 機 能
BSY 無線回線使用中
LNK 無線回線接続成立
PER パリティーエラー(シリアル通信)
END 正常終了
ENG 異常終了
CER コマンド異常
MER メモリー異常
RCV データの着信通知
FRE 回線空き状態
LBT Lowバッテリー検出
SAS セービング状態表示
15
【 コマンドとレスポンスの説明 】
<注意事項>
・ コマンドおよびレスポンスは、全てJISコードで表現されます。
・ 本文中で使用される記号「 」と「 ⊔ 」は、下記のデータを示します。
・・・キャリッジリターン(0DH)
⊔ ・・・スペース(20H)
● SND コマンド
【機能】 データ送信
・ 送信先アドレスを指定することにより指定アドレス(ID)にデータを最大560バイト送信する
ことが可能です。
送信相手先からACKデータを受信することにより、END を返送します。
自局KEYコードと相手先KEYコードが一致していない場合、データは、受信されません。
KEYコマンドで指定ください。(デフォルト:000)
・ リトライ機能
TRWで設定した回数(0~9)リトライを繰り返します。(デフォルト:0)
送信相手先からACKデータがリトライしても受信できなかった場合、ENG を返送します。
・ 同報送信
送信先アドレスを 「00000000」とするとKEYコードが一致したモデムのみデータを受
信します。
ACKの受信はないので送信後、END を返送します。
・ “=”の前に、“P”を付加することで、ポーリングデータ設定ができます。
【書式】① SND ⊔ XXXXXXXX = データ
XXXXXXXX:送信先アドレス(8桁:製造シリアル No.:アスキーコード)
データ:0~560 bytes(アスキーコード) まで、最後のデータの次に
(リターンコード)を入力することにより送信開始します。
② SND ⊔ , = データ
送信先アドレスは、最初はデフォルト値(EEPR0M 設定値:RYD コマンドで読み込める
値)、①または③の書式のデータ送信使用後は、①または③で設定した値となります。
また、直前にデータを受信した場合、データ受信した相手IDが送信先IDに自動的に
なります。
データ:0~560 bytes(アスキーコード) まで、最後のデータの次に
(リターンコード)を入力することにより送信開始します。
16
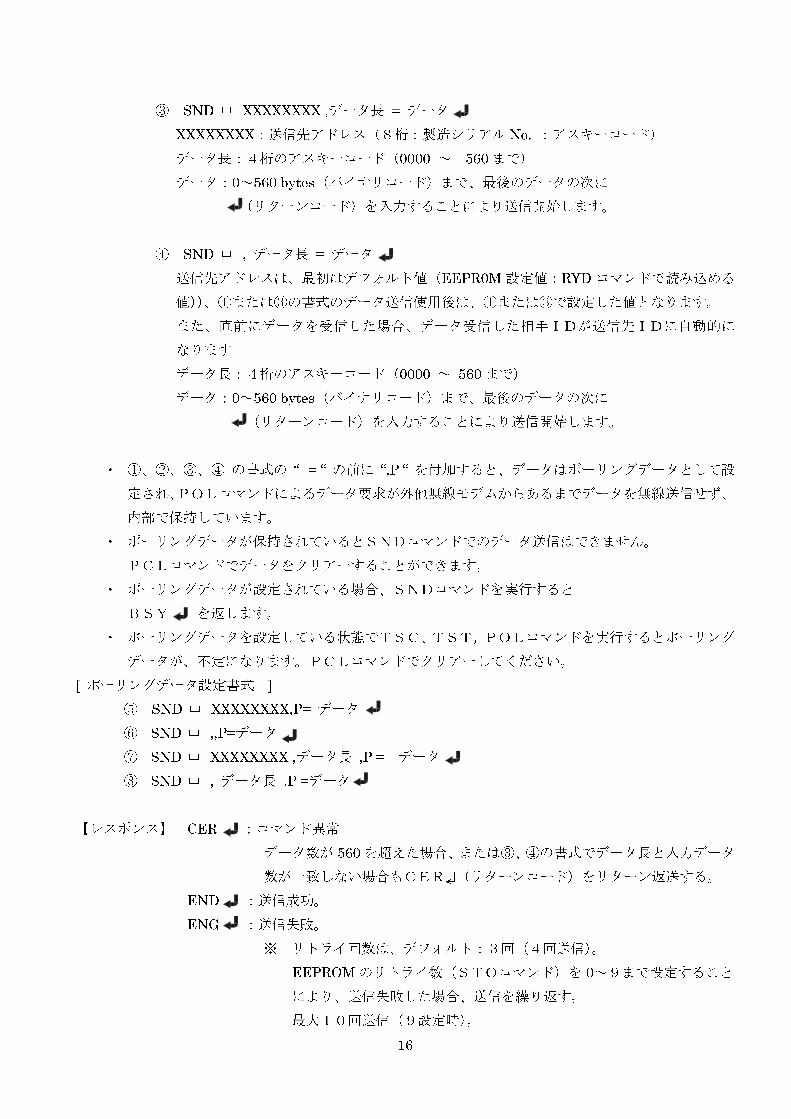
③ SND ⊔ XXXXXXXX ,データ長 = データ
XXXXXXXX:送信先アドレス(8桁:製造シリアル No. :アスキーコード)
データ長:4桁のアスキーコード(0000 ~ 560 まで)
データ:0~560 bytes(バイナリコード)まで、最後のデータの次に
(リターンコード)を入力することにより送信開始します。
④ SND ⊔ , データ長 = データ
送信先アドレスは、最初はデフォルト値(EEPR0M 設定値:RYD コマンドで読み込める
値))、①または③の書式のデータ送信使用後は、①または③で設定した値となります。
また、直前にデータを受信した場合、データ受信した相手IDが送信先IDに自動的に
なります
データ長:4桁のアスキーコード(0000 ~ 560 まで)
データ:0~560 bytes(バイナリコード)まで、最後のデータの次に
(リターンコード)を入力することにより送信開始します。
・ ①、②、③、④ の書式の “ = “ の前に “,P “ を付加すると、データはポーリングデータとして設
定され、POLコマンドによるデータ要求が外他無線モデムからあるまでデータを無線送信せず、
内部で保持しています。
・ ポーリングデータが保持されているとSNDコマンドでのデータ送信はできません。
PCLコマンドでデータをクリアーすることができます。
・ ポーリングデータが設定されている場合、SNDコマンドを実行すると
BSY を返します。
・ ポーリングデータを設定している状態でTSC、TST,POLコマンドを実行するとポーリング
データが、不定になります。PCLコマンドでクリアーしてください。
[ ポーリングデータ設定書式 ]
⑤ SND ⊔ XXXXXXXX,P= データ
⑥ SND ⊔ ,,P=データ
⑦ SND ⊔ XXXXXXXX ,データ長 ,P = データ
⑧ SND ⊔ , データ長 ,P =データ
【レスポンス】 CER :コマンド異常
データ数が 560 を超えた場合、または③、④の書式でデータ長と入力データ
数が一致しない場合もCER↵(リターンコード)をリターン返送する。
END :送信成功。
ENG :送信失敗。
※ リトライ回数は、デフォルト:3回(4回送信)。
EEPROM のリトライ数(STOコマンド)を 0~9まで設定すること
により、送信失敗した場合、送信を繰り返す。
最大10回送信(9設定時)。
17
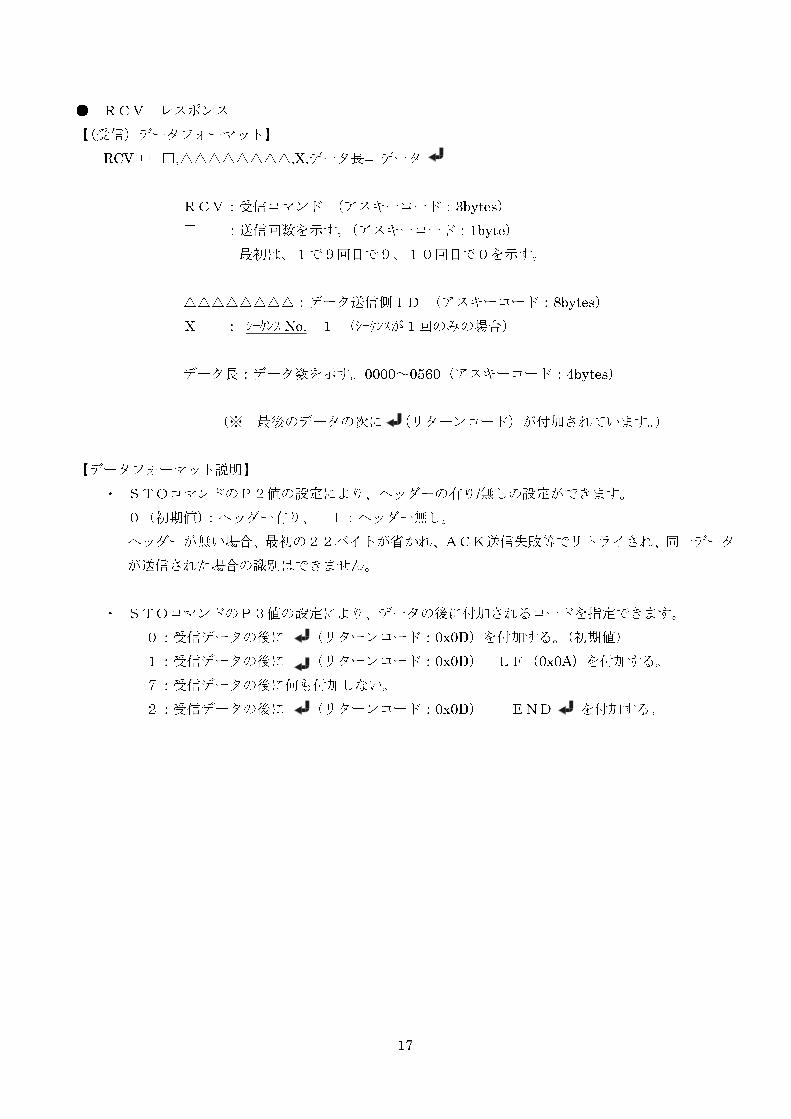
● RCV レスポンス
【(受信)データフォーマット】
RCV ⊔ □,△△△△△△△△,X,データ長= データ
RCV:受信コマンド (アスキーコード:3bytes)
□ :送信回数を示す。(アスキーコード:1byte)
最初は、1で9回目で9、10回目で0を示す。
△△△△△△△△:データ送信側ID (アスキーコード:8bytes)
X : シーケンス No. 1 (シーケンスが1回のみの場合)
データ長:データ数を示す。0000~0560(アスキーコード:4bytes)
(※ 最後のデータの次に (リターンコード)が付加されています。)
【データフォーマット説明】
・ STOコマンドのP2値の設定により、ヘッダーの有り/無しの設定ができます。
0(初期値):ヘッダー有り、 1:ヘッダー無し。
ヘッダーが無い場合、最初の22バイトが省かれ、ACK送信失敗等でリトライされ、同一データ
が送信された場合の識別はできません。
・ STOコマンドのP3値の設定により、データの後に付加されるコードを指定できます。
0:受信データの後に (リターンコード:0x0D)を付加する。(初期値)
1:受信データの後に (リターンコード:0x0D)+LF(0x0A)を付加する。
7:受信データの後に何も付加しない。
2:受信データの後に (リターンコード:0x0D)+ END を付加する。

18
● STO コマンド
【機能】 各種パラメータの設定及び呼び出し。(パラメータの省略可能、この場合 ‘ , , ‘ )
【書式】 STO ⊔ , , , ,
:データ再送回数 0~9 (初期値:0)
:データ受信時のヘッダの有無 (初期値:0)
0:ヘッダ有り
1:ヘッダ無し
:データ受信時のエンドコードの有無とエンドコードの指定(初期値:0)
0:受信データの後に (リターンコード:0x0D)を付加する。
1:受信データの後に (リターンコード:0x0D)+LF(0x0A)を付加する。
2:受信データの後に (リターンコード:0x0D)+END を付加する。
7:受信データの後に何も付加しない。
:MCA/固定チャネルの切り換え(初期値:0)
0:MCA方式
1:固定チャネル方式 WCNコマンド、またはSTOコマンドで指定した
チャネルを固定チャネルとします。
:固定チャネル方式のチャネルの設定 (初期値:01)
設定範囲 01~20 まで。
【説明】
・ このコマンドにより無線モデムは、各パラメータを無線モデム内の不揮発性メモリー(EEP
ROM)に書き込みますので、電源を切っても状態は保持されます。
書込み回数に制限があります。(10万回まで)
省略されたパラメータは、変化しません。
STO とした場合は、現在設定されているパラメータを
P1,P2,P3,P4,P5
と返します。
※ CNSコマンドでチャネルNo.が変更されていた場合、STO では、チャネルNo.
は、EEPROM の値には、戻りません。
RCNコマンドを実行することにより、EEPROM の値(STO で読み込める値)に戻
ります。
P1 P2 P3 P4 P5
P1
P2
P3
P4
P5

19
【使用例】
・ STO ⊔ 1,1,1,1,20
・ END -------- 正常終了
CER -------- コマンド異常
・ STO ⊔ ,,,,10 (※ チャネルのみ変更)
・ STO ⊔ ,0,,, (※ ヘッダの有無のみ変更)

20
● WCN コマンド
【機能】 RF チャネル番号の変更と EEPROMへ書込み(01~20)
【書式】 WCN ⊔
【説明】
・ チャネル番号を変更し、かつEEPROMへ書き込みします。
入力データは、01~20までの入力です。
・ 再度電源を入れた場合は、本コマンドで設定した値となります。
デフォルト値:01
・ 設定された状態は、無線モデム内の不揮発性メモリーの書き込みますので電源を切って
も状態は保持されます。但し、書込み回数に制限があります。(10万回)
【使用例】
・ WCN ⊔ 10
チャンネルを10に変更します。
・ 無線モデムの状態により下記レスポンスを返します。
END -------- 正常終了
CER -------- コマンド異常
● RCN コマンド
【機能】 WCNコマンドで設定したチャネル番号の読み出し
【書式】 RCN
【説明】
・ EEPROM に設定されているチャネル番号を読み出しします。
・ STOコマンドで設定した P4(MCA機能)が1の時、
固定チャネル方式となりWCNで設定したチャネル番号が有効になります。
・ このコマンドを実行することにより、無線モデムの不揮発性メモリーに設定されている
チャネル番号を有効にします。
(※ CNSコマンドで変更されていた場合、このコマンドで設定値に変更できます。)
【使用例】
・ RCN
・ 無線モデムの状態により下記レスポンスを返します。
10 -------- 正常終了
CER -------- コマンド異常
チャネルNO.

21
● CNS コマンド
【機能】 RF チャネル番号の変更(01~20)
【書式】 CNS ⊔
【説明】
・ チャネル番号を変更します。
入力データは、01~20までの入力です。
・ 再度電源を入れた場合は、本コマンドで設定した値は、無効となります。
不揮発性メモリーに設定されている値が有効となります。
(※ RCN、STOコマンドで確認できる値 )
【使用例】
・ CNS ⊔ 10
チャンネルを10に変更します。
・ 無線モデムの状態により下記レスポンスを返します。
END -------- 正常終了
CER -------- コマンド異常
チャネルNO.
22
● WYD コマンド
【機能】 送信相手局ID番号(シリアル製造番号:8桁)の設定(書込み)
【書式】 WYD ⊔
【説明】
・ EEPROM に送信相手局ID番号(シリアル製造番号:8桁)を設定します。
(初期値:00000000)
・ 設定された状態は、無線モデム内の不揮発性メモリーの書き込みますので電源を切って
も状態は保持されます。但し、書込み回数に制限があります。(10万回)
【使用例】
・ WYD ⊔
・ 無線モデムの状態により下記レスポンスを返します。
END -------- 正常終了
CER -------- コマンド異常
ID No.:8桁
ID No.:8桁

23
● RYD コマンド
【機能】 送信相手局ID番号(シリアル製造番号:8桁)の読み出し
【書式】 RYD
【説明】
・ EEPROM に設定されている送信相手局ID番号(シリアル製造番号:8桁)を読み出ししま
す。
送信相手局IDは、 WYD コマンドで設定できます。(初期値:00000000)
・ 相手先IDは、データ受信により、データ受信をした相手IDに自動的に変わります。
RYD 実行により、送信相手先IDを EEPROM の値に戻せます。
【使用例】
・ RYD
・ 無線モデムの状態により下記レスポンスを返します。
00000000 -------- 正常終了
送信相手局ID:00000000を示す。
CER -------- コマンド異常
● RID コマンド
【機能】 自局ID番号(シリアル製造番号:8桁)の読み出し
【書式】 RID
【説明】
・ EEPROM に設定されている自局ID番号(シリアル製造番号:8桁)を読み出しします。
自局IDは、工場出荷時設定されます。変更はできません。
【使用例】
・ RID
・ 無線モデムの状態により下記レスポンスを返します。
12345678 -------- 正常終了
自局ID:12345678を示す。
CER -------- コマンド異常

24
● KEY コマンド
【機能】 KEYコードの設定をします
【書式】 KEY ⊔
【説明】
・ KEYコード:3桁 を設定し、かつEEPROMへ書き込みします。
入力データは、000~999までの入力です。
(初期値:000)
・ KEYコードが一致していないと データの送受信が行えません。
同じKEYコードに設定してください。
・ KEY と入力すると現在設定されているKEYコードを呼出しします。
・ 設定された状態は、無線モデム内の不揮発性メモリーに書き込みますので電源を切って
も状態は保持されます。但し、書込み回数に制限があります。(10万回)
【使用例】
・ KEY ⊔ 123
KEYコードを123に設定します。
・ 無線モデムの状態により下記レスポンスを返します。
END -------- 正常終了
CER -------- コマンド異常
KEYコード:3

25
● POL コマンド
【機能】 ポーリング指定のデータ要求。
【書式】 POL ⊔
【説明】
・ このコマンドにより、相手局側のポーリング指定データを自動的に送信させます。
KEYコードが一致していないと相手局は、データ送信しません
・ 相手局にデータがある時のレスポンス
・
RCV ⊔ 1, ,1, =
(※ RCVのレスポンスフォーマットについては、SNDコマンドを参照ください。)
・ 相手局にデータが無い時のレスポンス
RCV ⊔
・ 相手局からの応答が無い時のレスポンス
ENG
・ データ受信時のヘッダ無しを指定した場合は、受信データのみを表示します。
【使用例】
・ POL ⊔ 12345678
・ レスポンス
RCV ⊔ 12345678 ------ 相手局:12345678からデータ無いレスポンス
● PCL コマンド
【機能】 ポーリング指定した登録データをキャンセルします。
【書式】 PCL
【説明】
・ SNDコマンドでポーリング指定で設定したデータのキャンセルをします。
無線モデムは、下記レスポンスを返します。
END ------- キャンセル終了
CER ------- コマンド異常
ID No.:8桁
ID No.:8桁 データ長 受信データ
ID No.:8桁
26
● CSC コマンド
【機能】 指定チャンネルのキャリアの有り無しの確認
【書式】 CSC ⊔
【説明】
・ 指定したチャネルのキャリアの有り無しを確認します
チャネルNo.:00~20まで
【使用例】
・ CSC ⊔ 12
・ キャリアの状態により下記レスポンスを返します。
FRE -------- キャリア無し
BSY -------- キャリア有り
CER -------- コマンド異常
● CHS コマンド
【機能】 全チャネル(01~20)のキャリアの有り無しの確認
【書式】 CHS
【説明】
・ 全チャネル(01~20)のキャリアの有り無しを確認します。
【使用例】
・ CHS
・ キャリアの状態により下記レスポンスを返します。
⊔ 01,02,05,06,07,08,09,10,11,12,13,14,15,16,17,18,19,20
END -------- 正常終了
(※ 3、4チャネル以外はすべてキャリア無しを示す )
CER -------- コマンド異常
チャネルNO.

27
● RSS コマンド
【機能】 RS-232C(C-MOSシリアル)の設定。(パラメータの省略可能、この場合 ‘ , , ‘ )
【書式】
RSS ⊔ , ,
:通信速度 初期値:9600
設定値:2400、4800、9600、19200、38400(bps)
:ストップビット 初期値:1
設定値:1、2 (ビット)
:パリティ 初期値: N
設定値: N 、E 、O
( N:無し、E:偶数 O:奇数 )
【説明】
・ モデムと端末装置間のRS-232C(C-MOSシリアル:共通)の設定を行います。
・ 無線モデム内の不揮発性メモリーに書き込みますので電源を切っても状態は保持されます。
但し、書込み回数に制限があります。(10万回)
・ RSS と入力した場合は、現在の設定値を返します。
・ ※ データ長はすべて8bit固定です。
・ RSSの設定は、RS232CとC-MOSシリアル共通です。
CER ------ コマンド異常
MER ------ メモリー異常
END ------ 正常終了
【使用例】
・ RSS ⊔ 2400,1,E ----(ボーレート:2400、ストップビット:1 パリティ:偶数 設定)
・ レスポンス
END
・ RSS
・ レスポンス
02400,1,E
ボーレート ストップ bit パリティ
ボーレート
ストップ bit
パリティ

28
● OCL コマンド
【機能】 電界強度の出力要求
【書式】 OCL ⊔
または
OCL
【説明】
・ 指定したチャネルの電界強度(受信の強さ)0~5の5段階で出力します。
チャネルNo.:00~20まで
・ OCL とした場合は、固定チャネル方式の場合(STOのP4が1)、
WCNで設定されているチャネルNO.の電界強度を出力し、MCA方式
の場合(STOのP4が0)前回MCAで送受信したチャネルNO.(初期値:00)の電界
強度を出力します。
【使用例】
・ OCL ⊔ 12
・ 電界強度により下記レスポンスを返します。
12 ⊔ 3 -------- チャネルNO.12の電界強度3を示します。
CER -------- コマンド異常
チャネルNO.

29
● TSC コマンド
【機能】 指定相手局IDに対して試験呼出しを行います。
また、接続可能な相手局IDの呼び出しも行えます。
【書式】 TSC ⊔
または
TSC ⊔ *
【説明】
・ 相手先IDを指定すると指定IDモデムより応答あれば END、
応答なければ ENGを表示します。
・ IDを*にした場合、接続可能なIDより応答があれば
LNK ⊔ を表示します。
応答なければ何も表示しません。
・ IDを*にした場合、応答待ち状態となっているため、
OFF を入力することにより、コマンド終了します。
【使用例】
・ TSC ⊔
・ 応答
END -------- 接続成立
ENG -------- 接続不成立
CER -------- コマンド異常
BSY -------- 回線使用中
・ TSC ⊔ *
・ 応答
LNK ⊔ 4D000007
LNK ⊔ 4D000100 ------ 4D000007,4D0001000 の2つのモデムと接続成立した
ことを示す。
・ OFF
・ 応答
END -------- コマンド終了
CER -------- コマンド異常
相手先ID :8
相手先ID:8桁
相手先ID :8
30
● TST コマンド
【機能】 テスト送信を行います。
【書式】 TST ⊔ ON
【説明】
・ テスト送信を開始します。
・ テスト送信中は、LEDが点滅します。(送信側、受信側)
・ テスト送信は、KEYコードが同一のもののみ行うことができます。
・ OFF によりテスト送信を終了します。
・ MCAモード時は、LED点滅が遅くなります。
・ 固定チャネルモード時は、チャネルNO.を同一にしてください。
・ 送信制限:約40秒毎に約2秒間送信を停止します。
【使用例】
・ TST ⊔ ON
OFF
・ END -------- 正常終了
CER -------- コマンド異常

31
● CDL コマンド
【機能】 コマンドレスモードの設定
【書式】 CDL
【説明】
・ このコマンドにより、コマンドモードからコマンドレスモードに変更します。
・ 設定された状態は、無線モデム内の不揮発性メモリーの書き込みますので電源を切って
も状態は保持されます。但し、書込み回数に制限があります。(10万回)
・ コマンドモードに戻すにはINIT端子(⑬番ピン:コネクター)を電源を入れた状態で
Low にすることにより行われます。
電源を切り、電源を投入時にINIT端子を Low にしてもコマンドモードになりますが
同時に各種パラメータが初期化されます。
・ 無線モデムの状態により下記レスポンスを返します。
END ------- 正常終了
CER ------- コマンド異常
MER ------- メモリー異常
・ コマンドレスモード時は必ずフロー制御を行ってください。
(XON/OFFまたはRTS/CTS)
・ 入力データが、TOTの設定タイムアウト値でタイムアウトせず連続480バイト以上入力
されるとXOFF信号(13H)またはRTS信号(Low:RS232時)を出力します。
無線送信が完了するとXON信号(11H)またはRTS信号(High:RS232時)を出力しま
す。
・ 連続送信データは、1回あたり必ず580バイトを超えないで下さい。
580バイトを超えるとデータ送信はせず“CER”を返します。
・ 送信相手先IDは、電源投入時は、RYDコマンドで読み込める値ですが、データ受信が
あるとデータ受信をした相手IDに自動的に変わります。
※ フロー制御 信号一覧
XON / XOFF方式 RTS/CTS 方式 フロー制御
シリアル XON XOFF RTS
C_RTS
CTS/
C_CTS
RS232C
11(H) 13(H) High
アクティブ
High
アクティブ
CMOSシリアル
11(H) 13(H) Low
アクティブ
Low
アクティブ
※ XON 信号で送信許可を意味する。
※ XOFF 信号で送信禁止を意味する。
※ RTS信号(OUT:アクティブレベル)で相手送信許可を意味する。
※ CTS信号(IN:アクティブレベル)で送信可能を意味する。

32
● XCT コマンド
【機能】 コマンドレスモード時の制御方式の選択
【書式】 XCT ⊔ ON ------ コマンドレスモード時、XON/OFF制御をします。
XCT ⊔ OFF ------ コマンドレスモード時、RTS/CTS制御をします。
【説明】
・ このコマンドにより、コマンドレスモード時のXON/XOFFまたは、
CTS/RTS制御に切り換えます。
・ 設定された状態は、無線モデム内の不揮発性メモリーの書き込みますので電源を切って
も状態は保持されます。但し、書込み回数に制限があります。(10万回)
・ XCT とした場合は、現在の設定を1 または 0 と返します。
( 1:XON/OFF 有効 )
( 0:RTS/CTS 有効 )
・ 初期値は、0です。
・ 無線モデムの状態により下記レスポンスを返します。
END ------- 正常終了
CER ------- コマンド異常
MER ------- メモリー異常
● TOT コマンド
【機能】 コマンドレスモード時のデータ間タイムアウトの設定
【書式】 TOT ⊔
【説明】
・ このコマンドにより、コマンドレスモード時のデータ間タイムアウト時間を05~99
(×20ms)の範囲で20ms刻みで設定します。
・ 設定された状態は、無線モデム内の不揮発性メモリーの書き込みますので電源を切って
も状態は保持されます。但し、書込み回数に制限があります。(10万回)
・ 初期値は、40(800ms)です。
・ TOT とした場合は、現在の設定をXX と返します。(XX=05~99)
・ 無線モデムの状態により下記レスポンスを返します。
END ------- 正常終了
CER ------- コマンド異常
MER ------- メモリー異常
・ このコマンドの設定は、コマンドレスモードでのみ有効です。
時間
33
● SAV コマンド
【機能】 セービングモード移行します。
(※ 無線受信状態(約70mA前後)⇒セービング状態(約10mA)
CMOSシリアルに設定した場合、RS232Cのライン電流分が減るので、
約6mAになります。)
【書式】 SAV
【説明】
・ セービング状態では、無線受信できません。また標準コマンドも受付けません。
・ セービング解除(SVRコマンド)することにより、無線受信可能となります。
【使用例】
・ SAV
・ SAS -------- 正常終了
CER -------- コマンド異常
● SVR コマンド
【機能】 セービング解除します。
(※ セービング状態(約10mA以下)⇒ 無線受信状態(約70mA前後))
【書式】 SVR
【説明】
・ セービング解除により、無線受信可能となり、また標準コマンドも受付け可能となります。
・ SVR :左記4文字の入力は、約2秒以内に行ってください。
2秒以上経過しますとSAS表示がでますので、再入力してください。
【使用例】
・ SVR
・ END -------- 正常終了
SAS -------- コマンド入力ミス
34
● VER コマンド
【機能】 ソフトのバージョンコードを呼び出しします。
【書式】 VER
【説明】
・ 内蔵ソフトのバージョンコードを読み出します。
【使用例】
・ VER
・ 下記レスポンスを返します。
Ver. 1.000
END -------- 正常終了
CER -------- コマンド異常
● EEC コマンド
【機能】 EEPROM のメモリーチェックを行い、ID以外のエリアに“0”を
書き込みます。また EEPROM のデフォルト設定(書込み)を行います。
【書式】 EEC
【説明】
・ 内蔵 EEPROM120バイトのリードライトチェックを行い、“0”デフォルト値を書き込みま
す。
(アドレス:0~119に書込み。)
【使用例】
・ EEC
・ OK ⊔ END -------- 正常終了
MER -------- メモリ異常

35
電源表示 LED 点滅:受信 OK
点灯:受信 NG
[ テスト送信方法 ]
通信エリアの確認のためにテスト送信機能を用いて、下記に示す方法で通信エリアの確認を行
なってください。
① 送信機側、受信機側の通信モードを「STO」コマンドを用いて合わせてください。
また、「KEY」コマンドで KEY コードを同一にしてください。
② 下図の接続図を参考にしてパソコンからテストコマンド(TSTコマンド)を入れてくださ
い。
受信機側ではパソコンを接続しなくても電源のみの供給で確認できます。
(コマンド表参照)
③ 送信機側から約40秒間連続でテスト送信を行ない、その後2秒休止に入ります。
④ 2秒休止後に再び③項を繰返します。
⑤ 送信機側では テスト送信中は、電源表示 LED が点滅を行ないます。
⑥ 受信機側では送信機からの電波を受けて正常に受信出来ると、電源表示 LED が点滅を行ない
ます。
正常に受信出来ないときは、電源表示 LED は点灯したままで点滅は行ないません。
⑦ 受信機側を移動しながら電源表示 LED の点滅の確認を行ない、通信エリアの確認を行なって
ください。
送信機 受信機
パソコン
(テスト送信)
電源

36
[ 本体取り付け時の注意事項 ]
本体ケースは防滴、防水、防塵構造にはなっていませんので、そのような可能性のある場
所での設置に当たっては機器内部、または外部ケースに入れるなどして運用してください。
・ 本装置の通信範囲は、周囲の状況により多少変化します。エラーの少ない良好な通信を行うために、
一般的に次の注意事項にしたがって運用してください。
☆ケースに組込んで使用される場合は、ANTがなるべく垂直になるように取付けてください。
☆ANTの周囲には、特に金属物のない場所を選んで取付けてください。
☆本装置の設置場所は、見通しの良いできるだけ高い場所を選んで設置してください。
・ 本体ケースの取付け面には、なるべく金属体を避けてプラスティック、モールド材等の場所に取付け
るようにしてください。外部アンテナ以外に本体内部の基板もアンテナとして機能していますので、
金属体の影響を受けると通信距離の低下を招く可能性があります。
(プラスティック、モールド材等)
無線モデム装置
・ 振動の多い機器の内部、あるいは外部に直接取付ける場合には、機器の取付け面と本体との間に緩衝
材を入れて振動が直接本体に伝わらないようにしてください。
振動が直接本体に伝わると変調が掛り、通信エラーが発生しやすくなります。
緩衝材
振動の多い機器面
無線モデム装置

37
[ 故障と思う前に ]
【故障と思う前に、次のことを再度チェックして下さい】
(1) 電源が入らない(電源 LED表示が点灯しない)
a. 接続機器から電源電圧が正常に掛かっていますか?
機器本体は正常に動作していても、無線モデム装置への接続ケーブルが外れていたり、
あるいは断線していて正常に電圧が掛かっていない可能性があります。
b. 過電圧を入力していませんか?
定格電圧以上の電圧が掛かっていると、無線モデム装置内部に過電流が流れて保護用
の内部ヒューズが切れている可能性があります。この場合は修理が必要となります。
c. 接続コネクタの接続が逆になっていませんか?
コネクタ側で逆接防止形状になっていますが、無理やりに押し込んで接続さ
れていると電源が入りません。またこの場合、無線モデム装置内部で故障が
発生する可能性がありますので、正常にコネクタを接続しても電源が入らな
い場合は修理が必要となります
(2) 通信ができない
a. 接続ケーブルがはずれていませんか?
電源が入っていても RS-232C部分のケーブルが外れていたり、断線していると通信
ができません。
b. 通信相手局との距離が離れすぎていませんか?
近くに移動して再度通信テストを行ってください。
簡易的にテストコマンドを実施して通信エリアの確認を行なってください。
c. RS-232Cの設定が間違っていませんか?
特にボーレートの設定が無線モデム装置と機器側(DTE)とで合っていませんと、通
信のやりとりができません。再度設定を確認してください。
もし設定値が分からなくなってしまったような時は、一度イニシャライズを行なって
初期設定値に戻してから再度設定を行なってください。
(「接続仕様」の項目を参照してください)

38
d. 機器内に組込みこんだ無線モデム装置において無線ノイズ妨害がありませんか?
機器内に無線モデム装置を組込みこんだ場合、機器内部から発生するデジタ
ルノイズの影響によって無線ノイズ妨害を受ける可能性があります。
シールド板、電波吸収体等を用いてなるべくノイズ源を遮蔽するようにして
ください。(下図参照)
無線モデム装置
※機器内組込み時の無線ノイズ妨害発生例
(ユニット) デジタルノイズ
CPU IC
e. 無線モデム装置の近傍にパソコン装置等のノイズ源がありませんか?
パソコン装置、インバーター式蛍光灯、モーター、あるいは他のデジタル機器等の
ノイズを発生しやすい機器が無線モデム装置の近傍にありますと、上記「d項」と
同様な無線ノイズ妨害を受ける可能性があります。
無線モデム装置をなるべくノイズ源と思われる場所から離して設置してください。
パソコン
無線ノイズ妨害
モニター
無線ノイズ妨害
無線モデム装置
39
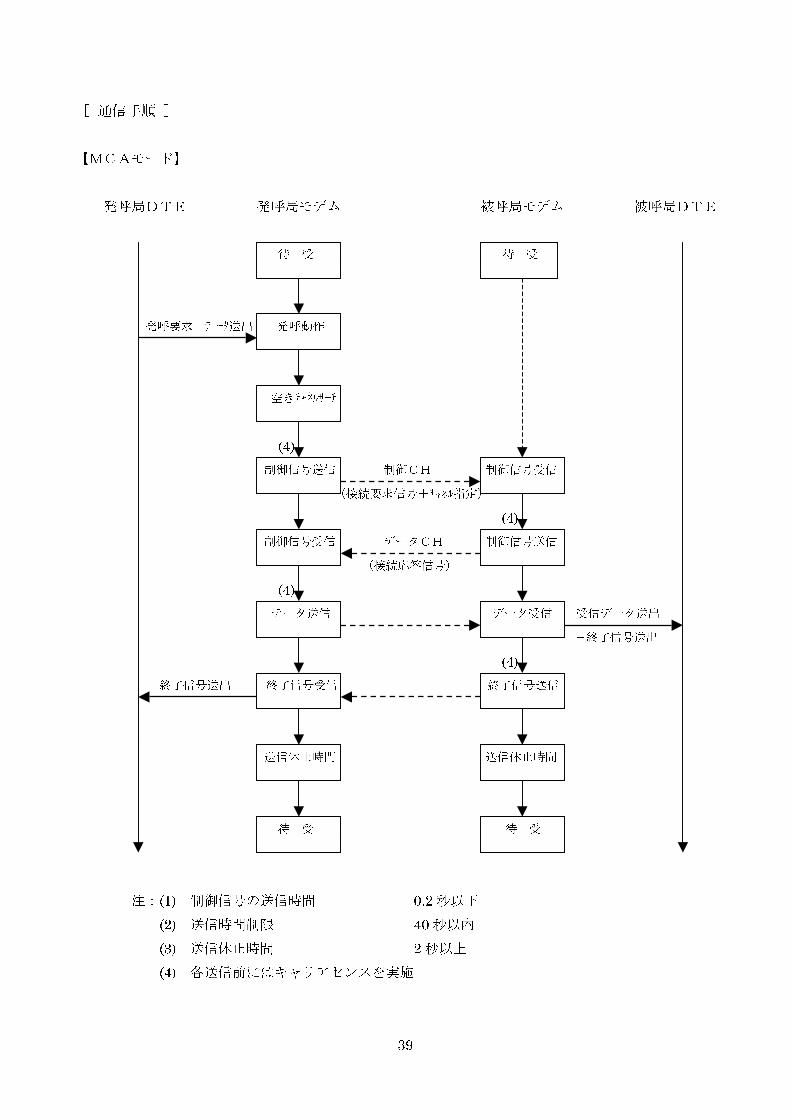
[ 通信手順 ]
【MCAモード】
発呼局DTE 発呼局モデム 被呼局モデム 被呼局DTE
待 受 待 受
発呼要求+データ送出 発呼動作
空きチャネルサーチ
(4)
制御信号送信 制御CH 制御信号受信
(接続要求信号+チャネル指定)
(4)
制御信号受信 データCH 制御信号送信
(接続応答信号)
(4)
データ送信 データ受信 受信データ送出
+終了信号送出
(4)
終了信号送出 終了信号受信 終了信号送信
送信休止時間 送信休止時間
待 受 待 受
注:(1) 制御信号の送信時間 0.2秒以下
(2) 送信時間制限 40秒以内
(3) 送信休止時間 2秒以上
(4) 各送信前にはキャリアセンスを実施
40
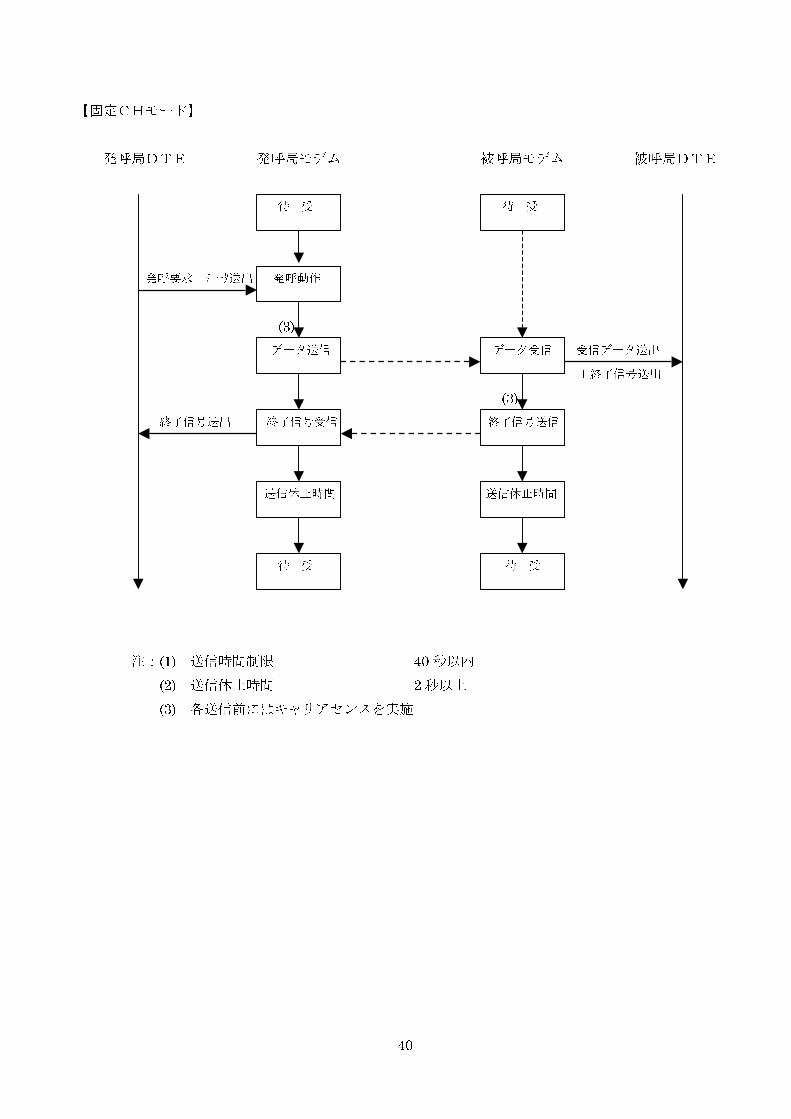
【固定CHモード】
発呼局DTE 発呼局モデム 被呼局モデム 被呼局DTE
待 受 待 受
発呼要求+データ送出 発呼動作
(3)
データ送信 データ受信 受信データ送出
+終了信号送出
(3)
終了信号送出 終了信号受信 終了信号送信
送信休止時間 送信休止時間
待 受 待 受
注:(1) 送信時間制限 40秒以内
(2) 送信休止時間 2秒以上
(3) 各送信前にはキャリアセンスを実施
41
[ 主な仕様 ]
(1)無線仕様
・無線規格 ARIB STD-T67準拠
・電波型式 F1D
・通信方式 単信方式
・変調方式 直接 2値 FSK
・データ伝送速度 16kbps
・周波数 1252.000MHz~1253.000MHz
・チャネル数 データ CH 20CH、制御 CH 1CH(50KHz間隔)
・送信時間制限 40秒以内(休止 2秒以上)
・通信距離 約300m(見通し距離) *周囲の状況によります
(2)有線仕様
・インターフェース RS-232C準拠、または CMOSレベルシリアル(VCC=3.3V仕様)
・通信速度 2400、4800、9600、19200、38400bps
・同期方式 調歩同期方式
(3)電源仕様
・動作入力電圧範囲 3.6V~5.5V
・消費電流 パワーセーブ時 約10mA( CMOSシリアル設定時:約6mA)
受信時 約70mA
送信時 約80mA
(4)環境仕様
・動作温度 -10℃~60℃
・動作湿度 20%~80%RH(結露なきこと)
・保存温度 -10℃~60℃
・保存湿度 10%~80%RH(結露なきこと)
(5)外形寸法
・W38:H66:D10.5mm(本体外形、アンテナ部は含まず)
(6)重量
・約27g(本体のみ、接続ケーブルは含まず)
42
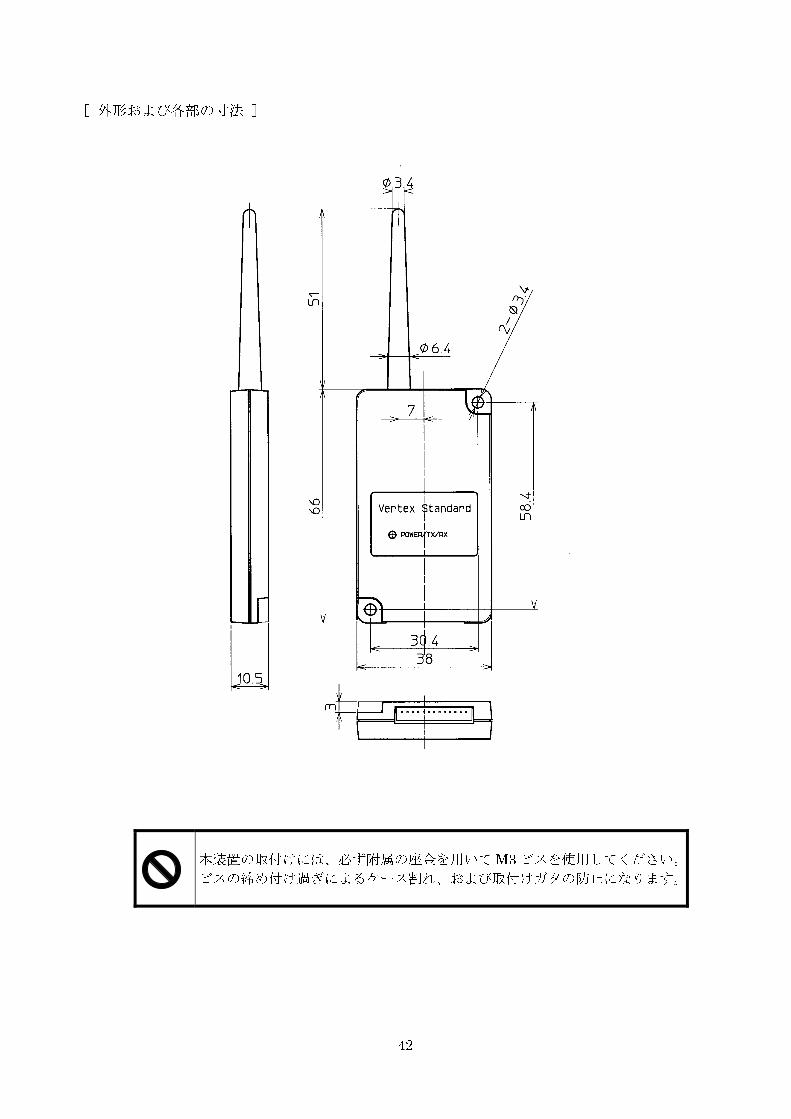
[ 外形および各部の寸法 ]
本装置の取付けには、必ず附属の座金を用いてM3ビスを使用してください。
ビスの締め付け過ぎによるケース割れ、および取付けガタの防止になります。

43
[ 付録 接続ケーブル仕様 ]
型名:CT-107(オプション)
L=30cm
※ 電源の接続は間違えないようにご注意ください。
また規定電圧以上の電圧を加えないようにしてください。
※ 端末処理:ハンダ上げ処理済み(5mm)
※ 接続信号名は「接続仕様」の項目を参照してください。
※ 上記以外のケーブルをご使用の場合は、弊社営業部までご相談ください。
1
13
赤色(VCC)
白色
黒色(GND)

44
[付録 CH周波数表]
CH番号 送受信周波数(MHz) 備 考
0 1252.000 制御CH
1 1252.050 データCH
2 1252.100 〃
3 1252.150 〃
4 1252.200 〃
5 1252.250 〃
6 1252.300 〃
7 1252.350 〃
8 1252.400 〃
9 1252.450 〃
10 1252.500 〃
11 1252.550 〃
12 1252.600 〃
13 1252.650 〃
14 1252.700 〃
15 1252.750 〃
16 1252.800 〃
17 1252.850 〃
18 1252.900 〃
19 1252.950 〃
20 1253.000 〃

45

46
ご注意
(1) 本書の一部または全部を無断で使用、複製、転載することを禁じます。
(2) 本書の内容については予告なしに将来変更することがあります。
(3) 本書は内容について万全を期して作成しましたが、万一ご不明な点や誤り、
記載漏れ等がありましたら、当社までご連絡ください。
(4) 運用した結果の影響については、(3)項の内容に関わらず責任を負いかね
ますので、あらかじめご了承ください。
(5) 記載されている会社社名および製品名は、各社の商標または登録商標です。
本製品に関するお問い合わせ窓口
販売元:株式会社スタンダード
〒153-8645 東京都目黒区中目黒4-8-8
TEL 03(3719)2231
FAX 03(5715)9992
製造元:株式会社バーテックススタンダード