apostila de plc ac500 módulo i
TRANSCRIPT

For internal ABB only
Confidential
Treinamento AC500 Módulo 1
Engenharia de aplicação

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 2/38
Treinamento CLP AC500 – Módulo I
Objetivo do curso: O objetivo deste curso é obter habilidade na programação do AC500, dos seus respectivos I/O`s e iniciar
as primeiras configurações de comunicação usando o PS501 que esta de acordo com a IEC61131-3.
Participante após o curso será capaz de realizar:
Compreender a arquitetura do PLC AC500 e suas diferentes funções
Criar novos projetos e configurar a estrutura de aplicação e programas
Utilizar o sistema de bibliotecas do AC500
Configuração do hardware do AC500
Desenvolver programas e configurações para diferentes aplicações utilizando diversas linguagens de programação
(IEC61131-3)
Criar e configurar redes com o AC500 em Ethernet

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 3/38
Índice
1. INSTALAÇÃO DO SOFTWARE DE PROGRAMAÇÃO DO PS501 CONTROL BUILDER 5
2. CONTROL BUILDER 6
2.1 New Project 6 2.2 Dispositivos 7 2.2.1 AC500_PM5xx 7 2.2.2 AC500_1 7 2.2.3 CPU Parameters 8 2.2.4 I/ O-BUS 10 2.2.5 Interfaces 12 2.2.6 Comunication modules 13
3. IP CONFIG TOOL. 14
4. INTRODUÇÃO AO SISTEMA DE CONFIGURAÇÃO DO AC500 15
4.1 POU’s 15 4.1.1 Programas 15 4.1.2 PLC_PRG 15 4.1.3 Blocos de Função 15 4.1.4 Função 17 4.1.5 Add Object 17 4.1.6 New Folder 18 4.1.7 Object Properties 18 4.2 Data types 18 4.2.1 Add Object 19 4.3 Visualizations 19 4.3.1 Add Object 19 4.4 Web Server 19 4.5 Resources 21 4.5.1 Global Variables 21 4.5.2 Library Manager 21 4.5.3 PLC Browser 22 4.5.4 Task Configuration 22 4.5.5 Watch and Recipe Manager 23
5. MÓDULO DE COMUNICAÇÃO COM AC500 24
5.1 Simulation Mode 24 5.1.1 Write Values (Ctrl + F7) 25 5.1.2 Force Values (F7) 25 5.1.3 Release Force 25
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 4/38
5.2 Modulo Online de Comunicação com AC500 26 5.2.1 Communication Parameters 26 5.2.2 Drive para Comunicação Serial 27 5.2.3 Drive para Comunicação Ethernet 28 5.2.4 Create Boot Project 28
6. INSTRUÇÕES BÁSICAS 30
6.1 Contato Normalmente Aberto 30 6.2 Contato Normalmente Fechado 30 6.3 Contato Paralelo Normalmente Aberto 30 6.4 Contato Paralelo Normalmente Fechado 30 6.5 Bobina Normalmente Aberta 30 6.6 Bobina Normalmente Fechada 30 6.7 Bobina Paralela 30 6.8 Bobina SET 30 6.9 Bobina RESET 30 6.10 SET e RESET (SR) 30 6.11 RESET e SET (RS) 30 6.12 S/R Bobina (S/R) 31 6.13 Negado (/) 31 6.14 Porta Lógica Inversão (NOT) 31 6.15 Porta Lógica Somadora (AND) 32 6.16 Porta Lógica Multiplicadora (OR) 32 6.17 Porta Lógica OU – Exclusivo (XOR) 32 6.18 Subtração (SUB) 32 6.19 Soma (ADD) 32 6.20 Divisão (DIV) 32 6.21 Multiplicação (MUL) 32 6.22 Radiciação (SQRT) 32 6.23 Exponencial (EXPT) 33 6.24 Borda de subida (R_TRIG) 33 6.25 Borda de Descida (F_TRIG) 33 6.26 Temporizador com Retardo na Energização (TON) 33 6.27 Temporizador com Retardo na Desenergização (TOF). 33 6.28 Temporizador com Retardo no Pulso (TP) 33 6.29 Contador Incremental (CTU) 33 6.30 Contador Decremental (CTD) 34 6.31 Contador Incremental e Decremental (CTUD) 34
7. COMUNICAÇÃO (CS31 – BUS, MODBUS RTU, MODBUS TCP/IP) 35
8. COMUNICAÇÃO MODBUS RTU – MESTRE E ESCRAVO (COM_MOD_MAST) 37
9. COMUNICAÇÃO MODBUS TCP– MESTRE E ESCRAVO (ETH_MOD_MAST) 38

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 5/38
1. Instalação do software de programação do PS501 Control Builder
A janela de instalação surgirá automaticamente ao ser inserido o CD; Caso a instalação não seja realizada diretamente pelo CD (Pen Drive, diretório do Windows etc.), os arquivos de instalação deverão ser copiados para o C:\ do computador, onde deve se executar o aplicativo cd_menu_V50.exe Na instalação do PS501, estão disponíveis os seguintes softwares: Instillation PS501 (ABB Configuration e Codesys); Tools;
Nas ferramentas estão disponíveis todas as ferramentas da linha V2.0 e V1.x: Codesys Service Tools; OPC Server; IP-Configuration Tools; AC500 Gateway Drives; TK503 + TK504 Cable Driver Tools for PS501 V1.x
Instale todas as opções disponíveis e reinicie o computador

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 6/38
2. Control Builder A partir desta ferramenta serão feitas todas as configurações iniciais do projeto, assim: Configuração de CPU(s) a ser utilizado Configuração de I/O do projeto Configuração dos cartões de comunicação Configuração das redes de comunicação Relação de tags endereçadas do projeto
2.1 New Project
Para iniciarmos um novo projeto clique na opção File New Project (Ctrl +N).
Nesta opção, escolheremos o modelo de CPU a ser utilizado, em seguida nomeando e indicando um local para armazenamento do projeto.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 7/38
2.2 Dispositivos
Com o projeto criado e salvo aparecerá uma estrutura de hardware do projeto em questão. Aqui faremos todas as configurações de entradas e saídas físicas do nosso projeto, e fixaremos quais protocolos de comunicação serão utilizados. Ainda, poderemos declarar todas as TAG´s das nossas variáveis físicas e estipular as áreas de memória persistente que serão incluídas ao processo.
2.2.1 AC500_PM5xx
Trata-se das informações da CPU a ser utilizada. Clicando duas vezes sobre o nome da CPU e nos disponibilizada as informações básicas desta.
2.2.2 AC500_1
Trata-se de um link entre o ABB Configurator e o Codesys, este deverá ser utilizado sempre que se fazer necessária uma atualização de hardware no projeto, mesmo se tratando de uma simples nomenclatura de variáveis. Ao utilizado ele abre um novo projeto do Codesys (se este não existir), ou apenas atualiza o projeto original (sem a necessidade de fechar o projeto aberto).

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 8/38
2.2.3 CPU Parameters
Relaciona todos os parametros possíveis para controle da CPU. Descritos abaixo. Auto RUN: manda a CPU para modo de operação (RUN), automaticamente, após o download. Error LED: indica quando deverá ser sinalizado o LED de erro, podendo ter como opção:
ON – Sinalização em quaisquer erros. OFF by E4 – Sinalização apenas para erros tipo E4. OFF by E3 – Sinalização apenas para erros tipo E3. Demais opções – Não utilizadas neste Firmware. Check Battery – Verifica a alimentação da CPU.
Behaviour of ouTPuts in stop: mostra como ficaram o estado das saídas físicas no caso da CPU ir para STOP. STOP on error class: mostra em quais tipos de error a CPU deverá ir para STOP. WarmStart: verifica a tensão de alimentação depois de um erro E2 ( curto circuito e ou queda de tensão). Reaction on floating point exception: no caso de um cálculo superior ao limited a CPU, indica se deve ser motivado um
erro ou não. Utilizado apenas para as CPU´s PM59X. Flexible Configuration: indica local de armazenamento dos arquivos de configuração do Hardware, no caso de
selecionado a opção NONE, estes arquivos são armazenados no próprio diretório do computador. Flexible Configuration timeout: tempo limite de reconhecimento do Flexible Configuration em segundos. Free Wheeling pause: tempo Maximo para execução de uma tarefa em “ms” Task Compatibility Mode: versão de Firmware. Start PERSISTENT %RB0. x: valor do primeiro Bytes a ser utilizado como área PERSISTENTE. End PERSISTENT %RB0. x: valor do ultimo BYTE a ser utilizado como área PERSISTENTE.
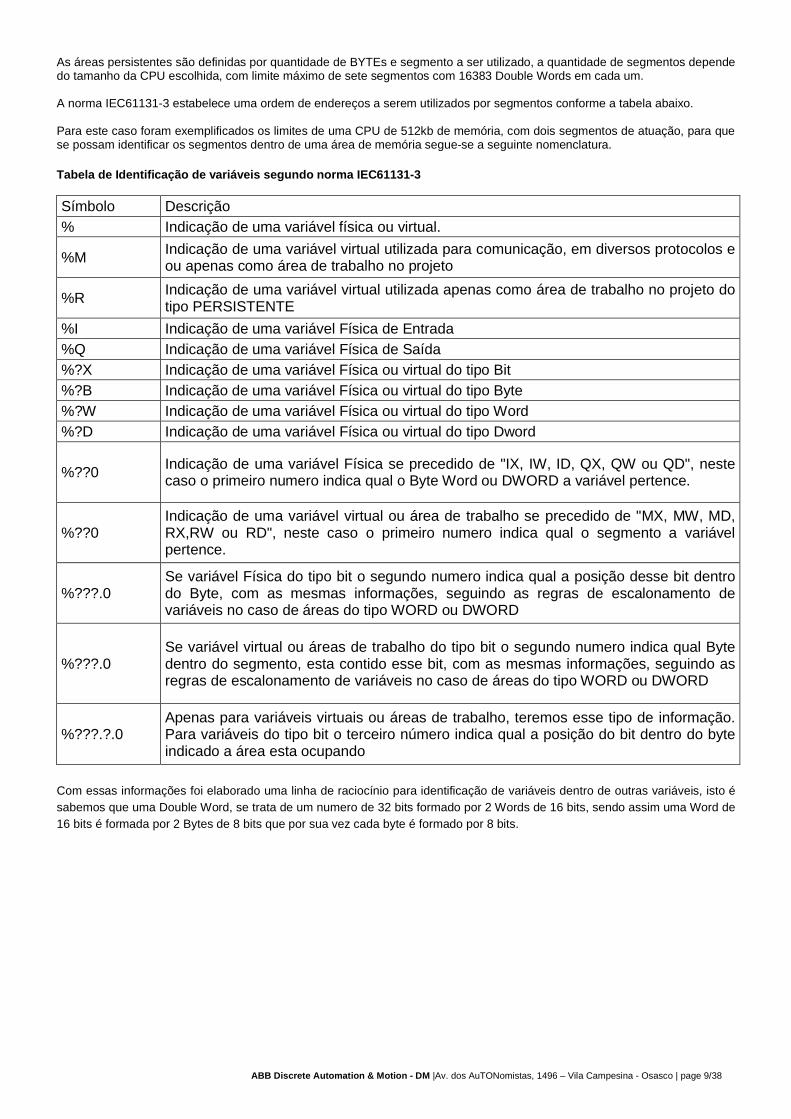
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 9/38
As áreas persistentes são definidas por quantidade de BYTEs e segmento a ser utilizado, a quantidade de segmentos depende do tamanho da CPU escolhida, com limite máximo de sete segmentos com 16383 Double Words em cada um. A norma IEC61131-3 estabelece uma ordem de endereços a serem utilizados por segmentos conforme a tabela abaixo. Para este caso foram exemplificados os limites de uma CPU de 512kb de memória, com dois segmentos de atuação, para que se possam identificar os segmentos dentro de uma área de memória segue-se a seguinte nomenclatura. Tabela de Identificação de variáveis segundo norma IEC61131-3 Símbolo Descrição % Indicação de uma variável física ou virtual.
%M Indicação de uma variável virtual utilizada para comunicação, em diversos protocolos e ou apenas como área de trabalho no projeto
%R Indicação de uma variável virtual utilizada apenas como área de trabalho no projeto do tipo PERSISTENTE
%I Indicação de uma variável Física de Entrada %Q Indicação de uma variável Física de Saída %?X Indicação de uma variável Física ou virtual do tipo Bit %?B Indicação de uma variável Física ou virtual do tipo Byte %?W Indicação de uma variável Física ou virtual do tipo Word %?D Indicação de uma variável Física ou virtual do tipo Dword
%??0 Indicação de uma variável Física se precedido de "IX, IW, ID, QX, QW ou QD", neste caso o primeiro numero indica qual o Byte Word ou DWORD a variável pertence.
%??0 Indicação de uma variável virtual ou área de trabalho se precedido de "MX, MW, MD, RX,RW ou RD", neste caso o primeiro numero indica qual o segmento a variável pertence.
%???.0 Se variável Física do tipo bit o segundo numero indica qual a posição desse bit dentro do Byte, com as mesmas informações, seguindo as regras de escalonamento de variáveis no caso de áreas do tipo WORD ou DWORD
%???.0 Se variável virtual ou áreas de trabalho do tipo bit o segundo numero indica qual Byte dentro do segmento, esta contido esse bit, com as mesmas informações, seguindo as regras de escalonamento de variáveis no caso de áreas do tipo WORD ou DWORD
%???.?.0 Apenas para variáveis virtuais ou áreas de trabalho, teremos esse tipo de informação. Para variáveis do tipo bit o terceiro número indica qual a posição do bit dentro do byte indicado a área esta ocupando
Com essas informações foi elaborado uma linha de raciocínio para identificação de variáveis dentro de outras variáveis, isto é sabemos que uma Double Word, se trata de um numero de 32 bits formado por 2 Words de 16 bits, sendo assim uma Word de 16 bits é formada por 2 Bytes de 8 bits que por sua vez cada byte é formado por 8 bits.
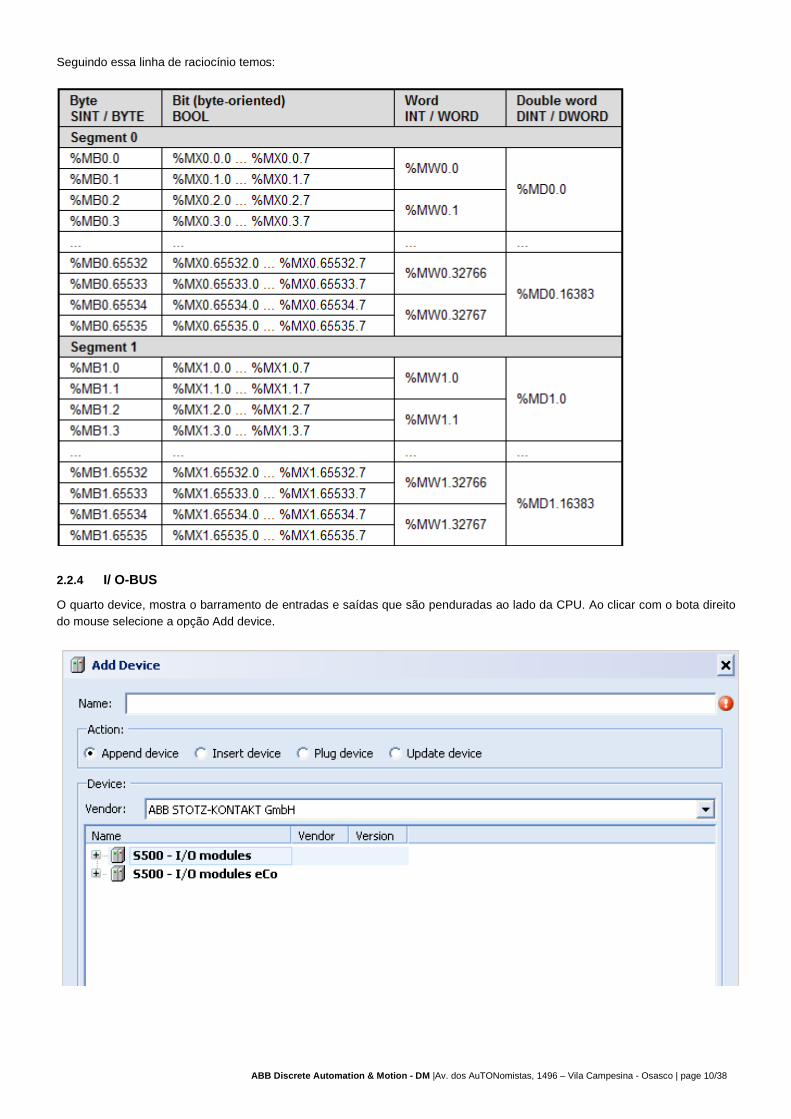
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 10/38
Seguindo essa linha de raciocínio temos:
2.2.4 I/ O-BUS
O quarto device, mostra o barramento de entradas e saídas que são penduradas ao lado da CPU. Ao clicar com o bota direito do mouse selecione a opção Add device.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 11/38
Selecione os cartões desejados com um duplo clique. Após adicionar todos os cartões feche o assistente. Clique duas vezes sobre um cartão adicionado e ele trará todas as informações de configuração e o mapa de variáveis deste. Na guia Configuration é possível verificar as configurações principais do cartão tal como desabilitá-las. Na Guia I/O Mapping é mostrado todo o mapeamento de entradas e saídas físicas do cartão. Na guia I/O Mapping é feita toda a declaração das variaveis físicas relacionadas aos cartões de entrada e saida.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 12/38
2.2.5 Interfaces
Configurações das portas seriais e Field bus. Aqui faremos as configurações necessárias para comunicação neste meio físico MODBUS RTU Clique com o botão direito do mouse sobre a porta desejada a selecione a opção Plug Device.
Aparecerão todas as opções disponíveis para a porta selecionada, escolha a opção MODBUS e confirme. Em seguida de um duplo clique sobre porta e ela mostrará as configurações disponíveis para o protocolo
Efetue as configurações desejadas entre mestre e escravo, maiores informações serão disponibilizadas no capitulo 8.1 MODBUS RTU – Mestre e Escravo (COM_MOD_MAST). Demais protocolos seguem os mesmos procedimentos, todavia estão fora do escopo deste curso.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 13/38
2.2.6 Comunication modules
PORTA ETHERNET Exibe as configurações das portas Ethernet e protocolos mestre de comunicação, por meio dos acopladores. Clique com o botão direito do mouse sobre a porta ethernet e selecione a opção Add Device, para este curso trabalharemos apenas com a função MODBUS TCP.
De um duplo clique sobre a guia MODBUS_ON_TCP_IP, faça as configurações a seguir: Server Conections = 5 Mais informações no capitulo 9 MODBUS TCP – Mestre e Escravo (ETH_MOD_MAST).

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 14/38
3. IP Config Tool. Desative os firewall da maquina e em seguida clique no link acima que esta na area de trabalho do Windows. Depois vasgulhe a rede a apartir da ferramenta de SCAN, o ABB ip configurator vai localizar todas as CPU´s conectadas a rede, liberando as configurações de IP necessárias.
Clique sobre a CPU e modifique o IP da CPU e a mascara de rede para padrão desejado. Clique em Send Configuration para enviar as novas configurações ao controlador,. Obs.: No caso das CPU´s da linha AC500 eCo é necessário que a chave de controle RUN/STOP, permaneça em modo RUN, antes das alterações. È interessante realizar um teste de comunicação inicial para se certificar a integridade do sistema de comunicação, isto é, continuidade dos cabos e portas de comunicação. Feche o assistente e execute o AC500.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 15/38
4. Introdução ao sistema de configuração do AC500
4.1 POU’s
As POU´s são os programas, blocos de função e funções desenvolvidas pelo programador.
Vamos entender um pouco mais sobre o que são e como utilizadas.
4.1.1 Programas
Utilizados para processamento das variáveis em tempos predeterminados, denominados de tarefas. Cada programa pode funcionar dentro de uma determinada tarefa ou todos juntos a partir de uma única tarefa.
4.1.2 PLC_PRG
Denominado de programa principal o PLC_PRG obedece a uma determinada tarefa, já padrão do sistema, assim para que não seja necessário determinar diferentes tarefas para s demais programas, todos os “PRG”, criados devem ser chamados no PLC_PRG, esse fará a execução ordenada dos programas seguindo seu ciclo de scan, sempre da Direita para a esquerda de cima para baixo No exemplo acima, ambos os programas foram chamados no PLC_PRG e este executará primeiramente o conteúdo de Programa_1 e em seguida o conteúdo de Programa_2. O ciclo de Scan do PLC_PRG é de 10ms.
4.1.3 Blocos de Função
Os blocos de função são lógicas individuais de construção própria ou default, do PLC, isto é, alguma manobra necessária para executar uma devida lógica, como por exemplo, os temporizadores.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 16/38
Reconhecemos os blocos de função por algumas características próprias. As principais são a necessidade de uma TAG para referenciá-los e não possuírem limite de entradas e saídas. O exemplo acima é a programação de um bloco de função com uma entrada e uma saída, quando o chamamos no PLC_PRG, ele ficará da seguinte forma. Ou seja, quando se manda a variável Entrada para nível lógico 1 obedecendo a programação desenvolvida da imagem acima automaticamente mudamos o estado da variável Saida para nível lógico 1.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 17/38
4.1.4 Função
Diferentemente dos blocos de função as FUNÇÔES, não necessitam de um nome que as referencie, pois a area de memoria utilizada em uma função é a mesma para todas as funções de mesmo objetivo, todavia, o seu resultado deve ser evidenciado em uma única saída, não possuindo um limite para a quantidade de entradas. Quando criamos novas funções ao nosso projeto, essas devem seguir as mesmas orientações das funções existentes. Como default o PLC_PRG, vem habilitado para programação em StruCTUre Text, em nosso curso utilizaremos com padrão a linguagem Ladder. Para modificar, primeiramente vamos compilar o projeto, na barra de ferramentas vá a Project BUILD (F11).
Depois clique com o botão direito do mouse sobre o PLC_PRG e escolha a opção Convert, em seguida selecione a opção LD e clique em OK.
4.1.5 Add Object
Para adicionar ao projeto um novo programa, bloco de função ou uma função, basta clicar com o botão direito sobre a área das POU´s e selecionar a opção Add Object. Em seguida escolha qual a linguagem de programação será utilizada.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 18/38
Codesys pode programar em até 6 linguagens diferentes, sendo Instruction List; Ladder Diagram; Structured Text Function Block; Sequential Function Chart; Continuous Function Chart.
Nota: A nomenclatura dos programas, blocos de função e funções não pode possuir espaços em branco ou caracteres especiais
4.1.6 New Folder
Para melhor organização a opção New Folder, cria novas pastas para armazenamento dos programas. Basta cliar sobre a area das POU´s com o botão direito do mouse e selecionar a opção NEW FOLDER
4.1.7 Object Properties
Nas propriedades de cada objeto é possível definir níveis de acesso aos programas caso se julgue necessário implementar ma segurança maior ao seu sistema.
4.2 Data types
Data types é um banco de estruturas de variaveis definidas pelo usuário, aqui é possivel, criar diversas estruturas de dados, contendo quaisquer tipos de variaveis em seu interior.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 19/38
4.2.1 Add Object Os data types são estruturas de dados criadas pelo usuário para adicionar uma estrutura clique sobre a guia Data Types e utilize a opção Add object, depois basta adicionar a sua estrutura as variáveis desejadas.
Neste exemplo foi criada uma estrutura do tipo MOTORES, com as TAGS internas denominadas por CORRENTE, TENSAO,RPM E FREQUENCIA. Assim, quando criada uma TAG do tipo MOTORES, ela adotara como TAG interna os mesmos endereços.
4.3 Visualizations
Area de interface com o usuário via orientação a objeto. Aqui é possível utilizar objetos de interação como Layers e Labels, Botões e Bargraph, para monitorar e alterar variaveis de processo dentro do CLP, tendo como escolha visualização local ou remota em ambiente Ethernet ou Internet
4.3.1 Add Object
Com o Botão direito do mouse adicione um novo objeto, este deve ser referenciado pelo nome PLC_VISU para primeira referencia com o PLC. Depois basta utilizar as ferramentas de visualização para criar as telas.
4.4 Web Server
No ABB Configurator de um duplo clique sobre a opção IP_SETTINGS, abaixo da porta Ethernet e na guia Extended Settings, Selecione a opção WEB Server Active e o numero de conexões que poderão visualizar esta tela. Utilize por default a porta 80 para comunicação.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 20/38
Em seguida atualize o Codesys com o link AC500_1. Depois vá até aba resouces e de um duplo clique em Target Settings, na aba visualization desabilite a opção Inhibit Download of visualization files e habilite a função Web Visualization
Em seguida vá a Project Clean All Projetc Rebuild All. Faça um novo Download para a CPU, lembrando que esta função somente se aplica as versões AC500, nos modelos AC500 eCo, existe um outro procedimento, todavia necessita de um computador servidor para execução. Todas as telas de visualização serão enviadas para a CPU, assim não recomendamos a utilização de figuras não tratadas, ou com alta resolução, o que poderia ocasionar problemas de lentidão
Exemplo de uma usina monitorada via WEBSERVER
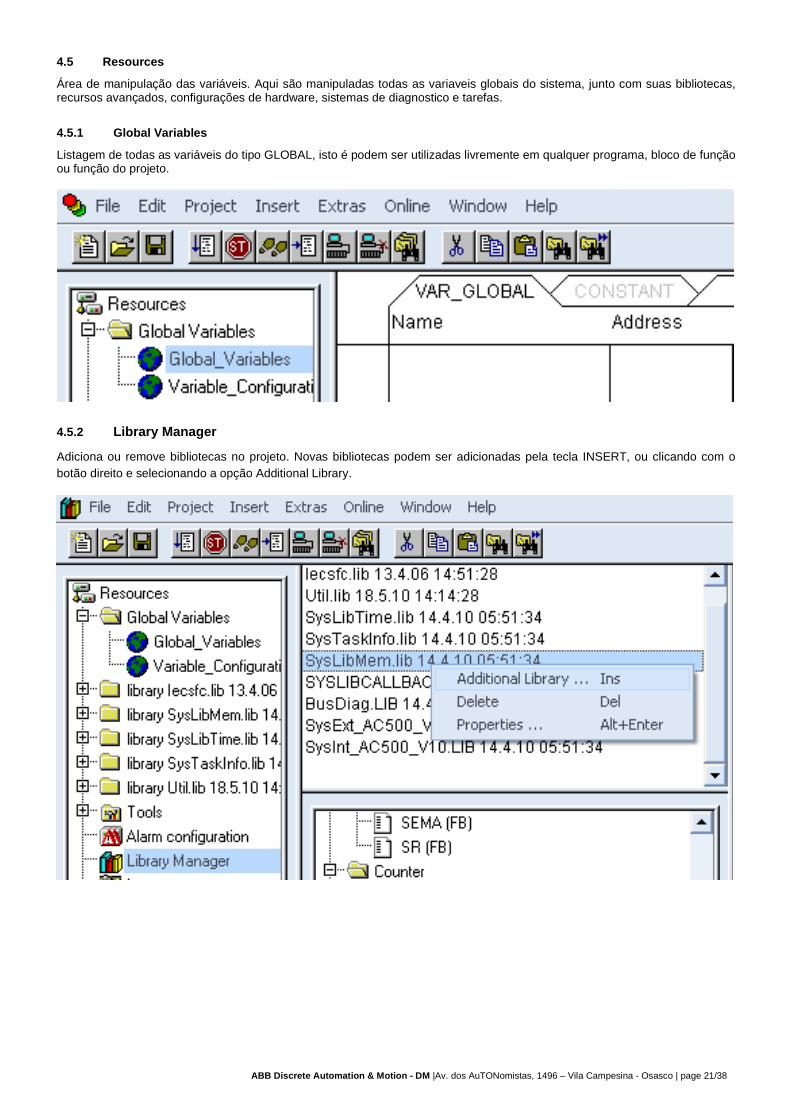
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 21/38
4.5 Resources
Área de manipulação das variáveis. Aqui são manipuladas todas as variaveis globais do sistema, junto com suas bibliotecas, recursos avançados, configurações de hardware, sistemas de diagnostico e tarefas.
4.5.1 Global Variables
Listagem de todas as variáveis do tipo GLOBAL, isto é podem ser utilizadas livremente em qualquer programa, bloco de função ou função do projeto.
4.5.2 Library Manager
Adiciona ou remove bibliotecas no projeto. Novas bibliotecas podem ser adicionadas pela tecla INSERT, ou clicando com o botão direito e selecionando a opção Additional Library.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 22/38
4.5.3 PLC Browser
Executa funções internas no PLC, as mais comuns são os reconhecimento e visualização de alarmes (diagshow all, diagack all) e gravação dos dados no cartão SD (sdappl).
4.5.4 Task Configuration
Referenciam as determinadas tarefas as POU´s correspondentes. Pode-se ainda determinar a velocidade de execução de cada tarefa e ou nível de importância destas ao PLC. Para adicionar uma nova tarefa de um duplo clique na opção Task Configuration e em seguida clique com o botão direito em System Events, escolha a opção Insert Task.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 23/38
Em seguida clique com o botão direito do mouse em New Task e selecione a opção Append Program Call.
Agora é possível definir os tempos de execução, prioridades e funcionamento das TASK´s
4.5.5 Watch and Recipe Manager
Área de monitoria de variáveis, aqui é possível monitorar todas as variáveis do sistema, mesmo as que não tenham sido utilizadas. Ainda é possível definir novas listas de monitoria, para diversas aplicações, basta clicar sobre o espaço abaixo da guia Standard.
Salve suas listas de variáveis e importe em outros projetos utilizando as ferramentas do Watch and Recipe Manager.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 24/38
5. Módulo de Comunicação com AC500 5.1 Simulation Mode
Para testar suas aplicações antes de efetuar os Downloads para a CPU, utilize o Modo de Simulação. Na barra de ferramentas, utilize a opção Online Simulation Mode.
Depois, retorne a guia Online e selecione a opção Login (Alt+F8). Seguida da opção Run (F5). A indicação de que seu programa esta em devido funcionamento, se localiza no canto inferior direito do CodeSys.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 25/38
Para uma situação de simulação tanto as palavras SIM quanto RUNNING devem estar em negrito, todavia se o DOWNLOAD tiver sido efetuado para a CPU apenas a palavra RUNNING, deve estar em negrito caso contrário desative o modo de Simulação.
5.1.1 Write Values (Ctrl + F7)
Esta opção se encontra na guia Online Write Values (Ctrl + F7), utilizada para escrever valores em quaisquer variáveis do sistema. Depois de clicar duas vezes sobre uma variável aparecera a tela de inserção de valores ou no caso de uma área booleana apenas a palavra FALSE ou TRUE, em azul ao lado da variável. O Comando Write Values (Ctrl + F7), muda o estado da variável para o pressuposto em azul ou escreve os valores informados na caixa de inserção.
5.1.2 Force Values (F7)
Algumas variáveis não podem ser modificadas com o Write Values (Ctrl + F7), devido seu estado físico não ser o indicado ou alguma outra variável a estar sobrescrevendo. O Force Values (F7), escreve os valores e estados na variável independentemente do seu estado físico ou de outras variáveis do processo, este comando é identificado pela cor vermelha atribuída ao endereço no momento de Force.
5.1.3 Release Force
Utilizado para desativar o force de uma única variável ou todas as variáveis do sistema (Shift + F7). Para retirar o force de uma única variável de um duplo clique sobre a variável forçada e selecione a opção Release force this variable, clique em OK e depois complete o comando com F7.
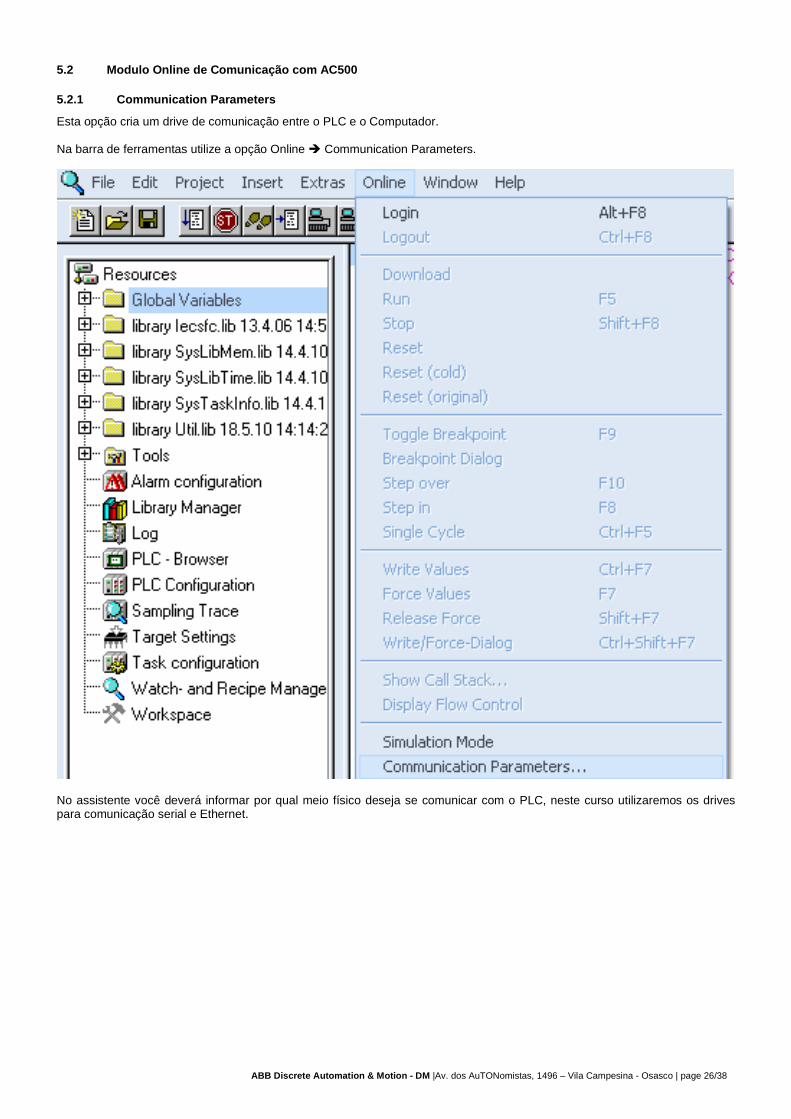
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 26/38
5.2 Modulo Online de Comunicação com AC500
5.2.1 Communication Parameters
Esta opção cria um drive de comunicação entre o PLC e o Computador. Na barra de ferramentas utilize a opção Online Communication Parameters.
No assistente você deverá informar por qual meio físico deseja se comunicar com o PLC, neste curso utilizaremos os drives para comunicação serial e Ethernet.
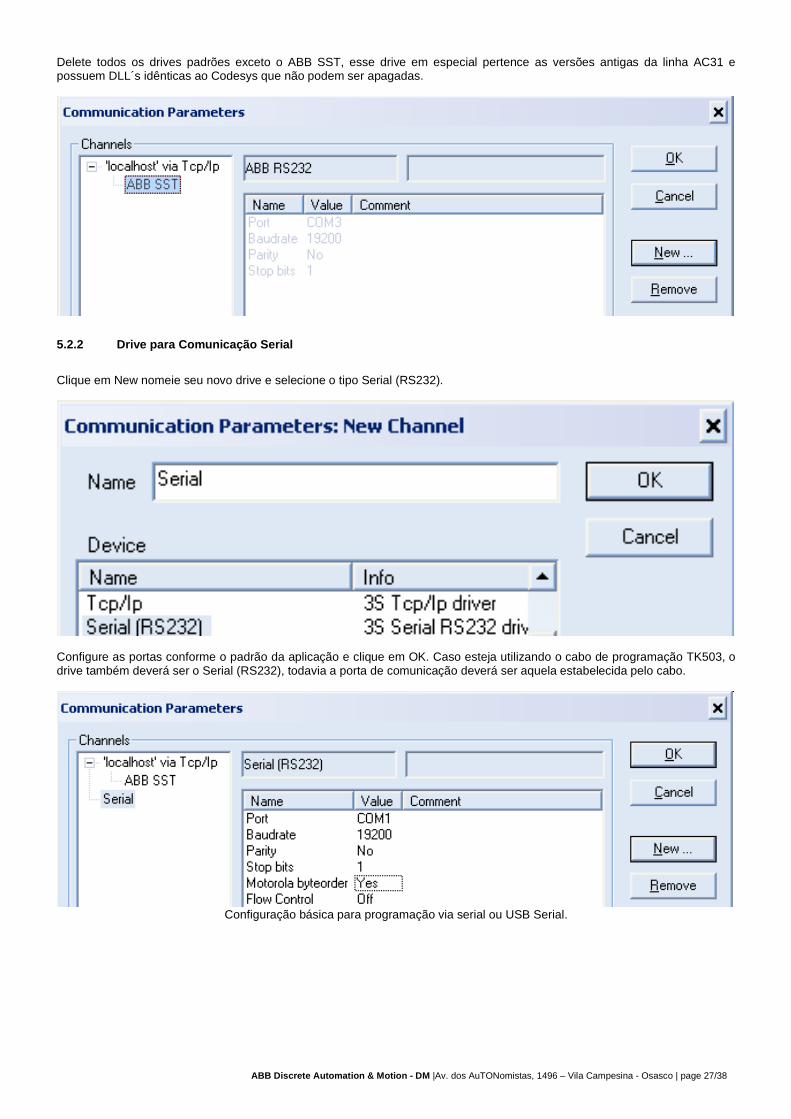
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 27/38
Delete todos os drives padrões exceto o ABB SST, esse drive em especial pertence as versões antigas da linha AC31 e possuem DLL´s idênticas ao Codesys que não podem ser apagadas.
5.2.2 Drive para Comunicação Serial
Clique em New nomeie seu novo drive e selecione o tipo Serial (RS232).
Configure as portas conforme o padrão da aplicação e clique em OK. Caso esteja utilizando o cabo de programação TK503, o drive também deverá ser o Serial (RS232), todavia a porta de comunicação deverá ser aquela estabelecida pelo cabo.
Configuração básica para programação via serial ou USB Serial.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 28/38
5.2.3 Drive para Comunicação Ethernet
Clique em New nomeie seu novo drive e selecione o tipo TCP/IP.
Configure a porta conforme padrão abaixo lembrado que o ip a ser colocado no address é mesmo utilizado para o PLC.
Configuração padrão para comunicação via Ethernet.
5.2.4 Create Boot Project
Depois de feito o Download para a CPU está opção deve ser selecionada para criar o BOOT de inicialização do Sistema, assim caso a CPU seja reiniciada ela não perderá o software já instalado. Existem duas possibilidades para o acionamento desta opção: Na guia References Target Setting, selecione a aba General e em seguida a opção Load bootproject Automatically. Na barra de ferramentas vá em Online Create Boot Projetc
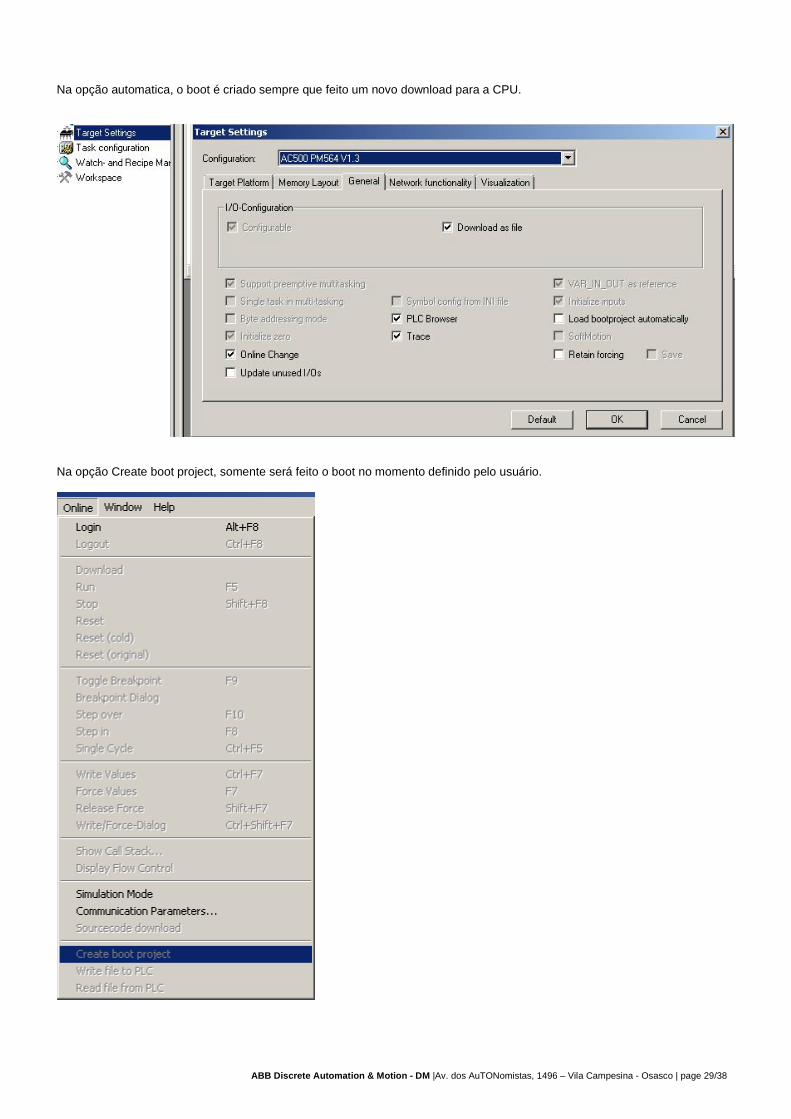
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 29/38
Na opção automatica, o boot é criado sempre que feito um novo download para a CPU.
Na opção Create boot project, somente será feito o boot no momento definido pelo usuário.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 30/38
6. Instruções básicas 6.1 Contato Normalmente Aberto
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . 6.2 Contato Normalmente Fechado
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . 6.3 Contato Paralelo Normalmente Aberto
Encontrado na barra de ferramentas, clique no contato que deseja ter outro NA em paralelo e clique no botão . 6.4 Contato Paralelo Normalmente Fechado
Encontrado na barra de ferramentas, clique no contato que deseja ter outro NF em paralelo e clique no botão . 6.5 Bobina Normalmente Aberta
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão . 6.6 Bobina Normalmente Fechada
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão seguido do botão . 6.7 Bobina Paralela
Encontrada na barra de ferramentas, clique no contato que deseja ter outra bobina em paralelo e clique no botão .Para
negá-la basta clicar no botão . 6.8 Bobina SET
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão . 6.9 Bobina RESET
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão . 6.10 SET e RESET (SR) Bloco de função com prioridade de RESET 6.11 RESET e SET (RS) Bloco de função com prioridade de SET.
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá um assistente de inserção, clique sobre a opção struCTUred e selecione qual bloco de função deseja adicionar depois clique em ok.
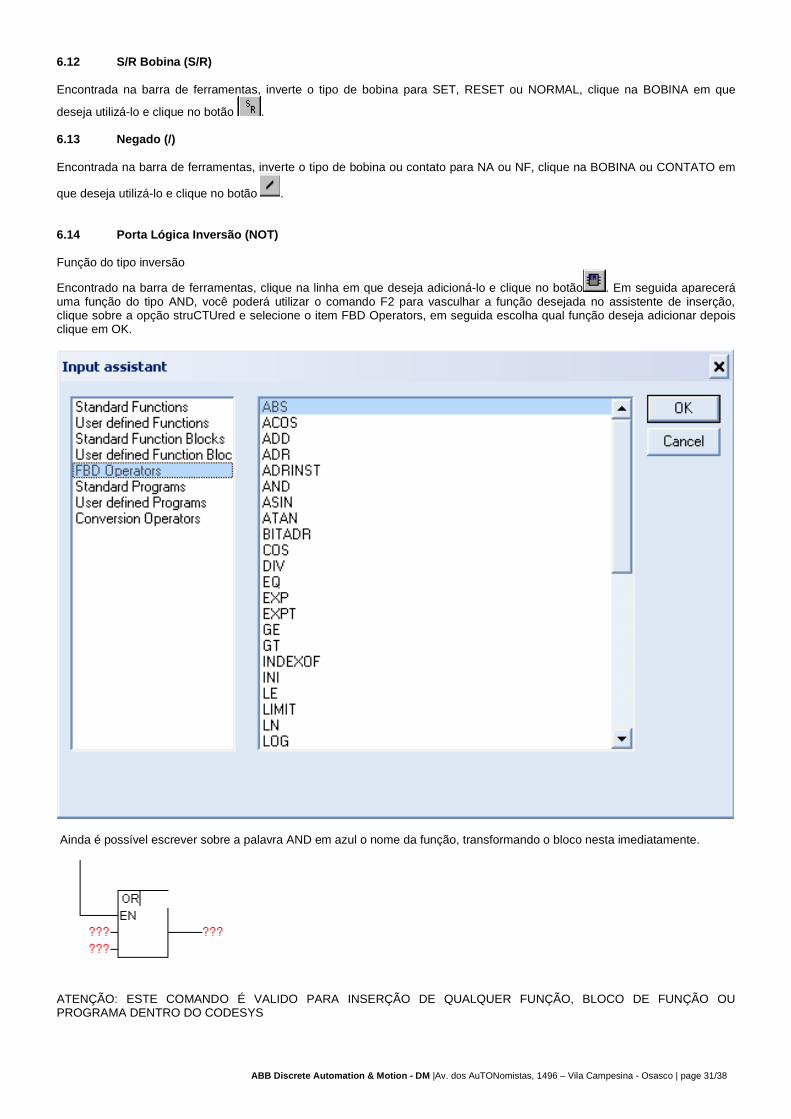
ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 31/38
6.12 S/R Bobina (S/R) Encontrada na barra de ferramentas, inverte o tipo de bobina para SET, RESET ou NORMAL, clique na BOBINA em que
deseja utilizá-lo e clique no botão . 6.13 Negado (/) Encontrada na barra de ferramentas, inverte o tipo de bobina ou contato para NA ou NF, clique na BOBINA ou CONTATO em
que deseja utilizá-lo e clique no botão . 6.14 Porta Lógica Inversão (NOT) Função do tipo inversão
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK.
Ainda é possível escrever sobre a palavra AND em azul o nome da função, transformando o bloco nesta imediatamente.
ATENÇÃO: ESTE COMANDO É VALIDO PARA INSERÇÃO DE QUALQUER FUNÇÃO, BLOCO DE FUNÇÃO OU PROGRAMA DENTRO DO CODESYS

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 32/38
6.15 Porta Lógica Somadora (AND) Função do tipo porta lógica E
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.16 Porta Lógica Multiplicadora (OR) Função do tipo porta lógica OU
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.17 Porta Lógica OU – Exclusivo (XOR) Função do tipo porta lógica OU-EXCLUSIVO
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.18 Subtração (SUB) Função do tipo Subtrator
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.19 Soma (ADD) Função do tipo Somador
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.20 Divisão (DIV) Função do tipo Divisor
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.21 Multiplicação (MUL) Função do tipo Multiplicadora
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.22 Radiciação (SQRT) Função do tipo Raiz Quadrada
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 33/38
6.23 Exponencial (EXPT) Função do tipo Exponencial
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item FBD Operators, em seguida escolha qual função deseja adicionar depois clique em OK. 6.24 Borda de subida (R_TRIG)
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão . O bloco de função da borda de subida pulsa a saída no momento em que a variável de entrada sai do estado “zero” e chega ao estado “um” 6.25 Borda de Descida (F_TRIG)
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão . O bloco de função da borda de descida pulsa a saída no momento em que a variável de entrada sai do estado “um” e chega ao estado “zero”. 6.26 Temporizador com Retardo na Energização (TON)
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão . O temporizador com retardo na energização começa a contar o tempo no momento da energização de seu “EN”, e seta a saída ao final do tempo estabelecido desde que seu “EN” fique ativo por todo o período de contagem, mantendo esse estado enquanto permanecer com seu “EN” ativo. 6.27 Temporizador com Retardo na Desenergização (TOF).
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão , em seguida substitua o nome do bloco de TON, para TOF. O temporizador com retardo na desenergização começa a contar o tempo no momento da desenergização de seu “EN”, e seta a saída no momento da energização de seu “EN” resetando a saída ao final do tempo estabelecido desde que seu “EN” fique desativado, por todo o período de contagem e mantendo esse estado até que seu “EN” seja ativado novamente. 6.28 Temporizador com Retardo no Pulso (TP)
Encontrada na barra de ferramentas, clique na linha em que deseja adicioná-la e clique no botão , em seguida substitua o nome do bloco de TON, para TP. O temporizador com retardo no pulso começa a contar o tempo e seta sua saída no momento da energização de seu “EN”, resetando a saída ao final do tempo estabelecido independentemente o estado de seu “EN” e mantendo esse estado até que seu “EN” seja desativado e ativado novamente. Variaveis destes blocos. IN – Inicia a contagem a partir do modelo de temporizador. PT –Tempo de contagem em milisegudos, segundos, horas ou dias. Q – Saida ET – Tempo de Contagem.
6.29 Contador Incremental (CTU)
Bloco de Função do tipo Contador Incremental
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item Standard Function Block, em seguida escolha qual função deseja adicionar depois clique em OK.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 34/38
Variaveis deste bloco. CU – Inicia a contagem de incremento a cada pulso. RESET – Reseta o valor total da contagem. Q – Saida PV– Valor Inicial de Contagem. CV – Valor Atual da Contagem.
6.30 Contador Decremental (CTD) Bloco de Função do tipo Contador Decremental
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item Standard Function Block, em seguida escolha qual função deseja adicionar depois clique em OK. Variaveis deste bloco. CD – Inicia a contagem de decremento a cada pulso. LOAD – Carrega o valor total da contagem para o valor atual. Q – Saida PV– Valor Inicial de Contagem. CV – Valor Atual da Contagem.
6.31 Contador Incremental e Decremental (CTUD)
Bloco de Função do tipo Contador Incremental e Decremental
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, você poderá utilizar o comando F2 para vasculhar a função desejada no assistente de inserção, clique sobre a opção struCTUred e selecione o item Standard Function Block, em seguida escolha qual função deseja adicionar depois clique em OK. Variaveis deste bloco. CU – Inicia a contagem de incremento a cada pulso. CD – Inicia a contagem de decremento a cada pulso. LOAD – Carrega o valor total da contagem para o valor atual. RESET – Reseta o valor total da contagem. QU – Saida Contador Incremental QD – Saida Contador Decremental PV– Valor Inicial de Contagem CV – Valor Atual da Contagem

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 35/38
7. Comunicação (CS31 – BUS, MODBUS RTU, MODBUS TCP/IP) Para configuração do Protocolo CS31, vá ao ABB Configurator, no quinto device selecione a porta COM1 e clique com o botão direito do mouse. Em seguida utilize a opção Plug Device. No assistente selecione a opção COM1 – CS31-BUS, e clique em Plug Device.
Clicando com o Botão direito do mouse sobre o barramento CS31 e selecionando a opção Add Device é possível adicionar novos módulos de I/O neste barramento.
Em seguida Adicione a cabeceira os I/O´s que forem necessários a aplicação, clicando sobre a cabeceira com o botão direito e escolhendo a opção Insert Device. A ligação elétrica deste tipo de comunicação é data pelo esquema abaixo:

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 36/38
Ligação da cabeceira remota intermediaria
Entrada 1.2 para polo positivo RS485. (Entrada). Entrada 1.3 para polo negativo RS485. (Entrada). Entrada 1.4 para polo terra RS485. (Entrada).
Para CS31 final de Rede.
Ligação da Cabeceira Final de Rede.
Entrada 1.0 fechada com entrada 1.2 Entrada 1.1 fechada com entrada 1.3 Entrada 1.4 Aberta Entrada 1.5 para polo positivo RS485. (Entrada) Entrada 1.6 para polo negativo RS485. (Entrada) Entrada 1.7 para polo terra RS485. (Entrada)
Após executado as configurações do barramento CS31, execute o device AC500, para atualização do Codesys

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 37/38
8. Comunicação MODBUS RTU – Mestre e Escravo (COM_MOD_MAST) Após efetuadas as configurações da porta desejada para comunicação conforme capitulo 2.2.5 Quinto Device. Utilizaremos o bloco de Função (COM_MOD_MAST). Para envio dos pacotes Modbus. Para adicioná-lo certifique-se que a biblioteca MODBUS_AC500_V10, esta adicionada em seu Library Manager.
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, Substitua a palavra AND por COM_MOD_MAST. Abaixo segue exemplo de configuração.
Variaveis deste Bloco de Função Primeiro EN – Indica o funcionamento do bloco. Segundo EN – Indica o envio de pacotes. COM – Indica por qual porta do PLC será feita a comunicação. SLAVE – Indica para qual SLAVE será enviado o Pacote. FCT – indica qual função MODBUS será utilizada na comunicação. TIMEOUT – Tempo máximo de resposta em ms. ADDR – Indica o primeiro endereço MODBUS a ser efetuada a Função discriminada em FCT. NB – Quantidade de endereços a serem lidos a partir do valor indicado em ADDR. DATA – Local de envio ou recebimento dos dados Bloco de Função BLINK – cria um sinal de onda quadrada. Bloco de Função ADR – Cria um link entre o dado recebido e a variável desejada.

ABB Discrete Automation & Motion - DM |Av. dos AuTONomistas, 1496 – Vila Campesina - Osasco | page 38/38
9. Comunicação MODBUS TCP– Mestre e Escravo (ETH_MOD_MAST) Após efetuadas as configurações da porta desejada para comunicação conforme capitulo 2.2.5 Quinto Device. Utilizaremos o bloco de Função (ETH_MOD_MAST). Para envio dos pacotes Modbus. Para adicioná-lo certifique-se que a biblioteca ETHERNET_AC500_V10, esta adicionada em seu Library Manager.
Encontrado na barra de ferramentas, clique na linha em que deseja adicioná-lo e clique no botão . Em seguida aparecerá uma função do tipo AND, Substitua a palavra AND por ETH_MOD_MAST. Abaixo segue exemplo de configuração.
Variaveis deste Bloco de Função Primeiro EN – Indica o funcionamento do bloco. Segundo EN – Indica o envio de pacotes. SLOT – Indica por qual porta Ethernet do PLC será feita a comunicação. IP_ADR – Indica para qual SLAVE será enviado o Pacote. FCT – indica qual função MODBUS será utilizada na comunicação. UNIT_ID – Código de identificação do SLAVE, quanto não possuir deixar como zero ADDR – Indica o primeiro endereço MODBUS a ser efetuada a Função discriminada em FCT. NB – Quantidade de endereços a serem lidos a partir do valor indicado em ADDR. DATA – Local de envio ou recebimento dos dados Bloco de Função BLINK – cria um sinal de onda quadrada. Bloco de Função ADR – Cria um link entre o dado recebido e a variável desejada. Bloco de Função IP_ADR_STRING_TO_DWORD – Os valores de IP_ADR devem estar em forma hexadecimal, este
bloco converte uma STRING no modelo ideal para esta variável.