c. misael molina jiménez
TRANSCRIPT

i
TESINA
Automatización de línea de producción con paletizado de rejillas.
QUE PRESENTA
C. Misael Molina Jiménez
EN CUMPLIMIENTO PARCIAL DE LA
ESTADÍA PRÁCTICA DE
INGENIERÍA MECATRÓNICA
ASESOR ACADÉMICO
Ing. Rolando Lizárraga Bañuelos
ASESOR EXTERNO
Ing. Jorge Abraham Peña
ORGANISMO RECEPTOR
IDTec Automatización
Mazatlán, Sin. 11 de Diciembre de 2015
ii

iii

iv

v
Resumen
“Automatización de línea de producción con Paletizado de Rejillas”
Misael Molina Jiménez
Unidad Académica de Ingeniería en Mecatrónica
Universidad Politécnica de Sinaloa
Mazatlán, Sinaloa, Diciembre 2016
Asesor: Ing. Rolando Lizárraga Bañuelos
Asesor externo: Ing. Jorge Abraham Peña
El proyecto consiste en la automatización de una línea de Palatización de celdas de ácido-plomo dentro de estaciones que cuentan con layers para el acomodo o paletizado de las celdas, un sistema de transporte para su fácil retirado y cortinas de seguridad para otorgar acceso al operador a la celda sin que este corra riesgo alguno.
Todo esto se realiza con la ayuda de un ROBOT de 6° de libertad, este encargado de realizar el traslado y paletizado de las celdas de ácido-plomo en los layers de cada estación.
Un conveyor o transportador de cadenas, que transporta las celdas de ácido-plomo hasta el punto especificado con ayuda de sensores de presencia para que el robot pueda acceder a ellas.
Gabinetes y registros con componentes de seguridad, los gabinetes eléctricos y de control cuentan con componentes de seguridad esto para prevenir fallos o ruido en las señales y limitar riesgos.
Pantalla HMI, este componente facilita el acceso a distintas funciones y menús permitidos por la empresa para que el operador pueda controlar y checar el funcionamiento del sistema.

vi
Índice
I. Introducción
II. Marco Teórico
2.1. PAC (control de automatización programable)
2.2. Point I/O de Seguridad
2.3. Robot
2.4. Drives (Variadores de seguridad)
2.5. Switch Ethernet
2.6. HMI
2.7. Como identificar un componente de seguridad y ¿qué es?
III. Desarrollo del Proyecto
3.1. Necesidad del cliente
3.2. Diseño mecánico
3.3. Instrumentación
3.4. Automatización
IV. Bibliografía
V. Conclusión
VI. Glosario

vii
Índice de figuras
Figura1.1. PAC
Figura 1.2. PLC
Figura 1.3. Point I/O de Seguridad
Figura 1.4. Point I/O
Figura 1.5. Robots Fanuc
Figura 1.6. Drive (Varinder Allen Bradley).
Figura 1.7. Switch Ethernet Allen Bradley
Figura 2.8. HMI (Panel View)
Figura 1.9. Dispositivos de seguridad
Figura 1.10. Conveyor SolidWorks
Figura 1.11. FluidSim
Figura 1.12. AutoCAD
Figura 1.13. Programación Escalera
Figura 1.14. Teachpendant
Figura 1.15. AutoCAD electrical

1
I. Introducción
IDTec automatización es una empresa que se enfoca en brindar sistemas
confiables y de gran nivel que sean capaces de cumplir requerimientos de calidad y
performance, teniendo en cuenta que IDTec es una empresa Mecatronica que posee
la capacidad de administración de proyectos, diseño, programación, fabricación y
ensamble de estos sistemas
En los últimos años la tecnología ha ido avanzando y junto con ella las industrias
cada día poseen las herramientas para brindar un mejor servicio en menor tiempo
tanto producción como innovación en sus productos o servicios y la automatización
es un factor importante en este avance porque al mismo tiempo la automatización
ayuda a reducir riesgos de oxidantes en el trabajo a los trabajadores u operadores de
ellos evitando que el trabajador interactúe lo mínimo hombre-máquina.

2
II. Automatización industrial
Es el uso de sistemas o elementos computarizados y electromecánicos para controlar maquinarias o procesos industriales. Como una disciplina de la ingeniería más amplia que un sistema de control, abarca la instrumentación industrial, que incluye los sensores, los transmisores de campo, los sistemas de control y supervisión, los sistemas de transmisión y recolección de datos y las aplicaciones de software en tiempo real para supervisar y controlar las operaciones de plantas o procesos industriales.
2.1. Controlador de Automatización Programable (PAC)
El PAC es un controlador de Automatización programable, es decir “un sistema
computarizado que puede ser programado para controlar automáticamente la lógica
de funcionamiento de máquinas, plantas y procesos”.
El PAC facilita la solución de problemas de automatización y control en las
industrias. Es un dispositivo muy flexible y de gran capacidad de procesamiento que
se puede adaptar a cualquier tipo de requerimiento, ayudando a mejorar los niveles
de producción de una planta.
La secuencia básica de operación del PAC es:
• Lectura de señales desde la interfaz de entradas.
• Procesado del programa para obtención de las señales de control.
• Escritura de señales en la interfaz de salidas.
El PAC está constituido por cuatro elementos principales:
• Fuente de Alimentación
• CPU
• Memoria
• Módulos de Entradas y Salidas
• Módulos de Comunicación
Otros componentes que permiten su operación son:
La unidad de programación, los dispositivos periféricos y algunos módulos especiales, dependiendo de la aplicación.
3
• Fuente de alimentación “Proporciona el voltaje y la corriente necesaria para el funcionamiento del CPU y las diferentes tarjetas del PAC”, están conectadas a través de un bus interno. La tensión es normalmente 110/220Vac de entrada y 24Vdc de salida. La fuente de alimentación incorpora una batería que se utiliza como energía de respaldo de corta duración. La alimentación a los circuitos E/S se realiza en circuitos independientes con otras fuentes o directamente del transformador a 110/220 VAC o 24 VDC, ya que las E/S necesitan más potencia.
• CPU La Unidad de Procesamiento Central es la parte inteligente del sistema. Consulta el estado de las entradas e interpreta las instrucciones del programa de usuario para ordenar la activación de las salidas correspondientes. El CPU realiza una gran cantidad de operaciones: lógicas, aritméticas, de control y de transferencia de información.
• Memoria, Las memorias guardan la información con la que funciona el PAC. Esta información es la de sistema (firmware) y la de usuario. El firmware es un programa grabado por el fabricante que establece la lógica de más bajo nivel que controla los circuitos electrónicos de un dispositivo. La información de usuario es la que el PAC necesita para ejecutar el control y la constituyen los datos del proceso y los datos de control. O memoria interna Almacena los datos del proceso como son el estado de las variables que maneja el controlador, imágenes de E/S, contadores, relés internos, señales de estado, datos alfanuméricos, temporizadores, constantes, información para las comunicaciones. Las variables contenidas en la memoria interna, pueden ser consultadas y modificadas continuamente por el programa por lo que se construye con dispositivos RAM. O memoria de programa Almacena los datos de control, entre estos tenemos el programa escrito por el usuario para su aplicación, las instrucciones de usuario, la configuración del PAC, y el número de E/S.
• Módulos de comunicación Permiten el tráfico de datos entre las interfaces de operador, las máquinas y los PAC, es decir entre todos los componentes del sistema de automatización. Se usan módulos para comunicaciones individuales punto a punto, multipunto o para la integración de la red. Los módulos de comunicación pueden ser:
• Modulo de comunicación Punto a Punto (Ej: RS232)
• Módulos de comunicación Multipunto (Ej: RS422, RS485)
• Módulos de red Propietarias (Ej: Modbus, DeviceNet)
• Módulos de red Comerciales basados en normas internacionales (Ethernet). Módulos Comunicaciones y Red en Controladores Lógicos Programables y Controladores de Automatización Programables.
Figura1.1 PAC Figura 1.2 PLC
4
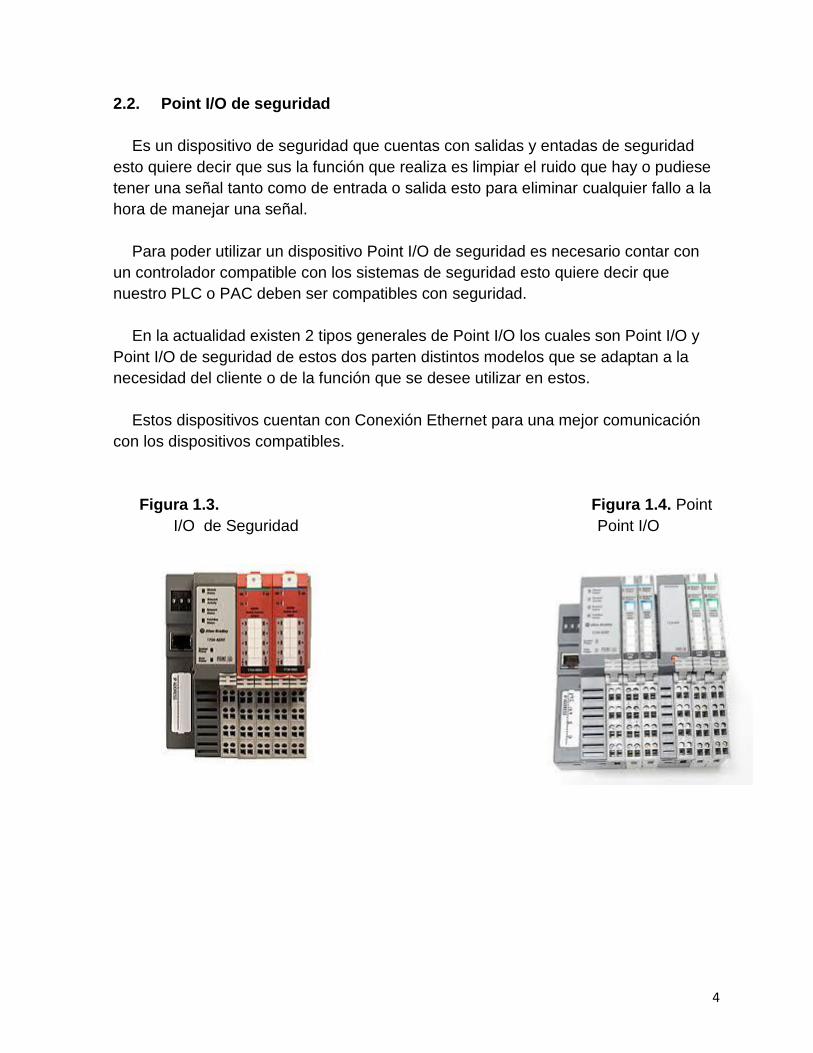
2.2. Point I/O de seguridad
Es un dispositivo de seguridad que cuentas con salidas y entadas de seguridad
esto quiere decir que sus la función que realiza es limpiar el ruido que hay o pudiese
tener una señal tanto como de entrada o salida esto para eliminar cualquier fallo a la
hora de manejar una señal.
Para poder utilizar un dispositivo Point I/O de seguridad es necesario contar con
un controlador compatible con los sistemas de seguridad esto quiere decir que
nuestro PLC o PAC deben ser compatibles con seguridad.
En la actualidad existen 2 tipos generales de Point I/O los cuales son Point I/O y
Point I/O de seguridad de estos dos parten distintos modelos que se adaptan a la
necesidad del cliente o de la función que se desee utilizar en estos.
Estos dispositivos cuentan con Conexión Ethernet para una mejor comunicación
con los dispositivos compatibles.
Figura 1.3. Figura 1.4. Point
I/O de Seguridad Point I/O

5
2.3. Robot
Un robot industrial es un manipulador multifuncional reprogramable, capaz de
mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias
variables, programadas para realizar tareas diversas.
Clasificación de los Robots industriales
La maquinaria para la automatización rígida dio paso al robot con el desarrollo de
controladores rápidos, basados en el microprocesador, así como un empleo de
servos en bucle cerrado, que permiten establecer con exactitud la posición real de
los elementos del robot y establecer el error con la posición deseada. Esta evolución
ha dado origen a una serie de tipos de robots, que se citan a continuación:
Manipuladores
Robots de repetición y aprendizaje
Robots con control por computador
Robots inteligentes
Micro-robots
Los robots utilizados preferentemente en la industria no cuentas con herramienta o
Grippers esto para que se le pueda adaptar cualquier tipo de herramienta.
Existen diferentes modelos con capacidades específicas como velocidad, fuerza,
grados de libertad y tamaños para distintos tipos de tareas
Figura 1.5. Robots Fanuc

6
2.4. Drives (variadores de seguridad)
Los Drives o variadores son dispositivos que se utilizan para el control de un motor
regulando la frecuencia de este cuentan con distintos comandos y funciones
dependiendo del modelo o tipo estos son compatibles con sistemas de seguridad
Clasificación de potencia de 0.4 a 22 kW / 0.5 a 30 Hp en voltajes globales de 100
a 600 V
Cuenta con un diseño modular con un núcleo de control desmontable e innovador
que permite la instalación y la configuración del software de forma simultánea.
Ofrece un amplio rango de control de motores, incluidos los volts por Hertz, el
control vectorial sin sensores y el control vectorial de velocidad de bucle cerrado
Admite una integración transparente con el entorno Logix y redes EtherNet/IP con
EtherNet/IP incorporada.
Opera temperaturas ambiente altas hasta de 70 °C (158 °F) con reducción del
régimen nominal de corriente y un juego de ventiladores de módulo de control.
Ofrece una medida compacta en relación con su rango de potencia y montaje Zero
Stacking con ranuras de flujo de aire de 50 mm.
Brinda un control de motores de imanes permanentes para mejorar la eficiencia de
la energía y reducir los costos relacionados
Cuenta con desconexión de par segura, la cual tiene certificación PLd/SIL2 Cat 3;
desconecta la potencia de rotación al motor sin desconectar la alimentación eléctrica
desde el variador para una puesta en marcha más rápida después de una demanda
en el sistema de seguridad.

7
Figura 1.6. Drive (Variador Allen Bradley).
2.5. Switch Ethernet
Cada Switch Ethernet Industrial dispone de sistema de conexión que pueden ser
de tipo RJ45, M12 o fibra óptica. Esto para hacer posible comunicación entre 2 o más
dispositivos industriales
Figura 1.7. Switch Ethernet Allen Bradley

8
2.6. HMI Panel View
HMI es una pantalla táctil que permite al operador o usuario un menú accesible y
fácil de usar para tener una mejor comunicación con el sistema
Figura 1.8. HMI (Panel View)
2.7. Como identificar un componente de seguridad y ¿qué es?
Un componente de seguridad cuenta con el mismo funcionamiento que un
componente sin seguridad la diferencia entre ambos funcionalmente son las
siguientes:
Un dispositivo de seguridad corrige las señales evitando así ruido en la señal o
variantes de esta misma.
Son más precisos a la hora de recibir señales, ejemplo si la señal no es 0 o 24V
este no reaccionara evitando riesgos en el proceso, sin embargo este cuenta con un
rango donde si la señal se encuentra dentro de él, amplificara la señal debilitada
haciendo la función de un repetidor de señal.
9
Físicamente la diferencia entre uno u otro es la siguiente los dispositivos de
seguridad cuentan con una línea roja en algunos casos o con este mismo color en la
mayor parte de su carcasa fácil de distinguir.
Los dispositivos de seguridad cuentan con una figurita como se muestra en la
siguiente imagen
Figura 1.9. Dispositivos de seguridad
III. Desarrollo del proyecto
3.1. Necesidad del Cliente
En base a la necesidad del cliente se plantea una solución a ese problema y se
elige la mejor opción que tanto como el cliente y la empresa estén de acuerdo que es
la indicada.
Teniendo en cuenta la idea y el funcionamiento de este a continuación el siguiente
paso es diseñar tanto lo mecánico como lo eléctrico.

10
3.2. Diseño Mecánico
Dentro de lo que es diseño mecánico se inicia buscando los componentes que se
necesitan de catálogos seleccionando así la mejor opción para el proyecto, también
se diseña la herramienta para el robot. Una vez teniendo lo necesario, se sigue con
el siguiente paso que es diseñar el proyecto en 3D utilizando el programa Solidworks
que es una herramienta muy buena a la hora de hacer diseños 3D ya que cuenta con
muchas herramientas útiles para este tipo de trabajos
Figura 1.10. Conveyor SolidWorks
Una vez terminado el diseño de cada pieza y o componente que es necesario, se
utiliza la herramienta de ensamble que proporciona SolidWorks y de esta forma
realizar una pequeña simulación o prevista al diseño del proyecto.
Cuando el ensamble 3D sea el esperado, se realizan planos con medidas en el
programa AutoCAD para la fabricación del diseño, es importante recalcar que estos
planos deben de contar con todas las medidas necesarias para que no tenga
problema alguno con su fabricación.
11
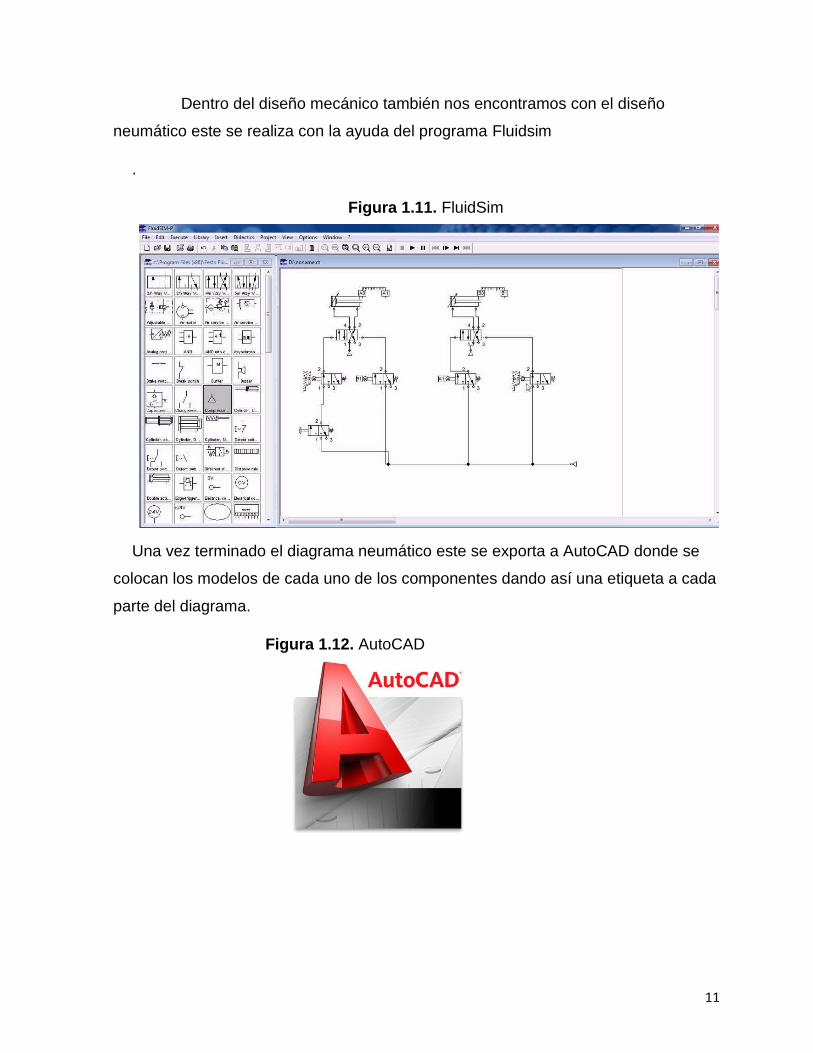
Dentro del diseño mecánico también nos encontramos con el diseño
neumático este se realiza con la ayuda del programa Fluidsim
.
Figura 1.11. FluidSim
Una vez terminado el diagrama neumático este se exporta a AutoCAD donde se
colocan los modelos de cada uno de los componentes dando así una etiqueta a cada
parte del diagrama.
Figura 1.12. AutoCAD

12
3.3. Instrumentación
Dentro del departamento de instrumentación se realiza el ensamblado de los
componentes eléctricos y mecánicos, para realizar las pruebas necesarias una vez
que todo esté listo.
Realizan el chequeo final a todas y cada una de las conexiones de los gabinetes y
registros con los que cuenta el proyecto así como el armado de la herramienta o
Gripper del robot
3.4. Automatización
El departamento de automatización cuenta con diferentes grupos por ejemplo:
Programación PAC
Programación Robot
Diseño de circuitos eléctricos
Cada uno de estos grupos está encargado de distintas áreas dentro del proyecto
Programadores de PAC y PLC manejan lenguaje tipo escalera ya que actualmente
en la industria es la mejor opción en programación ya que es fácil de comprender y
manejar.
Figura 1.13. Programación Escalera
13
Programadores de Robot Manejan lenguaje tipo ensamblador que proporciona el
proveedor del robot cada robot cuenta con un Teachpendant
Figura 1.14. Teachpendant
Los programadores de robot y programadores de PAC o PLC Realizan Pruebas de
conexión y comunicación entre ambos dispositivos ya que es muy importante que no
tenga fallo alguno entre la comunicación de ambos equipos.
Diseño de circuito eléctrico este grupo se encarga de diseñar los diagramas de
conexión de todo el sistema eléctrico utilizando AutoCAD eléctrical
1.15. AutoCAD electrical

14
IV. Bibliografía
(Libros)
Antonio Creus Solé. (2010). Instrumentación Industrial. Barcelona,
España: MARCOMBO.
Josep Balcells Sendra / José Luís Romeral. (2000). Automatas
Programables. Barcelon, España: MARCOMBO.
(Páginas de internet)
Drives Manual Allen Bradley PDF
URL
http://literature.rockwellautomation.com/idc/groups/literature/documen
ts/um/20b-um002_-en-p.pdf
HMI Manual Allen Bradley PDF
URL
http://literature.rockwellautomation.com/idc/groups/literature/documen
ts/um/2711c-um001_-es-p.pdf
PAC PDF
URL
http://www.wmea.net/Technical%20Papers/Allen%20Bradley%20Pro
grammable%20Automation%20Controllers%20-%20Nov%2008.pdf
ROBOT FANUC Manual PDF
URL
http://www.infoplc.net/files/descargas/fanuc_robotica/infoPLC_net_M
anualFANUCR-J3iB.pdf

15
V. CONCLUSION
Hoy en día las empresas han comenzado a actualizar sus procesos de
producción que anteriormente eran más lentos y menos eficientes, y han
apostado por el uso de dispositivos más actuales y más eficientes
Este proyecto es un buen ejemplo del avance que ha tenido la automatización
dentro de las empresas y los resultado son notables tanto que las empresas
optan por automatizar parte de su producción y ahí estar innovando
constantemente.
Este proyecto tubo resultados positivos tanto para el cliente como para IDTec
cumpliendo así con todas las necesidades y abriendo oportunidad a una
innovación del mismo proyecto para el cliente.

16
VI. Glosario
FANUC. Empresa fabricante de robots industriales.
HMI. Interfaz Humano Maquina.
PLC. Control lógico programable.
PAC. Control de Automatización Programable
DRIVES. Variador de frecuencia para motores AC
POINT I/O. Dispositivo de entradas y salidas de señales