微分方程式講義ノート¾®分方程式.pdf0 微分方程式とはどういうものか 0.1...
TRANSCRIPT

微分方程式 講義ノート

必要な微積分法の知識
積の微分法
(u(x)v(x))′ = u′(x)v(x) + u(x)v′(x)
商の微分法(u(x)
v(x)
)′
=u′(x)v(x)− u(x)v′(x)
v(x)2
合成関数の微分法
y = g(t), t = f(x) の合成関数 y = g(f(x)) の導関数dy
dxは
dy
dx=
dy
dt
dt
dx.
また, 記号 y′, f ′, g′ などを使うと
y′ = f ′(g(x))g′(x).(左辺を (f(g(x))′ と書くことがある.
)と書くこともある.
[例] y = eax+b (a, b は定数) は ax+ b = t とおくと y = et, t = ax+ b の合成関数となるから
dy
dx=
dy
dt
dt
dx=
d
dtet
d
dx(ax+ b) = et × a = aeax+b.
積分変数の変換. (置換積分法.)
不定積分∫
f(x) dx において x = g(t) をもちいて積分変数を x から t に
置き換えるには, f(x) を f(g(t)) で, dx をdx
dtdt で置き換えて∫
f(x)dx =
∫f(g(t))
dx
dtdt.
定積分の場合は t が a から b まで変動するとき x は g(a) から g(b) まで変動するので∫ g(b)
g(a)
f(x)dx =
∫ b
a
f(g(t))dx
dtdt.
1

[例 1]
∫eax+b dx (a = 0, b は定数).
ax+ b = t とすると eax+b = et, また x =t− b
aより dx =
dx
dtdt =
1
adt だから∫
eax+bdx =
∫et1
adt =
1
aeax+b.
[例 2]
∫dt
1 + t2.
x = tan−1 t とするとdx
dt=
1
1 + t2より dx =
dx
dtdt =
dt
1 + t2だから∫
dt
1 + t2=
∫dx = x = tan−1 t.
部分積分法∫u′vdx = uv −
∫uv′dx, あるいは
∫ b
a
u′vdx = [uv]ba −∫ b
a
uv′dx.
指数関数と対数関数
指数法則 ea+b = eaeb, ea−b =ea
eb, eab = (ea)b.
対数法則 logAB = logA + logB, logA
B= logA − logB, logAk = k logA,
ただし A,B = 0.
指数と対数の関係 a = eb ⇔ b = log a だから elog a = a, log eb = b.
導関数 (ex)′ = ex, (log |x|)′ = 1
x.
原始関数∫
ex dx = ex,
∫1
xdx = log |x|,
∫log x dx = x log x− x.
y = eaxのグラフ
O
y
x
a > 0 の場合
a < 0 の場合1
2

三角関数
sin2 x+ cos2 x = 1, 1 + tan2 x =1
cos2 x,
cos(α+ β) = cosα cos β − sinα sin β,
sin(α + β) = sinα cos β + cosα sin β
(sinx)′ = sin(x+
π
2
)= cos x だから
∫cosxdx = sin x = cos
(x− π
2
).
(cosx)′ = cos(x+
π
2
)= − sinx だから
∫sinxdx = − cosx = sin
(x− π
2
).
(tanx)′ =1
cos2 x.
逆三角関数sin−1 x = y ⇔ sin y = x ただし−1 <−− x <−− 1,
π
2<−− y <−−
π
2.
cos−1 x = y ⇔ cos y = x ただし−1 <−− x <−− 1, 0 <−− y <−− π.
tan−1 x = y ⇔ tan y = x ただし−∞ < x < ∞, −π
2< y <
π
2.
(sin−1 x)′ =1√
1− x2, (cos−1 x)′ =
−1√1− x2
, (tan−1 x)′ =1
1 + x2.
べき関数x > 0 に対し
xnm = m
√xn, x− n
m =1
m√xn
, (n,m = 1, 2, . . . )
とくに x12 =
√x, x− 1
2 =1√x.
(xα)′ = αxα−1 (α; 定数 ).
特に α =1
2のとき,
(√x)′=
1
2√x.∫
xα dx =xα+1
α + 1(α = −1; 定数 ).∫
x−1 dx =
∫dx
x= log x.
3
0 微分方程式とはどういうものか
0.1 定義
未知数 x の方程式というのは, 例えば
x2 − 3x+ 2 = 0
のような x の関係式であり, その解は数で,
x = 1 と x = 2
である. これに対し, 一つの変数 (例えば x)とその関数 (例えば y(x))およびその導関数の関係式, 例えば
y′(x) = 3y(x)
のようなものを常微分方程式という. またこの場合の x を独立変数といい, y(x) を未知関数という. 常微分方程式では分からないもの, 求めたいものは数ではなく関数であるところがこれまで習った方程式と大きく違う点である. 常微分方程式を満たす関数をこの常微分方程式の解という. この例の解は
y(x) = Ce3x (Cは任意の定数)
である. また, 二つ以上の独立変数 (たとえば x, y)とその未知関数 (たとえば u(x, y))およびその偏導関数 (ux(x, y), uy(x, y), · · · )の関係式を偏微分方程式という. またそれらの関係式を満たすような関数をその偏微分方程式の解という.
0.2 例
(1) 常微分方程式 y′(x) = 4x
独立変数 は x, 未知関数 は y = y(x).
解は y = 2x2 + C, C は定数であるが値はなんでもよい.
(2) 常微分方程式 y′(t) = 4y(t)
独立変数 は t, 未知関数 は y = y(t).
解 は y = Ce4t, C は定数であるが値はなんでもよい.
(3) 偏微分方程式 uxx(x, y) + uyy(x, y) = 0.
独立変数 は x と y. 未知関数 は u = u(x, y).
一つの解は u = log(x2 + y2).
4

0.3 何をするために使うか
0.3.1 物体の自由落下
パチンコ玉のような小さい物体を空中で落下させるときの運動のありさまを知りたい.
真空中の場合
0
y(t)
mg
mg
時刻 を t [s]
物体の質量を m [kg]
物体の時刻 t での位置を y(t) [m]
時刻 t での速度を v(t) [m/s]
時刻 t での加速度を a(t) [m/s2]
で表す. (y, v は下向きを正として測る.) このとき
v(t) =dy
dta(t) =
d2y
dt2
である.
一般に物体に力 F (t)が働くときその物体には
F (t) = ma(t)
で決まる加速度 a(t)が生じるということが知られている. これをNewton
の運動方程式という. 今の場合働く力 F は F = mg だから y(t) は微分方程式
my′′(t) = mg 従って y′′(t) = g
を満たすことがわかる. 解は
y(t) =1
2gt2 + v(0)t+ y(0) [m]
である. 特に, 初期位置 y(0), 初速 v(0) をともに 0 とすると
y(t) =1
2gt2 [m/s]
[問] この関数が解になっていることを確かめよ.
[問] t = 1, 5, 10, 20, 30 のときの落下距離と速度を計算せよ.
5

速度に比例して空気抵抗が働く場合前節の計算では速度が速くなりすぎるので,速度に比例した空気抵抗が生じる場合を想定する. 比例定数を k とすると上向きに kv(t) の大きさの空気抵抗が働くので, 物体に働く力は F = mg − kv(t) となる. したがって微分方程式は
my′′(t) = mg − ky′(t) 従って my′′(t) + ky′(t)−mg = 0
のように修正される. 解は
y =mg
k
((v(0)
g− m
k
)(1− e−
kmt)+ t
)+ y(0) [m]
であることが分かっている. 特に, 初期位置 y(0), 初速 v(0) をともに 0 とすると
y =mg
k
(t− m
k
(1− e−
kmt))
[m]
である.
[問] この関数が解であることを確かめよ. また t秒後の速度を求めよ.
参考までに雨滴の落ちる早さは次のようである. (広島市江波山気象館資料)
直径 [mm] 0.02 0.15 0.5 1 2 3
速度 [m/s] 0.01∼2 0.5 2.2 4 6.2 7.8
6

0.3.2 単振動
図のように壁面に物体がバネでつながれている. 床は摩擦がないものとする.
0 y(t)
ky′(t)
時刻 を t [s],
物体の質量を m [kg],
物体の時刻 t での位置を y(t) [m] で表す.
(位置, 速度は右向きを正として測る.)
ばねが伸び縮みしていないときの物体の位置を原点とすると, 物体にはバネの弾性力 −ky(t) [N] が働く. ただし k > 0
は弾性定数である. 運動方程式から y(t) は微分方程式
my′′(t) = −ky(t)
を満たすことがわかる. 解は
y = C1 cos
√k
mt+ C2 sin
√k
mt または y = A sin
(√k
mt+ φ
)(C1, C2, A, φ は y(0), y′(0)から決まる定数)
である.
[問] この関数が解になっていることを確かめよ.
0.3.3 電気回路の振動
C
LI(t)
q−q
図のような回路に時刻 t で流れる電流 I(t) は微分方程式
I ′′(t) + LCI(t) = 0
を満たす事が分かる. (後で詳しく述べる予定.) これは前節の方程式と同じ形をしているので解は
I = C1 cos√LCt+ C2 sin
√LCt または
y = A sin(√
LCt+ φ)
(C1, C2, A, φ は I(0), I ′(0)から決まる数)
となる.
7

0.3.4 生物個体群の成長
ある種の微生物の時刻 t [h] での個体数 (連続量と見なす)を y = y(t) [億個] とし
u(t,∆t) =y(t+∆t)− y(t)
y(t)
とおく. u(t,∆t) は時刻 t から t +∆t までの (時間∆tの間の)個体数の伸び率である.
増殖率一定の場合u(t,∆t)が tによらず ∆tのみで決まると仮定しこれを単に u(∆t)で表すと (u(0) = 0 であることに注意して)
y(t+∆t)− y(t)
∆t=
u(∆t)− u(0)
∆ty(t)
となる. ∆t → 0 とすることにより y(t) は微分方程式
y′(t) = u′(0)y(t)
を満たすことがわかる. この解は u′(0) = k とおくと
y = y(0)ekt
である. この k は t = 0の瞬間の伸び率であり, 増殖率という.
[問] この解の伸び率は一定であることを確かめよ.
以下に人類の総人口の増加の様子を示す.
年次 (西暦) 0 1630 1660 1800 1850 1900 1950 1970 2004人口 (億人) 2.5 4 4.45 8 10 16 22 36.2 63.3
8

個体数が大きくなると増殖率が小さくなる場合個体数があまりに大きくなると増殖率は低下するであろう. 例えば増殖率を k − ly(t) (l は正の定数) に変えると微分方程式は
y′(t) = (k − ly(t))y(t)
となり 解は
y =y(0)(
1− lky(0)
)e−kt + l
ky(0)
となることが分かっている.
[問] この関数が解になっていることを確かめよ.
[問] この関数は単調増加であるが, ある一定の量を超えないことを確かめよ.
0.4 まとめ
1. 微分方程式によっていろいろな現象に現れる量の変化の仕組みを言い表すことができる. これをその現象の数学モデルという.
2. 特に物体とそれに働く力が分かっているような場合には,運動方程式によってモデルを作ることができる.
3. そのモデルを解くことによってその現象の変化を予測することができる.
4. 解と実際の現象がかけ離れているときは, より精密なモデルを作り直して再度比較すればよい.
9

1 1階常微分方程式この節では独立変数を x とする. x の未知関数 y = y(x) とその導関数
y′(x), y′′(x), . . . の関係式 F (x, y, y′, y′′, · · · ) = 0 を yに関する常微分方程式というのであった. 以後常微分方程式を単に微分方程式という. ここに含まれる導関数の階数の最大値を, この常微分方程式の階数という. また, y,
y′, y′′ に関して 1次であるようなものを線形微分方程式といい, そうでないようなものを非線形微分方程式という. さらに, 線形微分方程式の内 y,
y′, y′′ の係数が定数であるようなものを定数係数線形微分方程式といい,
係数が xの関数であるようなものを変数係数線形微分方程式という.
一般に微分方程式の解は無数にあるが,これらを任意の値をとりうる定数 (これを任意定数とよぶ)を用いて一般的に表したものを一般解という.
一般解の任意定数に数値を代入して得られる解を特殊解という.
1.0 正規型1階常微分方程式
f(x, y) を 2変数の連続関数とするとき,
y′(x) = f(x, y) (1)
の形の微分方程式を正規型 1階常微分方程式という.
xをある特定の値 x0 に固定して, y(x0), y′(x0), · · · の値を定めるような条
件を初期条件という. 微分方程式と初期条件を{y′ = f(x, y)
y(x0) = a0(2)
のように組にしたものを微分方程式の 初期値問題 という.
初期値問題 (2) はある条件のもとで必ず一つだけ解を持つことを説明しよう. 解 y = y(x) のグラフ ( これを 解曲線 という) は曲線上の点 (x, y)
における接線の傾きは f(x, y) に等しいという性質を持つ. そこで各点(x, y) にベクトル (1, f(x, y)) の方向だけを対応させたもの (方向場 という)
を作る. 方向場は, 下の図のように各点 (x, y) に傾き f(x, y) の小線分を引いて表すと分かりやすい.
x
(x, y)傾き f(x, y)
これをすべての点 (x, y) において作る. 解曲線は曲線上のすべての点でこの小線分に接していることになる. 逆に言うと, そのような曲線が作れたらそれは解曲線となっていることになる. そのように解曲線が引けるためには, 方向場が滑らかならばよいだろう.
じつは次のことが分かっている.
10

定理 1.0 f(x, y), fy(x, y)は xy 平面の領域 Dで連続であるとし, (x0, a0) ∈D であるとする. このとき点 (x0, a0) の適当な近傍で初期値問題 (2) の解がただ一つ存在する.
[注意] f(x, y), fy(x, y)が連続であるという条件が方向場の滑らかさを意味している.
[考え方] (x0, a0)をとおる解曲線が少なくともひとつ存在すること.
図は f(x, y) = y − y2 の場合であるが, 定理の条件をみたしており方向場 (左図)はなめらかである. この事から右図のように解曲線が存在することを証明することが可能である.(詳細は省略する. )
-1 -0.5 0.5 1
-1
1
2
y′ = y − y2 の方向場
-1 -0.5 0.5 1
-1.5
-1
-0.5
0.5
1
1.5
2
2.5
y′ = y − y2 の解曲線
一点をとおる解曲線はひとつしかないこと.
y = y1(x), y = y2(x) を (2) の 2つの解とする. x > x0 で考える.
d
dx(y1(x)− y2(x))
2 = 2(y′1(x)− y′2(x))(y1(x)− y2(x))
= 2(f(x, y1)− f(x, y2))(y1(x)− y2(x))
ここで, 平均値の定理により f(x, y1) − f(x, y2) = fy(x, ξ) (ξ は y1(x) と y2(x)
の間にある適当な数) とできて, さらに fx(x, y) は連続であることにより(x0, a0) の近傍で有界であるから適当な数Cにより
<−− 2C(y1(x)− y2(x))2
11

両辺に e−2Cx をかけて移項すると
e−2Cx d
dx(y1(x)− y2(x))
2 − 2Ce−2Cx(y1(x)− y2(x))2 <−− 0
ところで積の微分法により
左辺 =d
dx
(e−2Cx(y1(x)− y2(x))
2)
だから e−2Cx(y1(x)− y2(x))2 は単調減少であることが分かる. したがって
e−2Cx(y1(x)− y2(x))2 <−− e−2Cx0(y1(x0)− y2(x0))
2 = 0
つまり
x > x0 ならば y1(x) = y2(x)
だから (2) の解はひとつしかない.
1.1 定数係数1階線型常微分方程式 (斉次型)
a を定数とするとき
y′(x) + ay(x) = 0 (3)
の形の微分方程式を斉次型定数係数 1階線型常微分方程式という. 正規形 1階方程式 (1) において f(x, y) = −ay としたものである.
定理 1.1. (1.1) の一般解は
y(x) = Ce−ax (C : 任意定数) (4)
であり他に解はない.
[確かめ] (4) が解であることは, (e−ax)′= −ae−ax であることから明らか.
(4) の他に解がないこと. は定理 1.0の条件を満たすので, 定理により明らか. □
初期値問題
定理 1.2. a, x0, y0 を定数とするとき, 初期値問題
y′(x) + ay(x) = 0, (3)
y(x0) = y0 (5)
12

はただ一つの解
y(x) = y0 e−a(x−x0) (6)
を持つ.
[確かめ] (3) の一般解は定理 1.1より y(x) = Ce−ax · · · (4) であり, またこれしかないが,これが初期条件 (5)を満たすようにCの値を決めればよい.
(4) に x = x0 を代入すると,
y(x0) = Ce−ax0
となるが (5) を使うと
y0 = Ce−ax0
となるので
C = y0eax0
を得る. この C を (4)に代入すれば (6)が得られる. □
1.2 定数係数1階線型常微分方程式 (非斉次型)
xを独立変数, y(x)を未知関数, aを定数, r(x)を既知関数とする. この時
y′(x) + ay(x) = r(x) (7)
を非斉次型定数係数 1階線型常微分方程式という. これは (1) においてf(x, y) = −ay + r(x) としたものである.
定理 1.3. r(x) を連続関数とする. (7) の一般解は
y(x) =
(∫r(x) eax dx + C
)e−ax (C : 任意定数) (8)
であり他に解はない.
[確かめ] (8) の両辺を微分すると
y′(x) =
(∫r(x) eax dx+ C
)′
e−ax +
(∫r(x) eax dx+ C
)(e−ax)′
= (r(x) eax) e−ax +
(∫r(x) eax dx+ C
)(−ae−ax) = r(x)− a y(x)
だから (8) が (7) の解であることが確かめられた.
13

(8)の他に解がないことは, (7)が定理1.0の条件を満たすので,定理により明らかである. □
[例 1.4] y′(x) + 2y(x) = 2x の一般解を求めよう.
e2x をこの方程式の積分因子といい, 次のように重要な働きをする. 積分因子 e2x を両辺にかけて
e2xy′(x) + 2e2xy(x) = 2xe2x.
この左辺 =(e2xy(x)
)′だから両辺を積分して
e2xy(x) =
∫2xe2x dx+ C.
右辺の積分は部分積分法により∫2xe2x dx = 2x
(1
2e2x)−∫
2
(1
2e2x)
dx+ C = xe2x − 1
2e2x + C
であるから, 解は
y = x− 1
2+ Ce−2x.
1.3 変数係数1階線型常微分方程式
y(x) を未知関数, f(x) を定数でない既知関数, r(x) を既知関数とする.
y′(x) + f(x)y(x) = r(x). (9)
の形の微分方程式を変数係数 1階線型常微分方程式という. r(x) ≡ 0 のとき斉次型, r(x) ≡ 0 のとき非斉次型という. これは (1) において f(x, y) =
−f(x)y + r(x) としたものである.
定理 1.4. f(x) を連続関数とする. 斉次型変数係数 1階線型常微分方程式の一般解は
y(x) = C e−F (x) (C : 任意定数) (10)
であり他に解はない. ただし F (x) は f(x) の原始関数.
定理 1.5. f(x), r(x) を連続関数とする. さらに一般に必ずしも斉次型でない変数係数 1階線型常微分方程式の一般解は
y(x) =
(∫r(x) eF (x) dx + C
)e−F (x) (C : 任意定数) (11)
14

であり他に解はない. ただし F (x) は f(x) の原始関数である. ここに現れる eF (x) を (10) の積分因子という.
[定理 1.5 の確かめ] まず (11) が (9) の解であることを示す.(eF (x)
)′=
f(x) eF (x) であることに注意して (11) の両辺を微分すると
y′(x) =
(∫r(x) eF (x) dx+ C
)′
e−F (x) +
(∫r(x) eF (x) dx+ C
) (e−F (x)
)′= r(x) eF (x) e−F (x) +
(∫r(x) eF (x) dx+ C
) (−f(x) e−F (x)
)= r(x)− f(x) y(x)
だから確かに (9) が満たされている.
(11)の他に解がないことは (9)が定理1.0の条件を満たすので,定理により明らかである. □注意を
[例 1.8.] 初期値問題 y′(x) + 2x y(x) = −x, y(1) = 0 の解を求めよう.
y の係数は 2x であり∫
2x dx = x2 + C (C は積分定数) だから積分因子
は ex2とすればよい. これを両辺にかけると
ex2
y′(x) + 2xex2
y(x) = −xex2
となる.(ex
2)′
= 2xex2に注意して積の微分法を使うと
左辺 =(ex
2
y(x))′
となるから両辺を積分すると
ex2
y(x) =
∫(−x)ex
2
dx+ C C は積分定数
となる. 右辺の積分は x2 = t とおいて置換積分することにより∫(−x)ex
2
dx = −1
2ex
2
+ C C は積分定数
となる. さらに両辺を ex2で割ると
y(x) = −1
2+ Ce−x2
C は任意定数
が得られるが, これが一般解である.
x = 1 を代入すると初期条件 y(1) = 0 により C =e
2がでてくるから, 特
殊解は
y(x) =e1−x2 − 1
2.
15

定数変化法 = 非斉次方程式の別解法
積分因子の替わりに次に述べる方法 (定数変化法)を用いても変数係数線形 1階微分方程式 (9) の一般解を求めることができる.
定理 r(x) ≡ 0 のときの (9) の一般解は
y(x) = C e−F (x) (F (x) : f(x) の原始関数, C :任意定数)
であるが, この C を適当な関数 u(x) に置き換えて
y(x) = u(x) e−F (x)
が必ずしも r(x) ≡ 0 でないときの (9) の一般解になるようにすることができる.
証明は省略する.
1.4 未定係数法
定数係数 1階線形微分方程式 (7) の右辺 r(x) が特別な関数である場合は, 次に述べる未定係数法を用いる事により, 面倒な積分をしなくとも一般解を求めることができる. まず, 次のことが分かっている. これは変数係数の場合にも成り立つ.
定理 1.6. (非斉次線型方程式の解の構造) 1階線形微分方程式
y′(x) + f(x)y(x) = r(x). (9)
の一般解は
y(x) = yp(x) + C e−F (x)
と表すことができる. ただし yp(x)は (9)の任意の一つの解, F (x)は f(x)の原始関数, C は任意定数である.
ここで C e−F (x) は (9) で r(x) ≡ 0とした斉次方程式
y′(x) + f(x)y(x) = 0 (12)
の一般解であることに注意せよ.
[確かめ] y(x), yp(x) ともに (9) の解だから
y′(x) + f(x)y(x) = r(x),
(yp(x))′ + f(x)yp(x) = r(x)
16

である. この両辺を引き算して
(y(x)− yp(x))′ + f(x)(y(x)− yp(x)) = 0
を得るが, これは y(x) − yp(x) が斉次方程式 (12) の解であることを表している. 従って定理 1.4 により
y(x)− yp(x) = C e−F (x)
がわかる. □
定理 1.6によれば (9)の一つの解 yp が分かれば (12)の一般解が分かることになる. 特に
• f(x) ≡ a (定数係数) で
• r(x) が 多項式, 三角関数, 指数関数の組み合わせ
のときは, 次に述べる未定係数法がうまく行く.
[r(x) = n次多項式のとき]
yp(x) =
{n次多項式 (a = 0のとき)
n+ 1次多項式 (a = 0のとき)
とおき係数を決めればよい.
[例 1.10] y′ + 3y = x2 − 1 · · · (a) の一般解を求めよ.
yp = αx2 + βx+ γ とおいて (a) の y に代入すると
(yp)′+3yp = (2αx+β)+3(αx2+βx+γ) = 3αx2+(2α+3β)x+β+γ = x2−1.
したがって
3α = 1 2α+ 3β = 0 β + γ = −1
でなくてはならない. これを解いて α =1
3, β = −2
9, γ = − 7
27を得るから
yp =1
3x2 − 2
9x− 7
27.
一方, y′ + 3y = 0 · · · (b) の一般解は y = Ce−3x だから a の一般解は
y =1
3x2 − 2
9x− 7
27+ Ce−3x.
17

[r(x) = cosωx, sinωxのとき] yp(x) = α cosωx+ β sinωxとおき係数α,
β を決めればよい.
[例 1.12] y′ + 2y = cos x · · · (a) の一般解を求めよ.
yp = α cosx+ β sinx を (a) の y に代入すると
(yp)′+2yp = (−α sin x+β cosx)+2(α cos x+β sinx) = (2α+β) cos x+(2β−α) sin x = cosx.
したがって
2α + β = 1 − α + 2β = 0
でなくてはならない. これを解いて α =2
5, β =
1
5を得るから
yp =2
5cos x+
1
5sin x.
一方, y′ + 2y = 0 · · · (b) の一般解は y = Ce−2x だから (a) の一般解は
y =2
5cos x+
1
5sin x+ Ce−2x.
[r(x) = keqx (q = −a) のとき] yp(x) = αeqxとおき係数 αを決めればよい.
[例 1.13] y′ − y = 2e2x · · · (a) の一般解を求めよ.
yp = αe2x を (a) の y に代入すると
(yp)′ − yp = (2α− α)e2x = 2e2x.
したがって α = 2 でなくてはならない.
一方, y′ − y = 0 · · · (b) の一般解は y = Cex だから (a) の一般解は
y = 2e2x + Cex.
1.5 変数分離型
非線形の微分方程式は解けないことがあるが, 非線型であっても
y′(x) = f(x)g(y(x)) (f ,g は既知関数. ) (13)
の形の微分方程式は, (積分さえ計算できれば)よく知られた関数の範囲で解を得ることができる. (13) を変数分離型微分方程式という.
18

[解法] (Step 1) g(y0) = 0 を満たす定数 y0 をさがす. もしあれば, 定数関数 y(x) ≡ y0 は (13) の解となる.
(Step 2) y(x) = y0 とならない解を求める. ((13) の解はある x で y(x) =y0 ならばすべての x で y(x) = y0 であることが分かっている.)
(Step 2-1) (13) の両辺を g(y(x)) で割る:
1
g(y(x))
dy
dx= f(x).
(Step 2-2) 両辺を xで積分する:∫1
g(y(x))
dy
dxdx =
∫f(x) dx+ C.
(Step 2-3) 置換積分法をつかって左辺の積分変数をxから yに変換することにより∫
dy
g(y)=
∫f(x) dx+ C.
この両辺の積分を計算したものが一般解である.
[例] y′(x) = y(x)(2− y(x)) · · · (a) の一般解を求めよ.
(a) は (13) で f(x) = 1, g(y) = y(2 − y) としたものである. まず定数関数y = 0, y = 2 は (a)の解である.
次に y = 0, 2 として両辺を y(y − 2) で割ると
1
y(y − 2)
dy
dx= −1.
両辺を x で積分すると
左辺の積分 =
∫1
y(y − 2)
dy
dxdx =
∫1
y(y − 2)dy
=
∫ (1
2(y − 2)− 1
2y
)dx =
1
2log
∣∣∣∣y − 2
y
∣∣∣∣+ C.
右辺の積分 =
∫−1 dx = −x+ C.
両辺比較して
1
2log
∣∣∣∣y − 2
y
∣∣∣∣ = −x+ C.
これを yについて解くと
y =2Ce2x
Ce2x − 1(C は任意定数).
これが一般解である. 定数解 y = 0 は一般解に含まれるが y = 2 は含まれない. このような解を 特異解という.
19

1.6 補足・発展
変数変換によって変数分離型に帰着される (従って”解ける”)微分方程式があるので, それを説明する.
1.6.1 同次型
y′(x) = f
(y(x)
x
)(f は既知関数. )
[解法] u =y
xにより変数を y から u へ変換して u の方程式に直すと,
y′ = (xu)′ = u+ xu′ だから
u′ =f(u)− u
x
のように変数分離型になる.
[例] y′(x) = − x
y(x)· · · (a) の一般解を求める.
f(u) = − 1uだから微分方程式は
u′ = −1 + u2
xu
となり, 解は
u = ±√C − x2
xしたがって x2 + y2 = C.
1.6.3
y′(x) = f(ax + by(x) + c) (f は既知関数, a, b, c は定数. )
[解法] u = ax+ by + c により変数を y から u へ変換して u の方程式に直すと, 変数分離型になる.
[例] y′(x) =1
x+ y(x)· · · (a) の一般解を求める.
u = x+ y u′ = 1 +1
u
u− log u = x+ C したがって y − log(x+ y + 1) = C.
20

2 2階線型常微分方程式
2.1 定数係数線型斉次方程式
2階の微分方程式
(2.1) y′′ + ay′ + by = 0, a, b : 実数の定数
を定数係数線型 2 階斉次常微分方程式という. これは完全に解くことができて,解は指数関数と三角関数を用いて表すことができる. 議論の見通しをよくするために複素指数関数を導入する.
2.1.1 複素指数関数
絶対値が 1である 2つの複素数 λ1 = cos q1 + i sin q1, λ2 = cos q2 + i sin q2 の積は
λ1λ2 = (cos q1 + i sin q1)(cos q2 + i sin q2) = cos(q1 + q2) + i sin(q1 + q2)
である.
O O O
q1 q2 q1q2λ1
λ2
λ1λ2
この事を利用して次のように複素指数関数を定める. 複素数 λ = p + iq
(p, q は実数) に対してeλ = ep(cos q + i sin q)
と定める.
複素指数関数は指数法則eλ1+λ2 = eλ1eλ2
をみたす. また, λ = p + iq を複素数の定数, x を実数の変数とするとき, x
の関数x 7→ eλx
を考えると, 導関数と不定積分は
d
dxeλx = λeλx,
∫∫∫eλxdx =
1
λeλx
となる. ただし積分は λ = 0 の場合のみ正しい. また, 左辺の微積分は i を通常の実数定数と同様にあつかって計算する.
21

2.1.2 重ね合わせの原理
C1, C2 を定数とするとき
y1(x), y2(x)が (2.1)の解 =⇒ C1 y1(x) + C2 y2(x)も (2.1)の解.
である.
[確かめ] C1 y1(x) + C2 y2(x) を (2.1) の左辺に代入すると
(C1 y1(x) + C2 y2(x))′′ + a(C1 y1(x) + C2 y2(x))
′ + b(C1 y1(x) + C2 y2(x))
= C1 (y′′1(x) + ay′1(x) + by1(x)) + C2 (y
′′2(x) + ay′2(x) + by2(x))
= 0
だから (2.1)をみたす.
2.1.3 関数の独立性, 基本解系
平面のベクトル a =−→OA, b =
−→OB の組 {a, b} が一次独立 (または線形独
立)であるとは, 点 O, A, B が一つの直線上にないことである. このことは
「定数の組 k1, k2 があって k1 a+ k2b = 0 となる」=⇒ k1 = k2 = 0
というのと同じことである. また, a = (a1, a2), b = (b1, b2) のとき
{a, b} が一次独立 ⇔
∣∣∣∣∣a1 b1a2 b2
∣∣∣∣∣ = 0
である.
関数の集合においてもベクトルと同様に加法とスカラー倍が考えられるので線形代数の考え方を使うことができる. 関数の組
{y1(x), y2(x), · · · , ym(x)}
が 1次独立であるとは
「定数の組 k1, k2, · · · , km があってすべての xに対して
k1 y1(x) + k2 y2(x) + · · ·+ km ym(x) = 0 となる」
=⇒ k1 = k2 = · · · = km = 0
となることと定める. 一次独立でないことを一次従属であるという.
[例] 1. {1, x, x2, · · · , xm} は一次独立である.
2. {ea1x, ea2x, · · · , eamx}, (a1, · · · , am は全て異なる) は一次独立である.
(2.1) の解の組で 1次独立であるものを基本解系という.
22
2.1.4 定数係数線型 2階斉次方程式の一般解
(2.2) λ2 + aλ+ b = 0
を (2.1) の特性方程式といい, その解を特性解という. 特性方程式の判別式a2 − 4b を D で表す.
定理 [1] (2.1)は次のような基本解系を持つ.
[1-1] D > 0 の場合. 特性解を λ1, λ2 (異なる 2実解となる) とするとき
{eλ1x, eλ2x}.
[1-2] D = 0 の場合. 特性解を λ (重解となる) とするとき
{eλx, x eλx}.
[1-3] D < 0 の場合. 特性解を λ1, λ2 (異なる 2複素解となる) とするとき
{eλ1x, eλ2x}
[2] {y1(x), y2(x)}を (2.1)の基本解系とするとき, (2.1) の一般解は
y(x) = k1y1(x) + k2y2(x), (k1, k2は任意定数)
の形をしている. この他に解はない.
以下この事を証明する.
補題 A. [1] λ が特性解であるとき y = eλx は (2.1) の解となる.
[2] さらに λ が重解であるとき, y = xeλx も (2.1) の解となる.
[確かめ.] [1] y = eλx を (2.1) の左辺に代入すると
(eλx)′′ + a(eλx)′ + b(eλx) = λ2eλx + aλeλx + beλx = (λ2 + aλ+ b)eλx = 0
だから (2.1)が満たされる.
[2] λ が重解であるとき λ = −a
2となるので, y = xeλx を (2.1) の左辺に代
入すると
(xeλx)′′ + a(xeλx)′ + b(xeλx) = (λ2 + aλ+ b)xeλx + (2λ+ a)eλx = 0
23

となるので y = xeλx も解となる. [確かめ終り]
これで [1] に現れる関数が全て解であることが分かった.
(2.5)
{y′′ + ay′ + by = 0, (1)
y(0) = A, y′(0) = B (2)
を定数係数線型 2階斉次方程式 (2.1) に対する初期値問題という. (2) を初期条件という. (2階方程式の場合は初期条件が 2個必要である.)
補題 B. (2.5) の解はただ一つである. 特に y(0) = 0, y′(0) = 0 である解は y(x) ≡ 0 だけである.
[考え方.] y1(x), y2(x) を (2.5) の二つの解とする.((y1 − y2)
2 + (y′1 − y′2)2)′
= 2(y1 − y2)(y′1 − y′2) + 2(y′1 − y′2)(y
′′1 − y′′2)
= 2{(y1 − y2)− a(y′1 − y′2)− b(y1 − y2)}(y′1 − y′2)
<−− K((y1 − y2)
2 + (y′1 − y′2)2)
(Kは適当な実数)
とできるが, このことから
(y1(x)− y2(x))2 + (y′1(x)− y′2(x))
2 <−− eKx((y1(0)− y2(0))
2 + (y′1(0)− y′2(0))2)
が導かれる. 初期条件が一致すれば右辺は 0となるので y1(x) ≡ y2(x) となる. [考え方終り]
補題 C.
{y1(x), y2(x)}が一次従属 ⇔
{(y1(0)
y′1(0)
),
(y2(0)
y′2(0)
)}が一次従属
[確かめ] ⇒ を示す. 仮定より,
k1y1(x) + k2y2(x) ≡ 0, (k1, k2) = (0, 0)
となる定数 k1, k2 がある. 微分してk1y
′1(x) + k2y
′2(x) ≡ 0
が分かるから
k1
(y1(x)
y′1(x)
)+ k2
(y2(x)
y′2(x)
)=
(0
0
)これに x = 0を代入すれば結論が得られる.
⇐ を示す. 仮定より
24

k1
(y1(0)
y′1(0)
)+ k2
(y2(0)
y′2(0)
)=
(0
0
), (k1, k2) = (0, 0)
となる定数 k1, k2 がある. ここでY (x) = k1y1(x) + k2y2(x)
とおくと, これは初期条件 Y (0) = 0, Y ′(0) = 0 をみたす (2.1) の解となるので補題Bより Y (x) ≡ 0. これは {y1(x), y2(x)}が一次従属であることを意味する. [確かめ終り]
これから定理 [1-1] ~ [1-3] の関数の組は一次独立である事が分かる。
補題 D. {y1(x), y2(x)} を (2.1) の基本解系とすると (2.1) の任意の解 y(x)
はある定数 k1, k2 によって
y(x) = k1y1(x) + k2y2(x), (k1, k2は任意定数)
と表される.
[確かめ]
{(y1(0)
y′1(0)
),
(y2(0)
y′2(0)
)}は一次独立となるから
k1
(y1(0)
y′1(0)
)+ k2
(y2(0)
y′2(0)
)=
(y(0)
y′(0)
)
となる定数 k1, k2 がある. ここで
Y (x) = k1y1(x) + k2y2(x)
とおくと, これは初期条件 Y (0) = y(0), Y ′(0) = y′(0) をみたす (2.1) の解となるので補題Bより Y (x) ≡ y(x). これは
y(x) = k1y1(x) + k2y2(x)
であることを意味する. [確かめ終り]
これで [2]が分かった.
25

2.1.5 D < 0 の場合の実数値解の求め方
前節の定理によれば, D < 0 の場合
y(x) = k1eλ1x + k2e
λ2x, (k1, k2は任意の複素数)
は複素数値をとる任意の解を表している. このうち, 実数値をとる解は次のように求められる.
a, bは実数だから特性解は互いに共役な複素数になるのでλ1 = A+iB, λ2 =
A− iB (A, Bは実数) とおける. この A, B により
{eAx cos Bx, eAx sin Bx}
は実数値の基本解系となり実数値の一般解は
y = C1 eAx cosBx+C2 e
Ax sinBx (C1,C2 は実数の任意定数).
と表される.
[確かめ]
1
2(eλ1x + eλ2x) = eAx cos Bx (= y1(x)とおく),
1
2i(eλ1x − eλ2x) = eAx sin Bx (= y2(x)とおく)
だから (重ね合わせの原理により)2つとも解になる. また,∣∣∣∣∣y1(0) y2(0)
y′1(0) y′2(0)
∣∣∣∣∣ =∣∣∣∣∣1 0
A B
∣∣∣∣∣ = B =
√−D
2= 0
だから一次独立である. 後は定理の [2]から出てくる.
26

2.3 定数係数線型2階非斉次方程式
(2.12) y′′ + ay′ + by = r(x), r(x) : 必ずしも 0でない関数
を定数係数線型 2階非斉次常微分方程式という.
2.3.1 一般解
(2.12) の解のひとつを yp(x) とすると (2.12) の一般解は
y = yp(x) + (2.1) の一般解
となる. この他に解はない.
[確かめ] y(x) を (2.12) の任意の解とする. Y (x) = y(x)− yp(x) とおくと
Y ′′(x)+aY ′(x)+bY (x) = (y′′(x)+ay′(x)+by(x))−(y′′p(x)+ay′p(x)+byp(x)) = r(x)−r(x) = 0
より Y (x) は (2.1) の解であるので明らか.
2.3.2 特解の求め方 未定係数法
[準備 1] 2つの関数 yi(x) (i = 1, 2) がそれぞれ微分方程式
y′′ + ay′ + by = ri(x), i = 1, 2
の解であるとする. この時, C1, C2 を任意の定数として関数Y = C1y1(x) + C2y2(x) は微分方程式
Y ′′ + aY ′ + bY = C1ri(x) + C2r2(x)
の解である.
[確かめ]
左辺 = (C1y1(x) + C2y2(x))′′ + a(C1y1(x) + C2y2(x))
′ + b(C1y1(x) + C2y2(x))
= C1(y′′1 + ay′1 + by1) + C2(y
′′2 + ay′2 + by2)
= C1r1 + C2r2 =右辺
だから.
27

[準備 2] (i) 複素数 λ が特性解でないとき,
yp(x) = Aeλx · · · (a)
が
y′′ + ay′ + by = keλx · · · (b)
の解になるように複素数の定数Aを選ぶことができる.
(ii) 複素数 λ が特性解で, 特性方程式の判別式 D が 0でないとき,
yp(x) = Ax eλx · · · (c)
が (b) の解になるように複素数の定数Aを選ぶことができる.
[確かめ] (i) のとき (a) を代入すると
(b)の左辺 = (Aeλx)′′ + a(Aeλx)′ + b(Aeλx)
= A(λ2 + aλ+ b)eλx
かつ λ2 + aλ+ b = 0 から明らか.
(i) のとき (c) を代入すると
(b)の左辺 = (Ax eλx)′′ + a(Ax eλx)′ + b(Ax eλx)
= A{(2λ+ a)eλx + (λ2 + aλ+ b)xeλx}
かつ λ2 + aλ+ b = 0, 2λ+ a =√D = 0 から明らか.
[準備 3] y(x), r(x) は複素数値をとる関数で, Y (X) = Re y(x), Z(X) =
Im y(x) とする. y(x) が
y′′ + ay′ + by = r(x), · · · (a)
の解であるならば, Y (x), Z(x) は それぞれ
Y ′′ + aY ′ + bY = Re r(x) Z ′′ + aZ ′ + bZ = Im r(x)
の解である.
[確かめ] y = Y + iZ, r(x) = Re r(x) + iIm r(x) を代入すると
(a) の左辺 = (Y + iZ)′′ + a(Y + iZ)′ + b(Y + iZ)
= (Y ′′ + aY ′ + bY ) + i (Z ′′ + aZ ′ + bZ)
(a) の右辺 = Re r(x) + iIm r(x)
となるが, 実部虚部同士をそれぞれ比較せよ.
28

特解の候補の決め方 k, k1, k2, α, β は実数の定数とする. このとき (2.12)
の一つの解 yp(x) は次のようになるとしてよい.
1. r(x) = k eλx の場合, (λ は複素数でもよい)
(a) λ は特性解でないならば yp(x) = Aeλx.
(b) λ は特性解, D = a2 − 4b = 0 ならば yp(x) = Axeλx.
2. r(x) = k cosβx または k sin βx の場合,
(a) ±iβ は特性解でないならば
yp(x) = A cos βx + B sin βx.
(b) ±iβ は特性解であるならば
yp(x) = Ax cos βx + B x sin βx.
3. r(x) = k eαx cos βxまたは k eαx sin βx の場合,
(a) α ± iβ は特性解でないならば
yp(x) = Aeαx cos βx + B eαx sin βx.
(b) D = 0 かつ α ± iβ は特性解であるならば
yp(x) = Axeαx cos βx + B xeαx sin βx.
4. r(x) = n次多項式の場合,
(a) a = 0, b = 0 ならば yp = n次多項式.
(b) a = 0, b = 0 ならば yp = n + 1次多項式.
(c) a = 0, b = 0 ならば yp = n + 2次多項式.
これらを (2.12) に代入してなりたつように未定係数 A, B, · · · を決めればよい.
[確かめ] 1 は [準備 2] と同じ. 3 は λ = α + iβ とおくとeαx cos βx = Reeλx, eαx sin βx = Imeλx
に注意すると [準備 2, 3] から導かれる.
4 は簡単な計算により分かる.
29

2.3.3 交流回路への応用
電気回路に交流起電力を加えたとき回路に流れる電流を,微分方程式を解くことによって求める. またその強制振動部分の簡易解法を述べる.
初めに主な素子の働きを検討しよう.
(i) コイル.
Ids
r
dB
I
P
IdsC
B
電流素片 Ids の近くの点 P には図のような磁界
dB = kIds× r
|r|3
ができる. (Biot-Savard の法則) 電流が閉じた曲線C 上を流れるときは, これを C 上線積分して磁界
B =
∫CkIds× r
|r|3
ができるが, これによる磁力線は図のように C を境界とする曲面 S を横切ってわき出してくる. これが電磁石の原理である.
B の S上面積分
Φ =
∫S
B · n dS (n は S の単位法ベクトル)
を磁束という. Φ は S を変形しても C が境界である限り不変である. また
Φ = LI (Lは自己誘導係数)
の関係がある. 逆に, (近くで磁石を動かしたりすることによって) Φ が時間的に変化するとき, CにはΦの変化を打ち消そうとする向きに起電力 E
が生じる. つまり
E = −dΦ
dt
である. (Lenz の法則) これが発電機の原理である. この 2つをあわせると
E = −LdI
dt
がわかる. これを電磁誘導 (自己誘導)現象という.
30
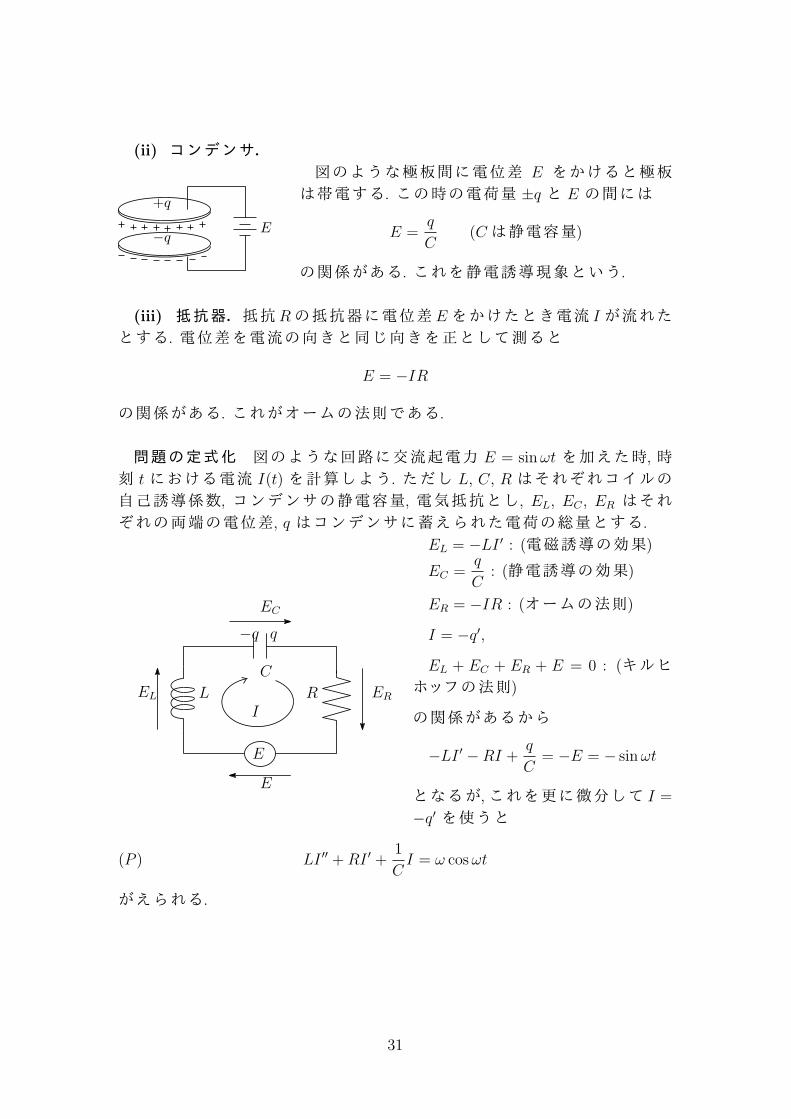
(ii) コンデンサ.
E
+q
−q
図のような極板間に電位差 E をかけると極板は帯電する. この時の電荷量 ±q と E の間には
E =q
C(Cは静電容量)
の関係がある. これを静電誘導現象という.
(iii) 抵抗器. 抵抗Rの抵抗器に電位差 Eをかけたとき電流 I が流れたとする. 電位差を電流の向きと同じ向きを正として測ると
E = −IR
の関係がある. これがオームの法則である.
問題の定式化 図のような回路に交流起電力 E = sinωt を加えた時, 時刻 t における電流 I(t) を計算しよう. ただし L, C, R はそれぞれコイルの自己誘導係数, コンデンサの静電容量, 電気抵抗とし, EL, EC , ER はそれぞれの両端の電位差, q はコンデンサに蓄えられた電荷の総量とする.
E
C
RL
E
EL ER
EC
I
q−q
EL = −LI ′ : (電磁誘導の効果)
EC =q
C: (静電誘導の効果)
ER = −IR : (オームの法則)
I = −q′,
EL + EC + ER + E = 0 : (キルヒホッフの法則)
の関係があるから
−LI ′ −RI +q
C= −E = − sinωt
となるが,これを更に微分して I =
−q′ を使うと
(P ) LI ′′ +RI ′ +1
CI = ω cosωt
がえられる.
31

(P ) の解 以下, (P ) の解を前節の方法で求める.
対応する斉次問題
(P0) LI ′′ +RI ′ +1
CI = 0
の特性方程式は
Lλ2 +Rλ+1
C= 0
である. ここで特性方程式の判別式Dが
D =
(R2 − 4L
C
)< 0
であることを仮定する. これは解が時間的に振動するための条件である.
特性解と基本解系は
λ =−R
2L±√−Di, { e
−R2L
t cos√−Dt, e
−R2L
t sin√−Dt }
となる. 2.3.1 により (P ) の一般解は
I(t) = I0(t) + Ip(t),
である. ただし
I0(t) = C1e−R2L
t cos√−Dt+ C2e
−R2L
t sin√−Dt, ((P0)の一般解)
Ip(t) は (P ) の一つの解
である. ここで|I0(t)| <−− (|C1|+ |C2|)e
−R2L
t → 0 (t → ∞)
により I0(t) は時間とともに急速に減衰してしまうので, 応用上は Ip(t) のみ調べれば十分な場合が多い.
Ip(t) を未定係数法により求めよう. I を
(P ) LI ′′ +RI ′ +1
CI = ωeiωt
の解とする. 前節の方法により (P ) の一つの解を作ることができる.
I = Aeiωt
とおき (P ) に代入すると
A
(−Lω2 + iRω +
1
C
)eiωt = ωeiωt
32

となるから
A =ω
−Lω2 + iRω + 1C
=1
−Lω + iR + 1Cω
( この分母を Z とおく )
とすればよい.
1
Z=
1
|Z|ei(φ−
π2), ただし φ は tanφ =
1cω
− Lω
Rとなる角
より (P ) のひとつの解は
I =1
Zeiωt =
1
|Z|ei(ωt+φ−π
2)
である.
一方, cosωt = Reeiωt だから 2.3.2 [準備 3] により ReI は (P ) の解である. したがって
Ip =1
|Z|cos(ωt+ φ− π
2) =
1
|Z|sin(ωt+ φ)
としてよい.
この等式はオームの法則 I = E/Rに似ている. この「抵抗」にあたる量
|Z| =√( 1Cω
− Lω)2 +R2 をこの回路のインピーダンスという. これは「抵
抗」のようなものであるが, その値は ω によって変わり ω が1√LCに一致
するときもっとも小さくなる.
L = C = 1 としたとき ω をいろいろ変えて I1 の振幅を調べると下図のようになる.
10 20 30 40
-1
-0.5
0.5
1
I_1 where L=C=R=1,omega=0.25,0.5,1
33

10 20 30 40
-1
-0.5
0.5
1
I_1 where L=C=R=1,omega=1,2,8
34

3.1 ラプラス変換とラプラス逆変換の求め方
3.1.1 広義積分の復習∫ ∞
0
f(t) dt =
特に F ′(t) = f(t) であるときは∫ ∞
0
f(t) dt =
3.1.2 ラプラス変換の定義
f(t) を (0,∞) を定義域とする t の関数とし, s を実数とする. 広義積分
F (s) =
∫ ∞
0
e−st f(t) dt
はもし収束するならば s の関数となるが, この関数 F (s) を f(t) のラプラス変換といい記号
L(f(t)), L(f), L(f)(s), · · ·
などで表す. つまり
(5.1) L(f)(s) =
∫∫∫ ∞
0
e−st f(t)dt
である. (5.1) によって決まる L は t の関数 f(t) を s の関数 F (s) に移す写像と考えることができるが, これもラプラス変換とよぶ.
f(t) が条件
• 区分的に連続 : 有限個の点以外で連続で, さらに不連続な点でも片側極限は存在する.
• 指数位数 : ある数M , α が存在して |f(t)| <−− Meαt, (t > 0)
を満たすとき, α < s であるような実数 s に対して F (s) が収束し, Laplace
変換が定義できる事が知られている. 以後はこのことを仮定する.
3.1.3 ラプラス逆変換の定義
L(f(t)) = F (s)
となるような tの関数 f(t)は, (もしあれば)不連続点での違いを無視すればただ一つに決まる. このとき
L−1(F (s)) = f(t)
によって決まる写像 L−1 をラプラス逆変換という.
35

3.1.4 ラプラス変換とラプラス逆変換の性質と例
[性質 1. 線形性] 関数 f1(t), f2(t),F1(s), F2(s) と定数 c1, c2 に対して
L(c1f1(t) + c2f2(t)) = c1L(f1(t)) + c2L(f2(t)),
L−1 (c1F1(s) + c2F2(s)) = c1L−1(F1(s)) + c2 L
−1(F2(s)).
確かめ :
[例 1. 指数関数のラプラス変換.] a を定数とするとき
L(eat) =1
s − a(s > Rea で存在する) 特に L(1) =
1
s
L−1
(1
s − a
)= eat 特に L−1
(1
s
)= 1
確かめ :
[性質 2. 移動法則.] a を実数の定数とするとき
L(f(t)) = F (s) (s > αで存在) ⇒ L(eat f(t)) = F (s−a) (s > α+aで存在)
確かめ :
36

[例 2. べき関数のラプラス変換.] n = 1, 2, · · · に対して
L(tn) =n!
sn+1, (s > 0 で存在する)
L(eat tn) =n!
(s − a)n+1, (s > a で存在する)
L−1
(1
sn+1
)=
tn
n!, L−1
(1
(s − a)n+1
)=
eat tn
n!.
確かめ :
[例 3. Heaviside 関数のラプラス変換.] λ > 0 のとき
Hλ(t) =
{0 (t < λ のとき)
1 (t >−− λ のとき)
で決まる関数を Heaviside 関数という. このとき
L(Hλ) =e−λs
s(s > 0 で存在する.)
確かめ :
37

3.1.5 導関数のラプラス変換 (微分法則)
(I) f(t) が 連続微分可能であるとき
L(f ′(t)) = sL(f(t))− f(0), (s 十分大で).
(II) f(t) が 2 回連続微分可能であるとき
L(f ′′(t)) = s2L(f(t))− s f(0)− f ′(0), (s 十分大で).
確かめ :
38

3.2 微分方程式の解法への応用
3.2.1 定数係数線型微分方程式の初期値問題
{y′′(t) + y′(t)− 6y(t) = −6et, (1)
y(0) = 0, y′(0) = 1 (2)
はラプラス変換を用いて次のようにして解くことができる.
手順 1 (1) の両辺をラプラス変換すると
L(y′′(t)) + L(y′(t))− 6L(y(t)) = −6L(et).
ここで微分法則により
L(y′′(t)) = s2 L(y(t))− s y(0)− y′(0), L(y′(t)) = sL(y(t))− y(0),
であり, また
L(et) =
だから L(y(t)) = Y (s) とおいて整理すると
(s2 + s− 6)Y (s)− sy(0)− y′(0)− y(0) =
手順 2 初期条件 (2) を代入して整理すると
(s2 + s− 6)Y (s) =
が得られる. すると Y に関する代数方程式となる.
手順 3 得られた代数方程式を整理して Y (s) について解き
Y (s) =
さらに右辺を部分分数分解して
39

.
= −1
2
1
s+ 3+
3
2
1
s− 1− 1
s− 2
の形に整理する.
手順 4 両辺をラプラス逆変換すれば
(3) y(t) = L−1(Y (s)) = −1
2e−3t +
3
2et − e2t
となるが これが (1), (2) の解である.
手順 5 検算する. (3) を微分すると
y′(t) =3
2e−3t +
3
2et − 2 e2t, y′′(t) = −9
2e−3t +
3
2et − 4 e2t.
これを (1) へ代入すると
となり確かに成り立っているから (3) は (1) の解である. また (2) が満たされることも
により分かる.
40