次世代人工知能・ロボット中核技術開発 ·...
TRANSCRIPT

国立研究開発法人 新エネルギー・産業技術総合開発機構
〜紹介ハンドブック〜
次世代人工知能・ロボット中核技術開発

次世代の人工知能・ロボットが人を豊かにする社会を目指して
“人間の能力を超える、または人間に匹敵する人工知能(AI)・ロボット技術の研究開発に挑戦”
―NEDOプロジェクト「次世代人工知能・ロボット中核技術開発」のコンセプト
現在、世界中で人工知能とロボットに非常に大きな注目が集まっています。人工知能とロ
ボットが、少子高齢化や災害への対応といった、我が国が抱える社会課題の先進的な解決の
切り札として、私たちの生活を向上させてくれるという期待が表れているのではないでしょ
うか。
「次世代人工知能・ロボット中核技術開発」は、政府のロボット革命実現会議を経て策定さ
れた「ロボット新戦略」を受け、平成27年度から開始しました。このプロジェクトは、現
在のロボット関連技術の延長上に留まらない革新的な、“ぶっ飛んだ”とも形容できる技術を
ターゲットとし、これまで人工知能・ロボットの導入を考えもつかなかった未開拓の分野で
新しい需要を創出することを狙っています。NEDOにおける人工知能・ロボットの基礎・基
盤的な研究開発は数年ぶりとなりますが、産学官の英知を結集し、長期的な視点でハイリス
クな研究開発に果敢に挑戦しています。
このプロジェクトの成果が、我が国経済に裨益し、NEDOのミッションの1つである産業
技術力の強化に繋がればと考えております。加えて、技術の実用化・事業化により、次世代
の人工知能・ロボットが、命・心・財産といった物心両面で、真に人を豊かにする社会の実
現を願っております。
皆様方におかれましては、NEDOが推進したこのプロジェクトの成果が、将来の人工知能
・ロボットへの実装をはじめとして様々な分野に波及することを、ぜひ期待していただければ
と思います。本書が、人工知能・ロボットに興味をお持ちの皆様方の参考となれば幸いです。
国立研究開発法人 新エネルギー・産業技術総合開発機構
次世代人工知能・ロボット中核技術開発
プロジェクトマネージャー (PM)
1

2
目 次
はじめに
プロジェクト概要とアクションプラン
次世代人工知能分野とは
革新的ロボット要素技術分野とは
平成 27 年度「先導研究」研究課題と計画
平成 27 年度「調査・先導研究」研究課題と計画(1)
平成 27 年度「調査・先導研究」研究課題と計画(2)
委託先一覧
索引
表紙解説
連絡先
… 1
… 3
… 4
… 5
… 7
… 32
… 33
… 50
… 52
… 55
… 56

3
プロジェクト概要とアクションプラン
人工知能・ロボット関連技術の熟度に応じて、1)すでに技術的に確立し社会への普及促進が図られる段
階、2)技術的に概ね確立し実用化研究開発によりモデルを提示する段階、3)人工知能・ロボットの利用
分野を念頭におきつつ人間の能力を超えることを狙う、又は人間に匹敵する大きな汎用性、ロバスト性等を
有する革新的な要素技術を研究開発する段階の三つの領域に整理します。
本プロジェクトでは、単なる現在のロボット関連技術の延長上にとどまらない、人間の能力を超えること
を狙う革新的な要素技術を研究開発します。具体的には、人工知能技術やセンサ、アクチュエータ等のロボ
ット要素技術について、我が国と世界の状況に鑑み、速やかに実用化への道筋をつける革新的な要素技術を
研究開発します。
研究開発する技術間の連携を図るとともに、本プロジェクトの成果普及の素地を築くべく、機を捉えてワ
ークショップを開催するなどの取組を通じて、本プロジェクトの情報発信を行います。
また、アワード方式(チャレンジプログラム)を開催するなどして本プロジェクトの成果物の試験的活用
による動作確認や更なる研究開発の促進、一般への広報を図ります。
プロジェクト概要
アクションプラン
1年目 2年目 3年目 4年目 5年目
先導研究(2年)
ワークショップ
実用化へステージアップ
ワークショップチャレンジプログラム等
先端技術開発(3年)
ステージゲート
技術 A 技術 A
技術E
技術 B + 技術 C + α
技術 B
技術 C
技術 D
技術 E
×
中間評価 事後評価
公募・採択・契約

言語理解
意思決定支援
予測共通コア人工知能
人工知能分野の研究者の英知を拠点に結集
4
次世代人工知能技術分野とは
研究開発項目③次世代人工知能共通基盤技術
・人工知能技術の有効性や信頼性を定量的に評価する方法�・標準的なベンチマークデータセットの準備の構築
研究開発項目②次世代人工知能フレームワーク・先進中核モジュール研究開発
・研究成果をモジュール化し統合するためのフレームワークで複数のサービスを実現�・多様な応用の核となる先進中核モジュールの研究開発し、エコシステムを実現
研究開発項目①大規模目的基礎研究・先端技術研究開発
・脳型 AI とデータ・知識融合型 AI に関する目的基礎研究と世界トップレベルの先端技術研究実施
次世代人工知能技術分野では、人間を超越する又は人間に匹敵する人工知能を新たな技術シーズとして研究開発し、これまで人工知能・ロボットの導入について考えもつかなかった分野での新たな需要の創出や我が国が強みを有する分野との融合による産業競争力の強化につなげていきます。 特に、人工知能分野との関係においては、融合を進めるべき分野として次の 3 点が挙げられます。すなわち、
1)AI for Manufacturing:我が国の高いものづくり力や世界シェア第 1 位の産業用ロボットと融合し、他 の追従を許さない製造業を実現します。例えば、ティーチングレスの産業用ロボットによる多品種少量 生産の作業支援、組み立て作業時の異常予測等により製造業の生産性向上を目指します。2)AI for Human Life:我が国の高品質なサービス業、医療・介護、交通インフラ等と融合し、豊かな生活 を提供します。例えば、消費者行動を解析し多様な業種を支援することで、サービスの高付加価値化に より、生活満足度を向上させます。また、人工知能の自律移動への応用として、自動車等に人工知能を 搭載することで、認知・判断・操作に時間を要する高齢者にもやさしい移動手段を実現したり、ドロー ン(小型無人航空機)をはじめとする陸上・空中・水中等移動体、ビル、社会環境全体がロボットであ るような場合を想定した人工知能技術とロボット技術の研究開発も実施したりすることなどが考えられ ます。3)AI for Science/Engineering:世界トップクラスの基礎科学と融合し、科学技術の発展を促進します。例 えば、生命科学、臨床医学、材料工学等において、多様な実験データから仮説や新たな理論等を自動生 成し、基礎研究を加速させます。
なお、次世代人工知能技術分野(研究開発項目①、②及び③)は、研究開発成果を最大化するため、研究開発拠点に英知を結集し、重要な研究開発テーマを選定して課題設定型により実施します。

5
革新的ロボット要素技術分野とは
研究開発項目⑥ロボットインテグレーション技術
・実環境の変化を瞬時に認知判断し、即座に対応して適応的に行動する技術・個別に開発された要素技術を効果的に連携させ統合動作させるシステム統合化技術
研究開発項目⑤革新的なアクチュエーション技術(スマートアクチュエーション)
・人共存型ロボットに活用可能なソフトアクチュエータ(人工筋肉)・高度な位置制御やトルク制御を組み合わせて関節の柔軟性を実現する新制御技術や機構等の研究開発
研究開発項目④革新的なセンシング技術(スーパーセンシング)
・画期的な視覚・聴覚・力触覚・嗅覚・加速度センシングシステム等の研究開発・センサと行動の連携による行動センシング技術等の研究開発
変化の速いロボット分野で、計算機の指数関数的な性能向上の恩恵を十分に享受するためには、国内外のロボット関連技術の動向や水準を把握した上で、人とロボットの協働の実現等、データ駆動型社会を勝ち抜くための研究開発を推進することが必要であり、ブレイクスルーを生み出す革新的な要素技術、及び、それらを統合する革新的なシステム化技術の研究開発を行う。 具体的には、ロボットが日常的に人と協働する、あるいは、人を支援する社会を実現させるため、ロボットが柔軟に行動を計画する技術等、必要だが未達な技術について、中核的な革新的ロボット要素技術を研究開発します。
革新的ロボット要素技術分野(研究開発項目④、⑤及び⑥)は、革新的な新たなセンサやアクチュエータ技術の発掘を積極的に進めるため、テーマ公募型により実施しました。 特に、平成 28 年度は、解決が求められる社会課題に対応可能な、革新的なロボット要素技術を俯瞰したうえで、重点的な研究開発が必要と考えられるテーマを選定し、課題設定型テーマ公募により実施しました。
生存者発見ロボット 人共存型ロボット
「次世代人工知能技術に関する強盗シンポジウムの開催」
総務省、文部科学省、経済産業省、JST と共に、第 1 回のシンポジウムを 2016 年 4 月 25 日(月)、東京都内で「第 1 回
次世代の人工知能技術に関する合同シンポジウム」を開催しました。
本シンポジウムでは、次世代 AI の研究開発と利活用や施策の連携をテーマに、関係府省・機関連携の取り組みの一環とし
て開催し、関係府省・機関の AI 研究開発のシナジー効果の創出を目指しており、今後もシンポジウムの開催が予定されてお
ります。
「次世代人工知能技術社会実装ビジョンを公表」
次世代の人工知能技術の発展に伴い、日本の出口分野においてどのような効果がもたらされるのか、人工知能技術の進展
予測とともに、時間軸上に可視化した「次世代人工知能技術社会実装ビジョン」を公表しました。
今後、NEDO として、本ビジョンを基に、産業界、学術界等さまざまな方面と意見交換を行い、本ビジョンをブラッシュ
アップしていきます。また、政府に設置された人工知能技術戦略会議で議論される予定の人工知能の産業化のロードマップ
策定にも貢献していく予定です。
「AI ポータルサイトの開設」
次世代人工知能の関係府省・機関の取り組み等に関する情報を集約し、アクセスしやすい環境を提供するために“AI ポー
タル”を立ち上げました。下記 URL を Check it!
URL: http://www.nedo.go.jp/activities/ZZJP2_100064.html
最新の動向
介護支援

7
平成 27 年度「先導研究」研究課題と計画
次世代人工知能技術分野(研究開発項目①、②及び③)は、研究開発成果を最大化するため、重要な研究開発テーマを選定し、課題設定型により実施しました。 革新的ロボット要素技術分野(研究開発項目④、⑤及び⑥)は、革新的な新たなセンサやアクチュエータ技術の発掘を積極的に進めるため、テーマ公募型により実施しました。
研究開発項目③ 次世代人工知能共通基盤技術
次世代人工知能の共通基盤技術として、人工知能技術の有効性や信頼性を定量的に評価し、性能を保証するための方法、そのために必要となる標準的問題設定や標準的ベンチマークデータセット等が満たすべき性質と構築の方法に関する研究開発を実施する。 また、それらを用いて、研究開発項目①、②の成果の評価を行う。
研究開発項目② 次世代人工知能フレームワーク・先進中核モジュール研究開発
広範な人工知能応用の研究開発や社会的実用化に資するため、研究開発項目①の成果である脳型人工知能技術、データ・知識融合型人工知能技術、その他大学や企業が保有する様々な人工知能技術をモジュール化し統合するための次世代人工知能フレームワークと、次世代人工知能技術を統合し、多様な応用に迅速につなげるための核となる先進中核モジュールの研究開発を実施する。
研究開発項目① 大規模目的基礎研究・先端技術研究開発
最新の計算論的神経科学の知見を取入れた脳型人工知能及びデータ駆動型の人工知能と知識駆動型の人工知能の融合を目指すデータ・知識融合型人工知能に関して、大規模なデータを用いた実世界の課題への適用とその結果の評価を前提とした目的基礎研究(大規模目的基礎研究)と、世界トップレベルの性能の達成を目指す先端技術の研究開発を実施する。
研究開発項目⑥ ロボットインテグレーション技術
実環境の変化を瞬時に認知判断し、即座に対応して適応的に行動する技術や個別に開発された要素技術を効果的に連携させ統合動作させるシステム統合化技術等の研究開発を実施する。
研究開発項目⑤ 革新的なアクチュエーション技術(スマートアクチュエーション)
人共存型ロボットに活用可能なソフトアクチュエータ(人工筋肉)、高度な位置制御やトルク制御を組み合わせてソフトウェア的に関節の柔軟性を実現する新方式の制御技術や機構等の研究開発を実施する。
研究開発項目④ 革新的なセンシング技術(スーパーセンシング)
屋外等の外乱の多い空間でも、的確に信号抽出ができる画期的な視覚・聴覚・力触覚・嗅覚・加速度センシングシステムやセンサと行動を連携させて、検知能力を向上させる行動センシング技術等の研究開発を実施する。
公募
H27FY (FY2015)【 予算 10 億円 】
H28FY (FY2016) H29FY (FY2017) H30FY (FY2018) H31FY (FY2019)【 予算 30.6 億円 】
先導研究【 AI:2件、ロボット:18 件 】
研究開発
ワークショップ
ステージゲート
計 画

① 状況依存の知識を観測データから学習
② 人間に理解可能な説明
画像や時系列データに関する質問応答システム
全体の状況・履歴の詳細な把握と解析
情報提供物理的操作
観測データ
クラウド
実世界個別性・状況依存性の高い介入・制御
少量データや複雑さに応じた学習・制御・予測
クラウドとエッジ両者の学習・推論の最適な組合わせ
質問応答
自然言語
通信削減
個別・状況依存性対応
脳型人工知能のロボットへの適用
【視覚】多様な状況で外界を深く理解【運動】自律的に動きを学習し環境に適応【言語】意味を理解し人間と意思疎通
扁桃体 海馬 小脳基底核
前頭前野
運動野視覚野
言語野
(2)データ・知識融合型人工知能の研究開発
(1)次世代脳型人工知能の研究開発
(3)機械学習および確率モデリング技術の高度化
世界最高水準の特徴表現学習の実現を目指し、以下を実施。• スケーラブルな機械学習・確率モデリング• 超複雑な機械学習・確率モデリング• 深層表現学習の高度化
画像、音声、自然言語テキスト等の多様で大量のデータと、論理式、ルール、RDF等で記述された大規模知識とを融合して利用できる人工知能。
最新の計算論的神経科学の知見に基づき、データの「深い理解」が可能な脳型人工知能を開発。• 大脳皮質ベイジアンネットモデルに基づく人工大脳皮質
• 計算論的神経科学、認知科学、言語学の最新の知見を取り込んだ、人工視覚野、人工運動野、人工言語野
8
委託先 :国立研究開発法人産業技術総合研究所(東京都江東区、茨城県つくば市)再委託先:国立大学法人電気通信大学(東京都調布市)、国立大学法人京都大学(京都府京都市)
①大規模目的基礎研究・先端技術研究開発
人間と相互理解できる次世代人工知能技術の研究開発�
先導研究のポイント
本研究開発は、人間が示す多様な状況への柔軟な対応力や深い理解力を人工知能に取り込むこと、及び、人間と人工知能の異質性を解消することにより、2つの知能が協働することを可能にし、単独では満足な解が得られなかった挑戦的な課題の解決することが目的である。その達成の鍵は、人間の知能活動を支える脳の計算機構の模倣および、人間知能の中核をなす知識処理と人工知能の中核となるデータ処理との自然な融合にあると考え、最新の計算論的神経科学の知見を取り入れた脳型人工知能および、データ駆動型の人工知能と知識駆動型の人工知能の融合を目指すデータ・知識融合型人工知能に関して、大規模なデータを用いた実世界の課題への適用とその結果の評価を前提とした目的基礎研究(大規模目的基礎研究)と、世界トップレベルの性能の達成を目指す先端技術の研究開発を実施する。
【キーワード】脳型人工知能、データ・知識融合型人工知能、計算論的神経科学、深層学習
先導研究の概要
想定される出口イメージ

クラウド上で、ロボットが人間との対話を通じて知能を獲得
大規模文献データから技術の未来を予測し、意思決定支援
• 生産・物流や生活支援で様々な商品・日用品を取り扱うロボットの実現
• 非整備環境での3次元空間把握や、製造・物流現場での難識別物体のハンドリング
• 屋内における実世界環境認識の実現
• 紐類・紙類・布類など不定形物の片付け・整理整頓・梱包
テキストを「意味表現」に変換し、それを画像やデータベースなどのメディアを超えて、質問応答などの応用につなげる
意味表現
【次世代人工知能フレームワーク】・人工知能の要素技術を、再利用可能な
モジュールとして簡便に組み込み・統合可能にするフレームワーク
・次世代人工知能研究テストベッド・社会的身体性知能の共有・活用のための
クラウドプラットフォーム・ネットワーク分析と言語処理の融合し
大規模な文献からの技術の未来を予測するプラットフォーム
センサフュージョンによる実世界環境理解モジュール
一般物体認識クラウドエンジン3次元センシングモジュール
不定形物操作システム 自然言語テキスト理解モジュール
【先進中核モジュール】
運動
AI研究者
アプリ開発者
モジュールを組み合わせてアプリを開発
観測・データ収集モジュール
作業動作自動生成
社会レベル行動モデリング・シミュレーション
動作の模倣学習
【フレームワークのイメージ】
認識 ・・・
AI技術を
モジュールに実装
9
委託先 :国立研究開発法人産業技術総合研究所(東京都江東区、茨城県つくば市)再委託先:大学共同利用機関法人情報・システム研究機構国立情報学研究所(東京都千代田区)、 国立大学法人東京大学(東京都文京区)、学校法人中部大学中部大学(愛知県春日井市)、 学校法人梅村学園中京大学(愛知県名古屋市)、国立大学法人信州大学(長野県長野市)、 国立大学法人奈良先端科学技術大学院大学(奈良県生駒市)、 国立大学法人大阪大学(大阪府吹田市、豊中市)、国立大学法人金沢大学(石川県金沢市)
②次世代人工知能フレームワーク研究・先進中核モジュール研究
人間と相互理解できる次世代人工知能技術の研究開発�
先導研究のポイント
個別の産業応用が持つ多様なニーズに応え、それぞれに有効な応用システムを構築するためには、個々の応用に見られる共通の知的処理をモジュールとして用意し、それらを応用の特殊性に応じて適応し、有効に組み合わせる機能を用意することが不可欠となる。本研究開発は、広範な人工知能応用の研究開発や社会的実用化に資するため、研究開発項目①の成果である脳型人工知能技術、データ・知識融合型人工知能技術、その他大学や企業が保有する様々な人工知能技術をモジュール化し統合するための次世代人工知能フレームワークと、次世代人工知能技術を統合し、多様な応用に迅速につなげるための核となる先進中核モジュールの研究開発を実施する。
【キーワード】次世代人工知能フレームワーク 、ビッグデータ、クラウド、データベース
想定される出口イメージ
先導研究の概要

屋外・公共空間
人間行動モデリングタスク
サービス現場地理空間情報画像解析衛星やニュース等からデータを収集し、画像を自動判読
新たな現象の生成や制御が可能な人間行動のモデル化
きめ細かい動作認識の研究開発
深層学習による 種類の日常生活の動作の認識
データ駆動型人工知能と論理知識型人工知能の融合による解釈可能な自動運転システム
事故情報テキスト解析、事故予防
対人インタラクションタスク保育所等で子どもの活動・状態を認識、保育支援
セマンティック情報に基づく自動運転システムにおける人工知能技術の性能評価・保証
酵素反応データベースに向けた文献キュレーション支援
産業用ロボットタスク
移動体(歩行者)検出・自動運転のためのセマンティックマップ
衛星画像を用いた津波で流出した建造物の自動抽出
人間の動作をきめ細かく認識できるパートナーロボット/コミュニケーションロボット
C子ちゃんが泣いている
人工知能が子供の成長を見守り、分析
サッカーボールから子供の飛出しを予測 災
安
事故情報から急所を検出し、異変や新たな事故を予防
10
委託先 :国立研究開発法人産業技術総合研究所(東京都江東区、茨城県つくば市)再委託先:学校法人千葉工業大学千葉工業大学(千葉県習志野市)、 学校法人玉川学園玉川大学(東京都町田市)、国立大学法人九州工業大学(福岡県北九州市)
③次世代人工知能基盤技術研究開発
人間と相互理解できる次世代人工知能技術の研究開発�
先導研究のポイント
研究開発した人工知能技術を実用に供するためには、その有効性や信頼性を定量的に評価する必要がある。とくに、従来の単能的な人工知能から、より統合的で複雑な動作をする人工知能技術の性能評価や信頼性検証の方法は、それ自体が研究課題となる。本研究開発項目では、次世代人工知能の共通基盤技術として、人工知能技術の有効性や信頼性を定量的に評価し性能を保証するための方法、そのために必要となる標準的問題設定や標準的ベンチマークデータセット等が満たすべき性質と構築の方法、に関する研究開発を実施する。 また、ステージゲート後に向けて、関係学会等との連携等、標準化に向けた活動や、企業との連携等、橋渡しに向けた検討を開始する。
【キーワード】次世代人工知能フレームワーク 、ビッグデータ、クラウド、データベース
先導研究の概要
想定される出口イメージ

【人工視覚野では双方向深層ネットワークで各種の視覚知能の実現を目指し、人工運動野ではゲームと運動模倣においてヒトと同程度となることを目指す】
人工運動野(ロボットの身体)人工視覚野(ロボットの眼)
模倣学習・徒弟学習
深層学習+逆強化学習
順逆強化学習+モジュール構造
霊長類視覚野からの拘束
脳からの一般物体デコーディング
双方向深層ネットワーク
ラット行動からの逆強化学習
脳からの一般手指運動デコーディング
一般物体追跡
人工視覚野と人工運動野の協調によりロボットの多様な動作を実現
脳機械融合型インターフェース
11
先導研究のポイント
委託先:株式会社国際電気通信基礎技術研究所 (ATR)(京都府けいはんな学研都市)
ヒトなどの脳の構造・機能的知見と脳活動データに基づき、多階層・並列・双方向結合の構造を有する人工ニューラルネットワークモデルを構築し、ヒトと同程度の視覚情報処理および行動学習の実現を可能とするアーキテクチャ、すなわち「脳型人工知能」、の構築を進めます 。人工視覚野では、ほ乳類の視覚系の階層構造・双方向結合を模倣したネットワークモデルを開発し、幅広い視覚知能の実現を目指します。ヒト脳活動からの一般物体デコーディングにより、モデルとヒト脳との類似性を調べます。人工運動野では、ほ乳
類の運動学習の中核をなす、皮質-基底核-視床ループの並列性に基づくネットワークモデルを開発し、ヒトと同程度となるゲームプレイと運動模倣の実現を目指します。
【キーワード】脳型人工知能、階層並列ニューラルネットワーク、視覚情報処理、ロボット制御、多重順逆対モデル
計算神経科学に基づく脳データ駆動型人工知能の研究開発
研究開発項目① 大規模目的基礎研究・先端技術研究開発
先導研究の概要
想定される出口イメージ

研究開発拠点の狙いと研究開発体制
12
狙 い
次世代人工知能技術分野(研究開発項目①、②及び③)の研究開発は、これらの研究開発項目が互いに密接に関連しており、総合的かつ集中的に行うことが必要かつ適切であると考えられることから、拠点を設け、産学官の英知を結集することにより実施します。 また、拠点の形成により、我が国の人工知能研究者の多くが個別に、実世界との接点が限られた中で研究している状況を変え、先進的な次世代人工知能の開発・実用化と基礎研究の進展という好循環の形成を図ります。 なお、NEDO は、拠点として採択した国立研究開発法人産業技術総合研究所 人工知能研究センター (AIRC)研究センター長の辻井潤一氏を次世代人工知能技術分野の PL(Project Leader) に任命しました。PL は、プロジェクトをより効率的かつ効果的に遂行するために、プロジェクトの技術目標等の達成に向けた取組、研究開発の進捗状況の把握、プロジェクトの実施体制の構築・改変、事業者間等の予算配分、当該プロジェクトに参画する研究者の人選及びプロジェクトの成果の評価等に係る業務の全部又は一部について、NEDO と協議して実施します。
大学・企業とも連携した国内最大の 研究拠点
観測データ収集
認識・モデル化・予測
産業用ロボット自動車
小売・流通サービス
医療・健康生活支援
社会・ビジネスへの適用
データ・知識融合型人工知能
脳型人工知能
大規模知識大脳皮質
運動野機械学習確率モデル
マルチモーダルデータ ・・・
・・・
情報通信サービス
文書・文献情報サービス
視覚野
自然言語理解
行動計画制御
・・・
③次世代人工知能共通基盤
②先進中核モジュール②次世代人工知能フレームワーク
①大規模目的基礎研究・先端技術研究開発
言語野
企業
技術移転共同研究
標準タスク・ベンチマークデータ起業
技術移転
ベンチャー

13
研究開発体制(平成28年 5月現在)
NEDO委託
株式会社国際電気通信基礎技術研究所①計算神経科学に基づく
脳型データ駆動型人工知能の開発
委託
共同研究
③次世代人工知能共通基盤技術研究開発
再委託共同実施
②次世代人工知能フレームワーク研究・先進中核モジュール研究開発
①大規模目的基礎・先端技術研究開発
再委託 再委託
再委託
再委託
再委託 再委託再委託再委託 再委託
再委託再委託 再委託
国立大学法人大阪大学
② 先進中核モジュールの研究開発
国立大学法人東京大学
② 次世代人工知能フレームワークの研究開発
国立大学法人大阪大学
② 先進中核モジュールの研究開発
国立大学法人金沢大学
② 先進中核モジュールの研究開発
学校法人中部大学中部大学
② 先進中核モジュールの研究開発
学校法人梅村学園中京大学
② 先進中核モジュールの研究開発
国立大学法人奈良先端科学技術大学院大学
② 先進中核モジュールの研究開発
国立大学法人九州工業大学
③ 自動運転タスク
学校法人千葉工業大学千葉工業大学
③ 画像解析タスク
国立研究開発法人産業技術総合研究所①大規模目的基礎・先端技術研究開発②次世代人工知能フレームワーク研究・先端中核モジュール研究開発③次世代人工知能共通基盤技術研究開発
国立大学法人信州大学
② 先進中核モジュールの研究開発
大学共同利用機関法人情報・システム研究機構国立情報学研究所② 次世代人工知能フレームワークの研究開発
学校法人玉川学園玉川大学③ 対人インタラクションタスク
国立大学法人東京大学 東京大学 人工知能先端技術人材育成講座人材育成施策
国立大学法人東京大学 東京大学 人工知能基礎技術(データサイエンティスト)人材育成講座
国立大学法人電気通信大学① 人工運動野の
研究開発
国立大学法人京都大学① 人工運動野の
研究開発
国立大学法人東京大学① スパイキンニューロン全
脳モデルと身体性情報構造化に基づく動的実世界知能の研究開発
国立大学法人東京大学① 人工視覚野の
研究開発
国立大学法人東京大学① 深層表現学習
の研究開発
再委託
再委託

【昆虫嗅覚受容体を用いた匂いセンサ研究開発の概要】
匂い認識による被災・要救助者の早期発見の支援
14
委託先:国立大学法人東京大学 (東京都文京区)、住友化学株式会社(大阪府大阪市)、 公益財団法人神奈川科学技術アカデミー(神奈川県川崎市)
人検知ロボットのための嗅覚受容体を用いた匂いセンサの開発
研究開発項目④ 革新的なセンシング技術 ( スーパーセンシング )
先導研究のポイント
本事業では、昆虫の嗅覚受容体を脂質二重膜に再構成したチップを作製し、ロボットに搭載可能な人検知匂いセンサの実現を目指す。「受容体の発現と精製」・「受容体のセンサチップ化」・「ロボット搭載に向けたデバイス化」を住友化学・神奈川科学技術アカデミー・東京大学が担当する。各項目は、①受容体の感度・選択性の最適化と安定産生条件の探索、②チップでの受容体の安定化と気中の匂い分子の液中への取り込み機構の開発、③匂い分子検知に伴う電気信号の規格化および、ロボットへ搭載が可能となるデバイス化に重点をおいて進める。
【キーワード】匂いセンサ、昆虫嗅覚受容体、脂質二重膜
先導研究の概要
想定される出口イメージ

マルチセンサ実装プラットフォームのオープン化による社会実装
【マルチセンサ実装プラットフォームのコンセプト図】
15
委託先 :国立大学法人東北大学 (宮城県仙台市)共同実施先:学校法人名城大学 (愛知県名古屋市)
次世代ロボットのためのマルチセンサ実装プラットフォーム
研究開発項目④ 革新的なセンシング技術 ( スーパーセンシング )
先導研究のポイント
センサの種類によらず統一した方法で共通のバスネットワーク上に高密度にセンサ実装できる汎用性の高いマルチセンサ実装プラットフォームを実現する。キーとなるのは様々なセンサと共通バスとを繋ぐオリジナル設計の汎用インタフェース LSI である。 具体的な研究内容は次の通り。(1) 複数種のセンサに対応可能なバス型センサ実装プラットフォーム実証、(2) ヒーターと温度センサを組み合わせたアクティブセンシングシステムの研究開発、(3) 新設計の汎用インタフェース LSI とネットワークシステムの開発、(4) プラットフォームのオープン化に向けたアプリケーション開発。
【キーワード】複数種類センサ実装、アクティブセンシング、インタフェース LSI、オープンプラットフォーム
先導研究の概要
想定される出口イメージ

【圧電体スプレー塗布・ひも状感圧センサを用いた皮膚センサ】
圧電性能を活かした単一センサによる接触圧計測と超音波探査
微小領域から工場・航空機規模の大面積面圧分布センサ
安全・安心なロボットと人の触れ合い
スプレー塗布により様々な対象に皮膚センサを成形
16
先導研究のポイント
委託先 :国立大学法人熊本大学 (熊本県熊本市)
人の生活空間で人と触れ合うロボットへの適用を想定し、3 次元自由曲面形状のロボット表面に密着し被覆する全身型皮膚センサを実現する。第一に、圧電材料溶液をスプレー塗布することでロボット表面形状と完全に一致する皮膚センサを形成する技術を開発する。圧電層の膜厚や電極パターンの調整により微小領域から大規模面圧分布まで用途に応じた様々な能力のセンサを製作可能である。また、ひも状の柔軟感圧センサをロボットに巻きつけることによる皮膚センサの形成技術についても取り組む。
【キーワード】触覚センサ、ロボットスキン、圧電触覚素子、音響式触覚素子
ロボットの全身を被覆する皮膚センサの確立と応用開発
研究開発項目④ 革新的なセンシング技術 ( スーパーセンシング )
先導研究の概要
想定される出口イメージ

基礎特性把握から実ロボットシステム応用までの研究戦略
超長尺多関節ロボットアーム
原発等の狭隘空間作業に適用する
テザー牽引型超不整地移動ロボット
テザーによる谷渡り
『超』腱駆動を原発等の狭隘空間作業に適用
17
先導研究のポイント
委託先:国立大学法人東京工業大学 (東京都目黒区)
近年しなやかかつ軽量な高強度化学繊維が開発され、比強度では金属製ワイヤを凌駕することから、これらを用いれば軽量・コンパクト・高耐荷重のロボット駆動機構が実現できる可能性がある。しかし金属製ワイヤに比して、化学繊維ワイヤは駆動系として用いるための客観的で公平な物性データ、設計指針が明らかではない。そこで本研究では、高強度化学繊維のロボット駆動要素としての基礎的諸特性を解明し、超軽量/超小型/超長尺/超冗長を可能とする『超』腱駆動機構要素群を開発する。超長尺多関節ロボットアーム、テザー牽引型超不整地移動ロボットに代表される実ロボットシステムならびに制御法を開発し有効性を実証する。
【キーワード】高強度化学繊維、ワイヤ駆動、超冗長アーム
高強度化学繊維を用いた『超』腱駆動機構と制御法の研究開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

【小型・ソフト・軽量・自由変形・高出力・小消費電力】
・Type-1-シート構造
・Type-2-織り構造
・Type-3-撚り構造
電圧ON
電圧OFF
電圧ON電圧OFF
電圧ON電圧OFF
Cathode
PVC gel
Anode
AnodeCathode
(Side view)
(Top view)
(Top view)
伸縮
伸縮
伸縮
AnodeCathode
PVC gel
Core: Conductive materials
Clad: PVC gel
Core: Conductive materials
Clad: PVC gel
【着るロボット・アシストウェア】 【スボーツウェア】
着ることのできるソフトアクチュエータ
18
先導研究のポイント
委託先:国立大学法人信州大学(長野県上田市)、 国立研究開発法人産業技術総合研究所(大阪府池田市)
生体筋と同等のサイズ・重量・出力に加え、大気中において生体筋よりもはるかに精密な動作を実現する「PVCゲルシートソフトアクチュエータ」を開発する。 具体的に、フレキシブル電極を用いた PVC ゲルシートアクチュエータ、及びフレキシブル電極を PVC ゲルに埋め込んだ芯鞘構造 PVC ゲルファイバーを用いた織構造伸縮シートと撚糸構造伸縮ストリングの試作を行う。平行して可塑化 PVC ゲルの電場応答メカニズムの解明及びアクチュエータの精密な位置制御を実現する。最後に、ウエアラブルなアシストウェアの試作を行い有用性を示す。
【キーワード】PVC ゲルソフトアクチュエータ、人工筋肉、伸縮シート、フレキシブル電極、ウェアラブルロボット
可塑化 PVC ゲルを用いたウェアラブルロボット用ソフトアクチュエータの研究開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

【高減速ギヤ】 【高回転型モータ】
【高密度ドライバ】
高密度アクチュエータの実現
高出力が必要となる移動ロボットや、協働ロボットのための低コスト関節駆動用
アクチュエータユニット
高出力ヒューマノイドロボット
脚車輪車いすロボット
19
先導研究のポイント
委託先:国立大学法人横浜国立大学 (神奈川県横浜市)
本研究では、高効率、高減速比のギヤを備えた高出力アクチュエータの開発を行っている。モータは高速回転型にすることにより出力の体積密度が向上する。そこで、高出力アクチュエータを実現するため、①大きな最高入力回転速度を許容する複合遊星歯車機構の開発、②減速機出力トルク密度を最大にする高速回転型モータの開発、③高速回転型モータに適した小型高出力モータドライバの開発に取り組んでいる。複合遊星歯車機構の構成を工夫することで、幅広い減速比が実現可能となる。また、減速機の動力伝達効率を最適化する設計法の開発を行っている。
【キーワード】高密度アクチュエータ、遊星歯車機構、高減速ギヤ、高回転型モータ、高密度ドライバ
高効率・高減速ギヤを備えた高出力アクチュエータの研究開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

【 球状全方向車輪(外部支持方式)】
『高い段差・溝走破性』『走行の滑らかさ』『耐荷重性』を満たす
球状全方向車輪
特異点回避受動輪
球状受動回転輪
球状受動回転輪の回転軸
能動回転軸(球体車輪構造の全体を回転させる)
U字型の外側支持体
接地点
走行面
円形断面
全方向駆動・次世代移動プラットフォーム・次世代ロボットハンド
例: 次世代車椅子
例: 工場内超人作業ロボットハンド
全方位移動機構を中核に様々な用途へ応用
20
先導研究のポイント
委託先:国立大学法人 東北大学(宮城県仙台市)
本研究においては、従来不可能であった段差・溝踏破性能を有する球状全方向車輪機構を核としてさらに発展させ、人が乗れるほどの耐荷重性と滑らかさの両立が可能な次世代の全方向移動プラットフォームの実現を目的としている。本機構は、人の搭乗だけでなく、作業ロボットの上半身を搭載するなど、作業ロボット用の全方向移動プラットフォームの足回りとしての利用、および、ロボットハンドの先端に搭載することで、任意方向ハンドリングも実現可能であり,次世代のアクチュエーション技術の核となる著しく有用性の高い機構である。そのため、本プロジェクトを通して、日本国での次世代ロボットの中核技術として、発展・実用化させるため実機・知財の創出を促しながら、尽力して取り組んでいく。
【キーワード】機構、全方向駆動、 構造設計・具現化
全方向駆動機構を核とした革新的アクチュエーション技術の研究開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

○柔軟なアクチュエータ(誘電エラストマ)の開発○柔軟かつ高精度な人肌圧力センサの開発
発生力
マクスウェル応力
機能1:アクチュエータ
・軽量(人体と同じくらいに軽く)・無音(音がせず動く)・柔軟性(優しい動き)・応答性(信号にすぐ反応する)
機能2:センサ
e-Rubber
SRM
C
圧力電気容量が変化
人肌圧力センサ対象物のわずかな変形を感じる
柔軟アクチュエータ形状に合わせやさしく把持する
出口例:ロボットハンド
形状、固さ(特に柔らかいもの)に順応した物体の把持の達成
21
先導研究のポイント
委託先 :豊田合成株式会社(愛知県清須市)、アドバンスト・ソフトマテリアルズ株式会社(千葉県柏市)再委託先:国立大学法人東京大学 (東京都文京区)
近年、介護、福祉の現場における人手不足問題、農業従事者の高年齢化が問題となっている。解決方法の一つとして、ロボット技術の導入が求められている。このような現場では、人と近い位置関係になるため、安全性確保の観点から柔軟なセンサ、及び駆動源が求められる。 本研究開発では、生体組織の機械的特性に極めて近い特性を示す可能性があるスライドリングマテリアル
(SRM)に注目し、人間の皮膚と同じようなやわらかさで高精度な圧力センサを実現する。また高度な制御なしで柔軟な駆動源となるアクチュエータを開発する。
【キーワード】スライドリングマテリアル、柔軟センサ、アクチュエータ
スライドリングマテリアルを用いた柔軟センサーおよびアクチュエータの研究開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

【 流体を用いた粘性可変機構 直動型 】
ピストン
コントローラ
アキュムレータ
制御バルブ
圧力センサ
0 0.5 1 1.5 2 2.5 30
200
400
600
800
1000
Current (A)
)N( ecr
oF
1000mm/min measured500mm/min measured100mm/min measured1000mm/min simulated500mm/min simulated100mm/min simulated
( ) 機械インピーダンス可変機構の開発
( ) 知的制御システムの開発
機械インピーダンス
慣性質量弾性係数
粘性係数
作業性
安全性
柔軟性
ふれあい
追従性
革新的技術の獲得:柔軟性を有するスマートアクチュエータを構成するメカニズムの設計、知的制御手法の設計、機能の最適化設計手法
人間との共存・協働のための基盤技術:人間との物理的接触が不可避な介護ロボットや案内ロボット、工場で人間と協働するロボットなどへの適用
22
先導研究のポイント
委託先:学校法人 早稲田大学 (東京都新宿区)
人間との共存・協働を目的としたインピーダンス可変機構を有する革新的なスマートアクチュエータの開発。
(1)機械インピーダンス可変機構の開発:機能性流体の特性を応用した慣性質量可変機構を試作し、これまでに開発実績のある粘弾性調整関節を元に、小型・軽量で調整幅の大きな粘弾性可変機構を試作する。各可変機構を単体試験し有用性を評価するとともに、アクチュエータユニットの統合のための仕様を明確化する。
(2)知的制御システムの開発:各特性可変機構の開発に合わせて、個別の機械特性を調整するために必要な複数のパラメータをチューニング・制御するための知的制御システムを開発する。
【キーワード】インピーダンス可変機構、慣性質量可変機構、磁気粘性 (MR) 流体、知的学習制御
慣性質量を含むインピーダンス可変機構を有するスマートアクチュエータ
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

油圧駆動による高耐久化
燃料電池とエネルギ回生による自律長時間駆動
力感受性の向上による実行可能タス
クの拡大
力強さと優しさを兼ね備えたアクチュエータ
【燃料電池・電池ハイブリッド電源系に駆動される小型油圧駆動系】
リチウム電池
パワーエレクトロニクス
電気静油圧アクチュエータ
小型化・高出力化高効率化
SiCを用いた損失低減高速電流制御
エネルギ回生の最適化
回生エネルギ活用
大瞬時パワー
水素燃料電池
長時間駆動
23
先導研究のポイント
委託先:国立大学法人東京大学 (東京都文京区)
人間との親和性、接触安全性、屋外での作業、これらにおいて必須の要素技術がカに敏感なアクチュエータである。本研究では、サーボ弁を用いる必要のない静油圧伝達機構を採用することで、油圧機器の頑健性と、弁による摩擦がない高力制御性を備えたアクチュエータ技術を実用化のレベルまで向上し、さまざまなロボットシステムに活用可能な数種類のモデルを開発する。さらに長時間のフィールド作業に適した燃料電池と、大電流を供給チウム電池をハイブリッド化した電源系を開発し、フィールドアクチュエーション技術を確立する。
【キーワード】電気静油圧アクチュエータ、水素燃料電池、次世代半導体
小型油圧駆動系と燃料電池・電池ハイブリッド電源によるフィールドアクチュエーション技術
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ
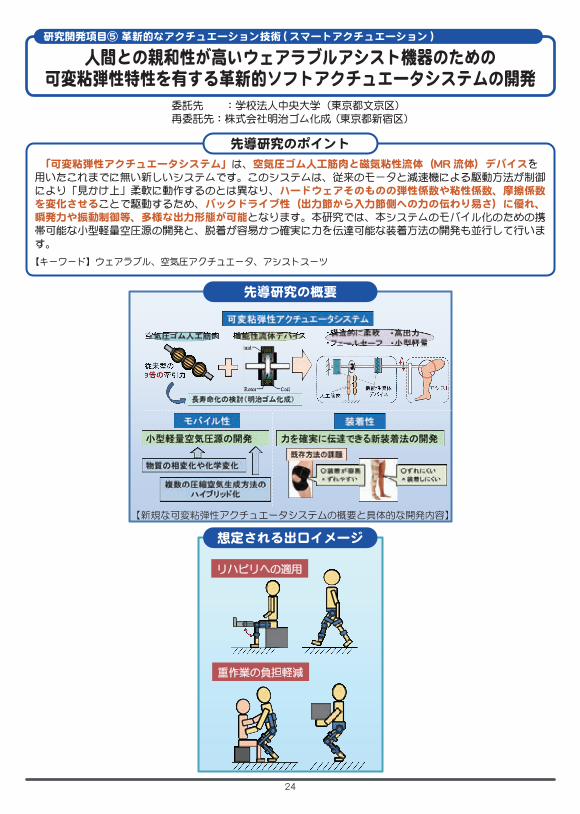
【新規な可変粘弾性アクチュエータシステムの概要と具体的な開発内容】
リハビリへの適用
重作業の負担軽減
24
先導研究のポイント
委託先 :学校法人中央大学(東京都文京区)再委託先:株式会社明治ゴム化成 (東京都新宿区)
「可変粘弾性アクチュエータシステム」は、空気圧ゴム人工筋肉と磁気粘性流体(MR 流体)デバイスを用いたこれまでに無い新しいシステムです。このシステムは、従来のモータと減速機による駆動方法が制御により「見かけ上」柔軟に動作するのとは異なり、ハードウェアそのものの弾性係数や粘性係数、摩擦係数を変化させることで駆動するため、バックドライブ性(出力節から入力節側への力の伝わり易さ)に優れ、瞬発力や振動制御等、多様な出力形態が可能となります。本研究では、本システムのモバイル化のための携帯可能な小型軽量空圧源の開発と、脱着が容易かつ確実に力を伝達可能な装着方法の開発も並行して行います。
【キーワード】ウェアラブル、空気圧アクチュエータ、アシストスーツ
人間との親和性が高いウェアラブルアシスト機器のための�可変粘弾性特性を有する革新的ソフトアクチュエータシステムの開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

高分子アクチュエータ
Fishing line artificial muscle[Haines et al., 2014, Science]
筋駆動型ロボットマニピュレータを試作(左図)ヒトに装着できる把持装具を目指す(右図)
CPAを用いたロボットハンド [M.C. Yip and G. Niemeyer, ICRA, 2015]
【筋骨格構造特有の構造を利用した制御設計(左図)の素材と駆動方法の基礎開発を行う(右図)】
アクチュエータ特性評価(電圧,電流,変形,力,温度)の様子.モデル化,制御設計を行う
2関節6筋肉で構成される筋骨格アーム試作機
ワイヤー
ジョイント
25
先導研究のポイント
委託先:国立大学法人九州大学(福岡県福岡市)、国立大学法人名古屋大学 (愛知県名古屋市)
人間と密接に接触・相互作用可能で、かつ極めて安価なロボットアクチュエーション技術の実現を目指す。このために用いる高分子人工筋肉アクチュエータとして、Coiled Polymer Actuator (CPA)、いわゆる釣糸アクチュエータに着目する。CPA は近年報告された新しいアクチュエータで、世界的に研究が今後進むと予想される。先導研究では、CPA ならびに他の電場応答性高分子の調査、CPA の特性計測実験とモデル化を行うとともに、CPA で駆動されるロボットマニピュレータの試作を行い、CPA を用いたロボットシステムの有用性を示すことを目的とする。
【キーワード】電場応答性高分子、釣糸アクチュエータ、Coiled Polymer Actuator、筋駆動ロボット、アシスト装具
高分子人工筋アクチュエータによる柔らかな運動支援装具の研究開発
研究開発項目⑤ 革新的なアクチュエーション技術 ( スマートアクチュエーション )
先導研究の概要
想定される出口イメージ

図は実機タスクをシミュレーションで継続性評価を子なっている様子。本研究開発によりロボット中核プロジェクトで開発された人工知能ソフトウェア等を常時、健全な状態でロボット本体に迅速にインテグレーションすることができるようになり、ロボット知能の高度化に貢献できる。
知能ソフトウエアを効率よく安全に実装できる
【膨大な知能ソフトの統合性有効性を自動検証するインテグレーション技術】
先導研究の概要
想定される出口イメージ
26
先導研究のポイント
委託先:国立大学法人東京大学 (東京都文京区)
背景:知能ソフトウェア要素群を効率よく安全に知能ロボットに取り込むための革新的なソフトウェアイン テグレーション管理機構の実現。�狙い:センサレベルやタスクレベルの仮想化が可能で実ロボットと仮想ロボットで透過的に利用できるシミ ュレーション技術を基盤とし、継続的テスティング手法に知能ロボットのタスクレベル検証技術なら びに実ロボットとソフトウェアインテグレーションの融合技術の研究開発を通じて、知能ソフトウェ ア要素統合の連携性、有効性を常時継続的自動的に検証する統合連結性有効性検証技術の研究開発を 通じて、革新的なソフトウェアシステムインテグレーション管理機構を実現する。
【キーワード】ロボットシステムインテグレーション、知能ロボットソフトウェアモジュール、常時継続的統合システム
ロボット知能ソフトの透過継続システムインテグレーション技術の研究開発
研究開発項目⑥ 革新的なロボットインテグレーション技術

実環境開発環境 シミュレーション
ロボットサービスの提案過程
ロボットサービスの開発現場
導入前の検討やインテグレーション作業が格段に容易
【 行動シミュレーション技術】
・・・
ロボットのセンシング、移動、人々の行動、をシミュレータ上で再現することで、開発環境上で、ロボットのインテグレーション作業を可能に
27
先導研究のポイント
委託先:株式会社国際電気通信基礎技術研究所(京都府相楽郡精華町)
ロボットの周囲の人々の移動行動(HRI 行動)を再現する HRI 行動シミュレーション技術を実現する。人々の移動行動に関する膨大なデータをもとに、人々のロボット近傍での行動を再現できるようにする。 この新たなシミュレータをロボットの開発環境に組み込むことにより、従来は、実環境でロボットをトライアンドエラーで動かし、人々の反応を見ながらロボットの行動を修正していたインテグレーションのプロセスを大幅に効率化する。
【キーワード】ヒューマンロボットインタラクション(HRI)、シミュレーション、開発環境
人共存環境で活動するロボットのための HRI 行動シミュレーション技術
研究開発項目⑥ 革新的なロボットインテグレーション技術
先導研究の概要
想定される出口イメージ

人ごみの中でタスクを実行するために、障害物の動作を推定するとともに接触も許容しながら自律移動する技術の開発
【人ごみを移動するロボット】【人と物理的インタラクション】
展示会や空港での受付案内や街中でのコミュニケーションなど人ごみでのタスクを
実現するロボットシステム
28
先導研究のポイント
委託先:パナソニック株式会社(大阪府門真市)、学校法人早稲田大学 (東京都新宿区)
ロボットと人の共存を更に進めるためには、多くの人が存在する環境下でロボットがタスクを実現することが重要となる。 本研究開発では、従来の「ロボットと人の接触を許容しない自律移動技術」の概念を超え、「人との接触・衝突を許容すること前提」として、人ごみのような多くの人が存在する中でも、人に不快感を与えることなく、人・ロボットが安全に共存することができる革新的な自律移動技術を開発することを目指す。具体的には、人・ロボットともにダメージを受けない安全な機構・制御や更には接触・衝突時であっても人に不快感を与えることなく移動することができるロボットシステムのインテグレーション技術の研究開発を行う。
【キーワード】自律移動、安全、接触、物理的インタラクション
人ごみをぶつかりながら安全かつ不快感を与えずに移動する自律移動技術の研究開発
研究開発項目⑥ 革新的なロボットインテグレーション技術
先導研究の概要
想定される出口イメージ

【先導研究期間の目標の概念図】
簡単な指示でどこでも動作できる
29
先導研究のポイント
委託先:国立大学法人 東北大学 (宮城県仙台市)
自律分散制御をベースとすることで、非構造的かつ予測不能的に変動する実世界環境下においても優れた実時間適応性と耐故障性、拡縮性、操縦性を同時かつ整合的に実現する次世代移動ロボットのためのロコモーション制御の基盤技術を提案する。この目的を達成するために,理学的な視座にも基づいたアプローチを展開する。先導研究では、数十体節程度の2次元ヘビ型ロボットをプラットフォームとして、テスト環境に内在する非構造性をロボットが「喜んで」推進のために活用する自律分散制御則を構築し、その妥当性を実験的に検証する。
【キーワード】自律分散制御、ヘビ型ロボット、生物ロコモーション、大自由度制御、自己組織化
生物ロコモーションの本質理解から切り拓く大自由度ロボットの革新的自律分散制御技術
研究開発項目⑥ 革新的なロボットインテグレーション技術
先導研究の概要
想定される出口イメージ

想定外の衝撃を受けても瞬時にバランスをとる
30
先導研究のポイント
委託先:国立大学法人東京大学 (東京都文京区)
背景:災害環境・不整地など整備されていない環境で想定外の衝撃を受けた時にロバストで安全に対応する ロボットが求められている。狙い:環境や経験などの行動記憶を利用することで障害へ適切に対応できるように行動記憶を統合した実時 間行動システムを構成する。作業している最中には見えていない周囲状況の記憶やそこにある物や環 境へ行動を行った際の反応から対象物の操作性や環境の不安定さなどの動作記憶などを、身体の多く のセンサとアクチュエータデバイスと高速通信可能な行動制御系へ統合して衝撃対応実時間行動シス テムを構成する。
【キーワード】環境センシング、適応アクチュエーション、行動記憶、衝撃対応、実時間行動システム
行動記憶レイヤ統合に基づく衝撃対応実時間行動システム中核総合化研究開発
研究開発項目⑥ 革新的なロボットインテグレーション技術
先導研究の概要
想定される出口イメージ
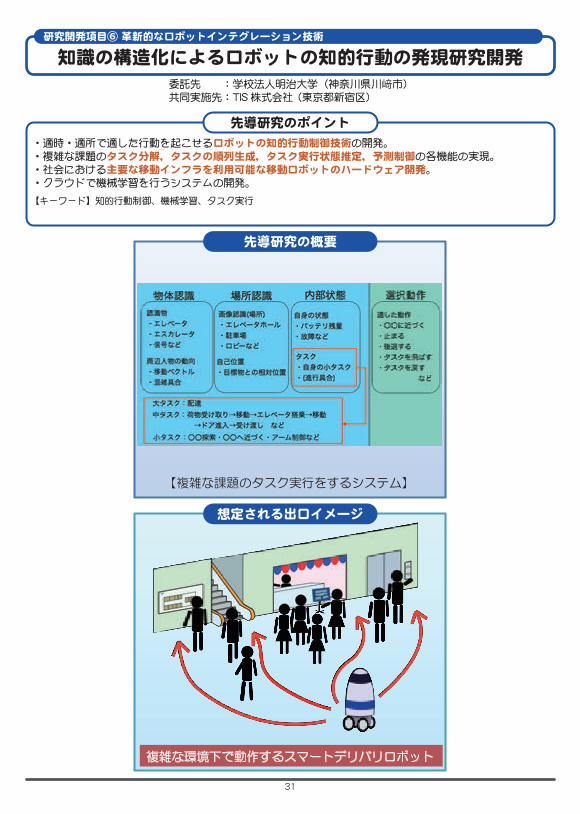
【複雑な課題のタスク実行をするシステム】
複雑な環境下で動作するスマートデリバリロボット
先導研究の概要
想定される出口イメージ
31
委託先 :学校法人明治大学(神奈川県川﨑市) 共同実施先:TIS 株式会社 (東京都新宿区)
知識の構造化によるロボットの知的行動の発現研究開発
研究開発項目⑥ 革新的なロボットインテグレーション技術
先導研究のポイント
・適時・適所で適した行動を起こせるロボットの知的行動制御技術の開発。・複雑な課題のタスク分解,タスクの順列生成,タスク実行状態推定,予測制御の各機能の実現。・社会における主要な移動インフラを利用可能な移動ロボットのハードウェア開発。・クラウドで機械学習を行うシステムの開発。
【キーワード】知的行動制御、機械学習、タスク実行

32
平成 27 年度「調査・先導研究」研究課題と計画(1)
本件は、平成 27 年 5 月 20 日から 6 月 30 日に、本プロジェクトに関連し、将来有望又は必要とされる可能性がある技術だが、現時点で研究手法が十分体系化されておらず、その実現手段の検討段階から研究開発が必要と考えられる技術的な課題に対して、情報提供依頼:RFI(Request For Information)として情報を提供いただきました。 その結果、調査研究から着手する必要はあるが、先導研究に結びつけるシーズ技術を示した有益な情報を多数提供いただいたので、その情報を参考に、調査研究から先導研究までを見据えた研究課題を設定しました。ここでは、その研究課題を調査・先導研究課題として、調査研究及び先導研究(以下「調査・先導研究」という)を実施します。
調査・先導研究課題③ 道具の操りと身体性の効果的な相互作用に関する研究開発
道具を使ったタスクを効率良く行うために、人間は、道具の特性を把握した上で、その特性を最大限に利用するための最適でダイナミックな行動を過去の試行錯誤に基づいて自然と生み出しているものと考えられる。そこで、本研究開発では、前記のように、人間が道具を扱う時の学習メカニズムを、次世代人工知能技術によりロボットで再現することで、その学習メカニズムの解明につなげるための研究開発を実施する。
調査・先導研究課題② マルチモーダルコミュニケーションに関する研究開発
ロボットと人間の意思疎通を図る研究は、さまざまなアプローチの提案がなされており、未だ発展途上ではあるが、特定の用途に適合することで成果を上げている。本研究開発では、次世代人工知能技術により、人間と意思疎通し、共感を得ることができるような機械の実現を目指す事を目的とする。そこで、人間のさまざま状態をセンシングし、適切に受け答えし、意思疎通が図れ、共感を得ることができるようなマルチモーダルコミュニケーションを実現するための研究開発を実施する。
調査・先導研究課題① 次世代人工知能プログラミング言語の研究開発
機械学習機能、セマンティックデータ上の推論機能、インテリジェントな対話機能など、近年の人工知能技術の成果をフルに活用した次世代人工知能技術は、将来、飛躍的に実装が進むと期待される。その技術開発に当たって、これまでの汎用型言語+ライブラリ・フレームワークという開発環境に対して、開発効率・保守性・拡張性を高め人工知能に特化した革新的なプログラミング言語の研究開発を目的とする。
調査・先導研究課題⑤ 次世代マニピュレーション技術創成のための研究開発
これまで多くのロボットハンド、ロボットアームが開発されてきたが、ヒトの手の機能に比肩する高度なマニピュレーションが可能なロボットハンド、ロボットアームは、未だ実現されたとはいえず、今後、ロボットを本格的に社会実装し、応用範囲を拡大していくためには、高度なマニピュレーション技術の研究開発が不可欠である。よって、手の器用さの本質を理解した上で、ヒトの手の機能に比肩する次世代マニピュレーション技術の創成を目的とした研究開発を実施する。
調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
近年、高分子材料や機能性流体、生体試料など新たな材料をロボットに応用する研究開発が盛んである。その一例として、MR 流体や Spider Silk などがある。それらの新たなロボット構成要素は、従来技術では不可能だった特性を実現したり、従来技術に対して圧倒的に低コストで機能を発揮したりするなどの可能性を持つ。また、それら新たなロボット構成要素を効果的に活用することで、従来ロボットが適用されてこなかった分野へ適用できるロボットを構成できる可能性がある。よって、次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法を研究開発する。

33
公募
H27FY (FY2015)【 予算 10 億円 】
H28FY (FY2016) H29FY (FY2017) H30FY (FY2018) H31FY (FY2019)【 予算 30.6 億円 】
先導研究調査研究【 AI:3 件、ロボット:13 件 】
研究開発
ワークショップ
ステージゲート
ステップゲート
RFI
計 画
調査・先導研究課題⑥ Industry4.0 等を踏まえた Universal 1.0(仮称)に向けた研究開発
近年、ドイツの Industry4.0、IoT(Internet of Things)、CPS(Cyber-Physical System) に注目が集まっており、機器ごと ( 例えば、エンコーダ、モータ、各種センサ等 ) に異なるインターフェースやデータプロトコルの標準化が進みつつある。その中で、日本が先んじてデファクトスタンダードの地位を得るために、ロボットを構成する機器を自由に組み替え可能で、システム構築を容易に行うこと (Easy to Use) が可能な標準規格 Universal1.0( 仮称 ) の策定に向けた調査研究を実施する。また、国内外のロボットへの導入に向けた実用化・事業化への見通しを得るための研究開発を実施する。
調査・先導研究課題⑧ ブレイン・マシン・インターフェース(BMI)技術の研究開発
人の脳波信号を非侵襲に取り出し、迅速かつ正確に人の各種動作や行動意図、また言語等を推定することにより、ロボット等の外部機器を操作したり、ソフトウェアを操作したりするなど、革新的な BMI システムの構築が実現可能となる。しかしながら、現時点では、非侵襲に抽出可能な脳波信号は、ノイズが大きく、動作や意図の推定が困難なことから、BMI の応用範囲は限定的かつ試行錯誤的な利用に留まっている。そこで本研究では、脳波信号から動作や意図、言語等の推定に適した手法を明らかにして、ロボット等に実装して検証することを目的とした研究開発を実施する。
調査・先導研究課題⑦ 自律型ヒューマノイドロボットの研究開
自律型ヒューマノイドロボットの応用先として、災害現場等へ人代替等への適用と位置づけられ研究開発が行われているが、1 次産業、2 次産業を俯瞰すると、自律型ヒューマノイドロボットのような汎用ロボットでは無く、機能に特化したロボット技術の導入が今後加速する可能性がある。このような状況の中で、自律型ヒューマノイドロボットの産業応用への可能性を調査し、必要性を明確にした上で開発優先度の高い要素技術に関して研究開発を実施する。
平成 27 年度「調査・先導研究」研究課題と計画(2)

【データフロー型の分散処理での並列化・最適化】
次世代ロボットに適した計算プラットフォーム
34
委託先 :株式会社トプスシステムズ(茨城県つくば市)再委託先:株式会社Cool Soft (茨城県つくば市)
メニーコアを活用するデータフロー型プログラミング言語の開発
調査・先導研究課題① 次世代人工知能プログラミング言語の研究開発
調査研究のポイント
次世代人工知能・プログラミング言語・計算プラットフォームについて、最新技術を俯瞰する。そして、人工知能特有の Massive Data Flow に適したストリーム処理が可能なデータフロー型のプログラミング・モデルを策定し、プログラミング言語仕様を設計する。また、開発効率や並列処理性能を GPGPU との比較のより定量的に評価する。標準化・普及促進への技術戦略策定、プログラミング言語開発のロードマップ策定を進め、次世代人工知能技術分野の拠点との有機的な連携・参画により、先導研究の内容と体制を設計する。
【キーワード】プログラミング言語、データフロー、ストリーム処理、分散並列処理、GPGPU
調査研究の概要
想定される出口イメージ

コミュニケーションを実現するための要素
多様な時系列情報を処理する深層学習基盤
ニューラルネットワーク基盤
時系列情報解析基盤
映像解析モジュール
音声解析モジュール
言語解析モジュール
・・・
知覚
蓄積
学習
反映
エンターテインメント
教育
コミュニケーションが求められる領域へ適用
介護
受付 案内
機械操作の補助
・・・
35
調査研究のポイント
委託先:株式会社 Preferred Networks(東京都文京区)
深層学習(ディープラーニング)技術の進歩により、多種多様なデータを利用した情報処理技術が飛躍的に進歩している。一方で、深層学習技術の研究開発を推し進めているのが海外の Web サービス系企業に多く、彼らが大量のデータやユーザの行動ログを利用することにより、技術革新を推し進めている。 本テーマでは、データを正しく収集、学習、反映(フィードバック)するための一連の仕組みを確立し、ロボットの知的機能の実現と産業への応用を目指した要素技術の検証、および開発を実施する。調査研究では、十分な計算処理能力と様々なセンサーを備えた端末を試作し、ネットワークを介してそれらの出力を共有、蓄積する仕組みを構築する。そして取得したデータを学習し、利用するための情報処理基盤を開発し、マルチモーダル情報処理の応用例として、言語による対話を中心とした機械との自然なコミニケーションの実現可能性を検証する。
【キーワード】時系列情報解析、マルチモーダルコミュニケーション、深層学習(ディープラーニング)、 分散学習
多様な時系列情報に対する深層学習基盤の開発
調査・先導研究課題② マルチモーダルコミュニケーションに関する研究開発
調査研究の概要
想定される出口イメージ

身体と環境に応じたロボットの道具の操り
【働きかけによる多様な道具の知覚】
36
調査研究のポイント
委託先:国立大学法人東京大学 (東京都文京区)
災害現場のような不確定要素が多い環境では、環境への馴染みによる適応という点で身体が柔軟なロボットが有効であると期待される。さらに、周りの物体を道具として活用できれば多様な状況への対応に有効である。そこで、本研究では柔軟ロボットによる道具使用に取り組む。柔軟な身体における道具使用では、道
具が身体に与える影響が大きく、道具-身体相互作用から生じる運動に着目することが有効と考えられる。調査研究では道具-身体相互作用の解析により、柔軟ロボットによる物体の知覚に取り組み、道具の使いこなしにつなげる。
【キーワード】ソフトロボット、適応的運動生成、ダイナミクス活用
柔軟ロボットによる身体環境相互作用に基づく道具使用
調査・先導研究課題③ 道具の操りと身体性の効果的な相互作用に関する研究開発
調査研究の概要
想定される出口イメージ
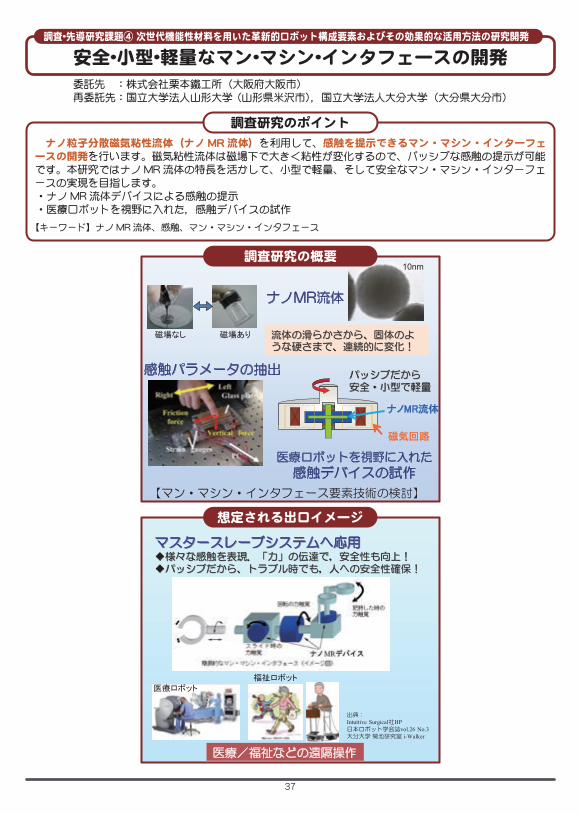
マスタースレーブシステムへ応用u様々な感触を表現.「力」の伝達で,安全性も向上!uパッシブだから、トラブル時でも,人への安全性確保!
出典:Intuitive Surgical社HP日本ロボット学会誌vol.26 No.3大分大学 菊池研究室 i-Walker
医療ロボット福祉ロボット
医療/福祉などの遠隔操作
【マン・マシン・インタフェース要素技術の検討】
感触パラメータの抽出
磁場なし 磁場あり
医療ロボットを視野に入れた
感触デバイスの試作
10nm
ナノ 流体
ナノ 流体
流体の滑らかさから、固体のような硬さまで、連続的に変化!
磁気回路
パッシブだから安全・小型で軽量
調査研究の概要
37
委託先 :株式会社栗本鐵工所(大阪府大阪市)再委託先:国立大学法人山形大学 (山形県米沢市),国立大学法人大分大学(大分県大分市)
安全・小型・軽量なマン・マシン・インタフェースの開発
調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
調査研究のポイント
ナノ粒子分散磁気粘性流体(ナノ MR 流体)を利用して、感触を提示できるマン・マシン・インターフェースの開発を行います。磁気粘性流体は磁場下で大きく粘性が変化するので、パッシブな感触の提示が可能です。本研究ではナノ MR 流体の特長を活かして、小型で軽量、そして安全なマン・マシン・インターフェースの実現を目指します。 ・ナノ MR 流体デバイスによる感触の提示 ・医療ロボットを視野に入れた,感触デバイスの試作
【キーワード】ナノ MR 流体、感触、マン・マシン・インタフェース
想定される出口イメージ

革新的な吸着移動機構モジュール
Air
吸着対象面凹凸面,表面に砂,錆が付着水
柔軟なポーラス状高分子凹凸に沿って変形し液体(水)によりシールを保つ
毛細管内包高分子
キャピラリーフォースにより液体を一定量浸透させる
カタツムリの腹足柔軟で常に濡れている
軟体動物の腹足を模倣し,表面張力やキャピラリーフォースを微細加工した高分子により制御
マイクロ・バイオロボティクス技術による生物模倣
自律分散制御によりモジュールが増加しても制御可能
吸着機構付き壁面移動モジュールロボット
インフラ点検、高所清掃などに利用
38
調査研究のポイント
委託先 :名城大学(愛知県名古屋市)
本研究では、カタツムリの腹足のように常に濡れている構造を模倣した塗れ吸着を用いることで吸着力を向上させた吸着モジュール、SuperWetAdsorption モジュール(SWA モジュール)の研究開発を目的とする。柔軟なポーラス状ポリマーと、それに液体をキャピラリーフォースにより適量排出する毛細管状ポリマーを複合して、凹凸やホコリ等が付着した壁面での安定した吸着を実現する。また、この吸着機構を搭載したモジュール型ロボットにより壁面等の安定した移動を実現する。
【キーワード】吸着機構、バイオミメティクス、微細加工、MEMS、モジュール型ロボット
機能性ポリマーを用いた移動ロボットの吸着機構の研究開発
調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
調査研究の概要
想定される出口イメージ

巨視的単純構造 ⇒ 微細構造化
エラストマー
柔軟電極
柔軟電極
エラストマー(a)
(b)
柔軟電極
微細構造化柔軟電極三次元構造電極を有するエラストマー相
【 アクチュエータ性能】大発生力 大歪 軽量 多自由度変形低消費エネルギー 高生体親和性 その他
低自由度直線変形モードアクチュエータから生体類似型の多自由度柔軟変形モードアクチュエータへ
多関節ロボットアーム生体模倣型ロボット(二足歩行ロボット等)義肢・義足柔軟材料を扱うためのサービスロボット
生体筋肉に類似したソフトアクチュエータ
39
調査研究のポイント
委託先:国立大学法人岐阜大学(岐阜県岐阜市)、株式会社ブイ・アール・テクノセンター(岐阜県各務原市)
Dielectric Elastomer Actuator(DEA)の実用化
【課題】大発生力化と大歪化を同時に実現することは材料力学的観点からは相反する
【調査研究】Microfabricatin を含めたその周辺技術に関する調査情報収集。更に、従来 DEA の性能を凌駕する「[1] 大発生力 [2] 大歪」の性質を有する DEA 素子の作製を行い、従来型低自由度直線変形モードアクチュエータを超える多自由度柔軟変形モードアクチュエータを開発。
【研究目的】Microfabrication 技術にて、Supercapacitor構造を有する微細構造化 DEA 素子の開発により両者を克服
コンデンサ化マテリアル基材によるソフトアクチュエーター開発調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
調査研究の概要
想定される出口イメージ
【キーワード】Soft Actuator、Dielectric Elastomer Actuator 、Microfabrication、Supercapacitor

装着型上下肢支援ロボットシステム高度組み立て作業用ロボット
【 流体とバネを利用した直動関節】
40
調査研究のポイント
委託先 :国立大学法人筑波大学(茨城県つくば市)
次世代機能性材料を最大限に生かすため、高い剛性と高い柔軟性の双方の特性を有し、適応的に柔剛融合する「賢い機構」のための新しい力学的ロボティクス理論(スマートメカニクス)を構築し、従来ではなしえなかった優れた剛性・柔軟性切り替え性能を有するロボット関節を開発する。また、開発したロボット関節を利用したロボットシステムを,装着型上下肢支援ロボットシステム,高度組み立て作業用ロボットなどへ展開し、実用化を見据えた実証実験を行うと共に、産業・医療・福祉分野への社会実装を目指す。
【キーワード】吸着機構、バイオミメティクス、微細加工、MEMS、モジュール型ロボット
剛性と柔軟性を融合させるスマートメカニクス
調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
調査研究の概要
想定される出口イメージ

材料、要素技術に着目した、技術開発目標を定め、ロードマップを作成する。
想定されるイノベーション目標達成イメージを描いたうえで、検証を行う。
イノベーションの種を見つける
41
調査研究のポイント
委託先 :株式会社エヌ・ティ・ティ・データ経営研究所(東京都千代田区)
ロボットメーカ単独では開発の手の及ばない構成素材や要素部材に着目したイノベーションについて、日本国内に蓄積された先進的な工業技術をベースに、日本ならではの同業種横断的・異業種縦断的な取組での目標達成を検討する。調査研究においては、[システム分野][エレメント分野][マテリアル分野](左図参照)における選抜されたメンバーにより、次世代ロボットに必要な材料・要素技術に関してロボット側のニーズの具体化と関連技術とのマッチングを行い、基本的には研究段階のものも含め、既存技術の評価と既存技術では不足している技術課題の明確化を行う。
【キーワード】吸着機構、バイオミメティクス、微細加工、MEMS、モジュール型ロボット
次世代機能性材料/次世代ロボット素材など要素技術の調査研究と次世代ロボットの試作開発
調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
調査研究の概要
想定される出口イメージ

次世代人工知能
技術
次世代マニピュレーショ ン技術の創成
ロボッ ト の社会実装の拡大
標準マニピュレーショ ンタスクによるベンチマークの明確化
ヒ ト の手の機能の
本質理解
認識 把持
システムインテグレーショ ン
製造 物流 サービスホーム
ヒトの手に比肩する高度なマニピュレーション
【研究概要図】
・ 要素技術調査
・ ニーズ調査
・ 既存チャレンジプログラム調査
・ 独自開発ロボッ ト ハンド 設計
・ 次世代人工知能技術分野との連携模索
標準的マニピュレーショ ンタスクの設定
調査研究
調査研究の概要
想定される出口イメージ
42
委託先 :国立大学法人神戸大学 (兵庫県神戸市)共同実施先:国立大学法人金沢大学 (石川県金沢市),国立大学法人信州大学(長野県長野市)
把持機能と認識機能の統合による高度なマニピュレーションの実現
調査・先導研究課題⑤ 次世代マニピュレーション技術創成のための研究開発
調査研究のポイント
今後ロボットを本格的に社会実装し、応用範囲を拡大していくためには、ヒトの手の機能に比肩する高度な次世代マニピュレーション技術の研究開発が不可欠である。 本調査研究では、把持機能と認識機能を統合した次世代マニピュレーション技術の創成に向けて、要素技術とシステムインテグレーションに関する調査研究を行うとともに、次世代マニピュレーション技術が求められている業種・分野を調査して必要な技術課題を明らかにし、調査研究後の先導研究、さらにその後の本格研究におけるベンチマークタスクとなる標準的マニピュレーションタスクを設定する。
【キーワード】ロボットハンド、次世代マニピュレーション技術、システムインテグレーション

日本の製造業が10年後20年後も競争力を維持するための を利用した戦略提言、及び のあり方の提示。また製造業に限らず、第 次産業・第 次産業への展開とこれら分野での日本のイニシアティブ発揮への提言。
デファクトの地位を確立し、多様な産業へ応用
【 国際ロボット展 協議会展示】
時代に対応した の戦略及び要求仕様の検討。世界の動向を踏まえた日本の製造業の方向性と の役割・戦略の整理。
43
調査研究のポイント
委託先 :一般社団法人 日本ロボット工業会
ORiN は既に 10 年以上の実績が存在し 1 万ライセンス(有償のみ)を発行する製造業におけるアプリケーションソフトウェアの標準プラットフォームである。アプリケーション側にもデバイス側にも過度の制約を要求しない柔軟な発想により誕生した世界に類を見ないオープン FA ソフトウェア基盤技術であり、デバイスとアプリケーションをつなぐミドルウェアの働きを担っている。近年、IoT 社会や Industry4.0 時代の到来が叫ばれ、ORiN は実装基盤として注目を集めるが、一方 SAP を始めとするビジネスアプリケーション提供企業はアプリケーション側に Close な形でデバイス側との接続ミドルウェアを整備しつつあり、囲い込みを加速している。このような情勢の中、日本の製造業の方向性を含め ORiN のとるべき戦略・方向性を明らかにする。
【キーワード】アプリケーションプラットフォーム、IoT、標準化、ロボット用ミドルウェア
IoT 時代に対応した ORiN3 の戦略及び仕様作成
調査・先導研究課題⑥ Industry4.0 等を踏まえた Universal 1.0(仮称)に向けた研究開発
調査研究の概要
想定される出口イメージ

株式会社テムザック:走破性の高い省エネ脚機構の開発既存の 足歩行ロボットでは、足首、膝、脚付け根に複数の回転軸に合わせた駆動モーターが必要。動物の脚のような筋リンク方式により、足首、膝のモーターを不要にし、省エネ・走破性の高い脚機構の開発を進める。
重心位置の実測スキャンデータを
用いた重心位置の計測次元動作解析
日本獣医生命科学大学:動物の骨格・動作分析
新潟県中越沖地震斜面崩壊
御嶽山噴火火山灰堆積
鬼怒川堤防決壊水没
車輪やクローラーでは走行不能な災害現場
44
調査研究のポイント
委託先 :学校法人日本医科大学 日本獣医生命科学大学 (東京都武蔵野市)、株式会社テムザック (福岡県宗像市)
我が国は、自然的な条件から地震、津波、噴火、地滑り等による災害が発生しやすい国土である。このような災害現場や不整地では、車輪やクローラーでも走行が不可能であり、省エネ・動物脚歩行ロボットの活躍が期待される。 本研究で得られる「多目的なヒューマノイドロボット駆動に応用可能な、動物の骨格、筋肉、筋の構造・働きの分析研究」の成果は、省エネ・動物脚歩行ロボット の開発を推進し、災害現場での走破性の高い駆動機構の開発につながる。 筋リンク方式により少ないモーターで脚の下部が水没しても駆動が継続できる歩行構造の開発を行う。
【キーワード】アプリケーションプラットフォーム、IoT、標準化、ロボット用ミドルウェア
動物の骨格・動作分析による、走破性が高い省エネ型脚機構の開発
調査・先導研究課題⑦ 自律型ヒューマノイドロボットの研究開発
調査研究の概要
想定される出口イメージ

【超高感度コグニティブ視覚システム】
カメラに比較し、数百倍の視界が可能煙に含まれる有害物質の特定が可能
人間が近づけないハザード環境用ロボットの視覚
45
調査研究のポイント
委託先 :国立研究開発法人産業技術総合研究所(茨城県つくば市)、株式会社ジェネシス(茨城県那珂市) 学校法人慶應義塾 (神奈川県横浜市)
災害現場の人代替用として使用される災害ロボットや極寒冷地、深海などの調査・情報収集ロボットの視覚システムを実現する。現状では、ほとんどロボットの目にはカメラが用いられている。しかし、カメラは煙中、濃霧等においては、光の散乱・吸収により数メートルしか視界が得られず、悪環境においてはロボットの目として使用できない。また、煙に含まれる有害物質を特定することも困難である。本研究においては、高速・広角で光ビームをステアリングさせ、その微弱な戻り光を検出する超小型軽量のレーザレーダーをロボットの目に適用すると共に、得られたデータから人工知能を用いて物体や有害物質の認識するシステムを開発する。
【キーワード】レーザレーダ、ロボット、視覚システム
広角・多波長レーザレーダによる超高感度コグニティブ視覚システム
調査・先導研究課題⑦ 自律型ヒューマノイドロボットの研究開発
調査研究の概要
想定される出口イメージ

大型構造物の組立をするヒューマノイドロボット
【調査研究を行う つの基盤技術】
物体検出・追跡技術
多点接触運動技術
Ver A Ver B
…
A B
ロボットシステム高信頼化技術
46
調査研究のポイント
委託先 :国立研究開発法人産業技術総合研究所(茨城県つくば市)
ヒューマノイドロボットが非整備環境において高信頼に移動・作業を行うために必要な基盤技術である、(1)環境計測データからの作業対象物体検出・追跡技術、(2)環境計測データに基づいたロバスト多点接触運動技術、(3)ロボットシステム高信頼化技術について、調査研究を行う。ヒューマノイドロボットの産業応用分野として有望と考えられる大型構造物の組立分野について調査を行い、産業応用の可能性、応用に際して必要となる基盤技術に対する要求仕様を明らかにし、技術戦略・ロードマップを作成する。
【キーワード】物体検出、多点接触全身運動制御、大規模ソフトウェア変更解析、差分デバッギング
非整備環境対応型高信頼ヒューマノイドロボットシステムの開発
調査・先導研究課題⑦ 自律型ヒューマノイドロボットの研究開発
調査研究の概要
想定される出口イメージ

高いS/N比,高い時間・空間分解能で安心・安全な侵襲型電極
【低侵襲な皮質内用剣山型電極と皮質表面用 電極】
47
調査研究のポイント
委託先 :国立大学法人豊橋技術科学大学 (愛知県豊橋市)
調査研究では、高い信号対雑音(S/N)比、高い時間・空間分解能等の取得を可能とする侵襲型電極に焦点を当て、侵襲型電極の課題となる、長期埋め込み安定性に加え、先導研究で取り組む BMI 検証による推定の正答率まで考慮し、各計測手法の評価基準を定める。侵襲型電極には、脳組織内に刺し入れる市販の剣山型電極と皮質脳波(ECoG)用電極を調査すると共に、自らが製作する直径 5μm の低侵襲性剣山型デバイスと 5μm 薄膜の低負担 ECoG 電極デバイスを評価対象とする。また、これらの計測手法の比較対象として非侵襲型の脳波(EEG)計測を調査する。
【キーワード】低侵襲剣山型電極、低侵襲 ECoG 電極、BMI
超低侵襲,超低負担な神経電極デバイス技術の BMI 応用
調査・先導研究課題⑧ ブレイン・マシン・インターフェース(BMI)技術の研究開発
調査研究の概要
想定される出口イメージ

【 構成要素間の相互作用のメカニズムを調査】
脳活動からの動作意図推定による装着型ロボット制御
48
調査研究のポイント
委託先 :株式会社国際電気通信基礎技術研究所(京都府 けいはんな学研都市 [ 相楽郡精華町 ])
装着型のロボットにブレイン・マシン・インタフェース (BMI) 技術を用いる際には、脳情報をデコードした結果でロボットが駆動されるだけでなく、ロボットの動作が脳活動に影響を与える。このメカニズムに着目し、BMI システムに関わる脳活動の動的モデル同定を行うことで、従来にはなかった迅速な脳活動に基づくロボット制御を可能とすることを目指す。
【キーワード】ブレイン・マシン・インタフェース、装着型ロボット、内部状態推定
脳活動モデル同定と内部状態推定に基づく BMI 技術
調査・先導研究課題⑧ ブレイン・マシン・インターフェース(BMI)技術の研究開発
調査研究の概要
想定される出口イメージ
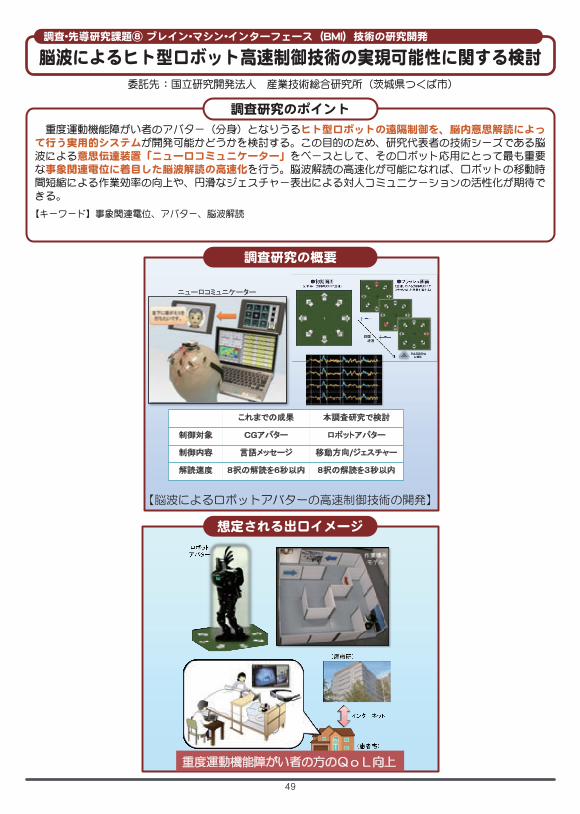
【脳波によるロボットアバターの高速制御技術の開発】
これまでの成果 本調査研究で検討
制御対象 CGアバター ロボットアバター
制御内容 言語メッセージ 移動方向/ジェスチャー
解読速度 8択の解読を6秒以内 8択の解読を3秒以内
ニューロコミュニケーター
重度運動機能障がい者の方のQoL向上
49
調査研究のポイント
委託先 :国立研究開発法人 産業技術総合研究所(茨城県つくば市)
重度運動機能障がい者のアバター(分身)となりうるヒト型ロボットの遠隔制御を、脳内意思解読によって行う実用的システムが開発可能かどうかを検討する。この目的のため、研究代表者の技術シーズである脳波による意思伝達装置「ニューロコミュニケーター」をベースとして、そのロボット応用にとって最も重要な事象関連電位に着目した脳波解読の高速化を行う。脳波解読の高速化が可能になれば、ロボットの移動時間短縮による作業効率の向上や、円滑なジェスチャー表出による対人コミュニケーションの活性化が期待できる。
【キーワード】事象関連電位、アバター、脳波解読
脳波によるヒト型ロボット高速制御技術の実現可能性に関する検討
調査・先導研究課題⑧ ブレイン・マシン・インターフェース(BMI)技術の研究開発
調査研究の概要
想定される出口イメージ

50
委託先一覧 平成 27 年度 先導研究
研究開発項目③ 次世代人工知能共通基盤技術
研究開発項目② 次世代人工知能フレームワーク・先進中核モジュール研究開発
研究開発項目① 大規模目的基礎研究・先端技術研究開発
人間と相互理解できる次世代人工知能技術の研究開発 国立研究開発法人産業技術総合研究所人工知能研究センタ(AIRC)
研究開発項目① 大規模目的基礎研究・先端技術研究開発
計算神経科学に基づく脳データ駆動型人工知能の研究開発 株式会社国際電気通信基礎技術研究所
高強度化学繊維を用いた『超』腱駆動機構と制御法の研究開発 国立大学法人東京工業大学
可塑化 PVCゲルを用いたウェアラブルロボット用ソフトアクチュエータの研究開発 国立大学法人信州大学国立研究開発法人産業技術総合研究所
高効率・高減速ギヤを備えた高出力アクチュエータの研究開発 国立大学法人横浜国立大学
全方向駆動機構を核とした革新的アクチュエーション技術の研究開発 国立大学法人東北大学
スライドリングマテリアルを用いた柔軟センサおよびアクチュエータの研究開発
豊田合成株式会社アドバンスト・ソフトマテリアルズ株式会社
慣性質量を含むインピーダンス可変機構を有するスマートアクチュエータ 学校法人早稲田大学
小型油圧駆動系と燃料電池/電池ハイブリッド電源によるフィールドアクチュエーション技術
国立大学法人東京大学
人間との親和性が高いウェアラブルアシスト機器のための可変粘弾性特性を有する革新的ソフトアクチュエータシステムの開発
学校法人中央大学
高分子人工筋肉アクチュエータによる柔らかな運動支援装具の研究開発 国立大学法人九州大学国立大学法人名古屋大学
次世代ロボットのためのマルチセンサ実装プラットフォーム 国立大学法人東北大学
ロボットの全身を被覆する皮膚センサの確立と応用開発 国立大学法人熊本大学
研究開発項目⑥ ロボットインテグレーション技術
研究科発項目⑤ 革新的なアクチュエーション技術(スマートアクチュエーション)
超広域認識行動計画学習ロボット知能ソフトウェア要素群の透過的継続的システムインテグレーション管理機構技術の研究開発
国立大学法人東京大学
人共存環境で活動するロボットのためのHRI 行動シミュレーション技術の実現 株式会社国際電気通信基礎技術研究所
人ごみをぶつかりながら安全かつ不快感を与えずに移動する自律移動技術の研究開発
パナソニック株式会社学校法人早稲田大学
生物ロコモーションの本質理解から切り拓く大自由度ロボットの革新的自律分散制御技術
国立大学法人東北大学
行動記憶レイヤ統合に基づく革新的能動センシング、適応アクチュエーション、障害対応実時間統合システムの中核総合化研究開発
国立大学法人東京大学
知識の構造化によるロボットの知的行動の発現研究開発 学校法人明治大学
人検知ロボットのための嗅覚受容体を用いた匂いセンサの開発 国立大学法人東京大学住友化学株式会社
公益財団法人神奈川科学技術アカデミー
研究開発項目④ 革新的なセンシング技術(スーパーセンシング)

51
委託先一覧 平成 27 年度 調査・先導研究
調査・先導研究課題① 次世代人工知能プログラミング言語の研究開発
メニーコアを活用するデータフロー型プログラミング言語の開発 株式会社トプスシステムズ
調査・先導研究課題② マルチモーダルコミュニケーションに関する研究開発
多様な時系列情報に対する深層学習基盤の開発 株式会社 Preferred Networks
調査・先導研究課題③ 道具の操りと身体性の効果的な相互作用に関する研究開発
柔軟ロボットによる身体環境相互作用に基づく道具使用
安全・小型・軽量なマン・マシン・インタフェースの開発
国立大学法人東京大学
調査・先導研究課題④ 次世代機能性材料を用いた革新的ロボット構成要素およびその効果的な活用方法の研究開発
株式会社栗本鐵工所
把持機能と認識機能の統合による高度なマニピュレーションの実現
調査・先導研究課題⑤ 次世代マニピュレーション技術創成のための研究開発
国立大学法人神戸大学
IoT 時代に対応した ORiN3 の戦略及び仕様作成
調査・先導研究課題⑥ Industry4.0 等を踏まえた Universal 1.0(仮称)に向けた研究開発
一般社団法人日本ロボット工業会
動物の骨格・動作分析による、走破性が高い省エネ型脚機構の開発
超低侵襲,超低負担な神経電極デバイス技術の BMI 応用
調査・先導研究課題⑦ 自律型ヒューマノイドロボットの研究開発
学校法人日本医科大学日本獣医生命科学大学株式会社テムザック
調査・先導研究課題⑧ ブレイン・マシン・インターフェース(BMI)技術の研究開発
国立学校法人豊橋技術科学大学
脳活動モデル同定と内部状態推定に基づく BMI 技術 株式会社国際電気通信基礎技術研究所
脳波によるヒト型ロボット高速制御技術の実現可能性に関する検討 国立研究開発法人産業技術総合研究所
機能性ポリマーを用いた移動ロボットの吸着機構の研究開発 学校法人名城大学
コンデンサ化マテリアル基材によるソフトアクチュエーター開発 国立大学法人岐阜大学株式会社ブイ・アール テクノセンター
剛性と柔軟性を融合させるスマートメカニクス 国立大学法人筑波大学
次世代機能性材料/次世代ロボット素材など要素技術の調査研究と次世代ロボットの試作開発
株式会社エヌ・ティ・ティ・データ経営研究所

52
索引①
産業技術総合研究所
産業技術総合研究所 人工知能研究センター
ジェネシス
信州大学
住友化学
さ
アドバンスト・ソフトマテリアルズ
エヌ・ティ・ティ・データ経営研究所
…21
…41
あ
神奈川科学技術アカデミー
岐阜大学
九州大学
熊本大学
栗本鐵工所
慶應義塾
神戸大学
国際電気通信基礎技術研究所
…14
…39
…25
…16
…37
…45
…42
…11…27…48
か
スライドリングマテリアルを用いた柔軟センサおよびアクチュエータの研究開発
次世代機能性材料/次世代ロボット素材など要素技術の調査研究と次世代ロボットの試作開発
人検知ロボットのための嗅覚受容体を用いた匂いセンサの開発
コンデンサ化マテリアル基材によるソフトアクチュエーター開発
高分子人工筋肉アクチュエータによる柔らかな運動支援装具の研究開発
ロボットの全身を被覆する皮膚センサの確立と応用開発
安全・小型・軽量なマン・マシン・インタフェースの開発
広角・多波長レーザレーダによる超高感度コグニティブ視覚システム
把持機能と認識機能の統合による高度なマニピュレーションの実現
計算神経科学に基づく脳データ駆動型人工知能の研究開発
人共存環境で活動するロボットのための HRI 行動シミュレーション技術の実現
脳活動モデル同定と内部状態推定に基づく BMI 技術
可塑化 PVC ゲルを用いたウェアラブルロボット用ソフトアクチュエータの研究開発
広角・多波長レーザレーダによる超高感度コグニティブ視覚システム
非整備環境対応型高信頼ヒューマノイドロボットシステムの開発
脳波によるヒト型ロボット高速制御技術の実現可能性に関する検討
人間と相互理解できる次世代人工知能技術の研究開発 研究開発課題①
人間と相互理解できる次世代人工知能技術の研究開発 研究開発課題②
人間と相互理解できる次世代人工知能技術の研究開発 研究開発課題③
広角・多波長レーザレーダによる超高感度コグニティブ視覚システム
可塑化 PVC ゲルを用いたウェアラブルロボット用ソフトアクチュエータの研究開発
人検知ロボットのための嗅覚受容体を用いた匂いセンサの開発
…18…45…46…49
…8…9
…10
…45
…18
…14

53
索引②
中央大学
筑波大学
テムザック
東京工業大学
東京大学
東北大学
トプスシステムズ
豊田合成
豊橋技術科学大学
人間との親和性が高いウェアラブルアシスト機器のための可変粘弾性特性を有する革新的ソフトアクチュエータシステムの開発
剛性と柔軟性を融合させるスマートメカニクス
動物の骨格・動作分析による、走破性が高い省エネ型脚機構の開発
高強度化学繊維を用いた『超』腱駆動機構と制御法の研究開発
人検知ロボットのための嗅覚受容体を用いた匂いセンサの開発
小型油圧駆動系と燃料電池/電池ハイブリッド電源によるフィールドアクチュエーション技術
ロボット知能ソフトの透過継続システムインテグレーション技術の研究開発
行動記憶レイヤ統合に基づく衝撃対応実時間行動システム中核総合化研究開発
柔軟ロボットによる身体環境相互作用に基づく道具使用
次世代ロボットのためのマルチセンサ実装プラットフォーム
全方向駆動機構を核とした革新的アクチュエーション技術の研究開発
生物ロコモーションの本質理解から切り拓く大自由度ロボットの革新的自律分散制御技術
メニーコアを活用するデータフロー型プログラミング言語の開発
スライドリングマテリアルを用いた柔軟センサおよびアクチュエータの研究開発
超低侵襲,超低負担な神経電極デバイス技術の BMI 応用
た
名古屋大学
日本医科大学日本獣医生命科学大学
日本ロボット工業会
な
高分子人工筋肉アクチュエータによる柔らかな運動支援装具の研究開発
動物の骨格・動作分析による、走破性が高い省エネ型脚機構の開発
IoT 時代に対応した ORiN3 の戦略及び仕様作成
…25
…44
…43
…24
…40
…44
…17
…14…23…26…30…36
…15…20…29
…34
…21
…47

54
索引③
パナソニック
Preferred Networks
ブイ・アール テクノセンター
は
明治大学
名城大学
ま
横浜国立大学
早稲田大学
人ごみをぶつかりながら安全かつ不快感を与えずに移動する自律移動技術の研究開発
多様な時系列情報に対する深層学習基盤の開発
コンデンサ化マテリアル基材によるソフトアクチュエーター開発
知識の構造化によるロボットの知的行動の発現研究開発
機能性ポリマーを用いた移動ロボットの吸着機構の研究開発
高効率・高減速ギヤを備えた高出力アクチュエータの研究開発
慣性質量を含むインピーダンス可変機構を有するスマートアクチュエータ
人ごみをぶつかりながら安全かつ不快感を与えずに移動する自律移動技術の研究開発
や・わ
…28
…35
…39
…31
…38
…19
…22…28

55
【表紙解説】
人工知能とロボット、これは現在もっとも急速な進歩を遂げている領域の
ひとつであり、次世代の産業の柱となりうる領域でもあります。表紙イラストは
「次世代」「人工知能」「ロボット」をイメージして作成しました。
本プロジェクトのさらなる躍進を祈念してやみません。
T-D-F 園山隆輔

56
国立研究開発法人 新エネルギー・産業技術総合開発機構
ロボット・AI 部 チーム SAMURAI
※プロジェクトの愛称 −『SAMURAI』の由来
我が国の英知を結集した人工知能・ロボットの研究開発の事業名を英文にする際に、
大和魂を持った勇ましい“侍”になぞらえ、『SAMURAI』プロジェクトと名付けました。
Strategic Advancement of Multi-Purpose Ultra-Human Robot and Artificial Intelligence Technologies; SAMURAI

国立研究開発法人 新エネルギー・産業技術総合開発機構
ロボット・AI 部
〒212-8554 神奈川県川崎市幸区大宮町 1310 ミューザ川崎セントラルタワーTel 044-520-5100 Fax 044-520-5103(代表)
http://www.nedo.go.jp July 2016(初版)