論文 - u-toyama.ac.jp · 図4にアクティブnhaが人体に近接したときの整...
TRANSCRIPT
論 文 ワイヤレスパーソナル通信におけるアンテナ・伝搬の最新技術論文特集
最急降下法による人体近接アクティブアンテナのインピーダンス
自動整合
小川 晃一†a) 高橋 司†† 小柳 芳雄†† 伊藤 公一†††
Automatic Impedance Matching of an Active Antenna Near the Human Operator
by the Steepest Gradient Algorithm
Koichi OGAWA†a), Tsukasa TAKAHASHI††, Yoshio KOYANAGI††, and Koichi ITO†††
あらまし 人体に近接した 150 MHz 帯ノーマルモードヘリカルアンテナの整合状態をバラクタダイオードによって変化させ,不整合損を除去することができるアクティブアンテナの構成について検討した.アクティブアンテナを最急降下法により自動整合するための制御回路並びに最適化アルゴリズムを理論的及び実験的に考察した.評価関数の 3 次元曲面形状を理論計算し,安定性と収束性の観点から評価関数の関数形式を決定した.実用状態での特性評価のため,人体電磁ファントムに近接したアクティブアンテナを実際にマイクロプロセッサと接続し,制御系の安定性と収束性について実験的に検討した.更に,電波暗室における放射指向性の測定結果から,提案方法により人体近接時のヘリカルアンテナの動作利得を 10 dB 以上改善できることを明らかにした.
キーワード アクティブアンテナ,人体影響,ヘリカルアンテナ,最急降下法,インピーダンス自動整合
1. ま え が き
VHF帯業務無線機では,無線機の使用が業務の妨
げにならないように,無線機本体は使用者のベルトに
常に固定され,本体と接続されたマイクとイヤホンに
よって通話する(図 1).この場合,アンテナは人体
の腹部に極近接して使用されることになるので,アン
テナ特性は人体の影響を強く受ける.文献 [1]~[3] で
はこのような状況における人体とノーマルモードヘリ
カルアンテナ (NHA: Normal mode helical antenna)
の電磁相互影響が詳細に検討されている.その結果,
アンテナが人体に近接することによって放射効率は
−20 dB以下に低下すること,更に放射効率低下の主†松下電器産業株式会社通信デバイス開発センター,門真市
Matsushita Electric Industrial Co., Ltd. Communication
Devices Development Center, 1006 Kadoma-shi, 571–8501
Japan††パナソニックモバイルコミュニケーションズ株式会社,横須賀市
Panasonic Mobile Communications Co., Ltd., 5–3 Hikari-
nooka, Yokosuka-shi, 239–0847 Japan†††千葉大学フロンティアメディカル工学研究開発センター,千葉市
Chiba University Research Center for Frontier Medical En-
gineering, 1–33 Yayoi-cho, Inage-ku, Chiba-shi, 263–8522
Japan
a) E-mail: [email protected]
図 1 使用状態の業務無線機Fig. 1 Business portable radio under talking condi-
tion.
要な要因は,アンテナが人体に近接したことによって
生じるインピーダンス不整合損であることが明らかに
されている.
このようなインピーダンス不整合によるアンテナの
動作利得の低減に対し,アクティブ素子を用いて能動
的にインピーダンス整合を図り,アンテナの動作利得
の低減を克服する試みが報告されている [4]~[9].し
かし,アンテナが人体に近接した場合のインピーダン
電子情報通信学会論文誌 B Vol. J87–B No. 9 pp. 1287–1298 2004 年 9 月 1287

電子情報通信学会論文誌 2004/9 Vol. J87–B No. 9
ス不整合の問題に関して,アクティブアンテナと制御
回路からなるサーボ系に対して最適化手法を用いて自
動整合の実験を行った報告はまだない.
アンテナと人体の電磁相互影響によって生じるイン
ピーダンス不整合は,アンテナと回路などの不整合の
問題と異なり,アンテナと人体の相対位置関係の変化
によって起こる入力インピーダンスの動的変化に対す
る考察が必要である.すなわち,想定される人体の動
きによって生じる入力インピーダンスをすべて整合さ
せることができるアクティブアンテナの構成と,イン
ピーダンスを整合状態に高速かつ安定に収束させるこ
とができる自動制御アルゴリズムの二つの要素に対す
る検討が重要である.
このような自動整合システムを実用化するためには,
整合回路形式はできるだけ簡便であることがシステム
の小型化及び量産時の製造コスト低減の観点から重要
である.手塚らは回路の簡素化のため,使用状況に対
応して反射係数面上の特定のインピーダンス範囲を自
動整合の対象とする方法を提案している [4].アンテナ
と人体の電磁相互影響によって生じるインピーダンス
の変化は反射係数面上の特定の範囲(容量性あるいは
誘導性)に現れることが多い [1], [2].したがって,こ
の性質を利用すると回路の大幅な簡素化が図れる可能
性がある.
本論文では,人体に近接した NHAの整合状態をバ
ラクタダイオードによって変化させ,不整合損を除去
することができるアクティブアンテナの構成(以下ア
クティブ NHAと呼ぶ)について検討した.アクティ
ブ NHAに用いた整合回路の構成は,人体近接時のイ
ンピーダンス変化に対応した簡素な回路形式としてい
る.アクティブ NHAを最急降下法により自動整合す
るための制御回路並びに最適化アルゴリズムを理論的
及び実験的に考察した.評価関数の 3次元曲面形状を
理論計算し,安定性と収束性の観点から評価関数の関
数形式を決定した.検討したアクティブ NHAの実用
状態での特性評価のため,人体電磁ファントムに近接
したアクティブ NHAを実際にマイクロプロセッサと
接続し,制御系の安定性と収束性について実験的に検
討した.更に,電波暗室における放射指向性の測定結
果から,提案方法により人体近接時 NHAの動作利得
を 10 dB以上改善できることを明らかにした.
2. アンテナの構成と等価回路
図 2にアクティブ NHAの構成を示す.検討したア
図 2 アクティブノーマルモードヘリカルアンテナ(アクティブ NHA)の構成
Fig. 2 Configuration of the active normal mode he-
lical antenna. (NHA1: P = 1.9mm, N = 49,
2R = 7.5mm, L = 93 NHA2: P = 1.9mm,
N = 52, 2R = 7.5mm, L = 101)
クティブ NHAは,アンテナ素子としてダイポール形
状の NHA素子を用いた構成であって,無線機筐体に
装着されたモノポール形状の NHAをモデル化したも
のである.モデル化の妥当性については文献 [3]に詳述
されている.NHAは自己共振周波数が約 150MHzで
ある 2種類の形状パラメータについて検討した.第 1
のNHAはピッチ P = 1.9mm,巻き数 N = 49, 直径
2R = 7.5mm (NHA1)であり,第 2 の NHA はピッ
チ P = 1.9mm,巻き数 N = 52, 直径 2R = 7.5mm
(NHA2)である.なお,NHA1は文献 [1]で検討され
ている NHA( [1] では ANT2と記載)と同形状であ
る.2種類の形状パラメータについて検討した目的は,
後述するように,バラクタダイオードの容量可変範囲
とインピーダンスの制御範囲の関係を調べるためで
ある.
アクティブ NHA には,図のようにバラクタダイ
オードがチョークインダクタを介して並列 (Cp) 及び
直列 (Cs) に接続されている.実験に用いたバラクタ
ダイオードは N 型 GaAs エピタキシアルプレーナ形
バラクタダイオード (MA2Z391:Panasonic)である.
ダイオードの諸特性は次章で述べる.ダイオードにバ
イアス電圧 V1 及び V2 を印加することによって,次
章で述べるように人体近接時のインピーダンス整合が
1288

論文/最急降下法による人体近接アクティブアンテナのインピーダンス自動整合
図られる.平衡–不平衡変換器には 1:4インピーダン
ス変換比を有する U-バランを用いた.
図 3にアンテナの等価回路を示す.図において Za
は NHAのみの入力インピーダンスを示している.バ
ランを狭帯域近似として,理想トランスフォーマとす
ると,図 3 の入力インピーダンス Zin は次式で表さ
れる.
Zin =1
4
(2ZCs +
ZCpZa
ZCp + Za
)(1)
ZCs =1
jωCs(2)
ZCp =1
jωCp(3)
ここで,Zcs,Zcp は直列及び並列ダイオードのイン
ピーダンスである.
図 4にアクティブ NHAが人体に近接したときの整
合の方法を示す.図中の Za はアンテナ形状NHA1の
入力インピーダンスをモーメント法により計算した結
図 3 アクティブ NHA の等価回路Fig. 3 Equivalent circuit of the active normal mode
helical antenna.
図 4 アクティブ NHA が人体に近接したときの整合方法(アンテナ形状:NHA1)
Fig. 4 Method for impedance matching when the an-
tenna of NHA1 is located close to the human
body.
果 [1]であって,アクティブ NHAと人体の距離 D が
小さくなると誘導性リアクタンスが増加する.なお,
距離 D は人体表面と NHA素子の巻きの中心間距離
と定義した.人体は高さ 170 cmの楕円柱状にモデル
化した.図 4では D = 5 cmのときの整合方法を示し
た.まず,Za を Cp によって 200Ω の定抵抗円上に
移動し,Cs によって 200Ω の純抵抗とし,更にバラ
ンによって Zin = 50Ω に変換される.同様に任意の
アンテナ–人体間距離 D の Za に対して整合状態にイ
ンピーダンス変換することができる.なお,ここでは
NHA1を例にとって説明したが NHA2の整合方法も
同様である.
図 5に人体近接時のインピーダンス特性の変化に対
する基礎検討をした結果を示す.図 5はモーメント法
による計算値である.図 5 (a)に示すようにアクティ
ブ NHAはあらかじめ自由空間において 150MHzで
(a) Impedance change due to the proximity of the human
body
(b) Restoration of impedance characteristics by applying
voltages to the varactor diodes
図 5 バラクタダイオードによるインピーダンス特性可変の基礎検討(アンテナ形状:NHA1)
Fig. 5 Basic study on a change of impedance charac-
teristics with varactor diodes for the antenna
structure of NHA1.
1289
電子情報通信学会論文誌 2004/9 Vol. J87–B No. 9
整合状態にあるとする.人体に近づくと共振周波数は
低くなり,150MHz において不整合となる.その状
態で Cp,Cs を制御し,最適値としたときの特性を
図 5 (b)に示す.人体近接時においても 150MHzにお
いて再び整合状態となっていることが分かる.
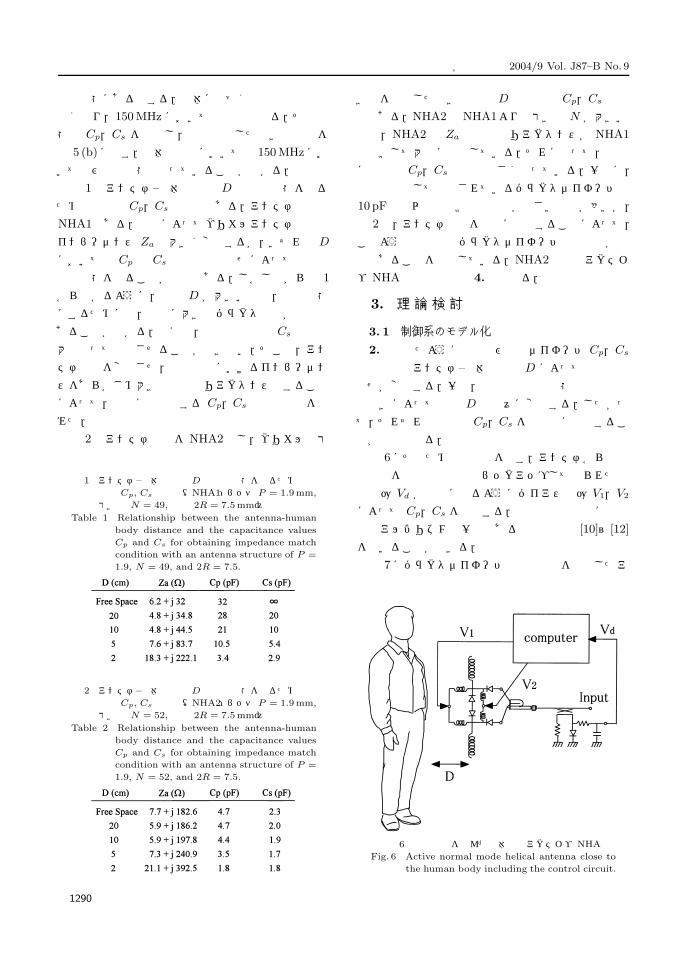
表 1 はアンテナ–人体間距離 D と整合状態を得る
ための容量値 Cp,Cs の関係である.アンテナ形状は
NHA1である.距離によってヘリカルアンテナの入力
インピーダンス Za は大きく変化するが,いずれの D
においても Cp と Cs の適切な組合せによって良好な
整合状態を得ることが可能である.しかしながら表 1
から分かるように,距離 D が大きい場合,整合状態
にするためには,非常に大きなバラクタ容量が必要で
あることが分かる.例えば,自由空間では Cs は無限
大となって整合させることができない.そこで,アン
テナ形状を変化させ,自由空間におけるインピーダン
スをあらかじめ大きな誘導性リアクタンスとすること
によって,整合に必要とする Cp,Cs 値の低減化を試
みた.
表 2はアンテナ形状を NHA2とし,ヘリカルの巻
表 1 アンテナ–人体間距離 D と整合状態を得るための容量値 Cp, Cs の関係(NHA1:ピッチ P = 1.9mm,
巻き数 N = 49, 直径 2R = 7.5mm)Table 1 Relationship between the antenna-human
body distance and the capacitance values
Cp and Cs for obtaining impedance match
condition with an antenna structure of P =
1.9, N = 49, and 2R = 7.5.
表 2 アンテナ–人体間距離 D と整合状態を得るための容量値 Cp, Cs の関係(NHA2:ピッチ P = 1.9mm,
巻き数 N = 52, 直径 2R = 7.5mm)Table 2 Relationship between the antenna-human
body distance and the capacitance values
Cp and Cs for obtaining impedance match
condition with an antenna structure of P =
1.9, N = 52, and 2R = 7.5.
き数を増やしたときの距離 D と容量値 Cp,Cs の関
係である.NHA2はNHA1よりも巻き数 N が大きい
ので,NHA2の Za は誘導性リアクタンスが NHA1
と比較して大幅に増加している.それに伴って,整合
に必要な Cp,Cs の値も小さくなっている.一般に,
高周波用として市販されているバラクタダイオードは
10 pF程度以下の比較的容量値が小さいものが多いが,
表 2は,アンテナ形状を適切に選択することによって,
このような小容量のバラクタダイオードでも整合が可
能であることを示唆している.NHA2形状のアクティ
ブ NHAの整合実験は 4.で述べる.
3. 理 論 検 討
3. 1 制御系のモデル化
2.で述べたように並列及び直列ダイオード Cp,Cs
の容量値はアンテナ–人体間距離 D によって最適な組
合せが変化する.一方,無線機の使用状態では使用者
の動きによって距離 D は様々に変化する.したがっ
て,それぞれの容量値 Cp,Cs を適応的に制御するこ
とが必要となる.
図 6にそのための構成図を示す.アンテナからの反
射電力を方向性結合器でピックアップして得られた検
波電圧 Vd が最小になるようにバイアス電圧 V1,V2
によって Cp,Cs を制御する.制御の指導原理には最
適化アルゴリズムの一種である最急降下法 [10]~[12]
を用いることができる.
図 7にバラクタダイオードと検波回路を考慮したア
図 6 制御回路を含んだ人体近接アクティブ NHA
Fig. 6 Active normal mode helical antenna close to
the human body including the control circuit.
1290

論文/最急降下法による人体近接アクティブアンテナのインピーダンス自動整合
図 7 ダイオードと検波回路を含んだ等価回路Fig. 7 Equivalent circuit including the varactor
diodes and detector circuit.
図 8 バラクタダイオードの C–V 特性(φ = 0.7V)Fig. 8 C-V characteristics of varactor diodes with
φ = 0.7V.
ンテナの等価回路を示す.図において Za は人体に近
接した NHAのインピーダンスである. Cp,Cs はバ
ラクタダイオードの容量であってバイアス電圧 V1 及
び V2 によって次式に従って変化する [13].
Cp =Co(
1− V1φ
)n (4)
Cs =Co(
1− V2φ
)n (5)
ここで,Co は零バイアス時の静電容量であり,φ は
固有障壁電圧(0.5~0.7V 程度),n は接合構造によ
る定数で合金接合形の場合は n = 1/2,拡散接合形の
場合は n = 1/3 である.
図 8 は 4. の実験に用いたバラクタダイオード
(MA2Z391:Panasonic)の容量対バイアス電圧 (C–V )
特性である.容量値は各バイアス電圧で 150MHzに
おけるバラクタダイオードのリアクタンス値をネット
ワークアナライザによって直接測定することによって
求めた.また,図 8には式 (4)及び式 (5)による理論
曲線も示す.図 8より,容量の可変範囲は 4.5~0.8 pF
程度,n は約 0.65 であることが分かる.この容量可
変範囲を表 1 及び表 2 で示した Cp,Cs の容量範囲
と比較すると,表 1の NHA1の場合には,D = 2 cm
のアンテナが人体に近接した状況でのみ整合可能であ
ることが分かる.一方,表 2の NHA2では,容量可
変範囲が表 2 で示した Cp,Cs の範囲をほぼ包含し
ていることから,自由空間 (D = ∞) から D = 2 cm
の範囲で整合をとることが可能である(自由空間と
D = 20 cm で必要な容量を補うため Cp には 0.5 pF
程度の容量を並列接続する).
ヘリカルアンテナからの反射波は検波ダイオードで
検波される.バラン入力端の反射係数 Γ は次式で表さ
れる.
Γ =Zin − Zo
Zin + Zo(6)
ここで Zin は式 (1) で定義される入力インピーダン
ス,Zo は同軸給電線のインピーダンスである.今ア
ンテナに Pin の電力を入力すると反射電力 Pr は次式
で与えられる.
Pr = |Γ|2 Pin (7)
反射電力 Pr をダイオード検波し,検波電圧 Vd を得
たとすると Vd は次式で計算できる.
Vd = K√
Pr (8)
ここで K は比例定数である.ただし,ダイオードは
入力信号電圧と検波電圧が比例する直線検波領域で動
作するものとしている [14].
次に,適応制御処理における検波電圧 Vd の最小化
法の基本原理を説明する.図 9は最急降下法に基づく
適応制御処理のフローチャートである.検波電圧 Vd
は制御電圧 V1,V2 によって変化するから,それらの
関数と考えれば次式で表される.
Vd = f(V1, V2) (9)
ここで,次式で定義される評価関数 y を考える.
y = |Vd − V0|q (10)
Vo は整合状態 (VSWR=1)に対応する検波電圧であ
1291

電子情報通信学会論文誌 2004/9 Vol. J87–B No. 9
図 9 制御アルゴリズムのフローチャートFig. 9 Flow chart for control algorithm.
り,ここでは V o = 0 とする.q は評価関数の形状を
決定する定数である.検波電圧 Vd を最小化する問題
は評価関数 y が最小になるような 2個の変数 V1,V2
を求めることと等価である.そのためには関数 y を変
数 V1,V2 で偏微分して,傾斜最大の方向を求めその
方向に少しずつ進んでいけばよい.最急降下法は,こ
の基本原理に基づいて,初期値をもとにその値を以下
の式 (11)及び式 (12)により繰り返し更新することで
最適値を求める方法である [10]~[12].
V1(n+ 1) = V1(n)− ∆y
∆V1(n)δ (11)
V2(n+ 1) = V2(n)− ∆y
∆V2(n)δ (12)
ここで Vi(n),Vi(n+ 1)(i = 1, 2) は n,n + 1 番目
のサンプル制御電圧を表しており,δ はサンプルを更
新するステップ間隔であり,収束の速度と収束後の残
差によってあらかじめ決定される値である.このよう
に,最急降下法は評価関数 y の変数 V1 あるいは V2
に関するこう配が最も急な方向(降下方向)に変数を
更新させていくため,効率良く最小値にたどり着ける.
なお,式 (11)及び式 (12)の導出と定式化は文献 [11]
に詳述されている.
3. 2 評価関数の曲面
最急降下法を用いた制御系の安定性や収束性などの
基本特性は,評価関数の曲面形状によって大きな影響
を受ける.そこで,3.1で求めた制御モデルから,評
価関数の曲面形状を計算し,制御系の基本特性につい
て考察した.
図 10は評価関数 y = V qd において,q = 0.5, 1, 2,
4 としたときの V1,V2 (0~10V)に対する曲面形状
である.曲面形状はすべて最大値で規格化している.
アンテナ形状は NHA1 で,バラクタダイオードの定
数は n = 0.33,Co = 6pF,φ = 0.5Vである.アン
テナ–人体間距離 D は 2 cmである.図 10より,いず
れの q においても計算した電圧の範囲では曲面には局
所的な極小値 (Local minimum) が存在しないことが
分かる.このうち,q = 0.5 及び 1のときは極小値で
y は鋭いピークを有しており,微分不能である.最急
降下法では式 (11),式 (12) から分かるようにその手
順に微分操作を含んでいるから,微分不能点では動作
が不安定になるおそれがある.一方,q = 2 及び 4で
は,評価関数 y は,最小値を含めて領域全体にわたっ
て滑らかであって微分可能であることが分かる.しか
し,q = 4 では傾斜が緩やかであって収束性が悪いこ
とが予想される.以上の考察から,安定性と収束性の
観点から本論文では q = 2 を採用することにした.
図 11 は,q = 2 としたときのアンテナ–人体間距
離 D による曲面形状の変化である.アンテナ形状は
NHA2である.バラクタダイオードの定数は,図 8の
実験的検討より,n = 0.65,Co = 4.5 pF,φ = 0.7V
とした.図 11より,距離が D = 20 cmから D = 2 cm
に変化し,アンテナが人体に近接するに伴って,評価
関数の最小値(最適解)を与える V1,V2 が高いバイ
アス電圧値の方向(すなわち,表 2の低い容量値の方
向)に移動する様子が視覚的によく分かる.更に,い
ずれの D においても曲面は滑らかで局所的な最小解
は存在しないことが確認される.
次に図 11 における距離 D の違いによる曲面形状
の変化を考察する.図 11 で D = 2 cm の場合には
最小値周辺で曲面が鋭く落ち込んでいるのに対し,
D = 20 cmの場合には曲面形状の鋭さが損なわれてい
る.これは図 8で示したバラクタダイオードの C–V
特性が原因である.ダイオードの容量変化はバイアス
電圧が低い領域では急しゅんだが,高い電圧値では変
化が平たんになる.このため,図 11 (a)のように低い
電圧値で整合がとられる場合は鋭い曲面形状が得られ
るが,図 11 (b)のように電圧が高い領域では変化の緩
やかな曲面になる.
1292

論文/最急降下法による人体近接アクティブアンテナのインピーダンス自動整合
図 10 評価関数の局面形状 (n = 0.33, Co = 6pF, φ = 0.5V, D = 2 cm)
Fig. 10 Surface of the estimation function (n = 0.33, Co = 6 pF, φ = 0.5V,
D = 2 cm).
図 11 評価関数の局面形状 (n = 0.65, Co = 4.5 pF, φ = 0.7V, q = 2)
Fig. 11 Surface of the estimation function (n = 0.65, Co = 4.5 pF, φ = 0.7V,
q = 2).
次にダイオード定数の違いによる曲面の変化を調べ
る.図 10 (c)と図 11 (b)はともに q = 2,D = 2 cm
であり,n がそれぞれ 0.33及び 0.65である.両者の
曲面形状を比較すると特徴的な相違点が観測される.
すなわち,図 11 (b)ではバイアス電圧の高い領域にお
ける曲面の変化が図 10 (c)より緩やかであるが,最小
点近傍では,対照的に,図 11 (b)の方が図 10 (c) よ
り急激な変化を示している.これは,図 8から分かる
1293

電子情報通信学会論文誌 2004/9 Vol. J87–B No. 9
ようにバラクタダイオードの定数 n が大きくなると
バイアス電圧に対する容量変化が急しゅんになるから
である.
4. 実 験 結 果
4. 1 収 束 性
最急降下法による最適化プログラムを用いて人体電
磁ファントムに近接したアクティブ NHAの自動整合
実験を行った.実験の様子を図 12 に示す.アンテナ
形状は表 2 で示した NHA2を用いた.アンテナへの
入力電力(図 7 の Pin)は 5 dBm である.実験に用
いたファントムは人体腹部を模擬したもので,内部に
エチレングリコールと塩を調合した人体等価溶液を注
入している [15].制御装置にはノートパソコンを用い,
制御電圧の変化は GP-IB 制御によって行った.プロ
グラム言語にはMATLAB(注1)を用いた.
図 13 に人体近接による整合状態の変化を示す.ア
ンテナ–ファントム間距離 D は 2.5 cmである.図 (a)
は自由空間における VSWR で 150MHz において整
合している.図 (b)はアンテナをファントムに近接し
た状態の特性で 150MHzにおける VSWRは 11.7で
ある.この状態で制御を実行すると図 (c)の特性にな
り 150MHz において VSWR=1.1となって再び整合
がとれている.なお,V1,V2 の初期値は自由空間に
おいて整合する電圧値とした.
図 14 は制御電圧の収束状況である.縦軸はバラク
タダイオードの印加電圧及び検波ダイオードの検波電
圧であり,横軸は制御の繰返し回数である.図におい
て (a)は制御電圧の初期値を自由空間で整合する電圧
図 12 ファントムを用いた実験の様子Fig. 12 Experimental setup using the human phantom.
値とした場合,(b)は初期値を人体近接時 (D = 2 cm)
に整合する電圧値とした場合である.図 14 (a) より
V1,V2 の変化によって検波電圧 Vd が減少し,68回
の繰返し動作によって最小値に収束する様子が分かる.
制御前と制御後の VSWRはそれぞれ 11.7及び 1.1で
あった.一方,図 14 (b)では 34回の繰返し動作によっ
て最小値に収束しており,これは (a)の初期値を自由
空間に整合する電圧値とした場合の半分の収束時間で
ある.このように,初期値を適切に設定することによ
り高速動作が可能である.
図 15は初期値を自由空間時に整合する電圧値とし,
アンテナ–ファントム間距離 D を 5 cmとしたときの
収束特性である.人体との距離が離れることによって
人体近接時の入力インピーダンスが自由空間における
値に近づき,収束が早くなることが分かる.
なお,1回の繰返しに要する時間は 0.4 秒であるの
で,34 回の繰返し動作に要する時間は 13.2 秒であっ
た.1回の繰返し時間 0.4 秒のうち,最急降下法の演
算時間は約 0.002 秒(2m秒),GP-IBによる計測器
の制御に要する時間(ハンドシェイク等)は 0.398 秒
である.したがって,34 回の繰返し動作を行うのに
制御プログラムが必要とする正味の演算時間は約 0.07
秒である.このように,収束時間の大半は GP-IB 制
御のために必要な時間である.計測装置の制御時間は
専用の D–A 変換回路等の採用によって短縮が可能で
ある.演算時間は MATLABを C 言語やアセンブラ
言語へ置き換えること,更にはDSPや FPGAによる
(注1):MATLAB は,米国における The MathWorks, Inc. の登録商標である.
1294

論文/最急降下法による人体近接アクティブアンテナのインピーダンス自動整合
図 13 人体近接による整合状態の変化Fig. 13 Change of impedance match condition due to
the proximity of the human body.
専用ロジック回路の採用によって大幅な短縮が期待で
きる.これらは今後の課題である.
4. 2 利得改善効果
本論文で述べている自動整合の最終的な目的は人体
近接時における実用状態におけるアンテナ利得の改
(a) Initial values are of voltages that achieve the matching
condition in free space
(b) Initial values are of voltages that achieve the matching
condition close to the human body
図 14 制御電圧の収束状況Fig. 14 Convergence response of the control voltages
in the case of D = 2.5 cm.
図 15 制御電圧の収束状況Fig. 15 Convergence response of the control voltages
in the case of D = 5 cm.
1295

電子情報通信学会論文誌 2004/9 Vol. J87–B No. 9
善である.そこで自動整合による利得改善効果を検証
した.
図 16 は,図 12 に示した人体ファントムに近接し
たアクティブNHAの水平面(X-Y 面)放射指向性の
測定結果である.測定の座標は図 1に記載した.偏波
は垂直偏波である.図 16 (a)は制御前(自由空間にお
ける整合状態)における測定結果であり,図 16 (b)は
図 12の制御系によって自動整合を行った後の測定結果
である.なお,制御系を含んだ図 12の実験セットアッ
プでは指向性測定は困難であるので,指向性測定はア
クティブ NHAに小形発振器を装着し,制御前と制御
後に対応する制御電圧をバラクタダイオードに印加し
て行った.制御電圧の印加はボタン電池と DC–DCコ
ンバータ ICによる昇圧回路によって行い,アンテナ
にはバイアス線が接続されない構造になっている.
図 16から制御前後で指向性の形に大きな変化はな
いが,動作利得が大幅に向上することが分かる.人体
正面方向の利得の改善量は距離 D = 5 cmでは 5 dB,
D = 1 cmでは 11.8 dBである.このように利得改善
量は D が小さくなるに伴って大きくなる.これは,ア
クティブ NHAが人体に近接すると人体の吸収電力以
上にインピーダンス不整合損が大幅に増加するからで
ある [1].また,アクティブ NHAは自由空間では水平
面指向性は無指向性であるが,アンテナがファントム
に近づくとファントム背面の放射が減少する様子が分
かる.
図 16 インピーダンス自動整合による水平面放射指向性変化の測定結果Fig. 16 Measured results for the radiation pattern changes in the horizontal plane
due to the automatic impedance matching control.
図 17はファントムとアンテナの距離を変化したと
きの制御前後の水平面における最大利得の変化である.
最大利得は図 16 から分かるようにファントムの正面
方向で生じる.図 17 から,インピーダンスを自動整
合することによって D = 2 cm以下では 10 dB以上の
大幅な利得の向上が可能であることが分かる.これに
より,本論文で提案した自動整合方式の有効性が検証
された.
図 17 インピーダンス自動整合による水平面最大利得とアンテナ–人体間距離 D の関係
Fig. 17 Measured results for the maximum gain in
the horizontal plane with regard to antenna-
body distance D due to the automatic
impedance matching control.
1296

論文/最急降下法による人体近接アクティブアンテナのインピーダンス自動整合
5. む す び
業務無線機用ヘリカルアンテナに対する人体とアン
テナの相互影響の軽減対策として,人体に近接した
ノーマルモードヘリカルアンテナ (NHA)の整合状態
をバラクタダイオードによって変化させ,不整合損を
除去することができるアクティブ NHAの構成につい
て検討した.アクティブ NHAを最急降下法により自
動整合するための制御回路並びに最適化アルゴリズム
を理論的及び実験的に考察した.評価関数の 3次元曲
面形状を理論計算し,安定性と収束性の観点から評価
関数の関数形式を決定した.具体的には,評価関数の
べき乗 (q) による収束の変化を調べ,その結果,q = 2
が収束曲面の連続性と傾斜角の観点から適当であるこ
とが分かった.
実用状態での特性評価のため,人体電磁ファントム
に近接したアクティブ NHA を実際にマイクロプロ
セッサと接続し,制御系の安定性と収束性について実
験的に検討した.初期値による収束時間の変化を調べ,
アンテナ–人体の距離によらず安定に収束することを
確認した.その結果,初期値を人体近接時に整合する
電圧値とすることによって,初期値を自由空間で整合
する電圧値とした場合と比較して約半分の収束時間と
なり,初期値を適切に設定することにより高速動作が
可能であることが分かった.しかし,収束に至る 34
回の繰返し動作に要する時間は 13.2 秒(計測装置の
制御時間を除いた正味の演算時間は 0.07 秒)であり,
実用化のためには専用の D/A変換回路等の採用等に
より高速化を図る必要があることが分かった.更に,
電波暗室における放射指向性の測定結果から,提案方
法により人体近接時のヘリカルアンテナの動作利得を
10 dB以上改善できることを明らかにした.
今後の研究課題としては,バラクタダイオードの損
失,大電力入力時のひずみ特性あるいは制御回路の IC
化によるリアルタイム制御に関する検討などがある.
文 献[1] 小川晃一,小柳芳雄,伊藤公一,“人体腹部に近接した
150MHz 帯ノーマルモードヘリカルアンテナの実効放射効率の解析と効率改善に関する検討,” 信学論(B),vol.J84-B, no.5, pp.902–911, May 2001.
[2] 小柳芳雄,河井寛記,小川晃一,伊藤公一,“全身等価楕円柱ファントムを用いた 150 MHz 帯ヘリカルアンテナの局所 SAR と放射特性に関する検討,” 信学論(B),vol.J85-B, no.5, pp. 664–675, May 2002.
[3] 小柳芳雄,河井寛記,小川晃一,伊藤公一,“人体等価ファントムと VHF 帯小形アンテナを用いた腹部内局所 SAR
の検討,” 信学論(B),vol.J86-B, no.7, pp.1207–1218,
July 2003.
[4] 手塚昌伸,水澤丕雄,野口啓介,別段信一,片木孝至,今西康人,“アンテナ自動整合システムにおける整合回路,” 信学論(B),vol.J85-B, no.11, pp.1977–1980, Nov. 2002.
[5] J.de Mingo, A. Crespo, and A. VaIdovinos, “In-
put impedance antenna automatic matching system,”
The 13th IEEE International Symposium on Per-
sonal, Indoor and Mobile Radio Communications,
vol.4, pp.1872–1876, 2002,
[6] S. Yichuang and J.K. Fidler, “High-speed automatic
antenna tuning units,” Antennas and Propagation
1995 ICAP ’95 Ninth International Conference on
(Conf. Publ. No. 407), vol.1, pp.218–222, April 1995.
[7] A. DeHon, T. Knight, and T. Simon, “Automatic
impedance control,” Solid-State Circuits Conference,
1993 Digest of Technical Papers 40th ISSCC, 1993
IEEE International, pp. 164–165, Feb. 1993.
[8] 小川晃一,小柳芳雄,伊藤公一,“アクティブインピーダンス制御によるヘリカルアンテナの人体影響軽減対策,”2002 信学総大,SBC-1-7, March 2002.
[9] アンテナのチューニング技術,別冊 CQ ham radio,CQ
出版社,1994.
[10] 森 正武,計算機のための数値計算法,科学技術出版社,1978.
[11] 菊間信良,アレーアンテナによる適応信号処理,科学技術出版社,1999.
[12] 松本欣二,フォートランプログラミング,朝倉書店,1972.
[13] 倉本源三郎,例題演習マイクロ波回路,東京電機大学出版局,1983.
[14] 阿部英太郎,マイクロ波,東京大学出版会,1983.
[15] 小川晃一,岩井 浩,畠中順子,“通話状態における携帯端末アンテナの電磁評価用高精度リアルファントム,” 信学論(B),vol.J85-B, no.5, pp.676–686, May 2002.
(平成 15 年 12 月 19 日受付,16 年 3 月 15 日再受付)
小川 晃一 (正員)
昭 54 静岡大・工・電気卒.昭 56 同大大学院修士課程了.同年松下電器産業(株)入社.以来,研究開発部門において,マイクロ波・ミリ波機器,衛星通信無線システム,移動体通信用アンテナ・高周波部品の研究に従事.現在,松下電器産業(株)通
信デバイス開発センター高周波デバイス担当参事.(社)関西電子工業振興センター (KEC) 次世代ワイヤレス研究会主査.千葉大学フロンティアメディカル工学研究開発センター客員教授.工博(東工大).平 2 オーム技術賞.平 13 テレコムシステム技術賞受賞.IEEE 会員.International WHO’S WHO of
Professionals メンバー.
1297

電子情報通信学会論文誌 2004/9 Vol. J87–B No. 9
高橋 司 (正員)
平 5 東工大・工・電気電子卒.平 7 同大大学院修士課程了.同年松下通信工業(株)入社.以来,ディジタル携帯電話を中心とした移動無線通信機用小形アンテナの研究に従事.現在,パナソニックモバイルコミュニケーションズ(株)R&D センター主任
技師.
小柳 芳雄 (正員)
平元電通大・電気通信・応用電子卒.同年松下通信工業(株)入社.以来,ディジタル携帯電話を中心とした移動無線通信機用小形アンテナ,人体と電磁波の相互影響の研究に従事.平 15 千葉大大学院博士後期課程了.現在,パナソニックモバイルコミュ
ニケーションズ(株)R&D センター主任技師.工博.IEEE
会員.
伊藤 公一 (正員)
昭 49 千葉大・工・電子卒.昭 51 同大大学院修士課程了.同年東工大・工・助手.昭54 千葉大・工・助手,平元同助教授,平 9
同教授,平 15 同大フロンティアメディカル工学研究開発センター教授となり,現在に至る.主として,プリントアンテナ,小
形アンテナ,がん治療用アプリケータ等アンテナの医療応用,ファントムを用いた人体と電磁波との相互影響評価の研究に従事.工博.IEEEシニア会員,AAAS,映像情報メディア学会,日本ハイパーサーミア学会,日本シミュレーション学会各会員.
1298