el obzavejdane kms
DESCRIPTION
pishtoviTRANSCRIPT
1. Структура и специфични условия на работа крабното електрообзавежадне.
Етапи на развитие на корабната автоматика.
Краят на 19 началото на 20 век се характеризират с бурното развитие на всички отрасли на знанията и промишлеността, в това число и на корабната автоматика. Новите двигатели, машини и механизми се оборудват със сложни за това време регулатори, управляващи и следящи системи. В корабостроенето тези събития изглеждат така.
За пръв път на кораб е бил монтиран електропривод през 1883 г., а през 1886 г. на крайцерите “Адмирал Нахимов” и „Адмирал Корнилов” са използувани електровентилатори с пускорегулираща апаратура. Рулеви електропривод за пръв път в историята на корабостроенето е изпозлуван през 1892 г. на броненосеца “дванадесетте апостола”. От 1898 г. на военните кораби започва да се осъществява програма по електрофикация на рулевите и шпилови приводи, а също и управление на артилерийските оръдия. Така се създават основите на корабната електроавтоматика.
Фиг. 1Екслоатацията на съвременните морски кораби е свързана с необходимостта от изпълнението на многочисленни управляващи и регулиращи въздействия, както по време на движение на кораба, така и по време на стоянка при изпълнение на разнообразни товро-разтоврни операции. Задачата за повишаване на ефективността от управлението се е решавала в степен, съотвтсваща на развитието на техниката, електрониката и теорията на автоматичното управление. Натрупаният през годините опит на строителство и експлоатция на кораби е показал, че само комплексната автоматизация на кораба може да обхване всички технически средства и технологични процеси, да осигури високи технико-икономически показатели на управляемирте процеси при всички условия на експлоатация на кораба, а същевременно да изключи непосредтвеното участие на човека в управлението и обслужването .
Съвременият комплексно автоматизиран кораб (КАК) представлява човеко-машинен комплекс, състоящ се от разсъсредоточени по кораба микропроцесорни станции (контролери) обединени в мрежа за събиране, предаване и обработка на данни, осигурявайки ефективно управление както на отделните технически средства, така и на кораба като цяло. Общокорабната мрежа се
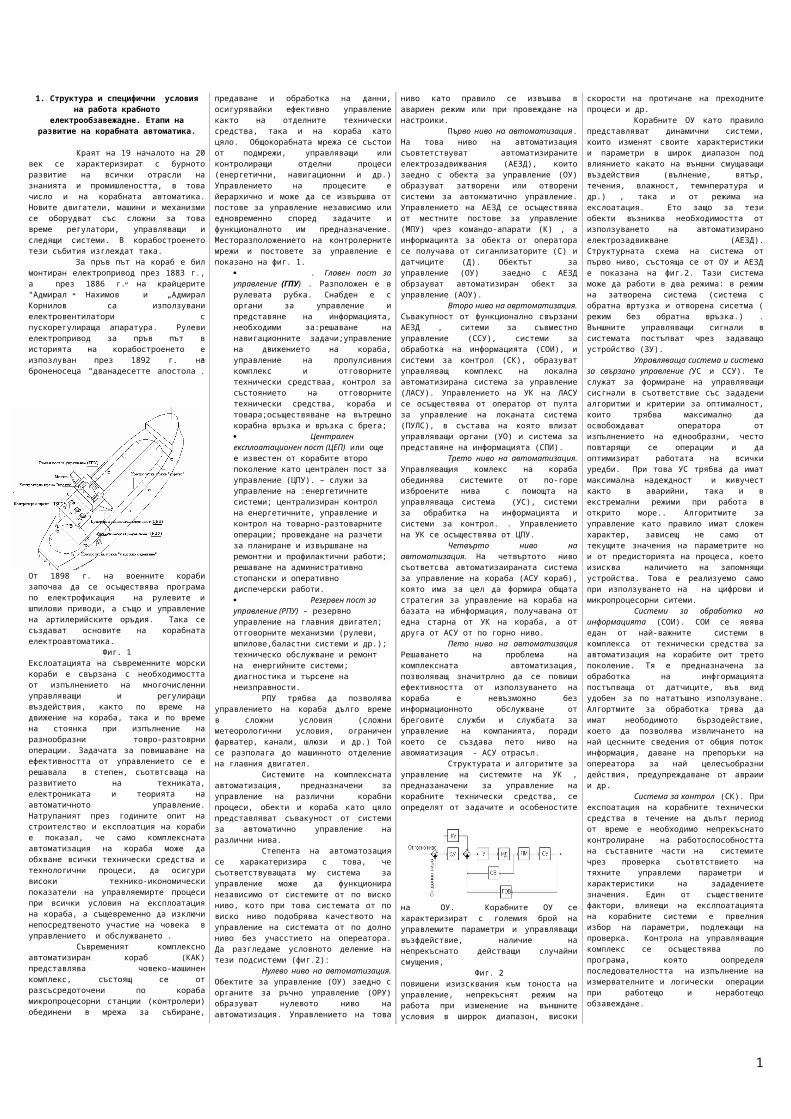
състои от подмрежи, управляващи или контролиращи отделни процеси (енергетични, навигационни и др.) Управлението на процесите е йерархично и може да се извършва от постове за управление независимо или едновременно според задачите и функционалното им предназначение. Месторазположението на контролерните мрежи и постовете за управление е показано на фиг. 1.
. Главен пост за управление (ГПУ) . Разположен е в рулевaта рубка. Снабден е с органи за управление и представяне на информацията, необходими за:решаване на навигационните задачи;управление на движението на кораба, управление на пропулсивния комплекс и отговорните технически средстваa, контрол за състоянието на отговорните технически средства, кораба и товара;осъществяване на вътрешно корабна връзка и връзка с брега; Централен експлоатационен пост (ЦЕП) или още е известен от корабите второ поколение като централен пост за управление (ЦПУ). – служи за управление на :енергетичните системи; централизиран контрол на енергетичните, управление и контрол на товарно-разтоварните операции; провеждане на разчети за планиране и извършване на ремонтни и профилактични работи; решаване на административно стопански и оперативно диспечерски работи. Резервен пост за управление (РПУ) – резервно управление на главния двигател; отговорните механизми (рулеви, шпилове,баластни системи и др.); техническо обслужване и ремонт на енергийните системи; диагностика и търсене на неизправности.
РПУ трябва да позволява управлението на кораба дълго време в сложни условия (сложни метеорологични условия, ограничен фарватер, канали, шлюзи и др.) Той се разполага до машинното отделение на главния двигател.
Системите на комплексната автоматизация, предназначени за управление на различни корабни процеси, обекти и кораба като цяло представляват съвакуност от системи за автоматично управление на различни нива.
Степента на автоматозация се харакатеризира с това, че съответствуващата му система за управление може да функционира независимо от системите от по виско ниво, кото при това системата от по виско ниво подобрява качеството на управление на системата от по долно ниво без учасстието на опереатора. Да разгледаме условното деление на тези подсистеми (фиг.2):
Нулево ниво на автоматизация. Обектите за управление (ОУ) заедно с органите за ръчно управление (ОРУ) образуват нулевото ниво на автоматизация. Управлението на това ниво като правило се извъшва в авариен режим или при провеждане на настроики.
Първо ниво на автоматизация. На това ниво на автоматизация съовтетствуват автоматизираните електрозадвижвания (АЕЗД), които заедно с обекта за управление (ОУ) образуват
затворени или отворени системи за автокматично управление. Управлението на АЕЗД се осъществява от местните постове за управление (МПУ) чрез командо-апарати (К) , а информацията за обекта от оператора се получава от сиганлизаторите (С) и датчиците (Д). Обектът за управление (ОУ) заедно с АЕЗД обрзауват автоматизиран обект за управление (АОУ).
Второ ниво на авртоматизация. Съвакупност от функционално свързани АЕЗД , ситеми за съвместно управление (ССУ), системи за обработка на информацията (СОИ), и системи за контрол (СК), образуват управляващ комплекс на локална автоматизирана система за управление (ЛАСУ). Управлението на УК на ЛАСУ се осъществява от оператор от пулта за управление на локаната система (ПУЛС), в състава на която влизат управляващи органи (УО) и система за представяне на информацията (СПИ).
Трето ниво на автоматизация. Управляващия комлекс на кораба обединява системите от по-горе изброените нива с помощта на управляваща система (УС), системи за обрабитка на информацията и системи за контрол. . Управлението на УК се осъществява от ЦПУ.
Четвърто ниво на автоматизация. На четвъртото ниво съответсва автоматизаираната система за управление на кораба (АСУ кораб), която има за цел да формира общата стратегия за управление на кораба на базата на ибнформация, получавана от една старна от УК на кораба, а от друга от АСУ от по горно ниво.
Пето ниво на автоматизация Решаването на проблема на комплексната автоматизация, позволяващ значитрлно да се повиши ефективността от използуването на кораба е невъзможно без информационното обслужване от бреговите служби и службата за управление на компанията, поради което се създава пето ниво на авомяатизация - АСУ отрасъл.
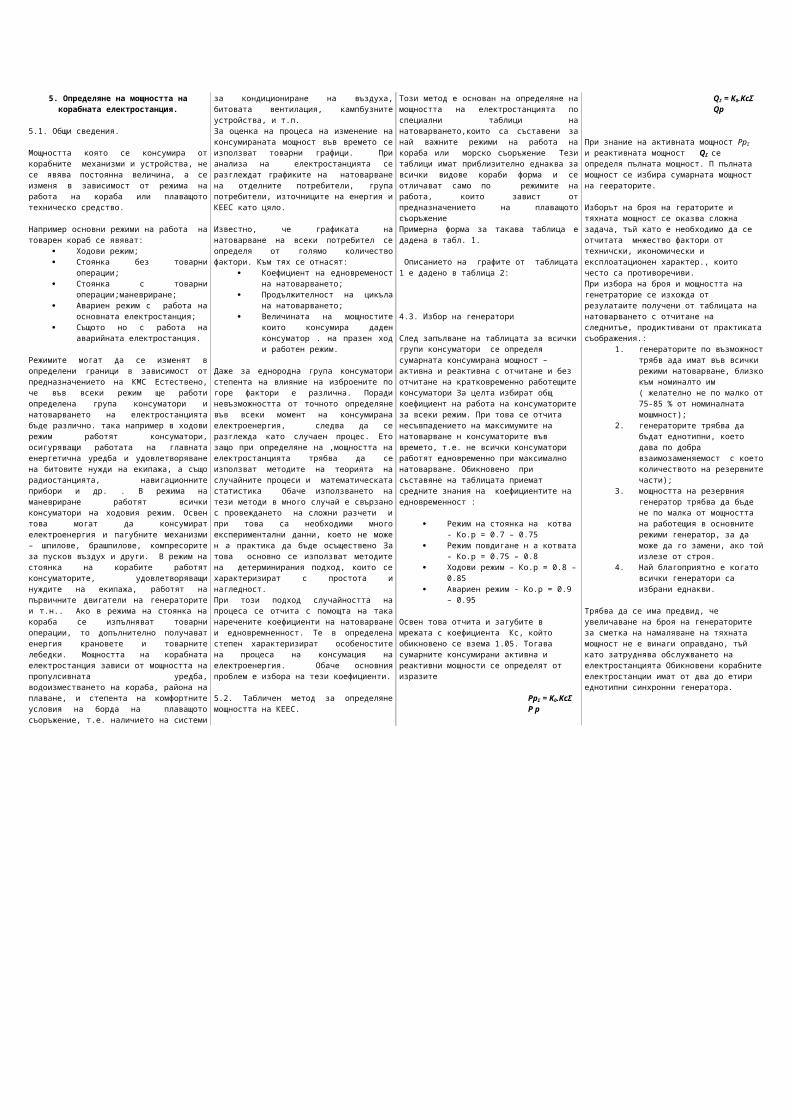
Структурата и алгоритмте за управление на системите на УК , предназаначени за управление на корабните технически средства, се определят от задачите и особеностите на ОУ. Корабните ОУ се характеризират с големия брой на управлемите параметри и управляващи възфдействие, наличие на непрекъснато
действащи случайни смущения, Фиг. 2
повишени изизсквания към тоноста на управление, непрекъснят режим на работа при изменение на външните условия в ширрок диапазон, високи скорости на протичане на преходните процеси и др.
Корабните ОУ като правило представляват динамични системи, които изменят своите характеристики и параметри в широк диапазон под влиянието какато на външни смущаващи въздействия (вълнение, вятър, течения, влажност, темнпература и др.)
, така и от режима на екслоатация. Ето защо за тези обекти възниква необходимостта от използуването на автоматизирано електрозадвижване (АЕЗД). Структурната схема на система от първо ниво, състояща се от ОУ и АЕЗД е показана на фиг.2. Тази система може да работи в два режима: в режим на затворена система (система с обратна вртузка и отворена сисетма ( режим без обратна връзка.) . Външните управляващи сигнали в системата постъпват чрез задаващо устройство (ЗУ).
Управляваща система и система за свързано управление (УС и ССУ). Те служат за формиране на управляващи сисгнали в съответствие със зададени алгоритми и критерии за оптималност, които трябва максимално да освобождават оператора от изпълнението на еднообразни, често повтарящи се операции и да оптимизират работата на всички уредби. При това УС трябва да имат максимална надеждност и живучест както в аварийни, така и в екстремални режими при работа в открито море.. Алгоритмите за управление като правило имат сложен характер, зависещ не само от текущите значения на параметрите но и от предисторията на процеса, което изисква наличието на запомнящи устройства. Това е реализуемо само при използуването на на цифрови и микропроцесорни ситеми.
Системи за обработка на информацията (СОИ). СОИ се явява едан от най-важните системи в комплекса от технически средства за автоматизация на корабите оит трето поколение. Тя е предназначена за обработка на инфгормацията постъпваща от датчиците, във вид удобен за по нататъшно използуване. Алгортмите за обработка трява да имат неободимото бързодействие, което да позволява извличането на най цеснните сведения от общия поток информация, даване на препоръки на опереатора за най целесъобразни действия, предупреждаване от авраии и др.
Система за контрол (СК). При експоатация на корабните технически средства в течение на дълъг период от време е необходимо непрекъснато контролиране на работоспособността на съставните части на системите чрез проверка съотвтствието на тяхните управлеми параметри и характеристики на зададениете значения. Един от съществените фактори, влияещи на екслпоатацията на корабните системи е првелния избор на параметри, подлежащи на проверка. Контрола на управляващия комплекс се осъществява по програма, която оопределя последователността на изпълнение на измервателните и логически операции при работещо и неработещо обзавеждане.
Система за предстваяне на информацията (СПИ). СПИ е предназначена за преобразуване на сигналите във вид , позволяващ осъществяването на оптимално съгласуване на информационните характеристики на оператора и техническите средства. Предсставянето на информацията се осъществавя с помощтта на визуални, акустични и механични символ като: сигнализатори, информиращи оператора за изпълнение на един или друг вид операции; индикатори, предназначени за представяне на контролируемите параемтри; регистратори, необходими за са фиксиарне с определена цел на съществено важна информация.
1

2

2. Източници на електрическа енергия на корабите.
Структура и параметри на електроенергийните системи
на корабите и морските съоръжения (КМС).
2.1. Общи сведения.Основни източници на ел.енергия на КМС се явяват машинните генераторни агрегати. Тези агрегати се състоят от променливотоков генератор и първичен двигател. В качеството на първичен агрегат се използва един или друг тип топлинен двигател.Топлинния двигател преобразува топлинната енергия в механична работа. Преобразуването на механичната енергия в електрическа се осъществява с помощта на електрически генератори. Начините на преобразуване на топлинната елегия в механична се определя от типа на топлинния двигател. На КМС се използват следните типове топлинни двигатели.:
1. Парни машини;2. Двигатели с вътрешно горене;3. Парни турбини;4. Газови турбини.
В случаите когато са нужни компактни агрегати с амка и средна мощност в качеството на първични двигатели се използват двигатели с вътрешно горене (ДВГ). Тези двигатели са с най-висок КПД и винаги са готови за незабавно пускане , но те имат и недостатък заключаващ се в сравнително малък срок на служба. (мото ресурс (1000-6000 ч.)През последните години все повечето се използват газови турбини. Те имат сравнително неголеми размери, икономични са , не изискват наличието на парни котли, и се отличават със сравнително дълъг срок на служба. При избор на първичен двигател за електрическите агрегати решават фактор се явява главната енергетична уредба. Ако тя е дизелна то и за първичен двигател на електрическата система се използва двигател с вътрешно горене, ако е парна се използва турбина.На някой кораби в качеството на първични двигатели на генераторите се използват главните двигатели. Мощността към генераторите (наричат се валогенератори) се подава или чрез еластичен или хидравличен съединител,, свързани към самия първичен двигател или към гребния вал. На фиг. 2. са показани две такива схеми на свързване на валогенераторите. Валогенераторите осигуряват захранване на консуматорите само при определени честоти на въртене на главния двигател. Проблема на валогенераторните уредби е са свързани с осигуряване на постоянна честота на
генерирания променлив ток на шините на генератора. Този проблем се заключава в
осигуряването на постоянна честота на въртене на вала на генератора на електрическа енергия при колебания на скоростта на вала. Използването на генератори на постоянен ток усложнява работа, поради необходимостта от по нататъшно преобразуване на генерираната електроенергия с постоянно напрежения в енергия с променливо напрежение с определена честота (50 или 60 хц.) През последните године започна внедряването на асинхронни генераори, което позволява да се повиши КПД н ауредбата о да се премахнат постояннотоковите машини и преобразователи. На морските кораби с дизеллни и газотурбинни уредби с цел повишаване на икономичността за задвибжване на генератора на електростанцията на ходови режим на кораба често се използват парни турбини, използващи парата на утилизационните котли. Утилизационния котел използва енергията на изгорелите газове (фиг. 3). Съществуват и комбинирани уредби, в коитио се запазва утилизационния котел с турбогенератор и се използва валогенертаор с една от показаните по горе предавки (връзки между генератора и първични двигател)
2.2. Генератори.На корабите и морските съоръжения до 70 години са се изпозвали както постояннотокови так и променливотокови синхронни генератори. Днес основно се испозват синхронни генератори с мощнсоти от части от мегавата до няколко мегавата. За конвенционалните търговски кораби напрежението на шините на генераторите се определя от регистровите организации (Lloyd Regyster, БКР и др). и е 400 волта, а на консуматорите 380 в. Мощността на корабната електростанция за конвенционалните типове кораби е 3-4 мегавата, докато на сондажните кораби, тя може да достугне до 40 -50 мегавата. На големите пътнически кораби достига до 100 мегават. Пради големиъте мощности на сна електрозтанциите на сондажните платфоми и пасажирските кораби генераториите генерират повишено напрежение на шините (6 и по вече киловолта).
Фиг. 4. разрез на корабен синхронен генератор
Фиг. 5 Схеми на охлаждане на корабни синхронни генератори
Фиг. 6. Компановка на дизел генератори
2.3. Системи за разпределение на електрическата енергия и електрически мрежи .
Консуматорите на електрическа енергия на КМС могат да да получават захранване непосредствено от главнито разпределително табло или от вторични разпределителни таб;ла или групови табла. Непосредствено от главноторазпределително табло получават захранване консуматори, работата на които осигурява движението и уптравлението н а кораба или МТСЗахранването на вторичните или груповите разпрделителни табла се осъществява по следните видове схеми:
Магистрална; Радиална (фидерна); Смесена .
На фиг. 7 са показани всички видове системи за разпределение на електрическата енергия на плаващите обекти.При магистралната схема разпределението на електроенергията (фиг. 7а) всички консуматори на електроенергия получават захранване по няколко магистрали чрез включени в тях табла (щитове) или магистрали кутии (МК).
При радиалната схема разпределението на електроенергията (фиг. 7б) най мощните и отговорни потребители получават енергия непосредствено от главното разпределително табло ГРТ по отделни фидери, а всички останали – от разпределителни щитове, захранвани по отдели фидери от главното разпределително табло.
Фиг. 7
При смесената схема разпределението на електроенергията (фиг. 7в) една част от консуматорите на електроенергия по магистралната схема а друга по радиалната схема.
При избора на една или друга схема за разпределение на електроенергията се отчитат два основни фактора:
Надеждност; Тегло на мрежата с
разпределителните табла и шкафове.
В магистралната система при повреждане на отделна магистрала се лишава група консуматори, захранвани от тази магистрала. Обаче магистралната система на захранване има сравнително по малка маса по сравнение с радиалната. Радиалната схема висока надеждност при захранване на потребителите, тъй като излизането от строй на определен фидер не се нарушава захранването на консуматорите, захранени от другите фидери.
Смесената система на захранване съчетава в себе си плюсовете и минусите и на двете системи Качеството на системата зависи от съотношението да двете компоненти – магистрална и радиална. Ето защо избора на една или друга система на захранване на консуматорите зависи от предназначението на кораба или плаващото техническо устройство, а също от количеството и разпределението на потребителите на електрическа енергия.
Предаването на електроенергията по борда на КМТС се извършва по отделни мрежи:
Силова, Нормално осветление; Аварийно осветление; Мрежи слаби токове; Радиотранслационни мрежи.
От силовите мрежи получават захранване електрозадвижванията на енергетичната уредба, палубните механизми, помпите на корабните системи, вентилаторите , други специфични механизми, характерни за даденото МТС.
Мрежата на нормалното осветление се състои от отделни вериги за външно и вътрешно осветление, сигнални и отличителни светлини и светлини за други специфични цели.
Мрежата за аварийно осветление се явява съставна част от мрежата за нормално осветление, но се захранва от авариен източник на електроенергия, и в частност от акумулаторни батерии. .
В слаботоковите мрежи влизат мрежата за телефонните връзки, звънчева и пожарна сигнализация, машинните телеграфи, рулевите указатели и др.
Радиотранслационна мрежа включа в себе си радио транслационната апаратура.
Броят и вида на отделните мрежи се определя в процеса на проектиране на –плаващото техническо средства в зависимост от количеството и типа на апаратурата и консуматорите на ел. енергия на борда.
3

4

3. Основни схеми на електростанциите на корабите и морските съоръжения (ЕКМС).
Елекетроенергетичната система представлява единен комплекс, състоящ се от електрически станции, подстанции и консуматори на електрическа енергия, свързани между себе си с линии за пренос на ток. Този комплекс включва преобразуване на механичната енергия в електрическа, пренасяне и разпределение до консуматорите.
В състава на електростанцията влизат източници на електроенергия и устройства, който осъществяват разпределение на енергията, контрол и управление на електрическите уредби. Електрическата система има в своя състав също различни видове преобразователи на ток, напрежение и честота.В опростен вид структурата на електроснабдяването е показана на фиг.1. Енергията на някакъв вид гориво се преобразува в във форма, удобна за производство на електроенергия. Която след това се пренася и разпределя за различни видове консуматори.
Фиг. 1.
Най разпространената система на корабите и морските технически съоръжения е системата, в която в качеството на преобразовател на топлинната енергия на горивото се преобразува в механична се използва дизелов двигател (фиг. 2.)
Фиг. 2.
Първичният източник на енергия – горивото 1 изгаря в цилиндрите на дизела 2. Полученото високо налягане в резултат на изгарянето на горивото превежда във въртене коляновия вал на дизела, които от своя страна върти ротора
на генератора на електрическа енергия 3. (преобразовател на механичната енергия в електрическа). Естествено при тези преобразования част от енергията се губи.
Ако изходната енергия, която се съдържа в горивото приемем за 100 %, а загубите в дизела бъдат около 65 %, в генератора и спомагателното оборудване 2%, то останалите 33% във вид на електроенергия ще бъдат предадени по линията за пренос на електроенергия, в която се губят около 3 %. Следователно, само 30 % от енергията на горивото ще постъпи към преобразователя на електрическа енергия в енергия, която човек може да възприеме: механична, топлинна, светлинна и др. Електростанциите на корабите и морските съоръжения се класифицират по различни признаци: по вида на първичния източник на енергия - топлинни и атомни; по рода на тока – постояннотокови и променливотокови; по предназначението - станции за корабните енергетични системи, гребни електрически станции; аварийни електростанции.
Електростанциите на корабите и морските съоръжения (ЕКМС) се отнасят към типа на сложните системи. Те се явяват многофункционални системи, тъй като те изпълняват няколко различни по характер функции, което се вижда от фиг,. 2. Те преобразуват преобразуване на един вид енергия в електрическа енергия, удобна за пренасяне и разпределение, пренасяне на електрическата енергия и отново преобразуването и в енергия удобна за използване от човека. Ето защо в ЕКМС се състоят от три основни подсистеми:
Подсистеми за преобразуване енергията на горивото в електрическа енергия;
Подсистема за пренасяне и разпределение на електрическата енергия;
Подсистема за преобразуване на електрическата енергия във енергия, необходима на човека или техническите средства
По такъв начин може да се направи обобщено заключение, че ЕКМС се състоят от множество
подсистеми и елементи, свързани между себе в структура, която се изменя с времето по определени правила, продиктувани от потребителите на електрическа енергия и условията на експлоатация на морските технически съоръжения. Изборът на подсистеми за получаване на електрическа енергия, а също пренасяне и разпределение на електрическата енергия към консуматорите, зависи от броя на консуматорите, мощността и режимите им на работа. В същото време, количеството и качеството на електрическата енергия, постъпваща към консуматорите, зависи от надеждността на функциониране на първите две подсистеми от системата ЕКМС.
Както вече беше отбелязано, че като правило, в ЕКМС се използват от два до четири генератора. Разбира се има изключения, които се продиктуват от особеностите на плаващото техническо съоръжение. На фиг. 3. е показана схема на ЕКМС с два генератора и радиална схема за пренасяне и разпределение на електрическата енергия. В нея влизат:
1. първични двигатели (дизели или турбини);
2. генератори (преобразователи на механична енергия в електрическа);
3. главно разпределително табло – комутиране и разпределение на енергията към различните потребители на електроенергия;
4. магистрали (фидери) за пренасяне на електроенергията към местните разпределителни табла.
5. местни разпределителни табла (устройства);
6. потребители (консуматори) на електрическа енергия – преобразователи на електрическата енергия в друг вид енергия: механична, топлинна; светлинна, електромагнитна, звукова и т.н.
7. трансформатор – преобразовател параметрите на електрическа
енергия – променливо напрежение с една амплитуда в напрежение с друга амплитуда;
8. изправител – преобразовател параметрите на електрическата енергия – променливо напрежение в постоянно напрежение.
Едно от основните условия за успешно функциониране на ЕКМС е системите да имат възможността да изпълняват свойството си за преобразуване на механичната енергия в електрическа, нейното разпределение и пренасяне до консуматорите и преобразуването и в други видове енергии при аварийни ситуации. За изпълнението на тези функции ЕКМС се снабдява с автоматични устройства за откриване на неизправностите и локализиране (изключване на повредените участъци за генериране и пренос на електрическа енергия), автоматично изключване на редица консуматори при пренатоварване на генераторите и/или включване на допълнителни генератори за увеличаване количеството на генерираната електроенергия.Проектирането на такава сложна ЕКМС има редица особености и изисква специален подход, известен сред проектантите като метод на системния подход.
Системния подход се използва за формулиране на общите условия, осигуряващи успешната работа на редица независими съставни части при обединяването им в едно цяло.
На фиг. 4. е показана принципна схема на реална електроенергиетчна система на кораб. От схемата се вижда, че тя се състои от:
Като правило генераторите се разполагат в близост до главния двигател на плаващото техническо средство. На фиг. 5 е показано разположението на генераторите на корабна електроенергетична система с елетрозадвижване. От фигурата се вижда, че те са разположени в кърмата, до генератотите. В резултат на такова разположение се намалява дължината на линиете а пренасяне на електрическата енергия, а от тук и загубите в прводниците.
5

4. Основни параметри на електростанциите на
корабите и морските съоръжения (ЕКМС).
4.1. Род на тока;Днес на корабите и морските
съоръжения основно се използват източници на променлив ток. При използване на променлив ток се достига голяма унификация на промишленото и корабно обзавеждане, захранването от брега става значително по просто,където променливия ток се явява основен род на тока. Променливотоковото обзавеждане има редица предимства пред оборудването на постоянен ток и преди всичко значително по висока надеждност от постояннотоковото. Появата на много скоростни асинхронни двигатели с ротор на късо в значителна степен позволило да се решат задачите, свързани с регулиране скоростта на различните видове механизми на корабите .Развитието на полупроводниковите техника позволило да се подобри автоматизацията на управлението на електрическите машини . На базата на тези изправители са създадени безконтактни релета , комутационни и защитни апарати, статически изправители, инвертори и преобразователи на честота, които имат съществени предимства пред контактната апаратура и машинните преобразователи.
4.2. Напрежение и честота на тока;
Съгласно Българския корабен регистър на клемите на източниците на трифазен ток напрежението трябва да бъде 400 волта а честотата 50 хц.. Номиналното напрежение на клемите на силовите консуматори трябва да бъде 380 волта. През последните години поради повишаване на мощността на електростанциите се наблюдава увеличаване на напрежението на източните на електроенергия на корабите и технически съоръжения. Така например при увеличаване на напрежението до 100 волта масата и габаритите на генератори до 3000 кВт се увеличават незначително поради необходимостта от повишаване на дебелината на изолацията. Увеличава се незначително масата и габаритите на асинхронните двигатели. В същото време, обаче съществено се намалява масата на комутационната и защитна апаратура, а също така и преносната мрежа. Общото
намаление на малогабаритните характеристики на електростанции на 1000 волта е около 25 % по сравнение с електростанции на 400 волта.
Друг път свързан с увеличаване на мощността на електростанциите на корабите и плаващите съоръжение се явява увеличаването на честотата на мрежата. Повишаването на честотата на мрежата влияе по различен начин на малогабаритните характеристики на елементите на електростанцията. Например повишаването на честотата до 400 хц. Води до незначително намаляване на малогабаритните характеристики на мрежата. Масата и габаритите на генераторите и двигателите се намаляват до 3.5. пъти. Независимо от това ,обаче цената на генераторите и двигателите с повишени честото са значително по високи, тъй като изискват материали с повишени качества. Друг съществен фактор влияеща избора на честотата е , че на сушата се използват променлив ток с честота 50 херца.
4.3. Корабни консуматори на електрическа енергия. Корабната електростанция осигурява електроенергия на голямо количество разнообразни консуматори, около 50% от които са двигатели, предназначени за задвижване на различни механизми.Всички консуматори на електроенергия се делят на групи, систематизирано показани в таблица 1.
6

7

5. Определяне на мощността на корабната електростанция.
5.1. Общи сведения.
Мощността която се консумира от корабните механизми и устройства, не се явява постоянна величина, а се изменя в зависимост от режима на работа на кораба или плаващото техническо средство.
Например основни режими на работа на товарен кораб се явяват:
Ходови режим; Стоянка без товарни операции; Стоянка с товарни
операции;маневриране; Авариен режим с работа на
основната електростанция; Същото но с работа на
аварийната електростанция.
Режимите могат да се изменят в определени граници в зависимост от предназначението на КМС Естествено, че във всеки режим ще работи определена група консуматори и натоварването на електростанцията бъде различно. така например в ходови режим работят консуматори, осигуряващи работата на главната енергетична уредба и удовлетворяване на битовите нужди на екипажа, а също радиостанцията, навигационните прибори и др. . В режима на маневриране работят всички консуматори на ходовия режим. Освен това могат да консумират електроенергия и пагубните механизми – шпилове, брашпилове, компресорите за пусков въздух и други. В режим на стоянка на корабите работят консуматорите, удовлетворяващи нуждите на екипажа, работят на първичните двигатели на генераторите и т.н.. Ако в режима на стоянка на кораба се изпълняват товарни операции, то допълнително получават енергия крановете и товарните лебедки. Мощността на корабната електростанция зависи от мощността на пропулсивната уредба, водоизместването на кораба, района на плаване, и степента на комфортните условия на борда на плаващото
съоръжение, т.е. наличието на системи за кондициониране на въздуха, битовата вентилация, кампбузните устройства, и т.п. За оценка на процеса на изменение на консумираната мощност във времето се използват товарни графици. При анализа на електростанцията се разглеждат графиките на натоварване на отделните потребители, група потребители, източниците на енергия и КЕЕС като цяло.
Известно, че графиката на натоварване на всеки потребител се определя от голямо количество фактори. Към тях се отнасят:
Коефициент на едновременост на натоварването;
Продължителност на цикъла на натоварването;
Величината на мощностите които консумира даден консуматор . на празен ход и работен режим.
Даже за еднородна група консуматори степента на влияние на изброените по горе фактори е различна. Поради невъзможността от точното определяне във всеки момент на консумирана електроенергия, следва да се разглежда като случаен процес. Ето защо при определяне на ,мощността на електростанцията трябва да се използват методите на теорията на случайните процеси и математическата статистика Обаче използването на тези методи в много случай е свързано с провеждането на сложни разчети и при това са необходими много експериментални данни, което не може н а практика да бъде осъществено За това основно се използват методите на детерминирания подход, които се характеризират с простота и нагледност. При този подход случайността на процеса се отчита с помощта на така наречените коефициенти на натоварване и едновремненност. Те в определена степен характеризират особеностите на процеса на консумация на електроенергия. Обаче основния проблем е избора на тези коефициенти.
5.2. Табличен метод за определяне мощността на КЕЕС.
Този метод е основан на определяне на мощността на електростанцията по специални таблици на натоварването,които са съставени за най важните режими на работа на кораба или морско съоръжение Тези таблици имат приблизително еднаква за всички видове кораби форма и се отличават само по режимите на работа, които завист от предназначението на плаващото съоръжение Примерна форма за такава таблица е дадена в табл. 1.
Описанието на графите от таблицата 1 е дадено в таблица 2:
4.3. Избор на генератори
След запълване на таблицата за всички групи консуматори се определя сумарната консумирана мощност – активна и реактивна с отчитане и без отчитане на кратковременно работещите консуматори За целта избират общ коефициент на работа на консуматорите за всеки режим. При това се отчита несъвпадението на максимумите на натоварване н консуматорите във времето, т.е. не всички консуматори работят едновременно при максимално натоварване. Обикновено при съставяне на таблицата приемат средните знания на коефициентите на едновременност :
Режим на стоянка на котва - Ко.р = 0.7 – 0.75
Режим повдигане н а котвата - Ко.р = 0.75 – 0.8
Ходови режим – Ко.р = 0.8 – 0.85 Авариен режим - Ко.р = 0.9 – 0.95
Освен това отчита и загубите в мрежата с коефициента Кс, който обикновено се взема 1.05. Тогава сумарните консумирани активна и реактивни мощности се определят от изразите
PpΣ = K0.KcΣ P p
QΣ = K0.KcΣ Qp
При знание на активната мощност PpΣ и реактивната мощност QΣ се определя пълната мощност. П пълната мощност се избира сумарната мощност на геераторите.
Изборът на броя на гераторите и тяхната мощност се оказва сложна задача, тъй като е необходимо да се отчитата мнжество фактори от техничски, икономически и експлоатационен характер., които често са противоречиви. При избора на броя и мощността на генетраторие се изхожда от резулатаите получени от таблицата на натоварването с отчитане на следнитъе, продиктивани от практиката съображения.:
1. генераторите по възможност трябв ада имат във всички режими натоварване, близко към номиналто им ( желателно не по малко от 75-85 % от номиналната мошмност);
2. генераторите трябва да бъдат еднотипни, което дава по добра взаимозаменяемост с което количеството на резервните части);
3. мощността на резервния генератор трябва да бъде не по малка от мощността на работещия в основните режими генератор, за да може да го замени, ако той излезе от строя.
4. Най благоприятно е когато всички генератори са избрани еднакви.
Трябва да се има предвид, че увеличаване на броя на генераторите за сметка на намаляване на тяхната мощност не е винаги оправдано, тъй като затруднява обслужването на електростанцията Обикновени корабните електростанции имат от два до етири еднотипни синхронни генератора.
Наименование на групите отделни консуматори
Бро
й н
а ед
нор
од
ните
по
тре
би
тел
и
Номинални данни на консуматора Данни за консуматора в режим на работа на кораба
Мо
щн
ост
на в
ала
на
м
еха
ни
зъм
а
Мо
щн
ост
ел
ектр
иче
ски
я
КП
Д н
а
конс
ума
тор
а η
ном
Кое
фи
ци
ент
на
м
ощ
ност
та (
cos
φ)
Кое
фи
ци
ент
на
и
зпо
лзв
ане
К
1
Сумарна установена мощност на консуматора
Кое
фи
ци
ент
на
на
това
р -
ване
на
Кое
фи
ци
ент
на
на
това
рва
н н
а
КП
Д н
а
конс
ума
тор
а η
Кое
фи
ци
ент
на
м
ощ
ност
та (
cos
φ)
Кое
фи
ци
ент
на
е
дно
вре
ме
ннос
т К
0
Сумарна установена мощност на консуматора
Акт
ивн
а
кВт
Ре
акти
вна
кВ
ар
Пъ
лн
а к
В
А
Акт
ивн
а
кВт
Ре
акти
вна
кВ
ар
км
ощ
нос
т
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17Група консуматори - 1Сумарна консумирана мощност по 1 група консуматориСумарна консумирана мощност по група консуматори с отчитане на кратковременната работа на консуматорите -------- -------- ------- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ----Група консуматори - n -------- -------- ------- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- -------- -------- ------- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ---- ----Сумарна консумирана мощност по всички групи консуматориВсичко с отчитане на коеф. на едновр. И загубите в мрежата.
Гр-фа
Съдържание
1.описват се всички консуматори на електрическа енергия, които ще бъдат монтирани на кораба или плаващото техническо съоръжение. Отделните консуматори се обединяват в групи като:
a) палубни механизми;b) механизми на енергетичните уредби; c) механизми на общокорабните системи; d) средства за навигация и връзка, камбузно
оборудване; e) бордово оборудване.
2. Oопределя количеството на едноименните консуматори.
3. Мощността на монтирания механизъм4. Записват се номиналните значения на мощността
консуматора на ел. енергия.5. Записват се номиналните значения на
коефициента на полезно действие (КПД) на консуматора на ел. енергия. .
6. Записват се номиналните значения на коефициента на мощността на консуматора на електроенергия (cos (φ))
7. Записва се коефициента на използване на консуматора на ел. енергия. ( като правило мощността на монтираните двигатели винаги е по голяма от необходимата мощност за задвижване на механизъма за който се използва дадения двигател.) К1 = Pмех/Pдв. ном.
8. Записва се максималната установена активна електрическа мощност на консуматорите в киловати, определена от израза P= (P д. ном./ηном).n. (n – брой еднотипни консуматори на ел. енергия)
9. Определя се значението на реактивната мощноста, като се знае активната мощност и коефициента на мощността cos (φ)) Q = P. tg (φном.)
10. Тук се записва пълната мощност на групата консуматори S
11. Монтираните на кораба консуматори със зададена електрическа номинална мощност не се използват напълно. Това се отчита с коефициента К2 = Pпотреб.мех/Pдв. ном
12. Записва се коефициента на използваемост на консуматора на електрическа мощност К3 = К1.К2 – характеризира физическото натоварване на двигателя в дадения режим.
13. Записва се КПД на консуматора съответстващ на режима в който се разглежда работата на двигателя
14. Записва се cos (φ) на консуматора, съответстващ на режима в който се разглежда работата на двигателя
15. Определя се коефициента на едновременност като отношение на броя на работещите в даден режим консуматори към общия брой на установените еднотипни консуматори за разчетния режим на кораба (ходови, стоянка и т.н.) К0 = nраб/nуст.
16. Активната консумирана мощност от еднотипните консуматори, изразена в киловати = Pp = (Pn/η)K0K3
17. Реактивната консумирана мощност от еднотипните консуматори, изразена в киловати = Qp = ((Pn/η)K0K3).tg(φ)


6. ПРИНЦИПИ НА ПОСТРОЯВАНЕ НА СИСТЕМИТЕ
ЗА РЕГУЛИРАНЕ НА НАПРЕЖЕНИЕТО В КЕЕС.
6.1. Общи сведения.Корабните синхронни генератори най-често мат електромагнитно възбуждане, т.е. възбуждане с помощта на намотка, захранвана от постоянен ток. Като източник на.електроенергия най-често се използува или вспомагателна електрическа машина (за постоянен ток или за променлив ток с изправител) или статически преобразователни устройства, включвани като правило полупроводникови прибори и трансформатори.Съвкупността от устройства, осъществяващи преобразуване на енергията за захранване на намотката за възбуждане на синхронните генератори и регулиращи възбуждането се нарича система за възбуждане.В зависимост от това, захранва ли се възбудителната намотка от независим източник или се използува енергия, получена от статора на синхронния генератор, системите за възбуждане се делят съответно на системи с независимо възбуждане или със самовъзбуждане.Най-широко разпространение са получили системите със самовъзбуждане, тъй като.те дават възможност да бъдат реализирани най-компактни конструкции и се характеризират с достатъчно висока надеждност.
Системите за възбуждане на корабните синхронни генератори следва да обезпечават високо качество на произвежданата електрическа енергия в сатически и динамични режими., както и устойчивост ма режимите на работа на генераторите. Ето защо, системата за възбуждане следва да работи като бързодействуваща система за автоматическо регулиране на напрежението.
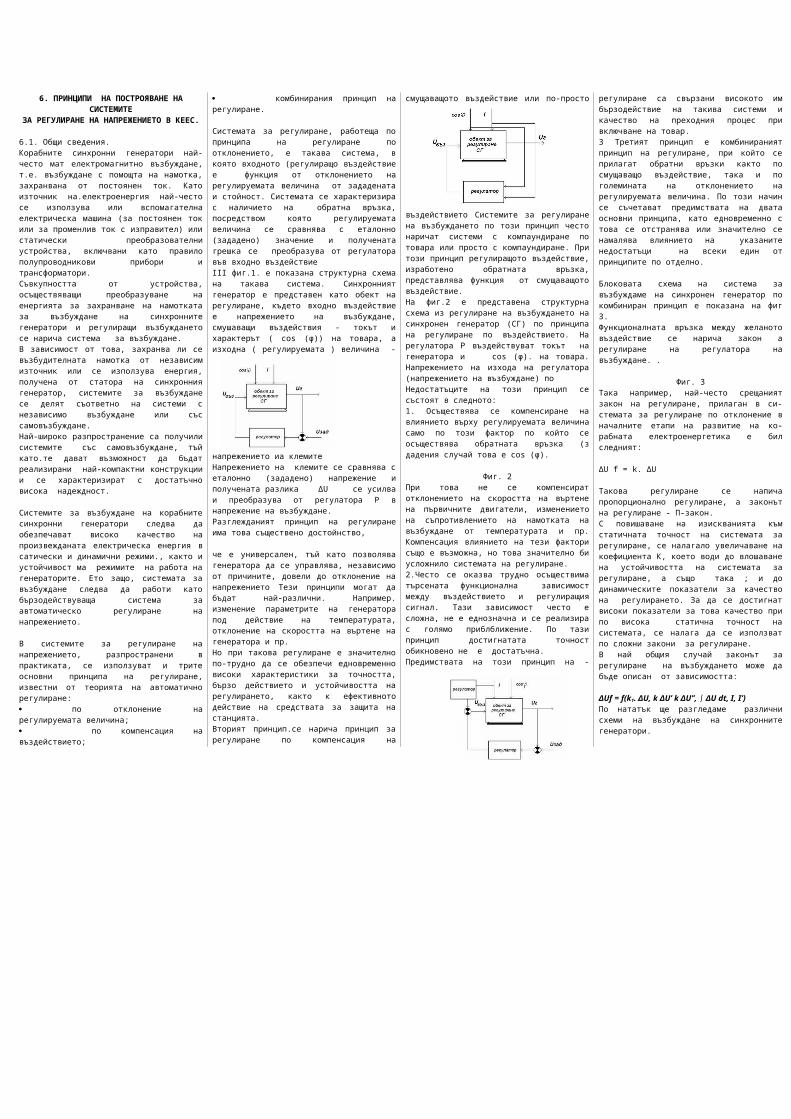
В системите за регулиране на напрежението, разпространени в практиката, се използуват и трите основни принципа на регулиране, известни от теорията на автоматично регулиране: по отклонение на регулируемата величина; по компенсация на въздействието; комбинирания принцип на регулиране.
Системата за регулиране, работеща по принципа на регулиране по отклонението, е такава система, в която входното (регулиращо въздействие е функция от отклонението на регулируемата величина от зададената и стойност. Системата се характеризира с наличието на обратна връзка, посредством която регулируемата величина се сравнява с еталонно (зададено) значение и получената грешка се преобразува от регулатора във входно въздействиеIII фиг.1. е показана структурна схема на такава система. Синхронният генератор е представен като обект на регулиране, където входно въздействие е напрежението на възбуждане, смушаващи въздействия - токът и характерът ( соs (φ)) на товара, а изходна ( регулируемата ) величина - напрежението иа клемитеНапрежението на клемите се сравнява с еталонно (зададено) напрежение и получената разлика ΔU се усилва и преобразува от регулатора Р в напрежение на възбуждане.Разглежданият принцип на регулиране има това съществено достойнство,
че е универсален, тъй като позволява генератора да се управлява, независимо от причините, довели до отклонение на напрежението Тези принципи могат да бъдат най-различни. Например. изменение параметрите на генератора под действие на температурата, отклонение на скоростта на въртене на генератора и пр.Но при такова регулиране е значително по-трудно да се обезпечи едновременно високи характеристики за точността, бързо действието и устойчивостта на регулирането, както к ефективното действие на средствата за защита на станцията.Вторият принцип.се нарича принцип за регулиране по компенсация на смущаващото въздействие или по-просто въздействието Системите за регулиране на възбуждането по този принцип често наричат системи с компаундиране по товара или просто с компаундиране. При този принцип регулиращото
въздействие, изработено обратната връзка, представлява функция от смущаващото въздействие.На фиг.2 е представена структурна схема из регулиране на възбуждането на синхронен генератор (СГ) по принципа на регулиране по въздействието. На регулатора Р въздействуват токът на генератора и сos (φ). на товара. Напрежението на изхода на регулатора (напрежението на възбуждане) по Недостатъците на този принцип се състоят в следното:1. Осъществява се компенсиране на влиянието върху регулируемата величина само по този фактор по който се осъществява обратната връзка (з дадения случай това е сos (φ).
Фиг. 2При това не се компенсират отклонението на скоростта на въртене на първичните двигатели, изменението на съпротивлението на намотката
на възбуждане от температурата и пр. Компенсация влиянието на тези фактори също е възможна, но това значително би усложнило системата на регулиране.2.Често се оказва трудно осъществима търсената функционална зависимост между въздействието и регулиращия сигнал. Тази зависимост често е сложна, не е еднозначна и се реализира с голямо приблближение. По тази принцип достигнатата точност обикновено не е достатъчна.Предимствата на този принцип на -регулиране са свързани високото им бързодействие на такива системи и качество на преходния процес при включване на товар.3 Третият принцип е комбинираният принцип на регулиране, при който се прилагат обратни връзки както по смущаващо въздействие, така и по големината на отклонението на регулируемата величина. По този начин се съчетават предимствата на двата основни принципа, като едновременно с това се отстранява или значително се намалява влиянието на указаните недостатъци на всеки един от принципите по отделно.
Блоковата схема на система за възбуждаме на синхронен генератор по комбиниран принцип е показана на фиг 3.Функционалната връзка между желаното въздействие се нарича закон а регулиране на регулатора на възбуждане. .
Фиг. 3Така например, най-често срещаният закон на регулиране, прилаган в си-стемата за регулиране по отклонение в началните етапи на развитие на ко-рабната електроенергетика е бил следният:
ΔU f = k. ΔU
Такова регулиране се напича пропорционално регулиране, а законът на регулиране - П-закон.С повишаване на изискванията към статичната точност на системата за регулиране, се налагало увеличаване на коефициента К, което води до влошаване на устойчивостта на системата за регулиране, а също така ; и до динамическите показатели за качество на регулирането. За да се достигнат високи показатели за това качество при по висока статична точност на системата, се налага да се използват по сложни закони за регулиране. В най общия случай законът за регулиране на възбуждането може да бъде описан от зависимостта:
ΔUf = f(k1. ΔU, k ΔU’ k ΔU’’, ∫ ΔU dt, I, I’)По нататък ще разгледаме различни схеми на възбуждане на синхронните генератори.

7. Системи за компаундиране на синхронните генератори.
Основни съотношения и структура.
Системите за компаундиране на синхронните генератори получиха широко разпространение след 60-те години, когато бяха създадени мушни полупроводникови диоди - отначало селенови и германиеви, а в последствие и силициеви Системите за компаундиране не включват въртящи се части поради което се наричат статични
Начинът (законът) на регулиране на тези системи може лесно да бъде изведен с помощта на приближени съотношения. Известно е от курса по електрически че в статичен режим неявнополюсният синхронен генератор може да бъде представен като източник на е.д.н. Еf с индуктивно вътрешно съпротивление Хс, където Еf
е пропорционално на тока на възбуждане на СГ. Тогава напрежението на статора па генератора и товарния ток IМожем да запишем следната зависимост:
Ако въведем закон на регулиране на възбуждането:
Лесно можем па заместим горния израз в зависимостта за напрежението на генератора и при условие к.кгк;=Хс и к.к.,.ки = 1Напрежението на клемите на генератора ще бъде неизменно. По такъв начин, ако реализираме система за възбуждане, действуваща съгласно горния закон, то напрежението на генератора в статичен режим ще бъде инвариантно по отношение тока на товара и неговата фаза (тоест ще зависи от cos ( φ) на товара). Реализацията на този закон отевидно предполага:1. Осъществяване на обратна връзка по тока на генератopа.2. Сумиране (векторно) на сигнала от тази връзка със сигнал, пропорционален на напрежението.3. Изправяне на получената сума от променливотокови сагнали.
Вместо сумиране на сигнала от обратната връзка по ток със сигнал, пропорционален на стабилизираното напрежение от клемите на генератора, обикновено се използува сигнал само пропорционален на напрежението на генератора. Тогава разглежданият за кон за регулиране ще се реализира от структурната схема , показана на фиг. 1. Обратните връзки по ток и напрежение на генератора се наричат канал на напрежението и канал (КН и КТ)на тока в системата за компаундиране.
По малко е разпространен вариантът на реализиране на закона, показан на фиг. 2. При него сигналите от КН и КТ първоначално се изправят а след това се сумират. Очевидно че при този начин се осъществява алгебрично, а не геометрично сумиране. Ето защо напрежението на генератора няма да зависи от cos ( φ) (характера на товара, дали е индуктивен, или капацитивен. Такова компандиране се нарича токово или амплитудно, за разлика от амплтудно фазовото компаундиране (АФК), където в закона за регулиране се въвежда информация за характера на товатра. В системите с АФК в закона за управление (в тока на възбуждането) се отчита както смущаващото вуздействие, преизвикао от тока на товара на генератора, така и от характера на товара. -52-
.Начинът, по който се осъществява сумирането, определя в в много голяма степен характеристиките на системата за регулиране.
Представяйки КИ и КТ съответно като
източник на напрежение вътрешно сиротивлеаие Zn и източник на ток с вътревпо ( ротивление 2т , можем да осъществим цва начина на свързваив на тези два източника - паралелно а послепователпо (фкг.2.2.4ш От електротехнкката е кзвестно, че източниппте на кгп| реженае се сумпрат послецователг>о, а източняцзте на ток - ттарз| леляо. Сяедозатеяно за схема 2.2.4.а е необходимо ги-53 -
Фиг.2.2.4МНОГО ПО-ГОЛЯМО ОТ СЪП-ротивленяето на възбу-дитетаата намотка кб « т.е. КН ца работе като източник на ток. За схема 2.2.4.6 - обрат-но - необходимо е 2т<5:Рв, т.е. каналът на ток да работи катоик на наппежение, за да се осьшестви сумирането.Обикновено, за да се изпълнят горните условия се вклкч-■но оъпротивление (иадуктивно или-капацитивно) паралелно на •'ш последователно с 2Н . Това съпротивление се нарпча имираш елемвнт, тъй като благодареяие на него ое осъщест-. |■ 'ммлуидирането (сумирааето).В завиоимост от начина, по който се осъществява сумпра-иптемите за компаундиране се делят на системи със:- електрическо сумиране;- електромагнитно сумиране;- последователно свърззане на КТ и КН;- папалелно свързване на КТ и КН;- амплитуцно-фазово кошаундиране;- амппитуцно-токово кошаундиране.§ 2.5. СИСТЕГА 5А .А;у11ДИТЗгЛНО-ФАЗОЮ К01ЖПЩ?Ш СПАРАЖШЮ СУТ.ЙРА11Е .На. Лиг.1.2.5 е показана схемата яа систеглата за амплн-4*яово кшпаундкране с трзнамотъчен сумираш трансг^орматор ■кпек компаунпкраи елемент. Скстемата се нарича о^^е снс-- 54 -
Фиг.1.2.5тема за ксмпаукдиране на Ленинграяския епектротех нически инстйтут (ЛЕТИ) обезпечава поддържане н найрежението с точност + 3 4-5% при изменение н ток от 0 до номинален п с о з 1|> на товапа от 0,2 до 1.Суишрането на сигналите от КН я КТ се извърива електро магнитно в номпауншращйят траноформатор (сутлират се намагнит-ваиите скли пророрционални на напрежвниего и тока).Конструктявно-трансфорглаторьт е трибедрен, като на вся ко бецро е разполозена по една напреженова, една токоза и едяа зторйчна намотка. Трансформаторът се изчислява тана, че ца се насйща при токове ирез токовата намотка около 3-4 I». 1Ья номи ■ иалеи ток трансформаторът е ненаситен и вторичната намотка ппе! ставлява източник на ток спрямо възбудителната намотка на гене-ратора.Компаундирашият еяемент С е вклкгаен в звездняя центъг! на напреженовата камотка последователно и превръща кзточникьт напрежевде, какъвто представлява напреженовата намотжа на тра* форматора в източник на ток спрямо възбуцнтеяната намотка. По такъв на'чян сигнадите от КН и КТ се сумират паралелно като гок ва източници. Еквивалентната заместваша схема ще има следняя вид (фиг.2.2.5).Бривеждайкв първичната (токовата и напрекеновата) ве) рпга на трансформатора към вторичната, ще получям следната пре(Фиг.2.2т5.а ФйР.2.2.5.6М екрявалентна схеш Сфиг.2.2.5.<5>*.Съпротизлението кВекб е лрйведеното
съпротивленве вЛуците.чната яамотка към променливотоковата страпа на изпра-ял, ИреБеждането се извьпшва, като се спазва условието в ттзи-| вяметричен товар с фазно съпротивление нбкб да се от~ голкова моше-гост, колкото и в постояннотоковата верига на ттеля. Тогата:По схемата определяме тока 1р
сс = 5 -V -90°= Ге(топарът е актпвно инпуктизен)-56 -При ъгьл 4* = 0 (активея товар) векторите 1и я I^ образуват ъгъл 90°, при Ч = 90° (чисто иниуктявея товар) съв-падат по фаза, но са ориентирани срещуположно. Зв ла се осъшестз аритметическо сумиране в този случай необхоцкмо е чапревеаовата намотка ца се обтача от край към яачаяо. Тогава векторът на тотса1Ц ше кзмени пояожението си на 180° и при кнцуктивен тозар сумирането на цвете съставки ше бъяе арнтметкчно.Иа фиг.3.2.5 е показана векторната п.иаграма, илистрираяполучените съотноиенч като с пунктир е пока зано геометрическото място на вектора Iк , при кзменешчето на коефициента на мошноа та от 1 цо 0 при инду тивен характер на то|вара. Фиг.3.2.5По аналогачен начин работи и схемата, прецставена на фиг.4.2.5, къцето сагнадите от КН и КТ се сумират електрическя,
Фиг.4.2.5- 57 -:тьпто па кокпаунцзращ елемент е използуван цросел. | пп използутза от фирмата "Елмо" (ГДР), чийто генераториолтова зъзбуцртелна намотка, пораци което отсъствува )'|,пи ттатсЛорматор з канала на напреяението. Еквивалентна-схема е аналогична на предидущата. Получаваяото съст-гока ппез възбушгтелпата намотка е аналогячно с тазм II, ■"■ гтг>!1 !!зползупането на кнпуктивен кояпазгнЕ1лпаш елемептпеобхопимост от сшша на знака на 1ц . Получено- има ввп.а:г-е •" + -==Ь = агс*д 90°«гшата пиагпама, илюстрираша сумипането на вектори- 1 е показана кафиг.5.2.5.Схемата може да се изпол-зува и за
генератори с ннско-омна възбуцнтелна намотка, прп което в канала яа напреженяето се включза съгласуваш трансйор-(латор.Иа рис.6.2.5 е посочена .'.■' схеаа за паралелно електро-1ра;;е на наггала на тока я канала яа напрекението р ■: ;п/?;сркатсл с особена ко:гфигуращ"я :;а маггатопро-
- 58 -воца включваща т.н. магннтен шунт.Конструктивяата беност се състсг.з в т че иапрежекошта иа1 ка е разполокена на| иай-горната част иа рата на магихттопроя и е отвелена от ток! та и вторвчяа !?акот| , посрецством капречЛФиг.6.2.5 пълнителек магнито^вод, наричан магнитен шунт. Межпу магнитния шунт и основкия нитопровож съгаеотвува межпина.Бо този начин потокът, съзааван от напреженовата чак.А ка, се разделя на две части - част от кего се затвагш по оскои ния магяитопровод, а част - по магнитния г^унт. Спеповатешю, а личиего на магнвтен щунт воци цо напаляване на индуктавната в| ка межяу токовата и напрежеаозата намотка. Потокът Брез магкз| иучт е еквивалеятен на увеличен поток на пазсейване. Иззестно от курса по еяектрячески машипи, че в еквиваяентната схема на! тпансформатора разсейването се представя като послеповатечгго ■ зана в първпчната намотка т.?;!дуктивност. Следсзатешю, схемат! еквпвалентна ча схема с тпкамотъчен тт^апсфорштот' и кнпуктвя кол.шауппипас елеиент, Бекторната пиаграма на схемата е анелоя иа на.тази, плецпталена на ?чаг«5#2#5.§2.6. СЮТЕСА ЕА А1ТЛ1ТУДЮ ФЛПОВО КО!"ПА5Г!ЦКРА!!:; С I БОСЛРДОВАТЕЛНО СП.ЙРАТШ\]в. фкг.1,2.6 е показата пп-кципната схема ня с"'сте:л:- 59 -
'етг.1.2.6за амплитутщо-фазово кошаущиране, с пос-яецовате.чно свързваао на КН и КТ, изпоязува-!ю от фипмата "Раце Конча?" - СФР>3. С--сте-мата вклвчза ^зпраг.:;-тел, цапреЕеноз и то-ков тсансформатор, свъозе:':-: посяедовател-т ттлпсфорглато" е кзпълнен с зъзпупша мекдияа ме*сдзг I ют ■;> бедрата. Ро-шта на тази зъзпуша 'дежцина аапогля 11п маг:;::г«':я пуит в гр"намотъч:»:я трансфорштор. Тя се р топа, че чрез ггпоьмната гга параметриге нр, траясформато-Ьтмра ::адич:!ето ::а коклауадараш елемент. В цадеккя с.^р-те г.ъздушпата гдендина зяачктелно се яамаляза х^ млпото съппотнзлеиае на намагнитвашия коптур) на траисйор-5>па1еатната схема това съпротизлеапе е пключе-ш па-■ овгпа, Ето заяо, токовкят трансфор;.датот) с пъзгуад;а •:о;-о ап бъде пгзглегщап като кзточнсн на ток с паралел.чозкгачено съпротивлекие, съ::-знеримо с тазара - т.е. като "^зточник на -1апрелен::е. Еке::-залентната заместваза схег.н е показана на фяг.2.2.6. Токът лрез съпрокзле- к се оппсде- = гкн .

- 60 -1/—2--------Г'КТекб + *]* 8 = агс1 9,2 у2къцетоПолуче;:ият израз е аиалогичен на тозк, ко":то олкпза ^ на възбукцане, обезпечаван от система с паралелао вкшчзгне гя х: КН. Бекторяата диатрама е показана аа (Тйг.3.2.6.Лодобен е и начииът :| работа на с.сстемага за г.1ч\ бухшане на скнхронните г1-" ратори тип ]Т,С (СССГР, ч:;ясхеиа е показана \т а;-'г.1 Фиг.3.2.6Сумирането на КН и КТ е осъшеотвено електрмческ:; и й|трамсфсзгдаторло бл^ даренке н на г.гшпав цяата. точ
нат аотка :;аратора '.: секп:'о;п:гто на послег.ната.Фяг.4.2.6чияът па паоота- 61 -Мпт/1 со пояснява ог ллеобразуваната схема на системата, по-й Щ| фиг.5.2.6, къцето секционнраната статорна нанотка е за-Я 0 пле послецозатеяио свързани е.д.н.( Ео;ЕИ '• а изгоави-
Фпг.5.2.6щяПуд;;телната иамотка - с трк еквизалеягни съпротивленкя, 1Им е.д.н. Е-| и послецоватеяно свързаният с него то-', , като източадк .на ток, то за ецна ;паза пол^^чаваме |, пооочеиа иа фиг.5.2.6.б. Тазя схеш показва, че КТ и КН послецозателно, очевидао нопичестзените съотношекия■ ое опрецелят от израз, подобен на тозк за схеглата с(Ормпторгю послесозателпо сумираае
(фкг.1.2.6).Нвзапксимо от простотата на схешта, последната обикно-(• ияползува саг.о за генег.атори с малка и средна мооност.*пк иг] схеглата е необходимостта от секшюниране ка намот-епатора, гшянкето яа сзправвтвля Еърху формата па [апре;;:еяието, особено пп:: малки натоварванкя на гене-\ | голек:: токозе аа късо съедзненке. По тезк причиш: за геиелатор" от серкя ЕЕС с голяма мошност се ггредгя;::-■!'"о-,:ю су"::раяе на канала ка тока :: канала ка напре-- 62 -§ 2.7. БЕЗЧЕТКОЖ ОШХРОИИ ГЕНЕРАТОРЛПря обслужването на корабцате сипхронна генератори със , системи за амплитудно фазово компаунциране (САФК) се налага ;ю.й-1 често ца се контролира състоянието на контактно-четковм апашт! При работа на генератора контактните пръстени и най-вече четк:!- I те се износзат значнтелно по-бъпзо, откош^.ото всичкя ппугя оота-1 нали части на генератора, като образувакият прах се натрупва пЛ намотките и четковия апарат.Съзцадените безконтактни система за възбуацане отстг.а-1 !>яват гореизброените яецостатъци в опростяват експлоаташюянотш обсяужване на генераторите. Безкоитактните (яяи по-точно безчс?'! ковите) синхрояни .геяератори вкжючват променшшотоков въз<1уц!'^е1 промвнлизия ток на който се изправя посредством полуптоводникоЛ циоди, разполоаеии на тала на генератора и се попава ;'а намот:;а1 та за възбуииане на СГ,Поради отсъстмето на поцвижпи и плъзгаши се контакти този генератор работ;1 надежлно при зибращга в пожаро и взр:гаос сни средк и пе създава рациосмуивния.Първият корабен безчетков генератор с иоиност 425 к\л/ и 1200 об/[.жн е изготвен от английската фирма А1Е и е монтиран на танкера "Вариселла" з 1960 г.Безконтактн:;те генераторл се изпълняпат пай-често съ сишфонвн'ияй асинхронен възбуцитед. Синхпоннгят пъзбудятеп щ сталлява "обърната" сянхронча маик:»а, пр:" която ::-г2ук?ора (вт-з-| будителната ■•амотка) е :1епоцззкна, а променквотокозата намотк! е на ротора. Аовнхрстннят зъзбудител предстатг^ява ас::::тонна "Л шина'със наг::т пото", лаботе-1 з геператорен ро;г:м с позикено хлъзгане.
- 63 -Пришдапните схемн на безчеткоь генератор със сзнхронен (Мропеи къзбудител ра показаии на фиг.1.2.7, на която с 1означени намотките на основния синхронен генератор, а с - пп мкоуцителката.Променливотоко-I | ] вите възбудите-I 1 1 1 имат разлачноЧИСЛО фа31! II Ш-зяични схег.Е за включзане на вторичнате на-мотки. Най-го-лямо разпрост-
I_________I I___________IФиг.1.2.7■ оа получпли трифазпите синхронни възбугители съедякеш: з », Изппавителното устройство обикновено се изпълкява са сз-ии пиоци, най-често по трифазна мостова схема. На фиг.2.2.7 гичпо о показана в разрез конструкцията на такъз генератор, къцето с 1 и 2 са обозначеш; съот -ветно грифазната статорна е възбудк-телната роторна намотка на основнпя генератор, с 3 - възбудителната на-котка на синхр-онкия възбудятел, с 4 - неговата променливотокова намот-
N.виг.2.2.7|| Б - изправителя.За па бъде безчетковия генератор автономен, необхода-пакето на променлввотоковия възбудител да се обезпе-ратора на осноечия синхронен генератор. Възбукдането- 64 -на зъзбудктеля същс както и в разгледаните до сега системк, се осъшествяза аа оснозата на изложемте принципи за регулиране -отклонение, по компенсация на зъзцействието ?ж комбанирания щй цип. Разликата е в това, че тъй като променяявотокоззят възбуга тед пграе рояята на усгявател на мощноот, системата за кошау:!-] дира:;е, обезпечаваща възбужкакето на нъзбуа-'Теля е шого по-иал! ка по мошаост в сравпение със системата за компаунплране на сбщ новеч СГ със съшата мощаост.На. схема 3.2.7 е псн казана такава систс| за зъзбулцане, :;зпо) зуваяа от австрийся фирма "Еяяе". Регуд| товът гаа наплекегг.ге включва САФК осъ;пес! нена с 3 еднофв.зш-5 т| кове тран сформагоря Бпосел 4, напре:::с::о| траноформаторк 3 я ■
Фиг.3.2.7и коректоп ;;а напрегепяе 10, въздействуваи ;;а Кзппалг:теля за з| буждаяе на възб/цитея 6.•.Сяствмите за зъзбуждане, реалкз;:ра:п; по такъв пач1.::: имат в срар^ение с обиккозенЕте скстеми за компауна:.1 сане ма.т1:о| по-лоши показагели за откяоиеяке ка пелг<е::.е\'':его з плнашмесг:: решгм, тъй като рех^язгорът ;га напчеженке е ;клвче;;
към въгз-у-! цнтепната. иорад15 :г:ерц13окността к?. възбув.и^елката иамотка посяеяната "етул№е:'ето на потока :>а възоу^гале на гояовнатя :| рина става малко пс ззбазеко. Тоз!' иевостатък е :;зс:егна" з "гя-65 -
1 г— Ггр
СР
■кь
работената от шведската фирма АСЗА система, показана на фиг.4.2.7. Регуллрането на тока на възбуждане на основ-няя генератор сгава яирект:;о. За тази цея променяивото е.п.н. на възбуцителката се изправя с управляем тирксто-рен мост, шдпуяснтв за управ-ление иа който се подават ппез въртяши се трансформа-Виг.4.2.7■: :;ма впсока цкнагличчи качестта а обезпечава вксо-р. сравкително слсвша. Вьзбуждането се осъществяза магсня, едната от които сяуяи за възбужца-К№п зъзбудител.Дру;1 гачнн за повйгаване цЕнамкчните качества па сис-р.;ране е ;:зпоязуване™о ча аскнхпо;?ен възбуцяте1. 11а показапа на Тиг.5.2.7 схег-а асиахроннют възоудптет е :;з-пълаен с чве статор11;- паютт-к;: - токола -ламотка ТН к ;■?.-преяенова иамотка !И. 1апре-::сенозата :т".отка е глързана?:?'.:. яросе! 1'л, ко".то сс уп-"?з.дя~а "^те" псгмаг.;:;?зп.::е:: транофорг/лгс: з 'япспзу '5.-;".
1 г.о. 2.7
,ащ. еге Г.К;. 1.'0
,,г,о.,.
2


8. . БЕЗЧЕТКОЖ ОШХРОИИ ГЕНЕРАТОРПря обслужването на корабцате сипхронна генератори със , системи за амплитудно фазово компаунциране (САФК) се налага ;ю.й-1 често ца се контролира състоянието на контактно-четковм апашт! При работа на генератора контактните пръстени и най-вече четк:!- I те се износзат значнтелно по-бъпзо, откош^.ото всичкя ппугя оота-1 нали части на генератора, като образувакият прах се натрупва пЛ намотките и четковия апарат.Съзцадените безконтактни система за възбуацане отстг.а-1 !>яват гореизброените яецостатъци в опростяват експлоаташюянотш обсяужване на генераторите. Безкоитактните (яяи по-точно безчс?'! ковите) синхрояни .геяератори вкжючват променшшотоков въз<1уц!'^е1 промвнлизия ток на който се изправя посредством полуптоводникоЛ циоди, разполоаеии на тала на генератора и се попава ;'а намот:;а1 та за възбуииане на СГ,Поради отсъстмето на поцвижпи и плъзгаши се контакти този генератор работ;1 надежлно при зибращга в пожаро и взр:гаос сни средк и пе създава рациосмуивния.Първият корабен безчетков генератор с иоиност 425 к\л/ и 1200 об/[.жн е изготвен от английската фирма А1Е и е монтиран на танкера "Вариселла" з 1960 г.Безконтактн:;те генераторл се изпълняпат пай-често съ сишфонвн'ияй асинхронен възбуцитед. Синхпоннгят пъзбудятеп щ сталлява "обърната" сянхронча маик:»а, пр:" която ::-г2ук?ора (вт-з-| будителната ■•амотка) е :1епоцззкна, а променквотокозата намотк! е на ротора. Аовнхрстннят зъзбудител предстатг^ява ас::::тонна "Л шина'със наг::т пото", лаботе-1 з геператорен ро;г:м с позикено хлъзгане.
- 63 -Пришдапните схемн на безчеткоь генератор със сзнхронен (Мропеи къзбудител ра показаии на фиг.1.2.7, на която с 1означени намотките на основния синхронен генератор, а с - пп мкоуцителката.Променливотоко-I | ] вите възбудите-I 1 1 1 имат разлачноЧИСЛО фа31! II Ш-зяични схег.Е за включзане на вторичнате на-мотки. Най-го-лямо разпрост-
I_________I I___________IФиг.1.2.7■ оа получпли трифазпите синхронни възбугители съедякеш: з », Изппавителното устройство обикновено се изпълкява са сз-ии пиоци, най-често по трифазна мостова схема. На фиг.2.2.7 гичпо о показана в разрез конструкцията на такъз генератор, къцето с 1 и 2 са обозначеш; съот -ветно грифазната статорна е възбудк-телната роторна намотка на основнпя генератор, с 3 - възбудителната на-котка на синхр-онкия възбудятел, с 4 - неговата променливотокова намот-
N.виг.2.2.7|| Б - изправителя.За па бъде безчетковия генератор автономен, необхода-пакето на променлввотоковия възбудител да
се обезпе-ратора на осноечия синхронен генератор. Възбукдането- 64 -на зъзбудктеля същс както и в разгледаните до сега системк, се осъшествяза аа оснозата на изложемте принципи за регулиране -отклонение, по компенсация на зъзцействието ?ж комбанирания щй цип. Разликата е в това, че тъй като променяявотокоззят възбуга тед пграе рояята на усгявател на мощноот, системата за кошау:!-] дира:;е, обезпечаваща възбужкакето на нъзбуа-'Теля е шого по-иал! ка по мошаост в сравпение със системата за компаунплране на сбщ новеч СГ със съшата мощаост.На. схема 3.2.7 е псн казана такава систс| за зъзбулцане, :;зпо) зуваяа от австрийся фирма "Еяяе". Регуд| товът гаа наплекегг.ге включва САФК осъ;пес! нена с 3 еднофв.зш-5 т| кове тран сформагоря Бпосел 4, напре:::с::о| траноформаторк 3 я ■
Фиг.3.2.7и коректоп ;;а напрегепяе 10, въздействуваи ;;а Кзппалг:теля за з| буждаяе на възб/цитея 6.•.Сяствмите за зъзбуждане, реалкз;:ра:п; по такъв пач1.::: имат в срар^ение с обиккозенЕте скстеми за компауна:.1 сане ма.т1:о| по-лоши показагели за откяоиеяке ка пелг<е::.е\'':его з плнашмесг:: решгм, тъй като рех^язгорът ;га напчеженке е ;клвче;; към въгз-у-! цнтепната. иорад15 :г:ерц13окността к?. възбув.и^елката иамотка посяеяната "етул№е:'ето на потока :>а възоу^гале на гояовнатя :| рина става малко пс ззбазеко. Тоз!' иевостатък е :;зс:егна" з "гя-65 -
1 г— Ггр
СР
■кь
работената от шведската фирма АСЗА система, показана на фиг.4.2.7. Регуллрането на тока на възбуждане на основ-няя генератор сгава яирект:;о. За тази цея променяивото е.п.н. на възбуцителката се изправя с управляем тирксто-рен мост, шдпуяснтв за управ-ление иа който се подават ппез въртяши се трансформа-Виг.4.2.7■: :;ма впсока цкнагличчи качестта а обезпечава вксо-р. сравкително слсвша. Вьзбуждането се осъществяза магсня, едната от които сяуяи за възбужца-К№п зъзбудител.Дру;1 гачнн за повйгаване цЕнамкчните качества па сис-р.;ране е ;:зпоязуване™о ча аскнхпо;?ен възбуцяте1. 11а показапа на Тиг.5.2.7 схег-а асиахроннют възоудптет е :;з-пълаен с чве статор11;- паютт-к;: - токола -ламотка ТН к ;■?.-преяенова иамотка !И. 1апре-::сенозата :т".отка е глързана?:?'.:. яросе! 1'л, ко".то сс уп-"?з.дя~а "^те" псгмаг.;:;?зп.::е:: транофорг/лгс: з 'япспзу '5.-;".
1 г.о. 2.7
,ащ. еге Г.К;. 1.'0
,,г,о.,.


9. СИНХОРОННИ МАШИНИ
10.1 Основни определения.
Синхронните машини се използуват най-вече като генератори. Такива са всички генератори на електроенергийните станции на корабите и морските съоръжения.. Тъй като най-широко приложение намират трифазните системи от е. д. н., напреженията и токовете, синхронните те генератори са изключително трифазни.
Синхронните генератори се състоят от неподвижна част - статор въртяща се част — ротор. Статорът представлява цилиндричен магнитопровод, в каналите на който е поставена трифазна намотка. Принципно тя не се различава от статорната намотка на асинхронния двигател. Състои се от три отделни фазови намотки (наричани понякога фази), изместени една от друга на 120 електрически градуса. Статорната намотка най-често се свързва в звезда. Роторът изпълнява ролята на индуктор и е предназначен да създава магнитния поток на машината На него е поставена възбудителна намотка, през която чрез система от пръстени и четки се пропуска постоянен ток. На фиг. 10 показано схематично устройството на трифазна синхронна машина Това е най-често използуваната конструктивна схема, при която котвената намотка е неподвижна, а възбудителната се върти. По този н; котвената намотка може да се изолира добре и да се избягнат п гащите се контакти във веригата й. Това е от особено значение, като при мощните синхронни машини се налага използуването на напрежение и през котвената им намотка протичат големи токове.
При малки мощности и при ниско напрежение синхронните генератори могат да бъдат изпълнени и с неподвижен индуктор и въртяща се котва.
Конструктивната
схема на такъв генератор е дадена на фиг. 10.2. Статорът е аналогичен на статора на генератор за постоянен ток
ток, а роторът — на ротор на асинхронен двигател с контактни пръстени.Тук се разглеждат само синхронните машини с въртящ се индуктор. В зависимост от конструкцията на ротора те биват: а)Синхронни машини с явни полюси (явно"полюсни)- Такъв ротор е показан на фиг. 10.3.б) Синхронни машини с неявни
полюси (неявно-
полюсни). Такъв ротор е показан на фиг.10.4.
Фиг. 10.3Фиг. 10.4Магнитният поток, който се възбужда от възбудителната нам е се изменя с течение на времето, затова роторът може да се направи масивен. При явно полюсния ротор бобините на възбудителната намотка се поставят върху полюсите. За облекчаване на технологията понякога полюсите се правят от стоманени листове. При протичането на постоянен ток през възбудителната намотка се получават последователно редуващи се северни и южни полюси.При бързоходните машини центробежните сили са големи и такава конструкция на ротора, която да притежава достатъчна механична здравина, трудно може да се осъществи. При неявно полюсните машини в ротора, направен от масивна стомана, се изрязват канали, в крито се поставят проводниците на възбудителната намотка. Каналите се затварят със специални немагнитни клинове, а челните съединения се укрепват с бандажи. По такъв начин се получава компактна и механично здрава конструкция, която може да издържа на големи центробежни сили. Периферната скорост на ротора на съвременните синхрон-ни генератори достига до 170 m/s.За задвижване на синхронните генератори на корабите се използват дизли или турбини. Турбините се строят обикновено за скорост на въртене 60 об/s (3000 об/min). Синхронните генератори, задвижвани от турбини, са неявнополюсни, най-често с два полюса. Наричат се турбоенератори.Дизелите са бавноходни – 7500 – 1000 об/мин.. Синхронните генератори, задвижвани от дизели обикновено са явнополюсни с голям брой полюси.За захранване на възбудителната намотка с постоянен ток се из-ползува генератор за постоянен ток с паралелно възбуждане, наречен възбудителка. Най-често възбудител ката се монтира на общ вал със синхронната машина. На фиг. 10.5 е дадена схемата на синхронен генератор. Възбудителният ток на генератора, а чрез него и напрежението му, се регулират чрез изменение на възбуждането на възбудителката посредством съпротивлението Rp. Мощността на възбудител-ката е 0,3—3 % от мощността на синхронния генератор, като малките стойности се отнасят за мощните генератори. Напрежението на възбудителката е в границите от 115 до 400 V. Днес такива генератори в корабните електростнации не се използват. ротор
Фнг. 10,5Фиг. 10.6
В корабните синхронни генератори
възбудителната намотка на синхронния
генератор се захранва и от изправител — полупроводников, механичен или йонен. На фиг. 10.6 е показана схемата на генератор, чиято възбудителна намотка се захранва от полупроводников изправител. Възбуждането се из-Извършва по следния начин. При въртенето на ротора в статорната намотка на генератора се индуктира е. д. н. от остатъчния магнитен по Посредством изправителя Из е. д. н. се изправя и през възбуди-а намотка протича изправен ток. Ако създаденият от възбудителната намотка магнитен поток съвпада по посока с остатъчния е.д.н. в статорната намотка нараства. Това има за резултат ново нарастване на възбудителния ток, ново нарастване на е. д. н. и т. н. Процесът т на възбуждането протича аналогично на този при генератора постоянен ток с паралелно възбуждане. Посредством съпротивлението Rр може да се регулира възбудителният ток Iв, а оттам напрежението на генератора.
Е.Д. Н. НА СИНХРОННИЯ ГЕНЕРАТОР
Синхронните генератори трябва да осигуряват получаването на напрежение с определена стойност, честота и форма на кривата — най-синусоидално напрежение с промишлена честота 50 Hz. При протичане на постоянен ток през възбудителната намотка на синхронния генератор в магнитната му верига се създава постоянен по :на магнитен поток. Поради въртенето на ротора от задвижва-двигател това магнитно поле пресича котвената намотка и индуктира съгласно закона за електромагнитната индукция в нея е. д. н. Тъй трите фази на статорната намотка са изместени една от друга на -120 електрически градуса, индуктираните е. д. н. са фазово из-я по на 1/3 част от периода, т. е. на 120°. Честотата на индуктираните е. д. н. зависи от скоростта на въртене на ротора и от броя на двойките полюси. Синхронните генератори трябва да осигурят получаването на синусоидално е. д. н. Съгласно нормите се допуска отклонение на кривата на е. д. н. на генератора от синусоидата с не от 5%.Във всеки от проводниците на намотката на дадена фаза се индуктира е. д. н. e=Blv, където В е магнитната индукция във въздушна междина l- дължината на проводника, v — периферната скорост на ротора.При постоянна скорост на въртене моментната стойност на индуктираното е. д. н. е се определя от стойността на магнитната индукция във въздушната междина. В разглежданата конструкция на машината проводникът е неподвижен, а поради въртенето на ротора се изменя магнитната индукция. При условие, че магнитната индукция във въздушната междина е разпределена синусоидално, в проводника ще индуктира синусоидално е. д. н.При явнополюсните генератори на полюсните накрайници се придава специална форма, с което се постига синусоидално разпределение на магнитната индукция във въздушната междина. Това е показано на .7. Ако полюсните накрайници не са скосени, разстоянието между статора и ротора (въздушната междина) е еднакво и кривата на. разпределение на магнитната индукция има приблизително трапецовидна форма. Със скосяването на полюсните накрайници поради нееднаквата дължина на въздушната междина, както това се вижда от фигурата, магнитната индукция се разпределя практически почти синусоидално.
Фиг. 10.7 Фиг. 10.8При неявнополюсните генератори същият ефект се постига чрез подходящо неравномерно разпределение на проводниците на възбудителната намотка по периферията на ротора (фиг. 10.8).По такъв начин на практика на изводите на
синхронния генератор се получава напрежение, което малко се различава по форма от синусоидатаВсяка една ,от фазовите намотки на статора се състои от множество навивки, които се разполагат в няколко канала по периферията на статора. Поради пространственото разпределение на проводниците между индуктираните в тях е. д. н. съществува определена фазова разлика, съответствуваща на ъгъла, на който проводниците са отместени един от друг по периферията на статора. На изводите на всяка фаза се получава е. д. н., равно на геометричната сума от е. д. н., индуктирани в отделните проводници, която е по-малка от аритметичната им сума.Ефективната стойност на фазовото е. д. н. се определя със същата формула, както при асинхронните машини:
E0=4,44f kωω Ф0
Където:kω e коефициент на намотката, с който се
взема пред вид намаляването на ефективната стойност на фазовото е. д. н. вследствие на разпределението на проводниците на статорната намотка по периферията на статора;
Фо — магнитен поток, създаден от възбудителната намотка.
Следователно ефективната стойност на индуктираното е. д. и. зависи от големината на магнитния поток Фо
и от честотата ω . За да се получи е. д. н. с промишлена честота f=50Hz, синхронният генератор трябва да се задвижва със строго определена скорост на въртене
n0 = (f/p) об/s.
В зависимост от броя на двойките полюси р при честота /=50Hz е получават следните скорости на въртене, наречени синхроини
Това налага синхронните генератори да се задвижват винаги от двигател, който има строго определена постоянна скорост на въртене.При това положение е. д. н. на синхронния генератор може да се изменя, a no такъв начин и да се регулира напрежението на извардите му само като се изменя магнитният поток Фо. Това се постига чрез изменение на възбудителния,ток. За целта във възбудителната верига а възбудителната се предвижда регулируемото съпротивление RP (фиг. 10.5). Синхронните генератори се строят ниски напрежение ( 400 в.) и за високи напрежения — 6kV или 10 kV.
р 1 2 3 4 5 6
n0
об/s 50 25 16,6 12,
510 8,2
nо
об/min
3000
1500 1000 ,750
600 500


10. ВКЛЮЧВАНЕ НА СИНХРОННИТЕ ГЕНЕРАТОРИ
ЗА ПАРАЛЕЛНА РАБОТА
Паралелната работа на синхронните генератори позволява да "се сигурността на работата на електрическите централи, да се непрекъснатото електроснабдяване на консуматорите и да се к. п. д. на работещите генератори. Този начин на работа дава ост в зависимост от товара да се включват толкова генератори, е необходимо за покриване на разхода на електрическа енергия се следи всеки от паралелно работещите генератори да се i приблизително до номиналната си мощност. При това състояние се- постига икономична работа не само на генераторите,
но и на задвижващите ги първични двигатели. Паралелната работа на синхрон-ните генератори позволява най-целесъобразно да се разпредели общият товар между отделните генератори.За да може да се осъществи нормално включване за паралелна работа, при което да не възникват големи изравнителни токове, трябва да се спазват определени условия. Тук се разглежда случаят, по-казан схематично на фиг. 10.18. Първият синхронен генератор Г1 е включен и работи, а вторият — Г2, трябва да бъде включен паралелно на първия. Свързването на двата генератора се осъществява посредством събирателните шини. Приема се, че напрежението U1 и честотата f1 на първия генератор Г1 остават неизменни, т. е. U1=-const и f1, = const.
Условията за паралелно включване на синхронни генератори са:1. Последователността на редуване на фазите на двaта генератора трябва да бъде еднаква. Това се постига, като се свържат едно-именните фази на генераторите, т. е. фаза А на първия генератор Г1 трябва да се свърже с фаза А на втория генератор Г2 и т. н. Това се пра-ви още при монтирането на генераторите.2. Ефективната стойност на е. д. н. Е2 на генератора Г2 трябва да бъде равна на ефективната стойност на напрежението на шините, т. е. на напрежението U1 на работещия генератор Г1.3, Честотата f2 на е. д. н. на генератора трябва да бъде равна на честотата f1 nа напрежението на работещия генератор, т. е. на честотата на мрежата.4, Освен ефективната стойност трябва и моментната стойност на е. д. н. е2 на генератора Г2 в момента на включването да бъде равна на моментната стойност на напрежението их на шините, т. е. е. д. н. на включвания генератор трябва да бъде равно и да съвпада по фаза с напрежението на шините.5: Формата на кривата на е. д. н. е 2 на включвания генератор трябва да бъде еднаква с тази на напрежението u1 на шините. Това изискване вие се удовлетворява от всички съвременни генератори, които осигуряват практически получаването на синусоидално е. д. н.
На практика се използуват два начина за включване на генераторите за паралелна работа:1. Метод на точната синхронизация, при който в паралел се включва възбуден синхронен генератор, след като предварително се изпълнят ш изброени по-горе условия.
2. Метод на самосинхронизацията (наричан още метод на грубата синхронизация), при който в паралел се включва невъзбуден синхронен генератор, след като приблизително се постига равенство на скорости-на въртене на двата генератора, а след това той се възбужда.
При точната синхронизация за изпълнението на условията за паралелно включване се следи с помощта на синхроноскоп. Най-простият синхроноскоп се състои от три електрически лампи, включени към изводите на генератора и шините. На фиг. 10.18 е показано свързването на лампите между едноименните изводи, при което всяка лампа е подложена на напрежение, равно на геометрическата разлика ΔU = U1-E2 на съответните фазни напрежения. Когато условията не са изпълнени, върху лампите действува известно напрежение и те светят,
като на всяка една от тях се подават напрежения с еднаква ефективната стойност, трите лампи светят с еднаква яркост (фиг. 10.19 а). Изравняването на напрежението на шините и е. д. н. на генератора Г2 се постига сравнително лесно чрез регулиране на възбуждането на Г2. Обаче по-трудно се постига и поддържа продължително изравняването на честотите, защото трудно може да се постигне и поддържа продължително време синхронното въртене на първичните двигатели на генераторите. Поради това напрежението, което се подава на лампите, представлява раз-лика на две еднакви по ефективна стойност напрежения с почти равни често-ти. Получава се така нареченото биене (фиг. 10.20). В съответствие с изменението на подаденото напрежение лампите на синхроноскопа едновременно ще светват и угасват
Фиг. 10.20 Колкото по-малка е разликата в честотите, толкова по-голям е периодът Тб на биенето. Поради разликата в честотите векторите на напрежението на генератора Г1 и е. д. н. на генератора Г2 ще се върти обратно на часовниковата стрелка с различни скорости. Моментът, когато векторите са в противофаза (фиг. 10.19 б),
съответствува на най-яркото светене на лампите. Включването на Г1 в този момент е равносилно на късо съединение за двата генератора и поради това е не-допустимо. В момента, когато напреженията са във фаза (фиг. 10.19 в), лампите не светят и в този момент генераторът Г2 трябва да се включи. Следователно угасването на лампите показва, че условията за паралелно включване са изпълнени. Обаче лампите угасват при напрежение 25--30% от номиналното им напрежение, поради което трудно може да се установи точно моментът, в който трябва да се включи Г2. За повишаване на точността паралелно на една от лампите се включва волтметърът.
Включването на генератора Г2 трябва да се извърши в момента, когато стрелката на волтметъра показва нула. Този начин на точна синхронизация се нарича „включване на тъмно".
Синхроноскопът може да се свърже така, че включването да стане „на светло" или „при въртяща се светлина".Включването на генератора за паралелна работа по метода на точната синхронизация е сложно и изисква много време. В такъв смисъл методът на самосинхронизацията, който напоследък започна да се прилага, е значително по-прост и по-удобен. При него преди пускане-то на първичния двигател генератор Г2 е невъзбуден. С помощта на първичния двигател генераторът Г2 се развърта до "скорост, близка до синхронната. При това не е необходимо да се достигне точната синхронна скорост. Допускат се отклонения в границите +24-3% от нея. При тези условия невъзбуденият генератор се включва към мре-жата, и веднага след това се подава възбуждането му, което трябва да осигури получаването на номинално напрежение. Когато синхронният генератор се включва по метода на самосинхронизацията, в статорната му намотка протича ток, няколко пъти по-голям от номиналния, и възникват механически удари. Големият ток поражда падение на напрежението на шините. Практиката показва, че механическите удари не са опасни за генератора, а токът в статорната намотка бързо намалява до нормалния. Включването на генератора е просто и.лес-но може да се автоматизира. To може да се осъществи даже и_в аварийни случаи, когато напрежението и честотата на мрежата се изменят.
12. ПАРАЛЕЛНА РАБОТА НА СИНХРОННИТЕ ГЕНЕРАТОРИ
В първия момент след включването към мрежата е. д. н. на генератора Г2 е равно по големина и съвпада по фаза с напрежението U1 на генератора Г1 (фиг. 20.18). При тези условия, както вече беше изяснено, ток в
статорната намотка на генератора Г2 не протича и той не отдава и не получава мощност от мрежата. В момента, когато напрежението па дадена фаза достигне максималната си стойност, оста на полюсите на ротора лежи в равнината на намотката на дадената на генератора Г2, т. е. ъгълът 6 е равен на нула. Електромагнитният момент не се създава и първичният двигател покрива само загубите които възникват в генератора Г2.За да протече ток през намотките на генератора Г2, трябва да се и е. д. н. Е2, индуктирано в статорната му намотка. Това може стане по два начина:
1) чрез изменение на възбудителния му ток, при което се изменя ината на е. д. н. Е2.2) чрез изменение на мощността на първичния му двигател, при се изменя ъгълът 6, т. е. фазата на е. д. н. Е.2.
Обикновено синхронният генератор се включва за паралелна работа [режа с много по-голяма мощност от неговата. Затова логично е при настоящото разглеждане да се приеме, че мощността на генератора Г1 е много по-голяма от мощността на генератора Г2, поради което напрежението и честотата на шините остават постоянни и не зависят от ла на работа на генератора Г2.
Влияние на изменението т възбудителния ток при постоянен въртящ момент на шала на генератора Г2
При увеличаване на възбудителния ток на генератора Г2 е. д. н нараства, без да се изменя фазата му, и става по-голямо от напрежението на шините U1 Когато Е2>U1, се казва,че генераторът Г2 е превъзбуден. Възниква разлика в напреженията ΔU = E2 - U1 която поражда протичането на ток I, който изостава фазово с 90° от .е д. н. Е.,, т. е. той има индуктивен харак тер (фиг. 10.21 а). При протичането му през статорната намотка той създава надлъжна реакция на котвата, но не създава електромагнитен момент. Поради това взаимното положение между ротора и резултантното магнитно поле не се променя (θ = 0). Генераторът Г2 генерира ре-активна мощност.При намаляване на възбудителния ток на генератора Г2 е. д. н. Е2, намалява и става по-малко от напрежението на шините U1. Когато E2<U1 , се казва, че генераторът Г2 недовъзбуден. Под действие на разликата в напреженията ΔU = E2 - U1 през статорната намотка на генератора Г2 протича ток I, който както се вижда от векторната диаграма (фиг. 10.216), изпреварва-фазово с 90° е. д. н.. Е2. Токът I, който има капацитивен характер, създава в генератора Г2 надлъжна намагнитваща реакция на котвата. 'Фазата на индуктираното е. д. н. Е2 не се променя. В този случай генераторът Г2 консумира реактивна мощност.
И в двата разгледани случая генераторът Г2 не отдава в мрежа активна мощност.Фиг. 10.21Нека генераторът Г2 да е натоварен с определен неизменен по големина активен товар Р= const. Между напрежението на изводите му U1=U=const и протичащия през статорната му намотка ток I съществува фазова разлика φ, На фиг. 10.22 е дадена опростената векторна диаграма на генератора. Про-екцията на е. д. н. Ео на генератора Г2 върху правата ОА, прекарана перпен-дикулярно на вектора на напрежението U на шините, е равна на E0sinθ, като дължината й е пропорционална на активната мощност на генератора:
Фиг. 10.22
При изменение на възбуждането на генератора Г2 е. д. н. Ео се изменя и по големина, и по фаза, но дължината на споменатата проекция остава неизменна, тъй като активната мощност Р — const. Следователно при изменение на възбуждането върхът на вектора на е. д. н. E0
ще се плъзга по правата АВ. Понеже токът I закъснява с 90° от падението на напрежението jIXc при изменение на възбуждането, го-лемината и фазата му ще се изменят, но активната му съставяща ще остава непроменена I cos φ= const, тъй като U= const и Р= const. При това положение върхът на вектора на тока I ще се плъзга по правата CD.При увеличаване на възбуждането на генератора Г2 токът му ще изостава с ъгъл φ
от напрежението U и нараства по големина (I'>I). Ъгълът θ намалява— θ '< θ.При намаляване на възбуждането токът I" на генератора Г2 също нараства по големина, обаче изпреварва с ъгъл φ " напрежението U. Ъгълът θ нараства— θ "> θ.И в двата случая генераторът Г2 отдава в мрежата постоянна активна мощност. Обаче в първия случай (при увеличаване на възбуждането му) той генерира реактивна мощност, а във втория случай {при намаляване на възбуждането му)--консумира реактивна мощност.От направения анализ се вижда, че при изменение на възбужда-нето на синхронния генератор при постоянен активен товар се изменя големината на тока I в статорната му намотка и фазовата разлика ср между тока и напрежението U.
Кривите, които представляват зависимостта I = f(Iв) между тока I в статорната намотка и възбудителния ток Iв на генератора при U= const и Р = const, ce наричат U-образни криви. Те са построени на фиг. 10.23 за различни стойностни на активния товар Р на генератора. От тях се вижда, че за всеки активен товар Р съществува определена стойност на възбудителния ток Iв, при който cos φ = 1, и токът I на генератора е минимален. При увеличаване на въз-буждането токът I се увеличава, като генераторът отдава реактивна мощност. При намаляване на възбуждането токът I също се увеличава, но-генераторът консумира реактив-на мощност.
Влияние на изменението на мощността на първичния двигател при постоянно възбуждане на синхронния генератор.
Мощността на първичния двигател се изменя чрез изменение на количеството подавано гориво или енергоносител (вода или пара) в турбината.При увеличаване на мощността се увеличава приложеният на вала на генератора Г2 въртящ момент, при което се нарушава установеното равновесие между въртящия и съпротивителния момент, опре-делен от товара на генератора. Роторът на генератора започва да се ускорява, при което ъгълът 8 нараства. Възниква фазова разлика между е. д. н. Ео на генератора Г2 и напрежението U на шините. Под действие на възникналата разлика в напреженията токът в статорната намотка на генератора се увеличава. Увеличава се и създаденият електромагнитен момент, който действува срещу посоката на въртене, т. е. представлява съпротивителен момент. Отново се възстановява равновесието между двигателния и съпротивителния момент, но вече при по-големи стойности на последните. Съответно е увеличен и ъгълът 6, което отразява изместването nа оста на полюсите на ротора по отношение на резултантния магнитен поток в посоката на въртене. Следователно увеличава се генерираната активна мощност.При намаляване на мощността на първичния двигател се намалява приложеният на вала на генератора Г2 въртящ момент. Пак се нарушава равновесието между двигателния и съпротивителния момент. При синхронното си въртене роторът на генератора Г2 изостава, при което се намалява ъгълът 9, а съответно на това и активната мощност на генератора.Следователно при паралелна работа, за да се измени произвежданата от синхронния генератор активна мощност, трябва да се въздействува върху мощността на първичния двигател, а за изменение на реактивната мощност —върху възбуждането на генератора.
При паралелна работа на няколко генератора често възниква необходимост от преразпределение на товара между тях. За да се прехвърли активен товар от един генератор на друг, трябва да се намали мощността на първичния двигател, който задвижва генератора, чий-то товар трябва да се намали и да се увеличи мощността на първичния двигател на генератора, който трябва да поеме товара. При постояннотоковите генератори това се осъществява чрез изменение на възбуждането. За преразпределяне на реактивната мощност се въз-действува върху възбуждането на генераторите — намалява се възбуждането на разтоварвания генератор, a ce увеличава възбуждането на този, който трябва да поеме товара. Преразпределянето на товарите трябва да се извършва постепенно, така че честотата и напрежение-то на шините да останат непроменени.
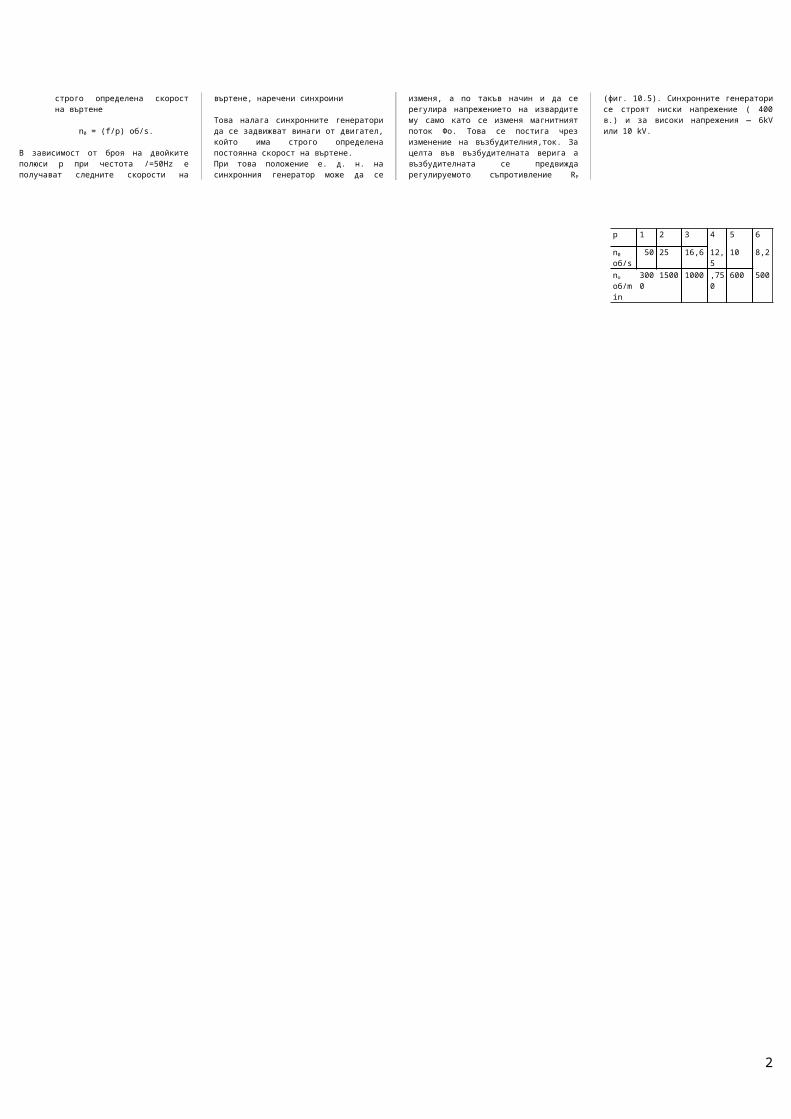

11. Защити на корабните електроенергетични системи
11.1. Общи сведения. По време на експлоатацията на корабите и морските съоръжения са възможни редица повреди в елементите и в мрежата на ЕЕС. Тези повреди могат да доведат до възникването на редица аварийни режими, свързани с къси съединения, претоварване на синхронните генератори и електропреносната мрежа, пожари н ит.н.За избягване на опасните последствия, предизвикани от тези режими, се предвиждат защити на елементите на ЕЕС, която се осъществява от следните средства:
Стопяеми предпазители; автоматични въздушни
изключватели; различни видове релета; полупроводникови защитни
елементи.Основните причини, предизвикващи претоварване на генераторите могат да се разделят на две групи:
1. предизвикани от аварийни ситуации в системата за управление на първичните двигатели (дизели, турбини) и генераторите;
2. предизвикани от консуматорите на електроенергия
В съвременните ЕЕС първичните двигатели са автоматизирани. Те имат автоматичен пуск, стабилизация на скоростта на въртене, стабилизация на температурните режими на и т.н. Информацията за състоянието на тези параметри се предава в системата за индикация :
Предупредителна сигнализация:
Аварийна сигнализация.
В системата за управление на турбините се осъществява контрол на следните основни параметри:
1. Честотата на въртене на турбината;
2. налягането на маслото;
3. солеността на водата;
4. налягането на кондензата.
В системата за управление на дизелите се извършва контрол на следните параметри:
1. температура на налягане в мазиланата система;
2. температура на налягане в охлаждащата система;
3. нивото на горивото и маслото в разходните цистерни;
4. температурата на лагерите;5. натоварването на двигателя.
11.1. Основни средства за защита, използвани в ЕЕС.А) Стопяеми предпазители – представляват защитни електрически апарати, автоматично изключващи електрическата верига при възникване на претоварване или къси съединения. Основен елемент в тях се явява стопяема вставка (пластина или проводник, които се включвате последователно в защитаваната верига. За предпазване на обслужващия персонал или предизвикването на пожари при прегарянето на предпазителя, стопяемата вставка се поставя в специален патрон от изолационен материал.
Б) Защитни релета. За защита на ЕЕС се използват различни видове релета. Релета се монтират непосредствено на автоматичните въздушни автомати за изключване на веригите на ЕЕС.
Топлинни релета. Топлинното реле се състой от три основни елемента: нагревателен елемент през който протича основния ток на веригата която
се защитава, биметална пластина и контактна система.
Реле за обратен ток. Тези релета се използват при паралелна работа на постояннотокови генератори и при зареждане на акумулатори. Принципа на действие е основа на получаване на въртящ момент в зависимост от посоката на тока. Тези релета се произвеждат с ток на работната намотка 6, 25,50, 150, 200, 400, 600, 800А.
Реле за обратна мощност. Използват се в ЕЕС за променлив ток. Предназначени са да защитят СГ в попадането им в двигателен режим. Представлява реле с две магнитни системи. Токовата намотка на едната магнитна система е разчетена за работа на 5 А и се включва в статора на една от фазите на генератора, който се защитава чрез токов трансформатор. Намотката на другата система се включва паралелно между фазите и е разчетена на 127 или 220 волта. Принцип на действие е аналогичен на принципа на действие на електромера. При смяната на посоката на тока се сменя и посоката на въртене на диска, респективно отварят или затварят контакти. 12. Елементи на корабната
автоматика. Преобразователи на физични величини в електрически сигнали (датчици) . Общи сведения
и характеристики.
12.1. Общи сведенияПостоянният контрол на такива физични параметри като скорост, температура, размери, ускорения , налягане, сили и др. се извършва с помощта на измервателни устройства. Измерваната неелектрическа величина се преобразува в електрическа величина – ток или напрежение. Устройствата които изпълняват тази функия обощено се наручат преобразователи на физически величини в електрически сигнали и в българската техническа терминология са известни като датчици, а в английската sensors (чувствителни елементи). Чувствителен елемент е този елемент който чувства (възприема) физичната величина (температура, сили, ускорение и.т.н.). По принципа на действие устройствата за преобразуване на физични величини в електрически сигнали могат да бъдат разделени на две основни групи:
параметрични (пасивни); генераторни (активни).
Първите преобразуват входната величина в параметър на електрическа верига (съпротивление, индуктивност, капацитет). Генераторните преобразуват физическата величина в е.д.н.
Датчикът е преобразовател на физична величина в електрически сигнал. В много случаи функциите на чувствителния елемент и датчика се изпълняват от един и същи елемент. Като правило електрическата величина на на изхода преобразователя на физичната величина е слаб. По нататъшното използване на този сигнал за непосредствено пказване чрез индикатор или използване в сисетмите за авотоматично регуиране или управление последният се усилва с помощтта на усилвател на електрически сигнали.
Обощена блокова схема на преобразовател на физични величини в електрически сигнали (датчици) е показана на фиг.1, където е обозначено:
1- чувствителен елемент, реагиращ на физичната величина и преобразуващ тази влеичиа в електрически сигнал;
2- усилвател (усилваща схема);3- регистриращо устройство;4- захранващо устройство .
фиг.1. Структурна схема за измерване на
неелектрически величини.
Преобразувателят е най-важната
част на уреда. Той представлява устройство,
което възприема измененията на измерваната
величина и ги преобразува в изменения на
параметър на електрически сигнал, удобен за
усилване, предаване на разстояние или за
използуване в друга форма. В повечето от
случаите технологичният параметър, който
характеризира определен процес и е
обикновено неелектрическа величина, се
преобразува в електрическа, а съответните
преобразуватели се наричат електрически.
Основните изисквания, които се предявяват
към преобразувателите, са:
а/ осъществяване на непрекъсната
и еднозначна зависимост между
изходната и входната величина;
б/ достатъчна чувствителност,
колкото по-голяма е
чувствителността на
преобразувателя, толкова по-
висока е точността на
измерването;
в/ постоянство на
характеристиките с течение на
времето;
г/ малка инертност;
д/ отсъствие на обратно
въздействие на преобразувателя
върху
контролирания процес;
е/ минимално влияние на
външните фактори /температура,
влажност,
вибрации и др./ върху
характеристиките на
преобразувателя;
ж/ простота, технологичност и
ремонтопригодност на
конструкцията.
Към преобразувателите, които са
предназначени за работа в системите за
автоматично регулиране, се поставят и
допълнителни изисквания за висока
надеждност, ниско ниво на паразитните
шумове и минимално влияние от външни
полета /магнитни, електромагнитни,
електростатични и др./
Електрическите преобразуватели
могат да бъдат разделени по различни
признаци. Най-съществено значение обаче има
класифицирането им в зависимост от
характера на изходната електрическа величина
и в зависимост от структурната схема на
преобразувателя.
В зависимост от характера на изходната
електрическа величина, преобразувателите се
делят на параметрични и генераторни.
Параметрични преобразуватели са
тези, които под действие на неелектрическата
величина изменят някои от електростатичните
си параметри /съпротивление, капацитет,
индуктивност и др./. За измерването на тези
параметри е необходим външен токоизточник.
Тези преобразуватели са по-прости по
устройство, поради което са получили широко
приложение. Към тях спадат контактни
преобразуватели, термосъпротивителни
преобразуватели, капацитивни
преобразуватели индуктивни преобразуватели,
фотоелектрически преобразуватели,
магнитоеластични преобразуватели и др.
Генераторните преобразуватели
преобразуват входната величина в
електродвижещо напрежение. Поради това в
повечето случаи измервателната схема, по
която те работят, е сравнително проста. Към
тази група спадат индукционни
преобразуватели, термоелектрически
преобразуватели, вентилни фотоелектрически
преобразуватели, преобразуватели на Хол и
др.
В зависимост от структурните схеми,
електрическите преобразуватели биват,
преобразуватели с последователно
преобразуване, диференциални
преобразуватели и компенсационни
преобразуватели.
Един и същи преобразувател може
да бъде използуван за измерване на различни
неелектрически величини по електрически път.
Също така е възможно и измерването на една
неелектрическа величина по електрически път
да става с помощта на различни
преобразуватели. Изборът на една или друга
комбинация трябва да става, като се вземат
предвид изискванията в конкретния случай,
стойността на измерваната величина, видът и
точността на измервателните средства, с които
разполагаме и др.
Независимо от различните видове и случаи на
използуване на преобразувателите, те могат
да бъдат сравнявани по общи характеристики.
Тези характеристики са следните: статична
характеристика, чувствителност, динамична
характеристика и точност.
Статичната характеристика представлява
зависимостта между входната величина Х и
изходната величина у в установен режим (фиг.
2 и фиг. 3). Фиг. 2
Фиг. 3
По характера на статичната
характеристика преобразователите се делят на
налогови (фиг. 2) и дискретни (фиг. 3). В
аналоговите при неперекъснатото изменение
на измерваната величина от минимално до
максимално значение изходният сигнал също
се изменя непрекъснато от минималното до
максималното си значение В дискретните
устройства при непрекъснатото изменение на
входната величина изходният сигнал
представлява дискретна функция.
Чувствителността на преобразувателя S е
отношението между изменението на изходната
величина и изменението на входната
величина ;
Чувствителността на
преобразувателя представлява стръмността на
статичната характеристика в определена
точка. В зависимост от характера на
статичната характеристика, преобразувателите
биват линейни и нелинейни (фиг. 1).
Нелинейните преобразуватели се
характеризират с променлива чувствителност,
линеен обхват и зона на нечувствителност.
Под линеен обхват се разбира областта между
две стойности на входната величина, в която
статичната характеристика може да се смята
за линейна.
Праг на нечувствителност е
максималната разлика между две стойности на
входната величина, при която не се получава
изменение на изходната величина.
Динамична характеристика на
преобразувателя се нарича зависимостта на
изходната величина от входната при бързи
изменения на последната. Динамичната
характеристика определя поведението на
преобразувателя в преходните режими. При
изменение на входната величина, изходната
величина не се изменя едновременно с нея, а с
известно закъснение. Интервалът от време
между началото на изменението на изходната
величина определя закъснението на
преобразувателя. Колкото това време е по-
голямо, толкова преобразувателя е по-
инертен.
12.2. Грешки при измерване на
неелектрически величини.
Степента на съответствие между
действителната стойност на измерената

величина и полученият резултат в процеса на
проведеното измерване, определя грешката,
т.е. Качеството на измерителните уреди и
системи. С цел да бъдат изучени и
анализирани, грешките се класифицират по
различни признаци, но основно те се делят на
три основни групи; груби, систематични и
случайни.
А. Груби грешки при измерване.
Причините, които пораждат грубите грешки,
биват обективни и субективни. Към първите се
отнасят резките колебания на температурния
режим, външни сътресения на измервателния
уред, влияние на външни паразитни полета,
грешки от паралакса и др. Субективните
причини са свързани с оператора, който може
да допусне груби грешки поради недостатъчна
квалификация, небрежност или умора.
Грубите грешки се изключват обикновено от
резултатите при измерването, обаче при
наличието на груби грешки трябва да се
анализират причините, които са ги
предизвикали.
Б. Систематични грешки.
Систематичните грешки се предизвикват от
действието на известни фактори за
съществуването, на които предварително може
да се знае и успешно да се води борба с тях.
Причините, които пораждат систематичните
грешки са следните: методични,
инструментални, температурни, субективни и
грешки от установяване на уредите в
пространството.
Причина за възникването на методичните
грешки е възприетият метод на измерване.
Често на входа на измерителното устройство
се подава не измерваната величина, а друга,
която не отразява измерваната достатъчно
точно. Измерителните уреди, освен към
измерваната величина, са чувствителни и към
други наричани смущаващи величини, дадени
в техническата документация на
измервателния апарат. Резултатната грешка
възникваща при тези условия се нарича
основна грешка.
Инструменталните грешки се делят на грешки
на уреда, свързани с неговата конструктивна
схема, грешки при изработването и
сглобяването на отделните части на уреда,
неточност при градуирането на скалата, грешки
дължащи се на калибрите, използувани за
настройка на измерителните инструменти,
прогресивно намаляване или нарастване на
измерителния натиск по дължината на скалата
и др.
Температурни грешки възникват вследствие на
отклоненията от нормалната температура
20°С.
Субективни грешки, които зависят от
квалификацията на експериментатора.
Субективните грешки биват случайни и
постоянни. Случайните субективни грешки се
дължат на недостатъчното осветление върху
скалата, умора на оператора и редица други
причини, чието влияние трудно се отстранява.
Грешките на метода, се дължат на
неподходящо избрания метод на измерване.
Ако даден метод е подходящ за едно
измерване, може да се окаже напълно
неподходящ за друго.
Грешките от установяването на уреда в
пространството се дължат на промяната на
положението на уреда в пространството. В
инструкцията за експлоатация на
измервателните уреди е указано в какво
положение трябва да се провежда
измерването с него. Промяната на това
положение затруднява правилната му работа и
внася съществени корекции в неговата
точност.
В. Случайни грешки при
измерването.
Случайните грешки са непостоянни, както по
стойност, така и по знак, предварително не
могат да бъдат определени и следователно не
могат да се изключват от резултата на
измерването.
Причините, които пораждат случайните грешки,
носят случаен характер и са твърде
разнообразни, например: 1. Непостоянство на измерителния
натиск поради изменение на силите
на триене, възникнало от неправилно манипулиране с измерителните инструменти;
2. Колебание на температурния режим, дължащо се на изменението на температурата в помещението, нееднаквата температура на измерваните части -особено ако се измерват веднага след обработването;
3. Нееднакво отчитане от различните оператори на дробните части от деленията на скалата;
4. Изменение в положението на машинната част при повторно измерване, поради което отклоненията на формата влияят върху резултата от измерването и пр.
Независимо, че случайните грешки не могат да
бъдат определени предварително, но когато те
са получени след многократно измерване на
машинните части, тогава честотата на тяхното
появяване, се подчинява на закона на
нормалното разпределение на случайните
величини, т.е. на закона на Гаус.
Графичният израз на нормалния закон е
показан на фиг.4. Кривата е камбанообразна,
симетрична, с два края, които асимптотично
клонят към оста х.
фиг. 4. Нормален закон на разпределението.
Една от характерните особености на
нормалния закон са двете инфлексни точки при
Х = -σ и Х =+σ . Изчислено е, че в интервала ±σ
се появяват около 68 % от всички възможни
случаи, а в интервала ±3σ се появяват около
99% от възможните случаи. Следователно
вероятността за появяване на случайни
величини извън интервала +3σ е около 1%.
.12.3. Пътища за повишаване на
точността на измервателните средства.
За да се намали влиянието на смущаващите
фактори върху резултата от проведеното
измерване, се използуват следните похвати: 1. 1. Избор на подходящ физически принцип за преобразуване на измерваната величина. Тъй като всяка величина може да бъде преобразувана, то използувания принцип трябва да бъде свързан по такъв начин с реалната величина, че получените грешки да имат минимална стойност. 2. 2. Избор на подходящ в конструктивно отношение преобразувател. 3. 3. Използуване на качествени елементи за реализиране на преобразувателите. Това означава използуването на елементи, които не променят параметрите си при външни въздействия /температура, налягане, влажност и др./ и които не стареят с времето.
4. 4. Добро съгласуване на входните и изходните параметри на преобразувателите. 5. 5. Отстраняване на смущаващите въздействия чрез подходяща филтрация на полезния сигнал. 6. 6. Електронна обработка на резултатите от измерването, чрез използуването на компютърни схеми.
2

3
13. Видове пасивни датчици. Принцип на действие
Датчиците, като беше отбелязано, служат за преобразуване на не електрическите величини (премествания, сили , налягания, температура и др. ) в електрически сигнал. Те могат да бъдат класифицирани по принципа на действие и по явленията, които те преобразуват. Ние ще ги класифицираме по принципа на действие.
По принципа на действие датчиците могат да бъдат разделени на две основни групи : параметрични (пасивни) и генераторни (активни). Първите преобразуват входната величина в параметър на електрическа верига (съпротивление, индуктивност, капацитет). Генераторните преобразуват физическата величина в е.д.н.
13.1. Реостатни (съпротивителни) датчици. Използват се за преобразуване на механично преместване в изменение на активно съпротивление на електрическа верига. Те представляват променливи съпротивления, величината на които зависи от положението на токоснемащия контакт (фиг. 1. ).
Характеристиката на потенциометричните датчици се изразяват със зависимостта
R = f(x)U=f(x), (5.1.)
Където:R – изходно съпротивление на реостата;U – изходно
напрежение а делителя;X – преместване на
плъзгача (линейно или ъглово).Фиг. 1
Характеристиките (5.1.) могат да бъдат линейни или нелинейни. Изходните сигнали на линейните потенциометри са пропорционални на преместването на токоснемащия контакт.
R = R п σU = Uп σ
Където: R п – пълно съпротивление на потенциометъра;
Uп - напрежение, което се подава на потенциометъра;
σ - относително преместване на четките (Xп/ X);
Xп - преместване на четката при което R = Rп и U = U п.
Статичните грешки на потенциометричните датчици се определят от конструкцията на потенциометъра (конструктивни грешки) и от схемата на свързване на потенциометъра в електрическата верига. Конструктивните грешки са резултат на наличието на луфтове, неравномерност на съпротивлението на потенциометъра по дължината на преместване на плъзгача, дебелината на съпротивителния поводник,от който е изработен потенциометъра и др.
Най-често използваните схеми на включване на потенциометрите в електрическите вериги са дадени в литературата. Във всички схеми с R1 е обозначено пълното съпротивление на потенциометъра; R2 – съпротивлението на товара, R3 – съпротивлението на допълнителните шунтове, U1 – напрежението на захранващия токоизточник, U2 – напрежението на изхода (върху товара).
Статичните грешки се изразяват в това, че под влиянието на товара се появява допълнителна неравномерност на характеристиката, даваща зависимостта на изходното напрежение във функция от входната величина (преместването на плъзгача.).
13.2 Индуктивни датчици Индуктивните преобразуватели представляват електромагнит, въздушната междина /δ/, на който се изменя в зависимост от измерваната механична величина /Р/. Обикновеният индуктивен преобразувател /фиг.2.а / се състои от неподвижен магнитопровод 1 върху който е навита намотката 2 и подвижен магнитопровод или котва 3, която се премества в зависимост от измерваната неелектрическа величина. Намотката е включена към източник за променлив ток, който възбужда променлив магнитен поток. Променливият магнитен поток преминава през неподвижния и подвижния магнитопровод и през въздушните междини, образувани между тях.
Фиг.2. Индуктивни преобразуватели. При въздействие на измерваната величина върху подвижната точка се изменя въздушната междина, а от там и съпротивлението на магнитната верига на преобразувателя. Това води до промяна на магнитния поток на, активното и пълното
съпротивление на намотката. В резултат на тези промени се изменя токът, който протича през намотката при неизменно захранващо напрежение. По стойността на активното съпротивление или по тока се съди за стойността на измерваната величина. Друг тип индуктивен преобразувател е с отворена магнитна верига, показан на фиг.2.б. Той се състои от бобината 1 във въздушната междина, на която е поместена сърцевината 2. Преместването на бобината се явява функция на измерваната механична величина Р. На фиг.2.в. е показан индуктивен преобразувател трансформаторен тип. Намотката 1 се захранва от източник за променлив ток. Към изхода на вторичната намотка 2 -волтметър или вибратора на осцилограф. При изменение на въздушната междина, предизвикано от преместването на котвата под действие на измерваната величина Р, се променя общото магнитно съпротивление на двете намотки, а следователно и големината на потока Ф. По такъв начин големината на потока и индуктираната във вторичната намотка е.д.н. Е2 ще бъдат във функционална зависимост с въздушната междина δ т.е. и с величаната Р. Разгледаните индуктивни преобразуватели имат съществени недостатъци: нелинейност на характеристиката фиг.3.: изходния им сигнал се влияе от промяната на амплитудата и честотата на захранващото напрежение: между подвижната и неподвижната част на магнитопровода съществуват значителни сили на привличане; изменението на температурата на околната среда води до изменение на изходния сигнал. Фиг.3. Характеристика на индуктивен преобразувател.
Посочените недостатъци ограничават използуването на обикновените индуктивни
преобразуватели. По широко приложение са получили диференциалните индуктивни преобразуватели. Те се състоят от два обикновени индуктивни преобразуватели с обща котва
/фиг.2..б./ Като за малки премествания е показана на фиг.4 а, а за по-големи премествания на фиг.4.б. Преобразователната характеристика на диференциален преобразувател е показана на фиг.5. Както се вижда тя има значително по-голям линеен участък в сравнение с този на обикновените индуктивни преобразуватели. Тя преминава през началото на координатната система, при което се променя фазата на сигнала.
Фиг.4. Диференциални типове индуктивни преобразуватели.
Фиг.5. Характеристика на диференциални индуктивни преобразуватели.
Принципът на действие е следния: при неутрално положение на котвата импедансите на двете половинки на преобразувателя са равни. Когато котвата се измести от неутралното си положение, под действие на силата Р, магнитното съпротивление на едната половинка се увеличава, а на другата намалява. Това предизвиква разбалансиране на моста и на изхода се получава сигнал пропорционален на преместването. При пълна симетрия на двете половинки т.е. при неутрално положение на котвата, изходния сигнал е равен на нула. Пълна симетрия на практика се получава трудно. Поради това при неутрално положение на котвата се получава някакъв начален сигнал. Индуктивните преобразуватели се използуват за измерване на премествания от 01 mm до 200 mm, а така също и всякакви величини, които могат да се преобразуват в премествания. Използуват се за контрол на линейни размери, за определяне на дефекти в машинни части или нежелателни примеси на метали и др. Индуктивните преобразуватели притежават редица предимства: проста и здрава конструкция; голяма надеждност; възможност за включване към източник с промишлена честота на тока; сравнително голяма мощност на изходния сигнал; висока чувствителност; диференциалните притежават добра линейност на преобразователната характеристика и независимост на изходния сигнал от температурата на околната среда. Към недостатъците трябва да се отнесат; наличие на сили на привличане; влияние на колебанията на амплитудата и честотата на захранващото напрежение върху стойността на изходния сигнал и др.13.3 Капацитивни преобразуватели. Капацитивните измерителни преобразуватели представляват кондензатор, чийто капацитет се променя под въздействието на измерваната неелектрическа величина. Капацитетът на плоскопаралелен кондензатор, състоящ се от два електрода, се определя чрез израза: C=ε Fd , 5.2.
Където: ε - диелектричната проницаемост на средата, ; F -ефективна площ на електродите /плочите/, m2 ;
Измерваната величина може да бъде свързана с
промяната на разстоянието между пластините, с промяна на повърхността им, с промяна на диелектрическата проницаемост на средата между електродите или с изменението на диелектричните загуби на кондензатора. В последните два случая капацитивните преобразуватели се използуват за анализ на състава на веществата, защото диелектрическата проницаемост и загубите на функции на свойствата им. Промяната на
диелектрическата проницаемост на веществото между електродите се използува за измерване на ниво на течни и насипни материал. В случая се използува разликата между диелектричната проницаемост на въздуха и течността или насипния материал. С промяната на нивото се променя диелектричната проницаемост на диелектрика между електродите. Преобразувателите на ниво се изпълняват във вид на плоскопаралелни или цилиндрични капацитивни преобразуватели /фиг.6/.
Фиг. 6. Капацитивен преобразувател за измерване на ниво на течности.
Пълният капацитет на кондензатора се определя като сума от два паралелно свързани кондензатора – С1 -на частта запълнена с течност и С2 -на частта извън течността С промяна на еквивалентната диелектрична проницаемост може да се преобразува дебелината не лентов материал, движещ се между плочите на плосък кондензатор /фиг.7/, или влажността на материал движещ се по гумено-лентова транспортна лента. Фиг. 7. капацитивен преобразувател Тъй като диелектричната проницаемост зависи и от температурата на диелектрика, то капацитивните преобразуватели с успех могат да се използуват за измерване на температури, главно в интервала – 10-100°С. Като диелектрик се използуват титанови съединения, диелектричната проницаемост, на които зависи от температурата
Фиг.8 Капацитивен преобразувател където Х е преместване на подвижния електрод спрямо неподвижния. С датчиците които са показани на фиг. 8, могат да се измерват премествания и други технологични величини, които се преобразуват в премествания. За повишаване на точността и чувствителността на тази конструкция преобразуватели, се използува и диференциален тип /фиг.9 /, линейни "а" и ъглови "б". Капацитивните преобразуватели притежават следните предимства: висока чувствителност, малка инертност, малки габарити и възможност за приспособяване на електродите в зависимост от целта на измерването.
Основен недостатък на капацитивните преобразуватели се явява грешката, предизвикана от паразитните капацитивности на свързващите проводници. Поради което на екранирането на съединителните проводници и правилният избор на точката на заземяване трябва да се отделя специално внимание. Освен това тези преобразуватели се нуждаят от захранващи източници с повишена честота, което в реални условия не винаги е осъществимо. Тъй като и при високите честоти съпротивлението им е голямо, а изходната мощност малка, капацитивните преобразуватели трябва да работят винаги с усилватели. За избягване на индуктираните смущения, връзката между преобразувателя и усилвателя се осъществява с
екранирани или коаксиални кабели.
4


14. Устройства за измерване на
преместване
и скорост на преместване
4.1. Измерване на ъглово
преместване и ъглова скорост.
А) измерване на ъглово
преместване (ъгли).
В системите за
автоматично регулиране често се
налага да се измерват ъглови
положения на валове ъгли на
разсъгласуване между тях. За целта
най-голямо разпространение са
получили индукционните селсини. По
конструкция селсините са аналогични
на електрическите машини за
променлив ток. Ще разгледаме две
разновидности на селсините.
Когато намотката за възбуждане
се разполага на статора и се прави
еднофазна, тогава статора се
изпълнява с явно изразени полюси.
В този случай на ротора се
разполагат три намотки, съединени
в звезда като при това
електрическите им оси са
разположени не 180 о . Трите края
на тези намотки се извеждат на три
пръстена на колектора.. Селсин от
този тип е показан на фиг . 1
Фиг.1
Фиг.
2.
Ако намотката за възбуждане се
изпълнява трифазна и се разполага
на статора (фиг . 1 .б) то роторът
се прави явно изразен на не го се
навива еднофазна намотка. Тази
намотка се съединява към два
колекторни пръстена, разположени на
оста на ротора.
Двата типа селсини могат да се
използуват в два различни
режима:
индикаторен
трансформаторен.
Индикаторен режим . В този режим се
използуват два селсина: селсин
датчик (СсД) и селсин приемник
(СсП), роторите на които са
включени в обща еднофазна
променливотокова верига, както е
показано на фиг. 2.. Статорните
намотки на СсД - S1,S2,S3 са
съединени със със статорните
намотки СсП - S1/,S2
/,S3/
Завъртайки ротора на селсин датчика на
ъгъл α, във веригата на статора
се създават токове i1,i2,i3, които
предизвикват магнитен поток на
намотката на статора nа селсин
приемника, взаимодействието на който с
магнитния поток на ротора на СсП
предизвиква вьртелив момеет Мсп . В
резултат на този момент ротора на СсП се
завърта на ъгъл β .
Големината на този момент
може да бъде определена по формулата
MСсП = Mmax f(α – β)
Кьдето:
Mmax - - максимален момент
на селсина:
(α – β) = θ - ъгъл на
разсъгласуване.
Зависимостта на MСсП от ъгъла раз
съгласуване на селсина, работещ в
индикаторен режим е показана на фиг.3.
От фигурата се вижда, че при малки ъгли
на разсъгласуване
MСсП = Mmax . θ
От гледна точка на намаляване грешката
голямо значение има стръмността на
характеристиката f(α – β).
Индикаторната схема н»
включване на селсина има свойството на
обратимост, т.е. завъртайки силсин
приемника на ъгъл β1- , ще получим
M/СсП = Mmax f(β - α )
Ако двата селсина са еднакви, то MСсП =
M/СсП. Тези два момента се стремят да
уравновесят ъглите β и α и при тяхното
равенство MСсП = M/СсП стават равни на
нула. От това следва, че моментите на
въртене селсините имат синхронизиращ
характер.
Трансформаторен режим.
Тази схема на включване се използува за
създаване на изходно напрежение, което
по величина и по знак еднозначно
определя ъгъла на разсъгласуване между
осите на селсините. Схемата на
включване на селсините в
трансформаторен режим е показана на
фиг.4.
Селсин датчикът е свързан със
задаващия вал, а селсин приемника с
изходния вал. Напрежението на краищата
на намотката на ротора се явява изходно
напрежение на схемата.
Да допуснем, че роторите на двата
селсина са неподвижни и. образуват с
първата фаза на статорите съответно
ъглите Sα и Sβ. Тогава може да се покаже,
че в намотката на ротора на селсин
приемника се индуктира е.д.н.
E2= Emax cos(ωt).cos(β-α)
При β = π/2, ще имаме
E2= Emax cos(ωt).sin(α)
По такъв начин при неподвижен ротор и
β = π/2 изходното напрежение на селсин
приемника е пропорционално на косинуса
на ъгъла на завъртане на ротора на
селсин датчика.
Да закрепим ротора на селсин приемника
по такъв начин, че при неподвижна ос на
намотката на фазата на ротора те да
бъдат изместени по отношение на
съответните намотки на ротора на 90° в
посоката на въртене
При завъртане на изпълнителната ос на
ъгъл β намотката на ротора ще бъде
преместена относно намотката на
статора Sb1 на ъгъл β+ π/2
Тогава изходното напрежение. ще бъде
U2= U2max cos(ωt).sin(α - β )
От последната формула се вижда,че това
напрежение е пропорционално на синуса
на ъгъла на разсъгласуване между
командната и изпълнителната оси.
където АГ^ е коефидаент на
трансФорматда на селсина.
Б). Измерване на скоростта
на ъглови
премествания
(скорост на
въртене).
В корабните системи за регулиране и
контрол честотата на въртене намират
приложение измервателните устройства
със следните типове чувствителни
елементи:
- механични центробежни
елементи;
- хидравлични центробежни
елементи;
- магнитоиндукционен
елементи;
- тахогенераторни елементи;
- стробоскопични елементи.
Да се спрем само на магнитоинционнте и
тахогенераторнит тъй като те са намерили
приложение в електрическите системи за
контрол и регулиране.
На фиг..5 е изобразено измерително
устройство с магнитоиндукционен
елементи чувствителен елемент.
На вала I, скоростта на въртене на кой
то се измерва е закрепен магнит 2 с
магнитопровод
4. Във
въртящото се
магнитно поле
на този магнит
се намира чаша 3, закрепена на ос 5.
В чашата се индуктира е.д.н., създаващо
вихрови токове. Взаимодействието на
магнитното поле на вихровите токове с
магнитното поле на въртящия се магнит
създава момент, големината на който
зависи от честотата на въртене и който се
стреми да завърти чашата в страната на
вала.1. На този момент противодействува
момента на спиралната пружина 6.
Равновесното положение зависи от
скоростта на въртене. То се индицира или
с помощта на механически свързана с
вала стрелка 7,или се преобразува в
електрическия сигнал с помощта на един
от разгледаните преобразователи на
механично преместване в електрически
сигнал.
На този принцип на действие са
построени измервателните устройва от
типа ТКМ и ТКМС, намерили приложение
в корабните системи за кон-трол и
управление.
По-голямо приложение са намерили
тахогенераторните измервателни
устройства. Те представляват
миниатюрен генератор на постоянен или
променлив ток, вала на който е твърдо
свързан с вала на който се измерва
ъгловата скорост. Изходна величина на
тахогенератора се явява напрежение,
пропорционално на скоростта на въртене.
U= Ke.Ф.ω
Кьдето:
- Ке - коефициент, зависещ от
конструкцията и схемата на
котвата;
- Ф - поток на възбувдане;
- ω- ъглова скорост.
Ако потокът Ф се създава от постоянен
магнит то е.д.н ще зависи само от
скоростта на въртене.
На фиг. 6 а, б са показани тахогенератори
с постоянни магнити, а на фиг.6 в,
променливотоков генератор.
Променливотоковите тахогенератори се
делят на
синхронни и асинхронни.
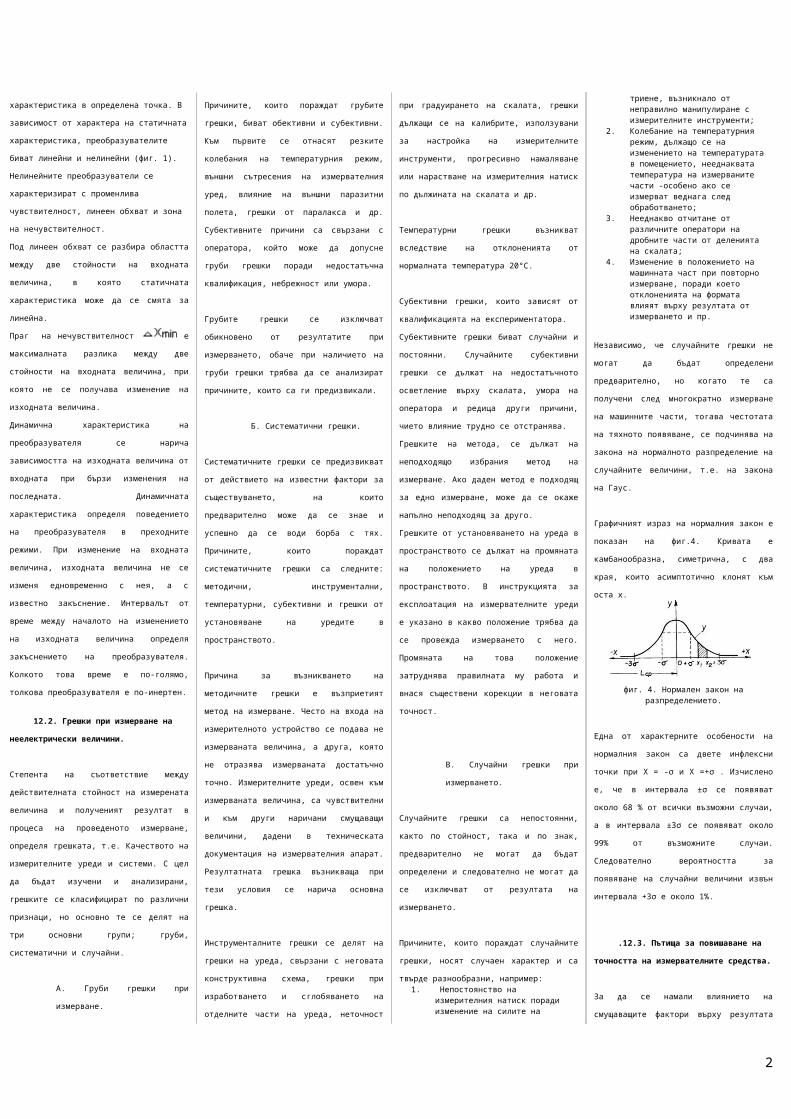
Тахогенераторите от синхронен тип
представляват малка синхронна машина с
ротор вьв вид на постоянен магнит .
Изходно-то напрежение на такъв
генератор има амплитуда и честота,
пропорционални на скоростта на въртене.
Изходното напрежение обикновено се
изправя с помощта на токоизправител
Този тахогенератор има два основни
недостатъка:
- изходното напрежение има
променлива честота, което
затруднява неговото
използуване в схемите за
променлив ток;
- тахогенераторът не е
чувствителен към
изменението на
направлението на въртене.
От тези недостатък е свободен
асинхронния тахогенератор.
Конструкцията на асинхронния
тахогенератор е подобна на
конструкцията на двуфазния асинхронен
двигател Намотката на възбуждане на
тахогенератора се захранва от мрежа с
променлив ток, а в изходната намотка се
индуктира в.д.н., имащо честота на
мрежата и амплитуда, пропорционална
на скоростта на въртене При изменение
направлението на въртене фазата на
изходното напрежение се изменя на 180°.
4.2. Устройства за измерване на
линейно преместване и
скорост на линейно
преместване.
Когато разглеждахме различете тилове
пасивни датчици видяхме, че те служат за
преобразуване на преместване в
електрически сигнал Освен това
отбелязахме, че не са редки случаите
когато в едно измервателно устройство
чувствителният елемент и
преобразователят могат да бъдат
обединени в един елемент. Така
например, на фиг. 7 е показана схема на
измервателно устройство с индуктивен
датчик, служещ за измерване на линейни
премествания. Аналогично, за измерване
на линейни премествания могат да бъдат
използувани също така капацитивни и
реостатни датчици.
Ф
иг. 7
Устройствата за
измерване на
скорости на
линейни премествания (линейни скорости)
са основани на прости преобразования на
тези скорости с помощта на
преобразователи от специален тип. Ако
имаме ограничено линейно преместване,
то скоростта на това преместване може
да бъде измерена с помощта на
устройството схематично показано на
фиг.8.
При преместване на буталото Б на
разстояние х се създава разлика в
налягането от двете му страни
ΔPБ = к dx/dt
тук К - коефициент на пропорционалност.
Възникващото усилие се възприема от
пружината Пр. Допускайки, че
характеристиката на пружината е
линейна, ще получим
(ΔPБ.SБ)/C = yi
Където: S-лице на буталото; С –
коефициент на еластичност на
пружината.
На базата на тези две уравнения, ще
имаме
y(t) = (KS/C).dx/dt
Преместването у(t) се преобразува в
електрическа величина с помощта н един
от известните
датчици.
В редица случаи може
да се получи на
изхода на
измервателното устройство сигнал,
пропорционален на скоростта на
преместване с помощта на прости
диференциращи вериги ( фиг.9).
Както е известно, напрежението U(t) на
изхода на реална диференцираща верига
е равно на производната на сигнала на
входа
7

15. Измерване скорости на неограничени
премествания (лагове)
15.1. Общи сведения.
За измерване скорости на
неограничени премествания ( подвижни
обекти по отношение на някаква среда) се
използуват различни методи и разнообразна
апаратура. Класификацията на приборите ,
предназначен за измерване скоростта и
изминатия път на кораба (лаговете) е показана
на фиг. 1.
Хидродинамични лагове. .
Принципът им на действие е основан на
измерване на хидродинамичното налягане,
създаваемо от скоростния напор на
надбягващия поток вода при движението на
кораба. Грешката на хидродинамичния лаг
като правило е нестабилна. Основните
причини са дрейфа на кораба, диферента на
корпуса на кораба, обрастването на корпуса,
клатенето и изменението на района на
плаване.
Относителни лагове. Днес на
корабите се използват индукционни,
хидродинамични и доплерови лагове,
измерващи скоростта на кораба, относно
водата.
Индукционни лагове. Тяхното
действие е основано на свойството на
електромагнитната индукция. Съгласно това
свойство при преместване на проводник в
магнитно поле в проводника се индуктира
е.д.с., пропорционално на скоростта на
неговото преместване. С помощта на
специален магнит, разположен под дъното на
корпуса на кораба се създава магнитно поле .
Обема вода под дъното на корпуса на
кораба,на който въздейства магнитното поле
може да се разглежда като множество
проводници, в които се е индуктира е.д.с.,
величина на което дава информация за
скоростта на движение на кораба.
Абсолютни лагове.. Под
абсолютни се разбират лаговете, измерващи
скоростта на кораба по отношение на дъното
на плавателния басейн. Разработените днес
абсолютни лагове се явяват
хидродинамичните, които се делят на
доплерови и корелационни.
Доплеровите са
хидроакустични, като техния принцип на
работа се заключава в измерването на
доплеровото изменение на честотата на
хидроакустичния сигнал, който се изпраща от
кораба и се отразява от дъното на
плавателния басейн. Те позволяват да се
постигне точност на измерване на скоростта на
кораба до 01 % с разрешаваща способност
0.01 възел. .
Корелационни лагове. Техният
принцип на действие се заключва в измерване
на времевото изместване на отразения от
дъното акустичен сигнал, приет от разнесени
по дъното на плаващия обект акустични
антени. Отличават се с висока точност,
поради факта, че скоростта на
разпространение на звука във водата не
оказва влияние на точността и са по надеждни
при клатене на корпуса на плаващия обект на
вълнение.
Ще разгледаме някой от тях,
намерили приложение за измерване скоростта
на кораба.
15.2. Принцип на действие на
основните видове лагове.
15.2.1. Хидродинамичен лаг
Най-голямо приложение за
измерване скоростта на кораба са намерили
хидродинамичните лагове . Принципът на
действие на хидродинамичния лаг е
Фиг.1.
основан на измерването на хидродинамичното
налягане, създаваемо от скоростния напор на
водата при движение на кораба и
хидростатичното налягане. Приемната тръба 1
(фиг. 1.) с канали 3 и 6 се монтира под дъното
на кораба така, че приемните отвори 2 и 7 да
бъдат извън границата 5 на турбулентния
слой, който се създава от движението на
кораба. Приемните отвори 2 и 7 са насочени
съответно към носа на кораба и надолу.
Ако корабът не се движи, то под действието на
статичното налягане на водата Pc ,
предизвикано от газенето на кораба, водата в
двете тръби ще се повдигне до нивото на
вoдолинията WL.
При движението на кораба под действието на
скоростния напор на водата възниква
хидродинамичен напор който предизвиква
повдигане на водата в тръбата 3 на някаква
височина h над водолинията. Зависимостта
между височината на повдигане на течността и
скоростта на кораба се определя по
формулата на Ойлер:
Кьдето: g = 9,81 ч/ сек. - земно ускорение.
Използуването на лаг с такава скала е
неудобно, тъй като дължината и трябва да
бъде няколко метра. Освен това тя ще бъде
квадрати на. о постоянно изменяща се нула,
зависеща от газенето. Ето защо в
хидродинамичните лагове налягането се
измерва с помощта на диференциални
манометри.
Двуканална хидравлична тръба II / фиг. 2 / чрез
тройник се съединява към камерата на
диференциалния манометър, разделен от
мембраната 4 на две части. В долната част
се подава сумарното на-лягане, а в горнати
араз крана 9 - статичното налягане Рс.
Статичното налягане в долната и горната
части на камерата взаимно се компенсира и т
мембраната ще действува само
хидродинамичното налягане Рд. По такъв
начин се изключва влиянието на
изменението на газенето на кораба на
показанията на лага под действието на
хидродинамичното налягане Рд мембраната 4
издига лоста 5, кой-то отклонява стрелката 7
на манометъра. Тъй като хидродинамичното
налягане зависи от скоростта Vк , то скалата
може да бъде градуирана във възли
Да определим зависимостта на
хидродинамичното налягане от скорост та на
кораба Vк • В първия пример / фиг. 1/
налягането се уравновесява от силата на
тежестта на стълба на водата.
Фиг. 2.
При напречно сечение на тръбата 5 = 1 см. ,
пресмятайки теглото на водния стълб, може да
се определи зависимостта на Рд от Vk .
Рд = γ h.s
където γ - специфично тегло на водата.
Поставяйки значението за h , ще получим
Рд = γ (Vk/2g)
От получената формула за различни
значения на Vk, може да се првсметне скалата
6 на манометъра във възли.
При плаване в плитководие не е удобно да се
използува приемна-та тръба II, тъй като тя
увеличава общото газене на кораба. Ето за-що
с помощта на два тройни крана 1 и 9 вместо
тръбата 11 към манометъра 3 се включват
тръбите 2 и 10. Сумарното налягане се
подава по тръбата 2, а статичното по тръбата
10. Използуването на това устройство /
тръбите 2 и 10 / в открито море не е
желателно, тъй като при килове клатене носа,
а следователно и тръбата 10 ще излизат от
водата и работата на лага ще бъде
неустойчива.
Изведената зависимост на Pд от Vk е
справедлива само за идеални течности, под
който в хидродинамиката се разбира
еднородна, непрекъсната, несвиваема и без
вискозитет течност. Морската вода не
удовлетворява тези условия в резултат на
което тя не е идеална течност. Освен това,
хидродинамичното налягане зависи от
мястото на установяване на приемната тръба
и формата на корпуса на кораба. Тези фактори
се отчитат с помощта на поправачен
коефициент „к” в резултат на което
последната формула приема вида:
Рд = к γ (Vk/2g)
Този коефициент се определя по опитен път
при изпитване на лага. и има вида изобразен
на фиг. 3. С някакво допускане в работния
диапазон на скоростите на кораба тази
криваа може да бъде заменена с права линия
к= а + bVk
кьдего a - значението на k. при Vk- = 0 ; bVk-
променлива съставна, зависеща от скоростта
на кораба.
Хидродинамичните лaгове са снабдени със
специални регулатори за компенсация на
постоянната а и променливата Vк., а също
така за изключване на грешките, вьзник-ващи
от замяната на кривата за коефициента k с
права линия. Фиг. 3
Лаговете са снабдени и с интегриращо
устройство, което непрекъснато интегрира
скоростта и показва изминатия път S.
15.2.2. Електромагнитен лаг
В последно време се разработват и лагове,
принципът на действие на които е основан на
използуването на принципа на
електромагнитната индукция На дъното на
кораба / фиг. 4. / се установява приемно
устройство, състоящо се от П образен магнит
5, 6 и три сребърни електрода 3, монтирани в
диелектрич-ната основа I. По намотката 6 на
електромагнита се пропуска променлив ток.
Полюсите на сърцевината 5 са обърнати към
водата. Те създават в нея променливо
магнитно поле
B = Bm.sin( ωt)
При движение на кораба със скорост Vк
магнитните силови -линии 2 пресичат морската
солена токопровеждаща вода и на основата на
явлението на електромагнитната индукция
създават в нея потенциална разлика, снема с
електродите 3 и равна
U = B.l.Vk
където l- разстояние между електродите.
По такъв начин, напрежението снемано с
помощта на електродите ще бъде
пропорционално на скоростта на кораба Vk.
Използуването на променливо
електромагнитно поле позволява да се
изключи появата на е.д.н. на поляризция, която
би внасяла грешки. На точността на
показанията на прибора оказва влияние
граничния слой на водата, увлекаем от корпуса
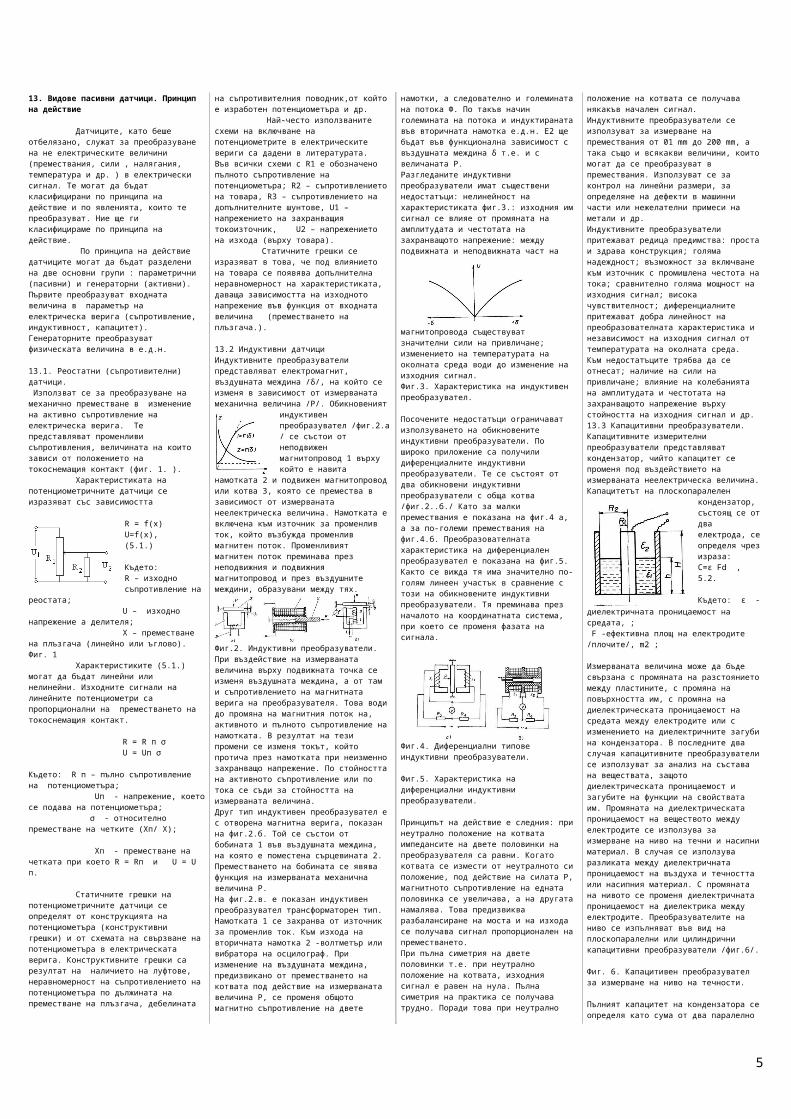
т кораба. До самите електроди скоростта на
движение на граничния слой е равна на нула и
се увеличава с отдалечаване от корпуса до
максимална стойност, определена от
скоростта на движение на кораба. Но
измереното напрежение не е само от
Фиг. 5
граничния слой, а от цялата дълбочина на
граничния слой, т.е го носи интегрален
характер. Пограничният слой вода, увлекаем
от корпуса на кораба, намалява сигнала до
величина по-малка от сигнала, съответствуващ
на действителната скорост на кораба. Тази
разлика се отчита с помощта на поправки в
измервателната схема на лага.
Напрежението на сигнала и освен линейна
съставна съдържа и не-линейна съставна
Uksin(ω) т.е.
U = Uл.sin(ωt) +
Uksin(ωt)
Освен това напрежението на сигнала съдържа
квадратична грешка пропорционална на
магнитната индукция на поето и неговата
честота:
Uk cos(ωt) = ω B S
cos(ωt)
кьдето S – лице на полюса на
електромагнита
По такъв начин, сумарното напрежение на
сигнала ще има вида :
U = Uл.sin(ωt) +
Uksin(ωt)+ Uk cos(ωt)
Напрежението на сигнала се подава на
измервателната схема на лага, където се
преобразува във вид удобен за представяне на
оператора. Индукционните лагове, както и
хидродинамичните се явяват относителни, т.е.
те измерват скоростта на кораба относително
водата, а не относително дъното.
Индукционните лагове могат да измерват
скорост на кораба над 0,5 вьзла с точност
0,2 вьзла в морска вода със соленост от 2 до
36 %%.
По сравнение с хидродинамичните лагове
индукционните имат следните предимства:
- приемното устройство не излиза извън
корпуса на кораба, което позволява да
бъде използуван при плаване в
плитководие ни ледове;
- работи с по-голяма точност и при по ниски
скорости;
- напрежението. на сигнала има линейна
зависимост от скоростта на кораба;
- приемното устройство не се нуждае от
специални грижи;
- измервателната схема може да се монтира в
произволно желано
место, независещо от газенето;
- има малко тегло и малка консумирана
мощност, което от своя с на позволява
да бъде монтиран и на малкотонажни
кораби.
Недостатък на тези лагове е, че не могат да
бъдат използувани при плаване в сладки
води / езера, реки/.
10


16. Устройства за измерване на
разход .
Устройства за измерване на ниво
16.1. Устройства за
измерване на разход Общи сведения
Пoд разход се разбира количеството
вещество / течност /, протичащо през
напречното сечение на тръбопровод за
единица време. Различава се моментен
разход и среден разход за определен
промеждутък от време. Различават също
така обемен Q , м3/с, масов М, кг/с. и
тегловен разход G , кгс./с, свързани със
съотношението
M = ρ.Q; G
= γ.Q
кьдето ρ - плътност на веществото в
потока, кг/м3 ; γ -специфично тегло, кгс/м3
;
В измервателните устройства, намерили
приложение в корабните системи за
контрол и управление на пари или газове
се използуват следващите чувствителни
елементи:
анемометрични-
представляват въртележки,
честотата на въртене на
които е пропорционална на
скоростта на потока и
следователно на разхода;
дроселни елементи -
принципът на действие на
които е основан на
зависимостта на моментния
разход от разликата на
наляганията в дроселния
елемент установен в
тръбопровода;
хадродинамични елементи -
основани на зависимостта
на момент-ната скорост на
потока в дадена точка от
разликата между пълното и
статично налягане в тази
точка;
ултразвукови елементи - в
тях се използува
зависимостта на
изместването на фазата на
ултразвукови колебания,
разпространяеми в поток и
въздушна среда от
скоростта на потока и
следователно от моментния
разход;
индукционни елементи -
основани са на
зависимостта на е.д.н.
индуктирано при
движението на потока на
токопроводяща течност
между полюсите на магнит
от скоростта на потока;
колориметрични - тук се
използува зависимостта на
разхода от разликата на
температурите на потока до
и след установения в трь-
бопровода нагревател;
рогометрични елементи -
принципът им на действие е
основан на зависимостта
на разхода от
преместването на поплавък,
плаващ във вертикално
разположена на
тръбопровода тръбичка;
В корабните системи за контрол и
управление са намерили приложение
основно разходомерите с
анемометрични чувствителни елементи
и с индукционен чувствителни елементи
на които ще се спрем малко по
подробно.
Принципът на действие на
разходомерите с анемометрични
чувствителни елементи се заключава в
следното. В измеряемия поток се
помества лека балансирана турбинка,
въртяща се на лагери с малък
коефициент на триене. Турбинката под
действието на движещия се поток
извършва въртеливо движение. При
установена скорост,скоростта на
въртене на турбинката е
пропорционална на скоростта на потока.
Конструктивно турбинката може да бъде
изпълнена аксиално или радиално фиг.
1. Преобразуването на скоростта на
въртене в електрически сигнал може
да стане с помощта на различни
датчици: електромагнитни, оптоелек-
трически, радиационни и др. .Полученият
на изхода на датчика пулсиращ сигнал,
броя т пулсациите на който в единица
време е пропорционален на скоростта на
въртене на турбинката, след усилване са
преобразува в аналогов или цифров вид.
В индукцонните разходомери / фиг. 2 /
под действието на магнитното поле в
движещата се течност се индуктира
е.д.н., големината на която при
постоянни други параметри е
пропорционална на скоростта на потока.
Измерването на е.д.н. се осъществява
между две метални пластинки,
поместени в потока.
Големината на индуктираното е.д.н. в
потока течност се опре-деля по
формулата.
E = -B.D.υ
υ - скорост на
течноат-
кьето В – магнитна индукция ; Q-
количество разход; В - дължина на
тръбата
Фиг. 1.
Разликата на потенциалите между
електродите ще бъде пропорционална
на общия разход на течността ,
разстоянието между електродите и
магнитната индукция В . При извода на
това уравнение е прието, че
електропроводи -мостта на течността е
значително по-голяма от
електропроводността тръбопровода, а
дебелината на стената му е много по-
малка от диаметъра му.
Индукционните разхадомери с постоянни
магнитни полета имат редица
недостатъци: един от които се заключава
в това, че постоянният електрически ток
елекгролизира водата в резултат на
което се образуват газове. Последните
довеждат до промяна на електрическото
съпротивление на
веригата, а от тук и до грешки.
фиг.2
16.2. Устройства за
измерване на ниво.
Нивото на течностите / вода, масло,
нефт и др. / в резервоарите се определя
от височината, измервана от някаква
точка, приета за начало на отчитане.
В корабните системи за управление и
контрол при измерване на нивото на
течностите се използуват следващите
чувствителни елементи:
поплавкови елементи -
основани са на
пшдаржането на кухо тя-ло
на повърхността на
изменяемата течност от
Архимедовата сила;
капацитивни елементи –
принципът им на действие е
основан на зависимостта на
капацитета на кондензатор,
пространството между
пластините на който
частично е запълнено от
течността на която се
измерва нивото;
радиоактивни - в тях се
използува зависимостта на
поглъщане на гама лъчи от
плътността на средата, през
която те преминават;
термохидравлични –
принципът на действие на
тези елементи в ос-нован на
различието на
коефициентите на
разширение на течностите;
термостатични - основани
са на зависимостта на
топлинното раз-ширение на
запълнена с нагрята течност
тръба от нивото на
запълване на тръбата
Да разгледаме накратко принца на
действие на някой типове измервателни
устройства на ниво.
Поплавкови чувствителни
елементи. Основна част на елемента се
явява поплавък / фиг. 3/, представляващ
кухо метално тяло, имащо форма на
цилиндър или кълбо и поместено в
камера, съединена по принципа на
скачените съдове с резервоара в който
се измерва нивото.
Изходна координата на поплавковия
елемент се явява положението на
ръчката, свързана с поплавъка.
Преобразуването на механичното пре-
местване може да стане с помощта на
един от разгледаните датчици
Недостатък на поплавковите
чувствителни елементи се явява
възмож-
ността за грешни показания при
клатене на кораба, а също така ниска
чувствителност, предизвикана от
триенето на лостовите механизъм
Фиг. 3. Фиг. 4 Фиг. 5
Капацитивня чувствителни
елементи. Капацитивният чувствителен
елемент / фиг.4 / представлява
цилиндричен съд запълнен с течност.
нивото на която се измерва и поставен в
него прьт. Съдът и прътът обра-зуват
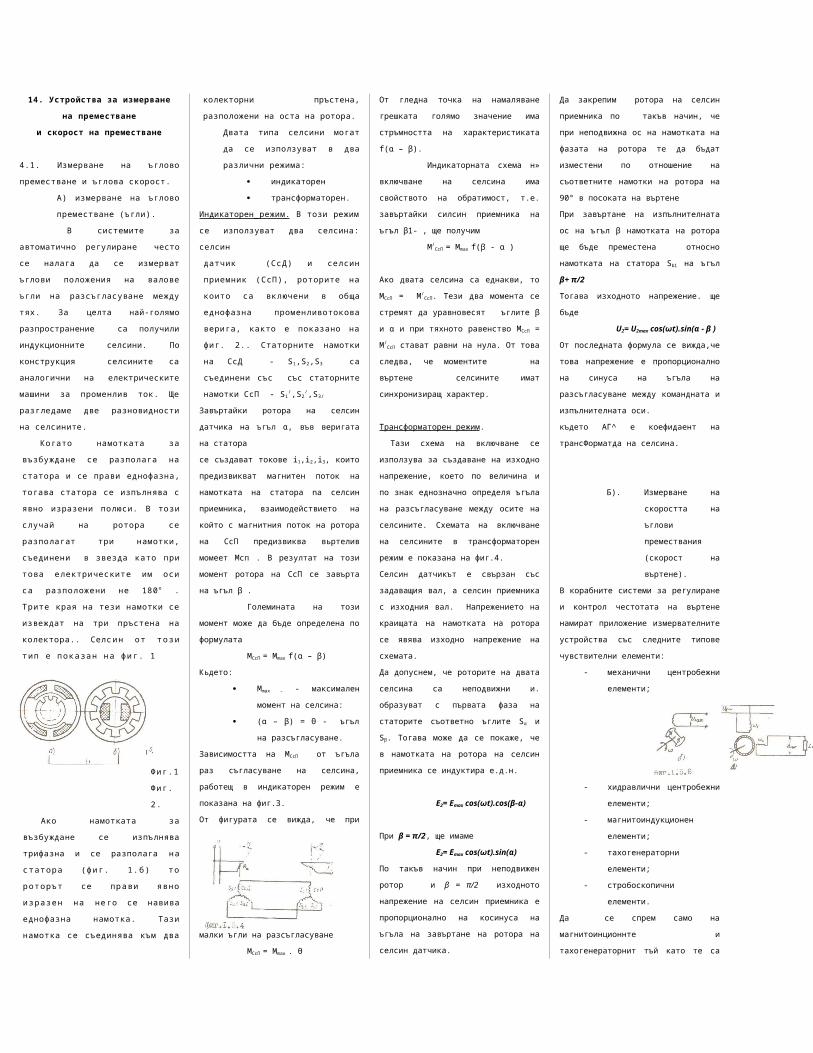
плочите на кондензатор, капацитета на
който е равен С = С1 + С2,
където: С1 _ капацитет на
долната част, запълнена с проводяща
течност; С2 - капацитет на горната част.
Сумарният капацитет С е линейно
зависещ от нивото на течността, се
явява изходна координата на
чувствителния елемент. Аналогично
вместо цилиндричен кондензатор може
да се използува и плосък кондензатор.
Радиоактивни чувствителни
елементи. Радиоактивният чувствителен
елемент / фиг.5 / съдържа източник на
гама излъчвания 2 и приемник 4, между
които е поместен съд 3, свързан с
резервоара в който се измерва нивото на
течността. От нивото на течността в
съда I зависи нивото на течността в
тръбата 3, а от тук и поглъщането на
гама лъчите. Източник на гама
излъчване служат радиоактивни
изотопи /кобалт-60/, а за приемник –
йонизираща камера. Йонизиращата
камера представлява съд с газ под
налягане. Потокът гама лъчи йонизира
газа в камерата. Възникващият
йонизационен поток зависи от
интензивността на непогьлнатото гама
излъчване и, следователно, от
контролируемото ниво.
Термохдравлични
чувствителни елеменги./ Фиг.6/.
Вътрешната част на елемента I е
свързана с резервоара в който се
контролира нивото на нагрятата течност.
Външната част на тръбата е запълнена с
кондензат При намаляване на нивото
на контролируемата течност се изменя
топлоотдаването към кондензата, тъй
като коефициента на топлоотдаване на
водата и парата към стената тръбата са
различни. В резултат на това се изменя
температурата и налягането в
затворената кухина 2; .изменението на
налягането к е еднозначно свързано с
нивото, възприемано от мембраната 3.
Термостатични
чувствителни елементи.
Термостатичните чувствителни
елементи / фиг. 7 / представляват
тръба, свързана о резервоара в който се
измерва нивото на нагрятата течност.
При изменение на нивото на нагрятата
течност се изменя температурата на
тръбата и нейното топлинно разширеше,
служещо за изходен сигнал на елемента.
Фиг. 6 фиг. 7
За правилното
функциониране на елемента тръбата
трябва да има топлинна изолация от
външната среда. Тези елементи се
използуват при условие, че
температурата на течността, нивото на
която се измерва е постоянна. Такъв
обект за контрол се явява нивото на
водата в барабаните на корабните парни
котли.
13
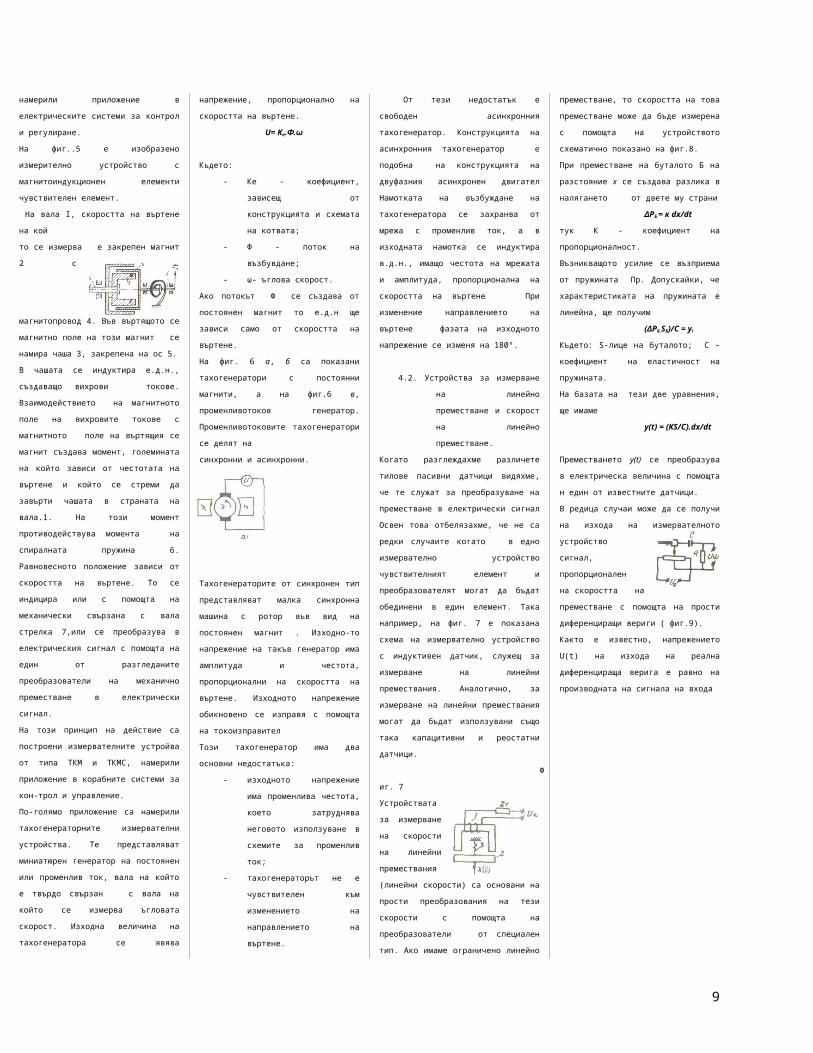
14

17. Устройства за измерване химически параметри на течности и газове.
17.1. Солемери.
Солеността на водата се явява важен технически
показател на нейното качество. Тя се определя от
общото количество, съдържащи се в нея хлористи
соли. Единица за измерване на соленост е градус
на Брандт/°Б/.
Един градус по Брандт съответства на
съдържанието на хлориди заедно с йодиди и
бромиди, което е еквивалентно на 10 мг NaCl или
6,06 хлор-иона в 1 л вода.
Най-точно солеността на водата може да бъде
определена на основата на химични реакции по
пътя на отчитане количеството реактиви,
участвуващи в реакцията. Тези методи за целите
на автоматичния контрол не са пригодни, тъй като
трудно се подават на автоматизация. Ето защо на
практика се използуват електрически методи за
определяне солеността на водата.
Принципът на действие на електрическите методи
е основан на зависимостта на специфичната
електропроводимост на водата от разтворените в
вея соля. Специфичната електрическа проводимост
χ - е величина, обратно пропорционална на
специфичното съпротивление ρ.
χ =1/ ρ; ρ = (R.S) / l
Където: R - пълно електрическо съпротивление на
проводникa; S - площ на напречното сечение; l -
дьлжина.
При постоянна температура на разтвора с
увеличаване на концентрацията на разтворените
сол неговата електропроводимост се увеличава,
при това между концентрацията на дадената сол и
електропроводността има еднозначна зависимост.
За чувствитвлен елемент на електрическите
солемери служи камера с електроди, поместени в
изследваната течност Към електродите се
включва вторичен прибор, измерващ
съпротивлението което оказва течността при
протичането на тока. Скалата на измервателния
прибор е градуирана в градуси по Брандт.
Електродите на солемера са подложени на
поляризация / на катода се отделят мехурчета
водород, образуващ се от ионите на водорода /, в
резултат на което се повишава съпротивлението на
разтвора, а оттук и появата на допълнителни
грешки. Това явление се изключва ако моста се
захранва с променлив ток.
Принципната схема на солемер на променлив ток
с неуравновесен мост е показана на фиг.1. Към
едни от диагоналите на моста се подвежда
променлив ток, а в другия се включва
измервателен прибор или усилвател.
Фиг. 1.
Съпротивленията R1, R2, R3, обикновено се изготвят
от манганин, а R5 от мед. Съпротивлението R4 с
нарастването на температурата се увеличава, а R5
намалява. Тези съпротивления се подбират така,
че тяхната сума при изменение на температурата в
определен диапазон да не се изменя.
Съпротивлението R4 с увеличаване концентрацията
на разтвора се намалява което довежда до раз
балансиране на моста. Аналогично са устроени и
електрическите солемери с автоматични
уравновесени мостове.
В корабните системи за контрол са намерили
приложение солемери от
типа СУВ и СПИ. Те се захранват с променливо
напрежение 220 в/400 хц.
и имат грешки в границите от 4 до 6 %.
17. 2. Кислородомери.
Друг важен технически показател, определя
качеството на водата е съдържанието на кислород.
Кислородосъдържанието се определя от
количеството на разтворения водата кислород и се
измерва в милиграми кислород, съдържащ се в
един литър вода.
Принципът на действие на кислородомерите е
основан на зависимостта на парциалното налягане
от съдържанието на кислород. На фиг.7.2, е
показана принципната схема на кислородомер.
Към един от диагоналите на неуравновесения мост
се подвежда ток от източника на постоянно
напрежение, а в другия се включва измервателен
прибор, скалата на конто е градуирана в
милиграми кислород на литър вода.
Съпротивленията R2, R3, както и в солемерите се
изготвят от манганин, а R1 и R4 от платина.
Глухата камера I е запълнена с чист водород.
Камерата 2 непрекъснато се запълва с кислород,
постъпващ от елекгролизатора 4.
Електролизаторът, към който се подава постоянен
ток, съдържа разтвор на КОН, при дисоциацията
на който се образуват иони на хидроксилна и калия.
Последните се събират на катода на който протича
реакцията
2K+H2O 2KOH + H2 I
в резултат на което се отделя водород. През
камерата 2 протича изследваната вода, от която се
отделя разтворения в нея кислород докато не се
установи определено равновесие между
концентрацията на кислорода, разтворен във
водата и този в средата на водорода над водата.
Водата от камерата 2 изтича през хидравличния
разтвор 3. Токът в диагонала на моста, както е
известно, се определя от зависимостта
Iм = K(R2.R4 –R1 R3)
Фиг. 2
където К - коефициент на пропорционалност.
При R2=R3 и ако в камерата 2 няма кислород,
топлопроводността от съпротивлението 4 към
стената на камерата се влошава тъй като топло-
проводността на кислорода е около 7 пъти по-
малка от топлопроводността на водорода. В
резултат на повишението на температурата
съпротивлението ще се увеличава с увеличаването
на кислорода, а съгласно формулата за тока, )
пропорционално на R4 , ще се увеличава и тока Iм.
По описания принцип са построени корабните
кислородомери от типа АКК. Те са снабдени с
охладител на контролируемата вода и регулатор на
температурата, регулатори на налягането на
контролируемата вода и стабилизатори на
захранващото напрежение.
17.3. Газоанализатори
Анализът на състава на димовите газове позволява
да се съди за процеса на горене в
парогенераторните установки и двигателите с
вътрешно горене. Ако за 100% се вземе обема на
сухите димови газове в разчет на 1 кг. гориво, то
CO2 +SO2 + CO + N2 + O2 = 100 %
Кьдето:
ако обозначим CO2 +SO2 = RO2 то при C0 = 0 /
пълно горене/ и O2=0 съвършено горене от горната
формула ще получим
RO2 + N2 = 100%
тук RO2 -величина, зависеща само от химическия
състав на горивото.
Практически съвършено горене няма. Отношението
на обема въздух
V , необходим за изгаряне на 1 кг. гориво, към
теоретически необходимия обем въздух V0, се
нарича коефициент на излишък на въздух α .
Величината α при икономично горене не трябва да
се отклонява от някакво оптимално за даденото
топлоизгарящо устройство. Недостатъка на въздух
довежда до непълно горене, а излишъкът до
отнасяне на топлината с подгретия въздух
Да обозначим обемното количеството RO2 в разчет
на 1 кг. гориво чрез VRO2 . Приблизително може
да се смята, че обемът на сухите димове газове е
равен на обема на въздуха V , израз.одван за
изгаря-не на това гориво. Тогава процентното
съдържание, ще бъде
RO2 = (VRO2 / α V0).100 %
Ако α = 1,
RO2 мах.= (VRO2 / α V0).100 %
От получените е съотношения ще имаме
α = ( RO2 мах / RO2 )
Съгласно последната формула величината α за
даденото гориво се определя от процентното
съдържание на CO2 +SO2 = RO2 в димовете
газове. Като правило горивата са със с малко
съдържание на SO2 поради което получавама
приблизителна с инженерна точност информация
за съдържанието на CO2 в изгорлрите газове в
корабните системи с външно или вътрешно горене.
Съставът на димовете газове най-точно и пълно
може да бъде анализиран с помощта на химически
газоанализатори. Обаче операциите, необходими
за целта не се поддават на автоматизация. За
автоматически анализ състава на газовете се
използуват различни електрически
газоанализатори.
Един от най-разпространете е електрическия
газоанализатор на СО2 е показан
на фиг. 3.а.
Към един от диагоналите на неуравновесен
електрически мост се подава постоянно
напрежение, а към другия се включва
измервателен прибор. Рамената на моста са
изготвени от платина и поместени в камери.
Камерите сьс съпротивления R1 и R3 запълнени с
въздух. През камерите със съпротивления R2 и R4
се пускат димови газове, съдържащи RO2 = CO2
+SO2 Топлопроводността на CO2, SO2 и Н2 са
близки към топлопроводността на въздуха, а
топлопроводността на СО примерно два пъти по-
малка. В резултат на това рамената R2 и R4 ще се
нагряват в резултат на което съпротивлението им
ще се увеличава. Токът в диагонала на моста ще
бъде
Iм = K(R2.R4 –R1 R3)
От формулата се вижда, че той е пропорционален
на тези съпротивления и, следователно, се явява
функция на съдържанието на СО2 . Знаейки
съдържанието на СО2 може да се определи и
излишъка на въздух α.
За да се отстрани влиянието на Н2 на показанията
на газоанализатора, тъй като топлопроводността на
Н - около 15 пъти голяма от топлопроводността на
С02 , пред прибора се установява камера за
доизгаряне продуктите на непълното горене.
17.4 .Електрически газоаранализатор на СО+Н.
Този прибор измерва продуктите на непълното
изгаряне в димовите газове - окис на кислорода и
водорода. Той възприема повишаването на
температурата при изгаряне на СО и Н в
присъствието на катализатор.
Съпротивленията R2. и R3 на неуравновесения мост
( фиг.3.б) се правят от манганин, а R4 и R1 от
платина. Камерата със съпротивление R4 е
запълнена с въздух, камерата R1 служи за
пропускане през нея на газовете, които ще се
анализират. Съпротивленията се нагряват до
температура 450-500°С. Под действието на
катализаторите СО и Н2 изгарят, температурата на
рамото се повишава, а следователно се повишава
и съпротивлението R1 . Мостът се разбалансирва и
протича ток пропорционален на R1 , респективно на
съдържанието на продуктите на непълното
изгаряне.


18. Устройства за първична обработка на информация от датчиците.
Общи сведения
18.1. Структура на интерфейса на цифровите микропроцесорни системи с аналоговите източници на информация.
Както вече е известно съвременният комплексно автоматизиран кораб (КАК) представлява човеко-машинен комплекс, състоящ се от разсъсредоточени по кораба микропроцесорни станции (контролери) обединени в мрежа за събиране, предаване и обработка на данни, осигурявайки ефективно управление както на отделните технически средства, така и на кораба като цяло. Общокорабната мрежа се състои от подмрежи, управляващи или контролиращи отделни процеси (енергетични, навигационни и др.)
Корабните ОУ като правило представляват динамични системи, които изменят своите физични характеристики и параметри (температура, налягане, сили, моменти и др. ) в широк диапазон под влиянието както на външни смущаващи въздействия (вълнение, вятър, течения, влажност, температура и др.) , така и от режима на експлоатация. Ето защо за управлението на тези обекти се използуват автоматични системи за контрол и управление. Структурната схема на система от първо ниво, състояща се от ОУ и ЦМПУ е показана на фиг. 1.
За съгласуване на аналоговите датчици с микропроцесорните устройства са необходими разнообразни периферни схеми (фиг. 1.13.2.). Отначало температурата, налягането и другите физически величини, явяващи се обект за контрол или управление, се преобразуват с помощта на датчици в електрически сигнали.
Фиг. 1..Изходните сигнали от датчиците
представляват аналогови величини, които не могат в такъв вид да бъдат обработвани от ЦМПУ. Ето защо изходните сигнали от датчиците трябва да
бъдат преобразувани в цифров кодЧесто изходните сигнали от датчика са
много малки по величина като електрически величини, а изходното съпротивление на датчика е много голямо. В такива случаи преди подлагането на сигнала на аналого-цифрово преобразуване (АЦП) се извършва предварителна обработка: усилване на сигнала и преобразуване на изходното съпротивление на датчика. Когато обекта се характеризира с голямо брой управляеми и управляващи величини, за преобразуване то на които са необходими много датчици, се използува аналогов мултиплексор (комутатор), целта на който е с помощта на един аналого-цифров преобразовател да се обслужват голямо количество датчици. За правилното преобразуване на бързо изменящите се сигнали в цифров код са необходими специални устройства известни като устройства “следене и запомняне” (sample hold – S/H)
За въвеждането на цифровите сигнали от изхода на аналого-цифровите преобразователи
в ЦМПУ се използуват допълнителни интерфейсни адаптери. В качеството на такива се изпзолзут големи интегрални схеми, представляващи паралелни или серийни интерфейсни адаптери. През последните години се произвеждат АЦП, които могат да се включат непосредствено към шината данни, а някой едночипови микрокомпютри има вградени АЦП с всички съгласуващи схеми и схеми за “следене и запомняне”
Фиг. 2
8.2. Предварителна обработка на
информацията. Многообразието от датчици,
построени на различни принципи, имат разнообразни изходни сигнали. Така например, датчиците за измерване на температура: в термодвойките функция на температурата е изходното напрежение; в терморезистора – съпротивлението, а фотодиода – тока. Подобни случай има и в датчиците за измерване на сили, налягания, скорости и др.
Табл. 1.Независимо от вида на електрическия параметър те имат една обща характеристика – изходния им сигнал е непрекъсната функция, т.е. те са аналогови. Има датчици с бинарен, цифров или квазицифров сигнал на изхода. Те работят на принципа включено-изключено. Друг тип датчици са тези които регистрират изменение на честота, фаза, временен интервал.
Преди преобразуването на различните сигнали в цифровото устройство е необходима предварителна обработка. Характера на предварителната обработка зависи основно от изходния сигнал на датчика (Табл.1.)
Когато изходните сигнали от датчиците са много слаби се налага те да бъдат усилени с помощта на операционни усилватели. Основните схеми на използуване на операционните усилватели (ОУ) са показани на фиг. 2. Използуването на една или друга схема е необходимо изисква пълен анализ на параметрите и характеристиките на сигналите. Изхождайки от
анализа и целта трябва да се избере подходящ операционен усилвател .
a) инвертиращ усилвател б) неинвертиращ усилвател в) диференциален
Фиг. 2. В най-общ вид операционните усилватели могат да бъдат класифицирани както следва:
1. ОУ с общо предназначение (работят с два захранващи източника и имат сравнително ниски цени).
2. ОУ с един захранващ източник. Имат подобни на първите характеристики. Поместват се по два или по четири в един корпус
3. ОУ с нисък коефициент на собствен шум. И по добри характеристики от ОУ с общо предназначение;
4. Високо точни ОУ. Имат малък дрейф на нулата и висок коефициент на усилване;
5. ОУ с високо входно съпротивление. Изпълнени са на базата на полеви транзистори;
6. Бързодействащи ОУ. Имат широка честотна лента, което позволява усилване на импулси с стръмни фронтове;
7. ОУ с малка консумация на енергия. Създадени са на базата на CMOS технология и обикновено са предназначени за работа от автономен източник на енергия.
ОУ се използуват във много видове обработка на сигналите, поради което те се явяват един от основните електронни елементи в схемите за предварителна обработка на сигналите .
18.3. Схема за следене и запомняне. (S/H – Sample Hold) . Създаването на АЦП с голямо бързодействие и висока разрешаваща способност е трудно и такива АЦП струват скъпо. За частично решаване на този проблем може пред АЦП да се включи схема S/H (фиг. 3.). Принципът на действие на тази схема е показан на фиг. 3..
Фиг. 3
Когато ключът е затворен , схемата работи в режим на “следене” и напрежението на кондензатора С бързо нараства до Uвх. Когато ключът е отворен , схемата работи в режим на запомняне, напрежението върху кондензатора не се променя, докато не се премине отново в
а) б)
Фиг. 4режим на “следене”. Докато схемата е в режим на “запомняне”, АЦП може да преобразува изходното и напрежение.
На практика командата за старт на преобразуването първо превключва схемата за следене и запомняне в режим на “запомняне” и след известна задръжка стартира преобразуването на аналоговото напрежение в цифров код от АЦП.
На практика в режим на “следене” източникът на входния сигнал не може да осигури необходимия ток за зареждане на кондензатора. Когато кондензаторът е зареден и се намира в режим на “запомняне” той се разрежда през входното съпротивление на АЦП, поради което напрежението му спада. Очевидно, че за решаване на този проблем е необходимо да се намали изходното съпротивление на източника на сигнала и повиши входното съпротивление на АЦП. За целта се използува схемата за преобразуване на съпротивление, където съпротивлението R се приема равно на нула. Операционният усилвател ОУ1 осигурява зареждането на кондензатора С, а операционният усилвател ОУ2 образно казано предпазва кондензатора С от разреждане поради голямото си входно съпротивление.
Една много често използвана в практиката схема е показна на фиг. 5(б) Тук сигналът за образната връзка на ОУ1 се взема не от изхода на ОУ1, а от изхода на ОУ2. Когато ключът е затворен, схемата се намира в режим на “следене” електрическите процеси са същите, както във вариант (а) на схемата. Предимството на схемата е в режим на “запомняне.” Когато ключът К е отворен, операционният усилвател ОУ1 е без обратна, което означава, че той има много голям коефициент на усилване и изходното му напрежение при съвсем малки входни напрежения
ще достигне максималната си стойност. При затваряне на ключа К кондензаторът С ще се зареди много бързо, с което се повишават динамичните характеристики на схемата S/H.
18.4. Аналогов мултиплексор. Причините за аналогово мултиплексиране на сигналите от датчиците основно са две. Първо
стойността на АЦП с добри параметри като правило е голяма, поради което за преобразуване в цифров код на десетки аналогови величини е по удобно да се използува един АЦП, но с аналогов мултиплексор (комутатор ) на входа. Второ при комутиране на един аналогов сигнал е необходим един ключ вместо n ( n -разрядност на АЦП) ключа, ако първо се извършваше преобразуване на аналоговия сигнал в цифров код, а след това се кумутираха съответните сигнали от датчиците.
Освен това използуването на мултиплексор позволява един усилвател, схема S/H и АЦП да обслужват последователно във времето всички входни сигнали, като така цената на схемата става по ниска. Действието на мултиплексора е показано на фиг.5, където е илюстрирана проста 8 канална система за интерфейс на микропроцесора с аналоговите датчици.
Фиг. 5
В практиката съществуват два типа мултиплексиране аналоговите сигнали от датчиците.
- с обща земя и мултиплексиране на един проводник, водещ към датчика. Този тип е показан на фиг. 5.
- диференциален вход – мултиплексират се двата проводника, идващи от датчика, поради което мултиплексорът има два изходни проводника, които са свързани към диференциален усилвател. Тази схема се използува при дълги проводници от датчиците, когато се налага да се елиминира влиянието на синфазните смущения. Най-често срещаните вградени в едочиповоте микрокомпютри с АЦП мултиплексори или мултиплексори изградени във вид на отделни интегрално схеми са с 8 или 16 канала. На практика се налага комутиране на значително по голям брой канали. В тези случаи се използуват схеми с каскадно мултиплексиране, свързани по схемата, както е показано на фиг. 6.
Фиг. 6В задачите, свързани с интерфейса на
микропроцесора с аналоговите датчици съществуват множество разнообразни ситуации, диктувани от решаваните задачи. Например ,често се налага снемане на сигнали от датчиците в цифров код в един и същ момент. Очевидно, че разгледаната схема с използуване на един S/H този проблем не може да бъде решен. В този случа се използуват схеми S/H за всека аналогов сигнал, като управлението им става едновременно, в резултат не което те запомнят всяка аналогова величина за един и същ момент от време, а след това се комутират и последователно се преобразуват от АЦП в цифров код. Такова решение води намаляване бързодействието на системата. Ако се изисква по голямо бързодействие, тогава за сметка на цената може да се премине към използуване на АЦП за всеки канал, с запомняне и мултиплексиране на цифрови сигнали.
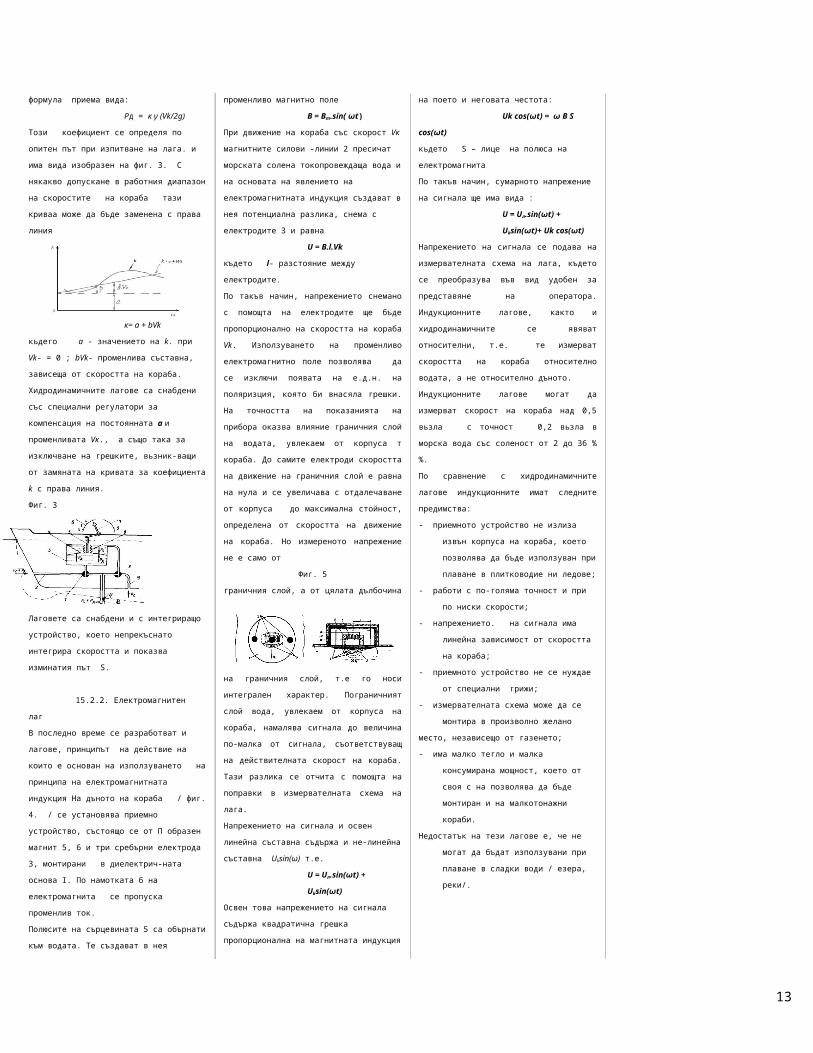
No: Вид схема Функция и предназначение1 Усилвател Усилване на слаби изходни сигнали от датчиците2 Преобразовател на съпротивление Преобразуване на високо изходно съпротивление на датчика в ниско3 Преобразовател на ток в напрежение (I/U) Преобразуват изходният параметър “ток” на датчика в напрежение.4 Преобразовател на действащо значение. Преобразува променливо напрежение от изхода на датчика в постоянно с величина равна на
действащото му значение5 Схема на логаритмич-но свиване. Свиване на динамичния диапазон на изходните сигнали с помощта на логаритмични усилватели.6 Филтър Премахване на насложените на полезния сигнал шумове с помощта на филтри с различни честотни
характеристики7 Схеми за линеаризация. Корекция на изходния сигнал с нелинейна зависимост между физичната величина и електрическия
сигнал на датчика.8 Усилвател с управляем коефициент на
усилване.Изменение на коефициента на усилване по определн закон в зависимост от величината на сигнала

19

19. Приложения на операционните усилватели и компараторите на напрежение
Операционните усилватели (ОУ) са основен изграждащ блок за много аналогови интегрални схеми (ИС) и имат много широк обхват на приложение. Във въпросa накратко са описани някои основни приложения на ОУ. Използваните формули са валидни за идеален ОУ (с много голям коефициент на усилване без обратна връзка). В тях също така не са отразени входното напрежение на не симетрия, поляризиращият входен ток, влиянието на крайната стойност на коефициента на усилване по напрежение без обратна връзка и изменението му при нарастване на честотата.Компараторите на напрежение са устройства, които са много подобни на ОУ. Тук са представени няколко примера на схеми, използващи компаратори на напрежение.
При представянето на операционните усилватели и компараторите на напрежение инвертиращият им вход отговаря на горния извод на схем-ното означение, а не инвертиращият — на долния извод.
9.1. Приложения на операционните усилватели.
1. Повторител на напрежение (фиг. 1). Усилването по напрежение на тази ма е единица, т. е. UO = US . Схемата има много голям входен. импеданс Z i, и малък изходен импеданс Zo, което я прави твърде подходяща за буферно стъпало, когато се свързват високоомни източници с нискоомни товари.
2. Неинвертиращ усилвател (фиг. 2). За тази схема Vo= (1+R2/R1)Us.Тя има много голям входен импеданс Z, и малък изходен импеданс Zo .
3. Инвертиращ усилвател (фиг.3). За тази схема Vo= (-R2/R1)Us Тяима входен импеданс ZI = R1 и много малък изходен импеданс.
4. Сумиращ усилвател (суматор) (фиг. .4). Тук
Uo= - RF (U1/R1 +U2/R2+ U3/R3 + …..)
Импедансът на отделните входове U1, U2, U3 …е различен и съответно равен нa съпротивленията R1, R2, R3 …..
5. Изваждащ усилвател (фиг.5 ). При тази схема изходното напрежение епропорционално на разликата на двата
входни сигнала:
Uo= - R2 /R1 (U1 -U2.)
По отношение на входа U1 входният импеданс е R1 + R2, a за входа U2 той е равен на R1
6. Суматор за алгебрично събиране (фиг..6 ). Тази схема е обобщение на схемата на обикновения
суматор и при нея изходното напрежение е алгебрична сума на входните сигнали, като коефициентите на различните входове се определят от съотношенията на съответните резистори.
7. Преобразувател ток — напрежение (фиг.7). Изходното напрежение при тази схема е право
пропорционално на входния ток и се дава с формулата Uo=-IsRf . Входният импеданс се определя от израза ZI= Rf/A , където RF e съпротивлението на резистора за обратна връзка, a A — коефициентът на усилване на ОУ без обратна връзка. Освен с твърде малкото входно напрежение схемата се характеризира и с много малък изходен импеданс.
8. Преобразувател напрежение — ток (фиг. 8). Големината на тока презтоварния резистор IL се дава с формулата IL= Us/R1, т.е. тя не зависи от RL. Ето защо схемата може да се разглежда като източник на константен ток. Or друга страна, тъй като токът в схемата е
правопропорционален на напрежението на сигнала Us , тя е източник на ток, управляван с напрежение. Особеност на схемата е, че нито един от краищата на товарния резистор RL не може да се заземява.
9. Източник на константен ток със заземен товар (източник на ток на Хаулънд) (фиг. 9). Токът през товарния резистор RL ce дава с изразаIL = (U2-U1)/R1 т.е. не зависи от RL. И тук схемата e източник на ток,
управляван с напрежение, като товарният резистор може да се заземява.
10. Интегратор (фиг. 10). Изходното напрежение Uo e пропорционално на интеграла от входното напрежение Us за времето на интегриране:
Uo = - (1/R1C1)∫ Us dt.
Времето за интегриране
се управлява от ключа S1. Ключът се отваря в момента t = 0 (началото на интегрирането) и се затваря в момента t=T (край на интегрирането и начало на разреждането на кондензатора C1), с което схемата се подготвя за следващия цикъл на интегриране.
Схемата може да работи и без резистора R1, при което се получава интегратор на ток
Uo = - (1/C1)∫ Is dt = Q/C1
където Q е пълният електрически заряд, получен от схемата през периода на интегриране.
11. Активен нискочестотен филтър (фиг. 11). При подаване към входа на тази схема на синусоиден
сигнал коефициентът и на усилване може да се определи по формулата
AF= - (RF/R1)(1/(1+jωRFCF).
Това е нискочестотен усилвател. чието усилване за постоянен ток AF(0) = - (RF/R1)честотната лента при ниво 3dB e BW= 1/2 πRFCF
12. Диференциатор и активен високочестотен филтър (фиг. 12). При R1=0 тази схема е «идеално» диференциращо стъпало, като изходното напрежение е равно на производната от входното по отношение на времето
U0= -RFC1(dUS/dt)
В някои случаи, за да се ограничи усилването на сигнали с високи честоти, желателно е да се използва резистор R1 c малко съпротивление В противен случай твърде големият коефициент на усилване на схемата за високите честоти създава проблеми вследствие на усилването на шумовото напрежение. Съпротивлението на резистора R1 ce избира така, че времеконстантата R1C1 да бъде малка в сравнение с периода на входния сигнал.При подаване на входа на синусоиден сигнал схемата действа като високо-честотен филтър.
13. Сумиращ интегратор (фиг.13). Тази схема е просто развитие на схе-мата на интегратора. За нея
Uo = - (1/R1C1)∫ (U1/R1
+U2/R2+R3/R3) dt.
14. Сумиращ
диференциатор (фиг. 14). Тази схема е развитие на схемата на обикновения диференциатор. За нея
U0= -RF (C1dU1/dt + C2dU2/dt+ C3dU3/dt)
R1C1<T, R2C2<T и R3C3<T, където Т е периодът на входния сигнал.
15. Прецизен еднополупериоден изправител (фиг.15). При тази схема Uo = Us при (Us> 0 и Uо = 0 при Us <0. Тя действа като прецизен еднополу-периоден изправител или детектор (в устройствата на съобщителната техника). В случая могат да се детектират сигнали от порядъка на миливолти, тъй като падът на напрежение върху диода в права посока се разделя на коефициента на усилване по напрежение на ОУ без обратна връзка.
16. Оптоелектронен датчик (фиг. 16). Тази проста схема датчик съдържа фотодиод и преобразувател ток — напрежение. Фототокът е линейна функция на интензитета на светлината,
следователно и изходното напрежение ще се променя линейно с интензитета на светлината. Фотодиодът може да работи и без преднапрежение, но при подаване на отрицателно преднапрежение — Un намалява капацитетът на прехода, което понижава времеконстантата на фотодиода.
9.2 . Приложни схеми с компаратори на напрежение.
Тук са, представени няколко приложни схеми, използуващи компаратори на напрежение. Във всички схеми тези компаратори могат да се заменят с ОУ, но в по-вечето случаи използването на подходящо избран компаратор на напрежение означава по-добра работа на схемата.
1. Генератор на правоъгълно напрежение (фиг. 17). Тази проста схемагенерира правоъгълни напрежение с честота
f gen = 1/(2R1C1ln3)
Напрежението върху кондензатора С1 има приблизително триъгълна форма.
2. Импулсен генератор (фиг.18. Тази схема генерира поредица от правоъгълни импулси, като коефициентът на запълване (отношението на продължителността на импулса към периода на повторение) се определя от отношението R1/(R1+R2)
3. Генератор на «закъснение» (фиг.19). Когато Us> UREF, на изхода на компаратора А1 се получава високо ниво. Кондензаторът С започва да се зарежда през резистора R1, Праговите нива (напреженията на превключване) на компараторите A2, А3 и A4 се задават от напрежението U+ и от делителя на напрежение R2 –R3- R4-R5. Напрежението върху кондензатора С1 достига най-напред опорното ниво на компаратора A4, при което неговото изходно напрежение се установява на високото си ниво. След това последователно се достигат праговите нива на компараторите A3 и A2 и на съответните изходи се появяват високи нива. Така се получават три изходни импулса, чиито положителни фронтове имат определено закъснение по отношение на входния импулс Us .
4. Тригер на Шмит (фиг.20). Схемата съдържа положителна обратна връзка — от изхода към не инвертиращия вход на компаратора (или ОУ), и работи като ключ. Отрицателният фронт на изходното напрежение (преходът от U0H към U0L) ce получава, когато входното напрежение превиши праговата стойност. Положителният фронт се
появява,когато входното напрежение спадне под друга прагова стойност .


20. Изпълнителни
механизми. Класификация, принцип
на работа.
Изпълнителните механизми са основен
елемент от системите за автоматично управление.
От параметрите на изпълнителните механизми
зависи устойчивата и сигурна работа на системата.
Също така правилния избор на типа изпълнителен
механизъм е определящ за качеството на
автоматизацията.
Изпълнителният механизъм (актюатор)
е предназначен да преобразува електрическия
сигнал, формиран според закона за управление в
съответната система за автоматично управление, в
управляващо въздействие на обекта.
В корабните системи за автоматично
управление, в зависимост от особеностите на
управляемия обект се използват електромеханични,
хидравлични, а в по редки случаи и пневматични
изпълнителни механизми. Така например,
преместването на рейката на горивната система на
главния корабен дизелов двигател в автоматичните
системи за управление се премества с помощта на
хидравличен или електромеханичен
изпълнителен механизъм. Преместването на
руля на кораба, като правило се извършва с
помощта на хидравличен изпълнителен
механизъм. Тук ще разгледаме видовете
изпълнителни механизми, особеностите и принцип
им на действие.
20.1. Електромеханични
изпълнителни механизми.
Електрическите изпълнителни
механизми са широко употребявани в системите за
управление, които също използват електричество за
целите на своето функциониране, поради
възможността за лесна комуникация с тях за
разлика от хидравличните и пневматичните
изпълнителни механизми, които се нуждаят от
допълнителни помпи или компресори.
Предимства на електрическите
изпълнителни механизми са:
Лесно
осигуряване на връзки – захранващи
и контролни кабели, чието трасиране
е многократно по-лесно изпълнимо в
сравнение с полагането на
тръбопроводи;
Електрическит
е сигнали са по-лесни за управление;
По-чисто
изпълнение на инсталацията;
Електрическит
е повреди са често по-лесни за
диагностициране.
Недостатъци на електрическите
изпълнителни механизми са:
По-големият
риск от пожар, вследствие на
експлоатационни неизправности, с
изключение на специално
конструираните задвижвания, което
обаче ги прави съответно по-скъпи;
Лоши
механични характеристики на
двигателите при малки обороти на
въртене;
Електрическит
е двигатели се прилагат основно за
ъглови премествания, но при
необходимост от преобразуване на
формата на движение се налага
използването на допълнителни
механизми;
По-лошо
отношение мощност/тегло в
сравнение с хидравличните
изпълнителни механизми.
20.1.1.Електромеханични
изпълнителни механизми за ъглово завъртане.
Има три основни типа двигатели
използвани в качеството си на изпълнителни
механизми в системите за управление.
Фиг.1. Изпълнителен механизъм за
ъглово завъртане
Това са променливотокови
изпълнителни двигатели, постояннотокови
изпълнителни двигатели и стъпкови двигатели.
20.1.1.1. Променливотокови
изпълнителни двигатели.
Двигателите за променливо
напрежение осигуряват голяма изходна мощност
при фиксирани обороти. Обикновено се изпълняват
за 1420 и 2900 об/мин.
Фиг..2. Принципна схема на
изпълнителен механизъм за ъглово завъртане.
Типичен режим на работа на тези
двигатели е On/Off, т.е. включено/изключено
състояние. Характерни параметри на
изпълнителните механизми за ъглово завъртане са:
номинално напрежение; номинална мощност; клас
на защитеност от околни въздействия; номинална
температура на околната работна среда;
максимален ъгъл на завъртане; време за пълно
завъртане; номинален момент на вала и др. В
редица случаи са оборудвани с допълнителни
крайни изключватели, потенциометри и
позиционери. За управляващи сигнали се използват
стандартните - 4÷20 mA; 0÷20 mA; 0÷10V.
Все по-често намират приложение
схеми на асинхронни двигатели с честотно
регулиране на оборотите, когато е необходимо
плавно изменение на регулируемата величина,
например разхода на охлаждаща вода през
топлообменник. Тези двигатели са куплирани с
понижаваща предавка, осигурявайки по-голям
въртящ момент и по-широк диапазон на регулиране.
Въпреки, че се използват предимно за ъглово
преместване на изпълнителния механизъм, тези
двигатели могат да бъдат изпълнени с водеща
винтова предавка за конвертиране на ъгловото
движение в линейно.
20.1.1.2. Постояннотокови
изпълнителни двигатели.
Постояннотоковите двигатели са
широко използвани в системите за управление и
обикновено се наричат сервомотори.
Разработването на мощни постоянни магнити в
последно време значително повиши отношението
мощност/тегло при постояннотоковите двигатели, но
в този аспект те все още не са толкова добри както
хидравличните двигатели. Сервомоторите
обикновено имат преобразувател куплиран на вала
на двигателя, служещ за обратна връзка по
положение и измерване на обороти на въртене.
Преобразувател
Фиг.3. Изпълнителен механизъм с
постояннотоков двигател.
20.1.1.3. Стъпкови двигатели.
Най-общо тези двигатели осигуряват
прецизно завъртане на ротора си съобразно броя
на електрическите импулси подадени към тях.
Понеже съществува установена закономерност
между ъгъла на завъртане на вала и изискваната
позиция не е необходима употребата на
преобразуватели. В този смисъл стъпковите
двигатели се явяват елементарни системи за
управление без обратна връзка. Съществуват три
типа стъпкови двигатели за общи приложения:
Стъпкови
двигатели с постоянни магнити.
Роторът на тези двигатели
е изграден с двойка постоянни магнити
образуващи северен (N) и южен (S)
полюси. На статора са разположени
две двойки полюси посредством
намотки захранвани с постоянно
напрежение, които осигуряват
последователност N-S-N-S (започвайки
от горе). Роторът заема позиция между
полюсите, в следствие на равенството
и противиположността на моментите
упражнени върху него.
Фиг.4. Стъпков двигател с
постоянни магнити.
Ако се промени
полярността на двете двойки полюси
на S-N-S-N, роторът ще се завърти в
ново установено състояние, както е
показано на следващата фигура. За
реализирането на повече стъпки се
проектират двигатели с повече
чифтове полюси, като намотките за
възбуждане на магнитното поле са две
и се
изпълняват като разчленени.
Фиг.5. Многополюсен
стъпков двигател.
Всяка смяна на
полярността на намотките води до
преместване на ротора с една стъпка.
Роторът се задържа в положение дори
и при липса на захранване на
намотките. С оглед повишаване на
броя на стъпките, полюсите често се
изпълняват стиковани един зад друг в
различни пръстени. Броят на стъпките
също така може да бъде повишен и
посредством предавателна кутия
куплирана на вала.
Стъпкови
двигатели с променливо магнитно
съпротивление.
Роторът на тези двигатели
е конструиран от мека стомана, като
броя на зъбите е различен от броя на
полюсите на статора. Статорната
намотка е многофазна.
Фиг.6. Стъпков двигател с променливо
магнитно съпротивление.
Двигател Червячна предавка
Предавка
DC Двигател
Преобразувател
Статор

Когато се приложи
захранващо напрежение към
статорната намотка, роторът се
позиционира в пространството с най-
малко магнитно съпротивление. Това
положение се определя от броя на
захранените фази. Роторът на тези
двигатели има много малък остатъчен
магнетизъм, вследствие на което при
премахване на захранването на
статорната намотка той не се задържа
в същото положение.
Броят на стъпките може да
се определи със следното уравнение:
,
където: S-брой на
зъбите на статора; R-брой на зъбите
на ротора.
Хибридни
стъпкови двигатели.
Хибридните двигатели са
комбинация от горните два типа. Всеки
полюс от статорния пакет е разчленен
на отделни зъби. Роторния пакет също
е разделен на два набора от зъби,
разположени един зад друг и
същевременно разместени на половин
зъбна ширина. Роторът е надлъжно
намагнитен.
Фиг..7. Хибриден стъпков
двигател.
В допълнение – всички
стъпкови двигатели се управляват
посредством контролери.
Фиг..8. Принципна схема
за управление на стъпков двигател.
20.1.2. Електромеханични
изпълнителни механизми за линейно
преместване.
Тези механизми изпълняват функции
присъщи за хидравличните и пневматичните
изпълнителни цилиндри. Използват механично
преобразуване на въртеливото движение от
постоянни или променливотокови двигатели
посредством съгласуващо звено, водещ винт и
закрепена към него изпълнителна щанга.
Фиг..9. Принципна схема на
изпълнителен механизъм за линейно преместване.
Съгласуващото звено представлява
редуктор за регулиране на оборотите.
Типичен пример за изпълнителен
механизъм с линейно преместване е показан на
следващата фигура.
Фиг.10. Изпълнителен механизъм за
линейно преместване.
Изпълнителни
механизми от този тип се
съединяват с различни
управляващи вентили
осигурявайки както режим на
работа Open/Closed
(Отворено/Затворено), така и
възможност за плавно
регулиране на желаната
величина. Номинални параметри са: номинално
напрежение; номинална мощност; клас на
защитеност от околни въздействия; номинална
температура на околната работна среда;
максимален ход; време за пълен ход; номинален
натиск на вала и др. Имат възможност за
дистанционно и местно управление, като е
предвидена блокировка между двата режима. В
редица случаи са допълнително снабдени с крайни
изключватели (NO/NC), потенциометър и
позиционер за стандартен сигнал 4 20 mА.
20.2.
Хидравлични
изпълнителни
механизми.
Хидравличните изпълнителни
механизми, наричани още хидравлични
сервомотори се изпълняват с постъпателно или
въртеливо движение. В качеството на източници за
захранване на хидравличните серводвигатели се
използват зъбни помпи, хидроакумулатори и др.
20.2.1. Хидравлични системи –
описание.
Типичните хидравлични системи за
управление се състоят от система за захранване с
масло, управляващ клапан, линеен изпълнителен
механизъм, датчик за линейно преместване и
сервоконтролер.
Датчик на линейното
преместване
Фиг.11. Блокова схема на хидравлична
система за управление.
Сервоконтролера сравнява
стойностите на зададената и тази на измерената
величини, изчислява грешката и изработва
съответстващ сигнал за задействане на
управляващия клапан. Последния от своя страна
регулира разхода на хидравлично масло подавано
към изпълнителния механизъм, докато не се
достигне желаната позиция, идикатор за което е
нулирането на сигнала на грешката.
Всички видове хидравлични системи
изискват захранване с масло под налягане –
обикновено се използват различни типове
минерални масла. Изборът на системата по
отношение на налягането зависи от множество
фактори. Системите с ниско налягане осигуряват
по-малки загуби от изтичане на масло, но
оборудването е с по-големи габарити за да може да
се постигне желаната мощност. Системите
работещи на по-високо налягане се характеризират
с по-големи загуби на масло, но за сметка на това
са с по-добри динамични характеристики, по-малки
размери и тегло. В много от разпространените
системи за стандартна стойност на налягането на
хидравличното масло е възприета работна стойност
210 bar.
Фиг.12. Принципна схема на
хидродвигател с постъпателно движение.
На фиг.12. е показана схемата на
хидродвигател (без работното бутало), като са
визуализирани каналите осъществяващи връзка с
него: А - с надбуталното пространство в работния
цилиндър и В – с подбуталното пространство. Към
управляващия цилиндър(показан на схемата) се
подава масло под налягане посредством входа Р.
Буталото на управляващия цилиндър е така
изпълнено, че в неутрално положение входа Р и
изхода Т са затворени.
При придвижване на буталото надолу,
входа Р се свързва с горната част на работния
цилиндър посредством тръбата А, а долната част –
с изхода Т, посредством тръбата В. Благодарение
на разликата в наляганията, които се образуват от
двете страни на работното бутало, последното ще
се задвижи надолу. При преместване на
управляващото бутало нагоре, работното бутало ще
се придвижи в другата посока.
В контекста на хидравличните системи
за управление управляващите клапани се делят на
два типа – пропорционални и сервоклапани.
Пропорционалните клапани използват директно
задвижване на буталото си под въздействието на
бобина или ел. двигател, докато сервоклапаните са
снабдени с поне едно междинно хидравлично
усилвателно стъпало, разположено между ел.
двигателя и буталото.
Главно предимство на
пропорционалния тип клапани е тяхната
резистентност към промени в налягането и
вискозитета на захранващото масло. Все пак
относително големия размер на оборудването и
големината на времеконстантата на намотките на
изпълнителните механизми (бобини или
ел.двигатели) осигурява по – лоши динамични
характеристики в сравнение със сервоклапаните.В
последните години се появиха т.нар. „серво-
пропорционални” клапани с по-леки бутала,
работещи с по-малко преместване. Техните
динамични характеристики се доближават до тези
на сервоклапаните и са с много по-ниска цена.
Сервоклапаните се характеризират с
по-голяма устойчивост на смущения в налягането на
захранващото масло, нивото на входния
управляващ сигнал, температурата на маслото и
околната среда, което от своя страна пък води до
по-стабилни динамични характеристики в
сравнение с едностъпалните пропорционални
клапани. Като недостатъци на сервоклапаните
може да бъде посочена тяхната сравнително
висока цена и чувствителността им към
замърсени масла.
Сервоклапаните изпълнени по
двустъпална схема могат да бъдат от т.нар.
реактивен тип или дюза-клапа тип. И двата са
конструирани с електрически серводвигател и се
различават по отношение на системите за
хидравлично масло.
Сервоклапаните от типа дюза-клапа са
по разпространени и се използват при
необходимост от високопроизводителни
приложения.
Полюс Зъби
Стъпковдвигател Контролер
Импулси
Система заснабдяване с масло
Серво-контролер
Управляващ клапан
Линеен актюатор
Товар
Датчик за линейно преместване
Зададенастойност
23
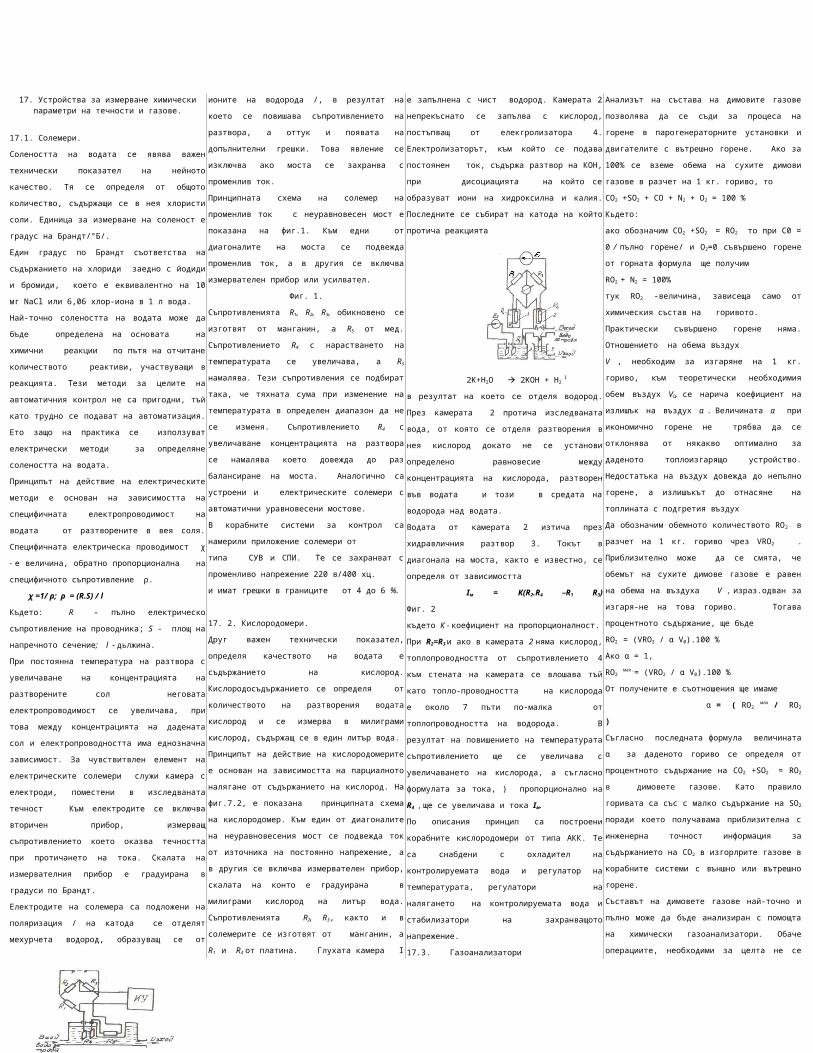
Фиг.13. Сервоклапан тип дюза-клапа.
На фиг.13. е показан сервоклапан от
типа дюза-клапа. Хидравличното масло се подава
на входа Р (Port), а изхода Т (Tank) е свързан с
резервоара за масло. Управляващите изходи А и В
са свързани с изпълнителния механизъм.
20.2.2. Линейни хидравлични
изпълнителни механизми.
Хидравличните изпълнителни
механизми (актюатори) са устройства
преобразуващи енергията на хидравличното масло
в механическа сила или движение. Линейните
актюатори могат да бъдат разделени в зависимост
от начина на прилагане на управляващото
въздействие на еднопосочни (налягането на
маслото действа само от едната страна на
буталото), т.е. те могат да извършват движение
само в една посока и двойнодействащи (маслото се
подава от двете страни на буталото), т.е.
движението е в двете посоки.
Фиг.14. Линейни серво хидравлични
изпълнителни механизми.
В зависимост от свързването им с
работните механизми актюаторите биват с
едностранно присъединяване и с двустранно
присъединяване. Първият тип се използва при
конструктивни ограничения от към работно
пространство. Неравномерното натоварване от
двете страни на буталото, обаче води до появата на
усложнения с тяхното управление. Актюаторите с
двустранно присъединяване на работните
механизми имат естественото предимство, че
осигуряват равномерна сила и скорост на
преместване, което се дължи на конструктивното им
изпълнение. Тези актюатори често биват наричани
симетрични или синхронизирани цилиндри.
Фиг.15. Принципна схема на
двойнодействащ актюатор с двустранно
присъединяване.
Показаният на фиг.15 актюатор се
състои от бутален прът и централно бутало с
износоустойчиви уплътнения, цилиндър и
уплътнения в двата края предотвратяващи
изтичането на масло от двете камери.
Позицията на буталото се определя от
налягането на хидравличното масло в камерите от
двете му страни и може да бъде променена
посредством увеличаване на налягането от едната
страна. На показаната схема маслото постъпва с
високо налягане през входа А, създавайки натиск
който води до преместване на буталото в
обозначената посока, а през В (в случая явяващ се
изход) маслото се оттича. В този смисъл
управлението на позицията на буталото е въпрос на
регулиране на разхода на хидравлично масло през
двата входа.
Уплътнения Посока на движение
24


21. Мониторинг и контрол на корабните технически средства .
21.1. Общи сведенияЕдин от основните пътища за
повишаване на ефективността на корабните технически средства се явява използването на системи за автоматичен контрол.
Контролът позволява да се определи
техническото състояние на обекта, правилността
на предаване и обработка на информацията в
него, мястото на неизправността, да предскаже
работоспособността на обекта в бъдеще.
Автоматизирана система за
контрол представлява съвкупност от сред-
ства, позволяващи да се определи техническото
състояние на обекта с участието на човека. Под
техническо състояние на обекта се разбира
съвкупността от значенията на параметрите на
система, характеризиращи отсъствието или
нали- чието на неизправност. С ъ в к у п н о с т т а о т
з н а ч е н и я т а н а п а р а м е т р и т е н а с и с
т е м а т а характеризиращи вътрешните
зависимости между нейните входни и из- ходни
сигнали се нарича вътрешна състояние на
системата .
Информационното състояние на
системата се определя от съвкупността на
значенията на параметрите, характеризиращи
отсъствието или наличието на изкривявания в
изходната информация на системата. Разликата
между инфор- мационното и техническо състояние
на системата се състои в това, че тех- ническото
състояние свидетелства само за наличието или
отсъствието на неиз- правност в системата.
Информационното състояние характеризира само
изход ната информация, която може да бъде
изкривена и при отсъствие на неизправ- ност в
системата, например при външни смущения.
Автоматизираните системи за
контрол са твърде разнообразни известни са
няколко метода за тяхната класификация.
Отбелязва се,че теоретично и прак- тическо
значение има класификацията на системите за
контрол по такива приз- наци, които биха
характеризирали тяхното вътрешно построяване и
функ- циониране. По характера на определяне на
състоянието на обекта САК могат да се разделят
на: САК на работоспособността, диагностични и
прогнозиращи. САК за определяне на
работоспособността определят наличието на
неизправност в системата без оказване на
мястото и причината за нейното възникване.
Такава САК се явява система за контрол
осъществяващи проверка само на определящи
параметри на обекта за контрол.
Диагностичните системи за контрол определят
не само наличието на неизп - равност, но и
мястото и характера й. С помощта на тези
САК се извършва проверка не само на
определящите, но и на спомагателните
параметри, които характеризират мястото и
характера на неизправността.
За контрол могат да бъдат активни
и пасивни. Активните системи за контрол
съдържат генератори за симулиращи сигнали
позволяващи да се оп- редели техническото
състояние на обекта по реакцията му на
симулиращите сигнали. Пасивните САК не
съдържат такива генератори.
По функционалните си възможности
САК се делят на информационно-логически и
информационно-изчислителни. Първите
обезпечават изпълнение на логически операции,
а вторите освен логически операции, обезпечават
изпъл- нението и на аритметични операции.
По вида на сигналите осъществяващи
е предаването, запомнянето и обра- ботката на
информацията САК се делят на аналогови,
цифрови и аналогово-цифрови. В първите САК
контролната информация се подава с помощта
на аналогови сигнали, във вторите се използват
цифрови кодове, а в третите се из- ползват двата
метода за предаване на информацията.
САК могат да са централизирани
и децентрализирани. Първите осъ-
ществяват контрол на техническото
състояние на обекта разделно по него- вите
устройства.В централизираните САК
определянето на техническото състояние на
обекта се извършва с помощта на централен блок,
осъществяващ приемането на информацията от
няколко устройства на обекта за контрол. САК,
осъществяващи последователен сбор и обработка
на информацията от няколко източника, се явява
система с последователно действие. Ако
приемането и об- работката на информацията се
извършва от няколко източника,САК се явява сис-
тема с паралелно действие.
САК се класифицират също така и по
вида на оценките на параметрите. Система за
контрол, даваща резултатите само от
класификацията на техническото състояние на
обекта за контрол, се наричат допускови системи.
САК, даващи информация освен за
класификацията още и информация във вид на
инструкции за отстраняване на
неизправностите, то тя се нарича информа-
ционна система.
По мястото на разположение САК
биват външни и вътрешни. Външните САК не
влизат в състава на обекта за контрол.
Вътрешните САК влизат непос- редствено в
контролируемия обект и са включени към него
САК по гъвкавостта на използваните от тях
програми се делят на: САК с постоянни програми
и САК с гъвкави програми.В първия случай
програмата е постоянно зададена, а във вто- рия
може да се изменя.
Ако САК позволява да се
извършва контрол на няколко разновидни
обекта тя се явява универсална и обратно, ако е
предназначена само за един тип обекти тя е
специализирана.
21.2. Задачите решавани от САК :- контрол на процесите - тук се извършва сравняване на значенията наконтролираните параметри със зададени или фиксирани гранични значения.При откриване на отклонение на параметрите от граничните стойности, наобслужващия персонал се подават светлинни и/или звукови сигнали и при не-обходимост се включва печатащото устройство. - документирането на процеса - проста форма на документиране напроцеса представлява воденето на протоколи или журнали (вахтен журнал намашинно отделение,маневрените операции и т.н.).За тази цел параметрите ха-рактеризиращи протичането на процеса, се измерват през равни интервали отвреме. По такъв начин обслужващия персонал се освобождава от необходи-ността периодично да снема и регистрира необходимите данни.Особена форма на документация представлява протокола за неизправ- ностите. В него се фиксират нарушенията на нормалния ход на експлоатацията с указване времето на тяхното появяване и отразяване обработката на данните от измерванията-данните от измерването се подлагат на различни операции за след- ните цели: съставяне на баланса ; пресмятане на показателите за работа на сис- темата. В баланса се пресмятат разходите на материали и енергия, а по тях се пресмятат експлоатационните разходи.
Системите за аварийно-
предупредителна сигнализация са типичен
пример за САК. С развитието на техника и
увеличаващите се икономически изиск- вания те
заемат съществена роля в корабната
индустрия. Те своевремен- ното известяват за
възникнали аварийни състояния чрез комбинация
от звукови и светлинни или изображения от
монитора на оператора сигнализации. Това
обръщение се нуждае от ефективна обработка на
сигналите с в ъ р з а н и с ъ с с и г - н а л н а т а
с и с т е м а з а т р е в о г а . Т а к а с е р е а л и з и р а
първостепенното спиране на повреда и
избягване на по-сложни аварийни ситуации.
Тъй като в предишни дипломни работи е
правен обстоен обзор и анализ на АПС системи в
настоящата дипломна работа ще се насочим
вниманието си към съществуващите корабни
системи за контрол.
21. 3. Структура на системите за контрол. Структурата на САК в най общия случай зависи
от типа на обработвания сигнал / аналогов или

цифров / и от вида на оценката на параметрите /допускова или количествена/.
На фиг. 1. А е показа блок схема на аналогова система за контрол.
А,
Б. Фиг.1.
Изходните напрежения от устройствата за сбор на информация / датчиците / / Д1, Д2.... Дn / , чрез вградения комутатор ВК се под-
веждат към разпределителния комутатор РК . Първият комутатор не се явява принципно необходим , тъй като той се използва само с цел да се съкрати количеството на проводниците които свързват обекта за контрол със САК . Ако броят на контролируемите параметри не е много голям до е възможно пряко съединение на измерителните устройства с РК При осъществяване контрол за работата на обекта РК подава към компаратора сигнали от контролируемите точки .
Комутатора сравнява изходните напрежения от измервателните устройства с техните но-I , предварително зададени значения , Ако изходният контро-лируем параметър се отклони от зоната на допуска , то компараторът дава съответните сигнали в регистриращото устройство /РУ / и устройството за индикация /И/ . Редът /последователността / на включване на съответните параметри се определя от твърдо фиксирана програма , задаваема от програмното устройство . Логичестката обработка при твърда програма е много проста и се заключава в даване на светлинен и /или /звуков сигнал . В същото време номера на отказалия елемент се индицира в схемата за индикация /И/ и се регистрира в регистъра на регистриращото устройство /РУ/.
В някой варианти комутатора /РК/ може да отсъства , но тогава случай е необходимо сравняването на всеки параметър със зоната на допуска да става с помощта на собствен компаратор.
Пример за система за допусков контрол може да служи системата 9/04 - МК , системата „Сигнал" /разработена у нас / . Тези системи се наричат системи за аварийно предупредителна сигнализация /АПС/ . Характерните особености за съвременните АПС са :
-различни способи за подаване на квитиран и неквитиран сигнал . Обикновенно до квитирането се подава звуков и „мигащ" светлинен сигнал , а след квитирането звуковия сигнал изчезва ,а светлинния преминава в постоянно светещ . В резултат на това вахтеният може да отличава новия сигнал от сигналите , появили се по-рано, които вече са били квитирани , но неизправностите показани от съответния датчик още не са отстранени.
- използването на едно общо устройство за звукова сигнализация на цялата група контролирувми параметри . Ако по някой от тях се даде тревожен сигнал , то при неговото квитиране звуковия сигнал се изключва , но по такъв начин , че той отново може да се включи ако друг параметър излезе от строя.
- наличието на „Памет" - подаването на тревожен сигнал продължава , докато той не бъде квитиран от вахтения даже ако откло-нението е било кратковременно и контролируемият параметър се е върнал в изходно състояние . В резултат на това даже и кратковременните отклонения не могат да бъдат незабелязани .
-обощение на група тревожни сигнали в един сигнал. Това позволява да се изнесат тревожните сигнали в място отдалечено от
сигналния пулт . Ако например в кораба се предвиждат работа без постоянна вахта в машинно отделение , то такива обобщени сигнали се изнасят в места където се намира персоналът . При поява на обобщен сигнал механикът отива до машинното отделение и по индивидуалните сигнални лампи определя кой именно параметър се е ,отклонил от нормалното значение.
В системите АПС често се използват датчици с контактни устройства . Те се настройват по такъв начин , че превключването на контакта да става при достигане на контролируемия параметър до зададено гранично значение . Като правило се предвижда такова изпълнение на датчика , при което контакта на датчика е затворен , докато значението на параметъра се намира в работния диапазон и се отваря при достигане на граничната стойност . Такова изпълнение на датчиците обезпечава контрол не само на значенията на параметъра , но и
състоянието на ве-ригата . Ако се прекъсне съединителния кабел или се зацапат контактите и т.н. , то ще бъде получен тревожен сигнал аналогично както при повреда.
В разглежданата система се осъществява аналогова обработка на информоцията , характерна особеност , на която е ниската точност , ниската надежност , необходимост от голям брой компаратори и др. . Лишени от тези недостатъци са цифровите системи за контрол /даталоге-ри/. функционалната схема на
даталогер е показана на фиг. 1.Б , Както се вижда от фигурата система съдържа
елементите на аналоговата система / ВК , РК , И, РИ / още и аналогоцифров преобразувател , осъществяващ преобразуването на аналоговата информация в цифров код , Сравняването на значенията на преобразуваните параметри с техните гранични стойности се осъществява с помощта на цифров компаратор ЦК ,
Предимствата на САК с цифрова обработка пред САК с аналогова обработка са : възможност за проста логическа обработка на резултатите от контрола , осъществяваща се без използване на сложни устройства , използване на един преобразувател и едно сравняващо устройство за контрол на всички параметри . Към недостатъците на даталогерите се отнасят високи изисквания към точността на устройствата за събиране на информацията ; трудности , възникващи при използването на
оптимални програми за контрол в процеса на откриване на неизправностите.
21.4. Структура на реална корабна система за контрол «ALSY 200” ( фиг.2 )
ALSY 200 - се базира на ноу-хау от различни аварийни системи с висококачествена електроника и съвременни технологии.Една от основните цели в разработката на ALSY 200 е простата експлоатация и опростената зборна програма.
ALSY 200 – точен потребител.Операторът гарантира поправянето на работното място , посредством клавиатурата и изложените процеси на монитора .Този непосредствен достъп е голяма помощ за оператора взимайки жизнено важни решения.Системата позволява на оператора да създаде директна конфигурация без специални средства , също да добавя аварийни точки , изменя текст , сигнални граници , времеви задръжки . Които могат да се регулират непо-средствено от оператора . ALSY 200 – има голяма гъвкавост в своята системотехника. -Връзки на оператора Централната сигнална система ALSY 200 е жизнено важна и е представена в проста и ясна форма на оператора.Всички сигнали и измерителни канали са представени, като различни детаилни нива от изобразени главни картини към всеки отделен канал.
-Аварийна сигнализация Порядъка за първостепенното спиране на повреда е крайно необходимо за оператора бързо да се информира за ненормалните състояния.Това обръщение се нуждае от ефективна обработка на сигналите свързани със сигналната система за тревога.
-Средно измерена стойностАко броят от аналогични величини изобразени на монитора често с значителен интерес за възможността да генерират средни стойности и отклонения от средната стойност на постъпващите сигнали.Типичен пример е температурата на изходящите газове,измерени в дизелов двигател. Груповите изображения на средните величини дават лесно четливо представяне на средните стойности и индивидуалните отклонения на екрана.
Реда на пренасяне на алармената информация към панелите с няколко индикатора,всички алармени канали трябва да бъдат групирани заедно в това число алармата от главния двигател,алармите на спомагателните механизми.Тези алармени сигнали не допускат разсейване на оператора и вместо това се обединява в по-нататъшното третиране на системата.Автоматичното ел.блокиране на отбраните алармени канали се получава,когато блокирания сигнал свързан като процесов вход е активиран.В допълнение на автоблокиране,всеки индивидуален канал може ръчно да се спре директно от клавиатурата.
-Kабинни панели Панелите имат 20 индикатора които доставят пълната информация,относно режима на работа (автоматичен или ръчен) и груповите тревоги в системата.Има проверка и потвърдителен бутон за оператора.
-Изходяшти сигналиALSY 200 има изходи за активиране на две независими сирени и две светлинни.Изходите за сирените са обезпечени с регулируеми времезадръшки,изходи за пейджър система за повикване на дежурния инженер.Важните процесни величини трябва понякога да бъдат наблюдавани от личната стая на инженера чрез директна индикация.Регистрираните доклади могат да бъдат записани като команди от опе-ратора или да бъдат инициализирани на всеки 4 часа.Има изход за връзка с цветен принтер ,който директно копира картината от екрана. -Вътрешен контролВ ALSY 200 захранващото напрежение,процесния интерфейс,свързващите линии паметта и програмното изпълнение са някой от нещата който могат да бъдат проверявани и преставени на екрана.Оператора има на свое разположение отлично средство което незабавно проследява неизправните устройства и намалява времето за престой.
Д1
Д2
Дn
БК
РК
СУ
И
ПУ
РУ
Д1
Д2
Дn
ВК
РК
ЦСУ
И
ПУ
РУ
АЦП
ПУ ПЗУ
ГЛАВЕН ИЗГЛЕД
КОНТРОЛ НА ПОМПИ И ВЕНТИЛИ
ПРОПУЛСИВЕН КОНТРОЛ
ЕНЕРГИЙНА РЪКОВОДНА СИСТЕМА
МОСТИК И КАБИННИ ПАНЕЛИ
РАЗПРЕДЕЛЕНИЛОКАЛНИ СИСТЕМИ
вкл/изкл 4-20mA РТ 100 Ni Crпреобразувател аналогови преобразуватели
Фиг.2.
27

Добре планираната система за връзка осъществява съвременен збор на системите данни.Високата възможност за обновяване на изобразяваната информация е задължителна.
ALSY 200 има: 1.Панел за връзка 2.Шинна връзка с други
продукти в пределите на морската пехота 3.Връзка с други
компютри и системи за изчисляване на устойчивостта
-Изобразяване на монитораИзображението на менюто се явява списък на съдържащите се системни процеси и обзорни изображения.-Обзорното изображение включва до 60 канала с информация от типа:
1.Име на канала
2.Състояния:нормално,предупредително,тревожно,блокирано
3.Измерване на величини:цифрови и във вид на диаграми
4.Алармени граници -Обектни изображения даващи информация за състоянията и установените параметри на канала.
-Алармен списък,пълен списък на всички потвърдени и непотвърде-ни аларми в системата сортирани в хронологически ред.Алармения списък се обновява периодично.
-Регистрационни списъци в който са преставени моментните стойности на величините групирани съгласно изискванията.Например 1 списък съдържашт стойности (величини) на основния двигател,2 списък показва величини от спомагателните механизми.
Системата се състои от: входни сигнали
-Платка с цифрови входове , 32 канал вкл./изкл. NO/NC 24 V = -Платка с аналогови входове , 32 канала напрежение: 0 - +5 , 0 - + 10 V =
Изходящи сигнали: -Платка с 16 канала -цифров,товар: 24–240 V ~ /= ,44W
-Аналог напрежение : 0 – 10 V ток: 0 – 10 , 0 – 20 mA
- три дисплея 16" или 19" цветен с отделна функционална клавиатура.Връзка: RS 232 или модем за близко разстояние Принтер за описание на инф.
Връзка: RS 232 -Графичен многоцветен принтер за отпечатване на инф. Връзка:RS 232
Мостови и кабинни панели 0 – 10 по номера, с 20 индикации за състояние и групова аларма. Връзка:RS 422
Излагани картини Групирани картини за наблюдение на изгорелите газове.Допълнителни картини за аналогови и цифрови входящи сигнали.
1
1
28