mbot 教學6 光感測器應用
TRANSCRIPT

電子工程系應 用 電 子 組電 腦 遊 戲 設 計 組
教學(6)光感測器與LED應用
吳錫修
Feb 17, 2017
shap
e th
e fu
ture
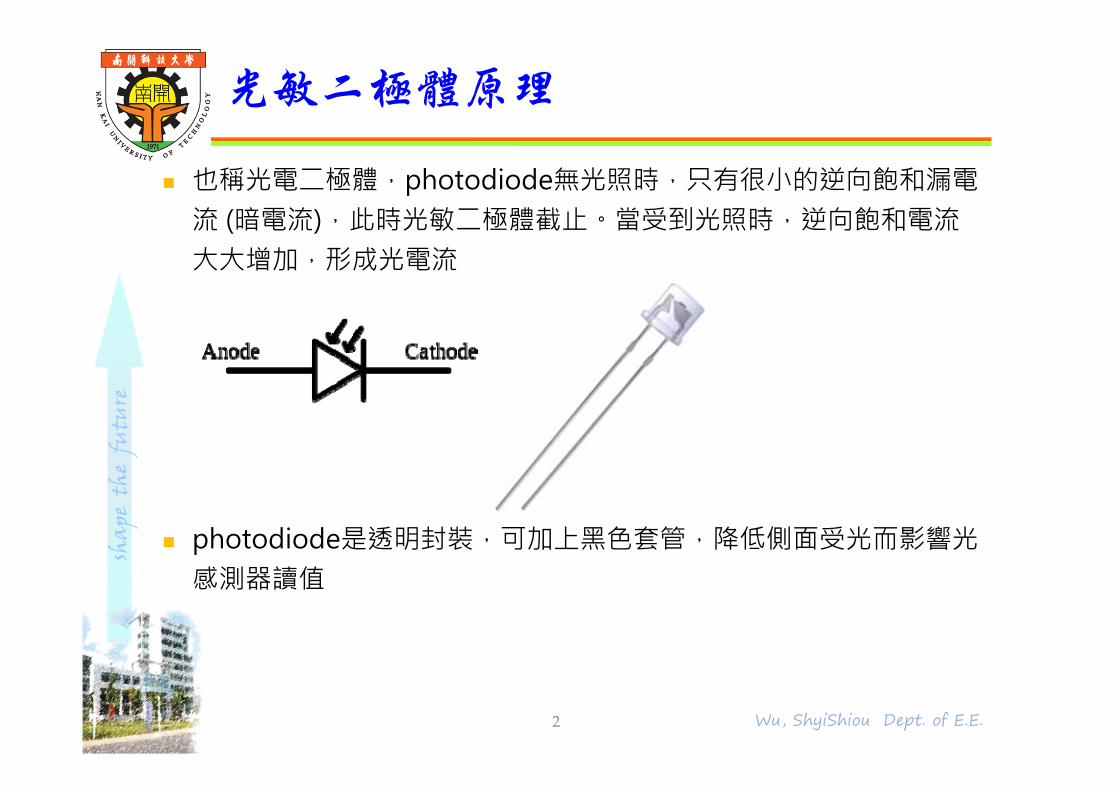
也稱光電二極體,photodiode無光照時,只有很小的逆向飽和漏電流 (暗電流),此時光敏二極體截止。當受到光照時,逆向飽和電流大大增加,形成光電流
photodiode是透明封裝,可加上黑色套管,降低側面受光而影響光感測器讀值
光敏二極體原理
2 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
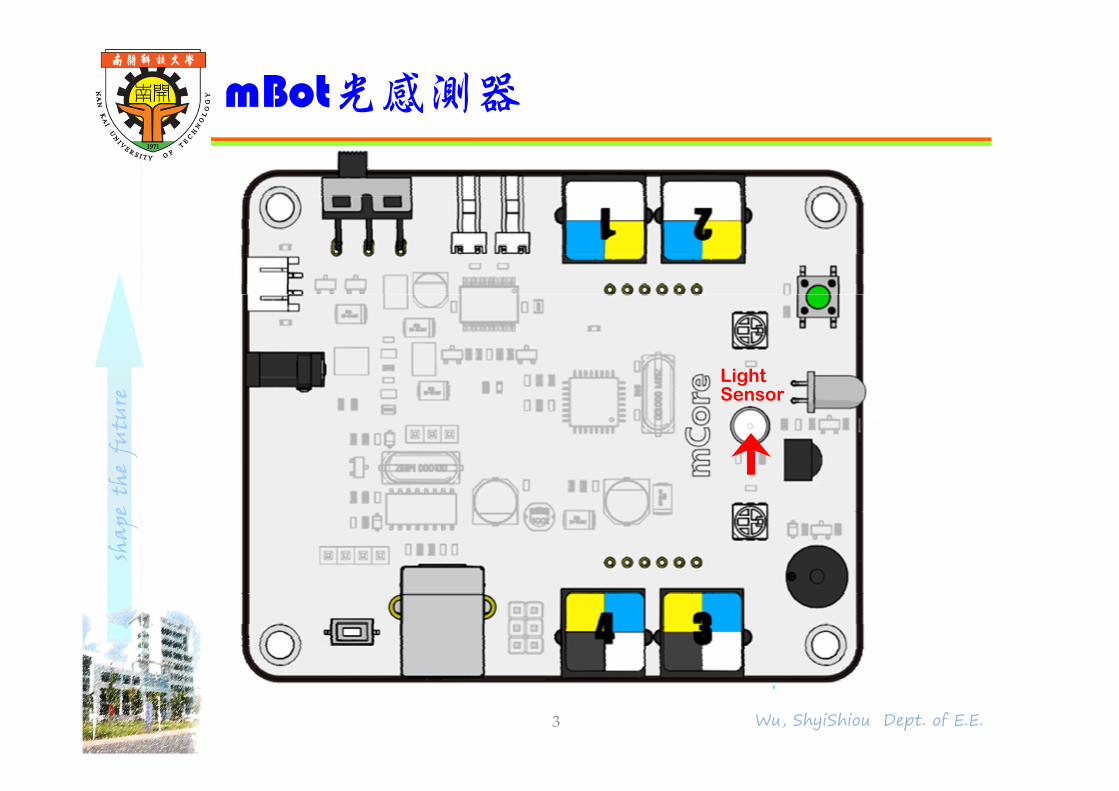
mBot光感測器
3
LightSensor
Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
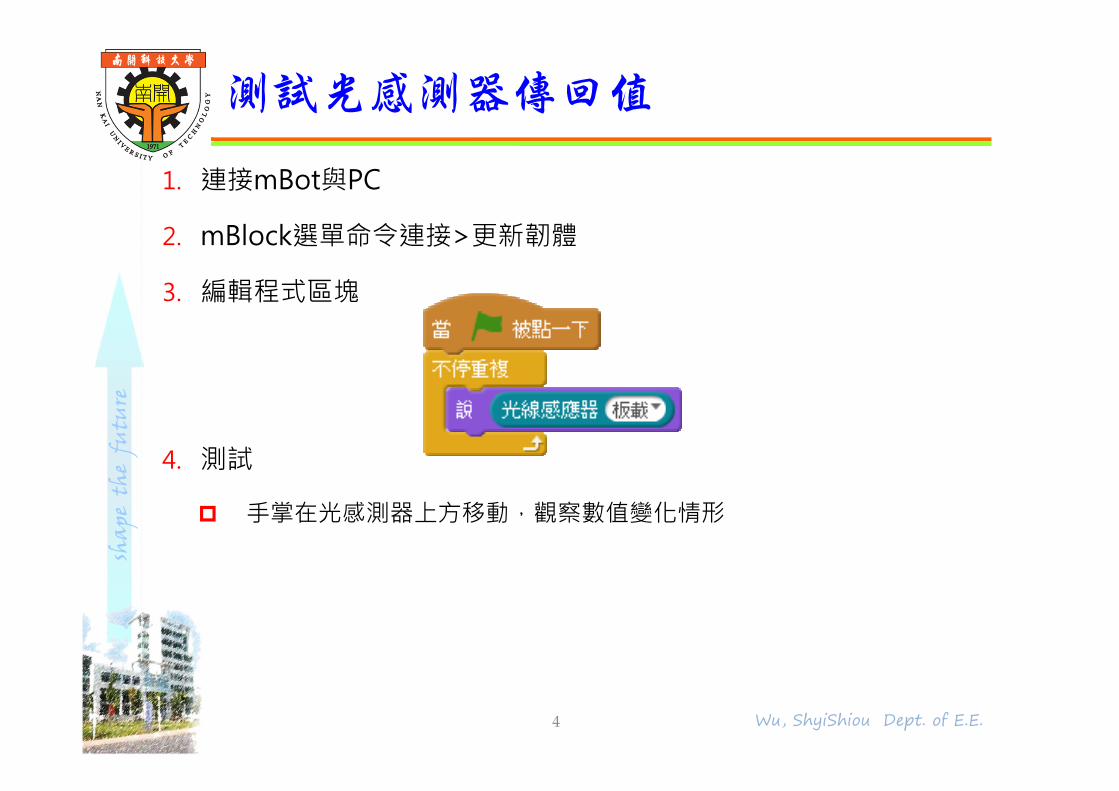
1. 連接mBot與PC
2. mBlock選單命令連接>更新韌體
3. 編輯程式區塊
4. 測試
手掌在光感測器上方移動,觀察數值變化情形
測試光感測器傳回值
4 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
控制指令
讀取光線感應器偵測值,傳回值0~1023,受光愈強,數值愈大
搭配運算指令及控制指令使用
mBot光感測器控制
5 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
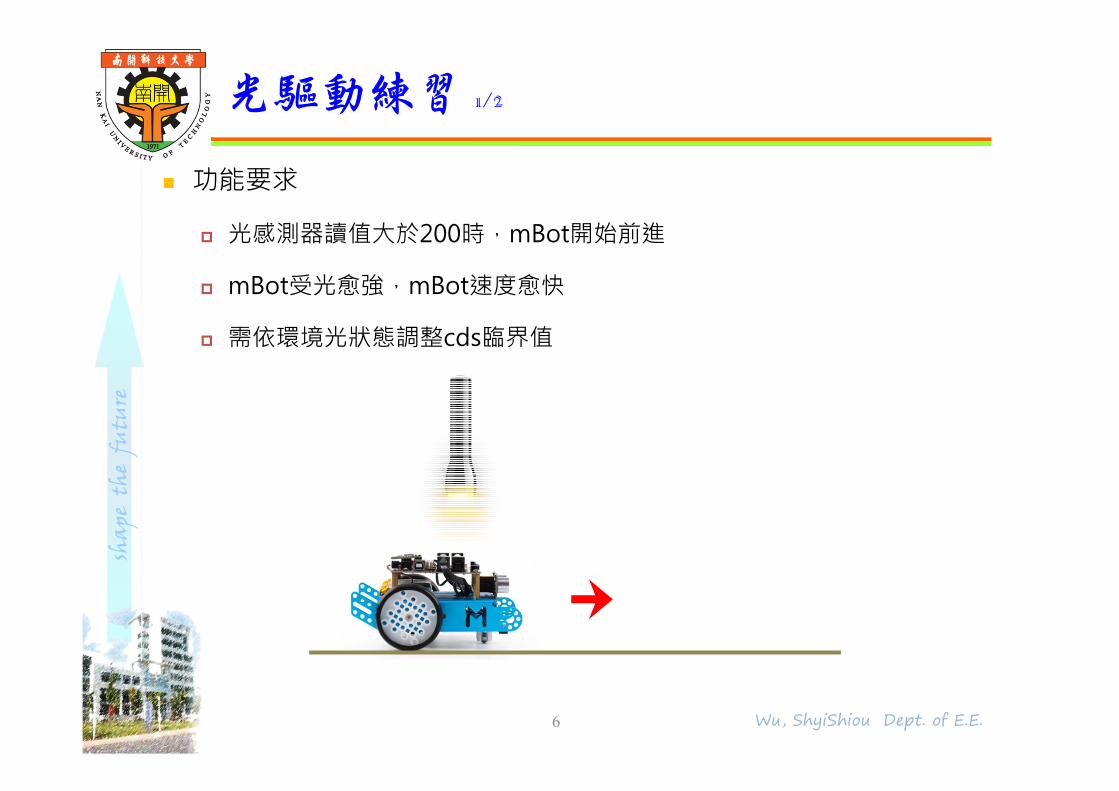
功能要求
光感測器讀值大於200時,mBot開始前進
mBot受光愈強,mBot速度愈快
需依環境光狀態調整cds臨界值
光驅動練習 1/2
6 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
參考程式
建立cds變數
光驅動練習 2/2
7 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
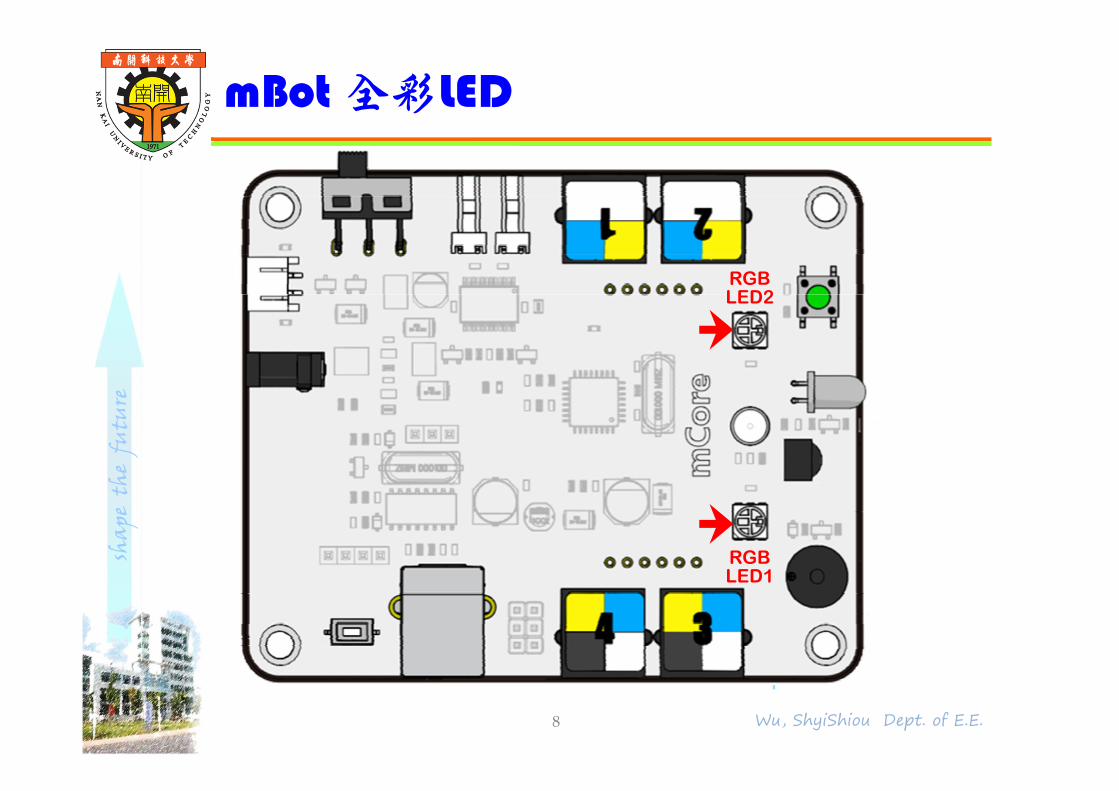
mBot 全彩LED
8
RGB LED2
RGB LED1
Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
發光二極體 (Light-emitting diode,LED) 是⼀種能發光的半導體電子元件
單色 LED
紅外線 、紅、橙、黃、綠、藍、紫、紫外線
LED原理 1/2
9 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
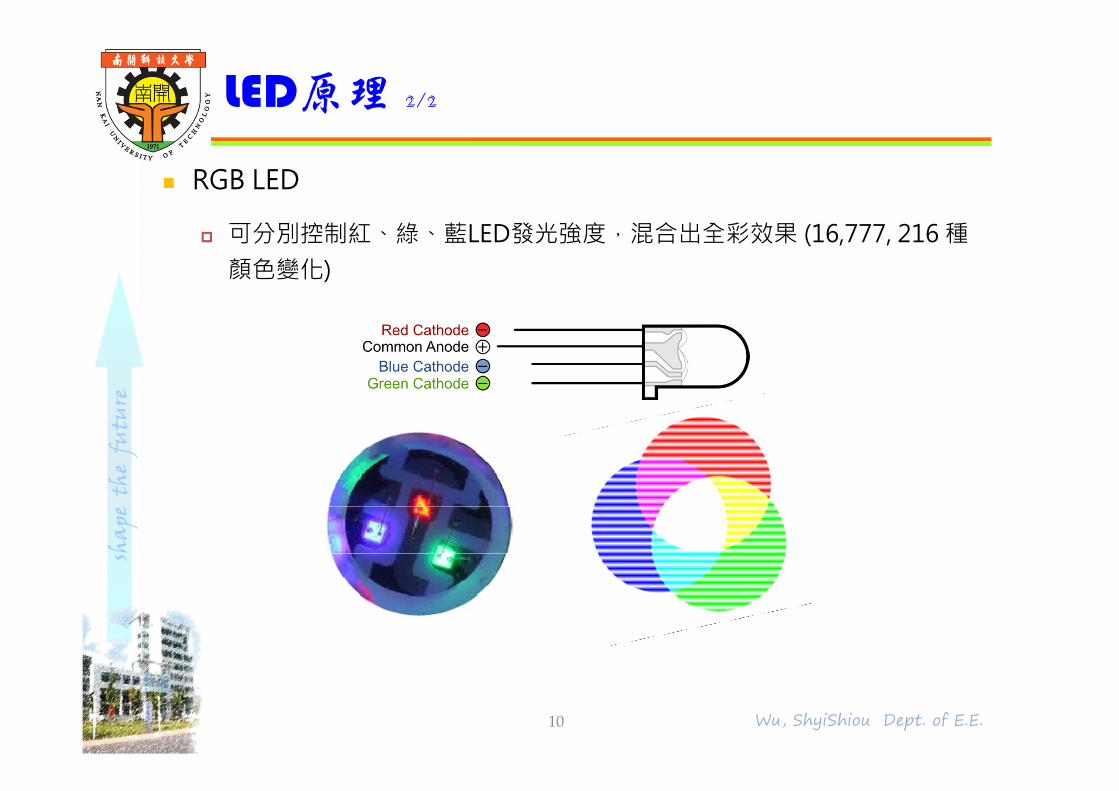
RGB LED
可分別控制紅、綠、藍LED發光強度,混合出全彩效果 (16,777, 216 種顏色變化)
LED原理 2/2
10 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
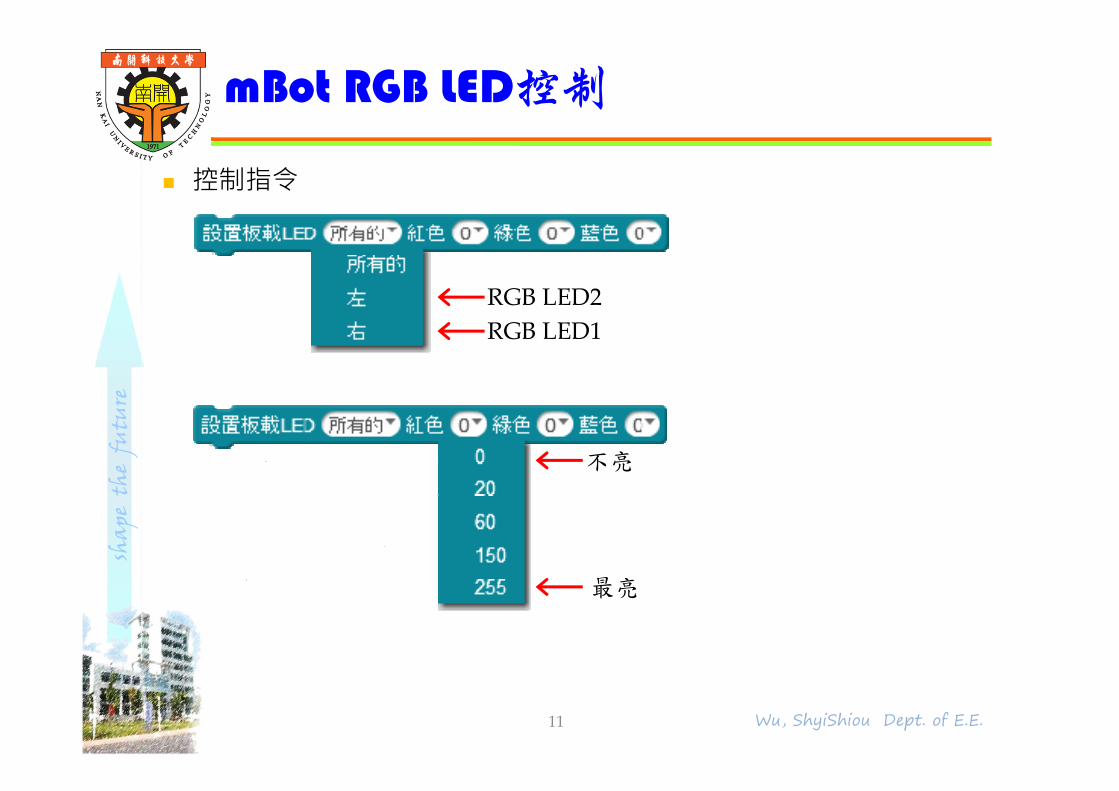
控制指令
mBot RGB LED控制
11
最亮
不亮
RGB LED2RGB LED1
Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
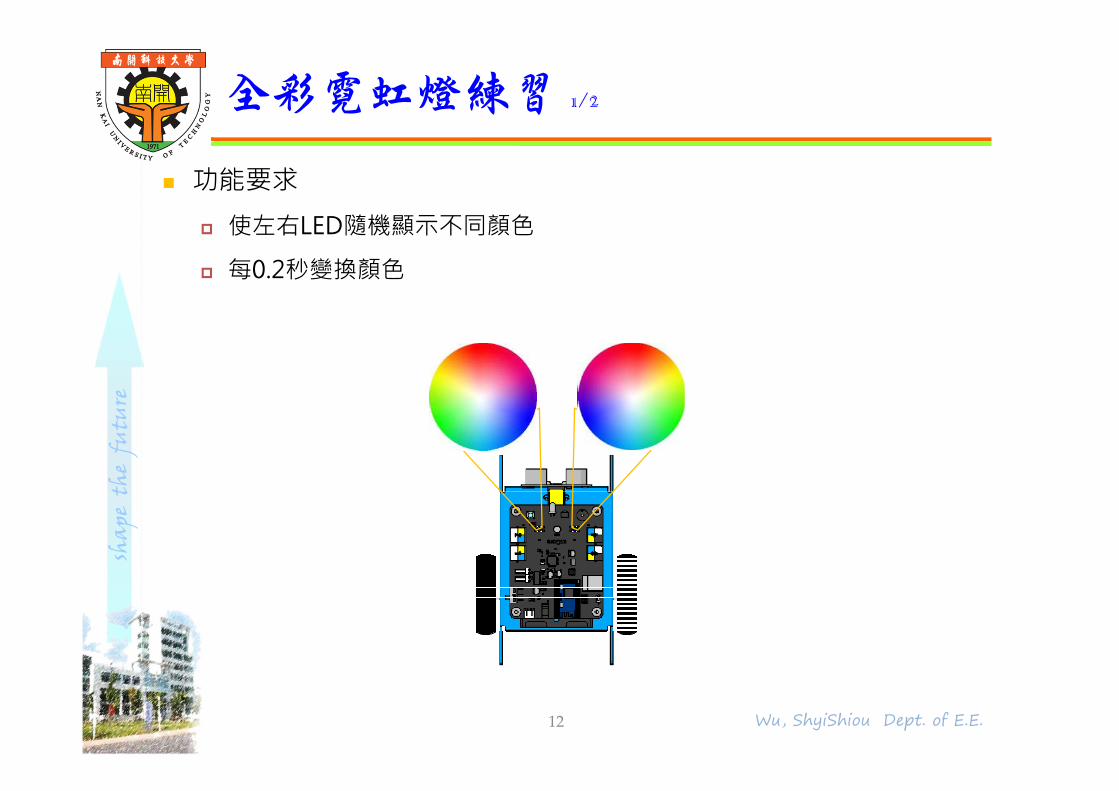
功能要求
使左右LED隨機顯示不同顏色
每0.2秒變換顏色
全彩霓虹燈練習 1/2
12 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
參考程式
建立R、G、B變數
全彩霓虹燈練習 2/2
13 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
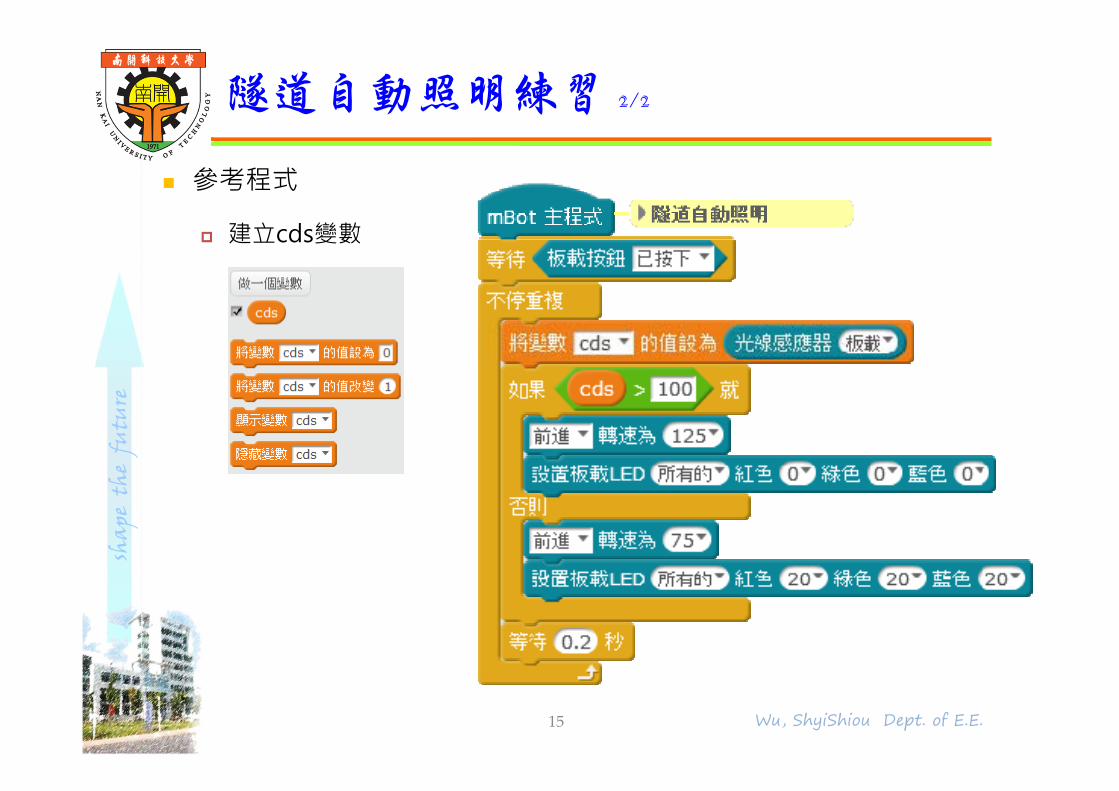
功能要求
按下按鈕後,mBot前進
當mBot進入隧道時放慢速度,點亮RGB LED燈
當mBot離開隧道時回復速度,關閉LED燈
設計注意事項:
1. 要依據環境光線強度調整光感測器臨界值
2. 由於光感測器側面沒有遮蔽,點亮RGB LED燈時,光感測器會接收到RGB LED光源
隧道自動照明練習 1/2
14 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
參考程式
建立cds變數
隧道自動照明練習 2/2
15 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
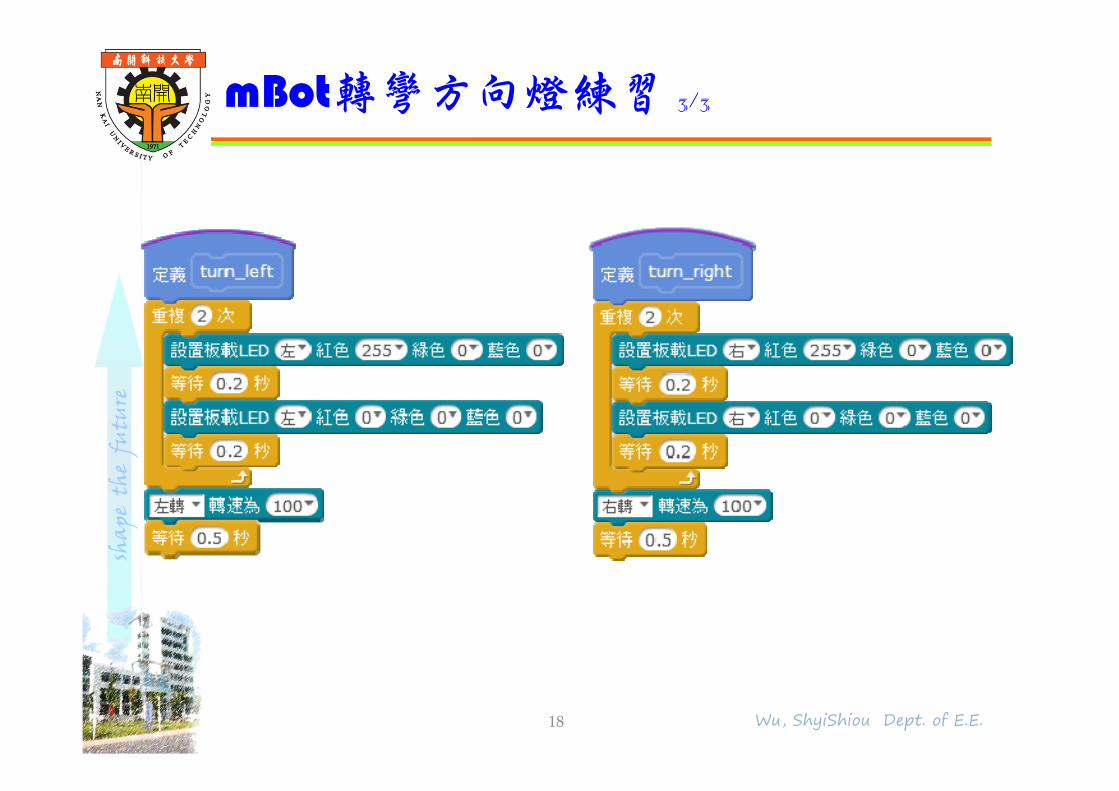
功能要求
按下按鈕後,mBot前進
每3秒讓mBot隨機左轉或右轉
轉彎前閃爍LED方向燈,每0.2秒紅色亮、滅閃爍2次
mBot轉彎方向燈練習 1/3
16 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
參考程式
mBot轉彎方向燈練習 2/3
17 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
mBot轉彎方向燈練習 3/3
18 Wu, ShyiShiou Dept. of E.E.