mbot教學(11) 聲音感測應用
TRANSCRIPT

電子工程系
教學(11)聲音感測應用
吳錫修
July 17, 2017

shap
e th
e fu
ture
將聲波轉換為電子訊號
動圈式麥克風(Dynamic Microphone)
當聲波進入麥克風,振膜受到聲波的壓力而產生振動,與振膜連接在⼀起的線圈則開始在磁場中移動產生感應電流
麥克風原理
2 Wu, ShyiShiou Dept. of E.E.
電容式麥克風(Condenser Microphone)
當聲波進入麥克風,振動膜和基板之間的距離會隨著振動而改變電容值;敏感度高,常見於錄音室使用
聲音
訊號輸出
感應磁鐡感應線圏
拾音薄膜
振動膜電阻
電池
訊號輸出
基板
聲音

shap
e th
e fu
ture
分貝器
數位錄音筆
亞馬遜語音助理Alexa
生活科技應用實例
3 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
聲音感測模組
4 Wu, ShyiShiou Dept. of E.E.
RJ25連接線
Me Sound Sensor

shap
e th
e fu
ture
聲音感測模組可接到mCore連接埠3及4,mBot連接埠3已經接超音波模組
控制指令
讀取聲音感應器讀值,數值愈高表示聲音愈大
搭配運算指令及控制指令使用
聲音感測模組指令
5 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
1. 連接mBot與PC
2. mBlock選單命令連接>更新韌體
3. 編輯程式區塊
4. 測試
對著麥克風模組說話,觀察數值變化情形
記錄⼀般值及高音量臨界值
檢測聲音感測模組傳回值
6 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
功能要求
聲音感測模組接到mBot連接埠4
LED自動點亮紅色燭光
對著麥克風吹氣可吹熄LED
LED紅色燭光熄滅後6秒自動再點亮
可吹滅的LED 1/3
7 Wu, ShyiShiou Dept. of E.E.
shap
e th
e fu
ture
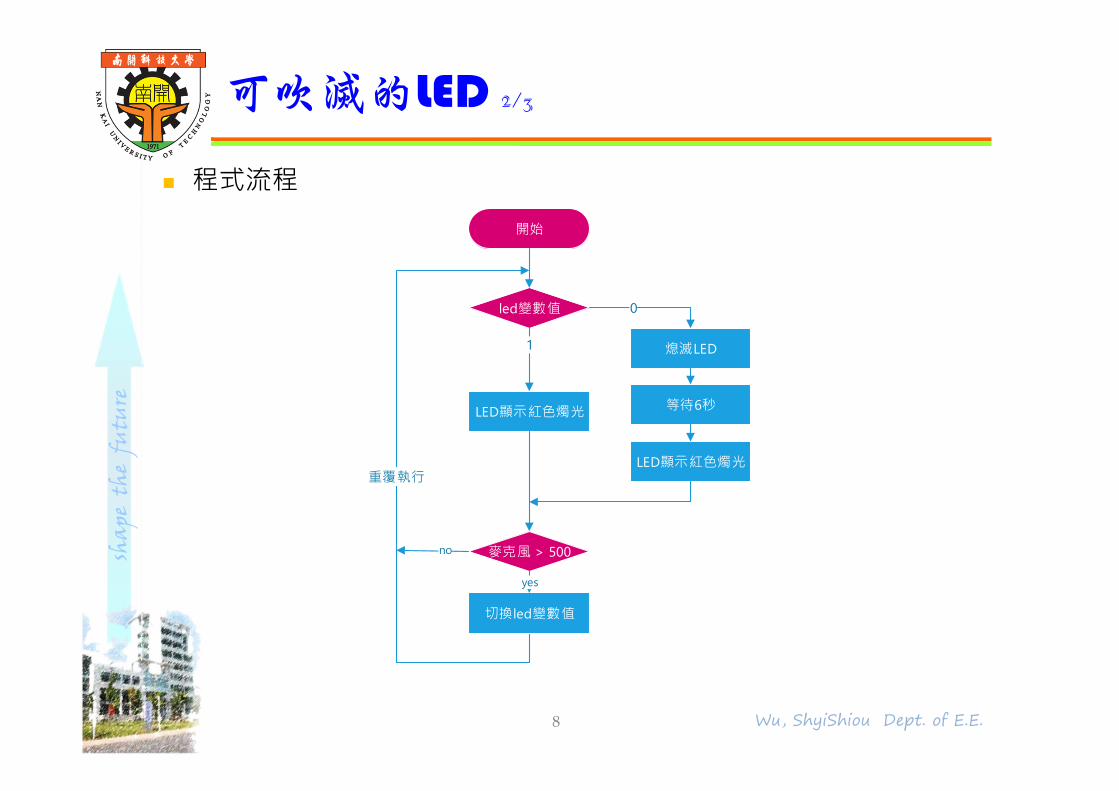
程式流程
可吹滅的LED 2/3
8 Wu, ShyiShiou Dept. of E.E.
開始
LED顯示紅色燭光
led變數值
1
0
重覆執行
麥克風 > 500
熄滅LED
LED顯示紅色燭光
等待6秒
切換led變數值
yes
no

shap
e th
e fu
ture
參考程式
可吹滅的LED 3/3
9 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
功能要求
聲音感測模組接到mBot連接埠4
拍手mBot開始前進,再拍手則mBot停止前進
mBot聲控練習 1/3
10 Wu, ShyiShiou Dept. of E.E.

shap
e th
e fu
ture
程式流程
mBot聲控練習 2/3
11 Wu, ShyiShiou Dept. of E.E.
開始
聲音>臨界值
no
yes
重覆執行
stop變數值
切換stop變數值
mBot停止 mBot前進
0
1
聲音>⼀般值
no
yes

shap
e th
e fu
ture
參考程式
mBot聲控練習 3/3
12 Wu, ShyiShiou Dept. of E.E.