mechanism 入門 - 東海大学 総合情報センター 湘南 … 入門...
TRANSCRIPT

第1版
Pro/ENGINEER
Mechanism 入門
東海大学総合情報センター
目 次 第1章 メカニズム ・・・・・・・ 1 1.1 メカニズムとは 1.2 メカニズムのアセンブリ
第2章 キネマティック解析 ・・・・・・・ 2 2.1 おおまかな操作の流れ 2.2 例1(並進移動の例) 2.3 例2(並進+回転移動の例) 2.4 例3(並進+スロットフォロワー結合移動の例) 2.5 例4(複数の回転移動の例)
練習問題解答 ・・・・ 16 付録 [用語] ・・・・ 19 (注)このテキストで用いている Pro/ENGINEERはWILDFIRE2.0です。
1 1
第1章 メカニズム このテキストは、Pro/ENGINEER(以降Pro/Eと略します)講座の
サブテキストです。Pro/E操作経験 100 時間程度で「設計」のアセンブリを理解している皆さんを対象に、メカニズムのひとつであるキネマティック解析の基本操作
を記述しています。 1.1 メカニズムとは モデルとしてのメカニズムは、各ファイル(モデル)間の結合(自由度を持ったア
センブリ)を定義した機構(モデル)のことです。 機能としてのメカニズムは、モーター、重力などのモデリングエンティティをメカ
ニズム(モデル)に追加してその運動を解析するモジュールのことです。解析には、
次の5タイプがあります。 <メカニズムの解析タイプ>
・キネマティック解析:メカニズムをサーボモーターで動かして、システムにかか るフォースを参照せずに運動を解析します。 ・ダイナミック解析:メカニズムのボディ質量に作用する慣性、重力、外部フォー ス間のリレーションを調べます。 ・スタティック解析:均衡状態のボディにかかるフォースを調べます。 ・フォースバランス解析:メカニズム特定の設定を維持するのに必要なフォースを 求めます。 ・繰り返しアセンブリ解析:適用したサーボモーターと結合の条件でアセンブリを 行うかどうかを決定するのに使用します。 1.2 メカニズムのアセンブリ Pro/E講座テキスト「3.5 アセンブリ」を参照して下さい。メカニズムのアセンブリは「結合」です。設計のアセンブリの「配置」とは違います。
2 2
第2章 キネマティック解析 キネマティック解析は、次の情報を取得するために使用します。 ・ジオメトリエンティティおよび結合の位置、速度、加速度。 ・コンポーネント(構成部品)間の干渉。 ・メカニズムの運動カーブのトレース。 ・メカニズムの運動をPro/E部品として取り込む運動エンベロープ。 2.1 おおまかな操作の流れ 1)メカニズム(モデル)作成 ① グラウンド(ファイル)、ボディ(ファイル)作成。 ② 結合(アセンブリ)作成。 ③ 結合の拡張。(カム、スロットフォロワー、歯車) 2)メカニズム(モデル)のチェック(この操作は省略可)
メカニズム(モデル)をドラッグ(手動)で動かしてチェックします。 3)サーボモーターの設定 4)メカニズム(モデル)の解析 5)解析結果の取得 ① 結果のプレイバック。 ② 干渉チェック。 ③ トレースカーブ作成。 ④ 運動エンベロープ作成。
3 3
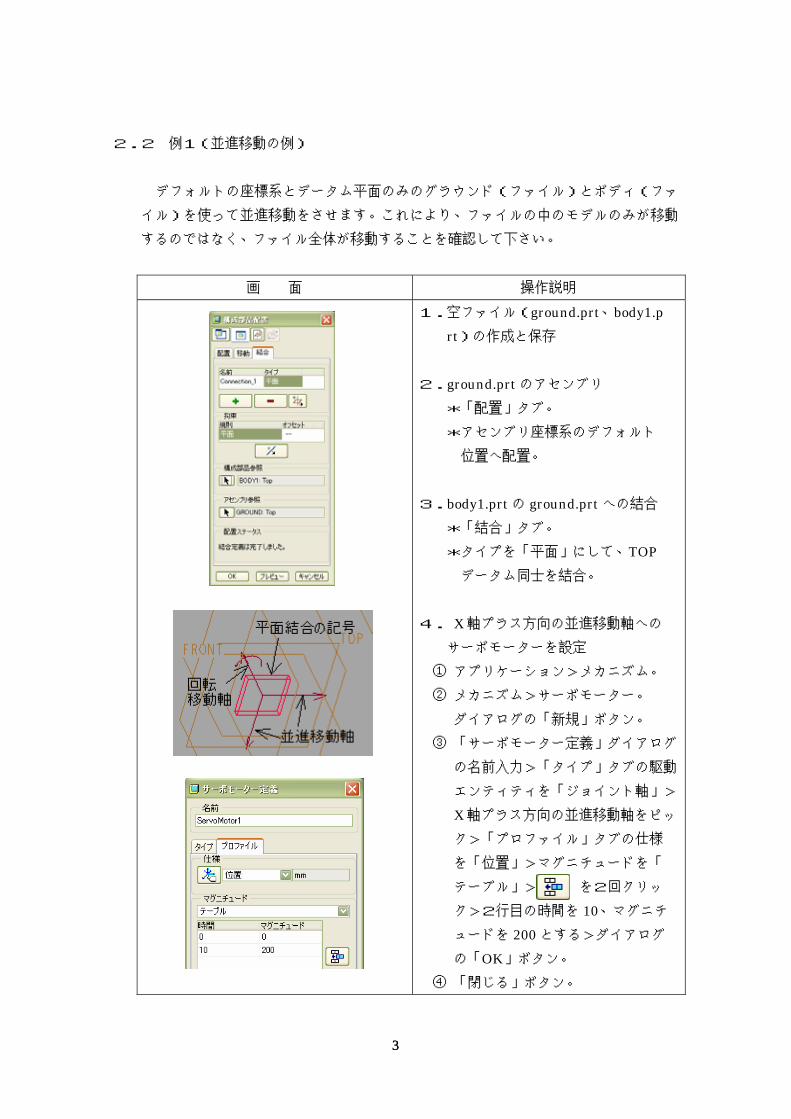
2.2 例1(並進移動の例) デフォルトの座標系とデータム平面のみのグラウンド(ファイル)とボディ(ファ
イル)を使って並進移動をさせます。これにより、ファイルの中のモデルのみが移動
するのではなく、ファイル全体が移動することを確認して下さい。
画 面 操作説明
1.空ファイル(ground.prt、body1.p rt)の作成と保存
2.ground.prtのアセンブリ *「配置」タブ。 *アセンブリ座標系のデフォルト 位置へ配置。 3.body1.prtの ground.prtへの結合 *「結合」タブ。 *タイプを「平面」にして、TOP
データム同士を結合。 4. X軸プラス方向の並進移動軸への
サーボモーターを設定 ① アプリケーション>メカニズム。 ② メカニズム>サーボモーター。 ダイアログの「新規」ボタン。 ③ 「サーボモーター定義」ダイアログ の名前入力>「タイプ」タブの駆動 エンティティを「ジョイント軸」> X軸プラス方向の並進移動軸をピッ ク>「プロファイル」タブの仕様 を「位置」>マグニチュードを「 テーブル」> を2回クリッ ク>2行目の時間を 10、マグニチ ュードを 200とする>ダイアログ の「OK」ボタン。 ④ 「閉じる」ボタン。
4 4
画 面 操作説明
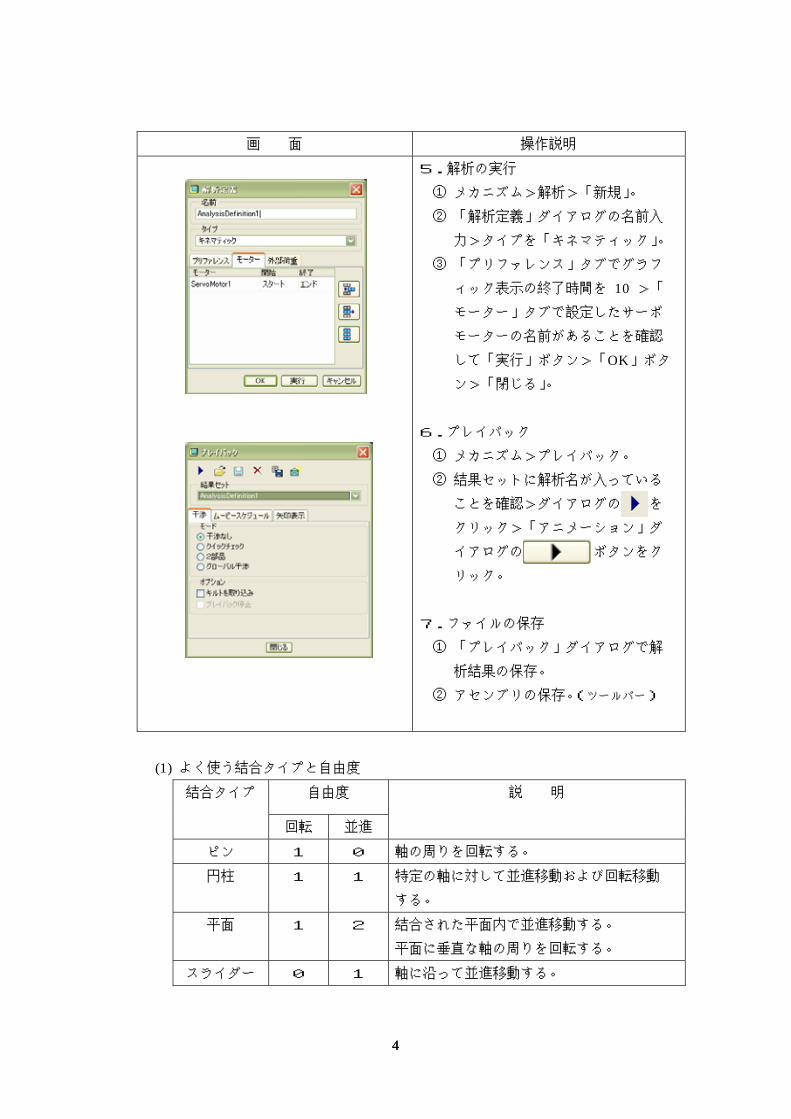
5.解析の実行 ① メカニズム>解析>「新規」。 ② 「解析定義」ダイアログの名前入 力>タイプを「キネマティック」。 ③ 「プリファレンス」タブでグラフ ィック表示の終了時間を 10 >「 モーター」タブで設定したサーボ モーターの名前があることを確認 して「実行」ボタン>「OK」ボタ ン>「閉じる」。 6.プレイバック ① メカニズム>プレイバック。 ② 結果セットに解析名が入っている ことを確認>ダイアログの を クリック>「アニメーション」ダ イアログの ボタンをク リック。 7.ファイルの保存 ① 「プレイバック」ダイアログで解 析結果の保存。 ② アセンブリの保存。(ツールバー)
(1) よく使う結合タイプと自由度
自由度 結合タイプ
回転 並進
説 明
ピン 1 0 軸の周りを回転する。 円柱 1 1 特定の軸に対して並進移動および回転移動
する。 平面 1 2 結合された平面内で並進移動する。
平面に垂直な軸の周りを回転する。 スライダー 0 1 軸に沿って並進移動する。
5 5
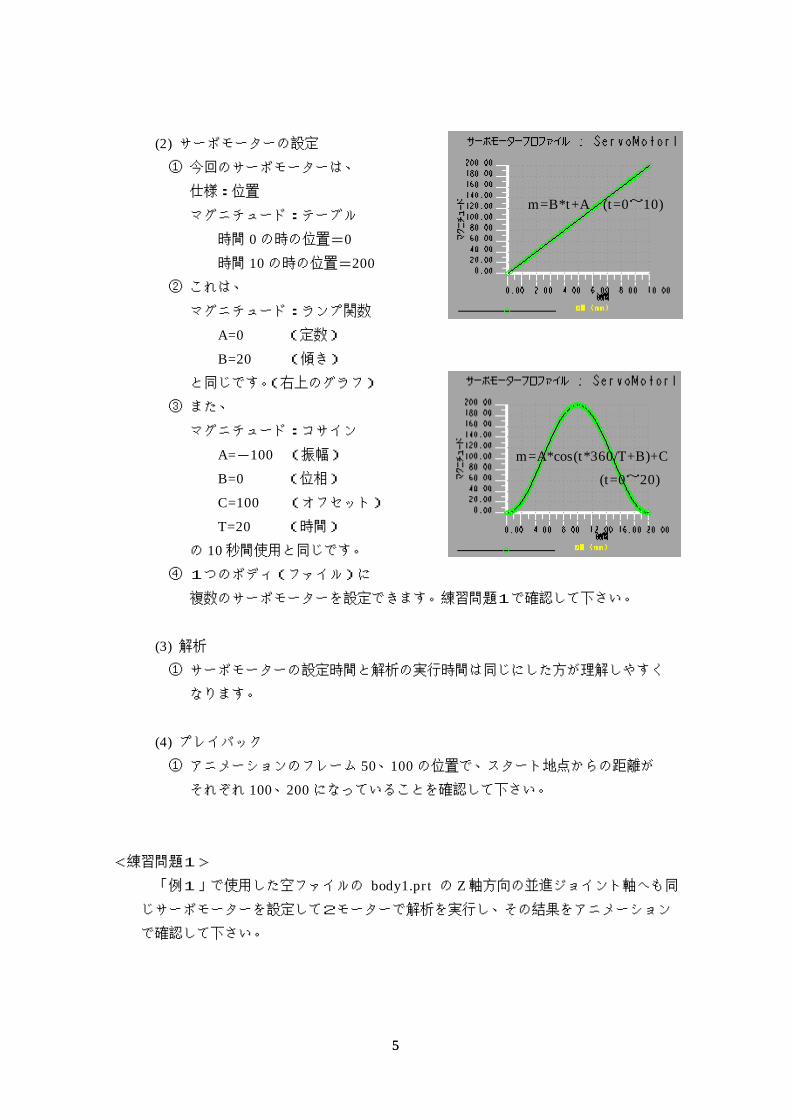
(2) サーボモーターの設定 ① 今回のサーボモーターは、 仕様:位置 マグニチュード:テーブル 時間 0の時の位置=0 時間 10の時の位置=200 ② これは、 マグニチュード:ランプ関数 A=0 (定数) B=20 (傾き) と同じです。(右上のグラフ) ③ また、 マグニチュード:コサイン A=-100 (振幅) B=0 (位相) C=100 (オフセット) T=20 (時間) の 10秒間使用と同じです。 ④ 1つのボディ(ファイル)に 複数のサーボモーターを設定できます。練習問題1で確認して下さい。 (3) 解析 ① サーボモーターの設定時間と解析の実行時間は同じにした方が理解しやすく なります。 (4) プレイバック ① アニメーションのフレーム 50、100の位置で、スタート地点からの距離が それぞれ 100、200になっていることを確認して下さい。 <練習問題1> 「例1」で使用した空ファイルの body1.prt の Z軸方向の並進ジョイント軸へも同 じサーボモーターを設定して2モーターで解析を実行し、その結果をアニメーション で確認して下さい。
m=A*cos(t*360/T+B)+C (t=0~20)
m=B*t+A (t=0~10)
6 6
2.3 例2(並進+回転移動の例) 「例1」で使用した空ファイルへそれぞれ次の様なモデルを作成し、メカニズムの
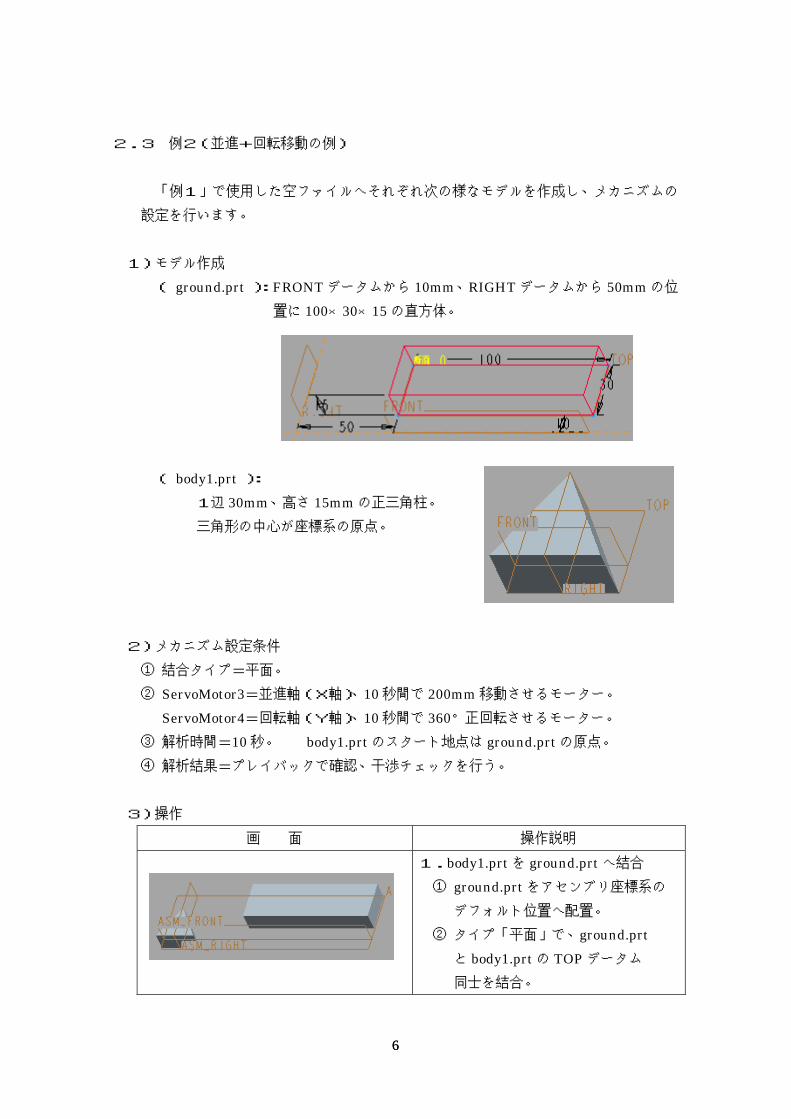
設定を行います。 1)モデル作成 ( ground.prt ):FRONTデータムから 10mm、RIGHTデータムから 50mmの位 置に 100×30×15の直方体。 ( body1.prt ): 1辺 30mm、高さ 15mmの正三角柱。 三角形の中心が座標系の原点。 2)メカニズム設定条件 ① 結合タイプ=平面。 ② ServoMotor3=並進軸(X軸)、10秒間で 200mm移動させるモーター。 ServoMotor4=回転軸(Y軸)、10秒間で 360°正回転させるモーター。 ③ 解析時間=10秒。 body1.prtのスタート地点は ground.prtの原点。 ④ 解析結果=プレイバックで確認、干渉チェックを行う。 3)操作
画 面 操作説明
1.body1.prtを ground.prtへ結合 ① ground.prtをアセンブリ座標系の デフォルト位置へ配置。 ② タイプ「平面」で、ground.prt と body1.prtの TOPデータム 同士を結合。
7 7
画 面 操作説明
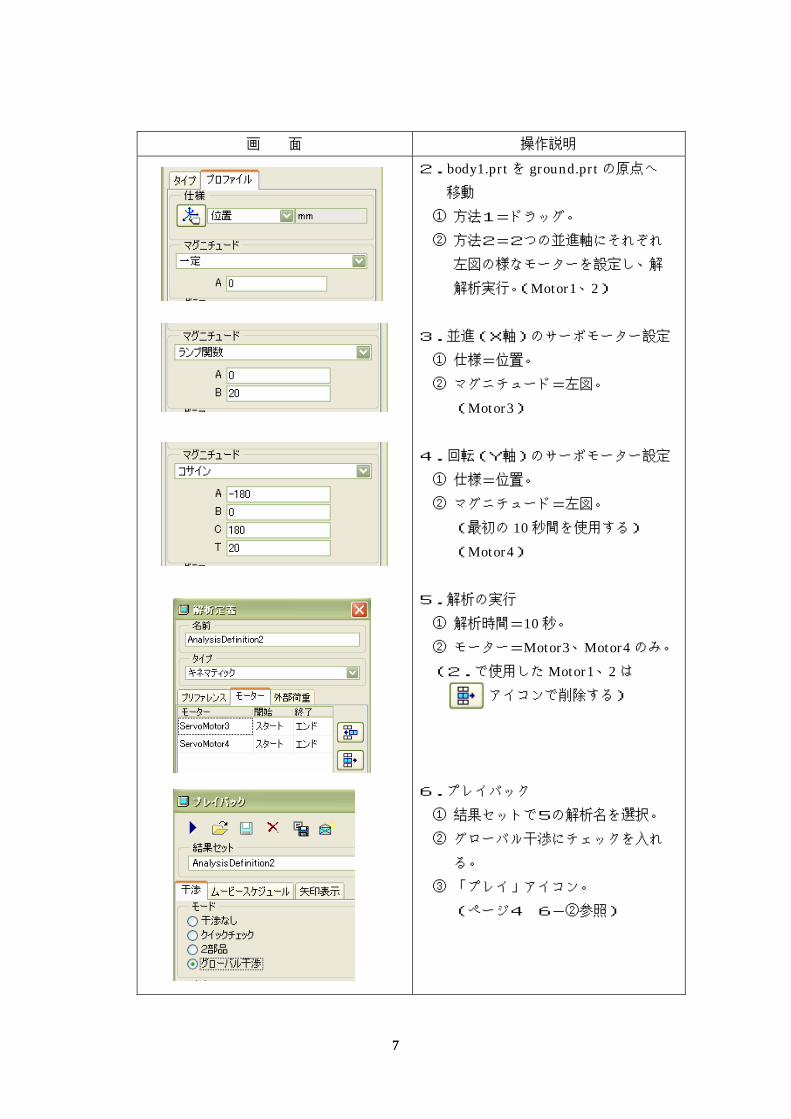
2.body1.prtを ground.prtの原点へ 移動 ① 方法1=ドラッグ。 ② 方法2=2つの並進軸にそれぞれ 左図の様なモーターを設定し、解 解析実行。(Motor1、2) 3.並進(X軸)のサーボモーター設定 ① 仕様=位置。 ② マグニチュード=左図。 (Motor3) 4.回転(Y軸)のサーボモーター設定 ① 仕様=位置。 ② マグニチュード=左図。 (最初の 10秒間を使用する) (Motor4) 5.解析の実行 ① 解析時間=10秒。 ② モーター=Motor3、Motor4のみ。 (2.で使用したMotor1、2は アイコンで削除する) 6.プレイバック ① 結果セットで5の解析名を選択。 ② グローバル干渉にチェックを入れ る。 ③ 「プレイ」アイコン。 (ページ4 6-②参照)
8 8
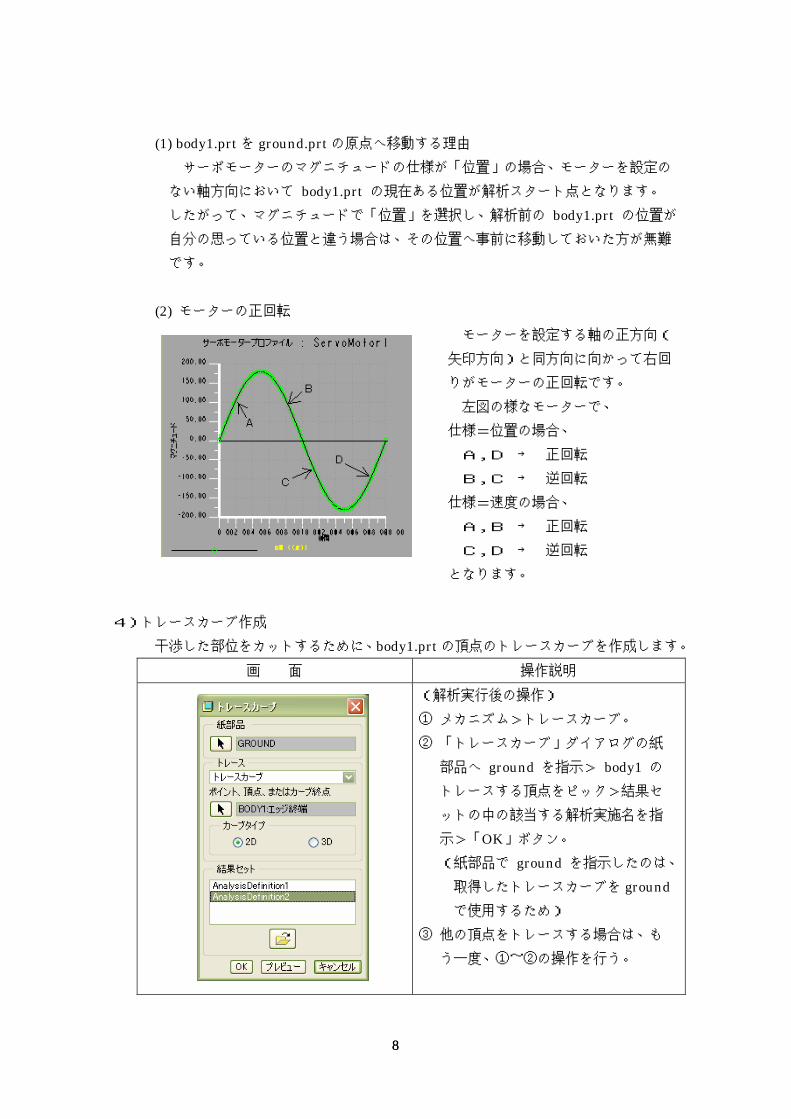
(1) body1.prtを ground.prtの原点へ移動する理由 サーボモーターのマグニチュードの仕様が「位置」の場合、モーターを設定の ない軸方向において body1.prt の現在ある位置が解析スタート点となります。 したがって、マグニチュードで「位置」を選択し、解析前の body1.prt の位置が 自分の思っている位置と違う場合は、その位置へ事前に移動しておいた方が無難 です。 (2) モーターの正回転 モーターを設定する軸の正方向( 矢印方向)と同方向に向かって右回 りがモーターの正回転です。 左図の様なモーターで、 仕様=位置の場合、 A,D → 正回転 B,C → 逆回転 仕様=速度の場合、 A,B → 正回転 C,D → 逆回転 となります。 4)トレースカーブ作成 干渉した部位をカットするために、body1.prtの頂点のトレースカーブを作成します。
画 面 操作説明
(解析実行後の操作) ① メカニズム>トレースカーブ。 ② 「トレースカーブ」ダイアログの紙 部品へ ground を指示> body1 の トレースする頂点をピック>結果セ ットの中の該当する解析実施名を指 示>「OK」ボタン。 (紙部品で ground を指示したのは、 取得したトレースカーブを ground で使用するため) ③ 他の頂点をトレースする場合は、も う一度、①~②の操作を行う。
9 9
画 面 操作説明
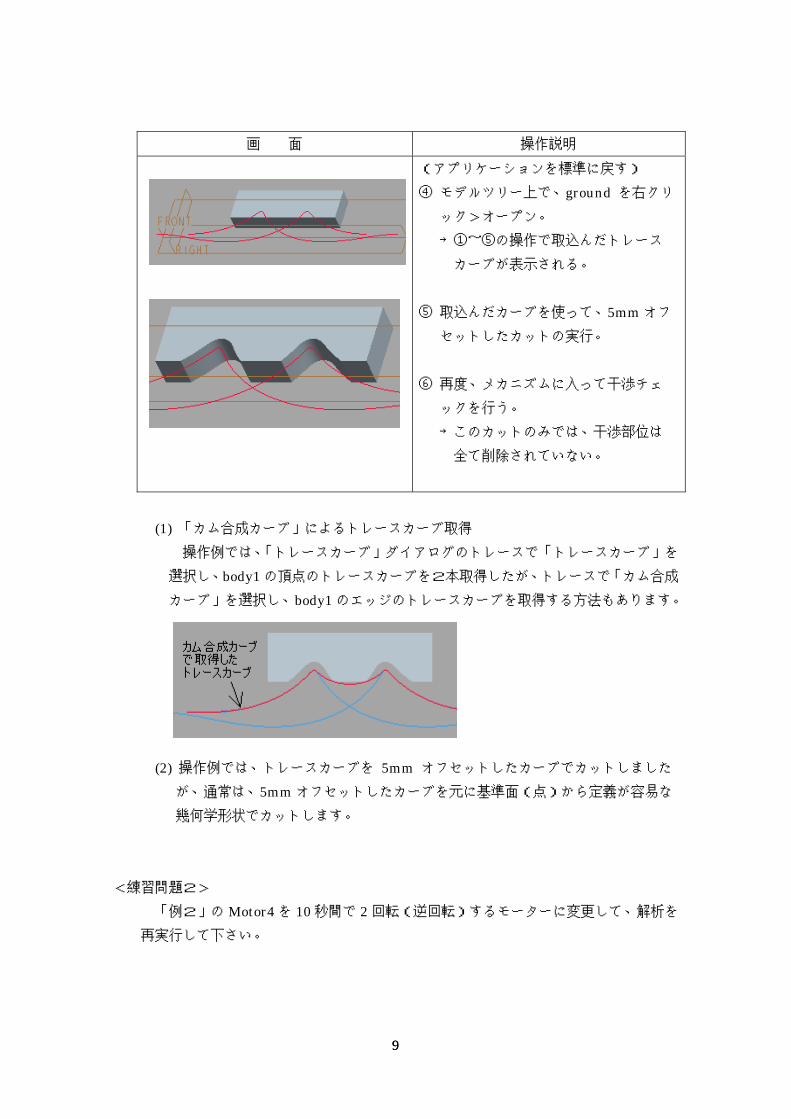
(アプリケーションを標準に戻す) ④ モデルツリー上で、ground を右クリ ック>オープン。 →①~⑤の操作で取込んだトレース カーブが表示される。 ⑤ 取込んだカーブを使って、5mmオフ セットしたカットの実行。 ⑥ 再度、メカニズムに入って干渉チェ ックを行う。 →このカットのみでは、干渉部位は 全て削除されていない。
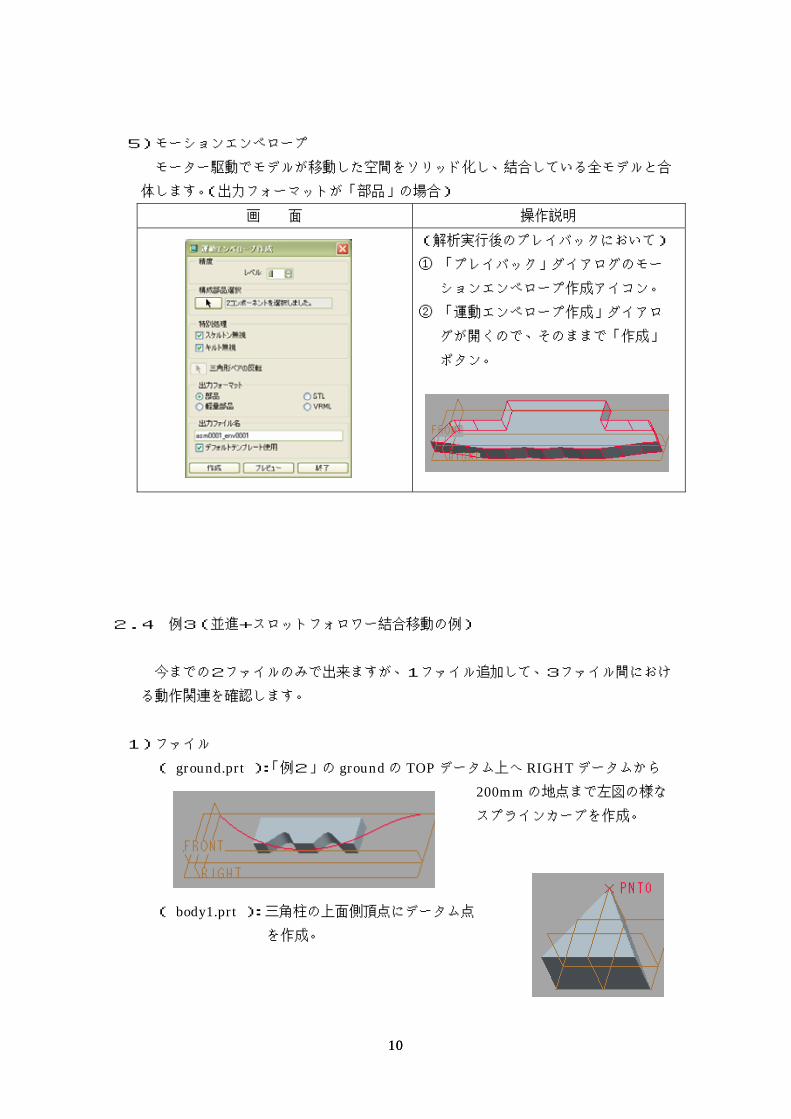
(1) 「カム合成カーブ」によるトレースカーブ取得 操作例では、「トレースカーブ」ダイアログのトレースで「トレースカーブ」を 選択し、body1の頂点のトレースカーブを2本取得したが、トレースで「カム合成 カーブ」を選択し、body1のエッジのトレースカーブを取得する方法もあります。 (2) 操作例では、トレースカーブを 5mm オフセットしたカーブでカットしました が、通常は、5mmオフセットしたカーブを元に基準面(点)から定義が容易な 幾何学形状でカットします。 <練習問題2> 「例2」のMotor4を 10秒間で 2回転(逆回転)するモーターに変更して、解析を 再実行して下さい。
10 10
5)モーションエンベロープ モーター駆動でモデルが移動した空間をソリッド化し、結合している全モデルと合 体します。(出力フォーマットが「部品」の場合)
画 面 操作説明
(解析実行後のプレイバックにおいて) ① 「プレイバック」ダイアログのモー ションエンベロープ作成アイコン。 ② 「運動エンベロープ作成」ダイアロ グが開くので、そのままで「作成」 ボタン。
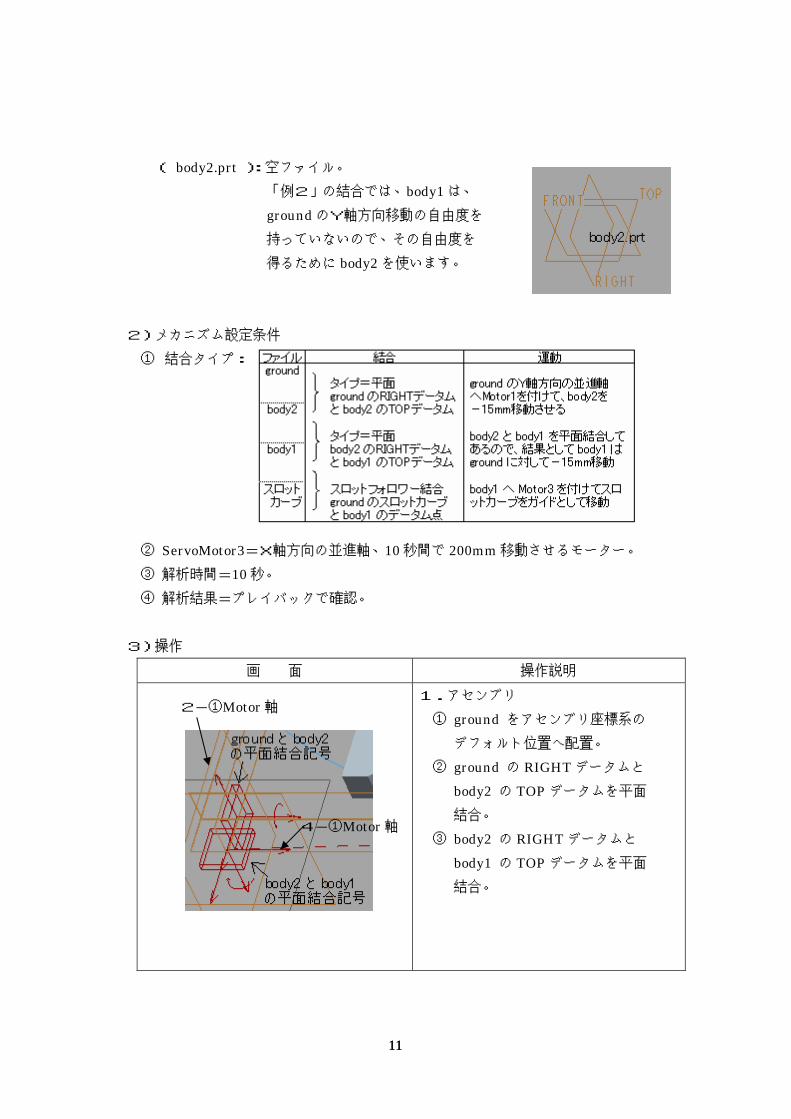
2.4 例3(並進+スロットフォロワー結合移動の例) 今までの2ファイルのみで出来ますが、1ファイル追加して、3ファイル間におけ る動作関連を確認します。 1)ファイル ( ground.prt ):「例2」の groundの TOPデータム上へ RIGHTデータムから 200mmの地点まで左図の様な スプラインカーブを作成。 ( body1.prt ):三角柱の上面側頂点にデータム点 を作成。
11 11
( body2.prt ):空ファイル。 「例2」の結合では、body1は、 groundのY軸方向移動の自由度を 持っていないので、その自由度を 得るために body2を使います。 2)メカニズム設定条件 ① 結合タイプ:
② ServoMotor3=X軸方向の並進軸、10秒間で 200mm移動させるモーター。 ③ 解析時間=10秒。 ④ 解析結果=プレイバックで確認。 3)操作
画 面 操作説明
1.アセンブリ ① ground をアセンブリ座標系の デフォルト位置へ配置。 ② ground の RIGHTデータムと body2 の TOPデータムを平面 結合。 ③ body2 の RIGHTデータムと body1 の TOPデータムを平面 結合。
2-①Motor軸
4-①Motor軸
12 12
画 面 操作説明
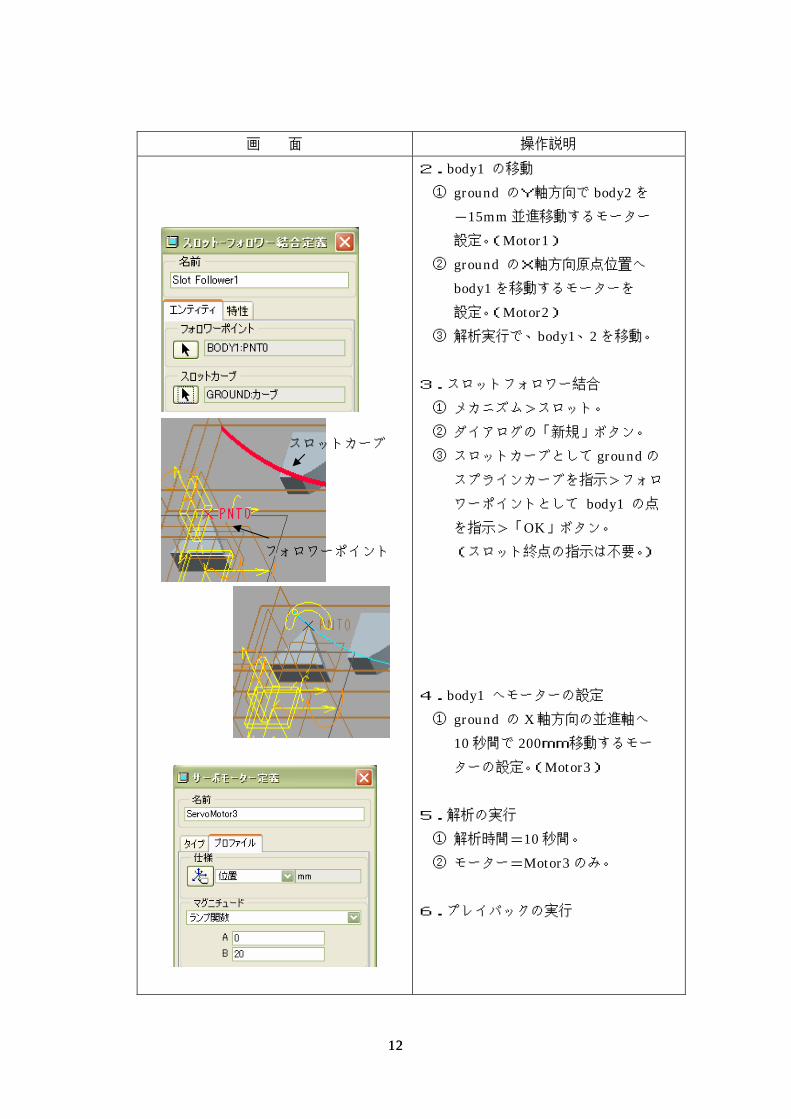
2.body1 の移動 ① ground のY軸方向で body2を -15mm並進移動するモーター 設定。(Motor1) ② ground のX軸方向原点位置へ body1を移動するモーターを 設定。(Motor2) ③ 解析実行で、body1、2を移動。 3.スロットフォロワー結合 ① メカニズム>スロット。 ② ダイアログの「新規」ボタン。 ③ スロットカーブとして groundの スプラインカーブを指示>フォロ ワーポイントとして body1 の点 を指示>「OK」ボタン。 (スロット終点の指示は不要。) 4.body1 へモーターの設定 ① ground の X軸方向の並進軸へ 10秒間で 200mm移動するモー ターの設定。(Motor3) 5.解析の実行 ① 解析時間=10秒間。 ② モーター=Motor3のみ。 6.プレイバックの実行
スロットカーブ
フォロワーポイント
13 13
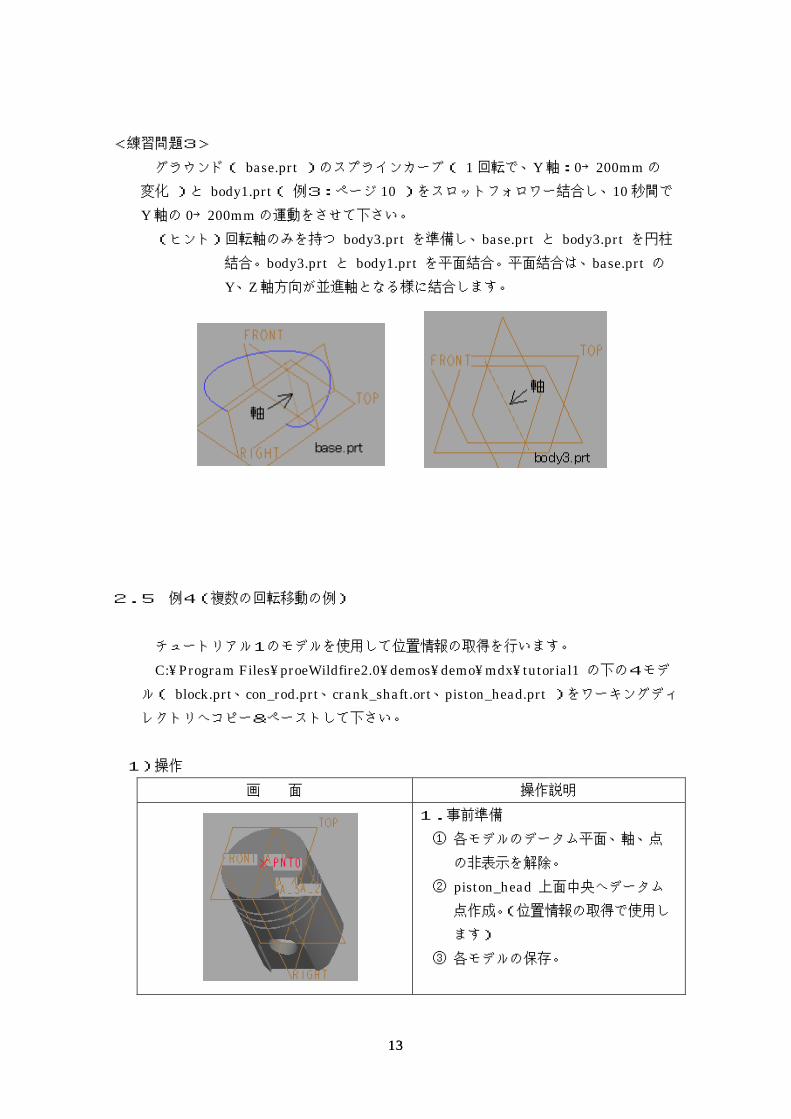
<練習問題3> グラウンド( base.prt )のスプラインカーブ( 1回転で、Y軸:0→200mmの 変化 )と body1.prt( 例3:ページ 10 )をスロットフォロワー結合し、10秒間で Y軸の 0→200mmの運動をさせて下さい。 (ヒント)回転軸のみを持つ body3.prt を準備し、base.prt と body3.prt を円柱 結合。body3.prt と body1.prt を平面結合。平面結合は、base.prt の Y、Z軸方向が並進軸となる様に結合します。 2.5 例4(複数の回転移動の例) チュートリアル1のモデルを使用して位置情報の取得を行います。 C:¥Program Files¥proeWildfire2.0¥demos¥demo¥mdx¥tutorial1 の下の4モデ ル( block.prt、con_rod.prt、crank_shaft.ort、piston_head.prt )をワーキングディ レクトリへコピー&ペーストして下さい。 1)操作
画 面 操作説明
1.事前準備 ① 各モデルのデータム平面、軸、点 の非表示を解除。 ② piston_head 上面中央へデータム 点作成。(位置情報の取得で使用し ます) ③ 各モデルの保存。
14 14
画 面 操作説明
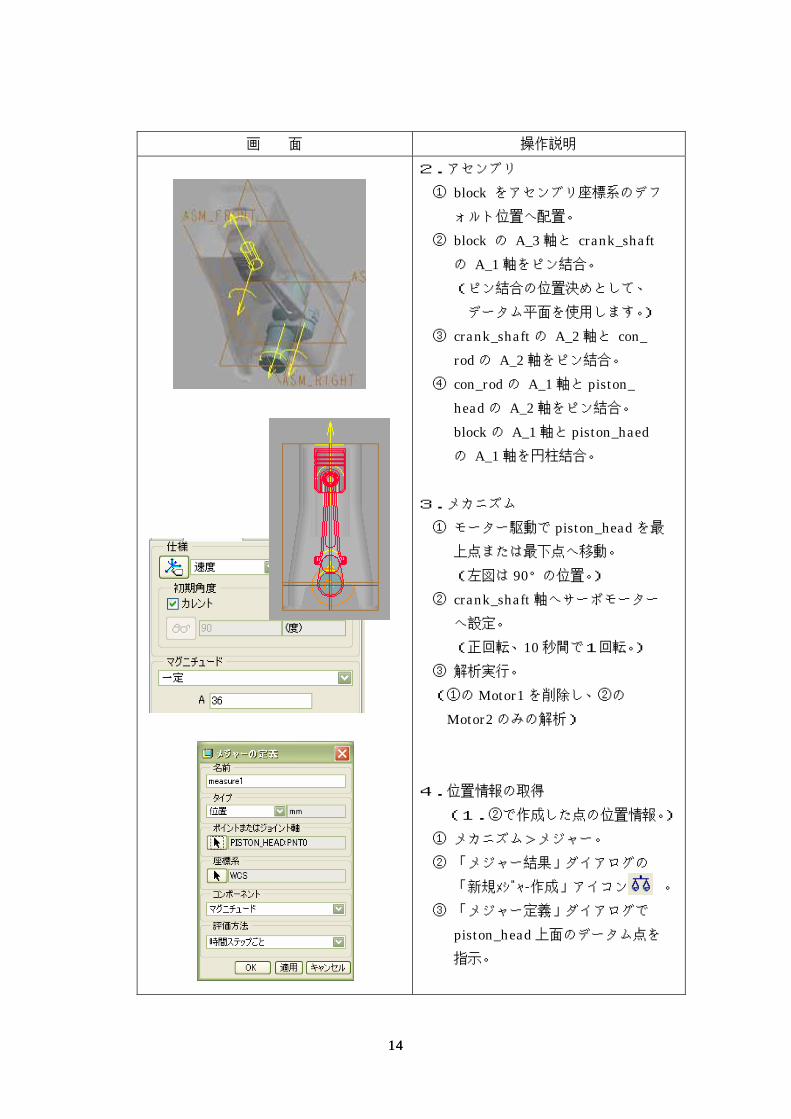
2.アセンブリ ① block をアセンブリ座標系のデフ ォルト位置へ配置。 ② block の A_3軸と crank_shaft の A_1軸をピン結合。 (ピン結合の位置決めとして、 データム平面を使用します。) ③ crank_shaftの A_2軸と con_ rodの A_2軸をピン結合。 ④ con_rodの A_1軸と piston_ headの A_2軸をピン結合。 blockの A_1軸と piston_haed の A_1軸を円柱結合。 3.メカニズム ① モーター駆動で piston_headを最 上点または最下点へ移動。 (左図は 90°の位置。) ② crank_shaft軸へサーボモーター へ設定。 (正回転、10秒間で1回転。) ③ 解析実行。 (①のMotor1を削除し、②の Motor2のみの解析) 4.位置情報の取得 (1.②で作成した点の位置情報。)
① メカニズム>メジャー。 ② 「メジャー結果」ダイアログの 「新規メジャー作成」アイコン 。 ③ 「メジャー定義」ダイアログで piston_head上面のデータム点を 指示。
15 15
画 面 操作説明
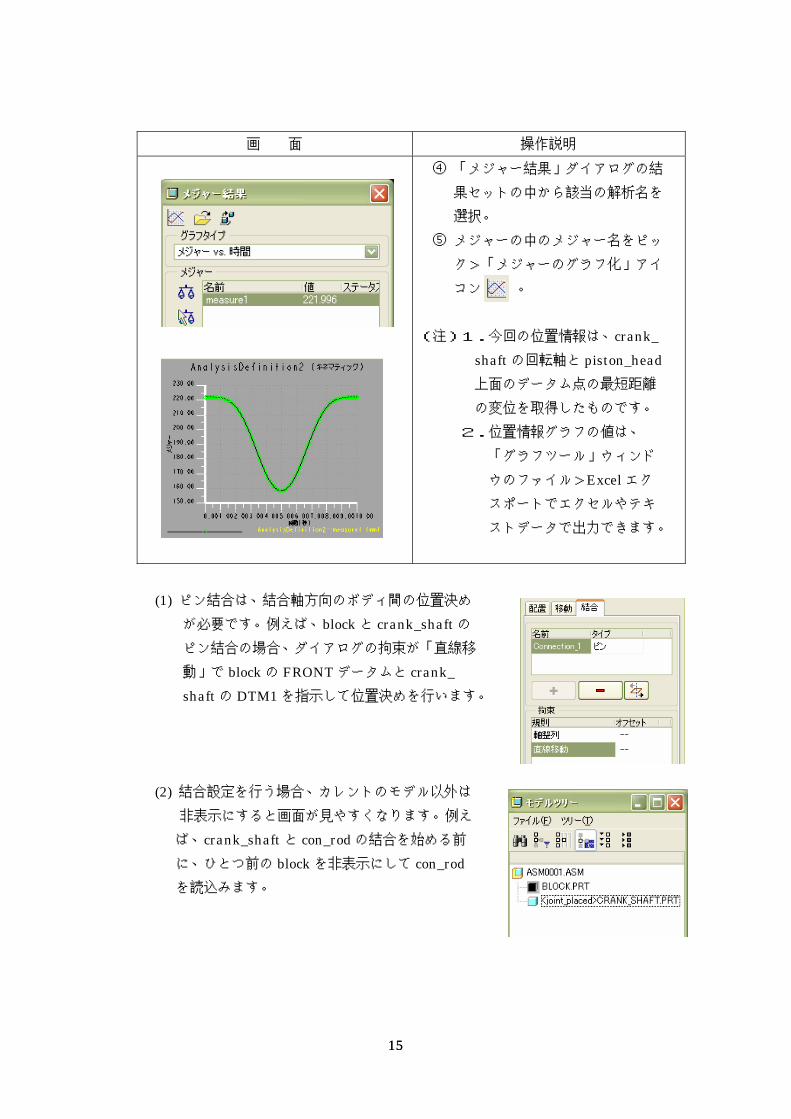
④ 「メジャー結果」ダイアログの結 果セットの中から該当の解析名を 選択。 ⑤ メジャーの中のメジャー名をピッ ク>「メジャーのグラフ化」アイ コン 。 (注)1.今回の位置情報は、crank_ shaftの回転軸と piston_head 上面のデータム点の最短距離 の変位を取得したものです。 2.位置情報グラフの値は、 「グラフツール」ウィンド ウのファイル>Excelエク スポートでエクセルやテキ ストデータで出力できます。
(1) ピン結合は、結合軸方向のボディ間の位置決め が必要です。例えば、blockと crank_shaftの ピン結合の場合、ダイアログの拘束が「直線移 動」で blockの FRONTデータムと crank_ shaftの DTM1を指示して位置決めを行います。
(2) 結合設定を行う場合、カレントのモデル以外は 非表示にすると画面が見やすくなります。例え
ば、crank_shaftと con_rodの結合を始める前 に、ひとつ前の blockを非表示にして con_rod を読込みます。
16 16
練習問題解答 解答はひとつの例です。絶対的なものではありません。 <問題1>
画 面 操作説明
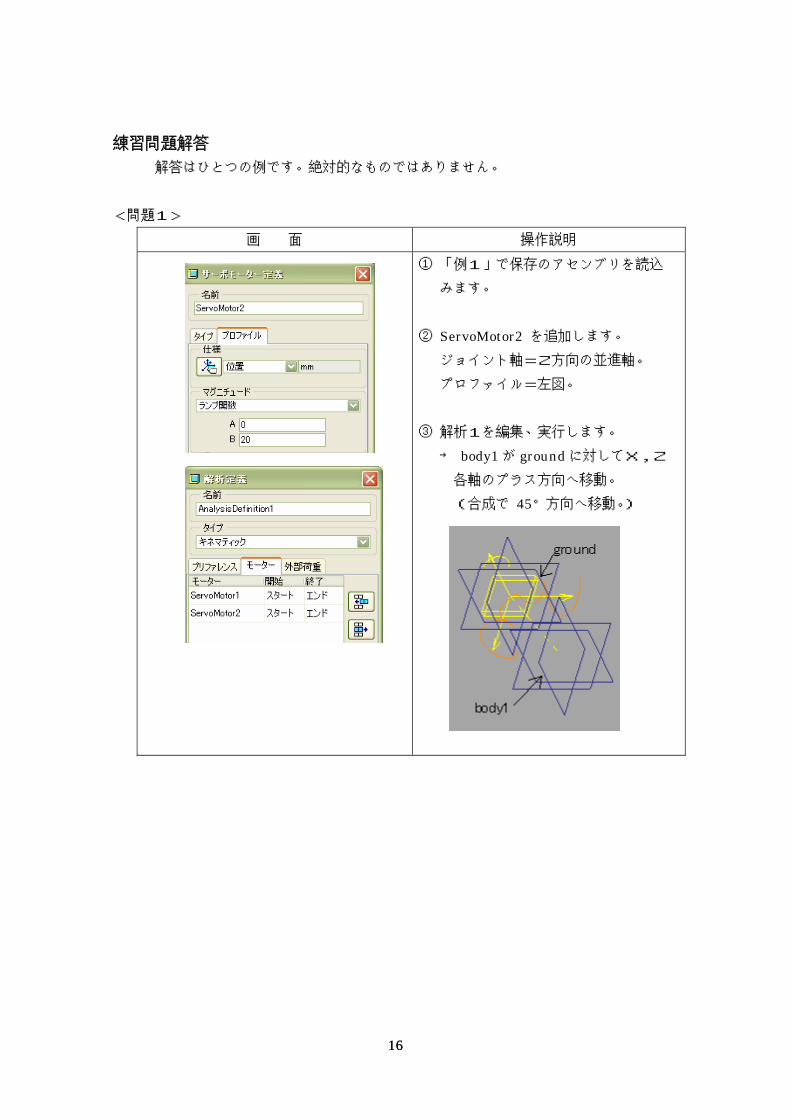
① 「例1」で保存のアセンブリを読込 みます。 ② ServoMotor2 を追加します。 ジョイント軸=Z方向の並進軸。 プロファイル=左図。 ③ 解析1を編集、実行します。 → body1が groundに対してX,Z 各軸のプラス方向へ移動。 (合成で 45°方向へ移動。)
17 17
<問題2> 画 面 操作説明
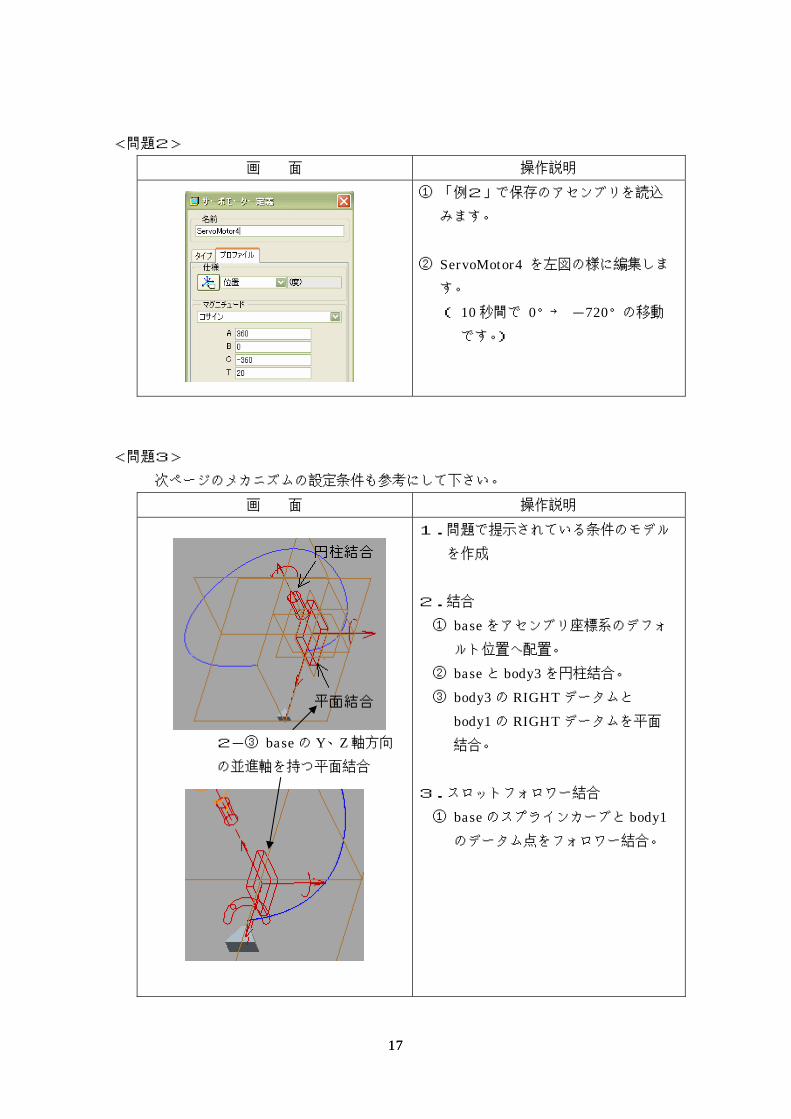
① 「例2」で保存のアセンブリを読込 みます。 ② ServoMotor4 を左図の様に編集しま す。 ( 10秒間で 0°→ -720°の移動 です。)
<問題3> 次ページのメカニズムの設定条件も参考にして下さい。
画 面 操作説明
1.問題で提示されている条件のモデル を作成 2.結合 ① baseをアセンブリ座標系のデフォ ルト位置へ配置。 ② baseと body3を円柱結合。 ③ body3の RIGHTデータムと body1の RIGHTデータムを平面 結合。 3.スロットフォロワー結合 ① baseのスプラインカーブと body1 のデータム点をフォロワー結合。
2-③ baseの Y、Z軸方向 の並進軸を持つ平面結合
18 18
画 面 操作説明
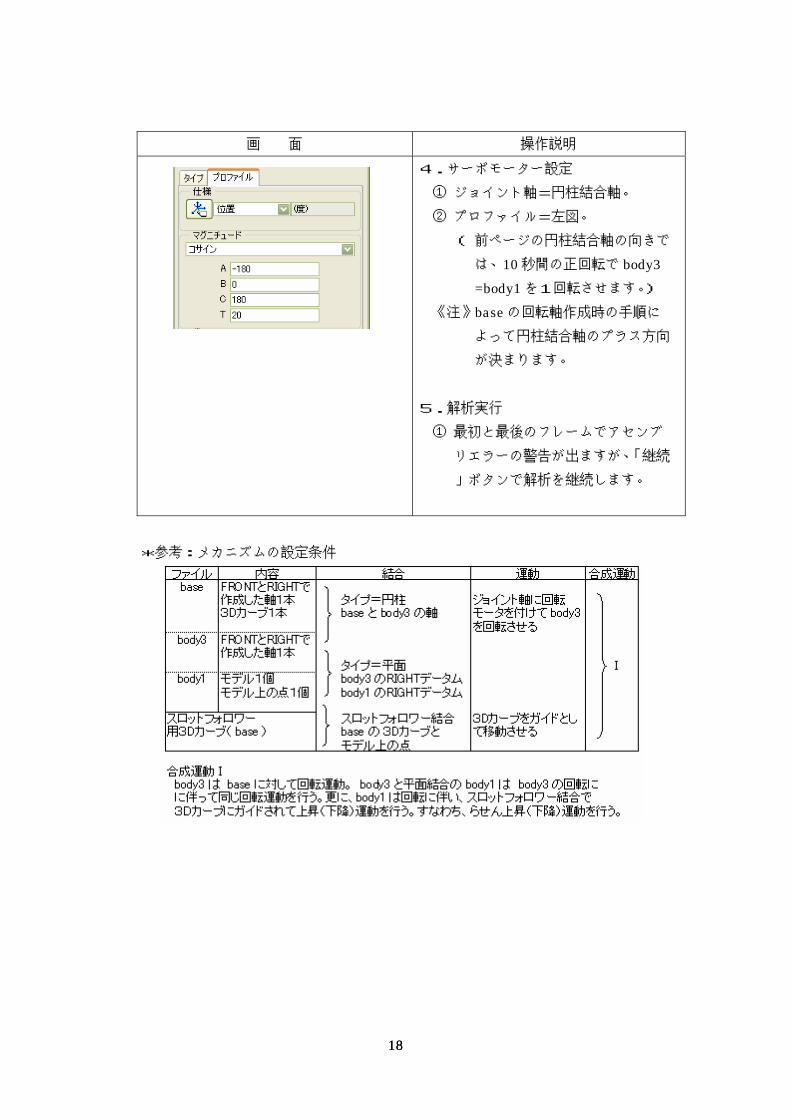
4.サーボモーター設定 ① ジョイント軸=円柱結合軸。 ② プロファイル=左図。 ( 前ページの円柱結合軸の向きで は、10秒間の正回転で body3 =body1を1回転させます。) 《注》baseの回転軸作成時の手順に よって円柱結合軸のプラス方向 が決まります。 5.解析実行 ① 最初と最後のフレームでアセンブ リエラーの警告が出ますが、「継続 」ボタンで解析を継続します。
*参考:メカニズムの設定条件
19 19
付録 [用語] 回転移動 軸を中心として、ボディ(ファイル)を回転させる運動タイプ。 グラウンド 移動しないボディ。 結合 ボディ間のリレーションで、ボディどうしの相対的な運動を定義、拘束します。 サーボモーター ボディ間の相対的な動きを定義する方法。
ジョイントやジオメトリエンティティ上にモーターを配置することにより、ボディ間
の位置、速度、加速度を設定できます。 ジョイント 部品モードのサブモードで、3D環境内で使える2Dドラフトモード。 プレイバック 解析実行時の運動を記録して再現する機能。 並進移動 ボディ(ファイル)を回転させずに直線に沿って移動させる運動タイプ。 ボディ 移動する構成部品(ファイル)。 グラウンドまたは他のボディに相対して動きます。