new perspectives of real and virtual mechanisms models … · new perspectives of real and virtual...
TRANSCRIPT
The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS7.006
New Perspectives of Real and Virtual Mechanisms Modelsin Theory of Mechanisms and Machines
Andrei Vukolov Olga [email protected] [email protected]
Bauman Moscow State Technical University2nd Baumanskaya street, 5, 105005 Moscow, Russian Federation
Abstract— Scaled models of mechanisms are widelyused in theory of machines and mechanisms. Through his-tory of discipline from XIXth century several collectionsof mechanisms and ”Cabinets of models” were createdin Germany, Russia, Italy etc. Development of new tech-nologies including photography, computer graphics and3D modeling made it possible to save artifact models andimprove usage of their images. They turn model to a kindof smart object with capabilities of integration with modernIT infrastructure. This paper presents new perspectives ofvirtual mechanisms models of several kinds (photographs,animations, 3D-models) in historical context of engineer-ing education and famous ”Russian method” of training.
Keywords: history of MMS, virtual models, mechanisms models,3D modeling, engineering education, BMSTU, mechanisms collection
I. Introduction
The discipline ”Theory of Mechanisms and Machines”are continuous developing from early time and the teachingmethodology must keep itself in date. One of the tasks ofthis methodology is to save knowledge about inventions ofthe past to use in future. Knowledge about the disciplinecan be distributed using many methods including lecturing,drawings, books etc. Scaled motile models may be consid-ered as one of the most effective ways to explain the idea ofthe mechanism and machine based on.
The idea of model collections suggested in France inXVIIth century was successfully transferred to whole Eu-rope and neighboring countries [7]. In general, these col-lections included mechanisms of all kind based on scientificdiscoveries of the time [4]. Tangible models had provideda new level of cognitive effectiveness while training.
However, the real model can not give a trainee full ex-planation of design and its tasks. Also construction ofthe model rarely conducts to use it in unusual teachingworkspace, outside the special auditorium for example. Asnumber of students increases as more difficult to use the realmodels especially as parts of collection. It is usually impos-sible to disassemble the model to explain peculiarities ofdesign. The typical TMM tasks such as mechanism schemasythesis and dynamic analysis in this case are turned to hid-den fields.
Fig. 1. Main building of Bauman Moscow State Technical University
New technologies that are used in Bauman Universityforce students to learn TMM through own experience ofmechanisms modeling [9]. In additional to understandingof the tasks this practice gives new multimedia data for fur-ther courses.
II. BMSTU and collection of models
Bauman Moscow State Technical University (fig. 1)1
also known as Bauman University was founded as MoscowCrafts School (MCS) in 1830 under ”Statute of MoscowCrafts School” approved by Emperor Nicolai I. The trainingprocess was focused on engineering. It included laboratorytraining where students were working with real engineer-ing and manufacturing tasks. This method is preserved tillpresent. Now the training process in BMSTU uncludes lec-tures, practical courses, laboratory works, all types of tests(exams, homeworks, practice tests etc.) and course works.
Creating of the mechanisms collection in Bauman uni-versity began in 1837 when Adolf Rosenkampf the grad-uate of Petersburg Institute of Transport Engineers (PSTUat present) and director of MCS paid his attention to col-lecting models. Conceivably the idea of organization ofcollection was brought to him from foreign scientists [5],such as Augustin de Betancourt [11] the famous engineerand transport administrator.
1Photograph by A. Vukolov
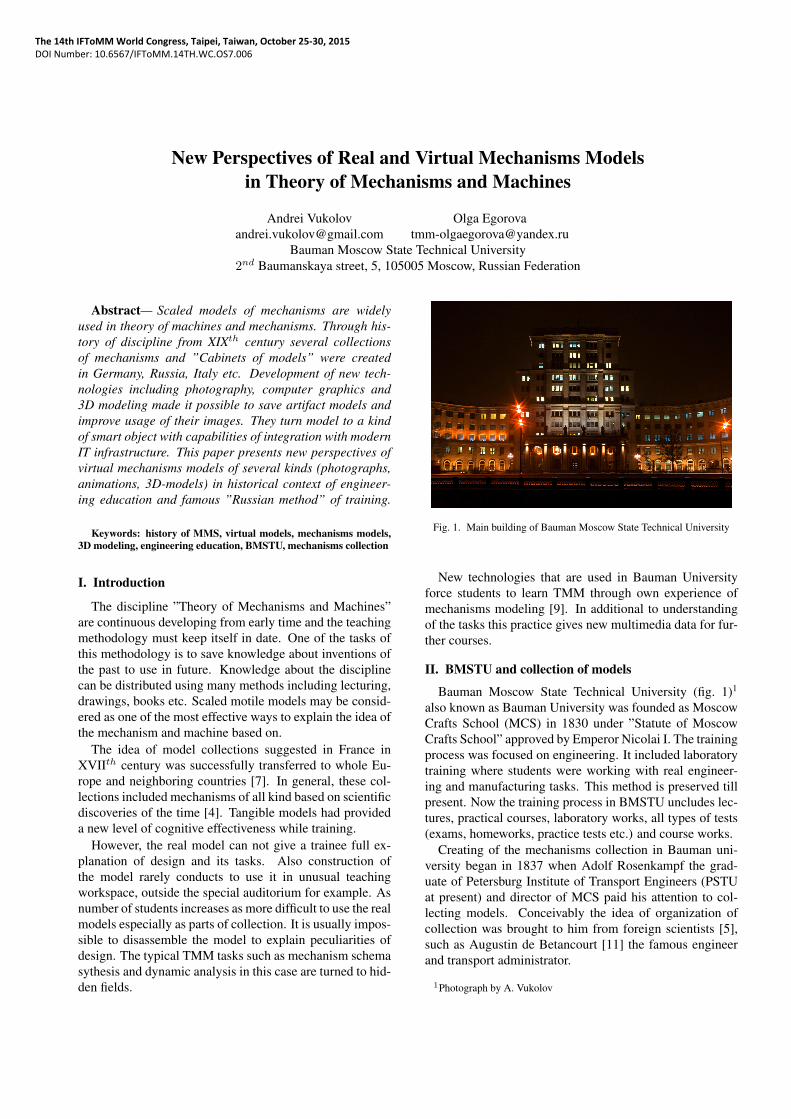
Fig. 2. Copy of Redtenbacher’s model (left picture) in collection of Bau-man University
Fig. 3. Composition of F. Orlov’s portrait with mechanisms fromReuleaux’s collection
The Russian Collection of Mechanisms was officiallycreated in 1840 by I. Balashev on base of MCS Depart-ment of Applied Mechanics (TMM department of BMSTUtoday). After that day the mechanisms models from collec-tion were in use in training process. Director of the SchoolA. Yershov from 1845 to 1869 made significant contribu-tion to the collection. Under his guidance students madeabout 100 models including copies of models (fig. 2) fromwell-known Redtenbacher’s collection [19].
BMSTU Collection of mechanisms was increased toabout 60 models through 1900s when under supervisingof F. Orlov (fig. 3)2 the director of TMM department sev-eral models from collection of Franz Reuleaux [18] werepurchased. That models were manufactured by GustavVoight. Later the collection was extended also for severaltimes [10].
2Image produced by A. Vukolov and A. Golovin
Fig. 4. Certificate of award
Fig. 5. Harmonic drive models in BMSTU collection
Today the mechanisms collection of TMM department ofBauman University is one of the largest collections of theworld with more than 500 models. From time of founda-tion there are several unique models with manufacturer’scredentials [9] saved in collection.
A. ”Russian method” of learning TMM in Bauman Univer-sity
Real manufacturing process as training section for stu-dents of engineering specialization had become well-knowhin the whole world in 1873 during World Exhibition in Vi-enna where it was called ”Russian Method” [13] andawarded with Big Golden medal (fig. 4).
A little bit later from Exhibitions the ”Russian Method”was implemented within educational system of MIT andWashington University. The combination of tool and jobanalysis provided a basis for now world famous Taylorismtechnique. In 70s–80s the collection was extended with har-monic drive models (fig. 5)3.
3Image produced by A. Vukolov

Fig. 6. Model set for synthesis task verification
B. Today usage of model collection
Now the collection is used while training process fordemonstration of parts movement, peculiarities of gear-ing etc. Also after extension of collection with harmonicdrives the TMM lecturers had an opportunity to demon-strate sophisticated gearing principles using movement ofreal mechanism. But the most common usage of the mod-els is experimental verification of synthesis tasks. BMSTUstudents do laboratory works with four-bar linkage synthe-sis and analysis tasks included [17]. TMM department hasspecial model sets (fig. 6) for four-bar and crankshaft-pistonlinkages for laboratory works [15]. These models containbars with changeable length and built-in measurement de-vices. In accordance with input data students set the syn-thesis task, built linkage and verify its motion law using themodel. Degrees of freedom, optimal bar lengths, displace-ment function and redundant links number are determinedduring the work.
III. Models in era of new technologies
Development of training process revealed the disadvan-tages of real models, such as weight and impossibility totransport big number of models outside from the main stor-age without special constraints. Also while lecturing TMMit is not enough to just demonstrate transformation of mo-tion using mechanism as closed system [8]. Developingof the new technologies requires experiments with mecha-nisms which often can not be performed in case of usage ofold and /or artifact models.
Digital imaging in earlier 2000s made it possi-ble to demonstrate models without physical access.V. B. Tarabarin attempted to create a photo gallery of mech-anisms on the unofficial website of department [16]. Forsome time this gallery was used to demonstrate collectionto students. Further development of digital photographytechniques brought possibilities of production of studio-quality images for demonstration (fig. 7)4 and measurementof mechanism parameters by photography [12]. Severalvideos were also produced to demonstrate real motion of
4Image produced by A. Vukolov, A. Golovin and Z. Tarabarina
Fig. 7. Studio-quality image of cogging mechanism
models. But photographic or video images are static. Theydo not bring full representation of both construction andmotion of mechanism as system of bodies. More capabili-ties needed for this.
IV. Role of 3D modeling solutions in modern TMMtraining
Evolution of 3D modeling software reveals new perspec-tives for TMM training process. Now the mechanisms andmodels can easily be converted to virtual 3D models withdefinition of solidity or without it. 3D models are kind of’smart objects’, so they can be runned and demonstratedat any place where required IT infrastructure installed. Byusage of various types of hardware and software environ-ment the lecturer has an opportunity to change model ex-terior and behavior for varied purposes [14]. For example,the student can disassemble the model into parts and exam-ine them separately in virtual environment. Using modernsoftware products such as Agisoft PhotoScan [3] hi-res tex-tured 3D model of an artifact mechanism model like shownon fig. 7 can be built for historical or archival purposes. Inthis case 3D modeling technique helps to save scientific her-itage as the digital photography used today in Bauman Uni-versity. Precise 3D documents also can be used for 3D pro-totyping and duplication of the mechanisms.
V. Modeling of mechanisms in Bauman University
As extension of the traditional TMM course the mul-timedia research projects were suggested to students onTMM department. The projects contained same target: toexplore and to build 3D model of mechanism from collec-tion of Bauman University. Among others, two historical
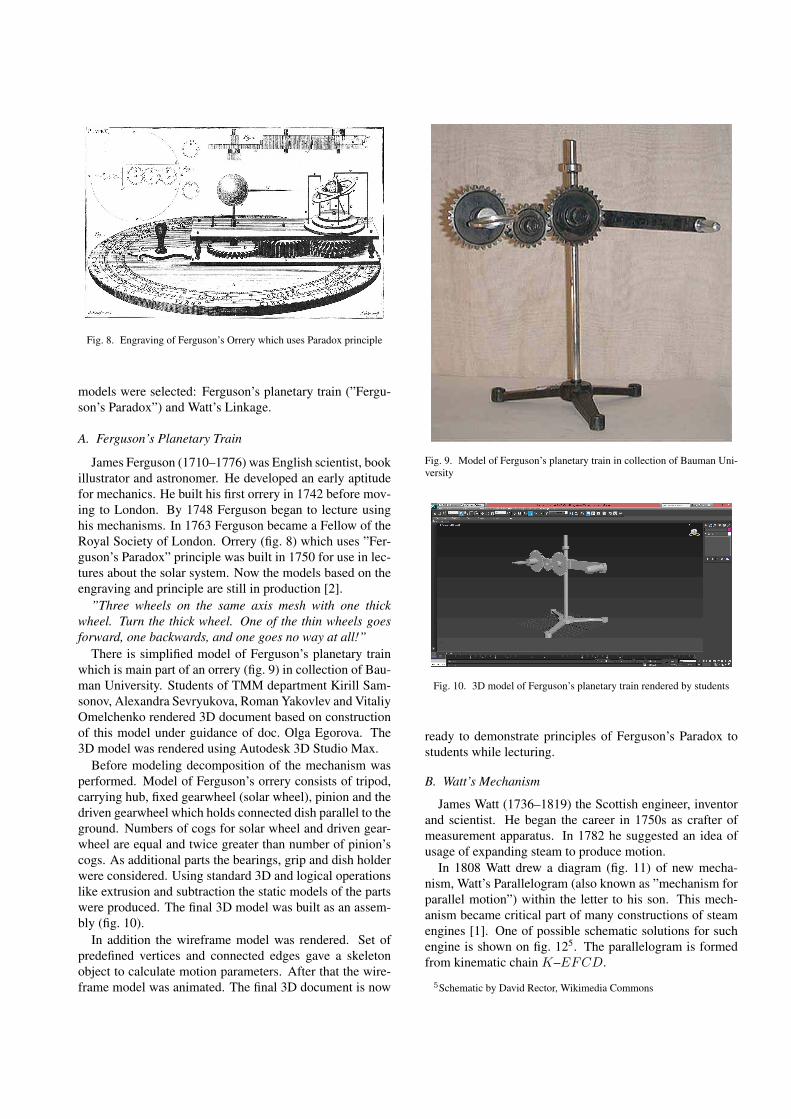
Fig. 8. Engraving of Ferguson’s Orrery which uses Paradox principle
models were selected: Ferguson’s planetary train (”Fergu-son’s Paradox”) and Watt’s Linkage.
A. Ferguson’s Planetary Train
James Ferguson (1710–1776) was English scientist, bookillustrator and astronomer. He developed an early aptitudefor mechanics. He built his first orrery in 1742 before mov-ing to London. By 1748 Ferguson began to lecture usinghis mechanisms. In 1763 Ferguson became a Fellow of theRoyal Society of London. Orrery (fig. 8) which uses ”Fer-guson’s Paradox” principle was built in 1750 for use in lec-tures about the solar system. Now the models based on theengraving and principle are still in production [2].
”Three wheels on the same axis mesh with one thickwheel. Turn the thick wheel. One of the thin wheels goesforward, one backwards, and one goes no way at all!”
There is simplified model of Ferguson’s planetary trainwhich is main part of an orrery (fig. 9) in collection of Bau-man University. Students of TMM department Kirill Sam-sonov, Alexandra Sevryukova, Roman Yakovlev and VitaliyOmelchenko rendered 3D document based on constructionof this model under guidance of doc. Olga Egorova. The3D model was rendered using Autodesk 3D Studio Max.
Before modeling decomposition of the mechanism wasperformed. Model of Ferguson’s orrery consists of tripod,carrying hub, fixed gearwheel (solar wheel), pinion and thedriven gearwheel which holds connected dish parallel to theground. Numbers of cogs for solar wheel and driven gear-wheel are equal and twice greater than number of pinion’scogs. As additional parts the bearings, grip and dish holderwere considered. Using standard 3D and logical operationslike extrusion and subtraction the static models of the partswere produced. The final 3D model was built as an assem-bly (fig. 10).
In addition the wireframe model was rendered. Set ofpredefined vertices and connected edges gave a skeletonobject to calculate motion parameters. After that the wire-frame model was animated. The final 3D document is now
Fig. 9. Model of Ferguson’s planetary train in collection of Bauman Uni-versity
Fig. 10. 3D model of Ferguson’s planetary train rendered by students
ready to demonstrate principles of Ferguson’s Paradox tostudents while lecturing.
B. Watt’s Mechanism
James Watt (1736–1819) the Scottish engineer, inventorand scientist. He began the career in 1750s as crafter ofmeasurement apparatus. In 1782 he suggested an idea ofusage of expanding steam to produce motion.
In 1808 Watt drew a diagram (fig. 11) of new mecha-nism, Watt’s Parallelogram (also known as ”mechanism forparallel motion”) within the letter to his son. This mech-anism became critical part of many constructions of steamengines [1]. One of possible schematic solutions for suchengine is shown on fig. 125. The parallelogram is formedfrom kinematic chain K–EFCD.
5Schematic by David Rector, Wikimedia Commons
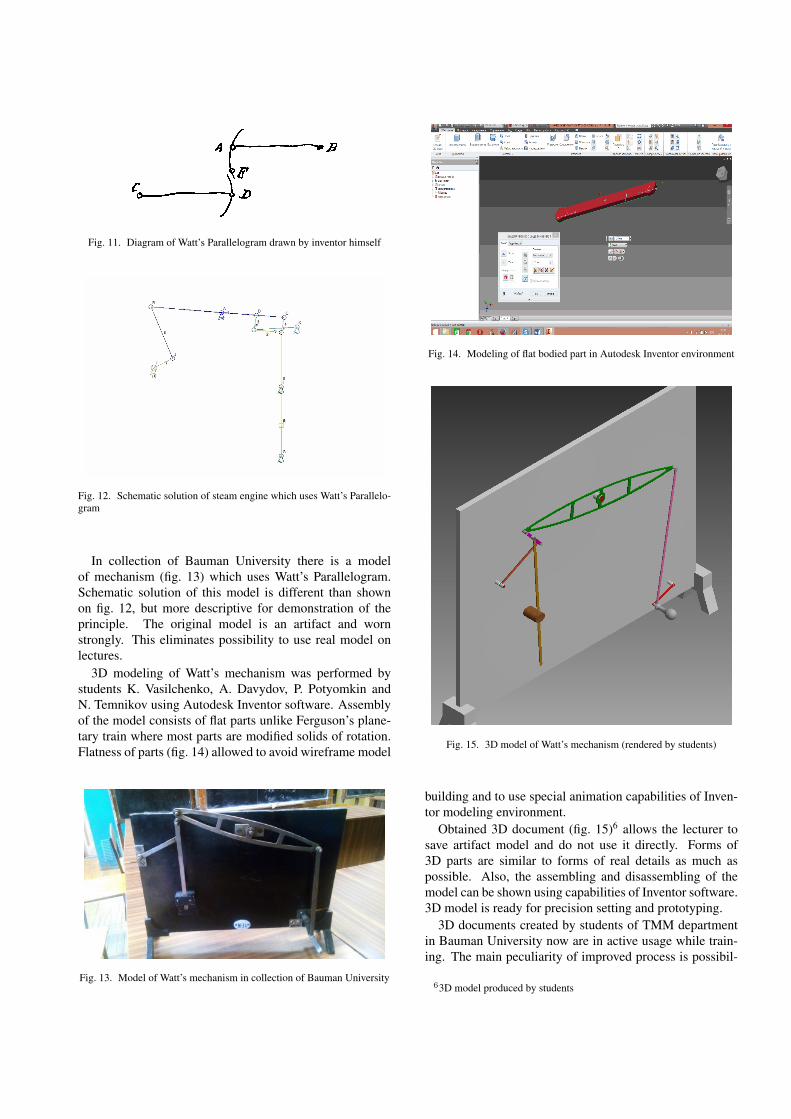
Fig. 11. Diagram of Watt’s Parallelogram drawn by inventor himself
Fig. 12. Schematic solution of steam engine which uses Watt’s Parallelo-gram
In collection of Bauman University there is a modelof mechanism (fig. 13) which uses Watt’s Parallelogram.Schematic solution of this model is different than shownon fig. 12, but more descriptive for demonstration of theprinciple. The original model is an artifact and wornstrongly. This eliminates possibility to use real model onlectures.
3D modeling of Watt’s mechanism was performed bystudents K. Vasilchenko, A. Davydov, P. Potyomkin andN. Temnikov using Autodesk Inventor software. Assemblyof the model consists of flat parts unlike Ferguson’s plane-tary train where most parts are modified solids of rotation.Flatness of parts (fig. 14) allowed to avoid wireframe model
Fig. 13. Model of Watt’s mechanism in collection of Bauman University
Fig. 14. Modeling of flat bodied part in Autodesk Inventor environment
Fig. 15. 3D model of Watt’s mechanism (rendered by students)
building and to use special animation capabilities of Inven-tor modeling environment.
Obtained 3D document (fig. 15)6 allows the lecturer tosave artifact model and do not use it directly. Forms of3D parts are similar to forms of real details as much aspossible. Also, the assembling and disassembling of themodel can be shown using capabilities of Inventor software.3D model is ready for precision setting and prototyping.
3D documents created by students of TMM departmentin Bauman University now are in active usage while train-ing. The main peculiarity of improved process is possibil-
63D model produced by students

ity of animated mechanism demonstration. Artifact modelof Watt’s mechanism which is in process of preparation torestoration isn’t now needed to move without significantreasons. The students who participated in research im-proved their skills of 3D modeling and learn special skillof setting up of animated virtual mechanisms. This skillcan also be used in further training on ADAMS softwarefor example.
VI. Conclusions
Creating of 3D models of mechanisms not only requiresstudent to improve skills of software operation but alsoforce him to learn some aspect of history and principlesof mechanics [6]. For example, it is needed to be famil-iar with theory of gearing to set Ferguson’s planetary train3D model wireframe model parameters properly. Anima-tion requires understanding of model motion law to set as-sembly behavior. But 3D models of mechanisms beingonce created reveal some new perspectives of TMM lectur-ing and training. From time of creation they are new instru-ments of knowledge translation. All aspects of mechanismwhich was prototype the 3D model can demonstrate andall peculiarities of motion can be explained using it. The3D documents can be used to save an artifact mechanismsmodels not only by saving it from excessive usage but alsoby giving possibility to make spares for corrupt parts using3D prototyping solutions.
References[1] Steam engines. Their history, description and application (in Rus-
sian). typ. Edward Pratz and Co., St. Pb., 1838.[2] James ferguson’s mechanical paradox (Orrery). Published on web-
site of Armstrong Metalcrafts (armstrongmetalcrafts.com), Onlinesince 2011.
[3] Agisoft LLC, St. Petersburg. Agisoft PhotoScan User Manual. Pro-fessional Edition, Version 1.1, 2015.
[4] Marco Ceccarelli. Italian kinematic studies in XIXth century. InMarco Ceccarelli, editor, International Symposium on History ofMachines and Mechanisms HMM 2000, pages 197–206. SpringerNetherlands, 2000.
[5] Marco Ceccarelli. Distinguished Figures in Mechanism and Ma-chine Science, volume 7 of History of Mechanism and Machine Sci-ence, chapter Francesco Masi (1852-1944), pages 141–162. SpringerNetherlands, 2010.
[6] Olga Egorova, Alexander Evgrafov, and Andrey Khisamov. NewTrends in Educational Activity in the Field of Mechanism and Ma-chine Theory, volume 19 of Mechanisms and Machine Science,chapter Experience of Modernization of the Curriculum TMM in St.Petersburg State Polytechnical University, pages 239–247. SpringerInternational Publishing, 2014.
[7] E. S. Ferguson. Engineering and the Mind’s Eye. The MIT Press,Cambridge MA USA, 1992.
[8] A. A. Golovin and C. B. Danilenko. Evolution of Theory of Mech-anisms and Machines from G. Monge to present day and mod-ern problems of TMM Training in technical university. In MarcoCeccarelli, editor, International Symposium on History of Machinesand Mechanisms HMM 2000, pages 263–270. Springer Netherlands,2000.
[9] A. A. Golovin and V. B. Tarabarin. Russian Models from the Mech-anisms Collection of Bauman University, volume 5 of History ofmechanism and machine Science. Springer Netherlands, 2008.
[10] Alexander Golovin. International Symposium on History of Ma-chines and Mechanisms HMM 2004, chapter Bauman University
TMM Department in the Former Half of the XXth Century (Pro-fessor N. Mertsalov, Professor L. Smirnov).
[11] Juan Ignacio Cuadrado Iglesias. Distinguished Figures in Mecha-nism and Machine Science, volume 1 of History of Mechanism andMachine Science, chapter Agustın de Betancourt y Molina (1758-1824), pages 31–60. Springer Netherlands, 2007.
[12] A. Potapova, A. A. Golovin, and A. Y. Vukolov. New Trends inMechanism Science, volume 5 of Mechanisms and Machine Science,chapter Peculiarities of Flat Cam Measurement by Results of DigitalPhoto Shooting, pages 269–276. Springer Netherlands, 2010.
[13] John D. Runkle. The Russian system of shop-work instruction forEngineers and Machinists. Kingman, Boston, 1876.
[14] V. Tarabarin and G. Carbone. Application of collection of mecha-nisms in teaching mechanism design (in Russian). Electronic scien-tific and technical journal ”Science and Education”, (6), June 2009.
[15] V. B. Tarabarin. Learning and methodological complex (in Russian).Unofficial website of RK-2 department TMM-UMK.BMSTU.RU,Online since 2005.
[16] V. B. Tarabarin. Photo gallery of mechanisms (in Russian). Unoffi-cial website of RK-2 department TMM-UMK.BMSTU.RU, Onlinesince 2005.
[17] V. B. Tarabarin and F. I. Fursyak. Laboratory works for course ”The-ory of Mechanisms and Mechanics of Machines” (in Russian). BM-STU, Moscow, 1991.
[18] G. Voight. Kinematische Modelle nach professor Reuleaux, cata-logue, volume I and II. Berlin, 1907.
[19] Jorg Wauer, Klaus Mauersberger, and Francis C. Moon. Distin-guished Figures in Mechanism and Machine Science, volume 7of History of Mechanism and Machine Science, chapter FerdinandJakob Redtenbacher (1809–1863), pages 217–245. Springer Nether-lands, 2010.