user's manual ys1500指示調節計 ys1700プログラマブル …€¦ · user's manual...
TRANSCRIPT
User'sManual YS1500 指示調節計
YS1700 プログラマブル指示調節計ユーザーズマニュアル
IM 01B08B01-024 版
IM 01B08B01-02
�IM 01B08B01-02
4th Edition : Sep. 2009 (YK)All Rights Reserved, Copyright © 2007 Yokogawa Electric Corporation
はじめにこのたびは、シングルループコントローラ YS1000 シリーズ(以下「YS1000」と呼びます)をお買い上げいただきましてありがとうございます。このマニュアルは、YS1500 の通信機能以外および YS1700 のプログラマブル機能と通信機能以外の使い方について説明したものです。ご使用前にこのマニュアルをよくお読みいただき、正しくお使いください。なお、YS1500/YS1700 のマニュアルとして、次の 5 つがあります。
● 紙マニュアルマニュアル名 マニュアル No. 内 容
YS1500/YS1700 オペレーションガイド IM 01B08B01-01基本的な操作方法について説明しています。CD にも収納されています
● 付属 CD に収納した電子マニュアルマニュアル名 マニュアル No. 内 容
YS1500/YS1700 オペレーションガイド IM 01B08B01-01 紙マニュアルと同じものです。
YS1500/YS1700 ユーザーズマニュアル IM 01B08B01-02本書です。すべての機能の使い方について説明しています。プログラム機能と通信機能は除きます。
YS1000 シリーズ通信インタフェースユーザーズマニュアル
IM 01B08J01-01イーサネット、シリアル、DCS-LCS 通信による使い方について説明しています。通信の配線については、オペレーションガイドをご覧ください。
YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能ユーザーズマニュアル
IM 01B08K01-02YSS1000 の使い方、YS1700 のプログラマブル機能、機器間通信について説明しています。
YS1000 シリーズリプレースマニュアル IM 01B08H01-01YS100、YS80、EBS、I、EK、HOMAC、100 ラインとの設置・配線の互換について説明しています。
付属 CD には、YS1310、YS1350、YS1360、YS110 のマニュアルも収納してあります。
ご注意● 本書の内容は、性能・機能の向上などにより将来予告なしに変更することがあります。● 本書の内容に関しては万全を期していますが、万一ご不審の点や誤りなどお気づきのことがありましたら、お
手数ですが、当社支社・支店・営業所までご連絡ください。● 本書の内容の全部または一部を無断で転載、複製することは禁止されています。
商標● 本書で使用の当社製品名またはブランド名は、当社の商標または登録商標です。● Microsoft、MS-DOS、Windows、Windows XP、および Windows NT は、米国 Microsoft Corporation の米国お
よびその他の国における登録商標または商標です。● Adobe、Acrobat、および Postscript は、Adobe Systems Incorporated( アドビシステムズ社 ) の商標です。● Ethernet は、米国 XEROX Corporation の登録商標です。● 本文中の各社の登録商標または商標には、TM、® マークは表示していません。● 本書で使用の各社製品名は、各社の商標、または登録商標です。
�� IM 01B08B01-02
このマニュアルの利用方法利用方法
最初にオペレーションガイドをお読みいただき、基本的な操作をご理解の上、本書をお読みください。プログラマブル機能/通信機能/リプレースにつきましては、それぞれのマニュアルをご覧ください。このユーザーズマニュアルは、以下に示す第 1 章~第 9 章で構成されています。
章 タイトルと内容
1制御機能コントローラモード(シングルループモード、カスケードモード、セレクタモード、プログラマブルモード)の機能、動作、設定項目について説明しています。
2制御補助機能第 1 章で説明した機能の補助的な機能、設定項目について説明しています。
3入出力補助機能入出力端子の定義、設定項目について説明しています。
4表示機能/セキュリティ機能LCD 表示の機能、調整、設定項目について説明しています。
5直入力(温度/抵抗/周波数)の調整YS1000 に内蔵した直入力変換器の設定や調整について説明しています。
6停電復帰処理瞬停後、停電後の動作について説明しています。
7セルフチューニング機能セルフチューニングの機能、動作について説明しています。プログラマブルモードにおける内容も説明しています。
8保守通常の点検、指示精度の検査、部品の交換周期について説明しています。
9仕様YS1000 の仕様を記述しています。

���IM 01B08B01-02
このマニュアルで使用している記号
本機器で使用しているシンボルマークで、人体への危険や機器の損傷の恐れがあることを示すとともに、その内容についてユーザーズマニュアルを参照する必要があることを示します。ユーザーズマニュアルでは、その参照ページに目印として、 「警告」「注意」の用語といっしょに使用しています。
警 告
取り扱いを誤った場合に、使用者が死亡または重傷を負う危険があるときに、その危険を避けるための注意事項が記載されています。
注 意
取り扱いを誤った場合に、使用者が軽傷を負うか、または物的損害のみが発生する危険があるときに、その危険を避けるための注意事項が記載されています。
Note本機器を取り扱ううえで重要な情報が記載されています。
関連する操作や説明の参照先をこのマークのあとに記述しています。
[ ]画面に表示される文字列を表示します。
設 定 画 面
設定画面を示し、設定画面を表示するまでのキー操作について説明しています。
設 定 内 容
設定内容について説明しています。
解 説
解説では操作に関する限定事項などを説明しています。

Blank Page
�IM 01B08B01-02
9
8
7
6
5
4
3
2
1
索
目次
はじめに ...................................................................................................................................................................................iこのマニュアルの利用方法 .............................................................................................................................................iiこのマニュアルで使用している記号 ..........................................................................................................................iii
第 1 章 制御機能1.1 コントローラモード(CTL)を選択する ............................................................................................... 1-1
1.1.1 シングルループモード(CTL=SINGLE)で制御する .......................................................................................... 1-3■ シングルループ制御の機能...................................................................................................................................... 1-6■ 自動制御/手動制御 ..................................................................................................................................................... 1-7
(1) YS だけで制御する ......................................................................................................................................... 1-8■ 自動制御/手動制御/カスケード設定自動制御 ..................................................................................... 1-10
(1) アナログ入力からの外部設定値で制御する ................................................................................ 1-13(2) 通信からの外部設定値で制御する/上位コンピュータが通信 FAIL したとき
バックアップする........................................................................................................................................ 1-15(3) 通信からの外部操作出力値で制御する/上位コンピュータが通信 FAIL したとき
バックアップする........................................................................................................................................ 1-181.1.2 カスケードモード(CTL=CAS)で制御する ........................................................................................................ 1-21
■ カスケード制御の機能 ............................................................................................................................................. 1-24■ 自動制御/手動制御 .................................................................................................................................................. 1-25
(1) YS だけで制御する ...................................................................................................................................... 1-27■ 自動制御/手動制御/カスケード設定自動制御 ..................................................................................... 1-30
(1) アナログ入力からの外部設定値で制御する ................................................................................ 1-34(2) 通信からの外部設定値で制御する/上位コンピュータが通信 FAIL したとき
バックアップする........................................................................................................................................ 1-38(3) 通信からの外部操作出力値で制御する/上位コンピュータが通信 FAIL したとき
バックアップする........................................................................................................................................ 1-441.1.3 セレクタモード(CTL=SELECT)で制御する...................................................................................................... 1-49
■ セレクタ制御の機能 .................................................................................................................................................. 1-52■ 自動制御/手動制御 .................................................................................................................................................. 1-53
(1) 第 1 ループ、第 2 ループともに YS だけで制御する .............................................................. 1-55■ 自動制御/手動制御/カスケード設定自動制御 ..................................................................................... 1-58
(1) 第 1 ループは YS だけで制御し、第 2 ループはアナログ入力からの 外部設定値で制御する ............................................................................................................................. 1-62
(2) 第 1 ループはアナログ入力からの外部設定値で制御し、第 2 ループは YS だけで制御する ...................................................................................................................................... 1-67
(3) 第 1 ループ、第 2 ループともにアナログ入力からの外部設定値で制御する ......... 1-71(4) 第 1 ループは通信からの外部設定値で制御(上位コンピュータが
通信 FAIL したときバックアップ)し、第 2 ループは YS だけで制御する ............... 1-76(5) 第 1 ループは通信からの外部設定値で制御(上位コンピュータが
通信 FAIL したときバックアップ)し、第 2 ループはアナログ入力からの 外部設定値で制御する ............................................................................................................................. 1-82
(6) 通信からの外部操作出力値で制御(上位コンピュータが通信 FAIL したとき バックアップ)する .................................................................................................................................. 1-89
(7) 通信からの外部操作出力値で制御(上位コンピュータが通信 FAIL したとき バックアップ)し、アナログ入力からの第 2 ループ外部設定値で制御する .......... 1-94
1.1.4 プログラマブルモード(CTL=PROG)で制御する(YS1700 のみ) ..................................................1-101

�� IM 01B08B01-02
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する) .......................... 1-1021.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD)) .............................................1-1041.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D)) ........................................1-1051.2.3 積分動作を停止させ、オーバーシュートの少ない制御を行う(出力リミッタ) ......................1-1061.2.4 設定値をオーバーしない安定した制御を行う(比例(PD)制御)...................................................1-1071.2.5 立ち上がりの早い制御を行う(リセットバイアス付 PID 制御) .........................................................1-1101.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィルタ機能) ......................1-1121.2.7 中和制御のようなゲイン特性をもった制御を行う(非線形 PID 制御) ..........................................1-1151.2.8 外乱を相殺する制御を行う(フィードフォワード制御) ........................................................................1-1191.2.9 むだ時間が長いプロセスの制御を行う(サンプル PI 制御) .................................................................1-1221.2.10 設定値に早く整定させる制御を行う(バッチ PID 制御(YS1700 プログラマブルモード
のみ))..................................................................................................................................................................................1-1241.2.11 複数の PID パラメータを切り替えて制御する(プリセット PID(YS1700 プログラマブル
モードのみ)) ..................................................................................................................................................................1-125
第 2 章 制御補助機能2.1 測定値を補正・演算する(機能選択モードのみ) ........................................................................... 2-1
2.1.1 入力フィルタ(一次遅れ演算) .................................................................................................................................... 2-12.1.2 開平演算(ローカット点可変形) ............................................................................................................................... 2-12.1.3 10 折線関数 ................................................................................................................................................................................ 2-22.1.4 比率演算....................................................................................................................................................................................... 2-3
2.2 トラッキング機能を使う(機能選択モードのみ) ........................................................................... 2-42.2.1 出力トラッキング .................................................................................................................................................................. 2-42.2.2 カスケード設定値トラッキング(シングルループモードのみ) .............................................................. 2-52.2.3 測定値トラッキング(シングルループモードのみ) ....................................................................................... 2-6
2.3 制御動作方向、バルブ方向を変更する .................................................................................................. 2-72.4 プリセット MV を使う .................................................................................................................................. 2-82.5 イベント機能を使う ...................................................................................................................................... 2-9
2.5.1 メッセージを表示させる(イベント表示機能(YSS1000 のみ設定可能)) ....................................... 2-92.5.2 プロセスアラーム発生時に PV バーの表示色を変える(アクティブ表示機能) .......................... 2-112.5.3 タグナンバ表示で知らせる(タグナンバ色交互表示機能) ..................................................................... 2-12
2.6 警報機能を設定する ....................................................................................................................................2-132.7 警報出力にヒステリシスを設定する ....................................................................................................2-14
第 3 章 入出力補助機能3.1 ディジタル入出力の機能を定義する(機能選択モードのみ) .................................................... 3-1
3.1.1 ディジタル端子の入力と出力を切り替える ........................................................................................................... 3-23.1.2 ディジタル入力の接点タイプを切り替える ........................................................................................................... 3-23.1.3 ディジタル出力の接点タイプを切り替える ........................................................................................................... 3-33.1.4 ディジタル入力の機能を変更する ............................................................................................................................... 3-4
(1) 自動切替(E-AUT) ........................................................................................................................................ 3-4(2) 手動切替(E-MAN) ...................................................................................................................................... 3-4(3) プリセット MV 切替(E-PMV) .............................................................................................................. 3-5(4) 出力トラッキング切替(E-TRK) ........................................................................................................... 3-5(5) 出力プリセットおよび手動切替(TR-MPMV) .............................................................................. 3-5(6) セルフチューニング切替(E-STC) ...................................................................................................... 3-6(7) カスケードオープン/クローズ切替(E-O/C) ............................................................................ 3-6(8) 第 2 ループローカル/リモート切替(E-L/R) ............................................................................. 3-6(9) セレクタ選択(E-SEL) ............................................................................................................................... 3-6(10) LCD バックライト消灯(LCD-OFF) ................................................................................................ 3-7(11) 手動切替(TR-MAN)、自動切替(TR-AUT)、カスケード切替(TR-CAS) ............... 3-7
3.1.5 ディジタル出力の機能を変更する ............................................................................................................................... 3-83.2 アナログ出力 3 の電圧/電流を切り替える(YS1700 プログラマブルモードのみ) ......3-123.3 アナログ出力 2、3、4 の出力種類を変更する .................................................................................3-13
���IM 01B08B01-02
9
8
7
6
5
4
3
2
1
索
第 4 章 表示機能/セキュリティ機能4.1 表示機能 ............................................................................................................................................................. 4-1
4.1.1 オペレーション画面の表示/非表示を設定する ................................................................................................. 4-14.1.2 トレンド画面のデータ表示/非表示を設定する ................................................................................................. 4-34.1.3 トレンド画面の時間幅を変更する ............................................................................................................................... 4-44.1.4 トレンド 3 画面の表示データを設定する ................................................................................................................ 4-54.1.5 ループ画面、トレンド画面、2 ループ画面のスケール目盛を変更する ................................................ 4-64.1.6 メータ画面の自動目盛分割/目盛数値を読みやすくする ............................................................................. 4-74.1.7 電源オン時に最初に表示させるオペレーション画面を選択する .............................................................. 4-84.1.8 LCD バックライトを消灯する/点灯する ................................................................................................................ 4-94.1.9 背景色、ループ色を変更する ...................................................................................................................................... 4-104.1.10 LCD の輝度/コントラストを調整する ............................................................................................................... 4-11
4.2 セキュリティ機能 .........................................................................................................................................4-124.2.1 キーロックを設定/解除する ...................................................................................................................................... 4-124.2.2 パラメータ変更を禁止/解除する ............................................................................................................................ 4-13
第 5 章 直入力(温度/抵抗/周波数)の調整5.1 直入力仕様一覧と基本操作 ......................................................................................................................... 5-15.2 センサタイプを設定する ............................................................................................................................. 5-45.3 バーンアウトを設定する ............................................................................................................................. 5-55.4 入力のゼロ調整、スパン調整を行う ...................................................................................................... 5-6
第 6 章 停電復帰処理6.1 停電復帰処理 .................................................................................................................................................... 6-1
第 7 章 セルフチューニング機能7.1 概要 ...................................................................................................................................................................... 7-1
7.1.1 セルフチューニングとは ................................................................................................................................................... 7-17.1.2 特徴と利用効果 ....................................................................................................................................................................... 7-1
7.2 動作原理 ............................................................................................................................................................. 7-27.2.1 セルフチューニング ............................................................................................................................................................. 7-27.2.2 応答監視....................................................................................................................................................................................... 7-27.2.3 プロセス特性の推定 ............................................................................................................................................................. 7-27.2.4 PID 定数チューニング .......................................................................................................................................................... 7-3
7.3 セルフチューニングのパラメータと動作 ............................................................................................. 7-47.3.1 パラメータと動作 .................................................................................................................................................................. 7-4
7.4 セルフチューニング(STC)の各モードにおける動作 .................................................................7-107.4.1 STC モード選択= ATSTUP ............................................................................................................................................. 7-117.4.2 STC モード選択= DISP .................................................................................................................................................... 7-127.4.3 STC モード選択= ON ....................................................................................................................................................... 7-127.4.4 STC モード選択= OFF ...................................................................................................................................................... 7-137.4.5 オンデマンドチューニング(OD) .......................................................................................................................... 7-137.4.6 セルフチューニング機能の起動と停止 .................................................................................................................. 7-147.4.7 各種制御機能と STC 組み合わせ ................................................................................................................................ 7-187.4.8 セルフチューニングアラーム ...................................................................................................................................... 7-20
7.5 シミュレーションテスト ...........................................................................................................................7-227.5.1 適用範囲.................................................................................................................................................................................... 7-227.5.2 シミュレーション例 .......................................................................................................................................................... 7-22
���� IM 01B08B01-02
7.6 アプリケーションガイド ...........................................................................................................................7-247.6.1 安定制御ループ(連続制御) ...................................................................................................................................... 7-247.6.2 むだ時間が支配的なプロセスの制御 ....................................................................................................................... 7-247.6.3 カスケード制御 .................................................................................................................................................................... 7-247.6.4 制御対象特性(むだ時間、遅れ時間、ゲイン)の変動に対する追従 ................................................. 7-257.6.5 中和制御.................................................................................................................................................................................... 7-257.6.6 積分特性を持つタンク液面の制御 ............................................................................................................................ 7-267.6.7 ヒステリシス特性を持つプロセスの制御 ............................................................................................................. 7-267.6.8 操作端の動作が遅いプロセスの制御 ....................................................................................................................... 7-277.6.9 プログラムパターン制御 ................................................................................................................................................ 7-277.6.10 シーケンス制御との組み合わせ(バッチ制御) ........................................................................................... 7-287.6.11 干渉のあるループの制御 .............................................................................................................................................. 7-287.6.12 インパルスノイズのあるループの制御 ............................................................................................................... 7-29
第 8 章 保守8.1 指示精度を検査する ...................................................................................................................................... 8-1
8.1.1 校正機器....................................................................................................................................................................................... 8-18.1.2 入力指示精度の確認 ............................................................................................................................................................ 8-18.1.3 出力指示精度の確認 ............................................................................................................................................................ 8-2
8.2 推奨部品交換周期 ........................................................................................................................................... 8-38.3 修理依頼品発送時の梱包 ............................................................................................................................. 8-4
第 9 章 仕様9.1 一般仕様 ............................................................................................................................................................. 9-1
入出力信号 ............................................................................................................................................................................... 9-1信号間絶縁 ............................................................................................................................................................................... 9-3伝送器供給電源 ..................................................................................................................................................................... 9-4通信信号仕様 .......................................................................................................................................................................... 9-4動作条件 .................................................................................................................................................................................... 9-5基準動作条件 .......................................................................................................................................................................... 9-6基準性能 .................................................................................................................................................................................... 9-6動作条件の影響 ..................................................................................................................................................................... 9-6直入力仕様 ............................................................................................................................................................................... 9-7構造・取付(基本形本体) ............................................................................................................................................ 9-8安全規格 .................................................................................................................................................................................... 9-9
索引
1-1IM 01B08B01-02
制御機能
11.1 コントローラモード(CTL)を選択する
設 定 画 面
エンジニアリング画面
0101.ai
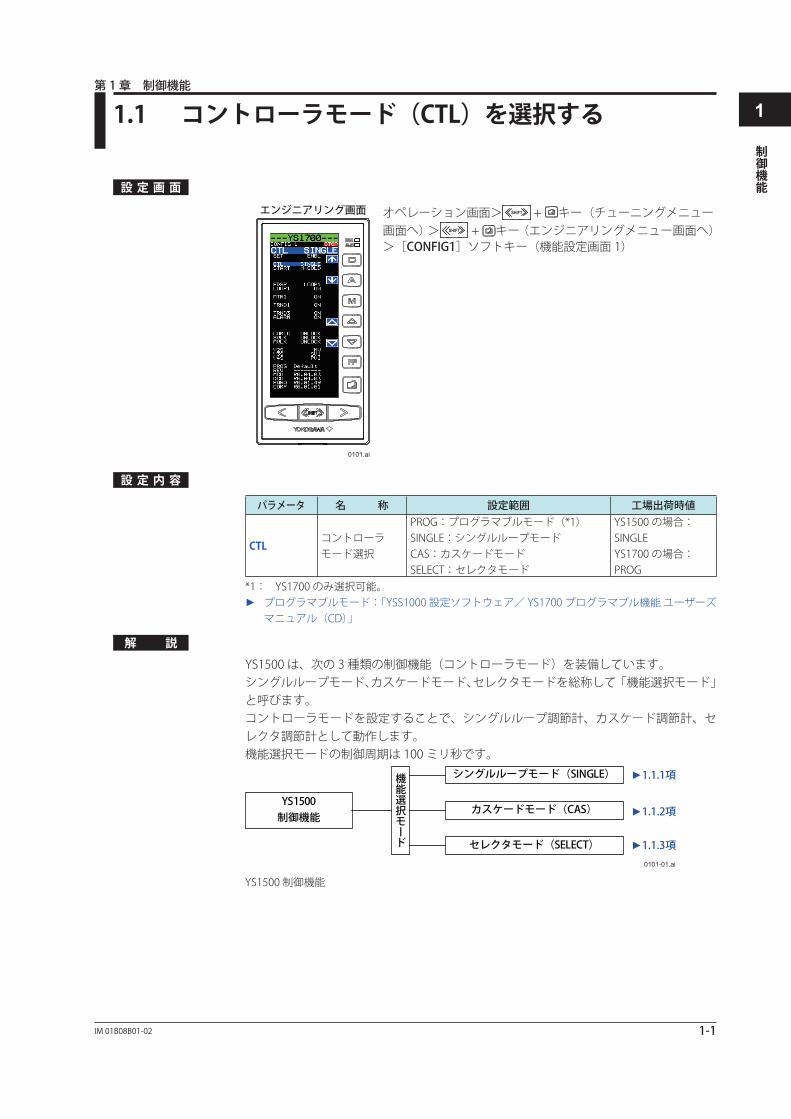
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG1]ソフトキー(機能設定画面 1)
設 定 内 容
パラメータ 名 称 設定範囲 工場出荷時値
CTLコントローラモード選択
PROG:プログラマブルモード(*1)SINGLE:シングルループモードCAS:カスケードモードSELECT:セレクタモード
YS1500 の場合:SINGLEYS1700 の場合:PROG
*1: YS1700 のみ選択可能。► プログラマブルモード:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能 ユーザーズ
マニュアル(CD)」
解 説
YS1500 は、次の 3 種類の制御機能(コントローラモード)を装備しています。シングルループモード、カスケードモード、セレクタモードを総称して「機能選択モード」と呼びます。コントローラモードを設定することで、シングルループ調節計、カスケード調節計、セレクタ調節計として動作します。機能選択モードの制御周期は 100 ミリ秒です。
YS1500
シングルループモード(SINGLE)
カスケードモード(CAS)
セレクタモード(SELECT)
►1.1.1項
►1.1.2項
►1.1.3項
制御機能
機能選択モード
0101-01.ai
YS1500 制御機能
第 1 章 制御機能
1-2 IM 01B08B01-02
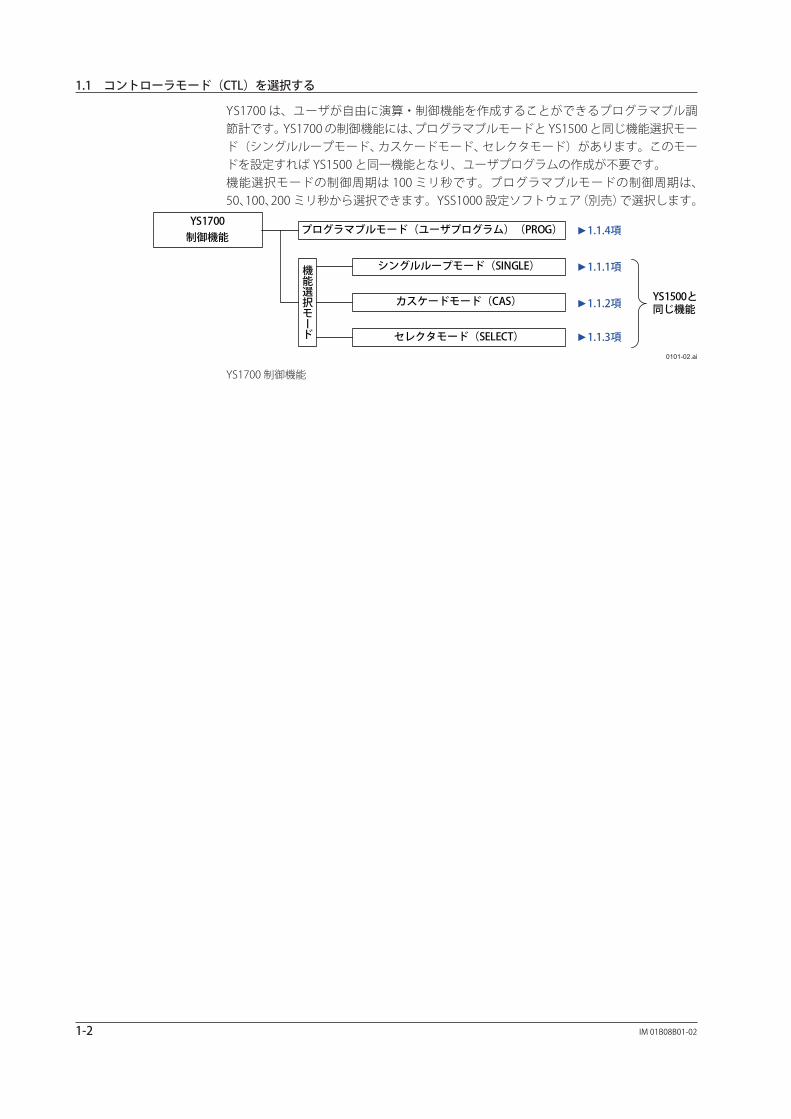
YS1700 は、ユーザが自由に演算・制御機能を作成することができるプログラマブル調節計です。YS1700 の制御機能には、プログラマブルモードと YS1500 と同じ機能選択モード(シングルループモード、カスケードモード、セレクタモード)があります。このモードを設定すれば YS1500 と同一機能となり、ユーザプログラムの作成が不要です。機能選択モードの制御周期は 100 ミリ秒です。プログラマブルモードの制御周期は、50、100、200 ミリ秒から選択できます。YSS1000 設定ソフトウェア(別売)で選択します。
プログラマブルモード(ユーザプログラム)(PROG) ►1.1.4項YS1700
シングルループモード(SINGLE)
カスケードモード(CAS)
セレクタモード(SELECT)
►1.1.1項
►1.1.2項
►1.1.3項
制御機能
YS1500と同じ機能
機能選択モード
0101-02.ai
YS1700 制御機能
1.1 コントローラモード(CTL)を選択する
1-3IM 01B08B01-02
制御機能
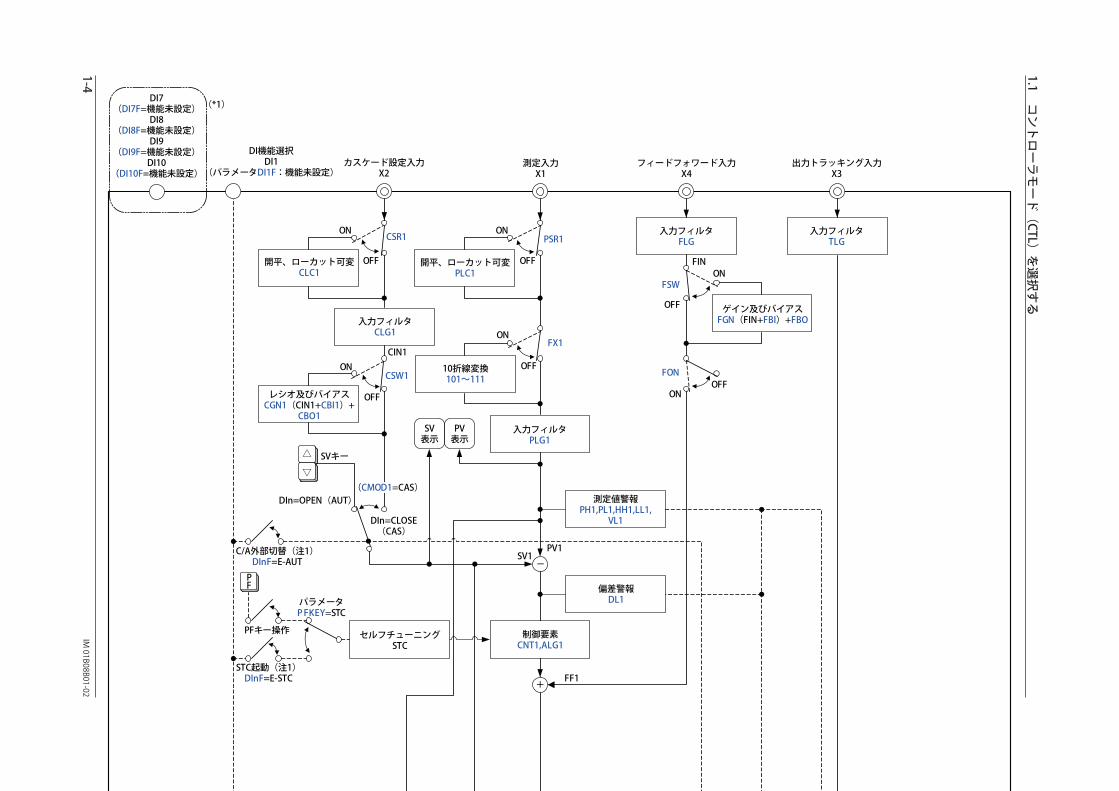
11.1.1 シングルループモード(CTL=SINGLE)で制御するシングルループモードは、1 ループの調節計として動作します。シングルループモードを選択すると下図の機能が構築されます。図中に記載されているパラメータ(青太字)を設定・変更することにより、必要な機能を実現できます。► パラメータ:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
の「パラメータ一覧」
1.1 コントローラモード(CTL)を選択する
1-4IM
01B08B01-02
0102.ai
CIN1
CSR1ON
OFF
CSW1ON
OFF
PSR1ON
OFF
FX1ON
OFF
FIN
FSWON
OFF
FON
ONOFF
FF1
TRK1
SVキー
MVキー
MV表示
PV表示
SV表示
SV1PV1
DIn=OPEN
DIn=CLOSE
DIn=CLOSEDIn=OPEN
DIn=OPENDIn=CLOSE
入力フィルタTLG
入力フィルタFLG
セルフチューニングSTC
出力リミッタMH1,ML1
プリセットMVPMV1
制御要素CNT1,ALG1
偏差警報DL1
開平、ローカット可変PLC1
測定値警報PH1,PL1,HH1,LL1,
VL1
入力フィルタPLG1
(注1)いずれか一つを選択できます。さらにDI/DOの機能割り付けを変更することにより、複数の接点を使用することができます。
DInF,DIn(n=1, 7, 8, 9, 10) バックライトOFF(注1)
DInF=LCD-OFF
C,A/M外部切替(注1)DInF=E-MAN
C押し切替(注1)DInF=TR-CAS
出力トラッキング(注1)DInF=E-TRK
STC起動(注1)DInF=E-STC
パラメータPFKEY=STC
C/A外部切替(注1)DInF=E-AUT
PFキー操作
(CMOD1=CAS)DIn=OPEN(AUT)
プリセットMV切替(注1)DInF=E-PMV
出力プリセットMVおよびMAN(注1)
DInF=TR-MPMV
A押し切替(注1)DInF=TR-AUT
M押し切替(注1)DInF=TR-MAN
LCDバックライト
*1:YS1700基本形(拡張I/O付き)のみ拡張I/O端子です。
開平、ローカット可変CLC1
10折線変換101~111
レシオ及びバイアスCGN1(CIN1+CBI1)+
CBO1
入力フィルタCLG1
DIn=CLOSE(CAS)
-
ゲイン及びバイアスFGN(FIN+FBI)+FBO
DI機能選択DI1
(パラメータDI1F:機能未設定)カスケード設定入力
X2測定入力
X1フィードフォワード入力
X4出力トラッキング入力
X3
(*1)
DO1測定値
上限警報出力(パラメータDO1F=PH1)
DO2測定値
下限警報出力(パラメータDO2F=PL1)
DO3測定値変化率
警報出力(パラメータDO3F=VL1)
DO4C/A,M
ステータス出力
(パラメータDO4F=CAS)
DO5C,A/M
ステータス出力
(パラメータDO5F=CASAUT)
Y1操作出力1
(4-20mA)
Y2操作出力2(1-5V)
(パラメータY2S=MV1
Y4測定値出力(1-5V)
(パラメータY4S=PV1)
(*1)
Y3設定値出力(1-5V)
(パラメータY3S=SV1)
(*1)
+
▽
PF
△
≪ < > ≫
DI7(DI7F=機能未設定)
DI8(DI8F=機能未設定)
DI9(DI9F=機能未設定)
DI10(DI10F=機能未設定)
DO7(DO7F=機能未設定)
DO8(DO8F=機能未設定)
DO9(DO9F=機能未設定)
DO10(DO10F=機能未設定)
シングルループモード機能ブロック図(YS1700 の場合)
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る

1-5IM
01B08B01-02
制御機能 1
0102.ai
CIN1
CSR1ON
OFF
CSW1ON
OFF
PSR1ON
OFF
FX1ON
OFF
FIN
FSWON
OFF
FON
ONOFF
FF1
TRK1
SVキー
MVキー
MV表示
PV表示
SV表示
SV1PV1
DIn=OPEN
DIn=CLOSE
DIn=CLOSEDIn=OPEN
DIn=OPENDIn=CLOSE
入力フィルタTLG
入力フィルタFLG
セルフチューニングSTC
出力リミッタMH1,ML1
プリセットMVPMV1
制御要素CNT1,ALG1
偏差警報DL1
開平、ローカット可変PLC1
測定値警報PH1,PL1,HH1,LL1,
VL1
入力フィルタPLG1
(注1)いずれか一つを選択できます。さらにDI/DOの機能割り付けを変更することにより、複数の接点を使用することができます。
DInF,DIn(n=1, 7, 8, 9, 10) バックライトOFF(注1)
DInF=LCD-OFF
C,A/M外部切替(注1)DInF=E-MAN
C押し切替(注1)DInF=TR-CAS
出力トラッキング(注1)DInF=E-TRK
STC起動(注1)DInF=E-STC
パラメータPFKEY=STC
C/A外部切替(注1)DInF=E-AUT
PFキー操作
(CMOD1=CAS)DIn=OPEN(AUT)
プリセットMV切替(注1)DInF=E-PMV
出力プリセットMVおよびMAN(注1)
DInF=TR-MPMV
A押し切替(注1)DInF=TR-AUT
M押し切替(注1)DInF=TR-MAN
LCDバックライト
*1:YS1700基本形(拡張I/O付き)のみ拡張I/O端子です。
開平、ローカット可変CLC1
10折線変換101~111
レシオ及びバイアスCGN1(CIN1+CBI1)+
CBO1
入力フィルタCLG1
DIn=CLOSE(CAS)
-
ゲイン及びバイアスFGN(FIN+FBI)+FBO
DI機能選択DI1
(パラメータDI1F:機能未設定)カスケード設定入力
X2測定入力
X1フィードフォワード入力
X4出力トラッキング入力
X3
(*1)
DO1測定値
上限警報出力(パラメータDO1F=PH1)
DO2測定値
下限警報出力(パラメータDO2F=PL1)
DO3測定値変化率
警報出力(パラメータDO3F=VL1)
DO4C/A,M
ステータス出力
(パラメータDO4F=CAS)
DO5C,A/M
ステータス出力
(パラメータDO5F=CASAUT)
Y1操作出力1
(4-20mA)
Y2操作出力2(1-5V)
(パラメータY2S=MV1
Y4測定値出力(1-5V)
(パラメータY4S=PV1)
(*1)
Y3設定値出力(1-5V)
(パラメータY3S=SV1)
(*1)
+
▽
PF
△
≪ < > ≫
DI7(DI7F=機能未設定)
DI8(DI8F=機能未設定)
DI9(DI9F=機能未設定)
DI10(DI10F=機能未設定)
DO7(DO7F=機能未設定)
DO8(DO8F=機能未設定)
DO9(DO9F=機能未設定)
DO10(DO10F=機能未設定)
シングルループモード機能ブロック図(YS1700 の場合)
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
1-6 IM 01B08B01-02
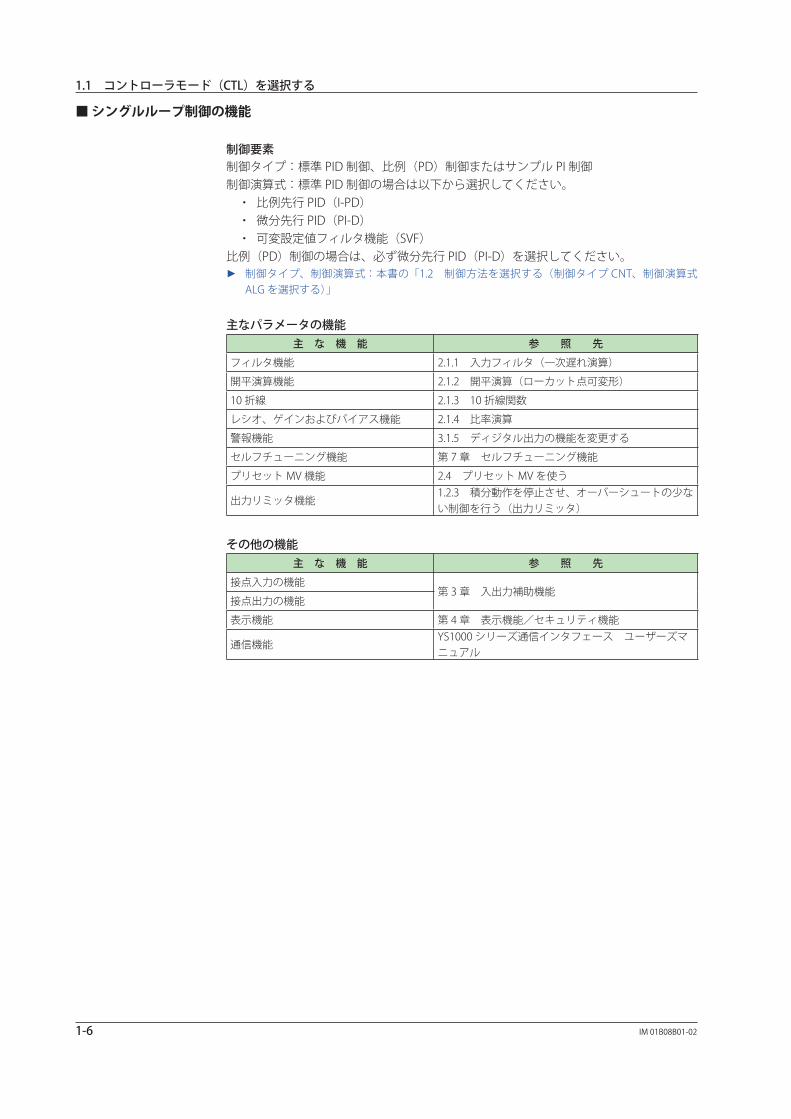
■ シングルループ制御の機能
制御要素制御タイプ:標準 PID 制御、比例(PD)制御またはサンプル PI 制御制御演算式:標準 PID 制御の場合は以下から選択してください。
・ 比例先行 PID(I-PD)・ 微分先行 PID(PI-D)・ 可変設定値フィルタ機能(SVF)
比例(PD)制御の場合は、必ず微分先行 PID(PI-D)を選択してください。► 制御タイプ、制御演算式:本書の「1.2 制御方法を選択する(制御タイプ CNT、制御演算式
ALG を選択する)」
主なパラメータの機能主 な 機 能 参 照 先
フィルタ機能 2.1.1 入力フィルタ(一次遅れ演算)
開平演算機能 2.1.2 開平演算(ローカット点可変形)
10 折線 2.1.3 10 折線関数
レシオ、ゲインおよびバイアス機能 2.1.4 比率演算
警報機能 3.1.5 ディジタル出力の機能を変更する
セルフチューニング機能 第 7 章 セルフチューニング機能
プリセット MV 機能 2.4 プリセット MV を使う
出力リミッタ機能1.2.3 積分動作を停止させ、オーバーシュートの少ない制御を行う(出力リミッタ)
その他の機能主 な 機 能 参 照 先
接点入力の機能第 3 章 入出力補助機能
接点出力の機能
表示機能 第 4 章 表示機能/セキュリティ機能
通信機能YS1000 シリーズ通信インタフェース ユーザーズマニュアル
1.1 コントローラモード(CTL)を選択する

1-7IM 01B08B01-02
制御機能
1■ 自動制御/手動制御
設 定 画 面
エンジニアリング画面
0103.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG2]ソフトキー(機能設定画面 2)
設 定 内 容
自動制御/手動制御のみを行う場合は、CMOD1=-(設定なし)に設定してください。「(1) YS だけで制御する」の動作となります。
パラメータ 名 称 設定範囲 工場出荷時値
CMOD1 C モード 1-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
-(設定なし)
解 説
運転モードは、計器前面の A モードキーまたは M モードキーを押すことで切り替わります。
A モードキーを押したとき、自動制御(A) M モードキーを押したとき、手動制御(M)
各運転モードの切り替えは、計器前面キーのほかにディジタル入力(DI)、通信およびユーザプログラムから行えます。
► 計器前面キーによる切り替え:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
► 通信による切り替え:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」► ディジタル入力による切り替え:本書の「3.1 ディジタル入出力の機能を定義する(機能選択
モードのみ)」► ユーザプログラムによる切り替え:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能
ユーザーズマニュアル(CD)」
記号の意味運転モードの記号と意味を示します。
記 号 意 味
(M) 手動制御(M)
(A) 自動制御(A)
1.1 コントローラモード(CTL)を選択する
1-8 IM 01B08B01-02
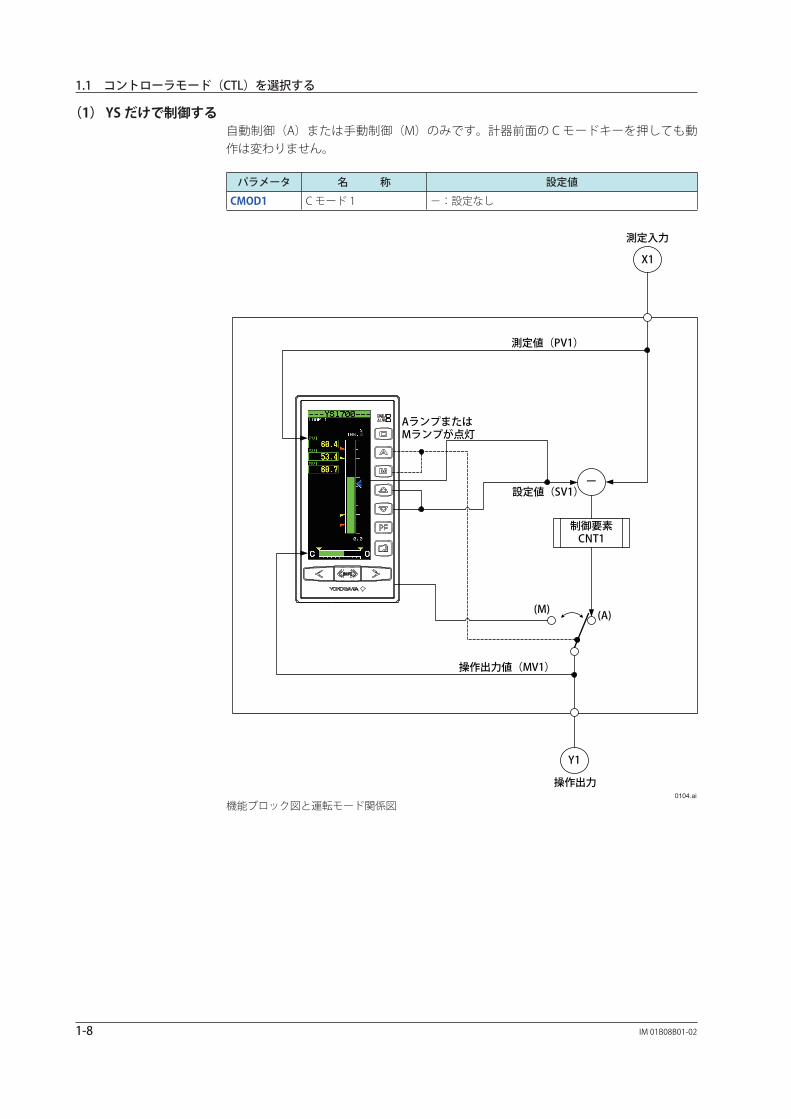
(1) YS だけで制御する自動制御(A)または手動制御(M)のみです。計器前面の C モードキーを押しても動作は変わりません。
パラメータ 名 称 設定値
CMOD1 C モード 1 -:設定なし
X1
Y1
(M) (A)
ー
測定値(PV1)
測定入力
測定値(PV1)
AランプまたはMランプが点灯
操作出力
操作出力値(MV1)
設定値(SV1)
制御要素CNT1
0104.ai
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する

1-9IM 01B08B01-02
制御機能
1
AUT MAN
(A)
(M)
AUT
MAN
自動制御
手動制御
Aモードキー押し Mモードキー押し
※Cモードキーを押しても動作は変わりません。
AUT、MAN:通信コマンドを送信(YSプロトコル)0105.ai
A
A
M
M
M
A
キーまたは通信による運転モード変更時の状態遷移図
各運転モードの計器前面表示状態
運転モード 計器前面ランプ
自動制御 (A) A ランプ点灯
手動制御 (M) M ランプ点灯
各運転モードの設定値、操作出力値
運転モード 設定値(SV1) 操作出力値(MV1)
自動制御 (A) キーまたは通信(*1)により設定 制御演算結果を出力
手動制御 (M) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
各運転モードへ遷移した直後の制御状態
運転モードの遷移
各運転モードへの遷移直後の状態
設定値(SV1) 制御状態
(A) → (M) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作が可能。
(M) → (A) 遷移直前をホールド遷移直前の操作出力値を初期値としてバンプレスに切り替わり自動制御を実行。
1.1 コントローラモード(CTL)を選択する
1-10 IM 01B08B01-02
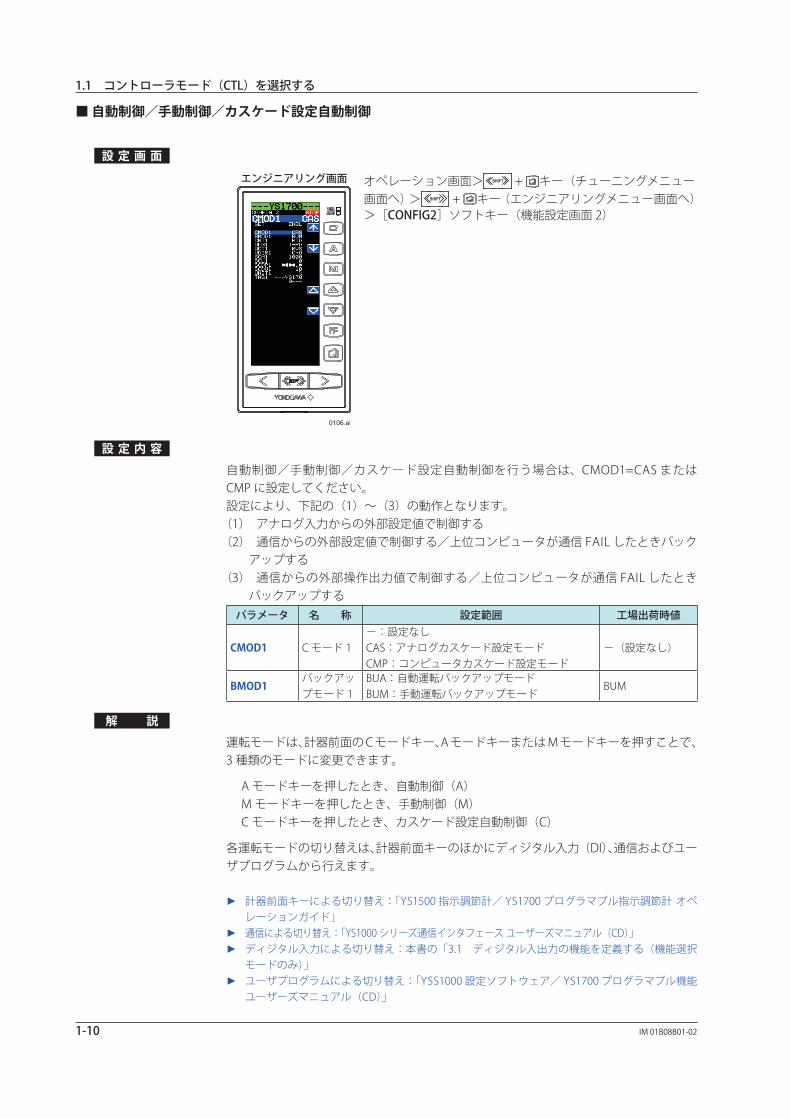
■ 自動制御/手動制御/カスケード設定自動制御
設 定 画 面
エンジニアリング画面
0106.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG2]ソフトキー(機能設定画面 2)
設 定 内 容
自動制御/手動制御/カスケード設定自動制御を行う場合は、CMOD1=CAS またはCMP に設定してください。設定により、下記の(1)~(3)の動作となります。
(1) アナログ入力からの外部設定値で制御する(2) 通信からの外部設定値で制御する/上位コンピュータが通信 FAIL したときバック
アップする(3) 通信からの外部操作出力値で制御する/上位コンピュータが通信 FAIL したとき
バックアップするパラメータ 名 称 設定範囲 工場出荷時値
CMOD1 C モード 1-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
-(設定なし)
BMOD1バックアップモード 1
BUA:自動運転バックアップモードBUM:手動運転バックアップモード
BUM
解 説
運転モードは、計器前面の C モードキー、A モードキーまたは M モードキーを押すことで、3 種類のモードに変更できます。
A モードキーを押したとき、自動制御(A) M モードキーを押したとき、手動制御(M) C モードキーを押したとき、カスケード設定自動制御(C)
各運転モードの切り替えは、計器前面キーのほかにディジタル入力(DI)、通信およびユーザプログラムから行えます。
► 計器前面キーによる切り替え:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
► 通信による切り替え:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」► ディジタル入力による切り替え:本書の「3.1 ディジタル入出力の機能を定義する(機能選択
モードのみ)」► ユーザプログラムによる切り替え:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能
ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
1-11IM 01B08B01-02
制御機能
1カスケード設定自動制御(C モード)カスケード設定自動制御(C)は、外部(通信またはアナログ入力)からの設定値(SV)により、制御を行うモードです。C モードキーを使用するカスケード設定自動制御(C)* は、C モード 1(CMOD1)パラメータの設定により運転モードの動作が異なります。カスケード設定自動制御(C)には、アナログカスケード設定モード(CAS)とコンピュータカスケード設定モード(CMP)があります。さらに、コンピュータカスケード設定モード(CMP)には、SPC モードと DDC モードがあります。*: カスケード設定自動制御は、(内部)カスケード制御ではありません。カスケード制御につい
ては、「1.1.2 カスケードモード(CTL=CAS)で制御する」をご覧ください。
カスケードのモード(パラメータ CMOD1) 通信のモード
カスケード設定自動制御 (C)
アナログカスケード設定モード(CAS) -
コンピュータカスケード設定モード(CMP)SPC モード(*)
DDC モード(*)
設定なし(-) -
*: SPC モードと DDC モードの選択は、通信用レジスタ LS1 で設定します。計器前面から設定できません。
SPC モードで使用する場合は LS1 に SPC を、DDC モードで使用する場合は LS1 に DDC を書き込みます。
SPC モード時、SV キー操作不可。DDC モード時、SV、MV キー操作不可。► SPC モードと DDC モード:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
バックアップモードバックアップモードは、コンピュータカスケード設定モード(CMOD1 = CMP)のときに使用できます。YS1000 の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信 FAIL になったと判断します。YS1000 は上位コンピュータを切り離し、自動的に運転モードを変更します。この運転状態をバックアップモードと呼び、2 種類のモードがあります。バックアップモードは、バックアップモード 1(BMOD1)エンジニアリングパラメータで設定します。
自動運転バックアップモード(BUA): カスケード設定自動制御(C)から自動制御(A)と同等の自動運転バックアップ(BUA)
モードに遷移します。計器前面のランプは、C ランプ点灯、A ランプ点滅となります。 この状態で上位システムが復帰すると、カスケード設定自動制御(C)に遷移します。
手動運転バックアップモード(BUM): カスケード設定自動制御(C)から手動制御(M)と同等の手動運転バックアップ(BUM)
モードに遷移します。計器前面のランプは、C ランプ点灯、M ランプ点滅となります。 この状態で上位システムが復帰すると、カスケード設定自動制御(C)に遷移します。
1.1 コントローラモード(CTL)を選択する
1-12 IM 01B08B01-02
記号の意味運転モードの記号と意味を示します。
記 号 意 味
(M) 手動制御(M)
(A) 自動制御(A)
(C)(CAS) カスケード設定自動制御(C)-アナログカスケード設定モード(CAS)状態
(C)(CMP)(SPC)カスケード設定自動制御(C)-コンピュータカスケード設定モード(CMP)-外部設定値によるカスケード、バックアップモード(SPC)状態
(C)(CMP)(DDC)カスケード設定自動制御(C)-コンピュータカスケード設定モード(CMP)-外部操作出力値によるカスケード、バックアップモード(DDC)状態
(BUM)上位コンピュータ通信 FAIL による手動運転バックアップ状態
(手動制御と同じ運転で、通信 FAIL 解除により自動復帰)
(BUA)上位コンピュータ通信 FAIL による自動運転バックアップ状態
(自動制御と同じ運転で、通信 FAIL 解除により自動復帰)
1.1 コントローラモード(CTL)を選択する
1-13IM 01B08B01-02
制御機能
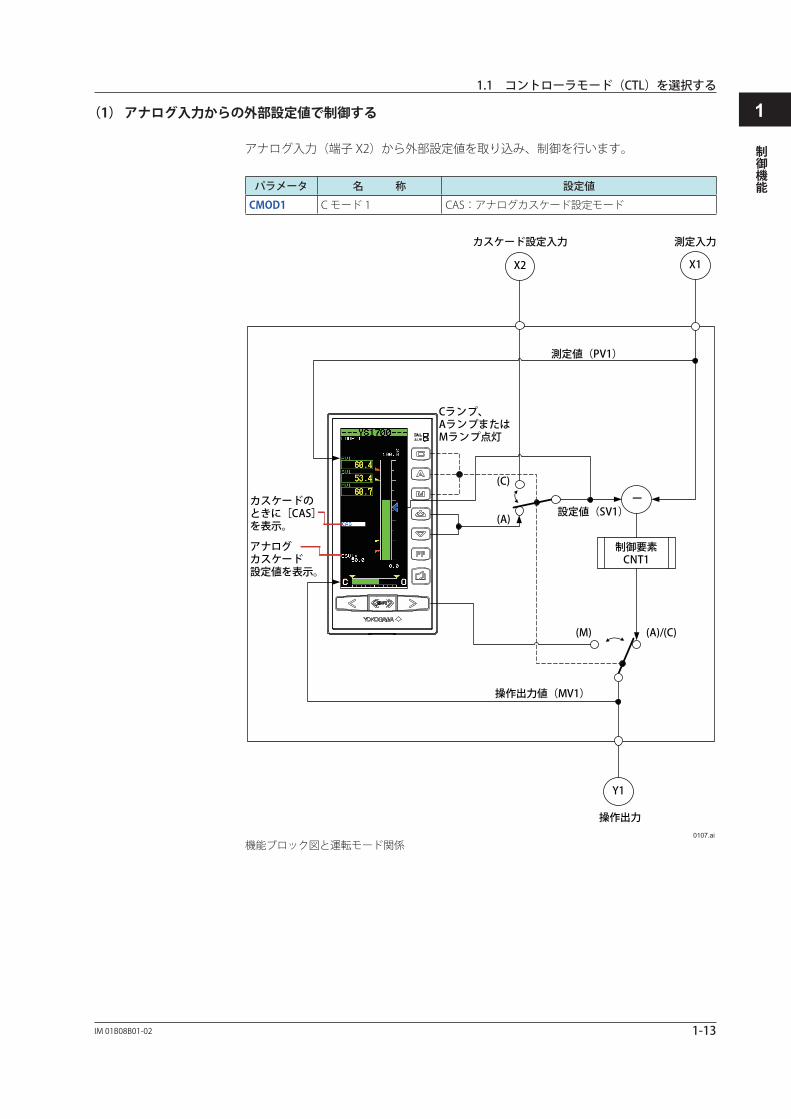
1(1) アナログ入力からの外部設定値で制御する
アナログ入力(端子 X2)から外部設定値を取り込み、制御を行います。
パラメータ 名 称 設定値
CMOD1 C モード 1 CAS:アナログカスケード設定モード
X1X2
(C)
(A)/(C)(M)
(A)
Y1
制御要素CNT1
ー設定値(SV1)
測定値(PV1)
操作出力値(MV1)
Cランプ、AランプまたはMランプ点灯
カスケードのときに[CAS]を表示。
アナログカスケード設定値を表示。
測定入力カスケード設定入力
操作出力0107.ai
機能ブロック図と運転モード関係
1.1 コントローラモード(CTL)を選択する
1-14 IM 01B08B01-02
AUT
MAN
MAN
CAS
AUT
(A)
CAS,MAN
カスケード設定自動制御
(A) :自動制御状態(M) :手動制御状態(C) :アナログカスケード設定自動制御状態
AUT、MAN、CAS:通信コマンドを送信 (YSプロトコル)
自動制御
(C)(CAS)
手動制御
(M)
0108.ai
AUT
CAS
Cモードキー押しC
C
C
Aモードキー押しAA
A
A
Mモードキー押しM
MM
C M
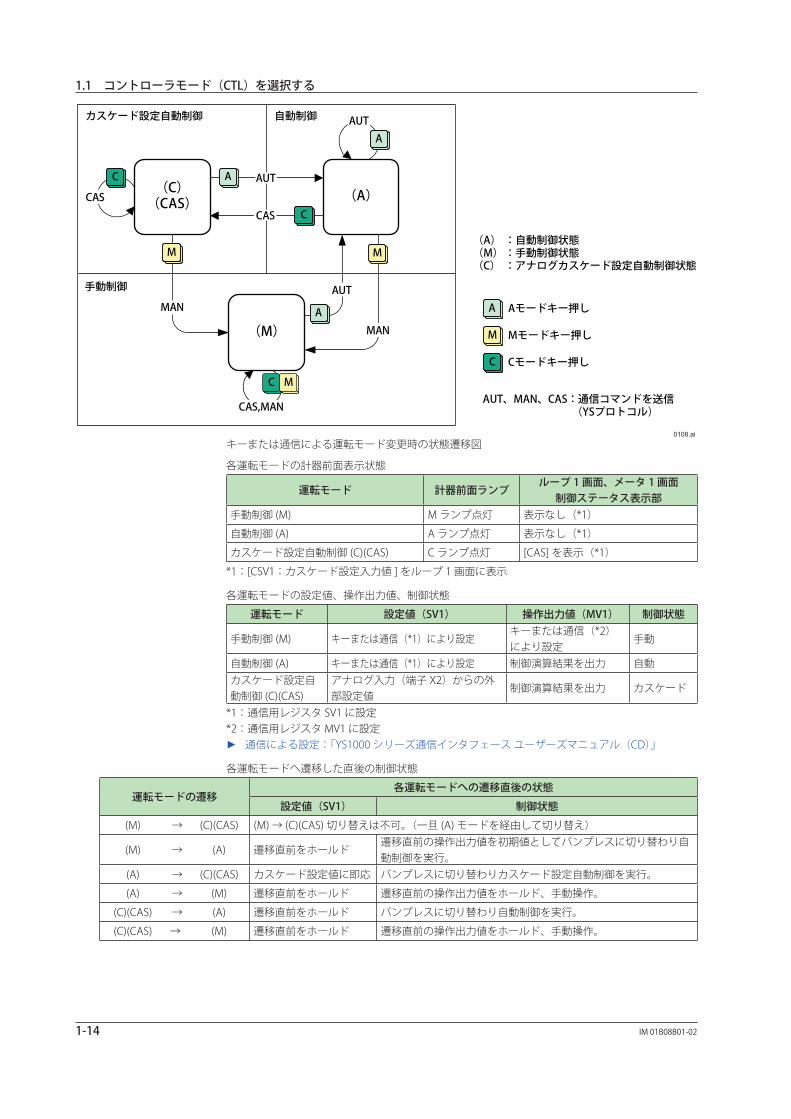
キーまたは通信による運転モード変更時の状態遷移図
各運転モードの計器前面表示状態
運転モード 計器前面ランプループ 1 画面、メータ 1 画面
制御ステータス表示部手動制御 (M) M ランプ点灯 表示なし(*1)
自動制御 (A) A ランプ点灯 表示なし(*1)
カスケード設定自動制御 (C)(CAS) C ランプ点灯 [CAS] を表示(*1)
*1:[CSV1:カスケード設定入力値 ] をループ 1 画面に表示
各運転モードの設定値、操作出力値、制御状態
運転モード 設定値(SV1) 操作出力値(MV1) 制御状態
手動制御 (M) キーまたは通信(*1)により設定キーまたは通信(*2)により設定
手動
自動制御 (A) キーまたは通信(*1)により設定 制御演算結果を出力 自動カスケード設定自動制御 (C)(CAS)
アナログ入力(端子 X2)からの外部設定値
制御演算結果を出力 カスケード
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
各運転モードへ遷移した直後の制御状態
運転モードの遷移各運転モードへの遷移直後の状態
設定値(SV1) 制御状態
(M) → (C)(CAS) (M) → (C)(CAS) 切り替えは不可。(一旦 (A) モードを経由して切り替え)
(M) → (A) 遷移直前をホールド遷移直前の操作出力値を初期値としてバンプレスに切り替わり自動制御を実行。
(A) → (C)(CAS) カスケード設定値に即応 バンプレスに切り替わりカスケード設定自動制御を実行。
(A) → (M) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作。
(C)(CAS) → (A) 遷移直前をホールド バンプレスに切り替わり自動制御を実行。
(C)(CAS) → (M) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作。
1.1 コントローラモード(CTL)を選択する
1-15IM 01B08B01-02
制御機能
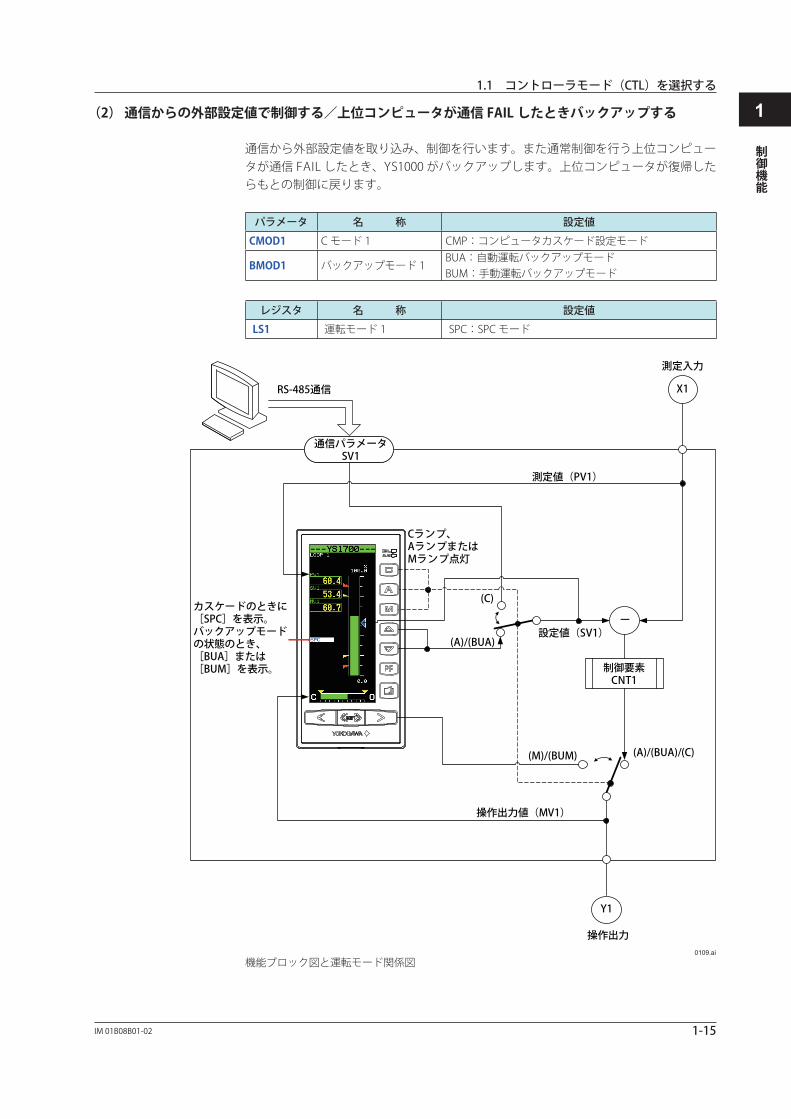
1(2) 通信からの外部設定値で制御する/上位コンピュータが通信 FAIL したときバックアップする
通信から外部設定値を取り込み、制御を行います。また通常制御を行う上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 SPC:SPC モード
X1
(C)
(A)/(BUA)/(C)(M)/(BUM)
(A)/(BUA)
Y1
制御要素CNT1
ー設定値(SV1)
測定値(PV1)
RS-485通信
操作出力値(MV1)
Cランプ、AランプまたはMランプ点灯
カスケードのときに[SPC]を表示。バックアップモードの状態のとき、[BUA]または[BUM]を表示。
測定入力
操作出力0109.ai
通信パラメータSV1
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
1-16 IM 01B08B01-02
AUT
MAN
MAN
SPC
AUT(A)
(M)
DDC
AUT
MAN
(C)(CMP)(SPC)
自動制御カスケード設定自動制御
手動制御
MAN
(BUM) (BUA)
パラメータ:BMOD1
AUT
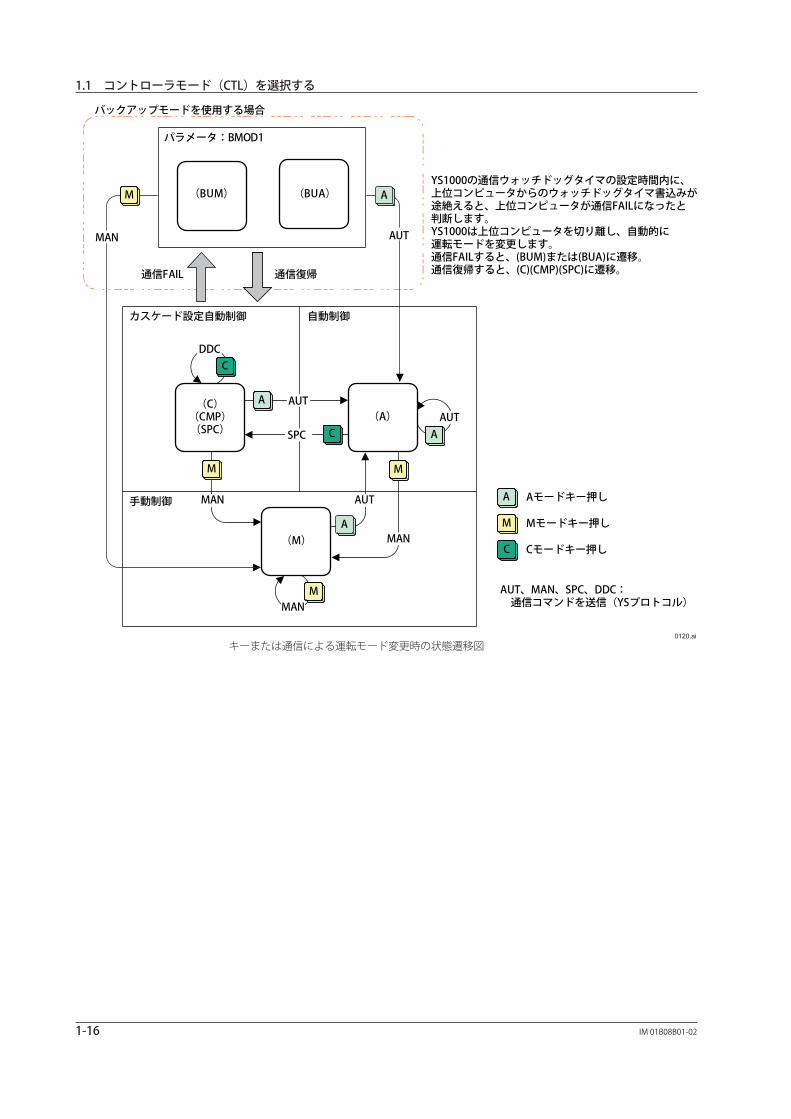
バックアップモードを使用する場合
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(SPC)に遷移。通信FAIL 通信復帰
0120.ai
Cモードキー押しC
Aモードキー押しA
Mモードキー押しM
C
C A
A
A
A
M
M
M
M
AUT、MAN、SPC、DDC: 通信コマンドを送信(YSプロトコル)
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
1-17IM 01B08B01-02
制御機能
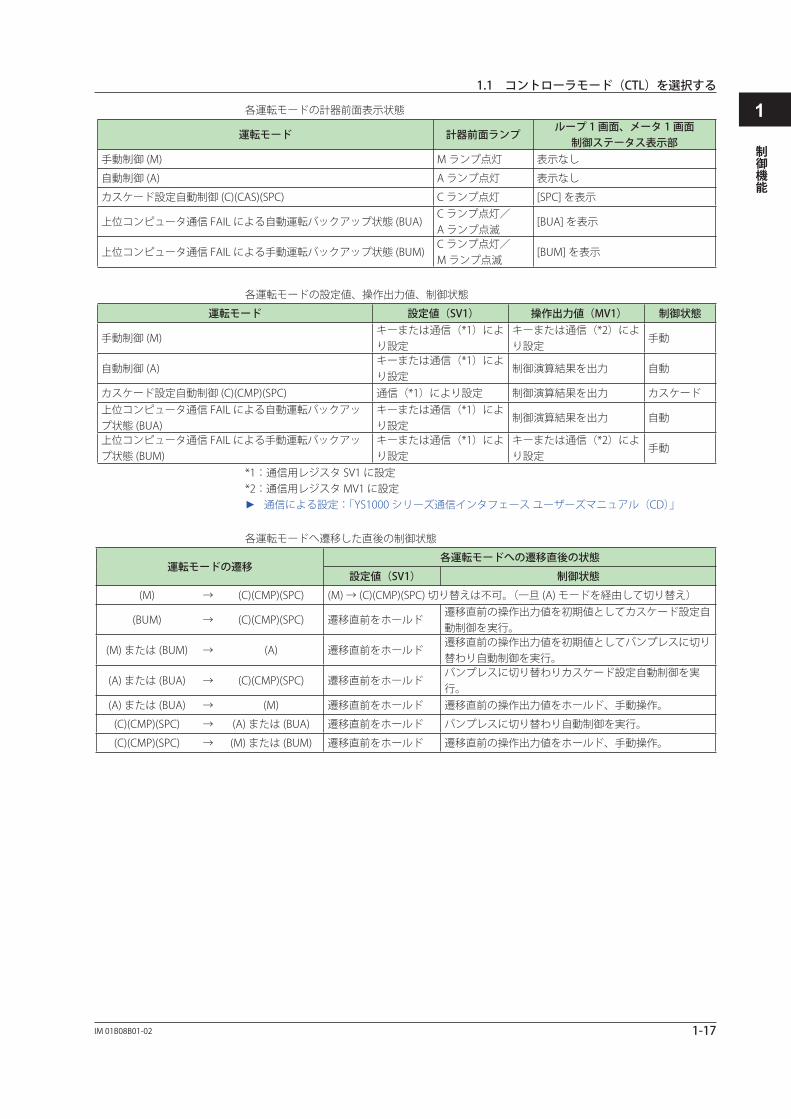
1各運転モードの計器前面表示状態
運転モード 計器前面ランプループ 1 画面、メータ 1 画面
制御ステータス表示部手動制御 (M) M ランプ点灯 表示なし
自動制御 (A) A ランプ点灯 表示なし
カスケード設定自動制御 (C)(CAS)(SPC) C ランプ点灯 [SPC] を表示
上位コンピュータ通信 FAIL による自動運転バックアップ状態 (BUA)C ランプ点灯/ A ランプ点滅
[BUA] を表示
上位コンピュータ通信 FAIL による手動運転バックアップ状態 (BUM)C ランプ点灯/ M ランプ点滅
[BUM] を表示
各運転モードの設定値、操作出力値、制御状態
運転モード 設定値(SV1) 操作出力値(MV1) 制御状態
手動制御 (M)キーまたは通信(*1)により設定
キーまたは通信(*2)により設定
手動
自動制御 (A)キーまたは通信(*1)により設定
制御演算結果を出力 自動
カスケード設定自動制御 (C)(CMP)(SPC) 通信(*1)により設定 制御演算結果を出力 カスケード上位コンピュータ通信 FAIL による自動運転バックアップ状態 (BUA)
キーまたは通信(*1)により設定
制御演算結果を出力 自動
上位コンピュータ通信 FAIL による手動運転バックアップ状態 (BUM)
キーまたは通信(*1)により設定
キーまたは通信(*2)により設定
手動
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
各運転モードへ遷移した直後の制御状態
運転モードの遷移各運転モードへの遷移直後の状態
設定値(SV1) 制御状態
(M) → (C)(CMP)(SPC) (M) → (C)(CMP)(SPC) 切り替えは不可。(一旦 (A) モードを経由して切り替え)
(BUM) → (C)(CMP)(SPC) 遷移直前をホールド遷移直前の操作出力値を初期値としてカスケード設定自動制御を実行。
(M) または (BUM) → (A) 遷移直前をホールド遷移直前の操作出力値を初期値としてバンプレスに切り替わり自動制御を実行。
(A) または (BUA) → (C)(CMP)(SPC) 遷移直前をホールドバンプレスに切り替わりカスケード設定自動制御を実行。
(A) または (BUA) → (M) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作。
(C)(CMP)(SPC) → (A) または (BUA) 遷移直前をホールド バンプレスに切り替わり自動制御を実行。
(C)(CMP)(SPC) → (M) または (BUM) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作。
1.1 コントローラモード(CTL)を選択する
1-18 IM 01B08B01-02
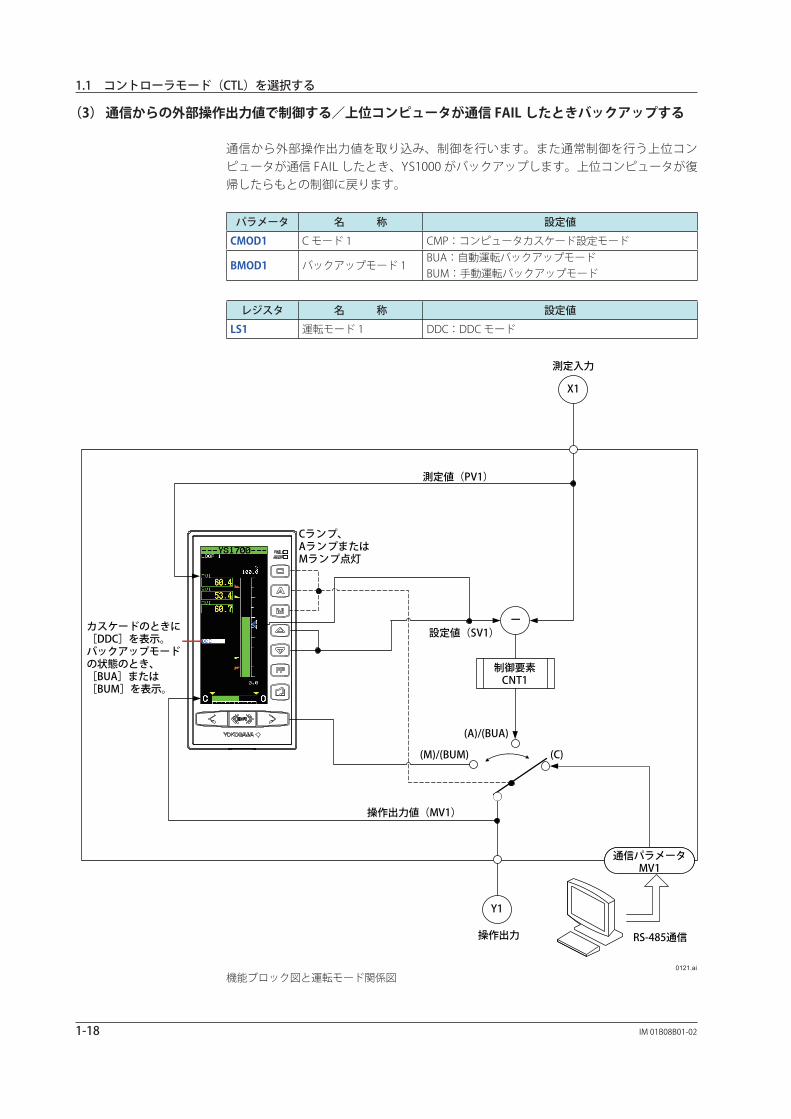
(3) 通信からの外部操作出力値で制御する/上位コンピュータが通信 FAIL したときバックアップする
通信から外部操作出力値を取り込み、制御を行います。また通常制御を行う上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 DDC:DDC モード
X1
(C)
(A)/(BUA)
(M)/(BUM)
Y1
制御要素CNT1
ー設定値(SV1)
測定値(PV1)
RS-485通信
操作出力値(MV1)
Cランプ、AランプまたはMランプ点灯
カスケードのときに[DDC]を表示。バックアップモードの状態のとき、[BUA]または[BUM]を表示。
測定入力
操作出力
0121.ai
通信パラメータMV1
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
1-19IM 01B08B01-02
制御機能
1
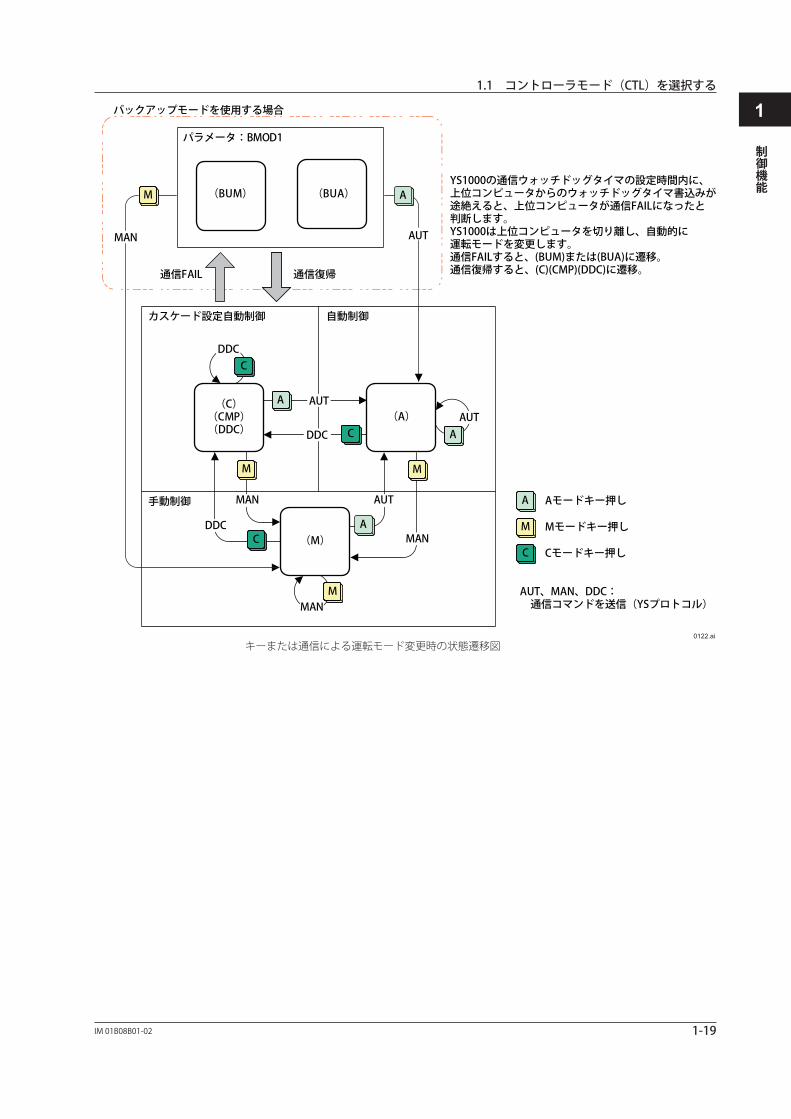
AUT
MAN
MAN
DDC
AUT(A)
(M)
DDC
AUT
MAN
(C)(CMP)(DDC)
自動制御カスケード設定自動制御
手動制御
MAN
(BUM) (BUA)
パラメータ:BMOD1
AUT
バックアップモードを使用する場合
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(DDC)に遷移。通信FAIL 通信復帰
0122.ai
DDC
Cモードキー押しC
Aモードキー押しA
Mモードキー押しM
C
C
C A
A
A
A
M
M
M
M
AUT、MAN、DDC: 通信コマンドを送信(YSプロトコル)
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
1-20 IM 01B08B01-02
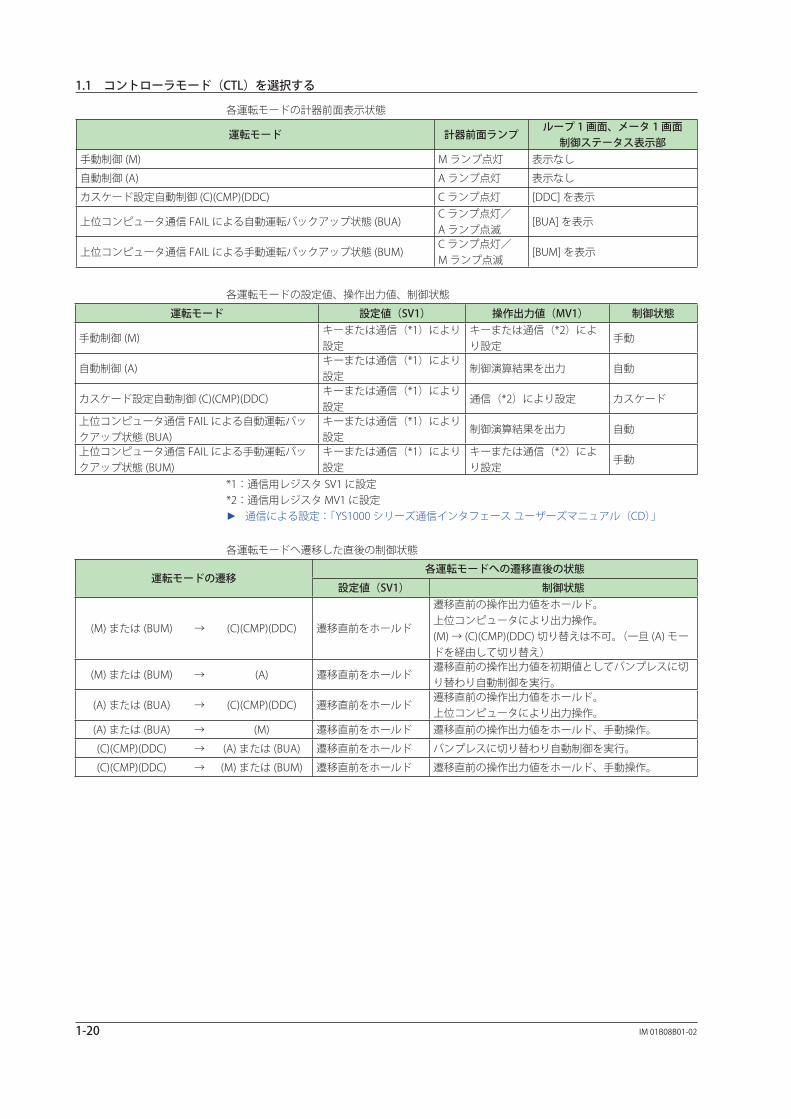
各運転モードの計器前面表示状態
運転モード 計器前面ランプループ 1 画面、メータ 1 画面
制御ステータス表示部手動制御 (M) M ランプ点灯 表示なし
自動制御 (A) A ランプ点灯 表示なし
カスケード設定自動制御 (C)(CMP)(DDC) C ランプ点灯 [DDC] を表示
上位コンピュータ通信 FAIL による自動運転バックアップ状態 (BUA)C ランプ点灯/ A ランプ点滅
[BUA] を表示
上位コンピュータ通信 FAIL による手動運転バックアップ状態 (BUM)C ランプ点灯/ M ランプ点滅
[BUM] を表示
各運転モードの設定値、操作出力値、制御状態
運転モード 設定値(SV1) 操作出力値(MV1) 制御状態
手動制御 (M)キーまたは通信(*1)により設定
キーまたは通信(*2)により設定
手動
自動制御 (A)キーまたは通信(*1)により設定
制御演算結果を出力 自動
カスケード設定自動制御 (C)(CMP)(DDC)キーまたは通信(*1)により設定
通信(*2)により設定 カスケード
上位コンピュータ通信 FAIL による自動運転バックアップ状態 (BUA)
キーまたは通信(*1)により設定
制御演算結果を出力 自動
上位コンピュータ通信 FAIL による手動運転バックアップ状態 (BUM)
キーまたは通信(*1)により設定
キーまたは通信(*2)により設定
手動
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
各運転モードへ遷移した直後の制御状態
運転モードの遷移各運転モードへの遷移直後の状態
設定値(SV1) 制御状態
(M) または (BUM) → (C)(CMP)(DDC) 遷移直前をホールド
遷移直前の操作出力値をホールド。上位コンピュータにより出力操作。(M) → (C)(CMP)(DDC) 切り替えは不可。(一旦 (A) モードを経由して切り替え)
(M) または (BUM) → (A) 遷移直前をホールド遷移直前の操作出力値を初期値としてバンプレスに切り替わり自動制御を実行。
(A) または (BUA) → (C)(CMP)(DDC) 遷移直前をホールド遷移直前の操作出力値をホールド。上位コンピュータにより出力操作。
(A) または (BUA) → (M) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作。
(C)(CMP)(DDC) → (A) または (BUA) 遷移直前をホールド バンプレスに切り替わり自動制御を実行。
(C)(CMP)(DDC) → (M) または (BUM) 遷移直前をホールド 遷移直前の操作出力値をホールド、手動操作。
1.1 コントローラモード(CTL)を選択する
1-21IM 01B08B01-02
制御機能
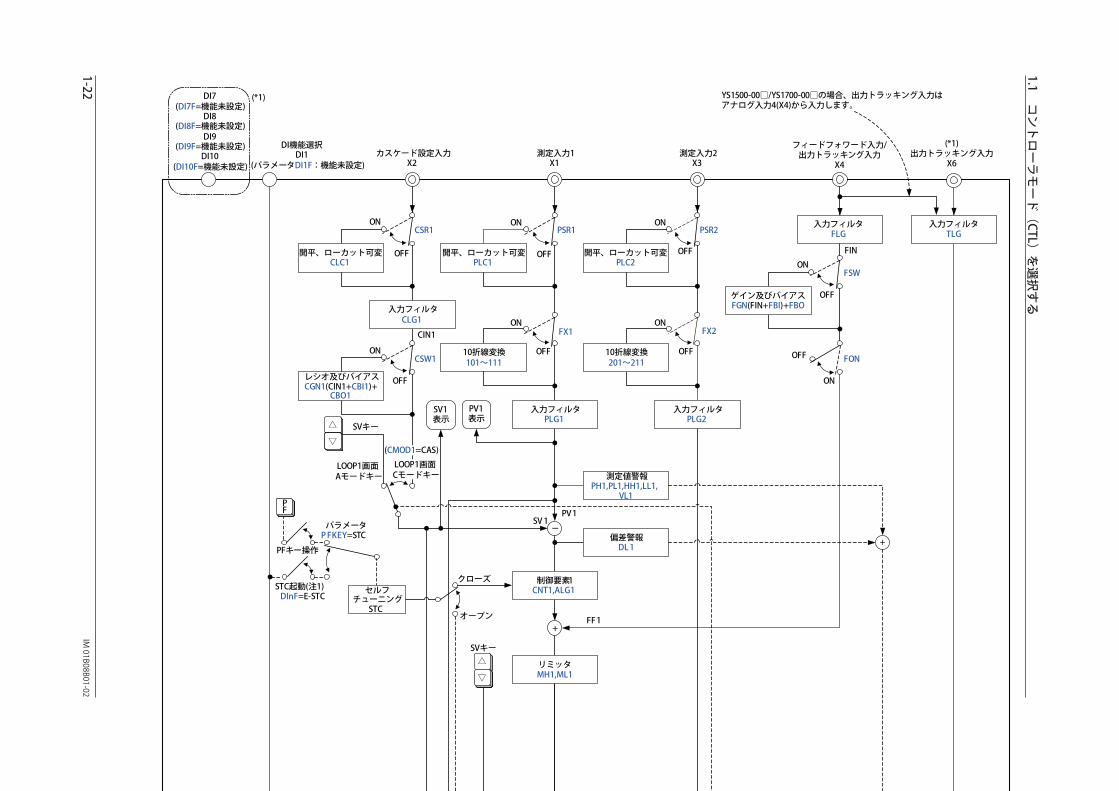
11.1.2 カスケードモード(CTL=CAS)で制御するカスケードモードは、2 つのループを直列(カスケード)に接続し、カスケード制御を実行します。カスケードモードを選択すると次の図の機能が構築されます。図中に記載されているパラメータ(青太字)を変更することにより、必要な機能を実現できます。► パラメータ:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
の「パラメータ一覧」
1.1 コントローラモード(CTL)を選択する
1-22IM
01B08B01-02
カスケード設定入力X2
測定入力1X1
フィードフォワード入力/出力トラッキング入力
X4測定入力2
X3
CIN1
CSR1ON
OFF
CSW1ON
OFF
PSR1ON
OFF
10折線変換101~111
FX1ON
OFF
FIN
FSWON
OFF
FON
ON
OFF
FF1
SVキー
MVキー
MV表示
PV1表示
SV1表示
PSR2ON
OFF
FX2ON
OFF
SV1PV1
リミッタMH1,ML1
SVキー
SV2PV2
+
TRK1
LCDバックライト
(CMOD1=CAS)
開平、ローカット可変CLC1
入力フィルタCLG1
レシオ及びバイアスCGN1(CIN1+CBI1)+
CBO1
測定値警報PH1,PL1,HH1,LL1,
VL1
偏差警報DL1
制御要素1CNT1,ALG1
入力フィルタPLG1
入力フィルタPLG2
10折線変換201~211
開平、ローカット可変PLC1
開平、ローカット可変PLC2
入力フィルタFLG
ゲイン及びバイアスFGN(FIN+FBI)+FBO
-
出力リミッタMH2,ML2
制御要素2CNT2,ALG2
プリセットMVPMV1
偏差警報DL2
測定値警報PH2,PL2,HH2,LL2,
VL2
セルフチューニング
STC
入力フィルタTLG
-
+
DI7(DI7F=機能未設定)
DI8(DI8F=機能未設定)
DI9(DI9F=機能未設定)
DI10(DI10F=機能未設定)
DI機能選択DI1
(パラメータDI1F:機能未設定)
LOOP1画面Cモードキー
LOOP1画面Aモードキー
+
STC起動(注1)DInF=E-STC
パラメータPFKEY=STC
内部カスケードO/C切替(注1)DInF=E-O/C
クローズDIn=CLOSEオープン
DIn=OPEN
オープン
クローズ
DI1=OPEN
DI1=CLOSE
DI1=OPEN
DI1=CLOSE
DO7(DO7F=機能未設定)
DO8(DO8F=機能未設定)
DO9(DO9F=機能未設定)
DO10(DO10F=機能未設定)
LOOP1画面またはLOOP2画面Mモードキー
PFキー操作
DInF,DIn(n=1, 7, 8, 9, 10)
(*1)
(*1)出力トラッキング入力
X6
(*1)
(注1)いずれか一つを選択できます。 さらにDI/DOの機能割り付けを変更することにより、 複数の接点を使用することができます。
*1:YS1700基本形(拡張I/O付き)のみ 拡張I/O端子です。
YS1500-00□/YS1700-00□の場合、出力トラッキング入力はアナログ入力4(X4)から入力します。
0123.ai
出力プリセットMVおよびMAN(注1)
DInF=TR-MPMVC押し切替(注1)DInF=TR-CASA押し切替(注1)DInF=TR-AUT
M押し切替(注1)DInF=TR-MAN
出力トラッキング(注1)DInF=E-TRK
プリセットMV切替(注1)DInF=E-PMV
バックライトOFF(注1)DInF=LCD-OFF
Y3設定値出力
(1-5V)(パラメータY3S=SV1)
Y2操作出力2
(1-5V)(パラメータY2S=MV)
Y1操作出力1(4-20mA)
DO5C,A/M
ステータス出力
(パラメータDO5F=CASAUT)
DO4C/A,M
ステータス出力
(パラメータDO4F=CAS)
DO3O/C
ステータス出力
(パラメータDO3F=O/C)
DO2第2ループ警報出力
(パラメータDO2F=2-ALM)
DO1第1ループ警報出力
(パラメータDO1F=1-ALM)
Y4測定値出力
(1-5V)(パラメータY4S=PV1)
(*1)
▽
△
▽
▽PF
▽
△
▽
≪ < > ≫
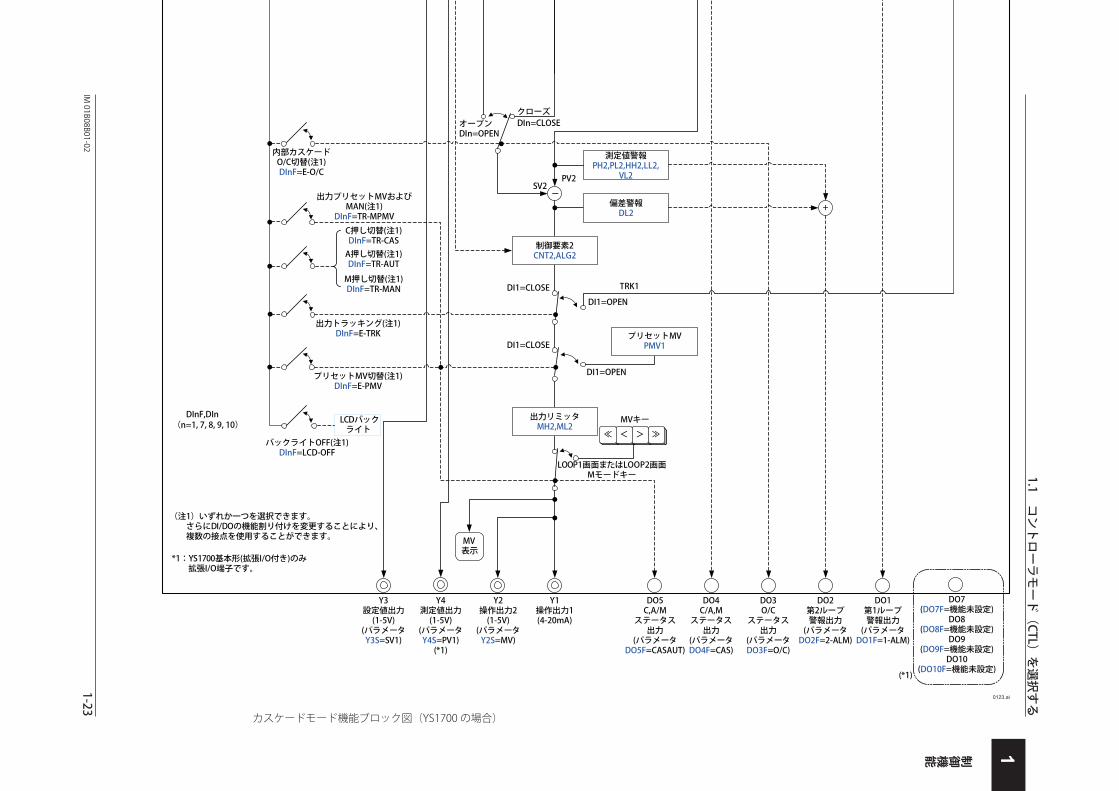
カスケードモード機能ブロック図(YS1700 の場合)
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
1-23IM
01B08B01-02
制御機能 1
カスケード設定入力X2
測定入力1X1
フィードフォワード入力/出力トラッキング入力
X4測定入力2
X3
CIN1
CSR1ON
OFF
CSW1ON
OFF
PSR1ON
OFF
10折線変換101~111
FX1ON
OFF
FIN
FSWON
OFF
FON
ON
OFF
FF1
SVキー
MVキー
MV表示
PV1表示
SV1表示
PSR2ON
OFF
FX2ON
OFF
SV1PV1
リミッタMH1,ML1
SVキー
SV2PV2
+
TRK1
LCDバックライト
(CMOD1=CAS)
開平、ローカット可変CLC1
入力フィルタCLG1
レシオ及びバイアスCGN1(CIN1+CBI1)+
CBO1
測定値警報PH1,PL1,HH1,LL1,
VL1
偏差警報DL1
制御要素1CNT1,ALG1
入力フィルタPLG1
入力フィルタPLG2
10折線変換201~211
開平、ローカット可変PLC1
開平、ローカット可変PLC2
入力フィルタFLG
ゲイン及びバイアスFGN(FIN+FBI)+FBO
-
出力リミッタMH2,ML2
制御要素2CNT2,ALG2
プリセットMVPMV1
偏差警報DL2
測定値警報PH2,PL2,HH2,LL2,
VL2
セルフチューニング
STC
入力フィルタTLG
-
+
DI7(DI7F=機能未設定)
DI8(DI8F=機能未設定)
DI9(DI9F=機能未設定)
DI10(DI10F=機能未設定)
DI機能選択DI1
(パラメータDI1F:機能未設定)
LOOP1画面Cモードキー
LOOP1画面Aモードキー
+
STC起動(注1)DInF=E-STC
パラメータPFKEY=STC
内部カスケードO/C切替(注1)DInF=E-O/C
クローズDIn=CLOSEオープン
DIn=OPEN
オープン
クローズ
DI1=OPEN
DI1=CLOSE
DI1=OPEN
DI1=CLOSE
DO7(DO7F=機能未設定)
DO8(DO8F=機能未設定)
DO9(DO9F=機能未設定)
DO10(DO10F=機能未設定)
LOOP1画面またはLOOP2画面Mモードキー
PFキー操作
DInF,DIn(n=1, 7, 8, 9, 10)
(*1)
(*1)出力トラッキング入力
X6
(*1)
(注1)いずれか一つを選択できます。 さらにDI/DOの機能割り付けを変更することにより、 複数の接点を使用することができます。
*1:YS1700基本形(拡張I/O付き)のみ 拡張I/O端子です。
YS1500-00□/YS1700-00□の場合、出力トラッキング入力はアナログ入力4(X4)から入力します。
0123.ai
出力プリセットMVおよびMAN(注1)
DInF=TR-MPMVC押し切替(注1)DInF=TR-CASA押し切替(注1)DInF=TR-AUT
M押し切替(注1)DInF=TR-MAN
出力トラッキング(注1)DInF=E-TRK
プリセットMV切替(注1)DInF=E-PMV
バックライトOFF(注1)DInF=LCD-OFF
Y3設定値出力
(1-5V)(パラメータY3S=SV1)
Y2操作出力2
(1-5V)(パラメータY2S=MV)
Y1操作出力1(4-20mA)
DO5C,A/M
ステータス出力
(パラメータDO5F=CASAUT)
DO4C/A,M
ステータス出力
(パラメータDO4F=CAS)
DO3O/C
ステータス出力
(パラメータDO3F=O/C)
DO2第2ループ警報出力
(パラメータDO2F=2-ALM)
DO1第1ループ警報出力
(パラメータDO1F=1-ALM)
Y4測定値出力
(1-5V)(パラメータY4S=PV1)
(*1)
▽
△
▽
▽PF
▽
△
▽
≪ < > ≫
カスケードモード機能ブロック図(YS1700 の場合)
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る

1-24 IM 01B08B01-02
■ カスケード制御の機能
制御要素制御タイプ:標準 PID 制御、サンプル PI 制御制御演算式:第 1 ループ、第 2 ループに、以下から選択できます。
・比例先行 PID(I-PD)・微分先行 PID(PI-D)・可変設定値フィルタ機能(SVF)
► 制御タイプ、制御演算式:本書の「1.2 制御方法を選択する(制御タイプ CNT、制御演算式ALG を選択する)」
主なパラメータの機能主 な 機 能 参 照 先
フィルタ機能 2.1.1 入力フィルタ(一次遅れ演算)
開平演算機能 2.1.2 開平演算(ローカット点可変形)
10 折線 2.1.3 10 折線関数
レシオ、ゲインおよびバイアス機能 2.1.4 比率演算
警報機能 3.1.5 ディジタル出力の機能を変更する
セルフチューニング機能 第 7 章 セルフチューニング機能
プリセット MV 機能 2.4 プリセット MV を使う
出力リミッタ機能1.2.3 積分動作を停止させ、オーバーシュートの少ない制御を行う(出力リミッタ)
その他の機能主 な 機 能 参 照 先
接点入力の機能第 3 章 入出力補助機能
接点出力の機能
表示機能 第 4 章 表示機能/セキュリティ機能
通信機能YS1000 シリーズ通信インタフェース ユーザーズマニュアル
1.1 コントローラモード(CTL)を選択する
1-25IM 01B08B01-02
制御機能
1■ 自動制御/手動制御
設 定 画 面
エンジニアリング画面
0123-01.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG2]ソフトキー(機能設定画面 2)
設 定 内 容
自動制御/手動制御のみを行う場合は、CMOD1=-(設定なし)に設定してください。「(1) YS だけで制御する」の動作となります。
パラメータ 名 称 設定範囲 工場出荷時値
CMOD1 C モード 1-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
-
解 説
第 1 ループの運転モードは、第 1 ループ画面で計器前面の A モードキーまたは M モードキーを押すことで切り替わります。
A モードキーを押したとき、第 1 ループ 自動制御(A) M モードキーを押したとき、第 1 ループ 手動制御(M)/第 2 ループ手動制御(M)(ク
ローズ)
第 2 ループの運転モードは、第 2 ループ画面で計器前面の C モードキー、A モードキーまたは M モードキーを押すことで、 3 種類のモードに変更できます。
A モードキーを押したとき、第 2 ループ 自動制御(A)(オープン) M モードキーを押したとき、第 1 ループ 手動制御/第 2 ループ 手動制御(M)(オー
プン) C モードキーを押したとき、第 2 ループ カスケードクローズ
各運転モードの切り替えは、計器前面キーのほかにディジタル入力(DI)、通信およびユーザプログラムから行えます。
► 計器前面キーによる切り替え:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
► 通信による切り替え:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」► ディジタル入力による切り替え:「3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)」► ユーザプログラムによる切り替え:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能
ユーザーズマニュアル」
1.1 コントローラモード(CTL)を選択する
1-26 IM 01B08B01-02
オープン/クローズとはクローズ(CLOSE):第 1 ループの出力値を第 2 ループの設定値(SV2)とする状態。(内部)カスケードクローズ状態。オープン(OPEN):第 2 ループの設定値(SV2)をキーまたは通信から設定する状態。(内部)カスケードオープン状態。
記号の意味運転モードの記号と意味を示します。
記 号 意 味
(M) 手動制御(M)
(A) 自動制御(A)
(OPEN) (内部)カスケードオープン(OPEN)状態
(CLOSE) (内部)カスケードクローズ(CLOSE)状態
1.1 コントローラモード(CTL)を選択する

1-27IM 01B08B01-02
制御機能
1(1) YS だけで制御する
内部カスケードする自動制御(A)または手動制御(M)のみです。第 1 ループでは、計器前面の C モードキーは押しても動作は変わりません。第 2 ループでは、計器前面の C モードキー、A モードキー、M モードキーはオープン/クローズ、自動、手動の切り替えを行います。
パラメータ 名 称 設定値
CMOD1 C モード 1 -:設定なし
X1
設定値(SV1)
制御要素1CNT1
(A1)
(M1)
(A2)
(C2)
(M2)
Y1
X3
制御要素2CNT2
ー
ー
測定入力1
測定値(PV1)
測定値(PV2)
(A1)/(A2)/(C2)(M1)/(M2)
操作出力値(MV)
(C2)(CLOSE)
(A2)(OPEN)
設定値(SV2)
第1ループ画面
第2 ループ画面
第1ループと同じ表示。
第2ループがカスケードのとき[CLOSE]を表示。第2ループが自動のとき[OPEN]を表示。第2ループで手動にすると[OPEN]を表示。第1ループで手動にすると[CLOSE]を表示。
測定入力2
操作出力0124.ai
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
1-28 IM 01B08B01-02
(C)
(C)CLOSE
(A)OPEN
(M)CLOSE
(M)OPEN
(A) (M)
A1-C2(CLOSE)
A1-A2(OPEN)
M1-M2(CLOSE)
M1-M2(OPEN)
A1-A2(CLOSE)
MAN(LS2)
AUT(LS2)
CAS(LS2)
AUT(LS1)
AUT(LS2)
MAN(LS2)
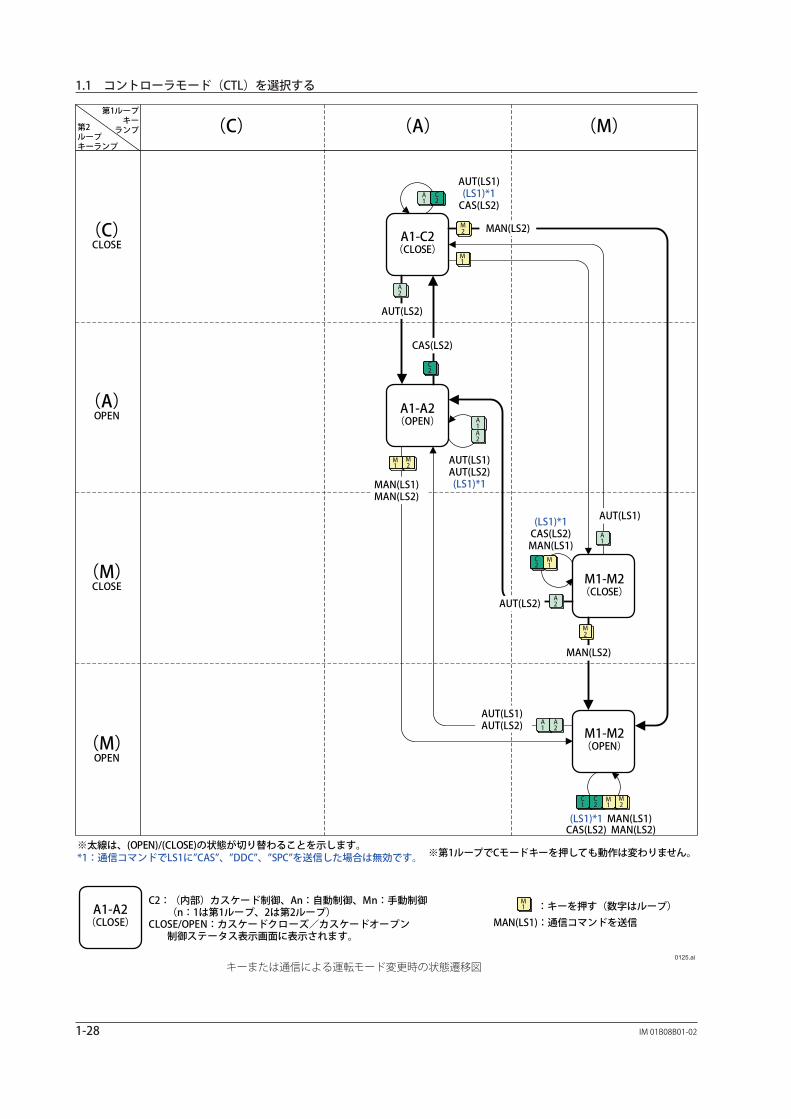
※太線は、(OPEN)/(CLOSE)の状態が切り替わることを示します。※第1ループでCモードキーを押しても動作は変わりません。
C2:(内部)カスケード制御、An:自動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
CLOSE/OPEN:カスケードクローズ/カスケードオープン制御ステータス表示画面に表示されます。
:キーを押す(数字はループ)MAN(LS1):通信コマンドを送信
*1:通信コマンドでLS1に”CAS”、”DDC”、”SPC”を送信した場合は無効です。
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)(LS1)*1CAS(LS2)
AUT(LS1)AUT(LS2)(LS1)*1
(LS1)*1CAS(LS2)MAN(LS1)
第1ループキー
ランプ第2ループキーランプ
0125.ai
(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
M2
M1
A1
C2
C2
C2
A1A2
A2
M2
M1
M1
A1
A1
A2
A2
M1
M2
C1
C2
M1
M2
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する

1-29IM 01B08B01-02
制御機能
1各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯[OPEN] を表示(第 2 ループで手動にした場合)[CLOSE] を表示(A1-C2 のとき、第 1 ループで手動にした場合)
自動制御 (A1)
(内部)カスケード制御 (C2)
A ランプ点灯 C ランプ点灯 [CLOSE] を表示
自動制御 (A2) A ランプ点灯 A ランプ点灯 [OPEN] を表示
各運転モードの設定値、制御状態
運転モード 設定値(SV1、SV2)制御状態
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2)キーまたは通信(*1)により設定
キーまたは通信(*2)により設定。(OPEN 時)
手動
第 2 ループの測定値が設定値(SV2)となる。(CLOSE 時)
手動
自動制御 (A1)
(内部)カスケード制御 (C2) キーまたは通信(*1)
により設定
第 1 ループの出力値が設定値(SV2)となる。(内部)カスケー
ド自動制御 (A2) キーまたは通信(*2)により設定。 自動
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
1-30 IM 01B08B01-02
■ 自動制御/手動制御/カスケード設定自動制御
設 定 画 面
エンジニアリング画面
0126.ai
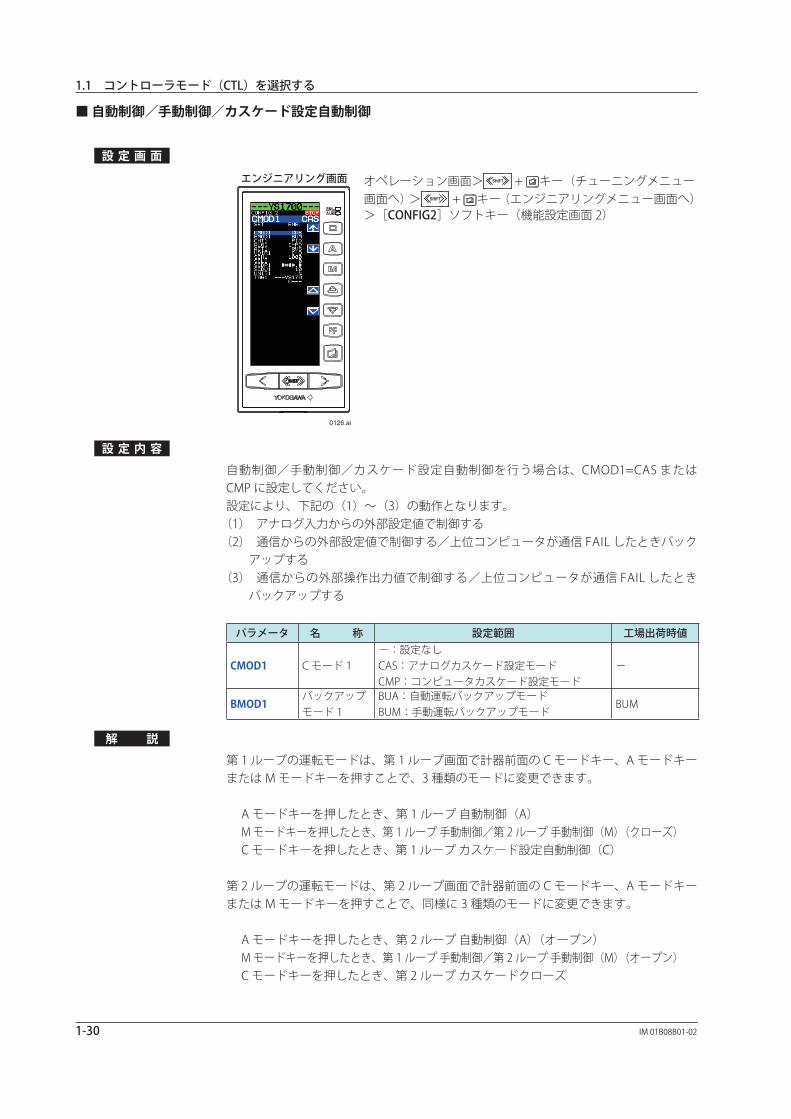
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG2]ソフトキー(機能設定画面 2)
設 定 内 容
自動制御/手動制御/カスケード設定自動制御を行う場合は、CMOD1=CAS またはCMP に設定してください。設定により、下記の(1)~(3)の動作となります。
(1) アナログ入力からの外部設定値で制御する(2) 通信からの外部設定値で制御する/上位コンピュータが通信 FAIL したときバック
アップする(3) 通信からの外部操作出力値で制御する/上位コンピュータが通信 FAIL したとき
バックアップする
パラメータ 名 称 設定範囲 工場出荷時値
CMOD1 C モード 1-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
-
BMOD1バックアップモード 1
BUA:自動運転バックアップモードBUM:手動運転バックアップモード
BUM
解 説
第 1 ループの運転モードは、第 1 ループ画面で計器前面の C モードキー、A モードキーまたは M モードキーを押すことで、3 種類のモードに変更できます。
A モードキーを押したとき、第 1 ループ 自動制御(A) M モードキーを押したとき、第 1 ループ 手動制御/第 2 ループ 手動制御(M)(クローズ) C モードキーを押したとき、第 1 ループ カスケード設定自動制御(C)
第 2 ループの運転モードは、第 2 ループ画面で計器前面の C モードキー、A モードキーまたは M モードキーを押すことで、同様に 3 種類のモードに変更できます。
A モードキーを押したとき、第 2 ループ 自動制御(A)(オープン) M モードキーを押したとき、第 1 ループ 手動制御/第 2 ループ 手動制御(M)(オープン) C モードキーを押したとき、第 2 ループ カスケードクローズ
1.1 コントローラモード(CTL)を選択する

1-31IM 01B08B01-02
制御機能
1各運転モードの切り替えは、計器前面キーのほかにディジタル入力(DI)、通信およびユーザプログラムから行えます。
► 計器前面キーによる切り替え:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
► 通信による切り替え:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」► ディジタル入力による切り替え:「3.1 ディジタル入出力の機能を定義する(機能選択モード
のみ)」► ユーザプログラムによる切り替え:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能
ユーザーズマニュアル」
オープン/クローズとはクローズ(CLOSE):第 1 ループの出力値を第 2 ループの設定値(SV2)とする状態。(内部)カスケードクローズ状態。オープン(OPEN):第 2 ループの設定値(SV2)をキーまたは通信から設定する状態。(内部)カスケードオープン状態。
1.1 コントローラモード(CTL)を選択する
1-32 IM 01B08B01-02
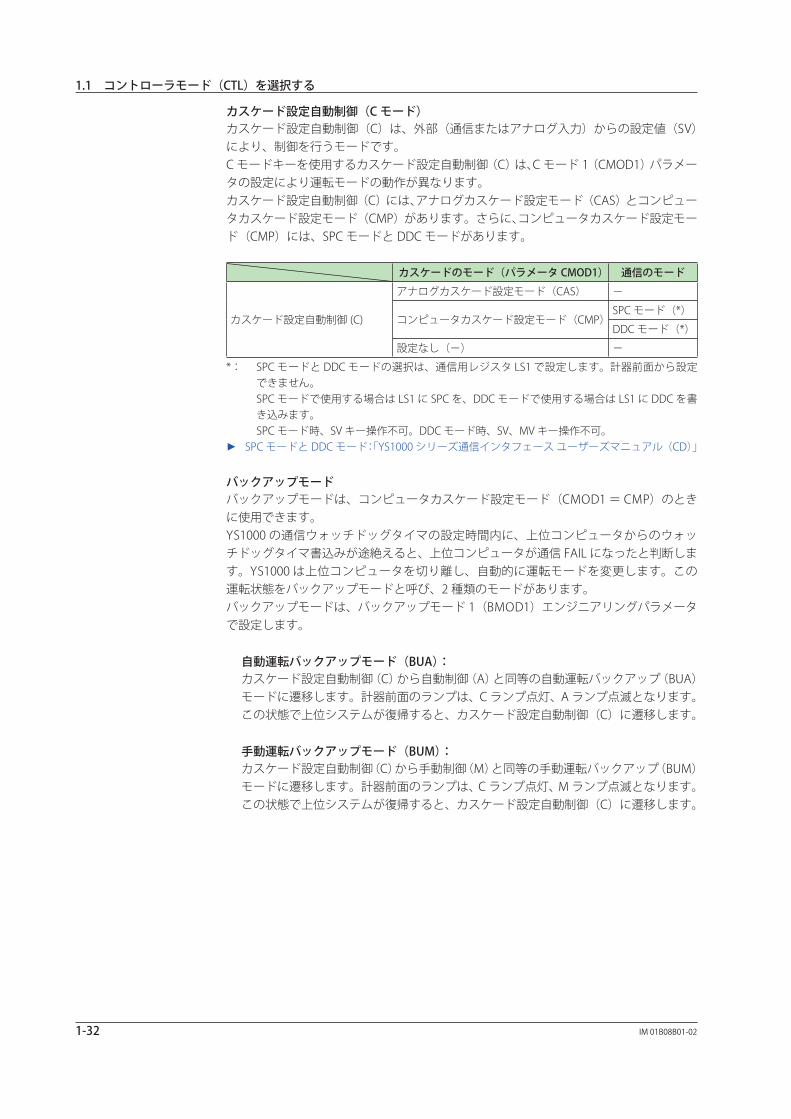
カスケード設定自動制御(C モード)カスケード設定自動制御(C)は、外部(通信またはアナログ入力)からの設定値(SV)により、制御を行うモードです。C モードキーを使用するカスケード設定自動制御(C)は、C モード 1(CMOD1)パラメータの設定により運転モードの動作が異なります。カスケード設定自動制御(C)には、アナログカスケード設定モード(CAS)とコンピュータカスケード設定モード(CMP)があります。さらに、コンピュータカスケード設定モード(CMP)には、SPC モードと DDC モードがあります。
カスケードのモード(パラメータ CMOD1) 通信のモード
カスケード設定自動制御 (C)
アナログカスケード設定モード(CAS) -
コンピュータカスケード設定モード(CMP)SPC モード(*)
DDC モード(*)
設定なし(-) -
*: SPC モードと DDC モードの選択は、通信用レジスタ LS1 で設定します。計器前面から設定できません。
SPC モードで使用する場合は LS1 に SPC を、DDC モードで使用する場合は LS1 に DDC を書き込みます。
SPC モード時、SV キー操作不可。DDC モード時、SV、MV キー操作不可。► SPC モードと DDC モード:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
バックアップモードバックアップモードは、コンピュータカスケード設定モード(CMOD1 = CMP)のときに使用できます。YS1000 の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信 FAIL になったと判断します。YS1000 は上位コンピュータを切り離し、自動的に運転モードを変更します。この運転状態をバックアップモードと呼び、2 種類のモードがあります。バックアップモードは、バックアップモード 1(BMOD1)エンジニアリングパラメータで設定します。
自動運転バックアップモード(BUA): カスケード設定自動制御(C)から自動制御(A)と同等の自動運転バックアップ(BUA)
モードに遷移します。計器前面のランプは、C ランプ点灯、A ランプ点滅となります。 この状態で上位システムが復帰すると、カスケード設定自動制御(C)に遷移します。
手動運転バックアップモード(BUM): カスケード設定自動制御(C)から手動制御(M)と同等の手動運転バックアップ(BUM)
モードに遷移します。計器前面のランプは、C ランプ点灯、M ランプ点滅となります。 この状態で上位システムが復帰すると、カスケード設定自動制御(C)に遷移します。
1.1 コントローラモード(CTL)を選択する
1-33IM 01B08B01-02
制御機能
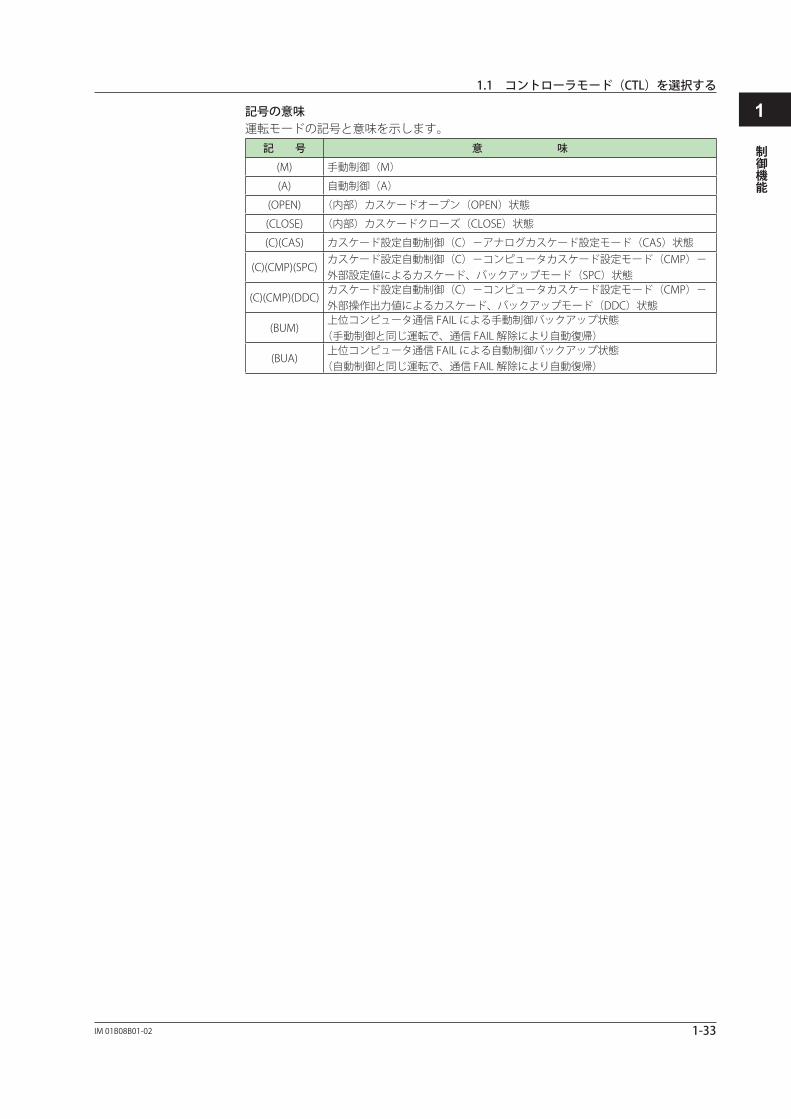
1記号の意味運転モードの記号と意味を示します。
記 号 意 味
(M) 手動制御(M)
(A) 自動制御(A)
(OPEN) (内部)カスケードオープン(OPEN)状態
(CLOSE) (内部)カスケードクローズ(CLOSE)状態
(C)(CAS) カスケード設定自動制御(C)-アナログカスケード設定モード(CAS)状態
(C)(CMP)(SPC)カスケード設定自動制御(C)-コンピュータカスケード設定モード(CMP)-外部設定値によるカスケード、バックアップモード(SPC)状態
(C)(CMP)(DDC)カスケード設定自動制御(C)-コンピュータカスケード設定モード(CMP)-外部操作出力値によるカスケード、バックアップモード(DDC)状態
(BUM)上位コンピュータ通信 FAIL による手動制御バックアップ状態
(手動制御と同じ運転で、通信 FAIL 解除により自動復帰)
(BUA)上位コンピュータ通信 FAIL による自動制御バックアップ状態
(自動制御と同じ運転で、通信 FAIL 解除により自動復帰)
1.1 コントローラモード(CTL)を選択する
1-34 IM 01B08B01-02
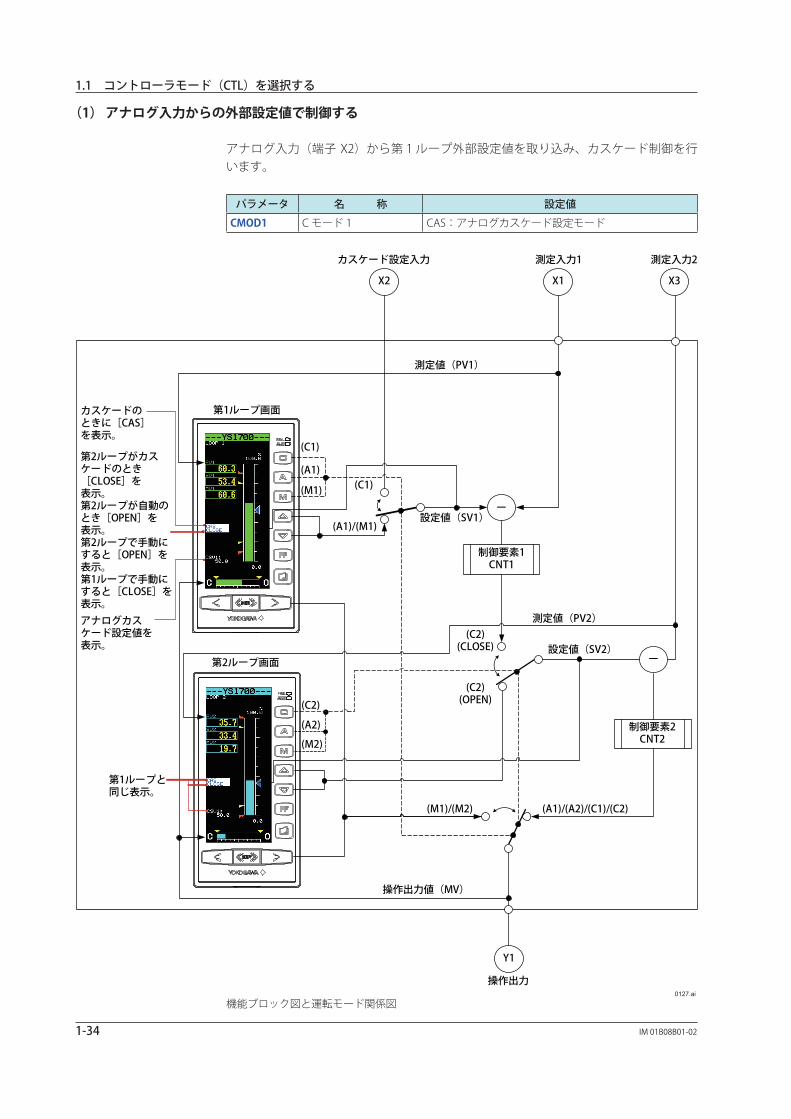
(1) アナログ入力からの外部設定値で制御する
アナログ入力(端子 X2)から第 1 ループ外部設定値を取り込み、カスケード制御を行います。
パラメータ 名 称 設定値
CMOD1 C モード 1 CAS:アナログカスケード設定モード
X1
設定値(SV1)
制御要素1CNT1
(A1)
(C1)
(C1)(M1)
(A1)/(M1)
(A2)
(C2)
(M2)
Y1
X3
制御要素2CNT2
ー
ー
測定入力1
測定値(PV1)
測定値(PV2)
(A1)/(A2)/(C1)/(C2)(M1)/(M2)
操作出力値(MV)
(C2)(CLOSE)
(C2)(OPEN)
設定値(SV2)
第1ループ画面
第2ループ画面
第1ループと同じ表示。
カスケードのときに[CAS]を表示。
アナログカスケード設定値を表示。
第2ループがカスケードのとき[CLOSE]を表示。第2ループが自動のとき[OPEN]を表示。第2ループで手動にすると[OPEN]を表示。第1ループで手動にすると[CLOSE]を表示。
測定入力2
操作出力
X2
カスケード設定入力
0127.ai
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
1-35IM 01B08B01-02
制御機能
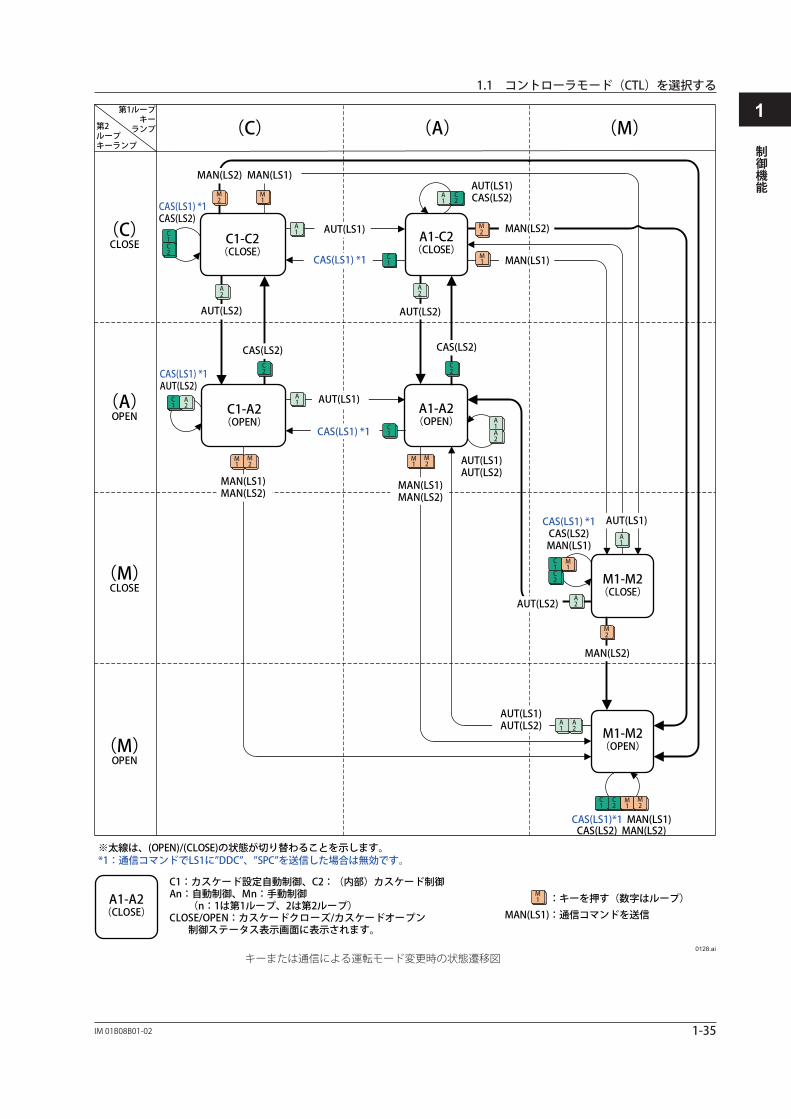
1(C)
(C)CLOSE
(A)OPEN
(M)CLOSE
(M)OPEN
(A) (M)第1ループ
キーランプ第2
ループキーランプ
A1-A2(CLOSE)
※太線は、(OPEN)/(CLOSE)の状態が切り替わることを示します。
:キーを押す(数字はループ)MAN(LS1):通信コマンドを送信
*1:通信コマンドでLS1に”DDC”、”SPC”を送信した場合は無効です。
0128.ai
C1:カスケード設定自動制御、C2:(内部)カスケード制御An:自動制御、Mn:手動制御
(n:1は第1ループ、2は第2ループ)CLOSE/OPEN:カスケードクローズ/カスケードオープン
制御ステータス表示画面に表示されます。
A1-C2(CLOSE)
C1-C2(CLOSE)
A1-A2(OPEN)
C1-A2(OPEN)
M1-M2(CLOSE)
M1-M2(OPEN)
MAN(LS2)
MAN(LS1)
AUT(LS2)
AUT(LS1)
AUT(LS1)
AUT(LS2)
AUT(LS1)
AUT(LS2)
MAN(LS2)
MAN(LS1)MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)
CAS(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
AUT(LS1)CAS(LS2)
AUT(LS1)AUT(LS2)
CAS(LS1) *1CAS(LS2)MAN(LS1)
CAS(LS1) *1AUT(LS2)
CAS(LS1) *1CAS(LS2)
CAS(LS1) *1
CAS(LS1) *1
CAS(LS2) CAS(LS2)
MAN(LS1)MAN(LS2)
A1
A1
A1
A1
A1
A1
A2
A2
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C2
M2
M2
M2
M1
M1
M1
C1 C2
M1
M1
M2
A2
M2
C1
C2
M1
M2
M1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する

1-36 IM 01B08B01-02
各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯[OPEN] を表示(第 2 ループで手動にした場合)(*1)[CLOSE] を表示(C1-C2 または A1-C2 のとき、第 1 ループで手動にした場合)(*1)
自動制御 (A1)
(内部)カスケード制御 (C2)
A ランプ点灯 C ランプ点灯 [CLOSE] を表示(*1)
自動制御 (A2) A ランプ点灯 A ランプ点灯 [OPEN] を表示(*1)
カスケード設定自動制御(C1)
(内部)カスケード制御 (C2)
C ランプ点灯 C ランプ点灯 [CAS]、[CLOSE] を表示(*1)
自動制御 (A2) C ランプ点灯 A ランプ点灯 [CAS]、[OPEN] を表示(*1)
*1:[CSV1:カスケード設定入力値 ] をループ 1 画面に表示
各運転モードの設定値、制御状態
運転モード 設定値(SV1、SV2)制御状態
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2)キーまたは通信(*1)により設定
キーまたは通信(*2)により設定。(OPEN 時)
手動
第 2 ループの測定値が設定値(SV2)となる。(CLOSE 時)
手動
自動制御 (A1)
(内部)カスケード制御 (C2) キーまたは通信(*1)に
より設定
第 1 ループの出力値が設定値(SV2)となる。(内部)カス
ケード自動制御 (A2) キーまたは通信(*2)により設定。 自動
カスケード設定自動制御(C1)
(内部)カスケード制御 (C2)
アナログ入力(端子 X2)からの外部設定値
第 1 ループの出力値が設定値(SV2)となる。(内部)カス
ケード
自動制御 (A2)アナログ入力(端子 X2)からの外部設定値
キーまたは通信(*2)により設定。 自動
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
1-37IM 01B08B01-02
制御機能
1
意図して空白にしています。
1.1 コントローラモード(CTL)を選択する
1-38 IM 01B08B01-02
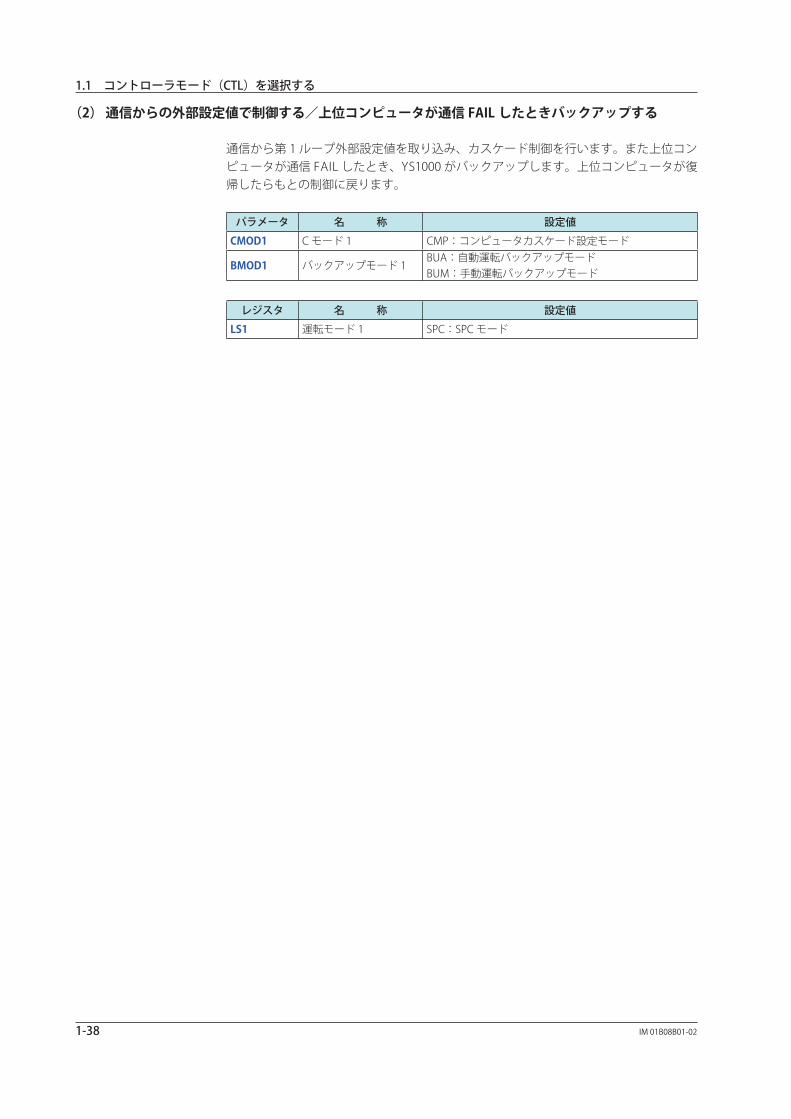
(2) 通信からの外部設定値で制御する/上位コンピュータが通信 FAIL したときバックアップする
通信から第 1 ループ外部設定値を取り込み、カスケード制御を行います。また上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 SPC:SPC モード
1.1 コントローラモード(CTL)を選択する
1-39IM 01B08B01-02
制御機能
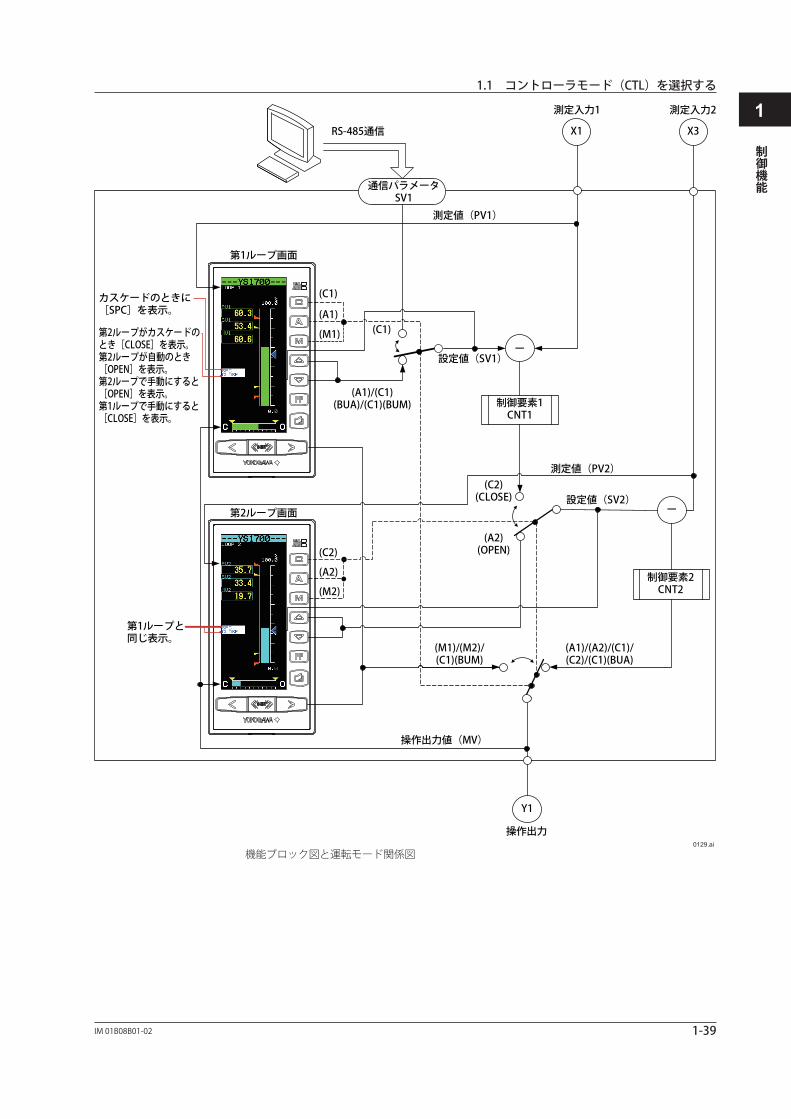
1X1
設定値(SV1)
制御要素1CNT1
(A1)
(C1)
(C1)(M1)
(A1)/(C1)(BUA)/(C1)(BUM)
(A2)
(C2)
(M2)
Y1
X3
制御要素2CNT2
ー
ー
測定入力1
測定値(PV1)
測定値(PV2)
(A1)/(A2)/(C1)/(C2)/(C1)(BUA)
(M1)/(M2)/(C1)(BUM)
操作出力値(MV)
(C2)(CLOSE)
(A2)(OPEN)
設定値(SV2)
第1ループ画面
第2ループ画面
第1ループと同じ表示。
カスケードのときに[SPC]を表示。
第2ループがカスケードのとき[CLOSE]を表示。第2ループが自動のとき[OPEN]を表示。第2ループで手動にすると[OPEN]を表示。第1ループで手動にすると[CLOSE]を表示。
測定入力2
操作出力0129.ai
RS-485通信
通信パラメータSV1
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する

1-40IM
01B08B01-02
通信FAIL通信復帰
通信FAIL
通信復帰
上記より選択
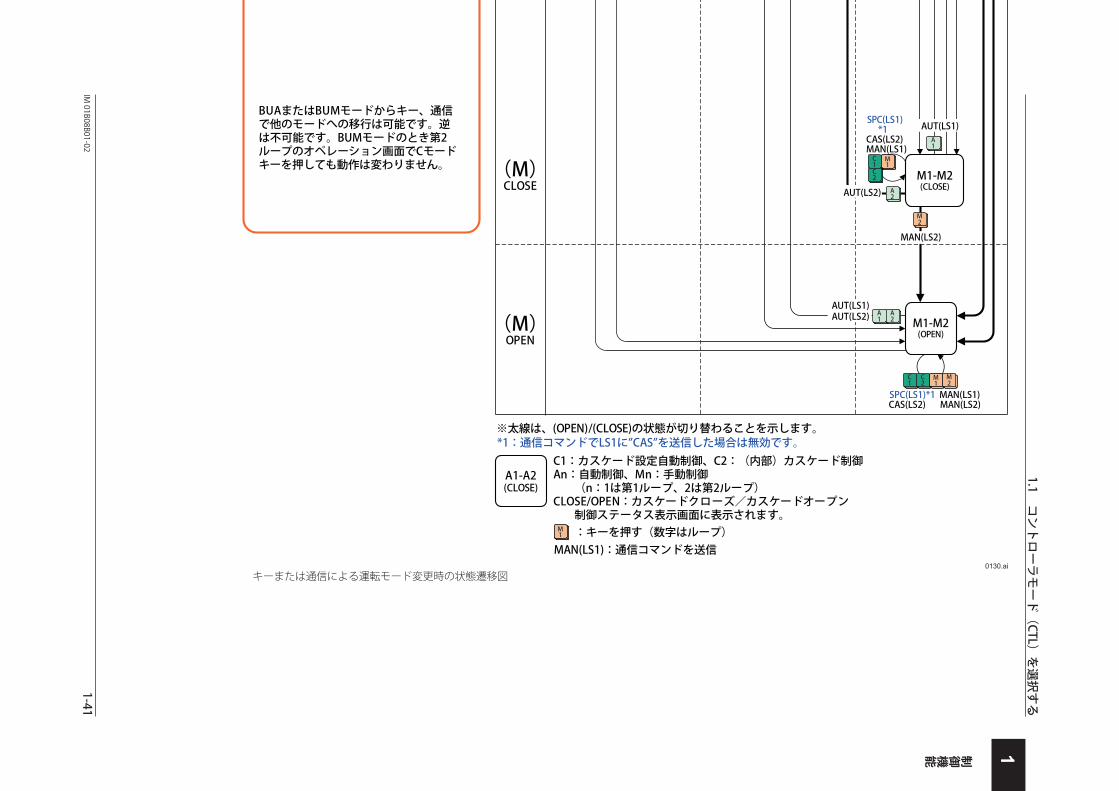
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。BUMモードのとき第2ループのオペレーション画面でCモードキーを押しても動作は変わりません。
(C)
(C)CLOSE
(C)CLOSE
(A)OPEN
(M)CLOSE
(M)OPEN
(A) (M)
CAS(LS2)
AUT(LS1)
*BUMのとき不可CAS(LS2)
SPC(LS1)*1
SPC(LS1)*1
SPC(LS1)*1
MAN(LS1)MAN(LS2)
AUT(LS2)
C1(SPC)-C2(CLOSE)
SPC(LS1)*1
MAN(LS2)
AUT(LS1)
MAN(LS1)
MAN(LS2)
AUT(LS1)CAS(LS2)
A1-C2(CLOSE)
AUT(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)
CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)MAN(LS1)
MAN(LS2)
AUT(LS2)
A1-A2(OPEN)
M1-M2(CLOSE)
M1-M2(OPEN)
AUT(LS1)AUT(LS2)
C1(SPC)-A2(OPEN)
A1-A2(CLOSE)
C1:カスケード設定自動制御、C2:(内部)カスケード制御An:自動制御、Mn:手動制御
(n:1は第1ループ、2は第2ループ)CLOSE/OPEN:カスケードクローズ/カスケードオープン
制御ステータス表示画面に表示されます。
*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。※太線は、(OPEN)/(CLOSE)の状態が切り替わることを示します。
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
バックアップモードを使用する場合
(A)OPEN
(A)OPEN
バックアップモードを使用する場合
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。YS1000の通信ウォッチドッグタイマの設定時間
内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(SPC)に遷移。
(BUA)
C1(BUA)-A2(OPEN)
C1(BUM)-A2(OPEN)
(BUM)
(BUA)
C1(BUA)-C2(CLOSE)
C1(BUM)-C2(CLOSE)
(BUM)
SPC(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
0130.ai
設定値
設定値第2ループキーランプ
設定値第2ループキーランプ
第2ループキーランプ
第2ループキーランプ
第1ループキー
ランプ
A1
A1
A1
A2
A2
A2
C1
C1
C1
C1
C2
C2
A1
C2
C2
M2
M2
M1
M1
M1
A2
M2
M1
M2
AUT(LS2)
A1
A1
A2
A2
M2
M1
C1 C2
M1
C1
C2
M1
M2
SPC(LS1)*1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
1-41IM
01B08B01-02
制御機能 1
通信FAIL通信復帰
通信FAIL
通信復帰
上記より選択
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。BUMモードのとき第2ループのオペレーション画面でCモードキーを押しても動作は変わりません。
(C)
(C)CLOSE
(C)CLOSE
(A)OPEN
(M)CLOSE
(M)OPEN
(A) (M)
CAS(LS2)
AUT(LS1)
*BUMのとき不可CAS(LS2)
SPC(LS1)*1
SPC(LS1)*1
SPC(LS1)*1
MAN(LS1)MAN(LS2)
AUT(LS2)
C1(SPC)-C2(CLOSE)
SPC(LS1)*1
MAN(LS2)
AUT(LS1)
MAN(LS1)
MAN(LS2)
AUT(LS1)CAS(LS2)
A1-C2(CLOSE)
AUT(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)
CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)MAN(LS1)
MAN(LS2)
AUT(LS2)
A1-A2(OPEN)
M1-M2(CLOSE)
M1-M2(OPEN)
AUT(LS1)AUT(LS2)
C1(SPC)-A2(OPEN)
A1-A2(CLOSE)
C1:カスケード設定自動制御、C2:(内部)カスケード制御An:自動制御、Mn:手動制御
(n:1は第1ループ、2は第2ループ)CLOSE/OPEN:カスケードクローズ/カスケードオープン
制御ステータス表示画面に表示されます。
*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。※太線は、(OPEN)/(CLOSE)の状態が切り替わることを示します。
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
バックアップモードを使用する場合
(A)OPEN
(A)OPEN
バックアップモードを使用する場合
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。YS1000の通信ウォッチドッグタイマの設定時間
内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(SPC)に遷移。
(BUA)
C1(BUA)-A2(OPEN)
C1(BUM)-A2(OPEN)
(BUM)
(BUA)
C1(BUA)-C2(CLOSE)
C1(BUM)-C2(CLOSE)
(BUM)
SPC(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
0130.ai
設定値
設定値第2ループキーランプ
設定値第2ループキーランプ
第2ループキーランプ
第2ループキーランプ
第1ループキー
ランプ
A1
A1
A1
A2
A2
A2
C1
C1
C1
C1
C2
C2
A1
C2
C2
M2
M2
M1
M1
M1
A2
M2
M1
M2
AUT(LS2)
A1
A1
A2
A2
M2
M1
C1 C2
M1
C1
C2
M1
M2
SPC(LS1)*1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
1-42 IM 01B08B01-02
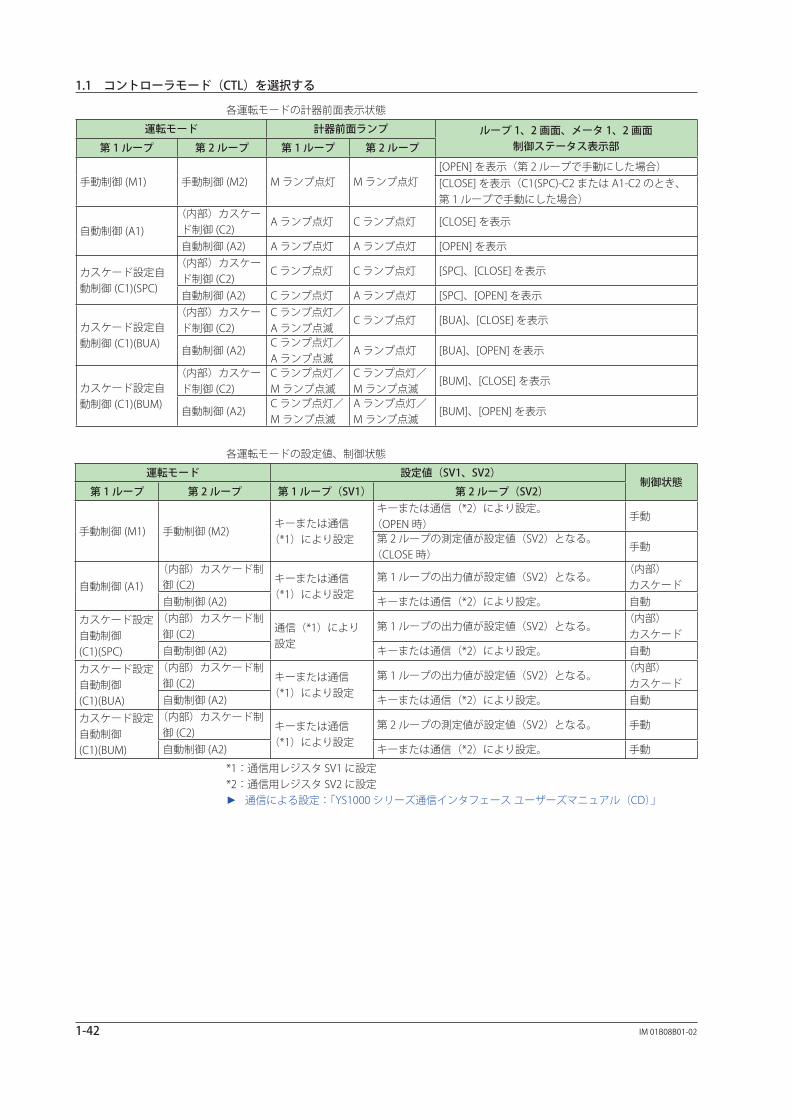
各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯[OPEN] を表示(第 2 ループで手動にした場合)[CLOSE] を表示(C1(SPC)-C2 または A1-C2 のとき、第 1 ループで手動にした場合)
自動制御 (A1)
(内部)カスケード制御 (C2)
A ランプ点灯 C ランプ点灯 [CLOSE] を表示
自動制御 (A2) A ランプ点灯 A ランプ点灯 [OPEN] を表示
カスケード設定自動制御 (C1)(SPC)
(内部)カスケード制御 (C2)
C ランプ点灯 C ランプ点灯 [SPC]、[CLOSE] を表示
自動制御 (A2) C ランプ点灯 A ランプ点灯 [SPC]、[OPEN] を表示
カスケード設定自動制御 (C1)(BUA)
(内部)カスケード制御 (C2)
C ランプ点灯/A ランプ点滅
C ランプ点灯 [BUA]、[CLOSE] を表示
自動制御 (A2)C ランプ点灯/A ランプ点滅
A ランプ点灯 [BUA]、[OPEN] を表示
カスケード設定自動制御 (C1)(BUM)
(内部)カスケード制御 (C2)
C ランプ点灯/M ランプ点滅
C ランプ点灯/M ランプ点滅
[BUM]、[CLOSE] を表示
自動制御 (A2)C ランプ点灯/M ランプ点滅
A ランプ点灯/M ランプ点滅
[BUM]、[OPEN] を表示
各運転モードの設定値、制御状態
運転モード 設定値(SV1、SV2)制御状態
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2)キーまたは通信
(*1)により設定
キーまたは通信(*2)により設定。(OPEN 時)
手動
第 2 ループの測定値が設定値(SV2)となる。(CLOSE 時)
手動
自動制御 (A1)
(内部)カスケード制御 (C2) キーまたは通信
(*1)により設定
第 1 ループの出力値が設定値(SV2)となる。(内部)
カスケード自動制御 (A2) キーまたは通信(*2)により設定。 自動
カスケード設定自動制御(C1)(SPC)
(内部)カスケード制御 (C2) 通信(*1)により
設定
第 1 ループの出力値が設定値(SV2)となる。(内部)
カスケード自動制御 (A2) キーまたは通信(*2)により設定。 自動
カスケード設定自動制御(C1)(BUA)
(内部)カスケード制御 (C2) キーまたは通信
(*1)により設定
第 1 ループの出力値が設定値(SV2)となる。(内部)
カスケード自動制御 (A2) キーまたは通信(*2)により設定。 自動
カスケード設定自動制御(C1)(BUM)
(内部)カスケード制御 (C2) キーまたは通信
(*1)により設定
第 2 ループの測定値が設定値(SV2)となる。 手動
自動制御 (A2) キーまたは通信(*2)により設定。 手動
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
1-43IM 01B08B01-02
制御機能
1
意図して空白にしています。
1.1 コントローラモード(CTL)を選択する
1-44 IM 01B08B01-02
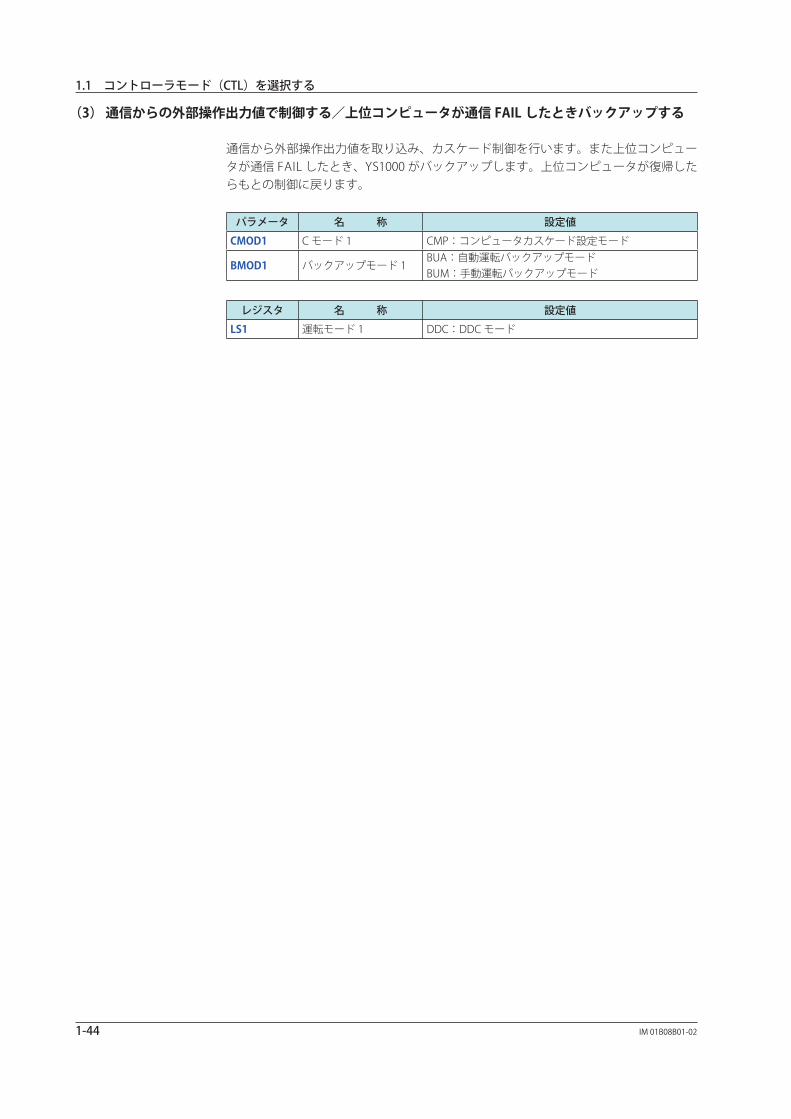
(3) 通信からの外部操作出力値で制御する/上位コンピュータが通信 FAIL したときバックアップする
通信から外部操作出力値を取り込み、カスケード制御を行います。また上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 DDC:DDC モード
1.1 コントローラモード(CTL)を選択する
1-45IM 01B08B01-02
制御機能
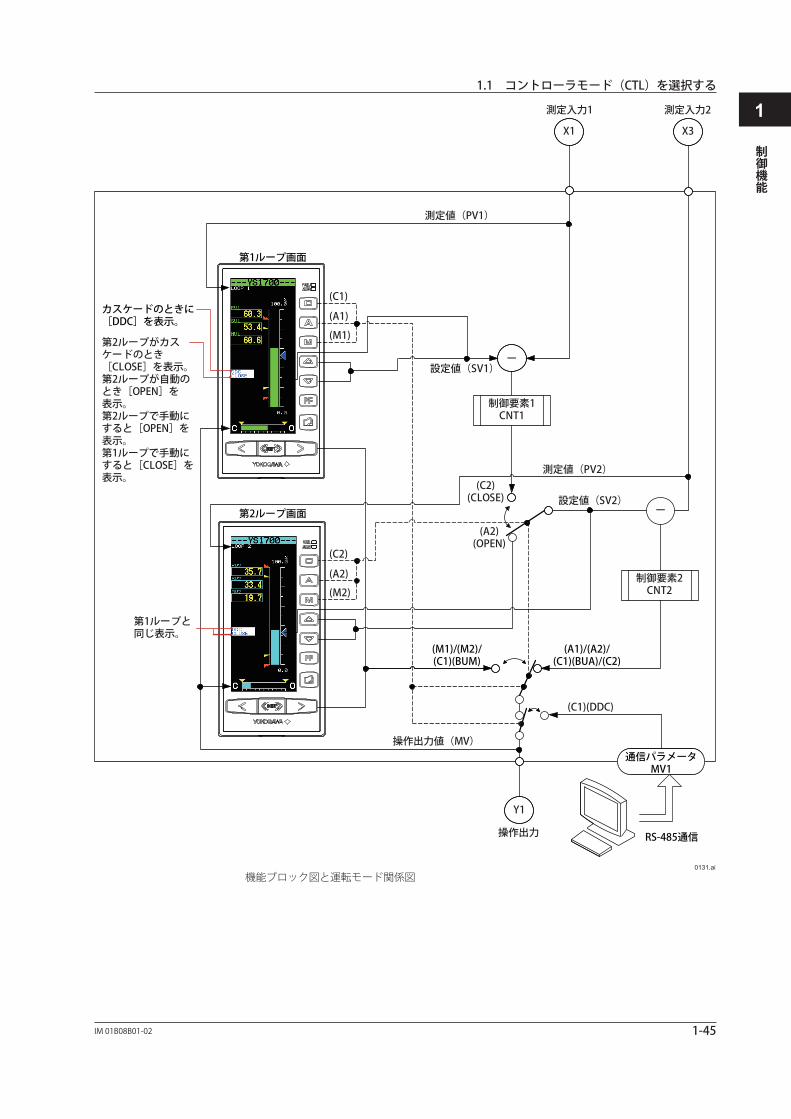
1X1
設定値(SV1)
制御要素1CNT1
(A1)
(C1)
(M1)
(A2)
(C2)
(M2)
Y1
X3
制御要素2CNT2
ー
ー
測定入力1
測定値(PV1)
測定値(PV2)
操作出力値(MV)
(C2)(CLOSE)
(A2)(OPEN)
設定値(SV2)
第1ループ画面
第2ループ画面
第1ループと同じ表示。
第2ループがカスケードのとき[CLOSE]を表示。第2ループが自動のとき[OPEN]を表示。第2ループで手動にすると[OPEN]を表示。第1ループで手動にすると[CLOSE]を表示。
測定入力2
操作出力
カスケードのときに[DDC]を表示。
(A1)/(A2)/(C1)(BUA)/(C2)
(M1)/(M2)/(C1)(BUM)
(C1)(DDC)
RS-485通信
0131.ai
通信パラメータMV1
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
1-46IM
01B08B01-02
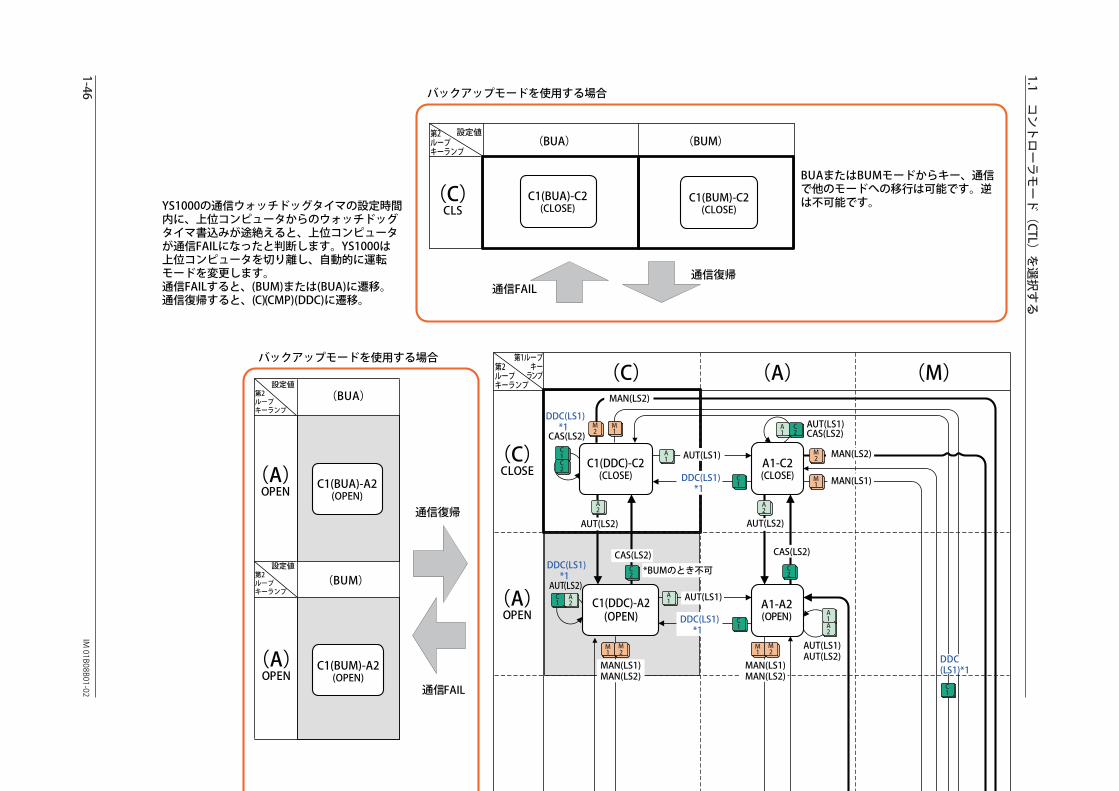
バックアップモードを使用する場合
(BUA) (BUM)設定値
(C)CLS
通信FAIL通信復帰
(C) (A) (M)
A1-C2(CLOSE)
A1-A2(OPEN)
M1-M2(CLOSE)
M1-M2(OPEN)
AUT(LS1)
AUT(LS2)
DDC(LS1)*1
AUT(LS2)
AUT(LS2)
CAS(LS2)
C1(DDC)-A2(OPEN)
MAN(LS1)MAN(LS2)
AUT(LS1)
MAN(LS2)
DDC(LS1)*1
AUT(LS1)AUT(LS2)
CAS(LS2)MAN(LS1)
AUT(LS2)
DDC(LS1)*1
AUT(LS1)AUT(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)
DDC(LS1)*1
C1(DDC)-C2(CLOSE)
(C)CLOSE
(A)OPEN
(M)CLOSE
(M)OPEN
A1-A2(CLOSE)
C1:カスケード設定自動制御、C2:(内部)カスケード制御An:自動制御、Mn:手動制御
(n:1は第1ループ、2は第2ループ)CLOSE/OPEN:カスケードクローズ/カスケードオープン
制御ステータス表示画面に表示されます。
*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。※太線は、(OPEN)/(CLOSE)の状態が切り替わることを示します。
第2ループキーランプ
第2ループキーランプ
AUT(LS1)CAS(LS2)
AUT(LS1) MAN(LS2)
MAN(LS1)
CAS(LS2)
MAN(LS2)
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(DDC)に遷移。
C1(BUA)-C2(CLOSE)
C1(BUM)-C2(CLOSE)
MAN(LS1)CAS(LS2) MAN(LS2)
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
0132.ai
第1ループキー
ランプ
通信FAIL
通信復帰
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。BUMモードのとき第2ループのオペレーション画面で C モードキーを押しても動作は変わりません。
バックアップモードを使用する場合
(BUA)
C1(BUA)-A2(OPEN)
C1(BUM)-A2(OPEN)
(BUM)
(A)OPEN
(A)OPEN
設定値第2ループキーランプ
設定値第2ループキーランプ
*BUMのとき不可
DDC(LS1)*1
DDC(LS1)*1
A1
A1
A1
A1
A1
A1
A2
A2
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C1 C2
M2
M2
M2
M1 C2
M1
M1
M1
A2
M2
M1
M2
C2
M1
M2
M1
C1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る

1-47IM
01B08B01-02
制御機能 1
バックアップモードを使用する場合
(BUA) (BUM)設定値
(C)CLS
通信FAIL通信復帰
(C) (A) (M)
A1-C2(CLOSE)
A1-A2(OPEN)
M1-M2(CLOSE)
M1-M2(OPEN)
AUT(LS1)
AUT(LS2)
DDC(LS1)*1
AUT(LS2)
AUT(LS2)
CAS(LS2)
C1(DDC)-A2(OPEN)
MAN(LS1)MAN(LS2)
AUT(LS1)
MAN(LS2)
DDC(LS1)*1
AUT(LS1)AUT(LS2)
CAS(LS2)MAN(LS1)
AUT(LS2)
DDC(LS1)*1
AUT(LS1)AUT(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)
DDC(LS1)*1
C1(DDC)-C2(CLOSE)
(C)CLOSE
(A)OPEN
(M)CLOSE
(M)OPEN
A1-A2(CLOSE)
C1:カスケード設定自動制御、C2:(内部)カスケード制御An:自動制御、Mn:手動制御
(n:1は第1ループ、2は第2ループ)CLOSE/OPEN:カスケードクローズ/カスケードオープン
制御ステータス表示画面に表示されます。
*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。※太線は、(OPEN)/(CLOSE)の状態が切り替わることを示します。
第2ループキーランプ
第2ループキーランプ
AUT(LS1)CAS(LS2)
AUT(LS1) MAN(LS2)
MAN(LS1)
CAS(LS2)
MAN(LS2)
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(DDC)に遷移。
C1(BUA)-C2(CLOSE)
C1(BUM)-C2(CLOSE)
MAN(LS1)CAS(LS2) MAN(LS2)
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
0132.ai
第1ループキー
ランプ
通信FAIL
通信復帰
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。BUMモードのとき第2ループのオペレーション画面で C モードキーを押しても動作は変わりません。
バックアップモードを使用する場合
(BUA)
C1(BUA)-A2(OPEN)
C1(BUM)-A2(OPEN)
(BUM)
(A)OPEN
(A)OPEN
設定値第2ループキーランプ
設定値第2ループキーランプ
*BUMのとき不可
DDC(LS1)*1
DDC(LS1)*1
A1
A1
A1
A1
A1
A1
A2
A2
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C1 C2
M2
M2
M2
M1 C2
M1
M1
M1
A2
M2
M1
M2
C2
M1
M2
M1
C1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る

1-48 IM 01B08B01-02
各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯[OPEN] を表示(第 2 ループで手動にした場合)[CLOSE] を表示(C1(DDC)-C2 または A1-C2 のとき、第 1 ループで手動にした場合)
自動制御 (A1)
(内部)カスケード制御 (C2)
A ランプ点灯 C ランプ点灯 [CLOSE] を表示
自動制御 (A2) A ランプ点灯 A ランプ点灯 [OPEN] を表示
カスケード設定自動制御 (C1)(DDC)
(内部)カスケード制御 (C2)
C ランプ点灯 C ランプ点灯 [DDC]、[CLOSE] を表示
自動制御 (A2) C ランプ点灯 A ランプ点灯 [DDC]、[OPEN] を表示
カスケード設定自動制御 (C1)(BUA)
(内部)カスケード制御 (C2)
C ランプ点灯/A ランプ点滅
C ランプ点灯 [BUA]、[CLOSE] を表示
自動制御 (A2)C ランプ点灯/A ランプ点滅
A ランプ点灯 [BUA]、[OPEN] を表示
カスケード設定自動制御 (C1)(BUM)
(内部)カスケード制御 (C2)
C ランプ点灯/M ランプ点滅
C ランプ点灯/M ランプ点滅
[BUM]、[CLOSE] を表示
自動制御 (A2)C ランプ点灯/M ランプ点滅
A ランプ点灯/M ランプ点滅
[BUM]、[OPEN] を表示
各運転モードの設定値、制御状態
運転モード 設定値(SV1、SV2)制御状態
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2)キーまたは通信
(*1)により設定
キーまたは通信(*2)により設定。(OPEN 時)
手動
第 2 ループの測定値が設定値(SV2)となる。(CLOSE 時)
手動
自動制御 (A1)
(内部)カスケード制御 (C2) キーまたは通信
(*1)により設定
第 1 ループの出力値が設定値(SV2)となる。 (内部)カスケード
自動制御 (A2) キーまたは通信(*2)により設定。 自動
カスケード設定自動制御(C1)(DDC)
(内部)カスケード制御 (C2) 通信(*1)により設
定
第 1 ループの出力値が設定値(SV2)となる。 通信による出力操作
自動制御 (A2) キーまたは通信(*2)により設定。 通信による出力操作
カスケード設定自動制御(C1)(BUA)
(内部)カスケード制御 (C2) キーまたは通信
(*1)により設定
第 1 ループの出力値が設定値(SV2)となる。 (内部)カスケード
自動制御 (A2) キーまたは通信(*2)により設定。 自動
カスケード設定自動制御(C1)(BUM)
(内部)カスケード制御 (C2) キーまたは通信
(*1)により設定
第 2 ループの測定値が設定値(SV2)となる。 手動
自動制御 (A2) キーまたは通信(*2)により設定。 手動
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-49IM 01B08B01-02
制御機能
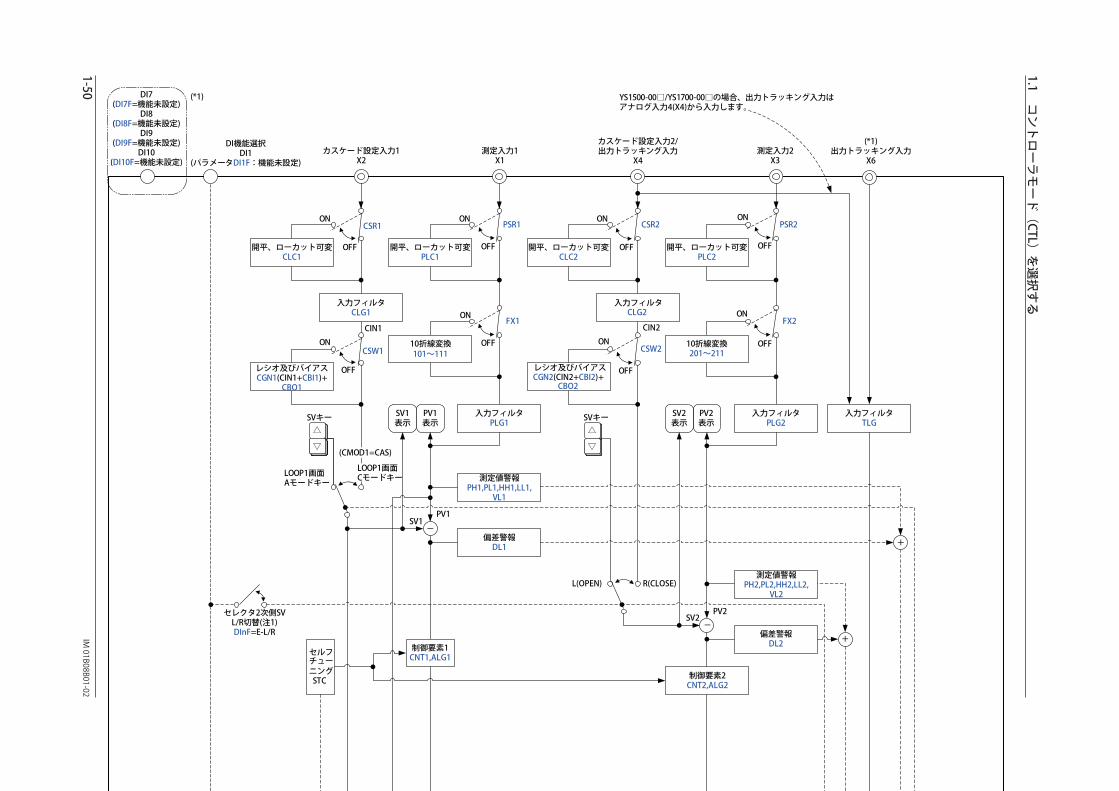
11.1.3 セレクタモード(CTL=SELECT)で制御するセレクタモードは、2 つ(第 1 ループ、第 2 ループ)の制御演算式による演算結果とオートセレクタ(ATSEL)で構成されています。オートセレクタ(ATSEL)は、オートハイセレクタ(HIGH)、オートローセレクタ(LOW)および手動による選択が可能です。セレクタモードを選択すると次の図の機能が構築されます。図中に記載されているパラメータ(青太字)を変更することにより、必要な機能を実現できます。► パラメータ:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
の「パラメータ一覧」
1.1 コントローラモード(CTL)を選択する
1-50IM
01B08B01-02
カスケード設定入力1X2
測定入力1X1
カスケード設定入力2/出力トラッキング入力
X4測定入力2
X3
CIN1
CSR1ON
OFF
CSW1ON
OFF
PSR1ON
OFF
FX1ON
OFF
制御要素1CNT1,ALG1
SVキー
MVキー
セルフチューニングSTC
MV表示
PV1表示
SV1表示
PSR2ON
OFF
FX2ON
OFF
SV1PV1
SV2PV2
CIN2
CSR2ON
OFF
CSW2ON
OFF
SVキー PV2表示
SV2表示
L(OPEN) R(CLOSE)
21
DI1=CLOSE→AUT
SSW
LCDバックライト
TRK1
(CMOD1=CAS)
開平、ローカット可変CLC1
入力フィルタCLG1
レシオ及びバイアスCGN1(CIN1+CBI1)+
CBO1
開平、ローカット可変PLC1
10折線変換101~111
入力フィルタPLG1
開平、ローカット可変CLC2
入力フィルタCLG2
レシオ及びバイアスCGN2(CIN2+CBI2)+
CBO2
開平、ローカット可変PLC2
10折線変換201~211
入力フィルタPLG2
入力フィルタTLG
測定値警報PH1,PL1,HH1,LL1,
VL1
偏差警報DL1
プリセットMVPMV1
制御要素2CNT2,ALG2
偏差警報DL2
-
測定値警報PH2,PL2,HH2,LL2,
VL2
+
出力リミッタMH1,ML1
オートセレクタATSEL
+
DI7(DI7F=機能未設定)
DI8(DI8F=機能未設定)
DI9(DI9F=機能未設定)
DI10(DI10F=機能未設定)
DI機能選択DI1
(パラメータDI1F:機能未設定)
LOOP1画面CモードキーLOOP1画面
Aモードキー
-
パラメータPFKEY=STC
STC起動(注1)DInF=E-STC
セレクタ選択(注1) DInF=E-SELC押し切替(注1) DInF=TR-CASA押し切替(注1) DInF=TR-AUTM押し切替(注1) DInF=TR-MAN
トラッキング切替(注1)DInF=E-TRK
出力プリセットMVおよびMAN(注1)
DInF=TR-MPMV
プリセットMV切替(注1)DInF=E-PMV
バックライトOFF(注1)DInF=LCD-OFF
セレクタ2次側SVL/R切替(注1)DInF=E-L/R
DI1=OPEN→1
DI1=OPEN
DI1=CLOSE
DI1=OPEN
LOOP1画面またはLOOP2画面Mモードキー
DInF,DIn(n=1, 7, 8, 9, 10)
(*1)
(*1)
(*1)出力トラッキング入力
X6
(注1)いずれか一つを選択できます。さらにDI/DOの機能割り付けを変更することにより、複数の接点を使用することができます。
*1:YS1700基本形(拡張I/O付き)のみ 拡張I/O端子です。
YS1500-00□/YS1700-00□の場合、出力トラッキング入力はアナログ入力4(X4)から入力します。
0133.ai
DI1=CLOSE
Y3設定値出力
(1-5V)(パラメータY3S=SV1)
Y4測定値出力
(1-5V)(パラメータY4S=PV1)
(*1)
Y2操作出力2
(1-5V)(パラメータY2S=MV)
Y1操作出力1(4-20mA)
DO5C,A/M
ステータス出力
(パラメータDO5F=CASAUT)
DO4C/A,M
ステータス出力
(パラメータDO4F=CAS)
DO3R/L
ステータス出力
(パラ メータDO3F=L/R)
DO2第2ループ警報出力
(パラメータDO2F=2-ALM)
DO1第1ループ警報出力
(パラメータDO1F=1-ALM)
DO7(DO7F=機能未設定)
DO8(DO8F=機能未設定)
DO9(DO9F=機能未設定)
DO10(DO10F=機能未設定)
▽
△
▽ ▽
△
▽
▽PF
≪ < > ≫
セレクタモード機能ブロック図(YS1700 の場合)
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
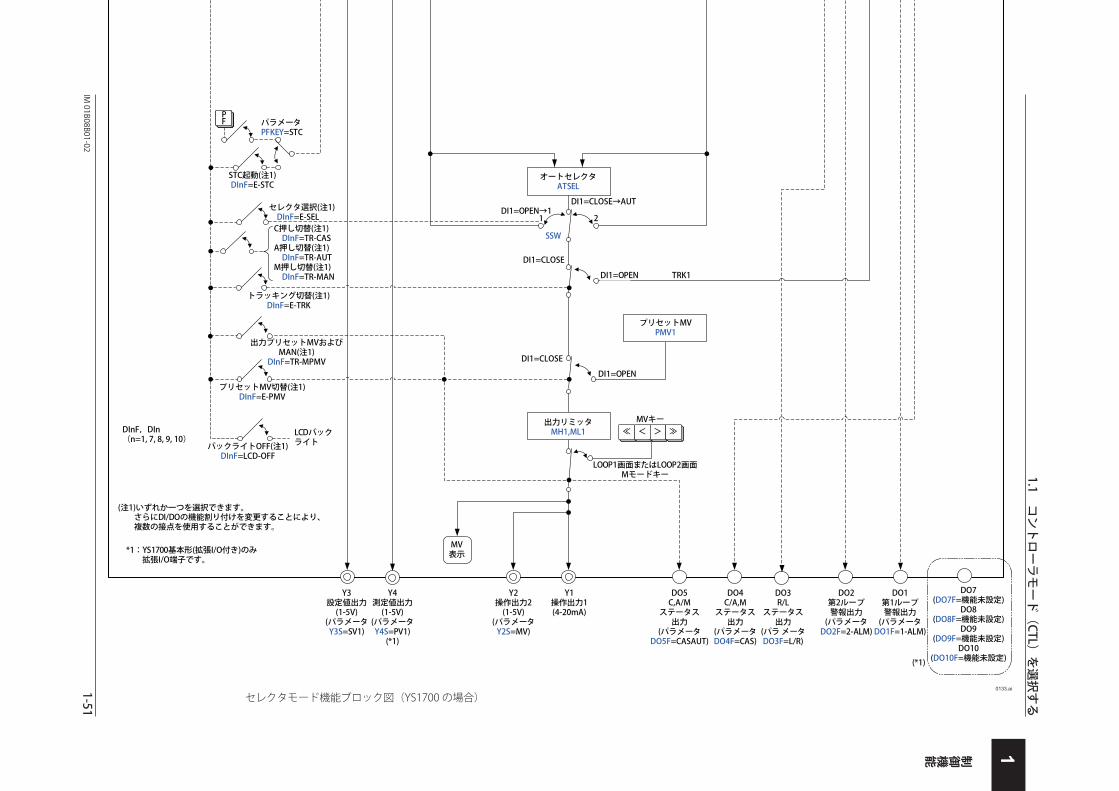
1-51IM
01B08B01-02
制御機能 1
カスケード設定入力1X2
測定入力1X1
カスケード設定入力2/出力トラッキング入力
X4測定入力2
X3
CIN1
CSR1ON
OFF
CSW1ON
OFF
PSR1ON
OFF
FX1ON
OFF
制御要素1CNT1,ALG1
SVキー
MVキー
セルフチューニングSTC
MV表示
PV1表示
SV1表示
PSR2ON
OFF
FX2ON
OFF
SV1PV1
SV2PV2
CIN2
CSR2ON
OFF
CSW2ON
OFF
SVキー PV2表示
SV2表示
L(OPEN) R(CLOSE)
21
DI1=CLOSE→AUT
SSW
LCDバックライト
TRK1
(CMOD1=CAS)
開平、ローカット可変CLC1
入力フィルタCLG1
レシオ及びバイアスCGN1(CIN1+CBI1)+
CBO1
開平、ローカット可変PLC1
10折線変換101~111
入力フィルタPLG1
開平、ローカット可変CLC2
入力フィルタCLG2
レシオ及びバイアスCGN2(CIN2+CBI2)+
CBO2
開平、ローカット可変PLC2
10折線変換201~211
入力フィルタPLG2
入力フィルタTLG
測定値警報PH1,PL1,HH1,LL1,
VL1
偏差警報DL1
プリセットMVPMV1
制御要素2CNT2,ALG2
偏差警報DL2
-
測定値警報PH2,PL2,HH2,LL2,
VL2
+
出力リミッタMH1,ML1
オートセレクタATSEL
+
DI7(DI7F=機能未設定)
DI8(DI8F=機能未設定)
DI9(DI9F=機能未設定)
DI10(DI10F=機能未設定)
DI機能選択DI1
(パラメータDI1F:機能未設定)
LOOP1画面CモードキーLOOP1画面
Aモードキー
-
パラメータPFKEY=STC
STC起動(注1)DInF=E-STC
セレクタ選択(注1) DInF=E-SELC押し切替(注1) DInF=TR-CASA押し切替(注1) DInF=TR-AUTM押し切替(注1) DInF=TR-MAN
トラッキング切替(注1)DInF=E-TRK
出力プリセットMVおよびMAN(注1)
DInF=TR-MPMV
プリセットMV切替(注1)DInF=E-PMV
バックライトOFF(注1)DInF=LCD-OFF
セレクタ2次側SVL/R切替(注1)DInF=E-L/R
DI1=OPEN→1
DI1=OPEN
DI1=CLOSE
DI1=OPEN
LOOP1画面またはLOOP2画面Mモードキー
DInF,DIn(n=1, 7, 8, 9, 10)
(*1)
(*1)
(*1)出力トラッキング入力
X6
(注1)いずれか一つを選択できます。さらにDI/DOの機能割り付けを変更することにより、複数の接点を使用することができます。
*1:YS1700基本形(拡張I/O付き)のみ 拡張I/O端子です。
YS1500-00□/YS1700-00□の場合、出力トラッキング入力はアナログ入力4(X4)から入力します。
0133.ai
DI1=CLOSE
Y3設定値出力
(1-5V)(パラメータY3S=SV1)
Y4測定値出力
(1-5V)(パラメータY4S=PV1)
(*1)
Y2操作出力2
(1-5V)(パラメータY2S=MV)
Y1操作出力1(4-20mA)
DO5C,A/M
ステータス出力
(パラメータDO5F=CASAUT)
DO4C/A,M
ステータス出力
(パラメータDO4F=CAS)
DO3R/L
ステータス出力
(パラ メータDO3F=L/R)
DO2第2ループ警報出力
(パラメータDO2F=2-ALM)
DO1第1ループ警報出力
(パラメータDO1F=1-ALM)
DO7(DO7F=機能未設定)
DO8(DO8F=機能未設定)
DO9(DO9F=機能未設定)
DO10(DO10F=機能未設定)
▽
△
▽ ▽
△
▽
▽PF
≪ < > ≫
セレクタモード機能ブロック図(YS1700 の場合)
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
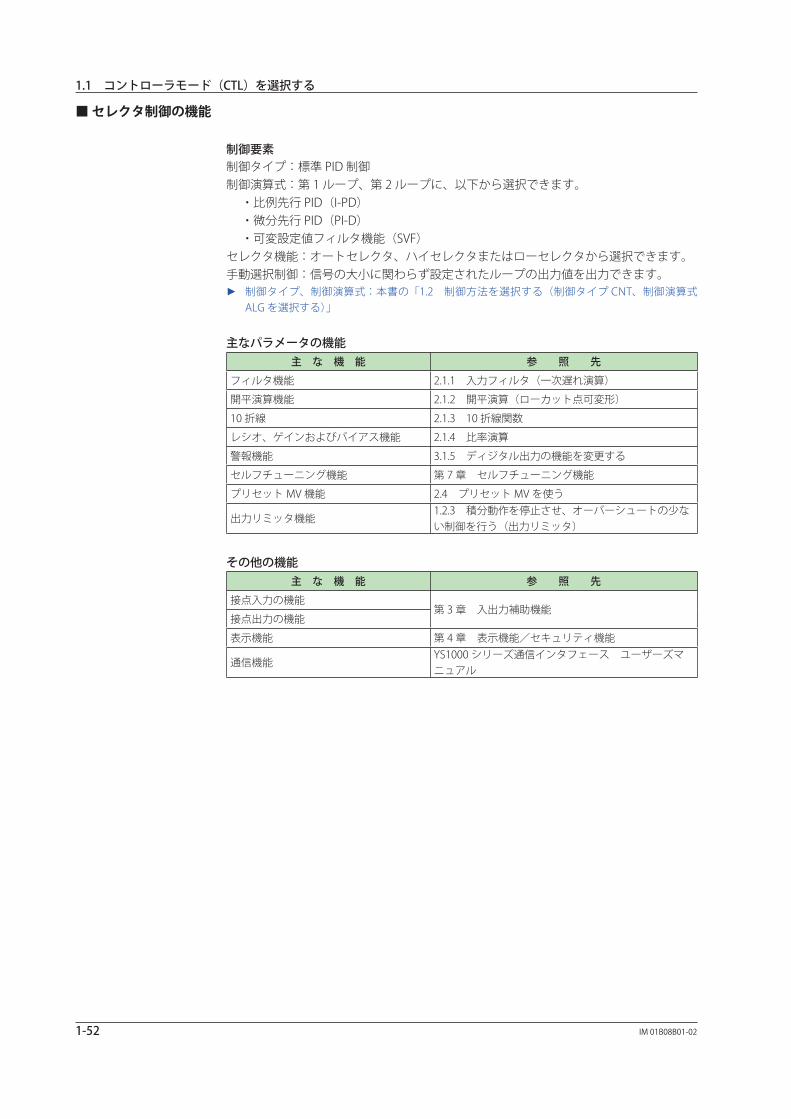
1-52 IM 01B08B01-02
■ セレクタ制御の機能
制御要素制御タイプ:標準 PID 制御制御演算式:第 1 ループ、第 2 ループに、以下から選択できます。 ・比例先行 PID(I-PD) ・微分先行 PID(PI-D) ・可変設定値フィルタ機能(SVF)セレクタ機能:オートセレクタ、ハイセレクタまたはローセレクタから選択できます。手動選択制御:信号の大小に関わらず設定されたループの出力値を出力できます。► 制御タイプ、制御演算式:本書の「1.2 制御方法を選択する(制御タイプ CNT、制御演算式
ALG を選択する)」
主なパラメータの機能主 な 機 能 参 照 先
フィルタ機能 2.1.1 入力フィルタ(一次遅れ演算)
開平演算機能 2.1.2 開平演算(ローカット点可変形)
10 折線 2.1.3 10 折線関数
レシオ、ゲインおよびバイアス機能 2.1.4 比率演算
警報機能 3.1.5 ディジタル出力の機能を変更する
セルフチューニング機能 第 7 章 セルフチューニング機能
プリセット MV 機能 2.4 プリセット MV を使う
出力リミッタ機能1.2.3 積分動作を停止させ、オーバーシュートの少ない制御を行う(出力リミッタ)
その他の機能主 な 機 能 参 照 先
接点入力の機能第 3 章 入出力補助機能
接点出力の機能
表示機能 第 4 章 表示機能/セキュリティ機能
通信機能YS1000 シリーズ通信インタフェース ユーザーズマニュアル
1.1 コントローラモード(CTL)を選択する

1-53IM 01B08B01-02
制御機能
1■ 自動制御/手動制御
設 定 画 面
エンジニアリング画面
0134.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG1]ソフトキー(機能設定画面 1)または[CONFIG2]ソフトキー(機能設定画面 2)
チューニング画面
0135.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)>[PID2]ソフトキー(PID 設定画面 2)
設 定 内 容
自動制御/手動制御のみを行う場合は、CMOD1= -(設定なし)、CMOD2= ー(設定なし)に設定してください。「(1) YS だけで制御する」の動作となります。
パラメータ 名 称 設定範囲 工場出荷時値
CMOD1 C モード 1-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
- ( 設定なし)
CMOD2 C モード 2-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
ATSELオートセレクタ選択
LOW:小さい方の出力値を選択HIGH:大きい方の出力値を選択
LOW
SSWセレクタ制御スイッチ
AUT:オートセレクタ選択(ATSEL)に従い自動選択1:第 1 ループの出力を選択2:第 2 ループの出力を選択
AUT
1.1 コントローラモード(CTL)を選択する
1-54 IM 01B08B01-02
解 説
第 1 ループ、第 2 ループの運転モードは、計器前面の A モードキーまたは M モードキーを押すことで切り替わります。
(表示しているループのモードが変更されます)
A モードキーを押したとき、自動制御(A) M モードキーを押したとき、手動制御(M)
各運転モードの切り替えは、計器前面キーのほかにディジタル入力(DI)、通信およびユーザプログラムから行えます。
► 計器前面キーによる切り替え:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
► 通信による切り替え:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」► ディジタル入力による切り替え:本書の「3.1 ディジタル入出力の機能を定義する(機能選択
モードのみ)」► ユーザプログラムによる切り替え:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能
ユーザーズマニュアル(CD)」
記号の意味運転モードの記号と意味を示します。
記 号 意 味
(M) 手動制御(M)
(A) 自動制御(A)
1.1 コントローラモード(CTL)を選択する
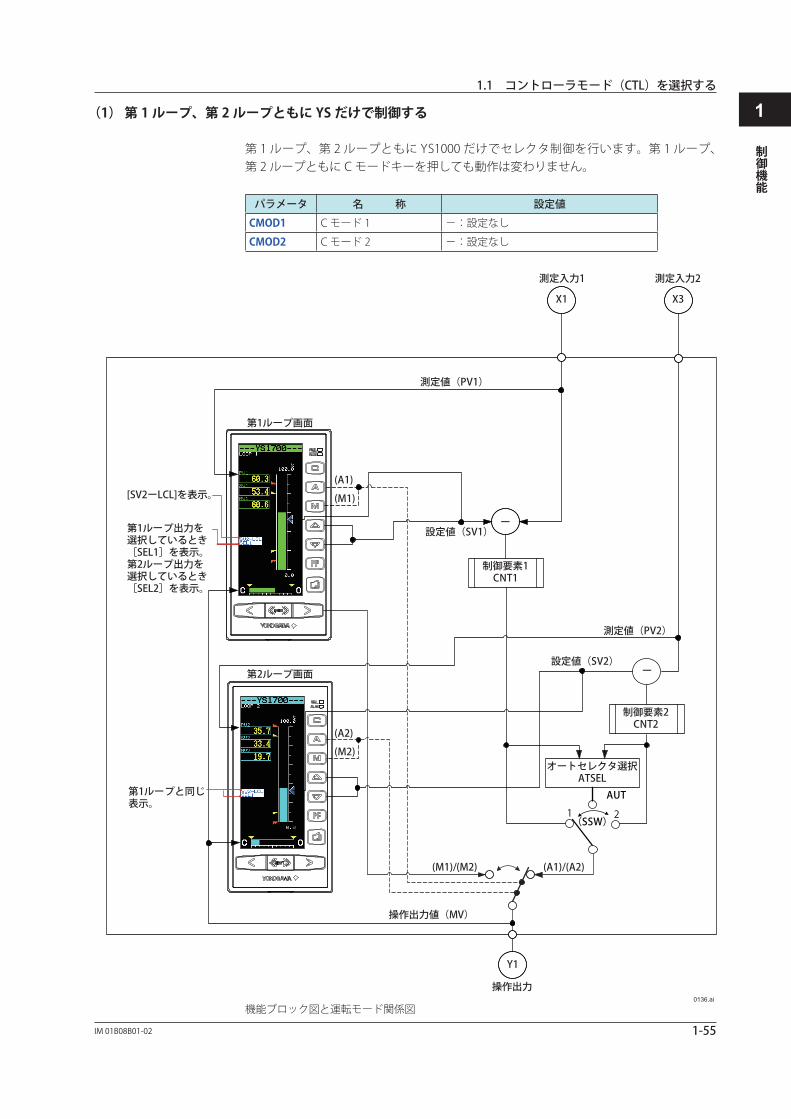
1-55IM 01B08B01-02
制御機能
1(1) 第 1 ループ、第 2 ループともに YS だけで制御する
第 1 ループ、第 2 ループともに YS1000 だけでセレクタ制御を行います。第 1 ループ、第 2 ループともに C モードキーを押しても動作は変わりません。
パラメータ 名 称 設定値
CMOD1 C モード 1 -:設定なし
CMOD2 C モード 2 -:設定なし
X1
設定値(SV1)
制御要素1CNT1
(A1)
(M1)
(A2)
(M2)
Y1
X3
ー
ー
オートセレクタ選択ATSEL
測定入力1
測定値(PV1)
測定値(PV2)
(A1)/(A2)(M1)/(M2)
操作出力値(MV)
設定値(SV2)
第1ループ画面
第2ループ画面
第1ループと同じ表示。
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。
[SV2ーLCL]を表示。
測定入力2
操作出力0136.ai
AUT
1 2(SSW)
制御要素2CNT2
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
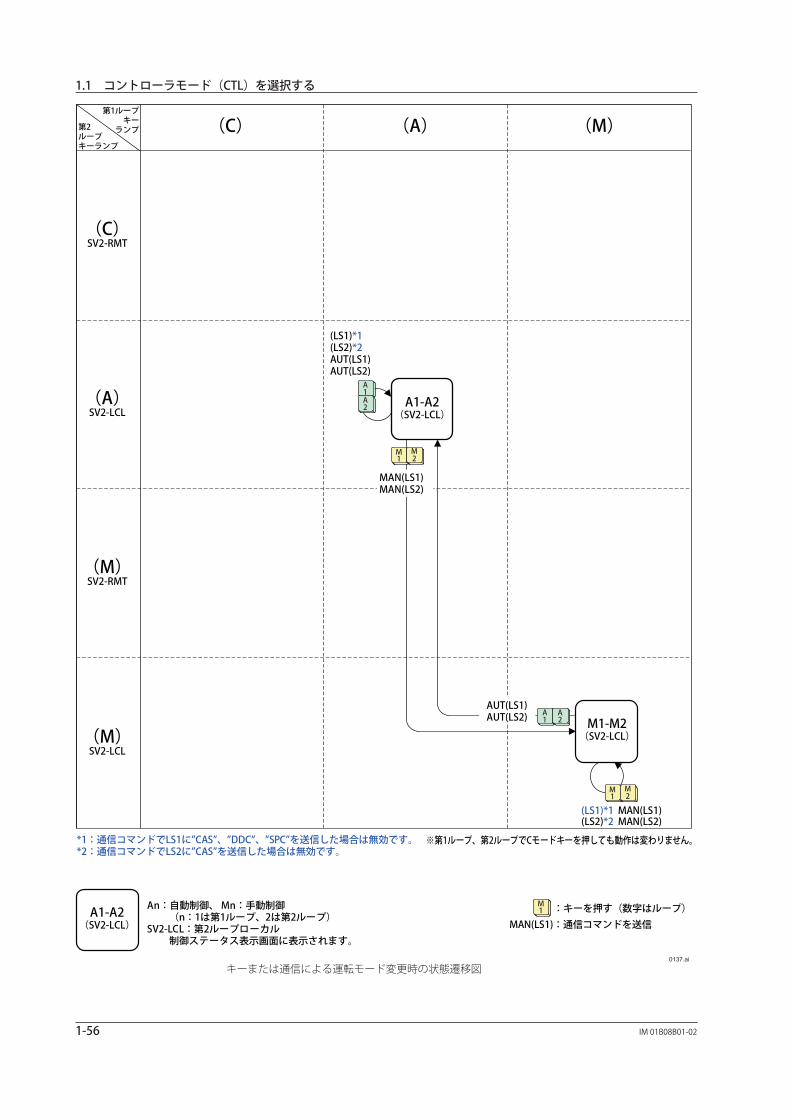
1-56 IM 01B08B01-02
A1-A2(SV2-LCL)
※第1ループ、第2ループでCモードキーを押しても動作は変わりません。
An:自動制御、 Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-LCL:第2ループローカル制御ステータス表示画面に表示されます。
:キーを押す(数字はループ)MAN(LS1):通信コマンドを送信
*1:通信コマンドでLS1に”CAS”、”DDC”、”SPC”を送信した場合は無効です。*2:通信コマンドでLS2に”CAS”を送信した場合は無効です。
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)第1ループ
キーランプ第2
ループキーランプ
0137.ai
A1-A2(SV2-LCL)
M1-M2(SV2-LCL)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)
(LS1)*1(LS2)*2AUT(LS1)AUT(LS2)
(LS1)*1 MAN(LS1)(LS2)*2 MAN(LS2)
A1
A1
A2
A2
M1
M1
M1
M2
M2
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する

1-57IM 01B08B01-02
制御機能
1各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯 [SV2-LCL] を表示
自動制御 (A1) 自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2)キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
自動制御 (A1) 自動制御 (A2)
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
自動制御 (A1)制御演算を出力
(非選択時は、第 1 ループ出力 =MV+Kp1 × E1)
自動制御 (A2)制御演算を出力
(非選択時は、第 2 ループ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
HIGH
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
自動制御 (A1)制御演算を出力
(非選択時は、第 1 ループ出力 =MV+Kp1 × E1)
自動制御 (A2)制御演算を出力
(非選択時は、第 2 ループ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
1 -
手動制御 (M1)キーまたは通信(*1)でMV を操作(手動操作)
手動制御 (M2) MV に追従 MV に追従
自動制御 (A1) 制御演算を出力 自動制御 (A2) MV に追従CNT1、CNT2 のうち信号の大小にかかわらず CNT1の出力を選択
2 -
手動制御 (M1) MV に追従 手動制御 (M2)キーまたは通信(*2)でMV を操作(手動操作)
MV に追従
自動制御 (A1) MV に追従 自動制御 (A2) 制御演算を出力CNT1、CNT2 のうち信号の大小にかかわらず CNT2の出力を選択
MV:操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1:通信用レジスタ MV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
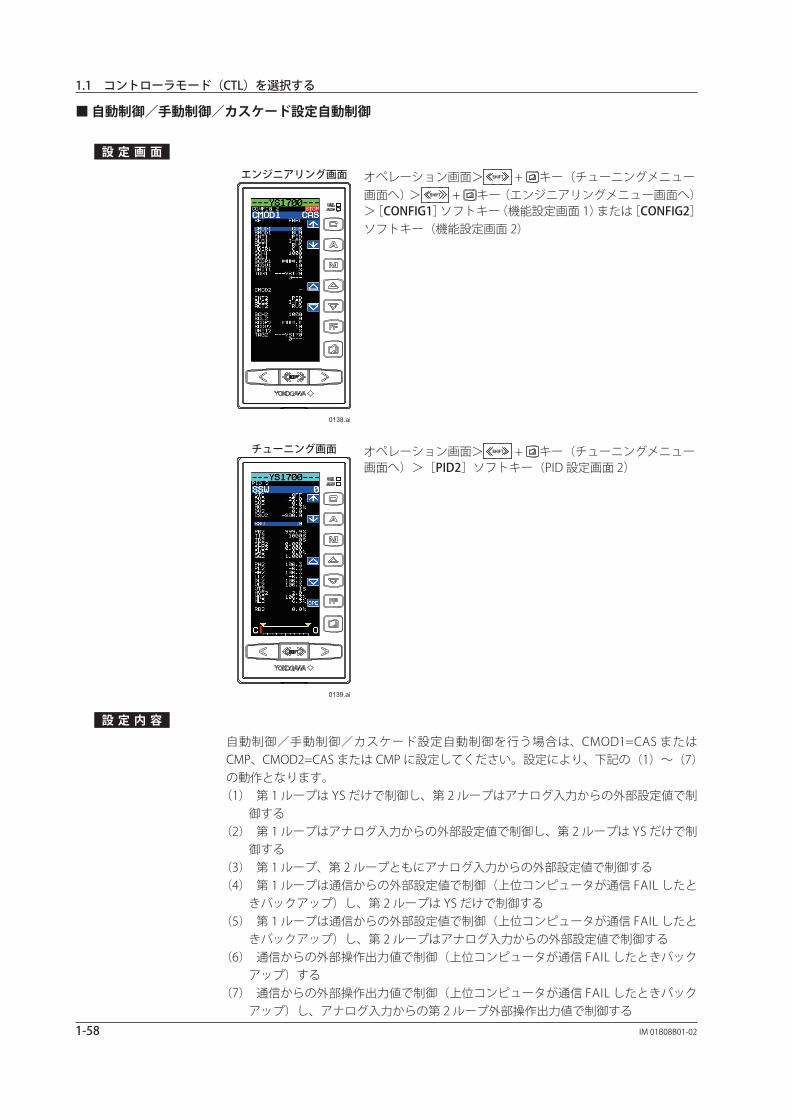
1-58 IM 01B08B01-02
■ 自動制御/手動制御/カスケード設定自動制御
設 定 画 面
エンジニアリング画面
0138.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG1]ソフトキー(機能設定画面 1)または[CONFIG2]ソフトキー(機能設定画面 2)
チューニング画面
0139.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)>[PID2]ソフトキー(PID 設定画面 2)
設 定 内 容
自動制御/手動制御/カスケード設定自動制御を行う場合は、CMOD1=CAS またはCMP、CMOD2=CAS または CMP に設定してください。設定により、下記の(1)~(7)の動作となります。
(1) 第 1 ループは YS だけで制御し、第 2 ループはアナログ入力からの外部設定値で制御する
(2) 第 1 ループはアナログ入力からの外部設定値で制御し、第 2 ループは YS だけで制御する
(3) 第 1 ループ、第 2 ループともにアナログ入力からの外部設定値で制御する(4) 第 1 ループは通信からの外部設定値で制御(上位コンピュータが通信 FAIL したと
きバックアップ)し、第 2 ループは YS だけで制御する(5) 第 1 ループは通信からの外部設定値で制御(上位コンピュータが通信 FAIL したと
きバックアップ)し、第 2 ループはアナログ入力からの外部設定値で制御する(6) 通信からの外部操作出力値で制御(上位コンピュータが通信 FAIL したときバック
アップ)する(7) 通信からの外部操作出力値で制御(上位コンピュータが通信 FAIL したときバック
アップ)し、アナログ入力からの第 2 ループ外部操作出力値で制御する
1.1 コントローラモード(CTL)を選択する
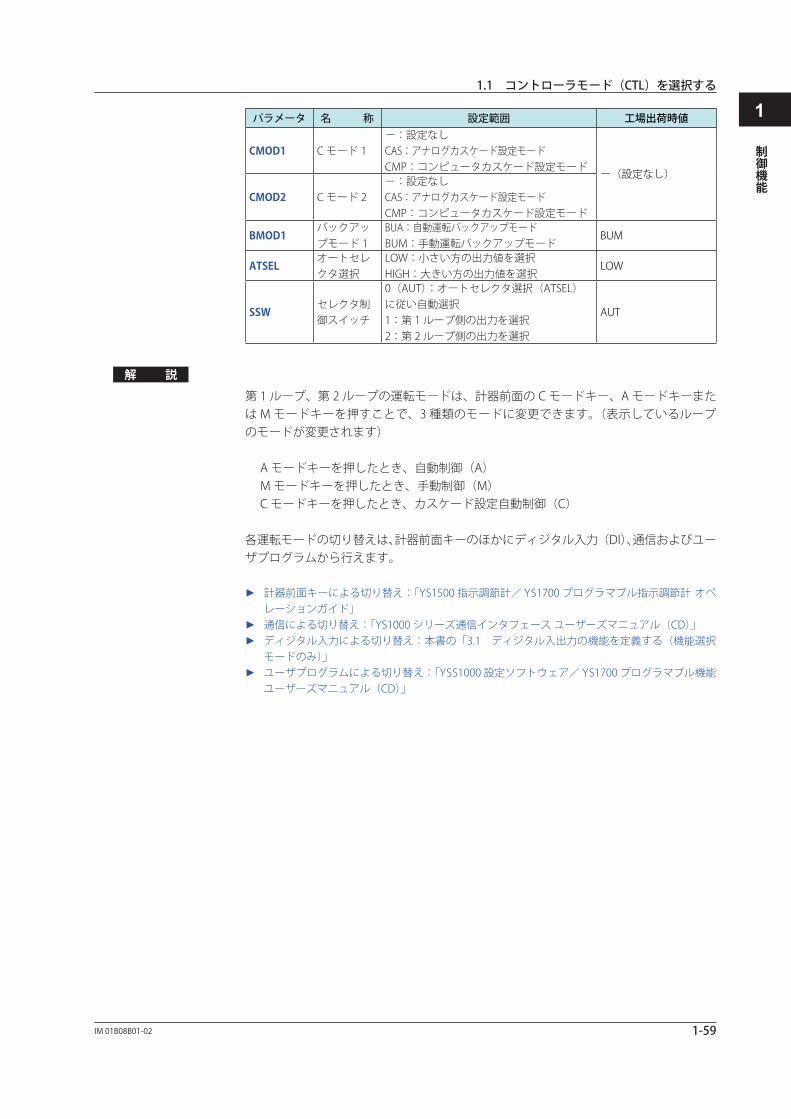
1-59IM 01B08B01-02
制御機能
1パラメータ 名 称 設定範囲 工場出荷時値
CMOD1 C モード 1-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
ー(設定なし)
CMOD2 C モード 2-:設定なしCAS:アナログカスケード設定モードCMP:コンピュータカスケード設定モード
BMOD1バックアップモード 1
BUA:自動運転バックアップモードBUM:手動運転バックアップモード
BUM
ATSELオートセレクタ選択
LOW:小さい方の出力値を選択HIGH:大きい方の出力値を選択
LOW
SSWセレクタ制御スイッチ
0(AUT):オートセレクタ選択(ATSEL)に従い自動選択1:第 1 ループ側の出力を選択2:第 2 ループ側の出力を選択
AUT
解 説
第 1 ループ、第 2 ループの運転モードは、計器前面の C モードキー、A モードキーまたは M モードキーを押すことで、3 種類のモードに変更できます。(表示しているループのモードが変更されます)
A モードキーを押したとき、自動制御(A) M モードキーを押したとき、手動制御(M) C モードキーを押したとき、カスケード設定自動制御(C)
各運転モードの切り替えは、計器前面キーのほかにディジタル入力(DI)、通信およびユーザプログラムから行えます。
► 計器前面キーによる切り替え:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガイド」
► 通信による切り替え:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」► ディジタル入力による切り替え:本書の「3.1 ディジタル入出力の機能を定義する(機能選択
モードのみ)」► ユーザプログラムによる切り替え:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能
ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-60 IM 01B08B01-02
カスケード設定自動制御(C モード)第 1 ループのカスケード設定自動制御(C)は、外部(通信またはアナログ入力)からの設定値(SV)により制御を行う運転モードです。アナログカスケード設定モード(CAS)とコンピュータカスケード設定モード(CMP)があります。さらに、コンピュータカスケード設定モード(CMP)には、SPC モードとDDC モードがあります。第 1 ループのカスケード設定自動制御(C)は、C モード 1(CMOD1)パラメータで設定します。
第 1 ループ カスケードのモード(パラメータ CMOD1) 通信のモード
カスケード設定自動制御(C)
アナログカスケード設定モード(CAS) -
コンピュータカスケード設定モード(CMP)SPC モード(*)
DDC モード(*)
設定なし(-) -
*: SPC モードと DDC モードの選択は、通信用レジスタ LS1 で設定します。計器前面から設定できません。
SPC モードで使用する場合は LS1 に SPC を、DDC モードで使用する場合は LS1 に DDC を書き込みます。
SPC モード時、SV キー操作不可。DDC モード時、SV、MV キー操作不可。► SPC モードと DDC モード:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
第 2 ループのカスケード設定自動制御(C)は、外部(アナログ入力)からの設定値(SV)により制御を行う運転モードです。アナログカスケード設定モード(CAS)があります。第 2 ループのカスケード設定自動制御(C)は、C モード(CMOD2)パラメータで設定します。アナログカスケード設定モード(CAS)に設定することで、第 2 ループのカスケード設定自動制御(C)が使用できます。
第 2 ループ カスケードのモード(パラメータ CMOD2)
カスケード設定自動制御(C)アナログカスケード設定モード(CAS)
設定なし(-)
外部から設定値(SV)が設定されているとき、制御ステータス表示部に [SV2-RMT] と表示されます。手動制御(M)では、設定値(SV)が外部から設定できる状態とキー、通信から設定できる状態の 2 種類があります。制御ステータス表示部の [SV2-RMT] で判断します。
セレクタモードのときは、第 1 ループ/第 2 ループのカスケード設定自動制御(C)の運転モードがパラメータ(CMOD1/CMOD2)設定により異なります。
1.1 コントローラモード(CTL)を選択する
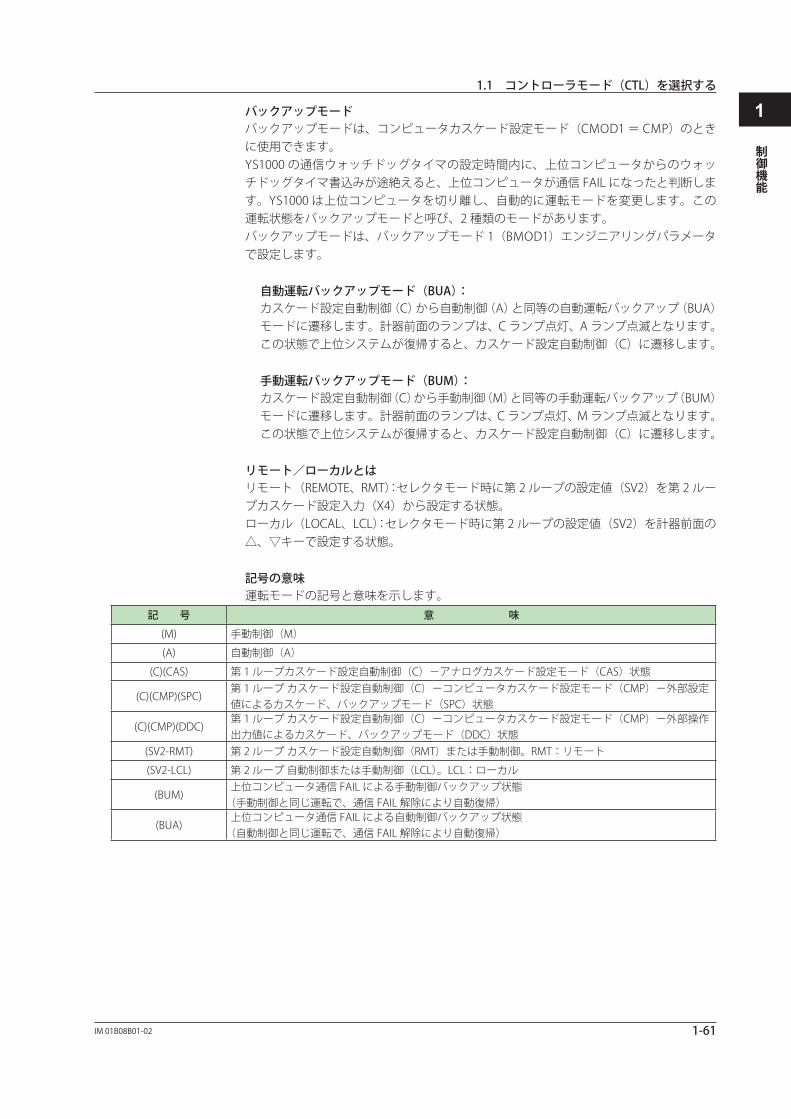
1-61IM 01B08B01-02
制御機能
1バックアップモードバックアップモードは、コンピュータカスケード設定モード(CMOD1 = CMP)のときに使用できます。YS1000 の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信 FAIL になったと判断します。YS1000 は上位コンピュータを切り離し、自動的に運転モードを変更します。この運転状態をバックアップモードと呼び、2 種類のモードがあります。バックアップモードは、バックアップモード 1(BMOD1)エンジニアリングパラメータで設定します。
自動運転バックアップモード(BUA): カスケード設定自動制御(C)から自動制御(A)と同等の自動運転バックアップ(BUA)
モードに遷移します。計器前面のランプは、C ランプ点灯、A ランプ点滅となります。 この状態で上位システムが復帰すると、カスケード設定自動制御(C)に遷移します。
手動運転バックアップモード(BUM): カスケード設定自動制御(C)から手動制御(M)と同等の手動運転バックアップ(BUM)
モードに遷移します。計器前面のランプは、C ランプ点灯、M ランプ点滅となります。 この状態で上位システムが復帰すると、カスケード設定自動制御(C)に遷移します。
リモート/ローカルとはリモート(REMOTE、RMT):セレクタモード時に第 2 ループの設定値(SV2)を第 2 ループカスケード設定入力(X4)から設定する状態。ローカル(LOCAL、LCL):セレクタモード時に第 2 ループの設定値(SV2)を計器前面の △、▽キーで設定する状態。
記号の意味運転モードの記号と意味を示します。
記 号 意 味
(M) 手動制御(M)
(A) 自動制御(A)
(C)(CAS) 第 1 ループカスケード設定自動制御(C)-アナログカスケード設定モード(CAS)状態
(C)(CMP)(SPC)第 1 ループ カスケード設定自動制御(C)-コンピュータカスケード設定モード(CMP)-外部設定値によるカスケード、バックアップモード(SPC)状態
(C)(CMP)(DDC)第 1 ループ カスケード設定自動制御(C)-コンピュータカスケード設定モード(CMP)-外部操作出力値によるカスケード、バックアップモード(DDC)状態
(SV2-RMT) 第 2 ループ カスケード設定自動制御(RMT)または手動制御。RMT:リモート
(SV2-LCL) 第 2 ループ 自動制御または手動制御(LCL)。LCL:ローカル
(BUM)上位コンピュータ通信 FAIL による手動制御バックアップ状態
(手動制御と同じ運転で、通信 FAIL 解除により自動復帰)
(BUA)上位コンピュータ通信 FAIL による自動制御バックアップ状態
(自動制御と同じ運転で、通信 FAIL 解除により自動復帰)
1.1 コントローラモード(CTL)を選択する
1-62 IM 01B08B01-02
(1) 第 1 ループは YS だけで制御し、第 2 ループはアナログ入力からの外部設定値で制御する
アナログ入力(端子 X4)から第 2 ループの外部設定値を取り込み、セレクタ制御を行います。
パラメータ 名 称 設定値
CMOD1 C モード 1 -:設定なし
CMOD2 C モード 2 CAS:アナログカスケード設定モード
1.1 コントローラモード(CTL)を選択する
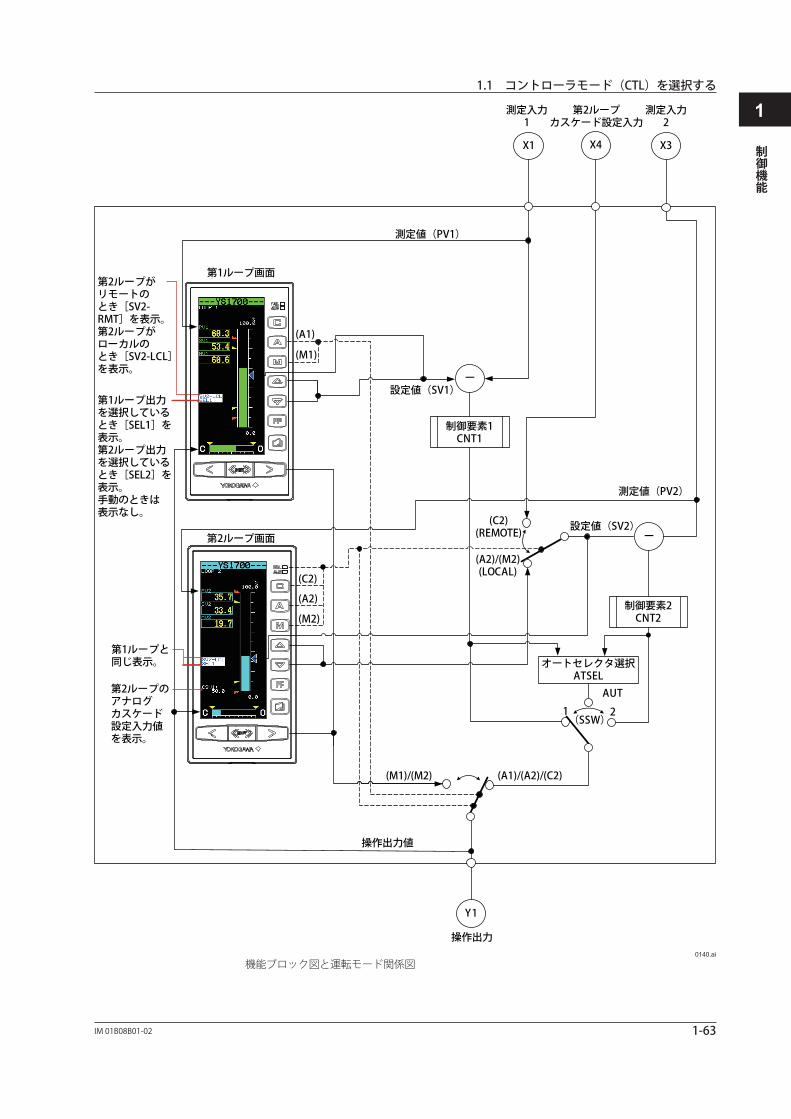
1-63IM 01B08B01-02
制御機能
1X1
Y1
X3
制御要素1CNT1
ー
ー
制御要素2CNT2
測定値(PV2)
設定値(SV1)
測定値(PV1)
(C2)(REMOTE)
(A2)/(M2)(LOCAL)
(M1)/(M2)
操作出力値
設定値(SV2)
第1ループ画面
第2ループ画面
X4
オートセレクタ選択ATSEL
AUT
1 2(SSW)
(A1)
(M1)
(C2)
(A2)
(M2)
(A1)/(A2)/(C2)
第1ループと同じ表示。
第2ループのアナログカスケード設定入力値を表示。
測定入力1
測定入力2
第2ループカスケード設定入力
操作出力
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のときは表示なし。
第2ループがリモートのとき[SV2-RMT]を表示。第2ループがローカルのとき[SV2-LCL]を表示。
0140.ai
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
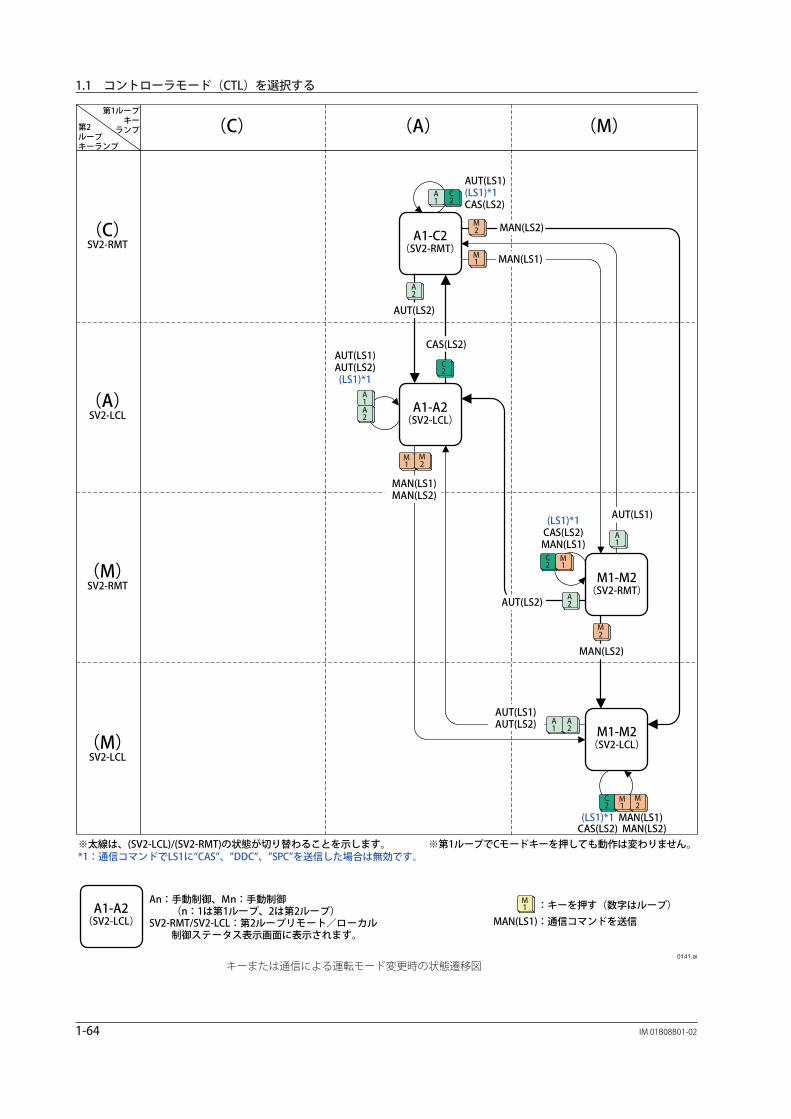
1-64 IM 01B08B01-02
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
※太線は、(SV2-LCL)/(SV2-RMT)の状態が切り替わることを示します。 ※第1ループでCモードキーを押しても動作は変わりません。
An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-RMT/SV2-LCL:第2ループリモート/ローカル制御ステータス表示画面に表示されます。
:キーを押す(数字はループ)MAN(LS1):通信コマンドを送信
*1:通信コマンドでLS1に”CAS”、”DDC”、”SPC”を送信した場合は無効です。
第1ループキー
ランプ第2ループキーランプ
0141.ai
A1-C2(SV2-RMT)
A1-A2(SV2-LCL)
M1-M2(SV2-RMT)
M1-M2(SV2-LCL)
MAN(LS2)
MAN(LS1)
AUT(LS2)
CAS(LS2)
AUT(LS1)
AUT(LS2)
MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)(LS1)*1CAS(LS2)
AUT(LS1)AUT(LS2)(LS1)*1
(LS1)*1CAS(LS2)MAN(LS1)
(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
A1
A1
A1
A1
A2
A2
A2
A2
C2
C2
C2
C2
M2
M2
M1
M1
M1
M1
M1
M2
M2
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
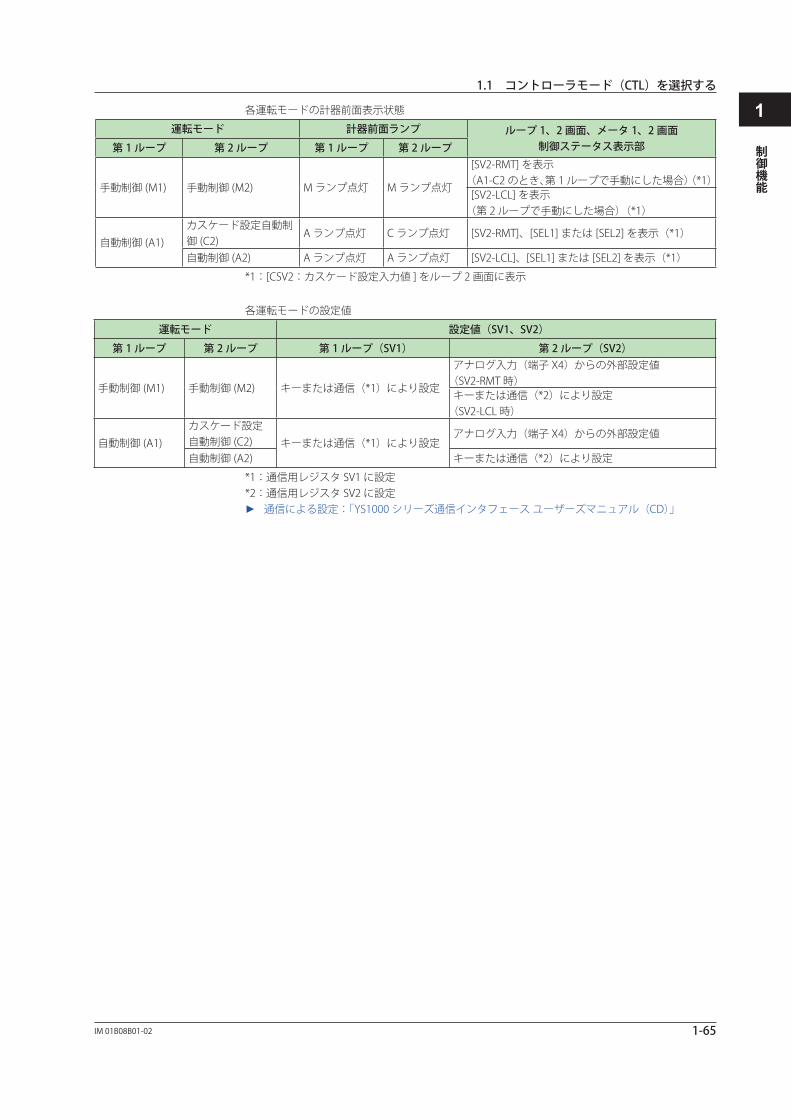
1-65IM 01B08B01-02
制御機能
1各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯
[SV2-RMT] を表示(A1-C2 のとき、第 1 ループで手動にした場合)(*1)
[SV2-LCL] を表示(第 2 ループで手動にした場合)(*1)
自動制御 (A1)
カスケード設定自動制御 (C2)
A ランプ点灯 C ランプ点灯 [SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
*1:[CSV2:カスケード設定入力値 ] をループ 2 画面に表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2) キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値(SV2-RMT 時)
キーまたは通信(*2)により設定(SV2-LCL 時)
自動制御 (A1)
カスケード設定自動制御 (C2) キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-66 IM 01B08B01-02
セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
自動制御 (A1)制御演算を出力
(非選択時は、第 1 ループ出力 =MV+Kp1 × E1)
カスケード設定自動制御 (C2) 制御演算を出力
(非選択時は、第 2 ループ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
自動制御 (A2)
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
HIGH
自動制御 (A1)制御演算を出力
(非選択時は、第 1 ループ出力 =MV+Kp1 × E1)
カスケード設定自動制御 (C2) 制御演算を出力
(非選択時は、第 2 ループ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
自動制御 (A2)
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
1 -自動制御 (A1) 制御演算を出力
カスケード設定自動制御 (C2)
MV に追従CNT1、CNT2 のうち信号の大小にかかわらずCNT1 の出力を選択自動制御 (A2)
手動制御 (M1)キーまたは通信(*1)でMV を操作(手動操作)
手動制御 (M2) MV に追従 MV に追従
2 -
自動制御 (A1) MV に追従
カスケード設定動制御 (C2)
制御演算を出力CNT1、CNT2 のうち信号の大小にかかわらずCNT2 の出力を選択自動制御 (A2)
手動制御 (M1) MV に追従 手動制御 (M2)キーまたは通信(*2)でMV を操作(手動操作)
MV に追従
MV:操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1:通信用レジスタ MV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
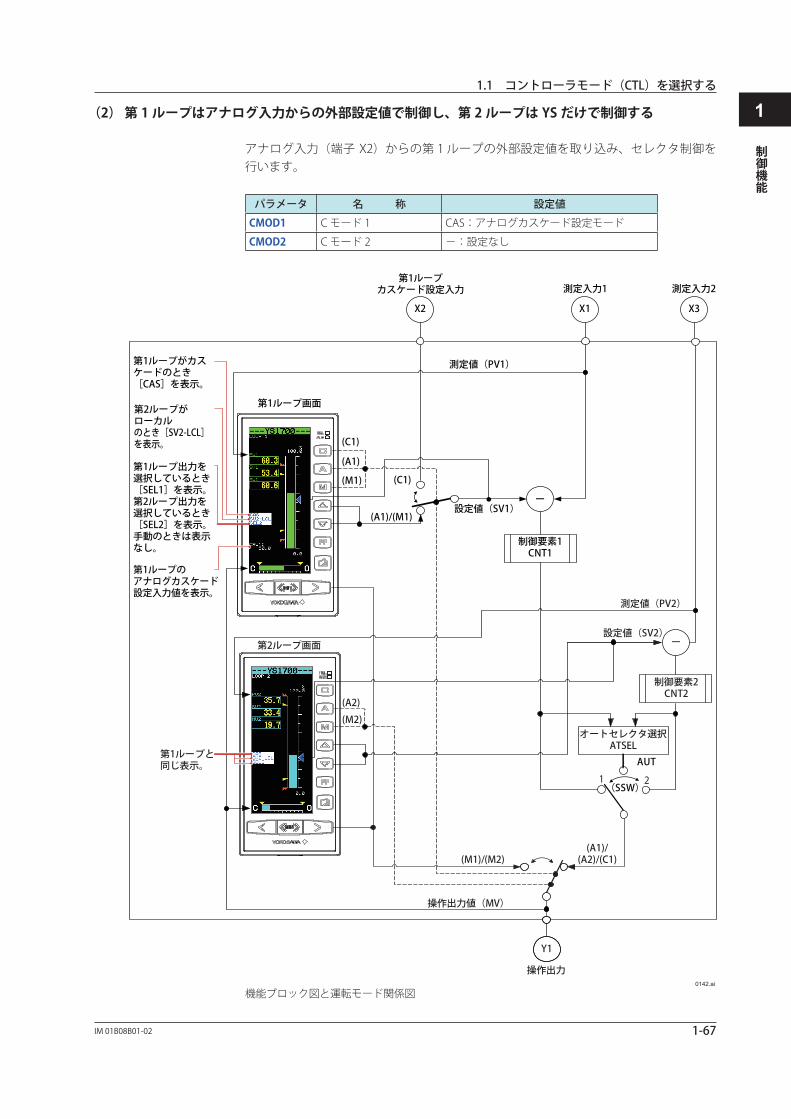
1-67IM 01B08B01-02
制御機能
1(2) 第 1 ループはアナログ入力からの外部設定値で制御し、第 2 ループは YS だけで制御する
アナログ入力(端子 X2)からの第 1 ループの外部設定値を取り込み、セレクタ制御を行います。
パラメータ 名 称 設定値
CMOD1 C モード 1 CAS:アナログカスケード設定モード
CMOD2 C モード 2 -:設定なし
X1
設定値(SV1)
制御要素1CNT1
(A1)
(C1)
(C1)(M1)
(A1)/(M1)
X3
ー
測定入力1
測定値(PV1)
測定入力2
X2
第1ループカスケード設定入力
第1ループ画面
第1ループがカスケードのとき[CAS]を表示。
第1ループのアナログカスケード設定入力値を表示。
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のときは表示なし。
(A2)
(M2)
Y1
ー
オートセレクタ選択ATSEL
測定値(PV2)
(A1)/(A2)/(C1)(M1)/(M2)
操作出力値(MV)
設定値(SV2)第2ループ画面
第1ループと同じ表示。
操作出力
AUT
1 2(SSW)
制御要素2CNT2
0142.ai
第2ループがローカルのとき[SV2-LCL]を表示。
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する

1-68 IM 01B08B01-02
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
*1:通信コマンドでLS1に”DDC”、”SPC”を送信した場合は無効です。 ※第2ループでCモードキーを押しても動作は変わりません。
An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-LCL:第2ループローカル制御ステータス表示画面に表示されます。
:キーを押す(数字はループ)MAN(LS1):通信コマンドを送信
*2:通信コマンドでLS2に”CAS”を送信した場合は無効です。
第1ループキー
ランプ第2ループキーランプ
0143.ai
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
A1-A2(SV2-LCL)
C1-A2(SV2-LCL)
AUT(LS1)
MAN(LS1)MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)(LS2)*2
CAS(LS1)*1(LS2)*2AUT(LS2)
CAS(LS1) *1
CAS(LS1)*1 MAN(LS1)(LS2)*2 MAN(LS2)
A1
A1
A1
A2
A2
C1
C1
M1
M1
M1
C1
A2
M2
M2
M2
M1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
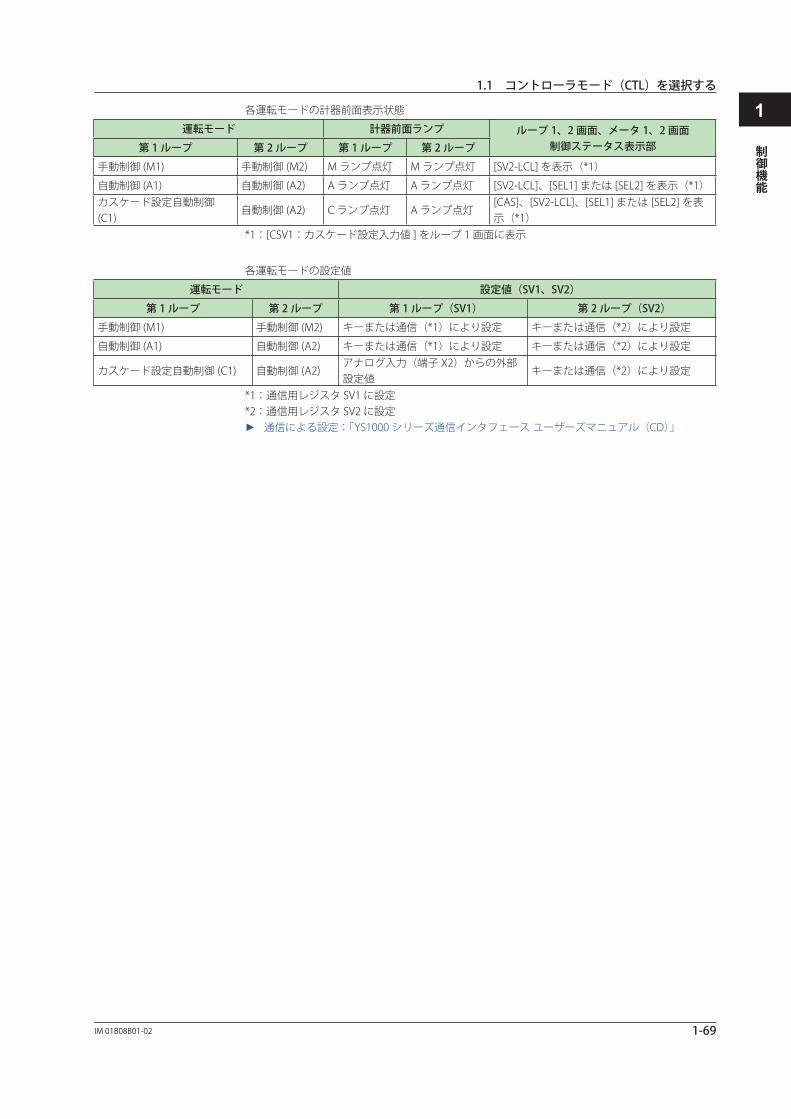
1-69IM 01B08B01-02
制御機能
1各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯 [SV2-LCL] を表示(*1)
自動制御 (A1) 自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示(*1)カスケード設定自動制御(C1)
自動制御 (A2) C ランプ点灯 A ランプ点灯[CAS]、[SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
*1:[CSV1:カスケード設定入力値 ] をループ 1 画面に表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
自動制御 (A1) 自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
カスケード設定自動制御 (C1) 自動制御 (A2)アナログ入力(端子 X2)からの外部設定値
キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-70 IM 01B08B01-02
セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
カスケード設定自動制御(C1)(CAS)
制御演算を出力(非選択時は、第 1 ループ
出力 =MV+Kp1 × E1)自動制御 (A2)
制御演算を出力(非選択時は、第 2 ループ
出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
自動制御 (A1)
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
HIGH
カスケード設定自動制御(C1)(CAS)
制御演算を出力(非選択時は、第 1 ループ
出力 =MV+Kp1 × E1)自動制御 (A2)
制御演算を出力(非選択時は、第 2 ループ
出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
自動制御 (A1)
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
1 -
カスケード設定自動制御 (C1) 制御演算を出力 自動制御 (A2) MV に追従
CNT1、CNT2 のうち信号の大小にかかわらずCNT1 の出力を選択自動制御 (A1)
手動制御 (M1)キーまたは通信(*1)でMV を操作(手動操作)
手動制御 (M2) MV に追従 MV に追従
2 -
カスケード設定自動制御 (C1) MV に追従 自動制御 (A2) 制御演算を出力
CNT1、CNT2 のうち信号の大小にかかわらずCNT2 の出力を選択自動制御 (A1)
手動制御 (M1) MV に追従 手動制御 (M2)キーまたは通信(*2)でMV を操作(手動操作)
MV に追従
MV:操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1:通信用レジスタ MV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
1-71IM 01B08B01-02
制御機能
1(3) 第 1 ループ、第 2 ループともにアナログ入力からの外部設定値で制御する
アナログ入力(端子 X2)から第 1 ループの外部設定値を取り込み、アナログ入力(端子 X4)から第 2 ループの外部設定値を取り込み、セレクタ制御を行います。
パラメータ 名 称 設定値
CMOD1 C モード 1 CAS:アナログカスケード設定モード
CMOD2 C モード 2 CAS:アナログカスケード設定モード
1.1 コントローラモード(CTL)を選択する
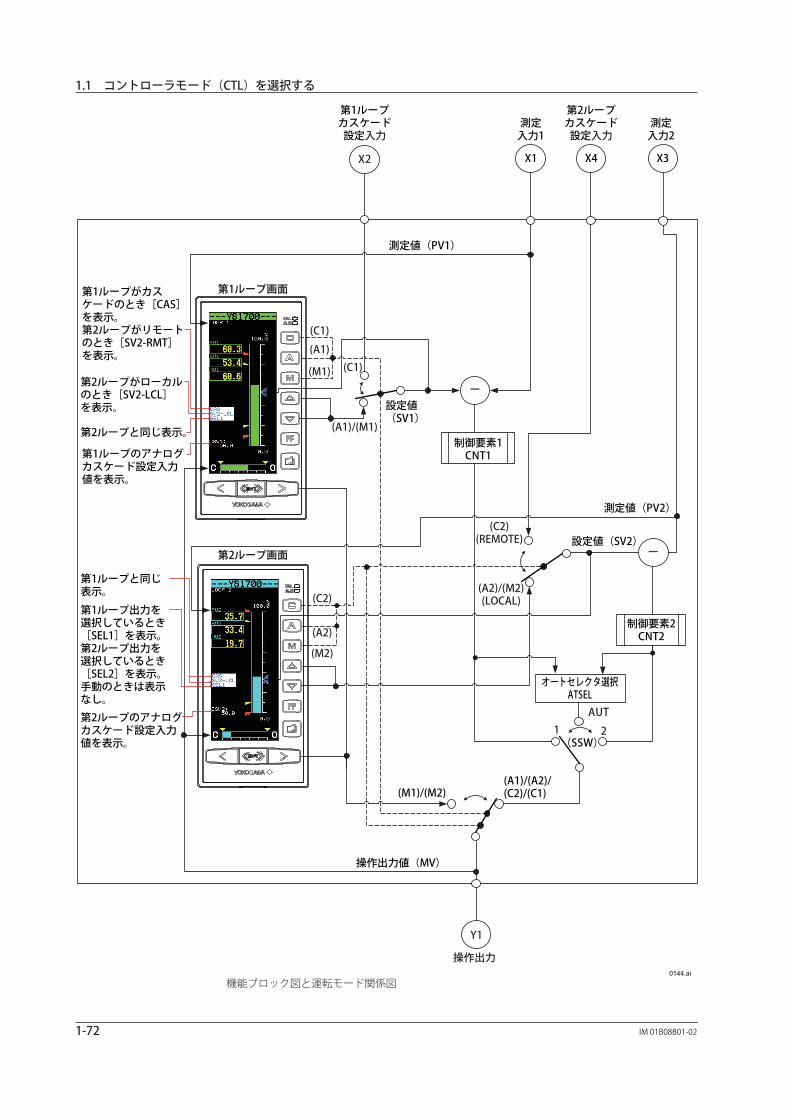
1-72 IM 01B08B01-02
X2
Y1
ー
ー
AUT1 2
操作出力0144.ai
操作出力値(MV)
(M1)/(M2)(A1)/(A2)/(C2)/(C1)
(A2)/(M2)(LOCAL)
制御要素2CNT2
制御要素1CNT1
(SSW)
オートセレクタ選択ATSEL
(C2)(REMOTE)
(C1)
(A1)/(M1)
(C1)
(A1)
(M1)
(C2)
(A2)
(M2)
測定値(PV2)
設定値(SV2)
設定値(SV1)
第2ループカスケード設定入力
第1ループカスケード設定入力
測定入力1
測定入力2
X1 X4 X3
測定値(PV1)
第2ループ画面
第1ループ画面
第1ループと同じ表示。
第2ループのアナログカスケード設定入力値を表示。
第1ループのアナログカスケード設定入力値を表示。
第2ループがローカルのとき[SV2-LCL]を表示。
第2ループと同じ表示。
第1ループがカスケードのとき[CAS]を表示。第2ループがリモートのとき[SV2-RMT]を表示。
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のときは表示なし。
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する

1-73IM 01B08B01-02
制御機能
1(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
※太線は、(SV2-RMT)/(SV2-LCL)の状態が切り替わることを示します。*1:通信コマンドでLS1に”DDC”、”SPC”を送信した場合は無効です。
An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-RMT/SV2-LCL:第2ループリモート/ローカル制御ステータス表示画面に表示されます。
:キーを押す(数字はループ)MAN(LS1):通信コマンドを送信
第1ループキー
ランプ第2ループキーランプ
0145.ai
A1-C2(SV2-RMT)
C1-C2(SV2-RMT)
A1-A2(SV2-LCL)
C1-A2(SV2-LCL)
M1-M2(SV2-RMT)
M1-M2(SV2-LCL)
MAN(LS2)
MAN(LS1)
AUT(LS2)
AUT(LS1)
AUT(LS1)
AUT(LS2)
AUT(LS1)
AUT(LS2)
MAN(LS2)
MAN(LS1)MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)CAS(LS2)
AUT(LS1)AUT(LS2)
CAS(LS1)*1CAS(LS2)MAN(LS1)
CAS(LS1)*1AUT(LS2)
CAS(LS1)*1CAS(LS2)
CAS(LS1) *1
CAS(LS1) *1
CAS(LS2) CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
A1
A1
A1
A1
A1
A1
A2
A2
A2
A2
A2
C1
C1
C1
C1
C1
C2
C2
C2
C2
C2
M2
M2
M2
M1
M1
M1
M1
M1
M1
A2
M2
M2
C1
C2
M1
M2
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
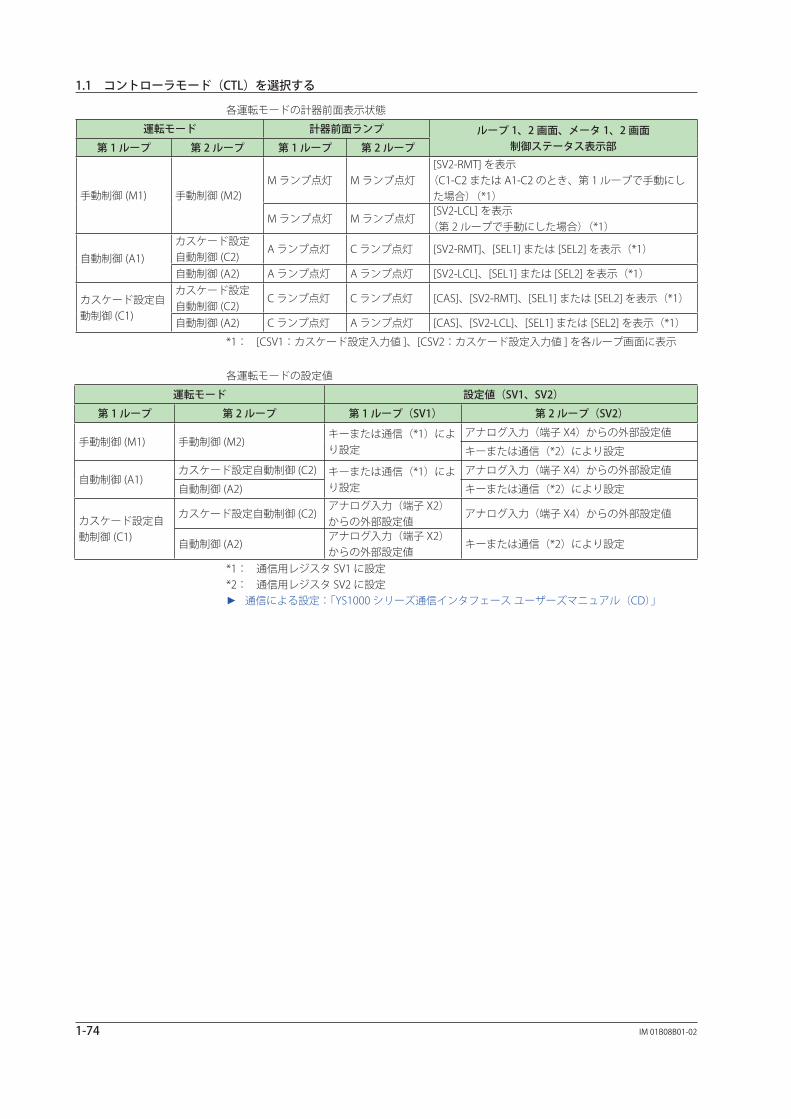
1-74 IM 01B08B01-02
各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2)M ランプ点灯 M ランプ点灯
[SV2-RMT] を表示(C1-C2 または A1-C2 のとき、第 1 ループで手動にし
た場合)(*1)
M ランプ点灯 M ランプ点灯[SV2-LCL] を表示
(第 2 ループで手動にした場合)(*1)
自動制御 (A1)
カスケード設定自動制御 (C2)
A ランプ点灯 C ランプ点灯 [SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
カスケード設定自動制御 (C1)
カスケード設定自動制御 (C2)
C ランプ点灯 C ランプ点灯 [CAS]、[SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2) C ランプ点灯 A ランプ点灯 [CAS]、[SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
*1: [CSV1:カスケード設定入力値 ]、[CSV2:カスケード設定入力値 ] を各ループ画面に表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2)キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
キーまたは通信(*2)により設定
自動制御 (A1)カスケード設定自動制御 (C2) キーまたは通信(*1)によ
り設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)
カスケード設定自動制御 (C2)アナログ入力(端子 X2)からの外部設定値
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2)アナログ入力(端子 X2)からの外部設定値
キーまたは通信(*2)により設定
*1: 通信用レジスタ SV1 に設定*2: 通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-75IM 01B08B01-02
制御機能
1セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
カスケード設定自動制御 (C1)
制御演算を出力(非選択時は、第 1 ルー
プ出力 =MV+Kp1 × E1)
カスケード設定自動制御 (C2)
制御演算を出力(非選択時は、第 2 ルー
プ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
自動制御 (A1) 自動制御 (A2)
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
HIGH
カスケード設定自動制御 (C1)
制御演算を出力(非選択時は、第 1 ルー
プ出力 =MV+Kp1 × E1)
カスケード設定自動制御 (C2)
制御演算を出力(非選択時は、第 2 ルー
プ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
自動制御 (A1) 自動制御 (A2)
手動制御 (M1) MV に追従 手動制御 (M2) MV に追従キーまたは通信で MV を操作(手動操作)
1 -
カスケード設定自動制御 (C1) 制御演算を出力
カスケード設定自動制御 (C2) MV に追従
CNT1、CNT2 のうち信号の大小にかかわらずCNT1 の出力を選択自動制御 (A1) 自動制御 (A2)
手動制御 (M1)キーまたは通信(*1)でMV を操作(手動操作)
手動制御 (M2) MV に追従 MV に追従
2 -
カスケード設定自動制御 (C1) MV に追従
カスケード設定自動制御 (C2) 制御演算を出力
CNT1、CNT2 のうち信号の大小にかかわらずCNT2 の出力を選択自動制御 (A1) 自動制御 (A2)
手動制御 (M1) MV に追従 手動制御 (M2)キーまたは通信(*2)でMV を操作(手動操作)
MV に追従
MV: 操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1: 通信用レジスタ MV1 に設定*2: 通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
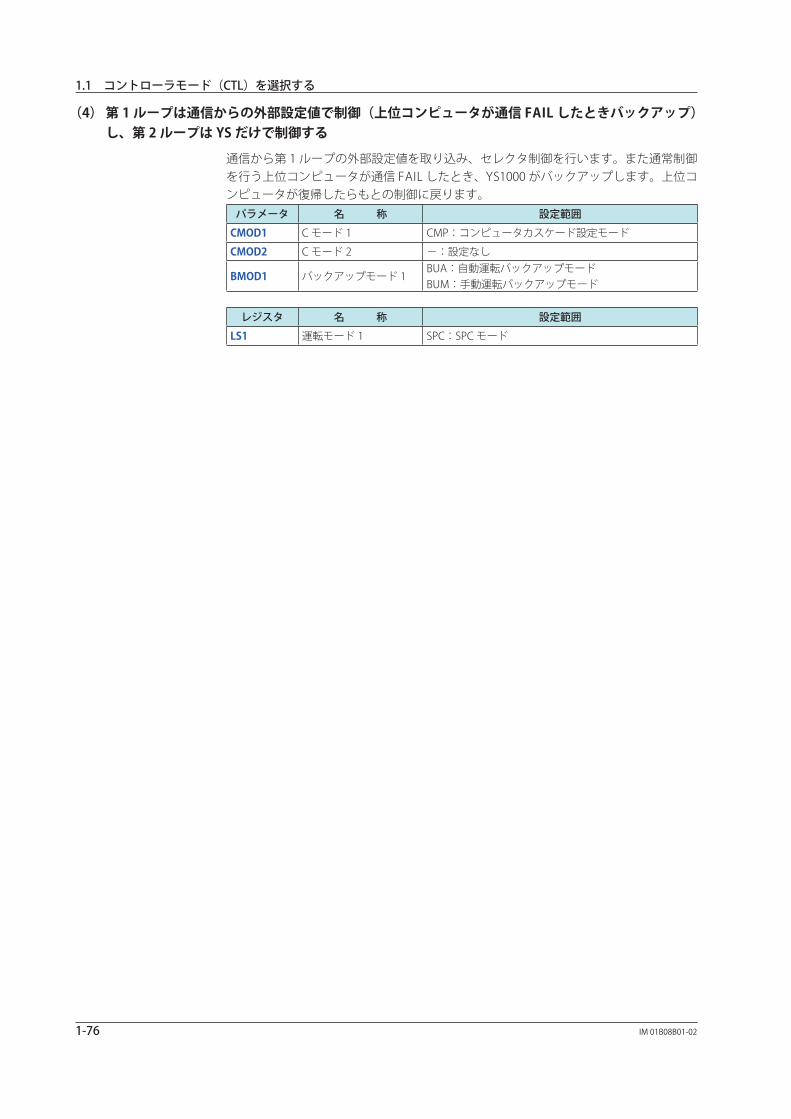
1-76 IM 01B08B01-02
(4) 第 1 ループは通信からの外部設定値で制御(上位コンピュータが通信 FAIL したときバックアップ)し、第 2 ループは YS だけで制御する
通信から第 1 ループの外部設定値を取り込み、セレクタ制御を行います。また通常制御を行う上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定範囲
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
CMOD2 C モード 2 -:設定なし
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定範囲
LS1 運転モード 1 SPC:SPC モード
1.1 コントローラモード(CTL)を選択する
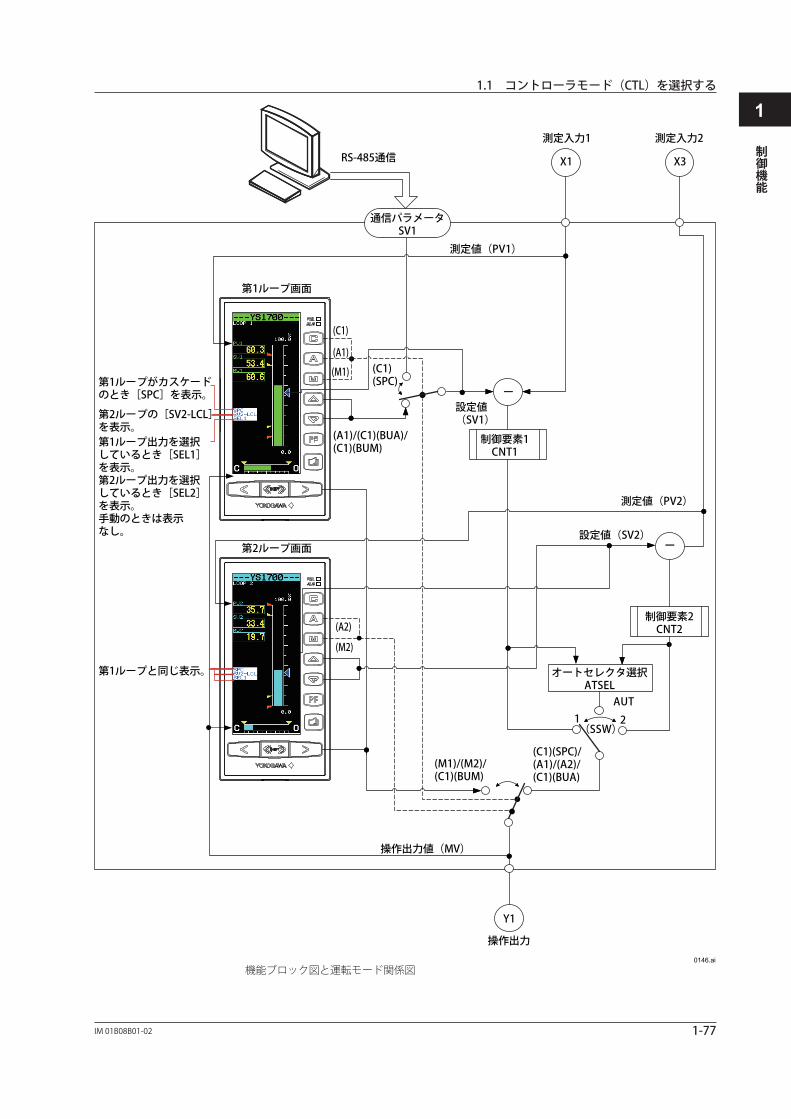
1-77IM 01B08B01-02
制御機能
1
Y1
制御要素1CNT1
制御要素2CNT2
ー
ー
(M1)/(M2)/(C1)(BUM)
(A1)/(C1)(BUA)/(C1)(BUM)
(C1)(SPC)
(C1)
(A1)
(A2)
(M2)
(M1)
(C1)(SPC)/(A1)/(A2)/(C1)(BUA)
AUT
0146.ai
1 2(SSW)
操作出力
X1 X3
測定値(PV1)
測定値(PV2)
設定値(SV1)
設定値(SV2)
操作出力値(MV)
オートセレクタ選択ATSEL
測定入力1 測定入力2
RS-485通信
通信パラメータSV1
第2ループ画面
第1ループ画面
第1ループと同じ表示。
第1ループがカスケードのとき[SPC]を表示。
第2ループの[SV2-LCL]を表示。第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のときは表示なし。
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
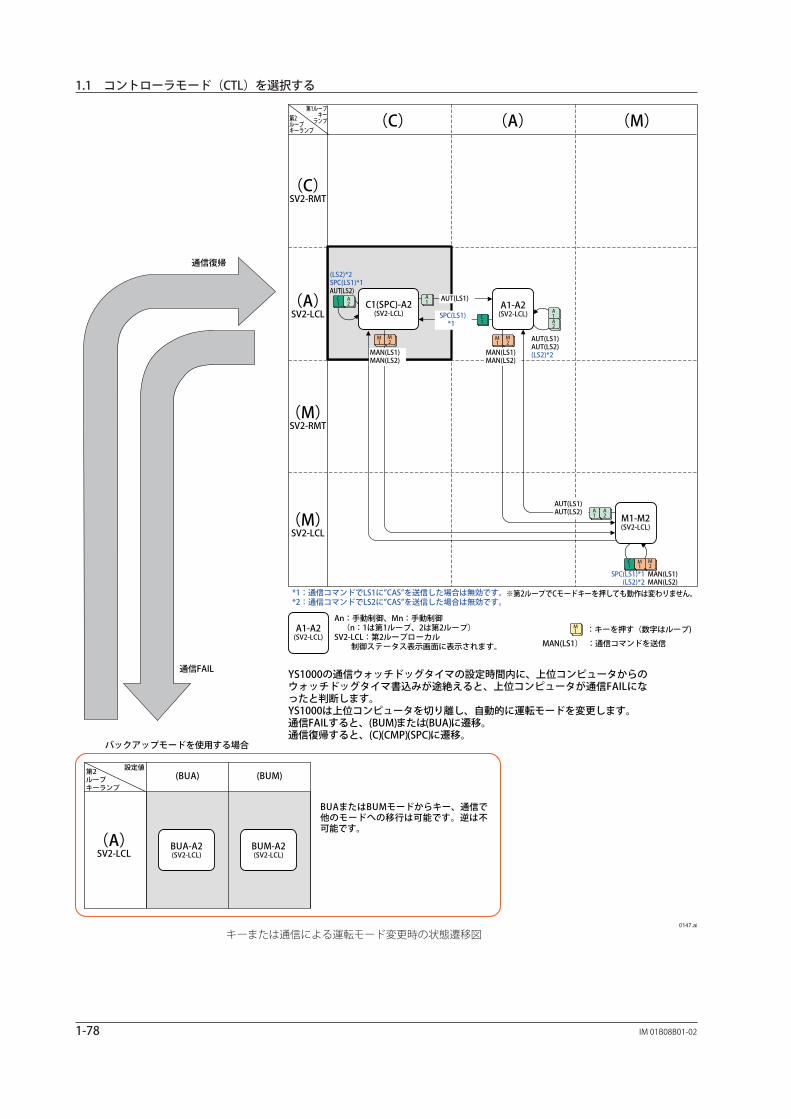
1-78 IM 01B08B01-02
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)第1ループ
キーランプ第2
ループキーランプ
A1-A2(SV2-LCL)
An:手動制御、Mn:手動制御 (n:1は第1ループ、2は第2ループ)SV2-LCL:第2ループローカル
制御ステータス表示画面に表示されます。
*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。*2:通信コマンドでLS2に”CAS”を送信した場合は無効です。
:通信コマンドを送信MAN(LS1)
:キーを押す(数字はループ)
バックアップモードを使用する場合
(A)SV2-LCL
設定値第2ループキーランプ
(BUA) (BUM)
BUA-A2(SV2-LCL)
BUM-A2(SV2-LCL)
※第2ループでCモードキーを押しても動作は変わりません。
0147.ai
左記より選択
AUT(LS1)
(LS2)*2SPC(LS1)*1 AUT(LS2)
SPC(LS1)*1 MAN(LS1)(LS2)*2 MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)(LS2)*2MAN(LS1)
MAN(LS2)
A1-A2(SV2-LCL)
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
C1(SPC)-A2(SV2-LCL)
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(SPC)に遷移。
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
A1A2
C1
C1
M1
M1
A1
A1
A2
C1
M1
M1
M2
M2
A2
M2
通信FAIL
通信復帰
SPC(LS1)*1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
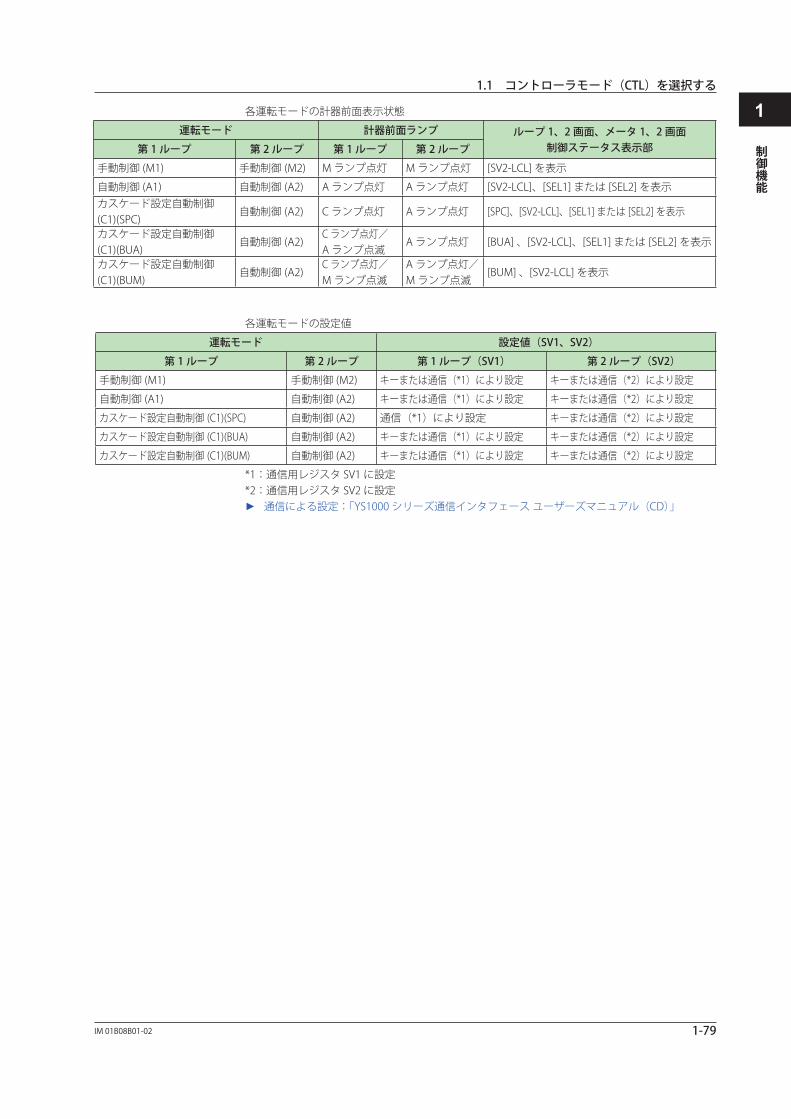
1-79IM 01B08B01-02
制御機能
1各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯 [SV2-LCL] を表示
自動制御 (A1) 自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示カスケード設定自動制御(C1)(SPC)
自動制御 (A2) C ランプ点灯 A ランプ点灯 [SPC]、[SV2-LCL]、[SEL1] または [SEL2] を表示
カスケード設定自動制御(C1)(BUA)
自動制御 (A2)C ランプ点灯/A ランプ点滅
A ランプ点灯 [BUA] 、[SV2-LCL]、[SEL1] または [SEL2] を表示
カスケード設定自動制御(C1)(BUM)
自動制御 (A2)C ランプ点灯/M ランプ点滅
A ランプ点灯/M ランプ点滅
[BUM] 、[SV2-LCL] を表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1) 手動制御 (M2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
自動制御 (A1) 自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)(SPC) 自動制御 (A2) 通信(*1)により設定 キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)(BUA) 自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)(BUM) 自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
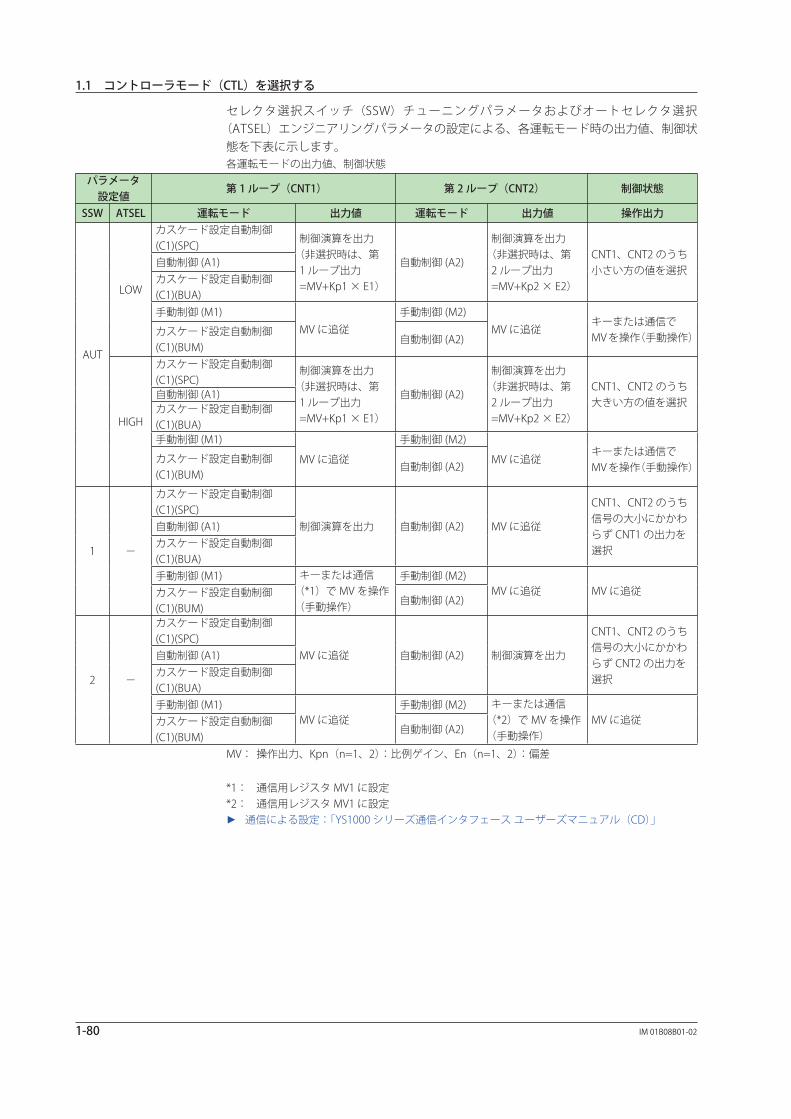
1-80 IM 01B08B01-02
セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
カスケード設定自動制御(C1)(SPC)
制御演算を出力(非選択時は、第
1 ループ出力=MV+Kp1 × E1)
自動制御 (A2)
制御演算を出力(非選択時は、第
2 ループ出力=MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
自動制御 (A1)カスケード設定自動制御(C1)(BUA)手動制御 (M1)
MV に追従
手動制御 (M2)
MV に追従キーまたは通信でMV を操作(手動操作)カスケード設定自動制御
(C1)(BUM)自動制御 (A2)
HIGH
カスケード設定自動制御(C1)(SPC)
制御演算を出力(非選択時は、第
1 ループ出力=MV+Kp1 × E1)
自動制御 (A2)
制御演算を出力(非選択時は、第
2 ループ出力=MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
自動制御 (A1)カスケード設定自動制御(C1)(BUA)手動制御 (M1)
MV に追従
手動制御 (M2)
MV に追従キーまたは通信でMV を操作(手動操作)
カスケード設定自動制御(C1)(BUM)
自動制御 (A2)
1 -
カスケード設定自動制御(C1)(SPC)
制御演算を出力 自動制御 (A2) MV に追従
CNT1、CNT2 のうち信号の大小にかかわらず CNT1 の出力を選択
自動制御 (A1)カスケード設定自動制御(C1)(BUA)手動制御 (M1) キーまたは通信
(*1)で MV を操作(手動操作)
手動制御 (M2)MV に追従 MV に追従カスケード設定自動制御
(C1)(BUM)自動制御 (A2)
2 -
カスケード設定自動制御(C1)(SPC)
MV に追従 自動制御 (A2) 制御演算を出力
CNT1、CNT2 のうち信号の大小にかかわらず CNT2 の出力を選択
自動制御 (A1)カスケード設定自動制御(C1)(BUA)手動制御 (M1)
MV に追従手動制御 (M2) キーまたは通信
(*2)で MV を操作(手動操作)
MV に追従カスケード設定自動制御(C1)(BUM)
自動制御 (A2)
MV: 操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1: 通信用レジスタ MV1 に設定*2: 通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-81IM 01B08B01-02
制御機能
1
意図して空白にしています。
1.1 コントローラモード(CTL)を選択する
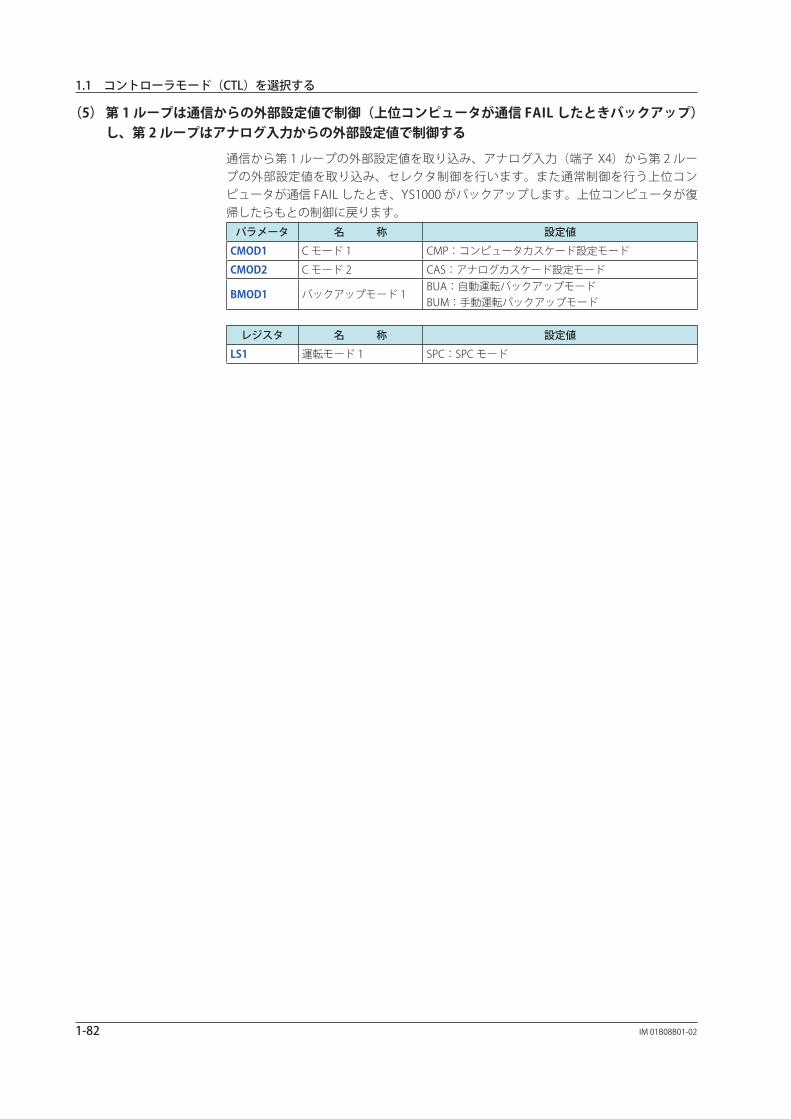
1-82 IM 01B08B01-02
(5) 第 1 ループは通信からの外部設定値で制御(上位コンピュータが通信 FAIL したときバックアップ)し、第 2 ループはアナログ入力からの外部設定値で制御する
通信から第 1 ループの外部設定値を取り込み、アナログ入力(端子 X4)から第 2 ループの外部設定値を取り込み、セレクタ制御を行います。また通常制御を行う上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
CMOD2 C モード 2 CAS:アナログカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 SPC:SPC モード
1.1 コントローラモード(CTL)を選択する
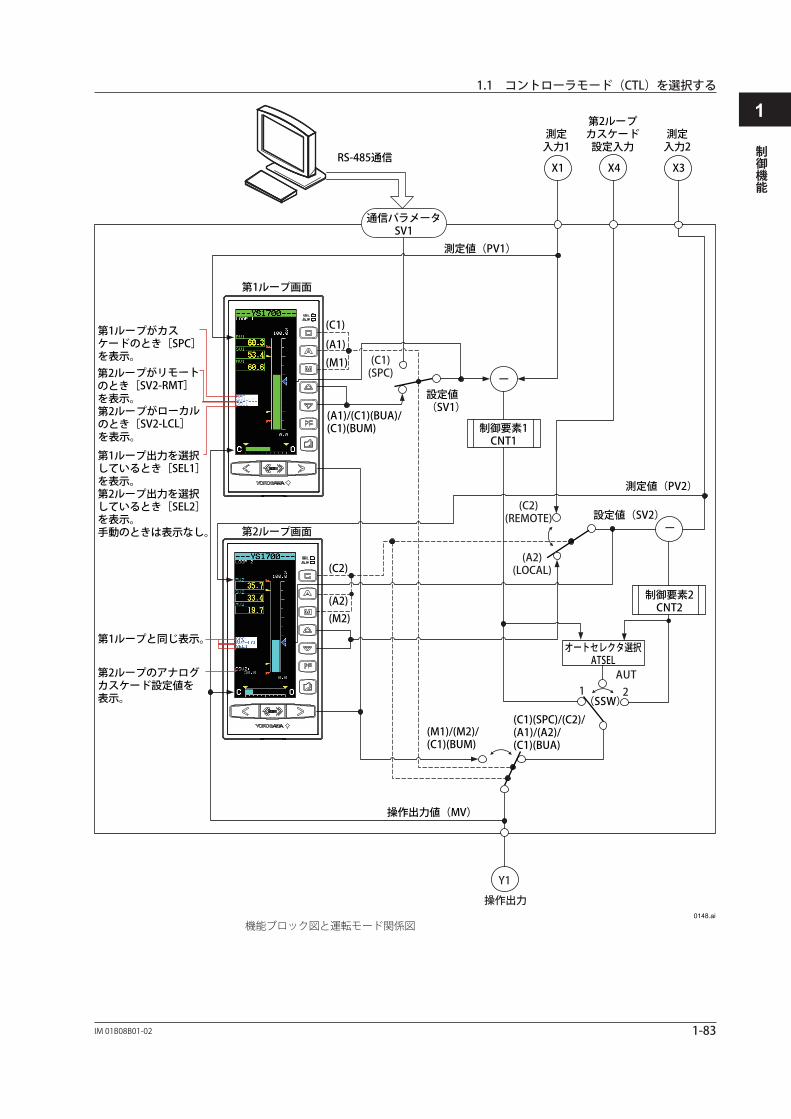
1-83IM 01B08B01-02
制御機能
1
Y1
ー
ー
AUT
(C2)(REMOTE)
(C1)(SPC)
(A2)(LOCAL)
1 2
操作出力
(C1)
(A1)(M1)
(C2)
(A2)(M2)
0148.ai
RS-485通信
通信パラメータSV1
第2ループ画面
第1ループ画面
第1ループと同じ表示。
第2ループのアナログカスケード設定値を表示。
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のときは表示なし。
第2ループがリモートのとき[SV2-RMT]を表示。第2ループがローカルのとき[SV2-LCL]を表示。
第1ループがカスケードのとき[SPC]を表示。
第2ループカスケード設定入力
測定入力1
測定入力2
X1 X4 X3
制御要素1CNT1
測定値(PV1)
設定値(SV1)
制御要素2CNT2
(SSW)
測定値(PV2)
設定値(SV2)
オートセレクタ選択ATSEL
(M1)/(M2)/(C1)(BUM)
(C1)(SPC)/(C2)/(A1)/(A2)/(C1)(BUA)
(A1)/(C1)(BUA)/(C1)(BUM)
操作出力値(MV)
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する
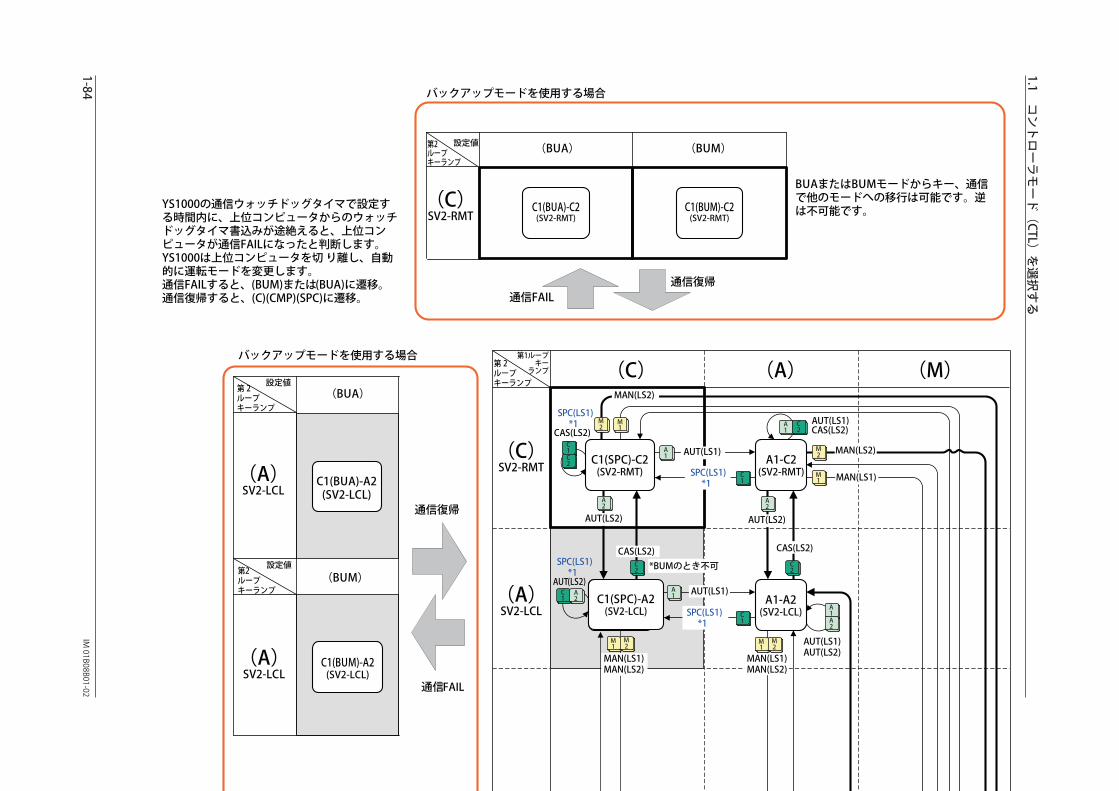
1-84IM
01B08B01-02
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
Cn:カスケード設定自動制御、An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-RMT/SV2-LCL:第2ループリモート/ローカル制御ステータス表示画面に表示されます。
※太線は、(SV2-LCL)/(SV2-RMT)の状態が切り替わることを示します。*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
C1(BUA)-C2(SV2-RMT)
C1(BUM)-C2(SV2-RMT)
0149.ai
設定値第 2ループキーランプ
設定値第2ループキーランプ
上記より選択
左記より選択
CAS(LS2)
AUT(LS1)
CAS(LS2)SPC(LS1)
*1 AUT(LS2)
SPC(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS2)
C1(SPC)-C2(SV2-RMT)
SPC(LS1)*1
MAN(LS2)
AUT(LS1)
MAN(LS1)
MAN(LS2)
AUT(LS1)CAS(LS2)
A1-C2(SV2-RMT)
AUT(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)
CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)MAN(LS1)
MAN(LS2)
AUT(LS2)
A1-A2(SV2-LCL)
M1-M2(SV2-RMT)
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
C1(SPC)-A2(SV2-LCL)
第 2ループキーランプ
第1ループキー
ランプ
通信FAIL通信復帰
(C)SV2-RMT
バックアップモードを使用する場合
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。YS1000の通信ウォッチドッグタイマで設定す
る時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切 り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(SPC)に遷移。
(BUA) (BUM)設定値第2ループキーランプ
通信FAIL
通信復帰
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
バックアップモードを使用する場合
(A)SV2-LCL
(A)SV2-LCL
(BUA)
C1(BUA)-A2(SV2-LCL)
C1(BUM)-A2(SV2-LCL)
(BUM)
A1
A1
A1
A1
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C2
M2
M2
M1
M1
M1
M1
A1
A1
A2
A2
C1
M1
C2
C2
M2
M1
M1
M2
A2
M2
M2
*BUMのとき不可
SPC(LS1)*1
SPC(LS1)*1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
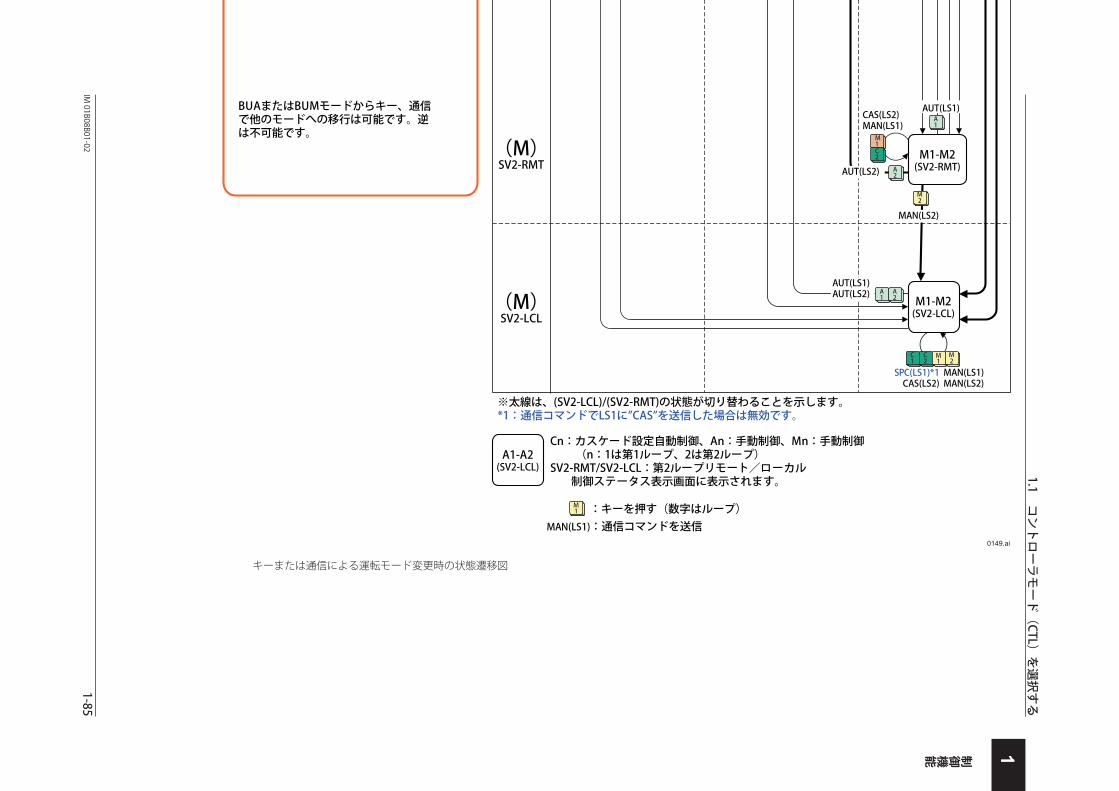
1-85IM
01B08B01-02
制御機能 1
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
Cn:カスケード設定自動制御、An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-RMT/SV2-LCL:第2ループリモート/ローカル制御ステータス表示画面に表示されます。
※太線は、(SV2-LCL)/(SV2-RMT)の状態が切り替わることを示します。*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
C1(BUA)-C2(SV2-RMT)
C1(BUM)-C2(SV2-RMT)
0149.ai
設定値第 2ループキーランプ
設定値第2ループキーランプ
上記より選択
左記より選択
CAS(LS2)
AUT(LS1)
CAS(LS2)SPC(LS1)
*1 AUT(LS2)
SPC(LS1)*1 MAN(LS1)CAS(LS2) MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS2)
C1(SPC)-C2(SV2-RMT)
SPC(LS1)*1
MAN(LS2)
AUT(LS1)
MAN(LS1)
MAN(LS2)
AUT(LS1)CAS(LS2)
A1-C2(SV2-RMT)
AUT(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)
CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)MAN(LS1)
MAN(LS2)
AUT(LS2)
A1-A2(SV2-LCL)
M1-M2(SV2-RMT)
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
C1(SPC)-A2(SV2-LCL)
第 2ループキーランプ
第1ループキー
ランプ
通信FAIL通信復帰
(C)SV2-RMT
バックアップモードを使用する場合
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。YS1000の通信ウォッチドッグタイマで設定す
る時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切 り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(SPC)に遷移。
(BUA) (BUM)設定値第2ループキーランプ
通信FAIL
通信復帰
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
バックアップモードを使用する場合
(A)SV2-LCL
(A)SV2-LCL
(BUA)
C1(BUA)-A2(SV2-LCL)
C1(BUM)-A2(SV2-LCL)
(BUM)
A1
A1
A1
A1
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C2
M2
M2
M1
M1
M1
M1
A1
A1
A2
A2
C1
M1
C2
C2
M2
M1
M1
M2
A2
M2
M2
*BUMのとき不可
SPC(LS1)*1
SPC(LS1)*1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
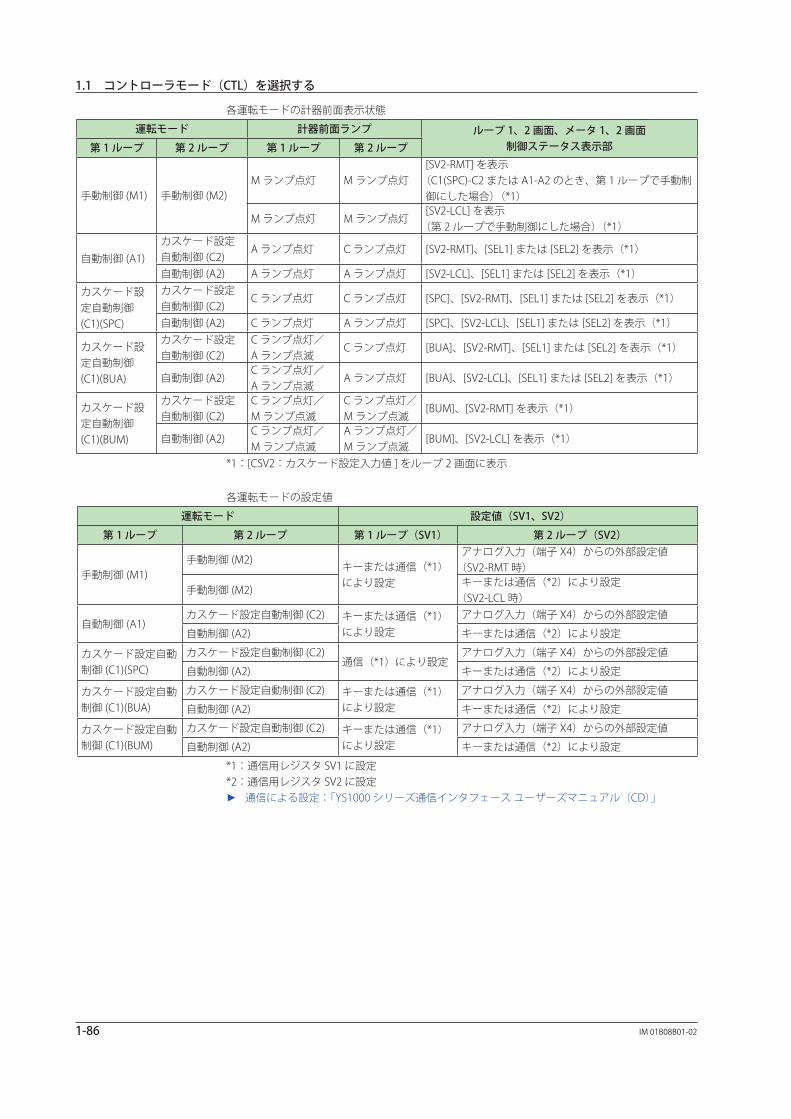
1-86 IM 01B08B01-02
各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面、メータ 1、2 画面制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2)M ランプ点灯 M ランプ点灯
[SV2-RMT] を表示(C1(SPC)-C2 または A1-A2 のとき、第 1 ループで手動制
御にした場合)(*1)
M ランプ点灯 M ランプ点灯[SV2-LCL] を表示
(第 2 ループで手動制御にした場合)(*1)
自動制御 (A1)
カスケード設定自動制御 (C2)
A ランプ点灯 C ランプ点灯 [SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
カスケード設定自動制御(C1)(SPC)
カスケード設定自動制御 (C2)
C ランプ点灯 C ランプ点灯 [SPC]、[SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2) C ランプ点灯 A ランプ点灯 [SPC]、[SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
カスケード設定自動制御(C1)(BUA)
カスケード設定自動制御 (C2)
C ランプ点灯/A ランプ点滅
C ランプ点灯 [BUA]、[SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2)C ランプ点灯/A ランプ点滅
A ランプ点灯 [BUA]、[SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
カスケード設定自動制御(C1)(BUM)
カスケード設定自動制御 (C2)
C ランプ点灯/M ランプ点滅
C ランプ点灯/M ランプ点滅
[BUM]、[SV2-RMT] を表示(*1)
自動制御 (A2)C ランプ点灯/M ランプ点滅
A ランプ点灯/M ランプ点滅
[BUM]、[SV2-LCL] を表示(*1)
*1:[CSV2:カスケード設定入力値 ] をループ 2 画面に表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1)手動制御 (M2)
キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値(SV2-RMT 時)
手動制御 (M2)キーまたは通信(*2)により設定
(SV2-LCL 時)
自動制御 (A1)カスケード設定自動制御 (C2) キーまたは通信(*1)
により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)(SPC)
カスケード設定自動制御 (C2)通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2) キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2) キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-87IM 01B08B01-02
制御機能
1セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態(1/2)
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
カスケード設定自動制御 (C1)(SPC)
制御演算を出力(非選択時は、第
1 ループ出力=MV+Kp1 × E1)
カスケード設定自動制御 (C2)
制御演算を出力(非選択時は、第
2 ループ出力=MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
自動制御 (A2)
自動制御 (A1)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
手動制御 (M1)
MV に追従
手動制御 (M2)
MV に追従キーまたは通信で MV を操作(手動操作)カスケード設定自動
制御 (C1)(BUM)
カスケード設定自動制御 (C2)自動制御 (A2)
HIGH
カスケード設定自動制御 (C1)(SPC)
制御演算を出力(非選択時は、第
1 ループ出力=MV+Kp1 × E1)
カスケード設定自動制御 (C2)
制御演算を出力(非選択時は、第
2 ループ出力=MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
自動制御 (A2)
自動制御 (A1)カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御(C2)自動制御 (A2)
手動制御 (M1)
MV に追従
手動制御 (M2)
MV に追従キーまたは通信で MV を操作(手動操作)
カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2)
自動制御 (A2)
1 -
カスケード設定自動制御 (C1)(SPC)
制御演算を出力
カスケード設定自動制御 (C2)
MV に追従CNT1、CNT2 のうち信号の大小にかかわらずCNT1 の出力を選択
自動制御 (A2)
自動制御 (A1)カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
手動制御 (M1)キーまたは通信(*1)で MV を操作(手動操作)
手動制御 (M2)
MV に追従 MV に追従カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2)自動制御 (A2)
1.1 コントローラモード(CTL)を選択する
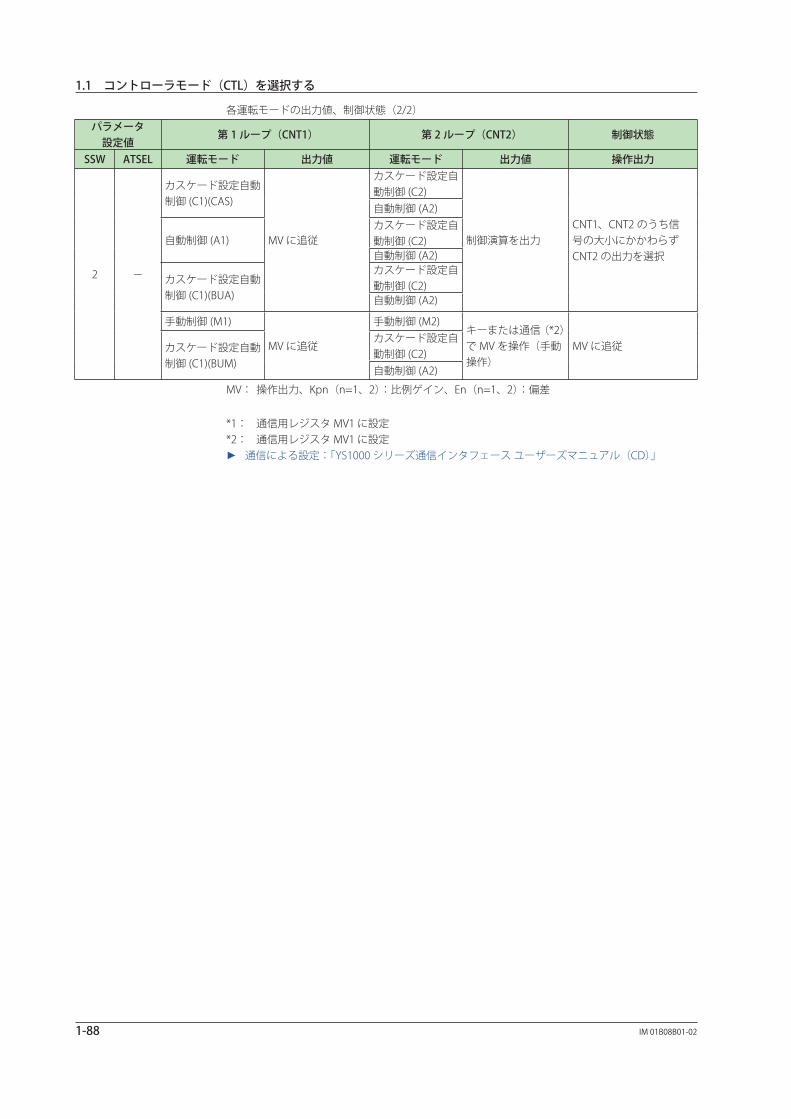
1-88 IM 01B08B01-02
各運転モードの出力値、制御状態(2/2)パラメータ
設定値第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
2 -
カスケード設定自動制御 (C1)(CAS)
MV に追従
カスケード設定自動制御 (C2)
制御演算を出力CNT1、CNT2 のうち信号の大小にかかわらずCNT2 の出力を選択
自動制御 (A2)
自動制御 (A1)カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
手動制御 (M1)
MV に追従
手動制御 (M2)キーまたは通信(*2)で MV を操作(手動操作)
MV に追従カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2)自動制御 (A2)
MV: 操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1: 通信用レジスタ MV1 に設定*2: 通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
1-89IM 01B08B01-02
制御機能
1(6) 通信からの外部操作出力値で制御(上位コンピュータが通信 FAIL したときバックアップ)する
通信から外部操作出力値を取り込み、セレクタ制御を行います。また通常制御を行う上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 DDC:DDC モード
1.1 コントローラモード(CTL)を選択する
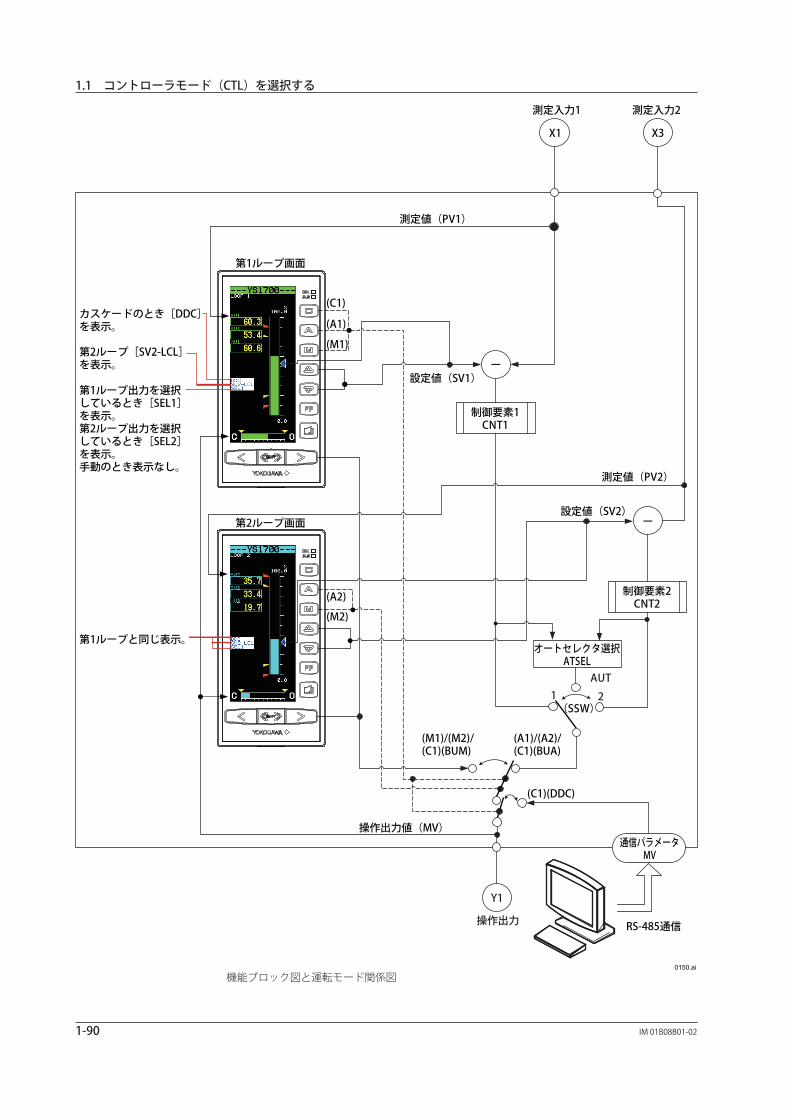
1-90 IM 01B08B01-02
Y1
ー
ー
AUT1 2
操作出力
(C1)
(A1)
(A2)
(M2)
(M1)
0150.ai
X1 X3
測定値(PV1)
測定入力1 測定入力2
第2ループ画面
第1ループ画面
第1ループと同じ表示。
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のとき表示なし。
第2ループ[SV2-LCL]を表示。
カスケードのとき[DDC]を表示。
RS-485通信
通信パラメータMV
(C1)(DDC)
操作出力値(MV)
(A1)/(A2)/(C1)(BUA)
(M1)/(M2)/(C1)(BUM)
(SSW)
制御要素2CNT2
制御要素1CNT1
測定値(PV2)
設定値(SV2)
設定値(SV1)
オートセレクタ選択ATSEL
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する

1-91IM 01B08B01-02
制御機能
1
0151.ai
通信FAIL
通信復帰
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)第1ループ
キーランプ第2
ループキーランプ
A1-A2(SV2-LCL)
Cn:カスケード設定自動制御、An:手動制御、Mn:手動制御 (n:1は第1ループ、2は第2ループ)SV2-LCL:第2ループローカル
制御ステータス表示画面に表示されます。
*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。*2:通信コマンドでLS2に”CAS”を送信した場合は無効です。
:通信コマンドを送信MAN(LS1)
:キーを押す(数字はループ)
バックアップモードを使用する場合
(A)SV2-LCL
設定値第2ループキーランプ
(BUA) (BUM)
C1(BUA)-A2(SV2-LCL)
C1(BUM)-A2(SV2-LCL)
※第2ループでCモードキーを押しても動作は変わりません。 第2ループは、第1ループのCモードキーの操作に依存します。
左記より選択
AUT(LS1)
(LS2)*2DDC(LS1)*1 AUT(LS2)
DDC (LS1)*1
MAN(LS1)(LS2)*2 MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS1)AUT(LS2)(LS2)*2MAN(LS1)
MAN(LS2)
A1-A2(SV2-LCL)
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
C1(DDC)-A2(SV2-LCL)
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからのウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(DDC)に遷移。
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
A1A2
C1
C1
M1
M1
A1
A1
A2
M1
M1
M2
M2
A2
M2
DDC(LS1)*1
C1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コントローラモード(CTL)を選択する
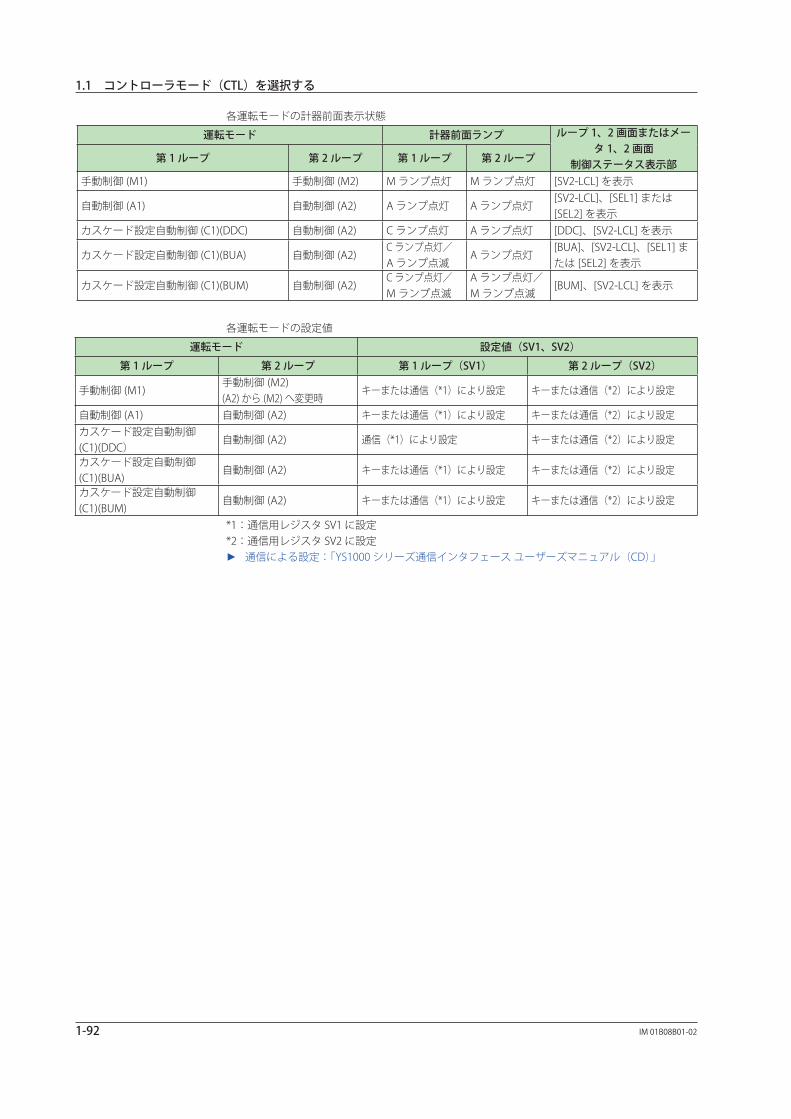
1-92 IM 01B08B01-02
各運転モードの計器前面表示状態
運転モード 計器前面ランプ ループ 1、2 画面またはメータ 1、2 画面
制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2) M ランプ点灯 M ランプ点灯 [SV2-LCL] を表示
自動制御 (A1) 自動制御 (A2) A ランプ点灯 A ランプ点灯[SV2-LCL]、[SEL1] または[SEL2] を表示
カスケード設定自動制御 (C1)(DDC) 自動制御 (A2) C ランプ点灯 A ランプ点灯 [DDC]、[SV2-LCL] を表示
カスケード設定自動制御 (C1)(BUA) 自動制御 (A2)C ランプ点灯/A ランプ点滅
A ランプ点灯[BUA]、[SV2-LCL]、[SEL1] または [SEL2] を表示
カスケード設定自動制御 (C1)(BUM) 自動制御 (A2)C ランプ点灯/M ランプ点滅
A ランプ点灯/M ランプ点滅
[BUM]、[SV2-LCL] を表示
各運転モードの設定値
運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
手動制御 (M1)手動制御 (M2)(A2) から (M2) へ変更時
キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
自動制御 (A1) 自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定カスケード設定自動制御(C1)(DDC)
自動制御 (A2) 通信(*1)により設定 キーまたは通信(*2)により設定
カスケード設定自動制御(C1)(BUA)
自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
カスケード設定自動制御(C1)(BUM)
自動制御 (A2) キーまたは通信(*1)により設定 キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
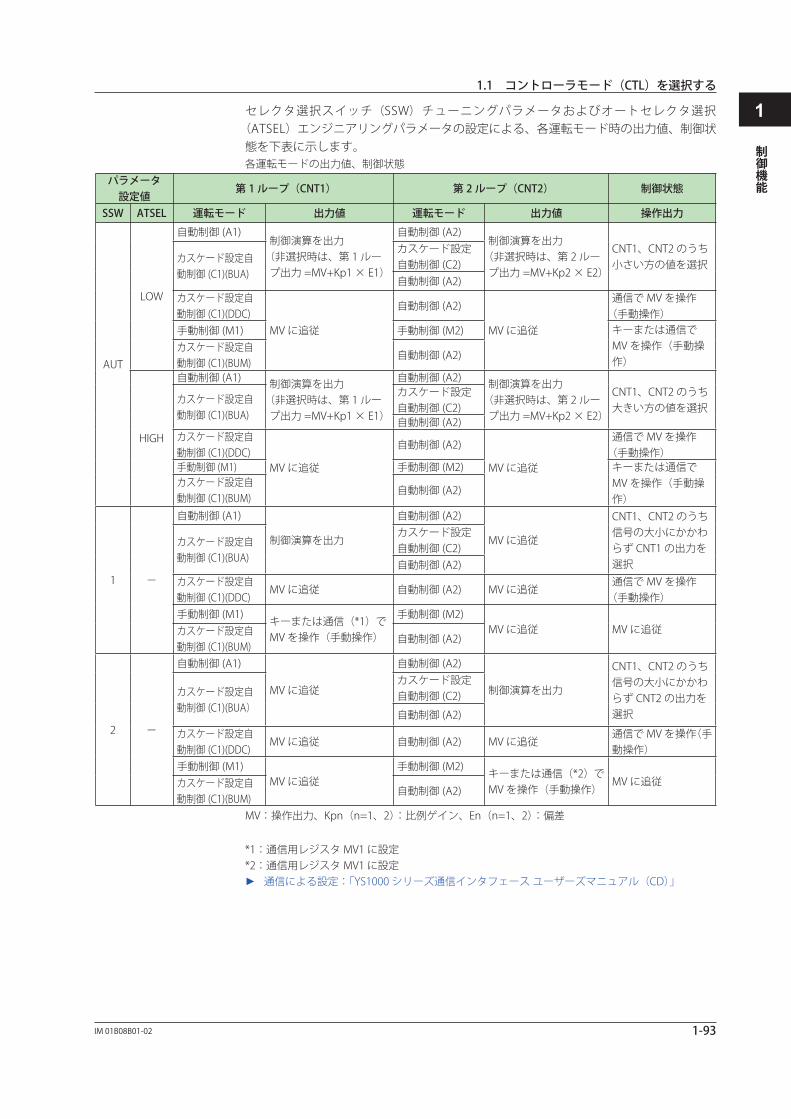
1-93IM 01B08B01-02
制御機能
1セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
自動制御 (A1)制御演算を出力
(非選択時は、第 1 ループ出力 =MV+Kp1 × E1)
自動制御 (A2)制御演算を出力
(非選択時は、第 2 ループ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択カスケード設定自
動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(DDC)
MV に追従
自動制御 (A2)
MV に追従
通信で MV を操作(手動操作)
手動制御 (M1) 手動制御 (M2) キーまたは通信でMV を操作(手動操作)
カスケード設定自動制御 (C1)(BUM)
自動制御 (A2)
HIGH
自動制御 (A1) 制御演算を出力(非選択時は、第 1 ルー
プ出力 =MV+Kp1 × E1)
自動制御 (A2) 制御演算を出力(非選択時は、第 2 ルー
プ出力 =MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(DDC)
MV に追従
自動制御 (A2)
MV に追従
通信で MV を操作(手動操作)
手動制御 (M1) 手動制御 (M2) キーまたは通信でMV を操作(手動操作)
カスケード設定自動制御 (C1)(BUM)
自動制御 (A2)
1 -
自動制御 (A1)
制御演算を出力
自動制御 (A2)
MV に追従
CNT1、CNT2 のうち信号の大小にかかわらず CNT1 の出力を選択
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(DDC)
MV に追従 自動制御 (A2) MV に追従通信で MV を操作
(手動操作)手動制御 (M1)
キーまたは通信(*1)でMV を操作(手動操作)
手動制御 (M2)MV に追従 MV に追従カスケード設定自
動制御 (C1)(BUM)自動制御 (A2)
2 -
自動制御 (A1)
MV に追従
自動制御 (A2)
制御演算を出力
CNT1、CNT2 のうち信号の大小にかかわらず CNT2 の出力を選択
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)
自動制御 (A2)
カスケード設定自動制御 (C1)(DDC)
MV に追従 自動制御 (A2) MV に追従通信で MV を操作(手動操作)
手動制御 (M1)MV に追従
手動制御 (M2)キーまたは通信(*2)でMV を操作(手動操作)
MV に追従カスケード設定自動制御 (C1)(BUM)
自動制御 (A2)
MV:操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1:通信用レジスタ MV1 に設定*2:通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
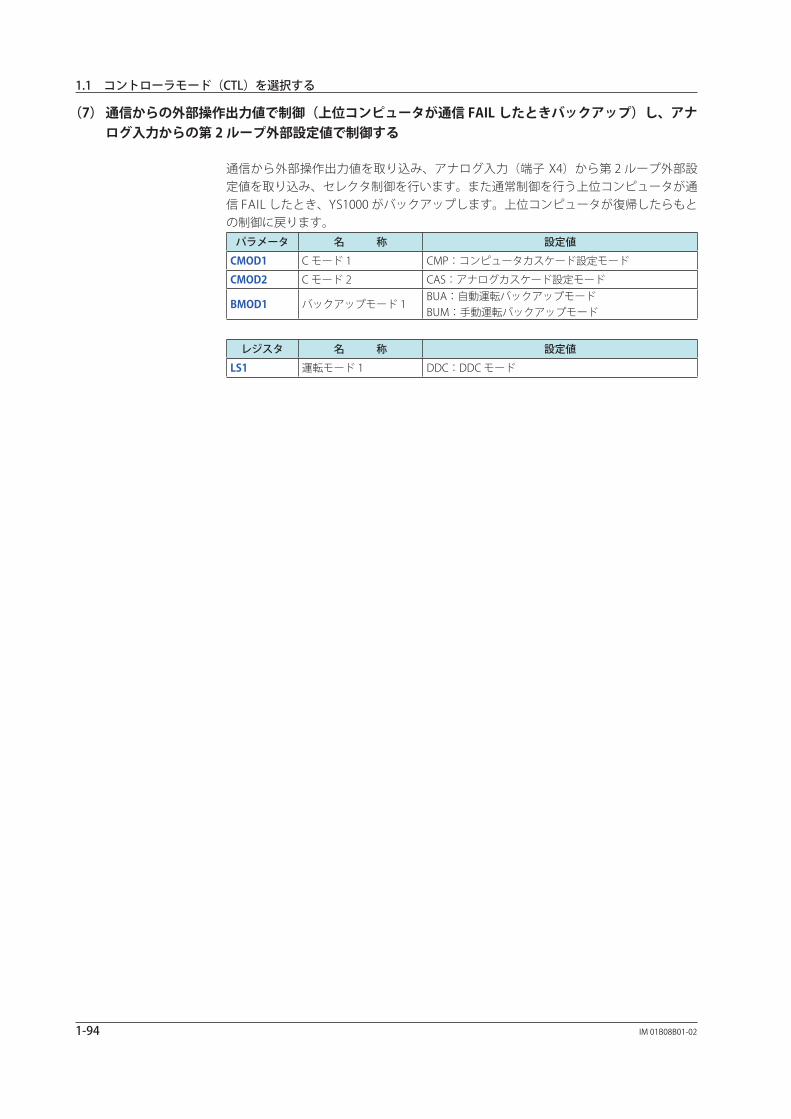
1-94 IM 01B08B01-02
(7) 通信からの外部操作出力値で制御(上位コンピュータが通信 FAIL したときバックアップ)し、アナログ入力からの第 2 ループ外部設定値で制御する
通信から外部操作出力値を取り込み、アナログ入力(端子 X4)から第 2 ループ外部設定値を取り込み、セレクタ制御を行います。また通常制御を行う上位コンピュータが通信 FAIL したとき、YS1000 がバックアップします。上位コンピュータが復帰したらもとの制御に戻ります。
パラメータ 名 称 設定値
CMOD1 C モード 1 CMP:コンピュータカスケード設定モード
CMOD2 C モード 2 CAS:アナログカスケード設定モード
BMOD1 バックアップモード 1BUA:自動運転バックアップモードBUM:手動運転バックアップモード
レジスタ 名 称 設定値
LS1 運転モード 1 DDC:DDC モード
1.1 コントローラモード(CTL)を選択する
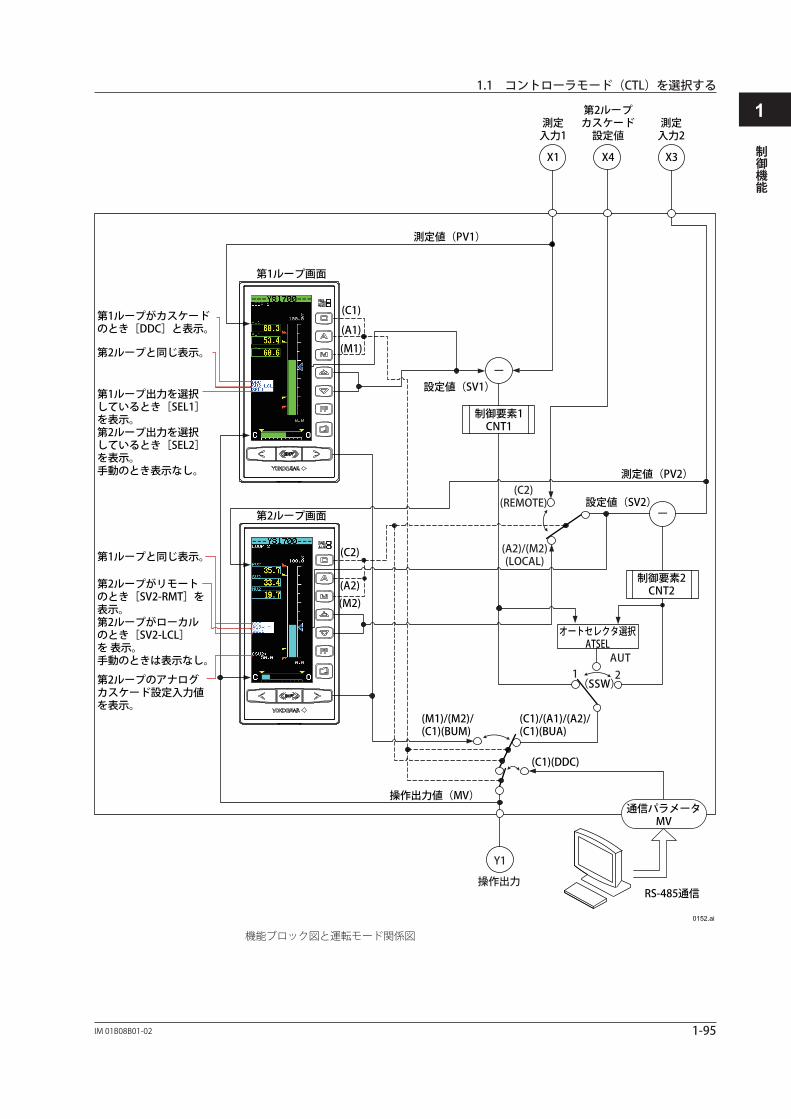
1-95IM 01B08B01-02
制御機能
1
ー
ー
AUT1 2
操作出力
Y1
(C1)
(A1)
(M1)
(C2)
(A2)(M2)
0152.ai
第2ループ画面
第1ループ画面
第1ループと同じ表示。
第2ループと同じ表示。
第1ループ出力を選択しているとき[SEL1]を表示。第2ループ出力を選択しているとき[SEL2]を表示。手動のとき表示なし。
第2ループのアナログカスケード設定入力値を表示。
第2ループがリモートのとき[SV2-RMT]を 表示。第2ループがローカルのとき[SV2-LCL]を 表示。手動のときは表示なし。
第1ループがカスケードのとき[DDC]と表示。
第2ループカスケード
設定値測定入力1
測定入力2
X1 X4 X3
(M1)/(M2)/(C1)(BUM)
(C1)(DDC)
(C1)/(A1)/(A2)/(C1)(BUA)
操作出力値(MV)
RS-485通信
通信パラメータMV
(C2)(REMOTE)
(A2)/(M2)(LOCAL)
制御要素1CNT1
制御要素2CNT2
(SSW)
測定値(PV2)
測定値(PV1)
設定値(SV2)
設定値(SV1)
オートセレクタ選択ATSEL
機能ブロック図と運転モード関係図
1.1 コントローラモード(CTL)を選択する

1-96IM
01B08B01-02
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
Cn:カスケード設定自動制御、An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-RMT/SV2-LCL:第2ループリモート/ローカル制御ステータス表示画面に表示されます。
※太線は、(SV2-LCL)/(SV2-RMT)の状態が切り替わることを示します。*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからの ウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(DDC)に遷移。
0153.ai
上記より選択
左記より選択
CAS(LS2)
AUT(LS1)
CAS(LS2)DDC(LS1)
*1 AUT(LS2)
DDC(LS1)*1
DDC (LS1)*1
MAN(LS1)CAS(LS2) MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS2)
C1(DDC)-C2(SV2-RMT)
DDC(LS1)*1
MAN(LS2)
AUT(LS1)
MAN(LS1)
MAN(LS2)
AUT(LS1)CAS(LS2)
A1-C2(SV2-RMT)
AUT(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)
CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)MAN(LS1)
MAN(LS2)
AUT(LS2)
A1-A2(SV2-LCL)
M1-M2(SV2-RMT)
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
C1(DDC)-A2(SV2-LCL)
DDC(LS1)*1
第2ループキーランプ
第1ループキー
ランプ
C1(BUA)-C2(REM)
C1(BUM)-C2(REM)
通信FAIL通信復帰
(C)REM
バックアップモードを使用する場合
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
(BUA) (BUM)設定値第2ループキーランプ
設定値第 2ループキーランプ
設定値第2ループキーランプ
通信FAIL
通信復帰
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
バックアップモードを使用する場合
(A)SV2-LCL
(A)SV2-LCL
(BUA)
C1(BUA)-A2(LCL)
C1(BUM)-A2(LCL)
(BUM)
A1
A1
A1
A1
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C2
M2
M2
M1
M1
M1
M1
A2
C1
C2
C2
M2
M1
M1
M1
A1
A1
A2
M2
A2
M2
M2
*BUMのとき不可
DDC(LS1)*1
C1
C1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る
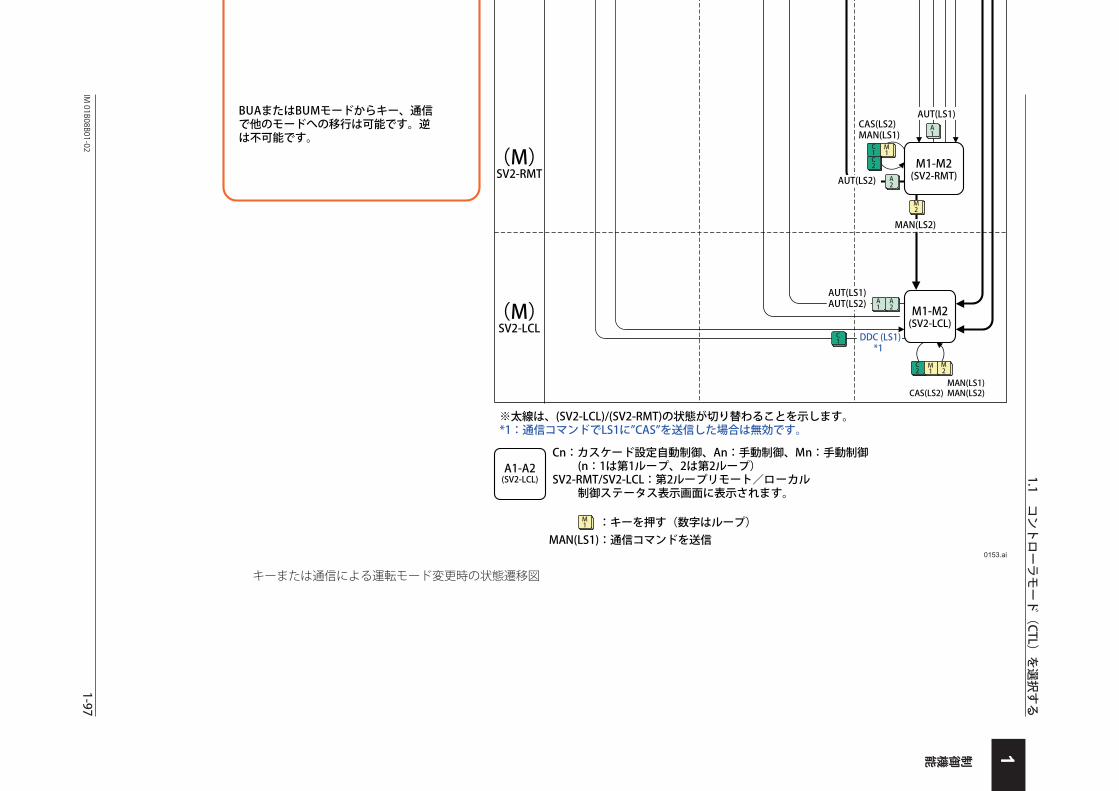
1-97IM
01B08B01-02
制御機能 1
(C)
(C)SV2-RMT
(A)SV2-LCL
(M)SV2-RMT
(M)SV2-LCL
(A) (M)
A1-A2(SV2-LCL)
Cn:カスケード設定自動制御、An:手動制御、Mn:手動制御(n:1は第1ループ、2は第2ループ)
SV2-RMT/SV2-LCL:第2ループリモート/ローカル制御ステータス表示画面に表示されます。
※太線は、(SV2-LCL)/(SV2-RMT)の状態が切り替わることを示します。*1:通信コマンドでLS1に”CAS”を送信した場合は無効です。
MAN(LS1):通信コマンドを送信:キーを押す(数字はループ)
YS1000の通信ウォッチドッグタイマの設定時間内に、上位コンピュータからの ウォッチドッグタイマ書込みが途絶えると、上位コンピュータが通信FAILになったと判断します。YS1000は上位コンピュータを切り離し、自動的に運転モードを変更します。通信FAILすると、(BUM)または(BUA)に遷移。通信復帰すると、(C)(CMP)(DDC)に遷移。
0153.ai
上記より選択
左記より選択
CAS(LS2)
AUT(LS1)
CAS(LS2)DDC(LS1)
*1 AUT(LS2)
DDC(LS1)*1
DDC (LS1)*1
MAN(LS1)CAS(LS2) MAN(LS2)
MAN(LS1)MAN(LS2)
AUT(LS2)
C1(DDC)-C2(SV2-RMT)
DDC(LS1)*1
MAN(LS2)
AUT(LS1)
MAN(LS1)
MAN(LS2)
AUT(LS1)CAS(LS2)
A1-C2(SV2-RMT)
AUT(LS2)
AUT(LS1)AUT(LS2)
AUT(LS1)
CAS(LS2)
MAN(LS1)MAN(LS2)
CAS(LS2)MAN(LS1)
MAN(LS2)
AUT(LS2)
A1-A2(SV2-LCL)
M1-M2(SV2-RMT)
M1-M2(SV2-LCL)
AUT(LS1)AUT(LS2)
C1(DDC)-A2(SV2-LCL)
DDC(LS1)*1
第2ループキーランプ
第1ループキー
ランプ
C1(BUA)-C2(REM)
C1(BUM)-C2(REM)
通信FAIL通信復帰
(C)REM
バックアップモードを使用する場合
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
(BUA) (BUM)設定値第2ループキーランプ
設定値第 2ループキーランプ
設定値第2ループキーランプ
通信FAIL
通信復帰
BUAまたはBUMモードからキー、通信で他のモードへの移行は可能です。逆は不可能です。
バックアップモードを使用する場合
(A)SV2-LCL
(A)SV2-LCL
(BUA)
C1(BUA)-A2(LCL)
C1(BUM)-A2(LCL)
(BUM)
A1
A1
A1
A1
A2
A2
A2
C1
C1
C1
C1
C2
C2
C2
C2
M2
M2
M1
M1
M1
M1
A2
C1
C2
C2
M2
M1
M1
M1
A1
A1
A2
M2
A2
M2
M2
*BUMのとき不可
DDC(LS1)*1
C1
C1
キーまたは通信による運転モード変更時の状態遷移図
1.1 コ
ント
ロー
ラモ
ード
(CTL)
を選
択す
る

1-98 IM 01B08B01-02
各運転モードの計器前面表示状態運転モード 計器前面ランプ ループ 1、2 画面またはメータ 1、2 画面
制御ステータス表示部第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
手動制御 (M1) 手動制御 (M2)
M ランプ点灯 M ランプ点灯[SV2-LCL] を表示
(第 2 ループで手動にした場合)(*1)
M ランプ点灯 M ランプ点灯[SV2-RMT] を表示
(C1(DDC)-C2 または A1-C2 のとき、第 1 ループで手動にした場合)(*1)
自動制御 (A1)
カスケード設定自動制御 (C2)
A ランプ点灯 C ランプ点灯 [SV2-RMT]、[SEL1] または [SEL2] を表示(*1)
自動制御 (A2) A ランプ点灯 A ランプ点灯 [SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
カスケード設定自動制御 (C1)(DDC)
カスケード設定自動制御 (C2)
C ランプ点灯 C ランプ点灯 [DDC]、[SV2-RMT] を表示(*1)
自動制御 (A2) C ランプ点灯 A ランプ点灯 [DDC]、[SV2-LCL] を表示(*1)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)
C ランプ点灯/A ランプ点滅
C ランプ点灯[BUA]、[SV2-RMT]、[SEL1] または [SEL2] を表示
(*1)
自動制御 (A2)C ランプ点灯/A ランプ点滅
A ランプ点灯 [BUA]、[SV2-LCL]、[SEL1] または [SEL2] を表示(*1)
カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2)
C ランプ点灯/M ランプ点滅
C ランプ点灯/M ランプ点滅
[BUM]、[SV2-RMT] を表示(*1)
自動制御 (A2)C ランプ点灯/M ランプ点滅
A ランプ点灯/M ランプ点滅
[BUM]、[SV2-LCL] を表示(*1)
*1:[CSV2:カスケード設定入力値 ] をループ 2 画面に表示
各運転モードの設定値運転モード 設定値(SV1、SV2)
第 1 ループ 第 2 ループ 第 1 ループ(SV1) 第 2 ループ(SV2)
自動制御 (A1)カスケード設定自動制御 (C2)
キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値(SV2-RMT 時)
自動制御 (A2)キーまたは通信(*2)により設定
(SV2-LCL 時)
手動制御 (M1)
手動制御 (M2)(C2) から (M2) へ変更時 キーまたは通信(*1)に
より設定
アナログ入力(端子 X4)からの外部設定値
手動制御 (M2)(A2) から (M2) へ変更時
キーまたは通信(*2)により設定
カスケード設定自動制御(C1)(DDC)
カスケード設定自動制御 (C2)通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
カスケード設定自動制御(C1)(BUA)
カスケード設定自動制御 (C2) キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
カスケード設定自動制御(C1)(BUM)
カスケード設定自動制御 (C2) キーまたは通信(*1)により設定
アナログ入力(端子 X4)からの外部設定値
自動制御 (A2) キーまたは通信(*2)により設定
*1:通信用レジスタ SV1 に設定*2:通信用レジスタ SV2 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する
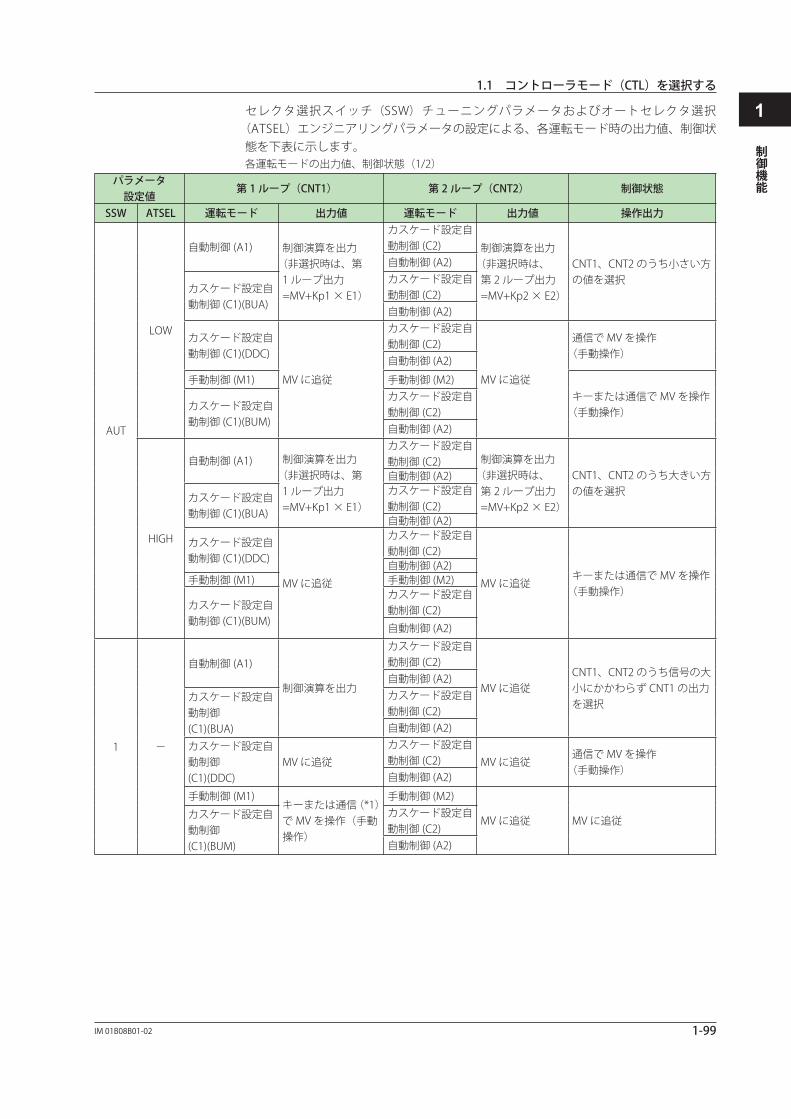
1-99IM 01B08B01-02
制御機能
1セレクタ選択スイッチ(SSW)チューニングパラメータおよびオートセレクタ選択(ATSEL)エンジニアリングパラメータの設定による、各運転モード時の出力値、制御状
態を下表に示します。各運転モードの出力値、制御状態(1/2)
パラメータ設定値
第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
AUT
LOW
自動制御 (A1) 制御演算を出力(非選択時は、第
1 ループ出力=MV+Kp1 × E1)
カスケード設定自動制御 (C2) 制御演算を出力
(非選択時は、第 2 ループ出力=MV+Kp2 × E2)
CNT1、CNT2 のうち小さい方の値を選択
自動制御 (A2)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(DDC)
MV に追従
カスケード設定自動制御 (C2)
MV に追従
通信で MV を操作(手動操作)
自動制御 (A2)
手動制御 (M1) 手動制御 (M2)キーまたは通信で MV を操作
(手動操作)カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2)自動制御 (A2)
HIGH
自動制御 (A1) 制御演算を出力(非選択時は、第
1 ループ出力=MV+Kp1 × E1)
カスケード設定自動制御 (C2) 制御演算を出力
(非選択時は、第 2 ループ出力=MV+Kp2 × E2)
CNT1、CNT2 のうち大きい方の値を選択
自動制御 (A2)
カスケード設定自動制御 (C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御 (C1)(DDC)
MV に追従
カスケード設定自動制御 (C2)
MV に追従キーまたは通信で MV を操作
(手動操作)
自動制御 (A2)手動制御 (M1) 手動制御 (M2)
カスケード設定自動制御 (C1)(BUM)
カスケード設定自動制御 (C2)
自動制御 (A2)
1 -
自動制御 (A1)
制御演算を出力
カスケード設定自動制御 (C2)
MV に追従CNT1、CNT2 のうち信号の大小にかかわらず CNT1 の出力を選択
自動制御 (A2)
カスケード設定自動制御(C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御(C1)(DDC)
MV に追従
カスケード設定自動制御 (C2) MV に追従
通信で MV を操作(手動操作)
自動制御 (A2)
手動制御 (M1)キーまたは通信(*1)で MV を操作(手動操作)
手動制御 (M2)
MV に追従 MV に追従カスケード設定自動制御(C1)(BUM)
カスケード設定自動制御 (C2)自動制御 (A2)
1.1 コントローラモード(CTL)を選択する
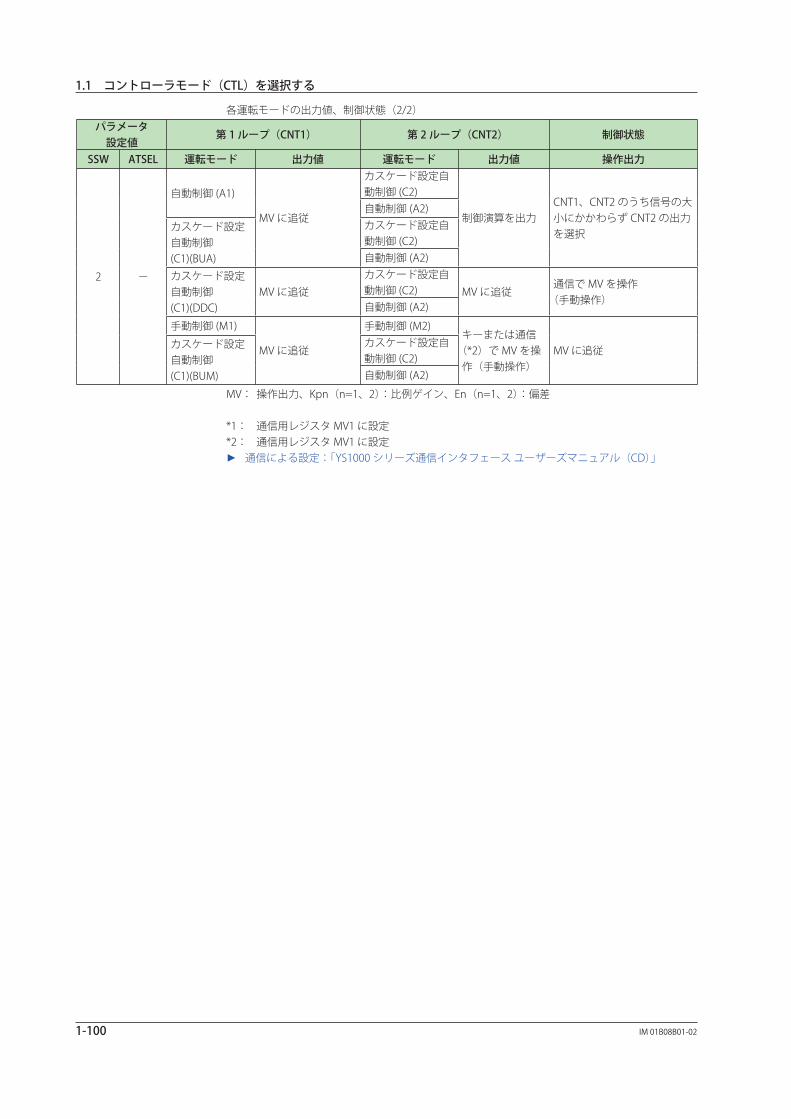
1-100 IM 01B08B01-02
各運転モードの出力値、制御状態(2/2)パラメータ
設定値第 1 ループ(CNT1) 第 2 ループ(CNT2) 制御状態
SSW ATSEL 運転モード 出力値 運転モード 出力値 操作出力
2 -
自動制御 (A1)
MV に追従
カスケード設定自動制御 (C2)
制御演算を出力CNT1、CNT2 のうち信号の大小にかかわらず CNT2 の出力を選択
自動制御 (A2)
カスケード設定自動制御(C1)(BUA)
カスケード設定自動制御 (C2)自動制御 (A2)
カスケード設定自動制御(C1)(DDC)
MV に追従
カスケード設定自動制御 (C2) MV に追従
通信で MV を操作(手動操作)
自動制御 (A2)
手動制御 (M1)
MV に追従
手動制御 (M2)キーまたは通信
(*2)で MV を操作(手動操作)
MV に追従カスケード設定自動制御(C1)(BUM)
カスケード設定自動制御 (C2)自動制御 (A2)
MV: 操作出力、Kpn(n=1、2):比例ゲイン、En(n=1、2):偏差
*1: 通信用レジスタ MV1 に設定*2: 通信用レジスタ MV1 に設定► 通信による設定:「YS1000 シリーズ通信インタフェース ユーザーズマニュアル(CD)」
1.1 コントローラモード(CTL)を選択する

1-101IM 01B08B01-02
制御機能
11.1.4 プログラマブルモード(CTL=PROG)で制御する(YS1700 のみ)プログラマブルモードでは、制御に必要な演算・制御機能を演算関数ライブラリとして調節計に内蔵しています。これらの関数をプログラム上で組み合わせて演算・制御機能を作成します。► 設定画面、設定内容:本書の「1.1 コントローラモード(CTL)を選択する」► プログラマブルモード:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能 ユーザー
ズマニュアル(CD)」
X1
Y1
X5
Y2
X8
Y4
X6
Y3
お客様がプログラムを作成
DI/DOnの端子は共有しています。どちらか指定して使用します。
DI/DOnの端子は共有しています。どちらか指定して使用します。
DI6/DO1
拡張I/O
拡張I/O
DI6/DO1
DI5/DO2
DI5/DO2
DI4/DO3
DI4/DO3
DI3/DO4
DI3/DO4
DI2/DO5
DI2/DO5
DI1/DO6
DI1/DO6
DI7
DO7
DI8
DO8
DI9
DO9
DI10
DO10
拡張I/O
~~
拡張I/O
0154.ai
工場出荷時は以下のプログラムが設定してあります。
0154-01.ai
X1
Y1
CSV1
SV1
Y2 Y3
BSC1
X2
1.1 コントローラモード(CTL)を選択する

1-102 IM 01B08B01-02
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
設 定 画 面
エンジニアリング画面
0155.ai
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[CONFIG2]ソフトキー(機能設定画面 2)
設 定 内 容
パラメータ 名 称 設定範囲 工場出荷時値
CNT1、CNT2 制御タイプ
PID:標準 PID 制御S-PI:サンプル PI 制御BATCH:バッチ PID 制御(*1)PD:比例(PD)制御(*2)
PID
ALG1、ALG2 制御演算式I-PD:比例先行 PIDPI-D:微分先行 PIDSVF:可変設定値フィルタ機能
I-PD
*1:YS1700 のみ選択可能。*2:比例(PD)制御の場合は、必ず微分先行 PID(PI-D)を選択してください。パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。
コントローラモードと制御タイプ
コントローラモード制御タイプ
シングルループモード
カスケードモード セレクタモード
第 1 ループ 第 2 ループ 第 1 ループ 第 2 ループ
標準 PID 制御 ○ ○ ○ ○ ○
比例(PD)制御 ○ - - - -
サンプル PI 制御 ○ ○ ○ - -
バッチ PID 制御 - - - - -
○:使用可能、-:使用不可能
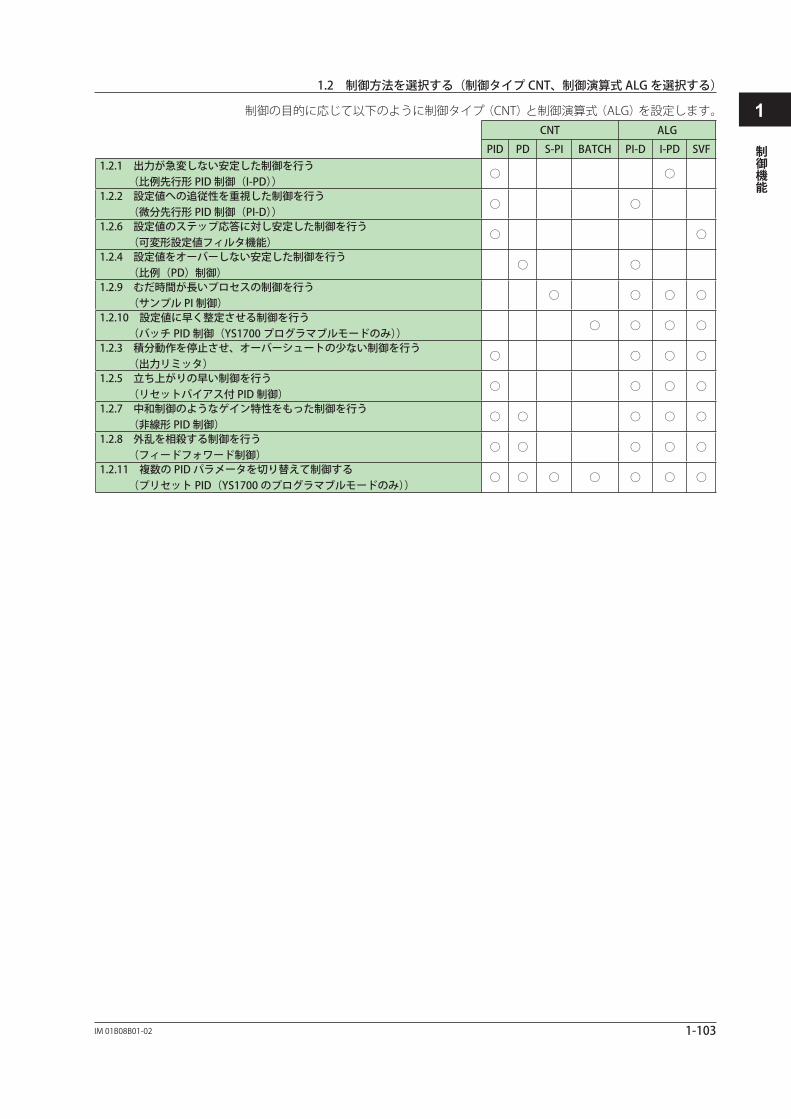
1-103IM 01B08B01-02
制御機能
1制御の目的に応じて以下のように制御タイプ(CNT)と制御演算式(ALG)を設定します。CNT ALG
PID PD S-PI BATCH PI-D I-PD SVF1.2.1 出力が急変しない安定した制御を行う
(比例先行形 PID 制御(I-PD))○ ○
1.2.2 設定値への追従性を重視した制御を行う (微分先行形 PID 制御(PI-D))
○ ○
1.2.6 設定値のステップ応答に対し安定した制御を行う (可変形設定値フィルタ機能)
○ ○
1.2.4 設定値をオーバーしない安定した制御を行う (比例(PD)制御)
○ ○
1.2.9 むだ時間が長いプロセスの制御を行う (サンプル PI 制御)
○ ○ ○ ○
1.2.10 設定値に早く整定させる制御を行う (バッチ PID 制御(YS1700 プログラマブルモードのみ))
○ ○ ○ ○
1.2.3 積分動作を停止させ、オーバーシュートの少ない制御を行う (出力リミッタ)
○ ○ ○ ○
1.2.5 立ち上がりの早い制御を行う (リセットバイアス付 PID 制御)
○ ○ ○ ○
1.2.7 中和制御のようなゲイン特性をもった制御を行う (非線形 PID 制御)
○ ○ ○ ○ ○
1.2.8 外乱を相殺する制御を行う (フィードフォワード制御)
○ ○ ○ ○ ○
1.2.11 複数の PID パラメータを切り替えて制御する (プリセット PID(YS1700 のプログラマブルモードのみ))
○ ○ ○ ○ ○ ○ ○
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
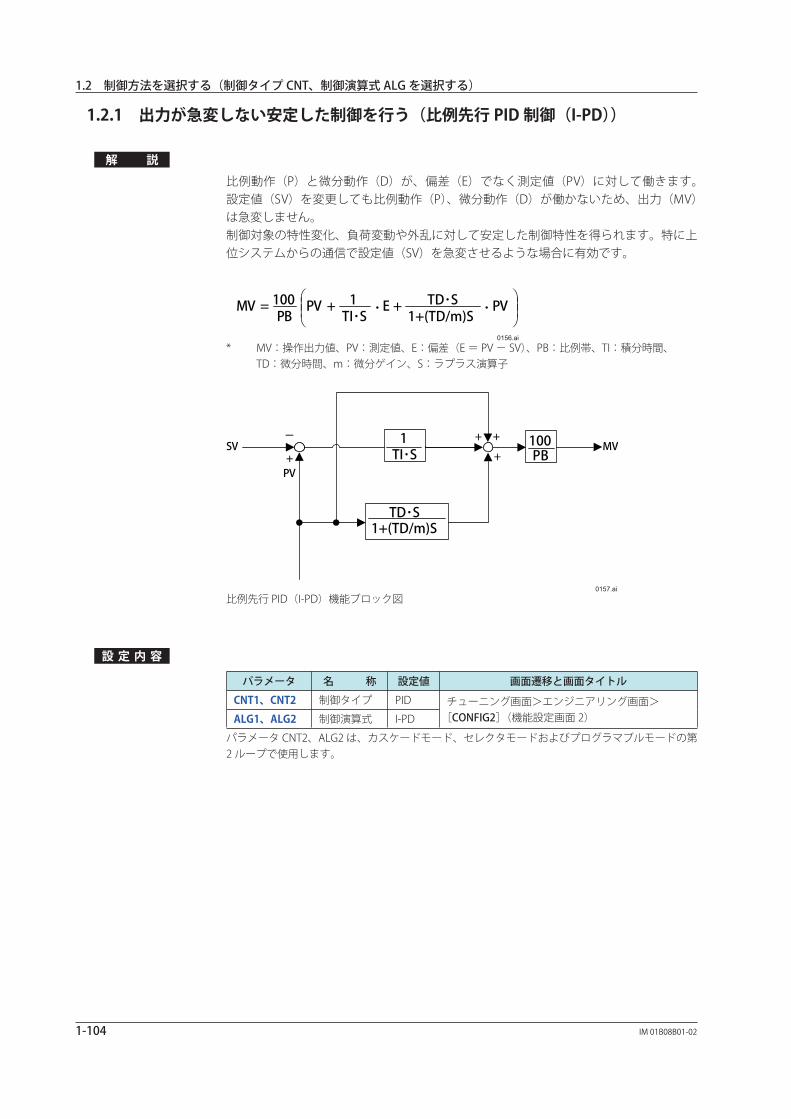
1-104 IM 01B08B01-02
1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))
解 説
比例動作(P)と微分動作(D)が、偏差(E)でなく測定値(PV)に対して働きます。設定値(SV)を変更しても比例動作(P)、微分動作(D)が働かないため、出力(MV)は急変しません。制御対象の特性変化、負荷変動や外乱に対して安定した制御特性を得られます。特に上位システムからの通信で設定値(SV)を急変させるような場合に有効です。
・+・+= PVTD・SE
TI・SPV
PBMV
1+(TD/m)S1100
0156.ai
* MV:操作出力値、PV:測定値、E:偏差(E = PV - SV)、PB:比例帯、TI:積分時間、 TD:微分時間、m:微分ゲイン、S:ラプラス演算子
-
+
+
+SV
PV
MV+
TD・S1+(TD/m)S
TI・S1
PB100
0157.ai
比例先行 PID(I-PD)機能ブロック図
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID チューニング画面>エンジニアリング画面>[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 I-PD
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
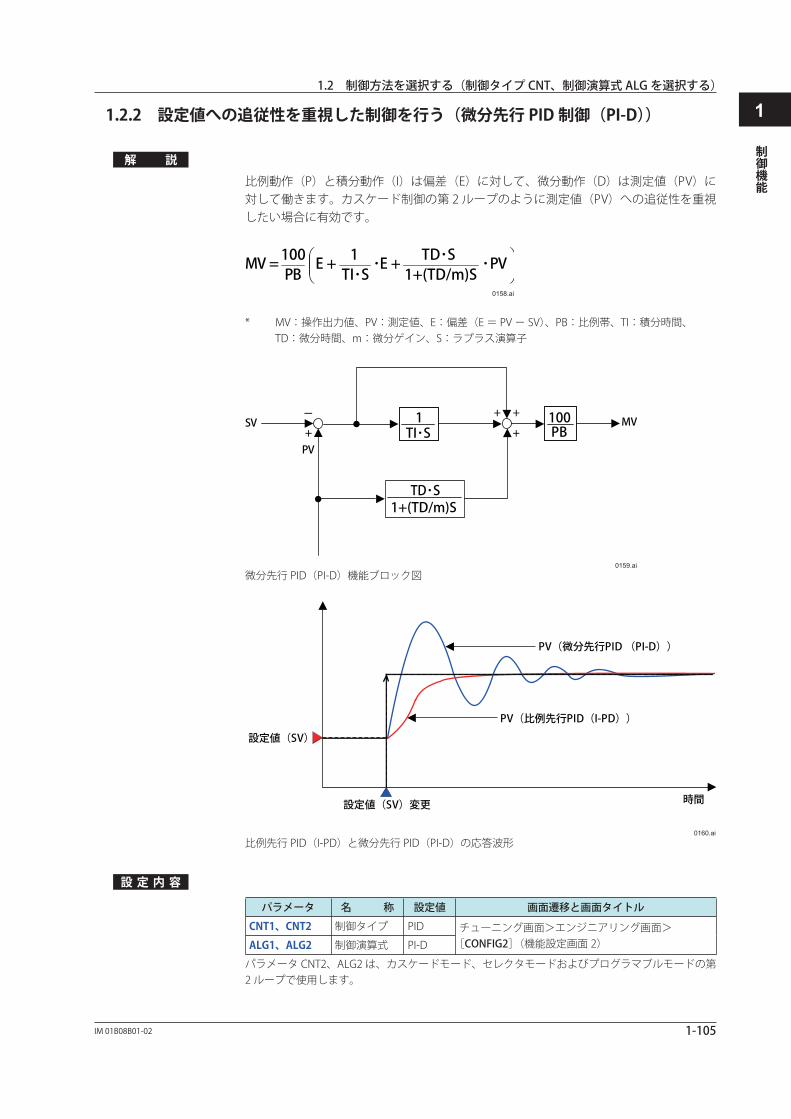
1-105IM 01B08B01-02
制御機能
11.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))
解 説
比例動作(P)と積分動作(I)は偏差(E)に対して、微分動作(D)は測定値(PV)に対して働きます。カスケード制御の第 2 ループのように測定値(PV)への追従性を重視したい場合に有効です。
・+・+= PVTD・SETI・S
EPB
MV1+(TD/m)S
1100
0158.ai
* MV:操作出力値、PV:測定値、E:偏差(E = PV - SV)、PB:比例帯、TI:積分時間、 TD:微分時間、m:微分ゲイン、S:ラプラス演算子
-
+
+
+SV
PV
MVTI・S1
TD・S1+(TD/m)S
PB100+
0159.ai
微分先行 PID(PI-D)機能ブロック図
設定値(SV)
PV(微分先行PID (PI-D))
設定値(SV)変更
PV(比例先行PID(I-PD))
時間
0160.ai
比例先行 PID(I-PD)と微分先行 PID(PI-D)の応答波形
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID チューニング画面>エンジニアリング画面>[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
1-106 IM 01B08B01-02
1.2.3 積分動作を停止させ、オーバーシュートの少ない制御を行う(出力リミッタ)
解 説
操作出力(MV)がリミット値(操作出力値上限値(MH)、操作出力下限値(ML))を超えようとすると積分動作(I)を停止させて、リセットワインドアップ(積分動作(I)による出力の飽和状態)を防止し、行き過ぎ量の少ない安定した制御を実現します。MH と ML の設定による操作出力(MV)の動作を下表に示します。
操作出力(MV)の動作
MH > ML設定範囲内で動作します。* 手動制御(M)のときは、MV:-6.3 ~ 106.3% で動作します。
MH ≦ ML 設定しないでください。
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PIDチューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式PI-D、I-PD、SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
MH1、MH2 操作出力値上限設定値 -6.3 ~ 106.3% チューニング画面>[PID1](PID 設定画面 1)または[PID2](PID 設定画面 2)ML1、ML2 操作出力値下限設定値 -6.3 ~ 106.3%
パラメータ MH2、ML2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

1-107IM 01B08B01-02
制御機能
11.2.4 設定値をオーバーしない安定した制御を行う(比例(PD)制御)
解 説
PID 動作から積分動作(I)を除いた制御を行います。一定流量を送出するような積分性プロセスにおいて、行き過ぎ量のない安定した制御を行いたい場合に有効です。ただし、比例(PD)制御を使用する場合には、制御演算式(ALG)を必ず微分先行 PID(PI-D)に設定してください。
MRPVTD・SEPB
MV +
+= ・
1+(TD/m)S100
0161.ai
* MV:操作出力、PV:測定値、E:偏差(E = PV - SV)、PB:比例帯、TD:微分時間、 m:微分ゲイン、S:ラプラス演算子、MR:マニュアルリセット
運転モードを切り替え、比例帯(PB)を変更した時は出力バンプを避けるために、一次遅れ追従をします。また、非線形 PID 制御の併用も可能です。運転モードを切り替えたときの動作を下表に示します。
運転モードの遷移各運転モードへの遷移直後の状態
設定値(SV) 制御状態
① (C)(CAS) → (A) 遷移直前をホールドバンプレスに切り替わり、自動制御を実行。
② (C)(CAS) → (M) 遷移直前をホールド遷移直前の操作出力値をホールド、手動操作。
③ (C)(CMP)(SPC) → -(CAS)モードと同じ運転モードの遷移をします。
④ (C)(CMP)(DDC) → -
⑤ (C) → -(C)モードを使用しない場合は、誤操作防止のため、
C モードキーを押してもモードは遷移しません。⑥ (A) → (C) カスケード設定値に即応 一次遅れ追従し、制御を続行。
⑦ (A) → (M) 遷移直前をホールド 手動操作。
⑧ (M) → (C)(M)→(C)切り替えは不可。(一旦(A)モードを経由し
て切り替えます)ただし、(DDC)モードでは可能
⑨ (M) → (A) 遷移直前をホールド 一次遅れ追従し、制御を続行。
*: (M)、(A)、(C)、(CAS)、(CMP)、(SPC)、(DDC)の記号の意味は、「1.1 コントローラモード(CTL)を選択する」をご覧ください。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

1-108 IM 01B08B01-02
運転モード
(C) (A) (M) (A) (C)
手動操作
①
時間
時間
設定値
出力値 1次遅れ追従
設定値変更
0162.ai
カスケード設定値
前ページ表参照⑦ ⑨ ⑥
(正動作で、測定値がほぼ一定の場合)
運転モード切り替えと設定値(SV)/操作出力値(MV)の動き
比例(PD)制御の使用例(1)タンク液面制御(積分性プロセスの制御)
計量ポンプで一定流量を送出する積分性プロセスにおいて、液面を制御するための流入流量制御です。
比例(PD)制御により行き過ぎ量のない安定した制御結果を得られます。
SV
一定流量
YS1700/YS1500 比例(PD)制御
出力0%
出力100%
MR=50%+α
0163.ai
* SV:設定値、MR:マニュアルリセット積分性プロセスの制御
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
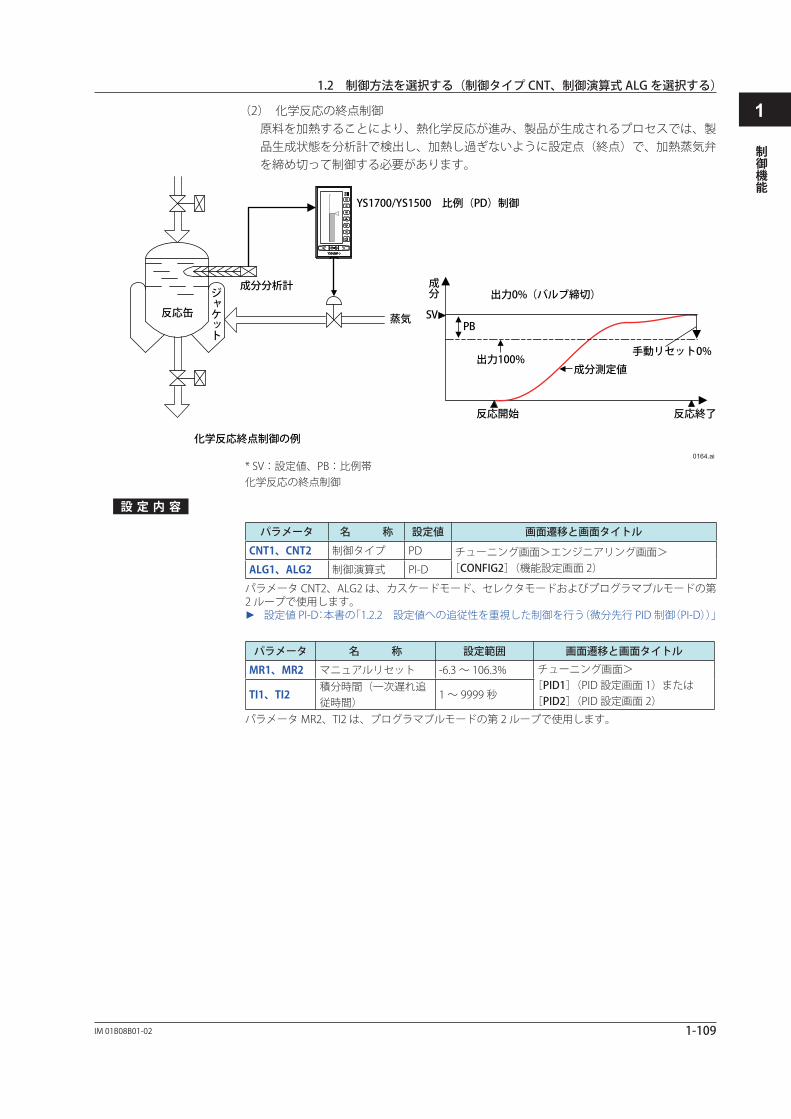
1-109IM 01B08B01-02
制御機能
1(2) 化学反応の終点制御 原料を加熱することにより、熱化学反応が進み、製品が生成されるプロセスでは、製
品生成状態を分析計で検出し、加熱し過ぎないように設定点(終点)で、加熱蒸気弁を締め切って制御する必要があります。
化学反応終点制御の例
反応缶
成分分析計
蒸気
YS1700/YS1500 比例(PD)制御
SV
成分測定値
反応開始 反応終了
PB
手動リセット0%
出力0%(バルブ締切)
出力100%
成分ジ
ャケット
0164.ai
* SV:設定値、PB:比例帯化学反応の終点制御
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PD チューニング画面>エンジニアリング画面>[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
MR1、MR2 マニュアルリセット -6.3 ~ 106.3% チューニング画面>[PID1](PID 設定画面 1)または[PID2](PID 設定画面 2)TI1、TI2
積分時間(一次遅れ追従時間)
1 ~ 9999 秒
パラメータ MR2、TI2 は、プログラマブルモードの第 2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

1-110 IM 01B08B01-02
1.2.5 立ち上がりの早い制御を行う(リセットバイアス付 PID 制御)
解 説
リセットバイアス付き PID 制御とは、リセットワインドアップを積極的に利用して、立ち上がりの速い応答を得たい場合に使用します。加熱処理や圧力放散弁などの制御に有効です。リセットバイアス(RB)は、出力の飽和バイアス量を任意に設定するため、測定値(PV)が戻り始めてから操作出力値(MV)がリミット値を離れるまでの時間を設定できます。
調整方法リセットバイアス(RB)を増加させていくと、応答特性が改善され設定値(SV)へ達する時間が短くなります。100% 以上に設定すると、設定値(SV)と測定値(PV)が反転した後に修正動作が始まります。また 0% に設定した場合には、リセットバイアス(RB)の効かない PID 制御となります。最適なリセットバイアス(RB)値は、応答特性を見ながら経験的に探してください。
使用例(1)バッチプロセスの温度制御
ON/OFF指令
原料PV
MV
簡易バッチプロセス
蒸気
ストップ弁バルブ
バッチ終了 バッチ開始
PV(RB=0%の場合)
PV(温度)
SV(設定温度)
MV(バルブ開度)RB
MH
時間
MV'=MH+RB
0165.ai
MV(RB=0%の場合)
簡易バッチ加熱処理プロセス
上図のような簡易バッチ加熱処理プロセスでは、バッチ工程が終了すると、設定値(SV)や運転モードはそのままの状態で、蒸気のストップ弁を閉鎖します。バッチ停止中に操作出力値(MV)は、操作出力値上限設定値(MH)でリミットされます。ただし、リセットバイアス(RB)の効果により、操作出力値上限設定値(MH)通過前の操作出力値(MV’)は、(MH+RB)でクランプされます。(リセットワインドアップ状態)この状態で次のバッチ工程が開始されると、蒸気弁が開かれ測定値(PV)が徐々に上昇します。操作出力値(MV)は、リセットバイアス(RB)の効果ですぐに出力リミット点から解放されません。よって、測定値(PV)の立ち上がり時間を改善することができます。一方で、リセットバイアス(RB)=0 のとき、リセットワインドアップがないので、測定値(PV)が上昇し始めるとすぐに操作出力値上限設定値(MH)から開放されます。よって、測定値(PV)の立ち上がり時間が長くなってしまいます。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
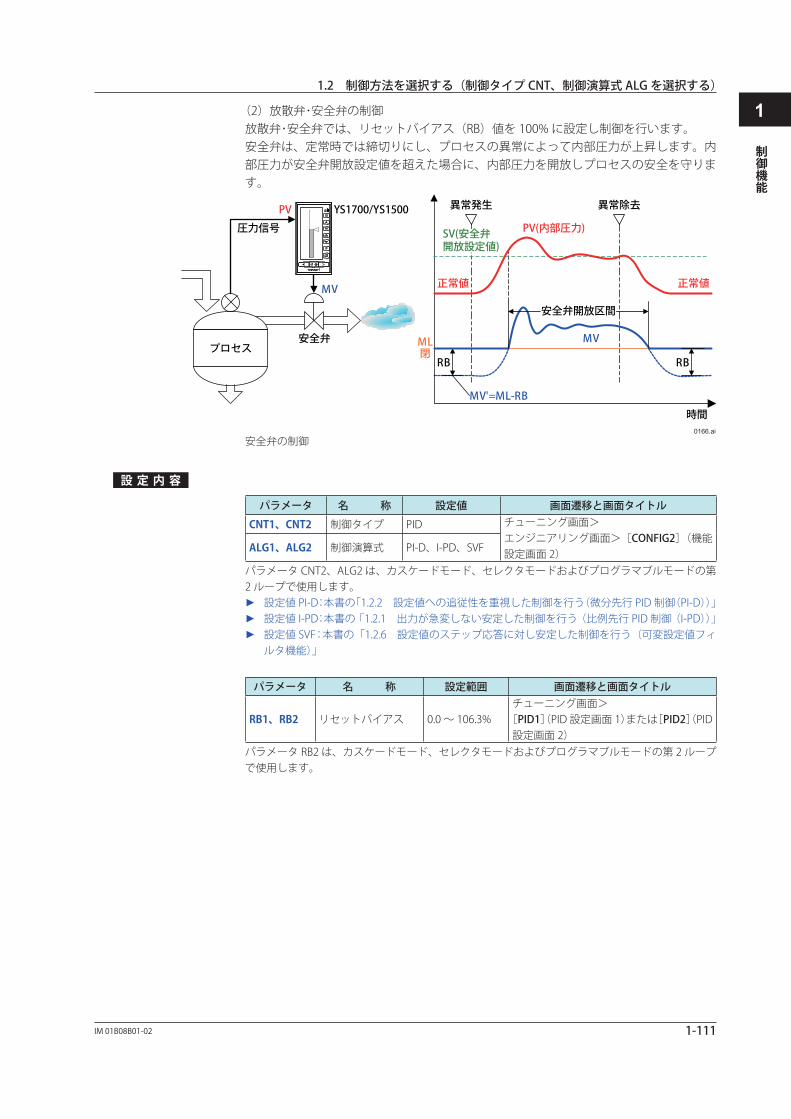
1-111IM 01B08B01-02
制御機能
1(2)放散弁・安全弁の制御放散弁・安全弁では、リセットバイアス(RB)値を 100% に設定し制御を行います。安全弁は、定常時では締切りにし、プロセスの異常によって内部圧力が上昇します。内部圧力が安全弁開放設定値を超えた場合に、内部圧力を開放しプロセスの安全を守ります。
PV
MV
圧力信号
安全弁プロセス
異常発生 異常除去
PV(内部圧力)
MV
RB
ML閉
時間
安全弁開放区間
正常値 正常値
MV'=ML-RB
0166.ai
YS1700/YS1500
RB
SV(安全弁開放設定値)
安全弁の制御
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID チューニング画面>エンジニアリング画面>[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D、I-PD、SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
RB1、RB2 リセットバイアス 0.0 ~ 106.3%チューニング画面>
[PID1](PID 設定画面 1)または[PID2](PID設定画面 2)
パラメータ RB2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

1-112 IM 01B08B01-02
1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィルタ機能)
解 説
測定値(PV)に重畳する外乱(D)を最小に抑える最適 PID パラメータ(比例帯(PB)、積分時間(TI)、微分時間(TD))と、設定値(SV)変更に対して追従性を発揮する最適PID パラメータの値は必ずしも一致しません。可変設定値フィルタ(SVF)で制御している場合は、外乱抑制向けの最適 PID パラメータのままで、設定値(SV)をステップに変更すると、応答はオーバーシュート気味となります。そこで設定値(SV)に対してフィルタ演算を施すことで、ステップ応答波形を最適に調整します。
動作原理微分先行 PID(PI-D)制御アルゴリズムを基本として、設定値(SV)にフィルタを付加します。設定値フィルタα(SFA)、β(SFB)を調整することによって、最適 PID パラメータを変更せずに設定値(SV)変更に対して追従性を調整することができます。設定値フィルタα(SFA)、β(SFB)については、後述の『設定値フィルタα(SFA)、β(SFB)の効果』を参照してください。
次に可変設定値フィルタ(SVF)の演算式を示します。
SVF1+(TI+TD)S
1+(α・TI-β・TD)S=
0167.ai
*1 SVF:可変設定値フィルタ、α , β:設定値フィルタ、TI:積分時間、TD:微分時間、S:ラプラス演算子
*2 α =0 ~ 1、β =0 ~ 1*3 α ·TI -β ·TD ≧ 0*4 β =0 のとき、式中 TD=0
(β=0のとき、式中のTD=0) GP:プロセス伝達関数
-+ +
+SV
PVMV GP(S)+
TI・S1
TD・S1+(TD/m)S
PB100
1+(TI+TD)S1+(α・TI-β・TD)S
0168.ai
可変設定値フィルタ(SVF)機能ブロック図
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
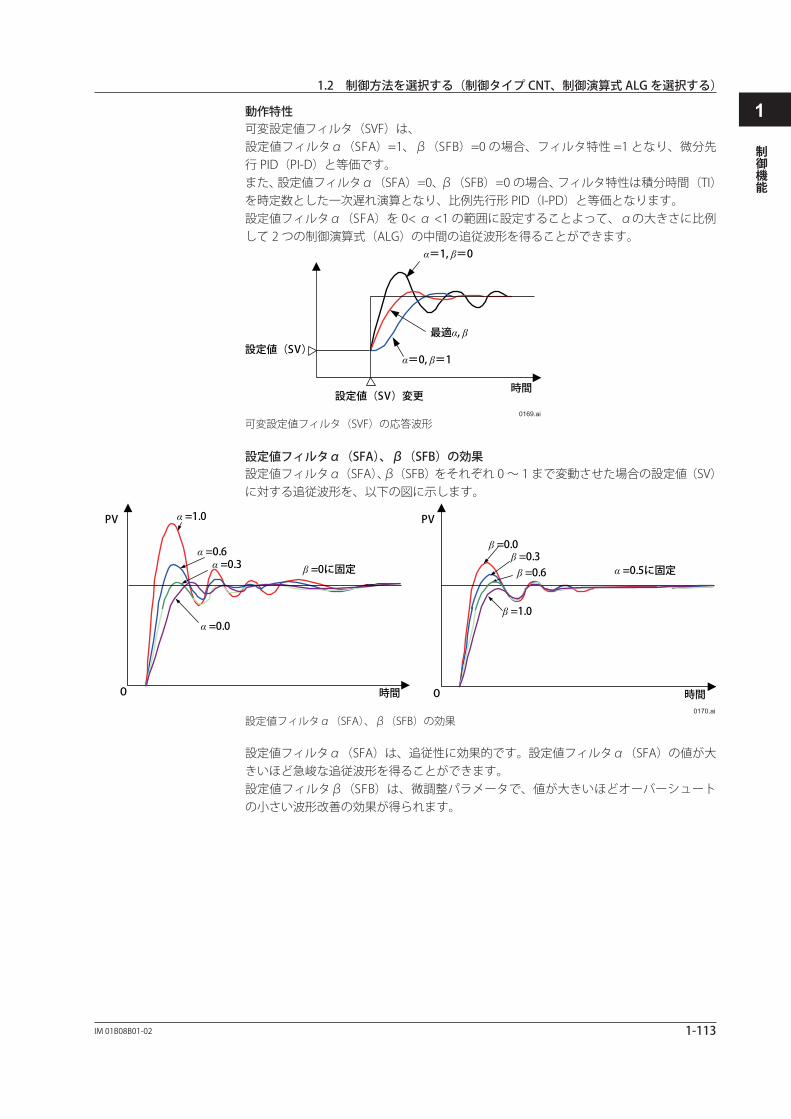
1-113IM 01B08B01-02
制御機能
1動作特性可変設定値フィルタ(SVF)は、設定値フィルタα(SFA)=1、β(SFB)=0 の場合、フィルタ特性 =1 となり、微分先行 PID(PI-D)と等価です。また、設定値フィルタα(SFA)=0、β(SFB)=0 の場合、フィルタ特性は積分時間(TI)を時定数とした一次遅れ演算となり、比例先行形 PID(I-PD)と等価となります。設定値フィルタα(SFA)を 0< α <1 の範囲に設定することよって、αの大きさに比例して 2 つの制御演算式(ALG)の中間の追従波形を得ることができます。
最適α, β
α=1, β=0
α=0, β=1設定値(SV)
設定値(SV)変更時間
0169.ai
可変設定値フィルタ(SVF)の応答波形
設定値フィルタα(SFA)、β(SFB)の効果設定値フィルタα(SFA)、β(SFB)をそれぞれ 0 ~ 1 まで変動させた場合の設定値(SV)に対する追従波形を、以下の図に示します。
PV α =1.0
β =0に固定α =0.3α =0.6
α =0.0
時間0 0
PV
β =1.0
α =0.5に固定β =0.3
β =0.0
β =0.6
時間0170.ai
設定値フィルタα(SFA)、β(SFB)の効果
設定値フィルタα(SFA)は、追従性に効果的です。設定値フィルタα(SFA)の値が大きいほど急峻な追従波形を得ることができます。設定値フィルタβ(SFB)は、微調整パラメータで、値が大きいほどオーバーシュートの小さい波形改善の効果が得られます。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
1-114 IM 01B08B01-02
チューニング方法(1)セルフチューニング(STC)機能を使わない場合
・ 操作出力値(MV)に変動を与え、その応答により最適 PID パラメータを求めます。・ 設定値(SV)をステップ変更し、希望する追従波形が得られるように設定値フィ
ルタα(SFA)を調整します。微分動作(D)付きの場合は、さらに設定値フィルタβ(SFB)で微調整します。
* 設定値フィルタα(SFA)、β(SFB)の推奨値は、設定値フィルタα(SFA)=0.5、設定値フィルタ(SFB)β =0.0 です。
(2)セルフチューニング(STC)機能を使う場合 セルフチューニング(STC)機能によって、外乱(D)を抑制するような PID パラメー
タを求め、設定値(SV)に対して追従するように設定値フィルタα(SFA)を求めます。ただし、設定値フィルタβ(SFB)の計算は行いません。
セルフチューニング(STC)機能を使用する場合は、設定値フィルタα(SFA)=0.5、β(SFB)=0.0 に設定してください。
► セルフチューニング(STC)機能:本書の「第 7 章 セルフチューニング機能」
使用例下記に示す場合において効果的です。
(1)カスケード制御の第 2 ループ(微分先行 PID(PI-D)では応答が急峻すぎる場合)(2)プログラム温度制御(3)設定値(SV)の変更が多い制御ループ
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID チューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
SFA1、SFA2 可変設定値フィルタα 0.000 ~ 1.000 チューニング画面>[PID1](PID 設定画面 1)または[PID2](PID 設定画面 2)SFB1、SFB2 可変設定値フィルタβ 0.000 ~ 1.000
パラメータ SFA2、SFB2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
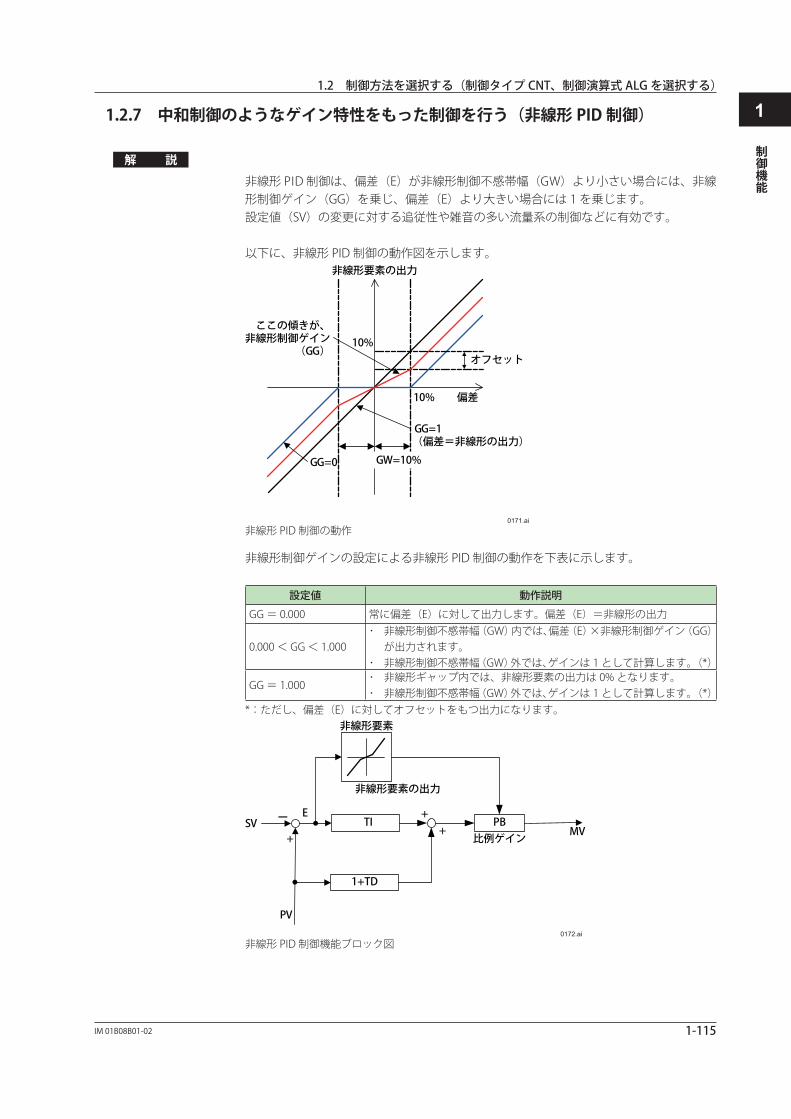
1-115IM 01B08B01-02
制御機能
11.2.7 中和制御のようなゲイン特性をもった制御を行う(非線形 PID 制御)
解 説
非線形 PID 制御は、偏差(E)が非線形制御不感帯幅(GW)より小さい場合には、非線形制御ゲイン(GG)を乗じ、偏差(E)より大きい場合には 1 を乗じます。設定値(SV)の変更に対する追従性や雑音の多い流量系の制御などに有効です。
以下に、非線形 PID 制御の動作図を示します。
偏差
非線形要素の出力
ここの傾きが、非線形制御ゲイン
(GG)
GG=0
GG=1(偏差=非線形の出力)
10%
10%オフセット
0171.ai
GW=10%
非線形 PID 制御の動作
非線形制御ゲインの設定による非線形 PID 制御の動作を下表に示します。
設定値 動作説明
GG = 0.000 常に偏差(E)に対して出力します。偏差(E)=非線形の出力
0.000 < GG < 1.000・ 非線形制御不感帯幅(GW)内では、偏差(E)×非線形制御ゲイン(GG)
が出力されます。・ 非線形制御不感帯幅(GW)外では、ゲインは 1 として計算します。(*)
GG = 1.000・ 非線形ギャップ内では、非線形要素の出力は 0% となります。・ 非線形制御不感帯幅(GW)外では、ゲインは 1 として計算します。(*)
*:ただし、偏差(E)に対してオフセットをもつ出力になります。
TI PBSV
PV
比例ゲイン MV
1+TD
非線形要素の出力
E
非線形要素
ー
+
++
0172.ai
非線形 PID 制御機能ブロック図
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

1-116 IM 01B08B01-02
使用例(1)設定値(SV)変更に対する追従性
非線形 PID 制御を使用することで、行き過ぎ量を抑えます。比例帯(PB)をあらかじめ小さく設定し、設定値(SV)変更に対して追従性が得られます。偏差が非線形制御不感帯幅(GW)内に入ると、非線形制御ゲイン(GG)の働きで出力を抑えます。
線形PID制御
時間 時間
SV
PV
非線形PID制御
SV
PV
0173.ai
非線形 PID 制御の設定値(SV)変更時の応答
(2)雑音や周期的脈動の抑制雑音の多い流量系の制御では、偏差(E)が小さいときは、ゲインが低いので制御バルブの変位が平滑化され、プロセスが安定します。偏差(E)が大きいときには、あらかじめ小さく設定された比例帯(PB)の働きによって、強い引きもどし効果を発揮し、応速性が改善されます。
40
100
0
60
80
線形PI制御
時間
40
100
0
60
80流量
非線形PI制御
時間0174.ai
流量
雑音の多い流量系における非線形 PI 制御の効果
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
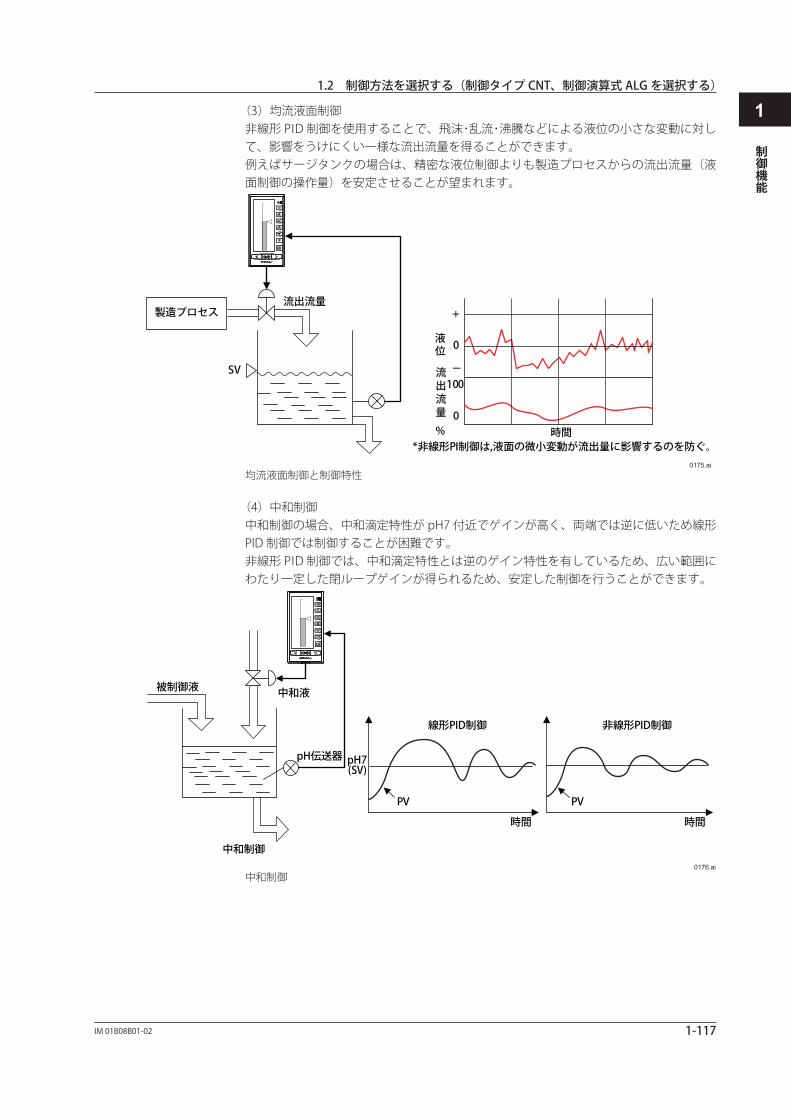
1-117IM 01B08B01-02
制御機能
1(3)均流液面制御非線形 PID 制御を使用することで、飛沫・乱流・沸騰などによる液位の小さな変動に対して、影響をうけにくい一様な流出流量を得ることができます。例えばサージタンクの場合は、精密な液位制御よりも製造プロセスからの流出流量(液面制御の操作量)を安定させることが望まれます。
*非線形PI制御は,液面の微小変動が流出量に影響するのを防ぐ。
+
-
0
100
0
液位
時間
流出流量
%
流出流量製造プロセス
SV
0175.ai
均流液面制御と制御特性
(4)中和制御中和制御の場合、中和滴定特性が pH7 付近でゲインが高く、両端では逆に低いため線形PID 制御では制御することが困難です。非線形 PID 制御では、中和滴定特性とは逆のゲイン特性を有しているため、広い範囲にわたり一定した閉ループゲインが得られるため、安定した制御を行うことができます。
中和制御
pH伝送器
中和液被制御液
線形PID制御
pH7(SV)
PV PV
非線形PID制御
時間 時間
0176.ai
中和制御
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
1-118 IM 01B08B01-02
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID、PD チューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D、I-PD、SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PD:本書の「1.2.4 設定値をオーバーしない安定した制御を行う(比例(PD)制御)」► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
GW1、GW2 非線形制御不感帯幅 0.0 ~ 100.0% チューニング画面>[PID1](PID 設定画面 1)または[PID2](PID 設定画面 2)GG1、GG2 非線形制御ゲイン 0.000 ~ 1.000
パラメータ GW2、GG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
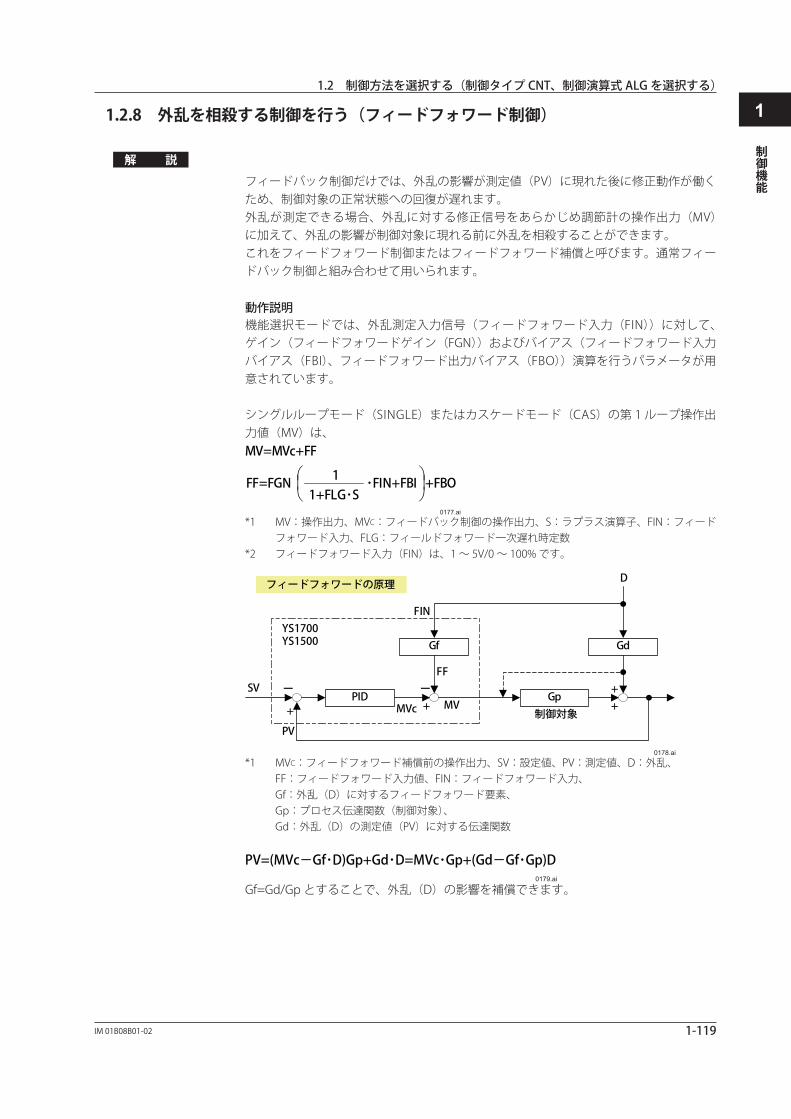
1-119IM 01B08B01-02
制御機能
11.2.8 外乱を相殺する制御を行う(フィードフォワード制御)
解 説
フィードバック制御だけでは、外乱の影響が測定値(PV)に現れた後に修正動作が働くため、制御対象の正常状態への回復が遅れます。外乱が測定できる場合、外乱に対する修正信号をあらかじめ調節計の操作出力(MV)に加えて、外乱の影響が制御対象に現れる前に外乱を相殺することができます。これをフィードフォワード制御またはフィードフォワード補償と呼びます。通常フィードバック制御と組み合わせて用いられます。
動作説明機能選択モードでは、外乱測定入力信号(フィードフォワード入力(FIN))に対して、ゲイン(フィードフォワードゲイン(FGN))およびバイアス(フィードフォワード入力バイアス(FBI)、フィードフォワード出力バイアス(FBO))演算を行うパラメータが用意されています。
シングルループモード(SINGLE)またはカスケードモード(CAS)の第 1 ループ操作出力値(MV)は、
FF=FGN
MV=MVc+FF
+FBO
・FIN+FBI
1+FLG・S1
0177.ai
*1 MV:操作出力、MVC:フィードバック制御の操作出力、S:ラプラス演算子、FIN:フィードフォワード入力、FLG:フィールドフォワード一次遅れ時定数
*2 フィードフォワード入力(FIN)は、1 ~ 5V/0 ~ 100% です。
フィードフォワードの原理
PID Gpー
+
ー+
SV
PV
MV制御対象
Gf
MVc
FF
Gd
++
YS1700YS1500
FIN
D
0178.ai
*1 MVC:フィードフォワード補償前の操作出力、SV:設定値、PV:測定値、D:外乱、 FF:フィードフォワード入力値、FIN:フィードフォワード入力、 Gf:外乱(D)に対するフィードフォワード要素、 Gp:プロセス伝達関数(制御対象)、 Gd:外乱(D)の測定値(PV)に対する伝達関数
PV=(MVc-Gf・D)Gp+Gd・D=MVc・Gp+(Gd-Gf・Gp)D
0179.ai
Gf=Gd/Gp とすることで、外乱(D)の影響を補償できます。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
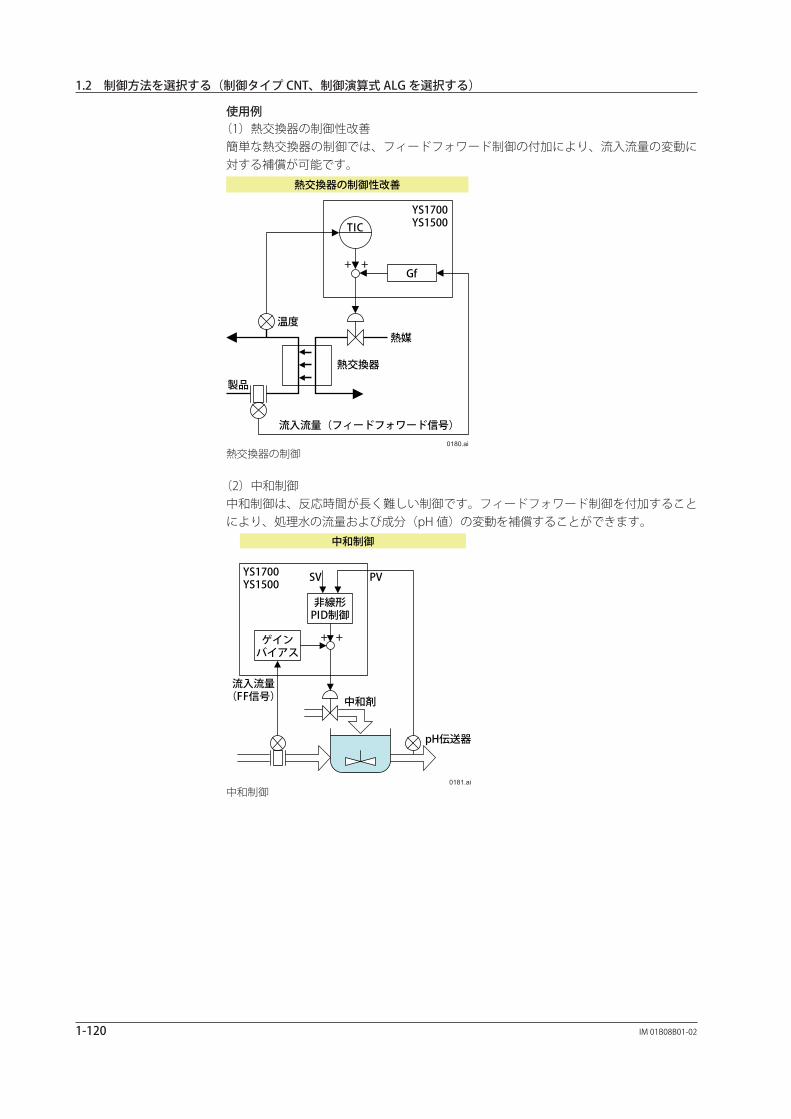
1-120 IM 01B08B01-02
使用例(1)熱交換器の制御性改善
簡単な熱交換器の制御では、フィードフォワード制御の付加により、流入流量の変動に対する補償が可能です。
Gf
TIC
+ +
製品
温度熱媒
YS1700YS1500
流入流量(フィードフォワード信号)
熱交換器
熱交換器の制御性改善
0180.ai
熱交換器の制御
(2)中和制御中和制御は、反応時間が長く難しい制御です。フィードフォワード制御を付加することにより、処理水の流量および成分(pH 値)の変動を補償することができます。
中和制御
ゲインバイアス
YS1700YS1500
+ +
pH伝送器
中和剤流入流量
(FF信号)
非線形PID制御
PVSV
0181.ai
中和制御
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

1-121IM 01B08B01-02
制御機能
1設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID、PD チューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D、I-PD、SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PD:本書の「1.2.4 設定値をオーバーしない安定した制御を行う(比例(PD)制御)」► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
FSWフィードフォワードゲイン演算 OFF:使用しない
ON:使用する
チューニング画面>エンジニアリング画面>
[CONFIG3](機能設定画面 3)FONフィードフォワード出力加算
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
FF1 フィードフォワード入力値 1 -100.0 ~ 200.0%チューニング画面>[PID1]
(PID 設定画面 1)FGN フィードフォワードゲイン -8.000 ~ 8.000
チューニング画面>[PARAMETER](PARAMETER
設定画面)
FBIフィードフォワード入力バイアス値
-106.3 ~ 106.3%
FBOフィードフォワード出力バイアス値
-800.0 ~ 800.0%
FLGフィードフォワード一次遅れ時定数
0.0 ~ 800.0 秒
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
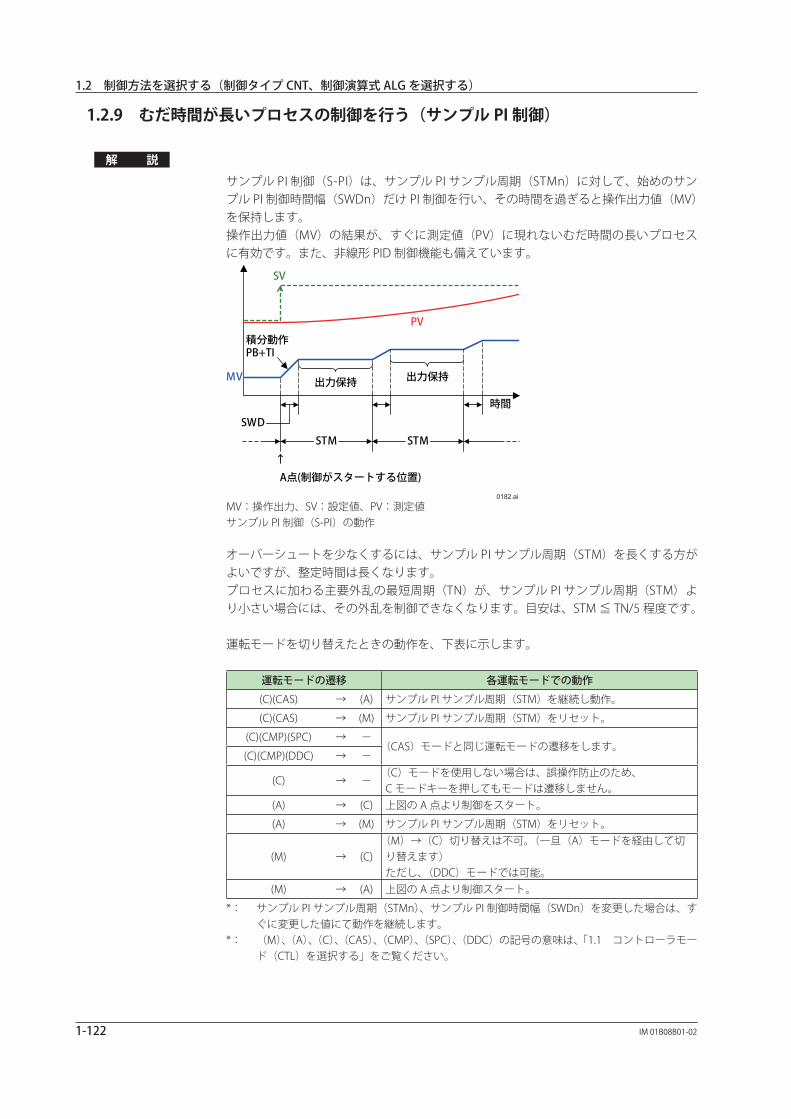
1-122 IM 01B08B01-02
1.2.9 むだ時間が長いプロセスの制御を行う(サンプル PI 制御)
解 説
サンプル PI 制御(S-PI)は、サンプル PI サンプル周期(STMn)に対して、始めのサンプル PI 制御時間幅(SWDn)だけ PI 制御を行い、その時間を過ぎると操作出力値(MV)を保持します。操作出力値(MV)の結果が、すぐに測定値(PV)に現れないむだ時間の長いプロセスに有効です。また、非線形 PID 制御機能も備えています。
A点(制御がスタートする位置)
↑
SV
MV
時間
STM
SWD
STM
PV
出力保持
積分動作PB+TI
出力保持
0182.ai
MV:操作出力、SV:設定値、PV:測定値サンプル PI 制御(S-PI)の動作
オーバーシュートを少なくするには、サンプル PI サンプル周期(STM)を長くする方がよいですが、整定時間は長くなります。プロセスに加わる主要外乱の最短周期(TN)が、サンプル PI サンプル周期(STM)より小さい場合には、その外乱を制御できなくなります。目安は、STM ≦ TN/5 程度です。
運転モードを切り替えたときの動作を、下表に示します。
運転モードの遷移 各運転モードでの動作
(C)(CAS) → (A) サンプル PI サンプル周期(STM)を継続し動作。
(C)(CAS) → (M) サンプル PI サンプル周期(STM)をリセット。
(C)(CMP)(SPC) → -(CAS)モードと同じ運転モードの遷移をします。
(C)(CMP)(DDC) → -
(C) → -(C)モードを使用しない場合は、誤操作防止のため、
C モードキーを押してもモードは遷移しません。(A) → (C) 上図の A 点より制御をスタート。
(A) → (M) サンプル PI サンプル周期(STM)をリセット。
(M) → (C)(M)→(C)切り替えは不可。(一旦(A)モードを経由して切
り替えます)ただし、(DDC)モードでは可能。
(M) → (A) 上図の A 点より制御スタート。
*: サンプル PI サンプル周期(STMn)、サンプル PI 制御時間幅(SWDn)を変更した場合は、すぐに変更した値にて動作を継続します。
*: (M)、(A)、(C)、(CAS)、(CMP)、(SPC)、(DDC)の記号の意味は、「1.1 コントローラモード(CTL)を選択する」をご覧ください。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
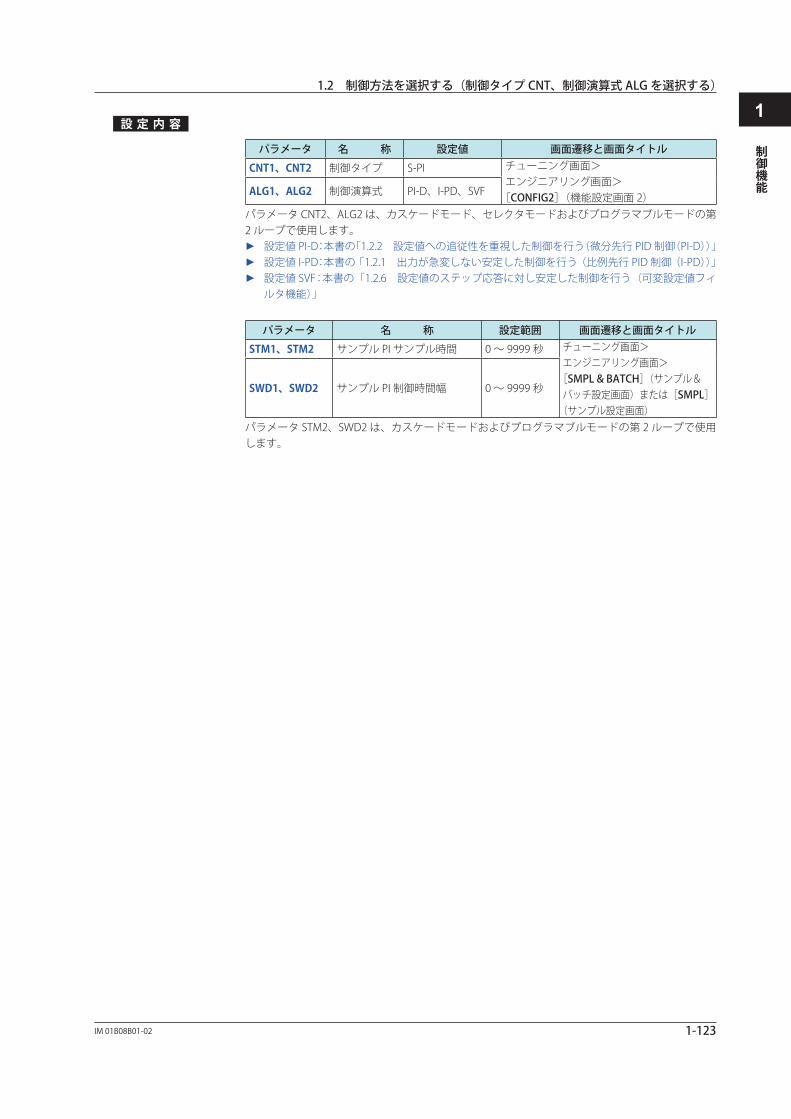
1-123IM 01B08B01-02
制御機能
1設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ S-PI チューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D、I-PD、SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
STM1、STM2 サンプル PI サンプル時間 0 ~ 9999 秒 チューニング画面>エンジニアリング画面>
[SMPL & BATCH](サンプル&バッチ設定画面)または[SMPL]
(サンプル設定画面)
SWD1、SWD2 サンプル PI 制御時間幅 0 ~ 9999 秒
パラメータ STM2、SWD2 は、カスケードモードおよびプログラマブルモードの第 2 ループで使用します。
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
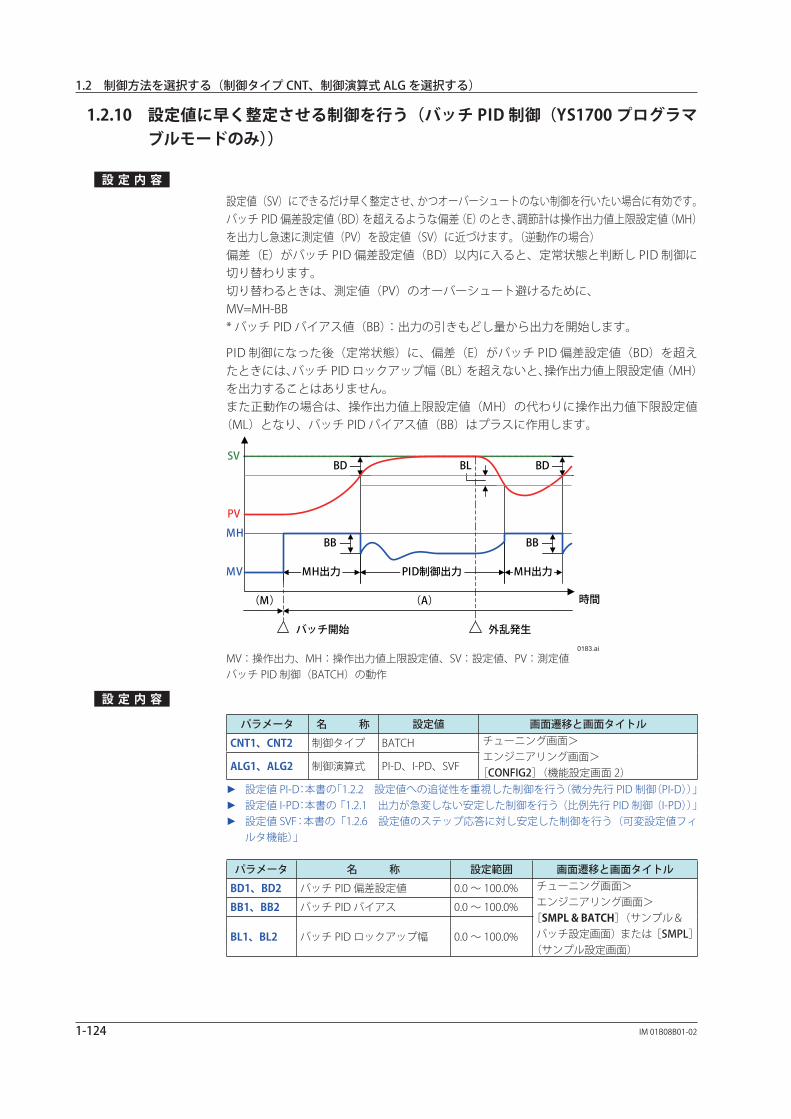
1-124 IM 01B08B01-02
1.2.10 設定値に早く整定させる制御を行う(バッチ PID 制御(YS1700 プログラマブルモードのみ))
設 定 内 容
設定値(SV)にできるだけ早く整定させ、かつオーバーシュートのない制御を行いたい場合に有効です。バッチ PID 偏差設定値(BD)を超えるような偏差(E)のとき、調節計は操作出力値上限設定値(MH)を出力し急速に測定値(PV)を設定値(SV)に近づけます。(逆動作の場合)偏差(E)がバッチ PID 偏差設定値(BD)以内に入ると、定常状態と判断し PID 制御に切り替わります。切り替わるときは、測定値(PV)のオーバーシュート避けるために、MV=MH-BB* バッチ PID バイアス値(BB):出力の引きもどし量から出力を開始します。
PID 制御になった後(定常状態)に、偏差(E)がバッチ PID 偏差設定値(BD)を超えたときには、バッチ PID ロックアップ幅(BL)を超えないと、操作出力値上限設定値(MH)を出力することはありません。また正動作の場合は、操作出力値上限設定値(MH)の代わりに操作出力値下限設定値
(ML)となり、バッチ PID バイアス値(BB)はプラスに作用します。
MH出力MH出力 PID制御出力
BDBLBDSV
時間
PV
(M) (A)
バッチ開始
BB
MV
MHBB
外乱発生0183.ai
MV:操作出力、MH:操作出力値上限設定値、SV:設定値、PV:測定値バッチ PID 制御(BATCH)の動作
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ BATCH チューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D、I-PD、SVF
► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
BD1、BD2 バッチ PID 偏差設定値 0.0 ~ 100.0% チューニング画面>エンジニアリング画面>
[SMPL & BATCH](サンプル&バッチ設定画面)または[SMPL]
(サンプル設定画面)
BB1、BB2 バッチ PID バイアス 0.0 ~ 100.0%
BL1、BL2 バッチ PID ロックアップ幅 0.0 ~ 100.0%
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)
1-125IM 01B08B01-02
制御機能
11.2.11 複数の PID パラメータを切り替えて制御する(プリセット PID(YS1700 プログラマブルモードのみ))
解 説
プリセット PID は、8 組の PID パラメータをあらかじめプリセット PID テーブルに設定しておき、ユーザプログラムでプロセスの状況に応じた PID パラメータを 8 組の中から選択し、2 個の制御要素に設定するものです。► ユーザプログラム:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能 ユーザーズマ
ニュアル(CD)」
設 定 内 容
パラメータ 名 称 設定値 画面遷移と画面タイトル
CNT1、CNT2 制御タイプ PID、S-PI、BATCH、PD チューニング画面>エンジニアリング画面>
[CONFIG2](機能設定画面 2)ALG1、ALG2 制御演算式 PI-D、I-PD、SVF
パラメータ CNT2、ALG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第2 ループで使用します。► 設定値 PI-D:本書の「1.2.2 設定値への追従性を重視した制御を行う(微分先行 PID 制御(PI-D))」► 設定値 I-PD:本書の「1.2.1 出力が急変しない安定した制御を行う(比例先行 PID 制御(I-PD))」► 設定値 SVF:本書の「1.2.6 設定値のステップ応答に対し安定した制御を行う(可変設定値フィ
ルタ機能)」
1.2 制御方法を選択する(制御タイプ CNT、制御演算式 ALG を選択する)

Blank Page
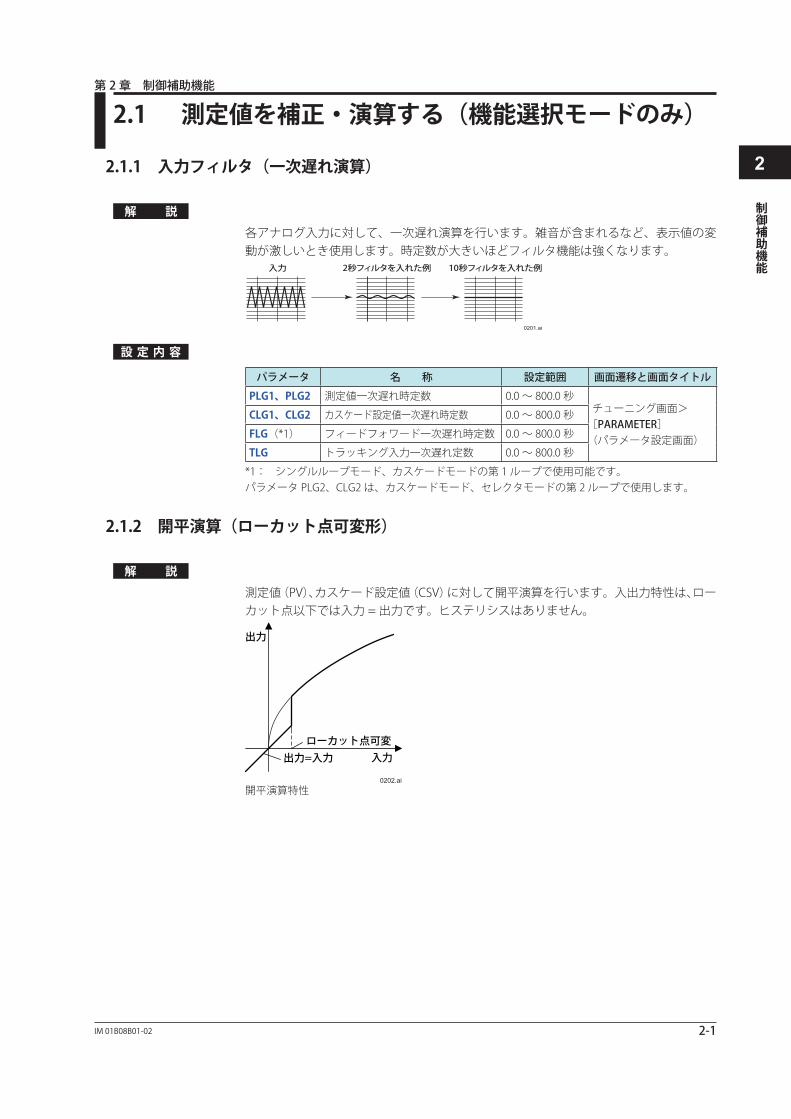
2-1IM 01B08B01-02
制御補助機能
2
2.1 測定値を補正・演算する(機能選択モードのみ)
2.1.1 入力フィルタ(一次遅れ演算)
解 説
各アナログ入力に対して、一次遅れ演算を行います。雑音が含まれるなど、表示値の変動が激しいとき使用します。時定数が大きいほどフィルタ機能は強くなります。
入力 2秒フィルタを入れた例 10秒フィルタを入れた例
0201.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
PLG1、PLG2 測定値一次遅れ時定数 0.0 ~ 800.0 秒チューニング画面>
[PARAMETER](パラメータ設定画面)
CLG1、CLG2 カスケード設定値一次遅れ時定数 0.0 ~ 800.0 秒
FLG(*1) フィードフォワード一次遅れ時定数 0.0 ~ 800.0 秒
TLG トラッキング入力一次遅れ定数 0.0 ~ 800.0 秒
*1: シングルループモード、カスケードモードの第 1 ループで使用可能です。パラメータ PLG2、CLG2 は、カスケードモード、セレクタモードの第 2 ループで使用します。
2.1.2 開平演算(ローカット点可変形)
解 説
測定値(PV)、カスケード設定値(CSV)に対して開平演算を行います。入出力特性は、ローカット点以下では入力 = 出力です。ヒステリシスはありません。
ローカット点可変出力=入力
出力
0202.ai
入力
開平演算特性
第 2 章 制御補助機能
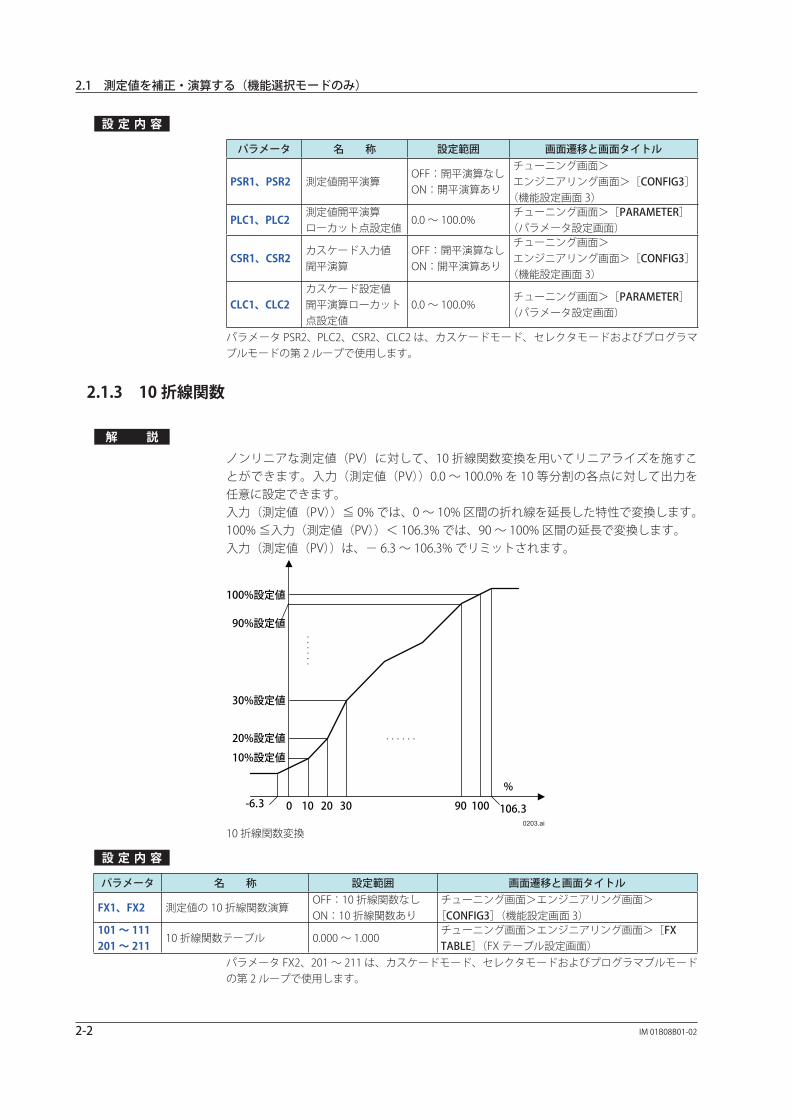
2-2 IM 01B08B01-02
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
PSR1、PSR2 測定値開平演算OFF:開平演算なしON:開平演算あり
チューニング画面> エンジニアリング画面>[CONFIG3]
(機能設定画面 3)
PLC1、PLC2測定値開平演算 ローカット点設定値
0.0 ~ 100.0%チューニング画面>[PARAMETER]
(パラメータ設定画面)
CSR1、CSR2カスケード入力値 開平演算
OFF:開平演算なしON:開平演算あり
チューニング画面> エンジニアリング画面>[CONFIG3]
(機能設定画面 3)
CLC1、CLC2カスケード設定値 開平演算ローカット 点設定値
0.0 ~ 100.0%チューニング画面>[PARAMETER]
(パラメータ設定画面)
パラメータ PSR2、PLC2、CSR2、CLC2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
2.1.3 10 折線関数
解 説
ノンリニアな測定値(PV)に対して、10 折線関数変換を用いてリニアライズを施すことができます。入力(測定値(PV))0.0 ~ 100.0% を 10 等分割の各点に対して出力を任意に設定できます。入力(測定値(PV))≦ 0% では、0 ~ 10% 区間の折れ線を延長した特性で変換します。100% ≦入力(測定値(PV))< 106.3% では、90 ~ 100% 区間の延長で変換します。入力(測定値(PV))は、- 6.3 ~ 106.3% でリミットされます。
0 10 20 1009030
10%設定値
20%設定値
30%設定値
90%設定値
100%設定値
%
106.3-6.30203.ai
......
......
10 折線関数変換
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
FX1、FX2 測定値の 10 折線関数演算OFF:10 折線関数なしON:10 折線関数あり
チューニング画面>エンジニアリング画面>[CONFIG3](機能設定画面 3)
101 ~ 111201 ~ 211
10 折線関数テーブル 0.000 ~ 1.000チューニング画面>エンジニアリング画面>[FX TABLE](FX テーブル設定画面)
パラメータ FX2、201 ~ 211 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
2.1 測定値を補正・演算する(機能選択モードのみ)
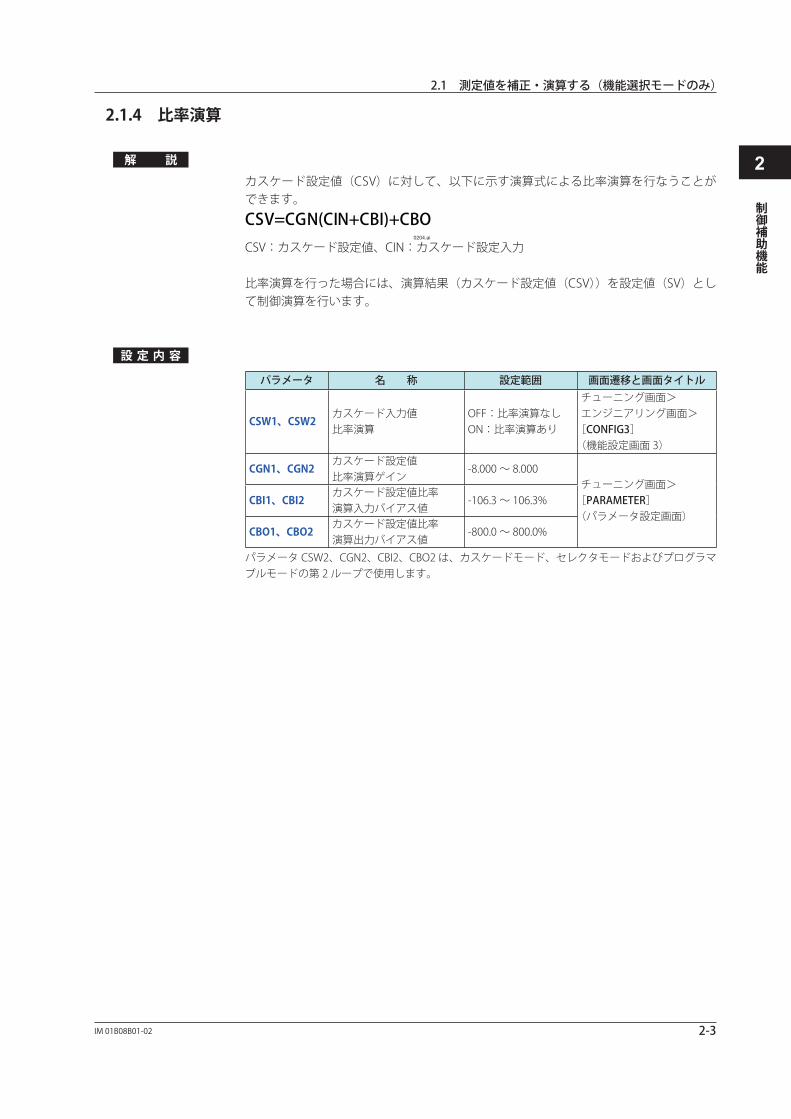
2-3IM 01B08B01-02
制御補助機能
2
2.1.4 比率演算
解 説
カスケード設定値(CSV)に対して、以下に示す演算式による比率演算を行なうことができます。
CSV=CGN(CIN+CBI)+CBO0204.ai
CSV:カスケード設定値、CIN:カスケード設定入力
比率演算を行った場合には、演算結果(カスケード設定値(CSV))を設定値(SV)として制御演算を行います。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
CSW1、CSW2カスケード入力値 比率演算
OFF:比率演算なしON:比率演算あり
チューニング画面> エンジニアリング画面>
[CONFIG3] (機能設定画面 3)
CGN1、CGN2カスケード設定値 比率演算ゲイン
-8.000 ~ 8.000チューニング画面>
[PARAMETER] (パラメータ設定画面)
CBI1、CBI2カスケード設定値比率 演算入力バイアス値
-106.3 ~ 106.3%
CBO1、CBO2カスケード設定値比率 演算出力バイアス値
-800.0 ~ 800.0%
パラメータ CSW2、CGN2、CBI2、CBO2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
2.1 測定値を補正・演算する(機能選択モードのみ)
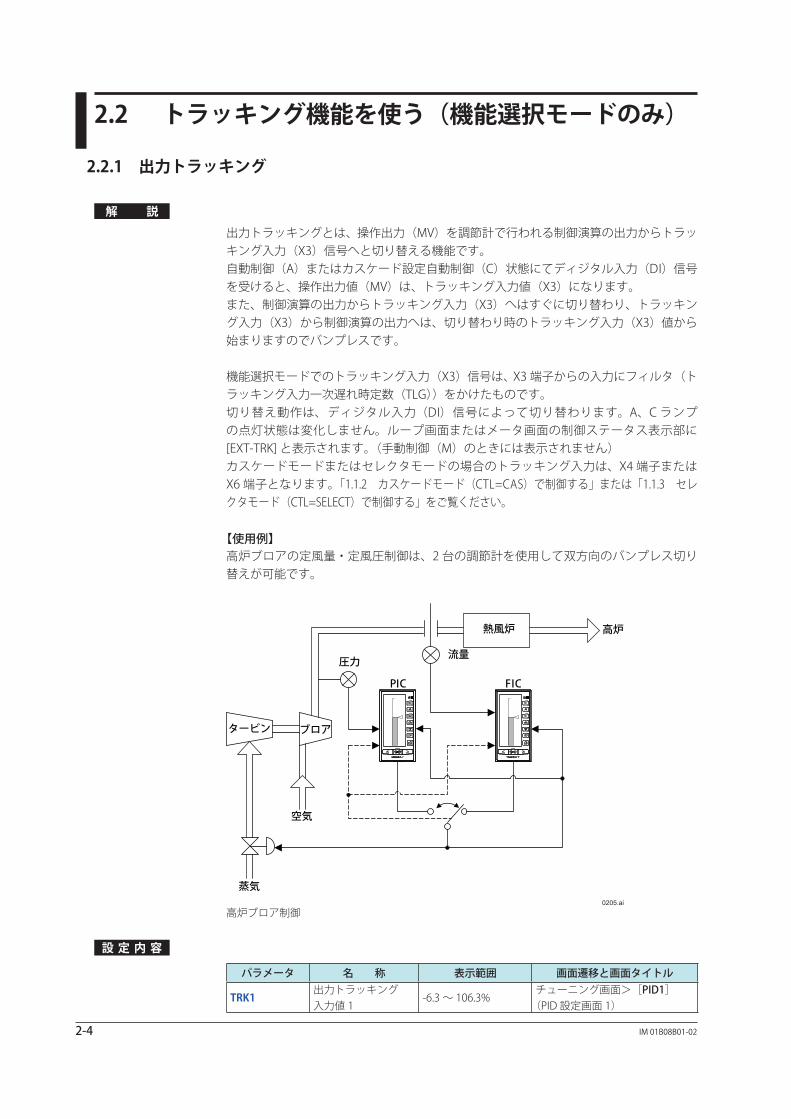
2-4 IM 01B08B01-02
2.2 トラッキング機能を使う(機能選択モードのみ)
2.2.1 出力トラッキング
解 説
出力トラッキングとは、操作出力(MV)を調節計で行われる制御演算の出力からトラッキング入力(X3)信号へと切り替える機能です。自動制御(A)またはカスケード設定自動制御(C)状態にてディジタル入力(DI)信号を受けると、操作出力値(MV)は、トラッキング入力値(X3)になります。また、制御演算の出力からトラッキング入力(X3)へはすぐに切り替わり、トラッキング入力(X3)から制御演算の出力へは、切り替わり時のトラッキング入力(X3)値から始まりますのでバンプレスです。
機能選択モードでのトラッキング入力(X3)信号は、X3 端子からの入力にフィルタ(トラッキング入力一次遅れ時定数(TLG))をかけたものです。切り替え動作は、ディジタル入力(DI)信号によって切り替わります。A、C ランプの点灯状態は変化しません。ループ画面またはメータ画面の制御ステータス表示部に[EXT-TRK] と表示されます。(手動制御(M)のときには表示されません)カスケードモードまたはセレクタモードの場合のトラッキング入力は、X4 端子またはX6 端子となります。「1.1.2 カスケードモード(CTL=CAS)で制御する」または「1.1.3 セレクタモード(CTL=SELECT)で制御する」をご覧ください。
【使用例】高炉ブロアの定風量・定風圧制御は、2 台の調節計を使用して双方向のバンプレス切り替えが可能です。
空気
タービン
高炉
蒸気
ブロア
FICPIC
流量圧力
0205.ai
熱風炉
高炉ブロア制御
設 定 内 容
パラメータ 名 称 表示範囲 画面遷移と画面タイトル
TRK1出力トラッキング 入力値 1
-6.3 ~ 106.3%チューニング画面>[PID1]
(PID 設定画面 1)
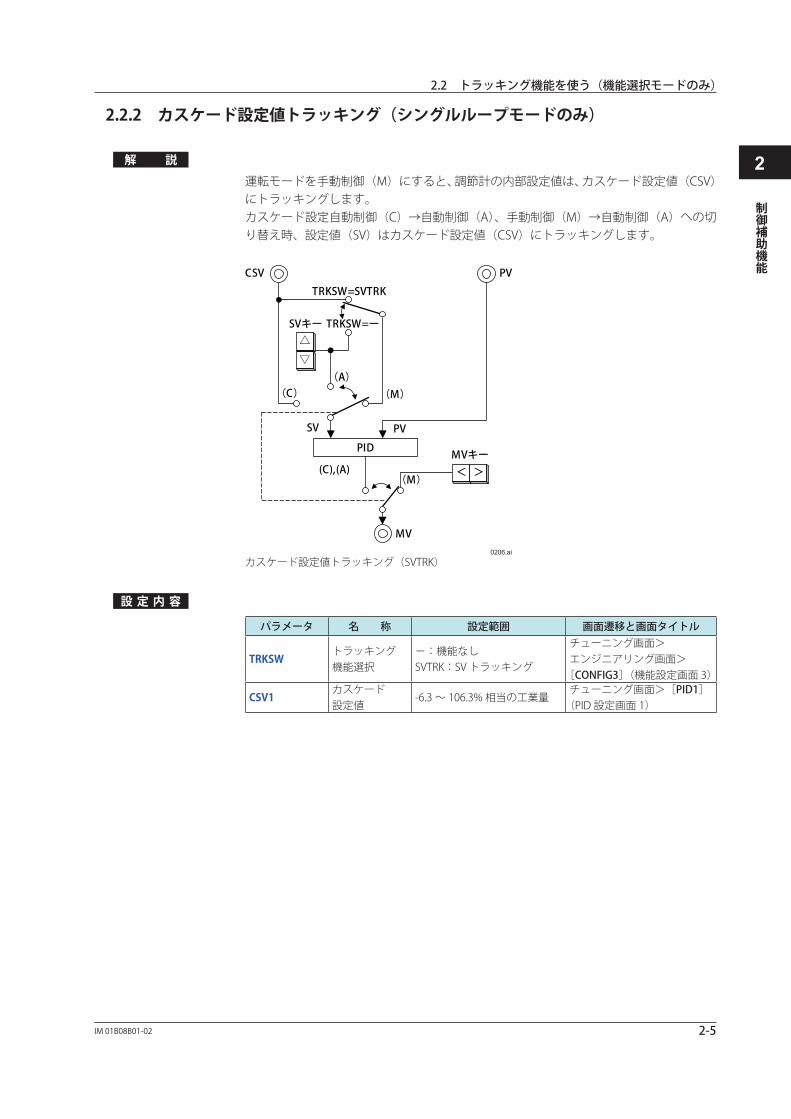
2-5IM 01B08B01-02
制御補助機能
2
2.2.2 カスケード設定値トラッキング(シングルループモードのみ)
解 説
運転モードを手動制御(M)にすると、調節計の内部設定値は、カスケード設定値(CSV)にトラッキングします。カスケード設定自動制御(C)→自動制御(A)、手動制御(M)→自動制御(A)への切り替え時、設定値(SV)はカスケード設定値(CSV)にトラッキングします。
△
▽
< >
SVキー
(C)(A)
PID
SV PV
(M)
TRKSW=SVTRK
(C),(A)
MV
MVキー
PVCSV
(M)
TRKSW=ー
0206.ai
カスケード設定値トラッキング(SVTRK)
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
TRKSWトラッキング 機能選択
-:機能なしSVTRK:SV トラッキング
チューニング画面> エンジニアリング画面>
[CONFIG3](機能設定画面 3)
CSV1カスケード 設定値
-6.3 ~ 106.3% 相当の工業量チューニング画面>[PID1]
(PID 設定画面 1)
2.2 トラッキング機能を使う(機能選択モードのみ)

2-6 IM 01B08B01-02
2.2.3 測定値トラッキング(シングルループモードのみ)
解 説
手動制御(M)から自動制御(A)に切り替えるとき、偏差(E)が大きくなると操作出力(MV)の変動も大きくなります。(特に微分先行 PID(PI-D)制御)これを防ぎたい場合に、手動制御(M)時に設定値(SV)を測定値(PV)に一致させておき、自動制御(A)に切り替えたときの急激な調節動作が働かないようにします。手動制御(M)→自動制御(A)に切り替えたとき、設定値(SV)を測定値(PV)にトラッキングします。
△
▽
< >
SVキー
(C)(A)
PIDSV PV
(M)
TRKSW=PVTRK
(C),(A)
MV
MVキー
PVCSV
(M)
TRKSW=ー
0207.ai
測定値トラッキング(PVTRK)
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
TRKSWトラッキング 機能選択
-:機能なしPVTRK:PV トラッキング
チューニング画面> エンジニアリング画面>
[CONFIG3](機能設定画面 3)
2.2 トラッキング機能を使う(機能選択モードのみ)

2-7IM 01B08B01-02
制御補助機能
2
2.3 制御動作方向、バルブ方向を変更する
解 説
制御動作方向は、下図のようになります。
正動作
偏差(PV-SV)
0 %
100 %
- +
操作出力
逆動作
0208.ai
バルブ方向は、LCD に表示される C - O、O - C を決めるものです。制御動作方向が逆動作の場合、操作出力は PV < SV のとき増加し、PV > SV のとき減少します。正動作の場合は逆の動作になります。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
ACT1、ACT2 制御動作方向RVS:逆動作DIR:正動作
チューニング画面> エンジニアリング画面>
[CONFIG2](機能設定画面 2)VDIR1、VDIR2 バルブ方向
C-O: 操作出力値 0%=C、100%=O
O-C: 操作出力値 0%=O、100%=C
パラメータ ACT2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。パラメータ VDIR2 は、プログラマブルモードの第 2 グループで使用します。
2-8 IM 01B08B01-02
2.4 プリセット MV を使う
解 説
自動制御またはカスケード制御状態のとき、ディジタル入力信号を受けると操作出力にあらかじめ設定したプリセット出力値を出力します。手動操作はできません。ディジタル入力信号が解除されると、元の運転に戻ります。プリセット MV 出力状態では、ループ画面、メータ画面に [EXT-PMV] が表示されます。A モードキー、C モードキーのランプ状態は変化しません。プリセット出力を 0% 以下に設定しておき、プロセス異常の緊急遮断などに利用できます。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
PMV1、PMV2 プリセット出力 -6.3 ~ 106.3%チューニング画面>
[PID1](PID 設定画面 1)または [PID2](PID 設定画面 2)
パラメータ PMV2 は、プログラマブルモードの第 2 ループで使用します。
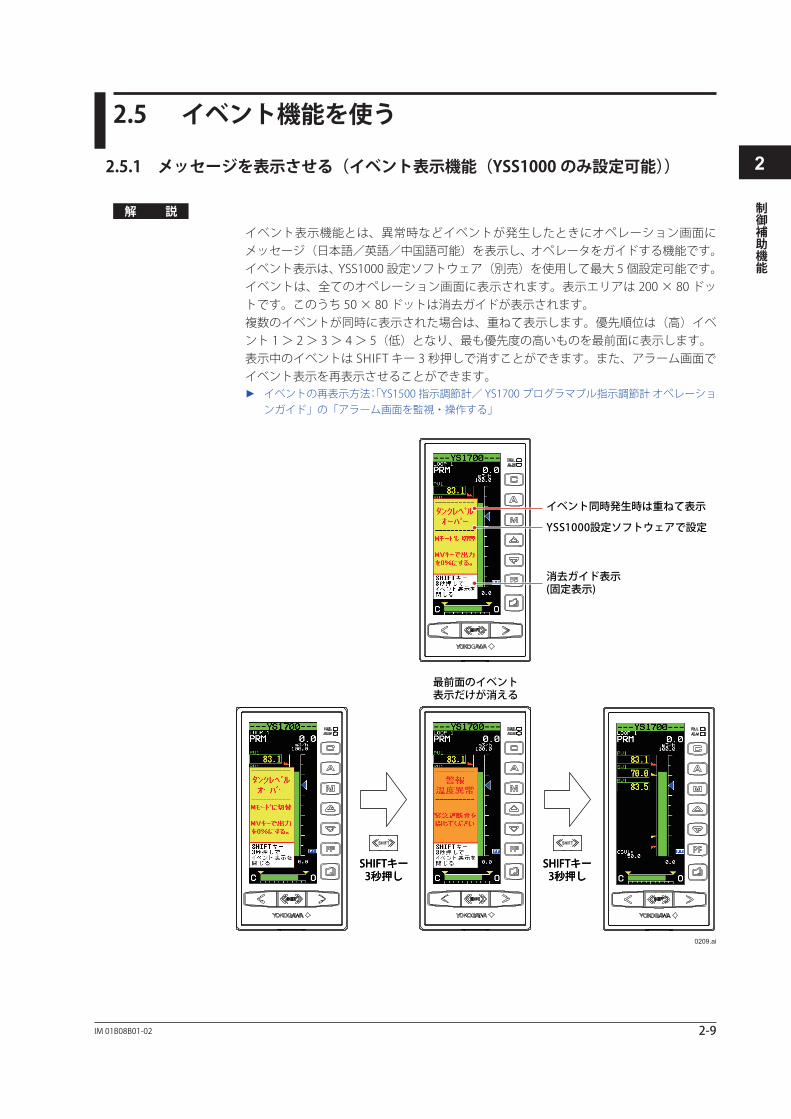
2-9IM 01B08B01-02
制御補助機能
2
2.5 イベント機能を使う
2.5.1 メッセージを表示させる(イベント表示機能(YSS1000 のみ設定可能))
解 説
イベント表示機能とは、異常時などイベントが発生したときにオペレーション画面にメッセージ(日本語/英語/中国語可能)を表示し、オペレータをガイドする機能です。イベント表示は、YSS1000 設定ソフトウェア(別売)を使用して最大 5 個設定可能です。イベントは、全てのオペレーション画面に表示されます。表示エリアは 200 × 80 ドットです。このうち 50 × 80 ドットは消去ガイドが表示されます。複数のイベントが同時に表示された場合は、重ねて表示します。優先順位は(高)イベント 1 > 2 > 3 > 4 > 5(低)となり、最も優先度の高いものを最前面に表示します。表示中のイベントは SHIFT キー 3 秒押しで消すことができます。また、アラーム画面でイベント表示を再表示させることができます。► イベントの再表示方法:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーショ
ンガイド」の「アラーム画面を監視・操作する」
SHIFTキー3秒押し
SHIFTキー3秒押し
0209.ai
SHIFT SHIFT
最前面のイベント表示だけが消える
SHIFTキー3秒押し
SHIFTキー3秒押し
YSS1000設定ソフトウェアで設定
消去ガイド表示(固定表示)
イベント同時発生時は重ねて表示
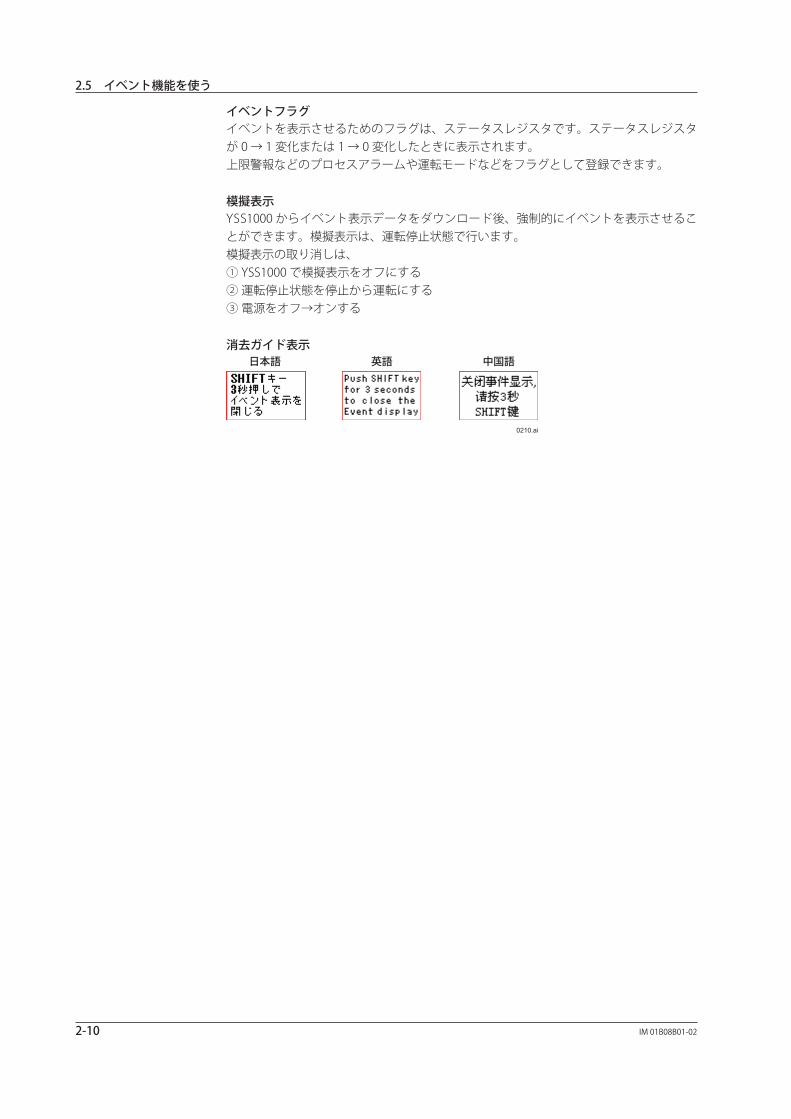
2-10 IM 01B08B01-02
イベントフラグイベントを表示させるためのフラグは、ステータスレジスタです。ステータスレジスタが 0 → 1 変化または 1 → 0 変化したときに表示されます。上限警報などのプロセスアラームや運転モードなどをフラグとして登録できます。
模擬表示YSS1000 からイベント表示データをダウンロード後、強制的にイベントを表示させることができます。模擬表示は、運転停止状態で行います。模擬表示の取り消しは、① YSS1000 で模擬表示をオフにする② 運転停止状態を停止から運転にする③ 電源をオフ→オンする
消去ガイド表示
0210.ai
日本語 英語 中国語
2.5 イベント機能を使う
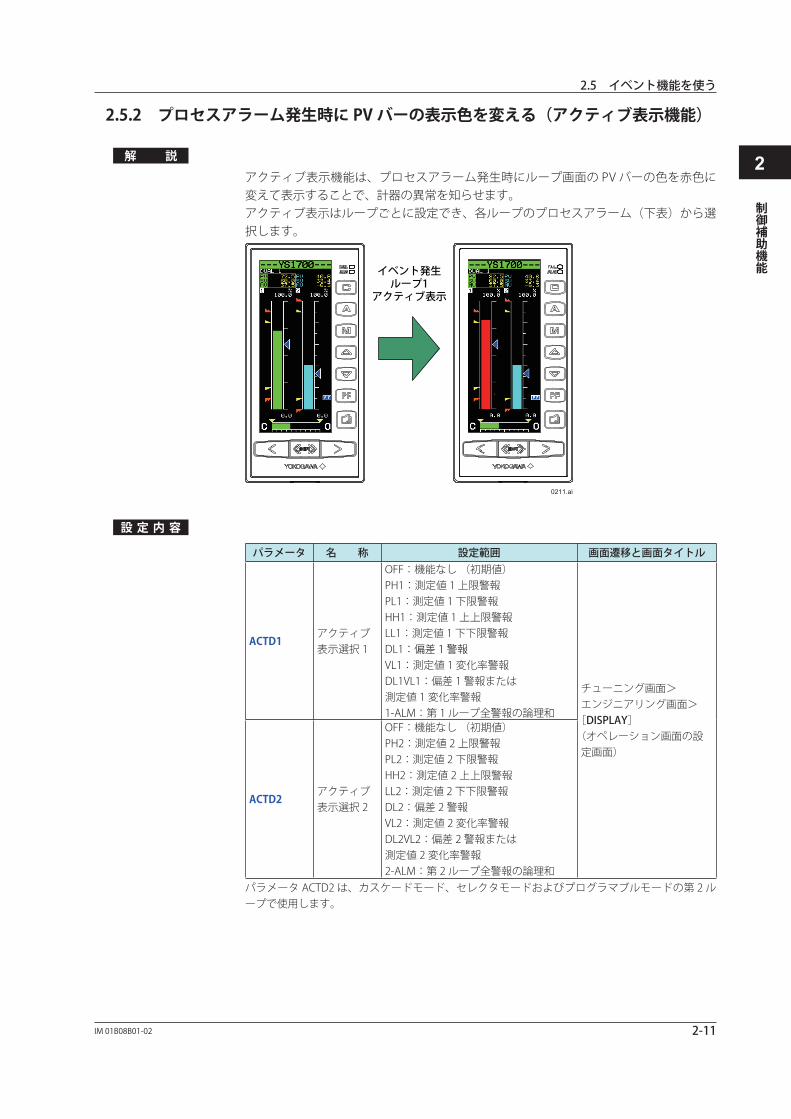
2-11IM 01B08B01-02
制御補助機能
2
2.5.2 プロセスアラーム発生時に PV バーの表示色を変える(アクティブ表示機能)
解 説
アクティブ表示機能は、プロセスアラーム発生時にループ画面の PV バーの色を赤色に変えて表示することで、計器の異常を知らせます。アクティブ表示はループごとに設定でき、各ループのプロセスアラーム(下表)から選択します。
イベント発生ループ1
アクティブ表示
0211.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
ACTD1アクティブ 表示選択 1
OFF:機能なし (初期値)PH1:測定値 1 上限警報PL1:測定値 1 下限警報HH1:測定値 1 上上限警報LL1:測定値 1 下下限警報DL1:偏差 1 警報VL1:測定値 1 変化率警報DL1VL1:偏差 1 警報または 測定値 1 変化率警報1-ALM:第 1 ループ全警報の論理和
チューニング画面> エンジニアリング画面>
[DISPLAY] (オペレーション画面の設
定画面)
ACTD2アクティブ 表示選択 2
OFF:機能なし (初期値)PH2:測定値 2 上限警報PL2:測定値 2 下限警報HH2:測定値 2 上上限警報LL2:測定値 2 下下限警報DL2:偏差 2 警報VL2:測定値 2 変化率警報DL2VL2:偏差 2 警報または 測定値 2 変化率警報2-ALM:第 2 ループ全警報の論理和
パラメータ ACTD2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
2.5 イベント機能を使う
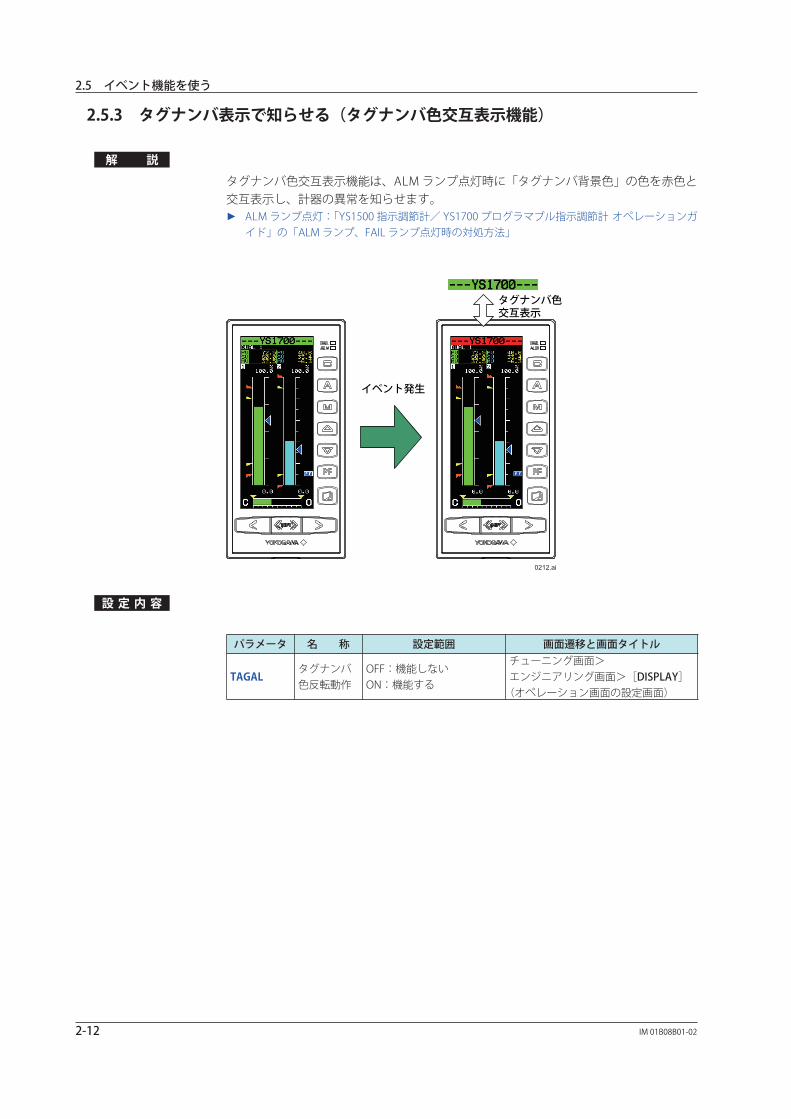
2-12 IM 01B08B01-02
2.5.3 タグナンバ表示で知らせる(タグナンバ色交互表示機能)
解 説
タグナンバ色交互表示機能は、ALM ランプ点灯時に「タグナンバ背景色」の色を赤色と交互表示し、計器の異常を知らせます。► ALM ランプ点灯:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレーションガ
イド」の「ALM ランプ、FAIL ランプ点灯時の対処方法」
イベント発生
タグナンバ色交互表示
0212.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
TAGALタグナンバ色反転動作
OFF:機能しないON:機能する
チューニング画面> エンジニアリング画面>[DISPLAY]
(オペレーション画面の設定画面)
2.5 イベント機能を使う

2-13IM 01B08B01-02
制御補助機能
2
2.6 警報機能を設定する
機能選択モード(シングルループモード、カスケードモード、セレクタモード)を選択すると、ディジタル出力に機能が自動的に割り付きます。► 機能選択モードのディジタル出力機能:本書の「1.1.1 シングルループモードで制御する」、
「1.1.2 カスケードモードで制御する」、「1.1.3 セレクタモードで制御する」► 警報機能の設定:本書の「3.1.5 ディジタル出力の機能を変更する」
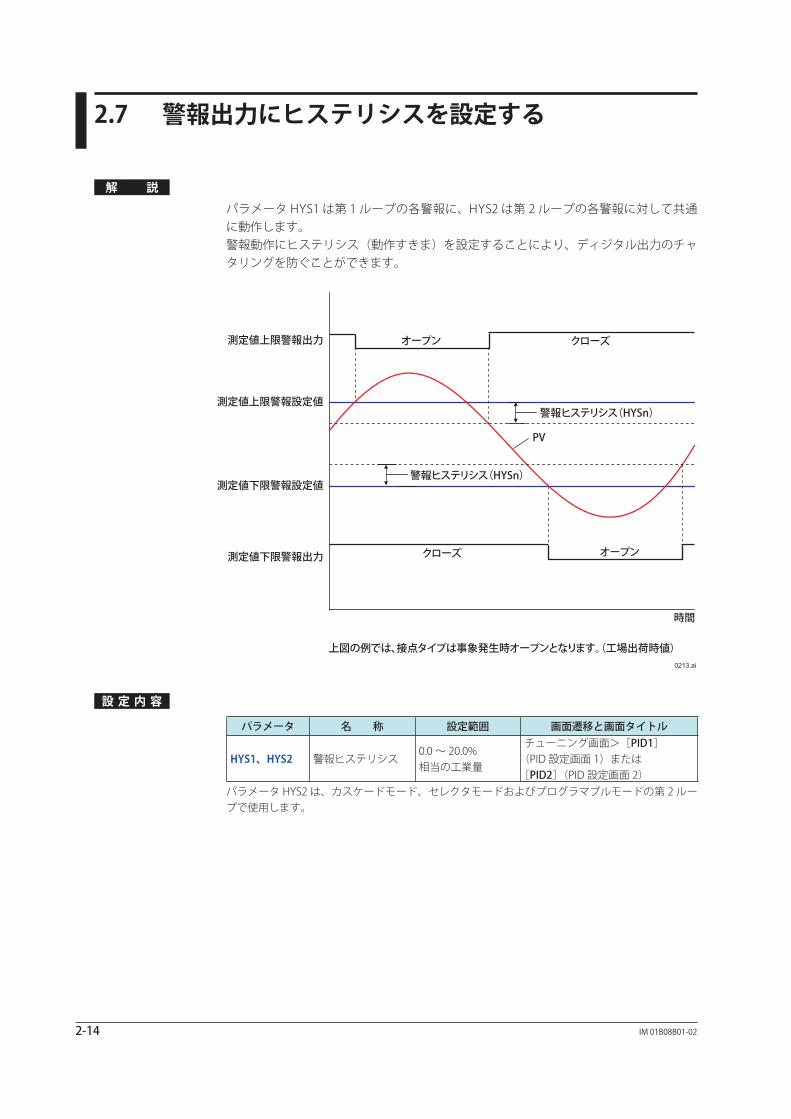
2-14 IM 01B08B01-02
2.7 警報出力にヒステリシスを設定する
解 説
パラメータ HYS1 は第 1 ループの各警報に、HYS2 は第 2 ループの各警報に対して共通に動作します。警報動作にヒステリシス(動作すきま)を設定することにより、ディジタル出力のチャタリングを防ぐことができます。
PV
クローズオープン
クローズ
上図の例では、接点タイプは事象発生時オープンとなります。(工場出荷時値)
警報ヒステリシス(HYSn)
警報ヒステリシス(HYSn)
オープン
時間
測定値上限警報設定値
測定値下限警報設定値
測定値上限警報出力
測定値下限警報出力
0213.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
HYS1、HYS2 警報ヒステリシス0.0 ~ 20.0% 相当の工業量
チューニング画面>[PID1] (PID 設定画面 1)または [PID2](PID 設定画面 2)
パラメータ HYS2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。

3-1IM 01B08B01-02
入出力補助機能
3
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
YS1000 のディジタル入力(DI)端子とディジタル出力(DO)端子は共用端子です。YS1700 基本形(拡張 I/O 付き)の拡張 I/O 端子は、専用端子です。機能選択モード(シングルループモード、カスケードモード、セレクタモード)を選択すると、ディジタル入出力端子に機能が自動的に割り付きます。機能が割りついていない端子は、必要に応じて機能を割り付けてください。► 機能選択モードのディジタル入出力機能:「YS1500 指示調節計/ YS1700 プログラマブル指示
調節計 オペレーションガイド」の「設置・配線」または本書の「第 1 章 制御機能」
3.1.1参照
DIとして使用する場合:3.1.2項参照DOとして使用する場合:3.1.3項参照
DIとして使用する場合:3.1.4項参照DOとして使用する場合:3.1.5項参照
ディジタル入出力端子、機能を変更する
接点タイプを決める
DIとして使用するかDOとして使用するかを
決める
機能を決める
終了
0301.ai
第 3 章 入出力補助機能
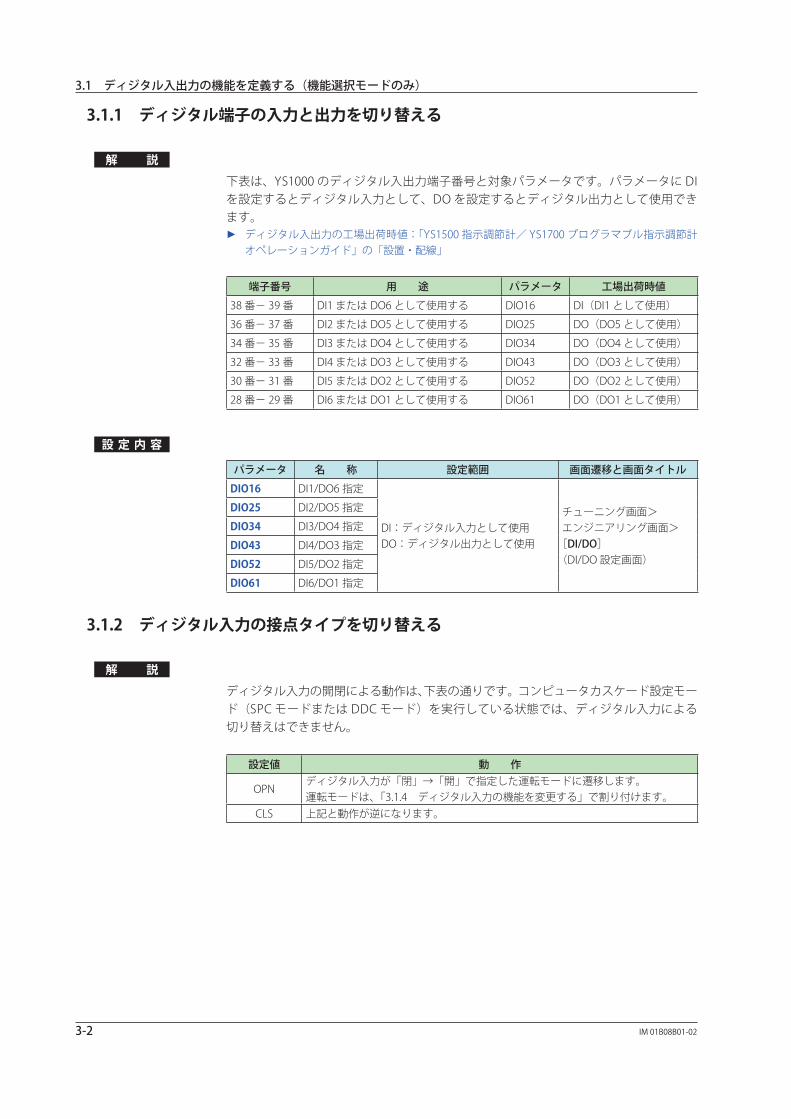
3-2 IM 01B08B01-02
3.1.1 ディジタル端子の入力と出力を切り替える
解 説
下表は、YS1000 のディジタル入出力端子番号と対象パラメータです。パラメータに DIを設定するとディジタル入力として、DO を設定するとディジタル出力として使用できます。► ディジタル入出力の工場出荷時値:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計
オペレーションガイド」の「設置・配線」
端子番号 用 途 パラメータ 工場出荷時値
38 番- 39 番 DI1 または DO6 として使用する DIO16 DI(DI1 として使用)
36 番- 37 番 DI2 または DO5 として使用する DIO25 DO(DO5 として使用)
34 番- 35 番 DI3 または DO4 として使用する DIO34 DO(DO4 として使用)
32 番- 33 番 DI4 または DO3 として使用する DIO43 DO(DO3 として使用)
30 番- 31 番 DI5 または DO2 として使用する DIO52 DO(DO2 として使用)
28 番- 29 番 DI6 または DO1 として使用する DIO61 DO(DO1 として使用)
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
DIO16 DI1/DO6 指定
DI:ディジタル入力として使用DO:ディジタル出力として使用
チューニング画面> エンジニアリング画面>
[DI/DO] (DI/DO 設定画面)
DIO25 DI2/DO5 指定
DIO34 DI3/DO4 指定
DIO43 DI4/DO3 指定
DIO52 DI5/DO2 指定
DIO61 DI6/DO1 指定
3.1.2 ディジタル入力の接点タイプを切り替える
解 説
ディジタル入力の開閉による動作は、下表の通りです。コンピュータカスケード設定モード(SPC モードまたは DDC モード)を実行している状態では、ディジタル入力による切り替えはできません。
設定値 動 作
OPNディジタル入力が「閉」→「開」で指定した運転モードに遷移します。運転モードは、「3.1.4 ディジタル入力の機能を変更する」で割り付けます。
CLS 上記と動作が逆になります。
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
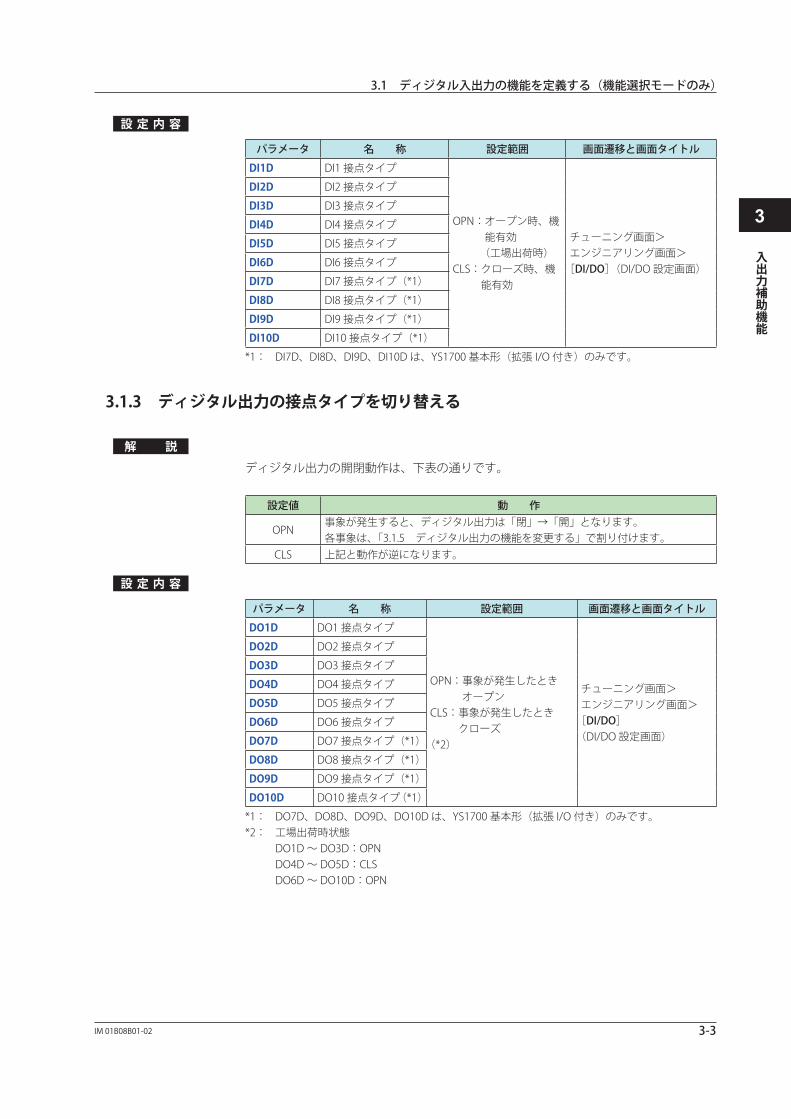
3-3IM 01B08B01-02
入出力補助機能
3
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
DI1D DI1 接点タイプ
OPN: オープン時、機能有効
(工場出荷時)CLS: クローズ時、機
能有効
チューニング画面> エンジニアリング画面>
[DI/DO](DI/DO 設定画面)
DI2D DI2 接点タイプ
DI3D DI3 接点タイプ
DI4D DI4 接点タイプ
DI5D DI5 接点タイプ
DI6D DI6 接点タイプ
DI7D DI7 接点タイプ(*1)
DI8D DI8 接点タイプ(*1)
DI9D DI9 接点タイプ(*1)
DI10D DI10 接点タイプ(*1)
*1: DI7D、DI8D、DI9D、DI10D は、YS1700 基本形(拡張 I/O 付き)のみです。
3.1.3 ディジタル出力の接点タイプを切り替える
解 説
ディジタル出力の開閉動作は、下表の通りです。
設定値 動 作
OPN事象が発生すると、ディジタル出力は「閉」→「開」となります。各事象は、「3.1.5 ディジタル出力の機能を変更する」で割り付けます。
CLS 上記と動作が逆になります。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
DO1D DO1 接点タイプ
OPN: 事象が発生したとき オープン
CLS: 事象が発生したとき クローズ
(*2)
チューニング画面> エンジニアリング画面>
[DI/DO] (DI/DO 設定画面)
DO2D DO2 接点タイプ
DO3D DO3 接点タイプ
DO4D DO4 接点タイプ
DO5D DO5 接点タイプ
DO6D DO6 接点タイプ
DO7D DO7 接点タイプ(*1)
DO8D DO8 接点タイプ(*1)
DO9D DO9 接点タイプ(*1)
DO10D DO10 接点タイプ(*1)
*1: DO7D、DO8D、DO9D、DO10D は、YS1700 基本形(拡張 I/O 付き)のみです。*2: 工場出荷時状態 DO1D ~ DO3D:OPN DO4D ~ DO5D:CLS DO6D ~ DO10D:OPN
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
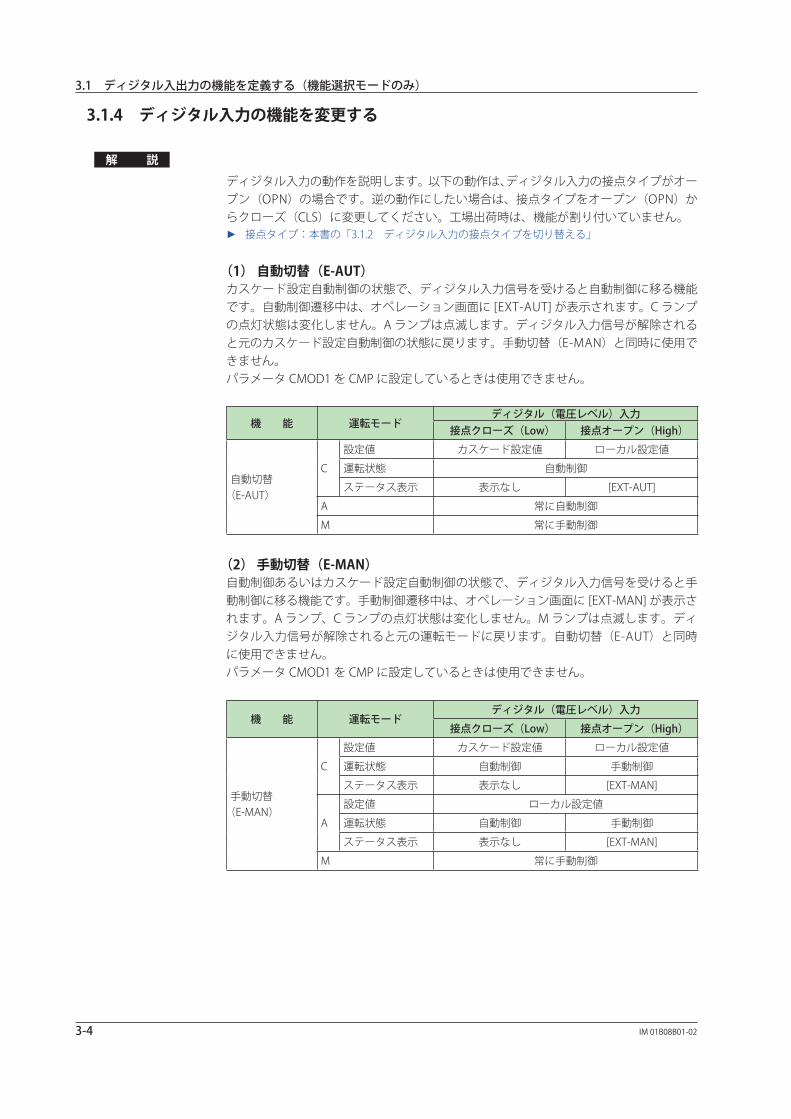
3-4 IM 01B08B01-02
3.1.4 ディジタル入力の機能を変更する
解 説
ディジタル入力の動作を説明します。以下の動作は、ディジタル入力の接点タイプがオープン(OPN)の場合です。逆の動作にしたい場合は、接点タイプをオープン(OPN)からクローズ(CLS)に変更してください。工場出荷時は、機能が割り付いていません。► 接点タイプ:本書の「3.1.2 ディジタル入力の接点タイプを切り替える」
(1) 自動切替(E-AUT)カスケード設定自動制御の状態で、ディジタル入力信号を受けると自動制御に移る機能です。自動制御遷移中は、オペレーション画面に [EXT-AUT] が表示されます。C ランプの点灯状態は変化しません。A ランプは点滅します。ディジタル入力信号が解除されると元のカスケード設定自動制御の状態に戻ります。手動切替(E-MAN)と同時に使用できません。パラメータ CMOD1 を CMP に設定しているときは使用できません。
機 能 運転モードディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)
自動切替(E-AUT)
C
設定値 カスケード設定値 ローカル設定値
運転状態 自動制御
ステータス表示 表示なし [EXT-AUT]
A 常に自動制御
M 常に手動制御
(2) 手動切替(E-MAN)自動制御あるいはカスケード設定自動制御の状態で、ディジタル入力信号を受けると手動制御に移る機能です。手動制御遷移中は、オペレーション画面に [EXT-MAN] が表示されます。A ランプ、C ランプの点灯状態は変化しません。M ランプは点滅します。ディジタル入力信号が解除されると元の運転モードに戻ります。自動切替(E-AUT)と同時に使用できません。パラメータ CMOD1 を CMP に設定しているときは使用できません。
機 能 運転モードディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)
手動切替(E-MAN)
C
設定値 カスケード設定値 ローカル設定値
運転状態 自動制御 手動制御
ステータス表示 表示なし [EXT-MAN]
A
設定値 ローカル設定値
運転状態 自動制御 手動制御
ステータス表示 表示なし [EXT-MAN]
M 常に手動制御
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
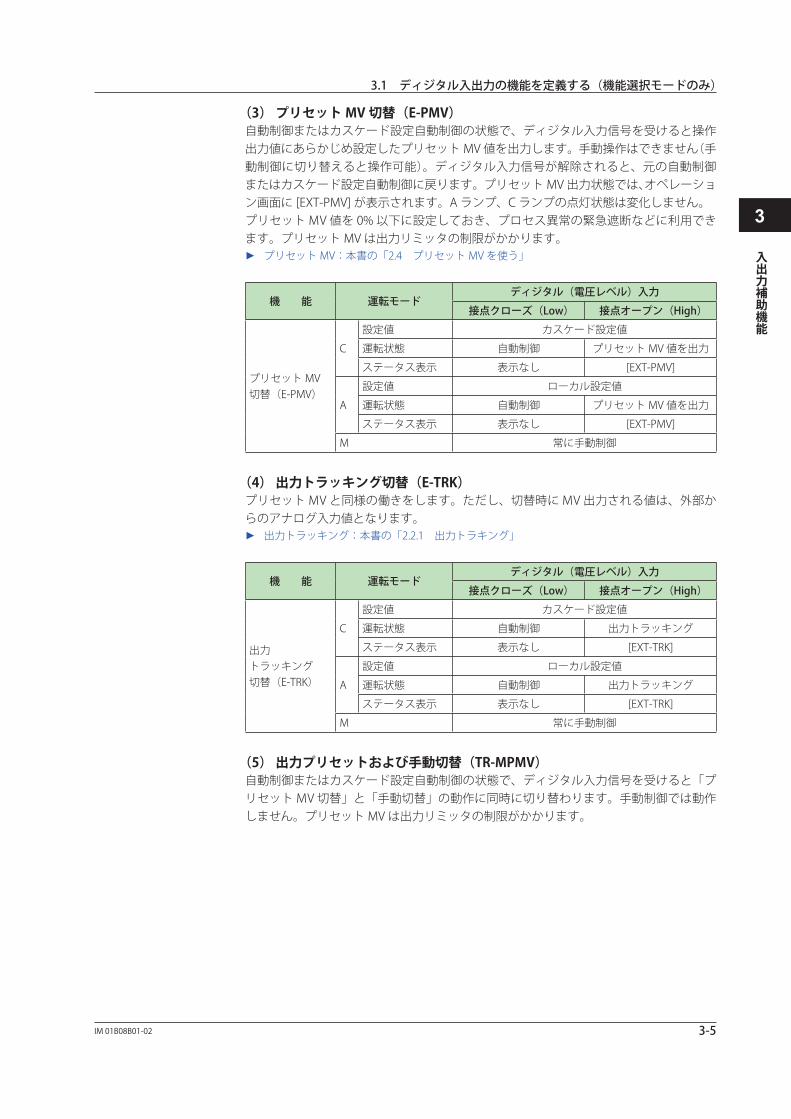
3-5IM 01B08B01-02
入出力補助機能
3
(3) プリセット MV 切替(E-PMV)自動制御またはカスケード設定自動制御の状態で、ディジタル入力信号を受けると操作出力値にあらかじめ設定したプリセット MV 値を出力します。手動操作はできません(手動制御に切り替えると操作可能)。ディジタル入力信号が解除されると、元の自動制御またはカスケード設定自動制御に戻ります。プリセット MV 出力状態では、オペレーション画面に [EXT-PMV] が表示されます。A ランプ、C ランプの点灯状態は変化しません。プリセット MV 値を 0% 以下に設定しておき、プロセス異常の緊急遮断などに利用できます。プリセット MV は出力リミッタの制限がかかります。► プリセット MV:本書の「2.4 プリセット MV を使う」
機 能 運転モードディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)
プリセット MV切替(E-PMV)
C
設定値 カスケード設定値
運転状態 自動制御 プリセット MV 値を出力
ステータス表示 表示なし [EXT-PMV]
A
設定値 ローカル設定値
運転状態 自動制御 プリセット MV 値を出力
ステータス表示 表示なし [EXT-PMV]
M 常に手動制御
(4) 出力トラッキング切替(E-TRK)プリセット MV と同様の働きをします。ただし、切替時に MV 出力される値は、外部からのアナログ入力値となります。► 出力トラッキング:本書の「2.2.1 出力トラキング」
機 能 運転モードディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)
出力 トラッキング 切替(E-TRK)
C
設定値 カスケード設定値
運転状態 自動制御 出力トラッキング
ステータス表示 表示なし [EXT-TRK]
A
設定値 ローカル設定値
運転状態 自動制御 出力トラッキング
ステータス表示 表示なし [EXT-TRK]
M 常に手動制御
(5) 出力プリセットおよび手動切替(TR-MPMV)自動制御またはカスケード設定自動制御の状態で、ディジタル入力信号を受けると「プリセット MV 切替」と「手動切替」の動作に同時に切り替わります。手動制御では動作しません。プリセット MV は出力リミッタの制限がかかります。
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)

3-6 IM 01B08B01-02
(6) セルフチューニング切替(E-STC)ディジタル入力信号を受けると、セルフチューニング機能は STC モード選択パラメータ
(STC)に従って動作します。ディジタル入力信号が解除されると、セルフチューニング機能を停止します。► セルフチューニング機能:本書の「第 7 章 セルフチューニング機能」
機 能ディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)セルフチューニング 切替(E-STC)
STC 機能停止 STC 機能起動
(7) カスケードオープン/クローズ切替(E-O/C)カスケードオープン/クローズ切替は、カスケードモード時に使用できます。ディジタル入力信号を受けると、(内部)カスケードオープン状態(第 1 ループの切断)となり、第 2 ループの制御となります。ディジタル入力信号が解除されると、(内部)カスケードクローズ状態となります。オペレーション画面にオープン/クローズ状態を示す [OPEN] または [CLOSE] が表示されます。
機 能ディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)オープン/クローズ 切替(E-O/C)
(内部)カスケードクローズ (内部)カスケードオープン
(8) 第 2 ループローカル/リモート切替(E-L/R)第 2 ループリモート/ローカル切替は、セレクタモード時に使用できます。ディジタル入力信号を受けると、第 2 ループの設定値をローカルに切り替えます。ディジタル入力信号が解除されると、リモートに切り替わり、外部からのカスケード設定値を使用します。オペレーション画面に第 2 ループ設定値のローカル/リモート状態を示す [SV2-LCL] または [SV2-RMT] が表示されます。
機 能ディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)ローカル/リモート切替(E-L/R)
リモート ローカル
(9) セレクタ選択(E-SEL)ディジタル入力信号を受けると、第 1 ループの演算結果が出力されます。ディジタル入力信号が解除されるとオートセレクタ選択パラメータ ATSEL に従って出力されます。
機 能ディジタル(電圧レベル)入力
接点クローズ(Low) 接点オープン(H�gh)
セレクタ選択(E-SEL) オートセレクタ選択第 1 ループの演算結果を
選択
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
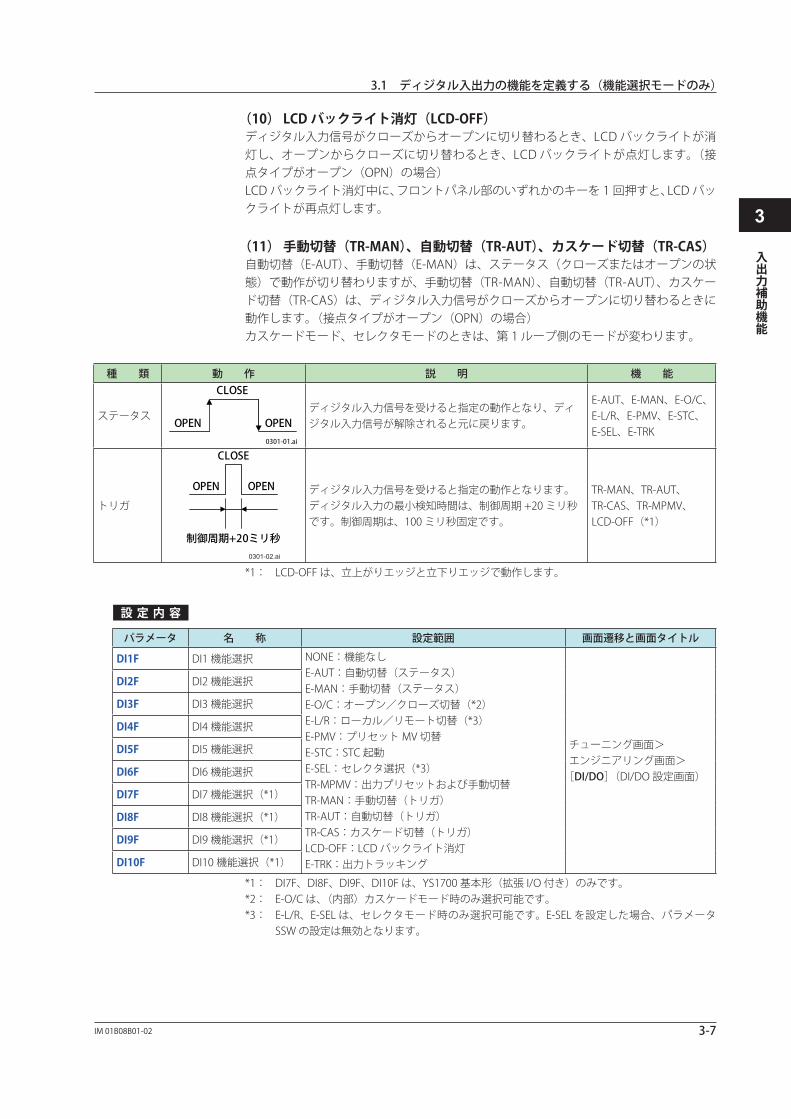
3-7IM 01B08B01-02
入出力補助機能
3
(10) LCD バックライト消灯(LCD-OFF)ディジタル入力信号がクローズからオープンに切り替わるとき、LCD バックライトが消灯し、オープンからクローズに切り替わるとき、LCD バックライトが点灯します。(接点タイプがオープン(OPN)の場合)LCD バックライト消灯中に、フロントパネル部のいずれかのキーを 1 回押すと、LCD バックライトが再点灯します。
(11) 手動切替(TR-MAN)、自動切替(TR-AUT)、カスケード切替(TR-CAS)自動切替(E-AUT)、手動切替(E-MAN)は、ステータス(クローズまたはオープンの状態)で動作が切り替わりますが、手動切替(TR-MAN)、自動切替(TR-AUT)、カスケード切替(TR-CAS)は、ディジタル入力信号がクローズからオープンに切り替わるときに動作します。(接点タイプがオープン(OPN)の場合)カスケードモード、セレクタモードのときは、第 1 ループ側のモードが変わります。
種 類 動 作 説 明 機 能
ステータス
CLOSE
OPENOPEN0301-01.ai
ディジタル入力信号を受けると指定の動作となり、ディジタル入力信号が解除されると元に戻ります。
E-AUT、E-MAN、E-O/C、E-L/R、E-PMV、E-STC、E-SEL、E-TRK
トリガ
制御周期+20ミリ秒
CLOSE
OPENOPEN
0301-02.ai
ディジタル入力信号を受けると指定の動作となります。ディジタル入力の最小検知時間は、制御周期 +20 ミリ秒です。制御周期は、100 ミリ秒固定です。
TR-MAN、TR-AUT、TR-CAS、TR-MPMV、LCD-OFF(*1)
*1: LCD-OFF は、立上がりエッジと立下りエッジで動作します。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
DI1F DI1 機能選択 NONE:機能なしE-AUT:自動切替(ステータス)E-MAN:手動切替(ステータス)E-O/C:オープン/クローズ切替(*2)E-L/R:ローカル/リモート切替(*3)E-PMV:プリセット MV 切替E-STC:STC 起動E-SEL:セレクタ選択(*3)TR-MPMV:出力プリセットおよび手動切替TR-MAN:手動切替(トリガ)TR-AUT:自動切替(トリガ)TR-CAS:カスケード切替(トリガ)LCD-OFF:LCD バックライト消灯E-TRK:出力トラッキング
チューニング画面> エンジニアリング画面>
[DI/DO](DI/DO 設定画面)
DI2F DI2 機能選択
DI3F DI3 機能選択
DI4F DI4 機能選択
DI5F DI5 機能選択
DI6F DI6 機能選択
DI7F DI7 機能選択(*1)
DI8F DI8 機能選択(*1)
DI9F DI9 機能選択(*1)
DI10F DI10 機能選択(*1)
*1: DI7F、DI8F、DI9F、DI10F は、YS1700 基本形(拡張 I/O 付き)のみです。*2: E-O/C は、(内部)カスケードモード時のみ選択可能です。*3: E-L/R、E-SEL は、セレクタモード時のみ選択可能です。E-SEL を設定した場合、パラメータ
SSW の設定は無効となります。
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)

3-8 IM 01B08B01-02
3.1.5 ディジタル出力の機能を変更する
解 説
ディジタル出力の動作を説明します。以下の動作は、ディジタル出力の接点タイプがオープン(OPN)の場合です。逆の動作にしたい場合は、接点タイプをオープン(OPN)からクローズ(CLS)に変更してください。► 接点タイプ:本書の「3.1.3 ディジタル出力の接点タイプを切り替える」
警報のステータス出力測定値 1 上限警報(PH1)、測定値 1 下限警報(PL1)、測定値 1 上上限警報(HH1)、測定値 1 下下限警報(LL1)、偏差 1 警報(DL1)、測定値 1 変化率警報(VL1)、偏差 1 警報または測定値 1 変化率警報(DL1VL1)、第 1 ループ全警報の論理輪(1-ALM)は、シングルループモードおよびカスケードモード、セレクタモードの第 1 ループで動作します。測定値 2 上限警報(PH2)、測定値 2 下限警報(PL2)、測定値 2 上上限警報(HH2)、測定値 2 下下限警報(LL2)、偏差 2 警報(DL2)、測定値 2 変化率警報(VL2)、偏差 2 警報または測定値 2 変化率警報(DL2VL2)、第 2 ループ全警報の論理輪(2-ALM)は、カスケードモード、セレクタモードの第 2 ループで動作します。各警報の動作を示します。
下図は、測定値上限警報、測定値上上限警報、測定値下限警報、測定値下下限警報および警報ヒステリシスの動作例です。
PV
クローズ
クローズ
警報ヒステリシス(HYS)
警報ヒステリシス(HYS)
警報ヒステリシス(HYS)
警報ヒステリシス(HYS)
オープン
オープン クローズクローズ
クローズオープン
オープン
時間 上図の例では、接点タイプは事象発生時オープンとなります。(工場出荷時値)
測定値上限警報設定値
測定値下限警報設定値
測定値上限警報出力
測定値下限警報出力
測定値上上限警報出力
測定値下下限警報設定値
測定値上上限警報設定値
測定値下下限警報出力
0302.ai
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)

3-9IM 01B08B01-02
入出力補助機能
3
下図は、偏差警報および警報ヒステリシスの動作例です。
PV
警報ヒステリシス(HYS)
警報ヒステリシス(HYS)
偏差警報設定値
偏差警報設定値
時間
クローズ クローズオープン クローズ オープン偏差警報出力
設定値(SV)
上図の例では、接点タイプは事象発生時オープンとなります。(工場出荷時値)0303.ai
警報ヒステリシス HYS1 は、PH1、PL1、HH1、LL1、DL1 に対して一括で動作します。警報ヒステリシス HYS2 は、PH2、PL2、HH2、LL2、DL2 に対して一括で動作します。
下図は、測定値変化率警報の動作例です。
PV
測定値変化率警報出力
この傾斜より大きい場合、警報発生
時間
クローズ クローズオープン クローズ オープン
変化率警報時間設定値
変化率警報設定値 変化率警報設定値
変化率警報時間設定値
変化率を超えた 変化率を超えた
上図の例では、接点タイプは事象発生時オープンとなります。(工場出荷時値)0304.ai
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
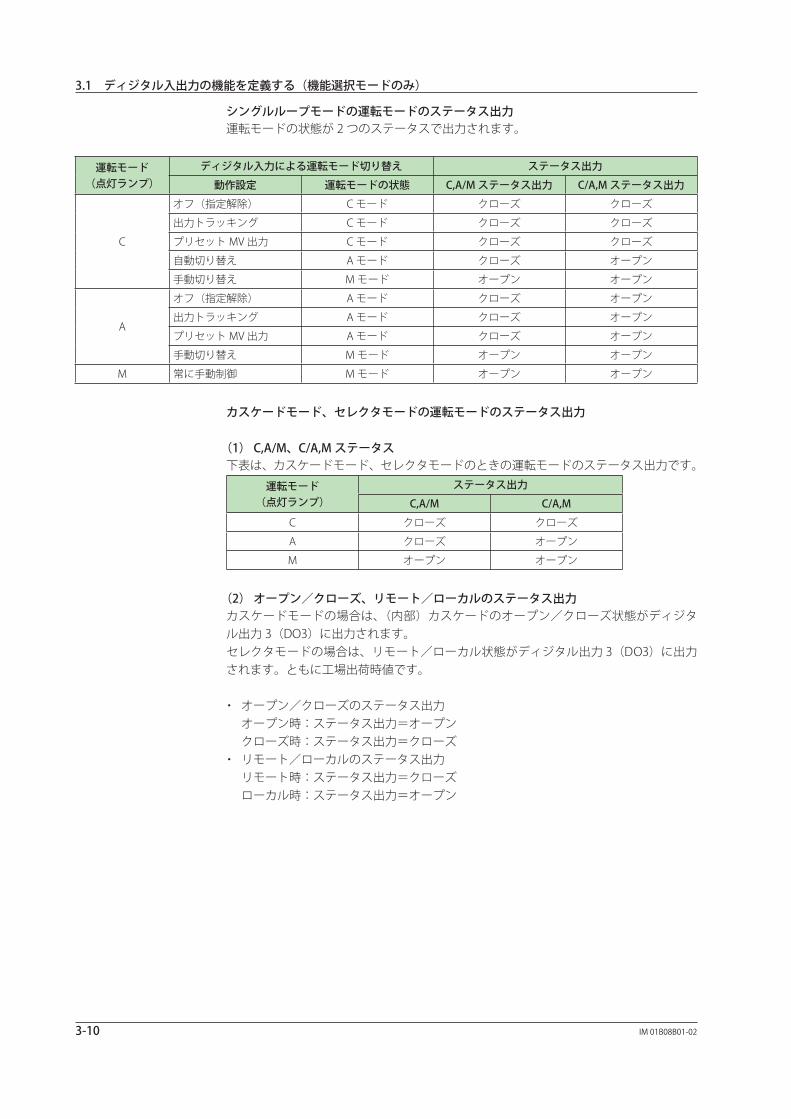
3-10 IM 01B08B01-02
シングルループモードの運転モードのステータス出力運転モードの状態が 2 つのステータスで出力されます。
運転モード (点灯ランプ)
ディジタル入力による運転モード切り替え ステータス出力
動作設定 運転モードの状態 C,A/M ステータス出力 C/A,M ステータス出力
C
オフ(指定解除) C モード クローズ クローズ
出力トラッキング C モード クローズ クローズ
プリセット MV 出力 C モード クローズ クローズ
自動切り替え A モード クローズ オープン
手動切り替え M モード オープン オープン
A
オフ(指定解除) A モード クローズ オープン
出力トラッキング A モード クローズ オープン
プリセット MV 出力 A モード クローズ オープン
手動切り替え M モード オープン オープン
M 常に手動制御 M モード オープン オープン
カスケードモード、セレクタモードの運転モードのステータス出力
(1) C,A/M、C/A,M ステータス下表は、カスケードモード、セレクタモードのときの運転モードのステータス出力です。
運転モード (点灯ランプ)
ステータス出力
C,A/M C/A,M
C クローズ クローズ
A クローズ オープン
M オープン オープン
(2) オープン/クローズ、リモート/ローカルのステータス出力カスケードモードの場合は、(内部)カスケードのオープン/クローズ状態がディジタル出力 3(DO3)に出力されます。セレクタモードの場合は、リモート/ローカル状態がディジタル出力 3(DO3)に出力されます。ともに工場出荷時値です。
・ オープン/クローズのステータス出力 オープン時:ステータス出力=オープン クローズ時:ステータス出力=クローズ
・ リモート/ローカルのステータス出力 リモート時:ステータス出力=クローズ ローカル時:ステータス出力=オープン
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
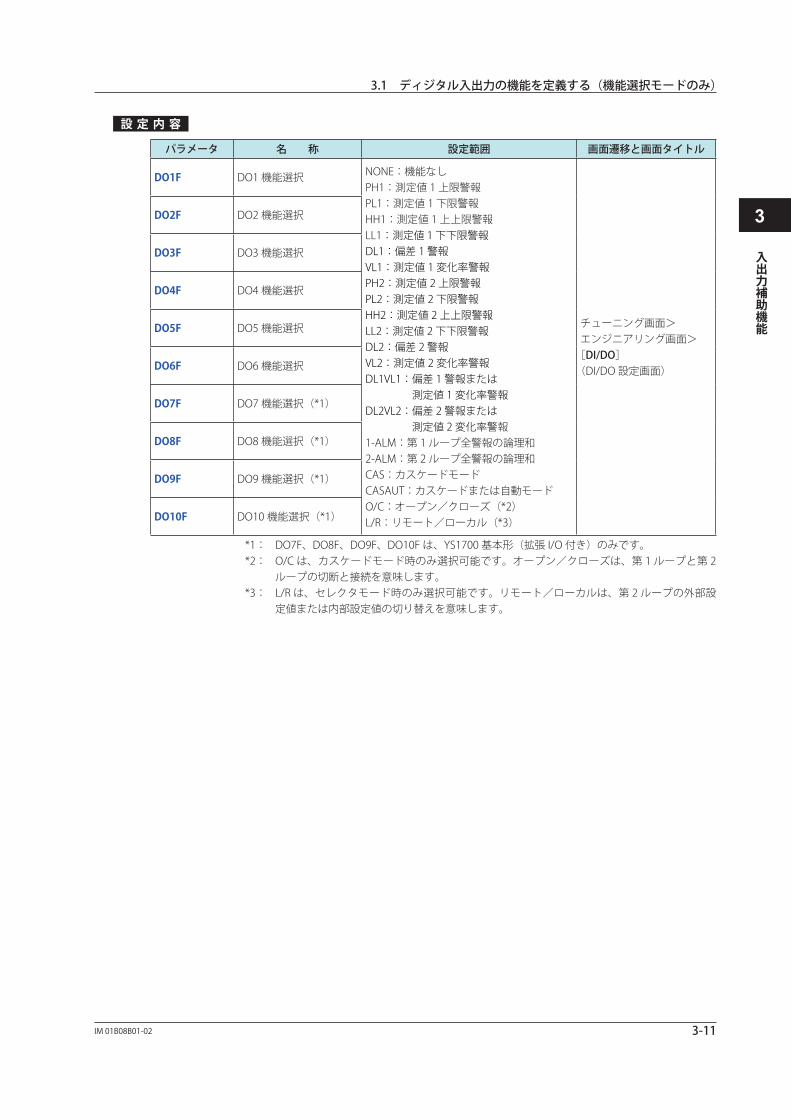
3-11IM 01B08B01-02
入出力補助機能
3
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
DO1F DO1 機能選択 NONE:機能なし PH1:測定値 1 上限警報PL1:測定値 1 下限警報HH1:測定値 1 上上限警報LL1:測定値 1 下下限警報DL1:偏差 1 警報VL1:測定値 1 変化率警報PH2:測定値 2 上限警報PL2:測定値 2 下限警報HH2:測定値 2 上上限警報LL2:測定値 2 下下限警報DL2:偏差 2 警報VL2:測定値 2 変化率警報DL1VL1: 偏差 1 警報または
測定値 1 変化率警報DL2VL2: 偏差 2 警報または
測定値 2 変化率警報1-ALM:第 1 ループ全警報の論理和2-ALM:第 2 ループ全警報の論理和CAS:カスケードモードCASAUT:カスケードまたは自動モードO/C:オープン/クローズ(*2)L/R:リモート/ローカル(*3)
チューニング画面> エンジニアリング画面>
[DI/DO] (DI/DO 設定画面)
DO2F DO2 機能選択
DO3F DO3 機能選択
DO4F DO4 機能選択
DO5F DO5 機能選択
DO6F DO6 機能選択
DO7F DO7 機能選択(*1)
DO8F DO8 機能選択(*1)
DO9F DO9 機能選択(*1)
DO10F DO10 機能選択(*1)
*1: DO7F、DO8F、DO9F、DO10F は、YS1700 基本形(拡張 I/O 付き)のみです。*2: O/C は、カスケードモード時のみ選択可能です。オープン/クローズは、第 1 ループと第 2
ループの切断と接続を意味します。*3: L/R は、セレクタモード時のみ選択可能です。リモート/ローカルは、第 2 ループの外部設
定値または内部設定値の切り替えを意味します。
3.1 ディジタル入出力の機能を定義する(機能選択モードのみ)
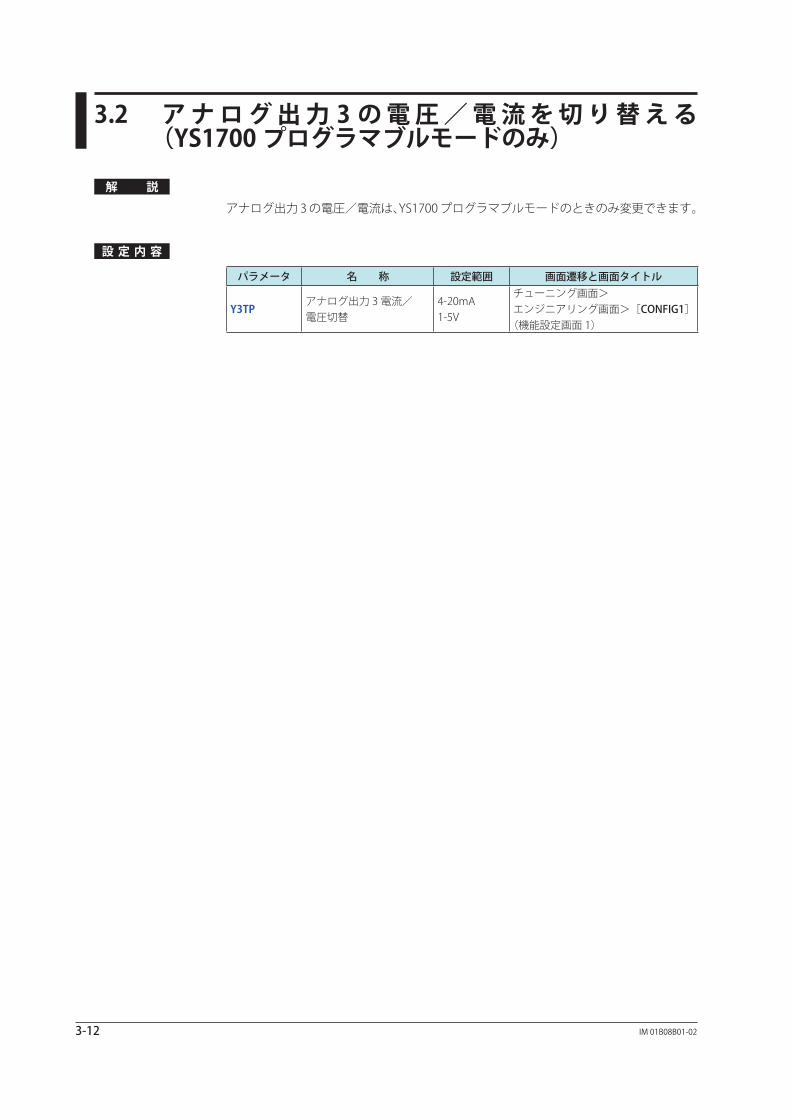
3-12 IM 01B08B01-02
3.2 ア ナ ロ グ 出 力 3 の 電 圧 / 電 流 を 切 り 替 え る(YS1700 プログラマブルモードのみ)
解 説
アナログ出力 3 の電圧/電流は、YS1700 プログラマブルモードのときのみ変更できます。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
Y3TPアナログ出力 3 電流/ 電圧切替
4-20mA 1-5V
チューニング画面> エンジニアリング画面>[CONFIG1]
(機能設定画面 1)
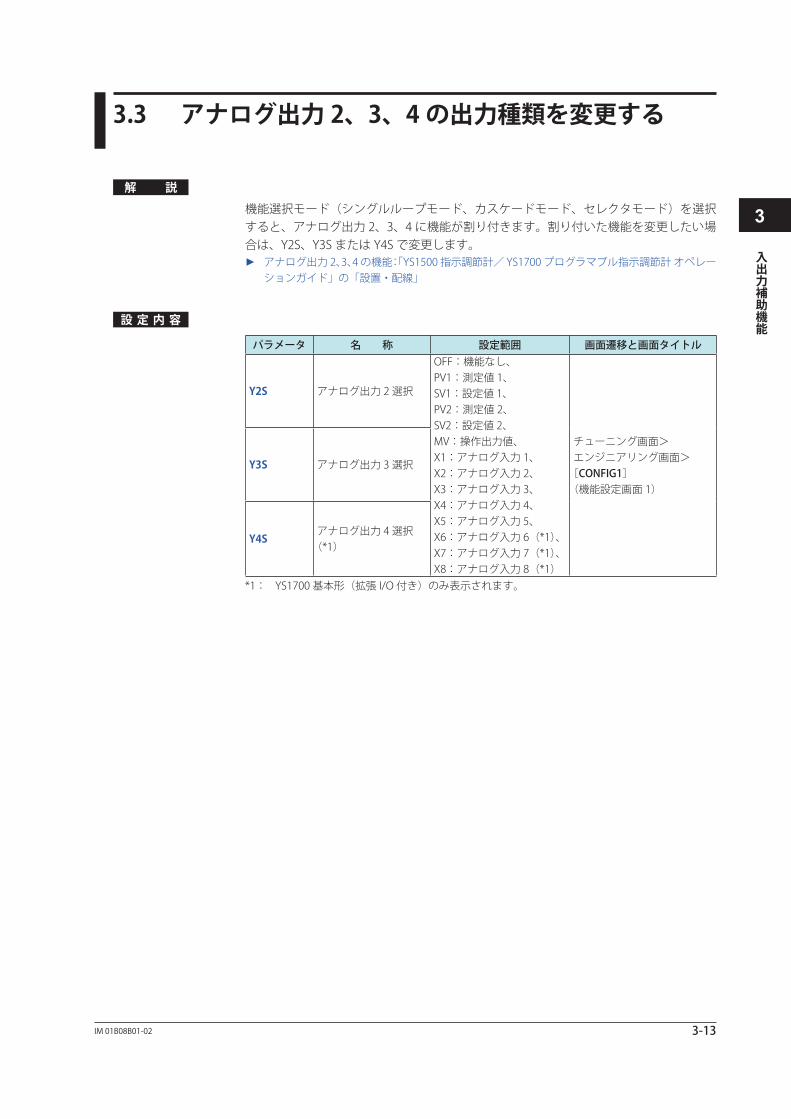
3-13IM 01B08B01-02
入出力補助機能
3
3.3 アナログ出力 2、3、4 の出力種類を変更する
解 説
機能選択モード(シングルループモード、カスケードモード、セレクタモード)を選択すると、アナログ出力 2、3、4 に機能が割り付きます。割り付いた機能を変更したい場合は、Y2S、Y3S または Y4S で変更します。► アナログ出力 2、3、4 の機能:「YS1500 指示調節計/ YS1700 プログラマブル指示調節計 オペレー
ションガイド」の「設置・配線」
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
Y2S アナログ出力 2 選択
OFF:機能なし、PV1:測定値 1、SV1:設定値 1、PV2:測定値 2、SV2:設定値 2、MV:操作出力値、X1:アナログ入力 1、X2:アナログ入力 2、X3:アナログ入力 3、X4:アナログ入力 4、X5:アナログ入力 5、X6:アナログ入力 6(*1)、X7:アナログ入力 7(*1)、X8:アナログ入力 8(*1)
チューニング画面> エンジニアリング画面>
[CONFIG1] (機能設定画面 1)
Y3S アナログ出力 3 選択
Y4Sアナログ出力 4 選択
(*1)
*1: YS1700 基本形(拡張 I/O 付き)のみ表示されます。

Blank Page
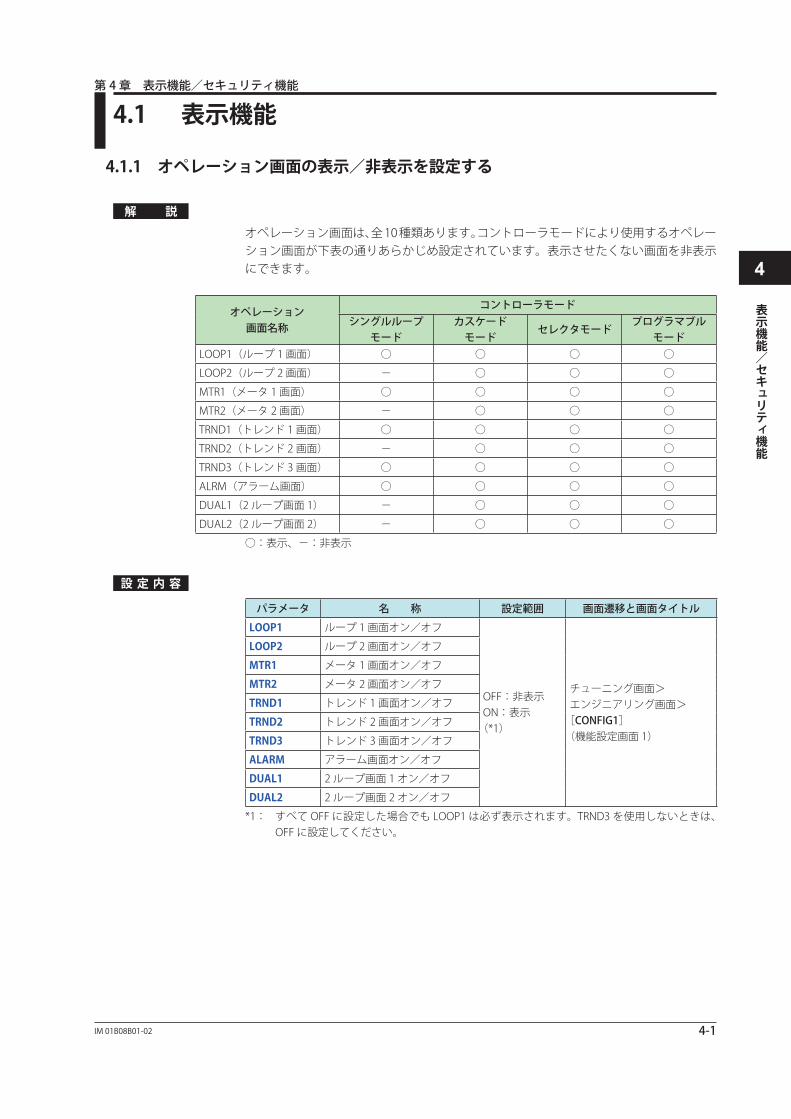
4-1IM 01B08B01-02
表示機能/セキュリティ機能
4
4.1 表示機能
4.1.1 オペレーション画面の表示/非表示を設定する
解 説
オペレーション画面は、全 10 種類あります。コントローラモードにより使用するオペレーション画面が下表の通りあらかじめ設定されています。表示させたくない画面を非表示にできます。
オペレーション 画面名称
コントローラモードシングルループ
モードカスケード
モードセレクタモード
プログラマブル モード
LOOP1(ループ 1 画面) ○ ○ ○ ○
LOOP2(ループ 2 画面) - ○ ○ ○
MTR1(メータ 1 画面) ○ ○ ○ ○
MTR2(メータ 2 画面) - ○ ○ ○
TRND1(トレンド 1 画面) ○ ○ ○ ○
TRND2(トレンド 2 画面) - ○ ○ ○
TRND3(トレンド 3 画面) ○ ○ ○ ○
ALRM(アラーム画面) ○ ○ ○ ○
DUAL1(2 ループ画面 1) - ○ ○ ○
DUAL2(2 ループ画面 2) - ○ ○ ○
○:表示、-:非表示
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
LOOP1 ループ 1 画面オン/オフ
OFF:非表示ON:表示
(*1)
チューニング画面> エンジニアリング画面>
[CONFIG1] (機能設定画面 1)
LOOP2 ループ 2 画面オン/オフ
MTR1 メータ 1 画面オン/オフ
MTR2 メータ 2 画面オン/オフ
TRND1 トレンド 1 画面オン/オフ
TRND2 トレンド 2 画面オン/オフ
TRND3 トレンド 3 画面オン/オフ
ALARM アラーム画面オン/オフ
DUAL1 2 ループ画面 1 オン/オフ
DUAL2 2 ループ画面 2 オン/オフ
*1: すべて OFF に設定した場合でも LOOP1 は必ず表示されます。TRND3 を使用しないときは、OFF に設定してください。
第 4 章 表示機能/セキュリティ機能
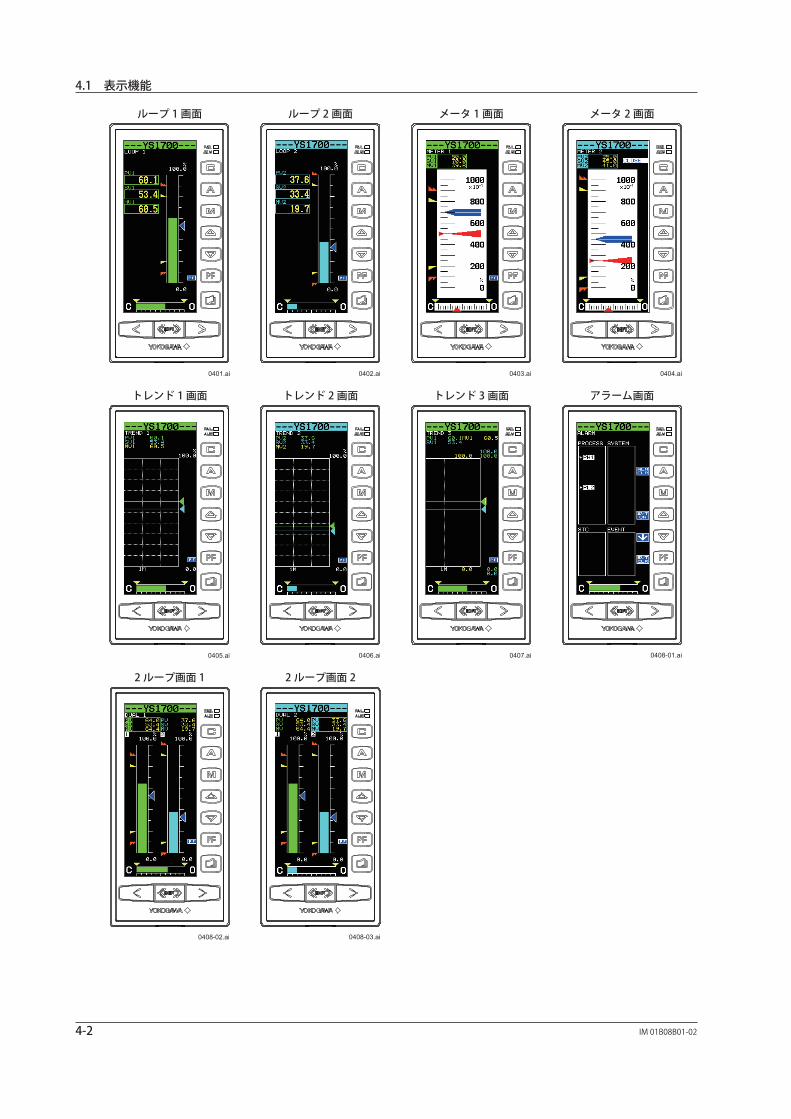
4-2 IM 01B08B01-02
ループ 1 画面 ループ 2 画面 メータ 1 画面 メータ 2 画面
0401.ai 0402.ai 0403.ai 0404.ai
トレンド 1 画面 トレンド 2 画面 トレンド 3 画面 アラーム画面
0405.ai 0406.ai 0407.ai 0408-01.ai
2 ループ画面 1 2 ループ画面 2
0408-02.ai 0408-03.ai
4.1 表示機能
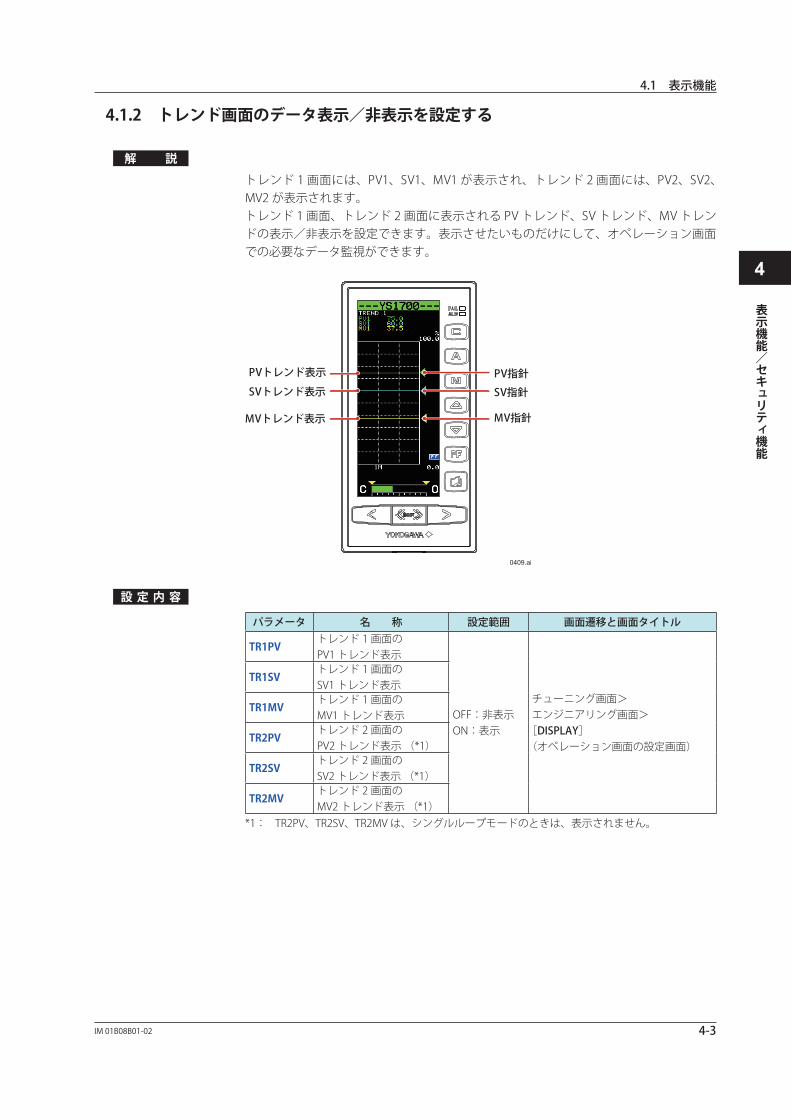
4-3IM 01B08B01-02
表示機能/セキュリティ機能
4
4.1.2 トレンド画面のデータ表示/非表示を設定する
解 説
トレンド 1 画面には、PV1、SV1、MV1 が表示され、トレンド 2 画面には、PV2、SV2、MV2 が表示されます。トレンド 1 画面、トレンド 2 画面に表示される PV トレンド、SV トレンド、MV トレンドの表示/非表示を設定できます。表示させたいものだけにして、オペレーション画面での必要なデータ監視ができます。
PVトレンド表示
SVトレンド表示PV指針
SV指針
MV指針MVトレンド表示
0409.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
TR1PVトレンド 1 画面の PV1 トレンド表示
OFF:非表示ON:表示
チューニング画面> エンジニアリング画面>
[DISPLAY] (オペレーション画面の設定画面)
TR1SVトレンド 1 画面の SV1 トレンド表示
TR1MVトレンド 1 画面の MV1 トレンド表示
TR2PVトレンド 2 画面の PV2 トレンド表示 (*1)
TR2SVトレンド 2 画面の SV2 トレンド表示 (*1)
TR2MVトレンド 2 画面の MV2 トレンド表示 (*1)
*1: TR2PV、TR2SV、TR2MV は、シングルループモードのときは、表示されません。
4.1 表示機能

4-4 IM 01B08B01-02
4.1.3 トレンド画面の時間幅を変更する
解 説
トレンド 1 画面、トレンド 2 画面、トレンド 3 画面に表示されるトレンドの時間幅を設定できます。
0410.ai
時間幅
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
TRDT1トレンド 1 画面の 時間幅
1M:1 分、5M:5 分、10M:10 分、30M:30 分、1H:1 時間、5H:5 時間、10H:10 時間、30H:30 時間
チューニング画面> エンジニアリング画面>
[DISPLAY] (オペレーション画面の設定画面)
TRDT2トレンド 2 画面の 時間幅
TRDT3トレンド 3 画面の 時間幅
パラメータ TRDT2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
4.1 表示機能

4-5IM 01B08B01-02
表示機能/セキュリティ機能
4
4.1.4 トレンド 3 画面の表示データを設定する
解 説
トレンド 3 画面に表示させる表示データを任意に設定できます。最大 4 つです。オペレーション画面での必要なデータ監視ができます。
トレンド画面3
トレンド3画面のデータ選択1の指針トレンド3画面のデータ選択2の指針トレンド3画面のデータ選択3の指針トレンド3画面のデータ選択4の指針
トレンド3画面のデータ選択1のディジタル表示トレンド3画面のデータ選択2のディジタル表示トレンド3画面のデータ選択3のディジタル表示トレンド3画面のデータ選択4のディジタル表示
トレンド3画面のデータ選択1のトレンド表示トレンド3画面のデータ選択2のトレンド表示トレンド3画面のデータ選択3のトレンド表示トレンド3画面のデータ選択4のトレンド表示
0411.ai
設 定 内 容
パラメータ 名 称 設定範囲(*1) 画面遷移と画面タイトル
TRDS1トレンド 3 画面 のデータ選択 1
OFF:表示なしPV1:測定値 1SV1:設定値 1MV1:操作出力値 1PV2:測定値 2SV2:設定値 2MV2:操作出力値 2X1:入力 1X2:入力 2X3:入力 3X4:入力 4X5:入力 5X6:入力 6 (*2)X7:入力 7 (*2)X8:入力 8 (*2)Y1:出力 1Y2:出力 2Y3:出力 3Y4:出力 4 (*2)
チューニング画面> エンジニアリング画面>
[DISPLAY] (オペレーション画面の設定画面)
TRDS2トレンド 3 画面 のデータ選択 2
TRDS3トレンド 3 画面 のデータ選択 3
TRDS4トレンド 3 画面 のデータ選択 4
*1: X1 ~ X8、Y1 ~ Y4 は、YS1000 端子部に入力、出力される値です。*2: X6、X7、X8、Y4 は、YS1700 基本形(拡張 I/O 付き)のみ選択可能。
4.1 表示機能
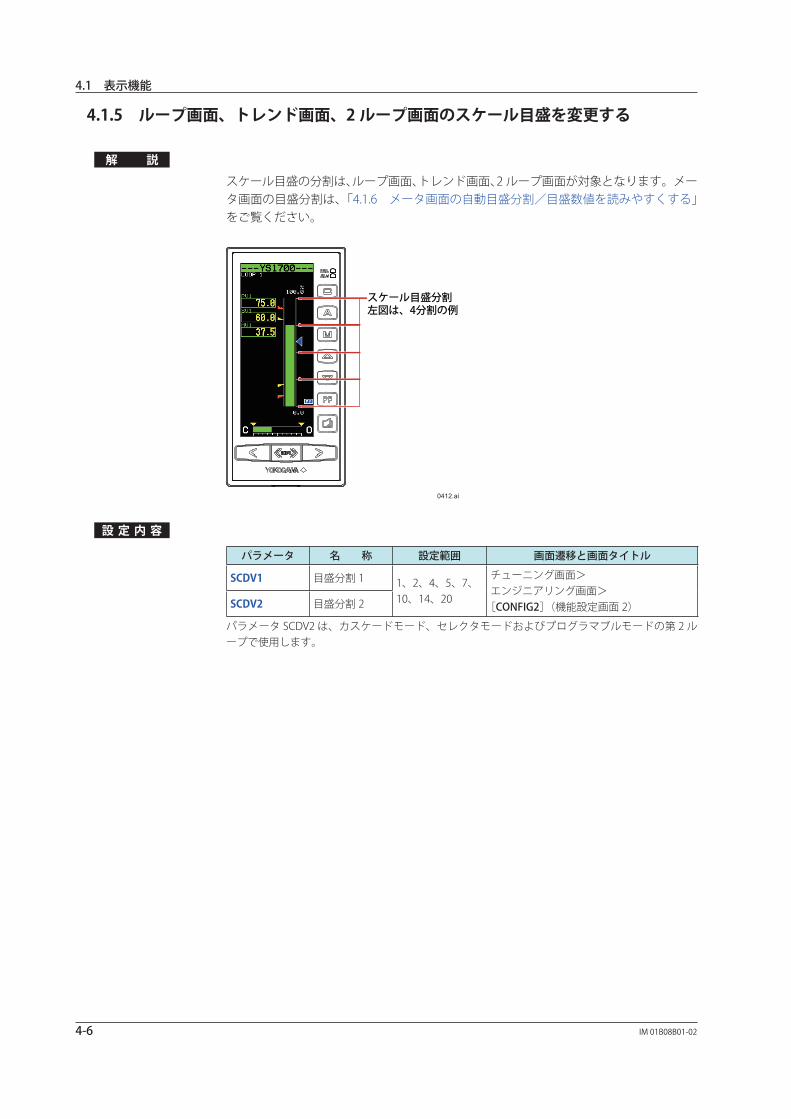
4-6 IM 01B08B01-02
4.1.5 ループ画面、トレンド画面、2 ループ画面のスケール目盛を変更する
解 説
スケール目盛の分割は、ループ画面、トレンド画面、2 ループ画面が対象となります。メータ画面の目盛分割は、「4.1.6 メータ画面の自動目盛分割/目盛数値を読みやすくする」をご覧ください。
スケール目盛分割左図は、4分割の例
0412.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
SCDV1 目盛分割 1 1、2、4、5、7、 10、14、20
チューニング画面> エンジニアリング画面>
[CONFIG2](機能設定画面 2)SCDV2 目盛分割 2
パラメータ SCDV2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
4.1 表示機能

4-7IM 01B08B01-02
表示機能/セキュリティ機能
4
4.1.6 メータ画面の自動目盛分割/目盛数値を読みやすくする
解 説
メータ画面のスケールは、スケール 0% 値とスケール 100% 値に設定した値から自動的に目盛を分割します。分割数は、最小 11 分割、最大 20 分割です。
0413.ai
また、メータ画面に表示される目盛数字は、目盛線分割と同様にスケール 0% 値とスケール 100% 値から自動的に決まります。目盛数字を見やすくするために、10 のべき乗で表示させることができます。
設 定 内 容
パラメータ 名 称 設定範囲 画面タイトル
MTMG1メータ 1 画面スケール 倍率 10 のべき乗
AUTO, 10^-5,10^-4,10^-3,10^-2,10^-1,10^0,10^1,10^2,10^3,10^4,10^5,
チューニング画面> エンジニアリング画面>[DISPLAY]
(オペレーション画面の設定画面)MTMG2メータ 2 画面スケール 倍率 10 のべき乗
パラメータ MTMG2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
4.1 表示機能
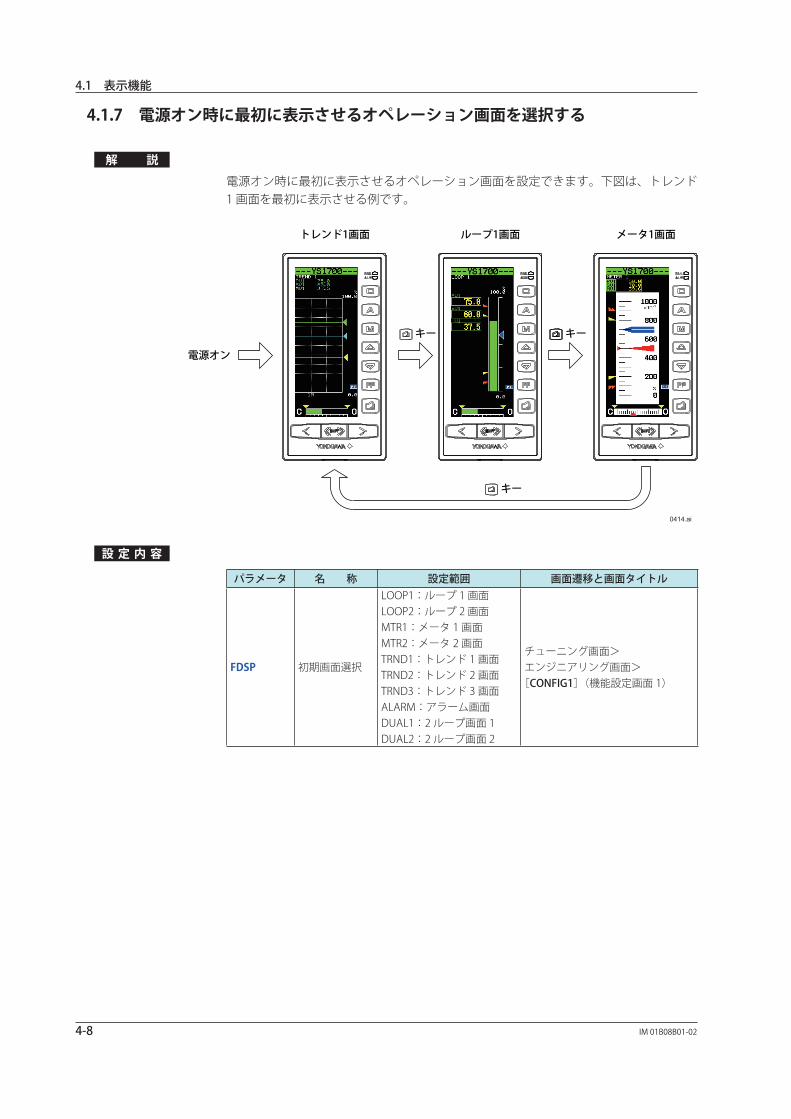
4-8 IM 01B08B01-02
4.1.7 電源オン時に最初に表示させるオペレーション画面を選択する
解 説
電源オン時に最初に表示させるオペレーション画面を設定できます。下図は、トレンド1 画面を最初に表示させる例です。
電源オン
キー キー
キー
トレンド1画面 ループ1画面 メータ1画面
0414.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
FDSP 初期画面選択
LOOP1:ループ 1 画面LOOP2:ループ 2 画面MTR1:メータ 1 画面MTR2:メータ 2 画面TRND1:トレンド 1 画面TRND2:トレンド 2 画面TRND3:トレンド 3 画面ALARM:アラーム画面DUAL1:2 ループ画面 1DUAL2:2 ループ画面 2
チューニング画面> エンジニアリング画面>
[CONFIG1](機能設定画面 1)
4.1 表示機能
4-9IM 01B08B01-02
表示機能/セキュリティ機能
4
4.1.8 LCD バックライトを消灯する/点灯する
解 説
バックライト消灯機能により、省エネ効果とディスプレイユニットの寿命を延ばすことができます。普段は表示を見ない場所に設置している場合や夜間は表示を消したい場合などに、バックライトを消すことができます。
次の方法でバックライトのオン/オフが可能です。① 前面キー② オフタイマ設定③ ディジタル入力④ 通信⑤ ユーザプログラム
①~⑤の方法に優先順位はありません。バックライト消灯機能は、最後に操作された状態となります。なお、FAIL、ALM およびイベント表示中は、バックライト消灯条件が成立してもバックライトは点灯します。
① 前面キー LCD バックライト消灯中にいずれかのキーを 1 回押すと、バックライトが点灯します。 キー操作によりバックライトを消灯させることはできません。キー操作で設定する場
合は②の方法を使用してください。
② オフタイマ設定 LCD バックライトオフタイマをオンすることにより、30 分間キー操作がない場合に
バックライトを消灯させることができます。
③ ディジタル入力 バックライト消灯機能が割り付いているディジタル入力がオープン状態からクローズ
状態になったとき消灯、クローズ状態からオープン状態になったとき点灯します。 YS1700 プログラマブルモードでは、ディジタル入力によりバックライトを消灯させ
ることはできません。► ディジタル入力へのバックライト消灯機能割り付け:本書の「3.1.4 ディジタル入力の機能
を変更する」
④ 通信 バックライトの点灯/消灯は、CFL フラグ(通信用レジスタ)で確認または設定します。
通信により CFL フラグに 0/1 を書込み、バックライトを点灯(0)/消灯(1)させます。► 通信によるバックライト消灯機能:「YS1000 シリーズ通信インタフェース ユーザーズマニュ
アル(CD)」
⑤ ユーザプログラム バックライトの点灯/消灯は、CFL フラグで確認または設定します。ユーザプログラ
ムにより CFL フラグに 0/1 を書込み、バックライトを点灯(0)/消灯(1)させます。► ユーザプログラムによるバックライト消灯機能:「YSS1000 設定ソフトウェア/ YS1700 プロ
グラマブル機能 ユーザーズマニュアル(CD)」
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
ECOLCD バックライト オフタイマ
OFF:オフタイマ機能オフON:オフタイマ機能オン (オフタイマ 30 分)
チューニング画面> エンジニアリング画面>
[LCD](LCD 設定画面)
4.1 表示機能
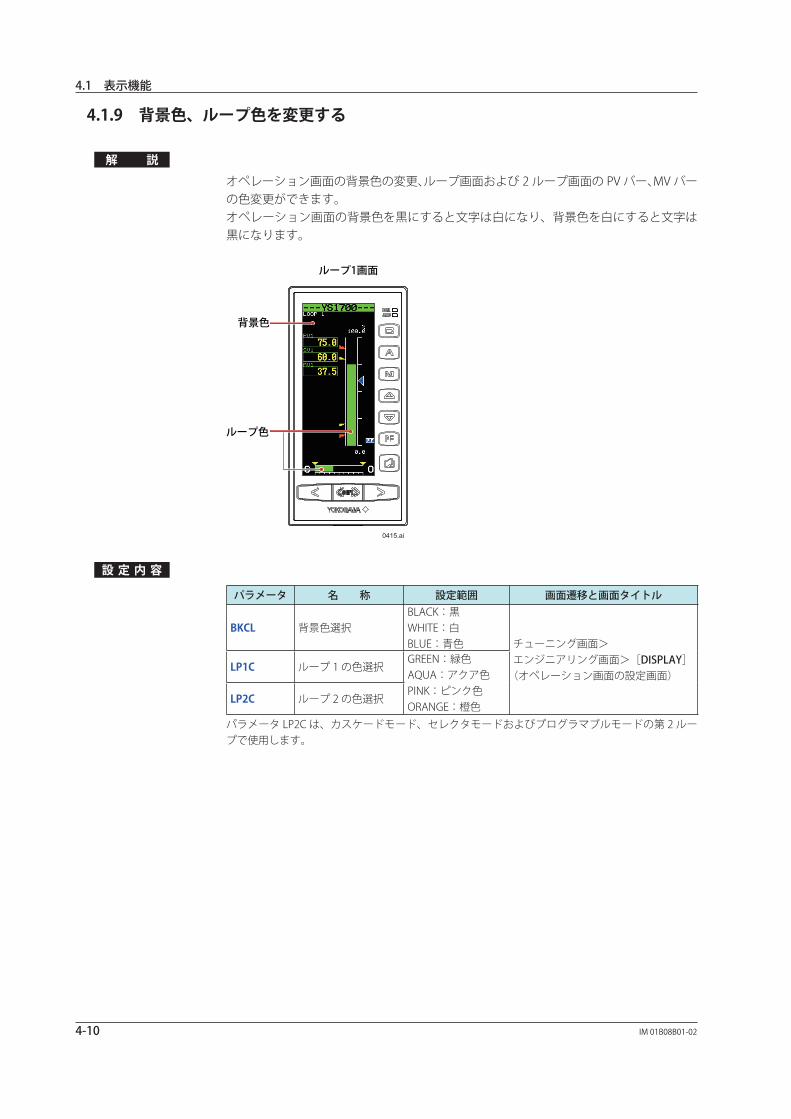
4-10 IM 01B08B01-02
4.1.9 背景色、ループ色を変更する
解 説
オペレーション画面の背景色の変更、ループ画面および 2 ループ画面の PV バー、MV バーの色変更ができます。オペレーション画面の背景色を黒にすると文字は白になり、背景色を白にすると文字は黒になります。
ループ1画面
背景色
ループ色
0415.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
BKCL 背景色選択BLACK:黒WHITE:白BLUE:青色 チューニング画面>
エンジニアリング画面>[DISPLAY] (オペレーション画面の設定画面)
LP1C ループ 1 の色選択GREEN:緑色AQUA:アクア色PINK:ピンク色ORANGE:橙色
LP2C ループ 2 の色選択
パラメータ LP2C は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
4.1 表示機能

4-11IM 01B08B01-02
表示機能/セキュリティ機能
4
4.1.10 LCD の輝度/コントラストを調整する
解 説
LCD のコントラストおよび輝度の調整が可能です。調整バー表示は、コントラストおよび輝度調整値をバー表示し、設定可能範囲に対する現在値の状態を示します。
選択パラメータ表示(拡大)
選択パラメータ表示
調整バー表示
カラーバー表示
0416.ai
Note・ コントラスト調整は、通電後 30 分以上経過した状態で行ってください。・ コントラスト値は、オレンジと赤の違い、および緑と黄の違いが認識できる値が最適値です。
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
BRT LCD 輝度調整 0 ~ 5 チューニング画面> エンジニアリング画面>
[LCD](LCD 設定画面)CTRS LCD コントラスト調整 0 ~ 10
4.1 表示機能
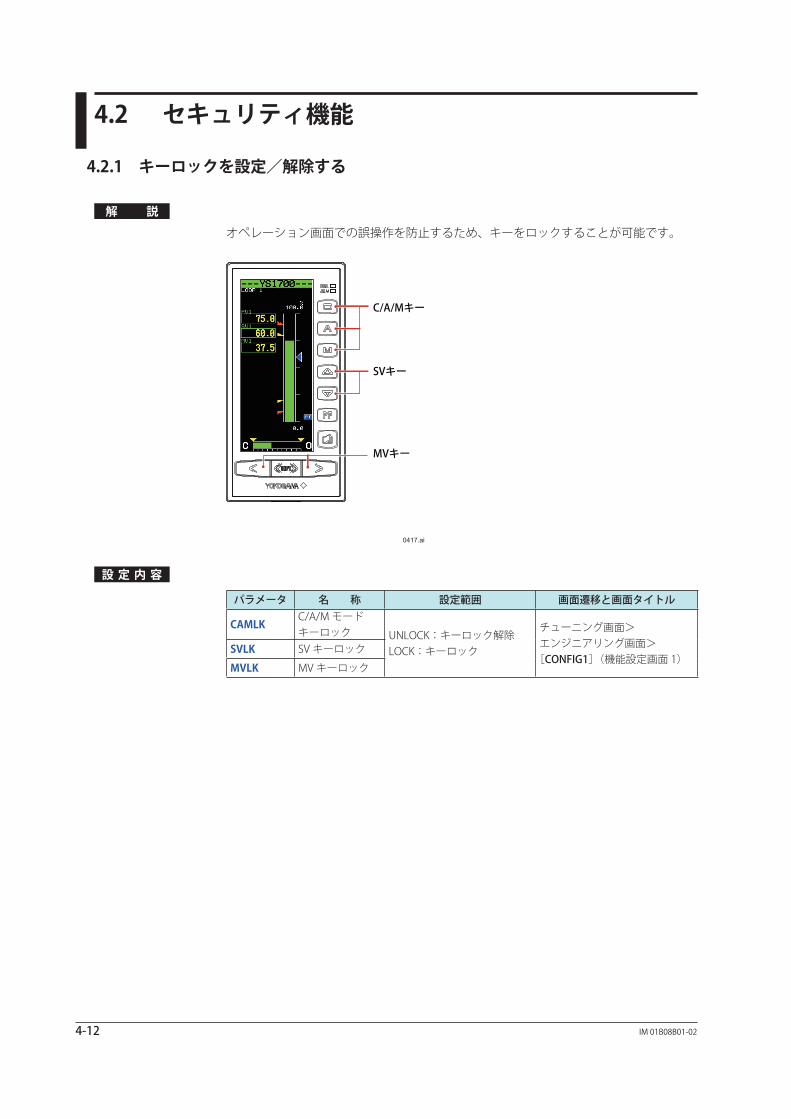
4-12 IM 01B08B01-02
4.2 セキュリティ機能
4.2.1 キーロックを設定/解除する
解 説
オペレーション画面での誤操作を防止するため、キーをロックすることが可能です。
C/A/Mキー
SVキー
MVキー
0417.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
CAMLKC/A/M モード キーロック UNLOCK:キーロック解除
LOCK:キーロック
チューニング画面> エンジニアリング画面>
[CONFIG1](機能設定画面 1)SVLK SV キーロック
MVLK MV キーロック

4-13IM 01B08B01-02
表示機能/セキュリティ機能
4
4.2.2 パラメータ変更を禁止/解除する
解 説
チューニングパラメータ、エンジニアリングパラメータの設定値を誤操作により変更されないようにロックすることが可能です。ロックすると、各設定画面でパラメータ設定値の増加キー [ △ ] および減少キー [ ▽ ] の表示が消えます。ロックするためのパスワードは 4 桁の数値です。工場出荷時は未設定です。パスワード未設定または解除済みのときは [SET PASSWORD]、[UNLOCK] を表示し、パスワード設定済みのときは [ENT PASSWORD]、[LOCK] を表示します。
ソフトキー機能ソフトキーは、計器前面の操作キーが、LCD 画面上に表示されたキーとして機能します。
・[SET] ソフトキー :パスワード設定キー パスワードを設定するときに押します。
・[ENT] ソフトキー :パスワード入力/解除キー パスワードを解除するときに押します。
・[ → ] ソフトキー :カーソル移動キー パスワードを設定/入力するとき、カーソルの位置を右方向に移動させます。
・[ △ ] ソフトキー :数値増加キー 数値を増加させます。数値は、0 ~ 9 がサイクルに変化します。
・[ ▽ ] ソフトキー :数値減少キー 数値を減少させます。数値は、0 ~ 9 がサイクルに変化します。
パスワード設定画面の操作(1)パスワードの設定(パスワードを設定しパラメータ変更を禁止する操作)
① パスワード画面に移行すると、[SET PASSWORD] と [UNLOCK] が表示されています。② [SET] ソフトキーを押すと、パスワード [0000] が表示されます。③ [ → ] ソフトキー(桁移動)、[ △ ] ソフトキー(増加)および [ ▽ ] ソフトキー(減
少)を使用し、パスワードを決定します。④ [SET] ソフトキーを押します。パスワードの背景色が変わります。⑤ 再度 [SET] ソフトキーを押します。パスワードは消え、[ENT PASSWORD] と [LOCK]
が表示されます。パスワードが設定されると同時に [SET] ソフトキー表示は消え、[ENT] ソフトキーが表示されます。
(2)パスワードの入力/解除(パスワードを設定してある計器にパスワードを入力してパラメータ変更を可能とする操作)
① パスワード画面に移行すると、[ENT PASSWORD] および [LOCK] が表示されています。
② [ENT] ソフトキーを押すと、[0000] が表示されます。③ [ → ] ソフトキー(桁移動)、[ △ ] ソフトキー(増加)および [ ▽ ] ソフトキー(減
少)を使用し、パスワードを揃えます。④ [ENT] ソフトキーを押します。パスワードの背景色が変わります。⑤ 再度 [ENT] ソフトキーを押します。パスワードが一致すれば、パスワードは消え、
[SET PASSWORD] と [UNLOCK] が表示され、パスワード変更可能状態になります。パスワードが不一致のときは、③項に戻ります。
4.2 セキュリティ機能

4-14 IM 01B08B01-02
設定内容/入力画面
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[PASSWORD]ソフトキー(パスワード設定画面)
パスワード設定
パスワード入力
パスワード状態表示
カーソル移動キーソフトキー機能表示
パスワード設定キー
数値増加キー数値減少キー
パスワード入力キー
パスワード設定 パスワード入力/解除
パスワード入力
0418.ai
4.2 セキュリティ機能
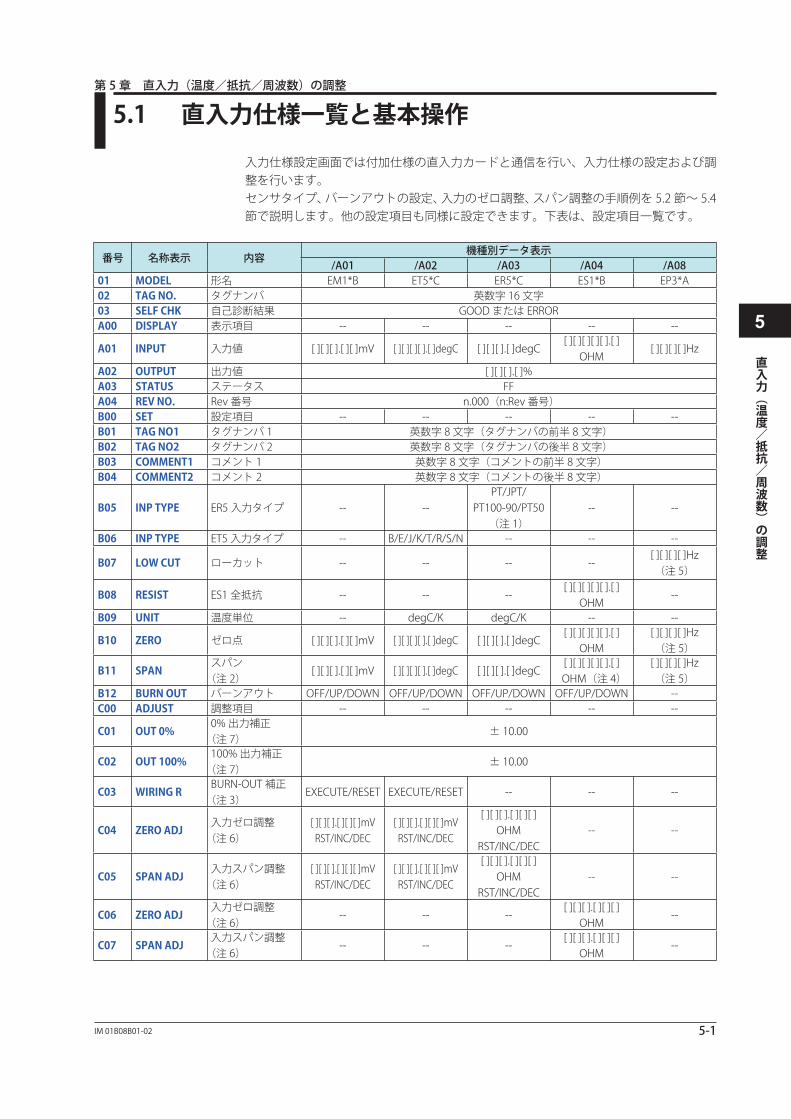
5-1IM 01B08B01-02
直入力(温度/抵抗/周波数)の調整
5
5.1 直入力仕様一覧と基本操作
入力仕様設定画面では付加仕様の直入力カードと通信を行い、入力仕様の設定および調整を行います。センサタイプ、バーンアウトの設定、入力のゼロ調整、スパン調整の手順例を 5.2 節~ 5.4節で説明します。他の設定項目も同様に設定できます。下表は、設定項目一覧です。
番号 名称表示 内容機種別データ表示
/A01 /A02 /A03 /A04 /A0801 MODEL 形名 EM1*B ET5*C ER5*C ES1*B EP3*A02 TAG NO. タグナンバ 英数字 16 文字03 SELF CHK 自己診断結果 GOOD または ERRORA00 DISPLAY 表示項目 -- -- -- -- --
A01 INPUT 入力値 [ ][ ][ ].[ ][ ]mV [ ][ ][ ][ ].[ ]degC [ ][ ][ ].[ ]degC[ ][ ][ ][ ][ ].[ ]
OHM[ ][ ][ ][ ]Hz
A02 OUTPUT 出力値 [ ][ ][ ].[ ]%A03 STATUS ステータス FFA04 REV NO. Rev 番号 n.000(n:Rev 番号)B00 SET 設定項目 -- -- -- -- --B01 TAG NO1 タグナンバ 1 英数字 8 文字(タグナンバの前半 8 文字)B02 TAG NO2 タグナンバ 2 英数字 8 文字(タグナンバの後半 8 文字)B03 COMMENT1 コメント 1 英数字 8 文字(コメントの前半 8 文字)B04 COMMENT2 コメント 2 英数字 8 文字(コメントの後半 8 文字)
B05 INP TYPE ER5 入力タイプ -- --PT/JPT/
PT100-90/PT50(注 1)
-- --
B06 INP TYPE ET5 入力タイプ -- B/E/J/K/T/R/S/N -- -- --
B07 LOW CUT ローカット -- -- -- --[ ][ ][ ][ ]Hz (注 5)
B08 RESIST ES1 全抵抗 -- -- --[ ][ ][ ][ ][ ].[ ]
OHM--
B09 UNIT 温度単位 -- degC/K degC/K -- --
B10 ZERO ゼロ点 [ ][ ][ ].[ ][ ]mV [ ][ ][ ][ ].[ ]degC [ ][ ][ ].[ ]degC[ ][ ][ ][ ][ ].[ ]
OHM[ ][ ][ ][ ]Hz (注 5)
B11 SPANスパン
(注 2)[ ][ ][ ].[ ][ ]mV [ ][ ][ ][ ].[ ]degC [ ][ ][ ].[ ]degC
[ ][ ][ ][ ][ ].[ ]OHM(注 4)
[ ][ ][ ][ ]Hz (注 5)
B12 BURN OUT バーンアウト OFF/UP/DOWN OFF/UP/DOWN OFF/UP/DOWN OFF/UP/DOWN --C00 ADJUST 調整項目 -- -- -- -- --
C01 OUT 0%0% 出力補正
(注 7)± 10.00
C02 OUT 100%100% 出力補正
(注 7)± 10.00
C03 WIRING RBURN-OUT 補正
(注 3)EXECUTE/RESET EXECUTE/RESET -- -- --
C04 ZERO ADJ入力ゼロ調整
(注 6)[ ][ ][ ].[ ][ ][ ]mVRST/INC/DEC
[ ][ ][ ].[ ][ ][ ]mVRST/INC/DEC
[ ][ ][ ].[ ][ ][ ]OHM
RST/INC/DEC-- --
C05 SPAN ADJ入力スパン調整
(注 6)[ ][ ][ ].[ ][ ][ ]mVRST/INC/DEC
[ ][ ][ ].[ ][ ][ ]mVRST/INC/DEC
[ ][ ][ ].[ ][ ][ ]OHM
RST/INC/DEC-- --
C06 ZERO ADJ入力ゼロ調整
(注 6)-- -- --
[ ][ ][ ].[ ][ ][ ] OHM
--
C07 SPAN ADJ入力スパン調整
(注 6)-- -- --
[ ][ ][ ].[ ][ ][ ] OHM
--
第 5 章 直入力(温度/抵抗/周波数)の調整
5-2 IM 01B08B01-02
注 1: PT=Pt100(IPTS-68:JIS'89)、JPT=JPt100(JIS'89)、PT100-90=Pt100(ITS-90:JIS'97)、PT50=Pt50(JIS'81)
注 2: 測定可能なデータは標準仕様に記載している範囲です。注 3: BURN-OUT 補正とは、外部導線抵抗値が大きい場合に発生する BURN-OUT 電流による誤差を
補正する機能です。注 4: 30k Ωまで可能ですが、標準仕様は 100 ~ 2000 Ωです。注 5: 有効数字 4 桁以下で設定。ただし、スパンについては 10000Hz が設定可能。注 6: 入 力 ゼ ロ 調 整、 入 力 ス パ ン 調 整 は、 各 直 入 力 カ ー ド の 入 力 調 整 を 行 う も の で す。
/A01、/A02、/A03 では A/D 変換部のオフセット、ゲインを調整できます。[ △ ]、[ ▽ ] ソフトキーにより[INC]または[DEC]を選択し、[ENT] ソフトキーを 2 度押すとそのたびに調整します。また、[RST]を選択して [ENT] ソフトキーを 2 度押すと調整がリセットされます。なお、/A04 ではゼロ、スパンの再設定を行います。すなわち、入力を 0% にしてゼロ調整、100% にしてスパン調整を行う([ENT] ソフトキーを 2 度押す)と、自動的にゼロ(B10)、スパン(B11)の値を再設定します。
注 7: 出 力 補 正 は、 各 直 入 力 カ ー ド の D/A 変 換 部(1 ~ 5V 出 力 ) の 調 整 を 行 う も の で す。 0% 出力補正によりオフセットを、100% 出力補正によりゲインを調整できます。± 10.00%の範囲で値を設定し、[ENT] ソフトキーを 2 度押すと、その値が加算された 0% 出力値または 100% 出力値が連続して出力される状態になります。この状態を終了させるにはこの画面で一度他のパラメータを表示させるか、または電源のオン・オフを行います。
基本操作1) 誤設定防止機能 誤操作を防止するため、この画面に展開直後は、どのパラメータも選択(反転表示)
されていません。[→]ソフトキーを一度押すと、最上行のパラメータ [SET](パラメータの設定許可/禁止)が選択されます。
2) 設定許可パラメータ操作 最上行の [SET] は、SC メンテナンス通信を許可するためのパラメータです。この画
面に展開直後は、[INHB](設定禁止)になっています。これを [ENBL](設定可)に設定しないと、SC メンテナンス通信はできません。[SET] パラメータ選択後、[△]ソフトキーを押すと、設定が [INHB] から [ENBL] に変更されます。同時に画面の右上に [STOP] と表示されます。[ENBL] に設定すると、運転モードが強制的に手動制御(Mモード)に切り替わり、操作出力および警報出力はホールドされます。また、他の画面に展開すると、自動的に [INHB] に戻ります。
3) ソフトキー・ [MNU]ソフトキー :メニュー(MENU)変更キー 押すごとに SC と通信し、SC のメニューを読み出して表示させます。
・ [PRM]ソフトキー :設定項目変更キー 押すごとに SC と通信し、SC の設定項目を読み出して表示させます。
・ [→]ソフトキー :カーソル移動キー データタイプが英数字のとき、反転表示の桁を右方向に移動させます。最右桁
の次は、最左桁に移動します。・ [△]ソフトキー :データ増加キー データを増加させます。データは、サイクルに変化します。
・ [▽]ソフトキー :データ減少キー データを減少させます。データは、サイクルに変化します。
・ [ENT]ソフトキー :エンタ(ENTER)キー SC にデータを書き込みます。書込み操作は、次の 2 段階になります。
① [ENT]ソフトキーを 1 回押します。通信データがすべて背景色反転表示になります。
② 再度[ENT]ソフトキーを押します。SC にデータが書き込まれ、通常表示に戻ります。[ENT]キー以外のキーを押すと、データは書き込まれず、通常表示に戻ります。
5.1 直入力仕様一覧と基本操作
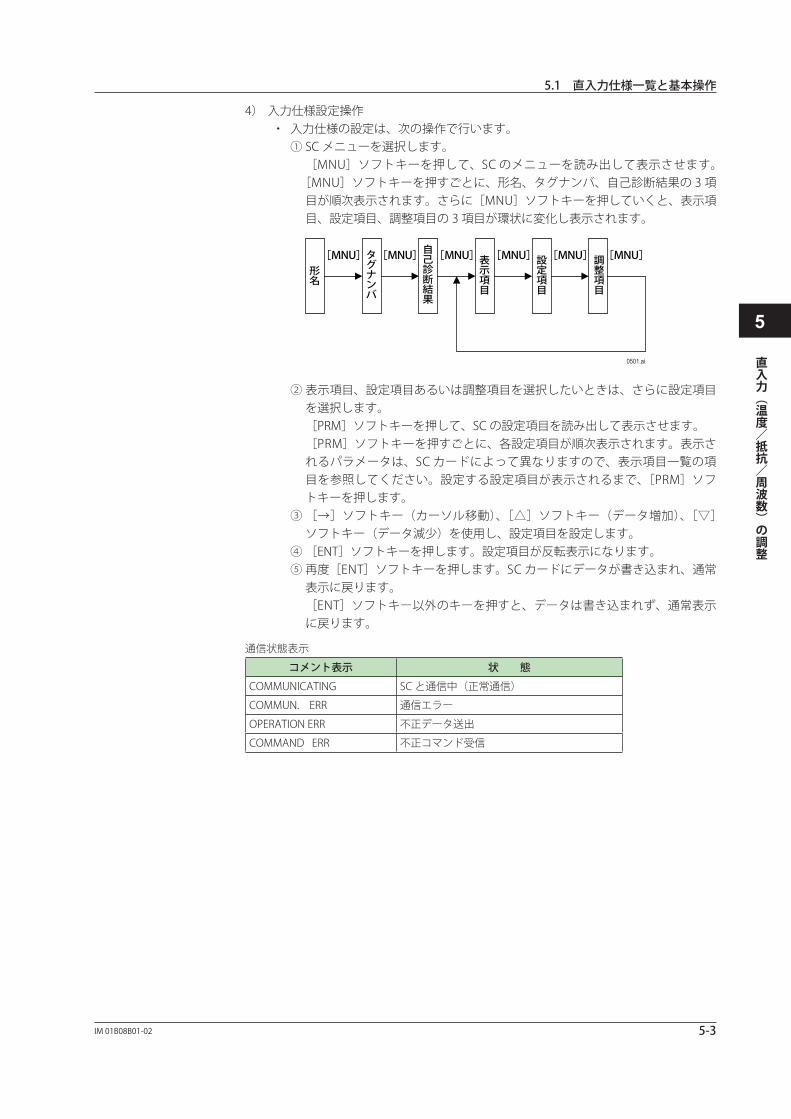
5-3IM 01B08B01-02
直入力(温度/抵抗/周波数)の調整
5
4) 入力仕様設定操作・ 入力仕様の設定は、次の操作で行います。
① SC メニューを選択します。 [MNU]ソフトキーを押して、SC のメニューを読み出して表示させます。
[MNU]ソフトキーを押すごとに、形名、タグナンバ、自己診断結果の 3 項目が順次表示されます。さらに[MNU]ソフトキーを押していくと、表示項目、設定項目、調整項目の 3 項目が環状に変化し表示されます。
形名
タグナンバ
自己診断結果
表示項目
設定項目
調整項目
[MNU]
0501.ai
[MNU][MNU] [MNU] [MNU] [MNU]
② 表示項目、設定項目あるいは調整項目を選択したいときは、さらに設定項目を選択します。
[PRM]ソフトキーを押して、SC の設定項目を読み出して表示させます。 [PRM]ソフトキーを押すごとに、各設定項目が順次表示されます。表示さ
れるパラメータは、SC カードによって異なりますので、表示項目一覧の項目を参照してください。設定する設定項目が表示されるまで、[PRM]ソフトキーを押します。
③ [→]ソフトキー(カーソル移動)、[△]ソフトキー(データ増加)、[▽]ソフトキー(データ減少)を使用し、設定項目を設定します。
④ [ENT]ソフトキーを押します。設定項目が反転表示になります。⑤ 再度[ENT]ソフトキーを押します。SC カードにデータが書き込まれ、通常
表示に戻ります。 [ENT]ソフトキー以外のキーを押すと、データは書き込まれず、通常表示
に戻ります。
通信状態表示
コメント表示 状 態
COMMUNICATING SC と通信中(正常通信)
COMMUN. ERR 通信エラー
OPERATION ERR 不正データ送出
COMMAND ERR 不正コマンド受信
5.1 直入力仕様一覧と基本操作

5-4 IM 01B08B01-02
5.2 センサタイプを設定する
解 説
センサタイプを設定できるのは、熱電対カードまたは測温抵抗体カードです。
設 定 内 容
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[SC MAINT]ソフトキー(入力仕様設定画面)
エンジニアリング画面
ソフトキー機能表示
メニュー変更キーパラメータ変更キーカーソル移動キーデータ増加キーデータ減少キーENTERキー
パラメータ番号パラメータ名称
データ表示
通信状態表示
0503.ai
設定手順 (測温抵抗体の種類を設定する例)
① [→]ソフトキーを押して、[SET INHB] を反転表示させる。
② [△]ソフトキーを押して、[SET ENBL] を表示させる。
③ [MNU]ソフトキーを押して、 01 MODEL 直入力カードの形名(例えば、ER5*C) を表示させる。④ [MNU]ソフトキーを数回押して、 B00 SET を表示させる。⑤ [PRM]ソフトキーを数回押して、左画面を表示さ
せる。⑥ [△]ソフトキーまたは[▽]ソフトキーを押して、
データ表示部を変更させる。⑦ [ENT]ソフトキーを押して、データ表示部を反転
させる。⑧ もう一度、[ENT]ソフトキーを押して、設定を確
定させる。
設定完了

5-5IM 01B08B01-02
直入力(温度/抵抗/周波数)の調整
5
5.3 バーンアウトを設定する
解 説
バーンアウトを設定できるのは、mV 入力カード、熱電対カード、測温抵抗体カード、ポテンショメータ入力カードです。
設 定 内 容
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[SC MAINT]ソフトキー(入力仕様設定画面)
エンジニアリング画面
ソフトキー機能表示
メニュー変更キーパラメータ変更キーカーソル移動キーデータ増加キーデータ減少キーENTERキー
パラメータ番号パラメータ名称
データ表示
通信状態表示
0504.ai
設定手順
① [→]ソフトキーを押して、[SET INHB] を反転表示させる。
② [△]ソフトキーを押して、[SET ENBL] を表示させる。
③ [MNU]ソフトキーを押して、 01 MODEL 直入力カードの形名(例えば、ER5*C) を表示させる。④ [MNU]ソフトキーを数回押して、 B00 SET を表示させる。⑤ [PRM]ソフトキーを数回押して、左画面を表示さ
せる。⑥ [△]ソフトキーまたは[▽]ソフトキーを押して、
データ表示部を変更させる。⑦ [ENT]ソフトキーを押して、データ表示部を反転
させる。⑧ もう一度、[ENT]ソフトキーを押して、設定を確
定させる。
設定完了
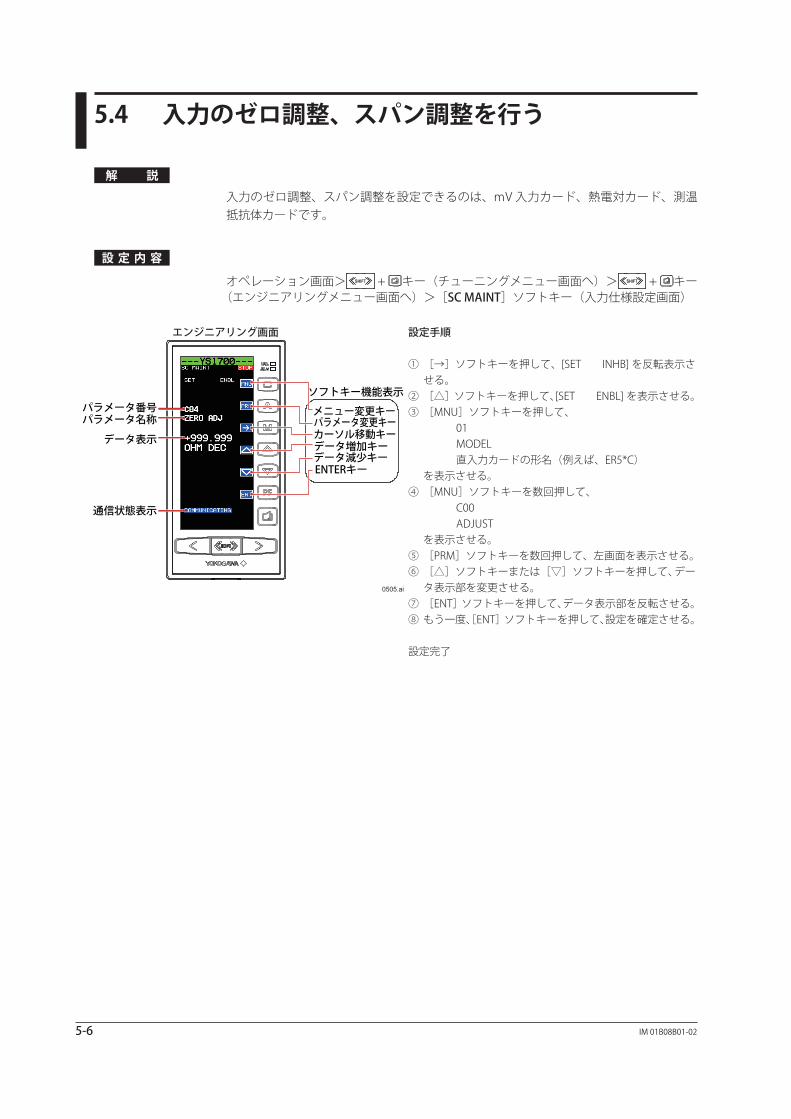
5-6 IM 01B08B01-02
5.4 入力のゼロ調整、スパン調整を行う
解 説
入力のゼロ調整、スパン調整を設定できるのは、mV 入力カード、熱電対カード、測温抵抗体カードです。
設 定 内 容
オペレーション画面> SHIFT + キー(チューニングメニュー画面へ)> SHIFT + キー(エンジニアリングメニュー画面へ)>[SC MAINT]ソフトキー(入力仕様設定画面)
エンジニアリング画面
ソフトキー機能表示
メニュー変更キーパラメータ変更キーカーソル移動キーデータ増加キーデータ減少キーENTERキー
パラメータ番号パラメータ名称
データ表示
通信状態表示
0505.ai
設定手順
① [→]ソフトキーを押して、[SET INHB] を反転表示させる。
② [△]ソフトキーを押して、[SET ENBL] を表示させる。③ [MNU]ソフトキーを押して、 01 MODEL 直入力カードの形名(例えば、ER5*C) を表示させる。④ [MNU]ソフトキーを数回押して、 C00 ADJUST を表示させる。⑤ [PRM]ソフトキーを数回押して、左画面を表示させる。⑥ [△]ソフトキーまたは[▽]ソフトキーを押して、デー
タ表示部を変更させる。⑦ [ENT]ソフトキーを押して、データ表示部を反転させる。⑧ もう一度、[ENT]ソフトキーを押して、設定を確定させる。
設定完了
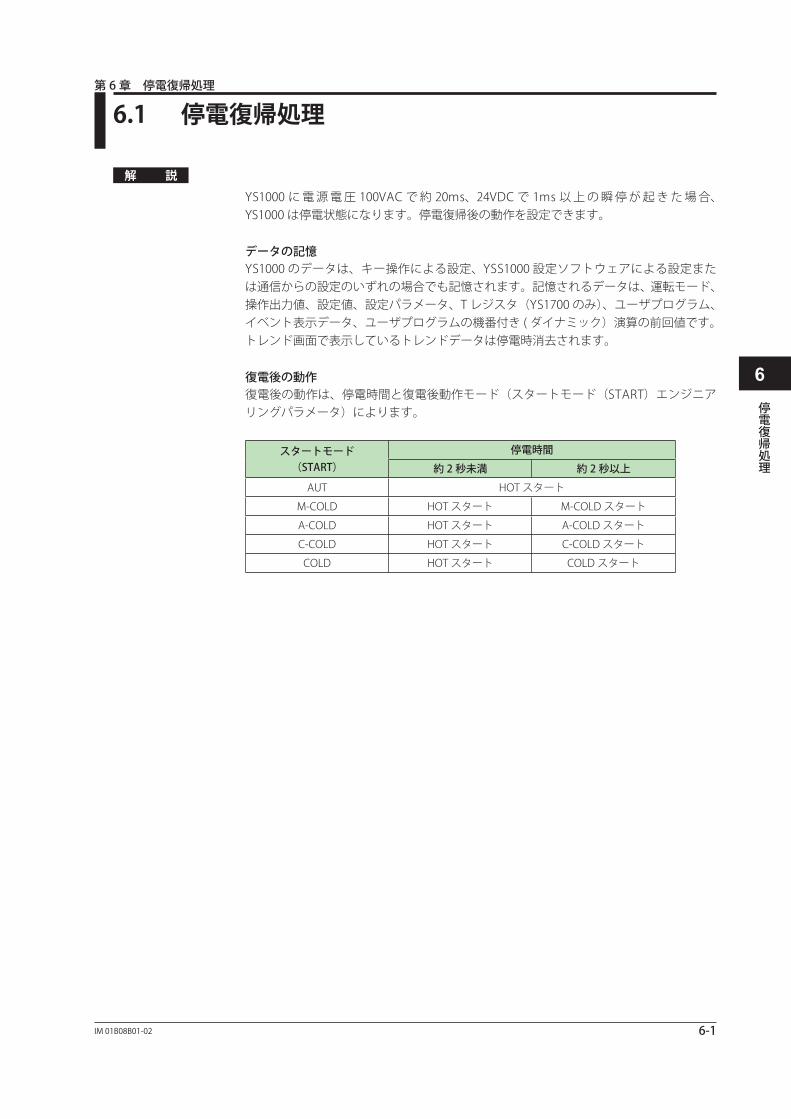
6-1IM 01B08B01-02
停電復帰処理
6
6.1 停電復帰処理
解 説
YS1000 に 電 源 電 圧 100VAC で 約 20ms、24VDC で 1ms 以 上 の 瞬 停 が 起 き た 場 合、YS1000 は停電状態になります。停電復帰後の動作を設定できます。
データの記憶YS1000 のデータは、キー操作による設定、YSS1000 設定ソフトウェアによる設定または通信からの設定のいずれの場合でも記憶されます。記憶されるデータは、運転モード、操作出力値、設定値、設定パラメータ、T レジスタ(YS1700 のみ)、ユーザプログラム、イベント表示データ、ユーザプログラムの機番付き ( ダイナミック)演算の前回値です。トレンド画面で表示しているトレンドデータは停電時消去されます。
復電後の動作復電後の動作は、停電時間と復電後動作モード(スタートモード(START)エンジニアリングパラメータ)によります。
スタートモード (START)
停電時間
約 2 秒未満 約 2 秒以上
AUT HOT スタート
M-COLD HOT スタート M-COLD スタート
A-COLD HOT スタート A-COLD スタート
C-COLD HOT スタート C-COLD スタート
COLD HOT スタート COLD スタート
第 6 章 停電復帰処理
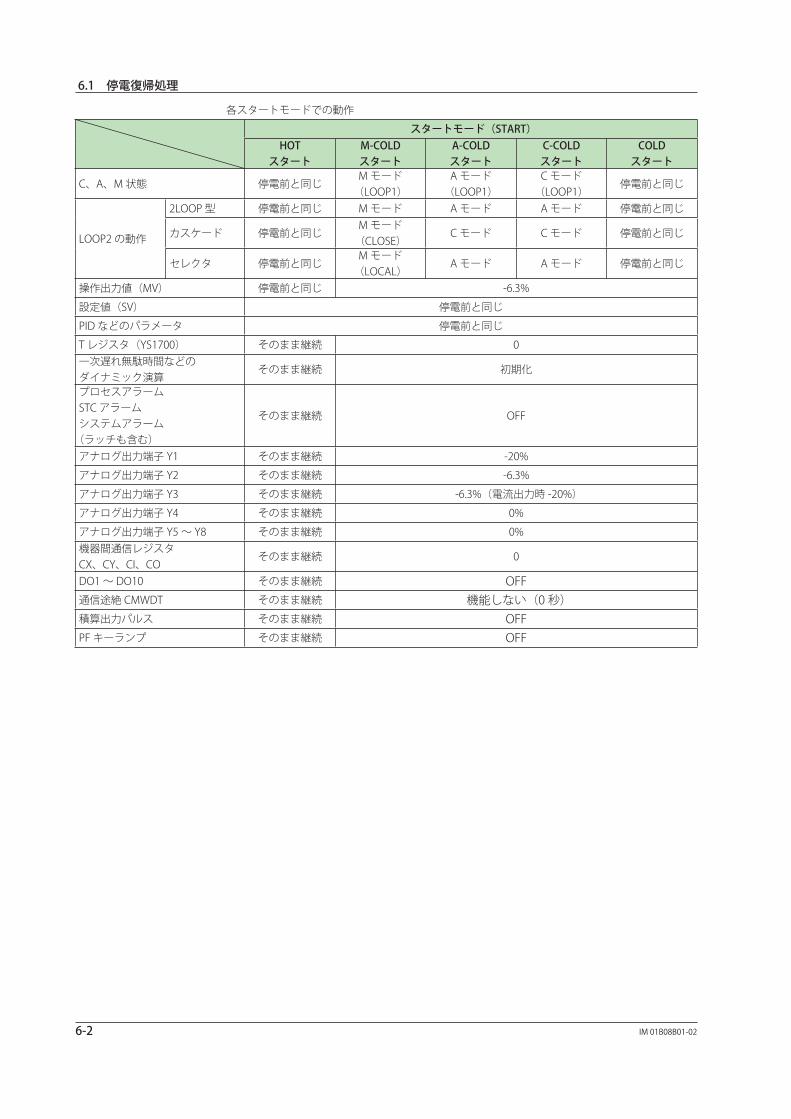
6-2 IM 01B08B01-02
各スタートモードでの動作
スタートモード(START)HOT
スタートM-COLD スタート
A-COLD スタート
C-COLD スタート
COLD スタート
C、A、M 状態 停電前と同じM モード
(LOOP1)A モード
(LOOP1)C モード
(LOOP1)停電前と同じ
LOOP2 の動作
2LOOP 型 停電前と同じ M モード A モード A モード 停電前と同じ
カスケード 停電前と同じM モード
(CLOSE)C モード C モード 停電前と同じ
セレクタ 停電前と同じM モード
(LOCAL)A モード A モード 停電前と同じ
操作出力値(MV) 停電前と同じ -6.3%
設定値(SV) 停電前と同じ
PID などのパラメータ 停電前と同じ
T レジスタ(YS1700) そのまま継続 0一次遅れ無駄時間などの ダイナミック演算
そのまま継続 初期化
プロセスアラーム STC アラームシステムアラーム
(ラッチも含む)
そのまま継続 OFF
アナログ出力端子 Y1 そのまま継続 -20%
アナログ出力端子 Y2 そのまま継続 -6.3%
アナログ出力端子 Y3 そのまま継続 -6.3%(電流出力時 -20%)
アナログ出力端子 Y4 そのまま継続 0%
アナログ出力端子 Y5 ~ Y8 そのまま継続 0%機器間通信レジスタ CX、CY、CI、CO
そのまま継続 0
DO1 ~ DO10 そのまま継続 OFF通信途絶 CMWDT そのまま継続 機能しない(0 秒)積算出力パルス そのまま継続 OFFPF キーランプ そのまま継続 OFF
6.1 停電復帰処理
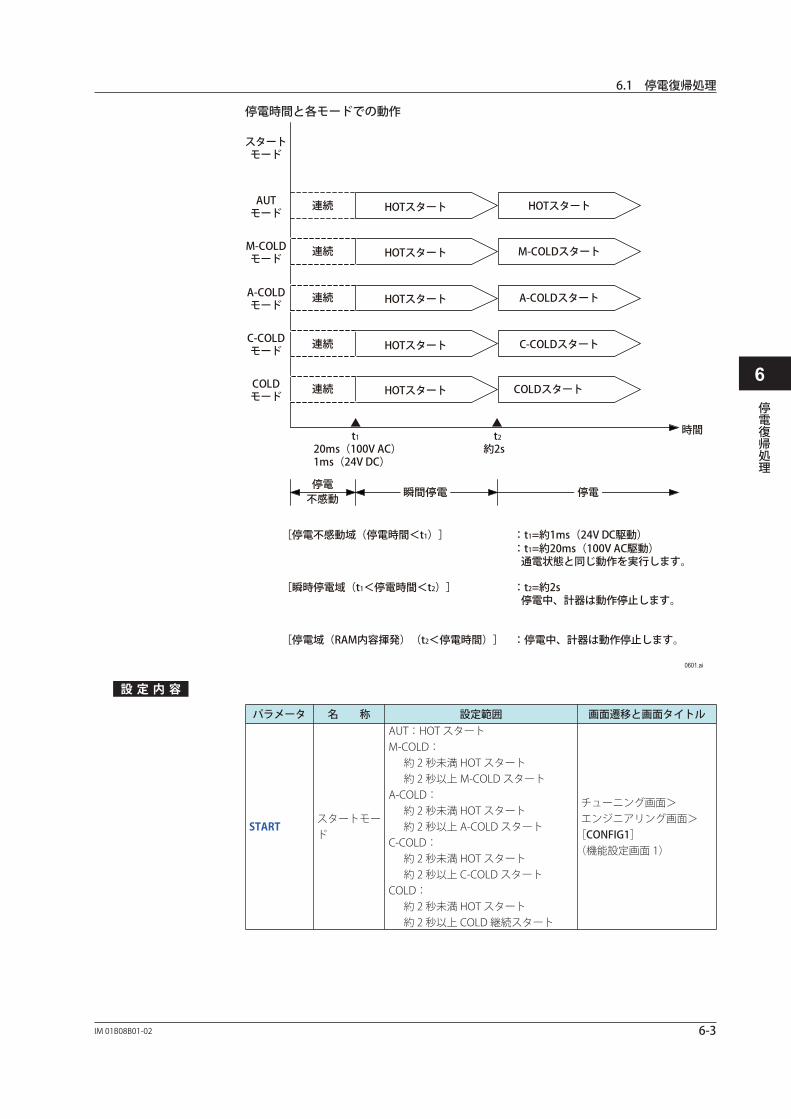
6-3IM 01B08B01-02
停電復帰処理
6
停電時間と各モードでの動作
連続 HOTスタート
M-COLDスタート連続 HOTスタート
HOTスタートAUTモード
スタートモード
▲t1
20ms(100V AC)1ms(24V DC)
▲t2
約2s
時間
停電不感動 瞬間停電 停電
[停電不感動域(停電時間<t1)] :t1=約1ms(24V DC駆動):t1=約20ms(100V AC駆動)通電状態と同じ動作を実行します。
[瞬時停電域(t1<停電時間<t2)] :t2=約2s停電中、計器は動作停止します。
[停電域(RAM内容揮発)(t2<停電時間)] :停電中、計器は動作停止します。
M-COLDモード
A-COLDスタート連続 HOTスタートA-COLDモード
C-COLDスタート連続 HOTスタートC-COLDモード
COLDスタート連続 HOTスタートCOLDモード
0601.ai
設 定 内 容
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
STARTスタートモード
AUT:HOT スタートM-COLD:
約 2 秒未満 HOT スタート 約 2 秒以上 M-COLD スタート
A-COLD: 約 2 秒未満 HOT スタート 約 2 秒以上 A-COLD スタート
C-COLD: 約 2 秒未満 HOT スタート 約 2 秒以上 C-COLD スタート
COLD: 約 2 秒未満 HOT スタート 約 2 秒以上 COLD 継続スタート
チューニング画面> エンジニアリング画面>
[CONFIG1] (機能設定画面 1)
6.1 停電復帰処理

Blank Page

7-1IM 01B08B01-02
セルフチューニング機能
7
7.1 概要
7.1.1 セルフチューニングとは制御システムの稼働現場では、
(1) 製品品質の向上(2) 省資源・省エネルギーの徹底(3) 多品種変量生産化(4) 原燃料の多様化(5) 運転条件・負荷の変更
などのきめ細かな制御性の改善が求められています。
プロセス制御では、多数の PID 調節計が使われています。よって制御ループの最適な制御状態を実現・維持するためには、PID パラメータのチューニングが必要であり、これは熟練オペレータや計装エンジニアの制御知識に基づいた調整経験とプロセス固有の運転ノウハウによって実施されます。しかしベテランオペレータの守備範囲は広く、担当業務も複雑化しているため、PID パラメータのチューニングが十分でない事例が見受けられます。そこで、PID パラメータを毎回設定しなくても、プロセス特性の変化に自動的に追従するセルフチューニング(STC:Self Tuning Control)機能が有効です。
セルフチューニング(STC)機能の目的は、以下の 2 点に要約できます。● プロセスの静特性・動特性の変化に追従して、最適な制御性を維持します。● プロセスの立ち上がり時におけるチューニング作業負担を軽減します。
7.1.2 特徴と利用効果セルフチューニング(STC)機能は、制御理論に基づくプロセス同定手法と長年にわたる制御ノウハウを組み合わせたものです。以下の特徴をもっています。
● 設定値(SV)変更による応答やオンデマンド指令による操作出力値(MV)変更による応答からプロセス特性を推定して、短時間に最適な PID 定数を計算します。従って長期間にわたる波形観測を待つ必要はありません。
● 周期的なテストの印加を必要としないので、プロセスへの外乱がありません。● セルフチューニング(STC)時のプロセス特性(むだ時間、時定数、ゲイン)の推定
値を表示するので特性変動の監視が可能です。● ユーザに特別な制御理論を要求しません。● セルフチューニング(STC)機能の設定パラメータが少ないため使いやすいです。● 安全操業のために PID パラメータの調整限界を設定できます。● セルフチューニング(STC)のオン/オフ切り替えが可能です。
第 7 章 セルフチューニング機能
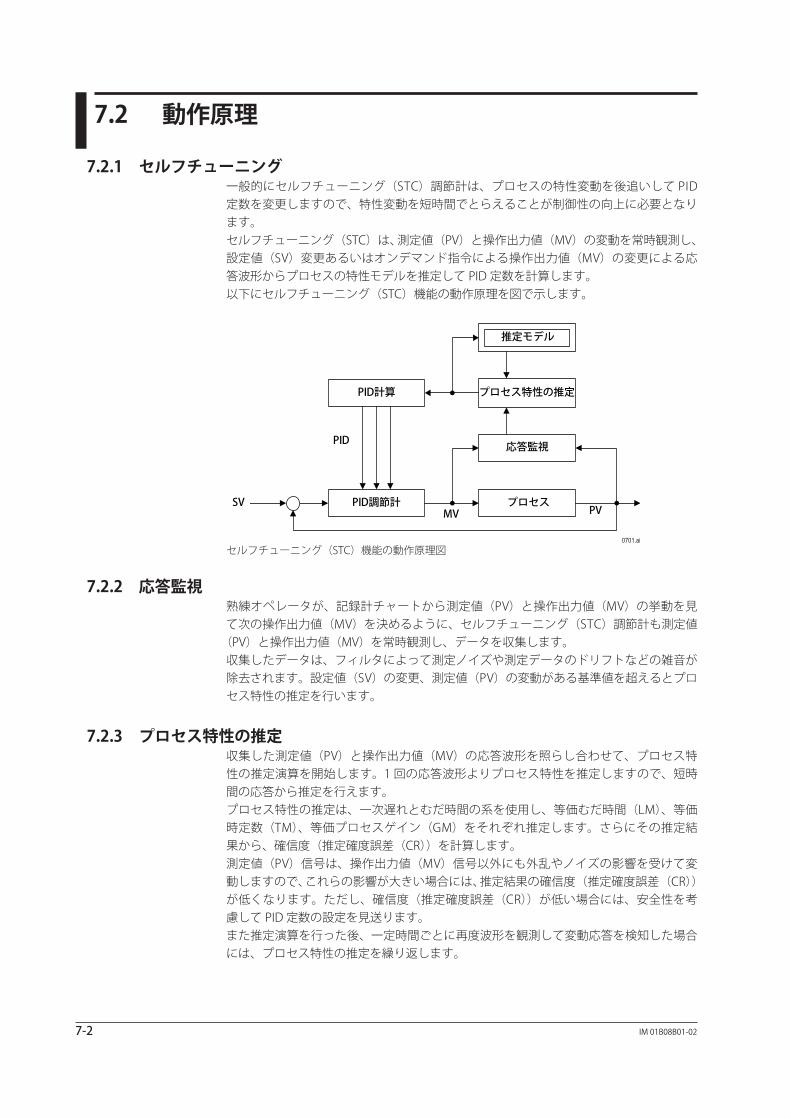
7-2 IM 01B08B01-02
7.2 動作原理
7.2.1 セルフチューニング一般的にセルフチューニング(STC)調節計は、プロセスの特性変動を後追いして PID定数を変更しますので、特性変動を短時間でとらえることが制御性の向上に必要となります。セルフチューニング(STC)は、測定値(PV)と操作出力値(MV)の変動を常時観測し、設定値(SV)変更あるいはオンデマンド指令による操作出力値(MV)の変更による応答波形からプロセスの特性モデルを推定して PID 定数を計算します。以下にセルフチューニング(STC)機能の動作原理を図で示します。
PVプロセス
PID計算
PID調節計
プロセス特性の推定
応答監視
推定モデル
PID
SVMV
0701.ai
セルフチューニング(STC)機能の動作原理図
7.2.2 応答監視熟練オペレータが、記録計チャートから測定値(PV)と操作出力値(MV)の挙動を見て次の操作出力値(MV)を決めるように、セルフチューニング(STC)調節計も測定値
(PV)と操作出力値(MV)を常時観測し、データを収集します。収集したデータは、フィルタによって測定ノイズや測定データのドリフトなどの雑音が除去されます。設定値(SV)の変更、測定値(PV)の変動がある基準値を超えるとプロセス特性の推定を行います。
7.2.3 プロセス特性の推定収集した測定値(PV)と操作出力値(MV)の応答波形を照らし合わせて、プロセス特性の推定演算を開始します。1 回の応答波形よりプロセス特性を推定しますので、短時間の応答から推定を行えます。プロセス特性の推定は、一次遅れとむだ時間の系を使用し、等価むだ時間(LM)、等価時定数(TM)、等価プロセスゲイン(GM)をそれぞれ推定します。さらにその推定結果から、確信度(推定確度誤差(CR))を計算します。測定値(PV)信号は、操作出力値(MV)信号以外にも外乱やノイズの影響を受けて変動しますので、これらの影響が大きい場合には、推定結果の確信度(推定確度誤差(CR))が低くなります。ただし、確信度(推定確度誤差(CR))が低い場合には、安全性を考慮して PID 定数の設定を見送ります。また推定演算を行った後、一定時間ごとに再度波形を観測して変動応答を検知した場合には、プロセス特性の推定を繰り返します。
7-3IM 01B08B01-02
セルフチューニング機能
7
7.2.4 PID 定数チューニングセルフチューニング(STC)調節計は、プロセス特性の推定結果から、制御目標タイプ
(OS)、制御演算式(ALG)および微分時間上限設定値(DMX)に応じて、最適な PID 定数を計算します。PID 調節計では、一般に設定値(SV)追従用と外乱抑制用とでは最適な PID 定数が異なります。セルフチューニング(STC)調節計では、制御演算式(ALG)が比例先行 PID(I-PD)と可変設定値フィルタ(SVF)の場合は外乱抑制用に、微分先行 PID(PI-D)の場合は設定値(SV)追従用に、PID 定数を計算します。セルフチューニング(STC)調節計では、外乱抑制と設定値(SV)追従のどちらも最適にすることが可能な可変設定値フィルタ(SVF)を推奨します。このとき、可変設定値フィルタ(SVF)用設定値フィルタα(SFA)パラメータの最適値も計算します。
以上より、PB、TI、TD は各パラメータの設定より求められます。 PB= f1(LM、TM、GM、IP、OS、ALG) TI = f2(LM、TM、GM、IP、OS、ALG) TD= f3(LM、TM、GM、IP、OS、ALG)
*1 PB:比例帯、TI:積分時間、TD:微分時間、OS:制御目標タイプ、IP:プロセスタイプ、 ALG:制御演算式、LM:等価むだ時間、TM:等価時定数、GM:等価プロセスゲイン*2 以下のパラメータは、自動的に算出されます。設定はできません。 LM:等価むだ時間、TM:等価時定数、GM:等価プロセスゲイン► パラメータ:本書の「7.3 セルフチューニングのパラメータと動作」► 可変設定値フィルタ(SVF)および設定値フィルタα(SFA):本書の「1.2.6 設定値のステッ
プ応答に対し安定した制御を行う(可変設定値フィルタ機能)」
通常セルフチューニング(STC)調節計は、推定結果に基づき PID 定数を計算しますが、応答が発振を始めたと判断した場合、1 回発振を止めるようなチューニングを行います。また、長時間制御偏差が小さくならない場合に、調節計のゲインを上げる場合には、変更幅を制限して安全性を確保します。
7.2 動作原理
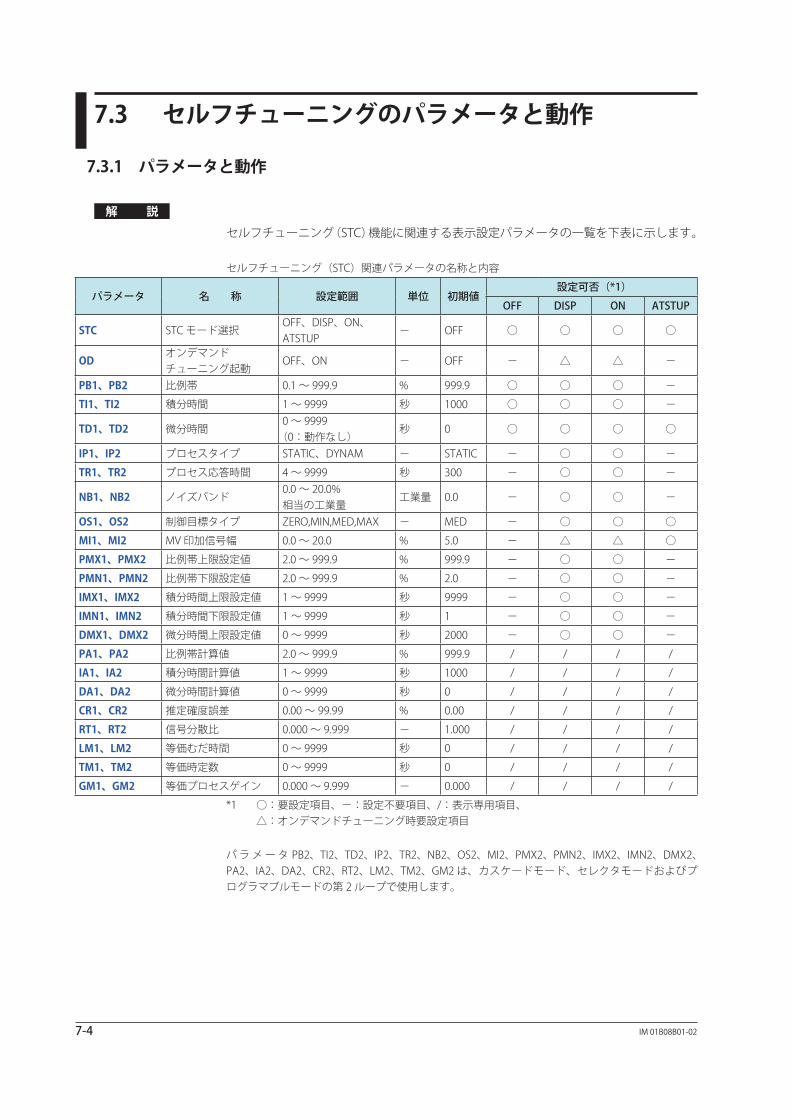
7-4 IM 01B08B01-02
7.3 セルフチューニングのパラメータと動作
7.3.1 パラメータと動作
解 説
セルフチューニング(STC)機能に関連する表示設定パラメータの一覧を下表に示します。
セルフチューニング(STC)関連パラメータの名称と内容
パラメータ 名 称 設定範囲 単位 初期値設定可否(*1)
OFF DISP ON ATSTUP
STC STC モード選択OFF、DISP、ON、 ATSTUP
- OFF ○ ○ ○ ○
ODオンデマンド チューニング起動
OFF、ON - OFF - △ △ -
PB1、PB2 比例帯 0.1 ~ 999.9 % 999.9 ○ ○ ○ -
TI1、TI2 積分時間 1 ~ 9999 秒 1000 ○ ○ ○ -
TD1、TD2 微分時間0 ~ 9999
(0:動作なし)秒 0 ○ ○ ○ ○
IP1、IP2 プロセスタイプ STATIC、DYNAM - STATIC - ○ ○ -
TR1、TR2 プロセス応答時間 4 ~ 9999 秒 300 - ○ ○ -
NB1、NB2 ノイズバンド0.0 ~ 20.0% 相当の工業量
工業量 0.0 - ○ ○ -
OS1、OS2 制御目標タイプ ZERO,MIN,MED,MAX - MED - ○ ○ ○
MI1、MI2 MV 印加信号幅 0.0 ~ 20.0 % 5.0 - △ △ ○
PMX1、PMX2 比例帯上限設定値 2.0 ~ 999.9 % 999.9 - ○ ○ -
PMN1、PMN2 比例帯下限設定値 2.0 ~ 999.9 % 2.0 - ○ ○ -
IMX1、IMX2 積分時間上限設定値 1 ~ 9999 秒 9999 - ○ ○ -
IMN1、IMN2 積分時間下限設定値 1 ~ 9999 秒 1 - ○ ○ -
DMX1、DMX2 微分時間上限設定値 0 ~ 9999 秒 2000 - ○ ○ -
PA1、PA2 比例帯計算値 2.0 ~ 999.9 % 999.9 / / / /
IA1、IA2 積分時間計算値 1 ~ 9999 秒 1000 / / / /
DA1、DA2 微分時間計算値 0 ~ 9999 秒 0 / / / /
CR1、CR2 推定確度誤差 0.00 ~ 99.99 % 0.00 / / / /
RT1、RT2 信号分散比 0.000 ~ 9.999 - 1.000 / / / /
LM1、LM2 等価むだ時間 0 ~ 9999 秒 0 / / / /
TM1、TM2 等価時定数 0 ~ 9999 秒 0 / / / /
GM1、GM2 等価プロセスゲイン 0.000 ~ 9.999 - 0.000 / / / /
*1 ○:要設定項目、-:設定不要項目、/:表示専用項目、 △:オンデマンドチューニング時要設定項目
パ ラ メ ー タ PB2、TI2、TD2、IP2、TR2、NB2、OS2、MI2、PMX2、PMN2、IMX2、IMN2、DMX2、PA2、IA2、DA2、CR2、RT2、LM2、TM2、GM2 は、カスケードモード、セレクタモードおよびプログラマブルモードの第 2 ループで使用します。
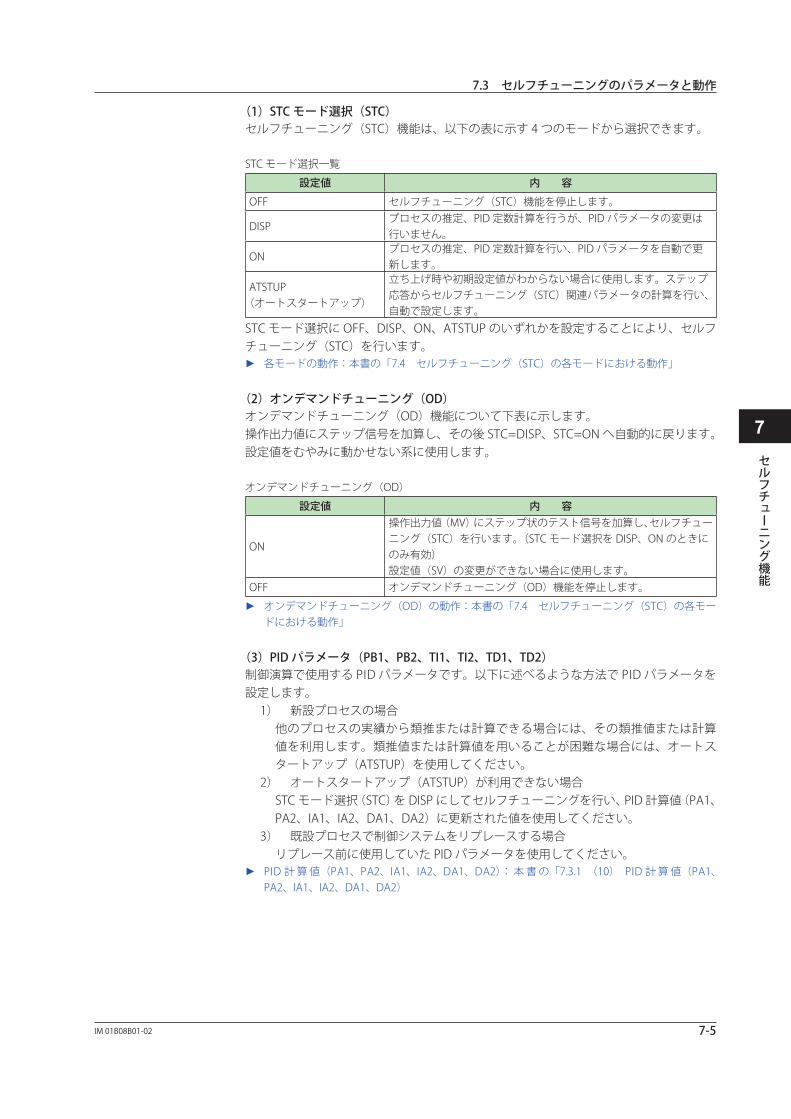
7-5IM 01B08B01-02
セルフチューニング機能
7
(1)STC モード選択(STC)セルフチューニング(STC)機能は、以下の表に示す 4 つのモードから選択できます。
STC モード選択一覧
設定値 内 容
OFF セルフチューニング(STC)機能を停止します。
DISPプロセスの推定、PID 定数計算を行うが、PID パラメータの変更は行いません。
ONプロセスの推定、PID 定数計算を行い、PID パラメータを自動で更新します。
ATSTUP (オートスタートアップ)
立ち上げ時や初期設定値がわからない場合に使用します。ステップ応答からセルフチューニング(STC)関連パラメータの計算を行い、自動で設定します。
STC モード選択に OFF、DISP、ON、ATSTUP のいずれかを設定することにより、セルフチューニング(STC)を行います。► 各モードの動作:本書の「7.4 セルフチューニング(STC)の各モードにおける動作」
(2)オンデマンドチューニング(OD)オンデマンドチューニング(OD)機能について下表に示します。操作出力値にステップ信号を加算し、その後 STC=DISP、STC=ON へ自動的に戻ります。設定値をむやみに動かせない系に使用します。
オンデマンドチューニング(OD)
設定値 内 容
ON
操作出力値(MV)にステップ状のテスト信号を加算し、セルフチューニング(STC)を行います。(STC モード選択を DISP、ON のときにのみ有効) 設定値(SV)の変更ができない場合に使用します。
OFF オンデマンドチューニング(OD)機能を停止します。
► オンデマンドチューニング(OD)の動作:本書の「7.4 セルフチューニング(STC)の各モードにおける動作」
(3)PID パラメータ(PB1、PB2、TI1、TI2、TD1、TD2)制御演算で使用する PID パラメータです。以下に述べるような方法で PID パラメータを設定します。
1) 新設プロセスの場合 他のプロセスの実績から類推または計算できる場合には、その類推値または計算
値を利用します。類推値または計算値を用いることが困難な場合には、オートスタートアップ(ATSTUP)を使用してください。
2) オートスタートアップ(ATSTUP)が利用できない場合 STC モード選択(STC)を DISP にしてセルフチューニングを行い、 PID 計算値(PA1、
PA2、IA1、IA2、DA1、DA2)に更新された値を使用してください。3) 既設プロセスで制御システムをリプレースする場合 リプレース前に使用していた PID パラメータを使用してください。
► PID 計 算 値(PA1、PA2、IA1、IA2、DA1、DA2): 本 書 の「7.3.1 (10) PID 計 算 値(PA1、PA2、IA1、IA2、DA1、DA2)
7.3 セルフチューニングのパラメータと動作
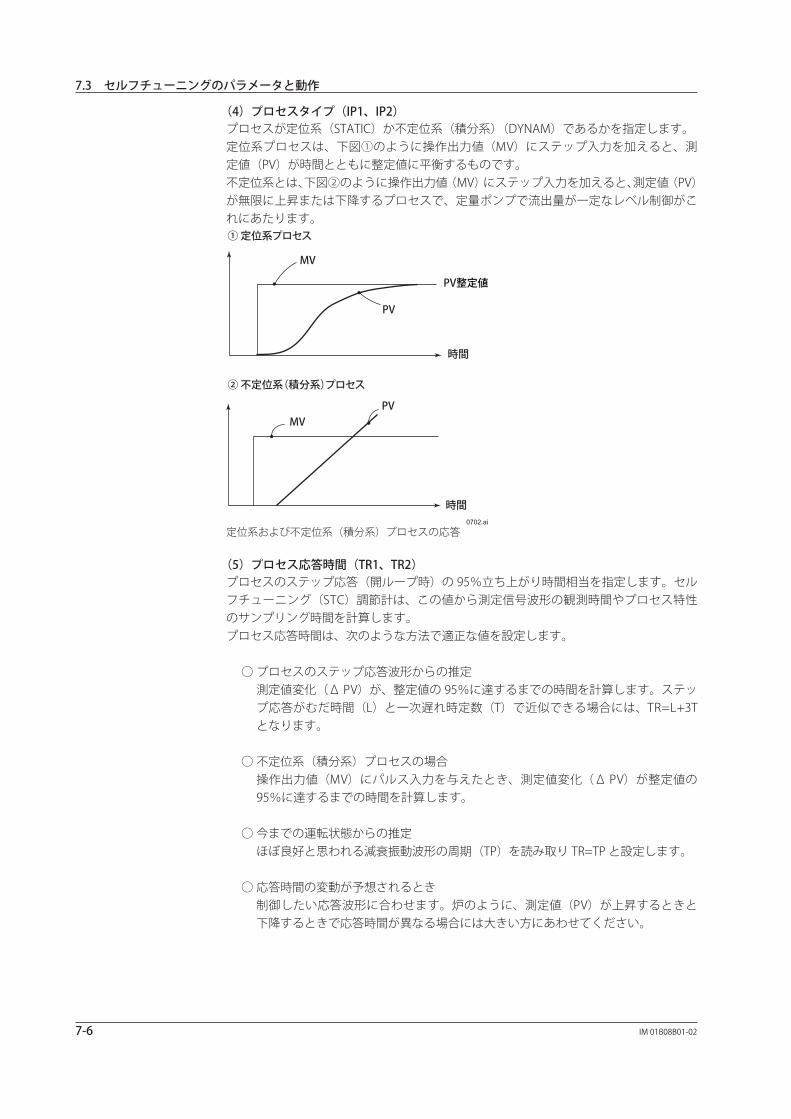
7-6 IM 01B08B01-02
(4)プロセスタイプ(IP1、IP2)プロセスが定位系(STATIC)か不定位系(積分系)(DYNAM)であるかを指定します。定位系プロセスは、下図①のように操作出力値(MV)にステップ入力を加えると、測定値(PV)が時間とともに整定値に平衡するものです。不定位系とは、下図②のように操作出力値(MV)にステップ入力を加えると、測定値(PV)が無限に上昇または下降するプロセスで、定量ポンプで流出量が一定なレベル制御がこれにあたります。
① 定位系プロセス
MV
MV
PV
PV
PV整定値
時間
時間
② 不定位系(積分系)プロセス
0702.ai
定位系および不定位系(積分系)プロセスの応答
(5)プロセス応答時間(TR1、TR2)プロセスのステップ応答(開ループ時)の 95%立ち上がり時間相当を指定します。セルフチューニング(STC)調節計は、この値から測定信号波形の観測時間やプロセス特性のサンプリング時間を計算します。プロセス応答時間は、次のような方法で適正な値を設定します。
○ プロセスのステップ応答波形からの推定 測定値変化(Δ PV)が、整定値の 95%に達するまでの時間を計算します。ステッ
プ応答がむだ時間(L)と一次遅れ時定数(T)で近似できる場合には、TR=L+3Tとなります。
○ 不定位系(積分系)プロセスの場合 操作出力値(MV)にパルス入力を与えたとき、測定値変化(Δ PV)が整定値の
95%に達するまでの時間を計算します。
○ 今までの運転状態からの推定 ほぼ良好と思われる減衰振動波形の周期(TP)を読み取り TR=TP と設定します。
○ 応答時間の変動が予想されるとき 制御したい応答波形に合わせます。炉のように、測定値(PV)が上昇するときと
下降するときで応答時間が異なる場合には大きい方にあわせてください。
7.3 セルフチューニングのパラメータと動作

7-7IM 01B08B01-02
セルフチューニング機能
7
【注意事項】プロセス応答時間の 1/20 が、プロセス推定のためのサンプリング周期(TS)になります。ただし、2TS 以下の応答波形は正しく捕らえることができません。一般にプロセス応答時間の設定は、正しい値より小さくするよりも大きくする方が、プロセス特性の推定値に対する誤差は小さくなります。また、プロセス応答時間を変更した場合には、4TR の間は調節計内部の測定データを初期化するため STC は動作しません。
MV
① ステップ応答からの推定
PV
時間
PV整定値
TR
95%
② 減衰振動波形からの推定
PV
時間
TP
TR=TP
固有振動周期
0703.ai
プロセス応答時間の推定方法
(6)ノイズバンド(NB1、NB2)ノイズバンド(NB)は、ノイズによりプロセス特性の推定が乱されるのを防止するために使用します。設定する際は、測定値(PV)信号に重畳するランダムなノイズ信号の波高値の 2 倍相当を設定します。下図また設定値が 0(初期値)以外のときには、調節計は測定値(PV)の応答波形が(所定値 +1/2NB)以上に振れたとき、プロセス特性の推定を行います。
0704.ai
所定値
NB
ノイズバンド
7.3 セルフチューニングのパラメータと動作

7-8 IM 01B08B01-02
(7)制御目標タイプ(OS1、OS2)使用者が望ましい制御目標を設定します。望ましい応答波形は、プロセスの種類や運転方法によって異なります。例えば、反応プロセスや熱処理プロセスの温度制御では、オーバーシュートは好まれません。一方、圧力制御や流量制御では、速やかな応答が優先され、多少のオーバーシュートは許される場合が多いと言えます。以下に制御目標タイプの種類と特長を示します。
制御目標タイプと特長
設定値 特 長 評価式
ZERO オーバーシュートなし オーバーシュート ゼロ
MINオーバーシュート : 小(約 5%)整定時間 : 小
荷重制御面積最小Min ∫∞ 0 |e| ・ t dt
MEDオーバーシュート : 中(約 10%)立ち上がり時間 : やや速い
制御面積最小Min ∫∞ 0 |e| dt
MAXオーバーシュート : 大(約 15%)立ち上がり時間 : 速い
自乗制御面積最小Min ∫∞ 0 e2 dt
制御目標タイプ =ZERO は、オーバーシュートがありません。制御目標タイプ =MIN は、偏差面積に経過時間を乗じた評価式を最小にしますので、オーバーシュートは小さめになります。制御目標タイプ =MED は、下図の制御面積を最小にします。(推奨)
0705.ai
SV
時間
PV応答
制御面積
制御面積(設定値(SV)変更の場合)
制御目標タイプ =MAX は、偏差(E)の自乗面積値を最小にしますので、オーバーシュートは大きめにして立ち上がりを速くします。
(8)MV 印加信号幅(MI1、MI2)オートスタートアップ(ATSTUP)またはオンデマンドチューニング(OD)のとき、操作出力値(MV)に印加するテスト信号の変化量を指定します。目安としては、測定値(PV)が 5% 程度振れる値を設定してください。
・ オートスタートアップ(ATSTUP)では、手動制御(M)状態で実行されるので偏差(E)を拡大する方向
・ オンデマンドチューニング(OD)では、自動制御(A)、カスケード設定自動制御(C)の状態で実行されるので偏差(E)を減らす方向
にそれぞれ印加信号を加えます。
MV ステップ変化の方向
DIR(正動作) RVS(逆動作)
SV > PV +MI%(- MI%) - MI%(+MI%)
SV < PV - MI%(+MI%) +MI%(- MI%)
SV = PV +MI%(+MI%) - MI%(- MI%)
( )外: オートスタートアップ(ATSTUP)、( )内:オンデマンドチューニング(OD)
7.3 セルフチューニングのパラメータと動作

7-9IM 01B08B01-02
セルフチューニング機能
7
(9)PID リミット値セルフチューニング(STC)による PID パラメータの変更にリミットを加えるものです。PID パラメータが一定限界値以上に変わると、プロセスに悪影響を及ぼす可能性がある場合には、あらかじめリミット値を設定しておきます。上限値≦下限値と設定した場合には、PID パラメータは下限値に固定されます。またセルフチューニング(STC)により、PID パラメータがリミット値に達すると、セルフチューニングアラーム(STCALM)を発生します。(PID 計算値(PA1、PA2、IA1、IA2、DA1、DA2)は、リミットされません)STC モード選択(STC)が DISP または ON の場合、微分時間上限設定値(DMX)を 0 に設定した場合は PI 制御になり、0 以外に設定した場合は、PID 制御または PI 制御となります。► PID 計 算 値(PA1、PA2、IA1、IA2、DA1、DA2): 本 書 の「7.3.1 (10) PID 計 算 値(PA1、
PA2、IA1、IA2、DA1、DA2)」► セルフチューニングアラーム(STCALM):本書の「7.4.8 セルフチューニングアラーム」
(10)PID 計算値(PA1、PA2、IA1、IA2、DA1、DA2)セルフチューニング(STC)によって、推定したプロセス特性からの計算結果を表示します。(制御演算には使用されません)PID 計算値がリミット値に達すると、セルフチューニングアラーム(STCALM)は発生しますが、表示はリミットされません。► セルフチューニングアラーム(STCALM):本書の「7.4.8 セルフチューニングアラーム」
(11)推定確度誤差(CR1、CR2)プロセス特性を推定したときの推定確度の誤差を表します。推定した結果が、実プロセスにあっている場合は、推定確度誤差は小さくなります。またノイズや外乱の影響で推定した結果が、十分に推定できない場合は、推定確度誤差は大きくなります。セルフチューニング(STC)調節計では、安全性を考慮し、推定確度誤差が 5% より大きい場合には、推定できないと判断し、PID の計算を行なわず新しいデータで再び推定を試みます。
(12)信号分散比(RT1、RT2)測定値(PV)の分散値と設定されているモデル出力の分散値の比を表示します。セルフチューニング(STC)調節計は、プロセス特性の変動を検知するために、推定したモデルを用いて上記の比を計算します。STC モード選択 =ON が一度も行われていないときは、信号分散比の計算は行わず(初期値 1.000 を表示)、アラームを出しません。プロセスとモデルが一致する場合には、信号分散比はほぼ 1 になります。0.5 ≧信号分散比、または信号分散比≧ 2 の場合にはアラーム(特性変動大)を発生します。
(13)推定等価モデル(LM1、LM2、TM1、TM2、GM1、GM2)セルフチューニング(STC)調節計は、推定したプロセスモデルをむだ時間と一次遅れ系で近似して表します。(不定位系(積分系)では、パルス入力に対する応答)等価むだ時間、等価時定数、等価プロセスゲインは、STC モード選択(STC)が DISP または ON、かつ推定確度誤差が 5% より小さい場合に更新されます。(推定確度誤差は、プロセス特性の推定を行うたびに更新されます)
7.3 セルフチューニングのパラメータと動作

7-10 IM 01B08B01-02
7.4 セルフチューニング(STC)の各モードにおける動作
セルフチューニング(STC)機能は、PID 制御において最適な制御状態を得るための PIDパラメータを自動的に調整する機能です。以下にセルフチューニング(STC)機能の動作フローを示します。
(STCモード選択=DISP)
(STCモード選択=ON)
(STCモード選択=DISP, ON)
STCモード選択?
PV,MV収集
スタート
PV変動?
プロセス特性の推定
PIDパラメータ計算
推定確度高い?
STCモード選択=ON?
PIDパラメータ変更設定
PID制御
スタートアップ処理
PID計算値表示のみ
リターン
オートスタートアップ(STCモード選択=ATSTUP)
セルフチューニング(STC)機能停止(STCモード=OFF)
処理完了?
NO
YES
NO
NO
YES
YES
YES
NO
0706.ai
セルフチューニング(STC)動作フロー
上図より、STC モード選択が DISP または ON の場合には、中央に進み測定値(PV)、操作出力値(MV)のデータ収集を行います。測定値(PV)の変動が所定値以下の場合には、制御性は良好とみなします。測定値(PV)の変動が所定値を超えるとプロセスの推定を行い、確信度(推定確度誤差(CR))が高い場合には、PID パラメータの計算を行います。計算された PID パラメータは、制御演算時に使用するか否かの指定ができます。更新しない場合は(STC モード選択 =DISP)、新パラメータは表示のみを行います。更新する場合は(STC モード選択 =ON)、新パラメータに変更します。これらの動作は、調節計の制御周期ごとに実行されます。
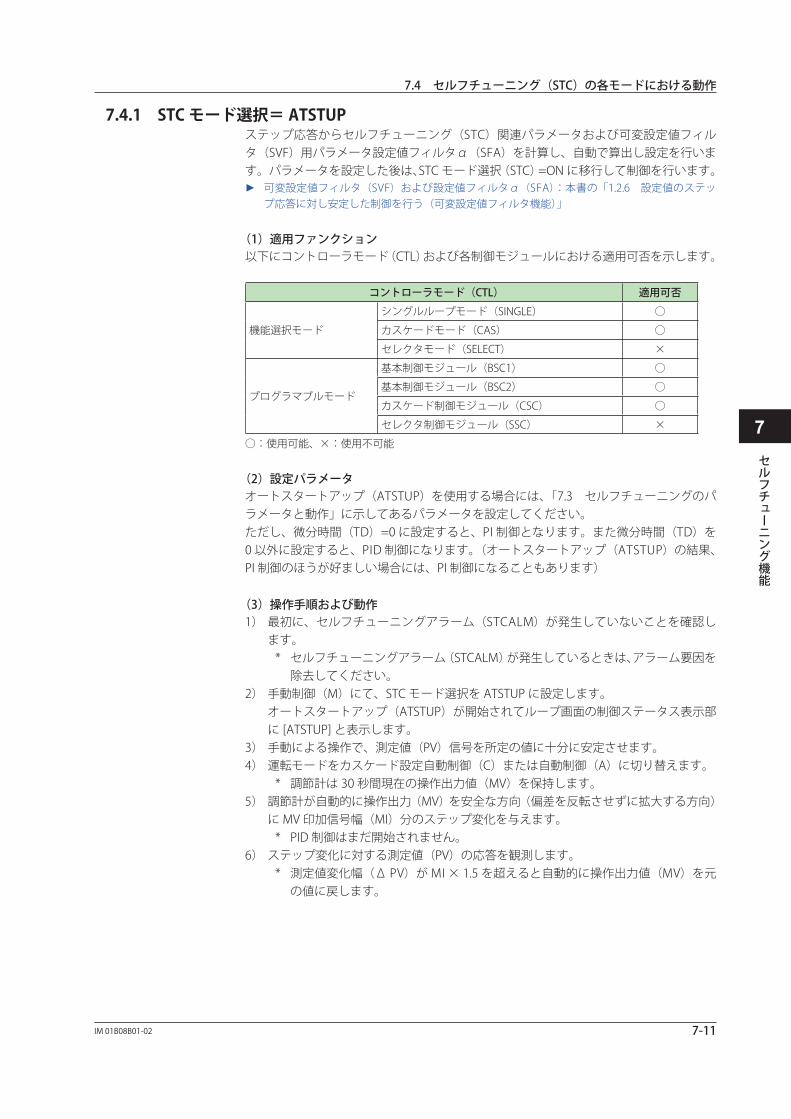
7-11IM 01B08B01-02
セルフチューニング機能
7
7.4.1 STC モード選択= ATSTUPステップ応答からセルフチューニング(STC)関連パラメータおよび可変設定値フィルタ(SVF)用パラメータ設定値フィルタα(SFA)を計算し、自動で算出し設定を行います。パラメータを設定した後は、STC モード選択(STC)=ON に移行して制御を行います。► 可変設定値フィルタ(SVF)および設定値フィルタα(SFA):本書の「1.2.6 設定値のステッ
プ応答に対し安定した制御を行う(可変設定値フィルタ機能)」
(1)適用ファンクション以下にコントローラモード(CTL)および各制御モジュールにおける適用可否を示します。
コントローラモード(CTL) 適用可否
機能選択モード
シングルループモード(SINGLE) ○
カスケードモード(CAS) ○
セレクタモード(SELECT) ×
プログラマブルモード
基本制御モジュール(BSC1) ○
基本制御モジュール(BSC2) ○
カスケード制御モジュール(CSC) ○
セレクタ制御モジュール(SSC) ×
○:使用可能、×:使用不可能
(2)設定パラメータオートスタートアップ(ATSTUP)を使用する場合には、「7.3 セルフチューニングのパラメータと動作」に示してあるパラメータを設定してください。ただし、微分時間(TD)=0 に設定すると、PI 制御となります。また微分時間(TD)を0 以外に設定すると、PID 制御になります。(オートスタートアップ(ATSTUP)の結果、PI 制御のほうが好ましい場合には、PI 制御になることもあります)
(3)操作手順および動作1) 最初に、セルフチューニングアラーム(STCALM)が発生していないことを確認し
ます。* セルフチューニングアラーム(STCALM)が発生しているときは、アラーム要因を
除去してください。2) 手動制御(M)にて、STC モード選択を ATSTUP に設定します。 オートスタートアップ(ATSTUP)が開始されてループ画面の制御ステータス表示部
に [ATSTUP] と表示します。3) 手動による操作で、測定値(PV)信号を所定の値に十分に安定させます。4) 運転モードをカスケード設定自動制御(C)または自動制御(A)に切り替えます。
* 調節計は 30 秒間現在の操作出力値(MV)を保持します。5) 調節計が自動的に操作出力(MV)を安全な方向(偏差を反転させずに拡大する方向)
に MV 印加信号幅(MI)分のステップ変化を与えます。* PID 制御はまだ開始されません。
6) ステップ変化に対する測定値(PV)の応答を観測します。* 測定値変化幅(Δ PV)が MI × 1.5 を超えると自動的に操作出力値(MV)を元
の値に戻します。
7.4 セルフチューニング(STC)の各モードにおける動作

7-12 IM 01B08B01-02
7) 測定値(PV)が安定すると、調節計が自動的に操作出力値(MV)を元に戻して応答を観測します。
* プロセスゲインが低く測定値変化幅(Δ PV)が 2% 未満の場合には、オートスタートアップ(ATSTUP)が不適当と判断すると、最大観測時間(約 80 分)経過後、手動制御(M)に戻り、STC モード選択の DISP に遷移してセルフチューニングアラーム(STCALM)を発生します。
8) ステップ応答で得られたデータから、STC モード選択が ON の場合と同様にして、プロセス特性の推定と PID パラメータ(PB,TI,TD)の算出を行います。
PID リミット値は、PID パラメータ(PB,TI,TD)の 4 倍(上限設定値)、1/4 倍(下限設定値)の値に設定されます。
プロセス応答時間(TR)は、“LM+3TM” 秒に設定されます。スタート時の測定値(PV)と終了時の測定値(PV)からプロセスタイプ(IP)を設定します。
またプロセス特性の推定結果が不適当と判断した場合には、セルフチューニングアラーム(STCALM)を発生してオートスタートアップ(ATSTUP)を停止します。
9) 続く一定時間(2TR、最小 2 分、最大 5 分)、ノイズ波高値を観測し、その値からノイズバンド(NB)を算出します。
10) すべての設定項目が算出設定されると、自動的に STC モード選択が ON となり、PID 制御およびセルフチューニング(STC)が開始されます。
11) オートスタートアップ(ATSTUP)中に、次の事項が起こると動作を停止して手動制御(M)および STC モード選択の DISP に遷移します。・ 停電が発生した場合・ セルフチューニングアラーム(STCALM)が発生した場合・ 手動制御(M)に変更した場合
► セルフチューニングアラーム(STCALM):本書の「7.4.8 セルフチューニングアラーム」
7.4.2 STC モード選択= DISPセルフチューニング(STC)の予備テストに有効です。プロセス特性の推定や PID パラメータの計算行い、計算された値が PID 計算値(PA1、PA2、IA1、IA2、DA1、DA2)に表示されますので、この値を見て有効かどうかを事前に確認できます。また PID パラメータ
(PB1、PB2、TI1、TI2、TD1、TD2)は、変更されません。STC モード選択の DISP は、調節計を自動制御(A)、カスケード設定自動制御(C)にするとセルフチューニング(STC)機能がスタートします。ただし、セルフチューニングアラーム(STCALM)が発生している場合には、アラーム要因を取り除いてください。*: STC モード選択の DISP を使用する場合には、「7.3 セルフチューニングパラメータと動作』
に示してあるパラメータを設定してください。► PID パラメータ(PB1、PB2、TI1、TI2、TD1、TD2):本書の「7.3.1 (3) PID パラメータ(PB1、
PB2、TI1、TI2、TD1、TD2)」► PID 計 算 値(PA1、PA2、IA1、IA2、DA1、DA2): 本 書 の「7.3.1 (10) PID 計 算 値(PA1、
PA2、IA1、IA2、DA1、DA2)」► セルフチューニングアラーム(STCALM):本書の「7.4.8 セルフチューニングアラーム」
7.4.3 STC モード選択= ONプロセス特性の推定や PID パラメータの計算を行います。また PID パラメータは、自動で更新され制御を行います。STC モード選択の ON は、調節計を自動制御(A)、カスケード設定自動制御(C)にするとセルフチューニング(STC)機能がスタートします。ただし、セルフチューニングアラーム(STCALM)が発生している場合には、アラーム要因を取り除いてください。► セルフチューニングアラーム(STCALM):本書の「7.4.8 セルフチューニングアラーム」
7.4 セルフチューニング(STC)の各モードにおける動作

7-13IM 01B08B01-02
セルフチューニング機能
7
7.4.4 STC モード選択= OFFセルフチューニング(STC)の動作を行いません。通常の PID 調節計として動作します。
7.4.5 オンデマンドチューニング(OD)オンデマンドチューニング(OD)は、オペレータの要求時に閉ループで操作出力値(MV)にステップ上のテスト信号を加えて、その時の測定値(PV)の応答からセルフチューニング(STC)を行います。(STC モード選択 =DISP または ON 時)設定値(SV)の変更ができない場合に有効です。
オンデマンドチューニング(OD)= OFFオンデマンドチューニング(OD)機能による動作が行われていません。
オンデマンドチューニング(OD)= ON以下にオンデマンドチューニング(OD)機能が実行している時の応答を示します。
0707.ai
オンデマンド指令
MV
P V
チューニング
(1)適用ファンクションオンデマンドチューニング(OD)を使用する場合には、以下の条件がすべて満たされるときのみ動作します。
1) コントローラモード(CTL) 以下にコントローラモード(CTL)および各制御モジュールにおける適用可否を示
します。
コントローラモード(CTL) 適用可否
機能選択モード
シングルループモード(SINGLE) ○
カスケードモード(CAS) ○
セレクタモード(SELECT) ×
プログラマブルモード
基本制御モジュール(BSC1) ○
基本制御モジュール(BSC2) ○
カスケード制御モジュール(CSC) ○
セレクタ制御モジュール(SSC) ×
○:使用可能、×:使用不可能► 基本制御モジュール、カスケード制御モジュール、セレクタ制御モジュール:「YSS1000
設定ソフトウェア/ YS1700 プログラマブル機能 ユーザーズマニュアル(CD)」
2) 運転モード 運転モードは、自動制御(A)またはカスケード設定自動制御(C)にしてください。 カスケード設定自動制御(C)のとき、DDC、SPC モードでは動作しません。
3) STC モード選択 STC モード選択は、DISP または ON に設定してください。
7.4 セルフチューニング(STC)の各モードにおける動作
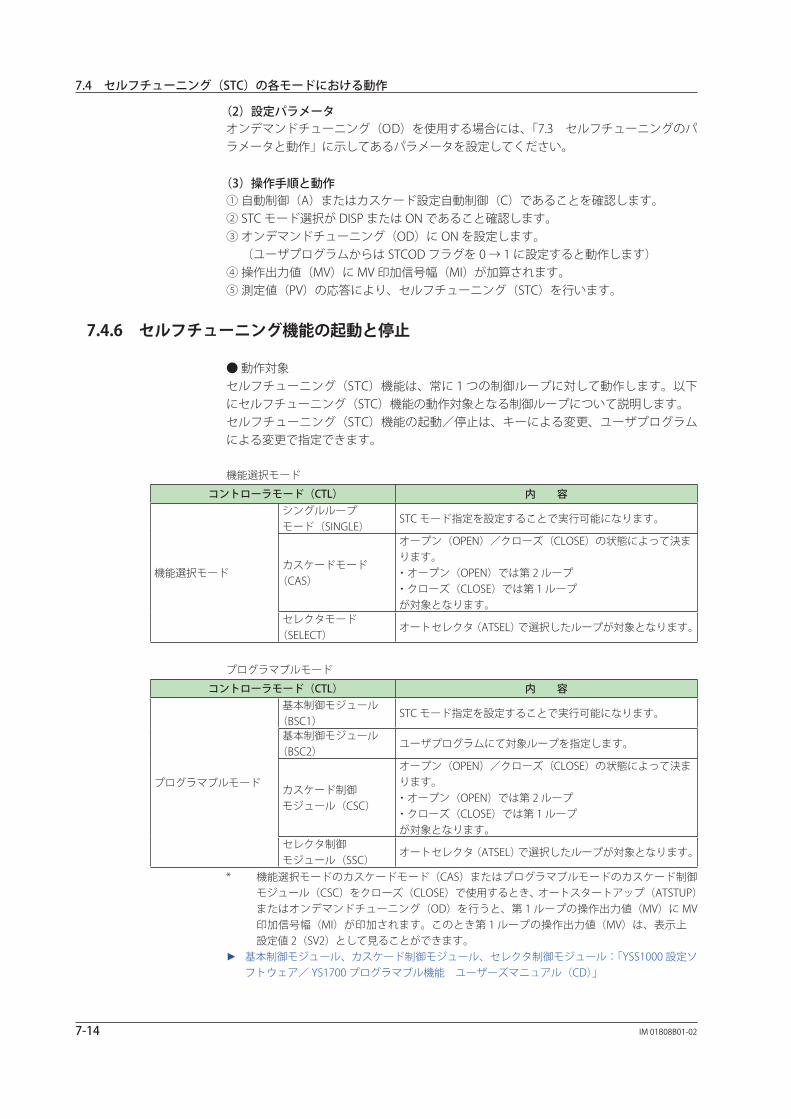
7-14 IM 01B08B01-02
(2)設定パラメータオンデマンドチューニング(OD)を使用する場合には、「7.3 セルフチューニングのパラメータと動作」に示してあるパラメータを設定してください。
(3)操作手順と動作① 自動制御(A)またはカスケード設定自動制御(C)であることを確認します。② STC モード選択が DISP または ON であること確認します。③ オンデマンドチューニング(OD)に ON を設定します。 (ユーザプログラムからは STCOD フラグを 0 → 1 に設定すると動作します)④ 操作出力値(MV)に MV 印加信号幅(MI)が加算されます。⑤ 測定値(PV)の応答により、セルフチューニング(STC)を行います。
7.4.6 セルフチューニング機能の起動と停止
● 動作対象セルフチューニング(STC)機能は、常に 1 つの制御ループに対して動作します。以下にセルフチューニング(STC)機能の動作対象となる制御ループについて説明します。セルフチューニング(STC)機能の起動/停止は、キーによる変更、ユーザプログラムによる変更で指定できます。
機能選択モード
コントローラモード(CTL) 内 容
機能選択モード
シングルループ モード(SINGLE)
STC モード指定を設定することで実行可能になります。
カスケードモード (CAS)
オープン(OPEN)/クローズ(CLOSE)の状態によって決まります。
・オープン(OPEN)では第 2 ループ・クローズ(CLOSE)では第 1 ループが対象となります。
セレクタモード (SELECT)
オートセレクタ(ATSEL)で選択したループが対象となります。
プログラマブルモード
コントローラモード(CTL) 内 容
プログラマブルモード
基本制御モジュール (BSC1)
STC モード指定を設定することで実行可能になります。
基本制御モジュール (BSC2)
ユーザプログラムにて対象ループを指定します。
カスケード制御 モジュール(CSC)
オープン(OPEN)/クローズ(CLOSE)の状態によって決まります。
・オープン(OPEN)では第 2 ループ・クローズ(CLOSE)では第 1 ループが対象となります。
セレクタ制御 モジュール(SSC)
オートセレクタ(ATSEL)で選択したループが対象となります。
* 機能選択モードのカスケードモード(CAS)またはプログラマブルモードのカスケード制御モジュール(CSC)をクローズ(CLOSE)で使用するとき、オートスタートアップ(ATSTUP)またはオンデマンドチューニング(OD)を行うと、第 1 ループの操作出力値(MV)に MV印加信号幅(MI)が印加されます。このとき第 1 ループの操作出力値(MV)は、表示上 設定値 2(SV2)として見ることができます。
► 基本制御モジュール、カスケード制御モジュール、セレクタ制御モジュール:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能 ユーザーズマニュアル(CD)」
7.4 セルフチューニング(STC)の各モードにおける動作
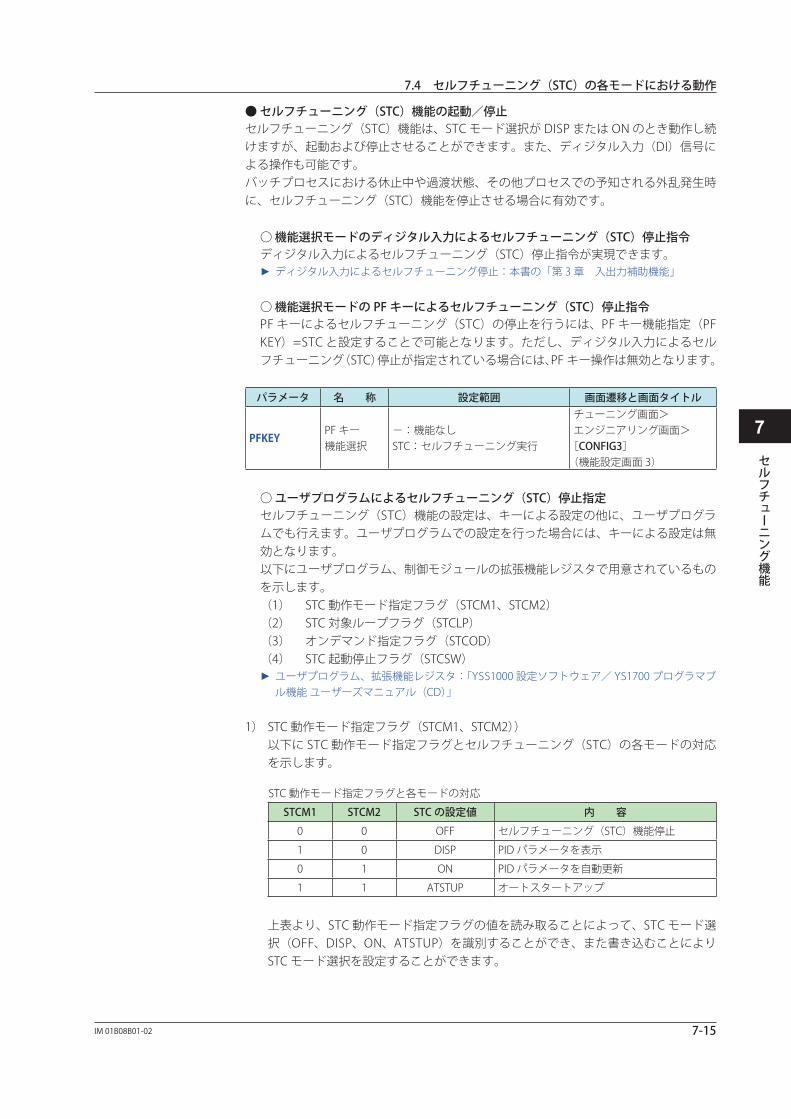
7-15IM 01B08B01-02
セルフチューニング機能
7
● セルフチューニング(STC)機能の起動/停止セルフチューニング(STC)機能は、STC モード選択が DISP または ON のとき動作し続けますが、起動および停止させることができます。また、ディジタル入力(DI)信号による操作も可能です。バッチプロセスにおける休止中や過渡状態、その他プロセスでの予知される外乱発生時に、セルフチューニング(STC)機能を停止させる場合に有効です。
○ 機能選択モードのディジタル入力によるセルフチューニング(STC)停止指令 ディジタル入力によるセルフチューニング(STC)停止指令が実現できます。
► ディジタル入力によるセルフチューニング停止:本書の「第 3 章 入出力補助機能」
○ 機能選択モードの PF キーによるセルフチューニング(STC)停止指令 PF キーによるセルフチューニング(STC)の停止を行うには、PF キー機能指定(PF
KEY)=STC と設定することで可能となります。ただし、ディジタル入力によるセルフチューニング(STC)停止が指定されている場合には、PF キー操作は無効となります。
パラメータ 名 称 設定範囲 画面遷移と画面タイトル
PFKEYPF キー 機能選択
-:機能なしSTC:セルフチューニング実行
チューニング画面> エンジニアリング画面>
[CONFIG3] (機能設定画面 3)
○ ユーザプログラムによるセルフチューニング(STC)停止指定 セルフチューニング(STC)機能の設定は、キーによる設定の他に、ユーザプログラ
ムでも行えます。ユーザプログラムでの設定を行った場合には、キーによる設定は無効となります。
以下にユーザプログラム、制御モジュールの拡張機能レジスタで用意されているものを示します。
(1) STC 動作モード指定フラグ(STCM1、STCM2) (2) STC 対象ループフラグ(STCLP) (3) オンデマンド指定フラグ(STCOD) (4) STC 起動停止フラグ(STCSW)
► ユーザプログラム、拡張機能レジスタ:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能 ユーザーズマニュアル(CD)」
1) STC 動作モード指定フラグ(STCM1、STCM2)) 以下に STC 動作モード指定フラグとセルフチューニング(STC)の各モードの対応
を示します。
STC 動作モード指定フラグと各モードの対応
STCM1 STCM2 STC の設定値 内 容
0 0 OFF セルフチューニング(STC)機能停止
1 0 DISP PID パラメータを表示
0 1 ON PID パラメータを自動更新
1 1 ATSTUP オートスタートアップ
上表より、STC 動作モード指定フラグの値を読み取ることによって、STC モード選択(OFF、DISP、ON、ATSTUP)を識別することができ、また書き込むことによりSTC モード選択を設定することができます。
7.4 セルフチューニング(STC)の各モードにおける動作
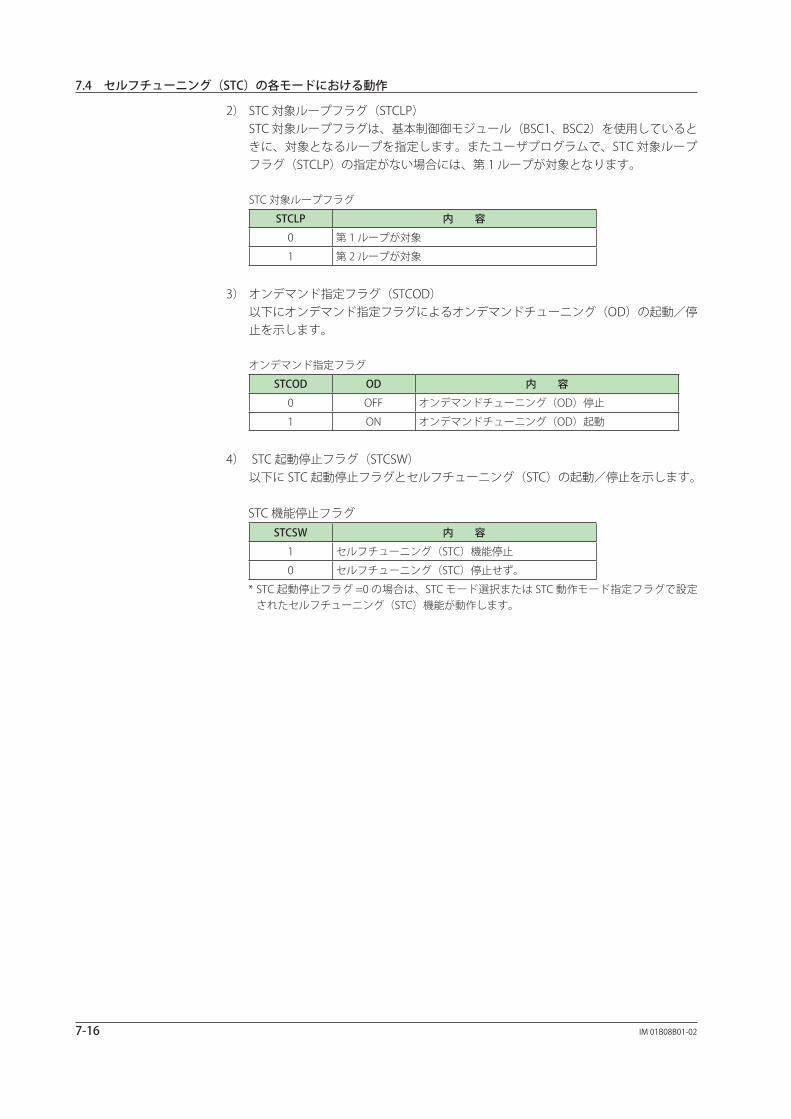
7-16 IM 01B08B01-02
2) STC 対象ループフラグ(STCLP) STC 対象ループフラグは、基本制御御モジュール(BSC1、BSC2)を使用していると
きに、対象となるループを指定します。またユーザプログラムで、STC 対象ループフラグ(STCLP)の指定がない場合には、第 1 ループが対象となります。
STC 対象ループフラグ
STCLP 内 容
0 第 1 ループが対象
1 第 2 ループが対象
3) オンデマンド指定フラグ(STCOD) 以下にオンデマンド指定フラグによるオンデマンドチューニング(OD)の起動/停
止を示します。
オンデマンド指定フラグ
STCOD OD 内 容
0 OFF オンデマンドチューニング(OD)停止
1 ON オンデマンドチューニング(OD)起動
4) STC 起動停止フラグ(STCSW) 以下に STC 起動停止フラグとセルフチューニング(STC)の起動/停止を示します。
STC 機能停止フラグSTCSW 内 容
1 セルフチューニング(STC)機能停止
0 セルフチューニング(STC)停止せず。
* STC 起動停止フラグ =0 の場合は、STC モード選択または STC 動作モード指定フラグで設定されたセルフチューニング(STC)機能が動作します。
7.4 セルフチューニング(STC)の各モードにおける動作

7-17IM 01B08B01-02
セルフチューニング機能
7
以下にセルフチューニング(STC)の機能ブロック図を示します。
パラメータ
パラメータ
パラメータ
STCSW
STCLP
STCM1
STCM2
STCOD
STC起動/停止0:起動1:停止
STC対象ループ0:第1ループ1:第2ループ
STCモード指定OFFDISPONATSTUP
STC
OD
オンデマンドチューニングOFFON
IPn
NBn
IMNnIMXnPMNnPMXnMInOSn
TRnPAn
DAn
GMnTMnLMnRTnCRn
IAn
*n=1,2DMXn
0708.ai
セルフチューニング(STC)機能ブロック図
7.4 セルフチューニング(STC)の各モードにおける動作
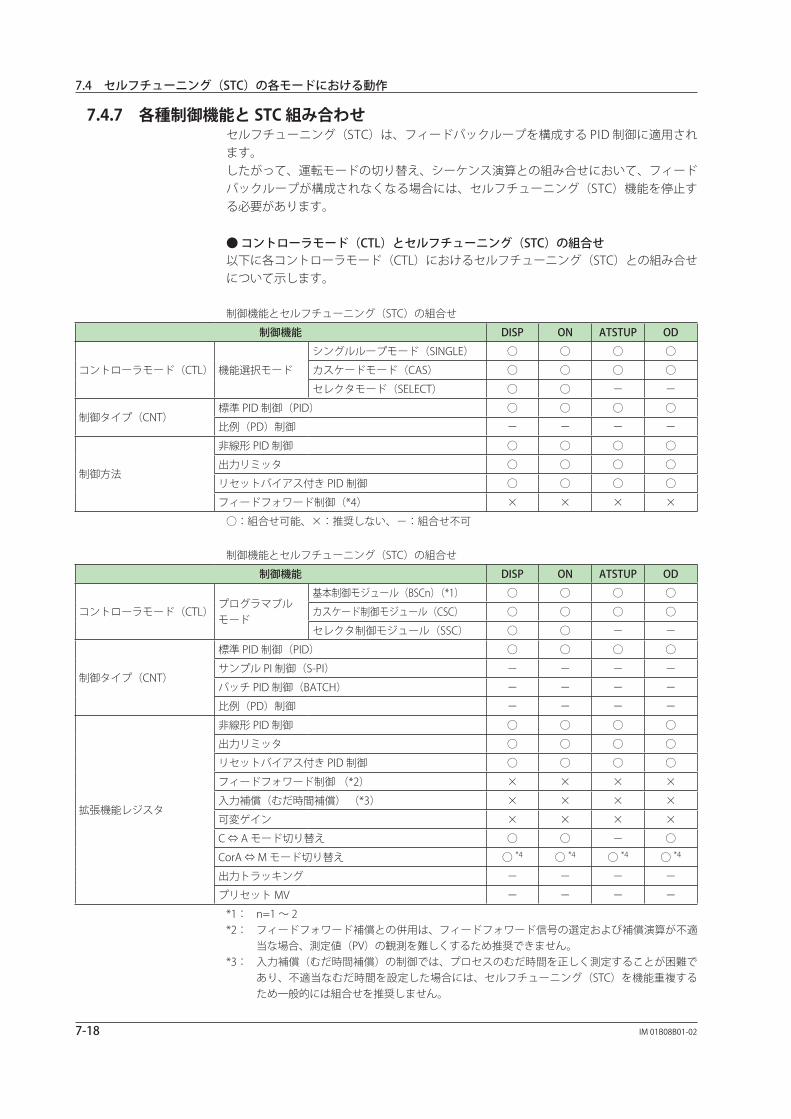
7-18 IM 01B08B01-02
7.4.7 各種制御機能と STC 組み合わせセルフチューニング(STC)は、フィードバックループを構成する PID 制御に適用されます。したがって、運転モードの切り替え、シーケンス演算との組み合せにおいて、フィードバックループが構成されなくなる場合には、セルフチューニング(STC)機能を停止する必要があります。
● コントローラモード(CTL)とセルフチューニング(STC)の組合せ以下に各コントローラモード(CTL)におけるセルフチューニング(STC)との組み合せについて示します。
制御機能とセルフチューニング(STC)の組合せ
制御機能 DISP ON ATSTUP OD
コントローラモード(CTL) 機能選択モード
シングルループモード(SINGLE) ○ ○ ○ ○
カスケードモード(CAS) ○ ○ ○ ○
セレクタモード(SELECT) ○ ○ - -
制御タイプ(CNT)標準 PID 制御(PID) ○ ○ ○ ○
比例(PD)制御 - - - -
制御方法
非線形 PID 制御 ○ ○ ○ ○
出力リミッタ ○ ○ ○ ○
リセットバイアス付き PID 制御 ○ ○ ○ ○
フィードフォワード制御(*4) × × × ×
○:組合せ可能、×:推奨しない、-:組合せ不可
制御機能とセルフチューニング(STC)の組合せ
制御機能 DISP ON ATSTUP OD
コントローラモード(CTL)プログラマブルモード
基本制御モジュール(BSCn)(*1) ○ ○ ○ ○
カスケード制御モジュール(CSC) ○ ○ ○ ○
セレクタ制御モジュール(SSC) ○ ○ - -
制御タイプ(CNT)
標準 PID 制御(PID) ○ ○ ○ ○
サンプル PI 制御(S-PI) - - - -
バッチ PID 制御(BATCH) - - - -
比例(PD)制御 - - - -
拡張機能レジスタ
非線形 PID 制御 ○ ○ ○ ○
出力リミッタ ○ ○ ○ ○
リセットバイアス付き PID 制御 ○ ○ ○ ○
フィードフォワード制御 (*2) × × × ×
入力補償(むだ時間補償) (*3) × × × ×
可変ゲイン × × × ×
C ⇔ A モード切り替え ○ ○ - ○
CorA ⇔ M モード切り替え ○ *4 ○ *4 ○ *4 ○ *4
出力トラッキング - - - -
プリセット MV - - - -
*1: n=1 ~ 2*2: フィードフォワード補償との併用は、フィードフォワード信号の選定および補償演算が不適
当な場合、測定値(PV)の観測を難しくするため推奨できません。*3: 入力補償(むだ時間補償)の制御では、プロセスのむだ時間を正しく測定することが困難で
あり、不適当なむだ時間を設定した場合には、セルフチューニング(STC)を機能重複するため一般的には組合せを推奨しません。
7.4 セルフチューニング(STC)の各モードにおける動作

7-19IM 01B08B01-02
セルフチューニング機能
7
ただし、反応缶ような温度-ゲインの関係をあらかじめ織り込んでおく用途では、セルフチューニング(STC)と組み合わせて効果を発揮します。
*4: C または A ⇔ M モード切り替えでは、手動制御(M)に切り替えた場合、STC モード選択=DISP,ON およびオンデマンドチューニング(OD)は動作しません。また自動制御(A)、カスケード設定自動制御(C)のとき、オートスタートアップ(ATSTUP)は動作しません。
表中の記号は、 ○:組合せ可能 ×: 推奨しない。(セルフチューニングアラーム(STCALM)は発生しませんが、正しくセル
フチューニング(STC)が動作しない可能性があるので使用しないでください。) -: 組合せ不可(セルフチューニングアラーム(STCALM)が発生します。)► セルフチューニングアラーム(STCALM):本書の「7.4.8. セルフチューニングアラーム」► 拡張機能レジスタ:「YSS1000 設定ソフトウェア/ YS1700 プログラマブル機能 ユーザーズマ
ニュアル(CD)」
● 各運転モードとセルフチューニング(STC)の組合せ以下に各運転モードにおけるセルフチューニング(STC)との組合せについて示します。
各運転モードとセルフチューニング(STC)の組合せ
運転モード DISP ON ATSTUP OD
手動制御(M) - - ○ -
自動制御(A) ○ ○ - ○
カスケード設定 自動制御(C)
アナログカスケード設定モード(CAS) ○ ○ - ○
コンピュータカスケードモード(CMP)(SPC) ○ ○ - ○
(DDC) - - - -
-(設定なし) - - - -
*1: 表中の記号は、 ○:組合せ可能 -:組合せ不可(セルフチューニングアラーム(STCALM)が発生します。)► セルフチューニングアラーム(STCALM):本書の「7.4.8 セルフチューニングアラーム」
7.4 セルフチューニング(STC)の各モードにおける動作
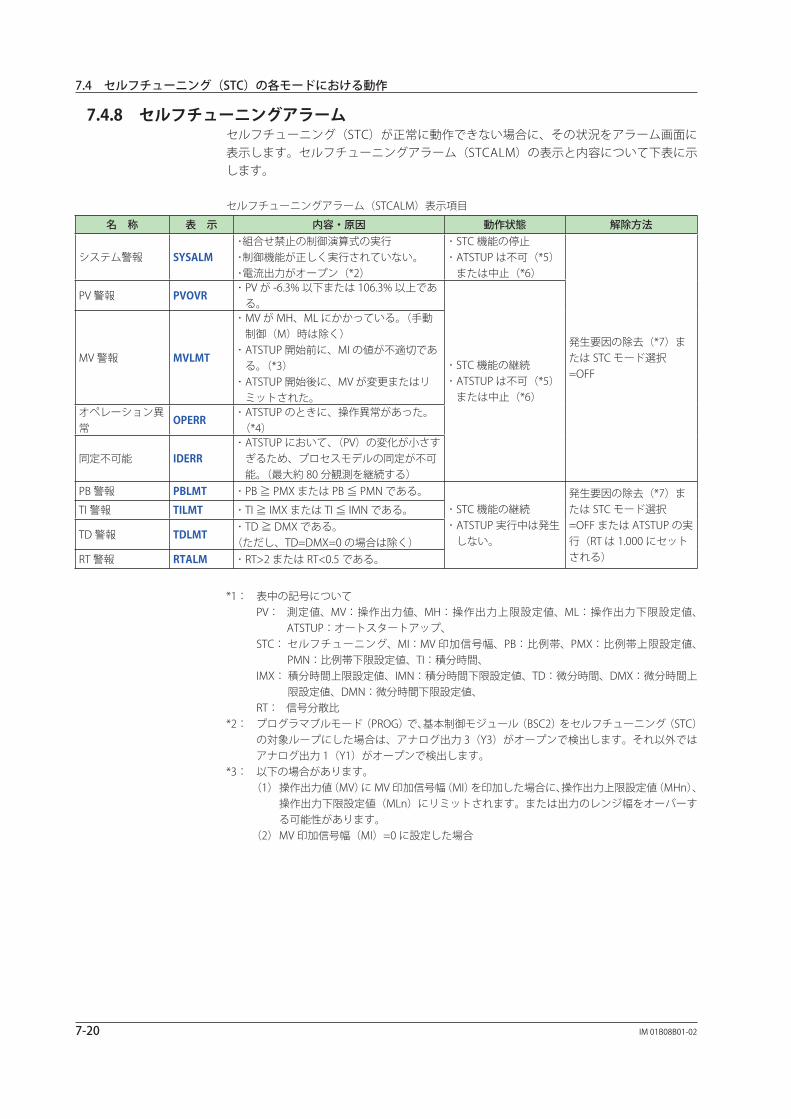
7-20 IM 01B08B01-02
7.4.8 セルフチューニングアラームセルフチューニング(STC)が正常に動作できない場合に、その状況をアラーム画面に表示します。セルフチューニングアラーム(STCALM)の表示と内容について下表に示します。
セルフチューニングアラーム(STCALM)表示項目
名 称 表 示 内容・原因 動作状態 解除方法
システム警報 SYSALM・組合せ禁止の制御演算式の実行・制御機能が正しく実行されていない。・電流出力がオープン(*2)
・ STC 機能の停止・ ATSTUP は不可(*5)
または中止(*6)
発生要因の除去(*7)または STC モード選択=OFF
PV 警報 PVOVR・ PV が -6.3% 以下または 106.3% 以上であ
る。
・ STC 機能の継続・ ATSTUP は不可(*5)
または中止(*6)
MV 警報 MVLMT
・ MV が MH、ML にかかっている。(手動制御(M)時は除く)
・ ATSTUP 開始前に、MI の値が不適切である。(*3)
・ ATSTUP 開始後に、MV が変更またはリミットされた。
オペレーション異常
OPERR・ ATSTUP のときに、操作異常があった。(*4)
同定不可能 IDERR・ ATSTUP において、(PV)の変化が小さす
ぎるため、プロセスモデルの同定が不可能。(最大約 80 分観測を継続する)
PB 警報 PBLMT ・ PB ≧ PMX または PB ≦ PMN である。
・ STC 機能の継続・ ATSTUP 実行中は発生
しない。
発生要因の除去(*7)または STC モード選択=OFF または ATSTUP の実行(RT は 1.000 にセットされる)
TI 警報 TILMT ・ TI ≧ IMX または TI ≦ IMN である。
TD 警報 TDLMT・ TD ≧ DMX である。
(ただし、TD=DMX=0 の場合は除く)RT 警報 RTALM ・ RT>2 または RT<0.5 である。
*1: 表中の記号についてPV: 測定値、MV:操作出力値、MH:操作出力上限設定値、ML:操作出力下限設定値、
ATSTUP:オートスタートアップ、STC: セルフチューニング、MI:MV 印加信号幅、PB:比例帯、PMX:比例帯上限設定値、
PMN:比例帯下限設定値、TI:積分時間、IMX: 積分時間上限設定値、IMN:積分時間下限設定値、TD:微分時間、DMX:微分時間上
限設定値、DMN:微分時間下限設定値、RT: 信号分散比
*2: プログラマブルモード(PROG)で、基本制御モジュール(BSC2)をセルフチューニング(STC)の対象ループにした場合は、アナログ出力 3(Y3)がオープンで検出します。それ以外ではアナログ出力 1(Y1)がオープンで検出します。
*3: 以下の場合があります。(1) 操作出力値(MV)に MV 印加信号幅(MI)を印加した場合に、操作出力上限設定値(MHn)、
操作出力下限設定値(MLn)にリミットされます。または出力のレンジ幅をオーバーする可能性があります。
(2) MV 印加信号幅(MI)=0 に設定した場合
7.4 セルフチューニング(STC)の各モードにおける動作
7-21IM 01B08B01-02
セルフチューニング機能
7
*4: 以下の場合があります。(1) STC 起動停止フラグ(STCSW)が、1(停止)の状態。(2) BUM 状態へ遷移。(3) EXT-MAN 状態へ遷移(機能選択モード シングルループモード(SINGLE)時)(4) 機能選択モード カスケードモード(CAS)またはプログラマブルモード(PROG) カ
スケード制御モジュール(CSC)でクローズ(CLOSE)時に、DDC モード、プリセットMV、またはトラッキング状態へ遷移。
(5) プログラマブルモード(PROG)の基本制御モジュール(BSCn)における STC 対象ループ(STCLP)の変更。
(6) STC モード選択の変更。(7) 停電の発生。
*5: オートスタートアップ(ATSTUP)開始前に発生した場合、計器前面 A キーを押してもオートスタートアップが開始されません。
*6: オートスタートアップ(ATSTUP)開始後に発生した場合、以下の状態に遷移します。・ 運転モード = 手動制御(M)・ STC モード指定(STC)=DISP
*7: セルフチューニングアラーム(STCALM)が、オートスタートアップ(ATSTUP)開始後に発生した場合は、要因が解除されてもセルフチューニングアラーム(STCALM)は解除されません。
この場合は、以下の方法で解除します。(1) アラーム表示画面を表示させて、CLR キーを押します。(2) オートスタートアップを再実行します。(発生要因を除去しておきます)(3) STC モード選択(STC)=OFF にします。
7.4 セルフチューニング(STC)の各モードにおける動作

7-22 IM 01B08B01-02
7.5 シミュレーションテスト
7.5.1 適用範囲セルフチューニング(STC)調節計の適用範囲を明らかにするため、さまざまな制御対象や初期 PID におけるシミュレーションテストとフィールドテストを実施しています。一般に多くのプロセスは、高次遅れ要素とむだ時間、ゲインの組み合わせにより、下式のように近似できます。
=Ke-LS
Gp(s)(1+T1S)(1+T2S) ⋅ ⋅ ⋅ ⋅ ⋅ (1+TnS)
0709.ai
セルフチューニング(STC)調節計は、設定値変更や操作量変更による測定値の変動に対して良好なチューニングを行います。操業条件変更や負荷変動に対しても、プロセス特性(ゲイン、むだ時間、遅れ時定数)が変動して同様な応答を示すとチューニングを行います。むだ時間、遅れ時間対比 L/T が約 3 までは良好な制御が可能です。
セルフチューニング適用の条件として次の点が挙げられます。1) PID 制御が可能であること。2) 制御偏差の変動を起こす要因(プロセス特性変化、設定値変更など)の周期が、制
御ループの固有振動周期より大きいこと。3) 操作量と測定値との間の応答がむだ時間と一次遅れ系(あるいは積分系)で近似で
きること。(上式で示される高次系もむだ時間と一次遅れ系で近似されます)
7.5.2 シミュレーション例下図に示すシミュレーションモデルに対し、制御目標タイプを MED、SVF 形として、設定値変更時の例を示します。チューニング前の応答がゆるやかな場合と振動的な場合です。異なる PID 初期値から短時間でほぼ同様な目標応答パターンに収束します。
外乱
PV
e-10S
1+10s
MV++
-+
PV
SVセルフ
チューニング調節計
プロセスモデル
プロセス・モデル特性GP(S)=
ゲイン:1、時定数:10秒、むだ時間:10秒0710.ai
シミュレーションモデル
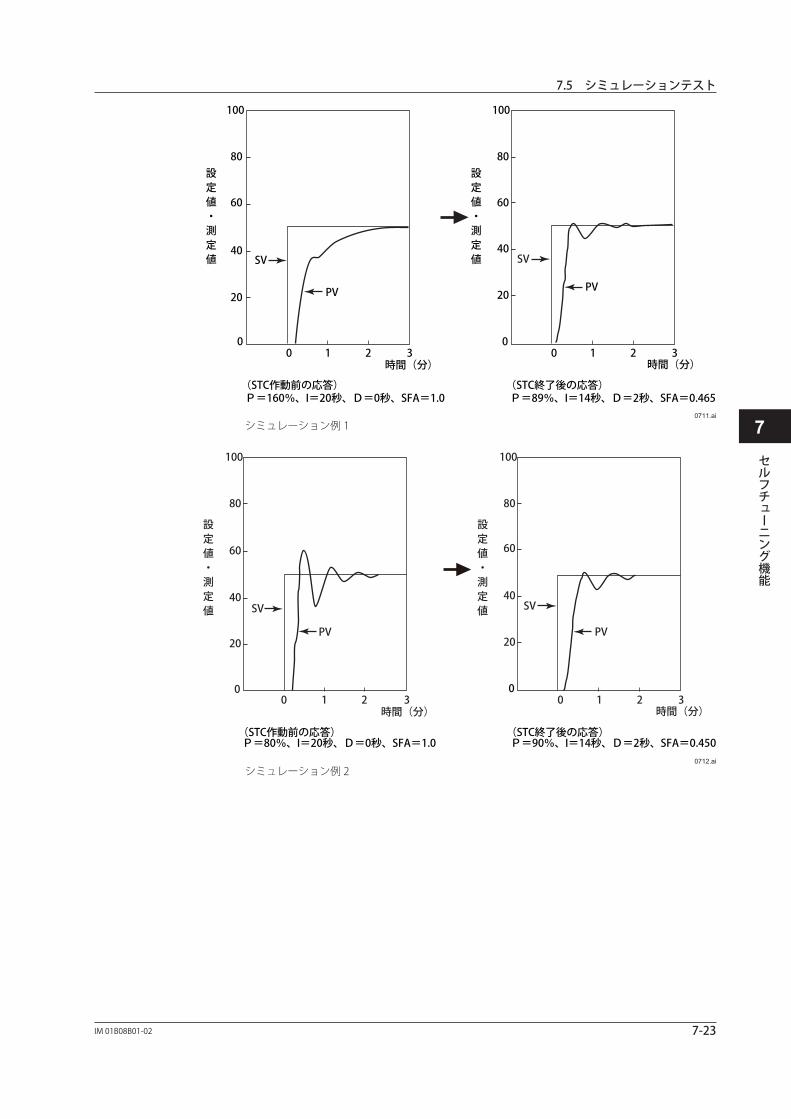
7-23IM 01B08B01-02
セルフチューニング機能
7
PVPV
設定値・測定値 SV
時間(分)
(STC作動前の応答)P=160%、I=20秒、D=0秒、SFA=1.0
00 1 2 3
20
40
60
80
100
SV
0711.ai
設定値・測定値
時間(分)
(STC終了後の応答)P=89%、I=14秒、D=2秒、SFA=0.465
00 1 2 3
20
40
60
80
100
シミュレーション例 1
PVPV
設定値・測定値 SV
時間(分)
(STC作動前の応答)P=80%、I=20秒、D=0秒、SFA=1.0
00 1 2 3
20
40
60
80
100
SV
0712.ai
設定値・測定値
時間(分)
(STC終了後の応答)P=90%、I=14秒、D=2秒、SFA=0.450
00 1 2 3
20
40
60
80
100
シミュレーション例 2
7.5 シミュレーションテスト

7-24 IM 01B08B01-02
7.6 アプリケーションガイド
各種の制御対象、制御ループに対して、セルフチューニング(STC)適用の留意点あるいは適用の可否などについて説明します。
7.6.1 安定制御ループ(連続制御)設定値(SV)変更の回数も少なく、プロセス特性の変化もほとんどない安定制御ループに対しては、最初にセルフチューニング(STC)により最適な PID パラメータを求めます。その後は、PID リミット値を利用し PID パラメータの範囲を狭くしてセルフチューニング(STC)を起動させるかあるいは停止します。
7.6.2 むだ時間が支配的なプロセスの制御基本 PID 制御とセルフチューニング(STC)を組み合わせた場合、シミュレーションにより L/T(むだ時間/一次遅れ時定数)比が約 3 までは良好な動作の得られることを確認しています。L/T>3 では、単純な PID による制御は難しくなります。この場合には、スミスのむだ時間補償制御あるいはサンプル PI 制御(S-PI)を検討してください。ただし、これらの制御とセルフチューニング(STC)の組み合わせはできません。
7.6.3 カスケード制御下図に示す温度制御 - 温度制御のように第 2 ループの応答が遅い場合、まずカスケード オープンで第 2 ループの PID パラメータに最適値を設定した後セルフチューニング(STC)を OFF とし、次に第 1 ループにセルフチューニング(STC)を作動させます。一般的には、相互干渉を避けるために、常時は制御の主目的である第 1 ループだけにセルフチューニング(STC)を実施することを推奨します。
TC1
TC2
蒸気
水
原料
反応器
スプリットレンジ調節弁
クーリングジャケット
0713.ai
カスケード制御

7-25IM 01B08B01-02
セルフチューニング機能
7
7.6.4 制御対象特性(むだ時間、遅れ時間、ゲイン)の変動に対する追従下図に示す例は、流出量(F)を制御する系ですが、タンクへの流入量(F1)の大きな周期的変動のために、レベル制御が働き中間流出量(F0)も変動します。(F0)の変動は、FIC の制御対象プロセスのゲイン変動に相当します。制御対象特性の変動に対しては、その変動周期が制御ループの固有振動周期に比べて大きい場合セルフチューニング(STC)が追従します。制御対象特性の変動による測定値応答の変動が検知されると、セルフチューニング(STC)が作動します。セルフチューニング(STC)は、オンデマンドチューニングのトリガ(キー操作または通信により OD = ON(1))があればより速く追従します。
LIC
還流
レベル
FIC
タンク
ポンプ
中間流出量(F0)
流出量(F)
流入量(F1)
0714.ai
ゲインが変化するプロセス
7.6.5 中和制御下図に示す中和制御において、pH プロセスは中和点(pH=7)付近できわめてゲインが大きく、両端ではゲインが小さい非線形特性を示します。pH 調節計に直接セルフチューニング(STC)を適用すると、中和点(pH=7)付近で最適 PID 定数を計算するため数百 % の比例帯(PB)に収束し、良好な制御はできません。この場合には、調節計の非線形要素と組み合わせて線形化した上でセルフチューニング
(STC)を適用します。
pH
MV(中和液)
0715.ai
14
12
10
876
4
2
0
中和液
pHC
pH伝送器
被制御液
中和制御と pH プロセス特性
7.6 アプリケーションガイド
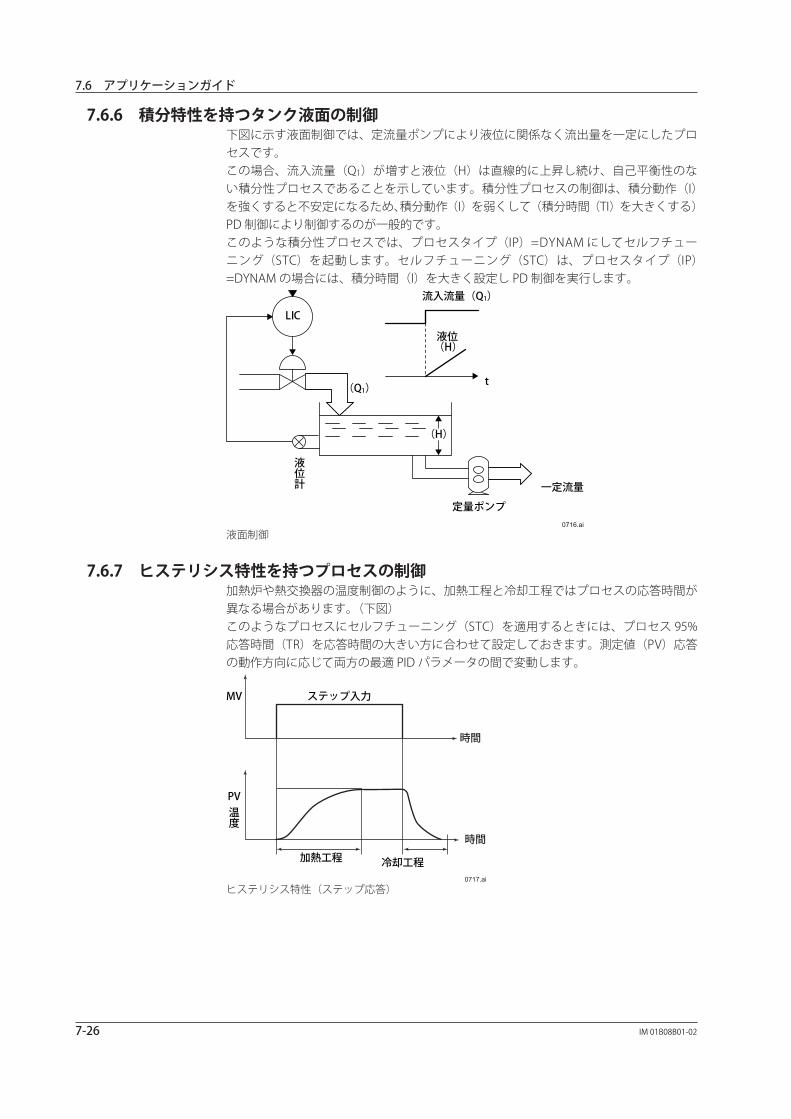
7-26 IM 01B08B01-02
7.6.6 積分特性を持つタンク液面の制御下図に示す液面制御では、定流量ポンプにより液位に関係なく流出量を一定にしたプロセスです。この場合、流入流量(Q1)が増すと液位(H)は直線的に上昇し続け、自己平衡性のない積分性プロセスであることを示しています。積分性プロセスの制御は、積分動作(I)を強くすると不安定になるため、積分動作(I)を弱くして(積分時間(TI)を大きくする)PD 制御により制御するのが一般的です。このような積分性プロセスでは、プロセスタイプ(IP)=DYNAM にしてセルフチューニング(STC)を起動します。セルフチューニング(STC)は、プロセスタイプ(IP)=DYNAM の場合には、積分時間(I)を大きく設定し PD 制御を実行します。
一定流量
LIC
(H)
(Q1)
定量ポンプ
流入流量(Q1)
液位(H)
t
液位計
0716.ai
液面制御
7.6.7 ヒステリシス特性を持つプロセスの制御加熱炉や熱交換器の温度制御のように、加熱工程と冷却工程ではプロセスの応答時間が異なる場合があります。(下図)このようなプロセスにセルフチューニング(STC)を適用するときには、プロセス 95%応答時間(TR)を応答時間の大きい方に合わせて設定しておきます。測定値(PV)応答の動作方向に応じて両方の最適 PID パラメータの間で変動します。
0717.ai
時間
時間
MV
PV
ステップ入力
加熱工程
温度
冷却工程
ヒステリシス特性(ステップ応答)
7.6 アプリケーションガイド

7-27IM 01B08B01-02
セルフチューニング機能
7
7.6.8 操作端の動作が遅いプロセスの制御下図のように電動弁で流量制御を行う場合、流量計の応答時間に比較して電動弁の応答時間が大きく支配的になることがあります。セルフチューニング(STC)は、操作端の遅れを含めてプロセス特性を推定しますので、操作端の遅れがない場合に比較して比例帯(PB)を大きめに設定します。制御性をさらに改善する必要がある場合には、微分動作(D)を補うために一次進み演算による位相補償などを付け加えてください。(右下図参照)
PID+
-
+
-
a:一次進み演算ゲインTD:一次進み時定数
aTDs1+TDs
FIC
M
流量計
電動弁
0718.ai
電動弁流量制御と一次進み出力補償
7.6.9 プログラムパターン制御下図のように、温度調節計の設定値(SV)を一定の昇温/降温パターンに沿って変化させるプログラム制御にセルフチューニング(STC)を適用する場合、次の点に留意してください。制御演算式(ALG)は、微分先行 PID(PI-D)または可変設定値フィルタ(SVF)を選びます。比例先行 PID(I-PD)では、設定値(SV)変化に対する追従性が悪くなります。上昇温度到達時のオーバーシュートを最小限に抑えるためには、セルフチューニング
(STC)の制御目標タイプ(OS)=ZERO に設定し、可変設定値フィルタ(SVF)を選びます。一般に、昇温または降温時のように設定値(SV)がランプ上に変化していく場合には、調節計はオフセットを生じます。オフセットを解消するためのオンデマンドチューニング(OD)を実行すると、制御偏差を減らす方向に操作出力(MV)が印加されると同時にその応答から PID パラメータを計算設定しますので、オフセットが減少します。
TIC
TPG
0719.ai
燃料
温度パターン発生器
時間
温度パターン温
度
熱
処
理
炉
プログラム制御
7.6 アプリケーションガイド
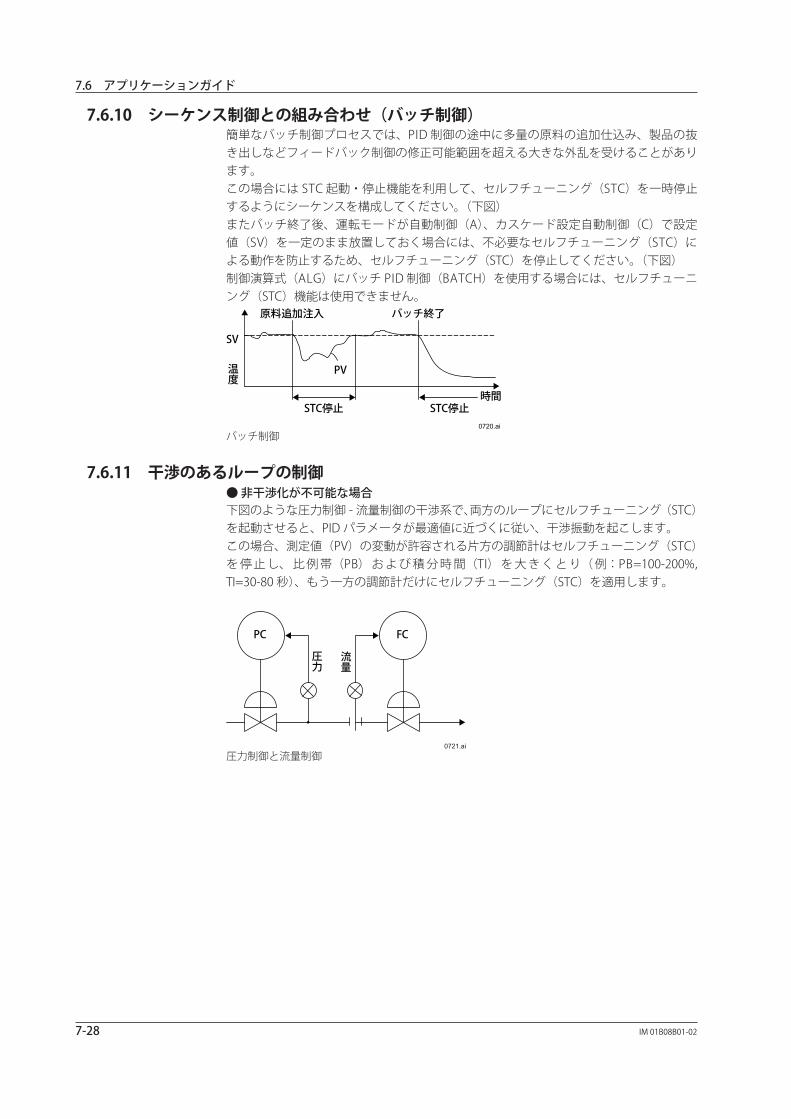
7-28 IM 01B08B01-02
7.6.10 シーケンス制御との組み合わせ(バッチ制御)簡単なバッチ制御プロセスでは、PID 制御の途中に多量の原料の追加仕込み、製品の抜き出しなどフィードバック制御の修正可能範囲を超える大きな外乱を受けることがあります。この場合には STC 起動・停止機能を利用して、セルフチューニング(STC)を一時停止するようにシーケンスを構成してください。(下図)またバッチ終了後、運転モードが自動制御(A)、カスケード設定自動制御(C)で設定値(SV)を一定のまま放置しておく場合には、不必要なセルフチューニング(STC)による動作を防止するため、セルフチューニング(STC)を停止してください。(下図)制御演算式(ALG)にバッチ PID 制御(BATCH)を使用する場合には、セルフチューニング(STC)機能は使用できません。
時間STC停止
SV
PV
STC停止
バッチ終了原料追加注入
温度
0720.ai
バッチ制御
7.6.11 干渉のあるループの制御● 非干渉化が不可能な場合下図のような圧力制御 - 流量制御の干渉系で、両方のループにセルフチューニング(STC)を起動させると、PID パラメータが最適値に近づくに従い、干渉振動を起こします。この場合、測定値(PV)の変動が許容される片方の調節計はセルフチューニング(STC)を 停 止 し、 比 例 帯(PB) お よ び 積 分 時 間(TI) を 大 き く と り( 例:PB=100-200%, TI=30-80 秒)、もう一方の調節計だけにセルフチューニング(STC)を適用します。
PC FC
圧力
流量
0721.ai
圧力制御と流量制御
7.6 アプリケーションガイド
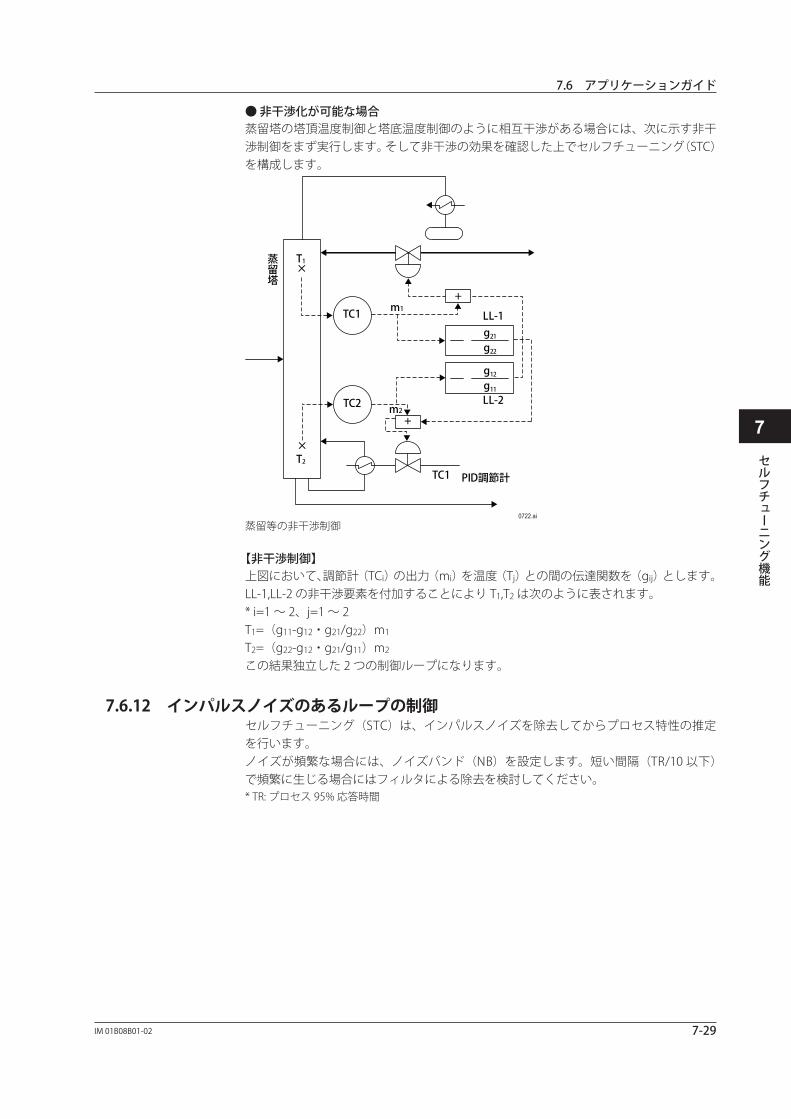
7-29IM 01B08B01-02
セルフチューニング機能
7
● 非干渉化が可能な場合蒸留塔の塔頂温度制御と塔底温度制御のように相互干渉がある場合には、次に示す非干渉制御をまず実行します。そして非干渉の効果を確認した上でセルフチューニング(STC)を構成します。
TC1 PID調節計
m2
m1
T1
T2
×
×
TC1
TC2
g21
g22
g12
g11
+
LL-1
LL-2
0722.ai
蒸留塔
+
蒸留等の非干渉制御
【非干渉制御】上図において、調節計(TCi)の出力(mi)を温度(Tj)との間の伝達関数を(gij)とします。LL-1,LL-2 の非干渉要素を付加することにより T1,T2 は次のように表されます。* i=1 ~ 2、j=1 ~ 2T1=(g11-g12・g21/g22)m1
T2=(g22-g12・g21/g11)m2
この結果独立した 2 つの制御ループになります。
7.6.12 インパルスノイズのあるループの制御セルフチューニング(STC)は、インパルスノイズを除去してからプロセス特性の推定を行います。ノイズが頻繁な場合には、ノイズバンド(NB)を設定します。短い間隔(TR/10 以下)で頻繁に生じる場合にはフィルタによる除去を検討してください。* TR: プロセス 95% 応答時間
7.6 アプリケーションガイド

Blank Page
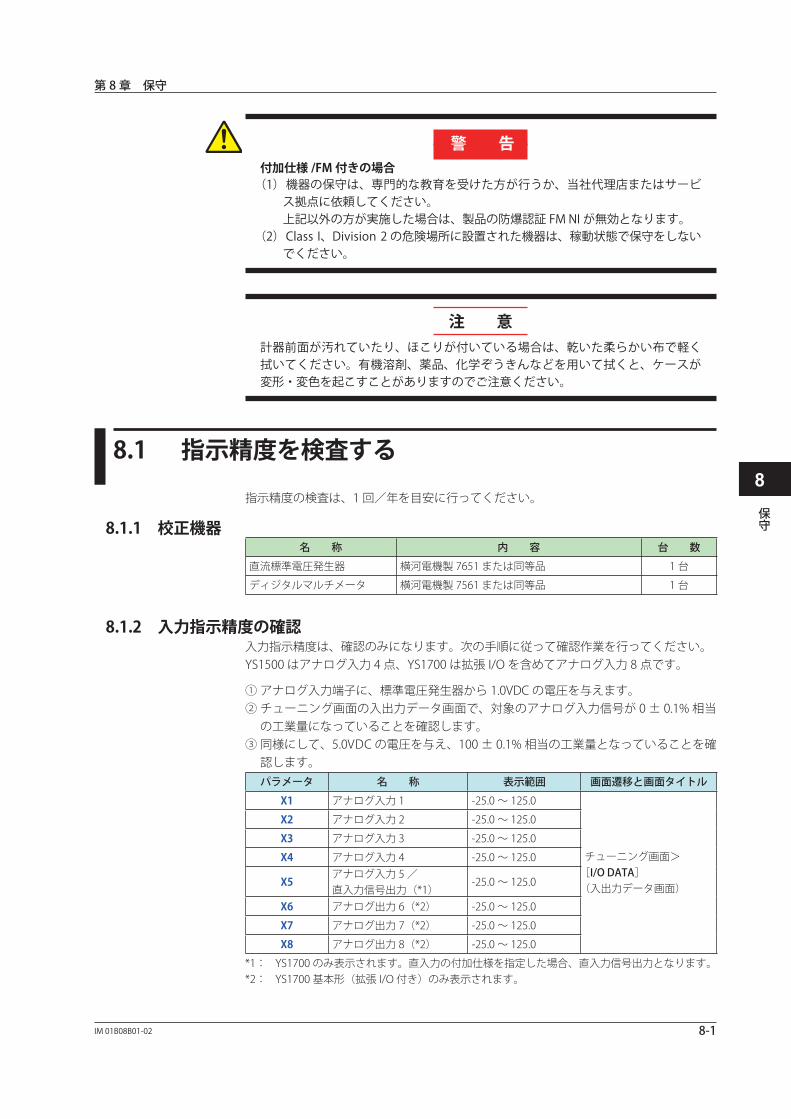
8-1IM 01B08B01-02
保守
8
警 告付加仕様 /FM 付きの場合
(1) 機器の保守は、専門的な教育を受けた方が行うか、当社代理店またはサービス拠点に依頼してください。
上記以外の方が実施した場合は、製品の防爆認証 FM NI が無効となります。(2) Class I、Division 2 の危険場所に設置された機器は、稼動状態で保守をしない
でください。
注 意計器前面が汚れていたり、ほこりが付いている場合は、乾いた柔らかい布で軽く拭いてください。有機溶剤、薬品、化学ぞうきんなどを用いて拭くと、ケースが変形・変色を起こすことがありますのでご注意ください。
8.1 指示精度を検査する
指示精度の検査は、1 回/年を目安に行ってください。
8.1.1 校正機器名 称 内 容 台 数
直流標準電圧発生器 横河電機製 7651 または同等品 1 台
ディジタルマルチメータ 横河電機製 7561 または同等品 1 台
8.1.2 入力指示精度の確認 入力指示精度は、確認のみになります。次の手順に従って確認作業を行ってください。YS1500 はアナログ入力 4 点、YS1700 は拡張 I/O を含めてアナログ入力 8 点です。
① アナログ入力端子に、標準電圧発生器から 1.0VDC の電圧を与えます。② チューニング画面の入出力データ画面で、対象のアナログ入力信号が 0 ± 0.1% 相当
の工業量になっていることを確認します。③ 同様にして、5.0VDC の電圧を与え、100 ± 0.1% 相当の工業量となっていることを確
認します。パラメータ 名 称 表示範囲 画面遷移と画面タイトル
X1 アナログ入力 1 -25.0 ~ 125.0
チューニング画面> [I/O DATA] (入出力データ画面)
X2 アナログ入力 2 -25.0 ~ 125.0
X3 アナログ入力 3 -25.0 ~ 125.0
X4 アナログ入力 4 -25.0 ~ 125.0
X5アナログ入力 5 / 直入力信号出力(*1)
-25.0 ~ 125.0
X6 アナログ出力 6(*2) -25.0 ~ 125.0
X7 アナログ出力 7(*2) -25.0 ~ 125.0
X8 アナログ出力 8(*2) -25.0 ~ 125.0
*1: YS1700 のみ表示されます。直入力の付加仕様を指定した場合、直入力信号出力となります。*2: YS1700 基本形(拡張 I/O 付き)のみ表示されます。
第 8 章 保守
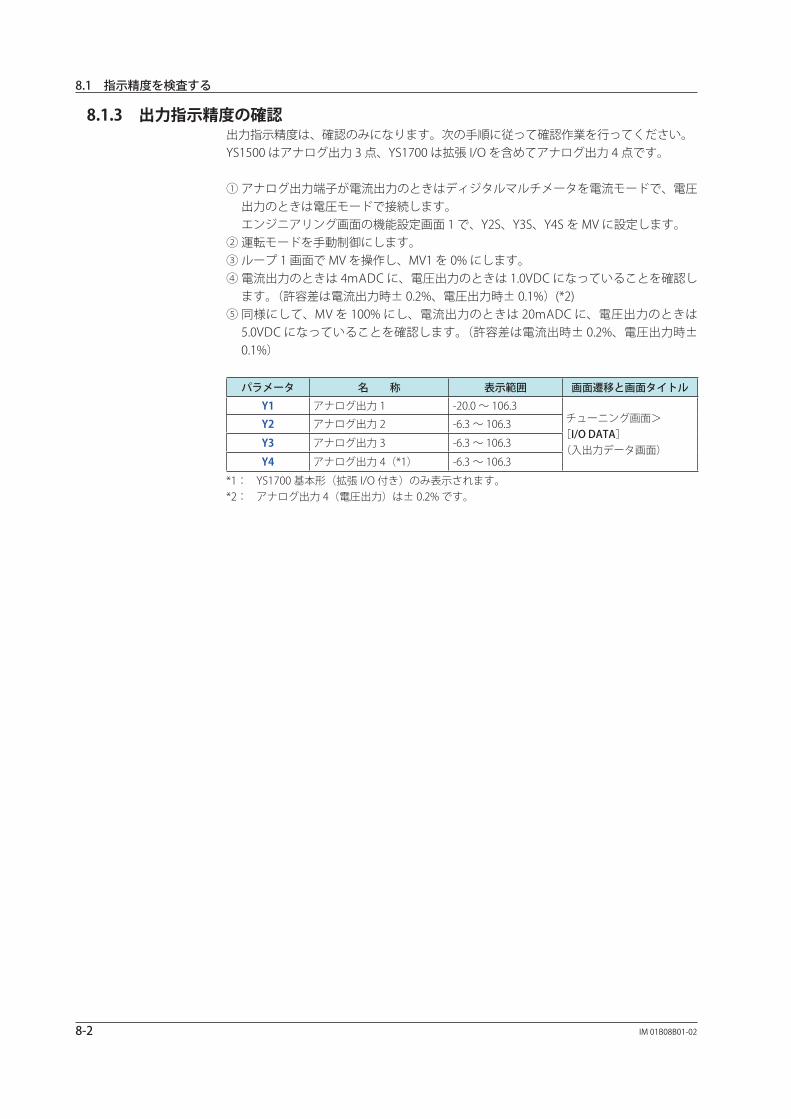
8-2 IM 01B08B01-02
8.1.3 出力指示精度の確認 出力指示精度は、確認のみになります。次の手順に従って確認作業を行ってください。YS1500 はアナログ出力 3 点、YS1700 は拡張 I/O を含めてアナログ出力 4 点です。
① アナログ出力端子が電流出力のときはディジタルマルチメータを電流モードで、電圧出力のときは電圧モードで接続します。
エンジニアリング画面の機能設定画面 1 で、Y2S、Y3S、Y4S を MV に設定します。② 運転モードを手動制御にします。③ ループ 1 画面で MV を操作し、MV1 を 0% にします。④ 電流出力のときは 4mADC に、電圧出力のときは 1.0VDC になっていることを確認し
ます。(許容差は電流出力時± 0.2%、電圧出力時± 0.1%)(*2)⑤ 同様にして、MV を 100% にし、電流出力のときは 20mADC に、電圧出力のときは
5.0VDC になっていることを確認します。(許容差は電流出時± 0.2%、電圧出力時±0.1%)
パラメータ 名 称 表示範囲 画面遷移と画面タイトルY1 アナログ出力 1 -20.0 ~ 106.3
チューニング画面> [I/O DATA] (入出力データ画面)
Y2 アナログ出力 2 -6.3 ~ 106.3
Y3 アナログ出力 3 -6.3 ~ 106.3
Y4 アナログ出力 4(*1) -6.3 ~ 106.3
*1: YS1700 基本形(拡張 I/O 付き)のみ表示されます。*2: アナログ出力 4(電圧出力)は± 0.2% です。
8.1 指示精度を検査する
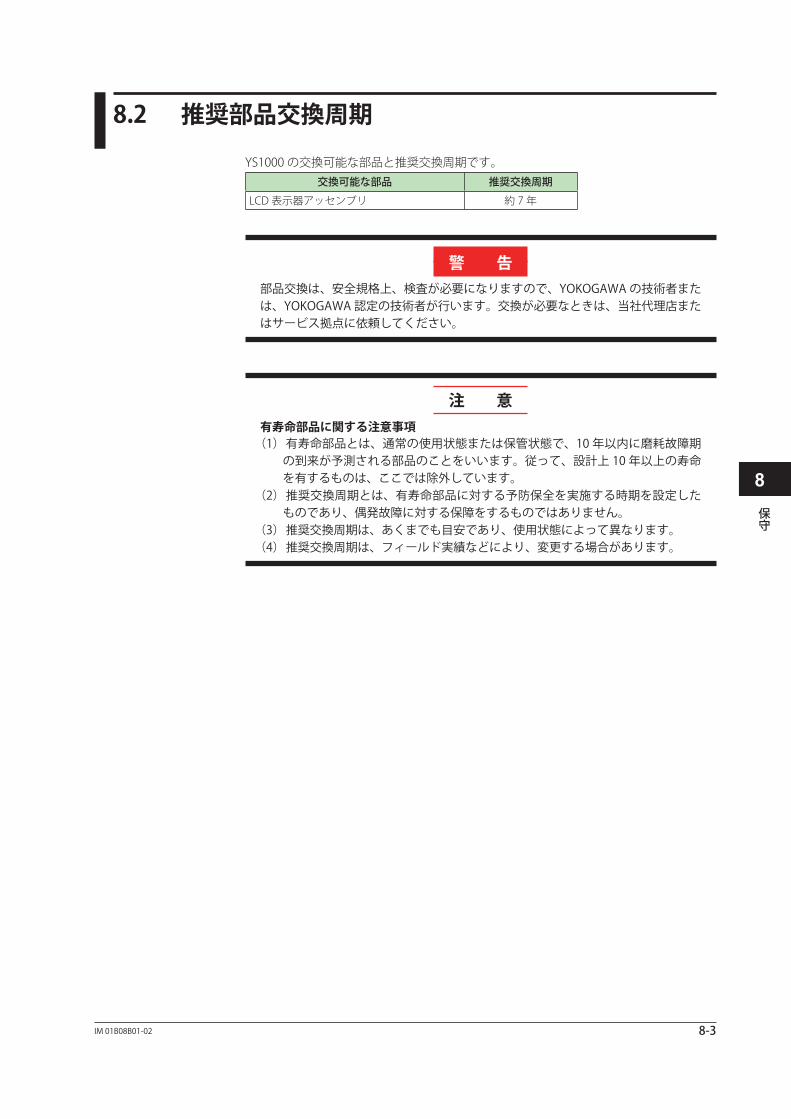
8-3IM 01B08B01-02
保守
8
8.2 推奨部品交換周期
YS1000 の交換可能な部品と推奨交換周期です。交換可能な部品 推奨交換周期
LCD 表示器アッセンブリ 約 7 年
警 告部品交換は、安全規格上、検査が必要になりますので、YOKOGAWA の技術者または、YOKOGAWA 認定の技術者が行います。交換が必要なときは、当社代理店またはサービス拠点に依頼してください。
注 意有寿命部品に関する注意事項
(1) 有寿命部品とは、通常の使用状態または保管状態で、10 年以内に磨耗故障期の到来が予測される部品のことをいいます。従って、設計上 10 年以上の寿命を有するものは、ここでは除外しています。
(2) 推奨交換周期とは、有寿命部品に対する予防保全を実施する時期を設定したものであり、偶発故障に対する保障をするものではありません。
(3) 推奨交換周期は、あくまでも目安であり、使用状態によって異なります。(4) 推奨交換周期は、フィールド実績などにより、変更する場合があります。
8-4 IM 01B08B01-02
8.3 修理依頼品発送時の梱包
本器が万一故障し、修理のため当社サービス拠点に発送いただく場合には、下記のように取り扱ってください。
警 告本器を帯電防止袋に入れ、納入時の梱包内装材とともに梱包箱に入れて発送してください。

9-1IM 01B08B01-02
仕様
9
9.1 一般仕様
警 告本機器は、測定分類Ⅰ(CAT. Ⅰ)に適合した機器ですので、測定分類Ⅱ、ⅢおよびⅣの計測に使用しないでください。
測定分類 測定分類表示 説 明 備考
IVIII
I
IIⅠ CAT. Ⅰ
主電源に直接接続しない回路上で実施する測定のためのものです。
Ⅱ CAT. Ⅱ低電圧設備に直接接続された回路上で実施する測定のためのものです。
家電機器,携帯工具など
Ⅲ CAT. Ⅲ建造物設備内で実施する測定のためのものです。
配電盤,回路遮断器など
Ⅳ CAT. Ⅳ低電圧設備への供給源で実施する測定のためのものです。
架空線,ケーブル系統など
入出力信号アナログ入力信号(測定分類Ⅰ) 対地間電圧:300VAC r.m.s max 定格過渡過電圧:1500V(注)
注:IEC/EN61010-1 で測定分類Ⅰの場合に想定される安全規格上の値であり、機器性能を保証する値ではありません。
項 目YS1700
プログラマブルモードYS1700 機能選択モード、
YS15001 ~ 5VDC(基本形) 5 点 4 点1 ~ 5VDC
(YS1700 基本形(拡張 I/O 付き))8 点 5 点
直入力(*1)(付加仕様) 上記のうち 1 点可能
入力抵抗 1M Ω以上
*1: mV、熱電対、測温抵抗体、ポテンショメータ入力、2 線式伝送器、入力アイソレータ、周波数入力のいずれかひとつ。
アナログ出力信号
項 目YS1700
プログラマブルモードYS1700 機能選択モード、
YS15004 ~ 20mA(基本形) 1 点
1 ~ 5VDC(基本形)2 点
(1 点は 4 ~ 20mA に切り替え可能)2 点
1 ~ 5VDC(YS1700 基本形(拡張 I/O 付き))
3 点 (1 点は 4 ~ 20mA に切り替え可能)
3 点
負荷抵抗YS1700
プログラマブルモードYS1700 機能選択モード、
YS15004 ~ 20mA 0 ~ 750 Ω
1 ~ 5VDC(アナログ出力 2、3) 2k Ω以上
1 ~ 5VDC(アナログ出力 4) 10k Ω以上
( 注 ) SIHN パネルメータ(負荷抵抗 2k Ω)に接続する場合は、YS1000 本体側の電圧出力を使用してください。
第 9 章 仕様

9-2 IM 01B08B01-02
電流出力は、バルブ(操作端)の強制全閉機能をもたせるための特性があります。信号減少のときは、出力信号が -6%(3.04mA 相当)以下になると電流出力は急激に減少し、-20%(0.8mA 相当)程度になります。信号増加のときは、出力信号が -5%以上になると電流出力は -20%(0.8mA 相当)から開放され、-5%(3.2mA 相当)に戻ります。出力信号が 100%以上のときはリニアに増加し、106.25%(21mA)程度でリミットされます。
21
出力信号(%)
電流出力(mA)
20
4
3.23.04
0.8
0 100 106.25-6 -5
0902.ai
ディジタル入力
項 目YS1700
プログラマブルモードYS1700 機能選択モード、
YS1500ディジタル入力(基本形) 6 点(ディジタル出力信号と共用)ディジタル入力
(YS1700 基本形(拡張 I/O 付き))6 点(ディジタル出力信号と共用)+ 4 点(コモン共通)
入力信号 ON OFF
無電圧接点の場合(*1)(*2)閉
抵抗 200 Ω以下開
抵抗 100k Ω以上
電圧接点の場合(*2)LOW
入力電圧 -0.5 ~ 1VDCHIGH
入力電圧 4.5 ~ 30VDC*1: 入力接点容量:5VDC、20mA 以上
最小パルス幅:YS1700 プログラマブルモードの場合 220 ミリ秒(制御周期 200 ミリ秒) 120 ミリ秒(制御周期 100 ミリ秒) 70 ミリ秒(制御周期 50 ミリ秒)最小パルス幅:YS1700 機能選択モード、YS1500 場合 120 ミリ秒
*2: 無電圧接点、電圧接点は同じ端子で受けることが可能。
9.1 一般仕様
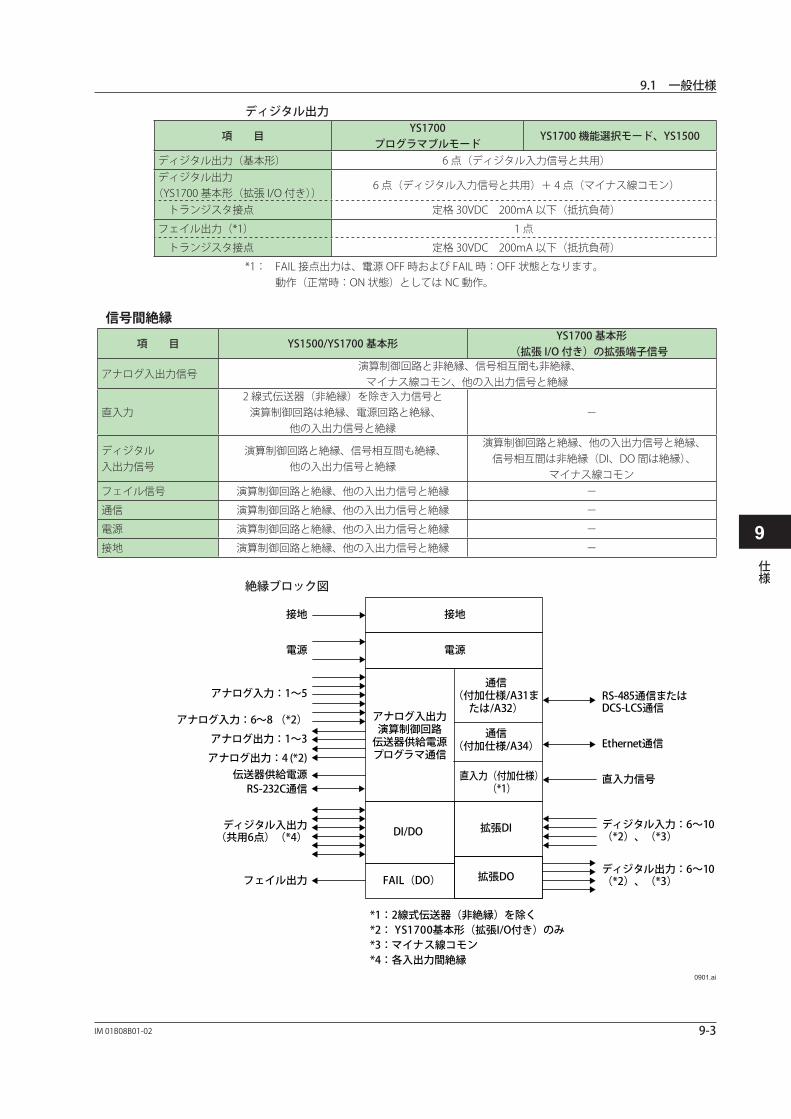
9-3IM 01B08B01-02
仕様
9
ディジタル出力
項 目YS1700
プログラマブルモードYS1700 機能選択モード、YS1500
ディジタル出力(基本形) 6 点(ディジタル入力信号と共用)ディジタル出力
(YS1700 基本形(拡張 I/O 付き))6 点(ディジタル入力信号と共用)+ 4 点(マイナス線コモン)
トランジスタ接点 定格 30VDC 200mA 以下(抵抗負荷)
フェイル出力(*1) 1 点
トランジスタ接点 定格 30VDC 200mA 以下(抵抗負荷)
*1: FAIL 接点出力は、電源 OFF 時および FAIL 時:OFF 状態となります。 動作(正常時:ON 状態)としては NC 動作。
信号間絶縁
項 目 YS1500/YS1700 基本形YS1700 基本形
(拡張 I/O 付き)の拡張端子信号
アナログ入出力信号演算制御回路と非絶縁、信号相互間も非絶縁、
マイナス線コモン、他の入出力信号と絶縁
直入力2 線式伝送器(非絶縁)を除き入力信号と
演算制御回路は絶縁、電源回路と絶縁、 他の入出力信号と絶縁
-
ディジタル 入出力信号
演算制御回路と絶縁、信号相互間も絶縁、 他の入出力信号と絶縁
演算制御回路と絶縁、他の入出力信号と絶縁、 信号相互間は非絶縁(DI、DO 間は絶縁)、
マイナス線コモンフェイル信号 演算制御回路と絶縁、他の入出力信号と絶縁 -
通信 演算制御回路と絶縁、他の入出力信号と絶縁 -
電源 演算制御回路と絶縁、他の入出力信号と絶縁 -
接地 演算制御回路と絶縁、他の入出力信号と絶縁 -
絶縁ブロック図
電源
接地
アナログ入出力演算制御回路
伝送器供給電源プログラマ通信
DI/DO
拡張DO
拡張DI
直入力(付加仕様)(*1)
*1:2線式伝送器(非絶縁)を除く
FAIL(DO)
接地
電源
アナログ入力:1~5
アナログ入力:6~8 (*2)
アナログ出力:1~3
アナログ出力:4 (*2)
ディジタル入出力(共用6点)(*4)
フェイル出力ディジタル出力:6~10 (*2)、(*3)
ディジタル入力:6~10 (*2)、(*3)
直入力信号RS-232C通信
*2: YS1700基本形(拡張I/O付き)のみ
伝送器供給電源
*3:マイナス線コモン
通信(付加仕様/A31ま
たは/A32)
通信(付加仕様/A34)
RS-485通信またはDCS-LCS通信
Ethernet通信
*4:各入出力間絶縁0901.ai
9.1 一般仕様
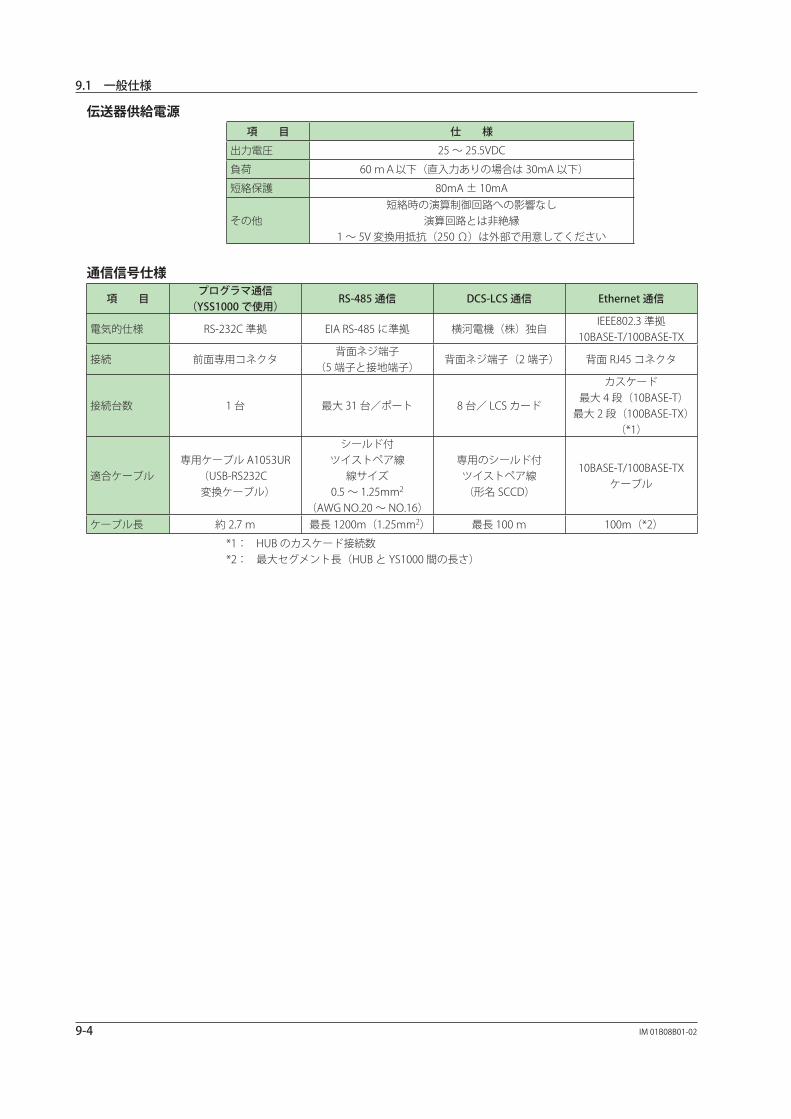
9-4 IM 01B08B01-02
伝送器供給電源項 目 仕 様
出力電圧 25 ~ 25.5VDC
負荷 60 mA以下(直入力ありの場合は 30mA 以下)
短絡保護 80mA ± 10mA
その他短絡時の演算制御回路への影響なし
演算回路とは非絶縁1 ~ 5V 変換用抵抗(250 Ω)は外部で用意してください
通信信号仕様
項 目プログラマ通信
(YSS1000 で使用)RS-485 通信 DCS-LCS 通信 Ethernet 通信
電気的仕様 RS-232C 準拠 EIA RS-485 に準拠 横河電機(株)独自IEEE802.3 準拠
10BASE-T/100BASE-TX
接続 前面専用コネクタ背面ネジ端子
(5 端子と接地端子)背面ネジ端子(2 端子) 背面 RJ45 コネクタ
接続台数 1 台 最大 31 台/ポート 8 台/ LCS カード
カスケード 最大 4 段(10BASE-T)
最大 2 段(100BASE-TX)(*1)
適合ケーブル専用ケーブル A1053UR
(USB-RS232C 変換ケーブル)
シールド付 ツイストペア線
線サイズ 0.5 ~ 1.25mm2
(AWG NO.20 ~ NO.16)
専用のシールド付 ツイストペア線 (形名 SCCD)
10BASE-T/100BASE-TX ケーブル
ケーブル長 約 2.7 m 最長 1200m(1.25mm2) 最長 100 m 100m(*2)
*1: HUB のカスケード接続数*2: 最大セグメント長(HUB と YS1000 間の長さ)
9.1 一般仕様
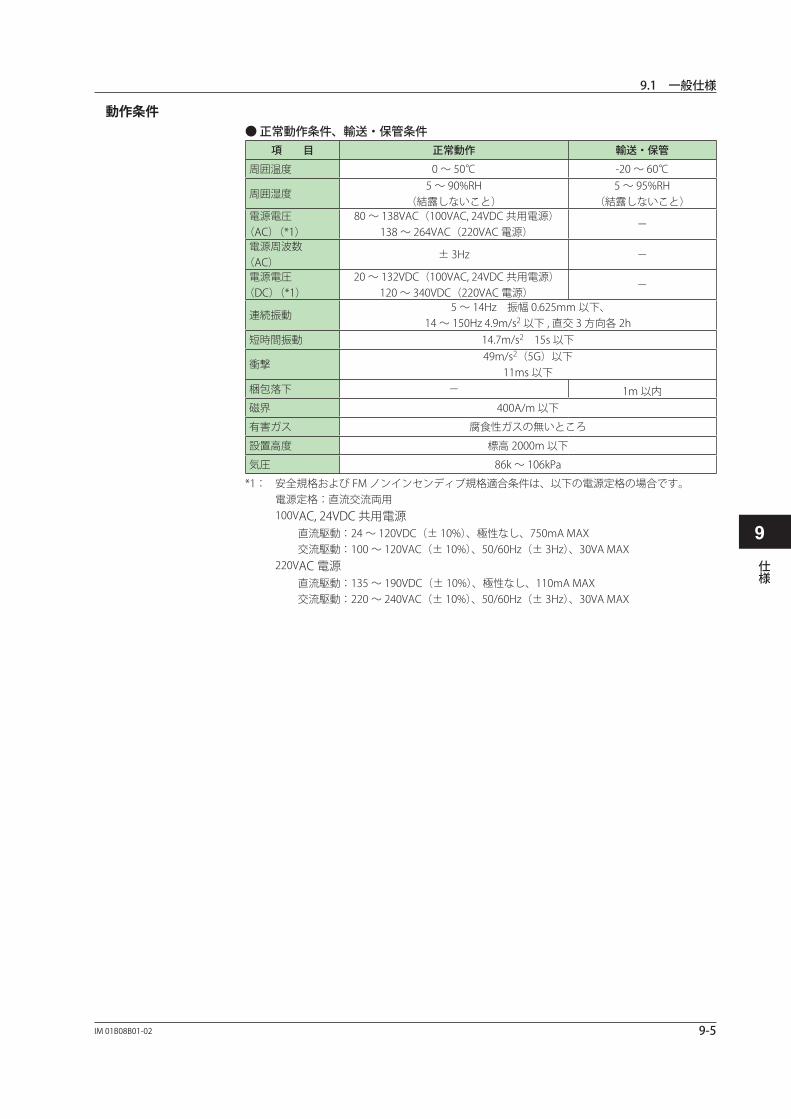
9-5IM 01B08B01-02
仕様
9
動作条件● 正常動作条件、輸送・保管条件
項 目 正常動作 輸送・保管
周囲温度 0 ~ 50℃ -20 ~ 60℃
周囲湿度5 ~ 90%RH
(結露しないこと)5 ~ 95%RH
(結露しないこと)電源電圧
(AC)(*1)80 ~ 138VAC(100VAC, 24VDC 共用電源)
138 ~ 264VAC(220VAC 電源)-
電源周波数 (AC)
± 3Hz -
電源電圧 (DC)(*1)
20 ~ 132VDC(100VAC, 24VDC 共用電源)120 ~ 340VDC(220VAC 電源)
-
連続振動5 ~ 14Hz 振幅 0.625mm 以下、
14 ~ 150Hz 4.9m/s2 以下 , 直交 3 方向各 2h短時間振動 14.7m/s2 15s 以下
衝撃49m/s2(5G)以下
11ms 以下梱包落下 - 1m 以内磁界 400A/m 以下
有害ガス 腐食性ガスの無いところ
設置高度 標高 2000m 以下
気圧 86k ~ 106kPa
*1: 安全規格および FM ノンインセンディブ規格適合条件は、以下の電源定格の場合です。 電源定格:直流交流両用
100VAC, 24VDC 共用電源 直流駆動:24 ~ 120VDC(± 10%)、極性なし、750mA MAX 交流駆動:100 ~ 120VAC(± 10%)、50/60Hz(± 3Hz)、30VA MAX220VAC 電源 直流駆動:135 ~ 190VDC(± 10%)、極性なし、110mA MAX 交流駆動:220 ~ 240VAC(± 10%)、50/60Hz(± 3Hz)、30VA MAX
9.1 一般仕様
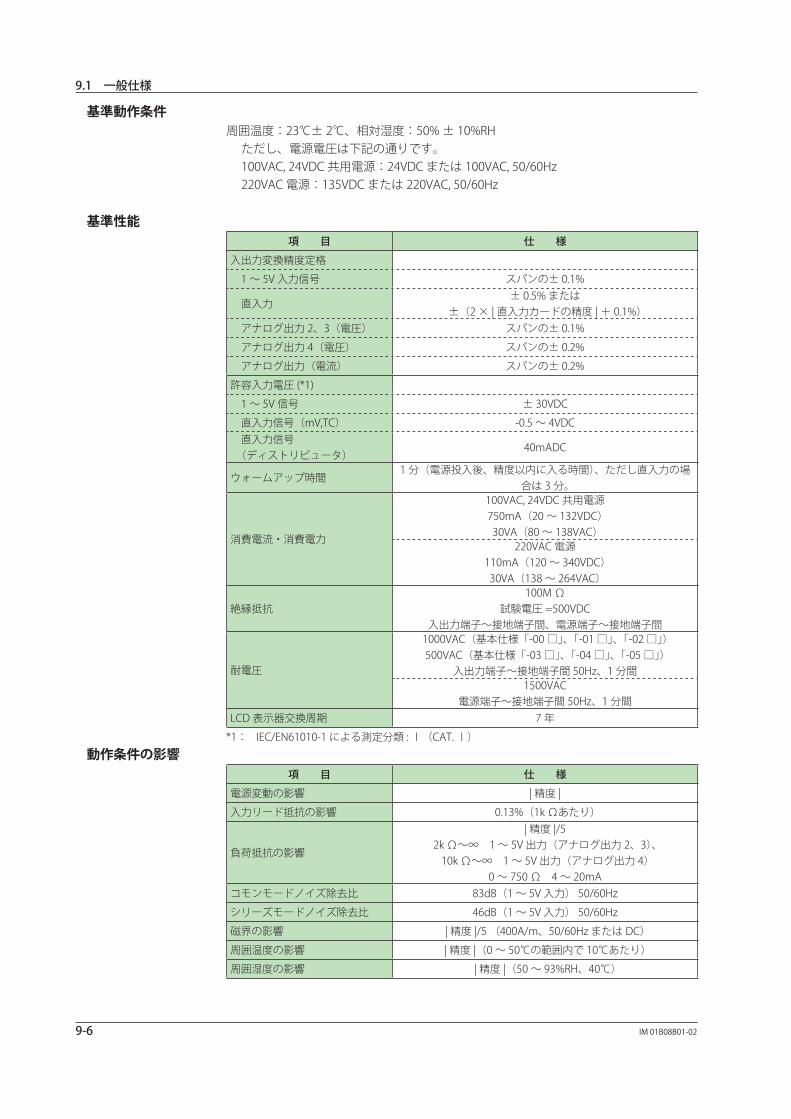
9-6 IM 01B08B01-02
基準動作条件周囲温度:23℃± 2℃、相対湿度:50% ± 10%RH ただし、電源電圧は下記の通りです。 100VAC, 24VDC 共用電源:24VDC または 100VAC, 50/60Hz 220VAC 電源:135VDC または 220VAC, 50/60Hz
基準性能項 目 仕 様
入出力変換精度定格
1 ~ 5V 入力信号 スパンの± 0.1%
直入力± 0.5% または
±(2 × | 直入力カードの精度 | + 0.1%) アナログ出力 2、3(電圧) スパンの± 0.1%
アナログ出力 4(電圧) スパンの± 0.2%
アナログ出力(電流) スパンの± 0.2%
許容入力電圧 (*1)
1 ~ 5V 信号 ± 30VDC
直入力信号(mV,TC) -0.5 ~ 4VDC 直入力信号 (ディストリビュータ)
40mADC
ウォームアップ時間1 分(電源投入後、精度以内に入る時間)、ただし直入力の場
合は 3 分。
消費電流・消費電力
100VAC, 24VDC 共用電源 750mA(20 ~ 132VDC) 30VA(80 ~ 138VAC)
220VAC 電源 110mA(120 ~ 340VDC) 30VA(138 ~ 264VAC)
絶縁抵抗100M Ω
試験電圧 =500VDC入出力端子~接地端子間、電源端子~接地端子間
耐電圧
1000VAC(基本仕様「-00 □」、「-01 □」、「-02 □」)500VAC(基本仕様「-03 □」、「-04 □」、「-05 □」)
入出力端子~接地端子間 50Hz、1 分間1500VAC
電源端子~接地端子間 50Hz、1 分間LCD 表示器交換周期 7 年
*1: IEC/EN61010-1 による測定分類 : Ⅰ(CAT. Ⅰ)
動作条件の影響項 目 仕 様
電源変動の影響 | 精度 |
入力リード抵抗の影響 0.13%(1k Ωあたり)
負荷抵抗の影響
| 精度 |/52k Ω~∞ 1 ~ 5V 出力(アナログ出力 2、3)、
10k Ω~∞ 1 ~ 5V 出力(アナログ出力 4)0 ~ 750 Ω 4 ~ 20mA
コモンモードノイズ除去比 83dB(1 ~ 5V 入力) 50/60Hz
シリーズモードノイズ除去比 46dB(1 ~ 5V 入力) 50/60Hz
磁界の影響 | 精度 |/5 (400A/m、50/60Hz または DC)
周囲温度の影響 | 精度 |(0 ~ 50℃の範囲内で 10℃あたり)
周囲湿度の影響 | 精度 |(50 ~ 93%RH、40℃)
9.1 一般仕様
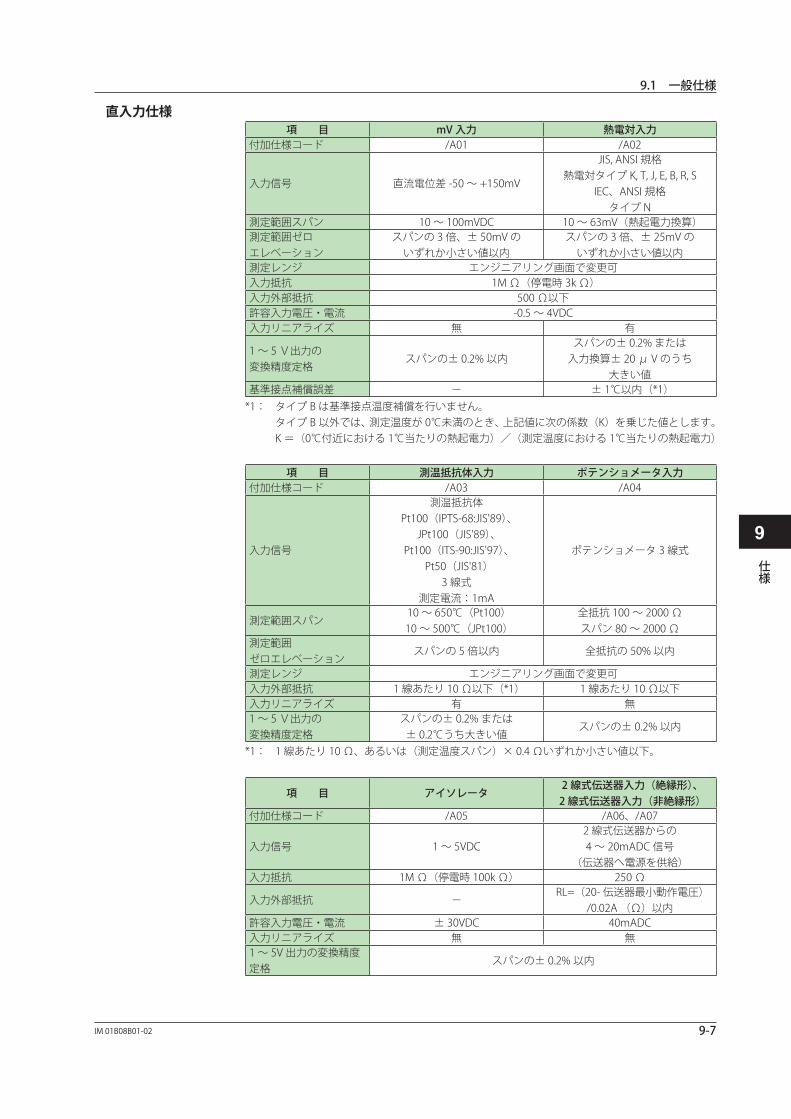
9-7IM 01B08B01-02
仕様
9
直入力仕様項 目 mV 入力 熱電対入力
付加仕様コード /A01 /A02
入力信号 直流電位差 -50 ~ +150mV
JIS, ANSI 規格熱電対タイプ K, T, J, E, B, R, S
IEC、ANSI 規格タイプ N
測定範囲スパン 10 ~ 100mVDC 10 ~ 63mV(熱起電力換算)測定範囲ゼロ エレベーション
スパンの 3 倍、± 50mV のいずれか小さい値以内
スパンの 3 倍、± 25mV のいずれか小さい値以内
測定レンジ エンジニアリング画面で変更可入力抵抗 1M Ω(停電時 3k Ω)入力外部抵抗 500 Ω以下許容入力電圧・電流 -0.5 ~ 4VDC入力リニアライズ 無 有
1 ~ 5 V出力の 変換精度定格
スパンの± 0.2% 以内スパンの± 0.2% または
入力換算± 20 μ V のうち 大きい値
基準接点補償誤差 - ± 1℃以内(*1)*1: タイプ B は基準接点温度補償を行いません。 タイプ B 以外では、測定温度が 0℃未満のとき、上記値に次の係数(K)を乗じた値とします。 K =(0℃付近における 1℃当たりの熱起電力)/(測定温度における 1℃当たりの熱起電力)
項 目 測温抵抗体入力 ポテンショメータ入力付加仕様コード /A03 /A04
入力信号
測温抵抗体Pt100(IPTS-68:JIS'89)、
JPt100(JIS'89)、Pt100(ITS-90:JIS'97)、
Pt50(JIS'81)3 線式
測定電流:1mA
ポテンショメータ 3 線式
測定範囲スパン10 ~ 650℃(Pt100)10 ~ 500℃(JPt100)
全抵抗 100 ~ 2000 Ωスパン 80 ~ 2000 Ω
測定範囲 ゼロエレベーション
スパンの 5 倍以内 全抵抗の 50% 以内
測定レンジ エンジニアリング画面で変更可入力外部抵抗 1 線あたり 10 Ω以下(*1) 1 線あたり 10 Ω以下入力リニアライズ 有 無1 ~ 5 V出力の 変換精度定格
スパンの± 0.2% または ± 0.2℃うち大きい値
スパンの± 0.2% 以内
*1: 1 線あたり 10 Ω、あるいは(測定温度スパン)× 0.4 Ωいずれか小さい値以下。
項 目 アイソレータ2 線式伝送器入力(絶縁形)、
2 線式伝送器入力(非絶縁形)付加仕様コード /A05 /A06、/A07
入力信号 1 ~ 5VDC2 線式伝送器からの 4 ~ 20mADC 信号
(伝送器へ電源を供給)入力抵抗 1M Ω(停電時 100k Ω) 250 Ω
入力外部抵抗 -RL=(20- 伝送器最小動作電圧)
/0.02A (Ω)以内許容入力電圧・電流 ± 30VDC 40mADC入力リニアライズ 無 無1 ~ 5V 出力の変換精度定格
スパンの± 0.2% 以内
9.1 一般仕様

9-8 IM 01B08B01-02
項 目 周波数入力付加仕様コード /A08
入力信号2 線式:接点、電圧パルス、電流パルス(伝送器電源供給も可能)3 線式:
電源供給形電圧パルス入力周波数 0 ~ 10kHz100% 周波数 0.1 ~ 10kHzゼロエレベーション 100% 入力周波数に対して 0 ~ 50% 設定可能測定レンジ エンジニアリング画面で変更可低入力カット点 設定範囲:0.01Hz(かつ最高周波数の 1%以上)~ 100%
最小入力パルス幅オン:60 μ s、オフ:60 μ s (入力周波数 0 ~ 6kHz)
オン:30 μ s、オフ:30 μ s (入力周波数 6 ~ 10kHz)
入力信号レベル
接点入力:リレー接点、トランジスタ接点開閉検出レベル 開:100k Ω以上 閉:200 Ω以下
接点容量:15VDC、15mA 以上電圧/電流パルス入力:
ローレベル;-1 ~ +8V、ハイレベル;+3 ~ +24Vパルス波高値;3V 以上(入力周波数 0 ~ 6kHz)
5V 以上(入力周波数 6 ~ 10kHz)内部負荷抵抗
(電流パルス用)200 Ω、500 Ω、1k Ωから選択可能(注文時指定項目)
入力フィルタ 10ms のフィルタ(無電圧接点用)の有/無を選択可能(注文指定項目)発信器用供給電源 12VDC 30mA、24VDC 30m A から選択可能(注文時指定項目)1 ~ 5V 出力変換 精度定格
スパンの± 0.2% 以内
構造・取付(基本形本体)項 目 仕 様
構造パネル前面防塵防滴構造(IP54 準拠)
ただし、多連密着計装時、および互換形は不可。取付方式 屋内設置のパネル取付
パネル取付 取付金具使用(上下)
パネルカット 137+2 × 68+0.7 (mm)
接続方式外部信号接続 M4 ねじ端子接続
電源、接地接続 M4 ねじ端子接続
外形寸法 144 × 72 × 250mm (高さ×幅×パネルからの奥行き)
質量 1.6kg
9.1 一般仕様
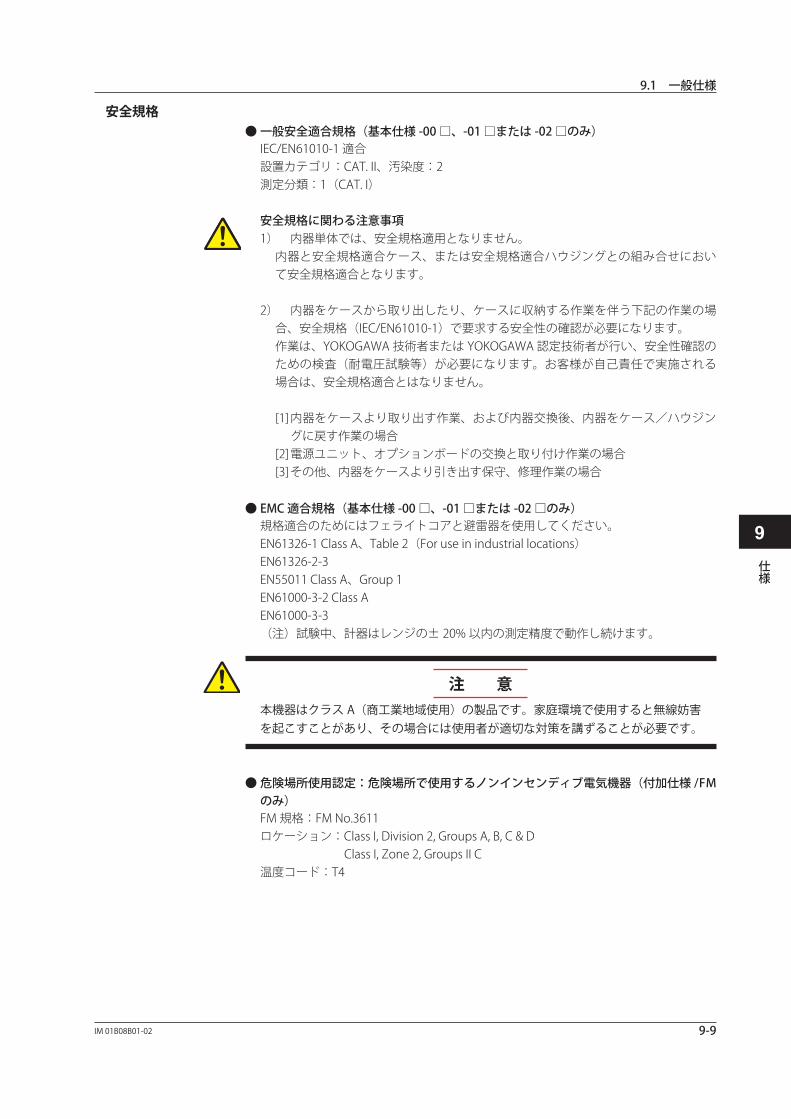
9-9IM 01B08B01-02
仕様
9
安全規格● 一般安全適合規格(基本仕様 -00 □、-01 □または -02 □のみ) IEC/EN61010-1 適合 設置カテゴリ:CAT. II、汚染度:2 測定分類:1(CAT. I)
安全規格に関わる注意事項1) 内器単体では、安全規格適用となりません。 内器と安全規格適合ケース、または安全規格適合ハウジングとの組み合せにおい
て安全規格適合となります。
2) 内器をケースから取り出したり、ケースに収納する作業を伴う下記の作業の場合、安全規格(IEC/EN61010-1)で要求する安全性の確認が必要になります。
作業は、YOKOGAWA 技術者または YOKOGAWA 認定技術者が行い、安全性確認のための検査(耐電圧試験等)が必要になります。お客様が自己責任で実施される場合は、安全規格適合とはなりません。
[1] 内器をケースより取り出す作業、および内器交換後、内器をケース/ハウジングに戻す作業の場合
[2] 電源ユニット、オプションボードの交換と取り付け作業の場合[3] その他、内器をケースより引き出す保守、修理作業の場合
● EMC 適合規格(基本仕様 -00 □、-01 □または -02 □のみ) 規格適合のためにはフェライトコアと避雷器を使用してください。 EN61326-1 Class A、Table 2(For use in industrial locations) EN61326-2-3 EN55011 Class A、Group 1 EN61000-3-2 Class A EN61000-3-3 (注)試験中、計器はレンジの± 20% 以内の測定精度で動作し続けます。
注 意本機器はクラス A(商工業地域使用)の製品です。家庭環境で使用すると無線妨害を起こすことがあり、その場合には使用者が適切な対策を講ずることが必要です。
● 危険場所使用認定:危険場所で使用するノンインセンディブ電気機器(付加仕様 /FMのみ)
FM 規格:FM No.3611 ロケーション:Class I, Division 2, Groups A, B, C & D Class I, Zone 2, Groups II C 温度コード:T4
9.1 一般仕様

9-10 IM 01B08B01-02
危険場所での使用条件(注意2)、(注意6)
YS1000 シリーズシングルループコントローラ
危険場所(分類) Class I, Division 2 Groups A, B, C, D
関連装置
危険場所(分類) Class I, Division 2 Groups A, B, C, D
制御装置( 注意 1)
非危険場所
( 注意 3)( 注意 4)( 注意 5) 0903.ai
防爆機器の外部配線パラメータ出力信号 信号名 Voc (V) Isc (mA) Ca ( μ F) La (mH) 備考
アナログ出力(Y1、Y3I)電流出力 23.5 21.0 0.3 10アナログ出力
(Y2、Y3V、Y4)電圧出力 5.25 6.3 0.9 50
伝送器供給ループ電源(LPS)
電源 25.5 90 0.2 1 *1
ディジタル入力 (DI1-DI10)
無電圧接点 7.25 20 0.9 50
RS-485 4.4 250 0.9 1ノンインセンディブ機器の外部配線コンセプトでは、配線パラメータがシステムとして厳密に検証されていなくても、下式を満たしていれば、FM ノンインセンディブ規格認定の機器 2 台を相互接続することができます。 Voc ≦ Vmax, Isc ≦ Imax, Ca ≧ Ci + C cable, La ≧ Li + L cable
*1:シャント抵抗(YS021:250 Ω± 0.1%、3W)接続時。
入力信号 信号名 Vmax (V) Imax (mA) C� ( μ F) L� (mH) 備考アナログ入力(X1-X8) 電圧入力 30 0.034 0.001 0ディジタル出力
(DO1-DO10)トランジスタ出力 30 200 0 0 *2
DCS-LCS 通信 トランジスタ出力 8.5 24 0.0001 0.07ノンインセンディブ機器の外部配線コンセプトでは、配線パラメータがシステムとして厳密に検証されていなくても、下式を満たしていれば、FM ノンインセンディブ規格認定の機器 2 台を相互接続することができます。 Voc or Vt ≦ Vmax, Isc or It ≦ Imax, Ca ≧ Ci + C cable, La ≧ Li + L cable
*2:Class I, Division 2 の要求を満たした配線であること。
注意1. YS1000 シリーズシングルループコントローラに接続する制御装置において、250 Vrms/
VDC を超える電圧を使用または発生しないようにしてください。2. 設置は NEC (National Electrical Code) 国際電気コード (ANSI/NFPA-70) に従ってください。3. 関連装置は、防爆機器の外部配線コンセプトに基づき、FMRC の承認を得たもの、あるい
は簡易な構造のもの(1.2 V、0.1 A、25 mW、20 μ J 以上発生/蓄積せず、スイッチ、熱電対、LED、測温抵抗体がない機器)を使用してください。
4. 関連装置の設置は、メーカの設置要領図に従ってください。5. 関連装置の接続は、各入出力信号の接続を代表して記載してあります。各信号は、シール
ドケーブルで別々に配線してください。6. FMRC の事前の承認なしに、図を改訂することを禁じます。
9.1 一般仕様

9-11IM 01B08B01-02
仕様
9
エネルギーを供給する機器Voc 回路開放最大出力電圧 ノンインセンディブ回路を開放したときに、開放端子に発生する最大電圧値。Isc 回路短絡最大出力電流 ノンインセンディブ回路を短絡・地絡したときに流れる最大電流値。Ca 許容最大キャパシタンス ノンインセンディブ回路に接続できるキャパシタンスの最大値。La 許容最大インダクタンス ノンインセンディブ回路に接続できるインダクタンスの最大値。
エネルギーを受ける機器Vmax 最大入力電圧 その機器のノンインセンディブ特性を維持できる最大入力電圧値。Imax 最大入力電流 その機器のノンインセンディブ特性を維持できる最大入力電流値。Ci 最大内部キャパシタンス ノンインセンディブ回路(外部配線)にその機器を接続したときに、ノンインセンディブ
回路(外部配線)につながると考えられる機器の内部キャパシタンスの最大値。Li 最大内部インダクタンス ノンインセンディブ回路(外部配線)にその機器を接続したときに、ノンインセンディブ
回路(外部配線)につながると考えられる機器の内部インダクタンスの最大値。
9.1 一般仕様

Blank Page
索 -1IM 01B08B01-02
索引
索
索引
DDDC モード ......................................................................... 1-11,1-32,1-60
EEMC 適合規格 ............................................................................................ 9-9
LLCD バックライト消灯 .................................................................. 3-7,4-9
SSPC モード ........................................................................... 1-11,1-32,1-60
あアクティブ表示 ..................................................................................... 2-11アプリケーションガイド ................................................................... 7-24安全規格 ...................................................................................................... 9-9
い一次遅れ演算 ............................................................................................. 2-1イベント表示 ............................................................................................. 2-9イベントフラグ ..................................................................................... 2-10
おオープン/クローズ ........................................................ 1-26,1-31,3-10オープン/クローズ切替 ...................................................................... 3-6オフタイマ .................................................................................................. 4-9オペレーション画面 ....................................................................... 4-1,4-8
か開平演算 ...................................................................................................... 2-1カスケード切替 ........................................................................................ 3-7カスケード設定自動制御 ............................................... 1-11,1-32,1-60カスケード設定値トラッキング ........................................................ 2-5カスケードモード ................................................................................. 1-21可変設定値フィルタ .......................................................................... 1-112
きキーロック ............................................................................................... 4-12危険場所使用認定 .................................................................................... 9-9輝度 ............................................................................................................ 4-11機能選択モード ................................................................................ 1-1,1-2
け警報機能 ................................................................................................... 2-13
こ校正機器 ...................................................................................................... 8-1コントラスト .......................................................................................... 4-11コントローラモード ............................................................................... 1-1
さサンプル PI 制御 .................................................................................. 1-122
し時間幅 ........................................................................................................... 4-4指示精度 ...................................................................................................... 8-1自動運転バックアップモード ...................................... 1-11,1-32,1-61自動切替 .............................................................................................. 3-4,3-7自動制御 .................................................................................. 1-7,1-25,1-53シミュレーションテスト ................................................................... 7-2210 折線関数 ................................................................................................ 2-2出力種類 ................................................................................................... 3-13出力トラッキング .................................................................................... 2-4出力トラッキング切替 ........................................................................... 3-5出力プリセット ........................................................................................ 3-5出力リミッタ ........................................................................................ 1-106手動運転バックアップモード ...................................... 1-11,1-32,1-61手動切替 .............................................................................................. 3-4,3-7手動制御 .................................................................................. 1-7,1-25,1-53修理依頼 ...................................................................................................... 8-4仕様 ............................................................................................................... 9-1消去ガイド表示 ..................................................................................... 2-10初期画面選択 ............................................................................................. 4-8シングルループモード ........................................................................... 1-3
すスケール目盛 ............................................................................................. 4-6ステータス出力 .............................................................................. 3-8,3-10ステップ応答 ........................................................................................ 1-112スパン調整 .................................................................................................. 5-6
せ制御演算式 ............................................................................................. 1-102制御周期 .............................................................................................. 1-1,1-2制御タイプ ............................................................................................. 1-102制御動作方向 ............................................................................................. 2-7制御方法 ................................................................................................. 1-102制御要素 .................................................................................. 1-6,1-24,1-52セキュリティ機能 ................................................................................. 4-12接点タイプ .......................................................................................... 3-2,3-3セルフチューニング ............................................................................... 7-1セルフチューニングアラーム .......................................................... 7-20セルフチューニング切替 ...................................................................... 3-6セレクタ選択 ............................................................................................. 3-6セレクタモード ..................................................................................... 1-49ゼロ調整 ...................................................................................................... 5-6センサタイプ ............................................................................................. 5-4
そ測定値トラッキング ............................................................................... 2-6
たタグナンバ色交互表示 ........................................................................ 2-12
ち中和制御 ....................................................................... 1-115,1-117,1-120直入力 ........................................................................................................... 5-1
索 -2 IM 01B08B01-02
索引
てディジタル入出力 .................................................................................... 3-1停電復帰 ...................................................................................................... 6-1電流/電圧切替 ..................................................................................... 3-12
とトラッキング ............................................................................................. 2-4トレンド 3 画面の表示データ ............................................................. 4-5トレンド画面 ..................................................................................... 4-3,4-4
に入力フィルタ ............................................................................................. 2-1
はバーンアウト ............................................................................................. 5-5背景色 ........................................................................................................ 4-10パスワード ............................................................................................... 4-13バックアップモード ........................................................ 1-11,1-32,1-61バッチ PID 制御 ................................................................................... 1-124バルブ方向 .................................................................................................. 2-7
ひヒステリシス .......................................................................................... 2-14非線形 PID 制御 ................................................................................... 1-115微分先行 PID 制御 ............................................................................... 1-105表示機能 ...................................................................................................... 4-1比率演算 ...................................................................................................... 2-3比例(PD)制御 .................................................................................. 1-107比例先行 PID 制御 ............................................................................... 1-104
ふフィードフォワード制御 ................................................................. 1-119部品交換 ...................................................................................................... 8-3プリセット MV .......................................................................................... 2-8プリセット MV 切替 ............................................................................... 3-5プリセット PID .................................................................................... 1-125プログラマブルモード ...................................................................... 1-101
むむだ時間 ................................................................................................. 1-122
めメッセージ .................................................................................................. 2-9目盛 ............................................................................................................... 4-7目盛分割 .............................................................................................. 4-6,4-7
も模擬表示 ................................................................................................... 2-10
ゆ有寿命部品 .................................................................................................. 8-3
りリセットバイアス付 PID 制御 ........................................................ 1-110リセットワインドアップ .................................................... 1-106,1-110リモート/ローカル .................................................................. 1-61,3-10
るループ色 ................................................................................................... 4-10
ろローカット点可変形 ............................................................................... 2-1ローカル/リモート切替 ...................................................................... 3-6

ユーザーズマニュアル 改訂情報資料名称 : YS1500 指示調節計/ YS1700 プログラマブル指示調節計ユーザーズマニュアル
資料番号 : IM 01B08B01-02
2007年3月/初版新規発行
2007年3月/2版誤記訂正
2007年9月/3版FM 認証取得、新 EMC 指令対応、誤記訂正
2009年9月/4版EMC 適合規格番号の変更
■ 著作者 横河電機株式会社■ 発行者 横河電機株式会社 〒 180-8750 東京都武蔵野市中町 2-9-32
Blank Page
本 社関 西 支 社東 北 支 店千 葉 支 店豊 田 支 店中 部 支 店北 陸 支 店中 国 支 店九 州 支 店北 九 州 支 店
0422-52-555506-6341-1330022-243-44410436-61-13880565-33-1611052-684-2000076-258-7010082-568-7411092-272-0111093-521-7234
〒180-8750 〒530-0001〒982-0032〒299-0111〒471-0027〒456-0053〒920-0177〒732-0043〒812-0037〒802-0003
東 京 都 武 蔵 野 市 中 町 2 - 9 - 3 2大阪府大阪市北区梅田2-4 -9(ブリーゼタワー21F)仙 台 市 太 白 区 富 沢 1 - 9 - 7千 葉 県 市 原 市 姉 崎 8 6 7豊田市喜多町2-160(コモ・スクエア・ウエスト7F)名 古 屋 市 熱 田 区 一 番 3 - 5 - 1 9金沢市北陽台2 - 3(金沢テクノパーク内)広 島 県 広 島 市 東 区 東 山 町 4 - 1福岡市博多区御供所町3-21(大博通りビジネスセンター7F)北九州市小倉北区米町2-2-1(新小倉ビル6F)
本 社 0422-52-0439 〒180-8750 東 京 都 武 蔵 野 市 中 町 2 - 9 - 3 2
北 海 道 サ ー ビ ス セ ン タ ー東 北 サ ー ビ ス セ ン タ ー鹿 島 サ ー ビ ス セ ン タ ー東 部 サ ー ビ ス セ ン タ ー東 関 東 サ ー ビ ス セ ン タ ー東 京 サ ー ビ ス セ ン タ ー新 潟 サ ー ビ ス セ ン タ ー北 陸 サ ー ビ ス セ ン タ ー静 岡 サ ー ビ ス セ ン タ ー
0144-72-8833022-743-57510299-93-3791048-620-14140436-61-2381044-266-0106025-241-2161076-293-12200545-51-7138
中 部 サ ー ビ ス セ ン タ ー四 日 市 サ ー ビ ス セ ン タ ー京 滋 サ ー ビ ス セ ン タ ー関 西 サ ー ビ ス セ ン タ ー姫 路 サ ー ビ ス セ ン タ ー岡 山 サ ー ビ ス セ ン タ ー中 国 サ ー ビ ス セ ン タ ー四 国 サ ー ビ ス セ ン タ ー九 州 サ ー ビ ス セ ン タ ー
052-684-2021059-351-8187077-521-1191072-224-2221079-224-6006086-446-23770834-21-32000897-33-1717093-551-0443
Oct '09
Printed in Korea