variability-resistant software through improved …mesl.ucsd.edu/site/talks/datecompiler13.pdf ·...
TRANSCRIPT
Variability-Resistant Software Through Improved Sensing & Modeling:
Compiler Directed Strategies
Rajesh K. Gupta
Outline
• Why variability?
• Expedition’s view of UNO Machines
– Sensors, Circuits, Instructions, Procedures, Tasks
– Error rates, vulnerabilities, classifications
• Between sense & adapt and model & predict
– Compile time optimization
– Runtime adaptive guardbanding
• WIP results and summary.
2
Caveats: A limited view (entirely work by Abbas Rahimi, UCSD) Caveats: A limited view (entirely work by Abbas Rahimi, UCSD) A very Expedition-centric view, not comprehensive, or even representative of Expeditions.

• Variability in transistor characteristics is a major challenge in nanoscale CMOS, PVTA – Static Process variation: effective transistor channel length and
threshold voltage – Dynamic variations: Temperature fluctuations, supply Voltage
droops, and device Aging (NBTI, HCI) • To handle variations designers use conservative guardbands
loss of operational efficiency
Variability is about Scale and Cost
22-Mar-13 3 Abbas Rahimi/ UC San Diego
Temperature
Clock
actual circuit delay guardband
Aging VCC Droop Across-wafer Frequency
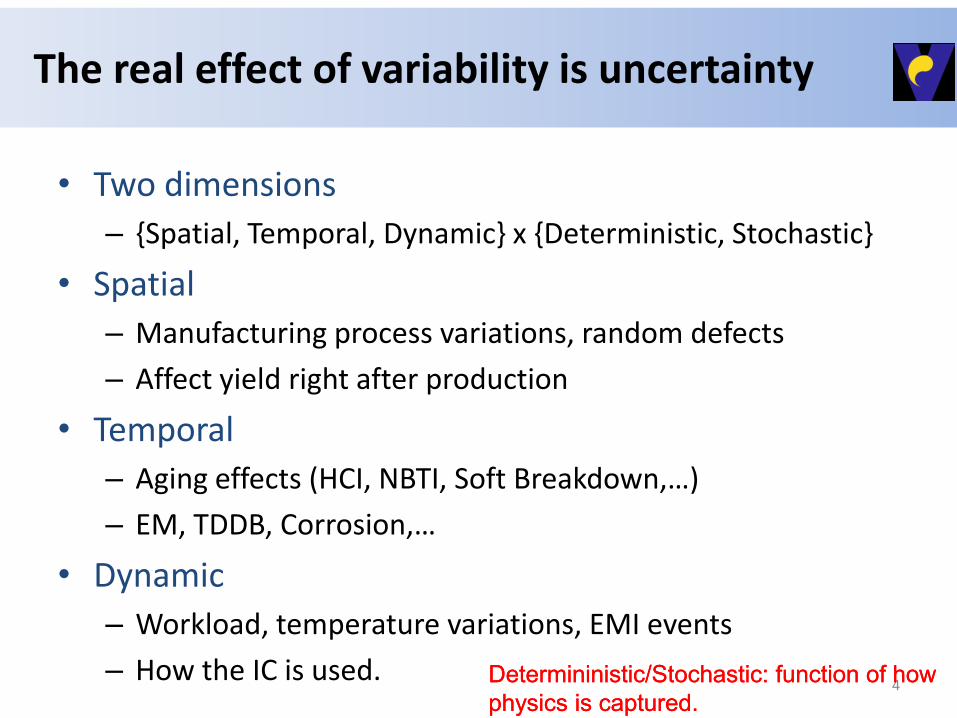
The real effect of variability is uncertainty
• Two dimensions
– {Spatial, Temporal, Dynamic} x {Deterministic, Stochastic}
• Spatial
– Manufacturing process variations, random defects
– Affect yield right after production
• Temporal
– Aging effects (HCI, NBTI, Soft Breakdown,…)
– EM, TDDB, Corrosion,…
• Dynamic
– Workload, temperature variations, EMI events
– How the IC is used. 4 DetermininisticDetermininistic/Stochastic: function of how /Stochastic: function of how
physics is captured.physics is captured.

Temporal and Functional Uncertainties
• Temporal uncertainties are quite familiar to real-time systems community – Measures that span architectural simplification to OS simplification,
structuring computation as precise and imprecise and combining with real-time OS models (FG/BG).
• PL: from performance to correctness to reliability
• Lately PL community has taken on fault-tolerant computations – How to avoid BSD? Decompose, Calibrate, Acceptance Tests
– Probabilistic Accuracy Bound & Early Phase Termination, [Rinard, ICS 2006]
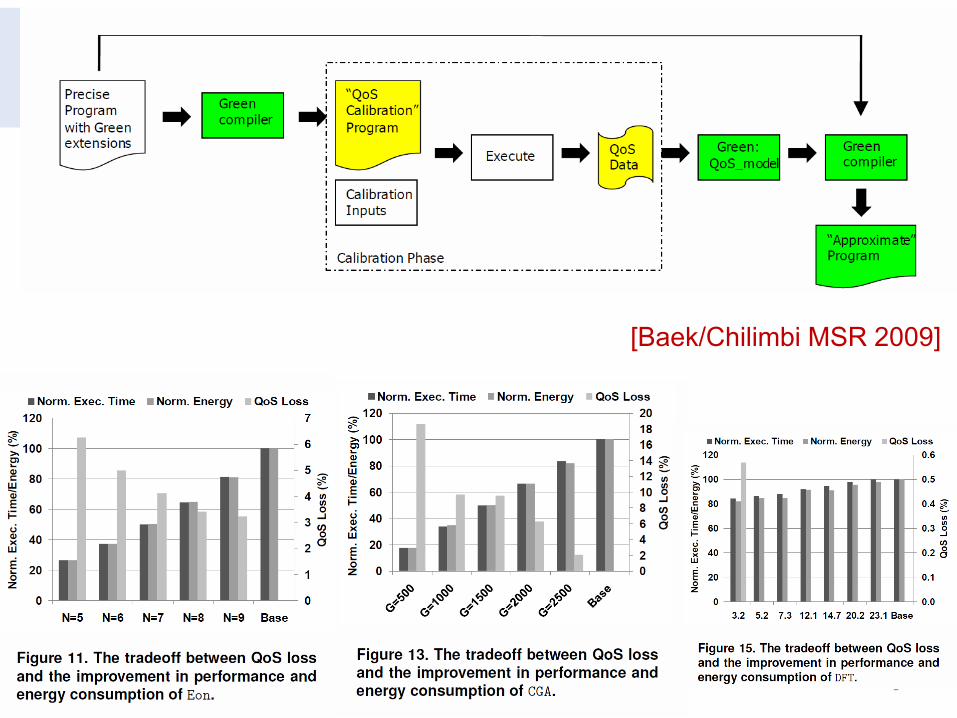
– Principled Approximation [Baek/Chilimbi MSR 2009]
• Programmer approximates expensive functions, build a model of QOS loss by the approximation during calibration phase – Use model during operational phase to save energy by an adaptation
function that monitors runtime behavior.
5
6
[Baek/Chilimbi MSR 2009]
Closer to HW: Uncertainty Manifestations
• The most immediate manifestations of variability are in path delay and power variations.
• Path delay variations has been addressed extensively in delay fault detection by test community.
• With Variability, it is possible to do better by focusing on the actual mechanisms
– For instance, major source of timing variation is voltage droops, and errors matter when these end up in a state change.
Combine these two observations and you get a rich literature in recent years for handling variability induced errors: Razor, EDA, TRC, … 7
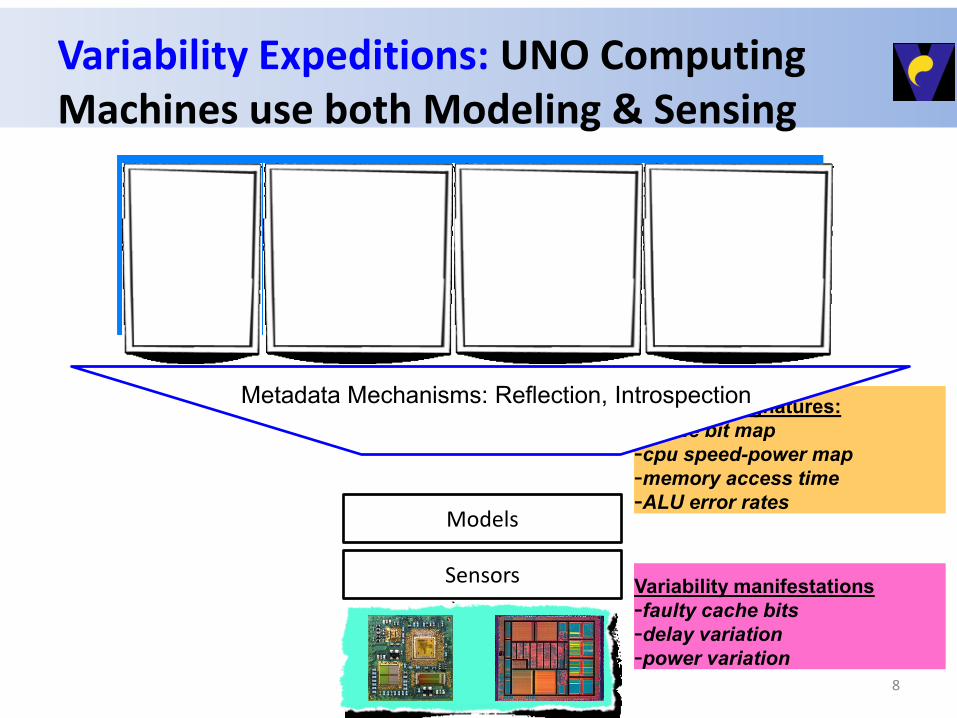
Variability Expeditions: UNO Computing Machines use both Modeling & Sensing
Variability manifestations
-faulty cache bits
-delay variation
-power variation
Variability manifestations
-faulty cache bits
-delay variation
-power variation
Variability signatures:
-cache bit map
-cpu speed-power map
-memory access time
-ALU error rates
Variability signatures:
-cache bit map
-cpu speed-power map
-memory access time
-ALU error rates
Do Nothing
(Elastic User,
Robust App)
Change
Algorithm
Parameters
(Codec Setting,
Duty Cycle Ratio)
Change
Algorithm
Implementation
(Alternate code
path, Dynamic
recompilation)
Change Hardware
Operating Point
(Disabling parts of
the cache,
Changing V-f)
8
Sensors
Models
Metadata Mechanisms: Reflection, Introspection
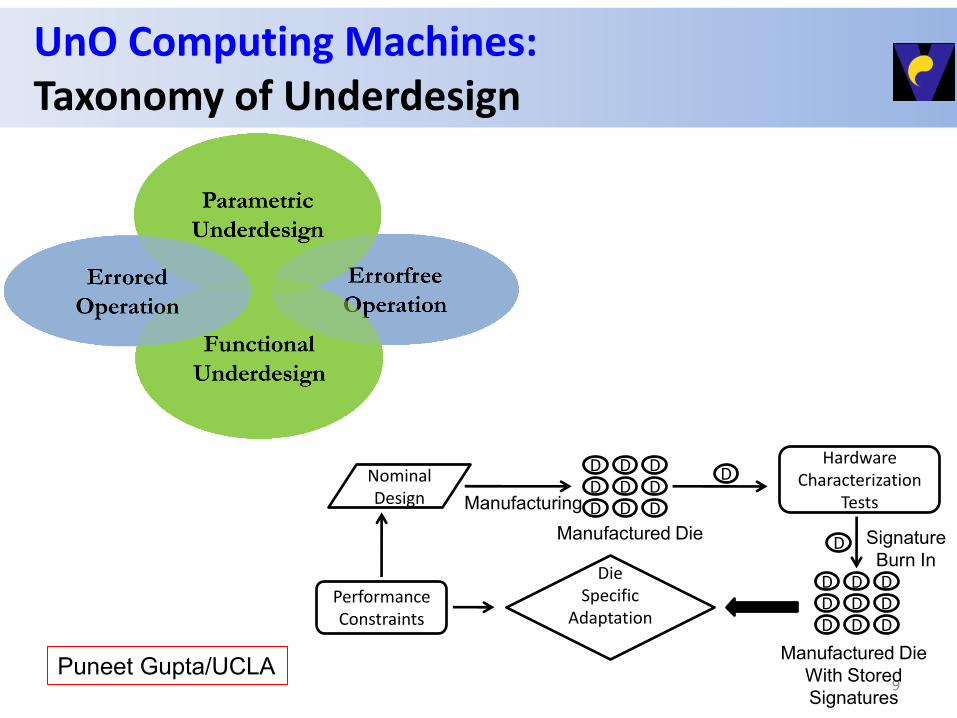
UnO Computing Machines: Taxonomy of Underdesign
9
Nominal Design
Hardware Characterization
Tests
Die Specific
Adaptation
D
Signature
Burn In
Manufacturing
Manufactured Die
Performance Constraints
D D D
D D D
D D D
D D D
D D D
D D D
D
Manufactured Die
With Stored
Signatures
Puneet Gupta/UCLA
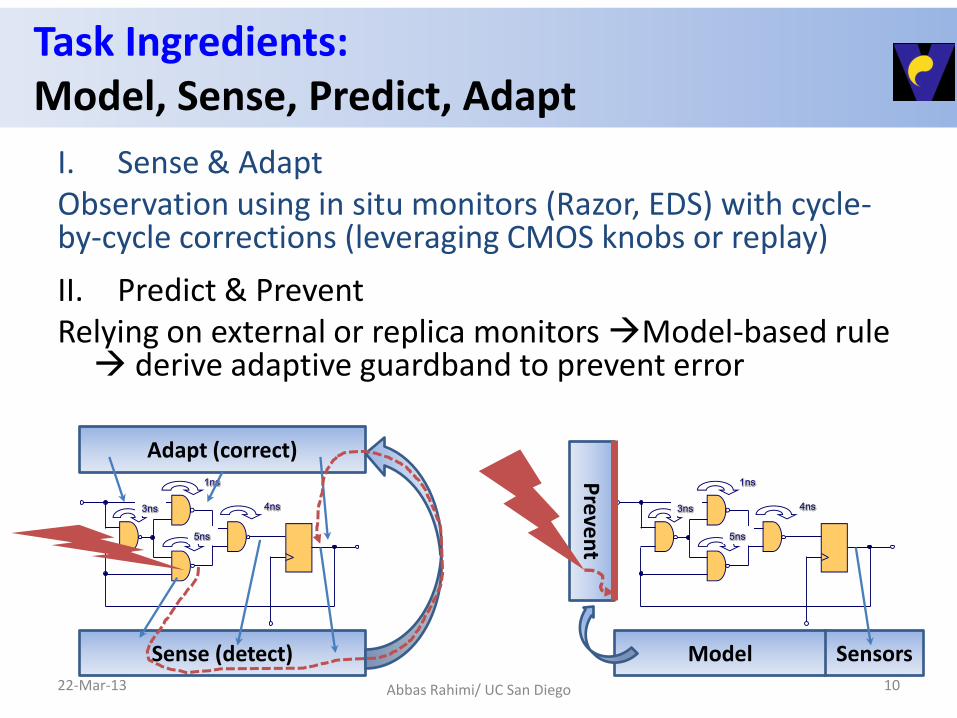
Task Ingredients: Model, Sense, Predict, Adapt
I. Sense & Adapt Observation using in situ monitors (Razor, EDS) with cycle-by-cycle corrections (leveraging CMOS knobs or replay)
22-Mar-13 Abbas Rahimi/ UC San Diego 10
1ns
4ns3ns
5ns
Sense (detect)
Adapt (correct)
Sensors Model
1ns
4ns3ns
5ns
Preve
nt
II. Predict & Prevent Relying on external or replica monitors Model-based rule derive adaptive guardband to prevent error

Instruction-level Vulnerability (ILV)
Sequence-level Vulnerability (SLV)
Procedure-level Vulnerability (PLV)
Task-level Vulnerability (TLV)
Monitor manifestations from instructions levels to task levels.
Expedition View of Cross-layer Awarenes & Adaptation (cf.: memory model)
By the time, we get to TLV, we are into a parallel software context: instruct OpenMP scheduler, even create an abstraction for programmers to express irregular and unstructured parallelism (code refactoring).
The steps to build
variability abstractions
up to the SW layer
Methodology
• Characterize effects of Dynamic Voltage and Temperature
Variation
• Estimate their effects on instruction executions
– Instruction-level Vulnerability (ILV)
– Sequence-level Vulnerability (SLV)
• Classify instructions, and sequences of instructions
• Use ILV, SLV
– Compile time optimization
– Runtime adaptive guardbanding
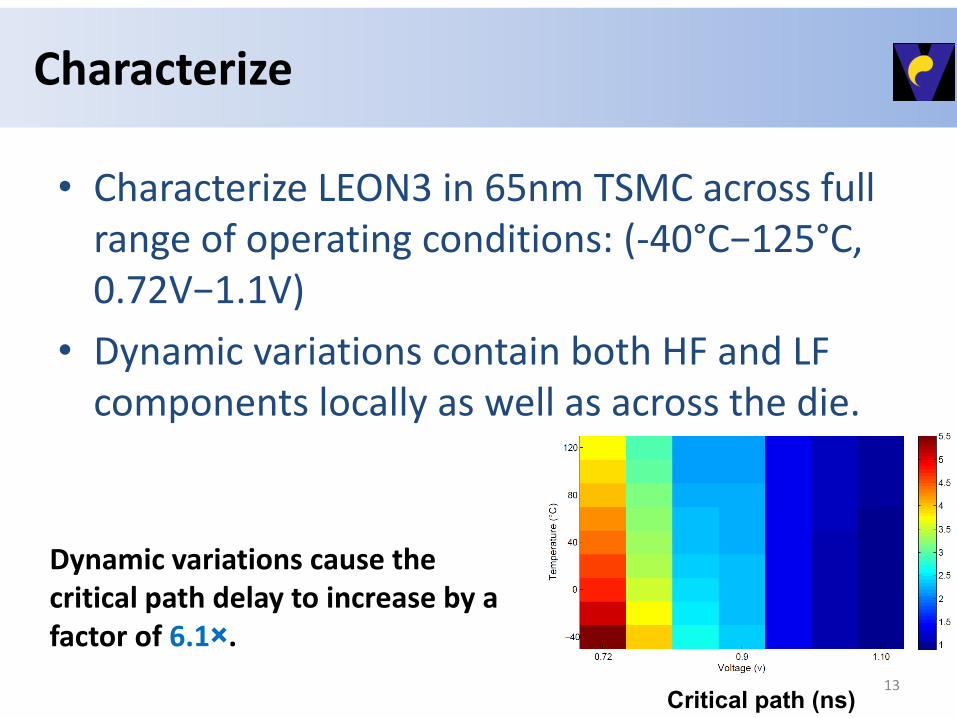
Characterize
• Characterize LEON3 in 65nm TSMC across full range of operating conditions: (-40°C−125°C, 0.72V−1.1V)
• Dynamic variations contain both HF and LF components locally as well as across the die.
13
Critical path (ns)
Dynamic variations cause the critical path delay to increase by a factor of 6.1×.
WAIT! DID WE MISS A STEP? One First Challenge: How do we make the leap to Software?
14
0
2
4
6
8
10
12
14
16
Fetch Decode Reg. acc. Execute Memory Write back
Num
ber
of
faile
d p
ath
s
x 10000 0.72V 0.88V 1.10V
0
1
2
3
4
5
6
7
8
Fetch Decode Reg. acc. Execute Memory Write back
Num
ber
of
faile
d p
ath
s
x 10000 -40 C 0 C 125 C
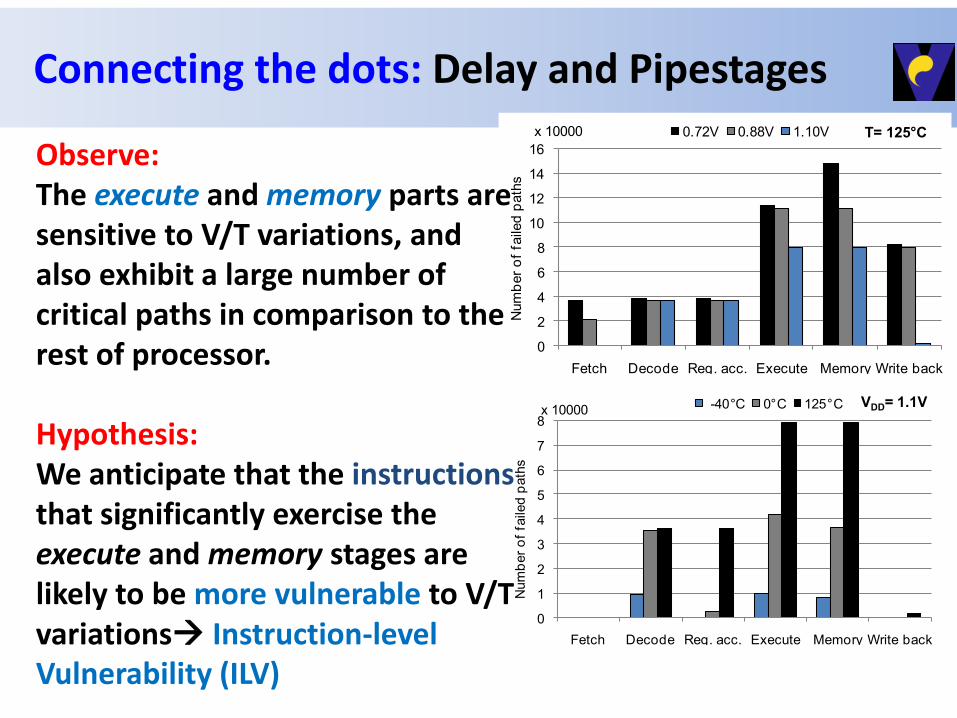
Observe: The execute and memory parts are sensitive to V/T variations, and also exhibit a large number of critical paths in comparison to the rest of processor. Hypothesis: We anticipate that the instructions that significantly exercise the execute and memory stages are likely to be more vulnerable to V/T variations Instruction-level Vulnerability (ILV)
VDD= 1.1V
T= 125°C
Connecting the dots: Delay and Pipestages

Method for ISA-level & Sequence-level Characterization
• For SPARC V8 instructions (V, T, F) are varied and – ILVi is evaluated for every instructioni with random operands
– SLVi is evaluated for a high-frequent sequencei of instructions
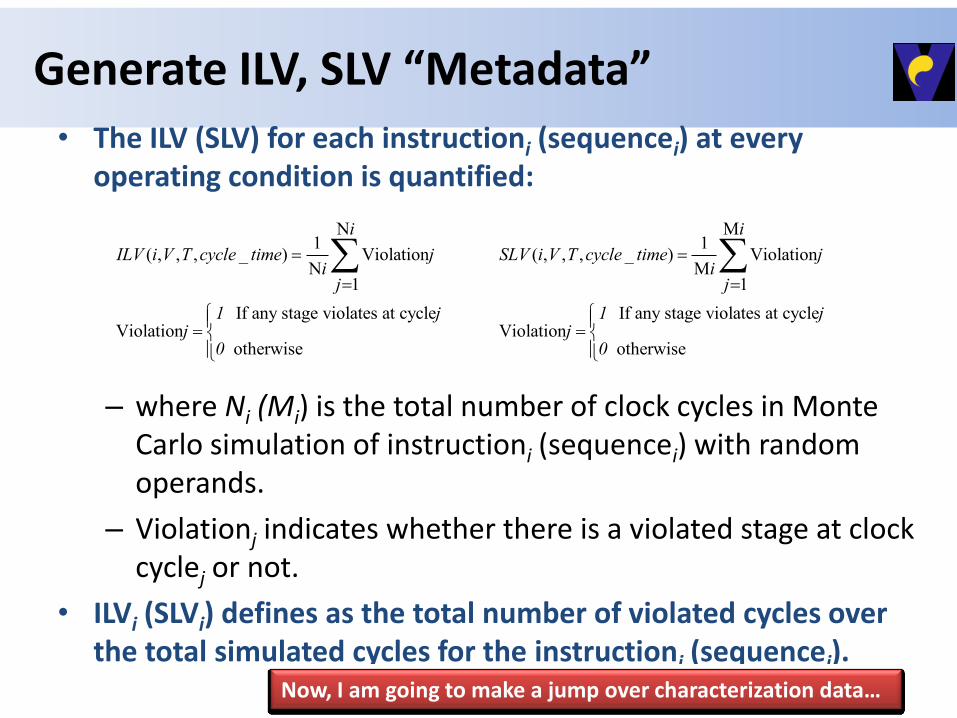
Generate ILV, SLV “Metadata” • The ILV (SLV) for each instructioni (sequencei) at every
operating condition is quantified:
– where Ni (Mi) is the total number of clock cycles in Monte Carlo simulation of instructioni (sequencei) with random operands.
– Violationj indicates whether there is a violated stage at clock cyclej or not.
• ILVi (SLVi) defines as the total number of violated cycles over the total simulated cycles for the instructioni (sequencei).
M1
( , , , _ ) ViolationM
1
If any stage violates at cycleViolation
otherwise
i
SLV i V T cycle time jij
1 jj
0
N
1( , , , _ ) Violation
N1
If any stage violates at cycleViolation
otherwise
i
ILV i V T cycle time jij
1 jj
0
Now, I am going to make a jump over characterization data…
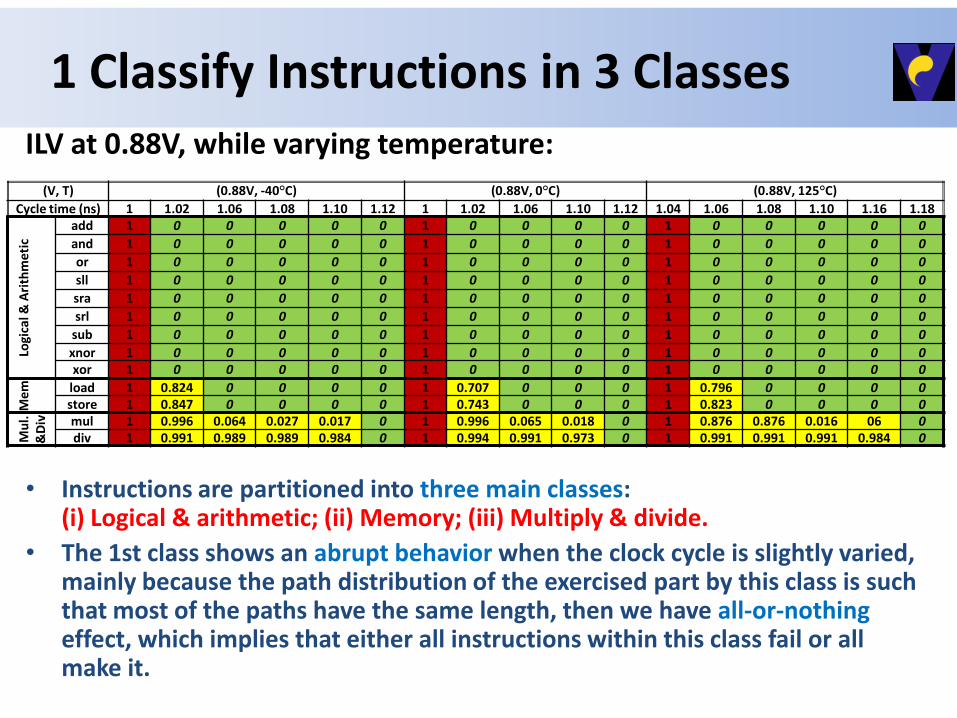
1 Classify Instructions in 3 Classes
• Instructions are partitioned into three main classes: (i) Logical & arithmetic; (ii) Memory; (iii) Multiply & divide.
• The 1st class shows an abrupt behavior when the clock cycle is slightly varied, mainly because the path distribution of the exercised part by this class is such that most of the paths have the same length, then we have all-or-nothing effect, which implies that either all instructions within this class fail or all make it.
(V, T) (0.88V, -40°C) (0.88V, 0°C) (0.88V, 125°C)
Cycle time (ns) 1 1.02 1.06 1.08 1.10 1.12 1 1.02 1.06 1.10 1.12 1.04 1.06 1.08 1.10 1.16 1.18
Logi
cal &
Ari
thm
etic
add 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
and 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
or 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
sll 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
sra 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
srl 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
sub 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
xnor 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 xor 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0
Me
m
load 1 0.824 0 0 0 0 1 0.707 0 0 0 1 0.796 0 0 0 0 store 1 0.847 0 0 0 0 1 0.743 0 0 0 1 0.823 0 0 0 0
Mu
l.&
Div
mul 1 0.996 0.064 0.027 0.017 0 1 0.996 0.065 0.018 0 1 0.876 0.876 0.016 06 0 div 1 0.991 0.989 0.989 0.984 0 1 0.994 0.991 0.973 0 1 0.991 0.991 0.991 0.984 0
ILV at 0.88V, while varying temperature:
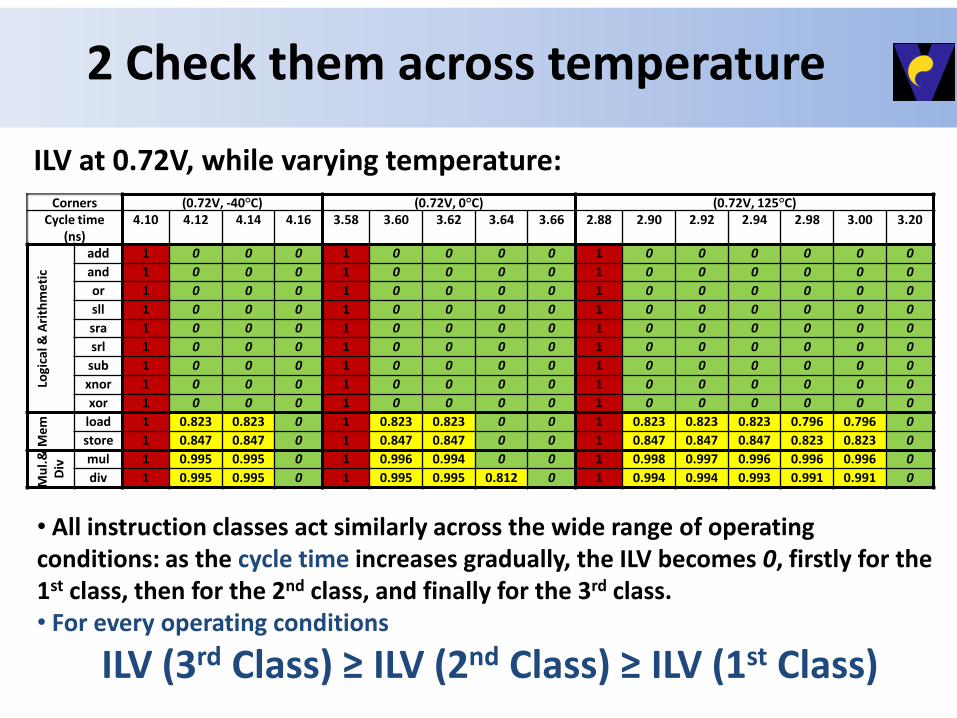
2 Check them across temperature
Corners (0.72V, -40°C) (0.72V, 0°C) (0.72V, 125°C) Cycle time
(ns) 4.10 4.12 4.14 4.16 3.58 3.60 3.62 3.64 3.66 2.88 2.90 2.92 2.94 2.98 3.00 3.20
Logi
cal &
Ari
thm
eti
c
add 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
and 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
or 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
sll 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
sra 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
srl 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
sub 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
xnor 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
xor 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0
Me
m
load 1 0.823 0.823 0 1 0.823 0.823 0 0 1 0.823 0.823 0.823 0.796 0.796 0
store 1 0.847 0.847 0 1 0.847 0.847 0 0 1 0.847 0.847 0.847 0.823 0.823 0
Mu
l.&
Div
mul 1 0.995 0.995 0 1 0.996 0.994 0 0 1 0.998 0.997 0.996 0.996 0.996 0
div 1 0.995 0.995 0 1 0.995 0.995 0.812 0 1 0.994 0.994 0.993 0.991 0.991 0
ILV at 0.72V, while varying temperature:
• All instruction classes act similarly across the wide range of operating conditions: as the cycle time increases gradually, the ILV becomes 0, firstly for the 1st class, then for the 2nd class, and finally for the 3rd class. • For every operating conditions
ILV (3rd Class) ≥ ILV (2nd Class) ≥ ILV (1st Class)
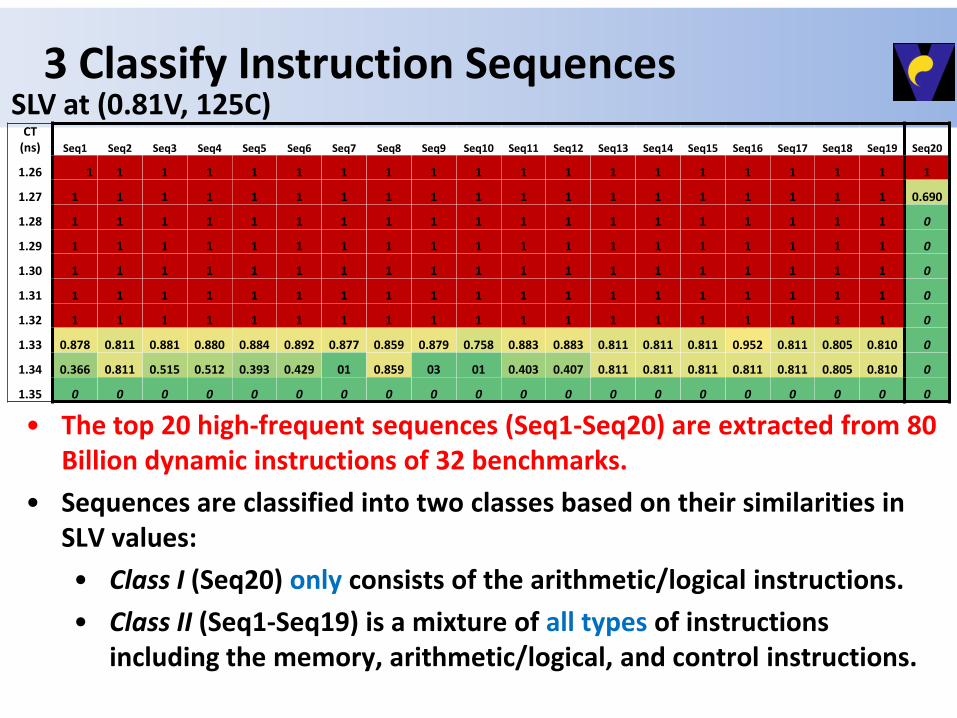
3 Classify Instruction Sequences CT
(ns) Seq1 Seq2 Seq3 Seq4 Seq5 Seq6 Seq7 Seq8 Seq9 Seq10 Seq11 Seq12 Seq13 Seq14 Seq15 Seq16 Seq17 Seq18 Seq19 Seq20
1.26 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1.27 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0.690
1.28 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.29 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.30 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.31 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.32 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.33 0.878 0.811 0.881 0.880 0.884 0.892 0.877 0.859 0.879 0.758 0.883 0.883 0.811 0.811 0.811 0.952 0.811 0.805 0.810 0
1.34 0.366 0.811 0.515 0.512 0.393 0.429 01 0.859 03 01 0.403 0.407 0.811 0.811 0.811 0.811 0.811 0.805 0.810 0
1.35 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
SLV at (0.81V, 125C)
• The top 20 high-frequent sequences (Seq1-Seq20) are extracted from 80 Billion dynamic instructions of 32 benchmarks.
• Sequences are classified into two classes based on their similarities in SLV values:
• Class I (Seq20) only consists of the arithmetic/logical instructions.
• Class II (Seq1-Seq19) is a mixture of all types of instructions including the memory, arithmetic/logical, and control instructions.
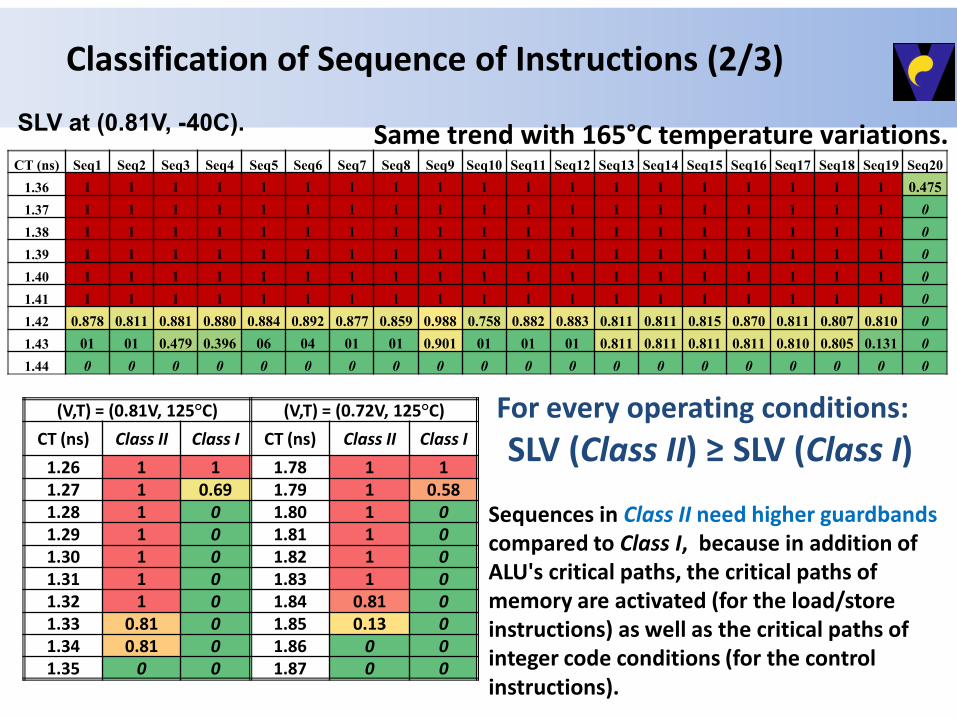
Classification of Sequence of Instructions (2/3)
CT (ns) Seq1 Seq2 Seq3 Seq4 Seq5 Seq6 Seq7 Seq8 Seq9 Seq10 Seq11 Seq12 Seq13 Seq14 Seq15 Seq16 Seq17 Seq18 Seq19 Seq20
1.36 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0.475
1.37 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.38 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.39 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.40 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.41 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0
1.42 0.878 0.811 0.881 0.880 0.884 0.892 0.877 0.859 0.988 0.758 0.882 0.883 0.811 0.811 0.815 0.870 0.811 0.807 0.810 0
1.43 01 01 0.479 0.396 06 04 01 01 0.901 01 01 01 0.811 0.811 0.811 0.811 0.810 0.805 0.131 0
1.44 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
SLV at (0.81V, -40C). Same trend with 165°C temperature variations.
(V,T) = (0.81V, 125°C) (V,T) = (0.72V, 125°C)
CT (ns) Class II Class I CT (ns) Class II Class I
1.26 1 1 1.78 1 1 1.27 1 0.69 1.79 1 0.58 1.28 1 0 1.80 1 0 1.29 1 0 1.81 1 0 1.30 1 0 1.82 1 0 1.31 1 0 1.83 1 0 1.32 1 0 1.84 0.81 0 1.33 0.81 0 1.85 0.13 0 1.34 0.81 0 1.86 0 0 1.35 0 0 1.87 0 0
For every operating conditions:
SLV (Class II) ≥ SLV (Class I)
Sequences in Class II need higher guardbands compared to Class I, because in addition of ALU's critical paths, the critical paths of memory are activated (for the load/store instructions) as well as the critical paths of integer code conditions (for the control instructions).
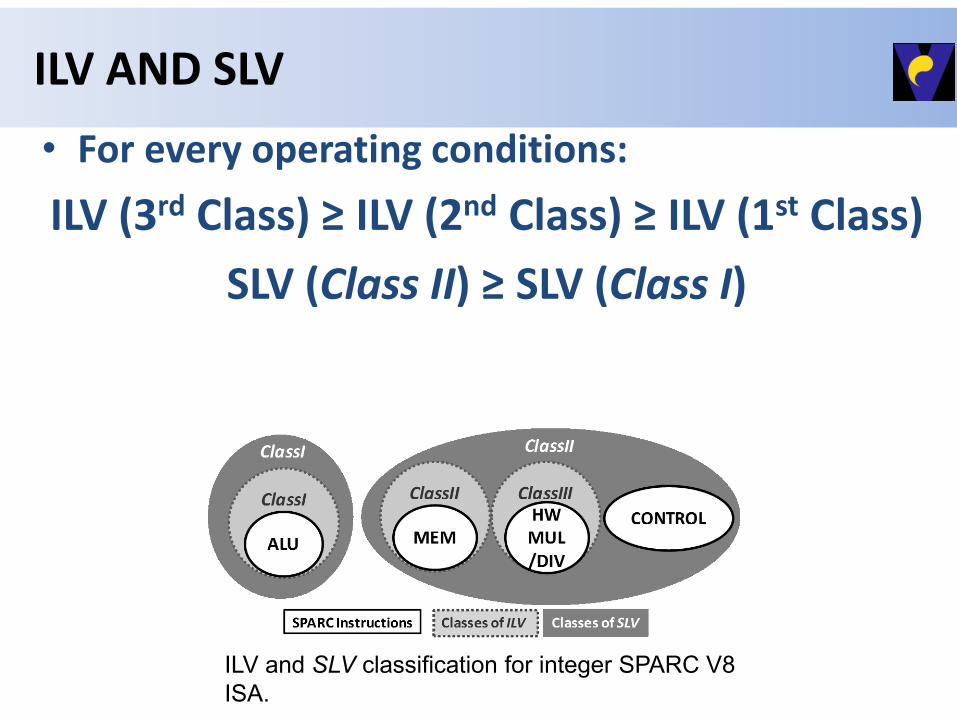
• For every operating conditions:
ILV (3rd Class) ≥ ILV (2nd Class) ≥ ILV (1st Class)
SLV (Class II) ≥ SLV (Class I)
ILV and SLV classification for integer SPARC V8
ISA.
ILV AND SLV
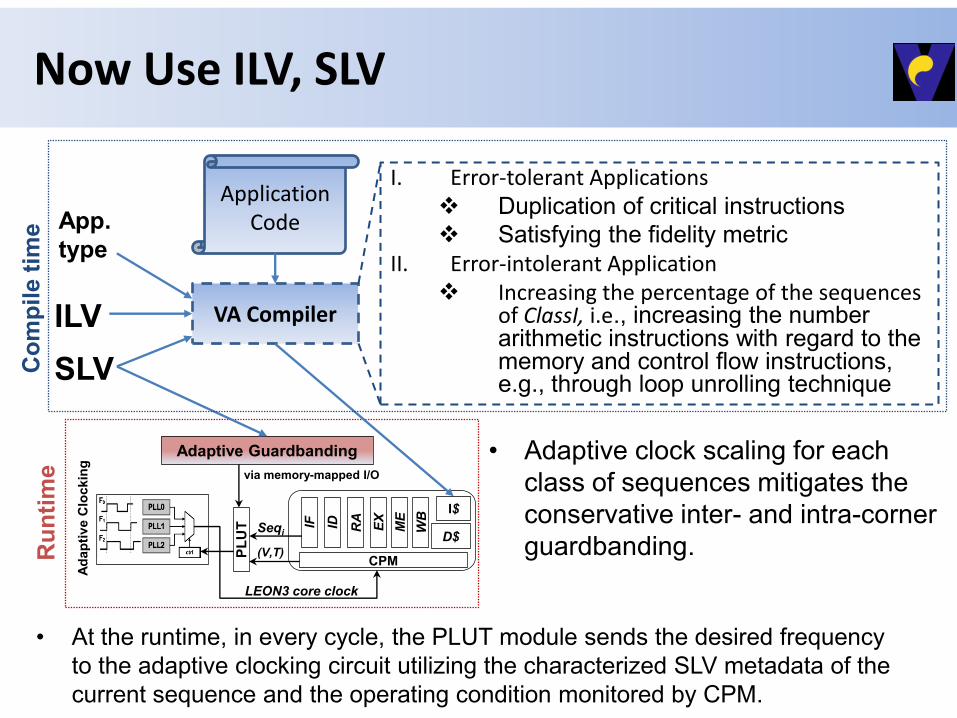
Now Use ILV, SLV
VA Compiler
Application Code
SLV
ILV
App.
type
I. Error-tolerant Applications
Duplication of critical instructions
Satisfying the fidelity metric II. Error-intolerant Application
Increasing the percentage of the sequences of ClassI, i.e., increasing the number arithmetic instructions with regard to the memory and control flow instructions, e.g., through loop unrolling technique
Adaptive Guardbanding
IF
ID
WB
CPM
I$
D$
PL
UT
RA
EX
ME
Ad
ap
tiv
e C
lockin
g
(V,T)
Seqi
via memory-mapped I/O
LEON3 core clock
Co
mp
ile t
ime
Ru
nti
me • Adaptive clock scaling for each
class of sequences mitigates the
conservative inter- and intra-corner
guardbanding.
• At the runtime, in every cycle, the PLUT module sends the desired frequency
to the adaptive clocking circuit utilizing the characterized SLV metadata of the
current sequence and the operating condition monitored by CPM.
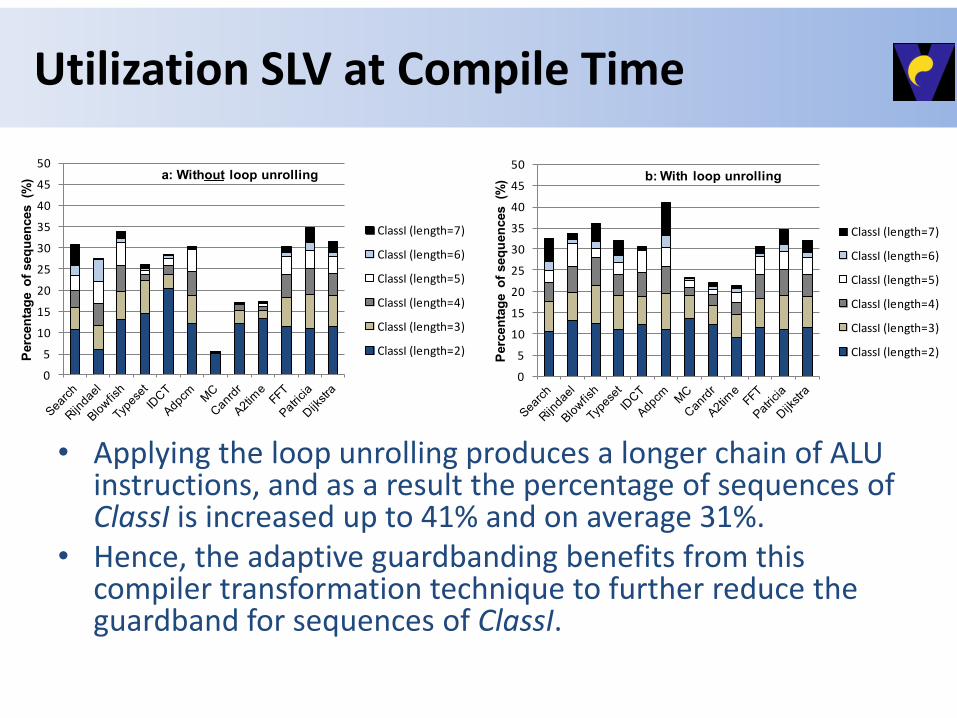
Utilization SLV at Compile Time
• Applying the loop unrolling produces a longer chain of ALU instructions, and as a result the percentage of sequences of ClassI is increased up to 41% and on average 31%.
• Hence, the adaptive guardbanding benefits from this compiler transformation technique to further reduce the guardband for sequences of ClassI.
0
5
10
15
20
25
30
35
40
45
50
Perc
en
tag
e o
f seq
uen
ces (%
) a: Without loop unrolling
ClassI (length=7)
ClassI (length=6)
ClassI (length=5)
ClassI (length=4)
ClassI (length=3)
ClassI (length=2)
0
5
10
15
20
25
30
35
40
45
50
Perc
en
tag
e o
f seq
uen
ces (%
) b: With loop unrolling
ClassI (length=7)
ClassI (length=6)
ClassI (length=5)
ClassI (length=4)
ClassI (length=3)
ClassI (length=2)

Effectiveness of Adaptive Guardbanding
• Using online SLV coupled with offline compiler techniques enables the processor to achieve 1.6× average speedup for intolerant applications, compared to recent work [Hoang’11], by adapting the cycle time for dynamic variations (inter-corner) and different instruction sequences (intra-corner).
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
No
rmali
zed
Th
rou
gh
pu
t
(0.72V,125°) (0.81V,0°) (0.81V,125°)
0.80
1.00
1.20
1.40
1.60
1.80
2.00
No
rmali
zed
Th
rou
gh
pu
t
(0.72V,125°) (0.81V,0°) (0.81V,125°)
• Adaptive guardbanding achieves up to 1.9× performance improvement for error-tolerant (probabilistic) applications in comparison to the traditional worst-case design.
[Hoang’11] G. Hoang, et al., "Exploring circuit timing-aware language and compilation,“ ASPLOS, 2011.

Example: Procedure Hopping in Clustered CPU, Each core with its voltage domain
• Statically characterize procedure for PLV
• A core increases voltage if monitored delay is high
• A procedure hops from one core to another if its voltage variation is high
• Less 1% cycle overhead in EEMBC.
26
... I$Bi-1I$B0
Log. Interc.
Core15
VA
-VD
D-h
op
pin
g
... TCDMBj-1TCDMB0
Log. Interc.
Low VDD
Typical VDD
High VDD
DF
S...
f+1
80
°f+
18
0°
f
CPM
Level ShiftersLevel Shifters
Level ShiftersLevel Shifters
SHM
PSS
Core0
VA
-VD
D-h
op
pin
g
CPM
PSS
VDD = 0.81V VDD = 0.99V VA-VDD-Hopping=( 0.81V 0.99V , )
f0
862
f1
909
f2
870
f3
847
f4
826
f5
855
f6
877
f7
893
f8
820
f9
826
f10
909
f11
847
f12
901
f13
917
f14
847
f15
901
f0
862
f1
909
f2
870
f3
847
f4
1370
f5
855
f6
877
f7
893
f8
1370
f9
1370
f10
909
f11
847
f12
901
f13
917
f14
847
f15
901
f0
1408
f1
1389
f2
1408
f3
1370
f4
1370
f5
1408
f6
1408
f7
1408
f8
1370
f9
1370
f10
1389
f11
1370
f12
1408
f13
1408
f14
1389
f15
1389
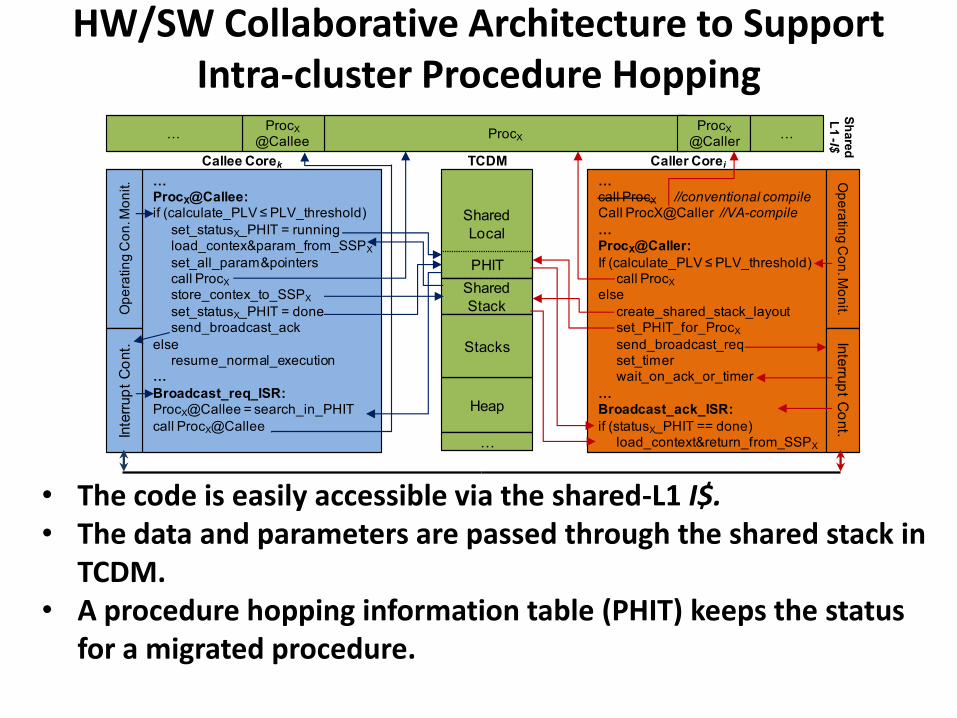
HW/SW Collaborative Architecture to Support Intra-cluster Procedure Hopping
27
• The code is easily accessible via the shared-L1 I$. • The data and parameters are passed through the shared stack in
TCDM. • A procedure hopping information table (PHIT) keeps the status
for a migrated procedure.
…ProcX@Callee:if (calculate_PLV ≤ PLV_threshold)
set_statusX_PHIT = runningload_contex¶m_from_SSPX
set_all_param&pointerscall ProcX
store_contex_to_SSPX
set_statusX_PHIT = donesend_broadcast_ack
else resume_normal_execution
…
Broadcast_req_ISR:ProcX@Callee = search_in_PHIT
call ProcX@Callee
…call ProcX //conventional compile Call ProcX@Caller //VA-compile
…ProcX@Caller:
If (calculate_PLV ≤ PLV_threshold)call ProcX
else
create_shared_stack_layoutset_PHIT_for_ProcX
send_broadcast_reqset_timerwait_on_ack_or_timer
…Broadcast_ack_ISR:
if (statusX_PHIT == done)load_context&return_from_SSPX
Shared
Local
Heap
Shared
Stack
ProcXProcX
@Callee
PHIT
Op
era
ting
Co
n. M
on
it.In
terru
pt C
ont.
Op
era
tin
g C
on
. Mo
nit.
Inte
rrup
t C
ont.
TCDM
Sh
are
d
L1 -I$
Callee Corek Caller Corei
ProcX
@Caller……
…
Stacks

NOT SURE HOW FAR WE CAN PUSH THIS SENSING. REMEMBER ILP?
Towards Model and Predict
28
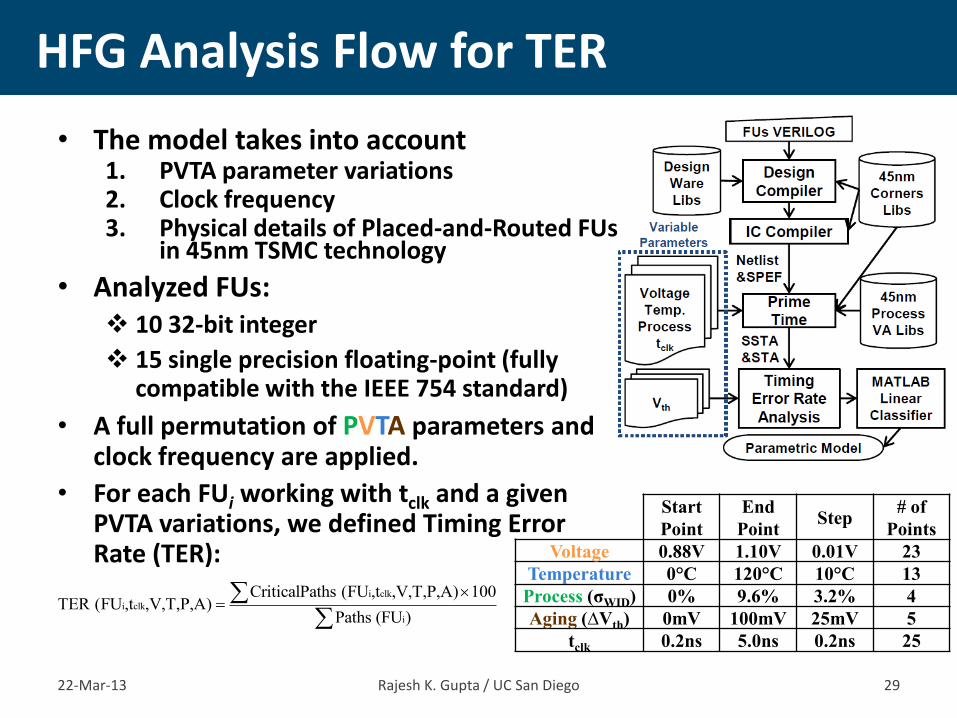
• The model takes into account 1. PVTA parameter variations 2. Clock frequency 3. Physical details of Placed-and-Routed FUs
in 45nm TSMC technology
• Analyzed FUs: 10 32-bit integer
15 single precision floating-point (fully compatible with the IEEE 754 standard)
• A full permutation of PVTA parameters and clock frequency are applied.
• For each FUi working with tclk and a given PVTA variations, we defined Timing Error Rate (TER):
HFG Analysis Flow for TER
22-Mar-13 Rajesh K. Gupta / UC San Diego 29
Start
Point
End
Point Step
# of
Points
Voltage 0.88V 1.10V 0.01V 23
Temperature 0°C 120°C 10°C 13
Process (σWID) 0% 9.6% 3.2% 4
Aging (∆Vth) 0mV 100mV 25mV 5
tclk 0.2ns 5.0ns 0.2ns 25
i clk
i clk
i
CriticalPaths (FU ,t ,V,T,P,A) 100TER (FU ,t ,V,T,P,A)
Paths (FU )
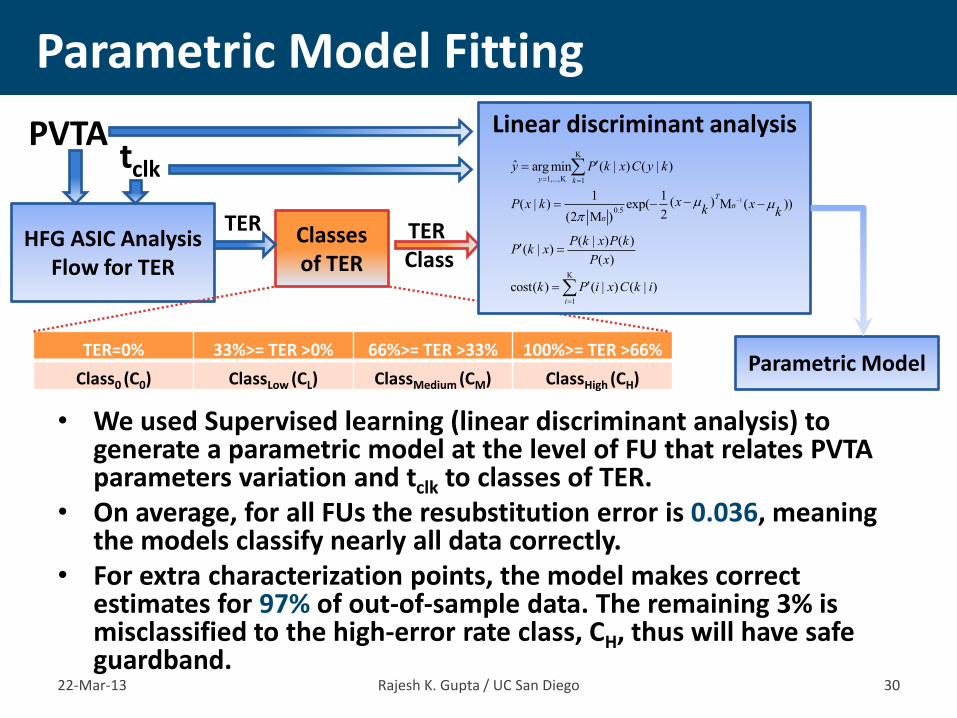
• We used Supervised learning (linear discriminant analysis) to generate a parametric model at the level of FU that relates PVTA parameters variation and tclk to classes of TER.
• On average, for all FUs the resubstitution error is 0.036, meaning the models classify nearly all data correctly.
• For extra characterization points, the model makes correct estimates for 97% of out-of-sample data. The remaining 3% is misclassified to the high-error rate class, CH, thus will have safe guardband.
Parametric Model Fitting
22-Mar-13 Rajesh K. Gupta / UC San Diego 30
HFG ASIC Analysis Flow for TER
PVTA tclk
TER=0% 33%>= TER >0% 66%>= TER >33% 100%>= TER >66%
Class0 (C0) ClassLow (CL) ClassMedium (CM) ClassHigh (CH)
Classes of TER
TER TER Class
K
1,...,K 1
ˆ ( | ) ( | )arg miny k
y P k x C y k
1σ
0.5σ
1 1( )( | ) exp( M ( ))
2(2 M )
TxP x k xk k
( | ) ( )( | )
( )
P k x P kP k x
P x
K
1
cost( ) ( | ) ( | )i
k P i x C k i
Linear discriminant analysis
Parametric Model
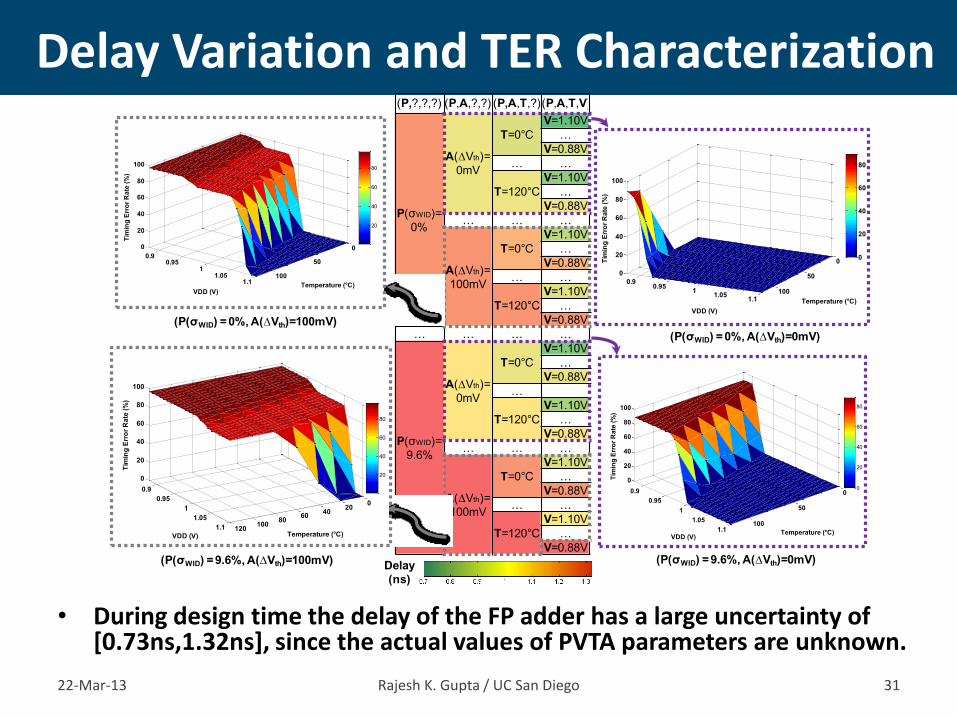
• During design time the delay of the FP adder has a large uncertainty of [0.73ns,1.32ns], since the actual values of PVTA parameters are unknown.
Delay Variation and TER Characterization
22-Mar-13 Rajesh K. Gupta / UC San Diego 31
(P,?,?,?) (P,A,?,?) (P,A,T,?)(P,A,T,V)
P(σWID)=
0%
A(∆Vth)=
0mV
T=0°C
V=1.10V
…
V=0.88V
… …
T=120°C
V=1.10V
…
V=0.88V
… … …
A(∆Vth)=
100mV
T=0°C
V=1.10V
…
V=0.88V
… …
T=120°C
V=1.10V
…
V=0.88V
… … … …
P(σWID)=
9.6%
A(∆Vth)=
0mV
T=0°C
V=1.10V
…
V=0.88V
…
T=120°C
V=1.10V
…
V=0.88V
… … …
A(∆Vth)=
100mV
T=0°C
V=1.10V
…
V=0.88V
… …
T=120°C
V=1.10V
…
V=0.88V
Delay
(ns)
0
50
100
0.90.95
11.05
1.1
0
20
40
60
80
100
Temperature (°C)VDD (V)
Tim
ing
Err
or
Ra
te (
%)
20
40
60
80
0
50
100
0.90.95
11.05
1.1
0
20
40
60
80
100
Temperature (°C)
VDD (V)
Tim
ing
Err
or
Ra
te (
%)
0
20
40
60
80
(P(σWID) = 0%, A(∆Vth)=100mV)
(P(σWID) = 0%, A(∆Vth)=0mV)
0
50
100
0.9
0.95
1
1.05
1.1
0
20
40
60
80
100
Temperature (°C)VDD (V)
Tim
ing
Err
or
Ra
te (
%)
0
20
40
60
80
(P(σWID) = 9.6%, A(∆Vth)=0mV)
020
4060
80100
120
0.9
0.95
1
1.05
1.1
0
20
40
60
80
100
Temperature (°C)VDD (V)
Tim
ing
Err
or
Ra
te (
%)
20
40
60
80
(P(σWID) = 9.6%, A(∆Vth)=100mV)

• The question is that mix of monitors that would be useful?
• The more sensors we provide for a FU, the better conservative guardband reduction for that FU.
Hierarchical Sensors Observability
22-Mar-13 Rajesh K. Gupta / UC San Diego 32
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
2.2
2.4
2.6t c
lk(n
s)
FP_expFP_add
INT_mac
P_sensor PA_sensors PAT_sensors PATV_sensors • The guardband of FP adder can be reduced up to • 8% (P_sensor),
• 24% (PA_sensors),
• 28% (PAT_sensors),
• 44% (PATV_sensors)
Sensor overheads: In-situ PVT sensors impose 1−3% area overhead [Bowman’09] Five replica PVT sensors increase area of by 0.2% [Lefurgy’11] The banks of 96 NBTI aging sensors occupy less than 0.01% of the core's area [Singh’11]
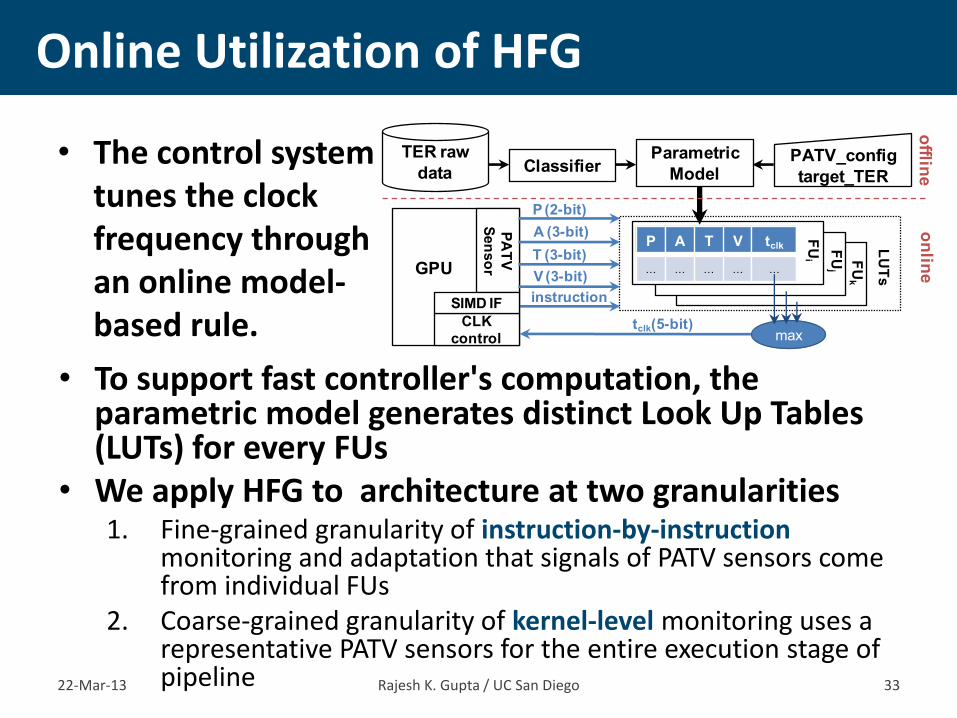
• The control system tunes the clock frequency through an online model-based rule.
Online Utilization of HFG
22-Mar-13 Rajesh K. Gupta / UC San Diego 33
FU
k
FU
j
TER raw
data ClassifierParametric
ModelPATV_config
target_TER
P A T V tclk
… … … … …
PA
TV
Sen
so
r
CLK
control
FU
i
max
P (2-bit)
A (3-bit)
T (3-bit)
V (3-bit)
instruction
tclk(5-bit)
LU
TsGPU
SIMD IF
offlin
eo
nlin
e
• To support fast controller's computation, the parametric model generates distinct Look Up Tables (LUTs) for every FUs
• We apply HFG to architecture at two granularities 1. Fine-grained granularity of instruction-by-instruction
monitoring and adaptation that signals of PATV sensors come from individual FUs
2. Coarse-grained granularity of kernel-level monitoring uses a representative PATV sensors for the entire execution stage of pipeline
Throughput benefit of HFG
22-Mar-13 Rajesh K. Gupta / UC San Diego 34
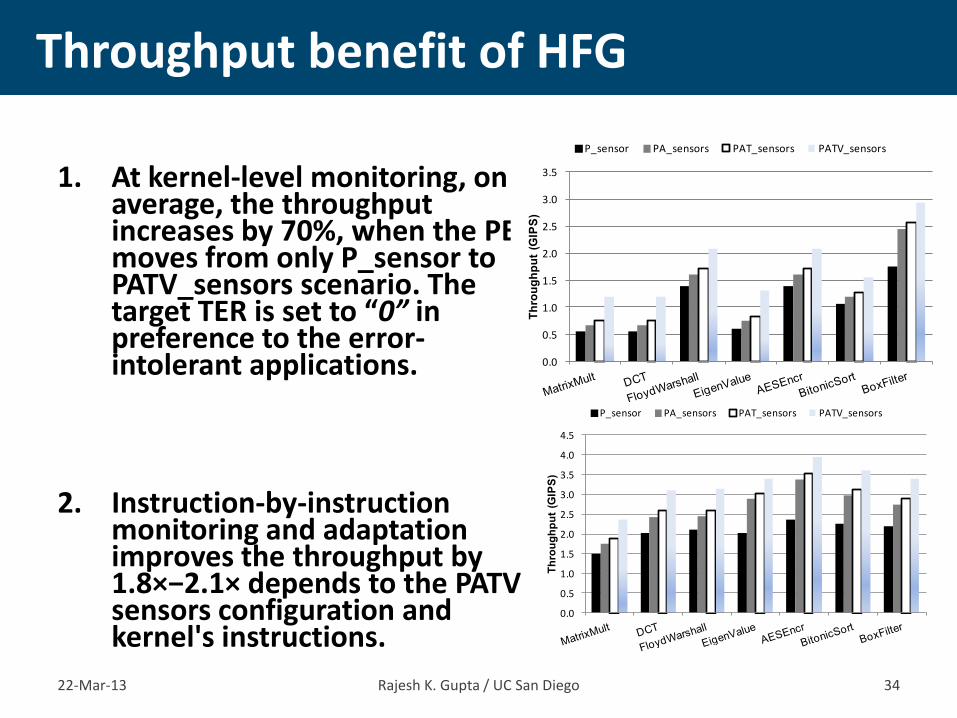
1. At kernel-level monitoring, on
average, the throughput increases by 70%, when the PE moves from only P_sensor to PATV_sensors scenario. The target TER is set to “0” in preference to the error-intolerant applications.
2. Instruction-by-instruction monitoring and adaptation improves the throughput by 1.8×−2.1× depends to the PATV sensors configuration and kernel's instructions.
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Th
rou
gh
pu
t (G
IPS
)
P_sensor PA_sensors PAT_sensors PATV_sensors
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
Th
rou
gh
pu
t (G
IPS
)
P_sensor PA_sensors PAT_sensors PATV_sensors

Thank You!
35
http://variability.org
The Variability Expedition
A NSF Expeditions in Computing Project