يـــــــــمـلعلا ثـــح ـلا و يـــلاعلا ... · 2014-11-02 ·...
TRANSCRIPT

العلـمـــــــــي الـبحـــث و العالـــي ـمـــليـالتع رةوزا
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
1ـفــسطيـ - اســـت فرحـاث عبــجامع
UNIVERSITE FERHAT ABBAS — SETIF1 UFAS1(ALGERIE)
Faculté de Technologie
Mémoire de Magister
Présenté au département d’Electrotechnique
Pour obtenir le diplôme
de Magister en Electrotechnique
Option :
Commande Electrique
par :
NETTARI Yakoub
Thème
Commandes robustes et intelligentes des convertisseurs DC-DC
Soutenu le 30/10/2014 devant le jury d’examen composé de :
M. KHEMLICHE Professeur Université Ferhat Abbas de Sétif1 Président
M. N. HARMAS Professeur Université Ferhat Abbas de Sétif1 Rapporteur
A. CHAIBA MCA Université Ferhat Abbas de Sétif1 Examinateur
A.BOUAFIA MCA Université Ferhat Abbas de Sétif1 Examinateur

Dédicaces
A mes chers parents
A mes chères frères, à mes chères sœurs, à ma famille et à tous mes amis.

SOMMAIRE
xi
Remerciements
Je tiens à remercier en tout premier lieu Allah qui me donne la force et le courage pour terminer
ce travail, après le prof. M.N.Harmas, Directeur de ce mémoire. Pour m’avoir proposé ce sujet de
magister et de m’avoir aidé par ses idées et ses conseils durant toute les étapes de réalisation de ce
travail.
Je remercie vivement le Pr. M.Khemliche: président du jury. Pour m’honorer de sa présence
ainsi que pour son soutien et ses encouragements durant la préparation de ce travail.
Je remercie également tous les membres du jury M. A.Bouafia et A. CHAIBA par la présence pour
examiner le présent travail et pour l’intérêt qu’ils ont porté à mon travail.
M. Rahmani Lazhar le doyen de la faculté de Technologie. Par cette occasion je tiens à le
remercier pour s’intéresser à juger mon travail, ainsi que pour tous ces efforts pour le bon avancement
des travaux de recherches dans la faculté.
Dr. H.Radjai le chef de département d’électrotechnique, par sa présence pour ses efforts donnés
durant mes années d’études dans l’université.
Je remercie spécialement mon collègue A.I.Kafi pour leur soutien et leur aide qui m’a permis
d’échanger des idées dans le même axe de recherche et pour son aide inédit sur la mise en forme et la
rédaction du mémoire.
Je ne peux pas oublier mes enseignants pour leurs efforts durant toutes mes années d’étude
dans l’université et pour leur soutien durant la réalisation de ce mémoire.
Enfin je remercie toute personne de près ou de loin qui a participé pour rendre ce travail
réalisable et présentable.
.
Sétif, le 08 / 06 /2014
NETTARI Yakoub

SOMMAIRE
Sommaire
INTRODUCTION GENERALE ................................................................. ….i
Chapitre 01............................................................................................................................. .................. 1.1
LES CONVERTISSEURS DC-DC.............................................................. 1.1
1.1. Introduction .......................................................................................................................................1.1
1.2. Mode de fonctionnement du convertisseur statique.........................................................1.1
1.3. Convertisseurs DC-DC ....................................................................................................................1.2
1.4. Convertisseur dévolteur (Buck converter)............................................................................1.7
1.4.1. Mode de conduction continue. ....................................................................................................... 1.7
1.4.2. Limite entre la conduction continue et discontinue. ............................................................ 1.11
1.4.3. Mode de conduction discontinue .................................................................................................. 1.12
1.4.4. Rendement du convertisseur statique........................................................................................ 1.13
1.5. La modélisation mathématique de convertisseur dévolteur (Buck). .........................1.13
1.5.1. Modèle moyen de convertisseur dévolteur (Buck) avec pertes inclus. ........................ 1.14
1.5.1.1. En mode de conduction continu. ............................................................................................... ..1.14
1.5.1.2. En mode de conduction discontinu. ......................................................................................... ..1.19
1. 6. Concep ti on d’un converti sseur dévolte ur. .................................................................1.20
1.7. Test en boucle ouverte. ................................................................................................................ 1.22
1.8. Conclusion............................................................................................................................. ............ 1.24
Chapitre 02............................................................................................................................................... 2.25
COMMANDE PAR MODE GLISSANT ET SYNERGETIQUE ...............2.25
2.1. Introduction .......................................................................................................................................2.25
2.2. Principes généraux de la commande par modes glissants..............................................2.25
2.2.1. Synthèse de la surface de glissement .......................................................................................... .2.26
2.2. 2. Co ndi ti ons de convergence et d’exis tence (s tabi li té) .......................................... 2.28
2.2.3. Synthèse de la loi de commande. .................................................................................................. 2.29
2.3. Synthèse de commande du convertisseur dévolteur par mode glissant ..................2.32
2.3.1. Choix de surface. ............................................................................................................................. ..... 2.33
2.3.2. Détermination de la commande. ................................................................................................... 2.33
2.3.3. Phénomène de chattrering. ............................................................................................................. 2.34
2.3. 4. Rem plac em ent de la fonc tion ‘’ sign’’ par une fonction continue .......................2.36
2.4. Commande synergétique. ...........................................................................................................2.37
2.4.1. Principe de la commande synergétique. .................................................................................... 2.38
2.4.2. Synthèse de la commande synergétique................................................................................... 2.38
2.4.3. Conception de la commande synergétique .............................................................................. 2.40
2.4.4. Loi de commande synergétique. ................................................................................................... 2.41
2.5. Résultats de simulation. ..............................................................................................................2.42
2.6. Synthèse des commandes améliorées ....................................................................................2.44
2.6.1. Mode glissant amélioré. .................................................................................................................... 2.44
2.6.2. Synergétique améliorée. ................................................................................................................... 2.44
2.6.2.1. Loi de commande avec limitation de courant ...................................................................... 2.45

SOMMAIRE
2.6.3. Loi de l'adaptation dynamique des paramètres de commande. ...................................... .2.46
2.6.4. Résultats de simulation des commandes améliorées........................................................... .2.47
2.6.5. Test de robustesse. ............................................................................................................................. ..2.49
2.7. Conclusion ........................................................................................................................................ 2.54
Chapitre 03............................................................................................................................. .................. 3.55
COMMANDE ADAPTATIVE FLOUE TERMINALE ............................. 3.55
3.1. Introduction ............................................................................................................................. ........3.55
3.2. Conception du contrôleur synergétique terminal. .............................................................3.55
3.3. Introduction aux systèmes flous ............................................................................................. ..3.57
3.3.1. Rappel sur les systèmes flous type-1 .......................................................................................... 3.57
3.3.1.1. Ensembles Flous............................................................................................................................... 3.58
3.3. 1.2. Foncti on d’Appartenanc e ......................................................................................................3.58
3.3.1.3. Base de règles. ................................................................................................................................... 3.60
3.3.1.4. Fuzzification....................................................................................................................................... 3.60
3.3. 1.5. L’i nférenc e .....................................................................................................................................3.60
3.3.1.6. Défuzzification ................................................................................................................................. 3.60
3.3.2. Approximation par les systèmes flous type-1 ........................................................................ 3.60
3.3.3. Théorème de l’approxi mati on uni vers elle ..........................................................................3.62
3.4. Commande adaptative floue directe et indirecte ...............................................................3.62
3.4.1. Commande adaptative floue directe............................................................................................ 3.62
3.4.2. Commande adaptative floue indirecte........................................................................................ 3.63
3.5. Commande adaptative floue indirecte par synergétique terminale. ........................ 3.63
3.5.1. Conception du contrôleur adaptatif flou selon la synthèse de Lyapunov .................... 3.63
3.5.2. Commande de supervision .............................................................................................................. 3.65
3.5. 3. Loi s d’adaptation ............................................................................................................................3.66
3.5.4. Algorithme de projection ................................................................................................................. 3.68
3.6. Résultats de simulation ............................................................................................................... 3.71
3.6.1. Test de robustesse. ............................................................................................................................. 3.73
3.7. Commande adaptative floue par mode glissant terminale ............................................ 3.78
3.7. 1. Loi s d’adaptation ............................................................................................................................ 3.79
3.8. Comparaison entre les commande AFTSMC et AFTSYC. ............................................... 3.80
3.9. Conclusion................................................................................................. ........................................ 3.82
Chapitre 04............................................................................................................................. .................. 4.83
OPTIMISATION DES PARAMETRES PAR LES ALGORITHMES GENETIQUES ......4.83
4.1. Introduction ..................................................................................................................................... 4.83
4.2. Algorithmes génétiques .............................................................................................................. 4.84
4.2.1. Outils évolutionnaires de base d'un (AG).................................................................................. 4.84
4.2.2. Optimisation par les algorithmes génétique ............................................................................ 4.85
4.2.3. Mécanismes de fonctionnement d’un (AG)............................................................................... 4.87
4.3. Optimisation des paramètres de contrôleur AFTSYC utilisant des Algorithmes
Génétiques (GA)............................................................................................................................. 4.97
4.4. Conclusion......................................................................................................................................... 4.102
CONCLUSION GENERALE ET PERSPECTIVES ................................ C.1

Liste des figures
Figure 1.1. Convertisseur Boost (élévateur de tension)............................................................................................. 1.3
Figure 1.2. Convertisseur Boost durant l’état on........................................................................................................ 1.3
Figure 1.3. Convertisseur Boost durant l’état off ....................................................................................................... 1.4
Figure 1.4. Convertisseur Buck-Boost ......................................................................................................................... 1.4
Figure 1.5. Convertisseur Buck-Boost durant l’état on ............................................................................................. 1.5
Figure 1.6. Convertisseur Buck-Boost durant l’état off .......................................................................................... 1.5
Figure 1.7. Convertisseur Cuk ....................................................................................................................................... 1.5
Figure 1.8. Le schéma de base du convertisseur dévolteur (Buck converter)........................................................ 1.7
Figure 1.9. Formes d’ondes des tensions et courants dans un convertisseur Buck en MCC .............................. 1.7
Figure 1.10. L’ondulation de la tension de sortie ....................................................................................................... 1.10
Figure 1.11. Tension aux bornes de l’inductance et courant la traversant (limite entre MCC et MCD) ........... 1.11
Figure 1.12. Forme d’ondes des tensions et courants en MCD............................................................................... 1.12
Figure 1.13. Circuit équivalent de convertisseur dévolteur (Buck) avec les pertes inhérentes aux éléments du
circuit électrique ........................................................................................................................................ 1.14
Figure 1.14. Schéma de convertisseur abaisseur (Buck), lorsque M est à l’état ON ............................................. 1.15
Figure 1.15. Schéma de convertisseur abaisseur (Buck), lorsque M est à l’état OFF ........................................... 1.17
Figure 1.16. Circuit du convertisseur dévolteur implémenté avec Matlab/Simulink ........................................... 1.22
Figure 1.17. Réponses transitoires des modèles développés en boucle ouverte ................................................... 1.22
Figure 1.18 (a). Variation de la tension de sortie en fonction du rapport cyclique en boucle ouverte .............. 1.23
Figure 1.18 (b). La variation du rapport cyclique ....................................................................................................... 1.23
Figure 2.1. Plane de phase en mode glissant ............................................................................................................... 2.26
Figure 2.2. Commande équivalente .............................................................................................................................. 2.31
Figure 2.3. Plan de phase................................................................................................................................................ 2.42
Figure 2.4. Tension de sortie Vo ................................................................................................................................... 2.43
Figure 2.5. Signal de commande d. ............................................................................................................................... 2.43
Figure 2.6. Courant d’inductance iL. ............................................................................................................................ 2.43
Figure 2.7. Plan de phase pour différentes valeurs de T ........................................................................................... 2.44
Figure 2.8. Courant d’inductance (iL) avec des différentes valeurs de T ............................................................... 2.45
Figure 2.9. Plan de phase de l’approche (1) ................................................................................................................ 2.45
Figure 2.10. Plan de phase de l’approche (2) .............................................................................................................. 2.46

Figure 2.11. Interprétation géométrique d'adaptation de paramètre ....................................................................... 2.47
Figure 2.12 .Tension de sortie Vo, (SMC améliorée).. .............................................................................................. 2.47
Figure 2.13. Signal de commande d, (SMC améliorée). ............................................................................................. 2.48
Figure 2.14. Courant de l’inductance iL (A),(SYC améliorée ) ................................................................................. 2.48
Figure 2.15. Signal de commande d, (SYC améliorée). ............................................................................................. 2.48
Figure 2.16. Tension de sortie Vo, (SYC améliorée).. ............................................................................................... 2.49
Figure 2.17. Tension de sortie Vo, avec la variation de la tension de référence Vref .......................................... 2.49
Figure 2.18. Tension de sortie Vo, avec la variation de la tension d’entrée Vin ................................................... 2.50
Figure 2.19 .Tension de sortie Vo, avec la variation de la charge R........................................................................ 2.50
Figure 2.20. Réponse du système avec SMC avec la variation de R et k=3.105 .................................................... 2.53
Figure 2.21. Réponse du système avec SYC avec la variation de R et T=5.10-4 ................................................... 2.53
Figure 3.1. Structure d’un contrôleur flou ................................................................................................................... 3.57
Figure 3.2. Différentes formes des fonctions d’appartenance ................................................................................. 3.59
Figure 3.3. Commande adaptative floue directe ......................................................................................................... 3.62
Figure 3.4. Commande adaptative floue indirecte...................................................................................................... 3.63
Figure 3.5. Méthode du gradient avec projection ....................................................................................................... 3.68
Figure 3.6. Schéma global de la commande adaptative floue ................................................................................... 3.70
Figure 3.7. Fonctions d'appartenance avec trois ensembles pour la variable « erreur et sa dérivée » ................ 3.71
Figure 3.8. Tension de sortie Vo (AFTSYC). ............................................................................................................. 3.72
Figure 3.9. Courant de l’inductance iL (A), (AFTSYC)............................................................................................. 3.72
Figure 3.10. Signal de commande AFTSYC ............................................................................................................... 3.72
Figure 3.11. Courant de charge io (A), (AFTSYC) .................................................................................................... 3.73
Figure 3.12. Schéma global du contrôleur AFTSYC avec le modèle (1.57) ........................................................... 3.73
Figure 3.13. Tension de sortie Vo du modèle (1.57) par AFTSYC ......................................................................... 3.74
Figure 3.14. Courant de l’inductance du modèle (1.57) par AFTSYC. ................................................................... 3.74
Figure 3.15. Signal de commande AFTSYC avec le modèle (1.57). ........................................................................ 3.74
Figure 3.16 .Variation de la tension de référence Vref.. ............................................................................................ 3.75
Figure 3.17. Tension de sortie lors la variation de la tension d’entrée Vin.. .......................................................... 3.75
Figure 3.18. Fonction g(x) lors la variation de Vin ................................................................................................... 3.76
Figure 3.19. Tension de sortie lors la variation de la charge R ................................................................................ 3.76
Figure 3.20. Signal de commande AFTSYC lors la variation de charge.. ............................................................... 3.76
Figure 3.21. Fonction f(x) lors la variation de la charge R.. ...................................................................................... 3.77
Figure 3.22. Fonction g(x) lors la variation de la charge R. ...................................................................................... 3.77
Figure 3.23. Courant de l’inductance lors la variation de R.. .................................................................................... 3.77
Figure 3.24. Tension de sortie Vo, par (AFTSMC et AFTSYC). ............................................................................ 3.81
Figure 3.25. Signal de commande, par (AFTSMC et AFTSYC). ............................................................................. 3.81
Figure 4.1. Organigramme général d'un algorithme génétique ................................................................................ 4.86
Figure 4.2. Exemple de sélection par roulette ............................................................................................................ 4.92
Figure 4.3. Croisement à un site .................................................................................................................................... 4.94
Figure 4.4. Croisement à k sites .................................................................................................................................... 4.95
Figure 4.5. Mutation dans un chromosome ................................................................................................................ 4.96
Figure 4.6. Le schéma synoptique du système de commande avec optimisation des paramètres ...................... 4.97
Figure 4.7. Résultats de l'approche GA-AFTSYC. .................................................................................................... 4.100
Figure 4.8. Figure 4.8. a- La tension de sortie (V), b- le courant de l’inductance iL (A).c- Le signale de
commande d, lors la variation de R, par GA-AFTSYC. ........................................................................................... 4.101

Liste des tableaux
Tableau 1.1. la complexité de chaque type de convertisseur .................................................................................... 1.6
Tableau 1.2. Le rendement de quelques convertisseurs connus .............................................................................. 1.13
Tableau 1.3. les paramètres de convertisseur dévolteur(Buck) ................................................................................ 1.21
Tableau 3.1. Les paramètres de contrôleur AFTSYC ................................................................................................ 3.71
Tableau 4.1. les paramètres optimaux obtenus par l’AG .......................................................................................... 4.98

Listes des Acronymes et Symboles
Acronymes
MCC Mode de Conduction Continu MCD Mode de Conduction Discontinu AC DC
Courant alternatif Courant continu
F.E.M Force électromotrice MLI Modulation de Largeur d’Impulsion SMC Commande par mode glissant SYC Commande synergétique TSYC Commande synergétique terminale TSMC Commande par mode glissant terminal MRAC Commande adaptative par modèle de référence
FBF Fonction de base floue
AFTSMC Commande adaptative floue par mode glissant terminal
AFTSYC GA-AFTSYC
Commande adaptative floue synergétique terminale Commande adaptative floue synergétique terminale optimisée par les algorithmes génétiques
PWM
Pulse Width Modulation

Symboles
x Vecteur d’état L Iinductance C Condensateur R Charge
Vin Tension d’entrée Vo Tension de sortie VD Tension directe de diode RL Résistance interne de l’inductance L iL Courant d’inductance
RM Résistance on de l’interrupteur M RC Résistance interne de C M Interrupteur io Le courant de charge
VC Tension du condensateur Vref Tension de référence e Erreur entre la sortie et la référence
Dérivée de l’erreur
s Surface de glissement Ψ Macro-variable synergétique µ Degré d’appartenance d’une variable floue l Indice des règles floues

Symboles
, partie nominale de f,g
V Fonction de Lyapunov T Constante de temps U Ensemble compact U Mf, Mg Constante positive (norme maximale de )
Paramètres du système flou
( ) Vecteurs de fonctions floues de base (FBF).
d Signal de commande
f get Ensembles des contraintes
Erreur d’approximation
Paramètres optimaux
Fonctions optimales du système
Valeurs maximales des fonctions f et g
Valeur minimale de la fonction g

INTRODUCTION GENERALE
i
INTRODUCTION GENERALE
Un convertisseur continu-continu ou hacheur est un convertisseur statique qui permet d’alimenter une
charge sous une tension continue réglable, à partir d’une source de tension continue (batterie par
exemple).
Les convertisseurs continu-continu sont devenus une composante essentielle des applications
industrielles et militaires au cours des dernières décennies. Grâce à leurs rendements de plus en plus
élevés, leurs faibles encombrements ainsi que leurs poids et coûts réduits, ils ont remplacé les
alimentations classiques linéaires, même pour de faibles niveaux de puissance. Un convertisseur de
puissance peut être caractérisé comme un système périodique, non-linéaire et variant au cours du temps
en raison de son fonctionnement basé sur le découpage. La topologie des éléments dynamiques du
système dépend de l’état instantané de chaque interrupteur commandé, ce qui rend la modélisation
complexe.
Toutefois, les modèles analytiques des convertisseurs continu-continu à commande PWM sont
essentiels pour la conception et l’analyse dans de nombreuses applications. telles que l'automobile,
l'aéronautique, l'espace, les télécommunications, la marine, les ordinateurs, les équipements médicaux…
Beaucoup d'efforts ont été faits au cours des dernières années pour contrôler les convertisseurs
continu-continu. Nombre de commandes ont été proposés [17][22][23][27][29][30][34][37][41][47].
En effet, il est nécessaire de développer des contrôleurs non-linéaires prenant en charge l’imprécision
des modèles mathématique dues en partie aux incertitudes sur les paramètres et leurs éventuelles
variations en fonction du temps et des points de fonctionnement.
Ces contrôleurs doivent donc être robuste vis-à-vis les incertitudes, des perturbations introduites et vis-
à-vis de les variations des paramètres du système.
Pour répondre à ces défis, cette étude propose la conception de contrôleurs robustes et intelligents.
Le travail est présenté en quatre chapitres organisés comme suit:
Le premier chapitre met en évidence la modélisation des différents types des convertisseurs, et
discute en détails les modèles des convertisseurs les plus usités en général et la conception d’un
convertisseur dévolteur (Buck) en particulier.
Le second chapitre introduit la synthèse de commande par mode glissant et la commande
synergétique et présente une comparaison entre les deux commandes ainsi que l’analyse des
performances de chacune.

INTRODUCTION GENERALE
ii
Le troisième chapitre propose :
L’amélioration des commandes précédentes par l’utilisation de la stratégie terminale
(Convergence à temps fini) et la technique adaptative basée sur l’estimation universelle par les
systèmes flous.
En raison du grand nombre des paramètres du contrôleur on s’oriente vers les algorithmes
d’optimisation telle que les algorithmes génétiques, et c'est ce qui est abordé dans le quatrième
chapitre.
Le travail sera terminé par une conclusion générale sur le travail effectué ainsi qu’une discussion des
résultats obtenus suivi de perspectives pour les travaux futurs.

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.1
Chapitre 1
CONVERTISSEURS DC-DC
1.1. Introduction
Les convertisseurs de type DC-DC convertissent un niveau de tension électrique à un autre
niveau par action de commutation. Ils sont populaires en raison de leurs petites tailles et
l'efficacité par rapport aux régulateurs linéaires. Les convertisseurs DC-DC ont un très grand
domaine d'application. Ceux-ci sont largement utilisés dans les ordinateurs personnels, des
périphériques informatiques et adaptateurs d'appareils électroniques pour fournir des
tensions continues [1]. La grande variété de topologie de circuit de convertisseurs varie entre
une configuration à un transistor unique ; abaisseur (Buck), élévateur (Boost) et abaisseur-
élévateur (Buck-Boost) et des configurations complexes comportant deux ou quatre
interrupteurs et qui emploient commutation douce ou des techniques de résonance pour
contrôler les pertes de commutation [2].
La conception de contrôleur pour n'importe quel système nécessite la connaissance de
comportement du système. Habituellement, cela implique une description mathématique de
la relation entre les entrées du processus, les variables d'état, et de la sortie. Cette description
sous forme des équations mathématiques qui décrivent le comportement du système
(processus) est appelé modèle du système. Ce chapitre décrit une méthode efficace pour
analyser, modéliser et simuler les convertisseurs électroniques de puissance par MATLAB.
Le logiciel MATLAB / SIMULINK peut être avantageusement utilisé pour simuler des
convertisseurs de puissance. Cette étude vise le développement des modèles pour tous les
convertisseurs de base et d'étudier sa réponse en boucle ouverte, de sorte que ces modèles
peut être utilisé en cas de conception d'un système en boucle fermée [3].
1.2. Mode de fonctionnement du convertisseur statique.
Le convertisseur peut fonctionner suivant deux modes de fonctionnements dépendant de sa
capacité de stockage d’énergie, de la période de commutation et de la charge. Ces deux
modes sont :

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.2
- Mode de Conduction Continue (MCC) : Dans ce cas, l’énergie emmagasinée dans
l’.inductance L est transférée partiellement. Le courant dans l’inductance ne s’annule pas sur
une période de commutation.
- Mode de Conduction Discontinue (MCD) : Dans ce cas, l’énergie emmagasinée dans
l’inductance L est transférée totalement. Le courant dans l’inductance s’annule avant la fin
d’une de commutation.
1.3. Convertisseurs DC-DC
Le hacheur ou convertisseur continu - continu est un dispositif de l'électronique de
puissance mettant en œuvre un ou plusieurs interrupteurs commandés et qui permet de
modifier la valeur de la tension d'une source de tension continue avec un rendement élevé.
Le découpage se fait à une fréquence élevée. Si la tension délivrée en sortie est inférieure à la
tension appliquée en entrée, le hacheur est dit dévolteur (ou abaisseur ou Buck). Dans le cas
contraire, il est dit survolteur (ou élévateur ou Boost). Il existe des hacheurs capables de
travailler dans les deux sens (Boost-Buck). Certains hacheurs sont également réversibles : ils
peuvent alors fournir de l'énergie à la charge, généralement une machine à courant continu
dans ce type d'application, ou bien en prélever ce qui permet de freiner la machine.
Il existe différentes méthodes de classification des convertisseurs DC-DC. L'une d'elles
dépend de la propriété d'isolation de la partie primaire et secondaire. L'isolation est
généralement réalisée par un transformateur, qui comporte une partie primaire sur le côté
d'entrée et un secondaire à côté de la sortie. La chaine de retour de la boucle de commande
est réalisée par un autre plus petit transformateur ou optiquement par optocoupleur. Par
conséquent, la sortie est isolée électriquement de l'entrée. Ce type comprend les
convertisseurs (Fly-back) avec un pont redresseur AC-DC supplémentaire à l'avant.
Toutefois, car l’implémentation de ces transformateur encombrant est très grand et coûteux,
convertisseurs DC-DC non-isolement sont plus préféré [2].
Les convertisseurs DC / DC non-isolés peuvent être classés comme suit:
Convertisseur Buck (dévolteur de tension). (Montré dans les sections au-dessous)
Un convertisseur Buck, ou hacheur série, est une alimentation à découpage qui convertit une
tension continue en une autre tension continue de plus faible valeur.
Convertisseur Boost (élévateur de tension).
Un convertisseur Boost, ou hacheur parallèle, est une alimentation à découpage de la Fig. 1.1
qui convertit une tension continue en une autre tension continue de plus forte valeur.

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.3
Fig.1.1. Convertisseur Boost (élévateur de tension).
Fig. 1.2. Convertisseur Boost durant l’état on.
Si le commutateur Q est ouvert à t0 et si la chute de tension aux bornes de la diode est
négligée, alors V0 est égale à Vin.
Lorsque le commutateur est fermé (fig. 1.2), la tension de la charge chute immédiatement à
zéro si le condensateur C est omis. Le courant du circuit iL circule à travers l’inductance L et
augmente [1],[4] et les équations d’état sont:
1( )
, 0 , :1
( )
Lin
o o
diV
dt Lt dT Q ON
dv v
dt C R
(1.1)
Lorsque Q est désactivé (fig. 1.3), l’inductance se trouve en série avec le générateur et sa
f.é.m. s’additionne à celle du générateur (effet survolteur). Le courant iL traversant
l’inductance traverse ensuite la diode D, le condensateur C et la charge. Il en résulte un
transfert de l’énergie accumulée dans l’inductance vers le condensateur. Le courant décroît
ensuite progressivement, car ov > Vin :
1( )
, , :1
( )
Lin o
o oL
diV v
dt LdT t T Q OFF
dv vi
dt C R
(1.2)

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.4
Fig. 1.3. Convertisseur Boost durant l’état off.
La diode D permet d’éviter la décharge du condensateur C, lorsque le commutateur est
activé. Le condensateur est supposé assez grand pour pouvoir lisser la tension de la charge.
La tension de la charge est donnée par :
Avec
: est le rapport cyclique (0 < D < 1)
On considère ici uniquement le comportement du circuit en conduction continue.
Convertisseur Buck-Boost (abaisseur- élévateur de tension, polarité opposée).
Un convertisseur Buck-Boost présenté par la Fig. 1.4 c’est une alimentation à découpage qui
convertit une tension continue en une autre tension continue de plus faible ou plus grande
valeur mais de polarité inverse [4].
Fig. 1.4. Convertisseur Buck-Boost.
Durant l’état «on», l’énergie apportée par la source est stockée dans l’inductance L (fig. 1.5). Cette
énergie est livrée ensuite à la charge pendant l’état «off» ( fig. 1.6). En raison de la présence de la diode
D, le courant circule à travers l’inductance L seulement dans une direction durant les deux états. Par
conséquent, V0 a une polarité opposée à Vin .Pour cette raison, ce circuit est aussi appelé convertisseur
inverseur. Les équations décrivant ce circuit peuvent être obtenues de la même manière qu’au paravent.
-
+

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.5
1( )
, 0 , :1
( )
Lin
o o
diV
dt Lt dT Q ON
dv v
dt C R
(1.4)
1( )
, , :1
( )
Lo
o oL
div
dt LdT t T Q OFF
dv vi
dt C R
(1.5)
Fig. 1.5. Convertisseur Buck-Boost durant Fig. 1.6. Convertisseur Buck-Boost l’état on durant l’état off
En conclusion, l’amplitude de V0 peut être inférieure ou supérieure à Vin suivant la valeur de ton et toff .
convertisseur Cuk (abaisseur- élévateur de tension).
Les convertisseurs Cuk sont dérivés de la cascade des convertisseurs abaisseurs et élévateurs. Tous les
convertisseurs mentionnés précédemment transfèrent l'énergie entre l'entrée et la sortie à l'aide d’une
inductance et l'analyse est basée sur l'équilibre de la tension aux bornes de l'inductance, par contre Le
convertisseur Cuk utilise le transfert d'énergie capacitif et l'analyse est basée sur l'équilibre du courant
du condensateur. la figure.1.3 montrée la topologie de circuit du convertisseur Cuk [4].
Fig.1.7. Convertisseur Cuk.
Pendant le mode de conduction continue de fonctionnement, les équations d'espace d'état sont :

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.6
Lorsque 0 , :t dT Q ON
1
1
2
2
2
2
2
1
1( )
1( )
1( )
1( )
Lin
cL
Lo c
o oL
div
dt L
dvi
dt C
div v
dt L
dv vi
dt C R
(1.6)
, :dT t T Q OFF
1
1
1
2
2
2
2
1
1( )
1( )
1( )
1( )
Lin o
cL
Lo
o oL
div v
dt L
dvi
dt C
div
dt L
dv vi
dt C R
(1.7)
Dans les cas cités en haut, l’adaptation entre la source et la charge est réalisée en choisissant
des valeurs adéquates du rapport cyclique.
Généralement, pour les convertisseurs DC/DC, l’interrupteur est commandé par un signal
PWM (Pulse Width Modulation) ou MLI (Modulation de Largeur d’Impulsion). Un signal
PWM est un signal rectangulaire de fréquence fixe, mais dont le rapport cyclique D est
variable. La valeur du rapport cyclique permet de contrôler la quantité d’énergie transmise.
Il existe d’autres types de convertisseur DC/DC plus complexes que ceux décrits en haut. Le
tableau suivant donne une idée sur la complexité de chaque type de convertisseur [75].
Tab.1.1. Complexité de chaque type de convertisseur.
Type Fonction Interrupteur Diode Transformateur Complexité
Buck Abaisseur 1 1 non Faible
Boost Elévateur 1 1 non Faible
Buck-Boost (Cuk)
Abaisseur/ Elévateur
1 1 non Faible
Half Forward Abaisseur/ Elévateur
1 1 oui Moyenne
Push Pull Abaisseur/ Elévateur
1 2 oui Moyenne
Half Bridge Abaisseur/ Elévateur
2 4 oui Forte
Full Bridge Abaisseur/ Elévateur
4 4 oui Forte

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.7
Plusieurs type de méthodes d'analyse et de contrôle sont appliqués à un grand nombre de
convertisseurs DC / DC non-isolés. Le convertisseur abaisseur de tension continu-continu
est le plus simple circuit convertisseur de puissance utilisé pour des nombreuses applications
de gestion de puissance et de régulateur de tension. Dans ce qui suit, on se limitera à l’étude
du convertisseur statique de type Buck.
1.4. Convertisseur dévolteur (Buck converter)
Le schéma de base du convertisseur est repris ci-dessous.
Fig.1.8. Le schéma de base du convertisseur dévolteur (Buck converter).
Une étude plus approfondie est nécessaire pour bien comprendre les phénomènes et
déterminer les différentes grandeurs électriques qui entrent en jeu. Ceci est primordial pour
mener à bien la phase de conception du convertisseur [4][5][6][7][x2].
1.4.1. Mode de conduction continue.
La figure 1.9 représente les formes d’ondes des principales grandeurs électriques en MCC.
Fig. 1.9. Formes d’ondes des tensions et courants dans un convertisseur Buck en MCC.
-Vo

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.8
L’augmentation du courant iL durant l’état passant ton = DT est donné par (aire du rectangle
bleu) :
∫
∫
De même, la baisse du courant dans l’inductance durant l’état bloqué est donnée par :
∫
∫
Si on considère que le convertisseur est en régime permanent, l’énergie stockée dans chaque
composant est la même au début et à la fin de chaque cycle de commutation. Par conséquent,
le courant iL traversant l’inductance est le même au début et à la .n de chaque cycle de
commutation. Ce qui peut s’écrire de la façon suivante :
⇒
La tension de sortie varie donc linéairement avec le rapport cyclique D. Le rapport cyclique
étant compris entre 0 et 1, la tension de sortie V0 est toujours inférieure à celle d’entrée.
Si on considère que l’inductance, la diode et le commutateur sont idéaux et qu.il n y a pas de
perte de puissance, alors les puissances moyennes à l’entrée et à la sortie du circuit sont égales
[6][8].
⇒
Le courant traversant la diode de roue libre est donné par :
a- Ondulation du courant iL et choix de L : Sur la figure 1.9, on voit que le courant
traversant l’inductance L présente une ondulation (l’ondulation du courant est
définie comme étant la différence entre la valeur maximale et la valeur minimale du
courant) qui est donnée par [8] :
Avec
, fréquence de commutation.
Sachant que l’ondulation du courant est maximale pour D = 0.5, on peut écrire pour un
courant d’ondulation maximum désiré [6][9]:

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.9
Le courant moyen passant à travers l’inductance est égal au courant continu traversant la charge, d’où :
La valeur maximum admissible pour résulte d’un compromis :
une valeur trop faible de conduit à une valeur excessive de l’inductance L
une valeur trop élevée de augmente la valeur maximale de courant que le
commutateur M et la diode doivent supporter, le maximum correspond en outre au
courant que M doit pouvoir interrompre.
une valeur trop élevée de augmente aussi la largeur de la zone correspondant à la
conduction Discontinue.
Le choix de la fréquence de commutation f est crucial. Plus elle est grande, plus est petit le
noyau de l’inductance et plus sont importantes les pertes par commutation de la puissance.
b- Ondulation de la tension de sortie V0, choix de C : Dans les topologies de
convertisseurs, on rajoute un condensateur C pour que la tension de sortie V0 et le
courant I0 se maintiennent à des valeurs constantes, même pendant l’ouverture de
l’interrupteur. Aussi, les composants du convertisseur sont dimensionnés pour que les
tensions et courants à la sortie présentent de faibles ondulations lors du passage de
l’interrupteur de la fermeture à l’ouverture et inversement.
L’ondulation de la tension de sortie peut être estimée en admettant que le courant traversant
le condensateur soit égal à l’ondulation du courant dans l’inductance. Autrement dit, on fait
l’hypothèse que l’ondulation du courant traversant la charge R est nulle.
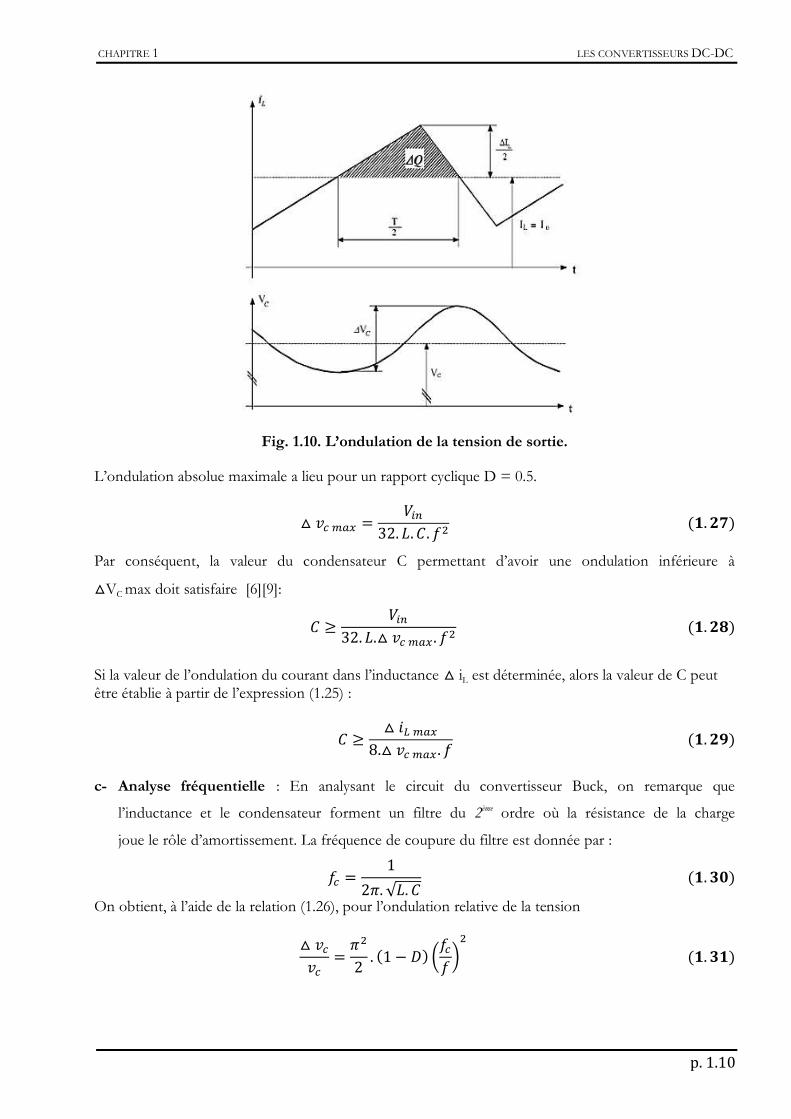
Sur la figure (1.10) on peut voir que pour chaque demi-période de commutation, le
condensateur emmagasine ou restitue une charge Q (aire du triangle hachuré) conduisant à
une variation de la tension à ses bornes estimée à [8] :
Ou en valeur relative
La relation (1.26) montre que l’ondulation relative est indépendante de la charge[7].
CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.10
Fig. 1.10. L’ondulation de la tension de sortie.
L’ondulation absolue maximale a lieu pour un rapport cyclique D = 0.5.
Par conséquent, la valeur du condensateur C permettant d’avoir une ondulation inférieure à
VC max doit satisfaire [6][9]:
Si la valeur de l’ondulation du courant dans l’inductance iL est déterminée, alors la valeur de C peut être établie à partir de l’expression (1.25) :
c- Analyse fréquentielle : En analysant le circuit du convertisseur Buck, on remarque que
l’inductance et le condensateur forment un filtre du 2ème ordre où la résistance de la charge
joue le rôle d’amortissement. La fréquence de coupure du filtre est donnée par :
√
On obtient, à l’aide de la relation (1.26), pour l’ondulation relative de la tension
(
)

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.11
Cette relation montre que l’ondulation relative de la tension peut être minimisée en fixant la
fréquence de coupure du filtre passe-bas à une valeur très inférieure à la fréquence de
commutation f.
1.4.2. Limite entre la conduction continue et discontinue.
Lorsque le courant à travers l’inductance s’annule juste au moment de la commutation, le
courant moyen dans la charge est égal à la moitié de l’ondulation iL. On se trouve alors à la
limite entre la conduction continue et la conduction discontinue.
Fig. 1.11 : Tension et courant aux bornes de l’inductance (limite entre MCC et MCD).
Le courant moyen maximum dans la charge est obtenu lorsque D = 0.5 On peut donc écrire
la relation
Si la fréquence de commutation f et la résistance de la charge R désirées sont établies, alors il
existe une valeur minimale pour l’inductance qui assure le mode de conduction
continue. L’expression (1.33) permet d’écrire :
Si la valeur de l’inductance L et la résistance de la charge R désirées sont établies, alors il
existe une valeur minimale pour la fréquence de commutation fmin qui assure le mode de
conduction continue.
Si la valeur de fréquence de commutation f et la valeur de l’inductance L désirées sont
établies, alors il existe une valeur minimale pour la résistance de la charge qui assure le
mode de conduction continue.

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.12
1.4.3. Mode de conduction discontinue
Dans le cas du mode de conduction discontinue, le courant à travers l’inductance s’annule
pendant L’intervalle toff . Les formes d’ondes des courants et tensions sont représentées sur la
figure 1.12 [x3].
Fig. 1.12 : Forme d’ondes des tensions et courants en MCD
Dans ce cas, la tension de sortie est donnée par :
On peut voir que l’expression de la tension de sortie est bien plus compliquée que celle
obtenue en MCC. En effet, la tension de sortie dépend non seulement de la tension d’entrée
et du rapport cyclique D, mais aussi de la valeur de l’inductance L, de la période de
commutation T et du courant de sortie. Par conséquent, il est plus intéressant de faire
fonctionner le convertisseur en MCC.
Dans les deux modes, le convertisseur est caractérisé par un courant d’entrée discontinu, ce
qui implique une perturbation harmonique dans la source de puissance.
CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.13
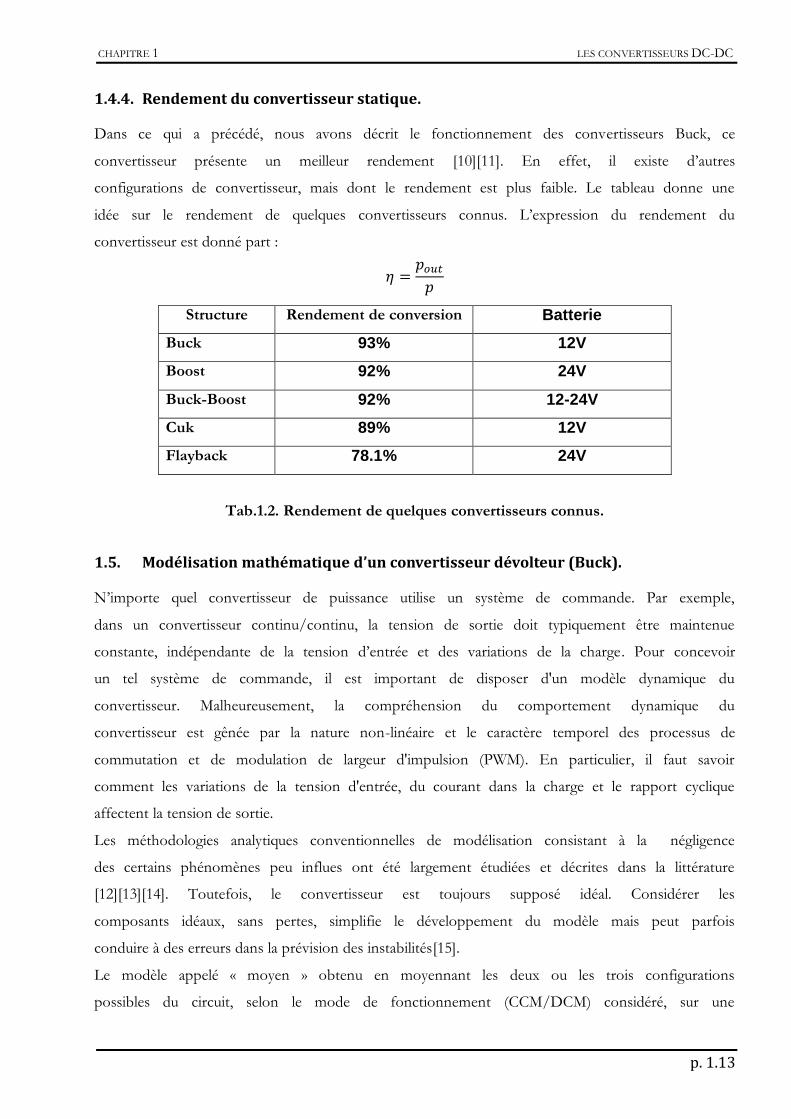
1.4.4. Rendement du convertisseur statique.
Dans ce qui a précédé, nous avons décrit le fonctionnement des convertisseurs Buck, ce
convertisseur présente un meilleur rendement [10][11]. En effet, il existe d’autres
configurations de convertisseur, mais dont le rendement est plus faible. Le tableau donne une
idée sur le rendement de quelques convertisseurs connus. L’expression du rendement du
convertisseur est donné part :
Structure Rendement de conversion Batterie
Buck 93% 12V
Boost 92% 24V
Buck-Boost 92% 12-24V
Cuk 89% 12V
Flayback 78.1% 24V
Tab.1.2. Rendement de quelques convertisseurs connus.
1.5. Modélisation mathématique d’un convertisseur dévolteur (Buck).
N’importe quel convertisseur de puissance utilise un système de commande. Par exemple,
dans un convertisseur continu/continu, la tension de sortie doit typiquement être maintenue
constante, indépendante de la tension d’entrée et des variations de la charge. Pour concevoir
un tel système de commande, il est important de disposer d'un modèle dynamique du
convertisseur. Malheureusement, la compréhension du comportement dynamique du
convertisseur est gênée par la nature non-linéaire et le caractère temporel des processus de
commutation et de modulation de largeur d'impulsion (PWM). En particulier, il faut savoir
comment les variations de la tension d'entrée, du courant dans la charge et le rapport cyclique
affectent la tension de sortie.
Les méthodologies analytiques conventionnelles de modélisation consistant à la négligence
des certains phénomènes peu influes ont été largement étudiées et décrites dans la littérature
[12][13][14]. Toutefois, le convertisseur est toujours supposé idéal. Considérer les
composants idéaux, sans pertes, simplifie le développement du modèle mais peut parfois
conduire à des erreurs dans la prévision des instabilités[15].
Le modèle appelé « moyen » obtenu en moyennant les deux ou les trois configurations
possibles du circuit, selon le mode de fonctionnement (CCM/DCM) considéré, sur une

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.14
période de découpage. Chaque configuration du circuit d’un convertisseur est représentée par
un modèle linéaire à temps continu. Les expressions mathématiques des dynamiques
continues sont obtenues en appliquant les lois de Kirchhoff qui décrivent le comportement
du convertisseur dans chacune des configurations. Le vecteur d’état des différents modèles
est composé par les courants et les tensions des éléments réactifs du circuit qui représentent
l’énergie emmagasinée (tels que les inductances et les condensateurs), et l’entrée des modèles
est donnée par la tension d’alimentation Vin et la grandeur de commande correspondant au
rapport cyclique d.
Dans ce qui vient on va modéliser le convertisseur dévolteur tenant en considération toutes
les pertes inhérentes aux éléments du circuit électrique pour améliorer la précision du
modèle; celle-ci consiste habituellement à manipuler des expressions mathématiques
complexes [16].
1.5.1. Modèle moyen de convertisseur dévolteur (Buck) avec pertes inclus.
La figure 1.13 présente le circuit de base équivalent d’un convertisseur dévolteur.
Fig. 1.13. Circuit équivalent de convertisseur dévolteur (Buck) avec les pertes inhérentes aux
éléments du circuit électrique.
1.5.1.1. En mode de conduction continu.
En mode de conduction continue (CCM), en fonction de la position de l’interrupteur noté
M, il existe deux états du circuit associés aux positions fermée et ouverte, représentés dans
l’espace d’état par les dynamiques suivantes :

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.15
1 1
1 1
_ :in
in
x A x BVM fermé
y C x EV
(1.38)
2 2
2 2
_ :in
in
x A x B VM ouvert
y C x E V
(1.39)
Le modèle moyen global prend une expression de la forme :
(1.40)
Avec :
1 2
1 2
1 2
1 2
A(d)= A d + A (1- d)
B(d)= B d + B (1- d)
C(d)= C d +C (1- d)
E(d)= E d + E (1- d)
(1.41)
Le domaine de validité de la modélisation par modèle moyen donnée par les équations (1.40)-
(1.41) est donné par la condition suivante : la fréquence de commutation du convertisseur est
beaucoup plus importante que la limite haute du domaine de validité.
. (1.42)
Dans les équations de notre modèle, [ Li cv ]T représente le vecteur d’état du modèle,[V0 i0 ]
T est la sortie
et Vin correspond à la tension d’entrée.
Quand l’interrupteur M se trouve dans la position fermée, la diode est bloquée. Lorsque l’interrupteur
passe en position ouvert, la diode se met en conduction. Donc, dans le mode de conduction continue,
les états de l’interrupteur et de la diode sont complémentaires.
1- Lorsque (u=1) l’interrupteur M se trouve dans la position fermée et D est ouvert Le
circuit équivalent d’hacheur abaisseur est comme suit :
Où u est l'état de commutation, lorsque u = 1, l'interrupteur M est fermé, et lorsque u = 0, M
est ouvert
Fig. 1.14. Schéma de convertisseur abaisseur (Buck), lorsque M est à l’état ON.
I0
CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.16
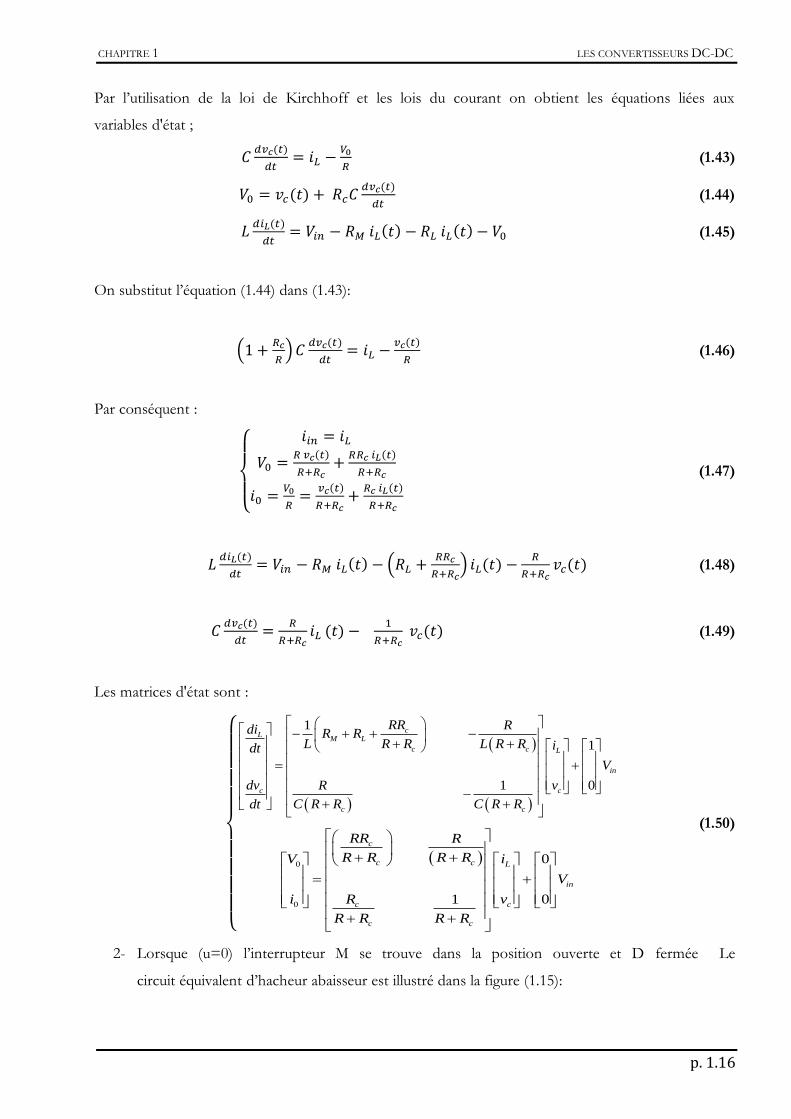
Par l’utilisation de la loi de Kirchhoff et les lois du courant on obtient les équations liées aux
variables d'état ;
(1.43)
(1.44)
(1.45)
On substitut l’équation (1.44) dans (1.43):
(
)
(1.46)
Par conséquent :
(1.47)
(
)
(1.48)
(1.49)
Les matrices d'état sont :
1
1
1
0
cL
M L
c c
c
c c
L
in
c
RR Rdi R RL R R L R Rdt
dv R
C R R C R Rd
i
V
v
t
0
0
1
0
0
c
c c
c
c
in
c
L
c
RR R
R R R R
R
R R
V i
V
i
R
v
R
(1.50)
2- Lorsque (u=0) l’interrupteur M se trouve dans la position ouverte et D fermée Le
circuit équivalent d’hacheur abaisseur est illustré dans la figure (1.15):

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.17
Fig. 1.15. Schéma de convertisseur abaisseur (Buck), lorsque M est à l’état OFF.
De même façon les équations différentielles qui présentent le modèle d’états dans ce cas sont :
(1.51)
(
)
(1.52)
(1.53)
Les matrices d'état sont :
1
1
0
0 0
cL
L
c c
D
L
cc
c
in
c
V
i
RR Rdi RL R R L R Rdt
dv R
C R R C R Rd
L
t
V
v
0
0
1
0
0
L
i
c
c c
c
n
c
c
c
RR R
R R R R
R
R R R
i
R
V
V
i v
(1.54)
Le modèle moyen est fourni par la moyenne des représentations linéaires (1.50), (1.54)
mentionnés précédemment et suivant l’équation (1.40) on peut écrire le modèle global
comme:
1
1
1( )
0 0
cL
L
c c
c
MD D
L
i
c c
n
c
RR Rdi RL R R L R Rdt
dv R
C R R C R
1R u u (V -uV )i L L
-
d
V
Rt
v
0
0
1
0
0
L
i
c
c c
c
n
c
c
c
RR R
R R R R
R
R R R
i
R
V
V
i v
(1.55)
Iin
I0
CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.18
Lorsque la fréquence de commutation f est assez élevée et les ondulations sont petites, si
nous supposons que le rapport cyclique d'une période de commutation est d, alors le modèle
moyenne d'espace d'état peut être réécrite comme[17].
1
1
1( )
0 0
cL
L
c c
c
MD D
L
i
c c
n
c
RR Rdi RL R R L R Rdt
dv R
C R R C R
1R d d (V - dV )i L L
-
d
V
Rt
v
0
0
1
0
0
L
i
c
c c
c
n
c
c
c
RR R
R R R R
R
R R R
i
R
V
V
i v
(1.56)
On note que le rapport cyclique d devient l’une des entrées du modèle moyen au même titre
que la tension d’alimentation Vin. Cette nouvelle entrée représente également la commande
du système qui est utilisée afin de piloter la sortie y. Donc on peut récrire le modèle global
comme:
1
1
1( )
0
DL c
in D M L
L
cL
L
c c
c
cc
c
RR Rdi RL R R L R Rdt
dv R
C R R C R Rdt
Vi v V V R iL L
d
i v
0
0
1
c
c c
c
L
c
c c
RR R
R R R R
R
R R R R
V i
i v
(1.57)
Le modèle moyen obtenu (1.57) est un modèle non-linéaire, et plus précisément bilinéaire, en
raison du produit entre le vecteur d’état x et le signal de commande d. Cependant, une
dynamique linéaire peut être obtenue en linéarisant le modèle (1.57) autour d’un point de
fonctionnement souhaité en régime permanent, mais le but de notre travail est le
développement des lois de commande non conventionnelles donc on s’occupe seulement au
le modèle non-linéaire donné par l’équation (1.57).
Si on considère que le convertisseur est idéal et les commutateurs M et D sans pertes ( cR =
LR =0, et MR = DV =0) le modèle du convertisseur dévolteur devient comme suit:
CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.19
1
10
1 0
inL
c
L
c
di
dt L
dv
C CR
i
d
v
d
L
t
V
0
0
10
0 1 0
0
L
c
i
i v
R
V
d
(1.58)
1.5.1.2. En mode de conduction discontinue.
Le circuit est décrit par trois configurations différentes. Les deux premières sont identiques
avec les configurations mentionnées en CCM, tandis que la troisième configuration apparait
si la diode devient bloquée durant le temps que l’interrupteur est dans la position ouverte, à la
fin de la période de découpage. Par conséquent, en fonction de l’état passant ou bloqué de
ces deux éléments on a trois dynamiques linéaires différentes caractérisant le comportement
dynamique du convertisseur :
_
_
M fermé
D blouqée
1 1
1 1
in
in
x A x BV
y C x EV
(1.59)
M_ouvert
D_passante2 2
2 2
in
in
x A x B V
y C x E V
(1.60)
_
_
M ouvert
D blouqée3 3
3 3
in
in
x A x B V
y C x E V
(1.61)
Dans ce mode de conduction, la moyenne des modèles (1.59)-(1.61) est faite avec le rapport
cyclique d1 = d (donné par la fraction de la période de commutation où l’interrupteur est
dans la position fermé), d2 (déterminé par la partie de la période de commutation où
l’interrupteur est ouvert et le courant par l’inductance est positif) et d3=1-d1-d2 (la partie de la
période T où le courant s’annule lorsque l’interrupteur reste dans la position ouverte).= Les
deux variables d2 et d3 ont des expressions algébriques dépendantes de la valeur du rapport
cyclique d1 , des paramètres du circuit, de la tension d’alimentation Vin et celle de sortie V0 .
Ainsi, tout en gardant l’hypothèse (1.42), le modèle moyen bilinéaire en DCM [18] présente la
dynamique suivante :
CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.20
(1.62)
Avec :
1,1 2
1 2
1 2
1 2
A(d)= A d + A (1- d) d d
B(d)= B d + B (1- d)
C(d)= C d +C (1- d)
E(d)= E d + E (1- d)
(1.63)
Également, le modèle moyen peut être linéarisé autour d’une point de fonctionnement, mais
le but de notre travail est le développement des lois de commande non conventionnelles,
donc on s’intéresse seulement au modèle non-linéaire donné par l’équation (1.57).
1.6. Conception d’un convertisseur dévolteur.
Le cahier des charges que nous nous sommes imposé est le suivant :
Ondulation du courant dans l’inductance L : iL= 40mA.
Ondulation de la tension aux bornes du condensateur C : vc = 1mV.
Fréquence de commutation : f = 100kHz.
.
Le choix d’une fréquence de commutation de 100kHz a été motivé par les raisons suivantes :
Plus la fréquence de commutation est grande, moins est grande la taille des composants
réactifs utilisés (capacités et inductance). Autrement dit, la densité de puissance est plus
élevée.
Le retard de la sortie par rapport à l’entrée qui est dû au temps de commutation est faib le
(10us).
Détermination des valeurs de L et C :
Le choix des éléments se fait en considérant que le convertisseur est en MCC. Dans la
section (1.4.1) précédent, nous avons vu les expressions permettant de déterminer les valeurs
de l’inductance L et de la capacité du condensateur C. Afin de respecter la condition sur
l’ondulation du courant de l’inductance imposée par le cahier des charges, l’inductance doit
être supérieure à une certaine valeur donnée par l’expression (1.64).

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.21
En pratique, la valeur de l’inductance choisie doit être au moins 20% supérieure que la valeur
calculée en théorie. Par conséquent, la valeur de l’inductance qu’on utilisera sera de L =
1000uH.
Pour respecter la condition sur l’ondulation de la tension de sortie, la capacité du
condensateur C doit vérifier l’expression (1.65) :
En ajoutant une tolérance de 20% sur la valeur de la capacité, on obtient C = 600 uF. La
valeur que nous utiliserons est 1000 uF.
L’expression (1.66) représente la fréquence de coupure du filtre du 2_eme ordre formé par
l’inductance et le condensateur :
√
La fréquence de coupure est très inférieure à la fréquence de commutation, ce qui respecte la
condition vue au paragraphe (1.4.1.c).
La valeur minimale de l’inductance qui assure le MCC est donnée par l’expression
(1.67).
Si on suppose que :
On résume les paramètres de convertisseur dévolteur(Buck) dans le tableau suivant :
Tab.1.3. Paramètres d’un convertisseur dévolteur(Buck).
Vin 10V
R 10-2.5Ω
L 1 mH (MCSCH895-102KU)[19].
RL 1.8 Ω[19].
C 1000uF, ( PCG1A102MCL1GS)Aluminum, High Temperature, Low
ESR[20].
RC 13 mΩ [20].
RM 0.27Ω
VD 0.82V

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.22
1.7. Test en boucle ouverte.
Deux tests ont été réalisés pour étudier le comportement du modèle obtenu en utilisant les
représentations dans l’espace d’état: une variation simple du rapport cyclique d en boucle ouverte.
Un point de fonctionnement a été choisi pour les essais avec les valeurs Vin = 10V, D = 0,5
et R = 10Ω.La variation de d a été effectuée par une transition 0,5 - 0,6 - 0,5.
Et on a fait une comparaison entre le modèle de circuit moyen bilinéaire obtenu dans les
équations sans pertes (1.58), avec pertes (1.57) et même modèle (1.57) en commutation
(MLI), (circuit implémenté avec Simulink).
Fig. 1.16. Circuit du convertisseur dévolteur implémenté avec Matlab/Simulink.
Fig.1.17. Réponses transitoires des modèles développés en boucle ouverte.

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.23
Comme nous avons mentionné plut tôt, lorsque la fréquence est assez élevée on peut
considérer le signal de commande d comme un signal continu[17]. Nous présentons dans la
figure (1.17) une comparaison entre les réponses transitoires du modèle moyen avec et sans
pertes de d continu à ceux des modèles en commutation. On remarque que les oscillations
présentent fortement à cause d’absence des résistances internes qui jouent le rôle
d’amortisseurs par contre dans l’autre modèle on constate que les osculations sont réduites
due à la présence des résistances internes.
Les réponses des deux modèles sont différentes au régime permanent (écart> 8%). Il y a
aussi une forte différence dans le temps du premier maximum et l’amortissement de la phase
transitoire. Cette différence se traduit par la puissance dissipé dans les éléments passives du
circuit électrique[21].
Fig. 1.18(a). Variation de la tension de sortie en fonction du rapport cyclique en boucle ouverte.
Fig. 1.18(b). Variation du rapport cyclique.

CHAPITRE 1 LES CONVERTISSEURS DC-DC
p. 1.24
La variation du rapport cyclique est montrée dans la Fig. 1.18.b. à cause de la croissance du
rapport cyclique de 0.5 au 0.6 à t=0.04s la tension de sortie augmente de 8.7V jusqu’à 10.57V
et ensuite revienne à 8.7V à t=0.06s puisque D devient 0.5. Généralement notre modèle
montre un comportement proche des convertisseurs réels. Bien que l'ajout des résistances
provoque des pertes énergétiques indésirables dans les éléments électroniques utilisées qui
affectent le rendement du convertisseur mais grâce aux lois de commande on peut ré-
augmenter le rendement.
1.8. Conclusion
Dans ce chapitre, nous avons entamé la partie la plus importante et la plus délicate de cette
étude, qui est le comportement du convertisseur de puissance (DC/DC). Dans un premier
temps, le comportement non linéaire des convertisseurs dévolteur (Buck) est précisément
analysé afin de mieux comprendre et choisir des lois de commande. Ces dernières sont
déterminées selon les exigences pour atteindre certains niveaux de performances (précision,
rapidité, insensibilité aux bruits, ...) et de robustesse exprimés par le cahier des charges.
Nous estimons que ce modèle reflète suffisamment le comportement souhaité. Il est alors
utilisé pour étudier et synthétiser des lois de commande par des approches détaillées dans les
prochains chapitres.
CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.25
Chapitre 2
COMMANDE PAR MODE GLISSANT ET
SYNERGETIQUE
2.1. Introduction
Dans ce chapitre on s’intéresse à deux lois de commandes : le mode glissant et synergétique ainsi qu’au
principe de chacune. L’application à un convertisseur dévolteur est ensuite abordée ainsi que la
discussion des résultats obtenus et les avantages et les inconvénients de chaque commande. Enfin on
présentera une étude comparative entre les deux commandes proposées.
2.2. Principes généraux de la commande par mode glissant
La commande par mode glissant (Sliding Mode Control, SMC) est un contrôle de type non
linéaire qui a été introduit pour le contrôle des systèmes à structure variable (comme les
convertisseurs statique) et il se base sur le concept de changement de structure du contrôleur
avec l’état du système afin d’obtenir une réponse désirée. La commande par mode glissant est
donc du type tout ou rien.
Dans ce type de commande, l'état du système définit la position de l'organe de commande.
L'idée est de diviser l'espace d'état par une frontière de décision appelée surface de glissement
cette hypersurface étant une relation entre les variables d'état du système, elle définit une
équation différentielle, et donc détermine totalement la dynamique du système, pourvu qu'il
reste sur elle.
Autrement dit, l’objectif est d’arriver à l’état de référence, une fois que l’état du système
atteint la surface de glissement (Figure 2.1), le système se trouve en régime glissant. Sa
dynamique est alors insensible aux perturbations extérieures et les variations paramétriques
tant que les conditions du régime glissant sont assurées [22][23].
Premièrement, pour atteindre cet objectif, il faut assurer l’attractivité de la surface de
glissement. En d’autre terme il faut que l’état du système dans n’importe quelle position de
l’espace d’état se dirige vers la surface de glissement.
Deuxièmement, une fois la surface atteinte, il faut assurer le glissement le long de cette surface
et la stabilité du système, pour rejoindre la référence. Pour cela, il faut trouver la condition

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.26
sous laquelle la dynamique du système glisse sur la surface vers l’état de référence désiré,
Figure 2.1.
Fig. 2.1. Plan de phases en mode glissant.
2.2.1. Synthèse de la surface de glissement
Supposons que l'objectif de commande est d'assurer une poursuite de trajectoire d'un signal
de référence par la sortie y Y R donc de faire tendre l'erreur dy y vers 0. La
synthèse de la surface de glissement repose sur la définition de la variable de glissement :
Soit → une fonction suffisamment différentiable et considérée comme
une sortie fictive du système (2.1) ( sous forme canonique de Brunovsky) telle que son
annulation permette de satisfaire l'objectif de commande. La fonction s(x,t) est appelée
variable de glissement ou de commutation.
[ ] [ ]
Où [ ] , représente l'état du système avec X un ouvert de Rn, u U,
compact de R, est l'entrée de commande qui est une fonction éventuellement discontinue
dépendante de l'état et du temps. Ψ(x, t), la dynamique nominale du système, est une fonction
Condition d’existence
𝑥
Région d’attractivité
Région de stabilité
𝑥
𝑆 𝑆 >
𝑆 <

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.27
définie sur X. [-C, C] est un terme additif inconnu, mais borné par C > 0 modélisant
notamment
La différence entre les valeurs théoriques et réelles de paramètres mal connus du
modèle,
Les phénomènes non modélisés ou négligés, à partir du moment où ils ne font pas varier
le degré relatif du système (ici égal à l'ordre du système, vu que l'on ne s'intéresse pas à la
dynamique des zéros)
Les perturbations extérieures.
[ ], avec 0 < ≤ <∞ est un terme modélisant l'incertitude sur le gain du système vis
à vis de la commande. L'incertitude sur sa connaissance provient en pratique essentiellement
de paramètres mal connus ou de phénomènes négligés, bien que ces derniers aient souvent
une autre conséquence (le chattering) [24].
L'ensemble (2.2) représente alors une sous-variété de X de dimension (n-1) appelée surface
de glissement ou contrainte de commutation. La définition classique du phénomène
d'évolution en régime glissant est donnée par.
Définition 2.1. [22] On dit qu'il existe un régime glissant idéal sur S s'il existe un temps fini
ts tel que la solution de (2.1) satisfait s(x; t) = 0 pour tout t ≥ ts .
Quand les trajectoires du système (2.1) évoluent sur la surface de glissement S, sa dynamique
est dite immergée dans l'état d'un système autonome de dimension inférieure de 1 à sa propre
dimension. Ce système autonome est appelé système réduit et sa dynamique est entièrement
déterminée par le choix de la surface de glissement. La surface la plus simple est un
hyperplan passant par l'origine de l'espace d'état, autrement dit, une surface linéaire en
chacune des variables d'état. Le système réduit est donc dans ce cas un système linéaire. S'il
est stable, sa convergence vers l'objectif final, l'origine du pan de phase, est nécessairement
exponentielle (sauf si le système réduit est d'ordre 0).
Pour obtenir d'autres propriétés, il faut choisir une structure de la surface de glissement
différente, plus complexe.[24].
Une condition nécessaire pour l'établissement d'un régime glissant est que la variable de
glissement ait un degré relatif égal à 1 par rapport à la commande u [22],(le degré relatif d'un
système est le nombre minimum de fois qu'il faut dériver la sortie par rapport au temps pour
faire apparaître l'entrée de manière explicite [25]). Considérons la variable de glissement
linéaire suivante.
Où et les coefficients .

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.28
Soit un polynôme d'Hurwitz, c.à.d. que le système réduit soit stable, puisque l'équation différentielle associée est
Ainsi, lorsque la variable de glissement s(x,t) est forcée à zéro, l'erreur de poursuite e
converge asymptotiquement vers zéro, avec une dynamique imposée par le choix des
coefficients ci. Cette dynamique peut être réglée par n'importe quelle méthode de placement
de pôles appropriée.
De plus, s(x, t) satisfait la condition sur le degré relatif puisque la commande u apparaît dans
l'expression de sa première dérivée par rapport au temps
[ ] [ ]
∑
Une fois la surface de glissement (c.à.d. la dynamique du système réduit) choisie, la seconde
étape consiste à choisir une commande stabilisant en zéro le système (2.5) en temps fini,
malgré les incertitudes et perturbations. Ainsi, le problème de poursuite de trajectoire d'ordre
n pour un système non linéaire SISO est ramené au problème de la stabilisation du système
du premier ordre (2.5) en zéro.
2.2.2. Conditions de convergence et d’existence (stabilité)
Les conditions d’existence et de convergence sont les critères qui permettent aux différentes
dynamiques du système de converger vers la surface de glissement et d’y demeurer,
indépendamment de la perturbation.
2.2.2.1. Fonction de commutation :
Cette approche est la plus ancienne. Elle est proposée et étudiée par Elmyanov et Utkin [26]
[27]. Il s’agit de donner à la surface une dynamique convergente vers zéro. Elle est donnée
par:
> <
< >
Cette condition peut être formulée comme suit:
<
Elle est globale mais ne garantit pas en revanche un temps d’accès fini.
Cette condition est toutefois difficile à utiliser pour faire la synthèse de la loi de commande,
particulièrement dans le cas d’un système multi-entrées.

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.29
2.2.2.2. Fonction de Lyapunov
La fonction de Lyapunov est une fonction scalaire positive > pour les variables
d’état du système. La loi de commande doit faire décroître cette fonction < . l’idée est
de choisir une fonction scalaire s(x) pour garantir l’attraction de la variable à contrôler vers sa
valeur de référence et de concevoir une commande u telle que le carré de la surface
correspond à une fonction de Lyapunov.
Nous définissons la fonction de Lyapunov comme suit:
Cette fonction est définie positive de manière évidente et sa dérivée est:
Pour que la fonction V(x) puisse décroître, il suffit d’assurer que sa dérivée soit négative.
Ceci n’est vérifiée que si la condition (2.6) est vérifiée.
L’équation (2.8) explique que le carré de la distance entre un point donné du plan de phase et
la surface de glissement exprime par diminue tout le temps, contraignant la trajectoire du
système à se diriger vers la surface à partir des deux côtés de cette dernière. Cette condition
suppose un régime glissant idéal ou la fréquence de commutation est infinie[27].
L’inégalité (2.7) est appelée condition d'attractivité qui n'est pas suffisante pour assurer une
convergence en temps fini vers la surface. Pour assurer une convergence de s(x,t) vers 0 en
temps fini, une condition plus forte doit être respectée. Dans le cas des modes glissants
classiques, on utilise généralement la condition d'attractivité non-linéaire dite condition de 𝜂-
attractivité [22].
𝜂
2.2.3. Synthèse de la loi de commande.
Une fois la surface de glissement choisi, ainsi le critère de convergence, il reste à déterminer
la condition d’attractivité, qu’il est nécessaire pour ramener la variable à contrôler vers la
surface et maintenir l'évolution du système sur elle s(x,t) = 0, ensuite vers son point
d’équilibre.
Dans ce qui vient on va montrer de différentes méthodes de la synthèse de structure
variables (SSV).

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.30
Méthode de Philippov [28][27]:
L’une des premières approches est la méthode de Philippov. Cette approche est basée sur les
résultats des travaux effectués par ce dernier sur les équations différentielles à second
membre discontinu. Il propose une loi de commande qui prend deux valeurs suivant le signe
de la surface de glissement :
>
<
Les valeurs exactes de sont choisies afin qu’une condition d’accès soit
vérifiée. C’est à dire telle que la trajectoire d´état atteigne la surface de commutation s(x)=0
en un temps fini.
Méthode d’ Utkin : commande équivalente [27][29]:
Plusieurs méthodes d’approche ont été utilisées pour décrire le mode de glissement lorsque la
trajectoire du système atteint la surface de glissement (s(x) = 0). Dans ce paragraphe, la
méthode adoptée est celle d’UTKIN connue sous le nom de commande équivalente. Cette
méthode décrit la dynamique du système sur la surface de glissement. Elle permet de garder
la variable contrôlée sur cette surface en imposant la valeur désirée en régime permanent de
la grandeur d’entrée. Pour un système contrôlé donné, la première étape pour la réalisation
d’une structure de régulation par ajout de la commande équivalente consiste à trouver un
vecteur d’entrée équivalent Ueq
de sorte que la trajectoire d’état du système à contrôler reste
sur la surface de glissement prédéfinie. Une fois la commande équivalente déterminée, la
dynamique du système peut être décrite par la substitution de Ueq
dans l’équation d’état. En se
basant sur la méthode d’Utkin, le calcul de la commande équivalente s’effectue en prenant en
considération les conditions d’invariances suivantes :
La commande équivalente est une fonction continue qui sert à maintenir la variable à
contrôler sur la surface de glissement elle est déduite en considérant que la surface
est nulle et donc .Elle peut être interpréter comme étant un retour d’état
particulier jouant le rôle d’un signal de commande appliquée sur le système à commander.
Elle peut être aussi interpréter autrement comme étant une valeur moyenne que prend la
commande lors de la commutation rapide entre les valeurs et [30].
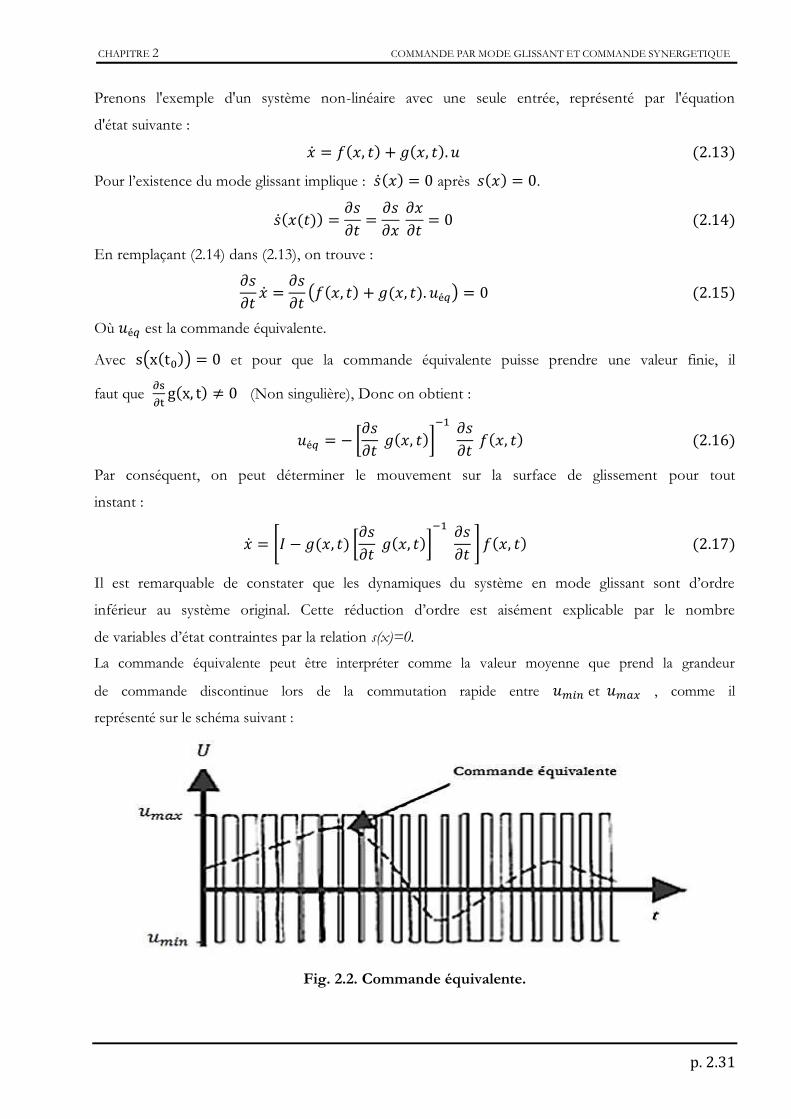
CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.31
Prenons l'exemple d'un système non-linéaire avec une seule entrée, représenté par l'équation
d'état suivante :
Pour l’existence du mode glissant implique : après .
En remplaçant (2.14) dans (2.13), on trouve :
( )
Où est la commande équivalente.
Avec ( ) et pour que la commande équivalente puisse prendre une valeur finie, il
faut que
(Non singulière), Donc on obtient :
[
]
Par conséquent, on peut déterminer le mouvement sur la surface de glissement pour tout
instant :
* [
]
+
Il est remarquable de constater que les dynamiques du système en mode glissant sont d’ordre
inférieur au système original. Cette réduction d’ordre est aisément explicable par le nombre
de variables d’état contraintes par la relation s(x)=0.
La commande équivalente peut être interpréter comme la valeur moyenne que prend la grandeur
de commande discontinue lors de la commutation rapide entre et , comme il
représenté sur le schéma suivant :
Fig. 2.2. Commande équivalente.

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.32
Ainsi, la commande équivalente est déduite à partir des conditions d’invariances données par
(2.12). Cette commande permet d’assurer que la trajectoire de la grandeur contrôlée reste sur
sa surface de glissement. Cependant, cette commande n’assure pas le contrôle en dehors de la
surface de glissement. C’est pourquoi, il faut ajouter une nouvelle condition pour que l’état
du système tende vers cette surface et l’atteigne. Cette nouvelle condition est la condition
d’attractivité. Elle est développée dans[31][32][33].
2.3. Synthèse de commande du convertisseur dévolteur par mode glissant.
Prenons le modèle bilinéaire du convertisseur dévolteur d’ordre 2 représenté par l'équation d'état (1.57)
développé dans le chapitre précédent,
1
1
1( )
0
DL c
in D M L
L
cL
L
c c
c
cc
c
RR Rdi RL R R L R Rdt
dv R
C R R C R Rdt
Vi v V V R iL L
d
i v
0
c
L
c
c
c
iRR R
R R R RV
v
Lorsqu’on suppose que les variables d’états du système sont :
Et la matrice P définit comme suite :
c
c c
RR R
R R R R
Alors le modèle d'état du système devient comme suite :
Comme nous avons mentionné précédemment que La synthèse d'une loi de commande par
modes glissants consiste donc à déterminer :
une hypersurface en fonction des objectifs de commande et des propriétés statiques et
dynamiques désirées pour le système bouclé
une loi de commande discontinue de manière à contraindre les trajectoires d'état du

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.33
système à atteindre cette hypersurface en temps fini puis à y rester en dépit des
incertitudes et des perturbations.
2.3.1. Choix de la surface.
La surface S(x) représente le comportement dynamique désiré du système, et la surface qui nous avons
supposée est comme suite[34].
∫
Avec :
Sont des constants positives représentent le régime souhaité.
2.3.2. Détermination de la commande.
Premièrement Pour résumer, le comportement du système peut être décrit par deux phases :
1- Phase de convergence. Cette phase correspond à l'intervalle de temps t [0, ts]
pendant lequel les trajectoires d'état du système ne sont pas dans la surface de
glissement S. Durant cette phase, le système reste sensible aux variations de
paramètres. Sa durée peut être réduite en augmentant 𝜂 c.à.d. en augmentant
l'amplitude de la commande.
La commande discontinue correspondante dans cette phase Par exemple, on peut prendre la
fonction sign :
>
<
2- Phase de glissement. Cette phase correspond à l'intervalle de temps t [ts, [durant laquelle
les trajectoires d'état sont confinées dans la surface de glissement S. Durant cette phase, le
comportement du système ne dépend plus du système d'origine ni des perturbations, mais est
entièrement déterminé par le choix de la surface de glissement. La commande correspondante
dans cette phase qui assure l’existence sur la surface de glissement est la commande équivalente
qui elle est déduit en considérant que la surface est nulle et donc .
Partir de l’équitation (2.22) on a

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.34
⇒
⇒
On remplace par , et de l’équation (2.19) on obtient :
⇒
(
)
Une classe de fonctions de Lyapunov classique pour la détermination des conditions
d'attractivité et de stabilité est celle des fonctions quadratiques du type :
Pour que la fonction de Lyapunov décroisse il suffit de s’assurer que sa dérivée soit négative .Ceci est
vérifié par < , on peut dire que le système est stable.
[( )]
On remplace d, Le contrôleur de mode glissant obtenu dans l’équation (2.27) dans (2.26) :
(
)
On obtient :
( )
Alors la stabilité est garantie et (2.29) est satisfaite.
2.3.3. Phénomène de chattering.
Un régime glissant idéal requiert une commande pouvant commuter à une fréquence infinie.
Évidemment, pour une utilisation pratique, seule une commutation à une fréquence finie est
possible, ce qui cause un retard entre la mesure de la sortie et le calcul de la commande, qui
peut être amplifié si le système présente naturellement des retards ou des dynamiques
négligées. Cela conduit le système à quitter la surface de glissement sans que la commande ne

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.35
puisse réagir, puis, une fois le signe de la commande inversé, à revenir sur cette surface et
passer de l'autre côté, et ainsi de suite.
Ainsi, durant le régime glissant, les discontinuités appliquées à la commande peuvent
entraîner des oscillations haute fréquence de la trajectoire du système autour de la surface de
glissement, un phénomène appelé broutement ou chattering en anglais. Les principales
raisons à l'origine de ce phénomène sont [35] :
les retards purs en série avec le système en boucle ouverte (retards inhérents au système,
échantillonnage,. . .),
les dynamiques non modélisées des capteurs et observateurs, qui retardent le moment où
le régulateur prend conscience qu'il faut inverser la commande,
les dynamiques non modélisées des actionneurs et autres dynamiques rapides du système,
qui retardent le moment où la commande est suffisamment forte pour rapprocher le
système de la surface de glissement.
Tous ces phénomènes ont globalement l'effet de retarder l'application effective de la
commande permettant de ramener le système sur la surface de glissement à partir du moment
où il l'a quittée.
On parle aussi de chattering pour désigner l'oscillation haute fréquence de la commande (et
non plus de la variable de glissement). Une autre cause de chattering, notamment sur la
commande, est le bruit de mesure. En effet, une erreur de mesure quand l'état est très proche
de la surface de glissement peut entraîner une erreur de signe de la commande, car cette
dernière croit à tort que le système se trouve de l'autre côté de la surface. Ce phénomène est
amplifié par la nécessité d'avoir des observateurs ou dérivateurs rapides, donc filtrant peu la
mesure.
Les phénomènes de chattering peuvent être si pénalisants que l'utilisation d'une loi de
commande par modes glissants peut, dans certaines applications, être à proscrire, vu que son
utilisation peut dégrader les performances, voire conduire à l'instabilité à cause du chattering
sur la sortie. Le chattering de la commande, quant à lui, peut entraîner une usure prématurée
des actionneurs ou de certaines parties du système à cause de trop fortes sollicitations.
En excitant les modes propres des dynamiques non modélisées ou des fréquences de
résonance du système correspondant aux retards de commutation, cette commande peut
provoquer sur les systèmes mécaniques un bruit haute fréquence et des oscillations
préjudiciables à leur structure. Sur des systèmes autres que mécaniques, les oscillations
engendrées peuvent poser d'autres problèmes (réduction de précision, créations d'ondes
électromagnétiques néfastes, ou autres ondes amplifiées par le système,...), et comme solution

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.36
de ce problème le remplacement de la fonction sign par des autres fonctions proposé par
des nombreuses des chercheures nous donne des meilleures réponses, telle que la fonction sat
et d’autres indiquées dans la section suivant.
2.3.4. Remplacement de la fonction ‘’sign’’ par une fonction continue
De nombreuses solutions ont été proposées dans le but de réduire ou d'éliminer ce
phénomène. Il existe des méthodes comme celle de la couche limite (boundary layer ) qui
consiste à remplacer la fonction « sign » de la loi de commande par une approximation
continue à gain élevé dans un proche voisinage de S [36][29], et saturée en dehors de ce
voisinage. Le régime glissant qui en résulte n'est plus confiné dans S, mais dans un proche
voisinage de celui-ci. Dans ce cas, le système est dit en régime pseudo-glissant.
Ces méthodes réduisent la robustesse de la commande. Elles sont paramétrées par une
constante positive réglée pour avoir un bon compromis entre réduction du chattering et
conservation de la robustesse. Dans les méthodes présentées ici, plus est petit, plus
l'approximation tend vers la fonction sign, et donc meilleure est la robustesse, au détriment
de la réduction du chattering. Les 2 fonctions les plus utilisées sont :
Fonction saturation. Cela consiste à remplacer la fonction sign(s) par la droite de pente
1/ à l'intérieur d'une bande de largeur située de part et d'autre de la surface de
glissement, la discontinuité étant conservée à l'extérieur de cette bande. Son expression est
donnée par :
, >
Et représentée avec = 1 sur la figure ci-contre.
Fonction sign + saturation. On peut combiner la fonction saturation précédente avec la
fonction sign.
>
Avec a > 0, b > 0
Et (a+b) ne dépassant pas l'amplitude maximale de la commande.
Elle est représentée avec , (a+b) = 1 et b = 0.3 sur la figure ci-contre.
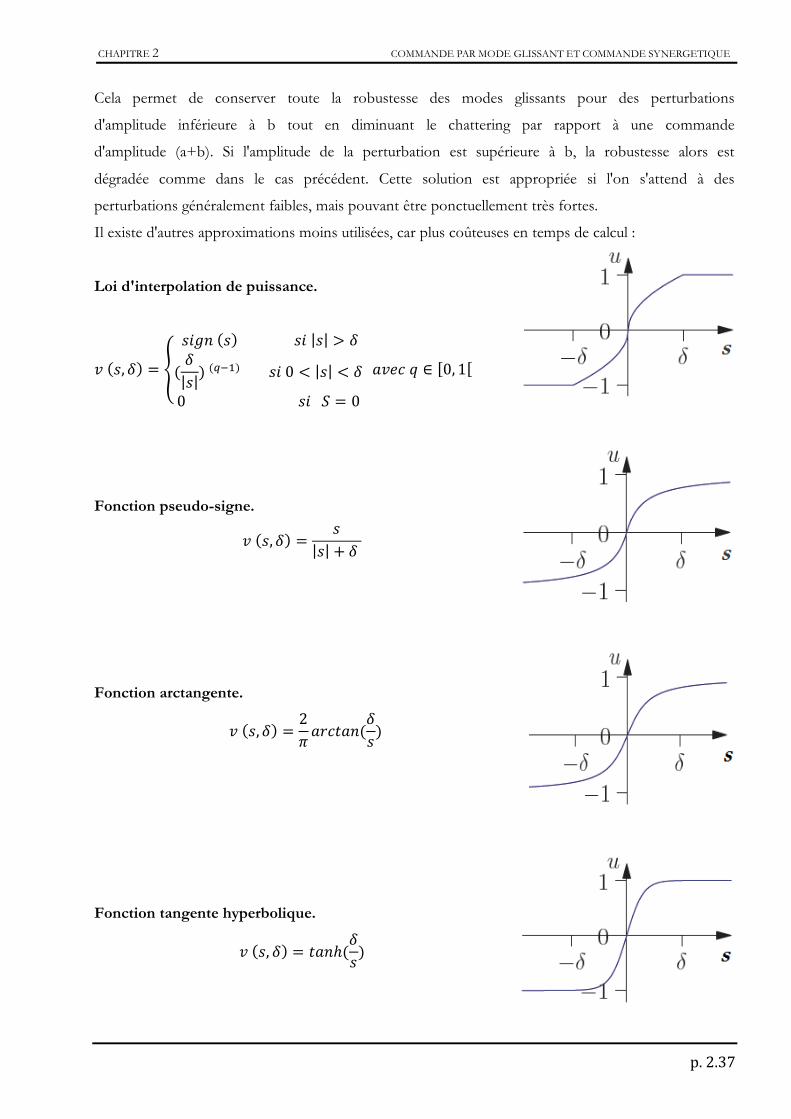
CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.37
Cela permet de conserver toute la robustesse des modes glissants pour des perturbations
d'amplitude inférieure à b tout en diminuant le chattering par rapport à une commande
d'amplitude (a+b). Si l'amplitude de la perturbation est supérieure à b, la robustesse alors est
dégradée comme dans le cas précédent. Cette solution est appropriée si l'on s'attend à des
perturbations généralement faibles, mais pouvant être ponctuellement très fortes.
Il existe d'autres approximations moins utilisées, car plus coûteuses en temps de calcul :
Loi d'interpolation de puissance.
>
< <
[ [
Fonction pseudo-signe.
Fonction arctangente.
Fonction tangente hyperbolique.

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.38
2.4. Commande synergétique.
La commande synergétique est une technique de contrôle assez proche de la commande par mode
glissant dans le sens où l’on force le système considéré à évoluer avec une dynamique pré-choisie par le
concepteur. Elle en diffère dans le fait que la commande y est toujours continue et utilise une macro-
variable qui peut être fonction de deux ou plusieurs variables d’état du système.
Ces deux techniques partagent les propriétés de la réduction de l’ordre et du découplage mais
contrairement au mode glissant (SMC) la commande synergétique convient à
l’implémentation car n’exigeant pas une trop grand bande passante du signal de commande
[37]. Son avantage primordial est que la loi de commande est continue contrairement à celle
utilisée en mode glissant et n’induit donc aucun problème de broutement, désavantage
majeur de la commande SMC limitant son implémentation hard sur des applications
pratiques [34].
2.4.1. Principe de la commande synergétique.
La théorie de commande synergétique a été introduite la première fois d'une façon générale
par les chercheurs russes dans les dernières années[38]. Récemment cette théorie a été
appliquée avec succès dans le domaine des commandes de l'électronique de puissance. Son
application à un convertisseur élévateur a été présentée dans [34], et quelques aspects
pratiques concernant la simulation et le hardware ont été discutés dans [37][39],et parmi les
applications pratiques réussies figure le chargeur de batteries [40].
Cette nouvelle approche ne requiert pas la linéarisation du modèle et emploie explicitement
un modèle non linéaire pour la synthèse de la commande.
La synthèse de la commande synergétique dans le cas général est passée en revue dans la
section suivante.
2.4.2. Synthèse de la commande synergétique.
Considérons le système dynamique non-linéaire SISO de dimension n qui peut être décrit par
l'équation non linéaire suivante :
Où x représente le vecteur d'état du système et u représente le vecteur de commande.
La synthèse du contrôleur synergétique débute par la définition d’une macro-variable par le
concepteur, pour réaliser le cahier des charges et prendre en charge d’éventuelles contraintes

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.39
de contrôle, qui est donnée comme suit.
Où est la macro-variable et ( , )x t est une fonction définie par l'utilisateur, en général
fonction des variables d'état et du temps. L’objectif de la commande synergétique est de
forcer le système à évoluer sur le domaine choisit au préalable par le concepteur :
Les caractéristiques de la macro-variable peuvent être choisies par le concepteur, selon les
paramètres tels que l'objectif de commande, le temps de réponse, limitations de la
commande, etc.… La macro-variable peut être une combinaison linéaire simple des variables
d'état, et elle est forcée d’évoluer d'une façon désirée exprimée par une contrainte choisie par
le concepteur comme indiquée en exemple par l’équation suivante :
>
Où T est un paramètre de contrôle qui indique la vitesse de convergence du système en
boucle fermé vers le domaine indiqué.
En tenant compte de la chaînes de la différentiation qui est donnée par
La substitution de (2.30) et de (2.31) dans (2.33) permet d’écrire :
En résolvant (2.35) pour u, la loi de commande peut être trouvée comme :
De (2.36), on peut voir que la commande dépend non seulement des variables d'état du
système, mais également de la macro-variable et de la constante de temps choisies T. En
d'autres termes, le concepteur peut choisir les caractéristiques du contrôleur en choisissant
une macro-variable appropriée et une constante de temps spécifique T. En synthétisant le
contrôleur, chaque domaine présente une nouvelle contrainte sur le domaine de l'espace
d'état et réduit l'ordre du système d’un degré, tout en allant dans la direction de la stabilité
globale. Dans la synthèse du contrôleur synergétique montré ci-dessus, il est clair que le
contrôleur synergétique agit sur le système non-linéaire et une linéarisation ou une
simplification du modèle n’est pas nécessaire comme lors de l'application de la théorie de
commande traditionnelle.
Par le choix approprié des macro-variables, le concepteur peut obtenir les caractéristiques

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.40
intéressantes suivantes pour le système final [41]:
Stabilité globale
Insensibilité vis-à-vis les paramètres
Suppression de bruit.
Il est intéressant de noter que la loi de la commande synergétique garantit la stabilité globale
sur le domaine choisi. Ceci signifie qu'une fois que l’hypersurface est atteinte le système n'est
pas supposé la quitter, même en cas d’assez grandes variations des paramètres. Cette
propriété d’invariance aux perturbations est partagée par la technique de commande en mode
glissant lors du glissement des trajectoires sur la surface de glissement. Un exemple
d’application est donné dans la section suivante afin d’illustrer la simulation de la mise en
œuvre du contrôle synergétique.
2.4.3. Conception de la commande synergétique :
Dans cette application on utilisera la commande synergétique, commande robuste appropriée
aux convertisseurs statiques (dévolteur).
Le comportement dynamique de ce convertisseur est décrit par un modèle non linéaire
détaillé dans le chapitre précédent qu’il nécessite une commande robuste et rapide en
régime transitoire. Cette commande doit être insensible et stable à la variation de courant de
charge. Ces caractéristiques attendues de la commande peuvent être réalisées par une
synthèse fondée sur la technique de contrôle synergétique[37].
Il y’a des nombreuse des chercheurs choisissent le principe de la structure en cascade pour
définir la macro-variable [34][42][41]. Ce principe est justifié par le fait que la dynamique du
courant est plus rapide que celle de la tension de sortie [43].
Cette structure présente des inconvénients liés au fait que le contrôleur synergétique pilote d’une
manière indirecte la tension. Ceci affecte les performances du contrôle en termes de robustesse et de
réponse dynamique. En réalité, dans la structure en cascade, le courant de référence peut être déduit
soit à l’aide d’un correcteur PID soit directement à l’aide des mesures du courant de charge et de la
tension d’entrée. Dans le premier cas, il est difficile de trouver une méthode standard pour calculer les
valeurs des gains du PID, puisque le contrôleur synergétique est non-linéaire[41][44]. Dans les deux cas,
la valeur de courant de référence risque d’être mal estimée. C’est pour ces raisons qu’on propose
d’étudier un mode de contrôle basé sur une macro-variable faisant intervenir toutes les variables d’état.

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.41
2.4.3.1. Choix de la macro-variable.
L’objectif de la commande est de réguler la tension de la sortie V0 à une tension de référence
Vref. On peut choisir mais pour ce choix on ne peut pas garantir la réduction
de l’erreur statique, Afin d'éliminer ce dernier un terme d’intégrale de l’erreur est ajoutée à la
définition de macro-variable. Ce terme doit être limité pour éviter le problème de (Windup)
et l'interférence avec la commande synergétique[34]. Le macro-variable choisie est définie
comme[45].
∫
Où
Sont des constants positives représentent le régime souhaité.
2.4.4. Loi de commande synergétique.
Pour la synthèse du contrôleur, nous employons le modèle de moyenne bilinéaire du
convertisseur buck, les équations d’états du convertisseur sont obtenues dans (2.19), comme
suite:
0 1d
Où
c
c c
RR R
R R R R
Où x1 représente le courant de l'inducteur, x2 la tension de condensateur, et d le rapport
cyclique. Notre objectif est d'obtenir une loi de commande d(x1, x2) en fonction des variables
d'état x1, x2, qui fournit les valeurs exigées de la tension de rendement du convertisseur
V0=Vref, , la limitation sur le rapport cyclique dans (2.38) devant aussi être satisfaite. Nous
employons le procédé décrit ci-dessus pour trouver d(x1, x2) qui porter le système à la
réponse désirée.
La substitution de de (2.37) dans (2.33) permet d'écrire:
( ) ∫
Et

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.42
Maintenant, substituant les dérivés V0 de (2.38) dans (2.39) donnant la loi de commande
suivante :
⇒
(
)
La loi de commande (2.40) force la trajectoire des variables d'état à satisfaire (2.38).
Selon cette équation, le système converge vers la macro-variable 0 avec une constante
de temps T et y demeure durant toute la période. Ainsi, à partir de ce moment-là, la
trajectoire d'état satisfait (2.41).
( ) ∫( )
Et la stabilité est garantie selon la fonction de Lyapunov
et l’équation (2.33) qui
nous donnent
⇒ .
En se déplaçant sur cette macro-variable, la trajectoire converge vers l'état d'équilibre du
convertisseur: .Une interprétation géométrique de la loi de commande dans le
plan de phase est montrée dans la figure.2.3.
2.5. Résultats de simulation.
On détermine les paramètres des deux contrôleurs qui jouent un rôle très important dans les
résultats de simulation, où l'état initial de ce système est [ ] . La tension de référence
est Vref=5V, Les paramètres principaux utilisés dans la conception des deux contrôleurs sont
ajustées par simulation en tenant compte les critères suivants :
Rapidité de la réponse sans dépassement important.
La réduction de l’amplitude des oscillations.
Réduction de l’erreur statique.
𝑒
Fig. 2.3. Plan de phase.
Pente= 𝛼

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.43
Fig.2.5. Signal de commande d.
Fig.2.4. Tension de sortie Vo.
Fig.2.6. Courant d’inductance iL(A).

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.44
2.6. Synthèse des commandes améliorées :
2.6.1. Mode glissant amélioré.
Comme nous avons mentionné dans section (2.3.4), on peut remplacer la fonction sign par la fonction
tangente hyperbolique pour améliorer la réponse et minimiser le problème de chattering qui est bien
claire dans les figures (2.4) et (2.5). La commande devient comme suite :
(
)
2.6.2. Commande synergétique améliorée.
En ce qui concerne la loi de commande synergétique, l’exemple du cas précédent illustre
clairement sa synthèse.
Il est bien sur possible d’améliorer les performances réalisées en introduisant des définitions
de macro-variable plus complexe qui permettront de mettre en application des lois de
commandes améliorées en utilisant la même procédé décrit ci-dessus. Dans la partie suivante
de ce travail quelques cas seront présentés en détail et les performances évaluées à l’aide de
simulation.
Un problème classique concerne l'imposition d'une limite sur l'une des variables d'état, par
exemple, la limitation du courant d'entrée maximal, dans notre cas ce phénomène apparaitre
dans la première phase où l’interrupteur est fermée, la dynamique du système dans cette
phase est lié à la valeur du constant de temps T comme a été illustrer dans la figure (2.7).
Fig.2.7.Plan de phase pour différentes valeurs de T.
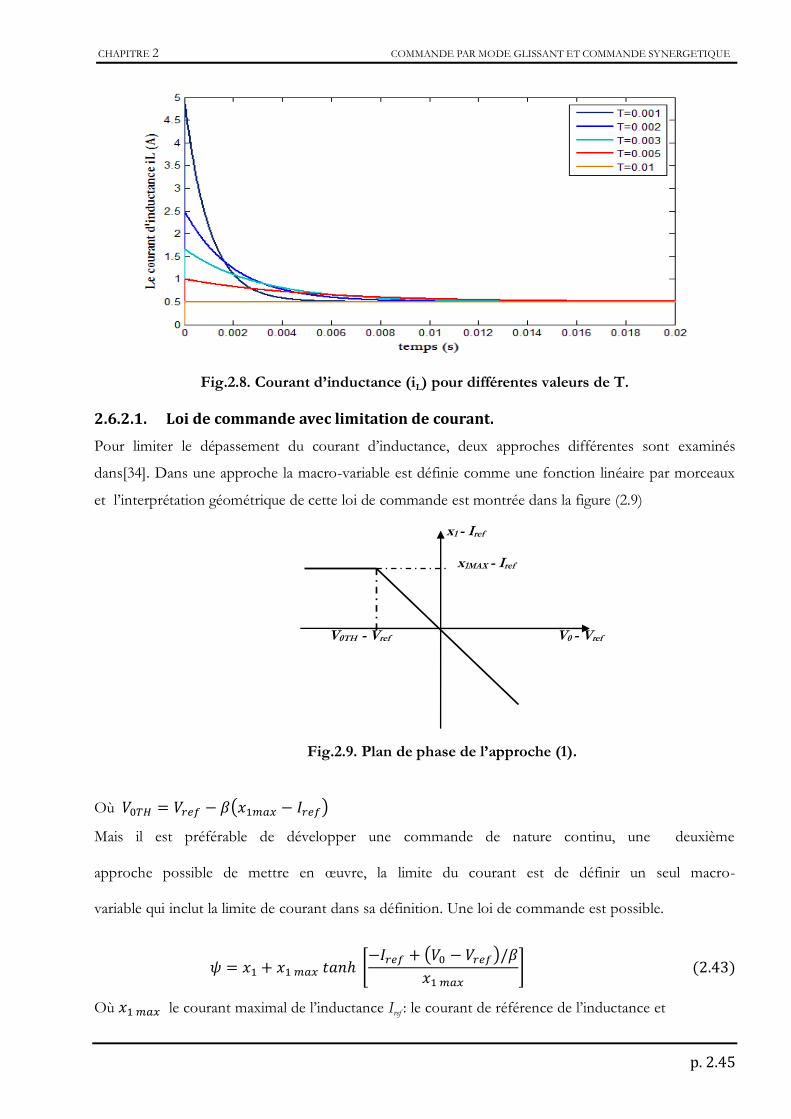
CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.45
Fig.2.8. Courant d’inductance (iL) pour différentes valeurs de T.
2.6.2.1. Loi de commande avec limitation de courant.
Pour limiter le dépassement du courant d’inductance, deux approches différentes sont examinés
dans[34]. Dans une approche la macro-variable est définie comme une fonction linéaire par morceaux
et l’interprétation géométrique de cette loi de commande est montrée dans la figure (2.9)
Où ( )
Mais il est préférable de développer une commande de nature continu, une deuxième
approche possible de mettre en œuvre, la limite du courant est de définir un seul macro-
variable qui inclut la limite de courant dans sa définition. Une loi de commande est possible.
* ( )
+
Où le courant maximal de l’inductance Iref : le courant de référence de l’inductance et
V0 - Vref
x1 - Iref
x1MAX - Iref
V0TH - Vref
Fig.2.9. Plan de phase de l’approche (1).

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.46
: Constant positive.
Cette nouvelle définition permettra de déterminer un nouveau manifold où le courant x1 est
naturellement limité par la fonction tangente hyperbolique de la plage de ± chaque
fois que l'état du système est sur le manifold. Une interprétation géométrique de la loi de
commande est représentée sur la Figure. (2.10).
En utilisant le même procédé décrit ci-dessus on obtient :
(
)
Où
1 Dc
L
c
c
c
L
Vi
RR RR
L R L Rv
LR R
1
( )in D M L
V V R iL
c
c c
RR R
R R R R
* ( )
+
2.6.3. Loi d'adaptation dynamique des paramètres de commande.
Le choix de la valeur du paramètre de commande k (SMC) et β (SYC) dans la définition de la
surface de glissement et la macro variable affecte la sortie : pendant le régime transitoire une
valeur relativement grande de k et β est souhaitable. D'une part, une petite valeur est
souhaitable pendant le régime permanant, parce que ceci réduit l'erreur statique de la tension
de sortie comme expliqué dans[42][34].
𝑥 𝑚𝑎𝑥 𝐼𝑟𝑒𝑓
𝑥 𝑉𝑟𝑒𝑓
𝑥 𝐼𝑟𝑒𝑓
𝑥 𝑚𝑎𝑥 𝐼𝑟𝑒𝑓
Fig.2.10. Plan de phase de l’approche (2).

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.47
De tout ça on ajuste dynamiquement les valeurs k et β en fonction de l'erreur de tension de
sortie, réduisant k, β quand l'erreur de tension de sortie est petite. Basé sur cette
considération k, β peut être choisi comme suit :
Fig. 2.11. Interprétation géométrique d'adaptation du paramètre β.
2.6.4. Résultats de simulation des commandes améliorées.
Fig.2.12. Tension de sortie Vo (SMC améliorée)

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.48
Pour T=0.002 s et x1max =0.8A.
Fig.2.13. Signal de commande d, (SMC amélioré).
Fig.2.14. Courant d’inductance iL (A), (SYC améliorée).
Fig.2.15. Signal de commande d, (SYC améliorée).
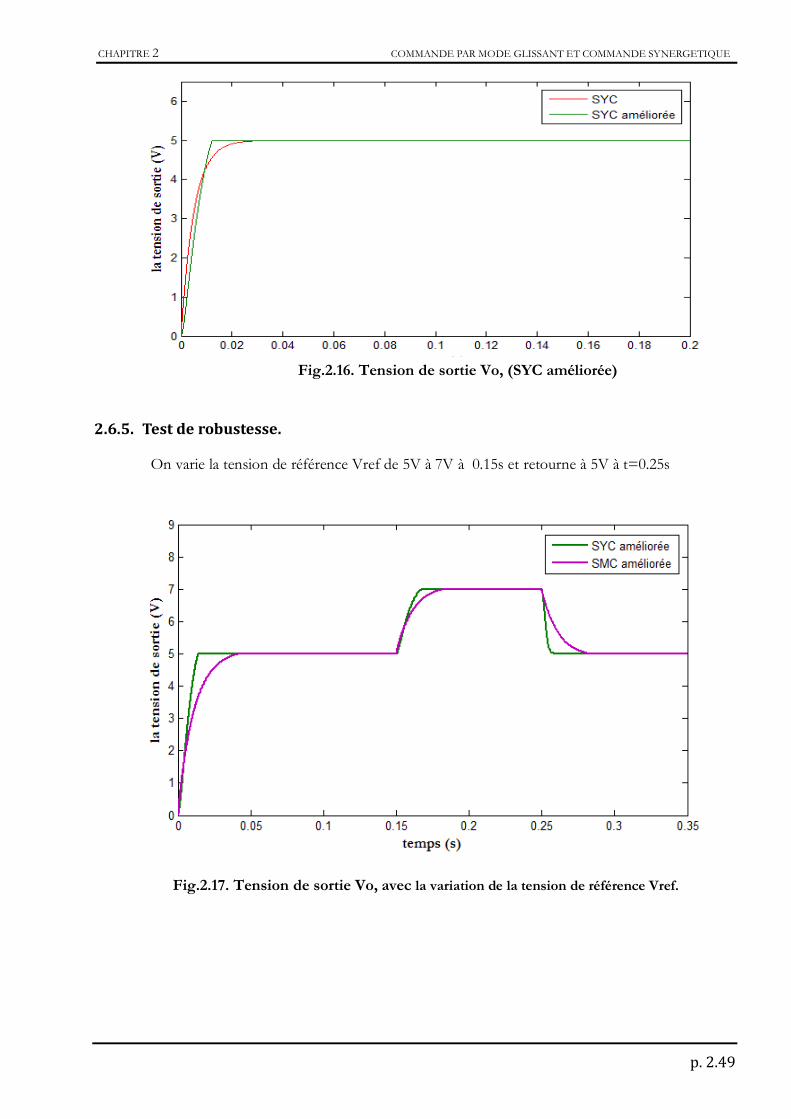
CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.49
2.6.5. Test de robustesse.
On varie la tension de référence Vref de 5V à 7V à 0.15s et retourne à 5V à t=0.25s
Fig.2.16. Tension de sortie Vo, (SYC améliorée)
Fig.2.17. Tension de sortie Vo, avec la variation de la tension de référence Vref.
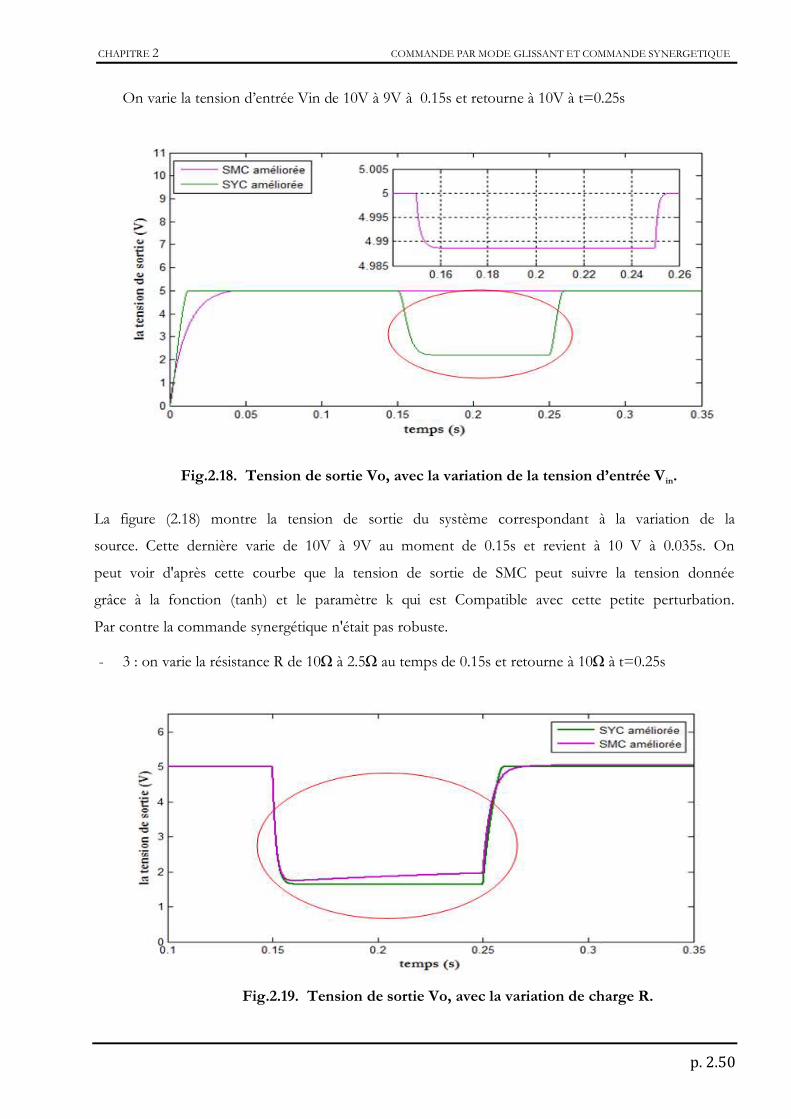
CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.50
On varie la tension d’entrée Vin de 10V à 9V à 0.15s et retourne à 10V à t=0.25s
La figure (2.18) montre la tension de sortie du système correspondant à la variation de la
source. Cette dernière varie de 10V à 9V au moment de 0.15s et revient à 10 V à 0.035s. On
peut voir d'après cette courbe que la tension de sortie de SMC peut suivre la tension donnée
grâce à la fonction (tanh) et le paramètre k qui est Compatible avec cette petite perturbation.
Par contre la commande synergétique n'était pas robuste.
- 3 : on varie la résistance R de 10Ω à 2.5Ω au temps de 0.15s et retourne à 10Ω à t=0.25s
Fig.2.19. Tension de sortie Vo, avec la variation de charge R.
Fig.2.18. Tension de sortie Vo, avec la variation de la tension d’entrée Vin.

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.51
La figure (2.19) montre la réponse du système à la fluctuation de la charge correspondante. La
résistance varie de 10Ω -2.5Ω à 0.15s et revient à 10 Ω à 0.25s. A partir de ces courbes, on peut voir les
mauvaises performances de poursuite.
La raison pour laquelle les deux commande ne peuvent suivre la référence c’est que on a étudié la
stabilité de chaque commande sans prendre en considération les perturbations et les incertitudes, Pour
cela, on rencontre des problèmes lors du changement de R et Vin Comme représenté dans fig. (2.18),
(2.19), Cela est dû à la sélection mauvaise et non étudié des paramètres k (SMC) et T (SYC), c'est ce que
nous allons discuter dans le paragraphe suivant.
De l'observation de la dynamique (2.19), il existe généralement des incertitudes paramétriques dans les
composants L, C, R., nous supposons que les fonctions dynamiques f (·) et g (·) peuvent être divisées
en une partie nominale et une partie inconnue sous la forme suivante:
Où et des incertitudes; et sont les parties nominales de et . et et satisfont :
Où , ≠ 0; la partie incertain de est supposée être supérieure borné par une fonction
positive F et α> 0.
Donc
( (
)
)
Pendant tout le temps, K> 0 déterminé dans ce qui suit.
En substituant la loi de commande au-dessus en la dynamique (2.26), le système en boucle
fermée est obtenu ci-dessous:
(
( (
)
) )
(( ) (
)( (
)
) ( (
)
) )

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.52
(( ) (
)( (
)
) )
A partir de la fonction de Lyapunov (2.32).
On a :
(( ) (
)( (
)
) )
𝜂 ( 𝜂 | ( (
)
) |)
𝜂 ( 𝜂 | ( (
)
) |)
On choisit
> 𝜂 | ((
)
)|
Donc
𝜂
Lorsque K suit l’inégalité (2.56), on peut garantir la stabilité malgré qu’on a pris en considération les
incertitudes de modélisation du notre système.
De même façon on peut poser des conditions sur le constant T de la commande synergétique
⇒
(
)
( ) (
) ( )
A partir de la fonction de Lyapunov suivante:
⇒
(( ) )
|( ) |

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.53
𝜂 (
𝜂 | ( ) |)
Donc
> 𝜂 | ( ) |
Pour atteindre ces conditions, nous devons prendre une très grande valeur de (K) et trop
petit valeur de T pour assurer la stabilité de chaque commande malgré l’existence des
perturbations.
Par exemple on prend: k=3.105, T=5.10-4.
Fig.2.20. Réponse du système avec SMC avec la variation de R et k=3.105
Fig.2.21. Réponse du système avec SYC avec la variation de R et T=5.10-4

CHAPITRE 2 COMMANDE PAR MODE GLISSANT ET COMMANDE SYNERGETIQUE
p. 2.54
Avec les grandes valeurs de k (SMC), on rencontre deux problèmes qui sont : le problème de
chattering apparaît malgré l’amélioration, et le dépassement inacceptable dans le courant
d’inductance (iL) au régime transitoire comme montrée dans la figure (2.20).
Nous avons essayé d'éviter ce dernier avec la commande synergétique par le choix d’un
manifold (2.43) qui assure la limitation du courant (il), mais on rencontre un autre défi qui est
à chaque fois on change la résistance R ou Vref on doit changer le courant de référence qu’il
n'est pas toujours facile.
2.7. Conclusion
A partir notre étude approfondie dans ce chapitre on a conclu que Les deux commande
synergique et commande par mode glissant ont le même but de forcer le système à
fonctionner sur le manifold (S,ψ)= 0.
La commande par mode glissant est robuste et ne se base pas fortement sur le modèle du système
contrairement à la commande synergétique mais elle a l’inconvenant de chattering qui présente un
grand problème à l’implémentation numérique [37].
La commande synergétique nous a permis d’éviter ce problème en outre, elle est moins sensible au bruit
à haute fréquence et impose un comportement dynamique bien contrôlée hors de manifold selon
l'équation. (2.33). mais malheureusement on constate une diminution de robustesse car sa sensibilité
aux écarts entre les paramètres du modèle et du système physique.
A première vue, la solution de ce dernier est l’utilisation d'observateurs sophistiqués pour la
détermination des paramètres du système mais cette solution n'est raisonnable que; si le coût de la
commande n'est pas un obstacle important. (Par exemple, des applications de haute puissance ou haute
tension).
Donc on s'oriente vers les commandes adaptatives, et on remarque aussi que le temps de réponse de
ces deux commandes est un peu grand, donc ce problème fait appel aux commandes à temps fini ce
que nous abordons dans les sections suivantes.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.55
Chapitre 03
COMMANDE ADAPTATIVE FLOUE TERMINALE
3. Introduction
Dans ce chapitre, nous introduisons la théorie de la commande terminale dans le but de
minimiser le temps de convergence. Nous allons dans un premier volet exposer les
fondements et les principes de cette approche avec les commandes par mode glissant et
synergétique. Pour ensuite on inclut les lois d’adaptation. On utilisera les systèmes flous de
type-1 pour approximer la dynamique des systèmes non linéaires inconnus. La stabilité du
système en boucle fermé est assurée par la synthèse de Lyapunov au sens que tous les
signaux soient bornés et les paramètres du contrôleur ajustés par une loi d’adaptation munie
d’un algorithme de projection suivi les résultats de simulation afin de valider notre approche
et finalement la comparaison entre les commandes AFTSM et AFTSYC.
4. Conception du contrôleur synergétique terminal.
Maintenant, le concept d'attraction terminal est inclus ici et synthétisé avec la commande
synergétique pour construire le schéma TSYC proposé.
Tout d'abord, nous introduisons le concept de la TSYC. On définit l'erreur e(t) = Vref –V0 et on choisit
la surface de terminal synergétique comme suite:
( ) ( )
Ou x1 et x2 sont les variable d’états du système défini dans (3.3) et
α > 0, β > 0, p et q sont des constants impaires positives telle que
.
Cette surface nous assure que la sortie du système atteint la référence dans un temps fini
montré dans l’expression suivante.
( ) (
| ( )|
) ( )

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.56
Mais avec le modèle complet de convertisseur dévolteur (1.57), il est très difficile de calculer
la commande à cause de la présence du dérivé deuxième de l’erreur dans l’expression de .
Pour cela nous avons décidé d’utiliser le modèle simple (1.58) pour déterminer la commande,
Ce choix est logique et acceptable Considérant toutes les pertes inhérentes aux éléments du
circuit électrique comme des incertitudes de modélisation.
On écrit le modèle (1.58) sous forme canonique par le choix de la tension de sortie et sa
dérivée comme des variables d’états :
( )
Donc le modèle d’état (1.58) récrire comme suit :
⇒
( ) ( ) ( )
En utilisant l'approche synergétique, l'équation (2.33) peut être exprimée comme suit:
. /
( ) ( )
L’utilisation de l’eq (3.4) et (3.5) nous donne la loi de commande suivante :
( )(
. / ( )) ( )
Pour justifier la stabilité de système de commande, on utilise la fonction de Lyapunov
suivante.
( )
La dérivation de l'équation (3.7) nous donne :
( ) [
.
/ ( ) ( ) ] ( )
( ) [
( )]
( )

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.57
L’équation (3.9) est toujours inferieur ou égale à zéro. Ce qu’il fait que la stabilité est garantie
mais seulement si n’existe aucune perturbation et l’erreur de modélisation est égal à zéro.
Généralement en réalité ces conditions ne sont pas vérifiées ce qui introduit un terme
additionnelle dans l’expression de .
| | ( )
Ou ( ) ( )
Pour éviter ce problème, on s'oriente vers la commande adaptative floue pour estimer les fonctions non
linéaire f et g de notre système.
3.3. Introduction aux systèmes flous
On appelle système flou tout système utilisant des ensembles flous et la structure
correspondante pour donner une formulation mathématique afin de relier la sortie du
système à son entrée.
3.3.1. Rappel sur les systèmes flous type-1
La structure d’une commande floue type-1 est présentée en figure (3.1) .Elle est composée de
quatre blocs distincts dont les définitions sont données ci-dessous[46] .
Fig.3.1. Structure d’un contrôleur flou.
Sortie
Ordinaire
Ensembles flous
d’entrée
Entrée
ordinaire Fuzzification
Base de Règles
Inférence
defuzzification
Ensembles flous de
sortie

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.58
3.3.1.1. Ensembles Flous
Soit X un espace de points (objets) dont l’élément générateur est noté par x, c.-à-d., X =x.
Un ensemble flou A dans X est un ensemble défini par sa fonction d’appartenance µA (x) qui
associe à chaque point dans X un nombre réel appartenant à l’intervalle [0 1], [47][48]:
( ) → , - ( )
Ce nombre réel représente le degré d’appartenance de x dans A. Alors, plus le degré
d’appartenance est proche de l’unité, plus l’élément x appartient à A. Si la valeur de la
fonction d’appartenance est égale à l’unité, on dit que x appartient complètement à
l’ensemble A. Si elle est égale à zéro, on dit que x n’appartient pas à A, et si elle est entre 0 et
1, on dit donc que x appartient partiellement à l’ensemble flou A :
( )
- ,
( )
3.3.1.2. Fonctions d’appartenance
Dans un domaine discret * + ou continu X, un ensemble flou A peut
être défini par un ensemble de pairs : degré d’appartenance / élément :
( ) ( ) ( ) ∑ ( )
∫ ( )
Dans un domaine continu, les ensembles flous sont définis analytiquement par leurs fonctions
d’appartenance.
Nous trouvons dans la littérature des formes variées pour les fonctions d’appartenance floues
[49][50][51].
Fonction d’appartenance trapézoïdale
( ) ( (
)) ( )
Où a, b, c et d sont les coordonnées des apex du trapèze. Si b = c, nous obtenons une
fonction d’appartenance triangulaire.
( )

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.59
Fonction d’appartenance exponentielle par morceaux
( )
. ( ) /
( ( )
)
( )
Où et sont les limites gauche et droite, respectivement ; et , sont les largeurs
gauche et droite, respectivement. Pour et la fonction d’appartenance
gaussienne est obtenue.
Fonction d’appartenance gaussienne
( ) ( ( ) ) ( )
Où est le centre de la gaussienne et sa largeur.
Fonction d’appartenance singleton
( )
( )
La figure 3.2 illustre des exemples sur les différentes formes des fonctions d’appartenance.
Fig.3.2. Différentes formes des fonctions d’appartenance.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.60
3.3.1.3. Base de règles.
On regroupe dans ce bloc, d’existence virtuelle, l’ensemble des définitions utilisé dans la
théorie des ensembles flous (univers de discours, variables linguistique, choix des
opérateurs…), ainsi que la base de règles, se transcrit sous forme de règles « SI…ALORS… »
De la stratégie de la commande de l’expert [52][53].
3.3.1.4. Fuzzification.
La fuzzification consiste à définir pour chacun des entrées réelles, les degrés d’appartenance
relativement à chacune de ses fonctions d’appartenance. On obtient ainsi pour chaque
variable réelle un ensemble de variables floues [54]
3.3.1.4.1. Inférence
L’étape d’inférence réalisée par un moteur d’inférence (cerveau du contrôleur flou) associe les
variables de sorties floues aux variables d’entrées floues à l’aide des règles d’application.
Parmi les méthodes d’inférence les plus utilisées, on cite : [54]
Méthode d’inférence max-min
Cette méthode réalise l’opérateur OU par la formation du maximum et l’opérateur ET par la
fonction min, la conclusion « Alors » de chaque règle par la fonction min.
Méthode d’inférence max-prod
La différence entre cette méthode et la méthode précédente réside dans le fait qu’Alors
est obtenu par la formation du produit.
3.3.1.5. Défuzzification
Défuzzification est la procédure inverse de la fuzzification. Elle consiste à convertir la valeur
d’une variable floue en une valeur numérique. Les méthodes les plus couramment utilisées
sont : [54]
La méthode de centre de gravité.
La méthode de maximum.
La méthode de surface.
3.3.2. Approximation par les systèmes flous type-1 :
L’ensemble du système flou avec la fuzzification singleton, la Défuzzification par centre de
gravité et le produit d’inférence sont des fonctions : nf U de la forme suivante
[55] :

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.61
1
1
1
1
( )
( )
( )
li
li
Mn
iF
Mn
iF
l
il
il
x
y x
x
y
( )
Où 1.........T
nx x x U le vecteur d’entrée, y représente les centres des fonctions
d’appartenance des conséquences, ( )i il
xF
correspond à la fonction d’appartenance de
l’entrée i
x de la règle l, et la conjonction ‘ET’ dans les prémisses, est réalisées par le produit.
Le système flou (3.18) peut être réécrit sous la forme suivante[56]:
( ) ( )Ty x x ( )
Où 1( , ... , )M Ty y est un vecteur de paramètres et 1( ) ( ( ), ... , ( ))M Tx x x est un
vecteur régressif avec le régresseur ( )l x (fonction floue de base) défini comme :
1
11
( )( )
( )
li
li
n
iFil
Mn
iFil
xx
x
( )
Avec des fonctions d’appartenance gaussiennes, le système représenté par (3.18) peut être
écrit sous la forme suivante :
2
11
2
11
1exp
2
( )
1exp
2
lMnl i i
lil i
lMn i i
lil i
x xy
y x
x x
( )
Ou les paramètres , 0l l l
i iy x et sont des paramètres réglables, avec
l
ix sont les centres
des gaussiennes et l
i leurs écarts type.
Il a été prouvé par Wang dans [57] que ces systèmes (3.21) sont des approximateurs
universels, capables d’approximer toute fonction réelle continue sur un ensemble compact U
avec une précision arbitraire donnée.
Ce résultat empirique a été justifié par des études théorique récentes [58][59][57].

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.62
3.3.2.1. Théorème de l’approximation universelle [57]
Soit une fonction non linéaire continue g(x) définie sur un intervalle bornée X et une
constante arbitraire ε, alors il existe un système flou f de la forme (3.18) tel que :
| ( ) ( )| ( )
Le théorème d’approximation universelle veut dire, que si on choisit proprement le nombre
de règles et les paramètres du système flou, on peut approcher n’importe quelle fonction non
linéaire continue sur un espace borné avec la précision voulue. Ainsi on peut écrire :
( ) ( ) ( )
Ainsi, la fonction non linéaire g(x) peut être représentée par un système flou et une certaine
erreur x appelée erreur minimale d’approximation, dont l’amplitude dépend de la précision
d’approximation.
3.4. Commande adaptative floue directe et indirecte
Les régulateurs adaptatifs flous sont classés en deux catégories [60]:
3.4.1. Commande adaptative floue directe (auto-ajustable)
La loi de commande est directement approximée par un ou plusieurs systèmes adaptatifs
flous. La structure de cette commande est montrée sur la figure (3.3).
Fig. 3.3. Commande adaptative floue directe.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.63
3.4.2. Commande adaptative floue indirecte (par modèle de référence MRAC)
Dans cette méthode on approxime d’abord le modèle du processus par des systèmes
adaptatifs flous puis on synthétise la loi de commande à partir du modèle approximé. La
figure (3.4) montre la structure de la commande adaptative floue indirecte.
Fig. 3.4. Commande adaptative floue indirecte.
Dans notre cas le problème est l'ignorance de les valeurs exacte de fonctions du modèle f et g
et pour cela on choisit l'adaptation floue indirecte pour estimer ces derniers et augmenter la
robustesse de performance de notre contrôleur.
3.5. Commande adaptative floue indirecte par synergétique terminale.
L’objectif de cette section est la synthèse d’une loi de commande d utilisant des systèmes
flous pour approcher les fonctions inconnues f(x) et g(x) afin de forcer la sortie du système
V0 de suivre le mieux possible la valeur de référence yref.
Dans cette section on montre d’une façon constructive, comment développer des
contrôleurs adaptatifs flous qu’on utilisera pour le développement du contrôleur terminal
synergétiques basés sur les systèmes flous.
3.5.1. Conception du contrôleur adaptatif flou selon la synthèse de Lyapunov.
On considère le système (3.4), si les fonctions f (x) et g(x) sont connues et les perturbations
externes nulles égal à 0, on détermine la loi de commande d comme il est présenté dans (3.6):
( )(
. / ( )) ( )

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.64
En remplaçant la commande (3.24) dans le système (3.4) nous obtenons la dynamique de l’erreur
suivant l’approche synergétique (3.5).
Ce qui implique que lim ( ) 0s
t te t
qui est l’objectif principal du contrôleur terminal. Cependant, dans
notre étude les fonctions f et g sont inconnues, ce qui rend l’approximation de f et g nécessaire, pour
cela on utilise les systèmes flous ˆ ( / )f
f x et ˆ ( / )g
g x respectivement, qui sont de la forme (3.25),
( / ) ( )
( / ) ( )
T
f f f
T
g g g
f x x
g x x
( )
Où ( )f
x et ( )g
x sont les vecteurs de fonctions floues de base (FBF).
Calcul des FBF :
Les systèmes flou type-1 sont caractérisés par une seule FBF ce qui nous permet d’obtenir les estimés
f et g simultanément, ceci implique que ( ) ( )f g
x x dans le développement de la commande, les
FBF seront données par :
( , ,l ) 11 n
1 1 11 1
( )
( )
( )
n
l iiFl i i
m m nn n
l iiFl l i i
x
x
x
( )
Ces FBF sont rassemblées dans un vecteur ( )x de dimension 1
n
i
i
m
pour l1=1,2,…, m1, ln=1,2,…,mn,
avec mi est le nombre des ensembles flous ayant liFi
comme degré d’appartenance.
Donc la loi de commande résultante est :
(
. / ) ( )
Cette commande est appelée dans la littérature de la commande adaptative, la commande équivalente
[61].
Par l’application de (3.24) au système (3.4), on obtient après quelques simples manipulations l’équation
de la dérive de manifold ψ suivante :
( ) ( )
( )
⇒
.( ) ( ) / ( )
Donc, nous devons avoir 0eV lorsque Ve dépasse une certaine constanteV , on remarque d’après

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.65
(3.29) qu’il est difficile de concevoir dc tel que le dernier terme de (3.29) soit négatif, pour cela on
introduit une commande de supervision qu’on décrit dans la section suivante.
3.5.2. Commande de supervision :
Pour assurer que 0eV lorsque Ve dépasse une certaine constanteV , on ajoute un autre terme de
commandes
d , appelé commande de supervision, la commande finale sera donc de la forme :
c s
d d d ( )
Il faut donc déterminer dc , afin que 0e
V quand e
V V , ceci est obtenu en substituant (3.30) dans
(3.29), en utilisant la même manipulation pour l’obtention de (3.28), on a la nouvelle équation de
manifold :
1 ˆ ˆ( ( / ) ( )) ( ( / ) ( )) ( ).
f g c sf x f x g x g x d g x d
T
( )
L’utilisation de (3.32) et (3.29) donne :
2
2
1 ˆ ˆ( ( / ) ( )) ( ( / ) ( )) ( )
1 ˆ ˆ. ( / ) ( ) ( / ) ( ) ( )
e f g c s
f g c c s
V f x f x g x g x d g x dT
f x f x g x d g x d g x dT
( )
Pour définir sd telle que le dernier terme de (3.32) soit non positif, on a besoin de connaître les limites
des f et g , pour cela on considère la supposition suivante :
Supposition :
On peut déterminer les fonctions ( ), ( ) ( )U U
Lf x g x et g x tel que ( ) ( )Uf x f x et
( ) ( ) ( )U
Lg x g x g x pour cx U , où ( ) , ( ) ( ) 0U U
Lf x g x et g x pour cx U
En se basant sur ( ), ( ) ( )U U
Lf x g x et g x et en observant (3.32), nous choisissons la commande de
superviseur ds comme suit:
*
1
1sgn( ) .[ ( / ) ( ) ( / ) ( ) ]
( )
U U
s f g c c
L
d I f x f x g x d g x dg x
( )
Ou *
1 1I si eV V (qui est une constante spécifiée par le concepteur), *
1 0I siV V .
La commande de supervision ds est non nulle quand eV V , et la valeur de V est généralement grande,
ce qui fait que ds joue le rôle d’une commande de protection plus qu’une commande active. Si x à un
bon comportement, au sens où Ve n’est pas trop grande, la commande d (3.30) devient la commande
floue dc (3.27).

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.66
On remplace (3.33) dans (3.32) quandV V , on trouve que :
2. 1 ˆ ˆˆ ˆU U
e c c c c
L
gV f f gd gd f f gd g d
T g
21
0T ( )
Le résultat obtenu dans (3.34) prouve que l’utilisation de la commande (3.30), où dc est donnée par
(3.27) et ds par (3.33), garantie queeV V . Puisque T est défini positive, et Ve est bornée, alors ψ(e)
est bornée, ce qui implique que l’état x est aussi borné.
3.5.3. Lois d’adaptation :
La tâche suivante, est de remplacer f et g par la formule spécifique des systèmes flous (3.25), et de
développer une loi d’adaptation pour ajuster les paramètres f g
et dans le but d'assurer la
convergence de l’erreur de poursuite vers zéro.
Tout d’abord, on définit les paramètres optimaux *
f et *
g par :
* ˆarg min sup ( / ) ( )f f
x Ucf f
f x f x
( )
* ˆarg min sup ( / ) ( )g g
x Ucg g
g x g x
( )
Où f g
et sont des ensembles de contraintes pour f g
et respectivement, spécifiés par l’expert.
Ces ensembles sont définis comme :
:f f f
M ( )
:g g g g
M ( )
Où f g
M et M sont des constantes positives spécifiées par l’expert.
On définit l’erreur d’approximation minimale par :
( ) ( ) ( (
) ( )) ( )
Avec | |
Alors, l’équation de (3.28) peut être écrite comme :
. ( ) ( )/ . ( ) (
)/
( )

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.67
Si on choisit ˆ ˆf et g de la forme (3.25), donc on peut récrire (3.40) comme :
(
) ( ) (
) ( )
( )
Où f f f
, gg g
et est la fonction floue de base
( )
( )
( )
Maintenant, on considère la fonction de Lyapunov candidate suivante :
( )
Où, r1 et r2 sont des constantes positives.
La dérivée de V par rapport au temps est donnée par :
( )
On remplace (3.42) dans (3.44) on obtient.
( ( )
( )
)
( )
On utilise ,f f g g
| |
( ( ) )
( ( ) ) ( )
Si on choisit les lois d’adaptation suivantes :
( )
( ) ( )
Alors à partir de (3.46) on aura :
| | ( )
L’influence du terme est minime, d’ordre de l’erreur d’approximation minimale qui est trop petite,
vu que les systèmes flous ont une capacité d’approximer les fonctions non linéaires f et g avec une
grande précision, car ils sont des approximateurs universels qui peuvent approximer n’importe quelle
fonction réelle continue avec une précision arbitraire. Donc, l’utilisation d’un nombre suffisant de
règles pour construire f et g permet d’avoir très petit. Si tend vers 0, alors (3.48) devient :
| | ( )
L’erreur à l’équation (3.48) c’est la meilleur erreur d’approximation peut obtenir, ce dernier

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.68
nous mène à déduire que tous les signaux du système sont bornés, depuis e(0) est borné donc
e(t) est borné, le signal de référence est aussi borné, ainsi les états du système sont borné.
Pour prouver que la convergence de l’erreur tan vers 0, nous devons prouver la suivante :
→ Lorsque
→
On suppose que | | donc on peut écrire (3.48) comme suivant :
| | | | ( )
L'intégration des deux côtés nous donne:
∫ | |
(| ( ) ( )|) ∫ | |
( )
Nous avons ψ L1, à partir de (3.51), la macro-variable est bornée ainsi que chaque terme,
donc L∞, en utilisant le théorème de Barbalat [61], nous pouvons conclure que l'erreur
du système converge vers zéro.
3.5.4. Algorithme de projection
Pour construire les vecteurs de paramètres f et g appartenant aux ensembles de contraintes f et g ,
respectivement, les lois d’adaptation (3.47) ne sont pas suffisantes. Pour résoudre ce problème, on
utilise l’algorithme de projection des paramètres[62].
Si les vecteurs de paramètres f et g appartenant aux ensembles de contraintes f et g ,
respectivement, ou sont sur la limite de ces ensembles, mais se dirigent vers l’intérieur de ces
ensembles, l’utilisation des lois d’adaptation (3.47) sont suffisantes. Autrement (si les vecteurs des
paramètres sont sur la limite des ensembles de contraintes mais se dirigent vers l’extérieur de ces
ensembles) on utilise l’algorithme de projection pour modifier les lois d’adaptation (3.47) de manière à
ce que les vecteurs de paramètres demeurent dans les ensembles de contraintes. Comme présenté
graphiquement dans la figure suivante :
Fig.3.5. Méthode du gradient avec projection[63].
Soit f g
et sont des ensembles de contraintes pour f g
et respectivement, comme suit :
| |

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.69
| |
Où et sont des constants.
On requiert que | | être bornée inférieurement par par ce que a partir l’équation (3.27), on
constate que ( )T
g gg x
il ne faut pas égale à zéro. Donc les lois d’adaptation modifiées avec la
projection sont définies par :
Pour ajuster le vecteur de paramètres f on utilise :
1
1
( ) ( ) ( & ( ) 0)
( ) ( ) ( & ( ) 0)
T
f f f f f
f
T
f f f
r x si M ou M x
p r e x si M x
( )
Où l’opérateur de projection *P est défini comme :
21 1 1
( )( ) ( )
T
f f
f
xP r x r x r
( )
Pour ajuster le vecteur de paramètres g on utilise :
Une fois qu’un élément gi
de g
on utilise
2
( ) ( ) 0
0 ( ) 0
i c i c
gii c
r x d si x d
si x d
( )
Où ( )i
x est le ièmei composant de ( )g x .
Autrement, on utilise,
2
2
( ) ( ) ( & ( ) 0)
( ) ( & ( ) 0)
T
c g g g g g c
g T
c g g g c
r x d si M ou M x d
p r x d si M x d
( )
Où l’opérateur de projection *P est défini, dans ce cas par :

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.70
22 2 2
( )( ) ( )
T
g g
c c c
g
xP r x d x d d
( )
La loi de commande adaptative floue indirecte synergétique terminale est synthétisée selon la structure
de la figure suivante :
Fig.3.6. Schéma global de la commande adaptative floue.
si
0
+
+ d y
Lois d’adaptation
Commande de supervision
si
Initiales,
déterminées Par l’information
linguistique
Système
Contrôleur terminale synergétique flou
e
+
-
y
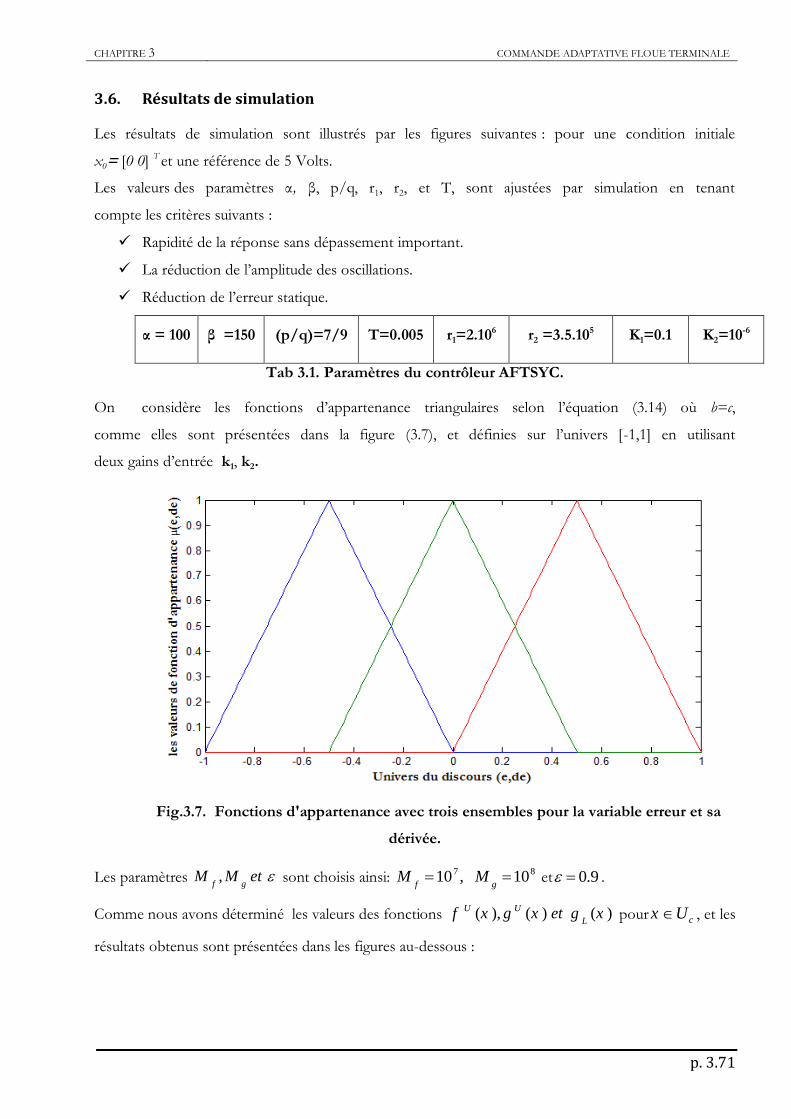
CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.71
3.6. Résultats de simulation
Les résultats de simulation sont illustrés par les figures suivantes : pour une condition initiale
x0= [0 0] T et une référence de 5 Volts.
Les valeurs des paramètres α, β, p/q, r1, r2, et T, sont ajustées par simulation en tenant
compte les critères suivants :
Rapidité de la réponse sans dépassement important.
La réduction de l’amplitude des oscillations.
Réduction de l’erreur statique.
α = 100 β =150 (p/q)=7/9 T=0.005 r1=2.106 r2 =3.5.105 K1=0.1 K2=10-6
Tab 3.1. Paramètres du contrôleur AFTSYC.
On considère les fonctions d’appartenance triangulaires selon l’équation (3.14) où b=c,
comme elles sont présentées dans la figure (3.7), et définies sur l’univers [-1,1] en utilisant
deux gains d’entrée k1, k2.
Fig.3.7. Fonctions d'appartenance avec trois ensembles pour la variable erreur et sa
dérivée.
Les paramètres ,f g
M M et sont choisis ainsi: 7 810 , 10
f gM M et 0.9 .
Comme nous avons déterminé les valeurs des fonctions ( ), ( ) ( )U U
Lf x g x et g x pour cx U , et les
résultats obtenus sont présentées dans les figures au-dessous :

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.72
Fig.3.8. Tension de sortie Vo (AFTSYC).
Fig.3.9. Courant d’inductance iL (A), (AFTSYC).
Fig.3.10. Signal de commande AFTSYC.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.73
Fig.3.11. Courant de charge io (A), (AFTSYC).
On constate à partir ces courbes que la sortie peut suivre la référence dans un temps très petit ts=0.126s
Et le pic du courant de l’inductance iL ne dépasse 1.3A au régime transitoire malgré l’existence des
oscillations dans le signal de commande et le courant iL.
3.6.1. Test de robustesse.
Pour en savoir, est ce que AFTSYC c’est une commande vraiment très robuste, contre les incertitudes
de modélisation on applique la commande obtenu dans (3.27) sur le modèle développé dans (1.57)
comme présentée dans la figure suivante.
Fig.3.12. Schéma global du contrôleur AFTSYC avec le modèle (1.57).
𝒆
L’estimation des fonctions f et g du
système par la commande adaptative
floue
(α, β, p, q, T, r1, r2, k1, k2)
Contrôleur
adaptative flou
synergétique
terminal

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.74
Les résultats obtenus sont comme suit :
Fig.3.13. Tension de sortie Vo du modèle (1.57) par AFTSYC.
Fig.3.14. Courant d’inductance du modèle (1.57) par AFTSYC.
Fig.3.15. Signal de commande AFTSYC avec le modèle (1.57).

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.75
A partir ces courbes on constat qu’AFTSYC a effectué une bonne régulation malgré
l’utilisation du modèle (1.57) qu’est proche que le modèle réel ce qui rend que cette
commande est applicable. Dans la section suivante on va présenter des tests de robustesse
pour analyser les performances de cette commande.
1- : on varie la tension de référence Vref de 5V à 7V au temps de 0.05s et retourne à 5V à t=0.1s.
2- on varie la tension d’entrée Vin de 10V à 9V au temps de 0.05s et retourne à 10V à t=0.1s.
Fig.3.17. Tension de sortie lors de la variation de la tension d’entrée Vin.
Fig.3.16. Variation de la tension de référence Vref.
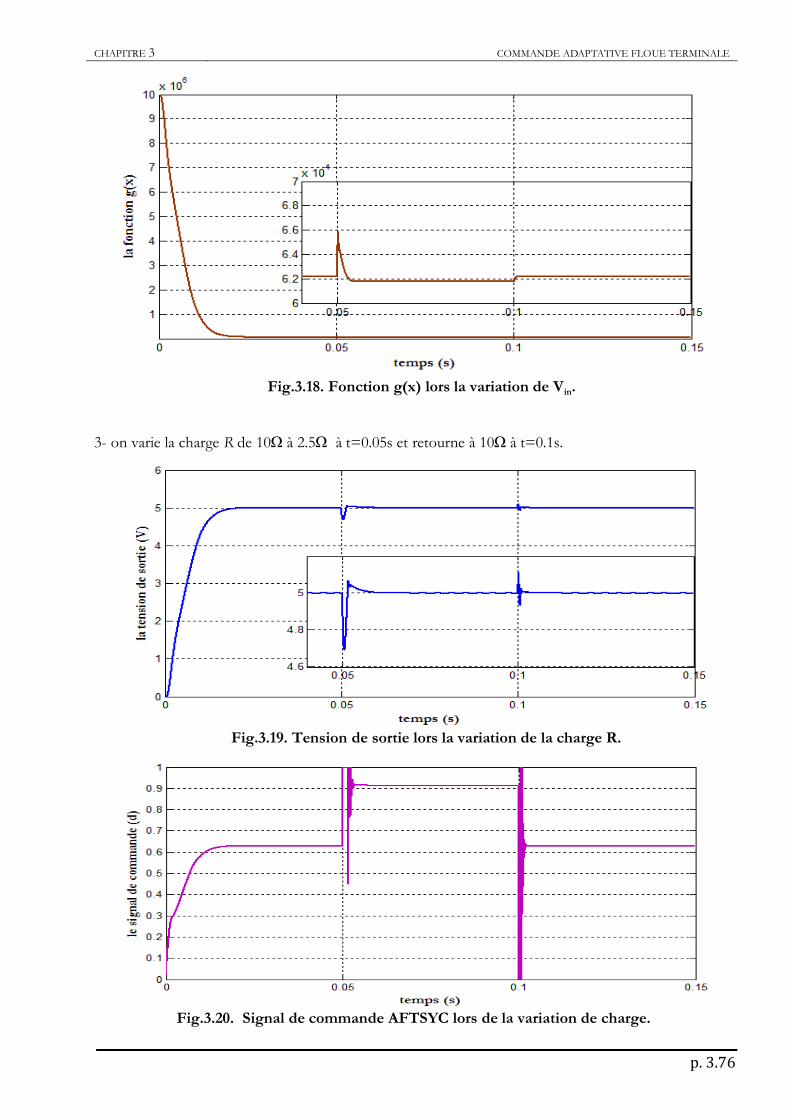
CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.76
3- on varie la charge R de 10Ω à 2.5Ω à t=0.05s et retourne à 10Ω à t=0.1s.
Fig.3.19. Tension de sortie lors la variation de la charge R.
Fig.3.20. Signal de commande AFTSYC lors de la variation de charge.
Fig.3.18. Fonction g(x) lors la variation de Vin.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.77
Fig.3.21. Fonction f(x) lors de la variation de la charge R.
Fig.3.23. Courant d’inductance lors de la variation de R.
Fig.3.22. Fonction g(x) lors de la variation de la charge R.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.78
D’après les courbes, on remarque que les valeurs de g(x) et f(x) estimée se change quand on
varie la résistance ou la tension d’entrée comme montrée dans les figures (3.21, 3.20, 3.17), ce
changement résultant de l’apprentissage floue qui implique une nouvelle valeur de commande
pour que la sortie peut suivre la référence, comme illustré dans la figure (3.19).
En utilisant les paramètres donnée dans le tableau (3.1), on observe des fluctuations au
niveau des résultats, cet effet est due de la non optimalité des paramètres du contrôleur
utilisées, pour résoudre ce problème, on fait appel aux algorithmes d’optimisation ce po int
sera détailler dans le chapitre prochain.
3.7. Commande adaptative floue par mode glissant terminal.
De même manière que nous avons vu précédemment on concept et synthèse la commande
AFTSMC.
Premièrement, Soit une surface de glissement comme proposée dans (3.1).
( ) ( )
Où sont des constantes positives tels que et
et ( )
Pour l’existence du mode glissant: ( )
( ) ( )
( ) ⇒
( ) ( ( )
. / ) ( )
La commande discontinue correspondante dans cette phase est comme suite :
( ) ( ) ( ) ( )
On considère le système (3.4) si les fonctions f et g sont connues, alors la loi de commande
est donnée par:
⇒
( ) ( ( )
. / ( ) ) ( )
La stabilité de cette commande (TSMC) est garantie si on choit la fonction de Lyapunov suivante :

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.79
⇒ | | ( )
Où k >0.
Cependant, f et g sont toujours inconnus dans la commande pratique. En utilisant des
systèmes flous pour estimer les fonctions f, g dans la commande (3.59). Alors la loi de
commande proposée devient :
( ) ( ( )
. / ( ) ) ( )
Lorsque on substitut (3.61) dans (3.56) on obtient :
( ) ( ) ( ) ( )
⇒ | | .( ) ( ) / ( )
Le même problème toujours la stabilité n’est pas garantie et il est difficile de concevoir dc tel que le
dernier terme de (3.63) soit négatif, pour cela on introduit une commande de supervision qu’on décrit
comme suivant :
*1
1sgn( ) .[ ( / ) ( ) ( / ) ( ) ]
( )U U
s g c cfL
d I s f x f x g x d g x dg x
( )
3.7.1. Lois d’adaptation :
La tâche suivante, est de approximer f et g par la formule spécifique des systèmes flous (3.25), et de
développer une loi d’adaptation pour ajuster les paramètres f g
et dans le but d'assurer la
convergence de l’erreur de poursuite vers zéro.
Comme illustrer dans la section (3.6.3) on peut écrire comme suite :
. ( ) ( )/ . ( ) (
)/ ( ) ( )
On définit l’erreur d’approximation minimale par :
( ) ( ) ( (
) ( )) ( )
Avec | |
Si on choisit ˆ ˆf et g de la forme (3.25), donc on peut récrire (3.66) comme :
( )
( ) ( ) ( )
Où f f f
, gg g
et est la fonction floue de base

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.80
Maintenant, on considère la fonction de Lyapunov candidate suivante :
( )
Où, r3 et r4 sont des constantes positives.
La dérivée de V par rapport au temps est donnée par :
( )
On remplace (3.67) dans (3.69) on obtient.
( ( )
( ) ( ) )
( )
On utilise ,f f g g
| |
( ( ) )
( ( ) ) ( )
Si on choisit les lois d’adaptation suivantes :
( )
( ) ( )
Alors à partir de (3.71) on aura :
| | ( )
L’utilisation d’un nombre suffisant de règles pour construire f et g permet d’avoir très petit. Si
tend vers 0, alors (3.73) devient :
| | ( )
L’utilisation du théorème de Barbalat [61], nous pouvons conclure que l'erreur du système
convergent vers zéro.
Pour construire les vecteurs de paramètres f et g appartenant aux ensembles de contraintes
f et g , respectivement, on utilise l’algorithme de projection de même manière dans la
section (3.6.4).
3.8. Comparaison entre les commandes AFTSMC et AFTSYC.
Dans cette section, nous allons comparer les résultats obtenus par AFTSYC et AFTSMC appliqués sur
le modèle (1.57) avec les pertes inhérentes aux éléments du circuit électrique.

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.81
d’après ces courbes, on peut conclure que la commande synergétique et la commande mode glissant
partage la propriété de la robustesse mais le premier a plusieurs autres avantages , il est bien adapté
pour la mise en œuvre numérique[37], il fonctionne à une fréquence de commutation constante, donc il
n’a pas le problème de broutement de mode glissant.
Malgré que ce problème est diminué avec AFTSMC, mais l’existence de la commande
discontinu et la variation de la fréquence de commutation restent toujours les grands
inconvénients de la commande par mode glissant. Par contre problème que le contrôleur
synergétique utilise le modèle du système pour synthétiser la commande est résolu dans ce
chapitre par l’estimation des fonctions f et g du système par la commande adaptative floue.
Fig.3.24. Tension de sortie Vo, par (AFTSMC et AFTSYC).
Fig.3.25. Signal de commande, par (AFTSMC et AFTSYC).

CHAPITRE 3 COMMANDE ADAPTATIVE FLOUE TERMINALE
p. 3.82
Cette dernière commande et sa facilité de la mise en œuvre numérique donne l’avantage le
plus important à l’approche synergétique.
Concernant la robustesse de la commande, les deux commandes montrent de bonnes
performances en termes de régulation de la tension de sortie.
3.9. Conclusion.
Dans ce chapitre, on a développée deux lois de commande, adaptative floue synergétique terminale et
adaptative floue par mode glissant terminale. On a remarqué deux avantages essentiels de l’approche
synergétique représenté par sa facilité de la mise en œuvre pratique et l’invariabilité de la fréquence de
commutation contrairement de la technique par mode glissant. Il est clair que la commande
synergétique est basée totalement sur la bonne connaissance de modèle, donc cette approche est
sensible aux erreurs de modélisation et variation des paramètres, pour ces raisons on a développé une
commande adaptative par l’utilisation de l’apprentissage par les systèmes flous qui nous donne des bons
résultats en terme de robustesse comme a été illustré dans les figures précédentes. La commande
intelligente développée nécessite le réglage précis de plusieurs paramètres de contrôleur, donc on a
besoin d’optimiser ces derniers par un des algorithmes d’optimisation, ce que nous présentons dans le
chapitre suivant.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.83
Chapitre 04
OPTIMISATION DES PARAMETRES PAR LES
ALGORITHMES GENETIQUES
4.1. Introduction
Dans la littérature, les méthodes d’optimisation se répartissent généralement en deux grandes
catégories : déterministes et non-déterministes.
Les méthodes déterministes se basent sur la valeur de la fonction objective et des contraintes,
ainsi que sur la valeur de leurs dérivées premières et parfois leurs dérivées secondes. Ce sont
des méthodes itératives convergeant vers un minimum local. La convergence vers un
optimum global n’est pas toujours assurée. Les méthodes déterministes sont généralement
efficaces quand l’évaluation de la fonction objective est très rapide, ou quand sa forme est
connue a priori. Dans la plupart des problèmes d’optimisation rencontrés par les ingénieurs,
on ne possède pas suffisamment d’information sur la fonction objectif ni sur ses dérivées.
Les cas d’optimisation complexes impliquant des temps de calcul importants, de nombreux
optima locaux ou des fonctions non-dérivables, seront souvent traités plus efficacement par
des méthodes non-déterministes. Ces méthodes font appel à des tirages de nombres
aléatoires qui permettent d’explorer l’espace de recherche plus efficacement. Elles sont faciles
à implanter pour le traitement des problèmes d’optimisation discrète, quand l’espace de
recherche devient non-convexe ou lorsque les gradients sont discontinus.
Dans le contexte de notre travail, l’optimisation est conduite sur les paramètres du contrôleur
par Les algorithmes génétiques (AG) a été développé par John Holland [73], ces dernières
figurent parmi les méthodes non-déterministes qui sont capables de maîtriser de telles
situations. Ils connaissent actuellement un essor considérable dans le domaine de
l’optimisation, grâce à leur universalité, fiabilité et robustesse. Ces algorithmes simulent les
mécanismes de reproduction des organismes vivants en vue de trouver une solution à un
problème donné. La robustesse est une des caractéristiques principales des AG. En effet, ils
permettent de fournir une ou plusieurs solutions de bonne qualité qui ne comprennent pas
nécessairement la solution optimale au sens mathématique mais qui se révèlent suffisantes en
pratique pour des problèmes très variés, en sollicitant un investissement en temps et
puissance de calcul assez faible.
CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.84
Dans ce travail, le choix des AG pour l’optimisation des paramètres du contrôleur est
motivé, d’une part, par la nature du problème d’optimisation qui est discontinue et, d’autre
part, par la robustesse et l’efficacité de ces algorithmes pour la recherche d’une solution très
proche de l’optimum ou presque optimale. Ce chapitre est dédié à l'optimisation discrète de
paramètres par les AG. La description du principe et des caractéristiques des AG sont
détaillés par la suite.
4.2. Algorithmes génétiques (AG)
Les algorithmes génétiques (AG), ont été initialement développés par John Holland [73]. ses
collègues et ses étudiants, à l'université du Michigan dans deux buts principaux [64].
1. Mettre en évidence et expliquer rigoureusement les processus d'adaptation des
systèmes naturels.
2. Concevoir des systèmes artificiels qui possèdent les propriétés des systèmes naturels.
Leurs champs d’application sont très vastes. Outre l’économie, ils sont utilisés pour
l’optimisation de fonctions numériques difficiles (discontinues, multimodales, bruitées…),
traitement d’image (alignement de photos satellites, reconnaissance de suspects…),
optimisation d’emplois du temps, optimisation de design, contrôle de systèmes industriels,
apprentissage des réseaux de neurones etc. La raison de ce grand nombre d’application est
claire c’est la simplicité de leurs mécanismes, la facilité de leur mise en application et leur
efficacité même pour des problèmes complexes, les (AG) peuvent être utilisés pour contrôler
un système évoluant dans le temps (chaîne de production, centrale nucléaire…) car la
population peut s’adapter à des conditions changeantes [64].
De plus, les (AG) utilisent deux stratégies importantes pour trouver une solution ou un
ensemble de solutions. Ces stratégies sont : l’exploration et l’exploitation. Elles permettent de
trouver le maximum global (solution du problème) du fait qu’elles sont complémentaires. Si
l’exploration investigue l’ensemble des solutions de l’espace de recherche, la phase
d’exploitation quant à elle se sert de la connaissance des solutions pour aider à trouver de
meilleures solutions. La combinaison de ces deux stratégies peut être tout à fait efficace [65].
4.2.1. Outils évolutionnaires de base d'un (AG)
Les (AG), sont basés sur trois éléments principaux : la sélection, le croisement et la
mutation. Dans la littérature il s’agit d’opérateurs de reproduction. Leur principe est simple,
comporte trois phases :

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.85
1- la genèse (l’initialisation aléatoire d’individus pour former la population de la première
génération).
2- la reproduction (l’évolution des individus de la génération courante vers la suivante) :
la sélection des individus reproducteurs.
le croisement génétique de ces individus pour la création de nouveaux individus.
la mutation de certains individus pour que la création génétique ne s’affaiblisse pas.
l’évaluation des individus par le calcul de leur fonction d'adaptation.
3- Recherche de l’individu le plus adapté selon les critères souhaités. La solution sera
représentée par le meilleur individu de la dernière génération.
Pour résumer, L’AG est fondé sur [66] :
Une représentation chromosomique des solutions du problème.
Une méthode pour générer une population initiale de solutions.
Une fonction d’évaluation (fitness) pour classer les solutions en fonction de leurs
dispositions.
Des opérateurs génétiques qui définissent la manière dont les caractéristiques
génétiques des parents sont transmis aux enfants.
Les valeurs des paramètres utilisés par l’AG.
4.2.2. Optimisation par les algorithmes génétique
Les (AG), utilisent un vocabulaire similaire à celui de la génétique, cependant, les processus
auxquels ils font référence sont beaucoup plus complexes. En imitant ce principe, les
algorithmes génétiques appliqués à un problème d’optimisation font évoluer un ensemble de
solutions utilisent un mécanisme de sélection naturelle. Ainsi, les AG ne se basent pas sur un
individu, mais sur une population d'individus qui vont évoluer de génération en génération
pour obtenir un résultat se rapprochant de la solution optimale. Pour un problème
d'optimisation donné, un individu représente un point de l'espace d'état ou une solution
possible du problème donné il est composé d'un ou plusieurs chromosomes. Les
chromosomes sont eux-mêmes constitués de gènes qui contiennent les caractères héréditaires
de l'individu. A chaque individu est attribué un "fitness" qui mesure la qualité de la solution
qu’il représente, souvent c'est la valeur de la fonction à optimiser. Ensuite, une nouvelle
population des solutions possibles est produite en sélectionnant les parents parmi les
meilleurs de la "génération" actuelle pour effectuer des croisements et des mutations
[66].

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.86
La sélection a pour but de favoriser les meilleurs éléments de la population, tandis que le
croisement et la mutation assurent une exploration efficace de l'espace d'état. Les meilleurs
individus d'une génération vont créer une nouvelle génération plus adaptée au problème dont
la nouvelle population contient une plus grande proportion de caractéristiques des meilleurs
individus de la génération précédente.
L’organigramme fonctionnel présenté dans la figure (4.1), illustre la structure générale de
l’algorithme génétique. Nous détaillerons dans la suite les diverses phases qui le constituent et
les mécanismes associés à chacune d’entre elles.
Fig. 4.1. Organigramme général d'un algorithme génétique

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.87
4.2.3. Mécanismes de fonctionnement d’un (AG)
Les différentes étapes de fonctionnement des (AG) se résument à qui suit :
Initialisation : Une population initiale de N individus est générée aléatoirement.
Évaluation : Chaque individus est décodé, puis évalué.
Sélection: Création d’une nouvelle population par l’utilisation d’une méthode de
sélection appropriée.
Recombinaison: croisement et mutation au sein de la nouvelle population.
Retour à la phase d’évaluation jusqu’à la vérification du critère d'arrêt de l’algorithme.
La mise en œuvre des algorithmes génétiques nécessite donc plusieurs étapes. L'idée
fondamentale est que: la population choisie contient potentiellement la solution, ou plutôt la
meilleure solution, à un problème donné. Cette solution n'est pas exprimée car la
combinaison génétique sur laquelle elle repose est dispersée chez plusieurs individus. Ce n'est
que par l'association de ces combinaisons génétiques au cours de la reproduction que la
solution pourra s'exprimer. Lors de la reproduction et de la recombinaison génétique
associée, un individu hérite, par hasard, d'un des gènes de chacun de ses parents. L'originalité
des mécanismes repose en particulier sur le fait qu'il n'a pas considéré les seules mutations
comme source d'évolution mais aussi et surtout les phénomènes de croisement. C'est en
croisant les solutions potentielles existant que l'on peut se rapprocher de l'optimum [67].
4.2.3.1. Initialisation de la population.
Comme dans tout problème d'optimisation, une connaissance de ``bons'' points de départ
conditionne la rapidité de la convergence vers l'optimum. Si la position de l'optimum dans
l'espace d'état est totalement inconnue, il est naturel de générer aléatoirement des individus
en faisant des tirages uniformes dans chacun des domaines associés aux composantes de
l'espace d'état, en veillant à ce que les individus produits respectent les contraintes [67].
La génération de la population initiale peut se faire en prenant des individus régulièrement
répartis dans l’espace. Néanmoins, une initialisation aléatoire est plus simple à réaliser. Les
valeurs N(x i) des gènes est alors tirées au hasard selon une distribution uniforme.
Le choix de la population initiale peut conditionner fortement la rapidité de l'algorithme. Il
doit être capable de produire une population d'individus non homogène qui servira de base
pour les générations futures, et capable de rendre plus ou moins rapide la convergence vers
l'optimum global.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.88
Dans le cas où l'on ne connaît rien du problème à résoudre, il est essentiel que la population
initiale soit assez bien répartie sur tout le domaine de recherche. Une population trop petite
évoluera probablement vers un optimum local intéressant alors qu’une population trop
grande sera inutile car le temps de convergence sera excessif. La taille de la population doit
être choisie de façon à réaliser un bon compromis entre temps de calcul et qualité du résultat.
4.2.3.2. Codage et décodage des variables.
Le codage est une partie très importante des algorithmes génétiques. Il permet de représente
l’individu sous la forme d’un chromosome. Ce chromosome est constitué de gènes qui
prennent des valeurs dans un alphabet binaire ou non. Certains auteurs n’hésitent pas à faire
le parallèle avec la biologie et parlent de génotype en ce qui concerne la représentation
binaire d’un individu, et de phénotype pour ce qui est de sa valeur réelle correspondante
dans l’espace de recherche [67].
Le choix du codage est délicat. Il doit permettre de coder toutes les solutions et permettre la
mise en œuvre des opérateurs de reproduction. C’est ainsi que le bon déroulement des
algorithmes génétiques sera assuré. Plusieurs type de codages sont utilisés, on citera à titre
d'exemple: codage réel, codage binaire, Gray.
- Codage binaire
Goldberg et Holland ont démontré qu’il est idéal de représenter le chromosome en une
chaîne binaire. C’est pourquoi les AG utilisent généralement cette représentation Les
individus sont représentés sous forme de chaînes de bits contenant toute l'information
nécessaire à la description d'un point dans l'espace. Ce type de codage a pour intérêt de
permettre la création d'opérateurs de croisement et de mutation simples [67].
A chaque variable d’optimisation xi correspond un gène. Un chromosome sera donc un
ensemble de gènes. Chaque point est représenté par un individu doté d’un génotype constitué
d’un ou de plusieurs chromosomes. La population est un ensemble de N individus qui vont
évoluer d’une génération à une autre. Du point de vue informatique, un gène est un entier
long de K bits. Un chromosome est un tableau de gènes. Un individu est un tableau de
chromosomes. La population est un tableau d’individus [67].
Dans le codage binaire le gène est codé par un caractère binaire, 0 ou 1. C’est le plus courant
et celui qui a été employé lors de la première application des algorithmes génétiques. Un des
avantages du codage binaire est que l’on peut ainsi facilement coder toutes sortes d’objets :
des réels, des entiers, des valeurs booléennes, des chaînes de caractères… Cela nécessite
simplement l’usage de fonctions de codage et décodage pour passer d’une représentation à
l’autre [66].

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.89
Pour chaque paramètre xi situé dans l’intervalle [xi min , xi max ], on associe une chaîne binaire
b0 b1…blxi définie sur lxi bits. A cette chaîne correspond une valeur entière naturelle [66] :
( ) ∑
( )
Le paramètre réel xi de l’espace de recherche relatif à N(xi) est obtenu par interpolation
linéaire.
( ) ( )
La longueur totale du chromosome est donnée par.
∑
( )
Où m: le nombre des paramètres.
Exemples
Chromosome A= 183.
1 1 1 0 1 1 0 1
Chromosome B=35.
0 0 1 1 0 0 0 1
- Codage réel
Davis, Janikow et Michalewicz ont effectué une comparaison entre la représentation binaire
et la représentation réelle. Ces auteurs ont trouvé que la représentation réelle donne de
meilleurs résultats d’après leur problème à résoudre. Dans ce codage le génome est un
vecteur réel et l’espace de recherche est un sous-ensemble de R. Cette représentation est
aujourd’hui très utilisée dans les problèmes d’optimisation car dans de nombreuses
applications du monde réel, ces problèmes sont naturellement formulés sous forme
paramétrique i.e. Les premiers travaux qui ont utilisé ce type de représentation ont été ceux
de Rechenberg et de Schwefel quand ils ont introduit les stratégies d’évolution [66]. Le

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.90
codage réel peut-être utile notamment dans le cas où l'on recherche le maximum d'une
fonction réelle.
Exemples :
chromosome
gène 1 gène 2 gène 3 gène 4
101.10100 110.01000 0.1100010 1.1001100
x1=5.625 x2=6.25 x3=0.778 x4=1.6
- Codage de Gray
Dans le cas d'un codage binaire on utilise souvent la "distance de Hamming" entre le codage
binaire de deux nombres réels proches, comme mesure de la dissimilarité entre deux
éléments de population, cette mesure compte les différences de bits de même rang de ces
deux séquences. Et c'est là que le codage binaire commence à montrer ses limites.
En effet, deux éléments voisins en termes de distance de Hamming ne codent pas
nécessairement deux éléments proches dans l'espace de recherche. Cet inconvénient peut être
évité en utilisant un "codage de Gray" : le codage de Gray est un codage qui a comme
propriété qu’entre un élément n et un élément n+1, donc voisin dans l'espace de recherche,
un seul bit diffère [68].
4.2.3.3. fonction d’adaptation
Pour calculer le coût d'un point de l'espace de recherche, on utilise une fonction d’évaluation
ou d’adaptation (F). L'évaluation d'un individu ne dépendant pas de celle des autres
individus, le résultat fournit par la fonction d'évaluation va permettre de sélectionner ou de
refuser un individu pour ne garder que les individus ayant le meilleur coût en fonction de la
population courante : c'est le rôle de la fonction (F). Cette procédure permet de s'assurer que
les individus performants seront conservés, alors que les individus peu adaptés seront
progressivement éliminés [68].
La fonction d’adaptation, associe une valeur pour chaque individu. Cette valeur a pour but
d’évaluer le degré d'adaptation d'un individu à son environnement. Les individus peuvent

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.91
être aussi comparés entre eux. Cette fonction, propre au problème, est souvent simple à
formuler lorsqu’il y a peu de paramètres. Au contraire, lorsqu’il y a beaucoup de paramètres
ou lorsqu’ils sont corrélés, elle est plus difficile à définir. Dans ce cas, la fonction devient une
somme pondérée de plusieurs fonctions.
La fonction d'adaptation doit exprimer le plus fidèlement possible, la problématique posée
sous forme mathématique. Sa définition peut être simplement analytique, ou elle peut
éventuellement faire appel au jugement de l'utilisateur. En raison de l’analogie avec la théorie
de l’évolution (survie des individus les mieux adaptés à leur environnement), les algorithmes
génétiques sont naturellement formulés en terme de maximisation. Ils servent donc à
déterminer le maximum d’une fonction F Réelle à une ou plusieurs variables. Le problème
d’optimisation sur l’espace de recherche E est formulé comme suit [68].
( )
( )
Si le problème à résoudre est un problème de minimisation d’une fonction J.
( )
( )
Ceci équivaut au problème de maximisation de F(x), que l'on définit comme suit:
( )
( )
Le choix de F n’est pas unique, mais cette transformation est la plus utilisée dans la
littérature.
4.2.3.4. La sélection des parents
La sélection des parents a pour but de deviner les individus de la population courante qui
seront autorisés à se reproduire (les “parents”). La sélection est fondée sur la qualité des
individus, estimée à l’aide de fonction d'adaptation. Cette opération est peut-être la plus
importante puisqu’elle permet aux individus d’une population de survivre, de se reproduire
ou de mourir. En règle générale, la probabilité de survie d’un individu sera directement reliée
à son efficacité relative au sein de la population. Il existe plusieurs méthodes pour la
reproduction. , on citera à titre d'exemple:
- La sélection par roulette ou proportionnelle
- La sélection par tournoi.
- La sélection à reste stochastique.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.92
- La sélection stochastique à reste stochastique.
- La sélection par le rang.
- La sélection uniforme.
Parmi ces différents types de sélection la méthode la plus connue et la plus utilisée reste la
roulette biaisée, proposée par Goldberg [74].
- La sélection par roulette
La phase de sélection spécifie les individus de la population qui doivent survivre. La méthode
de base, appelée roue de loterie attribue à chaque individu une probabilité de survie
proportionnelle à son adaptation dans la population. Lors de la phase de sélection, les
individus sont sélectionnés aléatoirement en respectant les probabilités pi associées pour
former la population de la nouvelle génération.
Cette méthode consiste à dupliquer chaque individu de la population proportionnellement à
son milieu. Ainsi, les individus ayant la plus grande valeur de fitness auront plus de chance
d'être choisis. Dans une population de N individus, la fonction de sélection est la suivante
[66].
( ) ( )
∑ ( )
( )
En utilisant cette probabilité de reproduction, on peut créer une roue de loterie biaisée.
Chaque individu de la population occupe une section de la roue proportionnellement à son
adaptation et qui indique aléatoirement quel individu peut se reproduire. Cette méthode
n’assure pas la sélection des meilleurs individus et peut être une cause de la convergence
prématurée.
Fig. 4.2. Exemple de sélection par roulette.
CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.93
- La sélection par tournoi
C’est la méthode la plus facile à mettre en œuvre. Cette technique utilise la méthode de la
roulette biaisée pour sélectionner deux individus. On récupère celui dont la valeur de la
fonction d’adaptation est la plus grande. Cette méthode choisit toujours une valeur de la
fonction d’adaptation plus élevée par rapport à la technique de la roulette biaisée [66].
- La sélection uniforme
C’est une technique très simple qui consiste à sélectionner un individu aléatoirement de la
population P. La probabilité Pi pour qu’un individu soit sélectionné est définie par [66].
( )
- La sélection par le rang
Cette méthode est très semblable au tirage à la roulette, sauf que les cases de la roulette ne
sont plus proportionnelles à la fitness des individus, mais à leur rang dans la population. Le
meilleur individu a le rang le plus élevé, le dernier a un rang de 1 [66].
- La sélection stochastique
Contrairement aux méthodes déterministes, les méthodes stochastiques associent aux
individus une probabilité de sélection, généralement fonction croissante de leur fonction
d'adaptation [66].
4.2.3.5. Recombinaison génétique
Pour créer un nouvel individu à partir des meilleures solutions précédemment sélectionnées,
il est nécessaire de procéder à la combinaison des gènes des parents pris de manière aléatoire
et d’après la théorie de l’évolution, pour que la génération suivante soit plus adaptée au
problème et plus performante on doit combiner les meilleurs individus de la population
actuelle. Une étape d’identification et de sélection de ces meilleurs individus est donc
nécessaire pour que chaque individu ait une chance proportionnelle à son adaptation de
devenir parent [67].
On distingue deux opérateurs principaux : Le croisement et La mutation qui permette
d’explorer l’ensemble des solutions possibles. Ces opérations sont appliquées aléatoirement, à
l’aide de deux paramètres, la probabilité de croisement et la probabilité de mutation. Ces
probabilités sont des paramètres très importants, qui influent de façon considérable sur la
convergence.
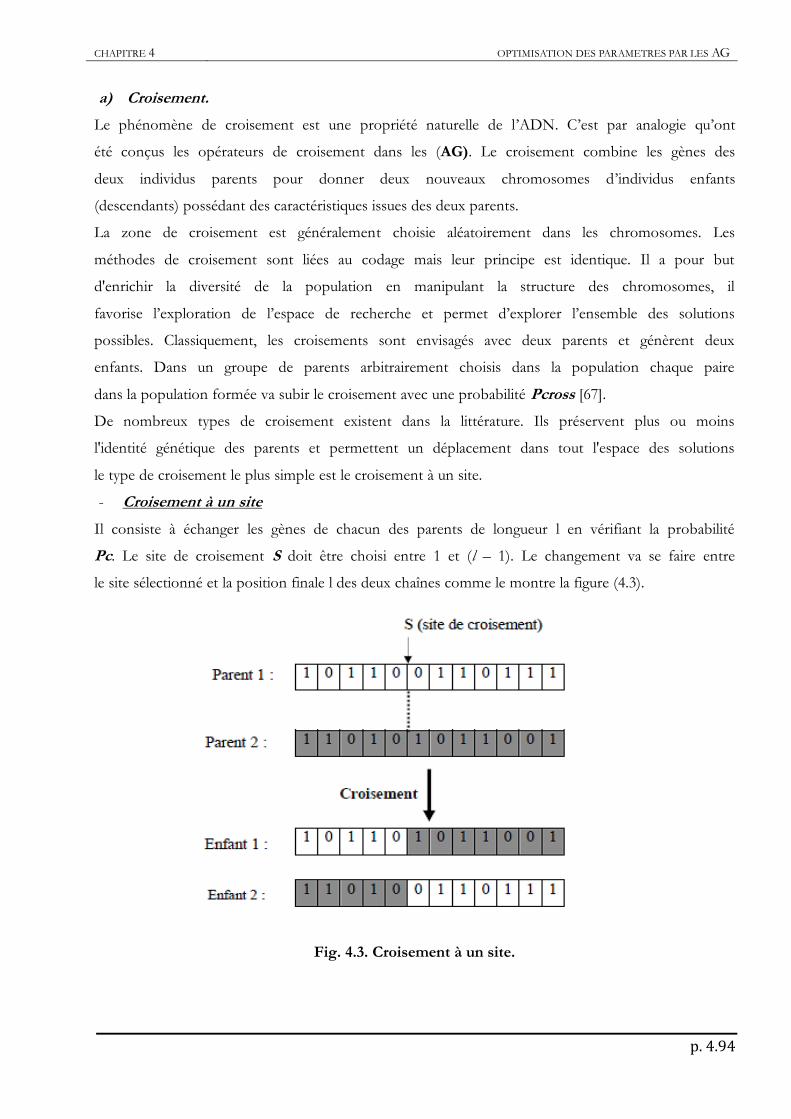
CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.94
a) Croisement.
Le phénomène de croisement est une propriété naturelle de l’ADN. C’est par analogie qu’ont
été conçus les opérateurs de croisement dans les (AG). Le croisement combine les gènes des
deux individus parents pour donner deux nouveaux chromosomes d’individus enfants
(descendants) possédant des caractéristiques issues des deux parents.
La zone de croisement est généralement choisie aléatoirement dans les chromosomes. Les
méthodes de croisement sont liées au codage mais leur principe est identique. Il a pour but
d'enrichir la diversité de la population en manipulant la structure des chromosomes, il
favorise l’exploration de l’espace de recherche et permet d’explorer l’ensemble des solutions
possibles. Classiquement, les croisements sont envisagés avec deux parents et génèrent deux
enfants. Dans un groupe de parents arbitrairement choisis dans la population chaque paire
dans la population formée va subir le croisement avec une probabilité Pcross [67].
De nombreux types de croisement existent dans la littérature. Ils préservent plus ou moins
l'identité génétique des parents et permettent un déplacement dans tout l'espace des solutions
le type de croisement le plus simple est le croisement à un site.
- Croisement à un site
Il consiste à échanger les gènes de chacun des parents de longueur l en vérifiant la probabilité
Pc. Le site de croisement S doit être choisi entre 1 et (l – 1). Le changement va se faire entre
le site sélectionné et la position finale l des deux chaînes comme le montre la figure (4.3).
Fig. 4.3. Croisement à un site.
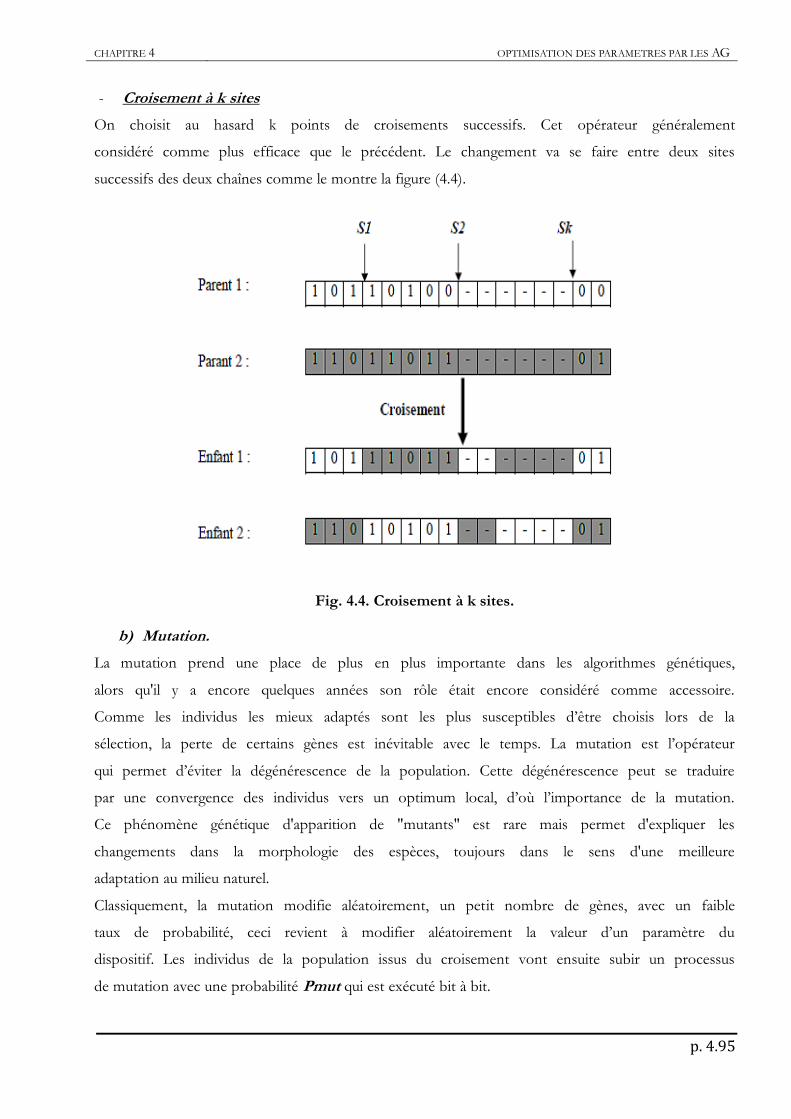
CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.95
- Croisement à k sites
On choisit au hasard k points de croisements successifs. Cet opérateur généralement
considéré comme plus efficace que le précédent. Le changement va se faire entre deux sites
successifs des deux chaînes comme le montre la figure (4.4).
Fig. 4.4. Croisement à k sites.
b) Mutation.
La mutation prend une place de plus en plus importante dans les algorithmes génétiques,
alors qu'il y a encore quelques années son rôle était encore considéré comme accessoire.
Comme les individus les mieux adaptés sont les plus susceptibles d’être choisis lors de la
sélection, la perte de certains gènes est inévitable avec le temps. La mutation est l’opérateur
qui permet d’éviter la dégénérescence de la population. Cette dégénérescence peut se traduire
par une convergence des individus vers un optimum local, d’où l’importance de la mutation.
Ce phénomène génétique d'apparition de "mutants" est rare mais permet d'expliquer les
changements dans la morphologie des espèces, toujours dans le sens d'une meilleure
adaptation au milieu naturel.
Classiquement, la mutation modifie aléatoirement, un petit nombre de gènes, avec un faible
taux de probabilité, ceci revient à modifier aléatoirement la valeur d’un paramètre du
dispositif. Les individus de la population issus du croisement vont ensuite subir un processus
de mutation avec une probabilité Pmut qui est exécuté bit à bit.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.96
Comme pour le croisement, la mutation dépend du problème posé, la principale différence se
situe dans le taux de mutation qui est généralement faible et se situe entre 0.5% et 1% de la
population totale. Ce taux faible permet d'éviter une dispersion aléatoire de la population et
n'entraîne que quelques modifications sur un nombre limité d'individus [68].
La mutation a pour rôle de maintenir une certaine diversité dans la population et protège les
individus contre une perte des informations essentielle contenues dans leurs gènes. Elles
permettent d’assurer une recherche aussi bien globale que locale et garantit la convergence
vers l’optimum.
Comme pour les croisements, de nombreuses méthodes de mutation ont été développées
dans la littérature mais l’une des plus efficaces est celle qui consiste à muter chaque paramètre
de la fonction à optimiser avec une probabilité dépendant des informations contenues dans
les gènes des individus. Dans le cas du codage binaire, chaque bit est remplacé selon une
probabilité Pmut par son inverse. C’est ce qu’illustre la figure (4.5).
Fig. 4.5. Mutation dans un chromosome.
4.2.3.6. Sélection finale
Cette étape consiste à garder seulement les solutions les plus intéressantes, tout en
maintenant une population assez grande et assez diversifiée. C’est pourquoi la taille de la
population doit rester la même d’une génération à l’autre. La sélection revient à choisir les
meilleurs individus pour former la nouvelle génération, c’est à dire éliminer N individu parmi
les 2N individus (N parents et N enfants) pour cela plusieurs méthodes sont proposées [68].
a) Sélection par descendance
Dans cette méthode, on garde toujours les enfants, quel que soit leur adaptation la
population de la nouvelle génération est obtenue par descendance ; les enfants remplaçant
automatiquement leurs parents. L’inconvénient de cette sélection est que l’on risque de voir
disparaître les caractéristiques génétiques des parents les mieux adaptés si elles n’ont pas été
totalement transmises lors de la recombinaison génétique.
Une mutation

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.97
b) Sélection par compétition
Une compétition a lieu entre parents et enfants pour déterminer ceux qui feront partie de la
génération suivante. Les enfants sont insérés dans la population si et seulement si leurs
performances sont supérieures à celles de leurs parents, à rang équivalent.
c) Sélection de procréation sélective
On garde les N meilleurs individus parmi la population intermédiaire de parents et d’enfants.
4.3. Optimisation des paramètres de contrôleur AFTSYC utilisant des Algorithmes
Génétiques (GA).
Un algorithme génétique a été utilisé dans cette étude dont le but d'ajuster des paramètres de
(AFTSYC) utilisés dans l’expression de la commande : α, B, (p /q), et r1, r2. Ainsi le centres de chaque
fonction d’appartenance triangulaire utilisé (b1, b2 , b3 b4, b5 et b6 ).
Le schéma synoptique du système de commande avec optimisation est représenté sur la Fig. (4.6).
La fonction objective choisie est donné par :
( ) ( )
Où
∫ ( | ( )| )
( )
Où t est le temps de simulation et |e (t)| la valeur absolue de l'erreur de tension et d la commande.
lorsque fonction objective est maximale, le critère J sera minimale donc les paramètres d’AFTSYC
seront optimales [69][70].
Fig. 4.6. Schéma synoptique du système de commande avec AG.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.98
Les paramètres d’AG sont: taille de la population est 100, le nombre de génération égale à 100, et la
fonction de mutation est gaussienne, et le nombre d'enfants élitisme égale à 5 et on utilise la sélection
par roulette.
Après l’optimisation en utilisant le modèle (1.58), les paramètres obtenus sont donnés dans le tableau
suivant :
Tab.4.1. Paramètres optimaux obtenus par AG.
Les résultats obtenus avec le modèle (1.58) sont présentées dans les figures suivantes :
Les paramètres du contrôleur AFTSYC
Avant l’optimisation après l’optimisation
α 150 100<α<200 150.451114738004932
β 100 50< β <200 183.834764387659988
(p /q) 0.7778 0< (p /q) <1 0.7775501056584560
T 0.005 0<T<1 0.0042035203174082
r1 2*106 1*103<r1<1*107 1e7*0.217731184736412
r2 3.5*105 1*103<r2<1*107 1e5*3.617687315353046
Les centres de
fonction
d’appartenance
De l’erreur
b1 -0.5 -0.9 <b1<-0.26 -0.462746181538611
b2 0 -0.25<b2<0.25 0.057917820807989
b3 0.5 0.26<b3<0.9 0.805072022575562
Les centres de
fonction
d’appartenance
De la dérivée
de l’erreur
b4 -0.5 -0.9 <b4<-0.26 -0.725432943123130
b5 0 -0.25<b5<0.25 -0.232586406643648
b6 0.5 0.26<b6<0.9 0.271447285894758
temps de réponse 0.0126s - 0.0112s
dépassement du courant
d’inductance (iLmax) 1.52% (1.26A) - 1.342% (1.171A)
Oscillation Existe au régime
transitoire nulle

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.99
(a) Tension de sortie (V), par GA-AFTSYC.
(b) Courant d’inductance iL (A), par GA-AFTSYC.
(c) Signal de commande (d), par GA-AFTSYC.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.100
On remarque à partir ces courbes une amélioration des performances de réponse au régime transitoires
traduit par la diminution des oscillations au niveau de signal de commande et au niveau du courant de
l’inductance, ainsi une vitesse de convergence meilleur.
Pour confirmer la validité de ces paramètres, on les applique sur le modèle (1.58), et les résultats
obtenus sont illustrées dans les figures suivantes:
(a) Tension de sortie Vo du modèle (1.58), par GA-AFTSYC.
(d) Fonction objective.
Fig.4.7. Résultats de l'approche GA-AFTSYC.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.101
Fig. 4.8. a- Tension de sortie Vo (V), b- Courant d’inductance iL (A).
c- Signal de commande d, lors de la variation de R, par GA-AFTSYC.
D’après les courbes, vu que les paramètres du contrôleur sont optimisés utilisant le modèle
(1.58), on peut voir une amélioration remarquable traduit par la diminution des oscillations
au niveau de la commande et courant de l’inductance dans le régime transitoire, par
conséquent la valeur de la commande reste dans son intervalle [0,1] si la variation des
paramètres R et Vin respecte la plage de fonctionnement du convertisseur, ainsi en constate
une convergence plus rapide.
(b) Signal de commande (d) du modèle (1.58), par GA-AFTSYC.
(c) Courant d’inductance iL du modèle (1.58), par GA-AFTSYC.

CHAPITRE 4 OPTIMISATION DES PARAMETRES PAR LES AG
p. 4.102
4.4. Conclusion.
Dans ce chapitre on a optimisé les paramètres de la commande AFTSYC, une bonne amélioration a été
obtenue au niveau du temps de réponse, le dépassement, les oscillations et l’erreur statique avec les
deux modèles (1.57), (1.58). L’importance de l’optimisation apparait de plus en plus dans la
détermination de centres des fonctions d’appartenance puisqu’il n’excite aucune méthode pour
déterminer ces paramètres.

CONCLUSION GENERALE ET PERSPECTIVES
p. C. 1
CONCLUSION GENERALE ET PERSPECTIVES
Le travail mené dans ce mémoire a porté sur le développement de commandes robustes et
intelligentes de convertisseurs de puissance DC-DC. Pour prendre en charge les incertitudes
sur les paramètres et l’aspect non linéaire, on a fait appel à la propriété d’approximation
universelle des systèmes flous pour estimer la dynamique des systèmes considérés afin
d’élaborer des commandes robustes. Ces dernières sont basées sur deux approches : le mode
glissant et la commande synergétique. Ces techniques ont, toutes deux, une convergence
asymptotique en plus du broutement propre à la commande par mode glissant.
Ce phénomène est résolu par l’approche synergétique qui ne requiert pas de composante
discontinue dans la loi de commande. Afin d’obtenir une convergence de temps fini
l’approche terminale est préconisée pour les deux techniques et les résultats de simulation
pour différents points de fonctionnement ont été présentés et discutés.
La commande synergétique partage avec la commande mode glissant la propriété de la
robustesse mais ce contrôleur a plusieurs autres avantages, il est bien adapté pour la mise en
œuvre numérique et nécessite une bande passante relativement faible, un deuxième avantage
est qu’il fonctionne à une fréquence de commutation constante, éludant donc le problème de
broutement inhérent au mode glissant par conséquence.
L’approche synergétique terminale requiert des paramètres dans la loi de commande qui ne
sont pas choisis par le concepteur de façon systématique et suggère dans la nécessité d’une
approche plus rigoureuse d’où l’idée d’utiliser les algorithmes génétiques pour obtenir des
valeurs optimales.
Nous avons donc introduit l’optimisation par AG à la technique terminale pour avoir une
convergence en temps fini. Ceci à aboutit à l’élaboration d’une commande adaptative
indirecte floue synergétique terminale avec des paramètres optimisés par les algorithmes
génétique.
Cette dernière a été appliquée à la simulation de la commande d’un convertisseur dévolteur,
indiquant une amélioration des performances au niveau du temps de réponse et du
dépassement. Concernant la robustesse de la commande, les réponses obtenues en présence
des variations de la charge et au niveau des paramètres du système ainsi en cas de
perturbations externes, montrent de bonnes performances en termes de régulation de la
tension de sortie et en stabilité.

CONCLUSION GENERALE ET PERSPECTIVES
p. C. 2
Nous espérons valider la commande développée dans ce travail expérimentalement comme
perspective ainsi que la publication des résultats. Ainsi l’utilisation des techniques plus
développées comme la logique floue type 2.

REFERENCES BIBLIOGRAPHIQUES
Références Bibliographiques
[1] M.H. Rashid, Power Electronics Handbook, Academic Press, 2001, p. 220.
[2] M. Biswal, Master of Technology (Research), ―control techniques for dc-dc buck converter with
improved performance‖ , National Institute of Technology , Rourkela, March 2011
[3] M. Assaf, D. Seshsachalam, D. Chandra, and RK Tripathi, ―DC-DCConverters via MATLAB/Simulink‖, Proc. WSEAS Conference on Automatic Control, Modelling and Simulation (ACMOS’05), Prague,Czech Republic, pp.464-471, 2005.
[4] J. Mahdavi, A. Emadi, and H. Toliyat, ―Application of state space averaging method to sliding mode control of PWM DC/DC converters,‖in proc. IEEE Ind. Application, Conf., New Orleans,USA, Oct. 1997,pp.820-827.
[5] A. Zenati, These de Doctorat ― Modélisation et simulation de microsystèmes multi domaines à signaux mixtes : vers le prototypage virtuel d’un microsystème autonome‖, Université Joseph Fourier Grenoble I , Octobre, 2007. [6] Robert W. Erickson, ―Fundamentals of Power Electronics, ‖ Chapman& Hall, 115 Fifth Avenue, New York, NY 10003, 1997.
[7] W. P. R. Ned Mohan, Tore M. Undeland, ―Power Electronics Converters, applications and design. ‖ Wiley (2edition), January 9, 1995.
[8] O. Adedamola, PhD thesis, ―Analysis, Modeling and Simulation of Optimal Power Tracking of Multiple-Modules of Paralleled Solar Cell Systems. ‖, Florida State University(2006).
[9] L.Alminde, M. Bisgaard, F.Gudmundsson, C. Kejser, T. Koustrup, C.Lodberg,T.Viscor, " Power Supply for the AAU Cubesat " supervised by Prof. Gert K. Andersen, Institute of Electronic Systems University of Aalborg, Report G. 01gr509, December 20, 2001.
[10] M. Sattler, Y. Liu, and C. Edrington, ―Comparison of linear and nonlinear buck converter models with varying compensator gain values for design optimization,‖ in North American Power Symposium (NAPS), 2010, pp. 1–7, Sept. 2010.
[11] N. Das, M. K. Kazimierczuk, "Power Losses and Efficiency of Buck PWM DC-DC Power Converter," in Electrical Insulation Conference and Electrical Manufacturing Expo, 2005, pp. 417-423.
[12] D. Maksimovic, a. M. Stankovic, V. J. Thottuvelil, and G. C. Verghese, ―Modeling and simulation of power electronic converters,‖ Proc. IEEE, vol. 89, no. 6, pp. 898–912, Jun. 2001.
[13] S. R. Sanders and G. C. Verghese, ―Synthesis of averaged circuit models for switched power converters,‖ IEEE International Symposium on Circuits ans Systems (ISCAS), pp.679–683 , 1990
[14] S.R. Sanders, JM Noworolski, XZ Liu, and GC Verghese, ―Generalized averaging method for power conversion circuits,‖ IEEE Trans. Power Electron., vol. 6, pp. 251–259, Apr. 1991.
[15] S. K. Mazumder, A. H. Nayfeh and D. Boroyevich, ―Theoretical and Experimental Investigation of the Fast and Slow-Scale Instabilities of a DC-DC Converter,‖ IEEE Transactions on Power Electronics, Vol 16, No. 2, 2001, pp. 201-216.

REFERENCES BIBLIOGRAPHIQUES
[16] A. Davoudi and J. Jatskevich, ―Realization of Parasitics in State-Space Average-Value Modeling of PWM DC–DC Converters,‖ IEEE Trans. Power Electron., vol. 21, no. 4, pp. 1142–1147, Jul. 2006.
[17] L. Fan, Y. Yu, "Adaptive Non-singular Terminal Sliding Mode Control for DC-DC Converters," Advances in Electrical and Computer Engineering, vol. 11, no. 2, pp. 119-122, 2011
[18] D. Maksimović and S.Ćuk, ―A unified analysis of PWM converters indiscontinuous modes,‖ IEEE Trans. Power Electron., vol. 6, pp. 476-490, July 1991.
[19] Multicomp, ―Inductor, 1mH, 10%, Radial Leaded,‖ MCSCH895-102KU datasheet, April. 2011 [Revised may.2011].
[20] Nichicon, ―Conductive polymer aluminum solid electrolytic capacitors,‖PCX1H330MCS1GS datasheet, Oct. 2011.
[21] M. U. Iftikhar, thèse doctorat de science ― Contribution à la modélisation des convertisseurs continu/continu dans une perspective de commande Influence du filtre d’entrée‖, Sciences et Technologies de l’Information des Télécommunications et des Systèmes, Université Paris-Sud11, décembre 2008.
[22] V. I. Utkin, ―Sliding Modes in Control and Optimization,‖ Springer-Verlag, Berlin, 1992
[23] M. P. Kaimierkowski and D. L. Sobczuk, ―Sliding mode feedback linearized control of PWM inverter fed induction motor,‖ IEEE IECON, 22nd Int. Conf. Ind. Electron. Control Instrum., vol. 1, pp. 244–249, 1996.
[24] V. Bregeault, thèse de doctorat Automatique et Informatique Appliquée ―Quelques contributions à la théorie de la commande par mode glissant‖, Sciences et technologies de l'information et des mathématiques, Ecole centrale de Nantes, 2010. [25] A. Isidori, ―Nonlinear Control Systems.,‖ Springer-Verlag, London, 1995.
[26] S. V. Elmyanov, V.A. Taran, ― On a class of variable structure control systems,‖ proc. of USSR Academy of Sciences, Energy and Automation, No .3, (In Russian), 1962.
[27] V. I. Utkin, ―Variable Structure Systems with Sliding Modes,‖ IEEE Transactions Automatic Control., vol. 22, pp. 212–222, 1977.
[28] R. A. DeCarlo, S. H. Zak, and G. P. Matthews, ―Variable structure control of nonlinear multivariable systems: a tutorial,‖ Proceedings of the IEEE, vol. 76, no. 3, pp. 212–232, 1988
[29] V. L. Utkin, ― Sliding Modes and Their Applications in Variable Structure Systems. ‖ MIR Publishers, Moscow, 1978.
[30] H. Bühler, ―Réglage par mode glissant,‖ Press. Polytechnique Romande, Lausanne, 1986.
[31] W. Gao, ―On the Design of Variable Structure Controller,‖ Proceedings of the International Conference on Industrial Electronics, Control, Instrumentation, and Automation, pp. 1943–1949, 1993.
[32] J.Y. Hung, W. Gao,and J.C. Hung, ―Variable structure control. A survey,‖IEEE Transactions on Industrial Electronics, vol. 40, no. 1, pp. 2–22, 1993.
[33] W. Gao, J.C. Hung, "Variable Structure Control of Nonlinear Systems: A New Approach," IEEE Transactions On Industrial Electronics, Vol. 40, No. 1, pp. 45-55, February 1993.

REFERENCES BIBLIOGRAPHIQUES
[34] E. Santi, A. Monti, D. Li; K. Proddutur, R. A. Dougal, "Synergetic control for DC-DC boost converter: implementation options", IEEE Transactions on Industry Applications, vol. 39, no. 6, pp. 1803-1813, Nov. 2003.
[35] K. D. Young, V. I. Utkin, and U. Ozguner, ―A control engineer’s guide to sliding mode control,‖ IEEE Transactions on Industrial Electronics, vol. 40 no. 1, pp. 2-22, February 1993.
[36] I. Boiko, ―Analysis of chattering in sliding mode control systems with continuous boundary layer approximation of discontinuous control,‖ American Control Conference, San Francisco, USA, pp. 757 - 762, 2011
[37] E. Santi, R. Dougal, D. Li, A. Monti, K. Prodduttur, ―Synergetic control for power electronics applications: a comparison with the sliding mode approach, ‖ WSP Journal of Circuits, Systems and Computers, Vol. 13, No. 4, pp. 737-760, August 2004.
[38] Wang, Q., J. Feng, and T. Li, ―Analysis of the synergetic control based on variable structure and application of power electronics, ‖ International Conference on Information Engineering and Computer Science, Wuhan, China, pp. 9–12, 2009.
[39] I. Kondratiev, E. Santi, R. Dougal, G. Veselov, Synergetic control for m-parallel connected DC–DC buck converters, PESC, in: 30th Annual IEEE, vol. 1, pp. 182–188 , 2004.
[40] Z. Jiang and R. A. Dougal, ―Synergetic control of power converters for pulse current charging of advanced batteries from a fuel cell power source,‖ IEEE Trans. Power Electron., vol. 19, no. 4, pp. 1140–1150, Jul. 2004.
[41] D. Li, K. Proddutur, E. Santi, and A. Monti, ―Synergetic control of a boost converter: Theory and experimental verification,‖ in Proc. IEEE Southeast Conf., Apr. 2002, pp. 197–200.
[42] A. Monti, R. Dougal, E. Santi, D. Li and K. Proddutur, ―Compensation for step-load variations when applying synergetic control, ‖ Proc. IEEE Applied Power Electron. Conf. (APEC’03) (2003), pp. 334–340.
[43] P.V. Kokotovic , R.E. O'Malley , P. Sannuti, ― Singular perturbations and order reduction in control theory — an overview, ‖ Automatica , vol. 12, pp. 123–132, 1976.
[44] A. Nasir, M. Tumari, and M. Ghazali, ―Performance Comparison between Sliding Mode Controller SMC and Proportional-Integral-Derivative PID Controller for a Highly Nonlinear Two-wheeled Balancing,‖ Proc. of the 6th International Conference on Soft Computing and Intelligent Systems, and the 13th International Symposium on Advanced Intelligent Systems (SCIS&ISIS2012), pp. 1403–1408, Nov. 2012.
[45] M. Harmas, A. Hamzaoui, K. Harmas, and Z. Bouchama, ―Adaptive Fuzzy Synergetic Converter Control,‖ 1st Taibah University International Conference on Computing and Information Technology ICCIT 2012, pp. 734–738, 2012.
[46] T. Takagi and M. Sugeno, Fuzzy identification of systems and its applications to modeling and control, IEEE Trans. Systems Man Cybernet, vol. 15, pp. 116–132, 1985.
[47] J, Mendel, "Uncertainty, fuzzy logic and signal processing," Signal Processing, vol. 80, pp. 913-933, Jun. 2000.
[48] K. Chafaa, thèse doctorat , ―Structures d’identification et de commande des systèmes non linéaires bases sur les techniques floues‖, Université de Batna, 2006.
[49] L. Zadeh, ―Fuzzy sets,‖ Informat. Control, vol. 8, pp. 338-353,1965.

REFERENCES BIBLIOGRAPHIQUES
[50] J. Jang, ―Fuzzy Modeling Using Generalized Neural Networks and Kalman Filter Algorithm.,‖ in Proc. of the Nineth National Conference on Artificial Intelligence, pp. 762–767.
[51] H. J. Zimmermann, Fuzzy Set Theory and Its Applications. Boston: Kluwer Academic Publishers, 1985
[52] C. C. Lee, ―Fuzzy logic in control syst,ems: fuzzy logic controller, part I,‖ IEEE Trans. on Syst.,Man, and Cybern., Vol.SRIC-20, No.2, pp.404-418, 1990.
[53] C. C. Lee, ―fuzzy logic in control syst,ems: fuzzy logic controller, part II,‖ IEEE Trans. on Syst., Man, and Cybern., Vol.SA4C-20. No.2, pp.419-435. 1990.
[54] P. Borne, J. Rozeinoer, J.R..Dieulot, L. Dubois, ― Introduction à la commande floue, ‖ Edition Technip, Paris,1998.
[55] M. Sugeno and G.T. Kang, ―Structure identification of fuzzy model,‖ Fuzzy sets Syst., vol. 28, pp. 15–33, 1988.
[56] L.X. Wang, ―Stable adaptive fuzzy control of nonlinear systems,‖ IEEE Transaction on Fuzzy System. vol. 1, no. 2, pp. 146-155, 1993.
[57] L. X. Wang, J .M. Mendel, "Fuzzy Basis Functions, Universal Approximation, and Orthogonal Least-Squares Learning", IEEE Trans. on Neural Networks, Vol. 3, No. 5, September 1992
[58] H. Kim and J. Mendel, ―Fuzzy basis functions: Comparisons with other basis functions,‖ IEEE Transactions on Fuzzy Systems, vol. 3, no. 2. may 1995
[59] B. Kosko, ―Fuzzy systems as universal approximators,‖ IEEE Trans. Comput., vol. 43, no. 11, pp. 1329-1333, Nov. 1994
[60] K.S. Narendra, and K. Parthasarathy, ―Identification and Control using Neural Networks‖, IEEE Trans. on Neural Networks, Vol. 1, pp. 4-27, 1990.
[61] S. Sastry and M. Bodson, Adaptive Control: Stability Convergence, and Robustness (Prentice-Hall, Englewood Cliffs, NJ, 1989).
[62] L. X. Wang, ―Fuzzy systems are universal approximators,‖ in Proc. IEEE Int. Conf. Fuzzy Systems (San Diego, CA), pp. 1163-1170, Mar. 1992.
[63] P.T. Chan, A.B. Rad, J. Wang, ―Indirect adaptive fuzzy sliding mode control: Part II: parameter projection and supervisory control,‖ Fuzzy Sets Syst., vol. 122, no. 1, pp. 31–43, Aug. 2001.
[64] Beasly D., Bull D.R., & Martin R.R., ―An overview of genetic algorithms : Part2. ‖ Research topics. University computing, UCISA,1993.
[65] Th. Back, D. B. Fogel, and Z. Michalewicz. ''Handbook of Evolutionary Computation''. Oxford University Press, 1997.
[66] N. Benahmed, ''optimisation de réseaux de neurones pour la reconnaissance de chiffres manuscrits isolés: sélection et pondération des primitives par algorithmes génétiques''. Université du Québec, 2002.
[67] J. Rennard, ―Genetic Algorithm Viewer: Démonstration d’un algorithme génétique,‖ pp. 1–13, 2000.
[68] T. Vallée and M. Yildizoglu, ―Présentation des algorithmes génétiques et de leurs applications en économie,‖ Rev. Econ. Polit., no. 1995, pp. 1–23, 2001.
REFERENCES BIBLIOGRAPHIQUES
[69] K. A. DeJong, " Adaptive system design: A genetic approach," IEEE Trans. Syst., Man, Cyber. vol. SMC-10, no. 9, pp. 566-574, Sept. 1980.
[70] J. J. Grefenstette, , "Optimization of Control Parameters for Genetic Algorithms," IEEE Transactions on Systems, Man, and Cybernetics, Vol. 16, No. 1, 1986, pp. 122-128.
[71] W. He, C. Zhi-mei, Z. Jing-Gang, and M. Wen-jun, ―Terminal Sliding Mode Control for Multi-degree-of-Freedom Robot Based on Genetic Algorithm,‖ 2009 Fifth Int. Conf. Nat. Comput., pp. 420–424, 2009.
[72] W. Juan and W. Ping, ―Optimization of fuzzy rule based on adaptive genetic algorithm and ant colony algorithm,‖ IEEE Transactions International Conference on Computational and Information Sciences, pp. 359–362, 2010.
[73] J.H. Holland, ―Adaptation in Natural and Artificial Systems. ‖ University of Michigan Press : Ann Arbor, 1975.
[74] D. E. Goldberg, ― Genetic Algorithms in Search, Optimization, and Machine Learning. ‖ Addison-Wesley, Reading, Mass. (1989).
[75] Albert Paul Malvino, "Principe d'électronique, cours et exercices corrigés" 6ème édition Dunod,Paris, 2002.

:ملـخـص
باقتزاح مجمىعة مه أوظمة التحكم الذكية و القىية لمحىل الطاقة مستمز /مستمز. قمىا بتطىيز وظامي زةم هذي المذك تهت
بعد المقاروة بيىهما اختزوا AFTSMC، AFTSYC : تحكم يعتمدان على التقزيب باستعمال أوظمة المىطق الغامض
AFTSYC الخىارسميات الجيىية لو قمىا بتحسيه معامالت هذا المتحكم باستعما
أوظمة التحكم الذكية و ،الخىارسميات الجيىية ، LF، المىطق الغامض لمحىل الطاقة مستمز /مستمز :كلمـات مفتاحيـــة
القىية
Résumé :
Le travail réalisé dans ce magister porte essentiellement sur le développement de
commandes robustes et intelligentes des convertisseurs DC-DC. On a développé deux lois de
commandes basées sur l’approximation universelle des systèmes flous, en l’occurrence : la
commande adaptative floue indirecte par mode glissant terminal(AFTSMC) et la commande
adaptative floue indirecte synergétique terminale(AFTSYC). Les résultats de simulation ont
permis de choisir la dernière approche pour l’optimisation des paramètres de la loi de
commande par les algorithmes génétiques.
Mots Clés : convertisseurs DC-DC, adaptative floue, mode glissant, synergétique, terminal,
Abstract:
This memory is dedicated to the study and integration of the neuro fuzzy control of FACTS systems. The integration of these elements enabled a smooth and easy control of power systems start from the reactive power compensation through the contribution in improving network stability eclectic. The control applied to the FACTS are many, the conventional method of control has been applied for many years and with the increase of electrical networks it is now necessary to move towards intelligent techniques like fuzzy logic and neural networks. In this paper a controller based on a hybrid configuration of the two techniques mentioned intelligent was designed and calculated to incorporate an element FACTS to improve transient stability of power grids in different operating points encountered in the operation of electrical networks
In this thesis our work focused on the development of robust and intelligent control
laws for DC-DC converters. We have developed two controllers based on the universal
approximation properties of fuzzy logic systems, that is: an indirect adaptive fuzzy terminal
sliding mode controller (AFTSMC), and an indirect adaptive fuzzy terminal synergetic controller
(AFTSYC). The latter was selected, after a performance comparison of simulation results, for
parameters optimization using genetic algorithms.
Key Words: DC-DC converters, adaptive, fuzzy control, GA, sliding mode, synergetic, terminal.